SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE . . … · 4 Metodologias de Comparaçao . Como no...
6
( .- 2 2 SIMPÓSIO BRASILEIRO DE . AUTOMAÇÃO INTELIGENTE . ." CEFIT-PR, 13 a 15 de Setembro de 1995 / Curitiba Paraná Comparação de Algoritmos de Suavização Espacial EDUARDO ROBERTO ARECO ARNALDO DE ALBUQUERQUE ARAÚJO MÁRIO FERNANDO MONTENEGRO CAMPOS DCC-Departamento de Ciência da Computação UFMG-Universidade Federal de Minas Gerais Caixa Postal 702 30161-970 Belo Horizonte, MG, Brasil Abstract. This work presents the results of the evaluation of some spatial-domain noise- smoothing techniques, focusing the edge-preserving ans smoothing charactheristics of the algo- rithms , when used iteratively. Some comments in evaluation noise-smoothing techniques are also included. The algorithms implementation has been executed within the Khoros environment. 1 Introdução o principal objetivo das técnicas de realce é pro- cessar uma imagem para que o resultado seja mais apropriado que a imagem original, para uma aplica- ção específica. Isto significa que determinada técni- ca pode ser altamente indicada para um tipo de aplicação e possuir um desempenho insatisfátorio com outra classe de aplicação. As técnicas de realce de imagens têm o propó- sito de obter algum tipo de melhora na imagem e para isso se valem do conhecimento de algumas características do sistema visual humano, visto que as imagens realçadas para melhorar a interpretação humana geralmente também melhoram o desempe- nho de aplicações automatizadas de níveis mais al- tos da área de procesamento digital de imagens. As principais tarefas classificadas como realce de imagens são as operações relativas à mudança da escala de cinza, as quais afetam o contraste e o brilho da imagem, e as operações sobre pontos da imagem, como suavização e realce de bordas [1]. Quando uma imagem é processada apenas para in- terpretação visual, o observador é quem deve jul- gar se os métodos empregados foram ou não satis- fatórios, sendo este processo muito subjetivo e di- ficultando o estabelecimento de um procedimento padrão para a comparação do desempenho dos al- goritmos. Já no caso de imagens processadas para servirem de entrada a sistemas de visão computa- cional ou reconhecimento automático, o processo de avaliação é mais simples, baseando-se no resultado destes sistemas. As técnicas de suavização têm o objetivo de tornar as regiões de uma imagem mais homogêneas, ou seja, fazer com que os pixels representantes de alguma característica de determinado objeto ve- nham a ter intensidades semelhantes. Geralmente os procedimentos de suavização procuram identifi- car pontos que não possuam nenhuma relação com a sua vizinhança, classificando os mesmos como pontos ruidosos e eliminando-os através de algum operador de vizinhança, como média ou mediana. Seus objetivos principais são a remoção de ruído e a uniformização dos níveis de cinza dos pixels nas regiões presentes na imagem. Com o maior desenvolvimento da área de pro- cessamento digital de imagens, o número de ar- tigos descrevendo técnicas de suavização espacial também tem crescido muito, o que leva o usuário . destes algoritmos a encontrar um problema na mo- delagem de sua aplicação: a escolha do algoritmo mais indicado para o seu caso. Somente uma análise criteriosa dos algoritmos disponíveis combinada com um bom procedimento de testes feitos com imagens representativas da classe a ser utilizada é que pode- riam auxiliar o pesquisador na escolha de determi- nado filtro. Mas isto nem sempre é possível; devido ao grande número de algoritmos disponíveis e a di- ficuldade de se conseguir definir exatamente quais as características das imagens que serão utilizadas. Este trabalho se propõe a auxiliar na escolha de um filtro de suavização espacial, sendo que para isso serão apresentados alguns dados comparativos referentes aos filtros estudados. Todos os testes e as implementações dos algoritmos foram feitos no ambiente Khoros. Pretende-se colocar os algo- ritmos implementados à disposição da comunidade acadêmica, através de uma toolbox para o sistema Khoros. 2 O Ambiente Khoros Khoros [2] é um ambiente para pesquisa desenvol- vido na Universidade do Novo México. O sistema Khoros integra múltiplos modos de interface com o usuário, geradores de código, visualização de da- dos, computação distribuída e processamento de
Transcript of SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE . . … · 4 Metodologias de Comparaçao . Como no...

( .-
~ ~ 22 SIMPÓSIO BRASILEIRO DE
~~' . AUTOMAÇÃO INTELIGENTE . . " CEFIT-PR, 13 a 15 de Setembro de 1995 / Curitiba Paraná
Comparação de Algoritmos de Suavização Espacial
EDUARDO ROBERTO ARECO
ARNALDO DE ALBUQUERQUE ARAÚJO
MÁRIO FERNANDO MONTENEGRO CAMPOS
DCC-Departamento de Ciência da Computação UFMG-Universidade Federal de Minas Gerais
Caixa Postal 702 30161-970 Belo Horizonte, MG, Brasil {areco,arnaldo,mario}~dcc.ufmg.br
Abstract. This work presents the results of the evaluation of some spatial-domain noisesmoothing techniques, focusing the edge-preserving ans smoothing charactheristics of the algorithms, when used iteratively. Some comments in evaluation noise-smoothing techniques are also included. The algorithms implementation has been executed within the Khoros environment.
1 Introdução
o principal objetivo das técnicas de realce é processar uma imagem para que o resultado seja mais apropriado que a imagem original, para uma aplicação específica. Isto significa que determinada técnica pode ser altamente indicada para um tipo de aplicação e possuir um desempenho insatisfátorio com outra classe de aplicação.
As técnicas de realce de imagens têm o propósito de obter algum tipo de melhora na imagem e para isso se valem do conhecimento de algumas características do sistema visual humano, visto que as imagens realçadas para melhorar a interpretação humana geralmente também melhoram o desempenho de aplicações automatizadas de níveis mais altos da área de procesamento digital de imagens. As principais tarefas classificadas como realce de imagens são as operações relativas à mudança da escala de cinza, as quais afetam o contraste e o brilho da imagem, e as operações sobre pontos da imagem, como suavização e realce de bordas [1]. Quando uma imagem é processada apenas para interpretação visual, o observador é quem deve julgar se os métodos empregados foram ou não satisfatórios, sendo este processo muito subjetivo e dificultando o estabelecimento de um procedimento padrão para a comparação do desempenho dos algoritmos. Já no caso de imagens processadas para servirem de entrada a sistemas de visão computacional ou reconhecimento automático, o processo de avaliação é mais simples, baseando-se no resultado destes sistemas.
As técnicas de suavização têm o objetivo de tornar as regiões de uma imagem mais homogêneas, ou seja, fazer com que os pixels representantes de alguma característica de determinado objeto venham a ter intensidades semelhantes. Geralmente os procedimentos de suavização procuram identifi-
car pontos que não possuam nenhuma relação com a sua vizinhança, classificando os mesmos como pontos ruidosos e eliminando-os através de algum operador de vizinhança, como média ou mediana. Seus objetivos principais são a remoção de ruído e a uniformização dos níveis de cinza dos pixels nas regiões presentes na imagem.
Com o maior desenvolvimento da área de processamento digital de imagens, o número de artigos descrevendo técnicas de suavização espacial também tem crescido muito, o que leva o usuário . destes algoritmos a encontrar um problema na modelagem de sua aplicação: a escolha do algoritmo mais indicado para o seu caso. Somente uma análise criteriosa dos algoritmos disponíveis combinada com um bom procedimento de testes feitos com imagens representativas da classe a ser utilizada é que poderiam auxiliar o pesquisador na escolha de determinado filtro. Mas isto nem sempre é possível; devido ao grande número de algoritmos disponíveis e a dificuldade de se conseguir definir exatamente quais as características das imagens que serão utilizadas.
Este trabalho se propõe a auxiliar na escolha de um filtro de suavização espacial, sendo que para isso serão apresentados alguns dados comparativos referentes aos filtros estudados. Todos os testes e as implementações dos algoritmos foram feitos no ambiente Khoros. Pretende-se colocar os algoritmos implementados à disposição da comunidade acadêmica, através de uma toolbox para o sistema Khoros.
2 O Ambiente Khoros
Khoros [2] é um ambiente para pesquisa desenvolvido na Universidade do Novo México. O sistema Khoros integra múltiplos modos de interface com o usuário, geradores de código, visualização de dados, computação distribuída e processamento de

266
informações. O resultado é um ambiente único com ferramentas para pesquisa e desenvolvimento de sistemas computacionais. O sistema foi desenvolvido para ambientes Unix que utilizam X Window System, e portanto pode ser transportado para uma ampla faixa de estações de trabalho que utilizam sistema operacional semelhante. É composto de diversos aplicativos, que podem ser classificados como ferramentas para o auxílio no desenvolvimento de sistemas e também aplicações para o usuário final. A utilização deste sistema para o desenvolvimento do trabalho se deve ao fato do mesmo ser de domínio público e de estar conseguindo uma boa aceitação, tanto no meio universitário quanto em outras instituições de pesquisa.
3 Descrição dos Filtros Implementados
Os filtros selecionados para este trabalho são aqueles citados pela literatura básica da área e também vários filtros mais recentes que têm aparecido nos periódicos relacionados com processamento de imagens.
A seguir, serão citados os parâmetros utilizados, quando os mesmos existirem, e o nome dado para a implementação de cada filtro: filtro da média [3], vavg, janela 3x3; mediana [4], vmedian, janela 3x3; mediana adaptativo [5], vadapmed, limiares TI e T2 iguais a 16; filtro sigma [6], vsigma, janela 5x5, K = 2 e a = 20; sigma adaptativo [7], vadapsig, janela 5x5, K = 2, Q = 2.0; filtro Nopel [8], vnopel; suavização por soma de diferenças absolutas [9], vsadvs; suavização por região mais homogênea [10], vmhns; média com os K vizinhos [11], vknn, janela 3x3, k = 7; suavização pelo inverso do gradiente [12], vgradinv; suavização logarítmica [13] , suavlog, M = 16; suavização pelo modelo de facetas [14], v/aceto
4 Metodologias de Comparaçao
. Como no caso unidimensional, a eficácia de um filtro pode ser avaliada por medidas de erro que baseiam-se em teorias de processamento digital de sinais. No caso bidimensional, além das técnicas derivadas do caso unidimensional, existe a vantagem adicional de poder-se verificar visualmente os resultados de aplicação de filtros. Ainda que subjetiva, esse tipo de avaliação tende a ser bastante precisa, e em muitos casos é a que deverá determinar a aceitação do filtro em questão.
Nesta seção, estão descritas as metodologias que foram utilizadas para avaliação, que enquadramse em duas grandes classes: subjetiva e objetiva.
4.1 Avaliação Visual
Uma das maneiras mais comuns para análise de desempenho de um determinado filtro, consiste em
2! SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE
gerar imagens de teste pela adição de ruídos de característica conhecida a uma imagem original. Essa imagem de teste é submetida à filtragem posterior, gerando uma imagem resultante que é analisada em termos da eficiência de suavização do filtro em questão. Essa análise é baseada, na maioria dos casos e por razões óbvias, em características subjetivas observadas na imagem resultante.
Esse tipo de avaliação é útil apenas para casos onde se possa cuidadosamente analisar a imagem, sendo os resultados dependentes de diversos fatores, principalmente variando com o observador. Para o caso onde haja necessidade de um processamento mais rápido ou até mesmo automatizado (por exemplo, restauração de películas cinematográficas), a avaliação subjetiva pode, quando muito, ser útil na determinação de parâmetros globais.
4.2 Métodos Estatísticos
Como no caso unidimensional, métodos estatítiscos podem ser utilizados na avaliação de resultados de filtros. Comumente utilizam-se métricas como o desvio padrão sobre uma área homogênea, para avaliar a eficiência de suavização. Medidas de erro, como a relação sinal/ruído (SNR) e o erro médio quadrático (EMQ) são úteis para verificar alterações em bordas presentes na imagem.
Estas medidas de erro são calculadas em relação à imagem original. Por outro lado, o desvio padrão, assim como outras medidas de homogeneidade, podem ser calculados apenas nas imagens filtradas, pois não necessitam de comparação com a imagem original. Entretanto, para que essas métricas possam ser aplicadas, torna-se necessária a existência de áreas na imagem original com altos índices de homogeneidade, para que seja possível medir apenas o poder de eliminação de elementos ruidosos, sem interferência de bordas ou texturas.
As metodologias descritas acima têm bom funcionamento em imagens com poucos objetos. Como exemplo, uma imagem de teste composta apenas de um círculo claro sobre fundo escuro atende a este requisito, pois podem ser escolhidas áreas bem definidas para o teste de eficiência de suavização, bastando para isso que essas áreas não estejam próximas às bordas do círculo.
A avaliação visual dos resultados permite constatar facilmente quando o erro tornou-se grande devido à distorção de bordas ou pela existência considerável de ruídos devido à baixa capacidade de filtragem.
4.3 Metodologia Utilizada
Para imagens mais complexas, que contém muitos objetos (como é o caso de imagens de cenas na-
')

22 SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE
turais), um outro método foi empregado. Neste método, procura-se desenvolver uma classificação dos pontos das imagens baseado em sua atividade espacial, ou seja, pela presença ou não de bordas ou texturas mais acentuadas. A princípio, podem ser definidas várias classes de equivalência, mas a restrição a apenas duas mostrou-se eficaz [15] . Para obter esta classificação, foi utilizado um procedimento baseado nas máscaras direcionais de Prewitt [16], onde a soma da saída das máscaras foi comparada a um limiar preestabelecido, determinando-se, assim, a classificação de um ponto em alta ou baixa atividade espacial.
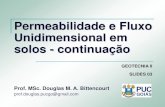
Posteriormente à aplicação das máscaras direcionais, é aplicado um filtro para nublar a imagem que é seguido de uma nova aplicação de limiar, gerando, desta vez, máscaras binarizadas correspondentes às regiões de alta e baixa atividade espacial. Este último filtro é aplicado por ser interessante ter-se não somente os pontos em que a atividade espacial é mais alta, mas também uma faixa na vizinhança dessa área, podendo-se assim observar mais facilmente os fenômenos de degradação de bordas. A Figura l(c) apresenta a máscara utilizada para definir as regiões de alta atividade espacial para a imagens de teste apresentada neste trabalho. A máscara para as regiões de baixa atividade espacial foi obtida com a inversão dessa última.
4.4 Procedimentos de teste
o procedimento básico para a realização dos testes foi a filtragem das imagens com ruído e posterior cálculo do erro médio quadrático (EMQ), que pode ser definido como sendo a média do quadrado das diferenças entre as duas imagens, para cada ponto da imagem. Para duas imagens f e f' de dimensões M x N o erro médio quadrático pode ser definido como:
1 M-l N-l
EMQ = MN L L (f(i,j) - f'(i,j))2. i=O j=O
Quando esse cálculo é realizado sobre toda a imagem, indistintamente, denomina-se, aqui, de erro médio quadrático geral. . Além deste cálculo foram efetuadas medidas do erro médio quadrático em regiões de alta e de baixa atividade espacial, aqui denominados de E1fQ High e EMQ Low, respectivamente. Neste caso, estende-se a definição acima adicionando-se uma terceira imagem binária que funciona como máscara de ativação da função de cáculo de erro. Assim, um ponto da imagem será incluído no cálculo do erro se o valor das coordenadas na terceira imagem for diferente de zero.
267
5 Descrição das Imagens Utilizadas
Neste trabalho, estão sendo mostrados resultados obtidos com um conjunto de imagens, gerado a partir da imagem Lena, apresentada na Figura l(a).
A imagem Lena foi escolhida para verificação do efeito de degradação dos objetos existentes, devido à aplicação iterativa dos algoritmos. Os testes comparativos foram realizados com os filtros citados anteriormente e constaram da aplicação iterativa dos mesmos nas imagens de teste e da medição dos três erros já definidos. Foram realizadas cinco aplicações de cada filtro. Procurou-se utilizar os parâmetros indicados pelo autor de cada algoritmo quando estes dados eram disponíveis, mas mesmo assim uma mudança nos parâmetros em alguns casos pode vir a melhorar o desempenho de alguns algoritmos, o que não foi realizado, devido ao grande número de possibilidades envolvidas.
Para realização dos testes , foram utilizados o ruído gaussiano com p., = O e (5 = 20, gerando a imagem da Figura l(b).
5.1 Análise dos Resultados
Os testes efetuados para a imagem Lena incluem os erros médios quadráticos para regiões de alta e baixa atividade espacial. Analisando os resultados destes erros e comparando com o EMQ geral, pode-se verificar que existem situações onde o EMQ geral foi diminuindo gradativamente a cada iteração, tendência seguida apenas pelo erro em regiões de baixa atividade espacial. Caso o EMQ em regiões de alta atividade espacial tenha um comportamento contrário ao do EMQ geral, conclui-se que o filtro, apesar de conseguir uma boa redução do erro médio quadrático geral, não está conseguindo preservar bordas e pequenos detalhes da imagem.
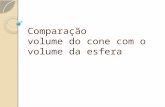
Nas tabelas 1,2 e 3, apresentam-se as medições do erro médio quadrático geral (EMQ), o erro médio quadrático em regiões de alta atividade (EMQ High) e o erro médio quadrático em regiões de baixa atividade (EMQ Low), respectivamente, para a imagem Lena com ruído gaussiano, após as três primeiras aplicações de cada algoritmo. Os erros iniciais, ou seja, antes da aplicação dos filtros, eram 398,84 o total, 397,67 nas regiões de alta atitividade e 400.,01 nas de baixa. Na Figura 3 tem-se uma amostra das imagens obtidas após o processo de filtragem, para que possa ser feita uma avaliação visual do desempenho dos filtros. O conjunto de imagens apresentados refere-se a segunda aplicação dos filtros já citados, utilizando a imagem de teste Lena com ruído gaussiano.
Um exemplo das informações que podem ser extraídas a partir dos três tipos de EMQ utilizados pode ser observado com o Filtro de Suavização

268
(a) (b)
2~ SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE
(c)
Figura 1: Imagem Lena - (a) original, (b) ruído gaussiano e (c) regiões de alta atividade espacial.
por Soma de Diferenças Absolutas (vsadvs). Pelo gráfico apresentado na Figura 2, que mostra os valores de EMQ para as aplicações do referido filtro sobre a imagem Lena, pode-se observar como o EMQ geral atinge seu mínimo após a segunda aplicação. Já o EMQ Low continua decrescendo até a quarta aplicação, o que não é válido para o EMQ High, que consegue o valor mínimo logo após a primeira aplicação. Deste exemplo, conclui-se que a aplicação deste filtro mais de uma vez já iniciaria um processo de degradação de bordas ou perda de pequenos objetos.
~--------,-------~------~~~
Gl.OO Tj;f{Jtn;!i 310.00 l!Mijüiw
360.00
340.00
320.00
1OO.00
210.00
260.00
240.00
220.00
200.00
180.00 -
160.00
140.00
120.00 .
100.00
10.00
60.00
'.
.:\ \ \
... \ .... \'\
\ '\
\" \\ \. \, - _ .. _ ... --.. -- --_. \\\,'------"_._-_. -----
.~ ............. ..
_ ... _-- ...... _-- ................ ~ 40.00 L..J.... ________ ~ ______ ----L-______ ____'~
""li<:.
Figura 2: EMQ, EMQ Lowe EMQ High - Filtro vsadvs
Conforme os dados apresentados nas Tabelas 1-3, a maioria dos filtros já consegue os valores de EMQ mínimos na segunda aplicação. Mesmo quando isto não ocorre, observa-se que o EMQ High normalmente atinge seus valores mínimos na primeira ou segunda aplicação, fato este que justifica
a não execução de um maior número de iterações. A comparação visual das imagens, embora sub-
I jetiva, também pode auxiliar na definição do número de execuções dos filtros. Em alguns casos a utilização de um operador gradiente pode facilitar a visualização do ruído presente na imagem.
filtro itero 1 itero 2 itero 3 vsadvs 139,24 128,45 133,00 vmhns 161,97 168,95 183,89 vavg 114,35 114,57 133,28 vmedian 128,21 109,98 110,66 vadapmed 140,96 137,21 140,76 vnopel 283,12 206,13 168,06 vfacet 184,23 173,93 183,29 vsigma 128,21 95,11 96,34 vknn 123,16 102,14 102,08 vgradinv 227,62 181,28 160,89 vlogsmoo 166,76 165,06 177,96 vadapsig 189,48 141,14 130,36
Tabela 1: EM Q geral - Imagem Lena
6 Conclusões
Neste trabalho, foram apresentadas metodologias utilizadas na avaliação comparativa dos filtros implementados. Uma descrição detalhada dos procedimentos de teste também foi apresentada.
O cálculo do erro médio quadrático em regiões de alta e baixa atividade espacial foi utilizado com sucesso para estimar a eficiência dos filtros.
A análise mostrou características importantes de cada filtro, realçando as situações de melhor e pior desempenho, relativas às condições de teste.
O processo de seleção de algoritmos de suavização espacial não é uma tarefa muito simples. Este trabalho tentou mostrar algumas técnicas utilizadas para auxiliar neste processo, técnicas estas
"
.'

2~ SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE
(a)
(d)
(g)
(j)
(b)
(e)
(h)
(k)
269
(c)
(f)
(i)
(1)
Figura 3: Imagem Lena - Resultado da aplicação 2 dos algoritmos (a) vsadvs, (b) vmhns, (c) vavg, (d) vmedian, (e) vadapmed , (f) vnopel , (g) vfacet, (h) vsigma , (i) vknn, (j) vgradinv, (k) vlogsmoo e (1) vadapsig.

270
filtro itere 1 itere 2 itere 3 vsadvs 213,03 226,01 243,84 vrnhns 261 ,58 304 ,80 339,64 vavg 191,53 216,25 261,27 vrnedian 196,41 191,58 203 ,30 vadaprned 242,85 257,30 268,64 vnopel 300,50 241,77 218 ,85 vfacet 316,38 324,39 347,17 vsigma 182,76 170,33 181,28 vknn 159,25 158,78 171,78 vgradinv 240 ,86 202,37 186,67 vlogsrnoo 260,36 299,15 333,68 vadapsig 232,14 212,25 219,72
Tabela 2: EMQ High - Imagem Lena
filtro itere 1 itere 2 itere 3 vsadvs 84 ,63 56,24 50,96 vmhns 88,26 68 ,41 68,62 vavg 57,22 39,32 38,55 vrnedian 77,74 49,58 42 ,10 vadaprned 65,54 48,33 46,11 vnopel 270,33 179,76 130,46 vfacet 86,43 62,57 62,00 vsigrna 87,84 39,44 33,48 vknn 96,45 60,21 50,49 vgradinv 217,81 165,68 141,81 vlogsrnoo 97,49 65,82 62,71 vadapsig 157,91 88,52 64,22
Tabela 3: EMQ Low - Imagem Lena
que podem ser estendidas e aplicadas a novos conjuntos de imagens, para que assim se tenha uma base maior de informações para auxiliar na escolha do melhor algoritmo para cada aplicação. Com base nos testes efetuados foi constatado que alguns algoritmos não possuem desempenho razoável para o tipo de ruído utilizado e também que algoritmos com desempenho global equivalente podem conseguir dados diferentes nas regiões de alta ou de baixa atividade espacial.
Referências
[1] Rafael C. Gonzalez and Paul \Vintz . Digital Image Processing. Addison-Wesley Publishing Company, 1987.
[2] John Rasure and Mark Young. An open environment for image processing and software development. In SPIE/ISf1T Symposium on Eletronic Imaging, volume 1659. SPIE, 1992.
[3] W. K. Pratt. Digital Image Processing. John Wiley & Sons, 1978.
2~ SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO INTELIGENTE
[4] 11. O. Ahmad and D. Sundararajan. A fast algorithm for two-dimensional median filtering. IEEE Trans. on Circuits and Systems, 34:1364- 1373, 1987.
[5] Ho-Ming Lin and Alan N. Wilson, Jr. Median filters with adaptive length . IEEE Trans. on Circuits and Systems, 35(6):675-689, 1988.
[6] J. S. Lee. Digital image smoothing anct the sigma filter. Computer Graphics and lmage Processing, 24:255-269 , 1983.
[7] S. H. Jung and N. C. Kim. Adaptive image restoration of sigma filter using local statistics and human visual characteristics. Eletronics Letters, 24(4):201-202, 1988.
[8] M. Imme. A noise peak elimination filter. CVGIP: Graphic Models and Image Processing, 53(2):204-211, March 1991.
[9] A. de A. Araújo. Sum of absolute grey leveI differences: an edge-preserving smoothing approach. Electronics Letters, 21:1219-1220, 1985.
[10] 11. Nagao and T. Matsuyama. Edge preserving smoothing. Computer Graphics and lmage Processing, 9:394-407, 1979.
[11] L. S. Davis and A. Rosenfeld. Noise cl~a
ning by iterated averaging. IEEE Trans. on Systems, Man, and Cybernetics, 8(9):705-710, 1978.
[12] D. C. C. Wang, A. H. Vagnucci, and C. C. Li. Gradiente inverse weighted smoothing scheme and the evaluation of its performance. Computer Graphics and Image Processing, 15:167-181, 1981.
[13] B. Chanda, B. B. Chanduri, and D. D. Majunder. Some algorithms for image enhancement incorporating human visual response. Pattern Recognition, 17:423-428, 1984.
[14] R. 11. Haralick. A facet model for image data. Computer Graphics and Image Processing, 15:634-647, 1981.
[15] Roland T. Chin and Chia-Lung Yeh. Quantitative evaluation of some edge-preserving noise-smoothing techniques. Computer Vision, Graphics, and Image Processing, 23:67-91, 1983.
[16] J. M. S. Prewitt . Object enhancement and extraction. In Picture Processing and Psychopictoris, pages 75-149. Academic Press, 1970.