Sistema de Alimentação Sem Contacto para Robôs de Inspeção ... · – Tensão aos terminais do...
82
Sistema de Alimentação Sem Contacto para Robôs de Inspeção de Linhas Aéreas de Alta Tensão (Contactless power converter for overhead line inspection robots) Miguel Chichorro de Medeiros Martins Fafaiol Dissertação para a obtenção do Grau de Mestre em Engenharia Eletrotécnica e de Computadores Orientador: Prof. José Fernando Alves da Silva Júri Presidente: Prof. Rui Manuel Gameiro de Castro Orientador: Prof. José Fernando Alves da Silva Vogal: Prof. Vítor Manuel de Carvalho Fernão Pires Fevereiro de 2016
Transcript of Sistema de Alimentação Sem Contacto para Robôs de Inspeção ... · – Tensão aos terminais do...

Sistema de Alimentação Sem Contacto para Robôs de
Inspeção de Linhas Aéreas de Alta Tensão
(Contactless power converter for overhead line inspection robots)
Miguel Chichorro de Medeiros Martins Fafaiol
Dissertação para a obtenção do Grau de Mestre em
Engenharia Eletrotécnica e de Computadores
Orientador: Prof. José Fernando Alves da Silva
Júri
Presidente: Prof. Rui Manuel Gameiro de Castro
Orientador: Prof. José Fernando Alves da Silva
Vogal: Prof. Vítor Manuel de Carvalho Fernão Pires
Fevereiro de 2016

i
Agradecimentos
Ao professor Fernando Silva pela sua disponibilidade na partilha dos seus conhecimentos, na
ajuda às muitas questões que lhe fui pondo ao longo do trabalho e atenção na orientação do
meu trabalho.
À Bárbara por não me deixar fazer amanhã o que podia fazer hoje.
E aos meus pais, pela eterna paciência e não terem desistido de mim.

ii
iii
Resumo
A distribuição de energia elétrica está assente nas linhas de transmissão, mas a manutenção
das mesmas nem sempre é de fácil acesso. Para tal, estão em estudo robôs que possibilitam a
inspeção destas linhas remotamente.
Este trabalho pretende dimensionar um sistema de alimentação para estes robôs,
aproveitando energia diretamente da linha de transmissão onde este se encontra, sem
acrescentar peso excessivo ao robô propriamente dito. Em estudos anteriores, devido à
configuração necessária do transformador alimentado em corrente, existiam limitações da
potência que se obtinha da rede.
Uma das soluções propostas implicava a introdução de um condensador de capacidade e
peso elevados. Este trabalho tem como objetivo principal aplicar essa solução, mas sem a
necessidade de introduzir tal condensador, diminuindo assim o volume e peso do sistema de
alimentação. O condensador é concretizado virtualmente através do controlador para o
conversor AC-DC utilizado.
Após dimensionamento do conversor e simulação do mesmo, foi verificada a viabilidade da
solução e os resultados apresentaram uma melhoria razoável. O conversor apresenta um
rendimento aceitável, rondando os 90%, embora a potência obtida seja bastante dependente da
corrente na linha. No entanto, para o intervalo de valores mais comum desta mesma corrente
consegue obter-se a potência necessária.
Palavras-chave: Conversor de Potência; Manutenção de linhas de transmissão; Controlo de
conversores; Transformador de corrente.

iv
Abstract
The distribution of electricity is based on the transmission lines, but their maintenance isn’t
always easily accessible. To do this, robots are being studied which enable inspection of these
lines remotely.
This work intends to develop a power system for these robots, drawing power directly from the
transmission line where it is connected, without adding excessive weight to the robot itself. In
previous studies, due to the required configuration of the current fed transformer, there were
limitations to the power obtained from the network.
One of the solutions proposed involved the introduction of a capacitor with an high capacity
and weight. This work aims to apply this solution, but without the need to introduce such a
capacitor, thus reducing the volume and weight of the power system. The capacitor is virtually
achieved through the controller for the AC-DC converter used.
After converter design and simulation of it, the viability of the solution was tested and the
results showed a reasonable improvement. The converter has an acceptable efficiency at around
90%, although the power obtained is quite dependent on line voltage. However, for the most
common value range in transmission line currents it is possibly to obtain the required power.
Key words: Power Converter; Maintenance of transmission lines; Converter controllers;
Current transformer.
v
Lista de Abreviaturas e símbolos
RIOL – Robotic Inspection Over power Lines
COT – Clamp On Transformer
DC – Direct Current
AC – Alternate Current
𝑈1 – Tensão do primário utilizado no dimensionamento do transformador
𝑈2 – Tensão do secundário utilizado no dimensionamento do transformador
𝐼1 – Corrente do primário utilizado no dimensionamento do transformador
𝐼2 – Corrente do secundário utilizado no dimensionamento do transformador
𝑅1 – Resistência equivalente representante das perdas por efeito de Joule no primário do
transformador
𝑅2 – Resistência equivalente representante das perdas por efeito de Joule no secundário
do transformador
𝐿1 – Indutância equivalente representante das perdas por efeitos de perdas no primário do
transformador
𝐿2 – Indutância equivalente representante das perdas por efeitos de perdas no secundário
do transformador
𝑁1 – Número de espiras no primário do transformador
𝑁2 – Número de espiras no secundário do transformador
𝑅𝑚 – Resistência equivalente representante das perdas no núcleo e ferro, por efeitos de
histerese no material ferromagnético e correntes de Foucault
𝐿𝑚 – Indutância equivalente de magnetização do transformador
𝜙𝑛ú𝑐𝑙𝑒𝑜 – Fluxo de campo magnético no interior do núcleo do transformador
𝑒 – Força electromotriz
– Intensidade de campo magnético
𝐽 – Densidade de corrente
– Densidade de fluxo magnético
𝜇0 – Permeabilidade magnética do ar
𝜇𝑟 – Permeabilidade magnética relativa do material utilizado no núcleo
𝐴𝑛ú𝑐𝑙𝑒𝑜 – Secção do núcleo do transformador
𝑚𝑚𝑓 – Força magnetomotriz
𝑆𝑛 – Potência nominal utilizada para o dimensionamento do transformador
𝑖𝑝 – Corrente no primário do transformador utilizado no dimensionamento do conversor
𝑖𝑠 – Corrente no secundário do transformador utilizado no dimensionamento do conversor
𝑣𝑝 – Tensão no primário do transformador utilizado no dimensionamento do conversor
𝑣𝑠 – Tensão no secundário do transformador utilizado no dimensionamento do conversor
𝑉𝐷𝐶 – Tensão no andar DC do conversor
𝐼𝐷𝐶 – Corrente à saída do conversor para o andar DC
𝐴𝑤 – Área da janela do transformador

vi
𝑤𝑡 – Comprimento médio das espiras nos enrolamentos
𝑀𝑔𝑙 – Caminho médio do campo magnético
𝐴𝑓𝑒 – Secção do transformador
𝑍𝑏_𝑝 – Impedância de base do lado do primário do transformador
𝑍𝑏_𝑠 – Impedância de base do lado do secundário do transformador
𝑅𝑜𝑢𝑡 – Resistência à saída do conversor que traduz o robô (RIOL)
𝑃𝑜𝑢𝑡 – Potência na saída do conversor
𝐼𝑜𝑢𝑡 – Corrente na resistência de saída do conversor
𝐶0 – Condensador retificador no andar DC
𝜔 – Frequência angular no conversor
𝑅𝑒𝑞 – Resistência equivalente vista aos terminais do transformador
𝑍𝑒𝑞 – Impedância equivalente vista aos terminais do transformador
𝑣𝑃𝑊𝑀 – Tensão aos termianis do conversor do lado do andar AC
𝑆1,2,3 & 4 – Semicondutores do conversor
𝛾1 – Variável que define o estado dos semicondutores no braço 1 do conversor
𝛾2 – Variável que define o estado dos semicondutores no braço 2 do conversor
𝑇𝑃𝑊𝑀 – Período utilizado no controlo PWM do conversor
𝑓𝑃𝑊𝑀 – Frequência utilizada no controlo PWM do conversor
𝑒𝑣 – Erro da tensão utilizado no controlo do conversor
𝜀 – Intervalo utilizado como referência nos comparadores histeréticos no controlo do
conversor
𝐻 – Ganho da realimentação
𝐹 – Produto entre o rendimento e o fator de potência
𝑇𝑧 – Zero do controlador PI
𝑇𝑝 – Pólo do controlador PI
𝑇𝑑 – Atraso do controlador
𝐾𝑝 – Ganho para o compensador preparado para grandes perturbações
𝐾𝑖 – Ganho para o compensador preparado para grandes perturbações
𝑘𝑤 – Ganho para o compensador preparado para grandes perturbações
𝐶𝑓𝑖𝑐 – Condensador que realiza a compensação do efeito da baixa indutância equivalente de
magnetização
𝑢𝑐 – Tensão aos terminais do condensador no dimensionamento do filtro e controlador
𝑖𝑐 – Corrente no condensador no dimensionamento do filtro e controlador
𝐶𝐴𝐶 – Condensador do filtro passa-baixo introduzido
𝐿𝐴𝐶 – Indutância do filtro passa-baixo introduzido
𝑓𝐴𝐶 – Frequência de corte do filtro passa-baixo introduzido
𝑖𝐿𝐴𝐶 – Corrente na indutância do filtro passa-baixo
vii
Lista de Figuras
Figura 1 - Robô de Manutenção (Fonte: [2]) ......................................................................................... 1
Figura 2 - Transformador básico com linhas de fluxo magnético (Fonte: Wikipedia) ..................... 5
Figura 3 - Esquema equivalente de transformador .............................................................................. 6
Figura 4 - Esquema equivalente de transformador referido ao primário ........................................... 7
Figura 5 - Transformador COT na linha de transmissão (Fonte: [2]) ................................................. 8
Figura 6 - Esquema utilizado para simulação do transformador ...................................................... 10
Figura 7 - Corrente no primário do transformador no seu teste de carga ....................................... 11
Figura 8 - Potência à saída do transformador no seu teste de carga.............................................. 12
Figura 9 - Valor eficaz da corrente de magnetização no teste de carga do transformador ......... 13
Figura 10 - Corrente eficaz no secundário no teste de carga do transformador ........................... 14
Figura 11 - Correntes de primário e magnetização no teste de carga do transformador ............. 15
Figura 12 - Esquema simplificado do conversor ................................................................................. 16
Figura 13 - Descodificador para os sinais de comando ..................................................................... 18
Figura 14 - Diagrama de blocos do controlo ....................................................................................... 20
Figura 15 - Diagrama de blocos do sistema de controlo linearizado ............................................... 20
Figura 16 - Esquema do controlo no Simulink .................................................................................... 21
Figura 17 - Compensador em regime de grandes perturbações ..................................................... 21
Figura 18 - Esquema para simulação do conversor base ................................................................. 22
Figura 19 - Correntes no primário e secundário do transformador ideal no teste do conversor
base ........................................................................................................................................................... 22
Figura 20 - Tensão Vdc à saída do conversor base ............................................................................ 23
Figura 21 – Ampliação da tensão Vdc controlada à saída do conversor base ................................ 23
Figura 22 - Tensão Vp no primário do transformador ideal no teste do conversor base .............. 24 Figura 23 - Corrente no primário e secundário para o conjunto do transformador e conversor
base ........................................................................................................................................................... 25 Figura 24 - Tensão no andar DC com Pout=600 W para o conjunto do transformador e conversor
base ........................................................................................................................................................... 26 Figura 25 - Pormenor na tensão no andar DC com Pout=600 W para o conjunto do
transformador e conversor base............................................................................................................ 26
Figura 26 - Tensão no andar DC com Pout=800 W para o conjunto do transformador e conversor
base ........................................................................................................................................................... 27
Figura 27 - Potência à saída no teste com Pout=800 W para o conjunto do transformador e
conversor base ......................................................................................................................................... 28
Figura 28 - Esquema equivalente para cálculo de Cfic ....................................................................... 29
Figura 29 - Impedância equivalente ...................................................................................................... 30
Figura 30 - Impedância equivalente ...................................................................................................... 30
Figura 31 - Esquema utilizado para simulação do condensador ..................................................... 31
Figura 32 - Esquema para simulação de condensador variável ...................................................... 32 Figura 33 - Potência na saída do transformador com diferentes valores de compensação da
corrente de magnetização ...................................................................................................................... 33 Figura 34 - Corrente eficaz na resistência de saída Rout com diferentes valores para o
condensador de compensação.............................................................................................................. 34 Figura 35 - Corrente de magnetização com diferentes valores para o condensador de
compensação ........................................................................................................................................... 35 Figura 36 - Potência à saída no teste de carga do transformador com condensador de
compensação ........................................................................................................................................... 35 Figura 37 – Valor eficaz da corrente na resistência de saída no teste de carga do transformador
com condensador de compensação ..................................................................................................... 36

viii
Figura 38 - Corrente na resistência de saída no teste de carga fixa do transformador com
compensação da corrente de magnetização....................................................................................... 37 Figura 39 - Comparação entre corrente de magnetização (azul) e corrente no condensador
(verde e encarnado) no teste de carga fixa do transformador com condensador de
compensação ........................................................................................................................................... 38
Figura 40 - Circulação da corrente de magnetização ........................................................................ 38
Figura 41 - Carga pretendida aos terminais do secundário .............................................................. 39
Figura 42 - Diagrama de blocos para obtenção de Vs_ref no caso com condensador virtual de
compensação ........................................................................................................................................... 40 Figura 43 - Esquema para controlo no Simulink no caso com condensador virtual de
compensação ........................................................................................................................................... 40 Figura 44 - Tensão no andar DC para o teste em condições fixas no conversor com
condensador virtual de compensação .................................................................................................. 42 Figura 45 - Potência à saída no teste em condições fixas no conversor com condensador virtual
de compensação...................................................................................................................................... 42 Figura 46 – Tremor (Ripple) na tensão no andar DC para o teste em condições fixas no
conversor com condensador virtual de compensação ....................................................................... 43 Figura 47 - Comparação entre corrente no primário (azul) e secundário (verde e vermelha) para
o teste em condições fixas no conversor com condensador virtual de compensação ................. 44 Figura 48 - Tensão no primário do transformador para o teste em condições fixas no conversor
com condensador virtual de compensação ......................................................................................... 44
Figura 49 - Tensão no secundário para o teste em condições fixas no conversor com
condensador virtual de compensação .................................................................................................. 45
Figura 50 - Corrente eficaz de entrada no primário para o teste de corrente variável.................. 46
Figura 51 - Tensão no andar DC no conversor base para o teste de corrente variável ............... 47
Figura 52 - Potência na saída no conversor base para o teste de corrente variável .................... 47
Figura 53 – Corrente eficaz no secundário do transformador no conversor base para o teste de
corrente variável ...................................................................................................................................... 48 Figura 54 - Tensão no andar DC no conversor com condensador virtual de compensação para
o teste de corrente variável .................................................................................................................... 49 Figura 55 - Potência na saída do conversor com condensador virtual de compensação para o
teste de corrente variável ....................................................................................................................... 49
Figura 56 - Corrente no secundário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável ................................................................................. 50 Figura 57 - Tensão no primário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável ................................................................................. 50
Figura 58 - Tensão no secundário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável ................................................................................. 51
Figura 59 - Potência na saída do conversor base no teste de potência de carga variável .......... 52
Figura 60 - Tensão no andar DC do conversor base no teste de potência de carga variável ..... 53 Figura 61 - Tensão no andar DC do conversor com condensador virtual de compensação no
teste de potência de carga variável ...................................................................................................... 54 Figura 62 – Tremor (Ripple) na tensão VDC no conversor com condensador virtual de
compensação no teste de potência de carga variável ....................................................................... 54 Figura 63 - Potência na saída do conversor com condensador virtual de compensação no teste
de potência de carga variável ................................................................................................................ 55 Figura 64 - Tensão no primário do transformador no conversor com condensador virtual de
compensação no teste de potência de carga variável ....................................................................... 56
Figura 65- Tensão no secundário do transformador no conversor com condensador virtual de
compensação no teste de potência de carga variável ....................................................................... 56
Figura 66 - Circuito equivalente do transformador com filtro LCL .................................................... 57

ix
Figura 67 - Obtenção de vs ref ................................................................................................................. 58
Figura 68 - Bloco de controlo adaptado ao filtro CL ........................................................................... 59
Figura 69 - Descodificador do erro........................................................................................................ 59
Figura 70 - Circuito utilizado nas simulações ...................................................................................... 60 Figura 71 - Tensão Vdc no conversor com filtro e condensador virtual de compensação para o
teste em condições fixas ........................................................................................................................ 61 Figura 72 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições fixas ......................................... 61
Figura 73 - Tensão VDC no conversor com filtro e condensador virtual de compensação para o
teste em condições de corrente variável .............................................................................................. 62 Figura 74 – Potência Pout na saída do conversor com filtro e condensador virtual de
compensação para o teste em condições de corrente variável ....................................................... 63
Figura 75 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições de corrente variável .............. 63
Figura 76 - Tensão VDC no conversor com filtro e condensador virtual de compensação para o
teste em condições de carga variável .................................................................................................. 64 Figura 77 – Potência Pout à saída do conversor com filtro e condensador virtual de
compensação para o teste em condições de carga variável ............................................................ 65 Figura 78 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições de carga variável ................... 65

x
Lista de Tabelas
Tabela 1- Características do transformador Longo em UI .................................................................. 9
Tabela 2 - Combinações possíveis de erro e comando dos semicondutores ................................ 18

xi
Índice Agradecimentos ........................................................................................................................... i
Resumo ....................................................................................................................................... iii
Abstract ........................................................................................................................................iv
Lista de Abreviaturas e símbolos ............................................................................................. v
Lista de Figuras ......................................................................................................................... vii
Lista de Tabelas ......................................................................................................................... x
Índice ............................................................................................................................................ xi
1. Introdução ............................................................................................................................ 1
1.1. Objetivo do Trabalho .................................................................................................. 2
1.2. Estrutura do Trabalho ................................................................................................ 3
2. Modelo do transformador e controlo do conversor base .............................................. 4
2.1. Modelo do transformador de corrente ..................................................................... 4
Funcionamento geral e esquema equivalente do transformador................................ 4
Simulação do transformador dimensionado ................................................................. 10
2.2. Modelo do conversor base ...................................................................................... 15
Descrição geral do conversor ......................................................................................... 15
Controlo PWM do Conversor .......................................................................................... 17
Controlo da tensão VDC .................................................................................................... 18
Simulação do conversor base ........................................................................................ 21
2.3. Simulação do conjunto transformador e conversor base ................................... 25
3. Controlo do conversor para compensação do efeito da baixa indutância
equivalente de magnetização ................................................................................................. 29
3.1. Capacidade para compensação do efeito da baixa indutância equivalente de
magnetização ........................................................................................................................ 29
Cálculo teórico de Cfic ...................................................................................................... 29
Simulação do transformador com condensador de compensação .......................... 31
3.2. Controlador do conversor para obter um condensador virtual de
compensação ........................................................................................................................ 39
4. Simulação do conversor com controlo e compensação do efeito da baixa
indutância equivalente de magnetização .............................................................................. 41
4.1. Simulação com Pout=800 W e 𝑖𝑝𝑒𝑓 = 300 𝐴 ......................................................... 41
Sem condensador virtual de compensação ................................................................. 41
Com condensador virtual de compensação ................................................................. 41
4.2. Comparação para diferentes correntes na entrada (Pout=800 W)..................... 46

xii
Sem condensador virtual de compensação ................................................................. 46
Com condensador virtual de compensação ................................................................. 48
4.3. Comportamento da tensão de saída com cargas variáveis (para 𝑖𝑝𝑒𝑓 = 300 𝐴)
52
Sem condensador virtual de compensação ................................................................. 52
Com condensador virtual de compensação ................................................................. 53
5. Introdução de filtro no andar AC do conversor ............................................................ 57
5.1. Dimensionamento do filtro e redimensionamento do controlo do conversor .. 57
5.2. Simulação do conversor com condensador virtual de compensação e filtro
integrado no circuito ............................................................................................................. 60
Simulação com Pout=800 W e 𝑖𝑝𝑒𝑓 = 300 A ................................................................. 60
Comparação para diferentes correntes na entrada (Pout=800 W)............................. 62
Comparação para cargas diferentes na saída (com 𝑖𝑝𝑒𝑓 = 300 𝐴) ......................... 64
6. Conclusão .......................................................................................................................... 66
Bibliografia ................................................................................................................................. 67

1
1. Introdução
A sociedade atual está altamente dependente da correta e fiável distribuição de energia
elétrica pelos diversos consumidores existentes. As grandes centrais de produção elétrica são
cada vez mais descentralizadas e deslocadas dos grandes centros de consumo, sendo a
distribuição extremamente importante dentro do sistema elétrico nacional e não só. A
transmissão é assegurada por linhas de transmissão a grandes distâncias.
Os condutores, isoladores e sistemas de proteção e fixação destas linhas não são de fácil
acesso por métodos convencionais, e as linhas são compridas o suficiente para inviabilizar a
supervisão ou manutenção por inspeção presencial por técnicos especializados.
Neste momento está em estudo um protótipo de um robô que faria a inspeção das linhas de
transmissão de energia de forma autónoma, podendo assim ser identificadas falhas ou zonas
mais degradadas na linha rapidamente e de forma mais eficiente [6].
O robô RIOL (“Robotic Inspection Over Lines”) contém três pernas mecânicas, que estarão
presas à linha de transmissão através de garras mecânicas [6]. A garra central incluirá um
transformador de corrente COT (“Clamp On Transformer”) [2] e [3]. As três garras estarão
agarradas na linha, excetuando o momento em que o RIOL fizer a transposição de eventuais
obstáculos, como as balizas de sinalização, em que soltará os seus braços sequencialmente,
mantendo sempre pelo menos dois braços seguros na linha de forma a suportar o seu peso e
manter a estabilidade.
Figura 1 - Robô de Manutenção (Fonte: [2])
Visto os braços mecânicos terem de suportar o peso do robô, e este estar suspenso na linha,
o peso do mesmo é uma condição importante no dimensionamento dos vários componentes do
robô.

2
Este robô funciona com uma tensão contínua DC, e a sua alimentação será feita a partir da
linha cujas tensões e correntes são alternadas quase sinusoidais AC. Para tal é necessário um
conversor AC-DC, que consiga entregar energia da linha para o robô, ajustando as grandezas à
energia necessária e pedida pelo mesmo [1]. E é sobre esse conversor e alimentação do robô
que se desenvolve o tema deste trabalho.
1.1. Objetivo do Trabalho
Sobre o tema da alimentação do robô RIOL, numa primeira fase foi estudado um conversor
para obter potência da linha AC de transmissão entregando-a em DC com valores de tensão
apropriados ao protótipo do robô [1]. O transformador foi considerado aproximadamente ideal.
Foram também realizados dois trabalhos com o objetivo de estudar e dimensionar o
transformador do tipo transformador de corrente, que entregará tensões e correntes alternadas
ao conversor [2] e [3]. Estes trabalhos concluíram que o modelo do transformador de corrente
tem parâmetros que o afastam muito do modelo de um transformador ideal.
Consequentemente, a solução de conversão de energia até agora encontrada para o
conversor [1] tem de ser melhorada considerando os parâmetros estimados para o transformador
construído [2] e [3]. Este transformador não é alimentado por uma fonte de tensão, mas por uma
corrente e portanto tem de ser dimensionado como um transformador de corrente em vez de
tensão. Isso conjugado com limitações de peso levanta algumas questões, nomeadamente uma
indutância equivalente de magnetização relativamente baixa, que limita fortemente a potência de
saída do transformador com baixas correntes na linha de transmissão.
Para obviar a este problema, no trabalho realizado por Francisco Serrano [3] é proposta uma
solução que seria ligar um condensador em paralelo com o secundário do transformador de
forma a atenuar o efeito da indutância equivalente de magnetização através da criação de
ressonância entre estes dois elementos.
Visto o robô estar condicionado pelo tamanho e peso não se pode simplesmente adicionar
um condensador ao conversor, visto que o condensador necessário seria de capacidade,
tamanho e peso consideráveis.
Tem este trabalho como objetivos:
Estimar o valor do condensador necessário para compensar o efeito da baixa
indutância equivalente de magnetização no funcionamento do mesmo;
Dimensionar um controlador para o conversor, que crie um condensador virtual visto
aos terminais do secundário do transformador para que não seja necessário adicionar
um condensador real;
Dimensionar um controlador para o conversor, que tenha em conta a presença de um
filtro de ordem superior para reduzir a injeção na rede de componentes de frequência
relacionada com a comutação do conversor;

3
1.2. Estrutura do Trabalho
O trabalho encontra-se dividido em quatro secções principais coincidentes com o segundo,
terceiro, quarto e quinto capítulo.
No segundo capítulo pretende-se fazer um apanhado do estado da arte, fazendo uma revisão
do trabalho já feito anteriormente e criando os modelos necessários para a continuação do
trabalho.
No terceiro capítulo encontra-se o desenvolvimento teórico do dimensionamento de um
condensador virtual para compensação do efeito da indutância equivalente de magnetização,
bem como dos controladores para concretizar a ação desse condensador virtual. Faz-se também
uma comparação do funcionamento entre o transformador com e sem o condensador virtual de
compensação.
No quarto capítulo fazem-se várias simulações já com a compensação pelo condensador
virtual e respetivo controlador implementado, de forma a tirar conclusões em relação ao seu
funcionamento e benefícios.
No quinto capítulo apresenta-se o dimensionamento de um filtro de 2ª ordem entre o
transformador e o conversor, e respetivo controlador para o conversor, para diminuir a injeção
na rede de componentes de frequência relacionadas com as comutações do conversor, de forma
a garantir grandezas sinusoidais no transformador e consequentemente na linha de transmissão.
No sexto capítulo referem-se as conclusões e as contribuições mais importantes do trabalho.
4
2. Modelo do transformador e controlo do conversor base
Para se poder estudar o controlador e conversor, foi necessário criar um modelo que
simulasse o funcionamento do transformador e conversor.
Inicialmente criou-se o modelo do transformador baseado nos trabalhos de Diogo Lopes [2] e
Francisco Serrano [3], e posteriormente o modelo do conversor de acordo com o dimensionado
por João Caxias Ferreira [1].
Depois de testados os modelos criados em separado, foi testado o modelo do conversor
juntamente com o transformador.
2.1. Modelo do transformador de corrente
Funcionamento geral e esquema equivalente do transformador
Para se introduzir o transformador utilizado, e posteriormente estudar a necessidade sentida
de melhorar o seu funcionamento, é feita uma pequena introdução ao funcionamento teórico de
um transformador.
O transformador é um equipamento eletromagnético que permite transmitir potência entre
circuitos, com rendimento quase unitário, podendo aumentar ou diminuir tensões e correntes
mediante o seu dimensionamento.
Exemplificando, na rede de transporte de energia a tensão nas linhas de transmissão é
considerada Alta Tensão, na ordem dos 400 kV (valor eficaz entre fases), e na rede de consumo
será cerca de 230 V (valor eficaz entre fase e neutro), denominada Baixa Tensão. São utilizados
transformadores de tensão para fazer esta conversão sem introduzir grandes perdas de potência.
O funcionamento do transformador é baseado no princípio da indução magnética.
Observando um esquema simplificado na fig. 2, temos um núcleo de material ferromagnético que
será percorrido por um fluxo magnético, e dois enrolamentos que envolvem esse mesmo núcleo.
As superfícies em que assentam as espiras dos enrolamentos são atravessadas pelo mesmo
fluxo magnético, logo existirá uma força eletromotriz em cada enrolamento proporcional ao fluxo
e ao número de espiras em cada enrolamento.
5
Figura 2 - Transformador básico com linhas de fluxo magnético (Fonte: Wikipedia)
As relações no transformador são baseadas na Lei de Indução de Faraday, que diz que um
fluxo magnético variável induz uma força eletromotriz e, que origina a tensão U:
𝑒 = −𝑑𝑁𝜙𝐹𝑒
𝑑𝑡 (1)
Onde 𝑁, é o número de espiras num dado enrolamento ou bobine, sendo 𝜙𝐹𝑒 o fluxo no núcleo
de ferro que acaba por passar em cada espira.
Desprezando a resistência nos enrolamentos, tipicamente muito pequenas, obtém-se,
𝑈1 = 𝑁1
𝑑∅𝐹𝑒
𝑑𝑡 ⋀ 𝑈2 = 𝑁2
𝑑∅𝐹𝑒
𝑑𝑡⇒
𝑈1
𝑈2=
𝑁1
𝑁2 (2)
Para obter a relação da corrente no transformador utiliza-se a Lei de Ampére, que relaciona
um campo magnético com a corrente induzida pelo mesmo.
Na sua forma integral, a Lei de Ampére estabelece a seguinte relação,
∮ . 𝑑𝑙 = ∬𝐽 . 𝑑𝑆 (3)
Escolhendo um caminho de comprimento 𝑙 para o integral, coincidente com as linhas de
campo magnético uniforme no núcleo, e sabendo que para um material ferromagnético não
saturado se pode escrever,
= 𝜇0𝜇𝑟 (4)
considerando um núcleo com secção uniforme 𝐴𝑛ú𝑐𝑙𝑒𝑜,
𝜙𝐹𝑒 = ∬ . 𝑑𝑆 = 𝐵𝐴𝑛ú𝑐𝑙𝑒𝑜 (5)

6
e sabendo ainda que,
∬𝐽 . 𝑑𝑆 = 𝑁𝑖𝐼𝑖 (6)
chega-se então à relação,
𝑚𝑚𝑓 = ∑𝑁𝑖𝐼𝑖 =𝑙
𝜇0𝜇𝑟𝐴𝑛ú𝑐𝑙𝑒𝑜𝜙𝐹𝑒 (7)
Esta é a chamada força magnetomotriz que no caso ideal será aproximadamente zero visto
a permeabilidade magnética do material do núcleo ser geralmente considerada muito elevada,
logo o somatório das correntes será também aproximadamente zero, e pode-se concluir,
𝑁1𝐼1 − 𝑁2𝐼2 ≈ 0 ⟺ 𝑁1𝐼1 = 𝑁2𝐼2 ⟺𝐼1𝐼2
=𝑁2
𝑁1 (8)
Estas serão as expressões base do transformador, (2) e (8). No entanto, até agora tem-se
considerado um transformador aproximadamente ideal, desconsiderando as perdas por efeito de
Joule e fugas de campo magnético, assim como os efeitos da não idealidade do material do qual
o núcleo é constituído.
Para considerar estas não idealidades é introduzido o esquema equivalente do transformador,
fig. 3, onde se ligam vários elementos representativos das não idealidades a um transformador
ideal com as relações (2 e 8) acima expressadas.
Figura 3 - Esquema equivalente de transformador
Os vários elementos estão associados às seguintes não-idealidades são:
R1, R2 – resistências equivalentes de perdas por efeito de Joule nos enrolamentos do
primário e secundário;
L1, L2 – Indutâncias equivalentes de fugas de campo magnético no primário e
secundário;
Rm – resistência equivalente de perdas no núcleo e ferro, por efeitos de histerese no
material ferromagnético e correntes de Foucault;
Lm – indutância equivalente de magnetização do transformador.

7
Muito frequentemente estas impedâncias são “referidas” ao primário ou ao secundário, ou
seja, são transportadas de um lado para o outro do transformador ideal no circuito equivalente.
Para tal são alteradas de acordo com a relação de transformação do transformador.
Por exemplo, referindo as impedâncias do secundário ao primário,
𝑅2′ = (
𝑁1
𝑁2)2𝑅2 (9)
𝐿2′ = (
𝑁1
𝑁2)2
𝐿2 (10)
Resultando no seguinte circuito equivalente da fig. 4,
Figura 4 - Esquema equivalente de transformador referido ao primário
Os valores para estes parâmetros são tipicamente obtidos através de testes feitos ao
transformador experimentalmente, nomeadamente os testes do transformador em circuito aberto
e em curto-circuito.
Modelo utilizado no trabalho
No caso do transformador utilizado para o projeto da fonte de alimentação do robô, será
dimensionado como um transformador de corrente em vez de tensão. Isto deve-se ao facto de o
robô se acoplar diretamente na linha de transmissão, mas sem ter possibilidade de se ligar
eletricamente à alta tensão entre fases. A alimentação elétrica será então conseguida à custa da
corrente que percorre o cabo da linha, cabo esse que é envolvido pelo núcleo do transformador,
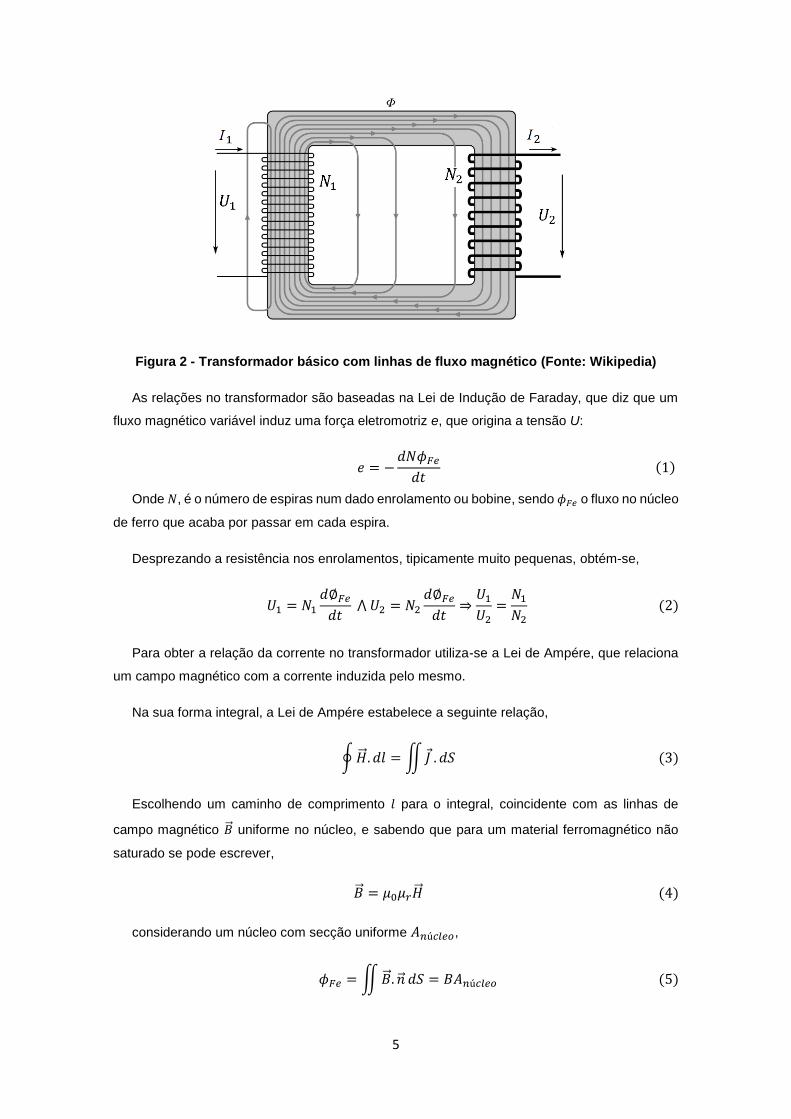
constituindo o seu enrolamento primário com uma única espira como se pode observar na fig. 5.
8
Figura 5 - Transformador COT na linha de transmissão (Fonte: [2])
Como se pode ver na fig. 5, o enrolamento secundário estará enrolado à volta do núcleo.
Todo o dimensionamento e estudo deste transformador foi realizado numa primeira fase em
[2], e depois aprofundado em [3].
Um dos obstáculos encontrados é que os transformadores de corrente são utilizados
sobretudo na medida de correntes elétricas e não em fontes de alimentação. Logo existe alguma
dificuldade na obtenção de métodos consistentes para a medição dos parâmetros do
transformador em estudo. Estes transformadores são dimensionados para serem alimentados
por corrente, portanto o facto de não funcionarem de forma convencional em situações de circuito
aberto impossibilita o estudo dos mesmos através dos testes padrão. Por esta razão, os
parâmetros do modelo do transformador determinados em [2] e em [3] dependem fortemente das
condições de operação e do número de espiras no secundário do transformador.
Os transformadores dimensionados nos trabalhos referidos anteriormente, [2] e [3], possuíam
uma relação de espiras de 1:30 ou próximo. Neste trabalho chegou-se à conclusão que essa
relação não seria indicada para o conversor com condensador virtual em estudo.
Logo, tendo em conta os resultados observados nesses trabalhos, foi dimensionado um
transformador com um número de espiras adequado a este trabalho. Porém, tendo em conta as
dificuldades de obtenção dos parâmetros do modelo do novo transformador, optou-se por um
modelo com parâmetros calculados através das expressões aproximadas para os parâmetros do
modelo do transformador em corrente apresentadas em [4].
O modelo utilizado prevê um transformador de potência nominal 𝑆𝑛 = 800 𝑉𝐴 para uma
corrente eficaz na rede de 300 A, ou seja, uma corrente no primário de 𝑖𝑝𝑒𝑓= 300 𝐴.
Considerando características aproximadamente ideais, pode-se estimar aproximadamente um
valor eficaz de tensão no primário,
𝑣𝑝𝑒𝑓=
𝑆𝑛
𝑖𝑝𝑒𝑓
=800
300= 2,67 ≈ 3 𝑉 (11)
9
O conversor a utilizar, um inversor DC-AC comutado, visto a energia transitar exclusivamente
no sentido rede-robô terá um funcionamento como um retificador comutado do tipo elevador, e a
tensão máxima do lado AC do conversor deverá ser menor que no andar DC, onde 𝑉𝐷𝐶𝑟𝑒𝑓 = 55 𝑉,
logo,
𝑣𝑠𝑒𝑓≤
𝑉𝐷𝐶𝑟𝑒𝑓
√2⇔ 𝑣𝑠𝑒𝑓
≤ 38,9𝑉 → 𝑣𝑠 = 30 𝑉 (12)
Para incluir as quedas de tensão nos semicondutores e ainda dispor de alguma margem no
índice de modulação, optou-se por uma tensão no secundário de 30 V, que resulta na relação
de transformação,
𝑛 =𝑣𝑝𝑒𝑓
𝑣𝑠𝑒𝑓
=3
30=
1
10 (13)
Como o primário é constituído pela linha de transmissão tem-se N1=1, o que leva a N2=10.
De seguida calculam-se os parâmetros para o circuito equivalente da fig. 4, baseado nas
características físicas do transformador longo em UI estudado nos trabalhos [2] e [3], mas com
a relação de espiras alterada, características essas apresentadas na tab. 1,
Tabela 1- Características do transformador Longo em UI
Aw wt Mgl Afe µr
12 cm2 1,6 m 0,18 m 70 cm2 1000
Os parâmetros do transformador foram então calculados através das expressões dadas em
[4] tendo os termos resistivos sido estimados em percentagem dos valores base,
𝐿1 = 𝜇0 𝑁12
6 𝑤𝑡 𝐴𝑤
𝑀𝑔𝑙2 ≈ 447 𝑛𝐻 (14)
𝐿2 = 𝜇0 𝑁22
6 𝑤𝑡 𝐴𝑤
𝑀𝑔𝑙2 ≈ 44,7 𝜇𝐻 (15)
𝐿𝑚 = 𝜇 𝑁12𝐴𝑓𝑒
𝑀𝑔𝑙≈ 48,9 𝜇𝐻 (16)
𝑍𝑏_𝑝 =𝑣𝑝
2
𝑆𝑛=
32
800= 0,01125 Ω (17)
𝑍𝑏_𝑠 =𝑣𝑠
2
𝑆𝑛=
302
800= 1,125 Ω (18)
𝑅1 = 0,01 𝑍𝑏_𝑝 = 112,5 𝜇Ω (19)

10
𝑅2 = 0,01 𝑍𝑏_𝑠 = 11,25 𝑚Ω (20)
Umas das características que podemos observar nos parâmetros deste transformador é uma
indutância de magnetização em pu 𝐿𝑚𝑝𝑢= 1,36 relativamente baixa, o que origina os problemas
que promovem este trabalho.
Tipicamente os modelos do transformador contêm uma impedância equivalente no designado
ramo de magnetização suficientemente alta 𝐿𝑚𝑝𝑢> 100 para que a corrente de magnetização
seja desprezável (analisando o esquema equivalente do transformador), sendo a corrente de
secundário dada pela expressão (8).
No caso em estudo isso não acontece, sendo a corrente de magnetização uma fração
considerável da corrente do primário (do transformador ideal no modelo equivalente), o que
acaba por originar a redução da potência que se consegue obter deste transformador.
O objetivo do presente trabalho é exatamente estudar a alteração ao controlo do conversor
no sentido de pôr em prática a solução apresentada em [3], e ligar em paralelo com o
transformador um condensador virtual (em [3] foi utilizado um condensador real) que entrará em
ressonância com a indutância de magnetização, compensando a corrente de magnetização.
Baseado nestes valores, apresentam-se de seguida as simulações pertinentes em relação ao
funcionamento do transformador.
Simulação do transformador dimensionado
Para a simulação do transformador, foi utilizado o seguinte esquema no Simulink da fig. 6,
Figura 6 - Esquema utilizado para simulação do transformador
Para se efetuar o estudo da potência de saída do transformador, foi ligado ao secundário uma
fonte de corrente controlada a simular uma resistência variável. A resistência que se observa na
figura no andar DC tem um valor muito elevado relativamente à impedância de base do
secundário e está presente devido ao facto de o Simulink não permitir que uma fonte de corrente
seja ligada em série com o modelo do transformador.

11
Visto o transformador ter sido dimensionado para uma corrente eficaz na rede de 𝑖𝑝𝑒𝑓=
300 𝐴, a simulação inicial foi feita com esses mesmos valores, como se vê na fig. 7.
Figura 7 - Corrente no primário do transformador no seu teste de carga
Para obter os valores de potência 𝑃𝑜𝑢𝑡 possíveis à saída do transformador, foi feito um
varrimento na fonte de corrente controlada a simular uma resistência variável, que resulta num
intervalo de resistências de carga,
𝑅𝑜𝑢𝑡 ∈ [0,01 Ω; 20 Ω] (21)

12
Figura 8 - Potência à saída do transformador no seu teste de carga
Como se pode observar pela fig. 8, a potência de saída máxima nestas condições está
próxima de 700 W quando Rout é ligeiramente inferior a 2 , ou seja próximo de Zb_s. Para valores
da resistência na saída do conversor superiores a 2 , a corrente no primário circula
principalmente pela indutância de magnetização limitando a potência transferida para o
secundário como se pode observar na fig. 9 e 10.
13
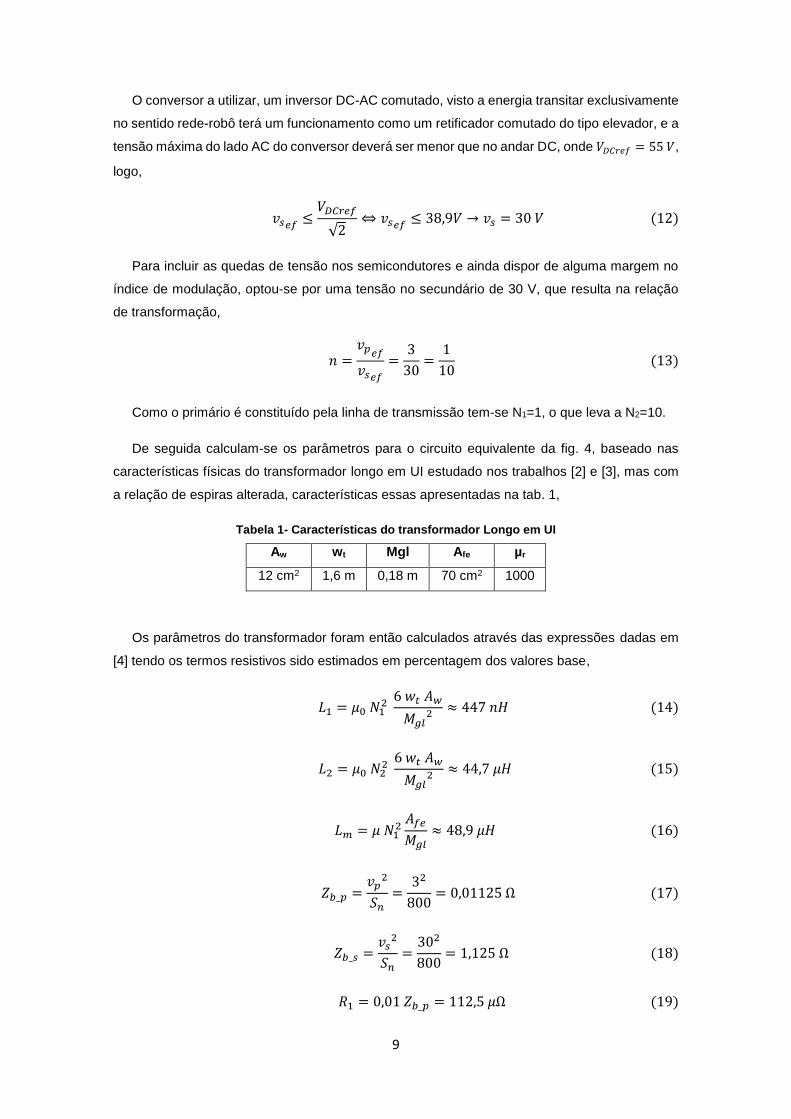
Figura 9 - Valor eficaz da corrente de magnetização no teste de carga do transformador
Ao ligar a resistência 𝑅𝑜𝑢𝑡 ao secundário do transformador, se não se considerar a indutância
associada às fugas 𝐿2, a resistência funciona como um divisor de corrente com a indutância
equivalente de magnetização. O que acontece é que a corrente apenas passa na resistência de
saída quando esta for significativamente inferior à impedância da indutância equivalente de
magnetização. E é isso que podemos observar na fig. 9 e 10, para valores pequenos da
resistência de saída a corrente de magnetização é pequena, ou seja, a corrente no secundário
do transformador obedece à relação quase ideal (8) como seria desejável. No entanto, conforme
a resistência de saída aumenta, o seu peso no divisor de corrente torna-se mais significativo, e
a corrente do primário reparte-se mais pela indutância equivalente de magnetização diminuindo
assim a potência disponível no secundário do transformador.

14
Figura 10 - Corrente eficaz no secundário no teste de carga do transformador
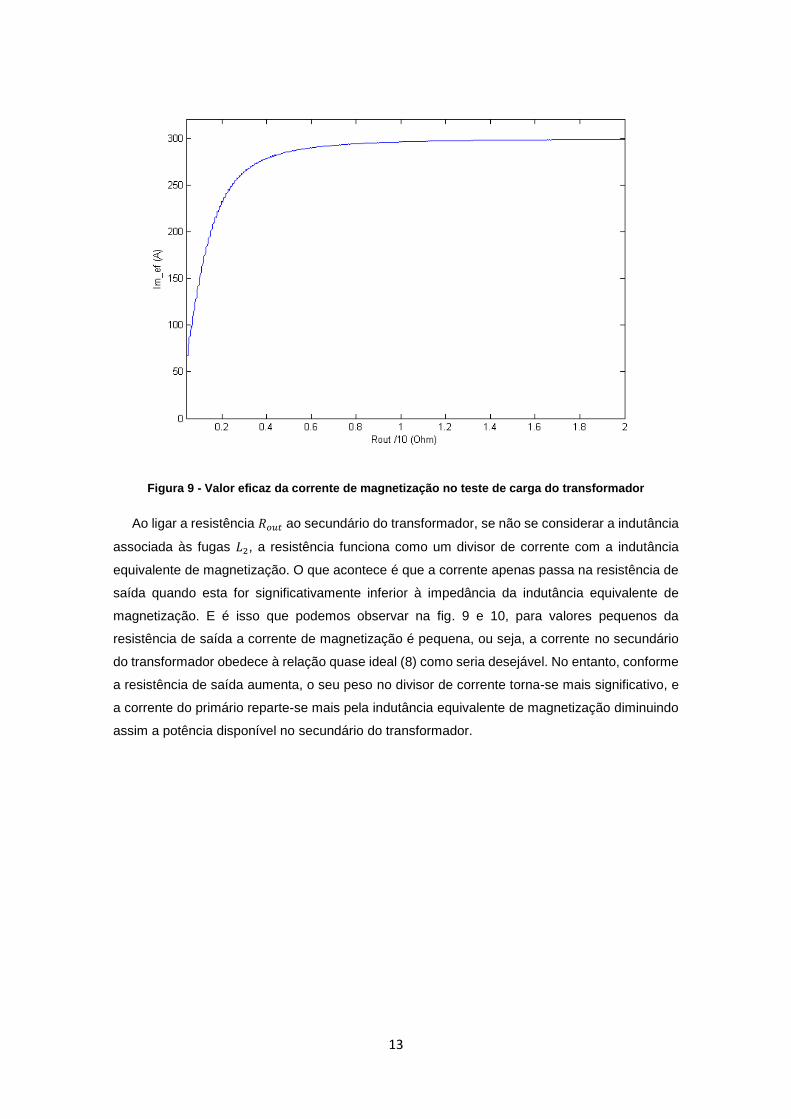
Na imagem seguinte, fig. 11, ilustra-se o andamento da corrente de magnetização (verde)
com a corrente no primário (azul) quando se tem na saída uma resistência de cerca de 10 , e
podemos observar que praticamente toda a corrente do primário é a corrente de magnetização,
o que leva a uma corrente e potência diminutas disponíveis no secundário.
15
Figura 11 - Correntes de primário e magnetização no teste de carga do transformador
De realçar que os parâmetros do modelo deste transformador não espelham perfeitamente
os estudos realizados previamente, mas aceita-se como uma boa aproximação ao possuir duas
características relevantes:
A sua indutância de magnetização é relativamente pequena, confirmando a
necessidade da inclusão de um condensador no secundário que permita compensar
alguns dos efeitos negativos do baixo valor da indutância de magnetização;
A curva característica da potência em função da carga no secundário é semelhante
em termos de valores possíveis, ao verificado no transformador Longo em UI
estudado em trabalhos anteriores [3].
2.2. Modelo do conversor base
Descrição geral do conversor
O conversor em estudo deve realizar uma conversão das grandezas AC disponíveis nas
linhas de transmissão onde o robô irá operar, para grandezas DC utilizáveis na sua operação.
Para tal, o controlo do mesmo conversor será fator importante, pois será esse controlo que
garantirá as tensões necessárias na alimentação elétrica do robô.
O conversor é um AC-DC monofásico em ponte completa (conversor de 4 quadrantes) em
funcionamento como retificador. O controlo terá como principal objetivo manter a tensão
16
retificada no valor de 𝑉𝐷𝐶 = 55 𝑉, relacionada com a tensão de operação do robô que funciona
com baterias de 48 V.
O estudo desenvolvido sobre este assunto foi realizado previamente em [1], e a construção
do modelo do conversor para o posterior estudo sobre a inserção do condensador foi baseado
nesse mesmo trabalho [1], que se resume a seguir.
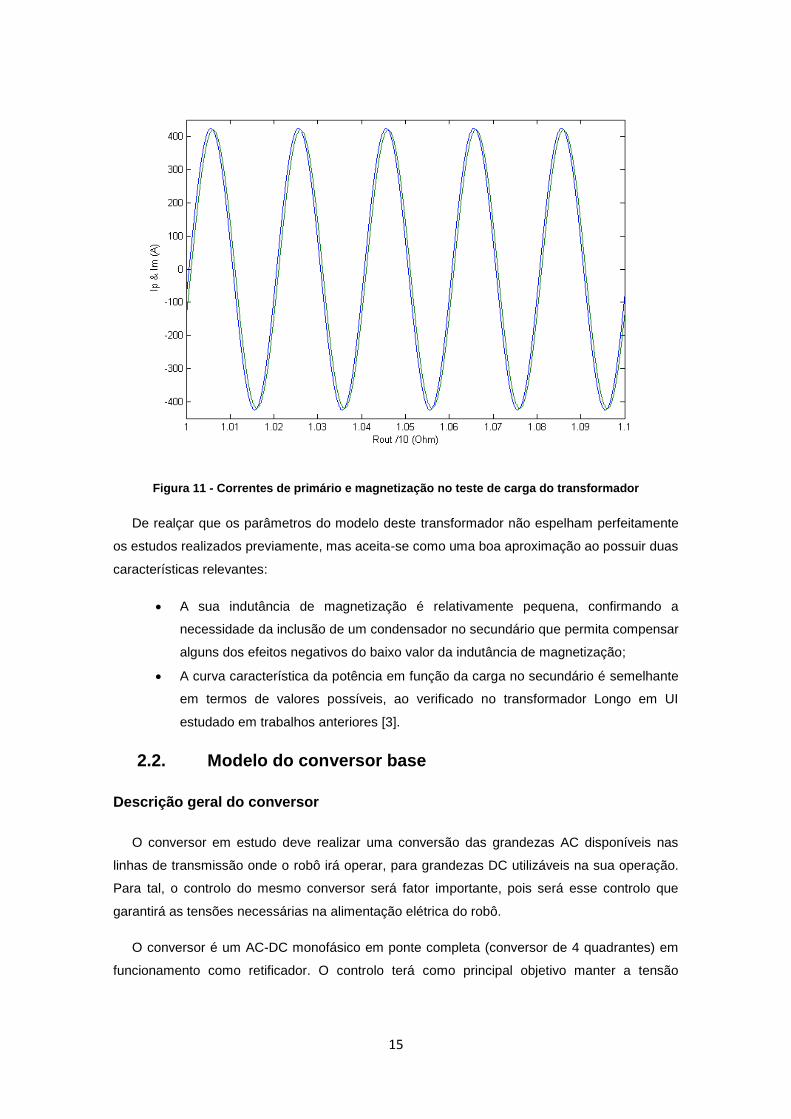
Figura 12 - Esquema simplificado do conversor
Dado que em [1] o condensador de compensação não está presente, foi necessário usar uma
versão simplificada em relação a [1], não considerando alguns dos filtros aí dimensionados.
Assim o inversor monofásico é ligado à rede através de um transformador sem qualquer filtro,
uma vez que a rede se comporta como fonte de corrente. Do lado DC, a carga está traduzida por
um condensador 𝐶0 e uma resistência 𝑅𝑜𝑢𝑡 que representa o consumo do robô.
Nesta fase considerou-se um transformador ideal com uma relação de transformação de 1:10,
visto as correntes na rede serem previstas entre os 100 A e os 1000 A, a corrente disponível
para a simulação deste conversor será à entrada da ponte entre os 10 A e os 100 A.
O valor de 𝐶0 é calculado para se obter uma tensão aproximadamente constante 𝑉𝐷𝐶, através
da expressão que relaciona a corrente envolvida no condensador e com o tremor (ripple) máximo
permitido de 2,5%.
𝐶0 =𝐼𝑜𝑢𝑡
∆𝑉𝑑𝑐=
800/55
2𝜋 × 50 × 0,025 × 55≈ 33,67 𝑚𝐹 (22)
Para o desenvolvimento do controlo do conversor, que tem como objetivo manter a tensão
𝑉𝐷𝐶 nos 55 V, foi em [1] utilizado o conceito do conversor se comportar como uma resistência Req
(resistência virtual). Tal implica que seja imposta no secundário do transformador uma tensão
proporcional à corrente no mesmo, ou seja,
𝑣𝑠 = 𝑅𝑒𝑞𝑖𝑠 (23)

17
Esta relação implica um fator de potência aproximadamente unitário, o que maximizaria a
potência ativa posta no robô usando um transformador quase ideal.
Para se conseguir o controlo do conversor, utiliza-se um controlador em cascata em que a
malha interna controla, por modulação de largura de impulso (PWM), a tensão 𝑣𝑠 e a malha
externa, de dinâmica mais lenta, controla a tensão quase constante 𝑉𝐷𝐶.
Controlo PWM do Conversor
Para o controlo da malha interna do conversor foi adotado um controlo de modulação por
largura de impulso, onde a duração destes impulsos está relacionado com o valor de 𝑣𝑃𝑊𝑀
pretendido.
Neste tipo de conversor tem-se três níveis possíveis na tensão 𝑣𝑃𝑊𝑀
𝑣𝑃𝑊𝑀 =
𝑉𝑑𝑐, 𝑞𝑢𝑎𝑛𝑑𝑜 𝑆1 𝑒 𝑆4 𝑂𝑁0, 𝑞𝑢𝑎𝑛𝑑𝑜 𝑆1 𝑒 𝑆3 𝑂𝑁 𝑜𝑢 𝑆2 𝑒 𝑆4 𝑂𝑁
−𝑉𝑑𝑐 , 𝑞𝑢𝑎𝑛𝑑𝑜 𝑆2 𝑒 𝑆3 𝑂𝑁 (24)
Introduzindo duas variáveis que simbolizam o estado dos semicondutores no conversor,
𝑣𝑃𝑊𝑀 =
𝑉𝑑𝑐 , 𝑝𝑎𝑟𝑎 𝛾1 = 1 ∩ 𝛾2 = 00, 𝑝𝑎𝑟𝑎 𝛾1 = 𝛾2
−𝑉𝑑𝑐 , 𝑝𝑎𝑟𝑎 𝛾1 = 0 ∩ 𝛾2 = 1 (25)
Pode expressar-se a relação,
𝑣𝑃𝑊𝑀 = (𝛾1 − 𝛾2)𝑉𝐷𝐶 (26)
Sabendo que o conversor tem 4 combinações possíveis, em função do valor pretendido para
𝑣𝑃𝑊𝑀, pode selecionar-se a combinação necessária.
Uma vez que 𝑣𝑃𝑊𝑀 não é variável de estado, optou-se por considerar o seu valor médio 𝑉𝑃𝑊𝑀
num período de comutação 𝑇𝑃𝑊𝑀. Assim deverá ser 𝑉𝑃𝑊𝑀 = 𝑣𝑠 = 𝑅𝑒𝑞𝑖𝑠 , ou seja,
𝑉𝑃𝑊𝑀 =1
𝑇𝑃𝑊𝑀∫ 𝑣𝑃𝑊𝑀𝑑𝑡
𝑇𝑃𝑊𝑀
0
≈ 𝑅𝑒𝑞𝑖𝑠 ≈ 𝑣𝑠 (27)
Supondo 𝑣𝑠 quase constante num período de comutação 𝑇𝑃𝑊𝑀, deve verificar-se:
1
𝑇𝑃𝑊𝑀∫ (𝑣𝑠 − 𝑣𝑃𝑊𝑀)𝑑𝑡
𝑇𝑃𝑊𝑀
0
= 0 (28)
Esta equação permite realizar o controlador PWM, pois qualquer desvio em torno de zero
pode ser anulado por seleção do valor adequado para 𝑣𝑃𝑊𝑀.
O controlador mede um erro 𝑒𝑣 (ou desvio);

18
𝑒𝑣 = ∫ (𝑣𝑠 − 𝑣𝑃𝑊𝑀)𝑑𝑡𝑇𝑃𝑊𝑀
0
= 0 (29)
Este erro comparado com um valor positivo, tendente para zero, permite definir o comando
do conversor:
𝑝𝑎𝑟𝑎 𝑒𝑣 > 𝜀 ⇒ 𝑣𝑃𝑊𝑀 = 𝑉𝐷𝐶 ⇒ 𝛾1 = 1 ∩ 𝛾2 = 0𝑝𝑎𝑟𝑎 − 𝜀 < 𝑒𝑣 < 𝜀 ⇒ 𝑣𝑃𝑊𝑀 = 0 ⇒ 𝛾1 = 𝛾2 = 0 ∪
𝑝𝑎𝑟𝑎 𝑒𝑣 < −𝜀 ⇒ 𝑣𝑃𝑊𝑀 = −𝑉𝐷𝐶 ⇒ 𝛾1 = 0 ∩ 𝛾2 = 1𝛾1 = 𝛾2 = 1 (30)
De onde se pode criar a tab. 2 de comutação dos semicondutores.
Tabela 2 - Combinações possíveis de erro e comando dos semicondutores
ev 𝜸𝟏 𝜸𝟐 S1 S2 S3 S4
𝑒𝑣 > 𝜀 1 0 ON OFF OFF ON
−𝜀 < 𝑒𝑣 < 𝜀 1 1 ON OFF ON OFF
−𝜀 < 𝑒𝑣 < 𝜀 0 0 OFF ON OFF ON
𝑒𝑣 < −𝜀 0 1 OFF ON ON OFF
Para obter os sinais de controlo são usados dois comparadores histeréticos, um com valor de
largura de histerese ligeiramente maior que a do outro. Os comparadores têm um sinal de saída
igual a 1 para valores maiores que o seu valor de janela, e 0 para valores menores. Como dito
anteriormente, um comparador tem os limites [−𝜀; 𝜀] e outro [−𝜀
3;𝜀
3]. Na simulação podem
utilizar-se diretamente a saída dos comparadores com as ligações da fig. 13., que ilustra o
descodificador que pretende implementar a relação (30).
Figura 13 - Descodificador para os sinais de comando
Controlo da tensão VDC
Para a malha externa de controlo da tensão quase constante 𝑉𝐷𝐶, considera-se a dinâmica
temporal da tensão 𝑣𝐷𝐶 em função das correntes:

19
𝐶0
𝑑𝑣𝑑𝑐
𝑑𝑡= (𝛾1 − 𝛾2)𝑖𝑠 −
𝑣𝑑𝑐
𝑅𝑜𝑢𝑡 (31)
Usando os valores médios das grandezas pode escrever-se a equação,
𝐶0
𝑑𝑉𝑑𝑐
𝑑𝑡= 𝐺𝐼𝑠 −
𝑉𝐷𝐶
𝑅𝑜𝑢𝑡 (32)
Onde G relaciona o valor médio da corrente pulsada (𝛾1 − 𝛾2)𝑖𝑠 à entrada do condensador
com o valor eficaz Is da corrente no secundário do transformador. Em regime permanente, a
tensão 𝑉𝐷𝐶 será aproximadamente constante, pelo que da equação anterior se tira:
𝐺𝐼𝑠 =𝑉𝐷𝐶
𝑅𝑜𝑢𝑡= 𝐼𝐷𝐶 (33)
O valor de G pode ser calculado considerando a conservação de potência no conversor, ou
seja, supondo um rendimento e fator de potência cos (), a potência de entrada
𝑃𝑖 = 𝑉𝑠𝐼𝑠cos ( ) iguala a potência de saída 𝑃𝑜 = 𝑉𝐷𝐶𝐼𝐷𝐶. Fazendo para comodidade de escrita,
𝐹 = cos ( ) , tem-se,
𝐹𝑉𝑠𝐼𝑠 = 𝑉𝐷𝐶𝐼𝐷𝐶 (34)
Substituindo na equação anterior 𝐼𝐷𝐶 = 𝐺𝐼𝑠, obtém-se,
𝐺 =𝐹𝑉𝑠𝑉𝐷𝐶
(35)
Supondo G quase constante e considerando também que 𝐼𝑠 = 𝑉𝑠/𝑅𝑒𝑞, vem,
𝐶0
𝑑𝑉𝐷𝐶
𝑑𝑡= 𝐺
𝑉𝑠𝑅𝑒𝑞
−𝑉𝐷𝐶
𝑅𝑜𝑢𝑡 (36)
Aplicando a transformada de Laplace obtém-se,
𝑉𝐷𝐶 =1
𝑠𝐶0(
𝐺
𝑅𝑒𝑞𝑉𝑠 −
𝑉𝐷𝐶
𝑅𝑜𝑢𝑡) (37)
Pode-se então, construir-se um diagrama de blocos para o sistema a controlar, onde se supôs
que o conversor controlado em PWM é aproximado por um sistema de 1ª ordem com constante
de tempo Td.

20
Figura 14 - Diagrama de blocos do controlo
Supondo que em regime permanente (Is constante) se pode aplicar o princípio da
sobreposição linear, e simplificando, obtém-se o diagrama da figura 15,
Figura 15 - Diagrama de blocos do sistema de controlo linearizado
De onde se obtém,
𝑇𝑍 = 𝐶0𝑅𝑜𝑢𝑡 (38)
𝑇𝑃 =4𝜁2𝑇𝑑𝐻𝐹𝐼𝑆
2
𝐼𝑜𝑢𝑡 (39)
Considerou-se também,
𝜁 = √2 2⁄ (40)
𝐻 = 𝐹 = 1 (41)
𝐺𝐼𝑠𝑅𝑒𝑞
=𝐹𝐼𝑠
2
𝑉𝐷𝐶 (42)
𝐼𝑜𝑢𝑡 =𝑉𝐷𝐶_𝑟𝑒𝑓
𝑅𝑜𝑢𝑡 (43)
𝐼𝑠 =𝐼𝑟𝑒𝑑𝑒
(𝑁𝑝/𝑁𝑠) (44)
21
𝜀 = 1 (𝑎 𝑢𝑡𝑖𝑙𝑖𝑧𝑎𝑟 𝑛𝑜𝑠 𝑐𝑜𝑚𝑝𝑎𝑟𝑎𝑑𝑜𝑟𝑒𝑠) (45)
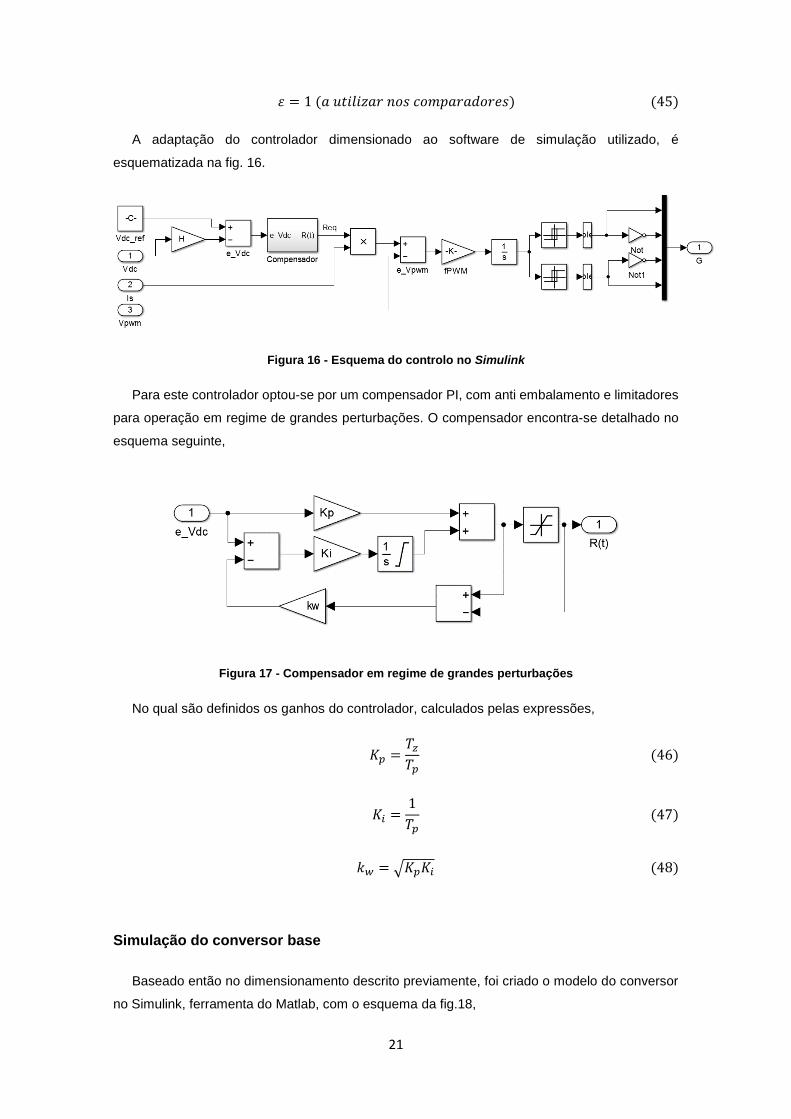
A adaptação do controlador dimensionado ao software de simulação utilizado, é
esquematizada na fig. 16.
Figura 16 - Esquema do controlo no Simulink
Para este controlador optou-se por um compensador PI, com anti embalamento e limitadores
para operação em regime de grandes perturbações. O compensador encontra-se detalhado no
esquema seguinte,
Figura 17 - Compensador em regime de grandes perturbações
No qual são definidos os ganhos do controlador, calculados pelas expressões,
𝐾𝑝 =𝑇𝑧
𝑇𝑝 (46)
𝐾𝑖 =1
𝑇𝑝 (47)
𝑘𝑤 = √𝐾𝑝𝐾𝑖 (48)
Simulação do conversor base
Baseado então no dimensionamento descrito previamente, foi criado o modelo do conversor
no Simulink, ferramenta do Matlab, com o esquema da fig.18,

22
Figura 18 - Esquema para simulação do conversor base
Na simulação do conversor foi imposta ao primário do transformador uma corrente 𝑖𝑝𝑒𝑓=
300 𝐴, e dimensionada uma resistência 𝑅𝑜𝑢𝑡 de forma a ser pedido uma potência de 800 W na
saída do conversor.
Figura 19 - Correntes no primário e secundário do transformador ideal no teste do conversor base
Neste caso, sendo o transformador ideal, pode ver-se na fig. 19 que a corrente no secundário
é uma imagem da corrente no primário com valor alterado pela relação de espiras do
transformador, sendo neste caso 10 vezes menor, resultado numa corrente 𝑖𝑠𝑒𝑓= 30 𝐴.

23
Figura 20 - Tensão Vdc à saída do conversor base
Pelas fig. 20 e 21 é possível observar que o controlo impõe uma tensão 𝑉𝐷𝐶 a variar em torno
do valor de referência 55 V. A amplitude da variação ao fim de um período transitório estabiliza
num valor próximo de 0,6 V, que resulta num tremor (ripple) de aproximadamente 1,1% sobre o
valor de referência, que é aceitável segundo as condições do projeto.
Figura 21 – Ampliação da tensão Vdc controlada à saída do conversor base
24
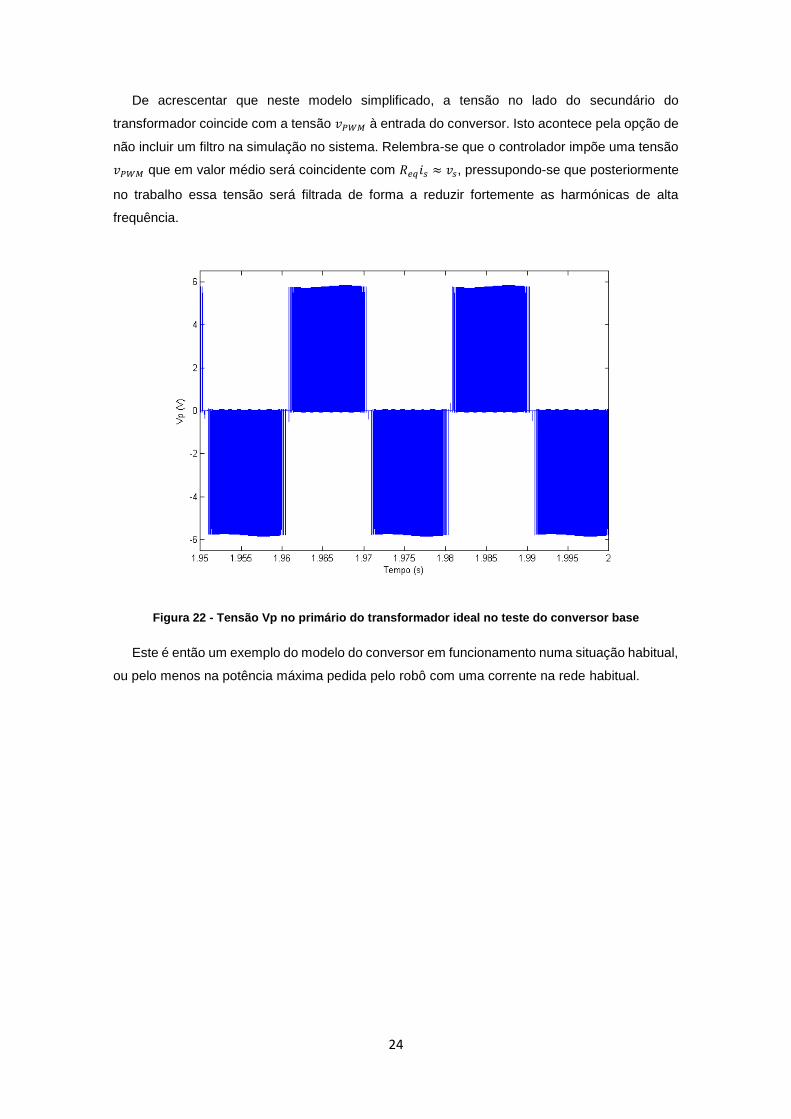
De acrescentar que neste modelo simplificado, a tensão no lado do secundário do
transformador coincide com a tensão 𝑣𝑃𝑊𝑀 à entrada do conversor. Isto acontece pela opção de
não incluir um filtro na simulação no sistema. Relembra-se que o controlador impõe uma tensão
𝑣𝑃𝑊𝑀 que em valor médio será coincidente com 𝑅𝑒𝑞𝑖𝑠 ≈ 𝑣𝑠, pressupondo-se que posteriormente
no trabalho essa tensão será filtrada de forma a reduzir fortemente as harmónicas de alta
frequência.
Figura 22 - Tensão Vp no primário do transformador ideal no teste do conversor base
Este é então um exemplo do modelo do conversor em funcionamento numa situação habitual,
ou pelo menos na potência máxima pedida pelo robô com uma corrente na rede habitual.

25
2.3. Simulação do conjunto transformador e conversor base
Depois de criados e testados satisfatoriamente os modelos do conversor e transformador em
separado, substituiu-se o transformador ideal no modelo do conversor pelo modelo do
transformador com parâmetros calculados neste trabalho.
A primeira simulação (fig. 23, 24 e 25), tendo em conta os resultados anteriores de que o
transformador teria uma potência máxima de cerca de 700 W, foi feita com uma corrente de
entrada eficaz de 𝐼𝑝𝑒𝑓= 300 𝐴, pedindo na saída 600 W.
Figura 23 - Corrente no primário e secundário para o conjunto do transformador e conversor base
Na fig. 23 podemos observar a relação entre as correntes no primário (azul) e secundário
(verde) do transformador, onde a corrente no secundário alcança uma amplitude de 𝑖𝑠 = 35 𝐴,
aquém dos 42 A esperados para um transformador quase ideal, com indutância equivalente de
magnetização suficientemente elevada.
26
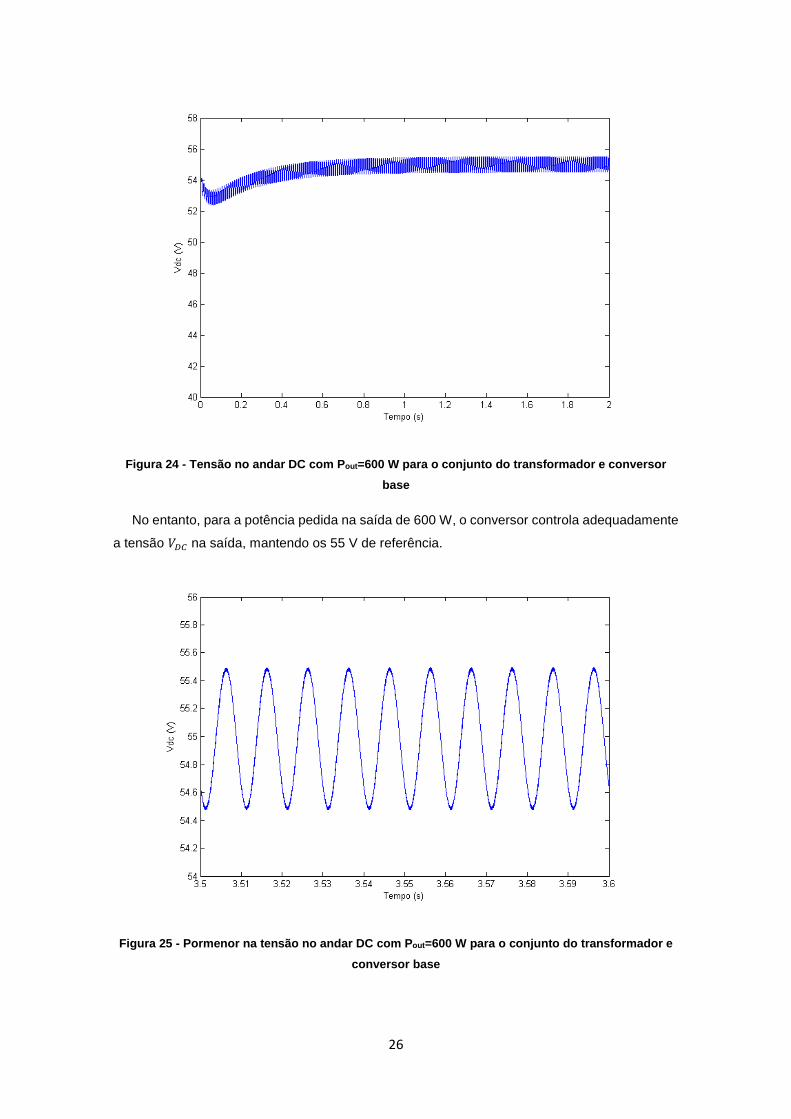
Figura 24 - Tensão no andar DC com Pout=600 W para o conjunto do transformador e conversor
base
No entanto, para a potência pedida na saída de 600 W, o conversor controla adequadamente
a tensão 𝑉𝐷𝐶 na saída, mantendo os 55 V de referência.
Figura 25 - Pormenor na tensão no andar DC com Pout=600 W para o conjunto do transformador e
conversor base

27
Como se pode observar na fig. 25, esta tensão tem um tremor (ripple) de cerca de 0,5 V, que
equivale a 0,9% sobre a tensão de referência, aceitável segundo o máximo dimensionado de
2,5%.
De seguida, fig. 26 e 27, efetuou-se o mesmo teste, mas com uma potência pedida na saída
de 800 W.
Figura 26 - Tensão no andar DC com Pout=800 W para o conjunto do transformador e conversor
base
Neste caso, como se pode observar pelas fig. 26 e 27 que representam a tensão 𝑉𝐷𝐶 e a
potência de saída, o controlador está no limiar de funcionamento quando são pedidos 800 W
nestas condições. A tensão varia em torno da tensão de referência mas tem um tremor (ripple)
que excede largamente o dimensionado (>15V).
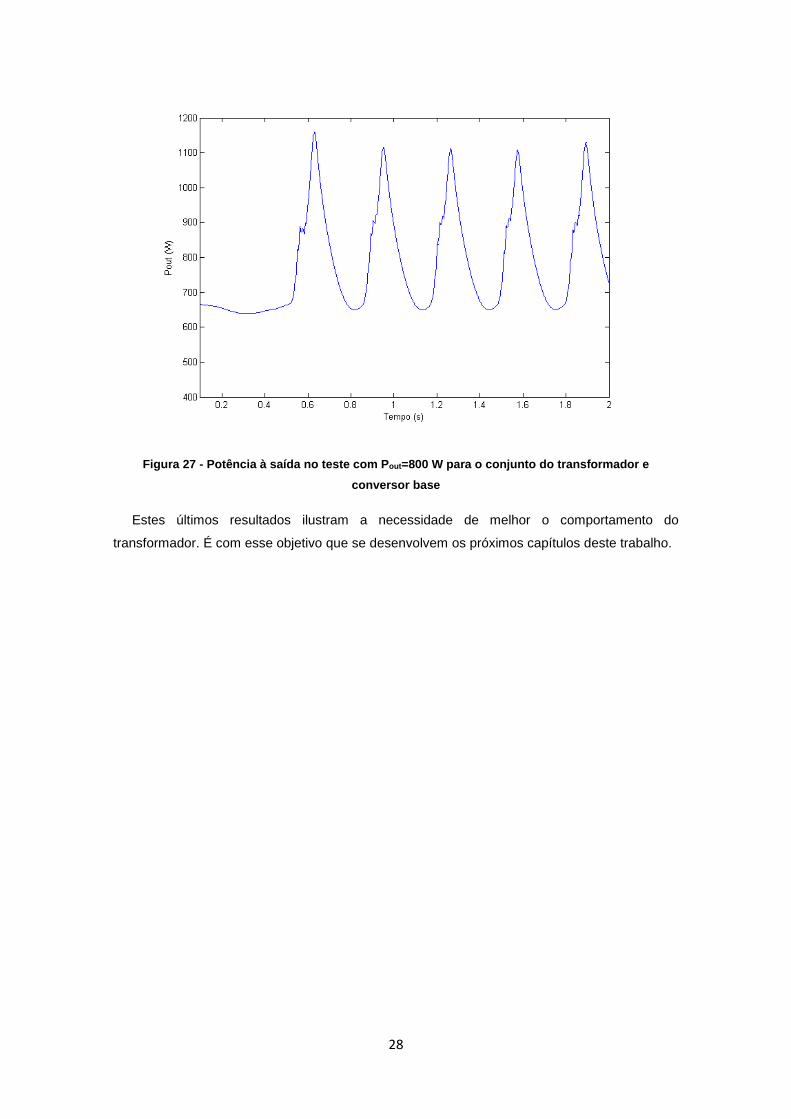
28
Figura 27 - Potência à saída no teste com Pout=800 W para o conjunto do transformador e
conversor base
Estes últimos resultados ilustram a necessidade de melhor o comportamento do
transformador. É com esse objetivo que se desenvolvem os próximos capítulos deste trabalho.
29
3. Controlo do conversor para compensação do efeito da baixa
indutância equivalente de magnetização
Nesta secção pretende-se dimensionar um sistema de controlo que crie um condensador
virtual no conversor para compensar o efeito da baixa indutância equivalente de magnetização.
Inicialmente estuda-se o transformador supondo um condensador real ligado em paralelo no
secundário.
Numa segunda fase dimensiona-se um controlador que obtenha do conversor um
comportamento equivalente ao do condensador real (condensador virtual).
Do ponto de vista da corrente na rede o condensador deverá, conjuntamente com a
impedância do ramo equivalente de magnetização, criar uma impedância equivalente
relativamente elevada compensando o efeito da baixa indutância de magnetização e obtendo
maior potência no secundário do transformador.
3.1. Capacidade para compensação do efeito da baixa
indutância equivalente de magnetização
O cálculo do valor da capacidade de um condensador real, colocado no secundário do
transformador, foi inicialmente feito em [3], recuperando-se aqui o caso mais relevante para a
situação em estudo.
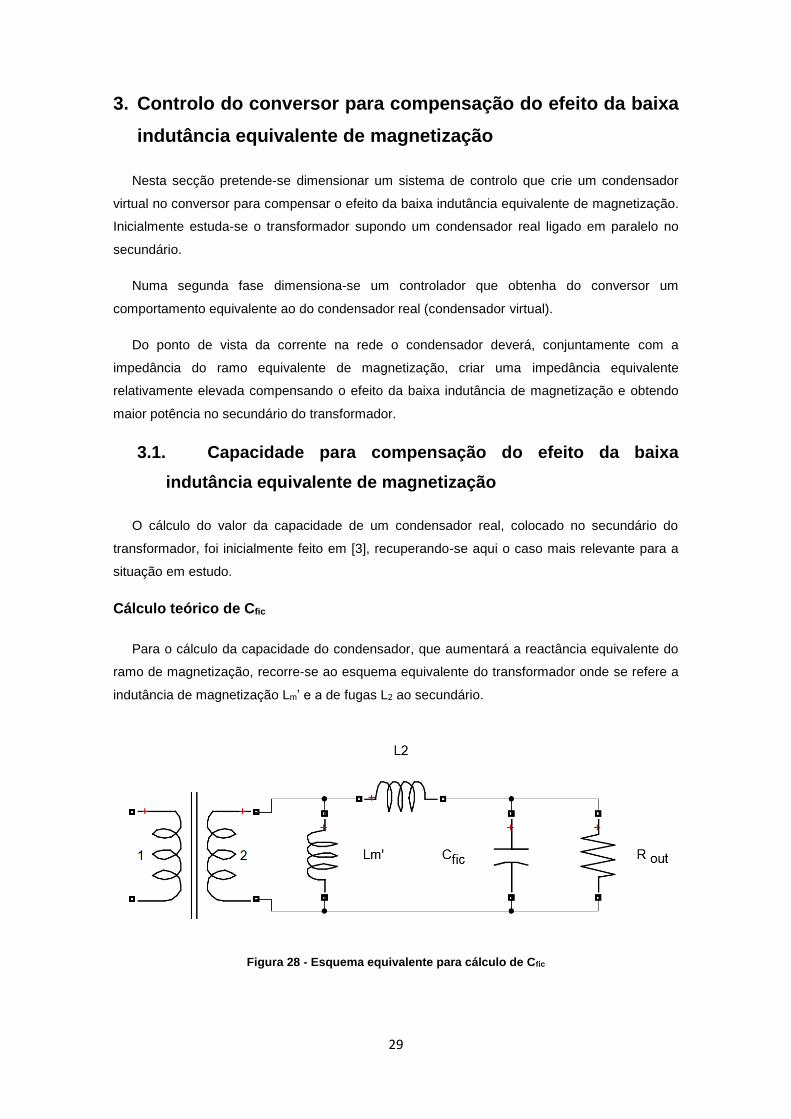
Cálculo teórico de Cfic
Para o cálculo da capacidade do condensador, que aumentará a reactância equivalente do
ramo de magnetização, recorre-se ao esquema equivalente do transformador onde se refere a
indutância de magnetização Lm’ e a de fugas L2 ao secundário.
Figura 28 - Esquema equivalente para cálculo de Cfic
30
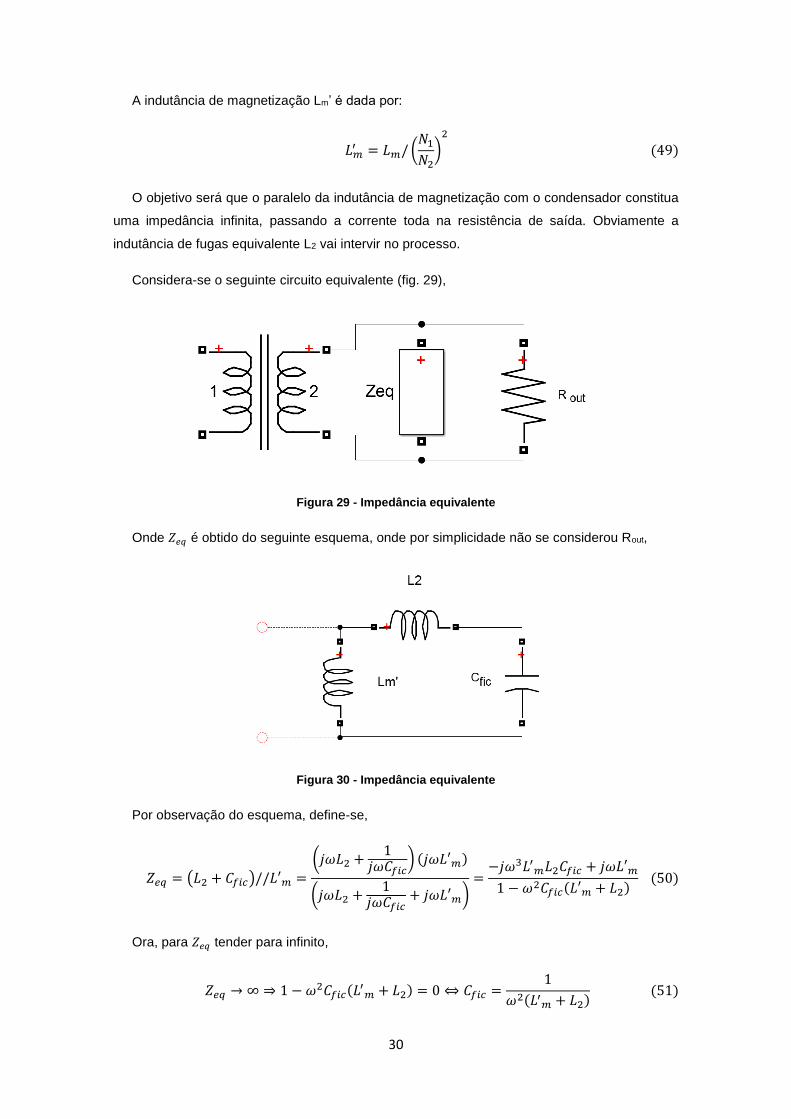
A indutância de magnetização Lm’ é dada por:
𝐿𝑚′ = 𝐿𝑚/ (
𝑁1
𝑁2)2
(49)
O objetivo será que o paralelo da indutância de magnetização com o condensador constitua
uma impedância infinita, passando a corrente toda na resistência de saída. Obviamente a
indutância de fugas equivalente L2 vai intervir no processo.
Considera-se o seguinte circuito equivalente (fig. 29),
Figura 29 - Impedância equivalente
Onde 𝑍𝑒𝑞 é obtido do seguinte esquema, onde por simplicidade não se considerou Rout,
Figura 30 - Impedância equivalente
Por observação do esquema, define-se,
𝑍𝑒𝑞 = (𝐿2 + 𝐶𝑓𝑖𝑐)//𝐿′𝑚 =
(𝑗𝜔𝐿2 +1
𝑗𝜔𝐶𝑓𝑖𝑐) (𝑗𝜔𝐿′𝑚)
(𝑗𝜔𝐿2 +1
𝑗𝜔𝐶𝑓𝑖𝑐+ 𝑗𝜔𝐿′𝑚)
=−𝑗𝜔3𝐿′
𝑚𝐿2𝐶𝑓𝑖𝑐 + 𝑗𝜔𝐿′𝑚
1 − 𝜔2𝐶𝑓𝑖𝑐(𝐿′𝑚 + 𝐿2) (50)
Ora, para 𝑍𝑒𝑞 tender para infinito,
𝑍𝑒𝑞 → ∞ ⇒ 1 − 𝜔2𝐶𝑓𝑖𝑐(𝐿′𝑚 + 𝐿2) = 0 ⇔ 𝐶𝑓𝑖𝑐 =
1
𝜔2(𝐿′𝑚 + 𝐿2)
(51)

31
Desta expressão pode retirar-se o valor do condensador, que compensará o efeito adverso
da indutância equivalente de magnetização na corrente do secundário do transformador.
Visto os valores do modelo serem,
𝜔 = 2𝜋𝑓 = 2𝜋 × 50 = 314,16 𝑟𝑎𝑑/𝑠 (52)
𝐿′𝑚 = 𝐿𝑚/ (
𝑁1
𝑁2)2
= (48,9 × 10−6)/ (1
10)2
= 4,89 𝑚𝐻 (53)
𝐿2 = 44,7 𝜇𝐻 (54)
Tem-se,
𝐶𝑓𝑖𝑐 =1
𝜔2(𝐿′𝑚 + 𝐿2)
= 2,05 𝑚𝐹 (55)
Esta análise é uma aproximação, tendo em conta que a resistência de saída 𝑅𝑜𝑢𝑡 está também
em paralelo com o condensador Cfic, logo o cálculo não seria tão simples como o realizado neste
caso. No entanto os resultados obtidos em termos do valor do condensador teórico e os valores
observados nas simulações são bastante aproximados, validando de certa forma a aproximação
considerada.
Simulação do transformador com condensador de compensação
Para estudar por simulação o efeito do condensador no funcionamento do transformador
foram realizados três testes diferentes. No primeiro teste verifica-se qual o valor da capacidade
que maximiza a potência de saída do transformador. No segundo, utilizando o valor de
capacidade ótimo, faz-se um varrimento na carga à saída do conjunto transformador e
condensador para comparar o funcionamento do transformador com e sem condensador. No
terceiro teste com o condensador ótimo e uma resistência de saída fixa observam-se as correntes
no transformador.
Figura 31 - Esquema utilizado para simulação do condensador
32
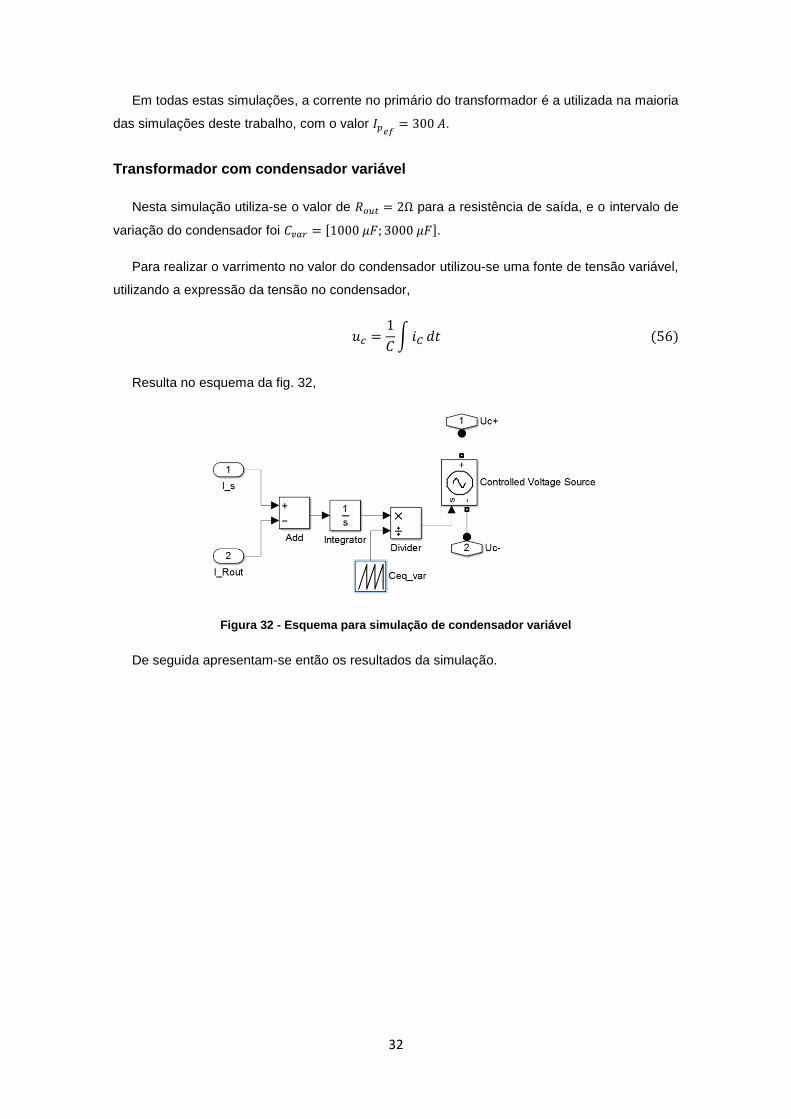
Em todas estas simulações, a corrente no primário do transformador é a utilizada na maioria
das simulações deste trabalho, com o valor 𝐼𝑝𝑒𝑓= 300 𝐴.
Transformador com condensador variável
Nesta simulação utiliza-se o valor de 𝑅𝑜𝑢𝑡 = 2Ω para a resistência de saída, e o intervalo de
variação do condensador foi 𝐶𝑣𝑎𝑟 = [1000 𝜇𝐹; 3000 𝜇𝐹].
Para realizar o varrimento no valor do condensador utilizou-se uma fonte de tensão variável,
utilizando a expressão da tensão no condensador,
𝑢𝑐 =1
𝐶∫ 𝑖𝐶 𝑑𝑡 (56)
Resulta no esquema da fig. 32,
Figura 32 - Esquema para simulação de condensador variável
De seguida apresentam-se então os resultados da simulação.

33
Figura 33 - Potência na saída do transformador com diferentes valores de compensação da
corrente de magnetização
A primeira análise que se faz é à potência no transformador segundo as novas condições, e
pode-se observar na fig. 33 que a potência máxima é aproximadamente atingida no momento
𝑥 = 2,13.
Visto o intervalo de variação ser de 𝐶𝑣𝑎𝑟 = [1000 𝜇𝐹; 3000 𝜇𝐹], e o intervalo de simulação 𝑥 =
[0; 4], pode-se concluir que se alcança a potência máxima para aproximadamente um 𝐶𝑓𝑖𝑐 =
2,065 𝑚𝐹, consistente com o resultado teórico obtido.
Nas fig. 34 e 35 observa-se a corrente eficaz na resistência de saída e indutância de
magnetização respetivamente. Da corrente na resistência pode-se observar que esta iguala a
corrente ideal do secundário, que será a corrente do primário afetada apenas pela relação de
transformação do transformador. Para 𝐶𝑓𝑖𝑐 diferentes as indutâncias não estão em ressonância
com o condensador e existem correntes de magnetização maiores, diminuindo as
potencialidades do transformador em relação à potência de saída.
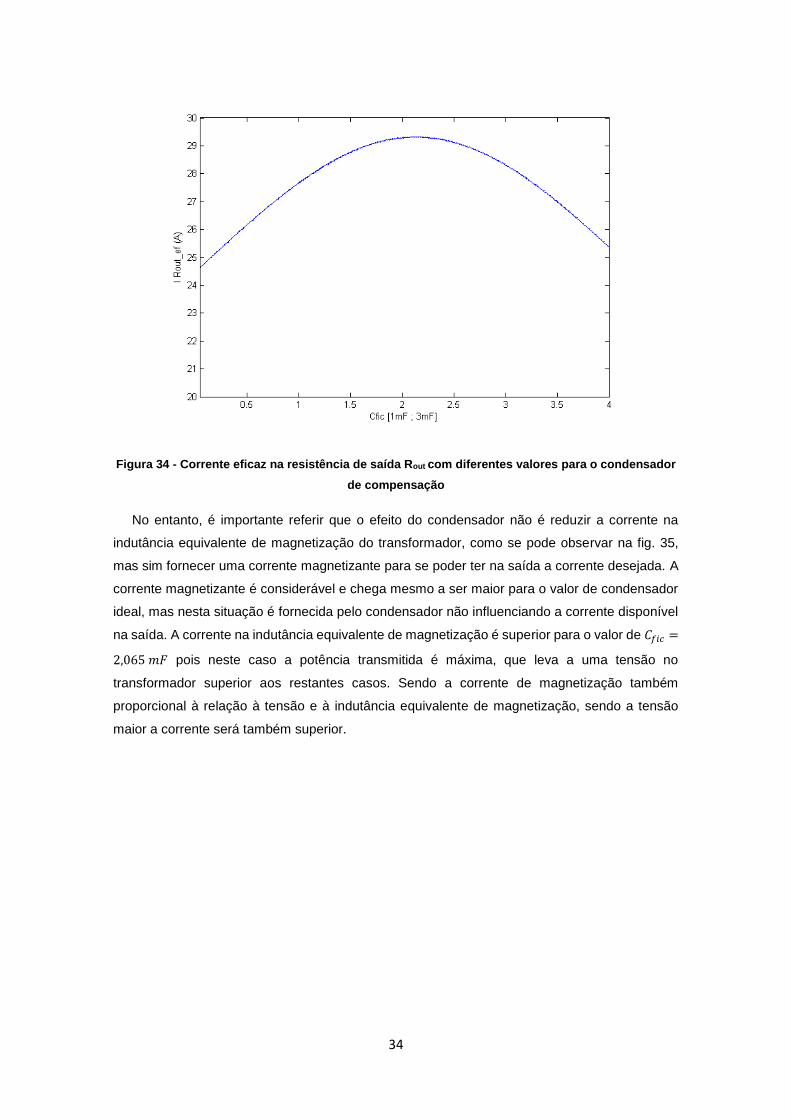
34
Figura 34 - Corrente eficaz na resistência de saída Rout com diferentes valores para o condensador
de compensação
No entanto, é importante referir que o efeito do condensador não é reduzir a corrente na
indutância equivalente de magnetização do transformador, como se pode observar na fig. 35,
mas sim fornecer uma corrente magnetizante para se poder ter na saída a corrente desejada. A
corrente magnetizante é considerável e chega mesmo a ser maior para o valor de condensador
ideal, mas nesta situação é fornecida pelo condensador não influenciando a corrente disponível
na saída. A corrente na indutância equivalente de magnetização é superior para o valor de 𝐶𝑓𝑖𝑐 =
2,065 𝑚𝐹 pois neste caso a potência transmitida é máxima, que leva a uma tensão no
transformador superior aos restantes casos. Sendo a corrente de magnetização também
proporcional à relação à tensão e à indutância equivalente de magnetização, sendo a tensão
maior a corrente será também superior.

35
Figura 35 - Corrente de magnetização com diferentes valores para o condensador de compensação
Transformador com condensador adaptado e carga variável.
Para a simulação com condensador fixo e resistência de saída variável, foram utilizados os
valores 𝐶𝑓𝑖𝑐 = 2,05 𝑚𝐹 e 𝑅𝑜𝑢𝑡 = [0,01 Ω; 20 Ω].
Figura 36 - Potência à saída no teste de carga do transformador com condensador de
compensação
36
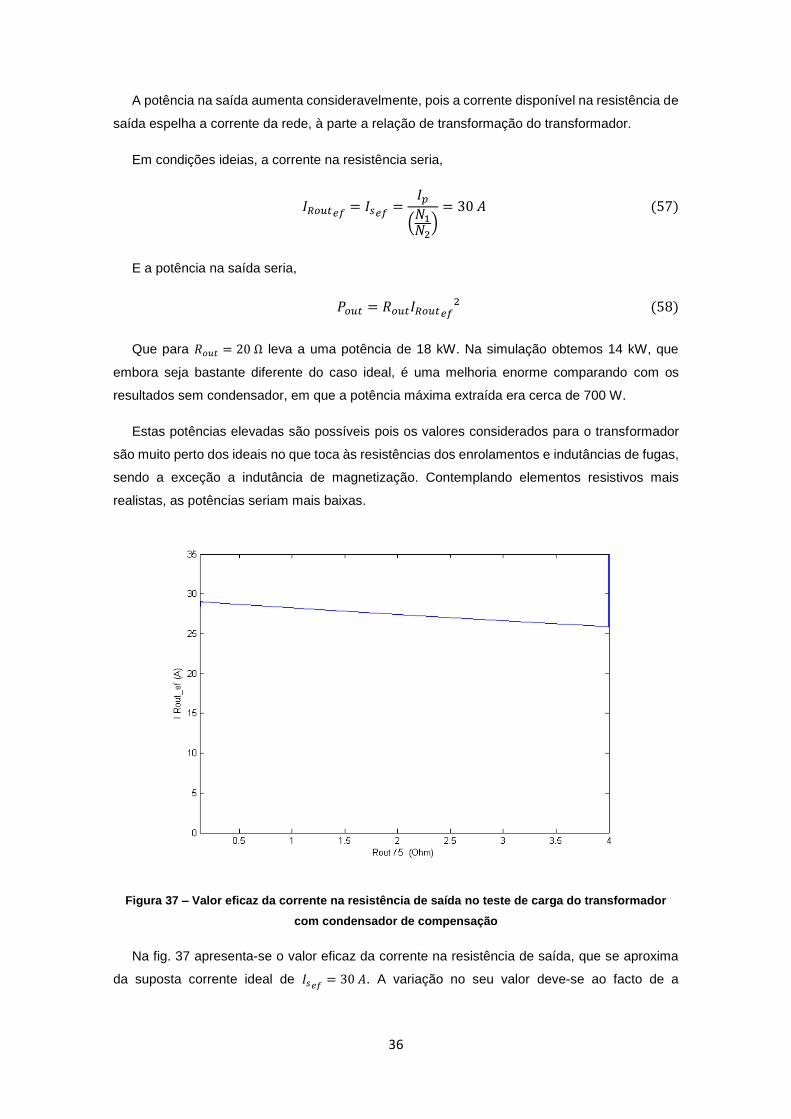
A potência na saída aumenta consideravelmente, pois a corrente disponível na resistência de
saída espelha a corrente da rede, à parte a relação de transformação do transformador.
Em condições ideias, a corrente na resistência seria,
𝐼𝑅𝑜𝑢𝑡𝑒𝑓= 𝐼𝑠𝑒𝑓
=𝐼𝑝
(𝑁1𝑁2
)= 30 𝐴 (57)
E a potência na saída seria,
𝑃𝑜𝑢𝑡 = 𝑅𝑜𝑢𝑡𝐼𝑅𝑜𝑢𝑡𝑒𝑓2 (58)
Que para 𝑅𝑜𝑢𝑡 = 20 Ω leva a uma potência de 18 kW. Na simulação obtemos 14 kW, que
embora seja bastante diferente do caso ideal, é uma melhoria enorme comparando com os
resultados sem condensador, em que a potência máxima extraída era cerca de 700 W.
Estas potências elevadas são possíveis pois os valores considerados para o transformador
são muito perto dos ideais no que toca às resistências dos enrolamentos e indutâncias de fugas,
sendo a exceção a indutância de magnetização. Contemplando elementos resistivos mais
realistas, as potências seriam mais baixas.
Figura 37 – Valor eficaz da corrente na resistência de saída no teste de carga do transformador
com condensador de compensação
Na fig. 37 apresenta-se o valor eficaz da corrente na resistência de saída, que se aproxima
da suposta corrente ideal de 𝐼𝑠𝑒𝑓= 30 𝐴. A variação no seu valor deve-se ao facto de a

37
aproximação feita para o cálculo do condensador não contabilizar a resistência de saída, e o
aumento desta afeta a adaptação do condensador às indutâncias consideradas.
Transformador com condensador de compensação e resistência fixos
Na simulação com elementos fixos, utilizou-se um condensador de 𝐶𝑓𝑖𝑐 = 2,05 𝑚𝐹 e uma
resistência de 𝑅𝑜𝑢𝑡 = 2 Ω.
A potência na saída resultante da simulação é medida em 𝑃𝑜𝑢𝑡 = 1720 W, que é bastante
próxima do valor teórico,
𝑃𝑜𝑢𝑡 = 𝑅𝑜𝑢𝑡𝐼𝑅𝑜𝑢𝑡𝑒𝑓2 = 2 × 302 = 1800 𝑊 (59)
Ou seja, o transformador em conjunto com o condensador está a comportar-se muito perto
do seu funcionamento como transformador ideal, em que espelha perfeitamente a corrente do
primário no secundário, e tal facto pode ser confirmado na fig. 38, onde se observa que a corrente
na resistência toma um valor de pico muito próximo do ideal 𝐼𝑠𝑝𝑖𝑑𝑒𝑎𝑙= 42,4 𝐴.
Figura 38 - Corrente na resistência de saída no teste de carga fixa do transformador com
compensação da corrente de magnetização
Aproveita-se esta simulação para analisar as correntes na indutância de magnetização e no
condensador.
38
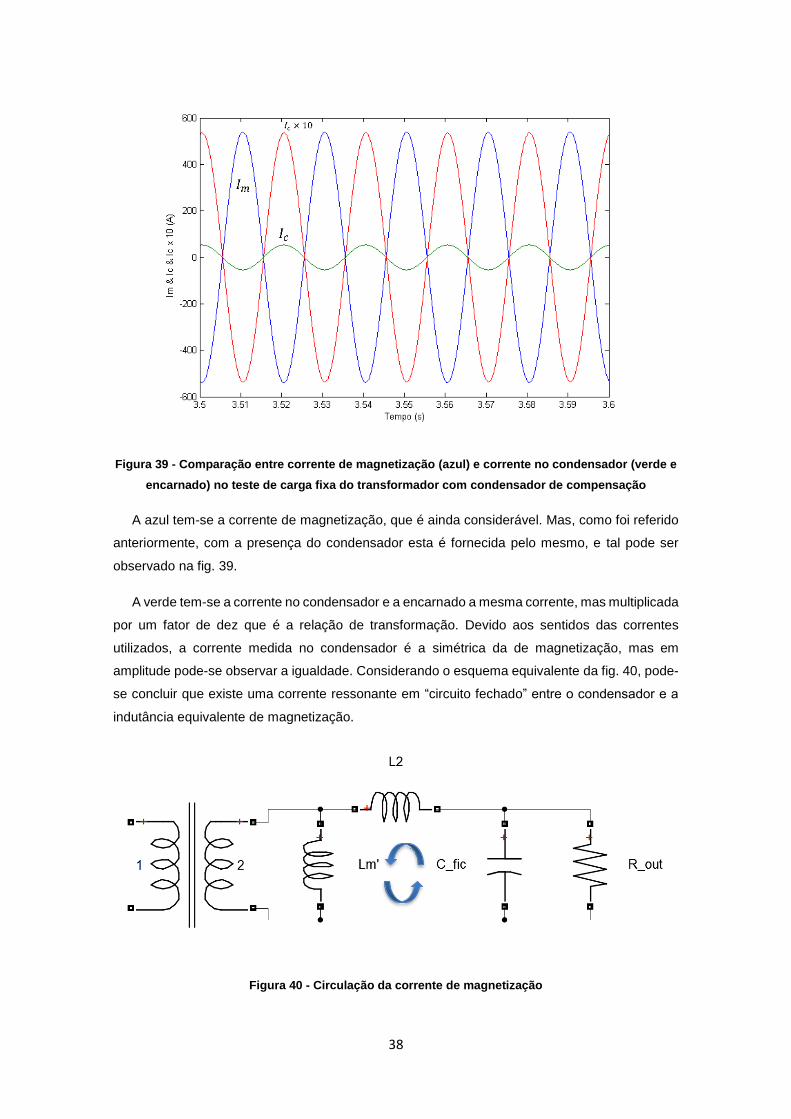
Figura 39 - Comparação entre corrente de magnetização (azul) e corrente no condensador (verde e
encarnado) no teste de carga fixa do transformador com condensador de compensação
A azul tem-se a corrente de magnetização, que é ainda considerável. Mas, como foi referido
anteriormente, com a presença do condensador esta é fornecida pelo mesmo, e tal pode ser
observado na fig. 39.
A verde tem-se a corrente no condensador e a encarnado a mesma corrente, mas multiplicada
por um fator de dez que é a relação de transformação. Devido aos sentidos das correntes
utilizados, a corrente medida no condensador é a simétrica da de magnetização, mas em
amplitude pode-se observar a igualdade. Considerando o esquema equivalente da fig. 40, pode-
se concluir que existe uma corrente ressonante em “circuito fechado” entre o condensador e a
indutância equivalente de magnetização.
Figura 40 - Circulação da corrente de magnetização

39
Verifica-se a possibilidade de otimização do conversor ligando um condensador em paralelo
ao secundário do transformador. Os resultados da simulação foram bastante positivos nesse
sentido, embora na realidade os resultados possam não ser tão bons num caso mais próximo da
realidade com um transformador real.
3.2. Controlador do conversor para obter um condensador
virtual de compensação
A segunda fase deste capítulo será criar um controlador que obtenha do conversor um
comportamento equivalente ao paralelo de um condensador com uma resistência colocado aos
terminais do transformador (condensador e resistência virtuais). Evita-se assim a necessidade
de adicionar um condensador real, o qual seria demasiado volumoso e pesado para as
especificações do robô.
O esquema a recriar será,
Figura 41 - Carga pretendida aos terminais do secundário
Notar que o paralelo do condensador e resistência só existe conceptualmente, uma vez que
também a resistência é virtual. O controlador do conversor fará com que do ponto de vista do
transformador, o conversor seja visto como uma carga equivalente a este paralelo.
O método para o dimensionamento do controlador é uma extensão da metodologia da
resistência virtual apresentada no capítulo 2. Aqui substitui-se a anterior relação na obtenção da
tensão de referência 𝑣𝑠𝑟𝑒𝑓,
𝑣𝑠 = 𝑅𝑒𝑞𝑖𝑠 (60)
por,
𝑣𝑠 = (𝑅𝑒𝑞//𝐶𝑓𝑖𝑐)𝐼𝑠 =
(𝑅𝑒𝑞
𝑗𝜔𝐶𝑓𝑖𝑐)
(𝑅𝑒𝑞 +1
𝑗𝜔𝐶𝑓𝑖𝑐)𝐼𝑠 (61)

40
e fazendo a transformada de Laplace,
𝑉𝑠𝐼𝑠
=
(𝑅𝑒𝑞
𝑠𝐶𝑓𝑖𝑐)
(𝑅𝑒𝑞 +1
𝑠𝐶𝑓𝑖𝑐)
=𝑅𝑒𝑞
1 + 𝑠𝐶𝑓𝑖𝑐𝑅𝑒𝑞=
1
𝑠𝐶𝑓𝑖𝑐 +1
𝑅𝑒𝑞
(62)
Esta relação passa a ser a nova forma de obter a referência para a tensão 𝑣𝑠 . O controlador
que assegura 𝑣𝑠 = 𝑣𝑠𝑟𝑒𝑓 mantém-se por agora inalterado, mudando apenas a forma como se
obtém a tensão de referência que comparada com a tensão 𝑣𝑠 origina um desvio, que por sua
vez define os impulsos PWM do conversor.
Na relação (62), o termo 𝑅𝑒𝑞 será variável no tempo, pois é ele que define a potência
necessária. A necessidade de variar 𝑅𝑒𝑞 implica a concretização da relação (62) como um
integrador com perdas (fig. 42).
Figura 42 - Diagrama de blocos para obtenção de Vs_ref no caso com condensador virtual de
compensação
O controlador a simular, à parte esta alteração, mantém-se definido como anteriormente.
Representado de seguida, na fig. 43, está o bloco de controlo do conversor com a redefinição
da tensão 𝑣𝑠𝑟𝑒𝑓,
Figura 43 - Esquema para controlo no Simulink no caso com condensador virtual de compensação
No capítulo seguinte apresentam-se as várias simulações mostrando o desempenho do
conversor com compensação do efeito da baixa indutância equivalente de magnetização.
41
4. Simulação do conversor com controlo e compensação do
efeito da baixa indutância equivalente de magnetização
Neste capítulo, depois de dimensionado o condensador virtual para compensação do efeito
da baixa indutância equivalente de magnetização e controlador para o emular, procedeu-se à
simulação do funcionamento do conversor com as alterações propostas para estudar os seus
efeitos.
De seguida serão feitos vários testes comparativos, variando a corrente de entrada e
observando o funcionamento das várias variantes do conversor, assim como variando a potência
pedida mantendo constante o valor eficaz da corrente na entrada.
4.1. Simulação com Pout= 800 W e 𝒊𝒑𝒆𝒇= 𝟑𝟎𝟎 𝑨
Sem condensador virtual de compensação
Como visto no capítulo 2, secção 2.3, para as condições de uma corrente no primário de
𝑖𝑝𝑒𝑓= 300 𝐴 e potência pedida na saída de 𝑃𝑜𝑢𝑡 = 800 𝑊, o conversor não consegue controlar a
tensão contínua de saída com o valor e tremor máximo desejado.
Com condensador virtual de compensação
Nesta simulação foi utilizado o conversor com condensador virtual de compensação, com
uma corrente de entrada no primário de 𝑖𝑝𝑒𝑓= 300 𝐴, pedindo na saída uma potência 𝑃𝑜𝑢𝑡 =
800 𝑊.
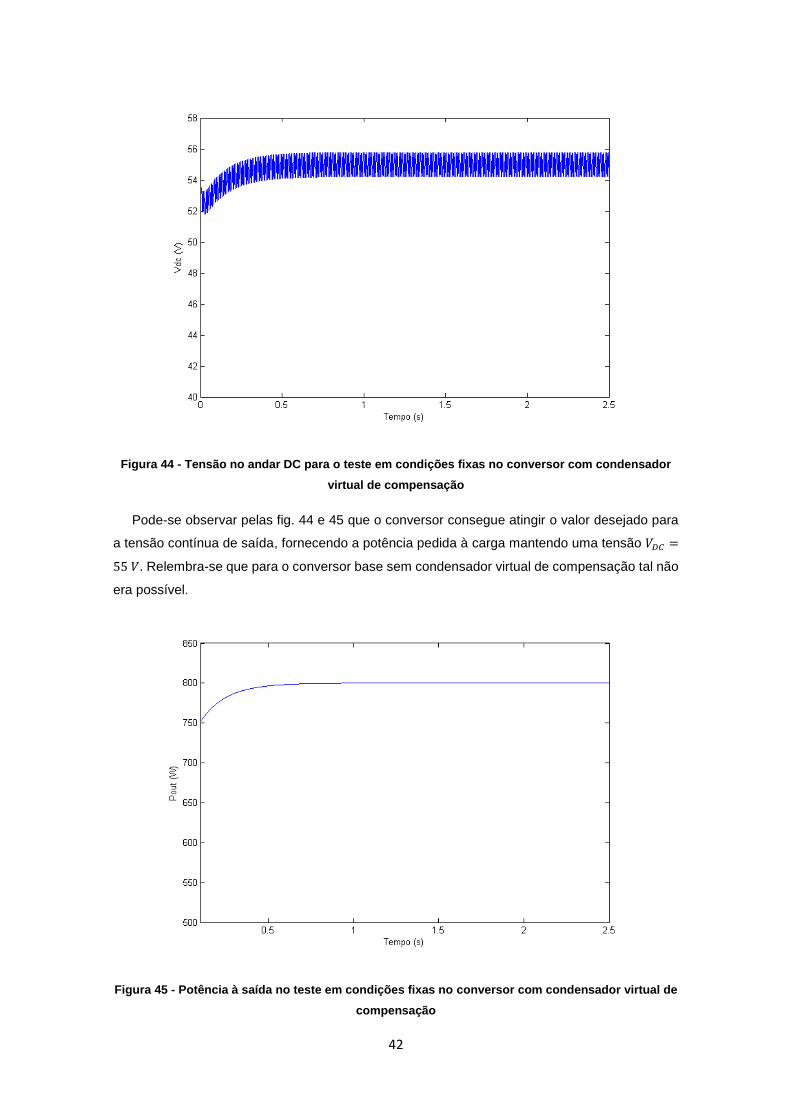
42
Figura 44 - Tensão no andar DC para o teste em condições fixas no conversor com condensador
virtual de compensação
Pode-se observar pelas fig. 44 e 45 que o conversor consegue atingir o valor desejado para
a tensão contínua de saída, fornecendo a potência pedida à carga mantendo uma tensão 𝑉𝐷𝐶 =
55 𝑉. Relembra-se que para o conversor base sem condensador virtual de compensação tal não
era possível.
Figura 45 - Potência à saída no teste em condições fixas no conversor com condensador virtual de
compensação
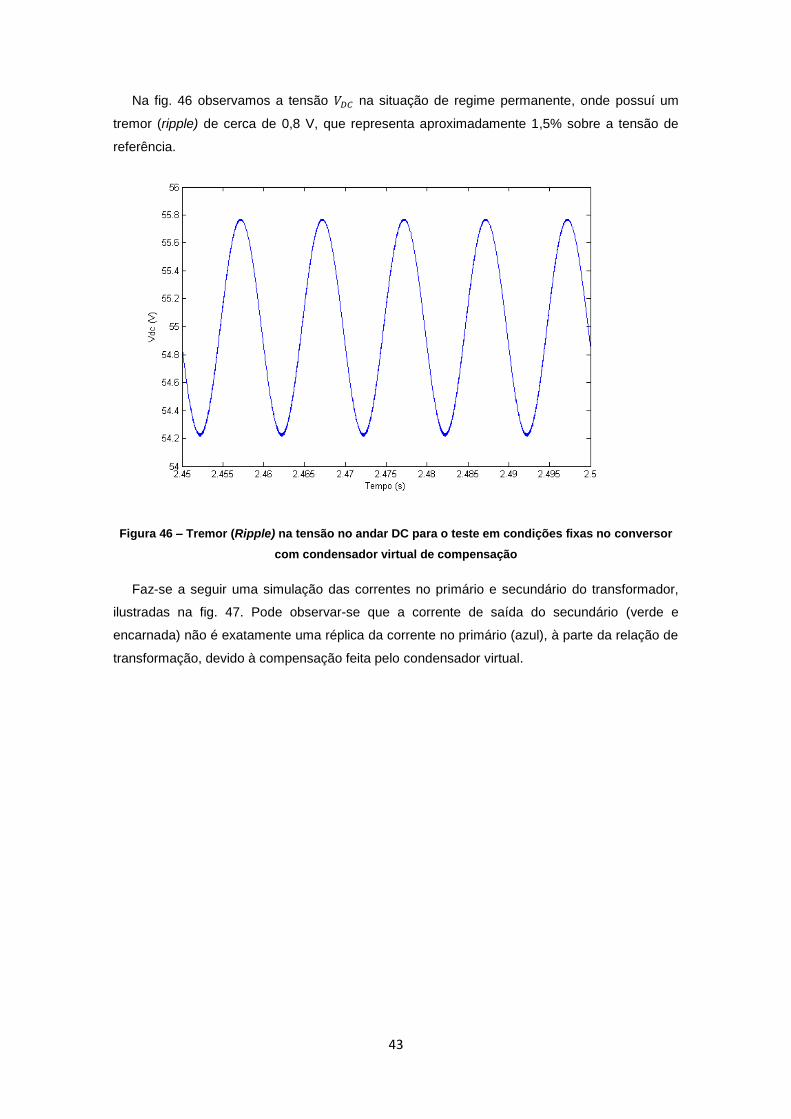
43
Na fig. 46 observamos a tensão 𝑉𝐷𝐶 na situação de regime permanente, onde possuí um
tremor (ripple) de cerca de 0,8 V, que representa aproximadamente 1,5% sobre a tensão de
referência.
Figura 46 – Tremor (Ripple) na tensão no andar DC para o teste em condições fixas no conversor
com condensador virtual de compensação
Faz-se a seguir uma simulação das correntes no primário e secundário do transformador,
ilustradas na fig. 47. Pode observar-se que a corrente de saída do secundário (verde e
encarnada) não é exatamente uma réplica da corrente no primário (azul), à parte da relação de
transformação, devido à compensação feita pelo condensador virtual.
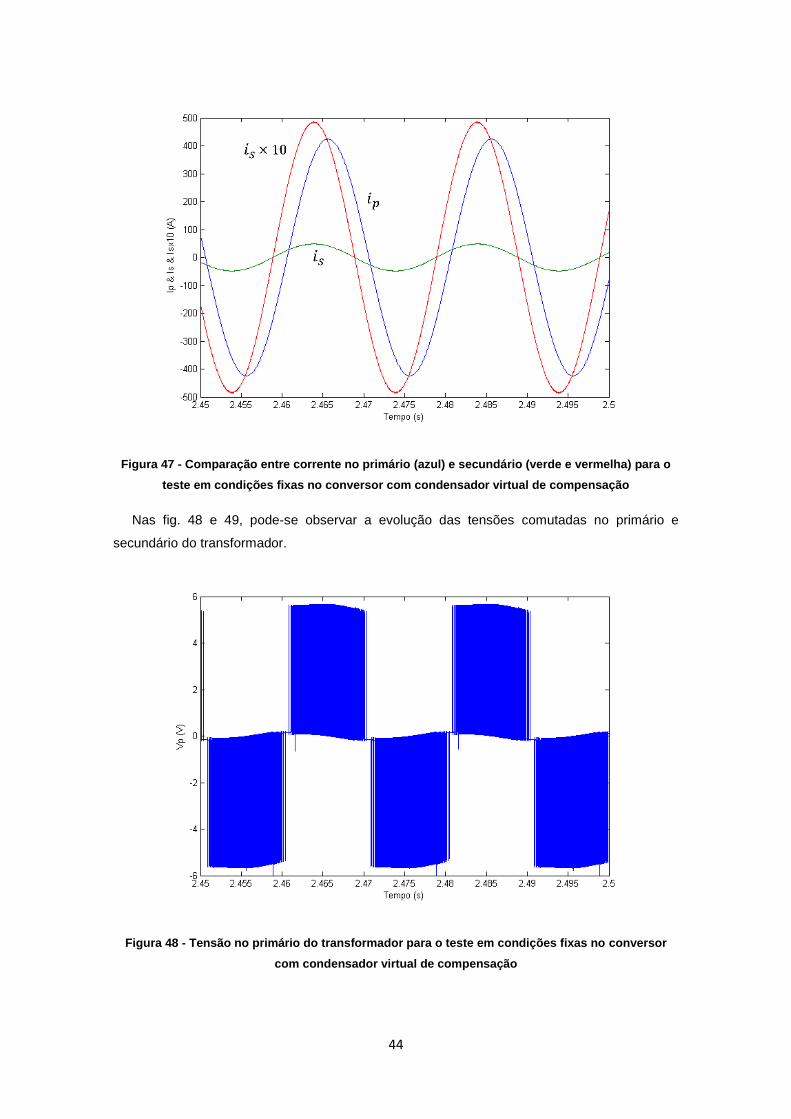
44
Figura 47 - Comparação entre corrente no primário (azul) e secundário (verde e vermelha) para o
teste em condições fixas no conversor com condensador virtual de compensação
Nas fig. 48 e 49, pode-se observar a evolução das tensões comutadas no primário e
secundário do transformador.
Figura 48 - Tensão no primário do transformador para o teste em condições fixas no conversor
com condensador virtual de compensação

45
Figura 49 - Tensão no secundário para o teste em condições fixas no conversor com condensador
virtual de compensação
Estas tensões contêm harmónicas de alta frequência que não devem ser introduzidas na rede,
pelo que posteriormente se apresentará um processo de as reduzir.
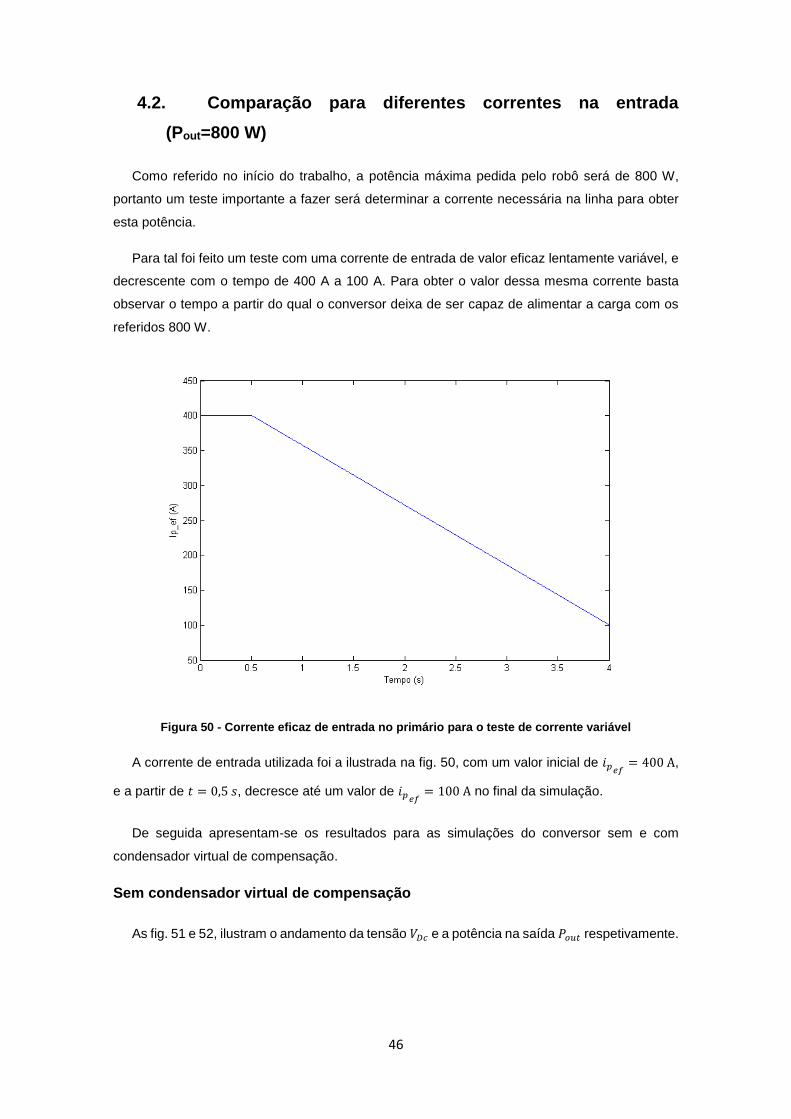
46
4.2. Comparação para diferentes correntes na entrada
(Pout=800 W)
Como referido no início do trabalho, a potência máxima pedida pelo robô será de 800 W,
portanto um teste importante a fazer será determinar a corrente necessária na linha para obter
esta potência.
Para tal foi feito um teste com uma corrente de entrada de valor eficaz lentamente variável, e
decrescente com o tempo de 400 A a 100 A. Para obter o valor dessa mesma corrente basta
observar o tempo a partir do qual o conversor deixa de ser capaz de alimentar a carga com os
referidos 800 W.
Figura 50 - Corrente eficaz de entrada no primário para o teste de corrente variável
A corrente de entrada utilizada foi a ilustrada na fig. 50, com um valor inicial de 𝑖𝑝𝑒𝑓= 400 A,
e a partir de 𝑡 = 0,5 𝑠, decresce até um valor de 𝑖𝑝𝑒𝑓= 100 A no final da simulação.
De seguida apresentam-se os resultados para as simulações do conversor sem e com
condensador virtual de compensação.
Sem condensador virtual de compensação
As fig. 51 e 52, ilustram o andamento da tensão 𝑉𝐷𝑐 e a potência na saída 𝑃𝑜𝑢𝑡 respetivamente.
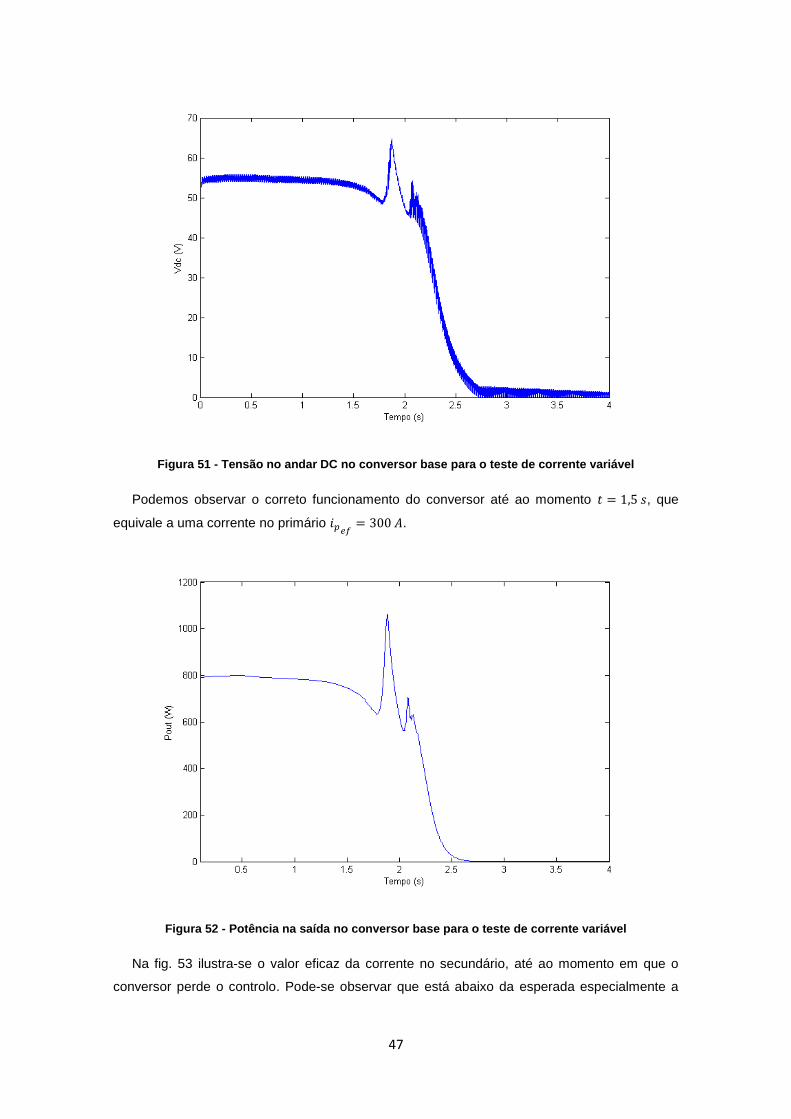
47
Figura 51 - Tensão no andar DC no conversor base para o teste de corrente variável
Podemos observar o correto funcionamento do conversor até ao momento 𝑡 = 1,5 𝑠, que
equivale a uma corrente no primário 𝑖𝑝𝑒𝑓= 300 𝐴.
Figura 52 - Potência na saída no conversor base para o teste de corrente variável
Na fig. 53 ilustra-se o valor eficaz da corrente no secundário, até ao momento em que o
conversor perde o controlo. Pode-se observar que está abaixo da esperada especialmente a
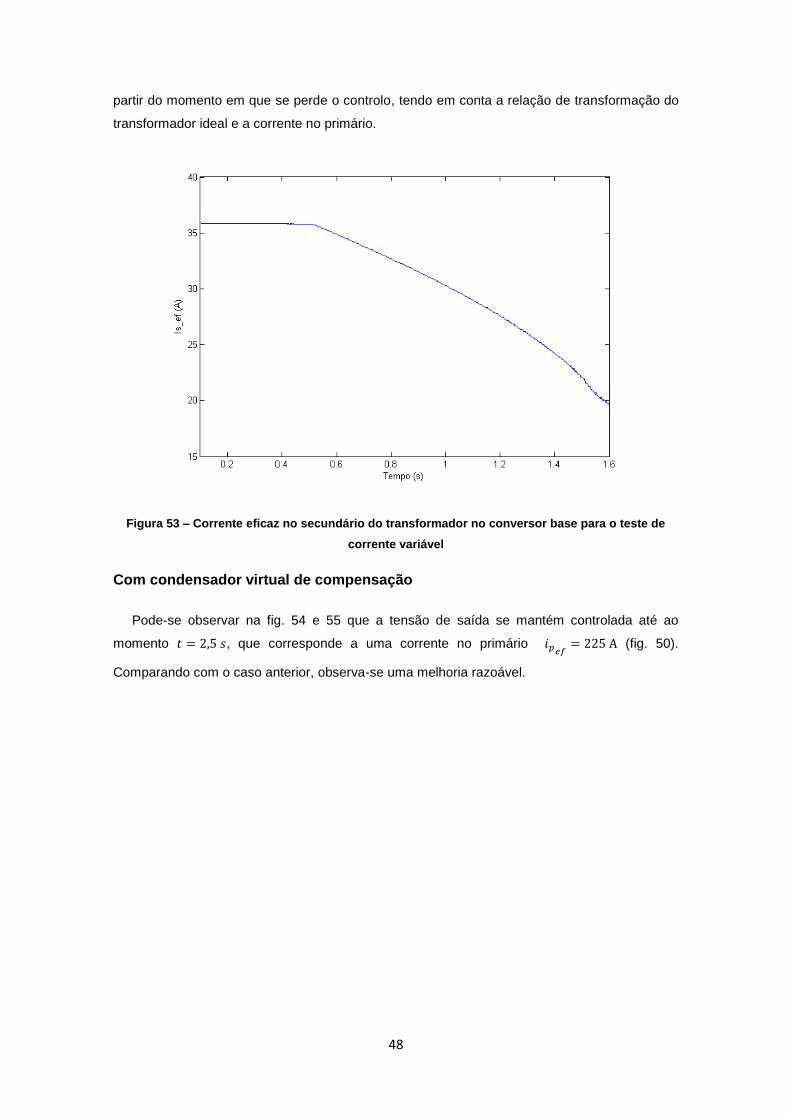
48
partir do momento em que se perde o controlo, tendo em conta a relação de transformação do
transformador ideal e a corrente no primário.
Figura 53 – Corrente eficaz no secundário do transformador no conversor base para o teste de
corrente variável
Com condensador virtual de compensação
Pode-se observar na fig. 54 e 55 que a tensão de saída se mantém controlada até ao
momento 𝑡 = 2,5 𝑠, que corresponde a uma corrente no primário 𝑖𝑝𝑒𝑓= 225 A (fig. 50).
Comparando com o caso anterior, observa-se uma melhoria razoável.
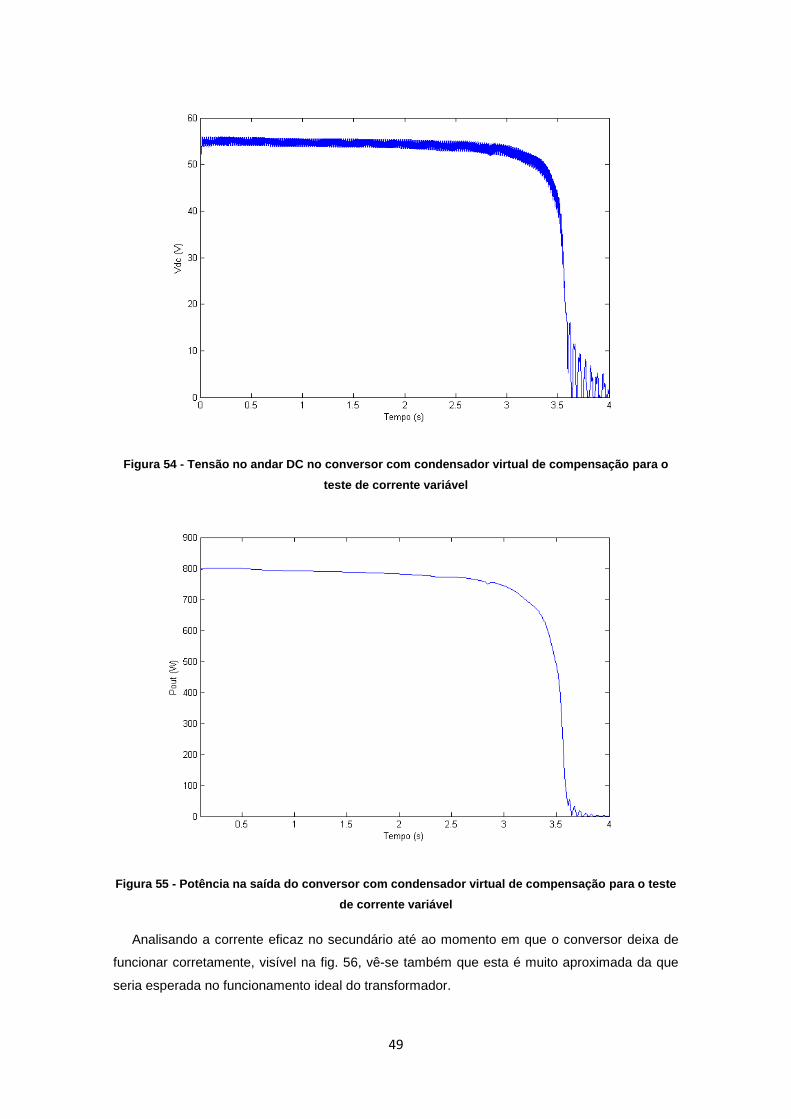
49
Figura 54 - Tensão no andar DC no conversor com condensador virtual de compensação para o
teste de corrente variável
Figura 55 - Potência na saída do conversor com condensador virtual de compensação para o teste
de corrente variável
Analisando a corrente eficaz no secundário até ao momento em que o conversor deixa de
funcionar corretamente, visível na fig. 56, vê-se também que esta é muito aproximada da que
seria esperada no funcionamento ideal do transformador.
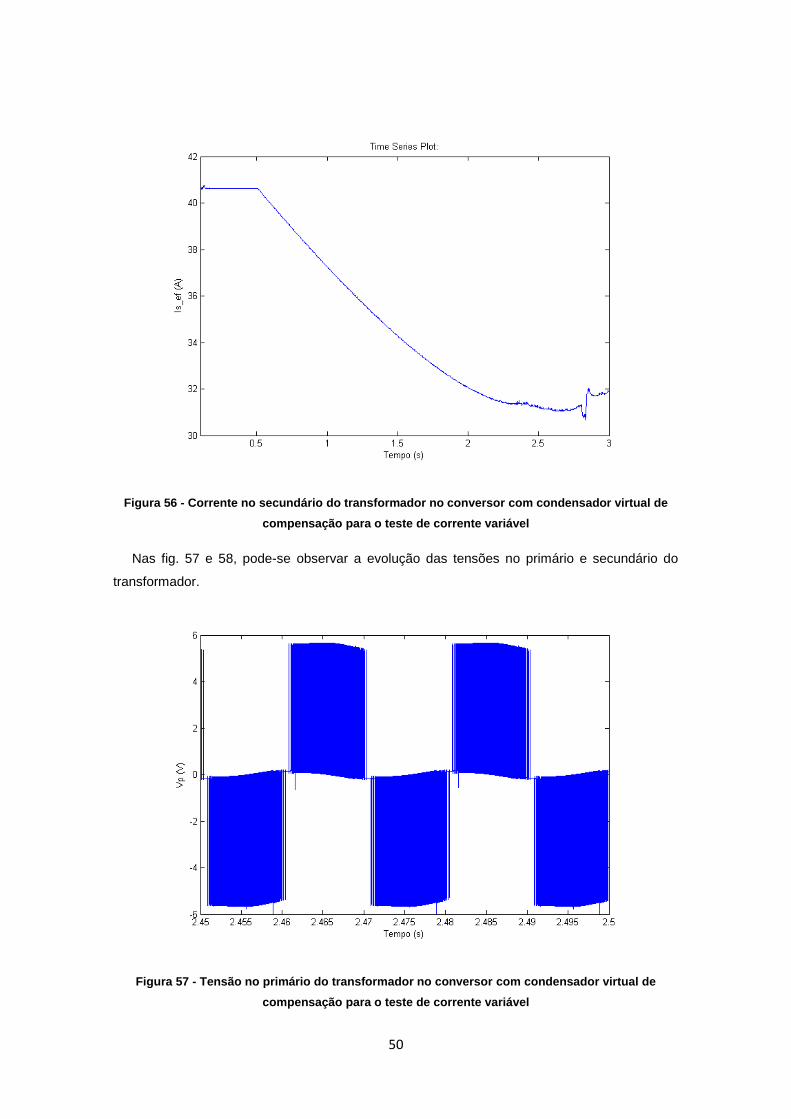
50
Figura 56 - Corrente no secundário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável
Nas fig. 57 e 58, pode-se observar a evolução das tensões no primário e secundário do
transformador.
Figura 57 - Tensão no primário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável
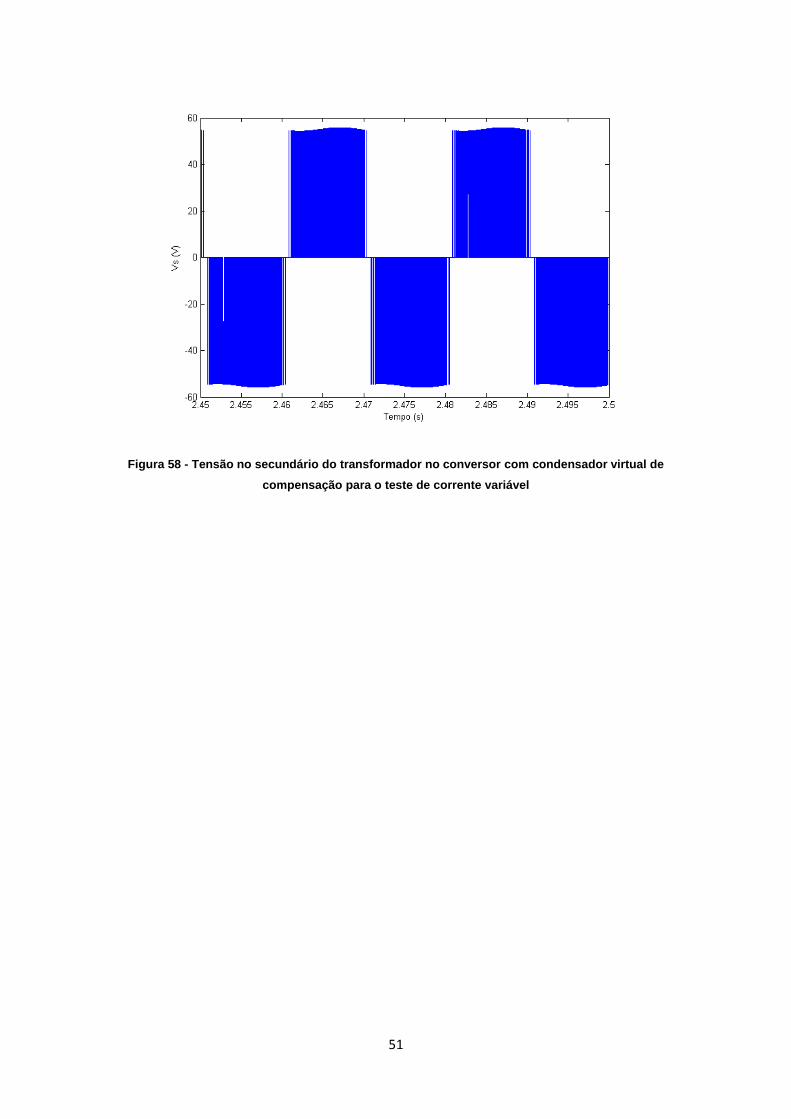
51
Figura 58 - Tensão no secundário do transformador no conversor com condensador virtual de
compensação para o teste de corrente variável

52
4.3. Comportamento da tensão de saída com cargas variáveis
(para 𝒊𝒑𝒆𝒇= 𝟑𝟎𝟎 𝑨)
Neste teste fixou-se a corrente no primário em 𝑖𝑝𝑒𝑓= 300 A e usou-se uma carga variável
crescente dos 400 W aos 900 W (de t=0 até 4 s).
O teste foi realizado para o conversor sem e com condensador virtual de compensação.
Sem condensador virtual de compensação
Observando as fig. 59 e 60, podemos observar o correto funcionamento do conversor até ao
momento 𝑡 = 2,5 𝑠, que equivale aproximadamente a 675 W na saída.
Figura 59 - Potência na saída do conversor base no teste de potência de carga variável
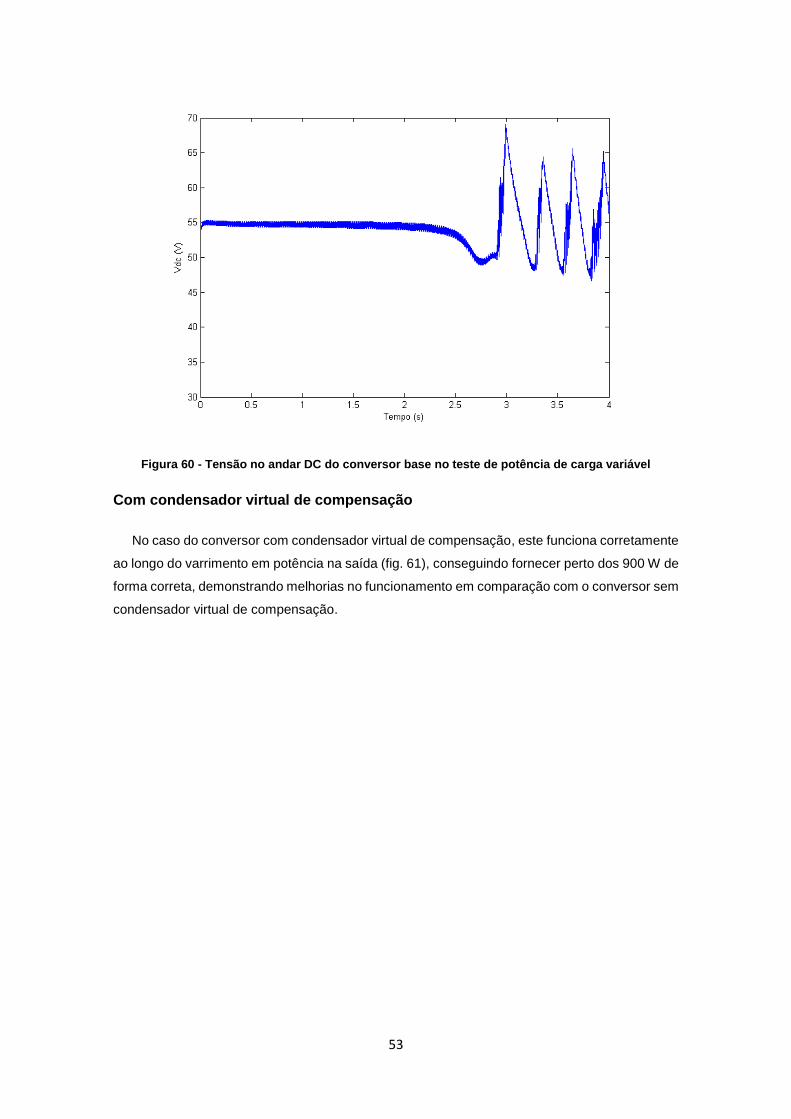
53
Figura 60 - Tensão no andar DC do conversor base no teste de potência de carga variável
Com condensador virtual de compensação
No caso do conversor com condensador virtual de compensação, este funciona corretamente
ao longo do varrimento em potência na saída (fig. 61), conseguindo fornecer perto dos 900 W de
forma correta, demonstrando melhorias no funcionamento em comparação com o conversor sem
condensador virtual de compensação.
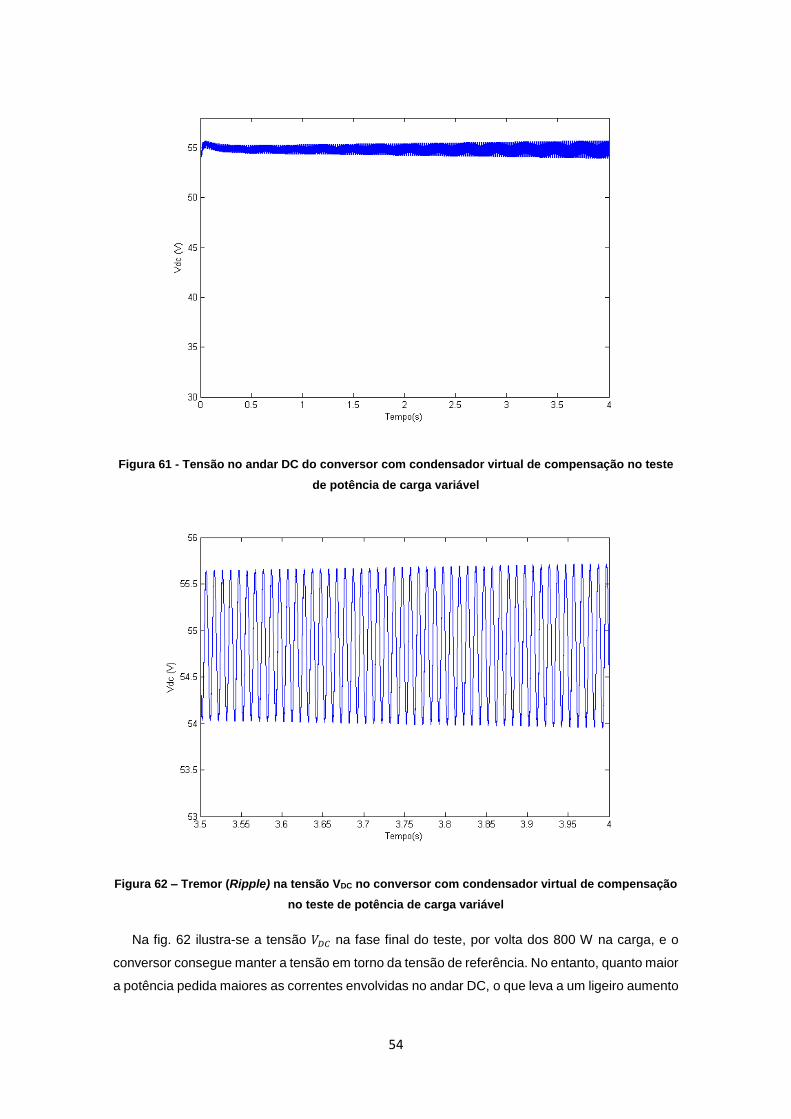
54
Figura 61 - Tensão no andar DC do conversor com condensador virtual de compensação no teste
de potência de carga variável
Figura 62 – Tremor (Ripple) na tensão VDC no conversor com condensador virtual de compensação
no teste de potência de carga variável
Na fig. 62 ilustra-se a tensão 𝑉𝐷𝐶 na fase final do teste, por volta dos 800 W na carga, e o
conversor consegue manter a tensão em torno da tensão de referência. No entanto, quanto maior
a potência pedida maiores as correntes envolvidas no andar DC, o que leva a um ligeiro aumento

55
do tremor (ripple) na tensão 𝑉𝐷𝐶, uma vez que o valor da capacidade de saída da tensão contínua
é dimensionada para cerca de 800 W.
Figura 63 - Potência na saída do conversor com condensador virtual de compensação no teste de
potência de carga variável
Na fig. 63, ilustra-se o andamento da potência pedida na saída, 𝑃𝑜𝑢𝑡.
Nas fig. 64 e 65, pode-se observar a evolução das tensões no primário e secundário do
transformador.

56
Figura 64 - Tensão no primário do transformador no conversor com condensador virtual de
compensação no teste de potência de carga variável
Figura 65- Tensão no secundário do transformador no conversor com condensador virtual de
compensação no teste de potência de carga variável
Como se referiu anteriormente, no próximo capítulo vai apresentar-se um processo de
reduzir as harmónicas de alta frequência da tensão.

57
5. Introdução de filtro no andar AC do conversor
Em todos os resultados apresentados anteriormente o conversor AC-DC não incluía qualquer
tipo de filtro entre a entrada do conversor e o transformador, portanto a tensão aos terminais do
transformador seria a tensão 𝑣𝑃𝑊𝑀, que contém alto teor harmónico visto tratar-se de uma onda
de tensão com modulação de largura de impulso.
Neste capítulo apresenta-se uma proposta para solucionar este problema, adicionando um
filtro entre o transformador e o conversor. Este facto implica também alterar o controlo para
contabilizar a existência de elementos adicionais no circuito.
5.1. Dimensionamento do filtro e redimensionamento do
controlo do conversor
O filtro inserido será do tipo LC passa-baixo, ligado aos terminais do secundário do
transformador, que em conjunto com a indutância equivalente de fugas L2 do transformador irá
funcionar como um filtro LCL de 3ª ordem.
Figura 66 - Circuito equivalente do transformador com filtro LCL
Para obter o bloco de controlo, relembra-se que se pretende que aos terminais do secundário
do transformador se tenha,
𝑣𝑠 =𝑅𝑒𝑞
1 + 𝑠𝐶𝑓𝑖𝑐𝑅𝑒𝑞 𝑖𝑠 (63)
Em que 𝐶𝑓𝑖𝑐 e 𝑅𝑒𝑞 são componentes virtuais, sendo esta relação forçada pelo controlador do
conversor.
Dado que a indutância de fugas L2 é indiscernível do transformador, a tensão 𝑣𝑠 tem de ser
medida aos terminais do novo condensador 𝐶𝐴𝐶.
Relembra-se também o diagrama de blocos (fig. 67) que permite obter a tensão de referência
𝑣𝑠𝑟𝑒𝑓 .

58
Figura 67 - Obtenção de vs ref
Analisando o circuito do filtro do lado AC do conversor estabelecem-se as seguintes relações,
𝐶𝐴𝐶
𝑑𝑣𝑠
𝑑𝑡= 𝑖𝑠 + 𝑖𝐿𝐴𝐶
(64)
isto é, a corrente no condensador 𝐶𝐴𝐶 será igual à soma da corrente proveniente do
transformador 𝑖𝑠, com a do conversor 𝑖𝐿𝐴𝐶,
Define-se como objetivo de controlo fazer com que o erro da tensão 𝑣𝑠, 𝑒𝑣𝑠 seja nulo:
𝑒𝑣𝑠= 𝑣𝑠𝑟𝑒𝑓
− 𝑣𝑠 = 0 (65)
Para que um eventual controlador seja estável, deve-se cumprir-se a condição,
𝑒𝑣𝑠
𝑑𝑒𝑣𝑠
𝑑𝑡< 0 ⇒
𝑑𝑒𝑣𝑠
𝑑𝑡= −𝑘𝑒𝑣𝑠
⇔𝑑
𝑑𝑡(𝑣𝑠𝑟𝑒𝑓
− 𝑣𝑠) = −𝑘 (𝑣𝑠𝑟𝑒𝑓− 𝑣𝑠) (66)
onde k é uma constante positiva. Utilizando a relação das correntes no circuito obtém-se,
𝑑𝑣𝑠𝑟𝑒𝑓
𝑑𝑡−
𝑖𝑠 + 𝑖𝐿𝐴𝐶𝑟𝑒𝑓
𝐶𝐴𝐶= −𝑘 (𝑣𝑠𝑟𝑒𝑓
− 𝑣𝑠) (67)
De onde se tira,
𝑖𝐿𝐴𝐶𝑟𝑒𝑓= 𝐶𝐴𝐶
𝑑𝑣𝑠𝑟𝑒𝑓
𝑑𝑡+ 𝑘𝐶𝐴𝐶 (𝑣𝑠𝑟𝑒𝑓
− 𝑣𝑠) − 𝑖𝑠 (68)
Esta equação define o valor de referência da corrente a injetar pelo conversor no filtro.
Consequentemente, o controlador terá agora de forçar a corrente à entrada do conversor 𝑖𝐿𝐴𝐶,
em vez da tensão 𝑣𝑃𝑊𝑀 como anteriormente. Defina-se então o erro de seguimento dessa
corrente:
𝑒𝑖𝐿𝐴𝐶= 𝑖𝐿𝐴𝐶𝑟𝑒𝑓
− 𝑖𝐿𝐴𝐶= 0 (69)
Este erro pode ser mantido suficientemente próximo de zero, utilizando novamente a
estratégia da expressão (30) e tab. 2, definidas no capítulo 2. O novo bloco de controlo está
representado nas fig. 68 e 69.
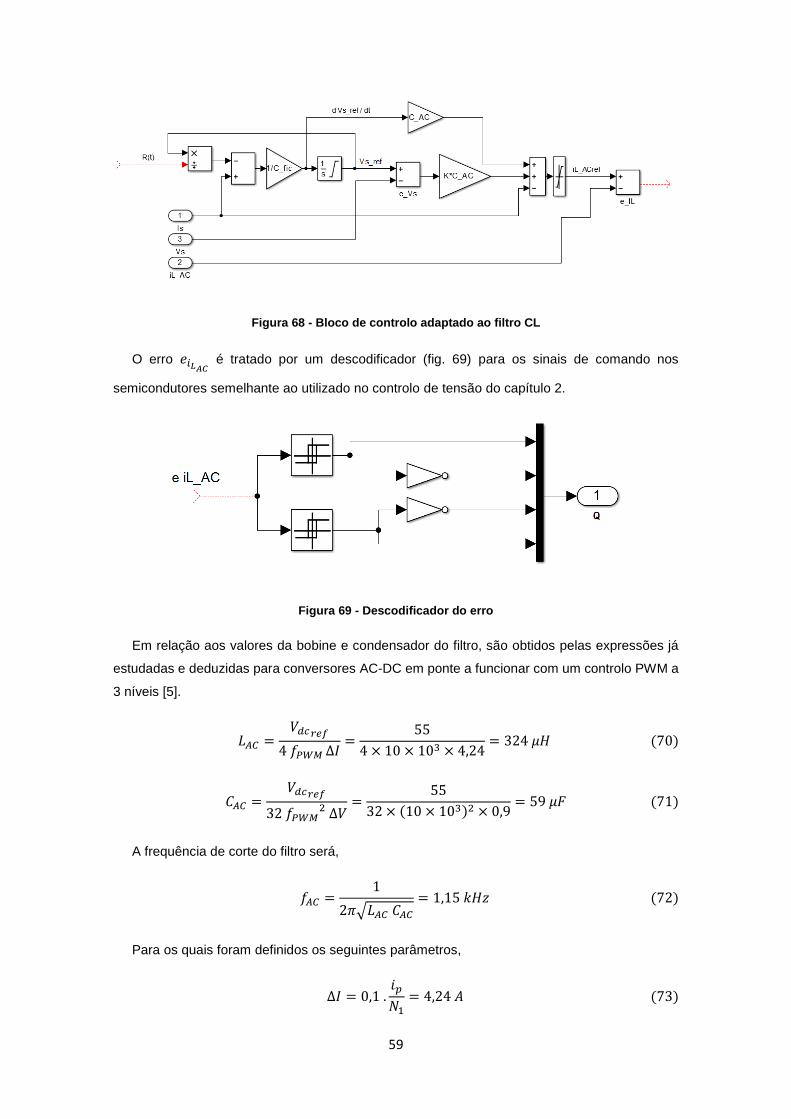
59
Figura 68 - Bloco de controlo adaptado ao filtro CL
O erro 𝑒𝑖𝐿𝐴𝐶 é tratado por um descodificador (fig. 69) para os sinais de comando nos
semicondutores semelhante ao utilizado no controlo de tensão do capítulo 2.
Figura 69 - Descodificador do erro
Em relação aos valores da bobine e condensador do filtro, são obtidos pelas expressões já
estudadas e deduzidas para conversores AC-DC em ponte a funcionar com um controlo PWM a
3 níveis [5].
𝐿𝐴𝐶 =𝑉𝑑𝑐𝑟𝑒𝑓
4 𝑓𝑃𝑊𝑀 ∆𝐼=
55
4 × 10 × 103 × 4,24= 324 𝜇𝐻 (70)
𝐶𝐴𝐶 =𝑉𝑑𝑐𝑟𝑒𝑓
32 𝑓𝑃𝑊𝑀2 ∆𝑉
=55
32 × (10 × 103)2 × 0,9= 59 𝜇𝐹 (71)
A frequência de corte do filtro será,
𝑓𝐴𝐶 =1
2𝜋√𝐿𝐴𝐶 𝐶𝐴𝐶
= 1,15 𝑘𝐻𝑧 (72)
Para os quais foram definidos os seguintes parâmetros,
∆𝐼 = 0,1 .𝑖𝑝𝑁1
= 4,24 𝐴 (73)

60
∆𝑉 = 0,03 × 𝑢𝑠 = 0,9 𝑉 (74)
𝑓𝑃𝑊𝑀 = 10 𝑘𝐻𝑧 (75)
5.2. Simulação do conversor com condensador virtual de
compensação e filtro integrado no circuito
Na fig. 70 ilustra-se o novo esquema utilizado para a simulação do sistema,
Figura 70 - Circuito utilizado nas simulações
Como é possível observar é inserido um condensador, uma indutância e uma resistência entre
o transformador e o conversor. A resistência, RAC=1 mΩ, representa as perdas da bobine, e tem
a vantagem de amortecer o regime transitório nas grandezas do circuito durante as simulações.
De seguida foram repetidas as simulações realizadas no capítulo 4 deste trabalho.
Simulação com Pout=800 W e 𝒊𝒑𝒆𝒇= 𝟑𝟎𝟎 𝐀
Nesta primeira simulação faz-se o teste básico com uma corrente no primário de 𝑖𝑝𝑒𝑓= 300 A,
pedindo na saída uma potência 𝑃𝑜𝑢𝑡 = 800 W.

61
Figura 71 - Tensão Vdc no conversor com filtro e condensador virtual de compensação para o
teste em condições fixas
Pode-se observar que o conversor mantém o controlo da tensão de saída no seu valor de
referência, tendo neste caso um tremor (ripple) de cerca de 1 V, equivalente a 1,82% do valor
contínuo de referência.
Figura 72 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições fixas
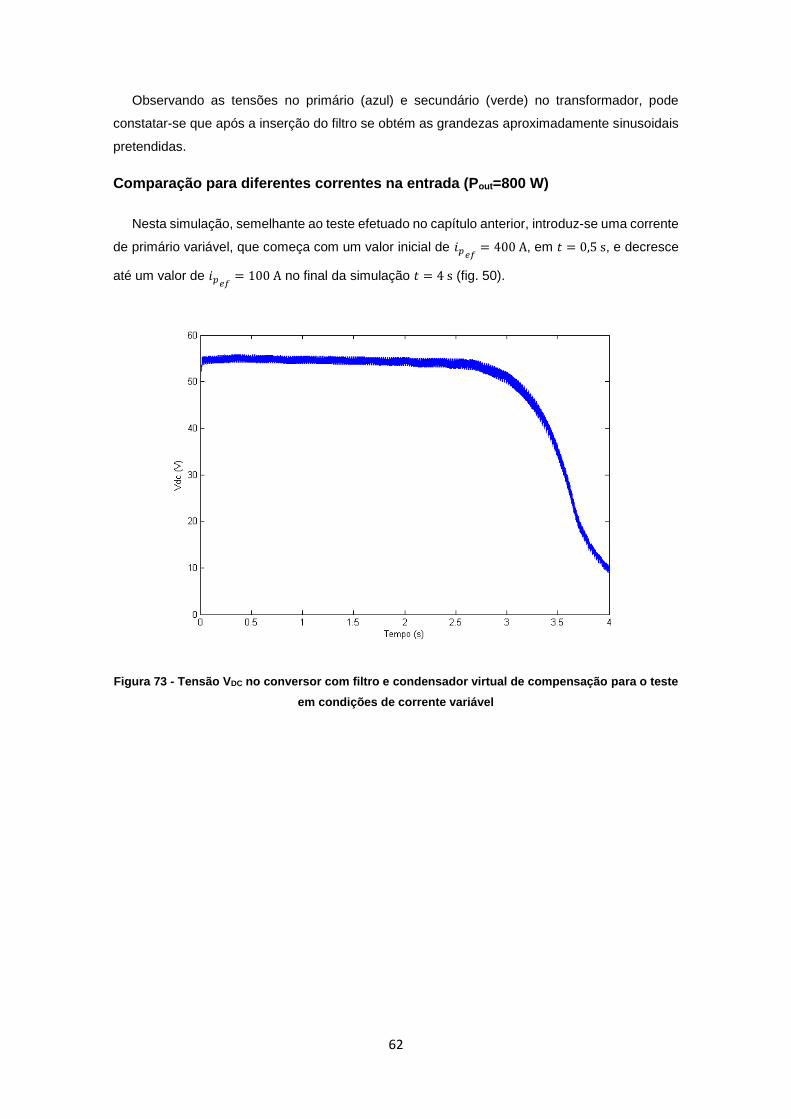
62
Observando as tensões no primário (azul) e secundário (verde) no transformador, pode
constatar-se que após a inserção do filtro se obtém as grandezas aproximadamente sinusoidais
pretendidas.
Comparação para diferentes correntes na entrada (Pout=800 W)
Nesta simulação, semelhante ao teste efetuado no capítulo anterior, introduz-se uma corrente
de primário variável, que começa com um valor inicial de 𝑖𝑝𝑒𝑓= 400 A, em 𝑡 = 0,5 s, e decresce
até um valor de 𝑖𝑝𝑒𝑓= 100 A no final da simulação 𝑡 = 4 s (fig. 50).
Figura 73 - Tensão VDC no conversor com filtro e condensador virtual de compensação para o teste
em condições de corrente variável

63
Figura 74 – Potência Pout na saída do conversor com filtro e condensador virtual de compensação
para o teste em condições de corrente variável
Comparando ao teste sem filtro, pode-se observar não existir diferenças significativas nas
potências obtidas, portanto o filtro não influencia o comportamento do sistema na 1ª harmónica.
No entanto, as tensões aos terminais do transformador são praticamente sinusoidais (fig. 75).
Figura 75 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições de corrente variável

64
Mostra-se assim que a redução harmónica e o controlo do conversor foram conseguidos de forma
adequada.
Comparação para cargas diferentes na saída (com 𝒊𝒑𝒆𝒇= 𝟑𝟎𝟎 𝑨)
Mostra-se a seguir o teste com carga variável onde se varia a carga pedida na saída entre os
400 W e os 900 W, mantendo na entrada uma corrente de 𝑖𝑝𝑒𝑓= 300 𝐴.
Figura 76 - Tensão VDC no conversor com filtro e condensador virtual de compensação para o teste
em condições de carga variável

65
Figura 77 – Potência Pout à saída do conversor com filtro e condensador virtual de compensação
para o teste em condições de carga variável
Como no caso sem filtro, o conversor continua a controlar a tensão para as potências pedidas,
ilustrando nas figuras 76 e 77 a tensão VDC controlada para valores de potência pedida na saída
entre os 400 W e os 900 W.
Figura 78 - Tensão no primário e secundário do transformador no conversor com filtro e
condensador virtual de compensação para o teste em condições de carga variável
Também observando na fig. 78 as tensões envolvidas no transformador, se constata que
continuam aproximadamente sinusoidais.

66
6. Conclusão
Deste trabalho conclui-se que a solução do uso de um condensador virtual para compensar
o efeito da baixa indutância equivalente de magnetização do transformador de corrente é viável
e recomendada para o caso em estudo.
Mostrou-se que partindo do conceito de resistência virtual e de maneira simples, é possível
alterar o controlo do conversor de forma a contemplar os efeitos de um condensador virtual ligado
ao secundário do transformador, sem haver a necessidade de incluir um condensador real no
circuito. Também se obteve um novo controlador capaz de incluir um filtro LCL de redução das
harmónicas de tensão relativas à frequência de comutação.
Dos testes realizados observou-se uma melhoria, ou um alargar dos intervalos de
funcionamento, no circuito em termos das potências disponíveis para o robô com as correntes
típicas na rede.
A primeira análise que se pode fazer é nos testes em condições de entrada semelhantes,
com 𝑖𝑝𝑒𝑓= 300 A, onde se observa uma melhoria da potência extraída do transformador de 675
W para 900 W.
Analisando os resultados para a mesma corrente de entrada e uma potência pedida na saída
de 800 W, que equivale à situação de potência máxima com uma corrente na entrada habitual,
observou-se um tremor na saída de 0,8 V (equivalente a 1,45% sobre a tensão de referência) e
uma taxa de distorção harmónica na tensão do primário de 3,52%. O conversor funciona com
um rendimento teórico de 96%, e são extraídos 830 W, logo o conversor será capaz de fornecer
os 800 W pretendidos pela carga.
Como desenvolvimento futuro, seria interessante construir e testar este sistema de
alimentação em laboratório.
67
Bibliografia
[1] J. Caxias; J. F. Alves da Silva; J. Sequeira. “Contactless Power Supply System for
Transmission Line Inspection Robôs”. IST, Lisboa, 2010.
[2] D. D. Furtado Lopes; J. F. Alves da Silva; J. Sequeira. “Transformador para Robô de
Inspecção de Linhas Aéreas”. IST, Lisboa, 2011.
[3] F. Serrano; J. F. Alves da Silva; M. J. Resende. “Transformers for Contactless Power Supplies
in High Voltage Lines”. IST, Lisboa, 2013.
[4] J. F. Alves da Silva. “Sistemas de Alimentação Autónoma: Transformer Design”. IST,
TULisbon, 2012.
[5] J. Fernando Silva, Electrónica Industrial: Semicondutores e Conversores de Potência, série
Manuais Universitários, Fundação Calouste Gulbenkian, Lisboa, 2013.
[6] J. Sequeira; L. Tavares. “RIOL - Robotic Inspection Over power Lines”. 6th IFAC Symposium
on Intelligent Autonomous Vehicles, September 2007.
[7] J. F. Alves da Silva; V. Fernão Pires; S. F. Pinto; J. D. Barros. Advanced control methods for
power electronics systems, Mathematics and computers in simulation 63 (3), 281-295, 2002
[8] J. F. Alves da Silva, Sliding mode control of voltage sourced boost-type reversible rectifiers
Industrial Electronics, 1997. ISIE'97. Proceedings of the IEEE, 1997
[9] J. F. A. Martins; A. J. Pires; J. F. Alves da Silva. A novel and simple current controller for three-
phase PWM power inverters: Special section on PWM current regulation
IEEE Transactions on Industrial Electronics 45 (5), 802-805, 1998
[10] J. F. Alves da Silva; N. Rodrigues; J. Costa. Space vector alpha-beta sliding mode current
controllers for three-phase multilevel inverters Power Electronics Specialists Conference, 2000.
PESC 00. 2000 IEEE 31st ... 2000
[11] J. F. Alves da Silva. PWM audio power amplifiers: sigma delta versus sliding mode control
Electronics, Circuits and Systems, 1998 IEEE International Conference on 1 ...1998
[12] J. F. Alves da Silva; S. F Pinto. Control methods for switching power converters, Power
Electronics Handbook, 935-998, 2007
[13] A. Sedra; K. Smith. “Microelectronic Circuits”. Oxford University Press, 4th edition, 1997.
[14] A. Fitzgerald; C. Kingsley; S. Umans. “Electric Machinery, ser. Electrical Engineering
Series”. McGraw-Hill Companies, Incorporated, 2003.

68
[15] J. J. Santana; F. Labique. “Electrónica de Potência”. Fundação Calouste Gulbenkian. Lisboa
1991.












![Isaac Asimov - Robôs 3 - Os Robôs [ N a k e d S u n ]](https://static.fdocumentos.com/doc/165x107/5571fc654979599169972a22/isaac-asimov-robos-3-os-robos-n-a-k-e-d-s-u-n-.jpg)