
SISTEMA DE COMUNICAÇÃO POR RÁDIO-FREQUÊNCIA...
134
i Universidade do Minho Escola de Engenharia Departamento de Engenharia Electrónica Industrial e de Computadores SISTEMA DE COMUNICAÇÃO POR RÁDIO-FREQUÊNCIA PARA PONTA CPTu Sérgio António Esteves da Silva Dissertação submetida para a obtenção do grau de Mestre em Engenharia Electrónica Industrial e Computadores pela Escola de Engenharia da Universidade do Minho Trabalho realizado sob a orientação do Professor Paulo Mateus Mendes Guimarães, Novembro 2008
Transcript of SISTEMA DE COMUNICAÇÃO POR RÁDIO-FREQUÊNCIA...

i
Universidade do Minho Escola de Engenharia
Departamento de Engenharia Electrónica Industrial e de Computadores
SISTEMA DE COMUNICAÇÃO POR RÁDIO-FREQUÊNCIA PARA PONTA CPTu
Sérgio António Esteves da Silva
Dissertação submetida para a obtenção do grau de Mestre em
Engenharia Electrónica Industrial e Computadores
pela
Escola de Engenharia da Universidade do Minho
Trabalho realizado sob a orientação do Professor Paulo Mateus Mendes
Guimarães, Novembro 2008

ii

iii
Agradecimentos
Quero agradecer ao meu orientador, Prof. Doutor Paulo Mateus Mendes pelo
apoio e orientação durante todo o projecto. E ao Prof. Doutor Júlio Barreiros Martins
pelo esforço e interesse para que os trabalhos decorressem pelo melhor.
À TGeotecnia S.A. que foi a empresa financiadora deste projecto agradeço
também a oportunidade.
À empresa Tecnosol FGE pela disponibilidade em nos receber numa visita às
suas instalações e nos esclarecer todas as duvidas colocadas.
À colega Ana Catarina pela correcção e ajuda na sua área de conhecimento.
E como não podia deixar de ser, à minha família que ao longo destes anos na
universidade sempre me ajudou e me deu todas as condições necessárias para a
finalização deste curso.

iv

v
Resumo
Cada vez mais a concorrência nas empresas é evidenciada pelos avanços
tecnológicos demonstrados, e a indústria de prospecção geotécnica não é excepção. A
necessidade de obter resultados mais fiáveis, rápidos, e com menor custo conduzem as
empresas à busca de inovação, a que os fabricantes de equipamentos tentam responder.
Às vezes, também as próprias empresas tentam desenvolver, ou melhorar, os seus
equipamentos internamente ou em parceria com as universidades. O presente trabalho é
a prova disso mesmo.
Os ensaios de cone de penetração estática, conhecidos pela sigla CPT (Cone
Penetration Test), têm-se revelado como uma importante ferramenta de prospecção
geotécnica. Com os dados deste tipo de ensaio pode-se determinar a estratigrafia do
local, ou seja, saber que tipos de camadas de subsolo existem num determinado local e a
que profundidades estão. É possível também prever a capacidade de carga de fundações
e medir algumas características dos solos, como por exemplo a temperatura, o nível de
contaminação, a resistividade eléctrica, etc.
Este projecto consiste num melhoramento de uma destas sondas de prospecção
geotécnica. O principal objectivo é eliminar o actual cabo de comunicação da sonda
com a superfície e substitui-lo por um sistema de aquisição de dados e transmissão por
rádio-frequência.
A solução para o sistema consiste numa plataforma que permite a aquisição dos
sinais geológicos junto da sonda através de conversores ADC. Sinais estes que por sua
vez são enviados pelo interior do sistema de prospecção, aproveitando as
potencialidades da tecnologia RF, para uma placa de interface com o computador, para
onde por fim são enviados. Foi também desenvolvida uma aplicação para visualização e
armazenamento dos dados no computador.
A principal vantagem deste sistema é o facto dos testes CPT serem executados
mais rapidamente, uma vez que não é necessário lidar com o longo cabo durante a
penetração.

vi
vii
Abstract More and more the competition in the companies is evidenced by the
demonstrated technological progresses and the industry of geotechnical prospecting is
not exception. The need to obtain more reliable and fast results, and with smaller cost
motivates the companies in search of innovation that the manufacturers of equipments
try to answer. Sometimes also the own companies try to develop or to improve their
equipments internally or together with universities. The present work is the proof of
that.
The cone penetration test, known by the acronyms CPT, has being revealed as an
important tool in the geotechnical prospection. With this kind of data it can be
determined the stratigraphy of the place, that is, to determine which underground layers
exist at a certain place and its depth. It is also possible to predict the load capacity of
foundations and to measure some characteristics of the soils, for example the
temperature, the contamination level, the resistivity etc.
This project consists of an improvement in one of these CPT cones. The main
objective is to remove the surface cone communication cable and replace it for a radio
frequency data acquisition system.
The solution for the system consists in a platform that allows the acquisition of
geological signals near the probe using ADC. These signals are sent by the interior of
the search system, taking advantage of the potentialities of the RF technology, to a
computer interface system, where finally they are sent to computer. It was also
developed an application for visualization and storage of data in the computer.
The main advantage of this system is the fact that CPT is executed more quickly
since it is not necessary to work with the long cable during the penetration and the
durability of the acquisition system.

viii
ix
Índice 1 INTRODUÇÃO ........................................................................................................... 1
1.1 CARACTERIZAÇÃO DE SOLOS USANDO CPT/CPTU ............................................ 1 1.2 ESTADO DA ARTE .................................................................................................. 4
1.2.1 Introdução histórica ............................................................................................ 4 1.2.2 Ondas sonoras ..................................................................................................... 6 1.2.3 Ondas de luz ........................................................................................................ 7 1.2.4 Ondas de rádio .................................................................................................... 8
1.3 MOTIVAÇÃO E OBJECTIVOS ............................................................................... 10 1.4 ESTRUTURA DO DOCUMENTO ............................................................................. 12
2 COMUNICAÇÃO POR RÁDIO-FREQUÊNCIA ................................................. 15
2.1 INTRODUÇÃO ....................................................................................................... 15 2.2 O ESPECTRO ELECTROMAGNÉTICO ................................................................... 16 2.3 PROPAGAÇÃO DE UM SINAL DE RF .................................................................... 17 2.4 CARACTERIZAÇÃO DE SISTEMA DE RF.............................................................. 18 2.5 NETWORK ANALYZER E SINAIS DE RÁDIO-FREQUÊNCIA .................................. 19 2.6 ZIGBEE NAS COMUNICAÇÕES SEM FIOS ............................................................. 21
3 PROJECTO E DESENVOLVIMENTO DO SISTEMA ELECTRÓNICO ........ 23
3.1 ARQUITECTURA DO SISTEMA DE AQUISIÇÃO .................................................... 23 3.2 ANÁLISE DE POSSÍVEIS SISTEMAS DE COMUNICAÇÃO REMOTA ....................... 24 3.3 PROJECTO DO SISTEMA DE COMUNICAÇÃO ...................................................... 25
3.3.1 Dimensionamento da linha de transmissão ..................................................... 26 3.3.2 Projecto do filtro de isolamento RF/DC .......................................................... 28 3.3.3 Dimensionamento das indutâncias .................................................................. 28 3.3.4 Dimensionamento dos condensadores ............................................................. 29
3.4 ESPECIFICAÇÃO DO MÓDULO DE RÁDIO-FREQUÊNCIA ..................................... 30 3.5 PROJECTO E DESENVOLVIMENTO DA PLACA DE AQUISIÇÃO ........................... 33
3.5.1 Arquitectura da placa de aquisição ................................................................. 33 3.5.2 Alimentação da sonda ....................................................................................... 34 3.5.3 Alimentação do modulo ZigBit ........................................................................ 34 3.5.4 Conversão analógico digital.............................................................................. 35
3.6 PROJECTO E DESENVOLVIMENTO DA PLACA DE INTERFACE ........................... 36 3.6.1 Arquitectura da placa de interface com o computador ................................. 36 3.6.2 Sub circuitos e alimentação .............................................................................. 37

x
4 PROJECTO E DESENVOLVIMENTO DO SISTEMA MECÂNICO ............... 39
4.1 PROJECTO DO ADAPTADOR DA PRENSA ............................................................. 39 4.2 PROJECTO DAS VARAS DA LINHA DE TRANSMISSÃO ......................................... 41 4.3 PROJECTO DA PEÇA DE ADAPTAÇÃO DAS VARAS À PLACA DE AQUISIÇÃO ...... 42 4.4 PROJECTO DO COMPARTIMENTO DO RECEPTOR .............................................. 43
5 DESENVOLVIMENTO DO SOFTWARE ............................................................. 45
5.1 INTRODUÇÃO ....................................................................................................... 45 5.2 FRAMEWORK EZEENET ...................................................................................... 45 5.3 DESCRIÇÃO DO SOFTWARE DA PLACA DE AQUISIÇÃO ...................................... 47 5.4 DESCRIÇÃO DO SOFTWARE DO MÓDULO RECEPTOR ........................................ 51 5.5 DESCRIÇÃO DA APLICAÇÃO DE INTERFACE COM UTILIZADOR ........................ 52 5.7 TESTE DE PROPAGAÇÃO DE UM PROTÓTIPO DA LINHA DE TRANSMISSÃO ...... 55 5.8 TESTE DE PROPAGAÇÃO DO FILTRO DA LT ....................................................... 58 5.9 TESTE DE PROPAGAÇÃO DO SISTEMA MECÂNICO ............................................. 59 5.10 OBSERVAÇÕES FINAIS ......................................................................................... 60
6 CONCLUSÕES E TRABALHO FUTURO ............................................................ 61
6.1 CONCLUSÕES ....................................................................................................... 61 6.2 TRABALHO FUTURO ............................................................................................ 61 REFERÊNCIAS ................................................................................................................ 62 BIBLIOGRAFIA ............................................................................................................... 63 ANEXO A ESTUDO ACERCA DE GUIAS DE ONDA E POSSIBILIDADE DE
IMPLEMENTAÇÃO NO PROJECTO. ................................................................................ 65 ANEXO B PCBS E ESQUEMÁTICOS .......................................................................... 71 ANEXO C COTAÇÕES DAS PEÇAS MECÂNICAS ........................................................ 77 ANEXO D SOFTWARE DOS MÓDULOS ZIGBIT ......................................................... 81 ANEXO E DATASHEET DO MÓDULO ZIGBIT ........................................................... 96
xi
Lista de figuras
Figura 1 - Exemplo de cone eléctrico [1]. ........................................................................ 1
Figura 2 - Plataforma móvel de sondagens [2]. ................................................................ 2
Figura 3 - Resultados de um ensaio CPTu [3]. ................................................................. 3
Figura 4 - Diagrama de classificação de solos para CPT e PCTu [3]. ............................. 4
Figura 5 - Penetrómetros desenvolvidos ao longo do tempo [1]. ..................................... 5
Figura 6 - Aspecto interior de um cone eléctrico [5]. ....................................................... 6
Figura 7 - Microfone receptor de dados [2]. ..................................................................... 7
Figura 8 - Optocone, sistema completo com pormenor da câmara e varas [8]. ............... 8
Figura 9 - Pormenor do receptor e do transmissor [6]. ..................................................... 9
Figura 10 - Sistema High Capacity da Geotech [6]. ........................................................ 9
Figura 11 - Descrição do sistema completo.................................................................... 12
Figura 12 - Onda periódica no tempo e no espaço. ........................................................ 15
Figura 13 - Espectro electromagnético [13]. .................................................................. 16
Figura 14 - LT condutor único. ...................................................................................... 17
Figura 15 - LT com dois condutores. ............................................................................. 17
Figura 16 - LT coaxial. ................................................................................................... 17
Figura 17 - Sinal electromagnético transmitido por uma antena [9]. ............................. 18
Figura 18 - Antena do tipo dipolo [9]. ............................................................................ 18
Figura 19 - Representação de uma rede com 2 portos. ................................................... 19
Figura 20 - Network Analyzer [14] ................................................................................ 20
Figura 22 - Comparação com outros standards. [16] ..................................................... 21
Figura 23 - Arquitectura do sistema ............................................................................... 23
Figura 25 - Circuito equivalente de uma linha de transmissão [9]. ................................ 26
Figura 26 - Representação do circuito de RF e DC. ....................................................... 28
Figura 27 - Impedâncias presentes na LT e na fonte. ..................................................... 29
Figura 28 - Módulos ZigBit™ com e sem antena integrada [10]. ................................. 30
Figura 29 - Pinout e dimensões do módulo Zigbit MNZB-24-B0 [10]. ........................ 31
Figura 30 - Características de consumo [10]. ................................................................. 31
Figura 31 - Características de Rádio-frequência do módulo [10]. ................................. 31
Figura 32 - Características do microcontrolador do módulo [10]. ................................. 32

xii
Figura 33 - Características do módulo ZigBit MNZB-24-B0 [10]. ................................ 32
Figura 34 - Diagrama de blocos do módulo ZigBit [10]. ............................................... 32
Figura 35 - Placa de aquisição de dados. ........................................................................ 33
Figura 36 - Arquitectura da placa de aquisição. ............................................................. 34
Figura 37 - Conversor DC/DC 3 Wats [11]. ................................................................... 34
Figura 38 - Conversor visto de frente, introduzido no PCB dentro do tubo. ................. 34
Figura 39 - Regulador 3,3V / 1A .................................................................................... 35
Figura 40 - Placa receptora de interface com o computador. ......................................... 36
Figura 41 - Arquitectura da placa de interface com o computador. ............................... 37
Figura 42 - Descrição da peça de adaptação à prensa. ................................................... 40
Figura 43 - Descrição da vara de penetração com pormenor de encaixe. ...................... 41
Figura 44 - Descrição da peça de adaptação das varas ao compartimento do receptor. . 42
Figura 45 - Descrição do compartimento da placa de aquisição. ................................... 43
Figura 46 - Descrição do sistema completo.................................................................... 44
Figura 47 - Diagrama da pilha de software eZeeNet [12]. ............................................. 45
Figura 48 - Sequencia de inicialização de uma aplicação eZeeNet [12]. ..................... 46
Figura 49 - Fluxograma da função Fw_userEntry. ......................................................... 48
Figura 50 - Fluxograma da função MainLoop................................................................ 50
Figura 51 - Diagrama de blocos da aplicação em LabView. .......................................... 52
Figura 52 - Janela de configuração da porta COM. ........................................................ 53
Figura 53 - Interface da aplicação em LabView. ............................................................ 53
Figura 54 - Bancada de teste da sonda. .......................................................................... 55
Figura 55 – Teste de propagação da LT de 1 metro. ...................................................... 56
Figura 56 - Linha de transmissão com um metro. .......................................................... 56
Figura 57 - Desenho do interior da adaptação e foto da extremidade exposta. .............. 56
Figura 58 - S21 da LT de 1 metro. ................................................................................. 57
Figura 59 - S21 da LT de 10 centímetros. ...................................................................... 57
Figura 60 - LT com 10 cm e conectores SMA para teste de propagação. ...................... 58
Figura 61 - S21 do filtro. ................................................................................................ 58
Figura 62 - PCB para teste propagação. ......................................................................... 59
Figura 63 - Futuro teste de propagação do sistema mecânico. ....................................... 59
Figura 64 - Representação de alguns tipos de guia de onda [1]. .................................... 65
Figura 65 - Eixos de coordenadas no guia de onda. ....................................................... 66
Figura 66 - Frequências de corte dos modos TE e TM [2]. ............................................ 67

xiii
Figura 67 - Esquemático da placa de aquisição. ............................................................. 71
Figura 68 - Vista dos componentes da placa de aquisição. ............................................ 71
Figura 69 - Vista das pistas de cima da placa de aquisição. ........................................... 72
Figura 70 - Vista das pistas de baixo da placa de aquisição. ......................................... 72
Figura 71 - Foto da placa de aquisição. .......................................................................... 72
Figura 72 - Esquemático da placa de interface. .............................................................. 72
Figura 73 - Vista dos componentes da placa de interface. ............................................. 73
Figura 74 - Vista dos condutores da placa de interface. ................................................. 73
Figura 75 - Foto da placa de interface. ........................................................................... 73
Figura 76 - Placa de interface com o computador. ......................................................... 74
Figura 77 - Placa de aquisição. ....................................................................................... 74
Figura 78 - Placa de testes maior e com os componentes mais afastados. ..................... 74
Figura 79 - Placa de interface com comunicação pela porta série.................................. 74
Figura 80 - Placa wireless com circuito base. ................................................................ 75
Figura 81 - Esquemático da placa wireless. ................................................................... 75
xiv
Lista de tabelas
Tabela 1 - Legenda do diagrama, (comportamento do solo) [3]. ..................................... 4
Tabela 2 - Descrição da imagem anterior [1]. .................................................................. 5
Tabela 3 - Características técnicas deste cone [7]. ........................................................... 7
Tabela 4 - Especificações técnicas do sistema High Capacity da Geotech [6]. ............. 10
Tabela 5 - Zeros das funções de Bessel. ......................................................................... 67
xv
Acrónimos ADC - Analog to Digital Converter.
CPT - Cone Penetration Test.
ESD - Electrostatic discharge. JTAG - Joint Test Action Group.
LT - Linha de transmissão.
NA - Network Analyzer .
OEM - Original Equipment Manufacturer.
PCB - Print Circuit Board.
QFN - Quad Flat No leads
RF - Rádio frequência.
SMA - SubMiniature version A.
SMD - Surface-mount devices.
SPI - Serial Peripheral Interface.
UART - Universal Asynchronous Receiver/Transmitter.
ZDO - Zigbee Device Object.


1
1 Introdução
1.1 Caracterização de solos usando CPT/CPTu A prospecção geotécnica através dos ensaios CPT e CPTu é bastante utilizada
pela sua simplicidade e fiabilidade. Consiste na cravação no solo de uma ponteira
cilíndrica com extremidade cónica com 60 º de ângulo de vértice e 10 ou 15 cm 2 de
área de base. A cravação é efectuada a uma velocidade constante de 2 cm/segundo e é
garantida pela introdução de hastes de 1 metro no solo que empurram o cone à
profundidade desejada. A figura seguinte representa uma destas sondas.
Figura 1 - Exemplo de cone eléctrico [1].
O equipamento que garante a cravação consiste numa estrutura de reacção onde
é montado um sistema de aplicação de cargas. Normalmente hidráulico, o pistão é
accionado por um motor a combustão ou eléctrico e a velocidade de cravação
controlada por uma válvula reguladora. Este equipamento pode ser montado num
camião, num veiculo utilitário ou reboque. A reacção dos esforços de cravação é
garantida pelo peso do conjunto ou por fixação ao solo por hélices de ancoragem. Na
figura seguinte pode-se visualizar um veículo multifunções que executa este tipo de
testes. Pode ver-se na imagem umas âncoras para fixar o veículo ao solo assegurando
assim uma reacção suficiente ao esforço descendente que o sistema necessita.

2
Figura 2 - Plataforma móvel de sondagens [2].
À medida que se procede à cravação do penetrómetro no solo, são feitas medidas
a cada 2 cm de profundidade. Os principais parâmetros lidos são:
-Resistência à penetração da ponta (qc)
-Resistência por atrito lateral (fs)
-Pressão intersticial (u)
Estes parâmetros variam com o tipo de solo penetrado. A resistência de ponta qc, varia
com o grau de rigidez, a resistência lateral ou atrito lateral fs, varia com as pressões
horizontais no solo, com o tipo de solo e grau de consolidação. Dos ensaios resultam
gráficos como o da figura 3 que são gerados por aplicações de software apropriadas.
3
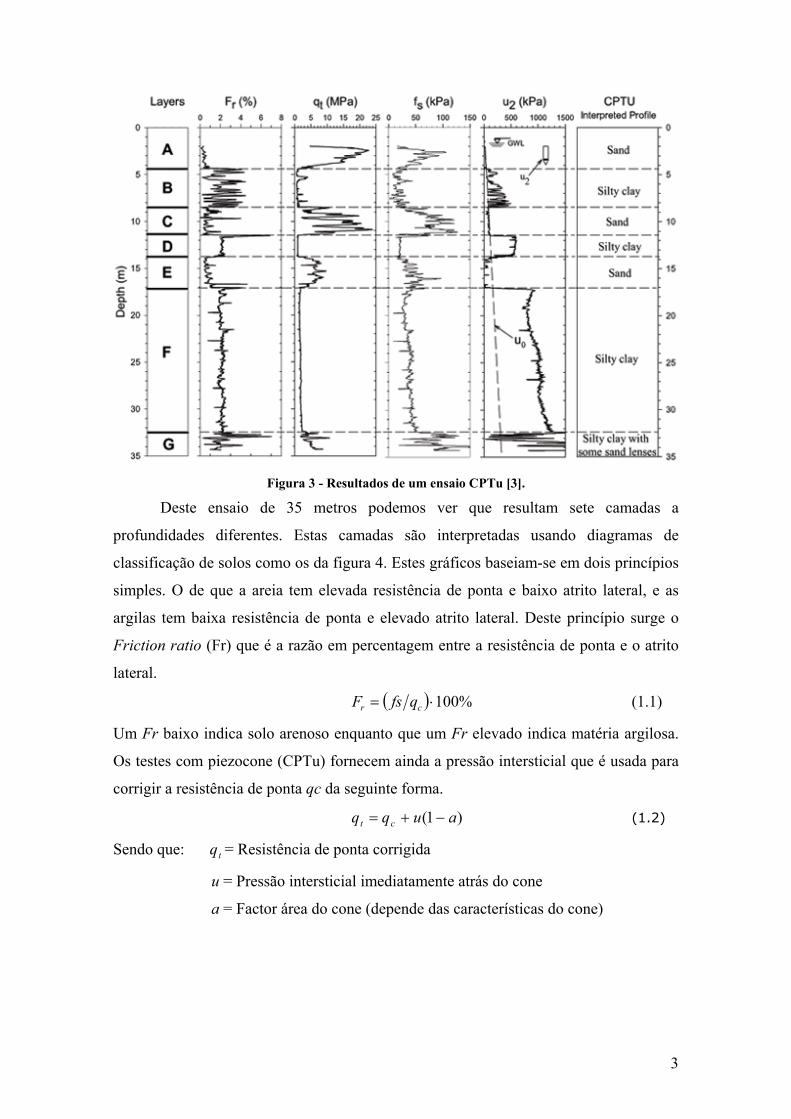
Figura 3 - Resultados de um ensaio CPTu [3].
Deste ensaio de 35 metros podemos ver que resultam sete camadas a
profundidades diferentes. Estas camadas são interpretadas usando diagramas de
classificação de solos como os da figura 4. Estes gráficos baseiam-se em dois princípios
simples. O de que a areia tem elevada resistência de ponta e baixo atrito lateral, e as
argilas tem baixa resistência de ponta e elevado atrito lateral. Deste princípio surge o
Friction ratio (Fr) que é a razão em percentagem entre a resistência de ponta e o atrito
lateral.
( ) %100⋅= cr qfsF (1.1)
Um Fr baixo indica solo arenoso enquanto que um Fr elevado indica matéria argilosa.
Os testes com piezocone (CPTu) fornecem ainda a pressão intersticial que é usada para
corrigir a resistência de ponta qc da seguinte forma.
)1( auqq ct −+= (1.2)
Sendo que: tq = Resistência de ponta corrigida
u = Pressão intersticial imediatamente atrás do cone
a = Factor área do cone (depende das características do cone)

4
Figura 4 - Diagrama de classificação de solos para CPT e PCTu [3].
Tabela 1 - Legenda do diagrama, (comportamento do solo) [3].
Zona Tipo de comportamento do solo
1 Solos finos sensíveis2 Solos orgânicos3 Argilas4 Argilas a argilas siltosas5 Argilas siltosas a siltes argilosos6 Areias siltosas a siltes argilosos7 Areias siltosas a siltes arenosos8 Areias a areias siltosas9 Areias
10 Areia cascalhenta a areia11 Granulado fino muito compacto12 Areias comp. a areias argilosas comp.
Com esta informação é possível, como já vimos, avaliar a estratigrafia do local
mas também determinar alguns parâmetros geotécnicos por exemplo a resistência ao
corte e o nível de compactação. Estes resultados podem ainda ser usados directamente
no dimensionamento geotécnico de fundações.
1.2 Estado da Arte 1.2.1 Introdução histórica
Os testes por cravação são já antigos, em 1932 na Holanda, faziam-se as
primeiras perfurações com penetrómetros. Usava-se um tubo do gás e umas varetas de
aço no interior com uma ponta cónica fixa na extremidade da vareta, era quanto bastava.
Três anos mais tarde no mesmo país, o laboratório Delfim Soil Mechanics projectou a
primeira sonda de penetração de 10 toneladas, operada manualmente, O cone mecânico
é ainda hoje muito usado devido à sua robustez, simplicidade e baixo custo. Em 1953

5
houve um avanço significativo ao adicionar a manga de atrito lateral. Nos anos 60 foi
desenvolvido um cone eléctrico que veio a tornar-se na base para as normas
internacionais.
As grandes vantagens em relação ao cone mecânico eram a eliminação de erros
de leitura devido a atrito entre as varas interiores e os tubos exteriores, a possibilidade
de uma penetração contínua sem ter que mover partes do penetrómetro influenciando a
resistência de ponta e o facto da leitura da resistência de ponta ser também contínua e
com fácil armazenamento dos dados [1].
Figura 5 - Penetrómetros desenvolvidos ao longo do tempo [1].
Tabela 2 - Descrição da imagem anterior [1].
a (1948) Cone mecânico com cobertura cónica b (1953) Cone mecânico com manga de atrito lateralc (1998) Cone eléctrico com medição de atrito lateral 2 cm² d (1997) Cone eléctrico com medição de atrito lateral 5 cm² e (1997) Piezocone eléctrico 10 cm² para testes wirelessf (1994) Piezocone eléctrico 10 cm²g (1998) Cone eléctrico sísmico 10 cm²h (1988) Piezocone descartável 10 cm²i (1989) Cone eléctrico com medição de atrito lateral 15 j (1986) Cone eléctrico com medição de atrito lateral 25

6
Em 1974 os piezocones CPTu começaram a aparecer e actualmente estão muito
generalizados. Um piezocone é uma sonda igual às outras mas com a capacidade de
medir a pressão intersticial ou seja a pressão da água a uma dada profundidade.
Actualmente existem cones para várias aplicações e tipos de terreno. Conforme a
sua capacidade e objectivo estes cones para além da informação tradicional (resistência
de ponta e atrito lateral), fornecem também outros dados, como por exemplo:
condutividade, temperatura, inclinação e profundidade do cone, detecção de poluentes e
contaminantes radioactivos, detecção do nível de água etc. Existem também cones que
recolhem amostras de solo à profundidade desejada.
Figura 6 - Aspecto interior de um cone eléctrico [5].
Para além de se medirem dados cada vez mais diversificados, tem-se inovado
também no método de transmissão da informação para a superfície, que de resto é onde
este projecto se concentra. Estas sondas enviam a informação por ondas sonoras e mais
recentemente por ondas de rádio frequência e ondas de luz. Iremos aqui ver em que
consiste cada uma destas tecnologias com o detalhe possível uma vez que os fabricantes
normalmente não fornecem pormenores técnicos da sua tecnologia.
1.2.2 Ondas sonoras A Geotech AB disponibiliza um cone designado de classic Cordless que
transmite um sinal acústico portador da informação recolhida pela sonda, através das
varas até a um microfone na superfície.
7
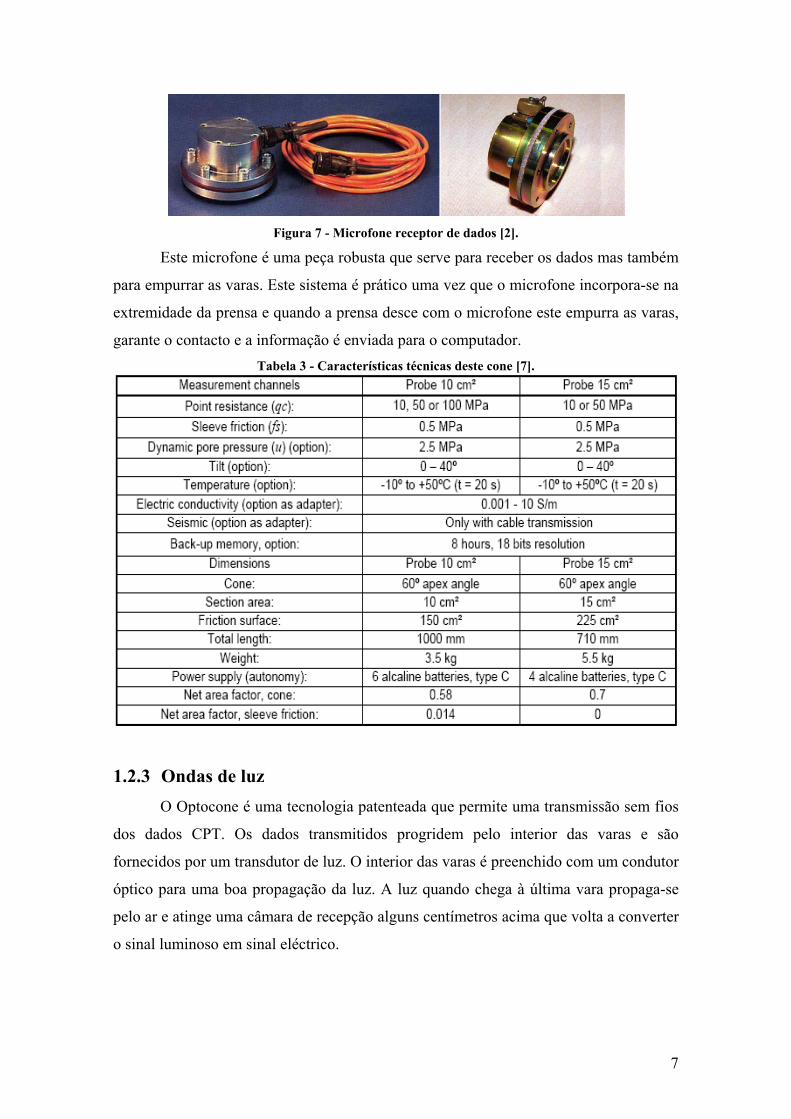
Figura 7 - Microfone receptor de dados [2].
Este microfone é uma peça robusta que serve para receber os dados mas também
para empurrar as varas. Este sistema é prático uma vez que o microfone incorpora-se na
extremidade da prensa e quando a prensa desce com o microfone este empurra as varas,
garante o contacto e a informação é enviada para o computador. Tabela 3 - Características técnicas deste cone [7].
1.2.3 Ondas de luz O Optocone é uma tecnologia patenteada que permite uma transmissão sem fios
dos dados CPT. Os dados transmitidos progridem pelo interior das varas e são
fornecidos por um transdutor de luz. O interior das varas é preenchido com um condutor
óptico para uma boa propagação da luz. A luz quando chega à última vara propaga-se
pelo ar e atinge uma câmara de recepção alguns centímetros acima que volta a converter
o sinal luminoso em sinal eléctrico.

8
Figura 8 - Optocone, sistema completo com pormenor da câmara e varas [8].
Um cone digital com bateria trata do registo, digitalização, conversão e
transmissão dos sinais lidos. A bateria dura sete horas e carrega em duas.
1.2.4 Ondas de rádio A Geotech tem também o sistema High Capacity que é considerado a nova
geração de cones wireless. Este cone para além de transmitir por rádio-frequência a
informação adquirida em tempo real, armazena também em memória os dados para
posterior download por USB para o computador.

9
Figura 9 - Pormenor do receptor e do transmissor [6].
As ondas de rádio transportam os dados CPT por dentro das varas subindo até ao
receptor. O receptor, que está ligado fisicamente à última vara, passa a informação pelo
ar para o transmissor (segundo o fabricante) que pode ser montado a um metro deste e
mesmo assim receber o sinal. Este sinal é depois enviado por cabo para o computador.
Figura 10 - Sistema High Capacity da Geotech [6].
Descrição da imagem segundo o fabricante:
1. Transmissor 2. Receptor
3. Cone CPT 4. Encoder de profundidade
5. Box de Interface 6. Portátil Datalogger.

10
Tabela 4 - Especificações técnicas do sistema High Capacity da Geotech [6].
Transmissor HC Receptor HC Comprimento: 450 mm. Comprimento: 170 mm. Diâmetro: 36 mm. Diâmetro: 70 mm. Alimentação: 5 pilhas alcalinas tipo (C). Alimentação: 11 - 28 Vdc, 0.2 A. Autonomia: 12 horas Taxa transmissão: até 128 kb/s
Segundo a Geoprobe, representante exclusivo nos Estados Unidos da Geotech
AB, este sistema abre a porta a novos sensores de aquisição por exemplo aquisição de
vídeo etc.
1.3 Motivação e objectivos O sistema inicial consiste num cone penetrómetro eléctrico da Geomil
Equipment com a referência C10CFIIP, que disponibiliza à saída os valores analógicos
referentes aos sensores. Esses valores são transportados através de um cabo pelo interior
das varas até à superfície. O que se pretende é eliminar este cabo e ler os dados junto da
sonda, enviando essa informação para a superfície utilizando a comunicação por rádio-
frequência. Assim se delinearam os objectivos de desenvolver uma placa de aquisição
de dados para colocar junto da sonda, bem como uma placa de recepção desses dados à
superfície, dimensionar os interfaces mecânicos necessários à propagação do sinal e
desenvolver uma aplicação de interface para visualização e armazenamento da
informação no computador.
De acordo com os testes de prospecção geotécnica da empresa, a sonda será
introduzida a uma profundidade máxima de 30 metros. O dispositivo é fixo na
extremidade de um grande tubo, que é enterrado por compressão de uma prensa
hidráulica. Este tubo é constituído por um conjunto de hastes que vão sendo adicionadas
à medida que a profundidade aumenta. O objectivo principal é eliminar o actual cabo de
transmissão, uma vez que este provoca bastante embaraço nos trabalhos de penetração,
atrasando assim todo o processo de sondagem. O problema deve-se ao facto de que,
para cada haste que é introduzida no solo, tem de se fazer passar todo o cabo pelo seu
interior e como o cabo é comprido, torna o processo moroso. No fim dos trabalhos o
cabo é novamente retirado e guardado. O que muitas vezes se faz para acelerar os
trabalhos é não retirar o cabo de dentro das hastes e armazenar as hastes em conjunto

11
com o cabo. Este método acelera a introdução das hastes no solo, mas faz com que o
cabo fique sujeito ao esforço de muitas dobras durante o armazenamento aumentando o
risco de se danificar, pelo que as hastes têm de ficar bem acondicionadas. O conjunto
das hastes com o cabo no interior também não é fácil de manusear devido ao seu
número e peso. Daí a motivação para retirar por completo este cabo e pensar numa
solução mais prática.
Na figura seguinte podemos ver a constituição do sistema que foi desenvolvido e
sua descrição.

12
Figura 11 - Descrição do sistema completo.
1.4 Estrutura do documento Este documento encontra-se dividido em 7 capítulos, incluindo introdução e
conclusões. O documento segue a sequência lógica do desenvolvimento do sistema.

13
O capítulo 1, divide-se em quatro secções. Inicialmente na secção (1.1),
apresenta-se uma breve explicação do que são os testes CPT, seguindo-se depois um
enquadramento com o estado da arte com a secção 1.2. Na secção 1.3, é realizada uma
descrição dos objectivos bem como a sua necessidade e na 1.4 e para terminar o
primeiro capítulo apresenta-se a estrutura deste documento.
No capítulo 2 faz-se uma breve introdução às rádio-frequências, descrevendo-se
alguns aspectos básicos da teoria das ondas electromagnéticas e linhas de transmissão.
No capítulo 3 apresenta-se o projecto do hardware descrevendo este a
componente de electrónica do sistema. Assim, este capítulo divide-se em 6 secções
iniciando-se com a secção 3.1 onde se descreve a arquitectura do sistema. Na secção
seguinte 3.2, apresentam-se algumas soluções para o método de comunicação, seguido
da descrição do método escolhido (3.3). Este método de comunicação exigiu um filtro
de isolamento da componente DC da radiofrequência que foi dimensionado também
nesta secção. Depois do canal de transmissão estar especificado, segue-se a descrição
dos módulos de rádio frequência que foram usados (3.4), seguido da explicação das
placas electrónicas, nomeadamente a placa de aquisição (3.5) e a placa de interface com
o computador (3.6).
O capítulo 4 consiste na descrição das peças mecânicas necessárias à
interligação dos diferentes componentes, pelo que descreve o adaptador da prensa (4.1),
a alteração efectuada nas varas de penetração (4.2), a peça de adaptação das varas ao
sistema de aquisição (4.3), e a peça que contém a placa de aquisição.
O capítulo 5 descreve do software iniciando-se na introdução (5.1) com uma
breve descrição do objectivo cada aplicação desenvolvida. A secção 5.2 é uma breve
explicação da pilha de software sobre a qual se desenvolveu as aplicações dos módulos.
De seguida descreve-se essas mesmas aplicações iniciando-se pelo software do módulo
de aquisição (5.3), seguido do software do módulo de interface com o computador (5.4).
Por fim o capítulo termina com a descrição da aplicação de interface com a secção 5.5.
O capítulo 6 é onde se apresentam os testes e resultados que foram sendo feitos
ao longo do projecto.
Por fim, e para além das referência bibliográficas e dos anexos, o documento
termina com um pequeno capitulo de conclusões (Cap. 7) onde se apresentam as
conclusões que advêm do projecto (7.2) e se faz uma descrição do trabalho futuro (7.2)
uma vez que o projecto será para continuar. São feitas também aqui algumas sugestões
para melhoramento do actual sistema.

14

15
2 Comunicação por rádio-frequência
2.1 Introdução
Um sinal de RF é um sinal electromagnético que se propaga num determinado
meio a uma frequência do espectro electromagnético. Existe uma relação fixa entre a
frequência do sinal e o seu comprimento de onda. O comprimento de onda é dado pela
distância percorrida pela onda num período de tempo igual ao período do sinal. Assim,
esta relação é dada pela velocidade de propagação do sinal no meio em questão.
Figura 12 - Onda periódica no tempo e no espaço.
Esta relação é descrita pela equação:
fc
=λ
Onde, λ - é o comprimento de onda.
c - é a velocidade da luz no meio em questão
f - é a frequência do sinal.
Normalmente, e para haver propagação, a frequência de utilização de um sistema RF é
escolhida de modo a que o comprimento de onda seja inferior à dimensão do sistema em
que se propaga.
Como já se disse, as ondas de rádio são electromagnéticas, contêm tanto campo
eléctrico como campo magnético. Os dois campos são equivalentes à tensão e à corrente
num circuito com ligações eléctricas. São medidos em termos similares, volts por metro
e amperes por metro, e o meio através do qual se propagam possui também uma
impedância. Se V = ZI num circuito eléctrico, numa onda electromagnética:
E = ZH
Onde

16
E = é o valor RMS do campo eléctrico, V/metro
H = é o valor RMS do campo magnético, A/metro
Z = é a impedância característica do meio, ohms
A tensão é a que a onda, passando à velocidade da luz,
iria induzir num condutor em um metro de comprimento.
A impedância característica de um meio depende da sua permeabilidade
(equivalente à indutância) e permissividade (equivalente à capacidade). Tomando estes
valores para campo aberto como:
μ = mH /104 7−×π (permeabilidade)
ε = mF /10361 9×π (permissividade)
Então a impedância campo aberto, Z, é dada por:
Ω== 377120πεμ [13]
2.2 O espectro electromagnético Como a gama de frequências electromagnéticas possíveis de produzir é elevada,
existe uma grande variedade de frequências que pode ser utilizada para os mais diversos
fins. A figura seguinte mostra o espectro electromagnético e respectivo comprimento de
onda, bem como a designação das diferentes bandas.
Figura 13 - Espectro electromagnético [13].
Ondas de diferentes frequências têm comportamentos diferentes, e isto, em
conjunto com a variedade espectral disponível em termos de canais de rádio
comunicação em cada banda, determina o seu uso.
17
Assim, a capacidade de aproveitar diferentes zonas espectrais e enviar vários
sinais em simultâneo através da multiplexação na frequência, fazem com que as rádio-
frequências sejam um dos mais utilizados métodos de transmitir informação à distância.
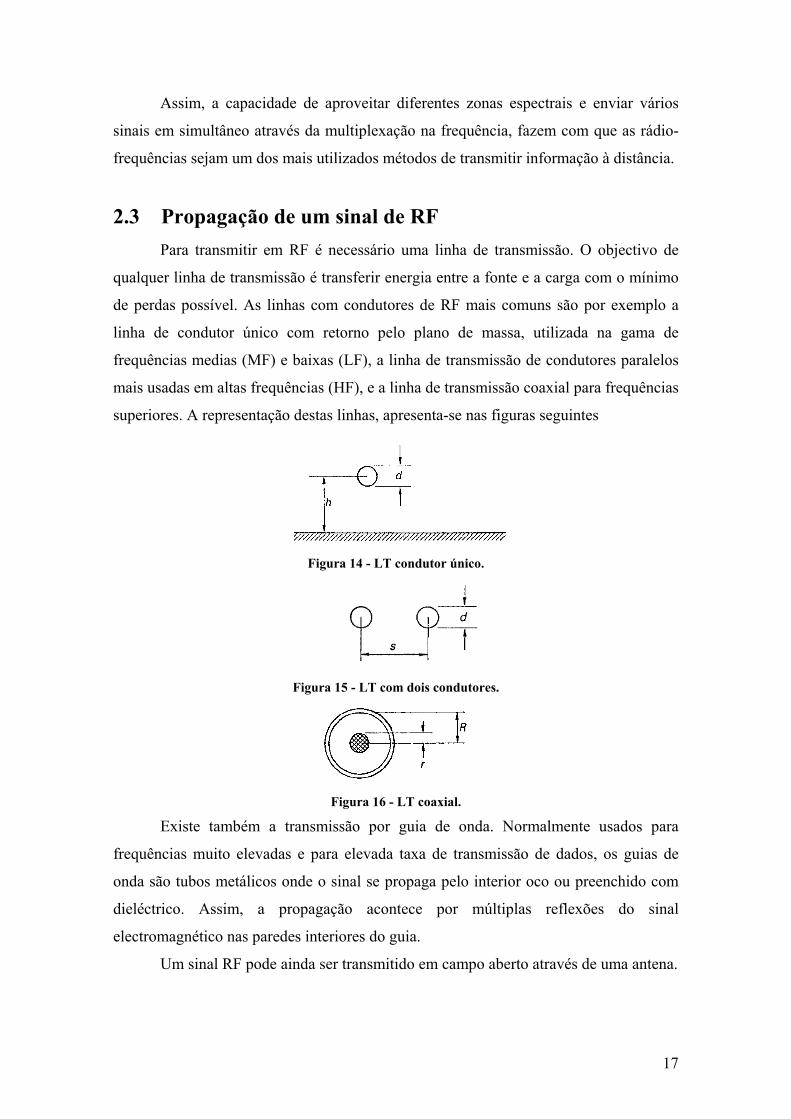
2.3 Propagação de um sinal de RF Para transmitir em RF é necessário uma linha de transmissão. O objectivo de
qualquer linha de transmissão é transferir energia entre a fonte e a carga com o mínimo
de perdas possível. As linhas com condutores de RF mais comuns são por exemplo a
linha de condutor único com retorno pelo plano de massa, utilizada na gama de
frequências medias (MF) e baixas (LF), a linha de transmissão de condutores paralelos
mais usadas em altas frequências (HF), e a linha de transmissão coaxial para frequências
superiores. A representação destas linhas, apresenta-se nas figuras seguintes
Figura 14 - LT condutor único.
Figura 15 - LT com dois condutores.
Figura 16 - LT coaxial.
Existe também a transmissão por guia de onda. Normalmente usados para
frequências muito elevadas e para elevada taxa de transmissão de dados, os guias de
onda são tubos metálicos onde o sinal se propaga pelo interior oco ou preenchido com
dieléctrico. Assim, a propagação acontece por múltiplas reflexões do sinal
electromagnético nas paredes interiores do guia.
Um sinal RF pode ainda ser transmitido em campo aberto através de uma antena.

18
Figura 17 - Sinal electromagnético transmitido por uma antena [9].
Pela figura podemos ver que em campo aberto o sinal é do tipo transversal
electromagnético (TEM) ou seja o campo eléctrico e o campo magnético são
perpendiculares entre si e perpendiculares à direcção de propagação. Um dos métodos
mais práticos de irradiar um sinal é com a “abertura” dos condutores na extremidade de
uma linha de transmissão formando assim um dipolo como mostra a figura seguinte.
Figura 18 - Antena do tipo dipolo [9].
Como existe uma mudança na geometria, passa a existir uma variação brusca na
Impedância característica nesse ponto. O dipolo perde assim energia para o espaço
envolvente. À volta do dipolo forma-se um campo eléctrico que para corrente continua
apresenta uma geometria circular. Para frequências elevadas, a corrente oscila nos
condutores e o campo eléctrico irradiado pelo dipolo varia periodicamente fazendo com
que as linhas de campo se propaguem afastando-se do dipolo.
2.4 Caracterização de sistema de RF As dimensões físicas de uma linha de transmissão ou seja, a distância entre os
condutores, o seu diâmetro e o material dieléctrico, determinam a impedância de uma
linha de transmissão. Se por qualquer razão esta impedância se altera num determinado
ponto de uma LT, significa que nesse local, parte do sinal será reflectido de volta para a
fonte, ou seja o sinal que chega ao destino chega atenuado. Esta atenuação é tanto maior
quanto maior for a diferença de impedâncias. Diz-se neste caso que existe uma

19
desadaptação de impedâncias. Estas reflexões são representadas pelos parâmetros S
(Scattering parameters) que podem ser calculados ou medidos com um Vector Network
Analyzer.
Figura 19 - Representação de uma rede com 2 portos.
As ondas de entrada de cada porto são aqui denominadas de a1 e a2, e as de
saída de b1 e b2. A relação entre as ondas de entrada e de saída são descritas pelos
parâmetros S da seguinte forma:
⎟⎠⎞
⎜⎝⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟
⎠⎞
⎜⎝⎛
21
21
2221
1211
aa
ssss
bb (2.1)
Onde,
Ou seja, o S21 por exemplo, é o ganho directo de amplitude. O que significa que
seu valor informa acerca de quanto é que o sinal à saída é maior do que o sinal da
entrada. Sendo que esse ganho em dB será dado por:
dBSG 21log20=
Pelo que para uma linha de transmissão sem perdas o coeficiente S21 será igual
a 1 o que corresponde a um ganho de 0 dB.
2.5 Network analyzer e sinais de rádio-frequência O network analyzer é uma das mais importantes ferramentas na análise de
circuitos analógicos. Ao medir a amplitude e a fase dos coeficientes de transmissão e de
reflexão de um circuito analógico, o network analyzer revela todas as características de
(2.2)

20
rede do circuito. No campo das microondas, os network analyzers são usados para
analisar uma vasta gama de materiais, componentes, circuitos, e sistemas.
Figura 20 - Network Analyzer [14]
Estes aparelhos de medida são amplamente usados para medir os parâmetros S.
Como mostra na figura seguinte, o instrumento consiste basicamente numa fonte, em
dispositivos de separação de sinais, e em detectores. Assim, o network analyzer
consegue medir as quatro ondas separadamente: Duas com direcção de propagação
igual à da fonte a1 e a2, e duas com direcção inversa b1 e b2. Os parâmetros S podem
assim ser obtidos por combinações destas quatro ondas de acordo com as equações
(2.2).
Os quatro detectores, representados por a1, a2, b1, e b2 são usados para medir as
correspectivas quatro ondas, e os dispositivos de separação para assegurar que estas são
medidas independentemente. [15]
DUT
a1
b1 b2
a2
Fonte
Figura 21 - Diagrama de blocos de um network analyzer. [15]

21
2.6 Zigbee nas comunicações sem fios ZigBee é um conjunto de especificações criado por uma aliança de empresas a
nível global com o objectivo de criar um standard em comunicações wireless que
respondesse aos requisitos de uma rede de sensores e controlo. O ZigBee é baseado no
standard 802.15.4 tirando partido de todas as vantagens que este standard especifica ao
nível físico e de acesso ao meio.
As características principais do ZigBee são:
Capacidade de auto restabelecimento.
Suporta grande número de dispositivos.
Baixa latência (na ordem dos 16ms).
Várias topologias de rede.
Independência do fabricante.
Desenvolvimento rápido e simples.
Vida da bateria muito longa (pode chegar a anos).
Segurança.
Baixo custo.
Em comparação com outros standards de comunicação sem fios, o standard
ZigBee responde a um conjunto de características que o tornam único e na escolha ideal
para um determinado tipo de aplicações.
Figura 22 - Comparação com outros standards. [16]
ZigBee é orientado para uma vasta área de aplicações no campo da automação
residencial, na indústria, automação e controlo, monitorização médica ou residencial.
Alguns exemplos são:
Controlo da iluminação.

22
Medições automáticas.
Detectores de fumo e gases.
Controlo de aquecimento.
Monitorização residencial (sensores de intrusão, movimento, de vidros partidos,
inundação, ruído, etc.)
Monitorização de pacientes.
Ligação de periféricos informáticos e objectos de entretenimento.
Dispositivos ZigBee são já bastante utilizados contudo prevê-se uma crescente
implementação e disseminação da tecnologia.
O termo ZigBee tem origem no método de comunicação que as abelhas usam
para informar acerca de novas fontes de alimento. Este silencioso mas eficaz sistema de
comunicação é conhecido como “Principio de ZigBee”. Ao dançar num padrão em zig-
zag, a abelha é capaz de partilhar informação importante, como localização, distancia e
direcção de uma nova fonte de alimento aos seus companheiros da mesma espécie.

23
3 Projecto e desenvolvimento do sistema
electrónico
3.1 Arquitectura do sistema de aquisição Tendo como base a descrição do problema foi proposta uma arquitectura base,
que está representada pela figura seguinte. Temos um emissor, um receptor, um sistema
de adaptação na prensa e um software no computador.
Figura 23 - Arquitectura do sistema
24
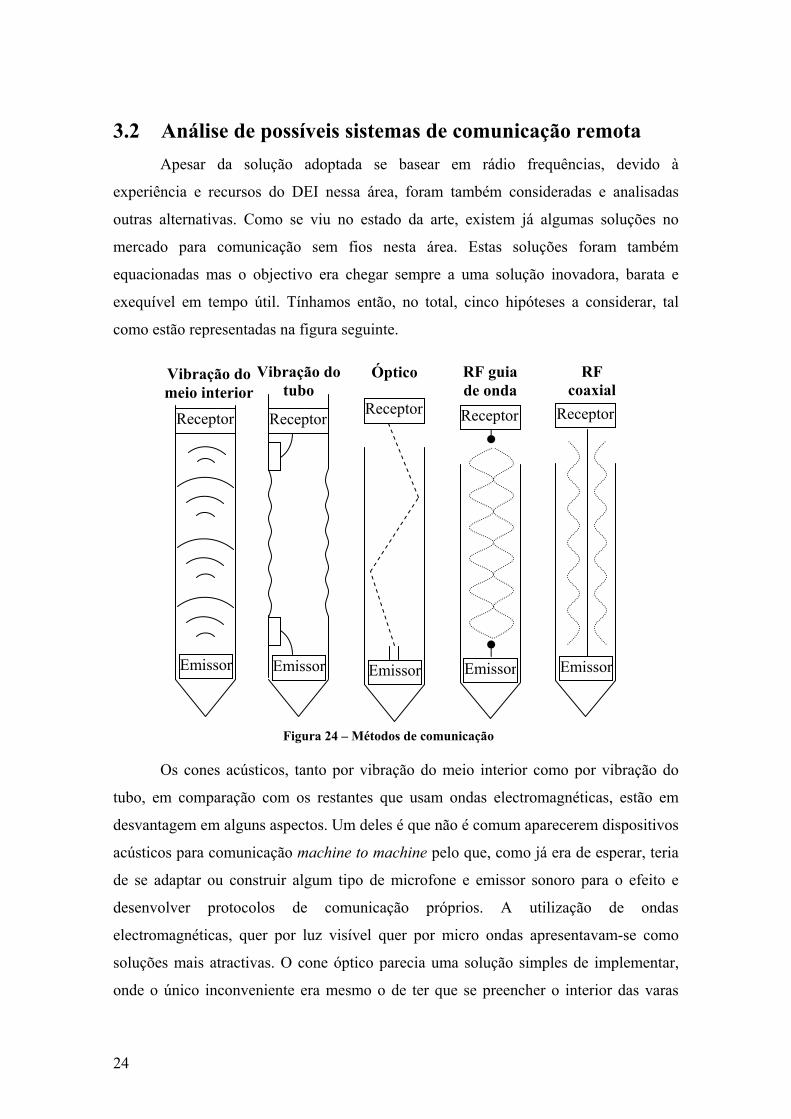
3.2 Análise de possíveis sistemas de comunicação remota Apesar da solução adoptada se basear em rádio frequências, devido à
experiência e recursos do DEI nessa área, foram também consideradas e analisadas
outras alternativas. Como se viu no estado da arte, existem já algumas soluções no
mercado para comunicação sem fios nesta área. Estas soluções foram também
equacionadas mas o objectivo era chegar sempre a uma solução inovadora, barata e
exequível em tempo útil. Tínhamos então, no total, cinco hipóteses a considerar, tal
como estão representadas na figura seguinte.
Os cones acústicos, tanto por vibração do meio interior como por vibração do
tubo, em comparação com os restantes que usam ondas electromagnéticas, estão em
desvantagem em alguns aspectos. Um deles é que não é comum aparecerem dispositivos
acústicos para comunicação machine to machine pelo que, como já era de esperar, teria
de se adaptar ou construir algum tipo de microfone e emissor sonoro para o efeito e
desenvolver protocolos de comunicação próprios. A utilização de ondas
electromagnéticas, quer por luz visível quer por micro ondas apresentavam-se como
soluções mais atractivas. O cone óptico parecia uma solução simples de implementar,
onde o único inconveniente era mesmo o de ter que se preencher o interior das varas
Emissor
Receptor
Vibração do tubo
Emissor
Receptor
RF coaxial
Emissor
Receptor
Vibração do meio interior
Emissor
Óptico
Receptor
Emissor
Receptor
RF guia de onda
Figura 24 – Métodos de comunicação
25
com um meio óptico adequado. O facto de já existirem cones com essa tecnologia
também era uma desvantagem. Optou-se contudo pelas rádio-frequências e fez-se um
estudo quanto à possibilidade de enviar os dados por rádio frequência usando as varas
tubulares como um guia de onda oco. Esse estudo apresenta-se em anexo e concluiu-se
que a comunicação do sistema teria sempre de ser feita a uma frequência superior a
10GHz pelo que, a essas frequências, a exigência para aquisição dos equipamentos é
superior e a complexidade de desenvolvimento é bem mais elevada em comparação com
o standard 2.4GHz.
No campo das rádio-frequências podíamos ainda modificar as varas como uma
linha de transmissão coaxial. Essa hipótese foi analisada e verificou-se
experimentalmente que era possível a propagação do sinal. Estes testes de propagação
encontram-se no capítulo Testes e Resultados. Esta solução tinha o inconveniente de ter
que se acrescentar a cada vara, uma outra haste metálica no interior ou seja um condutor
central isolado do exterior, mas este facto trazia também uma grande vantagem sobre
todas as outras soluções. O condutor central trazia a possibilidade de se poder alimentar
a sonda a partir da superfície, visto que tínhamos agora dois condutores eléctricos, o
tubo exterior e o condutor central. Estes condutores criavam assim um canal, que
garantia a alimentação da sonda e a transmissão do sinal. Ou seja um sinal continuo e
um sinal de alta-frequência que podiam ser facilmente separados com um filtro quando
fosse necessário. Com esta abordagem não é necessário a colocação de baterias na
sonda, fazendo com que esta não tenha que ser recarregada periodicamente. O uso de
baterias seria incontornável em qualquer uma das restantes soluções apresentadas. Pelo
conjunto de factores apresentados, optou-se por esta solução, ou seja, pelo uso da
transmissão por rádio-frequência numa linha de transmissão coaxial.
Esta abordagem acarretou alguns desafios mecânicos uma vez que o condutor
central tem de estar fixo à vara exterior e por outro lado tem de garantir um contacto
eléctrico com o condutor da vara seguinte quando estas são enroscadas.
3.3 Projecto do sistema de comunicação De acordo com a opção do ponto anterior, escolheu-se um sistema de
comunicação que usa uma linha de transmissão do tipo coaxial. Uma linha de
transmissão coaxial é constituída por um condutor central, um dieléctrico e um condutor
externo que envolve o conjunto. Neste caso o condutor externo são as varas tubulares
26
com 16mm de diâmetro e o dieléctrico é o ar. Como o diâmetro das varas é fixo, o
dimensionamento da linha de transmissão consiste no dimensionamento do condutor
interno.
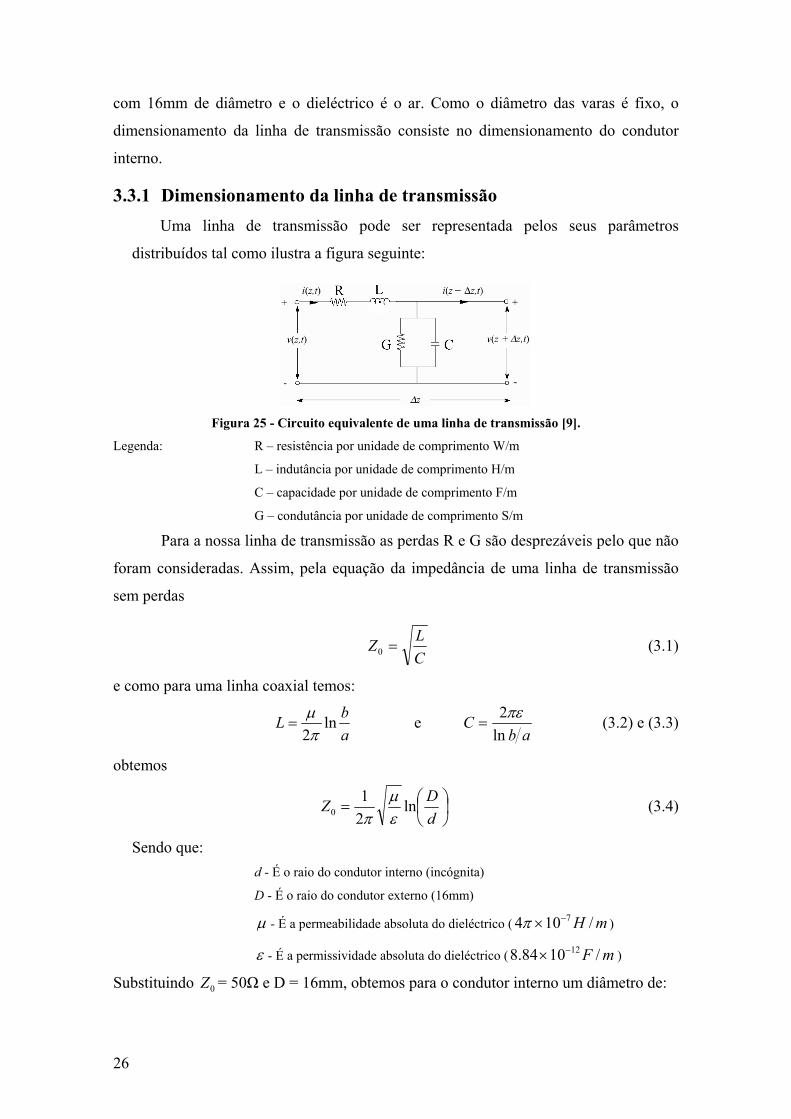
3.3.1 Dimensionamento da linha de transmissão Uma linha de transmissão pode ser representada pelos seus parâmetros
distribuídos tal como ilustra a figura seguinte:
Figura 25 - Circuito equivalente de uma linha de transmissão [9].
Legenda: R – resistência por unidade de comprimento W/m
L – indutância por unidade de comprimento H/m
C – capacidade por unidade de comprimento F/m
G – condutância por unidade de comprimento S/m
Para a nossa linha de transmissão as perdas R e G são desprezáveis pelo que não
foram consideradas. Assim, pela equação da impedância de uma linha de transmissão
sem perdas
CLZ =0 (3.1)
e como para uma linha coaxial temos:
abL ln
2πμ
= e ab
Cln2πε
= (3.2) e (3.3)
obtemos
⎟⎠⎞
⎜⎝⎛=
dDZ ln
21
0 εμ
π (3.4)
Sendo que: d - É o raio do condutor interno (incógnita)
D - É o raio do condutor externo (16mm)
μ - É a permeabilidade absoluta do dieléctrico ( mH /104 7−×π )
ε - É a permissividade absoluta do dieléctrico ( mF /1084.8 12−× )
Substituindo 0Z = 50Ω e D = 16mm, obtemos para o condutor interno um diâmetro de:

27
d = 7mm.
Escolhemos 50Ω para a impedância da linha por uma questão de adaptação às placas do
emissor e receptor que têm impedâncias de entrada e saída de 50Ω.
Por disponibilidade no mercado, adquirimos condutores internos de 8mm, em
vez de 7mm, o que faz descer um pouco a impedância para 42Ω. Dado que vai existir
desadaptação, é necessário verificar o seu impacto no sistema.
Balanço de potências
A potência de transmissão (Pt) do módulo varia de -17 a 3 dBm, ou seja, de
0,02mW a 2mW. A sensibilidade do receptor (Pr) é de -101 dBm pelo que consegue
detectar mW13101 −× . Sabendo isto, temos que garantir que a potência de transmissão
(Pt), menos a atenuação provocada pela desadaptação (A), seja maior que a
sensibilidade do receptor (Pr), ou seja,
rt PAP ≥− . (3.5)
Podemos calcular a atenuação através do cálculo das perdas por inserção. Assim,
a atenuação é dada por:
( )Γ−= 1log20A (3.6)
Em que, sl
sl
ZZZZ
+−
=Γ (3.7)
Onde Γ é o coeficiente de reflexão devido à variação de impedância entre a fonte sZ
(50 Ω) e a carga lZ (42Ω ).
Substituindo, obtemos um valor de:
A=-0,79dB
Ou seja uma atenuação de 0,79dB. Como a desadaptação acontece nas duas
extremidades da linha de transmissão, esta atenuação duplica, pelo que obtemos um
novo valor para a atenuação de:
A=1,58dB
Pela relação inicial rt PAP ≥− e para a menor potência de transmissão temos
que: ⇔−≥−− 10158,117

28
10158,18 −≥−⇔ Como queríamos verificar.
3.3.2 Projecto do filtro de isolamento RF/DC Como se optou por usar a linha de transmissão também como meio de fazer
chegar a alimentação à sonda e ao receptor, foi dimensionado um filtro para incluir no
receptor e no emissor que garanta o isolamento dos dois sinais nas placas, fazendo com
que os sinais só estejam sobrepostos na linha de transmissão. Ou seja, estes
componentes isolam, no receptor e no emissor, a alimentação do sinal transmitido.
Assim, colocou-se uma indutância em série no circuito DC para provocar uma
impedância elevada ao sinal RF, e colocou-se um condensador à saída de cada modulo
para o introduzir uma elevada impedância ao sinal DC.
Figura 26 - Representação do circuito de RF e DC.
3.3.3 Dimensionamento das indutâncias
As indutâncias neste caso servem para que o sinal RF não seja desviado para a
fonte. Se escolhermos uma impedância de 10KΩ no seu dimensionamento, estamos a
garantir que para 2,4GHz existirá uma impedância à passagem de corrente de 10KΩ, ou
seja o sinal é bastante atenuado pela bobine.
nHGhz
KLf
ZL
ZLLZ LL
L 6634.22
102
=×
Ω=⇔=⇔=⇔=
ππωω
Calculamos o L também para outros valores de impedância, num total de 3 valores:
nHLkZ obtivemosL 661 =⎯⎯⎯ →⎯Ω=
nHLkZ obtivemosL 66310 =⎯⎯⎯ →⎯Ω=
HLkZ obtivemosL μ6,6100 =⎯⎯⎯ →⎯Ω=
Vamos agora incluir na atenuação o efeito das indutâncias. Se o sistema
estivesse adaptado, teríamos de um lado a fonte com uma impedância de 50Ω, e do
outro a linha de transmissão com a mesma impedância. Como a linha de transmissão
29
tem impedância de 42Ω e ainda temos indutâncias em paralelo, esta irá baixar um pouco
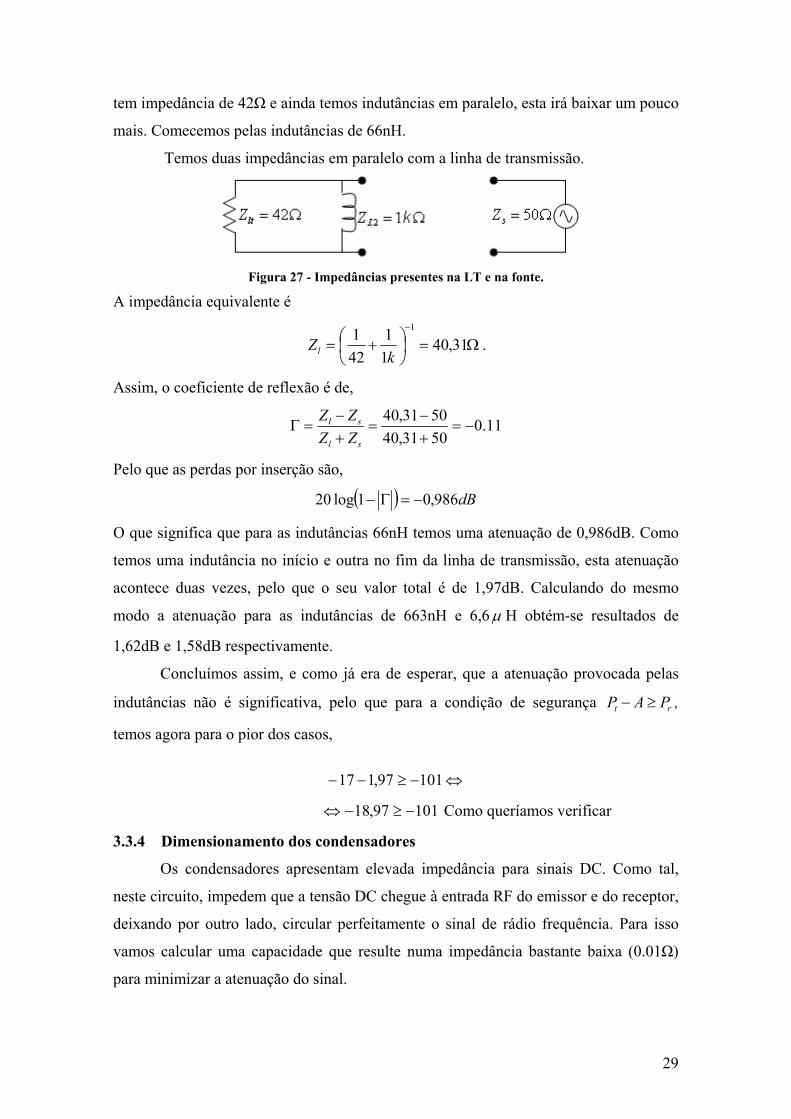
mais. Comecemos pelas indutâncias de 66nH.
Temos duas impedâncias em paralelo com a linha de transmissão.
Figura 27 - Impedâncias presentes na LT e na fonte.
A impedância equivalente é
Ω=⎟⎠⎞
⎜⎝⎛ +=
−
31,4011
421 1
kZl .
Assim, o coeficiente de reflexão é de,
11.05031,405031,40
−=+−
=+−
=Γsl
sl
ZZZZ
Pelo que as perdas por inserção são,
( ) dB986,01log20 −=Γ−
O que significa que para as indutâncias 66nH temos uma atenuação de 0,986dB. Como
temos uma indutância no início e outra no fim da linha de transmissão, esta atenuação
acontece duas vezes, pelo que o seu valor total é de 1,97dB. Calculando do mesmo
modo a atenuação para as indutâncias de 663nH e 6,6μ H obtém-se resultados de
1,62dB e 1,58dB respectivamente.
Concluímos assim, e como já era de esperar, que a atenuação provocada pelas
indutâncias não é significativa, pelo que para a condição de segurança rt PAP ≥− ,
temos agora para o pior dos casos,
⇔−≥−− 10197,117
10197,18 −≥−⇔ Como queríamos verificar
3.3.4 Dimensionamento dos condensadores
Os condensadores apresentam elevada impedância para sinais DC. Como tal,
neste circuito, impedem que a tensão DC chegue à entrada RF do emissor e do receptor,
deixando por outro lado, circular perfeitamente o sinal de rádio frequência. Para isso
vamos calcular uma capacidade que resulte numa impedância bastante baixa (0.01Ω)
para minimizar a atenuação do sinal.

30
nFGHz
CZ
CC
Zc
C 6.64.2201.0
111=
××Ω=⇔
×=⇔=
πωω
Calculamos o C também para outros valores de impedância, num total de 3 valores:
nFCZ obtivemosC 66.01.0 =⎯⎯⎯ →⎯Ω=
nFCZ obtivemosC 6.601.0 =⎯⎯⎯ →⎯Ω=
nFCZ obtivemosC 66001.0 =⎯⎯⎯ →⎯Ω=
O valor exacto destes componentes não é importante, por isso, e para facilitar a
aquisição dos componentes, foi calculada um gama de valores aceitáveis. Fizeram-se
testes de propagação com condensadores de 10nF numa linha de transmissão de 50 Ω
em PCB com resultados aceitáveis. Estes resultados apresentam-se no capítulo 6, Testes
e Resultados.
3.4 Especificação do módulo de rádio-frequência Fez-se uma breve pesquisa de dispositivos que pudessem ser usados neste
projecto. O dispositivo deveria ser capaz de:
• Caber dentro de um tubo de 16mm diâmetro
• Permitir comunicação por RF
• Não ser muito caro
• Transmitir pelo menos a 30 metros de distância
• De preferência, conter conversores analógico-digital
A opção de usar Zigbee foi baseada no facto de se pretender também uma
plataforma com protocolos de comunicação já implementados e assim garantir alguma
imunidade a erros de transmissão.
Foi seleccionado o dispositivo ZigBit™ da MeshNetics. O fabricante
disponibiliza vários módulos com diferentes características.
Figura 28 - Módulos ZigBit™ com e sem antena integrada [10].
Para o desenvolvimento foram adquiridos alguns desses módulos e um kit de
desenvolvimento. O módulo usado para este projecto foi o MNZB-24-B0 que não vem

31
com antena. Como podemos ver na figura seguinte existem 5 pinos de rádio-frequência,
onde três são ground e os dois restantes são entrada/saída diferenciais, e como a linha de
transmissão é coaxial, teve de se adaptar para saída unipolar seguindo o aconselhamento
do fabricante.
Figura 29 - Pinout e dimensões do módulo Zigbit MNZB-24-B0 [10].
Apresentam-se de seguida as características principais do módulo.
Figura 30 - Características de consumo [10].
Figura 31 - Características de Rádio-frequência do módulo [10].
13,5mm
18,8mm
32
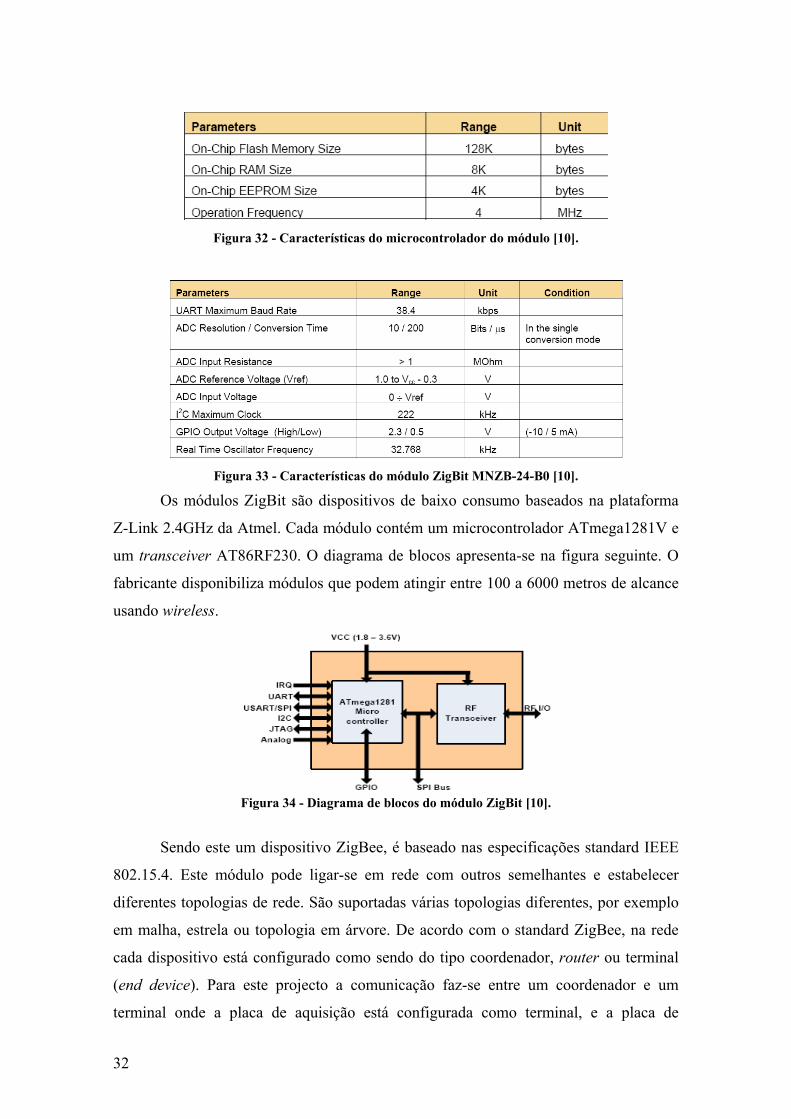
Figura 32 - Características do microcontrolador do módulo [10].
Figura 33 - Características do módulo ZigBit MNZB-24-B0 [10].
Os módulos ZigBit são dispositivos de baixo consumo baseados na plataforma
Z-Link 2.4GHz da Atmel. Cada módulo contém um microcontrolador ATmega1281V e
um transceiver AT86RF230. O diagrama de blocos apresenta-se na figura seguinte. O
fabricante disponibiliza módulos que podem atingir entre 100 a 6000 metros de alcance
usando wireless.
Figura 34 - Diagrama de blocos do módulo ZigBit [10].
Sendo este um dispositivo ZigBee, é baseado nas especificações standard IEEE
802.15.4. Este módulo pode ligar-se em rede com outros semelhantes e estabelecer
diferentes topologias de rede. São suportadas várias topologias diferentes, por exemplo
em malha, estrela ou topologia em árvore. De acordo com o standard ZigBee, na rede
cada dispositivo está configurado como sendo do tipo coordenador, router ou terminal
(end device). Para este projecto a comunicação faz-se entre um coordenador e um
terminal onde a placa de aquisição está configurada como terminal, e a placa de

33
interface com o computador configurada como coordenador. A programação é feita
sobre a pilha do fabricante, neste caso designada de eZeeNet.
3.5 Projecto e desenvolvimento da placa de aquisição No desenvolvimento da placa do emissor havia a restrição do tamanho da placa.
Ou seja, esta teria de caber dentro de um tubo de 16mm de diâmetro. Este facto
condicionou a escolha de alguns componentes e o desenho do PCB. A placa tem o
aspecto da figura seguinte e o seu esquemático e respectivo desenho do PCB encontra-
se em anexo.
Figura 35 - Placa de aquisição de dados.
A placa é constituída por:
• Conector coaxial SMA
• Circuito transformador, para saída RF unipolar
• Filtro de separação RF/DC
• Módulo ZigBit
• Dois pinos para programação
• Integrado que fornece uma tensão de referência para o ADC
• Circuito de reset
• Regulador para alimentar o módulo
• Conversor para alimentar a sonda
• Conector para a sonda (não representado na figura)
3.5.1 Arquitectura da placa de aquisição Na entrada do lado direito estão as ligações da sonda. Do lado esquerdo, pela
entrada coaxial, chega o sinal de rádio frequência e a alimentação de 12 V, onde logo a
seguir são separados pelo condensador e a indutância de filtragem. Podemos ver na
figura seguinte um esquema dos componentes da placa. Os 12V são convertidos em
3.3V para alimentar o módulo, e para +15V e -15V, para alimentar a sonda. Para isso
foi usado o regulador lms8117 e o conversor DC/DC TMR 3-1223.
15mm
102mm

34
Figura 36 - Arquitectura da placa de aquisição.
3.5.2 Alimentação da sonda
Figura 37 - Conversor DC/DC 3 Wats [11].
Este conversor é de 3W e fornece 100mA que é o consumo máximo da sonda.
Para potências superiores, o conversor seria maior e já não caberia dentro do tubo. Para
além do módulo ZigBit, este conversor foi o componente mais crítico em termos de
tamanho uma vez que para caber dentro do tubo teve de se cortar uma abertura no PCB
para “afundar” o conversor dividindo assim a sua altura para cada um dos lados da placa
como se pode ver na figura seguinte. As ligações eléctricas ao PCB são garantidas por
fios eléctricos soldados aos pinos do conversor e ao PCB.
Figura 38 - Conversor visto de frente, introduzido no PCB dentro do tubo.
3.5.3 Alimentação do modulo ZigBit
Conversor TMR 3
PCB
16mm
35
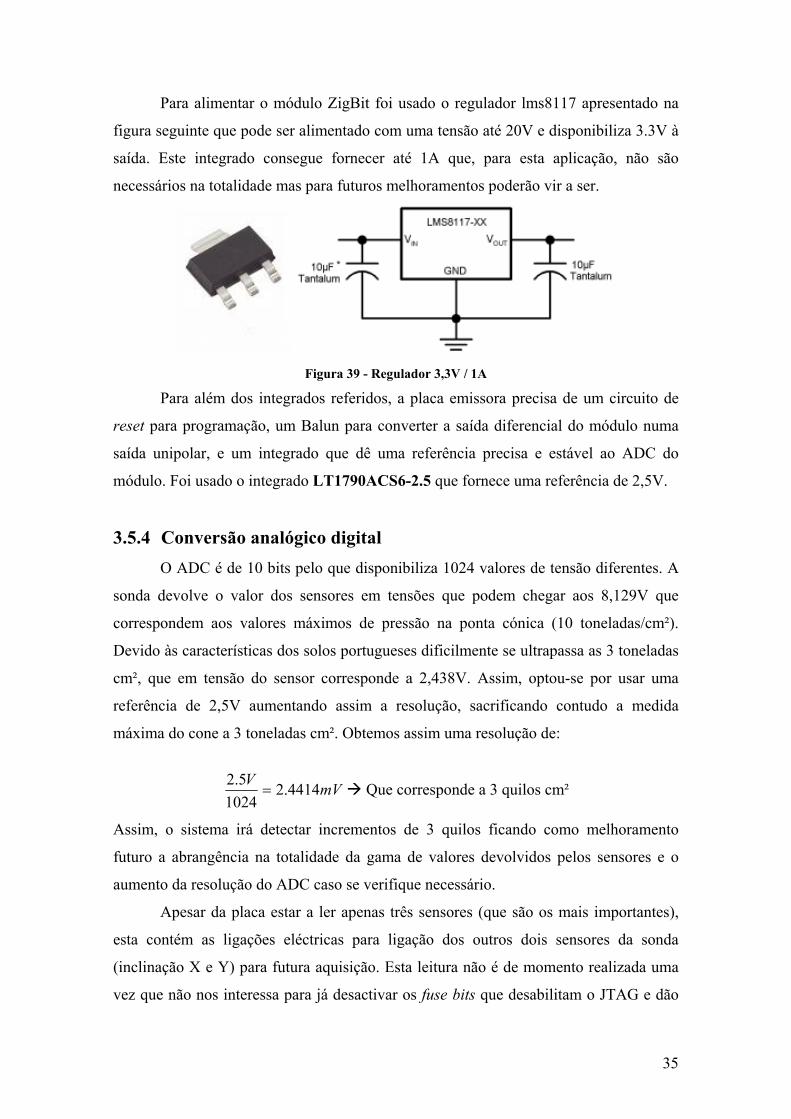
Para alimentar o módulo ZigBit foi usado o regulador lms8117 apresentado na
figura seguinte que pode ser alimentado com uma tensão até 20V e disponibiliza 3.3V à
saída. Este integrado consegue fornecer até 1A que, para esta aplicação, não são
necessários na totalidade mas para futuros melhoramentos poderão vir a ser.
Figura 39 - Regulador 3,3V / 1A
Para além dos integrados referidos, a placa emissora precisa de um circuito de
reset para programação, um Balun para converter a saída diferencial do módulo numa
saída unipolar, e um integrado que dê uma referência precisa e estável ao ADC do
módulo. Foi usado o integrado LT1790ACS6-2.5 que fornece uma referência de 2,5V.
3.5.4 Conversão analógico digital O ADC é de 10 bits pelo que disponibiliza 1024 valores de tensão diferentes. A
sonda devolve o valor dos sensores em tensões que podem chegar aos 8,129V que
correspondem aos valores máximos de pressão na ponta cónica (10 toneladas/cm²).
Devido às características dos solos portugueses dificilmente se ultrapassa as 3 toneladas
cm², que em tensão do sensor corresponde a 2,438V. Assim, optou-se por usar uma
referência de 2,5V aumentando assim a resolução, sacrificando contudo a medida
máxima do cone a 3 toneladas cm². Obtemos assim uma resolução de:
mVV 4414.21024
5.2= Que corresponde a 3 quilos cm²
Assim, o sistema irá detectar incrementos de 3 quilos ficando como melhoramento
futuro a abrangência na totalidade da gama de valores devolvidos pelos sensores e o
aumento da resolução do ADC caso se verifique necessário.
Apesar da placa estar a ler apenas três sensores (que são os mais importantes),
esta contém as ligações eléctricas para ligação dos outros dois sensores da sonda
(inclinação X e Y) para futura aquisição. Esta leitura não é de momento realizada uma
vez que não nos interessa para já desactivar os fuse bits que desabilitam o JTAG e dão

36
acesso aos pinos dos restantes ADC. Este procedimento é necessário porque os pinos do
JTAG são comuns com os dos restantes ADCs. Uma vez desbloqueados temos acesso a
8 canais de ADC.
3.6 Projecto e desenvolvimento da placa de interface No desenvolvimento da placa de interface já não havia a restrição da
dimensão, contudo, e como tem outro tipo de componentes esta placa não ficou
maior que a placa de aquisição. A placa tem o aspecto da figura seguinte e o seu
esquemático e desenho do PCB encontram-se em anexo.
Figura 40 - Placa receptora de interface com o computador.
A placa é constituída por:
• Conector coaxial
• Circuito transformador, para saída unipolar
• Filtro de separação RF/DC
• Módulo ZigBit
• Circuito de reset
• Regulador para alimentar o módulo
• Integrado conversor USB-UART
• Conector USB
• Conector 12 volts
• Integrado de protecção ESD e ruído
3.6.1 Arquitectura da placa de interface com o computador Pelo conector 12V entra a alimentação de todo o sistema. Esta tensão é
enviada pelo conector coaxial para a placa de aquisição, e é usada também aqui para
alimentar o módulo ZigBit através do regulador lms8117 (igual ao da placa de
aquisição). O conector USB faz a ligação do módulo ZigBit ao computador para envio
da informação, e pelo conector coaxial sai a alimentação 12V para a placa de aquisição

37
e entram os dados da sonda. Na figura seguinte podemos ver o tipo de ligação ente os
diferentes componentes.
Figura 41 - Arquitectura da placa de interface com o computador.
3.6.2 Sub circuitos e alimentação Podemos dividir esta placa em 4 secções diferentes:
1. Circuito base – (Módulo ZigBit, Balun, circuito de reset, e conector coaxial SMA)
Este circuito base está presente também na placa de aquisição. Apenas com este
circuito é possível a programação do módulo e a transmissão de informação pelo ar
a 1km de distância.
2. Interface com computador – (Ponte USB-UART, filtros de ruído e ESD, e
conector USB) Permite a programação e comunicação com o computador pela porta
USB.
3. Alimentação – (Regulador 3.3v, conector 12v) Com estes componentes podemos
alimentar todo o sistema com um jack standard 12 Volts garantindo uma tensão
regulada de 3.3v tanto no emissor como no receptor.
4. Filtro RF e DC – (Condensador e bobine) Com estes componentes é possível isolar
o sinal RF do sinal DC uma vez que estes sinais foram sobrepostos no circuito
coaxial. Este filtro também esta presente na placa de aquisição.
A tensão de 12 Volts foi escolhida por ser uma tensão “standard”, fácil de obter
da tensão da rede com um transformador, ou de uma bateria, mas principalmente porque
se obtém facilmente de viaturas pela tomada do isqueiro. Este facto é importante uma
vez que os testes geotécnicos podem ser feitos em sítios onde a tensão da rede não está
próxima do local do teste.

38
39
4 Projecto e desenvolvimento do sistema mecânico
4.1 Projecto do adaptador da prensa
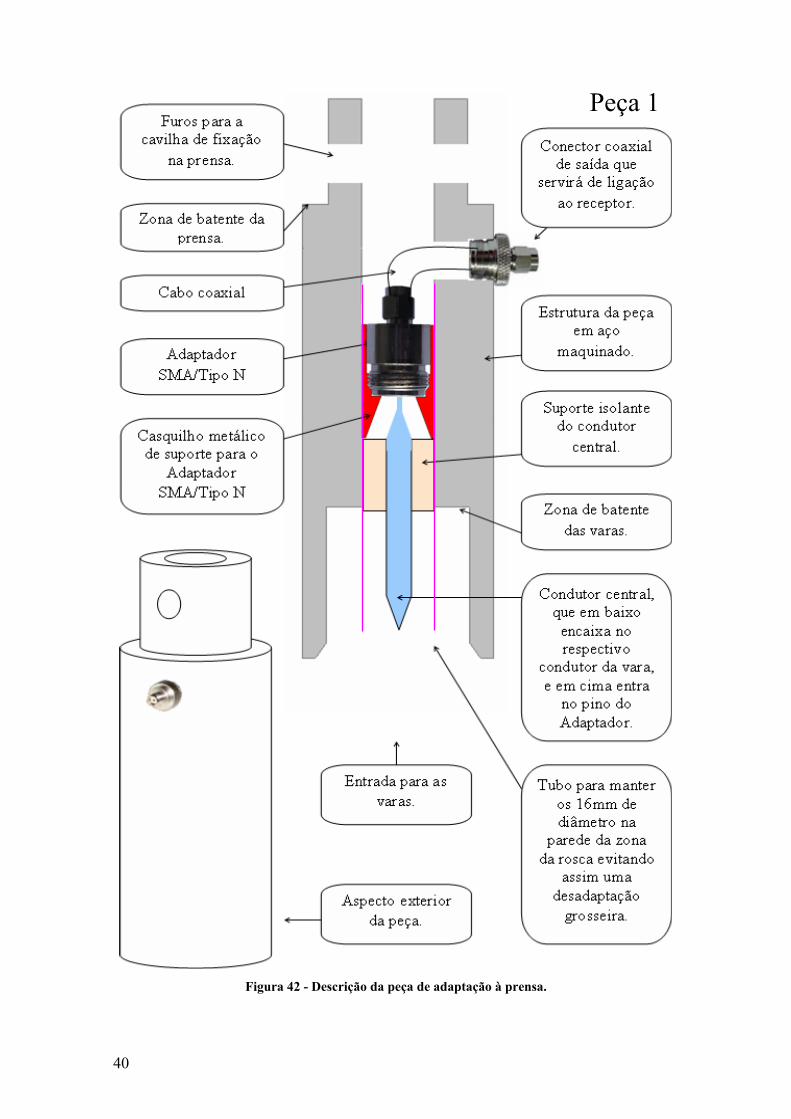
Foi necessário desenhar uma peça para criar um encaixe rápido com as varas e
garantir a continuidade da linha de transmissão enquanto as varas são introduzidas no
solo. Este objecto empurra as varas e é sujeito a forças de algumas toneladas. Fixa-se na
prensa com um método de cavilha e encaixa nas varas quando a prensa desce. A peça é
cilíndrica, podendo-se ver o aspecto interior e exterior na figura seguinte, que contem a
descrição dos seus constituintes. As medidas que foram usadas para o fabrico da
estrutura em aço encontram-se em anexo bem como as dimensões do casquilho interior.
A representação do corte transversal do conjunto encontra-se na figura
aproximadamente em tamanho real.
40
Figura 42 - Descrição da peça de adaptação à prensa.
Peça 1

41
4.2 Projecto das varas da linha de transmissão Estas varas constituem a maior parte da linha de transmissão. A partir das varas
antigas fixou-se um condutor central tubular de 8mm de diâmetro, de modo a que
encaixem uns nos outros como ilustra a figura seguinte. Estes condutores são fixos por
três pequenos cilindros de nylon. Na figura podemos ver, do lado esquerdo, uma destas
varas e o seu interior. Do lado direito vemos um pormenor de duas varas encaixadas.
Figura 43 - Descrição da vara de penetração com pormenor de encaixe.
Suporte isolante em nylon do
condutor central. Cada vara contém um
isolante em cada extremidade e um
no centro.
Vareta de 8mm de diâmetro
externo e 6mm de diâmetro
interno.
Nesta extremidade a
vareta é de 6mm e pontiaguda para facilitar o encaixe
com a vareta seguinte.
Nesta extremidade a
vareta é cortada para facilitar o
encaixe.
Peça 2
42
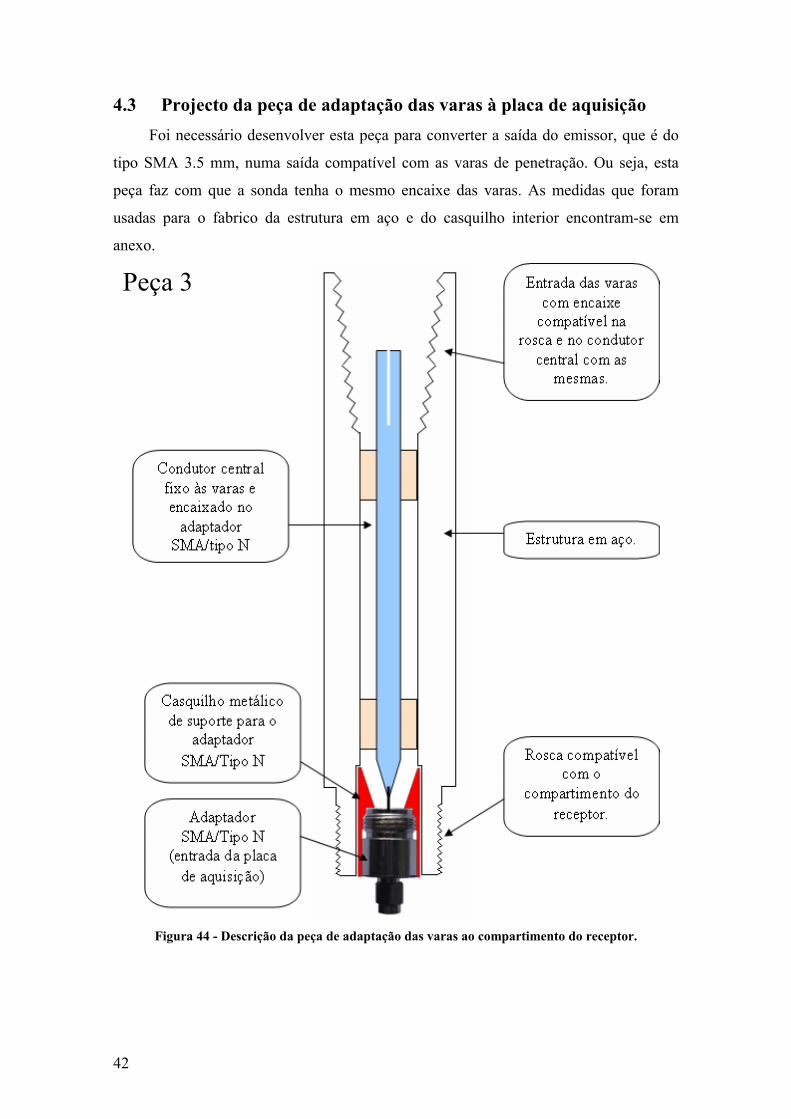
4.3 Projecto da peça de adaptação das varas à placa de aquisição Foi necessário desenvolver esta peça para converter a saída do emissor, que é do
tipo SMA 3.5 mm, numa saída compatível com as varas de penetração. Ou seja, esta
peça faz com que a sonda tenha o mesmo encaixe das varas. As medidas que foram
usadas para o fabrico da estrutura em aço e do casquilho interior encontram-se em
anexo.
Figura 44 - Descrição da peça de adaptação das varas ao compartimento do receptor.
Peça 3
43
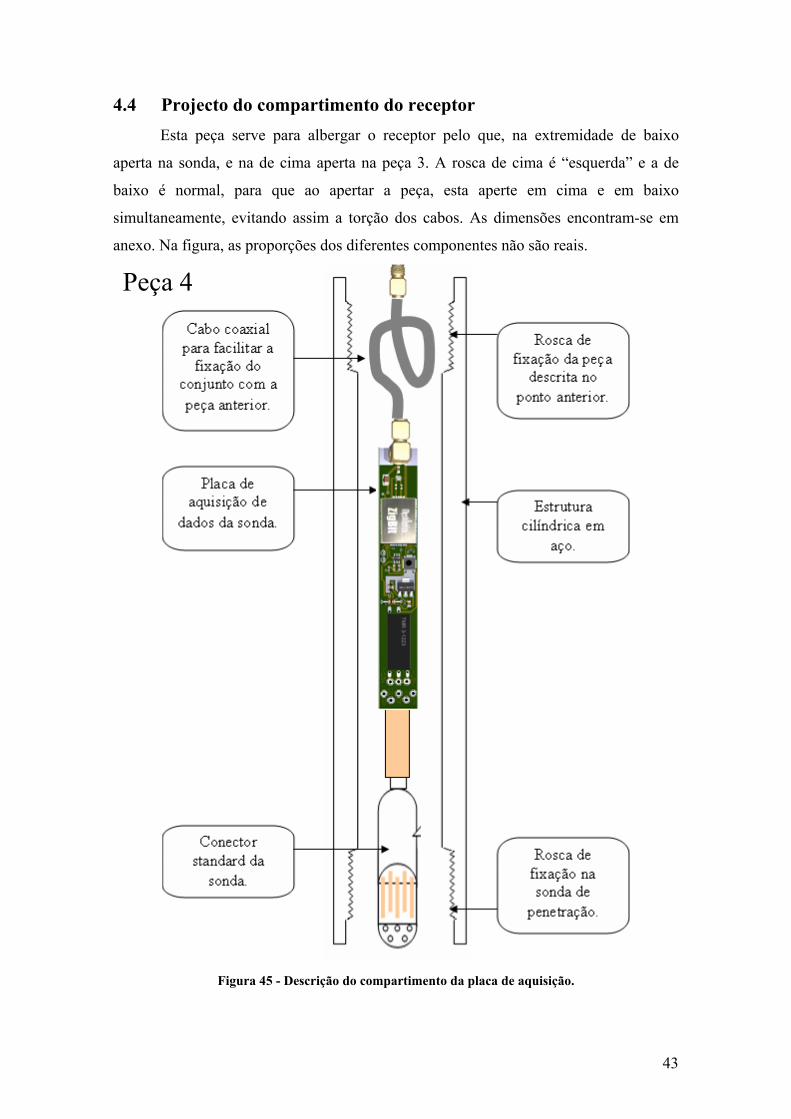
4.4 Projecto do compartimento do receptor Esta peça serve para albergar o receptor pelo que, na extremidade de baixo
aperta na sonda, e na de cima aperta na peça 3. A rosca de cima é “esquerda” e a de
baixo é normal, para que ao apertar a peça, esta aperte em cima e em baixo
simultaneamente, evitando assim a torção dos cabos. As dimensões encontram-se em
anexo. Na figura, as proporções dos diferentes componentes não são reais.
Figura 45 - Descrição do compartimento da placa de aquisição.
Peça 4
44
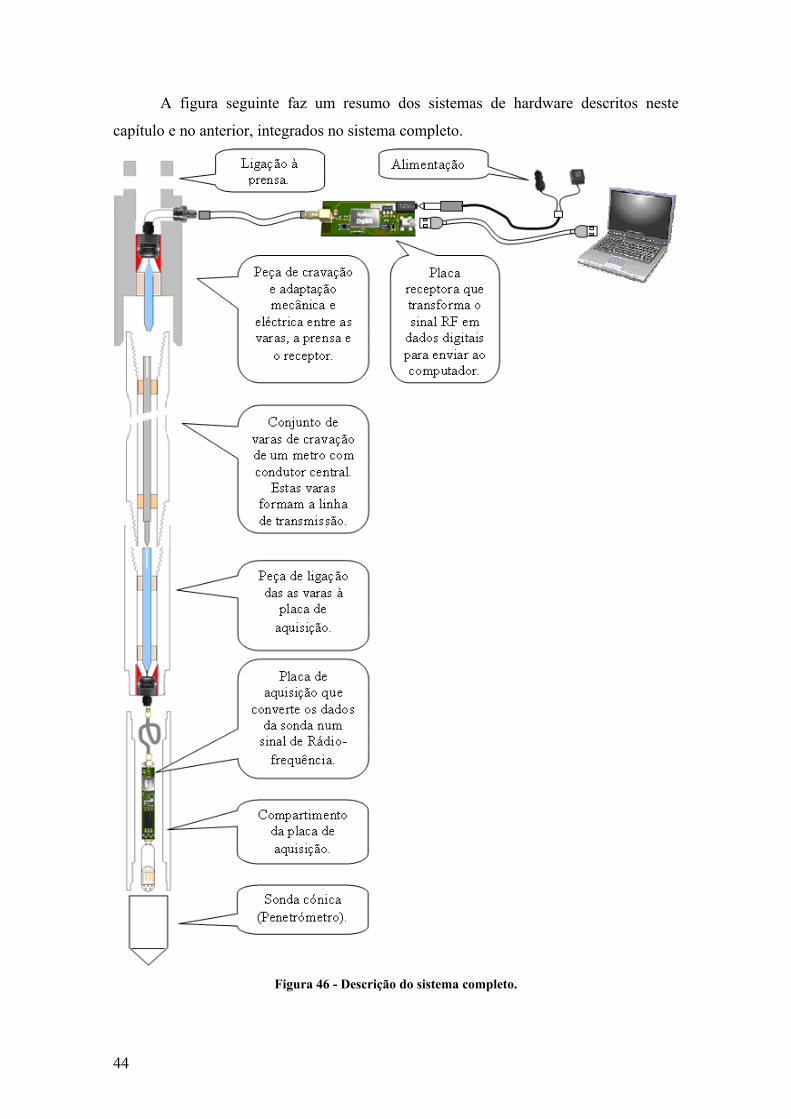
A figura seguinte faz um resumo dos sistemas de hardware descritos neste
capítulo e no anterior, integrados no sistema completo.
Figura 46 - Descrição do sistema completo.

45
5 Desenvolvimento do Software
5.1 Introdução O software deste projecto consiste em 3 programas diferentes. O software do
módulo aquisição, o software do módulo receptor da informação e o programa de
interface no computador. O software do módulo de aquisição, depois de estabelecer a
ligação com o receptor, faz a aquisição da informação dos sensores e envia-a para o
receptor. O software do módulo receptor estabelece a ligação, e limita-se a
reencaminhar os dados recebidos para o porto UART. A aplicação de interface no
computador recebe os dados, mostra-os de uma forma gráfica e guarda-os num ficheiro.
5.2 Framework eZeeNet O eZeeNet é uma pilha de software que está em conformidade com as
especificações ZigBee e fornece as ferramentas para a programação destes módulos.
Figura 47 - Diagrama da pilha de software eZeeNet [12].
Este software é composto por várias camadas cujas principais secções se designam:
eZeeNet Stack, eZeeNet Framework, SerialNet e HAL (Hardware Abstraction Layer). O
46
diagrama desta framework está ilustrado na figura anterior. As funções de cada camada
são as seguintes:
eZeeNet Stack encarrega-se das funções de configuração e transmissão na rede, por
exemplo escolha do tipo de dispositivo na rede, formação de rede ou node join,
configuração de PAN ID, selecção do canal etc.
eZeeNet Framework fornece ao programador acesso aos recursos do sistema (timers,
memoria, etc.), implementa multitarefa garantindo a execução do código do utilizador
juntamente com as funções de rede.
HAL é um interface entre o módulo ZigBit e os periféricos do microcontrolador
fornecendo uma API para o acesso a estes recursos sem conflito com a eZeeNet Stack.
SerialNet É um bloco opcional que oferece controlo de funcionalidades do ZigBit
através de comandos-AT pela porta UART [12].
O interface funcional deste software é do tipo C-Callable. Ou seja, é comum na
pilha aparecerem funções que são passadas como argumento de outras funções. Estes
Callbacks assumem assim papéis variados. São normalmente usadas para indicar a
conclusão de algum processo ou para por exemplo devolver o valor lido de um ADC.
Outras funções são associadas directamente a eventos, nomeadamente ao evento joined
ou ao lost da rede. Deste modo, quando o evento ocorre a função é invocada.
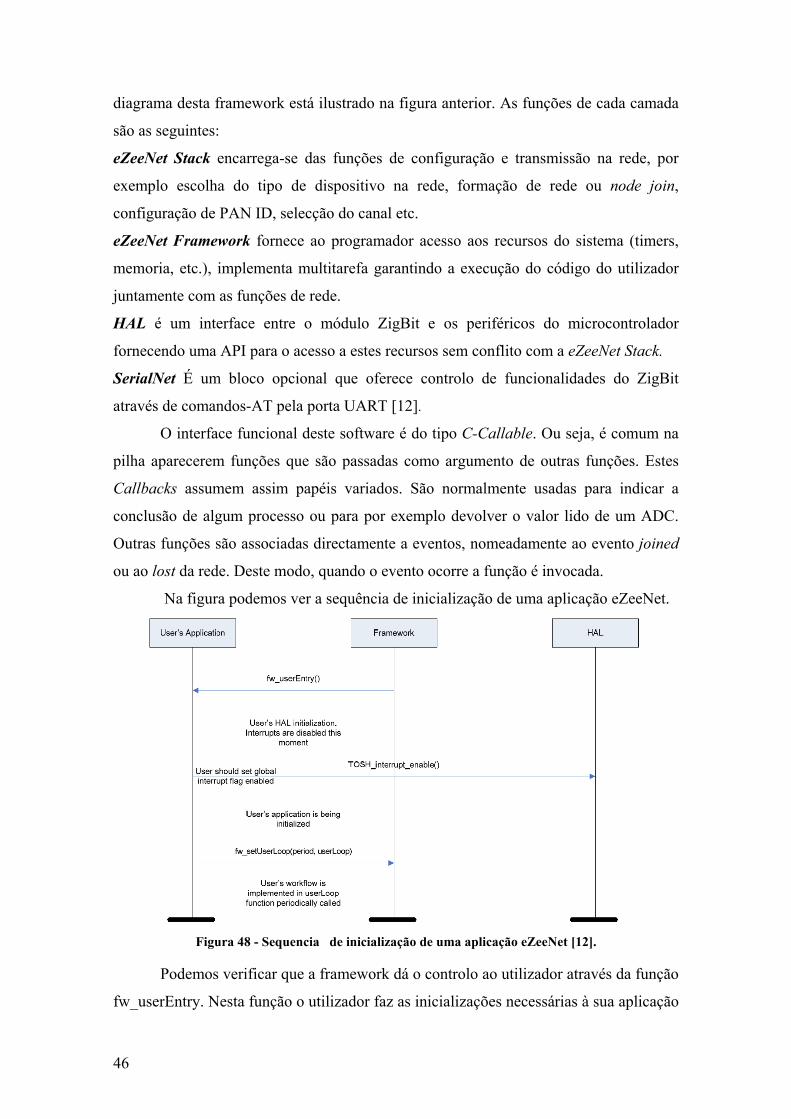
Na figura podemos ver a sequência de inicialização de uma aplicação eZeeNet.
Figura 48 - Sequencia de inicialização de uma aplicação eZeeNet [12].
Podemos verificar que a framework dá o controlo ao utilizador através da função
fw_userEntry. Nesta função o utilizador faz as inicializações necessárias à sua aplicação
47
(ex. inicializar ADC ou outros componentes da HAL), bem como as inicializações
necessárias ao funcionamento da rede, nomeadamente configuração de parâmetros de
rede (por exemplo a escolha do tipo de dispositivo, atribuição de endereços), ou
atribuição dos eventos de rede (joined e lost). Ainda nesta função, normalmente no fim,
é declarada a função fw_setUserLoop(period, MainLoop) que define de quanto em
quanto tempo vai ser executada a função MainLoop (pode ter outro nome), que é uma
espécie de função Main a criar pelo utilizador. Ou seja o utilizador tem de criar uma
função que é chamada pela framework periodicamente. Nesta função são executadas as
tarefas propriamente ditas da aplicação do utilizador.
5.3 Descrição do software da placa de aquisição O kit de desenvolvimento utilizado neste projecto vem com algumas aplicações
de exemplo para ajuda no desenvolvimento. Estas aplicações foram estudadas e para o
caso foi particularmente útil a aplicação Low Power que implementa uma rede de
dispositivos para troca de informação entre as placas Meshbean 2 do kit. Esta aplicação
é constituída por dois programas. Um programa para placa que assume o papel de
Terminal, e outro para a placa que assume o papel de Coordenador. O ponto-chave desta
aplicação é o baixo consumo tirando partido das opções de Power Down do
microcontrolador. Desta aplicação foram aproveitadas principalmente os mecanismos
de configuração da rede. Assim, o software da placa de aquisição é constituído por
algumas funções que se vão explicar de seguida. O nosso módulo de aquisição é para a
aplicação global um Terminal, e o módulo de interface assume o papel de Coordenador.
Conjunto de funções da aplicação:
• Fw_userEntry
• mainLoop
• networkJoin
• networkLost
• networkTransmit
• dataConfirm
• processData
48
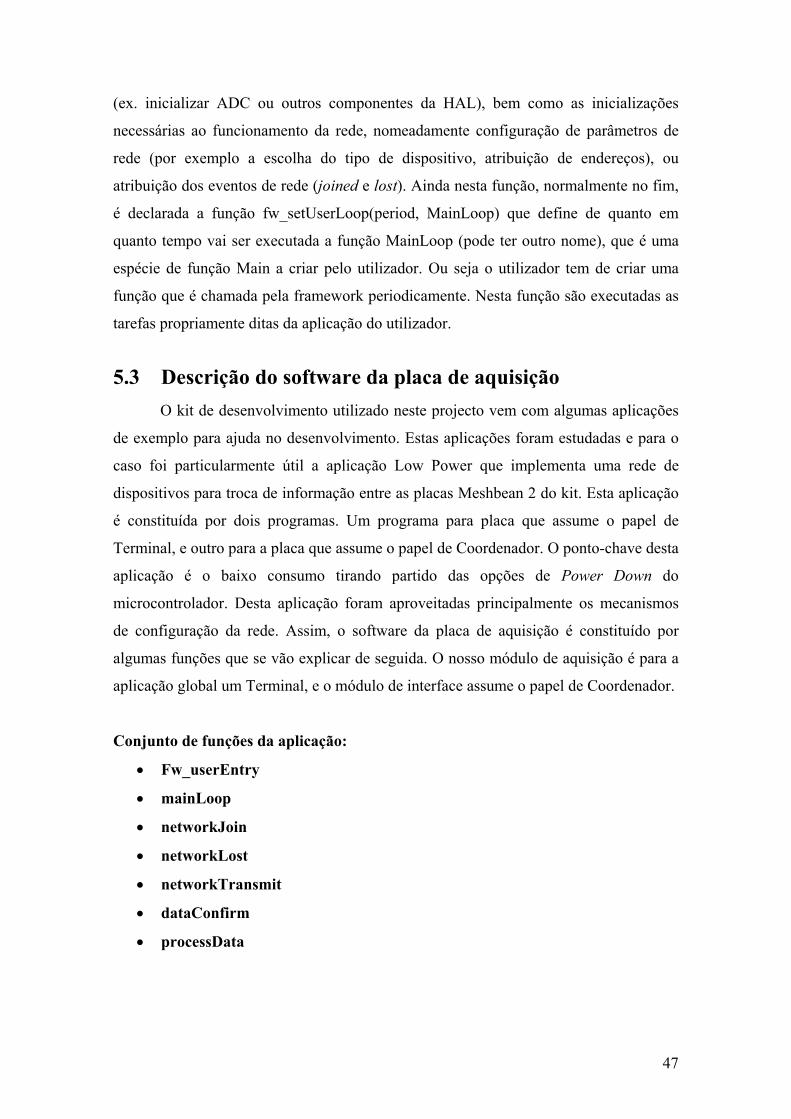
• Descrição da função Fw_userEntry - Como já se disse, a primeira entrada do
utilizador acontece na função Fw_userEntry. Esta função, como todas as que começam
por “Fw”, é uma função da framework. Esta em particular é o utilizador que a define
mas é invocada pela framework. Ao longo da função aparece várias vezes a função
fw_setParam que actualiza os parâmetros da rede que vão sendo alterados, recebendo
como argumento a estrutura desse mesmos parâmetros. Aparece também a função
fw_registerNetworkEvents que especifica quais as funções da aplicação que estão
associadas aos eventos da rede joined e lost. Depois é preenchida uma estrutura do tipo
FW_DataRequest_t que estabelece a informação da frame a transmitir. Na figura
seguinte ilustra-se esta função em forma de fluxograma.
Figura 49 - Fluxograma da função Fw_userEntry.
Fw_userEntry FrameWork
Enabling interrupts
Set Network parameters
Register Network Events
Init Sensor to network channel
Register end-point
ADC Init
Start main loop (fw_setUserLoop(33, mainLoop))
Fim
Called once

49
Na última linha desta função aparece fw_setUserLoop (time, mainLoop) que é
uma função que especifica não só o nome da função main (neste caso mainLoop) mas
também o tempo de espera (‘time’ em milissegundos) entre cada chamada desta função.
• Descrição da função MainLoop - Esta função é onde a actividade principal da
aplicação é executada. Aqui faz-se a aquisição dos sensores e o respectivo envio por
rádio-frequência. A função é composta por 3 estados, são eles:
NETWORK_IDLE_STATE,
NETWORK_JOIN_REQUEST_STATE,
NETWORK_JOINED_STATE,
que são enumerados pela variável networkState, avaliada numa estrutura ‘case’ no inicio
da função.
O estado IDLE é o estado por defeito que é assumido após Reset. Neste estado
poderia existir por exemplo uma espera por uma ordem de ligação à rede dada por
exemplo por um botão, um sensor ou uma qualquer ordem externa. Neste caso não se
espera por nenhum evento e é feito de imediato o pedido de ligação à framework através
da função fw_joinNetwork(). Após o qual o estado muda para JOIN REQUEST.
O estado JOIN REQUEST é um estado que indica que foi feito um pedido de
ligação e que a framework tenta estabelecer a ligação. Neste estado espera-se pela
confirmação da ligação e indica-se essa espera colocando um led a piscar. A
confirmação é dada pela framework através do evento joined. Quando acontece a
confirmação o estado muda para JOINED STATE.
O estado JOINED STATE é o estado da acção principal onde se faz a aquisição
e transmissão dos dados. Este estado é activado aquando do evento joined. A estratégia
adoptada foi que a cada ciclo da main é lido um sensor e enviado o seu valor, ou seja no
fim de 3 ciclos todos os sensores foram lidos. Optou-se por um tempo entre cada ciclo
de 33 milissegundos pelo que teremos aproximadamente a cada segundo, 10 amostras
de cada um dos 3 sensores.
Na Figura 50 apresenta-se o fluxograma da função principal MainLoop, e tal
como na figura anterior, podemos ver a interacção com a framework. Mas esta
representação apenas representa a passagem inicial e final pelo que a interacção com a
framework é feita várias vezes durante a execução da função. Aliás isto acontece
sempre que se usa uma função da framework ou sempre que acontece algum evento de
rede.
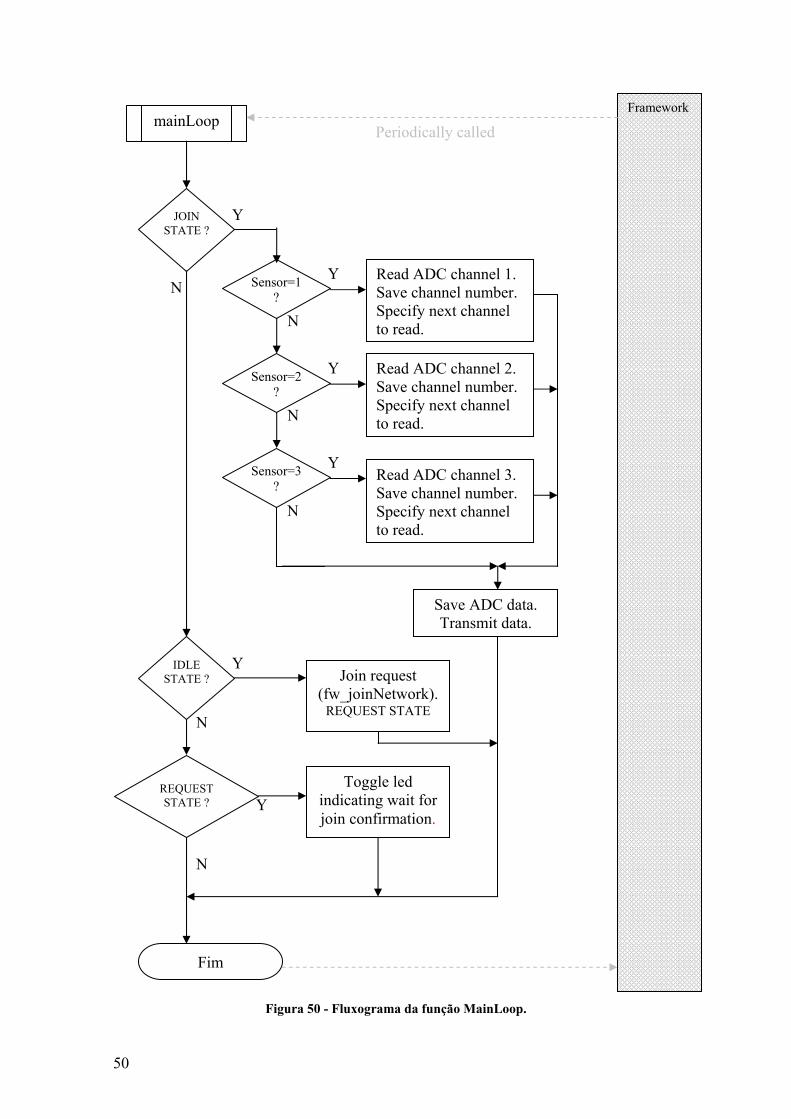
50
Figura 50 - Fluxograma da função MainLoop.
mainLoop
JOIN STATE ?
Sensor=1?
Y
N
Y
Y
N
N
Read ADC channel 1. Save channel number. Specify next channel to read.
Read ADC channel 2. Save channel number. Specify next channel to read.
Read ADC channel 3. Save channel number. Specify next channel to read.
IDLE STATE ?
REQUEST STATE ?
Fim
Save ADC data. Transmit data.
Framework
Join request (fw_joinNetwork).
REQUEST STATE
Toggle led indicating wait for join confirmation.
Periodically called
Sensor=2?
Sensor=3?
Y
Y
Y
N
N
N

51
• Descrição da função networkJoin - É invocada através do evento join da
framework, o que quer dizer que a função é executada quando a framework confirma
que ouve um join. O que a função faz é comutar do estado actual para JOINED,
alterando assim o seu fluxo de execução.
• Descrição da função networkLost - É também invocada por um evento (lost).
O que a função faz é simplesmente restabelecer a ligação invocando a função
fw_joinNetwork.
• Descrição da função networkTransmit – Esta função envia os dados para o
coordenador através da função fw_dataRequest, que recebe como argumento os
parâmetros a enviar e um apontador para a função dataContirm.
• Descrição da função dataConfirm é a função que indica se os dados foram
enviados ou não.
• Descrição da função processData é um callback da função adc_open e fornece
o valor lido pelo ADC.
5.4 Descrição do software do módulo Receptor
Esta aplicação limita-se a enviar os dados que recebe do emissor e a encaminhá-
los para o porto UART. Aqui usou-se o código correspondente ao coordenador da
aplicação Low power que neste caso não foi significativamente alterado. Este software é
estruturado da mesma forma que o do modulo de aquisição ou seja o controlo é dado ao
programador através da função fw_userEntry onde são inicializados todos os parâmetros
necessários à configuração da comunicação e onde é inicializada a função mainLoop.
Na mainLoop existem também os estados IDLE, JOINED e JOIN_REQUEST.
No estado IDLE o módulo fica à espera de ordem para ligar, esta ordem é dada
por pressão de um switch.
O estado JOIN_REQUEST é um estado de epera de confirmação de ligação à
rede (aqui a ordem de ligação já foi feita).
No estado JOINED o receptor não faz nada, ficando apenas à espera de receber
algo, quando isso acontece a função dataIndication é invocada, e aí são encaminhados
os dados para o porto série.
A função dataIndication fornece em argumento uma estrutura de dados do tipo
FW_DataIndication_t, que é onde está armazenada a informação recebida do emissor.
Dentro desta função é isolada a informação importante (valor do sensor e sua origem) e

52
colocada numa string para de seguida ser enviada através da função ‘uartFxns.put’ para
o porto série.
Existe a função ‘networkJoin’ e ‘networkLost’ com o mesmo objectivo que no
emissor e ainda a função ‘initUART’ que atribui funções de controlo para UART e
inicializa o canal UART.
5.5 Descrição da aplicação de interface com utilizador Esta aplicação foi desenvolvida em LabView e tem como objectivo a
visualização e armazenamento dos dados dos sensores. O seu diagrama de blocos é
apresentado na figura seguinte.
Figura 51 - Diagrama de blocos da aplicação em LabView.
O programa inicia com uma estrutura flat sequence que divide o programa em
duas frames. A primeira frame é onde se verifica o estado dos botões, podendo o
utilizador optar por iniciar a aquisição, guardar ou abrir dados já lidos ou sair da
aplicação. A segunda frame faz a aquisição.
Quando se pressiona o botão ‘start' o software muda para a segunda frame e lê
da porta série uma string com a informação de um sensor (valor e número do sensor) e
coloca num vector no índice indicado pelo número do sensor. Isto é feito três vezes
seguidas pelo ciclo for e repetido periodicamente pelo ciclo while que o contém.
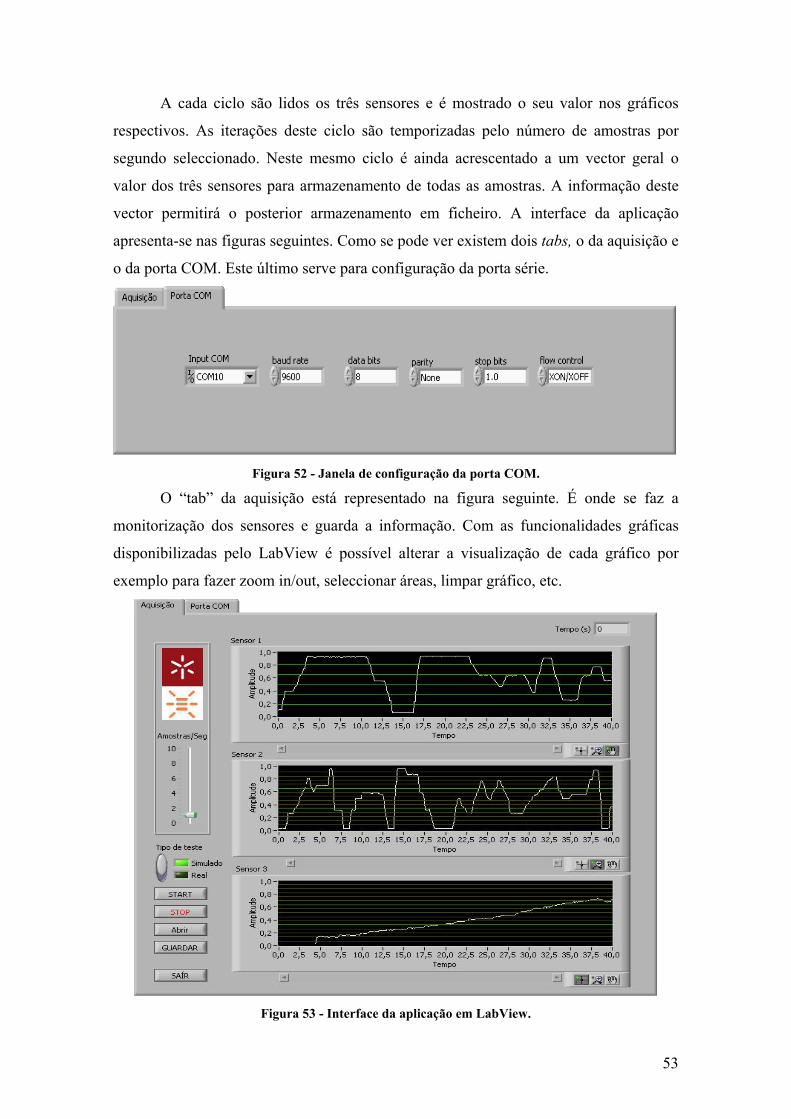
53
A cada ciclo são lidos os três sensores e é mostrado o seu valor nos gráficos
respectivos. As iterações deste ciclo são temporizadas pelo número de amostras por
segundo seleccionado. Neste mesmo ciclo é ainda acrescentado a um vector geral o
valor dos três sensores para armazenamento de todas as amostras. A informação deste
vector permitirá o posterior armazenamento em ficheiro. A interface da aplicação
apresenta-se nas figuras seguintes. Como se pode ver existem dois tabs, o da aquisição e
o da porta COM. Este último serve para configuração da porta série.
Figura 52 - Janela de configuração da porta COM.
O “tab” da aquisição está representado na figura seguinte. É onde se faz a
monitorização dos sensores e guarda a informação. Com as funcionalidades gráficas
disponibilizadas pelo LabView é possível alterar a visualização de cada gráfico por
exemplo para fazer zoom in/out, seleccionar áreas, limpar gráfico, etc.
Figura 53 - Interface da aplicação em LabView.

54
Como já se disse os dados podem ser armazenados em ficheiro. O software
permite posteriormente que se possa abrir estes ficheiros para visualização gráfica,
sendo que o ficheiro de destino deve ser do tipo folha de cálculo Excel. No ficheiro os
dados são dispostos em colunas e podem no Excel ser exportados para qualquer
formato.

55
Testes e resultados
5.6 Testes de bancada da sonda
Fizeram-se alguns testes de carga com o cone da Geomil para verificar o seu
funcionamento, linearidade e calibração. Foram medidos o esforço de ponta e o atrito
lateral, enquanto se media directamente do cone com um multímetro e osciloscópio a
resposta da sonda. Para isso usou-se uma bancada concebida para o efeito. A bancada é
constituída por um torno de suporte e um torno para compressão e foram usados anéis
de carga para validar os valores da sonda. A figura seguinte mostra o conjunto.
Figura 54 - Bancada de teste da sonda.
Depois de algumas medições com o cone em compressão em diferentes valores,
verificamos que a ponta responde correctamente ao esforço provocado e é muito
próxima do linear.
5.7 Teste de propagação de um protótipo da linha de
transmissão Para saber o grau de atenuação deste tipo de linha de transmissão construiu-se
uma amostra da linha de transmissão de um metro de comprimento com conectores
coaxiais nas pontas para ligar ao Vector Network Analyzer (VNA). Para isso foi feita a
seguinte ligação ao VNA com cabos coaxiais.
56
Figura 55 – Teste de propagação da LT de 1 metro.
O Sistema foi calibrado segundo um procedimento próprio, de modo a garantir
que estamos a medir a atenuação apenas na linha de transmissão, e não nos cabos de
ligação.
A linha de transmissão é constituída por um tubo metálico com 16mm de
diâmetro interno e por um condutor maciço interno de 8mm de diâmetro que foi
centrado no interior do tubo com espaçadores não condutores.
Figura 56 - Linha de transmissão com um metro.
Teve que se criar uma adaptação cónica para encaixar os conectores SMA do
Vector Network Analyzer como se pode ver na figura seguinte.
Figura 57 - Desenho do interior da adaptação e foto da extremidade exposta.
Fizeram-se então os testes e visualizaram-se os parâmetros S, nomeadamente o
S21 que é o mais importante nesta aplicação. Este parâmetro é o coeficiente transmissão
ou de ganho do sinal que atravessa a linha. E para 2.4GHz podemos verificar pelo
gráfico fornecido pelo Vector Network Analyzer que o seu valor é aproximadamente -
11.1dB. O que significa que um sinal colocado na entrada aparece na saída atenuado de
11.1dB.
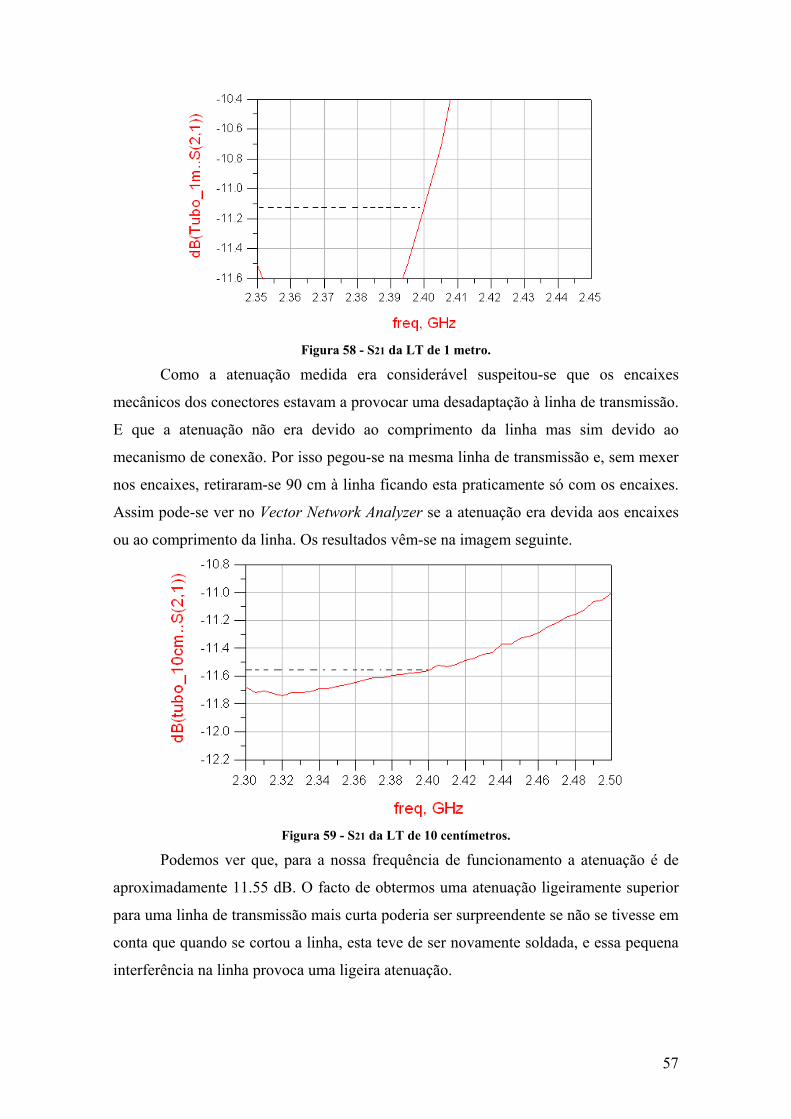
57
Figura 58 - S21 da LT de 1 metro.
Como a atenuação medida era considerável suspeitou-se que os encaixes
mecânicos dos conectores estavam a provocar uma desadaptação à linha de transmissão.
E que a atenuação não era devido ao comprimento da linha mas sim devido ao
mecanismo de conexão. Por isso pegou-se na mesma linha de transmissão e, sem mexer
nos encaixes, retiraram-se 90 cm à linha ficando esta praticamente só com os encaixes.
Assim pode-se ver no Vector Network Analyzer se a atenuação era devida aos encaixes
ou ao comprimento da linha. Os resultados vêm-se na imagem seguinte.
Figura 59 - S21 da LT de 10 centímetros.
Podemos ver que, para a nossa frequência de funcionamento a atenuação é de
aproximadamente 11.55 dB. O facto de obtermos uma atenuação ligeiramente superior
para uma linha de transmissão mais curta poderia ser surpreendente se não se tivesse em
conta que quando se cortou a linha, esta teve de ser novamente soldada, e essa pequena
interferência na linha provoca uma ligeira atenuação.
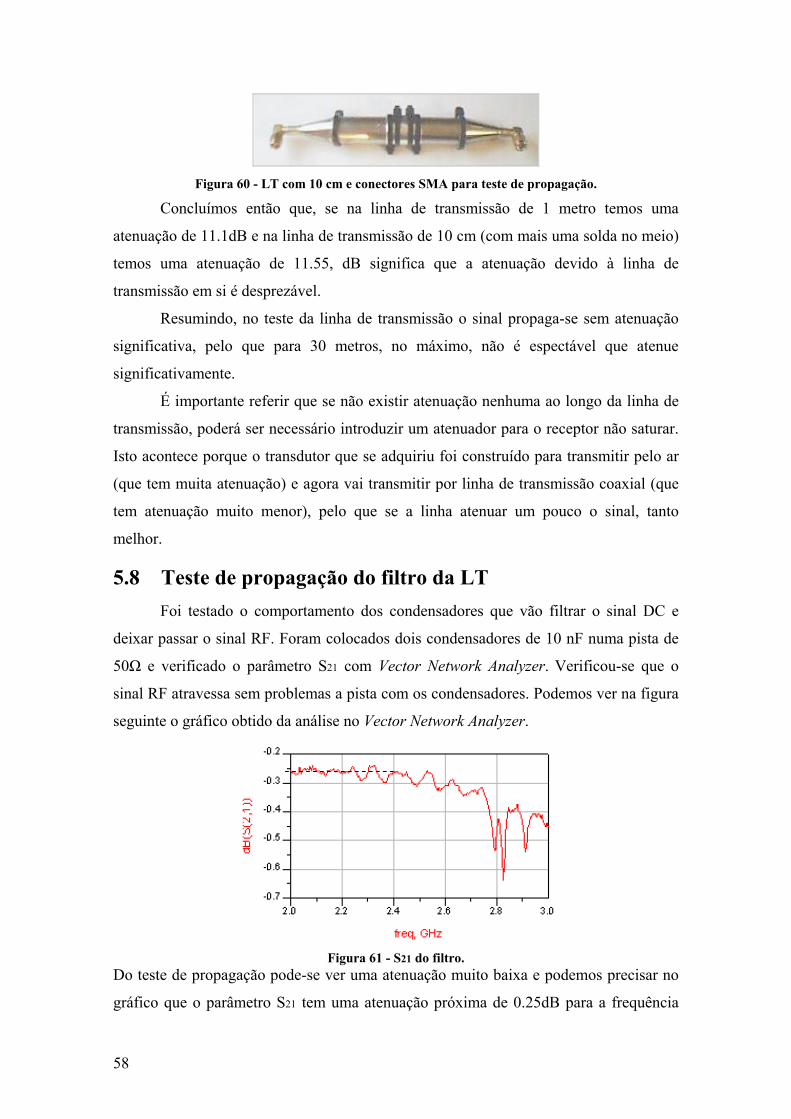
58
Figura 60 - LT com 10 cm e conectores SMA para teste de propagação.
Concluímos então que, se na linha de transmissão de 1 metro temos uma
atenuação de 11.1dB e na linha de transmissão de 10 cm (com mais uma solda no meio)
temos uma atenuação de 11.55, dB significa que a atenuação devido à linha de
transmissão em si é desprezável.
Resumindo, no teste da linha de transmissão o sinal propaga-se sem atenuação
significativa, pelo que para 30 metros, no máximo, não é espectável que atenue
significativamente.
É importante referir que se não existir atenuação nenhuma ao longo da linha de
transmissão, poderá ser necessário introduzir um atenuador para o receptor não saturar.
Isto acontece porque o transdutor que se adquiriu foi construído para transmitir pelo ar
(que tem muita atenuação) e agora vai transmitir por linha de transmissão coaxial (que
tem atenuação muito menor), pelo que se a linha atenuar um pouco o sinal, tanto
melhor.
5.8 Teste de propagação do filtro da LT Foi testado o comportamento dos condensadores que vão filtrar o sinal DC e
deixar passar o sinal RF. Foram colocados dois condensadores de 10 nF numa pista de
50Ω e verificado o parâmetro S21 com Vector Network Analyzer. Verificou-se que o
sinal RF atravessa sem problemas a pista com os condensadores. Podemos ver na figura
seguinte o gráfico obtido da análise no Vector Network Analyzer.
Figura 61 - S21 do filtro.
Do teste de propagação pode-se ver uma atenuação muito baixa e podemos precisar no
gráfico que o parâmetro S21 tem uma atenuação próxima de 0.25dB para a frequência
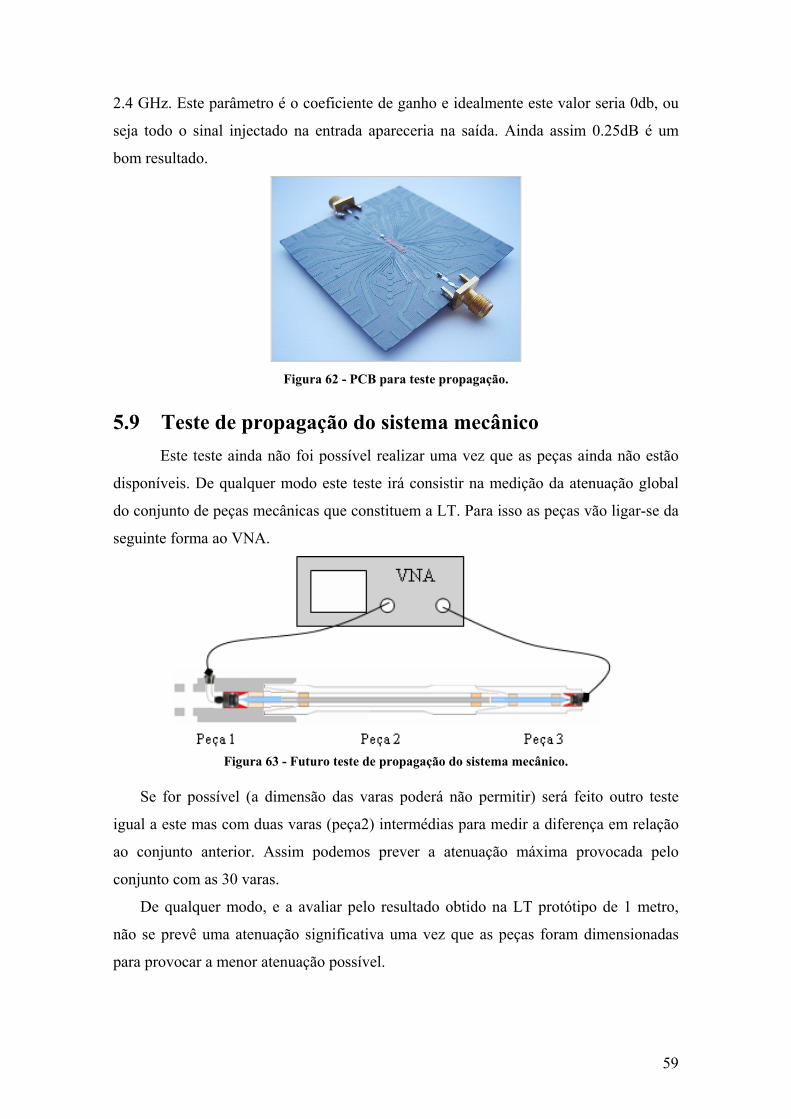
59
2.4 GHz. Este parâmetro é o coeficiente de ganho e idealmente este valor seria 0db, ou
seja todo o sinal injectado na entrada apareceria na saída. Ainda assim 0.25dB é um
bom resultado.
Figura 62 - PCB para teste propagação.
5.9 Teste de propagação do sistema mecânico Este teste ainda não foi possível realizar uma vez que as peças ainda não estão
disponíveis. De qualquer modo este teste irá consistir na medição da atenuação global
do conjunto de peças mecânicas que constituem a LT. Para isso as peças vão ligar-se da
seguinte forma ao VNA.
Figura 63 - Futuro teste de propagação do sistema mecânico.
Se for possível (a dimensão das varas poderá não permitir) será feito outro teste
igual a este mas com duas varas (peça2) intermédias para medir a diferença em relação
ao conjunto anterior. Assim podemos prever a atenuação máxima provocada pelo
conjunto com as 30 varas.
De qualquer modo, e a avaliar pelo resultado obtido na LT protótipo de 1 metro,
não se prevê uma atenuação significativa uma vez que as peças foram dimensionadas
para provocar a menor atenuação possível.

60
5.10 Observações finais Devido ao facto da dimensão da placa de aquisição ser bastante reduzida para
caber dentro do tubo, e de alguns componentes terem um package difícil de soldar
(QFN), houve dificuldade em colocar em funcionamento as placas tal como estão
descritas neste documento. No entanto para testar o sistema foram construídas placas
com os componentes mais afastados, e um PCB ligeiramente maior e mais fácil de
soldar. O componente QFN que é o integrado que faz a conversão UART/USB não foi
utilizado nestas placas, sendo que a comunicação para o computador é feita
directamente pela porta série. Deste modo as placas funcionam como esperado e
transmitem a informação correctamente.
Na totalidade foram desenvolvidas 5 placas sendo que as duas que seriam a
versão final ainda não foram testadas com sucesso. As outras três placas correspondem
às placas de testes em que uma é de aquisição, outra é de interface e a ultima é uma
placa de testes wireless. Estas funcionam correctamente. Quanto à componente
mecânica do sistema, foram projectadas 4 peças mecânicas e uma linha de transmissão
protótipo, sendo que as peças mecânicas ainda não foram testadas e a linha de
transmissão protótipo foi testada com sucesso.

61
6 Conclusões e trabalho futuro 6.1 Conclusões
A particularidade do sistema transmitir a informação por rádio-frequência, o
facto de não existir o convencional cabo de transmissão, o baixo custo e o facto do
sistema não precisar de baterias para funcionar, distinguem este sistema dos demais, não
tendo sido encontrado na pesquisa do estado da arte nenhum sistema que preenchesse
todos estes requisitos. Contudo o sistema, em fase de protótipo laboratorial, permitiu
testar e validar um novo conceito de ponta CPT. Os testes de campo que se seguirão,
permitirão melhorar significativamente o seu desempenho.
6.2 Trabalho futuro Os próximos passos deste projecto serão: verificar a atenuação do sistema
mecânico completo, bem como testar o sistema de encaixes num teste real de campo
com perfuração, onde se poderá verificar eventuais falhas e proceder à respectiva
correcção. Deverá também ser ampliada a gama de valores lidos pelo ADC, fazendo
com que este faça a aquisição das pressões mais elevadas da sonda. Deve actualizar-se o
software dos módulos uma vez que a pilha eZeeNet está constantemente a ser
actualizada e melhorada. Deverá ser introduzida no sistema a capacidade de leitura da
profundidade instantânea. Esta possibilidade já foi analisada e deverá ser de fácil
implementação com a utilização de um encoder junto ao pistão hidráulico da prensa
registando assim os movimentos de penetração da mesma. A aplicação de interface
deverá ser também melhorada. Para isso deverão ser estudados softwares já existentes
para avaliação de todas as especificidades necessárias a um software completo de
aquisição CPT(u). Um melhoramento que poderá ser feito também será a eliminação
dos cabos entre o computador e a prensa. Para isso será necessário que a peça 1
contenha um módulo ZigBit incorporado e que o cabo de alimentação ligue
directamente nesta peça. A comunicação deste módulo para o computador será
garantida por wireless para um terceiro modulo ZigBit que se ligará ao computador
como se fosse uma Pen USB. Este será um melhoramento significativo uma vez que o
operador ganha liberdade de movimentação e poderá fazer a aquisição de qualquer lugar
nomeadamente a partir do interior de uma viatura.
62
Referências
[1] J J M Brower, “IN SITU SOIL TESTING”
http://www.conepenetration.com/
[2] Eduardo Giugiani, Glaucia Figueiró,”Investigações Geotecnicas”, 2006
http://www.pucrs.br/feng/civil/professores/giugliani/Construcoes_III_Aula
_02.pdf
[3] Giuliano de Mio, Heraldo L. Giacheti, “The use of piezocone tests for high-
resolution stratigraphy of Quaternary sediment sequences in the Brazilian coast”,
2007, http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0001-
37652007000100017&lng=pt&nrm=iso
[4] Geomil Equipment, “historical Gallery”, http://www.geomil.com/History/hist-
gall.htm
[5] Geomil Equipment, http://www.geomil.com/
[6] Geotech AB, http://www.geotech.se/
[7] Geotech AB, “CPT(u) Probes”, 2004.
http://www.geotech.se/images/downloads/Datablad/engelska/CPTprobes_eng.pdf
[8] Teixeira et al, “Ensaios de Penetração Estática”, 2008
[9] Paulo Mateus Mendes, “Aulas de Micro dispositivos de RF para comunicações
sem fios”, 2008.
[10] Meshnetics, “ ZigBit OEM Module Product Datasheet”, 2007.
[11] Traco Power , “Application note TMR3”, 2007
http://www.tracopower.com/products/tmr3_application.pdf
[12] Meshnetics, “eZeeNet API Reference Manual”, 2007
[13] Steve Winder, Joe Carr, “Newnes Radio and RF Engineering Pocket Book”, 2002
[14] Amphenol RF , Global RF solutions
http://www.amphenolrf.com/news/newsletter/2003October.asp
[15] Chen, L. F. Ong, C. K. Neo, C. P. Varadan, V. V. Varadan, V. K. (1994)
“Microwave electronics: measurment and materials characterisation”
[16] ADAPTATIVE MODULES Your wireless partner.
http://www.adaptivemodules.co.uk/index.cfm/fa/ProductFAQ/#heading4

63
Bibliografia • David M. Pozar - Microwave Engineering 2nd Edition.
• Teixeira, A. C. M.; Gomes Correia, A.; Martins, J. B. (2008).
Ensaios de Penetração Estática: Avanços Tecnológicos e Aplicação ao
Dimensionamento de Estacas. Relatório de Projecto Individual da Licenciatura
em Engenharia Civil, apresentado à Universidade do Minho.
• Paulo Mateus Mendes, “Aulas de Micro dispositivos de RF para comunicações
sem fios”, 2008.
• J J M Brower , “IN SITU SOIL TESTING”
• Giuliano de Mio; Heraldo L. Giacheti, Anais da Academia Brasileira de
Ciências
Documentação adquirida com o kit de desenvolvimento
• ZigBit Development Kit Users Guide
• SerialNet API Reference Manual
• WSN Demo Messaging Protocol Description
• eZeeNet API Reference Manual
• SerialNet AT-Command Set Reference Manual
• ZigBit Power Consumption Testing
• Serial Bootloader Manual
• Using ZigBit Module with Analog Sensors
Sites de Internet
Geotecnia • CPT / CPTU - ENSAIO DE PENETRAÇÃO DE CONE COM MEDIDA DE POROPRESSÃO
http://www.insitu.com.br/cptu.htm • ENSAIOS DE CAMPO e suas aplicações à Engenharia de Fundações
http://www.ofitexto.com.br/conteudo/deg_230635.htm
• J J M Brower, IN SITU SOIL TESTING
http://www.conepenetration.com/
• Pitcher - SPECIALIZED CONE PENETROMETERS http://www.pitcherdrilling.com/Equipmentpages/modules.htm
• Vídeo LANKELMA– Introduction to Cone Penetration Testing
http://www.lankelma.com/site_pages.php?page=cpt_video

64
• Geoprobe - Fornecedor de equipamento CPT
http://www.geoprobe.com/products/tools/geotechnical/cptdesc.htm
• Giuliano de Mio; Heraldo L. Giacheti, Anais da Academia Brasileira de
Ciências.
http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0001-
37652007000100017&lng=pt&nrm=iso
• Geotech AB– Fabricante de equipamento.
http://www.geotech.se/index.php?option=com_frontpage&Itemid=1
• Eduardo Giugiani, Glaucia Figueiró, “Investigações Geotécnicas “2006.
http://www.pucrs.br/feng/civil/professores/giugliani/Construcoes_III_Aula_02.p
df
Zigbee
• Adaptative Modules , “ZigBee FAQ”
http://www.adaptivemodules.co.uk/index.cfm/fa/ProductFAQ/#heading14
Programação
• The Function Pointer Tutorials.
http://www.newty.de/fpt/index.html
• GNU make – Ajuda sobre MakeFile
http://www.gnu.org/software/make/manual/make.html#Simple-Makefile
• AVR Freaks – Ajuda sobre os módulos Zigbit.
http://www.avrfreaks.net/index.phpFornecedores
Rádio-frequência
• Meshnetics - Fabricante dos módulos ZigBit
http://www.meshnetics.com/
• Meshnetics – Documentação e software gratuito acerca dos módulos e kits
http://www.meshnetics.com/downloads/docs/
• Adaptivemodules - Fornecedor de módulos RF
http://www.adaptivemodules.co.uk/index.cfm/fa/main
• Farnel – Catálogo completo de produtos com tecnologia wireless
http://au.farnell.com/images/en_AU/pdf/Select40_AU_1.pdf

65
Anexo A Estudo acerca de guias de onda e possibilidade
de implementação no projecto.
Introdução A propagação de ondas electromagnéticas em guias de onda metálicos ocos é
hoje prática comum para sistemas de elevada taxa de transmissão de dados e em que a
distancia a transmitir não seja muito significativa.
Neste tipo de sistemas, a elevada imunidade ao ruído, e a possibilidade de
transmitir dados num canal já existente fazem deste guia a melhor opção em muitas
situações. No caso deste trabalho justifica-se pelo simples facto que já existe um canal.
Este estudo tem como objectivo a avaliação da viabilidade da transmissão de
dados por rádio-frequência, usando as varas ocas de penetração de uma sonda como
guia de onda.
Um guia de onda não é mais que um tubo metálico com secção transversal
normalmente constante e com dieléctrico interno homogéneo, normalmente ar, que
serve para transmitir energia a altas-frequências.
Podem-se classificar os guias de onda consoante o formato da sua secção. Assim
sendo, temos guias de onda circulares, rectangulares, elípticos, etc.
Apresentam-se na figura seguinte alguns exemplos de guias de onda.
Figura 64 - Representação de alguns tipos de guia de onda [1].
Tipos de onda electromagnética
Em rádio frequência existem três tipos de ondas electromagnéticas que se
caracterizam pela direcção das componentes perpendiculares à propagação. Ou seja
temos:
-Ondas TEM (Transverso Electromagnéticas) Ez= 0 Hz= 0
-Ondas TE (Transverso Eléctricas) Ez = 0 Hz ≠ 0
-Ondas TM (Transverso Magnéticas) Ez ≠ 0 Hz = 0

66
Figura 65 - Eixos de coordenadas no guia de onda.
O modo TE ocorre quando o campo magnético é a única componente
longitudinal à propagação, estando o campo eléctrico no plano transversal. Para o modo
TM ocorre o inverso. Nas ondas TEM tanto o campo eléctrico como o magnético estão
direccionadas no plano transversal à propagação e como precisam de dois ou mais
condutores para se propagar, este tipo de onda não se propaga em guias de onda.
Dimensionamento de um guia de onda a 2.4GHz Para fazer a análise do guia de onda usam-se as equações de Maxwell escritas no
sistema de coordenadas adequado à forma geométrica da secção transversal do guia
(neste caso à forma circular). Não vamos aqui deduzir todas as equações necessárias à
análise da propagação num guia visto que o nosso objectivo é apenas o
dimensionamento. Assim, iremos apresentar, quando necessário, as equações relevantes
ao dimensionamento.
Para dimensionar o guia de onda sabendo que a frequência de transmissão é de
2.4 GHz e escolhendo uma frequência de corte para o guia, 5% inferior a esta (2.28
GHz), calculamos o raio do guia através das seguintes equações:
nlc P
rπλ 2= (1)
cc
cfλ
= (2)
Sendo que:
cf é a frequência de corte pretendida para o guia
cλ é o comprimento de onda dessa frequência
c é a velocidade de propagação da onda no meio (consideramos 3x10^8)
r é o raio interior do guia
nlP é uma das raízes das funções de Bessel (define o modo a usar)
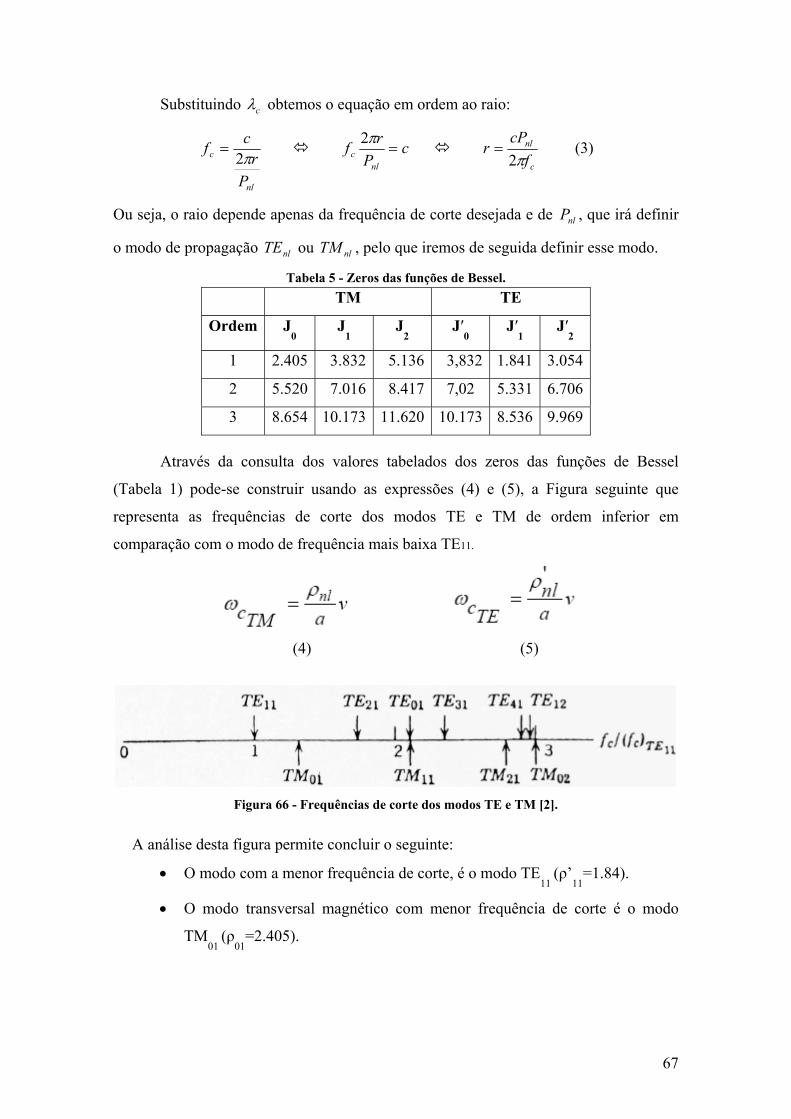
67
Substituindo cλ obtemos o equação em ordem ao raio:
nl
c
Pr
cfπ2
= cP
rfnl
c =π2
c
nl
fcP
rπ2
= (3)
Ou seja, o raio depende apenas da frequência de corte desejada e de nlP , que irá definir
o modo de propagação nlTE ou nlTM , pelo que iremos de seguida definir esse modo.
Tabela 5 - Zeros das funções de Bessel.
Através da consulta dos valores tabelados dos zeros das funções de Bessel
(Tabela 1) pode-se construir usando as expressões (4) e (5), a Figura seguinte que
representa as frequências de corte dos modos TE e TM de ordem inferior em
comparação com o modo de frequência mais baixa TE11.
(4) (5)
Figura 66 - Frequências de corte dos modos TE e TM [2].
A análise desta figura permite concluir o seguinte:
• O modo com a menor frequência de corte, é o modo TE11
(ρ’11
=1.84).
• O modo transversal magnético com menor frequência de corte é o modo
TM01
(ρ01
=2.405).
TM TE
Ordem J0 J
1 J
2 J′
0 J′
1 J′
2
1 2.405 3.832 5.136 3,832 1.841 3.054
2 5.520 7.016 8.417 7,02 5.331 6.706
3 8.654 10.173 11.620 10.173 8.536 9.969

68
Assim, o modo que será escolhido será o TE11 para obter a menor frequência, pelo que
iremos substituir na equação do raio, a frequência de corte por 2.28GHz e a raiz nlρ por
1.841 de modo obtermos um raio de menor dimensão possível.
cfcPrπ2
11= mmr 5,381028.22
1.8411039
8
=××
××=
π
Concluímos que o guia para transmitir a 2.4GHz no modo TE11 deve ter um
diâmetro de (38,5mmx2) = 7,7 cm
Para comparar, vamos também calcular o raio no modo mais próximo (TM01) e no
modo onde a raiz é igual nos dois modos (TE01=TM11) visto ser também um modo
importante.
• TM01
cf
cPr
π201= mmr 50
1028.222.405103
9
8
=××
××=
π Diâmetro = 10cm
• TE01
cf
cPr
π201= mmr 80
1028.223.832103
9
8
=××
××=
π Diâmetro = 16cm
Já temos o diâmetro do guia pelo que concluímos que para transmitir a uma
frequência de 2,4GHz precisamos de um tubo metálico com parede interior com 7,7cm
de diâmetro.
Cálculo da frequência de corte de um guia de onda com
16mm de diâmetro Para usar as varas de penetração como guia de onda temos que aumentar a
frequência de funcionamento uma vez que o seu diâmetro é fixo e não pode ser alterado.
Vamos aqui calcular a frequência de funcionamento necessária para que a propagação
ocorra correctamente num guia com essas características.
Iremos então calcular a frequência de corte inferior para sabermos a partir de
que frequência é que existe propagação. Como já vimos a expressão que permite
calcular a frequência de corte é dada pela seguinte equação:
rPc
f nlc π2
×=

69
Iremos calcular a frequência para o modo TM01 (ρ01=2.405) visto que a
excitação deste guia, a ser implementado, tem de ser feita por uma das extremidades do
guia (e não com um furo lateral) pelo que os modos TM facilitam a orientação da ponta
de prova que irá excitar o guia. A escolha do modo de ordem inferior é porque
queremos que a frequência seja o mais baixa possível.
Então para o raio de 8mm a frequência é dada por:
008.02405.2103 8
×××
=πcf
GHzfc 354.14=
No entanto se optarmos pelo modo TE que permite a menor frequência TE11
(ρ’11=1.84) teríamos:
008.021.841103 8
×××
=πcf
GHzfc 987.10=
Ou seja este guia deve funcionar a uma frequência de 14.354GHz + 5% = 15 GHz para
o modo TM01, ou a uma frequência de 10.987GHz + 5% = 11,5GHz se optarmos pelo
modo TE11.
Conclusão Conclui-se que para a aplicação das varas como guia de onda seria necessária a
transmissão a frequências nunca inferiores a 11,5GHz. Com este estudo fica claro que o
dimensionamento de um guia de onda está condicionado à frequência de utilização que
se pretende para o sistema.

70
Refêrencias
[1] http://www.nagas.com.br/download/guias.pdf
[2] Microwave Engineering 2nd Edition - David M. Pozar
Bibliografia
Microwave Engineering 2nd Edition - David M. Pozar
Webliografia
http://www.dee.eng.ufba.br/trabalho/HPs_ENG348_20062/Guia_Cil/
http://www.cfn.ist.utl.pt/~varandas/RadioFrequencia/Prop_OEGCilindrico.pdf
http://www.deetc.isel.ipl.pt/sistemastele/Pr1/Arquivo/Sebenta/Geral/IntroGeral.pdf
http://www.nagas.com.br/download/guias.pdf
http://flakey.info/antenna/waveguide/
http://www.comsol.com/showroom/gallery/images/1863_l.jpg
http://www.dsce.fee.unicamp.br/~pisso/Apostila%20Ondas%20Guiadas.pdf
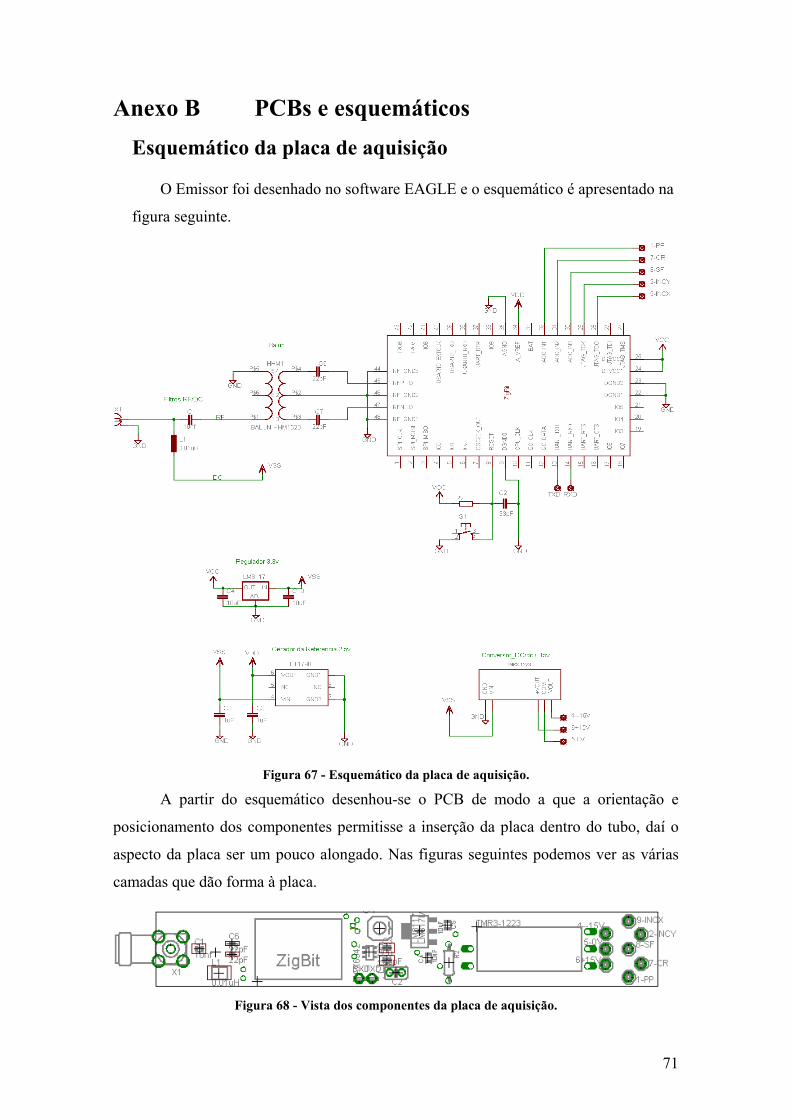
71
Anexo B PCBs e esquemáticos Esquemático da placa de aquisição
O Emissor foi desenhado no software EAGLE e o esquemático é apresentado na
figura seguinte.
Figura 67 - Esquemático da placa de aquisição.
A partir do esquemático desenhou-se o PCB de modo a que a orientação e
posicionamento dos componentes permitisse a inserção da placa dentro do tubo, daí o
aspecto da placa ser um pouco alongado. Nas figuras seguintes podemos ver as várias
camadas que dão forma à placa.
Figura 68 - Vista dos componentes da placa de aquisição.
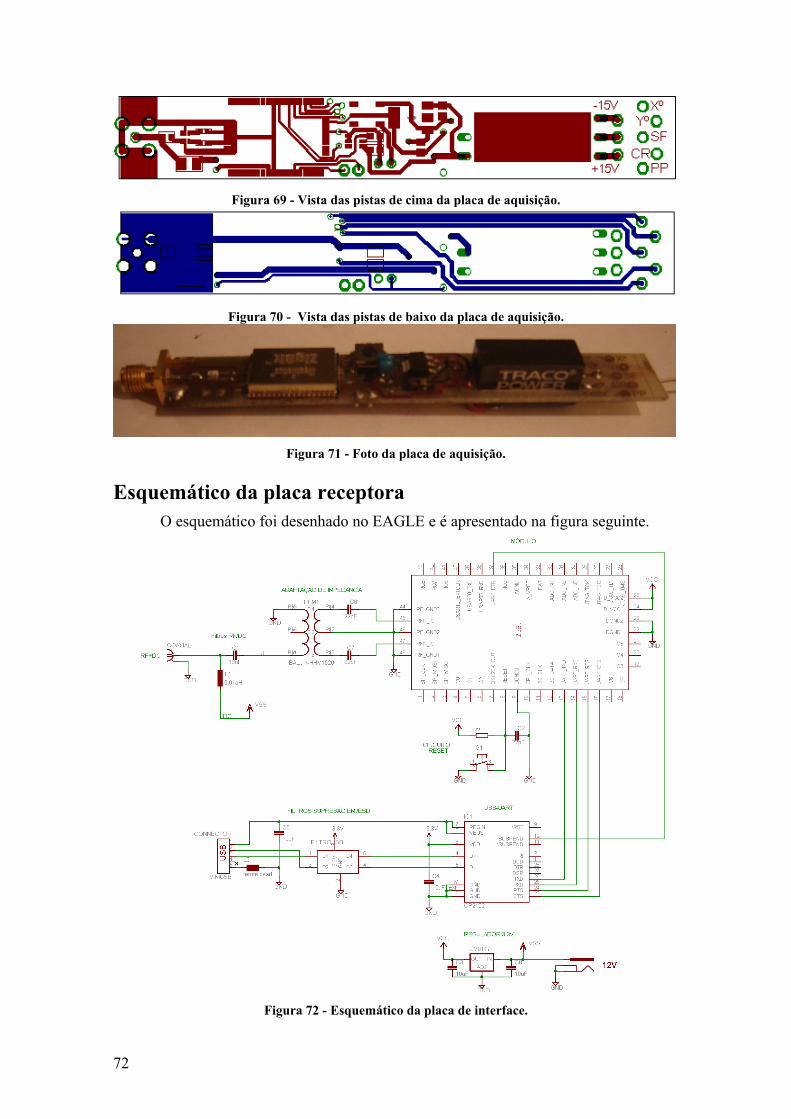
72
Figura 69 - Vista das pistas de cima da placa de aquisição.
Figura 70 - Vista das pistas de baixo da placa de aquisição.
Figura 71 - Foto da placa de aquisição.
Esquemático da placa receptora
O esquemático foi desenhado no EAGLE e é apresentado na figura seguinte.
Figura 72 - Esquemático da placa de interface.

73
A partir do esquemático desenhou-se o PCB e posicionaram-se os componentes
na forma como demonstram as figuras seguintes.
Figura 73 - Vista dos componentes da placa de interface.
Figura 74 - Vista dos condutores da placa de interface.
Figura 75 - Foto da placa de interface.
O Software EAGLE tem a capacidade de representar as placas em 3
dimensões pelo que apresento aqui os modelos em tamanho real do emissor e do
receptor.

74
Figura 76 - Placa de interface com o computador.
Figura 77 - Placa de aquisição.
Placas de testes de comunicação
Figura 78 - Placa de testes maior e com os componentes mais afastados.
Figura 79 - Placa de interface com comunicação pela porta série.
Placa de testes wireless (circuito base)
No início do projecto desenhou-se uma placa de transmissão para testes que
se revelou bastante útil na aprendizagem do funcionamento dos módulos. Serviu para
testar a capacidade de transmissão de um módulo, bem como a capacidade de ser
programado por bootloader. Verificou-se com ela também que mesmo usando PCB
convencional de baquelite o circuito de rádio frequência que liga à antena funciona
bem e a placa irradia a distâncias consideráveis.
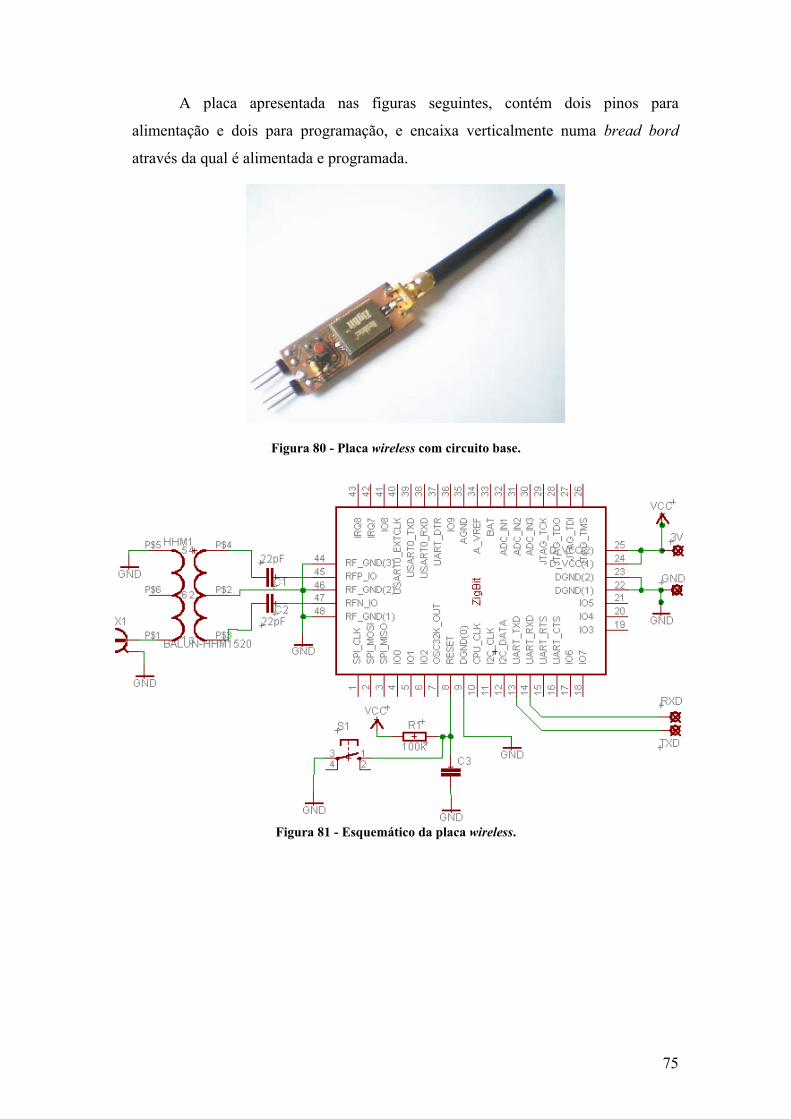
75
A placa apresentada nas figuras seguintes, contém dois pinos para
alimentação e dois para programação, e encaixa verticalmente numa bread bord
através da qual é alimentada e programada.
Figura 80 - Placa wireless com circuito base.
Figura 81 - Esquemático da placa wireless.

76

77
Anexo C Cotações das peças mecânicas
Cotação para fabrico da peça de adaptação à prensa
18
36
10
10
36
50
4
4
40
10 30
8
Secção transversal Aspecto Exterior, com
os furos vistos de frente.
120
Todas as medidas são em milímetros

78
Cotação para fabrico da peça de adaptação de encaixes
30
35,5
18
Esta rosca deve ser esquerda e apertar no
compartimento do receptor.
16
28,5
Todas as medidas são em milímetros
6
100
23
Aqui deverá entrar à pressão o casquilho descrito na página seguinte.
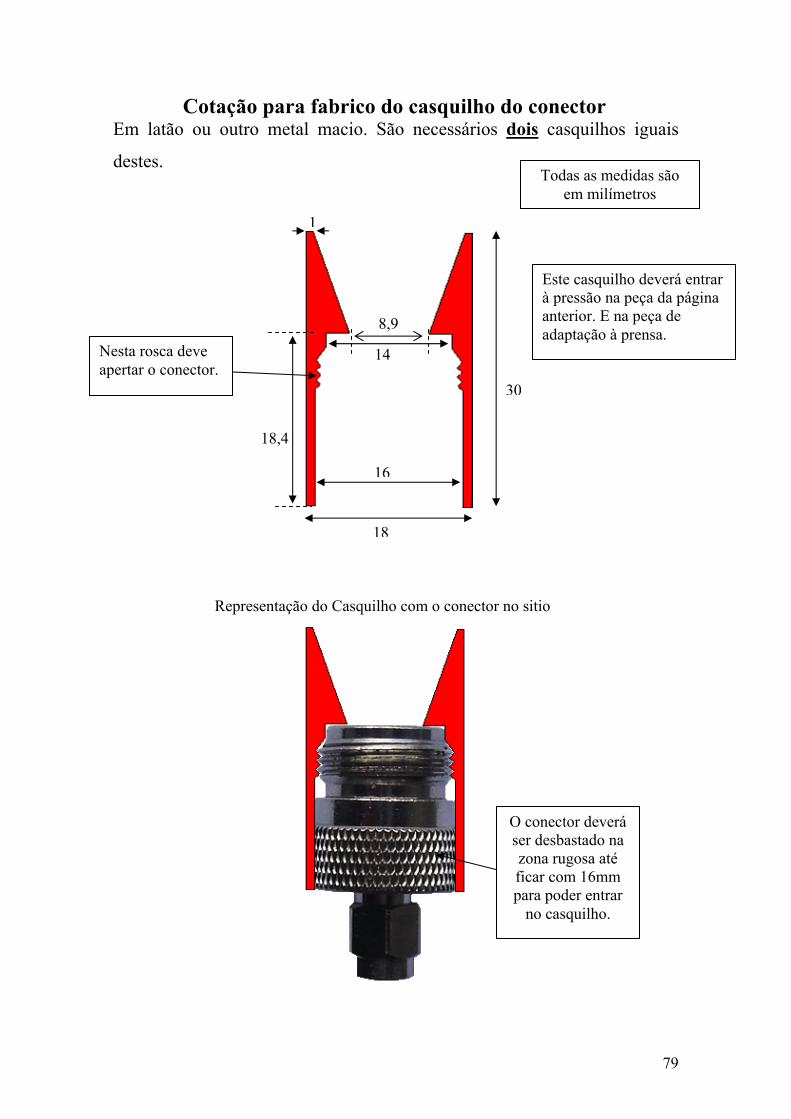
79
Cotação para fabrico do casquilho do conector Em latão ou outro metal macio. São necessários dois casquilhos iguais
destes.
30
18
1
14
16
8,9
Nesta rosca deve apertar o conector.
Representação do Casquilho com o conector no sitio
18,4
Este casquilho deverá entrar à pressão na peça da página anterior. E na peça de adaptação à prensa.
Todas as medidas são em milímetros
O conector deverá ser desbastado na zona rugosa até ficar com 16mm para poder entrar
no casquilho.

80
Cotação da peça do compartimento do receptor
24
35,5
Lado do cone. Rosca direita. Esta rosca deve apertar
no cone.
28,7
340
Lado da peça. Rosca esquerda. Esta rosca deve
entrar na peça de adaptação.
A peça que aperta em cima deverá apertar com o
mesmo número de voltas da peça que aperta em baixo.
Para mais detalhes, tanto em baixo como em cima, copiar pela peça já existente.
As dimensões deste lado devem ser em tudo iguais à do lado de baixo, com a excepção que a rosca deverá ser esquerda.
8
28,7 8
17
17
81
Anexo D Software dos módulos ZigBit Código da placa de aquisição
/******************************************************************************** Enddevice part of application implementation. ********************************************************************************/ #include "framework.h" #include "gpio.h" #include "irq.h" #include <sched.h> #include "leds.h" #include "adc.h" #define END_POINT 1 // End-point for transmission. #define DATA_HANDLE 1 // Data frame handle. #define COORDINATOR_NETWORK_ADDRESS 0x0000 // Coordinator network address (fixed). #define NETWORK_LED 0 // Network indication red LED. #ifndef MAC_ADDRESS #define MAC_ADDRESS 0 #endif #define LED_FLASH_DELAY 300u //defines network led blink period when device is searching network. static enum // Possible network states. NETWORK_IDLE_STATE, // Waiting for network request. NETWORK_JOINED_STATE, // Join procedure was successfully finished. NETWORK_JOIN_REQUEST_STATE, // Waiting for the join event networkState = NETWORK_IDLE_STATE; // Network default state. static struct // Sensors to network channel description. enum // Possible states. ENDDEV_ACK_RECEIVED_STATE, ENDDEV_DATA_TRANSMITING_STATE, // Data transmission state. ENDDEV_DATA_RETRANSMISSION_STATE,// Data retransmission state. state; struct union // Union for float to int conversions. float dataFloat; uint8_t dataInt[sizeof(float)]; sensorData;
82
NodeLogicalAddr_t logicalAddr; dataToSend; FW_DataRequest_t params; // Transmitting frame parameters. sensors2network; int readSensor = 1; //initial channel to read float sensorValue = 0.0; // Functions' prototypes. void mainLoop(); // Main loop. void networkJoin(void); // Network joint indication. void networkLost(void); // Network loss indication. void networkTransmit(void); // Data transmission over network. void dataConfirm(uint8_t handle, FW_DataStatus_t status);// Data transmission confirmation handler. void processData(uint16_t); // ADC sensor callback /******************************************************************************** User first entry point. ********************************************************************************/ void fw_userEntry(FW_ResetReason_t resetReason, bool isEepromCrcValid) // Enabling interrupts. TOSH_interrupt_enable(); // Set node role, PANID, logical address, channel mask. FW_Param_t param; // Set node role. param.id = FW_NODE_ROLE_PARAM_ID; param.value.role = ZIGBEE_END_DEVICE_TYPE; //this module will work as an end device. fw_setParam(¶m); //Set MAC addr param.id = FW_MAC_ADDR_PARAM_ID; fw_getParam(¶m); if ((0xFFFFFFFFFFFFFFFFll == param.value.macAddr) || (0 == param.value.macAddr)) if (0 != MAC_ADDRESS) param.id = FW_MAC_ADDR_PARAM_ID; param.value.macAddr = MAC_ADDRESS; fw_setParam(¶m); // Set PANID. param.id = FW_PANID_PARAM_ID;

83
fw_getParam(¶m); if ((0xFFFF == param.value.panID) || (0xFFFE == param.value.panID)) param.id = FW_PANID_PARAM_ID; param.value.panID = PANID; fw_setParam(¶m); // Set channel mask. param.id = FW_CHANNEL_MASK_PARAM_ID; fw_getParam(¶m); if (0x00000800 == param.value.channelMask) param.id = FW_CHANNEL_MASK_PARAM_ID; param.value.channelMask = CHANNEL_MASK; fw_setParam(¶m); // Set logical address. param.id = FW_NODE_LOGICAL_ADDR_PARAM_ID; param.value.logicalAddr = sensors2network.dataToSend.logicalAddr; fw_setParam(¶m); // Set DTR activity state param.id = FW_UART_DTR_PARAM_ID; param.value.uartDTR = FALSE; fw_setParam(¶m); // Register network events. ------This events inform about network state--------- FW_NetworkEvents_t handlers; handlers.joined = networkJoin; // This functions (networkJoin, netWorkLost etc.) handlers.lost = networkLost; //will execute when respective handler indicates handlers.addNode = NULL; handlers.deleteNode = NULL; fw_registerNetworkEvents(&handlers); // Init sensors to network channel. ---- Networck specification parameters------- sensors2network.params.dstNWKAddr = COORDINATOR_NETWORK_ADDRESS; sensors2network.params.addrMode = NODE_NWK_ADDR_MODE; sensors2network.params.srcEndPoint = END_POINT; sensors2network.params.dstEndPoint = END_POINT; sensors2network.params.arq = TRUE; sensors2network.params.broadcast = FALSE; sensors2network.params.handle = DATA_HANDLE; sensors2network.params.data = (uint8_t *)&sensors2network.dataToSend; sensors2network.params.length = sizeof(sensors2network.dataToSend); leds_open();

84
// Register end-point for transmission and receive. fw_registerEndPoint(END_POINT, NULL); // ADC configuration adc_init(); // Start main loop. fw_setUserLoop(33, mainLoop); // 30 loops/sec, providing 10 samples/sec of each sensor /******************************************************************************** Main loop. ********************************************************************************/ void mainLoop() switch (networkState) // -------In network.-------- case NETWORK_JOINED_STATE: switch(readSensor) case 1: //ADC channel and callback specification if (adc_open(ADC_INPUT_1, processData) == SUCCESS); adc_get(ADC_INPUT_1); //read from ADC sensors2network.dataToSend.logicalAddr = 1; //save which sensor was read readSensor = 2; //Sensor to read in next loop break; case 2: //ADC channel and callback specification if (adc_open(ADC_INPUT_2, processData) == SUCCESS); adc_get(ADC_INPUT_2); //read from ADC sensors2network.dataToSend.logicalAddr = 2; //save which sensor was read readSensor = 3; //Sensor to read in next loop break; case 3: //ADC channel and callback specification if (adc_open(ADC_INPUT_3, processData) == SUCCESS); adc_get(ADC_INPUT_3); //read from ADC sensors2network.dataToSend.logicalAddr = 3; //save which sensor was read readSensor = 1; //Sensor to read in next loop

85
default: break; //Save data in the transmission structure sensors2network.dataToSend.sensorData.dataFloat = sensorValue; networkTransmit(); //Transmit data break; // ---------Network hasn't been started once.----------- case NETWORK_IDLE_STATE: // Start network. networkState = NETWORK_JOIN_REQUEST_STATE; fw_joinNetwork(); break; // --------------waiting for framework join confirmation----------------- case NETWORK_JOIN_REQUEST_STATE: static uint32_t ledTime = 0; if ((fw_getSystemTime() - ledTime) > LED_FLASH_DELAY) leds_toggle(NETWORK_LED); ledTime = fw_getSystemTime(); default: break; /******************************************************************************** Network joint indication. ********************************************************************************/ void networkJoin(void) networkState = NETWORK_JOINED_STATE; /******************************************************************************** Network loss indication. ********************************************************************************/ void networkLost(void) if (networkState != NETWORK_JOIN_REQUEST_STATE) leds_off(NETWORK_LED); fw_joinNetwork();

86
/******************************************************************************** Data transmission over network. ********************************************************************************/ void networkTransmit(void) if (SUCCESS == fw_dataRequest(&sensors2network.params, dataConfirm)) sensors2network.state = ENDDEV_DATA_TRANSMITING_STATE; else sensors2network.state = ENDDEV_DATA_RETRANSMISSION_STATE; /******************************************************************************** Data transmission confirmation handler. ********************************************************************************/ void dataConfirm(uint8_t handle, FW_DataStatus_t status) if(status == FW_DATA_ACK_STATUS) // Data transmission success. sensors2network.state = ENDDEV_ACK_RECEIVED_STATE; /******************************************************************************** ADC sensor callback *********************************************************************************/ void processData (uint16_t raw) //raw is the adc read data sensorValue = ((float) raw / 1024) * 2,5; //Conversion scaled to our voltege reference,
// eof enddevice.c
Código da placa de interface
/******************************************************************************** Coordinator part of application implementation. ********************************************************************************/ #include "leds.h" #include "buttons.h" #include "framework.h" #include "stdio.h" #include "uart_fxns.h" #include "pwrctrl.h" #include "uart1_cntrl_fxns.h" #define END_POINT 1 // End-point for receive. #define NETWORK_LED 0 // Network indication LED. #define MAC_ADDR_ERR_LED 2 // Pin connected to mac addr error LED. #ifndef MAC_ADDRESS

87
#define MAC_ADDRESS 0 #endif #define LED_FLASH_DELAY 300u //defines network led blink period when device is searching network static enum // Possible network states. NETWORK_IDLE_STATE, // Waiting for network button press. NETWORK_JOINED_STATE, // Join procedure was successfully finished. NETWORK_JOIN_REQUEST_STATE, // Waiting for the join event. networkState = NETWORK_IDLE_STATE; // Network default state. static Uart1 uart1; struct Uart // Just stub for avoiding compiler warning. ; #define UART_BUFF_SIZE 80 static UartFxns uartFxns; static Uint8 uartTxBuff[UART_BUFF_SIZE]; static Uint8 uartRxBuff[UART_BUFF_SIZE]; void mainLoop(); // Main loop. void networkJoin(void); // Network joint indication. void networkLost(void); // Network loss indication. void dataIndication(const FW_DataIndication_t *params); // Data recieve indication handler. void initUART(); // Configurates and opens uart /******************************************************************************** User first entry point. ********************************************************************************/ void fw_userEntry(FW_ResetReason_t resetReason, bool isEepromCrcValid) //interrupts enabling TOSH_interrupt_enable(); // Uart initialization and opening. initUART(); leds_open(); buttons_open(NULL, NULL); // Set node role, PANID and channel mask. FW_Param_t param; // Set node role. param.id = FW_NODE_ROLE_PARAM_ID; param.value.role = ZIGBEE_COORDINATOR_TYPE; //this module will work as a coordinator.

88
fw_setParam(¶m); //Set MAC addr param.id = FW_MAC_ADDR_PARAM_ID; fw_getParam(¶m); if ((0xFFFFFFFFFFFFFFFFll == param.value.macAddr) || (0 == param.value.macAddr)) if (0 == MAC_ADDRESS) leds_on(MAC_ADDR_ERR_LED); else param.id = FW_MAC_ADDR_PARAM_ID; param.value.macAddr = MAC_ADDRESS; fw_setParam(¶m); // Set PANID. param.id = FW_PANID_PARAM_ID; fw_getParam(¶m); if ((0xFFFF == param.value.panID) || (0xFFFE == param.value.panID)) param.id = FW_PANID_PARAM_ID; param.value.panID = PANID; fw_setParam(¶m); // Set channel mask. param.id = FW_CHANNEL_MASK_PARAM_ID; fw_getParam(¶m); if (0x00000800 == param.value.channelMask) param.id = FW_CHANNEL_MASK_PARAM_ID; param.value.channelMask = CHANNEL_MASK; fw_setParam(¶m); // Register network events. FW_NetworkEvents_t handlers; handlers.joined = networkJoin; handlers.lost = networkLost; handlers.addNode = NULL; handlers.deleteNode = NULL; fw_registerNetworkEvents(&handlers);
89
// Register end-point for transmission and receive. fw_registerEndPoint(END_POINT, dataIndication); // Start main loop. fw_setUserLoop(100, mainLoop);// In this case loop time is not important_ // because the main task is executed by 'dataIndication' handler. /******************************************************************************** Main loop. ********************************************************************************/ void mainLoop() uint8_t button; switch (networkState) // In network. case NETWORK_JOINED_STATE: //waiting for dataIndication event break; // Network hasn't been started once. case NETWORK_IDLE_STATE: button = buttons_readState(); if (button&1) // Start network. networkState = NETWORK_JOIN_REQUEST_STATE; fw_joinNetwork(); break; case NETWORK_JOIN_REQUEST_STATE: static uint32_t ledTime = 0; if ((fw_getSystemTime() - ledTime) > LED_FLASH_DELAY) leds_toggle(NETWORK_LED); ledTime = fw_getSystemTime(); default: break; /******************************************************************************** Network joint indication. ********************************************************************************/ void networkJoin(void)

90
// Indicate network joint. leds_on(NETWORK_LED); networkState = NETWORK_JOINED_STATE; /******************************************************************************** Network loss indication. ********************************************************************************/ void networkLost(void) // Indicate network loss. if (networkState != NETWORK_JOIN_REQUEST_STATE) leds_off(NETWORK_LED); // Rejoin network. networkState = NETWORK_JOIN_REQUEST_STATE; fw_joinNetwork(); /******************************************************************************** Data recieve indication handler. ********************************************************************************/ void dataIndication(const FW_DataIndication_t *params) static char float2StrBuf[40]; // Buffer for conversion to string the received float value. typedef struct //Structure to receive data float f; //for sensor value NodeLogicalAddr_t logicalAddr; //for sensor channel indication ReceivedData_t; ReceivedData_t *receivedData; int stringLength; receivedData = (ReceivedData_t *) params->data; //Cast to our ReceivedData_t structure //String Construction stringLength = sprintf(float2StrBuf, "Sensor = %X, Dados = %d.%02d\r\n", (unsigned int)receivedData->logicalAddr, (int)receivedData->f, (int)(receivedData->f*100)%100); // send string to UART uartFxns.put(uartFxns.pUart, (Uint8*)float2StrBuf, stringLength); /******************************************************************************** inits and open uart ********************************************************************************/ void initUART()

91
UartMode mode; uart1_getFxns(&uartFxns); //provides a reference to UART1 interfaces implementation. uartFxns.pUart = (struct Uart*)&uart1; uart1_init(&uart1, uartTxBuff, UART_BUFF_SIZE, uartRxBuff, UART_BUFF_SIZE); mode.baudRate = UART_BAUD_RATE_9600; mode.dataBits = UART_DATA_BITS_8; mode.parity = UART_PARITY_NONE; mode.stopBits = UART_STOP_BITS_1; mode.flowCntrl.rts = false; mode.flowCntrl.cts = false; uartFxns.open(uartFxns.pUart, &mode);
// eof coordinator.c MakeFile para o software da placa de aquisição ############################################################################### # Makefile for enddevice ############################################################################### PROJECT = enddevice MCU = atmega1281 TARGET = $(PROJECT).elf CC = avr-gcc ## Options common to compile, link and assembly rules. COMMON = -mmcu=$(MCU) ## Compile options common for all C compilation units. CFLAGS = $(COMMON) CFLAGS += -Wall -D_WDM1281_ -Os -fsigned-char -fpack-struct -g ## Node configuration options CFLAGS += -D_ZBED_ ## Assembly specific flags. ASMFLAGS = $(COMMON) ASMFLAGS += -x assembler-with-cpp ## Linker flags. LDFLAGS = $(COMMON) LDFLAGS += ## Intel Hex file production flags. HEX_FLASH_FLAGS = -R .eeprom HEX_EEPROM_FLAGS = -j .eeprom HEX_EEPROM_FLAGS += --set-section-flags=.eeprom="alloc,load" HEX_EEPROM_FLAGS += --change-section-lma .eeprom=0 ## Used channels mask. CFLAGS += -DCHANNEL_MASK=(0x01L << 0x0B) CFLAGS += -DPANID=0xAAAA ## The eZeeNet network configuration parameters. CFLAGS += -DNWK_MAX_END_DEVICES=0 CFLAGS += -DNWK_MAX_ROUTER_NEIB_NUMBER=0 CFLAGS += -DNWK_MAX_DEPTH=2

92
CFLAGS += -DMAX_PAN_DESCRIPTORS=5 ## Path to Stack, StackSupport, HAL, TOSLib. SUPPORT_DIR = ../../eZeeNet #SUPPORT_DIR=$(wildcard ../../../WSN)$(wildcard ../../../trunk/src/WSN) ## Modules directories paths. APP_DIR = . STACK_DIR = $(SUPPORT_DIR)/Stack STACK_SUPPORT_DIR = $(SUPPORT_DIR)/StackSupport TOSLIB_DIR = $(SUPPORT_DIR)/TOSLib HAL_DIR = $(SUPPORT_DIR)/HAL/HAL_MESHBEAN FRAMEWORK_DIR = $(SUPPORT_DIR)/Framework ## Include Directories. INCLUDES = -I"$(STACK_DIR)/include" \ -I"$(TOSLIB_DIR)/include" \ -I"$(HAL_DIR)/base/include" \ -I"$(HAL_DIR)/eZeeNet/include" \ -I"$(HAL_DIR)/meshBean2/include" \ -I"$(STACK_SUPPORT_DIR)/include" \ -I"$(STACK_SUPPORT_DIR)/include/stack" \ -I"$(FRAMEWORK_DIR)/include" \ -I"$(SUPPORT_DIR)/HAL/HAL_MESHBEAN/base/interface" ## Library Directories LIBDIRS = -L"$(HAL_DIR)/lib" \ -L"$(TOSLIB_DIR)/lib" \ -L"$(FRAMEWORK_DIR)/lib" \ -L"$(STACK_SUPPORT_DIR)/lib" ## Libraries LIBS = -ltos \ -lmeshBean2 \ -lFW \ -lZigBitInt \ -lstackSupport \ -lc ## Objects explicitly added by the user LINKONLYOBJECTS = $(STACK_DIR)/lib/NWKMACLibA.o \ $(STACK_DIR)/lib/APLLibA.o \ $(HAL_DIR)/lib/wdtinit.o VPATH = $(APP_DIR): $(STACK_SUPPORT_DIR)/src ## Build all: clean $(TARGET) $(PROJECT).srec $(PROJECT).hex $(PROJECT).eep size OBJ = enddevice.o ConfigServer.o $(OBJ): %.o: %.c $(CC) -c $(CFLAGS) $(INCLUDES) $< -o $@ ##Link $(TARGET): $(OBJ) Makefile $(CC) $(CFLAGS) $(INCLUDES) $(OBJ) $(LINKONLYOBJECTS) -o $(TARGET) $(LIBDIRS) $(LIBS) -rm -rf *.o %.srec: $(TARGET)
93
avr-objcopy -O srec $(HEX_FLASH_FLAGS) $< $@ %.hex: $(TARGET) avr-objcopy -O ihex $(HEX_FLASH_FLAGS) $< $@ %.eep: $(TARGET) avr-objcopy $(HEX_EEPROM_FLAGS) -O ihex $< $@ %.lss: $(TARGET) avr-objdump -h -S $< > $@ size: @avr-size $TARGET ## Clean target clean: -rm -rf $(TARGET) $(PROJECT).srec $(PROJECT).hex $(PROJECT).eep -rm -rf *.o Make File do software da placa de interface ############################################################################### # Makefile for the project lowpower, coordinator ############################################################################### PROJECT = coordinator MCU = atmega1281 TARGET = $(PROJECT).elf CC = avr-gcc ## Options common to compile, link and assembly rules. COMMON = -mmcu=$(MCU) ## Compile options common for all C compilation units. CFLAGS = $(COMMON) CFLAGS += -Wall -D_WDM1281_ -Os -fsigned-char -fpack-struct -g ## Node configuration options CFLAGS += -D_COORDINATOR_ ## Assembly specific flags. ASMFLAGS = $(COMMON) ASMFLAGS += -x assembler-with-cpp ## Linker flags. LDFLAGS = $(COMMON) LDFLAGS += ## Intel Hex file production flags. HEX_FLASH_FLAGS = -R .eeprom HEX_EEPROM_FLAGS = -j .eeprom HEX_EEPROM_FLAGS += --set-section-flags=.eeprom="alloc,load" HEX_EEPROM_FLAGS += --change-section-lma .eeprom=0 ## Used channels mask. CFLAGS += -DCHANNEL_MASK=(0x01L << 0x0B) CFLAGS += -DPANID=0xAAAA ## The eZeeNet network configuration parameters. CFLAGS += -DNWK_MAX_END_DEVICES=8 CFLAGS += -DNWK_MAX_ROUTER_NEIB_NUMBER=0 CFLAGS += -DNWK_MAX_DEPTH=2 CFLAGS += -DMAX_PAN_DESCRIPTORS=5 ## Path to Stack, StackSupport, HAL, TOSLib.

94
SUPPORT_DIR = ../../eZeeNet #SUPPORT_DIR=$(wildcard ../../../WSN)$(wildcard ../../../trunk/src/WSN) ## Modules directories paths. APP_DIR = . STACK_DIR = $(SUPPORT_DIR)/Stack STACK_SUPPORT_DIR = $(SUPPORT_DIR)/StackSupport TOSLIB_DIR = $(SUPPORT_DIR)/TOSLib HAL_DIR = $(SUPPORT_DIR)/HAL/HAL_MESHBEAN FRAMEWORK_DIR = $(SUPPORT_DIR)/Framework ## Include Directories. INCLUDES = -I"$(STACK_DIR)/include" \ -I"$(TOSLIB_DIR)/include" \ -I"$(HAL_DIR)/base/include" \ -I"$(HAL_DIR)/eZeeNet/include" \ -I"$(HAL_DIR)/meshBean2/include" \ -I"$(STACK_SUPPORT_DIR)/include" \ -I"$(STACK_SUPPORT_DIR)/include/stack" \ -I"$(FRAMEWORK_DIR)/include" \ -I"$(SUPPORT_DIR)/HAL/HAL_MESHBEAN/base/interface" ## Library Directories LIBDIRS = -L"$(HAL_DIR)/lib" \ -L"$(TOSLIB_DIR)/lib" \ -L"$(FRAMEWORK_DIR)/lib" \ -L"$(STACK_SUPPORT_DIR)/lib" ## Libraries LIBS = -ltos \ -lmeshBean2 \ -lFW \ -lZigBitInt \ -lstackSupport \ -lc ## Objects explicitly added by the user LINKONLYOBJECTS = $(STACK_DIR)/lib/NWKMACLibA.o \ $(STACK_DIR)/lib/APLLibA.o \ $(HAL_DIR)/lib/wdtinit.o VPATH = $(APP_DIR): $(STACK_SUPPORT_DIR)/src ## Build all: clean $(TARGET) $(PROJECT).srec $(PROJECT).hex $(PROJECT).eep size OBJ = coordinator.o ConfigServer.o $(OBJ): %.o: %.c $(CC) -c $(CFLAGS) $(INCLUDES) $< -o $@ ##Link $(TARGET): $(OBJ) Makefile $(CC) $(CFLAGS) $(INCLUDES) $(OBJ) $(LINKONLYOBJECTS) -o $(TARGET) $(LIBDIRS) $(LIBS) -rm -rf *.o %.srec: $(TARGET) avr-objcopy -O srec $(HEX_FLASH_FLAGS) $< $@

95
%.hex: $(TARGET) avr-objcopy -O ihex $(HEX_FLASH_FLAGS) $< $@ %.eep: $(TARGET) avr-objcopy $(HEX_EEPROM_FLAGS) -O ihex $< $@ %.lss: $(TARGET) avr-objdump -h -S $< > $@ size: @avr-size $TARGET ## Clean target clean: -rm -rf $(TARGET) $(PROJECT).srec $(PROJECT).hex $(PROJECT).eep -rm -rf *.o

96
Anexo E Datasheet do módulo ZigBit (Na Próxima pagina)
DOC. M-251~01 V.1.14 WWW.MESHNETICS.COM DECEMBER 2007
ZigBit™ OEM Modules ZDM-A1281-*
Ultra-Compact 2.4GHz 802.15.4/ZigBee Modules
for Wireless Networking Applications
Product Datasheet
© 2007 MeshNetics

ZigBit™ OEM Modules Product Datasheet
Table of Contents Summary ............................................................................................................................................................. 3 Applications ........................................................................................................................................................ 3 Key features ........................................................................................................................................................ 3 Benefits................................................................................................................................................................ 3 ZigBit™ Module Overview ................................................................................................................................. 4 Specifications ..................................................................................................................................................... 5 Absolute Maximum Ratings**............................................................................................................................ 6 Physical/Environmental Characteristics and Outline ..................................................................................... 7 Pin Configuration................................................................................................................................................ 8 Mounting Information....................................................................................................................................... 12 Sample Antenna Reference Designs.............................................................................................................. 13 Agency Certifications....................................................................................................................................... 18 Related Documents .......................................................................................................................................... 20 Ordering Information........................................................................................................................................ 21 Disclaimer.......................................................................................................................................................... 22 Trademarks ....................................................................................................................................................... 22 Technical Support ............................................................................................................................................ 22 Contact Information.......................................................................................................................................... 22
© 2007 MeshNetics Page 2 of 22

ZigBit™ OEM Modules Product Datasheet
SummaryZigBit™ stands for ultra-compact, low-power, high-sensitivity 2.4GHz 802.15.4/ZigBee OEM modules from MeshNetics, based on the innovative Atmel’s mixed-signal hardware platform. They are designed for wireless sensing, control and data acquisition applications. The ZigBit modules eliminate the need for costly and time-consuming RF development, and shorten time to market for a wide range of wireless applications.
Two different versions of ZigBit modules are available: ZDM-A1281-B0 module with balanced RF port for applications where the benefits of PCB or external antenna can be utilized and ZDM-A1281-A2 module with dual chip antenna satisfying the needs of size sensitive applications.
ApplicationsZigBit features standards-based networking stack, based on IEEE802.15.4 PHY and MAC layers, and ZigBee NWK/APS/ZDO layers. It enables multipoint, multihop communications over an area of thousands of square meters at moderate data rates without expensive infrastructure support. The architecture of the Wireless Sensor Networks (WSN) allows for use of low powered devices. The applications include, but are not limited to:
• Building automation & monitoring • Lighting controls • Wireless smoke and CO detectors • Structural integrity monitoring
• HVAC monitoring & control • Inventory management • Environmental monitoring • Security
Key features• Ultra compact size (24 x 13.5 mm for
ZDM-A1281-A2 module and 18.8 x 13.5 mm for ZDM-A1281-B0 module)
• Innovative (patent-pending) balanced dual chip antenna design with antenna gain of approximately 0 dBi (for ZDM-A1281-A2 version)
• High RX sensitivity (-101 dBm) • Outperforming link budget (104 dB) • Up to 3 dBm output power • Very low power consumption
(< 6 µA in sleep mode) • Ample memory resources (128K bytes of flash
memory, 8K bytes RAM, 4K bytes EEPROM) • Wide range of interfaces (both analog and digital):
• 9 spare GPIO, 2 spare IRQ lines • 4 ADC lines + 1 line for supply voltage control
(up to 9 lines with JTAG disabled) • UART with CTS/RTS control • USART • I
2C
• SPI • 1-Wire • Up to 30 lines configurable as GPIO
• Capability to write own MAC address into the EEPROM
• Optional antenna reference designs • IEEE 802.15.4 compliant • 2.4 GHz ISM band • eZeeNet embedded software, including UART
bootloader and AT command set
• Water metering • Industrial monitoring
• Machinery condition and performance monitoring • Monitoring of plant system parameters such as
temperature, pressure, flow, tank level, humidity, vibration, etc.
• Automated meter reading (AMR)
Benefits • Less physical space constraints • Best-in-class RF link range • Longer battery life • Easy prototyping with 2-layer PCB • More memory for user software application • Mesh networking capability • Easy-to-use low cost Evaluation Kit • Single source of support for HW and SW • Worldwide license-free operation
© 2007 MeshNetics Page 3 of 22

ZigBit™ OEM Modules Product Datasheet
ZigBit™ Module Overview ZigBit is a low-power, high-sensitivity IEEE802.15.4/ ZigBee-compliant OEM module. This multi-functional device occupies less than a square inch of space, which is comparable to a typical size of a single chip. Based on a solid combination of Atmel’s latest AVR Z-Link hardware platform [1], the ZigBit offers superior radio performance with exceptional ease of integration.
AT86RF230RF
Transceiver
ATmega1281Micro
controller RF I/O
SPI BusGPIO
VCC (1.8 – 3.6V)
UART
I2CJTAG
Analog
IRQ
USART/SPIZigBit modules comply with the FCC (Part 15), IC and ETSI (CE) rules applicable to the devices radiating in uncontrolled environment. For details, see section Agency Certifications below.
ZigBit fully satisfies the requirements of the “Directive 2002/95/EC of the European Parliament and the Council of 27January 2003 on the restriction of the use of certain hazardous substances in electrical and electronic equipment” (RoHS). MeshNetics provides fully compliant product in all regions where the directive is enforced July 1, 2006.
ATmega1281Micro
controller
SPI BusGPIO
VCC (1.8 – 3.6V)
UART
I2CJTAG
Analog
IRQ
AT86RF230RF
Transceiver
Chip Antenna
USART/SPI
The ZigBit contains Atmel’s ATmega1281V Microcontroller [1] and AT86RF230 RF Transceiver [2]. The module features 128kb flash memory and 8 kb RAM. The ZigBit already contains a complete RF/MCU-relateddesign with all the necessary passive componentsincluded. The module can be easily mounted on a simple2-layer PCB. Compared to a single-chip, a module-basedsolution offers considerable savings in development time& NRE cost per unit during the design & prototypingphase.
Innovative (patent-pending) dual chip antenna design inZDM-A1281-A2 module eliminates the balun and achieves good performance over ZigBee frequency band.
MeshNetics provides tools for building ready-to-use applications around the ZigBit module. The Development Kit helps prototyping and testing an 802.15.4 or ZigBee networking solution. It includes the sensor boards with multiple interfaces, an out-of-the-box data acquisition software suite, as well as accessories and documentation. The sample data-acquisition application allows network monitoring and sensor data collection, all visualized via graphic interface.
The ZigBit modules come bundled with the eZeeNet networking firmware. The eZeeNet enables the module-based OEM products to form self-healing, self-organizing mesh networks. The eZeeNet stack conforms to IEEE802.15.4/ ZigBee specifications [3], [4], [5].
Depending on your design requirements, you can use the ZigBit to operate a sensor node, where it would function as a single MCU. Or you can pair it to a host processor, where the module would serve essentially as a modem.
In the former case, a user application should be bundled with the eZeeNet Software. The eZeeNet’s programming interface gives users flexibility to manage network and minimize power consumption.
ZDM-A1281-B0 Block Diagram
ZDM-A1281-A2 Block Diagram
eZeeNet™ Block Diagram
© 2007 MeshNetics Page 4 of 22

ZigBit™ OEM Modules Product Datasheet In the latter case, the host processor can control data transmission and manage module peripherals via powerful set of AT commands. This way, a minimum engineering effort for development of customer’s devices is required. Additionally, the sensors can be connected directly to the module, thus expanding the existing set of sensor interfaces. The over-the-air control via AT-commands makes debugging and network testing easier. It also enables wireless module configuration during OEM mass-production process and provides flexible commissioning protocol for installation and maintenance of ZigBit-based devices.
The eZeeNet is compact private profile software from MeshNetics that is specifically tailored for data acquisition applications. It allows optimizing the network traffic, reducing power consumption, scheduling, and smart power management. The eZeeNet software comes with a set of drivers for standard peripherals (I2C, GPIO, ADC, etc.) that ensure the ZigBit module easy integration.
SpecificationsTest Conditions (unless otherwise stated): Vcc= 3 V, f=2.45 GHz, Tamb= 25 °C
Module Operating Conditions Parameters Range Unit Condition
Supply Voltage (Vcc) 1.8 to 3.6 V
Current Consumption: RX mode 19 mA see Note
Current Consumption: TX mode 18 mA see Note
Current Consumption: Radio is turned off, MCU is active for 50% of the time.
14 mA see Note
Current Consumption: Power Save mode 6 μA see Note
Note: Parameters specified above are measured under the following conditions:
• eZeeNet software is running at 4 MHz clock rate, DTR line management is turned off
• all interfaces are set to the default state (see Pin Assignment Table)
• output TX power is 0 dBm
• JTAG is not connected
• Vcc = 3.0 V
• actual current consumption depends on multiple factors, including but not limited to the board design and materials, extra MCU load by user’s application, peripherals usage, EEPROM reading/writing, eZeeNet settings, network activity and so on.
RF Characteristics Parameters Range Unit Condition
Frequency Band 2.400 to 2.4835 GHz
Number of Channels 16
Channel Spacing 5 MHz
Transmitter Output Power -17 to +3 dBm Adjusted in 16 steps
Receiver Sensitivity - 101 dBm PER = 1%
On-Air Data Rate 250 kbps
TX Output / Rx Input Nominal Impedance 100 Ohms For balanced output
© 2007 MeshNetics Page 5 of 22

ZigBit™ OEM Modules Product Datasheet
ATmega1281V Microcontroller Characteristics Parameters Range Unit Condition
On-Chip Flash Memory Size 128K bytes
On-Chip RAM Size 8K bytes
On-Chip EEPROM Size 4K bytes
Operation Frequency 4 MHz
Module Interfaces Characteristics Parameters Range Unit Condition
UART Maximum Baud Rate 38.4 kbps
ADC Resolution / Conversion Time 10 / 200 Bits / μs In the single conversion mode
ADC Input Resistance > 1 MOhm
ADC Reference Voltage (Vref) 1.0 to Vcc - 0.3 V
ADC Input Voltage 0 ÷ Vref V
I2C Maximum Clock 222 kHz
GPIO Output Voltage (High/Low) 2.3 / 0.5 V (-10 / 5 mA)
Real Time Oscillator Frequency 32.768 kHz
Absolute Maximum Ratings**Parameter Min Value Max Value
Voltage of any Pin except RESET with respect to Ground
-0.5 V Vcc + 0.5 V
DC Current per I/O Pin 40 mA
DC Current D_VCC and DGND Pins 200 mA
Input RF Level +10 dBm
**Absolute Maximum Ratings are the values beyond which damage to the device may occur. Under no circumstances must the absolute maximum ratings given in this table be violated. Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device.
This is a stress rating only. Functional operation of the device at these or other conditions, beyond those indicated in the operational sections of this specification, is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.
Attention! ESD-sensitive device. Precaution should be taken when handling the device in order to prevent permanent damage.
© 2007 MeshNetics Page 6 of 22

ZigBit™ OEM Modules Product Datasheet
Physical/Environmental Characteristics and OutlineParameter Value Notes
Size 18.8 x 13.5 x 2.8 mm ZDM-A1281-B0
24.0 x 13.5 x 2.8 mm ZDM-A1281-A2
Weight 1.3 g ZDM-A1281-B0
1.5 g ZDM-A1281-A2
Operating Temperature Range -20°C to +70°C -40°C to +85°C operational*
Operating Relative Humidity Range
no more than 80%
ZDM-A1281-B0 Mechanical Drawing
17,3±0,2
12,0
±0,2
13,5
±0,2
18,8±0,2
0,8-0.2
2,0±0,11,0 typ 0,7±0,1
118
1925
26 43
4448
All dimensions are in millimeters
ZDM-A1281-A2 Mechanical Drawing
17,3±0,2
12,0
±0,2
13,5
±0,2
24,0±0,2
0,8-0.2
2,0±0,11,0 typ 0,7±0,1
118
1925
26 43
All dimensions are in millimeters
* Minor degradation of clock stability may occur
© 2007 MeshNetics Page 7 of 22
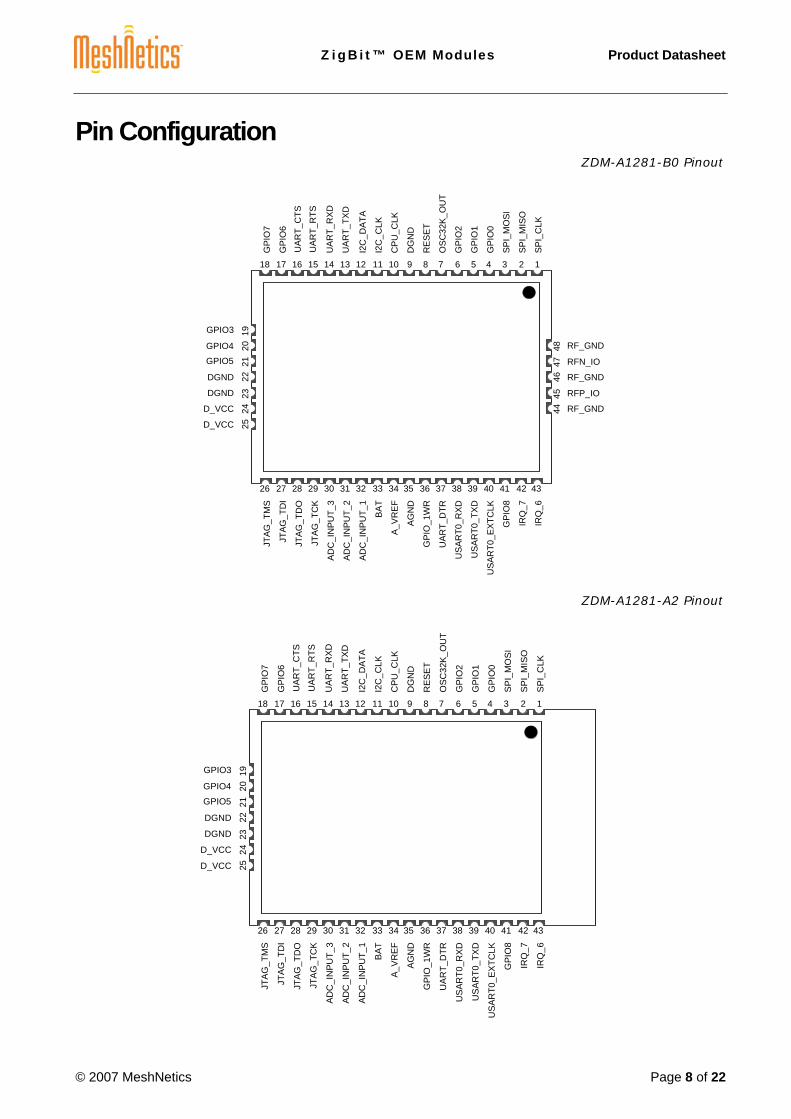
ZigBit™ OEM Modules Product Datasheet
Pin ConfigurationZDM-A1281-B0 Pinout
118
1925
43
234567891011121314151617
26 3433323130292827 35 42414039383736
2021
2223
24
4847
4645
44
SPI_
CLK
SPI_
MIS
O
SPI_
MO
SI
GPI
O0
GPI
O1
GPI
O2
OSC
32K_
OU
T
RE
SET
DG
ND
CP
U_C
LK
I2C
_CLK
I2C
_DAT
A
UA
RT_
RXD
UA
RT_
TXD
GPI
O6
GPI
O7
IRQ
_6
IRQ
_7
GP
IO8
USA
RT0
_EXT
CLK
USA
RT0
_TXD
US
ART0
_RXD
UA
RT_
DTR
GP
IO_1
WR
AG
ND
A_V
RE
F
BA
T
ADC
_IN
PUT_
1
ADC
_IN
PUT_
2
ADC
_IN
PUT_
3
JTAG
_TC
K
JTAG
_TD
O
JTAG
_TD
I
JTAG
_TM
S
GPIO3
UAR
T_C
TS
UAR
T_R
TS
DGND
DGND
D_VCC
D_VCC
RF_GND
RFP_IO
RF_GND
RFN_IO
RF_GND
GPIO4
GPIO5
ZDM-A1281-A2 Pinout
118
1925
43
234567891011121314151617
26 3433323130292827 35 42414039383736
2021
2223
24
SP
I_C
LK
SP
I_M
ISO
SP
I_M
OSI
GPI
O0
GPI
O1
GPI
O2
OSC
32K_
OU
T
RES
ET
DG
ND
CPU
_CLK
I2C
_CLK
I2C
_DAT
A
UAR
T_R
XD
UAR
T_TX
D
GPI
O6
GPI
O7
IRQ
_6
IRQ
_7
GPI
O8
USA
RT0
_EXT
CLK
USA
RT0
_TX
D
USA
RT0
_RX
D
UA
RT_
DTR
GP
IO_1
WR
AGN
D
A_V
REF
BAT
ADC
_IN
PUT_
1
ADC
_IN
PUT_
2
ADC
_IN
PUT_
3
JTAG
_TC
K
JTAG
_TD
O
JTA
G_T
DI
JTAG
_TM
S
GPIO3
UA
RT_
CTS
UA
RT_
RTS
DGND
DGND
D_VCC
D_VCC
GPIO4
GPIO5
© 2007 MeshNetics Page 8 of 22

ZigBit™ OEM Modules Product Datasheet
Pin Assignment Table
Connector Pin Pin Name Description I/O
Default State after
power on
Notes, see the list below
1 SPI_CLK Reserved for stack operation O 3
2 SPI_MISO Reserved for stack operation I/O 3
3 SPI_MOSI Reserved for stack operation I/O 3
4 GPIO0 General purpose digital input/output 0 I/O tri-state 1, 2, 3, 6
5 GPIO1 General purpose digital input/output 1 I/O tri-state 1, 2, 3, 6
6 GPIO2 General purpose digital input/output 2 I/O tri-state 1, 2, 3, 6
7 OSC32K_OUT 32.768 kHz clock output. O 3, 4
8 RESET Reset input (active low). I 3
9, 22, 23 DGND Digital ground
10 CPU_CLK
RF clock output. When module is in active state, 4 MHz signal is present on this line. While module is in the sleeping state, clock generation is stopped also.
O
3
11 I2C_CLK I2C serial clock output O tri-state 1, 2, 3, 6
12 I2C_DATA I2C serial data input/output I/O tri-state 1, 2, 3, 6
13 UART_TXD UART receive input I tri-state 1, 2, 3, 6
14 UART_RXD UART transmit output O tri-state 1, 2, 3, 6
15 UART_RTS RTS input (Request To Send) for UART hardware flow control. Active low. I tri-state 1, 2, 3, 6
16 UART_CTS CTS output (Clear To Send) for UART hardware flow control. Active low. O tri-state 1, 2, 3, 6,
7
17 GPIO6 General purpose digital input/output 6 I/O tri-state 1, 2, 3, 6
18 GPIO7 General purpose digital input/output 7 I/O tri-state 1, 2, 3, 6
19 GPIO3 General purpose digital input/output 3 I/O tri-state 1, 2, 3, 6
20 GPIO4 General purpose digital input/output 4 I/O tri-state 1, 2, 3, 6
21 GPIO5 General purpose digital input/output 5 I/O tri-state 1, 2, 3, 6
24, 25 D_VCC Digital supply voltage (Vcc) 8
26 JTAG_TMS JTAG test mode select I 1, 2, 3, 5
27 JTAG_TDI JTAG test data input I 1, 2, 3, 5
28 JTAG_TDO JTAG test data output O 1, 2, 3, 5
29 JTAG_TCK JTAG test clock I 1, 2, 3, 5
30 ADC_INPUT_3 ADC input channel 3 I tri-state 1, 2, 6
31 ADC_INPUT_2 ADC input channel 2 I tri-state 1, 2, 6
32 ADC_INPUT_1 ADC input channel 1 I tri-state 1, 2, 6
33 BAT ADC input channel 0. Used by the stack for battery level measurement. Nominal voltage to AGND is 1 V .
I tri-state 1, 2, 6
34 A_VREF Output/Input reference voltage for ADC I/O tri-state
© 2007 MeshNetics Page 9 of 22
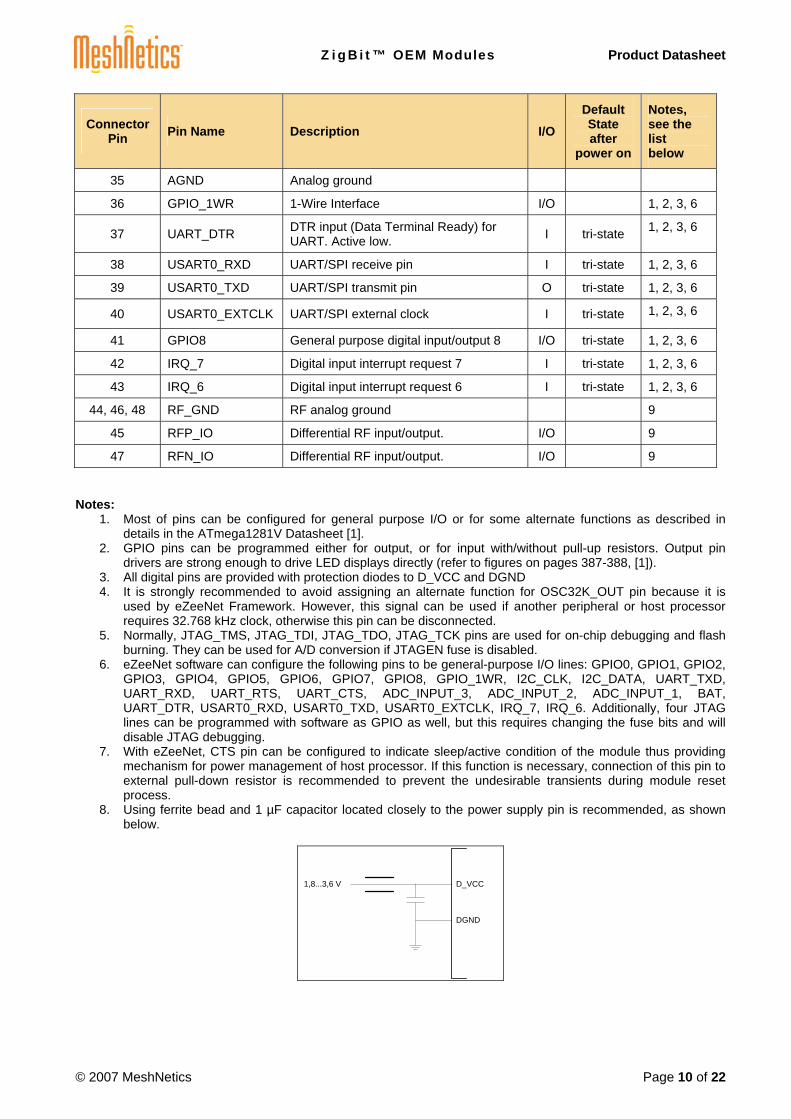
ZigBit™ OEM Modules Product Datasheet
Default Notes, Connector
Pin Pin Name Description I/O State see the after list
power on below
35 AGND Analog ground
36 GPIO_1WR 1-Wire Interface I/O 1, 2, 3, 6
37 UART_DTR DTR input (Data Terminal Ready) for UART. Active low. I tri-state 1, 2, 3, 6
38 USART0_RXD UART/SPI receive pin I tri-state 1, 2, 3, 6
39 USART0_TXD UART/SPI transmit pin O tri-state 1, 2, 3, 6
40 USART0_EXTCLK UART/SPI external clock I tri-state 1, 2, 3, 6
41 GPIO8 General purpose digital input/output 8 I/O tri-state 1, 2, 3, 6
42 IRQ_7 Digital input interrupt request 7 I tri-state 1, 2, 3, 6
43 IRQ_6 Digital input interrupt request 6 I tri-state 1, 2, 3, 6
44, 46, 48 RF_GND RF analog ground 9
45 RFP_IO Differential RF input/output. I/O 9
47 RFN_IO Differential RF input/output. I/O 9 Notes:
1. Most of pins can be configured for general purpose I/O or for some alternate functions as described in details in the ATmega1281V Datasheet [1].
2. GPIO pins can be programmed either for output, or for input with/without pull-up resistors. Output pin drivers are strong enough to drive LED displays directly (refer to figures on pages 387-388, [1]).
3. All digital pins are provided with protection diodes to D_VCC and DGND 4. It is strongly recommended to avoid assigning an alternate function for OSC32K_OUT pin because it is
used by eZeeNet Framework. However, this signal can be used if another peripheral or host processor requires 32.768 kHz clock, otherwise this pin can be disconnected.
5. Normally, JTAG_TMS, JTAG_TDI, JTAG_TDO, JTAG_TCK pins are used for on-chip debugging and flash burning. They can be used for A/D conversion if JTAGEN fuse is disabled.
6. eZeeNet software can configure the following pins to be general-purpose I/O lines: GPIO0, GPIO1, GPIO2, GPIO3, GPIO4, GPIO5, GPIO6, GPIO7, GPIO8, GPIO_1WR, I2C_CLK, I2C_DATA, UART_TXD, UART_RXD, UART_RTS, UART_CTS, ADC_INPUT_3, ADC_INPUT_2, ADC_INPUT_1, BAT, UART_DTR, USART0_RXD, USART0_TXD, USART0_EXTCLK, IRQ_7, IRQ_6. Additionally, four JTAG lines can be programmed with software as GPIO as well, but this requires changing the fuse bits and will disable JTAG debugging.
7. With eZeeNet, CTS pin can be configured to indicate sleep/active condition of the module thus providing mechanism for power management of host processor. If this function is necessary, connection of this pin to external pull-down resistor is recommended to prevent the undesirable transients during module reset process.
8. Using ferrite bead and 1 µF capacitor located closely to the power supply pin is recommended, as shown below.
D_VCC
DGND
1,8...3,6 V
© 2007 MeshNetics Page 10 of 22

ZigBit™ OEM Modules Product Datasheet
9. Pins 44 through 48 are not designed for the ZDM-A1281-A2 module. Note these pins are used in ZDM-A1281-B0, see them in antenna schematics below.
Typical Antenna Schematics
two capacitors*
RF_GND
RFP_IO
RF_GND
RFN_IO
RF_GND
44
45
46
47
48
*) 0402,22pF+/-5%, NP0 High Freq GradeMurata GRM1555C1H220JZ0D
Balun TDK’sHHM1520
24
3
5
16=Not
Connected
SMAConnector
For ZDM-A1281-B0 combined with External Antenna
© 2007 MeshNetics Page 11 of 22

ZigBit™ OEM Modules Product Datasheet
Mounting Information
ZDM-A1281-B0 PCB Recommended Layout, Top View
19,7
14,4
0,8
1,2
118
1925
4326
4844
All dimensions are in millimeters
1,0
ZDM-A1281-A2 PCB Recommended Layout, Top View
14,4
0,8
1,2
118
1925
4326
All dimensions are in millimeters
0,5
0,9
3,8
1,0
24,0
The above diagrams show the PCB layout recommended for ZigBit module. Neither via-holes nor wires are allowed on the PCB upper layer in area occupied by the module. As a critical requirement, RF_GND pins should be grounded via several holes to be located right next to the pins thus minimizing inductance and preventing both mismatch and losses.
© 2007 MeshNetics Page 12 of 22

ZigBit™ OEM Modules Product Datasheet
Sample Antenna Reference DesignsThis section presents PCB designs which combine ZigBit with different antennas: PCB onboard antenna, external antenna and dual chip antenna. These antenna reference designs are recommended for successful design-in.
PCB Layout: Symmetric Dipole Antenna recommended for ZDM-A1281-B0
ZigBit Module
ZigBit Module
60,0
4,0
1,2
6,5
25,0
3,3
3,3
Metallization, wires, through holes are unallowed
Metallization
Area supporting the components
11,5
11,5
52,5
1,2
Top side
Bottom side
Material: FR-4. thickness 1.6 mmMetallization: 35 umCoating: HASL, solder mask
All dimensions are in millimeters
2 through holes O3,01,
8
4,6
1,9
3,0
Metallized through holes O0.3~0.4Recommended step 1 mm
1,2
21,0
2,6
1,4
5,2
1.8
1,2
0,7
2,0
Two capacitors 0402,22pF+/-5%, NP0 High Freq GradeMurata GRM1555C1H220JZ0D
The symmetric dipole antenna above has been tuned for the particular design. The ‘cut-and-paste’ approach would not guarantee optimal performance because of multiple factors affecting proper antenna match, hence, affecting the pattern. The particular factors are the board material and thickness, shields, the material used for enclosure, the board neighborhood, and other components adjacent to antenna.
© 2007 MeshNetics Page 13 of 22

ZigBit™ OEM Modules Product Datasheet General recommendations: • Metal enclosure should not be used. Using low profile enclosure might also affect antenna tuning. • Placing high profile components next to antenna should be avoided. • Having holes punched around the periphery of the board eliminates parasitic radiation from the board edges
also distorting antenna pattern. • ZigBit module should not be placed next to consumer electronics which might interfere with ZigBit’s RF
frequency band.
543210-1-2-3-4-5
-10
0º
22,5º
45º
67,5º90º112,5º
135º
157,5º
180º
202,5º
225º
247,5º270º
292,5º
315º
337,5ºZDM-A1281-B0
PCB Antenna
Battery compartment
X
Y
X
Z Y210
67,5º90º
112,5º
270º
Z
-1-2-3-4-5
0º
22,5º
135º
157,5º
180º
202,5º
225º
247,5º 292,5º
315º
337,5º
-6-7-8-9-10
-15
-20
45º
ZDM-A1281-B0: Symmetric Dipole Antenna Pattern
(horizontal plane)
ZDM-A1281-B0:Symmetric Dipole Antenna Pattern
(vertical plane)
Nylon leg
© 2007 MeshNetics Page 14 of 22

ZigBit™ OEM Modules Product Datasheet
PCB Layout with 50 Ohm External Antenna recommended for ZDM-A1281-B0
Battery compartment
ZDM-A1281-B0
Nylon leg
External Antenna Connector
Material: FR-4. thickness 1.6 mmMetallization: 35 umCoating: HASL, solder maskDetailed dimensions: see datasheets for Balun and SMA-Connector
Metallization, wires, through holes are unallowed
Metallization
Area supportingthe components
Top side
Bottom side
All dimensions are in millimeters
2,0
7,5 2,
6
0,7
1,7
5,1
Balun TDK’s HHM1520
SMA-Connector
Metallized through holes O0,3~0,4Recommended step 1 mm
0,9
3,4
5,0
0,9
5,0
4 through holes O1,9
Two capacitors 0402,22pF+/-5%, NP0 High Freq GradeMurata GRM1555C1H220JZ0D
In case the external unbalanced 50 Ohm antenna is required, it can be easily interfaced to ZDM-A1281-B0 module by using 2:1 balun as shown above. This reference design demonstrates how to use SMA connector.
© 2007 MeshNetics Page 15 of 22

ZigBit™ OEM Modules Product Datasheet
PCB Layout with Dual Chip Antenna Module recommended for ZDM-A1281-A2
ZigBit Module
ZigBit Module
6,5
Metallized through holes O0.3~0.4Recommended step 1 mm
60,0
2 through holes O3,0
3,5
Metallization, wires, through holes are unallowed
Metallization
Area supportingthe components
Top side
Bottom side
Material: FR-4. thickness 1.6 mmMetallization: 35 umCoating: HASL, solder mask
All dimensions are in millimeters
3,5
Normally, chip antennas are more tolerant of the board or enclosure materials in ZigBit’s neighborhood as well. However, general recommendations given above for the PCB antenna design still apply.
The board design should prevent propagation of microwave field inside the board material. Electromagnetic waves of high frequency may penetrate the board thus making the edges of the board radiate, which may distort the antenna pattern. To eliminate this effect, metalized and grounded holes must be placed around the board’s edges as shown..
Since the design of dual chip antenna is intended for installation on FR-4 board 1.6 mm thick, the antenna performance may only be guaranteed for the particular board type and thickness.
© 2007 MeshNetics Page 16 of 22

ZigBit™ OEM Modules Product Datasheet
Note:
The antenna patterns presented above were observed using PCB enhanced with legs made of original nylon.
© 2007 MeshNetics Page 17 of 22

ZigBit™ OEM Modules Product Datasheet
Agency Certifications UNITED STATES (FCC)
This equipment complies with Part 15 of the FCC rules and regulations.
To fulfill FCC Certification requirements, an OEM manufacturer must comply with the following regulations:
1. The modular transmitter must be labelled with its own FCC ID number, and, if the FCC ID is not visible when the module is installed inside another device, then the outside of the device into which the module is installed must also display a label referring to the enclosed module. This exterior label can use wording such as the following:
Example of label required for OEM product containing ZDM-A1281-A2 module
Contains FCC ID: U6TZIGBIT-A2
The enclosed device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (i.) this device may not cause harmful interference and (ii.) this device must accept any interference received, including interference that may cause undesired operation.
Example of label required for OEM product containing ZDM-A1281-B0 module
Contains FCC ID: U6TZIGBIT-B0
The enclosed device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (i.) this device may not cause harmful interference and (ii.) this device must accept any interference received, including interference that may cause undesired operation.
Any similar wording that expresses the same meaning may be used.
2. To be used with the ZDM-A1281-B0 module, the external antennas have been tested and approved which are specified in herebelow. The ZDM-A1281-B0 Module may be integrated with other custom design antennas which OEM installer must authorize following the FCC 15.21 requirements.
WARNING: The Original Equipment Manufacturer (OEM) must ensure that the OEM modular transmitter must be labeled with its own FCC ID number. This includes a clearly visible label on the outside of the final product enclosure that displays the contents shown below. If the FCC ID is not visible when the equipment is installed inside another device, then the outside of the device into which the equipment is installed must also display a label referring to the enclosed equipment.
IMPORTANT: This equipment complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation (FCC 15.19).
The internal / external antenna(s) used for this mobile transmitter must provide a separation distance of at least 20 cm from all persons and must not be co-located or operating in conjunction with any other antenna or transmitter.
Installers must be provided with antenna installation instructions and transmitter operating conditions for satisfying RF exposure compliance. This device is approved as a mobile device with respect to RF exposure compliance, and may only be marketed to OEM installers. Use in portable exposure conditions (FCC 2.1093) requires separate equipment authorization.
IMPORTANT: Modifications not expressly approved by this company could void the user's authority to operate this equipment (FCC section 15.21).
IMPORTANT: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense (FCC section 15.105).
© 2007 MeshNetics Page 18 of 22

ZigBit™ OEM Modules Product Datasheet
CANADA (IC) Equipment is subject to certification under the applicable RSSs, shall be permanently labelled on each item, or as an inseparable combination. The label must contain the following information for full compliance:
For ZDM-A1281-A2 module:
Certification Number: IC: 7036A-ZIGBITA2
Manufacturer’s Name, Trade Name or Brand Name: ZIGBIT
Model Name: ZDM-A1281-A2
For ZDM-A1281-B0 module:
Certification Number: IC: 7036A-ZIGBITB0
Manufacturer’s Name, Trade Name or Brand Name: ZIGBIT
Model Name: ZDM-A1281-B0
IMPORTANT: This equipment for which a certificate has been issued is not considered certified if it is not properly labelled. The information on the Canadian label can be combined with the manufacturer’s other labelling requirements
IMPORTANT: Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.
IMPORTANT: To reduce potential radio interference to other users, the antenna type and its gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than that permitted for successful communication.
IMPORTANT: The installer of this radio equipment must ensure that the antenna is located or pointed such that it does not emit RF field in excess of Health Canada limits for the general population. Consult Safety Code 6, obtainable from Health Canada’s website www.hc-sc.gc.ca/rpb.
EUROPEAN UNION (ETSI)
The ZDM-A1281-A2 and ZDM-A1281-B0 Modules has been certified for use in European Union countries.
If the ZDM-A1281-A2 and ZDM-A1281-B0 Modules are incorporated into a product, the manufacturer must ensure compliance of the final product to the European harmonized EMC and low-voltage/safety standards. A Declaration of Conformity must be issued for each of these standards and kept on file as described in Annex II of the R&TTE Directive.
Furthermore, the manufacturer must maintain a copy of the ZDM-A1281-A2 and ZDM-A1281-B0 Modules documentation and ensure the final product does not exceed the specified power ratings, antenna specifications, and/or installation requirements as specified in the user manual. If any of these specifications are exceeded in the final product, a submission must be made to a notified body for compliance testing to all required standards.
IMPORTANT: The 'CE' marking must be affixed to a visible location on the OEM product. The CE mark shall consist of the initials "CE" taking the following form:
• If the CE marking is reduced or enlarged, the proportions given in the above graduated drawing must be respected.
• The CE marking must have a height of at least 5mm except where this is not possible on account of the nature of the apparatus.
• The CE marking must be affixed visibly, legibly, and indelibly.
More detailed information about CE marking requirements you can find at “DIRECTIVE 1999/5/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL” on 9 March 1999 at section 12.
Certification Approved Antennas list is presented in below.
© 2007 MeshNetics Page 19 of 22

ZigBit™ OEM Modules Product Datasheet
Approved Antenna List ZDM-A1281-A2 Module works with integrated dual chip antenna. The design of the antenna is fully
compliant with all the aforementioned regulation.
ZDM-A1281-B0 Module has been tested and approved for use with the antennas listed in the table below. ZDM-A1281-B0 Module may be integrated with other custom design antennas which OEM installer must authorize with respective regulatory agencies.
Part Number Manufacturer & Description Gain, dBi Min. Separation, cm
2010B4844-01 Antenova Titanis, swivel antenna (1/4 wave antenna) with SMA connector, frequency range 2.4-2.5 GHz
4.1 20
17010.10 WiMo, swivel antenna (1/2 wave antenna) with SMA connector, frequency range 2.35-2.5 GHz
2.1 20
Related Documents[1] Atmel 8-bit AVR Microcontroller with 64K/128K/256K Bytes In-System Programmable Flash.
2549F-AVR-04/06
[2] Atmel Low-Power Transceiver for ZigBee Applications. AT86RF230 Target Specification. 5131A-ZIGB-08/15/05
[3] IEEE Std 802.15.4-2003 IEEE Standard for Information technology – Part 15.4 Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (LR-WPANs)
[4] ZigBee Specification. ZigBee Document 053474r14, November 03, 2006
[5] eZeeNet™ IEEE802.15.4/ZigBee Software. Product Datasheet. MeshNetics Doc. M-251~02
© 2007 MeshNetics Page 20 of 22

ZigBit™ OEM Modules Product Datasheet
Ordering InformationContact MeshNetics for ordering ZigBit modules and/or ZigBit Development Kit.
Please specify the product part number and description when ordering ZigBit modules:
Part Number Description
ZDM-A1281-B0 2.4 GHz IEEE802.15.4/ZigBee OEM Module w/ Balanced RF Port
ZDM-A1281-A2 2.4 GHz IEEE802.15.4/ZigBee OEM Module with dual chip antenna
The ZigBit Development Kit is offered with 2 support packages:
• ZigBit Development Kit Lite offers access to standard evaluation and development tools and comes with 45 days of complimentary support. This option is good for product demonstration, platform evaluation and quick application prototyping.
• ZigBit Development Kit Complete comes with 1 year of professional support which provides users with continuous software updates, dedicated design-in support, and RF design assistance. It's ideal for customers engaged in a full cycle of developing, prototyping, and launching innovative products made possible by MeshNetics ZigBit wireless platform. It also features early software release access, and additional sample applications, including sources for WSN Demo application, examples of API use, and more.
ZDK Edition Lite Complete
Part Number ZDK-A1281-LTE ZDK-A1281-CPT
Support Duration 45 days 1 year
Hardware design support + +
RF design support + +
Software development support + +
Early software release† access – +
Access to Gerber Files‡ – +
Access to bootloader source code§ – +
Additional sample applications** – +
Response time 72 h, workdays 72 h, workdays Support channel E-mail E-mail
† Early software release access covers technology previews and demos, preliminary datasheets, and advance product announcemen
‡ MeshBean Gerber files greatly expedite custom PCB design-in and accelerate TTM for customer's specific products based on ZigBit modules and peripherals used within MeshBean development platform such as USB extension, sensor adaptations and others.
§ Access to serial bootloader source code is essential in building custom tools for serial and OTA upgrades.
** Additional sample applications include sources for (1) the embedded portion of WSN Demo, featuring the most comprehensive example of a typical data acquisition scenario, (2) smaller examples of API use, which may be used as application "building blocks", (3) sample applications featuring integration of ZigBit w/ 3-rd party sensors.
© 2007 MeshNetics Page 21 of 22

ZigBit™ OEM Modules Product Datasheet
DisclaimerMeshNetics believes that all information is correct and accurate at the time of issue. MeshNetics reserves the right to make changes to this product without prior notice. Please visit MeshNetics website for the latest available version.
MeshNetics does not assume any responsibility for the use of the described product or convey any license under its patent rights.
MeshNetics warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with MeshNetics standard warranty. Testing and other quality control techniques are used to the extent MeshNetics deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed.
TrademarksMeshNetics®, ZigBit, eZeeNet, ZigBeeNet, SensiLink, LuxLabs, Luxoft Labs, and MeshNetics, Luxoft Labs and ZigBit logos are trademarks of LuxLabs Ltd, dba MeshNetics.
All other product names, trade names, trademarks, logos or service names are the property of their respective owners.
Technical SupportTechnical support is provided by MeshNetics.
E-mail: [email protected]
Please refer to Support Terms and Conditions for full details.
Contact InformationMeshNetics
EMEA Office Am Brauhaus 12 01099, Dresden, Germany Tel: +49 351 8134 228 Office hours: 8:00am - 5:00pm (Central European Time) Fax: +49 351 8134 200
US Office 5110 N. 44th St., Suite L200 Phoenix, AZ 85018 USA Tel: (602) 343-8244 Office hours: 9:00am - 6:00pm (Mountain Standard Time) Fax: (602) 343-8245
Russia Office 9 Dmitrovskoye Shosse, Moscow 127434, Russia Tel: +7 (495) 725 8125 Office hours: 8:00am - 5:00pm (Central European Time) Fax: +7 (495) 725 8116
E-mail: [email protected]
www.meshnetics.com
© 2007 MeshNetics. All rights reserved.
No part of the contents of this manual may be transmitted or reproduced in any form or by any means without the written permission of MeshNetics.
© 2007 MeshNetics Page 22 of 22


















