Sistemas de 1 - 2 e 3 Ordem
42
Introdução Sistemas de Primeira Ordem Sistema de Segunda Ordem Efeito de um 3 o Pólos e um Zero Aula 7 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Cristiano, Curitiba Sistema de Controle
-
Upload
glauco-machado -
Category
Documents
-
view
216 -
download
2
description
Sistemas de 1 - 2 e 3 Ordem
Transcript of Sistemas de 1 - 2 e 3 Ordem

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Aula 7
Cristiano Quevedo Andrea1
1UTFPR - Universidade Tecnológica Federal do ParanáDAELT - Departamento Acadêmico de Eletrotécnica
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resumo
1 Introdução
2 Sistemas de Primeira Ordem
3 Sistema de Segunda Ordem
4 Efeito de um 3o Pólos e um Zero
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Uma vez determinado o modelo matemático via função detransferência, podemos então analisar o desempenho do sistema apartir de sua resposta.
Os sinais típicos para se analisar a resposta são as seguintes funções:degrau, rampa, senoide.
Resposta temporal: é a resposta de um sistema de controle e éconstituída por duas partes: resposta transitória e respostaestacionária.
Resposta Transitória: é a resposta que vai do estado inicialao estado final.Resposta Estacionária: é o comportamento do sinal desaída do sistema à medida que t tende ao infinito.
Assim, a resposta c(t) do sistema pode ser descrita como:
c(t) = ctr (t) + css(t),
sendo = ctr (t) a resposta transitória e css(t) a resposta estacionária.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
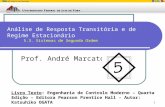
Estabilidade Absoluta: em projetos de sistemas de controle, aestabilidade é o objetivo principal. Caso, o projeto não consiga obter aestabilidade absoluta, o sistema será instável.O erro de regime estacionário pode ser observado quando a respostaem regime apresenta um erro em relação ao sinal de entrada.Será analisado a resposta de sistemas de primeira, segunda ordem eordem superior.
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
Step Response
Time (sec)
Am
plitu
de
SISTEMA DE PRIMEIRAORDEM
SISTEMA DE SEGUNDAORDEM
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Considere o circuito ilustrado a seguir:
Fisicamente, o diagrama de blocos ilustrado acimarepresenta um circuito RC, um sistema térmico, ou algosemelhante.A relação entrada e saída pode ser descrita como:
C(s)R(s)
=1
Ts + 1. (1)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
I- Resposta ao Degrau UnitárioConsiderando-se R(s) uma entrada degrau, de (1) temos,
C(s) =1s×
1Ts + 1
. (2)
Expandindo (2) em frações parciais, temos:
C(s) =1s−
TTs + 1
,
=1s−
1
s + 1T. (3)
Aplicando-se a transformada inversa de Laplace em (3)obtém-se:
c(t) = 1 − e−tT . (4)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Analisando-se (4) podemos observar que em t = 0,c(0) = 0. Por outro lado para t → ∞, c(t) = 1.
Em t = T , temos:
c(t) = 1 − e−1 = 0, 632.
Note que quanto menor a constante de tempo T , maisrapidamente o sistema responde.
A curva exponencial da resposta possui uma inclinação dalinha tangente em t = 0 de 1/T , pois,
∂c(t)∂t
∣
∣
∣
∣
t=0=
1Te−
tT
∣
∣
∣
∣
0=
1T.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resposta de um Sistema de Primeira Ordem
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Considerando a função de transferência abaixo:
C(s)R(s)
=1
s + 1, (5)
temos o seguinte mapeamento de pólos e zeros,
Pole−Zero Map
Real Axis
Imag
inar
y A
xis
−2 −1.8 −1.6 −1.4 −1.2 −1 −0.8 −0.6 −0.4 −0.2 0−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Da função de transferência do sistema de primeira ordempodemos tirar outras conclusões, então, considere novamentea função de transferência de um sistema de primeira ordem,
G(s) =K
s + 1T. (6)
O inverso da constante de tempo é homogêneo a1/segundos, ou seja, a frequência. A função detransferência do sistema de primeira ordem também podeser escrito como,
G(s) =K
s + a. (7)
Assim, podemos chamar o parâmetro a de frequênciaexponencial.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
A constante de tempo também pode ser obtida a partir dos pólos.Como o pólo da função de transferência é −a, podemos dizer que opólo fica localizado no inverso da constante de tempo.
Quanto mais longe do eixo imaginário ele se situe, mais rápida será aresposta transitória.
Tempo de Subida, Ts
O tempo de subida é definido como o tempo necessário para que aforma de onda vá de 0, 1 até 0, 9 do seu valor final.
Ts =2, 31a
−0, 11a
=2, 2a
.
Tempo de Estabelecimento, TeO tempo de estabelecimento é definido como o tempo necessário paraque a resposta alcance uma faixa de valores de 2% em torno do valorfinal e aí permanece.
Te =4a. (8)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Determinação Experimental de Funções de Transferência de PrimeiraOrdem
Frequentemente não é possível ou prático obter analiticamente afunção de transferência de um sistema.
Possivelmente o sistema é fechado e as partes componentes não sãoidentificáveis facilmente.
Podemos determinar a função de transferência destes sistemas pormeio da relação entre a entrada e saída, sem a necessidade deconhecer a construção interna da planta.
Se aplicarmos uma entrada degrau em um sistema de primeira ordempodemos determinar a constante de tempo e o valor de estadoestacionário.
Assim, considere G(s) = Ks+a . Aplicando-se um degrau tem-se,
C(s) =/
sK
s + a=
1s−
K/as + a
.
Cristiano, Curitiba Sistema de Controle
User
Typewritten Text
1
User
Typewritten Text
User
Typewritten Text

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
A partir da reposta medimos a constante de tempo, isto é,o tempo para que a resposta alcance 63% do valor daresposta em regime permanente.
Então fazemos:
Amp63,2% = 0, 632Valor Regime.
sendo Amp63,2% o valor da amplitude do valor de resposta63, 2% do valor de regime. Então, deve-se verificar otempo em que a saída atinge este valor, e apósidentificado, este valor será a constante de tempo T .
Em regime, temos que o valor é K/a, como a = 1/T ,podemos obter o valor de K.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resposta a Entrada Rampa para Sistemas de Primeira OrdemA transformada de Laplace para uma entrada rampa é dada daseguinte forma:
R(s) =1s2 . (9)
Então a saída de um sistema de primeira ordem é:
C(s) =1s2 ×
1Ts + 1
. (10)
Expandindo C(s) temos:
C(s) =1s2 −
Ts+
T 2
Ts + 1. (11)
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
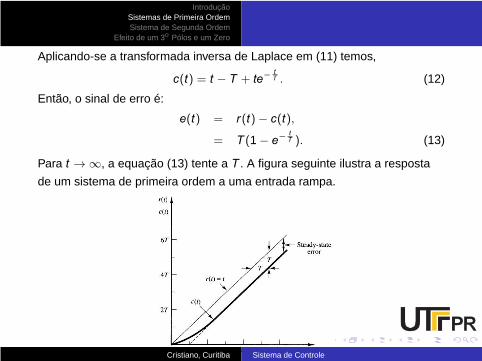
Aplicando-se a transformada inversa de Laplace em (11) temos,
c(t) = t − T + te−
tT . (12)
Então, o sinal de erro é:
e(t) = r(t)− c(t),
= T (1 − e−
tT ). (13)
Para t → ∞, a equação (13) tente a T . A figura seguinte ilustra a resposta
de um sistema de primeira ordem a uma entrada rampa.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resposta de Sistemas de Primeira Ordem a uma Entrada Impulso UnitáriaPara uma entrada impulso unitária δ(s) = 1 a um sistema de primeira ordem,a resposta obtida é:
C(s) = 1Ts + 1
. (14)
Aplicando a transformada inversa de Laplace em (14) tem-se:
c(t) = 1Te−
tT . (15)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Considere o diagrama de bloco de um sistema de segundaordem descrito a seguir:
Neste caso a função de transferência de malha fechada é dadapor:
Y (s) =G(s)
1 +G(s)=
Ks2 + ps + K
R(s).
A forma generalizada para a resposta de um sistema desegunda ordem é:
Y (s)R(s)
=Kω2
ns2 + 2ζωns + ω2
n. (16)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Y (s)R(s)
=Kω2
ns2 + 2ζωns + ω2
n. (17)
1 ωn: frequência natural de oscilação2 ζ: coeficiente de amortecimento3 Pólos: s12 = −ζωn ± jωn
√
1 − ζ2
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Exemplo: Encontre o valor do coeficiente de amortecimento eda frequência natural da seguinte função de transferência
Y (s)F (s)
=25
s2 + 10s + 25. (18)
então temos,
ω2n = 25 ⇒ ωn = 5,
2ζωn = 2ζ5 = 10 ⇒ ζ = 1. (19)
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resposta Naturais de Sistemas de Segunda Ordem
Respostas Superamortecidas
Pólos: 2 pólos reais em −σ1 e −σ2.Resposta Natural: duas exponenciais com constante detempo igual a localização dos pólos
c(t) = K1e−σ1t + K2e−σ2t . (20)
Respostas SubamortecidasPólos: 2 pólos complexos em −σd ± jωd .Resposta Natural: resposta com senoides amortecidasenvolvida por uma exponencial cuja constante de tempo éigual à parte real do pólo. A frequência da senoide é igual aparte imaginária da parte complexa
c(t) = Ae−σd tcos(ωd t − φ). (21)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Respostas Oscilatórias
Pólos: 2 pólos imaginários em ±jωd .Resposta Natural: resposta com senoide não amortecidascom frequência em radianos igual a parte imaginária dopólo
c(t) = Asen(ωd − φ). (22)
Respostas Criticamente AmortecidasPólos: 2 pólos reais em −σd .Resposta Natural: resposta com uma exponencial comconstante de tempo igual a parte real do pólo e umaexponencial multiplicada por t com constante de tempoigual a parte real do pólo
c(t) = K1e−σd t + K2te−σd t . (23)
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
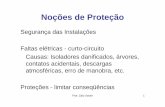
Resposta do Sistema de Segunda Ordem em Função doCoeficiente de Amortecimento ζ
ζ > 1: Sistema Superamortecido
−8 −7 −6 −5 −4 −3 −2 −1 0−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Pole−Zero Map
Real Axis
Imag
inar
y A
xis
0 0.5 1 1.5 2 2.50
0.5
1
1.5
Step Response
Time (sec)
Am
plitu
de
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
ζ = 1: Sistema Criticamente Amortecido
Pole−Zero Map
Real Axis
Imag
inar
y A
xis
0 5 10 150
0.5
1
1.5
Step Response
Time (sec)
Am
plitu
de
−2 −1.8 −1.6 −1.4 −1.2 −1 −0.8 −0.6 −0.4 −0.2 0−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
0 < ζ < 1: Sistema Subamortecido
Pole−Zero Map
Real Axis
Imag
inar
y A
xis
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
Step Response
Time (sec)
Am
plitu
de
−3 −2.5 −2 −1.5 −1 −0.5 0−3
−2
−1
0
1
2
3
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
ζ = 0: Sistema Não Amortecido
Pole−Zero Map
Real Axis
Imag
inar
y A
xis
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (sec)
Am
plitu
de
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Análise de Desempenho
Iremos abordar a análise de desempenho em sistemasubamortecido, isto é, 0 < ζ < 1.
Considerando-se um degrau unitário aplicado a um sistema desegunda ordem típico temos:
Y (s) =ω2n
s(s2 + 2ζωns + ω2n). (24)
Aplicando-se a transformada inversa de Laplace em (24),obtemos:
y(t) = 1 −1βe−ζωntsen(ωnβt + θ). (25)
sendo β =√
1 − ζ2 e 0 < ζ < 1.Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Curvas de Resposta de um Sistema de Segunda Ordem a umDegrau Unitário
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
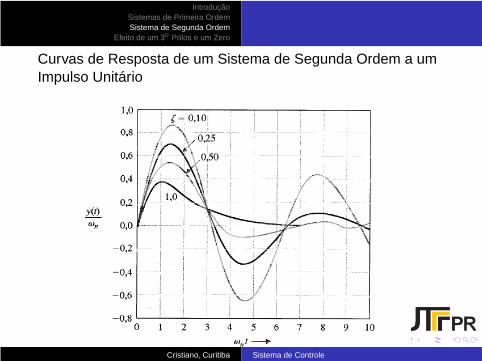
Aplicando-se um impulso δ(s) = 1 em um sistema de segundaordem típico temos,
Y (s) = 1 ×ω2n
s2 + 2ζωns + ω2n. (26)
Aplicando-se a transformada inversa de Laplace em (26)obtém-se:
y(t) =ωnβe−ζωntsen(ωnβt). (27)
o que simplesmente a derivada da resposta de um sistema desegunda ordem a entrada degrau.
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Curvas de Resposta de um Sistema de Segunda Ordem a umImpulso Unitário
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Índices de Desempenho
Tempo de Pico (Tp): é o tempo onde a resposta atinge omáximo valor. O tempo de pico, Tp pode ser obtido por:
Tp =π
ωn√
1 − ζ2, (28)
e a magnitude da resposta em Tp é dada por:
y(t) = 1 + e−
ζπ√
1−ζ2 . (29)
Tempo de Subida (Ts): é o tempo que a resposta leva parair de 10% a 90% do valor de regime da resposta.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Porcentagem de Overshoot (P.O.): a ultrapassagempercentual, P.0., é dada pela seguinte expressão,
P.O. = 100e−
ζπ√
1−ζ2 %, (30)
ou,
P.O. = 100 ×
(
Mp − FvFv
)
%, (31)
sendo
MP = valor máximo da resposta,
Fv = valor de regime permanente.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Tempo de Estabelecimento (Te): é o tempo que a respostaleva para atingir o regime. Considera-se regime quando aresposta atingir uma faixa em torno do valor de regime.Nos cálculos consideraremos que regime será quando aamplitude da resposta estiver a ±2% do valor de regime.Neste caso,
Te ∼=4
ζωn. (32)
A resposta transitória pode ser descrita por dois fatores:1 Rapidez da resposta, a qual pode ser projetada pela
escolha adequada do tempo de pico e o tempo de subida.2 Proximidade da resposta com a resposta desejada, a qual
pode ser atingida projetando-se um sistema de controlecom uma porcentagem de overshoot e tempo deestabelecimento adequado.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resumo
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Porcentagem de Overshoot versus Coeficiente deAmortecimento
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Exemplo1: Desenhe a região do plano complexo com:
P.O. < 20%,
Te < 4seg. (33)
Exemplo 2: Considere o sistema de controle abaixo:
Encontre: Tempo de subida, tempo de pico, valor de pico,tempo de estabelecimento, porcentagem de overshoot.
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
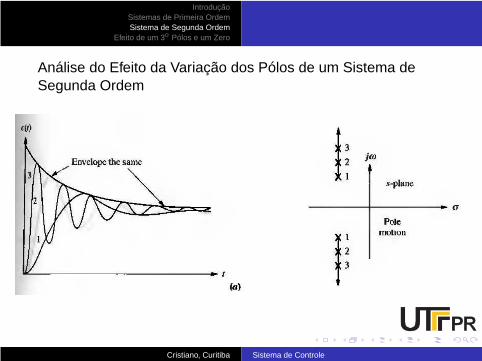
Análise do Efeito da Variação dos Pólos de um Sistema deSegunda Ordem
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
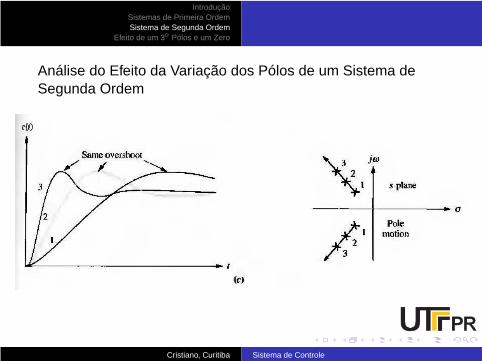
Análise do Efeito da Variação dos Pólos de um Sistema deSegunda Ordem
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Análise do Efeito da Variação dos Pólos de um Sistema deSegunda Ordem
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Considere o sistema de terceira ordem descrito a seguir:
T (s) =1
(s2 + 2ζs + 1)(γs + 1), (34)
sendo ωn = 1.Foi constatado que o tempo de estabelecimento (Ts) e aporcentagem de overshoot (P.O.) do sistema descrito em (34)pode ser aproximado para índices de um sistema de segundaordem se,
|1/γ| ≥ 10|ζωn|. (35)
Em outras palavras a resposta de um sistema de terceiraordem pode ser aproximada pelas raízes dominantes dosistema de segunda ordem quando a parte real das raízesdominantes for inferior a 1/10 da parte real da terceira raiz.
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Consideração
A idéia de pólo dominante deve ser utilizada quando a funçãode transferência não possuir zeros próximos aos pólosdominantes.
Em situações no qual a função de transferência possuirzeros próximos ao pólos dominantes, a resposta seráafetada significativamente.
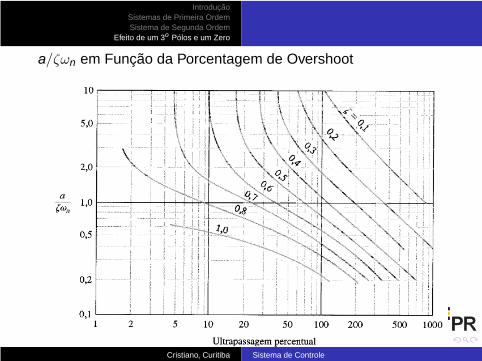
A resposta a um degrau de um sistema com um zero edois zeros é afetada pela localização do zero.
A porcentagem de overshoot para uma entrada degrau,em função de a/ζωn, sendo a a posição do zero, éilustrada a seguir.
Cristiano, Curitiba Sistema de Controle
IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
a/ζωn em Função da Porcentagem de Overshoot
Cristiano, Curitiba Sistema de Controle

IntroduçãoSistemas de Primeira OrdemSistema de Segunda Ordem
Efeito de um 3o Pólos e um Zero
Resposta ao Degrau Unitário Variando-se a Relação a/ζωn
Cristiano, Curitiba Sistema de Controle