Aula 5: Express˜oes Relacionais, Express˜oes Lógicas e Comandos ...
JOÃO MANUEL GONÇALVES CABRAL
ESTUDO ANAĹITICO E SIMBÓLICO
DAS BIFURCAÇÕES PARA A FAMÍLIA DAS
APLICAÇÕES RACIONAIS DE GRAU DOIS
UNIVERSIDADE DOS AÇORES
PONTA DELGADA
2009
JOÃO MANUEL GONÇALVES CABRAL
ESTUDO ANAĹITICO E SIMBÓLICO
DAS BIFURCAÇÕES PARA A FAMÍLIA DAS
APLICAÇÕES RACIONAIS DE GRAU DOIS
Dissertação apresentada na Universidade dos Açores
para obtenção do grau de Doutor no ramo de Matemática
e na especialidade de Análise, sob a orientação do Doutor
Ricardo José Mendes Severino, Professor Auxiliar do
Departamento de Matemática da Universidade do Minho
UNIVERSIDADE DOS AÇORES
PONTA DELGADA
2009
T́ıtulo da Tese: Estudo anaĺıtico e simbólico das bifurcações para a faḿılia das
aplicações racionais de grau dois
Aluno: João Manuel Gonçalves Cabral
Resumo
Neste trabalho estudamos as bifurcações das aplicações racionais de grau dois, definidas
no eixo real. Para tal desenvolvemos as técnicas da dinâmica simbólica, com as quais
mostramos a existência de cascatas de bifurcações de duplicação do peŕıodo, a que
correspondem regiões do espaço dos parâmetros de igual entropia. Por outro lado,
usando os métodos anaĺıticos tradicionais, estudamos outros tipos de bifurcações que
ocorrem para uma subfaḿılia, a-um-parâmetro, das aplicações referidas.
iii
Thesis: Analytic and symbolic study of the bifurcations for the family of rational
mappings of degree two
Student: João Manuel Gonçalves Cabral
Abstract
In this work we study the bifurcations in the family of quadratic rational maps. Using
symbolic dynamics techniques, we describe the existence of cascades of period doubling
bifurcations, with corresponding regions of the parameter space with constant topological
entropy. Then, using traditional analytic techniques, we study some other bifurcations
for a particular subfamily of those maps.
iv
Agradecimentos
Quero agradecer o apoio e dedicação, bem como a infinita paciência, que o Professor
Doutor Ricardo Severino mostrou ao longo de toda a execução desta dissertação.
Apesar de já não se encontrar no meio de nós, quero agradecer, com um recordar
bastante sentido, ao Professor Doutor José Sousa Ramos por ter sido um companheiro,
amigo e incentivador no ińıcio deste trabalho. A sua memória continua viva no seio das
pessoas que tocou ao longo da sua carreira profissional, e nestas tão humildes linhas
desta dissertação.
Por fim agradeço a todos, e são muitos, desde os amigos pelo apoio ao longo do
trabalho, à minha faḿılia pelas horas de paciência, e em especial ao meu filho Diogo
pelo seu sorriso diário, que me transformou as muitas horas de angústia em alegrias, ao
longo dos últimos anos.
v
Conteúdo
1 Introdução 1
2 Transformações racionais 6
2.1 Analiticidade e faḿılias normais . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Pontos fixos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Pontos periódicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Pontos cŕıticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Pontos excepcionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6 Classificação de componentes periódicos . . . . . . . . . . . . . . . . . 23
2.7 As transformações de Mobius . . . . . . . . . . . . . . . . . . . . . . . 25
2.8 Transformações racionais do segundo grau . . . . . . . . . . . . . . . . 26
2.9 Formas normais das transformações . . . . . . . . . . . . . . . . . . . . 28
2.10 A faḿılia Rc(z) = (z2 + c)/(z2 − 1) . . . . . . . . . . . . . . . . . . . 31
2.11 Uma restrição de Rc(z) ao eixo real . . . . . . . . . . . . . . . . . . . . 43
3 No eixo real 45
3.1 Uma restrição de Rc(z) ao eixo real . . . . . . . . . . . . . . . . . . . . 46
3.2 A faḿılia fr, com r < −1 . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3 Dinâmica do intervalo - caos . . . . . . . . . . . . . . . . . . . . . . . . 54
vi
4 Dinâmica Simbólica 72
4.1 A importância da dinâmica simbólica no estudo dos sistemas dinâmicos . 72
4.2 O quadro simbólico dos invariantes de amassamento . . . . . . . . . . . 84
4.3 A combinatória das sequências de amassamento . . . . . . . . . . . . . 104
4.4 Um produto simbólico . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5 Bifurcações 116
5.1 Bifurcações em dinâmicas do intervalo . . . . . . . . . . . . . . . . . . 117
5.2 Bifurcações em dinâmicas do intervalo: parte II . . . . . . . . . . . . . . 124
5.3 Bifurcações na faḿılia fλ . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.3.1 Um primeiro intervalo . . . . . . . . . . . . . . . . . . . . . . . 132
5.3.2 Um segundo intervalo . . . . . . . . . . . . . . . . . . . . . . . 136
5.3.3 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
6 Conclusões 143
Bibliografia 144
vii
Caṕıtulo 1
Introdução
Parece-nos incontestável que a Teoria dos Sistemas Dinâmicos tem sido, nas últimas
três décadas, das áreas mais activas e interessantes de toda a Matemática. Olhando
um pouco para trás, aquilo que nos deixa fascinados nesse caminho são as surpresas
que, de quando em quando, vêm questionar a nossa perspectiva de termos já alcançado
um conhecimento mais do que razoável das diferentes dinâmicas. Tal como aconteceu
com a dinâmica das aplicações quadráticas no intervalo e no plano complexo, que es-
condiam uma insuspeitada complexidade no seu seio, o estudo de uma dinâmica é uma
tarefa muit́ıssimo complicada que exige métodos pouco convencionais em Matemática.
Contudo, o facto de usarmos alguns desses métodos não significa de modo algum que
aceitemos esse tipo de resultados como objectivo final do estudo em causa. Mas também
é verdade que existe ainda na comunidade matemática alguma incompreensão relativa-
mente a certas formas de abordar certos problemas, problemas esses que, pelas suas
caracteŕısticas, de outro modo ficariam totalmente de lado de qualquer tentativa de
compreensão. No nosso entender, a utilização do computador no estudo da dinâmica
tem por objectivo primeiro levantar questões, pôr a nú complexidades em comportamen-
tos de sistemas regidos por aplicações bastante simples e, por isso, de alguma forma
desprezadas na eleição dos problemas matemáticos mais interessantes ainda em aberto.
No trabalho que agora se inicia, o computador foi usado de forma intensiva, podemos
mesmo dizer que fomos beneficiando dos avanços tecnológicos para estudar com um
detalhe cada vez maior as dinâmicas das aplicações racionais de grau dois. Em alguns
aspectos não foi posśıvel avançar muito para além das experiências computacionais, mas
1
pensamos que em alguns outros conseguimos chegar a formalizar as ideias e a estab-
elecer alguns resultados que nos parecem interessantes. No entanto, não resistimos a
deixar nesta introdução o resultado de uma questão colocada logo no ińıcio dos nossos
trabalhos e que pode, de alguma forma, ter como uma primeira resposta uma imagem.
Nos estudos das dinâmicas do intervalo com o confinamento do espaço de fases
pretende-se evitar comportamentos para infinito pouco interessantes. Por outro lado,
como todos sabemos, quando estudamos as aplicações quadráticas no plano complexo,
esses comportamentos para infinito trazem uma dicotomia às dinâmicas que o conjunto
de Mandelbrot descreve de uma forma absolutamente deslumbrante. Ora, quando pre-
tendemos estudar a dinâmica das aplicações racionais de grau dois,
fab(z) =z2 − az2 − b ,
é desde logo evidente que, de uma forma geral, vamos ter uma vez mais um confinamento
do espaço de fases, ou seja, não existem quaisquer órbitas divergentes. Assim sendo,
parece haver nesta faḿılia de dinâmicas uma diferença fundamental para as quadráticas
no plano complexo e assim se abre a questão de saber que resposta se obtém se classi-
ficarmos as dinâmicas pelo comportamento do seu ponto cŕıtico z = 0.
Para desenharmos a figura que se apresenta de seguida fixámos o segundo dos
parâmetros, neste caso escolhemos o valor b = 0.9, e deixámos o parâmetro a tomar
valores no plano complexo. Aquilo que obtemos é uma perspectiva do espaço dos
parâmetros, onde se destacam os valores de a correspondentes a dinâmicas que levam
a órbita do ponto cŕıtico z = 0 para comportamentos não periódicos1. De certa forma
pretendemos responder, numa primeira aproximação, claro está, à questão de saber que
valores do parâmetro a ∈ C correspondem a aplicações racionais com caos. E a respostanão deixa de ser surpreendente.
1Naturalmente que, computacionalmente estamos a destacar os valores dos parâmetros para os quaiso ponto cŕıtico z = 0, passado um número muito elevado de iterações, não apresenta um comportamentoperiódico de peŕıodo inferior a um determinado valor, esse já não muito grande.
2
Este gráfico, no fundo um diagrama de bifurcação ao estilo do conjunto de Mandel-
brot, onde não interessam as órbitas em si mas tão só a sua qualidade, periódica ou
não periódica, indica-nos a existência de uma região do plano onde aparentemente as
correspondentes dinâmicas serão razoavelmente complicadas2. Contudo, como de resto
seria de esperar, esta região do plano complexo/espaço dos parâmetros, não é de todo
simples, o que é desde logo notório na figura apresentada, mas que pode ser confirmado
na figura seguinte, onde se apresenta um seu detalhe.
2Apesar disso, deixamos aqui a informação que as zonas mais exteriores do plano complexo cor-respondem a valores do parâmetro para o qual a órbita do ponto cŕıtico se dirige para uma órbitaperiódica de peŕıodo dois.
3
Olhando para esta figura, é imposśıvel não ficar surpreendido com o aparecimento dos
já clássicos bolbos mandelbrotianos, um autêntico ex-libris das dinâmicas no plano com-
plexo. Com este exemplo gostaŕıamos sobretudo de mostrar de que forma a utilização
do computador pode servir para levantar questões importantes no estudo da dinâmica.
Pessoalmente, devemos confessar que estas experiências computacionais são, simultane-
amente, um est́ımulo para continuar a trabalhar nestas áreas da Matemática e sempre
uma fonte de prazer, com a sua contemplação.
Neste trabalho vamos estudar a faḿılia de aplicações racionais, apresentando primeiro
alguns dos resultados conhecidos sobre a dinâmica destas aplicações, nos Caṕıtulos 2 e 3,
4
para depois nos debruçarmos em concreto no estudo das suas bifurcações. Desse modo,
introduzimos, no Caṕıtulo 4, os métodos da dinâmica simbólica adaptados ao estudo da
dinâmica destas aplicações, para depois procurarmos definir um produto simbólico que
descreva as cascatas de bifurcações de duplicação do peŕıodo existentes. A aplicação
destes métodos a esta faḿılia de aplicações é original e, podemos dizê-lo sem falsa
modéstia, achamos que conseguimos alguns resultados bastante interessantes. Contudo,
estes métodos não conseguem (ainda) descrever todos os tipos de bifurcação presentes,
pelo que, no Caṕıtulo 5, utilizamos os tradicionais métodos anaĺıticos para estudar algu-
mas outras bifurcações. Os resultados encontrados foram descritos no artigo recemente
submetido a uma revista internacional da especialidade.
5
Caṕıtulo 2
Transformações racionais
Uma transformação racional é uma transformação do tipo
R(z) =P (z)
Q(z)=
a0zd + ... + ad
b0zd′ + ... + bd′
,
com Q(z) 6= 0, sendo uma transformação bijectiva na esfera de Riemann Ĉ nela própria.O quociente é dito irredut́ıvel se P e Q não têm factores comuns e tem uma única
representação a menos da multiplicação de numerador e denominador por uma constante
não nula. O grau de R pode ser definido como sendo o número máximo de pré-imagens
de um dado ponto z, representação mais usual, ou pelo máximo dos graus de P e de
Q. Denotando por Rk a composição k vezes de R, também podemos dizer que o grau
de R é multiplicativo, no sentido em que o grau do produto de duas transformações é
o produto de ambas as transformações, e o grau da composição de ordem k de R é a
potência de expoente k do grau de R.
Tomamos por convenção que R0 = I, com I a representar a transformação identi-
dade.
Definição 2.1. A órbita futura de um dado ponto z0 por acção de uma transformação
racional R é o conjunto de pontos
O+(z0) = {zk = Rk(z0), k = 0, 1, 2, ..., n}.
Se R(z) for invert́ıvel podemos definir a órbita total de z0 como o conjunto de pontos
zn = Rn(z0) para n ∈ Z, e a órbita passada de z0,
O−(z0) = {zk = Rk(z0), k = 0,−1,−2, ...,−n}.
6
2.1 Analiticidade e faḿılias normais
As transformações racionais são caracterizadas como transformações anaĺıticas de Ĉ em
Ĉ, sendo as únicas a possuir esta propriedade.
Uma função complexa de variável complexa f(z) pode ser decomposta nas suas partes
reais e imaginárias u(x, y) e v(x, y), respectivamente, bastando para isso decompor o
complexo em z = x + iy, com x, y valores reais, e efectuar os necessários cálculos.
Estas funções u e v são importantes na medida em que através delas podemos analisar
a diferenciabilidade de f .
Teorema 2.1. A função f(z) = u(x, y)+ iv(x, y) é diferenciável num ponto z = x+ iy
de uma região no plano complexo se e só se as derivadas parciais ux, uy, vx e vy são
cont́ınuas e satisfazem as condições de Cauchy-Riemann ux = vy e uy = −vx no pontoz.
Com base no Teorema 2.1, verificamos em que condições f é diferenciável num ponto
z, mas não numa vizinhança desse mesmo ponto. Ora, se acontecer que a função seja
também diferenciável numa vizinhança deste ponto dizemos que a função é anaĺıtica em
z.
Definição 2.2. Uma função f(z) é classificada de anaĺıtica num ponto z0 se f(z) for
diferenciável numa vizinhança de z0. A função é classificada de anaĺıtica numa região se
for anaĺıtica em todos os pontos desta região. Se esta for anaĺıtica em todo o plano C
é classificada como função inteira.
Para mais pormenores sobre a analiticidade de uma função e suas propriedades, bem
como a demonstração do Teorema 2.1, pode-se consultar [BV97], [AF97] e [Nee97].
Tomando por base as propriedades das funções anaĺıticas, podemos afirmar que a
transformação R, como resulta do quociente de duas funções polinomiais anaĺıticas em
C, é anaĺıtica em todo o plano complexo, com excepção, naturalmente, dos zeros de Q,
que são as singularidades de R.
Definição 2.3. Uma transformação é conforme num dado ponto z0 se for anaĺıtica neste
7
ponto, com derivada em z0 não nula, e conforme num doḿınio D se for conforme em
todos os pontos deste doḿınio.
Definição 2.4. Considere-se U, V ⊂ Ĉ. Uma função f : U −→ U diz-se conformal-mente conjugada, ou apenas conjugada, a uma função g : V −→ V se existir umatransformação conforme ϕ : U −→ V tal que g = ϕ ◦ f ◦ ϕ−1.
O conceito de função conformalmente conjugada foi introduzido por E. Schroder, em
1871, no estudo da iteração de transformações racionais. A equação g(ϕ(z)) = ϕ(f(z))
e suas variantes são conhecidas como equação de Schroder. Existia na altura, como ex-
iste hoje em dia, um grande interesse no estudo da iteração das transformações racionais
com ligação aos algoritmos de aproximação de zeros de uma dada transformação, especi-
ficamente, o método de Newton. Segundo confessa Douady, foi igualmente uma questão
de um aluno sobre a convergência do método de Newton, em 1978, que despertou o
interesse de J. Hubbard e do próprio Douady no estudo da iteração de transformações
racionais.
No estudo da iteração de transformações racionais uma das ferramentas mais usadas
é a noção de faḿılias normais.
Definição 2.5. Uma faḿılia de funções anaĺıticas complexas F definidas num doḿınio
D ⊂ Ĉ é chamada de faḿılia normal se cada subconjunto infinito contém uma sub-sequência que converge uniformemente na métrica esférica, em qualquer subconjunto
compacto de D.
Carleson e Gamelin, em [CG91], destacaram o facto de que Montel, na apresentação da
sua tese, em 1907, tenha lgo explicitado os seguintes teoremas, que são uma ferramenta
básica na descrição de faḿılias normais de funções.
Teorema 2.2. A faḿılia F de funções anaĺıticas em D ⊂ Ĉ limitadas por algumaconstante é normal.
Demonstração. Ver [CG91].
Teorema 2.3 (Montel). Seja F uma faḿılia de funções anaĺıticas definidas num doḿınio
D. Se a reunião ∪f∈F f(D) omite três pontos em Ĉ, então F é uma faḿılia normal.
8
Demonstração. Ver [CG91].
Usando a caracterização de faḿılia normal de funções podemos detectar dois tipos de
conjuntos invariantes na dinâmica de R. Um conjunto em que a transformação racional
R é estável sob iteração, onde podemos conhecer de forma bastante concreta o seu
comportamento e num outro conjunto, dito instável, onde a transformação tem um
comportamento não previśıvel sob iteração.
Definição 2.6. Um ponto z é estável sob uma transformação racional R se existir uma
vizinhança U de z tal que {Rk, k = 0, 1, ..., n} é uma faḿılia normal em U . O conjuntoΩR, formado pelos pontos z forma o conjunto estável ou conjunto normal de R. Este
conjunto também é designado de conjunto de Fatou.
Definição 2.7. O conjunto instável de R é o complementar de ΩR. Este conjunto,
também designado por conjunto de Julia, é denotado por JR.
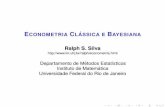
Conhecer o conjunto de Fatou de uma dada transformação R tem as suas vantagens,
ou até mesmo conhecer apenas parte deste conjunto, uma vez que a partir de um qualquer
ponto deste podemos gerar todos os outros sob iteração de R. Isso possibilita a criação
de imagens através de cálculos computacionais que geram autênticos mapas de onde
podemos nos orientar em relação à própria dinâmica da transformação, como se pode
verificar na figura seguinte.
9
0 100 200 300 400 500
0
100
200
300
400
500
Figura 2.1 Regiões estáveis de R(z) = (z2 + 0.4− 0.8i)/(z2 − 0.9)
Proposição 2.1. Se z é um elemento de ΩR, então a sua imagem e todas as suas
pré-imagens fazem parte de ΩR.
Demonstração. Ver L. Keen em [Dev91].
O máximo que pode acontecer a uma transformação racional é ser completamente
instável nunca o sendo completamente estável. Isto quer dizer que podemos encon-
trar em todas as faḿılias de transformações racionais sempre um conjunto onde as
transformações são instáveis, dependendo apenas se esta instabilidade se limita a um
conjunto de pontos ou ao próprio conjunto Ĉ.
Proposição 2.2. O conjunto JR é não vazio.
Demonstração. Ver L. Keen em [Dev91].
Teorema 2.4. JR = Ĉ ou tem interior vazio.
Demonstração. Ver L. Keen em [Dev91] e também [Bea91].
10
Teorema 2.5. JR = Ĉ se e só se existe uma órbita {Rn(z) : n ≥ 1}, para algum z,que seja densa em Ĉ.
Demonstração. Ver [Bea91].
Proposição 2.3. Se w ∈ JR, então⋃n
R◦−n(w) é denso em JR.
Demonstração. Ver L. Keen em [Dev91].
Proposição 2.4. JR é um conjunto infinito se grau(R) ≥ 2 e é perfeito.
Demonstração. Ver L. Keen em [Dev91] e também [Bea91].
Teorema 2.6. Se S é um conjunto não vazio completamente invariante sob a trans-
formação racional R, com grau(R) ≥ 2, então S contém um, dois ou infinitamentemuitos pontos.
Demonstração. Ver L. Keen em [Dev91] e também [Bea91].
Proposição 2.5. JR não contém qualquer conjunto fechado invariante.
Demonstração. Ver L. Keen em [Dev91].
Teorema 2.7. O conjunto de Fatou e o conjunto de Julia são completamente invariantes
sob uma transformação racional R.
Demonstração. Ver [Bea91].
Teorema 2.8. O conjunto JR está contido no fecho do conjunto dos pontos periódicos
de R, com grau(R) ≥ 2.
Demonstração. Ver [Bea91].
Teorema 2.9. Considere-se R uma transformação racional com grau(R) ≥ 2. Seja F0um conjunto completamente invariante de F . Então:
• ∂F0 = JR;
• F0 é ou simplesmente conexo ou infinitamente conexo;
11
• todos os outros componentes de ΩR são simplesmente conexos; e
• F0 é simplesmente conexo se e só se JR é conexo.
Demonstração. Ver [Bea91].
Teorema 2.10. Se JR é desconexo, então tem um incontável número de componentes
e cada ponto de JR é um ponto de acumulação de infinitas componentes de JR.
Demonstração. Ver [Bea91].
2.2 Pontos fixos
Ao iterarmos pontos em C por R(z) observamos que alguns pontos têm uma órbita
sempre constante, estes pontos são designados de pontos fixos.
Definição 2.8. Um ponto ζ é designado de ponto fixo de R quando R(ζ) = ζ.
Os pontos fixos numa transformação racional são as soluções da equação R(z)− z = 0,e pelo Teorema Fundamental da Álgebra, esta equação terá exactamente d soluções,
não necessariamente distintas, número esse igual ao grau de P (z) − zQ(z). Logo, alocalização dos pontos fixos de R(z) torna-se num mero processo de cálculo.
Com o aux́ılio de transformações conjugadas, A. Beardon, [Bea91], conseguiu deter-
minar o número exacto de pontos fixos de uma transformação racional.
Lema 2.1. Se ζ for um ponto fixo em C de uma transformação anaĺıtica f, e ϕ uma
transformação anaĺıtica, injectiva e finita em alguma vizinhança de ζ, então ϕfϕ−1 tem
o mesmo número de pontos fixos em ϕ(ζ) que f tem em ζ.
Demonstração. Ver [Bea91].
Teorema 2.11. Se d ≥ 1, uma transformação racional de grau d tem precisamented + 1 pontos fixos em Ĉ.
Demonstração. Ver [Bea91].
12
A cada ponto fixo ζ de uma transformação racional R está associado um número com-
plexo, que designamos de multiplicador, m(R, ζ) de R em ζ. Se ζ ∈ C o multiplicadoré R′(ζ). Este multiplicador é invariante sob conjugação, o que nos permite estabelecer
m(R,∞) = m((gRg−1, g(∞))),
sendo g uma transformação de Möbius que transforma o infinito num valor de C.
De acordo com o multiplicador m(R, ζ) podemos classificar os pontos fixos, classi-
ficação essa que se aplica a qualquer função anaĺıtica, em particular às transformações
racionais e à sua inversa local, caso exista.
Definição 2.9. Supondo que ζ é um ponto fixo de uma função anaĺıtica f , com λ =
m(f, ζ) = f′(ζ), temos que ζ é:
• super-atractor, se λ = 0;
• atractor, se 0 < |λ| < 1;
• repulsor, se |λ| > 1;
• racionalmente indiferente, se λ é uma raiz da unidade;
• irracionalmente indiferente, se |λ| = 1, mas λ não é uma raiz da unidade.
Supondo que z0 é um ponto fixo atractor de f . Se |λ| < ρ < 1, então temos que
|f(z)− z0| ≤ ρ|z − z0|
em alguma vizinhança de z0. Assim sendo, |fn(z)−z0| ≤ ρn|z−z0| e, consequentemente,as iteradas fn convergem uniformemente para z0 numa sua vizinhança.
Definição 2.10. A bacia de atracção de z0, denotada por A(z0), consiste em todos os
z tal que fn(z) é definida para todos os n ≥ 1 e fn(z) −→ z0. A componente conexade A(z0) contendo z0 é designada de bacia de atracção imediata de z0 e denotada por
A∗(z0).
Para um valor ε > 0 pequeno, temos que A(z0) coincide com a união das iteradas
inversas f−n(∆(z0, ε)) e, consequentemente, podemos concluir que A(z0) é um aberto.
13
Os pontos que são mais simples de entender são os pontos fixos atractores que não
sejam super-atractores.
Teorema 2.12. Suponha-se que f tem um ponto fixo atractor em z0, com multiplicador
λ satisfazendo 0 < |λ| < 1. Então existe uma transformação conforme ζ = ϕ(z) queleva uma vizinhança de z0 numa vizinhança de 0 que conjuga f(z) numa função linear
g(ζ) = λζ. A função conjugadora é única, a menos da multiplicação por um factor não
nulo.
Demonstração. Ver [CG91].
A conjugação ϕ é normalizável de tal forma que ϕ′(z0) = 1. A convergência uniforme
mostra que se f depende analiticamente de um parâmetro, assim acontece para a versão
normalizada de ϕ. Assim, a equação ϕ fica
ϕ(f(z)) = λϕ(z).
Esta equação permite-nos extender ϕ analiticamente a toda a bacia de atracção de
A(z0), pela fórmula
ϕ(z) = ϕ(fn(z))/λn,
onde n é escolhido grande o suficiente de tal forma que fn(z) pertença a uma vizinhança
de coordenadas de z0. Note-se que ϕ(z) = 0 se e só se fn(z) = z0 para algum n ≥ 1.
O ramo de ϕ−1 que transforma 0 em z0 pode ser extendido até que encontremos um
ponto cŕıtico de f ou que se saia do doḿınio de f . Se f é polinomial ou racional, então
o alcance de ϕ cobre todo o plano complexo.
A existência de uma transformação conjugada para um ponto fixo repulsor segue o
mesmo critério de formação de para os pontos fixos atractores. Supondo
f(z) = z0 + λ(z − z0) + ...
com |λ| > 1, teremosf−1(z) = z0 + (z − z0)/λ + ...,
ficando z0 um ponto fixo atractor. Qualquer transformação conjugando f−1(z) a ζ/λ
também conjuga f(z) a λζ.
14
Teorema 2.13. Para qualquer transformação racional R, cada órbita repulsora de R
está contida em J(R).
Demonstração. [Bea91]
L. E. Boettcher, em 1904, provou a existência da conjugação para estes casos.
Teorema 2.14. Suponha-se z0 um ponto fixo super-atractor de f , com
f(z) = z0 + ap(z − z0)p + ..., ap 6= 0, p ≥ 2.
Então existe uma transformação conforme ζ = ϕ(z) que transporta uma vizinhança de
z0 numa vizinhança de 0 que conjuga f(z) a ζp. A função conjugadora é única, a menos
da multiplicação por um (p− 1) ésima ráız da unidade.
Demonstração. Ver [CG91].
Se f depende analiticamente do parâmetro, o mesmo acontece com a função ϕ. Neste
caso a equação funcional ϕ(f(z)) = ϕ(z)p, permite-nos extender ϕ analiticamente até
encontrarmos um ponto cŕıtico de f . No entanto, a equação funcional log |ϕ(f(z))| =p log |ϕ(z)| permite-nos extender log |ϕ(z)| a toda a bacia de atracção A(z0). A funçãoextendida é uma função harmónica negativa, excepto nos polos do logaritmo em todas
as iteradas inversas de z0.
Teorema 2.15. Seja {ζ1, ..., ζq} uma órbita super atractora de R. Então cada ζ pertencea um componente do conjunto de Fatou F (R), e à medida que n → ∞, Rnq → ζlocalmente e de forma uniforme em cada componente respectivo.
Demonstração. Ver [Bea91].
Dado um ponto super atractor ζ de R , a componente F (R) à qual pertence ζ é
designada de bacia imediata de atracção de ζ. Assim, Rn → ζ precisamente quandoz está presente em alguma imagem inversa R−m(B), m ≥ 0, da bacia imediata deatracção B, e chamamos a este conjunto de pontos z o conjunto estável para ζ.
15
Definição 2.11. A bacia imediata de atracção de um ciclo super actractor é a união dos
componentes distintos de Fatou de F (R) e o conjunto estável para a órbita é a união
das bacias imediatas de atracção e todas as suas imagens inversas.
Considere-se f(z) = λz + azp+1 + · · · , a 6= 0 e λn = 1. Então, podemos distinguirtrês casos:
1. λ = 1 e p = 1,
2. λ = 1 e p > 1,
3. λn = 1 e λ 6= 1.
Caso 1. Assuma-se f(z) = z + az2 + . . . e a 6= 0. Conjugando f com ϕ(z) = az,podemos assumir que a = 1. Através da inversão z −→ −1/z desloquemos o valor 0para o ∞. A transformação conjugada tem a expansão g(z) = z + 1 + b/z + ... numavizinhança do infinito. Existem dois métodos para provar que existe uma transformação
ϕ conjugando g a uma translação z −→ z + 1, assim como o valor a tem mesmo deser 1. Um é devido a Fatou e usa o comportamento assimptótico de gn e outro envolve
transformação quase-conformes. Ambas as demonstrações podem ser encontradas em
[CG91].
Caso 2. Assuma-se agora que z′ = f(z) = z + azp+1 + ..., com a 6= 0 e p > 1,assim como a = 1. Defina-se z = ζ1/p e z′ = ζ ′1/p para 0 < arg ζ, arg ζ ′ < 2π e z, z′
restringidas a um sector apropriado de abertura 2π/p. Então temos
ζ ′ = ζ + pζ2 + O(|ζ|2+1/p).
Renormalizando novamente para remover o valor p e mudando de variáveis ζ = −1/z eζ ′ = −1/z′ teremos
z′ = g(z) = z + 1 + O(|z|−1/p).
Tanto o método de Fatou como o da cirurgia quase-conforme funciona aqui também,
mas em [CG91] é apresentada uma terceira via usando uma mistura dos dois métodos,
simplificando bastante a compreensão do movimento de iteração que acontece nestes
pontos.
16
Caso 3. Assumindo que f(z) = λz + ..., onde λ é uma raiz primitiva de ordem n da
unidade, então fn(z) tem de pertencer quer ao Caso 1 ou ao Caso 2.
A seguir apresentamos os resultados mais significativos de órbitas racionalmente
indiferentes que acontecem em F (R).
Teorema 2.16. Se o grau(R) ≥ 2 então cada órbita racionalmente indiferente detransformação racional R está contida em J(R).
Demonstração. Ver [Bea91].
Teorema 2.17. Seja ζ um ponto fixo indiferente de uma transformação racional R.
Então R é linearizável numa vizinhança de ζ se e só se ζ pertence a F (R).
Demonstração. Ver [Bea91].
Teorema 2.18. Seja R uma função racional de grau d, com d ≥ 2, e suponha-se queζ é um ponto fixo irracionalmente indiferente pertencente a alguma componente de
Fatou F0, de F (R). Então F0 é simplesmente conexa e R : F0 → F0 é analiticamenteconjugada a uma rotação de ordem infinita do disco unitário.
Demonstração. Ver [Bea91].
A qualquer componente F0 nas condições do teorema anterior chamamos disco de Siegel,
em homenagem a C. L. Siegel que, em 1941, foi o primeiro a provar a sua existência.
Apesar da geometria e dinâmica da iteração em vizinhanças de pontos que estejam
em J(R) não seja completamente clara podem ocorrer órbitas irracionalmente diferentes
em J . Para alguns resultados podemos consultar [Bea91], [CG91] e ainda [Dev91].
Considere-se λ = e2πiθ com θ irracional. Pretende-se uma solução ϕ para a equação
ϕ(f(z)) = λϕ(z), normalizada por ϕ′(0) = 1. Para h = ϕ−1 a equação fica em
f(h(ζ)) = h(λζ), com h′(0) = 1.
Teorema 2.19. A solução h para f(h(ζ)) = h(λζ) em qualquer disco {|ζ| < r} éunivalente.
Demonstração. Ver [CG91].
17
Teorema 2.20. A solução h para f(h(ζ)) = h(λζ) existe se e só se a sequência de
iteradas {fn} é uniformemente limitada em alguma vizinhança da origem.
Demonstração. Ver [CG91].
Teorema 2.21 (Siegel). Se θ for diofantina, e se f tem um ponto fixo em 0 com
multiplicador e2πiθ, então existe uma solução para a equação f(h(ζ)) = h(λζ), isto é,
f pode ser conjugada numa vizinhança de 0 à multiplicação por e2πiθ.
Demonstração. Ver [CG91].
Depois de estudarmos os pontos fixos, vejamos agora os pontos periódicos de uma
aplicação racional.
2.3 Pontos periódicos
Definição 2.12. Um ponto z0 diz-se periódico, de peŕıodo n, sob R, se Rn(z0) = z0.
Definição 2.13. Um ponto z0 é pré-periódico, ou eventualmente periódico, de periodo
n, se z0 não é periódico, mas existe um n > 0 tal que Rn+i(z0) = R
i(z0), com i > n.
Isto é, Ri(z0) é periódica para i > n.
Definição 2.14. Um ponto periódico z0 = Rn(z0) é designado de parabólico se
m(R, z0) = 1,
mas Rn não é a transformação identidade.
Um ponto periódico ζ de periodo n é classificado como um ponto fixo de Rn, mas muito
mais pode ser dito acerca disso. Por conjugação, podemos assumir que a órbita não
contém o ∞ e escreverζm = R
m(ζ), m = 0, 1, 2, · · ·
e assim ζm+n = ζm. Por n aplicações da regra da cadeia, obtemos
(Rn)′(ζm) =n−1Π
k=0R′(Rk(ζm))
=n−1Π
k=0R′(ζk),
18
sendo o segundo produto um rearranjo do primeiro. Este facto mostra que a derivada
(Rn)′ tem o mesmo valor em cada ponto ζj da órbita, e assim cada ponto ζj é classificado
exactamente da mesma maneira do que outro ζk na órbita. Como consequência disso
podemos estender a classificação dada aos pontos periódicos e falar no multiplicador da
órbita, órbitas atractoras, repulsoras, etc.
Definição 2.15. Se uma dada função f é conformalmente conjugada à sua parte linear
numa vizinhança de um ponto fixo ζ diz-se que f é linearizável, por outras palavras f é
conjugada com f0 : z −→ ζ + (z − ζ)f ′(ζ).
Teorema 2.22 (Schroder). Um ponto periódico de uma transformação racional com
multiplicador não nulo é estável se e só se é linearizável.
Demonstração. Ver L. Keen em [Dev91].
2.4 Pontos cŕıticos
No estudo da dinâmica da transformações racionais existem uns pontos que são muito
importantes, pois estes influenciam em muito a dinâmica da transformação, são os
pontos cŕıticos de uma transformação. Logo através deles podemos de uma forma mais
acesśıvel interpretar esta dinâmica, pois as órbitas dos pontos cŕıticos estão relacionadas
com as componentes estáveis de Fatou, ΩR. Cada ponto da órbita atractora, cada
órbita racionalmente indiferente, a fronteira de cada disco de Siegel e as fronteiras das
componentes de cada anel de Herman atraem uma infinita órbita crescente de algum
ponto cŕıtico de R.
Definição 2.16. Os pontos cŕıticos de uma transformação R são os pontos onde R
não é homeomorfismo, sendo R um homeomorfismo local, à excepção destes pontos em
número finito. Os pontos cŕıticos no plano complexo são os zeros de R′(z), e para ver
se o ∞ é ponto cŕıtico basta efectuar uma mudança de variável.
Sendo z0 um ponto cŕıtico de R, esta transformação racional não é injectiva em qualquer
vizinhança de z0, sendo o seu comportamento nesta vizinhança muito semelhante ao
comportamento que tem numa vizinhança do zero a transformação z −→ z2.
19
Definição 2.17. Um valor cŕıtico é a imagem de um ponto cŕıtico.
Os valores cŕıticos têm poucas pré-imagens e através do Teorema de Riemann-Hurwitz
podemos assegurar que uma transformação racional de grau d tem exactamente 2d− 2valores cŕıticos.
Teorema 2.23 (Relação de Riemann-Hurwitz). Sendo vR(z) a valência de R em z,
temos para qualquer transformação racional, não constante, R, que
∑[vR(z)− 1] = 2 (grau(R)− 1) .
Demonstração. Ver [Bea91].
Corolário 2.1. Uma transformação racional de grau positivo d tem no máximo 2d− 2pontos cŕıticos em C∞. Um polinómio de grau positivo d tem no máximo d− 1 pontoscŕıticos.
Demonstração. Ver [Bea91].
Convenciona-se o valor vR(z)− 1 como sendo a multiplicidade do ponto cŕıtico.
Através dos pontos cŕıticos de uma transformação R podemos localizar o conjunto
dos valores cŕıticos de Rn.
Teorema 2.24. Seja C o conjunto dos pontos cŕıticos de uma transformação racional
R. Então o conjunto dos valores cŕıticos de Rn é o conjunto
R(C) ∪R2(C) ∪ ... ∪Rn(C) = ∪nk=1Rk.
Demonstração. Ver [Bea91].
Definição 2.18. Uma transformação racional é hiperbólica se e só se a órbita de todos
os seus pontos cŕıticos convergem para alguma órbita periódica atractora.
Rees e Tan Lei mostraram que os componentes hiperbólicos de uma transformação
racional do segundo grau podem ser divididos em quatro classes distintas e Milnor,
[Mil93], em 1993, deu-lhes um nome consoante as suas propriedades.
20
Bitransitiva: Cada um dos dois pontos cŕıticos pertencem à bacia de atracção
imediata de algum ponto atractor, onde estes dois pontos periódicos são distintos mas
pertencem à mesma órbita. Evidentemente o periodo tem de ser dois ou mais.
Captura: Apenas um ponto cŕıtico pertence à bacia imediata de atracção de um
ponto periódico, mas a órbita do outro ponto cŕıtico eventualmente cai nesta bacia
imediata de atracção. Novamente o periodo tem de ser dois ou mais.
Atractores disjuntos: Os dois pontos cŕıticos pertencem a às bacias de atracção
de dois pontos atractores distintos.
Escape: Ambos os pontos cŕıticos convergem para o mesmo ponto fixo atractor.
Teorema 2.25. Seja R uma transformação racional de grau não inferior a dois. Então
a bacia de super atracção imediata de R de cada ciclo de R contém um ponto cŕıtico
de R.
Demonstração. Ver [Bea91].
Teorema 2.26. Cada bacia imediata de um ciclo racionalmente indiferente de R contém
um ponto cŕıtico de R.
Demonstração. Ver [Bea91].
Teorema 2.27. Seja {Ω1, · · · , Ωq} um ciclo de discos de Siegel ou de aneis de Hermande uma transformação racional R. Então o fecho das iterações dos pontos cŕıticos
contém ∪∂Ωj.
Demonstração. Ver [Bea91].
Teorema 2.28. Seja R uma transformação racional de grau não inferior a dois. Então
todos os ciclos irracionalmente indiferentes de R em J estão contidos no conjunto
derivado das órbitas do pontos cŕıticos de R.
Demonstração. Ver [Bea91].
Teorema 2.29. Se cada ponto cŕıtico de R é pré-periódico então J = Ĉ.
Demonstração. Ver [Bea91].
21
2.5 Pontos excepcionais
Definição 2.19. Um ponto z é designado de excepcional para R quando a classe de
equivalência [z] é finita, sendo [z] o conjunto mais pequeno e invariante que contém z.
O conjunto dos pontos excepcionais é denotado por ER.
A classe [z] só é finita em raras circunstâncias, por este facto o nome aplicado a estes
pontos z de excepcionais. Nas transformações racionais R é posśıvel verificar quantos
pontos destes iremos ter presentes.
Teorema 2.30. Uma transformação racional R de, pelo menos, grau 2 tem, quando
muito, dois pontos excepcionais. Se ER = {ζ}, então R é conjugada com um polinómioque faz corresponder ζ ao ∞. Se ER = {ζ1, ζ2}, com ζ1 6= ζ2, então R é conjugadacom alguma transformação z −→ zd, onde ζ1 e ζ2 correspondem ao zero e ao infinito.
Demonstração. Ver [Bea91].
Um dos realces que constam da prova deste último teorema é que a maioria das trans-
formações racionais não possuem pontos excepcionais.
Uma outra boa caracterização dos pontos excepcionais é dada pelo teorema seguinte,
em que identificamos os pontos excepcionais pela sua órbita passada.
Teorema 2.31. A órbita passada O−(z) de z é finita se e só se z é um ponto excepcional.
Demonstração. Ver [Bea91].
Teorema 2.32. Seja R uma transformação racional com grau(R) ≥ 2:
• se z não for um ponto excepcional, então JR está contido no fecho de O−(z);
• se z ∈ JR, então JR é o fecho de O−(z).
Demonstração. Ver [Bea91].
22
2.6 Classificação de componentes periódicos
Concentrando a nossa atenção para o conjunto de Fatou de uma transformação racional
R, com grau não inferior a dois, temos como resultado mais importante, obtido por
Sullivan, que a iteração de Ω de forma eventual irá resultar noutro componente Ω sob
R e que a imagem inversa de um componente Ω é a união disjunta de d componentes
de Ω. A dinâmica de R pode ser compreendida em parte, determinando como os vários
componentes de Ω são iterados por R.
Definição 2.20 (Componentes de F). Consideremos um componente fixo U de Ω.
1. Se R(U) = U , chamamos U uma componente de Ω.
2. Se Rn(U) = U para algum n ≥ 1, chamamos U uma componente periódica deΩ. O minimal n é o periodo da componente. Se n = 1 teremos uma componente
fixa.
3. Se Rm(U) é periódico para algum m ≥ 1, chamamos U uma componente pré-periódica de Ω.
4. Caso não aconteça nenhum dos pontos anteriores e todos os {Rn(U)} são distintosentão chamamos U um doḿınio errante.
D. Sullivan mostrou, em 1985, que as funções racionais não têm doḿınios errantes,
enquanto I.N. Baker mostrou, em 1976, que estes doḿınios existiam para certas funções
inteiras.
Em cada componente U de Ω, R é uma cobertura em ramo de U sobre R(U) com
quando muito d folhas. Em [CG91], Carleson e Gamelin têm uma afirmação muito
interessante acerca disso: uma componente de Ω é completamente invariante se e só se
R é uma cobertura em ramo em cada folha d, do componente sob ele mesmo.
Teorema 2.33. Se U é uma componente completamente invariante de Ω, então ∂U =
J , e toda as outras componentes de Ω são simplesmente conexas. Existe no máximo
duas componentes invariantes de Ω.
23
Demonstração. Ver [CG91]
Teorema 2.34. O número de componentes do conjunto de Fatou pode ser 0, 1, 2 ou
∞, e todos os casos ocorrem.
Demonstração. Ver [CG91].
Teorema 2.35 (Sullivan). Uma transformação racional não tem doḿınios errantes.
Demonstração. Ver [CG91].
Definição 2.21 (Doḿınios parabólicos). Uma componente periódica U de periodo n
do conjunto de Fatou Ω é chamada de parabólica se existe na sua fronteira um ponto
neutral fixo ζ de Rn com multiplicador 1, de tal forma que todos os pontos em U
convergem para ζ sobre iteração de Rn.
Os doḿınios U , R(U), ..., Rn−1(U) formam um ciclo parabólico. A sua união é a
bacia de atracção imediata associada a uma pétala atractora em ζ.
Definição 2.22 (Doḿınios de rotação). Uma componente periódica U de periodo n
do conjunto de Fatou Ω é chamada um anel de Herman se é duplamente conexa e Rn
é conjugada ou a uma rotação numa coroa circular ou a uma rotação seguida de uma
inversão.
Quando estendemos o conceito anterior para incluir os componentes periódicos de
U que são simplesmente conexos, nos quais alguma Rn é conjugada a uma rotação
obtemos os discos de Siegel.
Teorema 2.36 (Classificação de Sullivan). Suponha-se U uma componente periódica
do conjunto de Fatou Ω. Então, exactamente, uma das seguintes afirmações é válida:
1. U contém um ponto atractor periódico.
2. U é parabólico.
3. U é um disco de Siegel.
4. U é um anel de Herman.
Demonstração. Ver [CG91].
24
2.7 As transformações de Mobius
Uma classe importante das transformações racionais, são as transformações de Mobius,
que são do tipo
M(z) =az + b
cz + d
onde a, b, c, d são constantes complexas.
Estas transformações têm muitas propriedades interessantes e podem ser encontradas
em muitas aplicações da análise complexa. Apesar da sua simplicidade estas são a alma
para algumas das mais excitantes áreas de investigação na matemática moderna. Têm
ligações directas com as geometrias não euclidianas e até com a Teoria da Relatividade de
Einstein. Para detalhes sobre as propriedades fascinantes destas transformações podemos
consultar [Nee97].
Podemos, no entanto, sintetizar algumas dessas propriedades, que nos ajudam a
perceber melhor como funciona os aspectos geométricos e algébricos das transformações
de Mobius.
Uma destas propriedades é a capacidade de preservar ćırculos, ângulos e a simetria
dos conjuntos transformados, pois M(z) é uma transformação conforme. De forma única
M(z) transforma três pontos em outros três pontos, o que possibilita a obtenção de uma
transformação de Mobius única através de três quaisquer pontos do plano complexo
através do uso do rácio cruzado. As não singulares, em que ad − bc 6= 0, formamum grupo algébrico sob a operação composição e além do mais convencionando-se que
M(∞) = a/c e M(−d/c) = ∞, com c 6= 0 e M(∞) = ∞ quando c = 0, quandosob iteração, apresentam um comportamento dependendo se têm um ou dois pontos
fixos. Caso M(z) tenha apenas um ponto fixo ζ, então para todo o z, Mn(z) −→ ζe se tiver dois pontos fixos Mn(z) ou converge para um dos pontos fixos de M , ou os
pontos movem-se ciclicamente através de um conjunto finito de pontos, ou os pontos
formam um conjunto denso de um determinado ćırculo. A afirmação anterior pode ser
verificada através da conjugação topológica de M(z) com outra função de Mobius que
faça a deslocação dos pontos fixos e do infinito, como pode ser encontrado em [Bea91].
As transformações de Mobius classificam-se em quatro grupos distintos, consoante
25
a sua dinâmica transformadora. Teremos uma transformação eĺıptica se a + d é real
e |a + d| < 2; parabólica se a + d = ±2; hiperbólica se a + d é real e |a + d| > 2;loxodrómica se a + d é um número complexo. Se imaginarmos uma esfera em que
o pólo sul representa o zero da esfera de Riemann, e o infinito sendo representado
pelo pólo norte, podemos perceber melhor esta classificação em termos geométricos.
A transformação eĺıptica conduz os complexos sempre em circunferências paralelas de
latitude da esfera e a hiperbólica em circunferências de longitude que se cruzam no pólo
sul e no pólo norte. A transformação loxodrómica conduz os complexos em espirais que se
encontram nos pólos, enquanto que a parabólica conduz os complexos em circunferências
todas tangentes num dos pólos.
2.8 Transformações racionais do segundo grau
Assumindo d = 2 em R(z), vamos ter uma transformação racional de grau 2 do tipo
R2(z) =P2(z)
Q2(z)=
az2 + bz + c
a′z2 + b′z + c′,
com P e Q polinómios complexos. A equação R2(z) − w0 = 0 é do segundo grauem z, que mostra que sob a transformação de w = R2(z) cada ponto w0 é tomado
duas vezes. Isso mostra que esta transformação transporta o plano complexo z no
duplamente coberto plano w, ou de forma equivalente, transporta o plano complexo z
numa superf́ıcie de Riemann de duas folhas, cujas cobrem todo o plano w. Os pontos
de ramificação desta superf́ıcie de Riemann são os pontos w que são comuns às duas
folhas. Estes correspondem aos pontos z tais que ou R′2(z) = 0 ou em que R2(z)
tem um polo duplo. Podemos ver que existe em R2(z) exactamente dois pontos de
ramificação, distinguindo-se dois casos:
1. R2(z) tem um polo duplo, isto é, w = ∞ é um dos pontos de ramificação.
2. R2(z) tem dois pontos finitos de ramificação. No caso (a) a transformação R2(z)
pode ser decomposta em duas sucessivas transformações, sendo uma a trans-
formação de Mobius e uma do tipo z2 + const. No caso (b) a transformação
R2(z) pode ser decomposta em três sucessivas transformações: uma linear, uma
de Mobius e uma do tipo z + 1z.
26
Consideremos o primeiro dos casos: sejam w = ∞ e w = λ os dois pontos deramificação de w = R2(z), e z = z1, z = z2 os pontos correspondentes no plano z.
As expansões em série de R2(z) numa vizinhança destes mesmo pontos são da forma
seguinte:
R2(z) =α−2
(z − z1)2 +α−1
(z − z1) + α0 + α1(z − z1) + ...,
α−2 6= 0, eR2(z)− λ = β2(z − z2)2 + β3(z − z2)3 + ..., β2 6= 0,
respectivamente. Considerando o prinćıpio da continuação anaĺıtica de funções e que a
função√
R2(z)− λ
tem apenas uma singularidade no plano z inteiro que é o ponto z = z1, podemos concluir
pelo Teorema de Liouville da análise complexa que esta função tem de estar na forma
de Mobius. Assim, temos que
R2(z) = λ +
(Az + B
Cz + D
)2
e w = λ + z21 com
z1 =Az + B
Cz + D.
Consideremos agora o segundo caso: sejam w = λ e w = µ os dois pontos finitos de
ramificação da transformação. Usando uma mudança de variável de R2(z) para g(z),
estes pontos podem ser normalizados para estarem em g(z) = ±1, e assim
R2(z) =λ− µ
2g(z) +
λ + µ
2.
Sejam z = z1, e z = z2 os pontos correspondentes no plano z dos pontos de ramificação
λ e µ, respectivamente. A expansão em série de g(z) na vizinhança destes pontos são
da forma:
g(z)− 1 = α2(z − z1)2 + α3(z − z1)3 + ..., α2 6= 0,
e
g(z) + 1 = β2(z − z1)2 + β3(z − z1)3 + ..., β2 6= 0,
respectivamente. A função R2(z) tem dois polos simples, logo a função g(z) também
tem dois polos simples, que iremos designar por z = ζ1 e z = ζ2. Usando uma mudança
27
de variáveis de g(z) para h(z), é posśıvel construir uma função que tem apenas um único
polo
g(z) =1
2
(h(z) +
1
h(z)
).
De facto, os dois polos de g(z) correspondem a
h(z) = γ(z − ζ1) [1 + c1(z − ζ1) + ...]
e a
h(z) = δ(z − ζ2)−1 [1 + d1(z − ζ2) + ...] ;
isto é, eles correspondem a um zero e a um polo de h(z). Para além disso, devido
às expansões em série g(z) ± 1, podemos concluir que a função g(z) é regular numavizinhança de z = z1 e z = z2. A única singularidade de h(z) em todo o plano complexo
z é um polo, então h(z) tem de estar na forma de Mobius. Assim, renomeando funções
e constantes vamos ter
R2(z) = w = A′ζ2 + B′,
ζ2 =1
2
(ζ1 +
1
ζ1
),
ζ1 =Az + B
Cz + D.
A importância de toda a discussão presente nesta secção resume-se ao facto de que
o estudo da transformação R2(z) se reduz ao estudo da transformação de Mobius, da
transformação w = z2 e da transformação
w =(z + z−1
)/2.
2.9 Formas normais das transformações
As transformações racionais do segundo grau podem ser escritas de três formas difer-
entes, consoante a sua aplicação e estudo.
Consideremos
f(z) = zz + µ1µ2z + 1
,
28
com µ1µ2 6= 1. Aqui a origem é um ponto fixo de multiplicidade µ1, e o infinito é umponto fixo de multiplicidade µ2. O terceiro ponto fixo é o valor
1− µ11− µ2 ,
e tem multiplicidade
µ3 =2− µ1 − µ21− µ1µ2 .
Os pontos cŕıticos desta transformação são as duas ráızes
ω =−1±√1− µ1µ2
µ2
da equação
µ2ω2 + 2ω + µ1 = 0.
Note-se que tem um ponto cŕıtico no infinito quando µ2 = 0. Assim sendo, um breve
cálculo mostra que os valores cŕıticos são dados pela equação f(ω) = −ω2.
O formato da transformação racional é o seguinte
f(z) =z + z−1
µ+ a
com pontos cŕıticos ±1 e com um ponto fixo de multiplicidade µ 6= 0 no infinito. Osvalores cŕıticos são
f(±1) = a± 2/µ.
Os dois pontos fixos finitos z1 e z2 podem ser descritos como ráızes da equação
(1− µ)z2i + aµzi + 1 = 0.
Os correspondentes multiplicadores
µi = f′(zi) = (1− z−2i )/µ
satisfazem a relação
σ1 = µ1 + µ2 + µ = µ(1− a2)− 2 + 4/µ.
A função simétrica
σ2 = µ1µ2 + µ1µ3 + µ2µ3
29
pode ser calculada através da equação
0 = µ3 − σ1µ2 + σ2µ− σ3 = µ3 − σ1µ2 + σ2µ− σ1 + 2,
assim
σ2 = (µ + µ−1)σ1 − (µ2 + 2/µ).
O parâmetro τ = µ1µ2 ao longo da linha Per1(µ) é igual a
σ3/µ = (σ1 − 2)/µ,
então
τ =
(2− µ
µ
)2− a2.
Logo, para µ 6= 0, o parâmetro τ ao longo da linha Per1(µ) coincide com −a2, a menosda translação por uma constante dependente apenas de µ.
Se colocarmos os pontos cŕıticos como sendo o zero e o infinito, de tal forma que
f(z) = f(−z), então a transformação fica no formato
f(z) =αz2 + β
γz2 + δ.
Esta forma é particularmente conveniente para cálculo dos conjuntos de Julia. As quan-
tidades
A =αδ
αδ − βγ=
1 + βγ
αδ − βγ ,
B =α3β
(αδ − βγ)2 ,
C =γδ3
(αδ − βγ)2
são invariantes sob conjugação holomórfica que fixem os dois pontos cŕıticos. Assim A
e B + C são invariantes por conjugação holomórfica.
30
2.10 A faḿılia Rc(z) = (z2 + c)/(z2 − 1)
Analisemos agora com algum detalhe a faḿılia de transformações
Rc(z) = (z2 + c)/(z2 − 1),
com c ∈ C. O estudo de Rc(z) foi o embrião desta tese de doutoramento, tendo emconta de que a construção do espaço dos parâmetros c levou a um desenho muito similar
ao conjunto de Mandelbrot, o que nos levou a questionar o porquê deste facto, e qual
era o peso da contribuição do denominador e do numerador para a construção deste
mesmo espaço.
Os pontos fixos desta transformação são três, um real e dois números complexos,
que podem ser conjugados se |c| > 1. Fazendo
∇ = −11− 27c + 3√−15 + 66c + 81c2
os três pontos são
z0 =1
3
(1− 4.2
1/3
∇1/3 −∇1/321/3
);
z1 =1
12
(4 +
8.21/3(1 + i√
3)
∇1/3 + 22/3(1− i
√3)∇1/3
)
e
z2 =1
12
(4 +
8.21/3(1− i√3)∇1/3 + 2
2/3(1 + i√
3)∇1/3)
.
Observando as expressões anteriores notamos logo que encontrar vizinhanças de c em
que |R′c(zk)| < 1, por forma a perceber onde a transformação admite pontos fixosatractores, e o mesmo para |R′c(zk)| > 1, onde a transformação admite pontos fixosrepulsores, torna-se numa tarefa hercúlea em termos de cálculo. Para termos uma ideia
de como evolui a transformação, podemos, no entanto, atribuir valores particulares a c
por região e ir verificando a natureza dos pontos fixos respectivos.
Vejamos o caso de c = 0 + 0i. A transformação Rc(z) tem os três pontos fixos
z0 = 1/2(1 −√
5); z1 = 0 e z2 = 1/2(1 +√
5). Se iterarmos valores numa vizinhança
de raio ² tão pequeno quanto queiramos, de cada um dos valores, podemos ver z0 e z2
são pontos repulsores e z1 é um ponto atractor. O especial desta dinâmica é que quando
31
os pontos estão numa vizinhança de −z0 estes afastam-se do mesmo, fazendo com que−z0 assuma um papel de ponto repulsor fantasma porque nem sequer é ponto fixo datransformação! Também pontos na vizinhança do ponto z = 1 convergem para um, e
assim assumindo este ponto um papel de atractor fantasma, mas neste caso este é uma
singularidade da função que projecta logo de seguida todos os valores para o infinito.
Para completar o quadro, também podemos dizer que o ponto infinito é um ponto
atractor já que pontos na vizinhança do infinito são também levados na vizinhança do
um e depois no infinito novamente. A novidade aqui é que um ponto não fixo influencia
grandemente a dinâmica da transformação, quando devia ser apenas mais um no rio
gerado pelas diversas iterações, divergindo de ou convergindo para os pontos fixos da
transformação. Assim sendo a dinâmica da transformação não é apenas entendida pela
dinâmica do ponto cŕıtico, de forma geral, havendo um outro ponto que apesar não
ser nenhum ponto em especial também influencia a dinâmica da função, servindo como
limitante para a zona de influencia do ponto cŕıtico.
Definição 2.23. Dizemos que um ponto não fixo w ∈ C de uma dada transformaçãoé um ponto oculto se para todos os valores de uma vizinhança de raio ² → 0 estesdivergem de/convergem para w sob iteração da transformação. O conjunto oculto é a
reunião de todos os pontos ocultos.
No geral, para |c| < 1 a presença destes pontos ocultos vão-nos facilitar a compreensão,a ńıvel geométrico, da localização das bacias de atracção de dois pontos fixos. Na figura
seguinte podemos observar a presença de dois destes pontos permitindo-nos definir os
limites das bacias de atracção de z1, z2 e do ponto z = 1.
Figura 2.2 Aspecto geométrico das bacias de atracção de z1 e z2, para |c| < 1
Para |c| > 1 teremos um ponto fixo real e dois conjugados complexos, o que vai conferir
32
um pouco de simetria ao posicionamento das bacias de atracção no plano complexo,
obtendo-se a figura que de seguida se desenha.
Figura 2.3 Aspecto geométrico das bacias de atracção de z1 e z2 para |c| > 1
Os pontos ocultos representam os valores z para os quais podemos encontrar na sua
vizinhança mais próxima pontos das bacias de atracção do infinito, do um, e dos pontos
fixos que são atractores. Funcionam como se fossem pontos de Misiurewicz, mas no
plano z.
O espaço dos parâmetros c entende-se como sendo o retrato fiel da órbita do ponto
cŕıtico subjugada a uma determinada majoração dos valores complexos z, consoante o
valor de c.
Da mesma forma como é constrúıdo o conjunto de Mandelbrot, podemos construir
o nosso próprio espaço dos parâmetros para Rc(z). Tendo em conta que o ponto cŕıtico
de Rc(z) é z = 0, e iterando a transformação vamos obter a sequência
0,−c, c−1 + c,c(1− c + c2)−1 + 2c , · · · .
Uma das grandes diferenças de lidar com transformações polinomiais e racionais é que
neste caso, nas racionais, vamos obter vários valores de c para os quais esta sequência
tem elementos no infinito. Isso significa desde logo que o espaço dos parâmetros para
este tipo de funções racionais é um plano perfurado tantas vezes quantos os valores de
c que transformam os elementos desta sequência no infinito.
33
Proposição 2.6. Considere-se Ic como sendo o conjunto dos c′s que transformam os
elementos da órbita cŕıtica Ric(0), com i = 1, 2, 3, · · · em valores no infinito. À medidaque o número de iterações i aumenta, o menor valor real de Ic vai-se aproximando de
forma decrescente de um valor positivo 0.185 < α < 0.19.
Demonstração. Os valores que c toma no eixo real são fáceis de serem observados na
figura do espaço dos parametros anteriormente desenhada. São uma série de buracos
que começam no c = 1 que depois vão convergindo gradualmente para o valor resultante
da intersecção da cúspide da linha que limita o conjunto principal com o eixo real. Este
valor situa-se no intervalo real (0.185, 0.19) depois de efectuados os devidos cálculos.
Se observamos as diversas iterações Rnc (z), n = 1, 2, ..., verificamos que todas as trans-
formações em que n é impar têm o mesmo grau em numerador e denominador logo
daqui conclue-se que para |z| → ∞ , Rnc (z) → 1 e que depois Rn+1c (z) encarrega-se delevar este valor 1 para o infinito. Algebricamente também podemos ver que se fizermos
|z| = r a transformação Rc(z) vai levar esta circunferência numa outra circunferência
r2 =|z + c||z − 1| .
Ora, se fizermos z = x + iy e c = u + iv vamos obter a equação desta circunferência
em R2:
a2 − 2r4 − 2u
r4 − 1 a + b2 − 2v
r4 − 1b =r4 + u2 + v2
r4 − 1em que se fizermos r →∞ e |c| = r2 esta torna-se gradualmente na circunferência
(a− 1)2 + b2 = 3.
Todos os valores de z em que |z| < √3 são automaticamente levados no infinito e osvalores de z em que |z| > √3 vão cair dentro de um circulo centrado em z = 1 de raio² <
√3. Note-se que no ćırculo |z−1| < √3 vão haver outros valores que também serão
levados no infinito. Mas temos a garantia de que ao menos se |c| > 3, |Rnc (z)| → ∞, oque nos permite construir o espaço dos parâmetros c de Rc(z).
Definição 2.24. O conjunto de Mandelbrot de Rc(z) é o subconjunto do plano c dado
por MR = {c : Rnc (0) 9∞}.
34
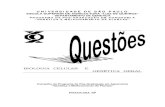
Podemos analisar em que valores de c é que Rc(z) tem uma órbita atractora de peŕıodo
1. Isso acontece quando Rc(z) = z e
| ddz
Rc(z)| < 1.
A fronteira desta região consiste nos valores c para os quais o valor do módulo da derivada
é um, isto éd
dzRc(z) = e
it,
0 ≤ t < 2π e daqui podemos extrair o valor de z e substitui-lo em Rc(z) = z e obteremosuma função do tipo c = f(it) que parametriza a desejada fronteira. Apesar de serem
necessários cálculos mais complexos e requerer mais computação dos que são precisos
para obter o conjunto de Mandelbrot, tendo por base a função quadrática, podemos ver
que o resultado geral será dado pela figura seguinte, que foi obtida usando a lista de
pontos fixos existente na função e a função densidade do programa Mathematica. Este
é o espaço dos parâmetros c onde se inclui o conjunto dos pontos onde a faḿılia de
transformações Rc(z) bifurca e em que |c| < 3.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.4 Espaço dos parâmetros de (z2 + c)/(z2 − 1)
A figura anterior apresenta uma simetria em relação ao eixo real, isso derivado de
Rc(−z) = Rc(z), e muitos pontos c que são designados por Devaney como sendo
35
buracos de Sierpinsky, ver, por exemplo, [DRS07], valores estes que claramente levam a
órbita do ponto cŕıtico para o infinito e regressam depois ao valor 1.
A semelhança entre esta figura e a obtida por Benoit Mandelbrot para as trans-
formações quadráticas é notável, até porque se tratam de transformações distintas. Mas,
no entanto, não seria de estranhar esta semelhança porque a transformação quadrática
Qc = z2 + c faz parte da transformação racional Rc(z) e logo dáı esta ter de herdar
algumas caracteŕısticas da dinâmica das suas componentes. Também podemos obser-
var pequenas ilhas que são cópias fieis do conjunto de Mandelbrot de Qc, veja-se, por
exemplo, a figura seguinte.
1.3 1.35 1.4 1.45 1.5
0.8
0.85
0.9
0.95
1
Figura 2.5 Secção de MR para 1.3 <
Douady e Hubbard, no seu trabalho On the dynamics of polynomial-like mappings, de
1985, estabelecem o critério para a existência de conjuntos de conjuntos de Mandelbrot
sob a forma de teorema.
Teorema 2.37 (Douady-Hubbard, 1985). Seja W ⊂ C um conjunto aberto, simples-mente conexo no espaço dos parâmetros de tal forma que a faḿılia de transformações
de um parâmetro {hµ : U ′µ −→ Uµ|µ ∈ W} são todas quase polinomiais de grau 2. Sejacµ o único ponto cŕıtico de hµ que está contido em U
′. Suponha-se que:
1. Os conjuntos U ′µ e Uµ dependem continuamente de µ;
2. Na fronteira de W , hµ(cµ) ∩ U ′µ = ∅;
3. O número de rotação de hµ(cµ) − cµ à medida que µ cobre a fronteira de W éum.
Então existe uma cópia homeomórfica do conjunto de Mandelbrot no interior de W .
Demonstração. Para além da demonstração original, podemos também ver uma versão
diferente em [DHU06].
Podemos identificar de forma bastante simples alguns valores de c para os quais Rc(z)
vai admitir valores periódicos de todas as ordens, com a excepção da ordem dois, já que
a ordem dois vai surgir apenas com a queda da órbita cŕıtica nos buracos de Sierpinsky.
Na figura seguinte destacamos os valores que produzem órbitas periódicas até peŕıodo
cinco.
37
-1.5 -1 -0.5 0 0.5 1 1.5 2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Figura 2.6 Valores de c em Rc(z) que geram órbitas periódicas
Também podemos localizar os primeiros valores c para os quais a origem cai numa órbita
periódica após algumas iterações. Estes pontos são chamados pontos de Misiurewicz,
ver os pontos representados a preto na figura que se apresenta.
Figura 2.7 Os primeiros pontos de Misiurewicz
Analisando cada c espećıfico no espaço dos parâmetros, onde podemos verificar a pre-
sença de regiões de estabilidade para a transformação Rc(z) consoante o valor de c, onde
podemos verificar algumas analogias com a estrutura dos conjuntos de Julia e Fatou com
os obtidos para a tranformação quadrática. Podemos encontrar muito trabalho elabo-
38
rado na transformação quadrática nos trabalhos de Milnor, Douady, Hubard, Devaney,
Gamelin, Beardon, entre outros, ver [Bea91], [Dev91], [CG91] e [Mil93], em que a maior
parte dos problemas em aberto residem em questões topológicas acerca da estrutura dos
conjuntos de Fatou e Julia, estando a maior parte dos problemas sobre a dinâmica em
si quase completamente entendida.
A transformação Rc(z), bem como muitas outras transformações racionais de grau
dois, apresenta aspectos estruturais dos conjuntos de Julia e Fatou muito semelhantes
aos conjuntos de Julia e Fatou da transformação quadrática, embora com diferenças na
quantidade existente deste conjuntos. O conjunto de Julia, como fronteira do conjunto
de Fatou vai-se formando também a partir do quase-ćırculo inicial gerado a partir do
c = 0 + 0i. Na transformação quadrática todos os valores de c que estão no interior
do cardióide principal produzem dois conjuntos de Fatou distintos, sendo o conjunto de
Julia um quase-ćırculo e na transformação racional Rc(z) os valores de c que estão na
região maior de periodo 1 produzem mais do que dois conjuntos de Fatou, por força das
descontinuidades de Rc, mas o conjunto de Julia permanece um quase-ćırculo, mas com
lacetes. Veja-se a figura seguinte.
0 100 200 300 400 5000
100
200
300
400
500
Figura 2.7 Conjunto de Fatou para c = 0 + 0i, de Rc(z)
39
Devido ao facto de que o conjunto de Julia ser a fronteira do conjunto de Fatou, e os
pontos onde existem estes lacetes serem pontos do conjunto de Julia, e pelo Teorema
2.34 podemos concluir que existem infinitos conjuntos de Fatou.
À medida que o valor c caminha para um ponto de bifurcação, do periodo um para
o periodo três, por exemplo o conjunto vai-se deformando, veja-se a figura seguinte,
e ganhando a forma dos coelhos de Douady que existem no bolbo de periodo três do
conjunto de Mandelbrot da transformação quadrática.
0 100 200 300 400 5000
100
200
300
400
500
Figura 2.8 Conjunto de Fatou para c = 0.2 + 0.6i de Rc(z)
40
0 100 200 300 400 5000
100
200
300
400
500
Figura 2.9 Coelho de Douady para Rc(z), com c = 0.6 + 1i
O formato destes conjuntos de Julia é consistente com os resultados descobertos por
McMullen, em 1988, para as transformações do tipo zn + λ/zd, com d ≥ 2 , n > 1, eos parâmetros n e d não simultâneamente iguais a dois, em que para uma vizinhança
aberta da origem no espaço dos parâmetros, λ 6= 0, o conjunto de Julia é um conjuntode Cantor de curvas simples fechadas.
Com o valor c no exterior de MR a evolução dos conjuntos de Julia já é bastante
diferente em Rc(z), comparando com as transformações Qc(z). Enquanto que nas
transformações Qc(z) a presença de c no exterior do conjunto de Mandelbrot implica
que o conjunto de Julia seja poeira fractal, ou seja constitúıdo por muitas infinitas
componentes disjuntas, nas Rc(z) o conjunto de Julia vai ser um dos dois casos:
• vai ser uma colecção de pontos de uma linha fractal descont́ınua, ou então,
• um conjunto semelhante ao triângulo de Sierpinsky, ver Figura 2.10.
41
0 100 200 300 400 5000
100
200
300
400
500
Figura 2.10 Conjunto de Julia de Rc para c = 1 + 0i
Em relação ao segundo dos casos apontados, existem já bastantes trabalhos relaciona-
dos, efectuados por Devaney e outros, ver, por exemplo, [DJS04] e [DRS07], para as
transformações
Dc(z) = zn + c/zn,
e entre os quais a prova que as singularidades deste tipo de transformações produzem
conjuntos semelhantes ao triângulo de Sierpinsky. Como as singularidades das trans-
formações racionais comportam-se de forma semelhante, sob iteração, a relação entre o
efeito causado pelas de Dc(z) e Rc(z) é imediato.
Quanto ao primeiro caso, se c /∈ MR os conjuntos de Julia vão-se transformar empoeira fractal, mas com uma adicionante interessante pelo facto de formar uma linha
fractal descont́ınua, ver a figura seguinte.
42
0 100 200 300 400 500
0
100
200
300
400
500
Figura 2.11 Conjunto de Julia tipo para Rc(z), com |c| > 3
Aparentemente a linha parece cont́ınua, mas isso não acontece.Escolhendo um caminho
γ, ao longo do eixo real, todo este caminho é transportado por Rc(z) no infinito, e para
constatar este facto basta iterar a função para esses valores, assim γ pertence ao conjunto
de Fatou e não pode pertencer ao seu complementar. Embora a formação da poeira
fractal seja mais evidente em Qc(z), organizada numa espécie de ilhas isoladas, em Rc(z)
também existe a mesma formação, mas de uma forma mais organizada estéticamente
em forma de colar.
2.11 Uma restrição de Rc(z) ao eixo real
Como vimos nas secções anteriores, de forma sintética, o estudo da dinâmica de Rc(z)
pode ser efectuado, usando como recurso todo conhecimento já adquirido nas funções
racionais estudadas por Devaney e Milnor, entre outros. Embora possa haver algumas
diferenças que possam só por si só assinalar alguns aspectos interessantes de Rc(z) vamos
canalizar o nosso estudo a restrições desta transformação ao eixo real. Ao efectuarmos
a restrição de Rc(z) ao eixo real teremos para todo o z = x + iy , y = 0, e assim a
43
transformação reduz-se a
fr(x) =x2 + r
x2 − 1com r = 1) e outro em que a
função tem três pontos fixos (r < 1). Embora ambos os casos sejam muito interessantes
de serem estudar, as nossas atenções nesta tese centram-se na faḿılia de aplicações com
apenas um ponto fixo.
44
Caṕıtulo 3
No eixo real
Como vimos no caṕıtulo anterior, o estudo da dinâmica de Rc(z) pode ser efectuado,
usando como recurso todo o conhecimento já adquirido nas funções racionais estudadas
por Devaney e Milnor, entre outros. Embora possa haver algumas diferenças que possam,
só por si só, assinalar alguns aspectos interessantes de Rc(z) vamos canalizar o nosso
estudo a restrições desta transformação ao eixo real.
A motivação desta passagem ao estudo das transformações racionais no eixo real vem
de um teorema de Eremenko e Gabrielov em que demonstraram uma conjectura de B.
e M. Shapiro: ”Se todos os pontos cŕıticos de uma transformação racional g pertencem
ao eixo real então existe uma transformação linear fraccionária φ tal que φ ◦ g é umafunção real.”
Teorema 3.1. Se todos os pontos cŕıticos de uma transformação racional são reais
então esta é equivalente a uma função racional real.
Como a nossa transformação Rc tem o seu único ponto cŕıtico no eixo real então existe
uma função φ tal que φ ◦ Rc é real. Embora Eremenko e Gabrielov não tendo sepreocupado em descriminar a própria transformação φ, este resultado permite, através
do estudo de funções reais, encontrar propriedades do comportamento de Rc(z), usando
as noções de equivalência associadas à conjugação topológica de transformações.
Note-se que os aspectos da dinâmica de uma dada transformação não se altera
com a conjugação topológica, dáı ser leǵıtimo pensar que podemos fazer um estudo da
dinâmica dos cortes ao eixo real de Rc, e depois com uma adequada transformação de
45
Mobius chegar à função φ.
3.1 Uma restrição de Rc(z) ao eixo real
Ao efectuarmos a restrição de Rc(z) ao eixo real temos para todo o z = x + iy , y = 0,
e assim a transformação reduz-se a
fr(x) =x2 + r
x2 − 1
com r = 0, x3 > 0,com x1 < x2 < x3, sendo estes repulsor, atractor, repulsor, respectivamente. Sob
iteração de fr, os pontos ]x1 − ², x1 + ²[ são levados em ]∞− ²,∞ + ²[, havendo umvalor ² para o qual os pontos x > x1 + ² são levados na vizinhança esquerda de x2;
Para −11/27 < r < 5/27 obtemos três pontos fixos reais, x1 < 0, x2 < 0, x3 > 0,com x1 < x2 < x3, sendo estes repulsor, atractor, repulsor, respectivamente. Sob
iteração de fr, os pontos ]x1 − ², x1 + ²[ são levados em ]∞− ²,∞ + ²[, havendo umvalor ² para o qual os pontos x > x1 + ² são levados na vizinhança esquerda de x2;
Para r = −11/27 obtemos três pontos fixos reais, x1 < 0, x2 > 0, x3 > 0, comx1 < x2 < x3, sendo estes repulsor, atractor, repulsor, respectivamente.;
Para r = 5/27 obtemos dois pontos fixos reais, x1 < 0, x2 > 0, com x1 < x2, sendo
x1 de segunda ordem, com x1 neutral e x2 repulsor;
Para r > 5/27 obtemos um ponto fixo real positivo, sendo este repulsor, e dois
complexos com parte real negativa;
Para r = −1 obtemos o caso trivial da recta horizontal, de ordenada um.
46
A função fr(x) insere-se numa vasta faḿılia de funções do tipo
fa,b(x) = (x2 − a)/(x2 − b)
que graficamente têm o aspecto que se apresenta. Com a = r e b = 1, podemos verificar
a alteração que fr(x) sofre à medida que r varia.
Muito embora todos os casos sejam interessantes de estudar, a nossa atenção nesta
tese centra-se na faḿılia de apenas um ponto fixo, r < −1. Ao fazer esta restrição,embarcamos num doḿınio da dinâmica que tem poucos estudos efectuados, comparati-
vamente ao que já existe em termos de funções racionais de variável complexa, que é o
estudo da dinâmica das funções racionais reais de variável real.
Um dos pontos de partida para o estudo destes tipos de funções foi fornecido por
Milnor em [Mil92], quando este, ao descrever o espaço das funções racionais de variável
real, sintetiza os casos das funções que podem ocorrer quando estas têm dois pontos
cŕıticos. Milnor distinguiu sete casos de funções racionais quadráticas, com coeficientes
reais, e que induzem uma transformação da circunferência R ∪∞ nela própria.
Supondo que os dois pontos cŕıticos de f são números complexos conjugados, implica
em primeira mão a continuidade da função, e também que f induz uma cobertura de
dois objectos para uma imagem, de R∪∞ em R∪∞. Existe apenas a distinção, nestecaso, no sinal da derivada, em que uma derivada positiva faz com que f transforme
R ∪∞ com grau +2, e em que a derivada negativa faz com que f transforme R ∪∞com grau −2.
Por outro lado, Milnor afirma que se os dois pontos cŕıticos são ambos reais, então f
transforma toda a circunferência unitária R∪∞ num intervalo fechado I = f(R∪∞),que é limitado pelos dois pontos cŕıticos. Assim, para estudar ambas as órbitas cŕıticas,
precisamos apenas de estudar a dinâmica de f restringida ao intervalo I.
Do trabalho de Milnor podemos também retirar uma definição importante.
Definição 3.1. Uma transformação racional real quadrática com pontos cŕıticos reais
ou é monótona, ou unimodal, ou bimodal, dependendo se o interior de I = f(R ∪∞) não contém pontos cŕıticos, contém um ponto cŕıtico ou contém os dois pontoscŕıticos, respectivamente. No caso de ser monótona distingue-se quando esta é monótona
47
crescente ou decrescente. Na bimodal distingue-se por (+ − +)-bimodal se o padrãodas voltas for crescente e por (−+−)-bimodal se o padrão das voltas for decrescente.
Um dos exemplos em que Milnor descreve é a função
f(x) = (1− 2x− x2)/(1− 2x + 3x2)
com f(R ∪ ∞) = [−1, 1], em que ambas as órbitas cŕıticas convergem para o pontofixo repulsor x = 1/3. Logo, f(x), usando a definição 3.1 está na fronteira das funções
unimodais e (+−+)-bimodais do espaço real modular.
Ora, como é óbvio, a função fr(x) não tem dois pontos cŕıticos, mas sim apenas
um, logo não se insere nesta classificação, e para além do mais
fr(R ∪∞) = [−∞, 1] ∪ [−r, +∞] = I1 ∪ I2.
Georgescu, Joita, Nowell e Stanik, em [GJNS05], fazem um estudo de funções racionais
reais de variável real, tomando f(x) = P (x)/Q(x), em que P (x) e Q(x) são polinómios
em R[x]. Estes autores fazem referência a Milnor [Mil92], argumentando que o próprio
Milnor descreve com exactidão a dinâmica das funções racionais reais, com os graus
de P (x) e Q(x) superiores ou iguais a dois. Isso, segundo o nosso ponto de vista,
não corresponde inteiramente à verdade, pois como acabamos de ver com o exemplo de
fr(x) esta função foge ao âmbito do trabalho desenvolvido por Milnor, pois este dedicou-
se apenas a todas as funções de grau dois com exactamente dois pontos cŕıticos não
infinitos. Logo a seguir, no mesmo artigo, Georgescu, Joita, Nowell e Stanik referem que
o comportamento das funções racionais reais ainda constituem um problema em aberto,
estando de acordo com o trabalho que se pretende fazer nesta tese, que é contribuir
com um pouco mais de informação em relação à dinâmica destas funções. Assim, em
[GJNS05] é explorada a dinâmica de várias funções racionais reais em que o grau de P (x)
é superior ao de Q(x), não tocando sequer em nenhuma função com as caracteŕısticas
de fr(x).
Por outro lado, W. Shen, [She03], desenvolveu um trabalho sobre a mensurabilidade
da dinâmica das funções racionais reais e adopta o mesmo prinćıpio do que Milnor
adoptando apenas as funções de grau dois que têm dois pontos cŕıticos não infinitos,
mas mais uma vez a faḿılia de funções tipo fr ficou de fora.
48
No geral, todos os artigos encontrados que exploram as funções racionais reais focam
sempre as funções que têm dois pontos cŕıticos, em que nenhum deles pode ser o infinito.
Compreende-se este facto pois, com este tipo de pontos cŕıticos, toda a teoria de suporte,
vinda da Análise Complexa, previamente resumida no Caṕıtulo 2, é convert́ıvel para as
funções racionais de variável real com menor ou maior dificuldade.
3.2 A faḿılia fr, com r < −1
A faḿılia das funções
fr(x) =x2 + r
x2 − 1produz um gráfico como o da figura que se apresenta de seguida, desde que r < −1.
-3 -2 -1 1 2 3
-2
2
4
Como podemos observar, trata-se de uma faḿılia de funções que tem exactamente dois
pontos cŕıticos, o infinito e o zero. Com
∆ = −11− 27r + 3√
3√−5 + 22r + 27r2,
tem sempre um ponto fixo real negativo e repulsor em
x =1
3
(1− 4.
3√
2
∆13
− ∆13
3√
2
).
e a transformação x −→ r/x conjuga fr com fr2 e transporta o zero no infinito evice-versa.
49
Lema 3.1. Para fa,b(x) = (x2 − a)/(x2 − b) , ga,b(x) = a/(bx) e ha,b(x) = fa2/b3,a/b2temos que
g ◦ f = h ◦ g = ab
x2 − bx2 − a.
Demonstração. Com um simples cálculo podemos verificar que f = g−1 ◦ h ◦ g.
Fazendo em particular r = −2 podemos calcular algumas iteradas da função fr e ver oque acontece com esta faḿılia de funções.Da análise dos valores encontrados, podemos
concluir que, os valores de uma vizinhança, quer à esquerda, quer à direita, tão próxima
quando queiramos do ponto fixo vão-se aproximando gradualmente de x = 1 e depois
são levados no infinito. O mesmo acontece com a própria órbita cŕıtica. E o que
acontece em relação aos pontos periódicos? Com r = −2, os únicos pontos periódicossão o ponto fixo e o um. Mas será que isso vai acontecer para os todos os valores de
r? Para averiguar este facto podemos desenhar o diagrama de bifurcação desta faḿılia
de funções.Para termos uma ideia mais abrangente do que se passa com a faḿılia de
funções fa,b, podemos estudar as curvas fna,b(0) = 0 no espaço dos parâmetros (a, b),
para pequenos peŕıodos, (n ≤ 5), restrição essa que resulta das limitações do cálculocomputacional1, veja-se a figura seguinte.
Figura 3.6 curvas no espaço dos parâmetros
Todas as funções com b < a e a²[1, +∞[ são funções com o mesmo tipo de gráfico danossa função fr. Fixando o valor b e fazendo variar a ficamos desde já com a noção
1Usando o programa Mathematica podemos obter resultados fiáveis, no máximo, até ao peŕıodosete.
50
de que as funções mais interessantes de estudar, onde aparece valores periódicos que
não sejam apenas de periodo dois são de facto as funções em que b > 1 e a > 1.
Qualquer corte na horizontal b > 1 na figura anterior posiciona-nos exactamente para
que valores de a a função vai admitir valores periódicos n = 1, 2, 3, 4, 5, · · · . A diferençaentre os valores de a para as várias linhas é que estes vão-se afastando numa medida
que tem por base uma função irracional. Por forma a tornarmos o nosso estudo mais
conclusivo vamos escolher um determinado caminho neste espaço de parâmetros, por
exemplo o caminho (a,−a + 8). Fazendo λ = a− 4, e olhando às condições de a e deb, convertemos a nossa função fa,b em fλ, com
fλ(x) = 1− 2 λx2 + λ− 4 ,
com 0 < λ ≤ 3.
Os pontos fixos de fλ são os valores
x =1
3+−13 + 3λ
3∆− 1
3∆,
com
∆ = 35(18λ + 3
√3√−36 + 103λ− λ2 + λ3
) 13
para cada valor de λ.
Como f´λ(0) = 0 temos que o cŕıtico x = 0 é um atractor e que, sendo f´λ(1) =
4λ(λ−3)2
o ponto fixo x = 1 é atractor quando 0 < λ < 1, repulsor quando 1 < λ ≤ 3 e neutralse λ = 1.
Na tabela seguinte temos os valores de λ para os quais a função tem órbitas periódicas
de n < 6 para x = 0 e x = 1.
51
x = 0 Total
Periodo 1 - 0
Periodo 2 λ = 1.62772 1
Periodo 3 λ = 0.715897; λ = 1.21933; 2
Periodo 4
λ = 0.526668;
λ = 0.657526;
λ = 1.38053
λ = 1.62772
λ = 1.24428
5
Period 5
λ = 0.455652; λ = 0.665751;
λ = 0.508419;
λ = 0.659791;
λ = 1.23505;
λ =