Teoria de Nós - SBM – Sociedade Brasileira de Matemática · Capítulo 1 História da Teoria de...
56
Teoria de Nós Oziride Manzoli Neto ICMC - USP 2 o Colóquio da Região Sudeste Janeiro de 2013
Transcript of Teoria de Nós - SBM – Sociedade Brasileira de Matemática · Capítulo 1 História da Teoria de...

Teoria de Nós
Oziride Manzoli Neto
ICMC - USP
2o Colóquio da Região Sudeste
Janeiro de 2013

Sumário
1 História da Teoria de Nós 1
2 Pré-requisitos 52.1 Álgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 O básico de Categorias e Funtores . . . . . . . . . . . . . . . . . . 52.1.2 O básico de Anéis de Grupos . . . . . . . . . . . . . . . . . . . . . 7
2.2 Topologia Algébrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.1 O básico de Homotopia . . . . . . . . . . . . . . . . . . . . . . . . 82.2.2 O básico de Homologia . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 O básico de Topologia Diferencial . . . . . . . . . . . . . . . . . . . . . . . 15
3 Teoria Clássica de Nós 213.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Número de enlaçamentos . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3 Alguns Invariantes de Nós e Enlaçamentos . . . . . . . . . . . . . . . . . 253.4 Construindo Nós e Enlaçamentos - Nós Primos . . . . . . . . . . . . . . . 33
4 Outras Teorias de Nós 374.1 Teoria Multidimensional de Nós . . . . . . . . . . . . . . . . . . . . . . . 374.2 O caso especial de S2 em S4 . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3 O círculo no plano, na esfera, no espaço projetivo e no toro . . . . . . . . 414.4 O Cilindro e a Faixa de Möbius em R3 . . . . . . . . . . . . . . . . . . . . 434.5 Mergulhos de Superfícies em R3 . . . . . . . . . . . . . . . . . . . . . . . 44
5 RP2 não mergulha em R3 47
Referências Bibliográficas 49
iii


Capítulo 1
História da Teoria de Nós
O estudo dos nós e enlaçamentos de forma razoavelmente formalizada começa comGauss em 1833, veja [Gauss]. Ele e alguns de seus alunos começam estudar o assunto,focalizando enlaçamentos, pois o interesse era o número de enlaçamentos (linkingnumber) de um enlaçamento (link). Seus estudos tinham como objetivo aplicaçõesna eletrodinâmica.
Lord Kelvin, como muitos de sua época, acreditava que os nós eram a chave para oentendimento das substâncias químicas, que seriam descritas pelas "formas dos nós".Tabelando-se os nós ter-se-ia uma descrição das substâncias químicas. Começa entãouma corrida para se obter tabelas de nós, nós cada vez mais complexos, isto significava,cada vez com mais cruzamentos.
A primeira tabela de nós foi feita por T. P. [Kirkman]. P. G. [Tait] também faz umatabela dos nós alternados de até dez cruzamentos.
E. Rutherford e D. Mendeleev põem fim a esta animação, Rutherford cria omodelo dos átomos, que até hoje utilizamos e a ênfase na pesquisa dos elementosquímicos muda para a Tabela Periódica organizada por Mendeleev. Praticidade para osquímicos, frustração para os matemáticos, que continuam os estudos de nós, sem maisa esperança de que os mesmos poderiam estar descrevendo os elementos químicos.Estudar nós torna-se então trabalho "abstrato"de matemáticos.
C. N. Little pega no pesado durante seis anos e produz tabela de 43 nós dedez cruzamentos. Sua tabela não foi contestada por muito tempo, em 1974, Perkodescobriu que dois nós da tabela de Little eram o mesmo [Perko]. Portanto na lista deLittle só havia 42 nós diferentes. Little também fez uma tabela de nós alternados deonze cruzamentos, eventualmente se descobriu a falta de outros onze nós. Era precisoum pouco de ordem neste trabalho!
A Topologia começou a ser reconhecida como área distinta da Matemática noinicio do século vinte e seu grande desenvolvimento começou na década de 1930.Tem sido uma área de muito desenvolvimento e tem influenciado muitas outrasáreas da matemática. Ela começa em resposta a certas necessidades dentro daAnálise. É uma espécie de "geometria rústica"cujo objetivo e salientar os aspectosqualitativos dos objetos geométricos. As idéias da Topologia tem penetrado quasetodas as áreas da matemática e na maioria dessas aplicações ela fornece ferramentase conceitos para provar certas proposições básicas conhecidas genericamente como"teoremas de existência". Os primórdios das idéias topológicas podem ser encontradosno trabalho de K. Weierstrass na década de 1860 no qual ele estuda o conceito
1
2 Capítulo 1: História da Teoria de Nós
de limite de uma função. Ele desenvolve a construção do sistema de númerosreais e revela algumas de suas propriedades importantes conhecidas agora comopropriedades topológicas. Depois vem G. Cantor (1874-1895) que desenvolveu a Teoriados Conjuntos, garantindo os fundamentos para a Topologia.
Um segundo aspecto da Topologia, chamado combinatorial ou algébrico, foiiniciado nos anos 1890 por H. Poincaré estudando calculo integral em dimensõesaltas. O primeiro aspecto, normalmente chamado Topologia Conjuntista (pointset topology), foi fundamentada por F. Hausdorff e outros no período 1900-1910.A compatibilização dos dois aspectos, conjuntista e combinatória, foi estabelecidaprimeiro por L. E. J. Brouwer, quando o mesmo desenvolveu o conceito de dimensãoe depois, definitivamente, por J. W. Alexander, P. L. Alexandrov e S. Lefschetz noperíodo 1915-1930. Até este período, Topologia era conhecida por "Analisys Situs".Foi S. Lefschetz quem primeiro a usar o nome Topologia.
Fruto do desenvolvimento da matemática em geral e da topologia emparticular, surgem os primeiros trabalhos apresentados de forma sistemático sobreTeoria dos Nós, Teoria de Enlaçamentos e sobre os Grupos de Tranças. Vejaas referências [Dehn(1910)], [Dehn(1914)], [Alexander(1923)], [Alexander(1928)],[Reidemeister(1926)], [Reidemeister(1926’)] e [Artin(1926)].
No inicio desta era, M. G. Haseman, listou os nós não equivalentes aos seusespelhados (aquirais?) com doze cruzamentos [Haseman].
J. Alexander (1927) estabelece lista dos nós até oito cruzamentos, K. Reidemeister(1932) até nove cruzamentos. J. Alexander e G.B. Briggs, usando uma forma deapresentar os nós criada por W. Wirtinger, estabelece um procedimento muito eficientede distinguir nós, a idéia era calcular o que ficou chamado Polinômio de Alexanderde um nó. Polinômios diferentes, nós não equivalentes! Só em 1984 é que se criaramoutros tipos de polinômios com o mesmo objetivo.
C.D. Papakyriakopoulos e J. Conway desenvolvem métodos mais simplificados dese calcular os Polinômios de Alexander.
Começa também o estudo de nós em dimensão mais alta, isto é, o estudo dosmergulhos das esferas de dimensão n ≥ 2 em esferas de dimensão maior que n, veja[Artin(1926)].
J. Conway [Conway] desenvolve nova notação para nós e com isso determina osnós primos de até onze cruzamentos. A. Caudron(1978) repara alguns erros na lista deConway.
C. H. Dowker inventa uma nova forma de representar nós, baseado em idéias deTait. Um algoritmo é feito e implementado em computador por M. B. Thistlethwaite.Assim obtém-se em 1981 lista de nós primos de até doze cruzamentos e em 1982 detreze cruzamentos.
C. Ernest e D. W. Sumners, em 1987, usando resultados de L. H. Kauffman, K.Murasugi e de Thistlethwaite avaliam que o número de nós de n cruzamentos é maiorou igual a (2n − 2 − 1)/3. Em 1990, D. J. A. Welsh avalia que o número de nós de ncruzamentos é menor que uma certa função de n.
Na década de 1980 bioquímicos descobriram enodamentos nas moléculas de DNA!Surgem questões como: "Seria possível criar moléculas enodadas?"; "Enodamentospoderiam determinar algumas das propriedades das substâncias? "Moléculasenodadas que não são topológicamente equivalentes às espelhadas dão origem àsubstâncias diferentes?".

3
Na Teoria Clássica dos Nós e Enlaçamentos surgem muitos outros invariantes como objetivo de distinguir suas classes, particularmente vários outros polinômios comoacima citado, veja [Kauffman(1988), Kauffman(1989)].
Trabalhos recentes mostram que este estudo tem produzido conhecimentomatemático valioso, relacionando a Teoria de Nós e Enlaçamentos com outras áreasde conhecimento como: Teoria Topológica de Campos e Mecânica Estatística naFísica, o estudo do DNA na Biologia e o estudo das estruturas tridimensionais dasmoléculas (stereochemistry) na Química, veja muita coisa interessante sobre isto em[Flapan]. Voce poderá ver também uma foto de uma molécula enodada de DNA em[Wasserman et al.].
O estudo de mergulhos de variedades em variedades é uma generalização naturaldestes estudos, assim como é o estudo de mergulhos de outros espaços, como grafos,em espaços como R2, R3 ou em Superfícies.
Para fazer justiça ao nome do mini-curso gostaria de apresentar uma boa visãosobre a Teoria dos Nós Clássica por isso a maior parte do curso será dedicada a estetópico.
Veremos desde o começo que precisamos de muitas ferramentas da Topologia e daAlgebra para estudar este assunto. Procuraremos portanto apresentar inicialmente,o suficiente (espero sem exagero!) destas ferramentas para o bom entendimento docurso. Devemos lembrar que estes pré-requisitos são muito úteis também para seestudar muitos outros assuntos. O participante do curso não precisa ver os detalhesdestas ferramentas durante o curso mas é uma grande oportunidade de ter um contatocom elas. Portanto, se houver tempo, não deixe de dar uma boa olhada nos prérequisitos, e tirar dúvidas durante as aulas, esse material, também, está bem resumidoe incompleto mas é muito interessante e útil.
Queremos apresentar também neste mini-curso um bocadinho da correspondenteteoria multidimensional, tudo dentro do contexto mais geral de mergulhos devariedades em variedades.
A maioria dos resultados serão só enunciados ficando as demonstrações para seremvistas nas referencias. Algumas poucas provas serão apresentadas, principalmentese forem fáceis! Na maioria das referências, principalmente nos livros, podemosencontrar quase todos os assuntos aqui abordados. A minha preferência pessoal é quedeterminou o que citar em cada caso. Pode ser que a citação não seja a mais adequadapara o gosto de cada um, por isso é bom que cada um procure olhar vários textos atéachar o que mais lhe agrada para estudar.
O assunto Nós e Enlaçamentos esta bastante relacionado com os Grupos de Tranças.Não abordaremos este assunto aqui, sobre isto temos vários textos interessantes emparticular temos disponível no site do XV Encontro Brasileiro de Topologia - RioClaro (2006) o texto do mini-curso "The Braid Groups"ministrado naquele encontropelo Professor Dale Rolfsen [Rolfsen(2006)]. Nas notas do mini-curso existe umabibliografia sobre o assunto e sugestões de vários textos para leitura, em particularveja uma prova do teorema de Alexander/Markov em [Morton].
As perguntas e os exercícios, quando sugeridos no texto, nem sempre são fáceis.Acho que alguns eu não sei responder ou se sei responder não tenho certeza se teriauma boa prova, no entanto não resisto a tentação de apresentá-los.
Neste curso as questões de mergulhos de objetos mais gerais como é o caso domergulhos de grafos em R2 ou R3 serão abordados apenas superficialmente. Usaremos

4 Capítulo 1: História da Teoria de Nós
um resultado sobre mergulhos de grafos em R3 para provar que o espaço projetivo nãomergulha em R3. (se der tempo!)
Em outras áreas da matemática, questões semelhantes são estudadas, por exemploos Teoremas de Sylow estudados em Teoria de Grupos estudam os "mergulhos"decertos sub-grupos mais simples (os p-grupos), em um grupo dado.
Similarmente, uma parte da Teoria de Fibrados Vetoriais consiste em estudar secertos fibrados são sub-fibrados de outros fibrados de dimensão maior.
Esperamos com isso que o participante possa ter uma boa idéia desta parte tãoimportante da matemática.
Além deste primeiro capítulo histórico, teremos um capitulo de pré-requisitos, umcapitulo sobre a Teoria Clássica de Nós, que é o nosso objetivo maior, um capituloque chamei "Outras Teorias de Nós"onde abordaremos intuitiva e superficialmentealguns casos mais gerais desta teoria e um ultimo capítulo "O Espaço Projetivo RP
2
não mergulha em R3".

Capítulo 2
Pré-requisitos
2.1 Álgebra
Espero que os leitores tenham um conhecimento básico de Teoria de Grupos, Anéis,Corpos e Módulos, que são normalmente apresentados nos cursos de graduação emMatemática. Existem três tópicos de Algebra que são muito usados nas TopologiasAlgébrica e Geométrica (da qual faz parte a Teoria de Nós), que são AlgebraHomológica, Grupos Livres e Anéis de Grupos e que em geral não são abordadosnos cursos de graduação. Não vou me aventurar em resumir Algebra Homológicaaqui mas vou tentar resumir os outros dois tópicos, Grupos Livres e Anéis de Grupos.Sugiro que os interessados procurem na bibliografia e deem uma boa olhada nos trêstópicos que são muito importantes para a formação geral de um matemático.
2.1.1 O básico de Categorias e Funtores
Uma linguagem que facilita muito a apresentação de muitas partes da matemáticaé a linguagem de categorias e funtores, portanto aqui vai um resumo deste assunto queespero facilite a apresentação do curso.
Definição 2.1 Uma categoria C é constituída de uma classe de objetos A, B, C... e de umafamília de conjuntos disjuntos hom(A, B) que pode ser indexada por C × C, isto é, para cadapar (A, B) de elementos de C × C um conjunto hom(A, B), satisfazendo as condições:
(i) Para cada terna de objetos A, B, C, existe uma função c, que associa cada elemento dehom(A, B)× hom(B, C) um elemento de hom(A, C).
(ii) Existe uma função "1", de C na reunião dos conjuntos disjuntos⋃
A hom(A, A) queassocia a cada A de C um elemento ”1A” da reunião com ”1A” ∈ hom(A, A).
Além disso devemos ter satisfeitas as duas exigências abaixo para as funções consideradas:
i. Associatividade da função c (denominada composição), isto é, seja α ∈ hom(A, B),β ∈ hom(B, C) e γ ∈ hom(C, D), então, c(c(α, β), γ) = c(α, c(B, γ))
ii. Identidade das funções ”1”, isto é, se α ∈ hom(A, B) então c(α, ”1B”) = α = c(”1A”, α)
Escreveremos por simplicidade:
5

6 Capítulo 2: Pré-requisitos
(a) α : A → B para α ∈ hom(A, B); α será denominado "morfismo de C"com "domínio A"e "contradomínio B".
(b) c(α, β) será indicado β ◦ α que pelas condições apresentadas só terá sentido se o domíniode β for o contradomínio de α.
(c) É claro que a tripla composição γ ◦ β ◦ α tem significado quando os domínios econtradomínios forem compatíveis.
Um elemento θ ∈ hom(A, B) será chamado uma equivalência em C se existirψ ∈ hom(B, A) tal que ψ ◦ θ = 1A e θ ◦ ψ = 1B (É claro que neste caso, ψ tambémserá uma equivalência).
Se um elemento θ ∈ hom(A, B) é uma equivalência, então o elemento ψ tal queψ ◦ θ = 1A e θ ◦ ψ = 1B é único.
Vejamos: seja ψ̄ outro elemento de hom(B, A) | ψ̄ ◦ θ = 1A e θ ◦ ψ̄ = 1B, entãoteremos ψ = 1A ◦ ψ = ψ̄ ◦ θ ◦ ψ = ψ̄ ◦ 1B = ψ̄
O elemento ψ nas condições acima, fica bem definido pela θ (quando existir) e serádenominado inverso de θ sendo indicado θ−1.
Exemplos de Categorias:
1. A classe constituída de um único grupo G, isto é, a categoria terá apenas umelemento; hom(G, G) será considerado como sendo o próprio G.
A aplicação c será definida por c(a, b) = a • b onde • é a operação existente emG. A aplicação "1"será a aplicação que à g ∈ G associa o elemento neutro. É fácilverificar as condições.
2. RM constituída de todos os módulos a esquerda de um anel R. Os objetossão os R-módulos, isto é, A, B, C... são os R-módulos. hom(A, B) será oconjunto HomR(A, B) de todos os homomorfismos de R-módulos de A em B.A composição (c) é a usual. É fácil verificar as condições.
3. A classe de todos os conjuntos tomando como morfismos as funções entre osconjuntos.
4. A classe de todos os grupos tomando-se como morfismos os homomorfismosentre elas.
5. A classe dos grupos abelianos também como morfismos os homomorfismos.
6. A classe dos espaços topológicos com os morfismos as aplicações contínuas entreeles.
Dadas duas categorias C e D um Funtor Covariante T está definido de C para Dquando tivermos:(a) A cada objeto A de C fica associado um único objeto T(A) de D.(b) A cada morfismo α de C fica associado um único morfismo T(α) de D, onde estasassociações respeitam as condições:

2.2: Topologia Algébrica 7
(1) T(1A) = 1T(A)
(2) Se α : A → B ∈ hom(A, B) então T(α) : T(A) → T(B)(3) T(α ◦ β) = T(α) ◦ T(β)
Um Funtor Contravariante é definido da mesma forma, mas com as condições (1)e:(2’) Se α : A → B então T(α) : T(B) → T(A).(3’) T(α ◦ β) = T(β) ◦ T(α).
Dados os funtores T : C → D e S : D → E definimos o funtor compostoT ◦ S : C → E por: (T ◦ S)(A) = T(S(A)) e T ◦ S(α) = T(S(α))).
É fácil verificar que T ◦ S é um funtor da categoria C na categoria E e que ocomposto de dois funtores é covariante se ambos forem covariantes ou ambos foremcontravariantes e o composto é contravariante se eles não forem ao mesmo tempocovariantes ou contravariantes.
Exemplos de funtores:1. πi é um funtor da categoria dos espaços topológicos pontuados na categoria dosgrupos.2. Hq é um funtor da categoria dos pares de espaços topológicos na categoria dosgrupos abelianos.
2.1.2 O básico de Anéis de Grupos
Um bom texto em português para ver este assunto é o livro do Polcino [Polcino]Fixemos um grupo G e um anel A com unidade.Uma combinação linear formal, finita de elementos de G e A e é uma "soma"da
forma r = ∑g r(g).g onde g ∈ G e r(g) ∈ A é tal que apenas uma quantidade finitados r(g), g ∈ G é diferente de 0 ∈ A. O conjunto de todas estas somas formais vãoconstituir um conjunto que chamaremos um anel de grupo e que denotaremos A[G].Precisamos em A[G] de uma soma e de um produto.
A soma é dada por r1 + r2 = ∑g r1(g).g + ∑g r2(g).g = ∑g(r1(g) + r2(g)).gO produto é dado por r1 · r2 = ∑g r3(g).g onde r3(g) = ∑g1.g2=g r1(g1) · r2(g2)
É fácil verificar que com estas definições de soma e produto, A[G] se torna um anel,chamado Anel de Grupo de G sobre A.
O exemplo que estaremos usando é Z[Z], isto é, o grupo G = Z e o anel A = Z,neste caso o Anel de Grupo se identifica com o Anel dos polinômios nas variáveis t, t−1
sobre Z.Como nem sempre os ingredientes envolvidos são comutativos, podemos ter anéis
bastante complicados neste familia de Anéis de Grupos.
2.2 Topologia Algébrica
Estamos supondo que o leitor esteja acostumado com as notações da TopologiaGeral ou de Espaços Métricos.

8 Capítulo 2: Pré-requisitos
2.2.1 O básico de Homotopia
Uma boa sugestão para leitura é o livro do Elon, [Elon1].
Nesta seção estamos trabalhando com a categoria dos espaços topológicos eaplicações contínuas ou na correspondente categoria de pares.
Considere as aplicações f : Z → X e g : Z → X, dizemos que f e g são homotópicasse existir aplicação, denominada homotopia, H : Z × [0, 1] → X tal que H(z, 0) = f (z)
e H(z, 1) = g(z), notação f H∼ g, f ∼ g ou H : f ∼ g.
Muitas vezes, nesta situação dizemos que temos uma familia continua de aplicaçõesht : Z → X com h0 = f e h1 = g.
Se A ⊂ Z temos a noção de homotopia relativa ao subconjunto A, neste caso pede-se que f|A = g|A e que H satisfaça a condição H(a, t) = f (a) = g(a), ∀ a ∈ A e∀ t ∈ [0, 1].
Na categoria dos pares de espaços topológicos e aplicações contínuas de pares,definimos (X, A)× I = (X × I, A × I) e temos a noção correspondente de homotopia.
Sejam f0, f1 : (X, A) → (Y, B) aplicações contínuas. Uma homotopia de paresentre f0 e f1 é uma aplicação contínua de pares H : (X, A) × I → (Y, B) tal queH(x, 0) = f0(x) e H(x, 1) = f1(x).
Observe que se H é uma homotopia entre aplicações de pares então H(A× I) ⊂ B.
Diz-se que (X, A) e (Y, B) tem o mesmo tipo de homotopia de pares se existemaplicações contínuas ϕ : (X, A) −→ (Y, B) e ψ : (Y, B) −→ (X, A) tais queϕ ◦ ψ ∼ Id(Y,B) e ϕ ◦ ψ ∼ Id(X,A), (homotopia de pares). Nestas condições ϕ e ψsão denominadas equivalências de homotopia, a versão não relativa é clara.
Se A = ∅ = B temos a versão usual de homotopia e se A = um ponto e B = umponto temos a homotopia pontuada.
Verifica-se facilmente que homotopia é uma relação de equivalência. Em qualquerdas situações acima, denotamos a classe de alguma f : Z → X por [ f ] ainda denotamoso conjunto das classes de homotopia por {Z,X}, embora em muitos livros a notação seja[Z, X].
Seja h : X → Y, então para toda f : Z → X e familia contínua ft : Z → X podemosentão fazer as aplicações compostas h ◦ f : Z → Y ou h ◦ ft : Z → Y, vemos então queh induz uma aplicação h∗ : {Z, X} → {Z, Y}, definida por h∗([ f ]) = h ◦ f .
Uma deformação de X é uma homotopia ft : X → X onde f0 = IdX e para todo t, fté um homeomorfismo.
Dado par (X, A) dizemos que uma homotopia ft : X → X é uma deformação deX em A se f0 = IdX, f1(X) ⊂ A e ft | A = IdA ∀ t ∈ [0, 1]. Note que neste caso a

2.2: Topologia Algébrica 9
homotopia faz os pontos de X − A "fluírem"para dentro de A, enquanto os pontos deA ficam "parados com o tempo t ∈ [0, 1]".
Vejam exemplos de deformações, muito interessantes, no capítulo 1 de [Prasolov].
Dado A um subespaço de X. Diz-se que A é um retrato de X se existe umaaplicação contínua r : X → A tal que r(a) = a, ∀ a ∈ A, r é chamada uma retração deX sobre A. Vê-se facilmente que A é um retrato de X se e somente se IdA : A → Apode ser prolongada a uma aplicação contínua de X em A. Se iA : A → X é ainclusão, e r : X → A uma retração, então temos r ◦ iA = IdA
Exemplos
1. Seja Z = S1 = X, Y = D2 e fn : S1 → S1 dada por fn(ei.Θ) = ei.n.Θ, n ∈ Z. Sabemosque se m = n em Z então { fn} = { fm}, sabemos também que toda f : S1 → S1 éhomotópica a alguma das fn isto é temos um bijeção {S1, S1} ↔ Z. Por outro lado, áfácil ver que todas as aplicações g : S1 → D2 são homotópicas entre si e homotópicasa qualquer aplicação constante, isto é {S1, D2} é um conjunto unitário. Se denotamosa inclusão i : S1 →֒ D2 então i∗ é constante, isto é, duas aplicações quaisquer de S1 emS1 quando consideradas como aplicação de S1 em D2 são sempre homotópicas.
2. Seja o par (X, A) = (D2, [−1, 1]), então ht(x, y) = (x, (1 − t)y) é deformação de D2
em [−1, 1].
3. Seja o par (X, A) = (D2 − {(0, 0)}, S1), note que S1 é o bordo de D2 entãoht(x, y) = (1 − t)(x, y) + t.{(x, y)/[(x2 + y2)]1/2} é uma deformação de D2 − {(0, 0)}em S1.
Lema 2.1 Se existe uma deformação de X em A então para todo espaço topológico Z, temos quei∗ : {Z, A} → {Z, X} é uma bijeção, onde i∗ é a induzida da inclusão i : A →֒ X.
Prova: Seja ht : X → X uma deformação de X em A, vejamos que i∗ é sobrejetiva.Seja [ f ] ∈ {Z, X} então f : Z → X, consideremos então ht ◦ f que é uma homotopiaentre f e g = h1 ◦ f note que g(Z) ⊂ A logo g pode ser considerada como umaaplicação de Z em A, isto é [g] ∈ {Z, A} e é claro que i∗[g] = [ f ].
Vejamos agora que i∗ é injetiva. Sejam [ f0] e [ f1] em {Z, A} tal que i∗[ f0] = i∗[ f1]Note que f0(Z) ⊂ A e f1(Z) ⊂ A, além disso existe homotopia entre f0 e f1 quandotomadas com aplicações de Z em X, seja ft : Z → X esta homotopia. Temos queh1 ◦ ft : Z → X também é uma homotopia, como f0(Z) ⊂ A segue também que ∀z ∈ Ztemos h1( f0(z)) = f0(z) e da mesma forma ∀z ∈ Z temos h1( f1(z)) = f1(z) entãoh1 ◦ ft é uma homotopia entre f0 e f1. Mas h1(Z) ⊂ A então h1 ◦ ft(Z) ⊂ A ∀t ∈ [0, 1]logo h1 ◦ ft é uma homotopia em A entre f0 e f1, isto é [ f0] = [ f1] em {Z, A}, portantoi∗ é injetiva.
Dizemos que um espaço topológico X é contraível se a aplicação identidade IdX :X → X é homotópica à uma aplicação constante de X em X. Isto é equivalente a dizerque X se deforma em algum de seus pontos.

10 Capítulo 2: Pré-requisitos
Consideremos agora o caso de "espaços topológicos pontuados" e "aplicações(contínuas!) pontuadas", isto é estaremos considerando pares (Z, z0) onde Z é espaçotopológico e z0 ∈ Z um ponto base. As aplicações consideradas f : (Z, z0) → (Y, y0)levam ponto base em ponto base. Nesta "categoria" uma homotopia H deve satisfazera condição H(z0, t) = y0 ∀t ∈ [0, 1]. As classes de homotopias são ditas com pontobase (ou "baseadas"!). A notação, para diferenciar da não baseada é [(Z, z0), (Y, y0)]mas se não há dúvidas sobre quem são os pontos bases, usamos a notação [X, Y]. Anotação para a classe de alguma f será a mesma que a não pontuada [ f ] pois o contextoem geral deixa claro em que categoria estamos. Existe uma aplicação (esquecimento)entre [Z, Y] e {Z, Y}, que leva [ f ] em [ f ], sendo esta ultima a classe de homotopiaconsiderada sem ponto base. Esta aplicação em geral não é uma bijeção. Outro fatorimportante a ser considerado é quando os espaços não são conexos por caminho. Nestecaso os conjuntos podem mudar muito se mudamos as escolhas dos pontos basesem componentes conexas por caminho diferentes, por isto, estaremos considerandoem geral espaços conexos por caminho quando estivermos trabalhando na categoriapontuada. Nestas condições, para uma boa quantidade de tipos de espaços topológicos(conexos) a mudança do ponto base vem acompanhada com uma bijeção natural entreo conjunto das classes correspondentes, por isso a notação simplificada não atrapalha.Neste contexto temos deformações pontuadas e vale o lema abaixo.
Lema 2.2 Se existe uma deformação de X em A (ponto base em A) então i∗ : [Z, A] → [Z, X]é uma bijeção onde i é a inclusão de A em X.
O Grupo Fundamental de um espaço topológico
Seja X um espaço topológico conexo por caminhos e p um ponto em X , temos entãoo par (X, p), vamos definir o grupo fundamental deste espaço topológico pontuado,que será denotado π1(X, p) ou mais abreviadamente π1(X).
Uma aplicação f : [0, 1] → X é um caminho em X ligando f (a) a f (b), se temosoutro caminho g tal que g(0) = f (1), podemos fazer a concatenação destes caminhos,definindo um caminho ( f ⊙ g) : [0, 1] → X por ( f ⊙ g)(t) = f (2t) se 0 ≤ t ≤ 1/2 e( f ⊙ g)(t) = g(2t − 1) se 1/2 ≤ t ≤ 1, que percorrerá, no mesmo "tempo" [0, 1], osdois caminhos dados na ordem pré estabelecida. Podemos também definir o caminhoinverso de f , isto é, ele percorre o mesmo caminho que faz f , porem no sentidocontrário, denotemos por f− este caminho que é definido por f−(t) = f (1 − t), t ∈[0, 1].
É fácil ver que a concatenação de caminhos não é associativa, isto é, ( f ⊙ g)⊙ h éem geral diferente de f ⊙ (g ⊙ h).
Seja (S1, q) o circulo pontuado, conforme a conveniência da notação, o circuloserá visto como subespaço de R2 ou dos complexos C ou como quociente de [0, 1]ou [0, 2π] ou [a, b], pelos seus pontos extremos, neste caso o ponto base será o pontocorrespondente aos identificados.
Note que se X não for conexo por caminhos, o que estaremos fazendo nesta seçãoé definir o grupo fundamental da componente conexa por caminhos do ponto base p,por isso, desde o começo, tomamos por facilidade, X conexo por caminhos.

2.2: Topologia Algébrica 11
Dada aplicação de f : (S1, q) → (X, p) obtém-se de forma natural aplicaçãocorrespondente f ′ : ([a, b], {a, b}) → (X, p) e vice-versa, além disso, f ∼ g se e somentese f ′ ∼ g′.
Estas aplicações são chamadas laços em X com ponto base p.Notemos que uma homotopia de laços, é uma homotopia fs tal que ∀s ∈ [0, 1] fs é
um laço em (X, p).Como um laço é um caso especial de caminho, podemos fazer a concatenação
de laços. Como foi observado anteriormente, a concatenação de caminhos, ouparticularmente de laços, não é associativa porém se considerarmos as classes dehomotopia de laços vemos que os dois laços ( f ⊙ g)⊙ h e f ⊙ (g ⊙ h) são homotópicos,logo em [([0, 1], {0, 1}), (X, p)] , [( f ⊙ g) ⊙ h] e [ f ⊙ (g ⊙ h)] são o mesmo elemento.Temos portanto uma boa definição de um produto no conjunto [([0, 1], {0, 1}), (X, p)]dado por [ f ].[g] = [ f ⊙ g].
Definição 2.2 O grupo fundamental de X em p, denotado π1(X, p), é o conjunto dasclasses de homotopia baseada de laços em X com ponto base p, ou seja, o conjunto[([0, 1], {0, 1}), (X, p)] (ou [(S1, q), (X, p)]) com o produto [ f ].[g] = [ f ⊙ g], elementoinverso [ f ]−1 = [ f−] e elemento neutro dado pela classe do caminho constante em p.
A prova de que a operação acima é bem definida e que realmente dá ao conjuntoum estrutura de grupo, é extensa, omitiremos.
Definição 2.3 Homomorfismo induzido por aplicação contínua Dada uma aplicação F :(X, x0) → (Y, y0), define-se um homomorfismo F∗ : π1(X, x0) → π1(Y, y0), por F∗([ f ]) =[F ◦ f ].
É fácil verificar que F∗ é um homomorfismo de grupos, que Id(X,x0)∗= Idπ1(X,x0)
e que (G ◦ F)∗ = G∗ ◦ F∗, em outras palavras se denotássemos F∗ por π1(F) entãoπ1 é um funtor covariante da categoria dos espaços topológicos baseados e aplicaçõescontínuas baseadas na categoria dos grupos e homomorfismos de grupos.
Não é difícil ver que no caso de o espaço ser conexo por caminhos e mudarmoso ponto base, obtemos grupos fundamentais isomorfos, por isso às vezes omitimos oponto base.
Exemplos
1. É fácil mostrar que se X for convexo ou contraível então π1(X) = (0).
2. Seja (X, p) = (S1, 1) e usemos por conveniência o intervalo [0, 2π] como domíniodos laços para π1(S1, 1). É possível provar que todo laço f : ([0, 2π], {0, 2π}) → (S1, 1)é homotópico à um dos laços fn(θ) = ei.n.θ, n ∈ Z e que ( fi ⊙ f j) ∼ fi+j, concluímosque π1(S1, 1) ≈ Z.
3. Sejam (X, p) e (Y, q) espaços topológicos pontuados, é fácil verificar que π1(X ×Y, (p, q)) ≈ π1(X, p) × π1(Y, q).
12 Capítulo 2: Pré-requisitos
Para a demonstração do proximo teorema, veja por exemplo [Armstrong] pagina138.
Teorema 2.1 (Teorema de Seifert-van Kampen)
Sejam X = A ∪ B espaços topológicos, i : A →֒ X e j : B →֒ X as inclusões, onde A, B eA ∩ B são subespaços conexos de X e considere o ponto base destes espaços x0 ∈ A ∩ B.
Suponha que os grupos fundamentais de A, B e A ∩ B sejam dados pelas apresentações:π1(A, x0) =< a1, a2, .... | r1, r2, ..... >, π1(B, x0) =< b1, b2, .... | s1, s2, ..... >e π1(A ∩ B, x0) =< c1, c2, .... | t1, t2, ..... >, então:
π1(X, x0) =< a1, a2, ...., b1, b2, .... | r1, r2, ....., s1, s2, ....., i∗(c1) = j∗(c1), i∗(c2) =j∗(c2), ... >.
A definição dos grupos de homotopia de dimensão maior cabe (sem asdemonstrações, é claro!) neste cantinho, vejamos:
πq(X, x0) é o conjunto das classes de homotopia relativa de aplicações de paresf : (Iq, ∂Iq) → (X, x0).
Dadas duas destas aplicações podemos concentrar cada uma delas em uma"metade"do q-cubo Iq, definindo assim, a soma de duas destas funções que, em nívelde homotopia, fica bem definida.
Desta forma o conjunto ganha uma operação tornando-se um grupo abeliano poisem dimensão ≥ 2 é possível concentrar um pouco mais as funções dentro dos q-cubose "rodar"os domínios destas funções concentradas, trocando-as de posição dentro do q-cubo inicial. O elemento neutro e os inversos são definidos de forma natural, trocando-se as orientações do cubo em que estão definidas.
Da mesma forma que no grupo fundamental, dada aplicação contínua F :(X, x0) → (Y, y0) define-se F∗q : πq(X, x0) → πq(Y, y0) por F∗q([ f ]) = [F ◦ f ] everifica-se facilmente que F∗q é um homomorfismo, que se chamado π∗q(F), mostra-nos que π∗q é um funtor covariante da categoria dos espaços topológicos pontuadosna categoria dos grupos abelianos.
2.2.2 O básico de Homologia
Uma boa sugestão para leitura é o novo livro do Elon, [Elon2].
Os axiomas de Eilenberg-Steenrod
A Teoria de Homologia é importante instrumento da Topologia Algébrica. É usadaem diversas outras áreas da matemática. Foi sistematizada através dos Axiomas deEilenberg-Steenrod o que facilita muito a sua utilização. Estaremos focalizando acategoria dos pares de espaços topológicos e aplicações contínuas entre estes pares.Consideramos a identificação X = (X, ∅), bem como as inclusões naturais derivadasdo par de espaços (X, A), que são:

2.2: Topologia Algébrica 13
(A, A)ր ց
(∅, ∅) → (A, ∅) (X, A) → (X, X)ց ր
(X, ∅)
São os seguintes os dados para uma teoria de homologia.
A cada par de espaços (X, A) e para cada inteiro q, pode-se associar, de maneirabem definida, grupos abelianos Hq(X, A) e homomorfismos denominados operadoresbordo
∂q = ∂(X,A,q) : Hq(X, A) → Hq−1(A),
Além disso, para toda f : (X, A) → (Y, B) e para todo q inteiro pode-se associarhomomorfismos de grupos:
fq = (Hq( f )) : Hq(X, A) → Hq(Y, B),
ou, abreviadamente:
f∗ : H∗(X, A) → H∗(Y, B) e ∂∗ : H∗(X, A) → H∗−1(A) e ∂∗ : H∗(Y, B) → H∗−1(B).
Para cada q, Hq é um funtor covariante.
Eilenberg e Steenrod deram, em 1945, uma descrição axiomática da Teoria daHomologia Relativa, estabelecendo os seguintes axiomas.
Axioma 2.1 (Identidade) Se Id : (X, A) → (X, A) é a função identidade, então Idq :Hq(X, A) → Hq(X, A) é a identidade de Hq(X, A) para todo inteiro q.
Axioma 2.2 (Composição) Se f : (X, A) → (Y, B) e g : (Y, B) → (Z, C) são aplicações depares, então (g ◦ f )q = gq ◦ fq para todo inteiro q.
Axioma 2.3 Se f : (X, A) → (Y, B) e f ′ : A → B é definida por restrição de f então, odiagrama abaixo é comutativo para todo inteiro q.
Hq(X, A)∂∗−→ Hq−1(A)
↓ fq ↓ f ′q−1
Hq(Y, B)∂∗−→ Hq−1(B)
Axioma 2.4 (Seqüência Exata) Para todo par (X, A) fica associada uma seqüência exata degrupos, denominada seqüência de homologia do par (X, A);
... → Hq(A)iq
−→ Hq(X)jq
−→ Hq(X, A)∂q−→ Hq−1(A)
iq−1−→ Hq−1(X) → ...
Axioma 2.5 (Homotopia) Se as aplicações f e g : (X, A) → (Y, B) são homotópicas, então,fq = gq para todo inteiro q.

14 Capítulo 2: Pré-requisitos
Axioma 2.6 (Excisão) Se U é um aberto de X tal que o fecho de U, esta contido no interiorde A, então, a aplicação inclusão e : (X − U, A − U) → (X, A) induz isomorfismoseq : Hq(X − U, A − U)
≈−→ Hq(X, A), para todo inteiro q.
Axioma 2.7 (Coeficiente) Se P é um espaço topológico unitário, então, Hq(P) = 0 se q 6= 0.
Se P é espaço topológico unitário e fixamos H0(P) = G então G é chamado grupo doscoeficientes da teoria de homologia em questão.
Daremos adiante um pouco do que é preciso para se construir uma teoria de homologiana qual fixaremos Z como grupo dos coeficientes (pode ser qualquer anel comutativocom unidade).
Alguns Resultados que se obtém diretamente dos axiomas
Proposição 2.1 Os grupos de homologia são invariantes do tipo de homotopia, isto é, sef : (X, A) → (Y, B) é uma equivalência de homotopia, então f∗ : H∗(X, A)
≈→ H∗(Y, B).
Demonstração: Sejam (X, A), (Y, B) pares de espaços que tem o mesmo tipo dehomotopia, isto é, existem f : (X, A) → (Y, B) e g : (Y, B) → (X, A) tal que ( f ◦ g) e(g ◦ f ) são homotópicas a identidade.Então, os axiomas 2 e 5 fornecem: (g ◦ f )∗ = g∗ ◦ f∗ = Id e ( f ◦ g)∗ = f∗ ◦ g∗ = Id ,logo f∗ : H∗(X, A)
≈→ H∗(Y, B) e g∗ : H∗(Y, B) ≈
→ H∗(X, A), são isomorfismos.
Como já vimos As aplicações f e g acima denominam-se equivalências de homotopiae os pares de espaços são chamados equivalentes homotópicos.
Proposição 2.2 Para todo espaço topológico X temos H∗(X, X) = 0.
Demonstração: Pelo axioma 4 temos a seqüência exata de homologia do par (X, X):
... → Hq(X)iq→ Hq(X)
jq→ Hq(X, X)
∂q→ Hq−1(X)
iq−1→ Hq−1(X) → ...
Logo, para todo q, iq é o isomorfismo identidade e, portanto, ker iq = 0 e Im iq =Hq(X).Como a seqüência é exata, temos que ker jq = Im iq = Hq(X).Temos então que Im jq = 0 (*).Como Im ∂q = ker iq−1 = 0 temos que ker ∂q = Hq(X, X) (**).Mas, Im jq = ker ∂q logo (*) e (**) fornecem Hq(X, X) = 0 para todo inteiro q.
Proposição 2.3 Se A ⊂ X é um retrato de X, então, H∗(X) ≈ H∗(A)⊕ H∗(X, A).
Demonstração: Como A i−→ X r
−→ A, é tal que, r ◦ i = IdA e, portanto, rq ◦ iq =id. Temos que iq é injetora e rq é sobrejetora. Consideremos a seqüência exata de
homologia do par (X, A): ... → Hq+1(X, A)∂q+1−→ Hq(A)
iq−→ Hq(X) → ...
Como i∗ é injetora, ∂∗ = 0. Obtemos então uma família de seqüências exatas curtas:
0 → Hq(A)iq
−→ Hq(X)jq
−→ Hq(X, A) → 0.
2.3: O básico de Topologia Diferencial 15
Consideremos a aplicação contínua π = i ◦ r : X → X.Verifica-se que πq = iq ◦ rq : Hq(X) → Hq(X) é um projetor do grupo abeliano Hq(X),isto é:
πq ◦πq = (iq ◦ rq) ◦ (iq ◦ rq) = iq ◦ (rq ◦ iq) ◦ rq = iq ◦ rq = πq, logo Hq(X) ≈ Imπq ⊕ kerπq
Como rq é sobrejetora e iq é injetora, vem que Imπq = Imiq = iq(Hq(A)) ≈ Hq(A).Então, Hq(X) ∼= iq(Hq(A))⊕ ker πq e, portanto, ker πq ≈ Hq(X)/iq(Hq(A)).Das seqüências exatas curtas acima decorre que Hq(X)/iq(Hq(A)) ∼= Hq(X, A) e daíHq(X) ≈ iq(Hq(A))⊕ Hq(X, A) ≈ Hq(A)⊕ Hq(X, A) para todo inteiro q.
Observação Seja {x0} sub espaço constituído de um único ponto de X, {x0} ⊂ X,então:Hq(X) ≈ Hq({x0})⊕ Hq(X, {x0}) logo,Hq(X) ≈ Hq(X, {x0}) para todo q 6= 0 e H0(X) ≈ Z ⊕ H0(X, {x0})
2.3 O básico de Topologia Diferencial
Acredito que todos saibam o que é uma curva ou uma superfície, no plano ou noespaço, como dar uma parametrização, achar vetor tangente ou plano tangente, etc.Curvas, surgem por exemplo como gráfico de aplicações de R em R e superfícies comográficos de aplicações de R2 em R. Se estas aplicações são contínuas, diferenciáveis devárias ordens, etc., as respectivas curvas e superfícies terão propriedades específicas.
Considerando estes objetos, mergulhados nos respectivos ambientes R2 ou R3
eles herdam destes espaços uma topologia, até mesmo uma métrica. Se os objetosforem dados por aplicações diferenciáveis eles também herdam uma "estruturadiferenciável"do ambiente, isto é, se temos dois destes objetos podemos falar deaplicações diferenciáveis entre eles. Se os objetos tem apenas uma estrutura topológicaentão temos que nos restringir a aplicações contínuas entres eles, ou seja, utilizamos acategoria que seja possível em cada caso.
Objetos de maiores dimensões surgem naturalmente, porem temos maisdificuldades de "visualizá-los". Utilizamos para isso nosso treinamento e nossaconfiança em manipular dados algébricos e analíticos para se ter uma visão geométrica"multidimensional"destes objetos. Muitas vezes utilizamos visões projetadas emespaços de dimensões menores, dos objetos em estudo, como fazemos com o estudoda Geometria Espacial através da Geometria Descritiva.
Gráficos de funções de Rk em R são objetos de dimensão k em Rk+1. Podemostambém parametrizar objetos de dimensão k em algum Rk+i, i ≥ 2, etc. Se algumdestes objetos tem a propriedade de que todos os seus pontos possuem vizinhançashomeomorfas (difeomorfas) a um Rn, com n fixo, dizemos que este objeto é umavariedade de dimensão n. As curvas são variedades de dimensão 1, as superfíciessão variedades de dimensão 2, etc.
Quando selecionamos as variedades que possuem estrutura diferenciável eportanto podemos falar das aplicações entre elas que são diferenciáveis, estamosfalando da categoria que normalmente é chamada categoria das variedadesdiferenciáveis, abreviadamente DIFF.

16 Capítulo 2: Pré-requisitos
É importante salientar que é possível descrever esta categoria sem fazer nenhumaalusão aos mergulhos destes objetos no Rn. Quando adotamos esta forma fica claroque podemos falar em variedades de classe Ck, quando as variedades possuemparametrizações de classe Ck e as aplicações entre elas também são de classe Ck.
Outra categoria importante são as variedades topológicas, classe C0, com asaplicações contínuas entre elas.
Quando estamos trabalhando com objetos que podem ser triangularizáveis, isto é,podemos achar um poliedro homeomorfo ao dito objeto, e consideramos as aplicações(contínuas) entre estes objetos que correspondem a aplicações lineares afins entre ospoliedros correspondentes, dizemos que estamos na categoria PL.
Todas são sub categorias da categoria dos espaços topológicos e aplicaçõescontínuas (TOP).
Definição 2.4 Uma variedade de dimensão n, Wn é um espaço topológico que pode se cobertopor imagens bijetivas de aplicações contínuas (cartas ou parametrizações) x : U → Wn ondeU é um aberto de Rn, x(U) é aberto de Wn e cada x : U → x(U) é um homeomorfismo.Se para duas quaisquer cartas, x1 e x2 cujas imagens se interceptam, tivermos que a aplicaçãocomposta (mudanças de coordenadas!) x−1
2 ◦ x1 : x−11 (U1 ∩ U2) → x2(U1 ∩ U2) for PL
ou diferenciável (digamos de classe Ck), dizemos que Wn é uma variedade de classe Ck, se asmudanças de coordenadas só forem PL ou contínuas dizemos que Wn é uma variedade PL outopológica.
Como vimos antes, muitas vezes já supomos que o espaço Wn, ao qual se quer daruma estrutura de variedade, já se situa em algum RN e as cartas são parametrizaçõesque generalizam os conceitos clássicos de curvas e superfícies parametrizadas. Estaforma de definir variedades é mais prática e é aceitável já que existem teoremas queprovam que, uma grande parte das variedades no sentido geral da definição acima,sempre mergulha de forma adequada em algum RN com N não tão grande.
Uma aplicação entre duas variedades Nn e Mm é dita PL ou diferenciável declasse Ck, se quando escrita em coordenadas (compondo com cartas locais no domínioe no contra-domínio) forem PL ou de classe Ck como aplicações entre os abertoscorrespondentes de Rn e Rm. Se k = 0 dizemos que a aplicação é continua e ocaso C0 coresponde à categoria topológica.
Exemplos de Variedades:
1. Rn ou qualquer de seus abertos são variedades de dimensão n.
2. Sn = {(x1, x2, .., xn+1) ∈ Rn+1com ‖ (x1, x2, .., xn+1) ‖= 1} a esfera unitária de Rn+1
é uma variedade de dimensão n.
3. O produto cartesiano de duas variedades é uma variedade.
Uma variedade com bordo se define como acima só que pedimos que os domíniosU são abertos de Hn = {(x1, x2, .., xn) ∈ Rn, com xn ≥ 0}. Observe então que podemoster pontos de dois tipos, um tipo onde sua vizinhança são os abertos U que se situam

2.3: O básico de Topologia Diferencial 17
em {(x1, x2, .., xn) ∈ Rn, com xn > 0} que são abertos usuais de Rn e outros pontoscuja vizinhança tem a forma de Hn, estes serão os pontos do bordo da variedadeconsiderada.
Exemplos de Variedades com bordo:
1. Hn é uma variedade com bordo, seu bordo é ∂Hn = {(x1, x2, .., xn) ∈ Rn, com xn =0} = Rn−1 e o seu interior é int(Hn) = {(x1, x2, .., xn) ∈ Rn, com xn > 0}.
2. Dn = {(x1, x2, .., xn) ∈ Rncom ‖ (x1, x2, .., xn) ‖≤ 1} o disco unitário de Rn é umavariedade com bordo, seu bordo é a esfera Sn−1. O interior de Dn é uma variedadeaberta. Usa-se a terminologia variedade fechada para uma variedade compacta e sembordo, como Sn.
3. In = [0, 1]n o n-cubo de Rn é uma variedade com bordo de dimensão n, seu bordoé homeomorfa à esfera Sn−1, um caso particular é I = [0, 1] o intervalo da reta que éuma variedade de dimensão 1 e seu bordo é {0, 1} (compare com o exemplo anterior).
Exercício: Encontre todas as variedades conexas de dimensão 1, com ou sem bordo, amenos de homeomorfismo.
Uma superfície bastante popular, a faixa de Möbius, é obtida do quadrado I2 ={(x, y) ∈ R2 tal que 0 ≤ x ≤ 1 e 0 ≤ y ≤ 1} identificando-se os pontos dosegmento à esquerda (0, y) ∈ I2 com os pontos correspondentes aos segmento à direita(1, 1 − y) ∈ I2, onde 0 ≤ y ≤ 1. Vamos denotar a Faixa de Möbius por M2. Note que oseu interior, isto é M2 menos o seu bordo ∂M2 (que é homeomorfo à um circulo S1!)(étambém chamada faixa de Möbius). M2 é o protótipo da superfície não orientável, istoé, ela só tem um lado!!
Qualquer superfície será dita não orientável se contiver uma sub-superfíciehomeomorfa a M2, caso contrario será dita orientável.
Podemos criar um protótipo para uma variedade não orientada de dimensão n,basta considerar o n-cubo In = {(x1, x2, ....., xn) onde 0 ≤ xi ≤ 1 ∀ i = 1, 2, ..., n}e identificar os pontos do (n-1)-cubo "à esquerda"{(0, x2, x3..., xn) ∈ In onde 0 ≤xi ≤ 1 ∀i = 2, ..., n} com os pontos correspondentes ao (n-1)-cubo "à direita"{(0, 1 − x2, x3..., xn) ∈ In, onde 0 ≤ xi ≤ 1 ∀i = 2, ..., n}, assim obtemos a variedadecompacta com bordo que denotaremos Mn.
Uma variedade de dimensão n será não orientável se contiver uma sub-variedadede dimensão n homeomorfa a Mn, caso contrário será dita orientável.
Para uma variedade orientável é possível escolher duas orientações, quando feitaesta escolha dizemos que temos uma variedade orientada.
Construindo variedades

18 Capítulo 2: Pré-requisitos
Já observamos que o produto cartesiano de duas variedades é uma variedade.Podemos construir com isso muitas variedades, usando algumas que já conhecemos.
Uma outra forma de construir variedades e tomar duas variedades com bordoshomeomorfos (difeomorfos) e colá-las através do bordo usando um homeomorfismo(difeomorfismo).
Uma operação bastante importante na categoria das variedades é a soma conexade duas variedades.
Definição 2.5 Dadas duas variedades M1 e M2 de mesma dimensão n a soma conexaM1♯M2 é definida da seguinte forma: escolha discos Dn
1 ⊂ M1 e Dn2 ⊂ M2 remova os interiores
destes discos. Nas variedades surgem as componentes de bordo Sn−11 = ∂Dn
1 e Sn−12 = ∂Dn
2 ,"colamos" estas esferas através de um homeomorfismo (ou um homeomorfismo PL se estamosnesta categoria ou um difeomorfismo se as variedades forem diferenciáveis) ϕ : Sn
1 Sn2
obtemos a soma conexa M1♯M2.
Teorema 2.2 Classificação de Superfícies As superfícies, conexas, compactas e sem bordosão classificadas, a menos de homeomorfismo, segundo a lista:
1. Orientáveis: a esfera S2, o toro T2 = (S1 × S1) e as somas conexas de toros, ♯gi=1(T
2)
onde g = 1, 2, 3, .... é chamado genus da superfície orientável correspondente. Diz-se que S2
tem genus 0.2. Não orientáveis: o espaço projetivo RRP
2 e somas conexas de espaços projetivos,♯
gi=1(RRP
2) onde g = 1, 2, 3, .... é chamado genus da superfície não orientável correspondente.
Detalhes e demonstrações podem ser vistas em [Moise] ou [Massey].
A classificação das superfícies compactas e conexas com bordo é feita daseguinte forma: Verifique se as duas superfícies dadas tem a mesma quantidade decomponentes de bordo (que necessariamente são um número finito de círculos S1), seestas quantidades forem diferentes então as superfícies são diferentes, se forem iguais,então cole um disco D2 em cada componente de bordo de cada superfície, fazendo comque as mesmas se tornem superfícies sem bordo. Use o teorema acima para verificarse as duas superfícies, conexas, compactas e sem bordo obtidas são homeomorfas, seforem, então as iniciais também serão.
As superfícies são espaços topológicos triangularizáveis, isto é, são homeomorfasa poliedros montados (de forma regulamentada) com vértices, arestas e facestriangulares. As superfícies compactas terão um número finito destes ingredientes.Defini-se a Característica de Euler de uma superfície compacta M por χ(M) =número de vértices - número de arestas + número de faces, obtidos de qualquertriangulação de M. Prova-se que este número χ(M) não depende da triangulação (sódepende da classe de homeomorfismo da superfície), isto é, χ(M) é um invariantetopológico e é usado para distinguir as superfícies acima descritas.
É fácil obter o seguinte resultado:

2.3: O básico de Topologia Diferencial 19
Proposição 2.4 Se M é orientável então seu genus g = [2− χ(M)]/2 e se M é não orientávelentão g = [2 − χ(M)].
Definição 2.6 Dada variedades Mm e Nn, n ≤ m se diz que Nn é sub-variedade de Mm
se Nn ⊂ Mm e se for possível parametrizar os pontos de Nn, vistos como pontos de Mm, porcartas x : Rm → Mm tal que x |Rn : Rn → Nn sejam cartas para Nn.
Definição 2.7 Seja f : Nn → Mm uma aplicação contínua (PL, diferenciável, etc.) entre duasvariedades, isto é, um morfismo na categoria correspondente. Se f : Nn → f (Nn) = imagemde f em Mm for um homeomorfismo (PL, difeomorfismo, etc.), então dizemos que f é ummergulho de Nn em Mm.
Dizemos que N ⊂ M tem colarinho duplo se existe mergulho i : N × [−1, 1] →֒ Mtal que i(x, 0) = x, ∀ x ∈ N, nesta situação Nn é dita mansa em Mm.
Definição 2.8 Seja Nn uma subvariedade compacta topológica de uma variedade PL, Mm.Dizemos que Nn é uma subvariedade mansa em Mm se existir um homeomorfismo PL h :Mm
Mm tal que h(Nn) é uma subvariedade PL de Mm.
A existência destes mergulhos e, caso existam, a sua classificação são objetivos deestudo da Teoria de Mergulhos entre variedades, da qual a Teoria de Nós é um casoparticular.

20 Capítulo 2: Pré-requisitos

Capítulo 3
Teoria Clássica de Nós
3.1 Introdução
Sobre a Teoria Clássica dos Nós, temos, em português, o livro do Derek [Hacon].apresentado no XV Colóquio Brasileiro de Matemática, que é muito gostoso de ler eestudar, por isso sempre que possível estaremos fazendo referência a ele.
Estudamos neste capítulo a classificação de certos mergulhos do círculo S1 (nós), oureunião disjunta de vários círculos (enlaçamentos) em R3 ou S3. Não é preciso discutirsobre a existência destes mergulhos pois existe pelo menos o mergulho padrão, dadopor S1 = {(cos(θ), sen(θ), 0) ∈ R3, com θ ∈ [0, 2π)} ou se pretendemos ver o mergulhocomo uma função, definimos f : S1 →֒ R3 por f (θ) = (cos(θ), sen(θ), 0). Neste casoestamos olhando S1 com o intervalo [0, 2π] onde identificamos os seus extremos, outrasvezes olharemos S1 como o circulo unitário nos complexos, isto é um ponto será daforma ei.θ. Estaremos também olhando S3 como a compactificação de R3 e é fácil verque existe uma bijeção natural entre os mergulhos ("mansos") do círculo em S3 e em R3,por isso, vamos abusar ainda mais da notação, usaremos algumas vezes a notação M3
para designar indistintamente S3 ou R3. Gostaríamos de dizer também que estamostrabalhando na categoria dos espaços topológicos e aplicações contínuas mas temosum problema sério aí, a existência de nós selvagens. Vejam abaixo um exemplar destaespécie não tão rara!!.
Figura 3.1: Nó Selvagem
Se voce gosta de emoção forte e esta interessado em nós selvagens veja [Milnor] e[Brode].
21

22 Capítulo 3: Teoria Clássica de Nós
Aqui estamos interessados em nós e enlaçamentos mansos ("não selvagens"), queincluem os diferenciáveis, os diferenciáveis por partes, os lineares por partes (PL), osde colarinho duplo, etc. Estaremos portanto nos restringindo à nós e enlaçamentosnestas categorias.
Em geral os nós e enlaçamentos são colocados em classes de equivalência e seestuda estas classes. Quando nada se explicitar, estaremos considerando a relação deequivalência dada por isotopia ambiental, isto é:
Definição 3.1 Sejam i0, i1 : S1 →֒ M3 dois nós, dizemos que i0 é ambientalmente isotópico ai1, se existe uma PL-deformação (isotopia que se inicia na identidade), H : M3 × I → M3 × I,dada por H(y, t) = (ht(y), t), onde h0 = idM3 e i1 = h1 ◦ i0.
A definição desta equivalência para enlaçamentos é similar à acima, por isso não aapresentamos.
Intuitivamente o que a isotopia ambiental faz é criar um movimento no ambiente(M3) de tal forma que o primeiro nó "K0 = i0(S1)" se desloca continuamenteconforme passa o tempo t ∈ [0, 1] até que no final do movimento (t = 1) se situaexatamente em K1 = i1(S1). Usamos a notação K0 ∼ K1 para indicar que os nóssão equivalentes e K0 ≁ K1 caso contrário. Note que se ik for definida a menos dehomeomorfismo definido no domínio (neste caso S1) é porque estamos interpretandoos nós essencialmente como suas imagens K0 e K1, e neste caso, a notação acima é bemmais significativa.
Nós e enlaçamentos mansos são aqueles que são isotópicos a nós e enlaçamentospoligonais, isto é, aqueles que são constituídos por uma seqüencia de segmentos dereta (PL). Daqui para frente nós e enlaçamentos serão sinônimos de nós e enlaçamentosmansos. Quando não houver perigo de confusão identificamos um nó ou umenlaçamentos com sua classe.
Quando fixamos orientação ao (s) círculo (s) e ou a M3 e exigimos que a relaçãode equivalência preserve as orientações estaremos falando de nós ou enlaçamentosorientados. Em geral o contexto deixa claro o que se estuda.
Dado um nó ou enlaçamento poligonal em R3 é sempre possível escolher um planode tal forma que a projeção do nó sobre este plano tenha características convenientesquais sejam: ter no máximo pontos duplos e os pontos duplos só ocorrem nos interioresdos segmentos que constituem o nó. Uma projeção desta forma é chamada projeçãoregular do nó.
É claro que a projeção regular de um nó não determina sua classe mas se em cadaponto duplo de uma destas projeções designarmos qual o segmento que esta "porbaixo", então a classe do nó fica determinada por esta projeção regular "qualificada".Uma projeção regular qualificada de um nó é chamado um diagrama do nó e as vezesapenas por projeção regular do nó. Note que em geral apresenta-se um desenho donó no plano onde o trecho que esta por baixo fica interrompido e o nó se apresentacomo uma seqüencia de segmentos de reta.
Dois diagramas de nós ou enlaçamentos são ditos equivalentes se um pode sertransformado no outro por seqüencias de movimentos chamados de "Reidemeister"que são seis e estão descritos abaixo (em cada desenho temos um movimento e seucorrespondente inverso).
Observe que nos desenhos deveríamos estar apresentando as projeções dos nós comlinhas poligonais, isto é, por segmentos de retas, no entanto, abusaremos novamente

3.1: Introdução 23
Figura 3.2: Movimentos de Reidemeister
da notação, apresentando os diagramas com seqüencia de arcos curvilíneos, poisfacilitam o desenho.
Definição 3.2 Um enlaçamento de duas componentes L = K1 ⊔K2 é dito separável (splittable)se cada Ki esta dentro de uma bola D3
i ⊂ R3, i = 1, 2 com D31 disjunta de D3
2.
A generalização para enlaçamentos de mais componentes e de dimensões maioresé obvia.
Definição 3.3 Dado um enlaçamento de duas componentes L = K1 ⊔ K2, dizemos que K1é homotopicamente não enlaçada à K2 se o mergulho f : S1 →֒ R3 − K2 que define K1 éhomotópica à uma aplicação constante em R3 − K2.
Similarmente para K2 homotopicamente não enlaçada a K1.
A generalização para mais componentes e maiores dimensões é obvia.
Daqui para frente estaremos focalizando os nós mas a maioria dos argumentos valepara enlaçamentos.
Existe um resultado muito importante que remete o estudo dos nós e enlaçamentosclássicos ao estudo de seus diagramas. É um teorema cuja prova não será apresentadaaqui, para isso veja [Burde/Zieschang], pagina 9.
Teorema 3.1 Dois nós clássicos K e L são equivalentes por isotopia ambiental se e somente sealgum diagrama de K for equivalente (por movimentos de Reidemeister) a algum diagrama deL.
Uma classificação dos nós por isotopia ambiental seria uma forma de discernirexatamente cada uma das classes, listando-as. O que não temos. Veja na figura3.3 alguns nós equivalentes (o que é fácil comprovar, nestes casos) e outros nãoequivalentes o que já não é tão fácil comprovar, mesmo nestes casos.
Na figura 3.4 abaixo (que eu não me lembro de onde tirei!) vemos uma seqüenciade movimentos de Reidemeister levando o nó Figura Oito na sua imagem refletida,comprovando que este nó é aquiral.

24 Capítulo 3: Teoria Clássica de Nós
Figura 3.3: Nós equivalentes e não equivalentes
Figura 3.4: O nó Figura 8 é aquiral
3.2 Número de enlaçamentos
Quando estudamos enlaçamentos é muito importante o conceito de número deenlaçamento (linking number). Em [Rolfsen(1976)], pagina 132 podemos encontraroito formas diferentes de se definir o número de enlaçamentos entre dois nós disjuntos(enlaçamento de duas componentes), vamos colocar aqui apenas três delas. Na figuraabaixo vemos o número de enlaçamento de alguns enlaçamentos.
Figura 3.5: Número de enlaçamento
Sejam C e D dois nós disjuntos e orientados em R3. Considere uma projeção regulardeste enlaçamento e os pontos de cruzamentos onde C atravessa por baixo de D. Se o
3.3: Alguns Invariantes de Nós e Enlaçamentos 25
cruzamento se dá da direita para a esquerda do sentido da orientação de D, rotulamoseste cruzamento +1, caso contrário −1. O número de enlaçamento L(C, D) será asoma destes rótulos. Similarmente se define L(D, C). Se temos um enlaçamento detrês (ou mais) componentes, C1, C2 e D todos orientados, considerando-se C1 + C2 oenlaçamento de duas componentes correspondente, podemos definir da mesma formaL(C1 + C2, D) e obtemos que L(C1 + C2, D) = L(C1, D) + L(C2, D).
Uma outra forma de se definir o numero de enlaçamento é a seguinte: Sabemos queH1(R
3 − D;Z) ≃ Z, gerado por δ e onde o isomorfismo é definido pelas orientaçõesde todos os espaços envolvidos. Como C é um ciclo orientado em R3 − D temos que aclasse de C, [C] = n.δ, para algum inteiro n, definimos L(C, D) = n.
É possível provar que as definições são equivalentes. Além disso, se Ct e Dt éfamilia de nós disjuntos em R3, para cada t ∈ [0, 1] então L(C0, D0) = L(C1, D1) eque L(C, D) = L(D, C).
Esta definição se generaliza da seguinte forma:Sejam X e Y subespaços topológicos disjuntos de R3 e x ∈ H1(X;Z) e y ∈ H1(Y;Z).
Seja x representada por alguma curva C e y representada por alguma curva D,definimos L : H1(X;Z) × H1(Y;Z) → Z por L(x, y) = L(C, D). É possível provarque L é uma forma bilinear simétrica.
Existem versões em dimensões mais alta desta forma bilinear que mede se osconjuntos X e Y estão enlaçados dentro de algum Rn ou dentro de algum espaço Zonde ambos estão mergulhados. Em particular podemos encontrar invariantes para omergulho de superfícies orientáveis em M3 olhando para o mergulho e um transladadodele numa direção normal. Veja mais detalhes em [Hacon] capitulo VI.
Uma terceira forma de se definir o número de enlaçamento entre C e D é consideraruma superfície orientável W2 tal que ∂W2 = D (chamada superfície de Seifert paraD) e calcular o número de intersecção W2.C e colocar este número igual à L(C, D).Este numero de intercessão é calculado da seguinte forma: Por uma homotopia façacom que C e W2 fiquem transversais, isto significa que teremos um número finitode cruzamentos transversais entre C e W e estes pontos de cruzamento poderãoser rotulados +1 se a orientação local de W seguida da orientação de C for igual aorientação do ambiente e rotulado −1 caso contrário. Então, W2.C será a soma destesrótulos.
3.3 Alguns Invariantes de Nós e Enlaçamentos
Temos muitos mecanismos que conseguem diferenciar algumas e às vezes muitasclasses de nós mas ainda não todas. Estes mecanismos são chamados genericamente deinvariantes. São como o genus e a característica de Euler que usamos na classificaçãode superfícies.
O que é um invariante no estudo dos nós?Suponha que possamos associar a cada nó K um valor IK em algum conjunto de tal
forma que se K ∼ L então IK = IL, isto é, I(.) é constante nas classes de equivalências(para alguma equivalência pré estabelecida). Então temos que se IJ 6= IN então J ≁ Ne neste caso a associação I distingue a classe de J e de N, usamos I para provar quea classe do nó J, denotada [J] 6= [N], a classe do nó N. Então I(.) é um invariante útilpara distinguir estas classes.
26 Capítulo 3: Teoria Clássica de Nós
Vamos ver agora alguns invariantes da teoria clássica de nós. Notemos quealguns invariantes (nem todos) podem ser usados também para o caso da teoriamultidimensional de nós e alguns que podem ser usados também para o caso maisgeral que é o estudo da classificação de mergulhos de variedades em variedades.
Devido ao teorema 3.1 acima muitos invariantes dos nós clássicos são definidos emfunção de seus diagramas.
Tricoloração
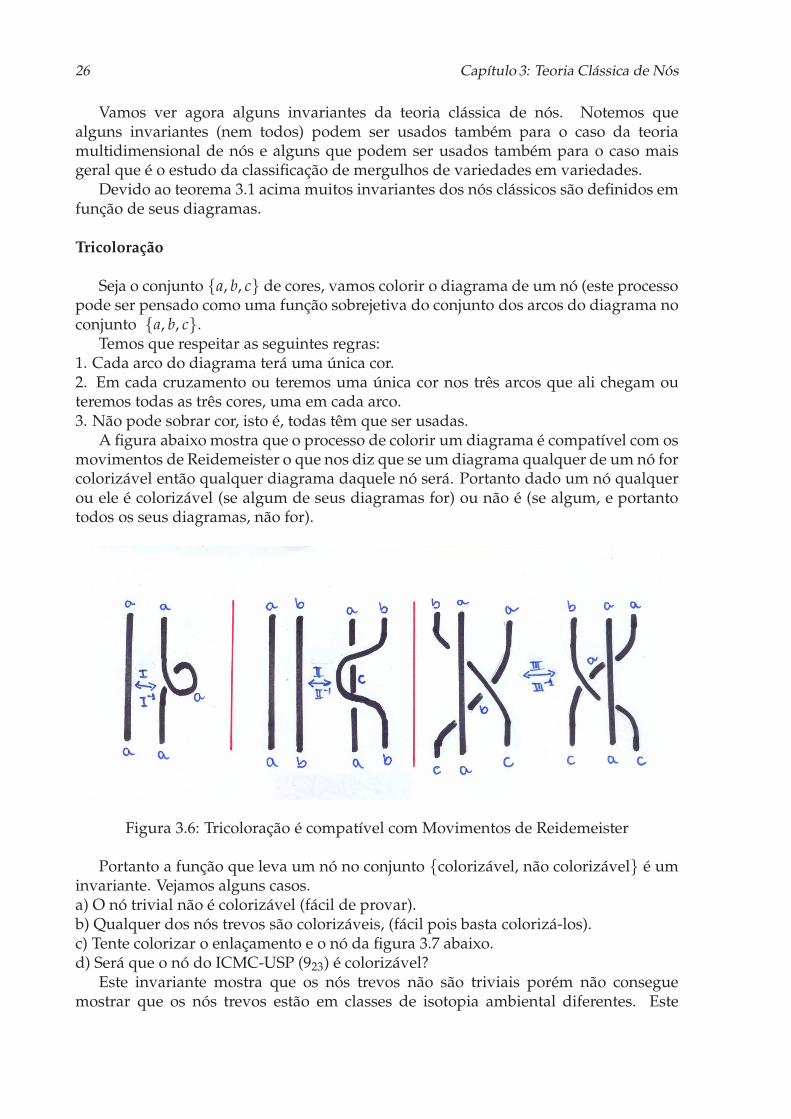
Seja o conjunto {a, b, c} de cores, vamos colorir o diagrama de um nó (este processopode ser pensado como uma função sobrejetiva do conjunto dos arcos do diagrama noconjunto {a, b, c}.
Temos que respeitar as seguintes regras:1. Cada arco do diagrama terá uma única cor.2. Em cada cruzamento ou teremos uma única cor nos três arcos que ali chegam outeremos todas as três cores, uma em cada arco.3. Não pode sobrar cor, isto é, todas têm que ser usadas.
A figura abaixo mostra que o processo de colorir um diagrama é compatível com osmovimentos de Reidemeister o que nos diz que se um diagrama qualquer de um nó forcolorizável então qualquer diagrama daquele nó será. Portanto dado um nó qualquerou ele é colorizável (se algum de seus diagramas for) ou não é (se algum, e portantotodos os seus diagramas, não for).
Figura 3.6: Tricoloração é compatível com Movimentos de Reidemeister
Portanto a função que leva um nó no conjunto {colorizável, não colorizável} é uminvariante. Vejamos alguns casos.a) O nó trivial não é colorizável (fácil de provar).b) Qualquer dos nós trevos são colorizáveis, (fácil pois basta colorizá-los).c) Tente colorizar o enlaçamento e o nó da figura 3.7 abaixo.d) Será que o nó do ICMC-USP (923) é colorizável?
Este invariante mostra que os nós trevos não são triviais porém não conseguemostrar que os nós trevos estão em classes de isotopia ambiental diferentes. Este

3.3: Alguns Invariantes de Nós e Enlaçamentos 27
Figura 3.7: Será que este enlaçamento e este nó são colorizáveis?
invariant é muito ligado à existência de epimorfismos do grupo fundamental do nóem grupos finitos. Este invariante pode ser refinado, por exemplo, no caso do nó sercolorizável, então quantas colorizações ele tem? Temos também p-colorização parap 6= 3. Para maiores detalhes sobre este invariante veja [Aneziris], paginas 37 e 61.
Número mínimo de cruzamentos nos diagramas
Dado um diagrama de um nó, é possível aumentar artificialmente o seu númerode cruzamentos, basta ver o primeiro movimento de Reidemeister. Isto significa queo número de cruzamentos não é um invariante do nó (não é constante em todos osrepresentantes de sua classe), no entanto o número mínimo de cruzamentos é uminvariante.
È fácil ver que o nó trivial tem número de cruzamentos zero e que qualquer outronó tem numero de cruzamentos ≥ 3, logo é fácil de distinguir o nó trivial dos outrosnós. Na história dos nós vimos como foi difícil encontrar os nós diferentes com umcerto número de cruzamentos. Continua sendo difícil, embora tenhamos muitos outrosinvariantes à disposição.
Número de desemaranhadamento
No dicionário, não encontrei a palavra desenodamento mas encontrei emaranhadoe desemaranhado, por isso usei estas palavras para criar des+emaranhado+mento!
Dado um diagrama de nó, temos um certo número de pontos duplos onde dizemosque um dado arco passa acima de outro. Se trocamos esta condição, isto é, sefizermos com que o arco que passava por cima fique por baixo, o novo nó estarámuito provavelmente em outra classe de equivalência. Um procedimento bastantesimples de escolha onde fazer a troca e onde não, nos leva ao nó trivial. Esteprocesso de trivialização exige portanto um certo número de trocas, menor que onúmero de cruzamentos, é claro. Novamente este número pode variar muito comos procedimentos mas o número mínimo de trocas para se chegar ao nó trivial é uminvariante do nó. É claro que para o nó trivial este numero é zero e para os nós trevos

28 Capítulo 3: Teoria Clássica de Nós
este número é um. É fácil ver também que se o nó tem n cruzamentos então estenumero é ≤ (n − 1).
O Gênero
Dada uma superfície orientável com bordo dizemos que seu gênero é o gênero dasuperfície sem bordo obtida dela colando-se um disco em cada componente de bordo.
É possível provar que todo nó é bordo de uma superfície orientável e conexamergulhada em M3. Este resultado pode ser provado usando um diagrama do nó.Se o nó for o trivial é claro que um disco D2 ⊂ M3 borda o nó, mas para nós maiscomplicados a superfície pode ter gênero muito grande. Novamente observamos quedada uma destas superfícies é possível através de "somas conexas ambientais" com"pequenos toros" aumentar o genus destas superfícies. Novamente o gênero mínimode tais superfícies é um invariante da classe de isotopia ambiental dos nós. O nó trivialtem gênero zero, os nós trevos têm gênero um. Este invariante pode ser determinadoatravés do grupo do nó (definição abaixo), veja [Neuwirth].
O determinante
Este invariante tem este nome porque será o determinante de um sistema deequações lineares, com coeficientes nos inteiros obtido de equações da forma r + s =2w que surgem dos cruzamentos de um diagrama do nó. Os procedimentos são osseguintes:
Considere um diagrama de um nó K, suponha que o mesmo tenha n cruzamentos:1. Associe a cada arco uma variável, digamos, x1, x2, ...., xn.2. Em cada cruzamento escreva uma equação da forma r + s = 2w substituindo w pelavariável associada ao arco que no cruzamento passa por cima e substituindo r e s pelasoutras variáveis dos arcos que no cruzamento passam por baixo. Com isto temos nequações e n variáveis.3. Coloque qualquer uma da variáveis = 0.4. Descarte uma equação qualquer.5. No sistema (n − 1) × (n − 1) obtido, calcule o módulo do determinante doscoeficientes, este valor inteiro, chamado determinante do nó, será denotado D(K).
Prova-se que D(K) é um invariante de nós, veja [Hacon] para mais detalhes e váriosexemplos. Na figura 3.8 veja o calculo do determinante de três nós.
Vemos então que o nó trivial, o nó trevo e o nó K da figura são todos nãoequivalentes. Veremos mais adiante que é possível obter este invariante de outroinvariante, o Polinômio de Alexander, que é portanto um invariante mais "poderoso"que o determinante.
Observações 3.1 Observemos que os grupos de homologia do complementar dos nós e dosenlaçamentos, Hi(X;Z), não distinguem os nós ou os enlaçamentos,isto é, para cada i, estesgrupos são sempre os mesmos, pouco importa os nós ou os enlaçamentos que consideremos,logo não servem com invariantes para diferenciar entre os nós ou entre os enlaçamentos, emparticular para qualquer nó H1(X;Z) ≃ Z veja [Hacon], pagina 75 para uma prova disto.Esta observação vale para as dimensões mais altas também.

3.3: Alguns Invariantes de Nós e Enlaçamentos 29
Figura 3.8: Cálculo de determinantes de alguns nós
O grupo fundamental de um nó
É fácil de provar que se dois nós K1 e K2 são equivalentes então seus complementosM3 − K1 e M3 − K2 são homeomorfos, o que implica que qualquer invariantetopológico definido no complementar de um nó será um invariante das classes dosnós. O grupo fundamental é um destes invariantes e é chamado grupo do nó.
É fácil ver que se o nó for trivial com complementar X então π1(X) ≈ Z. Épossível provar que vale também a recíproca, isto é, se temos um nó tal que o grupofundamental de seu complementar for isomorfo à Z, então o nó é trivial (isto é, estana classe do nó trivial). Na verdade o único grupo abeliano que surge como grupo denó é o grupo do nó trivial, que é Z, todos os outros não são abelianos.
O grupo do nó é de grande importância também porque dele são definidosmuitos outros invariantes, por exemplo pode-se definir através dele os Polinômios deAlexander e o Determinante. O grupo do nó é portanto um invariante mais poderosoque estes dois.
A tricoloração tem a ver com existência de homomorfismos sobrejetivos do grupodo nó em certos grupos finitos.
O grupo do nó é também um invariante que se generaliza para dimensões maisaltas.
Existe um procedimento para encontrar uma apresentação do grupo fundamentalde um nó através de seus diagramas (apresentação de Wirtinger). Voce pode vercom detalhes este procedimento em [Rolfsen(1976)], ag. 56. Abreviadamente, oprocedimento é o seguinte:
1. Escolha uma orientação para K.2. Tome um diagrama de K e ordene os seus arcos (orientados), α1, α2, ...αn, usando aorientação escolhida para K.3. É fácil ver (demorado de formalizar!) que é possível modificar o nó por umaisotopia ambiental de tal forma que todos os arcos fiquem em plano horizontal deR3, digamos z = 1, além disso as passagens inferiores se deem dentro de pequenos
30 Capítulo 3: Teoria Clássica de Nós
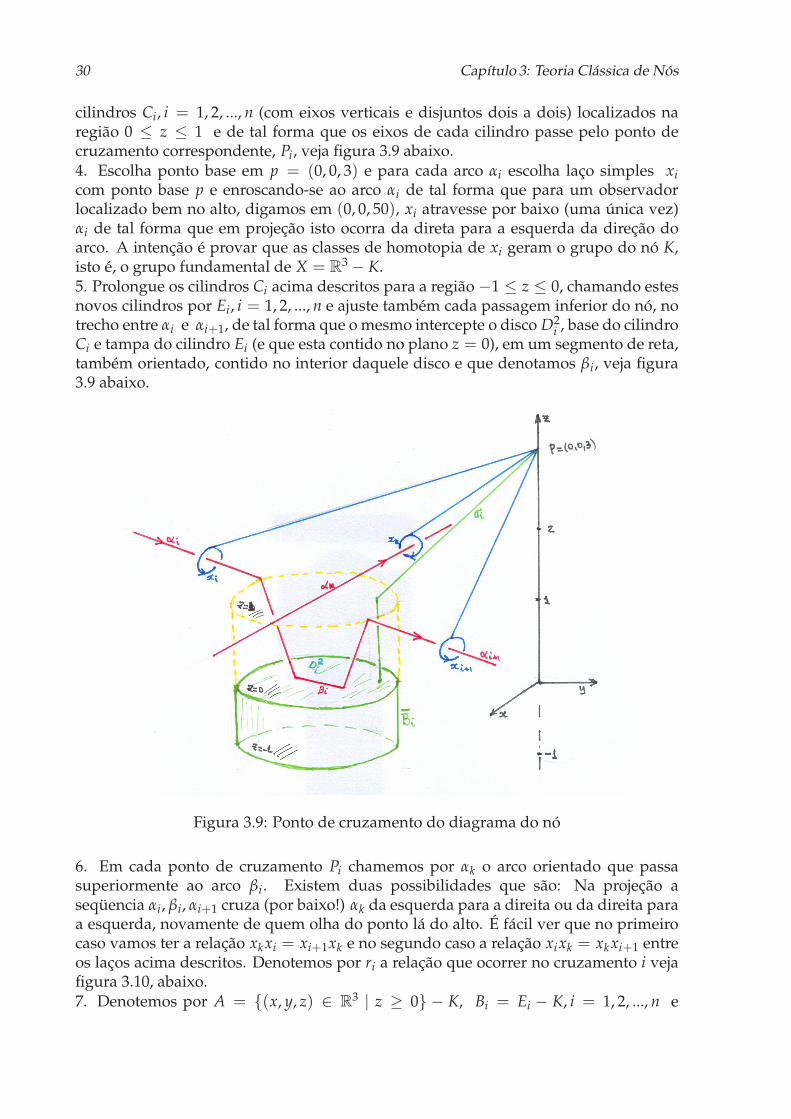
cilindros Ci, i = 1, 2, ..., n (com eixos verticais e disjuntos dois a dois) localizados naregião 0 ≤ z ≤ 1 e de tal forma que os eixos de cada cilindro passe pelo ponto decruzamento correspondente, Pi, veja figura 3.9 abaixo.4. Escolha ponto base em p = (0, 0, 3) e para cada arco αi escolha laço simples xicom ponto base p e enroscando-se ao arco αi de tal forma que para um observadorlocalizado bem no alto, digamos em (0, 0, 50), xi atravesse por baixo (uma única vez)αi de tal forma que em projeção isto ocorra da direta para a esquerda da direção doarco. A intenção é provar que as classes de homotopia de xi geram o grupo do nó K,isto é, o grupo fundamental de X = R3 − K.5. Prolongue os cilindros Ci acima descritos para a região −1 ≤ z ≤ 0, chamando estesnovos cilindros por Ei, i = 1, 2, ..., n e ajuste também cada passagem inferior do nó, notrecho entre αi e αi+1, de tal forma que o mesmo intercepte o disco D2
i , base do cilindroCi e tampa do cilindro Ei (e que esta contido no plano z = 0), em um segmento de reta,também orientado, contido no interior daquele disco e que denotamos βi, veja figura3.9 abaixo.
Figura 3.9: Ponto de cruzamento do diagrama do nó
6. Em cada ponto de cruzamento Pi chamemos por αk o arco orientado que passasuperiormente ao arco βi. Existem duas possibilidades que são: Na projeção aseqüencia αi, βi, αi+1 cruza (por baixo!) αk da esquerda para a direita ou da direita paraa esquerda, novamente de quem olha do ponto lá do alto. É fácil ver que no primeirocaso vamos ter a relação xkxi = xi+1xk e no segundo caso a relação xixk = xkxi+1 entreos laços acima descritos. Denotemos por ri a relação que ocorrer no cruzamento i vejafigura 3.10, abaixo.7. Denotemos por A = {(x, y, z) ∈ R3 | z ≥ 0} − K, Bi = Ei − K, i = 1, 2, ..., n e
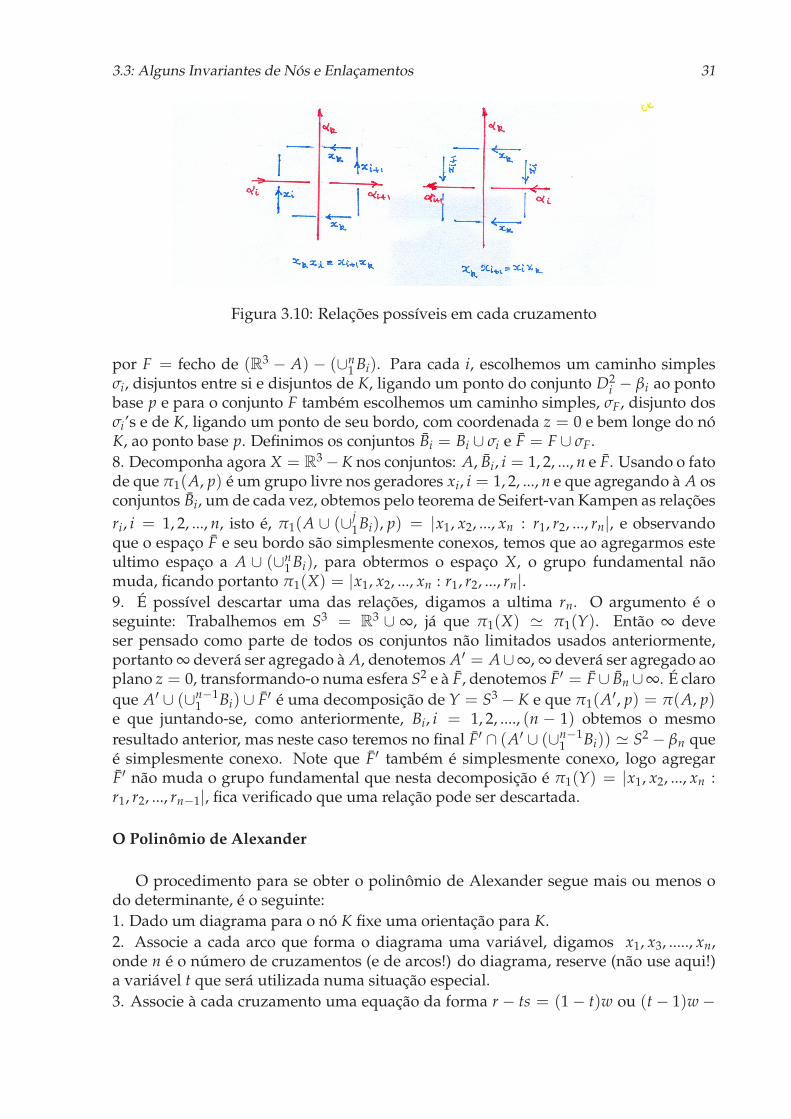
3.3: Alguns Invariantes de Nós e Enlaçamentos 31
Figura 3.10: Relações possíveis em cada cruzamento
por F = fecho de (R3 − A) − (∪n1 Bi). Para cada i, escolhemos um caminho simples
σi, disjuntos entre si e disjuntos de K, ligando um ponto do conjunto D2i − βi ao ponto
base p e para o conjunto F também escolhemos um caminho simples, σF, disjunto dosσi’s e de K, ligando um ponto de seu bordo, com coordenada z = 0 e bem longe do nóK, ao ponto base p. Definimos os conjuntos B̄i = Bi ∪ σi e F̄ = F ∪ σF.8. Decomponha agora X = R3 −K nos conjuntos: A, B̄i, i = 1, 2, ..., n e F̄. Usando o fatode que π1(A, p) é um grupo livre nos geradores xi, i = 1, 2, ..., n e que agregando à A osconjuntos B̄i, um de cada vez, obtemos pelo teorema de Seifert-van Kampen as relaçõesri, i = 1, 2, ..., n, isto é, π1(A ∪ (∪
j1Bi), p) = |x1, x2, ..., xn : r1, r2, ..., rn|, e observando
que o espaço F̄ e seu bordo são simplesmente conexos, temos que ao agregarmos esteultimo espaço a A ∪ (∪n
1 Bi), para obtermos o espaço X, o grupo fundamental nãomuda, ficando portanto π1(X) = |x1, x2, ..., xn : r1, r2, ..., rn|.9. É possível descartar uma das relações, digamos a ultima rn. O argumento é oseguinte: Trabalhemos em S3 = R3 ∪ ∞, já que π1(X) ≃ π1(Y). Então ∞ deveser pensado como parte de todos os conjuntos não limitados usados anteriormente,portanto ∞ deverá ser agregado à A, denotemos A′ = A∪∞, ∞ deverá ser agregado aoplano z = 0, transformando-o numa esfera S2 e à F̄, denotemos F̄′ = F̄∪ B̄n ∪∞. É claroque A′ ∪ (∪n−1
1 Bi) ∪ F̄′ é uma decomposição de Y = S3 − K e que π1(A′, p) = π(A, p)e que juntando-se, como anteriormente, Bi, i = 1, 2, ...., (n − 1) obtemos o mesmoresultado anterior, mas neste caso teremos no final F̄′ ∩ (A′ ∪ (∪n−1
1 Bi)) ≃ S2 − βn queé simplesmente conexo. Note que F̄′ também é simplesmente conexo, logo agregarF̄′ não muda o grupo fundamental que nesta decomposição é π1(Y) = |x1, x2, ..., xn :r1, r2, ..., rn−1|, fica verificado que uma relação pode ser descartada.
O Polinômio de Alexander
O procedimento para se obter o polinômio de Alexander segue mais ou menos odo determinante, é o seguinte:1. Dado um diagrama para o nó K fixe uma orientação para K.2. Associe a cada arco que forma o diagrama uma variável, digamos x1, x3, ....., xn,onde n é o número de cruzamentos (e de arcos!) do diagrama, reserve (não use aqui!)a variável t que será utilizada numa situação especial.3. Associe à cada cruzamento uma equação da forma r − ts = (1 − t)w ou (t − 1)w −

32 Capítulo 3: Teoria Clássica de Nós
ts + r = 0 onde w deve ser identificado com a variável que passa superiormentena região do cruzamento e deve ser orientada de acordo com a orientação dado aonó inicialmente, r e s serão substituídos pelas variáveis associadas aos arcos que seaproximam do cruzamento inferiormente. Como escolher a posição de r e s na equação,já que estas posições não são simétricas(r não tem coeficiente mas s tem coeficiente t);a forma de decidir é usando a orientação fixada para o nó e em particular a orientaçãono trecho do cruzamento, a escolha é assim: usando somente a orientação do trechosuperior do nó, no cruzamento, r da equação deve ser identificado com a variávelassociada à esquerda de w e conseqüentemente s será identificado com a variável queesta à direita de w.4. Coloque agora alguma das variáveis igual à zero.5. Descarte qualquer uma das equações.6. Escreva o sistema (n − 1) × (n − 1) de equações acima com coeficientes no anelΛ = Z[t, t−1].7. Encontre o determinante δ(t) deste sistema. Será um elemento do anel Λ.8. Multiplique δ(t) por ±tj (inversíveis em Λ!!), para obter △K(t) com △K(t) =△K(t−1) e △K(1) = 1, este é o Polinômio de Alexander do nó K.
Veja um exemplo de cálculo do polinômio de Alexander na figura 3.11.
Figura 3.11: Calculo do Polinômio de Alexander do nó do ICMC-USP (923)
No livro do Derek [Hacon] voce encontrará muita coisa interessante sobre ospolinômios de Alexander. Em particular o calculo deste polinômio para os nós torais epara os nós iterados. Voce também encontrará lá, como calcular o polinômio de Jones,

3.4: Construindo Nós e Enlaçamentos - Nós Primos 33
outro invariante polinomial muito importante.Salientamos os seguintes resultados:
1. O polinômio de Alexander não depende da orientação escolhida para o nó.2. O polinômio de Alexander de um nó K e de seu refletido (em algum espelho)K̄ é omesmo.3. Todo polinômio △(t) ∈ Z[t, t−1] e satisfazendo as condições: △(t) = △(t−1) e△(1) = 1 é o polinômio de Alexander de um nó (como temos uma grande quantidadedestes polinômios, teremos uma grande quantidade de nós não equivalentes!).
3.4 Construindo Nós e Enlaçamentos - Nós Primos
A primeira construção básica para se construir nós, a partir de outros nós Ki, i = 1, 2em S3, é a soma dos dois denotada K1♯K2. Vejamos a construção: considere os pares(S3, Ki), pontos Pi ∈ Ki e remova pequenas vizinhanças regulares destes pontos, quesão pares (B3
i , B1i ) não enodados. Os pares reminiscences de cada remoção são pares de
discos enodados (B3i , Ki) com bordos (S2
i , S0i ). Colamos B3
1 a B32 pelos bordos através de
um homeomorfismo de pares que inverte orientação ϕ : (S21, S0
1) → (S22, S0
2), obtendoo par (S3, K1♯K2) onde K1♯K2 é chamado soma de K1 e K2. A figura 3.12 ilustra aconstrução acima.
Figura 3.12: Soma de dois nós
A figura 3.13 mostra uma construção equivalente. Nesta figura colocamos os doisnós dentro de S3, mas devemos considerar cada nó no interior de uma bola tal que osseus interiores sejam disjuntos e que elas se tocam ao longo de um segmento de seusbordos e é importante que a faixa (retângulo) que realiza a conexão dos dois nós cruzeas fronteiras das bolas ao longo deste segmento. Note que a construção não dependedos pontos escolhidos para se colar a faixa em cada um dos nós, não depende tambémse cada pedaço da faixa esta torcida ou enodada nos trechos em que adentram o interiorde cada bola.
Um nó é dito primo se não for a soma de dois outros nós não triviais.Também podemos definir soma conexa de enlaçamentos e definir Enlaçamentos
Primos, veja [Kawauchi] capítulo 3.

34 Capítulo 3: Teoria Clássica de Nós
Figura 3.13: Soma conexa (ambiental?)
Uma outra construção parecida com esta, porem, mais geral, é a soma ao longo deuma faixa f , onde é permitido que a faixa se enlace com os nós (que estão em bolasdistintas de S3) de forma arbitrária, veja figura 3.14. A notação neste caso é K♯ f L.
Figura 3.14: Soma conexa ao longo de faixa f
Na definição de K1♯K2 a soma é determinada apenas pelos dois nós, já K1♯ f K2 vaidepender também da faixa f .
Voce saberia dar condições sobre como a faixa f deve estar em R3 − (K1 ∪ K2) paraque a segunda operação coincida com a primeira?
Temos o seguinte resultado:O polinômio de Alexander da "soma" H♯K, é o produto dos polinômios de
Alexander da cada um deles, isto é △K♯L(t) = △K(t). △L (t).
Outra forma de se construir nós é colocar um nó numa vizinhança tubular de outronó, neste processo obtemos nós chamados de nós satélites ou iterados.

3.4: Construindo Nós e Enlaçamentos - Nós Primos 35
Figura 3.15: Nó satélite ou iterado
Seja H um nó em S3 sabemos que existem homeomorfismos ϕ : (S1 ×D2)0 → N(H)onde (S1 × D2)0 é o toro sólido mergulhado de forma trivial em S3 e N(H) ⊂ S3 é umavizinhança tubular fechada de H em S3, temos ainda que H = ϕ(S1 × {(0, 0)})
Seja L um nó contido no toro (S1 × D2)0 e de tal forma que não exista nenhumabola B3 tal que K ⊂ B3 ⊂ (S1 × D2)0.
A imagem de L pelo homeomorfismo ϕ será um novo nó, que depende de H de Le do homeomorfismo ϕ, podemos denotar este novo nó por H ∗ϕ L.
Podemos escolher um homeomorfismo especial ϕ0 que é aquele que manda osistema meridiano-longitude do toro sólido padrão no sistema meridiano-longitudeda vizinhança tubular N(H), neste caso a notação que podemos usar para o nó satéliteé H ∗ L.
Dizemos que H é um acompanhante (companion) do nó satélite H ∗ L.Aqui também é possível tomar o segundo nó L e trocá-lo por um Enlaçamento,
obtemos um enlaçamento satélite K ∗ L que tem o nó H como acompanhante. Vejamais detalhes em [Kawauchi], capitulo 3.
Caso o segundo nó L se situe no bordo de (S1 × D2)0, isto é se for um nó toral dotipo (p,q) então H ∗ L é chamado um nó cabo, mais especificamente um nó cabo-(p,q).Veja a notação nó toral-(p,q) na seção 4.2 onde temos a classificação dos nós no toro.
Temos o seguinte resultado: O polinômio de Alexander do iterado de H ∗K, é dadopor △H∗K(t) = △H(tq). △K (t)
Temos uma descrição dos Polinômios de Alexander usando espaço de recobrimentoe o Teorema de Mayer-Vietoris. Esta forma de definir este invariante permite a suageneralização para nós de dimensões mais altas. Em [Rolfsen(1976)], capitulo 7 eem [Hacon], capitulo 6 temos ótimas apresentações desta forma de se calcular enteinvariante.

36 Capítulo 3: Teoria Clássica de Nós

Capítulo 4
Outras Teorias de Nós
4.1 Teoria Multidimensional de Nós
Nesta seção vamos mostrar um pouquinho do problema de existência eclassificação dos mergulhos das esferas Sn, n ≥ 2 nas esferas Sm com m > n,usualmente chamada Teoria Multidimensional de Nós.
Como no caso clássico às vezes é conveniente ver as esferas como compactificaçãodos espaços euclidianos correspondentes. É claro também que é desnecessário sepreocupar com a existência pois nestes casos temos mergulhos padrões, a questãoque se coloca então neste caso é verificar se é possível criar mergulhos que não sejamequivalentes ao padrão e classificá-los.
Como no caso clássico nos mantemos estudando os mergulhos mansos, porexemplo os que possuem colarinho duplo, os que são ambientalmente PL-isotópicosa PL-mergulhos, isto é, damos às esferas triangulações e pedimos que nas classes deequivalência dos mergulhos tenhamos representantes lineares por parte. Recordemosque N ⊂ M tem colarinho duplo se existe mergulho i : N × [−1, 1] →֒ M tal quei(x, 0) = x, ∀ x ∈ N
É bastante conhecido no caso de n = 2 e m = 3 o mergulho topológico de S2
em R3 conhecido como "Esfera com Chifres", onde um dos lados do mergulho não éhomeomorfo ao disco D3 veja pg. 79 de [Rolfsen(1976)] e a figura 4.1.
Evitando estes mergulhos selvagens, temos em codimensão um o teorema deSchönflies:
Teorema 4.1 (Teorema de Schönflies) Seja Sn mergulhada em Sn+1, com colarinho duplo,então o fecho de cada uma das componentes do complementar do mergulho é homeomorfo aodisco Dn+1.
Note que os mergulhos diferenciáveis e os PL satisfazem as condições do teoremaacima.
Em codimensão (m − n) maior que dois, o complementar Sm − Sn é simplesmenteconexo e muitos dos invariantes, particularmente aqueles oriundos dos grupos dos nósnão existem. Na verdade neste caso se consideramos apenas aspectos topológicos dosmergulhos mansos, temos que todos são equivalentes aos mergulhos triviais (padrões).Não trivialidade surge apenas se considerarmos questões de diferenciabilidade, isto é,se trabalharmos na categoria diferencial, alguns resultados sobre esta questão foramestudados por Haefliger, veja [Haefliger].
37

38 Capítulo 4: Outras Teorias de Nós
Figura 4.1: Esfera com Chifres
Vejam as demonstrações dos teoremas a seguir em [Greenberg/Harper].
Teorema 4.2 (Da separação de Jordan-Brouwer) Se Dr é um disco fechado de dimensão rmergulhado na esfera Sn onde r ≤ n então H0(Sn − Dr;Z) ≃ Z e Hq(Sn − Dr;Z) = 0 paraq ≥ 1.
Corolário 4.1 Sn não pode ser desconectada pela remoção de um disco fechado Dr.
Teorema 4.3 Seja Sr mergulhada em Sn, então r ≤ n e se r = n Sr = Sn, além disso, no casor < n temos que H0(Sn − Sr;Z) ≃ Z ≃ Hn−r−1(Sn − Sr;Z) e Hq(Sn − Sr; Z) = 0 nosoutros casos.
Uma conclusão importante destes resultados é que os grupos de homologia docomplementar dos mergulhos não distinguem os enodamentos de esferas em esferas.
4.2 O caso especial de S2 em S4
Comecemos pelo caso de S2 em R4 ou S4 que, como já observamos, sãoessencialmente a mesma coisa.
Consideremos o conjunto {(x, y, z, 0) ∈ R4|x2 + y2 + z2 = 1} este conjunto éuma esfera que denotaremos S2
0. É a representante do nó padrão ou trivial em R4.Através da compactificação de R4 podemos considerar S2
0 ⊂ S4. Poderíamos tambémconsiderar {(x, y, z, 0, 0) ∈ S4 ⊂ R5 | x2 + y2 + z2 = 1} e já teríamos S2
0 ⊂ S4.É possível verificar que o complementar deste nó tem o tipo de homotopia de S1.
Logo o grupo (fundamental) deste nó é Z.A questão que se coloca inicialmente é se existe nós (mergulhos de S2 em R4) não
triviais, por exemplo com grupos diferentes de Z. Vejamos uma construção que mostraque para cada nó (manso) clássico K existe um nó S2
K ⊂ R4, o "rodado de K"(outranotação é K∗) cujo complemento tem grupo igual ao grupo de K. A construção é devidaà Emil Artin, veja [Artin(1926)] ou [Andrews/Curtis].

4.2: O caso especial de S2 em S4 39
Inicialmente decompomos R4 =< e1, e2, e3, e4 > usando o plano P = R23,4 =<
e3, e4 > como eixo de rotação, isto é, consideremos para cada θ ∈ [0, 2π) (ou (0, 2π]conforme a conveniência) E(θ) = (cos(θ), sen(θ)) ∈ S1 ⊂ R2
1,2 =< e1, e2 > e o semi3-espaço R3(θ) = {(ρcos(θ), ρsen(θ), c, d) ∈ R4, ρ ∈ [0, ∞), c, d ∈ R}. Em especial afolha R3(0) é o semi 3-espaço onde vamos colocar o nó K para ser "rodado".
Figura 4.2: Rotação em R4
Dado ponto (a, b, c, d) ∈ R4 definimos como o seu rodado o conjuntoRot((a, b, c, d)) = {(cos(θ)a − sen(θ)b, sen(θ)a + cos(θ)b, c, d) ∈ R4 onde θ ∈ [0, 2π)}.Observe que se a = 0 = b então o ponto (0, 0, c, d) pertence ao eixo P, seu rodado é elepróprio, caso contrário, isto é a2 + b2 > 0 então o rodado do ponto será um círculo cujoplano é ortogonal ao eixo P.
Denotemos i : R3(0) →֒ R4 a inclusão. Podemos definir uma aplicação contínua H :R4 → R3(0) por H((x, y, z, w)) = Rot((x, y, z, w)) ∩R3(0), note que H|R3(0) = IdR3(0).É fácil ver que H ◦ i = IdR3(0). Chamemos Θ : S1 → [0, 2π) (ou (0, 2π] conformea conveniência) a função inversa de E, dada acima, que é contínua em S1 − {(1, 0)}.Temos que Θ((cos(ϕ), sen(ϕ)) = ϕ.
Definamos, para uso posterior, a aplicação θ : R4 − P → [0, 2π) (ou (0, 2π]conforme a conveniência), por θ(x, y, z, w) = Θ(z/(z2 + w2)1/2, w/(z2 + w2)1/2) e aaplicação rotação de um ângulo θ em torno do eixo P por Rotθ
P: R4 → R4, dada
por RotθP(a, b, c, d) = (a.cos(θ) − b.sen(θ), a.sen(θ) + b.cos(θ), c, d). Devemos notar que
tanto RotθP
como a aplicação θ → RotθP
são aplicações contínuas.
Seja K o nó (manso) dado inicialmente em R3, suponhamos que o mesmo seja dadopor uma seqüencia de segmentos de reta e que o espaço ambiente seja o R3
1,3,4 =
R3 < e1, e3, e4 >, isto é R3(0) ∪ R3(π). Através de translação e rotação (e talvez uma

40 Capítulo 4: Outras Teorias de Nós
pequena deformação) neste R3 podemos supor que o nosso nó K esteja totalmentecontido em R3(0) e que apenas um de seus segmentos, que chamaremos β0, esteja noeixo P. Denotemos β = K−interior de β0, isto é, β é a reunião de todos os outrossegmentos do nó, excluído (o interior de) β0, β é homeomorfo à um segmento e o nóK = β ∪ β0. Usando-se o teorema de Seifert-van Kampen é possível mostrar que ainclusão jK : R3(0)− K → R3
1,3,4 − K induz um isomorfismo nos grupos fundamentaisjK∗ : π1(R
3(0)− K) → π1(R31,3,4 − K).
Denotemos S2K = Rot(β), e é fácil ver que S2
K ≃ S2 é uma 2-esfera mergulhada emR4.
Observemos que se tivéssemos colocado o nó K no interior de R3(0) obteríamospela rotação um toro enodado em R4.
Estudemos o grupo do nó S2K .
Temos a inclusão iK : R3(0) − K →֒ R4 − (S2K ∪ β0) e a retração HK : R4 − (S2
K ∪β0) → R3(0)− K definidas por restrição de i e H, então HK ◦ iK = IdR3(0)−K. Logo asinduzidas nos grupos fundamentais nos dá HK∗ ◦ iK∗ = Idπ1(R3(0)−K) o que nos permiteconcluir que iK∗ é injetiva. Isto já seria suficiente para garantir que o mergulho não étrivial.
Usando-se o Teorema de Seifert-van Kampen é possível mostrar que a inclusãojS2
K: R4 − (S2
K ∪ β0) → R4 − S2K induz um isomorfismo nos grupos fundamentais
jS2K∗
: π1(R4 − (S2
K ∪ β0)) → π1(R4 − S2
K).
O próximo passo é provar que iK∗ : π1(R3(0) − K) → π1(R
4 − (S2K ∪ β0)) é
sobrejetiva. Para isto consideremos [s] ∈ π1(R4 − (S2
K ∪ β0)) onde s : [0, 1] →R4 − (S2
K ∪ β0), s(0) = q = s(1), s constituído por uma seqüencia de segmentos deretas s1.s2......sm com vértices q = q0, q1, ...., qj, ..., qm = q, onde q ∈ P − K pontobase de todos os espaços envolvidos. Os segmentos que porventura cruzem R3(0)são divididos inserindo-se na seqüencia de vertices de s estes pontos de intersecção.Manteremos a notação supondo na notação inicial que nenhum dos segmentos cruzemR3(0).
Para cada qj ∈ P− K, qj 6= q, escolha caminho vj em P− K ligando qj à q, paraos outros qk’s, isto é, para aqueles que estão em folhas (abertas) do tipo R3(θk) − P,escolhemos caminhos vk em R3(θk) ligando qk à q.
Substituímos s por s1.v1.v−11 .s2.v2.v−1
2 .s3.v3.v−13 ....sj.vj.v
−1j ....sm−1.vm−1.v−1
m−1.sm queé homotópico a s e que é constituídos por caminhos fechados com ponto base q que, oujá estão emR3(0)−K ou estão entre duas folhas R3(θr) e R3(θs) com 0 ≤ θr ≤ θs ≤ 2π.Mostremos que os caminhos que estão entre as duas folhas são homotópicos emR4 − (S2
K ∪ β0) a caminhos em R3(0) − K, mais precisamente, provemos que se λ éum caminho fechado com ponto base q cuja imagem fica entre duas folhas R3(θr) eR3(θs) com 0 ≤ θr ≤ θs < 2π ( ou 0 < θr ≤ θs ≤ 2π conforme a conveniência)então λ ≃ HK ◦ λ, este ultimo caminho fechado esta em R3(0)− K. É fácil ver que aaplicação W : [0, 1] × [0, 1] → R4 − (S2
K ∪ β0), dada por W(s, t) = Rot−t.θ(λ(s))P
(λ(s))é uma homotopia entre λ e HK ◦ λ. A conclusão é que s pode ser escrito como umacomposição de outros caminhos, todos, na imagem de iK∗ e portanto [s] esta nestaimagem, ou seja iK∗ é sobrejetiva e logo o grupo do nó S2
K em R4 é isomorfo ao grupodo nó K em R3.
O processo acima, que chamaremos "rodar"(spinning) tem uma generalização que
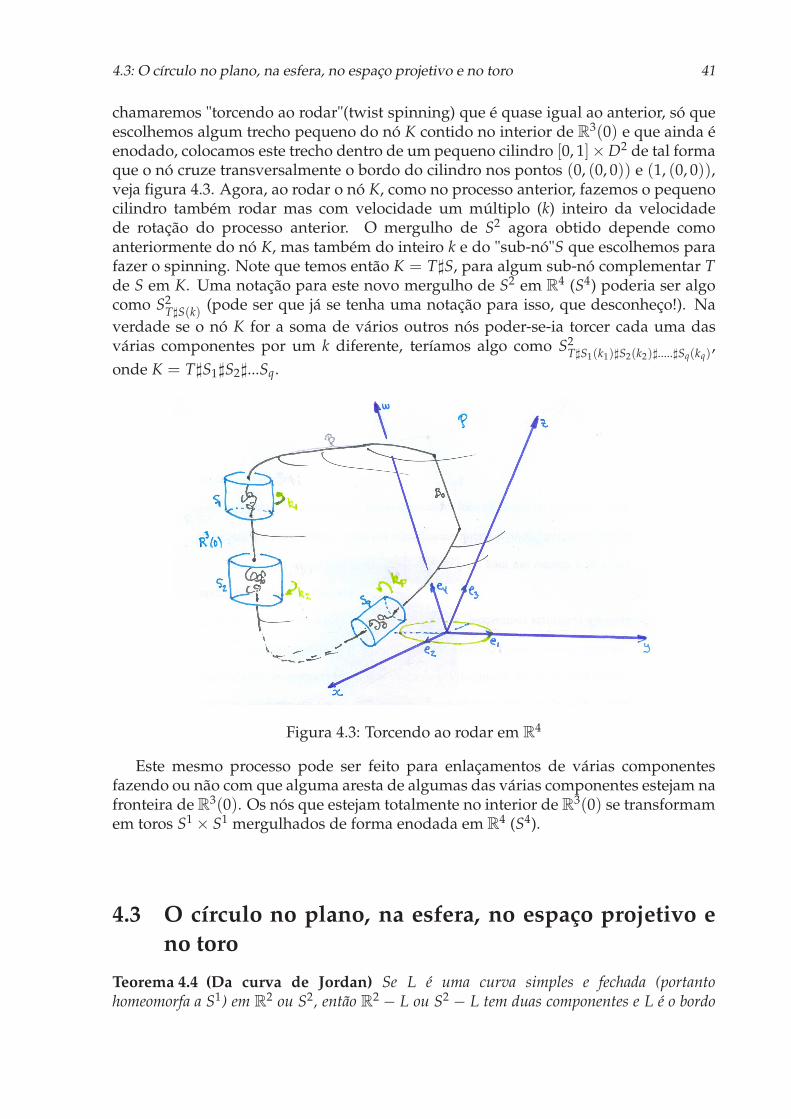
4.3: O círculo no plano, na esfera, no espaço projetivo e no toro 41
chamaremos "torcendo ao rodar"(twist spinning) que é quase igual ao anterior, só queescolhemos algum trecho pequeno do nó K contido no interior de R3(0) e que ainda éenodado, colocamos este trecho dentro de um pequeno cilindro [0, 1]× D2 de tal formaque o nó cruze transversalmente o bordo do cilindro nos pontos (0, (0, 0)) e (1, (0, 0)),veja figura 4.3. Agora, ao rodar o nó K, como no processo anterior, fazemos o pequenocilindro também rodar mas com velocidade um múltiplo (k) inteiro da velocidadede rotação do processo anterior. O mergulho de S2 agora obtido depende comoanteriormente do nó K, mas também do inteiro k e do "sub-nó"S que escolhemos parafazer o spinning. Note que temos então K = T♯S, para algum sub-nó complementar Tde S em K. Uma notação para este novo mergulho de S2 em R4 (S4) poderia ser algocomo S2
T♯S(k) (pode ser que já se tenha uma notação para isso, que desconheço!). Naverdade se o nó K for a soma de vários outros nós poder-se-ia torcer cada uma dasvárias componentes por um k diferente, teríamos algo como S2
T♯S1(k1)♯S2(k2)♯.....♯Sq(kq),
onde K = T♯S1♯S2♯...Sq.
Figura 4.3: Torcendo ao rodar em R4
Este mesmo processo pode ser feito para enlaçamentos de várias componentesfazendo ou não com que alguma aresta de algumas das várias componentes estejam nafronteira de R3(0). Os nós que estejam totalmente no interior de R3(0) se transformamem toros S1 × S1 mergulhados de forma enodada em R4 (S4).
4.3 O círculo no plano, na esfera, no espaço projetivo eno toro
Teorema 4.4 (Da curva de Jordan) Se L é uma curva simples e fechada (portantohomeomorfa a S1) em R2 ou S2, então R2 − L ou S2 − L tem duas componentes e L é o bordo

42 Capítulo 4: Outras Teorias de Nós
de ambas.
ExercíciosTente responder a questão acima no caso de:1. L ser a reunião disjunta de 2 curvas simples.2. L ser a reunião em um ponto de duas curvas simples (figura 8).3. L ser a reunião disjunta de n curvas simples.
Teorema 4.5 (De Schönflies) Nas hipóteses do teorema anterior, uma das componentes deR2 − L ou as duas componentes de S2 − L são homeomorfas ao disco D2.
Corolário 4.2 Quaisquer dois nós de S1 em S2 ou em R2 são equivalentes por homeomorfismono contradomínio.
O corolário acima também é válido para a equivalência por isotopia ambiental. Vejaprova em [Rolfsen(1976)], pagina 11.Exercícios1. O que se pode dizer de enlaçamentos de vários círculos disjuntos em S2 ou em R2.2. O que se pode dizer da classificação de mergulhos da reunião em um ponto de doiscírculos (figura 8) em S2 ou em R2.
Vamos apresentar de forma muito resumida o estudo dos mergulhos do círculoS1 no toro T2 = S1 × S1. Neste caso temos resultados completos e não triviais e areferência é [Rolfsen(1976)]
O grupo fundamental do toro é abeliano logo isomorfo ao seu primeiro grupode homologia, isto é, π1(T2) ≃ Z ⊕ Z ≃ H1(T2;Z) e as classes de homotopiarepresentáveis por mergulhos são da forma (a, b) ∈ Z ⊕ Z tal que: ou a = 0 = bou m.d.c.(a,b)=1.
Um nó que borda um disco D2 é chamado trivial ou não essencial, corresponde àclasse (0, 0) no grupo fundamental, caso contrário é chamado não trivial ou essencial.Um nó correspondente à (±1, 0) é chamado nó longitudinal e um correspondente à(0,±1) é chamado nó meridional.
É fácil ver que todos os nós triviais são equivalentes por isotopia ambiental (e comoconseqüência são equivalentes por homeomorfismo na imagem). É fácil também vernós meridionais e longitudinais são equivalentes por homeomorfismo na imagem.
A demonstração dos resultados abaixo podem ser vistos em [Rolfsen(1976)].
Proposição 4.1 Para todo nó K essencial em T2, isto é, [K] não correspondente à (0, 0) nogrupo fundamental, existe um homeomorfismo h : T2 → T2 tal que a imagem de K é um nómeridional.
Observe que esta proposição nos diz que todo nó que não seja o trivial é equivalentepor um homeomorfismo em T2 ao nó meridional, ou seja, temos o seguinte teorema declassificação de nós no toro, por homeomorfismo na imagem:
Teorema 4.6 (Classificação dos nós no toro T2 por homeomorfismo na imagem)Existem apenas dois tipos de nós no toro por homeomorfismos na imagem, os equivalentes aotrivial (não essenciais) e os equivalentes a um nó meridional (os essenciais).
A classificação por isotopia ambiental é dada por:

4.4: O Cilindro e a Faixa de Möbius em R3 43
Teorema 4.7 (Classificação dos mergulhos de S1 no toro T2 por isotopia ambiental)Dois nós, K e L no toro, são equivalentes por isotopia ambiental se e somente se [K] = ±[L] nogrupo fundamental.
4.4 O Cilindro e a Faixa de Möbius em R3
Na figura 4.4 abaixo vemos um cilindro e uma faixa de Möbius mergulhadas em R3,acho que estes mergulhos podem ser considerados como os mergulhos "padrões"destesespaços em R3.
Figura 4.4: Cilindro e Faixa de Möbius - I
Que tal estes outros mergulhos da figura 4.5. Se observarmos direito veremos quetemos ainda o cilindro e a faixa de Möbius, porem agora estão mergulhados de formadiferente.
Figura 4.5: Cilindro e Faixa de Möbius - II
Qual é o numero de enlaçamento L(C1, C2) entre as duas componentes de bordo C1e C2 do cilindro?
Qual é o número de enlaçamento L(C, M) entre o bordo da faixa de Möbius C e oseu Meridiano M?
Será que podemos complicar ainda mais os mergulhos destes espaços? Vejamos aproxima figura 4.6.
Novamente temos o cilindro e a faixa de Möbius mergulhados de forma que os seusmeridianos M coincidem com nós de R3.

44 Capítulo 4: Outras Teorias de Nós
Figura 4.6: Cilindro e Faixa de Möbius-III
Exercício 1 Será que todo mergulho destes espaços em R3 são como acima? Comoprovar ou reprovar esta afirmação?Exercício 2 Como são os mergulhos do cilindro e da faixa de Möbius em R4?
4.5 Mergulhos de Superfícies em R3
Normalmente temos as superfícies, orientáveis, mergulhadas em R3 como na figura4.7 abaixo.
Observe que o "lado de dentro"das superfícies são discos com alças (handlebodies).
Mas que tal o mergulho do bi-toro em R3, mostrado na figura 4.8 abaixo. Estemergulho é um exemplo de um mergulho no bi-toro, pensado em S3, em que, ambosos "lados"em que o S3 ficou dividido, não é um "handlebody"(como seria possívelprovar isto?), o que mostra claramente que podemos ter muitas classes diferentes demergulhos das superfícies em R3 ou em S3.
Quando a superfície tiver bordo, o seu bordo será um nó (caso tiver apenas umacomponente conexa) ou um enlaçamento (se o bordo tiver várias componentes).
Como no caso da teoria de nós, existem invariantes para detectar diferentes classesde mergulhos de superfícies. Alguns destes invariantes já servem para detectardiferenças entre os nós ou enlaçamentos que constituem o bordo destas superfícies,caso sejam superfícies com bordo. Derek [Hacon] aborda esta questão no capítulo VI.
Considere um nó K em S3, é possível provar que sua vizinhança tubular fechadaé homeomorfa à S1 × D2, isto é, existe mergulho K : S1 × D2 →֒ S3, tal queK(S1 × (0, 0)) = K. Se consideramos T2
K = K(S1 × ∂(D2)) onde ∂(D2) ≈ S1, obtemosum mergulho do toro T2 em S3. Se K é complicado o mergulho do toro correspondente

4.5: Mergulhos de Superfícies em R3 45
Figura 4.7: Superficies em R3
T2K é complicado porem uma das componentes em que S3 fica dividida pela imagem
de T2, é um toro sólido, isto é, é um espaço homeomorfo à S1 × D2. Note que o outro"lado"do mergulho é um espaço definido pelo nó clássico K, chamado exterior do nó Ke se este nó não for o trivial este espaço é muito diferente de S1 × D2.
Uma questão então é: É possível mergulhar o toro em S3 de tal forma que os dois"lados"do mergulho sejam diferentes de S1 × D2. A resposta é não e este é o resultadodo teorema abaixo, veja demonstração em [Rolfsen(1976)], pagina 107.
Teorema 4.8 (Teorema do toro de Alexander) Um toro T2 mergulhado (PL) em S3 divideeste espaço em duas partes sendo pelo menos uma delas homeomorfa ao toro sólido S1 × D2.
Veja generalizações destes resultados em [Laércio/Saeki (2002)],[Laércio/Saeki (2005)] e [Laércio/Oziride/Saeki], em particular vejam abaixo umresultado de [Laércio/Saeki (2002)] muito interessante.
Teorema 4.9 Se p, q ≥ 1 e p + q = r com r ímpar, então existem para cada n, inteiro nãonulo, mergulhos distintos fn : Sp × Sq × Sr →֒ Sp+q+r+1 tal que o fecho de nenhuma dasduas componentes de Sp+q+r− imagem fn é homologicamente equivalente ao produto de duasesferas e um disco.
Uma pergunta que se coloca imediatamente é se um bi-toro mergulhado em S3
sempre bordará em pelo menos um dos lados o correspondente "handlebody". Aresposta é negativa, veja exemplo na figura 4.8 acima, onde ambos os lados domergulho em S3 possui um pedaço homeomorfo ao complementar de um nó nãotrivial.
Exercício: Calcular o grupo fundamental de cada um dos lados do mergulho da figura4.8.

46 Capítulo 4: Outras Teorias de Nós
Figura 4.8: Bitoro em S3

Capítulo 5
RP2 não mergulha em R3
Podemos encontrar provas deste fato usando Cohomologia e em particularDualidade de Alexander, vejam em [Greenberg/Harper] pg. 235 ou [Spanier] pg. 356.
Vejamos uma prova, dada por Hiroshi, veja [Maehara], mais elementar, que usaapenas um resultado básico de Teoria de Grafos.
O resultado abaixo pode ser encontrado em [Conway/Gordon] ou em [Sachs].
Proposição 5.1 (Teorema do Enlaçamento) Todo mergulho do 6-grafo-completo, K6 em R3
contem um par de ciclos disjuntos constituindo um enlaçamento não trivial.
Usando o resultado acima obtemos:
Lema 5.1 Para qualquer mergulho da Faixa de Möbius M2 em R3 o par (∂M2, C), onde ∂M2
é o bordo da Faixa de Möbius e C é o seu meridiano, formam um enlaçamento não trivial.
Prova: Considere K6 na Faixa de Möbius M2 como representado no retângulo abaixo,onde cada par dos seis pontos P1, P2, P3, P4, P5, P6 são conectados por uma curvasimples em M2. Este grafo K6 contem exatamente dez pares de ciclos disjuntos, quesão:
HH
HH
HHH
a
b
c
d
e a
b
c
d
e
P2
P3 P4
P5
P6
P1
(P1P2P3, P4P5P6), (P1P2P4, P3P5P6), (P1P2P5, P3P4P6), (P1P2P6, P3P4P5), (P1P3P4, P2P5P6)
47
48 Capítulo 5: RP2 não mergulha em R3
(P1P3P5, P2P4P6), (P1P3P6, P2P4P5), (P1P4P5, P2P3P6), (P1P4P6, P2P3P5), (P1P5P6, P2P3P4)
Cada um dos nove ciclos sublinhados borda uma 2-célula em M2 disjunta do ciclocorrespondente no par, logo em qualquer mergulho de M2 em R3, nove pares de ciclosdo K6 acima construído são enlaçamentos triviais. Pelo Teorema do Enlaçamento acimaconcluímos que o par (P1P3P4, P2P5P6) tem que ser um enlaçamento não trivial.
Como o ciclo (P2P5P6) é o meridiano C de M2 e o ciclo (P1P3P4) é o ∂M2 o lema estademonstrado.
Teorema 5.1 O Espaço Projetivo 2-dimensional RP2 não mergulha em R3.
Prova: Suponha RP2 mergulhado em R3. Removendo-se uma célula aberta D de
RP2 obtemos um mergulho de M2 em R3. Então o bordo de M2 e o meridiano C deM2 formam um enlaçamento não trivial, isto é, C intercepta D, isto é, não tínhamosinicialmente um mergulho, uma contradição.
Exercício: Prove que as outras superfícies sem bordo, não orientáveis, também nãomergulham em R3.

Referências Bibliográficas
[ ] Abaixo uma bibliografia longa (mas não muito!!). Se voce precisa uma bibliografiamais completa consulte a bibliografia do [Kawauchi]
[LIVROS]
[Kawauchi] A. Kawauchi. A survey of Knot Theory, Birkhäuser(1996).
[Aneziris] C. N. Aneziris. The Mystery of Knots - Computer Programming for KnotTabulation, Word Scientific - Serie on Knots and Everything - vol. 20
[Hacon] D. Hacon. Introdução à Teoria de Nós em R3, IMPA - 15o Colóquio Brasileiro deMatemática (1985)
[Farmer/Stanford] D. W. Farmer and T. B. Stanford. Knots and Surfaces, MathematicalWord, 6, AMS(1991)
[Rolfsen(1976)] D. Rolfsen. Knots and Links, Publish or Perish Inc.(1976).
[Rolfsen(2006)] D. Rolfsen. The Braid Group, XV Encontro Brasileiro deTopologia(2006).
[Flapan] E. Flapan. When topology meets chemistry: A topological look at molecular chirality,Cambridge University Press (2000).
[Elon1] E. L. Lima. Grupo fundamental e espaços de recobrimento, Projeto Euclides. IMPA(1993).
[Elon2] E. L. Lima. Homologia básica, Projeto Euclides. IMPA (2009).
[Spanier] E. H. Spanier. Algebraic Topology, MacGraw-Hill Book Company New York(1966)
[Moise] E. E. Moise. Geometric Topology in Dimensions 2 and 3, Springer-Verlag -Graduate Texts in Mathematics n. 47.
[Burde/Zieschang] G. Burde and H. Zieschang. Knots, De Gruyter(1985).
[Sampaio] J. C. V. Sampaio Tópicos de Topologia Intuitiva, X Encontro Brasileiro deTopologia (1996)
[Greenberg/Harper] M. J. Greenberg and J. R. Harper Algebraic Topology - A first course,The Benjamin/Cummings Publishing Company.
49
50 Referências Bibliográficas
[Armstrong] M. A. Armstrong. Basic Topology Spring-Verlag. Undergraduate Texts inMathematics
[Crowell/Fox] R. H. Crowell and R. H. Fox. Introduction to Knot Theory, SpringerVerlag, Graduate Texts in Mathematics n. 57
[Prasolov] V. V. Prasolov. Intuitive Topology, Mathematical Word, 4, AMS(1995).
[Massey] W. S. Massey. Algebraic Topology: An Introduction, Spinger-Verlag - GraduateTexts in Mathematics n. 56.
[ARTIGOS]
[Haefliger] A. Haefliger. Knotted (4k-1)-spheres in 6k-space, Ann. of Math., 75, pg. 452-466 (1962).
[Maehara] H. Maehara, Why is RP2 not embeddable in R3, Am. Math. Montly, vol 100,n. 9, pag. 862-864 (1993).
[Artin(1925)] E. Artin. Zur Isotopie zweidimensionalen Flächen im R4, Abh. Math. Sem.Univ. Hamburg 4, pg. 174-177 (1925).
[Artin(1926)] E. Artin. Theorie der Zöpfe, Abh. Math. Sem. Univ. Hamburg 4, pg. 47-72(1926).
[Schubert] H. Schubert. Die eindeutige Zerlegbarkeit eines Knoten in PrimknotenSitzungsber. Akad. Wiss. Heidelberg, math.-nat. KI.,3: pg.57-104 (1949)
[Sachs] H. Sachs. On a spatial analogue of Kuratowski’s theorem on planar graphs - an openproblem in Graph Theory, Lagow 1981, Lectures Notes in Math. 1018, pg.230-241,Spring Verlag, Berlin (1982)
[Morton] H. R. Morton. Threading Knot diagrams, Math. Proc. Cambridge Philos. Soc.99, n. 2 pg. 247-260 (1986).
[Alexander(1923)] J. Alexander. A lemma on systems of knotted curves, Proc. Nat. Acad.Sci. USA 9, pg.93-95(1923).
[Alexander(1928)] J. Alexander, Topological invariantes of knots and links, Transcripts ofThe AMS 30, pg.275-306 (1928).
[Conway] J. H. Conway. An enumeration of Knots and Links and some of their algebraicproperties, Computational Problems in Abstract Algebra. Pergamaon Press, NewYork, pg. 329-358 (1970).
[Conway/Gordon] J. H. Conway and C. M. Gordon. Knots and Links in spatial graphs,J. Graph Theory, 7 pg. 445-452 (1985).
[Andrews/Curtis] J. J. Andrews and M. L. Curtis. Knotted 2-spheres in the 4-sphere,Annals of Mathematics vol.70, n. 3, pg. 565-571 (1959).
[Milnor] J. W. Milnor. Most Knots are wild, Fund. Math. 54, pg.335-338 (1964).

Referências Bibliográficas 51
[Perko] K. A. Perko. On the classifications of Knots, Proc. Amer. Math. Soc. 45, pg. 262-266 (1974).
[Gauss] K. F. Gauss. Zur mathematischen Theorie der electrodynamischen Wirkungen,Werke Konigl. Gessell. Wiss. Gottingen, 5 pg. 695 (1833).
[Reidemeister(1926)] K. Reidemeister. Knoten und Gruppen, Abh. Math. Sem. Univ.Hamburg 5, pg.24-32 (1926).
[Reidemeister(1926’)] K. Reidemeister. Elementare Begründung der Knotentheorie, Abh.Math. Sem. Univ. Hamburg 6, pg.56-64 (1926).
[Reidemeister(1932)] K. Reidemeister. Knotentheorie, Ergbh. Math. Grnnzgeb 1,Springer Verlag. (1932)
[Kauffman(1988)] L. H. Kauffman. New invariants in the theory of knots, Amer. Math.Monthly 95, n. 3, pg. 195-242 (1988).
[Kauffman(1989)] L. H. Kauffman. Polynomial invariants in knot theory, Braid grup, knottheory and statistical mechanics, pg. 27-58, Adv. Ser. Math. Phis., 9, Word. Sci. Publ.(1989).
[Neuwirth] L. P. Neuwirth. The algebraic determination of the genus of knots, Amer. J.Math 82, pg. 791-798 (1960).
[Dehn(1910)] M. Dehn. Über die Topologie des dreidimensionalen Raumes, Math. Ann. 69,pg.137-168 (1910).
[Dehn(1914)] M. Dehn. Die beiden Kleeblattschlingen, Math. Ann. 102, pg.402-413 (1914).
[Haseman] M. G. Haseman. On knots, with a census of amphicheirals with 12 crossings,Trans. Royal Soc. Edinburgh 52, pg.235-255 (1918).
[Tait] P. G. Tait. On Knots I, II, III, Scientific papers, I(1877-1885, London), pag. 273-437,Cambridge Univ. Press.
[Brode] R. Brode. Über wilde Knoten und ihre ¨Anzahl¨, Diplomarbeit, Ruhr-UniversitätBochum(1981).
[Goldstein] R. Z. Goldstein. Piecewise linear unknotting of Sp × Sq in Sp+q+1, MichiganMath. J. 14, pg.405-415 (1967).
[Wasserman et al.] S. A. Wasserman, J. M. Dungan and N. R. Cozzarelli. Discovery ofpredicted DNA knot substantiates a model for site-spedific recombination, Scinecs, 229pag. 251-257 (1985).
[Kirkman] T. P. Kirkman. The enumeration, description and construction of knots with fewerthan 10 crossings, Trans. Royal Soc. Edinburg, 32, pag.281-309 (1885).
[Laércio/Oziride/Saeki] L. A. Lucas, O. M. Neto and O. Saeki. A generalization ofAlexander’s torus theorem to higher dimensions and an unknotting theorem for Sp × Sq
embedded in Sp+q+2, Kobe J. Math. 13, pg. 145-165 (1996).

52 Referências Bibliográficas
[Laércio/Saeki (2002)] L. A. Lucas and O. Saeki. Embedding of Sp × Sq × Sr in Sp+q+r+1,Pacific Journal of Math. vol. 207, n.2, pg. 447-462 (2002).
[Laércio/Saeki (2005)] L. A. Lucas and O. Saeki. Codimension one embeddings of productof three spheres, Topology and its Applications. 146-147, pag. 409-419 (2005).
[Polcino] F. J. Polcino Milies. Anéis de Grupos, IV Escola de Álgebra - SBM (1976)