
Transformador Electrónico de Potência para Aplicações em ... · de perdas garantindo uma boa...
111
Transformador Electrónico de Potência para Aplicações em Sistemas de Energia Pedro Miguel Costa Fernandes Dissertação para obtenção do Grau de Mestre em Engenharia Electrotécnica e de Computadores Orientadores: Profª Doutora Sónia Maria dos Santos Paulo Ferreira Pinto Prof. Doutor José Fernando Alves da Silva Júri Presidente: Profª Doutora Maria Eduarda Sampaio Pinto de Almeida Pedro Orientador: Profª Doutora Sónia Maria dos Santos Paulo Ferreira Pinto Vogal: Prof. Doutor João José Esteves Santana Novembro 2014
Transcript of Transformador Electrónico de Potência para Aplicações em ... · de perdas garantindo uma boa...
Transformador Electrónico de Potência para
Aplicações em Sistemas de Energia
Pedro Miguel Costa Fernandes
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Orientadores: Profª Doutora Sónia Maria dos Santos Paulo Ferreira Pinto
Prof. Doutor José Fernando Alves da Silva
Júri
Presidente: Profª Doutora Maria Eduarda Sampaio Pinto de Almeida Pedro
Orientador: Profª Doutora Sónia Maria dos Santos Paulo Ferreira Pinto
Vogal: Prof. Doutor João José Esteves Santana
Novembro 2014

ii

iii
“The little I know, I owe to my ignorance”
Sacha Guitry

iv
v
Agradecimentos
Todo o meu percurso académico e em particular o desenvolvimento desta dissertação teve o
contributo de muitas pessoas. Nesse sentido quero demonstrar o meu agrado a todos os que,
de forma directa ou indirecta, contribuíram para que hoje, possa estar a homenageá-las com
estas palavras que escrevo.
Em primeiro lugar quero agradecer à Prof. Doutora Sónia Ferreira Pinto, pela oportunidade em
fazer esta dissertação sob a sua orientação, pela disponibilidade e paciência demonstrada desde
o primeiro dia. Destaco a sua capacidade de inovação que em muito contribuiu para este
resultado final.
Ao Prof. Doutor Fernando Silva, agradeço toda a sua simpatia, assim como as sugestões
providenciadas que tornaram todo este trabalho mais legível.
Dedico esta dissertação aos meus pais por todo o apoio, confiança e inspiração. Tiveram um
papel tao determinante para o meu sucesso. Ao meu irmão que sempre me deu ânimo e força
para continuar.
De forma muito especial, agradeço à minha namorada Ana Azevedo, por todo o apoio, carinho e
compreensão demonstrada ao longo destes anos todos.
Aos meus colegas e amigos, Bruno Pereira, Ricardo Gago, Nuno Fontes, Ana Assis agradeço a
troca de ideias, sugestões e críticas que contribuíram directamente para a realização desta
dissertação. Agradeço também a todas as pessoas, que contribuíram para a concretização desta
etapa, mas infelizmente não poderei mencionar todos.
A todos, muito obrigado.

vi
vii
Resumo
A evolução da tecnologia na área da electrónica de potência tem sido bastante notória nos
últimos anos, nomeadamente no desenvolvimento de novos semicondutores que estão
preparados para operar em sistemas com valores de tensão muito elevados, como é o caso dos
ultra high voltage device.
Por outro lado, tem-se verificado também uma grande evolução nos transformadores de alta
frequência, nomeadamente nas ligas ferromagnéticas, que promovem uma elevada densidade
de fluxo de saturação, ou seja, uma elevada densidade de potência assim como um baixo valor
de perdas garantindo uma boa eficiência do transformador.
Nesta dissertação é proposto um transformador de potência de alta frequência para aplicações
em sistemas de energia, ou seja, para além da redução/elevação de níveis de tensão e do
isolamento galvânico garantido pelo transformador clássico, este transformador permite muitas
outras funcionalidades, tais como: grande capacidade de controlo, menor volume do núcleo do
transformador, bom comportamento face às flutuações da tensão.
Este transformador é designado por Solid State Transformer, e é composto por um Conversor
Matricial Modular, um Conversor Matricial Trifásico e um Transformador de Alta Frequência. O
SST permite obter um sistema de tensão de saída regulável em carga, não só em amplitude
como também em frequência.
O Conversor Matricial Modular foi projectado durante a realização da dissertação e para além de
estar apto para funcionar em sistemas MT, permite a não saturação do transformador de alta
frequência.
Palavras-Chave
Solid State Transformer, Transformador de Alta Frequência, Conversor Matricial, Modulação com
Vectores Espaciais, Controlo de Tensão, Controlo de Corrente.
viii
ix
Abstract
The technological evolution in the field of power electronics has been very evident in recent years,
including the development of new semiconductors that are prepared to operate in systems very
high working voltages, as in the case of ultra high voltage device.
On the other hand, there has also been a large development of high-frequency transformers, in
particular ferromagnetic alloys that promote a high saturation flux density, that is, high power
density as well as a lower losses ensuring high efficiency.
This dissertation proposes a power transformer for high frequency applications in power systems,
that is, the proposed transformer, not only performs the voltage reduction / increase guaranteeing
galvanic isolation as in the classic transformer, but it also allows many other features such as:
large capacity control, lower volume of the transformer core and good dynamic performance
against voltage fluctuations.
This transformer is designated Solid State Transformer, and it is composed of a Modular Matrix
Converter, a Three Phase Matrix Converter and High Frequency Transformer. The SST allows to
obtain a system of adjustable output voltage under load, not only in amplitude but also in
frequency.
The Modular Matrix Converter was designed during the course of the dissertation. In addition to
being able to function in MT systems, it also enables the unsaturation of the transformer.
Keywords
Solid State Transformer, High Frequency Transformer, Matrix Converter, Space Vector
Modulation, Voltage Regulator, Current Regulator.

x

xi
Abreviaturas e Terminologias
AC Corrente Alternada (Alternate Current)
AC – AC Conversão electrónica de potência onde na entrada e
saída do sistema as grandezas eléctricas são alternadas
AC – DC Conversão electrónica de potência com corrente
alternada de entrada e corrente continua na saída
BT Baixa Tensão
CMM Conversor Matricial Modular
DC Corrente Continua (Direct Current)
HFT Transformador de Alta Frequência
(High Frequency Transformer)
MC Conversor Matricial
MT Média Tensão
PI Controlo Proporcional Integral
RMS Root mean square
SVM Space Vector Modulation
SST Solid State Transformer
xii
Lista de Variáveis
𝜉 Factor de amortecimento
𝜂 Rendimento do conversor matricial
αi Ganho do sensor de leitura da corrente
αv Ganho do sensor de leitura da tensão
αβ Sistema referenciado a um plano de coordenadas αβ
dq Sistema referenciado a um plano de coordenadas dq
ω Frequência angular da componente fundamental
ωc Frequência angular de corte do filtro de entrada
ωi Frequência angular da tensão de entrada do conversor
matricial
ωo Frequência angular da tensão de saída do conversor
matricial
ωs Frequência angular de comutação do conversor matricial
ϕi Ângulo de fase de entrada da carga
ϕo Ângulo de fase de saída da carga
φi Valor instantâneo da fase da corrente de referência de
entrada.
φv Valor instantâneo da fase da tensão composta de
referência de saída.
θi Ângulo do vector da corrente de referência de entrada
relativo ao sector onde se encontra.
θv Ângulo do vector da tensão de referência de saída
relativo ao sector onde se encontra.
C Transformação de Concordia/Clark
𝐶𝑓 𝑖𝑛 Valor do condensador do filtro de entrada
𝐶𝑓 𝑜𝑢𝑡 Valor do condensador do filtro de saída
𝑑𝛼 , 𝑑𝛽 , 𝑑𝛾 , 𝑑𝛿 , 𝑑0 Factores de ciclo associado ao processo SVM
fc Frequência de corte do filtro de entrada
fi Frequência das variáveis de entrada do Conversor
Matricial Modular
fo Frequência das variáveis de saída do Conversor Matricial
Fp Factor de potência
fs Frequência de comutação do Conversor Matricial
Hdq Tensão de comando das correntes de saída
𝐼𝛾 , 𝐼𝛿 , 𝐼0 Vectores espaciais adjacentes ao vector de referência de
corrente.
ia, ib, ic Valor instantâneo das correntes de entrada do conversor
matricial
xiii
𝑖𝑎𝑟𝑒𝑓 , 𝑖𝑏𝑟𝑒𝑓 , 𝑖𝑐𝑟𝑒𝑓 Valor instantâneo das correntes de referência de entrada
do conversor matricial
𝑖∝𝑟𝑒𝑓 , 𝑖𝛽𝑟𝑒𝑓 Valor instantâneo, em coordenadas αβ, das correntes de
referências de saída do conversor matricial
𝐼𝑖𝑟𝑒𝑓𝛼𝛽 Valor instantâneo, em coordenadas αβ, das correntes de
referências de entrada do conversor matricial
Ik Vector das correntes de entrada do conversor matricial
k = {1,2,3,4,5,6}
IA, IB, IC Valor instantâneo das correntes de saída do conversor
matricial.
IDC Corrente no andar intermédio da associação rectificador
inversor equivalente.
Ii Valor eficaz das correntes de entrada do conversor
matricial.
𝐼𝑖𝑚𝑎𝑥 Amplitude da corrente de entrada do conversor matricial.
Io Valor eficaz das correntes de saída do conversor matricial
𝐼𝑜𝑑𝑞 Valor instantâneo, em coordenadas dq, das correntes de
saída do conversor matricial
𝐾𝑖 Ganho integral do compensador PI
𝐾𝑝 Ganho proporcional do compensador PI
𝐼𝑜𝑑𝑞 𝑟𝑒𝑓 Valor instantâneo, em coordenadas dq, das correntes de
referência de saída do conversor matricial
𝐿1 𝑖𝑛 Indutância do filtro de entrada do conversor matricial
𝐿1 𝑜𝑢𝑡 Indutância do filtro de saída do conversor matricial
mc Índice de modulação das correntes de entrada
mv Índice de modulação das tensões de saída
𝑁𝑖 Número do sector de localização do vector de referência
das correntes de entrada
𝑁𝑣 Número do sector de localização do vector de referência
das tensões de saída
𝑃𝐷𝐶 Potência no andar intermédio da associação rectificador
inversor equivalente
Pin Potência de entrada do conversor matricial
Pout Potência de saída do conversor matricial
Pperdas Potência de perdas no conversor matricial
ri Resistência incremental negativa do filtro de entrada
Ro Resistência de carga para efeito de dimensionamento do
filtro de entrada
rout Resistência equivalente de carga
rp Resistência de amortecimento colocada em paralelo
colocada em paralelo com a bobina do filtro de entrada

xiv
S Matriz de 3x3 elementos que representa o estado dos
interruptores bidireccionais do conversor matricial
Sc Matriz que relaciona as tensões compostas de saída com
as tensões simples de entrada do conversor matricial
𝐒𝐓 Transposta da matriz S
𝑆𝑘𝑗
Interruptor bidireccional que liga a fase de saída k = {1, 2,
3} à fase de entrada j = {1, 2, 3} do conversor matricial
trifásico
Tc Período de comutação do conversor matricial
Td Tempo de atraso na resposta do conversor
𝑉𝛼 , 𝑉𝛽 , 𝑉0 Vectores espaciais adjacentes ao vector de referência da
tensão.
Va, Vb, Vc Tensões simples de entrada do conversor matricial
Vab, Vbc, Vca Tensões compostas de entrada do conversor matricial
VA, VB, VC Tensões simples de saída do conversor matricial
VAB, VBC, VCA Tensões compostas de saída do conversor matricial
𝑉𝐴𝐵𝑟𝑒𝑓 , 𝑉𝐵𝐶𝑟𝑒𝑓 , 𝑉𝐶𝐴𝑟𝑒𝑓 Tensões compostas de referência da saída do conversor
matricial
Vcarga Tensão aos terminais da carga
VDC Tensão no andar intermédio do conversor matricial
Vi Valor eficaz da tensão simples de entrada no conversor
matricial
Vic Valor eficaz da tensão composta de entrada no conversor
matricial
Vo Valor eficaz da tensão simples de saída do conversor
matricial.
𝑉𝑜𝛼𝑟𝑒𝑓 , 𝑉𝑜𝛽𝑟𝑒𝑓 Vector de referência da tensão composta de saída em
coordenadas αβ.
𝑉0𝐶 Valor eficaz da tensão composta de saída do conversor
matricial.
Zof Impedância característica do filtro de saída.
Zf Impedância característica do filtro de entrada.
xv
Lista de Figuras
Figura 1.1 - Esquema de um transformador clássico, com frequência de trabalho de 50 Hz
[Cabral, 2009] ................................................................................................................................ 1
Figura 2.1 - Esquema Simplificado do Solid State Transformer. .................................................. 5
Figura 2.2 - Frequência de trabalho do Transformador Clássico (50/60 Hz) face à frequência de
trabalho do SST ( > 1kHz). ............................................................................................................ 5
Figura 2.3 – Diferentes topologias do SST ................................................................................... 7
Figura 2.4 - Possíveis aplicações do SST no sistema de distribuição de energia eléctrica [She,
2013]. ............................................................................................................................................. 9
Figura 2.5 - a) Aplicação em sistemas de tracção [Kolar, 2011a]; b) Produção de energia offshore
[Kolar, 2011a]; c) Smart grid [Kolar, 2011a]; ............................................................................... 10
Figura 2.6 – Diferentes aplicações do SST ................................................................................. 11
Figura 2.7 - Conversor Matricial Monofásico .............................................................................. 15
Figura 2.8 – Conversor Matricial Trifásico .................................................................................. 17
Figura 2.9 - Vectores espaciais de tensão de saída relativamente á zona de localização das
tensões de entrada. ..................................................................................................................... 22
Figura 2.10 - Vectores espaciais da corrente de entrada relativamente á zona de localização das
correntes de saída. ...................................................................................................................... 23
Figura 2.11 - Modelo equivalente do conversor matricial para o método de modulação indirecto.
..................................................................................................................................................... 24
Figura 2.12 - Módulo rectificador do conversor matricial. ........................................................... 27
Figura 2.13 - a) Sector das correntes de entrada; b) Localização espacial dos vectores I1 a I9 e
divisão do plano complexo αβ em seis sectores que determinam a localização da corrente de
entrada; c) Representação do processo para a sintetização de 𝐼𝑖𝑟𝑒𝑓𝛼𝛽 com recurso aos vectores
espaciais adjacentes ao sector onde se encontra o vector de referência. ................................. 28
Figura 2.14 - Módulo inversor do conversor matricial. ................................................................ 31
Figura 2.15 - a) Sector das tensões de saída; b) Localização espacial dos vectores V1 a V8 e
divisão do plano complexo αβ em seis sectores que determinam a localização da tensão de
saída; c) Representação do processo para a sintetização de 𝑉𝑜𝑟𝑒𝑓𝛼𝛽 com recurso aos vectores
espaciais adjacentes ao sector onde se encontra o vector de referência. ................................. 33
Figura 2.16 - Processo de modulação usado para a selecção dos vectores espaciais, assim como
para a determinação do tempo de actuação. .............................................................................. 37
Figura 2.17 - Processo de selecção dos vectores a aplicar nos interruptores do conversor
matricial. ...................................................................................................................................... 37

xvi
Figura 3.1 - Esquema simplificado do modelo SST .................................................................... 39
Figura 3.2 – Esquema simplificado da associação em série dos conversores matriciais
monofásicos ................................................................................................................................ 40
Figura 3.3 - Esquema do processo de modulação modificado aplicado ao sistema proposto ... 41
Figura 3.4 - a) Onda da tensão original, com valor médio diferente de zero num período de
comutação dos semicondutores; b) Onda da tensão modificada pelo conversor matricial modular,
com valor médio nulo. ................................................................................................................. 42
Figura 3.5 - Filtro de entrada do conversor ................................................................................. 47
Figura 3.6 - Esquema monofásico equivalente do filtro de entrada do conversor ...................... 48
Figura 3.7 – Circuito de amortecimento presente no filtro de entrada do conversor matricial. .. 49
Figura 3.8 – Filtro de saída do conversor matricial. .................................................................... 51
Figura 3.9 – Esquema equivalente monofásico do filtro de saída. ............................................. 51
Figura 4.1 - Carga alimentada pelo conversor matricial. ............................................................ 55
Figura 4.2 - Diagrama de blocos do controlador da corrente de saída....................................... 57
Figura 4.3 - Diagrama de blocos ................................................................................................. 58
Figura 4.4 – Controlo da tensão de saída. .................................................................................. 59
Figura 4.5 – Modelo utilizado no dimensionamento do regulador de tensão na carga .............. 61
Figura 4.6 - Diagrama de blocos do controlador de tensão. ....................................................... 61
Figura 5.1 – Modelo SST simulado. ............................................................................................ 64
Figura 5.2 – Tensão aos terminais da carga (THDv=1.7%) ........................................................ 66
Figura 5.3 – Corrente na carga ................................................................................................... 66
Figura 5.4 – a)Tensão simples de referência aos terminais da carga (Representado a vermelho)
e a respectiva tensão simples na carga (Representado a azul); Erro entre a tensão de referência
e a tensão controlada .................................................................................................................. 67
Figura 5.5 – Tensão aplicada a um enrolamento primário do transformador (MT) .................... 67
Figura 5.6 – Tensão de saída do transformador (BT) ................................................................. 68
Figura 5.7 – Correntes de entrada do SST (MT). ....................................................................... 68
Figura 5.8 – Tensão (Vermelho) e corrente na fase A (Azul) à entrada do conversor matricial
modular. ....................................................................................................................................... 69
Figura 5.9 – Tensões trifásicas na MT. ....................................................................................... 70
Figura 5.10 – Tensão aos terminais da carga (THDv=2%). ........................................................ 70
Figura 5.11 - Corrente na carga .................................................................................................. 71
Figura 5.12 – a) Tensão simples de referência aos terminais da carga (representada a vermelho)

xvii
e a respectiva tensão simples na carga (representada a azul); b) Erro entre a tensão de referência
e a tensão controlada .................................................................................................................. 71
Figura 5.13 – Índice de modulação ............................................................................................. 72
Figura 5.14 - Tensões trifásicas na MT. ...................................................................................... 73
Figura 5.15 – Tensão aos terminais da carga (THDv=1.7%)...................................................... 73
Figura 5.16 – Corrente na carga. ................................................................................................ 74
Figura 5.17 – a) Tensão simples de referência aos terminais da carga (Representado a vermelho)
e a respectiva tensão simples na carga (Representado a azul); b) Erro entre a tensão de
referência e a tensão controlada ................................................................................................. 74
Figura 5.18 – Índice de modulação ............................................................................................. 75
Figura 5.19 – Tensões trifásicas na MT. ..................................................................................... 75
Figura 5.20 – Tensão aos terminais da carga (THDv=2%). ........................................................ 76
Figura 5.21 – a) Tensão simples de referência aos terminais da carga (Representada a vermelho)
e a respectiva tensão simples na carga (Representado a azul); Erro entre a tensão de referência
e a tensão controlada. ................................................................................................................. 76

xviii
xix
Lista de Tabelas
Tabela 2.1 – Comparação das diferentes ligas [Ferch, 2003]. ..................................................... 8
Tabela 2.2 – Vantagens e desvantagens do conversor matricial ............................................... 14
Tabela 2.3 - Combinações possíveis de ligação dos interruptores do conversor matricial
monofásico. ................................................................................................................................. 16
Tabela 2.4 - Combinações possíveis de ligação dos interruptores do conversor matricial trifásico.
..................................................................................................................................................... 19
Tabela 2.5 - Vectores espaciais da tensão de saída e da corrente de entrada para todas as
combinações possíveis de ligação dos interruptores do conversor matricial. ............................ 21
Tabela 2.6 - Vectores de estado gerados pelo rectificador para todas as combinações de ligação
dos interruptores. ........................................................................................................................ 27
Tabela 2.7 - Vectores de estado gerados pelo inversor para todas as combinações de ligação
dos interruptores. ........................................................................................................................ 31
Tabela 2.8 - Vectores do conversor matricial utilizados na modulação das tensões compostas de
saída e das correntes de entrada................................................................................................ 36
Tabela 3.1 - Resumo dos parâmetros de dimensionamento dos semicondutores de potência . 44
Tabela 3.2 - Resumo dos parâmetros de dimensionamento dos semicondutores de potência . 46
Tabela 3.3 - Resumo dos parâmetros do filtro de entrada ......................................................... 50
Tabela 3.4 - Resumo dos parâmetros do filtro de saída. ............................................................ 53
Tabela 4.1 - Resumo dos parâmetros do controlador da corrente de saída. ............................. 59
Tabela 4.2 - Resumo dos parâmetros do controlador de tensão. ............................................... 62
Tabela 5.1 – Características do SST .......................................................................................... 65
Tabela 5.2 – Características da cava de tensão ......................................................................... 69
Tabela 5.3 – Características da sobretensão ............................................................................. 72

xx
xxi
Índice
Capítulo 1 - Introdução .............................................................................................................. 1
1.1 - Objectivos da Dissertação ................................................................................................. 2
1.2 - Estrutura da Dissertação ................................................................................................... 3
Capítulo 2 - Estado da Arte ....................................................................................................... 5
2.1 - Transformador de Alta Frequência ................................................................................... 7
2.2 - Aplicações do SST .............................................................................................................. 9
2.3 - SST versus Transformador Clássico ................................................................................. 12
2.4 - Conversor Matricial ......................................................................................................... 12
2.4.1 - Conversor Matricial Monofásico .............................................................................. 14
2.4.2 - Conversor Matricial Trifásico ................................................................................... 16
2.4.2.1 - SVM - Space Vector Modulation ........................................................................ 24
2.4.2.2 - Modulação Vectorial no Rectificador.................................................................. 26
2.4.2.3 - Modulação Vectorial no Inversor ........................................................................ 30
2.4.2.4 - Aplicação da Modulação Inversa ao Conversor Matricial .................................. 35
Capítulo 3 - Solid State Transformer - SST ............................................................................ 39
3.1 - Conversor Matricial Modular .......................................................................................... 40
3.1.1 - SVM Modificado ....................................................................................................... 41
3.1.2 - Dimensionamento dos Semicondutores do Conversor Matricial Monofásico ........ 42
3.1.2.1 - Tensão Máxima a Suportar ................................................................................ 42
3.1.2.2 - Corrente Máxima a Suportar .............................................................................. 43
3.1.3 - Dimensionamento dos Semicondutores do Conversor Matricial Trifásico ............. 44
3.1.3.1 - Tensão Máxima a Suportar ................................................................................ 44
3.1.3.2 - Corrente Máxima a Suportar .............................................................................. 45
3.2 - Dimensionamento dos Componentes de Filtragem ....................................................... 46
3.2.1 - Dimensionamento do Filtro de Entrada ................................................................... 47
3.2.2 - Dimensionamento do Filtro de Saída ....................................................................... 50
Capítulo 4 - Controlo do Sistema ............................................................................................ 55
4.1 - Dimensionamento do Controlador de Corrente ............................................................. 55
4.2 - Dimensionamento do Controlador de Tensão ................................................................ 59
Capítulo 5 - Resultados ........................................................................................................... 63
5.1 - Cenário 1 – Condições de funcionamento nominais ...................................................... 65
5.2 - Cenário 2 – Situação de Cava na Média Tensão ............................................................. 69
5.3 - Cenário 3 – Situação de Sobretensão na Média Tensão ................................................. 72

xxii
5.4 - Cenário 4 - Distorção Harmónica no lado da Média Tensão........................................... 75
Capítulo 6 - Conclusões .......................................................................................................... 77
6.1 - Conclusões ...................................................................................................................... 77
6.2 - Perspectivas de Trabalho Futuro .................................................................................... 78
Referências Bibliográficas ........................................................................................................... 79
Anexos ......................................................................................................................................... 85
Anexo A - Matriz Sc ................................................................................................................. 85
Anexo B – IGBT (FZ250R65KE3) ............................................................................................... 87
Anexo C – IGBT (DIM800XSM45-TS000) ................................................................................. 88
Anexo D - Resistência de amortecimento do filtro de entrada .............................................. 89
1
Capítulo 1 - Introdução
Os transformadores são máquinas eléctricas estáticas constituídas por um, dois ou mais
enrolamentos eléctricos bobinados à volta de um núcleo comum que pode ser de ar mas na
grande maioria das vezes é de material ferromagnético, como o aço, a fim de reproduzir uma
baixa relutância permitindo um maior fluxo magnético [Cabral, 2009].
O funcionamento de um transformador baseia-se no fenómeno da indução mútua entre dois
circuitos eléctricos isolados, mas magneticamente acoplados (Figura 1.1).
VPrimário VSecundárioN1 N2
Figura 1.1 - Esquema de um transformador clássico, com frequência de trabalho de 50 Hz
Assim como o transformador, mais máquinas eléctricas exploram os efeitos descobertos por
Oersted e Faraday.
As principais etapas cronológicas que identificam o desenvolvimento destas máquinas são:
- Em 1820, foi descoberto por Oersted o efeito magnético gerado pela corrente eléctrica.
- Em 1831, Faraday descobriu a lei da indução magnética lançando assim os fundamentos do
electromagnetismo.
- Em 1864, Maxwell estabelece as bases teóricas do electromagnetismo.
- Em 1890, são inventadas as principais formas de máquinas eléctricas e até cerca de 1950
desenvolve-se uma intensa investigação industrial com vista ao aumento das potências
específicas das máquinas através da introdução de sistemas de refrigeração e de materiais
activos mais eficientes.
Nos últimos anos o desenvolvimento dos transformadores não estagnou, muito pelo contrário. A
evolução foi tal, que permitiu a produção de transformadores de menores dimensões, com maior
capacidade e mais eficientes [Cabral, 2009].

2
O transformador tem como objectivo transferir energia eléctrica de um ou mais enrolamentos,
por meio da indução magnética para outros enrolamentos. Todos estes enrolamentos têm um
circuito magnético comum e portanto estão acoplados magneticamente. Assim, os
transformadores transformam grandezas alternadas primárias noutras grandezas alternadas
secundárias, com a mesma frequência, mas de valores diferentes, mantendo a potência
praticamente constante [Jeszenszky, 1996].
Estes dispositivos permitem transmitir uma potência alternada a diferentes níveis de tensão. Por
isso, desempenham um papel importante na maioria dos circuitos de corrente alternada, e são
imprescindíveis em sistemas de transporte e distribuição de energia. São os transformadores
que permitiram o transporte de energia eléctrica a longas distâncias, resolvendo assim o
problema fundamental da electrotecnia [Jeszenszky, 1996].
Por outro lado, a introdução dos sistemas de energia renováveis trouxe um aumento da
complexidade na operação do sistema de energia. Com o desenvolvimento tecnológico dos
conversores electrónicos de potência e a utilização de novas ligas com boas capacidades
magnéticas, surgiu um novo transformador, designado “Solid State Transformer” (SST)
[Kolar,2011a], ou transformador electrónico de potência.
Os SST são muito recentes, pelo que o conhecimento do seu comportamento em sistemas de
energia é bastante limitado [Merwe et al, 2009a]. No entanto, com o aumento da produção
descentralizada em pequena e larga escala, e da necessidade daí resultante de controlar a
tensão na rede, os SST têm um elevado potencial de utilização para sistemas de energia
[Kolar,2011a].
A introdução deste novo dispositivo SST na rede de energia eléctrica poderá garantir um maior
controlo da energia, entre os sistemas de geração distribuída e a rede. De igual forma, o SST
permite também o controlo do trânsito de potência, essencial para o funcionamento estável e
seguro da rede. No entanto, todas estas funcionalidades têm um custo, originando um sistema
mais complexo e caro.
O SST proposto nesta dissertação é composto por Conversores Matriciais Monofásicos ligados
à rede MT, um transformador de alta frequência (2kHz) e um Conversor Matricial Trifásico ligado
à rede BT.
1.1 - Objectivos da Dissertação
A presente dissertação tem como principal objectivo propor uma nova topologia modular para
transformadores electrónicos de potência para aplicações em redes de energia eléctrica.
Para a concretização da dissertação foram delineados vários objectivos:
- Realizar o estudo sobre o estado da arte do Solid State Transformer, assim como da sua
dinâmica.
- Propor e analisar a arquitectura que melhor se adequa ao caso de estudo;
- Dimensionar os semicondutores a usar, tendo em atenção os níveis de tensão e corrente a
3
suportar.
- Dimensionar os controladores das tensões e das correntes de saída;
- Dimensionar os filtros de entrada e de saída do SST;
- Avaliar o desempenho do sistema proposto em regime de funcionamento nominal e no caso de
ocorrência de perturbações na rede de MT, nomeadamente cavas ou sobretensões
1.2 - Estrutura da Dissertação
A dissertação encontra-se dividida em 6 capítulos:
No primeiro capítulo é apresentado o enquadramento da dissertação, onde são descritas as
razões que motivam a utilização dos SST na rede de energia eléctrica. São ainda especificados
os objectivos e a estrutura da dissertação.
No segundo capítulo é feita uma análise do estado da arte do Solid State Transformer,
identificando os vários tipos de SST existentes, assim como todas as suas aplicações. Neste
capítulo é ainda apresentado um pequeno enquadramento sobre os transformadores de alta
frequência, evidenciando aspectos construtivos essenciais para o seu bom funcionamento. Por
fim, é ainda realizada uma descrição dos conversores matriciais monofásicos e trifásicos e do
processo de modulação SVM.
No terceiro capítulo é apresentado o sistema proposto, o Solid State Transformer. É apresentado
o processo de modulação SVM modificado que permite, à frequência de comutação, obter valor
médio nulo das tensões e correntes no transformador. Neste capítulo são ainda dimensionados
os filtros de entrada e de saída do SST.
No quarto capítulo são dimensionados os controladores das tensões na rede BT e das correntes
de saída do SST.
No quinto capítulo são apresentados os resultados de simulação do sistema proposto, para
vários cenários de funcionamento.
No sexto capítulo são apresentadas as conclusões do trabalho realizado e são sugeridas
algumas melhorias a efectuar em dissertações futuras.
Nos anexos é disponibilizada informação auxiliar que apoia a compreensão da dissertação.

4

5
Capítulo 2 - Estado da Arte
Hoje em dia, os transformadores de potência são dispositivos fundamentais do sistema de
distribuição de energia. O uso generalizado do transformador resultou numa tecnologia
relativamente barata, madura e com grande eficiência [Merwe et al, 2009a]. Apesar da sua
grande utilidade, apresentam algumas desvantagens, tais como [Hassan, 2010]:
Grandes dimensões;
Presença do óleo do transformador, prejudicial ao meio ambiente;
Saturação do núcleo do transformador;
Flutuações de tensão;
Sensibilidade às harmónicas da corrente de saída;
Regulação de tensão pouco eficiente. Ao nível da distribuição, a regulação de tensão é
pouco satisfatória.
VAC VACConversor Matricial
Conversor Matricial
Transformador de Alta Frequência
50/60Hz 50/60HzAlta Frequencia> 1kHz
Figura 2.1 - Esquema Simplificado do Solid State Transformer.
101
102
103
104
105
Frequência [Hz]
Solid State TransformerTransformador Clássico [50/60]Hz
Figura 2.2 - Frequência de trabalho do Transformador Clássico (50/60 Hz) face à frequência de
trabalho do SST ( > 1kHz).
Em 1980, o investigador James Brooks implementou o primeiro protótipo do SST. Devido às
grandes limitações tecnológicas da época, teve pouco sucesso. No entanto, passados alguns
anos, o conceito do SST desenvolveu-se, com diferentes arquitecturas e topologias e, nos
últimos 10 anos, a arquitectura e topologia dos SST foi adaptada de forma a permitir novas
aplicações, nomeadamente em sistemas de energia.
Nos últimos anos, o interesse nos “transformadores inteligentes”, mais conhecidos como Solid
State Transformers, tem vindo a crescer tanto, que no ano de 2010 a tecnologia SST foi
considerado pelo MIT “Massachusetts” Institute of Technology”, como uma das tecnologias com
6
maior relevância nos futuros sistemas de distribuição energia. Nos últimos anos, muitos
investigadores têm vindo a estudar novas aplicações do SST, resultando em diferentes
arquitecturas e topologias, que estão associadas a diferentes aplicações [She, 2013].
Actualmente o SST não é visto como um substituto do transformador clássico, mas sim como
uma alternativa a este. Com recurso a conversores electrónicos de potência, e a um
transformador de alta frequência, obtém-se um equipamento multifuncional, que realiza todas as
funções do transformador clássico, isto é, redução / elevação do valor da tensão do primário para
o secundário assim como o isolamento galvânico. No entanto, para além destas funções, o SST
apresenta outras vantagens e funcionalidades face ao transformador clássico, nomeadamente
[Merwe et al, 2009b], [Bhattacharya et al, 2010]:
Grande capacidade de controlo;
Menor volume do transformador de alta frequência. O volume do transformador é
inversamente proporcional à frequência, ou seja, o aumento da frequência de trabalho
resulta numa diminuição do volume do transformador;
Ajuste para um factor de potência unitário;
Bom comportamento face às flutuações da tensão;
Capacidade de protecção a jusante da instalação;
Em [Kolar et al, 2012], os autores caracterizam o SST nas diferentes topologias e arquitecturas,
com as respectivas aplicações. O SST é habitualmente constituído por 2 ou mais conversores
electrónicos de potência e um transformador de alta frequência integrado.
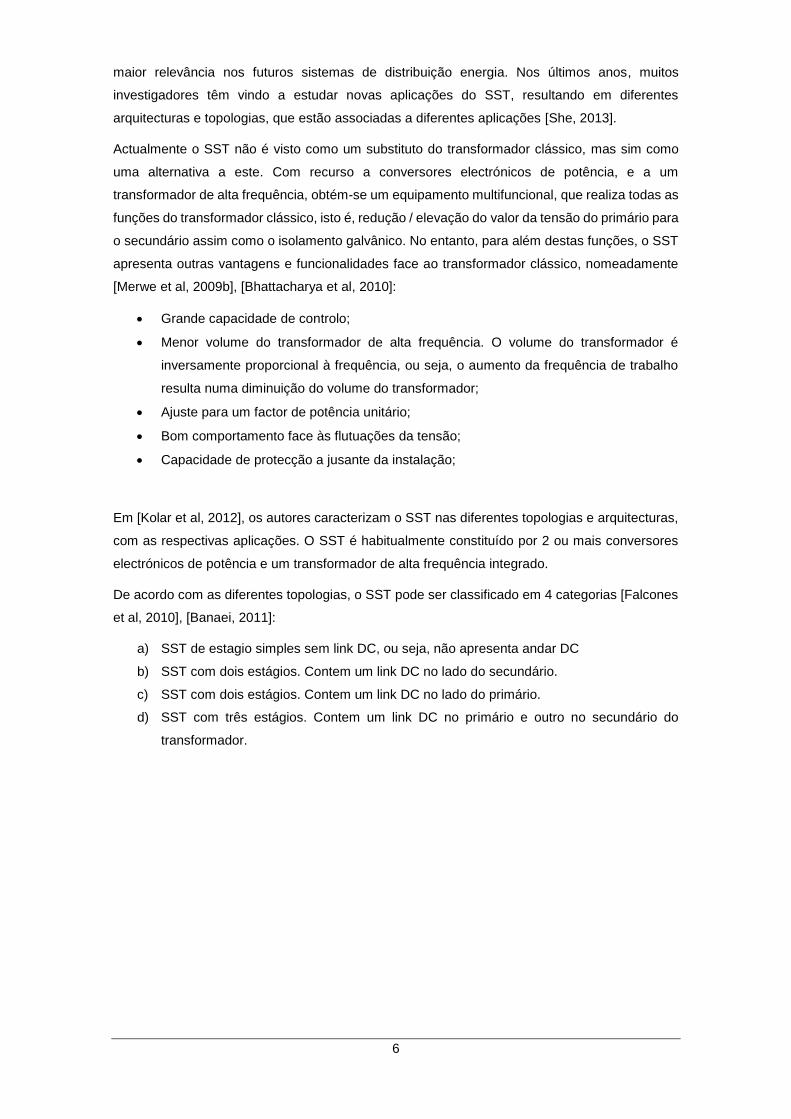
De acordo com as diferentes topologias, o SST pode ser classificado em 4 categorias [Falcones
et al, 2010], [Banaei, 2011]:
a) SST de estagio simples sem link DC, ou seja, não apresenta andar DC
b) SST com dois estágios. Contem um link DC no lado do secundário.
c) SST com dois estágios. Contem um link DC no lado do primário.
d) SST com três estágios. Contem um link DC no primário e outro no secundário do
transformador.
7
Média Tensão
Baixa Tensão
Média Tensão
Baixa Tensão
DC-Link
Média Tensão
Baixa Tensão
DC-Link
Média Tensão
DC-Link 1 DC-Link 2
Baixa Tensão
a )
b )
c )
d )
Figura 2.3 – Diferentes topologias do SST
2.1 - Transformador de Alta Frequência
O transformador de alta frequência é um componente essencial do conjunto SST. A obtenção de
um SST com bons valores de fiabilidade leva ao cumprimento de elevadas exigências impostas
ao transformador de alta frequência. Para isso há muitas questões que precisam de ser
abordadas. Em primeiro lugar, é necessário a escolha de um bom material magnético para o
núcleo do transformador. Só assim é possível obter elevados níveis de eficiência, ou seja, uma
elevada densidade de potência e baixas perdas por parte do transformador [Colonel et al, 2004].
Actualmente existe uma grande diversidade de ligas com boas capacidades magnéticas que
podem ser usadas em sistemas de elevada potência, tais como o aço de silício, as ferrites, os
materiais amorfos e por fim os materiais nanocristalinos [Colonel et al, 2004] [Ferch, 2003].
Na Tabela 2.1 é apresentada uma comparação entre as diferentes ligas magnéticas.
A liga aço de silício tem uma elevada densidade de fluxo de saturação, assim como uma elevada
permeabilidade. No entanto, para elevadas frequências de operação apresenta grandes perdas.
A liga “advanced silicon steel” nas mesmas condições da liga anterior, apresenta menor valor de
perdas bem como uma diminuição na densidade de fluxo.
Embora o valor das perdas da liga ferrite – “high performance ferrite” sejam baixas assim como
o seu custo, os núcleos de ferrite nos transformadores de alta frequência não são a melhor opção
pois a baixa densidade de fluxo leva a um aumento do volume do núcleo, levando a um conflito
com a construção compacta do SST.
As ligas “Fe—amorphous alloy” e “Co—amorphous alloy”, são boas opções para equipar o núcleo
do transformador de alta frequência. No entanto o melhor candidato entre as opções listadas na
8
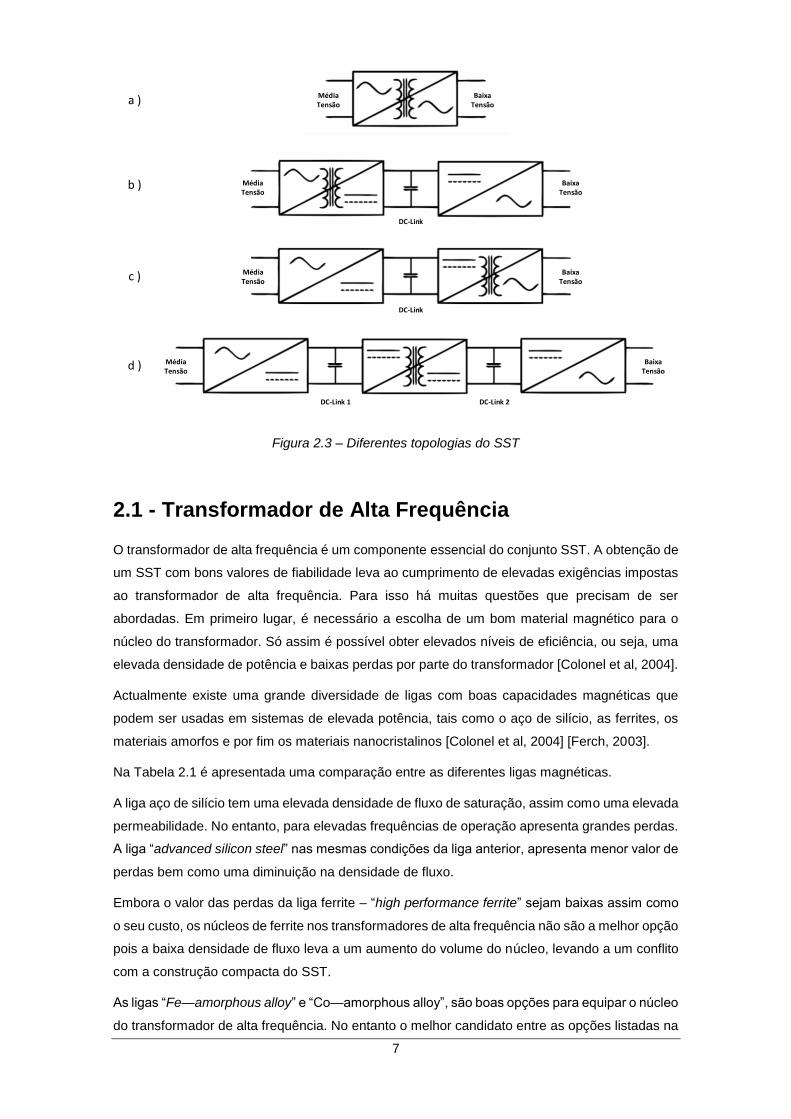
tabela, é a liga nanocristalina que garante uma elevada densidade de fluxo de saturação ou seja,
uma elevada densidade de potência, assim como um baixo valor de perdas promovendo assim
uma boa eficiência do transformador.
A liga nanocristalina é uma excelente opção, no entanto há que realçar o custo elevado da
mesma, elevando assim o custo do transformador de alta frequência e consequentemente o
custo do SST [Ferch, 2003] [Shen, 2006].
Tabela 2.1 – Comparação das diferentes ligas [Ferch, 2003].
Material Alloy
Composition
Loss
(W/Kg)
Saturation
Bsat [mT]
Magnetos
triction
(10-6)
Permeability
(50 Hz)
µ4 - µmáx
Max.
Working
Temp.
[ºC]
Grain Oriented silicon
steel Fe97Si3 <1000 2000 9 2K – 35K 120
Advanced silicon steel Fe93.5Si6.5 40 1300 0.1 16K 130
High performance ferrite MnZn 17 500 21 1.5K – 15K 100/120
Fe-amorphous alloy Fe76(Si,B)24 18 1560 27 6.5K – 8K 150
Co-amorphous alloys a Co73(Si,B)27 5 550 <0.2 100K – 150K 90/120
Co-amorphous alloys b Co77(Si,B)23 5.5 820 <0.2 2K – 4.5K 120
Co-amorphous alloys c Co80(Si,B)20 6.5 1000 <0.2 1K – 2.5K 120
Nanocrystalline alloys I FeCuNbSiB 4.0 1230 0.1 20K – 200K 120/180
Nanocrystalline alloys II FeCuNbSiB 4.5 1350 2.3 20K – 200K 120/180
Nanocrystalline alloys III FeCuNbSiB 8.0 1450 5.5 100K 120/180
Os transformadores de alta frequência que equipam o SST são muito compactos. Por esse
motivo, é necessário considerar dois aspectos importantes para o seu bom desempenho: uma
boa capacidade térmica e um bom isolamento. Sistemas refrigerados por convecção são sempre
uma boa solução quando possível [Du et al, 2010.
Para além do método já referido, os dissipadores de calor com sistema de ventilação forçado (air
cooling) ou os sistemas de refrigeração a água (water cooling), são os mais comuns em
aplicações de elevada potência [Du et al, 2010], [Ortiz et al, 2013].
9
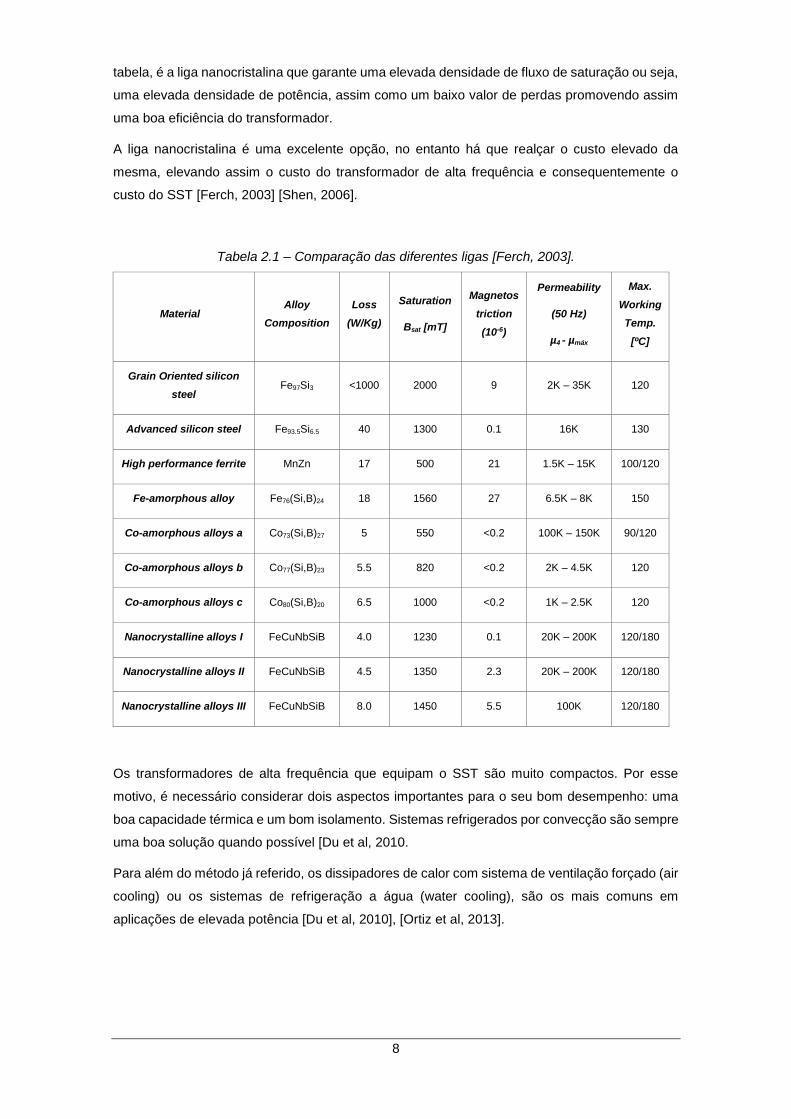
2.2 - Aplicações do SST
Nos últimos anos tem sido feito um grande esforço no sentido de projectar, implementar e
explorar todo o potencial dos SST nos sistemas de distribuição de energia, nomeadamente nas
redes de energia inteligentes “smart grids” [She, 2013]. A Figura 2.4 por um lado retracta o
sistema de energia tradicional, onde o transformador clássico é integrado nas mais diversas
aplicações do sistema de distribuição de energia. Por outro lado, apresenta uma visão de como
pode vir ser aplicado o SST no futuro.
Figura 2.4 - Possíveis aplicações do SST no sistema de distribuição de energia eléctrica [She,
2013].
O SST pode ser usado em qualquer sistema de energia, mas tendo em conta as suas
capacidades, faz sentido que seja aplicado em sistemas onde o transformador clássico não seja
tão eficaz [Kolar,2011a], [Kolar et al, 2011], [Kolar,2013b].
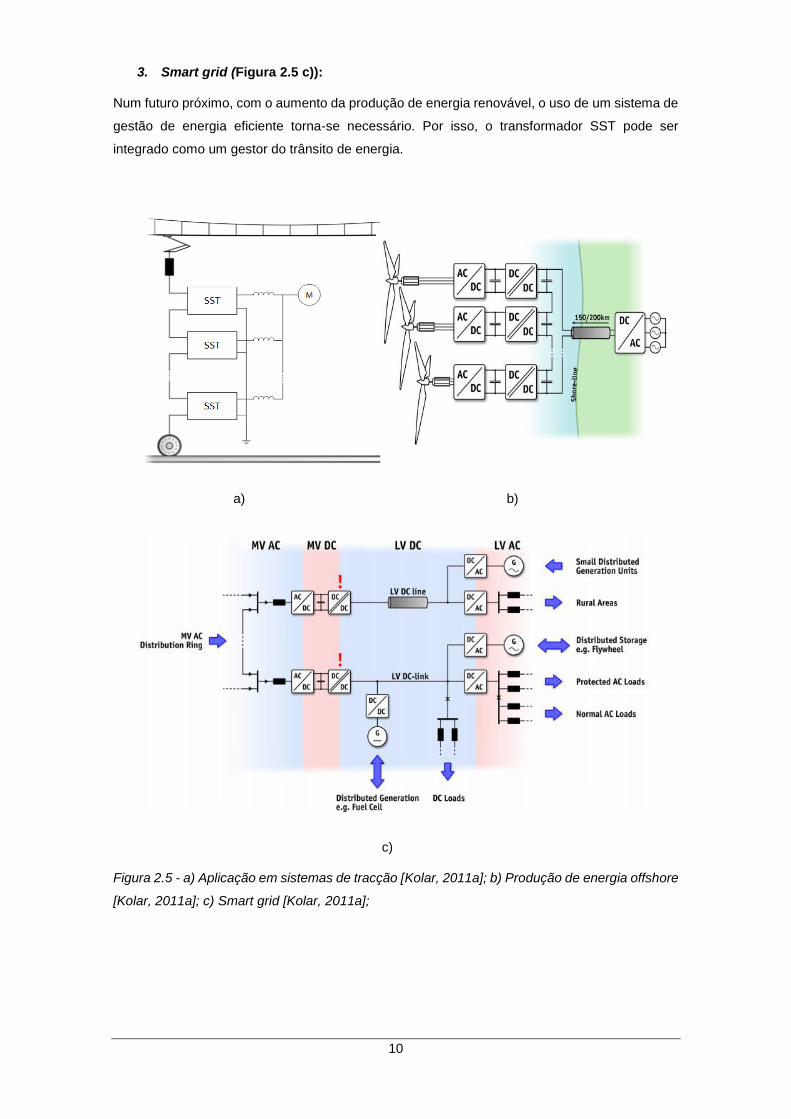
1. Sistemas de tracção (Figura 2.5 a)):
O transformador dos sistemas de tracção representa aproximadamente 15% do seu peso total.
Com a introdução do transformador SST neste tipo de sistemas, espera-se obter melhorias
significativas relativamente ao peso, e à sua eficiência.
2. Produção de energia offshore (Figura 2.5 b)):
A introdução do transformador SST nestes sistemas de energia resulta numa redução de peso e
tamanho. A grande vantagem é a criação de plataformas mais pequenas com um custo reduzido.
O ajuste do factor de potência para valor unitário, é uma mais valia deste transformador,
aumentando assim a eficiência de transmissão de energia.
10
3. Smart grid (Figura 2.5 c)):
Num futuro próximo, com o aumento da produção de energia renovável, o uso de um sistema de
gestão de energia eficiente torna-se necessário. Por isso, o transformador SST pode ser
integrado como um gestor do trânsito de energia.
a) b)
c)
Figura 2.5 - a) Aplicação em sistemas de tracção [Kolar, 2011a]; b) Produção de energia offshore
[Kolar, 2011a]; c) Smart grid [Kolar, 2011a];

11
O SST apresenta grande versatilidade. Deste modo iremos analisar algumas aplicações deste
transformador na rede de energia eléctrica [Wang, 2009]:
1- Aplicação entre a fonte e a carga ou rede de distribuição (Figura 2.6 A) B)).
O SST permite obter na saída, valor eficaz de tensão e frequência constante, quando na entrada
se tem tensão e/ou frequência variável. O ajuste do factor de potência para valor unitário permite
um aumento na eficiência da transmissão de energia, assim como um aumento do fluxo de
potência activa.
2- Ligação entre duas redes de distribuição (Figura 2.6 C)).
Uma das características que evidenciam o SST dos transformadores clássicos, é o facto de ele
não requerer que as duas redes tenham o mesmo nível de tensão e frequência. Pode ser também
ser usado como compensador de energia reactiva para ambas as redes.
3- Aplicação entre a rede de media tensão e a de baixa tensão ou carga (Figura 2.5 D)).
Neste contexto, o SST apresenta vantagem face ao transformador clássico, pois permite o
controlo do trânsito de activa entre o lado de media tensão para o de baixa tensão. Esta
característica é bastante útil caso no lado de baixa tensão exista geração de energia, tal como
acontece no caso dos painéis fotovoltaicos.
Como se pode verificar, existem muitas aplicações para o SST, de modo que para cada uma
delas existe diferentes necessidades. Este trabalho irá focar a aplicação do SST entre a rede de
média tensão e a de baixa tensão, tal como está representado na Figura 2.5 D).
SST Carga
SST
SST RedeRede
SSTRede de Média Tensão
Rede de Baixa
Tensão
Rede
Rede de Média Tensão
SST Carga
Caso de estudo
A )
B )
C )
D )
Figura 2.6 – Diferentes aplicações do SST
12
2.3 - SST versus Transformador Clássico
Os pontos menos favoráveis do SST face ao transformador clássico são [Merwe et al, 2009a]:
1- O baixo custo do transformador clássico.
Os SST´s de primeira geração foram os que mais sofreram, pois a desigualdade de
preços era evidente. No entanto o grande avanço tecnológico que se tem verificado na
área de electrónica de potência trouxe uma nova esperança pois, torna-se possível
construir um SST com um custo reduzido. Por outro lado, o aumento de preço do cobre
e das ferrites vem contribuir positivamente para o avanço deste novo conceito.
2- A elevada complexidade do SST torna-o pouco fiável quando comparado com o
transformador clássico.
Tal como acontece com todos os sistemas recentes, a fiabilidade do SST deverá
aumentar com o avanço tecnológico.
3- Relativamente á eficiência, ainda não é claro qual a eficiência de um SST num estado
mais maduro, mas segundo a literatura, varia entre os 90% e 98.1%. A eficiência do
transformador clássico é claramente superior, no entanto, o SST apresenta
características bastante interessantes como redução harmónica ou o ajuste do factor de
potência.
Apesar destas características menos favoráveis, num futuro próximo o conceito do SST poderá
ser economicamente viável, pois contribui para uma melhor operação da rede de distribuição.
2.4 - Conversor Matricial
Dada a grande evolução tecnológica dos semicondutores de potência nas últimas décadas, os
conversores electrónicos de potência têm sofrido um enorme desenvolvimento, resultando em
equipamentos de grande fiabilidade e robustez. Este facto deve-se à influência destes
conversores no desenvolvimento de aplicações industriais de custo reduzido, com elevada
densidade de potência e com elevado rendimento.
O conversor matricial é um conversor electrónico de potência, comandado a alta frequência, e
que permite a conversão de AC para AC, garantindo tensões de saída de frequência e amplitude
variável, com a possibilidade de regulação do factor de potência de entrada. O conversor é
constituído por interruptores bidireccionais controlados, que para além de permitirem a ligação
de qualquer uma das fases de saída a uma das fases de entrada, permitem de igual forma o
controlo bidireccional do trânsito de energia, ou seja a corrente tanto pode fluir no sentido fonte-
carga como carga-fonte.
O conversor matricial começou a ser investigado em 1976 por Lazlo Gyugyi e Brian Pelly
[Casadei et al, 2012]. Por se tratar de um conversor AC-AC apresentava a vantagem de não
serem necessários componentes de armazenamento de energia. Por outro lado, tinha como
desvantagem o fraco desempenho dos semicondutores utilizados [Holmes et al, 1992].

13
Venturini e Alesina introduziram a teoria da modulação por largura de impulso (Pulse With
Modulation - PWM) [Alesina et al, 1989], onde a comutação a alta frequência reduzia o conteúdo
harmónico das variáveis de entrada e saída. Inicialmente o conversor apresentava uma limitação
na tensão de saída de 50% face á tensão de entrada mas os mesmos autores em 1989 [Alesina
et al, 1989], com a adição de componentes de 3ª harmónica na entrada e na saída do conversor,
conseguiram maximizar a relação de transferência entrada/saída para 87%, continuando a
garantir tensões de saída e correntes de entrada sinusoidais.
Em 1992, surgiu uma nova metodologia para o processo de modulação do conversor matricial
(Conversor indirecto), [Neft et al 1992], representado como uma associação rectificador/inversor,
ligados por um elemento de armazenamento de energia (DC-link). Aliado a esta nova
metodologia, surgiu uma nova estratégia de modulação, designada modulação com vectores
espaciais (SVM – Space Vector Modulation) [Huber et al, 1989] [Huber et al, 1992] [Huber et al,
1995]. Em 1993, [Pinto et al, 2007], foi implementada a modulação SVM para os conversores
matriciais directos (sem andar intermédio).
Desde então, vários investigadores se têm dedicado ao aperfeiçoamento da modulação vectorial
do conversor matricial, nomeadamente na definição de novas estratégias de modulação que
contemplem a definição sistemática dos vectores a utilizar no processo de modulação e a ordem
segundo o qual devem ser aplicados na determinação do conteúdo harmónico das correntes de
entrada, assim como o efeito da existência de desequilíbrios nas variáveis de entrada/saída do
conversor [Pinto, 2003].
Segundo Zhang, à semelhança do método proposto por Venturini, a modulação SVM também
considera condições ideais na entrada e saída do conversor, o que pode dar origem a pequenos
erros na fase das correntes de entrada. Esse erro resulta da utilização de um filtro, que não é
contabilizado no processo de modulação do conversor, mas que é necessário para minimizar as
componentes de alta frequência das correntes injectadas na rede [Pinto, 2003].
Até aos dias de hoje foram projectados mais conversores permitindo assim defini-lo como um
conversor universal de frequência e tensão:
- AC para AC polifásico [Huber et al, 1992];
- Trifásico – monofásico [Mazet et al, 1998];
- Monofásico – trifásico [Dobrucky et al, 1998];
- Monofásico – monofásico [Zuckerberger et al, 1997];
- AC – DC [Holmes et al, 1992];
- DC – AC [Holmes et al, 1992];
A popularidade dos conversores matriciais face à convencional associação rectificador/inversor
interligados por um barramento DC tem aumentado substancialmente nos últimos anos. Os
conversores matriciais, para além de serem mais versáteis, não apresentam o armazenamento
intermédio de energia, permitindo assim tamanhos mais reduzidos. Por outro lado, a ausência
do armazenamento de energia, traduz-se num aumento de rendimento, uma vez que não se
14
verificam perdas nos componentes de armazenamento.
Tabela 2.2 – Vantagens e desvantagens do conversor matricial
Vantagens Desvantagens
- Não apresenta armazenamento intermédio
de energia
- Falta de elementos reactivos, resultando
numa diminuição do tempo de vida dos
semicondutores
- Permite o fluxo bidireccional de energia - Controlo muito complexo
- Garante tensões de saída e correntes de
entrada sinusoidais - Limitação da tensão de saída
- Elevado rendimento
- Grande versatilidade (AC-AC, AC-DC, DC-
AC, DC-DC)
- Dimensões reduzidas
No geral, as vantagens dos conversores matriciais superam as desvantagens, existindo boas
perspectivas de se tornarem numa opção cada vez mais interessante, assim como virem a
ocupar um lugar importante no mercado dos conversores de potência.
Actualmente o potencial de aplicação dos conversores matriciais é muito elevado, desde
accionamentos electromecânicos para controlo de velocidade em processos fabris [Gamboa,
2007], restauradores dinâmicos de tensão associados a volantes de inércia [Gamboa, 2009],
controladores unificados do trânsito de energia (UPFC – Unified Power Flow Controller)
[Monteiro, 2014], transporte de energia a alta tensão (HVDC) [Pires, 2014], reguladores de
tensão em postos de transformação [Alcaria, 2013], sistemas de energia renovável [Afonso,
2013], [Fernandes, 2015], ou sistemas de tracção eléctrica, [Mendes, 2013]. Aliados à baixa
distorção harmónica nas tensões de entrada e saída, o menor peso e dimensão, e o elevado
rendimento são uma grande vantagem destes conversores.
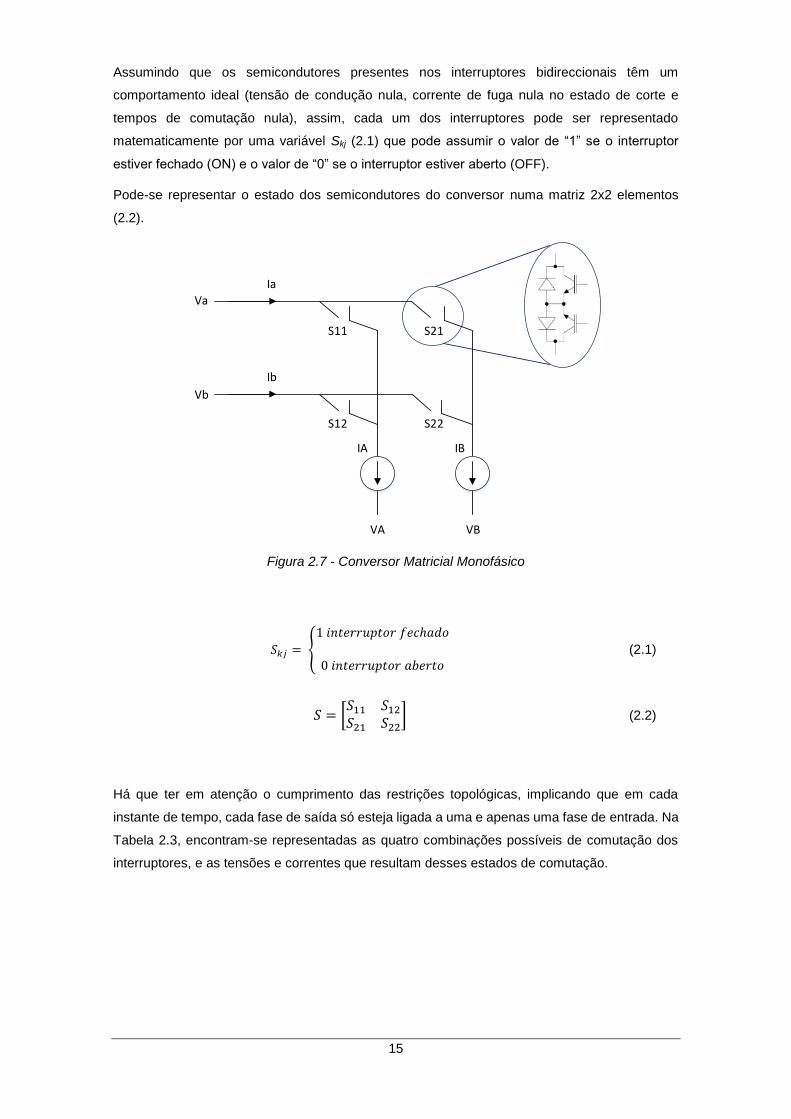
2.4.1 - Conversor Matricial Monofásico
O conversor matricial monofásico é composto por 4 interruptores bidireccionais totalmente
controlados ao fecho e á abertura, que permitem a interligação de dois sistemas monofásicos,
um com características de fonte de tensão e outro com características de fonte de corrente
(Figura 2.7).
15
Assumindo que os semicondutores presentes nos interruptores bidireccionais têm um
comportamento ideal (tensão de condução nula, corrente de fuga nula no estado de corte e
tempos de comutação nula), assim, cada um dos interruptores pode ser representado
matematicamente por uma variável Skj (2.1) que pode assumir o valor de “1” se o interruptor
estiver fechado (ON) e o valor de “0” se o interruptor estiver aberto (OFF).
Pode-se representar o estado dos semicondutores do conversor numa matriz 2x2 elementos
(2.2).
S11
Va
Vb
Ia
Ib
S12
S21
S22
VA VB
IA IB
Figura 2.7 - Conversor Matricial Monofásico
𝑆𝑘𝑗 = {
1 𝑖𝑛𝑡𝑒𝑟𝑟𝑢𝑝𝑡𝑜𝑟 𝑓𝑒𝑐ℎ𝑎𝑑𝑜
0 𝑖𝑛𝑡𝑒𝑟𝑟𝑢𝑝𝑡𝑜𝑟 𝑎𝑏𝑒𝑟𝑡𝑜 (2.1)
𝑆 = [𝑆11 𝑆12𝑆21 𝑆22
] (2.2)
Há que ter em atenção o cumprimento das restrições topológicas, implicando que em cada
instante de tempo, cada fase de saída só esteja ligada a uma e apenas uma fase de entrada. Na
Tabela 2.3, encontram-se representadas as quatro combinações possíveis de comutação dos
interruptores, e as tensões e correntes que resultam desses estados de comutação.
16
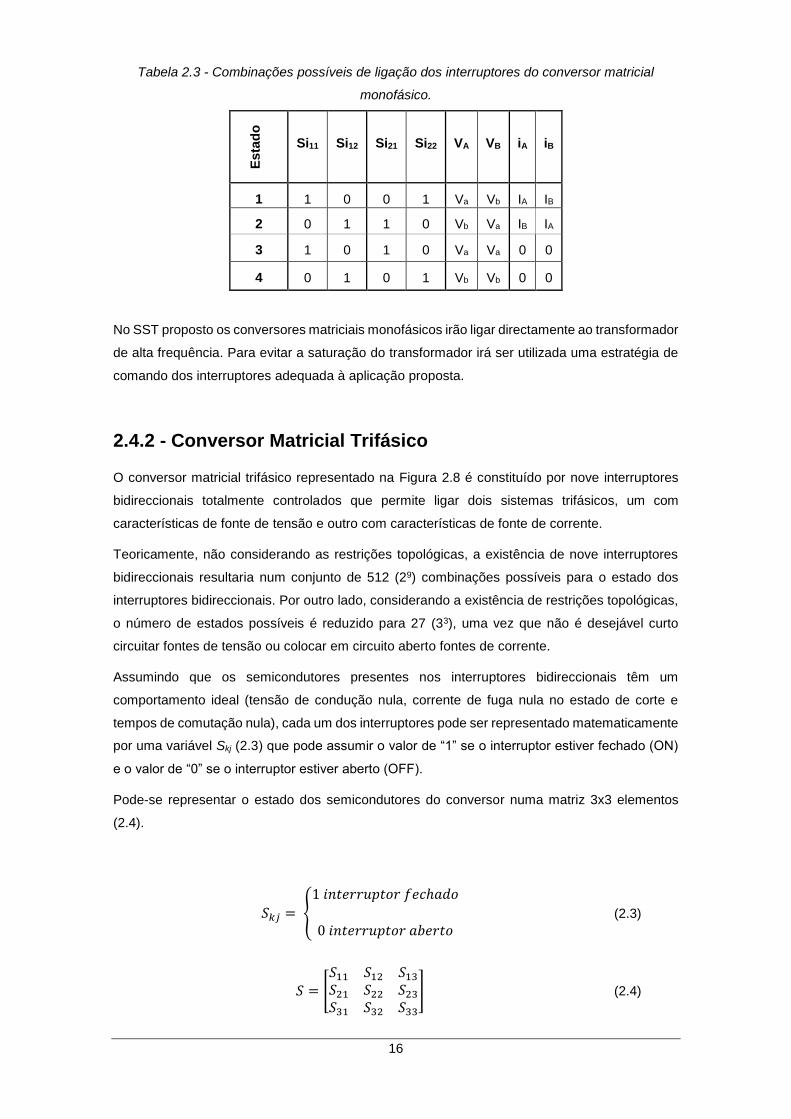
Tabela 2.3 - Combinações possíveis de ligação dos interruptores do conversor matricial
monofásico.
Esta
do
Si11 Si12 Si21 Si22 VA VB iA iB
1 1 0 0 1 Va Vb IA IB
2 0 1 1 0 Vb Va IB IA
3 1 0 1 0 Va Va 0 0
4 0 1 0 1 Vb Vb 0 0
No SST proposto os conversores matriciais monofásicos irão ligar directamente ao transformador
de alta frequência. Para evitar a saturação do transformador irá ser utilizada uma estratégia de
comando dos interruptores adequada à aplicação proposta.
2.4.2 - Conversor Matricial Trifásico
O conversor matricial trifásico representado na Figura 2.8 é constituído por nove interruptores
bidireccionais totalmente controlados que permite ligar dois sistemas trifásicos, um com
características de fonte de tensão e outro com características de fonte de corrente.
Teoricamente, não considerando as restrições topológicas, a existência de nove interruptores
bidireccionais resultaria num conjunto de 512 (29) combinações possíveis para o estado dos
interruptores bidireccionais. Por outro lado, considerando a existência de restrições topológicas,
o número de estados possíveis é reduzido para 27 (33), uma vez que não é desejável curto
circuitar fontes de tensão ou colocar em circuito aberto fontes de corrente.
Assumindo que os semicondutores presentes nos interruptores bidireccionais têm um
comportamento ideal (tensão de condução nula, corrente de fuga nula no estado de corte e
tempos de comutação nula), cada um dos interruptores pode ser representado matematicamente
por uma variável Skj (2.3) que pode assumir o valor de “1” se o interruptor estiver fechado (ON)
e o valor de “0” se o interruptor estiver aberto (OFF).
Pode-se representar o estado dos semicondutores do conversor numa matriz 3x3 elementos
(2.4).
𝑆𝑘𝑗 = {
1 𝑖𝑛𝑡𝑒𝑟𝑟𝑢𝑝𝑡𝑜𝑟 𝑓𝑒𝑐ℎ𝑎𝑑𝑜
0 𝑖𝑛𝑡𝑒𝑟𝑟𝑢𝑝𝑡𝑜𝑟 𝑎𝑏𝑒𝑟𝑡𝑜 (2.3)
𝑆 = [
𝑆11 𝑆12 𝑆13𝑆21 𝑆22 𝑆23𝑆31 𝑆32 𝑆33
] (2.4)

17
S11
Va
Vb
Vc
Ia
Ib
Ic
S12
S13
S21 S31
S22 S32
S13 S13
IA IB IC
VA VB VC
Figura 2.8 – Conversor Matricial Trifásico
Para que as restrições topológicas referidas sejam verificadas, é necessário garantir a
continuidade da corrente em cada fase de saída do conversor (carácter fonte de corrente),
implicando assim que em cada linha de S exista sempre um interruptor fechado. Por forma a
evitar o curto-circuito entre fases na entrada do conversor, em cada linha da matriz S não deverá
existir mais do que um interruptor com o estado logico “1”, ou seja, a soma instantânea de todos
os elementos de cada linha da matriz S (2.4) é sempre igual a “1” (2.5). As referidas restrições
implicam que, em cada instante de tempo, cada fase de saída só esteja ligada a uma e apenas
uma fase de entrada.
∑𝑆𝑘𝑗 = 1 𝑘 ∈ {1,2,3}
3
𝑗=1
(2.5)
A matriz S permite relacionar matematicamente as tensões simples VA, VB, VC de saída do
conversor com as tensões simples Va, Vb, Vc de entrada (2.6). Por outro lado, a transposta da
matriz S permite relacionar matematicamente as correntes de entrada Ia, Ib, Ic com as correntes
de saída do conversor IA, IB, IC (2.6). (Nota: a tensão e a corrente de entrada do conversor estão
representadas por letras minúsculas “a, b, c” e a tensão e corrente de saída do conversor estão
representadas por letras maiúsculas “A, B, C”.)
18
[
𝑉𝐴𝑉𝐵𝑉𝐶
] = 𝑆 [
𝑉𝑎𝑉𝑏𝑉𝐶
] [
𝐼𝑎𝐼𝑏𝐼𝑐
] = 𝑺𝑻 [
𝐼𝐴𝐼𝐵𝐼𝐶
] (2.6)
A matriz Sc (2.7) relaciona a tensão composta de saída do conversor com a tensão simples de
entrada. (Anexo A)
As matrizes S e Sc são importantes na definição das técnicas de comando do conversor matricial.
[
𝑉𝐴𝐵𝑉𝐵𝐶𝑉𝐶𝐴
] = 𝑺𝒄 [
𝑉𝑎𝑉𝑏𝑉𝑐
]
(2.7)
𝑺𝑐 = [
𝑆11 − 𝑆21 𝑆12 − 𝑆22 𝑆13 − 𝑆23𝑆21 − 𝑆31 𝑆22 − 𝑆32 𝑆23 − 𝑆33𝑆31 − 𝑆11 𝑆32 − 𝑆12 𝑆33 − 𝑆13
]
Torna-se possível representar na Tabela 2.4 as 27 combinações possíveis de comutação dos
interruptores, onde também se representam, para cada uma dessas combinações, os valores
instantâneos das tensões aplicadas aos terminais de saída do conversor matricial e das correntes
de entrada em cada uma das fases.

19
Tabela 2.4 - Combinações possíveis de ligação dos interruptores do conversor matricial
trifásico.
Gru
po
Es
tad
o
S11 S12 S13 S21 S22 S33 S31 S32 S33 VA VB VC VAB VBC VCA Ia Ib Ic
I
1 1 0 0 0 1 0 0 0 1 Va Vb Vc Vab Vbc Vca IA IB IC
2 1 0 0 0 0 1 0 1 0 Va Vc Vb -Vca -Vbc -Vab IA IC IB
3 0 1 0 1 0 0 0 0 1 Vb Va Vc -Vab -Vca -Vbc IB IA IC
4 0 1 0 0 0 1 1 0 0 Vb Vc Va Vbc Vca Vab IC IA IB
5 0 0 1 1 0 0 0 1 0 Vc Va Vb Vca Vab Vbc IB IC IA
6 0 0 1 0 1 0 1 0 0 Vc Vb Va -Vbc -Vab -Vca IC IB IA
II
7 1 0 0 0 1 0 0 1 0 Va Vb Vb Vab 0 -Vab IA -IA
IA
0
8 0 1 0 1 0 0 1 0 0 Vb Va Va -Vab 0 Vab -IA IA 0
9 0 1 0 0 0 1 0 0 1 Vb Vc Vc Vbc 0 -Vbc 0 IA -IA
10 0 0 1 0 1 0 0 1 0 Vc Vb Vb -Vbc 0 Vbc 0 -IA IA
11 0 0 1 1 0 0 1 0 0 Vc Va Va Vca 0 -Vca -IA 0 IA
12 1 0 0 0 0 1 0 0 1 Va Vc Vc -Vca 0 Vca IA 0 -IA
13 0 1 0 1 0 0 0 1 0 Vb Va Vb -Vab Vab 0 IB -IB 0
14 1 0 0 0 1 0 1 0 0 Va Vb Va Vab -Vab 0 -IB IB 0
15 0 0 1 0 1 0 0 0 1 Vc Vb Vc -Vbc Vbc 0 0 IB -IB
16 0 1 0 0 0 1 0 1 0 Vb Vc Vb Vbc -Vbc 0 0 -IB IB
17 1 0 0 0 0 1 1 0 0 Va Vc Va -Vca Vca 0 -IB 0 IB
18 0 0 1 1 0 0 0 0 1 Vc Va Vc Vca -Vca 0 IB 0 -IB
19 0 1 0 0 1 0 1 0 0 Vb Vb Va 0 -Vab Vab IC -IC 0
20 1 0 0 1 0 0 0 1 0 Va Va Vb 0 Vab -Vab -IC IC 0
21 0 0 1 0 0 1 0 1 0 Vc Vc Vb 0 -Vbc Vbc 0 IC -IC
22 0 1 0 0 1 0 0 0 1 Vb Vb Vc 0 Vbc -Vbc 0 -IC IC
23 1 0 0 1 0 0 0 0 1 Va Va Vc 0 -Vca Vca -IC 0 IC
24 0 0 1 0 0 1 1 0 0 Vc Vc Va 0 Vca -Vca IC 0 -IC
III
25 1 0 0 1 0 0 1 0 0 Va Va Va 0 0 0 0 0 0
26 0 1 0 0 1 0 0 1 0 Vb Vb Vb 0 0 0 0 0 0
27 0 0 1 0 0 1 0 0 1 Vc Vc Vc 0 0 0 0 0 0

20
Aplicando a transformação de Concordia/Clarke (2.8) para cada uma das 27 combinações
representadas na Tabela 2.4, é possível representar as tensões de saída e das correntes de
entrada em coordenadas αβ, descritas na Tabela 2.5.
𝑪 = √2
3
[ 1 0
1
√2
−1
2
√3
2
1
√2
−1
2−√3
2
1
√2]
[
𝑋𝐴𝑋𝐵𝑋𝐶
] = [𝑪] [
𝑋𝛼𝑋𝛽𝑋0
] (2.8)
A Tabela 2.5 encontra-se organizada em três grupos distintos:
− Grupo I é constituído por vectores girantes, uma vez que apresentam amplitude fixa e ângulo
variável.
− Grupo II é constituído por vectores de amplitude variável no tempo e argumento fixo. São
designados por vectores pulsantes.
− Grupo III é constituído por três vectores nulos, cada um deles depende única e exclusivamente
de uma fase de entrada.
Para o processo de modulação do conversor matricial vão ser usados apenas os vectores do
grupo 2, pois em cada instante é conhecida a sua orientação no plano αβ, simplificando o
processo de selecção dos vectores. Os vectores do grupo 2 são designados de vectores
pulsantes porque as suas amplitudes apresentam uma dependência dos valores instantâneos
das tensões e correntes que lhes dão origem. Neste caso, a amplitude e o sentido dos vectores
espaciais da tensão de saída depende do valor instantâneo das tensões de entrada. Por outro
lado, os vectores espaciais da corrente de entrada vão depender do valor instantâneo das
correntes de saída.
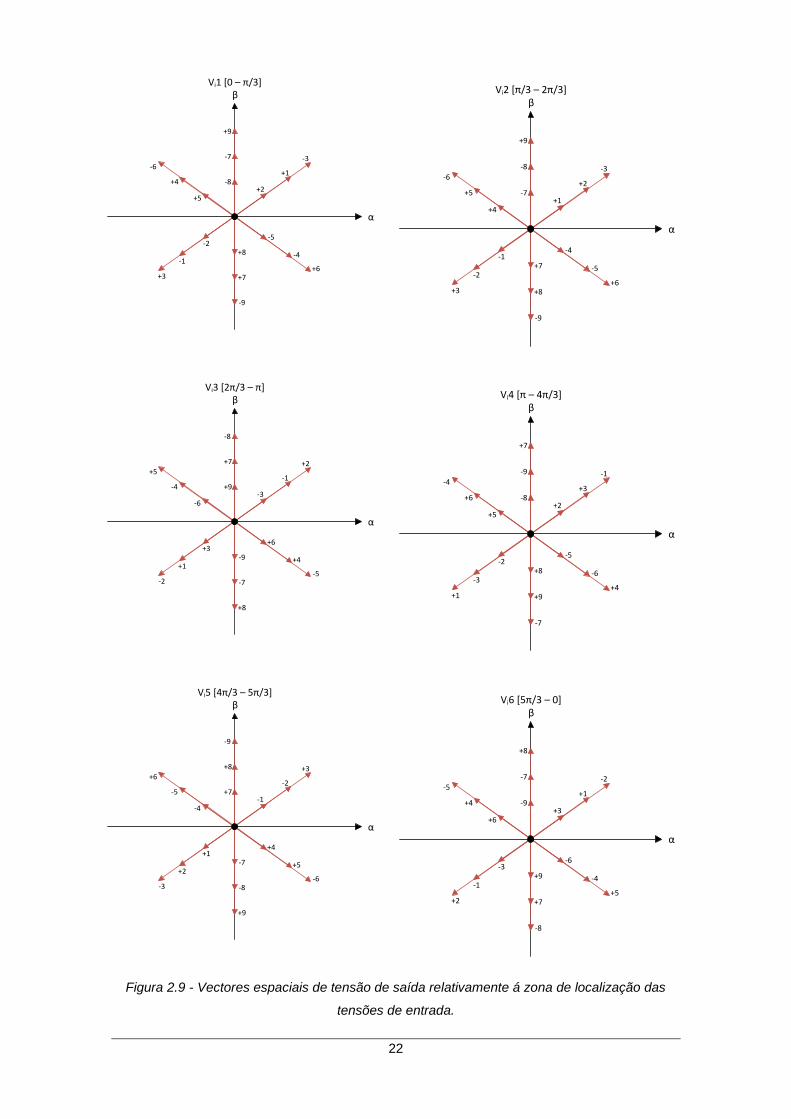
Considerando que as tensões de entrada são conhecidas, é necessário dividir o plano complexo
αβ em 6 zonas distintas, onde cada zona apresenta características especificas dos vectores
espaciais utilizados no controlo das tensões de saída.
Para cada uma dessas zonas, é possível determinar a localização espacial dos vectores
utilizados no controlo das tensões de saída (Figura 2.9).
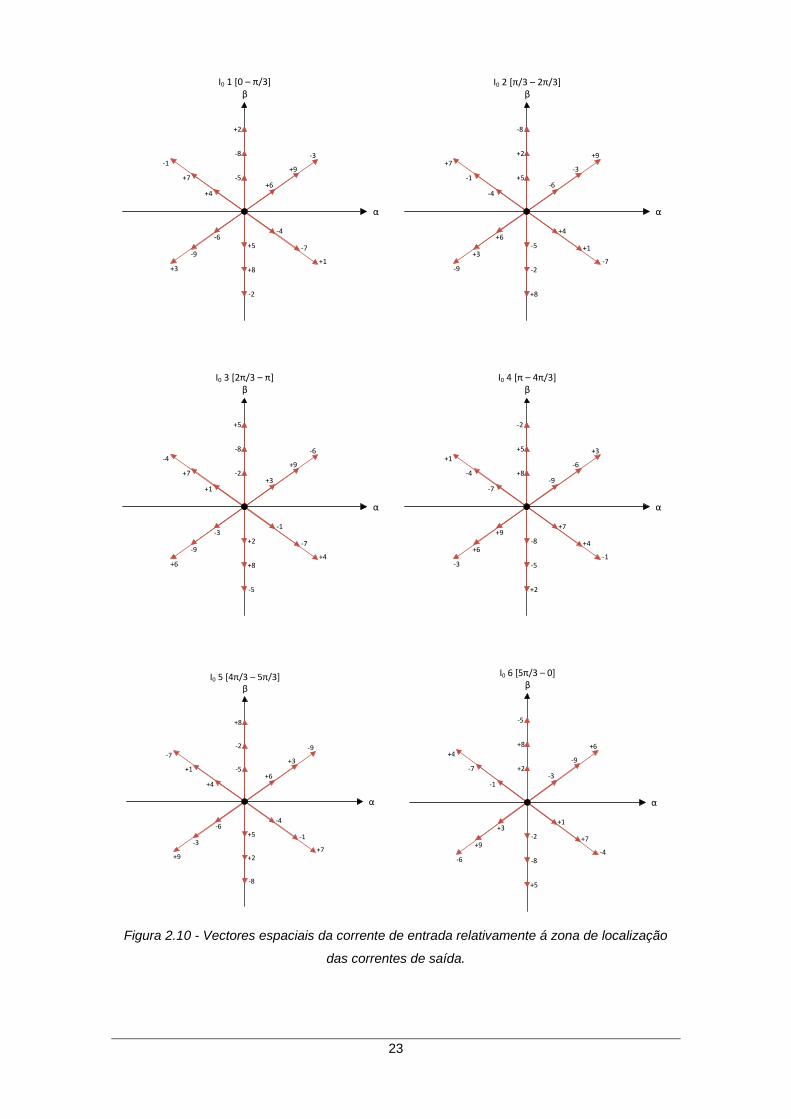
Seguindo o mesmo raciocínio, conhecendo as correntes de saída e dividindo o plano complexo
αβ em 6 zonas distintas, é possível determinar, para cada uma dessas zonas, a localização
espacial dos vectores utilizados para o controlo das correntes de entrada (Figura 2.10).
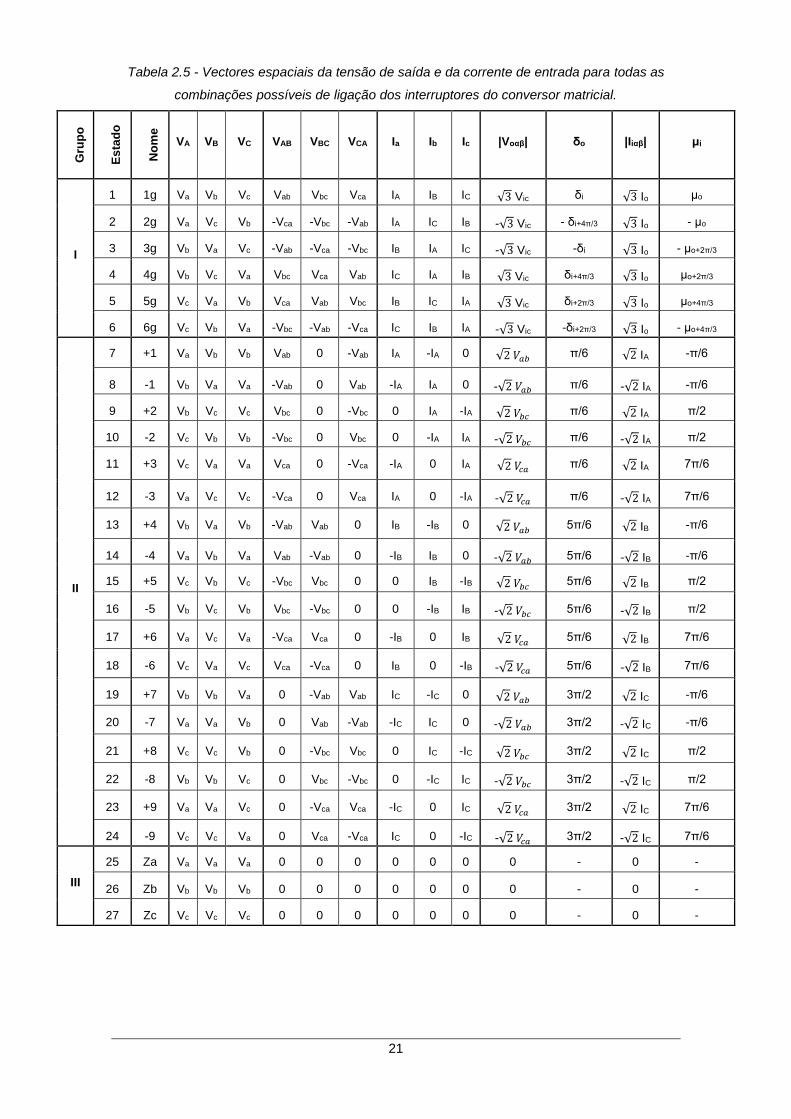
21
Tabela 2.5 - Vectores espaciais da tensão de saída e da corrente de entrada para todas as
combinações possíveis de ligação dos interruptores do conversor matricial.
Gru
po
Es
tad
o
No
me
VA VB VC VAB VBC VCA Ia Ib Ic |Voαβ| δo |Iiαβ| μi
I
1 1g Va Vb Vc Vab Vbc Vca IA IB IC √3 Vic δi √3 Io μo
2 2g Va Vc Vb -Vca -Vbc -Vab IA IC IB -√3 Vic - δi+4π/3 √3 Io - μo
3 3g Vb Va Vc -Vab -Vca -Vbc IB IA IC -√3 Vic -δi √3 Io - μo+2π/3
4 4g Vb Vc Va Vbc Vca Vab IC IA IB √3 Vic δi+4π/3 √3 Io μo+2π/3
5 5g Vc Va Vb Vca Vab Vbc IB IC IA √3 Vic δi+2π/3 √3 Io μo+4π/3
6 6g Vc Vb Va -Vbc -Vab -Vca IC IB IA -√3 Vic -δi+2π/3 √3 Io - μo+4π/3
II
7 +1 Va Vb Vb Vab 0 -Vab IA -IA 0 √2 𝑉𝑎𝑏 π/6 √2 IA -π/6
8 -1 Vb Va Va -Vab 0 Vab -IA IA 0 -√2 𝑉𝑎𝑏 π/6 -√2 IA -π/6
9 +2 Vb Vc Vc Vbc 0 -Vbc 0 IA -IA √2 𝑉𝑏𝑐 π/6 √2 IA π/2
10 -2 Vc Vb Vb -Vbc 0 Vbc 0 -IA IA -√2 𝑉𝑏𝑐 π/6 -√2 IA π/2
11 +3 Vc Va Va Vca 0 -Vca -IA 0 IA √2 𝑉𝑐𝑎 π/6 √2 IA 7π/6
12 -3 Va Vc Vc -Vca 0 Vca IA 0 -IA -√2 𝑉𝑐𝑎 π/6 -√2 IA 7π/6
13 +4 Vb Va Vb -Vab Vab 0 IB -IB 0 √2 𝑉𝑎𝑏 5π/6 √2 IB -π/6
14 -4 Va Vb Va Vab -Vab 0 -IB IB 0 -√2 𝑉𝑎𝑏 5π/6 -√2 IB -π/6
15 +5 Vc Vb Vc -Vbc Vbc 0 0 IB -IB √2 𝑉𝑏𝑐 5π/6 √2 IB π/2
16 -5 Vb Vc Vb Vbc -Vbc 0 0 -IB IB -√2 𝑉𝑏𝑐 5π/6 -√2 IB π/2
17 +6 Va Vc Va -Vca Vca 0 -IB 0 IB √2 𝑉𝑐𝑎 5π/6 √2 IB 7π/6
18 -6 Vc Va Vc Vca -Vca 0 IB 0 -IB -√2 𝑉𝑐𝑎 5π/6 -√2 IB 7π/6
19 +7 Vb Vb Va 0 -Vab Vab IC -IC 0 √2 𝑉𝑎𝑏 3π/2 √2 IC -π/6
20 -7 Va Va Vb 0 Vab -Vab -IC IC 0 -√2 𝑉𝑎𝑏 3π/2 -√2 IC -π/6
21 +8 Vc Vc Vb 0 -Vbc Vbc 0 IC -IC √2 𝑉𝑏𝑐 3π/2 √2 IC π/2
22 -8 Vb Vb Vc 0 Vbc -Vbc 0 -IC IC -√2 𝑉𝑏𝑐 3π/2 -√2 IC π/2
23 +9 Va Va Vc 0 -Vca Vca -IC 0 IC √2 𝑉𝑐𝑎 3π/2 √2 IC 7π/6
24 -9 Vc Vc Va 0 Vca -Vca IC 0 -IC -√2 𝑉𝑐𝑎 3π/2 -√2 IC 7π/6
III
25 Za Va Va Va 0 0 0 0 0 0 0 - 0 -
26 Zb Vb Vb Vb 0 0 0 0 0 0 0 - 0 -
27 Zc Vc Vc Vc 0 0 0 0 0 0 0 - 0 -
22
β
α
+2
+1
-3
-8
-7
+9
+5
+4
-6
-9
+7
+8
+3
-1
-2
+6
-4
-5
Vi1 [0 – π/3]
β
α
+1
+2
-3
-7
-8
+9
+4
+5
-6
-9
+8
+7
+3
-2
-1
+6
-5
-4
Vi2 [π/3 – 2π/3]
β
α
-3
-1
+2
+9
+7
-8
-6
-4
+5
+8
-7
-9
-2
+1
+3
-5
+4
+6
Vi3 [2π/3 – π]
β
α
+2
+3
-1
-8
-9
+7
+5
+6
-4
-7
+9
+8
+1
-3
-2
+4
-6
-5
Vi4 [π – 4π/3]
β
-1
-2
+3
+7
+8
-9
-4
-5
+6
+9
-8
-7
-3
+2
+1
-6
+5
+4
Vi5 [4π/3 – 5π/3]
α
β
+3
+1
-2
-9
-7
+8
+6
+4
-5
-8
+7
+9
+2
-1
-3
+5
-4
-6
Vi6 [5π/3 – 0]
α
Figura 2.9 - Vectores espaciais de tensão de saída relativamente á zona de localização das
tensões de entrada.
23
β
α
+6
+9
-3
-5
-8
+2
+4
+7
-1
-2
+8
+5
+3
-9
-6
+1
-7
-4
I0 1 [0 – π/3]
β
α
-6
-3
+9
+5
+2
-8
-4
-1
+7
+8
-2
-5
-9
+3
+6
-7
+1
+4
I0 2 [π/3 – 2π/3]
β
α
+3
+9
-6
-2
-8
+5
+1
+7
-4
-5
+8
+2
+6
-9
-3
+4
-7
-1
I0 3 [2π/3 – π]
β
α
-9
-6
+3
+8
+5
-2
-7
-4
+1
+2
-5
-8
-3
+6
+9
-1
+4
+7
I0 4 [π – 4π/3]
β
+6
+3
-9
-5
-2
+8
+4
+1
-7
-8
+2
+5
+9
-3
-6
+7
-1
-4
I0 5 [4π/3 – 5π/3]
α
β
-3
-9
+6
+2
+8
-5
-1
-7
+4
+5
-8
-2
-6
+9
+3
-4
+7
+1
I0 6 [5π/3 – 0]
α
Figura 2.10 - Vectores espaciais da corrente de entrada relativamente á zona de localização
das correntes de saída.
24
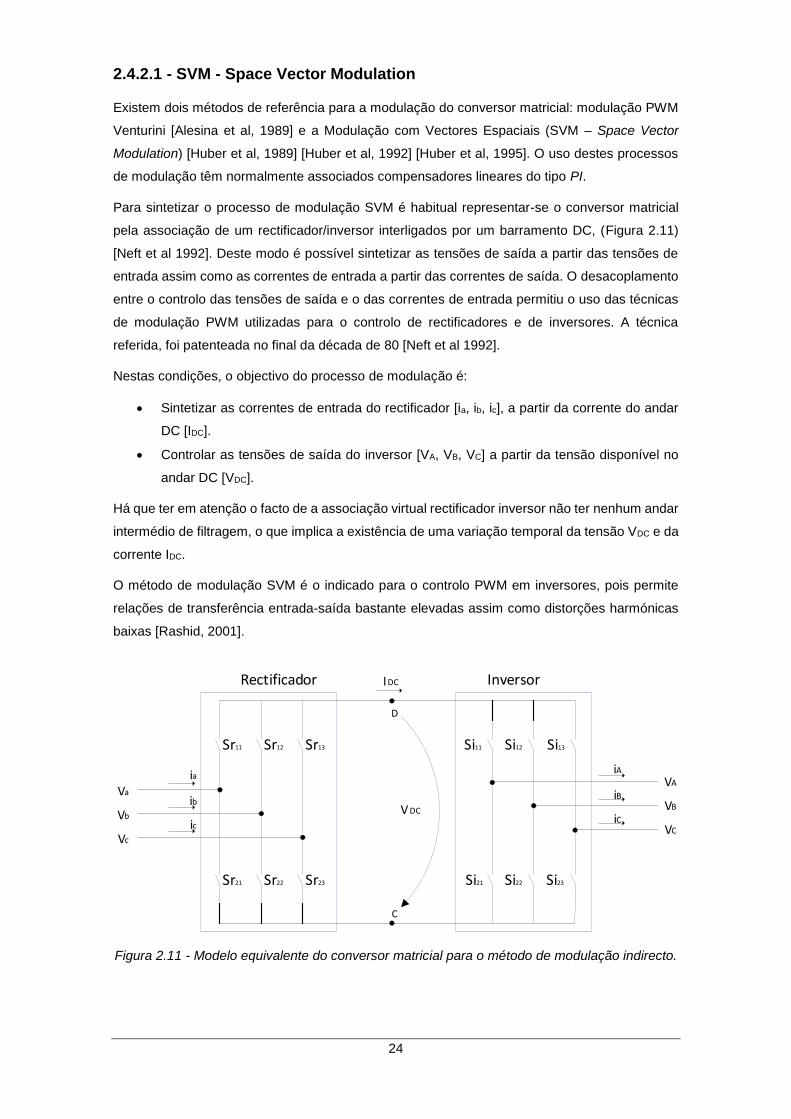
2.4.2.1 - SVM - Space Vector Modulation
Existem dois métodos de referência para a modulação do conversor matricial: modulação PWM
Venturini [Alesina et al, 1989] e a Modulação com Vectores Espaciais (SVM – Space Vector
Modulation) [Huber et al, 1989] [Huber et al, 1992] [Huber et al, 1995]. O uso destes processos
de modulação têm normalmente associados compensadores lineares do tipo PI.
Para sintetizar o processo de modulação SVM é habitual representar-se o conversor matricial
pela associação de um rectificador/inversor interligados por um barramento DC, (Figura 2.11)
[Neft et al 1992]. Deste modo é possível sintetizar as tensões de saída a partir das tensões de
entrada assim como as correntes de entrada a partir das correntes de saída. O desacoplamento
entre o controlo das tensões de saída e o das correntes de entrada permitiu o uso das técnicas
de modulação PWM utilizadas para o controlo de rectificadores e de inversores. A técnica
referida, foi patenteada no final da década de 80 [Neft et al 1992].
Nestas condições, o objectivo do processo de modulação é:
Sintetizar as correntes de entrada do rectificador [ia, ib, ic], a partir da corrente do andar
DC [IDC].
Controlar as tensões de saída do inversor [VA, VB, VC] a partir da tensão disponível no
andar DC [VDC].
Há que ter em atenção o facto de a associação virtual rectificador inversor não ter nenhum andar
intermédio de filtragem, o que implica a existência de uma variação temporal da tensão VDC e da
corrente IDC.
O método de modulação SVM é o indicado para o controlo PWM em inversores, pois permite
relações de transferência entrada-saída bastante elevadas assim como distorções harmónicas
baixas [Rashid, 2001].
Sr11
ia
ib
ic
iA
iB
iC
D
V DC
C
Va
Vb
Vc
VA
VB
VC
Rectificador InversorIDC
Sr12 Sr13
Sr21 Sr22 Sr23
Si11 Si12 Si13
Si21 Si22 Si23
Figura 2.11 - Modelo equivalente do conversor matricial para o método de modulação indirecto.

25
O método de modulação parte do pressuposto que o conversor matricial é alimentado por um
sistema trifásico simétrico e equilibrado, cujas tensões compostas, de valor eficaz Vi e frequência
ωi estão definidas em (2.9).
[
𝑉𝑖 𝐴𝐵(𝑡)𝑉𝑖 𝐵𝐶(𝑡)
𝑉𝑖 𝐶𝐴(𝑡)] = √2 √3 𝑉𝑖
[ cos(𝜔𝑖𝑡 +
𝜋
6)
cos(𝜔𝑖𝑡 + 𝜋
6 −
2𝜋
3)
cos(𝜔𝑖𝑡 + 𝜋
6 −
4𝜋
3)]
= √2 𝑉𝑖𝐶
[ cos(𝜔𝑖𝑡 +
𝜋
6)
cos(𝜔𝑖𝑡 + 𝜋
6 −
2𝜋
3)
cos(𝜔𝑖𝑡 + 𝜋
6 −
4𝜋
3)]
(2.9)
Pretende-se garantir que as tensões compostas de saída do conversor seguem as tensões
compostas de referência (2.10), de valor eficaz V0C e de frequência ωo.
[
𝑉𝐴𝐵𝑟𝑒𝑓(𝑡)
𝑉𝐵𝐶𝑟𝑒𝑓(𝑡)
𝑉𝐶𝐴𝑟𝑒𝑓(𝑡)
] = √2 √3 𝑉0
[ cos(𝜔𝑜𝑡 +
𝜋
6)
cos(𝜔𝑜𝑡 + 𝜋
6 −
2𝜋
3)
cos(𝜔𝑜𝑡 + 𝜋
6 −
4𝜋
3)]
= √2 𝑉0𝐶
[ cos(𝜔𝑜𝑡 +
𝜋
6)
cos(𝜔𝑜𝑡 + 𝜋
6 −
2𝜋
3)
cos(𝜔𝑜𝑡 + 𝜋
6 −
4𝜋
3)]
(2.10)
Partindo do pressuposto que existem filtros ideais na entrada e saída do conversor matricial,
então as correntes de entrada e saída são aproximadamente idênticas às suas primeiras
harmónicas. Deste modo, é possível garantir correntes de saída sinusoidais, de valor eficaz I0 e
amplitude 𝐼0𝑚𝑎𝑥(2.11), em que para uma dada frequência de referência de saída 𝜔𝑜, a carga é
caracterizada por um valor de impedância 𝑍0 e desfasagem ϕ𝑜.
[
𝐼𝐴(𝑡)𝐼𝐵(𝑡)
𝐼𝐶(𝑡)] ≈ √2 𝐼𝑜
[
cos(𝜔𝑜𝑡 + ϕ𝑜)
cos (𝜔𝑜𝑡 + ϕ𝑜 − 2𝜋
3)
cos (𝜔𝑜𝑡 + ϕ𝑜 − 4𝜋
3)]
= 𝐼0𝑚𝑎𝑥
[
cos(𝜔𝑜𝑡 + ϕ𝑜)
cos (𝜔𝑜𝑡 + ϕ𝑜 − 2𝜋
3)
cos (𝜔𝑜𝑡 + ϕ𝑜 − 4𝜋
3)]
(2.11)
De forma análoga, pretende-se que as correntes de entrada do conversor matricial sigam as
correntes de referência (2.12), de valor eficaz 𝐼𝑖 e valor de pico 𝐼𝑖𝑚𝑎𝑥, de frequência 𝜔𝑖 e que
apresentem um ângulo de desfasamento ϕ𝑖 relativamente ás tensões de entrada.

26
[
𝑖𝑎𝑟𝑒𝑓(𝑡)
𝑖𝑏𝑟𝑒𝑓(𝑡)
𝑖𝑐𝑟𝑒𝑓(𝑡)
] = √2 𝐼𝑖
[
cos(𝜔𝑖𝑡 + ϕ𝑖)
cos(𝜔𝑖𝑡 + ϕ𝑖 − 2𝜋
3)
cos(𝜔𝑖𝑡 + ϕ𝑖 − 4𝜋
3)]
= 𝐼𝑖𝑚𝑎𝑥
[
cos(𝜔𝑖𝑡 + ϕ𝑖)
cos(𝜔𝑖𝑡 + ϕ𝑖 − 2𝜋
3)
cos(𝜔𝑖𝑡 + ϕ𝑖 − 4𝜋
3)]
(2.12)
Com recurso á transformada de Concordia/Clarke (2.13), é possível simplificar a análise de um
sistema trifásico (2.10), (2.12) num sistema de dois eixos (bifásico) (2.14) (2.15).
[𝑋𝛼 𝑋𝛽] = [𝐶𝑇] [𝑋𝑎𝑏𝑐] (2.13)
[𝑉𝑜𝛼𝑟𝑒𝑓(𝑡)
𝑉𝑜𝛽𝑟𝑒𝑓(𝑡)] = 3 𝑉𝑜 [
cos(𝜔𝑜𝑡 + 𝜋
6)
sin(𝜔𝑜𝑡 + 𝜋
6)] (2.14)
[𝑖∝𝑟𝑒𝑓(𝑡)
𝑖𝛽𝑟𝑒𝑓(𝑡)] = √3 𝐼𝑖 [
cos(𝜔𝑖𝑡 + ϕ𝑖)sin(𝜔𝑖𝑡 + ϕ𝑖)
] (2.15)
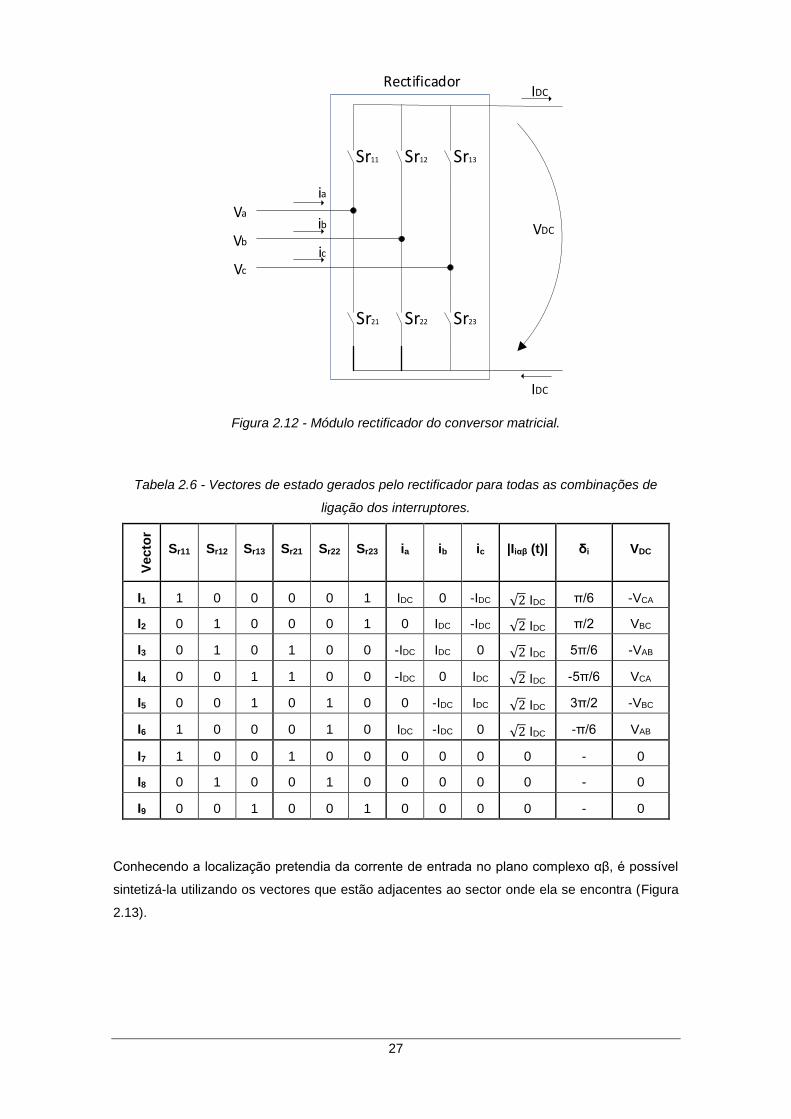
2.4.2.2 - Modulação Vectorial no Rectificador
No rectificador há 9 combinações possíveis de comutação, capazes de gerar uma tensão VDC de
valor médio constante, e ao mesmo tempo, garantir continuidade da corrente.
Com recurso à transformação de Concordia, aplicada em todas as combinações possíveis de
ligação dos interruptores, obtém-se os nove vectores espaciais, dos quais três deles são nulos
(Figura 2.12) (Tabela 2.6).
27
ia
ib
ic
VDC
Va
Vb
Vc
Rectificador
IDC
IDC
Sr11
Sr12 Sr13
Sr21 Sr22 Sr23
Figura 2.12 - Módulo rectificador do conversor matricial.
Tabela 2.6 - Vectores de estado gerados pelo rectificador para todas as combinações de
ligação dos interruptores.
Vecto
r
Sr11 Sr12 Sr13 Sr21 Sr22 Sr23 ia ib ic |Iiαβ (t)| δi VDC
I1 1 0 0 0 0 1 IDC 0 -IDC √2 IDC π/6 -VCA
I2 0 1 0 0 0 1 0 IDC -IDC √2 IDC π/2 VBC
I3 0 1 0 1 0 0 -IDC IDC 0 √2 IDC 5π/6 -VAB
I4 0 0 1 1 0 0 -IDC 0 IDC √2 IDC -5π/6 VCA
I5 0 0 1 0 1 0 0 -IDC IDC √2 IDC 3π/2 -VBC
I6 1 0 0 0 1 0 IDC -IDC 0 √2 IDC -π/6 VAB
I7 1 0 0 1 0 0 0 0 0 0 - 0
I8 0 1 0 0 1 0 0 0 0 0 - 0
I9 0 0 1 0 0 1 0 0 0 0 - 0
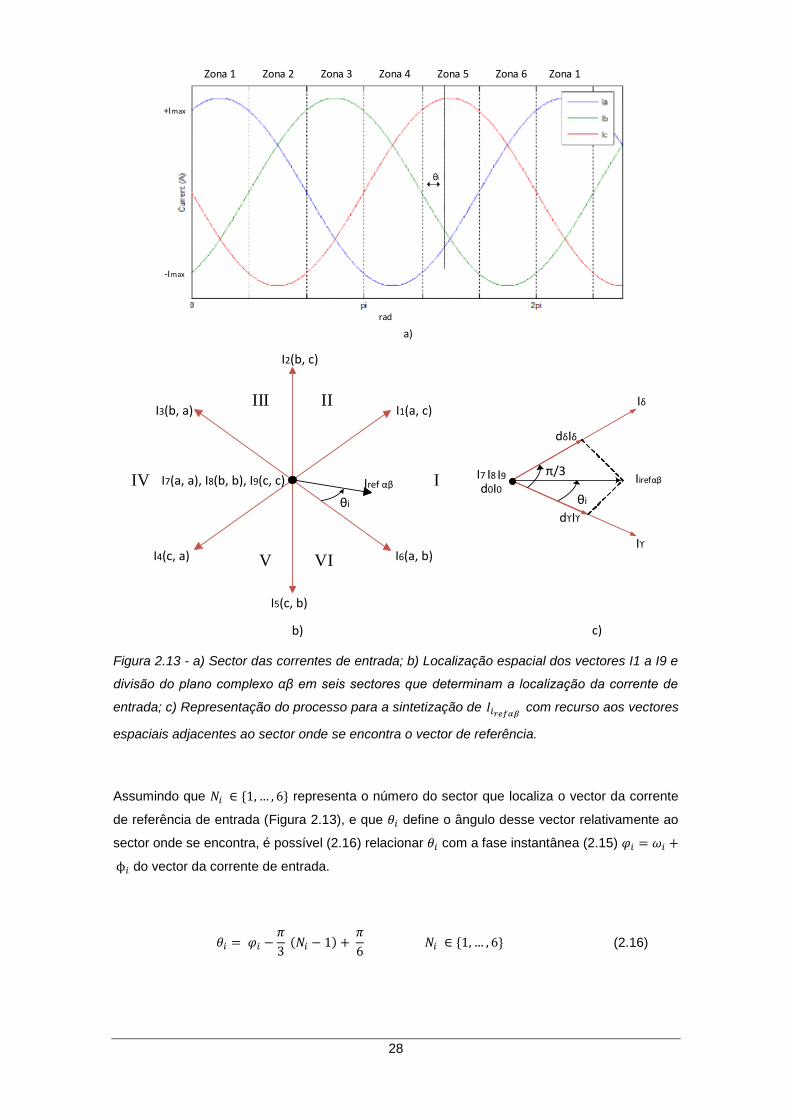
Conhecendo a localização pretendia da corrente de entrada no plano complexo αβ, é possível
sintetizá-la utilizando os vectores que estão adjacentes ao sector onde ela se encontra (Figura
2.13).
28
Zona 1
+Imax
-Imax
θi
rad
Zona 2 Zona 3 Zona 4 Zona 5 Zona 6 Zona 1
a)
I1(a, c)
I2(b, c)
I3(b, a)
I4(c, a)
I5(c, b)
I6(a, b)
I7(a, a), I8(b, b), I9(c, c)
III II
V VI
IV IIref αβ
θi
Iδ
Iϒ
Iirefαβ I7 I8 I9d0I0
θi
π/3
dϒIϒ
dδIδ
b) c)
Figura 2.13 - a) Sector das correntes de entrada; b) Localização espacial dos vectores I1 a I9 e
divisão do plano complexo αβ em seis sectores que determinam a localização da corrente de
entrada; c) Representação do processo para a sintetização de 𝐼𝑖𝑟𝑒𝑓𝛼𝛽 com recurso aos vectores
espaciais adjacentes ao sector onde se encontra o vector de referência.
Assumindo que 𝑁𝑖 ∈ {1, … , 6} representa o número do sector que localiza o vector da corrente
de referência de entrada (Figura 2.13), e que 𝜃𝑖 define o ângulo desse vector relativamente ao
sector onde se encontra, é possível (2.16) relacionar 𝜃𝑖 com a fase instantânea (2.15) 𝜑𝑖 = 𝜔𝑖 +
ϕ𝑖 do vector da corrente de entrada.
𝜃𝑖 = 𝜑𝑖 −𝜋
3 (𝑁𝑖 − 1) +
𝜋
6 𝑁𝑖 ∈ {1, … , 6} (2.16)

29
Com base na representação da Figura 2.13, e com recurso às relações trigonométricas é
possível sintetizar o vector da corrente de referência de entrada. Por outro lado, considera-se
que os vectores adjacentes são 𝐼𝛾, 𝐼𝛿 e os vectores zero são 𝐼7, 𝐼8 e 𝐼9, com factores de ciclo
𝑑𝛿(para 𝐼𝛿), 𝑑𝛾(para 𝐼𝛾) e 𝑑0(para um dos 3 vectores zero).
Considerando frequências de comutação muito superiores á frequência de entrada fs>>fi, é
possível garantir que o vector da corrente 𝐼𝑖𝑟𝑒𝑓𝛼𝛽 é dado por (2.17), para cada período de
comutação.
𝐼𝑖𝑟𝑒𝑓𝛼𝛽 ≈ 𝐼𝛾𝑑𝛾 + 𝐼𝛿𝑑𝛿 + 𝐼0𝑑0 (2.17)
Os factores de ciclo 𝑑𝛾, 𝑑𝛿 e 𝑑0 (2.18) podem ser determinados recorrendo a uma análise
trigonométrica aplicada aos vectores representados na Figura 2.13.c) [Huber et al, 1995].
{
𝑑𝛾 =
𝑇𝛾
𝑇𝑠= 𝑚𝑐 sin (
𝜋
3 − 𝜃𝑖)
𝑑𝛿 = 𝑇𝛿𝑇𝑠= 𝑚𝑐 sin (𝜃𝑖)
𝑑0 =𝑇0𝑇𝑠= 1 − 𝑑𝛾 − 𝑑𝛿
(2.18)
O índice de modulação da corrente relaciona a amplitude da corrente de entrada 𝐼𝑖𝑚𝑎𝑥 com a
corrente no andar intermédio 𝐼DC, e é caracterizado pela constante 𝑚c (2.19).
𝑚𝑐 = 𝐼𝑖𝑚𝑎𝑥𝐼𝐷𝐶
(2.19)
O valor médio da tensão á saída do rectificador VDC pode ser calculado partindo do princípio da
conservação de energia, ou seja, a potência instantânea de entrada 𝑃𝑖𝑛 tem que ser
necessariamente igual às potências instantâneas no andar intermédio 𝑃𝐷𝐶 e na saída 𝑃𝑜𝑢𝑡.
Teoricamente, considerando interruptores ideais e que todas as tensões e correntes são
aproximadamente iguais às suas harmónicas fundamentais, podemos considerar as igualdades
(2.20) válidas.
30
𝑃𝐷𝐶 = 𝑃𝑖𝑛 = 𝑃𝑜𝑢𝑡 (2.20)
É possível determinar o valor da potência no andar intermédio 𝑃𝐷𝐶 (2.20) com base na tensão
𝑉𝐷𝐶 e corrente 𝐼𝐷𝐶; a potência de entrada pode ser obtida tendo em consideração a tensão
simples 𝑉𝑖𝑚𝑎𝑥 e a corrente 𝐼𝑖𝑚𝑎𝑥 da entrada do rectificador (2.21).
𝑉𝐷𝐶𝐼𝐷𝐶 = 31
2𝑉𝑖𝑚𝑎𝑥𝐼𝑖𝑚𝑎𝑥cos (ϕ𝑖) (2.21)
A tensão no andar intermédio 𝑉𝐷𝐶 (2.22) que se calcula a partir de (2.21), depende de três
parâmetros: da amplitude da tensão simples 𝑉𝑖𝑚𝑎𝑥 ou da tensão composta 𝑉𝑖𝑐𝑚𝑎𝑥, do índice de
modulação da corrente 𝑚𝑐 e do angulo de fase ϕ𝑖.
𝑉𝐷𝐶 = 31
2𝑉𝑖𝑚𝑎𝑥
𝐼𝑖𝑚𝑎𝑥𝐼𝐷𝐶
cos(ϕ𝑖) = 31
2𝑉𝑖𝑚𝑎𝑥𝑚𝑐 cos(ϕ𝑖) =
√3
2𝑉𝑖𝑐𝑚𝑎𝑥𝑚𝑐 cos(ϕ𝑖) (2.22)
De notar, que a tensão 𝑉𝐷𝐶 é constante em regime estacionário, e que o seu valor máximo
equivale a √3
2 do pico da tensão composta de entrada, o qual é atingido quando a desfasagem
da corrente de entrada é nula. O aumento do desfasamento resulta numa diminuição do valor da
tensão no andar intermédio.
2.4.2.3 - Modulação Vectorial no Inversor
No inversor (Figura 2.14) as oito combinações possíveis de comutação (Tabela 2.7), dão origem
a oito vectores espaciais, dos quais dois deles são vectores nulos. Neste caso, a amplitude dos
vectores depende da tensão 𝑉𝐷𝐶 disponível no andar intermédio.
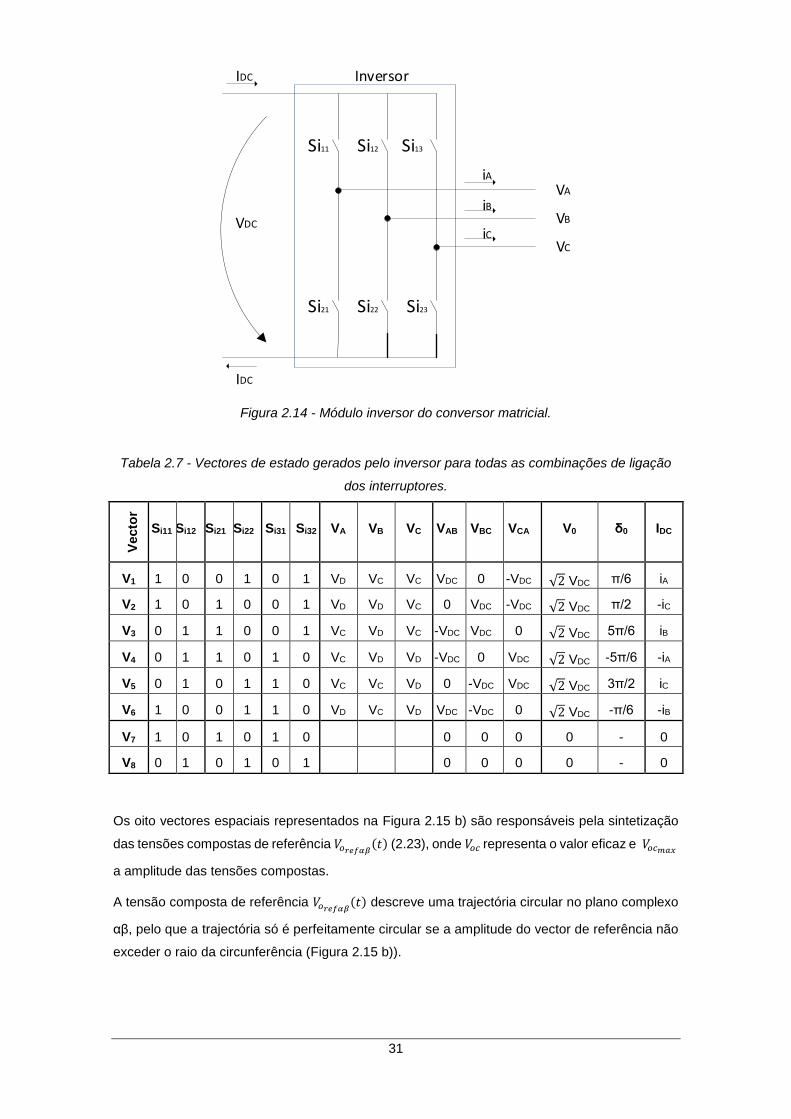
31
iA
iB
iC
VA
VB
VC
InversorIDC
IDC
VDC
Si11 Si12 Si13
Si21 Si22 Si23
Figura 2.14 - Módulo inversor do conversor matricial.
Tabela 2.7 - Vectores de estado gerados pelo inversor para todas as combinações de ligação
dos interruptores.
Vecto
r
Si11 Si12 Si21 Si22 Si31 Si32 VA VB VC VAB VBC VCA V0 δ0 IDC
V1 1 0 0 1 0 1 VD VC VC VDC 0 -VDC √2 VDC π/6 iA
V2 1 0 1 0 0 1 VD VD VC 0 VDC -VDC √2 VDC π/2 -iC
V3 0 1 1 0 0 1 VC VD VC -VDC VDC 0 √2 VDC 5π/6 iB
V4 0 1 1 0 1 0 VC VD VD -VDC 0 VDC √2 VDC -5π/6 -iA
V5 0 1 0 1 1 0 VC VC VD 0 -VDC VDC √2 VDC 3π/2 iC
V6 1 0 0 1 1 0 VD VC VD VDC -VDC 0 √2 VDC -π/6 -iB
V7 1 0 1 0 1 0 0 0 0 0 - 0
V8 0 1 0 1 0 1 0 0 0 0 - 0
Os oito vectores espaciais representados na Figura 2.15 b) são responsáveis pela sintetização
das tensões compostas de referência 𝑉𝑜𝑟𝑒𝑓𝛼𝛽(𝑡) (2.23), onde 𝑉𝑜𝑐 representa o valor eficaz e 𝑉𝑜𝑐𝑚𝑎𝑥
a amplitude das tensões compostas.
A tensão composta de referência 𝑉𝑜𝑟𝑒𝑓𝛼𝛽(𝑡) descreve uma trajectória circular no plano complexo
αβ, pelo que a trajectória só é perfeitamente circular se a amplitude do vector de referência não
exceder o raio da circunferência (Figura 2.15 b)).

32
𝑉𝑜𝑟𝑒𝑓𝛼𝛽(𝑡) = √3 𝑉𝑜𝑐 𝑒𝑗𝜔𝑜𝑡 =
√3
2 𝑉𝑜𝑐𝑚𝑎𝑥 𝑒
𝑗𝜔𝑜𝑡 (2.23)
O valor máximo que a tensão composta de referência (2.24) pode atingir é igual á tensão 𝑉𝐷𝐶
imposta á saída do rectificador. Com isto, podemos concluir que a tensão de saída do modelo
rectificador inversor é limitada pelo rectificador.
𝑉𝑜𝑐𝑚𝑎𝑥 = 𝑉𝐷𝐶 (2.24)
Seguindo o mesmo conceito aplicado no rectificador, temos que 𝑁𝑣 representa o número do
sector de localização da tensão composta de referência (Figura 2.15), 𝜃𝑣 define o ângulo da
tensão relativamente ao sector onde se encontra.
Tendo em conta o valor instantâneo da fase (2.14) 𝜑𝑣 = 𝜔𝑜𝑡 + 𝜋
6 da tensão composta de
referência de saída é possível relacionar 𝜃𝑣 com 𝜑𝑣 (2.25).
𝜃𝑣 = 𝜑𝑣 −𝜋
3 (𝑁𝑣 − 1) +
𝜋
6 𝑁𝑣 ∈ {1, … , 6} (2.25)

33
Zona 1
3 5 1 2 4 6
+Vmax
-Vmax
θv
rad
Zona 2 Zona 3 Zona 4 Zona 5 Zona 6 Zona 1
a)
1
V1(D, C, C)
V2(D, D, C)
V3(C, D, C)
V4(C, D, D)
V5(C, C, D)
V6(D, C, D)
V7(C, C, C), V8(D, D, D)
III II
V VI
IV IV0
θv
Vβ
Vα
V0refαβ V7 V8
d0V0θv
π/3
dα Vα
dβ Vβ
b) c)
Figura 2.15 - a) Sector das tensões de saída; b) Localização espacial dos vectores V1 a V8 e
divisão do plano complexo αβ em seis sectores que determinam a localização da tensão de
saída; c) Representação do processo para a sintetização de 𝑉𝑜𝑟𝑒𝑓𝛼𝛽 com recurso aos vectores
espaciais adjacentes ao sector onde se encontra o vector de referência.
Com recurso aos vectores espaciais adjacentes 𝑉𝛼, 𝑉𝛽 e 𝑉0 representados na Figura 2.15 c)
obtém-se o vector de tensão 𝑉𝑜𝑟𝑒𝑓𝛼𝛽 , em que os factores de ciclo associados a cada um desses
vectores são, 𝑑𝛼, 𝑑𝛽 e 𝑑𝑜.
Teoricamente, assumindo uma frequência de comutação muito superior á de saída f0 >> fs , é
possível garantir que para cada período de comutação, o vector da tensão 𝑉𝑜𝑟𝑒𝑓𝛼𝛽 é descrito por
(2.26).

34
𝑉𝑜𝑟𝑒𝑓𝛼𝛽 ≈ 𝑉𝛼𝑑𝛼 + 𝑉𝛽𝑑𝛽 + 𝑉0𝑑𝑜 (2.26)
O procedimento é semelhante ao que foi usado no rectificador para sintetizar as correntes de
entrada, isto é, os factores de ciclo 𝑑𝛼, 𝑑𝛽 e 𝑑0 (2.27) podem ser determinados com base em
relações trigonométricas aplicadas aos vectores representados na Figura 2.15c) [Huber et al,
1995].
{
𝑑𝛼 =
𝑇𝛼𝑇𝑠= 𝑚𝑣 sin (
𝜋
3 − 𝜃𝑖)
𝑑𝛽 = 𝑇𝛽
𝑇𝑠= 𝑚𝑣 sin (𝜃𝑖)
𝑑0 =𝑇0𝑇𝑠= 1 − 𝑑𝛼 − 𝑑𝛽
(2.27)
O índice de modulação 𝑚𝑣 (2.28), relaciona o valor máximo da tensão de saída 𝑉𝑜𝑚𝑎𝑥 = √2 𝑉0 e
a tensão no andar intermédio 𝑉𝐷𝐶.
𝑚𝑣 = 𝑉𝑜𝑚𝑎𝑥𝑉𝐷𝐶
(2.28)
Recorrendo ao princípio da conservação de energia, a potência no andar intermédio 𝑃𝐷𝐶 é igual
á potencia de saída do inversor 𝑃𝑜𝑢𝑡, torna-se então possível determinar o valor médio da
corrente 𝐼𝐷𝐶 no andar intermédio (2.29).
𝑃𝐷𝐶 = 𝑃𝑜𝑢𝑡
𝑉𝐷𝐶 𝐼𝐷𝐶 = 3 1
2 𝑉𝑜𝑚𝑎𝑥 𝐼𝑜𝑚𝑎𝑥 cos(ϕ𝑜)
(2.29)
A corrente 𝐼𝐷𝐶 (2.30) no andar intermédio da associação, resulta de (2.28) e depende de três
parâmetros: da amplitude da corrente de saída 𝐼𝑜𝑚𝑎𝑥 , do índice de modulação da tensão 𝑚𝑣 e
do angulo ϕ𝑜, que resulta da desfasagem da tensão face á corrente de saída.

35
𝐼𝐷𝐶 = 3 1
2 𝑉𝑜𝑚𝑎𝑥𝑉𝐷𝐶
𝐼𝑜𝑚𝑎𝑥 cos(ϕ𝑜)
= 3 1
2 𝑚𝑣 𝐼𝑜𝑚𝑎𝑥 cos(ϕ𝑜)
(2.30)
2.4.2.4 - Aplicação da Modulação Inversa ao Conversor Matricial
Assumindo frequências de comutação muito superiores ás frequências de entrada e de saída
(fs>>fi; fs>>f0) da associação rectificador inversor, pode-se supor, que para um período de
comutação, os valores médios da tensão 𝑉𝐷𝐶 e da corrente 𝐼𝐷𝐶 no andar intermédio são
constantes. Neste caso, é possível aplicar simultaneamente a modulação da tensão de saída e
da corrente de entrada á associação rectificador inversor da Figura 2.11.
Tendo em atenção que o andar rectificador necessita de dois vectores não nulos para fazer a
modulação da corrente de entrada e que o andar inversor precisa de dois vectores não nulos
para fazer a modulação das tensões de saída, assim a modulação resultante irá necessitar de 4
vectores não nulos e um vector nulo. Para a modulação das correntes de entrada e das tensões
de saída, o tempo de comutação (2.31) para cada vector é obtido pela multiplicação dos factores
de ciclo obtidos para o rectificador e para o inversor [Huber et al, 1995].
{
𝑑𝛾𝑑𝛼 = 𝑚𝑐 𝑚𝑣 sin (
𝜋
3 − 𝜃𝑖) sin (
𝜋
3 − 𝜃𝑣)
𝑑𝛾𝑑𝛽 = 𝑚𝑐 𝑚𝑣 sin ( 𝜋
3 − 𝜃𝑖) sin ( 𝜃𝑣)
𝑑𝛿𝑑𝛼 = 𝑚𝑐𝑚𝑣 sin(𝜃𝑖) sin ( 𝜋
3 − 𝜃𝑣)
𝑑𝛿𝑑𝛽 = 𝑚𝑐𝑚𝑣 sin( 𝜃𝑖) sin( 𝜃𝑣)
𝑑0 = 1 − 𝑑𝛾𝑑𝛼 − 𝑑𝛾𝑑𝛽 − 𝑑𝛿𝑑𝛼 − 𝑑𝛿𝑑𝛽
(2.31)
Os tempos de comutação (2.31) são definidos por dois índices de modulação: o da tensão 𝑚𝑣 e
o da corrente 𝑚𝑐. A multiplicação dos dois índices determina o ganho da função transferência do
conversor matricial. De forma a garantir que o conversor matricial segue as referências de tensão
e de corrente definidas [Nielsen, 1996], o índice de modulação da tensão (2.28) deve ser definido
como em (2.32), substituindo (2.22) em (2.28). Admitindo 𝑚𝑐 = 1 elimina-se o factor dependente
da tensão fictícia 𝑉𝐷𝐶 no andar intermédio da associação rectificador inversor.
𝑚𝑣 = 𝑉𝑜
32𝑉𝑖𝑚𝑎𝑥 𝑚𝑐 cos(ϕ𝑜)
(2.32)
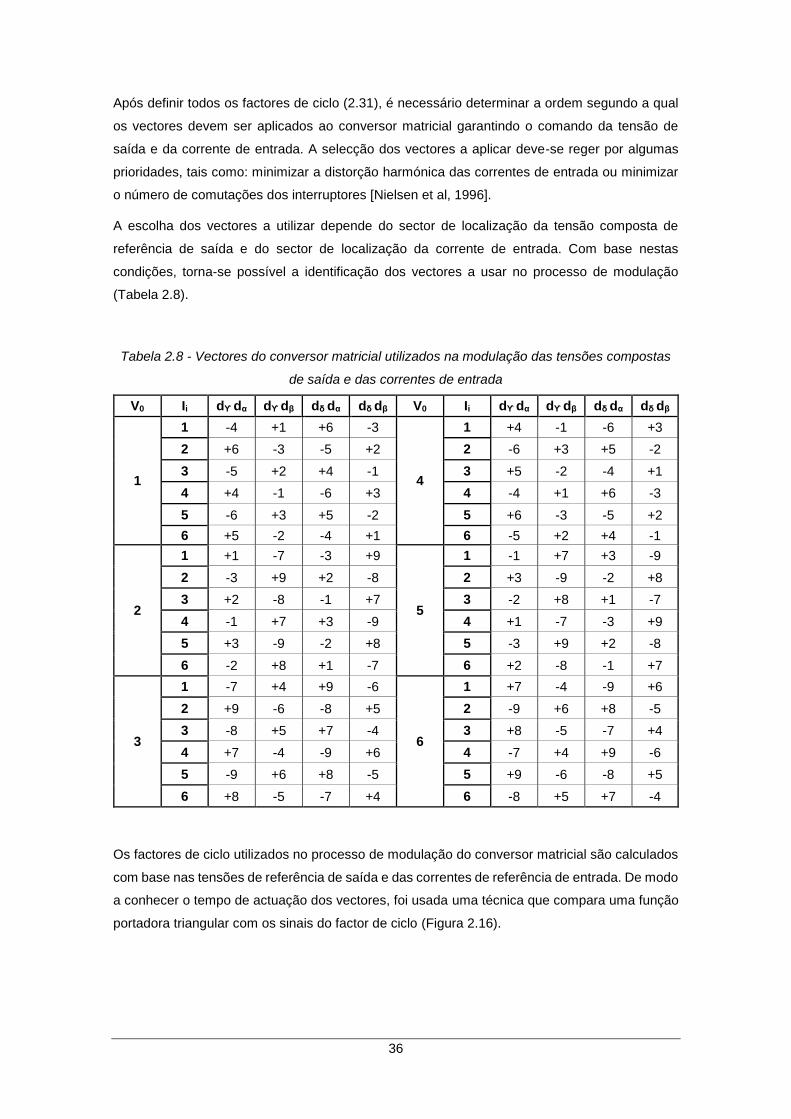
36
Após definir todos os factores de ciclo (2.31), é necessário determinar a ordem segundo a qual
os vectores devem ser aplicados ao conversor matricial garantindo o comando da tensão de
saída e da corrente de entrada. A selecção dos vectores a aplicar deve-se reger por algumas
prioridades, tais como: minimizar a distorção harmónica das correntes de entrada ou minimizar
o número de comutações dos interruptores [Nielsen et al, 1996].
A escolha dos vectores a utilizar depende do sector de localização da tensão composta de
referência de saída e do sector de localização da corrente de entrada. Com base nestas
condições, torna-se possível a identificação dos vectores a usar no processo de modulação
(Tabela 2.8).
Tabela 2.8 - Vectores do conversor matricial utilizados na modulação das tensões compostas
de saída e das correntes de entrada
V0 Ii dϒ dα dϒ dβ dδ dα dδ dβ V0 Ii dϒ dα dϒ dβ dδ dα dδ dβ
1
1 -4 +1 +6 -3
4
1 +4 -1 -6 +3
2 +6 -3 -5 +2 2 -6 +3 +5 -2
3 -5 +2 +4 -1 3 +5 -2 -4 +1
4 +4 -1 -6 +3 4 -4 +1 +6 -3
5 -6 +3 +5 -2 5 +6 -3 -5 +2
6 +5 -2 -4 +1 6 -5 +2 +4 -1
2
1 +1 -7 -3 +9
5
1 -1 +7 +3 -9
2 -3 +9 +2 -8 2 +3 -9 -2 +8
3 +2 -8 -1 +7 3 -2 +8 +1 -7
4 -1 +7 +3 -9 4 +1 -7 -3 +9
5 +3 -9 -2 +8 5 -3 +9 +2 -8
6 -2 +8 +1 -7 6 +2 -8 -1 +7
3
1 -7 +4 +9 -6
6
1 +7 -4 -9 +6
2 +9 -6 -8 +5 2 -9 +6 +8 -5
3 -8 +5 +7 -4 3 +8 -5 -7 +4
4 +7 -4 -9 +6 4 -7 +4 +9 -6
5 -9 +6 +8 -5 5 +9 -6 -8 +5
6 +8 -5 -7 +4 6 -8 +5 +7 -4
Os factores de ciclo utilizados no processo de modulação do conversor matricial são calculados
com base nas tensões de referência de saída e das correntes de referência de entrada. De modo
a conhecer o tempo de actuação dos vectores, foi usada uma técnica que compara uma função
portadora triangular com os sinais do factor de ciclo (Figura 2.16).

37
dϒ dα
dϒ dβ
dδ dα
dδ dβ
d0 dϒ dα
dϒ dβ
dδ dα
dδ dβ
dϒ dα
dϒ dβ
dδ dα
dδ dβ
d0 dϒ dα
dϒ dβ
dδ dα
dδ dβ
Sina
is d
o fa
ctor
de
cicl
o
Tempo
Figura 2.16 - Processo de modulação usado para a selecção dos vectores espaciais, assim
como para a determinação do tempo de actuação.
A selecção dos vectores a aplicar no controlo do conversor matricial não se baseia apenas na
análise da Figura 2.16, mas também na Tabela 2.8.
Da Figura 2.16 obtém-se o tempo de condução de cada vector. Essa informação em conjunto
com a localização da corrente de entrada e da tensão de saída segue para a Tabela 2.8, de onde
resultam os vectores a aplicar aos interruptores do conversor matricial trifásico.
A Figura 2.17 representa de forma simplificada a obtenção final do vector a aplicar ao conversor
matricial.
dϒ dα
dϒ dβ
dδ dα
dδ dβ
d0 dϒ dα
dϒ dβ
dδ dα
dδ dβ
dϒ dα
dϒ dβ
dδ dα
dδ dβ
d0 dϒ dα
dϒ dβ
dδ dα
dδ dβ
Sina
is d
o fa
ctor
de
cicl
o
Tempo
S11
Va
Vb
Vc
Ia
Ib
Ic
S12
S13
S21 S31
S22 S32
S13 S13
IA IB IC
VA VB VC
Tdϒ dα Vector -4
Localização da corrente de entrada
Localização da tensão de saída
1 1
Figura 2.17 - Processo de selecção dos vectores a aplicar nos interruptores do conversor
matricial.
No SST proposto neste trabalho, o método de modulação tem de ser modificado de forma a
garantir a não saturação do transformador de alta frequência.

38
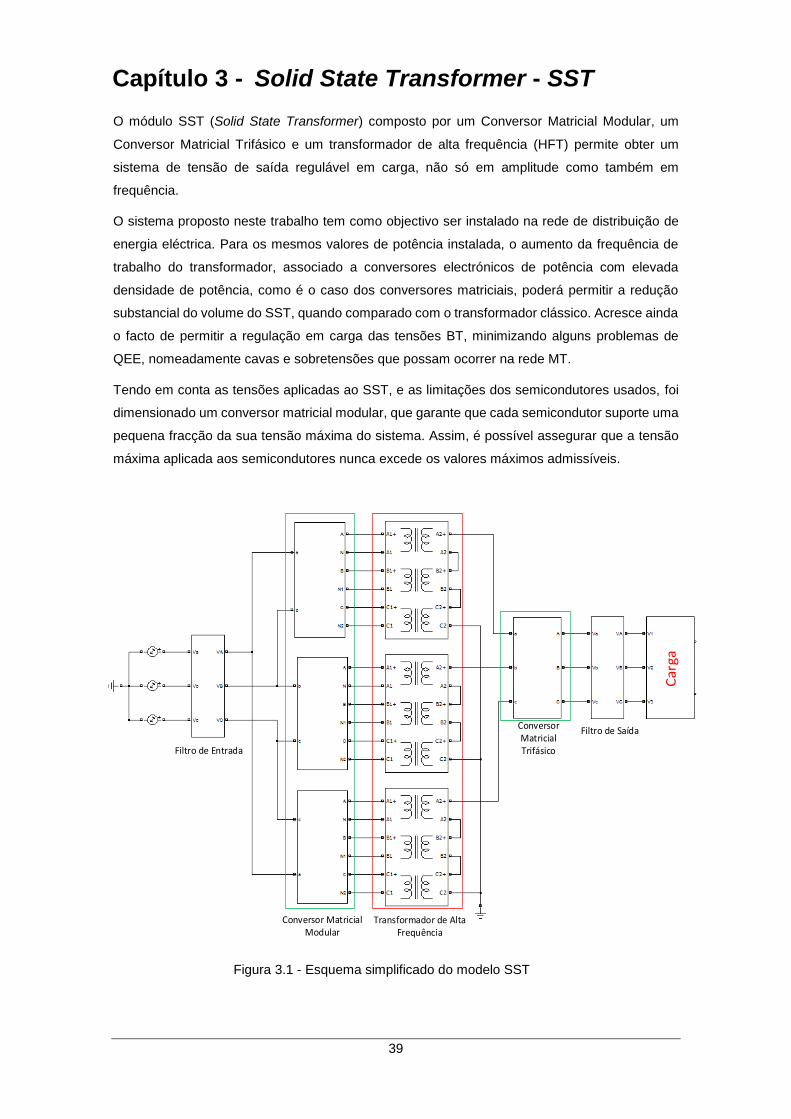
39
Capítulo 3 - Solid State Transformer - SST
O módulo SST (Solid State Transformer) composto por um Conversor Matricial Modular, um
Conversor Matricial Trifásico e um transformador de alta frequência (HFT) permite obter um
sistema de tensão de saída regulável em carga, não só em amplitude como também em
frequência.
O sistema proposto neste trabalho tem como objectivo ser instalado na rede de distribuição de
energia eléctrica. Para os mesmos valores de potência instalada, o aumento da frequência de
trabalho do transformador, associado a conversores electrónicos de potência com elevada
densidade de potência, como é o caso dos conversores matriciais, poderá permitir a redução
substancial do volume do SST, quando comparado com o transformador clássico. Acresce ainda
o facto de permitir a regulação em carga das tensões BT, minimizando alguns problemas de
QEE, nomeadamente cavas e sobretensões que possam ocorrer na rede MT.
Tendo em conta as tensões aplicadas ao SST, e as limitações dos semicondutores usados, foi
dimensionado um conversor matricial modular, que garante que cada semicondutor suporte uma
pequena fracção da sua tensão máxima do sistema. Assim, é possível assegurar que a tensão
máxima aplicada aos semicondutores nunca excede os valores máximos admissíveis.
Filtro de Entrada
Filtro de SaídaConversor Matricial Trifásico
Car
ga
Conversor Matricial Modular
Transformador de Alta Frequência
Figura 3.1 - Esquema simplificado do modelo SST

40
No primeiro andar do SST, os conversores matriciais monofásicos são responsáveis por gerar
uma tensão de frequência muito mais elevada que a da rede (50 Hz). Neste trabalho assumiu-
se que essa frequência era de 2kHz, que corresponde à frequência fundamental de trabalho do
transformador de alta frequência.
Na saída do transformador o conversor matricial trifásico é alimentado por tensões comutadas a
2kHz e, através de um processo de modulação SVM modificado, deverá garantir tensões
sinusoidais, com frequência de 50 Hz à sua saída.
Uma característica importante, deve-se ao facto de a ligação de neutro se encontrar acessível
no lado da baixa tensão.
3.1 - Conversor Matricial Modular
O Conversor Matricial Modular é composto por conversores matriciais monofásicos em série,
garantindo que os valores de tensão a suportar pelos semicondutores são compatíveis com os
semicondutores actualmente existentes no mercado. Deste modo é possível salvaguardar a boa
operacionalidade dos mesmos.
Na Figura 3.2 está representado um esquema simplificado da associação em série dos
conversores matriciais monofásicos.
Figura 3.2 – Esquema simplificado da associação em série dos conversores matriciais
monofásicos
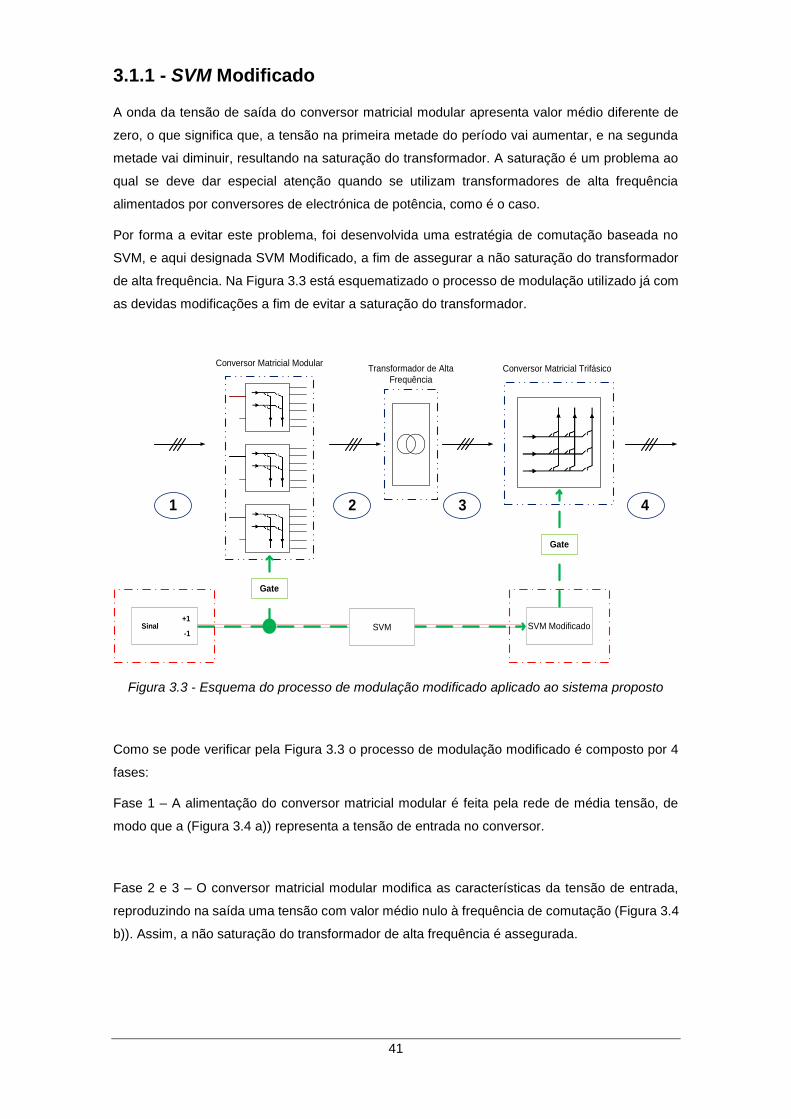
41
3.1.1 - SVM Modificado
A onda da tensão de saída do conversor matricial modular apresenta valor médio diferente de
zero, o que significa que, a tensão na primeira metade do período vai aumentar, e na segunda
metade vai diminuir, resultando na saturação do transformador. A saturação é um problema ao
qual se deve dar especial atenção quando se utilizam transformadores de alta frequência
alimentados por conversores de electrónica de potência, como é o caso.
Por forma a evitar este problema, foi desenvolvida uma estratégia de comutação baseada no
SVM, e aqui designada SVM Modificado, a fim de assegurar a não saturação do transformador
de alta frequência. Na Figura 3.3 está esquematizado o processo de modulação utilizado já com
as devidas modificações a fim de evitar a saturação do transformador.
Conversor Matricial TrifásicoConversor Matricial Modular
1 2 3 4
Sinal SVM Modificado
Transformador de Alta
Frequência
Gate
Gate
SVM+1
-1
Figura 3.3 - Esquema do processo de modulação modificado aplicado ao sistema proposto
Como se pode verificar pela Figura 3.3 o processo de modulação modificado é composto por 4
fases:
Fase 1 – A alimentação do conversor matricial modular é feita pela rede de média tensão, de
modo que a (Figura 3.4 a)) representa a tensão de entrada no conversor.
Fase 2 e 3 – O conversor matricial modular modifica as características da tensão de entrada,
reproduzindo na saída uma tensão com valor médio nulo à frequência de comutação (Figura 3.4
b)). Assim, a não saturação do transformador de alta frequência é assegurada.
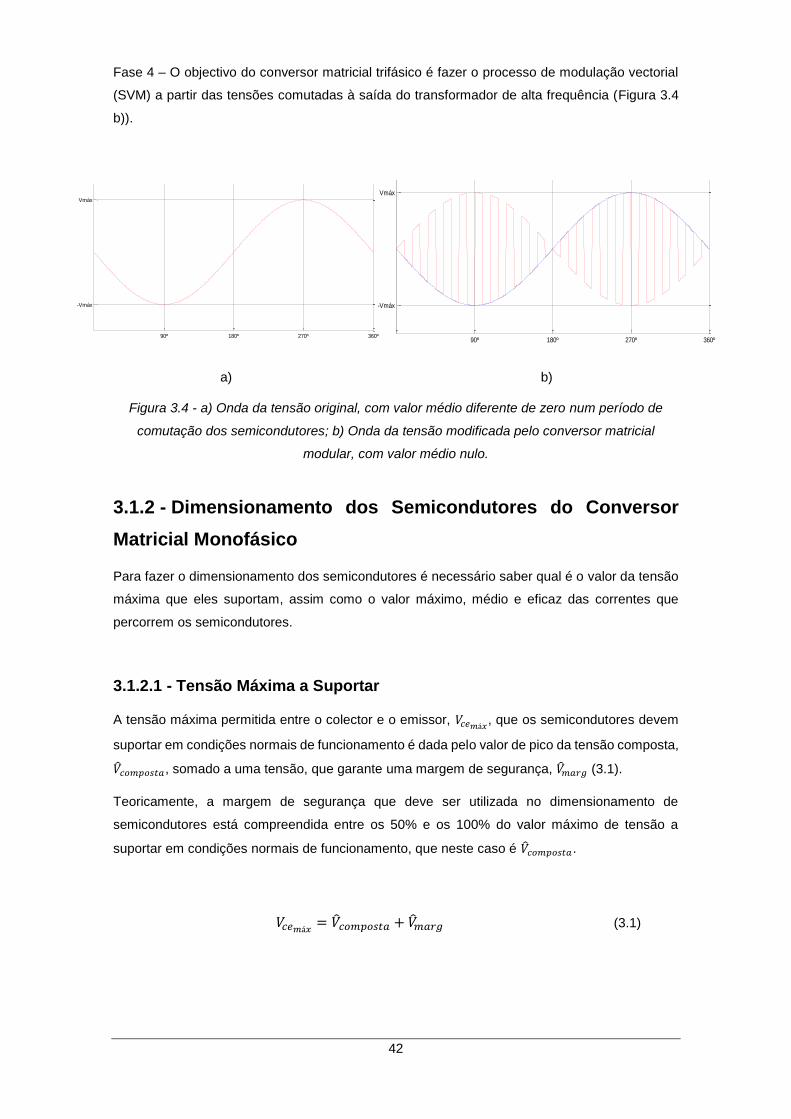
42
Fase 4 – O objectivo do conversor matricial trifásico é fazer o processo de modulação vectorial
(SVM) a partir das tensões comutadas à saída do transformador de alta frequência (Figura 3.4
b)).
a) b)
Figura 3.4 - a) Onda da tensão original, com valor médio diferente de zero num período de
comutação dos semicondutores; b) Onda da tensão modificada pelo conversor matricial
modular, com valor médio nulo.
3.1.2 - Dimensionamento dos Semicondutores do Conversor
Matricial Monofásico
Para fazer o dimensionamento dos semicondutores é necessário saber qual é o valor da tensão
máxima que eles suportam, assim como o valor máximo, médio e eficaz das correntes que
percorrem os semicondutores.
3.1.2.1 - Tensão Máxima a Suportar
A tensão máxima permitida entre o colector e o emissor, 𝑉𝑐𝑒𝑚á𝑥, que os semicondutores devem
suportar em condições normais de funcionamento é dada pelo valor de pico da tensão composta,
�̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎, somado a uma tensão, que garante uma margem de segurança, �̂�𝑚𝑎𝑟𝑔 (3.1).
Teoricamente, a margem de segurança que deve ser utilizada no dimensionamento de
semicondutores está compreendida entre os 50% e os 100% do valor máximo de tensão a
suportar em condições normais de funcionamento, que neste caso é �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎.
𝑉𝑐𝑒𝑚á𝑥 = �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 + �̂�𝑚𝑎𝑟𝑔 (3.1)
90º 180º 270º 360º
-Vmáx
Vmáx
90º 180º 270º 360º
-Vmáx
Vmáx
43
Como se pode verificar pela Figura 3.2, o Conversor Matricial Modular, uma associação de
conversores matriciais monofásicos que encontra-se instalado no lado da média tensão, sendo
que a análise será realizada segundo essa configuração.
Assim, a tensão submetida aos semicondutores será a tensão da rede, 𝑉𝑟𝑒𝑑𝑒, a dividir pelos n
conversores matriciais monofásicos que compõem o conversor matricial modular (3.2).
�̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 =√2 𝑉𝑟𝑒𝑑𝑒
𝑛 (3.2)
Determinado o valor de pico da tensão composta, a tensão máxima admissível pelos
semicondutores é dada por (3.3).
𝑉𝑐𝑒𝑚á𝑥 = �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 + �̂�𝑚𝑎𝑟𝑔 (3.3)
3.1.2.2 - Corrente Máxima a Suportar
O valor de corrente máxima que os semicondutores deverão suportar 𝐼𝑐𝑜𝑛𝑣𝑚á𝑥 , será imposto pelo
valor máximo da corrente observado nas fases de saída do conversor matricial, nas condições
normais de funcionamento [Silva, 2008].
Nestas condições, a corrente que irá percorrer o conversor é dada por (3.4).
𝐼𝑐𝑜𝑛𝑣 =𝑆𝑛𝑜𝑚𝑖𝑛𝑎𝑙3 𝑉𝑝𝑟𝑖𝑚𝑎𝑟𝑖𝑜
(3.4)
Determinado 𝐼𝑐𝑜𝑛𝑣, torna-se possível determinar o valor máximo da corrente a suportar pelos
semicondutores (3.5).
𝐼𝑐𝑜𝑛𝑣𝑚á𝑥 = √2 𝐼𝑐𝑜𝑛𝑣 (3.5)
No que respeita ao valor eficaz da corrente nos semicondutores, assumiu-se para efeito de
cálculo, a distribuição uniforme da corrente pelos dois interruptores bidireccionais que constituem
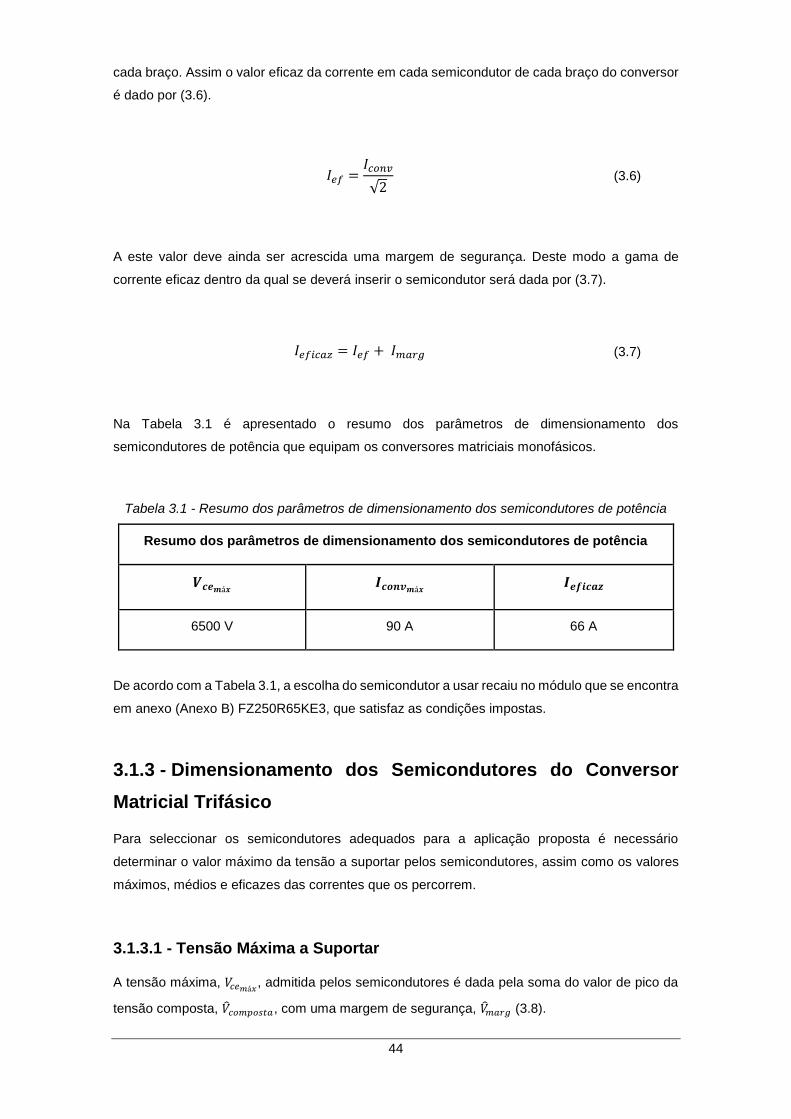
44
cada braço. Assim o valor eficaz da corrente em cada semicondutor de cada braço do conversor
é dado por (3.6).
𝐼𝑒𝑓 =𝐼𝑐𝑜𝑛𝑣
√2 (3.6)
A este valor deve ainda ser acrescida uma margem de segurança. Deste modo a gama de
corrente eficaz dentro da qual se deverá inserir o semicondutor será dada por (3.7).
𝐼𝑒𝑓𝑖𝑐𝑎𝑧 = 𝐼𝑒𝑓 + 𝐼𝑚𝑎𝑟𝑔 (3.7)
Na Tabela 3.1 é apresentado o resumo dos parâmetros de dimensionamento dos
semicondutores de potência que equipam os conversores matriciais monofásicos.
Tabela 3.1 - Resumo dos parâmetros de dimensionamento dos semicondutores de potência
Resumo dos parâmetros de dimensionamento dos semicondutores de potência
𝑽𝒄𝒆𝒎á𝒙 𝑰𝒄𝒐𝒏𝒗𝒎á𝒙 𝑰𝒆𝒇𝒊𝒄𝒂𝒛
6500 V 90 A 66 A
De acordo com a Tabela 3.1, a escolha do semicondutor a usar recaiu no módulo que se encontra
em anexo (Anexo B) FZ250R65KE3, que satisfaz as condições impostas.
3.1.3 - Dimensionamento dos Semicondutores do Conversor
Matricial Trifásico
Para seleccionar os semicondutores adequados para a aplicação proposta é necessário
determinar o valor máximo da tensão a suportar pelos semicondutores, assim como os valores
máximos, médios e eficazes das correntes que os percorrem.
3.1.3.1 - Tensão Máxima a Suportar
A tensão máxima, 𝑉𝑐𝑒𝑚á𝑥, admitida pelos semicondutores é dada pela soma do valor de pico da
tensão composta, �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎, com uma margem de segurança, �̂�𝑚𝑎𝑟𝑔 (3.8).

45
𝑉𝑐𝑒𝑚á𝑥 = �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 + �̂�𝑚𝑎𝑟𝑔 (3.8)
O conversor matricial trifásico encontra-se do lado do secundário do transformador de alta
frequência, ou seja, o conversor deverá operar em baixa tensão, sendo o valor de pico da tensão
composta dada por (3.9).
�̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 = 𝑉𝑠𝑒𝑐𝑢𝑛𝑑𝑎𝑟𝑖𝑜 √2 √3 (3.9)
Determinado o valor de pico da tensão composta, é possível determinar qual a gama de tensão
máxima dentro da qual se irá inserir o semicondutor mais adequado (3.10).
𝑉𝑐𝑒𝑚á𝑥 = �̂�𝑐𝑜𝑚𝑝𝑜𝑠𝑡𝑎 + �̂�𝑚𝑎𝑟𝑔 (3.10)
3.1.3.2 - Corrente Máxima a Suportar
O valor de corrente máxima que os semicondutores deverão suportar 𝐼𝑐𝑜𝑛𝑣𝑚á𝑥 , será imposto pelo
valor máximo da corrente observado nas fases de saída do conversor matricial trifásico, nas
condições normais de funcionamento [Silva, 2008].
Deste modo, o conversor matricial é submetido a uma corrente que é dada por (3.11).
𝐼𝑐𝑜𝑛𝑣 =𝑆𝑛𝑜𝑚𝑖𝑛𝑎𝑙3 𝑉𝑐𝑎𝑟𝑔𝑎
(3.11)
De (3.11), é possível determinar o valor máximo da corrente a suportar pelos semicondutores
(3.12).
𝐼𝑐𝑜𝑛𝑣𝑚á𝑥 = √2 𝐼𝑐𝑜𝑛𝑣 (3.12)
No que respeita ao valor eficaz da corrente nos semicondutores, assumiu-se para efeito de
cálculo, que os valores médios e eficazes das correntes que fluem pelos 3 interruptores
46
bidireccionais que constituem cada braço são aproximadamente iguais em cada período de
comutação. Deste modo, o valor eficaz da corrente em cada semicondutor de cada braço do
conversor é dado por (3.13).
𝐼𝑒𝑓 =𝐼𝑐𝑜𝑛𝑣
√3 (3.13)
A este valor deve ainda ser acrescida uma margem de segurança compreendida entre os 50% e
os 100% do valor obtido em (3.13).
Assim, a gama de valores de corrente eficaz dentro da qual se deverá inserir o semicondutor
será dada por (3.14).
𝐼𝑒𝑓𝑖𝑐𝑎𝑧 = 𝐼𝑒𝑓 + 𝐼𝑚𝑎𝑟𝑔 (3.14)
Na Tabela 3.2 é apresentado o resumo dos parâmetros de dimensionamento dos
semicondutores de potência que equipam o conversor matricial trifásico.
Tabela 3.2 - Resumo dos parâmetros de dimensionamento dos semicondutores de potência
Resumo dos parâmetros de dimensionamento dos semicondutores de potência
𝑽𝒄𝒆𝒎á𝒙 𝑰𝒄𝒐𝒏𝒗𝒎á𝒙 𝑰𝒆𝒇𝒊𝒄𝒂𝒛
4200 V 1300 A 800
De acordo com a Tabela 3.2, a escolha do semicondutor a usar recaiu no módulo que se encontra
em anexo (Anexo C) DIM800XSM45-TS000, que satisfaz as condições impostas.
3.2 - Dimensionamento dos Componentes de Filtragem
Uma vez que a conversão AC-AC é realizada de forma directa, com comutação a frequências
muito elevadas (kHz), o sistema requer componentes de filtragem: um filtro de alta frequência de
entrada e um filtro de saída.
O filtro de entrada actua como um interface entre o conversor e a rede de média tensão. Com
este filtro pretende-se evitar distorções significativas nas correntes de entrada do conversor,
assim como diminuir a injecção de correntes harmónicas de alta frequência na rede de
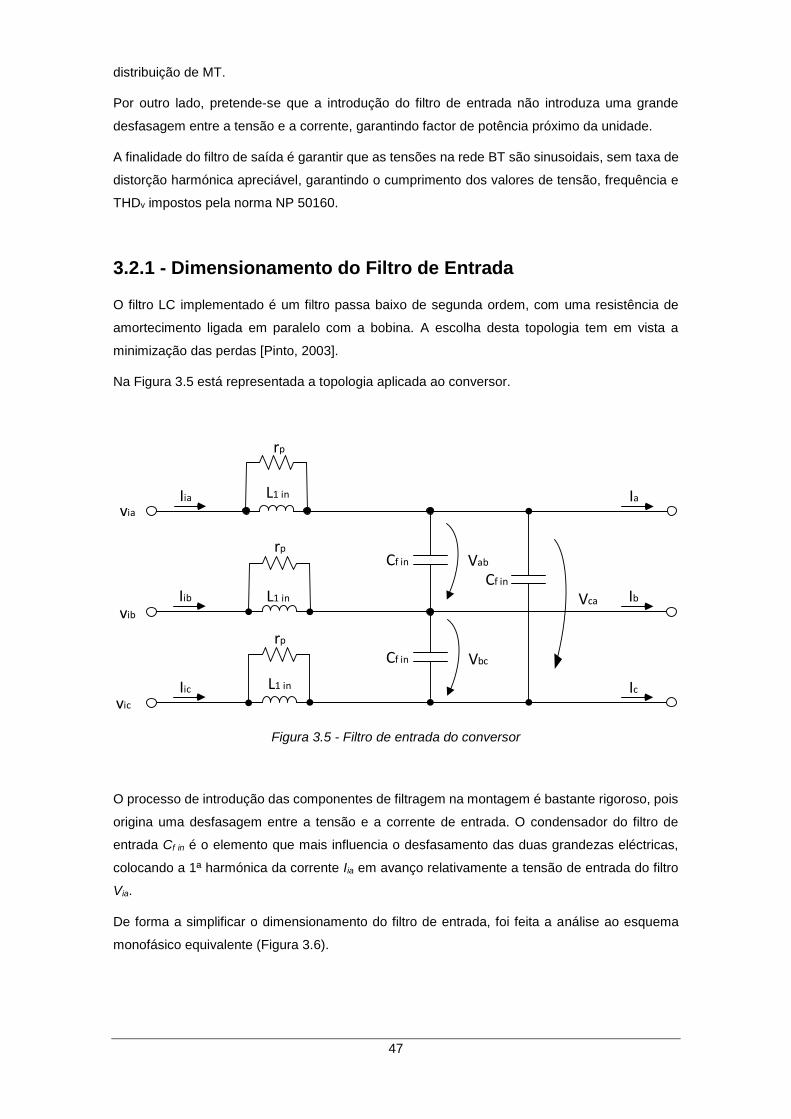
47
distribuição de MT.
Por outro lado, pretende-se que a introdução do filtro de entrada não introduza uma grande
desfasagem entre a tensão e a corrente, garantindo factor de potência próximo da unidade.
A finalidade do filtro de saída é garantir que as tensões na rede BT são sinusoidais, sem taxa de
distorção harmónica apreciável, garantindo o cumprimento dos valores de tensão, frequência e
THDv impostos pela norma NP 50160.
3.2.1 - Dimensionamento do Filtro de Entrada
O filtro LC implementado é um filtro passa baixo de segunda ordem, com uma resistência de
amortecimento ligada em paralelo com a bobina. A escolha desta topologia tem em vista a
minimização das perdas [Pinto, 2003].
Na Figura 3.5 está representada a topologia aplicada ao conversor.
Iia L1 in
rp
Vab
Vbc
VcaIib
Iic
rp
rp
Ia
Ib
Ic
via
vib
vic
L1 in
L1 in
Cf in
Cf in
Cf in
Figura 3.5 - Filtro de entrada do conversor
O processo de introdução das componentes de filtragem na montagem é bastante rigoroso, pois
origina uma desfasagem entre a tensão e a corrente de entrada. O condensador do filtro de
entrada Cf in é o elemento que mais influencia o desfasamento das duas grandezas eléctricas,
colocando a 1ª harmónica da corrente Iia em avanço relativamente a tensão de entrada do filtro
Via.
De forma a simplificar o dimensionamento do filtro de entrada, foi feita a análise ao esquema
monofásico equivalente (Figura 3.6).

48
Ii L1 in
rp
Cf in Vo
I
Vi
Figura 3.6 - Esquema monofásico equivalente do filtro de entrada do conversor
Teoricamente, conhecendo o valor máximo da tensão (𝑉𝑜𝑚𝑎𝑥), e da corrente mínima á saída do
filtro (𝐼𝑚𝑖𝑛), é possível determinar o valor da capacidade do condensador (𝐶𝑓 𝑖𝑛) para ligação em
estrela (3.15) [Silva, 2011].
O valor da capacidade depende da frequência angular ω𝑖 e do factor de potência de entrada 𝐹𝑝.
𝐶𝑓 𝑖𝑛 = 𝐼𝑚𝑖𝑛
ω𝑖𝑉𝑜𝑚𝑎𝑥 tan (𝑐𝑜𝑠−1(𝐹𝑝) (3.15)
Para o cálculo da bobina do filtro de entrada (𝐿1 𝑖𝑛), considera-se que a frequência de corte (fc)
escolhida deverá estar uma década abaixo da frequência de comutação (fs) e uma década acima
da frequência da rede (fi), (𝑓i < 𝑓c < 𝑓s, ou seja, ω𝑖 < ω𝑐 < ω𝑠) [Monteiro, 2011], [Pinto, 2003].
Conhecida a frequência de corte (fc), o valor da bobina é dado por 3.16.
𝐿1 𝑖𝑛 = 1
𝜔𝑐2C𝑓 𝑖𝑛
(3.16)
O circuito de amortecimento (Figura 3.7), é composto por uma resistência, designada por
resistência de amortecimento rp, que está colocada em paralelo com a bobina 𝐿1 𝑖𝑛. Este circuito
tem como objectivo diminuir as oscilações provenientes das comutações dos semicondutores de
potência assim como evitar a instabilidade do sistema.
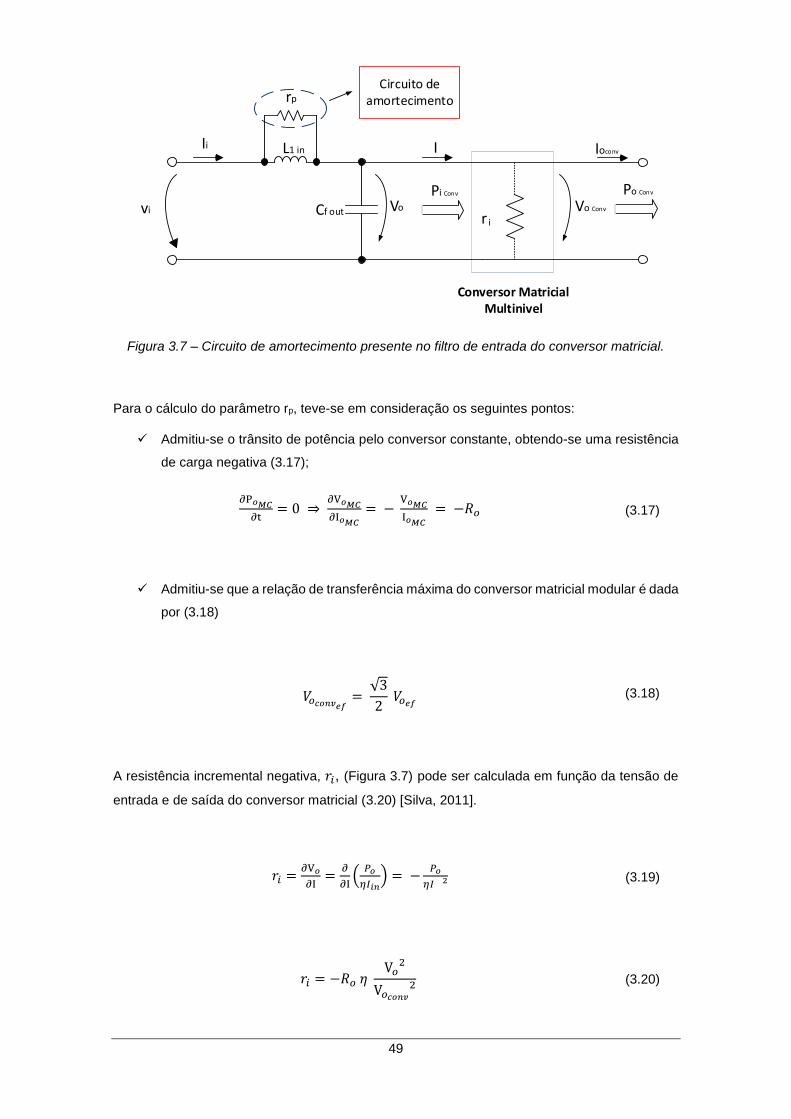
49
I
Vor i
Conversor Matricial Multinivel
vi
L1 inIi
Cf out
Pi Conv
rp
Circuito de amortecimento
Po Conv
Vo Conv
Ioconv
Figura 3.7 – Circuito de amortecimento presente no filtro de entrada do conversor matricial.
Para o cálculo do parâmetro rp, teve-se em consideração os seguintes pontos:
Admitiu-se o trânsito de potência pelo conversor constante, obtendo-se uma resistência
de carga negativa (3.17);
∂P𝑜𝑀𝐶∂t
= 0 ⇒ ∂V𝑜𝑀𝐶∂I𝑜𝑀𝐶
= − V𝑜𝑀𝐶I𝑜𝑀𝐶
= −𝑅𝑜 (3.17)
Admitiu-se que a relação de transferência máxima do conversor matricial modular é dada
por (3.18)
𝑉𝑜𝑐𝑜𝑛𝑣𝑒𝑓= √3
2 𝑉𝑜𝑒𝑓 (3.18)
A resistência incremental negativa, 𝑟𝑖, (Figura 3.7) pode ser calculada em função da tensão de
entrada e de saída do conversor matricial (3.20) [Silva, 2011].
𝑟𝑖 =∂V𝑜
∂I=
∂
∂I(𝑃𝑜
𝜂𝐼𝑖𝑛) = −
𝑃𝑜
𝜂𝐼 2 (3.19)
𝑟𝑖 = −𝑅𝑜 𝜂 V𝑜
2
V𝑜𝑐𝑜𝑛𝑣2 (3.20)
50
Substituindo a relação de transferência máxima (3.18), na expressão (3.20), obtém-se (3.21).
𝑟𝑖 = −4
3𝑅𝑜𝜂 (3.21)
Por fim, conhecendo o valor de 𝑟𝑖 e a impedância característica do filtro 𝑍𝑓 é possível determinar
a resistência de amortecimento 𝑟𝑝, (Anexo D), (3.52), em que 𝜉 representa o factor de
amortecimento.
𝑍𝑓 = √𝐿1 𝑖𝑛
𝐶𝑓 𝑖𝑛
(3.22)
𝑟𝑝 =𝑟𝑖𝑍𝑓
2𝜉𝑟𝑖 − 𝑍𝑓
Na Tabela 3.3 encontra-se o resumo dos parâmetros do filtro de entrada obtidos nas expressões
acima mencionadas.
Tabela 3.3 - Resumo dos parâmetros do filtro de entrada
Filtro de entrada do conversor
VN (kV) IN (A) L (mH) C (μF) rp (Ω)
10 36 39.5 0.593 91.7
3.2.2 - Dimensionamento do Filtro de Saída
O filtro de saída projectado apresenta características de um filtro passa baixo LC, que assegura
a filtragem das harmónicas de alta frequência das correntes de saída do conversor matricial e da
tensão na rede BT. A redução do conteúdo de alta frequência traduz-se numa diminuição da
distorção harmónica das grandezas filtradas, melhorando de forma significativa a qualidade de
energia eléctrica.
A topologia utilizada encontra-se representada na Figura 3.8.

51
L1 outIia
Iib
Iic
via
vib
vic
Vab
Vbc
Vca
Ia
Ib
Ic
Cf out Cf out Cf out
L1 out
L1 out
Figura 3.8 – Filtro de saída do conversor matricial.
Por forma a simplificar o dimensionamento do filtro de saída, a análise será realizada com base
no esquema equivalente monofásico (Figura 3.9).
I
Vorout
Resistência Equivalente
vi
L1 outIi
Cf out
PFiltro
Figura 3.9 – Esquema equivalente monofásico do filtro de saída.
Para o cálculo dos parâmetros do filtro é necessário conhecer o valor eficaz da corrente nominal
no filtro (3.23).
𝑖𝑓𝑖𝑙𝑡𝑟𝑜_𝑠𝑎𝑖𝑑𝑎 = 𝑆𝑁𝑆é𝑟𝑖𝑒
3𝑉𝑝𝑟𝑖𝑚á𝑟𝑖𝑜
1
𝑛 (3.23)

52
Conhecendo as características do transformador de alta frequência, obtém-se o valor da
resistência equivalente á saída do filtro, 𝑟𝑜𝑢𝑡 (3.24).
𝑟𝑜𝑢𝑡 = 𝑆𝑁𝑆é𝑟𝑖𝑒
3 𝑖𝑓𝑖𝑙𝑡𝑟𝑜_𝑠𝑎𝑖𝑑𝑎2
(3.24)
Obtido o valor da resistência equivalente, 𝑟𝑜𝑢𝑡, a impedância característica do filtro de saída 𝑍𝑜𝑓
é dada por (3.25), em que 𝜉 representa o factor de amortecimento do filtro [Silva, 2013].
𝑍𝑜𝑓 = 𝑟𝑜𝑢𝑡2 𝜉
(3.25)
Para o cálculo da bobina e da capacidade do condensador do filtro, é preciso ter atenção à
frequência de corte do filtro de saída. Assim, a frequência de corte ideal deverá estar uma década
abaixo da frequência de comutação (𝑓s) e uma década acima da frequência da rede 𝑓i,
(𝑓i < 𝑓c < 𝑓s, ou seja, ω𝑖 < ω𝑐 < ω𝑠) [Monteiro, 2011], [Pinto, 2003].
A capacidade do condensador é dada por (3.26).
𝐶𝑓 𝑜𝑢𝑡 = 1
ω𝑐𝑍𝑜𝑓 (3.26)
O valor do coeficiente de auto-indução da bobina é obtido segundo a expressão (3.27).
𝐿1 𝑜𝑢𝑡 = 𝑍𝑜𝑓
ω𝑐 (3.27)
Na Tabela 3.4 está o resumo dos parâmetros do filtro de saída obtidos segundo as expressões
acima mencionadas. Os valores serão posteriormente utilizados na simulação do sistema.

53
Tabela 3.4 - Resumo dos parâmetros do filtro de saída.
Filtro de saída do conversor (LC)
VN (V) IN (A) L (mH) C (μF)
400 909 10 8.37

54

55
Capítulo 4 - Controlo do Sistema
No presente capítulo são apresentadas as estratégias de controlo de corrente e de tensão
utilizado no sistema proposto.
4.1 - Dimensionamento do Controlador de Corrente
Considerando que o transformador de alta frequência (SST) alimenta uma carga com
características indutivas (Carga RLE), (Figura 4.1), a dinâmica das correntes de saída em
coordenadas abc, é dada por (4.1).
R
R
R
L
L
L
Conversor Matricial
IA
IB
IC
UA
E
UB
E
UC
E
Figura 4.1 - Carga alimentada pelo conversor matricial.
{
𝑈𝐴 = 𝑅 𝐼𝐴 + 𝐿
𝑑𝑖𝐴𝑑𝑡
+ 𝐸𝐴
𝑈𝐵 = 𝑅 𝐼𝐵 + 𝐿𝑑𝑖𝐵𝑑𝑡
+ 𝐸𝐵
𝑈𝐶 = 𝑅 𝐼𝐶 + 𝐿𝑑𝑖𝐶𝑑𝑡
+ 𝐸𝐶
(4.1)
Aplicando a transformação de Concordia (2.8) a (4.1) obtém-se a dinâmica das correntes de
saída do conversor em coordenadas αβ (4.2).
{𝑈𝛼 = 𝑈𝑐𝑎𝑟𝑔𝑎𝛼 + 𝐿
𝑑𝑖𝛼𝑑𝑡
+ 𝐸𝛼
𝑈𝛽 = 𝑈𝑐𝑎𝑟𝑔𝑎𝛽 + 𝐿𝑑𝑖𝛽
𝑑𝑡+ 𝐸𝛽
(4.2)
A transformação de Park (4.3), (4.4) permite converter o sistema de coordenadas αβ num sistema
de duas dimensões, dq, girante e síncrono com a rede, que em regime permanente, toma valores
contínuos e não sinusoidais, o que simplifica a representação do sistema.

56
[𝑋𝑑𝑋𝑞] = [
cos (𝜔𝑡) sin (𝜔𝑡)− sin (𝜔𝑡) cos (𝜔𝑡)
] [𝑋𝛼𝑋𝛽] (4.3)
𝐷 = [cos (𝜔𝑡) sin (𝜔𝑡)− sin (𝜔𝑡) cos (𝜔𝑡)
] [𝑋𝑑𝑋𝑞] = [𝐷] [
𝑋𝛼𝑋𝛽] (4.4)
Aplicando a transformação de Park (4.3), (4.4) a (4.2), obtém-se a dinâmica das correntes de
saída do conversor em coordenadas dq (4.5).
[𝐷 ] [𝑈𝛼𝑈𝛽] = [𝐷 ] [
𝑈𝑐𝑎𝑟𝑔𝑎𝛼𝑈𝑐𝑎𝑟𝑔𝑎𝛽
] + [𝐷 ] [𝐿 00 𝐿
] [
𝑑𝑖𝛼𝑑𝑡𝑑𝑖𝛽
𝑑𝑡
] + [𝐷 ] [𝐸𝛼𝐸𝛽] (4.5)
Após algumas simplificações em (4.5) e resolvendo em ordem a 𝑖𝑑 e 𝑖𝑞, obtém-se a dinâmica
das correntes de saída do conversor em coordenadas dq (4.6).
Da análise, resultou a dinâmica das correntes de saída em coordenadas dq, em função de 𝐻𝑑𝑞,
que representa as tensões de comando, responsáveis por garantir que as correntes de saída, ,
𝑖𝑑 e 𝑖𝑞 seguem as correntes de referência.
{𝑖�̇� =
−𝑈𝑐𝑎𝑟𝑔𝑎𝑑𝐿
+1
𝐿(𝑈𝑑 +𝑊. 𝐿. 𝑖𝑞 − 𝐸𝑑)
𝑖�̇� =−𝑈𝑐𝑎𝑟𝑔𝑎𝑞
𝐿+1
𝐿(𝑈𝑞 −𝑊. 𝐿. 𝑖𝑑 − 𝐸𝑞)
{𝐻𝑑 = 𝑈𝑑 +𝑊 𝐿 𝑖𝑞 − 𝐸𝑑𝐻𝑞 = 𝑈𝑞 −𝑊 𝐿 𝑖𝑑 − 𝐸𝑞
(4.6)
O diagrama de blocos do controlador de corrente está representado na Figura 4.2, em que 𝐼𝑜𝑑𝑞𝑟𝑒𝑓
é a corrente de referência e 𝐼𝑜𝑑𝑞 é a corrente na carga. Ambas as grandezas referidas são
multiplicadas por um ganho αi e quando subtraídas um erro que é aplicado ao controlador Ci (s).
O controlador gera uma tensão de comando 𝐻𝑑𝑞 que é utilizado no processo de modulação.

57
Carga Trifásica de Saída
Hdq V0dq I0dq
αi
αi
I0dq ref
+ -
Figura 4.2 - Diagrama de blocos do controlador da corrente de saída.
Para o dimensionamento do regulador de corrente, o conversor matricial trifásico pode ser
representado como uma função transferência de primeira ordem (4.7), com um tempo de atraso
dado por Td.
𝐺(𝑠) =1
1 + 𝑠 𝑇𝑑 (4.7)
O tempo médio de atraso de resposta do sistema (MC+SVM), é considerado como metade do
tempo de comutação do conversor matricial, 𝑇𝑐 (4.8).
𝑇𝑑 =𝑇𝑐2
(4.8)
O controlador PI (Proporcional - Integral), 𝐶(𝑠) (4.9), é apropriado para este tipo de sistemas,
pois para alem de garantir um erro estático nulo, apresenta um tempo de subida aceitável.
𝐶(𝑠) = 1 + 𝑠𝑇𝑧𝑠𝑇𝑝
(4.9)
Para o cálculo dos parâmetros 𝑇𝑧 e 𝑇𝑝, considera-se que o zero da função, ou seja, o zero de
C(s) anula o polo de menor frequência, introduzido pelo filtro de saída. De (4.10), obtém-se 𝑇𝑧,
onde 𝑅𝑜𝑢𝑡 é a soma da resistência interna da bobina com a resistência de carga.
𝑇𝑧 = 𝐿𝑜𝑢𝑡𝑅𝑜𝑢𝑡
(4.10)
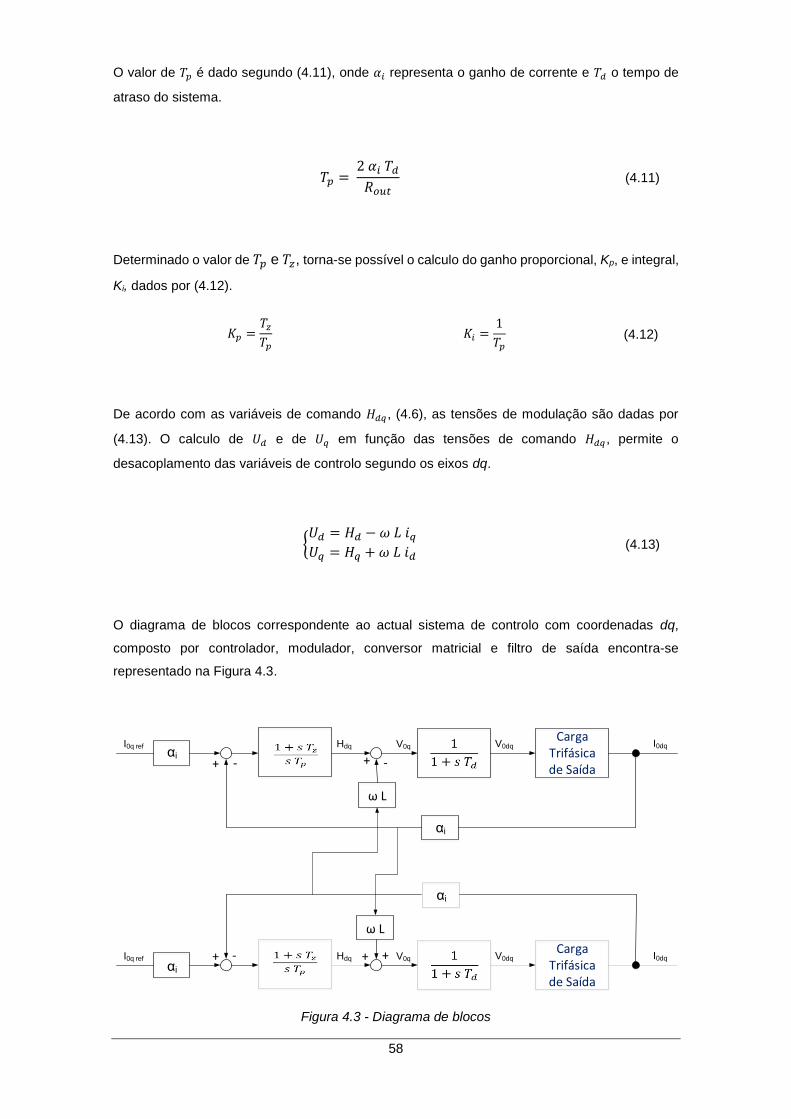
58
O valor de 𝑇𝑝 é dado segundo (4.11), onde 𝛼𝑖 representa o ganho de corrente e 𝑇𝑑 o tempo de
atraso do sistema.
𝑇𝑝 = 2 𝛼𝑖 𝑇𝑑𝑅𝑜𝑢𝑡
(4.11)
Determinado o valor de 𝑇𝑝 e 𝑇𝑧, torna-se possível o calculo do ganho proporcional, Kp, e integral,
Ki, dados por (4.12).
𝐾𝑝 =𝑇𝑧𝑇𝑝
𝐾𝑖 =1
𝑇𝑝 (4.12)
De acordo com as variáveis de comando 𝐻𝑑𝑞, (4.6), as tensões de modulação são dadas por
(4.13). O calculo de 𝑈𝑑 e de 𝑈𝑞 em função das tensões de comando 𝐻𝑑𝑞, permite o
desacoplamento das variáveis de controlo segundo os eixos dq.
{𝑈𝑑 = 𝐻𝑑 −𝜔 𝐿 𝑖𝑞𝑈𝑞 = 𝐻𝑞 +𝜔 𝐿 𝑖𝑑
(4.13)
O diagrama de blocos correspondente ao actual sistema de controlo com coordenadas dq,
composto por controlador, modulador, conversor matricial e filtro de saída encontra-se
representado na Figura 4.3.
Carga Trifásica de Saída
Hdq V0dq I0dq
αi
αi
I0q ref + - V0q
Carga Trifásica de Saída
Hdq V0dq I0dq
αi
αi
I0q ref
+ -
V0q
+ -
+ +
ω L
ω L
Figura 4.3 - Diagrama de blocos
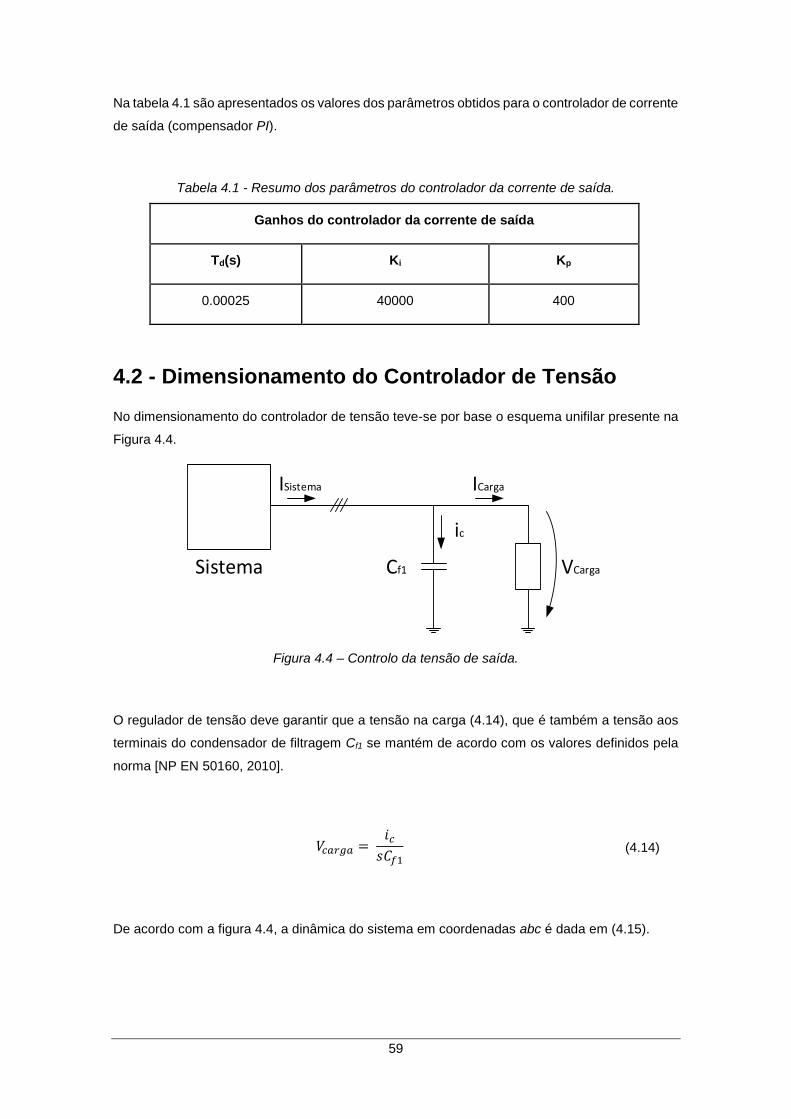
59
Na tabela 4.1 são apresentados os valores dos parâmetros obtidos para o controlador de corrente
de saída (compensador PI).
Tabela 4.1 - Resumo dos parâmetros do controlador da corrente de saída.
Ganhos do controlador da corrente de saída
Td(s) Ki Kp
0.00025 40000 400
4.2 - Dimensionamento do Controlador de Tensão
No dimensionamento do controlador de tensão teve-se por base o esquema unifilar presente na
Figura 4.4.
Sistema
ISistema ICarga
ic
VCargaCf1
Figura 4.4 – Controlo da tensão de saída.
O regulador de tensão deve garantir que a tensão na carga (4.14), que é também a tensão aos
terminais do condensador de filtragem Cf1 se mantém de acordo com os valores definidos pela
norma [NP EN 50160, 2010].
𝑉𝑐𝑎𝑟𝑔𝑎 = 𝑖𝑐𝑠𝐶𝑓1
(4.14)
De acordo com a figura 4.4, a dinâmica do sistema em coordenadas abc é dada em (4.15).
60
{
𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝑎 = 𝐶𝑓1
𝑑𝑣𝑐𝑎𝑑𝑡
+ 𝑖𝑐𝑎𝑟𝑔𝑎𝑎
𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝑏 = 𝐶𝑓1𝑑𝑣𝑐𝑏𝑑𝑡
+ 𝑖𝑐𝑎𝑟𝑔𝑎𝑏
𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝑐 = 𝐶𝑓1𝑑𝑣𝑐𝑐𝑑𝑡
+ 𝑖𝑐𝑎𝑟𝑔𝑎𝑐
(4.15)
Com a aplicação da transformação de Concordia (3.6) a (4.15), e após algumas simplificações
obtém-se a dinâmica das correntes de saída do conversor em coordenadas αβ (4.16).
As correntes do condensador em coordenadas αβ, relacionam as correntes de saída do
conversor e as correntes na carga.
{
𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝛼 = 𝐶𝑓1𝑑𝑣𝑐𝑎𝑑𝑡
+ 𝑖𝑐𝑎𝑟𝑔𝑎𝑎
𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝛽 = 𝐶𝑓1𝑑𝑣𝑐𝛽𝑑𝑡
+ 𝑖𝑐𝑎𝑟𝑔𝑎𝛽
(4.16)
Após a aplicação da transformação de Park (4.3), (4.4) a (4.16) e de alguma manipulação
matemática, obtém-se a dinâmica do sistema em coordenadas dq (4.17).
{𝑣𝑐𝑑̇ = −
𝑖𝑐𝑎𝑟𝑔𝑎𝑑𝐶
+1
𝐶∙ (𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝑑 + 𝜔. 𝐶. 𝑣𝑐𝑞)
𝑣𝑐𝑞̇ = −𝑖𝑐𝑎𝑟𝑔𝑎𝑞𝐶
+1
𝐶∙ (𝑖𝑠𝑖𝑠𝑡𝑒𝑚𝑎𝑞 − 𝜔. 𝐶. 𝑣𝑐𝑑)
(4.17)
No caso do dimensionamento do controlador (Figura 4.5) considera-se que a corrente na carga,
dada por Icarga, é uma perturbação do sistema [Pinto et al, 2011], [Alcaria et al, 2013]. Por sua
vez e, visto que a corrente de saída do conversor matricial se encontra controlada, é possível a
representação do conjunto constituído pelo conversor matricial, bobina de filtragem e indutâncias
de fugas do transformador, pela fonte de corrente Isistema.

61
Isistema Icarga
ic
Cf1Vcarga
Figura 4.5 – Modelo utilizado no dimensionamento do regulador de tensão na carga
Com base na Figura 4.5 e na expressão final 4.17, obtém-se o diagrama de blocos relativo ao
controlador de tensão, onde o bloco
𝐺𝑖𝛼𝑖⁄
𝑠𝑇𝑑+1 representa o modelo do conversor matricial controlado
em corrente [Pinto et al, 2006].
Iref matrix Ilinha Vcarga
αv
αv
VCarga ref
+ -
Icarga
+
- Ic
Figura 4.6 - Diagrama de blocos do controlador de tensão.
Da Figura 4.6, tem-se que a função de transferência em cadeia fechada da tensão da rede
relativamente á corrente na carga é dada por (4.18) [Pinto et al, 2011].
𝑉𝑐𝑎𝑟𝑔𝑎(𝑠)
𝑖𝑐𝑎𝑟𝑔𝑎(𝑠)=
1𝑠𝐶𝑓1
1 +𝛼𝑣𝛼𝑖(𝐾𝑝 +
𝐾𝑖𝑠 )
1𝑠𝑇𝑑 + 1
1𝑠𝐶𝑓1
(4.18)
Da simplificação de (4.18), resulta a função transferência na forma canónica (4.19).
𝑉𝑐𝑎𝑟𝑔𝑎(𝑠)
𝑖𝑐𝑎𝑟𝑔𝑎(𝑠)=
𝑠𝛼𝑣
𝑇𝑑 𝐶𝑓1 𝛼𝑖(𝑇𝑑𝑠 + 1)
𝑠3 +1𝑇𝑑𝑠2 +
𝐾𝑝 𝛼𝑣𝑇𝑑 𝐶𝑓1 𝛼𝑖
𝑠 +𝐾𝑖 𝛼𝑣
𝑇𝑑 𝐶𝑓1 𝛼𝑖
(4.19)
O denominador da função de transferência (4.19) pode ser expresso como um polinómio de
terceira ordem em s (4.20).

62
𝑃3(𝑠) = 𝑠3 + 1.75𝜔0𝑠
2 + 2.15𝜔02𝑠 + 𝜔0
3 (4.20)
Igualando os termos em s do polinómio obtido em (4.20) com o denominador de (4.19), é possível
obter os valores dos ganhos proporcional e integral do compensador PI.
{
1.75 =
1𝑇𝑑
2.15 =𝐾𝑝 𝛼𝑣𝑇𝑑 𝐶𝑓1 𝛼𝑖
1 =𝐾𝑖 𝛼𝑣
𝑇𝑑 𝐶𝑓1 𝛼𝑖
(4.21)
Manipulando (4.21), obtém-se os ganhos proporcional e integral do compensador (4.22).
{
𝐾𝑝 =
2.15𝐶𝑓1𝛼𝑖
𝛼𝑣𝑇𝑑(1.75)2
𝐾𝑖 =𝐶𝑓1 𝛼𝑖
𝛼𝑣𝑇𝑑2(1.75)3
(4.22)
Na Tabela 4.2 encontra-se o resumo dos parâmetros obtidos no dimensionamento do controlador
de tensão (compensador PI).
Tabela 4.2 - Resumo dos parâmetros do controlador de tensão.
Ganhos do controlador de tensão na carga
Td(s) Ki Kp
0.00025 12.5 0.0118

63
Capítulo 5 - Resultados
No presente capítulo são apresentados os resultados de simulação do SST proposto neste
trabalho. Na Figura 5.1. encontra-se representado um esquema genérico do SST, e dos
controladores necessários para garantir o seu correcto funcionamento.
O SST desenvolvido nesta dissertação foi implementado no software MATLAB/Simulink, a fim
de avaliar e testar o seu desempenho e robustez perante vários cenários de operação.
Numa primeira abordagem irá ser feita uma análise do sistema em condições de funcionamento
ideais, sem qualquer tipo de perturbação, de modo a aferir o funcionamento do SST.
Posteriormente será analisado o comportamento do sistema perante perturbações com origem
no lado da média tensão, nomeadamente cavas e sobretensões. Por fim, foi considerado a
existência de harmónicas de tensão na MT, neste caso, a existência da 5ª harmónica, com o
objectivo de verificar qual o seu comportamento perante este tipo de perturbação.
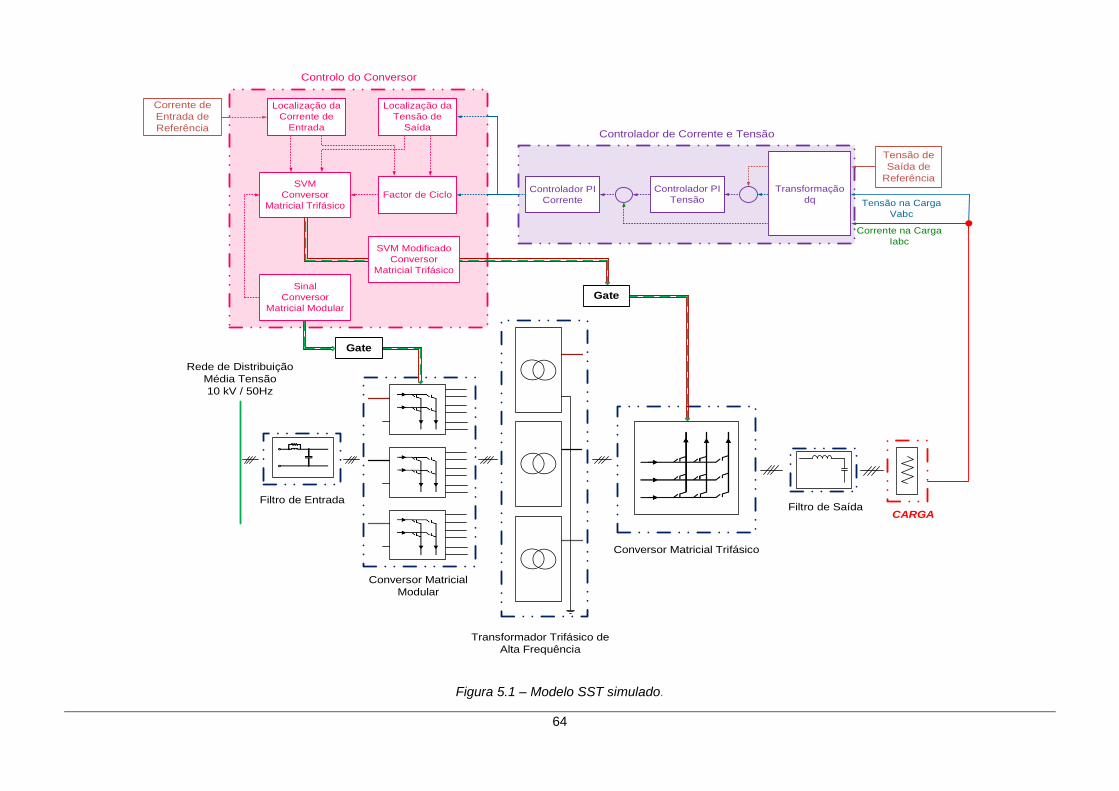
64
Rede de Distribuição
Média Tensão
10 kV / 50Hz
Filtro de Entrada
Conversor Matricial
Modular
Transformador Trifásico de
Alta Frequência
Conversor Matricial Trifásico
Filtro de SaídaCARGA
Controlador PI
Tensão
Tensão de
Saída de
ReferênciaControlador PI
Corrente Tensão na Carga
Vabc
Corrente na Carga
Iabc
Localização da
Tensão de
Saída
Localização da
Corrente de
Entrada
Sinal
Conversor
Matricial Modular
Factor de Ciclo
Gate
Controlador de Corrente e Tensão
Controlo do Conversor
Transformação
dq
Gate
SVM
Conversor
Matricial Trifásico
Corrente de
Entrada de
Referência
SVM Modificado
Conversor
Matricial Trifásico
Figura 5.1 – Modelo SST simulado.
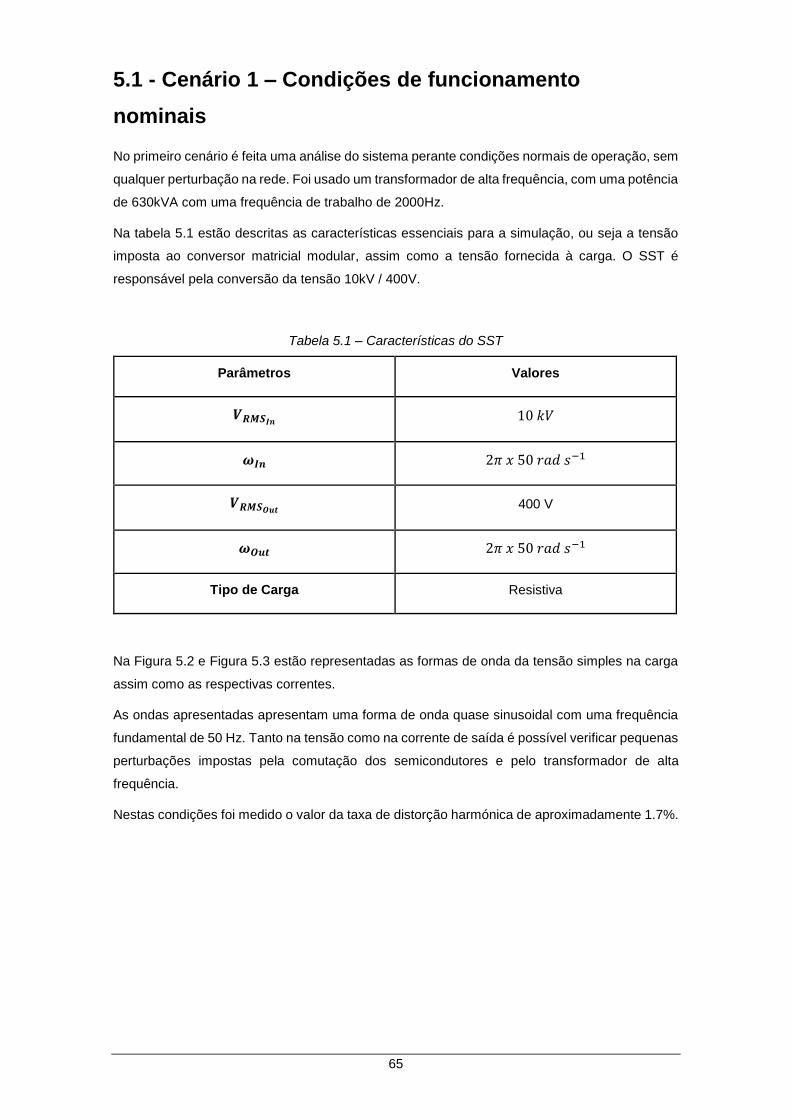
65
5.1 - Cenário 1 – Condições de funcionamento
nominais
No primeiro cenário é feita uma análise do sistema perante condições normais de operação, sem
qualquer perturbação na rede. Foi usado um transformador de alta frequência, com uma potência
de 630kVA com uma frequência de trabalho de 2000Hz.
Na tabela 5.1 estão descritas as características essenciais para a simulação, ou seja a tensão
imposta ao conversor matricial modular, assim como a tensão fornecida à carga. O SST é
responsável pela conversão da tensão 10kV / 400V.
Tabela 5.1 – Características do SST
Parâmetros Valores
𝑽𝑹𝑴𝑺𝑰𝒏 10 𝑘𝑉
𝝎𝑰𝒏 2𝜋 𝑥 50 𝑟𝑎𝑑 𝑠−1
𝑽𝑹𝑴𝑺𝑶𝒖𝒕 400 V
𝝎𝑶𝒖𝒕 2𝜋 𝑥 50 𝑟𝑎𝑑 𝑠−1
Tipo de Carga Resistiva
Na Figura 5.2 e Figura 5.3 estão representadas as formas de onda da tensão simples na carga
assim como as respectivas correntes.
As ondas apresentadas apresentam uma forma de onda quase sinusoidal com uma frequência
fundamental de 50 Hz. Tanto na tensão como na corrente de saída é possível verificar pequenas
perturbações impostas pela comutação dos semicondutores e pelo transformador de alta
frequência.
Nestas condições foi medido o valor da taxa de distorção harmónica de aproximadamente 1.7%.

66
Figura 5.2 – Tensão aos terminais da carga (THDv=1.7%)
Figura 5.3 – Corrente na carga
Na Figura 5.4 a) é feita a comparação da tensão simples na carga com a tensão de referência,
sendo possível concluir que o seguimento da referência é conseguido com um erro estacionário
bastante reduzido, ou quase inexistente, tal como se pode se pode verificar pela Figura 5.4 b).
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-400
-300
-200
-100
0
100
200
300
400
Corr
ente
[A
]
Tempo [s]
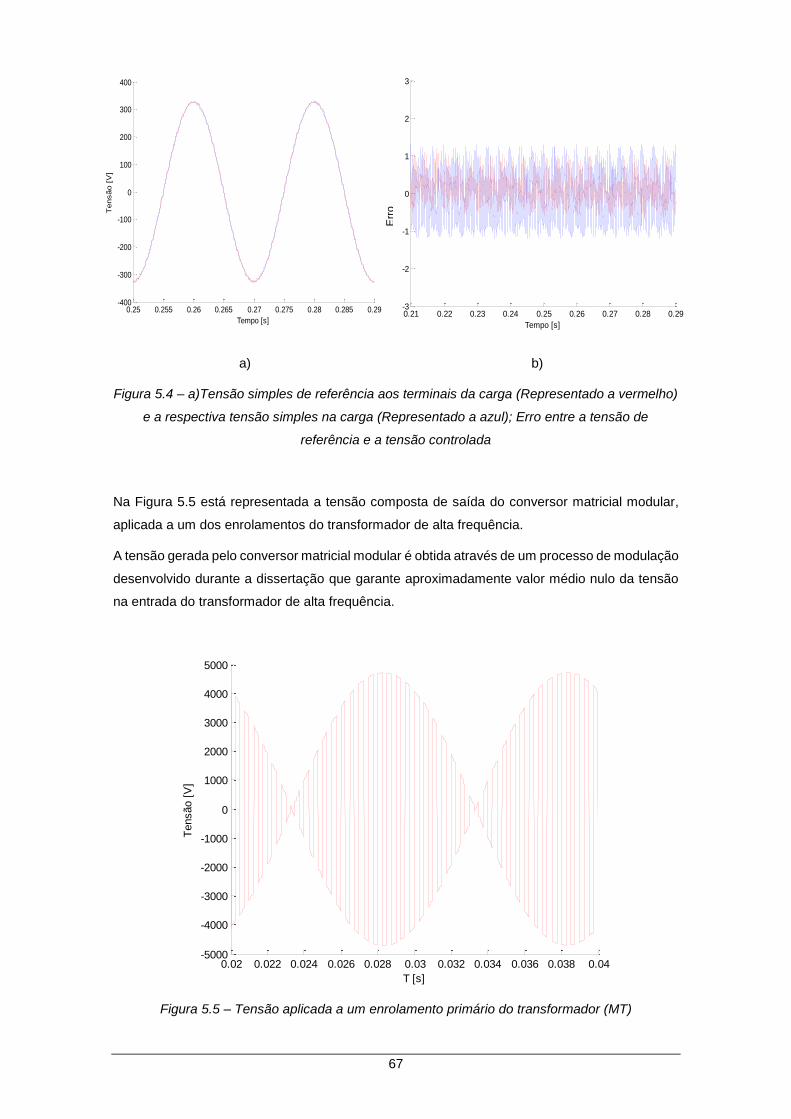
67
a) b)
Figura 5.4 – a)Tensão simples de referência aos terminais da carga (Representado a vermelho)
e a respectiva tensão simples na carga (Representado a azul); Erro entre a tensão de
referência e a tensão controlada
Na Figura 5.5 está representada a tensão composta de saída do conversor matricial modular,
aplicada a um dos enrolamentos do transformador de alta frequência.
A tensão gerada pelo conversor matricial modular é obtida através de um processo de modulação
desenvolvido durante a dissertação que garante aproximadamente valor médio nulo da tensão
na entrada do transformador de alta frequência.
Figura 5.5 – Tensão aplicada a um enrolamento primário do transformador (MT)
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]0.21 0.22 0.23 0.24 0.25 0.26 0.27 0.28 0.29-3
-2
-1
0
1
2
3
Tensão [
V]
Tempo [s]
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
Tensão [
V]
T [s]
Err
o

68
Como se pode verificar pela Figura 5.6, a tensão à saída do transformador é idêntica à da entrada
com a devida transformação do nível de tensão. Nota-se algum tremor na onda da tensão
originado pelo transformador de alta frequência.
Figura 5.6 – Tensão de saída do transformador (BT)
Na Figura 5.7 verifica-se que as correntes à entrada do filtro contêm harmónicas de alta
frequência, provenientes da alta frequência de comutação dos semicondutores dos conversores.
A introdução do filtro na entrada do SST minimiza o conteúdo harmónico de alta frequência,
apresentando correntes de entrada aproximadamente sinusoidais.
Figura 5.7 – Correntes de entrada do SST (MT).
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-600
-400
-200
0
200
400
600
Tensão [
V]
T [s]
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-100
-80
-60
-40
-20
0
20
40
60
80
100
Cor
rent
e [A
]
Tempo [s]

69
Na Figura 5.8 observam-se as formas de onda da tensão e corrente na fase A à entrada do
conversor matricial modular. Verifica-se um ligeiro avanço da corrente face à tensão, que resulta
dos condensadores do filtro de entrada do conversor matricial. Com o aumento da corrente na
carga, ou seja, com o aumento da potência activa transitada, as ondas tendem a ficar em fase.
Figura 5.8 – Tensão (Vermelho) e corrente na fase A (Azul) à entrada do conversor matricial
modular.
5.2 - Cenário 2 – Situação de Cava na Média Tensão
Na presente secção é feita uma análise em detalhe do comportamento do SST quando
confrontado com uma situação de cava no lado da média tensão.
Na Tabela 5.2 está descrito as características da cava em estudo.
Tabela 5.2 – Características da cava de tensão
Tipo de Carga Profundidade da Cava Duração da Cava
Resistiva 30% 2 Ciclos da Rede
Na Figura 5.9 é possível verificar a perturbação na onda da tensão de entrada do conversor
matricial modular. A cava provocou um abaixamento na tensão de entrada durante dois períodos
da rede.
0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28-100
-80
-60
-40
-20
0
20
40
60
80
100
Tensão [
V]
/ C
orr
ente
[A
]
Tempo [s]
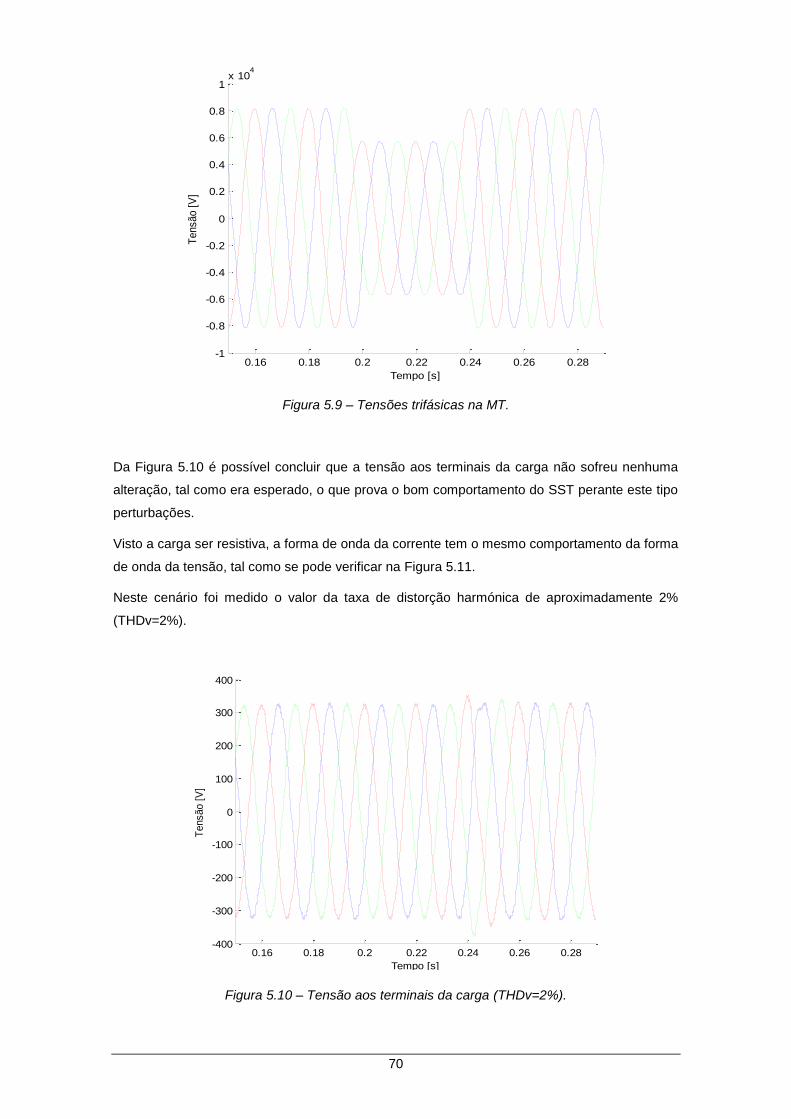
70
Figura 5.9 – Tensões trifásicas na MT.
Da Figura 5.10 é possível concluir que a tensão aos terminais da carga não sofreu nenhuma
alteração, tal como era esperado, o que prova o bom comportamento do SST perante este tipo
perturbações.
Visto a carga ser resistiva, a forma de onda da corrente tem o mesmo comportamento da forma
de onda da tensão, tal como se pode verificar na Figura 5.11.
Neste cenário foi medido o valor da taxa de distorção harmónica de aproximadamente 2%
(THDv=2%).
Figura 5.10 – Tensão aos terminais da carga (THDv=2%).
0.16 0.18 0.2 0.22 0.24 0.26 0.28-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1x 10
4
Tensão [
V]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]
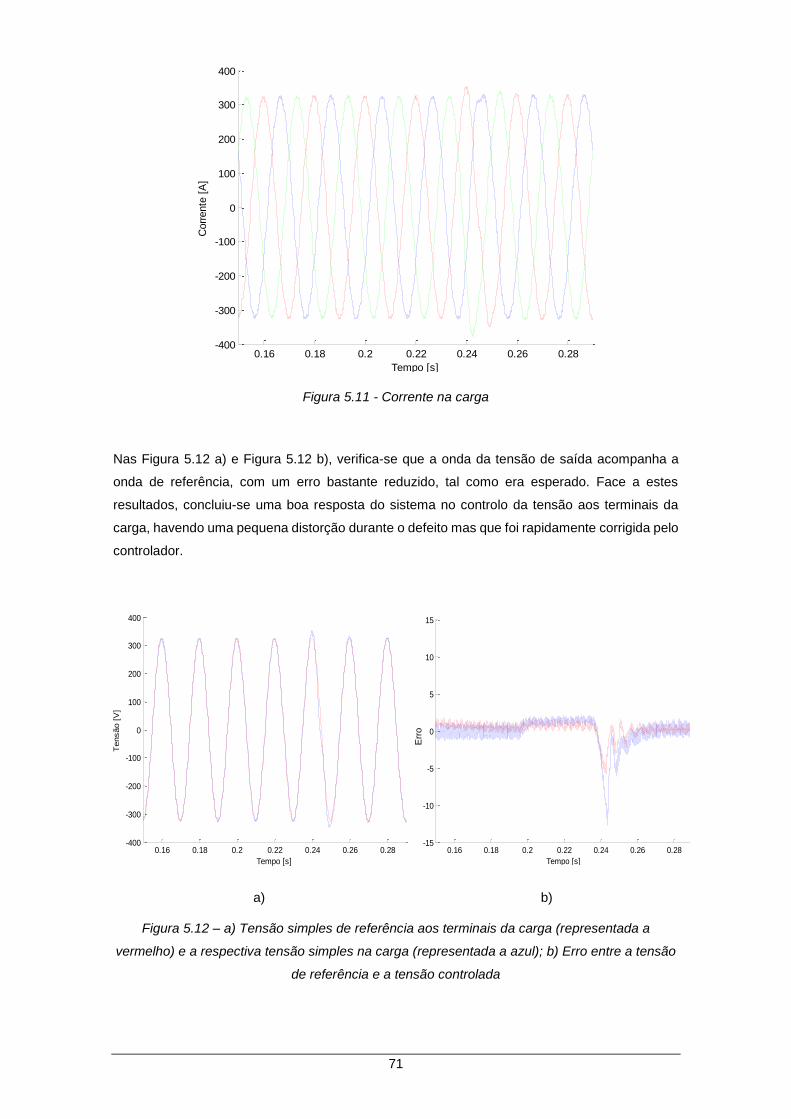
71
Figura 5.11 - Corrente na carga
Nas Figura 5.12 a) e Figura 5.12 b), verifica-se que a onda da tensão de saída acompanha a
onda de referência, com um erro bastante reduzido, tal como era esperado. Face a estes
resultados, concluiu-se uma boa resposta do sistema no controlo da tensão aos terminais da
carga, havendo uma pequena distorção durante o defeito mas que foi rapidamente corrigida pelo
controlador.
a) b)
Figura 5.12 – a) Tensão simples de referência aos terminais da carga (representada a
vermelho) e a respectiva tensão simples na carga (representada a azul); b) Erro entre a tensão
de referência e a tensão controlada
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Corr
ente
[A
]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-15
-10
-5
0
5
10
15
Tensão [
V]
Tempo [s]
Err
o

72
Na Figura 5.13 está representado a evolução temporal do índice de modulação, que até ao
momento da perturbação apresenta uma evolução constante, com um valor compreendido entre
0.7 e 0.8.
O índice reage á perturbação com um aumento bastante significativo, chegando mesmo a atingir
a unidade. Após o efeito, o índice rapidamente estabiliza.
Figura 5.13 – Índice de modulação
5.3 - Cenário 3 – Situação de Sobretensão na Média
Tensão
No terceiro cenário é submetido o SST a uma sobretensão com uma duração de 2 períodos da
rede. Na Tabela 5.3 encontra-se especificado as características da perturbação.
Tabela 5.3 – Características da sobretensão
Tipo de Carga Sobretensão Duração da Sobretensão
Resistiva 30% 2 Ciclos da Rede
Na Figura 5.14 está representada uma possível perturbação na tensão de entrada do conversor
matricial. A sobretensão provocou um aumento substancial na tensão de entrada durante dois
períodos da rede.
0.16 0.18 0.2 0.22 0.24 0.26 0.280
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 <
m <
1
Tempo [s]
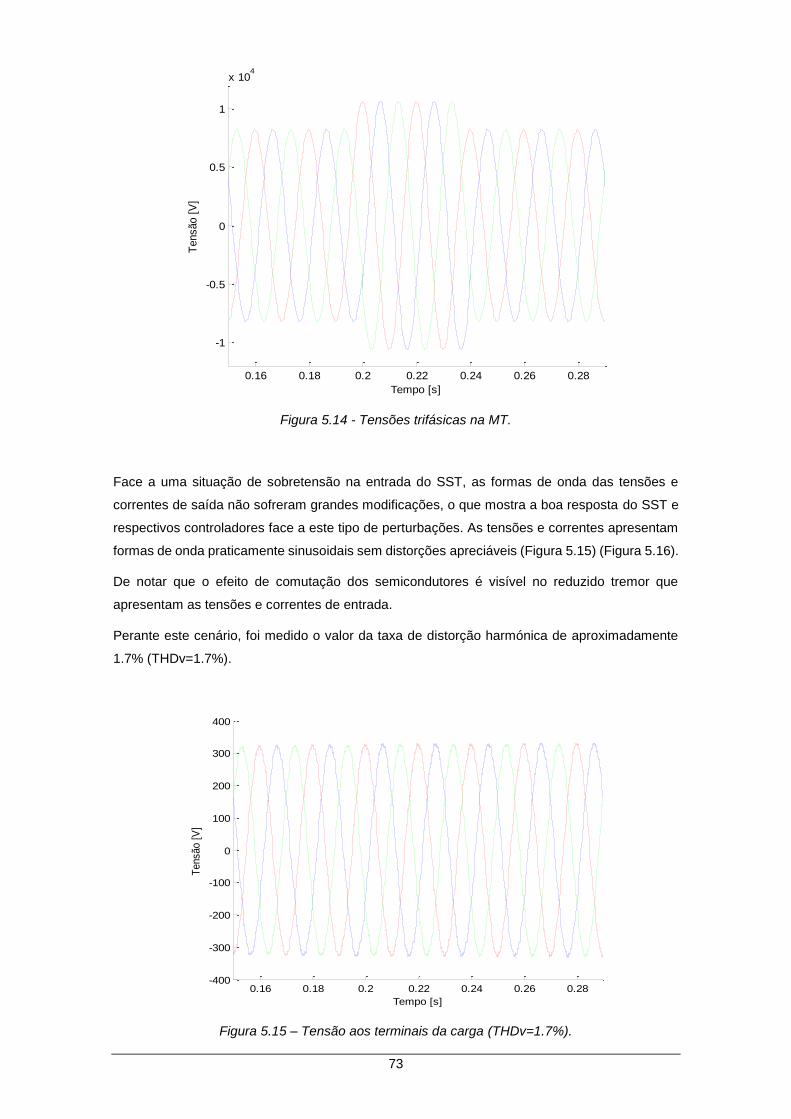
73
Figura 5.14 - Tensões trifásicas na MT.
Face a uma situação de sobretensão na entrada do SST, as formas de onda das tensões e
correntes de saída não sofreram grandes modificações, o que mostra a boa resposta do SST e
respectivos controladores face a este tipo de perturbações. As tensões e correntes apresentam
formas de onda praticamente sinusoidais sem distorções apreciáveis (Figura 5.15) (Figura 5.16).
De notar que o efeito de comutação dos semicondutores é visível no reduzido tremor que
apresentam as tensões e correntes de entrada.
Perante este cenário, foi medido o valor da taxa de distorção harmónica de aproximadamente
1.7% (THDv=1.7%).
Figura 5.15 – Tensão aos terminais da carga (THDv=1.7%).
0.16 0.18 0.2 0.22 0.24 0.26 0.28
-1
-0.5
0
0.5
1
x 104
Tensão [
V]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]

74
Figura 5.16 – Corrente na carga.
Como se pode verificar pelas Figura 5.17 a) e Figura 5.17 b) a forma de onda da tensão
controlada segue a referência com um erro bastante reduzido.
a) b)
Figura 5.17 – a) Tensão simples de referência aos terminais da carga (Representado a
vermelho) e a respectiva tensão simples na carga (Representado a azul); b) Erro entre a
tensão de referência e a tensão controlada
No caso de sobretensão, o índice de modulação no momento da perturbação reage com uma
diminuição do seu valor, retomando o valor normalizado após o efeito (Figura 5.18).
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Corr
ente
[A
]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]0.16 0.18 0.2 0.22 0.24 0.26 0.28
-10
-8
-6
-4
-2
0
2
4
6
8
10
Tensão [
V]
Tempo [s]
Err
o
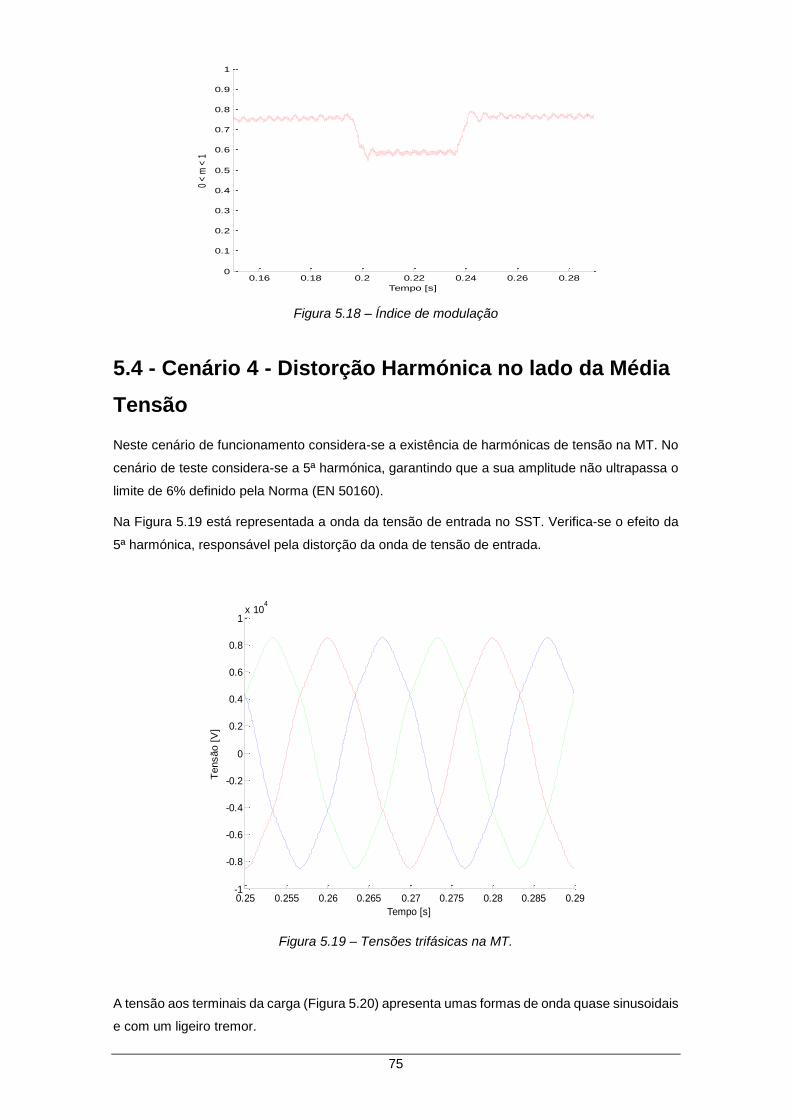
75
Figura 5.18 – Índice de modulação
5.4 - Cenário 4 - Distorção Harmónica no lado da Média
Tensão
Neste cenário de funcionamento considera-se a existência de harmónicas de tensão na MT. No
cenário de teste considera-se a 5ª harmónica, garantindo que a sua amplitude não ultrapassa o
limite de 6% definido pela Norma (EN 50160).
Na Figura 5.19 está representada a onda da tensão de entrada no SST. Verifica-se o efeito da
5ª harmónica, responsável pela distorção da onda de tensão de entrada.
Figura 5.19 – Tensões trifásicas na MT.
A tensão aos terminais da carga (Figura 5.20) apresenta umas formas de onda quase sinusoidais
e com um ligeiro tremor.
0.16 0.18 0.2 0.22 0.24 0.26 0.280
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 <
m <
1
Tempo [s]
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1x 10
4
Tensão [
V]
Tempo [s]
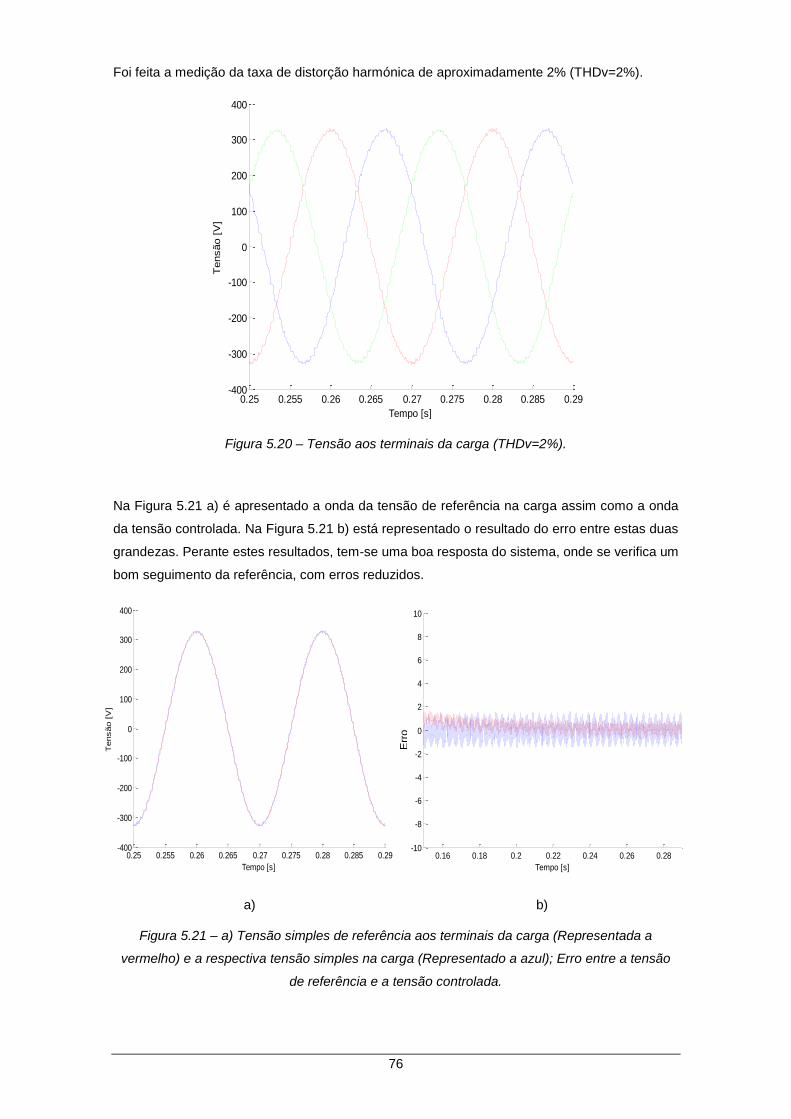
76
Foi feita a medição da taxa de distorção harmónica de aproximadamente 2% (THDv=2%).
Figura 5.20 – Tensão aos terminais da carga (THDv=2%).
Na Figura 5.21 a) é apresentado a onda da tensão de referência na carga assim como a onda
da tensão controlada. Na Figura 5.21 b) está representado o resultado do erro entre estas duas
grandezas. Perante estes resultados, tem-se uma boa resposta do sistema, onde se verifica um
bom seguimento da referência, com erros reduzidos.
a) b)
Figura 5.21 – a) Tensão simples de referência aos terminais da carga (Representada a
vermelho) e a respectiva tensão simples na carga (Representado a azul); Erro entre a tensão
de referência e a tensão controlada.
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]
0.25 0.255 0.26 0.265 0.27 0.275 0.28 0.285 0.29-400
-300
-200
-100
0
100
200
300
400
Tensão [
V]
Tempo [s]
0.16 0.18 0.2 0.22 0.24 0.26 0.28-10
-8
-6
-4
-2
0
2
4
6
8
10
Tensão [
V]
Tempo [s]
Err
o
77
Capítulo 6 - Conclusões
Neste capítulo são apresentadas as principais conclusões da dissertação assim como propostas
para trabalhos futuros.
6.1 - Conclusões
Esta dissertação teve como objectivo o desenvolvimento de um transformador de potência de
alta frequência para sistemas de distribuição, capaz de produzir tensões de magnitude e
frequência variável na saída.
A solução proposta nesta dissertação evidenciou-se como tendo a possibilidade de dar resposta
a lacunas impostas pelo Transformador Clássico.
Durante o desenvolvimento deste projecto, surgiram várias preocupações, tais como a não
saturação do transformador de potência, que com a alteração das características da modulação
SVM foi conseguido. Outra grande preocupação foi as limitações de tensão impostas pelos
semicondutores que constituem os conversores matriciais, não facilitando a integração do
conversor matricial no lado da média tensão.
Conhecido o problema, foi desenvolvido um conversor matricial modular, que regula a tensão
para níveis que não coloquem em causa a operacionalidade dos conversores usados.
O comando do conversor matricial trifásico tem por base a modulação SVM com algumas
alterações, de modo a garantir na saída um sistema trifásico com frequência de 50Hz.
Tanto o controlo de tensão como o controlo de corrente foram realizados através de
compensadores PI, que apresentaram um bom desempenho com erro estático próximo de zero,
permitindo uma resposta rápida e garantindo a estabilidade do sistema para vários cenários de
carga.
O SST foi submetido a uma cava de tensão equilibrada (30%) durante dois períodos da rede,
com vista a ser analisado o comportamento do sistema perante este tipo de perturbações. Tal
como era esperado, o sistema apresentou na saída ondas sinusoidais.
Foi também feito o estudo perante uma sobretensão equilibrada (30%) com duração de 2
períodos da rede. De forma idêntica à cava de tensão, o sistema conseguiu responder
positivamente á perturbação, mostrando na sua saída ondas sinusoidais.
De realçar a maior sensibilidade do sistema para a situação de cava a 30%, pois após o defeito,
este demorou algum tempo até atingir a estabilidade. No caso da sobretensão, o sistema não é
tão sensível, pois não foi verificado qualquer desequilíbrio durante o efeito.
Por fim, foi considerado a existência de harmónicas de tensão na MT. Perante este cenário,
concluiu-se que o sistema proposto consegue minimizar os efeitos da perturbação, apresentando
na saída ondas de tensão e correntes sinusoidais.
Em todos os cenários de teste foi feita a medição da taxa de distorção harmónica (THD), tendo
sido obtido valores compreendidos entre os 1.5% e os 2%. Concluiu-se que o sistema proposto
apresenta uma boa gama de valores de taxa harmónica, inferior ao valor regulamentar, segundo
78
a Norma 50160.
O controlador projectado funciona adequadamente quando submetido a perturbações, pois
apresenta uma boa capacidade de regulação.
Como se pode verificar, este método revelou ser uma boa estratégia para seguimento da
referência, pois assegura na saída ondas de tensão e corrente praticamente sinusoidais.
Para finalizar, é importante ter em atenção que este sistema tem muitas outras utilidades que
poderão vir a ser desenvolvidas num futuro próximo, tais como, a integração numa smart grid ou
em subestações que equipam os sistemas de energia renováveis.
6.2 - Perspectivas de Trabalho Futuro
Da realização desta dissertação, surgiram novas ideias a maioria com vista a melhorar o sistema
proposto.
Algumas dessas propostas encontram-se descritas nos parágrafos seguintes:
- A implementação laboratorial do SST seria uma mais valia para o desenvolvimento da
tecnologia;
- A optimização do processo de modulação SVM, ou seja, melhorar a selectividade dos vectores
a usar, tendo em conta o menor número de comutações dos semicondutores.
- Reestruturação do conversor matricial modular com vista a melhorar a sua versatilidade.
- Desenvolvimento de novos tipos de filtros, permitindo a redução do conteúdo harmónico. Uma
solução seria o aumento da ordem dos filtros, colocando filtros de dois estágios. Outra solução
interessante seria a implementação de amortecimento activo (active damping), com vista a
melhorar a eficiência do sistema.
- Em vez do conversor matricial trifásico, do lado da BT seria interessante usar um outro tipo de
conversor matricial, como por exemplo o conversor matricial de 4 braços.
79
Referências Bibliográficas
[Afonso et al, 2013] Afonso, L P; Pinto, S F; Silva, J F; “Maximum Power Point Tracker
for Wind Energy Generation Systems Using Matrix Converters”,
Proc. POWERENG'13, pp 978-983, Istanbul, Turkey, May 2013.
[Alesina et al, 1989] Alesina, A.; Venturini, M.; “Analysis and Design of Optimum
Amplitude Nine-Switch Direct AC-AC Converters”, IEEE Trans.
On Power Electronics, Vol. 4, No 1, pp.101-112, January 1989.
[Alcaria, 2012] Alcaria, P.; “Reguladores Activos de Tensão para a Rede de
Distribuição BT”, MSc Thesis, Instituto Superior Técnico,
Universidade Técnica de Lisboa, 2012.
[Alcaria et al, 2013] Alcaria, P; Pinto, S.; F., Silva, J. F.; ”Active Voltage Regulators for
Low Voltage Distribution Grids: the Matrix Converter Solution”,
Proc. 4th International Conference on Power Engineering, Energy
and Electrical Drives, PowerEng 2013, pp 989-994, Istanbul,
Turkey, May 2013.
[Banaei, 2011] Banaei, M., R.; Salary, R.; “Power quality improvement based on
novel power electronic transformer,” in 2011 2nd Power
Electronics, Drive Systems and Technologies Conference, 2011,
no. 401, pp. 286–291.
[Bhattacharya et al, 2010] Bhattacharya, S.; Zhao, T.; Wang, G.; Dutta, S.; Baek, S.; Du, Y.;
Parkhideh, B.; Zhou, X.; Huang, A., Q.; “Design and development
of Generation-I silicon based Solid State Transformer,” in 2010
Twenty-Fifth Annual IEEE Applied Power Electronics Conference
and Exposition (APEC), 2010, pp. 1666–1673.
[Cabral, 2009] Cabral, C.; ”Apontamentos teóricos – Maquinas Eléctricas 1”, ISE
– UALG, 2009.

80
[Casadei et al, 2012] Casadei, D., Serra, G., Tani, A., Zarri, L., “Matrix Converter
Modulation Strategies: a New General Aproach Based on Space-
Vector Representation of the Switch State”, IEEE Transaction on
Industrial Electronics, Vol. 49, No. 2, April 2002.
[Colonel et al, 2004] Colonel, W, M.; Mclyman, T.; “Transformer and Inductor Design
Handbook”, 3rd ed. Boca Raton, FL, USA: CRC Press, 2004.
[Dobrucky et al, 1998] Dobrucky, B.; Havrilla, R.; Dubovsky, J.; “A Single Phase
Supplied Matrix Converter with Unity Power Factor”, Proc.
PEMC’98 Conference, Vol. 6, pp. 146-150, September 1998,
Prague.
[Du et al, 2010] Du, S., B., Y.; Wang, G.; Bhattacharya, S.; “Design
considerations of high voltage and high frequency transformer for
solid state transformer application”, in Proc. 36th Annual IEEE
IECON, Nov. 2010, pp. 421–426.
[Falcones et al, 2010] Falcones, S.; Xiaolin Mao; Ayyanar, R.; “Topology comparison for
Solid State Transformer implementation,” in IEEE PES General
Meeting, 2010, pp. 1–8.
[Encarnação et al, 2012] Encarnação, L.; Silva, J F; Pinto, S F; Redondo, L; “Grid
Integration of Offshore Wind Farms Using Modular Marx
Multilevel Converters”, Volume 372, pp 311-320, in
“Technological Innovation for Value Creation, IFIP Advances in
Information and Communication Technology”, Springer Berlin
Heidelberg, 2012.
[Ferch, 2003] Ferch, M.; “Nanocrystalline Core Materials for Modern Power
Electronic Designs”,,Langenselbold, Germany, 2003,
http://www.magnetec.de/en/
[Fernandes, 2014] Fernandes, G C; Pinto, S F; Silva, J F; “Maximum Power Point
Tracking of Matrix Converter Based Wind Systems with
Permanent Magnet SynchronousGenerator”, CONTROLO 2014
– Proceedings of the 11th Portuguese Conference on Automatic
Control, pp 303-312, Portugal, Julho 2014.
81
[Gamboa, 2007] Gamboa, P; Pinto, S F; Silva, J F; Margato, E; “Predictive Optimal
Control of Unity Power Factor Matrix Converters used in Field
Oriented Controlled Induction Motor Drives”; IEEE International
Symposium on Industrial Electronics, ISIE 2007, pp 1334-1339,
Vigo, Spain, June 2007.
[Gamboa, 2009] Gambôa, P; Silva, J F; Pinto, S F; Margato, E.; “Control for a
Dynamic Voltage Restorer with Flywheel Energy Storage”, 35th
Annual Conference of IEEE Industrial Electronics - IECON'09, pp
759-764, Porto, Portugal, November 2009.
[Hassan, 2010] Hassan, R.; Radman, G.; "Survey on Smart Grid" IEEE 2010
SoutheastCon, Proceedings of the power electronic application
conference, vol., no., pp.210–213, March 2010.
[Holmes et al, 1992] Holmes, D. G., Lipo, T. A., ”Implementation of a Controlled
Rectifier Using AC-AC Matrix Converter Theory”, IEEE
Transactions on Power Electronics, Vol. 7, No. 1, pp. 240-250,
Janeiro 1992.
[Huber et al, 1995] Huber, L.; Borojevic, D.; “Space Vector Modulated Three-Phase
to Three-Phase Matrix Converter with Input Power Factor
Correction”; IEEE Transactions on Industry Applications, Vol. 31,
No 6, pp. 1234 - 1246, November/December 1995.
[Jeszenszky, 1996] Jeszenszky, S.; “History of transformers”, IEEE Power
Engineering Review, Vol. 16, 1996, pp. 9-12.
[Kolar,2011] Kolar, J., W.; “Intelligent Solid State Transformers ( SSTs ) A Key
Building Block of Future Smart Grid Systems The MEGA Cube
Project” 2011, pp. 1–63.
[Kolar et al, 2012] Kolar, J., W.; Ortiz, G.; “Solid State Transformer Concepts in
Traction and Smart Grid Applications”, Tutorial at the 15th
International Power Electronics and Motion Control Conference
(ECCE Europe 2012), Novi Sad, Serbia, September, 2012.
82
[Kolar, 2013] Kolar, J., W.; “Next Generation Power Electronics Infrastructure
System The EEnergy Internet”, April, 2013, pp. 1–57.
[Mazet et al, 1998] Mazet, L.; Boulant, H.; Huselstein, J.; Glaize, C.; “Switching
Control in Three-Phase Matrix Converters by Discrimination of
Command Orders”, Proc. PEMC’98 Conference, Vol. 2, pp. 64-
67, September 1998, Prague.
[Mendes, 2013] Mendes, P.; ”Matrix Converter Based High Power High
Frequency Modular Transformers for Traction Conversion
Systems”, MSc Thesis, Instituto Superior Técnico, Universidade
Técnica de Lisboa, 2013.
[Merwe et al, 2009a] van der Merwe, J., W.; du T. Mouton, H.; “The solid-state
transformer concept: A new era in power distribution,” in
AFRICON 2009, 2009, pp. 1–6.
[Merwe et al, 2009b] van der Merwe, J., W.; du T. Mouton, H.; “Solid-state transformer
topology selection,” in 2009 IEEE International Conference on
Industrial Technology, 2009, pp. 1–6.
[Monteiro, 2014] Monteiro, J; Silva, J F; Pinto, S F; Palma, J; “Linear and Sliding
Mode Control Design for Matrix Converter Based Unified Power
Flow Controllers”, IEEE Transactions on Power Electronics, Vol.
29, No. 7, pp. 3357-3367, July 2014
[Neft et al 1992] Neft, C.; Schauder, C.; “Theory and Design of a 30-hp Matrix
Converter”, IEEE Transactions on Industry Applications, Vol. 28,
No 3, pp. 546-551, May/June 1992.
[Nielsen et al, 1996] Nielsen, P.; Blaabjerg, F.; Pedersen, J.; “Space-Vector
Modulated Matrix Converter with Minimized number of Switchings
and a Feedforward Compensation of Input Voltage Unbalance”;
Proc. PEDES’96 Conference, Vol. 2, pp. 833-839, New Delhi,
India.
83
[Ortiz et al, 2013] Ortiz, G.; Leibl, M.; Kolar, J., W.; Apeldoorn, O.; “Medium
frequency transformer for solid-state-transformer application—
Design and experimental verification”, in Proc. IEEE PEDS, April
2013, pp. 1285–1290.
[Pinto, 2003] Pinto, S.; “Conversores Matriciais Trifásicos: Generalização do
Comando Vectorial Directo”, PhD Thesis, Instituto Superior
Técnico Universidade Técnica de Lisboa, July 2003.
[Pinto et al, 2006a] Pinto, S.; Silva, J.; Gambôa, P.; “Current Control of a Venturini
Based Matrix Converter”, IEEE International Symposium on
Industrial Electronics – ISIE 2006, Vol. 4, pp. 3214 – 3219,
Montréal, Canada, July 2006.
[Pinto et al, 2006b] Pinto, S F; Silva, J F; “Matrix Converters: The Direct Control
Approach Using Sliding Mode”, International Review of Electrical
Engineering, Vol 1, No 4, pp 468-479, October 2006.
[Pinto et al, 2006c] Pinto, S F; Silva, J F; “Input Filter Design of a Mains Connected
Matrix Converter”, IEEE International Conference on Harmonics
and Quality of Power, 12th ICHQP, Cascais, Portugal, October
2006.
[Pinto et al, 2011] Pinto, S., Silva, J. F., Silva, F., Frade, P.; ”Design of a Virtual Lab
to Evaluate and Mitigate Power Quality Problems Introduced by
Microgeneration, in Electrical Generation and Distribution
Systems and Power Quality Disturbances” , Intech, 2011.
[Pires, 2014] Pires, R; “Conversores Isolados para Transmissão em Corrente
Continua a Alta Tensão, usando Conversores Matriciais”, MSc
Thesis, Instituto Superior Técnico, Universidade Técnica de
Lisboa, 2014.
[Shen, 2006] Shen, W.; “Design of High-density Transformers for High-
frequency High-power Converters”, Phd Thesis, Virginia
Polytechnic Institute, Blacksburg, Virginia, July 2006.

84
[She, 2013] She, X.; “Review of Solid-State Transformer Technologies and
Their Application in Power Distribution Systems”, Future
Renewable Electr. Energy Delivery & Manage. Syst. Center,
North Carolina State Univ., 2013.
[Silva, 2008] Silva, J.; “Sistemas de Energia em Telecomunicações: Textos de
apoio”; Instituto Superior Técnico, Universidade Técnica de
Lisboa, 2008.
[Silva, 2011a] Silva, J. F.; Pinto, S. F.; “Advanced Control of Switching Power
Converters”, Cap. 36, pp 1037-1113, Power Electronics
Handbook 3rd edition, Editor M. H. Rashid, Burlington:
Butterworth-Heinemann, ELSEVIER, ISBN: 978-0-12-382036-5,
2011.
[Silva, 2011b] Silva, J.; “Input Filter Design for Power converters”; Sistemas de
Energia Autónomos, Lecture Notes; Instituto Superior Técnico,
Universidade Técnica de Lisboa, 2011.
[Silva, 2013] Silva, J. F.: “Electrónica Industrial”, 2ª Edição, Fundação
Calouste Gulbenkian, ISBN 978-972-31-1499-7, Lisboa, 2013.
[Wang, 2009] Wang, D.; Mao, C.; Lu, J.; “Operation and control mode of
electronic power transformer” in 2009 IEEE PES/IAS Conference
on Sustainable Alternative Energy (SAE), 2009, pp. 1–5.
[Zhang et al, 2002] Zhang, R.; Himamshu, V.; Boroyevich, D.; Lee, F.; “Three-
Dimensional Space Vector Modulation for Four-Leg Voltage-
Source Converters," IEEE Power Electronics Letters, vol. 17, no.
3, May 2002.
[Zuckerberger et al, 1997] Zuckerberger, A.; Weinstock, D.; Alexandrovitz, A.; “Single-phase
Matrix Converter”, IEE Proceedings Electronic Power
Applications, Vol.144, No 4, pp. 235-240, July 1997.

85
Anexos
Anexo A - Matriz Sc
A matriz S (2.4) para além de representar os estados de comutação dos semicondutores,
possibilita uma relação matemática entre as tensões simples de saída 𝑉𝐴, 𝑉𝐵 , 𝑉𝐶 com as tensões
simples de entrada 𝑉𝑎 , 𝑉𝑏 , 𝑉𝑐.
Por outro lado, a transposta da matriz S (ST) relaciona as correntes de entrada 𝐼𝑎 , 𝐼𝑏 , 𝐼𝑐 com as
correntes de saída 𝐼𝐴 , 𝐼𝐵 , 𝐼𝐶 (A.1).
[
𝑉𝐴𝑉𝐵𝑉𝐶
] = 𝑆 [
𝑉𝑎𝑉𝑏𝑉𝐶
] [
𝐼𝑎𝐼𝑏𝐼𝑐
] = 𝑆𝑇 [
𝐼𝐴𝐼𝐵𝐼𝐶
] (A.1)
Considera-se que a relação entre tensões compostas e simples é dada por (A.2).
{
𝑉𝐴𝐵 = 𝑉𝐴 − 𝑉𝐵
𝑉𝐵𝐶 = 𝑉𝐵 − 𝑉𝐶
𝑉𝐶𝐴 = 𝑉𝐶 − 𝑉𝐴
(A.2)
Substituindo (2.6) em (A.2) obtém-se um novo sistema de equações que relaciona as tensões
compostas de saída com as tensões simples de entrada (A.3).
{
𝑉𝐴𝐵 = 𝑆11𝑉𝑎 + 𝑆12𝑉𝑏 + 𝑆13𝑉𝑐 − 𝑆21𝑉𝑎 − 𝑆22𝑉𝑏 − 𝑆23𝑉𝑐
𝑉𝐵𝐶 = 𝑆21𝑉𝑎 + 𝑆22𝑉𝑏 + 𝑆23𝑉𝑐 − 𝑆31𝑉𝑎 − 𝑆32𝑉𝑏 − 𝑆33𝑉𝑐
𝑉𝐶𝐴 = 𝑆31𝑉𝑎 + 𝑆32𝑉𝑏 + 𝑆33𝑉𝑐 − 𝑆11𝑉𝑎 − 𝑆12𝑉𝑏 − 𝑆13𝑉𝑐
(A.3)
Após alguma manipulação de variáveis, obteve-se (A.4).

86
{
𝑉𝐴𝐵 = (𝑆11 − 𝑆12)𝑉𝑎 + (𝑆12 − 𝑆22)𝑉𝑏 + (𝑆13 − 𝑆23)𝑉𝑐
𝑉𝐵𝐶 = (𝑆21 − 𝑆31)𝑉𝑎 + (𝑆22 − 𝑆32)𝑉𝑏 + (𝑆23 − 𝑆33)𝑉𝑐
𝑉𝐶𝐴 = (𝑆31 − 𝑆11)𝑉𝑎 + (𝑆32 − 𝑆12)𝑉𝑏 + (𝑆33 − 𝑆13)𝑉𝑐
(A.4)
Reescrevendo (A.4) na forma matricial, obtém-se (A.5).
𝑺𝒄 = [
𝑆11 − 𝑆12 𝑆12 − 𝑆22 𝑆13 − 𝑆23𝑆21 − 𝑆31 𝑆22 − 𝑆32 𝑆23 − 𝑆33𝑆31 − 𝑆11 𝑆32 − 𝑆12 𝑆33 − 𝑆13
] (A.5)
Por fim, temos que a matriz Sc relaciona as tensões compostas de saída com as tensões simples
de entrada (A.6).
[
𝑉𝐴𝐵𝑉𝐵𝐶𝑉𝐶𝐴
] = 𝑆𝑐 [
𝑉𝑎𝑉𝑏𝑉𝑐
] (A.6)

87
Anexo B – IGBT (FZ250R65KE3)
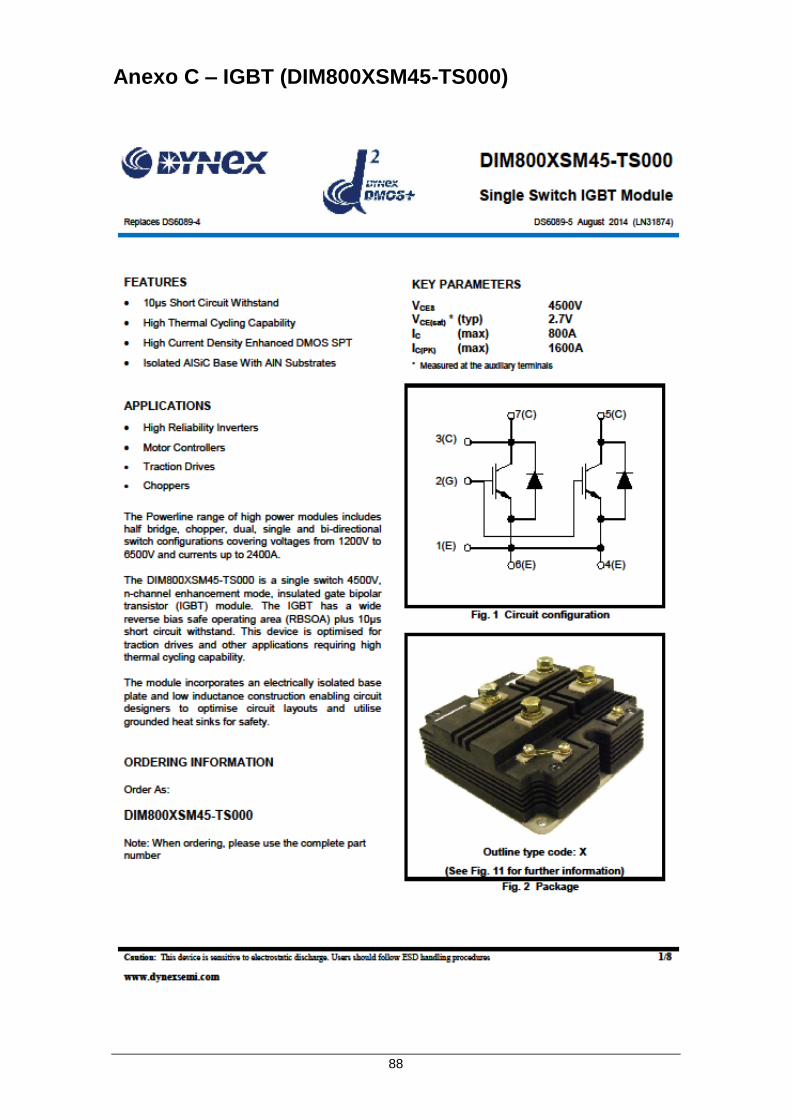
88
Anexo C – IGBT (DIM800XSM45-TS000)

89
Anexo D - Resistência de amortecimento do filtro de
entrada
Considerando a função de transferência do filtro de entrada dada por (D.1).
𝑉𝑜(𝑠)
𝑉𝑖(𝑠)=
1𝐶𝑓 𝑖𝑛 𝐿1 𝑖𝑛
(𝑠𝐿1 𝑖𝑛𝑟𝑝
+ 1)
𝑠2 + 𝑠 (𝑟𝑝 + 𝑟𝑖𝐶𝑓 𝑖𝑛 𝑟𝑝 𝑟𝑖
) +1
𝐶𝑓 𝑖𝑛 𝐿1 𝑖𝑛
(D.1)
De acordo com a função transferência (D.1), o denominador desta pode ser descrito como um
polinómio de segunda ordem (D.2) em função do amortecimento desejado.
𝑓(𝑠) = 𝑠2 + 2𝜉𝑤𝑛𝑠 + 𝑤𝑛2 (D.2)
Comparando os coeficientes com as mesmas potencias de (D.1) e (D.2), por forma a garantir um
factor de amortecimento desejado (𝜉 < 1), o valor de 𝑟𝑝 é dado por (D.3).
2 𝜉𝑤𝑛 =𝑟𝑝 + 𝑟𝑖
𝐶𝑓 𝑖𝑛 𝑟𝑝 𝑟𝑖 ⇒ 𝑟𝑝 =
𝑟𝑖2 𝜉 𝑤𝑛 𝐶𝑓 𝑖𝑛 𝑟𝑖 − 1
=𝑟𝑖𝑍𝑓
2𝜉𝑟𝑖 − 𝑍𝑓 (D.3)
De modo a garantir a estabilidade do sistema, devido á introdução da resistência de
amortecimento 𝑟𝑝, é necessário que o coeficiente de s do denominador da função de
transferência (D.1) seja positiva, resultando (D.4).
𝑟𝑝 + 𝑟𝑖
𝐶𝑓 𝑖𝑛 𝑟𝑝 𝑟𝑖> 0 ⇒ 𝑟𝑝 < −𝑟𝑖 (D.4)




![Apostila Do Mini-Hand[1]](https://static.fdocumentos.com/doc/165x107/5571fcd94979599169980def/apostila-do-mini-hand1.jpg)











