
uAULA4
33
Sinais e Sistemas Aula 4 Professor: Rafael Antunes Nóbrega 1
-
Upload
thiago-scher -
Category
Documents
-
view
218 -
download
3
description
Aula de SS
Transcript of uAULA4
Sinais e SistemasAula 4
Professor: Rafael Antunes Nóbrega
1

Continuação...
• CAPÍTULO 1: Introdução:– Sinais de tempo contínuo e de tempo discreto;– Energia e Potência de um sinal– Transformações de variáveis independentes;– Sinais periódicos– Sinais senoidais e exponenciais;– Funções impulso unitário e degrau unitário;– Sistemas de tempo contínuo e de tempo discreto;– Propriedades básicas de sistemas;
• CAPÍTULO 2: Sistemas lineares invariantes no tempo:– Representações de sinais em termos de impulso;– Convolução.– Esquema de Interconexões– Propriedades de sistemas LIT
2
visto
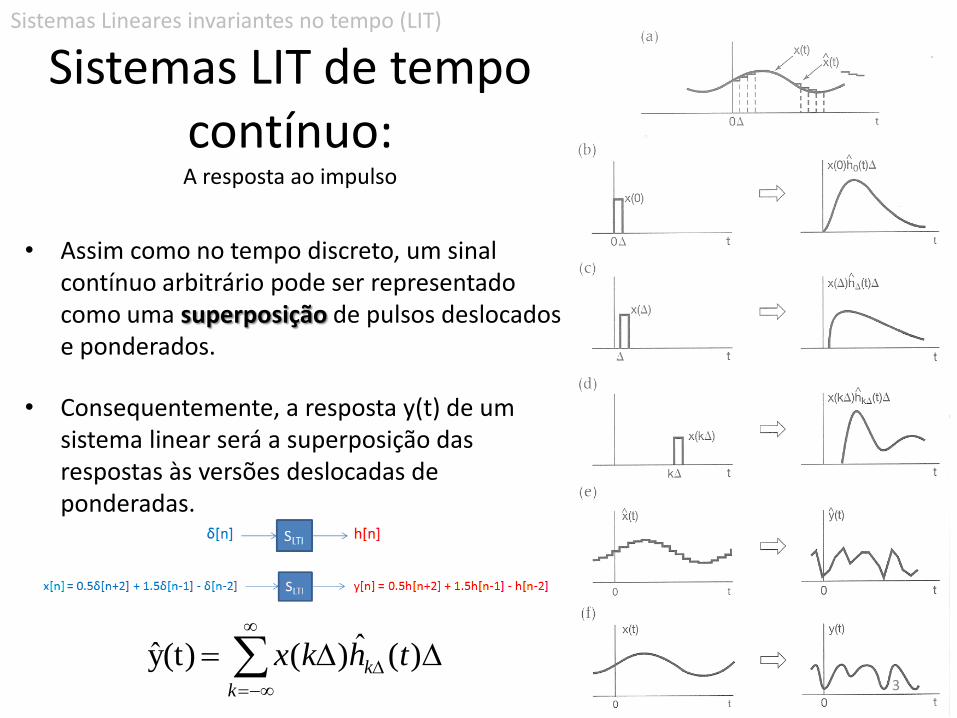
• Assim como no tempo discreto, um sinal contínuo arbitrário pode ser representado como uma superposição de pulsos deslocados e ponderados.
• Consequentemente, a resposta y(t) de um sistema linear será a superposição das respostas às versões deslocadas de ponderadas.
3
Sistemas LIT de tempo contínuo:A resposta ao impulso
Sistemas Lineares invariantes no tempo (LIT)
k
k thkx )(ˆ)((t)y

• Assim como no tempo discreto, um sinal contínuo arbitrário pode ser representado como uma superposição de pulsos deslocados e ponderados.
• Consequentemente, a resposta y(t) de um sistema linear será a superposição das respostas às versões deslocadas de ponderadas.
• Na prática, com ∆ suficientemente pequeno, a resposta a δ∆(t-k∆) é essencialmente a mesma que a resposta a δ(t), logo:–
4
Sistemas LIT de tempo contínuo:A resposta ao impulso
Sistemas Lineares invariantes no tempo (LIT)
No limite ∆→0(t)h(t)hk

• Logo, no limite ∆→0:
• Se além de linear, o sistema for invariante no tempo, então:– hτ(t) = h0(t-τ)
5
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
k
k thkx )(ˆ)((t)y
dthx )()(y(t)
∆→0
dthx )()(y(t) Integral de convolução
)()(y(t) thtx
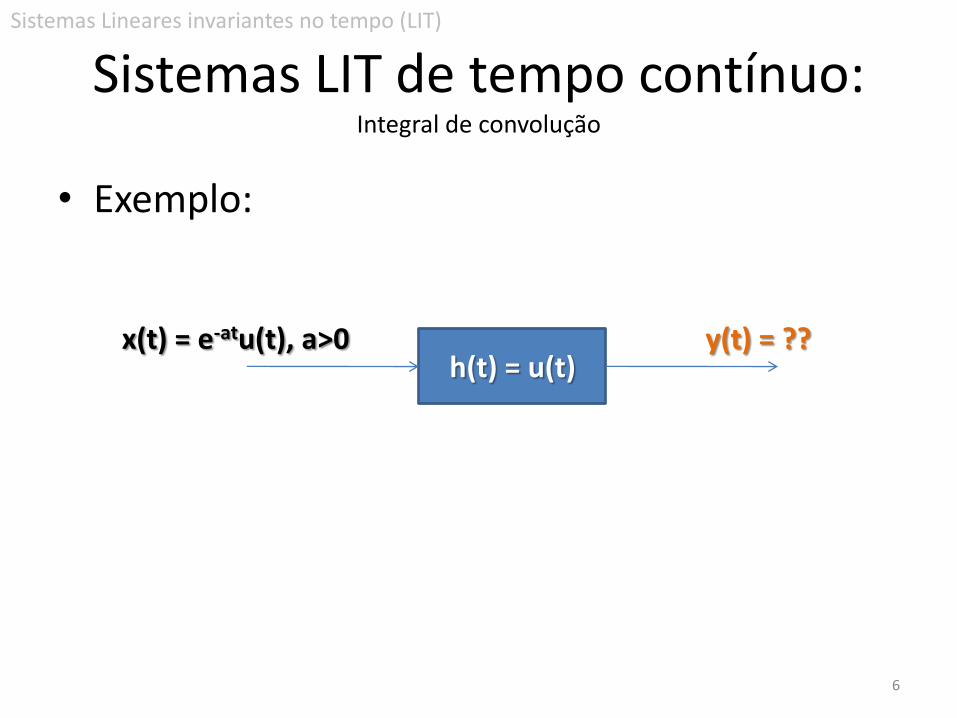
• Exemplo:
6
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
h(t) = u(t)x(t) = e-atu(t), a>0 y(t) = ??

• Exemplo:
7
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
h(t)x(t) y(t) = ??
1, 0 < t < Tx(t)
0, caso contrário
t, 0 < t < 2Th(t)
0, caso contrário
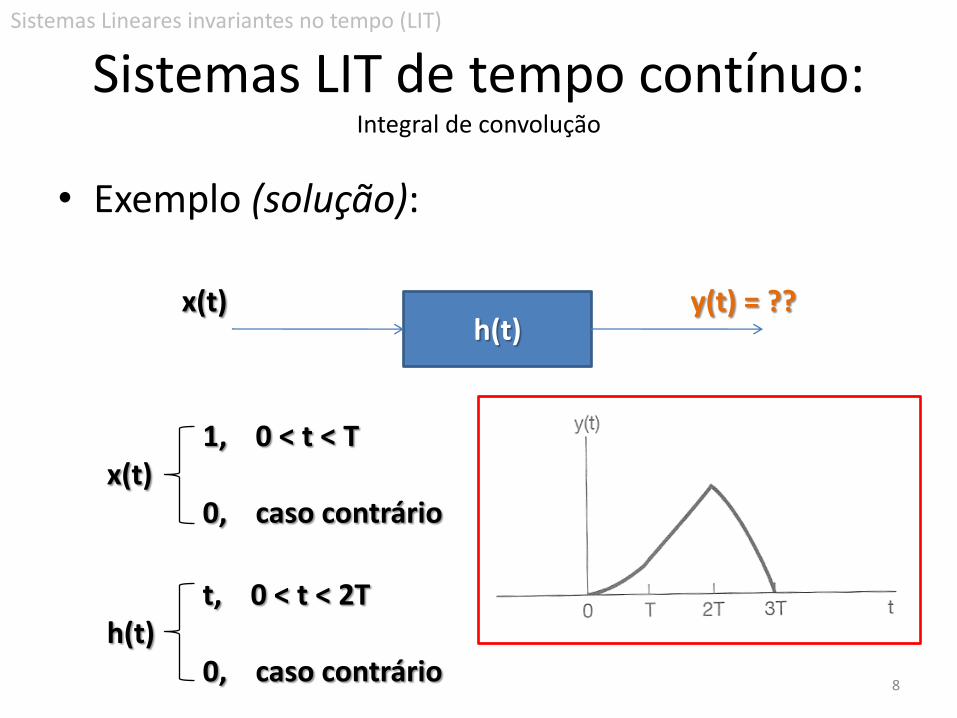
• Exemplo (solução):
8
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
h(t)x(t) y(t) = ??
1, 0 < t < Tx(t)
0, caso contrário
t, 0 < t < 2Th(t)
0, caso contrário

• Exemplo:
9
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
h(t) = u(t-3)x(t) = e2tu(-t) y(t) = ??

• Exemplo (solução):
10
Sistemas LIT de tempo contínuo:Integral de convolução
Sistemas Lineares invariantes no tempo (LIT)
h(t) = u(t-3)x(t) = e2tu(-t)
y(t)
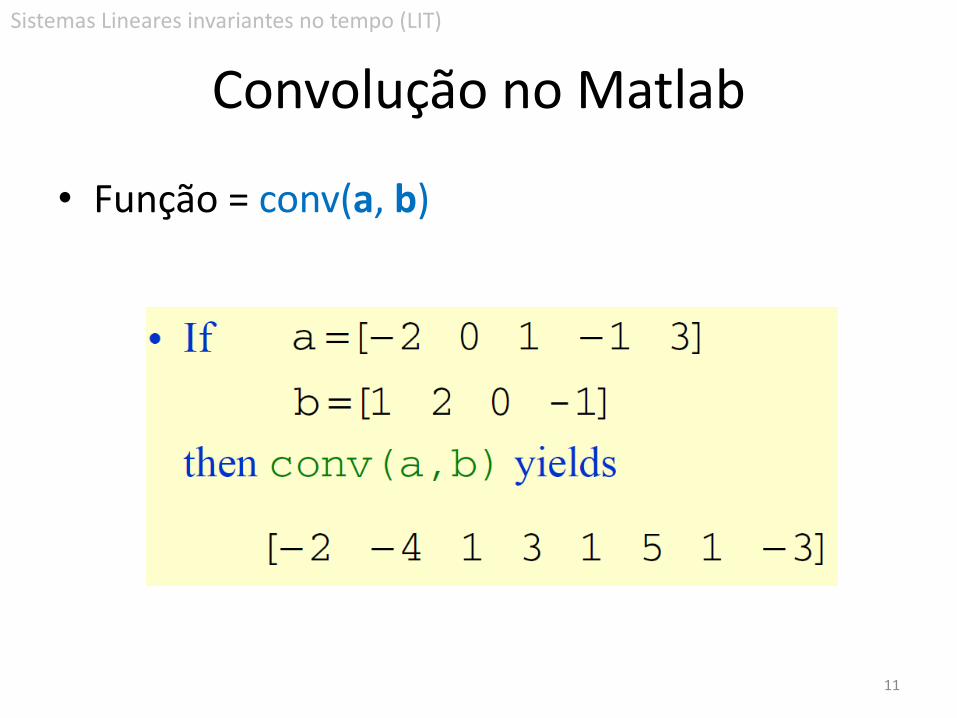
Convolução no Matlab
• Função = conv(a, b)
11
Sistemas Lineares invariantes no tempo (LIT)

Propriedades da Convolução
• Comutativa
– x[n] * y[n] = y[n] * x[n]
• Associativa
– (x[n] * y[n]) * z[n] = x[n] * (y[n] * z[n])
• Distributiva
– x[n] * (y[n] + z[n]) = x[n] * y[n] + x[n] * z[n]
12
Sistemas Lineares invariantes no tempo (LIT)

Propriedades da Convolução
• Comutativa
– x[n] * y[n] = y[n] * x[n]
• Associativa
– (x[n] * y[n]) * z[n] = x[n] * (y[n] * z[n])
• Distributiva
– x[n] * (y[n] + z[n]) = x[n] * y[n] + x[n] * z[n]
13
h1 h2
h2 h1
h1
h3
h2
+
Sistemas Lineares invariantes no tempo (LIT)
h1 h2 h3

Propriedades da Convolução
• Tamanho da sequência de saída para entradas finitas:
• Considere y[n] = x[n] * h[n]
• Se x[n] é finito com Nx elementos
• e h[n] é finito com Nh elementos
• y[n] será finito com Ny = Nx + Nh - 1
14
Sistemas Lineares invariantes no tempo (LIT)

Esquema de InterconexõesConexão em Cascata
• A resposta ao impulso de todo o sistema é dado da convoluçãodos sistemas em cascata.
= =
• Segue que se h1 e h2 são estáveis, h é estável
15
Sistemas Lineares invariantes no tempo (LIT)

Esquema de InterconexõesConexão em Cascata
• Exemplo de uma aplicação Sistema Inverso.
• Imagine um sinal que deve ser enviado através de um canal.– Esse canal distorce o seu sinal de x[n] x[n]
– Se a resposta ao impulso desse canal for conhecida = h[n], podemos recuperar o sinal x[n].
– Ex.: Aplicando um sistema inverso na saída do canal (h[n]*hi[n]=δ[n]).• Pois, como visto, x[n]*δ[n] = x[n].
16
^
Sistemas Lineares invariantes no tempo (LIT)
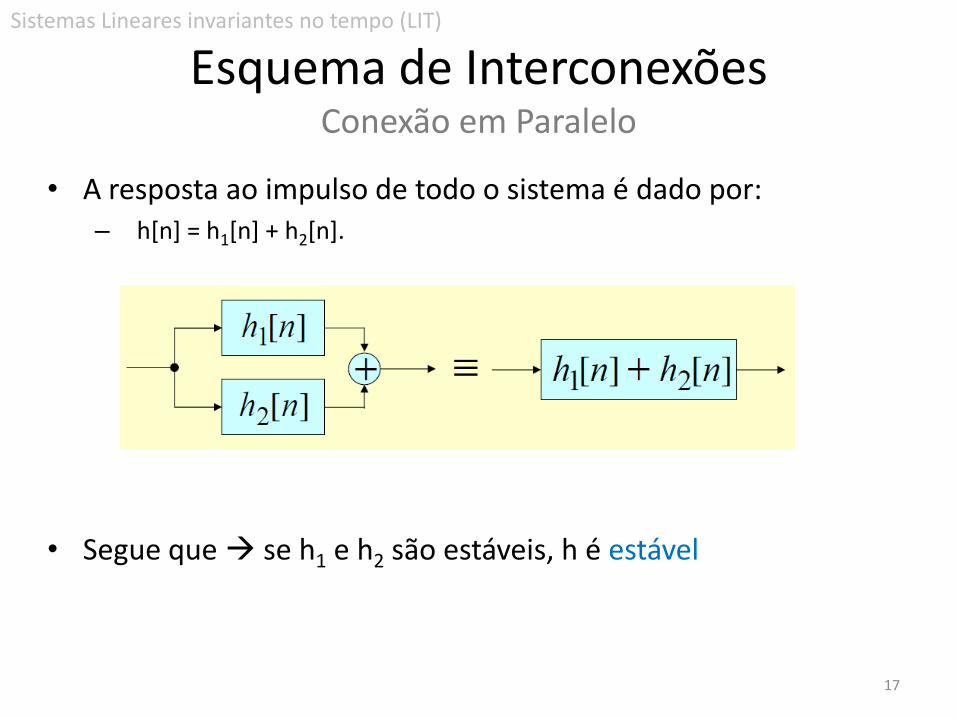
Esquema de InterconexõesConexão em Paralelo
• A resposta ao impulso de todo o sistema é dado por:– h[n] = h1[n] + h2[n].
• Segue que se h1 e h2 são estáveis, h é estável
17
Sistemas Lineares invariantes no tempo (LIT)

Esquema de Interconexões
18
• Exemplo:
??
Sistemas Lineares invariantes no tempo (LIT)

Esquema de Interconexões
19
• Exemplo (solução):
Sistemas Lineares invariantes no tempo (LIT)
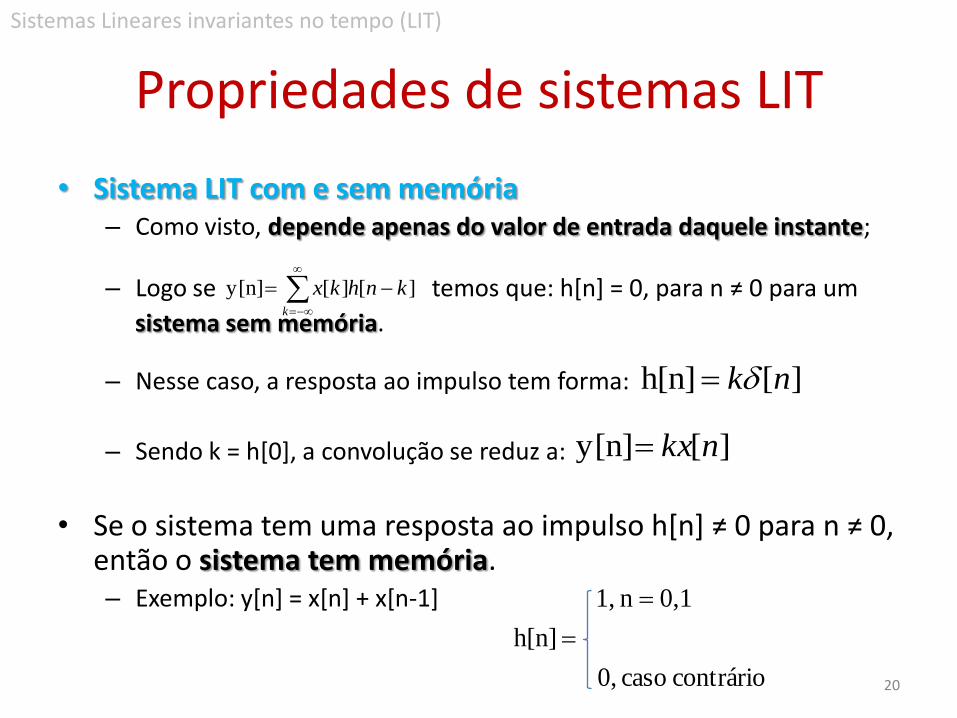
• Sistema LIT com e sem memória– Como visto, depende apenas do valor de entrada daquele instante;
– Logo se temos que: h[n] = 0, para n ≠ 0 para um
sistema sem memória.
– Nesse caso, a resposta ao impulso tem forma:
– Sendo k = h[0], a convolução se reduz a:
• Se o sistema tem uma resposta ao impulso h[n] ≠ 0 para n ≠ 0, então o sistema tem memória.– Exemplo: y[n] = x[n] + x[n-1]
20
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
][h[n] nk
][y[n] nkx
contrário caso 0,
h[n]
0,1n 1,
][][ y[n] knhkxk

• Sistema LIT com e sem memória– O mesmo é válido para um sistema contínuo.
– Note que se k = 1, e se tornam sistemas identidades, com saída igual a entrada e com a resposta ao impulso unitário, igual ao impulso unitário.
– Nesse caso x[n] = x[n] * δ[n] e x(t) = x(t) * δ(t).
– Que se reduzem às propriedades seletivas dos impulsos unitários:
21
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
][h[n] nk )(h(t) tk
][][x[n] knkxk
dtx
)()(x(t)

• Sistema LIT invertíveis
– Ou seja, a condição h(t)*h1(t) = δ(t) deve ser respeitada;
– Assim como h[n]*h1[n] = δ[n]
22
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)

• Exemplo:
– Considere y(t) = x(t-t0)
23
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)

• Exemplo:
– Prove que h[n] = u[n] tem um sistema inverso dado por y[n] = x[n]-x[n-1]
24
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)

25
• Causalidade dos sistemas LIT– Depende apenas de valores presentes e passados
– Da convolução
– Vemos que para que um sistema seja causal, y[n] não deve depender de x[k] para k > n. Para que isso ocorra todos os h[n-k] que multiplicam valores de x[k] para k > n devem ser nulos.
– Isso leva a condição h[n] = 0, para n < 0, ou seja, a resposta ao impulso de um sistema LIT causal deve ser nula antes que o impulso ocorra.
– Logo, para um sistema LTI causal:
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
k
knhkx ][][y[n]
n
k
knhkx ][][y[n]
0
][][y[n]k
knxkhOu, de modo semelhante

26
• Causalidade dos sistemas LIT
– Para o contínuo, de modo semelhante:
– Conclusão: de maneira geral, quando um sistema tem valores iguais a zero para n < 0 ou t < 0, esse sistema é causal.
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
0)()()()(y(t) dtxhdthx
t

27
• Estabilidade para um sistema LIT
– Lembrete: Toda entrada limitada produz uma saída limitada.
– O que, a partir da convolução temos uma expressão para o módulo da saída:
– E considerando |x[n]| < B para todo n e usando o fato que:
– Logo, para um sistema estável temos:
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
k
knxkh ][][y[n]
k
knxkh ][][y[n]
??

28
• Estabilidade para um sistema LIT
– Lembrete: Toda entrada limitada produz uma saída limitada.
– O que, a partir da convolução temos uma expressão para o módulo da saída:
– E considerando |x[n]| < B para todo n e usando o fato que:
– Logo, para um sistema estável temos:
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
k
knxkh ][][y[n]
k
knxkh ][][y[n]
k
kh ][Condição necessária e suficiente
29
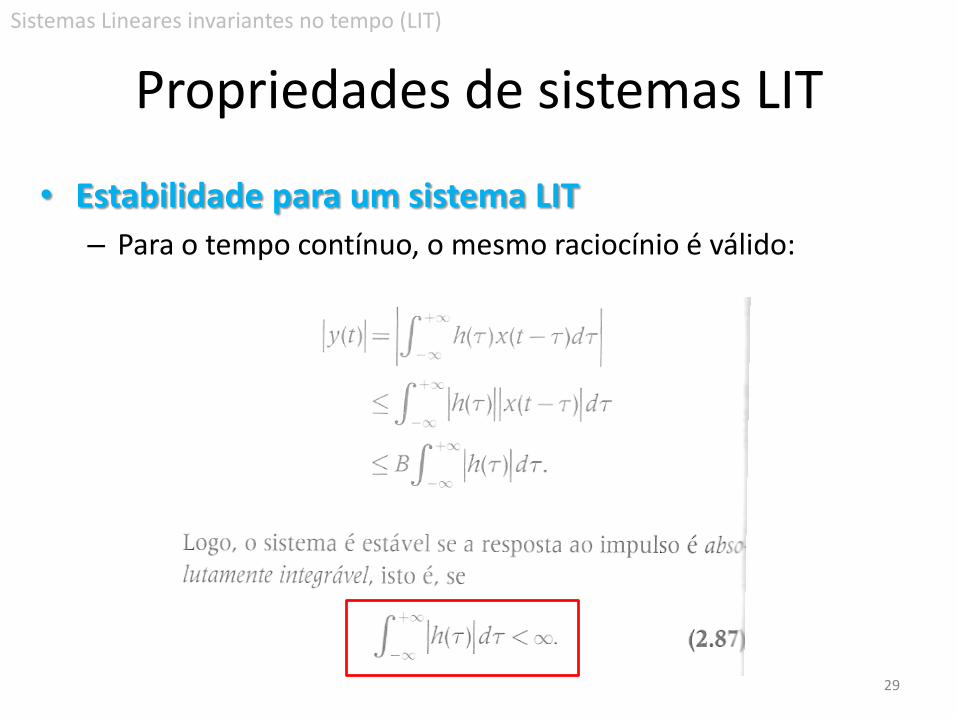
• Estabilidade para um sistema LIT
– Para o tempo contínuo, o mesmo raciocínio é válido:
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
• Exemplo: O acumulador é estável??
30
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
n
k
kxny ][][

31
• A resposta ao degrau unitário de um sistema LIT
– Vimos que a resposta ao impulso h[n] e h(t):• Caracteriza o sistema LIT completamente;
• Pode ser relacionada as propriedades do sistema, (ex. estabilidade, causalidade).
– A resposta ao degrau também pode ser importante:• s[n] = u[n]*h[n];
• s[n] pode ser vista como a resposta à entrada h[n] de um sistema LIT com reposta ao impulso unitário = u[n];
• Levando ao acumulador...
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)

• Chegamos que:
– A resposta ao degrau de um sistema LIT é a soma cumulativa de sua resposta ao impulso.
• Levando a:
– Inversamente, a resposta ao impulso de um sistema LIT de tempo discreto é a diferença de primeira ordem de sua resposta ao degrau.
• Concluindo: A resposta ao degrau unitário também pode ser usada para caracterizar um sistema LIT, já que podemos calcular a resposta ao impulso unitário a partir dela.
32
n
k
khns ][][
]1[][][ nsnsnh
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)
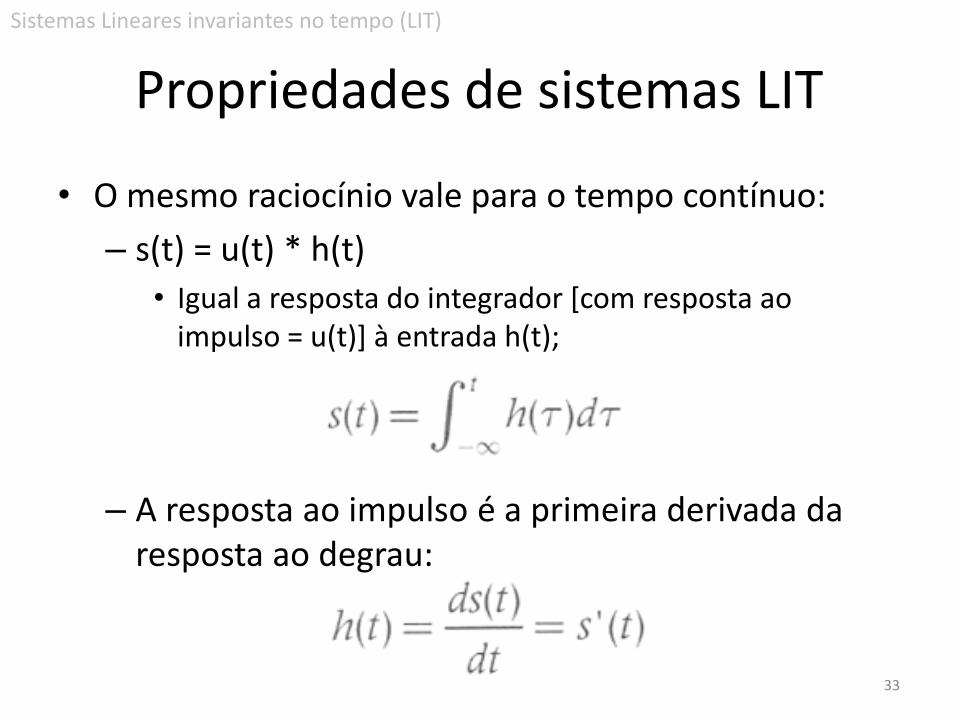
• O mesmo raciocínio vale para o tempo contínuo:
– s(t) = u(t) * h(t)
• Igual a resposta do integrador [com resposta ao impulso = u(t)] à entrada h(t);
– A resposta ao impulso é a primeira derivada da resposta ao degrau:
33
Propriedades de sistemas LIT
Sistemas Lineares invariantes no tempo (LIT)


















