Uma Abordagem Algorítmica e Computacional · universidade federal do paranÁ setor de...
261
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE TECNOLOGIA/SETOR DE CIÊNCIAS EXATAS DEPARTAMENTO DE ENGENHARIA CIVIL/ DEPARTAMENTO DE MATEMÁTICA PROGRAMA DE PÓS-GRADUAÇÃO EM MÉTODOS NUMÉRICOS EM ENGENHARIA ANÁLISE NUMÉRICA: Uma Abordagem Algorítmica e Computacional , por Lucas Máximo Alves CURITIBA – PARANÁ MARÇO – 2007
Transcript of Uma Abordagem Algorítmica e Computacional · universidade federal do paranÁ setor de...
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE TECNOLOGIA/SETOR DE CIÊNCIAS EXATAS
DEPARTAMENTO DE ENGENHARIA CIVIL/ DEPARTAMENTO DE MATEMÁTICA
PROGRAMA DE PÓS-GRADUAÇÃO EM MÉTODOS NUMÉRICOS EM ENGENHARIA
ANÁLISE NUMÉRICA:
Uma Abordagem Algorítmica e Computacional
, por
Lucas Máximo Alves
CURITIBA – PARANÁ
MARÇO – 2007
LUCAS MÁXIMOALVES
ANÁLISE NUMÉRICA:
Uma Abordagem Algorítmica e Computacional
,
CURITIBA – PARANÁ
MARÇO – 2007
LUCAS MÁXIMOALVES
ANÁLISE NUMÉRICA:
Uma Abordagem Algorítmica e Computacional
,
Apostila organizada como resultado do estudo das aulas da Disciplina de ANÁLISE NUMÉRICA para obtenção de créditos no curso de Doutorado do Programa de Pós-Graduação em Métodos Numéricos do Setor de Tecnologia/Setor de Ciências Exatas, Departamento de Engenharia Civil/Departamento de Matemática da Universidade Federal do Paraná Orientador: Prof. Dr. José Antonio Marques Carrer Orientador: Prof. Dr.
CURITIBA – PARANÁ
MARÇO – 2007
Dedicatória
Dedico este trabalho a todos os que, não se
conformando com este mundo da forma como o
encontraram, querem torná-lo em um lugar cada vez
melhor, através de suas atitudes e de seu trabalho.
Agradecimentos
Agradeço a Deus pelo seu imenso amor e misericórdia revelado nas oportunidades
que a vida me trouxe. Quero também agradecer:
À minha Família pelo apoio emocional e espiritual, ao meu orientador o Prof. Dr.
....., ao meu Co-Orientador o Prof. Dr. .... , a Maristela Bradil pela amizade e dedicação com
que nos atende, aos amigos, ...., .... ...., ......., e toda a galera do CESEC.

Epígrafe
“vida é um algo multidimensional cuja imprevisível curvatura temporal só é conhecida quando se experimenta os fatos a cada dia e, mesmo assim, não se consegue prever com exatidão a curvatura temporal dos fatos seguintes, mesmo que se expanda esta (a curvatura futura) numa vizinhança em torno do fato no instante presente” (Lucas M. Alves)

Sumário
Apresentação ............................................................................................................................19 Capítulo I ..................................................................................................................................20 INTRODUÇÃO AOS ERROS EM COMPUTADORES ........................................................20 1. 1 - Objetivos do Capítulo .....................................................................................................20
1. 2 - Introdução 20
1. 3 - Noções Básicas sobre Erros ............................................................................................21
1. 4 - Representação dos Números em um Computador ..........................................................22
1. 5 - Aritmética de Ponto Flutuante ........................................................................................24
1.5.1 – Exemplo - 1 ..................................................................................................................24 1.5.2 – Exemplo - 2 ..................................................................................................................25 1. 6 – Análise de Erros 26
1.6.1 - Erro absoluto: ................................................................................................................26 1.6.2 - Erro relativo: .................................................................................................................26 1. 7 - Erros de arredondamento e truncamento em um Sistema de Artimética de ponto
Flutuante 27
1.7.3 – Exemplo - 3 ..................................................................................................................27 1.7.1 - Truncamento: ...............................................................................................................28 1.7.2 – Arredondamento ...........................................................................................................28 1.7.4 – Exemplo - 4 ..................................................................................................................30 Solução: 31 Conclusão:31 1. 8 – Erro absoluto e Erro relativo nas Operações Aritméticas com Erros na representação
das Parcelas ou Fatores 31
1.8.1 – Adição...........................................................................................................................32 1.8.2 - Subtração.......................................................................................................................32 1.8.3 – Multiplicação ................................................................................................................33 1.8.4 - Divisão ..........................................................................................................................34 1. 9 - Exemplos e Aplicações ...................................................................................................36
1. 10 - Exercícios e Problemas .................................................................................................37
Capítulo II.................................................................................................................................38 ARITIMÉTICA DE PONTO FLUTUANTE EM PROGRAMAÇÃO....................................38 2. 1 - Objetivos do Capítulo .....................................................................................................38
2. 2 – Introdução 38
2. 3 – História e Evolução dos Computadores..........................................................................39
2.3.1 - Máquinas Calculadoras Mecânicas ...............................................................................39 2.3.2 - Inicio da Era da Computação – Eletromecânico ...........................................................39 2.3.3 - Inicio da Era da Computação Eletrônica.......................................................................39 2. 4 – Representação Binária de Números................................................................................40
2.4.1 - Esquema de um Computador ........................................................................................40 2.4.2 - Base Numéricas.............................................................................................................40 2.4.3 - Sistema Binário .............................................................................................................40 2.4.4 - Exemplos de Representação de Números .....................................................................42 2.4.5 - Transformação de um Valor Positivo em um Numero Negativo..................................42 2.4.6 - Aritmética Binária .........................................................................................................43 2. 5 – Representação Normalizada ...........................................................................................44
2. 6 – Programação em FORTRAN..........................................................................................45
2. 7 – Exemplos e Aplicações...................................................................................................46
2. 8 – Exercícios e Problemas...................................................................................................47
Capítulo III ...............................................................................................................................48 SISTEMA DE EQUAÇÕES LINEARES ................................................................................48 3. 1 -Objetivos do Capítulo ......................................................................................................48
3. 2 - Introdução 48
3. 3 – Resolução de Sistemas Lineares.....................................................................................49
3. 4 – Métodos Iterativos ..........................................................................................................49
3.4.1 - Esquema Iterativo..........................................................................................................49 3.4.2 - Critério de Parada do Processo Iterativo .......................................................................50 3.4.3 - Utilização dos métodos iterativos .................................................................................50 3. 5 – Método de Gauss-Jacobi.................................................................................................51
3.5.1 - Exemplo ........................................................................................................................52 3.5.2 - Verificação da convergência: ........................................................................................53 3.5.1 - Convergência do método...............................................................................................54 3. 6 – Método de Gauss-Seidel.................................................................................................55
3.6.1 - O Processo Iterativo ......................................................................................................55 3.6.1 - Exemplo ........................................................................................................................58 3.6.2 - Solução ..........................................................................................................................58 3.6.2 - Convergência do Método ..............................................................................................64 3.6.3 - Exemplo ........................................................................................................................65 3.6.4 - Solução ..........................................................................................................................65 3. 7 - Exemplos e Aplicações ...................................................................................................66
3.7.1 - Exemplo ........................................................................................................................66 3.7.2 - Solução ..........................................................................................................................66 3. 8 - Exercícios e Problemas ...................................................................................................68
Capítulo IV ...............................................................................................................................69 ZEROS DE FUNÇÕES E RAIZES DE EQUAÇÕES.............................................................69 4. 1 -Objetivos do Capítulo ......................................................................................................69
4. 2 - Introdução 69
4. 3 - Zeros de Funções Reais...................................................................................................70
4.3.1 - Problema .......................................................................................................................70 4.3.2 - Aproximação inicial para raiz: .....................................................................................70 4.3.3 – Método da Bi-Secção (ou de Bolzano).........................................................................71 Exemplo : 74
4.3.3.1 – Prova da Convergência do Método da Bi-Secção .....................................................76 4. 4 – Iteração Linear 78
4.4.1 - Uma equação de iteração...............................................................................................79 4.4.2 - Um critério de parada para as iterações ........................................................................80 4.4.3 - Conclusão:.....................................................................................................................80 4. 5 - Critério de Convergência para a iteração x = (x)..........................................................82
4.5.1 - Teorema do Valor Médio ..............................................................................................82 4.5.2 - Teorema da Permanência do Sinal ................................................................................82 4.5.3 – Teorema do Limitante da Derivada da função de Iteração...........................................83 4. 6 – Ordem de Convergência de uma Iteração.......................................................................85
4. 7 – Métodos de Aproximação...............................................................................................87
4.7.1 – Método das Aproximações Sucessivas ou Ponto Fixo .................................................87 4.7.1 – Interpretação Geométrica .............................................................................................87 4.7.2 – Método de Newton-Raphson ........................................................................................88 4.7.1 – Interpretação Geométrica .............................................................................................89 4.7.2.1 – Critério de Convergência do Método de Newton-Raphson.......................................90 4.7.2 – Método de Newton-Raphson Modificado ....................................................................92 4.7.1 – Interpretação Geométrica .............................................................................................92 4.7.2.1 – Critério de Convergência do Método de Newton-Raphson Modificado...................95 4.7.3 – Método da Secante........................................................................................................96 4.7.1 – Interpretação Geométrica .............................................................................................96 4.7.3.1 – Cálculo da Ordem de Convergência do Método da Secante ....................................98 4.7.3.2 – Prova da Convergência do Método da Secantes......................................................103 4.7.4 – Método da Falsa Posição ou Regula-Falsi..................................................................104 4.7.1 – Interpretação Geométrica ...........................................................................................104 4. 8 - Exemplos e Aplicações .................................................................................................107
4.8.1 - Problema .....................................................................................................................107 Solução 107 Solução 111 4. 9 - Exercícios e Problemas .................................................................................................113
Solução pelo Método do Ponto Fixo ......................................................................................113 Solução pelo Método de Newton-Raphson ............................................................................117 Solução 120 Capítulo V ..............................................................................................................................123 SISTEMA DE EQUAÇÕES NÃO-LINEARES ....................................................................123 5. 1 - Objetivos do Capítulo ...................................................................................................123
5. 2 - Introdução 123
5. 3 - Exemplos e Aplicações .................................................................................................125
5. 4 - Exercícios e Problemas .................................................................................................126
Capítulo VI .............................................................................................................................127 INTERPOLAÇÃO POLINOMIAL........................................................................................127 6. 1 – Objetivos do Capítulo...................................................................................................127
6. 2 – Introdução 127
6. 3 – Interpolação – Polinômio de Interpolação....................................................................128
6.3.1 - Teorema - 1 .................................................................................................................128 Prova 129 6.3.2 - Definição - 1................................................................................................................130 6.3.3 - Exemplo - 1 .................................................................................................................131 6. 4 – Interpolação Polinomial de Lagrange...........................................................................133
6. 5 – Forma de Newton – Interpolação Polinomial por Diferenças Dividas.........................135
6.5.1 – Propriedade das Diferenças Divididas........................................................................136 6.5.2 – Forma de Newton para o Polinômio Interpolador ......................................................137 6. 6 – Estudo do Erro na Interpolação pelo Método de Newton ............................................140
6.6.1 – Teorema de Rolle........................................................................................................140 6.6.2 – Limitante para o Erro..................................................................................................141 6. 7 – Problemas na Interpolação Polinomial .........................................................................142
6. 8 –Interpolação Polinomial de Hermite..............................................................................143
6.8.1 - Teorema.......................................................................................................................143 6.8.2 - Método Alternativo de Newton das Diferenças Divididas .........................................145 6. 9 –Interpolação Polinomial de Bezier ................................................................................146
6.9.1 - Introdução ...................................................................................................................146 6.9.2 - Definições Básicas ......................................................................................................147 6.9.3 - Definição Matemática da Curva de Bezier .................................................................148 6.9.4 - Exemplo de Curva de Bezier.......................................................................................149 6.9.5 - Propriedades da Curva de Bezier ................................................................................151 6.9.6 - Curva de Bezier na Forma Matricial ..........................................................................154 6.9.7 - Conexão de várias Curva de Bezier ...........................................................................155 6.9.8 - Vantagens e Desvantagens da Curva de Bezier .........................................................156 6. 10 – Interpolação Polinomial de Bernstein.........................................................................157
6.10.1 - Motivação de sua Existência .....................................................................................157 6.10.2 - Definição dos Polinômios .........................................................................................158 6.10.3 - Propriedades dos Polinômios ....................................................................................160 6.10.4 - Base de Potência de Bernstein ..................................................................................164 6.10.5 – Aproximação de Funções Contínuas ........................................................................164 Prova 165 6.10.6 - Derivadas dos Polinômios.........................................................................................165 6.10.7 - Matriz de Representação dos Polinômios .................................................................166 6.10.8 - Exemplo de Aplicação de Interpolação de uma curva Bezier...................................167 6. 11 –Interpolação Polinomial por Spline .............................................................................170
6.11.1 - Definição das Splines ................................................................................................170 6.11.2 - Base para splines lineares (n = 1)..............................................................................171 6.11.3 - Base para splines cúbicas (n = 3) ..............................................................................172 6.11.4 - Uso de Splines na Interpolação .................................................................................172 6. 12 –Interpolação Polinomial por B-Spline .........................................................................174
6. 13 – Exemplos e Aplicações...............................................................................................177
6.13.1 – Método de Interpolação de Lagrange – Exemplo 1..................................................177 Solução 177 6.13.2 – Método de Interpolação de Lagrange – Exemplo 2..................................................178 Solução: 178
6.13.3 – Método de Interpolação – Exemplo 3.......................................................................179 Solução: 179 6.13.4 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 1.........181 Solução 181 6.13.5 – Análise do Erro no Método das Diferenças Divididas – Exemplo - 1 .....................184 Solução 184 6.13.6 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 2.........185 Solução 185 6.13.7 – Cálculo dos Limitantes do Erro – Exemplo - 1 ........................................................187 6.13.8 – Estimativa para o Erro – Exemplo 1.........................................................................188 6.13.9 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 3.........189 Solução: 189 b. Limitante do erro em cada caso..........................................................................................191 6.13.10 - Exemplo de Interpolação do Método de Bernstein - 1............................................193 6.13.11 - Exemplo de Interpolação do Método de Hermite - 1 ..............................................194 Solução 194 6.13.12 - Exemplo de Interpolação do Método de Hermite - 2 ..............................................199 Solução 199 6. 14 – Exercícios e Problemas...............................................................................................201
6.14.1 - Trabalho para casa.....................................................................................................201 Capítulo VII............................................................................................................................202 MÉTODOS DE AJUSTE DE CURVAS ...............................................................................202 7. 1 - Objetivos do Capítulo ...................................................................................................202
7. 2 - Introdução 202
7. 3 – Método dos Mínimos Quadrados .................................................................................203
7. 4 - Exemplos e Aplicações .................................................................................................204
7. 5 - Exercícios e Problemas .................................................................................................205
Capítulo VIII ..........................................................................................................................206 INTEGRAÇÃO NUMÉRICA................................................................................................206 8. 1 -Objetivos do Capítulo ....................................................................................................206
8. 2 - Introdução 206
8. 3 – Integração Numérica.....................................................................................................207
8. 4 – Método do Trapézio para a Integração .........................................................................208
8.4.1 - Erro no Método do Trapézio .......................................................................................208 8.4.1 - Exemplo ......................................................................................................................210 8. 5 – Método de Integração de Simpson ...............................................................................211
8.5.1 - Erro no Método de Simpson .......................................................................................213 8.5.2 - Exemplo ......................................................................................................................215 8. 6 – Integração Numérica pelo Método da Quadratura de Gauss ........................................217
8. 7 – Método de Integração de Chébychev ...........................................................................223
8.7.1 - Exemplo ......................................................................................................................225 8.7.2 - Solução ........................................................................................................................225 8. 8 - Exemplos e Aplicações .................................................................................................226
8. 9 - Exercícios e Problemas .................................................................................................227
Capítulo IX .............................................................................................................................228 SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ..............................................228 9. 1 - Objetivos do Capítulo ...................................................................................................228
9. 2 - Introdução 228
9. 3 – Solução Numérica de Equações Diferenciais ...............................................................229
9. 4 – Métodos de Integração..................................................................................................229
9. 5 – Métodos Iterativos de passo um, usando só anterior nx ...........................................230
9.5.7 - Ordem do Método Numérico ......................................................................................230 9.5.1 - Método de Euler Linear ou de ordem mm ..................................................................231 9.5.2 - Exemplo ......................................................................................................................232 9.5.3 - Solução ........................................................................................................................232 9.5.4 - Método Quadrático da Série de Taylor com Três Termos ..........................................234 9.5.5 - Exemplo ......................................................................................................................234 9.5.6 – Solução .......................................................................................................................234 9.5.10 - Método de Heun ou Método de Euler Modificado ...................................................236 9.9.2 - Exemplo ......................................................................................................................236 9. 6 – Métodos de Runge-Kutta..............................................................................................238
9.6.1 - Método de Runge-Kutta de Ordem 1 ..........................................................................238 9.6.2 - Método de Runge-Kutta de Ordem 2 ..........................................................................238 9.6.3 - Método de Runge-Kutta de Ordem 3 ..........................................................................241 9.6.4 - Método de Runge-Kutta de Ordem 4 ..........................................................................242 9.6.5 - Método de Runge-Kutta de Ordem m.........................................................................244 9.9.2 - Exemplo ......................................................................................................................244 9. 7 – Métodos de Predição-Correção ....................................................................................245
9. 8 – Métodos Implícitos que usam 1nx como Corretor ...................................................246
9.9.1 - Algorimo .....................................................................................................................246 9.9.2 - Exemplo ......................................................................................................................247 9. 9 – Métodos Explícitos, passo múltiplo, que usam 1 2, ,n n nx x x como Previsor ............250
9.10.1 - Adams-Moutton: .......................................................................................................250 9.10.2 - Adams-Bashforth: .....................................................................................................250 9.10.3 - Método de Hamming:................................................................................................250 9. 10 – Métodos de Passos Múltiplos .....................................................................................251
9.11.1 - Método de Milne-Simpson (4ª ordem)......................................................................252 9. 11 - Exemplos e Aplicações ...............................................................................................253
9.12.1 - Exemplo ....................................................................................................................253 9. 12 - Exercícios e Problemas ...............................................................................................254
Anexos....................................................................................................................................255 A1 - Os códigos para compilação em MATLAB para Curvas de Bezier...............................255
A2 – Superfícies de Bezier .....................................................................................................257
A3 – Superfícies de B-Spline .................................................................................................259

Bibliografia.............................................................................................................................261
Lista de Figuras
Figura - 1. 1. Diagrama de transformação de um problema real em um modelo matemático .21 Figura - 1. 2. Seqüência de aparecimento ou introdução natural dos erros nas etapas de cálculo da solução de um problema físico. ...........................................................................................21 Figura - 1. 3. Esquema da faixa de Operação Numérica de um Computador ..........................25 Figura - 1. 4. Representação Esquemática de um Computador................................................40 Figura - 1. 5. Representação Esquemática de um Computador................................................40 Figura - 1. 6. .............................................................................................................................44 Figura - 4. 1. .............................................................................................................................71 Figura - 4. 2. .............................................................................................................................72 Figura - 4. 3. .............................................................................................................................73 Figura - 4. 4. .............................................................................................................................74 Figura - 4. 5. Teorema do valor médio .....................................................................................82 Figura - 4. 6. Função de Iteração ..............................................................................................85 Figura - 4. 7. Representação Geométrica do Método de Aproximações Sucessivas ou Ponto Fixo...........................................................................................................................................87 Figura - 4. 8. Representação Geométrica do Método de Newton-Raphson. ............................89 Figura - 4. 9. Representação Geométrica do Método de Newton-Raphson Modificado..........92 Figura - 4. 10. Representação Geométrica do Método da Secante...........................................97 Figura - 4. 11. Representação Geométrica da Falsa Posição..................................................104 Figura - 4. 12. .........................................................................................................................105 Figura - 6. 1. Escolha da ordem do polinômio de interpolação, Interpolação: Linear, Quadrática, Cúbica. ................................................................................................................128 Figura - 6. 2. ...........................................................................................................................134 Figura - 6. 3. ...........................................................................................................................137 Figura - 6. 4. ...........................................................................................................................140 Figura - 6. 5. ...........................................................................................................................142 Figura - 6. 6. ...........................................................................................................................143 Figura - 6. 7. ...........................................................................................................................148 Figura - 6. 8. Funções de mistura. (a) Polígono de três pontos, n = 2; (b) Polígono de quatro pontos, n = 3; (c) Polígono de cinco pontos, n = 4; (d) Polígono de cinco pontos, n = 5; .....153 Figura - 6. 9. Sergi Natanovich Bernstein quem primeiro utilizou os polínios que levam o seu nome. ......................................................................................................................................157 Figura - 6. 10. .........................................................................................................................160 Figura - 6. 11. .........................................................................................................................167 Figura - 6. 12. .........................................................................................................................168
Figura - 6. 13. .........................................................................................................................168 Figura - 6. 14. .........................................................................................................................168 Figura - 6. 15. .........................................................................................................................169 Figura - 6. 16. .........................................................................................................................169 Figura - 6. 17. .........................................................................................................................169 Figura - 6. 18. a) Spline linear (n = 1); b) Spline cúbica (n = 3). ...........................................170 Figura - 6. 19. .........................................................................................................................171 Figura - 6. 20 ..........................................................................................................................172 Figura - 6. 21.A função B-Spline não passa pelos pontos de controle. ..................................174 Figura - 8. 1. Processo de integração numérica. .....................................................................207 Figura - 8. 2. Transformação de coordenadas do mapeamento linear do contorno................217 Figura - 8. 3. Integral de Gauss da função z() nas coordenadas de generalizadas k...........218 Figura - 8. 4. Processo de Integração de Gauss. .....................................................................221 Figura - 8. 5. Integração de Gauss para um função linear. .....................................................222 Figura - 9. 1. ...........................................................................................................................231 Tabela - IX.1...........................................................................................................................235 Figura - A. 1. Os dezesseis pontos de controle de uma superfície de Bézier. ........................258
Lista de Tabelas
Tabela - I. 1...............................................................................................................................25 Tabela - IV. 1............................................................................................................................75 Tabela - IV. 2..........................................................................................................................108 Tabela - IV. 3..........................................................................................................................112 Tabela - IV. 4..........................................................................................................................112 Tabela - IV. 5..........................................................................................................................113 Tabela - IV. 6..........................................................................................................................114 Tabela - IV. 7..........................................................................................................................115 Tabela - IV. 8..........................................................................................................................116 Tabela - IV. 9..........................................................................................................................117 Tabela - IV. 10........................................................................................................................118 Tabela - IV. 11........................................................................................................................118 Tabela - IV. 12........................................................................................................................119 Tabela - IV. 13........................................................................................................................121 Tabela - VI. 1. Tabela de Diferença Divididas.......................................................................135 Tabela - VI. 2..........................................................................................................................151 Tabela - VI. 3..........................................................................................................................177 Tabela - VI. 4..........................................................................................................................179 Tabela - VI. 5..........................................................................................................................179 Tabela - VI. 6..........................................................................................................................181 Tabela - VI. 7..........................................................................................................................181 Tabela - VI. 8..........................................................................................................................183 Tabela - VI. 9..........................................................................................................................184 Tabela - VI. 10........................................................................................................................184 Tabela - VI. 11........................................................................................................................185 Tabela - VI. 12........................................................................................................................188 Tabela - VI. 13........................................................................................................................189 Tabela - VI. 14........................................................................................................................189 Tabela - VI. 15........................................................................................................................190 Tabela - VI. 16........................................................................................................................190 Tabela - VI. 17........................................................................................................................194 Tabela - VI. 18........................................................................................................................199

Tabela - VI. 19........................................................................................................................199
Lista de Siglas

Lista de Símbolos

Apresentação Esta apostila é resultado da digitação das aulas do prof. José Antonio Marques
Carrer. Ela é resultado de estudos pessoais do estudante de doutorado Lucas Máximo Alves.
Alguns acréscimos as notas de aulas foram feitos com o intuito de se esclarecer mais algum
assunto, ou detalhar algum tópico ou exercício em questão. A idéia é fornecer, a quem possa
interessar, um material com os cálculos detalhados e mastigados para que a consulta seja
rápida e fácil, principalmente para aqueles estudantes que em época de provas sesejam fazer
uma revisão rápida da matéria, lendo-a como se fosse um jornal de notícias, sem embargos e
confusões. A estruturação visual do texto desta apostila procura facilitar uma leitura dinâmica.
Ela foi desenvolvida durante alguns anos de experiência no preparo de notas de aulas na
Universidade Estadual de Ponta Grossa. Esta forma de estruturação busca uma forma de se
obter uma consulta visual rápida e agradável (não cansativa aos olhos), a partir do conteúdo
contido numa página. Pensou-se em uma diagramação do texto de forma que fosse possível
coletar informações do conteúdo das páginas visualmente, para uma rápida reindexação
mental do conteúdo em ministração durante as aulas em tempo real. Desta forma, uma pessoa
familiarizada com o assunto do texto terá facilidade de encontrar o que lhe interessa no
momento, por meio de um rápido exame de uma página de interesse.
Capítulo I
INTRODUÇÃO AOS ERROS EM COMPUTADORES
RESUMO
Neste capítulo será visto uma introdução a teoria matemática dos erros e suas
definições gerais. Serão apontado as principais fontes de erros numéricos. Serão fornecidos
exemplos de casos de erros numéricos para que o estudante possa adquirir uma sensibilidade
no entendimento e na detecção de erros numéricos cometidos em cálculos por computadores.
1. 1 - Objetivos do Capítulo
i) Entender as várias definições de tipos de erro, tais como: erro absoluto e
relativo, etc;
ii) Saber detectar fontes de erros matemáticos;
iii) Saber quantificar, estimar e calcular erros;
iv) Entender a fonte de erros em um computador;
v) Entender como funciona os erros na aritmética de ponto flutuante.
1. 2 - Introdução
O erro experimental é algo inerente a medida. Por outro lado, o erro de cálculo
pode surgir de várias fontes que vão, desde o método de aproximação escolhido até a máquina
utilizada no cálculo. Estudar erros e tipos de erros matemáticos é imprescindível no Cálculo
Numérico de quantidades físicas. Saber estimá-los é de vital importância na ciência e na
engenharia. Saber prevê-los facilita a análise numérica e define os resultados finais dos
cálculos. Dele depende a limitação de muitas estruturas em física química e engenharia.

1. 3 - Noções Básicas sobre Erros
De uma maneira geral, um problema real é descrito, em termos matemáticos, por
meio de equações diferenciais que envolvem variáveis relevantes no estudo do problema real.
Essa seleção de variáveis não deve impedir que o modelo matemático seja uma boa
representação do modelo real, conforme mostra a Figura - 1. 1.
Figura - 1. 1. Diagrama de transformação de um problema real em um modelo matemático
Dado um problema físico, para resolvê-lo devemos matematizá-lo por meio de
equações diferenciais que em geral possui dois tipos de soluções: uma analítica e outra a
solução numérica ou aproximada. Dada uma solução nós teremos erros. É impossível
matematizar em um problema real abarcando todos os detalhes. Portanto, o modelo que
fornece a solução analítica já é uma aproximação do problema real.
A solução analítica é a solução exata do modelo matemático que tenta representar
o problema real. Contudo, já a solução analítica pode ser truncada ou aproximada quando está
é fornecida por uma série infinita, por exemplo. Esta seqüencia de erros é esquematizada na
Figura - 1. 2.
Figura - 1. 2. Seqüência de aparecimento ou introdução natural dos erros nas etapas de cálculo da solução de um problema físico.
Se o modelo matemático não possuir solução analítica pode-se recorrer aos
métodos numéricos para a solução das equações que representam o modelo.
* Métodos Numéricos: Conjunto de procedimentos utilizados para transformar o modelo
matemático em um problema numérico.
A descrição seqüencial dos passos em um número finito, que caracterizam um
método numérico chama-se algoritmo.
Na solução do problema com o emprego de métodos numéricos e de
computadores surgem erros devidos a representação dos números no computador e resultantes
de operações aritméticas. Se x representa a solução analítica e x , a numérica deseja-se saber:
quão próximo x está de x.
1. 4 - Representação dos Números em um Computador
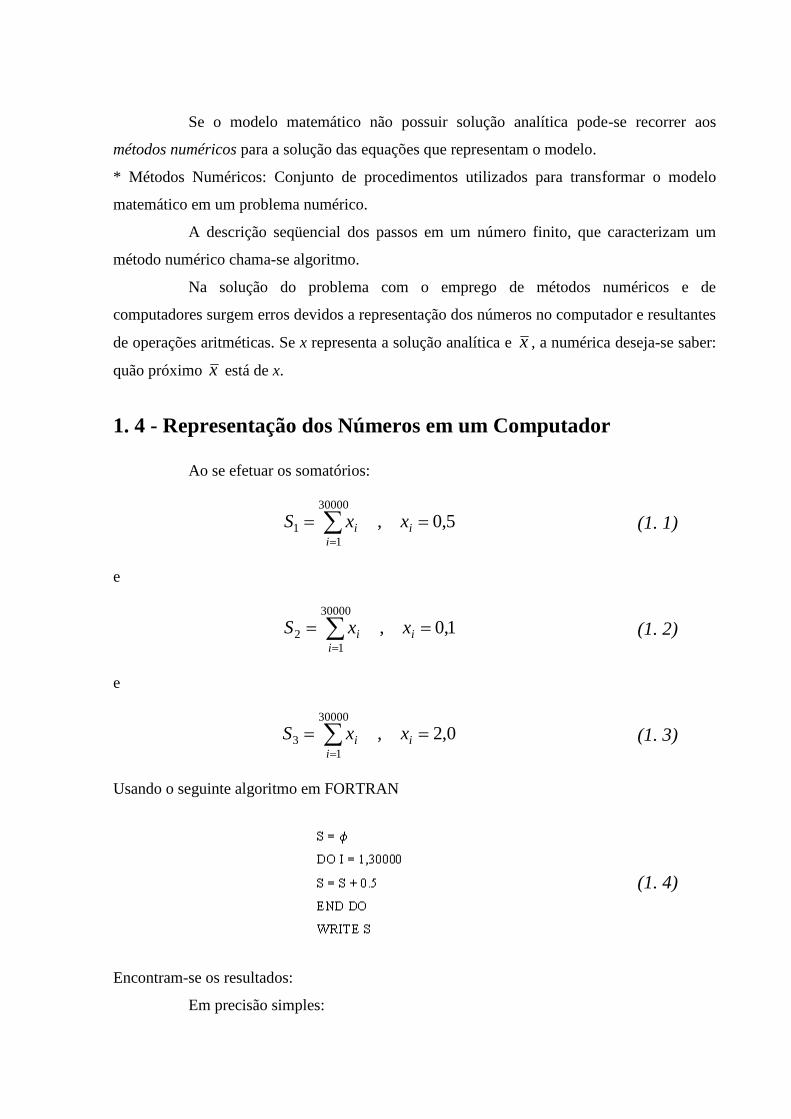
Ao se efetuar os somatórios:
30000
11 5,0,
iii xxS (1. 1)
e
30000
12 1,0,
iii xxS (1. 2)
e
30000
13 0,2,
iii xxS (1. 3)
Usando o seguinte algoritmo em FORTRAN
(1. 4)
Encontram-se os resultados:
Em precisão simples:
S1 = 15000
S2 =3000,576
S3 = 60000
(1. 5)
Em precisão dupla:
S1 = 15000
S2 =2999,99999999837
S3 = 60000
(1. 6)
O resultado correto para S2 seria 3000. A diferença entre esse resultado e os
fornecidos pelo computador, isto é, o erro, ocorre devido à representação de 0,1 no
computador.
A representação de um número depende da base disponível na máquina em uso e
do numero máximo de dígitos usados. Um computador opera, normalmente, no sistema
binário. No dia a dia emprega-se a base decimal. Uma fonte de erros é proveniente da
conversão do sistema binário para o decimal.
De um modo geral, um número na base , ojjj aaaaaa 1221 ... ,
10 ka , jk ,...,2,1,0 , pode ser escrito na forma polinomial:
01
111221 ...... o
jj
jjojjj aaaaaaaaaa
(1. 7)
Por exemplo:
101001234
2 )23(2.12.12.12.02.110111 (1. 8)
O número 10)5,0( possui representação finita na base 2, igual 2)1,0( ; o número
10)1,0( possui representação infinita na base 2...)00110000110011,0(2
Um número inteiro decimal sempre pode ser representado exatamente no sistema
binário porque os números inteiros podem ser expressos como a soma de potências de 2.
Uma fração racional só pode ser expressa por um número finito de dígitos no
sistema binário quando pode ser escrita como o quociente de dois inteiros p/q onde q é uma
potência de 2: q = 2n para algum inteiro n.

1. 5 - Aritmética de Ponto Flutuante
Um computador representa um número real no sistema denominado aritmética de
ponto flutuante.
A forma normalizada de um número representado na base em aritmética de
ponto flutuante de t dígitos é:
etddd .... 21 (1. 9)
onde 0;,...,2,1;10 1 dtjd j (forma normalizada), “ e ” é o expoente
no intervalo ],[ ul ; em geral , ul .
A nomenclatura utilizada é a dos logaritmos: O expoente é denominado
característica e a parte fracionária, mantissa.
1.5.1 – Exemplo - 1
Considerando uma máquina que opera no sistema: ]5,5[,3,10 et
nesse sistema os números serão representados como:
11 2
0. ... 10
0 9, 1, 2, 3e
tj
dd d d
d j t
(1. 10)
O maior número representado é (em módulo):
9990010.999,0 5 M (1. 11)
O menor é:
65 1010.100,0 m (1. 12)
Para um número real x:
1) Mxm
Se
310.23589,089,235 x (1. 13)
com truncamento:
310.235,0x (1. 14)
com arredondamento:
310.236,0x (1. 15)
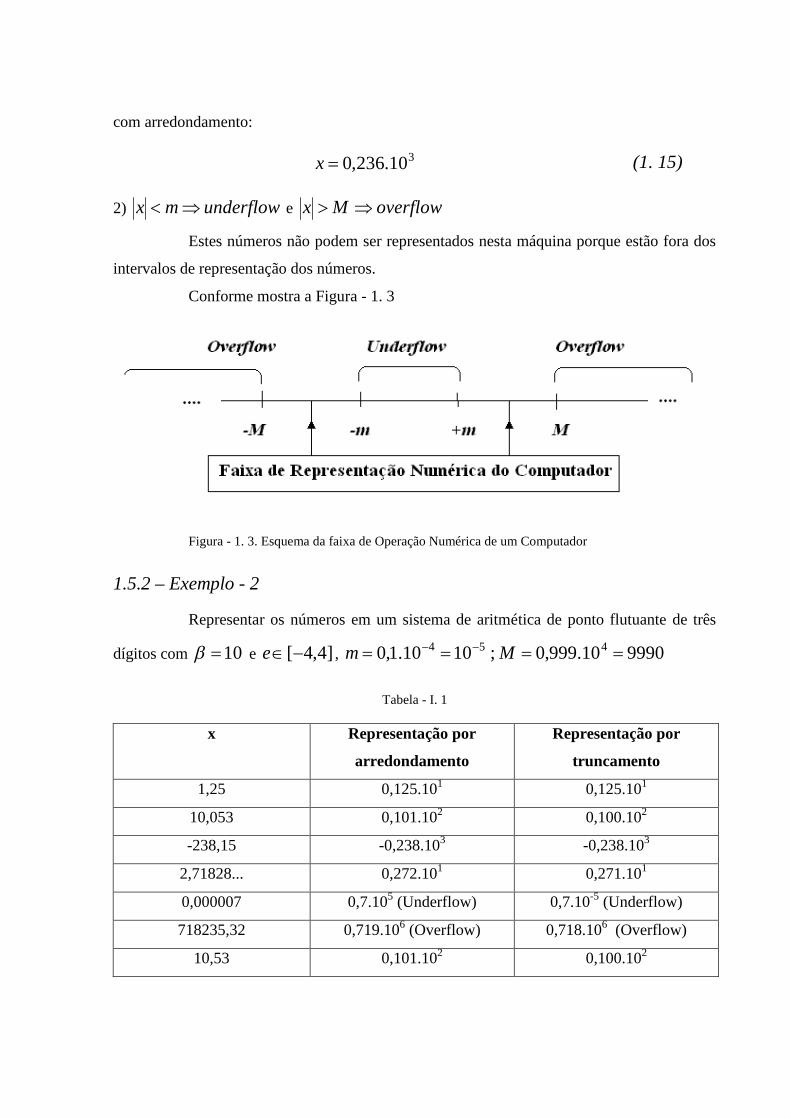
2) underflowmx e overflowMx
Estes números não podem ser representados nesta máquina porque estão fora dos
intervalos de representação dos números.
Conforme mostra a Figura - 1. 3
Figura - 1. 3. Esquema da faixa de Operação Numérica de um Computador
1.5.2 – Exemplo - 2
Representar os números em um sistema de aritmética de ponto flutuante de três
dígitos com 10 e ]4,4[e , 999010.999,0;1010.1,0 454 Mm
Tabela - I. 1
x Representação por
arredondamento
Representação por
truncamento
1,25 0,125.101 0,125.101
10,053 0,101.102 0,100.102
-238,15 -0,238.103 -0,238.103
2,71828... 0,272.101 0,271.101
0,000007 0,7.105 (Underflow) 0,7.10-5 (Underflow)
718235,32 0,719.106 (Overflow) 0,718.106 (Overflow)
10,53 0,101.102 0,100.102

1. 6 – Análise de Erros
Vamos a partir de agora introduzir uma análise elementar de erros a partir da
conceituação de erros absoluto e relativo.
1.6.1 - Erro absoluto:
É a diferença entre o valor exato de um número x e seu valor aproximado x :
xxEAx (1. 16)
Nem sempre é possível conhecer o valor exato de um número por isso o erro pode
ser calculado em relação ao ser valor aproximado,
0,01(limitante superior do erro)xEA x x (1. 17)
1.6.2 - Erro relativo:
O erro relativo é empregado quando o erro absoluto de duas medidas são
próximas, mas o valor absoluto delas são distintos. Portanto, o erro relativo é o erro relativo
dividido pelo seu valor exato x:
0,
xx
xxx
EAER xx (1. 18)
e
xxx
xEAER x
x
(1. 19)
Se o erro exato não é conhecido, mas apenas o valor aproximado, o erro relativo é
dado por:
xx
EA x xERx x
(1. 20)
E
xx
EA x xERx x
(1. 21)

1. 7 - Erros de arredondamento e truncamento em um Sistema de Artimética de ponto Flutuante
Seja x um número real no sistema de ponto flutuante, logo:
etddd .... 21 (1. 22)
onde é a base em que a máquina opera, t é o número de dígitos na mantissa, com
0 1jd ; 1, 2,...,j t e 1 0d (forma normalizada), e “ e ” é o expoente no intervalo
[ , ]u u .
Se x está na base 10 com t dígitos este pode ser escrito da seguinte forma:
.10 .10e e tx xx f g (1. 23)
onde 0,1 1xf e 0 1xg
1.7.3 – Exemplo - 3
Se 234,57x e 4t , temos:
234,5 0,07x (1. 24)
ou
3 10,2345.10 0,7.10x (1. 25)
Logo
3 1.10 .10x xx f g (1. 26)
onde 0, 2345xf e 0,7xg
É claro que na representação de x neste sistema .10e txg não pode ser
incorporado totalmente à mantissa. Então surge a questão de como considerar esta parcela na
mantissa e definir o máximo erro absoluto (ou relativo) cometido.
Dado um sistema de aritmética de ponto flutuante de t dígitos na base 10, as
seguintes limitações são encontradas para os erros absolutos e relativos, de truncamento e
arredondamento:

1.7.1 - Truncamento:
O erro absoluto no truncamento, .10e txg é desprezado e .10e
xx f daí:
xEA x x (1. 27)
ou seja
.10 .10 .10e e t ex x x xEA f g f (1. 28)
logo
.10e tx xEA g (1. 29)
como 1xg temos:
texEA 10 (1. 30)
O erro relativo é dado por:
xx
EA x xERx x
(1. 31)
ou seja
1
.10 10 10.10 0,1.10
1010
e t e t e txx
x e ex
e tx e
gEAERx x f
ER
(1. 32)
Portanto,
110 txER (1. 33)
1.7.2 – Arredondamento
No arredondamento, xf é modificado para levar em consideração xg
.10 .10e e tx xx f g (1. 34)
1.102
1.10 102
ex x
e e tx x
f se gx
f se g
(1. 35)
Então o erro absoluto é dado por:
xEA x x (1. 36)
ou seja
.10 .10 .10e e t ex x x xEA f g f (1. 37)
logo
.10e tx xEA g (1. 38)
como 12xg temos:
1102
e txEA (1. 39)
E o erro relativo é dado por:
xx
EA x xERx x
(1. 40)
ou seja
1
110.10 1 1022.10 0,1.10
1 102 10
e te t e txx
x e ex
e tx e
gEAERx x f
ER
(1. 41)
Portanto,
11021 t
xER (1. 42)
Por outro lado se 12xg , teremos:
Então o erro absoluto é dado por:
xEA x x (1. 43)
ou seja
.10 .10 .10 10e e t e e tx x x xEA f g f (1. 44)
logo
1 .10e tx xEA g (1. 45)
como 12xg temos:
1102
e txEA (1. 46)
E o erro relativo é dado por:
xx
EA x xERx x
(1. 47)
ou seja
1
110.10 1 1022.10 0,1.10
1 102 10
e te t e txx
x e ex
e tx e
gEAERx x f
ER
(1. 48)
Portanto,
11102
txER (1. 49)
1.7.4 – Exemplo - 4
Sendo t = 4 base 10 e sendo dados x = 0,937.104 e y = 0,1272.102, obter (x + y) e
xy, usando truncamento e arredondamento:
Solução:
a) 444 10.938272,010.001272,010.937,0 yx (1. 50)
Como t = 4, o resultado arredondado é:
40,9383.10x y (1. 51)
O resultado truncado é:
40,9382.10x y (1. 52)
b) 624 10.1191864,010.1272,0.10.937,0. yx (1. 53)
Como t = 4, o resultado arredondado é:
6. 0,1192.10x y (1. 54)
O resultado truncado é:
6. 0,1191.10x y (1. 55)
Conclusão:
Ainda que as parcelas ou fatores em uma expressão estejam representados
exatamente no sistema, não se pode esperar que o resultado da equação seja exato.
1. 8 – Erro absoluto e Erro relativo nas Operações Aritméticas com Erros na representação das Parcelas ou Fatores
Dada uma seqüência de operações é importante a noção de como o erro se
propaga em uma operação ao longo das operações subseqüentes.
O erro total em uma operação é composto pelo erro das parcelas ou “features” e
pelo erro no resultado da operação.
Sejam x e y tais que:
xEAxx (1. 56)
e

yEAyy (1. 57)
1.8.1 – Adição
O erro absoluto é dado por:
)()(
)()(
yx
yx
EAEAyxEAyEAxyx
(1. 58)
Ou
yxEAyxyx (1. 59)
Onde yxyx EAEAEA e o erro absoluto da soma.
O erro relativo é dado por:
. . .( ) ( )
x y y yx xx y
EA EA EAEA EA x yERx y x y x y x x y y x y
(1. 60)
logo
. .x yx y
x ER y ERER
x y
(1. 61)
1.8.2 - Subtração
Analogamente temos:
)()(
)()(
yx
yx
EAEAyxEAyEAxyx
(1. 62)
Ou
yxEAyxyx (1. 63)
Onde yxyx EAEAEA e o erro absoluto da soma.
O erro relativo é dado por:
. .x y yx
x yEA EAEA x yERx y x x y y x y
(1. 64)
logo
. .x yx y
x ER y ERER
x y
(1. 65)
1.8.3 – Multiplicação
O erro absoluto é dado por:
. ( ).( )
( . ) ( )x y
y x x y
x y x EA y EA
x y xEA yEA EA EA
(1. 66)
Admitindo que o produto x yEA EA pode ser desprezado temos:
. ( . ) ( )y xx y x y xEA yEA (1. 67)
E, portanto xy y xEA xEA yEA é o erro absoluto da soma.
O erro relativo é dado por:
.y x
xyxEA yEA
ERx y
(1. 68)
ou
. .. . .xy
xy y xEA x yER EA EAx y x y x y
(1. 69)
Logo o erro relativo é:
yxxy
EAEAERx y
(1. 70)
ou seja
xy x yER ER ER (1. 71)

1.8.4 - Divisão
yEAy
EAxEAyEAx
yx
y
x
y
x
1
1 (1. 72)
Expandindo 1
1
yEAy em Série e desprezando-se as potências maiores do que 1,
encontra-se:
yEA
yEA
y
y
1
1
1 (1. 73)
Então:
y
EAyEAx
EAyEAx
yx yx
y
x 1 (1. 74)
Que resulta em:
2yEAEAEAyEAxyx
yEAy
yEAx
yx yxxyyx
(1. 75)
Desprezando o produto dos erros absolutos
2y
EAxEAyyx
yx yx (1. 76)
E, portanto,
2/ y
EAxEAyEA yx
yx (1. 77)
E
// 2/
x y x yx y
EA yEA xEAyERx y x y
(1. 78)
Logo
2/ 2 2
.
. .yx
x yy xEAy EAER
x y x y (1. 79)
ficando
/ .yx
x yEAEAER
x y (1. 80)
Portanto,
/x y x yER ER ER (1. 81)

1. 9 - Exemplos e Aplicações

1. 10 - Exercícios e Problemas
Capítulo II
ARITIMÉTICA DE PONTO FLUTUANTE EM PROGRAMAÇÃO
RESUMO
Neste capítulo será visto um breve histórico da evolução dos computadores. Um
resumo da representação binária dos números, um estudo do funcionamento binário dos
computadores e exemplos de aritmética de ponto flutuante.
2. 1 - Objetivos do Capítulo
i) Adquirir uma rápida visão da evolução dos computadores durante as decadas
ii) Entender como funciona a aritmética de ponto flutuante
iii) Conhecer o funcionamento da representação dos números em um computador
iv) Entender a geração ea representação binária e decimal dos números
2. 2 – Introdução
O computador deixou de ser um objeto privativo dos cientistas e entrou no dia a
dia da sociedade. Porém poucos são os que verdadeiramente conhecem a sua evolução e seu
funcionamento. Para o cientista e calculista de engenharia é imprescindível ter acesso a
informações mais detalhadas sobre o funcionamento do cálculo nos computadores nos dias de
hoje. Pois dessas informações dependem a qualidade dos seus cálculos. Um curso de Análise
Numérica como este visa dar ao estudante uma rápida visão do funcionamento dos
computadores e das máquinas de cálculo. O estudante deve adquirir através do entendimento
do funcionamento do computador uma sensibilidade profissional para o estudo e análise dos
erros cometidos nos cálculos numéricos utilizados em ciência e engenharia.
2. 3 – História e Evolução dos Computadores
2.3.1 - Máquinas Calculadoras Mecânicas
1) Ábaco
2) Pascalina
3) Calculadora de Leibnitz
4) Tear de Jacquard
5) Máquina Diferencial de Babbage – que utilizava os cartões de Jacquard
6) Máquina Analítica de Babbage – Pai do Computador
2.3.2 - Inicio da Era da Computação – Eletromecânico
1) Tabulador de Holleitz (1890)
2) Mark I – (1944) Máquina Eletromecânica
3)
2.3.3 - Inicio da Era da Computação Eletrônica
1) ENIAC (1942): Usava válvulas
2) EDVAC (1944)
3) EDSAC (1949) – 1º computador de programa armazenado operacional de grande escala
Válvula x Transistor
4) UNIVAC – I: 1º computador comercial de sucesso
5) IBM System/360 – modelos 40, 50, 65 e 75
6) PDP-8 (1965): 1º minicomputador comercial, PDP 10, PDP 11
7) Cray – I (1976) 1º supercomputador
8) Micromputadores: Apple IIc Plus, Xerox Alto
9) IBM/PC: Computador Pessoal
2. 4 – Representação Binária de Números
Vamos a partir de agora descrever resumidamente o funcionamento da
representação dos números em um computador.
2.4.1 - Esquema de um Computador
Figura - 1. 4. Representação Esquemática de um Computador
2.4.2 - Base Numéricas
Base 10: (2.310)d = 2 x 103 + 3 x 102 + 1 x 101 + 0 x 100 (2. 1)
Base 2: (10011)b = 1 x 24 + 0 x 23 + 0 x22 + 1 x 21 + 1 x 20 = (19)d (2. 2)
2.4.3 - Sistema Binário
O sistema binário requer mais dígitos que o sistema decimal, porque só possui
dois algarismo o zero e o um (0 ou 1).
Figura - 1. 5. Representação Esquemática de um Computador
Palavra de Dados – PD:
1) Valor Máximo: 24
0000 11110 15
(2. 3)
2) Valor Máximo: 28
00000000 111111110 255
(2. 4)
3) Valor Máximo: 216
0000000000000000 11111111111111110 65535
(2. 5)
4) Valor Máximo: 232
00000000000000000000000000000000 111111111111111111111111111111110 4294967295
(2. 6)
5) 264
00000000000000000000000000000000 1111111111111111111111111111111100000000000000000000000000000000 11111111111111111111111111111111
0 ...
(2. 7)
....
O Windows Vista é o 1º Sistema Operacional que pretende usar toda a
capacidade.
2.4.4 - Exemplos de Representação de Números
Considerando-se palavras de 32 bits temos:
Complemento a dois para sinais
0000.0000...0000 = 0d (2. 8)
0000.0000...0001 = 1d (2. 9)
0111.1111...1111b = 2.147.483.647 (2. 10)
1000. 0000...1111b = -2.147.483.647 (2. 11)
1111.1111...1111b = -1d (2. 12)
31 30 1 02 2 ... 2 2 (2. 13)
2.4.5 - Transformação de um Valor Positivo em um Numero Negativo
2d = 0010b (2. 14)
Ida

Inverte o número e soma com o número 0001:
2 0010 ( )1101 ( )
1
2 1110
d b inverteb soma
d
(2. 15)
ou
-2d = 1101 + 0001 = 1110 = -2d (2. 16)
Volta
Soma 0001 com 1
0001 + 1 = 0010b = +2d (2. 17)
2.4.6 - Aritmética Binária
1) Soma
6d + 7d = 13d (2. 18)
00000111 700000110 6
00001110 13
dd
d
(2. 19)
2) Subtração
7d – 6d = (2. 20)
* BYTE DE CARRY QUE CARREGA O (1)
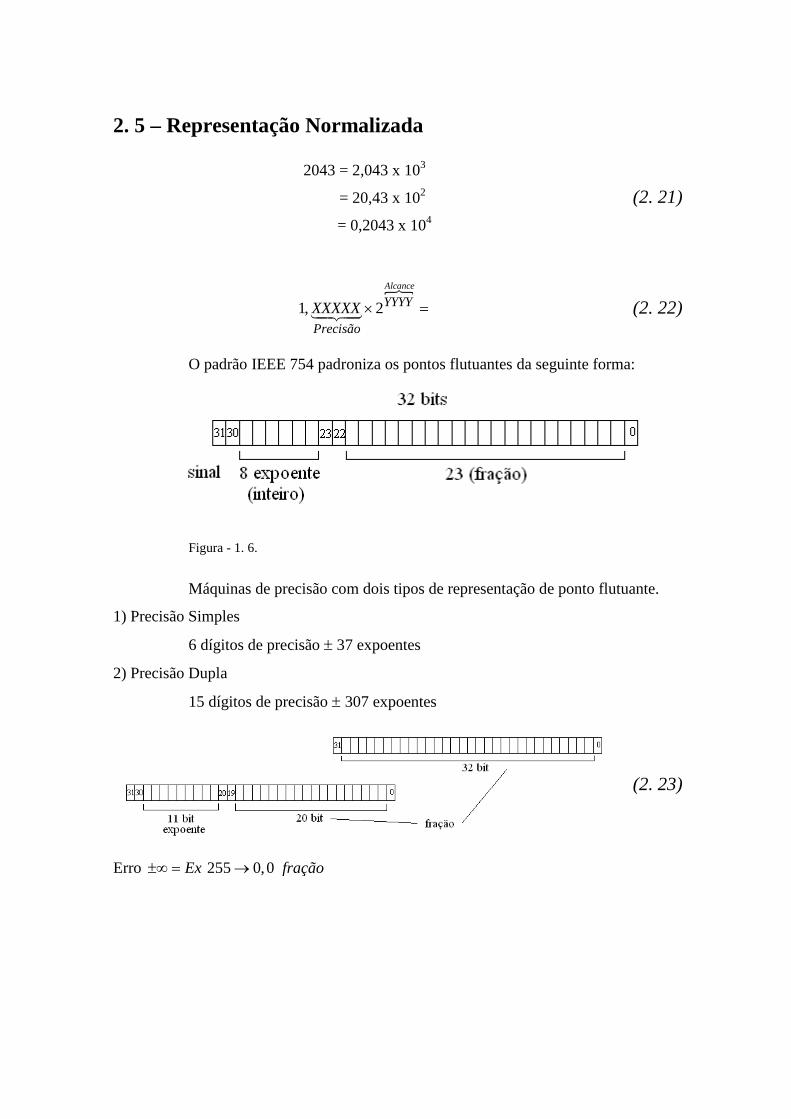
2. 5 – Representação Normalizada
2043 = 2,043 x 103
= 20,43 x 102
= 0,2043 x 104
(2. 21)
1, 2
Alcance
YYYY
PrecisãoXXXXX (2. 22)
O padrão IEEE 754 padroniza os pontos flutuantes da seguinte forma:
Figura - 1. 6.
Máquinas de precisão com dois tipos de representação de ponto flutuante.
1) Precisão Simples
6 dígitos de precisão 37 expoentes
2) Precisão Dupla
15 dígitos de precisão 307 expoentes
(2. 23)
Erro 255 0,0Ex fração
2. 6 – Programação em FORTRAN
INTEGER : KNDI
KNDI = SELECTED_INT_KIND (r) – você declara o que você quer e fica como precisão padrão
(r = 50)
REAL : KNDR
KNDR = SELECTEC_REAL_KIND([p][r]) – precisão , alcance
SELECTED_INT_KIND([p][r])
(p = 15 r = 100) - Retorna o número inteiro referente ao KIND ( “tipo”que diz qual o número o processador
usa para identificar simples ou dupla precisão)
INTEGER
TYPE
REAL*8
REAL(KIND = KND)
A = 2.0 * B
A = 2.0_KND * B – garante o número digitado ganhe a precisão que você quer.

2. 7 – Exemplos e Aplicações

2. 8 – Exercícios e Problemas
Capítulo III
SISTEMA DE EQUAÇÕES LINEARES
RESUMO
3. 1 -Objetivos do Capítulo
3. 2 - Introdução

3. 3 – Resolução de Sistemas Lineares
Os métodos numéricos para a resolução de um sistema linear podem ser divididos
em métodos diretos e métodos iterativos.
Métodos Diretos são aqueles que fornecem a solução exata do sistema linear,
quando ela existe, após um número finito de operações.
Métodos Iterativos são aqueles que, partindo de uma aproximação inicial, por
exemplo, (0)
~x , geram uma seqüência de ( )
~kx que converge para a solução do problema, caso
ela exista, sob certas condições.
3. 4 – Métodos Iterativos
Idéia central: Generalização do Método do Ponto Fixo
Assim, o sistema ~ ~ ~A x b onde
~A é a matriz dos coeficientes,
~x é o vetor das
incógnitas e ~b é o vetor independente, pode ser convertido em um sistema do tipo:
~ ~ ~ ~ ~( )x C x g x (3. 1)
onde a matriz ~C tem a mesma dimensão de
~A e o vetor
~g tem a mesma dimensão de
~b . O
vetor ~( )x é a função de iteração.
3.4.1 - Esquema Iterativo
Dada uma aproximação inicial (0)
~x :
1ª Aproximação
(1) (0) (0)
~ ~ ~ ~ ~( )x C x g x (3. 2)
2ª Aproximação
(2) (1)
~ ~ ~ ~x C x g (3. 3)
.... K- ésima aproximação
( ) ( 1)
~ ~ ~ ~
k kx C x g (3. 4)
Se a seqüência de aproximações (0) (1) ( )
~ ~ ~, ,...., kx x x converge para a solução do problema, seja
1
~~ ~A b (3. 5)
então,
( )
~ ~lim k
kx
(3. 6)
e
~ ~ ~ ~C g (3. 7)
3.4.2 - Critério de Parada do Processo Iterativo
O processo iterativo é repetido até que o vetor ( )
~
kx esteja suficientemente
próximo do vetor ( 1)
~
kx ou que o número máximo de iterações tenha sido ultrapassado.
Para uma precisão , o vetor ( )
~
kx é considerado solução aproximada do
problema se:
( ) ( ) ( 1)
1max | |k k k
i ii nd x x
(3. 8)
Adotando como critério de parada o erro relativo, pode-se escrever:
( ) ( ) ( 1)
1max | |k k k
i ii nd x x
(3. 9)
3.4.3 - Utilização dos métodos iterativos
Quando a matriz ~A for esparsa (isto é, apresentar grande numero de elementos
nulos). Os Métodos Iterativos utilizam apenas elementos da matriz original, enquanto que o
Método da Eliminação de Gauss, não preserva esparsidade, isto é, durante o processo de
eliminação de muitos elementos nulos podem se tornar não nulos.

3. 5 – Método de Gauss-Jacobi
Considerando o sistema:
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
......
...
n n
n n
n n nn n n
a x a x a x ba x a x a x b
a x a x a x b
(3. 10)
E admitindo que 0, 1, 2,..,iia i n , o vetor ~x é isolado mediante a separação pela diagonal:
1 1 12 2 111
1 ( ... )n nx b a x a xa
(3. 11)
e
2 2 21 1 222
1 ( ... )n nx b a x a xa
(3. 12)
e
1 1 1 11 ( ... )n n n n n nnn
x b a x a xa
(3. 13)
Em forma matricial temos:
~ ~ ~ ~x C x g (3. 14)
onde
13 112
11 11 11
23 221
22 22 22
31 32 3~
33 33 33
1 2 3
0
0
0...
: : : ... :
... 0
n
n
n
n n n
nn nn nn
a aaa a a
a aaa a a
C a a aa a a
a a aa a a
(3. 15)
com

1
11
2
22~
n
nn
babag
ba
(3. 16)
assim a relação recursiva do método é dado pela seguinte formula.
( 1) ( )
~ ~ ~ ~
k kx C x g (3. 17)
3.5.1 - Exemplo
Resolver o sistema
1 2 3
1 2 3
1 2 3
10 2 75 8
2 3 10 6
x x xx x x
x x x
(3. 18)
pelo Método de Gauss-Jacobi com 0,05 e usando
(0)
~
7108
56
10
x
(3. 19)
Para o processo iterativo tem-se:
( 1) ( ) ( )1 2 3
( 1) ( ) ( )2 1 3
( 1) ( ) ( )23 1
0,2 0,1 0,7
0,2 0,2 1,6
0,2 0,3 0,6
k k k
k k k
k k k
x x x
x x xx x x
(3. 20)
Ou
( 1) ( )1 1
( 1) ( )2 2
( 1) ( )3 3
0 0, 2 0,1 0,70,2 0 0,2 1,60,2 0,3 0 0,6
k k
k k
k k
x xx xx x
(3. 21)
Para k = 0 tem-se:

(1) (0)
~ ~ ~ ~
0,961,86
0,94x C x g
(3. 22)
3.5.2 - Verificação da convergência:
(1) (0)1 1
~ ~(1) (0)
2 2~ ~
(1) (0)3 3
~ ~
| | 0, 26
| | 0,26
| | 0,34
x x
x x
x x
(3. 23)
onde
(1) (0)
(1) 1(1)
1,2,3
max 0,34 0,18281,86max
i ii nk
ii
x xd
x
(3. 24)
Fazemos os outros e como está maior que o erro, continuamos o procedimento
Para k = 1 tem-se:
(2) (1)
~ ~ ~ ~
0,9781,98
0,966x C x g
(3. 25)
onde
(2) (1)
(2) 1(2)
1,2,3
max 0,12 0,06061,98max
i ii nk
ii
x xd
x
(3. 26)
Veja que o valor x(2) tem dk(2) > erro
Para k = 2 tem-se:
(3) (2)
~ ~ ~ ~
0,99941,9888
0,9984x C x g
(3. 27)
onde

(3) (2)
(3) 1(3)
1,2,3
max 0,0324 0,01631,9888max
i ii nk
ii
x xd
x
(3. 28)
O valor x(3) tem dk(3) < erro, logo a solução aproximada do problema é:
(3)
~
0,99941,9888
0,9984x
(3. 29)
3.5.1 - Convergência do método
Uma condição suficiente para a convergência do Método Iterativo de Gauss-
Jacobi é dada pelo “critério das linhas”:
Dado o sistema linear
~ ~ ~A x b (3. 30)
Seja
1
| || |
nkj
kj kkj k
aa
(3. 31)
se
1max 1kk n
(3. 32)
então, o método de Gauss-Jacobi gera uma seqüência ( )
~
kx convergente para a solução do
sistema dado, independentemente da escolha da aproximação inicial (0)
~x .
Para a matriz ~A do exemplo :

1
2 3
3
2 1 0,310 101 1 0,4 0,5 15 102 3 0,5
10 10
(3. 33)
logo, o método é convergente
3. 6 – Método de Gauss-Seidel
Considere o sistema
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
......
...
n n
n n
n n nn n n
a x a x a x ba x a x a x b
a x a x a x b
(3. 34)
Do mesmo modo que no Método Gauss-Jacobi, no Método de Gauss-Seidel o
sistema ~ ~ ~A x b também é escrito na forma
( ) ( 1)
~ ~ ~ ~ ~( )k kx C x g x (3. 35)
por separação da diagonal.
3.6.1 - O Processo Iterativo
Dada a aproximação inicial (0)
~x , as demais são calculadas considerando o novo
sistema:
( 1) ( ) ( ) ( )1 1 12 2 13 3 1
11
( 1) ( 1) ( ) ( )2 2 21 1 23 3 2
22
( 1) ( 1) ( 1) ( )3 3 31 1 32 2 3
33
( 1) ( 1) ( 1) ( 11 1 1 2 2 ( 1) ( 1)
1 ...
1 ...
1 ...
:1 ...
k k k kn n
k k k kn n
k k k kn n
k k k kn n n n n n
nn
x b a x a x a xa
x b a x a x a xa
x b a x a x a xa
x b a x a x a xa
)
(3. 36)

E admitindo que 0, 1, 2,..,iia i n , o vetor ~x é isolado mediante a separação pela diagonal:
1 2
( 1) ( ) ( )1 12 1
11
1 ( ... )k k kn nx b a x a x
a
2 1
( 1) ( 1) ( ) ( )2 21 3 3 2
22
1 ( ... )k k k kn n nx b a x a x a x
a
( 1) ( 1) ( 1) ( 1)3 31 1 32 2 3 ( 1)
1 ( ... )k k k kn n n
nn
x b a x a x a xa
( 1) ( 1) ( 1) ( 1)1 1 2 2 1 ( 1)
1 ( ... )k k k kn n n n n n n
nn
x b a x a x a xa
(3. 37)
Portanto, no cálculo de ( 1)kjx são utilizados os ( 1) , 1,2,3,...,( 1)k
ix i j já
calculados e os valores ( ) , ( 1),...,kmx m j n restantes.
Para a representação matricial do esquema, a matriz ~A é escrita com
~ ~ ~ ~A L D R (3. 38)
onde:
~L é uma matriz triangular inferior com diagonal nula,
~D é uma matriz diagonal com 0, 1, 2,...,iid i n
~R é uma matriz triangular superior com diagonal nula,
11 12 1
21 22 2
~ ~ ~
1 2
0 0 ... 0 0 ... 0 0 ...0 ... 0 0 ... 0 0 0 ...
; ;: : : .. 0 : : : .. 0 : : : .. :
... 0 0 0 ... 0 0 ... 0
n
n
n n nn
a a aa a a
L D R
a a a
(3. 39)
Então
~ ~ ~A x b (3. 40)
substituindo pela expressão ~ ~ ~ ~A L D R temos

~ ~ ~ ~ ~
~ ~ ~ ~1 1 1
~ ~ ~ ~
L D R x b
Dx b Lx Rx
x D b D Lx D Rx
(3. 41)
Para o processo iterativo vale:
( 1) 1 1 ( 1) 1 ( )
~ ~ ~ ~
k k kx D b D Lx D Rx (3. 42)
A expressão:
( 1) ( )
~ ~ ~ ~
k kx C x g (3. 43)
é obtida da equação (3. 42), agrupando as matrizes que multiplicam ( 1)
~
kx da seguinte forma:
1 ( 1) 1 ( ) 1~ ~ ~ ~ ~ ~~ ~ ~
k kD L I x D R x D b
(3. 44)
Resolvendo para x(k+1) temos:
1 1( 1) 1 1 ( ) 1 1
~ ~ ~ ~ ~ ~ ~ ~ ~~ ~ ~k kx D L I D R x D L I D b
(3. 45)
Chamando
11 1
~ ~ ~ ~ ~~C D L I D R
(3. 46)
e
11 1
~ ~ ~ ~ ~~g D L I D b
(3. 47)
obtém-se
( 1) ( )
~ ~ ~ ~
k kx C x g (3. 48)
3.6.1 - Exemplo
Resolver o sistema
1 2 3
1 2 3
1 2 3
5 53 4 63 3 6 0
x x xx x xx x x
(3. 49)
Utilizando o método de Gauss-Seidel com
(0)
~
000
x
(3. 50)
e =0,05
3.6.2 - Solução
A matriz do sistema linear:
~ ~ ~A x b (3. 51)
é:
1
2
3
5 1 1 53 4 1 63 3 6 0
xxx
(3. 52)
rasgando as matrizes temos:
~ ~ ~
0 0 0 5 0 0 0 1 13 0 0 ; 0 4 0 : 0 0 13 3 0 0 0 6 0 0 0
L D R
(3. 53)
onde
1
~
1 0 05
10 04
10 06
D
(3. 54)
Logo

11 1
~ ~ ~ ~ ~~
11 10 0 0 05 50 0 0 1 0 0 0 1 1
1 10 0 3 0 0 0 1 0 0 0 0 0 14 4
3 3 0 0 0 1 0 0 01 10 0 0 06 6
C D L I D R
(3. 55)
ou
11 1
~ ~ ~ ~ ~~
1
1 0 050 0 0 1 0 0 0 1 1
13/ 4 0 0 0 1 0 0 0 0 0 14
3/ 6 3/ 6 0 0 0 1 0 0 010 06
C D L I D R
(3. 56)
E
11 1
~ ~ ~ ~ ~~
1
1 0 051 0 0 0 1 1
13/ 4 1 0 0 0 0 0 14
3/ 6 3/ 6 1 0 0 010 06
C D L I D R
(3. 57)
Como
1
1 0 00 0
10 0
1
aadd b
ab bf e c de bf e
abc bc c
(3. 58)
temos:

11 1
~ ~ ~ ~ ~~
1 0 051 0 0 0 1 1
13/ 4 1 0 0 0 0 0 14
3/ 4 3/ 6 3/ 6 3/ 6 1 0 0 010 06
C D L I D R
(3. 59)
E
11 1
~ ~ ~ ~ ~~
1 105 51 0 0
13/ 4 1 0 0 04
1/ 8 3/ 6 1 0 0 0
C D L I D R
(3. 60)
e por último
11 1
~ ~ ~ ~ ~~
1 105 5
3 10 3/ 2020 4
0 1/ 40 1/ 40 1/8
C D L I D R
(3. 61)
E
~
1 105 5
20 3/ 2020
0 1/ 40 4 / 40
C
(3. 62)
e
11 1
~ ~ ~ ~ ~~1
~
1 10 0 0 05 50 0 0 1 0 0 5
1 10 0 3 0 0 0 1 0 0 0 64 4
3 3 0 0 0 1 01 10 0 0 06 6
g D L I D b
g
(3. 63)
Logo
11 1
~ ~ ~ ~ ~~
~
1 1 10 0 05 5 5 5
2 10 3/ 20 0 0 620 4
010 1/ 40 4 / 40 0 06
g D L I D b
g
(3. 64)
e
11 1
~ ~ ~ ~ ~~
~
1 105 5 1
10 3/ 20 6 / 410
00 1/ 40 1/10
g D L I D b
g
(3. 65)
Portanto,
11 1
~ ~ ~ ~ ~~
~
6 / 2018 / 80
6 /160
g D L I D b
g
(3. 66)
obtém-se

( 1) ( )
~ ~ ~ ~
k kx C x g (3. 67)
Logo
( 1) ( )1 1
( 1) ( )2 2
( 1) ( )3 3
1 105 5 6 / 20
10 3/ 20 18 / 8010
6 /1600 1/ 40 1/10
k k
k k
k k
x xx xx x
(3. 68)
Para o processo iterativo temos:
( 1) ( ) ( )
( 1) ( ) ( )
( 1) ( 1) ( 1)
~ ~ ~1 2 3
~ ~ ~2 1 3
~ ~ ~3 1 2
1 0,2 0,2
1,5 0,75 0,25
0,5 0,5
k k k
k k k
k k k
x x x
x x x
x x x
(3. 69)
i) Para k = 0 tem-se,
(1)
(1)
(1)
~ 1
~ 2
~ 3
1
1,5 0,75.1 0,25.0 0,75
0,5.1 0,5.0,75 0,875
x
x
x
(3. 70)
O primeiro valor é
(1)
~
10,750,875
x
(3. 71)
Verificação da convergência:
(1) (0)1 1
~ ~(1) (0) (1)
2 2 (1)~ ~
1,2,3(1) (0)3 3
~ ~
| | 1
1| | 0,75 ; 1max
| | 0,875
rii
x x
x x dx
x x
(3. 72)
Fazemos os outros e como está maior que o erro, continuamos dr = 1 > epsilon
ii) Para k = 1

( 2)
( 2)
( 2)
~ 1
~ 2
~ 3
1,025
0,95
0,9875
x
x
x
(3. 73)
O segundo valor é
(2)
~
1,0250,950,9875
x
(3. 74)
Verificação da convergência:
(2) (1)1 1
~ ~(2) (1) (2)
2 2 (2)~ ~
1,2,3(2) (1)3 3
~ ~
| | 0,025
0,2 0,2| | 0, 20 ; 0,19511,025max
| | 0,1125
rii
x x
x x dx
x x
(3. 75)
Fazemos os outros e como está maior que o erro, continuamos pois dr=1>epsilon
iii) Para k = 2
(3)
(3)
(3)
~ 1
~ 2
~ 3
1,0075
0,9912
0,9993
x
x
x
(3. 76)
O terceiro valor é
(3)
~
1,00750,99120,9993
x
(3. 77)
Verificação da convergência:
(3) (2)1 1
~ ~(3) (2) (3)
2 2 (2)~ ~
1,2,3(3) (2)3 3
~ ~
| | 0,00175
0,0412 0,0412| | 0,0412 ; 0,04091,0075max
| | 0,0118
rii
x x
x x dx
x x
(3. 78)

Com dk(3) = 0.0409 < erro, portanto a solução x(3) a solução aproximada do sistema é:
(3)
~
1,00750,99120,9993
x
(3. 79)
3.6.2 - Convergência do Método
Critério de Sassenfeld
Sejam
12 13 11
11
... na a aa
(3. 80)
e
1 1 2 2 ( 1) ( 1) ( 1)... ...j j j j j j j jnj
jj
a a a a a
a
(3. 81)
Ou
1
1 1
j n
k jk jkk k j
jjj
a a
a
(3. 82)
Sejam,
1max jj n
(3. 83)
Se 1 , o Método de Gauss-Seidel gera uma seqüência convergente, qualquer que seja
(0)
~x .
Quanto menor o valor de , mais rápido é a convergência.
1) Critério das Linhas
É o mesmo Método Gauss-Jacobi. Se 1max 1kk n
onde

1
| || |
nkj
kj kkj k
aa
(3. 84)
Então, o método de Gauss-Seidel gera uma seqüência ( )
~
kx convergente.
OBS:
1) Se o critério das linhas for atendido, o critério de Sassenfeld também será.
2) Tanto o Critério das Linhas para o Método Gauss-Jacobi quanto os critérios de Sassenfeld
e o Critério das Linhas para o Método de Gauss-Seidel estabelecem condições suficientes para
a convergência.
3.6.3 - Exemplo
Para o sistema de equações do exemplo anterior, verificar se o Método de Gauss-
Seidel gera uma seqüência convergente. Utilizar o critério de Sassenfel e o Critéio das Linhas.
3.6.4 - Solução
(a)
12 131
11
1 1 0,45
a aa
(3. 85)
e
21 1 232
22
3.0,4 1 0,554
a aa
(3. 86)
e
31 1 32 23
33
3.0,4 3.0,55 0,4756
a aa
(3. 87)
Como 1 3max 0,55 1jj
,
Conclui-se que o Método Gauss-Seidel gera uma seqüência convergente, qualquer que seja (0)
~x .
(b) Usando o Critério das Linhas temos:

12 131
11
1 1 0,45
a aa
(3. 88)
;
21 232
22
3 1 14
a aa
(3. 89)
e
31 3213
33
3 3 16
a aa
(3. 90)
Conclusão
Como 1 , o Critério das Linhas não é atendido embora o Critério de
Sassenfeld tenha sido.
3. 7 - Exemplos e Aplicações
3.7.1 - Exemplo
Seja o sistema
1 2 3
1 2 3
1 2 3
2 3 90 1
0 3 3
x x xx x x
x x x
(3. 91)
Verificar a convergência pelo método de Gauss-Seidel
3.7.2 - Solução
1º)
12 131
11
1 3 4 22 2
a aa
(3. 92)
e
21 1 232
22
0.2 1 11
a aa
(3. 93)

e
31 1 32 23
33
1.2 0.( 1) 23 3
a aa
(3. 94)
Com
1,2,3max 2ji
(3. 95)
Como 1 3max 2jj
, o critério das linhas não é atendido, pois é muito grande
Se o sistema não satisfizer o critério de Sassenfeld pode-se trocar as linhas de
forma que ele satisfaça.
2º) Trocando a primeira a equação pela terceira (linha 1 pela linha 3) temos:
1 2 3
1 2 3
1 2 3
0 3 30 12 3 1
x x xx x xx x x
(3. 96)
logo
12 131
11
3 31
a aa
(3. 97)
O que é pior não deu!
3º) Trocando a primeira coluna pela terceira:
3 2 1
3 2 1
3 2 1
3 0 1 30 1
3 2 9
x x xx x xx x x
(3. 98)
Temos:
113
(3. 99)
e
21.1/3 1
1 3 (3. 100)
e

33(1/3) 1.(1/3) 2
2 3
(3. 101)
Portanto, =2/3 e tem-se garantia da convergência.
3. 8 - Exercícios e Problemas
Capítulo IV
ZEROS DE FUNÇÕES E RAIZES DE EQUAÇÕES
RESUMO
Neste capítulo será visto diferentes métodos de cálculo de zeros de funções tais
como: o Método da Bissecção, o Método Iterativo das Aproximações Sucessivas, o Método
de Newton-Raphson, o Método da Secante, etc. e a análise da ordem e da convergência destes
métodos será feito junto com um estudo comparativo entre eles, a partir de um mesmo
exemplo resolvido pelos diferentes métodos.
4. 1 -Objetivos do Capítulo
i) Entender a problemática do cálculo de zero de funções;
ii) Saber encontrar o zero de funções por meio de diferentes métodos numéricos;
iii) Saber analisar os diferentes métodos de cálculo de zero de funções;
iv) Saber distinguir entre a qualidade de métodos de cálculos de zeros de funções;
através de análise de erros e da análise da ordem de convergência de um método numérico.
4. 2 - Introdução
Os problemas em ciência e engenharia são descritos matematicamente por meio
de equações diferenciais. As soluções dessas equações diferenciais são funções e a solução
destas equações para determinadas condições de contorno ou de problemas de valor inicial
são calculadas por meio de zeros de funções. Portanto, saber calcular zeros de funções
corresponde, a saber, calcular um problema até sua última instância, a fim de se obter
resultados numéricos além dos analíticos.
Um dos problemas que ocorrem mais frequentemente em trabalhos científicos é
calcular as raízes de equações da forma:
( ) 0f x (4. 1)
A função ( )f x pode ser um polinômio em x ou uma função transcendente.
Em raros casos é possível obter as raízes exatas de ( ) 0f x , como ocorre, por
exemplo, supondo-se ( )f x um polinômio fatorável. Em geral, queremos obter somente
soluções aproximadas, confiando a aproximação em alguma técnica computacional. Vamos
então considerar vários métodos iterativos para a determinação de aproximação para raízes
isoladas de ( ) 0f x . Será dada uma atenção especial às equações polinomiais em virtude da
importância de que as mesmas gozam na análise.
4. 3 - Zeros de Funções Reais
Vamos agora estudar o problema de cálculo de zero de funções. Os zeros de uma
unção ( )y f x são os valores de x que anulam esta função. Este podem ser Reais ou
Complexos. Neste capítulo trataremos apenas dos zeros Reais.
4.3.1 - Problema
Dada uma função ( )y f x encontrar os valores da variável independente x tais
que ( ) 0 f x . Esses valores são denominados raízes da equação ( ) 0 f x ou zeros da
função ( )y f x .
O problema da procura das raízes da equação ( ) 0 f x pode ser resolvido com o
emprego de métodos interativos.
Os métodos interativos estacionários de passo um contém as seguintes etapas:
4.3.2 - Aproximação inicial para raiz:
Consiste em obter um intervalo que contenha a raiz.
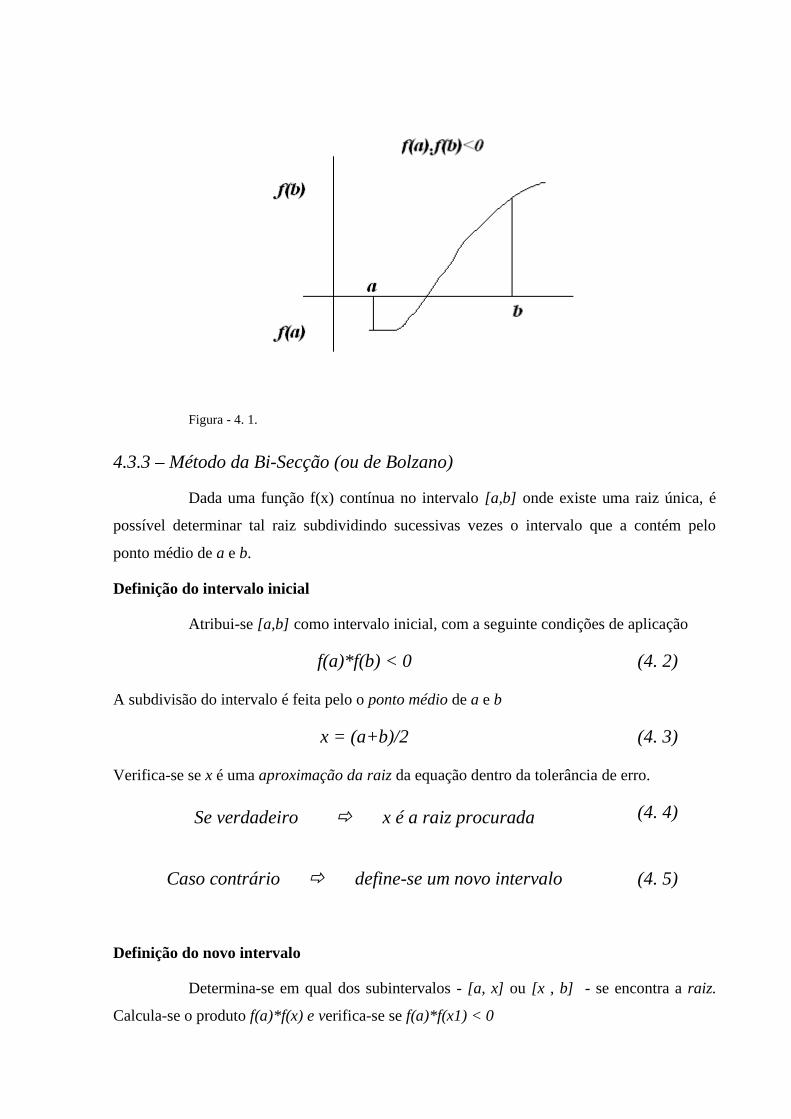
Figura - 4. 1.
4.3.3 – Método da Bi-Secção (ou de Bolzano)
Dada uma função f(x) contínua no intervalo [a,b] onde existe uma raiz única, é
possível determinar tal raiz subdividindo sucessivas vezes o intervalo que a contém pelo
ponto médio de a e b.
Definição do intervalo inicial
Atribui-se [a,b] como intervalo inicial, com a seguinte condições de aplicação
f(a)*f(b) < 0 (4. 2)
A subdivisão do intervalo é feita pelo o ponto médio de a e b
x = (a+b)/2 (4. 3)
Verifica-se se x é uma aproximação da raiz da equação dentro da tolerância de erro.
Se verdadeiro x é a raiz procurada (4. 4)
Caso contrário define-se um novo intervalo (4. 5)
Definição do novo intervalo
Determina-se em qual dos subintervalos - [a, x] ou [x , b] - se encontra a raiz.
Calcula-se o produto f(a)*f(x) e verifica-se se f(a)*f(x1) < 0
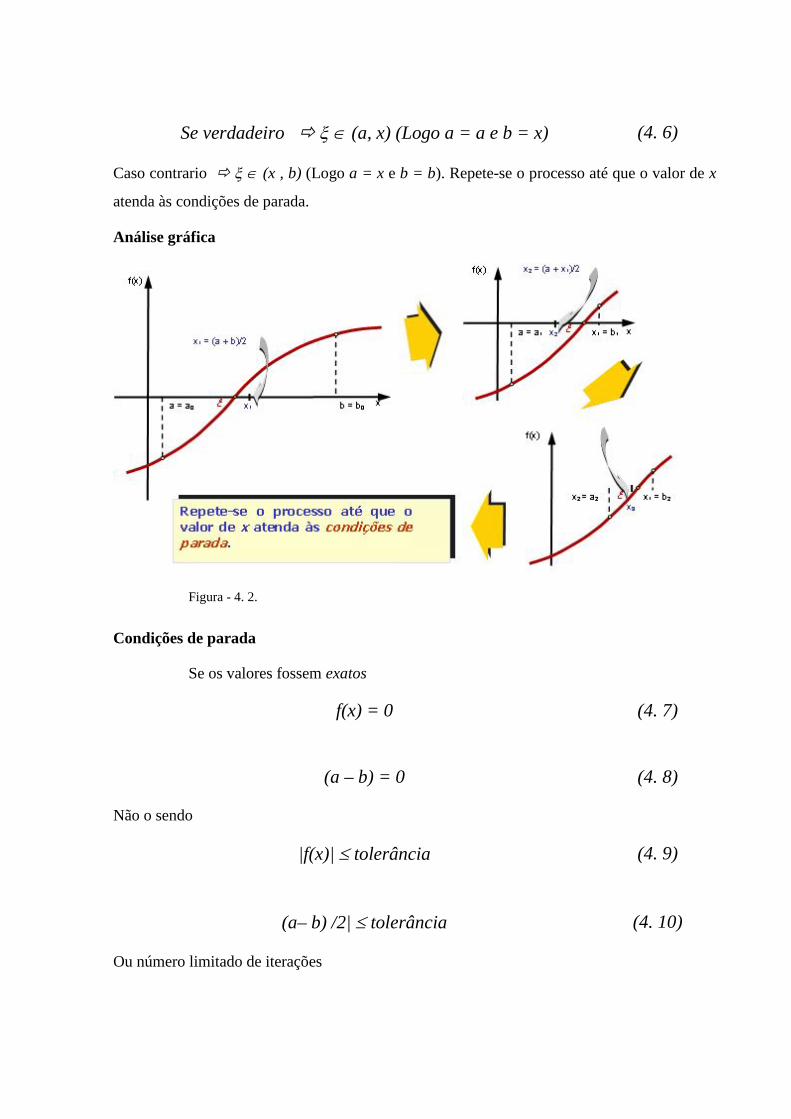
Se verdadeiro (a, x) (Logo a = a e b = x) (4. 6)
Caso contrario (x , b) (Logo a = x e b = b). Repete-se o processo até que o valor de x
atenda às condições de parada.
Análise gráfica
Figura - 4. 2.
Condições de parada
Se os valores fossem exatos
f(x) = 0 (4. 7)
(a – b) = 0 (4. 8)
Não o sendo
|f(x)| tolerância (4. 9)
(a– b) /2| tolerância (4. 10)
Ou número limitado de iterações

Figura - 4. 3.
Estimativa do Número de Iterações
Dada uma precisão e um intervalo inicial ;a b , é possível saber, a priori,
quantas iterações serão efetuadas pelo método da bissecção até que se obtenha -b a
Veja que:
0 01 1 1
0 01 12 2 2
0 02 2 1 13 3 2 3
1 1 0 0
2
2 2
2 2 2:
2 2k k
k k k
b ab a
b ab ab a
b ab a b ab a
b a b ab a
(4. 11)
Deve-se obter o valor de k tal que k kb a , ou seja,
0 0log( ) log( )log(2)
b ak (4. 12)
Exemplo: Se desejamos encontrar o zero da função ( ) log( ) 1f x x x que está no intervalo
[2;3] com precisão de 210 , quantas iterações, no mínimo, devemos efetuar?
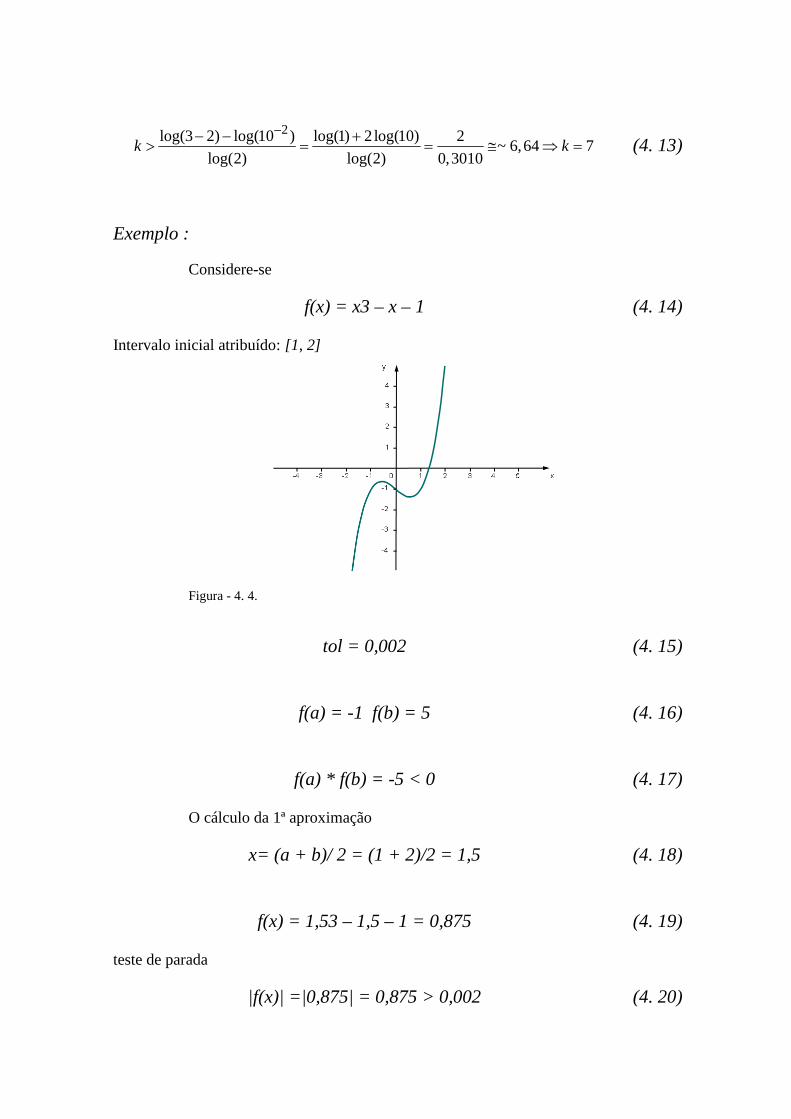
2log(3 2) log(10 ) log(1) 2 log(10) 2 ~ 6,64 7log(2) log(2) 0,3010
k k
(4. 13)
Exemplo :
Considere-se
f(x) = x3 – x – 1 (4. 14)
Intervalo inicial atribuído: [1, 2]
Figura - 4. 4.
tol = 0,002 (4. 15)
f(a) = -1 f(b) = 5 (4. 16)
f(a) * f(b) = -5 < 0 (4. 17)
O cálculo da 1ª aproximação
x= (a + b)/ 2 = (1 + 2)/2 = 1,5 (4. 18)
f(x) = 1,53 – 1,5 – 1 = 0,875 (4. 19)
teste de parada
|f(x)| =|0,875| = 0,875 > 0,002 (4. 20)
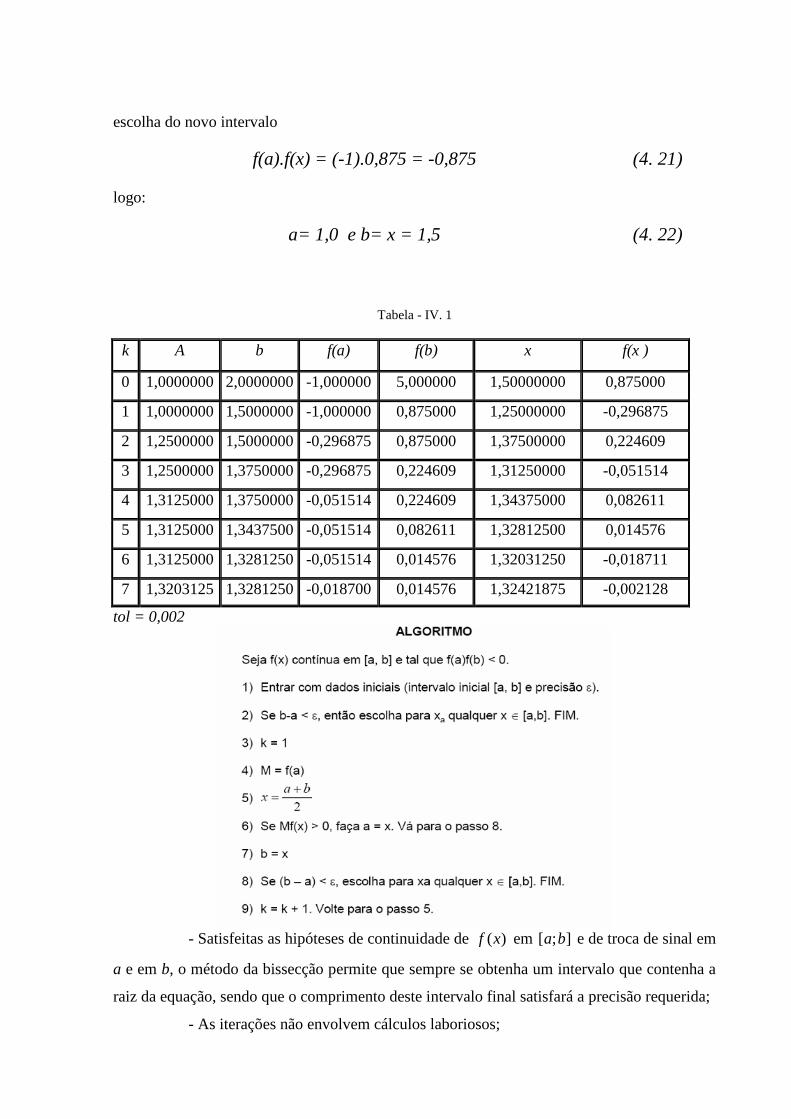
escolha do novo intervalo
f(a).f(x) = (-1).0,875 = -0,875 (4. 21)
logo:
a= 1,0 e b= x = 1,5 (4. 22)
Tabela - IV. 1
k A b f(a) f(b) x f(x )
0 1,0000000 2,0000000 -1,000000 5,000000 1,50000000 0,875000
1 1,0000000 1,5000000 -1,000000 0,875000 1,25000000 -0,296875
2 1,2500000 1,5000000 -0,296875 0,875000 1,37500000 0,224609
3 1,2500000 1,3750000 -0,296875 0,224609 1,31250000 -0,051514
4 1,3125000 1,3750000 -0,051514 0,224609 1,34375000 0,082611
5 1,3125000 1,3437500 -0,051514 0,082611 1,32812500 0,014576
6 1,3125000 1,3281250 -0,051514 0,014576 1,32031250 -0,018711
7 1,3203125 1,3281250 -0,018700 0,014576 1,32421875 -0,002128
tol = 0,002
- Satisfeitas as hipóteses de continuidade de ( )f x em [ ; ]a b e de troca de sinal em
a e em b, o método da bissecção permite que sempre se obtenha um intervalo que contenha a
raiz da equação, sendo que o comprimento deste intervalo final satisfará a precisão requerida;
- As iterações não envolvem cálculos laboriosos;
- A convergência pode ser muito lenta, ou seja, dependendo do intervalo inicial e
da precisão requerida, o número de iterações pode ser muito grande
4.3.3.1 – Prova da Convergência do Método da Bi-Secção
O método da bisecção gera três sequências ka não crescente por superiormente
por ob , então existe Rr tal que:
rakk
lim (4. 23)
kb : não crescente e limitada inferiormente por oa , então existe Rs tal que:
sbkk
lim (4. 24)
kx : por construção temos:
2kk
kbax
(4. 25)
onde kkk bxa , k . Assim, k
koo
kkabab
2
(4. 26)
Então
02
limlim
k
ookkkk
abab (4. 27)
Como ka e kb são convergentes então
0limlim
kkkkab (4. 28)
Logo
srab kkkk
limlim (4. 29)
Seja srl o limite das duas seqüências. Dado que ,k k kx a b
lim kk
k x l
.

Vamos agora provar que l é o zero da função. Em cada iteração k temos:
0)().( kk bfaf (4. 30)
Então:
)()().()().(
lim.lim)(lim).(lim)().(lim02 lflflfsfrf
bfafbfafbfaf kkkkkkkkkkk
(4. 31)
Assim
0)(0)(0 2 lflf (4. 32)
Portanto,
lxkk
lim onde 0)( lf (4. 33)
É o zero da função. Concluímos, pois que o método da bisecção converge sempre que f for
contínua em ];[ ba com 0)().( bfaf .
Sendo
2ln)ln()ln( kkoo ababk
(4. 34)
Se kk ab onde é o erro estimado, portanto o número de interação k é dada por:
2lnln)ln(
oo abk (4. 35)

4. 4 – Iteração Linear
A fim de introduzir o método de iteração linear no cálculo de uma raiz da equação
( ) 0f x (4. 36)
reescrevemos, inicialmente, a equação (4. 36), para expressá-la na forma:
( )x x (4. 37)
de forma que qualquer solução de (4. 37) seja, também, solução de (4. 36). Em geral, há
muitas maneiras de expressar ( )f x na forma (4. 37). Basta considerarmos
( ) ( ) ( )x x A x f x (4. 38)
Para qualquer ( )A x tal que ( ) 0A x .
Nem todas, porém, serão igualmente satisfatórias para as nossas finalidades.
Algumas formas possíveis da equação
2( ) 2 0f x x x (4. 39)
por exemplo, são:
a)
2 2x x (4. 40)
b)
2x x (4. 41)
c)
21xx
(4. 42)
d)
2 2 , 0.x xx x mm
(4. 43)
Geometricamente, uma raiz de (4. 37) é um número x x , para o qual a reta y x intercepta
a curva ( )y x . Pode ocorrer, naturalmente, que estas curvas não se interceptem, caso em
que não haverá solução real. Admitiremos, contudo, que essas curvas se interceptem no

mínimo, uma vez; que estamos interessados em determinar uma dessas raízes, digamos x x ,
e que ( )x e '( )x sejam contínuas num intervalo que contenha essa raiz.
4.4.1 - Uma equação de iteração
Considere uma equação de iteração do tipo x = (x), onde é uma função a uma
variável, denominada função de iteração, que varia de método a método. Seja 0x x uma
aproximação inicial para a raiz x x de (4. 37). Obtemos as aproximações sucessivas ix para
a solução desejada x x , usando o processo iterativo definido por:
1 ( ), 0,1,2,...i ix x i (4. 44)
Esse processo é chamado de método iterativo linear. Partindo de uma aproximação inicial, xo,
constrói-se uma seqüência da forma:
)(:
)()(
1
12
1
ii
o
xx
xxxx
(4. 45)
onde se espera que:
)()(limlim 1
iiiixx (4. 46)
Para que esse processo seja vantajoso, devemos obter aproximações sucessivas
ix , convergentes para a solução desejada x x . Contudo, é fácil obter exemplos para os
quais a seqüência ix diverge.

4.4.2 - Um critério de parada para as iterações
Se o processo iterativo é convergente a aproximação xi está mais próxima de do
que xi-1; caso contrário, se o processo for divergente, a aproximação xi está mais afastada do
que xi-1.
Escolhendo um número arbitrariamente pequeno; se o processo é convergente
para todo Mi , pode-s escrever:
Mitodoparaxi (4. 47)
Conclui-se que, quando i , 0 ix :
0lim
iix (4. 48)
ou
iixlim (4. 49)
Se a expressão (4. 48) é válida para xi, também é válida para xi+1:
0lim 1
iix (4. 50)
ou
1lim iix (4. 51)
Combinando-se as expressões (4. 49) e (4. 51) tem-se:
0lim 1
iiixx (4. 52)
4.4.3 - Conclusão:
Quando i , a diferença entre duas aproximações sucessivas deve tender a
zero. Os critérios de parada de processo iterativo podem ser escritos como:
a)
ii xx 1 (4. 53)
b)
1 ( )if x f (4. 54)
Como ( ) 0f temos:
1ixf (4. 55)
c)
1
1
i
ii
xxx
(4. 56)

4. 5 - Critério de Convergência para a iteração x = (x)
Vamos agora demonstrar uma série de teoremas que ajudarão a estabelecer os
critério de convergência de uma função de iteração.
4.5.1 - Teorema do Valor Médio
Se (x) é uma função contínua e diferenciável sobre o segmento [a,b], e derivável
em qualquer ponto x (a,b), existe então, pelo menos um ponto entre a e b, a < < b, tal
que:
( ) ( )'( ) b ab a
(4. 57)
ou
))((')()( abab (4. 58)
Figura - 4. 5. Teorema do valor médio
4.5.2 - Teorema da Permanência do Sinal
Seja f uma função de variável real definida e contínua numa vizinhança de 0x . Se
0( ) 0f x então ( ) 0f x para todo x pertencente a uma vizinhança suficientemente pequena
de 0x .

4.5.3 – Teorema do Limitante da Derivada da função de Iteração
Considerando as iterações do tipo )(1 ii xx , e 1 ixa e ixb , pode-se
escrever:
1 1( ) ( ) '( )i i i ix x x x (4. 59)
Como 1)( ii xx e ii xx )( 1 , pode-se escrever:
1 1'( )i i i ix x x x (4. 60)
que representa a seqüência:
2 1 1 2 1'( )x x x x (4. 61)
e
12223 )(' xxxx (4. 62)
Até
11 )(' iiiii xxxx (4. 63)
Admitindo que a derivada )(' é limitada na região que contém a raiz, pode-se escrever:
Mi )(' (4. 64)
Então:
oxxMxx 112 (4. 65)
e
oxxMxxMxx 12
1223 (4. 66)
e
oxxMxxMxxMxx 13
122334 (4. 67)
Até
oi
iiii xxMxxMxx 111 (4. 68)
Pela expressão (4. 52):

0lim 1
iiixx (4. 69)
Verifica-se que o lado esquerdo da expressão (4. 68) deve-se tornar muito pequeno para
grandes valores de i. Se M < 1, 1 0iM x x tende a zero para i , essa condição é
suficiente.
Assim, se 1' Mi , o processo iterativo deve convergir.
Observação
A convergência do processo iterativo será tanto mais rápida quanto menor for o
valor de ' x .
Por outro lado, se a declividade '( )x for maior que 1 em valor absoluto, para
todo x pertencente a um intervalo numa vizinhança da raiz, pode ser visto que a iteração
1 ( )k kx x , 0,1,...k , divergirá.

4. 6 – Ordem de Convergência de uma Iteração
Uma iteração é definida por:
ii xx 1 (4. 70)
Se 1' Mxi para todo x na região que inclui os valores intermediários xi e
a raiz , o processo iterativo deve convergir.
Conseqüência
Se x' está próximo de zero em toda a região, a iteração converge
rapidamente, se x' está próxima de 1, a iteração converge lentamente. Graficamente
temos:
Figura - 4. 6. Função de Iteração
1 ii xOCCDxAB (4. 71)
Definição – 1.
Seja
nnnx 0 uma seqüência que converge para e nn xe o erro cometido
na iteração n. Se houver um número 1p e um constante 0C tais que:
Cx
xe
ep
n
n
n
n
n
11lim (4. 72)

então p é denominado ordem de convergência da seqüência e C, constante assimptótica do
erro.
Para p = 1,2,3... a convergência é dita linear, quadrática, cúbica, ..,etc
respectivamente.
Definição – 2.
Um método iterativo é de ordem p para a raiz se ele gera uma seqüência que
converge para com ordem p.
O método iterativo ii xx 1 é um método de primeira ordem. Pelo teorema
do valor médio temos:
1
1
11 ' ii
i
ii x
xxx (4. 73)
ou
ii
i
xx
'1
(4. 74)
Se 0' i , a seqüência converge para com ordem p = 1.

4. 7 – Métodos de Aproximação
4.7.1 – Método das Aproximações Sucessivas ou Ponto Fixo
Este método é também chamado de Método do Ponto Fixo. A equação de iteração
é obtida da equação 0)( xf , que pode ser reescrita na forma )(xx por meio de
artifício algébrico.
Por exemplo, a equação
03 xe x (4. 75)
pode ser reescrita como:
3
xex (4. 76)
onde 3
)(xex .
Para o processo iterativo nós teríamos:
31
ix
iex (4. 77)
4.7.1 – Interpretação Geométrica
Figura - 4. 7. Representação Geométrica do Método de Aproximações Sucessivas ou Ponto Fixo.

4.7.2 – Método de Newton-Raphson
A expansão em série de Taylor de )( 1ixf na vizinhança de ix é escrita como:
...!2
)()(''))((')()(2
111
ii
iiiiiixxxfxxxfxfxf (4. 78)
Supondo que:
1) 1ix , ou seja 1ix está muito próximo de , de tal maneira que:
.0)( 1 ixf (4. 79)
2) ii xx 1 , ou seja 1ix está muito próximo de ix , de maneira que todos as potências de
ii xx 1 iguais ou maiores do que dois podem ser desprezadas. Logo,
))((')(0 1 iiii xxxfxf (4. 80)
Portanto,
)(')(
1i
iii xf
xfxx (4. 81)
A função de iteração do método de Newton-Raphson é:
)(')()(
xfxfxx (4. 82)
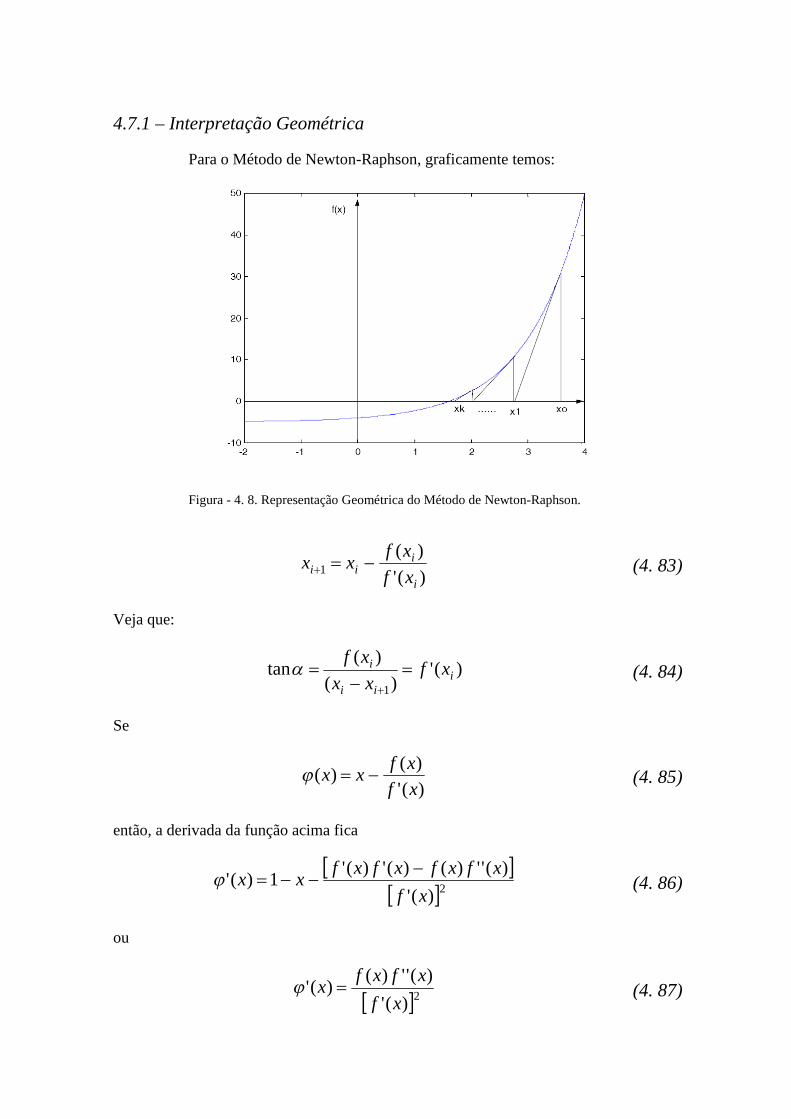
4.7.1 – Interpretação Geométrica
Para o Método de Newton-Raphson, graficamente temos:
Figura - 4. 8. Representação Geométrica do Método de Newton-Raphson.
)(')(
1i
iii xf
xfxx (4. 83)
Veja que:
)(')(
)(tan1
iii
i xfxxxf
(4. 84)
Se
)(')()(
xfxfxx (4. 85)
então, a derivada da função acima fica
2)('
)('')()(')('1)('xf
xfxfxfxfxx (4. 86)
ou
2)(')('')()('
xfxfxfx (4. 87)

Como ( ) 0f , por hipótese é a raiz do problema, se 0)(' f , então 0)(' que a
condição suficiente para a convergência é atendida.
O método de Newton-Raphson converge quadraticamente no caso de raízes reais e
simples, isto é a seqüência
nnnx 0 gerada pelo método tem ordem de convergência igual a
dois.
Cálculo da Ordem de Convergência do Método de Newton-Raphson
Supondo que '' seja continua numa vizinhança de , o desenvolvimento em
serie de Taylor de ( )x em torno de x , é dado por
...!2
)('')()(')()()( 2 xxx (4. 88)
Para o processo iterativo, fazendo ixx temos
...!2
)('')()(')()()( 2 iii xxx (4. 89)
Como
0)(' e )(1 ii xx , (4. 90)
desprezando-se os termos que contém derivadas de ordem superior a dois pode-se escrever
!2)('')( 2
1 ii xx (4. 91)
ou
Ce
e
x
x
i
i
i
i
!2)(''
21
21
(4. 92)
Se 0)('' , logo comparando-se com a equação (4. 72) temos que a ordem de
convergência é p = 2.
4.7.2.1 – Critério de Convergência do Método de Newton-Raphson
O meto de Newton-Raphson converge sempre que 0x x for suficientemente pequeno.

Prova
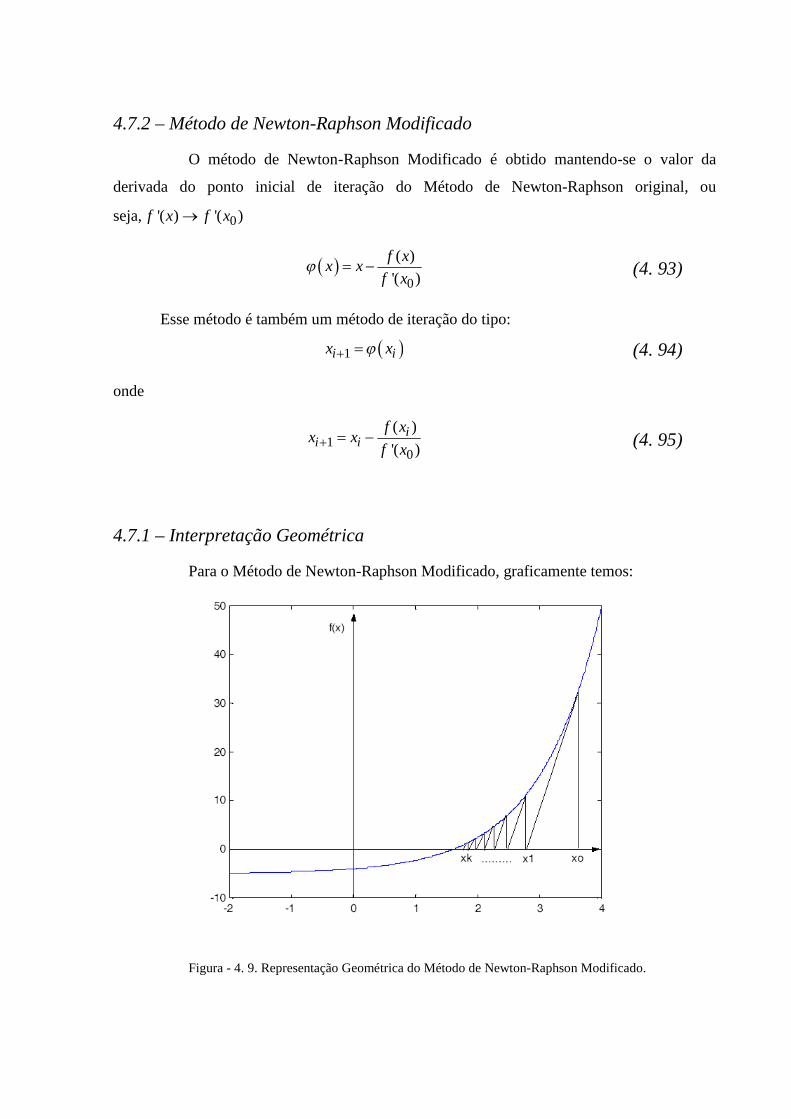
4.7.2 – Método de Newton-Raphson Modificado
O método de Newton-Raphson Modificado é obtido mantendo-se o valor da
derivada do ponto inicial de iteração do Método de Newton-Raphson original, ou
seja, 0'( ) '( )f x f x
0
( )'( )
f xx xf x
(4. 93)
Esse método é também um método de iteração do tipo:
1i ix x (4. 94)
onde
10
( )'( )
ii i
f xx xf x (4. 95)
4.7.1 – Interpretação Geométrica
Para o Método de Newton-Raphson Modificado, graficamente temos:
Figura - 4. 9. Representação Geométrica do Método de Newton-Raphson Modificado.

Dada uma primeira aproximação 0x da raiz real da equação, traçando-se por essa
abscissa uma reta normal ao eixo x , encontra-se na interseção com o gráfico da função o
ponto 0 0( , ( ))x f x . Traça-se a tangente ao gráfico nesse ponto e sua interseção com o eixo x
fornece a abscissa 1x , primeira iteração, pois:
0 0 01 0 0 0
0
( ) ( ) ( )( ) tan
f x f x f xx x x xf x k
(4. 96)
Traça-se pela abscissa 1x uma reta normal ao eixo x e encontra-se na interseção com o
gráfico da função o ponto 1 1( , ( ))x f x . Traça-se por esse ponto uma reta paralela à tangente
anterior e sua interseção com o eixo x fornece a abscissa 2x , segunda iteração, pois
1 1 12 1 1 1
0
( ) ( ) ( )( ) tan
f x f x f xx x x xf x k
(4. 97)
Cálculo da Ordem de Convergência do Método de Newton-Raphson Modificado
Supondo que '' seja continua numa vizinhança de , o desenvolvimento em
serie de Taylor de ( )x em torno de x , é dado por
...!2
)('')()(')()()( 2 xxx (4. 98)
Para o processo iterativo, fazendo ixx temos
...!2
)('')()(')()()( 2 iii xxx (4. 99)
Derivando a relação ( ) temos:
0
'( )' 1'( )
f xxf x
(4. 100)
Logo para x temos:
0
'( )' 1'( )
ff x
(4. 101)
Substituindo ( ) em ( ) temos:

2
0
'( ) ''( )( ) ( ) ( ) 1 ( ) ...'( ) 2!i i i
fx x xf x
(4. 102)
Como 1 ( ) e = ( )i ix x é o ponto de convergência temos:
210
'( ) ''( )1 ...'( ) 2!i i i
fx x xf x
, (4. 103)
Ou
210
'( ) ''( ) ...'( ) 2!i i i i
fx x x xf x
, (4. 104)
Dividindo tudo por ix temos:
1
0
'( ) ''( )1 ...'( ) 2!
i ii
i
x f x xx f x
, (4. 105)
Tomando o limite para i temos:
1
0
'( ) ''( )lim 1 ...'( ) 2!
ii i
x fx f x
(4. 106)
Se 0)('' , desprezando-se os termos que contém derivadas de ordem superior a dois,
logo podemos escrever:
1
0
'( )lim 1'( )
ii i
x fx f x
(4. 107)
Portanto,
1 1
0
'( )lim lim 1'( )
n ipi i in
e x fx f xe
(4. 108)
Como o lado direito da equação é constante
0
'( )1'( )
fCf x
(4. 109)
temos a partir de ( )
1 11 0
'( )1'( )
i ip
i i
e x fCf xe x
(4. 110)
logo comparando-se com a equação (4. 72) temos que a ordem de convergência é 1p .
4.7.2.1 – Critério de Convergência do Método de Newton-Raphson Modificado
4.7.3 – Método da Secante
A equação de recorrência é obtida substituindo no Método de Newton-Raphson,
)(' ixf pelo quociente das diferenças
)()()()('
1
1
ii
iii xx
xfxfxf (4. 111)
Onde ix e 1ix são duas aproximações para a raiz, assim
)()()(
)(
1
11
ii
ii
iii
xxxfxf
xfxx (4. 112)
Ou
)()()()(
1
11
ii
iiiii xfxf
xfxxxx (4. 113)
)()(
)()()()(
1
111
ii
iiiiiii xfxf
xfxxxxfxfx (4. 114)
Então
)()()()(
1
111
ii
iiiii xfxf
xfxxfxx (4. 115)
4.7.1 – Interpretação Geométrica
Para o Método da Secante, graficamente temos:

Figura - 4. 10. Representação Geométrica do Método da Secante.
que por semelhança de triângulos temos
11
1 )()()(
ii
i
ii
ii
xxxf
xxxfxf (4. 116)
ou
)()()()(
1
111
ii
iiiii xfxf
xfxxfxx (4. 117)
Assim podemos concluir que o método da secante é um método iterativo estacionário de
passo dois. Pode-se provar que o método das secantes é um método de ordem 1,618...

4.7.3.1 – Cálculo da Ordem de Convergência do Método da Secante
Vamos iniciar supondo
nn ex (4. 118)
Para substituir na equação (4. 117) onde é raiz e em é o erro.
Substituindo na equação de recorrência (4. 117) temos:
11 nn ex (4. 119)
e
11 nn ex (4. 120)
e obtendo
)()()()()()(
1
111
nn
nnnnn efef
efeefee (4. 121)
Multiplicando os termos de (4. 121) pelo denominador da fração temos:
)()()()()()()( 1111 nnnnnnn efeefeefefe (4. 122)
ou distribuindo os valores
)()(
)()()()()(
11
111
nnnn
nnnnn
efeefeefefefefe
(4. 123)
e
)()()()(
)()()()(
111
111
nnnnnn
nnnnn
efeefeefefefefefefe
(4. 124)
Logo cancelando alguns termos temos:
)()()()(
1
111
nn
nnnnn efef
efeefee (4. 125)
Expandindo as funções f em Série de Taylor entorno de x , obtemos:
...)()!1(
...)(''!2
)(')()( 12
12
111
nnnnn f
nefefefef
(4. 126)
e
...)()!1(
...)(''!2
)(')()( 122
nnnnn f
nefefefef (4. 127)
subtraindo as equações
...)!1()(
...!2
)('')(')()(
21
21
21
211
nn
n
nnnnnn
een
f
eeffeeefef
(4. 128)
e
...)()!1(
...)(''!2
)(')( 12
12
111
nnnnnnnnn f
neefeefeeefe (4. 129)
e
)!1(...)(''
!2)(')()(
21
21
111
nnnnnnnnnn f
neefeefeefeefe
(4. 130)
Então, a equação (4. 125) pode ser escrita a partir de (4. 13) a (4. 15), como:
..])()!1()(
)(!3
)(''')(!2
)(''[)()(
21
21
21
21111
nn
n
nnnnnnnnnn
een
f
eefeefeeefeefe
(4. 131)
Logo (4. 125) fica
...)!1()(...
!2)('')('
..)()!1()(...)(
!3)(''')(
!2)(''
21
21
21
21
21
21
21
211
1
nn
n
nnnn
nn
n
nnnnnn
n
een
feeffee
een
feefeefeee
(4. 132)
Supondo que os termos en e en-1 são pequenos o suficientes, tais que todas as
potências iguais ou maiores que 2 podem ser desprezados. Logo,
).('
).(!2
)(''
1
11
1
fee
eefeee
nn
nnnn
n
(4. 133)
ou
)('!2)(''
11
ffeee nnn (4. 134)
Onde
Aeee nnn 11 (4. 135)
Logo
)('!2)(''
ffA (4. 136)
Voltando ao critério da determinação da ordem de convergência temos que para
determinar a ordem é necessário que:
01
1
Ce
ep
n
n quando n (4. 137)
logo
pnn eCe 1 (4. 138)
Sabendo que vale para n’= n -1, temos:
pnn eCe 1 (4. 139)
Logo
1/1/1
npp
n eCe (4. 140)
e

pn
pn eCe /1/1
1
(4. 141)
Substituindo esse resultado (4. 141) na expressão (4. 138) temos:
Aeee nnn 11 (4. 142)
Sendo:
AeCee pn
pnn
/1/11 (4. 143)
e
1/11
1 Cee pnn
(4. 144)
onde
ACC p/11
(4. 145)
Voltando em ( ) temos:
pn
pn eCeC /11
1 (4. 146)
Como CC 1 temos:
pn
pn eCeC /11 (4. 147)
Logo
pppp 1/11 2 (4. 148)
e
012 pp (4. 149)
e
1 1 4 1 52.1 2
p (4. 150)
como 1p . Logo
1 5 1,618..2
p (4. 151)
Fazendo CC 1 temos:
ACC p/1 (4. 152)
logo
11
/11
pp
pp
p ACCCA (4. 153)
Portanto,
ppp
ff
ffC
11
)('!2)(''
)('!2)(''
(4. 154)
Conclusão
Existe
nnnx 0 uma seqüência gerada por:
)()()()(
1
111
nn
nnnnn xfxf
xfxxfxx (4. 155)
que converge para , com nn xe , tal que 1...618,1 p e
pffC1
)('!2)('' . Portanto,
Ce
ep
n
n
n
1lim (4. 156)
Implica que
p
pn
n
n ff
e
e /11
)('!2)(''lim
(4. 157)
Logo
)('2)(''lim
)('!2)(''lim 1
112
ff
e
ef
f
e
ep
n
n
npn
n
n
(4. 158)
Então a ordem de convergência do Método das Secantes, sendo ...618,1p temos:
)!1()(...
!2)('')('
!3)('''
!2)(''
1
1
1
nfff
ffeee n
nn
n
(4. 159)
e
?
11 )(''!3)('''
)('!2)(''
A
nnn ff
ffeee
(4. 160)
4.7.3.2 – Prova da Convergência do Método da Secantes

4.7.4 – Método da Falsa Posição ou Regula-Falsi
O método da falsa posição é um caso particular do método da secante, no qual os
pontos ))(,( 11 ii xfx e ))(,( ii xfx são escolhidos de modo que.
0)().( 1 ii xfxf (4. 161)
A equação de recorrência é a mesma do método da secante, que é dada por:
)()()()(
1
111
ii
iiiii xfxf
xfxxfxx (4. 162)
Para funções convexas esse método é estacionário.
4.7.1 – Interpretação Geométrica
Para o Método Regula-Falsi, graficamente temos:
Figura - 4. 11. Representação Geométrica da Falsa Posição.
Considerando a reta que passa pelos pontos ),( 00 yx e ),( 11 yx temos a seguinte
equação:
)(1
1o
o
oo xx
xxyyyy
(4. 163)
Quando 0,2 yxx temos:
ooo
o xyy
yxyy
yx)( 1
11
12
(4. 164)
E por analogia a reta que passa por ),( 22 yx é dada por:
)( 221
212 xx
xxyyyy
(4. 165)
Quando 0,3 yxx temos a seguinte equação:
221
11
12
23 )(
xyy
yxyy
yx
(4. 166)
Agora generalizando o processo temos
iii
ii x
yyyx
yyyx
)( 1
11
11
(4. 167)
Para funções não convexas, não é estacionário, isto é, a função de iteração não é a
mesma a cada iteração (a representação gráfica correta está na página 36 do livro de Cálculo
Numérico Sperandio), por exemplo.
Graficamente temos:
Figura - 4. 12.

Temos as seguintes equações
11
1
11
12 )(
xyy
yxyy
yxo
o
(4. 168)
2212
23 )(
xyy
yxyy
yxo
oo
(4. 169)
332
22
3
34 )(
xyy
yxyy
yxo
(4. 170)

4. 8 - Exemplos e Aplicações
4.8.1 - Problema
1) Encontrar as raízes das equações utilizando os critérios de parada,
)( ixf e ii xx 1 (4. 171)
com 210
a)
452 xxy (4. 172)
Solução
Fazendo y = 0 e isolando x temos a seguinte função.
542
xx (4. 173)
pelo Método do Ponto Fixo temos;
5
42
1
i
ixx (4. 174)
A condição de convergência do método é 1)(' x . Calculando temos:
15
25
2)(' xxx (4. 175)
Levando os valores da função no critério de convergência temos
Se
251
52
52;0 xxxx (4. 176)
Se
251
52
52;0 xxxx (4. 177)
arrumando essa equação chegamos que 5,25,2 x

Para que o processo seja convergente, a estimativa inicial deve pertencer ao
intervalo
25
25
x (4. 178)
Observando que 4)0( y e 2)3( y e 10)6( y , conclui-se que uma das raízes está
contida no intervalo (0;3) e a outra no intervalo (3;6). A raiz que está contida no intervalo
(3;6) não pode ser encontrada com o emprego do método do ponto fixo.
Como o intervalo (0;3) não está inteiramente contido em 25;2
5 , deve-se
identificar em intervalo contido em 25;2
5 e que contenha a raiz. Como
21,2)4,2( y , pode-se concluir que a raiz procurada está contida no intervalo )4,2;0( e
que o processo iterativo será convergente.
Adotando o ponto de chute inicial 5,10 x obtemos a seguinte tabela para os
valores de:
Tabela - IV. 2
i ix 1ix )( 1ixf ii xx 1
0 1,5 1,25 0,6875 0,25
1 1,25 1,1125 0,324844 0,1375
2 1,1125 1,047351 0,140334 0,064969
3 1,047351 1,019464 0,058013 0,0280067
4 1,019464 1,007862 0,023524 0,011602
5 1,007862 1,003157 0,009461 0,004705
Logo 003157,1
Alternativamente, de
0452 xxy (4. 179)
podemos escrever
0442 xxx (4. 180)
ou

442 xxxx (4. 181)
onde )(x pode ser escrita da seguinte forma:
44)( 2 xxx (4. 182)
Derivando essa função temos
42)(' xx (4. 183)
A condição de convergência 1)(' x fornece:
Se
2514242;042 xxxx (4. 184)
Se
2514242;042 xxxx (4. 185)
Para que o processo seja convergente, devemos ter
25
23
x (4. 186)
que não contém nenhuma raiz.
025
23
25,225
25,123
yyy
y (4. 187)
Não satisfaz o critério
Outra opção e
0451045 22 xxxxx (4. 188)
então
54102
xxx (4. 189)

Assim )(x é dada por
5410)(
2
xxx (4. 190)
Sua derivada fica assim determinada
5102)('
xx (4. 191)
Da condição de convergência do método temos que 1)(' x levando o valor de
)(' x na condição do modulo da derivada temos
15
102)('
xx (4. 192)
Arrumando essa equação temos
Se
251
5102
5102;0
5102
xxxx (4. 193)
Se
2151
5102
5102;0
5102
xxxx (4. 194)
Para 2
1525
x , o processo é convergente, a seguinte raiz é encontrada quando
5410)(
2
xxx (4. 195)
Adotando 50 x , após cinco iterações encontra-se o valor aproximado.
001739,4 (isso com uma aproximação com 6 casas decimais)
b)
03 xey x (4. 196)
Solução
Isolando x na equação acima temos
xex31
(4. 197)
Assim )(x é dada por
xex31)( (4. 198)
Derivando essa equação ela fica escrita da seguinte forma
xex31)(' (4. 199)
Das condições de convergência do método temos
131)(' xex (4. 200)
Arrumando a equação acima temos
Se
0986,13ln3131
31;0 xeeex xxx (4. 201)
Se
0986,13ln3131
31;0 xeeex xxx (4. 202)
O processo convergente para
3ln3ln x (4. 203)
ou
3ln033
1311
x
e
e
x
x
(4. 204)
Da equação

xex31
(4. 205)
Necessitamos que x seja maior que zero
Dando um chute inicial temos a seguinte tabela depois das iterações
Tabela - IV. 3
i ix 1ix )( 1ixf ii xx 1
0 0,8 0,741847 0,125731 0,058153
1 0,741847 0,699937 0,086185 0,041910
2 0,699937 0,671208 0,057025 0,028729
3 0,671208 0,652200 0,036840 0,019008
4 0,652200 0,639920 0,023431 0,012280
5 0,639920 0,632110 0,014753 0,00781
6 0,632110 0,627192 0,009230 0,004918
Temos assim que o valor aproximado da raiz é 627192,0
Com o método de Newton-Raphson temos que a equação de recorrência é dada
por
33
)(')(
1
i
i
xi
x
ii
iii e
xexxfxfxx (4. 206)
E arrumando para o problema temos a seguinte equação
31
1
i
i
xi
x
i exex (4. 207)
Fazendo as iterações chegamos na tabela abaixo
Tabela - IV. 4
i ix 1ix )( 1ixf ii xx 1
0 0,8 0,574734 0,052456 0,225266
1 0,574734 0,617613 0,001657 0,042879
2 0,617613 0,619060 0,000001 0,001447
Chega se na raiz da equação com apenas três iterações com o seguinte valor aproximado
619060,0 .
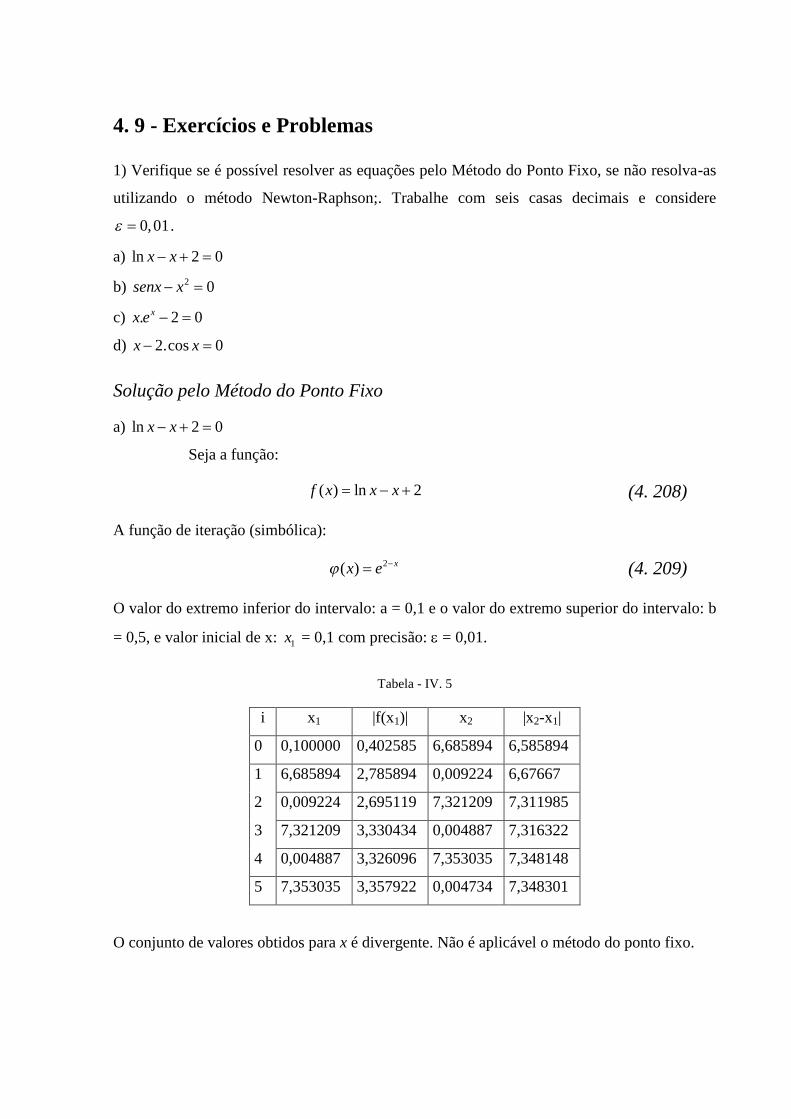
4. 9 - Exercícios e Problemas
1) Verifique se é possível resolver as equações pelo Método do Ponto Fixo, se não resolva-as
utilizando o método Newton-Raphson;. Trabalhe com seis casas decimais e considere
0,01 .
a) ln 2 0x x
b) 2 0senx x
c) . 2 0xx e
d) 2.cos 0x x
Solução pelo Método do Ponto Fixo
a) ln 2 0x x
Seja a função:
( ) ln 2f x x x (4. 208)
A função de iteração (simbólica):
2( ) xx e (4. 209)
O valor do extremo inferior do intervalo: a = 0,1 e o valor do extremo superior do intervalo: b
= 0,5, e valor inicial de x: 1x = 0,1 com precisão: = 0,01.
Tabela - IV. 5
i x1 |f(x1)| x2 |x2-x1|
0 0,100000 0,402585 6,685894 6,585894
1 6,685894 2,785894 0,009224 6,67667
2 0,009224 2,695119 7,321209 7,311985
3 7,321209 3,330434 0,004887 7,316322
4 0,004887 3,326096 7,353035 7,348148
5 7,353035 3,357922 0,004734 7,348301
O conjunto de valores obtidos para x é divergente. Não é aplicável o método do ponto fixo.

b) 2 0senx x
Seja a função:
2( )f x senx x (4. 210)
A função de iteração (simbólica):
( )x senx (4. 211)
O valor do extremo inferior do intervalo: a = 6 e o valor do extremo superior do intervalo:
b = 3 , e o valor inicial de x: 1x = 6
com precisão: = 0,01.
Tabela - IV. 6
i x1 |f(x1)| x2 |x2-x1|
0 0,523599 0,225844 0,707107 0,183508
1 0,707107 0,149637 0,806001 0,098894
2 0,806001 0,071887 0,849426 0,043425
3 0,849426 0,029377 0,866546 0,01712
4 0,866546 0,011196 0,872982 0,006436
5 0,872982 0,004151 0,875356 0,002374
O zero da função é 0x = 0,872982 com um número de iterações: k = 5, o erro em x: e =
0,006436.
c) . 2 0xx e
Seja a função:
( ) . 2xf x x e (4. 212)
A função de iteração:
( ) 2. xx e (4. 213)
O valor do extremo inferior do intervalo: a = 0,5, e o valor do extremo superior do intervalo: b
= 1, e valor inicial de x: 1x = 0,7, com precisão: = 0,1.
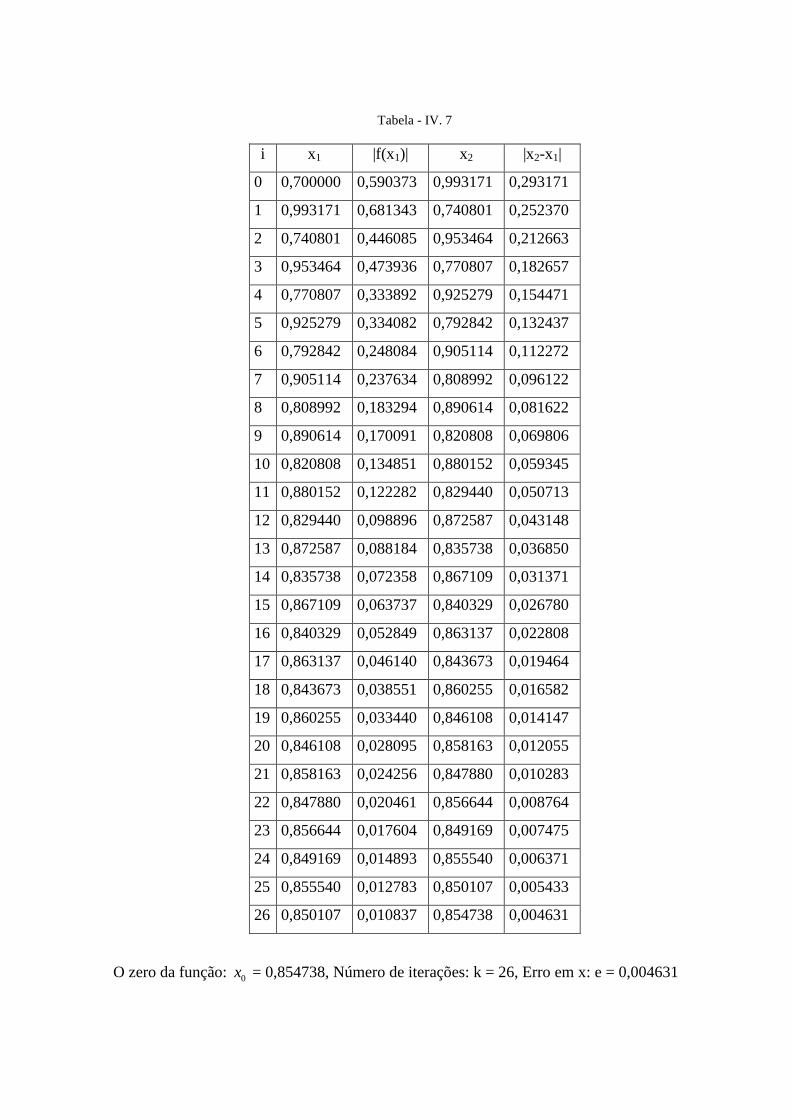
Tabela - IV. 7
i x1 |f(x1)| x2 |x2-x1|
0 0,700000 0,590373 0,993171 0,293171
1 0,993171 0,681343 0,740801 0,252370
2 0,740801 0,446085 0,953464 0,212663
3 0,953464 0,473936 0,770807 0,182657
4 0,770807 0,333892 0,925279 0,154471
5 0,925279 0,334082 0,792842 0,132437
6 0,792842 0,248084 0,905114 0,112272
7 0,905114 0,237634 0,808992 0,096122
8 0,808992 0,183294 0,890614 0,081622
9 0,890614 0,170091 0,820808 0,069806
10 0,820808 0,134851 0,880152 0,059345
11 0,880152 0,122282 0,829440 0,050713
12 0,829440 0,098896 0,872587 0,043148
13 0,872587 0,088184 0,835738 0,036850
14 0,835738 0,072358 0,867109 0,031371
15 0,867109 0,063737 0,840329 0,026780
16 0,840329 0,052849 0,863137 0,022808
17 0,863137 0,046140 0,843673 0,019464
18 0,843673 0,038551 0,860255 0,016582
19 0,860255 0,033440 0,846108 0,014147
20 0,846108 0,028095 0,858163 0,012055
21 0,858163 0,024256 0,847880 0,010283
22 0,847880 0,020461 0,856644 0,008764
23 0,856644 0,017604 0,849169 0,007475
24 0,849169 0,014893 0,855540 0,006371
25 0,855540 0,012783 0,850107 0,005433
26 0,850107 0,010837 0,854738 0,004631
O zero da função: 0x = 0,854738, Número de iterações: k = 26, Erro em x: e = 0,004631

d) 2.cos 0x x
Seja a função:
( ) 2.cosf x x x (4. 214)
A função de iteração:
( ) arccos( / 2)x x (4. 215)
O valor do extremo inferior do intervalo: a = 6 , e o valor do extremo superior do intervalo:
b = 3 , e valor inicial de x: 1x = 1, com precisão: = 0,01,.
Tabela - IV. 8
i x1 |f(x1)| x2 |x2-x1|
0 1 0,080605 1,047198 0,047198
1 1,047198 0,047198 1,019727 0,027471
2 1,019727 0,027471 1,03577 0,016044
3 1,035770 0,016044 1,026419 0,009351
4 1,026419 0,009351 1,031876 0,005457
O zero da função é 0x = 1,026419 para um número de iterações: k = 4, o erro em x: e =
0,009351.

Solução pelo Método de Newton-Raphson
a) ln 2 0x x
Em primeiro lugar, verificamos, graficamente, que a função
( ) ln 2f x x x (4. 216)
admite um zero real no intervalo [0,1; 0,5].
Seja a função:
( ) ln 2f x x x (4. 217)
A derivada da função:
( ) 1/ 1f x x (4. 218)
O valor do extremo inferior do intervalo: a = 0,1 e o valor do extremo superior do intervalo: b
= 0,5, com precisão de = 0,01, com valor inicial de x: 1x = 0,1
Tabela - IV. 9
i x1 x2 |f(x2)| |x2-x1|
1 0,100000 0,144732 0,077605 0,044732
2 0,144732 0,157864 0,003883 0,013133
O zero da função: 0x = 0,157864, Número de iterações: k = 2, Erro em x: e = 0,013133.
b) 2 0senx x .
Em primeiro lugar, verificamos, graficamente, que a função 2( )f x senx x
admite um zero real no intervalo [ 6 ; 3
].
Seja a função:
2( )f x senx x (4. 219)
a derivada da função:
( ) cos 2.f x x x (4. 220)

O valor do extremo inferior do intervalo: a = 6 , e o valor do extremo superior do intervalo:
b = 3 , e valor inicial de x: 1x = 6
, com precisão: = 0,01.
Tabela - IV. 10
i x1 |f(x1)| x2 |f(x2)| |x2-x1|
1 0,523599 0,225844 1,770172 2,153318 1,246573
2 1,770172 2,153318 1,194172 0,496136 0,576000
3 1,194172 0,496136 0,948629 0,087279 0,245543
4 0,948629 0,087279 0,882229 0,006171 0,066399
O zero da função: 0x = 0,882229 para um número de iterações: k = 4 e erro em x: e =
0,066399.
c) . 2 0xx e
Em primeiro lugar, verificamos, graficamente, que a função ( ) . 2xf x x e
admite um zero real no intervalo [0,5;1].
Seja a função:
( ) . 2xf x x e (4. 221)
A derivada da função:
( ) ( 1). xf x x e (4. 222)
O valor do extremo inferior do intervalo: a = 0,5 e o valor do extremo superior do intervalo: b
= 1 e valor inicial de x: 1x = 0,5, com precisão: = 0,01.
Tabela - IV. 11
i x1 |f(x1)| x2 |f(x2)| |x2-x1|
1 0,500000 1,175639 0,975374 0,586848 0,475374
2 0,975374 0,586848 0,863359 0,047121 0,112015
3 0,863359 0,047121 0,852694 0,000384 0,010665

O zero da função é 0x = 0,852694 para um número de iterações: k = 3 e erro em x: e =
0,01665.
d) 2.cos 0x x
Em primeiro lugar, verificamos, graficamente, que a função ( ) 2.cosf x x x
admite um zero real no intervalo [ 6 ; 3
].
Seja a função:
( ) 2.cosf x x x (4. 223)
A derivada da função:
1 2.f senx (4. 224)
O valor do extremo inferior do intervalo: a = 6 e o valor do extremo superior do intervalo:
b = 3 , e valor inicial de x: 1x = 6
com precisão: = 0,01
Tabela - IV. 12
i x1 |f(x1)| x2 |f(x2)| |x2-x1|
1 0,523599 1,208452 1,127825 0,270573 0,604226
2 1,127825 0,270573 1,031431 0,004249 0,096393
O zero da função: 0x = 1,031431 para um número de iterações: k = 2 e erro em x: e =
0,096393.

2) Deduza uma fórmula de iteração para calcular a raiz cúbica de um número positivo C pelo
Método do Ponto Fixo, e pelo Método de Newton-Raphson, a seguir considere C = 3 e
resolva o problema com 210 . Examine a convergência da iteração 1 /i ix a x para
qualquer número positivo.
Solução
Para encontrar a raiz quadrada de um número a é o mesmo que resolver a
equação 2 0x a .
Seja 1 1x a uma primeira aproximação da raiz quadrada. Assim, a primeira
iteração nos fornece:
11
axa
(4. 225)
Uma segunda iteração nos daria:
2 1
1
ax aaa
(4. 226)
Com uma terceira iteração, chegaríamos a:
31
axa
(4. 227)
E assim por diante. Por conseguinte, podemos observar que a série de valores encontrados
para 1ix não é convergente.

3) Resolução da equação 2 0senx x utilizando o método de Newton-Raphson Modificado.
Solução:
Em primeiro lugar, verificamos, graficamente, que a função
2( )f x senx x (4. 228)
que admite um zero real no intervalo [ 6 ; 3
].
Newton-Raphson Modificado
Seja a função:
2( )f x senx x (4. 229)
A derivada da função:
( ) cos 2f x x x (4. 230)
O valor do extremo inferior do intervalo: a = / 6 e o valor do extremo superior do intervalo:
b = / 3 e valor inicial de x: 1x = 0,7, com precisão: E = 0,0001
Tabela - IV. 13
i x1 x2 ( )f x 2 1x x
1 0,700000 0,942802 0,154218 0,242802
2 0,942802 0,817371 0,079668 0,125431
3 0,817371 0,913810 0,061254 0,096439
4 0,913810 0,845776 0,043213 0,068035
5 0,845776 0,897966 0,033149 0,052191
6 0,897966 0,859736 0,024282 0,038230
7 0,859736 0,888901 0,018524 0,029165
8 0,888901 0,867229 0,013765 0,021672
9 0,867229 0,883687 0,010454 0,016458
10 0,883687 0,871375 0,007820 0,012311
O zero da função é 0x = 0,871375 para um número de iterações: k = 10 e erro em x: e =
0,012311.

4) Usando o método de Newton-Raphson, com erro inferior a 310 , determinar uma raiz das
sequintes equações:
a) 2 tan( )x x
b) 3 25 12 4 0x x x
c) ( ) 0xsen x e
d) 4 8 0x
5) Seja 2( ) 3 2f x x x . Use o método das secantes para calcular 3x , a partir de 0 0x e
1 0,5x
6) A equação tan( )x x tem uma raiz entre 2 e 3
2 . Determiná-la pelo método das secantes
com erro inferior a 310
7) Determinar uma raiz de
a) ( ) 0xsen x xe
b) cos( ) xx e
usando o método Regula-Falsi.
Capítulo V
SISTEMA DE EQUAÇÕES NÃO-LINEARES
RESUMO
5. 1 - Objetivos do Capítulo
5. 2 - Introdução

(5. 1)

5. 3 - Exemplos e Aplicações

5. 4 - Exercícios e Problemas

Capítulo VI
INTERPOLAÇÃO POLINOMIAL
RESUMO
Neste capítulo será visto diferentes métodos de interpolação de funções tais como:
o Método Lagrange, o Método de Newton das Diferenças Divididas, o Método de Bernstein,
o Método de Hermite, a análise da ordem e da convergência destes métodos e um estudo
comparativo entre eles a partir de um mesmo exemplo feito pelos diferentes métodos.
6. 1 – Objetivos do Capítulo
i) Entender a problemática da interpolação em ciência e engenharia
ii) Saber interpolar pontos por meio de diferentes métodos de interpolação.
iii) Saber analisar os resultados de uma interpolação linear, quadrática, cúbica, etc.
iii) Saber analisar o erro dos diferentes métodos de interpolação
iv) Saber distinguir entre a qualidade de métodos de interpolação de funções
através de análise de erros e da análise da ordem de convergência de um método numérico.
6. 2 – Introdução
Interpolar uma função )(xf consiste em “substituir” ou aproximar )(xf por
uma outra função, )(xg por exemplo, com o objetivo de realizar ou facilitar certas
operações. A função )(xg pode ser polinomial, trigonométrica, racional, etc.
A substituição é feita quando:
1) São conhecidos valores discretos da função e é necessário calcular um valor
correspondente a um outro tabelado.
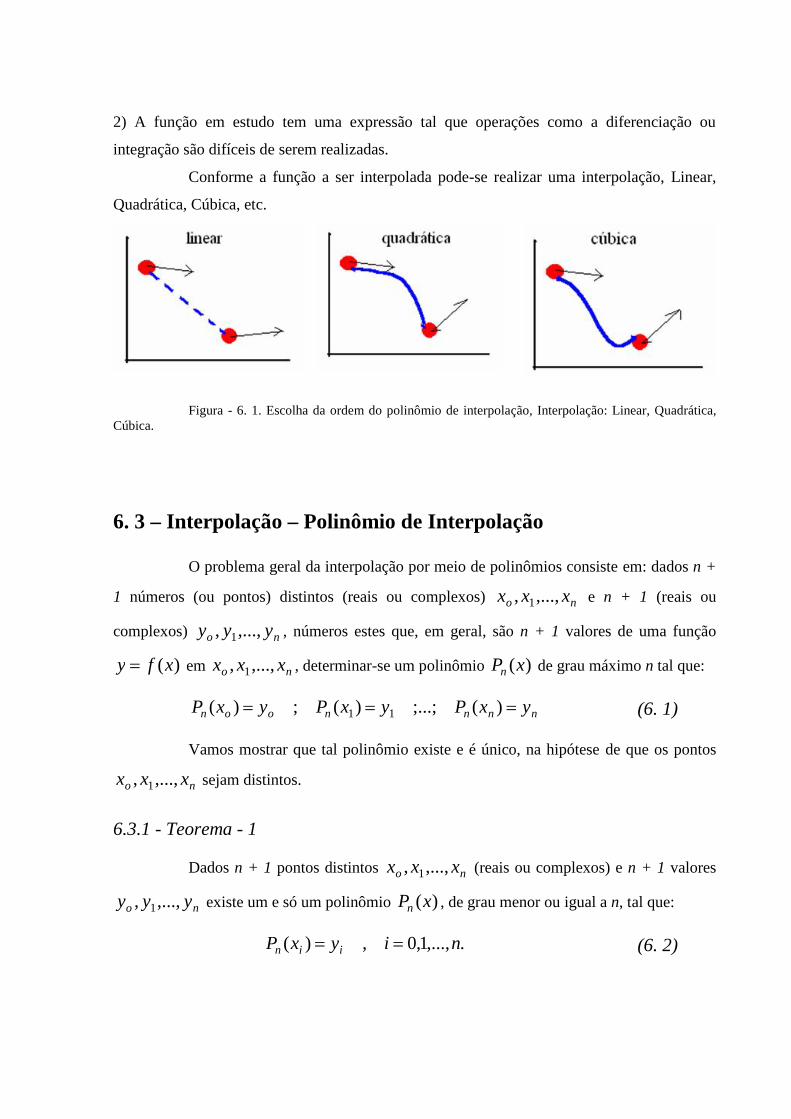
2) A função em estudo tem uma expressão tal que operações como a diferenciação ou
integração são difíceis de serem realizadas.
Conforme a função a ser interpolada pode-se realizar uma interpolação, Linear,
Quadrática, Cúbica, etc.
Figura - 6. 1. Escolha da ordem do polinômio de interpolação, Interpolação: Linear, Quadrática, Cúbica.
6. 3 – Interpolação – Polinômio de Interpolação
O problema geral da interpolação por meio de polinômios consiste em: dados n +
1 números (ou pontos) distintos (reais ou complexos) no xxx ,...,, 1 e n + 1 (reais ou
complexos) no yyy ,...,, 1 , números estes que, em geral, são n + 1 valores de uma função
)(xfy em no xxx ,...,, 1 , determinar-se um polinômio )(xPn de grau máximo n tal que:
nnnnoon yxPyxPyxP )(;...;)(;)( 11 (6. 1)
Vamos mostrar que tal polinômio existe e é único, na hipótese de que os pontos
no xxx ,...,, 1 sejam distintos.
6.3.1 - Teorema - 1
Dados n + 1 pontos distintos no xxx ,...,, 1 (reais ou complexos) e n + 1 valores
no yyy ,...,, 1 existe um e só um polinômio )(xPn , de grau menor ou igual a n, tal que:
.,...,1,0,)( niyxP iin (6. 2)

Prova
Seja nnon xaxaaxP ...)( 1 um polinômio de grau no máximo n, com n
+ 1 coeficientes no aaa ,...,, 1 a serem determinados.
Em vista do Teorema 4.1 , temos:
nn
nnno
nn
on
onoo
yxaxaa
yxaxaa
yxaxaa
...
......................................
...
1
11110
1
(6. 3)
O determinante do sistema (6. 3), conhecido pelo nome de determinante de
Vandermonde, é:
nnn
n
noo
no
xx
xxxx
xxxVV
..1:::1
..1
..1
),...,,( 111 (6. 4)
Para se calcular V, procedemos da seguinte maneira:
Consideremos a função V(x) definida por:
n
n
noo
no
xx
xxxx
xxxxVV
..1:::1
..1
..1
),,...,,( 111 (6. 5)
V(x) é, como facilmente se verifica, um polinômio de grau menor ou igual a n.
Além disso, V(x) se anula em 11 ,,...,, nno xxxx . Podemos então escrever:
))...()((),,...,,( 111 nono xxxxxxAxxxxVV (6. 6)
onde A depende de 11,...,, no xxx .
Para se calcular A, desenvolvemos (6. 5) segundo os elementos da última linha e
observamos que o coeficiente de nx é ),...,,( 11 no xxxVV . Logo,

))...()()(,...,,(),,...,,( 11111 nonono xxxxxxxxxVxxxxVV (6. 7)
Obtivemos assim, uma fórmula de recorrência:
))...()()(,...,,(),,...,,( 111111 nononno xxxxxxxxxVxxxxVV (6. 8)
De (6. 4) tiramos:
)(),( 11 oo xxxxV (6. 9)
em vista de (6. 8) escrevemos:
))()((),,( 122121 xxxxxxxxxVV ooo (6. 10)
Por aplicações sucessivas de (6. 8), obtemos:
ji
jinno xxxxxxVV )(),,...,,( 11 (6. 11)
Por hipótese, os pontos no xxx ,...,, 1 são distintos. Daí 0V e o sistema (6. 3)
tem uma só solução no aaa ,...,, 1 .
Vimos, então que dado n + 1 pontos distintos no xxx ,...,, 1 e n + 1 valores,
nnoo yxfyxfyxf )(,...,)(,)( 11 de uma função y = f(x), existe um e um só
polinômio )(xPn de grau no máximo n tal que:
.,...,1,0,)()( nixfxP iin (6. 12)
Em vista disso, podemos por a seguinte definição:
6.3.2 - Definição - 1
Chama-se polinômio de interpolação de uma função y = f(x) sobre um conjunto de
pontos no xxx ,...,, 1 , ao polinômio de grau no máximo n que coincide com f(x) em
no xxx ,...,, 1 . Tal polinômio será designado por );( xfPn e, sempre que não causar confusão
simplesmente por )(xPn .

6.3.3 - Exemplo - 1
Dados os pares de pontos (1,1), (2,4), (3,9), (4,16), determinar o polinômio de
interpolação P2(x) para a função definida por este conjunto de pares sobre os pontos 1,2,3.
Temos:
)(3)(2)(1
e321
22
11
2
1
xfyxfyxfy
xxx ooo
(6. 13)
Queremos determinar 2212 )( xaxaaxP o , tal que
2,1,0)()(2 ixfxP ii . Então
22
2221
12
1211
221
yxaxaa
yxaxaa
yxaxaa
o
o
oooo
(6. 14)
ou substituindo xi e yi, i = 0, 1, 2,
993442
111
21
21
21
aaaaaa
aaa
o
o
o
(6. 15)
ou ainda na forma matricial:
941
931421111
2
1
aaao
(6. 16)
Determinaremos 21,, aaao , pela Regra de Cramer, temos:
02931421111
(6. 17)
e
0939424111
o (6. 18)
duas colunas iguais, e
0991441111
1
(6. 19)
duas colunas iguais,
2931421111
2
(6. 20)
Logo 21,, aaao são dadas por:
0o
oa (6. 21)
e
011
a (6. 22)
e
1222
2 a (6. 23)
Temos, finamente:
22 100)( xxxP (6. 24)
ou
22 100)( xxxP (6. 25)

6. 4 – Interpolação Polinomial de Lagrange
Dados os pontos no xxx ,...,, 1 e os valores correspondentes
nixfy ii ,...,1,0,)( o polinômio )(xpn é representado como:
)(...)()()( 11 xLyxLyxLyxP nnoon (6. 26)
onde os polinômios nkxLk ,...,2,1,0),( são polinômios de grau n .
Se )(xPn interpola )(xf nos pontos selecionados, então, para cada ix a
condição iin yxP )( deve ser atendida.
)(...)()()( 11 xLyxLyxLyxP nnooin (6. 27)
Se os polinômios )(xLk forem tais que:
ikseikse
xLk 01
)( (6. 28)
A condição iin yxP )( é satisfeita.
Os polinômios )(xLk são definidos como:
))...()()...()()(())...()()...()()(()(
1121
1121
nkkkkkkkok
nkkok xxxxxxxxxxxx
xxxxxxxxxxxxxL
(6. 29)
Como o numerador de )(xLk é um ponto produto de n fatores da forma
nkkixx i ,...1,1,...,12,0, . )(xLk é um polinômio de grau n ;
consequentemente, )(xPn é um polinômio de grau menor ou igual a n .
A forma de Lagrange para o polinômio interpolador é:
)()(0
xLyxP k
n
kkn
(6. 30)
onde
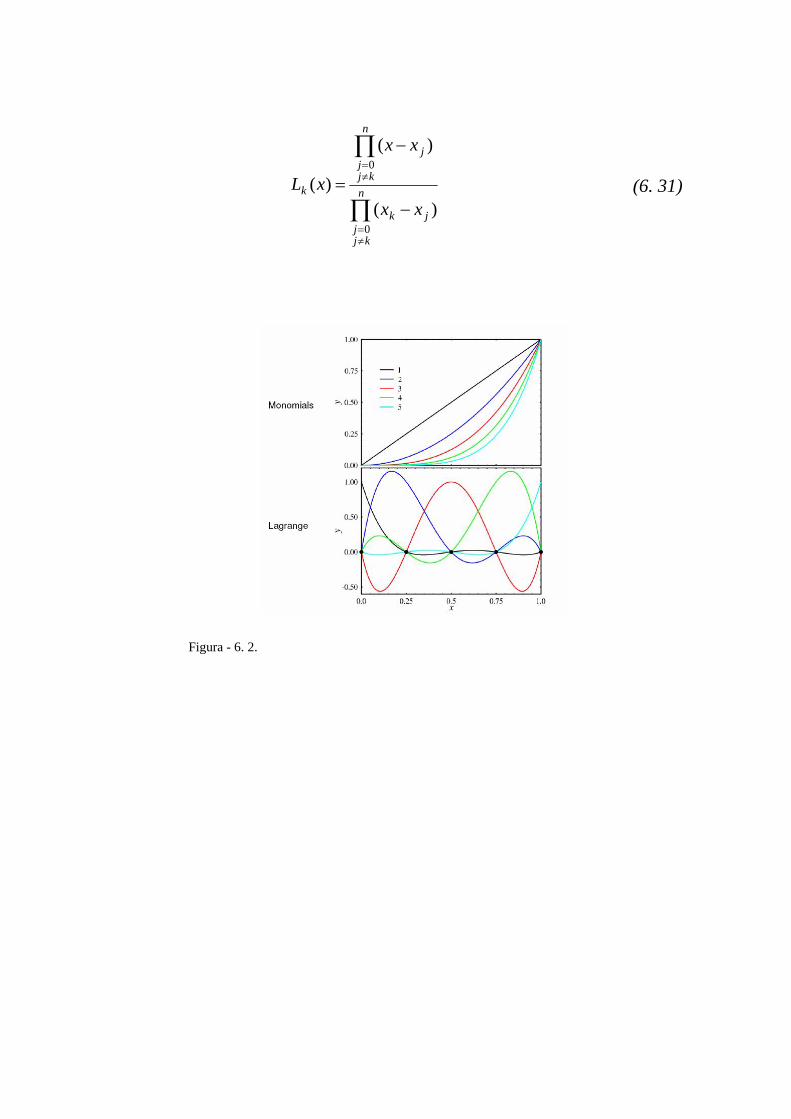
n
kjj
jk
n
kjj
j
k
xx
xx
xL
0
0
)(
)(
)( (6. 31)
Figura - 6. 2.

6. 5 – Forma de Newton – Interpolação Polinomial por Diferenças Dividas
A forma de Newton para o polinômio )(xPn que interpola )(xf nos )1( n
pontos distintos no xxx ,...,, 1 é:
))...()((...))(()()(
11
121
non
ooon
xxxxxxdxxxxdxxddxP
(6. 32)
Os coeficientes kd , nk ,...,2,1,0 são diferenças divididas de ordem k entre os
pontos .,...,2,1,0)),(,( njxfx jj
A diferença dividida de ordem k da função )(xf sobre os )1( k pontos
no xxx ,...,, 1 é representada como:
],...,,[][ 1 kok xxxfxf (6. 33)
Por definição temos a seguinte tabela:
Tabela - VI. 1. Tabela de Diferença Divididas
Diferença Divida Ordem
)(][ oo xfxf 0
o
o
o
oo xx
xfxfxx
xfxfxxf
1
1
1
11
)()(][][],[ 1
o
oo xx
xxfxxfxxxf
2
12121
],[],[],,[ 2
o
oo xx
xxxfxxxfxxxxf
3
21321321
],,[],,[],,,[ 3
: :
on
nonno xx
xxxfxxxfxxxxf
],...,,[],...,,[],...,,,[ 112121
n
Então:

][ oo xfd (6. 34)
e
],[ 11 xxfd o (6. 35)
e
],,[ 212 xxxfd o (6. 36)
:
],...,,,[ 21 non xxxxfd (6. 37)
6.5.1 – Propriedade das Diferenças Divididas
1) Irrelevância da ordem dos argumentos.
Por exemplo:
],[)()()()(],[ 11
1
1
11 o
o
o
o
oo xxf
xxxfxf
xxxfxfxxf
(6. 38)
Por indução demonstra-se que:
],...,,,[],...,,,[2121 no
xxxxfxxxxf no (6. 39)
onde no ,...,, 1 é qualquer permutação de n...,2,1,0 .
2) Forma simétrica da Diferença Dividida
n
in
ikk
ji
ino
xx
xfxxxxf0
1
21
)(
)(],...,,,[ (6. 40)
Forma simétrica geral:

6.5.2 – Forma de Newton para o Polinômio Interpolador
Se )(xf contínua em um intervalo ];[ ba e sejam dadas (n+1) pontos
bxxxxa no ...21 (6. 41)
Seja )(xPo o polinômio de grau zero que interpola )(xf em oxx . Então:
][)()( ooo xfxfxP (6. 42)
Para todo ];[ bax e oxx temos:
o
o
o
oo xx
xfxfxx
xfxfxxf
1
1
1
11
)()(][][],[ (6. 43)
Portanto,
],[)()()( xxfxxxfxf ooo (6. 44)
ou
],[)()()( xxfxxxPxf ooo (6. 45)
Designado por )(xRo o erro que é cometido ao se aproximar )(xf por )(xPo ,
tem-se:
],[)()()()( xxfxxxPxfxR oooo (6. 46)
i) Seja )(1 xP o polinômio de grau menor ou igual a 1 que interpola )(xf em ox e
1x , conforme mostra a Figura - 6. 3.
Figura - 6. 3.

onde
))((],[)()()(
],[)()(
],[],[],,[],,[
1
1
1
1
1
111
xxxxxxfxxxfxf
xx
xxfxx
xfxfxx
xxfxxfxxxfxxxf
o
oooo
o
o
oooo
(6. 47)
Portanto,
],,[))((],[)()()( 111 xxxfxxxxxxfxxxfxf ooooo (6. 48)
onde:
umgrau
zerograu
oooo xqxPxxfxxxfxP )()(],[)()()( 111 (6. 49)
E o erro )(1 xR , é dado por:
],,[))(()( 111 xxxfxxxxxR oo (6. 50)
Observe que: 0)()( 111 xRxR o
ii) Seja )(2 xP o polinômio de grau menor ou igual a dois que interpola )(xf em
21,, xxxo pode-se escrever:
))()((],,[))((],[)()()(
],,[],[)()(
],,[],[],[
],,[],,[],,,[],,,[
21
1211
2
121
1
2
121
11
2
121
1221
xxxxxxxxxfxxxxxxfxxxfxf
xx
xxxfxx
xxfxx
xfxfxx
xxxfxx
xxfxxfxx
xxxfxxxfxxxxfxxxxf
o
ooooo
o
oo
o
ooo
oo
oo
(6. 51)

Portanto,
],,,[))()((],,[))((],[)()()(
2121
2111
xxxxfxxxxxxxxxfxxxxxxfxxxfxf
oo
ooooo
(6. 52)
onde:
)(
211
)(
12
21
],,[))((],[)()()(xq
oo
xP
ooo xxxfxxxxxxfxxxfxP (6. 53)
E o erro )(21 xR , é dado por:
],,,[))()(()( 21212 xxxxfxxxxxxxR oo (6. 54)
Observe que os coeficientes dos polinômios de interpolação são diferenças divididas.
Para um polinômio interpolador de grau n pode-se escrever:
],...,,[))...()((...],,[))((],[)()()(
1121
21111
nono
ooooon
xxxfxxxxxxxxxfxxxxxxfxxxfxP
(6. 55)
e
],...,,[))...()(()( 111 nonon xxxfxxxxxxxq (6. 56)
e
],...,,,[)(
],...,,,[))...()(()(
210
211
xxxxfxx
xxxxfxxxxxxxR
o
n
ii
onon
(6. 57)

6. 6 – Estudo do Erro na Interpolação pelo Método de Newton
A fórmula de Newton pode ser escrita como:
n
iin xGxxxPxf
0)()()()( (6. 58)
onde
],,,...,,,[)( 21 xxxxxfxG no (6. 59)
Vamos ver agora uma outra forma de expressar o erro G(x).
Define-se uma fração )(tQ onde:
n
iin GxttPtftQ
0)()()()()( (6. 60)
Que se anula quando ixt , i = 0,1,2,...,n ((n+1) vezes). E também quando t = x.
6.6.1 – Teorema de Rolle
Se a função )(xf é contínua no intervalo ];[ ba , diferenciável em );( ba se
0)()( bfaf então existe pelo menos um ponto c, bca , tal que 0)(' cf ,
conforme mostra a Figura - 6. 4.
Figura - 6. 4.

Aplicando o teorema de Rolle à função Q , tem-se que 'Q se anula pelo menos
(n+1) vezes, ''Q se anula pelo menos n vezes e assim sucessivamente, até )1( nQ que se
anula pelo menos uma vez no intervalo (xo;xn).
Derivando (6. 60) (n+1) vezes em relação à variável t, obtém-se:
)()!1()()( )1()1( GntftQ nn (6. 61)
Se 0)()1( nQ , onde é o ponto onde a função Q(t) se anula pelo menos uma
vez, então:
],,...,,[)!1(
)()( 21
)1(
no
n
xxxxfn
fG
(6. 62)
Assim
n
i
n
in nfxxxR
0
)1(
)!1()()()( (6. 63)
Onde ),( ko xx
6.6.2 – Limitante para o Erro
Se )()1( xf n for contínua no intervalo ];[ no xx pode-se escrever:
)!1())...()(()()()( 1
1
nMxxxxxxxPxfxR n
nonn (6. 64)
onde
)(max )1(
];[1 xfM n
xxxn
no
(6. 65)
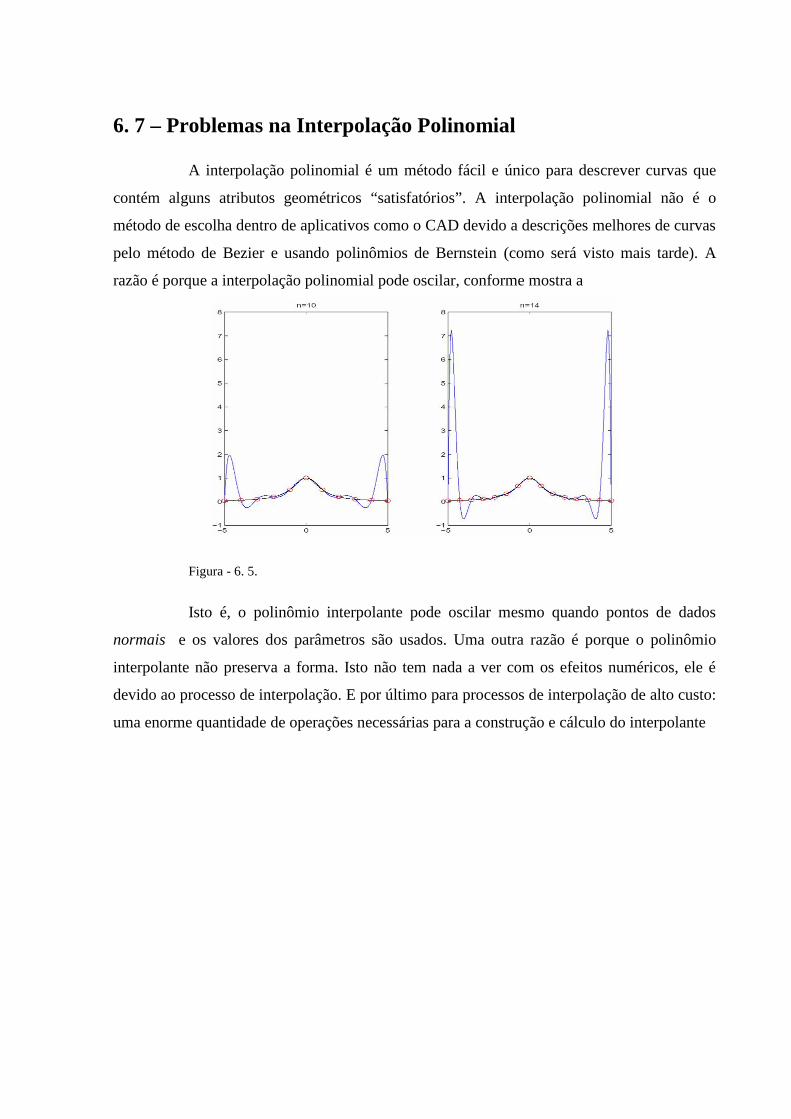
6. 7 – Problemas na Interpolação Polinomial
A interpolação polinomial é um método fácil e único para descrever curvas que
contém alguns atributos geométricos “satisfatórios”. A interpolação polinomial não é o
método de escolha dentro de aplicativos como o CAD devido a descrições melhores de curvas
pelo método de Bezier e usando polinômios de Bernstein (como será visto mais tarde). A
razão é porque a interpolação polinomial pode oscilar, conforme mostra a
Figura - 6. 5.
Isto é, o polinômio interpolante pode oscilar mesmo quando pontos de dados
normais e os valores dos parâmetros são usados. Uma outra razão é porque o polinômio
interpolante não preserva a forma. Isto não tem nada a ver com os efeitos numéricos, ele é
devido ao processo de interpolação. E por último para processos de interpolação de alto custo:
uma enorme quantidade de operações necessárias para a construção e cálculo do interpolante

6. 8 –Interpolação Polinomial de Hermite
A interpolação pelo Método dos Polinômios de Hermite considera o
conhecimento básico dos seguintes valores das funções:
( ) ( )'( ) ( )''( ) ( )
H x f xH x f xH x f x
(6. 66)
conforme mostra a Figura - 6. 6.
Figura - 6. 6.
6.8.1 - Teorema
Se 1[ ; ]f C a b e se 0 1, ,..., [ ; ]nx x x a b são distintos, o único polinômio de
grau mínimo concordante com f e f ’ em 0 1, ,..., nx x x é o polinômio de Hermite de grau pelos
menos 2n+1, dado por:
2 1 , ,0 0
ˆ( ) ( ) ( ) '( ) ( )n n
n i n j i n jj j
H x f x H x f x H x
(6. 67)
Onde
2, , ,( ) 1 2( ) ' ( ) ( )n j j n j j n jH x x x L x L x (6. 68)

2, ,
ˆ ( ) ( ) ( )n j j n jH x x x L x (6. 69)
e , ( )n jL x é o j’ésimo coeficiente do polinômio de Lagrange ( )nL x
Prova

6.8.2 - Método Alternativo de Newton das Diferenças Divididas
Existe um método alternativo para se calcular os polinômios de Hermite usando-
se as diferenças divididas de Newton. Vejamos:
1 1 11
( ) [ ] [ , ,..., ]( )( )...( )n
n o o n o kk
P x f x f x x x x x x x x x
(6. 70)
Nós devemos passar para
2 1( ) ?nH x (6. 71)
E associar
1 1 2 1, ,..., , ,...,o n o nx x x z z z (6. 72)
Onde
1
1
2 1
3 1
2
2 1
, ,...,
:
o o
o
n n
n n
xz xz xz xz x
z xz x
(6. 73)
Veja que neste caso
11
1
[ ] [ ][ , ] oo
o
f x f xf x xx x
(6. 74)
Se anula. Logo devemos fazer:
2 2 1 2[ , ] '[ ] '( )io i i if z z f z f x (6. 75)

6. 9 –Interpolação Polinomial de Bezier
6.9.1 - Introdução
As técnicas de interpolação, que ajusta uma curva aos pontos dados, em muitos
casos oferecem excelentes resultados, elas são particularmente usadas quando a forma básica
da curva é conhecida através de avaliação experimental ou por cálculo matemático. Alguns
exemplos que empregam esta técnica é o projeto de asas de avião, distribuidores para
motores, e algumas peças mecânicas. Porém existe uma classe de problemas que são
denominados de ab inito, em que as técnicas de interpolação (fitting) mostraram-se
ineficientes. Alguns exemplos de ab initio o projeto de fuselagem de avião, cascos de navios e
design de automóveis. Uma técnica alternativa para a descrição adequada da curva para
problemas de ab initio são as Curvas de Bézier, que foi desenvolvida pelo matemático francês
Pierre Bézier nos anos 60, durante seus trabalhos em projetos de automóveis para a Renault.
Originalmente Bézier baseou sua curva em princípios geométricos, porém mais tarde, Forrest,
Gordon e Riesenfeld mostraram que o resultado é equivalente à base de Bernstein, ou função
de aproximação polinomial.
Atualmente a curva de Bézier é amplamente utilizada na maioria dos softwares de
computação gráfica disponíveis no mercado, entre eles temos o Adobe Illustrator, o Corel
Draw, o Auto CAD, 3Ds MAX, Rhinoceros 3D, e bibliotecas como o OpenGL, VTK, entre
outros. No próximo capítulo serão revisados três diferentes tipos de representações para
curvas, mostrando as vantagens e desvantagens de seu uso. No capítulo três, é mostrada a
definição matemática da curva de Bézier. No quarto capítulo é construído um exemplo a partir
de definição matemática. O quinto capítulo mostra algumas propriedades da curva. O sexto
mostra a curva de Bézier na forma matricial. No sétimo capítulo é comentada a importância
da continuidade da curva para conexão de duas ou mais curvas de Bézier e, por fim, no oitavo
são comentadas vantagens e desvantagem no uso das curvas de Bézier. Em anexo estão os
códigos para visualizar as curvas de Bézier em MATLAB, algumas citações de uso de Bézier
em aplicativos (software) e uma introdução a superfícies, em especial, as superfícies NURBS
muito utilizadas por projetistas para acelerar a construção de objetos.
6.9.2 - Definições Básicas
Representações da Curva
Existem basicamente 3 formas de representação para curvas: a explícita, a
implícita e a paramétrica. A forma mais intuitiva de se definir uma curva plana é através de
uma equação do tipo
xfy (6. 76)
Este tipo de representação é chamado de forma explicita da curva, pois uma coordenada é
função explicita da outra. É bastante simples representar uma reta com esta forma
baxy (6. 77)
Ou um círculo centrado na origem
22 xry (6. 78)
Outra representação importante é obtida usando a forma implícita da curva :
0, yxf (6. 79)
Este tipo de equação é bastante empregado para cônicas. Desta forma, um circulo de centro
(0,0) de raio r é descrito pela equação
0222 ryx (6. 80)
Tanto a forma explícita como a implícita, permitem que as curvas sejam armazenadas de
maneira eficiente, visto que o número de coeficientes é pequeno. A forma explicita só pode
ser utilizada para curvas que possuam apenas um valor de y, para cada valor de x, já a forma
implícita não possui esta limitação. Por outro lado, a avaliação de uma curva na forma
explícita é feita de maneira trivial, enquanto para curvas na forma implícita esta variação
requer a solução da equação:
0, yxf (6. 81)
Devido aos problemas das outras formas de representação, a forma paramétrica é amplamente
utilizada na modelagem geométrica. Matematicamente, uma curva paramétrica pode ser
definida através da equação:
tpp (6. 82)
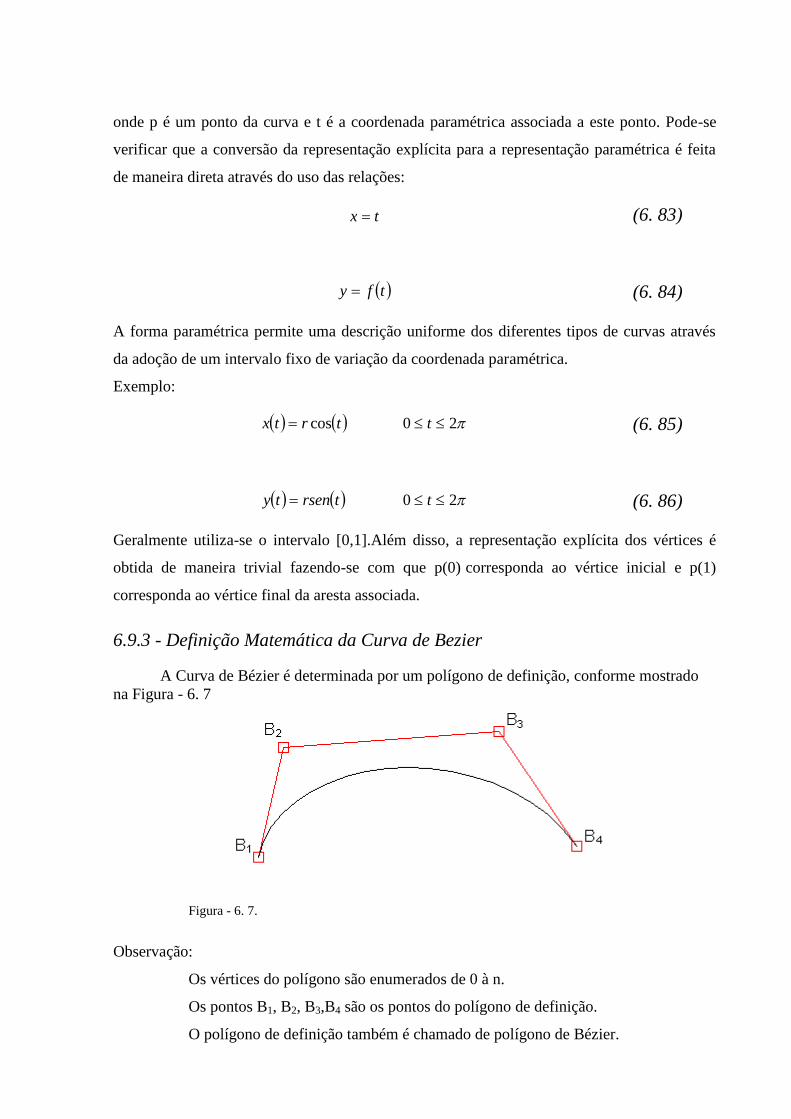
onde p é um ponto da curva e t é a coordenada paramétrica associada a este ponto. Pode-se
verificar que a conversão da representação explícita para a representação paramétrica é feita
de maneira direta através do uso das relações:
tx (6. 83)
tfy (6. 84)
A forma paramétrica permite uma descrição uniforme dos diferentes tipos de curvas através
da adoção de um intervalo fixo de variação da coordenada paramétrica.
Exemplo:
trtx cos 20 t (6. 85)
trsenty 20 t (6. 86)
Geralmente utiliza-se o intervalo [0,1].Além disso, a representação explícita dos vértices é
obtida de maneira trivial fazendo-se com que p(0) corresponda ao vértice inicial e p(1)
corresponda ao vértice final da aresta associada.
6.9.3 - Definição Matemática da Curva de Bezier
A Curva de Bézier é determinada por um polígono de definição, conforme mostrado na Figura - 6. 7
Figura - 6. 7.
Observação:
Os vértices do polígono são enumerados de 0 à n.
Os pontos B1, B2, B3,B4 são os pontos do polígono de definição.
O polígono de definição também é chamado de polígono de Bézier.
Matematicamente, uma curva de Bézier é definida como:
,1
0 1n
i n ii
P t B J t t
(6. 87)
Onde as funções bases de Bézier (ou Bernstein) ou ainda funções de mistura (blending) são:
, 1
com
!! !
n iin i
nJ t t
i
n ni i n i
(6. 88)
Observação:
O grau da função de mistura é sempre uma unidade a menos que o número de
pontos do polígono de definição.
6.9.4 - Exemplo de Curva de Bezier
Considerando os pontos B0=[1 1], B1=[2 3], B2 =[4 3], B3 = [3 1], vértices do
polígono de Bézier. Determine 7 pontos sobre a curva de Bézier
Dados do problema:
Os pontos B0, B1, B2, B3, definem o polígono de Bézier;
O grau das funções de mistura é n = 3, ou seja, 4 menos 1.
Cálculo das funções de mistura J3,i.
Aplicando a definição de função de mistura:
n iin,i
nJ t 1 t
i
(6. 89)
temos:

3 6!(3 )!
3 6 10 0!(3 0)!
3 6 31 1!(3 1)!
3 6 32 2!(3 2)!
3 6 13 3!(3 3)!
ni i i i
(6. 90)
Então:
J3,0 (t) = (1)t0(1 – t )3-0 = (1-t)3
J3,1 (t) = 3t (1 – t )3-1 = 3t(1-t)2
J3,2 (t) = 3t2(1-t)3-2 = 3t2(1-t)
J3,3 (t) = (1)t3(1-t)3-3 = t3
(6. 91)
Como os pontos sobre a curva de Bézier são calculados por:
3
,1
i n ii
P t B J t
(6. 92)
Temos que:
P(t) = B0J3,0 + B1J3,1 + B2J3,2 + B3J3,3
P(t) = (1-t)3 B0 + 3t(1-t)2B1+3t2(1-t)B2 + t3P3 (6. 93)
P(0) = B0 = [1 1]
P(0,15) = 0,614 B0 + 0,325 B1 + 0,058 B2 + 0,003 B3 = [1,5 1,765]
P(0,35) = 0,275 B0 + 0,444 B1 + 0,239 B2 + 0,042 B3 = [2,248 2,367]
P(0,5) = 0,125 B0 + 0,375 B1 + 0,375 B2 + 0,125 B3 = [2,75 2,5] P(0,65) = 0,042 B0 + 0,239 B1 + 0,444 B2 + 0,275 B3 = [3,122 2,367]
(6. 94)
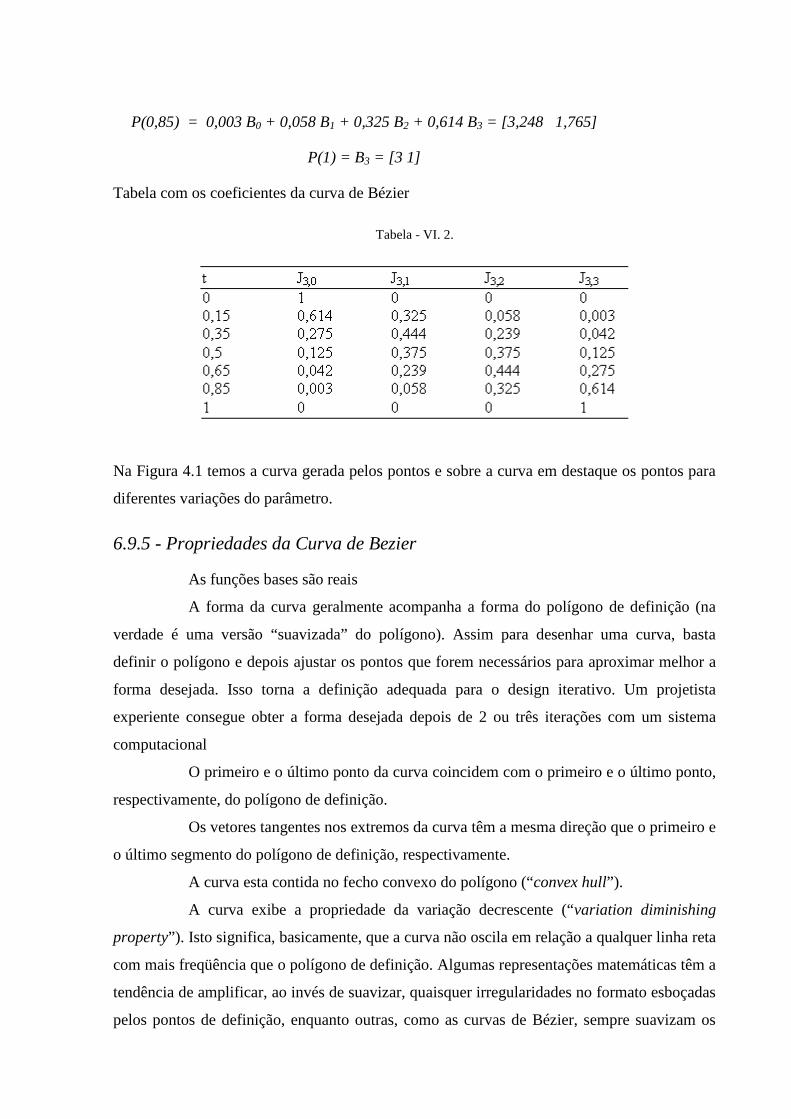
P(0,85) = 0,003 B0 + 0,058 B1 + 0,325 B2 + 0,614 B3 = [3,248 1,765]
P(1) = B3 = [3 1]
Tabela com os coeficientes da curva de Bézier
Tabela - VI. 2.
Na Figura 4.1 temos a curva gerada pelos pontos e sobre a curva em destaque os pontos para
diferentes variações do parâmetro.
6.9.5 - Propriedades da Curva de Bezier
As funções bases são reais
A forma da curva geralmente acompanha a forma do polígono de definição (na
verdade é uma versão “suavizada” do polígono). Assim para desenhar uma curva, basta
definir o polígono e depois ajustar os pontos que forem necessários para aproximar melhor a
forma desejada. Isso torna a definição adequada para o design iterativo. Um projetista
experiente consegue obter a forma desejada depois de 2 ou três iterações com um sistema
computacional
O primeiro e o último ponto da curva coincidem com o primeiro e o último ponto,
respectivamente, do polígono de definição.
Os vetores tangentes nos extremos da curva têm a mesma direção que o primeiro e
o último segmento do polígono de definição, respectivamente.
A curva esta contida no fecho convexo do polígono (“convex hull”).
A curva exibe a propriedade da variação decrescente (“variation diminishing
property”). Isto significa, basicamente, que a curva não oscila em relação a qualquer linha reta
com mais freqüência que o polígono de definição. Algumas representações matemáticas têm a
tendência de amplificar, ao invés de suavizar, quaisquer irregularidades no formato esboçadas
pelos pontos de definição, enquanto outras, como as curvas de Bézier, sempre suavizam os

pontos de controle. Assim, a curva nunca cruza uma linha reta arbitrária mais vezes que a
seqüência de segmentos que conectam os pontos de controle.
A curva é invariante sob transformações afins. Esta propriedade garante que os
dois procedimentos descritos abaixo produzem o mesmo resultado.
primeiro calcula um ponto da curva, e depois aplica a ele uma transformação afim;
primeiro, aplica uma transformação afim ao polígono de definição e depois gera a curva.
Uma conseqüência prática: suponha que traçamos uma curva cúbica calculando
100 pontos sobre ela; e que agora queremos desenhar a mesma curva depois de uma rotação.
Podemos aplicar a rotação a cada um dos 100 pontos, e desenhar os pontos
resultantes, ou aplicar a rotação a cada um dos 4 pontos do polígono de controle, calcular
novamente os 100 pontos e traçá-los. A primeira estratégia requer que a rotação seja aplicada
100 vezes, e a segunda requer a aplicação apenas 4 vezes! È interessante observar que as
curvas de Bézier não são invariantes sob transformações projetivas.
Interpolação dos pontos extremos
Os vetores tangentes dos pontos extremos têm a mesma direção dos segmentos do
polígono de controle.
Pode-se mostrar que para qualquer valor do parâmetro t, o somatório das funções
base é a unidade, isto é:
,0
1n
n ii
J
(6. 95)
Observação: As curvas de Bézier não são invariantes sob transformações projetivas.
Alguns resultados
i n in,i n
ni i (n i)Jin n
(6. 96)
O máximo valor para cada função de mistura ocorre em t = i/n e é dado por:
Por exemplo, para uma cúbica (n=3). O Máximo valor para J3,1 e J3,2 ocorre em
1/3 e 2/3, respectivamente, com os valores :
J3,1(1/3) = 4/9 e J3,2(2/3)= 4/9 (6. 97)
Os gráficos abaixo mostram as funções de mistura para alguns valores de n.

Figura - 6. 8. Funções de mistura. (a) Polígono de três pontos, n = 2; (b) Polígono de quatro pontos, n = 3; (c) Polígono de cinco pontos, n = 4; (d) Polígono de cinco pontos, n = 5;
O primeiro ponto da curva coincide com o primeiro ponto do polígono de
definição, isto é:
00 BP (6. 98)
Prova:
Aqui definiremos que 00 =1.
n 0n,0
i n in,i
n!(1)(1 0)J (0) 1 para i 0n!
n!(0) (1 0)J (i) 0 para i 0i!(n i)!
(6. 99)
Portanto:

0 ,0 0 00 0 .1nP B J B B (6. 100)
Similarmente para o último ponto da curva, isto é, para t =1,
,
,
!(1) (0)(1) 1!(1)
!( ) (1 1) 0!( )!
n n nn n
i n in i
nJ para i nn
nJ i t para i ni n i
(6. 101)
Portanto:
,1 1 .1n n n n nP B J B B (6. 102)
Além disso, pode-se mostrar que para qualquer valor do parâmetro t, o somatório das funções
base é a unidade, isto é:
,0
1n
n ii
J t
(6. 103)
6.9.6 - Curva de Bezier na Forma Matricial
A equação para a curva de Bézier pode ser expressa na forma matricial, da seguinte forma, para n = 3
0
3 2 12 3
2
3
( ) [ 1 3 1 3 ]
BB
P t t t t t tBB
(6. 104)
Desenvolvendo e agrupando os termos do parâmetro podemos reescrever como
0
13 2
2
3
1 3 3 13 6 3 0
( ) 13 3 0 0
1 0 0 0
BB
P t t t tBB
(6. 105)
De modo análogo para n = 4, a curva de Bézier correspondente a 5 pontos de controle é

0
14 3 2
2
3
4
1 4 6 4 14 12 12 4 0
( ) 1 6 12 6 0 04 4 0 0 0
1 0 0 0 0
BB
P t t t t t BBB
(6. 106)
De uma forma geral uma curva de Bézier pode ser expressa na forma matricial como
P(t) = T N G = F G (6. 107)
onde F = Jn,0 Jn,1 ... Jn,n (Funções de Mistura) e G = B0, B1,..., Bn (Vértices do polígono de
definição)
Observações:
Para qualquer valor de n a matriz [N] é simétrica em relação a diagonal principal;
O canto triangular inferior (abaixo da diagonal principal) direito contém apenas
zeros.
6.9.7 - Conexão de várias Curva de Bezier
Em geral, uma forma complexa não pode ser modelada por uma única curva, mas
por várias curvas que são conectadas em seus pontos extremos. Ao criar as junções temos que
controlar a continuidade nos pontos de junção. Neste ponto surge uma pergunta. O que
significa continuidade?
Continuidade de ordem 0, C0, significa que duas curvas se encontram.
Continuidade de primeira, C1, ordem exige que as curvas tenham tangentes
comuns no ponto de junção.
Continuidade de Segunda ordem, C2 ,exige que as curvaturas sejam as mesma
A forma mais simples de continuidade C0 assegura que a curva ou a união de
curvas não terá descontinuidade. O nível seguinte C1 indica que a inclinação ou a derivada
primeira da curva é constante em todos os pontos. A continuidade C2 implica continuidade na
derivada segunda da curva e assim por diante.
As derivadas (primeira e segunda) das curvas de Bézier são dadas por:
n
i iin
n
i itJBtPeJBtP
0,0)('')('','' (6. 108)
onde:

2 2
, , , ,2 2(1 2 )
' ( ) ( ) '' ( ) ( )(1 ) (1 )
n i n i n i n ii nt i nt nt i t
J t J t e J t J tt t t t
(6. 109)
pode ser demonstrado que:
P’ (0) = n(B1-B0) . (6. 110)
P’ (1) = n(Bn-Bn-1) (6. 111)
P’’(0) = n(n-1)(B0-2B1+B2) (6. 112)
P’’(1) = n(n-1)(Bn-2Bn-1+Bn-2) (6. 113)
6.9.8 - Vantagens e Desvantagens da Curva de Bezier
Pode ser demonstrado que:
O controle da curva é global. Isto significa que a mudança de um ponto do
polígono de definição (ponto de controle) implica na mudança de toda a curva. Para controle
local deve-se utilizar B-Spline(ver Anexo A), que uma evolução da curva de Bézier;
O número de pontos do polígono de definição especifica diretamente o grau da
curva gerada. Desta forma o aumento no número de pontos do polígono de definição aumenta
o custo de avaliação da curva e suas derivadas;
A construção de desenhos complexos é acelerada com o uso das curvas Bézier.
6. 10 – Interpolação Polinomial de Bernstein
Na matemática sub-área de Análise Numérica, os polinômios de Bernstein, foram
chamados assim, depois que o matemático Sr. Sergi Natanovich Bernstein, que inventou esses
polinômios, que levam o seu nome, utilizou-os pela primeira vez para realizar uma prova
construtiva do Teorema de Aproximação de Stone-Weierstrass. Com o advento da computaçã
gráfica os polinômios de Bernstein tornaram-se importante na interpolação de curvas de
Bezier.
Figura - 6. 9. Sergi Natanovich Bernstein quem primeiro utilizou os polínios que levam o seu nome.
Na interpolação eles formam um polinômio capaz de ajustar curvas suaves por
meio de uma combinação linear da base polinomial de Bernstein. Prefere-se sobre outras
interpolações polinomiais porque:
• É mais eficiente.
• Outros polinômios de altos graus são computacionalmente mais caros.
• Erros pequenos.
• A curva interpolante é mais suave.
• Melhor controle sobre a forma das curvas
• Manipulação flexível de curvas com garantia e controle de forma da curva resultante
• Introdução de pontos de controle que não necessariamente estende-se sobre a curva.
6.10.1 - Motivação de sua Existência
A motivação da existência dos polinômios de Bernstein surgiu da forma do
Binômio de Newton como:

n
i
iinn bain
ba0
)( (6. 114)
Os polinômios de Bernstein são os termos da Série Binomial de Newton, formando uma
seqüência de funções.
6.10.2 - Definição dos Polinômios
Os polinômios de Bernstein de grau n são definidos como:
( ) (1 ) com 0,1 , 0,...,n n i ii
nB t t t t i n
i
(6. 115)
para ni ,...,2,1,0 onde os seus coeficientes binomiais são dados por:
! 0!( )!
0 0
n para i nni n i
ipara i n
(6. 116)
Observe que os expoentes desse polinômio em t aumenta de uma unidade e os
expoentes em (1 - t) diminuem de uma unidade conforme o índice i aumenta. Os polinômios
de Bernstein de graus 1, 2, 3 e 4 são mostrados na Figura - 6. 10 para o intervalo de 10 t .
ttttttB
ttttttB
01111,1
0011,0
)1()!11(!1
!1)1(11
)(
)1()1()!01(!0
!1)1(01
)( (6. 117)

2202222,2
111122,1
202022,0
)1()!22(!2
!2)1(22
)(
)1()1()!12(!1
!2)1(12
)(
)1()1()!02(!0
!2)1(02
)(
ttttttB
tttttttB
ttttttB
(6. 118)
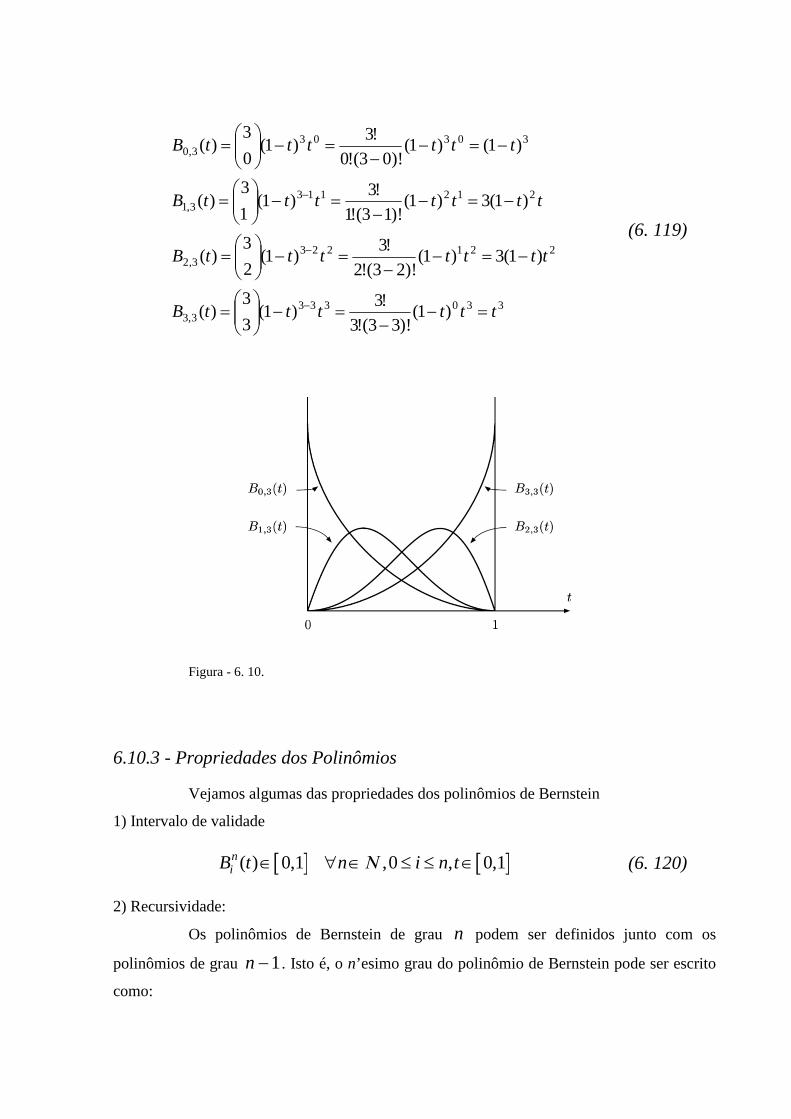
3303333,3
2212233,2
2121133,1
303033,0
)1()!33(!3
!3)1(33
)(
)1(3)1()!23(!2
!3)1(23
)(
)1(3)1()!13(!1
!3)1(13
)(
)1()1()!03(!0
!3)1(03
)(
ttttttB
tttttttB
tttttttB
ttttttB
(6. 119)
Figura - 6. 10.
6.10.3 - Propriedades dos Polinômios
Vejamos algumas das propriedades dos polinômios de Bernstein
1) Intervalo de validade
( ) 0,1 ,0 , 0,1niB t n i n t (6. 120)
2) Recursividade:
Os polinômios de Bernstein de grau n podem ser definidos junto com os
polinômios de grau 1n . Isto é, o n’esimo grau do polinômio de Bernstein pode ser escrito
como:

)()()1()( 1,11,, ttBtBttB nknknk (6. 121)
Para mostrar isto, nós precisamos usar a definição do polinômio de Bernstein e alguma
álgebra simples:
3) Positividade:
( ) 0 [0;1]nvB t x (6. 122)
4) Partição de uma Unidade:
0 ( ) 1 t 0,1 n nii B t
(6. 123)
Prova:
0 0
1 1
1 ( )
n
n nn i i nii i
t t
nt t B t
i
(6. 124)
5) Simetria
( ) (1 )n ni n iB t B t (6. 125)
6) Grau Crescente:
7) Forma n escolhas i do Triângulo de Pascal
n n-1 n-1n! = = + i i i-1i!(n - i)!
(6. 126)

00 : : 1
0
1 11: , : 1 + 1
0 12 2 2
2 : , , : 1 + 2 + 10 1 23 3 3 3
3: , , , : 1 + 3 + 3 +10 1 2 34 4 4 4
4 : , , ,0 1 2
4, : 1 + 4 + 6 + 4 + 1
3 1:
n n n n n n: , ,...., , , ,...., : 1,(n-1)+(i-1),(n-1+i),...,1
0 1 k-1 k k+1 ni
(6. 127)
1: 11,1: 1 + 11,2,1: 1 + 2 + 11,3,1: 1 + 3 + 3 +11,4,6,4,1: 1 + 4 + 6 + 4 + 1:1, n, ...,(n-1)+(i-1),(n-1+i),...,1
(6. 128)
8) Graus mais altos lerps de graus inferiores
i n-ii,n
i n-i i n-i
i,n-1 i-1,n-1
nB ( ) = t (1-t)
i
n-1 n-1= t (1-t) + t (1-t)
i i-1= (1-t)B ( ) + tB ( )
t
t t
(6. 129)
9) Forma uma Base de Potências

Alguns polinômios de Interpolação formam uma base de funções ortogonais, quer sejam: - Polinômios de Lagrange - Polinômios de Bernstein - Polinômios de Hermite - etc. 10)
( ) 0nvB t (6. 130)
11) Se 0 ou v v n
,0(0)nv vB (6. 131)
e
,(1)nv v nB (6. 132)
onde ,v n é o Delta de Kröenecker.
12)
( )nvB t (6. 133)
Possui uma raiz de multiplicidade v no ponto 0t (note que se 0v não existe raiz em
0t . Possui uma raiz com multiplicidade n v no ponto 1t (note que se v n ao existe
raiz em 1t )
13)
(1 ) ( )n n vv vB t B t (6. 134)
14) Se 0v , então ( )nvB t possui um único máximo local no intervalo [0;1] em /t v n .
Este máximo toma valores:
( )v n n v nv n n v
v
(6. 135)

6.10.4 - Base de Potência de Bernstein
A base polinomial de Bernstein de grau n formam uma base no espaço vetorial de
funções de grau n. Uma combinação linear da base polinomial de Bernstein é dada por:
0 0, 1 1, ,( ) ( ) ( ) ... ( )n n n n nB t b B t b B t b B t (6. 136)
onde os coeficientes ib são chamados de coeficientes de Bernstein ou coeficientes de Bezier.
6.10.5 – Aproximação de Funções Contínuas
Seja ( )f x uma função contínua sobre o intervalo [0;1]. Considere o polinômio
de Bernstein dado por:
0( )( ) ( ) ( )
nn
n vv
vB f t f B tn
(6. 137)
Pode-se mostrar que:
lim ( )( ) ( )nnB f t f t
(6. 138)
Uniformemente sobre o intervalo [0;1]. Esta é uma condição mais forte do que a proposição
de que o limite se mantém para cada valor de t separadamente, que deveria ser uma
convergência ponto a ponto além da convergência uniforme. Especificamente, a palavra
uniformemente significa que:
lim sup ( ) ( )( ) para 0 1 0nnf t B f t t
(6. 139)
Os polinômios de Bernstein então tenha recursos para de uma forma provar o teorema da
aproximação de Stone-Weieerstrass que toda função contínua de valor real sobre um intervalo
real [a;b] pode ser uniformemente aproximada por funções polinomiais em R.
Uma condição mais geral para uma função com derivada k’ésima continua é:
( )( ) ( )( ) ( ) ( )kk k
n knB f t f tn
(6. 140)
e
( ) ( )( ) ( ) ( ) 0k k
nf t B f t
(6. 141)
Onde aditivamente
( ) 0 1 11 1 ... 1kk
n kn n nn
(6. 142)
é um auto valor de ( )( )nB f t , as correspondentes autofunção é um polinômio de graus k.
Prova
6.10.6 - Derivadas dos Polinômios
6.10.7 - Matriz de Representação dos Polinômios
Um polinômio ( )B t pode ser expresso na base polinomial de Bernstein como:
)(...)()()( ,,11,00 tBctBctBctB nnnnn (6. 143)
Em termos de vetores, este é facilmente escrita como:
n
nnnn
c
cc
tBtBtBtB:
)(...)()()( 1
0
,,1,0 (6. 144)
Nós podemos converter a expressão anterior para matrizes onde:
nnnnn
n
c
cc
bbb
bbb
tttB:
...::::0...0...0
...1)( 1
0
,1,0,
1,10,1
0,0
(6. 145)
Como por exemplo:
3 2 2 30 1 2 3( ) (1 ) [3 (1 ) ] [3 (1 )]B t P t P t t P t t Pt (6. 146)
onde
0
13 2
2
3
1 3 3 13 6 3 0
( ) 13 3 0 0
1 0 0 0
PP
B t t t tPP
(6. 147)
Este resultado nos ajudará a interpolar uma curva de Bezier como será visto em seguida.
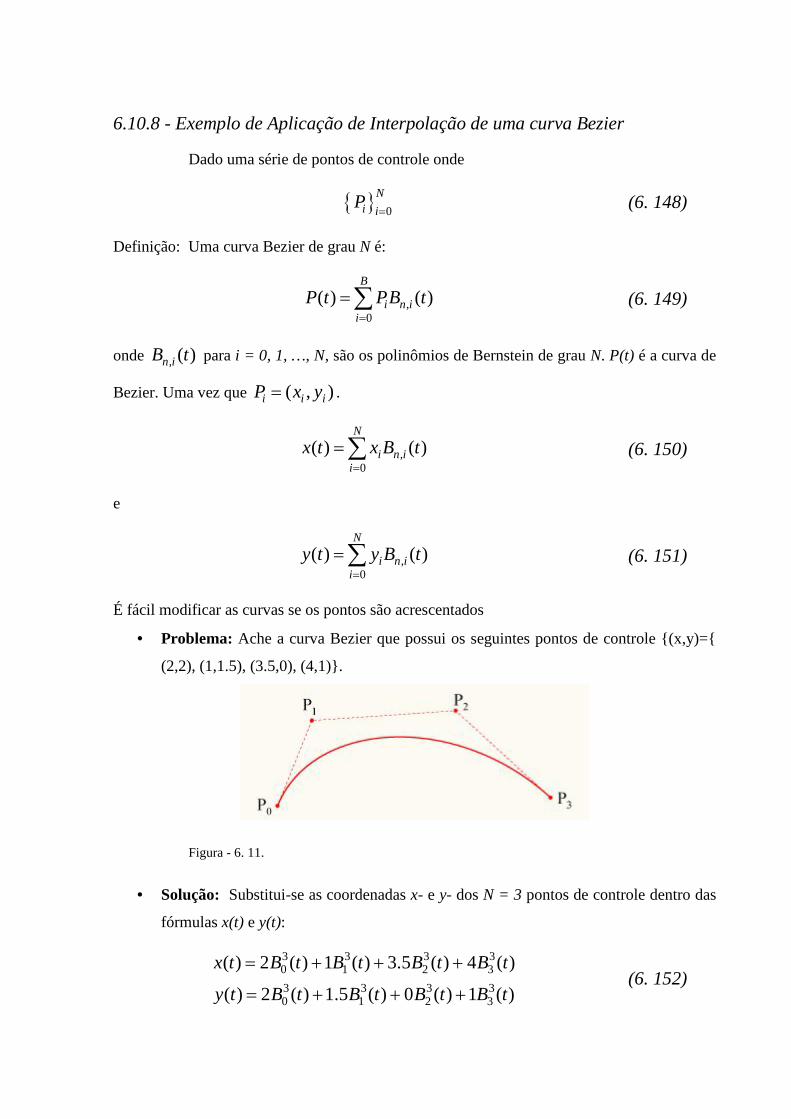
6.10.8 - Exemplo de Aplicação de Interpolação de uma curva Bezier
Dado uma série de pontos de controle onde
0N
i iP
(6. 148)
Definição: Uma curva Bezier de grau N é:
,0
( ) ( )B
i n ii
P t PB t
(6. 149)
onde , ( )n iB t para i = 0, 1, …, N, são os polinômios de Bernstein de grau N. P(t) é a curva de
Bezier. Uma vez que ( , )i i iP x y .
,0
( ) ( )N
i n ii
x t x B t
(6. 150)
e
,0
( ) ( )N
i n ii
y t y B t
(6. 151)
É fácil modificar as curvas se os pontos são acrescentados
• Problema: Ache a curva Bezier que possui os seguintes pontos de controle {(x,y)={
(2,2), (1,1.5), (3.5,0), (4,1)}.
Figura - 6. 11.
• Solução: Substitui-se as coordenadas x- e y- dos N = 3 pontos de controle dentro das
fórmulas x(t) e y(t):
3 3 3 30 1 2 33 3 3 30 1 2 3
( ) 2 ( ) 1 ( ) 3.5 ( ) 4 ( )
( ) 2 ( ) 1.5 ( ) 0 ( ) 1 ( )
x t B t B t B t B t
y t B t B t B t B t
(6. 152)
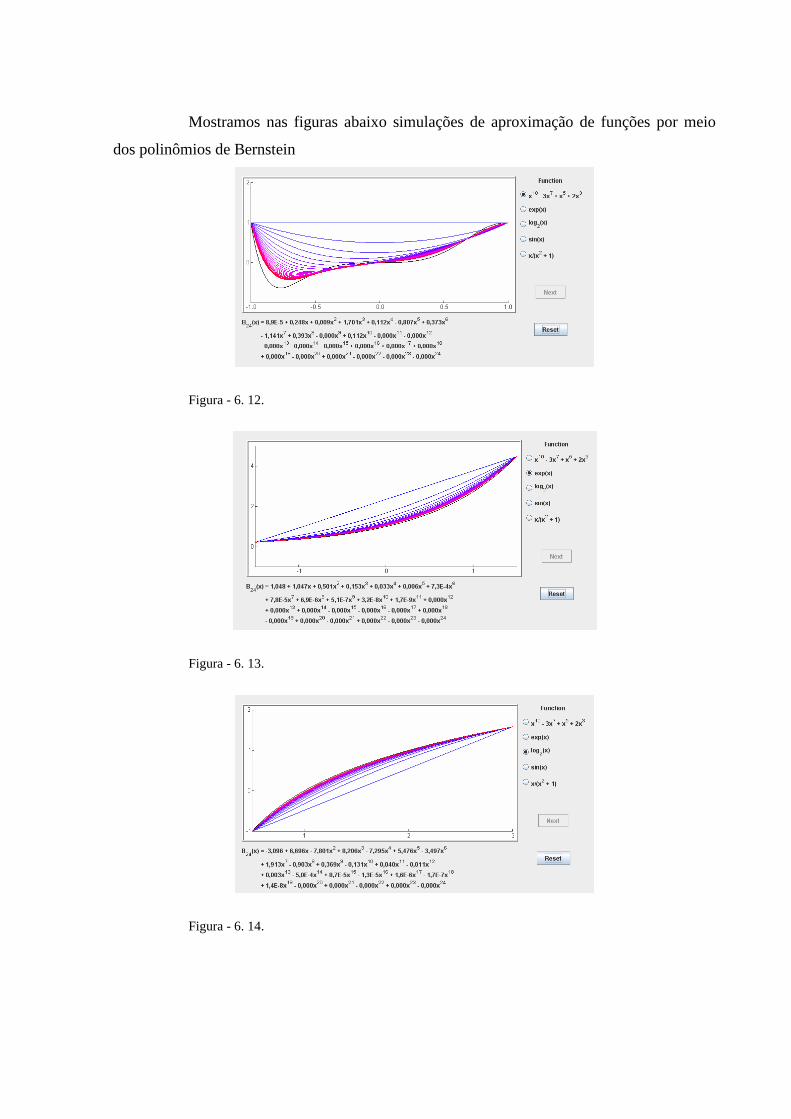
Mostramos nas figuras abaixo simulações de aproximação de funções por meio
dos polinômios de Bernstein
Figura - 6. 12.
Figura - 6. 13.
Figura - 6. 14.

Figura - 6. 15.
Figura - 6. 16.
Figura - 6. 17.

6. 11 –Interpolação Polinomial por Spline
No estudo de métodos numéricos é muito comum o desenvolvimento de funções
em séries de Taylor. Entretanto, a aproximação por uma série de potências só é possível
quando a função possui derivadas no ponto ao redor do qual estamos trabalhando. A série de
Taylor nos permite obter uma aproximação de f(x) através de polinômios em h.
(6. 153)
A aproximação por polinômios tem uma vantagem da propriedade da analiticidade.
As funções polinomiais por partes, chamadas splines, apresentam boas
propriedades de aproximação, convergência e estabilidade com respeito aos erros de
arredondamento. As funções splines estão associadas a uma partição predeterminada no
intervalo [ ; ]a b definido pelos pontos 0 1, ,... mx x x tais que:
0 1 2: ... ma x x x x b (6. 154)
em cada subintervalo 1; , 1,2,...,i ix x i m os splines são polinômios (que possui todas as
derivadas). Estes pedaços de polinômios são “colados” convenienetemente para que algumas
derivadas, da ordem ditada no problema, exitam em todo o intervalo [ ; ]a b .
6.11.1 - Definição das Splines
Uma função ( )xS é chamada spline de grau n, associada a uma partição (2) de
[ ; ]a b , se:
i) ( )xS é um polinômio de grau n em cada subintervalo 1; i ix x ;
ii) ( )xS tem (n-1) derivadas contínuas em cada ix , isto é, ( )xS é uma função com (n-1)
derivadas em ;a b
Figura - 6. 18. a) Spline linear (n = 1); b) Spline cúbica (n = 3).
A amplitude das aplicações de splines em métodos numéricos deve-se a utilização
dessas funções para gerar espaços de dimensão finita que aproximam problemas de dimensão
infinita.
É possível estabelecer base a partir de funções splines. Dada a base 1( ) ki ix ,
qualquer elemento deste espaço vetorial pode ser escrito como:
(6. 155)
Onde 1 2, ,..., kc c c são os coeficientes da combinação linear e k é a dimensão do espaço
vetorial
6.11.2 - Base para splines lineares (n = 1)
A base para funções lineares é dada por:
(6. 156)
Graficamente temos as chamadas funções chapéu, conforme mostra a Figura - 6. 19
Figura - 6. 19.
Usando esta base, as splines de grau 1 associadas a partição definida por
0 1, ,... mx x x , as quais são retas por partes podem ser escritas na forma:
(6. 157)
Onde ( )ixiS S são os valores que ( )xS assumem em ix
6.11.3 - Base para splines cúbicas (n = 3)
A expressão analítica para base para funções cúbica é dada por:
(6. 158)
Graficamente temos as funções ( )iB x , que são sinos com vértices em ix , conforme mostra a
Figura - 6. 20
Figura - 6. 20
Pode-se observar que, para completar a base no intervalo 0; mx x , é necessário introduzir
nós adicionais. Isto ocorre porque a função 1( )B x têm influência no intervalo 0; mx x , uma
vez que 1( ) 0B x em 0; mx x . Assim como a função 1( )mB x também contribui no
intervalo 0; mx x . A combinação linear destas funções é:
(6. 159)
6.11.4 - Uso de Splines na Interpolação
Para o uso das splines na interpolação, tomamos os pontos de interpolação como
os nós da partição das funções splines. Na interpolação linear por partes da função f(x) nos
pontos , 1,2,...,ix i n procuramos os coeficientes ai tais que:
(6. 160)
Como visto anteriormente 0i jl x se i j e 1i jl x se i j . Portanto,

(6. 161)
No caso linear o spline que interpola 0, 1, 2,... nf f f f é obtido de imediato:
0
( ) 1m
i ii
x f l x
1S (6. 162)
No caso de splines cúbicas procuramos os coeficientes ia , tais que:
1
1( ) 1
n
i ii
x a B x
3S (6. 163)
E
( ) , 0,1, 2,...,j j jx f x f j n 3S (6. 164)
Onde ( )iB x é a base das splines cúbicas. A figura que ilustra as splines cúbicas mostra que,
para cada jx , os únicos valores diferentes de zero são 1 1( ), ( ) e ( )j j i j j jB x B x B x . Assim
para cada ponto de interpolação teremos:
(6. 165)
Como os pontos de interpolação foram escolhidos como nós da malha, temos que
1( ) 1j jB x , ( ) 4i jB x e 1( ) 1j jB x . Lembrando a condição de interpolação temos:
(6. 166)
temos um sistema de incógnitas ai:
(6. 167)
Este sistema possui n+1 equações e n+3 incógnitas, que são 1 0 1 2 1, , , ,..., ,n na a a a a a para
resolver este sistema precisamos de duas condições adicionais:
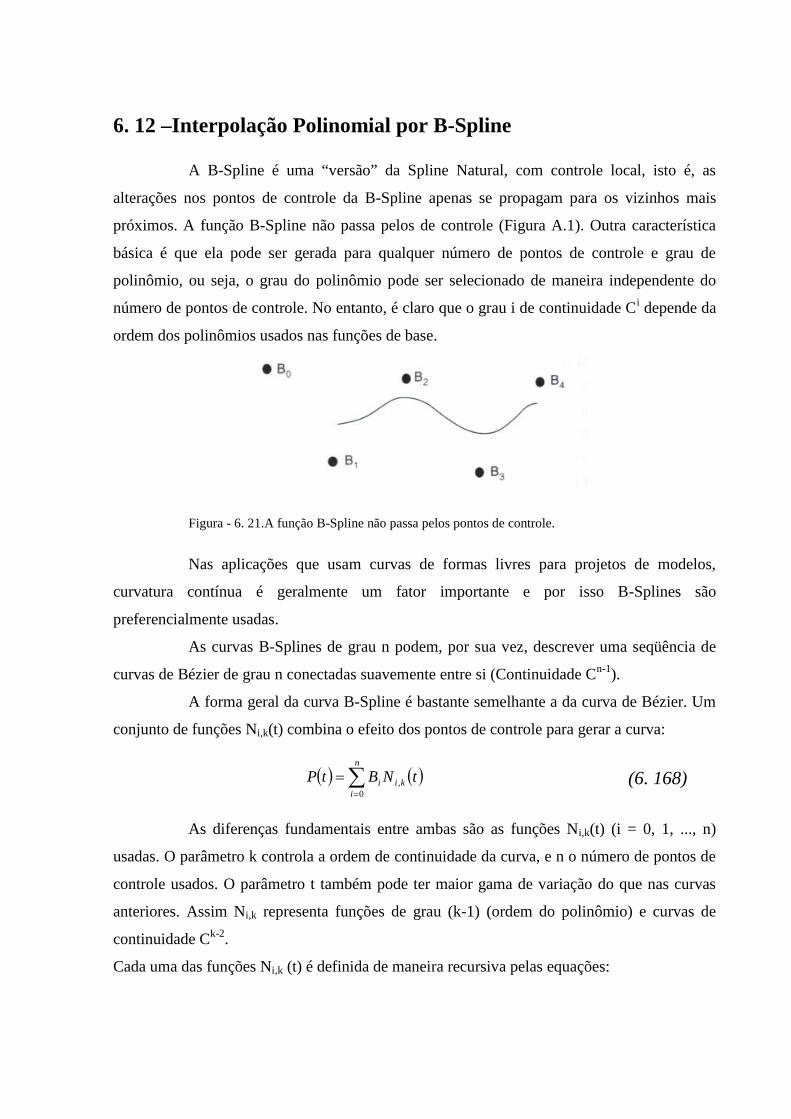
6. 12 –Interpolação Polinomial por B-Spline
A B-Spline é uma “versão” da Spline Natural, com controle local, isto é, as
alterações nos pontos de controle da B-Spline apenas se propagam para os vizinhos mais
próximos. A função B-Spline não passa pelos de controle (Figura A.1). Outra característica
básica é que ela pode ser gerada para qualquer número de pontos de controle e grau de
polinômio, ou seja, o grau do polinômio pode ser selecionado de maneira independente do
número de pontos de controle. No entanto, é claro que o grau i de continuidade Ci depende da
ordem dos polinômios usados nas funções de base.
Figura - 6. 21.A função B-Spline não passa pelos pontos de controle.
Nas aplicações que usam curvas de formas livres para projetos de modelos,
curvatura contínua é geralmente um fator importante e por isso B-Splines são
preferencialmente usadas.
As curvas B-Splines de grau n podem, por sua vez, descrever uma seqüência de
curvas de Bézier de grau n conectadas suavemente entre si (Continuidade Cn-1).
A forma geral da curva B-Spline é bastante semelhante a da curva de Bézier. Um
conjunto de funções Ni,k(t) combina o efeito dos pontos de controle para gerar a curva:
n
ikii tNBtP
0, (6. 168)
As diferenças fundamentais entre ambas são as funções Ni,k(t) (i = 0, 1, ..., n)
usadas. O parâmetro k controla a ordem de continuidade da curva, e n o número de pontos de
controle usados. O parâmetro t também pode ter maior gama de variação do que nas curvas
anteriores. Assim Ni,k representa funções de grau (k-1) (ordem do polinômio) e curvas de
continuidade Ck-2.
Cada uma das funções Ni,k (t) é definida de maneira recursiva pelas equações:
tervalosnosdemaittt
tN iii sin,0
,1 11, (6. 169)
tNtttt
tNtt
tttN ki
iki
kiki
iki
iki 1,1
11,
1,
(6. 170)
Como o denominador pode se tornar zero, usa-se a convenção: 0/0 = 0. Essa formulação
requer a escolha de um conjunto de valores ti chamados nós, que se relacionam ao parâmetro
t. As únicas restrições impostas a esses nós são:
Estejam em ordem não decrescente, ou seja, os valores dos elementos ti devem
satisfazer a relação ti ≤ ti+1;
Um mesmo valor não deve aparecer mais que k vezes, ou seja, não pode surgir mais vezes que
a ordem da Spline usada. Esses valores de nós idênticos são referidos como nós múltiplos, ou
nós em multiplicidade.
Como as curvas de Bézier, as Splines satisfazem também a propriedade de
envoltória convexa. Satisfazem também a propriedade normalizante já que:
n
iki tN
0, 1 (6. 171)
Em uma curva B-Spline, o número de pontos de controle (n+1), o grau (k-1) e o
número de nós estão relacionados. Supondo que estes nós sejam t0, t1, t2 ... tm , essas
características se relacionam pela expressão: m = n + k
Há mais opções para manipular as curvas B-Splines que as curvas de Bézier. Nas
curvas de Bézier, as formas geométricas podem ser alteradas pelos pontos de controle e pelo
grau da curva. Nas curvas B-Splines, além desses dois conjuntos de variáveis, as formas
podem ser afetadas através:
Dos espaçamentos dos intervalos entre ti e ti+1. Quando os espaçamentos forem
iguais, dizemos que são curvas B-Splines uniformes, caso contrário, curvas B-Splines não
uniformes;
Do uso de múltiplos nós no vetor de nós (os nós são geralmente apresentados
como vetores);
Do uso de múltiplos pontos de controles;

Vários aplicativos possuem rotinas para a construção de curvas B-Splines, como
por exemplo:
Maple, um sistema de álgebra computacional comercial de uso genérico que
incorpora o método Bspline;
Adobe Systems, companhia que desenvolve programas de computador e que
explora intensivamente curvas B-Splines;
6. 13 – Exemplos e Aplicações
6.13.1 – Método de Interpolação de Lagrange – Exemplo 1
1) Dada tabela:
Tabela - VI. 3.
x -1 0 2
y 4 1 -1
Obter os polinômios de Lagrange de ordem dois que interpola esses pontos:
Solução
O polinômio de Lagrange de ordem dois é dado por:
)()()()( 22112 xLyxLyxLyxP oo (6. 172)
onde
32
)21)(01()2)(0()(
2 xxxxxLo
(6. 173)
e
)2(21
)20))(1(1()2))(1(()( 2
1
xxxxxL (6. 174)
e
6)02))(1(2()0))(1(()(
2
2xxxxxL
(6. 175)
logo
)2(61)2(
21
3)2(4)( 22
2
2 xxxxxxxP
(6. 176)
Portanto,

137
32)(
2
2 xxxP (6. 177)
6.13.2 – Método de Interpolação de Lagrange – Exemplo 2
2) Sabe-se que a equação 0xx e admite uma raiz no intervalo (0, 1). Determine o valor
dessa raiz utilizando interpolação quadrática (sugestão: utilize os pontos x = 0,
x = 0,5 e x = 1 para determinar o polinômio interpolador) e compare o valor calculado com o
obtido através da solução da equação (utilizando, por exemplo, o método Newton-Raphson).
Solução:
Polinômio Interpolador De Lagrange
Os Polinômios de Lagrange neste caso é dado por:
0
1
2
( 0,5)( 1) 2( 0,5)( 1)(0 0,5)(0 1)
( 1) 4 ( 1)(0,5 0)(0,5 1)( 0)( 0,5) 2 ( 0,5)(1 0)(1 0,5)
x xL x x
x xL x x
x xL x x
(6. 178)
donde:
22
2
( ) 1.(2).( 0,5)( 1) 0,10653066.( 4). ( 1) 0,632120559.(2). ( 0,5)
( ) 0,309636. 1,941757. 1
p x x x x x x xp x x x
(6. 179)
Resolvendo a equação acima, obtém-se a raiz 0x = 0,5661 compreendida no intervalo (0, 1).
Newton-Raphson
Seja a função:
( ) xf x x e (6. 180)
A derivada da função:
( ) 1 xf x e (6. 181)

O valor do extremo inferior do intervalo: a = 0 e o valor do extremo superior do intervalo: b =
1 com precisão: E = .0001 e valor inicial de x: 1 0,5x .
Tabela - VI. 4.
i x1 |f(x1)| x2 |f(x2)| |x2-x1|
1 0,500000 0,106531 0,566311 0,001305 0,066311
2 0,566311 0,001305 0,567143 1,96E-07 0,000832
O zero da função: 0x = 0,567143 para um número de iterações: k = 2 e erro em x: e =
0,000832.
Existe uma diferença igual a 0,001043 entre o valor encontrado resolvendo a
equação interpoladora de Lagrange e o valor encontrado pelo método de Newton-Raphson.
6.13.3 – Método de Interpolação – Exemplo 3
3) Dada a tabela
Tabela - VI. 5.
X -1 0 1 3
f(x) a b c d
Seja ( )np x o polinômio que interpola f(x) em -1, 0, 1 , 3. Imponha condições sobre a, b, c, d
para que se tenha n = 2.
Solução:
Como são dados quatro pontos, para que possamos determinar os coeficientes de
um polinômio de interpolação, este deverá ser de grau três, pois possui quatro coeficientes:
2 33 0 1 2 3( ) . . .p x a a x a x a x (6. 182)
Impondo a condição de que as coordenadas dos pontos dados satisfaçam a expressão do
polinômio, obtemos um sistema de quatro equações com quatro incógnitas, 0 1 2 3, , ,a a a a .
3 0 1 2 3
3 0
3 0 1 2 3
3 0 1 2 3
( 1)(0)(1)(3) 3 9 27
p a a a a ap a bp a a a a cp a a a a d
(6. 183)
Sendo 0a b , subtraímos a terceira equação multiplicada por 3 da quarta equação, e obtemos:
2 32 6 24 3b a a d c (6. 184)
Somando a primeira equação com a terceira:
22 2b a a c (6. 185)
donde
2 1/ 2( 2 )a a c b (6. 186)
Substituindo na equação obtida anteriormente:
32 3 3 6 24 3b a c b a d c (6. 187)
e
33 8 6 24a b c d a (6. 188)
Para que tenhamos n = 2, é preciso que 3 0a ; portanto deve-se ter:
3 8 6 0a b c d (6. 189)
que é a condição solicitada.
Como exemplo, se tomarmos b = 0, c = 1 e d = 0, resulta: 3a + 6 = 0, donde: a
= 2 , e
1 2
1 2
21
a aa a
(6. 190)
Resolvendo, encontramos: 2 0,5a e 1 1,5a ; donde:
22 ( ) 1,5 0,5p x x x (6. 191)
é o polinômio interpolador procurado.
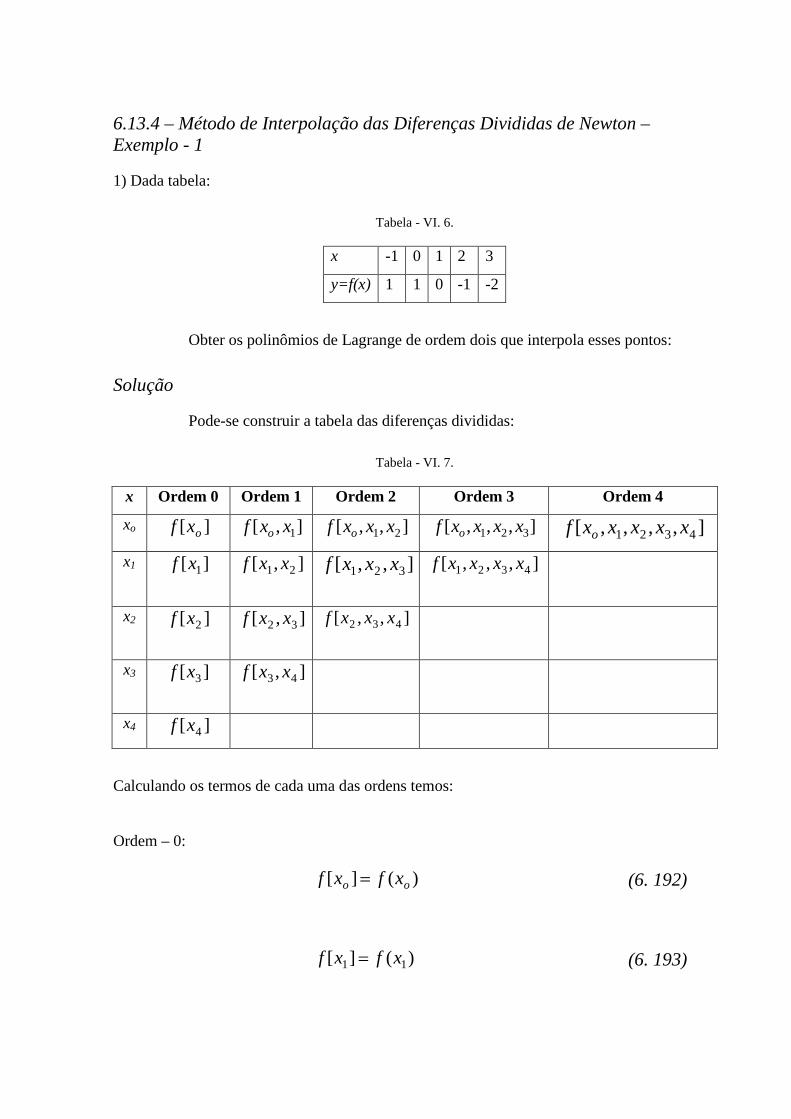
6.13.4 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 1
1) Dada tabela:
Tabela - VI. 6.
x -1 0 1 2 3
y=f(x) 1 1 0 -1 -2
Obter os polinômios de Lagrange de ordem dois que interpola esses pontos:
Solução
Pode-se construir a tabela das diferenças divididas:
Tabela - VI. 7.
x Ordem 0 Ordem 1 Ordem 2 Ordem 3 Ordem 4
xo ][ oxf ],[ 1xxf o ],,[ 21 xxxf o ],,,[ 321 xxxxf o ],,,,[ 4321 xxxxxf o
x1 ][ 1xf ],[ 21 xxf ],,[ 321 xxxf
],,,[ 4321 xxxxf
x2 ][ 2xf ],[ 32 xxf
],,[ 432 xxxf
x3 ][ 3xf ],[ 43 xxf
x4 ][ 4xf
Calculando os termos de cada uma das ordens temos:
Ordem – 0:
)(][ oo xfxf (6. 192)
)(][ 11 xfxf (6. 193)
)(][ 22 xfxf (6. 194)
)(][ 33 xfxf (6. 195)
)(][ 44 xfxf (6. 196)
Ordem – 1:
o
oo xx
xfxfxxf
1
11
)()(],[ (6. 197)
12
1221
)()(],[xx
xfxfxxf
(6. 198)
23
2332
)()(],[xx
xfxfxxf
(6. 199)
34
3443
)()(],[xx
xfxfxxf
(6. 200)
Ordem – 2:
o
oo xx
xxfxxfxxxf
2
12121
],[],[],,[ (6. 201)
13
2132321
],[],[],,[xx
xxfxxfxxxf
(6. 202)
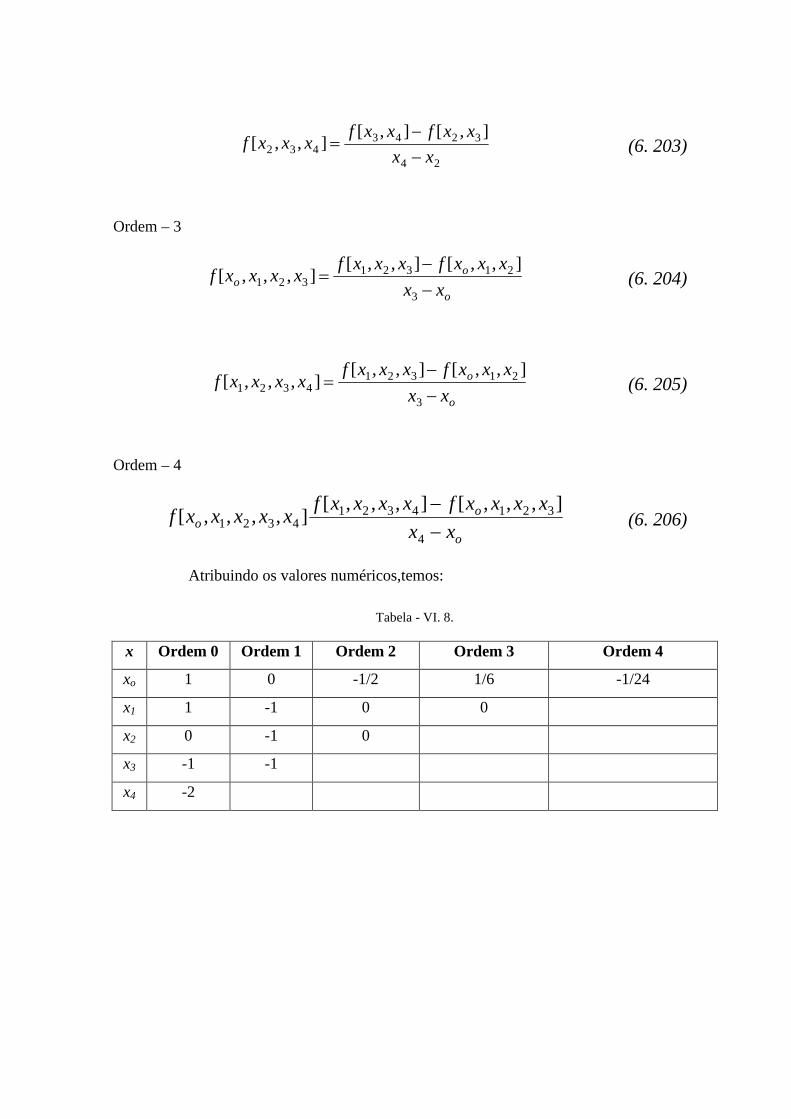
24
3243432
],[],[],,[
xxxxfxxfxxxf
(6. 203)
Ordem – 3
o
oo xx
xxxfxxxfxxxxf
3
21321321
],,[],,[],,,[ (6. 204)
o
o
xxxxxfxxxfxxxxf
3
213214321
],,[],,[],,,[ (6. 205)
Ordem – 4
o
oo xx
xxxxfxxxxfxxxxxf
4
32143214321
],,,[],,,[],,,,[ (6. 206)
Atribuindo os valores numéricos,temos:
Tabela - VI. 8.
x Ordem 0 Ordem 1 Ordem 2 Ordem 3 Ordem 4
xo 1 0 -1/2 1/6 -1/24
x1 1 -1 0 0
x2 0 -1 0
x3 -1 -1
x4 -2

6.13.5 – Análise do Erro no Método das Diferenças Divididas – Exemplo - 1
1) Utilizar a forma de Newton para interpolar )(xf nos pontos dados:
Tabela - VI. 9.
x -1 0 2
y = f(x) 4 1 -1
Solução
Como 2n , temos:
],,[))((],[)()()( 21112 xxxfxxxxxxfxxxfxP ooooo (6. 207)
Determinação das diferenças divididas:
Tabela - VI. 10.
x Ordem 0 Ordem 1 Ordem 2
-1 4 -3 2/3
0 1 -1
2 -1
Assim:
32))1())(1(()3))(1((4)(2 xxxxxP (6. 208)
xxxxP32
32334)( 2
2 (6. 209)
137
32)( 2
2 xxxP (6. 210)
6.13.6 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 2
2) Obter o valor de )7,3ln( por interpolação linear da tabela:
Tabela - VI. 11.
x 1 2 3 3,7 4
ln(x) 0,0000 0,6931 1,0986 ?????? 1,3863
Solução
Como ]4;3[7,3 x , adota-se 3ox e 41 x . Pela forma de Newton, temos:
],[)(][)( 11 xxfxxxfxP ooo (6. 211)
Calculando as diferenças divididas temos:
0986,1][ oxf (6. 212)
2877,0)()(],[1
11
o
oo xx
xfxfxxf (6. 213)
Logo
]4;3[/2355,02877,02877,0)3(0986,1)(1
xpxxxP
(6. 214)
Logo
3000,1)7,3(1 P (6. 215)
Se for adotado um polinômio do segundo grau:
],,[))((],[)(][)( 21112 xxxfxxxxxxfxxxfxP ooooo (6. 216)
Pode-se adotar 3;2 1 xxo e 42 x para calcular as diferenças divididas:
Ordem – 0:
6931,0)(][ oo xfxf (6. 217)
Ordem – 1:
4055,0)()(],[1
11
o
oo xx
xfxfxxf (6. 218)
2877,0)()(],[12
1221
xx
xfxfxxf (6. 219)
Ordem – 2:
0589,024
4055,02877,0],,[
],[],[],,[
21
2
12121
xxxf
xxxxfxxfxxxf
o
o
oo
(6. 220)
Logo
)0589,0)(3)(2(4055,0)2(6931,0)(2 xxxxP (6. 221)
4713,07000,00589,0)( 22 xxxP (6. 222)
Portanto,
3124,1)7,3(2 P (6. 223)
onde os erros para a:
i) Interpolação linear:
00083,0)7,3()7,3ln( 1 P (6. 224)
ii) Interpolação quadrática:
004,0)7,3()7,3ln( 2 P (6. 225)

6.13.7 – Cálculo dos Limitantes do Erro – Exemplo - 1
i) Para a Interpolação linear:
]4;3[;2
)('')4)(3(2
)(''))(()( 11 fxxfxxxxxR o (6. 226)
Se
xxfxxf 1)('ln)( e 2
1)(''x
xf (6. 227)
Logo
]4;3[;1050,0)(;)4)(3(21)( 2121
xRxxxR (6. 228)
Para delimitar o erro, adota-se:
0117,031050,0)7,3( 21 R (6. 229)
Comparando-se com o erro de o 0,0083 este é um resultado coerente.
ii) Para a Interpolação quadrática:
]4;2[;2
)('')4)(3)(2(
2)(''))()(()( 212
fxxx
fxxxxxxxR o (6. 230)
Se
xxfxxf 1)('ln)( e 2
1)(''x
xf e 32)('''x
xf (6. 231)
Logo
332)4)(3)(2
31
62)4)(3)(2()(
xxxxxxxR (6. 232)
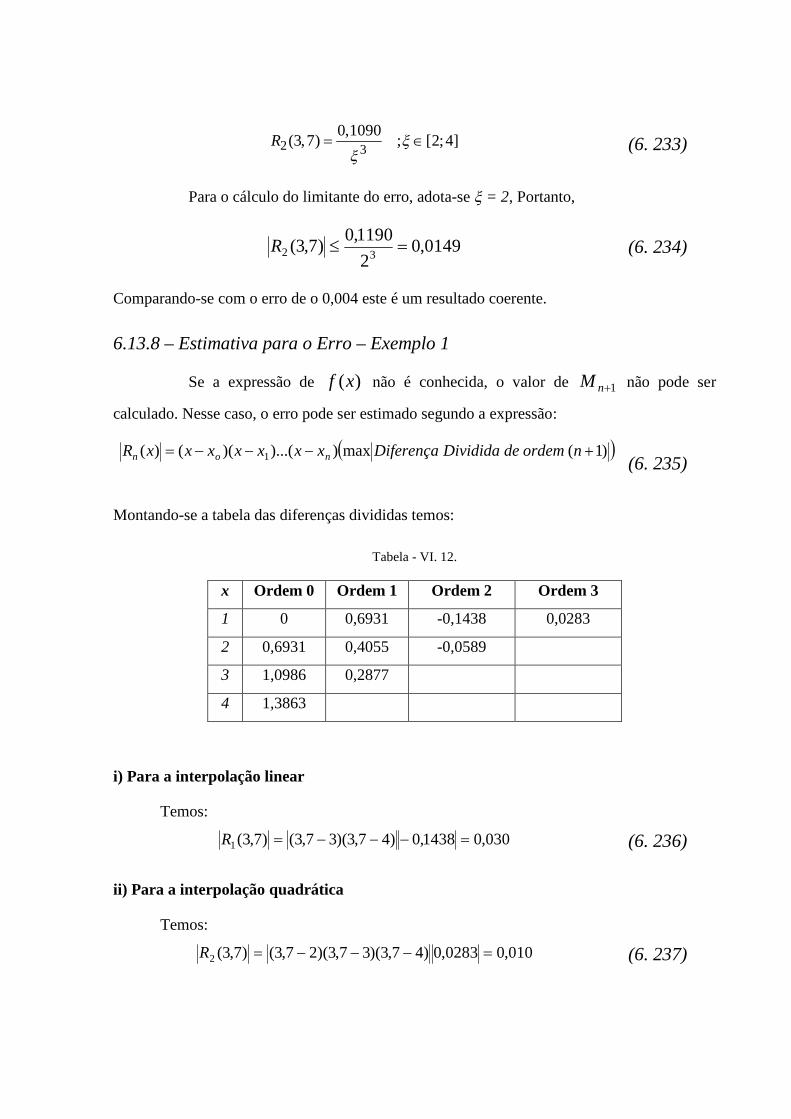
2 30,1090(3,7) ; [2;4]R
(6. 233)
Para o cálculo do limitante do erro, adota-se = 2, Portanto,
0149,021190,0)7,3( 32 R (6. 234)
Comparando-se com o erro de o 0,004 este é um resultado coerente.
6.13.8 – Estimativa para o Erro – Exemplo 1
Se a expressão de )(xf não é conhecida, o valor de 1nM não pode ser
calculado. Nesse caso, o erro pode ser estimado segundo a expressão:
)1(max))...()(()( 1 nordemdeDivididaDiferençaxxxxxxxR non
(6. 235)
Montando-se a tabela das diferenças divididas temos:
Tabela - VI. 12.
x Ordem 0 Ordem 1 Ordem 2 Ordem 3
1 0 0,6931 -0,1438 0,0283
2 0,6931 0,4055 -0,0589
3 1,0986 0,2877
4 1,3863
i) Para a interpolação linear
Temos:
030,01438,0)47,3)(37,3()7,3(1 R (6. 236)
ii) Para a interpolação quadrática
Temos:
010,00283,0)47,3)(37,3)(27,3()7,3(2 R (6. 237)
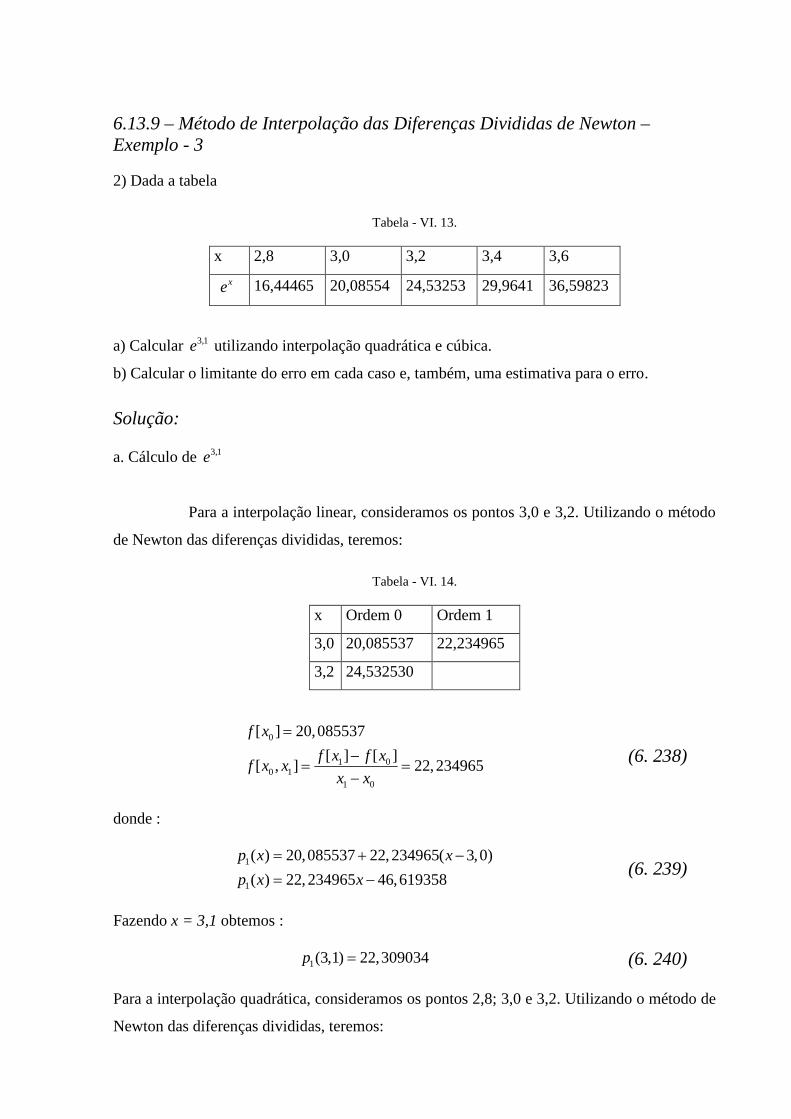
6.13.9 – Método de Interpolação das Diferenças Divididas de Newton – Exemplo - 3
2) Dada a tabela
Tabela - VI. 13.
x 2,8 3,0 3,2 3,4 3,6
xe 16,44465 20,08554 24,53253 29,9641 36,59823
a) Calcular 3,1e utilizando interpolação quadrática e cúbica.
b) Calcular o limitante do erro em cada caso e, também, uma estimativa para o erro.
Solução:
a. Cálculo de 3,1e
Para a interpolação linear, consideramos os pontos 3,0 e 3,2. Utilizando o método
de Newton das diferenças divididas, teremos:
Tabela - VI. 14.
x Ordem 0 Ordem 1
3,0 20,085537 22,234965
3,2 24,532530
0
1 00 1
1 0
[ ] 20,085537[ ] [ ][ , ] 22,234965
f xf x f xf x x
x x
(6. 238)
donde :
1
1
( ) 20,085537 22, 234965( 3,0)( ) 22, 234965 46,619358
p x xp x x
(6. 239)
Fazendo x = 3,1 obtemos :
1(3,1) 22,309034p (6. 240)
Para a interpolação quadrática, consideramos os pontos 2,8; 3,0 e 3,2. Utilizando o método de
Newton das diferenças divididas, teremos:
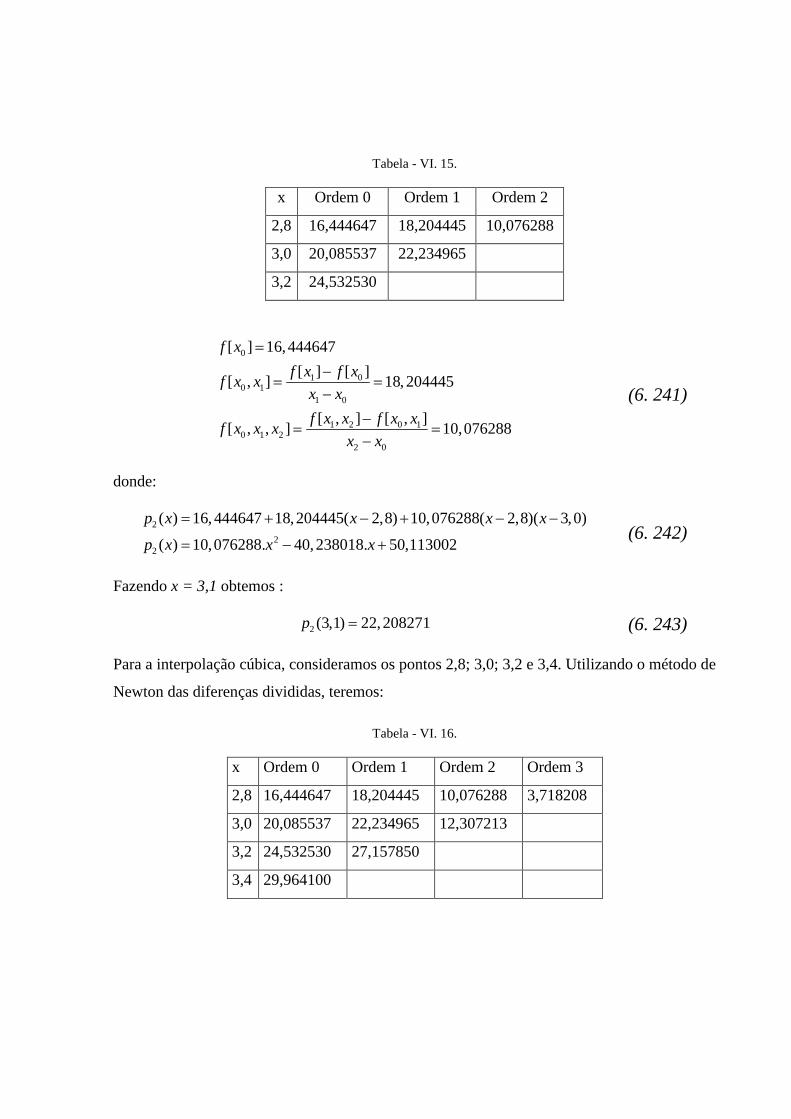
Tabela - VI. 15.
x Ordem 0 Ordem 1 Ordem 2
2,8 16,444647 18,204445 10,076288
3,0 20,085537 22,234965
3,2 24,532530
0
1 00 1
1 0
1 2 0 10 1 2
2 0
[ ] 16,444647[ ] [ ][ , ] 18, 204445
[ , ] [ , ][ , , ] 10,076288
f xf x f xf x x
x xf x x f x xf x x x
x x
(6. 241)
donde:
22
2
( ) 16, 444647 18,204445( 2,8) 10,076288( 2,8)( 3,0)
( ) 10,076288. 40,238018. 50,113002
p x x x x
p x x x
(6. 242)
Fazendo x = 3,1 obtemos :
2 (3,1) 22,208271p (6. 243)
Para a interpolação cúbica, consideramos os pontos 2,8; 3,0; 3,2 e 3,4. Utilizando o método de
Newton das diferenças divididas, teremos:
Tabela - VI. 16.
x Ordem 0 Ordem 1 Ordem 2 Ordem 3
2,8 16,444647 18,204445 10,076288 3,718208
3,0 20,085537 22,234965 12,307213
3,2 24,532530 27,157850
3,4 29,964100

0
1 00 1
1 0
1 2 0 10 1 2
2 0
1 2 3 0 1 20 1 2 3
3 0
[ ] 16,444647[ ] [ ][ , ] 18,204445
[ , ] [ , ][ , , ] 10,076288
[ , , ] [ , , ][ , , , ] 3,718208
f xf x f xf x x
x xf x x f x xf x x x
x xf x x x f x x xf x x x x
x x
(6. 244)
donde :
3
3 23
( ) 16, 444647 18, 204445( 2,8) 10, 076288( 2,8)( 3, 0)3, 718208( 2,8)( 3, 0)( 3, 2)( ) 3, 679792. 23, 01875. 58,826008. 48,57811
p x x x xx x x
p x x x x
(6. 245)
Fazendo x = 3,1 obtemos :
3(3,1) 22,197002p (6. 246)
O verdadeiro valor é: 3,1 22,197951e .
b. Limitante do erro em cada caso
i) Interpolação linear:
Como ( ) xf x e , tomamos 3,0( ) 20,085537f e e
3( ) ( 3,0)( 3,2)2!eR x x x
(6. 247)
320,085537| (3,1) | (0,1)( 0,1) 0,100428
2R (6. 248)
ii) Interpolação quadrática:
Como
( ) xf x e (6. 249)
tomamos
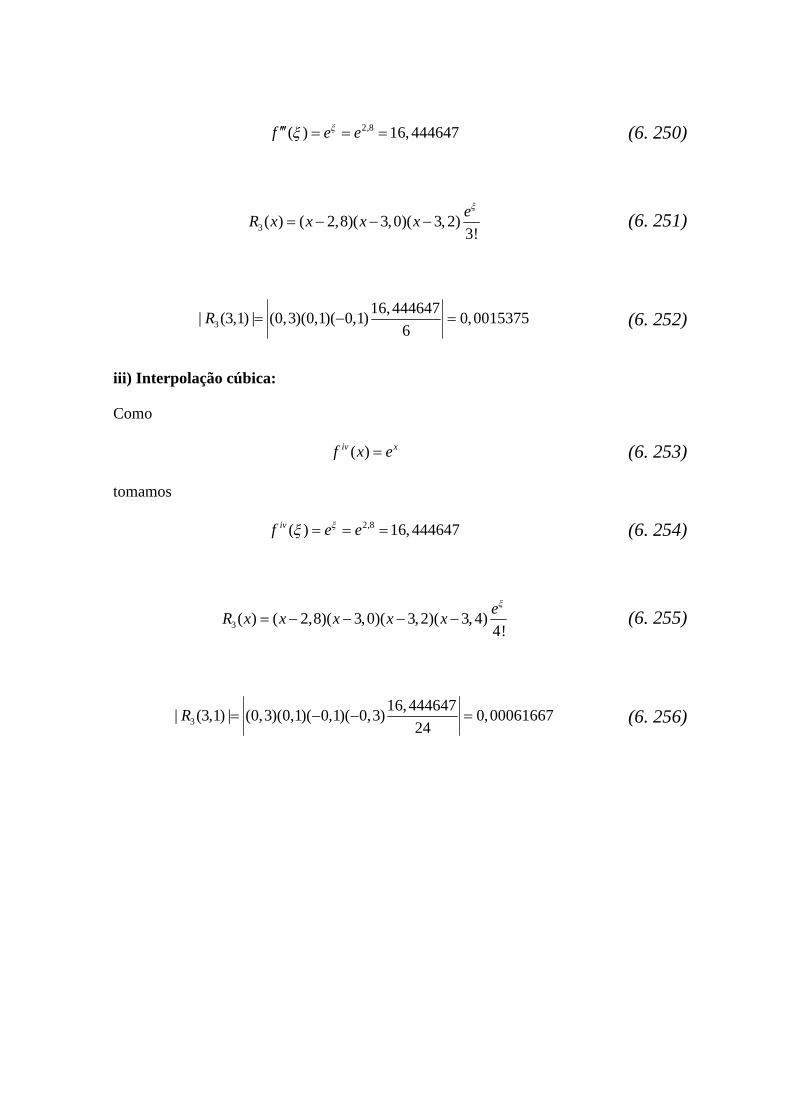
2,8( ) 16, 444647f e e (6. 250)
3( ) ( 2,8)( 3,0)( 3, 2)3!eR x x x x
(6. 251)
316,444647| (3,1) | (0,3)(0,1)( 0,1) 0,0015375
6R (6. 252)
iii) Interpolação cúbica:
Como
( )iv xf x e (6. 253)
tomamos
2,8( ) 16, 444647ivf e e (6. 254)
3( ) ( 2,8)( 3,0)( 3,2)( 3, 4)4!eR x x x x x
(6. 255)
316,444647| (3,1) | (0,3)(0,1)( 0,1)( 0,3) 0,00061667
24R (6. 256)

6.13.10 - Exemplo de Interpolação do Método de Bernstein - 1
6.13.11 - Exemplo de Interpolação do Método de Hermite - 1
Use o polinômio de Hermite que concorda com os dados relacionados na tabela
para encontrar uma aproximação para f(1,5).
Tabela - VI. 17.
k kx ( )kf x '( )kf x
0 1,3 0,6200860 -0,5220232
1 1,6 0,4554022 -0,5698954
2 1,9 0,2818186 -0,5811571
Solução
2(2) 1 0 2,0 1 2,1 2 2,2
0 2,0 1 2,1 2 2,2
( ) ( ) ( ) ( ) ( ) ( ) ( )ˆ ˆ ˆ'( ) ( ) '( ) ( ) '( ) ( )
H x f x H x f x H x f x H x
f x H x f x H x f x H x
(6. 257)
Inicialmente vamos calcular , ( )n jL x e ,' ( )n jL x .
i) Logo:
1 22,0
0 1 0 2
( )( )( )( )( )
x x x xL xx x x x
(6. 258)
Substituindo os valores temos:
2,0( 1,6)( 1,9)( )
(1,3 1,6)(1,3 1,9)x xL x
(6. 259)
Ou
2
2,050 175 152( )
9 9 9x xL x (6. 260)
e
2
2,0100 175' ( )
9 9x xL x (6. 261)
ii)
0 22,1
1 0 1 2
( )( )( )( )( )
x x x xL xx x x x
(6. 262)
2
2,1100 320 247( )
9 9 9x xL x (6. 263)
e
2
2,1200 320' ( )
9 9xL x (6. 264)
iii)
0 12,2
2 0 2 1
( )( )( )( )( )
x x x xL xx x x x
(6. 265)
2
2,250 145 104( )
9 9 9x xL x (6. 266)
e
2
2,2100 145' ( )
9 9xL x (6. 267)
Calculando os , ( )n jH x temos:
i)
22,0 0 2,0 0 2,0( ) 1 2( ) ' ( ) ( )H x x x L x L x (6. 268)
e
22
2,0100 175 50 175 152( ) 1 2( 1,3) (1,3)
9 9 9 9 9x xH x x
(6. 269)
22
2,0
22
2,0
50 175 152( ) 1 2( 1,3) 59 9 9
50 175 152( ) 1 (10 12)9 9 9
x xH x x
x xH x x
(6. 270)
ii)
22,1 1 2,1 1 2,1( ) 1 2( ) ' ( ) ( )H x x x L x L x (6. 271)
e
22
2,1200 320 100 320 247( ) 1 2( 1,6) (1,6)9 9 9 9 9
x xH x x
(6. 272)
22
2,1
22
2,1
100 320 247( ) 1 2( 1,6) 09 9 9
200 320 247( ) 19 9 9
x xH x x
x xH x
(6. 273)
iii)
22,2 2 2,2 2 2,2( ) 1 2( ) ' ( ) ( )H x x x L x L x (6. 274)
e
22
2,2100 145 500 145 104( ) 1 2( 1,9) (1,9)
9 9 9 9 9x xH x x
(6. 275)
22
2,2
22
2,2
50 145 104( ) 1 2( 1,9) 59 9 9
50 145 104( ) 1 (10 16)9 9 9
x xH x x
x xH x x
(6. 276)
Calculando os ,ˆ ( )n jH x temos:\
i)
22,0 0 2,0
ˆ ( ) ( ) ( )H x x x L x (6. 277)
e
22
2,050 175 152ˆ ( ) ( 1,3)
9 9 9x xH x x
(6. 278)
ii)
22,1 1 2,1
ˆ ( ) ( ) ( )H x x x L x (6. 279)
e
22
2,1100 320 247ˆ ( ) ( 1,6)
9 9 9x xH x x
(6. 280)
iii)
22,2 2 2,2
ˆ ( ) ( ) ( )H x x x L x (6. 281)
e
22
2,250 145 104ˆ ( ) ( 1,9)
9 9 9x xH x x
(6. 282)
Substituindo o valor 1,5x temos:
22
2(2) 1
22
22
22
50 175 152( ) 0,6200860 1 (10 12)9 9 9
200 320 2470,4554022 19 9 9
50 145 1040,2818186 1 (10 16)9 9 9
50 175 1520,5220232( 1,3)9 9 9
x xH x x
x x
x xx
x xx
22
22
100 320 2470,5698954( 1,6)9 9 9
50 145 1040,5811571( 1,9)9 9 9
x xx
x xx
(6. 283)
Logo
5(1,5) 0,5118277H (6. 284)

6.13.12 - Exemplo de Interpolação do Método de Hermite - 2
Use o polinômio de Hermite que concorda com os dados relacionados na tabela
para encontrar uma aproximação para f(1,5).
Tabela - VI. 18.
x ( ) lnf x x 1'( )f xx
1 0 1
2 0,693 0,5
Solução
3 0 0 1 0 0 1 2 0 1
0 1 2 3 0 1 2
( ) [ ] [ , ]( ) [ , , ]( )( )[ , , , ]( )( )( )
H x f z f z z x z f z z z x z x zf z z z z x z x z x z
(6. 285)
Construindo a tabela temos:
Tabela - VI. 19.
x Ordem 0 Ordem 1 Ordem 2 Ordem 3
x [ ]f z 2 0 2 1 1[ , ]i if z z 2 2 1 2 2[ , , ]i i if z z z
2 2 1 2 2 2 3[ , , , ]i i i if z z z z
0 0 1z x 0[ ] 0f z 1[ , ] 1of z z 1 2 3[ , , ] 0,3068f z z z
1 2 3[ , , , ] 0,1137of z z z z
1 0 1z x 1[ ] 0f z 1 2[ , ] 0,693f z z
1 2 3[ , , ] 0,1931f z z z ],,,[ 4321 xxxxf
2 1 2z x 2[ ] 0,693f z 2 3[ , ] 0,5f z z
3 1 2z x 3[ ] 0,693f z
Logo
3( ) 0 1( 1) 0,3068( 1)( 1) 0,1137( 1)( 1)( 2)H x x x x x x x (6. 286)
Portanto,
3( 1,5) 0 1(1,5 1) 0,3068(1,5 1)(1,5 1)0,1137(1,5 1)(1,5 1)(1,5 2)
H x
(6. 287)
e

3( 1,5) 0,4090H x (6. 288)

6. 14 – Exercícios e Problemas
6.14.1 - Trabalho para casa
Dado pontos igualmente espaçados do tipo:
)(),(),(),(),( 22
11
11
22
n
nn
nn
nn
nn
n tfutfutfutfutfu (6. 289)
Encontre o polinômio de Lagrange do 3º grau dado por:
...)()()()()( 2
21
11
13 tLutLutLutLutP n
nn
nn
nn
n (6. 290)
e as suas derivadas de primeira
?)(?)(
1
33 nn tttt dt
tdPdt
tdP (6. 291)
e segunda ordens
?)(?)(
1
23
2
23
2
nn tttt dt
tPddt
tPd (6. 292)
E depois substitua na seguinte equação
1111 ~~~~ nnnn FuKuCuM (6. 293)
o qual dará origem ao método de Houbolt.
Se você se empolgar com o problema encontre o polinômio do 4º grau )(4 tP .
Capítulo VII
MÉTODOS DE AJUSTE DE CURVAS
RESUMO
7. 1 - Objetivos do Capítulo
7. 2 - Introdução

7. 3 – Método dos Mínimos Quadrados
(7. 1)

7. 4 - Exemplos e Aplicações

7. 5 - Exercícios e Problemas
Capítulo VIII
INTEGRAÇÃO NUMÉRICA
RESUMO
8. 1 -Objetivos do Capítulo
8. 2 - Introdução

8. 3 – Integração Numérica
Se uma função f(x) é contínua em um intervalo [a;b], então, se existe uma função
F(x) tal que F’(x) = f(x), essa função é denominada primitiva de f(x) e a integral definida de
f(x) em [a;b] é calculada como:
( ) ( ) ( )b
af x dx F b F a (8. 1)
No entanto, há situações nas quais a primitiva não pode ser determinada, por exemplo:
2 ( );b bxa a
sen xe dx dxx
(8. 2)
Para essas situações, deve-se recorrer aos métodos numéricos para se obter uma aproximação
para a integral de f(x).
Para simplificar os cálculos e empregar um procedimento padrão para a integração
numérica substitui-se a função a ser integrada por um polinômio que a aproxime no intervalo
[a;b] ou nos subintervalos resultantes da divisão do intervalo original em intervalos menores.
Figura - 8. 1. Processo de integração numérica.
A integração é substituída por expressões denominadas fórmulas de Newton-
Cotes, do tipo:
00 0 1 1 2 2( ) ( ) ( ) ( )... ( )nx
n nxf x dx C f x C f x C f x C f x (8. 3)
Onde 0 1 .... na x x x b (as fórmulas são chamadas fórmulas fechadas).
Se o intervalo de integração é dividido em intervalos de mesmo comprimento, os
coeficientes Ci são determinados de acordo como o grau do polinômio interpolador. Se, em
cada subintervalo, a função f(x) é substituída por um segmento linear, obtém-se a regra do
trapézio, por outro lado, se em cada par de subintervalos a função é aproximada por uma
parábola, obtém-se a regra de Simpson.

8. 4 – Método do Trapézio para a Integração
No método do trapézio cada subintervalo 1[ , ]i ix x define um trapézio de base
1i ib aw x x
n
, altura do lado esquerdo 1( )if x e altura do lado direito ( )if x .
Admite-se, portanto, que f(x) varia linearmente em 1[ , ]i ix x . A área do trapézio é
1( ) ( )2i i iwA f x f x (8. 4)
A área total dos n trapézios é a aproximação trapezoidal da integral e é igual a
1
n
n ii
T A
(8. 5)
Ou
0 1 1 2 1( ) ( ) ( ) ( ) ... ( ) ( )2 2 2n n nw w wT f x f x f x f x f x f x (8. 6)
Ou ainda
0 1 1 2 1( ) ( ) ( ) ( ) .. ( ) ( )2 2n n nw wT f x f x f x f x f x f x
(8. 7)
Relativamente a expressão geral de Newton-Cotes:
0 1 2 1; ... ;2 2n nw wC C C C w C (8. 8)
8.4.1 - Erro no Método do Trapézio
Considerando o i-ésimo trapézio
1( ) ( )2i i iwA f x f x (8. 9)
Se F(x) for a primitiva da função f(x), o valor exato da integral entre 1ix e ix será:
11( ) ( ) ( )i
i
xi ix
f x dx F x F x
(8. 10)

O erro de integração cometido no intervalo 1[ ; ]i ix x é
i i iE A I (8. 11)
Empregando a Série de Taylor para obtenção de 1( )if x em função dos valores de f(x) e de
suas derivadas em ix , pode-se escrever:
21
1 1"( )( )( ) ( ) '( )( ) ...
2!i i i
i i i i if x x xf x f x f x x x
(8. 12)
Como 1i iw x x
2
1"( )( ) ( ) '( ) ...
2!i
i i if x wf x f x f x w (8. 13)
Portanto
2 3
1'( ) "( )[ ( ) ( )] ( ) ...
2 2 3!i
i i i iw f xi w f x wA f x f x f x w (8. 14)
Da mesma maneira, pode-se calcular F(xi-1) em função dos valores de F(x) e de
suas derivadas em xi:
2 31 1
1 1"( )( ) "'( )( )( ) ( ) '( )( )
2! 3!i i i i i i
i i i i iF x x x F x x xF x F x F x x x
(8. 15)
Como F(x) é uma primitiva de f(x), então:
( ) '( ); '( ) "( ); "( ) "'( )f x F x f x F x f x F x (8. 16)
Substituindo (13) em (12)
2 3
1'( ) "( )( ) ( ) ( ) ...
2! 3!i i
i i if x w f x wF x F x f x w (8. 17)
Assim
2 3
1'( ) "( )( ) ( ) ( ) ...
2! 3!i i
i i i if x w f x wI F x F x f x w (8. 18)
O erro Ei é igual a

2 3 2 3'( ) "( ) '( ) "( )( ) [ ( ) ..]2! 3! 2! 3!
i i i ii i i i i
f x w f x w f x w f x wE A I f x w f x w (8. 19)
Simplificando temos:
3 1 1"( ) ( )4 6i iE f x w termos em w4,w5,etc (8. 20)
Desprezando os termos em w4,w5,etc , o erro cometido na integração do i-ésimo
trapézio será:
3
"( )12i iwE f x (8. 21)
Se, para todo x [a;b] a condição "( )f x M for válida, então:
3
12iwE M (8. 22)
Somando os erros cometidos na integração de cada trapézio, o erro máximo total,
igual a soma dos erros é:
3 2 2
. ( )12 12 12iw w wE n M nw M b a M (8. 23)
Portanto, o erro de integração no Método do Trapézio, é proporcional a w2 ou inversamente
proporcional a n2.
8.4.1 - Exemplo
a) Calcular
0,5
0xe dx (8. 24)
empregando dez sub-intervalos
b) Estimar o erro cometido
c) Calcular o número de subintervalos para que o erro seja inferior a 10-6

8. 5 – Método de Integração de Simpson
O Método de Simpson substitui a função a ser integrada por uma série de
segmentos parabólicos. Se a integração for efetuada no intervalo [A;B] e uma única parábola
for adotada para aproimar a função pode-se adotar o ponto médio do intervalo
2a b
c
,
como o terceiro ponto para a definição da parábola. Assim, os pontos
, , , , ,A f A B f B C f C definem uma única parábola:
2y x x (8. 25)
A área sob a parábola pode ser calculada com o emprego de uma fórmula equivalente à do
método do trapézio:
. ( ) . ( ) . ( )A P f a Q f b R f c (8. 26)
Os valores de P, Q, e R podem ser determinados a partir da equação da parábola
que passa pelos pontos A,B e C. Alternativamente, levando-se em conta que o Método de
Simpson deve fornecer respostaas exatas para qualquer f(x) que seja uma parábola,
consequemente irá fornecer respostas exatas para qualquer f(x) que seja um polinômio de grau
menor do que dois, isto é, para as funções constante e linear.
Pode-se afirmar, então que as funções, f(x) = x e f(x) = x2 e f(x) = 1 são integradas
exatamente com o emprego da equação (8. 26). Dessa maneira, os coeficientes P, Q, R são
determinados.
( ) . ( ) . ( ) . ( )b
a
f x dx P f a Q f b R f c (8. 27)
Fazendo , , 0a w b w c e:
i) Para ( ) 1f x ,
1 2 .1 .1 .1w
w
dx w P Q R
(8. 28)
ii) Para ( )f x x

0 .( ) .( ) .(0)w
w
xdx P w Q w R
(8. 29)
ii) Para 2( )f x x
32 2 2 22 .( ) .( ) .(0)
3
w
w
wx dx P w Q w R
(8. 30)
Agrupando as equações anteriores temos:
ii) Para ( )f x x
2 2 3
1 1 1 20 0
0 23
P ww w Q
Rw w w
(8. 31)
Resolvendo o Sistema:
4e3 3w wP Q R (8. 32)
Portanto, no Método de Simpson
( ) 4 ( ) ( )3swA f a f c f b (8. 33)
De uma maneira geral, divide-se o intervalo de integração em um número par de
sub-intervalos.
A área entre 1,i ix x e 1ix é dada por:
1 112
( ) 4 ( ) ( )3 i i iiwA f x f x f x
(8. 34)
A área total será:
1 3 1
2 4 2
( ) ( ) 4 ( ) ( ) ... ( )3 2 ( ) ( ) ... ( )
o n nn
n
f x f x f x f x f xwSf x f x f x
(8. 35)

Em relação à expressão geral da fórmula de Newton-Cotes temos:
1 3 1 2 4 24; ... ; ...
3 3 3o n n nw w wC C C C C C C C (8. 36)
8.5.1 - Erro no Método de Simpson
Considerando dois intervalos 1,i ix x e 1,i ix x
1 112
( ) 4 ( ) ( )3 i i iiwA f x f x f x
(8. 37)
Se ( )F x é a primitiva de ( )f x , o valor exato da integral entre 1ix e ix é dado
por:
1
1
1 112
( )i
i
x
i iix
I f x F x F x
(8. 38)
O erro de corrente do emprego do método de Simpson é:
1 1 12 2 2
i i iE A I
(8. 39)
Desenvolvendo 1if x e 1if x em Série de Taylor em torno de xi:
21 1 1
31
''( )( ) ( ) '( )( ) ( )2!
'''( ) ( ) ...3!
ii i i i i i i
ii i
f xf x f x f x x x x x
f x x x
(8. 40)
ou
2 3 41
''( ) '''( ) ''''( )( ) ( ) '( ) ...2! 3! 4!
i i ii i i
f x f x f xf x f x f x w w w w (8. 41)
e
2 3 41
''( ) '''( ) ''''( )( ) ( ) '( ) ...2! 3! 4!
i i ii i i
f x f x f xf x f x f x w w w w (8. 42)

Susbtituindo (8. 41) e (8. 42) na Fórmula de Simpson, as Derivadas ímpares se anulam
2 4
12
6 ( ) 2 ''( ) ( ) ...3 2! 4!i i iiw w wA f x f x f x
(8. 43)
Ou
3 5
12
12 ( ) 2 ''( ) 2 ( ) ...3! 4! 3i i iiw wA f x w f x f x
(8. 44)
Desenvolvendo 1iF x e 1iF x em Série de Taylor em torno de xi:
21
3 4 5
''( )( ) ( ) '( )2!
'''( ) ( ) ( ) ...3! 4! 5!
ii i i
IV Vi i i
F xF x F x F x w w
F x F x F xw w w
(8. 45)
E
21
3 4 5
''( )( ) ( ) '( )2!
'''( ) ( ) ( ) ...3! 4! 5!
ii i i
IV Vi i i
F xF x F x F x w w
F x F x F xw w w
(8. 46)
Susbtituindo (8. 45) e (8. 46) na expressão analítica da integral
3 5
112
2 ' 2 ''' 2 ...3! 5!
Vi i i i ii
w wI F x F x F x w F x F x
(8. 47)
Como iF x é uma primitiva de if x temos:
( ) ' ; '( ) '' ; ''( ) '''i i i i i if x F x f x F x f x F x (8. 48)
Portanto,
3 5
12
2 2 '' 2 ...3! 5!
IVi i ii
w wI f x w f x f x
(8. 49)
O Erro 12
iE
é igual a:

3 5
1 1 12 2 2
3 5
12 2 '' 2 ...3! 5! 3
2 2 '' 2 ...3! 5!
IVi i ii i i
IVi i i
w wE A I f x w f x f x
w wf x w f x f x
(8. 50)
ou
5 7 91
2
2 2 +termosem , ,...72 120
IViiE f x w w w
(8. 51)
Desprezando os termos de ordem suoerior em 7 9, ,...w w , o erro cometido na integração dos
dois intervalos será:
5
12 90
IVii
wE f x
(8. 52)
Se para todo ;x a b a condição ( )IVif x M for válida, então:
5
.90iwE M (8. 53)
Se o intervalo de integração for dividido em n segmentos (onde n é par) o erro
máximo total será a soma dos erros cometidos nos 2n pares de segmentos:
5 4 4
. . . . .2 90 180 180sn w w wE M n w M b a M (8. 54)
Portanto, o erro de integração no método de Simpson é proporcional a w4, ou inversamente
proporcional a n4.
8.5.2 - Exemplo
a) Calcular
0,5
0xe dx (8. 55)
empregando dez sub-intervalos

b) Estimar o erro cometido
c) Calcular o número de subintervalos para que o erro seja inferior a 10-6

8. 6 – Integração Numérica pelo Método da Quadratura de Gauss
O método da quadratura de Gauss é um método utilizado para se calcular integrais
numericamente. A vantagem desse método é que ele é fácil de programar e possui boa
precisão.
Considere um elemento de contorno j, conforme mostra a Figura - 8. 2
Figura - 8. 2. Transformação de coordenadas do mapeamento linear do contorno.
no qual deseja-se calcular a seguinte integral:
j
b
a
drfdrfI
)(*)(* (8. 56)
fazendo-se uma transformação de coordenadas através do mapeamento linear onde a distância
Xr (8. 57)
é transformada em )(rr . Logo teremos:
)()( XrXr (8. 58)
desta forma a integral (8. 56) pode ser expressa como:
1
1
))((*)(* d
ddrfIdrfI
b
a
(8. 59)
onde
dd
é o Jacobiano da Transformação das Coordenadas Globais para as Coordenadas
Locais. Queremos encontrar uma solução numérica aproximada para a integral de tal forma
que:

g
k
N
kkk w
ddrfId
ddrfI
1
1
1
))(())((*
(8. 60)
onde k são as coordenadas e pesos da quadratura.
Considere a seguinte integral
gN
kkk wzIdzI
1
1
1
)()( (8. 61)
onde
ddrfz ))((*)( e
kddrfz kk
))((*)(
O nosso objetivo, portanto, é avaliar essa expressão (integral) através de um
somatório de amostras ponderadas de z() em pontos 1, 2, 3,...k, da seguinte forma:
ErrowzdzIgN
kkk
1
1
1
)()( (8. 62)
onde os wk são os pesos de Gauss e os k são as coordenadas generalizadas de Gauss,
conforme está representado na Figura - 8. 3.
Figura - 8. 3. Integral de Gauss da função z() nas coordenadas de generalizadas k.
Podemos definir os pesos e as coordenadas de Gauss de tal forma que as integrais
de polinômios sejam efetuadas com exatidão, por meio da seguinte regra geral: Com N pontos
de Gauss integra-se com exatidão polinômios de grau 2N-1. Por exemplo:
I) Para dois (2) pontos de Gauss (polinômio do 3º grau).

Neste caso teremos 4 incógnitas (w1,1) e (w2,2). Logo o polinômio de grau 3
possui quatro (4) coeficientes arbitrários, ou seja:
033
2210 xaxaxaa (8. 63)
Vamos agora calcular os pesos e as coordenadas de Gauss para 2 pontos de Gauss.
)()()( 2211
1
1
zwzwdz
(8. 64)
como
33
2210)( aaaaz (8. 65)
Temos:
0)(1
1
33
1
1
22
1
11
1
10
1
1
dadadadadz (8. 66)
Como 3210 e,, aaaa são arbitrários, cada uma das integrais acima deve ser integrada com
exatidão. Fazendo.
i) 0,1 3210 aaaa e z = 1
1.1.2))1(1)( 211
1
1
10
1
1
wwdadz
(8. 67)
logo
221 ww (8. 68)
ii) 0,1 3201 aaaa e z =
2211
221
1
21
11
1
1
02)1(
2)1(
2)( wwdadz
(8. 69)
logo
02211 ww (8. 70)
iii) 0,1 3102 aaaa e z = 2

222
211
331
1
31
1
22
1
1 32
3)1(
3)1(
3)( wwdadz
(8. 71)
logo
322
222
11 ww (8. 72)
iv) 0,1 2103 aaaa e z = 3
322
311
441
1
41
1
33
1
1
04)1(
4)1(
4)( wwdadz
(8. 73)
Logo
0322
311 ww (8. 74)
Portanto, a partir do resultado destes cálculos podemos montar um sistema de
equações para calcular os valores de wk nos pontos k da seguinte forma:
0
3/2
02
322
311
222
211
2211
21
ww
ww
wwww
(8. 75)
ou
3/202
0
0
00
101
2
1
32
31
22
21
21
w
w
(8. 76)
Resolvendo esse sistema não-linear de equação
57735.0;57735.01
21
21
ww
(8. 77)
Logo, substituindo esses valores em (8. 64) temos:
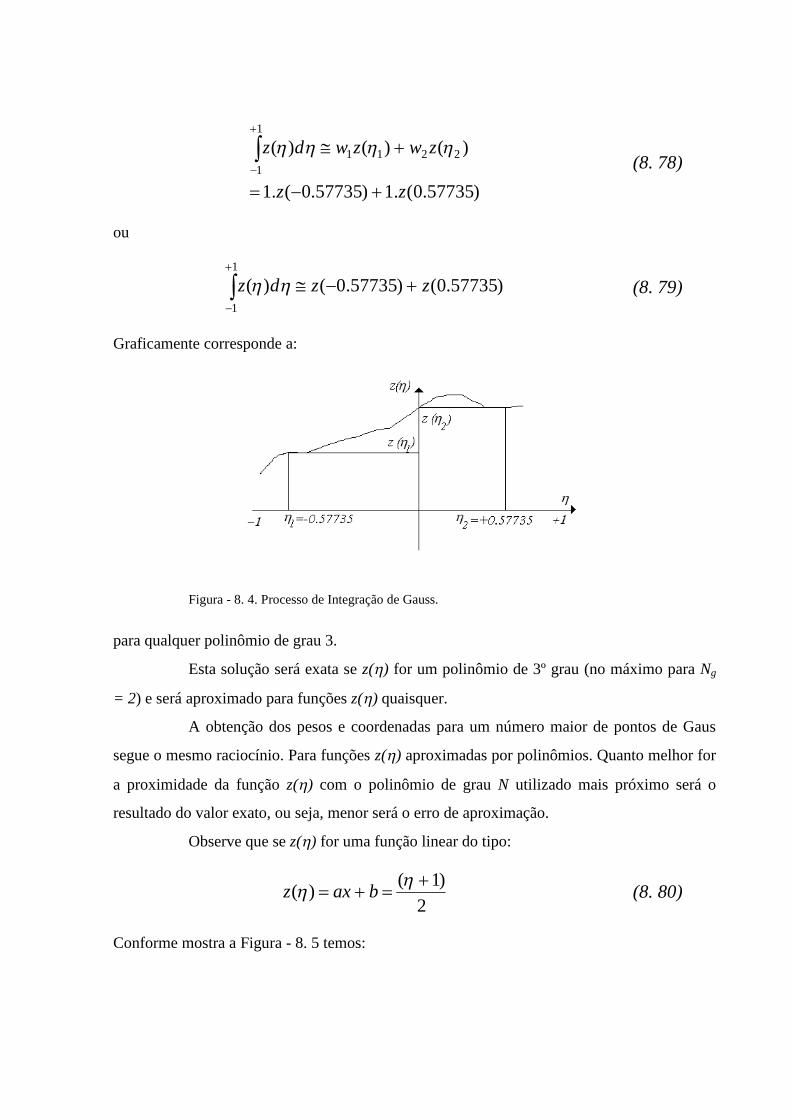
)57735.0(.1)57735.0(.1
)()()( 2211
1
1
zz
zwzwdz
(8. 78)
ou
)57735.0()57735.0()(1
1
zzdz
(8. 79)
Graficamente corresponde a:
Figura - 8. 4. Processo de Integração de Gauss.
para qualquer polinômio de grau 3.
Esta solução será exata se z() for um polinômio de 3º grau (no máximo para Ng
= 2) e será aproximado para funções z() quaisquer.
A obtenção dos pesos e coordenadas para um número maior de pontos de Gaus
segue o mesmo raciocínio. Para funções z() aproximadas por polinômios. Quanto melhor for
a proximidade da função z() com o polinômio de grau N utilizado mais próximo será o
resultado do valor exato, ou seja, menor será o erro de aproximação.
Observe que se z() for uma função linear do tipo:
2)1()(
baxz (8. 80)
Conforme mostra a Figura - 8. 5 temos:
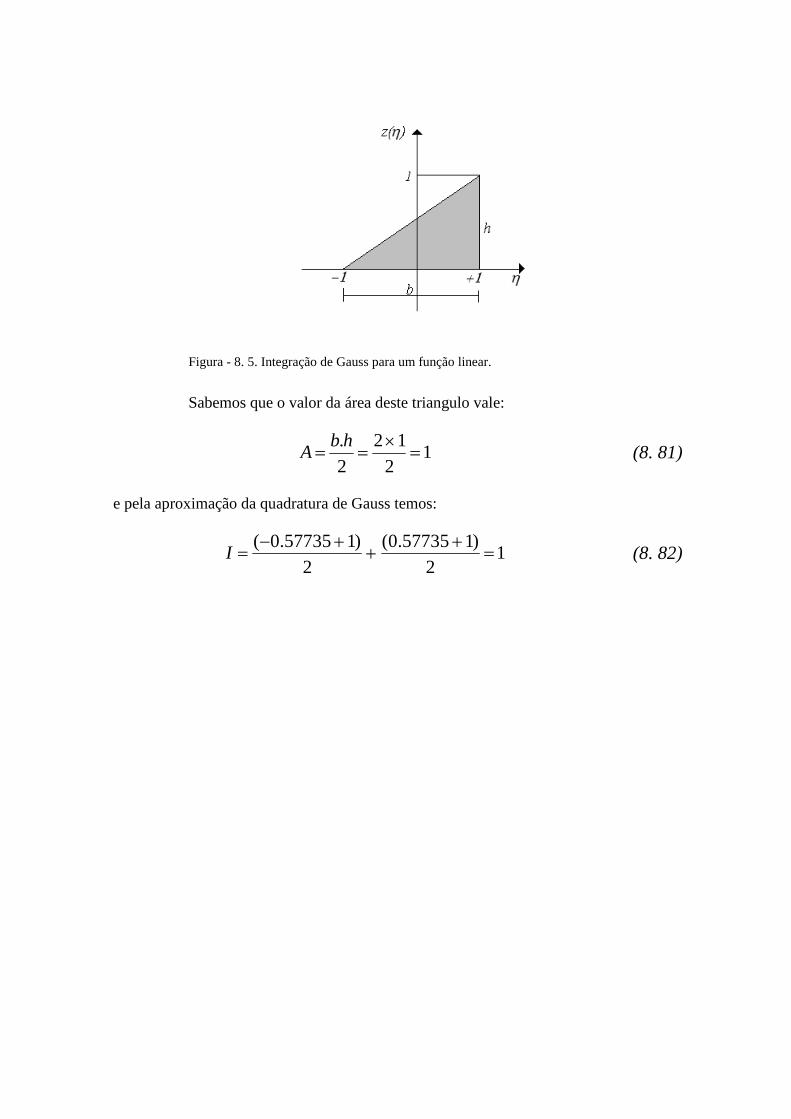
Figura - 8. 5. Integração de Gauss para um função linear.
Sabemos que o valor da área deste triangulo vale:
12
122.
hbA (8. 81)
e pela aproximação da quadratura de Gauss temos:
12
)157735.0(2
)157735.0(
I (8. 82)

8. 7 – Método de Integração de Chébychev
A fórmula de integração de Chebychev é similar a de Gauss, não sendo porém, tão
versátil devido a limitação do número de pontos e, consequentemente, no grau máximo do
polinômio que pode ser integrado exatamente.
Partindo da igualdade (46)
1 1 2 2( ) ( ) ( )... ( )b
n naf x dx C f x C f x C f x (8. 83)
Se
1 2 ... nC C C (8. 84)
Então
1 2( ) ( ) ( )... ( )b
n naf x dx C f x f x f x (8. 85)
Analogamente à integração Gausssiana, com a finalidade de se obter uma fúmula que seja
válida para qualquer intervalo de integração, o intervalo ;a b é reduzido ao intervalo 1;1
com a mudança de variáveis:
1 1;
2 2 2t a t b b a dt
x dx
(8. 86)
fazendo
1 1( ) ( )
2 2t a t b
f x f g t
(8. 87)
e
1 2( ) ( ) ( )... ( )b
n nag t dt C g t g t g t (8. 88)
O problema consiste na determinação das variáveis Cn, t1, t2,...,tn de modo que
essa fórmula seja exata para toda função da forma:
2 11 2 1( ) ... n
o ng t a a t a t a t (8. 89)
Integrando g(t) e efetuando a soma indicada à direita em (8. 88) temos:

2 4 61 1 2
2 2 2 1 1 12 1 2 1 1 2
2 ... [ ...1 3 5 7
... ... ]
on o n
n n nn n n
a a a a C na a t t t
a t t t a t t t
(8. 90)
Igualando os coeficientes 1 2 1, , ,...,o na a a a nos dois membros obtemos:
1 2
2 2 21 2
3 3 31 2
4 4 41 2
1 1 11 2
21
... 02...
3 3
... 02...
5 5:
2...? ?
n
n
nn
n
nn
n n nn
n
Cn
t t tnt t t
C
t t tnt t t
C
nt t tC
(8. 91)
São tabelados os valores para 3,4,5,6,7 9n e . Para 8n ou 9n , o sistema
de equações (8. 91) possui raízes complexas.
n Cn t
3 2/3 1 3
2
0,7071070
t tt
4 1/2 1 4
2 3
0,7946540,187592
t tt t
5 2/5 1 5
2 4
3
0,8324980,374541
0
t tt tt
6 1/3 1 6
2 5
3 4
0,8662470,4225190, 266635
t tt tt t
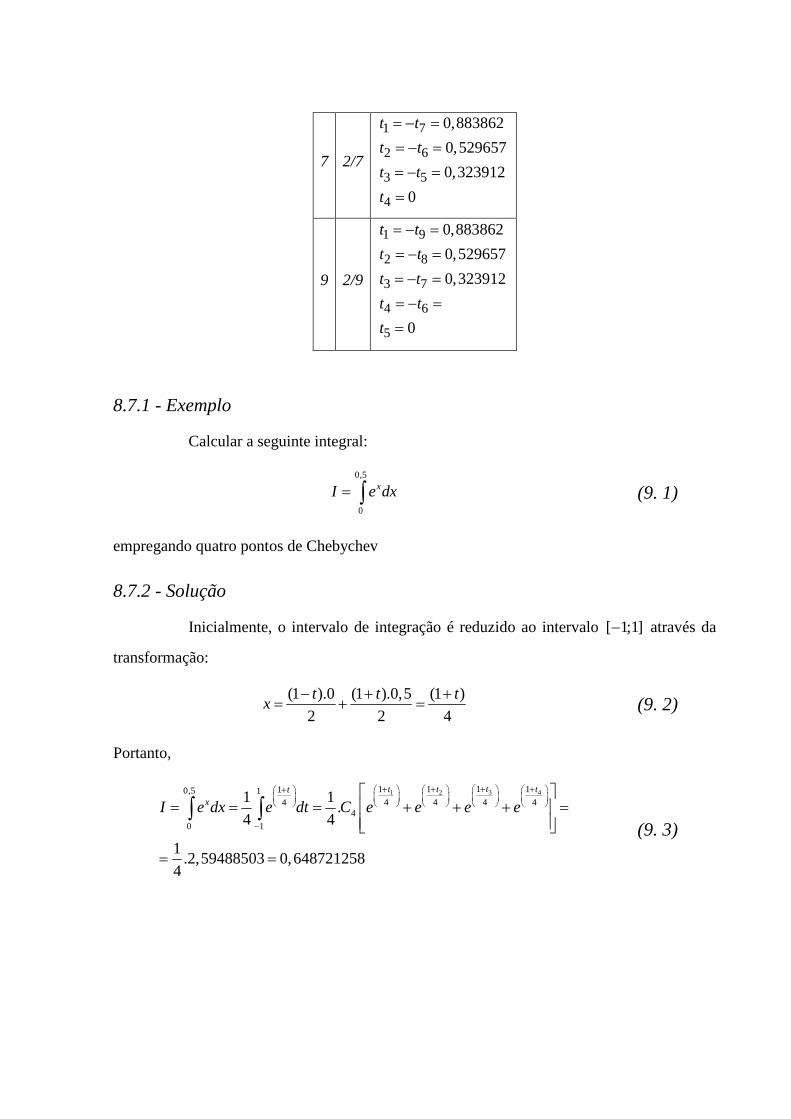
7 2/7
1 7
2 6
3 5
4
0,8838620,5296570,323912
0
t tt tt tt
9 2/9
1 9
2 8
3 7
4 6
5
0,8838620,5296570,323912
0
t tt tt tt tt
8.7.1 - Exemplo
Calcular a seguinte integral:
0,5
0
xI e dx (9. 1)
empregando quatro pontos de Chebychev
8.7.2 - Solução
Inicialmente, o intervalo de integração é reduzido ao intervalo [ 1;1] através da
transformação:
(1 ).0 (1 ).0,5 (1 )2 2 4t t tx
(9. 2)
Portanto,
31 2 411 1 110,5 144 4 44
40 1
1 1 .4 4
1 .2,59488503 0,6487212584
tt t ttxI e dx e dt C e e e e
(9. 3)

8. 8 - Exemplos e Aplicações

8. 9 - Exercícios e Problemas
Capítulo IX
SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS
RESUMO
9. 1 - Objetivos do Capítulo
9. 2 - Introdução
9. 3 – Solução Numérica de Equações Diferenciais
Dada uma equação diferencial de ordem m , se os valores da função e suas
derivadas de ordem ( 1)m são especificados em um mesmo ponto tem-se um problema de
valor inicial (abreviadamente PVI). Se, para 2m , as condições fornecidas para a busca da
solução não são todas dadas em um mesmo ponto, tem-se um problema de valor de contorno
(abreviadamente PVC).
Por exemplo,
2
2 0; (0) 0, '(0) 1d y y x y ydt
(9. 4)
é um exemplo de PVI
2
2 0; (0) 0, '(1) 1d y y x y ydt
(9. 5)
é um exemplo de PVC
9. 4 – Métodos de Integração
9. 5 – Métodos Iterativos de passo um, usando só anterior nx
Os métodos de iterativos de passo um, usando só anterior nx são: O Método de
Euler, Método de Séries de Taylor, Método de Heun, Método de Runge-Kutta.
9.5.1 - Ordem do Método Numérico
Um método numérico é de ordem n ( n inteiro positivo) se é exata para
polinômios de grau n , isto é, se a solução analítica de um PVI é um polinômio de grau n ,
então a solução numérica (aproximada) e a solução analítica coincidem em um método de
ordem n .
O Método de Euler é um método de ordem um e o Método da Série de Taylor
com três termos é um método de ordem dois conforme veremos a seguir.

9.5.2 - Método de Euler Linear ou de ordem mm
Dada a equação ' ( , )y f x y com 0 0( )y x y , o método de Euler consiste em:
conhecidos 0x e 0 0( )y x y , calcular '0 0 0 0'( ) ( , )y y x f x y determinar a equação da reta que
passa por 0 0( , )x y com coeficiente angular '0y conhecido. A equação da reta é:
' '0 0 0 0 0 0( ) ( )y y y x x y y y x x (9. 6)
Gráfico
Figura - 9. 1.
Para
1 0x x x h , 1 1( )y x y (9. 7)
é calculado aproximadamente como
'1 0 0 1 0( )y y y x x = '
0 0 ( )y y h (9. 8)
Para o cálculo de 2 2( )y x y , determina-se a equação da reta que passa por
1 1( , )x y com coeficiente angular '1 1 1( , )y f x y . Logo a equação fica:
' '1 1 1 1 1 1( ) ( )y y y x x y y y x x (9. 9)
Para
2 1 2 2; ( )x x x h y x y (9. 10)
então
' '2 1 1 1 1 1( ) ( )y y y x x y y h (9. 11)

e assim sucessivamente encontramos uma forma geral de escrever, se 1k kx x h cte pode-
se escrever:
'1 ( , )
kk k k k ky y hf x y y hy (9. 12)
9.5.3 - Exemplo
Dada a equação diferencial
dy y xdx
(9. 13)
com (0) 2y , determine (1)y para 14
h .
9.5.4 - Solução
Calculamos
''(0) 2 0 2
y y xy
(9. 14)
e substituímos
1 0 0 01 1( , ) 2 .2 2,54 4
y y f x y (9. 15)
Fazemos o mesmo para os próximos pontos:
2 1 1 11 1 1( , ) 2,5 .(2,5 ) 3,06254 4 4
y y f x y (9. 16)
3 2 2 21 1 2( , ) 3,0625 .(3,0625 ) 3,7031254 4 4
y y f x y (9. 17)
4 3 3 31 ( , ) ..... 4, 441406254
y y f x y (9. 18)
Onde a solução exata é

4(1) 4,718282..y y (9. 19)
A justificativa é que expandimos
( ) ( ) ( ) '( ) .....f x f a x a f a (9. 20)
em série de Taylor em torno de a então
'1 ....
k
k k kdespreza sey
y y hy
(9. 21)
Obs: a solução exata é encontrada aplicando na equação diferencial linear é
1 exp( )y x x (9. 22)

9.5.5 - Método Quadrático da Série de Taylor com Três Termos
Neste método, a equação é resolvida usando
2' "
1 2kk k khy y hy y (9. 23)
O valor de "ky é obtido derivando a equação de primeira ordem em relação a x e efetuando o
calculo para kx x .
9.5.6 - Exemplo
Resolva o exemplo anterior por este método com 14
h
'y y x (9. 24)
e
" ' 1y y (9. 25)
9.5.7 – Solução
Substituindo (9. 24) em (9. 25) temos:
" 1y y x (9. 26)
sendo
2
1 ' ''2k khy y hy y (9. 27)
Logo, substituindo na equação temos:
2 2
1 ( )2 2k k k kh hy y h y x
(9. 28)
Utilizando uma calculadora ou qualquer outro programa temos a seguinte tabela:
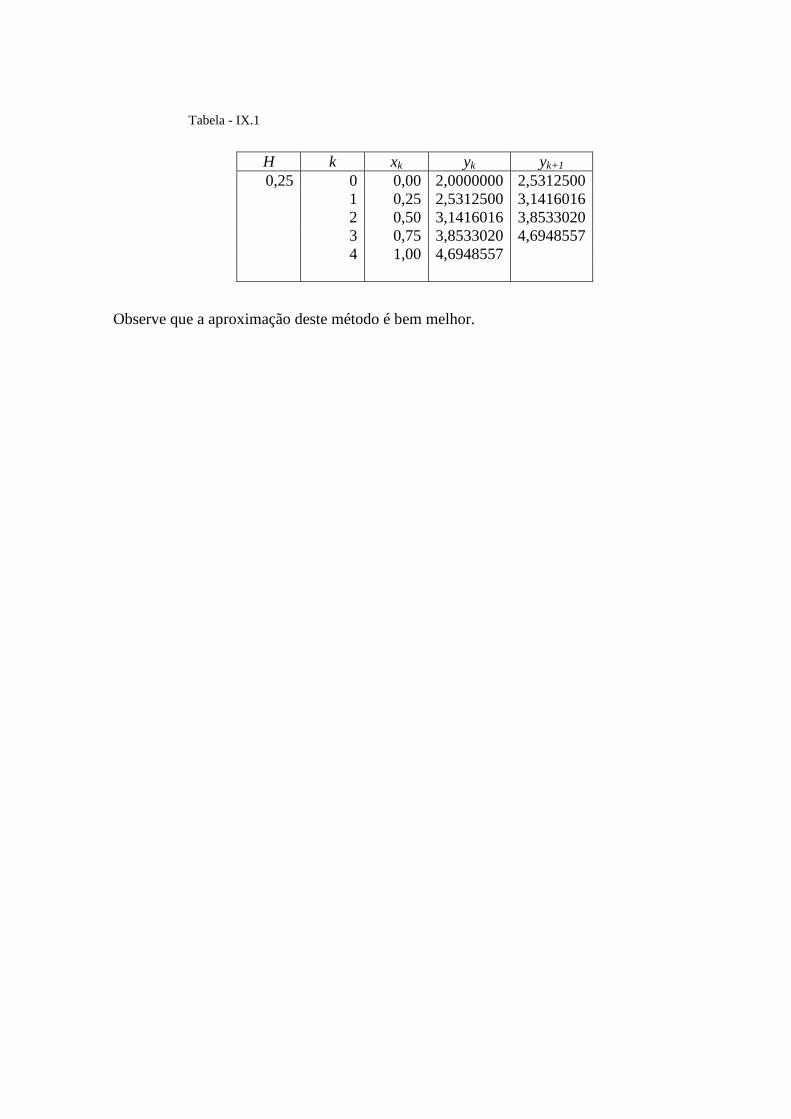
Tabela - IX.1
H k xk yk yk+1 0,25 0 0,00 2,0000000 2,5312500
1 0,25 2,5312500 3,1416016 2 0,50 3,1416016 3,8533020 3 0,75 3,8533020 4,6948557 4 1,00 4,6948557
Observe que a aproximação deste método é bem melhor.

9.5.8 - Método de Heun ou Método de Euler Modificado
O Método de Heun é uma modificação do Método de Euler, que utiliza a
expressão de Linear de Euler auto-recursivamente.
Dada a expressão
1 ( , )k k k ky y hf x y (9. 29)
onde
( , )k kdyf x ydx
(9. 30)
temos que
1 1( , ) ( , ( ( , ))k k k k k kf x y f x h y h f x y (9. 31)
Considerando que a reta passa pelo ponto ( , )k kx y e cujo coeficiente angular é
igual a
1 1( , ) ( , )2
k k k kf x y f x y (9. 32)
Substituindo-se (9. 31) em (9. 32) e depois em (9. 29) obtém-se a expressão do Método de
Heun:
1 , , ,2k k k k k k k khy y f x y f x h y hf x y (9. 33)
O Método de Heun é um aperfeiçoamento do método de Euler e é um método de
segunda ordem ou ordem 2.
9.5.9 - Exemplo
Resolver a seguinte equação diferencial
'y y x (9. 34)
Com (0) 2y e calcular (1)y utilize o Método de Heun com 0,25h .
9.5.10 - Solução
Utilizando a fórmula:
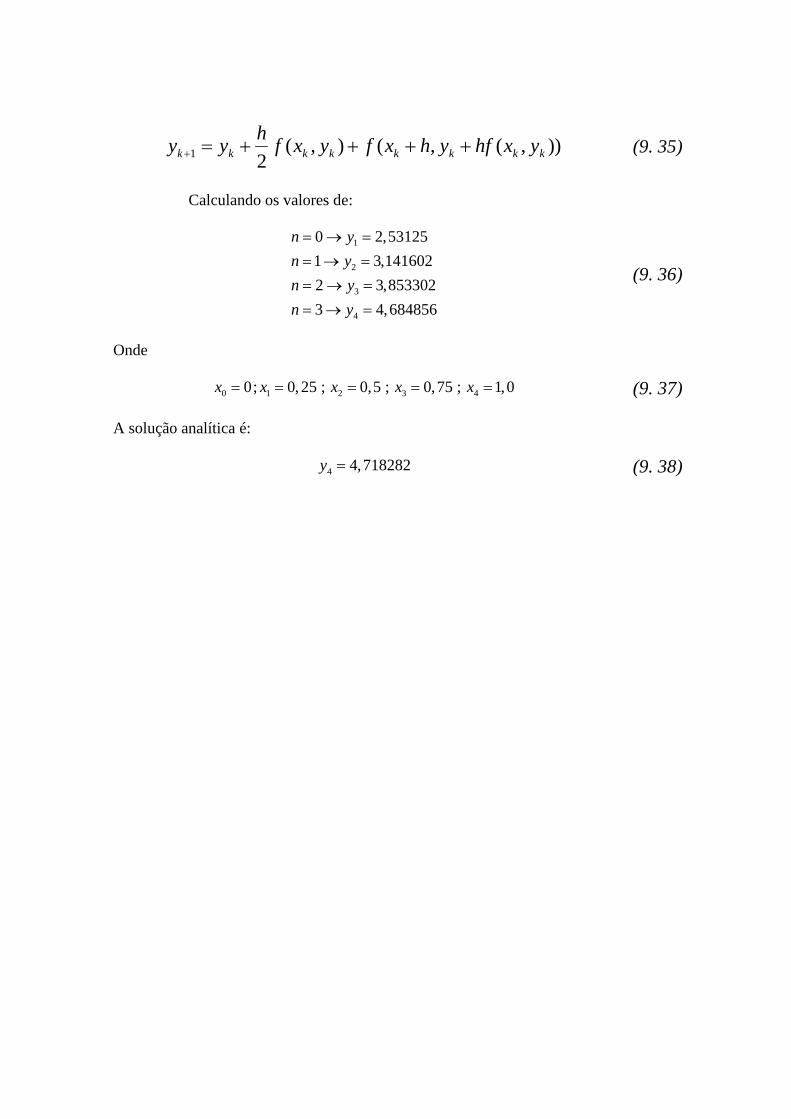
1 ( , ) ( , ( , ))2k k k k k k k khy y f x y f x h y hf x y (9. 35)
Calculando os valores de:
1
2
3
4
0 2,531251 3,1416022 3,8533023 4,684856
n yn yn yn y
(9. 36)
Onde
0 1 2 3 40; 0, 25 ; 0,5 ; 0,75 ; 1,0x x x x x (9. 37)
A solução analítica é:
4 4,718282y (9. 38)

9. 6 – Métodos de Runge-Kutta
Nos Métodos de Runge-Kutta, o cálculo do valor das derivadas da função
( , )f x y nos pontos ( , )k kx y é substituindo pelo cálculo da função ( , )f x y em pontos
convenientes, produzindo resultados equivalentes.
9.6.1 - Método de Runge-Kutta de Ordem 1
O Método de Euler é o Método de Runge-Kutta de ordem um. A expressão deste
Método de Runge-Kutta de ordem um é dada por:
'1 ( , )
kk k k k ky y hf x y y hy (9. 39)
9.6.2 - Método de Runge-Kutta de Ordem 2
Para obter uma expressão correspondente no Método de Runge-Kutta de ordem 2,
considera-se que a expressão
2
1 ( , ) '( , )2!k k k k k khy y hf x y f x y (9. 40)
Pode ser substituída por outra expressão equivalente do tipo:
1 1 2( )k ky y h ak bk (9. 41)
Igualando (9. 40) com (9. 41) temos
1 2 ( , ) '( , )2!k k k khak bk f x y f x y (9. 42)
Como 1 2,k k são coeficientes angulares, podemos fazer:
1 ( , )k kk f x y (9. 43)
2 ( , ( , ))k k k kk f x ph y qhf x y (9. 44)
As incógnitas são , , ,a b p q .
Expandindo a função 2k em torno do ponto ( , )k kx y através da Série de Taylor,
para duas variáveis temos:
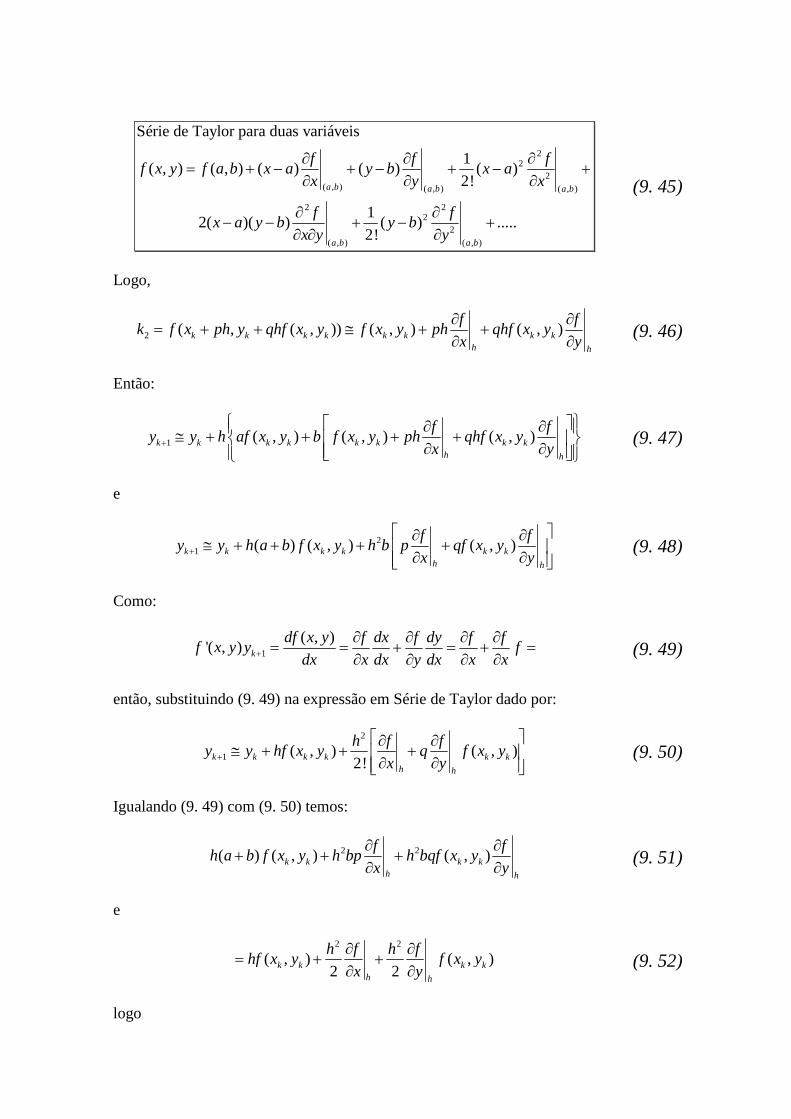
22
2( , ) ( , ) ( , )
2 22
2( , ) ( , )
Série de Taylor para duas variáveis
1( , ) ( , ) ( ) ( ) ( )2!
1 2( )( ) ( ) .....2!
a b a b a b
a b a b
f f ff x y f a b x a y b x ax y x
f fx a y b y bx y y
(9. 45)
Logo,
2 ( , ( , )) ( , ) ( , )k k k k k k k kh h
f fk f x ph y qhf x y f x y ph qhf x yx y
(9. 46)
Então:
1 ( , ) ( , ) ( , )k k k k k k k kh h
f fy y h af x y b f x y ph qhf x yx y
(9. 47)
e
21 ( ) ( , ) ( , )k k k k k k
h h
f fy y h a b f x y h b p qf x yx y
(9. 48)
Como:
1( , )'( , ) k
df x y f dx f dy f ff x y y fdx x dx y dx x x
(9. 49)
então, substituindo (9. 49) na expressão em Série de Taylor dado por:
2
1 ( , ) ( , )2!k k k k k k
h h
h f fy y hf x y q f x yx y
(9. 50)
Igualando (9. 49) com (9. 50) temos:
2 2( ) ( , ) ( , )k k k kh h
f fh a b f x y h bp h bqf x yx y
(9. 51)
e
2 2
( , ) ( , )2 2k k k k
h h
h f h fhf x y f x yx y
(9. 52)
logo

11212
a b
bpp q
bq
(9. 53)
Fazendo 1 112 2
p q b e a , Logo:
1 , , ,2k k k k k k k khy y f x y f x h y hf x y (9. 54)
1 1 22k khy y K K (9. 55)
onde
1 ,k kK f x y (9. 56)
e
2 1,k kK f x h y hK (9. 57)

9.6.3 - Método de Runge-Kutta de Ordem 3
Proposta do professor (que não se encontra nos livros) – Método de Runge-Kutta
de ordem 3.
2 3
1 , ' , '' ,2! 3!k k k k k k k kh hy y hf x y f x y f x y (9. 58)
e
1 1 2 3k ky y aK bK cK (9. 59)
onde
1 ,k kK f x y (9. 60)
e
2 1
2
,
, ,k k
k k k k
K f x h y hK
K f x ph y q x y
(9. 61)
e
3 , ?k kK f x rh y (9. 62)

9.6.4 - Método de Runge-Kutta de Ordem 4
A expressão do Método de Runge-Kutta de ordem quatro é dada por:
1 1 2 3 42 26k khy y K K K K (9. 63)
onde
1 ,k kK f x y (9. 64)
e
2 1,2 2k kh hK f x y K
(9. 65)
e
3 2,2 2k kh hK f x y K
(9. 66)
4 3,k kK f x h y hK (9. 67)
9.6.5 - Exemplo
Resolver a seguinte equação diferencial
'y y x (9. 68)
Com (0) 2y e calcular (1)y utilizando Método de Runge-Kutta de ordem quatro (4) com
0,25h .
9.6.6 - Solução
Utilizando a fórmula:
(9. 69)
Calculando os valores de:
1
2
3
4
0 2,5340171 3,1487002 3,8669593 4,718211
n yn yn yn y
(9. 70)
Onde
0 1 2 3 40; 0, 25 ; 0,5 ; 0,75 ; 1,0x x x x x (9. 71)
A solução analítica é:
4 4,718282y (9. 72)

9.6.5 - Método de Runge-Kutta de Ordem m
Os Métodos de Runge-Kutta de ordem m fornecem valores aproximados da
solução da equação diferencial:
( , )dy f x ydx
(9. 73)
que coincidem com os valores de y obtidos através da expansão em Série de Taylor em
torno de um ponto x , até o termo que incluim mh , isto é:
2 3( 1)( ) ( ) ( , ) '( , ) "( , ) ... ( , )
2! 3! !
mmh h hy x h y x hf x y f x y f x y f x y
m (9. 74)
(Obs: A estimativa do erro no Método de Runge-Kutta não é bem determinada!)
9.6.7 - Exemplo
Resolver a seguinte equação diferencial
'y y x (9. 75)
Com (0) 2y e calcular (1)y com 0,25h .
9. 7 – Métodos de Predição-Correção
Uma característica dos Métodos de Runge-Kutta na obtenção do ponto
1 1( , )n nx y usamos apenas a informação fornecida pelo ponto anterior ( , )n nx y , não usando
outros pontos anteriores. Contudo, alguns outros métodos exigem a informação de pontos
anteriores.
Nos Métodos de Predição-Correção temos:
1 - Predição :
“Prevemos” um valor para 1ny . As Fórmulas Abertas ou Explícitas são usadas
como Previsoras. A fórmula mais simples é do tipo ......
2 - Correção:
Outro método “corrige” este valor e recorrige iterativamente até um critério de
parada. As Fórmulas Fechadas ou Implícitas são usadas como corretor. A fórmula mais
simples é do tipo trapezoidal.

9. 8 – Métodos Implícitos de passo Posterior
Os método implícitos ou fechados usam o passo posterior 1nx . Essas Fórmulas
Fechadas ou Implícitas são usadas como corretor. A fórmula mais simples é do tipo
trapezoidal a qual é dada por:
1 1 1( , ) ( , ) , 0,1,...2n n n n n nhy y f x y f x y n (9. 76)
Note que 1ny aparece nos dois lados da equação. Podemos tentar obter 1ny iterativamente.
Para a aproximação inicial 1
(0)n
y
pode-se usar uma fórmula aberta ou explícita, por exemplo, o
método de Euler:
1
(0) ( , )2n n n nhy y f x y
(9. 77)
Substituindo (9. 77) em (9. 76) ficamos com:
1 0
1 1
( ) ( 1)1,( , ) ( )
2n n
k kn n n n
hy y f x y f x y
(9. 78)
9.8.1 - Algorimo
Um método de predição-correção de segunda ordem resolve uma equação
diferencial 0 0' ( , ), ( )y f x y y x y com h conhecido e 0nx x nh , 0,1,.n da seguinte
forma:
1. Calcular o 1
(0)n
y
(previsor) usando (2) ou outro método explícitos.
2. Calcular1
( )n
ky
,k=1,2,... usando (3) ou outro método implícito, iterando até
( ) ( 1)1 1
( )1
k kn n
kn
y y
y
(9. 79)
9.8.2 - Convergência do método de 2ª ordem (Euler-Trapezoidal)
O Critério de Convergência do Método de segunda ordem é dado por:

2hf y
(9. 80)
9.8.3 - Exemplo
Resolver a seguinte equação diferencial
'y y x (9. 81)
Com (0) 2y e calcular (1)y com 0,5h (Obs: escolheu-se este muito grande! Apenas para
questão de tempo da aula).
9.8.4 – Solução
1ª etapa:
Para 0,5x , usaremos como Previsor o Método de Euler. Logo,
(0)1 0 0 0( , )y y hf x y (9. 82)
(0)1 2 0,5(2 0)y (9. 83)
(0)1 3,0y (9. 84)
E usaremos como Corretor o Método do Trapézio. Logo,
(1) (0)1 0 0 0 1 1( , ) ( , )
2hy y f x y f x y (9. 85)
(1)1
0,52 2 (3,0 0,5)2
y (9. 86)
(1)1 3,125y (9. 87)
Fazendo mais uma iteração temos:

(2)1
0,52 2 (3,125 0,5) 3,1562
y
(9. 88)
(2)1
0,52 2 (3,125 0,5)2
y (9. 89)
(2)1 3,156y (9. 90)
E assim até termos uma certa margem do erro
(3)1 3,164y ; (4)
1 3,166y ; (5)1 3,167y (9. 91)
logo
1 1 1( , ) 'f x y y (9. 92)
(5)1 1 1 1( , )f x y y x (9. 93)
1 1( , ) 3,167 0,5f x y (9. 94)
1 1( , ) 2,667f x y (9. 95)
2ª etapa:
Para 1,0x , usaremos como Previsor o Método de Euler. Logo,
(0)2 1 1 1( , )y y hf x y (9. 96)
(0)2 3,167 0,5(2,667)y (9. 97)
(0)2 4,501y (9. 98)
E usaremos como Corretor o Método do Trapézio. Logo,

(1)2 3,167 0, 25(4,501 1,0)y (9. 99)
(1)2 4,709y (9. 100)
Fazendo mais uma vez obtemos:
(2) (3) (4)2 2 24,761; 4,774; 4,777y y y e (5)
2 4,778y (9. 101)
O resultado exato é:
4,71828y (9. 102)

9. 9 – Métodos Explícitos, passo múltiplo, que usam 1 2, ,n n nx x x como Previsor
Alguns métodos explícitos ou abertos de passo múltiplos são: o Método de Adam-
Bashforth, o Método de Nystrom, etc.
Comentários:
9.9.1 - Adams-Moutton
Este Método é geralmente utilizado como Corretor.
1 1
( ) ( )1 29 19 5
24n n
k kn n n n
hy y f f f f (9. 103)
onde ( , )n n nf f x y
9.9.2 - Adams-Bashforth
Este Método é geralmente utilizado como Previsor.
1 1 2 355 59 37 924n n n n n nhy y f f f f (9. 104)
9.9.3 - Método de Hamming (1915-1958)
1 1
1 3 1 2
( ) ( )2 1
4 2 2 (previsor)3
1 39 2 (corretor)8 8n n
n n n n n
k kn n n n
hy y f f f
hy y y f f f
(9. 105)

9. 10 – Métodos de Passos Múltiplos
Partindo de um PVI
( , )dy f x ydx
(9. 106)
e usando que 0 0( )y x y temos:
00( ) ( , ( ))
x
xy x y f t y t dt (9. 107)
é solução. Logo:
1
01 0( ) ( ) ( , ( ))
x
xy x y x f x y x dx (9. 108)
1
1( ) ( ) ( , ( ))k
k
x
k k xy x y x f x y x dx
(9. 109)
Considerando j+1 intervalos de integração
1
1
Newton-Cotes
( ) ( ) ( , ( ))k
k
x
k k xy x y x f x y x dx
(9. 110)
Assim 1
1 1( ) Pr( )k
k j
x
k k k j xy y x y x dx
(9. 111)
Como os pontos ix são igualmente espaçados RP pode ser construída com base no conceito de diferenças finitas retroativas. Supondo 1, ,...,k k k Rf f f conhecidos para kx x h temos:
"'P ( ) ( 1) .... ( 1)( 2)...( 1)
2! !
Rk k
R k kf fx f f R
k (9. 112)
Substituindo (9. 112) em (9. 111) e integrando o polinômio obtemos o erro local de truncamento é dado pela expressão
12 1
1
( 1)( 2)...( ) ( , ( ))( 1)!
R RLT
RE h f y dR
(9. 113)
onde a ordem é 2R .
9.10.1 - Método de Milne-Simpson (4ª ordem)
Temos j = 3 e R = 3
Previsor
1 3 1 24 2 2 (previsor)3k k k k khy y f f f (9. 114)
514 ( , ( ))15
IVTLE h f y (9. 115)
Corretor j = 1
1 1k R kx x (9. 116)
1
' " "'1 1 1 1 1 1
1 12 2 ....3 90k
IVk k k k k ky y h f f f Of f
(9. 117)
onde
51
190
IVTL kE f h (9. 118)
Substituímos na equação onde tem as derivadas chegamos a:
1 1 1 1( 4 )k k k k ky y h f f f (9. 119)
cuja convergência deve satisfazer:
'( ) 1 (9. 120)
Portanto,
0 1
10
( ) ( , )( , )'( )
k
k
h f x Cf xh
(9. 121)
Seja ( , )f x yM máxy
. Para 1ky próxima da raiz
0
1hM
(9. 122)
onde 0 é o coeficiente que multiplica 1kf na fórmula implícita.
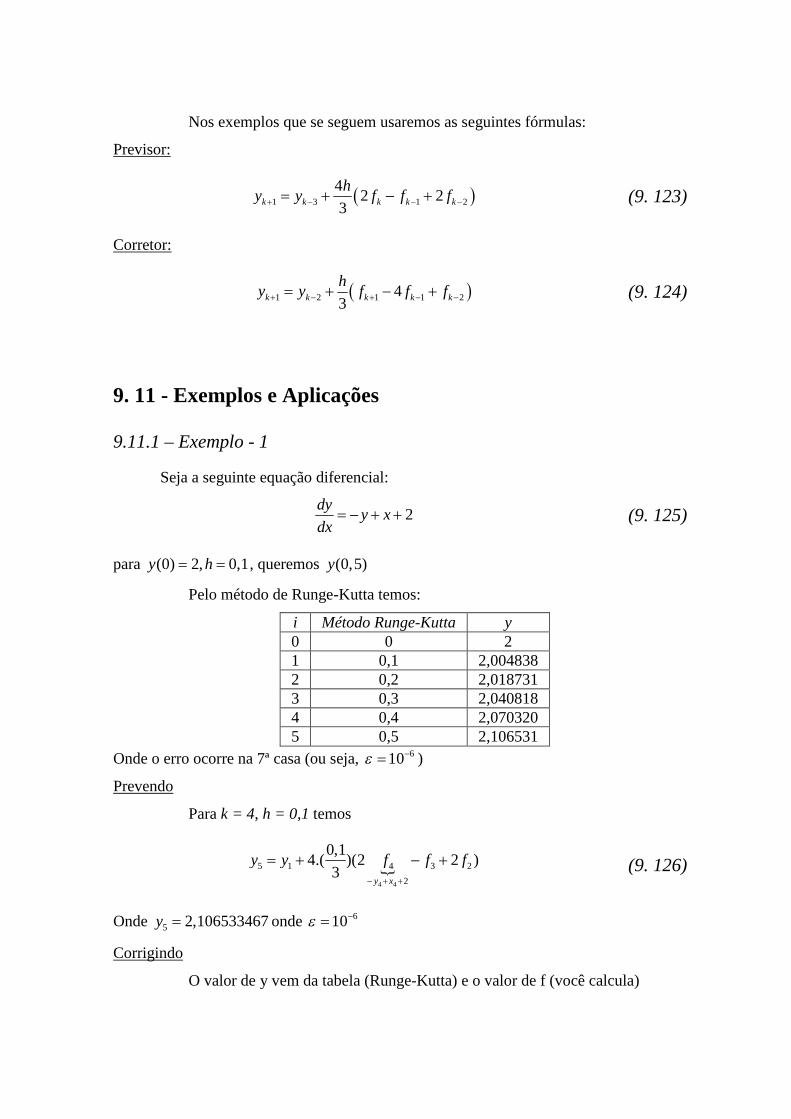
Nos exemplos que se seguem usaremos as seguintes fórmulas:
Previsor:
1 3 1 24 2 23k k k k khy y f f f (9. 123)
Corretor:
1 2 1 1 243k k k k khy y f f f (9. 124)
9. 11 - Exemplos e Aplicações
9.11.1 – Exemplo - 1
Seja a seguinte equação diferencial:
2dy y xdx
(9. 125)
para (0) 2, 0,1y h , queremos (0,5)y
Pelo método de Runge-Kutta temos:
i Método Runge-Kutta y 0 0 2 1 0,1 2,004838 2 0,2 2,018731 3 0,3 2,040818 4 0,4 2,070320 5 0,5 2,106531
Onde o erro ocorre na 7ª casa (ou seja, 610 )
Prevendo
Para k = 4, h = 0,1 temos
4 4
5 1 4 3 22
0,14.( )(2 2 )3
y x
y y f f f
(9. 126)
Onde 5 2,106533467y onde 610
Corrigindo
O valor de y vem da tabela (Runge-Kutta) e o valor de f (você calcula)
5 5
5 3 5 4 32
0,1( )( )3
y x
y y f f f
(9. 127)
5
5
5
1
2
3
2,106530284
2,106530391
2,106530387
y
y
y
(9. 128)
E 710 . Onde o erro de truncamento local
1 0
7
1291,06.10
iTL k k
TL
E y y
E
(9. 129)
Cuja solução exata é:
(0) 2,10653067y (9. 130)
9. 12 - Exercícios e Problemas
Anexos A1 - Os códigos para compilação em MATLAB para Curvas de Bezier
Bezier.m %Programa bezier: Curvas de Bezier %Desenha a curva de Bezier relativamente a um conjunto de pontos %Exemplo de uso: %x=[1 2 4 3] %y=[1 3 3 1] %n=3 %[bezx,bezy]=bezier(x,y,n) function [bezx,bezy]=bezier(x,y,n) hold on plot (x,y,'o') i=0; k=0; for t=0:0.01:1 i=i+1; bnk=bernstein(n,k,t); ber(i)=bnk; end bezx=ber*x(1); bezy=ber*y(1); for k=1:n i=0; for t=0:0.01:1 i=i+1; bnk=bernstein(n,k,t); ber(i)=bnk; end bezx=bezx+ber*x(k+1); bezy=bezy+ber*y(k+1); end plot(bezx,bezy) hold off Bernstein.m %programa bernstein: polinomios de Bernstein % function [bnk]=bernstein(n,k,x) if k==0 C=1;
else C=factorial(n)/(factorial(k)*factorial(n-k)); end bnk=C*x^k*(1-x)^(n-k);

A2 – Superfícies de Bezier
As superfícies têm um papel muito importante na computação gráfica. De uma
maneira geral, as superfícies são uma generalização das curvas.
A equação para a superfície de Bézier é uma extensão direta das curvas de
Bézier. Um ponto qualquer da superfície pode ser obtido pela expressão:
n
i
m
jmjini tJsJBtsP
0 0,,, 1,0 ts (A. 1)
onde, como no caso das curvas de Bézier, Bi,j define o vértice e controle da superfície e
Ji,n(s), Ji,m(t) são funções de Berstein nas direçõess e t respectivamente.
Se a superfície de Bézier a ser gerada for definida por dois polinômios de grau 3,
teremos as chamadas superfícies bicúbicas de Bézier, que podem ser escritas como:
1
1,2
3
23
ttt
MGMssstsP TBBB (A. 2)
sendo
0001003303631331
BM (A. 3)
e os pontos de controle representados pela matriz:
3,32,31,30,2
3,22,21,20,2
3,12,11,10,1
3,02,01,00,0
PPPPPPPPPPPPPPPP
GB (A. 4)
Para representar uma superfície Bézier bicúbica, os dezesseis pontos de controles
devem ser especificados(Figura A.2).

Figura - A. 1. Os dezesseis pontos de controle de uma superfície de Bézier.
A3 – Superfícies de B-Spline
As superfícies B-Spline mais conhecidas na prática da computação gráfica é o
NURBS (Nonuniform Rational B-Splines), um sistema de modelagem gráfico-computacional
que utiliza, além de círculos, linhas e arcos as splines. É empregado em sistemas CAD
(desenho auxiliado por computador) para geração de superfícies complexas. São formas
matemáticas que permitem a construção de simples linhas 2D (bidimensionais), círculos,
arcos ou mesmo sólidos geométricos regulares à superfície orgânica complexas 3D
(tridimensonais). Os objetos em NURBS podem ser utilizados para qualquer tipo modelagem,
animação, ilustração, ou modelos para a fabricação industrial por causa de sua flexibilidade e
precisão na construção dos objetos 3D. Permitem definir com precisão secções cónicas
(polinómios quadráticos).
O termo NURBS é a abreviatura de Non-Uniform Rational B-Splines Surfaces, ou
seja, é uma B-Splines racional (originária da razão de polinômios). Non-uniform significa que
a influência da extensão de um controle de vértice não precisa ser a intervalos iguais do
parâmetro t, podendo variar (o que é muito bom na modelagem de superfícies irregulares).
Rational significa que a equação usada para representar a curva ou superfície é expressa pela
razão de dois polinômios. A forma rational fornece um modelo melhor de algumas superfícies
importantes.
As superfícies NURBS forem criadas especialmente para modelagem em três
dimensões no computador. Na prática, ou seja, para o projetista, a maior qualidade no uso de
superfícies NURBS é a velocidade e facilidade de construção de objetos muito complexos.
Essas superfícies são obtidas com uso de matrizes Bi,j de nós não-uniformes e é uma das
formas de representação mais usadas em projetos de engenharia.
A função polinomial das curvas NURBS é definida como:
n
iini
n
iinii
w
tNw
tNBwtPtP
0,
0,
(A. 5)
Diferentes segmentos de curvas NURBS podem ter diferentes níveis de
continuidade dependendo do posicionamento dos pontos de controle pelo usuário. Em
particular, quando posicionamos dois pontos de controle em um mesmo lugar ou muito
próximos, o nível de continuidade será reduzido. Dois pontos de controle aguçam a curvatura.
Essa propriedade de uma NURBS é conhecida como multiplicidade.
O sucesso da NURBS é verificado pela enorme quantidade de aplicativos e API’s
(Interface de Programação de Aplicativos) que se beneficiam desta poderosa ferramenta, entre
elas então:
► OpenGL (Open Graphics Library) pode ser definida como uma biblioteca de
interface de software para aceleração da programação de dispositivos gráficos 3D com
excelente qualidade visual e rapidez. Criada pela SGI, a biblioteca OpenGL é bastante popular
nas indústria de jogos, super computadores, efeitos especiais para TV e cinema.
► VTK, (Visualization Toolkit) é uma API disponibilizada gratuitamente pela Kitware Inc,
possuindo código fonte aberto e é totalmente portável. Ele consiste em uma biblioteca de
classes implementadas em C++ e é utilizada para o processamento de imagens e visualização
científica.
► 3D Studio Max ou 3ds Max, é um programa de modelagem 3D que permite renderização
de imagens e animação. Sendo usado em produção de filmes de animação, vinhetas e
comerciais para TV, maquetes eletrônicas e na criação de qualquer mundo virtual.
► Rhinoceros 3D da empresa Robert McNeel & Associates, possui um formato que
reconhece as NURBS e tem um foco maior na modelagem de superfícies.
Bibliografia 1 – Burden, R. L. Faires, J. D. Numerical Analyisis, Brooks – Cole Publishing Company,
1997.
2 – Cunha, M. C. Métodos Númericos, Editora Unicamp, 2003 (sugere o uso do Maple)
3 – Sperandio, D. Cálculo Numérico, Pearson
4 – Atkinson, K. An Introduction to Numerical Analysis, John Willey & Sons, 1978
5 – http://www.sbg.ac.at/mat/staff/revers/revers07.html
6 - http://www.cse.uiuc.edu/iem/interpolation/brnstein/
7 - http://en.wikipedia.org/wiki/Bernstein_polynomial
8 - Kenneth I. Joy, Bernstein Polynomials, On-Line Geometric Notes
9 - Foley, James D., Fundamentals of interactive computer graphics, The System
Programming Series.(1942);
10 - Azevedo, Eduardo, Computação Gráfica, Teoria e Prática (2003);
11 - Jambrina, Leonardo F., Tema 2: Curvas de Bézier;
12 - Andrade, Lenimar N. de Curvas e Superfícies de Bézier e B-Spline (1999);
13 - Universidade de Aveiro http://www.mat.ua.pt/disciplinas/an
14 - Conte, S. D. “Elementos de Análise Numérica”.
15 - Bronson, R. “Moderna Introdução às Eq. Difs.”