UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE …lotavio/tgs/2014... · Dessa forma, o circuito...
66
UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE ENGENHARIA MECÂNICA Relatório Final Trabalho de Conclusão de Curso Caracterização de Indutores para Sistemas de Levitação Inductrack Autor: Leandro Victor Fidelis Orientador: Prof. Dr. Luiz Otavio Saraiva Ferreira Campinas, novembro de 2014.
-
Upload
truongthuan -
Category
Documents
-
view
213 -
download
0
Transcript of UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE …lotavio/tgs/2014... · Dessa forma, o circuito...

UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final
Trabalho de Conclusão de Curso
Caracterização de Indutores
para Sistemas de Levitação Inductrack
Autor: Leandro Victor Fidelis
Orientador: Prof. Dr. Luiz Otavio Saraiva Ferreira
Campinas, novembro de 2014.

UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final
Trabalho de Conclusão de Curso
Caracterização de Indutores
para Sistemas de Levitação Inductrack
Autor: Leandro Victor Fidelis
Orientador: Prof. Dr. Luiz Otavio Saraiva Ferreira
Curso: Engenharia de Controle e Automação
Trabalho de Conclusão de Curso apresentado à Comissão de Graduação da Faculdade de
Engenharia Mecânica, como requisito para a obtenção do título de Engenheiro de
Automação e Controle.
Campinas, 2014
S.P. - Brasil

Agradecimentos
Agradeço ao professor. Dr. Luiz Otávio Saraiva Ferreira e ao professor Dr Pablo
Siqueira Meirelles pela oportunidade de desenvolver esse projeto. Também agradeço ao
meu colega de grupo Arlindo Anselmo de Oliveira Coutinho pelo comprometimento com o
trabalho e ao Marcílio Messias da Silveira, técnico do Laboratório de Mecatrônica, que
contribuiu muito com sua experiência durante a montagem da bancada.

i
Índice
Resumo ............................................................................................................................. 1
Lista de Figuras ................................................................................................................ 2
Lista de Tabelas ................................................................................................................ 3
Nomenclatura .................................................................................................................... 4
Capítulo 1 ............................................................................................................................. 5
Introdução ......................................................................................................................... 5
Capítulo 2 ............................................................................................................................. 6
Revisão Bibliográfica......................................................................................................... 6
2.1. Conceito indutrack e levitação magnética passiva ............................................ 6
2.2. Calculo da velocidade crítica ............................................................................ 8
2.3. Aquisição de dados ........................................................................................... 9
2.4. Tiristores (Rashid, 1999) ..................................................................................10
2.5. Motor DC e Universal: ......................................................................................11
Capítulo 3 ............................................................................................................................15
Especificações do projeto ................................................................................................15
3.1 Esquema circuito projeto: ....................................................................................15
3.2 Controle do motor universal: ...............................................................................16
3.3 Validação do circuito de velocidade: ...................................................................19
3.4 Circuito tacômetro: ..............................................................................................21
3.5 Placas de controle e aquisição: ...........................................................................22
3.6 Definição do Arduíno: ..........................................................................................23
Capítulo 4 ............................................................................................................................25
Montagem da bancada – Execução do projeto ................................................................25
4.1 Montagem da bancada ........................................................................................25
4.2 Medição das forças de torção e levitação ...........................................................27
4.3 Medição da velocidade ........................................................................................32
4.4 Programação do Microcontrolador ......................................................................34
Capítulo 5 ............................................................................................................................36

ii
Experimentos ...................................................................................................................36
5.1 Procedimento dos testes e pistas utilizadas ........................................................36
5.2 Características do sistema utilizado e interferências ..........................................36
5.3 Resultados dos testes – Disco Alumínio 1 ..........................................................38
5.4 Resultados dos testes – Disco Alumínio 2 ..........................................................40
5.5 Comparação das pistas de alumínio ...................................................................43
5.6 Resultados dos testes – Cobre 1 ........................................................................43
5.7 Resultados dos testes – Cobre 2 ........................................................................46
5.8 Comparação das pistas de cobre ........................................................................48
Capítulo 5 ............................................................................................................................50
Conclusões ......................................................................................................................50
Bibliografia ...........................................................................................................................51
Anexos.................................................................................................................................52

1
Resumo
Fidelis, Leandro Victor, Caracterização de indutores para sistema de Levitação Indutrack,
Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas, Trabalho de
Conclusão de Curso, 2014, 66p.
A partir do Trabalho de conclusão de curso realizado pelo aluno Rafael Schmidt
Seminari, em 2009, decidimos executar fisicamente a bancada de caracterização proposta
para podermos realizar testes de caracterização do sistema INDUTRACK de levitação
magnética passiva. O objetivo final da bancada é permitir o estudo do comportamento de
diferentes configurações de indutores dispostos radialmente em um disco, que pode servir
tanto para aplicações de mancais magnéticos e levitação sobre trilhos quanto outro
sistema de levitação magnética passiva.
A bancada foi construída em dupla com o aluno Arlindo Anselmo de Oliveira
Coutinho, da turma de Engenharia de Controle Automação de 2008, sendo que este teve
foco maior na parte mecânica e o aluno Leandro Victor Fidelis na parte eletrônica e
computacional.
Palavras Chave: Indutrack, levitação magnética passiva, protótipo, bancada

2
Lista de Figuras
Figura 1 - Esquema de montagem bancada ......................................................................... 5
Figura 2 - Imãs em arranjo Halbach ..................................................................................... 6
Figura 3 - Circuito RL deslizando num arranjo de imãs ........................................................ 8
Figura 4 - Simulação da direção do campo B ....................................................................... 9
Figura 5 - Período de variação do campo magnético ........................................................... 9
Figura 6 - Principio funcionamento motor CC (Siemens, 2006) ...........................................11
Figura 7 - Comutador e escovas (Siemens, 2006) ..............................................................12
Figura 8 - Esquema motor universal (www.feiradeciencias.com.br, 2014) ..........................13
Figura 9 - Modelo de circuito elétrico para motor CC ..........................................................13
Figura 10 - Diagrama de ligações do projeto .......................................................................15
Figura 11 - Comportamento tiristor (Rashid, 1999) .............................................................16
Figura 12 - Circuito dimmer .................................................................................................17
Figura 13 - Circuito para controle velocidade motor ............................................................18
Figura 14 - Variação do ganho e angulo de disparo do gate ...............................................18
Figura 15 - Tensão na carga (roxo) para R1=R2=5% .........................................................19
Figura 16 - Tensão na carga (roxo) para R1=R2=30% .......................................................19
Figura 17 - Ensaio validação controle velocidade ...............................................................20
Figura 18 - Forma de onda com máxima potência ..............................................................20
Figura 19 - forma de onda com potência mínima ................................................................20
Figura 20 - Esquema de ligação do tacometro ...................................................................21
Figura 21 - Circuito tacômetro .............................................................................................22
Figura 22 - Usinagem das peças da bancada .....................................................................25
Figura 23 - Bancada montada sem a pista ..........................................................................25
Figura 24 - Posição das células de carga ............................................................................26
Figura 25 - Bancada completa com hardware .....................................................................27
Figura 26 - Teste do amplificador inversor ..........................................................................28
Figura 27 - Amplificador de instrumentação (Datasheet LF353) .........................................28
Figura 28 - Placa do amplificador com regulagem de offset ................................................29
Figura 29 - Curva de resposta da célula de carga ...............................................................30
Figura 30 - Conferencia dos pesos ......................................................................................30
Figura 31 - Fio organizado celula de carga .........................................................................31
Figura 32 - Placa tacômetro ................................................................................................32

3
Figura 33 - Diferenciação da reflexão da luz .......................................................................32
Figura 34 - Tempo de resposta do emissor-receptor ...........................................................33
Figura 35 - Verificação das velocidades de rotação medidas ..............................................34
Figura 36 - Regulador de velocidade com marcações para experimento ............................36
Figura 37 – Dados do ensaio sem pista (vazio) ...................................................................37
Figura 38 - Variação das forças sem pista (vazio) ...............................................................37
Figura 39 - Pista alumínio 8 ranhuras ..................................................................................39
Figura 40 - Dados do ensaio da pista aluminio com 8 ranhuras ..........................................39
Figura 41 - Esforço x Velocidade para pista com 8 ranhuras ..............................................40
Figura 42- Pista alumínio 24 ranhuras .................................................................................41
Figura 43 - - Dados do ensaio da pista aluminio com 24 ranhuras ......................................41
Figura 44 - Esforço x Velocidade para pista com 24 ranhuras ............................................42
Figura 45 - Pista com peso para compensar a levitação .....................................................42
Figura 46 - Comparação de pistas de aluminio ...................................................................43
Figura 47 - Pista cobre sem ranhuras .................................................................................44
Figura 48 - Dados do ensaio da pista cobre sem ranhuras .................................................44
Figura 49 -Esforço x Velocidade para pista com 24 ranhuras .............................................45
Figura 50 - Ensaio com pista de cobre sem ranhuras compensado ....................................45
Figura 51 - Pista cobre 180 ranhuras ..................................................................................46
Figura 52 - Dados do ensaio da pista cobre 180 ranhuras .................................................47
Figura 53 - Esforço x Velocidade pista cobre 180 ranhuras ................................................47
Figura 54 - Esforço x Velocidade compensado pista cobre 180 ranhuras ...........................48
Figura 55 - Comparação das pistas de cobre ......................................................................48
Lista de Tabelas
Tabela 1 - Comparativo Micro-controladores e sistema de aquisição .................................22
Tabela 2 - Comparativo Arduinos ........................................................................................23
Tabela 3 - Parâmetros pista alumínio 8 ranhuras ................................................................38
Tabela 4 - Parâmetros pista alumínio 24 ranhuras ..............................................................40
Tabela 5- Parâmetros pista cobre sem ranhuras .................................................................43
Tabela 6 - Parametros ensaio pista cobre 180 ranhuras .....................................................46

4
Nomenclatura
Letras Latinas
d Distancia da lateral do imã cúbico [m]
B Campo magnético [T]
L Indutância [L]
N Número de espiras -
f Frequência [Hz]
fc Frequência de corte [Hz]
R Resistência [Ω]
C Capacitância [F]
Letras Gregas
𝜙 Fluxo magnético [T.m2]
𝜀 Força contra eletromotriz [V]
𝜔 Velocidade angular [rad/s]
𝜔𝑐 Velocidade angular de corte [rad/s]

5
Capítulo 1
Introdução
O projeto consiste na montagem de uma bancada de testes conforme imagem
abaixo:
Figura 1 - Esquema de montagem bancada
Um motor estará fixado a uma pista com imãs permanentes em arranjo de Halbach.
Um suporte que será ligado a extensômetros permite o posicionamento de uma pista de
indutores imediatamente acima do arranjo de imãs, possibilitando a medição da força de
arrasto e de levitação gerada pela movimentação dos imãs permanentes abaixo dos
indutores.
Realizando variações nas pistas, será possível caracterizar o comportamento de
cada tipo de arranjo de indutores de acordo com a velocidade de giro do motor, medindo
as forças de arrasto e levitação.

6
Capítulo 2
Revisão Bibliográfica
2.1. Conceito indutrack e levitação magnética passiva
O Conceito indutrack depende de dois componentes principais. Uma parte com imãs
cúbicos dispostos no arranjo Halbach e outra parte com circuitos indutivos. O arranjo
Halbach faz com que seja gerado um campo magnético senoidal de um lado dos imãs e
os campos sejam anulados do lado posterior, conforme ilustração abaixo (Schmidt
Seminari, 2009):
Figura 2 - Imãs em arranjo Halbach
Dessa forma, o circuito indutivo que pertence a segunda parte do indutrack, quando
deslizado sobre o arranjo de imãs, fica sob ação de um campo magnético que varia de
direção de maneira senoidal. Pela Lei de Faraday, quando há variação do fluxo magnético

7
em uma bobina, neste é induzida uma tensão, portanto aparece uma tensão alternada no
circuito da pista indutiva.
𝜙 = ∫ 𝐵. 𝑑𝐴
Definição de fluxo magnético (Halliday, 1993)
𝜀 = −𝑁.𝑑𝜙
𝑑𝑡
Lei de Faraday (Halliday, 1993)
Essa tensão, como observado na equação acima, depende do campo gerado pelos
imãs, da área do condutor do circuito indutivo e da velocidade em que as partes se
deslocam uma em relação à outra.
Considerando que um condutor em que percorre corrente elétrica gera um campo
magnético e este campo, quando na presença de um campo magnético externo gera uma
força de acordo com a equação abaixo, é necessário calcular a corrente gerada na pista
para saber a força que irá aparecer por conta do movimento relativo entre as partes do
dispositivo.
𝐹𝑏 = 𝑖. 𝐿 𝑥 𝐵
Força sobre uma corrente (Halliday, 1993)
Considerando um circuito RL (Schmidt Seminari, 2009) conforme malha abaixo, é
necessário estabelecer a equação da corrente para se calcular a força gerada.

8
Figura 3 - Circuito RL deslizando num arranjo de imãs
Pela lei das malhas,
𝑉 = 𝐿.𝑑𝐼(𝑡)
𝑑𝑡+ 𝑅. 𝐼(𝑡) Aplicando Laplace
𝐼(𝑠)
𝑉(𝑠)=
1
𝑅+𝐿.𝑠
Obtém-se então uma função de transferência de primeira ordem com polo em -𝑅
𝐿, que é
estável e tem fase inicial 0 e final de -90 graus. Dessa forma, observa-se que a força
resultante por conta da tensão induzida, terá a mesma direção que a velocidade para
pequenas velocidades, mas a medida que essa aumenta até passar pelo polo R/L, chegara
um instante em que a força será perpendicular à velocidade. Essa força perpendicular
provoca repulsão entre as duas partes do sistema, implicando na levitação magnética
passiva.
2.2. Calculo da velocidade crítica
De acordo com a teoria indutrack apresentada no item anterior, existe uma
velocidade a partir da qual a força de arrasto passa a ser desprezível em relação a
força de repulsão. Essa relação depende basicamente do polo da função de
transferência entre a corrente e a tensão induzida na parte do circuito RL. (polo = -R/L).
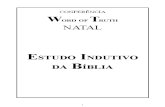
Considerando a simulação do arranjo Halbach abaixo (Schmidt Seminari, 2009),
observamos que se a lateral de um imã medir d, o período da variação do fluxo será de
4.d.
9
Figura 4 - Simulação da direção do campo B
Figura 5 - Período de variação do campo magnético
Assim, pode-se determinar a velocidade crítica da pista em função de R e L para
saber se será possível obter com o motor que será utilizado para montagem:
𝜔 = 𝑅
𝐿 = 2. 𝜋. 𝑓 =
2.𝜋.𝑣
4.𝑑 𝑣 >
2.𝑑.𝑅
𝜋.𝐿
2.3. Aquisição de dados

10
O projeto da construção da bancada necessita de coleta de informações das forças
de arrasto e repulsão entre as partes do sistema indutrack que será caracterizado.
Portanto, alguns pontos de aquisição de dados devem ser observados:
Efeito anti-aliasing: Quando se deseja fazer uma aquisição de sinais, a frequência de
amostragem não pode ser inferior que o dobro da frequência máxima a ser observada
(Arruda, 2008), caso contrário, teremos um efeito indesejado da distorção do sinal lido.
Para evitar esse problema, pode-se utilizar um filtro passa baixa, que limita as
frequências lidas. Caso seja necessária rampa de descida bem acentuada para o corte
de altas frequências, podemos utilizar um filtro Butterworth ou Chebychev (Oppenheim),
mas uma possibilidade simples é a utilização de um circuito RC, que tem
comportamento de passa baixa e a frequência de corte é dada por:
𝜔𝑐 = 1
𝑅. 𝐶
Medição de frequência por janela fixa ou frequência fixa: As medições de frequência
podem ser dadas de duas maneiras: Frequência fixa ou janela fixa. O método de janela
fixa consiste em ler pulsos externos durante um período de tempo conhecido e, após
esse período, determina-se a frequência lida dividindo-se a quantidade de pulsos lidos
pelo período conhecido. Esse método é recomendado para altas frequências. Outra
possibilidade é disparar um contador de pulsos com uma frequência conhecida durante
o intervalo de um período da leitura de um pulso externo. Este outro método é
conhecido como frequência fixa e indicado para medição de baixas frequências.
(Otávio, 1 semestre 2012)
2.4. Tiristores (Rashid, 1999)
Os tiristores são dispositivos semicondutores utilizados para chaveamento em
circuitos de potência. Existem alguns tipos diferentes de tiristores, mas os de interesse no
trabalho são o tiristores de controle de fase (SCR) e o TRIAC. Para iniciar a condução em
um tiristor SCR (disparar) é necessário aplicar uma tensão positiva entre o gatinho e o
catodo. Uma vez iniciada a condução, o tiristor continuará conduzindo até que uma tensão
reversa seja aplicada em seus terminais.
O TRIAC tem o comportamento de 2 tiristores SCR ligados em antiparalelo.

11
2.5. Motor DC e Universal:
Princípio de funcionamento: O motor universal é um motor de corrente contínua que
possui bobinas ao invés de imãs permanentes, o que permite a alteração dos polos do
estator quando a tensão da rede inverte o sentido. Portanto, a análise é feita inicialmente
para o Motor CC e posteriormente complementada para o motor universal.
O princípio de giro do eixo do motor CC pode ser ilustrado pela figura abaixo:
Figura 6 - Principio funcionamento motor CC (Siemens, 2006)
Na imagem o estator é representado por imãs permanentes nas
extremidades. Ao centro uma bobina enrolada em um entreferro polariza o metal
fazendo aparecer um polo norte e um sul quando energizada com uma corrente. Os
polos do entreferro são atraídos pelos polos do imã permanente fazendo rotor girar.
Quando os polos estão se alinhando, a corrente tem o sentido invertido, implicando
na inversão dos polos do rotor e consequentemente o rotor continua girando.
A inversão da corrente ocorre por meio de um comutador com duas escovas,
que com o giro do motor altera o contato dos terminais da bobina do rotor. Um
esquema simplificado é mostrado abaixo:

12
Figura 7 - Comutador e escovas (Siemens, 2006)
Durante um período entre o contato da escova estar em um polo e alterar a
polarização, o rotor fechará um curto entre os terminais da bobina, sem que ela fique
energizada. A inércia do eixo faz com que o rotor complete o ciclo de rotação para inverter
o sentido e o curto permite a liberação da energia armazenada na bobina, processo que
emite uma faísca.
No caso dos motores universais, ao invés de imãs permanentes no estator, este
também é formado eletroímã (bobinas e entreferros) de acordo com imagem abaixo:

13
Figura 8 - Esquema motor universal (www.feiradeciencias.com.br, 2014)
Como os imãs estão alimentados pela tensão de alimentação do motor, se a tensão
de alimentação é invertida, os polos do estator também serão invertidos, portanto o
funcionamento ocorre tanto em corrente contínua quanto em corrente alternada.
Modelo para controle: O circuito que representa um motor CC pode ser modelado
conforme a figura abaixo (Siemens, 2006), exibindo a relação entre o circuito do rotor
(armadura) e do estator(campo):
Figura 9 - Modelo de circuito elétrico para motor CC
Fazendo análise do circuito pela Lei de Kirchhoff e lembrando que pela Lei de
Faraday a força eletromotriz induzida é proporcional ao fluxo de rotação e desprezando a
queda de tensão na armadura devido ao resistor Ra, chegamos a conclusão que:

14
𝑛 = 𝐾 𝑈𝑎
Φ
Onde:
n – velocidade de rotação
K – constante que depende das características físicas do motor
Φ - fluxo no entreferro
O que permite concluir que a velocidade é diretamente proporcional a tensão
aplicada na armadura e inversamente proporcional ao fluxo no entreferro. Portanto, para
controlarmos um motor CC, basta controlar a tensão na armadura ou o fluxo no entreferro,
que pode ser feito controlando-se a corrente de campo. Esse resultado é importante para o
trabalho, pois permitirá a escolha de um método de controle para o motor.

15
Capítulo 3
Especificações do projeto
3.1 Esquema circuito projeto:
Para ter uma visão geral do circuito do projeto, fiz o esquema abaixo:
Figura 10 - Diagrama de ligações do projeto
Consideramos que teremos 8 laminas para medição das tensões de arrasto e
levitação. Cada lamina utilizará 2 extensômetros, um para tração e outro para compressão,
obtendo dessa forma 4 pontes de Wheatstone.
Para o controle de velocidade do motor, considerei um controle simples inicialmente,
onde um tacômetro observará a velocidade do motor e será exibida em um display. A
16
regulagem da velocidade será feita inicialmente por um potenciômetro e posteriormente
por um set point de velocidade que será informado por um display.
Um micro controlador faz a conversão das leituras dos extensômetros e do
tacômetro em forças e velocidade, exibindo-as em um display.
Neste esquema, o micro controlador a ser considerado precisa ter:
5 entradas analógicas
1 saída PWM
1 saída analógica
3.2 Controle do motor universal:
Como para realizar o controle da velocidade do motor podemos simplesmente alterar a
tensão da armadura, escolhermos projetar um controlador de tensão. Tendo em vista que
o motor a ser utilizado irá operar em correntes e tensões elevadas e maiores do que um
circuito eletrônico com PWM suportaria (da ordem de 220V e 6A), é proposto um circuito
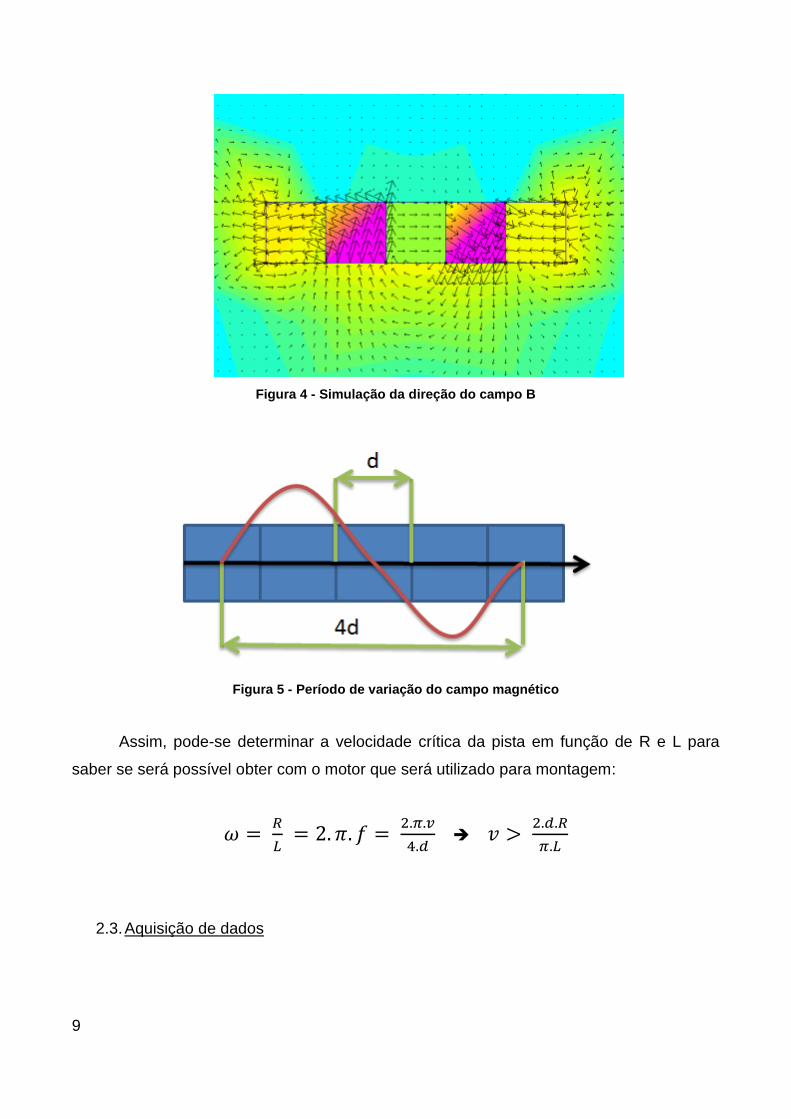
utilizando tiristores. A ideia é montar um chaveamento da tensão aplicada de modo a
permitir a variação da tensão média aplicada. Esse chaveamento será realizado alterando-
se o ângulo de disparo do tiristor, conforme o gráfico abaixo:
Figura 11 - Comportamento tiristor (Rashid, 1999)
Um circuito conhecido que utiliza tiristores para o chaveamento é o dimmer. O
dimmer mais comum funciona com um tiristor TRIAC e um circuito RC para realizar o
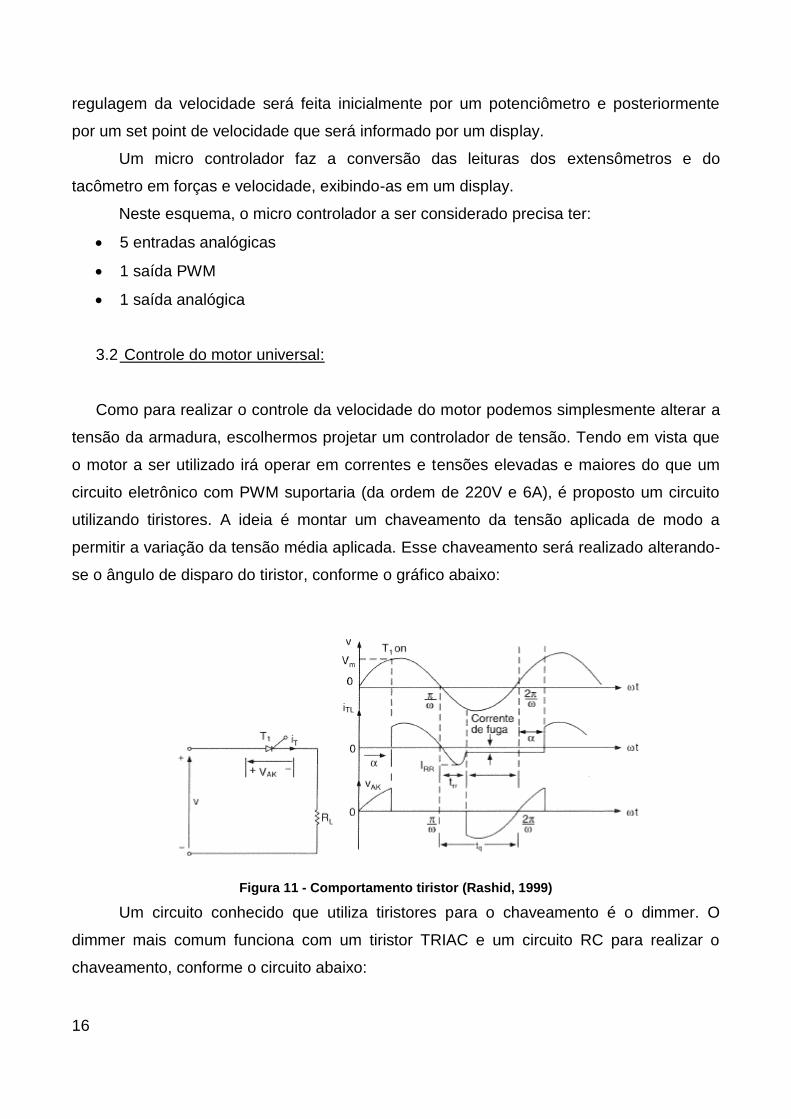
chaveamento, conforme o circuito abaixo:
17
Figura 12 - Circuito dimmer
No circuito RC, pela análise de Laplace a tensão no capacitor é dada por:
𝑉𝑐 = 1
1 + 𝑅𝐶. 𝑠𝐶𝐴
Na frequência de 60Hz (ω = 377/rad/s), o ângulo de defasagem entre a tensão de
alimentação e a tensão no capacitor é dado por:
𝜃 = 𝑎𝑟𝑐𝑡𝑔 (𝐼𝑚(𝑉𝑐)
𝑅𝑒(𝑉𝑐))
Como a tensão no capacitor está atrasada em relação a alimentação, o gate do
tiristor será disparado com o ângulo de defasagem . A variação do ângulo de defasagem
pode ser feita variando-se o termo RC da equação, o que pode ser feito com um
potenciômetro. No entanto, o circuito RC tem apenas 1 polo, fazendo com o controle do
ângulo seja no máximo até 90º. Dessa forma, projetei um outro circuito com 2 polos,
permitindo variação até 180º.

18
Figura 13 - Circuito para controle velocidade motor
Onde R1 e R2 são Potenciômetros.
Para o novo circuito, obtive a seguinte relação por Laplace:
𝑉𝑐2 = 1
(1 + 𝑅2. 𝐶2. 𝑠)(1 + 𝑅1. 𝐶1. 𝑠) + 𝐶2. 𝑅1. 𝑠𝐶𝐴
Escolhendo uma constante RC para atenuar 3db próximo de 377rad/s e
posteriormente apurando os valores com o Matlab ®, obtive a curva abaixo confirmando
uma boa varredura no ângulo de disparo:
Figura 14 - Variação do ganho e angulo de disparo do gate
Onde:
R1 = R2 = Potenciômetro variando de 0 a 200k

19
C1 = C2 = 50nF
A resistência do motor foi considerada como R = 10 e a indutância L = 10mH.
Verifiquei na curva do ângulo que para R1=R2=5% o ângulo deveria ser de
aproximadamente 30º e para R1=R2=30% o ângulo deveria ser aproximadamente 95º.
Simulando o circuito da Figura 13, confirme o resultado conforme gráficos abaixo:
Figura 15 - Tensão na carga (roxo) para R1=R2=5%
Figura 16 - Tensão na carga (roxo) para R1=R2=30%
3.3 Validação do circuito de velocidade:

20
Para verificar o funcionamento prático do circuito proposto para a velocidade do motor,
comprei um dimmer e alimentei duas lâmpadas – colocadas em série para diminuir a
potência luminosa – conforme esquema abaixo:
Figura 17 - Ensaio validação controle velocidade
Com o osciloscópio ligado em paralelo em uma das lâmpadas, verifiquei a forma da
tensão que está sendo aplicada no mínimo e no máximo curso do dimmer:
Figura 18 - Forma de onda com máxima potência
Figura 19 - forma de onda com potência mínima

21
Observando as formas de onda confirmei o entendimento esperado.
Durante o experimento, observei que pode ser difícil ter uma regulagem precisa da
velocidade apenas com o circuito RC como disparo, pois voltando a curva característica de
variação do ângulo da Figura 14 observei que penas variações no potenciômetro no início,
causam grande variação de tensão (faixa entre 0% ~ 20% do potenciômetro já variam mais
de 100º no ângulo de disparo) e variações no curso final são pouco sensíveis na variação
do angulo. No entanto, como o circuito é simples de ser construído e permite o controle da
velocidade, proponho construí-lo inicialmente e posteriormente utilizar o controlador com
um PWM executando a função de gerador de pulsos para regular o gatinho. Isso permitirá
fazer um controle em malha fechada e setar a velocidade desejada, porém com um circuito
já em funcionamento.
3.4 Circuito tacômetro:
Para medir a velocidade do motor, considerei o esquema abaixo:
Figura 20 - Esquema de ligação do tacometro
Será posicionado um conjunto com foto emissor e foto receptor, similar aos
utilizados na placa de óptica que identificava a fita no chão no projeto de ES770. O
conjunto será posicionado logo abaixo do disco acoplado no eixo do motor. Uma faixa de
cor diferente será identificada pelo sensor e provocará uma interrupção no controlador.

22
Figura 21 - Circuito tacômetro
Como a velocidade máxima do motor é 25.000rpm, que corresponde a frequência de
aproximadamente 417Hz, se utilizarmos o método da frequência fixa com um clock igual
ou superior a 4MHz teremos uma precisão mínima de aproximadamente 1/10.000 Hz ou
0,006rpm em 25.000rpm (avaliando somente o método de determinação da velocidade).
Para velocidades menores, a precisão aumenta, portanto utilizaremos frequência fixa.
Como inicialmente não há um requisito de tempo mínimo para atualização da
velocidade no display, faremos a média das 10 ultimas velocidades antes de exibir, o que
ajuda eliminar ruídos.
3.5 Placas de controle e aquisição:
Inicialmente considerei 3 possibilidades, sendo uma delas comprar placas de aquisição
e controle prontas da National Instruments. Após algumas consultas de preço na internet,
descartei a compra de placas da NI e avaliei apenas as outras duas que são a utilização do
PIC18F4550, utilizado no projeto da disciplina de ES770 do semestre passado (2013-2s)
com a mesma placa que foi utilizada no carrinho ou o Arduíno, circuito didático que utiliza a
linha ATMega e tem bastante material disponível. Para fazer a opção, fiz a tabela
comparativa abaixo considerando alguns parâmetros chaves.
Tabela 1 - Comparativo Micro-controladores e sistema de aquisição
Parâmetro PIC 18F4550 Arduíno Melhor no parâmetro

23
Preço R$100,00
(componentes + pic)
~R$100,00 (Kit
básico)
Empate
Afinidade dos alunos
do TG
Experiência de 1 ano
em projetos
embarcados
Sem afinidade PIC 18F4550
Material disponível
para consulta
Material técnico e
exemplos ES770
Vários fóruns e
materiais na Web
Arduíno
Facilidade de
upgrade
Necessidade de
alteração na placa
Vende módulos
separados
Arduíno
Facilidade de montar
a placa
Necessário soldar
componentes
Placa vem pronta Arduíno
Considerando a experiência com o projeto de ES770, no qual tivemos bastante
dificuldade com a utilização da placa por conta de problemas de soldagem e com a
comunicação do bootloader via USB em conjunto com os pontos da tabela acima,
avaliamos que a melhor opção é a aquisição de um Arduíno. A única desvantagem
apontada que foi a afinidade dos alunos, consideramos ser facilmente contornada pela
facilidade que temos com programação em C e a quantidade de material disponível na
Web. Outra vantagem que consideramos importante é que se houver o interesse de
realizar manutenções ou upgrades no futuro, o Arduíno possui um vasto material e
experiências relatadas na Web, o que permitirá a fácil adaptação de outros que por ventura
se envolverem no projeto.
3.6 Definição do Arduíno:
Como existem vários tipos de Arduíno, realizei uma comparação consultando o site
oficial do Arduíno (http://arduino.cc/en/Products.Compare)
Tabela 2 - Comparativo Arduíno
Parâmetro Mínimo Projeto
Arduíno Uno
Arduíno Mega
Arduíno ADK
Arduíno Leonardo
Tensão - 5V 5V 5V 5V
Micro controlador - ATmega328 ATmega2560 ATmega2560 ATmega32U4
Pinos I/O 8 14 54 54 20

24
Pinos PWM 1 6 (8 bits) 15 (8 bits) 15 (8 bits) 7 (8 bits)
Pinos analógicos 7 6 (10 bits) 16 (10 bits) 16 (10 bits) 12 (10 bits)
Memória Flash - 32KB 256KB 256KB 32KB
Clock - 16MHz 16MHz 16MHz 16MHz
USB Sim Regular Regular Regular Micro (2.0)
Preço médio* - R$ 60,00 R$ 90 R$ 200 R$ 60,00
Suporte a Androide NA Não Não Sim Não
* Fonte mercado livre em 27/4/2014
A variação de preço entre os modelos é baixa, exceto pelo ADK que dá suporte a
Androide e portanto é mais caro. Como não há aplicação no projeto que necessite de
Androide, optamos pela compra do Arduíno Mega, que tem pouca diferença no valor e
maior capacidade de memória e portas de entrada e saída.
25
Capítulo 4
Montagem da bancada – Execução do projeto
4.1 Montagem da bancada
Inicialmente havíamos projetado uma bancada parecida com o proposto no início do
projeto, porém com pequenas modificações. No andamento do projeto, vimos que não estava sendo possível concluir a parte mecânica, por conta dos materiais que atrasaram e da usinagem das peças que não estava sendo executada em tempo hábil. Por conta disso, alteramos o projeto, utilizando peças e equipamentos que estavam disponíveis e realizamos a maior parte da usinagem por conta própria.
Figura 22 - Usinagem das peças da bancada
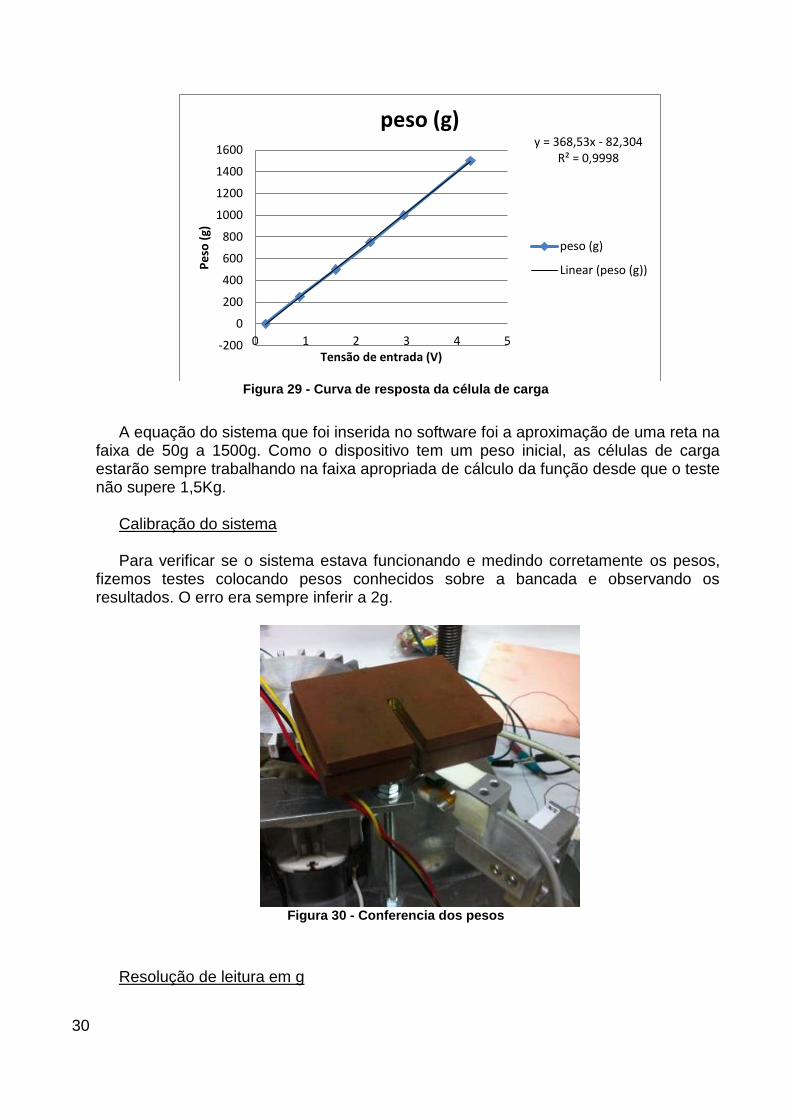
. A nova configuração ficou da seguinte forma:
Figura 23 - Bancada montada sem a pista

26
Substituímos as lâminas por 4 células de carga. Duas para medir o torque em X e
duas para medir a força em Y. Utilizamos os próprios fusos projetados anteriormente para
sustentar as células de carga e usinamos 4 peças para fixar as células no fuso e fixar a
célula de força em X na célula de força em Y.
Figura 24 - Posição das células de carga
Nesta etapa, nos preocupamos no sentido de giro do motor, para posicionar o
sensor de torque e no peso máximo de levitação. Posicionamos as células de carga que
mediam a variação em Y para medir forças aplicadas para baixo. Então colocamos uma
madeira de aproximadamente 800g para sustentar as pistas. Dessa forma, sabíamos que
poderíamos medir uma força de levitação de até 800g, e caso o resultado fosse maior,
deveríamos aumentar o peso.
Na parte de hardware, habilitamos o Arduíno para enviar os dados USB. Isso
possibilitou a coleta de uma amostragem bem maior do que havíamos previsto para os
primeiros ensaios, permitindo a geração de gráficos com linhas de tendência que serão
apresentados mais a frente. A bancada com todo o sistema está abaixo:

27
Figura 25 - Bancada completa com hardware
4.2 Medição das forças de torção e levitação
Sensores de peso Com a mudança do projeto, tivemos que improvisar os sensores de força da
bancada. Haviam disponíveis no laboratório células de carga de 300g, 3Kg e 5Kg. Avaliamos que por conta do peso que a estrutura poderia oferecer, a célula de carga mais recomendável era a de 3Kg.
No datasheet da célula de carga, verifiquei que a sensibilidade do dispositivo é de 2mV/V. Dessa forma, como estávamos alimentando o sensor com 5V, o sinal máximo esperado era de 10mV. Avaliei que um circuito com amp-op na configuração amplificador inversor seria suficiente, com dois estágios de amplificação.

28
Figura 26 - Teste do amplificador inversor
O CI utilizado inicialmente foi o TL074. No entanto, não estava sendo possível
observar variações na saída do circuito, apenas uma tensão constante próxima de 4V. Após muitas tentativas de remontagem procurando mal contatos e variando ganhos e trocando o circuito amplificador para similares como LF353, observei no datasheet que o TL074 CN tem um offset de até 13mV, o que saturava a saída do amplificador logo de início, sem ligar a célula de carga. Após diminuir substancialmente o ganho projetado de 430vezes para 50 vezes, foi possível observar uma variação na saída.
Também foi proposta pelo professor uma nova configuração de um circuito amplificador de instrumentação:
Figura 27 - Amplificador de instrumentação (Datasheet LF353)

29
O circuito também não funcionou como esperado pelo mesmo motivo de offset. A solução pensada como melhor era comprar um amplificador operacional com
regulagem de offset, no entanto, por conta do atraso do projeto, optou-se por utilizar uma placa amplificadora pronta, desenvolvida no laboratório para testes com a célula de carga.
Figura 28 - Placa do amplificador com regulagem de offset
O diferencial mais importante é o amplificador com regulagem de offset. A
configuração do circuito é o mesmo amplificador inversor. Aquisição dos dados Para aquisição dos dados, foi programada uma função que faz uma média móvel
dos valores de entrada para cada uma das células de carga. Isso elimina ruídos brancos e estabiliza a leitura. Também foi desenvolvida uma função que guarda os valores iniciais com os pesos dos componentes da bancada e desconta esses valores do sinal na saída. Isso permite zerar o peso e partir de um referencial que meça apenas as variações desejadas nas forças.
No programa, o tempo de aquisição dos dados, assim como o número de elementos para a média móvel estão parametrizados. Isso permitiu realizar testes com diferentes valores até chegarmos em valores satisfatórios com poucas oscilações durante os experimentos.
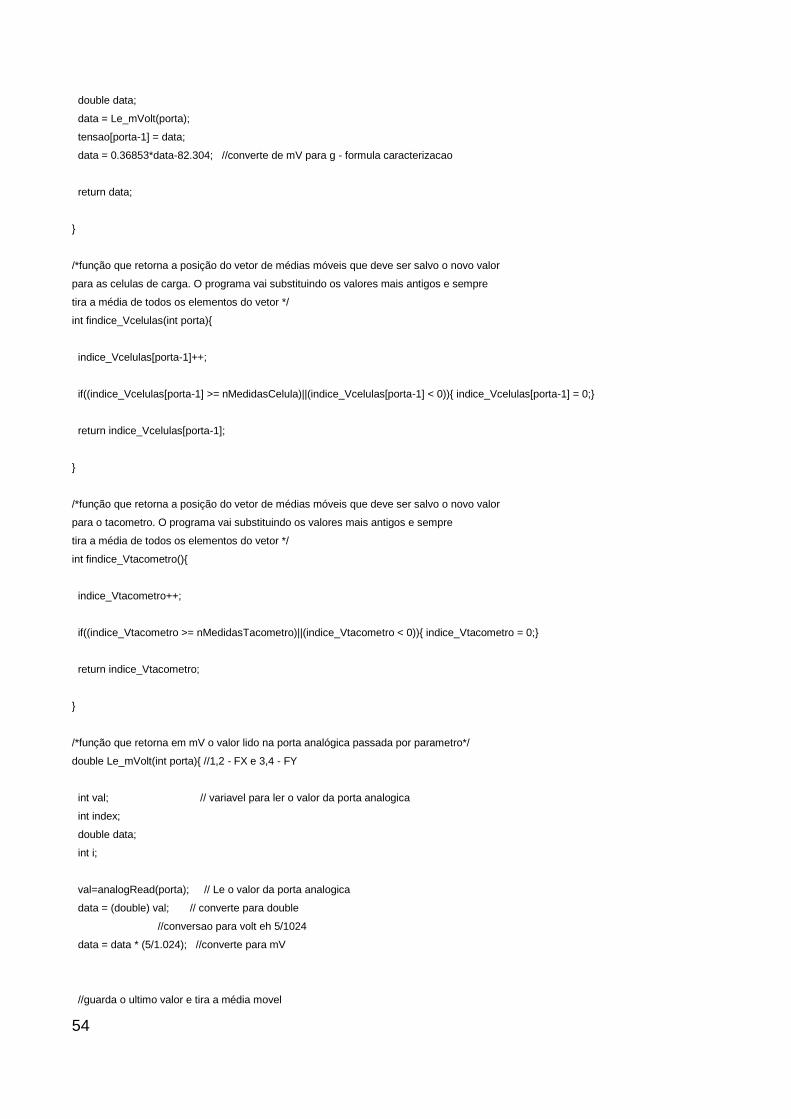
Curva da célula de carga Para converter a entrada em Volts para peso em g, foi realizado um experimento
com pesos conhecidos, observando a tensão na saída do sistema para cada peso posicionado. Obtivemos a curva abaixo:
30
Figura 29 - Curva de resposta da célula de carga
A equação do sistema que foi inserida no software foi a aproximação de uma reta na
faixa de 50g a 1500g. Como o dispositivo tem um peso inicial, as células de carga estarão sempre trabalhando na faixa apropriada de cálculo da função desde que o teste não supere 1,5Kg.
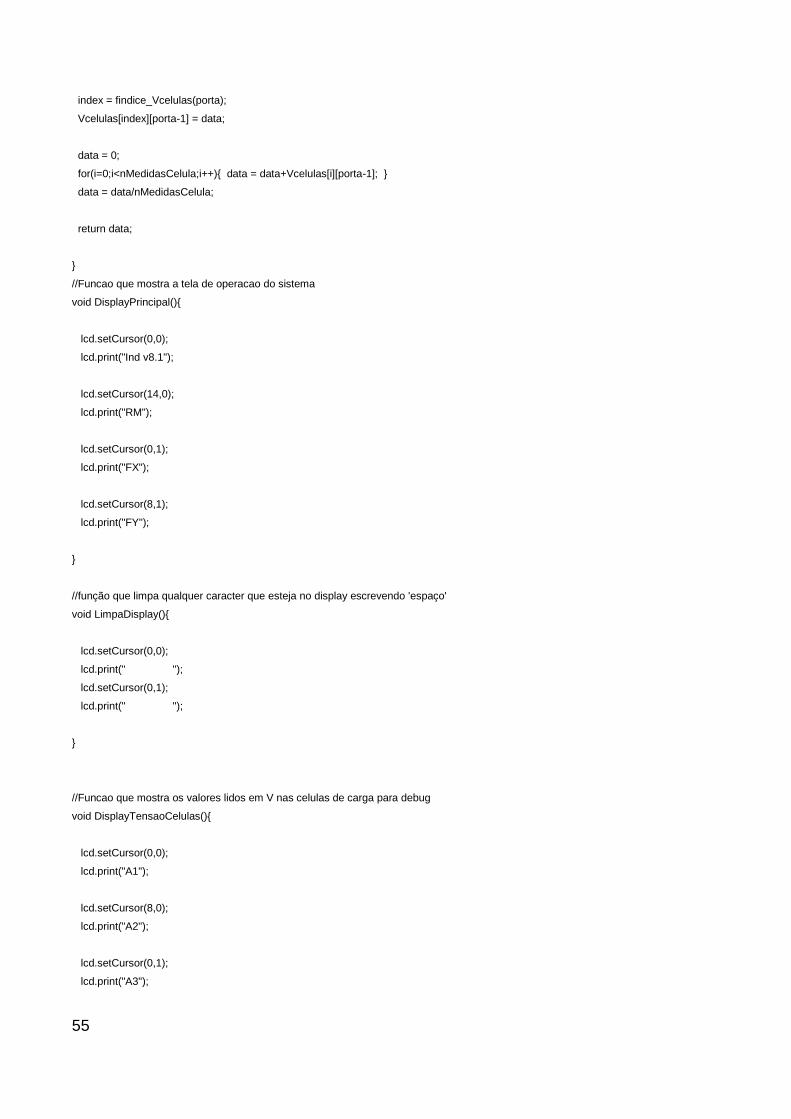
Calibração do sistema Para verificar se o sistema estava funcionando e medindo corretamente os pesos,
fizemos testes colocando pesos conhecidos sobre a bancada e observando os resultados. O erro era sempre inferir a 2g.
Figura 30 - Conferencia dos pesos
Resolução de leitura em g
y = 368,53x - 82,304R² = 0,9998
-200
0
200
400
600
800
1000
1200
1400
1600
0 1 2 3 4 5
Pe
so (
g)
Tensão de entrada (V)
peso (g)
peso (g)
Linear (peso (g))

31
Como a entrada analógica do Arduíno é 10bits e a sensibilidade da célula de carga é 2mv/V, alimentada com 5V para um máximo de 3Kg. Observamos que:
Sensibilidade = 10mV em 3Kg 10/3 .10-6 V/g. Como a 1500g tivemos uma tensão de 4,27V (do ensaio da curva da célula de
carga), o ganho do amplificador estava em 854 vezes. No entanto, a entrada do Arduíno estava configurada para ler até 5V, permitindo a leitura correta de até 1500g. Assim, 5V/1024 * 1500/4,27 = 1,71g/bit.
Dessa forma, teremos um erro menor de 1,7/100 = 1,7% quando as leituras forem
superiores a 100g. Interferências nas medições Durante os ensaios, após realizarmos os primeiros testes e em especial no
momento que se iniciava alguma filmagem, percebia-se uma oscilação significativa nas leituras de força nas células de carga. Neste momento, procurávamos por mal contatos e por vezes refizemos alguns cabos até que percebeu-se que ao aproximar o celular da dos fios da célula de carga, o micro controlador começava a registrar valores aleatórios e de alta amplitude, mesmo sem o motor estar ligado.
Para diminuir essas interferências, curto-circuitamos a malha de todos os cabos blindados das células de carga com o terra das fontes. Isso não eliminou as oscilações ao aproximar o celular, mas estabilizava o sinal logo após a retirada do celular de perto do sensor e possibilitou a continuidade dos testes. Também desenrolamos os cabos das células de carga que estavam organizados para minimizar o efeito.
Figura 31 - Fio organizado célula de carga
Além de aterrar a malha dos cabos, com o objetivo de mitigar esses efeitos
externos, poderíamos ter diminuído o cabo da célula de carga. Porém, por se tratar de um dispositivo provisório que possivelmente deverá ser devolvido ao laboratório a posterior, decidimos não cortar os cabos.

32
4.3 Medição da velocidade
Esquema de medição
O sensor de medição de velocidade foi implantado da maneira como foi projetado.
Utilizamos uma placa com um par emissor-receptor posicionado embaixo do disco com imãs. Foi feita uma faixa de cor escura embaixo do disco, permitindo assim um nível de sinal alto e baixo.
Figura 32 - Placa tacômetro
Figura 33 - Diferenciação da reflexão da luz

33
Uma das preocupações foi se o tempo de resposta do par emissor-receptor era suficientemente rápido para medir as velocidades do sistema. Para essa verificação, foi montado um circuito com o sensor proposto e utilizado um gerador de frequências para alimentar o emissor. Um osciloscópio foi ligado na saída e na entrada do circuito, permitindo a visualização do sinal.
Figura 34 - Tempo de resposta do emissor-receptor
Observa-se que o tempo de resposta é inferior a 50.10-6 s, o que permite medir até
1,2 milhões de RPM, que é bem superior ao esperado máximo de 25000rpm, portanto atende com folga.
O primeiro método para medição foi gerar uma interrupção e medir com o método da frequência fixa, porém com o Arduíno não estávamos conseguindo utilizar um clock mais rápido que 1KHz. Como chegávamos a velocidades de 8000rpm, isso dava erros de medição próximos de 10%. Como o método da janela fixa, diminuímos o tempo de atualização do sinal para quase 1s, o que diminuiu significativamente nosso erro num tempo aceitável. Como sempre iniciávamos os testes com velocidades próximas de 1000rpm, tínhamos um erro máximo de:
𝑒 =1
100060
∗ 100 = 6%
Pela característica do experimento, sempre aumentávamos a velocidade, o que diminui o erro pelo método da janela fixa. Como o programa fazia uma média móvel, o erro também diminuía com a estabilização da velocidade.
Para testar se nosso controle estava funcionando, ligamos um osciloscópio na
entrada da porta que lia as interrupções e observamos que as velocidades lidas pelo micro controlador e pelo osciloscópio eram bem próximas.

34
Figura 35 - Verificação das velocidades de rotação medidas
Além de conferir a velocidade, ligando o osciloscópio percebemos os níveis de
tensão que estavam sendo gerados e o duty cicle, permitindo ajustar o tamanho da parte preta embaixo da pista e o melhor material de maneira a absorver mais luz. A imagem acima foi uma das primeiras medições de velocidade com uma fita isolante preta no disco, antes da solução final com a lixa preta.
Problemas observados e solução proposta
Inicialmente, usamos um papel contact preto como parte escura da pista. No entanto, nosso sinal no nível baixo estava próximo de 2,5V. Esse sinal está na zona nebulosa do micro controlador, que não garante que a leitura será 1 ou 0. Por este motivo, nos testes iniciais, estávamos lendo uma velocidade completamente diferente da observada no osciloscópio.
Para solução deste problema, encontramos duas saídas. Uma era a montagem de um circuito shimitt-trigger, que permitiria a formação de uma onda quadrada com nível baixo próximo de 0 para nosso sinal. A outra saída, que foi adotada pela simplicidade e facilidade de implantação, foi colocar uma lixa preta no lugar do papel contact. Como a lixa tem a superfície irregular, além de absorver o sinal do emissor, ela espalha o pouco que é refletido. Com isso, conseguimos um nível baixo de 1,20V, o que foi satisfatório na comparação das velocidades.
4.4 Programação do Micro controlador
Como esperado, a utilização do Arduíno facilitou muito o projeto por conta de existir
muito material disponível na internet. Foram desenvolvidas várias versões até chegarmos na versão final utilizada nos
ensaios. As principais características do programa, que também podem ser observados no código fonte na sessão anexos do relatório são:
Tempo de amostragem independente para as células de carga, tacômetro, envio dos dados USB e atualização do display;
Média móvel dos valores para eliminação de ruídos brancos

35
Tempos e quantidade de amostras definidos por constantes no início do programa, o que permite a fácil alteração para ajustes finos durante o experimento
Leitura e envio dos dados via USB, o que permitiu a geração de curvas de força em função da velocidade
Telas de Debug para observar as tensões lidas em cada célula de carga, a conversão em força e um display principal para operação do sistema

36
Capítulo 5
Experimentos
5.1 Procedimento dos testes e pistas utilizadas
Inicialmente havíamos planejado fazer leituras em 4 pontos do dimmer posicionado
para controle de velocidade, aguardar estabilizar, anotar os dados e traçar os gráficos. No entanto, conseguimos desenvolver a tempo a aquisição dos dados via USB, o que permitiu uma amostragem grande de dados.
Figura 36 - Regulador de velocidade com marcações para experimento
De acordo as forças de arrasto e velocidades observadas durante os experimentos,
variamos a ligação da bancada entre 110V e 220V. Isso permitiu uma faixa de velocidades bem variável para cada tipo de pista.
Utilizamos basicamente pistas de cobre e alumínio, sendo que a lista de cobre foi feita com uma placa de circuito impresso e espessura fina e a pista de alumínio com uma chapa de 3mm de espessura.
De acordo com a teoria, quando utilizamos uma chapa inteira sem ranhuras, o campo magnético senoidal induzirá correntes parasitas na pista. Essas correntes tendem a aquecer a placa e criar uma força de arrasto forte. Colocando pistas com ranhuras, esperávamos observar uma diminuição da força em X e aumento da levitação na mesma velocidade, pois as ranhuras formam pequenos circuitos RL conforme explicado na teoria do indutrack.
Para todos os casos, esperávamos que o sistema fizesse uma força de levitação e arrasto por conta da posição do disco em relação ao campo. Não esperávamos observar atração da pista tampouco que o campo fizesse forças no sentido de giro do motor.
5.2 Características do sistema utilizado e interferências
Após realizar o primeiro teste com uma pista de alumínio, ficamos otimistas com os
resultados, porém, como não utilizamos uma placa com muitas ranhuras, o resultado observado foi principalmente a força de arrasto devido as correntes de Foucault (ou correntes parasitas) e pouca força de repulsão. Posteriormente recorremos a placa de cobre com 180 ranhuras e, para nossa completa surpresa, o sistema atraiu a placa.

37
Contrariados, não encontrando uma explicação lógica para o fato observado, rodamos o sistema sem nenhuma placa e concluímos, pelo gráfico observado, que toda a bancada causa uma interferência muito forte nas medições atraindo as células de carga ou induzindo uma corrente nos extensômetros que dá uma leitura significativa de forças fictícias.
Figura 37 – Dados do ensaio sem pista (vazio)
Figura 38 - Variação das forças sem pista (vazio)
-200,00
-
200,00
400,00
600,00
800,00
1.000,00
1.200,00
1
12
23
34
45
56
67
78
89
10
0
11
1
12
2
13
3
14
4
15
5
16
6
17
7
Títu
lo d
o E
ixo
Amostra
Dados do Ensaio
velocidade (rad/s)
Torque X (g.m)
FY (g)
y = 0,0172x - 9,4284
y = 0,0299x - 32,927
-100,00
-
100,00
200,00
300,00
400,00
500,00
600,00
700,00
800,00
- 3.000,00 6.000,00 9.000,00 12.000,00
Esfo
rço
Velocidade
Variação das forças em função da velocidade
Torque X (g.m)
FY (g)
Linear (Torque X (g.m))
Linear (FY (g))

38
Observa-se forças de até 700g em Y. Infelizmente descobrimos esse fenômeno pouco tempo antes da entrega do trabalho final, o que não permitiu testar algumas ideias como o isolamento do sistema do disco com uma gaiola de Gauss ou algum dispositivo para diminuir as vibrações.
O artifício que utilizamos para observar os resultados das placas que geram menos efeitos que as interferências foi subtrair a função gerada a partir do teste em vazio da função gerada com o teste com as placas. Isso permitiu observar o resultado bem próximo do que era esperado para cara placa do ponto de vista qualitativo, o que significa que o dispositivo permite a caracterização destes sistemas, como era esperado. Para fazer essa subtração, fizemos uma aproximação dos dados obtidos no ensaio para uma função polinomial de ordem 2 utilizando a linha de tendência do Excel, que tem como base a aproximação dos mínimos quadrados. Dessa forma, todos os gráficos que foram gerados a partir dos experimentos e serão demonstrados, terão uma linhada de tendência e uma equação representativa.
Também observamos que após desligar a bancada para alguns testes realizados em placas com arrasto grande, a força em X saia do ponto 0. O que percebemos observando os gráficos é que os suportes estavam deslizando e fizemos uma compensação de offset no resultado para eliminar esse efeito quando era observado. 5.3 Resultados dos testes – Disco Alumínio 1
Fizemos um teste com uma pista de alumínio com 8 ranhuras. Para fixar a pista
utilizamos firam hellerman, que não interfere no campo magnético. Os parâmetros e
resultados estão abaixo.
Tabela 3 - Parâmetros pista alumínio 8 ranhuras
Características do ensaio Valor
Tensão motor (V) 110
Material Alumínio
Número ranhuras 8
Espessura pista (mm) 3
Tempo amostragem USB 1s
Distancia pista (mm) 5,5

39
Figura 39 - Pista alumínio 8 ranhuras
Figura 40 - Dados do ensaio da pista alumínio com 8 ranhuras
-150,00
-100,00
-50,00
-
50,00
100,00
150,00
200,00
250,00
300,00
1 4 7 101316192225283134374043464952555861646770
Títu
lo d
o E
ixo
Amostra
Dados do Ensaio
rad/s
Torque X (g.m)
FY (g)

40
Figura 41 - Esforço x Velocidade para pista com 8 ranhuras
Observa-se, conforme esperado, uma força de levitação em Y e uma força de arrasto em X. Neste caso, o efeito da pista foi bem superior as interferências da bancada por conta da espessura da pista. Para observar melhor o efeito das ranhuras, fizemos uma outra placa com mais ranhuras demonstrado no tópico seguinte.
5.4 Resultados dos testes – Disco Alumínio 2
Fizemos também um teste com uma pista de alumínio com 24 ranhuras. Para fixar a
pista utilizamos parafusos de latão para interferir o mínimo possível no campo. Os
parâmetros e resultados estão abaixo.
Tabela 4 - Parâmetros pista alumínio 24 ranhuras
Características do ensaio Valor
Tensão motor (V) 220
Material Alumínio
Número ranhuras 24
Espessura pista (mm) 3
Tempo amostragem USB 1s
Distancia pista (mm) 3
y = 1E-06x2 + 0,0092x + 0,0983
y = -2E-05x2 - 0,0006x - 0,0341
-140,00
-120,00
-100,00
-80,00
-60,00
-40,00
-20,00
-
20,00
40,00
60,00
- 1.000,00 2.000,00 3.000,00
Esfo
rço
Velocidade (rpm)
Variação das forças em função da velocidade
Torque X (g.m)
FY (g)
Polinômio (Torque X (g.m))
Polinômio (FY (g))

41
Figura 42- Pista alumínio 24 ranhuras
Figura 43 - - Dados do ensaio da pista alumínio com 24 ranhuras
-1.400,00
-1.200,00
-1.000,00
-800,00
-600,00
-400,00
-200,00
-
200,00
400,00
600,00
1 8
15
22
29
36
43
50
57
64
71
78
85
92
99
10
6
11
3
12
0
Títu
lo d
o E
ixo
Amostra
Dados Ensaio
Velocidade (rad/s)
Torque X (g.m)
FY (g)

42
Figura 44 - Esforço x Velocidade para pista com 24 ranhuras
Observa-se também o resultado esperado de levitação em Y e arrasto bem menor em X, Porém, desta vez, observa-se uma força bem maior em Y. Observação: No primeiro teste com 24 ranhuras, observamos que a força superava os 800g do peso da estrutura de madeira e portanto daria interferência nas medições por conta da posição errada da célula de carga. Para eliminar esse problema, colocamos alguns pesos de madeira até a estrutura ficar com 1400g aproximadamente, que está dentro da faixa do experimento e da equação elaborada para célula de carga.
Figura 45 - Pista com peso para compensar a levitação
y = -3E-06x2 + 0,0406x + 5,1666
y = 6E-07x2 - 0,3145x + 37,634-1.400,00
-1.200,00
-1.000,00
-800,00
-600,00
-400,00
-200,00
-
200,00
- 1.500,00 3.000,00 4.500,00
Esfo
rço
Velocidade (rpm)
Variação das forças em função da velocidade
Torque X (g.m)
FY (g)
Polinômio (Torque X (g.m))
Polinômio (FY (g))

43
5.5 Comparação das pistas de alumínio
Para visualizar melhor a diferença entre as pistas, sobrepomos os gráficos das forças e
observamos exatamente o esperado. Com o aumento das ranhuras, o torque diminuiu e a
levitação aumentou
Figura 46 - Comparação de pistas de alumínio
5.6 Resultados dos testes – Cobre 1
Fizemos testes com uma pista de cobre bem fina. Conforme comentado anteriormente,
os resultados foram influenciados pela interferência da bancada e por conta disso, para
conseguir chegar a alguma conclusão, subtraímos o efeito da bancada das medidas. Os
parâmetros e gráficos estão abaixo.
Tabela 5- Parâmetros pista cobre sem ranhuras
Características do ensaio Valor
Tensão motor (V) 110
Material Cobre
-2000
-1500
-1000
-500
0
500
1000
1500
0 1000 2000 3000 4000 5000 6000
Am
plit
ud
e
Velocidade (rpm)
24 ranhuras_Tx
24 ranhuras_Fy
8 ranhuras_Tx
8_ranhuras_Fy

44
Número ranhuras 0
Espessura pista (mm) 1
Tempo amostragem USB 1s
Distancia pista (mm) 3
Figura 47 - Pista cobre sem ranhuras
Figura 48 - Dados do ensaio da pista cobre sem ranhuras
-50,00
-
50,00
100,00
150,00
200,00
250,00
300,00
350,00
400,00
450,00
1
10
19
28
37
46
55
64
73
82
91
10
0
10
9
11
8
12
7
13
6
14
5
15
4
Títu
lo d
o E
ixo
Amostra
Dados do Ensaio
Velocidade (rad/s)
Torque X (g.m)
FY (g)

45
Figura 49 -Esforço x Velocidade para pista com 24 ranhuras
Como podemos observar no gráfico acima, a força Y está positiva, o que significa atração e não levitação, portanto a interferência da bancada está superior ao sistema. Compensando o efeito do sistema em vazio, obtemos o gráfico abaixo:
Figura 50 - Ensaio com pista de cobre sem ranhuras compensado
Sem o efeito das interferências, observamos a repulsão, conforme o esperado.
y = 5E-07x2 + 0,0018x - 0,2263
y = 3E-06x2 - 0,0025x + 0,2127
-10,00
-5,00
-
5,00
10,00
15,00
20,00
25,00
30,00
35,00
- 1.000,00 2.000,00 3.000,00 4.000,00
Esfo
rço
Velocidade
Variação das forças em função da velocidade
Torque X (g.m)
FY (g)
Polinômio (Torque X (g.m))
Polinômio (FY (g))
-60
-50
-40
-30
-20
-10
0
10
20
30
40
0 1000 2000 3000 4000 5000 6000
Am
plit
ud
e
Velocidades (rpm)
Pista cobre sem ranhuras
2_Tx (g.m)
2_Fy (g)

46
5.7 Resultados dos testes – Cobre 2
Repetimos o teste anterior, agora com a pista de cobre com 180 ranhuras. Os
parâmetros e gráficos estão abaixo.
Tabela 6 - Parâmetros ensaio pista cobre 180 ranhuras
Características do ensaio Valor
Tensão motor (V) 220
Material Cobre
Número ranhuras 180
Espessura pista (mm) 1
Tempo amostragem USB 1s
Distancia pista (mm) 3
Figura 51 - Pista cobre 180 ranhuras

47
Figura 52 - Dados do ensaio da pista cobre 180 ranhuras
Figura 53 - Esforço x Velocidade pista cobre 180 ranhuras
Novamente observamos forças positivas em Y e devamos compensar o efeito da
pista em vazio, de acordo com gráfico abaixo:
-200,00
-
200,00
400,00
600,00
800,00
1.000,00
1
10
19
28
37
46
55
64
73
82
91
10
0
10
9
11
8
12
7
13
6
14
5
15
4
Títu
lo d
o E
ixo
Amostra
Dados do Ensaio
Velocidade (rad/s)
Torque X (g.m)
FY (g)
y = 7E-07x2 + 0,0107x + 0,8364
y = -2E-06x2 + 0,0298x - 4,2509
-200,00
-100,00
-
100,00
200,00
300,00
400,00
500,00
600,00
- 5.000,00 10.000,00
Esfo
rço
Velocidade
Variação das forças em função da velocidade
Torque X (g.m)
FY (g)
Polinômio (Torque X (g.m))
Polinômio (FY (g))

48
Figura 54 - Esforço x Velocidade compensado pista cobre 180 ranhuras
Agora com a compensação conseguimos observação o efeito desejado. Apesar do torque também estar negativo, interpretamos que ocorreu por conta dos erros na compensação do sistema em vazio, pois os valores medidos são de ordem pequena.
5.8 Comparação das pistas de cobre
Para visualizar melhor a diferença entre as pistas, assim como para as pistas de
alumínio, sobrepomos os gráficos das forças e observamos exatamente o esperado. Com
o aumento das ranhuras, o torque diminuiu e a levitação aumentou.
Figura 55 - Comparação das pistas de cobre
-350
-300
-250
-200
-150
-100
-50
0
50
0 1000 2000 3000 4000 5000 6000
Am
plit
ud
e
Velocidades (rpm)
Pista cobre 180 ranhuras
7_Tx
7_Fy
-350
-300
-250
-200
-150
-100
-50
0
50
100
0 1000 2000 3000 4000 5000 6000
Am
plit
ud
e
Velocidade (rpm)
cobre_sem_ranhuras - Tx (g.m)
cobre_sem_ranhuras - Fy (g)
180 ranhuras - Tx (g.m)
180 ranhuras - Fy (g)

49
Neste caso, os gráficos sobrepostos estão com o desconto do sistema em vazio.
Observamos que a força de levitação aumento 7 vezes quando próximo de 5000rpm.

50
Capítulo 5
Conclusões
Além da tecnologia Indutrack, o trabalho trouxe desafios de gestão do projeto e
desenvolvimento de habilidades para identificar problemas e propor as melhores soluções
em tempo hábil que ainda viabilize o objetivo principal da meta estabelecida, permitindo
explorar as diversas fases do desenvolvimento de um projeto, desde a idealização, até a
execução e testes finais.
O ponto mais importante é que conseguimos ao final concluir a montagem do
dispositivo, realizar medições e confirmar o esperado quando fizemos a análise teórica.
Agora com a bancada pronta outros alunos terão a oportunidade de realizar
caracterizações e validações da teoria em um experimento prático para diversas
aplicações eletromagnéticas.

51
Bibliografia
Arruda, J. R. (2008). ANÁLISE ESPECTRAL DE SINAIS. Apostila . Campinas: UNICAMP.
Fitzgerald, E. A. Máquinas Elétricas.
Halliday, D. (1993). Fundamentos de Física 3, Eletromagnetismo, 4ed.
Oppenheim. Discrete-Time Signal Processing.
Otávio, L. (1 semestre 2012). Aula 5 ES670 - Conceitos Básicos de Sistemas de Tempo
real.
Rashid, M. (1999). Eletronica de Pontencia - Circuitos, Dispositivos e Aplicações.
Schmidt Seminari, R. (2009). E. de Levitação Magnética Passiva por Meio da Tec.
Indutrack. Campinas.
Siemens. (2006). Guia rápido para uma especificação precisa. MOTORES DE CORRENTE
CONTÍNUA . www.siemens.com.br/motores.
www.feiradeciencias.com.br, I. s. (02 de 05 de 2014). www.feiradeciencias.com.br.

52
Anexos
Código programa Arduíno
//inclui a biblioteca pronta para trabalhar com o display
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 9, 4, 5, 6, 7); //pinos que serão utilizados na interface com o display
int lcd_key = 0; //guarda o enumerado dos botoes
int adc_key_in = 0; //variável para ler a tensao de entrada dos botoes
int ultimo_botao = 5; //ultimo botao precinado
int RPM = 0; //variavel que guarda a velocidade atual em RPM
/* offsets utilizados quando o usuário zera o peso do sistema
cada número corresponde a celula de carga ligada a entrada analógica correspondente
as variaveis X e Y são respectivamente a soma de 1 + 2 e 3 + 4 */
double offset1 = 0;
double offset2 = 0;
double offset3 = 0;
double offset4 = 0;
double offsetX = 0;
double offsetY = 0;
//vetores que guadam as ultimas forcas e tensoes lidas
double forca[6] = 0, 0, 0, 0, 0, 0; //f1,f2,f3,f4,fx,fy
double tensao[4] = 0, 0, 0, 0;
// variavel para contar as interrupções do tacometro
long rpmconta=0; //Cria uma variável para armazenar as contagem
//variaveis para contar o tempo de cada parte do sistema
//e permitir tempos de aquisição diferentes
unsigned long FTimer_display;
unsigned long FTimer_tacometro;
unsigned long FTimer_celula;
unsigned long FTimer_USB;
//enumerados para os botoes do display
#define btnRIGHT 0
#define btnUP 1
#define btnDOWN 2
#define btnLEFT 3
#define btnSELECT 4

53
#define btnNONE 5
#define timerTacometro 500 // Tempo de aquisição do tacometro. Quanto maior o tempo, mais preciso - janela fixa
#define timerDisplay 600 // Tempo de atualização do display
#define timerCelula 40 // Tempo de aquisição da celula de carga. Quanto menor o tempo mais preciso
#define timerUSB 1000 // Tempo de atualização da USB. Quanto menor o tempo mais preciso
#define nMedidasCelula 70 //Numero de medidas para média móvel da celula de carga
#define nMedidasTacometro 3 //Numero de medidas para média móvel do tacometro
//vetores que guardam os ultimos valores lidos para realizar a média móvel.
double Vcelulas[nMedidasCelula][4]; //valores de tensao para cada celular de carga [nmedidas][porta]
int indice_Vcelulas[4] = 0, 0, 0, 0; //ultimo indice do vetor que foi salvo cada valor lido.
double Vtacometro[nMedidasTacometro]; //valores do tacometro
int indice_Vtacometro = 0;
/*função realizada na interrupção da porta do tacometro*/
void pegarpm()
rpmconta++; //Increvementa o a contagem de rotações
/*
função para leitura dos botões
cada botão estão ligado em um nível de um divisor de tensão. Dessa forma
ao pressionar cada botão, uma porta analógica é alimentada com um valor
de tensão diferente, o que permite diferenciar os botões utilizando
apenas uma porta do micro controlador
*/
int read_LCD_buttons()
adc_key_in = analogRead(0);
if (adc_key_in > 1000) return btnNONE;
if (adc_key_in < 50) return btnRIGHT;
if (adc_key_in < 250) return btnUP;
if (adc_key_in < 450) return btnDOWN;
if (adc_key_in < 650) return btnLEFT;
if (adc_key_in < 850) return btnSELECT;
return btnNONE;
/*função que retorna a força lida na porta enviada por parametro*/
double Le_forca(int porta) //1,2 - FX e 3,4 - FY
54
double data;
data = Le_mVolt(porta);
tensao[porta-1] = data;
data = 0.36853*data-82.304; //converte de mV para g - formula caracterizacao
return data;
/*função que retorna a posição do vetor de médias móveis que deve ser salvo o novo valor
para as celulas de carga. O programa vai substituindo os valores mais antigos e sempre
tira a média de todos os elementos do vetor */
int findice_Vcelulas(int porta)
indice_Vcelulas[porta-1]++;
if((indice_Vcelulas[porta-1] >= nMedidasCelula)||(indice_Vcelulas[porta-1] < 0)) indice_Vcelulas[porta-1] = 0;
return indice_Vcelulas[porta-1];
/*função que retorna a posição do vetor de médias móveis que deve ser salvo o novo valor
para o tacometro. O programa vai substituindo os valores mais antigos e sempre
tira a média de todos os elementos do vetor */
int findice_Vtacometro()
indice_Vtacometro++;
if((indice_Vtacometro >= nMedidasTacometro)||(indice_Vtacometro < 0)) indice_Vtacometro = 0;
return indice_Vtacometro;
/*função que retorna em mV o valor lido na porta analógica passada por parametro*/
double Le_mVolt(int porta) //1,2 - FX e 3,4 - FY
int val; // variavel para ler o valor da porta analogica
int index;
double data;
int i;
val=analogRead(porta); // Le o valor da porta analogica
data = (double) val; // converte para double
//conversao para volt eh 5/1024
data = data * (5/1.024); //converte para mV
//guarda o ultimo valor e tira a média movel
55
index = findice_Vcelulas(porta);
Vcelulas[index][porta-1] = data;
data = 0;
for(i=0;i<nMedidasCelula;i++) data = data+Vcelulas[i][porta-1];
data = data/nMedidasCelula;
return data;
//Funcao que mostra a tela de operacao do sistema
void DisplayPrincipal()
lcd.setCursor(0,0);
lcd.print("Ind v8.1");
lcd.setCursor(14,0);
lcd.print("RM");
lcd.setCursor(0,1);
lcd.print("FX");
lcd.setCursor(8,1);
lcd.print("FY");
//função que limpa qualquer caracter que esteja no display escrevendo 'espaço'
void LimpaDisplay()
lcd.setCursor(0,0);
lcd.print(" ");
lcd.setCursor(0,1);
lcd.print(" ");
//Funcao que mostra os valores lidos em V nas celulas de carga para debug
void DisplayTensaoCelulas()
lcd.setCursor(0,0);
lcd.print("A1");
lcd.setCursor(8,0);
lcd.print("A2");
lcd.setCursor(0,1);
lcd.print("A3");

56
lcd.setCursor(8,1);
lcd.print("A4");
//Funcao que mostra os valores lidos em g nas celulas de carga para debug
void DisplayForcas()
lcd.setCursor(0,0);
lcd.print("F1");
lcd.setCursor(8,0);
lcd.print("F2");
lcd.setCursor(0,1);
lcd.print("F3");
lcd.setCursor(8,1);
lcd.print("F4");
//Funcao que mostra a tela de ajuste de offset
void DisplayOffset()
lcd.setCursor(0,0);
lcd.print("O1");
lcd.setCursor(8,0);
lcd.print("O2");
lcd.setCursor(0,1);
lcd.print("O3");
lcd.setCursor(8,1);
lcd.print("O4");
void setup()
FTimer_display = 0;
FTimer_tacometro = 0;
FTimer_celula = 0;
lcd.begin(16, 2);
57
Serial.begin(9600); //inicia o serial
int Le_tacometro()
int timerTacometro_real = millis() - FTimer_tacometro;
//verifica se atingiu o tempo de amostragem do tacometro
if(timerTacometro_real >= timerTacometro)
detachInterrupt(0); //Desabilita a interrupção
timerTacometro_real = millis() - FTimer_tacometro;
double d_rpm = (double) rpmconta; //converte para double antes de calcular em rpm para nao perder informacao
d_rpm = d_rpm * 1000.0 / ((double)timerTacometro_real); //converte para Hz considerando o tempo real
d_rpm = d_rpm * 60; //Multiplica a contagem por 60 para pegar o RPM
int index = findice_Vtacometro();
int i = 0;
Vtacometro[index] = d_rpm;
//faz a media movel dos ultimos n valotes
d_rpm = 0;
for(i=0;i<nMedidasTacometro;i++) d_rpm = d_rpm+Vtacometro[i];
d_rpm = d_rpm/nMedidasTacometro;
//reinicia a interrupção para o proximo ciclo
rpmconta = 0; //Zera a variável que armazena a contagem de rotações
FTimer_tacometro = millis();
attachInterrupt(0, pegarpm, FALLING); //Habilita o pino 2(INT 0) para atender a
//interrupção (pegarpm) por borda
de descida (FALLING).
return d_rpm;
else return RPM;
void imprime_dados_usb_titulo()
Serial.print("FX,");
Serial.print("FY,");
Serial.println("RPM");

58
void imprime_dados_usb()
Serial.print(forca[4]-offsetX, DEC); //escreve FX na USB
Serial.print(",");
Serial.print(forca[5]-offsetY, DEC); //escreve FY na USB
Serial.print(",");
Serial.println(RPM, DEC); //escreve a velocidade em rpm na USB
void loop()
RPM = Le_tacometro();
//envia os dados via USB de acordo com o tempo de atualização definido
if(millis() - FTimer_USB >= timerUSB)
FTimer_USB = millis();
if(RPM==0) imprime_dados_usb_titulo();
imprime_dados_usb();
//atualiza as forcas e tensoes de acordo com o tempo de atualização da celula de carga
if(millis() - FTimer_celula >= timerCelula)
FTimer_celula = millis();
forca[0] = Le_forca(1);
forca[1] = Le_forca(2);
forca[2] = Le_forca(3);
forca[3] = Le_forca(4);
forca[4] = forca[0] + forca[1];
forca[5] = forca[2] + forca[3];
lcd_key = read_LCD_buttons(); //le algum botao pressionado
if(!(lcd_key == btnNONE))
ultimo_botao = lcd_key;
switch (ultimo_botao) //verica o botao pressionado para tomar alguma ação

59
case btnLEFT:
DisplayTensaoCelulas();
break;
case btnUP: //mostra as forcas para debug
if(millis() - FTimer_display > timerDisplay)
LimpaDisplay();
FTimer_display = millis();
lcd.setCursor(2,0);
lcd.print(forca[0]);
lcd.setCursor(10,0);
lcd.print(forca[1]);
lcd.setCursor(2,1);
lcd.print(forca[2]);
lcd.setCursor(10,1);
lcd.print(forca[3]);
DisplayForcas();
break;
case btnDOWN: //zera os pesos para compensar o peso da estrutura
if(millis() - FTimer_display > timerDisplay)
LimpaDisplay();
FTimer_display = millis();
// zera a forca 1
lcd.setCursor(2,0);
offset1 = forca[0];
lcd.print(offset1);
// zera a forca 2
lcd.setCursor(10,0);
offset2 = forca[1];
lcd.print(offset2);
// zera a forca 3
lcd.setCursor(2,1);
offset3 = forca[2];
lcd.print(offset3);
// zera a forca 4

60
lcd.setCursor(10,1);
offset4 = forca[3];
lcd.print(offset4);
//zera as forças X e Y
offsetX = offset1+offset2;
offsetY = offset3+offset4;
DisplayOffset();
break;
case btnRIGHT: //mostra as tensoes para debug
if(millis() - FTimer_display > timerDisplay)
LimpaDisplay();
FTimer_display = millis();
// Le a Tensao em 1
lcd.setCursor(2,0);
lcd.print(tensao[0]*0.001);
// Le a Tensao em 2
lcd.setCursor(10,0);
lcd.print(tensao[1]*0.001);
// Le a Tensao em 3
lcd.setCursor(2,1);
lcd.print(tensao[2]*0.001);
// Le a Tensao em 4
lcd.setCursor(10,1);
lcd.print(tensao[3]*0.001);
DisplayTensaoCelulas();
break;
case btnSELECT:
case btnNONE: //caso nao tenha apertado nenhum botao, sistema mostra o display principal
if(millis() - FTimer_display > timerDisplay)
LimpaDisplay();
FTimer_display = millis();

61
// Le a forca em X
lcd.setCursor(2,1);
lcd.print(forca[4]-offsetX);
// Le a forca em Y
lcd.setCursor(10,1);
lcd.print(forca[5]-offsetY);
lcd.setCursor(9,0); // move cursor to second line "1" and 9 spaces over
lcd.print(RPM);
DisplayPrincipal();
break;