UNIVERSIDADE FEDERAL DO CEARÁ DEPARTAMENTO DE … ALMEIDA DO NASCIMENTO... · RENAN ALMEIDA DO...
83
UNIVERSIDADE FEDERAL DO CEARÁ DEPARTAMENTO DE ENGENHARIA ELÉTRICA CURSO DE ENGENHARIA ELÉTRICA RENAN ALMEIDA DO NASCIMENTO BARROSO PROJETO DE UM MOTOR DE INDUÇÃO LINEAR FORTALEZA, CEARÁ 2014
Transcript of UNIVERSIDADE FEDERAL DO CEARÁ DEPARTAMENTO DE … ALMEIDA DO NASCIMENTO... · RENAN ALMEIDA DO...
UNIVERSIDADE FEDERAL DO CEARÁDEPARTAMENTO DE ENGENHARIA ELÉTRICA
CURSO DE ENGENHARIA ELÉTRICA
RENAN ALMEIDA DO NASCIMENTO BARROSO
PROJETO DE UM MOTOR DE INDUÇÃO LINEAR
FORTALEZA, CEARÁ
2014

RENAN ALMEIDA DO NASCIMENTO BARROSO
PROJETO DE UM MOTOR DE INDUÇÃO LINEAR
Trabalho do Conclusão de Curso submetido àCoordenação do Curso de Graduação em Enge-nharia Elétrica da Universidade Federal do Ce-ará, como requisito parcial para a obtenção dograu de Engenheiro Eletricista.
Área de concentração: Eletrônica de Potência eAcionamento de Máqui-nas
Orientador: Prof. Dr.-Ing. Tobias RafaelFernandes Neto
Co-Orientador: Prof. Dr. Ricardo Silva ThéPontes
FORTALEZA, CEARÁ
2014

A000z Barroso, R. A. N..Projeto de um Motor de Indução Linear / Renan Almeida
do Nascimento Barroso. 2014.82p.;il. color. enc.Orientador: Prof. Dr.-Ing. Tobias Rafael Fernandes NetoCo-Orientador: Prof. Dr. Ricardo Silva Thé PontesTrabalho de Conclusão de Curso(Engenharia Elétrica) - Uni-
versidade Federal do Ceará, Departamento de Engenharia Elé-trica, Fortaleza, 2014.
1. Máquinas Elétricas 2. Método dos Elementos Finitos3. Motor Linear I. Prof. Dr.-Ing. Tobias Rafael FernandesNeto(Orient.) II. Universidade Federal do Ceará– EngenhariaElétrica(Graduação) III. Engenheiro
CDD:000.0

RENAN ALMEIDA DO NASCIMENTO BARROSO
PROJETO DE UM MOTOR DE INDUÇÃO LINEAR
Trabalho do Conclusão de Curso submetido à Coordenação do Curso de Graduação em Enge-nharia Elétrica da Universidade Federal do Ceará, como requisito parcial para a obtenção dograu de Engenheiro Eletricista. Área de concentração: Eletrônica de Potência e Acionamentode Máquinas
Aprovada em: __/__/____
BANCA EXAMINADORA
Prof. Dr.-Ing. Tobias Rafael Fernandes NetoUniversidade Federal do Ceará - UFC
Orientador
Prof. Dr. Ricardo Silva Thé PontesUniversidade Federal do Ceará - UFC
Co-orientador
Dr. Cícero Marcos Tavares CruzUniversidade Federal do Ceará - UFC
Co-orientador

AGRADECIMENTOS
Aos meus pais, por além de tudo me proverem uma educação de qualidade dentro efora de casa.
Aos professores José Carlos Teles Campos, René Torrico Bascopé, Ricardo SilvaThé Pontes, Tobias Rafael Fernandes Neto, Sérgio Daher, Bismark Claure Torrico, FernandoLuiz Marcelo Antunes e Henrique Antunes Cunha Júnior.
Aos companheiros de almoço e jogatina: Barnabé, Odilio, M.B., Mayrom e Yale.
À equipe Aeromec: Diego "Ramsés", Lucas, Danilo e Chico.
Aos companheiros de PET e do curso: Adriano, Bruno "Pafras", Daniel "Gema",Raphael, Abnadan "Bina", Lucas, Janaína "Jajas", Janailson "Jana", Carol e outros.
Aos integrantes do Lamotriz: Victor, Rafael "Thrash", Eduardo, Lohran, Rooney,Felipe, Kleymilson e Renan "Novato".
Agradeço também a Diego Victor Simões de Sousa, Rudy Matela e Sergio Correiapelo template em LATEX utilizado na formatação deste documento.

“Ere many generations pass, our machinerywill be driven by a power obtainable at anypoint of the universe.”
(Nikola Tesla)

RESUMO
O presente trabalho apresenta uma breve discussão sobre as vantagens e desvanta-gens da substituição de motores rotativos - cujo uso é amplamente disseminado - por motoreslineares em aplicações nas quais se deseja movimentos de translação. São exemplificadas nu-merosas possibilidades de aplicações práticas. Um projeto de um Motor de Linear de Induçãounilateral com secundário maciço para aplicações industriais diversas é apresentado. Tomou-secuidado para apresentar as considerações de projeto e o raciocínio por trás das equações demaneira clara e lógica, investigando diferentes possibilidades de construção do motor. Após adimensionamento do motor, seu circuito equivalente e característica de tração versus velocidadeforam determinados analiticamente. O projeto foi validados por meio do Método dos Elemen-tos Finitos. Um modelo bidimensional do motor do domínio da frequência foi utilizado. Paracorrigir discrepâncias relacionadas à simplificação da máquina tridimensional para o modelobidimensional, uma correção analítica foi adotada.
Palavras-chave: Máquinas Elétricas. Método dos Elementos Finitos. Motor Linear.

ABSTRACT
The present work presents a brief discussion about the advantages and disadvan-tages of the substitution of rotary motors - whose use is commonplace - for linear motors inapplications where linear motion is desired. Numerous possibilities of practical applicationsare exemplified. A project of a one-sided, solid secondary Linear Induction Motor for generalindustrial applications is presented. Care has been taken to present the project considerationsand the reasoning behind the equations in a clear and logic manner, also investigating differentpossibilities of the motor. After the sizing of the device, it’s equivalent circuit and thrust/speedcharacteristic were analytically determined. The project was validated with the use of the FiniteElement Method. A bidimensional, frequency domain model was utilized. To correct discre-pancies related to the simplification of the three dimensional motor to the bidimensional motor,an analytical, pre-processing correction was adopted.
Keywords: Electrical Machinery. Finite Element Method. Linear Motor.
LISTA DE FIGURAS
Figura 1.1 Formato básico da geometria de um motor linear de indução. . . . . . . . . . . . . . 18
Figura 1.2 Esquemático em corte de um motor linear de indução unilateral. . . . . . . . . . . . 18
Figura 1.3 Linhas de densidade de corrente induzida no secundário. . . . . . . . . . . . . . . . . . 18
Figura 1.4 Sistema de parafuso e rosca sem fim para conversão de movimento rotativo emlinear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figura 1.5 Esquemático em corte de um motor linear de indução bilateral. . . . . . . . . . . . . 20
Figura 1.6 (a) Motor linear unilateral de primário curto e (b) secundário curto. . . . . . . . . 21
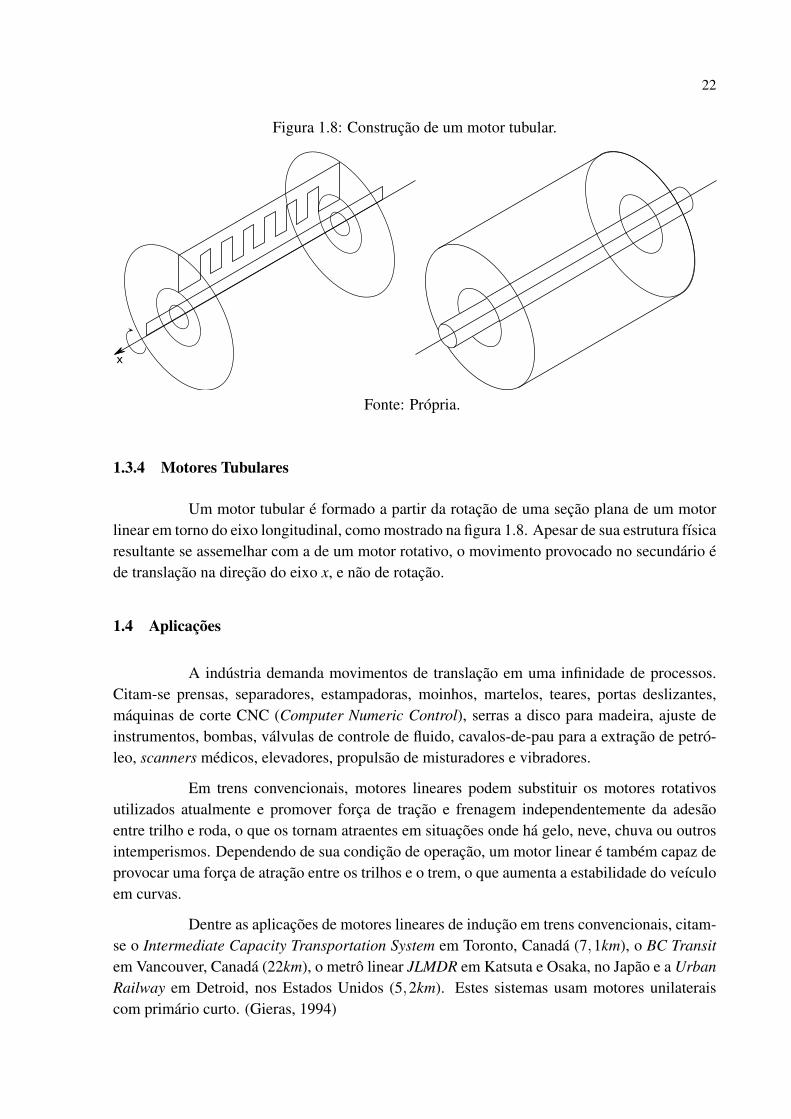
Figura 1.7 Esquemático em corte de um motor linear com secundário em escada. . . . . . 21
Figura 1.8 Construção de um motor tubular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
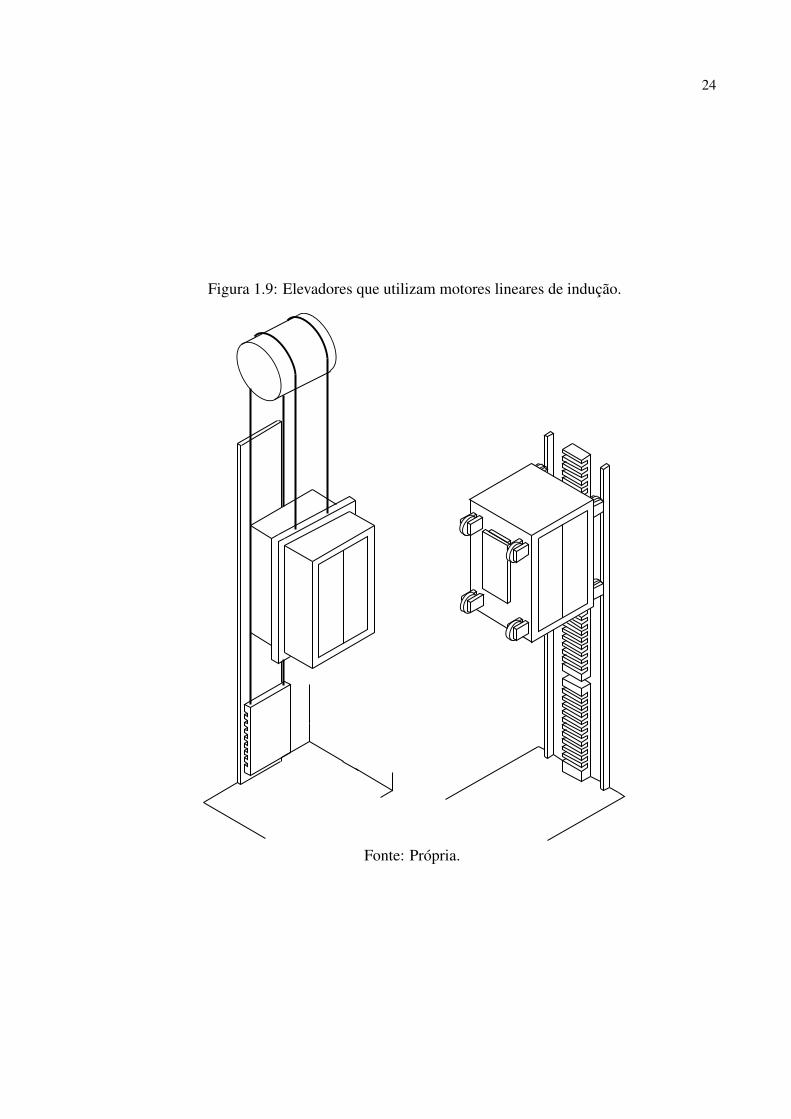
Figura 1.9 Elevadores que utilizam motores lineares de indução. . . . . . . . . . . . . . . . . . . . . 24
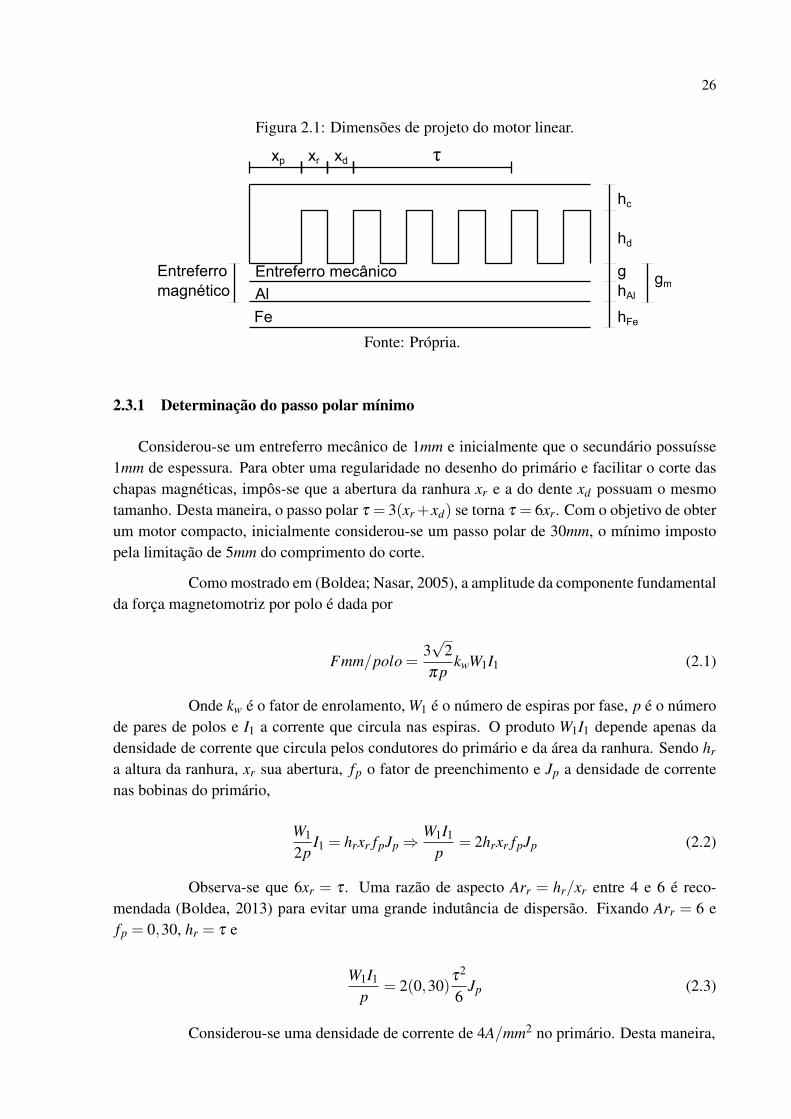
Figura 2.1 Dimensões de projeto do motor linear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figura 2.2 Características de conjugados de motores rotativos de indução de diferentesclasses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figura 2.3 Profundidade de penetração do efeito de ponta de saída por passo polar versusgoodness factor para diferentes valores de escorregamento. . . . . . . . . . . . . . . . 30
Figura 2.4 Circuito equivalente de um motor linear de indução. . . . . . . . . . . . . . . . . . . . . . . 38
Figura 2.5 Curva analítica de tração do motor linear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Figura 3.1 Elemento triangular de uma malha. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48

Figura 3.2 Geometria do modelo da simulação eletromagnética. . . . . . . . . . . . . . . . . . . . . . 51
Figura 3.3 Geometria do modelo da simulação eletromagnética. Modelo tridimensional. 51
Figura 3.4 Efeito de ponta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 3.5 Curva de magnetização do ferro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Figura 3.6 Diagrama de circuito da ligação das bobinas de uma fase do primário. . . . . . 56
Figura 3.7 Diagrama de circuito da ligação das bobinas de uma fase do primário comcorreção de cabeça de bobinas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Figura 3.8 Comparação entre curvas de tração obtidas analiticamente e pelo modelo emelementos finitos. Motor de 50N, 60Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Figura 3.9 Comparação entre curvas de tração obtidas analiticamente e pelo modelo emelementos finitos. Motor de 150N, 60Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Figura 3.10 Comparação entre curvas de tração obtidas analiticamente e pelo modelo emelementos finitos. Motor de 200N, 40Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Figura 3.11 Malha utilizada nas simulações. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Figura 3.12 Comparação entre curvas de tração obtidas analiticamente e pelo modelo emelementos finitos para o motor do projeto principal. . . . . . . . . . . . . . . . . . . . . . . 63
Figura 3.13 Distribuição do módulo da densidade de fluxo magnético no secundário domotor. Velocidade nula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figura 3.14 Distribuição do módulo da densidade de fluxo magnético no secundário domotor. Velocidade síncrona. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figura 3.15 Linhas de fluxo da densidade de fluxo magnético. Velocidade nula. . . . . . . . . 65
Figura 3.16 Linhas de fluxo da densidade de fluxo magnético. Velocidade síncrona. . . . . 65
Figura 3.17 Distribuição espacial da componente vertical da densidade de fluxo magnéticodo entreferro. Velocidade nula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Figura 3.18 Distribuição de harmônicas espaciais da densidade de fluxo do entreferro. Ve-locidade nula. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Figura 3.19 Distribuição espacial da componente vertical da densidade de fluxo magnéticodo entreferro. Velocidade síncrona. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figura 3.20 Distribuição de harmônicas espaciais da densidade de fluxo do entreferro. Ve-locidade síncrona. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
LISTA DE TABELAS
Tabela 2.1 Combinações viáveis de parâmetros de projeto. . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Tabela 2.2 Parâmetros de projeto e seus símbolos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Tabela 3.1 Propriedades físicas dos materiais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Tabela A.1 Dados da curva de histerese do núcleo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71

SUMÁRIO
LISTA DE SÍMBOLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1 O Motor de Indução Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 História . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3 Variações Construtivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.1 Primário Bilateral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.2 Posicionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.3 Secundário em Escada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3.4 Motores Tubulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.4 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 PROJETO ANALÍTICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.1 Especificações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Critérios de Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Dimensionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Determinação do passo polar mínimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.2 Determinação do número de polos, passo polar e escorregamento nominal . . . . . . . 28
2.3.3 Cálculo do entreferro equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3.4 Cálculo da densidade de fluxo de entreferro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.5 Condutibilidade elétrica efetiva do secundário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.6 Circuito elétrico equivalente reduzido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.7 Goodness factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.8 Perdas no núcleo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.9 Determinação do número de espiras por fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.4 Resultados Obtidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3 SIMULAÇÕES NUMÉRICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1 Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.1 Preliminares Analíticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.2 Discretização e Aproximação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.1.3 Solução dos Potenciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2.1 Espaço . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2.2 Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3 Materiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.4 Condições de Contorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.5 Aferição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6.1 Força de tração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6.2 Penetração no secundário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6.3 Efeito de extremidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.6.4 Densidade de fluxo magnético no entreferro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4 CONCLUSÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
REFERÊNCIAS BIBLIOGRÁFICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
APÊNDICE A -- ANEXOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
A.1 Curva de magnetização. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
A.2 Código principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
A.3 Cálculo dos parâmetros magnéticos do secundário . . . . . . . . . . . . . . . . . . . . . . . . 79
LISTA DE SÍMBOLOS
ε Permissividade elétrica do meioε0 Permissividade elétrica do vácuoσ Condutividade elétrica do meioµ Permeabilidade magnética do meioµ0 Permeabilidade magnética do vácuoNlam Número de laminações de um núcleo magnéticoxr Abertura da ranhura do primáriohr Altura da ranhura do primárioxd Abertura do dente do primáriokw Fator de enrolamentoW1 Número de espiras por fasep Número de pares de polosI1 Corrente de fase no primáriofp Fator de preenchimentoτ Passo polarAr Razão de aspecto de ranhurahAl Espessura da placa de alumínio do secundáriog Entreferro mecânicogm Entreferro magnéticogmEq Entreferro magnético equivalenteRg Relutância do entreferroR2 Relutância do secundárioRd Relutância do denteRc Relutância da culatralp Largura do núcleo magnéticols Largura do alumínio do secundárioKc Coeficiente de CarterKFg Coeficiente de enfranjamentokss Coeficiente de saturação do secundárioBd Amplitude desejada da componente harmônica fundamental da densidade de fluxo
magnético do entreferroφd Fluxo magnético por polo desejadoUs Velocidade síncronaf1 Frequência de alimentação elétrica do primárioVn Velocidade nominalSn Escorregamento nominalLp Comprimento da parte ativa do primário
δFe Profundidade de penetração no ferro do secundárioµFe Permeabilidade magnética relativa média do ferro do secundárioσFe,E f Condutibilidade elétrica efetiva do ferro do secundárioktrFe Coeficiente de efeito transversal do ferro do secundárioBt,Fe Máxima densidade de fluxo magnético no secundárioσAl,Eq Condutibilidade elétrica equivalente do alumínioktr,Al Coeficiente de efeito transversal do alumíniokskin Coeficiente de efeito pelicular do alumínioR1 Resistência do primárioL1 Indutância de dispersão do primárioσCu Condutibilidade elétrica do cobrelec Comprimento do fio que forma uma cabeça de bobinaJp Densidade de corrente nominal no cobrer1 Resistência do primário pelo quadrado do número de espirasl1 Indutância do primário pelo quadrado do número de espirasq Número de ranhuras por polo por faseR′2 Resistência do secundário referenciada ao primário em condição de partidaL′2 Indutância de dispersão do secundário referenciada ao primário em condição de
partidar′2 Resistência do secundário referenciada ao primário em condição de partida pelo
quadrado do número de espiras por fasel′2 Indutância de dispersão do secundário referenciada ao primário em condição de
partida pelo quadrado do número de espiras por fasePnom Potência mecânica nominalΩ Domínio de análise~B Densidade de fluxo magnético~A Potencial magnético vetorial~H Campo magnético~J Densidade de corrente~D Densidade de fluxo elétrico~E Campo elétrico~Je Densidade de corrente imposta por agente externo~v Velocidade~r Posição~X f Fasor associado à função Xψ Potencial magnético escalarφ Função de formaΦ Vetor dos potenciais magnéticos escalares associados a uma malha
Wi(x,y) Função de peso (ou função de ponderação)R(x,y) Residual
17
1 INTRODUÇÃO
1.1 O Motor de Indução Linear
Um motor linear de indução é um dispositivo de conversão eletromecânica de ener-gia capaz de fornecer trabalho mecânico de translação. Dentre os vários tipos de máquinaselétricas, o motor de indução se destaca por não necessitar de contato elétrico entre suas partesfixas e partes móveis, o que dispensa o uso de escovas e simplifica sua construção e manutenção.
A figura 1.1 mostra um diagrama do formato básico de um motor linear de induçãosem bobinas, assim como os eixos ordenados que serão utilizados ao longo do texto para orientara geometria do dispositivo. O movimento do motor ocorre ao longo do eixo x, denominadotambém eixo longitudinal. O eixo y é denominado transversal ou lateral, e o z é o eixo vertical.
A figura 1.2 mostra o diagrama em corte no plano xz de um motor linear de indu-ção. O dispositivo é composto por um primário, que é feito de material com alta permeabilidademagnética com ranhuras que são preenchidas com bobinas, e um secundário com alta condutibi-lidade elétrica. A região de ar que separa o primário do secundário é denominada entreferro. Aaplicação de correntes variantes no tempo (usualmente trifásicas) nas bobinas do primário pro-voca o estabelecimento no secundário de um campo magnético variante no tempo distribuídosenoidalmente no espaço. A variação do campo magnético provoca a indução de corrente nosecundário, que interage com o campo magnético e provoca uma força resultante que pode serutilizada para a obtenção de trabalho útil.
O campo magnético gerado pelo primário e as correntes induzidas no secundárioregem o comportamento da máquina. A figura 1.3 mostra uma distribuição típica de linhas dedensidade de corrente em um secundário de um motor linear de indução, visto de cima (isto é,o eixo z é normal à folha). É eficiente que a densidade de fluxo magnético gerada no entreferrotenha uma distribuição próxima de uma senoide, mas na prática formas de onda aproximadassão adquiridas.
Atualmente, a maior parte as aplicações que necessitam de movimentos de transla-ção utilizam máquinas rotativas acopladas a sistemas de transmissão de movimento para trans-formar o movimento de rotação em translação, como por exemplo o sistema mostrado na figura1.4. A complexidade mecânica adicional acarreta em um maior custo inicial, maior peso, maiorvolume, menor robustez e um maior custo de manutenção, motivado principalmente pelo des-gaste entre partes móveis. Em contrapartida, motores lineares são capazes de promover movi-mentos de translação de forma direta. A componente da força resultante normal ao secundáriopode ser de atração ou repulsão dependendo do tipo de motor linear de indução e sua condiçãode operação.
Em relação às máquinas rotativas equivalentes, motores lineares possuem constru-ção mecânica e manutenção simplificada, dispensam dispositivos de conversão de movimento eapresentam níveis de ruído e vibração reduzidos. Em compensação, motores lineares apresen-tam baixos rendimentos e fatores de potência devido aos maiores entreferros utilizados.

18
Figura 1.1: Formato básico da geometria de um motor linear de indução.
x y
z
Fonte: Própria.
Figura 1.2: Esquemático em corte de um motor linear de indução unilateral.
Entreferro
Primário
Secundário (Al)x
z
Secundário (Fe)
Fonte: Própria.
Figura 1.3: Linhas de densidade de corrente induzida no secundário.
Fonte: (Poloujadoff; Sabonnadiere,1968).
19
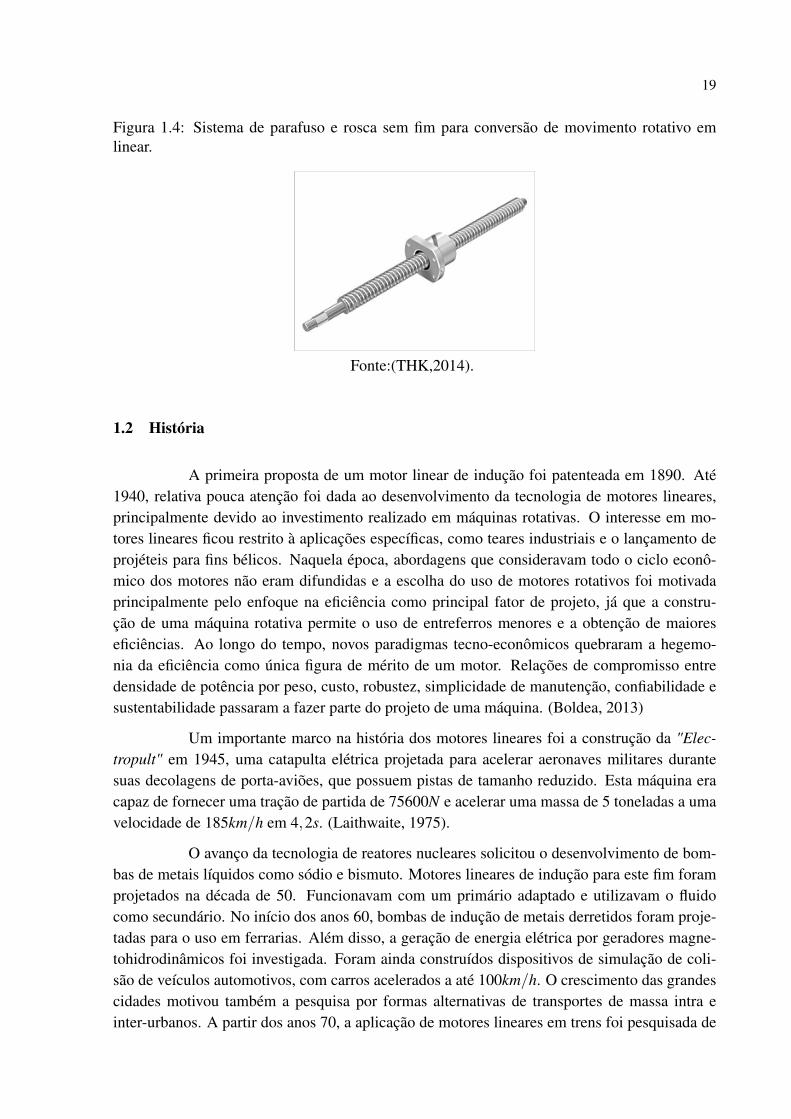
Figura 1.4: Sistema de parafuso e rosca sem fim para conversão de movimento rotativo emlinear.
Fonte:(THK,2014).
1.2 História
A primeira proposta de um motor linear de indução foi patenteada em 1890. Até1940, relativa pouca atenção foi dada ao desenvolvimento da tecnologia de motores lineares,principalmente devido ao investimento realizado em máquinas rotativas. O interesse em mo-tores lineares ficou restrito à aplicações específicas, como teares industriais e o lançamento deprojéteis para fins bélicos. Naquela época, abordagens que consideravam todo o ciclo econô-mico dos motores não eram difundidas e a escolha do uso de motores rotativos foi motivadaprincipalmente pelo enfoque na eficiência como principal fator de projeto, já que a constru-ção de uma máquina rotativa permite o uso de entreferros menores e a obtenção de maioreseficiências. Ao longo do tempo, novos paradigmas tecno-econômicos quebraram a hegemo-nia da eficiência como única figura de mérito de um motor. Relações de compromisso entredensidade de potência por peso, custo, robustez, simplicidade de manutenção, confiabilidade esustentabilidade passaram a fazer parte do projeto de uma máquina. (Boldea, 2013)
Um importante marco na história dos motores lineares foi a construção da "Elec-tropult" em 1945, uma catapulta elétrica projetada para acelerar aeronaves militares durantesuas decolagens de porta-aviões, que possuem pistas de tamanho reduzido. Esta máquina eracapaz de fornecer uma tração de partida de 75600N e acelerar uma massa de 5 toneladas a umavelocidade de 185km/h em 4,2s. (Laithwaite, 1975).
O avanço da tecnologia de reatores nucleares solicitou o desenvolvimento de bom-bas de metais líquidos como sódio e bismuto. Motores lineares de indução para este fim foramprojetados na década de 50. Funcionavam com um primário adaptado e utilizavam o fluidocomo secundário. No início dos anos 60, bombas de indução de metais derretidos foram proje-tadas para o uso em ferrarias. Além disso, a geração de energia elétrica por geradores magne-tohidrodinâmicos foi investigada. Foram ainda construídos dispositivos de simulação de coli-são de veículos automotivos, com carros acelerados a até 100km/h. O crescimento das grandescidades motivou também a pesquisa por formas alternativas de transportes de massa intra einter-urbanos. A partir dos anos 70, a aplicação de motores lineares em trens foi pesquisada de

20
maneira intensa, tanto na substituição de motores rotativos em trens convencionais quanto naviabilidade de sistemas de levitação magnética para trens. (Boldea, 2013)
1.3 Variações Construtivas
1.3.1 Primário Bilateral
O motor exemplificado na figura 1.2 possui um único primário e por este motivoé denominado simples ou unilateral. Um motor linear duplo ou bilateral possui dois primá-rios montados simetricamente em relação ao secundário. A figura 1.5 esquematiza um motorbilateral.
Usualmente ao secundário de um motor simples é adicionada uma camada de ferroou outro material com alta permeabilidade magnética. Esta camada adicional é denominadabackiron e serve para completar o circuito magnético da máquina. A utilização de ferro lami-nado melhora o desempenho da máquina, mas o ferro maciço é frequentemente utilizado porrazões econômicas, especialmente quando o secundário é muito extenso.
Figura 1.5: Esquemático em corte de um motor linear de indução bilateral.
Entreferro
Primário
Secundário
Entreferro
Primário
x
z
Fonte: Própria.
1.3.2 Posicionamento
A figura 1.6 diferencia um motor de primário curto de um motor de secundáriocurto. No primeiro caso, o estator da máquina é composto pela chapa de material condutorcom backiron e o veículo contém o núcleo magnético principal e as bobinas. Esta configuraçãoconcentra a complexidade da máquina em seu veículo, que deve portar consigo os conversoreseletrônicos para o acionamento das bobinas. Este tipo de máquina apresenta a necessidade dofornecimento de potência a um objeto móvel. Em contrapartida, um motor com primário longotem um veículo mais simples ao custo de trilhos mais complexos e permite ligações diretamentecom a rede elétrica.
Motores de primário curto são usualmente mais baratos, especialmente quando a
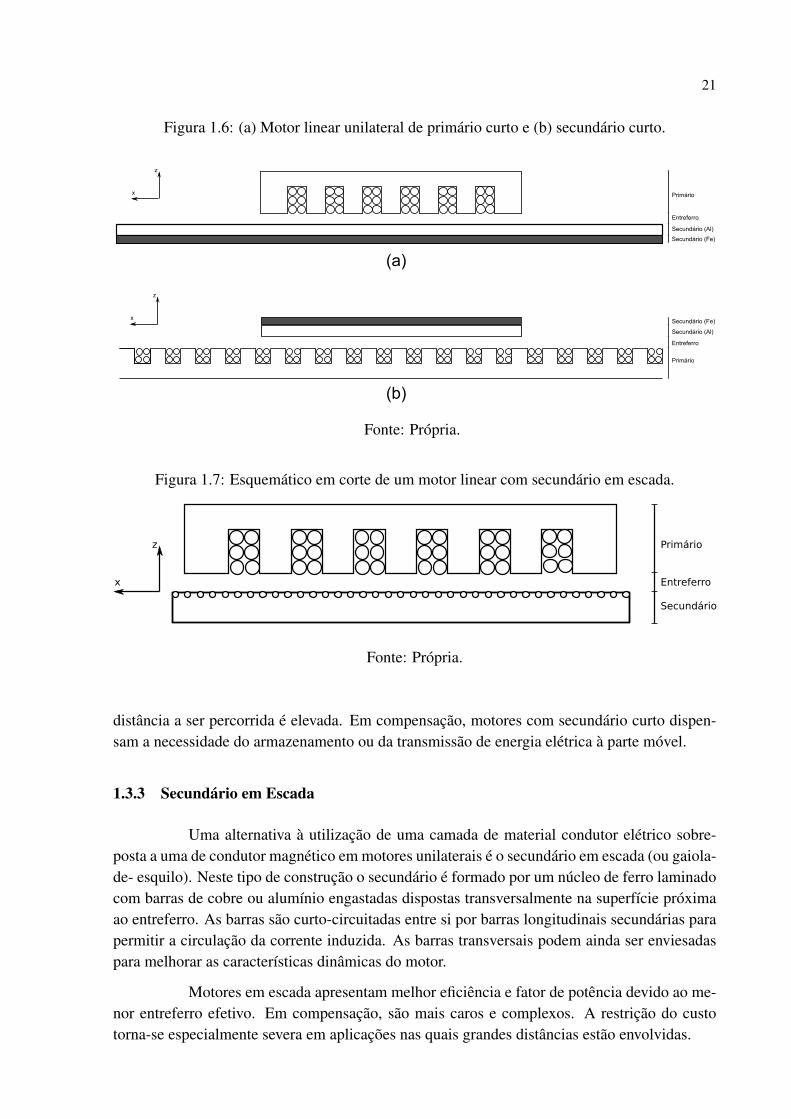
21
Figura 1.6: (a) Motor linear unilateral de primário curto e (b) secundário curto.
(a)
(b)
x
z
x
z
Entreferro
Primário
Secundário (Al)
Secundário (Fe)
Entreferro
Primário
Secundário (Al)
Secundário (Fe)
Fonte: Própria.
Figura 1.7: Esquemático em corte de um motor linear com secundário em escada.
Entreferro
Primário
Secundário
x
z
Fonte: Própria.
distância a ser percorrida é elevada. Em compensação, motores com secundário curto dispen-sam a necessidade do armazenamento ou da transmissão de energia elétrica à parte móvel.
1.3.3 Secundário em Escada
Uma alternativa à utilização de uma camada de material condutor elétrico sobre-posta a uma de condutor magnético em motores unilaterais é o secundário em escada (ou gaiola-de- esquilo). Neste tipo de construção o secundário é formado por um núcleo de ferro laminadocom barras de cobre ou alumínio engastadas dispostas transversalmente na superfície próximaao entreferro. As barras são curto-circuitadas entre si por barras longitudinais secundárias parapermitir a circulação da corrente induzida. As barras transversais podem ainda ser enviesadaspara melhorar as características dinâmicas do motor.
Motores em escada apresentam melhor eficiência e fator de potência devido ao me-nor entreferro efetivo. Em compensação, são mais caros e complexos. A restrição do custotorna-se especialmente severa em aplicações nas quais grandes distâncias estão envolvidas.
22
Figura 1.8: Construção de um motor tubular.
x
Fonte: Própria.
1.3.4 Motores Tubulares
Um motor tubular é formado a partir da rotação de uma seção plana de um motorlinear em torno do eixo longitudinal, como mostrado na figura 1.8. Apesar de sua estrutura físicaresultante se assemelhar com a de um motor rotativo, o movimento provocado no secundário éde translação na direção do eixo x, e não de rotação.
1.4 Aplicações
A indústria demanda movimentos de translação em uma infinidade de processos.Citam-se prensas, separadores, estampadoras, moinhos, martelos, teares, portas deslizantes,máquinas de corte CNC (Computer Numeric Control), serras a disco para madeira, ajuste deinstrumentos, bombas, válvulas de controle de fluido, cavalos-de-pau para a extração de petró-leo, scanners médicos, elevadores, propulsão de misturadores e vibradores.
Em trens convencionais, motores lineares podem substituir os motores rotativosutilizados atualmente e promover força de tração e frenagem independentemente da adesãoentre trilho e roda, o que os tornam atraentes em situações onde há gelo, neve, chuva ou outrosintemperismos. Dependendo de sua condição de operação, um motor linear é também capaz deprovocar uma força de atração entre os trilhos e o trem, o que aumenta a estabilidade do veículoem curvas.
Dentre as aplicações de motores lineares de indução em trens convencionais, citam-se o Intermediate Capacity Transportation System em Toronto, Canadá (7,1km), o BC Transitem Vancouver, Canadá (22km), o metrô linear JLMDR em Katsuta e Osaka, no Japão e a UrbanRailway em Detroid, nos Estados Unidos (5,2km). Estes sistemas usam motores unilateraiscom primário curto. (Gieras, 1994)

23
Graças a adoção de motores lineares, a altura dos vagões do JLMDR foram reduzi-das, o que permitiu que o diâmetro mínimo dos túneis caísse de 6,2m para 4,0m. Os motoressão alimentados por um inversor de 650kVA e 750V (dc). No aeroporto de Birmingham, naInglaterra, foi construído um sistema de transporte com levitação eletrodinâmica que cruza umadistância de 610m com carros de 5 toneladas que carregam 40 passageiros cada. Há grande inte-resse na pesquisa de trens magnéticos levitantes. A substituição das rodas de um trem por umasustentação magnética (ou eletrodinâmica) elimina o desgaste dos trilhos e das rodas e permiteviagens em velocidades muito acima das dos transportes atuais. Por poder promover uma forçade repulsão controlável, motores lineares de indução são utilizados em diferentes tecnologiasde trens de levitação. (Gieras, 1994)
Motores lineares de indução podem ser ainda aplicados a elevadores. A figura 1.9mostra duas maneiras de construir um elevador baseado em motor linear. Mo primeiro, o sis-tema de roldanas característico de elevadores com motores lineares é mantido, mas ao invésde um motor rotativo acionar as polias, um motor linear fixado ao contrapeso promove o mo-vimento da máquina. Um secundário longo é disposto verticalmente ao longo de uma paredelateral do fosso. O segundo modelo apresenta um exemplo de elevador sem cabos. Um secun-dário curto é fixado nas laterais do carro e um primário longo na parede do fosso. O primário édividido em seções de comprimento aproximadamente igual ao do secundário, que são aciona-das sequencialmente a medida que o carro sobre ou desce.
24
Figura 1.9: Elevadores que utilizam motores lineares de indução.
Fonte: Própria.

25
2 PROJETO ANALÍTICO
2.1 Especificações
Deseja-se projetar um motor linear de indução trifásico para aplicação industrial com se-cundário em alumínio e bloco maciço de ferro com tração de partida 100N e velocidade de2m/s a 3m/s. A potência mecânica na do motor deve ficar portanto entre 200W e 300W . Ocomprimento do primário deve ser menor que 30cm. A tensão de linha nominal de alimentaçãoé 380V e frequência de alimentação é 60Hz.
2.2 Critérios de Projeto
1. Considerando a viabilidade da construção mecânica das peças mecânicas do projeto, parauma aplicação com curtas distâncias, entreferros mecânicos de 1mm são viáveis. Paralongas viagens (como uma aplicação transporte urbano), espera-se um entreferro mínimode 8mm. Considerou-se para este projeto o primeiro caso. (Boldea, 2013)
2. Para simplificar a construção mecânica do projeto, desconsiderou-se a possibilidade deum projeto de um motor bilateral. Optou-se por um motor unilateral.
3. Um secundário de gaiola de esquilo foi desconsiderado para simplificar a construção doprojeto e reduzir seu custo.
4. Para motores de indução de face única com secundário em alumínio, o produto entre ofator de potência e a eficiência costuma ser baixo, entre 0,20 e 0,30. (Gieras,1994).
5. Devido ao relativo grande entreferro magnético (devido à presença da camada de alumíniono secundário), a densidade de fluxo magnético no entreferro costuma ser baixa, entre0,20T e 0,35T . (Boldea, 2013)
6. Para motores com resfriamento a ar, usualmente a razão entre a força de tração e a áreado entreferro é 1N/cm2 e a densidade de corrente máxima no cobre é 4A/mm2.
7. Limitações tecnológicas no corte da chapa de aço magnético impõem um comprimentomínimo de uma ranhura de 5mm.
8. Os dados da curva de histerese do material do núcleo são mostrados na tabela A.1. Naregião na qual a densidade de fluxo magnético é menor que 1T , a permeabilidade relativaé µr ≈ 3617.
2.3 Dimensionamento
A figura 2.1 mostra as principais dimensões do motor.
26
Figura 2.1: Dimensões de projeto do motor linear.
xr xd
hd
ghAl
hFe
gm
Fe
Al
Entreferro mecânico
τ
Entreferro magnético
xp
hc
Fonte: Própria.
2.3.1 Determinação do passo polar mínimo
Considerou-se um entreferro mecânico de 1mm e inicialmente que o secundário possuísse1mm de espessura. Para obter uma regularidade no desenho do primário e facilitar o corte daschapas magnéticas, impôs-se que a abertura da ranhura xr e a do dente xd possuam o mesmotamanho. Desta maneira, o passo polar τ = 3(xr+xd) se torna τ = 6xr. Com o objetivo de obterum motor compacto, inicialmente considerou-se um passo polar de 30mm, o mínimo impostopela limitação de 5mm do comprimento do corte.
Como mostrado em (Boldea; Nasar, 2005), a amplitude da componente fundamentalda força magnetomotriz por polo é dada por
Fmm/polo =3√
2π p
kwW1I1 (2.1)
Onde kw é o fator de enrolamento, W1 é o número de espiras por fase, p é o númerode pares de polos e I1 a corrente que circula nas espiras. O produto W1I1 depende apenas dadensidade de corrente que circula pelos condutores do primário e da área da ranhura. Sendo hr
a altura da ranhura, xr sua abertura, fp o fator de preenchimento e Jp a densidade de correntenas bobinas do primário,
W1
2pI1 = hrxr fpJp⇒
W1I1
p= 2hrxr fpJp (2.2)
Observa-se que 6xr = τ . Uma razão de aspecto Arr = hr/xr entre 4 e 6 é reco-mendada (Boldea, 2013) para evitar uma grande indutância de dispersão. Fixando Arr = 6 efp = 0,30, hr = τ e
W1I1
p= 2(0,30)
τ2
6Jp (2.3)
Considerou-se uma densidade de corrente de 4A/mm2 no primário. Desta maneira,

27
W1I1
p= (0,40Ae/mm2)τ2 (2.4)
Substituindo a equação 2.4 na equação 2.1 e fixando kw = 1,00 (considera-se enro-lamentos concentrados), obtém-se
Fmm/polo =3√
2π
kwW1I1
p= (1,3504)(0,40Ae/mm2)τ2 = (0,5402Ae/mm2)τ2 (2.5)
Observa-se que a força magnetomotriz cresce com o quadrado do passo polar. Emcompensação, o aumento do passo polar implica em um aumento do tamanho da máquina e davelocidade síncrona.
Um entreferro mecânico g = 1mm foi adotado. Inicialmente, um secundário dealumínio hAl = 1mm de espessura foi considerado. A relutância do entreferro é dada por
Rg =gmEq
µ0τlp(2.6)
Onde lp é a espessura do secundário e gmEq é o entreferro magnético equivalente,composto pela soma das dimensões do entreferro mecânico e da espessura do secundário maisa contabilização de efeitos de dispersão e saturação no circuito magnético da maquina.
gmEq = (g+hAl)KckFg(1+ kss) (2.7)
Para que a equação 2.7 seja avaliada, é necessário usar valores que ainda não foramescolhidos. Baseado em cálculos anteriores de máquinas semelhantes, supôs-se inicialmentepara hAl = 1mm, gmEq = 2,1709mm e para hAl = 3mm, gmEq = 4,2449mm.
Seja Bd a densidade de fluxo magnético desejada no entreferro. Neste caso, 0,20T .A área do polo é lpτ , e o fluxo magnético desejado é
φd = Bdlpτ (2.8)
O produto do fluxo com a relutância total do circuito magnético é igual à forçamagnetomotriz necessária. Por simplicidade, supõe-se inicialmente que a relutância do núcleoé desprezível. Neste caso,
Fmm/polo = φdRg = BdlpτgmEq
µ0τlp= Bd
gmEq
µ0(2.9)
Observa-se que a força magnetomotriz necessária para gerar uma densidade de fluxoBd independe do passo polar, enquanto que a força magnetomotriz disponível depende direta-mente de τ . Desta maneira, para um dado entreferro é possível calcular o mínimo passo polar

28
que resulta em uma densidade de fluxo Bd no entreferro.
(0,5402Ae/mm2)τ2 = BdgmEq
µ0⇒ τ =
√BdgmEq
µ0(0,5402Ae/mm2)(2.10)
Para hAl = 1mm,
τ ≥
√(0,20T )(2,1709mm)
(4π10−7H/m)(0,5402Ae/mm2)= 25,29mm (2.11)
Para hAl = 3mm,
τ ≥
√(0,20T )(4,2449mm)
(4π10−7H/m)(0,5402Ae/mm2)= 35,36mm (2.12)
2.3.2 Determinação do número de polos, passo polar e escorregamento nominal
A velocidade síncrona em uma máquina linear é dada por
Us = 2.τ. f1 (2.13)
Onde f1 é a frequência elétrica da alimentação do primário. Deseja-se evitar anecessidade de uso de um inversor, portanto a frequência nominal da rede elétrica foi adotada.A velocidade nominal de operação Vn depende do escorregamento nominal Sn,
Vn = (1−Sn)Us⇒Us =Vn
1−Sn(2.14)
Deseja-se limitar a velocidade nominal para no máximo 3m/s. Portanto, para umdado escorregamento o máximo passo polar admissível é
τmax =(3m/s)
2(60Hz)(1−Sn)(2.15)
Observa-se que motores lineares com secundário em alumínio exibem curvas deforça versus velocidade semelhantes às curvas de conjugado versus velocidade rotacional demáquinas rotativas de classe D. Um dispositivo desta categoria apresenta o máximo conjugadona partida e um decrescimento monotônico deste com o aumento da velocidade. A figura 2.2ilustra o comportamento descrito.
Define-se a grandeza goodness factor (G) como

29
Figura 2.2: Características de conjugados de motores rotativos de indução de diferentes classes.
Fonte: (Cowern,2004).
G =2π f1Lm
R′2(2.16)
Para o motor linear unilateral,
G =µ0τ2ωσAlhAl
πktrkskingeq(2.17)
O goodness factor é um número adimensional que indica a razão entre o o armaze-namento de energia no campo magnético e sua dissipação. Máquinas elétricas com altos valoresde G tendem a ser mais eficazes. De acordo com (Boldea, 2013), se o produto do escorrega-mento nominal com o goodness factor nominal for unitário, o projeto resultante maximizará arazão entre a força do motor e as perdas no primário.
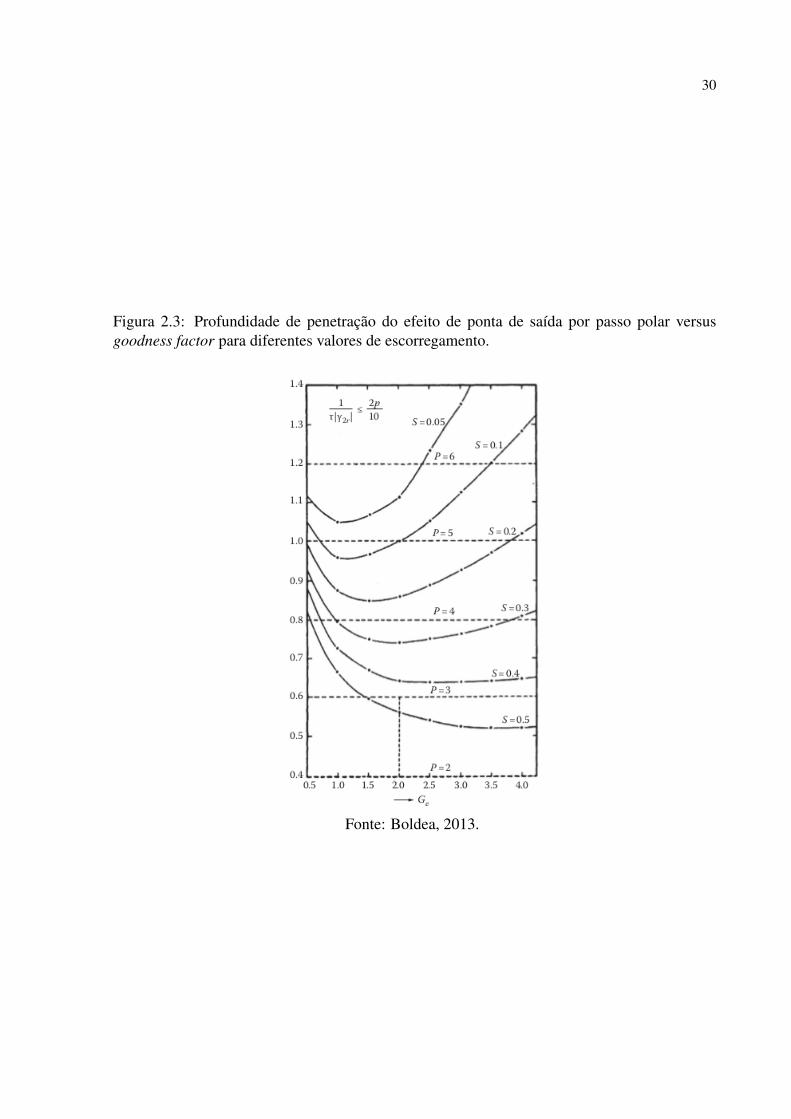
É desejável minimizar o impacto do efeito de ponta, que reduz a tração efetivado motor. É possível mostrar que a razão entre a profundidade de penetração do efeito deponta e o comprimento total do motor depende apenas do número de polos, do escorregamentonominal e do goodness factor. A figura 2.3 pode ser usada como um guia para a escolha dosparâmetros citados de tal maneira que a profundidade do efeito de ponta seja no máximo 10%do comprimento total do motor. No eixo vertical é mostrada a razão entre a profundidadede penetração do efeito de ponta de saída e o passo polar. No eixo horizontal é mostrado ogoodness factor. Cada curva pontilhada indica a relação das duas variáveis anteriores para umvalor específico de escorregamento. As retas tracejadas indicam o limite de 10% para diferentesvalores de número de pares de polos. Observa-se que o aumento do escorregamento implica emuma diminuição da profundidade do efeito de ponta, o que é positivo para um motor de caráterclasse D.
30
Figura 2.3: Profundidade de penetração do efeito de ponta de saída por passo polar versusgoodness factor para diferentes valores de escorregamento.
Fonte: Boldea, 2013.

31
O aumento do número de polos atenua o efeito de ponta e a assimetria de fases, po-rém aumenta o comprimento do motor. Deseja-se limitar o comprimento do núcleo magnéticoem 300mm. A seguir, as possibilidades de escolha de escorregamento nominal, passo polar enúmero de pares de polos são analisadas uma a uma.
De acordo com a equação 2.15, um escorregamento de 10% implica em um passopolar máximo de 27,77mm. Tal valor é muito próximo do limite inferior de 25,29mm calculadona equação 2.11. Conclui-se que um escorregamento nominal de 10% não é viável.
Para um escorregamento de 20%, o máximo passo polar aceitável é 31,25mm.Deseja-se escolher um valor inteiro para xr para facilitar a construção do núcleo, portanto τ
deve ser múltiplo de 6. A única opção é τ = 30mm. O máximo número de pares de polosque satisfaz a condição de comprimento máximo é 4, resultando em um comprimento total deprimário de 240mm. Porém, na figura 2.3 observa-se que para 5 pares de polos é o mínimonecessário para que a curva de Sn = 0,20 satisfaça a condição de 10% de efeito de ponta.
Para um escorregamento de 30%, o máximo passo polar admissível é 35,71mm.Neste caso, é coerente adotar τ = 30mm ou τ = 36mm, implicando em uma abertura de ra-nhura xr = 5mm ou xr = 6mm, respetivamente. Em ambos os casos, o máximo número depares de polos que resulta em um comprimento de núcleo aceitável é 4, com 240mm e 288mmrespectivamente. A condição de efeito de ponta é satisfeita para um goodness factor tal que10≤ G≤ 36.
O passo polar máximo para Sn = 40% é 41,67mm, o que permite a possibilidadede adoção de xr = 7mm, τ = 42mm. Porém, é necessário utilizar pelo menos 4 pares de polospara satisfazer a condição do efeito de ponta, o que resulta em um comprimento de primário de336mm, acima do aceitável. É possível admitir τ = 30mm e τ = 36mm com um escorregamentode 40%, mas não há mudanças no máximo numero de polos, o que resultaria na mesma máquinaconsiderada anteriormente trabalhando com um carregamento distinto.
Finalmente, para Sn = 50%, o máximo passo polar é 50mm, o que permite quexr = 8mm, τ = 48mm seja adotado. A condição de efeito de ponta é satisfeita para G > 15 parap = 3, o que implica em um comprimento de núcleo de Lp = 288mm.
A imposição da condição de 10% de efeito de ponta permite quatro possibilidades,mostradas na tabela 2.1. O escorregamento de 50% implica em uma velocidade síncrona muitoalta, o que dificulta a operação do motor em baixo carregamento. A abertura de dente de 6mmapresenta problemas dependendo do método de corte da chapa do núcleo. Dentre as duas possi-bilidades restantes, a combinação com 4 pares de polos foi escolhida por representar um motormais compacto e mais leve.
Observa-se na figura 2.3 que a profundidade do efeito de ponta é de 75% a 80%do passo polar. Tomando o pior caso, verifica-se que a profundidade do efeito de ponta é(0,80)(30mm) = 24mm. Uma extensão do núcleo de xp = 15mm foi adicionada à cada extre-midade da parte ativa, resultando em um comprimento total do primário de 270mm.
Uma vez que o passo polar foi definido, é possível calcular a força magnetomotrizpor polo, como mostrado na equação 2.5.

32
Tabela 2.1: Combinações viáveis de parâmetros de projeto.
xr τ p Sn Lp Us Vn5mm 30mm 5 20% 300mm 3,60m/s 2,88m/s5mm 30mm 4 30% 240mm 3,60m/s 2,52m/s6mm 36mm 4 30% 288mm 4,32m/s 3,02m/s8mm 48mm 3 50% 288mm 5,76m/s 2,88m/s
Fonte: Própria.
Fmm/polo = (0,5402Ae/mm2)(30mm)2 = 486,18Ae (2.18)
Considerando que a razão entre força motriz e área do entreferro é usualmente1N/cm2, que a força desejada é 100N e adotando uma margem de segurança de 20%, conclui-seque a área do entreferro deve ser de 120cm2. Como seu comprimento é 240mm, conclui-se quea largura do primário lp deve ser 50mm.
2.3.3 Cálculo do entreferro equivalente
É possível agora calcular o entreferro equivalente
gmEq = (g+hAl)KckFg(1+ kss). (2.19)
Kc é o coeficiente de Carter, kFg contabiliza a dispersão no primário e kss a satu-ração do material férrico do secundário, cuja área transversal é limitada pela profundidade depenetração da densidade de fluxo magnético.
O coeficiente de Carter contabiliza a variação da relutância do entreferro devido apresença das ranhuras. Usualmente adquire valores entre 1,1 e 1,7 e pode ser calculado de duasformas. A equação clássica é
Kc =1
1−σc(xr/τ); σc =
2π
tg−1(
xr
2gm
)− 1
π
(2gm
xr
)ln
[1+(
xr
2gm
)2]
(2.20)
Onde gm = g + hAl é o entreferro magnético. Para xr = 5mm => τ = 30mm ehAl = 1mm => gm = 2mm,
σc =2π
tg−1(
(5mm)
2(2mm)
)− 1
π
(2(2mm)
(5mm)
)ln
[1+(
(5mm)
2(2mm)
)2]= 0,3308 (2.21)

33
Kc =1
1− (0,3308)/6= 1,0583 (2.22)
Uma nova formulação é citada em Boldea (2013),
Kc = 1+τ
2πgm[(1+α)log(1+α)+(1−α)log(1−α)] ; α =
xr
τ(2.23)
Para o caso corrente, α = 1/6 e
Kc = 1+(30mm)
2π(2mm)[(1+1/6)log(1+1/6)+(1−1/6)log(1−1/6)] = 1,0667 (2.24)
Adotou-se o pior caso Kc = 1,0667. O coeficiente kFg tem expressão
kFg =senh(gmπ/τ)
gmπ/τ> 1 (2.25)
kFg possui valores próximos da unidade exceto quando gm/τ é grande. No casocorrente,
kFg =senh [(2mm)π/(30mm)]
(2mm)π/(30mm)= 1,0073 (2.26)
Finalmente, o coeficiente de saturação kss é dado por
kss =µ0
2gmKcδFeµFe(2.27)
Onde gm é o entreferro magnético, Kc é o coeficiente de Carter, δFe é a profun-didade de penetração do ferro do secundário e µFe sua permeabilidade magnética relativa. Apermeabilidade relativa adotada é 3617 (adimensional) e δFe pode ser calculado como
δFe = Re
1√
(π/τ)2 + jSn(2π f1)µ0µFeσFe,E f
(2.28)
Onde σFe,E f é a condutibilidade efetiva do ferro, dada por
σFe,E f =σFe
ktrFe; ktrFe =
1−tgh(
πlp2τi
)(
πlp2τi
)−1
(2.29)
Onde i é o número de lâminas eletricamente isoladas que compõem o núcleo mag-nético do secundário. Para um bloco maciço, i = 1 e a profundidade de penetração do ferro émínima, implicando em uma relutância máxima. Um núcleo de secundário laminado é de cons-
34
trução mais complexa, mas permite uma superfície maior para o fluxo magnético. Considerou-se um secundário laminado é de construção inviável. Fazendo i = 1,
ktrFe =
1−tgh(
π(50mm)2(30mm)
)(
π(50mm)2(30mm)
)−1
= 1,6075 (2.30)
σFe,E f =(107S/m)
1,6075= 6,2208.106S/m (2.31)
De posse da condutibilidade equivalente do ferro, a equação 2.28 pode ser utilizadapara calcular a profundidade de penetração no material, que pode ser usada para calcular amáxima densidade de fluxo no secundário (BtFe).
BtFe = Bgτ
πδFe(2.32)
Porém, a equação 2.28 requer a permeabilidade relativa do ferro µr, que depende deBtFe, que por sua vez depende de δFe, que depende de µr. A dependência cíclica entre as trêsvariáveis resulta na necessidade de um método iterativo para calculá-las. O método utilizado eo programa escrito para a automação do método são apresentados em anexo. Para as condiçõesdo projeto, a solução encontrada foi µr = 158, BtFe = 1,820T e δFe = 1,04mm. Como esperado,há uma alta saturação no núcleo magnético do secundário.
A profundidade de penetração também é a espessura mínima da chapa de ferro a serutilizada na construção do secundário. A maior profundidade de penetração ocorre na veloci-dade síncrona. Fazendo S = 0.01 para evitar uma singularidade e reutilizando o método itera-tivo, encontra-se uma profundidade de penetração de 2,27mm. O valor comercial de 2,25mm éo mais adequado para a construção. A largura da barra é lp = 50mm≈ 2”.
A constante de saturação é
kss =(4π10−7H/m)
2(2mm)(1,0667)(2,25mm)(158)= 1,777.10−3 (2.33)
Finalmente, o entreferro equivalente é
gmEq = (2mm)(1,0667)(1,0073)(1+1,777.10−3) = 2,15mm (2.34)
O valor calculado foi semelhante ao estimado (o erro relativo entre 2,15mm e2,17mm é 0,9%), de tal forma que considerou-se desnecessário repetir os cálculos anterioresbaseados no valor estimado de gmEq.

35
2.3.4 Cálculo da densidade de fluxo de entreferro
O circuito magnético do motor é composto por quatro partes principais: entreferro,dente, culatra e secundário. A relutância do entreferro é
Rg =2,25mm
4π.10−7H/m(1)(50mm)(30mm)= 1,14.106 1
H(2.35)
A relutância do secundário é
R2 =15mm
4π.10−7H/m(3617)(2,27mm)(50mm)= 0,063.106 1
H(2.36)
A de cada dente é
Rd =30mm
4π.10−7H/m(3617)(50mm)(5mm)= 0,026.106 1
H(2.37)
A culatra do primário foi fixada em 10mm.
Rc =15mm
4π.10−7H/m(3617)(10mm)(50mm)= 0,007.106 1
H(2.38)
Observa-se que mesmo com uma culatra pequena, a sua contribuição para a relu-tância total do circuito magnético é muito baixa, menor que 1%. A altura da culatra do primárionão é limitada por sua relutância, mas sim fatores práticos construtivos, como a garantia deespaço suficiente para a perfuração de parafusos de fixação.
Observa-se ainda que a relutância do entreferro contribui com 92,2% da relutânciatotal. A relutância do secundário representa 5,1% do total, fato explicado pela alta saturação domaterial.
A força magnetomotriz por polo é 486,17Ae, como calculado na equação 2.18. Arelutância total por polo é ΣRi = 1,2381.1061/H, o que implica que a densidade de fluxo porpolo é
|~Bg|=486,28Ae
1,2381.1061/H1
(30mm)(50mm)= 0,262T (2.39)
O resultado está dentro do intervalo de 0,20T a 0,35T considerado anteriormente.
2.3.5 Condutibilidade elétrica efetiva do secundário
É necessário calcular a condutibilidade elétrica equivalente do alumínio, dada por

36
σAl,Eq =σAl
ktr,Alkskin
(1+
σFe
σAl
δFektr,Alkskin
ktr,FehAl
)(2.40)
Onde σAl é a condutibilidade natural do alumínio, ktr contabiliza o efeito transversale kskin o efeito pelicular. A razão σFe/ktr,Fe é a condutibilidade relativa equivalente, encontradana equação 2.31.
kskin = εsenh(2ε)+ sen(2ε)
cosh(2ε)− cos(2ε); ε = hAl
√S(2π f1)µ0σAl
2(2.41)
ε = (1mm)
√(1,00)2π(60Hz)(4π10−7H/m)(3,33.107S/m)
2= 88,81.10−3 (2.42)
kskin = (88,81.10−3)senh(2(88,81.10−3))+ sen(2(88,81.10−3))
cosh(2(88,81.10−3))− cos(2(88,81.10−3))= 1,0000. (2.43)
Tal resultado é coerente com o fato que a profundidade do alumínio é 1mm enquantoque a profundidade de penetração é
1√(Sπ f1σ µ0)
=1√
[(1,00)π(60Hz)(3,33.107S/m)(4π.10−7H/m)]= 11,3mm. (2.44)
A constante ktr,Al é dada por
ktr,Al =k2
xkr
[1+SG2
e(kr/kx)2
1+(SGe)2
](2.45)
com
kr = 1−Re[(1−SGe)
2λ
αlptgh(
αlp
2
)](2.46)
kx = 1+Re[(SGe + j)
2SGeλ
αlptgh(
αlp
2
)](2.47)
λ = 1+√
1+ jSGetg(
αlp
2
)tgh(
π
τ
) ls− lp
2(2.48)
α =π
τ(1+ jSGe) (2.49)
Ge =2µ0τ2 f1
πσAl
hAl
gmEq(2.50)
Onde ls é a largura do secundário. É recomendado por Boldea (2013) que a larguraadicional do alumínio de secundário seja próxima a τ/π para cada lado. A relação resulta
37
em 9,55mm≈ 10,00mm, o que implica em uma largura de secundário de 2(10mm)+50mm =
70mm. Conclui-se então que a chapa de alumínio deve ter 1mm por 70mm de seção transversalretangular.
A condutibilidade elétrica efetiva varia com o escorregamento. Como deseja-se ga-rantir uma tração de partida mínima, é de interesse encontrar σAl,Eq para S = 1. Desta maneira,
Ge =2(4π.10−7H/m)(30mm)2(60Hz)
π(3,33.107S/m)
(1,00mm)
(2,00mm)= 0,7193 (2.51)
α =π
(30mm)(1+ j(1)(0,7193)) = 128,996 35,72om−1 (2.52)
λ = 1+√
1+ j(1,00)(0,7193)tg((128,996 35,72om−1)(50mm)
2
).tgh
(π
(30mm)
)(70mm−50mm)
2
(2.53)
λ = 0,9966 −0,58o (2.54)
kx = 1+Re[((0,7193)+ j)
2(1,00)(0,7193)(0,9966 −0,58o)
(128,996 35,72om−1)(50mm)
.tgh((128,996 35,72om−1)(50mm)
2
)] (2.55)
kx = 1,000 (2.56)
kr = 1−Re[(1− (1,00)(0,7193))
2(0,9966 −0,58o
(128,996 35,72om−1)(50mm)
tgh((128,996 35,72om−1)(50mm)
2
)] (2.57)
kr = 0,929 (2.58)
ktr,Al =(1)2
(0,929)
[1+(1,00)(0,7193)2(0,929/1)2
1+[(1,00)(0,7193)]2
]= 0,619 (2.59)
38
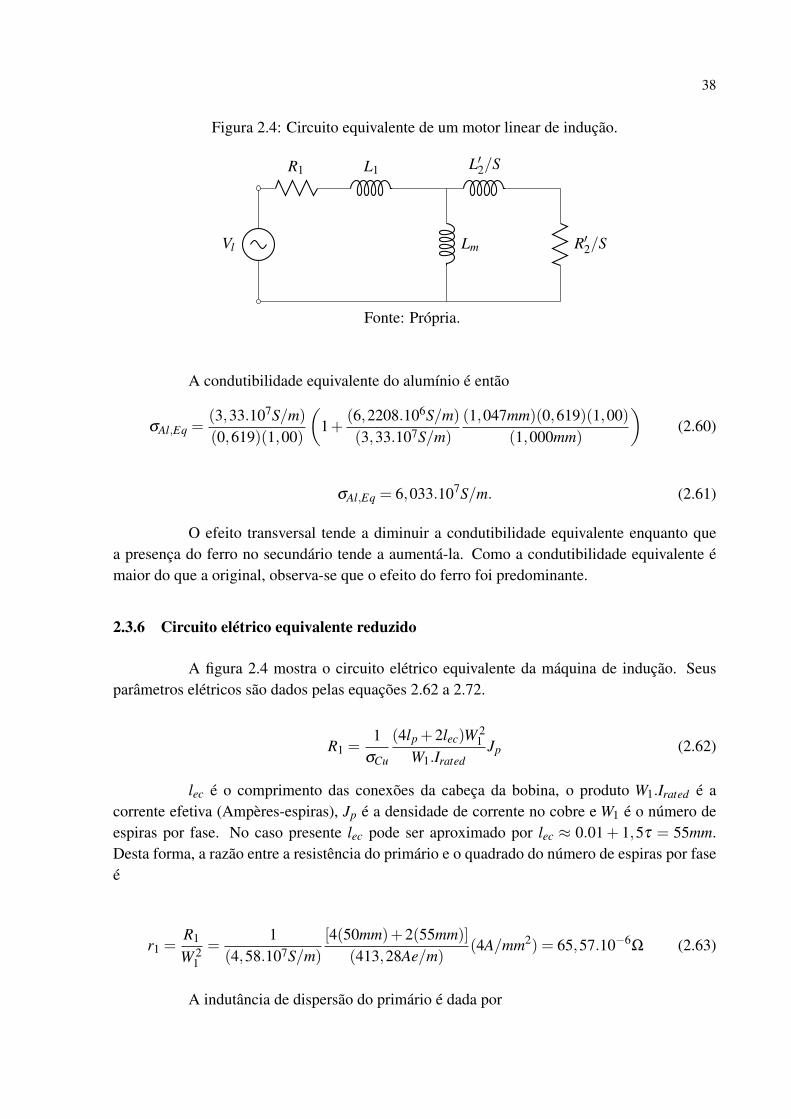
Figura 2.4: Circuito equivalente de um motor linear de indução.
Vl
R1 L1 L′2/S
R′2/SLm
Fonte: Própria.
A condutibilidade equivalente do alumínio é então
σAl,Eq =(3,33.107S/m)
(0,619)(1,00)
(1+
(6,2208.106S/m)
(3,33.107S/m)
(1,047mm)(0,619)(1,00)(1,000mm)
)(2.60)
σAl,Eq = 6,033.107S/m. (2.61)
O efeito transversal tende a diminuir a condutibilidade equivalente enquanto quea presença do ferro no secundário tende a aumentá-la. Como a condutibilidade equivalente émaior do que a original, observa-se que o efeito do ferro foi predominante.
2.3.6 Circuito elétrico equivalente reduzido
A figura 2.4 mostra o circuito elétrico equivalente da máquina de indução. Seusparâmetros elétricos são dados pelas equações 2.62 a 2.72.
R1 =1
σCu
(4lp +2lec)W 21
W1.IratedJp (2.62)
lec é o comprimento das conexões da cabeça da bobina, o produto W1.Irated é acorrente efetiva (Ampères-espiras), Jp é a densidade de corrente no cobre e W1 é o número deespiras por fase. No caso presente lec pode ser aproximado por lec ≈ 0.01+ 1,5τ = 55mm.Desta forma, a razão entre a resistência do primário e o quadrado do número de espiras por faseé
r1 =R1
W 21=
1(4,58.107S/m)
[4(50mm)+2(55mm)]
(413,28Ae/m)(4A/mm2) = 65,57.10−6
Ω (2.63)
A indutância de dispersão do primário é dada por

39
L1 =2µ0
pq[2lp(λslot +λdi f f )+λendlec]W 2
1 (2.64)
Sendo q o número de ranhuras por polo por fase, λslot = hr/(3xr) para ranhurasabertas, λdi f f ≈ 0,25 e λend ≈ 0,66q para enrolamentos de camada única. Assim,
L1
W 21=
2(4π.10−7H/m)
(4)(1)[2(50mm)((30mm)/(3)(5mm)+(0,25))+(0,66)(55mm)] (2.65)
l1 =L1
W 21= 164,18.10−9H (2.66)
A resistência do secundário referenciada ao primário é
R′2 =12aek2
wW 21
hAlτ pσAl,Eq(2.67)
Onde ae = lp+gm,Eq = 50mm+2,13mm= 52,13mm. e kw é o fator de enrolamento.No caso presente, utiliza-se um bobinas concentradas de passo pleno. Como y/τ = 1 e q = 1,kw = 1.
r′2 =R′2W 2
1=
12(52,13mm)(1,00)2
(1mm)(30mm)(4)(6,033.107S/m)= 86,44.10−6
Ω (2.68)
A indutância de dispersão do secundário referenciada ao primário é
L′2 =R′2
2π f1
δFeσFe,Eq
hAlσAl,Eq
kt,Al
kt,Fekskin (2.69)
L′2W 2
1=
(86,44.10−6Ω)
2π(60Hz)(1.047mm)(6,2208.106S/m)
(1mm)(6,033.107S/m)
0,6181,607
(1,0000) (2.70)
l′2 =L′2W 2
1= 15,32.10−9H (2.71)
A indutância de magnetização é
Lm =6µ0(2ae)k2
w1W 21 τ
π2 pgmEq(2.72)
40
lm =Lm
W 21=
6(4π10−7H/m)(2(52,13mm))(1,00)2(30mm)
π2(4)(2,15mm)= 277,62.10−9H (2.73)
2.3.7 Goodness factor
O goodness factor na partida é
G =Xm
R′2=
2π f1lmW 21
r′2W 21
=2π f1lm
r′2(2.74)
G =2π(60Hz)(277,62.10−9H)
(86,44.10−6Ω)= 1,2108 (2.75)
2.3.8 Perdas no núcleo
É necessário calcular uma aproximação das perdas no núcleo. As perdas por cor-rentes de Foucault são
Peddy ≈σFed2
Fe24
[2π f1]2B2
mM1 (2.76)
Sendo dFe a espessura de laminação do ferro, Bm é o valor de pico da densidade defluxo magnético e M1 é a massa do núcleo. O volume de ferro no primário é
VFe,1 = (270mm)(50mm)(30mm+10mm)−24(50mm)(5mm)(30mm) = 360,00cm3 (2.77)
Considerando uma densidade de 7,874g/cm3,
M1 = (472,500cm3)(7,874g/cm3) = 2,83kg (2.78)
Supondo uma densidade fluxo média com pico de 0,15T e uma laminação de0,27mm (M4),
Peddy ≈(6,2208106S/m)(0,27mm)2
24[2π(60Hz)]2(0,15T )2(2,83kg) = 171W (2.79)
Para uma densidade de fluxo de 0,20T ,
Peddy ≈(6,2208106S/m)(0,27mm)2
24[2π(60Hz)]2(0,20T )2(2,83kg) = 304W (2.80)

41
2.3.9 Determinação do número de espiras por fase
Considerando um caso geral no qual as perdas no núcleo são modeladas por umaresistência Rc em série em Lm (ver figura 2.4), a impedância de entrada de fase é
Zin = (r1W 21 + jω1l1W 2
1 )+
[1
Rc + jω1lmW 21+
1r′2W 2
1 /S+ l′2W 21 /S
]−1
(2.81)
É possível controlar o valor de Zin escolhendo um número de espiras por fase W1
conveniente. Um alto valor de W1 implica em um baixo torque, pois a corrente absorvida pelomotor é baixa graças a sua alta impedância de entrada. Um baixo valor de W1 permite traçõesmaiores ao custo maiores correntes e menor eficiência.
Utilizando-se uma versão modificada do método da bisseção, mostrada no códigoda seção A.2, encontra-se o número de espiras por fase que garante o torque de partida desejado.
W1 = 1608 (2.82)
No presente projeto, ignorou-se a presença de Rc pela falta de métodos de preverseu valor com precisão. Neste caso, pode-se fazer Rc ≈ 0 e fatorar W1 na equação 2.81 paraencontrar uma impedância de entrada que resulte em na força desejada de partida. Optou-sepelo método numérico por sua flexibilidade: a fatoração não é possível em um projeto no qualRc é considerado.
O valor de W1 encontrado equivale a 402 espiras por polo por fase. Considerando ofator de preenchimento de 0,30, a seção transversal do condutor do primário é
S1 =(30mm)(5mm)(0,30)
402= 0,112mm2 (2.83)
De acordo com o padrão American Wire Gauge, as seções padronizadas mais pró-ximas são a AWG 26, com 0,129mm2 e a 27, com 0,102mm2. O primeiro implica em um fatorde preenchimento de 0,3285 e o segundo, 0,2598. Adotou-se o AWG 27. O comprimento totalde fio utilizado na construção do motor é (3)(1608)[4(50mm)+ 2(55mm)] = 1495,440m. Amassa total do cobre é (1495,440m)(0,988kg/km) = 1,477kg.
Os parâmetros de circuito tornam-se
R1 = 144,12Ω (2.84)
L1 = 424,51mH (2.85)
R′2 = 223,50Ω (2.86)
42
L′2 = 39,61mH (2.87)
Lm = 717,82mH (2.88)
2.4 Resultados Obtidos
A partir dos parâmetros de circuito equivalente, a curva mostrada na figura 2.5 foi traçada.Para cada valor de escorregamento, o circuito da figura 2.4 foi resolvido e a força foi calculadapela expressão
Fx =3πSGLm|I1|2
τ(1+(SG)2)(2.89)
No eixo horizontal encontra-se a velocidade adimensional, referenciada à veloci-dade síncrona. Observa-se um comportamento semelhante a um motor classe D na curva detração com uma concavidade característica para baixo e uma força de partida de 110,8N. Navelocidade nominal de 2,52m/s (equivalente a um escorregamento de 30% e uma velocidade de0,70pu), a força de tração é de 51,2N e a potência mecânica é (51,2N)(2,52m/s) = 129,0W .A corrente de linha consumida pelo primário é de 1,7A na partida e 1,4A em escorregamentonominal. A tabela 2.2 resume as características principais do motor projetado.
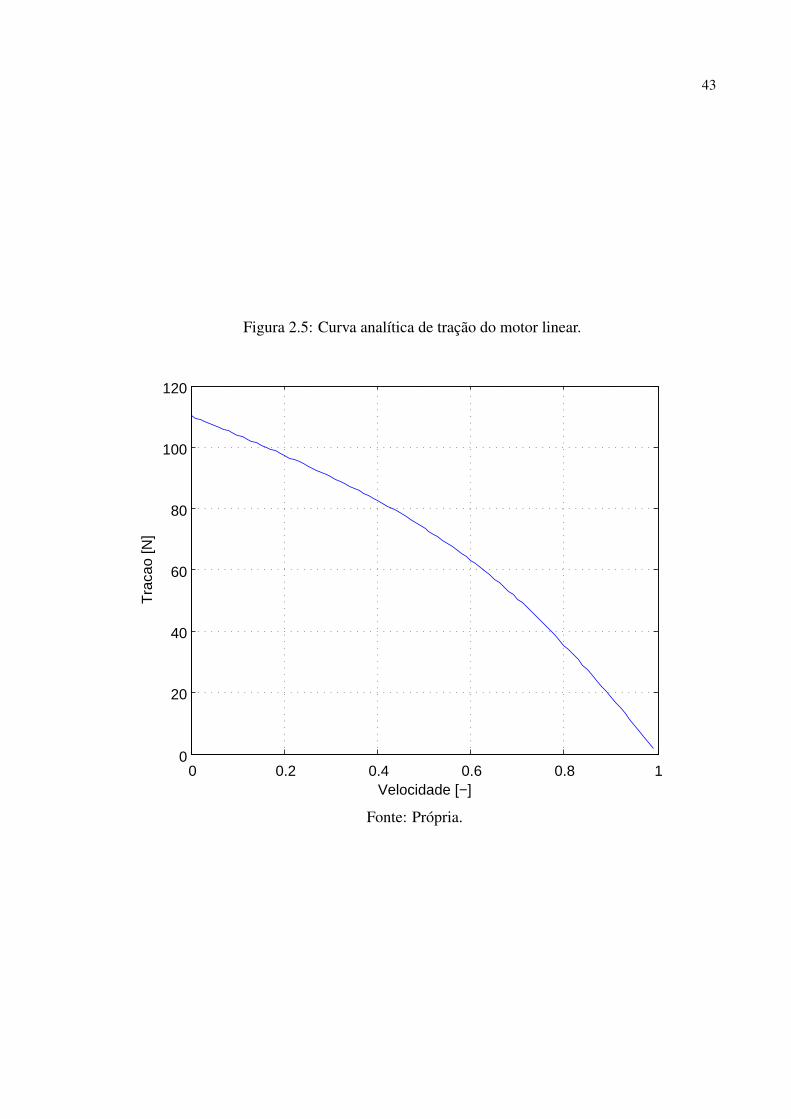
43
Figura 2.5: Curva analítica de tração do motor linear.
0 0.2 0.4 0.6 0.8 10
20
40
60
80
100
120
Velocidade [−]
Tra
cao
[N]
Fonte: Própria.

44
Tabela 2.2: Parâmetros de projeto e seus símbolos.
Descrição Símbolo ValorPotência nominal Pnom 129W
Corrente nominal (linha) Inom 1,4ACorrente de partida (linha) Ipar 1,7A
Velocidade síncrona Us 3,60m/sVelocidade nominal Vn 2,52m/s
Escorregamento nominal S 30%Numero de pares de polos p 4
Abertura do dente xd 5mmAbertura da ranhura xr 5mm
Profundidade da ranhura hr 30mmPasso polar τ 30mm
Comprimento da parte ativa do primário Lp 240mmComprimento total do primário Lt 270mm
Largura do primário lp 50mmLargura do secundário ls 70mmEntreferro mecânico g 1mm
Espessura do secundário hAl 1mmEspessura do núcleo férrico do secundário hFe 2,25mm
Altura da culatra do primário hc 10mmLigação padrão ∆
Número de espiras por fase W1 1608Frequência nominal f1 60Hz
Tensão nominal (linha) Vn 380VResistência do primário R1 144,12Ω
Indutância de dispersão do primário L1 424,5mHResistência do secundário (S = 1) R′2 223,5Ω
Indutância de dispersão do secundário (S = 1) L′2 39,6mHIndutância de magnetização Lm 717,8mH
Fonte: Própria.

45
3 SIMULAÇÕES NUMÉRICAS
3.1 Método
O Método dos Elementos Finitos é um método numérico amplamente utilizado paraa solução de equações diferenciais parciais relacionadas a campos físicos. Foi proposto inicial-mente para a solução de problemas estruturais, mas atualmente é amplamente aplicado à diver-sas áreas da física. Atualmente, vários pacotes de software permitem o uso do método de formasemiautomática, mas a obtenção de resultados coerentes e confiáveis depende do entendimentodo operador da física por trás do problema, das característica da máquina e do funcionamentodo método numérico.
Neste trabalho o Método dos Elementos Finitos foi empregado para a determinaçãoda distribuição da densidade de fluxo magnético e da densidade de corrente no motor lineardurante sua operação.
3.1.1 Preliminares Analíticas
A formulação do método inicia-se com a definição do potencial magnético vetorial~A, um campo vetorial tal que
~B = ∇×~A (3.1)
Esta definição garante que para qualquer distribuição de ~A, a densidade de fluxomagnética associada respeite a equação de inexistência de monopolo magnético
∇.~B = 0 (3.2)
Em seguida, invoca-se a Lei de Ampère
∇× ~H = ~J+∂~D∂ t
(3.3)
A densidade de corrente ~J possui três parcelas: a primeira é a densidade de correnteproveniente da presença de campos elétricos, dada por σ~E. A segunda parcela é a de densidadede corrente ~Je imposta por algum agente externo para provocar o aparecimento dos campos.Neste caso, ~Je inclui as correntes das bobinas da máquina. A terceira parcela é o termo deLorentz, que contabiliza o efeito movimentação com velocidade ~v de um objeto que conduzcorrente. Desta maneira,
~J = σ~E +~Je +σ~v×~B (3.4)

46
∇× ~H = σ~E +~Je +σ~v×~B+∂~D∂ t
(3.5)
Considera-se, para a apresente aplicação, que as grandezas variam senoidalmenteno tempo1 com frequência angular ω . Isto é, sendo~r o vetor posição, o potencial magnético édado por
~A(~r, t) = ~A f (~r)exp( jωt) (3.6)
Onde ~A f , uma função apenas do espaço, é o fasor associado a ~A. A definição 3.6vale também para ~B, ~H, ~J, ~D e ~E. Assim,
∂~A∂ t
=∂
∂ t
[~A f (~r)exp( jωt)
]= jω ~A f (~r)exp( jωt) = jω~A (3.7)
A partir da Lei de Faraday,
∇×~E =−∂~B∂ t
(3.8)
conclui-se2 que
~E =− jω~A (3.9)
A partir da relação construtiva ~D = ε~E, termo ∂~D/∂ t pode ser escrito como
∂~D∂ t
= ε∂~E∂ t
= ε∂
∂ t
[~E f (~r)exp( jωt)
]= jωε~E (3.10)
Substituindo a equação 3.9,
∂~D∂ t
= jωε(− jω~A) = ω2ε~A. (3.11)
Aplicando a relação construtiva ~B = µ~H à parcela ∇× ~H, e considerando-se ummeio magneticamente anisotrópico, obtém-se
∇× ~H = ∇×(
µ−1~B
)= µ
−1(∇×~B) (3.12)
1Esta consideração é justificada na seção 3.2.2.2Rigorosamente, conclui-se que ∇× ~E = − jω(∇×~A), o que não implica necessariamente que ~E = − jω~A.
Porém, devido ao fato que o kernel do rotacional incluir todos as constantes, pode-se utilizar o grau de liberdadeextra para escolher um novo ~A∗ = ~A+δ~A de tal forma que a relação 3.9 seja verdadeira. Tal consideração é válidapara qualquer distribuição de campo magnético.

47
Aplicando a definição de potencial magnético (equação 3.1),
∇× ~H = µ−1[∇× (∇×~A)
](3.13)
Substituindo as equações 3.2, 3.9, 3.11 e 3.13 na equação 3.5, obtém-se
µ−1[∇× (∇×~A)
]=− jσ~A+~Je +σ~v× (∇×~A)+ω
2ε~A (3.14)
( jωσ −ω2ε)~A+µ
−1[∇× (∇×~A)
]−σ~v× (∇×~A) = ~Je (3.15)
A equação 3.15 estabelece ~A em função das propriedades dos materiais, da frequên-cia angular, da velocidade das partes móveis e das correntes forçadas. Descobrindo-se ~A emtodos os pontos, pode-se aplicar as equações 3.1 e 3.9 para determinar os campos magnético eelétrico. Pode-se também determinar as correntes induzidas a partir da relação ~J = σ~E.
Em duas dimensões, geralmente ~A e ~Je são normais ao plano. Neste caso, indicandocomo z o eixo normal ao plano de análise, tem-se que ~A = Az~az, ~Je = Je
z~az e
∇×~A =∂Az
∂y~ax−
∂Az
∂x~ay (3.16)
∇× (∇×~A) = ∂ 2Az
∂x∂ z~ax +
∂ 2Az
∂y∂ z~ay−
[∂ 2Az
∂x2 +∂ 2Az
∂y2
]~az (3.17)
Em um domínio bidimensional, a variação em z de qualquer função é nula, portanto:
∇× (∇×~A) =−[
∂ 2Az
∂x2 +∂ 2Az
∂y2
]~az (3.18)
Substituindo as relações 3.16 e 3.18 na equação 3.15, obtém-se uma equação escalarpara cada eixo ordenado decompondo os vetores nos eixos canônicos. As equações associadasaos eixos x e y resultam em identidades (0 = 0), e a referente ao eixo z se torna
( jωσ −ω2ε)Az−σ
[vx
∂Az
∂y− vy
∂Az
∂x
]−µ
−1[
∂ 2Az
∂x2 +∂ 2Az
∂y2
]= Je
z (3.19)
onde vx =~v.~ax e vy =~v.~ay.
O problema da análise da máquina é resolvido com a solução numéria da equação3.19. Dados dos materiais são utilizados para mapear ε , σ e µ em todos os pontos. ω é definidopela frequência de operação do motor,~v é definido pelo usuário para modelar uma parte móvel eJe
z é a densidade de corrente proveniente das bobinas da máquina. A partir destes dados, deseja-
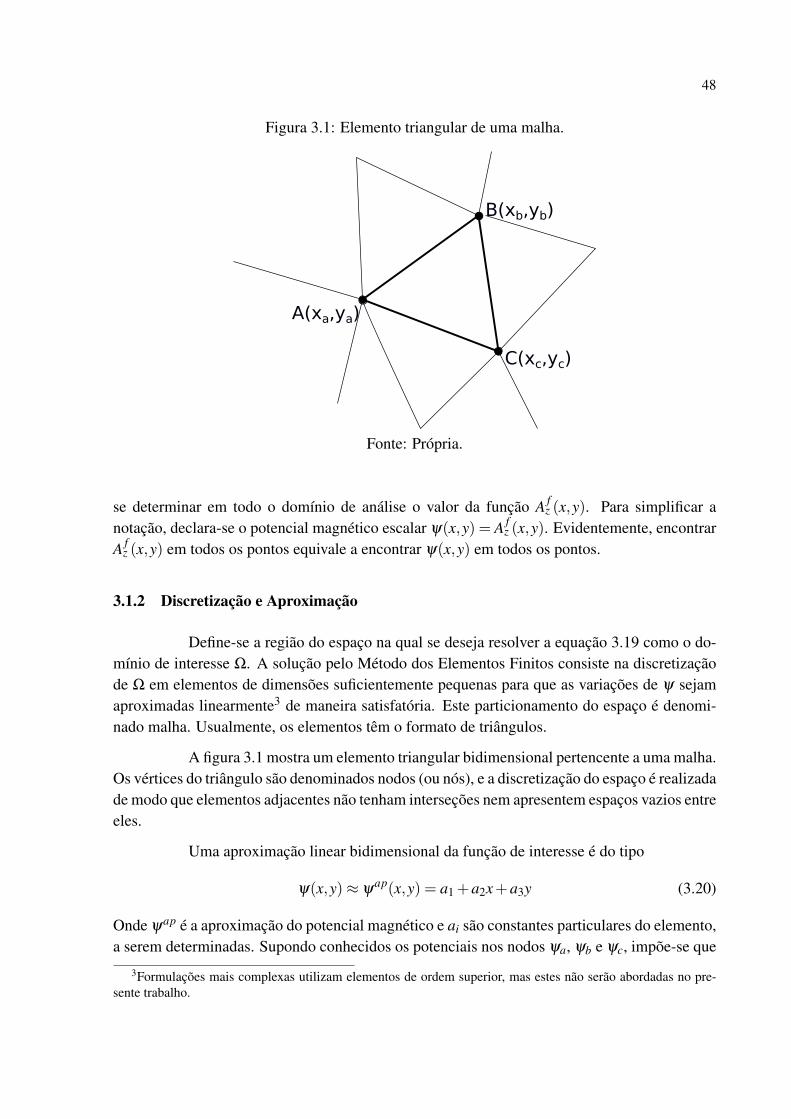
48
Figura 3.1: Elemento triangular de uma malha.
A(xa,ya)
B(xb,yb)
C(xc,yc)
Fonte: Própria.
se determinar em todo o domínio de análise o valor da função A fz (x,y). Para simplificar a
notação, declara-se o potencial magnético escalar ψ(x,y) = A fz (x,y). Evidentemente, encontrar
A fz (x,y) em todos os pontos equivale a encontrar ψ(x,y) em todos os pontos.
3.1.2 Discretização e Aproximação
Define-se a região do espaço na qual se deseja resolver a equação 3.19 como o do-mínio de interesse Ω. A solução pelo Método dos Elementos Finitos consiste na discretizaçãode Ω em elementos de dimensões suficientemente pequenas para que as variações de ψ sejamaproximadas linearmente3 de maneira satisfatória. Este particionamento do espaço é denomi-nado malha. Usualmente, os elementos têm o formato de triângulos.
A figura 3.1 mostra um elemento triangular bidimensional pertencente a uma malha.Os vértices do triângulo são denominados nodos (ou nós), e a discretização do espaço é realizadade modo que elementos adjacentes não tenham interseções nem apresentem espaços vazios entreeles.
Uma aproximação linear bidimensional da função de interesse é do tipo
ψ(x,y)≈ ψap(x,y) = a1 +a2x+a3y (3.20)
Onde ψap é a aproximação do potencial magnético e ai são constantes particulares do elemento,a serem determinadas. Supondo conhecidos os potenciais nos nodos ψa, ψb e ψc, impõe-se que
3Formulações mais complexas utilizam elementos de ordem superior, mas estes não serão abordadas no pre-sente trabalho.
49
nos nodos o potencial da aproximação linear seja igual ao potencial ψi do nodo correspondente:
ψa = a1 +a2xa +a3ya
ψb = a1 +a2xb +a3yb
ψc = a1 +a2xc +a3yc
(3.21)
O valor das constantes ai é determinado a partir da solução do sistema linear 3.21 em ai. Subs-tituindo esta solução na equação 3.20, obtém-se
ψap(x,y) = φa(x,y)ψa +φb(x,y)ψb +φc(x,y)ψc (3.22)
Comφa(x,y) = D−1 [(xbyc− xcyb)+(yb− yc)x+(xc− xb)y]φb(x,y) = D−1 [(xcya− xayc)+(yc− ya)x+(xa− xc)y]φc(x,y) = D−1 [(xayb− xbya)+(ya− yb)x+(xb− xa)y]
(3.23)
Onde D é igual ao dobro da área do elemento. As funções φi são denominadas funções de forma,e norteiam a combinação linear dos potenciais dos nodos para a determinação do potencial deum ponto qualquer no interior do elemento. Observa-se que φk(xk,yk) = 1 e φk(xi,yi) = 0 sei 6= k.
Cada nodo da malha possui uma função de forma associada a ele, gerada pela uniãodas funções de forma daquele nó nos elementos adjacentes. Como as malhas são construídasde modo a não haver interseções, a função de forma de todos os nodos são definidas de maneiraunívoca.
3.1.3 Solução dos Potenciais
Enumerando-se todos os nodos da malha, pode-se organizar os potenciais dos nósψi em um vetor Ψ = [ψ1 ψ2 ψ3 ... ψN ], onde N é o número de nodos. Por meio das funções deforma, cada vetor Ψ gera em todo domínio uma solução aproximada ψap. Resta descobrir quevalores de ψi geram uma boa aproximação da solução exata.
Substituindo a solução exata ψ na equação 3.19 e subtraindo ambos os lados porJe
z , obtém-se um resultado nulo em todos os pontos:
( jωσ −ω2ε)ψ−σ
[vx
∂ψ
∂y− vy
∂ψ
∂x
]−µ
−1[
∂ 2ψ
∂x2 +∂ 2ψ
∂y2
]− Je
z = 0 (3.24)
Substituindo a solução aproximada ψap, obtém-se um valor numérico R denominado residual,que é associado ao erro entre a solução aproximada e a solução exata naquele ponto do espaço.A minimização do residual faz com que a φ ap aproxime φ com melhor fidelidade.
( jωσ −ω2ε)ψap−σ
[vx
∂ψap
∂y− vy
∂ψap
∂x
]−µ
−1[
∂ 2ψap
∂x2 +∂ 2ψap
∂y2
]− Je
z = R(x,y) (3.25)
Para a solução do problema, basta encontrar um vetor Ψ que minimize o residual
50
em todos os pontos. Por ser um problema com N incógnitas, devem ser supridas N equaçõespara a formação de um sistema linear com solução única. Estas equações são obtidas definindo-se N funções de peso W1(x,y), W2(x,y), ..., WN(x,y) linearmente independentes e forçando-separa cada Wi(x,y) a relação
∫Ω
R(x,y)Wi(x,y)dΩ = 0 (3.26)
As funções de peso são funções definidas no domínio Ω cujos valores numéricosindicam quais regiões do espaço o residual local possui uma maior influência no cálculo de umresidual global, que na equação 3.26 é forçado para zero. Diferentes funções de peso podem seradotadas gerando uma infinidade de formulações diferentes para a solução da equação diferen-cial 3.19. Em eletromagnetismo, a formulação denominada método de Galerkin é amplamenteutilizada. Nela, escolhe-se Wi(x,y) = φi(x,y) para todo i = 1,2...N.
Com a aplicação das funções de forma na equação 3.26 e a substituição da equa-ção 3.25 na mesma equação 3.26, obtém-se uma equação algébrica para cada um dos N nós,resultando em um sistema de equações linearmente independentes entre si. O sistema pode serresolvido por um computador. Se ε , µ e σ forem constantes, o sistema de equações resultanteé linear e pode ser resolvido com uma única inversão matricial. Em aplicações práticas de má-quinas elétricas, µ é uma função de ~B (ou seja, é indiretamente uma função de ψ) e um métodonumérico como o de Newton deve ser utilizado para a solução do sistema de equações.
3.2 Modelo
Um modelo do motor projetado foi construído e analisado no software COMSOL. Afigura 3.2 mostra a geometria do domínio da simulação eletromagnética bidimensional utilizada.A partir da solução do campo eletromagnético, podem ser computadas grandezas de interesseprático, como a força mecânica produzida pela máquina e seu consumo de corrente.
Além do próprio motor, o modelo contem uma porção de ar ao redor do dispositivo.Desta maneira, o fluxo magnético que se dispersa do núcleo é contabilizado. Os cantos dodomínio são arrendondados para para evitar incongruências numéricas características de cantosretos.
3.2.1 Espaço
É esperado que um modelo tridimensional apresente resultados mais fiéis que ummodelo bidimensional, porém ao custo computacional maior em tempo de processamento ememória necessária. Além disso, a modelagem da geometria exata das cabeças das bobinasmostrou-se problemática. Uma modelagem tridimensional da máquina foi realizada, e sua geo-metria ser vista na figura 3.3. Porém, sua simulação está fora do escopo do presente trabalho.
O domínio de simulação é considerado como tendo uma profundidade de 50mm,coerente com a espessura do núcleo magnético. A exceção é no segmento de alumínio do

51
Figura 3.2: Geometria do modelo da simulação eletromagnética.
Fonte: Própria.
Figura 3.3: Geometria do modelo da simulação eletromagnética. Modelo tridimensional.
Fonte: Própria.
52
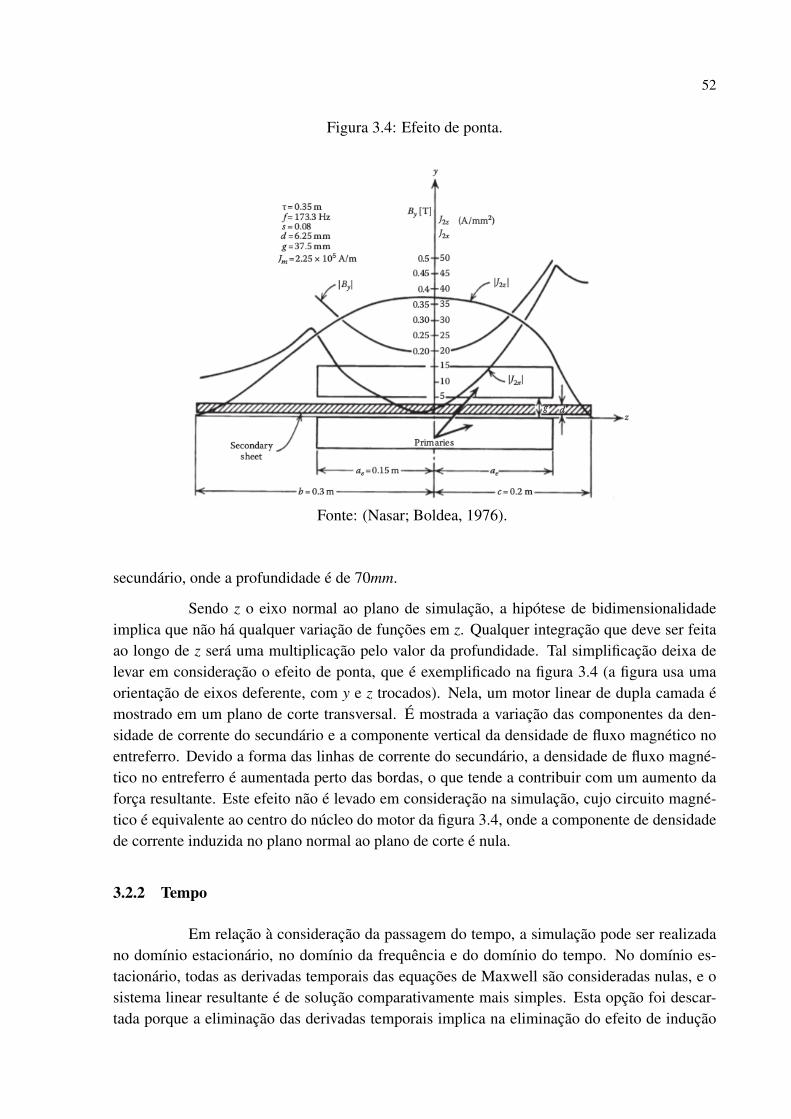
Figura 3.4: Efeito de ponta.
Fonte: (Nasar; Boldea, 1976).
secundário, onde a profundidade é de 70mm.
Sendo z o eixo normal ao plano de simulação, a hipótese de bidimensionalidadeimplica que não há qualquer variação de funções em z. Qualquer integração que deve ser feitaao longo de z será uma multiplicação pelo valor da profundidade. Tal simplificação deixa delevar em consideração o efeito de ponta, que é exemplificado na figura 3.4 (a figura usa umaorientação de eixos deferente, com y e z trocados). Nela, um motor linear de dupla camada émostrado em um plano de corte transversal. É mostrada a variação das componentes da den-sidade de corrente do secundário e a componente vertical da densidade de fluxo magnético noentreferro. Devido a forma das linhas de corrente do secundário, a densidade de fluxo magné-tico no entreferro é aumentada perto das bordas, o que tende a contribuir com um aumento daforça resultante. Este efeito não é levado em consideração na simulação, cujo circuito magné-tico é equivalente ao centro do núcleo do motor da figura 3.4, onde a componente de densidadede corrente induzida no plano normal ao plano de corte é nula.
3.2.2 Tempo
Em relação à consideração da passagem do tempo, a simulação pode ser realizadano domínio estacionário, no domínio da frequência e do domínio do tempo. No domínio es-tacionário, todas as derivadas temporais das equações de Maxwell são consideradas nulas, e osistema linear resultante é de solução comparativamente mais simples. Esta opção foi descar-tada porque a eliminação das derivadas temporais implica na eliminação do efeito de indução

53
Tabela 3.1: Propriedades físicas dos materiais.
Ar Cobre Ferro (não-laminado) Ferro (laminado) Alumínioεr [−] 1 1 1 1 1µr [−] 1 1 3617 Não Linear 1
σ [S/m] 0 5,998.107 1.107 291 3,77.107
Fonte: Boldea, 2005.
de correntes a partir da variação temporal ou espacial de campo magnético, que é essencial parao funcionamento do motor de indução. Além disso, a ausência de indução de corrente no se-cundário implica em uma profundidade de penetração infinita para o campo magnético, o queresultaria ma formação de um circuito magnético completamente diferente do real.
No domínio da frequência, a variação temporal de todas as variáveis é conside-rada senoidal, e suas distribuições no espaço são expressas como números complexos cujosargumentos exprimem o defasamento angular à uma referência e cujos módulos exprimem aintensidade. Esta opção permite que a indução de corrente e a resistência do secundário à pe-netração de campo sejam contabilizados, mas não permite a determinação da forma de ondada corrente (que será distorcida devido à não-linearidade da impedância de entrada), nem doestudo de transitórios, como a partida do motor. Seu custo computacional é, em geral, interme-diário entre os domínios estacionários e do tempo, e por isso foi selecionado para a realizaçãodas simulações no presente trabalho.
No domínio do tempo, a simulação é realizada para cada ponto de uma partição dacoordenada tempo. As derivadas temporais são contabilizadas por meio de derivadas discretasque levam em consideração simulações anteriores. Além de contabilizar a indução eletromag-nética, este modo de simulação permite o estudo de transitórios e o efeito de distorção da formade onda da corrente. Devido ao alto custo computacional deste método, decidiu-se deixar suaaplicação à trabalhos futuros.
3.3 Materiais
Por se tratar de uma simulação eletromagnética, as propriedades dos materiais re-levantes ao estudo são a condutividade elétrica (σ ), a permissividade elétrica (ε) e a permeabi-lidade magnética (µ). A tabela 3.1 mostra os valores adotados para cada um dos materiais emsuas condições naturais. A permissividade elétrica e a permeabilidade magnética são mostradasem seus valores relativos referidos ao vácuo, onde ε0 = 8,85pF/m e µ0 = 400π nH/m.
Para contrabalancear o fato da simulação bidimensional não contabilizar natural-mente o efeito de borda (mostrado na figura 3.4), as condutibilidades do ferro não-laminado edo alumínio foram corrigidas de acordo com as constantes kTr, calculadas no capítulo 2. Destamaneira, σFe = 6,22.106/m e σAl = 5,37.107S/m.
Para a obtenção de resultados coerentes, especialmente em condições com altos va-lores de corrente de fase, a não-linearidade do núcleo do primário deve ser considerada. A figura
54
3.5 mostra a curva de magnetização do material férrico do núcleo do primário. A curva é mon-tada a partir da interpolação linear dos dados experimentais mostrados na tabela A.1. Os dadosdisponíveis fornecem a curva até 2,4T , mas observou-se que era necessária a extrapolação dacurva para valores maiores de densidade de fluxo. Para garantir uma convergência estável, acurva foi extrapolada por uma reta cujo coeficiente angular implica que
lim|~H|→∞
µ(|~H|) = µ0. (3.27)
Para se levar em consideração a laminação do primário, a condutibilidade elétricado ferro foi reduzida de seu valor natural de 1.107S/m de acordo com a relação mostrada em(Bermudez; Gomez; Salgado, 2008).
σequivalente =σ
N2lam
. (3.28)
Onde Nlam é o número das lâminas que formam o núcleo. Com uma espessurade lâmina de 0,27mm e uma largura do núcleo de 50mm, aproximadamente 185 chapas sãoutilizadas, o que implica em σequivalente = 291,6 S/m. No secundário, onde não há laminação,a condutibilidade do ferro foi mantida inalterada.
Rigorosamente, o secundário também é não-linear, mas verificou-se empiricamenteque a convergência do método é difícil quando os núcleos do primário e do secundário sãonão-lineares. Experimentou-se com o primário linear e o secundário não-linear, e vice-versa.Observou-se que a consideração o secundário linear apresenta resultados melhores. O erro cri-ado pela linearidade do secundário é maior em baixas velocidades, já que nesse caso a correntedo primário é maior e também a densidade de fluxo magnético no motor.
3.4 Condições de Contorno
No limite exterior do domínio de simulação foi aplicada a condição de isolamentomagnético. Isto significa que qualquer fluxo que na realidade se dispersaria para o infinito éao invés disso forçado a não cruzar a fronteira externa da região de simulação e permanecerpróximo à máquina. Espera-se que tal comportamento gere erros. Porém, após sucessivas si-mulações com diferentes espaçamentos entre a fronteira do domínio de análise e a superfície domotor, chegou-se a um ponto a partir do qual o aumento da distância da fronteira não modificavasensivelmente os resultados. A geometria resultante é mostrada na figura 3.2.
Na fronteira inferior do domínio de simulação, onde está o secundário, o núcleoférrico do trilho boqueia naturalmente a passagem de fluxo magnético graças a oposição dascorrentes induzidas nele. Além disso, a espessura do núcleo do secundário foi escolhida paraser maior do que a profundidade de penetração do campo. Portanto, espera-se que a presençado isolamento magnético abaixo do núcleo do secundário não mude significativamente a distri-buição de densidade de fluxo magnético no espaço.

55
Figura 3.5: Curva de magnetização do ferro.
0 2 4 6 8 10 12 14 16
x 104
0
0.5
1
1.5
2
Campo magnetico [A/m]
Den
sida
de d
e flu
xo m
agne
tio [T
]
Fonte: Boldea, 2005.
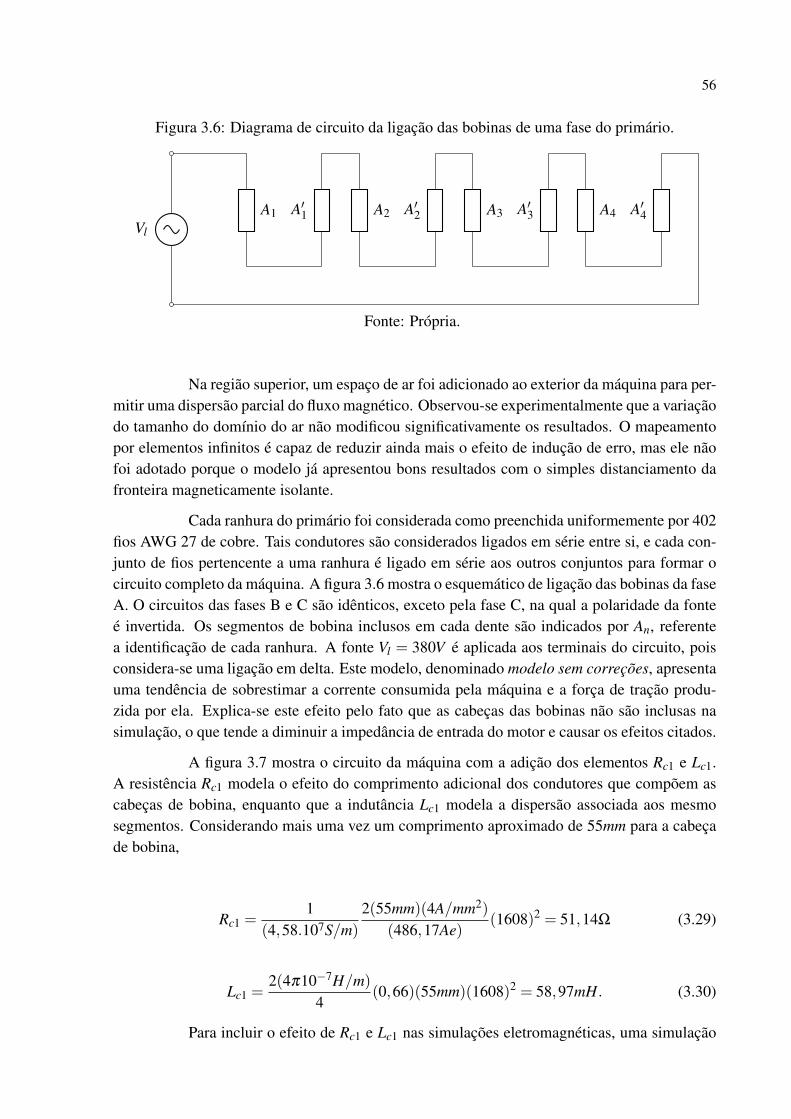
56
Figura 3.6: Diagrama de circuito da ligação das bobinas de uma fase do primário.
Vl
A1 A′1 A2 A′2 A3 A′3 A4 A′4
Fonte: Própria.
Na região superior, um espaço de ar foi adicionado ao exterior da máquina para per-mitir uma dispersão parcial do fluxo magnético. Observou-se experimentalmente que a variaçãodo tamanho do domínio do ar não modificou significativamente os resultados. O mapeamentopor elementos infinitos é capaz de reduzir ainda mais o efeito de indução de erro, mas ele nãofoi adotado porque o modelo já apresentou bons resultados com o simples distanciamento dafronteira magneticamente isolante.
Cada ranhura do primário foi considerada como preenchida uniformemente por 402fios AWG 27 de cobre. Tais condutores são considerados ligados em série entre si, e cada con-junto de fios pertencente a uma ranhura é ligado em série aos outros conjuntos para formar ocircuito completo da máquina. A figura 3.6 mostra o esquemático de ligação das bobinas da faseA. O circuitos das fases B e C são idênticos, exceto pela fase C, na qual a polaridade da fonteé invertida. Os segmentos de bobina inclusos em cada dente são indicados por An, referentea identificação de cada ranhura. A fonte Vl = 380V é aplicada aos terminais do circuito, poisconsidera-se uma ligação em delta. Este modelo, denominado modelo sem correções, apresentauma tendência de sobrestimar a corrente consumida pela máquina e a força de tração produ-zida por ela. Explica-se este efeito pelo fato que as cabeças das bobinas não são inclusas nasimulação, o que tende a diminuir a impedância de entrada do motor e causar os efeitos citados.
A figura 3.7 mostra o circuito da máquina com a adição dos elementos Rc1 e Lc1.A resistência Rc1 modela o efeito do comprimento adicional dos condutores que compõem ascabeças de bobina, enquanto que a indutância Lc1 modela a dispersão associada aos mesmosegmentos. Considerando mais uma vez um comprimento aproximado de 55mm para a cabeçade bobina,
Rc1 =1
(4,58.107S/m)
2(55mm)(4A/mm2)
(486,17Ae)(1608)2 = 51,14Ω (3.29)
Lc1 =2(4π10−7H/m)
4(0,66)(55mm)(1608)2 = 58,97mH. (3.30)
Para incluir o efeito de Rc1 e Lc1 nas simulações eletromagnéticas, uma simulação
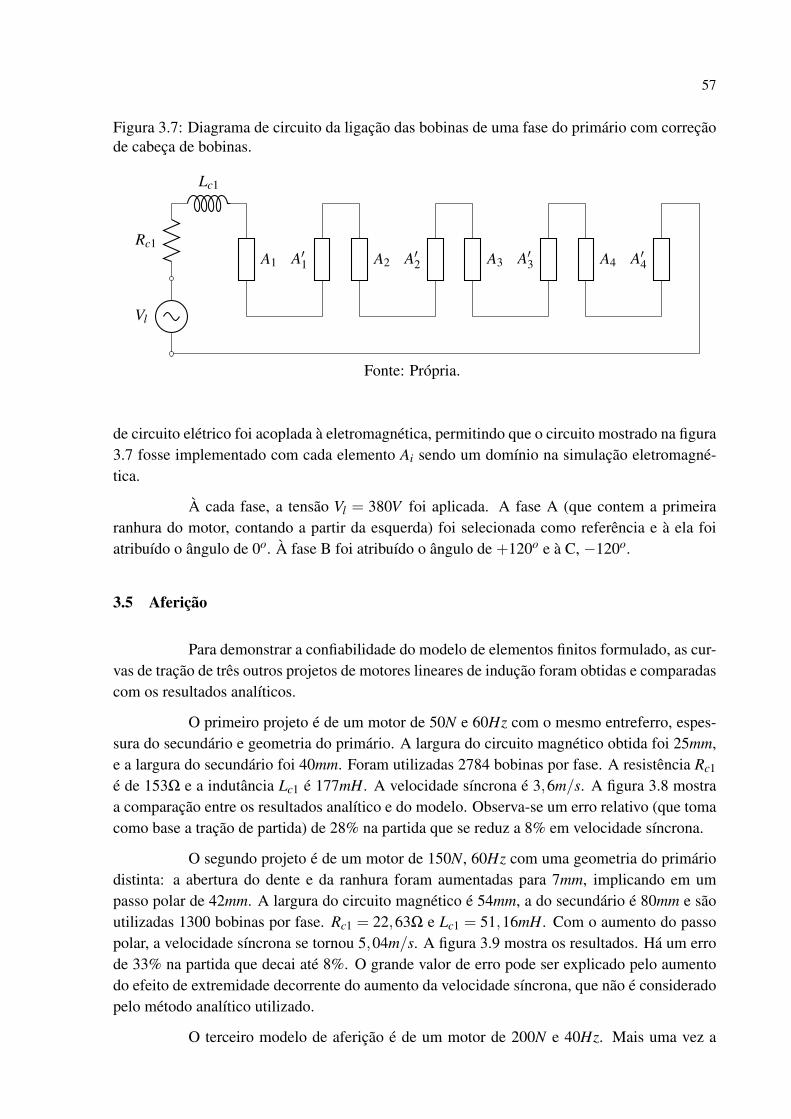
57
Figura 3.7: Diagrama de circuito da ligação das bobinas de uma fase do primário com correçãode cabeça de bobinas.
Vl
Rc1
Lc1
A1 A′1 A2 A′2 A3 A′3 A4 A′4
Fonte: Própria.
de circuito elétrico foi acoplada à eletromagnética, permitindo que o circuito mostrado na figura3.7 fosse implementado com cada elemento Ai sendo um domínio na simulação eletromagné-tica.
À cada fase, a tensão Vl = 380V foi aplicada. A fase A (que contem a primeiraranhura do motor, contando a partir da esquerda) foi selecionada como referência e à ela foiatribuído o ângulo de 0o. À fase B foi atribuído o ângulo de +120o e à C, −120o.
3.5 Aferição
Para demonstrar a confiabilidade do modelo de elementos finitos formulado, as cur-vas de tração de três outros projetos de motores lineares de indução foram obtidas e comparadascom os resultados analíticos.
O primeiro projeto é de um motor de 50N e 60Hz com o mesmo entreferro, espes-sura do secundário e geometria do primário. A largura do circuito magnético obtida foi 25mm,e a largura do secundário foi 40mm. Foram utilizadas 2784 bobinas por fase. A resistência Rc1
é de 153Ω e a indutância Lc1 é 177mH. A velocidade síncrona é 3,6m/s. A figura 3.8 mostraa comparação entre os resultados analítico e do modelo. Observa-se um erro relativo (que tomacomo base a tração de partida) de 28% na partida que se reduz a 8% em velocidade síncrona.
O segundo projeto é de um motor de 150N, 60Hz com uma geometria do primáriodistinta: a abertura do dente e da ranhura foram aumentadas para 7mm, implicando em umpasso polar de 42mm. A largura do circuito magnético é 54mm, a do secundário é 80mm e sãoutilizadas 1300 bobinas por fase. Rc1 = 22,63Ω e Lc1 = 51,16mH. Com o aumento do passopolar, a velocidade síncrona se tornou 5,04m/s. A figura 3.9 mostra os resultados. Há um errode 33% na partida que decai até 8%. O grande valor de erro pode ser explicado pelo aumentodo efeito de extremidade decorrente do aumento da velocidade síncrona, que não é consideradopelo método analítico utilizado.
O terceiro modelo de aferição é de um motor de 200N e 40Hz. Mais uma vez a
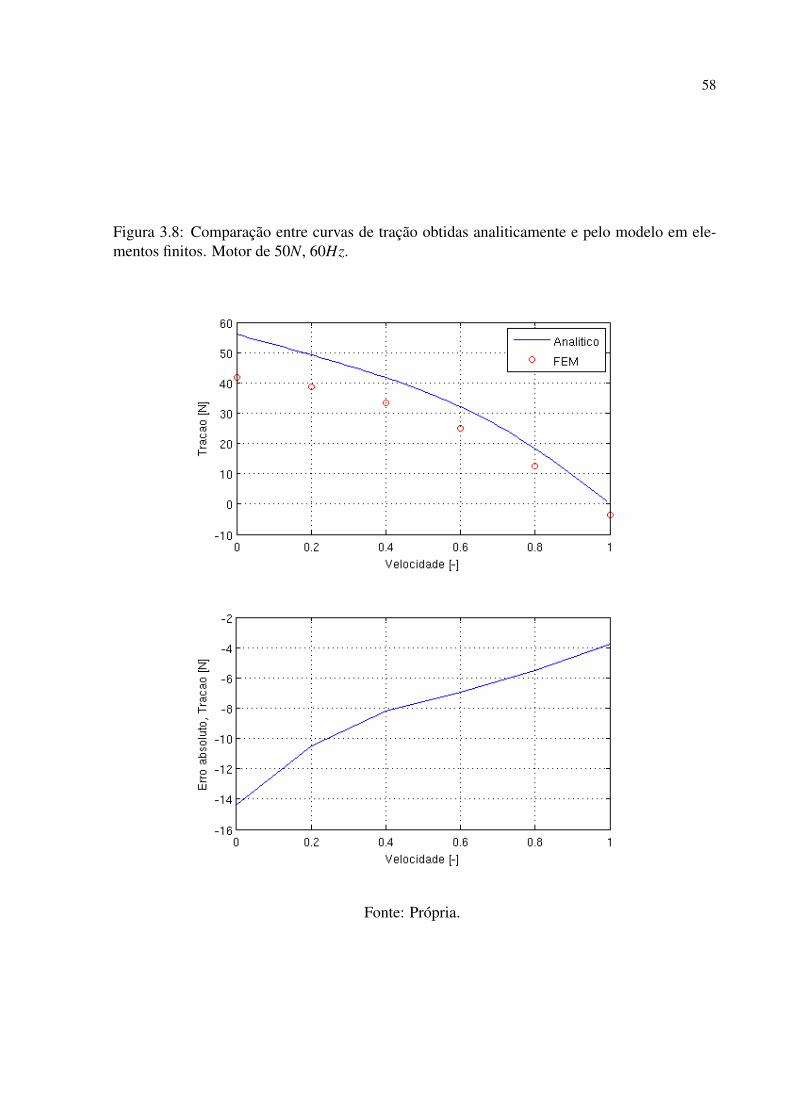
58
Figura 3.8: Comparação entre curvas de tração obtidas analiticamente e pelo modelo em ele-mentos finitos. Motor de 50N, 60Hz.
Fonte: Própria.

59
Figura 3.9: Comparação entre curvas de tração obtidas analiticamente e pelo modelo em ele-mentos finitos. Motor de 150N, 60Hz.
Fonte: Própria.

60
geometria do primário foi mantida idêntica ao do motor principal. Sua velocidade síncrona é de2,4m/s, a largura do circuito magnético é 100mm e a do secundário é 120mm. São utilizadas992 espiras por fase. Rc1 = 22,90Ω e Lc1 = 22,44mH. A figura 3.10 mostra as curvas de traçãodo motor. Verifica-se uma diferença de 16% na partida, que cai para 7,6% em velocidadesíncrona.
Observa-se que nos três projetos de aferição o aspecto da curva analítica é segue oformato dos resultados numéricos. Verifica-se também que os modelos com maior velocidadesíncrona exibem maiores erros, o que pode evidenciar que a diferença nas previsões dos doismétodos está ligada aos efeitos de ponta.
3.6 Resultados
De modo a avaliar diferentes condições de escorregamento, cada simulação com-portou 11 diferentes condições de operação, referentes a valores de escorregamento da unidadeao zero com uma resolução de 0,10 (adimensional).
A discretização do domínio de simulação é mostrada na figura 3.11. A malha possui7481 elementos, concentrados preferencialmente no entreferro, no secundário e nas extremida-des superior e inferior dos dentes.
A simulação de todas as condições de escorregamento demorou cerca de 40 minutosem um Intel Core i7 CPU 930 2.80GHz ×8 com 12GB de memória RAM (11,7GB utilisáveis)e aproximadamente 140GB de espaço livre no disco. O sistema operacional utilizado foi oUbuntu versão 13.04, 64 bits.
3.6.1 Força de tração
A figura 3.12 mostra a comparação entre a força de tração calculada analiticamentee pelo método dos elementos finitos. Observa-se um erro de 18% na partida que cai para 8%em velocidade síncrona. Este é um erro aceitável para o projeto de motores lineares.
3.6.2 Penetração no secundário
As figuras 3.13 e 3.14 mostram a distribuição do módulo da densidade de fluxomagnético no secundário do motor em duas situações distintas: velocidade nula e velocidadesíncrona. No primeiro caso, a frequência vista pelo secundário é a síncrona, e a corrente indu-zida no secundário produz um fluxo opositor ao fluxo do primário, impedindo a penetração efazendo a maior parte do fluxo se concentrar na parte superior do secundário. Na velocidadesíncrona, não há a indução de correntes no secundário e o campo magnético é capaz de penetrarno ferro, permitindo que o fluxo de distribua de maneira mais uniforme.
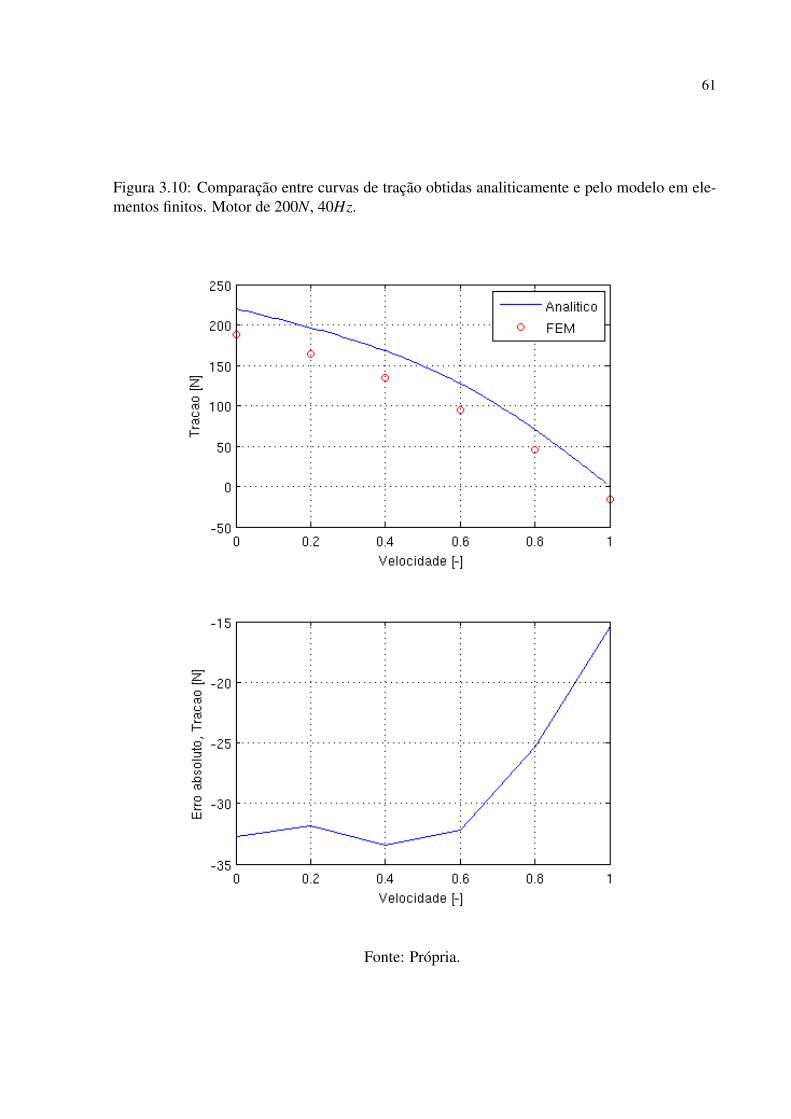
61
Figura 3.10: Comparação entre curvas de tração obtidas analiticamente e pelo modelo em ele-mentos finitos. Motor de 200N, 40Hz.
Fonte: Própria.

62
Figura 3.11: Malha utilizada nas simulações.
Fonte: Própria.
3.6.3 Efeito de extremidade
As figuras 3.15 e 3.16 mostram as linhas de fluxo da densidade de fluxo magnéticona extremidade saída do motor (ou seja, a força no primário atua da esquerda para a direita).Observa-se que na velocidade síncrona há o surgimento de um laço adicional de campo abaixodo prolongamento do primário, o que indica que na região do centro dos enlaçamentos há umagrande intensidade de corrente percorrendo a direção normal ao plano de simulação. A presençade correntes naquela região mesmo na ausência de uma bobina acima para induzir corrente éexplicada pelo movimento da placa do secundário, que transporta a corrente que foi induzidaabaixo do primário.
3.6.4 Densidade de fluxo magnético no entreferro
A figura 3.17 mostra a distribuição espacial da componente vertical da densidadede fluxo magnético ao longo do entreferro. Observam-se quatro comprimentos de onda, o que éesperado já que o motor possui quatro pares de polos. Os valores máximos da densidade de fluxosão próximos de 0,50T . A figura 3.18 mostra a decomposição da onda em seus harmônicosespaciais, com uma fundamental igual a duas vezes o passo polar. A componente fundamentalespacial apresenta um valor de 0,230T , enquanto o valor previsto durante o projeto analítico foide 0,222T . A diferença entre os valores é de 8mT , o que é desprezível. A concordância entre osvalores analítico e numérico da densidade de fluxo magnético indicam que o modelo numéricoé bem fundamentado. Observa-se ainda na distribuição de densidade de fluxo magnético umagrande componente de quinta harmônica, cujo comprimento de onda é 12mm.
A figura 3.19 mostra a densidade de fluxo magnético no entreferro na velocidadesíncrona. Observa-se que o pico de intensidade é maior, com aproximadamente 0,50T . A figura3.20 mostra a intensidade dos harmônicos espaciais da onda. A fundamental tem uma amplitudede 0,320T e mais uma vez a quinta harmônica se destaca.
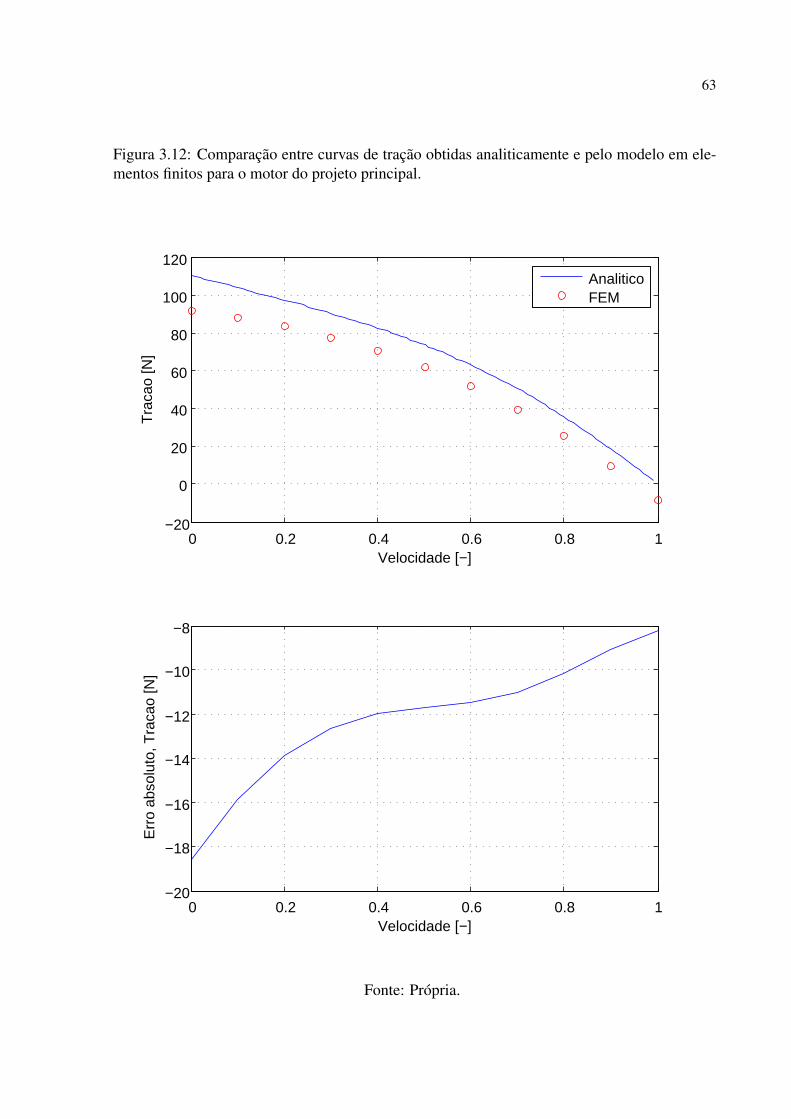
63
Figura 3.12: Comparação entre curvas de tração obtidas analiticamente e pelo modelo em ele-mentos finitos para o motor do projeto principal.
0 0.2 0.4 0.6 0.8 1−20
0
20
40
60
80
100
120
Velocidade [−]
Tra
cao
[N]
AnaliticoFEM
0 0.2 0.4 0.6 0.8 1−20
−18
−16
−14
−12
−10
−8
Velocidade [−]
Err
o ab
solu
to, T
raca
o [N
]
Fonte: Própria.

64
Figura 3.13: Distribuição do módulo da densidade de fluxo magnético no secundário do motor.Velocidade nula.
Fonte: Própria.
Figura 3.14: Distribuição do módulo da densidade de fluxo magnético no secundário do motor.Velocidade síncrona.
Fonte: Própria.

65
Figura 3.15: Linhas de fluxo da densidade de fluxo magnético. Velocidade nula.
Fonte: Própria.
Figura 3.16: Linhas de fluxo da densidade de fluxo magnético. Velocidade síncrona.
Fonte: Própria.
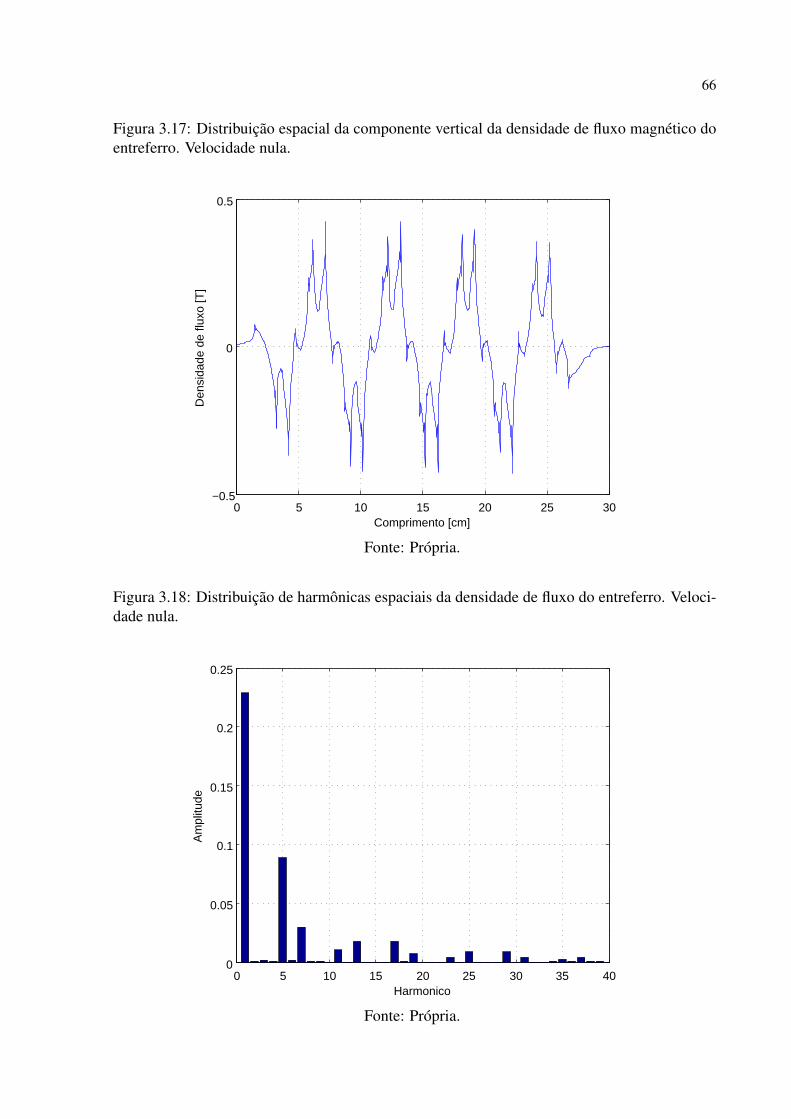
66
Figura 3.17: Distribuição espacial da componente vertical da densidade de fluxo magnético doentreferro. Velocidade nula.
0 5 10 15 20 25 30−0.5
0
0.5
Comprimento [cm]
Den
sida
de d
e flu
xo [T
]
Fonte: Própria.
Figura 3.18: Distribuição de harmônicas espaciais da densidade de fluxo do entreferro. Veloci-dade nula.
0 5 10 15 20 25 30 35 400
0.05
0.1
0.15
0.2
0.25
Harmonico
Am
plitu
de
Fonte: Própria.

67
Figura 3.19: Distribuição espacial da componente vertical da densidade de fluxo magnético doentreferro. Velocidade síncrona.
0 5 10 15 20 25 30
−0.4
−0.2
0
0.2
0.4
0.6
Comprimento [cm]
Den
sida
de d
e flu
xo [T
]
Fonte: Própria.
Figura 3.20: Distribuição de harmônicas espaciais da densidade de fluxo do entreferro. Veloci-dade síncrona.
0 5 10 15 20 25 30 35 400
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Harmonico
Am
plitu
de
Fonte: Própria.

68
4 CONCLUSÕES
Um motor linear que atente as especificações propostas foi projetado com sucesso.Considerações iniciais baseadas na literatura foram realizadas para nortear o início do projeto.O passo polar foi escolhido levando em consideração a disponibilidade de força magnetomotrizsuficiente para um dado comprimento entreferro e densidade de fluxo de entreferro (que proíbepassos polares muito pequenos) e a velocidade síncrona máxima admissível da máquina (queproíbe passos polares muito grandes). O escorregamento nominal e o número de polos foramdeterminados para reduzir a influência do efeito de ponta ao mesmo tempo que o comprimentoda máquina se mantivesse viável. Em seguida, a largura do núcleo magnético foi calculada paraque a densidade de tração por área do entreferro fosse próxima à densidade de outras máquinas.Em seguida, os parâmetros de circuito equivalente do motor foram calculados e o número deespiras por fase foi ajustado para que a força de tração de partida da máquina atendesse àscondições de projeto. Finalmente, a curva analítica de tração foi obtida.
Um modelo eletromagnético bidimensional no domínio da frequência foi construídopara ser resolvido pelo Método dos Elementos Finitos. Correções no modelo foram utilizadaspara contabilizar a laminação do núcleo, efeitos tridimensionais não contabilizados natural-mente pelo modelo e o efeito das cabeças de bobina. A não-linearidade do núcleo magnéticodo primário foi considerada. A confiabilidade do modelo foi aferida por meio da compara-ção dos resultados numéricos com as curvas analíticas de três projetos distintos de motores.Observou que as curvas analíticas tendem a prever uma força de tração maior do que as simu-lações, o que pode ser explicado pelo fato do modelo analítico utilizado não considerar o efeitode extremidade. Notou-se uma excelente concordância entre as previsões analítica e numéricada densidade de fluxo magnético do entreferro da máquina. Simulações envolvendo o projetoprincipal mostraram uma concordância entre o resultado analítico e numérico. A solução porElementos Finitos permitiu a visualização de características relevantes do campo eletromagné-tico da máquina, como o efeito de extremidade e a distribuição da densidade de fluxo magnéticodo entreferro e no secundário. Observou-se também a predominância da quinta harmônica es-pacial da densidade de fluxo magnético do entreferro.
As técnicas de projeto de modelagem utilizadas na elaboração deste trabalho mostram-se úteis para o dimensionamento e a validação de projetos de motores lineares de indução.
69
REFERÊNCIAS BIBLIOGRÁFICAS
Barros, J. P. A.; Sadowski, N., Electromagnetic Modelling by Finite Element Methods, MercelDekker, New York, 2003.
Bermudez, A; Gomez, D.; Salgado, P., Eddy-Current Losses in Laminated Cores and theComputation of an Equivalent Conductivity Magnetics, IEEE Transactions on , vol.44, no.12,pp.4730,4738, Dez. 2008
Bianchi, N., Electrical Machine Analysis using Finite Element Methods, CRC Press, NewYork, 2005.
Boldea I., Linear Electric Machines, Drives and MAGLEVs Handbook, CRC Press, 2013.
Boldea, I. and Nasar, S.A., Linear Electric Actuators and Generators Cambridge UniversityPress, 2005.
Cowern, E., Understanding Induction Motor Nameplate Information, Elec-trical Construction and Maintenance, 1 de maio de 2004, Disponível em:<http://ecmweb.com/motors/understanding-induction-motor-nameplate-information>.Acesso em 15 de julho de 2014.
COMSOL Multiphysics, User’s Guide.
Fernandes, T.R., Sistema de Transporte Vertical Utilizando um Motor de Indução LinearBilateral, 197f. Dissertação (Mestrado em Engenharia Elétrica) - Centro de Tecnologia,Universidade Federal do Ceará, Foraleza, 2007.
Gieras, I. Linear Induction Drives, Clarendon Press, Oxford, U.K., 1994.
Hayt, W. and Buck, J., Engineering Electromagnetics, McGraw-Hill Education, New York,2011.
Laithwaite, Eric R., "Linear electric machines—A personal view," Proceedings of the IEEE ,vol.63, no.2, pp.250,290, Feb. 1975
Nasar, S.A. and Boldea, I., Linear Motion Electric Machines, John Wiley & Sons, New York,1976.
Poloujadoff, M., The Theory of Linear Induction Machinery, Oxford University Press, Oxford,1980.
Poloujadoff, M., "Linear induction machines I. History and theory of operation," Spectrum,IEEE , vol.8, no.2, pp.72,80, Feb. 1971
Poloujadoff, M., "Linear induction machines II. Applications," Spectrum, IEEE , vol.8, no.3,pp.79,86, March 1971
Poloujadoff, M., and Sabonnadiere, J. C., "Determination of the lines of current in thesecondary of short stator induction motor," Compt. Rend. Acad. Sci., vol. 266, pp. 272-275,1968.
70
The Engineer, An Electrical Runway, Londres, 25 de outubro de 1946. Disponível em:<http://www.theengineer.co.uk/Journals/2013/10/30/x/m/g/Electropult.pdf> Acesso em 13 deagosto de 2014.
THK, Catálogo de produtos. Disponível em: <http://www.thk.com/sites/default/files/thkcom/images/ja/products/class/ballscrew/rol_ballscrew_01.jpg> Acesso em 19 de agosto de2014.
Tabela de condutores do padrão American Wire Gauge. Disponível em:<http://en.wikipedia.org/wiki/American_wire_gauge>. Acesso em 19 de julho de 2014.

71
APÊNDICE A -- ANEXOS
A.1 Curva de magnetização.
A tabela A.1 foi utilizada no projeto analítico e nas simulações numéricas.
Tabela A.1: Dados da curva de histerese do núcleo.
B[T ] H[A/m]0 0
1,0 2201,1 2731,2 3561,3 4821,4 7601,5 13401,6 24601,7 48001,8 82701,9 152202,0 340002,1 618932,2 972612,3 1452602,4 176838
Fonte: (Boldea, 2005).
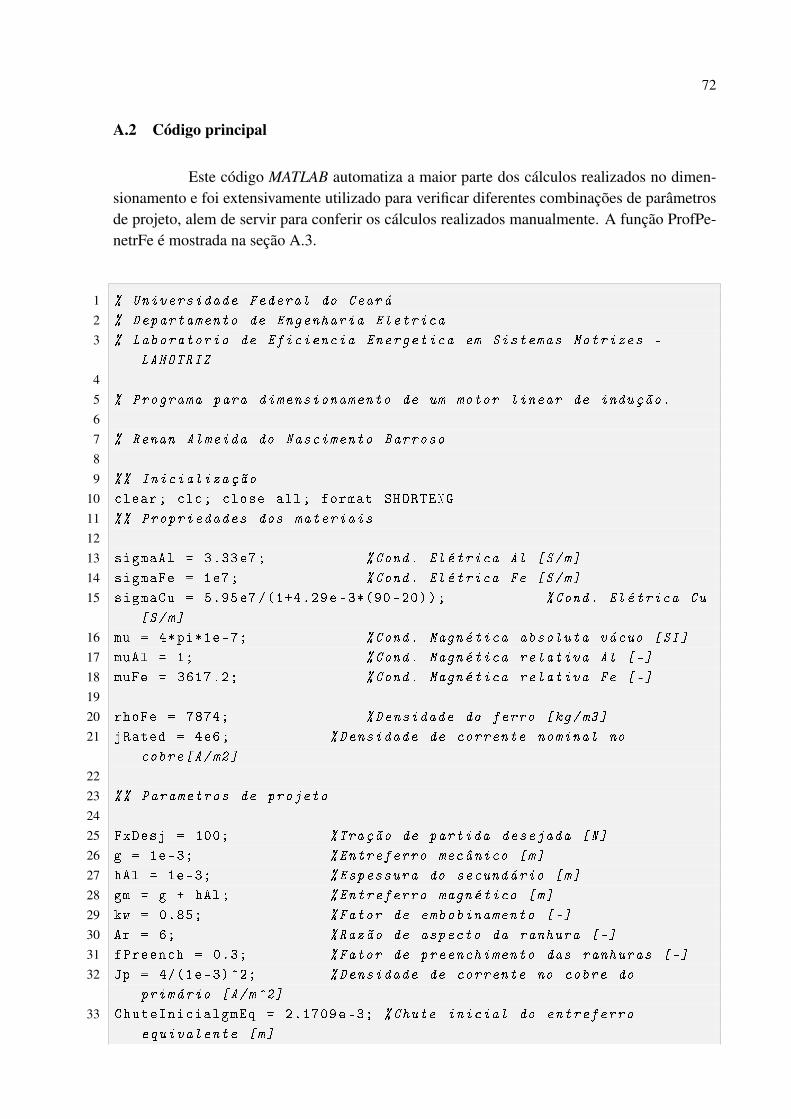
72
A.2 Código principal
Este código MATLAB automatiza a maior parte dos cálculos realizados no dimen-sionamento e foi extensivamente utilizado para verificar diferentes combinações de parâmetrosde projeto, alem de servir para conferir os cálculos realizados manualmente. A função ProfPe-netrFe é mostrada na seção A.3.
1 % Universidade Federal do Ceará
2 % Departamento de Engenharia Eletrica
3 % Laboratorio de Eficiencia Energetica em Sistemas Motrizes -
LAMOTRIZ
45 % Programa para dimensionamento de um motor linear de indução.
67 % Renan Almeida do Nascimento Barroso
89 %% Inicialização
10 clear; clc; close all; format SHORTENG
11 %% Propriedades dos materiais
1213 sigmaAl = 3.33e7; %Cond. Elétrica Al [S/m]
14 sigmaFe = 1e7; %Cond. Elétrica Fe [S/m]
15 sigmaCu = 5.95e7 /(1+4.29e-3*(90 -20)); %Cond. Elétrica Cu
[S/m]
16 mu = 4*pi*1e-7; %Cond. Magnética absoluta vácuo [SI]
17 muAl = 1; %Cond. Magnética relativa Al [-]
18 muFe = 3617.2; %Cond. Magnética relativa Fe [-]
1920 rhoFe = 7874; %Densidade do ferro [kg/m3]
21 jRated = 4e6; %Densidade de corrente nominal no
cobre[A/m2]
2223 %% Parametros de projeto
2425 FxDesj = 100; %Tração de partida desejada [N]
26 g = 1e-3; %Entreferro mecânico [m]
27 hAl = 1e-3; %Espessura do secundário [m]
28 gm = g + hAl; %Entreferro magnético [m]
29 kw = 0.85; %Fator de embobinamento [-]
30 Ar = 6; %Razão de aspecto da ranhura [-]
31 fPreench = 0.3; %Fator de preenchimento das ranhuras [-]
32 Jp = 4/(1e-3)^2; %Densidade de corrente no cobre do
primário [A/m^2]
33 ChuteInicialgmEq = 2.1709e-3; %Chute inicial do entreferro
equivalente [m]
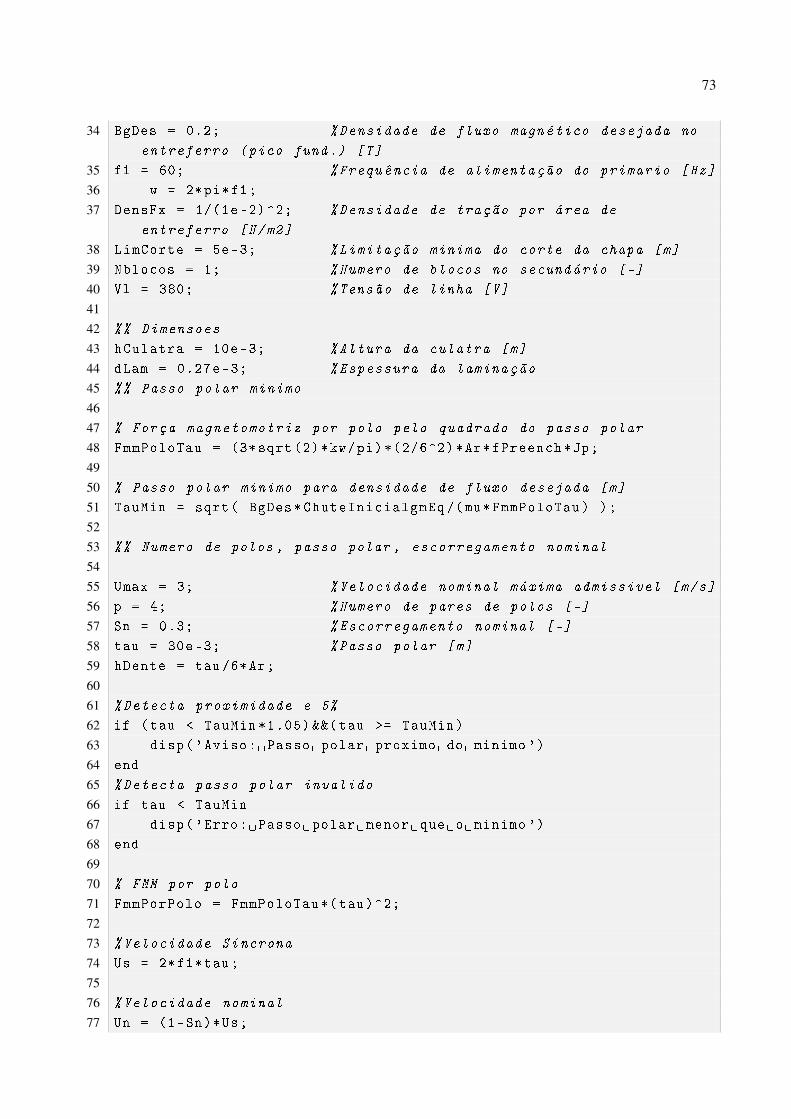
73
34 BgDes = 0.2; %Densidade de fluxo magnético desejada no
entreferro (pico fund.) [T]
35 f1 = 60; %Frequência de alimentação do primario [Hz]
36 w = 2*pi*f1;
37 DensFx = 1/(1e-2)^2; %Densidade de tração por área de
entreferro [N/m2]
38 LimCorte = 5e-3; %Limitação minima do corte da chapa [m]
39 Nblocos = 1; %Numero de blocos no secundário [-]
40 Vl = 380; %Tensão de linha [V]
4142 %% Dimensoes
43 hCulatra = 10e-3; %Altura da culatra [m]
44 dLam = 0.27e-3; %Espessura da laminação
45 %% Passo polar minimo
4647 % Força magnetomotriz por polo pelo quadrado do passo polar
48 FmmPoloTau = (3* sqrt (2)*kw/pi)*(2/6^2)*Ar*fPreench*Jp;
4950 % Passo polar minimo para densidade de fluxo desejada [m]
51 TauMin = sqrt( BgDes*ChuteInicialgmEq /(mu*FmmPoloTau) );
5253 %% Numero de polos , passo polar , escorregamento nominal
5455 Umax = 3; %Velocidade nominal máxima admissivel [m/s]
56 p = 4; %Numero de pares de polos [-]
57 Sn = 0.3; %Escorregamento nominal [-]
58 tau = 30e-3; %Passo polar [m]
59 hDente = tau/6*Ar;
6061 %Detecta proximidade e 5%
62 if (tau < TauMin *1.05) &&(tau >= TauMin)
63 disp('Aviso: Passo polar proximo do minimo ')
64 end
65 %Detecta passo polar invalido
66 if tau < TauMin
67 disp('Erro: Passo polar menor que o minimo ')
68 end
6970 % FMM por polo
71 FmmPorPolo = FmmPoloTau *(tau)^2;
7273 %Velocidade Síncrona
74 Us = 2*f1*tau;
7576 %Velocidade nominal
77 Un = (1-Sn)*Us;

74
7879 if Un > Umax
80 disp('Erro: Velocidade nominal acima do maximo indicado ')
81 end
8283 %Comprimento da parte ativa do primário
84 Lp = 2*tau*p;
8586 %Largura do nucleo magnetico (+20% de segurança)
87 lp = 1.2* FxDesj /( DensFx*Lp );
8889 %% Calculo do entreferro equivalente
9091 %Coeficiente de Carter
92 dxR = tau/6; %Abertura da ranhura
93 Sc = 2/pi*atan( dxR /(2*gm) ) - (2/pi)*( gm/dxR )*log( 1+(
dxR /(2*gm) )^2 );
94 KcAntigo = 1/( 1 - Sc*dxR/tau );
9596 alfa = dxR/tau;
97 KcNovo = 1 + tau /(2*pi*gm)*( (1+ alfa)*log(1+ alfa) +
(1-alfa)*log(1-alfa) );
9899 Kc = max(KcNovo ,KcAntigo);
100101 %Dispersão no primário
102 kFg = sinh( gm*pi/tau )/(gm*pi/tau);
103104 % Condutibilidade elétrica efetiva do ferro
105 ae = 0.5*lp ;
106 temp = pi*ae/(tau*Nblocos);
107 kTri = 1/(1- tanh(temp)/temp );
108 sigmaFeEq = sigmaFe/kTri;
109110 % Saturação no ferro do secundário
111 S = 1;
112 [Bt profPenetrFe muFeSec] = ProfFeFunc(S);
113 kss = mu/( 2*(g+hAl)*Kc*profPenetrFe*muFeSec );
114115 % Entreferro equivalente
116 gmEq = gm*Kc*kFg *(1+ kss);
117118 %% Circuito magnético
119120 %Relutancia do entreferro
121 Rg = gmEq/( mu*tau*lp );

75
122 %Relutancia do dente
123 Rd = Ar*dxR/(mu*muFe*lp*dxR);
124 %Relutancia do secundario
125 Rs = (tau/2)/( mu*muFe*profPenetrFe*lp );
126 %Rs = 0;
127 %Relutancia da culatra
128 Rc = (tau/2)/(mu*muFe*lp*hCulatra);
129130 Rt = Rg + Rd + Rs + Rc;
131132 %Densidade de fluxo no entreferro
133 FluxoPorPolo = (FmmPorPolo /( Rg + Rd + Rs + Rc ));
134135 Bg = FluxoPorPolo /(tau*lp);
136137 if Bg < BgDes
138 fprintf('Atenção: baixa densidade de fluxo no entreferro ')
139 Bg
140 end
141142 %% Condutibilidade Elétrica efeitva do secundário
143144 %Dimensionamento da largura adicional do Al do secundário
145 ls = lp + 2*tau/pi;
146 ls = round (100*ls)/100;
147 c = 0.5*ls;
148149 %Efeito pelicular no secundário
150 ProfPenetAl = sqrt( 2/( S*2*pi*f1*mu*sigmaAl ) );
151 eps = hAl*sqrt( S*2*pi*f1*mu*sigmaAl /2 );
152 kSkin = eps*( sinh (2*eps) + sin(2*eps) )/( cosh (2*eps) -
cos(2*eps) ) ;
153154 Get = mu*tau ^2*(2* pi*f1)/pi^2* sigmaAl*hAl/gm;
155 alfa = (pi/tau)*( 1 + 1i*S*Get );
156 lambda = 1 + sqrt( 1 + 1i*S*Get
)*tan(alfa*ae)*tanh(pi/tau)*(c-ae); %<--Aqui
157 kr = 1-real( (1-S*Get)*lambda /(alfa*ae)*tanh( alfa*ae ) );
158 kx = 1+real( (S*Get + 1i)*S*lambda*Get*tanh( alfa*ae )/alfa*ae );
159 kTr = kx^2/kr*( 1+ S *Get ^2*(kr/kx)^2 )/( 1+S^2+Get^2 );
160161 sigmaAlEq = sigmaAl /(kSkin*kTr)*( 1 +
sigmaFe /( sigmaAl)*( profPenetrFe*kTr*kSkin)/(hAl*kTri) );
162163 %% Circuito equivalente reduzido
164

76
165 lec = 1.5* tau + 0.01; %End connecton length [m]
166 ae = lp + gmEq;
167168 % Resistência do primário por quadrado do número de voltas [Ohm]
169 r1 = (1/ sigmaCu)*( 4*lp + 2*lec )*jRated/FmmPorPolo;
170171 % Indutância do primário por quadrado do número de voltas [H]
172 l1 = 2*mu/(p)*( 2*lp*( 0.25 + hDente /(3* dxR) ) + 0.66* lec );
173174 % Resistência do secundário por quadrado do número de voltas ,
referenciado ao primário [Ohm]
175 r2p = 12*ae*(kw)^2/( hAl*tau*p*sigmaAlEq );
176177 %Indutância de dispersão do secundário por quadrado do número de
voltas [Ohm]
178 l2p = r2p*profPenetrFe*sigmaFe*kTr*kSkin/(
sigmaAlEq*hAl*kTri *(2*pi*f1) );
179180 %Indutância de magnetização por quadrado no número de voltas [H]
181 lm = 6*mu*(2*ae)*(kw)^2*tau/(pi^2*p*gmEq);
182183 %% Goodness factor
184185 %Calculado de duas maneiras distintas
186187 G1 = mu*tau ^2*(2* pi*f1)/pi^2* sigmaAlEq*hAl/gmEq;
188 G2 = 2*pi*f1*lm/r2p;
189190 if abs((G1 - G2)/max(G1,G2)) > 0.1
191 disp('Aviso: Calculos de Goodness Factor nao batem')
192 end
193 G = G1;
194195 %% Determinação do numero de espiras por fase
196197 % Encontra o número de bobinas correto para que a tração de
partida seja a
198 % desejada. Este código é flexível o suficiente para que uma
resistência de
199 % perdas no núcleo Rn seja incluída em série com a indutância de
dispersão
200 % Lm
201202 Rn = 0;
203 W1min = 100;
204 W1max = 10000;
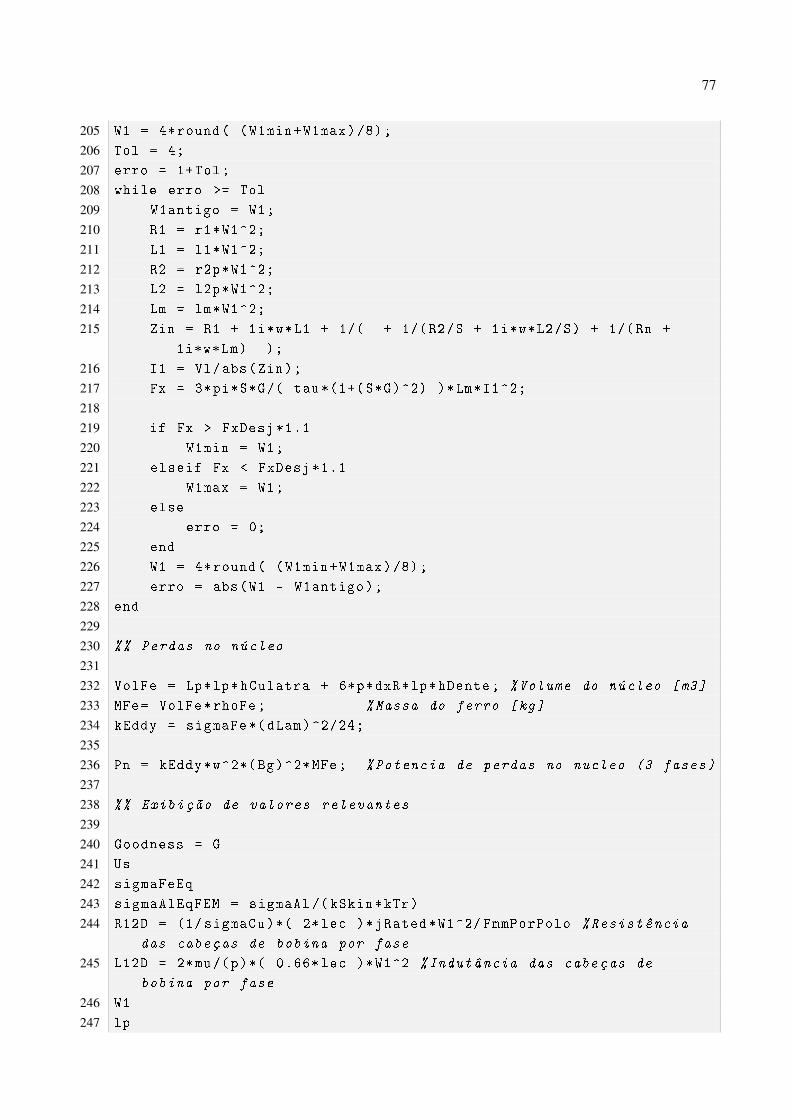
77
205 W1 = 4*round( (W1min+W1max)/8);
206 Tol = 4;
207 erro = 1+Tol;
208 while erro >= Tol
209 W1antigo = W1;
210 R1 = r1*W1^2;
211 L1 = l1*W1^2;
212 R2 = r2p*W1^2;
213 L2 = l2p*W1^2;
214 Lm = lm*W1^2;
215 Zin = R1 + 1i*w*L1 + 1/( + 1/(R2/S + 1i*w*L2/S) + 1/(Rn +
1i*w*Lm) );
216 I1 = Vl/abs(Zin);
217 Fx = 3*pi*S*G/( tau *(1+(S*G)^2) )*Lm*I1^2;
218219 if Fx > FxDesj *1.1
220 W1min = W1;
221 elseif Fx < FxDesj *1.1
222 W1max = W1;
223 else
224 erro = 0;
225 end
226 W1 = 4*round( (W1min+W1max)/8);
227 erro = abs(W1 - W1antigo);
228 end
229230 %% Perdas no núcleo
231232 VolFe = Lp*lp*hCulatra + 6*p*dxR*lp*hDente; %Volume do núcleo [m3]
233 MFe= VolFe*rhoFe; %Massa do ferro [kg]
234 kEddy = sigmaFe *(dLam)^2/24;
235236 Pn = kEddy*w^2*(Bg)^2*MFe; %Potencia de perdas no nucleo (3 fases)
237238 %% Exibição de valores relevantes
239240 Goodness = G
241 Us
242 sigmaFeEq
243 sigmaAlEqFEM = sigmaAl /(kSkin*kTr)
244 R12D = (1/ sigmaCu)*( 2*lec )*jRated*W1^2/ FmmPorPolo %Resistência
das cabeças de bobina por fase
245 L12D = 2*mu/(p)*( 0.66* lec )*W1^2 %Indutância das cabeças de
bobina por fase
246 W1
247 lp

78
248 ls
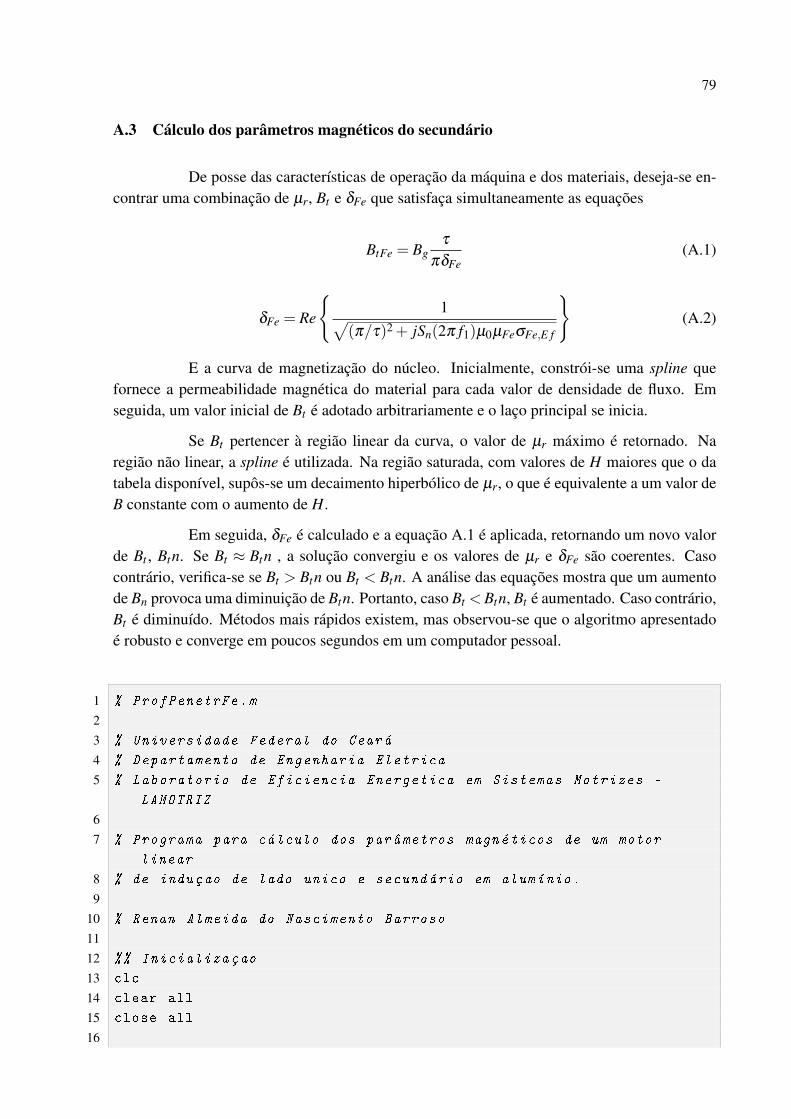
79
A.3 Cálculo dos parâmetros magnéticos do secundário
De posse das características de operação da máquina e dos materiais, deseja-se en-contrar uma combinação de µr, Bt e δFe que satisfaça simultaneamente as equações
BtFe = Bgτ
πδFe(A.1)
δFe = Re
1√
(π/τ)2 + jSn(2π f1)µ0µFeσFe,E f
(A.2)
E a curva de magnetização do núcleo. Inicialmente, constrói-se uma spline quefornece a permeabilidade magnética do material para cada valor de densidade de fluxo. Emseguida, um valor inicial de Bt é adotado arbitrariamente e o laço principal se inicia.
Se Bt pertencer à região linear da curva, o valor de µr máximo é retornado. Naregião não linear, a spline é utilizada. Na região saturada, com valores de H maiores que o databela disponível, supôs-se um decaimento hiperbólico de µr, o que é equivalente a um valor deB constante com o aumento de H.
Em seguida, δFe é calculado e a equação A.1 é aplicada, retornando um novo valorde Bt , Btn. Se Bt ≈ Btn , a solução convergiu e os valores de µr e δFe são coerentes. Casocontrário, verifica-se se Bt > Btn ou Bt < Btn. A análise das equações mostra que um aumentode Bn provoca uma diminuição de Btn. Portanto, caso Bt <Btn, Bt é aumentado. Caso contrário,Bt é diminuído. Métodos mais rápidos existem, mas observou-se que o algoritmo apresentadoé robusto e converge em poucos segundos em um computador pessoal.
1 % ProfPenetrFe.m
23 % Universidade Federal do Ceará
4 % Departamento de Engenharia Eletrica
5 % Laboratorio de Eficiencia Energetica em Sistemas Motrizes -
LAMOTRIZ
67 % Programa para cálculo dos parâmetros magnéticos de um motor
linear
8 % de induçao de lado unico e secundário em alumínio.
910 % Renan Almeida do Nascimento Barroso
1112 %% Inicializaçao
13 clc
14 clear all
15 close all
16
80
17 %% Parametros
18 Niter = 10000; % Número de iterações [-]
1920 Tol = 0.001; % Precisao numérica da densidade de fluxo
21 % magnetico no secundário [T]
2223 Bg = 0.2; % Densidade de fluxo no entreferro [T]
24 tau = 30e-3; % Passo polar [m]
25 S = 0.30; % Escorregamento [-]
26 f1 = 60; % Frequência elétrica de alimentaçao [Hz]
27 sigmaFeEq = 6.2208 e6; % Condutibilidade elétrica efetiva do
28 % ferro [S/m]
2930 mu0 = 4*pi*1e-7; % Permeabilidade magnética absoluta do
vácuo [H/m]
3132 Bt = 2; % Valor inicial da densidade de fluxo no
33 % secundário
3435 %% Curva BH
3637 % Dados da curva de magnetização do ferro.
38 % Primeira coluna: densidade de fluxo [T]
39 % Segunda coluna: força magnetomotriz [A/m]
40 BH = [
41 0 0
42 1.0 220
43 1.1 273
44 1.2 356
45 1.3 482
46 1.4 760
47 1.5 1340
48 1.6 2460
49 1.7 4800
50 1.8 8270
51 1.9 15220
52 2.0 34000
53 2.1 61893
54 2.2 97261
55 2.3 145260
56 2.4 176838
57 ];
5859 cB = BH( :,1 );
60 cH = BH( :,2 );
61
81
62 % Cálculo da curva mu_relativo versus B
63 Mur = zeros(length(cH) ,1);
64 for k = 2: length(cH)
65 Mur(k) = cB(k)/(mu0*cH(k));
66 end
67 Mur(1) = Mur(2); % Correção do primeiro ponto: O laço anterior
atribui
68 % 0/0 ao primeiro ponto , mas sabe -se que o início
de uma
69 % curva de magnetização possui permeabilidade
constante.
7071 BM = spline( cB , Mur ); % Geração da spline de aproximação da
curva de
72 % magnetização
7374 %Plotagem para comparação entre spline e dados
75 plot( cB , Mur )
76 grid on
77 hold on
78 b = linspace(min(cB),max(cB) ,20);
79 plot(b,ppval(BM,b),'color','r')
8081 %% Laço principal
82 Hist = [0]; % Histórico dos erros
83 HistBt = [Bt]; % Histórico de Bt
84 for it=1: Niter
8586 % Retorna o valor de permeabilidade magnética associado a
densidade
87 % de fluxo Bt
88 if Bt < 1 %Região linear
89 muFe = Mur(1);
90 elseif Bt >= 1 && Bt < max(cB) %Região da spline
91 muFe = ppval(BM,Bt);
92 elseif Bt >= max(cB) %Região pós-saturação
93 muFe = ppval(BM,max(cB))*max(cB)/Bt;
94 end
9596 % Profundidade de penetração magnética
97 deltaFe = real (1/ sqrt( (pi/tau)^2 +
1i*S*2*pi*f1*mu0*muFe*( sigmaFeEq) ));
9899 % Valor de B que satisfaz a consecódigo e do método
utilizadorvação do fluxo
100 Bnovo = Bg*tau/(pi*deltaFe);

82
101102 erro = abs( Bnovo - Bt );
103104 %Variação de Bt
105 if Bnovo > Bt
106 Bt = Bt + Tol;
107 else
108 Bt = Bt - Tol;
109 end
110111 Hist = [Hist ; erro];
112 HistBt = [HistBt ; Bt];
113114 %Detecção de convergência
115 if it > 5
116 if (Hist(it) == Hist(it -2))&&( Hist(it) ==
Hist(it -4))&&( Hist(it -1) == Hist(it -3))
117 break;
118 end
119 end
120 end
121122 % Exibição das variáveis calculadas
123 Bt % Densidade de fluxo no secundário
124 1000* deltaFe % Profundidade de penetração [mm]
125 muFe % Permeabilidade magnética relativa [-]
126127 % Relatório de convergência
128 figure
129 subplot (2,1,1)
130 plot(Hist)
131 xlabel('Iteração')
132 ylabel('Erro Absoluto [T]')
133 grid on
134 subplot (2,1,2)
135 plot(HistBt)
136 xlabel('Iteração')
137 ylabel('Bt [T]')
138 grid on