UNIVERSIDADE TECNOLOGICA FEDERAL DO PARAN´ A´...
24
UNIVERSIDADE TECNOL ´ OGICA FEDERAL DO PARAN ´ A DISCIPLINA DE OFICINA DE INTEGRAC ¸ ˜ AO II ANDR ´ E LUCAS ZANELLATO, FELIPE UKAN PEREIRA, HUDO CIM ASSENC ¸O DESENVOLVIMENTO DE UM PLOTTER 2D DE BAIXO CUSTO RELAT ´ ORIO FINAL DE PROJETO CURITIBA 2014
Transcript of UNIVERSIDADE TECNOLOGICA FEDERAL DO PARAN´ A´...

UNIVERSIDADE TECNOLOGICA FEDERAL DO PARANADISCIPLINA DE OFICINA DE INTEGRACAO II
ANDRE LUCAS ZANELLATO, FELIPE UKAN PEREIRA, HUDO CIMASSENCO
DESENVOLVIMENTO DE UM PLOTTER 2D DE BAIXO CUSTO
RELATORIO FINAL DE PROJETO
CURITIBA
2014

ANDRE LUCAS ZANELLATO, FELIPE UKAN PEREIRA, HUDO CIMASSENCO
DESENVOLVIMENTO DE UM PLOTTER 2D DE BAIXO CUSTO
Relatorio Final de Projeto apresentado a Disciplinade Oficina de Integracao II do curso de Engenhariade Computacao da Universidade TecnologicaFederal do Parana demonstrando o processo dedesenvolvimento do projeto.
Orientador: Hugo Vieira Neto
Co-orientador: Cesar Vargas Benıtez
CURITIBA
2014

RESUMO
. DESENVOLVIMENTO DE UM PLOTTER 2D DE BAIXO CUSTO. 24 f. Relatorio Final deProjeto – Disciplina de Oficina de Integracao II, Universidade Tecnologica Federal do Parana.Curitiba, 2014.
Este trabalho apresenta o processo de desenvolvimento de um Plotter 2D detalhando as etapasde planejamento, orcamento e realizacao juntamente com as dificuldades encontradas pelaequipe ao decorrer do projeto. O Plotter em questao possui movimentacao atraves de um motorde passo em cada um dos eixos, sendo o movimento dos mesmos transmitido por correiasdentadas. Para realizar o desenho, a maquina conta com uma caneta acoplada a um solenoidepara movimenta-la para cima e para baixo. Os motores e o solenoide sao controlados peloArduino atraves do programa open-source GRBL. A precisao e a area de trabalho esperadasforam reduzidas ao longo do projeto, mas o resultado final foi obtido com sucesso.
Palavras-chave: Plotter, Arduino, GRBL, G-CODE, Motor de Passo, CNC

SUMARIO
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 REVISAO BIBLIOGRAFICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1 GCODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 GRBL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 MICROCONTROLADORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.1 Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 MOTORES DE PASSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.5 PONTE H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.6 TRANSMISSAO MECANICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.6.1 Correias e Polias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.6.1.1 Correias Dentadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1 ESTRUTURA DA MAQUINA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 CIRCUITO DE CONTROLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 SOFTWARE DE CONTROLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4 ORCAMENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.5 CRONOGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184 RESULTADOS E DISCUSSOES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215 CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23REFERENCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24

5
1 INTRODUCAO
A necessidade por maquinas automatizadas e de maior precisao surgiu apos a revolucao
industrial. As maquinas automaticas apresentam maior consistencia e precisao quando
comparadas a trabalhos manuais. A medida que a necessidade de uma producao em larga escala
aumenta, a demanda por maquinas deste tipo acompanha o crescimento.
Em 1947, John Parsons com a intencao de fabricar pecas de avioes comecou a fazer
experimentos que dariam base para as maquinas CNC (Computer Numerical Control) de hoje.
Em 1951 foi dada sequencia a um de seus projetos de maquina com tres eixos pelo Massachutts
Institute of Technology, que apos alguns anos demonstrou ser possıvel movimentar os tres
eixos simultaneamente. No ano de 1955 estas maquinas controladas numericamente ja estavam
disponıveis para a industria (SEAMES, 2001).
As primeiras maquinas NC, numericamente controladas, rodavam com cartoes e fitas
perfuradas. Mas devido ao tempo e esforco necessario para editar este tipo de material os
computadores tomaram seu lugar. O tipo de sistema DNC (Direct numerical control) surgiu
com a introducao dos computadores nesta area. O uso deste sistema exigia um mainframe
ou um mini-computador, o que encarecia bastante seu uso. Este tipo de sistema envolvia
um computador para controlar uma ou mais maquinas numericamente controlaveis (SEAMES,
2001).
Existiram outros tipos de sistemas que utilizavam computadores de maneiras
diferentes. O mais importante e que estes modelos antigos permitiram, atraves de avancos
tecnologicos, o surgimento das maquinas CNC de hoje. A utilizacao de uma CPU (Central
Processing Unit) para fazer o interfaceamento vem sendo feita a varios anos, como citado no
paragrafo anterior. A utilizacao de um Arduino para fazer o interfaceamento se sustenta nesta
ideia de uma CPU ou mais para intermediar a comunicacao.
As maquinas CNC foram desenvolvidas visando aumentar a produtividade, reduzir os
custos, tornar a producao mais economica, aumentar a precisao de replicacao de pecas e tambem
para fazer trabalhos que seriam impraticaveis sem ela (SEAMES, 2001).

6
Atualmente existe uma grande variedade de maquinas numericamente controladas.
Elas podem ser encontradas em varias areas, principalmente na area industrial. Elas
normalmente sao encontradas em empresas que fabricam pecas, como, por exemplo,
metalurgicas.
A motivacao para o projeto foi justamente a grande aplicabilidade e os varios
conhecimentos envolvidos neste tipo de maquina. De modo que o objetivo a ser atingido
e aprender na pratica como um plotter pode funcionar, ou seja, como integrar os nossos
conhecimentos em software e hardware para obter uma maquina numericamente controlavel.
O diagrama em blocos (figura 1) busca dar uma visao geral do trabalho e auxiliar o leitor no
entendimento do mesmo.
Figura 1: Diagrama de blocos do projeto.

7
2 REVISAO BIBLIOGRAFICA
2.1 GCODE
GCODE e uma linguagem que pode representar graficamente um programa funcional.
Ela foi concebida para ser tao facilmente entendida por humanos como por maquinas, assim
podendo os humanos gerarem testes de entrada e as saıdas facilmente interpretaveis (JOY;
AXFORD, 1991).
Esta representacao mais grafica de linguagem foi inicialmente concebida por motivos
de ensino. A representacao de um programa funcional podia entao ser impressa no formato
ASCII, que e o formato GCODE. Este formato podia ser facilmente transmitido de uma
maquina para outra usando email ou outra forma de transferencia de dados (JOY; AXFORD,
1991).
O GCODE hoje e amplamente utilizado em maquinas de automacao, como em
maquinas de comando numerico computadorizado (CNC), que e o tipo de maquina que tratamos
no projeto. Ou seja, o GCODE esta sendo utilizado para enviar comandos para a maquina.
2.2 GRBL
O programa GRBL esta sendo utilizado como interpretador de GCODE e tambem
como interface para transmitir os comandos a partir do computador. Ou seja, ele atua como o
software que envia os comandos de GCODE para o Arduino e tambem como o interpretador de
GCODE no proprio Arduino.
Como interpretador de GCODE no Arduino, o GRBL funciona muito bem em sistemas
baseados em Atmega328. Por mais que haja uma certa incompatibilidade com outros sistemas
isto nao foi um grande problema (BENGLER, 2014). Como controlador ele tem uma interface
grafica para diversos sitemas operacionais que permite fazer upload de comandos escritos em
GCODE de um arquivo.

8
2.3 MICROCONTROLADORES
Em geral um microcontrolador contem um processador e memorias: RAM (random
access memory), EEPROM ou EPROM (ROM - read only memory; EPROM - erasable
programmable read only memory; EEPROM ou E2PROM - electrically erasable programmable
read only memory) e mais atualmente memorias Flash.
Outrossim os microcontroladores podem possuir alem dos componentes logicos e
aritmeticos usuais de um microprocessador elementos adicionais, como: memoria de leitura
e escrita para armazenamento de dados, memoria somente de leitura para armazenamento
de programas, EEPROM para armazenamento permanente dos dados e tambem conversores
analogicos/digitais, digitais/analogicos e outros perifericos de entrada/saıda. (PEDRONI,
2010).
2.3.1 ARDUINO
O Arduino Uno foi o microcontrolador utilizado. Ele e um microcontrolador open-
source que pode, entre outras coisas, atuar acionando as suas saıdas para ativar motores de
acordo com o que o GRBL manda de sinal. Ou seja, a sequencia de acionamentos para os
motores e feita pelo Arduino a partir de comandos recebidos por ele do GRBL.
Em particular este modelo foi baseado no ATmega328, que possui 14 portas digitais e
seis analogicas. Para fazer upload dos softwares, enviar os comandos em GCODE e tambem
para sua alimentacao esta sendo usada a entrada USB.
2.4 MOTORES DE PASSO
Os motores de passo sao um tipo de motor eletrico normalmente utilizado em
aplicacoes que exigem precisao. Impressoras a jato de tinta e maquinas CNC (Comando
Numerico Computadorizado) sao exemplos de aplicacoes. Entre suas principais caracterısticas
estao :(MICROCHIPTECHNOLOGYINC, 2004)
• Movimento discretizado, controlado por pulsos.
• Manutencao do torque quando parado (se energizado).
• Ausencia de escovas, sendo mais confiavel e sua vida util determinada apenas pelo
rolamento interno.

9
Os motores de passo que estao sendo utilizados sao do modelo EPSON EM-326,
retirados de uma impressora EPSON LX 300+II. Possuem quatro fios para ligacao que sao
representados na figura 2.
Figura 2: Fiacao motor de passo bipolar.
Existem basicamente tres tipos de motores de passo, o de ima permanente, o de
relutancia variavel e o hıbrido (HUMPHRIES, 1988). Seu modo de funcionamento se divide
em unipolar e bipolar. O modo unipolar utiliza apenas metade de cada bobina, em uma metade
a corrente passa em uma direcao e na outra metade a direcao e invertida. Neste modo o circuito
utilizado para o controle do motor e simplificado, mas como apenas metade das bobinas sao
utilizadas por vez, o torque e reduzido (MICROCHIPTECHNOLOGYINC, 2004).
No modo bipolar utiliza-se a bobina inteira, sendo o sentido da corrente controlado
por um circuito chamado de Ponte H. A complexidade do circuito de controle do motor e maior
assim como o torque.
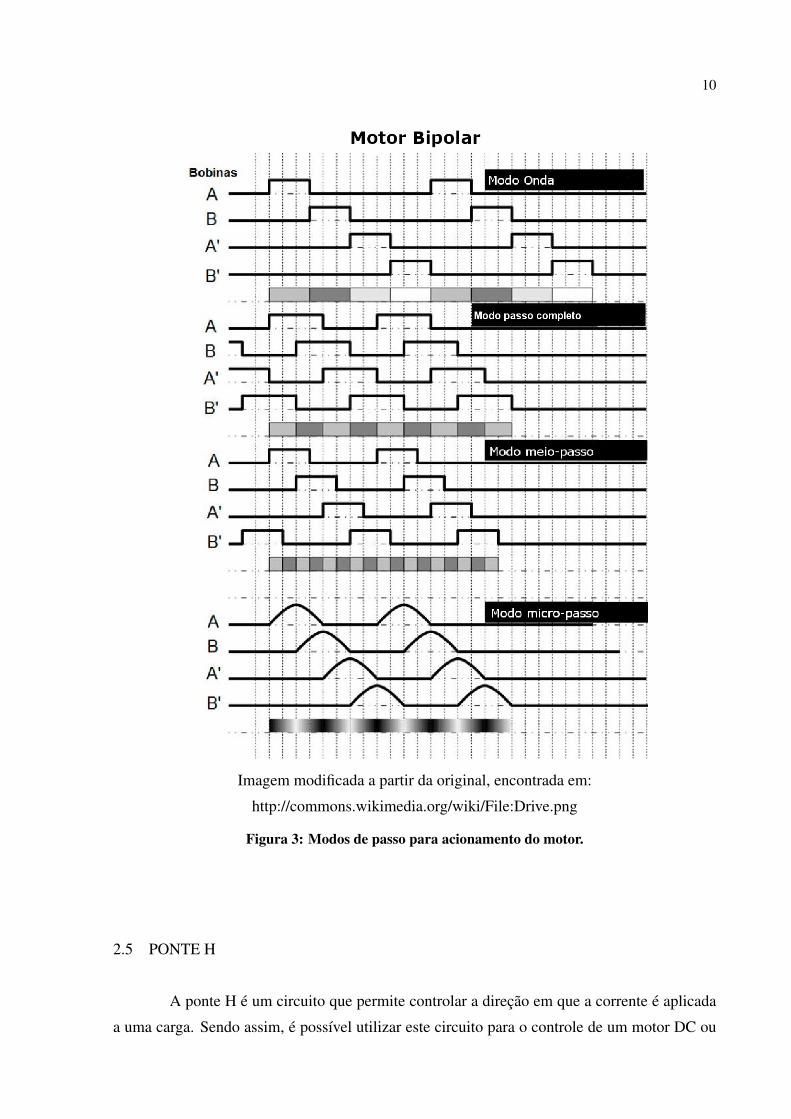
Para fazer com que o motor gire em um determinado sentido e necessario acionar as
bobinas em uma sequencia. A figura 3 mostra diferentes formas de onda para o acionamento das
bobinas. O modo de onda utilizado para o acionamento dos motores esta sendo o de meio-passo.
10
Imagem modificada a partir da original, encontrada em:
http://commons.wikimedia.org/wiki/File:Drive.png
Figura 3: Modos de passo para acionamento do motor.
2.5 PONTE H
A ponte H e um circuito que permite controlar a direcao em que a corrente e aplicada
a uma carga. Sendo assim, e possıvel utilizar este circuito para o controle de um motor DC ou

11
motor de passo, como mostrado na figura 3, as bobinas A′ e B′ sao na verdade as bobinas A e
B mas com uma corrente circulando no sentido inverso. No caso de motores DC, o sentido da
corrente determina o sentido de giro do motor (MCMANIS, 2006).
A solucao utilizada neste trabalho foi o circuito integrado L298, que possui duas pontes
H e uma corrente maxima de 2A em cada uma delas (STMICROELECTRONICS, 2000).
2.6 TRANSMISSAO MECANICA
A transmissao mecanica sao conjuntos mecanicos utilizados para transferencia de
movimento ou forca de um eixo a outro. O eixo motriz e quase sempre o eixo do motor, a
partir do qual o movimento ou a forca sera transmitida. Tal tipo de conjunto e necessario pois
muitas vezes nao e possıvel gerar o movimento exatamente como desejado, ou ao menos nao e
economicamente viavel.
Existem varios tipos de transmissoes mecanicas, como engrenagens, correntes e
correias. A utilizada neste projeto foi a transmissao atraves de pares correia-polia.
2.6.1 CORREIAS E POLIAS
Dentro do par correia-polia, existe uma variedade de tipos de transmissoes, por correias
planas, em V e correias dentadas ou sincronizadoras podendo todas estas serem acompanhadas
de polias das mesmas variedades sendo a correia plana a mais comum dos tipos.
O par correia-polia e uma alternativa barata para transmissoes mecanicas, ja que os
elementos nao precisam de grande precisao para atingir grandes rendimentos, sendo geralmente
superiores a 90 %.
Quando instalando uma correia, uma preocupacao deve ser a tensao mecanica. A
tensao nao pode ser muito alta, pois pode causar muito atrito na correia ou muito esforco no
eixo, mas se a tensao for muito baixa a transmissao entre eixos tera um menor rendimento.
As vantagens de usar correias sao muitas, entre elas (CHURCHES, 2010)
(EUROCORREIAS, 2009):
• Baixo custo de reposicao.
• Nao necessitam de alta precisao na montagem.
• Nao e necessario e nem deve ser feita lubrificacao.

12
• Boa resistencia a choques e vibracoes.
• Transmissao de medias a longas distancias.
2.6.1.1 CORREIAS DENTADAS
A principal vantagem das correias dentadas e que os dentes das mesmas se encaixam
nos dentes da roda dentada acoplada no eixo motriz (ver figura 4) (no caso deste projeto, o
motor eletrico), o que a faz agir quase como uma corrente e diminui um dos maiores problemas
das correias, o escorregamento.
Imagem modificada a partir da original, encontrada em:
http://commons.wikimedia.org/wiki/File:Pulio.png
Figura 4: Exemplo de encaixe entre Correia Dentada e Roda Dentada.
13
3 METODOLOGIA
O projeto iniciou-se pelo interesse da equipe em maquinas CNC. Como construir uma
maquina de corte CNC exigiria muitos recursos, a equipe decidiu simplificar o projeto e fazer
um plotter 2D. A ideia do funcionamento manteve-se a mesma, mas barateou-se o projeto.
3.1 ESTRUTURA DA MAQUINA
Atraves de pesquisa na internet, a equipe decidiu utilizar-se de correias para
transmissao. Como um dos integrantes ja possuıa um motor de passo, a ideia inicial foi buscar
uma correia dentada para acoplar ao mesmo. Apos encontrar tal correia, percebemos que o
preco da mesma, juntamente com mais um par motor-correia, seria proibitivo para o orcamento
previsto. Sendo assim, a equipe investigou o uso de um fuso no projeto, mas descobriu-se
que este metodo levaria o cabecote (parte mecanica que movimenta a ferramenta que carrega a
caneta) a ter uma velocidade muito baixa, devido ao passo muito baixo de roscas disponıveis
comercialmente. A solucao encontrada foi utilizar-se de pecas usadas.
Como o plotter funciona sobre uma folha A4, decidiu-se buscar pecas de impressoras
usadas, visto que seria possıvel a utilizacao do eixo do toner no projeto. Assim, a equipe
comprou o eixo de um impressora, dois motores de passo e correias por um preco muito menor
do que os orcados anteriormente. Alem disso, como a estrutura foi feita em madeira e o pai
de um dos integrantes possui uma oficina de marcenaria, o projeto acabou saindo por um preco
bastante razoavel (ver tabela 1).
Por ultimo, apos a obtencao dos motores e do eixo, a equipe encontrou o problema do
acoplamento do outro eixo ao motor e como este eixo seria acoplado a estrutura. Para acoplar o
eixo a estrutura, foram utilizadas corredicas de gaveta simples, que satisfizeram as necessidades
imediatas.
As polias utilizadas no projeto foram feitas de poliuretano, um polımero que, dentre
outras caracterısticas, possui alta resistencia a abrasao e a tensao, o que e extremamente valioso

14
em um par correia-polia, principalmente considerando o uso de correias dentadas no projeto.
(VICKLTDA, 2013)
Para acoplar o motor ao cabecote da maquina, aproveitou-se o eixo comprado da
impressora. Removeu-se o motor, a correia e a polia que a impressora usava originalmente
e adaptou-se o cabecote com novos furos para ser possıvel parafusar um motor para o eixo.
Trocou-se a polia original pela fabricada em poliuretano e acoplou-se a correia. Para fazer a
caneta acompanhar o movimento da correia, a equipe utilizou uma peca que a impressora usa,
na qual a parte de baixo da correia e presa por pressao e e utilizada como base para o solenoide.
O eixo completo pode ser visto na figura 5, onde 1 (em preto no fundo) e a mao francesa nao
modificada, 2 e a mao francesa modificada e 3 e o cabecote.
Figura 5: Eixo da Caneta
Resolvida o acoplamento do motor do eixo do cabecote, decidimos ter a mesma
abordagem para o motor do eixo corredico: prender a correia por pressao em uma das hastes de
madeira assim fazendo acompanhar o movimento da parte de baixo da correia.
Utilizando um pedaco de metal em formato de L, prendeu-se o motor a base de madeira
e com uma mao francesa, prendeu-se a polia na extremidade oposta, como pode ser visto na
figura 6, onde 1 (em preto) e a mao francesa nao modificada, 2 e a corredica e 3 e a haste.

15
Figura 6: Eixo da Corredica
Com o motor, a correia e a polia no lugar, foi preciso construir uma peca para prender
a correia e a haste de madeira. Para isso, comprou-se outra mao francesa que foi modificada,
tornando-a uma prensa para que o movimento da correia e da haste ficasse sincronizado.
Figura 7: Mao Francesa Modificada

16
A modificacao foi feita cortando um pedaco da ponta da mao francesa, onde ficaria o
segundo furo, sobrepondo os dois furos e parafusando os dois pedacos juntos, como pode ser
visto na figura 7.
3.2 CIRCUITO DE CONTROLE
Paralelamente a procura de materiais e a montagem da estrutura, a equipe tambem
montou dois circuitos para o controle dos motores, uma ponte H dupla feita com transistores
BJT (figura 8) e uma utilizando o conjunto de circuitos integrados L297 e L298 (figura
9). Comparando as duas opcoes, optou-se pela utilizacao dos circuitos integrados devido a
capacidade destes controlar a corrente aplicada no motor utilizando um sinal PWM, e tambem
ao espaco necessario ser menor. O circuito foi montado utilizando como base o datasheet do
circuito integrado L297 (STMICROELECTRONICS, 2001).
R1470
B212V
R21k
R310k
R4470
R510kR6
10k
R7470
R810k
R91k
R10470
A+ A-
Q2BC337Arduino 1
Arduino 2
Q1BDX34
Q3BDX33
Q6
BC337
Q5
BDX34
Q4BDX33
D11N4007
D21N4007
D31N4007
D41N4007
D5
1N4007
D6
1N4007
Figura 8: Ponte H com transistores BJT para teste.
Com a estrutura mecanica e o circuito de controle montados, iniciou-se entao os
processos de testes para identificar possıveis falhas de projeto e melhorias a serem feitas.

17
1 1
2 2
3 3
4 4
5 5
AA
BB
CC
Dat
e: 2
0 au
g 20
14K
iCad
E.D
.A.
Rev
: S
ize:
A4
Id: 1
/1
Titl
e: C
ircui
to d
e co
ntro
le
File
: ofic
inas
.sch
She
et: /
SEN_A 1
OU
T1
2
OU
T2
3
VSS4
INP
UT
15
EN
AB
LE_A
6
INP
UT
27
GND8
VCC9
INP
UT
310
EN
AB
LE_B
11
INP
UT
412
OU
T3
13
OU
T4
14
SEN_B 15
IC2
L298
SYNC 1GND2
HOME 3
A4
INH
15
B6
C7
INH
28
D9
EN
AB
LE10
RE
SE
T20
CNTL 11
VCC12SENS2 13
SENS1 14
VR
EF
15
OSC16
CW
/CC
W17
CLO
CK
18
H/F
19
IC1 L2
97
R2
10k
1
2
3
RV110k
C1
3,3n
R1
22k
R30,5
R40,5
D6
UF4007
D3
UF4007
D14
UF4007
D15
DIODE
D2
UF4007
D10
UF4007
D7
UF4007
D11
UF4007
VS
S
+36
V
VS
S
+5V
C2
2200u
C3
100n
VC
C
C4
2200u
C5
100n
VC
C
VC
C
1 2456
IC5
4N25
DIP
6
VC
C
DG
ND
R7
220
R12470
Ard
uino
Ste
p X
1 2456
IC4
4N25
DIP
6
VC
C
DG
ND
R6
220
R11470
Ard
uino
Dir
X
SEN_A 1
OU
T1
2
OU
T2
3
VSS4
INP
UT
15
EN
AB
LE_A
6
INP
UT
27
GND8
VCC9
INP
UT
310
EN
AB
LE_B
11
INP
UT
412
OU
T3
13
OU
T4
14
SEN_B 15
IC9
L298
SYNC 1GND2
HOME 3A
4
INH
15
B6
C7
INH
28
D9
EN
AB
LE10
RE
SE
T20
CNTL 11
VCC12SENS2 13
SENS1 14
VR
EF
15
OSC16C
W/C
CW
17
CLO
CK
18
H/F
19
IC8 L2
97
R15
10k
1
2
3
RV210k
R160,5
R170,5
D8
UF4007
D5
UF4007
D16
UF4007
D17
UF4007
D4
UF4007
D12
UF4007
D9
UF4007
D13
UF4007
VS
S
VC
C
VC
C
1 2456
IC6
4N25
DIP
6
VC
C
DG
ND
R8
220
R13470
Ard
uino
Ste
p Y
1 2456
IC3
4N25
DIP
6
VC
C
DG
ND
R5
220
R10470
Ard
uino
Dir
Y
Filt
ro d
e al
imen
taçã
o
1 2456
IC7
4N25
DIP
6
VC
C
DG
ND
R9
220
R1410k
Ard
uino
Dir
Z
C1
B 2
E3
Q1
BC
537
TO
92
D1
DIODE1
2
P1
Sol
enoi
de VS
S
1 2 3 4
P3Motor Y
1 2 3 4
P2Motor X
Syn
c
Syn
c
Figura 9: Ponte H com CI L298 e L297.

18
A partir dos primeiros testes realizados, perceberam-se alguns problemas no circuto
em relacao ao controle de corrente. Quando acionado o PWM, havia um ruıdo muito grande
e o motor nao respondia adequadamente ao controle. Apos mais testes e alguns componentes
queimados, foi identificada a ausencia de um filtro capacitivo para a alimentacao de 5V e a
necessidade de optoacopladores para que o Arduino nao sofresse danos. Alem dessas correcoes,
foi utilizada uma topologia em estrela para o ground do circuito, diminuindo ainda mais o ruıdo
na parte logica do circuito.
3.3 SOFTWARE DE CONTROLE
O software utilizado para o controle foi o GRBL. Como ja introduzido na secao de
Revisao Bibliografica, ele funciona como interpretador de GCODE no Arduino e tambem como
controlador em um computador. No computador e possıvel mandar comandos individuais para
cada eixo da maquina e tambem controlar outras caracterısticas dela, como velocidade e duty
cycle dos pulsos.
Durante todo o projeto foram feitos programas para o Arduino com a intencao de
testar as pontes H. Ainda quando tınhamos apenas uma ponte H funcional ja havıamos decidido
utilizar o GRBL pois ele atendia a todas as nossas necessidades. Com a utilizacao do GRBL
nao foi preciso alterar nada no projeto principal.
3.4 ORCAMENTO
Como relatado, a equipe nao possuıa um orcamento grande, embora um projeto
deste tipo tenha um custo (relativo a estudantes) alto. Para contornar este fato, a equipe
decidiu utilizar pecas usadas. As pecas usadas foram satisfatorias para o termino do projeto,
principalmente devido ao objetivo didatico do mesmo. Se este fosse um projeto comercial, ou
se a equipe possuısse mais recursos, o orcamento poderia ser muito maior.
De qualquer maneira, a montagem do projeto e a solucao de problemas atraves de
alternativas de baixo custo proporcionou um grande aprendizado a equipe, inclusive forcando a
criatividade em certos momentos para solucoes menos ortodoxas.
3.5 CRONOGRAMA
A primeira peca feita e testada foi a ponte H, sendo projetada e montada pela equipe.
Ela teve utilidade inicialmente mas um dos transistores usados esquentava muito e logo teve

19
Tabela 1: Precos EstimadosMateriais Valor
Eixo Cabecote 30 R$
Motores, Correias ePolias
40 R$
Estrutura (madeira) 50 R$
Eletronicos 50 R$
Outros 50 R$
Total 220 R$
que ser feita a mudanca na abordagem para o acionamento dos motores de passo. Em seguida
testou-se o CI L298, sendo que ele tambem esquentava mais do que o esperado. Ao revisarmos
as formas de onda e observarmos as correntes nos circuitos em certos instantes, foi possıvel
controlar as mesmas em um nıvel satisfatorio tanto para o chip quanto para o motor.
Paralelamente testaram-se varios softwares que pudessem ser utilizados em um
Arduino. Comecamos utilizando o Arduino Mega 2560, mas devido a algumas
incompatibilidades com softwares encontrados, foi feita a troca para um um Arduino Uno
disponibilizado pelo professor orientador. Com o novo microcontrolador foi possıvel em poucos
minutos confirmar que o GRBL seria o software a ser utilizado para o interfaceamento. Como
este software possui funcionalidade tanto como interpretador de GCODE quanto para ser a
interface que controla os movimentos da maquina, o mesmo supriu as duas necessidades da
equipe.
Para fazer a estrutura, a equipe utilizou-se da oficina de marcenaria do pai de um dos
integrantes, onde a realizacao e montagem da mesma foi feita com a ajuda de um marceneiro.
Para um dos eixos parafusou-se uma corredica nas laterais da estrutura, sendo que o outro eixo
foi retirado de uma impressora e entao parafusado na parte superior da estrutura, em outra data.
Apos os dois eixos ja estarem fixados na estrutura principal precisavamos fixar os
motores. O primeiro motor a ser fixado foi para o eixo retirado da impressora. Este trabalho
foi feito em aproximadamente duas semanas, pois sempre que nos reunıamos, faltava algum
material.
Durante este tempo foi fabricado tambem o mecanismo de ativacao da caneta, um
solenoide, pelo pai de um dos integrantes. Foram feitos testes e ajustes principalmente em
relacao ao consumo excessivo de corrente do circuito, que com os motores e com o solenoide
nao ativos consumia mais de 2 amperes.

20
Em seguida em um extremidade foi fixado o motor para o outro eixo e na outra
extremidade foi parafusada uma cantoneira que com um parafuso com porcas suporta a polia do
outro lado. A princıpio, ao colocarmos a correia, nao foi possivel movimentar este eixo. Apos
algum tempo foi resolvido colocar uma mao francesa modificada e um pedaco de metal em L
para prender a correia na base movel que se movimenta pelo canal da corredica.

21
4 RESULTADOS E DISCUSSOES
O resultado obtido com a maquina desenvolvida pela equipe foi condizente com o
custo e os materiais utilizados. Nao se esperava obter uma alta precisao utilizando apenas uma
estrutura de madeira e uma corredica simples. Na figura 10 pode-se observar a tentativa de
reproduzir o desenho da figura 11.
Figura 10: Tentativa de reproducao de um desenho.
Figura 11: Desenho de um alienıgena, retirado de (MILLER, 2010).

22
Alguns problemas ainda nao foram resolvidos. Observou-se que a solucao utilizada
para o levantamento da caneta nao respondeu como de esperado. Ao acionar o solenoide, este
esquenta e dilata o seu centro, que e feito de metal, causando muito atrito com o pistao que
prende a caneta, impossibilitando que a mesma suba. Outros problemas como folgas foram
identificados, a equipe acredita que a utilizacao de uma corredica telescopica e mudancas
simples na estrutura como a utilizacao de mais um elemento de fixacao entre as hastes do
cabecote possam melhorar o desempenho da maquina.
Sendo assim, as proximas modificacoes na maquina seriam:
• Trocar a corredica atual por outra com maior precisao.
• Utilizar outra solucao para o levantamento da caneta.
• Incluir um elemento de fixacao entre as hastes, diminuindo o seu desalinhamento.
O desenho na figura 10 apresenta deformacoes tambem pelo fato do desenho ser maior
que a area de trabalho da maquina.
As melhorias propostas buscam aumentar a precisao da maquina, mas o foco do
projeto nao foi alta precisao e sim demonstrar a viabilidade de um plotter 2D de baixo custo.
Considerando este objetivo, e possıvel dizer que o resultado foi satisfatorio, ainda que existam
melhorias possıveis, mesmo no curto prazo.

23
5 CONCLUSAO
A materia de Oficina de Integracao II se tornou um grande desafio para os integrantes.
Conseguir transformar o conhecimento teorico obtido em algo pratico e estimulante e consolida
muito mais esses conhecimentos. Pensando nisso, e no nome da disciplina, a escolha de um
projeto que envolveu fortemente a parte mecanica e a eletronica forcou a equipe a ir alem de
sua zona de conforto.
A falta de recursos monetarios forcou a criatividade na solucao de problemas que a
equipe encontrou, o que acabou sendo um grande aspecto positivo do projeto. Percebemos
que pode ser facil resolver um problema com a ferramenta certa. Entretanto, muitas vezes
essa ferramenta nao esta disponıvel ou ainda nao existe e nao devemos deixar que isso impeca
o projeto de prosseguir, independentemente do problema. Sabemos que e necessario que um
engenheiro saiba lidar com falta de recursos, principalmente trabalhando em um paıs que nem
sempre possui desenvolvimento tecnologico de ponta, nem mesmo o acesso ao mesmo.
A uniao da eletronica com a mecanica e com a computacao trouxe problemas a equipe
que nao seriam vistos dentro do ambiente academico e que trazem licoes que serao levadas para
todos os projetos daqui para frente.
Durante o processo foram superadas varias dificuldades, que consequentemente
geraram muito conhecimento para equipe, inclusive sobre a importancia pratica, pois por muitas
vezes somente o conhecimento teorico nao foi suficente para solucionar os problemas. Isto
aconteceu com a equipe quando parecia haver a necessidade de equipamentos que nao eram
realmente necessarios e aos poucos foram desenvolvidas tecnicas proprias e simples, para a
solucao de problemas.
Entendemos que o trabalho feito e a experiencia obtida durante todo o processo serao
de grande valor em nosso futuro. A disciplina de Oficina de Integracao II nos ajudou a
perceber que devemos buscar tanto o conhecimento teorico quanto o pratico. Adicionalmente
os membros da equipe aprenderam a valorizar o planejamento, a criatividade, a simplicidade e
principalmente seus companheiros de equipe.

24
REFERENCIAS
BENGLER. GRBL. 2014. Disponıvel em: <http://bengler.no/grbl>. Acesso em: 09 desetembro de 2014.
CHURCHES, A. General Notes on Engineering Hardware, part 6. 2010. Disponıvelem: <https://www.engineersaustralia.org.au/sites/default/files/shado/Learned6.pdf>. Acessoem: 15 de agosto de 2014.
EUROCORREIAS. Estudo sobre a eficiencia de correias. 2009. Disponıvel em:<http://www.eurocorreias.pt/noticias/ceenergetica.pdf>. Acesso em: 15 de agosto de 2014.
HUMPHRIES, J. Motors and controls. Maxwell Macmillan Canada, Incorporated,1988. (Electrical and electronics technology). ISBN 9780675202350. Disponıvel em:<http://books.google.com.br/books?id=fv1ZAAAAYAAJ>. Acesso em: 16 de agosto de 2014.
JOY, M.; AXFORD, T. Gcode: A revised standard for a graph representationfor functional programs. SIGPLAN Not., ACM, New York, NY, USA,v. 26, n. 1, p. 133–139, jan. 1991. ISSN 0362-1340. Disponıvel em:<http://doi.acm.org.ez48.periodicos.capes.gov.br/10.1145/122203.122214>. Acesso em:10 de agosto de 2014.
MCMANIS, C. H-Bridges: Theory and Practice. 2006. Disponıvel em:<http://www.mcmanis.com/chuck/robotics/tutorial/h-bridge/>. Acesso em: 17 de agostode 2014.
MICROCHIPTECHNOLOGYINC. Stepping motors fundamentals. 2004.
MILLER, G. Free G-code, CamBam, DXF, and STL files. 2010.
PEDRONI, V. A. Eletronica Digital Moderna e VHDL. [S.l.]: Campus, 2010.
SEAMES, W. S. Computer Numerical Control: Concepts and Programming. [S.l.]:Cengage Learning, 2001.
STMICROELECTRONICS. L298 dual full-bridge driver. 2000. Disponıvel em:<http://www.sparkfun.com/datasheets/Robotics/L298 H Bridge.pdf>. Acesso em: 15 deagosto de 2014.
STMICROELECTRONICS. L297 stepper motor controllers. 2001. Disponıvel em:<http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/CD00000063.pdf>.Acesso em: 15 de agosto de 2014.
VICKLTDA. Poliuretano - PU. 2013. Disponıvel em:<http://www.vick.com.br/vick/novo/datasheets/datasheet-poliuretano pu.pdf>. Acessoem: 16 de agosto de 2014.