UNIVERSIDADEFEDERALFLUMINENSE ... Lucas de Sou… · LUCASDESOUZAALMEIDA VARIEDADES DIFERENCIÁVEIS...
118
UNIVERSIDADE FEDERAL FLUMINENSE INSTITUTO DO NOROESTE FLUMINENSE DE EDUCAÇÃO SUPERIOR DEPARTAMENTO DE CIÊNCIAS EXATAS, BIOLÓGICAS E DA TERRA CURSO DE BACHARELADO EM MATEMÁTICA LUCAS DE SOUZA ALMEIDA VARIEDADES DIFERENCIÁVEIS E O TEOREMA DE STOKES SANTO ANTÔNIO DE PÁDUA 2019
Transcript of UNIVERSIDADEFEDERALFLUMINENSE ... Lucas de Sou… · LUCASDESOUZAALMEIDA VARIEDADES DIFERENCIÁVEIS...

UNIVERSIDADE FEDERAL FLUMINENSEINSTITUTO DO NOROESTE FLUMINENSE DE EDUCAÇÃO SUPERIORDEPARTAMENTO DE CIÊNCIAS EXATAS, BIOLÓGICAS E DA TERRA
CURSO DE BACHARELADO EM MATEMÁTICA
LUCAS DE SOUZA ALMEIDA
VARIEDADES DIFERENCIÁVEIS E O TEOREMA DE STOKES
SANTO ANTÔNIO DE PÁDUA2019

LUCAS DE SOUZA ALMEIDA
VARIEDADES DIFERENCIÁVEIS E O TEOREMA DE
STOKES
Trabalho de Conclusão de Curso apre-sentado ao Curso de Graduação em Ba-charelado com ênfase em MatemáticaAplicada e Computacional, do Depar-tamento de Ciências Exatas, Biológi-cas e da Terra, no Instituto do Noro-este Fluminense de Educação Superiorda Universidade Federal Fluminense,como requisito parcial para a obtençãodo grau de Bacharel em Matemática.
Orientador:
Prof. Erick Javier Palacios Escobar
Santo Antônio de Pádua2019


LUCAS DE SOUZA ALMEIDA
VARIEDADES DIFERENCIÁVEIS E O TEOREMA DESTOKES
Trabalho de Conclusão de Curso apre-sentado ao Curso de Graduação em Ba-charelado com ênfase em MatemáticaAplicada e Computacional, do Depar-tamento de Ciências Exatas, Biológi-cas e da Terra, no Instituto do Noro-este Fluminense de Educação Superiorda Universidade Federal Fluminense,como requisito parcial para a obtençãodo grau de Bacharel em Matemática.
.
BANCA EXAMINADORA
Prof. Erick Javier Palacios Escobar(Orientador)- INFES/UFF
Prof. Fernanda Mendonça de Vasconcellos - INFES/UFF
Prof. Francisco Miguel Zamora Inuma - INFES/UFF
Santo Antônio de Pádua2019

AGRADECIMENTOS
Primordialmennte, agradeço a Deus pelo dom da vida, que em todo tempo esteve
ao meu lado, me abençoando grandiosamente.
Ao meu Pai Ari Francisco Almeida e minha Mãe Rosélia Pereira de Souza Almeida
que tornaram possível toda a caminhada até a realização deste trabalho. Além disso,
sempre estiveram ao meu lado, nos momentos bons e nos ruins. Ao meu Irmão Josué
de Souza Almeida, que assim como os meus pais foi essencial para a realização deste
trabalho.
Ao meu orientador pelo empenho dedicado na elaboração deste projeto, que em todo
tempo acreditou em mim, até mesmo quando eu não acreditava, pela paciência e,
principalmente, pelos conselhos e incentivos que em todas as nossas orientações se
fezeram presentes.
A professora Fernanda Mendonça, que na primeira disciplina que lecionou para mim,
tive a certeza que o meu sonho era ser professor, pois as suas aulas são inspiradoras
e impecáveis. Assim como o meu orientador, foi uma grande conselheira durante
toda a minha graduação.
A todos os meus amigos, que sem eles enfrentar todas as lutas que tive ao longo do
curso seria bem mais difícil. Em particular, quero agradecer ao Bruno e Mariana,
que foram e sempre serão a minha família na fé, me mostraram o que é, de fato,
viver o Reino. E ao meu grande amigo, Lucas Couto, que não encontro palavras
para expressar toda a minha gratidão.
Ao professor Wagner Telles que, além de professor, se tornou um grande amigo
durante o curso.
Agradeço também ao professor Miguel Zamora, que aceitou participar da banca
desse trabalho de conclusão de curso.
A todos os terceirizados, principalmente, ao Seu Marcelo e a Dona Nini.

Por fim, agradeço a esta universidade, seu corpo docente, direção e administração
que oportunizaram a janela que hoje me permite enxegar um futuro que antes não
era possível.

Deixe suas escolhas refletirem suas esperanças, e não os seus medos. (Nelson Mandela)

RESUMO
A Geometria Diferencial é um campo da matemática que estuda a geometria pelaótica do cálculo diferencial e integral. Dentro dessa perspectiva uma de suas principaislinhas de pesquisa é a análise de propriedades geométricas e topológicas de variedades,tendo em vista que esta área teve notória influência em teorias que revolucionaram omundo a partir do século XX, como a relatividade geral. Com isso, este trabalho fazuma abordagem introdutória de variedades diferenciáveis, propriedades e o teorema deStokes, já que o nosso objetivo é a demonstração de dito o teorema sobre superfícies m-dimensionais, que associa a integral de uma superfície com o seu bordo. Além disso umasuperfície m-dimensional é particularmente uma variedade de dimensão m. Dessa forma,abordaremos também as formas diferenciais sobre essas superfícies.
Palavras-chaves: Cálculo Diferencial, Variedades Diferenciáveis, Formas Diferenciais, Su-
perfícies m-dimensionais, Teorema de Stokes.

ABSTRACT
Differential Geometry is an area of mathematics that studies geometry through the
optics of differential and integral calculus. Within this perspective one of its main lines
of research is the analysis of geometric and topological properties of varieties, considering
that this area had a notable influence in theories that revolutionized the world from
the twentieth century, such as general relativity. Thus, this work takes an introductory
approach to differentiable manifolds, properties, and Stokes’ theorem, since our goal is
to demonstrate the theorem on m-dimensional surfaces, which associates the integral of
a surface with its edge. Furthermore, a m-dimensional surface is particularly a variety of
m-dimension. In this way, we will also address the differential forms on these surfaces.
Keywords: Differential Calculus, Differentiable Manifolds, Differential Forms, m-dimensional
surfaces, Stokes’ Theorem.

SUMÁRIO
Introdução 12
1 Preliminares 14
1.1 Cálculo Diferencial em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.1.1 Métricas e Normas . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.1.2 Algumas Noções Topológicas . . . . . . . . . . . . . . . . . . . . . . 17
1.1.3 Limites e Continuidades . . . . . . . . . . . . . . . . . . . . . . . . 19
1.1.4 Continuidade Uniforme . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.1.5 Funções Diferenciáveis . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.1.6 Desigualdade do Valor Médio . . . . . . . . . . . . . . . . . . . . . 27
1.1.7 Derivadas Parciais na Forma Matricial . . . . . . . . . . . . . . . . 28
1.1.8 Curvas em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.1.9 Derivadas de Segunda Ordem . . . . . . . . . . . . . . . . . . . . . 33
1.1.10 Partição da Unidade . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.1.11 Teorema da Função Inversa e Teorema da Função Implícita . . . . . 35
2 Variedades Diferenciáveis 37
2.1 Variedade Diferenciável . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3 Funções Diferenciáveis em Variedades . . . . . . . . . . . . . . . . . . . . . 44
2.4 Espaços Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.5 A Diferencial de Funções Diferenciáveis . . . . . . . . . . . . . . . . . . . . 48
2.6 Orientabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51

3 Formas Diferenciais 54
3.1 Tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.2 Produto Tensorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3 Forma Diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.4 Formas Diferenciais em Variedades . . . . . . . . . . . . . . . . . . . . . . 68
4 Superfícies 70
4.1 Superfícies m-dimensionais em Rn . . . . . . . . . . . . . . . . . . . . . . . 70
4.2 Formas Diferenciais sobre Superfícies . . . . . . . . . . . . . . . . . . . . . 74
4.3 Superfícies com Bordo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.4 Espaços Tangentes sobre Superfícies com Bordo . . . . . . . . . . . . . . . 87
4.5 Formas Diferenciais em Superfícies com Bordo . . . . . . . . . . . . . . . . 87
5 Integração 90
5.1 Difinições Básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2 Teorema de Fubini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.3 Teorema de Mudança de Variáveis . . . . . . . . . . . . . . . . . . . . . . . 102
5.3.1 Partição da Unidade . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.4 Orientação Induzida no Bordo . . . . . . . . . . . . . . . . . . . . . . . . . 105
6 O Teorema de Stokes 109
6.1 O Teorema de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.2 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Referências 118

Introdução
A geometria é um ramo da matemática que já vem sendo estudada a muitos séculos
atrás, aproximadamente 5000 a.C, a mesma começou a ser explorada pelo antigo egito,
babilônia, índia(Hindus) e China. Principalmente pelos egípcios que tinham a necessidade
de fazer cálculos de áreas de terrenos e volumes de silos e pirâmides.
Depois de muitas décadas pode-se desenvolver, exponencialmente, a geometria, pela
infindável busca por respostas de problemas que ainda perduravam no século XIX, com
,por exemplo, a tentativa de provar o V postulado de Euclides. Assim, destacamos o
matemático alemão, Carl Friedrich Gauss, que foi considerado um dos mais relevantes
matemático da época, o qual fez muitas descobertas sobre geometria, trazendo novas
concepções que influenciaram diretamente os estudos cntemporâneos da matemática, es-
sas cooncepções fizeram com que uma nova geometria se instaurasse no século XIX, a
geometria não euclidiana.
Gauss em sua jornada pela matemática mentoriou o alemão, Georg Friedrich Ber-
nhard Riemann, que estudou exaustivamente as pesquisas efetuadas pelo seu mentor ,
dando origem a novos conceitos e teorias. No ano de 1854 em seus estudos sobre super-
fícies desenvolveu fundamentos teóricos para o sugirmento de objetos geométricos mais
abstratos e gerais,os quais, atualmente, são chamadas de variedades.
O presente trabalho tem como objetivo a demonstração do teorema de Stokes sobre
superfícies m-dimensionais, para isso é imprescindível a apresentação dos conceitos e pro-
priedades das variedades, haja vista que uma superfície m-dimensional é uma variedade
de dimensão m, então é razoável que os resultados obtidos em variedades sejam natural-
mente aplicados em superfícies e, além disso, a notação é análoga, fazendo com que seja
construída uma familiaridade com o tema.
Deste modo, omitiremos a maioria das demonstrações dos teoremas e proposições, aqui
apresentados, para que não seja desviada a atenção do objeto central do nosso estudo, que
é o teorema de Stokes, então só utilizaremos os resutados gerados pelos mesmos, mas ao
leitor interessado pode encontrar as demonstrações no livro do Elon de análise no Espaço
Rn, Rolci de Cálculo Avançado e do Manfredo de Formas Diferenciais e Aplicações.

Introdução 13
O corpo teórico deste trabalho foi estruturado de maneira que pomova uma simpli-
cação na compreensão do teorema de Skotes, dessa forma, no capítulo 1 trazemos os
preliminares do cálculo diferencial em Rn, no capítulo 2 uma introdução as variedades di-
ferenciáveis, no capítulo 3 é elucidado o conteúdo de formas diferencias sobre variedades,
uma das partes mais importantes, pois no ambiente a qual está inserida é possível definir
o cálculo integral e, posteriomente, no capítulo 4 apresentaremos a teoria de superfícies
m-dimensionais, juntamente com suas propriedades e resultados mais essenciais. Por con-
seguinte, no capítulo 5 falaremos sobre integrais em Rn que , por fim, serão usados no
capítulo 6 para a construção da demonstração do teorema de Stokes.

Capítulo 1
Preliminares
Neste capítulo apresentaremos alguns conceitos que são fundamentais para a compre-
ensão dos temas abordados neste trabalho. Como exemplo, citaremos algumas noções
topológicas, além de conteúdos envolvendo o cálculo diferencial em Rn.
1.1 Cálculo Diferencial em Rn
1.1.1 Métricas e Normas
Começaremos com os conceitos de métricas e normas,tendo em vista que os conteúdos
posteriores estão intrinsecamente ligados a essa noção. Como, por exemplo, continuidade
que é um dos temas mais importantes no estudo da matémática de modo geral.
Introduziremos os conceitos de métrica e norma, tendo em vista que os conteúdos
posteriores estão intrinsecamente ligados a essas noções.
Definição 1.1.1. Sejam M um conjunto arbitrário e uma função d : M × M → R.Dizemos que d é uma métrica em M se d satisfizer às seguintes propriedades, ∀x, y e
z ∈M :
i) d(x, y) ≥ 0, d(x, y) = 0⇔ x = y;
ii) d(x, y) = d(y, x);
iii) d(x, z) = d(x, y) + d(y, z).
O item (iii) é denominado desigualdade triangular, consequência do fato de que a soma

1.1 Cálculo Diferencial em Rn 15
de dois lados de um triângulo é sempre maior que a do teceiro lado.
Intuitivamente, dados dos pontos x e y em M , usamos a função d para determinar a
"distância"entre eles. Assim, podemos admitir que M é um espaço topológico munido da
métrica d e denominamos (M,d) de espaço métrico.
Exemplo 1.1.1. Seja d : R2 × R2 → R definida por
d(x, y) =√
(x1 − y2)2 + (x2 − y2)2, (1.1)
onde x = (x1, x2) e y = (y1, y2). Então d é uma métrica em R2.
De fato, os itens (i) e (ii) são imediatos. Assim, resta mostrar que d satisfaz à desi-
gualdade triangular. Para isso, vamos considerar a desigualdade de Cauchy-Schwarz.
Desigualdade de Cauchy-Schwarz. ∀x, y ∈ Rn vale a seguinte desigualdade
|〈x, y〉| ≤ |x||y|,
de modo que
|x| = ∑n
i=1(xi)2
12 e |y| =
∑ni=1(yi)
212 . (1.2)
Voltanto ao exemplo 1.1.1, queremos provar que dados quaisquer x, y e z ∈ R2 a desigual-
dade
d(x, z) ≤ d(x, y) + d(y, z)
é verdadeira.
Com efeito, tomemos
d(x, z) =√
(x1 − y1 + y1 − z1)2 + (x2 − y2 + y2 − z2)2.
Elevando ambos os membros da igualdade ao quadrado:
[d(x, z)]2 = (x1− y1 + y1− z1)2 + (x2− y2 + y2− z2)2 =⇒ (x1− y1)2 + 2(x1− y1)(y1−z1) + (y1 − z1)2 + (x2 − y2)2 + 2(x2 − y2)(y2 − z2) + (y2 − z2)2.
Pela desigualdade de Cauchy-Schwarz,
[d(x, z)]2 ≤ (x1−y1)2 +(y1−z1)2 +2[(x1−y1)2 +(x2−y2)2]12 [(y1−z1)2 +(y2−z2)2]
12 =
[√
(x1 − y1)2 + (x2 − y2)2 +√
(y1 − z1)2 + (y2 − z2)2]2 = [d(x, y) + d(y, z)]2.

1.1 Cálculo Diferencial em Rn 16
Logo,
d(x, z) ≤ d(x, y) + d(y, z), ∀x, y e z em R2.
Vale ressaltar que a métrica apresentada no Exemplo 1.1.1 é chamada de métrica
usual de R2 e pode ser estendida para Rn, com n ≥ 3.
Observe que a noção de métrica vale para espaços M arbitrários. Porém, no caso
em que o conjunto M é um espaço vetorial (real ou complexo) de dimensão finita, pode-
mos calcular as distâncias de maneira mais simples, através das normas, cuja definição
apresentaremos a seguir.
Definição 1.1.2. Sejam V um espaço vetorial (real ou complexo) e ‖ ‖: V → R uma
função arbitrária. Dizemos que ‖ ‖ é uma norma em V se ‖ ‖ satisfizer às seguintes
propriedades:
i) ‖x‖ ≥ 0, ∀x ∈ V ;
ii) ‖x‖ = 0⇔ x = 0;
iii) ‖λx‖ = |λ|‖x‖, ∀λ ∈ R (ou ∀λ ∈ C) e ∀x ∈ V ;
iv) ‖x+ y‖ ≤ ‖x‖+ ‖y‖, ∀x, y ∈ V .
Observação 1.1.1. De acordo com a definição acima, podemos observar que toda norma
induz uma métrica em um espaço vetorial V , isto é: toda norma é uma métrica. No
entanto, a recíproca não ocorre.
Um espaço vetorial normado é um par formado por um espaço vetorial V e um norma
‖ ‖, denotado por (V, ‖ ‖). Por exemplo, na desigualdade de Cauchy-Schwarz enuciada
acima, foi utilizada a chamada norma euclidiana sobre Rn e o mesmo é um exemplo de
espaço vetorial normado.
Definição 1.1.3. Seja V um espaço vetorial e ‖ ‖♠, ‖ ‖F duas normas em V . Dizemos
que essas normas são equivalentes se:
∃a, b > 0 tais que
a‖ ‖♠ ≤ ‖ ‖F ≤ b‖ ‖♠,∀x ∈ V. (1.3)
Seguem abaixo exemplos de normas em Rn, as quais são equivalentes entre si, duas a
duas:

1.1 Cálculo Diferencial em Rn 17
a) Norma um: ‖x‖1 = |x1|+ |x2|+ . . .+ |xn|
b) Norma euclidiana (ou norma usual): ‖x‖2 =√|x1|2 + |x2|2 + . . .+ |xn|
c) Norma do máximo (ou norma infinito): ‖x‖∞ =max|x1|, |x2|, . . . , |xn|
Observação 1.1.2. Como já vimos, uma norma induz uma métrica. Assim, normas
equivalentes em V implicam em métricas equivalentes e, por conseguinte, dão origem à
mesma topologia.
1.1.2 Algumas Noções Topológicas
A topologia de um espaço métrico (ou vetorial normado) trata do estudo dos chamados
conjuntos abertos. A partir de tudo que foi exposto até agora, introduziremos conceitos
básicos que estão diretamente relacionados à topologia dos espaços normados. Como
principal foco, podemos citar a noção de função contínua, cuja relevância é de grande
destaque no estudo da matemática.
A seguir, definiremos alguns objetos necessários para a compreensão da topologia dos
espaços vetoriais normados e do conceito de função contínua. Por esta razão, os conjuntos
V que se seguem nesta seção serão sempre considerados espaços vetoriais normados.
Observação 1.1.3. Sejam r > 0 e x0 ∈ V , com V munido de uma norma ‖ ‖. Dizemos
que o conjunto
B(x0; r) = x ∈ V ; ‖x− x0‖ < r (1.4)
é uma bola aberta em V .
Definição 1.1.4. Sejam A um subconjunto de V e x0 ∈ A. Dizemos que x0 é ponto
interior de A, se existe r > 0 tal que B(x0; r) ⊂ A.
Definição 1.1.5. Dizemos que x0 ∈ A é ponto de acumulação de A se, para todo r > 0,
(B(x0; r) \ x0) ∩ A 6= ∅.
Observação 1.1.4. O conjunto de todos pontos interiores de A é denotado por intA
(dependendo da referência) e o conjunto de todos os pontos de acumulação de A por A′.
Observação 1.1.5. Aqueles pontos que não são de acumulação, são denominados pontos
isolados, isto é, se x0 ∈ A não é um ponto de acumulação então existe um r > 0 tal que
B(x0; r) ∩ A = x0.

1.1 Cálculo Diferencial em Rn 18
Definição 1.1.6. Dizemos que A ⊂ V é um conjunto aberto, quando todo x0 ∈ A é ponto
interior de A.
Proposição 1.1.1. A união qualquer de conjuntos abertos é um conjunto aberto. A
interseção finita de conjuntos abertos é um conjunto aberto.
Demonstração. Seja Aλλ uma família tal que cada Aλ é aberto. Considerando x0 ∈⋃Aλ, então existe um índice λ tal que x0 ∈ Aλ. Como Aλ é aberto, existe r > 0 tal que
B(x0; r) ⊂ Aλ ⊂⋃Aλ. Portanto,
⋃Aλ é aberto.
Para provarmos à interseção finita ⋂nj=1Aj, considere y0 ∈
⋂nj=1 Aj, assim para
todo j ∈ In, com In = 1, 2, . . . , n, y0 ∈ Aj. Então, existe r > 0 tal que B(y0; r) ⊂ Aj.
Daí, tomando r =minr1, r2, . . . , rn, temos que B(y0; r) ⊂⋂nj=1Aj. Portanto
⋂nj=1 Aj é
aberto.
Definição 1.1.7. Dizemos que um subconjunto A de V é limitado se existe r > 0 tal que
A ⊂ B(0; r).
Definição 1.1.8. Dizemos que A ⊂ V é um conjunto fechado se Ac é aberto.
Proposição 1.1.2. A interseção qualquer de conjuntos fechados é um conjunto fechado.
A união finita de conjuntos fechados é um conjunto fechado.
Demonstração. Basta aplicar as propriedades (⋂Aλ)
c =⋃Acλ e (
⋃Aλ)
c =⋂Acλ. Após
isso, usar a Proposição 2.1.
Definição 1.1.9. A = A′ ∪ A é denominado aderência ou fecho de A.
As definições a seguir tratam do conceito de conjunto compacto, cuja relevância é
notória no decorrer dos capítulos, principalmente no Capítulo 5, em que introduziremos
a noção de partição da unidade em superfícies m-dimensionais.
Definição 1.1.10. Uma cobertura de um conjunto A ⊂ V é uma família C = (Cλ)λ de
conjuntos Cλ ⊂ V , tais que A ⊂⋃λ
Cλ.
Definição 1.1.11. Um conjunto X ⊂ V é dito compacto quando toda cobertura de X
admite subcobertura finita, isto é, se Cλλ é uma cobertura aberta de X, então existem
λ1, λ2, . . . , λk tais que X ⊂ Cλ1 ∪ . . . ∪ Cλk .
Proposição 1.1.3. Todo conjunto compacto é fechado e limitado.

1.1 Cálculo Diferencial em Rn 19
Demonstração. Seja X um conjunto compacto. Então a familía B(xj; 1)x∈X é uma
cobertura aberta de X. Assim, existem x1, x2, . . . , xm tais que X ⊂⋃mj=1B(xj; 1).
Lembrando que, B(xi; 1) = x ∈ X; ‖x− xi‖ < 1.
Dessa forma, escolhendo r = max‖x1‖, ‖x2‖, . . . , ‖xm‖ + 1 > 0, temos que X ⊂B(0; r). De fato, ‖x‖ = ‖x − xi + xi‖ ≤ ‖x − xi‖ + ‖xi‖ < 1 + ‖xi‖ ≤ r. Logo, X é
limitado.
Agora, resta mostrarmos que X é fechado, ou seja, que Xc é aberto. Considere
x0 ∈ Xc e rx = 12‖x − x0‖. Assim, podemos afirmar que B(x; rx)x∈X é uma cobertura
para X, com isso, existem x1, x2, . . . , xm tais que
X ⊂m⋃j=1
B(xj; rxj). (1.5)
Tomando r = minrx1 , rx2 , . . . , rxm > 0.
Seja B(x0; r) ⊂ Xc. Com efeito, pela definição r temos que B(x0, r) =⋂mj=1B(x0; rxj).
Aplicando o complementar em 1.5, temos
B(x0, r) =m⋂j=1
B(x0; rxj) ⊂m⋂j=1
B(xj, rxj)c ⊂ Xc. (1.6)
Logo, Xc é aberto e, portanto, X é fechado.
A seguir, enuciaremos as definições de conjuntos conexo e convexo, que serão menci-
onados quando tratarmos do conceito de continuidade.
Definição 1.1.12. Dizemos que um conjunto B ⊂ Rn é conexo se, para todo A1 e A2
abertos tais que B ⊂ A1 ∪ A2 e B ∩ Ai 6= ∅, i = 1, 2, temos A1 ∩ A2 6= ∅.
Definição 1.1.13. Dizemos que um conjunto A de um espaço vetorial V é convexo se,
para todo x, y ∈ A temos
λx+ (1− λ)y ∈ A, ∀λ ∈ [0, 1]. (1.7)
1.1.3 Limites e Continuidades
Nesta seção, definiremos dois conceitos imprescindíveis para o estudo do cálculo em
Rn: limites de funções e funções contínuas. Especificamente, abordaremos funções de Rn

1.1 Cálculo Diferencial em Rn 20
em Rm munidos de suas normas euclidianas, respectivamente.
Definição 1.1.14. Sejam f : X ⊂ Rn → Rm, x0 ∈ X ′ e b ∈ Rm. Dizemos que b é
limite de f(x), quando x se aproxima de x0, se ∀ε > 0,∃δ > 0; 0 < ‖x − x0‖ < δ e
x ∈ X ⇒ ‖f(x)− b‖ < ε.
E escrevemos:
limx→x0
f(x) = b. (1.8)
Intuitivamente, estamos querendo analisar o comportamento da função f em uma
vizinhança de x0, com x 6= x0 pois a noção de limite só tem sentido quando x0 ∈ X ′.
É importante destacar que a Definição 5.1.5 pode ser reescrita utilizando a notação
de bolas, isto é:
limx→x0
f(x) = b⇔ ∀ε > 0,∃δ > 0;x ∈ X ∩ (B(x0; δ)) \ x0 ⇒ f(x) ∈ B(b; ε). (1.9)
Teorema 1.1.1. Sejam X ⊂ Rn , x0 ∈ X ′ e f, g : X → Rm. Se limx→x0
f(x) = b e
limx→x0
g(x) = c, então
i) limx→x0
[f(x)± g(x)] = b± c;
ii) limx→x0
[f(x)g(x)] = bc;
iii) limx→x0
[f(x)
g(x)
]=b
c, c 6= 0.
Apresentaremos a seguir apenas a demonstração do item (ii). O leitor interessado
poderá encontrar as demonstrações dos demais itens em [1].
Demonstração. Sejam limx→x0 f(x) = b e limx→x0 g(x) = c. Considere
f(x)g(x)− bc = f(x)g(x)− cf(x) + cf(x)− bc = [g(x)− c] f(x) + [f(x)− b] c.
Passando ao limite na expressão acima, temos que
limx→x0
[f(x)g(x)− bc] = 0⇒ limx→x0
f(x)g(x) = bc.

1.1 Cálculo Diferencial em Rn 21
A definição de continuidade que veremos abaixo está diretamente relacionada a de
limite de funções. A diferença entre ambos está no fato de que para uma função f : X ⊂Rn → Rm ser contínua em x0, é necessário que x0 ∈ X (não basta que x0 seja apenas um
ponto de acumulação).
Definição 1.1.15. Sejam f : X ⊂ Rn → Rm, x0 ∈ X ∩X ′ e b ∈ Rm. Dizemos que f é
contínua em x0 se limx→x0
f(x) = f(x0), isto é:
∀ε > 0,∃δ > 0; ‖x− x0‖ < δ e x ∈ X ⇒ ‖f(x)− f(x0)‖ < ε. (1.10)
Equivalentemente, utilizando a notação de bolas, podemos escrever:
f é contínua em x0 ⇔ ∀ε > 0,∃δ > 0;x ∈ X ∩ (B(x0; δ))⇒ f(x) ∈ B(b; ε). (1.11)
As mesmas propriedades de adição e de multiplicação de limites são válidas para
funções contínuas. Isso é razoável, pois a definição de continuidade em um ponto é um
limite.
Teorema 1.1.2. Sejam f : X ⊂ Rn → Rm, g : Z ⊂ Rm → Rk tais que f(X) ⊂ Z. Se
x0 ∈ X ′, y0 ∈ Z ∩ Z ′, limx→x0 f(x) = y0 e g é contínua em y0, então
limx→x0
(f g) (x) = g(y0) (1.12)
Teorema 1.1.3. . Seja f : Rn → Rm. Então, as afirmativas abaixo são equivalentes.
i) f é contínua;
ii) A é aberto em Rm ⇒ f−1(A) é aberto em Rn;
iii) F é chado em Rm ⇒ f−1(F ) é fechado em Rn.
Demonstração. i) ⇔ ii) Seja b ∈ f−1(A). Assim, a = f(b) ∈ A. Como A é aberto,
exite ε > 0 tal que B(a; ε) ⊂ A. Além disso, f é contínua, então existe δ > 0 no qual
f(B(b; δ) ⊂ B(a; ε) ⊂ A. Daí B(b; δ) ⊂ f−1(B(a; ε) ⊂ f−1(A). Portanto A é aberto.
Analogamente, dado ε > 0, considere A = B(a; ε) e a = f(b). Como A é aberto e, por

1.1 Cálculo Diferencial em Rn 22
hipótese, f−1(A) é aberto, para qualquer b ∈ f−1(A), temos que existe δ > 0 tal que
B(b; δ) ⊂ f−1(A) então f(B(b; ε)) ⊂ B(a; ε) ⊂ A . Portanto, f é contínua.
ii) ⇔ iii) Seja F fechado, então F c ⊂ Rm é aberto, assim pela hipótese, temos
que f−1(F c) = f−1(F )c é aberto. Logo pela definição de fechado, f−1(F ) é fechado.
Reciprocamente, se A é aberto, então F = Ac é fechado, assim f−1(F ) = f−1(A)c é
fechado. Portanto, f−1(A) é aberto.
Apresentaremos agora alguns resultados relacionados a funções contínuas sobre de-
terminados conjuntos.
Teorema 1.1.4. . Seja f : Rn → Rm função contínua e K ⊂ Rm conjunto compacto.
Então f(K) é conjunto compacto de Rm.
Corolário 1.1.5. Se f : Rm → R é função contínua e K ⊂ Rm é compacto, então existem
x, x ∈ K tais que f(x) = minf(x);x ∈ K e f(x) = maxf(x);x ∈ K.
Temos um teorema muito importante quando trabalhamos em R no qual, para toda
função f : [a, b]→ R contínua com f(a) < d < f(b) implica na existência de um c ∈ (a, b)
tal que f(c) = d. Esse teorema é conhecido como Teorema do Valor Intermediário, possui
relevantes resultados para a matemática, como, por exemplo, determinar raízes de funções
dentro de um domínio compacto. De maneira análoga, porém generalizada, trabalhamos
no espaço n-dimensional (Rn).
Teorema 1.1.6. . Se f : Rn → Rm é função contínua e B ⊂ Rn conjunto conexo então,
f(B) ⊂ Rm é conjunto conexo.
Em outras palavras, toda função contínua mapeia conjuntos conexos em conjuntos
conexos.
Outro conceito importante é o de função convexa, que apresentaremos a seguir.
Definição 1.1.16. Dizemos que uma função f : A ⊂ V → R é convexa se A é um
conjunto convexo e para todo x, y ∈ A, vale a desigualdade
f(λx+ (1− λ)y) ≤ λf(x) + (1− λ)f(y), ∀ ∈ [0, 1]. (1.13)
Lema 1.1. Seja f : A ⊂ V → R uma função convexa. Se x1, . . . , xk ∈ A e λ1, . . . , λk ∈

1.1 Cálculo Diferencial em Rn 23
[0, 1] são tais que λ1 + . . .+ λk = 1, então
f
(k∑i=1
λixi
)≤
k∑i=1
λif(xi). (1.14)
O teorema abaixo mostra a relação entre funções convexas e funções contínuas.
Teorema 1.1.7. . Toda função convexa f : Rn → R é contínua.
1.1.4 Continuidade Uniforme
Pelo o que vimos anteriormente continuidade é um conceito local, agora veremos um
outro tipo de continuidade mas que representa um conceito global.
Definição 1.1.17. Seja A ⊂ Rn e f : A → Rm uma função. Dizemos que f é uniforme-
mente contínua em A se ∀ε > 0 existe δ > 0 tal que se x, y ∈ A e ‖x − y‖ < δ, então
‖f(x)− f(y)‖ < ε.
Definição 1.1.18. Dizemos que uma função f : A ⊂ Rn → Rm é Lipschitz-contínua em
A se existe M > 0 tal que
‖f(x)− f(y)‖ ≤M‖x− y‖, ∀x, y ∈ A (1.15)
Definição 1.1.19. Toda função contínua definida num campacto K ⊂ Rn é uniforme-
mente contínua.
1.1.5 Funções Diferenciáveis
Ao estudarmos derivadas em Rn vimos qua a reta que tangência uma função em um
determinado ponto é a melhor aproximação da função em uma vizinhança desse ponto.
Agora veremos que essa ideia é facilmente generalizadada ao Rn.
Definição 1.1.20. Seja x0 ∈ Rn e v um vetor unitário de Rn. Dizemos que f possui
derivada direcional em x0 na direção ~v se existe o limite
limt→0
f(x0 + t~v)− f(x0)
t(1.16)
denominado derivada direcional de f em x0 na direção ~v e denotado por ∂f∂~v
(x0). Quando
o vetor direção for a base canônica, escrevemos a derivada direcional simplismente por∂f∂xi
(x0), ∀i = 1, . . . , n e intitulamos de derivada parcial de f em x0 em relação a xi.

1.1 Cálculo Diferencial em Rn 24
Para o caso de funções escalares, consideremos um aberto U ⊂ Rn, ‖ ‖ a norma
euclidiana de Rn e f : U → R, com a seguinte definição
Definição 1.1.21. Dizemos que f é diferenciável em x0 se existem funções L, r : R→ Rtais que
f(x0 + h) = f(x0) + L(h) + r(h) (1.17)
com L uma aplicação linear e r satisfazendo
limh→0|r(h)|‖h‖ = 0 (1.18)
Essa definição diz que toda função diferenciável em x0 ∈ U , pode ser aproximada por
meio da transformação linear L e de um "resto"representado por r(h) que só depende de
h e de x0. E como f é diferenciável chamamos L do diferencial de f em x0, podendo ser
denotada por f ′(x0) ou df(x0).
Exemplo 1.1.2. Consideremos f(x1, x2) = x1x2, x2 6= 0. Então podemos escrever
f(x1 + h1, x2 + h2) = x1x2
+ 1x22
(x2h1 − x1h2) + h2(x1h2−x2h1)
x22(x2+h2). (1.19)
Como L(h) = 1x22
(x2h1 − x1h2) é linear em h e a função r(h) = h2(x1h2−x2h1)
x22(x2+h2)satisfaz
|r(h)|‖h‖ ≤
√x20+y20
y20(y0+h2‖ h ‖→ 0 se h→ 0 (1.20)
temos que f é diferenciável em (x1, x2) e
f ′(x0, y0)(h) =y0h1 − x0h2
y20
(1.21)
Proposição 1.1.4. Sejam f, g : U → R funções diferenciáveis em x0. Então
i) f + g é diferenciável em x0 e (f + g)′(x0) = f ′(x0) + g′(x0)
ii) fg é diferenciável em x0 e (fg)′(x0) = f(x0)g′(x0) + g(x0)f ′(x0);
iii) se g(x0) 6= 0 então fgé diferenciável em x0 e
(fg)′(x0) = 1
g(x0)2(g(x0)f ′(x0)− f(x0)g′(x0)) (1.22)
Outro conceito importante que é construído a partir da definição de diferencial é o
gradiente de uma função, que representa as derivadas parciais de um diferencial na forma
matricial. A seguir mostraremos como é realizada a construção do vetor grandiente.

1.1 Cálculo Diferencial em Rn 25
Se L : Rn → R é função linear, então existe s ∈ Rn tal que L(h) = 〈s : h〉 para todo
h ∈ Rn. De fato, seja e1, . . . , en a base canônica de Rn e si = L(ei). Então
L(h) = L
(n∑i=1
hiei
)=
n∑i=1
hisi = 〈s, h〉 (1.23)
Agora, considerando L = f ′(x0) a diferencial de uma função f . Então, L(h) = 〈s, h〉para algum s ∈ Rn e para todo h ∈ Rn. Assim, tomando h = tei, temos da definição
1.1.21
f(x0 + λei)− f(x0)
t= L(ei) +
r(tei)
t(1.24)
Fazendo t tender a zero, implica em
L(ei) = limt→0
f(x0 + tei)− f(x0)
t=∂f
∂xi(x0) (1.25)
Assim, denotamos o vetor cujas componentes são definidas pelo limite acima por
∇f(x0) =
(∂f
∂x1
(x0), . . . ,∂f
∂xn(x0)
)(1.26)
e chamamos de vetor gradiente de f em x0. Com isso, se f é diferenciável podemos
escrever a sua diferencial por
f ′(x0)(h) =< ∇f(x0) : h >, ∀h ∈ Rn (1.27)
À forma matricial, gradiante, também é munido das propriedades acima.
i) ∇(f + g)(x0) = ∇f(x0) + f(x0)∇g(x0);
ii) ∇(fg)(x0) = g(x0)∇f(x0) + f(x0)∇g(x0);
iii) ∇fg(x0) = 1
g(x0)2(g(x0)∇f(x0)− f(x0)∇g(x0))
Teorema 1.1.8. . Seja U ⊂ R aberto e f : U → R uma função cujas derivdas parciais
existem U e são contínuas em um ponto x0 em U . Então f é diferenciável em x0.
Agora estudaremos o conceito de diferenciabilidade para espaços mais gerais, como
por exemplo funções f : Rn → Rm, n,m > 1. A diferencial de funções dessa forma
difere somente na sua representação já que agora é uma matriz n×m.

1.1 Cálculo Diferencial em Rn 26
Definição 1.1.22. Dizemos que f : U ⊂ Rn → Rn é diferenciável em x0 ∈ U se existem
funções L, r : Rn → Rm tais que
f(x0 + h) = f(x0) + L(h) + r(h) (1.28)
com L linear e r função o(‖ h ‖), isto é, satisfazendo
limh→0
‖ r(h) ‖‖ h ‖
= 0 (1.29)
Lembrando que r(h) depende de x0 também, só não o colamos na notação para não
ficar muito carregada. O termo o(‖ h ‖) é utilizado para expressar de maneira simbólica
que ‖ r(h) ‖ se aproxima de zero mais "rápido"do que ‖ h ‖ a medida com que h tende a
zero.
Se f é uma função diferenciável em x0, então a transformação linear L é denominada
a diferencial de f em x0, que denotamos por f ′(x0).
Lema 1.2. Uma função f : U → Rn, f = (f1, . . . , fm) é diferenciável se, e somente se,
cada uma de suas componentes fi : U → R é diferenciável em x0.
Anteriomente vimos a definição do gradiente para o caso real, na qual resume-se em
uma matriz linha com a coluna correspondente a dimensão do seu domínio. Agora para
o caso de dimensões maiores temos matrizes com mais de uma linha, dependendo apenas
da dimensão no qual a função está inserida.
Se f : U → Rm é uma função diferenciável em x0 ∈ U , então sua diferencial f ′(x0) é
uma transformação linear de Rn em Rm. Amatriz associada a f ′(x0) a f ′(x0) relativamente
as bases canônicas de Rn e Rm é dada por
[f ′(x0)] =
∂f1∂x1
(x0) . . . ∂f1∂xn
(x0)... . . . ...
∂fm∂x1
(x0) . . . ∂fm∂xn
(x0)
(1.30)
No caso em que m = n, denominamos [f ′(x0)] por Matriz Jacobiana, o seu determi-
nante de Jacobiano e o seu traço é, a soma dos elementos da diagonal, de Divergente de
f em x0, a seguir temos as suas respctivas notações.
i) Jacobiano da função f em x0:Jf (x0) = det [f ′(x0)]
ii) Divergente da função f emx0:div f(x0) = tr [f ′(x0)] =∑n
i=1∂fi∂xi
(x0)

1.1 Cálculo Diferencial em Rn 27
Observação 1.1.6. De álgebra linear sabemos que, dada uma transformação linear T , se
o determinante da matriz associada a trarnsfomrção for diferente de zero então T admite
uma inversa. Com o Jacobiano é da mesma forma, se JfF (x0) 6= 0. , então a matriz
[f ′(x0)] é invertível. Como f ′(x0) aproxima f(x)− f(x0) na vizinhança de x0, então seria
razoável esperar que f também fosse invertível nas proximidades de x0. Essa ideia ficará
mais clara quando enuciarmos o teorema da função inversa.
Na matemática elementar são estudados diversos conteúdos que sedimentam uma base
para que, a partir desses conhecimentos prévios, seja possível trabalhar com conceitos mais
avançados. Como por exemplo a composição de funções, nesse trabalho usaremos muito
desse artifício para determinar se uma função é diferenciável sobre uma variedade e sobre
superícies m-dimensionais. Dessa forma, considere o seguinte teorema
Teorema 1.1.9. . (Regra da Cadeia). Sejam U subconjunto aberto de Rn e V subconjunto
aberto de Rm. Considere f : U → Rm e g : A → Rk funções tais que f(U) ⊂ V . Se f é
diferenciável em x0 e g é diferenciável em y0 = f(x0), então g f é diferenciável em x0 e
(g f)′(x0) = g′(x0) = g′(y0) f ′(x0) (1.31)
[(g f)′(x0)] = [g′(y0)] [f ′(x0)] (1.32)
1.1.6 Desigualdade do Valor Médio
O teorema do valor médio é um dos mais utilizados em problemas matemáticos e
físicos, pois ele torna factível a determinação de pontos críticos, quando existirem, assim
como relação da velocidade média de um percurso com a estantânea, mas o mesmo não
se restringe a funções de R em R, temos também de Rn em R como segue no teorema
abaixo.
Teorema 1.1.10. . Seja f : Rn → R uma função diferenciável e x1 e x2 dois pontos de
Rn. Então existe x sobre o segmento de reta que liga x1 a x2 tal que
f(x2)− f(x1) = 〈∇f(x) : x2 − x1〉 (1.33)
Porém, para as aplicações f : Rn → Rm, com m > 1, o teorema do valor médio não é
aplicável, uma vez que a f só assume valores em Rm.
Exemplo 1.1.3. Considere f : R → R2 de classe C∞ definida por f(t) = eit =
(cost, sent). Sua derivada f ′(t) = i.eit = (−sent, cost), é diferente de zero para todo

1.1 Cálculo Diferencial em Rn 28
t ∈ R. De fato |f ′(t)| = 1 para todo t. Em particular tomemos o intervalo [0, 2π] ⊂ R,assim pelo teorema do valor médio, existe t0 ∈ (0, 2π) tal que f(2π) − f(0) = f ′(t0)2π,
que é um absurdo, pois f(2π) = f(0).
Contudo, existe uma forma mais restrita para esse teorema, desenvolvida com base
numa desigualdade, sendo válida para funções diferenciáveis f : U → Rm. Mas mesmo
assim não deixa de ser vantajosa, haja vista que as igualdades nem sempre são utilizadas
pois não sabemos nada sobre o ponto intermédiário t0.
Teorema 1.1.11. (Desigualdade do Valor Médio). Sejam U ⊂ Rm aberto e f : U → Rn
contínua. Se o segmento fechato [a, a+h] está contido em U e f é diferenciável em todos
os pontos do segmento aberto (a, a+ h), então
|f(a+ h)− f(a)| ≤ |h|.sup0<t<1|f ′(a+ th)|
1.1.7 Derivadas Parciais na Forma Matricial
Seja f : Rn → Rm uma função diferenciável em x0. Então a diferencial f ′(x0)
fica representada por [f ′(x0)]. Considerando Rn = Rk × Rl e denotando x = (y, z) =
(y1, . . . , yk, z1, . . . , zk), podemos escrever
[f ′(x0)] =
∂f1∂y1
(x0) . . . ∂f1∂yk
(x0) ∂f1∂z1
(x0) . . . ∂f1∂zl
(x0)... . . . ...
... . . . ...∂fm∂y1
(x0) . . . ∂fm∂yk
(x0) ∂fm∂z1
(x0) . . . ∂fm∂zl
(x0)
(1.34)
Tomando isoladamente cada matriz dos espaço Rk e Rl, Bk e Bl respectivamente, e
para todo h = (h1, h2) ∈ Rk × Rl, temos
f ′(x0)h = Bkh1 +Blh2 (1.35)
Dessa forma denominamos às submatrizes Bk e Bl como derivadas parciais de f em x0
em relação respectivamente a y e z. Então, para simplificar a notação podemos reescrever
f ′(x0)h da seguinte forma:
f ′(x0)h =∂f
∂y(x0)h1 +
∂f
∂zh2 (1.36)
A partir desse resultado alteramos a notação da regra da cadeia, de acordo com o
próximo teorema.

1.1 Cálculo Diferencial em Rn 29
Teorema 1.1.12. . Seja f : Rk ×Rl → Rm uma função diferenciável em (x0, y0). Sejam
g1 : Rn1 → Rk e g2 : Rn2 → Rl funções diferenciáveis tais que g1(u0) = x0 e g2(v0) = y0.
Então g : Rn1+n2 → Rm definida por g(u, v) = f(g1(u), g2(v)) é diferenciável em (u0, v0) e
[g′(u0, v0)] =
[∂f
∂x(x0, y0)
] [∂g1
∂u(u0)
]+
[∂f
∂y(x0, y0)
] [∂g2
∂v(v0)
](1.37)
O conceito de diferencial para espaços euclidianos é imprescindível à compreensão da
teoria de formas diferenciais que veremos no capítulo 3 e, por conseguinte, para o estudo
de integrais sobre superfícies m-dimensionais.
Seja f : U ⊂ Rm uma função diferenciável em todos os pontos x0 ∈ U . A diferencial
de f , denotado por df(x) também é uma aplicação linear, qal que
df : U → L(Rm,Rm
x 7→ df(x)(1.38)
onde L(Rn,Rm) é o conjunto das aplicações lineares de Rn em Rm. Como já vimos
anteriormente, cada df(x) ∈ L(Rm,Rm) temos uma matriz [df(x)] ∈Mm×n
Exemplo 1.1.4. Se f(x1, x2) = (x1x2, x21 + x2
2) então f ′ : R2 → L(R2,R2) é dada por
[f ′(x1, x2)] =
[x2 x1
2x1 2x2
](1.39)
Definição 1.1.23. Dizemos que uma função diferenciável f : U → Rm é de classe C1 em
x0 ∈ U se f ′ é uma função contínua em x0. Quando f é de classe C1 em U , dizemos que
f ′ é contínua em todos os pontos de U .
Ou seja, quando a função é diferenciável e sua derivada é contínua afirmamos que a
mesma é de classe C1.
Essas definições também são aplicadas a casos gerais nos quais as funções são definidas
e assumem valores em espaços vetoriais normados, segue exatamente como foi mostrado
em todas as seções que antecedem a esta.
Definição 1.1.24. Sejam V e W com ‖‖V e ‖‖W suas respectivas normas. Dizemos que
f : V → W é diferenciável em x0 ∈ V se existem funções L, r : V → W tais que
f(x0 + h) = f(x0) + L(h) + r(h), (1.40)

1.1 Cálculo Diferencial em Rn 30
como L é linear e r uma função o(‖‖V ), isto é, satisfazendo
limh→0
‖ r(h) ‖W‖ h ‖V
= 0 (1.41)
Assim, como denotado anteriormente L = f ′(x0)
Proposição 1.1.5. Se f : V → W é uma função linear contínua, então f é diferenciável
em todo ponto x0 ∈ V e f ′(x0) = f
Exemplo 1.1.5. Considere a seguinte transformação linear:
T : R2 −→ R2
(x, y) 7−→ T (x, y) = (2x+ y, x+ 2y)(1.42)
Como T (x, y) = (2x + y, x + 2y) temos que T1(x, y) = 2x + y e T2(x, y) = x + 2y.
Sabemos que a diferencial de T na forma matricial é dada por:
[T ′(x, y)] =
[∂T1∂x
∂T1∂y
∂T2∂x
∂T2∂y
](1.43)
Com isso, basta calcularmos as derivadas parciais de T1 e T2.
∂T1∂x
= 2 ∂T1∂y
= 1∂T2∂x
= 1 ∂T2∂y
= 2(1.44)
Daí,
[T ′(x, y)] =
[2 1
1 2
]⇐⇒ T ′(x, y) = (2x+ y, x+ 2y)
1.1.8 Curvas em Rn
Uma curva de modo intuitivo é uma deformação contínua de um intervalo da reta,
além disso, podemos pensar na trajetória de uma partícula na qual a cada instante t
conseguimos escrever a posição da partícula (x, y, z). Matematicamente,
Definição 1.1.25. Sejam I um intervalo da Re e ω : I → Rn uma função contínua.
Dizemos que Γ = γ(I) é uma curva em Rn e que γ é uma representação paramétrica ou
uma parametrização da curso.
Exemplo 1.1.6. Sem I = [0, 2π] e γ : I → R2 definida por γ(θ) = (senθ, cosθ). Então
γ(I) é a circunfeência unitária centrada na origem demR2.

1.1 Cálculo Diferencial em Rn 31
Exemplo 1.1.7. Todo gráfico de uma função realcontínua de uma variável real é uma
curva. Com efeito, se f : I → R é uma função contínua definidanum intervalo I, então
podemos considerar a parametrizaçãoγ → R2 definida por γ(x) = (x, f(x)).
Como mencionado anteriormente, uma curva é um caminho definido em um intervalo
limitado de R e contínua e,por isso, γ(t) é limitada. Logo faz sentido medirmos o seu
comprimento.
m∑i=1
‖ γ(ti)− γ(ti−1) ‖ (1.45)
onde P = t0 < t1 < . . . < tm−0 < tm é uma partição de I
Definição 1.1.26. Uma curva γ : I → Rn é retificável se existe M > 0 tal que
m∑i=1
‖ γ(ti)− γ(ti−1) ‖≤M (1.46)
Para qualquer partição de P de I. Além disso, se γ é retificável, então
med(γ) = supP∈P (I)m∑i=1
‖, t1 ∈ P. (1.47)
é denominado o comprimento de γ.
Definição 1.1.27. Seja γ uma curva em Rn. Se γ : I → Rn é uma função diferenciável
em todos os pontos interiores de I, dizemos que γ é uma curva diferenciável. Então
γ(t0 + ∆t) = γ(t0) + γ′(t0)∆t+ r(∆t) (1.48)
onde γ′(t0) : R→ Rn é uma função linear e r : R→ Rn é função o(|∆t|), isto é,
lim∆t→0
‖r(∆t)‖‖∆‖
= 0 (1.49)
A curva γ = (γ1, . . . , γn) é uma curva diferenciável se e somente se cada coordenda γié função diferenciável no interior de I.
Assim como no caso de funções diferenciáveis, γ ∈ C1 se, γ′ existe e é contínua em I.
Proposição 1.1.6. Se γ : [a, b]→ Rn é curva de classe C1 em [a, b], então γ é retificável
e
med(γ) =
∫ b
a
‖γ′(t)‖dt (1.50)

1.1 Cálculo Diferencial em Rn 32
Definição 1.1.28. Denominamos integral de linha da função f sobre γ a integral∫ b
a
f(γ(t))‖γ′(t)‖dt (1.51)
Uma propriedade importante dessa integral é o fato que, sob certas condições, ela
independe da parametrização da curva. De fato, seja γ1 : [a, b]→ Rn uma curva de classe
C1 e ϕ : [α, β] → [a, b] função de classe C1 tal que ϕ′(τ) > 0 para todo τ ∈ (α, β).
Definindo γ2(τ) = γ1(ϕ(τ)), permite nos concluir que∫ β
α
f(γ2(τ))‖γ′2(τ)‖dτ =
∫ b
a
f(γ1(t))‖γ′1(t)‖dt (1.52)
Nos textos de Cálculo Diferencial é usual a notação ds = ‖γ′(t)‖dt, onde ds é denomi-
nado elemento de comprimento de arco. Assim, e tendo em vista a propriedade de invari-
ância em relação ao parâmetro, se uma dada curva Γ é parametrização por γ : [a, b]→ Rn,
é usual escrever ∫Γ
f ds =
∫ b
a
f(γ(t))‖γ′(t)‖dt (1.53)
Até agora definimos integrais de linha para o caso escalar, porém podemos definir
de outra forma, utilizando a ideia de campo vetorial, ou seja, admitimos uma função
contínua g : U → Rn, U ⊂ Rn aberto, que denominamos de campo, sobre uma curva
γ : [a, b]→ Rn.
Definição 1.1.29. Denominamos integral de linha do campo g donde g : U → Rn
contínua com U ⊂ Rn aberto, sobre γ a integral∫γ
gdγ =
∫ b
a
〈g(γ(t)) : γ′(t)〉dt (1.54)
As integrais de linha possui grandes aplicações, dentro as quais mencionamos o cálculo
de densidade de uma determinado objeto (arame, corda, barra, etc), além disso, possui
uma relação com um dos teoremas mais importantes de cálculo diferencial e integral,
Teorema Fundamental do Cálculo, para entender melhor esta relação, vamos lembrar a
interpretação desse teorema para o casa de funções reias. Se g : [a, b] → R é função
contínua e x0 ∈ (a, b), então a função f : [a, b]→ R definida por
f(x) = y0 +
∫ x
x0
g(s)ds (1.55)

1.1 Cálculo Diferencial em Rn 33
é diferenciável em (a, b) e é a única função que satisfazf ′(x) = g(x), ∀x ∈ (a, b)
f(x0) = y0
(1.56)
A extensão para funções de várias variáveis resume-se em, dada uma função g : U →Rn contínua em U ⊂ Rn aberto, queremos descobrir a existência de uma outra função
f : U → Rn que satisfaz as condições mostradas acima, trocando (a, b) por U . Com a
obtenção de uma resposta afirmativa, denominamos g como campo gradiente em U e f
potencial associado ao campo g.
Em cálculo vetorial, o campo gradiente é representado pelo gradiente de uma função,
pois se considerarmos f : U → Rm escalar, seu gradiente sempre será um campo vetorial.
E quando g é um campo vetorial conservativo o mesmo é gradiente de alguma função,
neste caso especificamente, g = ∇f , então chamamos f de função pontecial de g. A partir
disso, temos os seguintes resultados
Definição 1.1.30. Seja U um domínio de Rn. Dizemos que g : U → Rn é campo
conservativo em U se, para todo x, y ∈ U e duas curvas diferenciáveis quaisquer γ1, γ2
ligando x a y, tem-se ∫γ1
g.dγ =
∫γ2
g.dγ (1.57)
Lema 1.3. Seja U um domínio de Rn, isto é, aberto e conexo. Se f : U → Rn é função
de classe C1 em U . Então f ′ é campo conservativo.
Teorema 1.1.13. . Seja U um domínio de Rn. Se g : U → Rn é campo conservativo
contínuo em U , então dado x0 ∈ U e y0 ∈ R, existe uma única f : U → R de classe C1
tal que
f ′(x) = g(x), ∀x ∈ Uf(x0) = y0
(1.58)
1.1.9 Derivadas de Segunda Ordem
Anteriomente, em funções diferenciáveis, já foi definido o conjunto L(Rn;R), então
sabemos que f ′ ∈ L(Rn;R), agora desejamos determinar f ′′ mas para isso f ′ precisa ser
diferenciável, vejamos como é realizado esse processo.

1.1 Cálculo Diferencial em Rn 34
Seja f : U → L(Rn;R) uma função diferenciável. Assim, podemos definir a função
f ′ : U → L(Rn;R)
x 7→ f ′(x)(1.59)
Como L(Rn;R) é isomorfo ao Rn, reescrevemos a aplicação f ′ : U → Rn e para
definirmos f ′′, isto é, que f ′ seja diferenciável em algum ponto x0 ∈ U , precisamos que f ′
satisfaça a condição da denifição ... . Então existem funções L, r : Rn → Rn tais que
f ′(x0 + h) = f ′(x0) + Lh+ r(h) (1.60)
Onde L é linear e r é o(‖ h ‖). Daí, L é a diferencial de f ′ e a denominamos de derivada
de segunda ordem de f , denotada por L = f ′′(x0).
Lema 1.4. Seja f : U ⊂ Rn → R uma função de classe C1 em U , duas vezes diferenciável
em x0. Então existe r : Rn → R satisfazendo
limh→0|r(h)|‖h‖2 = 0
tal que
f(x0 + h) = f(x0) + 〈f ′(x0) : h〉+ 12〈f ′′(x0)h : h〉+ r(h)
(1.61)
Da mesma forma que [f ′(x0)] tem uma matriz associada a qual é denominada Ja-
cobiana, se é uma mtriz quadrada, [f ′′(x0)] também possui a sua respectiva matriz, no
entanto, agora são das derivadas parciais de segunda ordem, e chamamos [f ′′(x0)] de
Matriz Hessiana de f em x0, e representamos
[f ′′(x0)] =
∂2f∂x21
(x0) ∂2f∂x2∂x1
(x0) . . . ∂2f∂xn∂x1
(x0)...
... . . . ...∂2f
∂x1∂xn(x0) ∂2f
∂x2∂xn(x0) . . . ∂2f
∂x22(x0)
(1.62)
1.1.10 Partição da Unidade
Está seção é primordial para o entendimento da demonstração do teorema de Stokes
que é o escopo desse trabalho.
Definição 1.1.31. Se A ⊂ Rn. Dizemos que Φ ⊂ C∞(Rn,R) é uma partição da unidade
de A se as seguintes propriedades são satisfeitas:
i) 0 ≤ φ(x) ≤ 1 para todo x ∈ Rn e para todo φ ∈ Φ;

1.1 Cálculo Diferencial em Rn 35
ii) Para todo x ∈ A, existe r > 0 tal que φ ∈ Φ;φ(y) > 0,∀y ∈ Br(x) é finito
iii) Para todo x ∈ A,∑
φ∈Φ φ(x) = 1
Além disso, se U = Uλλ∈Λ é uma cobertura aberta de A, dizemos que Φ é subordinada
a U se para todo φ ∈ Φ, existe Uλ ∈ U e Bλ ⊂ Uλ um conjunto fechado tais que φ(x) = 0
para todo x ∈ Uλ Bλ
Teorema 1.1.14. . Sejam A ⊂ Rn e U uma cobertura aberta de A. Então existe Φ ⊂C∞(Rn,R) partição da unidade de A subordinada a U.
Lema 1.5. Sejam K ⊂ U ⊂ Rn, K compacto e U aberto. Então, podemos determinar B
compacto e ψ : Rn → [0, 1] de classe C∞ tais que
K ⊂ B ⊂ B ⊂ U, (1.63)
ψ(x) =
1 x ∈ K,0 x ∈ Rn \B
(1.64)
Lema 1.6. Seja K ⊂ Rn compacto e U uma cobertura aberta de K. Então existe
Φ ⊂ C∞(Rn,R) partição da unidade de K subordinada a uma subcobertura finita de U .
1.1.11 Teorema da Função Inversa e Teorema da Função Implícita
Aqui enuciaremos o teorema da função inversa para o espaço Rn, tendo em vista que
o mesmo é um dos principais teoremas da análise no Rn que possui uma vasta aplicabili-
dade. O intuito do uso desse teorema é fazer com o leitor tenha noção de difeomorfismos
locais para que, ao chegar na seguinte seção, variedades diferenciáveis, possa sentir-se
familiarizado com a notação e o significado de aplicações que são invertíveis em uma
vizinhança.
Teorema 1.1.15. . (Teorema da função inversa.) Sejam U ⊂ Rm um aberto e f : U →Rm de classe Ck(1 ≤ k ≤ ∞) tal que, em um ponto x0 ∈ U , f ′(x0) ∈ L(Rm) é um
isomorfismo. Então f é um difeomorfismo de classe Ck de uma vizinhança V de x0 sobre
uma vizinhança W de f(x0).
Demonstração. A demonstração pode ser encontrado em [4]
Do cálculo de uma variável real, sabemos que funções implícitas são da forma: f :

1.1 Cálculo Diferencial em Rn 36
R2 → R tal que f(x, y) = 0 com y = f(x). Segue um exemplo, clássico, que representa
uma função implícita.
Exemplo 1.1.8. Seja f : R2 → R tal que f(x, y) = x2 + y2 − 1 = 0 é a equação
da circunferência unitária . Explicitando y temos que y =√
1− x2 ou y = −√
1− x2.
Assim, podemos definir uma g : [−1, 1]→ R pondo g(x) =√
1− x2. Logo g está implícita
na equação da circunferência.
Teorema 1.1.16. (Função Implícita). Seja f : Rk×Rm → Rm uma função de classe C1.
Considere f(x0, y0) = 0 e det∂f∂y
(x0, y0)6= 0. Então existe δ0 > 0 e uma única função
de classe C1, ϕ : Bδ0(x0) ⊂ Rk → Rm tal que ϕ(x0) = y0 e
f(x, ϕ(x)) = 0, ∀x ∈ Bδ0(x0) (1.65)
Demonstração. A demonstração desse teorema pode ser realizada como consequência do
teorema da função inversa, tendo em vista que o objetivo é determinar uma função ϕ que
satisfaça as condições impostas pelo teorema acima, com isso precisamos utilizar a ideia
de inversa local. Ela pode ser encontrada em [1]

Capítulo 2
Variedades Diferenciáveis
Neste capítulo iremos apresentar a definição de variedade diferenciável, assim como
suas propriedades e, posteriormente, mostraremos como é realizada a aplicação do cálculo
diferencial sobre a mesma. Dessa forma, enuciaremos alguns conceitos que são imprescin-
díveis à fundamentação teórica de todo conteúdo que tange variedades diferenciáveis.
2.1 Variedade Diferenciável
Definição 2.1.1. Dizemos que um espaço topológicoM é localmente euclidiano de dimen-
sãom quando, para cada ponto p ∈M existir uma vizinhança aberta U ⊂M homeomorfa
ao Rm, ou seja, temos aplicações ϕ : U −→ ϕ(U) ⊂ Rm, com ϕ(U) vizinhança aberta de
ϕ(p).
Definição 2.1.2. As aplicações acima mencionadas são denominadas cartas ou sistema
de coordenadas locais.
Observação 2.1.1. Um espaço topológico com a característica de ser localmente euclidi-
ano permite a aplicação do cálculo diferencial e integral haja vista que o Rn é um espaço
natural do cálculo.
Definição 2.1.3. Uma variedade topológica é um espaço topológico M que satisfaz três
condições:
i) Localmente Euclidiano;
ii) Espaços de Hausdorff;
iii) Base Enumerável.

2.1 Variedade Diferenciável 38
A necessidade de se definir variedades topológicas vem do fato das variedades diferen-
ciáveis, de modo geral, serem espaços topológicos munidos de estruturas diferenciáveis.
Ao longo do texto é realizado uma análise da construção dessas estruturas juntamente
com suas propriedades.
De acordo com a observação 2.1.1 podemos afirmar que pela propriedade de ser lo-
calmente euclidiana é possível a aplicação do cálculo diferencial sobre uma variedade
diferenciável, tendo em vista que a derivação é um conceito local, mas antes disso pre-
cisamos analisar as cartas pois queremos que as mesmas sejam diferenciáveis e de classe
C∞, uma vez que, por meio do homeomorfismo, conseguimos projetar um aberto deM no
espaço Rn. Porém não conhecemos as propriedades de U ⊂M , por conseguinte, limita o
estudo da variedadeM . Para solucionar esse problema devemos construir funções que são
definidas de Rm à Rm, por intermédio de interseções de abertos contido em M , fazendo
com que a variedade seja analisada inteiramente dentro de um ambiente qua a aplicação
do cálculo já é conhecida.
Como M é localmente euclidiana, para todo p ∈ M existe uma vizinhança U ⊂ M .
Então, considerando U vizinhança de p ∈ M e V vizinhança de q ∈ M com U ∩ V 6= ∅,
definimos os sistemas de coordenadas ϕu : U ∩ V −→ ϕu(U ∩ V ) ⊂ Rm e ϕv : U ∩ V −→ϕv(U ∩V ) ⊂ Rm. Daí, faz todo sentido trabalharmos com a composição dessas aplicações,
ou seja, ϕv ϕ−1u e, analogamente, ϕu ϕ−1
v sendo todas de classe C∞.
Definição 2.1.4. Mediante ao que foi supracitado, denominamos ϕv ϕ−1u e ϕu ϕ−1
v
como funções de transição ou mudança de coordenadas.
A partir disso, é conveniente e aceitável a análise das variedades por meio da dife-
renciação. Em particular, as cartas são difeomorfismos e, em decorrência, as funções de
transição também. A seguir temos uma figura que ilustra uma variedade diferenciável e
a construção das funções de transição.

2.1 Variedade Diferenciável 39
Figura 2.1: Uma representação geométrica de uma variedade topológica.
É necessário que as cartas sejam de classe C∞ pois, dessa maneira, garantimos a
construção de uma estrutura diferenciável para M . Baseado-se nisso, surge um novo
conceito que relaciona as cartas de forma que uma seja compatível com a outra.
Definição 2.1.5. Dizemos que ϕu e ϕv são compatíveis quando ϕu ϕ−1v e ϕv ϕ−1
u são
diferenciáveis de classe C∞.
Porém, para determinarmos uma estrutura em M as análises efetuadas anteriormente
sobre uma "pequena"quantidade de cartas não são suficientes, uma vez que as mesmas
não conseguem cobrir toda a variedade. Diante disso, ao considerarmos uma coleção A =
(Uλ, ϕλ) : λ ∈ Λ com Uλ : λ ∈ Λ uma cobertura aberta de M , tal que⋃λ∈Λ Uλ = M ,
é possível definir uma estrutura para M .
Definição 2.1.6. A coleção A de cartas compatíveis é chamada de atlas compatível ou
uma estrutura defirenciável de M .
Definição 2.1.7. Dizemos que um atlas é maximal se contém todas as cartas compatíveis
definidas em M .
Agora podemos definir uma variedade diferenciável, assim:
Definição 2.1.8. Dizemos que o par (M,A) é uma variedade diferenciável, onde M é
um espaço topológico de Hausdorff, com base enumerável e A é um atlas maximal de
dimensão m e classe Ck(k ≥ 1) sobre M .

2.2 Exemplos 40
Observação 2.1.2. É necessário o fato do atlas ser maximal pois uma variedade pode ter
mais de uma estrutura diferenciável mas basta pegarmos apenas uma que já é suficiente
para aplicarmos o cálculo diferencial, então escolhemos o maximal, isto é, aquele que
engloba todos os outros atlas.
Proposição 2.1.1. Seja M uma variedade diferenciável. Então:
i) Todo atlas suave A de M está contido em um único atlas maximal, denominado de
estrutura diferenciável determinada por A;
ii) Dois atlas de M determinam uma estrutura diferenciável se, e somente se, a união
deles é um atlas.
Demonstração. Seja A um atlas emM . Vamos considerar A o conjunto de todas as cartas
compatíveis as cartas de A. Dessa forma, pela definição 2.1.5 e 2.1.7 devemos provar que,
dadas as cartas (U,ϕ), (V, ψ) ∈ A , onde U e V são abertos de M tais que U ∩ V 6= ∅define funções de transição ϕ ψ−1 e ψ ϕ−1, restritas a U ∩ V , diferenciáveis de classe
C∞.
Com efeito, por hipótese A é um atlas compatível, então dado (W, θ) ∈ A uma carta
de classe C∞ com W ⊂ M temos que ψ θ−1 e θ ϕ−1 definidas em V ∩W e W ∩ U ,respectivamente, são de classe C∞.
Então, faz sentido admitirmos U ∩ V ∩W 6= ∅ tal que ψ ϕ−1 = (ψ θ−1) (θ ϕ−1)
seja de classe C∞. Como ψ ϕ−1 é um homeomorfismo não precisamos mostrar para o
caso em que a função de transição é ϕ ψ−1.
Logo, já temos que A é um atlas compátivel e pela definição 3.6 é maximal.
A unicidade é natural. De fato, dado B um atlas maximal em relação as cartas de A.Como A possui todas as cartas compatíveis a A segue que B ⊆ A e pela maximalidade
de B, temos que A ⊆ B.
Portanto, A = B.
ii) Ao leitor interessado ver a demonstração em [3].
2.2 Exemplos
Exemplo 2.2.1. Seja M uma variedade de dimensão 0. Assim, para cada p ∈ M existe
somente uma vizinhança de p ⊂ M de p tal que ϕ : p → R0 é o único sistema de

2.2 Exemplos 41
coordenadas que gera, A = (p, ϕ), o atlas que determina uma estrutura diferenciável
em M , pois admite trivialmente a condição de compatibilidade.
Observação 2.2.1. Toda variedade de dimensão 0 é um espaço topológico discreto que
admite uma única estrutura diferenciável.
Exemplo 2.2.2. Seja M = Rn. Para cada número n inteiro não negativo, o espaço
euclidiano Rn é uma variedade diferenciável com a estrutura diferenciável determinada
pelo altlas A = (Rn, IdRn). Esse sistema coordenadas é o mais geral , no entanto, podemos
admitir as cartas ϕ : U → V com U, V ⊂ Rn tal que ϕ é um difeomorfismo e, ainda assim,
é possível definir uma estrutura diferenciável para o Rn.
Exemplo 2.2.3. Seja A o atlas de classe C∞ em R que consiste de uma única carta local
x = id : R → R. Seja z : R → R o sistema de coordenadas dada por z(t) = t3. Então z
não é compatível em relação ao atlas A, mesmo sabendo que ϕxz(t) = t3 é de classe C∞,
temos que ϕzx(t) = t13 não é derivável em t = 0.
Exemplo 2.2.4. Sejam U ⊂ Rn um aberto e f : U → Rk uma função contínua. O gráfico
de f é o subconjunto de Rn x Rk definido por:
Gr(f) = (x, y) ∈ Rn x Rk : x ∈ U e y = f(x) (2.1)
Com a topologia induzida do subespaço U .
Considerando $1 : Rn x Rk → Rn a projeção do primeiro fator (coordenada) e
ϕ : Gr(f)→ U a restrinção de $1 para Gr(f) tal que
ϕ(x, y) = x, (x, y) ∈ Gr(f) (2.2)
Dessa forma, observamos que ϕ é uma função contínua e, além disso, é um homeo-
morfismo de Gr(f) sobre U , tendo em vista que ϕ−1(x, f(x)) é contínua. Daí, podemos
afirmar que Gr(f) é uma variedade com um único atlas global (máximo) (Gr(f), ϕ).
Exemplo 2.2.5. (O plano projetivo real P2(R)). Denotaremos por P2(R) o conjunto
de todas as retas de R3 que passam pela origem (0, 0, 0), i.e., P2(R) é o conjunto das
"direções"em R3. Queremos introduzir uma estrutura diferenciável em P2(R). Para isto,
seja (x, y, z) ∈ R3−(0, 0, 0), e observe que P2(R) é o espaço quociente de R3−(0, 0, 0)pela relação de equivalência .

2.2 Exemplos 42
(x, y, z) (λx, λy, λz), λ ∈ R, λ 6= 0 (2.3)
Os pontos de P2(R) serão denotados por [x, y, z]. Agora, definimos os conjuntos
V1, V2, V3 em P2(R) por
V1 = [x, y, z];x 6= 0,V2 = [x, y, z]; y 6= 0,V3 = [x, y, z]; z 6= 0
(2.4)
e aplicações fi : R2 → Vi, i = 1, 2, 3, por
f1(u, v) = [1, u, v], f2(u, v) = [u, 1, v], f3(u, v) = [u, v, 1] (2.5)
onde (u, v) ∈ R2. Geometricamente, V2, por exemplo, é o conjunto das retas de R3
que passam pela origem e não estão contidas no plano xOz. Afirmamos que a família
(fi,R2) é uma estrutura diferenciável para P2(R). Cada fi, i = 1, 2, 3, é evidentemente
bijetiva e tal que⋃i fi(R2) = P2(R). Resta mostrar que f−1
i (Vi ∩ Vj) é aberto em R2 e
f−1j fi é diferenciável. Consideremos o caso i = 1, j = 2, os demais casos sendo totalmente
análogos. Os pontos de f−11 (V1 ∩ V2) são da forma (u, v), com u 6= 0. Assim, f−1
1 (V1 ∩ V2)
é aberto em R2 e
f−12 f1(u, v) = f−1
2 ([1, u, v]) = f−12
([1
u, 1,
v
u
])=
(1
u,v
u
)(2.6)
é certamente diferenciável, conforme desejado.
Exemplo 2.2.6. (Espaço projetivo real). É uma generalização do exemplo anterior. Seja
(x1, . . . , xn+1) ∈ Rn+1 e defina o espaço projetivo real n-dimensional Pn(R) como o espaço
quociente de Rn+1 − 0 pela relação de equivalência :
(x1, . . . , xn+1) (λx1, . . . , λxn+1), λ ∈ R, λ 6= 0 (2.7)
Os ponto de Pn(R) serão denotados por [x1, . . . , xn+1]. Defina subconjuntos Vi ⊂Pn(R), i = 1, . . . , n+ 1, por

2.2 Exemplos 43
Vi = [x1, . . . , xn+1];xi 6= 0, (2.8)
e aplicações fi : Rn → Vi por
fi(y1, . . . , yn) = [y1, . . . , yi−1, 1, yi, . . . , yn] (2.9)
Procedendo como o exemplo anterior, é fácil checar que a família (fi,Rn) define
uma estrutura diferenciável em Pn(R)
Definição 2.2.1. Seja M = Sn a esfera unitária contida em Rn+1. É uma variedade
topológica, pois sua topologia é induzida pelo espaço Rn+1, então é Hausdorff com base
enumerável.
Para mostrar que Sn é uma variedade diferenciável, precisamos encontrar uma es-
trutura diferenciável, isto é, um atlas maximal em Sn. Assim, basta considerarmos as
projeções estereográficas, ou seja, dados N = (0, . . . , 0, 1) e S = (0, . . . , 0,−1) pontos
antipodais norte e sul, respectivamente, com U1 = Sn − N e U2 = Sn − S abertos deSn tais que ϕ1 : U1 → ϕ1(U1) ⊂ Rn e ϕ2 : U2 → ϕ2(U2) ⊂ Rn são homeomorfismos, onde
para cada pi ∈ Ui, i = 1, 2. temos que
ϕ1(p1) = 11−xn+1
(x1, . . . , xn, 0) e ϕ2(p2) = 11+xn+1
(x1, . . . , xn, 0) . . . (2.10)
Além disso, temos que U1 ∩ U2 = Rn − 0. Dessa forma, ϕ2 ϕ−11 e ϕ1 ϕ−1
2 são
homeomorfismos de classe C∞. Esse resultado é consequência de 2.10, pois ϕi possui as
derivadas parciais contínuas para todo pi ∈ Ui, com isso são de classe C∞ e, portanto,
suas composições também são. Logo (Ui, ϕi) é uma estrutura diferenciável em Sn.
Exemplo 2.2.7. (Variedade Produto) Sejam M e N variedades de dimensão m e n, com
estrutas A = (Ui, ϕi)i∈I e B = (Vj, ψj)j∈J respectivamente. Então, podemos mostrar
que o produto cartesiano M ×N tem uma estrutura natural de variedade diferenciável de
dimensão m+ n que é gerada pela família de aplicações C = (Ui × Vj, (ϕi, ψj))(i,j)∈I×J
Exemplo 2.2.8. (Toto n-dimensional (Tn)). Como caso particular do exemplo anterior,
podemos considerar o produto cartesiano Tn = S1× . . .×S1, n vezes, chamado de n-toro.

2.3 Funções Diferenciáveis em Variedades 44
2.3 Funções Diferenciáveis em Variedades
No capítulo I expomos o cálculo diferencial sobre o Rn, como vimos na seção anterior,
as variedades se comportam localmente como abertos de Rn, à vista disso, os conceitos
do cálculo estendem-se naturalmente nesses objetos. A derivada f ′(p) será uma transfor-
mação linear de TMp para TNf(p).
Definição 2.3.1. Sejam M e N variedades de dimensões m e n, respectivamente e f :
M → N contínua. Dizemos que f é diferenciável em p ∈ M , quando existem U ⊂ M
vizinhança de p e V ⊂ N vizinhança de f(p) com as cartas, ϕ : U → Rm e ψ : V → Rn
tais que ψ f ϕ−1 : ϕ(U)→ ψ(V ) é diferenciável em ϕ(p). Então, f é diferenciável em
p.
Abaixo segue uma imagem que tem por finalidade ilustrar geometricamente a definição
de aplicação diferenciável entre duas variedades diferenciáveis em um ponto arbitrário.
Figura 2.2: Uma representação geométrica da diferenciabilidade entre duas variedades.

2.4 Espaços Tangentes 45
Assim, de modo geral, dizemos que f : M → N é diferenciável quando f for diferen-
ciável em todos os pontos de M. E, afirmamos, que f ∈ C∞ se, para cada ponto p ∈ M ,
existem sistemas de coordenadas locais ϕ em M e ψ em N como p ∈ U e f(U) ⊂ V tais
que ψ f ϕ−1 : ϕ(U)→ ψ(V ) é de classe C∞ ou, equivalentemente, quando existem um
atlas A sobre M e um atlas B sobre N tais que cada ψ ∈ A e ϕ ∈ A existem e são de
classe C∞.
Um resultado muito importante de aplicações diferenciáveis entre variedades é a com-
posição das mesmas.
Proposição 2.3.1. Dada f : M → N e g : N → P aplicações diferenciáveis de classe
C∞, temos que g f também o é.
Demonstração. Sejam f : M → N e g : N → P funções diferenciáveis, com p ∈ M .
Por definição de variedades diferenciáveis, temos que existem (V, θ) vizinhança de f(p) e
(W,ψ) de g(f(p)) tal que g(V ) ⊂ W e ψ g θ−1 : θ(V ) → ψ(W ) é diferenciável. De
fato, como f é contínua, f−1(V ) é uma vizinhança p ∈ M . Daí, podemos definir (U,ϕ)
um sistema de coordenadas tal que p ∈ U ⊂ f−1(V ) e θ f ϕ−1 é diferenciável de ϕ(U)
em θ(V ). Então,
g(f(U)) ⊂ g(V ) ⊂ W e ψ (g f) ϕ−1 = (ψ g θ−1) (θ f ϕ−1) : ϕ(U)→ ψ(W )
(2.11)
Portanto, ψ (g f)ϕ−1 é diferenciável, pois é uma composição de funções diferenciáveis
2.4 Espaços Tangentes
Antes de definir o diferencial de uma função diferenciável, devemos analisar as fibras
tangentes a cada ponto do domínio, comumente as fibras são chamadas de espaços tan-
gentes. A priori, estudaremos os vetores tangentes a espaços euclidianos. Dado x ∈ Rn
definimos um espaço tangente a Rn no ponto x como
TxRn = x × Rn = (x, u) : v ∈ Rn (2.12)
onde TxRn é o conjunto de todos os vetores tangentes a Rn com origem no ponto x.
Em R a derivação é realizada em relação a uma coordenada apenas, no entanto,
quando aplicamos o cálculo sobre Rn temos mais de uma direção na qual podemos aplicar

2.4 Espaços Tangentes 46
as derivadas. Por esse fato, nos preocupamos somente com as derivadas direcionais, que
a cada ponto x ∈ Rn associa um vetor u ∈ TxRn que representa a direção que queremos
analisar a taxa de variação da função ao longo do ponto x e em qual velocidade a mesma
ocorre.
Definição 2.4.1. Sejam u ∈ TxRn e f : Rn → R uma função arbitrária. Dizemos que
Duf |x : C∞(Rn)→ R é a derivada de f na direção do vetor u no ponto x quando
Duf(x) =d
dt|t=0 f(x+ tu) (2.13)
é uma aplicação linear sobre R que satisfaz a seguinte regra
Du(fg)(x) = f(x)Dug(x) + g(x)Duf(x) (2.14)
chamada de regra do produto.
É convinente representarmos as derivadas direcionais com respeito a base canônica de
Rn, ou seja, considerando u = uiei|x temos que Duf(x) = ui ∂f∂xi
(x).
A partir disso, substituimos Du|x por v cujo intuito é "poupar"a notação. Então de
acordo com a definição 2.4.1 v : C∞(Rn) :→ R é denominada derivada em x que satisfaz
a regra do protudo, isto é
v(fg) = f(x)vg + g(x)vf (2.15)
Temos também que TxRn é um espaço vetorial, uma vez que, dado v1, v2 ∈ TxRn e
λ ∈ R, a soma e o produto por um escalar estão bem definidos,
(v1 + v2)f = v1f + v2f e (λv1)f = λ(vf) (2.16)
Proposição 2.4.1. Suponhamos x ∈ Rn, v ∈ TxRn e f, g ∈ C∞(Rn:
i) Se f é uma função constante então vf = 0
ii) Se f(x) = g(x) = 0 então v(fg) = 0
Demonstração. Para provarmos o primeiro ítem i) basta admitirmos, em particular, f1 ∈C∞(Rn) tal que f1(x) = 1. Então para qualquer função f(x) = c, c ∈ R afirmamos que

2.4 Espaços Tangentes 47
vf = v(cf1) = cvf1 = 0 (2.17)
De fato, pela equação acima temos que c = 0 ou vf1 = 0. Assim, pela regra do
produto segue que
vf1 = v(f1f1) = f1(x)vf1 + f1(x)vf1 = 2vf1 ⇐⇒ vf1 = 0 (2.18)
Portanto, vf = 0.
Reciprocamente, para o segundo ítem ii), aplicando a regra do produto nas funções f
e g
v(fg) = f(x)vg + g(x)vf = 0 + 0 = 0 (2.19)
Isso é consequência da hipótese, pois f(x) = g(x) = 0.
Proposição 2.4.2. Dado p ∈ Rn a derivação em p
∂
∂x1
|p, . . . ,∂
∂xn|p (2.20)
definida por ∂∂xi|pf = ∂
∂xi(p) é uma base para TpRn.
Demonstração. Ao leitor interessado, a demonstração pode ser encontrada em [3].
Analogamente aos espaços euclidianos, definiremos uma diferencial de funções dife-
renciáveis sobre uma variedade M qualquer.
Definição 2.4.2. Sejam M , uma variedade diferenciável, e p ∈M . Uma aplicação linear
ω : C∞(M)→ R é denominada de derivação em p se satisfaz a seguinte condição:
ω(fg) = f(p)ωg + g(p)ωf, ∀f, g ∈ C∞(M). (2.21)
O conjunto de todas as derivações de C∞(M) em p, denotado por TpM , é um espaço
de vetores tangentes de M no ponto p.

2.5 A Diferencial de Funções Diferenciáveis 48
2.5 A Diferencial de Funções Diferenciáveis
Assim como em Rn que calculamos o diferencial de uma função, por meio da jacobiana,
representando a melhor aproximação linear da função em uma vizinhança aberta de um
ponto do domínio, temos que essa mesma ideia intuitiva é generalizada quando nosso
objeto de estudo é uma variedade.
Definição 2.5.1. Sejam M e N , variedades diferenciáveis, e f : M → N uma aplicação
C∞. Dado p ∈M definimos a aplicação:
dfp : TpM → TpN
Como a diferencial de f em p.
Então, para cada ω ∈ TpM a derivada de f(p) é definida a partir da composição com
uma função g : V ⊂ N → R de classe C∞ e denotamos da seguinte forma
dfp(ω)(g) = ω(g f) (2.22)
que é responsável pela linearidade do diferencial, pois considerando g, h ∈ C∞(N)
obtemos
dfp(ω)(gh) = ω((gh) f)
= ω((g f)(h f))
= g f(p)ω(h f) + h f(p)ω(g f)
= g(f(p))dpf(ω)(h) + h(f(p))dpf(ω)(g)
(2.23)
Proposição 2.5.1. SejamM , N e N variedades diferenciáveis e f : M → N e g : N → P
aplicações diferenciáveis com p ∈M . Então
i) dfp : TpM → Tf(P )N é linear;
ii) d(g f)p = dgf(p) dfp : TpM → Tg(f(p))P ;
iii) d(IdM)p = IdTpM : TpM → TpM ;
iv) Se f é um difeomorfismo, então dfp : TpM → Tf(P )N é um isomorfismo e (dfp)−1 =
d(f−1)f(p).

2.5 A Diferencial de Funções Diferenciáveis 49
Demonstração. Ao leitor interessado a demonstração pode ser encontrada em [3].
A partir de agora enuciaremos alguns conceitos importantes sobre funções diferenciá-
veis entre variedades e suas aplicações, nos quais temos a definição de imersão, submersão,
mergulho e, por fim, subvariedade.
Definição 2.5.2. Uma aplicação diferenciável f : M → N é dita uma imersão se para
todo ponto p ∈M a derivada f ′(p) : TMp → TNf(p) é injetiva.
Exemplo 2.5.1. g : R→ R2 dado por g(t) = (t3 − 4t, t2 − 4).
Figura 2.3:
No exemplo 2.5.1 é intuitivo perceber que g é uma imersão, já que g′(t) = (3t2−4, 2t) 6=(0, 0), portando g′ é injetiva.
Exemplo 2.5.2. f : R→ R2 dada por f(t) = (t3, t2).
Figura 2.4:
Neste caso, ao derivarmos f encontraremos f ′(t) = (3t2, 2t) , que avaliado em t = 0
temos que f ′(0) = (0, 0). Logo f ′ não é injetiva e, portanto, f não é uma imersão.
Observação 2.5.1. Um detalhe que não podemos deixar de mencionar é que uma imer-
são não necessariamente é injetora, segue um exemplo no qual temos uma função que é
imersão, no entanto, não é injetora.
Exemplo 2.5.3. f : R→ R2 dada por f(t) = (t3 − t, t2).
f ′(t) = (3t2 − 1, 2t) 6= (0, 0),∀t ∈ R
Porém, f(1) = (0, 1) = f(−1), logo f não é injetiva.

2.5 A Diferencial de Funções Diferenciáveis 50
Definição 2.5.3. Dizemos que f é ummergulho se, f é uma imersão e um homeomorfismo
de M sobre o subespaço f(M) ⊂ N .
Exemplo 2.5.4. f : (1,+∞)→ R2 dada por f(t) = ((1t)cos(2πt), (1
t)sin(2πt)).
Proposição 2.5.2. Seja f : M → N uma imersão entre variedades diferenciáveis. Então,
dado p ∈M , existe um aberto U ⊂M , com p ∈ U , tal que f |U : U → N é um mergulho.
Demonstração. Sejam ϕ e ψ as cartas locais sobre M e N , sendo f é uma imersão.
Com isso, basta provarmos que f |U é um homeomorfismo de U sobre f(U) com a
topologia induzida por N . Mas de forma conviniente, é mais prático mostrar que ψ f ϕé um homeormorfismo de ϕ(U) sobre ψ(V ).
Sabemos que ψ e ϕ são homeomorfismos de classe C∞ e f é contínua, por hipótese.
Assim, podemos afirmar que ψ f ϕ−1 é um difeomorfismo de classe C∞.
Dessa forma, escrevendo f como a composição de funções, segue
f |U = ψ−1 (ψ f ϕ−1) ϕ
Como, cada composição acima é um homeomorfismo, segue que f |U é homeomorfismo
de U sobre sua imagem f(U).
Portanto, f |U é um mergulho.
Definição 2.5.4. Uma subvariedade M de classe Ck,k ≥ 1 de uma variedade N de classe
Cr(r ≥ k) é um subconjunto M ⊂ N , com a topologia induzida pela de N, e dotado de
uma estrutura de variedade Ck tal que a aplicação de inclusão i : M → N é um mergulho
de classe Ck.
Exemplo 2.5.5. A aplicação f : R → R2, dada por f(t) = eit, é uma imersão C∞ tal
que f : R→ f(R) = S1 é uma subvariedade C∞ de R2.
Exemplo 2.5.6. Seja N = R2, com sua estrutura habitual de variedade de classe C∞ e
M = (x, y) ∈ R2;x4 = y3. Então M = f−1(0), onde f : R2 → R é uma função de classe
C∞ definida por f(x, y) = x4 − y3. Se 0 ∈ R fosse um valor regular de f , M seria uma
subvariedade de classe C∞ de R2. Apesar disso, M é uma subvariedade de classe C1 de
R2 pois é gráfico da função y = x43 .
Observação 2.5.2. Seja f : M → N uma aplicação diferenciável entre variedades. Supo-
nha que f é uma imersão e que é injetora. Então, o conjunto f(M) munido da estrutura
C∞ que faz com que f : M → f(M) seja um difeomorfismo é dito uma subvariedade

2.6 Orientabilidade 51
imersa de N . No caso em que f for uma mergulho, dizemos que f(M) é uma subvarie-
dade mergulhada de N .
Segue abaixo o teorema da função inversa para variedades.
Teorema 2.5.1 (Teorema da Função Inversa). Sejam M e N variedades diferenciáveis
de classe Ck, dimensões m e n, respectivamente e f : M → N diferenciável. Se f ∈Cr(M,N), r ≥ 1, e p ∈ M tal que f ′(p) : TMp → TNf(p) é um isomorfismo. Então,
existem U ⊂M vizinhança de p e V ⊂ N vizinhança de f(p) com as cartas, ϕ : U → Rm
e γ : V → Rn e f(U) = V tais que f é um difeomorfismo de U em V .
Demonstração. Por hipótese f é de classe Cr em p. Considere U1 uma vizinhança de p,
assim existe uma carta ϕ1 com domínio U1. Analogamente tem-se V1 uma vizinhança de
f(p) e uma carta γ1.
Daí,
γ1 f ϕ−11 : ϕ1(U1)→ γ1(V1) é de classe Cr em ϕ1(U1).
Logo,
(γ1 f ϕ−11 )′(ϕ(p)) ∈ L(Rm,Rn)
Agora, admitindo
U = U1 e V = V1 com U ⊂M e V ⊂ N .
Pode-se, concluir que f é um difeomorfismo de U sobre V .
2.6 Orientabilidade
Definição 2.6.1. Dizemos que uma variedade diferenciável M é orientável, quando M
admite uma estrutura diferenciável (Uα, ϕα) tal que, para cadar par de índices α, β
tais que ϕα(Uα) ∩ ψβ(Uβ) 6= ∅, a diferencial da mudança de coordendas ψ−1β ϕα tem
determinante positivo. Caso contrário, M é não orientável. Se M é orientável, uma
estrutura diferenciável que compre a definição acima é denominada uma orientação para
M
Observação 2.6.1. Existe outra maneira de verificar se uma variedade é orientável ou
não, observando se existe um campo contínuo de vetores normais unitários sobre a mesma.
Dessa forma vamos elencar duas condições que uma variedade deve atender para que seja
orientável.

2.6 Orientabilidade 52
i) Se, num aberto U de uma superfície M ⊂ Rn é encontrados definidos l campos de vetores
normais v1, . . . , vl : U → M , de classe C∞, linearmente independentes em cada ponto de
U , então os vetores vi podem ser supostos ortonormais, isto é, a existência de um campo
contínuo de vetores normais unitários. Caso os mesmos não sejam ortornamais, basta
aplicarmos o processo de ortogonalização de de Gram-Schmidt.
ii) Sejam M ⊂ Rm+1 uma variedade de classe C∞ que possui um campo contínuo de vetores
normais unitários v : M → Rm+1 e λ : [a, b] → M um caminho contínuo em M com
λ(a) = λ(b). Então, dada qualquer família contínua a um parâmetro u(t), de vetores
normais unitários ao longo de λ(t) é contínua e, para cada t0 ∈ [a, b], u(t0) ∈ TMλ(t) é
normal a M no ponto λ(t0), temos necessariamente u(a) = u(b).
Figura 2.5: Representação do compo contínuo de vetores normais unitários
Exemplo 2.6.1. Vejamos agora um exemplo de uma variedade M2 ⊂ R2 que não possui
campo contínuo de vetores normais.
A faixa de Mobius M é o espaço obtido do retângulo [0, 2π]× (0, 1) pela identificação
dos pontos (0, t) e (2π, 1− t), t percorrendo o intervalo (0, 1).
Figura 2.6:
Sua lei de formação é dada pela f : (0, 1)×R→ R3 tal que f(s, t) = λ(t)+(s−2)δ(t),
sendo λ(t) = (cost, sent, 0) e δ(t) = cos2 λ(t) + sen2 et.
O caminho v : [0, 2π]→ R3 definido por
v(t) =∂f
∂t
(1
2, t
)× ∂f
∂t
(1
2, t
)= (−cost sen2,−sent sen2, cos2) (2.24)

2.6 Orientabilidade 53
é contínuo, |v(t)| = 1 para todo t, e v(t) é normal à faixa de Mobius no ponto λ(t) (no
centro da faixa) para todo t ∈ [0, 2π]; é importante notar que v(0) = −v(2π), enquanto
que λ(0) = λ(2π). O segundo ponto das condições para que uma variedade seja orientável,
mostra que não pode existir um campo contínuo de vetores normais não nulos na faixa
de Mobius.

Capítulo 3
Formas Diferenciais
3.1 Tensores
Para definir um tensor, primeiramente, devemos lembrar de alguns conceitos e pro-
priedades que tangem a álgebra multilinear.
Definição 3.1.1. Sejam V1, . . . , Vk e W espaços vetorias. Dizemos que uma aplicação
f : V1 × . . . × Vk → W é mutilinear se é linear em cada componente de Vi, i = 1, . . . , k,
isto é, satisfaz a seguinte propriedade:
f(v1, . . . , αvi + βvj, . . . , vk) = α(f(v1, . . . , vi, . . . , vk)) + β(f(v1, . . . , vj, . . . , vk)) (3.1)
com α e β ∈ R
Observação 3.1.1. Para os casos nos quais k = 2 chamamos f de uma apliaçã bilinear e
quando k = 1 temos as tranformações lineares usuais, T : V → W , nais quais cada vetor
de uma espaço vetorial V é associado a um vetor de um espaço vetorial W .
Observação 3.1.2. Denotamos por L(V1, . . . , Vk;W ) o conjunto de todas aplicações mul-
tilineares de V1× . . .× Vk sobre W . Podemos observar que L(V1, . . . , Vk;W ) é um espaço
vetorial. Com efeito, dado f, g ∈ L(V1, . . . , Vk;W ) implica que
(f + g)(v1, . . . , vk) = f(v1, . . . , vk) + g(v1, . . . , vk)
(αf)(v1, . . . , vk) = α(f(v1, . . . , vk)(3.2)
Observação 3.1.3. Quando W = R chamamos f : V1 × . . . × Vk → R de funcional
mutilinear ou forma multilinear, a segunda denominação será mais utilizada no capítulo
V.

3.2 Produto Tensorial 55
Definição 3.1.2. Um tensor de ordem k é uma aplicação T : V K → R multilinear.
Observação 3.1.4. De maneira mais geral um tensor é um aplicação entre dois espaços
vetoriais quaisquer, no entanto, com relação ao que tange o conteúdo desse trabalho é
convinente admitirmos apenas os tensores com valores reais.
Representamos T k(V ) como o conjunto dos tensores de ordem k e, claramente, é um
espaço vetorial, consequência direta da observação 3.1.2.
3.2 Produto Tensorial
Definição 3.2.1. Sejam T (V ) = V ∗ e T (W ) = W ∗ espaços duais de V e W respec-
tivamente. Então, dados ω ∈ T (V ) e η ∈ T (W ) demoninamos a aplicação bilinear
ω ⊗ η : V ⊗W → R tal que ω ⊗ η(v, w) = ω(v)η(w) como o produto tensorial de ω e η.
Observação 3.2.1. Ao admitirmos ω ∈ T k(V ) e η ∈ T l(V ) o produto tensorial é ω⊗η ∈T k+l(V ) pondo
ω ⊗ η(v1, . . . , vk, vk+1, . . . , vk+l) = ω(v1, . . . , vk)η(vk+1, . . . , vk+l) (3.3)
Proposição 3.2.1. Dados ω, θ ∈ T k(V ) e η ∈ T l(V ) as seguintes propriedades são
intrínsecas ao T k+l(V ):
i) Distributividade a direita: (ω + θ)⊗ η = ω ⊗ η + θ ⊗ η;
ii) Distributividade a esquerda: ω ⊗ (θ + η) = ω ⊗ θ + ω ⊗ η;
iii) Produto por escalar: (αω)⊗ θ = ω ⊗ (αθ) = α(ω ⊗ θ);
iv) Associatividade: (ω ⊗ θ)⊗ η = ω ⊗ (θ ⊗ η).
Demonstração. i) Para ω ∈ T k(V ), θ ∈ T k(V ) e η ∈ T l(V ), temos pela obervação 3.2.1
que
(ω + θ)⊗ η(v1, . . . , vk, vk+1, . . . , vk+l) = (ω + θ)(v1, . . . , vk)η(vk+1, . . . , vk+1)
= (ω(v1, . . . , vk) + θ(v1, . . . , vk))η(vk+1, . . . , vk+l)
= (ω(v1, . . . , vk)η(vk+1, . . . , vk+l) + θ(v1, . . . , vk)η(vk+1, . . . , vk+l)
= ω ⊗ η + θ ⊗ η
(3.4)

3.2 Produto Tensorial 56
ii) segue de maneira análoga a i).
iii) Seja α ∈ R. Então
(αω)⊗ θ = (αω(v1, . . . , vk)θ(v1, . . . , vk)
= ω(v1, . . . , vk)(αθ(v1, . . . , vk))
= α(ω(v1, . . . , vk)θ(v1, . . . , vk))
= α(ω ⊗ θ)
(3.5)
iv) Considerando, agora, ω ∈ T k(V ), θ ∈ T l(V ) e η ∈ Tm(V ) tensores arbitrários.
Temos que
(ω ⊗ θ)⊗ η = (ω ⊗ θ(v1, . . . , vk+1, . . . , vk+l))η(vk+l+1, . . . , vk+l+m) =
= ω(v1, . . . , vk)θ(vk+1, . . . , vk+l)η(vk+l+1, . . . , vk+l+m)(3.6)
Como consequência de R ser um corpo, temos que o produdo de seus elementos gozam
da propriedade de associatividade, daí
ω(v1, . . . , vk)(θ(vk+1, . . . , vk+l)η(vk+l+1, . . . , vk+l+m))
= ω(v1, . . . , vk)(θ ⊗ η)(v1, . . . , vk, vk+1, . . . , vk+l, vk+l+1, . . . , vk+l+m))
= ω ⊗ (θ ⊗ η)
(3.7)
Agora,temos uma proposição muito importante a respeito dos espaços de tensores,
vimos que o mesmo é um espaço vetorial então admite uma base geradora, porém ainda
não sabemos quem são seus elementos. Com esse objetivo, consideremos a seguinte pro-
posição:
Proposição 3.2.2. Seja V um espaço vetorial de dimensão n tal que e1, . . . , en uma
base para V e φ1, . . . , φn a correspondente base dual para V ∗. Então
B =φi1 ⊗ . . .⊗ φik : i1, . . . , ik = 1, . . . , n
(3.8)
é uma base para T k(V ). Em particular dimT k(V ) = nk.
Demonstração. Inicialmente, tomemos e1, . . . , en uma base para V . Daí para qualquer
v ∈ V e α ∈ R resulta em v =∑n
j=1 aijej.

3.2 Produto Tensorial 57
Agora, admitindo ω ∈ T k(V ) um tensor de ordem k, temos que
ω(v1, . . . , vk) = ω(∑n
i1=1 α1,i1ei1 , . . . ,∑n
ik=1 αk,ikeii)
= ω(∑n
i1,...,ik=1 α1,i1 , . . . , αk,ik(ei1 , . . . , eik))
=∑
i1,...,ik=1 α1,i1 , . . . , αk,ikω(ei1 , . . . , eik)
(3.9)
Além disso, pela definição de produto tensorial, segue que
φj1 ⊗ . . .⊗ φjk(v1, . . . , vk) = φj1(v1) . . . φjk(vk) = φj1(∑n
i1=1 α1,i1ei1). . . φjk
(∑nik=1 αk,ikeii
)=(∑n
i1=1 α1,i1φj1(ei1)). . .(∑n
ik=1 αk,ikφjk(eii))
= α1,j1 . . . αk,jk(3.10)
Substituindo a equação 3.9 em 3.10
ω(v1, . . . , vk) =∑
i1,...,ik=1
ω(ei1 , . . . , eik)φj1 ⊗ . . .⊗ φjk(v1, . . . , vk) (3.11)
Dessa forma, dado ω ∈ T k(V ) temos que o mesmo pode ser escrito como combinação
dos elementos de B. Então, para acabarmos a prova resta mostrar que os vetores de Bsão linearmente independentes.
Com efeito, suponha
n∑i1,...,ik=1
βi1,...,ikφi1 ⊗ . . .⊗ φik = 0 (3.12)
Aplicando em ambos os membros as coordenadas (ej1 , . . . , ejk)
0 =(∑n
i1,...,ikβi1,...,ikφi1 ⊗ . . .⊗ φik
)(ej1 , . . . , ejk)
=∑n
i1,...,ikβi1,...,ikφi1(ej1) . . . φik(ejk)
= βj1...jk ∀j1, . . . , jk = 1, . . . , n
(3.13)
Exemplo 3.2.1. Seja V um espaço vetorial. A aplicação 〈, 〉 : V × V :→ R denominada
produto interno, é um produto tensorial bilinear.
Exemplo 3.2.2. SejaM(n) o espaço das matrizes quadradas de ordem n. A aplicação
det :M(n)→ R conhecida como função determinante, é um tensor multilinear.

3.2 Produto Tensorial 58
Sejam V ,W espaços vetoriais sobre R, f : V → W uma aplicação linear e ω ∈ T k(W ),
podemos definir uma nova aplicação, denotada por f ∗ω, onde
(f ∗ω)(v1, . . . , vk) = ω(f(v1), . . . , f(vk) (3.14)
chamamos f ∗ω de pull-back de ω.
Proposição 3.2.3. Sejam T k(V ) e T k(W ) espaços de tensores. Entãof ∗ : T kW → T kV
é uma aplicação linear.
Demonstração.
(f ∗(ω + η)(v1, . . . , vk) = (ω + η)(f(v1), . . . , f(vk))
= ω(f(v1, . . . , vk) + η(f(v1, . . . , f(vk))
= (f ∗ω)(v1, . . . , vk) + (f ∗η)(v1, . . . , vk)
= (f ∗ω + f ∗η)(v1, . . . , vk)
(3.15)
Daí, (f ∗(ω + η) = f ∗ω + f ∗η.
Agora, considere β ∈ R
(f ∗(βω))(v1, . . . , vk) = (βω)(f(v1, . . . , vk)
= βω(f(v1, . . . , vk)
= β(f ∗ω)(v1, . . . , vk)
= (β(f ∗ω))(v1, . . . , vk)
(3.16)
Assim, f ∗(βω) = (β(f ∗ω)).
Proposição 3.2.4. Sejam T k(V ) e T k(W ) espaços de tensores. Dados ω ∈ T k(V ) e
η ∈ T l(W ) vale a seguinte propriedade:
f ∗(ω ⊗ η) = f ∗ω ⊗ f ∗η (3.17)
Demonstração. De fato,
(f ∗(ω ⊗ η))(v1, . . . , vk) = ω ⊗ η(f(v1, . . . , f(vk))
= ω(f(v1, . . . , f(vk))η(f(v1, . . . , vk)
= f ∗ω(v1, . . . , vk)(f∗η)(v1, . . . , vk)
= (f ∗ω ⊗ f ∗η)(v1, . . . , vk)
(3.18)

3.3 Forma Diferencial 59
Por convenção, temos que T 0(V ) = R.
Definição 3.2.2. Dizemos que ω ∈ T k(V ) é um tensor alternado se, para cada 1 ≤ i ≤j ≤ k e v1, . . . , vk ∈ V , temos
ω(v1, . . . , vi, . . . , vj, . . . , vk) = −ω(v1, . . . , vj, . . . , vi, . . . , vk) (3.19)
Denotaremos Λk(V ) como o espaço dos tensores alternados de ordem k, além de tensor
alternado, chamamos ω de uma forma exterior, ou simplismente, uma k-forma sobre V .
Observação 3.2.2. O conjunto dos tensores alternadados de ordem k sobre V é um
subespaço vetorial de T k(V ). Um tensor alternado de ordem k sobre V é também chamado
de uma forma exterior de ordem k sobre V , ou simplesmente, uma k-forma sobre V
Definição 3.2.3. Dado um tensor ω ∈ T k(V ), o alternadi de ω é o tensor A(t) ∈ T k(V )
definido por
A(t)(v1, . . . , vk) =1
k!
∑σ∈sk
sgnt ω(vσ(1), . . . , vσ(k)) (3.20)
onde sk é o conjunto das permutações de 1, . . . , k e sgnt é o sinal da permutação
σ
(1 se σ par
−1 se σ impar
)
Definição 3.2.4. Dados ω ∈ Λk(V ) e η ∈ Λl(V ), o produto exterior de ω por η definido
por
ω ∧ η =(k + l)!
k!l!A(ω ⊗ η) (3.21)
onde ω ∧ η ∈ Λk+l(V )
O conceito de tensor alternado é um dos mais importantes desse capítulo, pois a
partir do mesmo definimos as formas nas quais representam os integrandos no teorema
de Stokes.
3.3 Forma Diferencial
O estudo das formas diferenciais teve origem no início do século XX, com o matemático
francês Élie Cartan, por meio de pesquisas realizadas acerca da aplicação dos teoremas
de Green e Stokes, centrais em cálculo vetorial, nos espaços euclidianos com dimensão
maior do que 3. É imprescindível o estudo de formas neste trabalho, pois só podemos

3.3 Forma Diferencial 60
definir integrais em espaços topológicos como as variedades diferenciáveis, se as mesmas
estiverem munidas de uma forma diferencial. Dessa forma, nesta seção mostraremos como
construir uma k-forma sobre uma variedade.
Definição 3.3.1. Uma k-forma é uma aplicação multilinear ω : V × . . .× V → R com a
seguinte propriedade
ω(v1, . . . , vi, . . . , vj, . . . , vk) = −ω(v1, . . . , vj, . . . , vi, . . . , vk), ∀i, j ∈ 1, . . . , k (3.22)
Observação 3.3.1. Para k = 1, Λ1(V ), obtemos Λ1(V ) = ωi : V → R : ωi é linear
= V ∗, donde o conjunto das k-formas é resumido no espaço vetorial dual. Além disso,
Λk(V ) é um espaço vetorial, pois cada elemento de Λk(V ) é uma aplicação multilinear,
então satisfaz a soma e o produto por um escalar. Daí, precisamos determinar uma base
para Λk(V ) e esse processo consiste em admitirmos uma base do espaço vetorial Λ1(V ),
isso faz sentido pois estamos tratando de um espaço dual e, por algebra linear, sabemos
que o dual de um espaço vetorial de dimensão finita possui uma base. Assim, consideramos
e1, . . . , en uma base de V e ω1, . . . , ωn uma base para o espaço dual V ∗.
Para utilizar os vetores ωi, com 1 ≤ i ≤ n, no intuito de encontrar uma base para
o espaço vetorial Λk(V ) vamos utilizar o produto exterior pois o mesmo é primordial no
cálculo das formas diferenciais e, a seguir, observaremos que o produto exterior é, de
fato, uma representação analítica das k-formas. Podemos representar, além do que foi
mostrado na seção anterior, o produto exterior como
Definição 3.3.2. O produto exterior entre as 1-formas ωi1 , . . . , ωik é a k-forma ξk =
ωi1 ∧ . . . ∧ ωik ∈ Λk(V ) é dada por:
ξk(v1, . . . , vk) = det
ωi1(v1) . . . ωi1(vk)
... . . . ...
ωik(v1) . . . ωik(vk)
(3.23)
A seguir temos uma proposição em que ωi1 ∧ . . .∧ωik : 1 ≤ i1 < . . . < ik ≤ n é uma
base para Λk(V ).
Proposição 3.3.1. Se V é um n-espaço real com base e1, . . . , en e a base dutal,
ω1, . . . , ωi. Então B = ωi1 ∧ . . . ∧ ωik : 1 ≤ i1 < . . . < ik ≤ n é uma base para
o espaço dual vetorial real Λk(V ) e, além disso, sua dimensão é dada por Cnk = n!
(n−k)!k!e
quando k > n dimΛk(V ) = 0.

3.3 Forma Diferencial 61
Demonstração. Devemos mostrar que os elementos de B são linearmeente independentes
e que cada vetor de Λk(V ) são gerados por meio de uma combinação linear dos vetores
da base. Assim, suponha que ∑1≤i1<...<ik≤n
ai1...ikωi1 ∧ . . . ∧ ωik = 0 (3.24)
com ai1...ik ∈ R.
Aplicando (ej1 , . . . , ejk) ∈ V × . . .× V em 3.24
0 =∑
1≤i1<...<ik≤n
ai1...ikωi1 ∧ . . . ∧ ωik(ej1 , . . . , ejk) (3.25)
Obtemos,
0 =∑
1≤i1<...<ik≤n
ai1...ikωi1(ej1) ∧ . . . ∧ ωik(ejk) = aj1...jk . (3.26)
Pois,
ωik(ejk) =
0 , ik 6= jk
1 , ik = jk(3.27)
Agora, resta provarmos que para todo α ∈ Λk(V ) existe uma combinação linear
dos vetores de B. Dessa forma, definindo η =∑
i1<...<ikα(ei1 , . . . , eik)ωi1 ∧ . . . ∧ ωik e
realizando o mesmo processo no qual determinamos aj1...jk em ∗, temos η(ei1 , . . . , eik) =
α(ei1 , . . . , eik), ∀ 1 ≤ i1 < . . . < ik ≤ n
Portanto η = α.
Assim, para cada p ∈ U e ω ∈ Λk(Rn), existem números ai1,...,ik tal que
ω(p) =∑
1≤i1<...<ik≤k
ai1,...,ik(p)ωi1 ∧ . . . ∧ ωik (3.28)
Proposição 3.3.2. (Propriedades do Produto Exterior) Sejam ω, ω′, η, η
′ e ξ multicove-
tores (formas diferenciais) de um espaço vetorial V de dimensão finita. Então sucedem
as seguintes propriedades:
i) Bilinearidade: Para a, a′ ∈ R,
(aω + a′ω′) ∧ η = a(ω ∧ η) + a
′(ωi ∧ η)
η ∧ (aω + a′ωi) = a(η ∧ ω) + a
′(η ∧ ω′
(3.29)

3.3 Forma Diferencial 62
ii) Associatividade: ω ∧ (η ∧ ξ) = (ω ∧ η) ∧ ξ
iii) Anticomutatividade ω ∈ Λk(V ∗) e η ∈ Λl(V ∗),
ω ∧ η = (−1)klη ∧ ω
iv) Se (ξi) é alguma base para V ∗ e I = (i1, . . . , ik) é o intervalo de subíndice, então ξi1 ∧. . . ∧ ξik = ξI
v) Sejam os covetores ω1, . . . , ωk e os vetores v1, . . . , vk. Então ω1∧. . .∧ωk(v1, . . . , vk) =det(ωj(vi)).
Demonstração. Ao leitor interessado a demonstração dessas propriedades são realizadas
em [3]
Agora, considerando uma aplicação xi : Rn → R que associa a cada ponto p ∈ Rn
a sua i-ésima coordenada, dada por xi(p) = pi. Então pela definição do diferencial do
capítulo 2, temos que
dxi(p)(v) =d
dt|t=0x
i(p+ tv) =d
dt|t=0(pi + tvi) = vi (3.30)
Em particular, dxi(p) = δij. Logo dx1(p), . . . , dxk(p) é a base dual de e1, . . . , en.Dessa forma, para qualquer sistema de coordenadas diferenciável, uma k-forma ω pode
ser escrita localmente por
ω =∑
i1<...<ik
ai1,...,ikdxi1 ∧ . . . ∧ dxik =
∑I
aIdxI (3.31)
Sabemos que as funções aI são reais e chamamos ω de uma k-forma diferencial quando
as funções aI são diferenciáveis.
Definição 3.3.3. Seja f : U ⊂ Rm → V ⊂ Rn uma função diferenciável, U e V abertos.
Dada uma k-forma em V , o pull-back de ω, denotado por f ∗ω, é a k-forma em U definida
por
(f ∗ω)(p) = (df(p))∗(ω(f(p))) (3.32)
Assim,

3.3 Forma Diferencial 63
(f ∗ω)(p)(v1, . . . , vk) = (df(p))∗(ω(f(p)))(v1, . . . , vk) = ω(f(p))(df(p)(v1), . . . , df(p)(vk))
(3.33)
Então, dada f : U ⊂ Rm → R diferenciável, podemos escrever df(p)(v) como
∑mj=1
∂f∂xj
(p)vj =∑m
j=1∂f∂xj
(p)dxj(p)(v)
=(∑m
j=1∂f∂xj
(p)dxj(p))
(v)(3.34)
Logo, f é 0-forma e df é 1-forma.
Teorema 3.3.1. . Seja f : U ⊂ Rm → V ⊂ Rn uma função diferenciável. Valem as
seguintes prorpiedades:
i) f ∗(ω + η) = f ∗(ω) + f ∗η, ∀ω e η k-formas;
ii) f ∗(gω) = (g f)f ∗(ω), f ∈ C∞, ω ∈ T k(R) e g ∈ C∞(Rn;R). Em particular, se
conderamos g = c,∀c ∈ R, temos que f ∗(cω) = cf ∗(ω);
iii) f ∗(ω ∧ η) = (f ∗ω) ∧ (f ∗η), ∀ω ∈ T k(Rn), η ∈ T l(Rn);
iv) f ∗(dxi) =∑m
j=1∂f∂xjdxj.
Demonstração. i) É emediata a partir da definição.
ii)(f ∗(gω))(p)(v1, . . . , vk) = gω(f(p)(df(p)v1, . . . , df(p)vk)
= (g(f(p))ω(f(p)))(df(p)v1, . . . , df(p)vk)
= (g(f(p))ω(f(p)))(df(p)v1, . . . , vk)
= g(f(p))ω(f(p))(df(p)v1, . . . , df(p)vk)
= g(f(p))(f ∗ω)(p)(v1, . . . , vk)
= (g(f(p))(f ∗ω)(p))(v1, . . . , vk)
= (g f)(f ∗ω)(p)(v1, . . . , vk).
(3.35)
iii)(f ∗(ω ∧ η))(p) = (df(p))∗((ω ∧ η)(f(p)))
= (df(p))∗(ω(f(p) ∧ η(f(p)))
= (df(p))∗(ωf(p) ∧ (df(p))∗(η(f(p)))
= (f ∗ω)(p) ∧ (f ∗η)(p), ∀p
(3.36)

3.3 Forma Diferencial 64
Logo f ∗(ω ∧ η) = (f ∗ω) ∧ (f ∗η)
iv)(f ∗(dxi))(p)(v) = dxi(f(p))(df(p)(v))
= d(xi f)(p)(v)
= df i(p)(v)
=∑m
j=1∂f i
∂xj(p)vj
=∑m
j=1∂f i
∂xj(p)dxj(v)
=(∑m
j=1∂f i
∂xj(p)dxj
)(v)
(3.37)
Logo, f ∗(dxi) =∑m
j=1∂f i
∂xjdxj
Mediante ao que foi supracitado, vimos a definição de k-formas e elecamos suas pro-
priedades, obtendo por conseguinte, resultados importantes para começar o estudo de
integrais, pois como mencionado a base dual do espaço das k-formas Λk(R) assume o
papel de integrando quando iniciarmos o capítulo 5. Agora iremos analisar as K-formas
de classe C∞.
Definição 3.3.4. Seja ω ∈ Ωk(U), o conjunto de todas as k-formas ω de ordem k dife-
renciáveis e de classe C∞ em U ⊂ Rn. Definimos a aplicação d : Ωk(U)→ Ωk+1(U) linear
como uma diferencial exterior de ω.
Observação 3.3.2. Se k = 0, ou seja, ω = f : U → R então df é diferenciável em f . Se
k > 0, ω =∑
I aIdxI , nesse caso dω =
∑nj=1 daI ∧ dxI , com daI =
∑I daI =
∑nj=1
∂aI∂xjdxj
então dω =∑
I,j∂aI∂xjdxj ∧ dxI .
Teorema 3.3.2. . Dada ω ∈ Ωk(U) e η ∈ Ωl(U), U ⊂ Rn. A diferencial exterior possui
as seguintes propriedades:
i) d(ω + η) = dω + dη, ω, η ∈ Ωk(U), U ⊂ Rn
ii) d(ω ∧ η) = dω ∧ η + (−1)kω ∧ dη ω ∈ Ωk(U) e η ∈ Ωl(U), U ⊂ Rn
iii) d(dω) = 0.
Demonstração. i) Seja ω =∑
I aIdxI e η =
∑I bIdx
I . Dessa forma,
ω + η =∑
I(aI + bI)dxI (3.38)

3.3 Forma Diferencial 65
implica em,d(ω + η) =
∑I d(aI + bI) ∧ dxI
=∑
I(daI + dbI) ∧ dxI
=∑
I daI ∧ dxI +∑
I dbI ∧ dxI
= dω + dη
(3.39)
ii) Para provar esse ítem, vamos considerar 4 casos os quais seguem abaixo
Caso 1
Se k = 0 e l = 0, ω = f : U → R e η = g : U → R.
Então, d(ω ∧ η) = d(fg) = gdf + fdg = df ∧ g + f ∧ dg = dω ∧ η + (−1)0ω ∧ dη.
Caso 2
Se k > 0 e l = 0, ω =∑
I aIdxI e η = g : U → R
Então,
d(ω∧η) = d(gω) = d(
(∑
(gaI)dxI)
=∑I
d(gaI)∧dxI =∑I
(gdaI +aIdg)∧dxI (3.40)
Logo,d(ω ∧ η) =
∑I gdaI ∧ dxI +
∑I aIdg ∧ dxI
= g∑
I daI ∧ dxI +∑
I(−1)kaIdxI ∧ dg
= gdω + (−1)k(∑
I aIdxI)∧ dg
= dω ∧ g + (−1)kω ∧ dg= dω ∧ η + (−1)kω ∧ dη.
(3.41)
Para o caso cujo k = 0 e l > 0 temos a demonstração análaga ao ítem anterior.
Caso 3
Finalmente, para o caso geral, que temos k > 0 e l > 0, com ω =∑
I aIdxI e
η =∑
J bJdxJ .

3.3 Forma Diferencial 66
Como (ω ∧ η) =∑
I,J aIbJdxI ∧ dxJ temos que
d(ω ∧ η) =∑
I,J d(aIbJ) ∧ dxI ∧ dxJ
=∑
I,J(bJdaI + aIdbJ) ∧ dxI ∧ dxJ
=∑
I,J bJdaI ∧ dxI ∧ dxJ +∑
I,J aIdbJ ∧ dxI ∧ dxJ
=∑
I,J daI ∧ dxI ∧ bJdxJ + (−1)k∑aIdx
I ∧ dbJ ∧ dxJ=(∑
I daI ∧ dxI)∧(∑
J bJdxJ)
+ (−1)k(∑
I aIdxI)∧(∑
J dbJ ∧ dxJ).
= dω ∧ η + (−1)kω ∧ dη(3.42)
iii) Assim como a propriedade anterior, vamos analisar quando k = 0 e k > 0
Caso 1
Se ω = f : U ⊂ R Rightarrow df =∑
j=1∂f∂xj
.
d(df) =∑n
k=1 d(∂f∂xj
)∧ dxj
=∑n
j=1
(∑nk=1
∂2f∂xk∂xj
dxk)∧ dxj
=∑n
j,k=1∂2f
∂xk∂xjdxk ∧ dxj
=∑
j 6=k∂2f
∂xk∂xjdxkωdxi
=∑
j<k∂2f
∂xk∂xidxk ∧ dxj +
∑k<j
∂2f∂xk∂xj
dxk ∧ dxj
=∑
j<k∂2f
∂xk∂xjdxk ∧ dxj +
∑j<k
∂2f∂xj∂xk
dxj ∧ dxk
=∑
j<k
(∂2f
∂xk∂xj− ∂2f
∂xj∂xk
)dxk ∧ dxj = 0
(3.43)
Pelo teorema do Schwarz.∑
j<k
(∂2f
∂xk∂xj− ∂2f
∂xj∂xk
)dxk ∧ dxj = 0
Caso 2
Se k > 0 então ω =∑
I aIdxI
De i) temos que dω =∑
I d(daI ∧ dxI e por ii)∑
I d(daI) ∧ dxI −∑
I daI ∧ d(dxI).
Teorema 3.3.3. . Seja f : U ⊂ Rn → V ⊂ Rn diferenciável. Para toda k-forma
diferenciável k-forma ω em V , vale
d(f ∗ω) = f ∗(dω)
Definição 3.3.5. Dizemos que uma k-forma ω, k ≥ 0 em um aberto U ⊂ Rn é fechada,
quando dω = 0.

3.3 Forma Diferencial 67
Definição 3.3.6. Dizemos que uma k-forma ω, k ≥ 1, em U é exata, quando existe uma
(k − 1)-forma η em U tal que ω = dη
Proposição 3.3.3. Sejam ω uma k-forma diferenciável. Se ω é exata então ω é fechada.
Demonstração. De fato, como ω é exata, então existe, pela definição, uma (k-1)-forma η
tal que ω = dη mas sabemos que ω é pelo menos de classe C1, então podemos calcular o
diferencial de ω. Dessa forma, dω = d(dη) = 0. Logo ω é fechado.
No entanto a recíprova não é verdadeira, ou seja, uma forma fechada não necessaria-
mente é exata.
Exemplo 3.3.1. Seja δθ a 1-forma em R2 − 0 dada por
δθ(x, y) = − y
x2 + y2dx+
x
x2 + y2dy (3.44)
Essa equação é chamada de elemento de ângulo
Esse exemplo é para mostrar como é realizado o cálculo sobre formas diferenciais, nesse
caso especificamente, estamos trabalhando com 1-forma e mostraremos que a mesma é
fechada.
d(δθ) = d(−y
x2+y2
)∧ dx+ d
(x
x2+y2
)∧ dy
=(∂∂x
(−y
x2+y2
)dx+ ∂
∂y
(−y
x2+y2
)dy)∧ dx+
(∂∂x
(x
x2+y2
)dx+ ∂
∂y
(x
x2+y2
)dy)∧ dy
= ∂∂y
(y
x2+y2
)dx ∧ dy + ∂
∂x
(x
x2+y2
)dx ∧ dy
= x2+y2−y.2x(x2+y2)2
dx ∧ dy + x2+y2−x.2x(x2+y2)2
dx ∧ dy
= x2−y2(x2+y2)2
dx ∧ dy + y2−x2(x2+y2)2
dx ∧ dy = 0
(3.45)
Logo, δθ é fechada em R2 − 0.

3.4 Formas Diferenciais em Variedades 68
3.4 Formas Diferenciais em Variedades
Agora já podemos aplicar formas diferenciais em variedades, pois conhecemos como é
o comportamento das k-formas sobre um espaço vetorial de dimensão finita. Como uma
variedade é localmente euclidiana e em cada ponto podemos associar um vetor tangente,
faz sentido o estudo das formas sobre as mesmas. Assim, considere T k(TM) sendo o
fibrado dos k-tensores covariantes emM e o subconjunto de T k(TM) formado por tensores
alternados denotaremos por Λk(TM) tal que
Λk(TM) = qP∈MΛk(TpM) (3.46)
Definição 3.4.1. Uma k-forma em uma variedade M é uma aplicação que associa cada
p ∈M a um ωp ∈ Λk(TpM)
p ∈M 7−→ ωp ∈ Λk(TpM) (3.47)
Definição 3.4.2. Assim como definido na seção anterior, o produto exterior de duas
formas diferenciais é definido como (ω ∧ η)p = ωp ∧ ηp. Dado o produto exterior de uma
k-forma com uma l-forma obtemos uma (k + l)-forma.
Observação 3.4.1. Se uma das formas citada acima for de grau 0, temos um produto
usual de R, isto é, se f é uma 0-forma e η é uma k-forma, interpretamos o produto exterior
f ∧ η como o produto usual (multiplicação) fη.
Agora, considerando uma aplicação xi : M → R que associa a cada ponto p ∈ M
a sua i-ésima coordenada, dada por xi(p) = pi. Então pela definição de diferencial do
capítulo 2, temos que
dxi(p)(v) =d
dt|t=0x
i(p+ tv) =d
dt|t=0(pi + tvi) = v1 (3.48)
Em particular, dxi(p) = δij. Logo dx1(p), . . . , dxk(p) é a base dual de e1, . . . , en.Dessa forma, para qualquer sistema de coordenadas diferenciável, uma k-forma ω pode
ser escrita localmente por
ω =∑I
aIdxi1 ∧ . . . ∧ dxik =
∑I
aIdxI (3.49)

3.4 Formas Diferenciais em Variedades 69
Exemplo 3.4.1. SejaM = R4. e1, e2, e3, e3 a base canônica do R4 e dx1, dx2, dx3, dx4a sua correspondente base dual. Considere ai, aij, aijk, aijkl : R4 → R funções reais, então
temos as seguintes formas:
i) 0-formas: as prórpias funções ai : R4 → R, 1 ≥ i ≥ 4.;
ii) 1-formas: a1dx1 + a2dx2 + a3dx3 + a4dx4;
iii) 2-formas: a12dx1 ∧ dx2 + a13dx1 ∧ dx3 + a14dx1 ∧ dx4 + a23dx2 ∧ dx3 + a24dx2 ∧ dx4 +
a34dx3 ∧ dx4;
iv) 3-formas: a123dx1 ∧ dx2 ∧ dx3 + a124dx1 ∧ dx2 ∧ dx4 + a234dx2 ∧ dx3 ∧ dx4;
v) 4-formas: a1234dx1 ∧ dx2 ∧ dx3 ∧ dx4.
Definição 3.4.3. Seja f : M → N uma função diferenciável. O pull-back de uma k-forma
ω em N é a k-forma f ∗ω definida por:
(f ∗ω)(p) = (df(p))∗(ω(f(p))). (3.50)
Assim, para cada p ∈M e v1, . . . , vk ∈ TpM
(f ∗ω)(p)(v1, . . . , vk) = ω(f(p))(df(p)(v1, . . . , vk) (3.51)
Todas as propriedades de formas diferenciais, sem exceção, mencionadas na seção
anterior sobre espaços vetorias são estendidas naturalmente para as variedades diferenciá-
veis, com isso não iremos enunciá-las novamente. Somente o pull-back foi citado de novo,
pois o mesmo é imprescindível à compreensão do teorema Stokes.

Capítulo 4
Superfícies
Este capítulo tem como objetivo o estudo de superfícies m-dimensionais, principal-
mente, as superfícies com bordo, levando em consideração que a demonstração do teo-
rema de Stokes que apresentaremos neste trabalho é definido sobre uma superfície m-
dimensional. Algumas demonstrações de teoremas e proposições, abaixo elencadas, serão
omitidas pois nosso escopo é agrupar o máximo possível de mecanismos para que o teo-
rema de Stokes seja devidamente demonstrado.
4.1 Superfícies m-dimensionais em Rn
Definição 4.1.1. Uma superfície m-dimencional em Rn é um conjuntoM com a seguinte
propriedade: para todo p ∈M , existem abertos V de Rn e U de Rm, p ∈ V e uma função
ϕ : U →M ∩ V satisfazendo:
i) ϕ é diferenciável (como aplicação de U em Rn)
ii) dϕ(q) : Rm → Rn é injetiva ∀q ∈ U
iii) ϕ é um homeomorfismo entre U e M ∩ V
Teorema 4.1.1. . Sejam U ⊂ Rn aberto e f : U → Rk uma função diferenciável. Então
M = (x, f(x)) : x ∈ U é uma m-superfície em Rm+k.
Demonstração. Seja ϕ : U →M dada por ϕ(x1, . . . , xm) = (x1, . . . , xm, f(x1, . . . , xm).
i) É satisfeita pois as funções (x1, . . . , xm) 7→ xi com 1 ≤ i ≤ m são diferenciáveis e f
é diferenciável por hipótese.

4.1 Superfícies m-dimensionais em Rn 71
ii) Para mostrar que dϕ é injetiva basta mstrarmos que dϕ 6= 0. Assim,
dϕ(q)(e1) = ∂ϕ∂x1
(q) = (1, 0, . . . , 0, ∂f∂x1
(q))
dϕ(q)(e2) = ∂ϕ∂x2
(q) = (0, 1, . . . , 0, ∂f∂x2
(q))...
......
dϕ(q)(em) = ∂ϕ∂xm
(q) = (0, 0, . . . , 1, ∂f∂xm
(q))
(4.1)
Segue imediatamente que dϕ(q)(e1), . . . , dϕ(q)(em) são linearmente independente, ou
seja, dϕ(q) é injetiva ∀q ∈ U .
iii) Como ϕ é uma bijeção de U emM e ϕ é contínua, basta mostrar que ϕ−1 : M → U
é contínua. Mas isso é imediato, pois ϕ−1 = π |M onde π : Rm+k → Rm é a projeção nas
m-primeiras coordenadas.
Definição 4.1.2. Seja f : U ⊂ Rm → Rn, U aberto, uma função diferenciável. Um ponto
p ∈ U é chamado crítico se df(p) : Rm → Rn não é sobrejetiva (isso sempre ocorre se
m < n). A imagem de um ponto crítico é chamada de valor crítico. Um valor que não é
crítico é chamado regular.
No caso particular f : U ⊂ Rm → R, a ∈ f(U) é valor regular se, e somente se,
∇f(p) 6= 0, ∀p ∈ f−1(a).
Teorema 4.1.2. . Seja f : U ⊂ Rm → Rn,m > n, uma função diferenciável. Se
a ∈ f(U) é valor regular de f então f−1(a) é uma (m-n)-superfície em Rm
Teorema 4.1.3. . Toda superfície M ⊂ Rn é localmente um gráfico. Mais precisamente,
para todo p ∈M , existe em aberto V de Rn contendo p tal que V ∩M é o gráfico de uma
função diferenciável f : W → Rn−m, W ⊂ Rm aberto.
Definição 4.1.3. Dizemos que uma função f : V ⊂ Rk → M ⊂ Rn, V aberto, é
diferenciável se ela o for como aplicação de V em Rn.
Teorema 4.1.4. . Sejam M ⊂ Rn uma superfície e ϕ : U ⊂ Rm →M uma parametriza-
ção de M . Se f : V ⊂ Rk é diferenciável e f(V ) ⊂ ϕ(U), então ϕ−1 f é diferenciável.

4.1 Superfícies m-dimensionais em Rn 72
Figura 4.1:
Corolário 4.1.5. Sejam M ⊂ Rn e ϕ : U ⊂ Rm → M uma parametrização. Se γ : I →ϕ(U) é uma curva diferenciável, então ϕ−1 γ : I → U é diferenciável.
Figura 4.2:
Corolário 4.1.6. Sejam M ⊂ Rn, ϕ : U → M e ψ : V → M parametrizações de M tais
que ψ−1 ϕ∣∣ϕ−1(W ) é um difeormorfismo, onde W = ϕ(U) ∩ ψ(V ).
Figura 4.3:
Definição 4.1.4. Sejam M ⊂ Rn uma superfície e p ∈ M . Um vetor v ∈ Rn é tangente
a M em p se existe uma curva diferenciável γ : (−ε, ε)→M tal que γ(0) = v e γ′(0) = v.
Figura 4.4:

4.1 Superfícies m-dimensionais em Rn 73
O conjunto de todos os vetores de Rn que são tangentes a M em p é denominado de
espaço tangente de M em p e denotado por TpM .
Teorema 4.1.7. . Para toda superfície de Rn e todo ponto p, TpM é um espaço vetorial
m-dimensional de Rn.
Definição 4.1.5. Sejam M ⊂ Rn uma superfície e f : M → Rk. Dizemos que f é
diferenciável em p ∈M se existe uma parametrização ϕ : U → V , onde p ∈ ϕ(U), tal que
f ϕ é diferenciável em ϕ−1(p).
Figura 4.5:
Teorema 4.1.8. . f : M → Rk é diferenciável se, e somente se, f ϕ é diferenciável
para toda parametrização ϕ : U →M .
Figura 4.6:
Definição 4.1.6. Uma função f : M → N entre duas superfícies M ⊂ Rn e N ⊂ Rl é
chamada diferenciável se f for diferenciável como aplicação de M em Rl.

4.2 Formas Diferenciais sobre Superfícies 74
Teorema 4.1.9. .Se f : M ⊂ Rn → N ⊂ Rl é diferenciável então ϕ−1 f ψ é diferen-
ciável, para todas as parametrizações ϕ : U →M e ψ : V → N tais que f(ϕ(U)) ⊂ ψ(V ).
Figura 4.7:
Definição 4.1.7. Um difeomorfismo entre duas superfícies M e N é uma bijeção diferen-
ciável f : M → N tal que f−1 : N →M é diferenciável.
Proposição 4.1.1. Seja f : M → Rl(N ⊂ Rl) uma função diferenciável. Dados p ∈ Me v ∈ TpM , seja γ : (−ε, ε) → M uma curva diferenciável tal que γ(0) = p e γ′(0) = v.
Então df(p)(v) = (f γ)′(0) onde df(p) : TpM → Rl(Tf(p)N .
Teorema 4.1.10. .(Regra da cadeia) Se f : M → N e g : N → P são aplicações
diferenciáveis então g f : M → P é diferenciável. Além disso, para todo p ∈M
d(g f)(p) = dg(f(p)) df(p) (4.2)
4.2 Formas Diferenciais sobre Superfícies
Iniciaremos esta seção com a definição de campo vetorial sobre uma superfície, para
depois introduzirmos os conceitos de formas diferenciais. As noções que apresentaremos é
similiar com aquelas vistas no capítulo 3, porém nos preocupamos em detalhar nesta seção
pois utilizaremos esses conceitos com suas respectivas notações novamente na construção
da demonstração do teorema de Stokes.
Definição 4.2.1. (Campo Vetorial) Um campo vetorial em uma superfície M ⊂ Rn é
uma aplicação X : M → Rn tal que X(p) ∈ TpM , para todo p ∈ M . O campo X é
chamado diferenciável se a aplicação X : M → Rn é diferenciável.
Observação 4.2.1. Seja ∂∂ui
(p) = dϕ(q)(ei) onde ei é base canônica de Rm. Como
dϕ(q) : Rm → TpM é um isomorfismo, ∂∂u1
(p), . . . , ∂∂um
(p) é uma base de TpM , ∀p ∈ϕ(U). Com isso, existem números reais a1(p), . . . , am(p) tais queX(p) =
∑mi=1 ai(p)
∂∂ui
(p).
As funções ai : ϕ(U)→ R determinadas por X(p) são chamadas funções coordenadas de
X na parametrização ϕ.

4.2 Formas Diferenciais sobre Superfícies 75
Definição 4.2.2. Uma forma diferencial, ou simplesmente uma k-forma, em uma superfí-
cie M ⊂ Rn é uma aplicação ω : M →⋃x∈M Λk(TxM) tal que ω(x) ∈ Λk(TxM),∀x ∈M .
Sejam M ⊂ Rn uma superfície e ϕ : U ⊂ Rm → M uma parametrização. Para cada
p = ϕ(u) ∈ ϕ(U) e cada i = 1, . . . ,m, seja ∂∂ui
(p) = dϕ(u)(ei). Como dϕ(u) é injetiva,
∂∂ui
(p), . . . , ∂∂um
(p) é uma base de TpM .
Seja du1(p), . . . , dum a sua base dual. Logo existem únicos números reais ai1,...,ik(p)
com 1 ≤ i1 < . . . < ik ≤ m tais que
ω(p) =∑
i1<...<ik
ai1,...,ik(p)dui1(p) ∧ . . . ∧ duik(p) (4.3)
Definição 4.2.3. As funções ai1,...,ik : ϕ(U) → R, ik < . . . < ik, são chamadas as
componentes de ω na parametrização ϕ.
A expressão acima, que será chamada a representação local de ω na parametrização
ϕ, pode ser abreviada como:
ω =∑I
aIduI (4.4)
Definição 4.2.4. Uma k-forma ω em uma superfície M ⊂ Rn é chamada contínua (dife-
renciável) se, para todo p ∈ M , existe uma parametrização ϕ : U ⊂ Rm → M , p ∈ ϕ(U),
tal que as componentes de ω na parametrização ϕ são funções contínuas.
Com o próximo teorema mostraremos que uma k-forma ω gera funções aI diferenciá-
veis.
Teorema 4.2.1. . Sejam M ⊂ Rn uma superfície e ω uma k-forma em M . Sejam
ϕ : U → M e ψ : V → M parametrizações de M tais que ϕ(U) ∩ ψ(V ) 6= ∅. Sejam
ω =∑
I aIduI e ω =
∑I bIdv
I as parametrizações locais de ω nas parametrizações ϕ e ψ,
respectivamene. Então, para todo p ∈ ϕ(U)∩ψ(V ) aI(p) =∑
J det(∂hJ∂xI
(u))bJ(p) onde
u = ϕ−1(p) h = ψ−1 ϕ∣∣ϕ−1(W ) e ∂hJ
∂xI(u) é a submatriz k × k da matriz jacobiana de h
em u considerando apenas as entradas que não estão em alguma das linhas j1, . . . , jk ealguma das colunas i1, . . . , ik.
Corolário 4.2.2. Se ω é uma k-forma contínua (diferenciável) então as componentes de
ω em qualquer parametrização são contínuas (diferenciáveis).
Corolário 4.2.3. Se ω é uma n-forma e ω = adu1∧ . . .∧dun e ω = bdv1∧ . . .∧dvn são as
representações locais de ω em ϕ : U →M e ψ : V →M , então, para todo p ∈ ϕ(U)∩ψ(V )
ap = det (Jh(u))bp onde u = ϕ−1(p) e Jh(u) é a matriz Jacobiana de h = ψ−1 ϕ em u.

4.2 Formas Diferenciais sobre Superfícies 76
Para a demonstração do teorema 4.2.1 precisamos do seguinte lema
Lema 4.1. Seja v1, . . . , vn uma base de V e seja φ1, . . . , φn a base dual. Fixe 1 ≤i1 < . . . < ik ≤ n. Para todos j1, . . . , jk temos
i) Se j1, . . . , jk 6= i1, . . . , ik φi1 ∧ . . . ∧ φik(vj1 , . . . , vjk) = 0;
ii) Para toda permutação t ∈ sk, φi1 ∧ . . . ∧ φik(vit(1 , . . . , vit(k)) = sgnt.
Demonstração. Consideremos ∂∂u1
(p), . . . , ∂∂um
(p) e ∂∂v1
(p), . . . , ∂∂vm
(p) bases de TpM ,
com du1(p), . . . , dum(p) e dv1(p), . . . , dvm(p) suas respectivas bases duais.
Seja dij a matriz de mudança de base ∂∂ui
(p) para a base ∂∂vi
(p), ou seja,
∂∂ui
(p) =∑
j dji∂∂vj
(p) (4.5)
temos
∂∂ui
(p) = dϕ(u)(ei) = d(ψ h)(u)(ei)
= dψ(v)(dh(u)(ei)
= dψ(v)(∂h∂xi
(u))
= dψ(v)(∑
j=1∂hj∂xi
(u)ej
)=∑
j∂hj∂xi
(u) ∂∂vj
(p)
(4.6)
Comparando a expressão 4.5 com 4.6, temos dji =∂hj∂xi
(u). Como dui1∧. . .∧duik , i1 <. . . < ik é uma base de Λk(TpM) existem únicos números reias ci1,...,ik
dvj1 ∧ . . . ∧ dvik =∑
i1<...<ikCj1,...,jki1,...,ik
dui1 ∧ . . . ∧ duik (4.7)
temos,
ω(p) =∑
j1<...<jkbj1,...,jkdv
j1 ∧ . . . ∧ dvjk
=∑
j1<...<jkbj1,...,jk
∑i1<...<ik
Cj1,...,jki1,...,ik
dui1 ∧ . . . ∧ duik(4.8)
Logo,
ω(p) =∑
i1<...<ik
(∑j1<...<jk
Cj1,...,jki1,...,ik
bj1,...,jk
)dui1 ∧ . . . ∧ duik (4.9)

4.2 Formas Diferenciais sobre Superfícies 77
temos
ai1,...,ik =∑
j1<...<jk
Cj1,...,jki1,...,ik
bj1,...,jk (4.10)
mas
dvj1 ∧ . . . ∧ dvjk(
∂∂ui1
, . . . , ∂∂uik
)dvj1 ∧ . . . ∧ dvjk
(∑l1dl1,i1
∂∂vl1
, . . . ,∑
lkdlk,ik
∂∂vlk
)=
=∑m
l1,...,lk=1 dl1,i1 . . . dlk,ikdvj1 ∧ . . . ∧ dvjk
(∂
∂vl1, . . . , ∂
∂vlk
)(4.11)
Usando o lema 4.1
dvj1 ∧ . . . ∧ dvjk(
∂∂ui1
, . . . , ∂∂uik
)=∑l1,...,lk=j1,...,jk dl1,i1 . . . dlk,ikdv
j1 ∧ . . . ∧ dvjk(
∂∂vl1
, . . . , ∂∂vlk
)=∑
t djt(1),i1 . . . djt(k),ikdvj1 ∧ . . . ∧ dvjk
(∂
∂vjt(1), . . . , ∂
∂vjt(k)
)=∑
t sgnt djt(1),i1 . . . djt(k),ik(4.12)
Por outro lado,
dvj1 ∧ . . . ∧ dvjk =∑
l1<...<lk
Cj1,...,jki1,...,ik
dul1 ∧ . . . ∧ dulk (4.13)
Então
dvj1 ∧ . . . ∧ dvjk(
∂∂uik
)=∑
l1<...<lkCj1,...,jki1,...,ik
dul1 ∧ . . . ∧ dulk(
∂∂ui1
, . . . , ∂∂uik
)= Cj1,...,jk
i1,...,ik
(4.14)
Logo de 4.12 e 4.14, obtemos,
Cj1,...,jki1,...,ik
=∑
t sgnt djt(1),i1 . . . djt(k),ik (4.15)
Seja T a matriz k × k dada por Tlm = djl,im
De 4.15, obtemos
Cj1,...,jki1,...,ik
=∑
t sgnt Tt(1),1 . . . Tt(k),k)
=∑
t sgnt Tt1,t(1) . . . T
tk,t(k) = det T t = det (T t) = det T
(4.16)

4.2 Formas Diferenciais sobre Superfícies 78
De 4.10 e 4.16, concluimos que
ai1,...,ik =∑
j1<...<jk(det T ) bj1,...,jk
Como (di,j) é a matriz Jacobiana de h em u e usando a notação ∂hJ∂xI
para a matriz T,
temos aI =∑
J det(∂hJ∂xI
(u))bJ
Definição 4.2.5. Sejam ω e η formas diferenciais em uma superfícieM e seja g : M → Ruma função. Se ω e η tiverem a mesma ordem, ω + η é a forma dada por:
(ω + η)(p) = ω(p) + η(p) (4.17)
As formas gω e ω ∧ η são definidas por:
(gω)(p) = g(p)ω(p) , (ω ∧ η)(p) = ω(p) ∧ η(p) (4.18)
Teorema 4.2.4. . Se ω, η e g são diferenciáveis em M , então ω + η, gω, e ω ∧ η são
diferenciáveis.
Definição 4.2.6. Seja f : M → N uma função diferenciável. O pull-back de uma k-forma
ω em N é a k-forma f ∗ω definida por
(f ∗ω)(p) = (df(p))∗(ω(f(p))) (4.19)
Assim, para p ∈M e v1, . . . , vk ∈ TpM, (f ∗ω)(p)(v1, . . . , vk) = ω(f(p))(df(p)(v1), . . . , df(p)(vk))
Teorema 4.2.5. . Seja f : M → N uma função diferenciável. Então:
i) f ∗(ω + η) = f ∗ω + f ∗η , para todas as ω e η de mesma ordem em U ;
ii) f ∗(gω) = (g f)f ∗ω;
iii) f ∗(ω ∧ η) = (f ∗ω) ∧ (f ∗η)
Lema 4.2. Seja ϕ : U →M uma parametrização de uma superfície M ⊂ Rn. Para cada
p = ϕ(u) ∈ ϕ(U), seja du1(p), . . . , dum(p) a base dual da base ∂∂ui
(p) = dϕ(u)(ei) ,
então
(ϕ)−1)∗(dxi) = dui (4.20)
onde xi : Rm → R é a projeção na i-ésima coordenada.

4.3 Superfícies com Bordo 79
Teorema 4.2.6. . Sejam f : M → N e g : N → P funções diferenciáveis. Então, para
toda forma ω em p
(g f)∗ω = f ∗(g∗ω) (4.21)
Lema 4.3. Seja f : M → N uma função diferenciável e sejam ϕ : U → M e ψ : V → N
parametrizações tais que f(ϕ(U)) ⊂ ψ(V ), então, para todo i = 1, . . . , n
f ∗(dvi) =m∑j=1
∂hi∂xj
duj (4.22)
onde h = ψ−1 f ϕ.
Teorema 4.2.7. . Se f : M → N é diferenciável e ω é uma k-forma diferenciável em N ,
então f ∗ω é diferenciável.
Definição 4.2.7. Seja ω uma k-forma diferenciável em uma superfície M ⊂ Rn. Se
ϕ : U ⊂ Rm → M é uma parametrização de M e ω =∑
I aIduI é a representação local
de ω na parametrização ϕ, definimos
dω(p) =∑I
daI(p) ∧ duI(p) , p ∈ ϕ(U) (4.23)
Lema 4.4. Tomando a mesma notação que a utilizada na definição 4.2.7
∑I daI ∧ duI = (ϕ−1)∗(d(ϕ∗ω)) em ϕ(U) (4.24)
Lema 4.5. Se ϕ : U →M e ψ : V →M são parametrizações tais que ϕ(U)∩ ψ(V ) 6= ∅.
Então,
(ϕ−1)(d(ϕ∗ω)) = (ψ−1)∗(d(ψ∗ω)) em ϕ(U) ∩ ψ(V ) (4.25)
Os dois lemas acima mostram que dω está bem definido.
Teorema 4.2.8. Se f : M → N é diferenciável então d(f ∗ω) = f ∗(dω) para toda forma
diferenciável.
4.3 Superfícies com Bordo
A demonstração do teorema de Stokes para uma superfície m-dimensional necessita
da noção de superfície com bordo, já que a ideia intuitiva do teorema é associar a integral
de uma superfície com o seu respectivo bordo. Dessa forma, considere Hm um semiplano
tal que:

4.3 Superfícies com Bordo 80
1. Hm = (x1, . . . , xm) ∈ Rm : xm ≥ 0 é o semiplano superior
2. ∂Hm = (x1, . . . , xm) ∈ Rm : xm = 0 = Rm−1 x 0 é o bordo do semiplano
superior
3. int(Hm) = Hm \ ∂Hm é o interior do semiplano superior
Definição 4.3.1. Seja X um subconjunto de Rn uma função f : X → Rn é chamada
diferenciável, se, para cada p ∈ X, existem um aberto Up ⊂ Rm, contendo p, e uma função
diferenciável gp : Up → Rn tais que f |Up∩X= gp |Up∩X .
Definição 4.3.2. Seja V um aberto de Hm e seja f : V → Rn uma função diferenciável.
A diferencial de f em um ponto p ∈ V é definida por df(p) = dg(p), onde g é qualquer
extensão local diferenciável de f a uma vizinhança de p.
Figura 4.8:
Teorema 4.3.1. . df(p) está bem definida, isto é, df(p) não depende da função g.
Demonstração. Se p ∈ int(Hm), quaisquer duas extensões locais diferenciáveis de f coin-
cidem em uma vizinhança aberta de f e, portanto, possuem a mesma diferencial em p.
Suponha, agora, que p ∈ ∂Hm. Para i = 1, . . . ,m− 1
dg(p)(e1) = ∂g∂x1
(p) = ddt|t=0 g(p+ tei1) = d
dt|t=0
ddt|t=0 (p+ tei) (4.26)
Logo, df(p) não depende de g, para i = 1, . . . ,m− 1
Por outro lado,
dg(p)(em) = ddt|t=0 g(p+tem) limt→0
g(p+tem)−g(p)t
= limt→0g(p+tem)−g(p)
t= limt→0
f(p+tem)−f(p)t
Logo, dg(p) também não depende de g
Teorema 4.3.2. . Sejam V e U abertos em Hm e Hn, respectivamente, e sejam f :
V → U e g : U → Rk funções diferenciáveis. Então g f : V → Rk é diferenciável e
d(g f)(x) = dg(f(x)) df(x),∀x ∈ V .

4.3 Superfícies com Bordo 81
Figura 4.9:
Demonstração. Tome x ∈ V . Como g é diferenciável existem uma vizinhança aberta U
de f(x) em Rn e uma função diferenciável g : U → Rk tal que g |U∩M = g |U∩U .
Como f é diferenciável, existem um aberto V de Rm, contendo x, e uma função
diferenciável f : V → Rn tais que f |V ∩V = f |V ∩V
Temos também que f é diferenciável, podemos supor, reduzindo V , se necessário, que
f(V ) ⊂ U , de forma que g f : V → Rk está definida e é diferenciável em V ∪ V pondo
g f = g f . Logo, g f possui uma extensão local diferenciável em uma vizinhança
aberta de x. Como x é arbitrário, g f é diferenciável.
Agora, para todo x ∈ V , temos por definição,
d(g f)(x) = d(g f)(x) = dg(f(x)) df(x)
dg(f(x)) df(x)(4.27)
Definição 4.3.3. Sejam U e V abertos em semiespaços. Uma função f : U → V é
chamada difeomorfismo se f é bijetiva e f e f−1 são diferenciáveis.
Teorema 4.3.3. Se f : U ⊂ Hm → V ⊂ Hn é um difeomorfismo então m = n e
f(∂U) = ∂V .
Demonstração. Pela regra da cadeia,
IRm = d(IM)(x) = d(f−1 f)(x) = d(f−1)(f(x)) df(x)
IRn = d(IV )(y) = d(f f−1)(y) = df(f−1(y)) d(f−1)(y)
(4.28)
Logo, df(x) : Rm → Rn é um isomorfismo, daí m = n.
Se x ∈ U\∂Hm, f é diferenciável em uma vizinhança aberta U de x com U ⊂ intHm∩Ucomo df(y) é um isomorfismo para todo y ∈ U , temos, pelo teorema da função inversa,
f(U) é aberto em Rm. Como f(U) ⊂ f(U) = V , concluimos que f(x) /∈ ∂V .

4.3 Superfícies com Bordo 82
Assim, f−1(∂V ) ⊂ ∂U
Analogamente, prova-se que f(∂U) ⊂ ∂V , portanto f(∂U) = ∂V .
Definição 4.3.4. Uma superfície com bordo de dimensão m em Rn é um conjunto M
satisfazendo a seguinte propriedade: Para todo p ∈ M , existem um aberto V de Rn,
contendo p, um aberto U de Hm e uma função ϕ : U →M tal que
i) ϕ é diferenciável;
ii) dϕ(g) é injetiva, ∀g ∈ U ;
iii) ϕ é um homeomorfismo entre U e V ∩M
Figura 4.10:

4.3 Superfícies com Bordo 83
Teorema 4.3.4. . Seja M ⊂ Rn uma superfície com bordo e seja f : V ⊂ Hk → M
uma função diferenciável (com aplicação de V em Rn tal que f(V ) ⊂ ψ(U), para alguma
parametrização ψ : U ⊂ Hm →M , então ψ−1 f : V ⊂ Hk → Rm é diferenciável.
Lema 4.6. Se ϕ : U ⊂ Hm →M e ψ : V ⊂ Hm →M são parametrizações de M tais que
ϕ(U)∩ψ(V ) 6= ∅. Então, fazendo W = ϕ(U)∩ψ(V ), ψ−1 ϕ : ϕ−1(W )→ ψ−1(W ) é um
difeomorfismo.
Figura 4.11:
Demonstração. ϕ∣∣ϕ−1(W ) : ϕ−1(W ) → Rn é diferenciável e ϕ(ϕ−1(W )) = W ⊂ ψ(V ).
Logo, pelo teorema acima, ψ−1 ϕ∣∣ϕ−1(W ) é diferenciável. A sua inversa ϕ−1 ψ
∣∣ψ−1(W )
é diferenciável, pela mesma razão.
Definição 4.3.5. Seja M ⊂ Rn uma superfície com bordo. Um ponto p ∈M é chamado
ponto de bordo se existe uma parametrização ϕ : U ⊂ Hm → M tal que p = ϕ(u), com
u ∈ ∂U ∩Hm.
Figura 4.12:

4.3 Superfícies com Bordo 84
Definição 4.3.6. O conjunto dos pontos do bordo de M , denotado por ∂M , é chamado
o bordo de M .
Figura 4.13:
Teorema 4.3.5. . Seja M ⊂ Rn é uma superfície com ∂M 6= ∅. Então ∂M é uma
superfície sem bordo de dimensão (m− 1).
Demonstração. Sejam
∂Hm = Rm−1 × 0, ∂U = U∂Hm
U = U ∩Hm, U aberto de Rm.(4.29)
Dessa forma,
∂U = U ∩Hm ∩ ∂Hm = U ∩ ∂Hm (4.30)
isto é, ∂U é um aberto de ∂Hm.
Agora, π : Rm → Rm−1 definida por π(x1, . . . , xm) = (X1, . . . , Xm−1).
Então, π |∂Hm : ∂Hm → Rm−1 é um homeomorfismo.
U1 = π(∂U) é aberto em Rm−1, logo ∂U = U1 × 0.
Tome p ∈ ∂M e considere uma parametrização ϕ : U ⊂ Hm → M tal que p ∈ ϕ(U).
Seguindo com a mesma notação, seja ϕ1 : U1 ⊂ Rm−1 → ∂M dada por ϕ1(u) = ϕ(u, 0)
Como ϕ(∂U) = ϕ(U) ∩ ∂M temos que ϕ1(U1) = ϕ(∂U) = ϕ(U) ∩ ∂M é aberto em
∂M
Lembrando que a composta das aplicações diferenciáveis é uma aplicação diferenciável,
seja u ∈ U1 7→ (u, 0) ∈ U e ϕ : U → M ⊂ Rn, então ϕ1 é diferenciável. Com efeito,
considere i : U1 → ∂U , pondo u 7→ (u, 0) segue ϕ1 = ϕ i
Como dϕ é injetiva, dϕ1 é injetiva.

4.3 Superfícies com Bordo 85
Finalmente, ϕ1 : U1 → ϕ1(U1) é um homeomorfismo, pois i : U1 → ∂U e ϕ |∂U : ∂U →ϕ(∂U) são homeomorfismo.
Já que p ∈ ∂M foi admitido arbitrariamente, ∂M é uma superfície (sem bordo) de
dimensão m− 1.
Definição 4.3.7. Dizemos que uma superfície M ⊂ Rn é orientável se existe uma família
(ϕα, Uα)α∈Λ de parametrizações satisfazendo:
i)⋃α∈Λ ϕα(Uα) = M ;
ii) detJ(ϕ−1β ϕα) > 0 em ϕ−1
α (W ), sempre que W = ϕα(Uα) ∩ ϕβ(Uβ) 6= ∅
Observação 4.3.1. Uma família (ϕα, Uα)α∈Λ que satisfaz i) e ii) é chamada de Atlas
coerente, para os casos em que só satisfaz i) chamamos apenas de atlas.
Uma orientação em M é um atlas coerente máximo, se contém todas as parametriza-
ções que são coerentes a ϕα.
Uma superfície é orientável quando nela obtemos um atlas coerente máximo.
Teorema 4.3.6. . Se M é uma superfície orientável com ∂M 6= ∅, então ∂M é orien-
tável.
Figura 4.14:
Demonstração. Seja (ϕα, Uα)α∈Λ um atlas coerente em M . Considere a subfamília, que
ainda denotaremos por (ϕα, Uα), formada por todas as parametrizações da família cujas
imagens intercptam ∂M .
Para cada α ∈ Λ, sejam Uα = π(∂Uα) e ϕα : Uα → ∂M dada por ϕα(u) = ϕα(u, 0)
Sejam α, β ∈ Λ tais que ϕα(Uα) ∩ ϕβ(Uβ) 6= ∅.

4.3 Superfícies com Bordo 86
Seja W = ϕα(Uα) ∩ ϕα(Uβ).
Sejam h = (ϕ−1β )−1 ϕα e h = (ϕβ)−1 ϕα
h : (ϕα)−1(W )→ (ϕβ)−1(W )
h : (ϕα)−1(W )→ (ϕβ)−1(W )(4.31)
é fácil verificar
h(u, 0) = (h(u), 0) u ∈ (ϕ−1)(W ) (4.32)
hi : i−ésima função coordenda de h. A equação 4.32 mostra que hm(u, 0) = ( ˜u, 0, u ∈(ϕα)−1(W ) Para todo i = 1, . . . ,m− 1 temos s∂hm
∂xi(u, 0) = 0
Logo a Jh(u, 0) tem a forma
∂h1∂x1
∂h1∂x2
. . . ∂h1∂xm−1
∂h1∂xm
∂h2∂x1
∂h2∂x2
. . . ∂h2∂xm−1
∂h2∂xm
...... . . .
......
∂hm−1
∂x1
∂hm−1
∂x2. . . ∂hm−1
∂xm−1
∂hm−1
∂xm
0 0 . . . 0 ∂hm∂xm
(4.33)
donde,
detJh(u, 0) =∂hm∂xm
(u, 0)det
(∂hi∂xj
)i,j=1,...,m−1
(4.34)
De 4.32 , temos ∂hi∂xj
(u, 0) = ∂hi∂xj
(u), i, j = 1, . . . ,m
Segue de 4.34 que
detJh(u, 0) =∂hm∂xm
(u, 0)detJh(u) (4.35)
Como detJh(u, 0) 6= 0, de 4.35 temos que
∂hm∂xm
(u, 0) 6= 0 (4.36)
hm(u, t) > 0 para todo t > 0) = suficientemente pequeno,
∂hm∂xm
(u, 0) = limt→0+
hm(u, t)− hm(u, 0)
t= lim
t→0+
hmt≥ 0 (4.37)

4.4 Espaços Tangentes sobre Superfícies com Bordo 87
Usando , obtemos
∂hm∂xm
(u, 0) > 0 (4.38)
De 4.11 e 4.38, concluimos que detJh(u) > 0, ∀u ∈ (ϕα)−1(W )
Logo, ∂M é orientável.
Definição 4.3.8. Seja f : M → Rk uma função definida em uma superfície M ⊂ Rn
dizemos que f é diferenciável se para cada p ∈ M existe uma parametrização ϕ : U ⊂Hm →M tal que f ϕ : U ⊂ Hm → Rk.
Teorema 4.3.7. . Se f : M → Rk é diferenciável, então f ϕ é diferenciável para toda
parametrização ϕ : U ⊂ Hm →M .
4.4 Espaços Tangentes sobre Superfícies com Bordo
Definição 4.4.1. SejaM ⊂ Rn uma superfície. Dizemos que um vetor v ∈ Rn é tangente
a M em p se existe uma curva diferenciável γ : [0, ε)→M tal que γ(0) = p e γ′(0) = v.
O conjunto dos vetores que são tangentes a M em p é chamado espaço tangente a M
em p e denotado por TpM .
Teorema 4.4.1. . Se ϕ : U ⊂ Hm → M é uma parametrização de uma vizinhança de
p ∈M , então TpM = dϕ(u)(Rm), u = ϕ−1(p)
Como os elementos de TpM são veores tangentes aa superfície M ⊂ Rn também
podemos definir um campo vetorial e a definição é a mesma de antes. Seja X : M →Rn, X(p) ∈ TpM
4.5 Formas Diferenciais em Superfícies com Bordo
Nesta seção iremos mencionar, novamente, os conceitos de formas elencados no capí-
tulo 3, no entanto, aqui temos algumas particularidades, como, por exemplo, temos as
representações locais de uma k-forma que são dadas a partir de parametrizações no bordo
de um superfície M .

4.5 Formas Diferenciais em Superfícies com Bordo 88
Definição 4.5.1. Uma forma diferencial, ou simplesmente uma k-forma, em uma super-
fície ,com bordo, M ⊂ Rn é uma aplicação ω : M →⋃p∈M Λk(TpM) tal que ω(p) ∈
Λk(TpM),∀p ∈M .
ϕ : U ⊂ Hm →M, ∈ ϕ(U) e ∂∂ui
(p) = dϕ(u)(ei)dui(p)(4.39)
Agora uma k-forma ω possui uma representação local onde as parametrições são
definidas no bordo de M .
ω(p) =∑
i1<...<ik= ai1,...,ik(p)dui1 ∧ . . . ∧ duik(p) =
∑I aI(p)du
I(p) (4.40)
são as componentes de ω na parametrização ϕ e aI : ϕ(U)→ R
Definição 4.5.2. Dizemos que uma k-forma ω em uma superfícieM ⊂ Rn é diferenciável
se para cada p ∈M , existe uma parametrização ϕ : U ⊂ Hm →M tal que as componentes
de ω nessa parametrização são diferenciáveis
ω =∑
I duI em ϕ(U), ω =
∑I bIdv
I em ψ(V ), h = ψ−1 ϕaI =
∑J det
(∂hj∂xI
)bj
h = ψ−1 ϕ∣∣ϕ−1(W ) : ϕ−1(W )→ ψ−1(W )
(4.41)
é diferenciável
Teorema 4.5.1. . Seja f : U ⊂ Hm → V ⊂ Hn uma função diferenciável. Se ω é uma
k-forma diferenciável em V , então d(f ∗ω) = f ∗(dω).
Sejam M ⊂ Rn, N ⊂ Rl superfícies
Corolário 4.5.2. f : M → N diferenciável significa f : M → Rl diferenciável M ⊂ Rn
superfície com ∂M 6= ∅
Pergunta i : ∂M →M inclusão é diferenciável ?
Essa pergunta é necessaŕia pois quando enuciarmos o teorema de Stokes precisamos
que essa inclusão seja diferenciável.
Pela definição, devemos mostrar que a inclusão de ∂M em Rn é diferenciável.

4.5 Formas Diferenciais em Superfícies com Bordo 89
Dessa forma, considere as seguintes parametrizações,
ϕ : U ⊂ Hm →M e ϕ : U → ∂M U = π(∂U), π : RM → Rm−1 ϕ(u) = ϕ(u, 0)
(4.42)
Com isso,
i ϕ(u) = i ϕ(u, 0) = ϕ(u, 0) (4.43)
é diferenciável, pois é a composta das funções diferenciáveis u 7→ (u, 0) e ϕ : U → Rn.
Como p ∈ ∂M foi tomado arbitrário, concluimos que i : ∂M →M é diferenciável.

Capítulo 5
Integração
Neste capítulo introduziremos os conceitos báicos de integrais definidas em Rn, assim
como os teoremas e propriedades que faremos uso na demonstração do teorema de Stokes.
5.1 Difinições Básicas
Definição 5.1.1. Um bloco m-dimensional fechado A em Rm é o produto A = [a1, b1]×. . .× [am, bm] de intervalos limitados e fechados de R. O volume de A é definido por
V ol(A) =∏m
i=1(bi − ai) (5.1)
Definição 5.1.2. Uma partição de um bloco m-dimensional A = [a1, b1]× . . .× [am, bm] é
uma coleção P = (P1, . . . , Pm) onde, para cada i = 1, . . . ,m, Pi é uma partição de [ai, bi].
Figura 5.1:
Uma partição P de um bloco A divide A em um número finito de bloco menores,
chamado de blocos da partição, intuitivamente, podemos pensar em um refinamento no
qual um objeto é fragmentado em partes menores.
Seja B ∈ P um bloco gerado a partir da partição de A. Então B = I1 × . . .× Im tal

5.1 Difinições Básicas 91
que Ij é um subintervalo de [aj, bj]. Daí,
V ol(A) =∑B∈P
vol(B) (5.2)
A partir daí podemos definir uma função f : A → R, com A sendo um bloco m-
dimensional, limitada. Assim, pelo teorema de weierstrass, de números reais, f atinge um
ponto mínimo e um ponto máximo, vamos considerar esses pontos da seguinte forma:
mB(f) = inff(x) : x ∈ B e MB(f) = supf(x) : x ∈ B (5.3)
A ideia intuitiva da definição de supremo e o ínfimo das funções como a f é admitir
a soma do produto de cada invervalo de uma partição com os respectivos valores que
as funções assumem dentro desse intervalo, com intuito de determinarmos as áreas e/ou
volumes dessas regiões que serão representados em forma de polígonos ou sólidos. Por
isso introduzimos a seguinte definição
Definição 5.1.3. A soma inferior e a soma superior de f relativamente à partição P são
definidas por:
s(f, P ) =∑
B∈P mB(f)vol(B) e S(f, P ) =∑
B∈P MB(f)vol(B) (5.4)
Observação 5.1.1. Com isso, podemos observar que o domínio particionado (bloco)
possibilita a construção de objetos que possuem de forma natural o cálculo de áreas e/ou
volumes no entanto os mesmos são aproximações realizados sobre a região limitada pelo
gráfico da função, então faz sentido querermos particionar o máximo possível um intervalo
para que os polígonos ou sólidos construídos sejam a melhor aproximação, dependendo
apenas da dimensão na qual estão inseridos. Nesse trabalho estudaremos sobre o Rm para,
posteriomente, generalizarmos às superfícies m-dimensionais.
Definição 5.1.4. Dizemos que uma partição Q = (Q1, . . . , Qm) de A refina uma partição
P = (P1, . . . , Pm) se, para cada i = 1, . . . ,m, Pi ⊂ Qi.
Teorema 5.1.1. Sejam A um bloco m-dimensional e f : A → R limitada. Para toda as
partições P e Q de A tais que Q refina P , temos que
s(f, P ) ≤ s(f,Q) ≤ S(f,Q) ≤ S(f, P ) (5.5)

5.1 Difinições Básicas 92
Demonstração. Para demonstrarmos essa desigualdade, basta compararmos s(f, P ) com
s(f,Q) e S(f, P ) com S(f,Q), pois por definição já sabemos que s(f, P ) ≤ S(f, P ) e
s(f,Q) ≤ S(f,Q). Com isso vamos considerar dois casos:
Caso 1 (s(f, P ) ≤ s(f,Q))
s(f,Q) =∑
B′∈QmB′(f)V ol(B′) =∑
B∈P∑
B′⊂BmB′(f)V ol(B′) ≤
≤∑
B∈P∑
B′⊂BmB(f)V ol(B′) =∑
B∈P mB(f)∑
B′⊂B V ol(B′) =
=∑
B∈P mB(f)V ol(B) = s(f, P )
(5.6)
Essa relação é consequência direta do
V ol(B) =∑
B′⊂B V ol(B′)
mB′(f) = inff(x) : x ∈ B′ ≤ inff(x) : x ∈ B = mB(f)
(5.7)
Caso 2 (S(f,Q) ≤ S(f, P ))
De maneira análoga ao caso 1, mas agora
MB′(f) =∑
B′⊂B V ol(B′)
MB′(f) = supf(x) : x ∈ B′ ≥MB(f) = supf(x) : x ∈ B(5.8)
Pelo caso 1 e caso 2 segue que
s(f, P ) ≤ s(f,Q) ≤ S(f,Q) ≤ S(f, P )
Corolário 5.1.2. Para todas as funções P e Q de A, temos s(f, P ) ≤ S(f, P )
Demonstração. Sejam P = (p1, . . . , pm) e Q = (q1, . . . , qm) partições de bloco A. Consi-
derando R = (r1, . . . , rm) tal que, para cada i = 1, . . . ,m,Ri = Pi ∪Qi
Pelas propriedades básicas de operações entre conjuntos, temos que R refina P e Q.
Logo, pelo teorema anterior (anotar o número),
s(f, P ) ≤ s(f,R) ≤ S(f,R) ≤ S(f,Q) (5.9)

5.1 Difinições Básicas 93
Observação 5.1.2. Com isso, podemos afirmar que o conjunto s(f, P ) : P partição de
A possui uma cota superior e que o conjunto S(f, P ) : P partição de A possui uma
cota infeior. Essa observação é muito importante, pois precisamos que as somas inferiores
estejam o mais próximo do gráfico da função, por outro lado, as somas superiores se
comportam de maneira inversa, tendo em vista que a mesma "estrapola"o gráfico. Desse
raciocínio é construído a noção de supremo e ínfemo.
Definição 5.1.5. A integral inferior e a integral superior de f em A são definidas por
∫−A
f(x)dx = supPs(f, P ) e∫A
f(x)dx = infPs(f, P ) (5.10)
Para simplificar a notação vamos usar
∫−A
f(x)dx =
∫−A
f e∫ −A
f(x)dx =
∫ −A
f (5.11)
Pela definição 5.1.5 é evidente que∫−A
f ≤∫ −A
f
Definição 5.1.6. Uma função limitada f : Rm → R é integrável quando∫ −A
f =
∫−A
f .
Teorema 5.1.3. . Uma condição necessária e suficiente para que uma função limitada
f : A→ R seja integrável é que, para todo ε > 0, exista uma partição P de A tal que
S(f, P )− s(f, P ) < ε (5.12)
Demonstração. Suponha que f seja integrável. Dado ε > 0, existem partições Q e R de
A tais que
s(f,Q) >
∫A
f − ε
2e S(f,R) <
∫A
f +ε
2(5.13)
Seja P uma partição que refina ambas as partições Q e R. Pelo corolário 5.1.2
∫A
f − ε
2< s(f, P ) ≤ S(f, P ) <
∫A
f +ε
2(5.14)
donde

5.1 Difinições Básicas 94
S(f, P )− s(f, P ) < ε (5.15)
Para provar a recíproca, observe que, para toda partição P ,
s(f, P ) ≤∫−A
f ≤∫ −A
f ≤ S(f, P ) (5.16)
Logo, se vale a condição,
∣∣∣∣∫ −A
f −∫−A
f
∣∣∣∣ < ε, ∀ε > 0 (5.17)
Portanto,
∫ −A
f =
∫−A
f (5.18)
Exemplo 5.1.1. Sejam A, um bloco m-dimensional, e f : A→ R tal que f(x) = c, c ∈ R.
Então, para toda partição P de A e todo o bloco B ∈ P , mB(f) = c = MB(f). Daí,
s(f, P ) ≤ mB∈PV ol(B) = c∑
B∈P V ol(B) = cV ol(A)
S(f, P ) =∑
B∈P MB(f)V ol(B) = c∑B ∈ PV ol(A) = cV ol(A)
(5.19)
Logo, ∫−A
f = supps(f, P ) = c V ol(A) e∫ −A
f = infS(f, P ) = c V ol(A) (5.20)
Então provamos que f é integrável e∫A
f = cV ol(A)
Exemplo 5.1.2. Seja A = [0, 1]× [0, 1] e seja f : A→ R dada por
f(x, y) =
0 , x ∈ Q1 , x ∈ Qc
(5.21)
Para toda partição P de A e todo B ∈ P ,
mB(f) = 0 , MB(f) = 1
Segue que, para toda partição P .

5.1 Difinições Básicas 95
s(f, P ) =∑
B∈P mB(f)V ol(B) =∑
B∈P 0.V ol(B) = 0
S(f, P ) =∑
B∈P MB(f)V ol(B) =∑
B∈P 1.V ol(B) = V ol(A) = 1(5.22)
Dessa forma,
∫−A
f = supPs(f, P ) = 0∫ −A
f = infPS(f, P ) = 1(5.23)
Portanto, f não é integrável
Teorema 5.1.4. . Se f : A→ R é contínua então f é integrável.
Demonstração. Dado ε > 0, existe pela continuidade uniforme de f em A, δ > 0 tal que
‖ x− y ‖< δ ⇒| f(x)− f(y) |< εV ol(A)
(5.24)
Considere uma partição P tal que
| P |= maxi | Pi |< δ (5.25)
Sabendo que todas as normas em Rm são equivalente podemos supor que ‖ . ‖ é a
norma do máximo.
De 5.24, segue que
MB(f)−mB(f) = sup| f(x)− f(y) |: x, y ∈ B≤ ε
V ol(A)(5.26)
Para todo B ∈ P . Daí,
S(f, P )− s(f, P ) =∑
B∈P (MB(f)−mB(f))V ol(B)
≤∑
B∈Pε
V ol(A)V ol(B) = ε
V ol(A)V ol(A) = ε
(5.27)
Pelo teorema 5.1.3 f é integrável.

5.1 Difinições Básicas 96
Proposição 5.1.1. Sejam f, g : A → R funções integráveis, temos as seguintes proprie-
dades:
i) A função f + g é integrável em A e∫A
(f + g) =
∫A
f +
∫A
g;
ii) Para todo c ∈ R, a função cf é integrável e∫A
cf = c
∫A
f ;
iii) Se f(x) ≤ g(x), para todo x ∈ A,∫A
f ≤∫A
g;
iv) A função | f |: A→ R é integrável e∣∣∣∣∫A
f
∣∣∣∣ ≤ ∫A
| f |.
Demonstração. As demonstrações dessas propriedades para um bloco fechado em Rn são
análogas as realizadas para R, com isso as mesmas podem ser encontradas em [5]
Definição 5.1.7. Um conjunto X ⊂ Rm tem medida (m-dimensional) nula e denotamos
med X = 0, se, para todo ε > 0, existe uma sequência A1, A2, . . ., de blocos fechados tal
que
X ⊂⋃∞i=1Ai e
∑∞i=1 V ol(Ai) < ε (5.28)
Observação 5.1.3. Se Y ⊂ X e med X = 0, então med Y = 0
Na definição acima, pode-se utilizar blocos abertos ao invés de blocos fechados. De
fato, se A1, A2, . . ., é uma cobertura de X, por blocos abertos tal que∑V ol(Ai) <
ε2
Considere, para cada i, um bloco fechado Bi tal que Ai ⊂ Bi e V ol(Bi) < 2V ol(Ai).
A sequência B1, B2, . . . de blocos abertos cobre X e∑i
V ol(Bi) <∑i
2V ol(Ai) = 2∑i
V ol(Ai) < ε (5.29)
Teorema 5.1.5. Se X =⋃∞i=1 Xi e med Xi = 0, então med X = 0.
Corolário 5.1.6. Todo subconjunto enumerável X ⊂ Rm tem medida nula. Em particu-
lar, o conjunto dos números racionais Q ⊂ R tem medida nula.
Definição 5.1.8. Um conjunto X ⊂ Rn tem conteúdo (m-dimensional) nula se, para
cada ε > 0, existe uma coleção finita A1, A2, . . . , An de blocos fechados tal que
X ⊂⋃ni=1 V ol(Ai) e
∑ni=1 V ol(Ai) < ε (5.30)
i) Todo conjunto de conteúdo nulo tem medida nula.

5.1 Difinições Básicas 97
ii) Na definição acima, pode-se utilizar blocos abertos ao invés de blocos fechados.
Proposição 5.1.2. Se A1, . . . , An é uma cobertura de [a, b] por intervalos compactos de
R, entãon∑i=1
V ol(Ai) ≥ b− a (5.31)
Em particular, [a, b] não tem conteúdo (1-dimensional) nulo.
Proposição 5.1.3. Se K ⊂ Rm é compacto e med K = 0, então K tem conteúdo nulo.
Corolário 5.1.7. [a, b] não tem medida (1-dimensional) nula.
Exemplo 5.1.3. Seja X = Q ∩ [0, 1]. Como X é enumerável, X tem medida nula. Por
outro lado, toda cobertura finita A1, . . . , An de X, formada por intervalos compactos de
R, é também uma cobertura de [0, 1], é também uma cobertura de [0, 1]. Logo, pela
proposição 5.1.2,
n∑i=1
V ol(Ai) ≥ 1 (5.32)
Portanto, X não tem conteúdo nulo.
Definição 5.1.9. Seja f : X → R uma função limitada , definida em um conjunto
X ⊂ Rm. A oscilação de f em X é o número
σ(f,X) = supx,y∈X |f(x)− f(y)| (5.33)
É imediato verificar que
σ(f,X) = supf(x) : x ∈ X − inff(x) : x ∈ X (5.34)
Considere agora supf(x) : x ∈ X ∩Bδ(x) para δ > 0.
Definição 5.1.10. A oscilação de f em x é o número
σ(f,X) = limδ→0
σ(f,X ∩Bδ(x)) (5.35)
Proposição 5.1.4. Seja f : X → R uma função limitada, definida em um conjunto
X ⊂ Rm. Então f é contínua em x ∈ X se, e somente se, σ(f, x) = 0
Lema 5.1. Se m < n e a a ∈ Rn−m então Rm × a tem medida nula em Rn.

5.2 Teorema de Fubini 98
Teorema 5.1.8. (Lebesgue). Seja f : A→ R uma função limitada, definida em um bloco
A ⊂ Rn temos que, f é integrável em A se, e somente se, o conjunto Df de seus pontos
de descontinuidade tem medida m-dimensional nula.
5.2 Teorema de Fubini
A1 ⊂ Rm e A2 ⊂ Rn blocos fechados f : A1 × A2 → R função limitada. Para cada
x ∈ A1 considere fx : A1 → R dada por fx(y) = f(x, y) com
ϕ(x) =
∫−A2
fx(y)dy , ψ(x) =
∫ −A2
fx(y)dy (5.36)
Teorema 5.2.1. . Com a notação acima, se f é integrável, então as funções ϕ : A1 → Re ψ : A1 → R são integráveis e
∫A1xA2
f(x, y)dxdy =
∫A1
ϕ(x)dx =
∫A1
ψ(x)dx (5.37)
Figura 5.2:
Demonstração. As partições P de A1 × A2 são do tipo P1, P2 onde P1 é uma partição
de A1 e P2 é uma partição de A2. Cada bloco B ⊂ P é do tipo B1 × B2 onde B1 ∈ P1 e
B2 ∈ P2.
Para cada x ∈ B1, mB(f) ≤ inff(x, y) : y ∈ B2 = mB2(fx). Daí, para cada x ∈ B1
∑B2
mB1xB2(f)V ol(B2) ≤∑B2
mB2(fx)V ol(B2) = s(fx, P2) ≤∫−A2
fx = ϕ(x) (5.38)
Logo,
∑B2
mB1xb2(f)V ol(B2) ≤ infϕ(x) : x ∈ B1 = mB1(ϕ) (5.39)

5.2 Teorema de Fubini 99
Assim,
s(f, P ) =∑
B1∈P1
(∑B2∈P2
mB1xB2(f)V ol(B2))V ol(B1)
≤∑
B1∈P1mB1(ϕ)V ol(B1) = s(ϕ, P1) ≤
∫−A1
ϕ, ∀P(5.40)
Analogamente, prova-se que
∫ −A1
ϕ ≤ S(f, P ),∀P (5.41)
Juntando 5.40 e 5.41 obtemos
s(f, P ) ≤∫−A1
ϕ ≤∫ −A1
ϕ ≤ S(f, P ),∀P. (5.42)
Logo ϕ é integrável e
∫A1
ϕ(x)dx =
∫A1xA2
f(x, y)dxdy (5.43)
A prova de que∫A1
ψ(x)dx =
∫A1xA2
f é feita de forma análoga.
Podemos reescrever 5.37 como:
∫A1×A2
f(x, y)dxdy =
∫A1
dx
(∫−A1
f(x, y)dy
)=
∫A1
dx
(∫ −A2
f(x, y)dy
)(5.44)
Se tivéssemos fixado y ∈ A2 e considerado a função fy : A1 → R com x = f(x, y)
obteríamos a forma análoga a qual obtemos anteriomente pela demonstração do teorema
∫A1xA2
f(x, y)dxdy =
∫A2
dy
(∫−A1
f(x, y)dx
)=
∫A2
dy
(∫ −A1
f(x, y)dx
)(5.45)
Exemplo 5.2.1. Seja f : [0, 1]× [0, 1]→ R dada por:
f(x, y) =
0, x 6= 1
2
1, x = 12e y ∈ Q
0, x = 12e y ∈ Qc
(5.46)

5.2 Teorema de Fubini 100
Temos que Df = (x, y) : x = 12, conjunto nos quais f possui descontinuidade.
Como med(Df ) = 0 em R2 temos pelo teorema do lebesgue, que f é integrável. A função
f 12
: [0, 1]→ R pondo y 7→ f(12, y) é descontínua em todo os pontos de [0, 1]. Como [0, 1]
não tem medida nula em R, f 12não é integrável, pelo teorema de Lebesgue.
f : A1 × A2 → R , fx : A2 → Ry 7→ f(x, y)
ϕ(x) =
∫−A2
fx(y)dy , ψ)x) =
∫ −A2
fx(y)dy 99K ϕ(x) ≤ ψ(x)
(5.47)
f é diferenciável então∫A1×A2
f =
∫A1
ψ(x)dx =
∫A2
ψ(x)dx
Temos ϕ e ψ integráveis, ϕ(x) ≤ ψ(x) e∫ϕ =
∫ψ então ϕ e ψ são iguais a menos
de um conjunto de medida nula. Isso implica que fx é integrável em quase todo ponto do
domínio, exceto no conjuto de medida nula pelo teorema de Lebesgue.
Corolário 5.2.2. Se f : A1 × A2 → R é contínua, então
∫A1×A2
f(x, y)dxdy =
∫A1
dx
∫A2
f(x, y)dy =
∫A2
dy
∫A1
f(x, y)dx (5.48)
Se f : [a1, b1]× . . .× [am, bm]→ R, então
∫A
f =
∫ b1
a1
∫ b2
a2
. . .
∫ bm
am
fdxmdxm−1 . . . dx1 (5.49)
Proposição 5.2.1. Sejam A ⊂ Rm um bloco fechado f : A→ R integrável, e f : C → Ra extensão trivial de f a um bloco C que contém A, ou seja
f(x) =
f(x), x ∈ A
0, x /∈ A(5.50)
Então f é integrável e∫C
f =
∫A
f
Demonstração. Df ⊂ Df ⊂ Df ∪ ∂A medDf =med∂A = 0.
Então medDf = 0 ⇒ f é integrável. Suponha inicialmente f ≥ 0. Seja P =
(P1, . . . , Pm) uma partição de C e seja Q = (Q1, . . . , Qm) a partição de C tal que, para
cada i = 1, . . . ,m Qi = Pi ∪ ai, bi.

5.2 Teorema de Fubini 101
Por outro lado, para cada bloco B ∈ Q temos B ⊂ A ou B intersecta A apenas na
fronteira de ambos. Se R = (R1, . . . , Rm) é a partição dada por Ri = Qi ∩ [ai, bi] tem-se
que os blocos de R são precisamente os blocos de Q contidos em A.
Logo,
s(f, P ) ≤ s(f,Q) =∑
B∈Q(f)V ol(B) =∑
B⊂AmB(f)V ol(B) +∑
B*AmB(f)V ol(B)
=∑
B∈RmB(f)V ol(B) = s(f,R) ≤∫−A
f =
∫A
f
(5.51)
Segue que∫C
f =
∫−C
f ≤∫A
f
Para provar que a desiqualdade oposta: Seja P uma partição de A e seja Q =
(Q1, . . . , Qm) a partição onde Qi = Pi ∪ ci, di (C = [c1, d1]× . . .× [cm, dm])
s(f,Q) =∑B∈Q
mB(f)V ol(B) +∑B*A
mB(fV ol(B) =∑B∈P
mB(f)V ol(B) = s(f, P ) (5.52)
Logo, s(f, P ) = s(f,Q) ≤∫−C
f =
∫C
f e daí∫A
f =
∫−A
f ≤∫C
f
Para f qualquer, considere as partes positiva e negativa de f e f , temos f = f+ + f−
e f = f = f+
+ f− como f+ e f− são as extensões triviais de f+ e f− a C. Pela parte já
provada ∫C
f =
∫C
f+
+
∫C
f−
=
∫A
f+ +
∫A
f− =
∫A
f (5.53)
Definição 5.2.1. Dada uma função f : X ⊂ Rm → R, o suporte de f denotado por
suppf , é o fecho do conjunto x ∈ X : f(x) 6= 0 em X.
Definição 5.2.2. Seja f : Rm → R contínua com suporte compacto e seja A um bloco
fechado de Rm tal que suppf ⊂ A. A integral de f em Rm é definida por∫Rm
f =
∫A
f |A (5.54)
Para provar que∫Rm
f não depende de A.
Seja B um outro bloco fechado contendo suppf . Seja C um bloco fechado contendo
A∪B. Observando que f |C é a extensão trivial a C tanto de f |A quanto que f |B, temos

5.3 Teorema de Mudança de Variáveis 102
Figura 5.3:
pela proposição 5.2.1∫A
f |A=
∫C
f |C=
∫B
f |B, o que mostra intmR f está bem definida.
Figura 5.4:
Definição 5.2.3. Seja f : U ⊂ Rm → R, U aberto em Rm, uma função contínua cujo
suporte é compacto e está contido em U . A integral de f em U é dada por∫U
f =
∫Rm
f =
∫A
f |A (5.55)
onde A é um bloco fechado de Rm tal que suppf ⊂ A e f : Rm → R é a extensão
trivial de f a Rm. Note que f é contínua e suppf = suppf
5.3 Teorema de Mudança de Variáveis
Teorema 5.3.1. Se h : U → V é um difeomorfismo entre os abertos U e V de Rm ( de
Hm) e f : V → R é uma função contínua tal que suppf é compacto e suppf ⊂ V , então
∫V
f(x)dx =
∫U
(f h)(y) | det(Jh(y)) | dy (5.56)
Seja ψ : V →M uma outra parametrização positiva de M tal que suppω ⊂ ϕ(V )
Seja ω = bdv1 ∧ . . . ∧ dvm a representação de ω na pametrização ψ. Para provar que∫M
ω está bem definida, precisamos mostrar que∫U
(a ϕ) =
∫V
h ψ
Recordemos que, para todo x ∈ ϕ−1(ω) segue que (a ϕ) = (b ψ)(h(x))det(Jh(x)
Como ϕ e ψ são parametrizações positivas detJh(x) > 0, ∀x ∈ ϕ−1(ω), temos

5.3 Teorema de Mudança de Variáveis 103
∫U
a ϕ =
∫ϕ−1(ω)
(a ϕ)
∫ϕ−1(ω)
(b ψ)(h(x))detJh(x)dx =
∫ϕ−1(ω)
b ψ(h(x)) | detJh(x) | dx
(5.57)
Pelo teorema de mudança de variáveis
∫U
a ϕ =
∫ψ−1(ω)
b ψ =
∫V
b ψ (5.58)
Logo,∫M
ω está bem definida nesse caso.
5.3.1 Partição da Unidade
Teorema 5.3.2. . Seja K um conjunto compacto de uma superfície Mm ⊂ Rn e seja
Vα uma cobertura aberta de K. Então existem funções ξ1, . . . , ξs : M → R tais que:
i) 0 ≤ ξi ≤ , ∀x ∈M , ∀i = 1, . . . , s;
ii) suppξi é compacto e está contido em algum aberto Vi ∈ Vϕ;
iii)∑s
i=1 ξi(x) = 1 , ∀x ∈ K
Por causa de iii), a família ξ1, . . . , ξs é chamada Partição Diferenciável da Unidade e
ii) que a partição da unidade está subordinada à cobertura Vα.
Definição 5.3.1. Se ω é uma n-forma contínua que tem suporte compacto contido na
imagem de uma parametrização positiva ϕ : U →M , então
∫M
ω =
∫ϕ(U)
ω =
∫U
ϕ∗ω (5.59)
Com,

5.3 Teorema de Mudança de Variáveis 104
ω = adu1 ∧ . . . ∧ dum
ϕ∗(ω) = (a ϕ)ϕ∗(du1 ∧ . . . ∧ dum)
= (a ϕ)ϕ∗(du1) ∧ . . . ∧ ϕ∗(dum) = (a ϕ)dx1 ∧ . . . ∧ dxm
⇒∫U
ϕ∗ω =
∫U
a ϕ =
∫M
ω
(5.60)
Observação 5.3.1. Se suppω ⊂ ψ(V ) onde ψ : V →M é uma parametrização negativa,
e ω = bdv1 ∧ . . . ∧ dvm é uma representação de ω na parametrização ψ, então∫M
ω = −∫V
(b ψ) (5.61)
Se ω1, . . . , ωr são m-formas contínuas em M cujos suportes são compactos e estão
contidos na imagem de uma parametrização positiva ϕ : U → M então a m-forma ω =
ω1 + . . .+ ωr é contínua, tem suporte compacto contido em ϕ(U) e
∫M
ω =
∫M
ω1 + . . .+
∫M
ωr
ω = a1du1 ∧ . . . ∧ dum, . . . , ωr = ardu
1 ∧ . . . ∧ dum ⇒ ω = (a1 + . . .+ ar)du1 ∧ . . . ∧ dum
∫M
ω =
∫U
(a1 + . . .+ ar) ϕ
=
∫U
(a1 ϕ+ . . .+ ar ϕ)
=
∫U
a1 ϕ+ . . .+
∫U
ar ϕ
=
∫M
ω1 + . . .+
∫M
ωr
=∑r
i=1
∫M
ωi
(5.62)
Agora, voltando ao caso geral, o segundo caso.
ω m-forma contínua com suporte compacto. Seja Vα uma cobertura aberta de
suppω, aonde cada Vα é imagem de uma parametrização positiva ϕα : Uα → M , e seja
ξ1, . . . , ξs : M → R uma partição da unidade subordinada à cobertura Vα. Para cada
i = 1, . . . , s a forma ξiω tem suporte compacto contido em algum aberto Vi ∈ Vα. Por

5.4 Orientação Induzida no Bordo 105
definição∫M
ω :=s∑i=1
∫M
ξiω. Precisamos mostrar que∫M
ω não depende das escolhas
feitas. Seja ωβ uma outra cobertura de suppω, onde cada ωβ é a imagem de uma
parametrização positiva ψβ : Zβ →M e seja η1, . . . , ηr : M → R uma partição da unidade
subordinada à cobertura ωβ. Para cada j = 1, . . . , r a forma njω é contínua e tem
suporte compacto contido em algum ωj ∈ ωβ.
Precisamos mostrar que∑s
i=1
∫M
ξiω =r∑j=1
njω para todo i = 1, . . . , s e todo j =
1, . . . , r. Seja supp ξiηjω é compacto e supp ξiηjω ⊂ Vi ∩ ωj.
Por outro lado,∑s
i=1 ξiω = ω e∑r
j=1 ηjω = ω, pois se x ∈ suppω segue
(∑i
ξiω
)(x) =
(∑i
ξi(x)
)ω(x) = ω(x) (5.63)
Caso contrário, se x /∈ suppω, compre trivialmente a igualdade.
Logo,
∑j ξinjω = ξj
∑j ηjω = ξiω∑
i ξiηjω = nj∑
i ξiω = ηjω(5.64)
Segue da observação 5.3.1 que
∑si=
∫M
ξiω =s∑i=
(r∑j=
∫M
ξinjω
)=∑r
j=
(∑si=1
∫M
ξinjω
)∑r
j=1
∫M
ηjω.
(5.65)
Provando que∫M
ω está bem definido.
5.4 Orientação Induzida no Bordo
Definição 5.4.1. Sejam Mm ⊂ Rn uma superfície com ∂M 6= 0, p ∈ ∂M . Dizemos que
um vetor v ∈ TpM aponta para fora deM se, para alguma parametrização ϕ : U ⊂ Hm →M com p = $(u) ∈ ϕ(U), a última coordenada do vetor ω = (dϕ(u))−1(v) é negativa.
Observação 5.4.1. Segue abaixo algumas observações:

5.4 Orientação Induzida no Bordo 106
i) Agora, a definição acima independe da escolha das parametrização
ii) Se ψ : V ⊂ Hm → M é uma outra parametrização de M com p = ψ(z) ∈ ψ(V ) e
ω′ = (dψ(z))−1(v), então ω′m < 0
De fato, ω =∑
i ωiei, então ω′ = dh(u)(ω) =
∑mi=1 ωi
∂h∂xi
(u). Logo, a projeção π :
Rm → R com π(x) = xm é tal que π(∂h∂xi
)= 0, i = 1, . . . ,m−1, pois hm(x1, . . . , xm−1, 0) =
0 para i = 1, . . . ,m− 1. Daí,
π
(∂h
∂xi
)=∂hm∂xi
(x1, . . . , xm−1, 0) =d
dt|t=0 hm(x1, . . . , xi + t, . . . , xm−1, 0) = 0 (5.66)
Logo, ω′m = ωm∂h∂xm
(u) já provamos que ∂h∂xm
(u) > 0. Donde ω′m < 0.
Definição 5.4.2. O vetor ~n ∈ TpM determinado pelas condições ~n ⊥ Tp(∂M), | ~n |= 1
e ~n aponto para fora de M é chamado vetor unitário conormal exterior a M em p, ou
simplesmente, conormal exterior a M em p. Consideremos
~n : ∂M → Rn
p 7→ ~n(p)(5.67)
M é uma superfície orientada ϕ > 0 (parametrização positiva) p = ϕ(U). Segue daí
que ∂ϕ∂x1
(u), . . . , ∂ϕ∂xm
é uma base de TpM . Além disso, tomemos uma outra parametrização
ψ > 0, p = ψ ∂ϕ∂xj
(u) =∑m
j=1 aji∂ψ∂xj
(z), com (aji) = Jh(u) onde h = ψ−1 ϕ.Como ϕ > 0 e ψ > 0, já que pertencem a mesma estrutura diferenciável, detJh > 0.
Então ∂ϕ∂xi
(u) e ∂ψ∂xi
(z) determinam a mesma orientação e, TpM
Definição 5.4.3. Sejam M uma superfície orientada com ∂M 6= 0 e p ∈ ∂M . Dizemos
que uma base v1, . . . , vn−1 de Tp(∂M) é positiva se ~n(p), v1, . . . , vn−1 for uma base
positiva de TpM .
Teorema 5.4.1. . Existe uma orientação a em ∂M que induz em cada p ∈ ∂M a mesma
orientação da denifição acima.
Lema 5.2. Seja M ⊂ Rn uma superfície. Então M é orientável se, e somente se, existe
uma m-forma contínua ω qual que ω(p) 6= 0, p ∈M .
Demonstração. Suponha que uma tal ω existe. Dado p ∈M , considere ϕp : Up →M um
sistema de coordenadas, com Up conexo e p = ϕp(up) tal que ω(∂ϕp
∂x1(up), . . . ,
∂ϕp
∂xm(up)
)> 0
Como ω(∂ϕp
∂x1(x), . . . , ∂ϕp
∂xm(x))6= 0, ∀x ∈ Up.

5.4 Orientação Induzida no Bordo 107
Temos pela conexidade de Up e pela continuidade de ω que ω(∂ϕp
∂x1(x), . . . , ∂ϕp
∂xm(x))>
0, ∀x ∈ Up
Afirmação: O atlas = ϕp : p ∈M é coerente.
Sejam ϕ : U → M e ψ : V → M parametrização de tais que ω = ϕ(U) ∩ ψ(V ) 6= ∅.
Denotamos n = ψ−1 ϕ∣∣ϕ−1(W ) temos, para cada x ∈ ϕ−1(W )
ω
(∂ϕ
∂x1
(x), . . . ,∂ϕ
∂xm(x)
)= detJh(x)ω
(∂ψ
∂y1
(h(x)), . . . ,∂psi
∂ym(h(x))
)(5.68)
Reciprocamente, suponha M orientável e sejam a uma orientação para M e θ a forma
elementos de volume de M , associado a essa orientação. Dado p ∈ M e seja ϕ : U → M
uma parametrização positiva tal que p = ϕ(U). Seja e1, . . . , em uma base ortonomal
positiva de TpM . Por definição θ(p)(e1, . . . , em) = 1 como dim Λm(TpM) = 1, existe
λ ∈ R tal que θ(p) = λdu1 ∧ . . . ∧ dum, onde dui(p) é a base dual da base ∂∂ui
(p) deTpM . Seja (aij) a matriz determinada por ∂ϕ
∂xp=∑m
i=1 ai,jei, temos
λ = λdu1 ∧ . . . ∧ dum(∂ϕ∂x1
(u), . . . , ∂ϕ∂xm
(u))
θ(p)(∂ϕ∂x1
(u), . . . , ∂ϕ∂xm
(u))
= det(aijθ(p)(e1, . . . , em) = det(aij)(5.69)
como
gij =
⟨∂ϕ
∂xi,∂ϕ
∂xj
⟩=
⟨∑k
akiek,∑l
aliel
⟩.∑k,l
akialjδkl =∑k
akiakj =∑k
atik = (ata)ij
(5.70)
Logo, det(gij) = det(ata) = (...)2 e, como, ∂ϕ∂xi
(u) e ei são bases positivas de TpM
segue que det(aij) > 0. Daí, por 5.70, λ = det(aij) =√det(gij) > 0.
A representação de θ na parametrização ϕ é θ =√det(gij)du
1 ∧ . . . ∧ dum. Com isso
θ é contínua.
Definição 5.4.4. A orientação do teorema anterior é chamada orientação induzida de
M em ∂M .
Lema 5.3. Seja M ⊂ Rn uma superfície orientada e sejam ω1 + . . . + ωk, então ω é
contínua com suporte compacto e∫M
ω =
∫M
ω1 + . . .+
∫M
ωk
Demonstração. Seja K = suppω1 ∪ . . . ∪ suppωk. Considere Vα uma cobertura aberta

5.4 Orientação Induzida no Bordo 108
de K, onde, para cada α, Vα é a imagem de uma parametrização positiva ϕα : Uα → M .
Seja ξ1, . . . , xs uma partição da unidade subordinada à cobertura Vα. Camo suppω ⊂ K
temos por definição
∫M
ω =s∑i=1
∫M
ξiω (5.71)
com, ω =∑k
j=1 ωj.
ξiω =k∑j=1
ξiωj , i = 1, . . . , s (5.72)
Como suppωj ⊂ K, temos, por definição,
∫M
=s∑i=1
∫M
ξiωj , j = 1, . . . , k (5.73)
Por outro lado,
supp(ξiωj) ⊂ suppξi ⊂ Vi ∈ Vα ∀j = 1, . . . , k
De 5.72, obtemos então ∫M
ξiω =k∑j=1
∫M
ξiωj (5.74)
De 5.71, 5.73 e 5.74 concluimos que
∫M
ω =s∑i=1
∫M
ξiω =s∑i=1
(k∑j=1
∫M
ξiωj
)=∑k
j=1
(∑si=1
∫M
ξ1ωj
)=∑k
j=1
∫M
ωj
(5.75)

Capítulo 6
O Teorema de Stokes
Finalmente chegamos ao teorema principal desse trabalho. Nesta seção enuciaremos
o teorema de Stokes e daremos duas aplicações.
6.1 O Teorema de Stokes
Teorema 6.1.1. . Seja M ⊂ Rn uma superfície orientada de classe Ck(k ≥ 1) e seja ω
uma (m-1)-forma diferenciável em M , com suporte compacto. Então,∫M
dω =
∫∂M
i∗ω (6.1)
onde ∂M tem a orientação induzida de M e i : ∂M →M é a inclusão de ∂M em M .
Observação 6.1.1. Quando ∂M = ∅, a demonstração que faremos implicará que∫M
dω =
0. Assim, para que 6.1 aconteça para qualquer caso, convencionamos que∫∂M
i∗ω = 0.
Demonstração. Suponha inicialmente que suppω esteja contido na imagem de uma para-
metrização positiva ϕ : U ⊂ Hm →M . Se
ω =∑n
i=1 aidu1 ∧ . . . ∧ dui ∧ . . . ∧ dum (6.2)
onde ai : ϕ(U)→ R
é a representação de ω na parametrização ϕ, temos, por definição
dω =m∑i=1
dai ∧ du1 ∧ . . . ∧ dui ∧ . . . ∧ dum (6.3)

6.1 O Teorema de Stokes 110
Lembrando que
dai =∑k
(∂ai ϕ∂xk
ϕ−1
)duk (6.4)
Obtemos
dai(ϕ(u)) =∑
k∂ai∂xk
(u)duk (6.5)
onde ai = ai ϕ : U → R
Resumidamente
dai =m∑k=1
∂ai∂xk
duk (6.6)
De 6.3 e 6.6, temos
dω =∑m
1
(∑mk=1
∂ai∂xk
duk)∧ du1 . . . ∧ dui ∧ . . . ∧ dum
=∑m
i=1∂ai∂xidui ∧ du1 ∧ . . . ∧ dui ∧ . . . ∧ dum
=(∑
i=1(−1)i−1 ∂ai∂xi
)du1 ∧ . . . ∧ dum
(6.7)
A fórmula 6.7 é a representação de dω na parametrização ϕ. Como supp(dω) ⊂suppω ⊂ ϕ(U), temos por definição,∫
M
dω =
∫U
m∑i=1
(−1)i−1 ∂ai∂xi
(6.8)
Seja A = [c1, d1]× . . .× [cm, dm], com cm = 0, um bloco fechado tal que
ϕ−1(suppω) ⊂ (c1, d1)× . . .× (cm−1, dm−1)× [0, dm) (6.9)
Figura 6.1:
Figura 6.2:

6.1 O Teorema de Stokes 111
Figura 6.3:
Segue de 6.8 que∫M
=
∫A
(m∑i=1
(−1)i−1 ∂ai∂xi
)=
m∑i=1
(−1)i−1
∫A
∂ai∂xi
(6.10)
Figura 6.4:
Para i = 1, . . . ,m− 1, temos , pelo teorema de Fubini∫A
∂ai∂xi
=
∫ dm
0
∫ dm−1
cm−1
. . .
∫ d1
c1
dx1 . . . dxi . . . dxm
(∫ di
ci
∂ai∂xi
dxi)
=
∫ dm
0
∫ dm−1
cm−1
. . .
∫ d1
c1
dx1 . . . dxi . . . dxm (ai(x1, . . . , di, . . . , xm)− a1 (x1, . . . , xi, . . . , xm)). = 0
(6.11)
pois ϕ−1(suppω) ⊂ x = (x1, . . . , xm) ∈ Rn : ci < xi < di
Figura 6.5:
Usando novamente o teorema de Fubini, temos∫A
∂am∂xm
=
∫ dm−1
cm−1
. . .
∫ d1
c1
dx1 . . . ldotsdxm−1
(∫ dm
0
∂am∂xm
dxm)
=
∫ dm−1
cm−1
. . .
∫ d1
c1
dx1 . . . dxm−1 (am(x1, . . . , xm−1, dm)− am(x1, . . . , xm−1, 0))
= −∫ dm−1
cm−1
. . .
∫ d1
c1
am(x1, . . . , xm−1, 0)dx1 . . . dxm−1
(6.12)

6.1 O Teorema de Stokes 112
Figura 6.6:
De 6.10, 6.11 e 6.12, concluimos que∫M
dω = (−1)m∫ dm−1
cm−1
. . .
∫ d1
c1
am(x1, . . . , xm−1, 0)dx1 . . . dxm−1 (6.13)
Agora, 3 casos:
(a)
∂M = ∅, ϕ−1(suppω) ⊂ (c1, d1)× . . .× (0, dm) (6.14)
am(x1, . . . , xm−1, 0) = 0 (x1, . . . , xm−1) ∈ [c1, d1]× . . .× [cm−1, dm−1]
Logo, ∫M
dω = 0 =
∫∂M
i∗ω (6.15)
(b) Se ∂M 6= ∅ e ω |∂M = 0, obtemos (x) e i∗ω = 0. Logo∫M
dω = 0 =
∫∂M
i∗ω
(c) Suponha agora ∂M 6= ∅ e ω |∂M 6= 0
Obtemos a representação de i∗ω na parametrização ϕ : U ⊂ Hm−1 → ∂M como
ω =∑m
i=1 aidu1 ∧ . . . ∧ dui ∧ . . . ∧ dum
i∗ω =∑m
i=1(ai i)i∗(du1) ∧ . . . ∧ i∗ ˜(dui) ∧ . . . ∧ i∗(dum)
= (am i)i∗(du1) ∧ . . . ∧ i∗(dum−1)
(6.16)
Já que i∗(dum) = 0 temos i∗(dum)(∂ϕ∂xi
)= dum
(∂ϕ∂xj
)= 0, j = 1, . . . ,m− 1
como(∂ϕ∂xj, j = 1, . . . ,m− 1
)gera Tp(∂M) ∀p ∈ ∂M , i∗(dum)(v) = 0 ∀v ∈ Tp(∂M)
Logo, para todo i, j = 1, . . . ,m− 1
i∗(dui)
(∂ϕ
∂xj
)= dui
(∂ϕ
∂xj
)= δij (6.17)
Logo, (i∗(dui)) é base dual de(∂ϕ∂xi
(u))e portanto 6.16 é a representação local de i∗ω na
parametrização ϕ

6.1 O Teorema de Stokes 113
Como ϕ é positiva se, e somente se, m é par
∫∂M
i∗ω = (−1)m∫U
am i ϕ(x1, . . . , xm−1)dx1 . . . dxm−1
= (−1)m∫U
am(x1, . . . , xm−1, 0)dx1 . . . dxm−1
(6.18)
Como supp (am (x1, . . . , xm−1, 0)) ⊂ [c1, d1]× . . .× [cm−1, dm−1]. Obtemos∫∂M
i∗ω = (−1)m∫ dm−1
cm−1
. . .
∫ d1
c1
am(x1, . . . , xm−1, 0)dx1 . . . dxm (6.19)
De 6.13 e 6.18 obtemos 6.1
No caso em que suppω não está contido na imagem de nenhuma parametrização
positiva, considere uma cobertura suppω ⊂⋃Vα, onde Vα = ϕα(Uα), ϕα : Uα → M
parametrização positiva.
Seja ξ1, . . . , ξs uma partição da unidade subordinada à cobertura Vα. suppξi ⊂ Vi ∈Vα, ω = ξiω
Temos suppω ⊂ suppξi ⊂ Vi e ω =∑s
i=1 ξiω =∑s
i=1 ωi
Como d é linear dω =∑s
i=1 dωi, suppdωi ⊂ suppωi ⊂ suppω e supp(dωi) é compacto
para todo i. Segue que ∫M
dω =s∑j=1
∫M
dωj (6.20)
Além disso, como supp(dωj) ⊂ suppωj ⊂ suppξj ⊂ Vj, temos, pelo caso já demons-
trado ∫M
dωj =
∫∂M
i∗ωj (6.21)
Mas i∗ω =∑s
j=1 i∗ωj e , para cada j, supp(i∗ωj) ⊂ suppωj.∫
∂M
i∗ω =s∑j=1
∫∂M
i∗ωj (6.22)
De 6.20, 6.21 e 6.22, obtemos∫M
dω =s∑j=1
∫∂M
i∗ωj =
∫∂M
i∗ω (6.23)

6.2 Aplicações 114
6.2 Aplicações
Veremos, agora, os teoremas que são consequências do teorema de Stokes.
Teorema 6.2.1. (Teorema da Divergência ou Teorema de Gauss). Seja X um campo de
classe C1 em um aberto U ⊂ Rm e seja M ⊂ U uma superfície com bordo, compacta, de
classe C1 e dimensão m. Então∫M
X =
∫M
(div X)dM =
∫∂M
〈X,~n〉d(∂M) (6.24)
Onde ∂M tem a orientação induzida de M e ~n é o campo vetorial unitário que aponto
para fora de M .
Demonstração. Sejam U aberto de Rm, X = (x1, . . . , xm) campo de classe C1 em U e
M :superfície com bordo, compacta de classe C1 e dimensão m contida em U .
Considere M com a orientação de Rn e ∂M com a orientação induzida. Agora, con-
sideremos ω =∑m
i=1(−1)i−1xidx1 ∧ . . . ∧ dxi ∧ . . . ∧ dxm.
ω é uma (m-1)-forma de classe C1 em U .
dω =∑m
i=(−1)i−1dx1 ∧ dx1 ∧ . . . ∧ dxi ∧ . . . ∧ dxm
=∑m
i=1(−1)i−1(∑m
k=1∂xi∂xk
dxk)∧ dx1 ∧ . . . ∧ dxi ∧ . . . ∧ dxm
=∑m
i=1(−1)i−1 ∂xi∂xidxi ∧ dx1 ∧ . . . dxi ∧ . . . ∧ dxm
=(∑m
i=1∂xi∂xi
)dx1 ∧ . . . ∧ dxm = (divX) dx1 ∧ . . . ∧ dxm
(6.25)
Se M é superfície orientada, denotamos dM : Elemento de volume de M
dx1 ∧ . . . ∧ dxm é o elemento de volume de Rn.
dM = dx1 ∧ . . . ∧ dxm
i∗ω = λd(∂M)
Afirmação:
i∗ω = 〈X,~n〉d(∂M) (6.26)
Onde ~n é o campo normal unitário que aponto para fora de M . Vamos mostrar que 6.26
para o caso particular de m = 3, a demonstração no caso geral é análoga.

6.2 Aplicações 115
Dado p ∈ ∂M , v, ω base ortonormal positiva de Tp(∂M) com v = (v1, v2, v3) ω(ω1, ω2, ω2)
λ = λd(∂M)(v, ω) = (i∗ω)(p)(v, ω) = ω(p)(v, ω)
= (x1(p)dx2 ∧ dx3 − x2dx1 ∧ dx3 + x3(p)dx1 ∧ dx2)(v, ω)
= x1(p)(v2ω3 − v3ω2) + x2(p)(v2ω1 − v1ω3) + x3(p)(v1ω2 − v2ω1)
= det (Xp, v, ω)
(6.27)
Se tivessemos v, ω, v × ω base positiva então v × ω, v, ω é positiva e como ~n é
único temos v × ω = ~n, v, ω Logo,
Xp = 〈Xp, ~n(p)〉~n(p) + 〈Xp, v〉v + 〈Xp, ω〉ω⇒ λ = 〈Xp, ~n(p)〉 det(~n(p), v, ω) = 〈Xp, ~n(p)〉
(6.28)
Logo i∗ω = 〈x, ~n〉 det(∂M) Pelo teorema de Stokes.∫M
div XdM =
∫M
dω =
∫∂M
i∗ω =
∫∂M
〈X,~n〉d(∂M) (6.29)
Observação 6.2.1. ∫M
(div X) dx =
∫M
(div X) dM (6.30)
X ⊂ Rn subsconjunto limitado, f : X → R função. Tome um bloco fechado A ⊃ X e
considere f : A→ R,
f(x) =
f(x), x ∈ X
0, x 6∈ X
Definição 6.2.1. f é integrável em X se f é integrável em A. Em caso afirmativo, a
integral de f em X é dada por ∫X
f =
∫A
f (6.31)
1. Nem a integrabilidade de f nem o valor da integral depende do bloco A considerado
2. Se f : X → R é contínua, Df ⊂ ∂X
3. Se M ⊂ Rm é uma superfície com bordo, compacta e f : M → R é contínua, então
f é integrável em M pois med(∂M) = 0
Teorema 6.2.2. (Teorema de Stokes para o R3). Seja S uma superfície orientada de
classe C1, lisa por partes, ∂S uma curva simples e fechada com orientação induzida de

6.2 Aplicações 116
S. Seja X um campo vetorial de classe C1 em U ⊂ R3. Então∫ ∫S
〈rot X,~n〉dS =
∫∂S
〈X,~n〉d(∂S) (6.32)
onde ~n é o vetor normal unitário a dS
Demonstração. Consideremos X = (a, b, c) campo de classe C1 em U e S = M , uma
superfície com bordo, compacta, orientável, de classe C1 de dimensão 2, contida em U .
Escolhendo a orientação positiva para M , segue que ∂M possui a mesma orientação.
Assim, podemos definir uma 1-forma ω ∈ Ω1(U), onde
ω = adx+ bdy + cdz ⇒ dω = da ∧ dx+ db ∧ dy + dc ∧ dz (6.33)
Como cada componente do campo X são funções definidas em Rm com valores reais,
temos que
dω =(∂a∂xdx+ ∂a
∂ydy + ∂a
∂zdx)∧ dx+
(∂b∂xdx+ ∂b
∂ydy + ∂b
∂zdz)∧ dy +
(∂c∂xdx+ ∂c
∂ydy + ∂c
∂zdz)∧ dz
=(∂b∂x− ∂a
∂y
)dx ∧ dy +
(∂a∂z− ∂c
∂x
)dz ∧ dx+
(∂c∂y− ∂b
∂z
)dy ∧ dz
(6.34)
Para aplicarmos o teorema de Stokes que demonstramos anteriormente, sejam i :
∂M → M , j : M → U e h : ∂M → U as inclusões de ∂M em M , de M em U e de ∂M
em U , respectivamente. Temos que admitir essas inclusões , pois ω está definda em U ,
mas precisamos definir uma 1-forma em ∂M . Para isso, tomemos, inicialmente, a 1-forma
j∗ω.
d(j∗ω) = j∗(dω) (6.35)
Sejam p ∈M e v, w base ortonormal positiva de TpM
j∗(dω)(p)(v, ω) = dω(p)(v, w) =(∂b∂x− ∂a
∂y
)(v1w2 − v2w1 +
(∂a∂z− ∂c
∂x
)(v3w1 − v1w3)+(
∂c∂y− ∂b
∂z
)(v2w3 − v3w2)
= 〈rot X(p), v × w〉 = 〈rot X(p),V(p)〉〈V(p), v × w〉 = 〈rot X,V〉(p)(6.36)
Onde rot X =(∂c∂y− ∂b
∂z, ∂a∂z− ∂c
∂x, ∂b∂x− ∂a
∂y
)é o rotacional do campo X e V é o campo
normal unitário a M definido pela orientação de M .
Logo,d(j∗ω) = j∗(dω) = 〈rot X,V〉dM
i∗(j∗ω) = (j i)∗ω = h∗ω(6.37)

6.2 Aplicações 117
Sejam p ∈M , w ∈ Tp(∂M) vetor unitário positivo. h∗ω = λd(∂M)
λ = λd(∂M)(ω) = (h∗ω)(p)(w) = ω(p)(w) = a(p)w1 + b(p)w2 + c(p)w3 = 〈X(p), w〉(6.38)
Logo, h∗ω = 〈X(p), ω〉d(∂M) onde ω ∈ Tp(∂M)
Pelo teorema de Stokes.
∫M
〈rot X,V〉dM =
∫M
d(j∗ω) =
∫∂M
i∗(j∗ω) =
∫∂M
〈X,w〉d(∂M) (6.39)

Referências
[1] CIPOLATTI, R. Cálculo Avançado. 1. ed. Rio de Janeiro: SBM, 2018.
[2] DO CARMO, M. P. Differential Forms and Applications. 1. ed. Berlin: Springer-Verlag, 1994.
[3] LEE, J. M. Introduction Smooth Manifolds. 2. ed. New York: Springer-Verlag, 2012.
[4] LIMA, E. L. Análise no Espaço Rn. 1. ed. Rio de Janeiro: IMPA, 2004.
[5] LIMA, E. L. Curso de Análise Vol 1. 14. ed. Rio de Janeiro: IMPA, 2017.
[6] LIMA, E. L. Variedades Diferenciáveis. 1. ed. Rio de Janeiro: IMPA, 2008.
[7] SPIVAK, M. Cálculo en Variedades. 1. ed. Barcelona: Editorial Reverté SA, 1988.

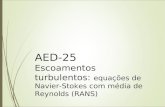

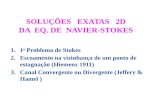














![[Título] Lara Geraldes e Miguel Stokes - social.turnaround.ptsocial.turnaround.pt/uploads/966bf1551100485f4d625b37d1896715.pdf · A importância das cartas sociais 4. Integração](https://static.fdocumentos.com/doc/165x107/5b1cd7c47f8b9aad5d8b8546/titulo-lara-geraldes-e-miguel-stokes-a-importancia-das-cartas-sociais.jpg)