




Línguas
Páginas
Legal


Descrição de Sistemas LTI por Variáveis de Estados 1
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Descrição de Sistemas LTI por Variáveis de Estado
Os estados de um sistema podem ser definidos como o
conjunto mínimo de sinais que descrevem o comportamento
dinâmico do sistema. Sendo assim, dado o valor dos estados
em um instante n0 (ou t0 ) e a entrada para n ≥ n0 (ou t ≥ t0 ),
pode-se determinar os valores de todos os estados para n ≥ n0
(ou t ≥ t0 ).

Descrição de Sistemas LTI por Variáveis de Estados 2
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Descrição de Sistemas LTI por Variáveis de Estado
A descrição por variáveis de estado para um sistema
LTI consiste em uma série de equações diferenciais ou de
diferenças de primeira ordem que descrevem como os
estados do sistema e a entrada se relacionam, e uma equação
que descreve a saída do sistema como função das variáveis
de estado e de entrada do sistema no instante atual.

Descrição de Sistemas LTI por Variáveis de Estados 3
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Descrição de Sistemas LTI por Variáveis de Estado

Descrição de Sistemas LTI por Variáveis de Estados 4
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Descrição de Sistemas LTI por Variáveis de Estado

Descrição de Sistemas LTI por Variáveis de Estados 5
Para o sistema de tempo discreto representado pelo diagrama de
blocos abaixo, obter a representação por variáveis de estado.

Descrição de Sistemas LTI por Variáveis de Estado
Descrição de Sistemas LTI por Variáveis de Estados 6
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Admitindo como estados do sistema os sinais de saída de cada
elemento de deslocamento no tempo, q1[n] e q2[n].

Descrição de Sistemas LTI por Variáveis de Estado
Descrição de Sistemas LTI por Variáveis de Estados 7
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Representação do sistema na forma matricial de equações de estado.

Descrição de Sistemas LTI por Variáveis de Estado
Descrição de Sistemas LTI por Variáveis de Estados 8
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica

Descrição de Sistemas LTI por Variáveis de Estados 9
Exemplo 2.21: Para o sistema de tempo discreto representado
pelo diagrama de blocos abaixo, obter a representação por
variáveis de estado.

Descrição de Sistemas LTI por Variáveis de Estados 10
Exercício 2.15: Encontre a descrição por variáveis de estado
correspondente ao diagrama de blocos apresentado a seguir.

Descrição de Sistemas LTI por Variáveis de Estados 11
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Para sistemas de tempo contínuo, a forma de representação por
variáveis de estado é análoga àquela de tempo discreto, e é
representada na forma

Descrição de Sistemas LTI por Variáveis de Estados 12
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Para o circuito elétrico apresentado a seguir obter a representação
por variáveis de estado. Após obter esta representação, obter
o diagrama de blocos equivalente.

Descrição de Sistemas LTI por Variáveis de Estados 13
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Para o circuito elétrico apresentado a seguir obter a representação
por variáveis de estado. Após obter esta representação, obter
o diagrama de blocos equivalente.

Descrição de Sistemas LTI por Variáveis de Estados 14
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Transformação de Estados
Suponha que um mesmo sistema possa ser descrito por um outro
conjunto de variáveis de estado tal que

Descrição de Sistemas LTI por Variáveis de Estados 15
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Exemplo 2.24: Um sistema LTI de tempo discreto é representado pelas
seguintes matrizes:

Descrição de Sistemas LTI por Variáveis de Estados 16
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Admitindo que este sistema vai ser representado por novos estados
determinar as matrizes .
Descrição de Sistemas LTI por Variáveis de Estados 17
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
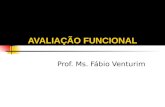
Exercício 2.21: Um sistema LTI de tempo contínuo é descrito pelas
seguintes matrizes:

Descrição de Sistemas LTI por Variáveis de Estados 18
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Admitindo que este sistema vai ser representado por novos estados
determinar as matrizes .

Descrição de Sistemas LTI por Variáveis de Estados 19
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Para os dois circuitos elétricos anteriores, determinar as matrizes
de transformação de similaridade – T, de forma que as novas
variáveis de estado sejam as cargas nos capacitores e os fluxos nos
indutores. Obter as novas realizações na forma de espaço de
estados.

Descrição de Sistemas LTI por Variáveis de Estados 20
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Exercícios:
Descrição de Sistemas LTI por Variáveis de Estados 21
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Hipóteses:
Relação Linear
Vazões Q1(t) e Q2(t)
Alturas das colunas de líquido H1(t) e H2(t)
R1 e R2 resistências ao fluxo
A1 e A2 áreas uniformes

Descrição de Sistemas LTI por Variáveis de Estados 22
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Equações fundamentais do processo:
1
211
R
(t)H(t)H(t)Q
2
22
R
(t)H(t)Q
Descrição de Sistemas LTI por Variáveis de Estados 23
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
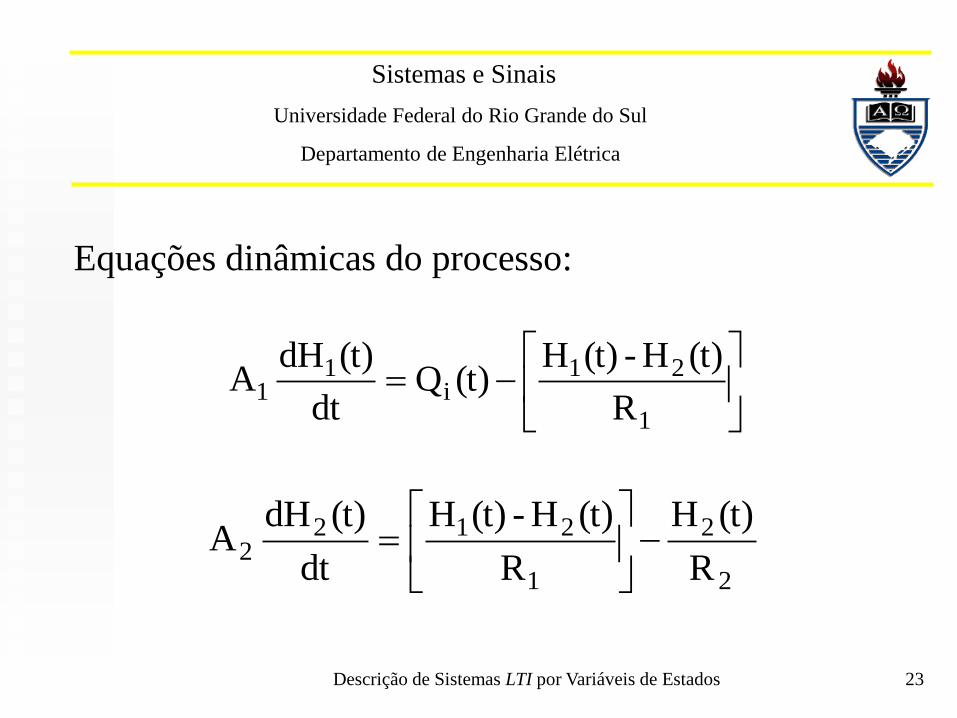
Equações dinâmicas do processo:
1
21i
11
R
(t)H-(t)H(t)Q
dt
(t)dHA
2
2
1
2122
R
(t)H
R
(t)H-(t)H
dt
(t)dHA

Descrição de Sistemas LTI por Variáveis de Estados 24
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Mostre que a equação diferencial homogênea de
ordem n: 1
1 1
1
0n n
n n
n n
d y d y dya a a y
dt dt dt
x
a.aaa
....
.....
.
.
x
nnn
121
1
0100
0010
Pode ser representada na forma de espaço de estados
por:

Descrição de Sistemas LTI por Variáveis de Estados 25
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
Determine a representação na forma de espaço de
estados do seguinte sistema multivariável:
2212141322212
2111242312111
udubyayaycycy
udubycycyayay

Descrição de Sistemas LTI por Variáveis de Estados 26
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
A partir dos diagramas de fluxo, obter as
representações por variáveis de estados.

Descrição de Sistemas LTI por Variáveis de Estados 27
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
A partir dos diagramas de fluxo, obter as
representações por variáveis de estados.

Descrição de Sistemas LTI por Variáveis de Estados 28
Sistemas e Sinais
Universidade Federal do Rio Grande do Sul
Departamento de Engenharia Elétrica
A partir dos diagramas de fluxo, obter as
representações por variáveis de estados.
Top Related