





Línguas
Páginas
Legal

FACULDADE DE ENGENHARIA CURSO DE ENGENHARIA ELÉTRICA
OSCAR JULIAN ECHEGUREN CASCO
ESTUDOS E IMPLEMENTAÇÃO SOBRE RÁDIO CONTROLE
Porto Alegre
Junho de 2005

1
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
FACULDADE DE ENGENHARIA
CURSO DE ENGENHARIA ELÉTRICA
OSCAR JULIAN ECHEGUREN CASCO
ESTUDOS E IMPLEMENTAÇÃO SOBRE RÁDIO
CONTROLE
Porto Alegre
Junho de 2005
2
OSCAR JULIAN ECHEGUREN CASCO
ESTUDOS E IMPLEMENTAÇÃO SOBRE RÁDIO
CONTROLE
Trabalho de conclusão apresentado como requisito à conclusão do curso de Engenharia Elétrica da Faculdade de Engenharia da Pontifícia Universidade Católica do Rio Grande do Sul. Orientador: Prof. Vicente Mariano Canalli
Porto Alegre
Junho de 2005
3
RESUMO
Este trabalho apresenta o estudo do Controle remoto de porta de garagem para o
desenvolvimento e implementação de um controle remoto proposto para a Transmissão e
Recepção de informações codif icadas dependendo da tarefa solicitada. Sabe-se da importância
dos rádios controle, estes surgiram com a finalidade de minimizar esforços, permitindo, desta
forma, o acionamento a distância de qualquer equipamento eletro-eletrônico, desde um simples
carrinho de brinquedo até um carro de verdade. Este Transmissor proposto envia as informações
codificadas (codificadores encontrados no mercado local) através de módulos híbridos (TWS-
RWS), fabricados pela Telecontrolli, que devem operar em freqüências idênticas. O Módulo
Híbrido (TWS) Transmissor RF é encarregado de irradiar a informação de menor freqüência
(Sinal codificado modulado), captada por um receptor Módulo Híbrido (RWS), que demodula
o sinal recebido e assim envia para um decodif icador, este irá comparar os sinais codificados
(endereços A1-A2-A3-A4-A5) com sua configuração, sendo assim, ativa quatro saídas que
podem ser controladas através de dados selecionados na transmissão (D6-D7-D8-D9), sendo
16 combinações possíveis de tarefas, todas controladas pelo Transmissor. Enfim, o tema do
presente trabalho visa atender, dentro da entidade da PUCRS, nos laboratórios (ver
laboratórios), o controle da luz e do ar, através dos circuitos aqui propostos, que são
controlados por monitores que compõem a entidade.

4
LISTA DE FIGURAS
Figura 2.1: Diagrama de blocos de transmissor e receptor comerciais .................................... 14
Figura 2.2: Codificador e Decodificador MM53200N............................................................. 16
Figura 2.3: Operação do MM53200N dependendo do modo de seleção do pino 15 .............. 16
Figura 2.4: Pulsos gerados dependendo do código binário selecionado .................................. 17
Figura 2.5: Funcionamento do Oscilador RF .......................................................................... 18
Figura 2.6: Oscilador LC ......................................................................................................... 18
Figura 2.7: Oscilações Amortecidas ......................................................................................... 19
Figura 2.8: Funcionamento do Oscilador ................................................................................. 20
Figura 2.9: Circuito Oscilador ou Armstrong........................................................................... 20
Figura 2.10: Módulo Híbrido do Receptor RWS estudado ..................................................... 22
Figura 2.11: Funcionamento da Porta de garagem ................................................................... 22
Figura 2.12: Diagrama de blocos do funcionamento da porta de garagem .............................. 24
Figura 3.1: Circuito Transmissor e Receptor implementado em laboratório ........................... 27
Figura 3.2: Circuito Transmissor implementado em placa...................................................... 28
Figura 3.3: Circuito Receptor implementado em placa ........................................................... 29
Figura 3.4: Pulsos de códigos na saída do codif icador MM53200N........................................30
Figura 3.5: Seleção de endereço A1 aberto ............................................................................. 30
Figura 3.6: Seleção de endereço A2 aberto .............................................................................. 30
Figura 3.7: Seleção de endereço A3 aberto .............................................................................. 31
Figura 3.8: Seleção de endereço A4 aberto .............................................................................. 31
Figura 3.9: Espectro de freqüência do transmisor irradiado pelo Oscilador RF tipo
Armstrong.............................................................................................................. 31
Figura 3.10: Sinal demodulado obtido na saída do módulo híbrido RWS............................... 32
Figura 3.11: Freqüência de oscilação do sinal demodulado 1,71 kHz .....................................33
Figura 3.12: Comparação entre o Sinal modulante e o Sinal demodulado............................... 33
5
Figura 3.13: Tempo de atraso entre o sinal modulante na transmissão e o sinal
demodulado no receptor ...................................................................................... 34
Figura 4.1: Diagrama de blocos contendo as etapas do transmissor e receptor....................... 37
Figura 4.2: Módulo Híbrido do Transmissor TWS e Receptor RWS....................................... 38
Figura 4.3: Codificador MC145026 ......................................................................................... 40
Figura 4.4: Diagrama de blocos do codif icador MC145026 .................................................... 41
Figura 4.5: Pulsos dependendo da lógica na entrada do codificador MC145026 .................... 42
Figura 4.6: Decodif icador MC145027...................................................................................... 43
Figura 4.7: Diagrama de blocos do decodificador MC145027................................................. 43
Figura 4.8: Circuito de comando do rele que podem ter danos por falta de proteção de
acionamento ...................................................................................................... 44
Figura 4.9: Circuito de comando do rele usando uma proteção de acionamento..................... 45
Figura 4.10: Teste de transmissão entre o Codificador e o Decodificador.............................. 46
Figura 4.11: Modulação da mensagem través da portadora de RF........................................... 48
Figura 5.1: Ajuste da freqüência de oscilação do codificador MC145026............................... 51
Figura 5.2 : Ajuste da freqüência de oscilação do decodificador MC145027.......................... 54
Figura 5.3: Acionamento do rele dependendo da saída do decodif icador ................................ 56
Figura 5.4: Dimensionamento do Resistor (R) para acionar o transistor............................ 57
Figura 6.1: Circuito Transmissor e Receptor montado em laboratório ....................................61
Figura 6.2: Circuito Transmissor implementado em laboratório.............................................. 62
Figura 6.3: Circuito Receptor implementado em laboratório.................................................. 63
Figura 6.4: Pulsos na saída do pino 15 do codificador entrando com lógica 0 nos
endereços e Dados............................................................................................. 64
Figura 6.5: Osciloscópio com faixa de freqüência até 100MHz .............................................. 65
Figura 6.6: Seleção do dado D6 com lógica 1 .......................................................................... 65
Figura 6.7: Seleção do dado D7 com lógica 1 .......................................................................... 65
Figura 6.8: Seleção do dado D8 com lógica 1 .......................................................................... 66
Figura 6.9: Seleção do dado D9 com lógica 1 .......................................................................... 66
Figura 6.10: Seleção dos dados D6,D7,D8,D9 lógica 1........................................................... 66
Figura 6.11: Seleção dos dados D8,D9 com lógica 1 ............................................................... 66
Figura 6.12: Freqüência de operação de oscilação do codif icador 1,89 kHz .......................... 66
Figura 6.13: Espectro de freqüência do transmissor irradiado pelo módulo hibrido TWS...... 67
Figura 6.14: Sinal demodulado obtido na saída do módulo híbrido RWS............................... 68
Figura 6.15: Freqüência de oscilação do sinal demodulado 1,89 kHz .....................................69

6
Figura 6.16: Comparação entre o Sinal modulante e o Sinal demodulado............................... 69
Figura 6.17: Tempo de atraso do receptor................................................................................ 70

7
LISTA DE TABELAS
Tabela 4.1: Faixa de radiocomunicações.................................................................................. 39
Tabela 5.1: Valores típicos de escolha dos componentes para criar a oscilação
desejada do MC145026 obtido do fabricante de acordo com a tabela [2]........... 51
Tabela 5.2: Valores típicos de escolha dos componentes para criar a oscilação
desejada do MC145027 obtido do fabricante de acordo com a tabela ................ 54
Tabela 5.3: Tabela de ganhos ................................................................................................... 57

8
SUMÁRIO
1 INTRODUÇÃO GERAL ................................................................................................... 11
1.1 INTRODUÇÃO.................................................................................................................. 11
1.2 OBJETIVOS DO TRABALHO......................................................................................... 11
1.3 CONTRIBUIÇÕES DO TRABALHO............................................................................... 11
1.4 ORGANIZAÇÃO DO TRABALHO................................................................................. 12
2 ESTUDO DE UM CONTROLE REMOTO COMERCIAL ........................................... 14
2.1 INTRODUÇÃO.................................................................................................................. 14
2.2 CODIFICADOR E DECODIFICADOR............................................................................ 15
2.3 ETAPA TRANSMISSORA................................................................................................ 17
2.3.1 Oscilador RF.................................................................................................................. 18
2.4 ETAPA RECEPTOR.......................................................................................................... 21
2.4.1 Receptor de RF – Módulo hibrido............................................................................... 21
2.4.2 Receptor da Porta de Garagem.................................................................................... 22
2.5 CONCLUSÃO.................................................................................................................... 24
3 RESULTADOS EXPERIMENTAIS DE ANALISE DE UM CONTROL E REMOTO
UNIVERSAL DE PORTA DE GARAGEM .................................................................... 26
3.1 INTRODUÇÃO.................................................................................................................. 26
3.2 CIRCUITO TRANSMISSOR E RECEPTOR ESTUDADO............................................. 26
3.3 PLACA DO TRANSMISSOR ........................................................................................... 27
3.4 PLACA DO RECEPTOR................................................................................................... 28
3.5 FORMAS DE ONDA NA SAÍDA DO CODIFICADOR MM53200N............................. 29
9
3.6 ESPECTRO EMITIDO PELO OSCILADOR RF.............................................................. 31
3.7 FORMAS DE ONDA DEMODULADA PELO MÓDULO HIBRIDO RWS.................. 32
3.8 CONCLUSÃO.................................................................................................................... 34
4 ESTUDO DO CONTROLE REMOTO IMPLEMENTADO .......................................... 36
4.1 INTRODUÇÃO.................................................................................................................. 36
4.2 DIAGRAMA DE BLOCOS............................................................................................... 36
4.3 TRANSMISSOR E RECEPTOR DE RF – MÓDULOS HIBRIDOS................................ 37
4.4 ANTENA DO TRANSMISSOR E RECEPTOR............................................................... 39
4.5 CODIFICADOR................................................................................................................. 39
4.6 DECODIFICADOR............................................................................................................ 42
4.7 RELE .................................................................................................................................. 44
4.8 TESTE DE FUNCIONAMENTO DO MC15026 E MC145027....................................... 46
4.9 FUNCIONAMENTO DO TRANSMISSOR E RECEPTOR............................................ 47
4.10 CAMPOS DE APLICAÇÕES DO CONTROLE REMOTO........................................... 48
4.11 CONCLUSÃO.................................................................................................................. 49
5 DIMENSIONAMENTO DAS ETAPAS DO CONTROLE REMOTO PRO POSTO... 50
5.1 INTRODUÇÃO.................................................................................................................. 50
5.2 DIMENSIONAMENTO DAS ETAPAS DO TRANSMISSOR........................................ 50
5.2.1 Codificador MC145026 (Motorola).............................................................................. 50
5.3 DIMENSIONAMENTO DAS ETAPAS DO RECEPTOR............................................... 53
5.3.1 Decodificador MC145027 (Motorola).......................................................................... 53
5.4 DIMENSIONAMENTO DO RELE................................................................................... 55
5.5 DIMENSIONAMENTO DA ANTENA............................................................................. 58
5.6 CONCLUSÃO.................................................................................................................... 59
6 RESULTADOS EXPERIMENTAIS E FORMA DE ONDA DO CONT ROLE
REMOTO PROPOSTO......................................................................................................60
6.1 INTRODUÇÃO.................................................................................................................. 60
6.2 CIRCUITO PROPOSTO IMPLEMENTADO NO LABORATÓRIO............................... 60
6.2.1 Protótipo do Circuito transmissor............................................................................... 61
6.2.2 Protótipo do Circuito Receptor.................................................................................... 62
6.3 FORMAS DE ONDA NA SAÍDA DO CODIFICADOR MC145026............................... 63
10
6.4 ESPECTRO EMITIDO PELO MÓDULO HÍBRIDO TWS.............................................. 67
6.5 FORMA DE ONDA DEMODULADA PELO MÓDULO HIBRIDO RWS..................... 68
6.6 CONCLUSÃO.................................................................................................................... 70
7 CONCLUSÃO GERAL ....................................................................................................... 72
REFERÊNCIAS ...................................................................................................................... 73
11
1 INTRODUÇÃO GERAL
1.1 INTRODUÇÃO
Neste capítulo, serão inicialmente descrito os objetivos do estudo do controle remoto.
A seguir serão descrita as contribuições do trabalho proposto é como ele será organizado.
1.2 OBJETIVOS DO TRABALHO
Realizar o estudo de um transmissor e receptor comercial universal que é o empregado
no controle de porta de garagens, com o objetivo de estudar e propor a implementação de um
sistema de controle remoto similar
Para a implementação do sistema proposto foram estudados os componentes que
serão utilizados no controle remoto
1.3 CONTRIBUIÇÕES DO TRABALHO
A primeira contribuição deste trabalho é o estudo, implementação e projeto de um
sistema de controle remoto composto por um transmissor e um receptor, empregando
componentes encontrados no comercio local, com base em estudo realizado em um comando

12
universal de porta de garagem. O sistema de controle remoto proposto permitiu como
modificações dispensa de temporizador utilizando o decodificador MC145027 (Motorola).
Isso foi possível porque os pinos de dados deste decodificador estão ligados a um latch (um
tipo de memória volátil elementar). Os dados permanecem no latch até que um novo dado seja
enviado e aceito, até que a alimentação da fonte seja interrompida.
1.4 ORGANIZAÇÃO DO TRABALHO
O Trabalho esta organizado da seguinte forma nesta Introdução Geral:
No Capítulo 2 é descrito o Estudo de um controle Remoto Comercial incluindo os
diagramas de blocos do transmissor e receptor, explicando os compontes utilizados no
estudo: codificadores, decodificadores, oscilador RF e Módulo Híbrido RWS explicando o
funcionamento da etapa receptora da porta de garagem.
No Capítulo 3 são obtidos Resultados experimentais de formas de onda do Controle
Remoto comercial (Transmissor e Receptor)
No Capítulo 4 é descrito o estudo do controle remoto proposto incluindo diagrama de
blocos do transmissor e do receptor, explicando cada etapa, serão estudados os componentes
empregados em cada bloco (Transmissão-Recepção): codificadores, decodificadores,
Módulos Híbridos (TWS, RWS) e Reles . Serão apresentados testes para o funcionamento
do transmissor e receptor. Após apresentado os testes serão agregados os Módulos Híbridos
para o funcionamento do circuito completo e também serão citados alguns campos de
aplicação do controle remoto proposto.
No Capítulo 5 esta apresentado o dimensionamento do controle remoto proposto
(Transmissor e Receptor), onde são apresentados os cálculos para obter-se a oscilação dos
circuitos integrados (codificador e decodif icador), o dimensionamento dos reles utilizados
nas saídas dos decodif icadores responsáveis no acionamento dos servos e o dimensionamento

13
do comprimento da antena que é obtida dependendo da freqüência de operação dos controles
remotos.
No Capítulo 6 é verificado Resultados experimentais das diferentes formas de onda
do Controle Remoto proposto (Transmissor e Receptor)
14
2 ESTUDO DE UM CONTROLE REMOTO COMERCIAL
2.1 INTRODUÇÃO
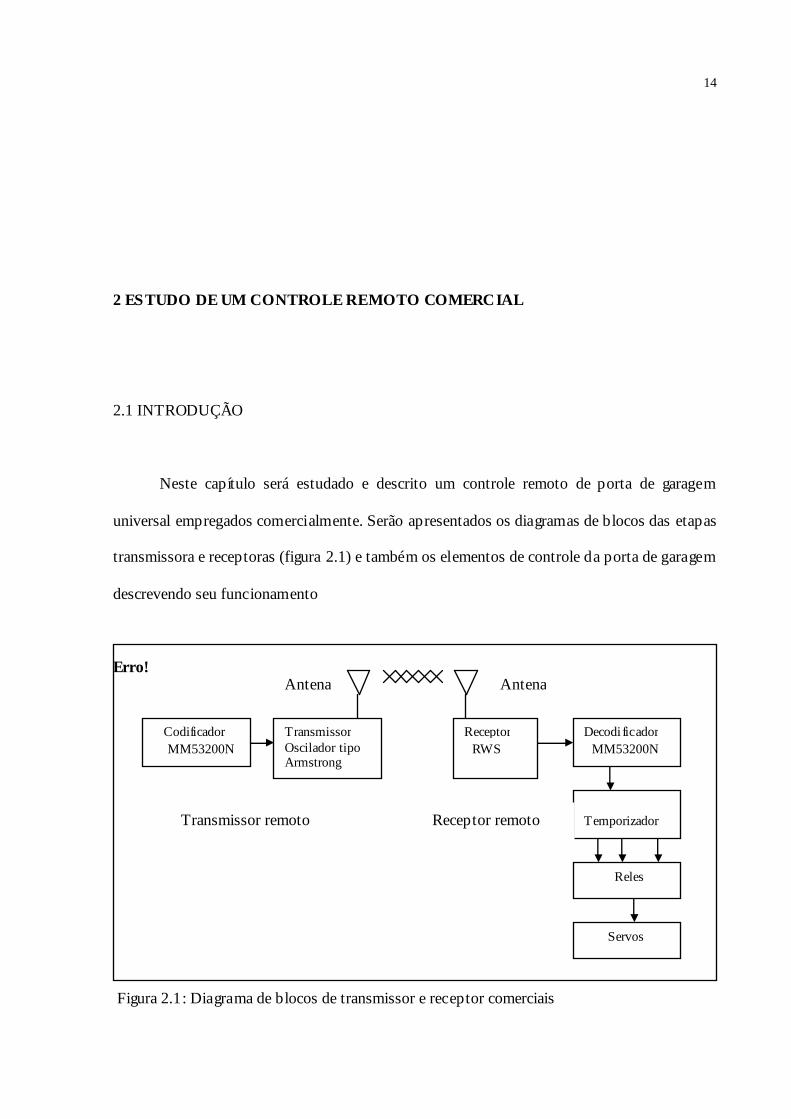
Neste capítulo será estudado e descrito um controle remoto de porta de garagem
universal empregados comercialmente. Serão apresentados os diagramas de blocos das etapas
transmissora e receptoras (figura 2.1) e também os elementos de controle da porta de garagem
descrevendo seu funcionamento
Erro!
Figura 2.1: Diagrama de blocos de transmissor e receptor comerciais
Codificador MM53200N
Transmissor Oscilador tipo Armstrong
Receptor RWS
Decodi ficador MM53200N
Temporizador
Antena Antena
Reles
Transmissor remoto Receptor remoto
Servos

15
No transmissor utiliza-se um codif icador MM53200N, que é a etapa de baixa
freqüência a que produz a denominada modulação, e uma etapa osciladora de alta freqüência
(LC ou Armstrong) que produz o sinal de rádio para transmitir o sinal e irradiado através de
uma antena.
Na etapa receptora utiliza-se um modelo hibrido (RWS) receptor para receber o sinal.
O sinal é demodulado e aplicado a um decodif icador (MM53200N) que compara os bits de
endereços recebidos com o da sua configuração sendo assim aciona uma saída que é enviada a
um temporizador que é encarregado de temporizar os reles e acionar os mesmos excitando-os
assim para acionamento do motor monofásico
2.2 CODIFICADOR E DECODIFICADOR
O codificador codif ica um sinal usando tipos de códigos, e o decodificador é o circuito
lógico que permite que a combinação de códigos, das variáveis de entrada permita ativar as
saídas [1]. Neste Controle Remoto emprega-se circuitos integrados que utilizam codificação
por pulsos, com um número elevados de combinações.
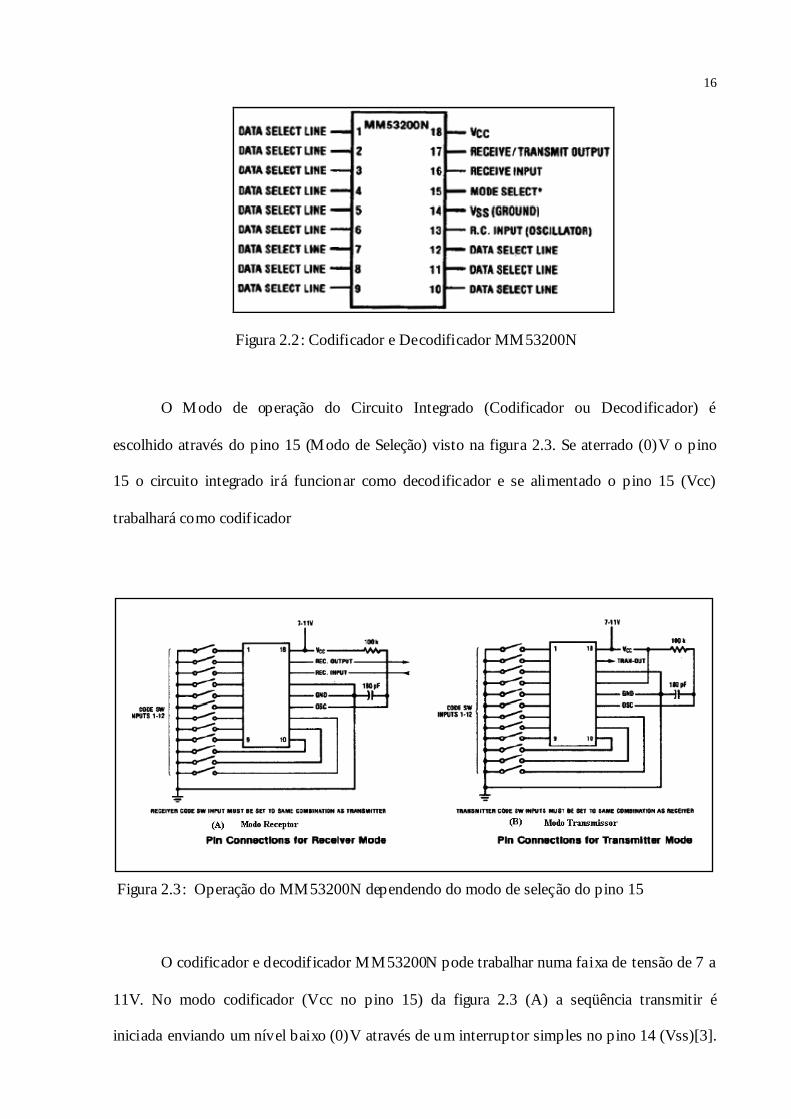
O Circuito Integrado MM53200N (da figura 2.2) trabalha como codificador ou
decodificador, sendo um sistema digital que compõe Transmissor e Receptor[2]. Trabalhando
na modalidade transmitir (codificador), o MM53200N sequencialmente codificará e
transmitirá 12 bits da entrada. Cada um dos 12 bits pode ser 1 ou 0 para permitir 4096
( 4096212 = ) combinações no modo binário (0,1), usando os pinos (A1, A2, A2, A3, A4, A5,
A6, A7, A8, A9, A10, A11, A12).
16
Figura 2.2: Codificador e Decodificador MM53200N
O Modo de operação do Circuito Integrado (Codificador ou Decodificador) é
escolhido através do pino 15 (Modo de Seleção) visto na figura 2.3. Se aterrado (0)V o pino
15 o circuito integrado irá funcionar como decodificador e se alimentado o pino 15 (Vcc)
trabalhará como codif icador
Figura 2.3: Operação do MM53200N dependendo do modo de seleção do pino 15
O codificador e decodif icador MM53200N pode trabalhar numa faixa de tensão de 7 a
11V. No modo codificador (Vcc no pino 15) da figura 2.3 (A) a seqüência transmitir é
iniciada enviando um nível baixo (0)V através de um interruptor simples no pino 14 (Vss)[3].

17
É possível transmitir o sinal dependendo do tempo que o pino permanece baixo. O digito
binário transmitido é codificado em pulsos (vista na figura 2.4). Sendo enviados 13 pulsos
(pino 17) por ciclo sendo o primeiro pulso de reconhecimento e os outros pulsos restantes
(12 pulsos) equivalem a cada bit codificado. Nestes pulsos, uma lógica 0 (nível baixo) é
codificada como um pulso longo consecutivo e uma lógica 1 (nível alto) é codificada como
um pulso curto consecutivo, sendo observada a operação dos pulsos na figura 2.4
Figura 2.4: Pulsos gerados dependendo do código binário selecionado
No modo decodificador (0 V no pino 15) da f igura 5.5 (B), o receptor recebe os
códigos do transmissor onde é demodulado. O decodificador então compara o 12 códigos de
endereços recebido com seu código de endereço local que devem ter a mesma combinação,
sendo assim ativa a saída do pino 17 (Receiver output) com 5V.
2.3 ETAPA TRANSMISSORA
Será descrita a seguir o oscilador RF necessária para irradiar a informação feita pelo
MM53200N modo codificador.
18
2.3.1 Oscilador RF
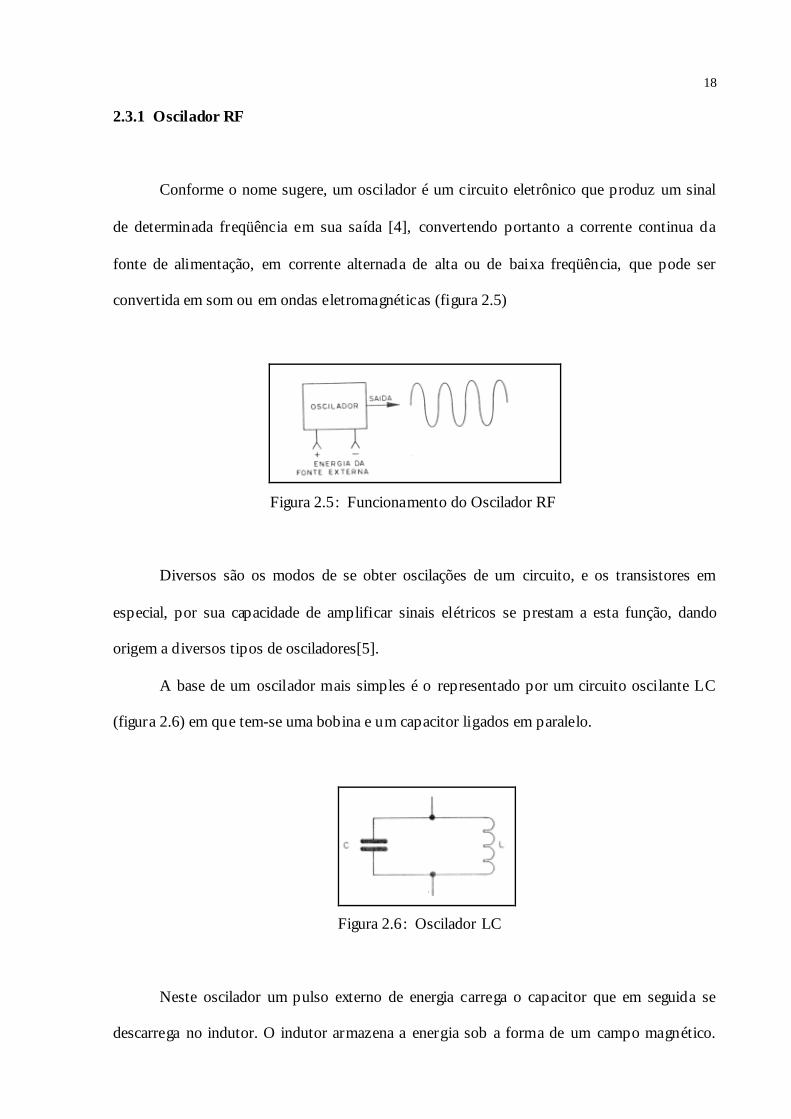
Conforme o nome sugere, um oscilador é um circuito eletrônico que produz um sinal
de determinada freqüência em sua saída [4], convertendo portanto a corrente continua da
fonte de alimentação, em corrente alternada de alta ou de baixa freqüência, que pode ser
convertida em som ou em ondas eletromagnéticas (figura 2.5)
Figura 2.5: Funcionamento do Oscilador RF
Diversos são os modos de se obter oscilações de um circuito, e os transistores em
especial, por sua capacidade de amplificar sinais elétricos se prestam a esta função, dando
origem a diversos tipos de osciladores[5].
A base de um oscilador mais simples é o representado por um circuito oscilante LC
(figura 2.6) em que tem-se uma bobina e um capacitor ligados em paralelo.
Figura 2.6: Oscilador LC
Neste oscilador um pulso externo de energia carrega o capacitor que em seguida se
descarrega no indutor. O indutor armazena a energia sob a forma de um campo magnético.

19
Este campo magnético ao diminuir devolve a energia armazenada para o capacitor[6]. Neste
oscilador, em cada ciclo, a energia se reduz obtendo-se oscilações na forma amortecidas
(figura 2.7)
Figura 2.7: Oscilações Amortecidas
Para que o circuito produza uma oscilação de amplitude constante é preciso repor a
energia perdida em cada ciclo[7]. Os transistores podem ser usados como amplificadores para
manter as oscilações, repondo a energia no circuito.Um oscilador é então um amplificador no
qual o sinal da saída é reaplicado a entrada de forma a manter as oscilações.
Para que um amplificador funcione como oscilador é necessário assim, que ele tenha
um fator de amplificação maior do que 1. A velocidade com que o sinal é recolocado na
entrada do amplificador e depois amplificado, determina a freqüência das oscilações neste
caso[8]. É importante nos osciladores que funcionam deste modo a relação entre a fase do
sinal de entrada em relação á saída.
Os osciladores são então formados por um elemento ativo, um transistor por exemplo,
que tem por função recolocar no circuito a energia perdida em cada oscilação; (um circuito de
realimentação que mantém as oscilações[9]. Um circuito resonante, determina a freqüência
de operação do oscilador de acordo com o diagrama de blocos (visto na figura 2.8).
20
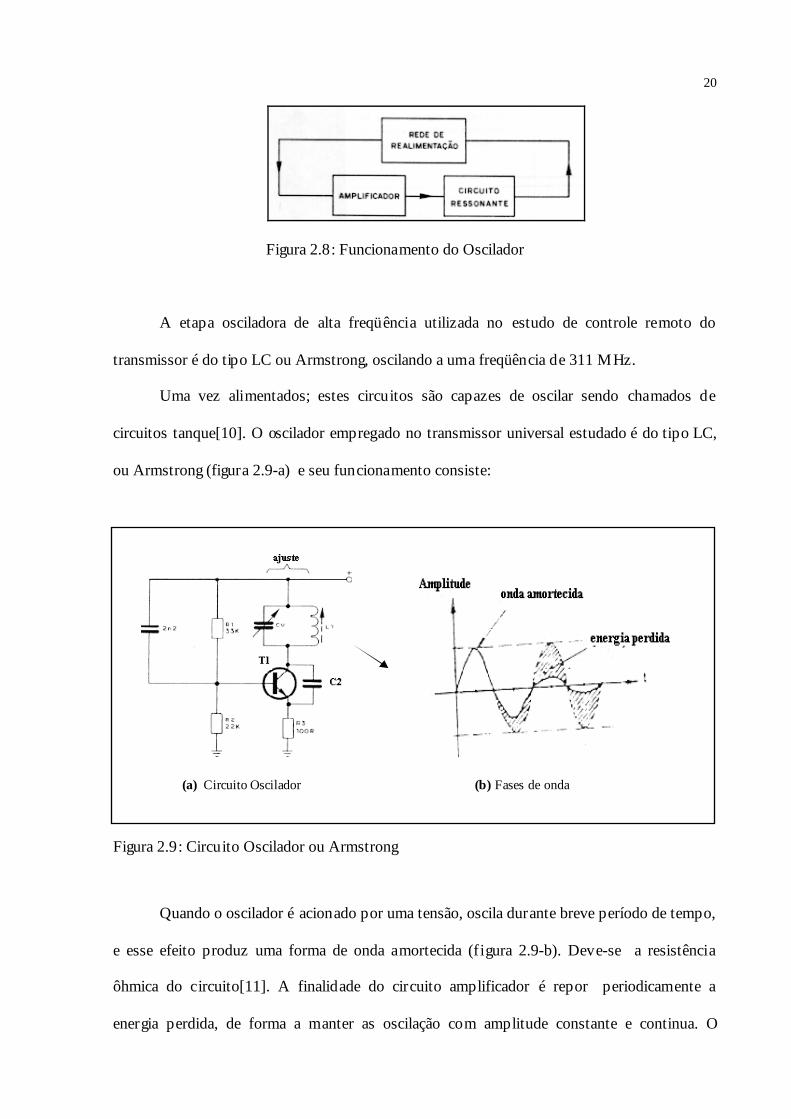
Figura 2.8: Funcionamento do Oscilador
A etapa osciladora de alta freqüência utilizada no estudo de controle remoto do
transmissor é do tipo LC ou Armstrong, oscilando a uma freqüência de 311 MHz.
Uma vez alimentados; estes circuitos são capazes de oscilar sendo chamados de
circuitos tanque[10]. O oscilador empregado no transmissor universal estudado é do tipo LC,
ou Armstrong (figura 2.9-a) e seu funcionamento consiste:
(a) Circuito Oscilador (b) Fases de onda
Figura 2.9: Circuito Oscilador ou Armstrong
Quando o oscilador é acionado por uma tensão, oscila durante breve período de tempo,
e esse efeito produz uma forma de onda amortecida (f igura 2.9-b). Deve-se a resistência
ôhmica do circuito[11]. A finalidade do circuito amplificador é repor periodicamente a
energia perdida, de forma a manter as oscilação com amplitude constante e continua. O
21
transistor T1 só conduz durante uma pequena parte de cada ciclo (classe C) e a corrente do
coletor promove a energia adicional necessária a cada ciclo.
Aqui o próprio transistor produz a defasagem de 180° e o transformador produz a
defasagem restante para completar os 360°.
A freqüência de oscilação é dada pela expressão abaixo:
LCfosc
..2
1
π=
2.4 ETAPA RECEPTOR
Serão descritas a descrição do módulo híbrido RF e o funcionamento do receptor da
porta de garagem
2.4.1 Receptor de RF – Módulo hibrido
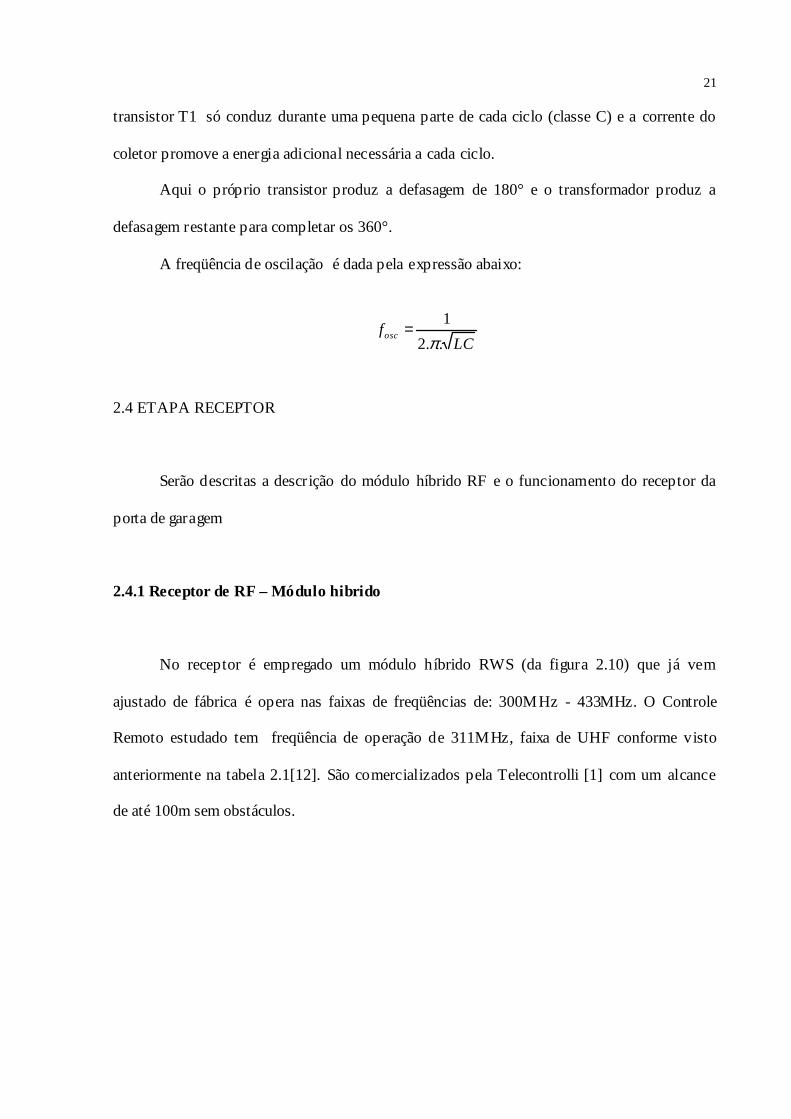
No receptor é empregado um módulo híbrido RWS (da figura 2.10) que já vem
ajustado de fábrica é opera nas faixas de freqüências de: 300MHz - 433MHz. O Controle
Remoto estudado tem freqüência de operação de 311MHz, faixa de UHF conforme visto
anteriormente na tabela 2.1[12]. São comercializados pela Telecontrolli [1] com um alcance
de até 100m sem obstáculos.
22
Figura 2.10: Módulo Híbrido do Receptor RWS estudado
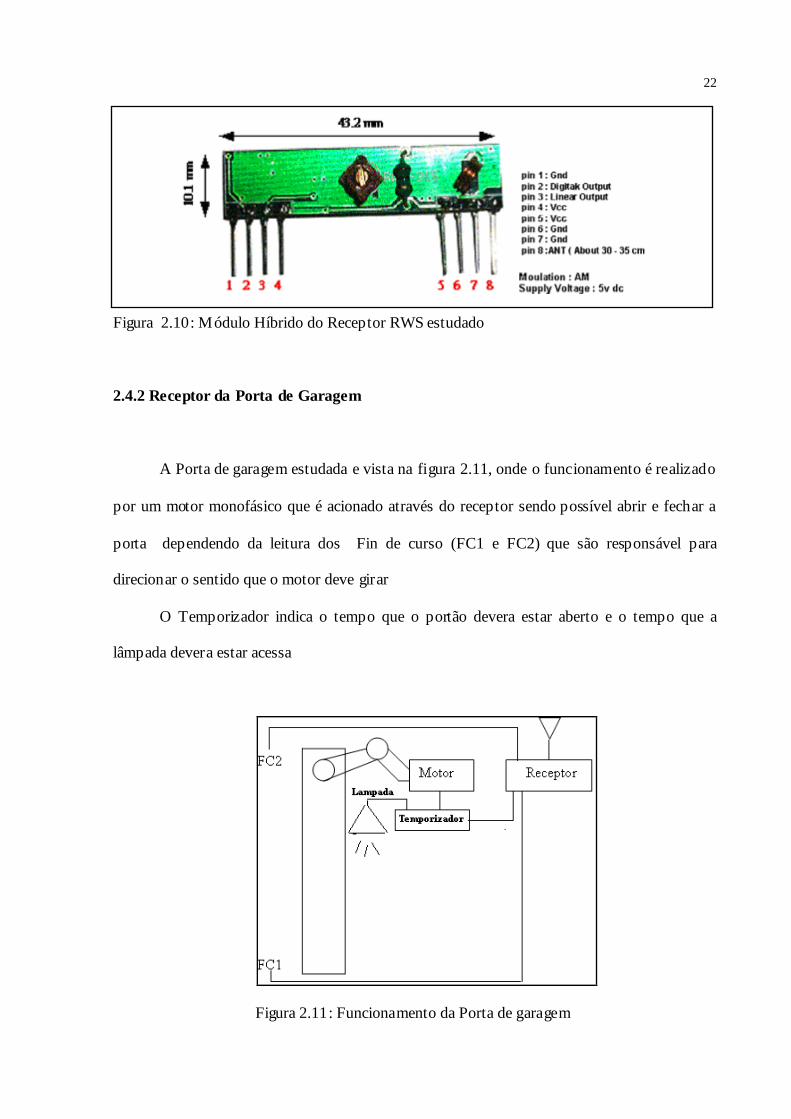
2.4.2 Receptor da Porta de Garagem
A Porta de garagem estudada e vista na figura 2.11, onde o funcionamento é realizado
por um motor monofásico que é acionado através do receptor sendo possível abrir e fechar a
porta dependendo da leitura dos Fin de curso (FC1 e FC2) que são responsável para
direcionar o sentido que o motor deve girar
O Temporizador indica o tempo que o portão devera estar aberto e o tempo que a
lâmpada devera estar acessa
Figura 2.11: Funcionamento da Porta de garagem
23
Os passos de funcionamento da Porta de Garagem são descritas a seguir:
a) Aciona Motor e acende a lâmpada;
b) A porta sobe;
c) Desliga Fim de curso 1 (FC1);
d) Liga Fim de curso 2 (FC2);
e) Temporiza;
f) Retorna automático;
g) Desliga fim de curso 2 (FC2);
h) Liga Fim de curso 1(FC1);
i) Desce;
j) Temporiza;
k) Desliga lâmpada.
O circuito receptor é acionada através do decodificador que é ativada fazendo a
comparação de suas combinações com o sinal demodulado.
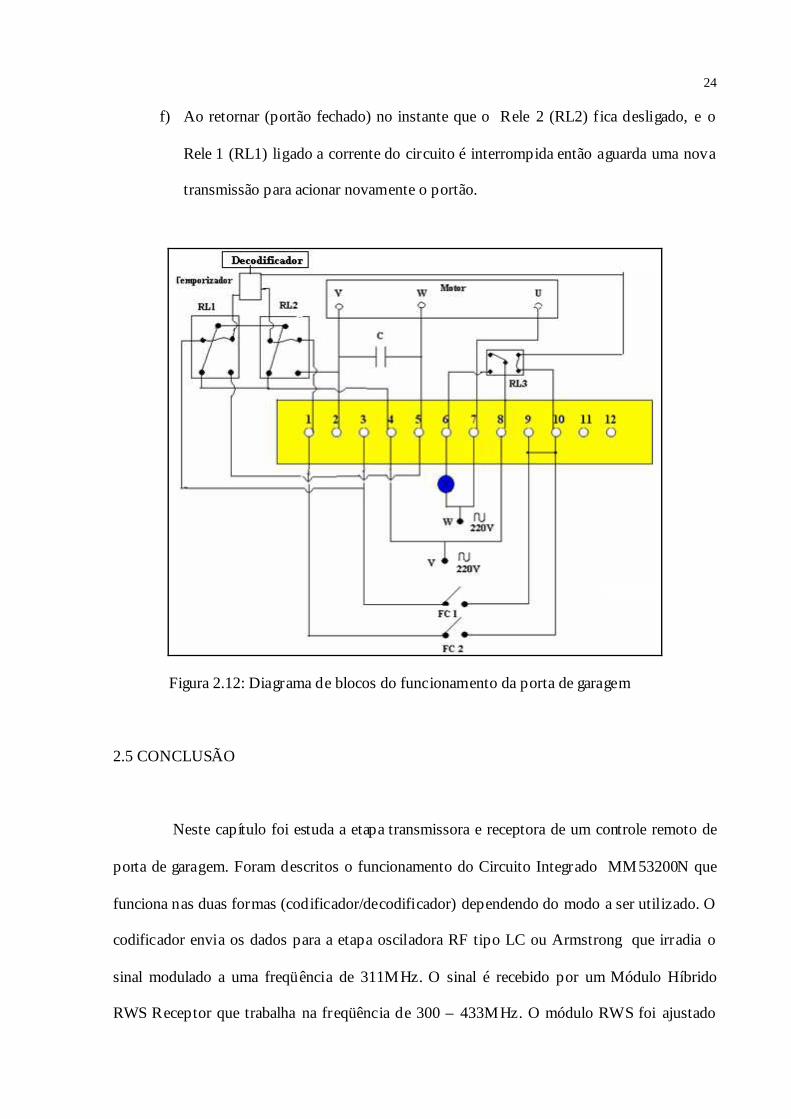
No momento em que é acionado a saída do decodificador (5V) ocorreu o seguintes
passos (vista na figura 2.12)
a) Aciona o Rele 3 onde é acessa a lâmpada;
b) Acionando o Rele 3 (RL3) verifica se quais dos fin de curso (FC1 ou FC2) está
fechado;
c) Se o FC1 (portão fechado) estiver fechado, circulará corrente pelo rele 1 (RL1)
fazendo funcionar o motor no sentido horário;
d) No momento em que o portão abre completamente o FC1 é desligado é o FC2
ligado;
e) Se o FC2 estiver ligado e FC1 desligado (portão aberto) circulara corrente pelo
rele 2 (RL2) fazendo funcionar o motor no sentido anti-horário no instante que é
ativado novamente o transmissor senão ele aguarda, é retorna automaticamente;
24
f) Ao retornar (portão fechado) no instante que o Rele 2 (RL2) f ica desligado, e o
Rele 1 (RL1) ligado a corrente do circuito é interrompida então aguarda uma nova
transmissão para acionar novamente o portão.
Figura 2.12: Diagrama de blocos do funcionamento da porta de garagem
2.5 CONCLUSÃO
Neste capítulo foi estuda a etapa transmissora e receptora de um controle remoto de
porta de garagem. Foram descritos o funcionamento do Circuito Integrado MM53200N que
funciona nas duas formas (codificador/decodificador) dependendo do modo a ser utilizado. O
codificador envia os dados para a etapa osciladora RF tipo LC ou Armstrong que irradia o
sinal modulado a uma freqüência de 311MHz. O sinal é recebido por um Módulo Híbrido
RWS Receptor que trabalha na freqüência de 300 – 433MHz. O módulo RWS foi ajustado

25
para o controle remoto a 311MHz de forma a receber o sinal transmitido. O sinal é
demodulado e o decodificador compara com a da sua configuração de endereços (A1-A12) e
assim aciona uma saída. O sinal de saída é enviado a um temporizador que aciona os reles
por um tempo acionando o motor monofásico

26
3 RESULTADOS EXPERIMENTAIS DE ANALISE DE UM CONTRO LE REMOTO
UNIVERSAL DE PORTA DE GARAGEM
3.1 INTRODUÇÃO
Neste capítulo serão comentadas as principias formas de onda e resultado
experimentais do trabalho estudado
3.2 CIRCUITO TRANSMISSOR E RECEPTOR ESTUDADO
Para o estudo do controle remoto de Porta de Garagem foi testado o funcionamento do
circuito (Transmissor e Receptor) implementando em laboratório (vista na figura 3.1)
27
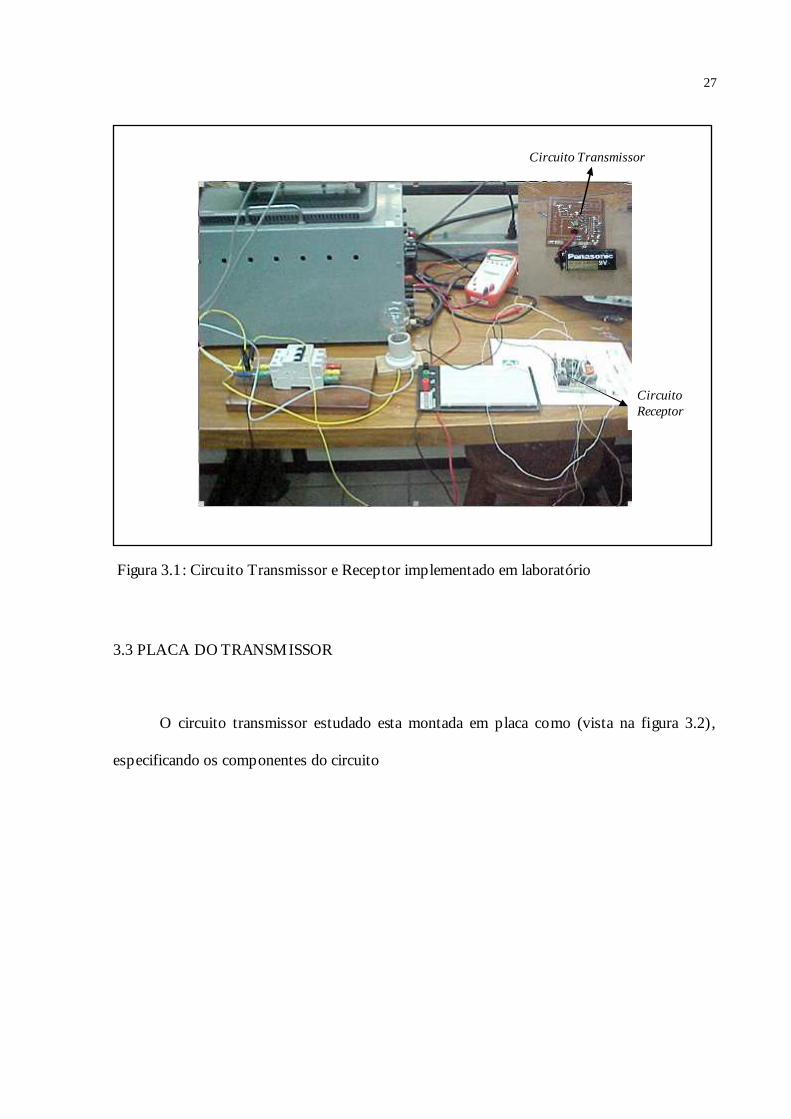
Figura 3.1: Circuito Transmissor e Receptor implementado em laboratório
3.3 PLACA DO TRANSMISSOR
O circuito transmissor estudado esta montada em placa como (vista na figura 3.2),
especificando os componentes do circuito
Circuito Transmissor
Circuito Receptor

28
Figura 3.2: Circuito Transmissor implementado em placa
3.4 PLACA DO RECEPTOR
O circuito receptor estudado esta montada em placa como observado na figura 3.3,
especificando os seus componentes do circuito.
Decodificador MM53200N
Seleção de
Endereços
Alimentação
Bateria (9V) Oscilador RF
Sinal de Códigos enviados de forma serial para o Oscilador RF
29
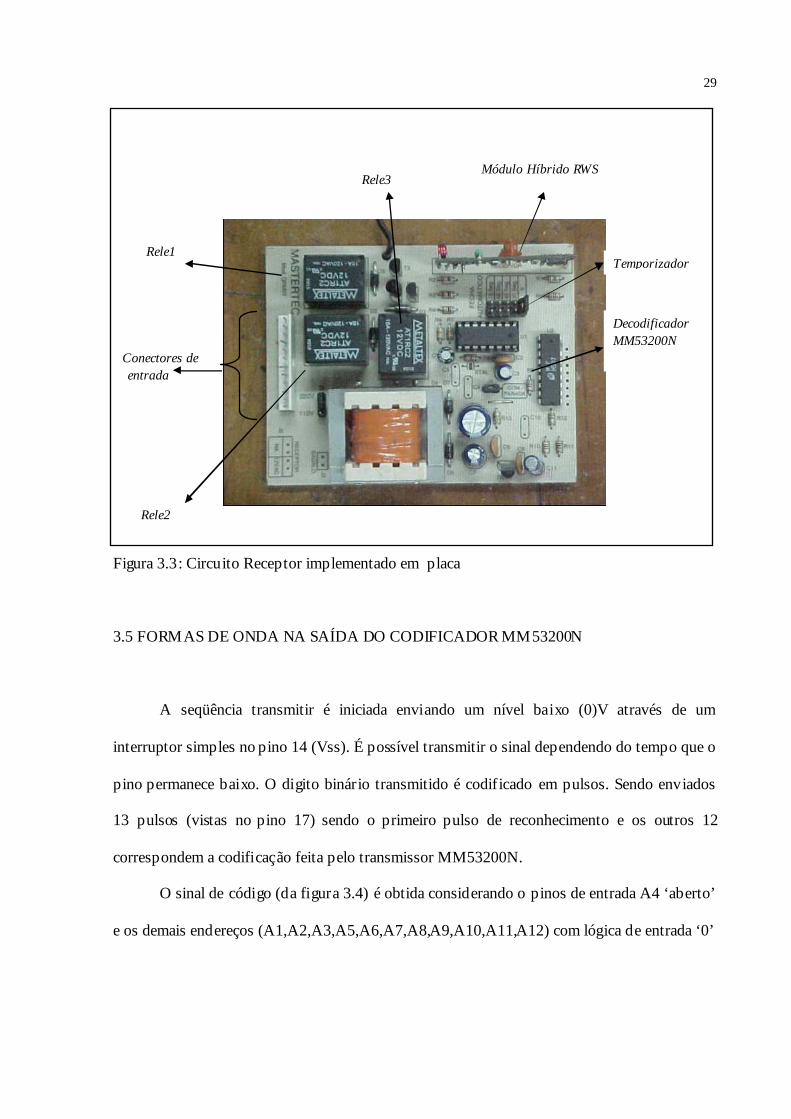
Figura 3.3: Circuito Receptor implementado em placa
3.5 FORMAS DE ONDA NA SAÍDA DO CODIFICADOR MM53200N
A seqüência transmitir é iniciada enviando um nível baixo (0)V através de um
interruptor simples no pino 14 (Vss). É possível transmitir o sinal dependendo do tempo que o
pino permanece baixo. O digito binário transmitido é codif icado em pulsos. Sendo enviados
13 pulsos (vistas no pino 17) sendo o primeiro pulso de reconhecimento e os outros 12
correspondem a codificação feita pelo transmissor MM53200N.
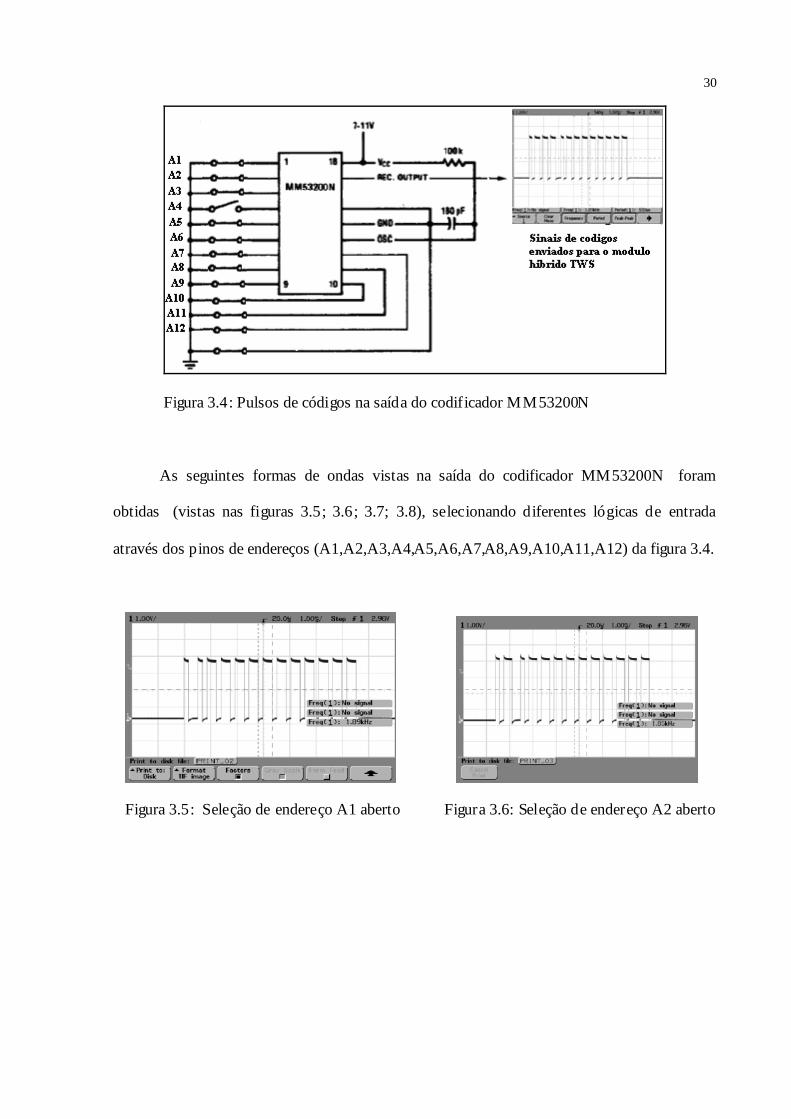
O sinal de código (da figura 3.4) é obtida considerando o pinos de entrada A4 ‘aberto’
e os demais endereços (A1,A2,A3,A5,A6,A7,A8,A9,A10,A11,A12) com lógica de entrada ‘0’
Módulo Híbrido RWS
Rele1
Rele2
Rele3
Decodificador MM53200N
Conectores de entrada
Temporizador
30
Figura 3.4: Pulsos de códigos na saída do codif icador MM53200N
As seguintes formas de ondas vistas na saída do codificador MM53200N foram
obtidas (vistas nas figuras 3.5; 3.6; 3.7; 3.8), selecionando diferentes lógicas de entrada
através dos pinos de endereços (A1,A2,A3,A4,A5,A6,A7,A8,A9,A10,A11,A12) da figura 3.4.
Figura 3.5: Seleção de endereço A1 aberto Figura 3.6: Seleção de endereço A2 aberto
31
Figura 3.7: Seleção de endereço A3 aberto Figura 3.8: Seleção de endereço A4 aberto
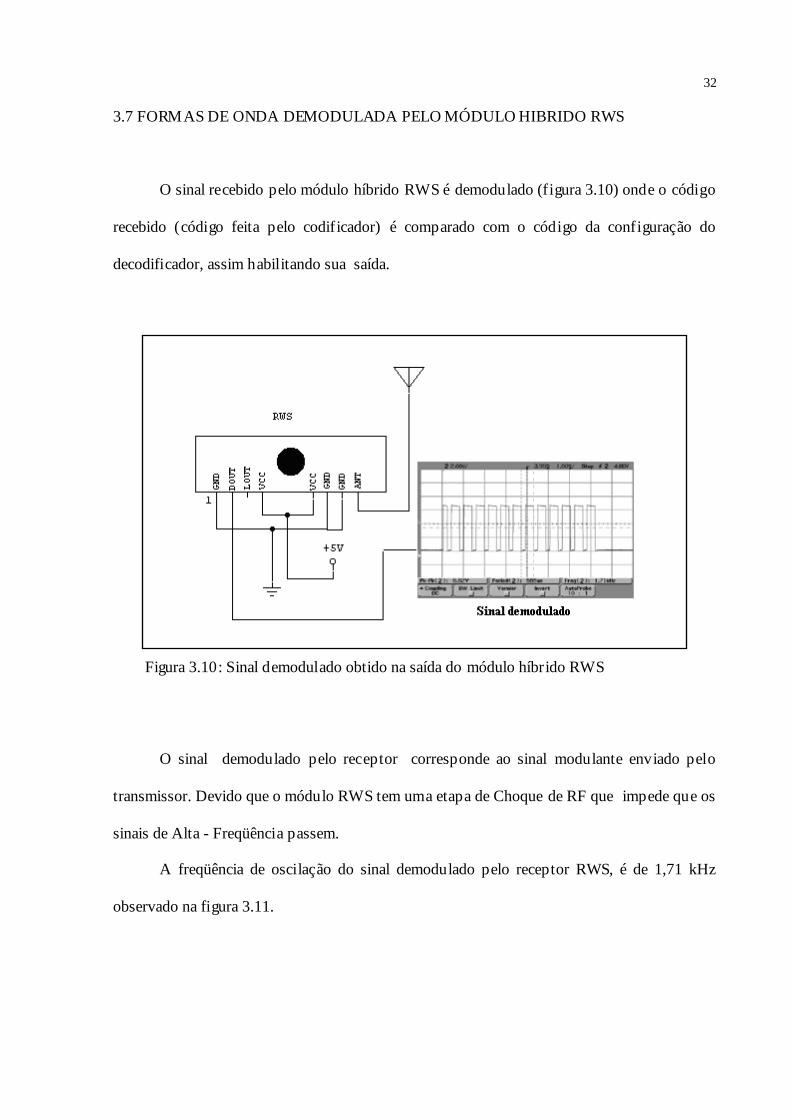
3.6 ESPECTRO EMITIDO PELO OSCILADOR RF
O sinal emitido pelo oscilador RF (da figura 3.2) é obtido através do ANALISADOR
DE ESPECTRO (HP) de 1,8 GHz. A freqüência da portadora é de 304,96 MHz (figura 3.9),
Faixas UHF, onde o oscilador RF envia os códigos modulados representados por pulsos
retangulares
0
C H 1 S S p e c t r u m 1 0 d B / R E F 0 d B m
E x t R e f
- 1 3 . 8 5 3 d B m
3 0 4 . 9 6 8 7 5 M H z
C E N T E R 3 0 4 . 9 M H z S P A N 1 M H z R B W 3 k H z V B W 3 k H z A T N 1 0 d B S W P 2 2 5 . 2 m s e c
H l d
Figura 3.9: Espectro de freqüência do transmissor irradiado pelo Oscilador
RF tipo Armstrong
32
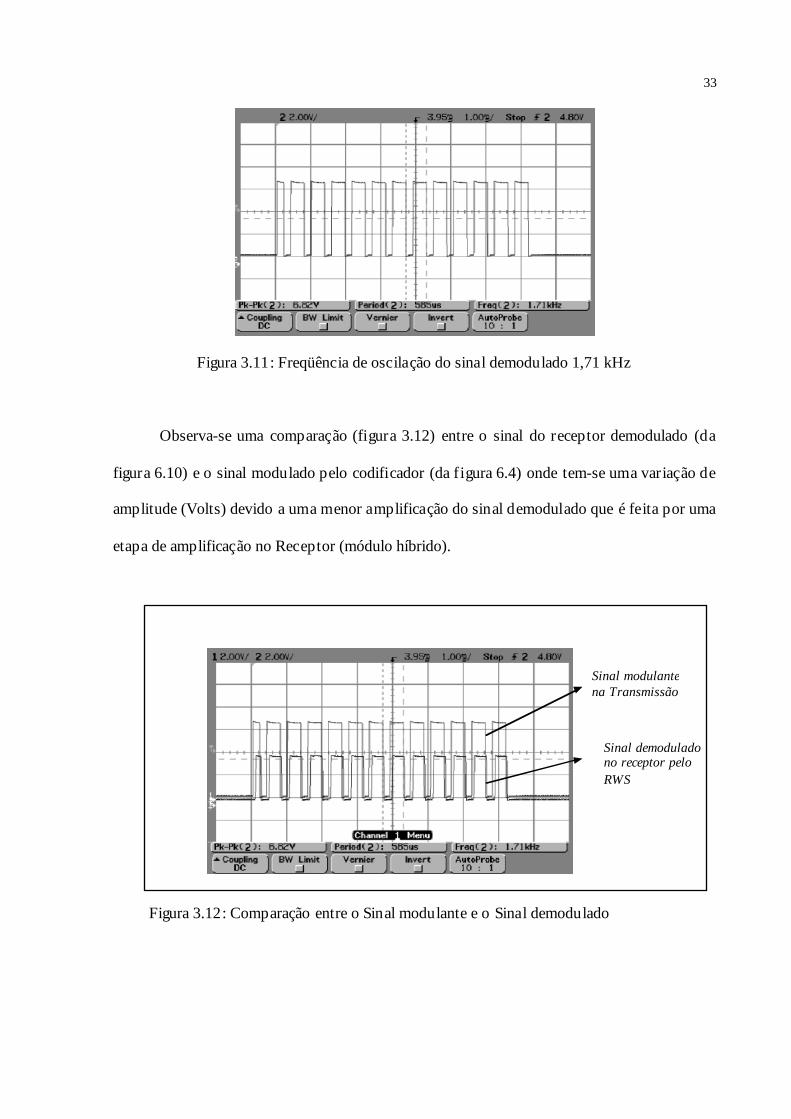
3.7 FORMAS DE ONDA DEMODULADA PELO MÓDULO HIBRIDO RWS
O sinal recebido pelo módulo híbrido RWS é demodulado (f igura 3.10) onde o código
recebido (código feita pelo codif icador) é comparado com o código da configuração do
decodificador, assim habilitando sua saída.
Figura 3.10: Sinal demodulado obtido na saída do módulo híbrido RWS
O sinal demodulado pelo receptor corresponde ao sinal modulante enviado pelo
transmissor. Devido que o módulo RWS tem uma etapa de Choque de RF que impede que os
sinais de Alta - Freqüência passem.
A freqüência de oscilação do sinal demodulado pelo receptor RWS, é de 1,71 kHz
observado na figura 3.11.
33
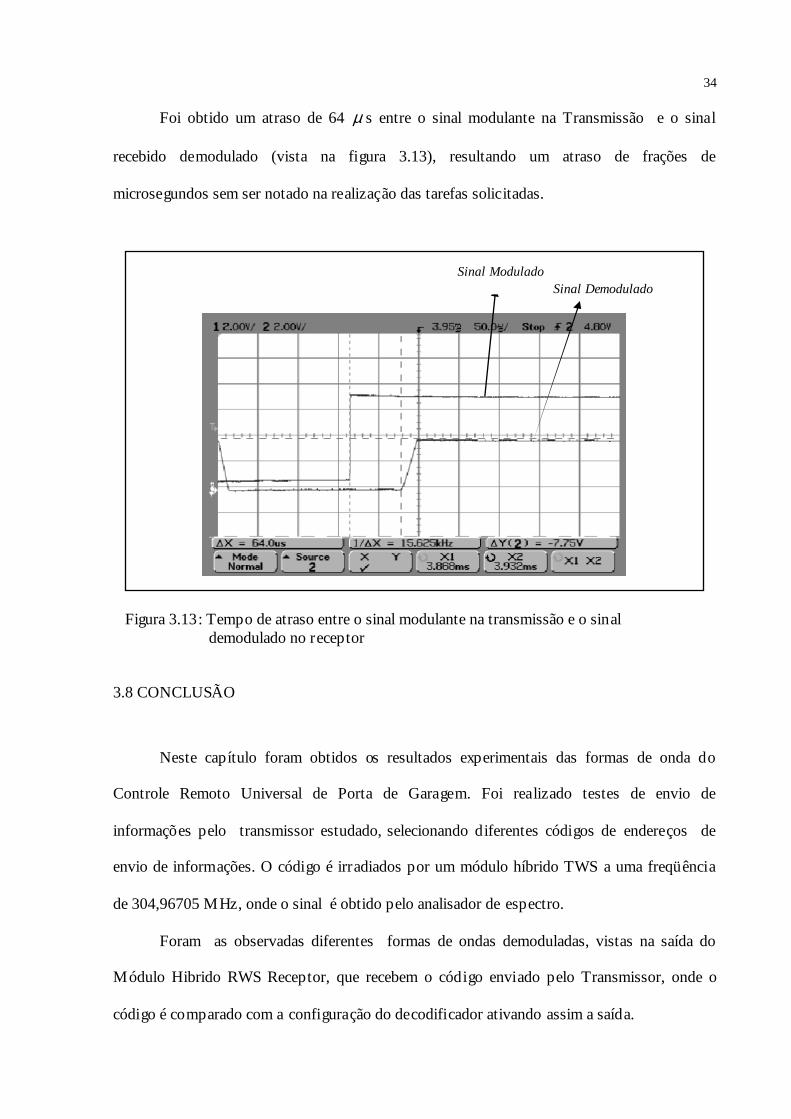
Figura 3.11: Freqüência de oscilação do sinal demodulado 1,71 kHz Observa-se uma comparação (figura 3.12) entre o sinal do receptor demodulado (da
figura 6.10) e o sinal modulado pelo codificador (da f igura 6.4) onde tem-se uma variação de
amplitude (Volts) devido a uma menor amplificação do sinal demodulado que é feita por uma
etapa de amplificação no Receptor (módulo híbrido).
Figura 3.12: Comparação entre o Sinal modulante e o Sinal demodulado
Sinal modulante na Transmissão
Sinal demodulado no receptor pelo RWS
34
Foi obtido um atraso de 64 µ s entre o sinal modulante na Transmissão e o sinal
recebido demodulado (vista na figura 3.13), resultando um atraso de frações de
microsegundos sem ser notado na realização das tarefas solicitadas.
Figura 3.13: Tempo de atraso entre o sinal modulante na transmissão e o sinal demodulado no receptor
3.8 CONCLUSÃO
Neste capítulo foram obtidos os resultados experimentais das formas de onda do
Controle Remoto Universal de Porta de Garagem. Foi realizado testes de envio de
informações pelo transmissor estudado, selecionando diferentes códigos de endereços de
envio de informações. O código é irradiados por um módulo híbrido TWS a uma freqüência
de 304,96705 MHz, onde o sinal é obtido pelo analisador de espectro.
Foram as observadas diferentes formas de ondas demoduladas, vistas na saída do
Módulo Hibrido RWS Receptor, que recebem o código enviado pelo Transmissor, onde o
código é comparado com a configuração do decodificador ativando assim a saída.
Sinal Modulado Sinal Demodulado

35
Foi feita uma comparação de tempo entre os códigos enviados e os códigos recebidos,
havendo assim um tempo de atraso de frações de microsegundos
36
4 ESTUDO DO CONTROLE REMOTO IMPLEMENTADO
4.1 INTRODUÇÃO
Neste capítulo será estudado é descrito de forma geral o controle remoto
implementado. Serão apresentados os diagramas de blocos das etapas transmissoras e
receptoras. Também são descritas e estudados os módulos híbridos que integram a
transmissão e recepção dos sinais. Os codificadores e decodif icadores que permitem
particularizar o sistema de controle são abordados. Serão estudados os relés necessários para o
comando de cargas remotas e sua importância para o controle proposto, é feito testes para
verificar o funcionamento do codificador e decodificador e após verificado será explicado o
modo de funcionamento citando alguns campos de aplicações do controle remoto
implementado.
4.2 DIAGRAMA DE BLOCOS
A função do transmissor e receptor empregados em um controle remoto são descritas
através dos seguintes diagramas de blocos, vistos na figura 2.1
37
Erro!
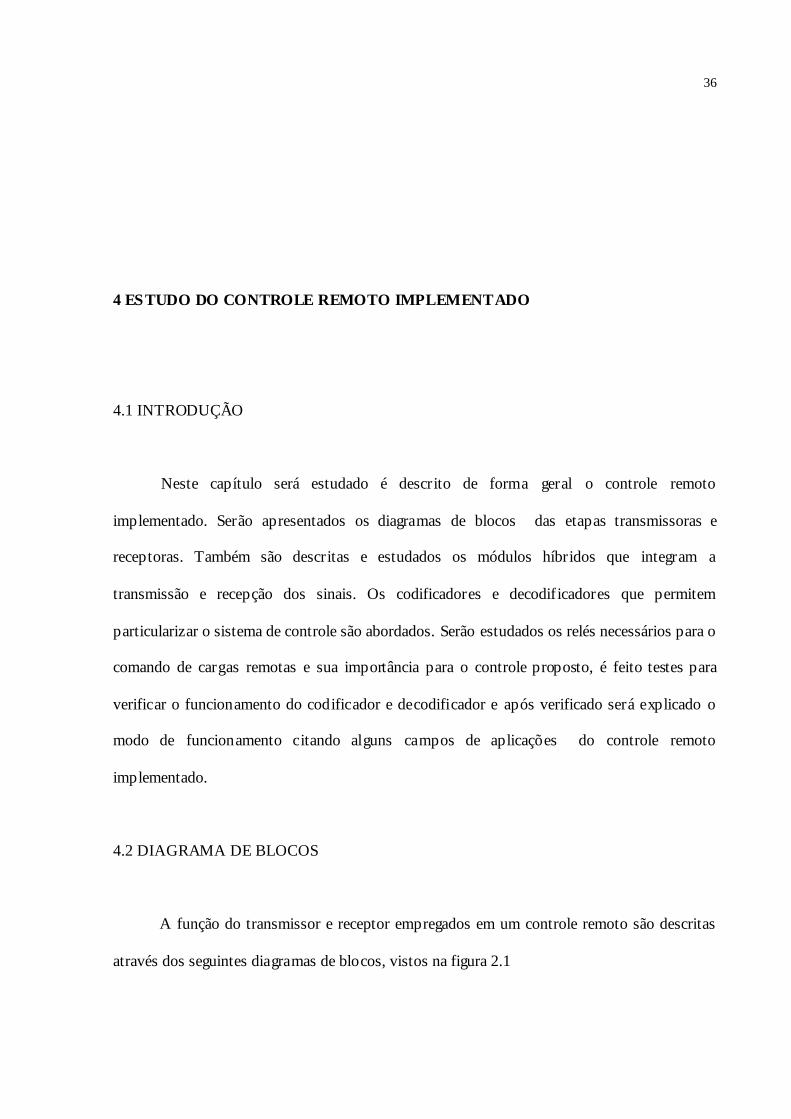
Figura 4.1: Diagrama de blocos contendo as etapas do transmissor e receptor
Na etapa transmissão utiliza-se um codificador e um módulo híbrido oscilador RF para
transmitir o sinal. O transmissor possui uma etapa osciladora de alta freqüência RF, e uma
etapa de baixa freqüência que produz a modulação, onde o sinal de baixa freqüência é
codificado e sobreposto ao de alta freqüência sendo irradiado através de uma antena.
Na etapa receptora utiliza-se um módulo híbrido receptor para receber o sinal. O sinal
é demodulado e aplicado a um decodif icador que aciona quatro saídas dependendo da
codificação do transmissor, excitando assim os reles para acionamento dos servos conectados
ao receptor.
4.3 TRANSMISSOR E RECEPTOR DE RF – MÓDULOS HIBRIDOS
Um dos maiores problemas enfrentados por projetistas e fabricantes de sistemas de
controle remoto está no ajuste do transmissor e do receptor, bem como na escolha apropriada
das freqüências de operação[12]. No primeiro caso, além de se demorar tempo para encontrar
o ponto certo de operação do par (transmissor e receptor), existe ainda o problema adicional
Codificador MC145026
Transmissor Oscilador RF TWS
Receptor RWS
Decodi ficador MC145027
Reles
Antena Antena
Servos
Diagrama do transmissor Diagrama do receptor
38
de que qualquer choque, ou mesmo o simples fechamento da caixa em que se encontram,
pode retirar o circuito de sintonia.
No caso de se operar em freqüências muito altas (na faixa UHF), por exemplo,o
circuito torna-se critico é de difícil ajuste, quando não se dispõe de equipamento apropriado.
Com os módulos híbridos comercializados pela Telecontrolli [13] estes problemas
podem ser contornados, pois, o par (transmissor e receptor) já vem ajustado de fábrica por
processo de alta precisão a laser. Assim sua operação em freqüências elevadas possibilita uma
boa imunidade aos ruídos e interferências.
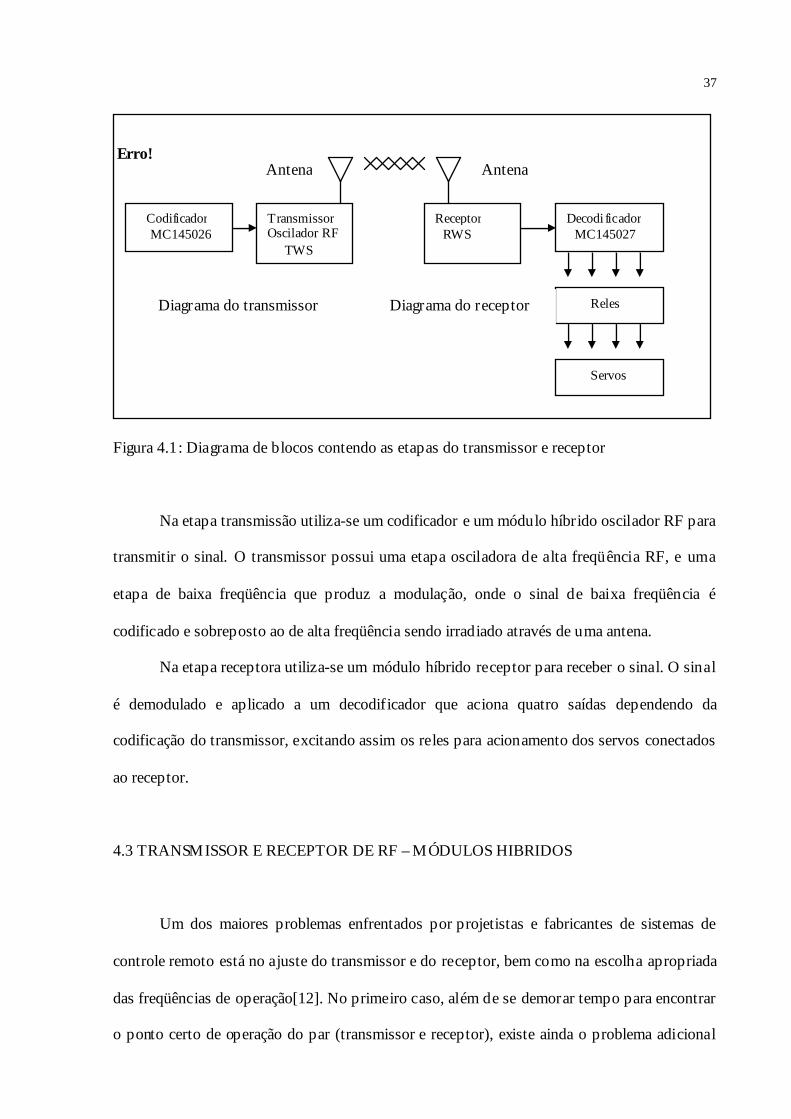
Os módulos TWS (Transmitter Empresa WS) e RWS (Receiver Emprsa WS) da
figura 4.2 têm alcance de até 100m sem obstáculos, desde que a antena e a fonte de
alimentação do transmissor sigam as recomendações técnicas do fabricante[13]. Esses
módulos já saem de fábrica regulados.
Figura 4.2: Módulo Híbrido do Transmissor TWS e Receptor RWS
39
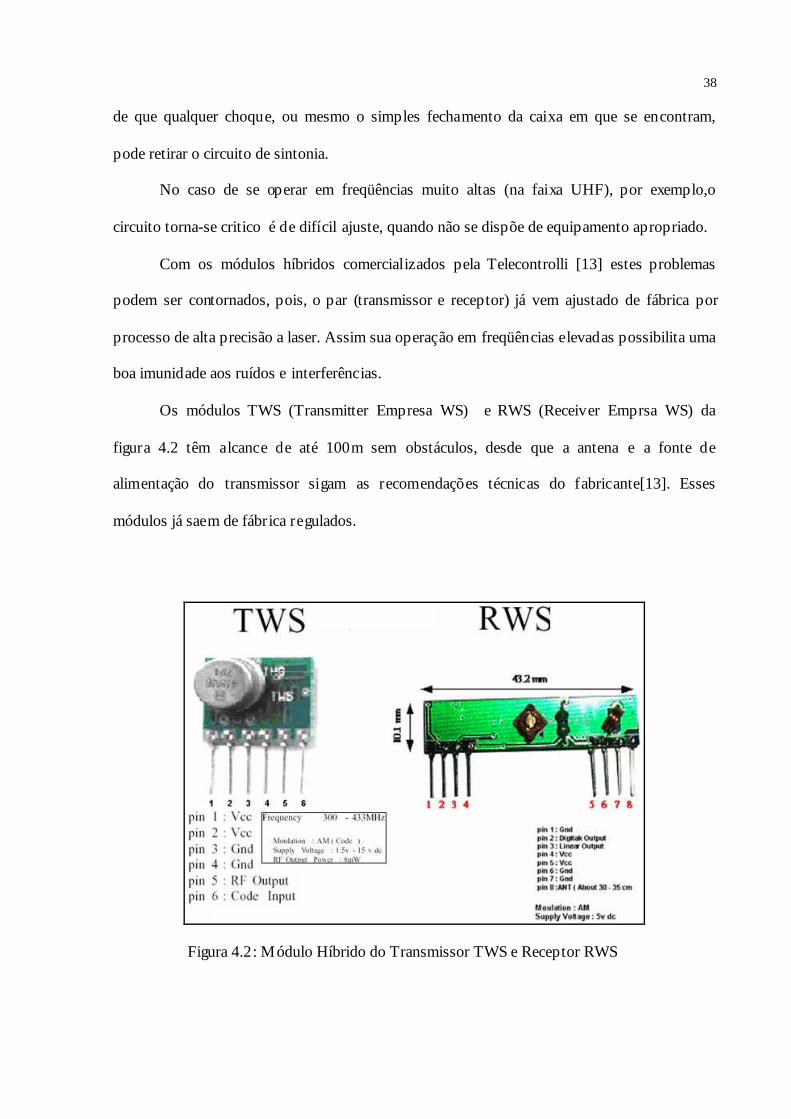
Os módulos TWS e RWS trabalham nas faixas de freqüências de: 300MHz e
433,92MHz. Os módulos empregado neste trabalho, operam a 433,92MHz que pode ser
classificado com UHF vista na tabela 4.1
Tabela 4.1: Faixa de radiocomunicações
É possível optar por outros módulos com uma das freqüências citadas (300MHz-
433MHz), mas o par (TWS e RWS) deve ter freqüências idênticas para que possa haver uma
comunicação entre o transmissor e receptor
4.4 ANTENA DO TRANSMISSOR E RECEPTOR
O comprimento preciso da antena do TWS e RWS é muito importante para que seja
possível obter um bom alcance, entre o módulo transmissor e o receptor[14]. Para um módulo
que trabalha na freqüência de 433,92MHz, pode ser usado um fio rígido de cobre (26AWG)
como antena, de comprimento igual a 23,81 cm..
4.5 CODIFICADOR
O codificador é um circuito lógico que, como o próprio nome o diz, codifica um sinal
que se encontra em uma forma para a outra, usando um tipo de código[15]. No projeto utiliza-
40
se circuitos integrados que são codif icados por largura de pulsos, com um elevado numero de
combinações.
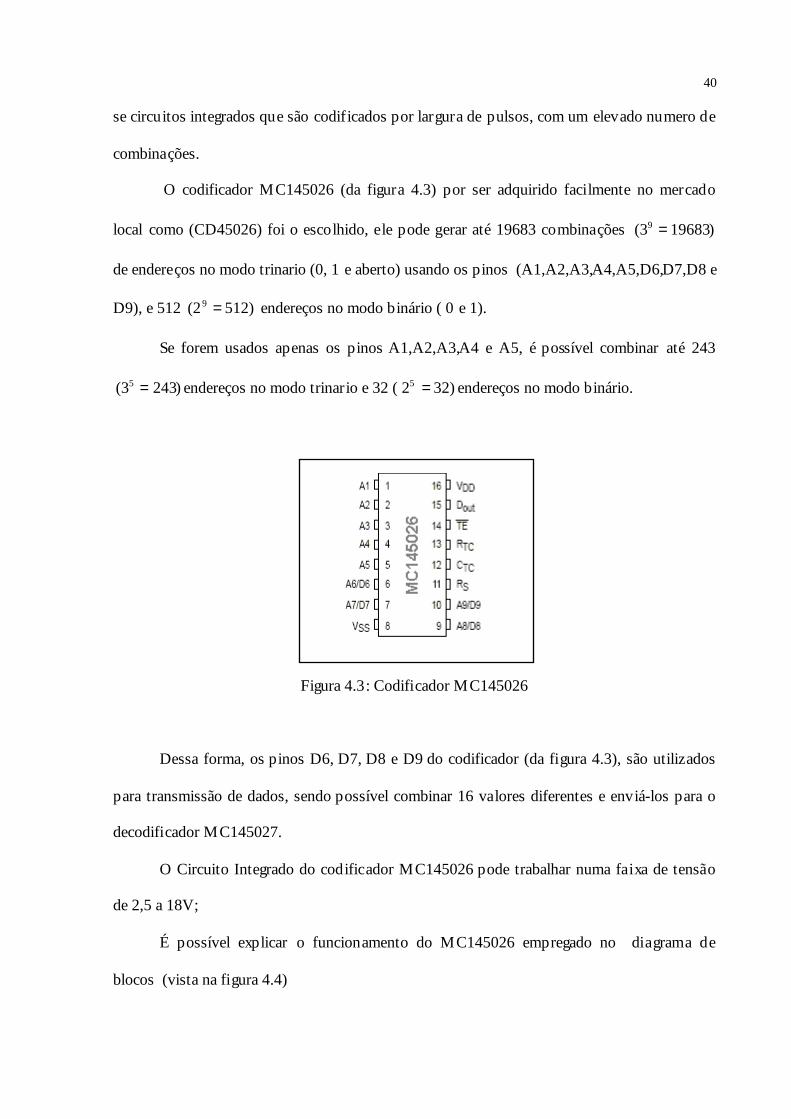
O codificador MC145026 (da figura 4.3) por ser adquirido facilmente no mercado
local como (CD45026) foi o escolhido, ele pode gerar até 19683 combinações )196833( 9 =
de endereços no modo trinario (0, 1 e aberto) usando os pinos (A1,A2,A3,A4,A5,D6,D7,D8 e
D9), e 512 )5122( 9 = endereços no modo binário ( 0 e 1).
Se forem usados apenas os pinos A1,A2,A3,A4 e A5, é possível combinar até 243
)2433( 5 = endereços no modo trinario e 32 ( )3225 = endereços no modo binário.
Figura 4.3: Codificador MC145026
Dessa forma, os pinos D6, D7, D8 e D9 do codificador (da figura 4.3), são utilizados
para transmissão de dados, sendo possível combinar 16 valores diferentes e enviá-los para o
decodificador MC145027.
O Circuito Integrado do codificador MC145026 pode trabalhar numa faixa de tensão
de 2,5 a 18V;
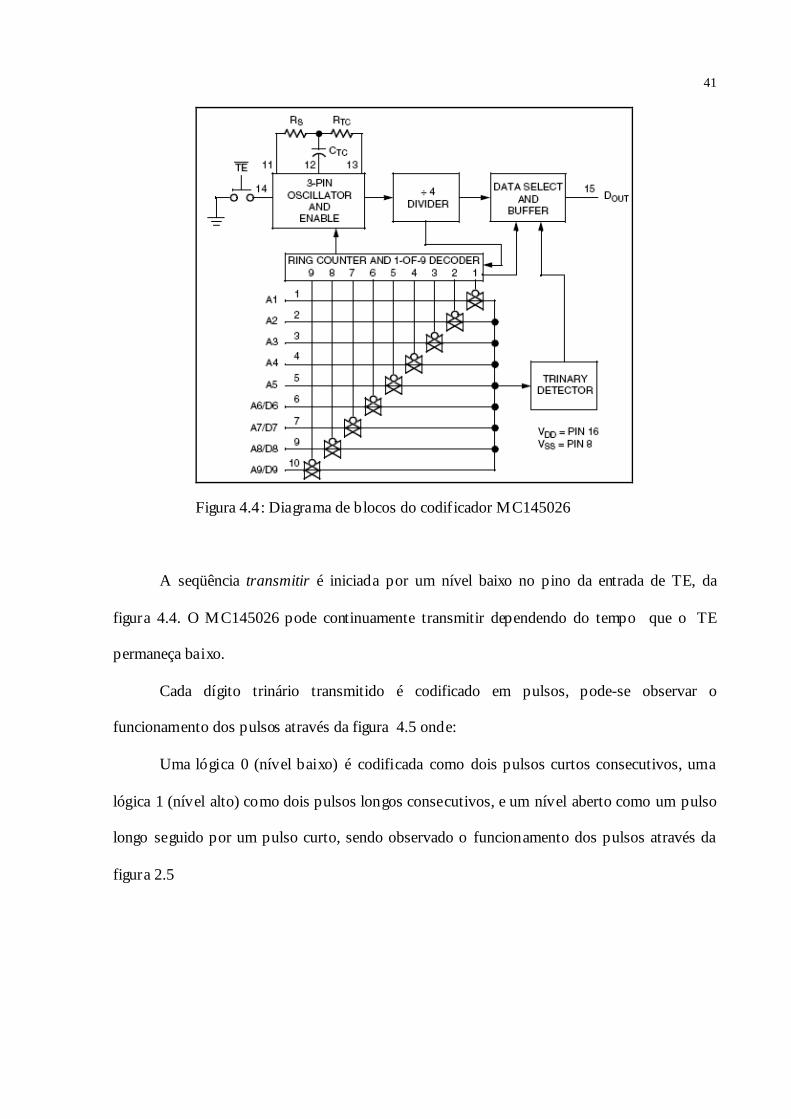
É possível explicar o funcionamento do MC145026 empregado no diagrama de
blocos (vista na figura 4.4)
41
Figura 4.4: Diagrama de blocos do codif icador MC145026
A seqüência transmitir é iniciada por um nível baixo no pino da entrada de TE, da
figura 4.4. O MC145026 pode continuamente transmitir dependendo do tempo que o TE
permaneça baixo.
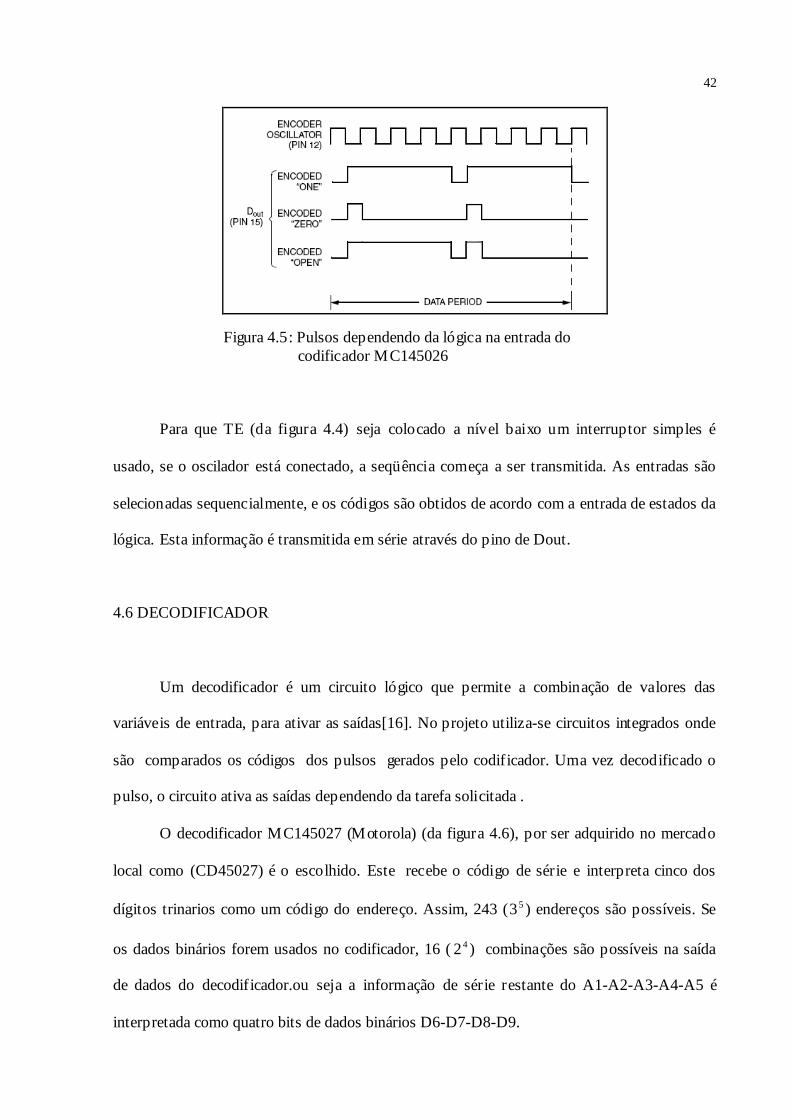
Cada dígito trinário transmitido é codificado em pulsos, pode-se observar o
funcionamento dos pulsos através da figura 4.5 onde:
Uma lógica 0 (nível baixo) é codificada como dois pulsos curtos consecutivos, uma
lógica 1 (nível alto) como dois pulsos longos consecutivos, e um nível aberto como um pulso
longo seguido por um pulso curto, sendo observado o funcionamento dos pulsos através da
figura 2.5
42
Figura 4.5: Pulsos dependendo da lógica na entrada do codificador MC145026
Para que TE (da figura 4.4) seja colocado a nível baixo um interruptor simples é
usado, se o oscilador está conectado, a seqüência começa a ser transmitida. As entradas são
selecionadas sequencialmente, e os códigos são obtidos de acordo com a entrada de estados da
lógica. Esta informação é transmitida em série através do pino de Dout.
4.6 DECODIFICADOR
Um decodificador é um circuito lógico que permite a combinação de valores das
variáveis de entrada, para ativar as saídas[16]. No projeto utiliza-se circuitos integrados onde
são comparados os códigos dos pulsos gerados pelo codif icador. Uma vez decodificado o
pulso, o circuito ativa as saídas dependendo da tarefa solicitada .
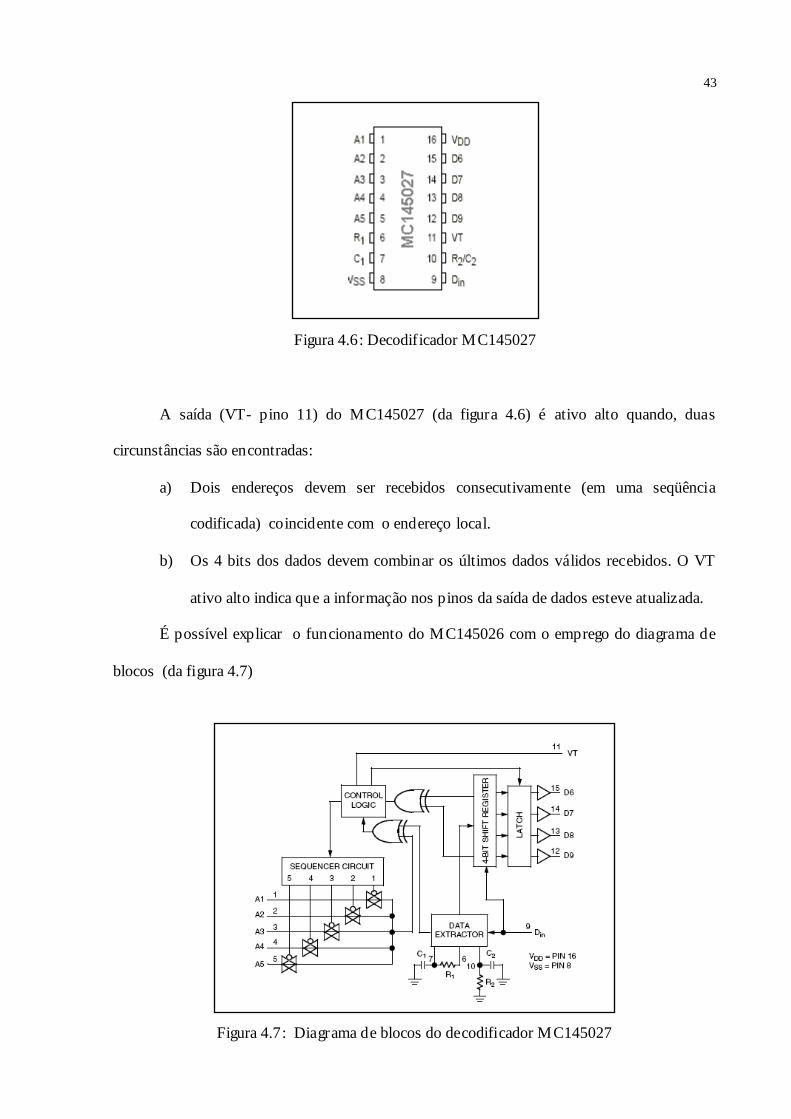
O decodificador MC145027 (Motorola) (da figura 4.6), por ser adquirido no mercado
local como (CD45027) é o escolhido. Este recebe o código de série e interpreta cinco dos
dígitos trinarios como um código do endereço. Assim, 243 ( 53 ) endereços são possíveis. Se
os dados binários forem usados no codificador, 16 (42 ) combinações são possíveis na saída
de dados do decodif icador.ou seja a informação de série restante do A1-A2-A3-A4-A5 é
interpretada como quatro bits de dados binários D6-D7-D8-D9.
43
Figura 4.6: Decodif icador MC145027
A saída (VT- pino 11) do MC145027 (da figura 4.6) é ativo alto quando, duas
circunstâncias são encontradas:
a) Dois endereços devem ser recebidos consecutivamente (em uma seqüência
codificada) coincidente com o endereço local.
b) Os 4 bits dos dados devem combinar os últimos dados válidos recebidos. O VT
ativo alto indica que a informação nos pinos da saída de dados esteve atualizada.
É possível explicar o funcionamento do MC145026 com o emprego do diagrama de
blocos (da figura 4.7)
Figura 4.7: Diagrama de blocos do decodificador MC145027

44
4.7 RELE
É necessário distinguir a tensão que aciona o relé da tensão que o mantém fechado que
é muito menor.
A corrente que aciona o relé é denominada corrente de acionamento, enquanto que a
corrente que o mantém fechado (muito menor) é a corrente de manutenção no momento em
que um relé é desenergizado, as linhas de força do campo magnético da bobina, diminuem
[17]. Nesta redução, as espiras da bobina do próprio relé são cortadas, havendo então a
indução de uma tensão na bobina. Esta tensão tem polaridade oposta àquela que criou o
campo e pode atingir valores muitos altos. O valor desta tensão depende da taxa de variação
do campo e da indutância da bobina (L)
Se o componente que faz o acionamento do relé não estiver dimensionado para
suportar esta tensão, ou se não houver uma proteção adequada, sua ação sobre o circuito
poderá ser danosa, explicado na figura 4.8.
Figura 4.8: Circuito de comando do rele que podem ter danos por falta de proteção de acionamento
Devemos projetar o circuito de comando do rele de tal forma que proporcione uma
proteção do circuito de acionamento
45
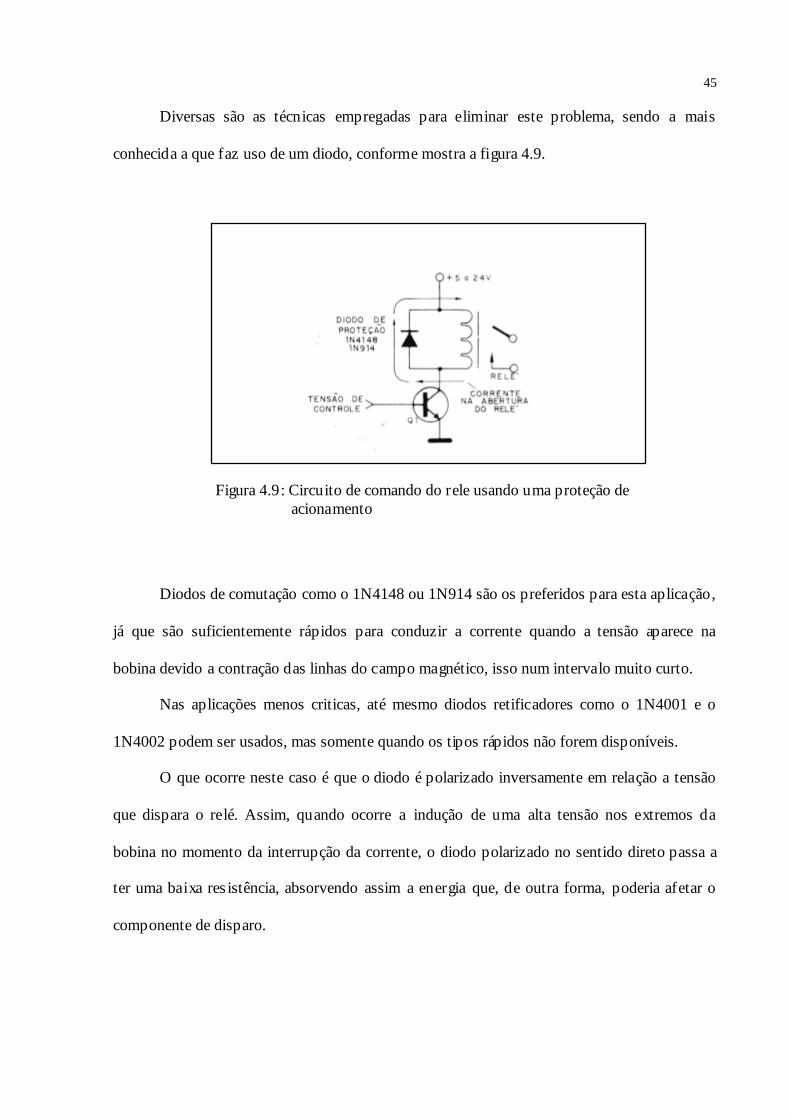
Diversas são as técnicas empregadas para eliminar este problema, sendo a mais
conhecida a que faz uso de um diodo, conforme mostra a figura 4.9.
Figura 4.9: Circuito de comando do rele usando uma proteção de acionamento
Diodos de comutação como o 1N4148 ou 1N914 são os preferidos para esta aplicação,
já que são suficientemente rápidos para conduzir a corrente quando a tensão aparece na
bobina devido a contração das linhas do campo magnético, isso num intervalo muito curto.
Nas aplicações menos criticas, até mesmo diodos retificadores como o 1N4001 e o
1N4002 podem ser usados, mas somente quando os tipos rápidos não forem disponíveis.
O que ocorre neste caso é que o diodo é polarizado inversamente em relação a tensão
que dispara o relé. Assim, quando ocorre a indução de uma alta tensão nos extremos da
bobina no momento da interrupção da corrente, o diodo polarizado no sentido direto passa a
ter uma baixa res istência, absorvendo assim a energia que, de outra forma, poderia afetar o
componente de disparo.
46
4.8 TESTE DE FUNCIONAMENTO DO MC15026 E MC145027
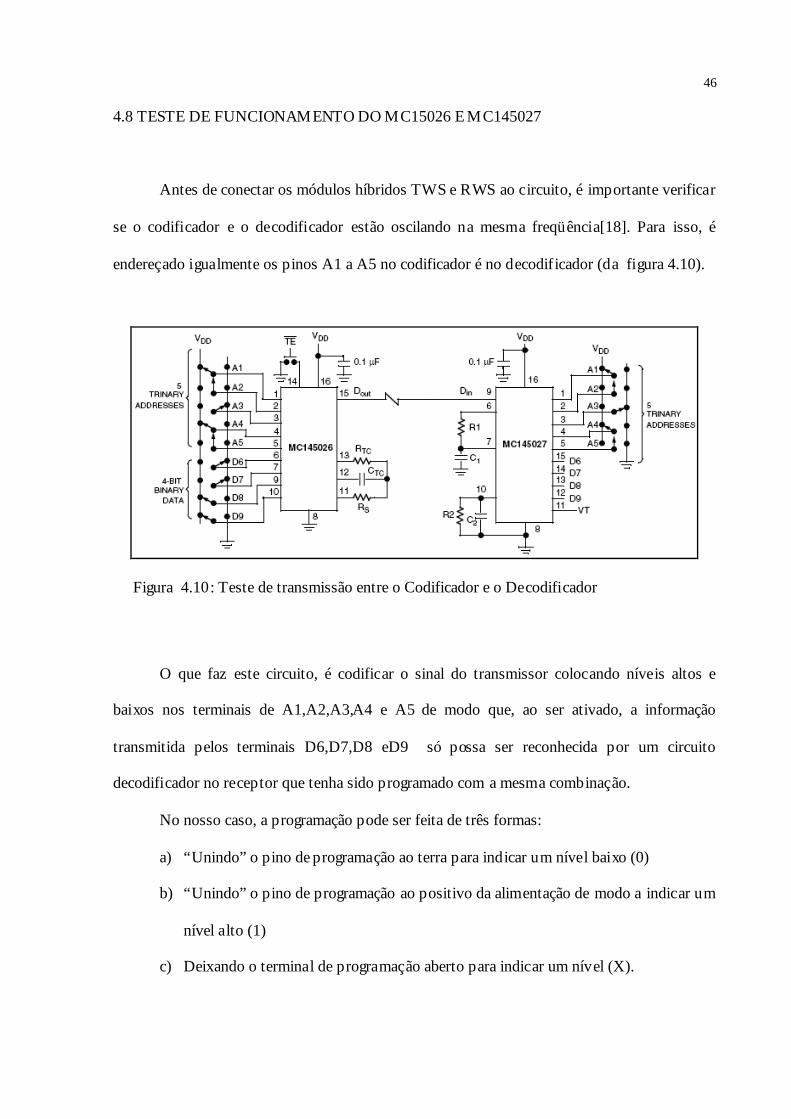
Antes de conectar os módulos híbridos TWS e RWS ao circuito, é importante verificar
se o codificador e o decodificador estão oscilando na mesma freqüência[18]. Para isso, é
endereçado igualmente os pinos A1 a A5 no codificador é no decodif icador (da figura 4.10).
Figura 4.10: Teste de transmissão entre o Codificador e o Decodificador
O que faz este circuito, é codificar o sinal do transmissor colocando níveis altos e
baixos nos terminais de A1,A2,A3,A4 e A5 de modo que, ao ser ativado, a informação
transmitida pelos terminais D6,D7,D8 eD9 só possa ser reconhecida por um circuito
decodificador no receptor que tenha sido programado com a mesma combinação.
No nosso caso, a programação pode ser feita de três formas:
a) “Unindo” o pino de programação ao terra para indicar um nível baixo (0)
b) “Unindo” o pino de programação ao positivo da alimentação de modo a indicar um
nível alto (1)
c) Deixando o terminal de programação aberto para indicar um nível (X).
47
Para a transmissão de dados em forma serial coloca-se um fio entre o pino 15 Dout
(Saída de dados) do codificador MC145026 e o pino 9 Din (Entrada de dados) do
decodificador MC145027 para simular a transmissão entre os circuitos integrados.
No pino 11 (VT - Valid Transmission) do decodif icador conecta-se um resistor de 470
Ω e um LED. Para testar se há um sincronismo entre os circuitos integrados, o pino 14 (TE-
Transmit Enable) do MC145026 deve estar no nível baixo (0v), ao fazer isso, o LED
conectado ao pino VT do MC145027 deverá acender. Ao desejar-se um teste mais elaborado,
codifica-se as entradas de dados (D6-D9) do MC145026 e conectado LEDs aos pinos de
dados (D6-D9) do MC145027, ao levar o pino TE a nível baixo (0v) os LEDs conectados aos
pinos de dados do MC145027, deverão se acender conforme a combinação feita nos pinos de
dados do MC145026. Dessa forma se estará certo de que o par codificador e decodif icador
está em sincronismo, funcionando corretamente. Após devem ser acrescentados os módulos
TWS e RWS ao circuito, de forma a testar o sistema completo.
4.9 FUNCIONAMENTO DO TRANSMISSOR E RECEPTOR
A transmissão dos dados digitais entre os pares MC145026/TWS e RWS/MC145027 é
vista na figura 2.11[19]. O codif icador MC145026 envia os bits de endereço/dados
serialmente para o módulo transmissor assim que o pino TE tenha sido levado a nível baixo
(0v). Por sua vez, o módulo TWS transmite os bits modulados através da portadora de rádio
freqüência. O módulo RWS captura os dados e repassa-os para o decodificador MC145027
que faz uma comparação nos bits do endereço recebido com os bits do endereço de sua
própria configuração. Se os endereços forem iguais, os bits de dados ficam disponíveis nos
pinos (D6,D7,D8 e D9) e o pino VT é levado a nível alto (1). O pino VT só permanece ativo
por um instante informando que um dado foi reconhecido e está disponível. Já os pinos dos
dados retém a última informação.
48
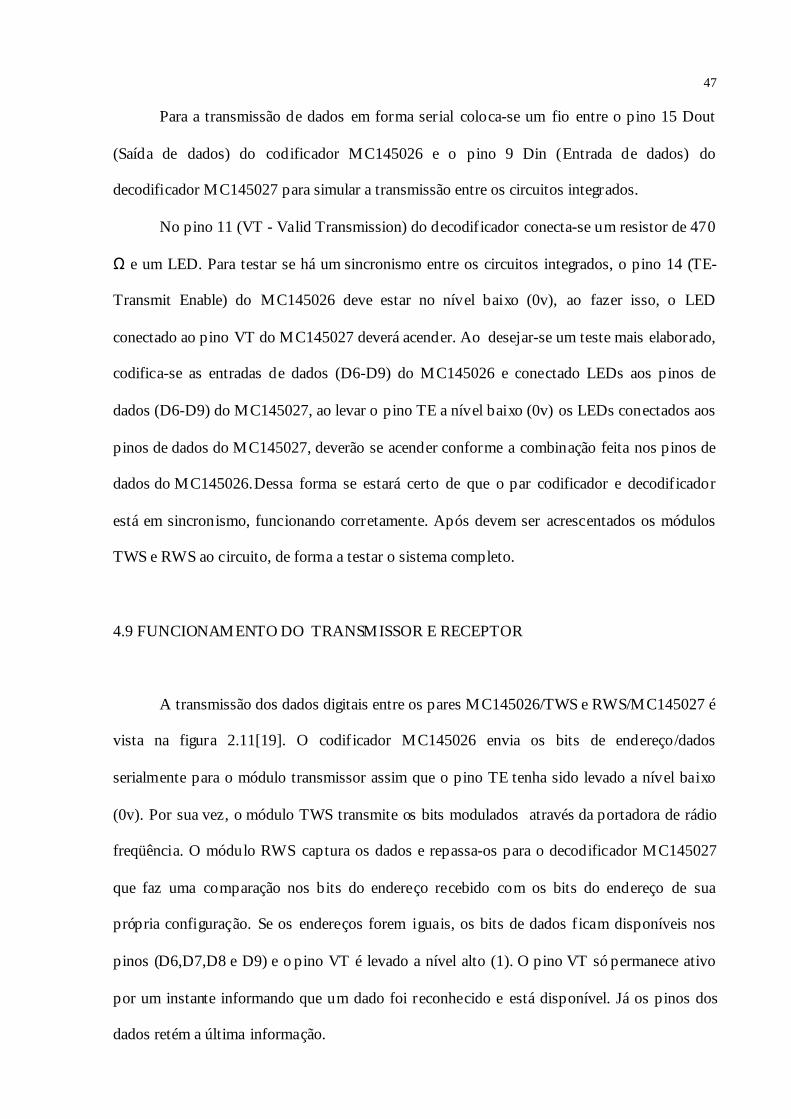
É possível porque estes pinos estão ligados a um latch (um tipo de memória volátil
elementar). Os dados permanecem no latch (da figura 4.7) até que um novo dado seja enviado
e aceito, ou a alimentação da fonte seja interrompida
Figura 4.11: Modulação da mensagem través da portadora de RF 4.10 CAMPOS DE APLICAÇÕES DO CONTROLE REMOTO
São quatro canais de controle que podem ser programadas para o acionamento travado
ou momentâneo [20]. Dentre as possíveis aplicações para o aparelho sugere-se as seguintes:
a) Automação Industrial: Para o controle de máquinas a curta distância sem a
necessidade de fios.
b) Robótica: No acionamento das diversas funções de um robô sem a necessidade de
fios.
c) Controle Domestico: Para acionamento de até 4 funções de um eletrodoméstico
comum.
d) Segurança: Na abertura de portas de instalações industriais, comerciais e
domesticas, além do acionamento de funções complementares (alarmes, sistemas
de aviso etc).

49
e) Monitoria de Eventos: Com o acionamento do transmissor por circuitos ligados a
sensores.
4.11 CONCLUSÃO
Neste capítulo é descrito o funcionamento da etapa transmissora e receptora do
controle remoto proposto. Foram utilizados codificadores e decodif icadores adquiridos no
mercado local, e par de módulos híbridos TWS que enviam o sinal modulado ao RWS,
ajustado com a mesma freqüência de operação de 433,92MHz .
Também foram propostos os testes de funcionamento do codificador e decodif icador
através da conexão de fios, na qual o codificador envia os dados para o decodificador que
compara os cincos endereços A1-A5 que devem ter sua mesma configuração e assim habilita
a saída de dados.
Após verificado o funcionamento do codificador/decodificador foram adicionados no
circuito os módulos híbridos TWS/RWS, onde o codificador dispõe os bits modulados a
serem enviadas pelo módulo híbrido, através da portadora de radio- freqüência (RF) onde
RWS captura os dados e repassa-os para o decodificador MC145027, que faz uma
comparação nos bits do endereço recebido com os bits do endereço de sua própria
configuração, se os endereços forem iguais ficam disponíveis na sua saída de dados.
Foram estudados os relés e sua importância dentro controle proposto, sendo importante
utilizar quatro reles no projeto, colocados nas saídas de dados (D6, D7, D8, D9) do
decodificador MC145027, de forma que o mesmo seja de controlar quatro canais possíveis.
50
5 DIMENSIONAMENTO DAS ETAPAS DO CONTROLE REMOTO PRO POSTO
5.1 INTRODUÇÃO
Neste capítulo será apresentado o dimensionamento dos componentes de cada etapa
tanto do transmissor como do receptor do controle remoto proposto, devendo se obter a
mesma operação em freqüência nos duas etapas para uma comunicação possível.
5.2 DIMENSIONAMENTO DAS ETAPAS DO TRANSMISSOR
Para a montagem da etapa do transmissor foi usado um codificador MC145026
(Motorola) e um módulo híbrido (TWS) oscilador de RF, necessários para irradiar a
informação desejada.
5.2.1 Codificador MC145026 (Motorola)
Para dimensionar o ajuste da freqüência de oscilação do codificador MC145026
adota-se valores comercias típicos para RTC, CTC e RS (da figura 5.1) [21], sendo estes
responsáveis pela oscilação do circuito.
51
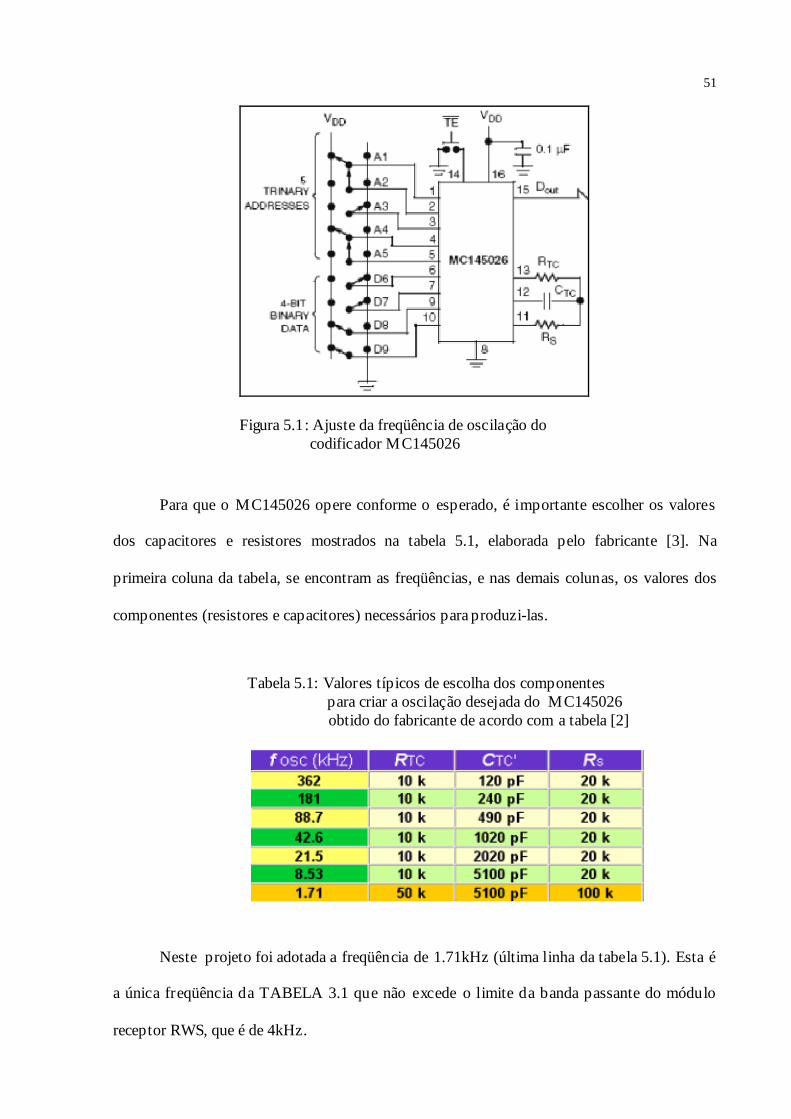
Figura 5.1: Ajuste da freqüência de oscilação do codificador MC145026
Para que o MC145026 opere conforme o esperado, é importante escolher os valores
dos capacitores e resistores mostrados na tabela 5.1, elaborada pelo fabricante [3]. Na
primeira coluna da tabela, se encontram as freqüências, e nas demais colunas, os valores dos
componentes (resistores e capacitores) necessários para produzi-las.
Tabela 5.1: Valores típicos de escolha dos componentes
para criar a oscilação desejada do MC145026 obtido do fabricante de acordo com a tabela [2]
Neste projeto foi adotada a freqüência de 1.71kHz (última linha da tabela 5.1). Esta é
a única freqüência da TABELA 3.1 que não excede o limite da banda passante do módulo
receptor RWS, que é de 4kHz.
52
Para facilitar a aquisição dos componentes no mercado, o resistor de 50kΩ, pode ser
substituído por um de 47kΩ, sem dificuldade o capacitor de 5100pF pode ser substituído por
um de 5,6nF (poliéster). Para comodidade, os valores dos capacitores C1 e C2 foram
convertidos de micro para nano. A seguir será encontrado o valor da freqüência de oscilação
dependendo dos Resistores e Capacitores dimensionados para o projeto
As expressões para o dimensionamento da freqüência de oscilação desejada do
MC145026 [3]
KHzfkHz
sendo
uFCpF
KR
KRs
RRs
CRf
osc
TC
TC
TC
TCTCosc
4001
15400
10
20
(3.2) 2
3.1) ( ..3,2
1
≤≤
<<Ω≥
Ω≥=
=
A seguir foram utilizadas as expressões (3.1) e (3.2) para obter a freqüência de
oscilação do MC145026, usando os valores do TCC = 5,1nF e TCR = Ωk50 dimensionados
53
comercialValor 10050.2
:
3.2) ( 2
71,11,5.50.3,2
1
:
1,5 50R para -
) 3.1 ( ..3,2
1
TC
>−Ω=Ω=
=
=Ω
=
=Ω=
=
KKRs
então
RRs
KHznFk
f
então
nFCeK
CRf
TC
osc
TC
TCTC
osc
5.3 DIMENSIONAMENTO DAS ETAPAS DO RECEPTOR
Para a implementação da etapa do receptor foi empregado um decodificador
MC145027 e um módulo híbrido (RWS) oscilador de RF
5.3.1 Decodificador MC145027 (Motorola)
Para dimensionar a freqüência de oscilação do decodificador MC145027 foram
adotados valores comerciais para R1, C1 e R2, C2 [22] da figura 5.2, responsáveis pela
oscilação do circuito. A oscilação do MC145027 deve ser idêntica a do MC145026 para que
este funcione.
54
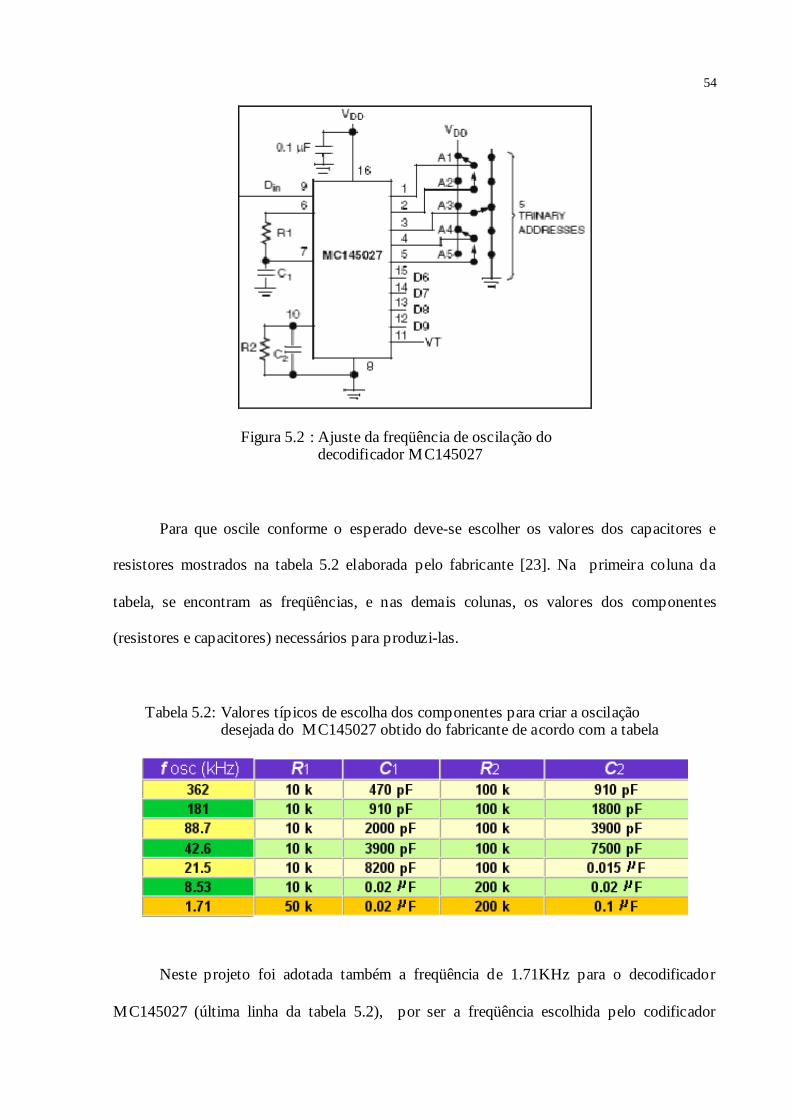
Figura 5.2 : Ajuste da freqüência de oscilação do decodificador MC145027
Para que oscile conforme o esperado deve-se escolher os valores dos capacitores e
resistores mostrados na tabela 5.2 elaborada pelo fabricante [23]. Na primeira coluna da
tabela, se encontram as freqüências, e nas demais colunas, os valores dos componentes
(resistores e capacitores) necessários para produzi-las.
Tabela 5.2: Valores típicos de escolha dos componentes para criar a oscilação desejada do MC145027 obtido do fabricante de acordo com a tabela
Neste projeto foi adotada também a freqüência de 1.71KHz para o decodificador
MC145027 (última linha da tabela 5.2), por ser a freqüência escolhida pelo codificador

55
MC145026 e a única freqüência que não excede o limite da banda passante do módulo
receptor RWS, que é de 4KHz.
Foram adotado os seguintes valores comerciais da figura 3.2 para R2=200KΩ, e como
R1= TCR =50KΩ. É possível assim, dimensionar a oscilação do decodificador através das
seguintes expressões:
comercialValor 1002
2001,5.50.77
2..77
2
1,5,50,2002
) 3.4 ( ..772.2
comercialValor 221
50
1,5.50.95,3
1
..95,31
então
1,5,50,501
(3.3) ..95,31.1
>−=
==
=Ω=Ω=−
=
>−=
==
=Ω=Ω=−
=
nFC
K
nK
R
CRC
então
nFCKRKRpara
CRCR
nFC
K
nK
R
CRC
nFCKRKRpara
CRCR
TCTC
TCTC
TCTC
TCTC
TCTC
TCTC
5.4 DIM ENSIONAM ENTO DO RELE
Para que o relé seja energizado corretamente e os contatos atuem, é preciso que uma
corrente de intensidade mínima determinada circule pela bobina[24]. Deve-se então aplicar
56
uma tensão de determinado valor, que em função da resistência do enrolamento vai permitir
que a corrente mínima determinada seja estabelecida.
Na prática os relés são especificados em termos da corrente que deve passar pelo
enrolamento para uma determinada tensão que é a tensão de funcionamento Foi utilizado reles
de 9V (Tensão de funcionamento) e contatos do rele admitem uma corrente máxima de 15A-
120V.
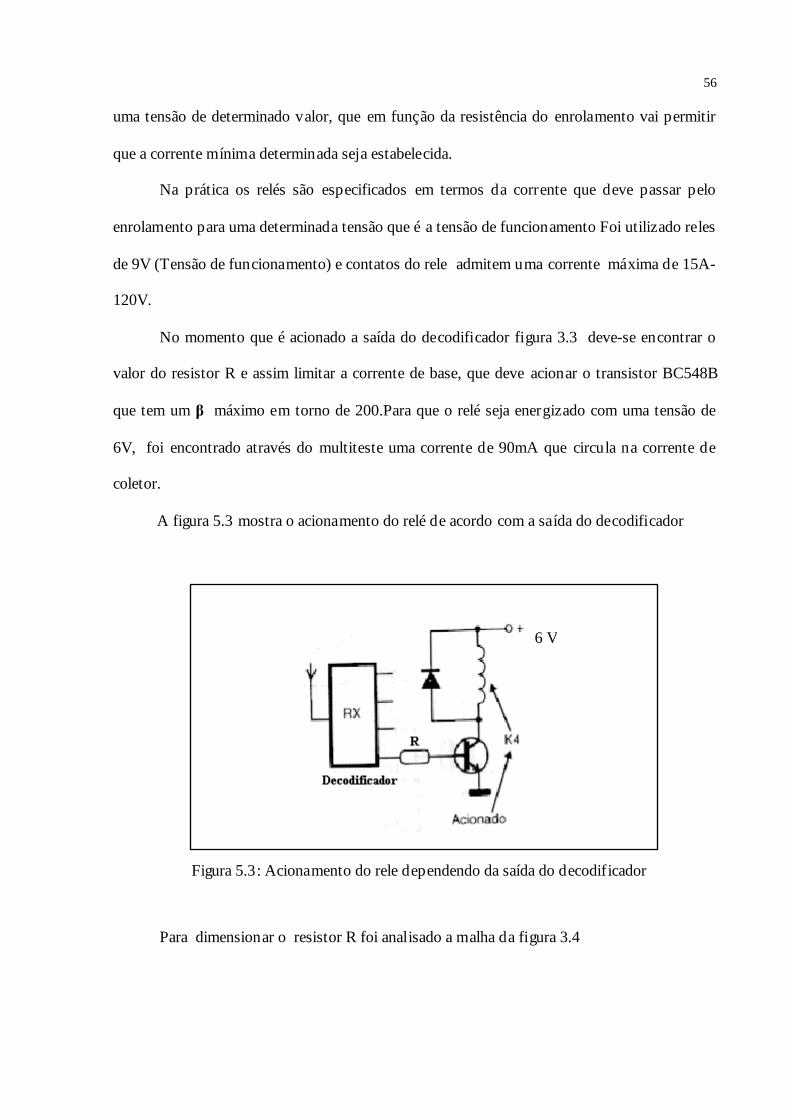
No momento que é acionado a saída do decodificador figura 3.3 deve-se encontrar o
valor do resistor R e assim limitar a corrente de base, que deve acionar o transistor BC548B
que tem um β máximo em torno de 200.Para que o relé seja energizado com uma tensão de
6V, foi encontrado através do multiteste uma corrente de 90mA que circula na corrente de
coletor.
A figura 5.3 mostra o acionamento do relé de acordo com a saída do decodificador
Figura 5.3: Acionamento do rele dependendo da saída do decodif icador
Para dimensionar o resistor R foi analisado a malha da figura 3.4
6 V
57
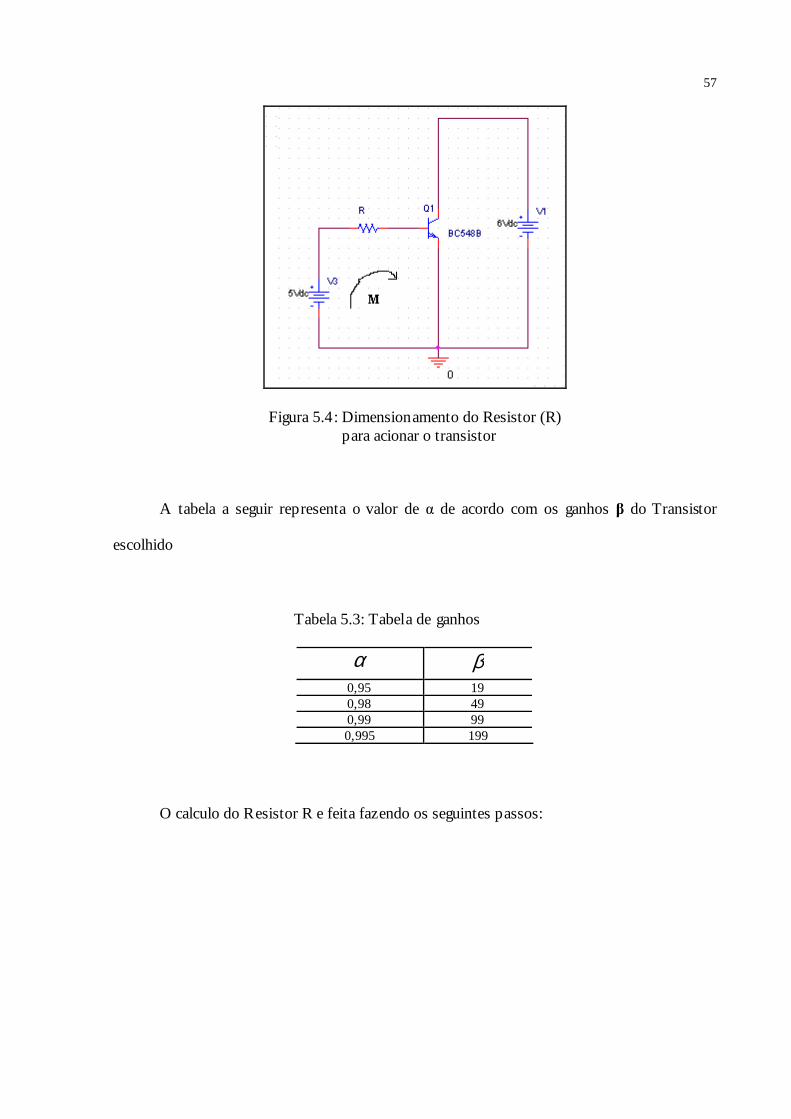
Figura 5.4: Dimensionamento do Resistor (R) para acionar o transistor
A tabela a seguir representa o valor de α de acordo com os ganhos β do Transistor
escolhido
Tabela 5.3: Tabela de ganhos
α β
0,95 19 0,98 49 0,99 99 0,995 199
O calculo do Resistor R e feita fazendo os seguintes passos:
58
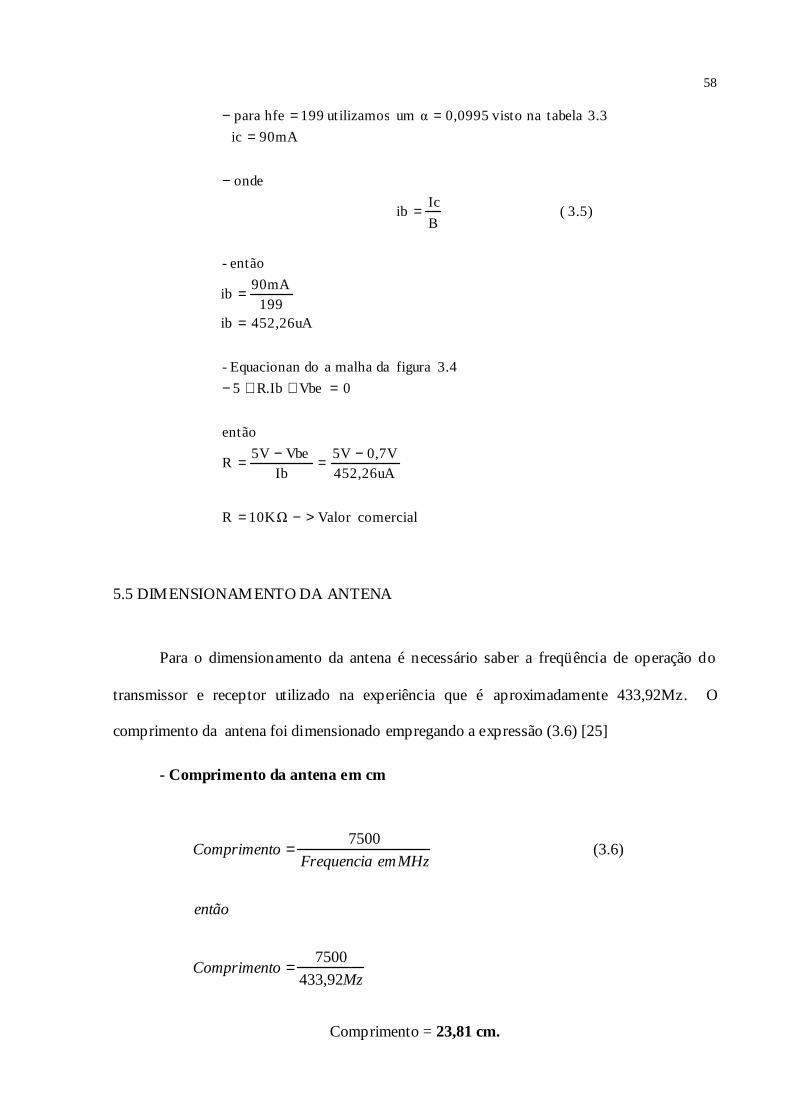
comercialValor 10KΩR
452,26uA0,7V5V
IbVbe5V
R
então
0VbeR.Ib5
3.4 figura da malha a doEquacionan -
452,26uAib199
90mAib
então -
3.5) ( B
Icib
onde
90mAic
3.3 tabelana visto0,0995α um utilizamos 199hfe para
>−=
−=−=
=++−
=
=
=
−
===−
5.5 DIMENSIONAMENTO DA ANTENA
Para o dimensionamento da antena é necessário saber a freqüência de operação do
transmissor e receptor utilizado na experiência que é aproximadamente 433,92Mz. O
comprimento da antena foi dimensionado empregando a expressão (3.6) [25]
- Comprimento da antena em cm
MzoCompriment
então
MHzemFrequenciaoCompriment
92,433
7500
(3.6) 7500
=
=
Comprimento = 23,81 cm.
59
- Comprimento da antena em polegadas:
MzoCompriment
então
MHzemFrequenciaoCompriment
92,433
2952
(3.7) 2952
=
=
Comprimento = 9,37 in.
5.6 CONCLUSÃO
Neste capítulo foi feito o dimensionamento das etapas Transmissora e Receptora do
Controle Remoto proposto. Foram dimensionados o ajuste da freqüência de oscilação do
codificador MC145026 e do decodificador MC145027, devendo operar com as mesmas
freqüências, necessárias para o funcionamento do circuito.
Foi dimensionada as correntes necessárias para o acionamento do rele e o calculo do
comprimento da antena dependendo da freqüência de operação do controle remoto proposto.

60
6 RESULTADOS EXPERIMENTAIS E FORMA DE ONDA DO CONT ROLE
REMOTO PROPOSTO
6.1 INTRODUÇÃO
Neste capítulo serão ilustradas e comentadas as principias formas de onda e resultado
experimentais do trabalho proposto
6.2 CIRCUITO PROPOSTO IMPLEMENTADO NO LABORATÓRIO
Para a realização do trabalho foram implementados os circuitos do transmissor e
receptor em laboratório (figura 4.1)
61
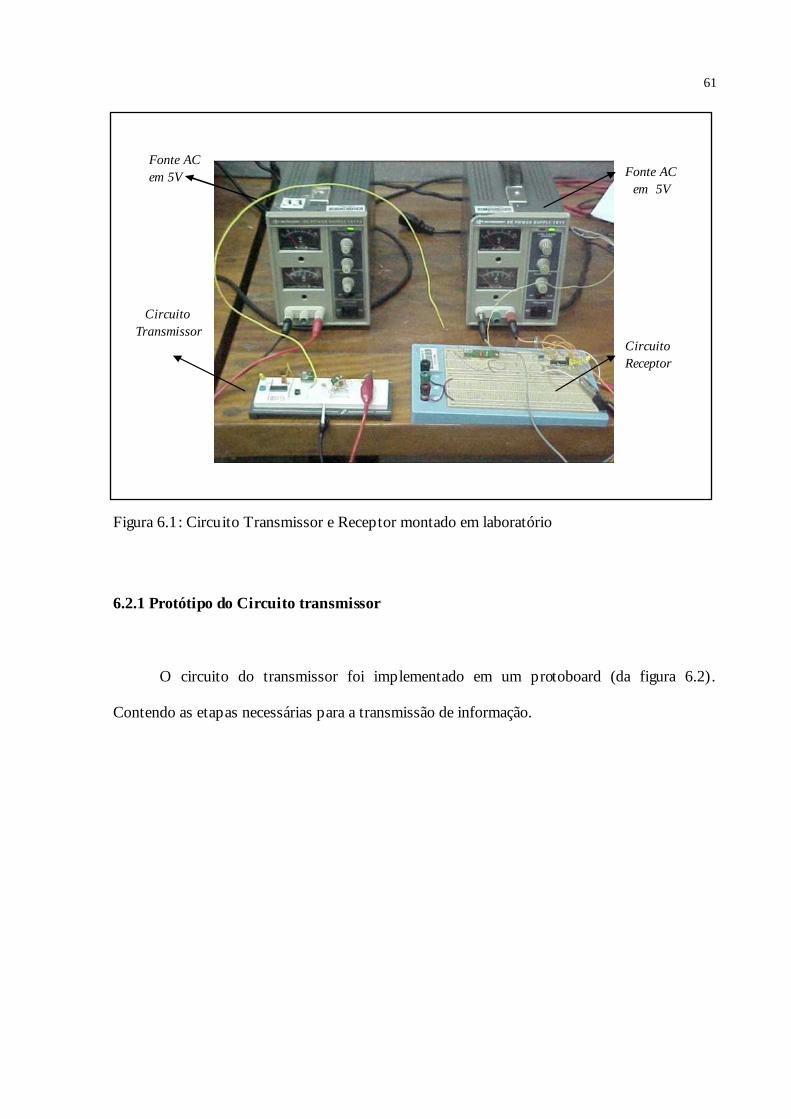
Figura 6.1: Circuito Transmissor e Receptor montado em laboratório
6.2.1 Protótipo do Circuito transmissor
O circuito do transmissor foi implementado em um protoboard (da figura 6.2).
Contendo as etapas necessárias para a transmissão de informação.
Circuito Transmissor
Circuito Receptor
Fonte AC em 5V
Fonte AC em 5V
62
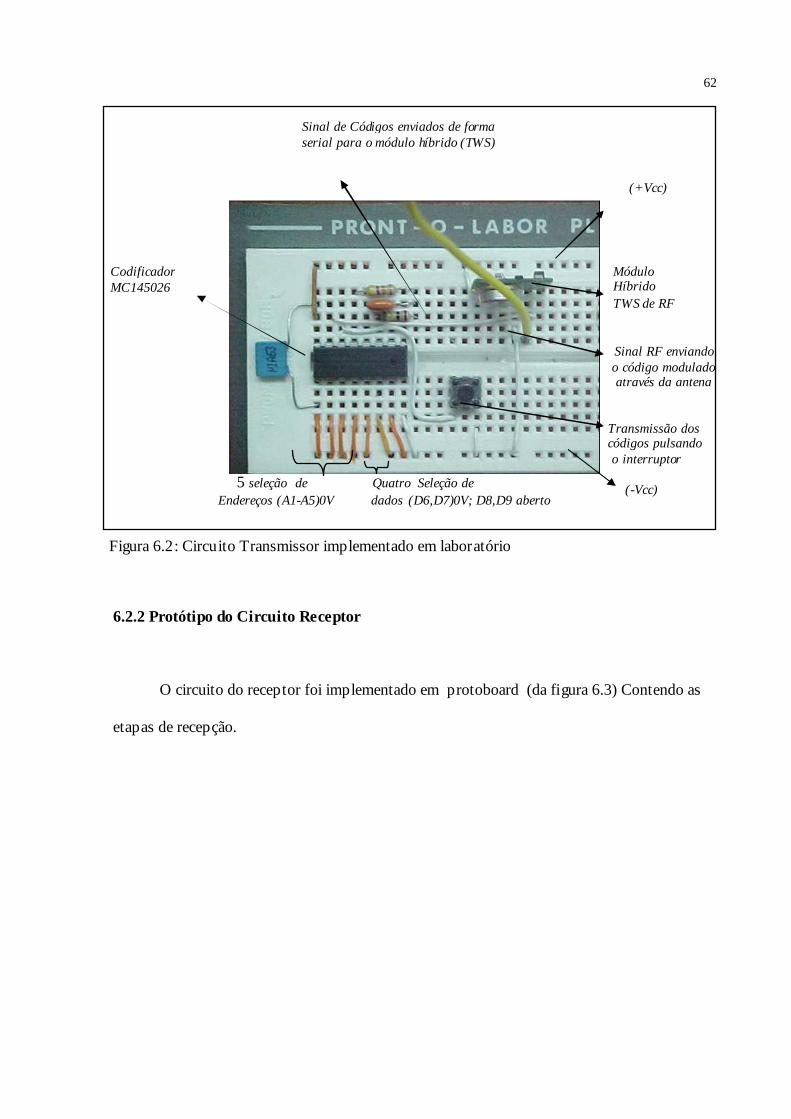
5 seleção de Quatro Seleção de Endereços (A1-A5)0V dados (D6,D7)0V; D8,D9 aberto
Figura 6.2: Circuito Transmissor implementado em laboratório
6.2.2 Protótipo do Circuito Receptor
O circuito do receptor foi implementado em protoboard (da figura 6.3) Contendo as
etapas de recepção.
Módulo Híbrido TWS de RF
Sinal RF enviando o código modulado através da antena
Transmissão dos códigos pulsando o interruptor (-Vcc)
Codificador MC145026
(+Vcc)
Sinal de Códigos enviados de forma serial para o módulo híbrido (TWS)
63
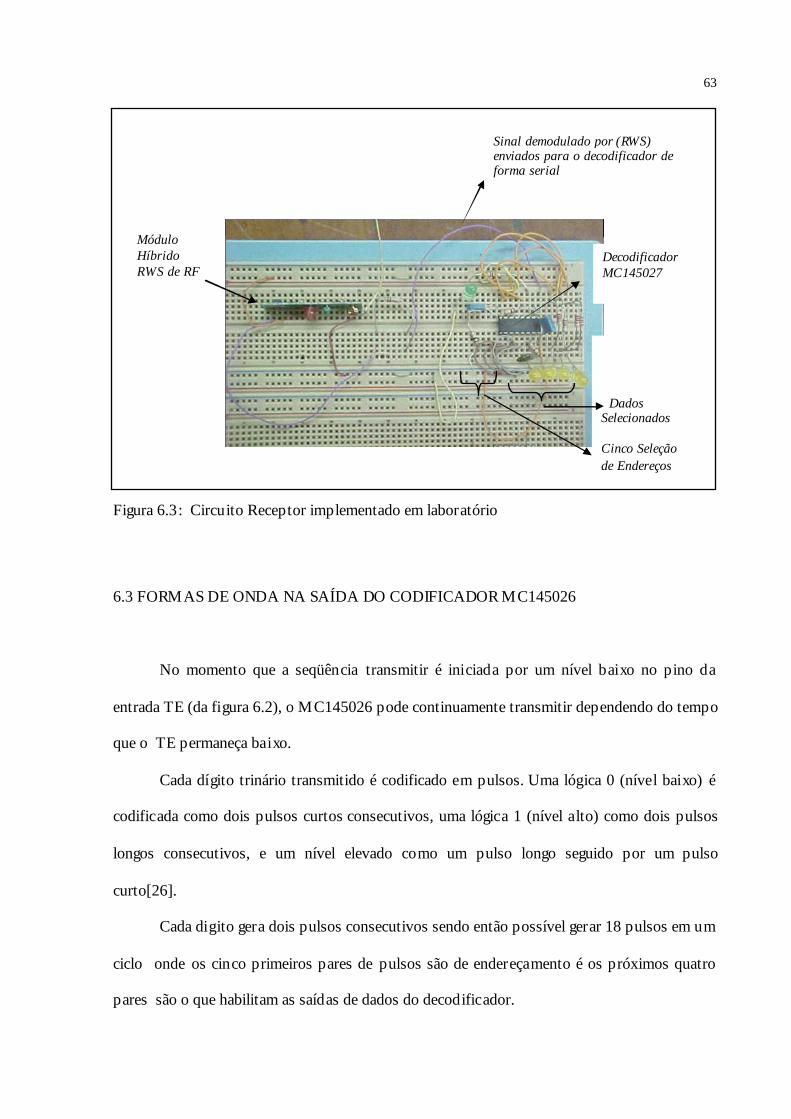
Figura 6.3: Circuito Receptor implementado em laboratório
6.3 FORMAS DE ONDA NA SAÍDA DO CODIFICADOR MC145026
No momento que a seqüência transmitir é iniciada por um nível baixo no pino da
entrada TE (da figura 6.2), o MC145026 pode continuamente transmitir dependendo do tempo
que o TE permaneça baixo.
Cada dígito trinário transmitido é codificado em pulsos. Uma lógica 0 (nível baixo) é
codificada como dois pulsos curtos consecutivos, uma lógica 1 (nível alto) como dois pulsos
longos consecutivos, e um nível elevado como um pulso longo seguido por um pulso
curto[26].
Cada digito gera dois pulsos consecutivos sendo então possível gerar 18 pulsos em um
ciclo onde os cinco primeiros pares de pulsos são de endereçamento é os próximos quatro
pares são o que habilitam as saídas de dados do decodificador.
Módulo Híbrido RWS de RF
Decodificador MC145027
Dados Selecionados Cinco Seleção de Endereços
Sinal demodulado por (RWS) enviados para o decodificador de forma serial
64
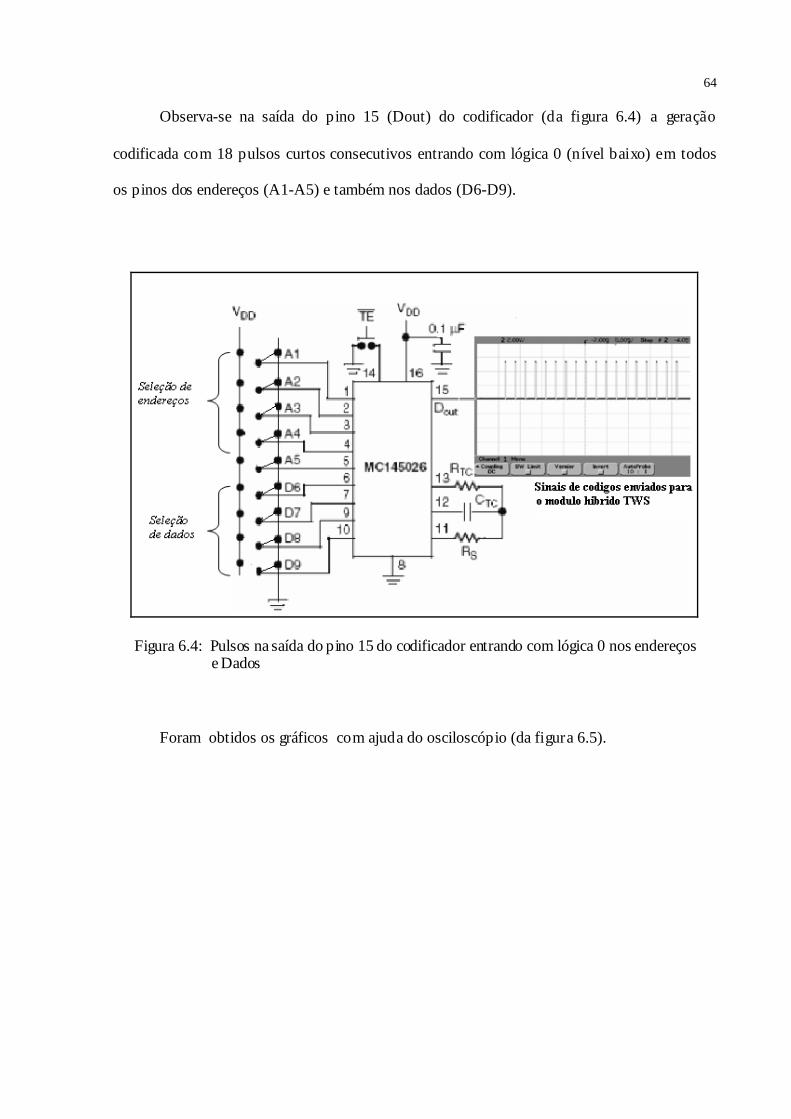
Observa-se na saída do pino 15 (Dout) do codificador (da figura 6.4) a geração
codificada com 18 pulsos curtos consecutivos entrando com lógica 0 (nível baixo) em todos
os pinos dos endereços (A1-A5) e também nos dados (D6-D9).
Figura 6.4: Pulsos na saída do pino 15 do codificador entrando com lógica 0 nos endereços e Dados
Foram obtidos os gráficos com ajuda do osciloscópio (da figura 6.5).
65
Figura 6.5: Osciloscópio com faixa de freqüência até 100MHz
O sinal de endereços e de dados do codif icador (da f igura 4.4) é feita através da
seleção do tipo de código que será enviado (0, 1 ou aberto). Foram selecionados diferentes
tipos de habilitação de dados vistas nas figuras 6.6; 6.7; 6.8 ;6.9 ;6.10; 6.11 mantendo os
códigos de endereços (A1,A2,A3,A4,A5) com lógica 0
Figura 6.6: Seleção do dado D6 com lógica 1 Figura 6.7: Seleção do dado D7 com lógica 1

66
Figura 6.8: Seleção do dado D8 com lógica 1 Figura 6.9: Seleção do dado D9 com lógica 1
Figura 6.10: Seleção dos dados D6,D7,D8,D9 lógica1 Figura 6.11: Seleção dos dados D8,D9 com lógica1
A freqüência que oscila os pulsos na saída do pino 15 Dout do codificador (da figura
6.4) é identificada através do período entre os pulsos (da figura 6.12), que é aproximadamente
1,89 kHz aproximada da freqüência dimensionada
Figura 6.12: Freqüência de operação de oscilação do codificador 1,89 kHz

67
6.4 ESPECTRO EMITIDO PELO MÓDULO HÍBRIDO TWS
É obtido o sinal modulado emitido pelo módulo híbrido TWS da figura 6.2 através de
um ANALISADOR DE ESPECTRO (HP) DE 1,8 GHz. Foi usado o analisador devido a que
os osciloscópios comuns disponíveis (figura 6.5) trabalham em uma faixa de 100 MHz na
qual seria obtido o gráfico desejado. Observa-se que a freqüência da portadora obtida através
do analisador de espectro é de 433,96 MHz, onde o módulo híbrido TWS envia os bits
modulados representados por pulsos observados na figura 6.13
0
C H1 S S p e c t r u m 1 0 d B / RE F - 2 0 d B m
Ex t R e f
- 3 9 . 1 7 6 d B m
4 3 3 . 9 6 2 7 5 MH z
CE NT E R 4 3 3 . 9 4 9 MHz S PA N 1 MH z RB W# 1 0 k H z V BW 1 0 k Hz A T N 1 0 d B S WP 4 0 ms e c
H l d
Figura 6.13: Espectro de freqüência do transmissor irradiado pelo módulo híbrido TWS

68
6.5 FORMA DE ONDA DEMODULADA PELO MÓDULO HIBRIDO RWS
O sinal recebido pelo módulo hibrido RWS é demodulado (f igura 6.14) onde o código
recebido (código feita pelo codif icador) é comparado com o código da configuração do
decodificador. Para ter um funcionamento deve-se ter:
a) A mesma freqüência de operação dos módulos híbridos
b) A mesma freqüência de oscilação dos codificadores e decodificadores
c) O mesmo o código de endereços A1-A5
Figura 6.14: Sinal demodulado obtido na saída do módulo híbrido RWS
A freqüência de oscilação do sinal demodulado pelo receptor RWS (da figura 6.15), é
recebido com a mesma freqüência de oscilação do sinal modulante enviado pelo transmissor
TWS (1,89 kHz) isso significa que o sinal chegou em perfeitas condições.
69
Figura 6.15: Freqüência de oscilação do sinal demodulado 1,89 kHz
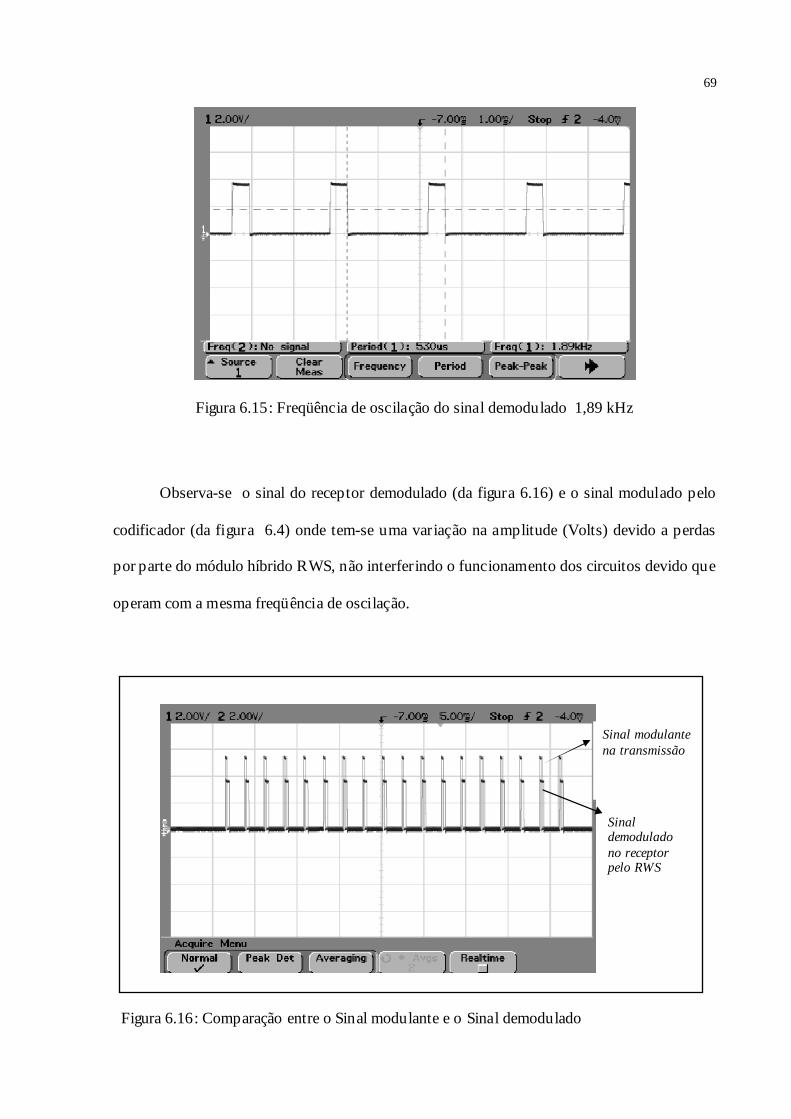
Observa-se o sinal do receptor demodulado (da figura 6.16) e o sinal modulado pelo
codificador (da figura 6.4) onde tem-se uma variação na amplitude (Volts) devido a perdas
por parte do módulo híbrido RWS, não interferindo o funcionamento dos circuitos devido que
operam com a mesma freqüência de oscilação.
Figura 6.16: Comparação entre o Sinal modulante e o Sinal demodulado
Sinal modulante na transmissão
Sinal demodulado no receptor pelo RWS

70
Observa-se um atraso de 110µ s (da figura 6.17) na chegada da informação no
receptor do sinal demodulado isso resultará um atraso de frações de micro segundos sem
quase ser notado na realização da tarefas solicitadas
Figura 6.17: Tempo de atraso do receptor
6.6 CONCLUSÃO
Neste capítulo foram obtidos os resultados experimentais das formas de onda do
Controle Remoto Proposto. Foi realizado testes de envio de informações pelo protótipo do
transmissor selecionando diferentes códigos de envio de dados, onde o código é irradiados
por um módulo híbrido TWS a uma freqüência de 433,96275 MHz onde o sinal é capturado
pelo analisador de espectro.
Foram obtidos as formas de ondas demoduladas observadas na saída do Módulo
Hibrido RWS Receptor, que recebem o código enviado pelo Transmissor, onde o código é
comparado com a configuração do decodificador ativando assim o dado selecionado.
Sinal modulante Sinal demodulado na transmissão na recepção
Atraso
71
Foi feita uma comparação de tempo entre os códigos enviados e os códigos recebidos,
havendo assim um tempo de atraso de frações de microsegundos.

72
7 CONCLUSÃO GERAL
O desenvolvimento deste trabalho foi de estrema relevância para a melhor
compreensão dos princípios de acionamento de diversos dispositivos via radio, realizando o
estudo do Controle remoto de porta de garagem foi possível a implementação de um controle
remoto proposto para a Transmissão e Recepção de informações codificadas, dependendo da
tarefa solicitada
As maiores dificuldades, encontradas no decorrer do trabalho, foram de combinar a
freqüência de oscilação dos circuitos integrados (codificadores e decodif icadores), os quais
devem operar sincronizadamente, assim como o estudo de controle remoto de porta de
garagem
Conclui-se com o trabalho exposto que de acordo com as diversas necessidades do
mercado e as formas de telecontrole para esta aplicação, o radio controle aqui apresentado,
mostra-se uma proposta simples e eficiente, levando em consideração as técnicas aplicadas
nos mesmos.
73
REFERÊNCIAS
[1] BRAGA, Newton C. Radio Controle. Revista Saber Eletrônica, São Paulo, n. 110, p. 65, 1981. [2] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.73, p. 60, 1978. [3] ______. Radio Controle Transmissor de Canais Remotos. Revista Saber Eletrônica, São Paulo, n.57, p. 35, 1977. [4] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.66, p. 66, 1980. [5] HARA, Pedro T. Radio Controle Transmissor para uso Automotivo - (parte II). Revista Saber Eletrônica, São Paulo, n.235, p. 62-63, 1992. [6] DE SOUZA, Marco Antonio Marques. Controle Remoto Digital de 8 Canais. Revista Saber Eletrônica, São Paulo, n.221, p. 3, 1991. [7] ______. Controle Remoto Digital de 8 Canais - (parte II). Revista Saber Eletrônica, São Paulo, n.222, p. 7-8, 1991. [8] BRAGA, Newton C. Radio Controle. Revista Saber Eletrônica, São Paulo, n.108, p. 69, 1981. [9] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.72, p. 58, 1978. [10] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, 1979. [11] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.110, p. 65, 1987. [12] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.73, p. 60-64, 1978. [13] ______. Radio Controle Transmissor de Canais Remotos. Revista Saber Eletrônica, São Paulo, n.57, p. 35-40, 1977. [14] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.66, p. 66-71, 1980.
74
[15] HARA, Pedro T. Radio Controle Transmissor para uso RF - (parte II). Revista Saber Eletrônica, São Paulo, n.235, p. 66, 1992. [16] DE SOUZA, Marco Antonio Marques. Controle Remoto Digital. Revista Saber Eletrônica, São Paulo, n.221, p. 3-4, 1991. [17] ______. Controle Remoto Digital de 8 Canais - (parte II). Revista Saber Eletrônica, São Paulo, n.222, p. 77, 1991. [18] BRAGA, Newton C. Radio Controle. Revista Saber Eletrônica, São Paulo, n.102, p. 54, 1981. [19] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.110, p. 58-59, 1978. [20] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, 1984. [21] HARA, Pedro T. Radio Controle Transmissor para uso RF - (parte I). Revista Saber Eletrônica, São Paulo, n.235, p. 60, 1997. [22] DE SOUZA, Marco Antonio Marques. Controle Remoto Digital RF. Re vista Saber Eletrônica, São Paulo, n.221, p. 3-4, 1990. [23] ______. Controle Remoto Digital de Canais - (parte I). Revista Saber Eletrônica, São Paulo, n.122, p. 77, 1991. [24] BRAGA, Newton C. Radio Controle. Revista Saber Eletrônica, São Paulo, n.102, p. 51, 1981. [25] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, n.120, p. 61, 1988. [26] ______. Radio Controle. Re vista Saber Eletrônica, São Paulo, 1987.
Top Related