
![Www.fiepr.org.Br Sindicatos Sindirepa UploadAddress Material de Apoio 21 10-Injecao Eletronica2[59894][9762]](https://static.fdocumentos.com/doc/165x107/55cf935a550346f57b9d57b2/wwwfieprorgbr-sindicatos-sindirepa-uploadaddress-material-de-apoio-21-10-injecao.jpg)






Línguas
Páginas
Legal

15/08/2016
1
FUNDAMENTOS DA REALIMENTAÇÃOELETRÔNICA
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA
ELETRÔNICA 2 - ET7BC
Prof.ª Elisabete Nakoneczny Moraes
Curitiba, 16 de agosto de 2016.
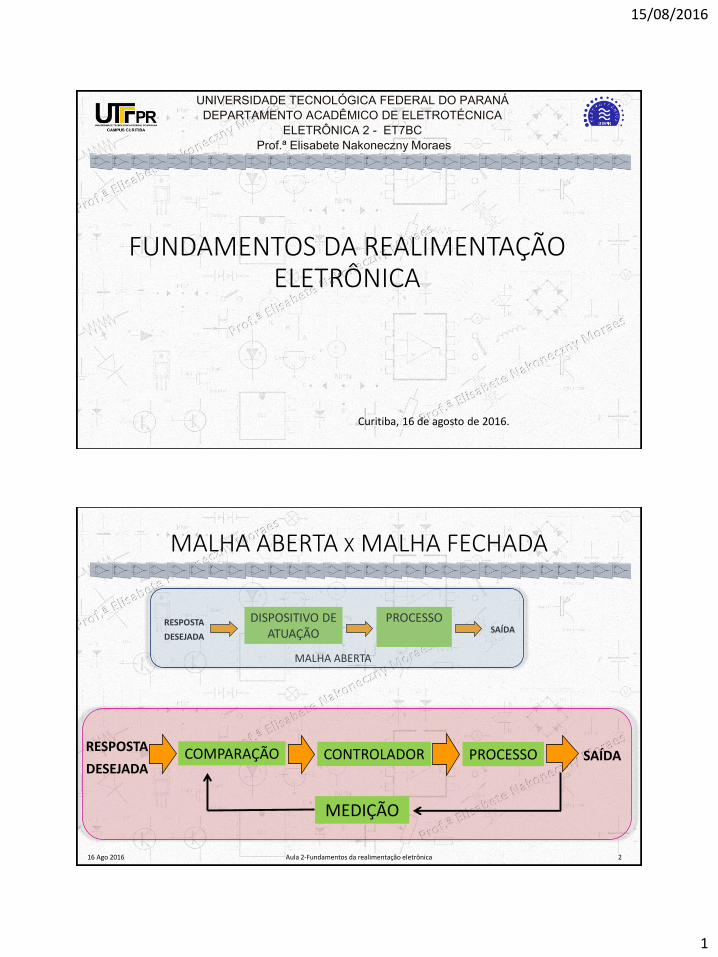
MALHA ABERTA X MALHA FECHADA
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 2
DISPOSITIVO DE ATUAÇÃO
PROCESSORESPOSTA
DESEJADASAÍDA
MALHA ABERTA
RESPOSTA
DESEJADACONTROLADOR PROCESSO SAÍDACOMPARAÇÃO
MEDIÇÃO
15/08/2016
2
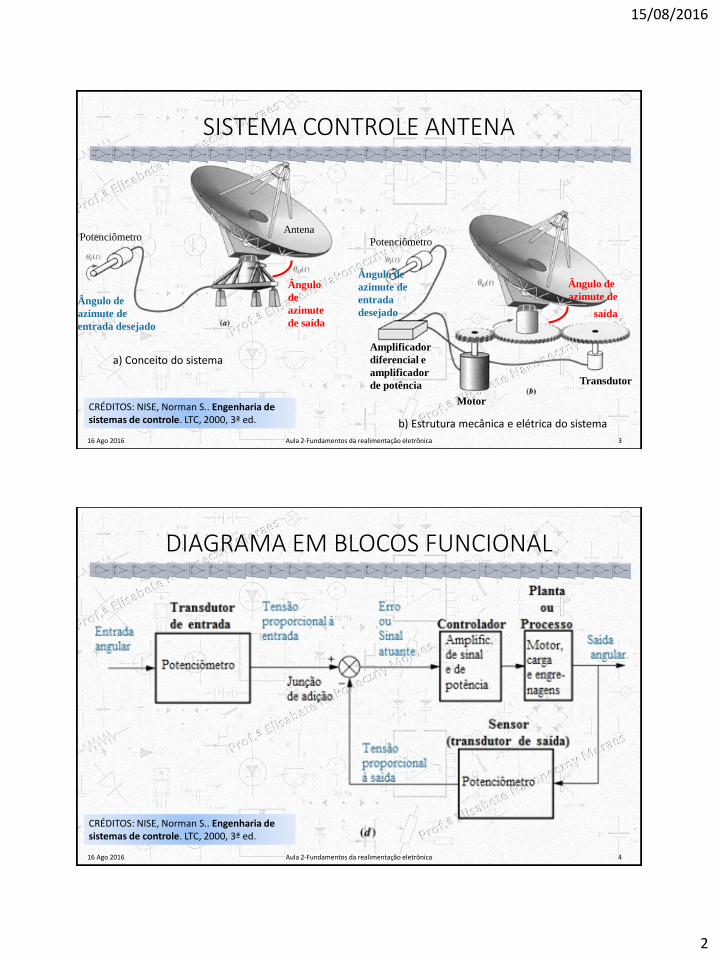
SISTEMA CONTROLE ANTENA
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 3
CRÉDITOS: NISE, Norman S.. Engenharia de sistemas de controle. LTC, 2000, 3ª ed.
Ângulo de
azimute de
entrada desejado
PotenciômetroAntena
Ângulo
de
azimute
de saída
a) Conceito do sistema
b) Estrutura mecânica e elétrica do sistema
Ângulo de
azimute de
entrada
desejado
Motor
Amplificador
diferencial e
amplificador
de potência
Potenciômetro
Transdutor
Ângulo de
azimute de
saída
DIAGRAMA EM BLOCOS FUNCIONAL
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 4
CRÉDITOS: NISE, Norman S.. Engenharia de sistemas de controle. LTC, 2000, 3ª ed.
15/08/2016
3
FUNDAMENTOS DA REALIMENTAÇÃO
Segundo Aguirre (2007, p.7):
Controle:
ramo do conhecimento que estuda maneiras sistemáticas de descrever e de sintetizar ações tais que esses sistemas se comportem de maneira previamente determinada.
Automação:
estuda maneiras de implementar e de realizar ações para tornar um sistema ou processo automático, sendo que tais ações podem, ou não, ter tido sua origem na área de controle.
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 5
AGUIRRE, Luis Antonio et al. (Ed.). Enciclopédia de automática: controle e automação. Vol II. Blucher, 2007.
FUNDAMENTOS DA REALIMENTAÇÃO
Sistemas Dinâmicos x Sistemas Estáticos:
Um sistema é chamado estático se sua saída pode ser calculada como uma função de sua entrada atual.
Um sistema dinâmico, por outro lado possui memória: a saída é uma função das entradas atuais como também das passadas (FERNANDES, GUTMAN e MEHL).
Instabilidade:
característica do controle dinâmico onde o perigo maior está associada ao crescimento ilimitado dos sinais (AGUIRRE, 2007, p. 11)
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 6
FERNANDES, José M; MEHL, Ewaldo Luiz de M. e GUTMAN, Per-Olof. Sistemas de controle realimentados. Apostila UFPR. 2004
15/08/2016
4
CONTROLADOR
Desenvolvimento do controle automático segundo BENNETT:
“Early control”: até 1900
“Pre-classical period”: 1900-1940
“Classical period”: 1935-1960
“Modern control”: após 1955
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 7
CLÁSSICA: principais técnicas de controle-On-off-Proporcional-Integral-Derivativo (PID)
MODERNO: principais técnicas de controle
-Multivariável -Preditivo -Ótimo-Adaptativo -Robusto -Inteligente-Não-linear
Sugestão de leitura:BENNETT, Stuart. A brief history of automatic control. IEEE Control Systems Magazine, v. 16, n. 3, p. 17-25, 1996.
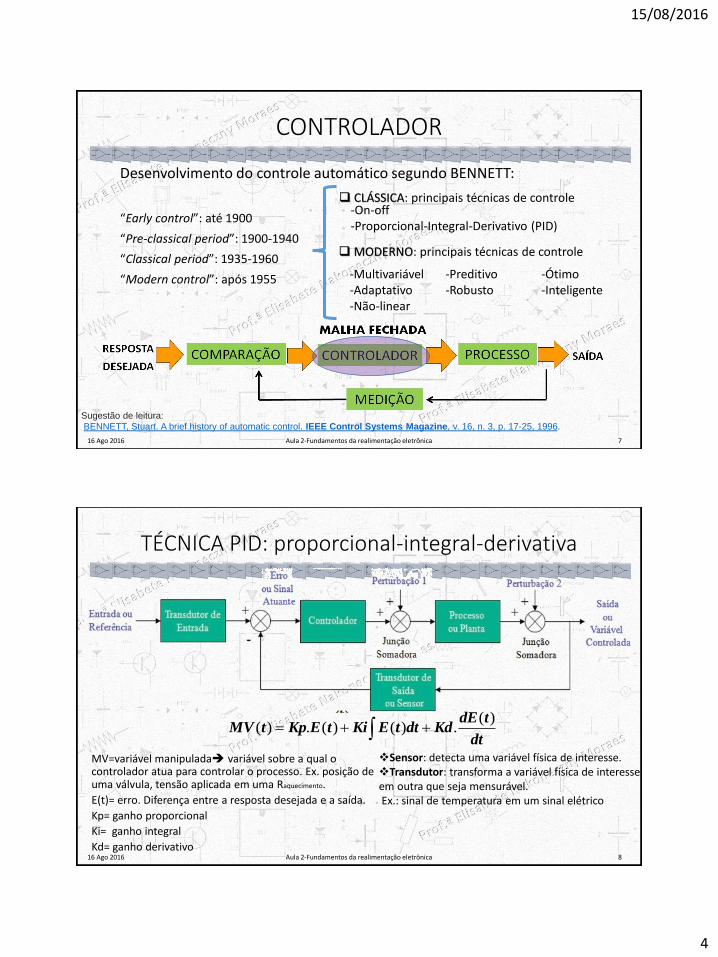
TÉCNICA PID: proporcional-integral-derivativa
MV=variável manipulada variável sobre a qual o controlador atua para controlar o processo. Ex. posição de uma válvula, tensão aplicada em uma Raquecimento.
E(t)= erro. Diferença entre a resposta desejada e a saída.
Kp= ganho proporcional
Ki= ganho integral
Kd= ganho derivativo16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 8
dt
tdEKddttEKitEKptMV
)(.)()(.)(
Sensor: detecta uma variável física de interesse.Transdutor: transforma a variável física de interesse em outra que seja mensurável.Ex.: sinal de temperatura em um sinal elétrico
15/08/2016
5
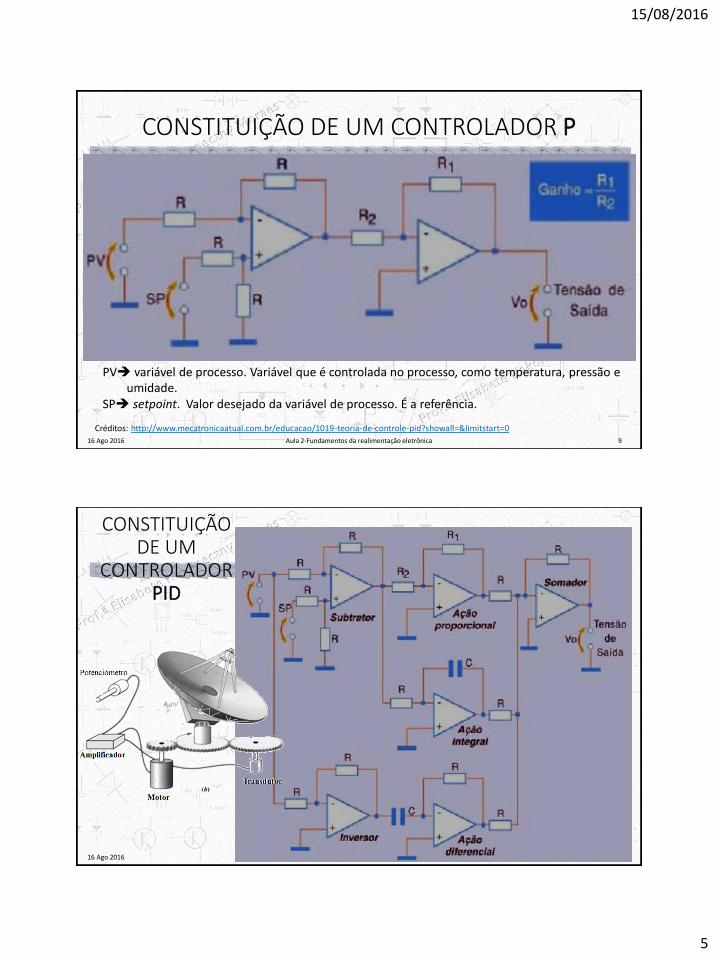
CONSTITUIÇÃO DE UM CONTROLADOR P
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 9
Créditos: http://www.mecatronicaatual.com.br/educacao/1019-teoria-de-controle-pid?showall=&limitstart=0
PV variável de processo. Variável que é controlada no processo, como temperatura, pressão e umidade.
SP setpoint. Valor desejado da variável de processo. É a referência.
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 10
CONSTITUIÇÃO DE UM
CONTROLADOR PID
15/08/2016
6
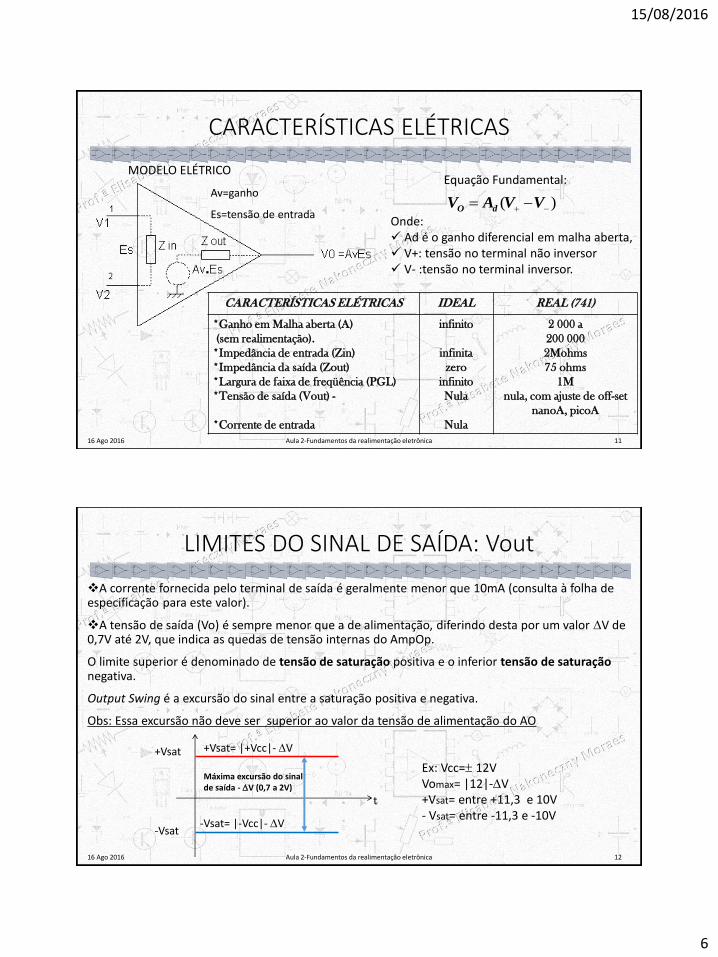
CARACTERÍSTICAS ELÉTRICAS
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 11
MODELO ELÉTRICO
Av=ganho
Es=tensão de entrada)( VVAV dO
Equação Fundamental:
Onde: Ad é o ganho diferencial em malha aberta, V+: tensão no terminal não inversor V- :tensão no terminal inversor.
CARACTERÍSTICAS ELÉTRICAS IDEAL REAL (741)
*Ganho em Malha aberta (A)
(sem realimentação).
*Impedância de entrada (Zin)
*Impedância da saída (Zout)
*Largura de faixa de freqüência (PGL)
*Tensão de saída (Vout) -
*Corrente de entrada
infinito
infinita
zero
infinito
Nula
Nula
2 000 a
200 000
2Mohms
75 ohms
1M
nula, com ajuste de off-set
nanoA, picoA
LIMITES DO SINAL DE SAÍDA: Vout
A corrente fornecida pelo terminal de saída é geralmente menor que 10mA (consulta à folha de especificação para este valor).
A tensão de saída (Vo) é sempre menor que a de alimentação, diferindo desta por um valor V de 0,7V até 2V, que indica as quedas de tensão internas do AmpOp.
O limite superior é denominado de tensão de saturação positiva e o inferior tensão de saturação negativa.
Output Swing é a excursão do sinal entre a saturação positiva e negativa.
Obs: Essa excursão não deve ser superior ao valor da tensão de alimentação do AO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 12
+Vsat
-Vsat
Máxima excursão do sinal de saída - V (0,7 a 2V)
t
+Vsat= |+Vcc|- V
-Vsat= |-Vcc|- V
Ex: Vcc= 12VVomax= |12|-V+Vsat= entre +11,3 e 10V- Vsat= entre -11,3 e -10V
15/08/2016
7
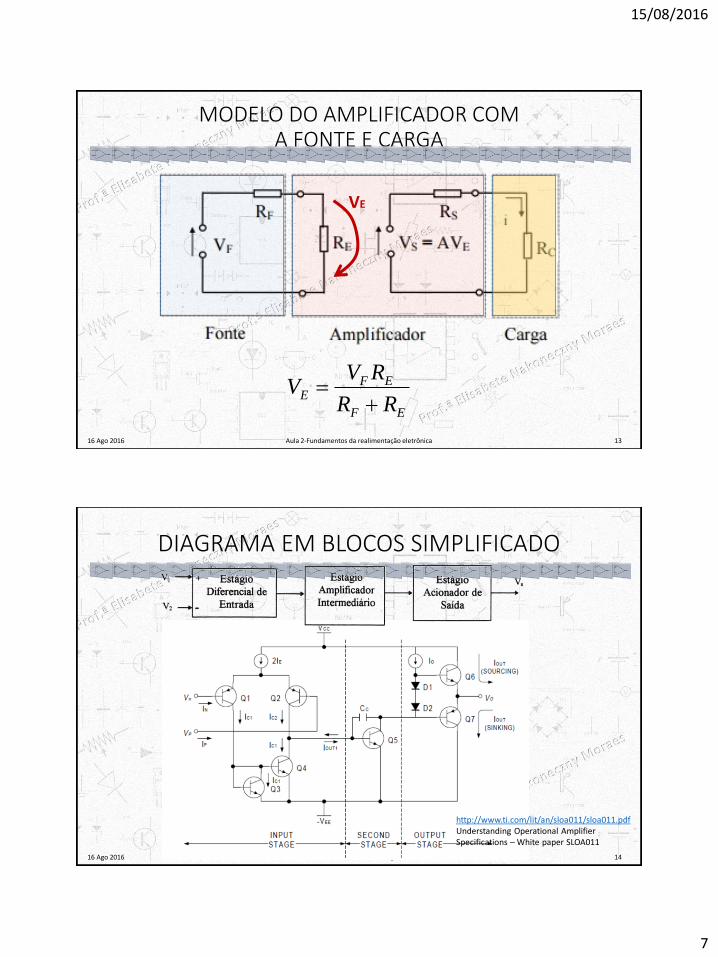
MODELO DO AMPLIFICADOR COM A FONTE E CARGA
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 13
VE
EF
EFE
RR
RVV
DIAGRAMA EM BLOCOS SIMPLIFICADO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 14
http://www.ti.com/lit/an/sloa011/sloa011.pdfUnderstanding Operational AmplifierSpecifications – White paper SLOA011
15/08/2016
8
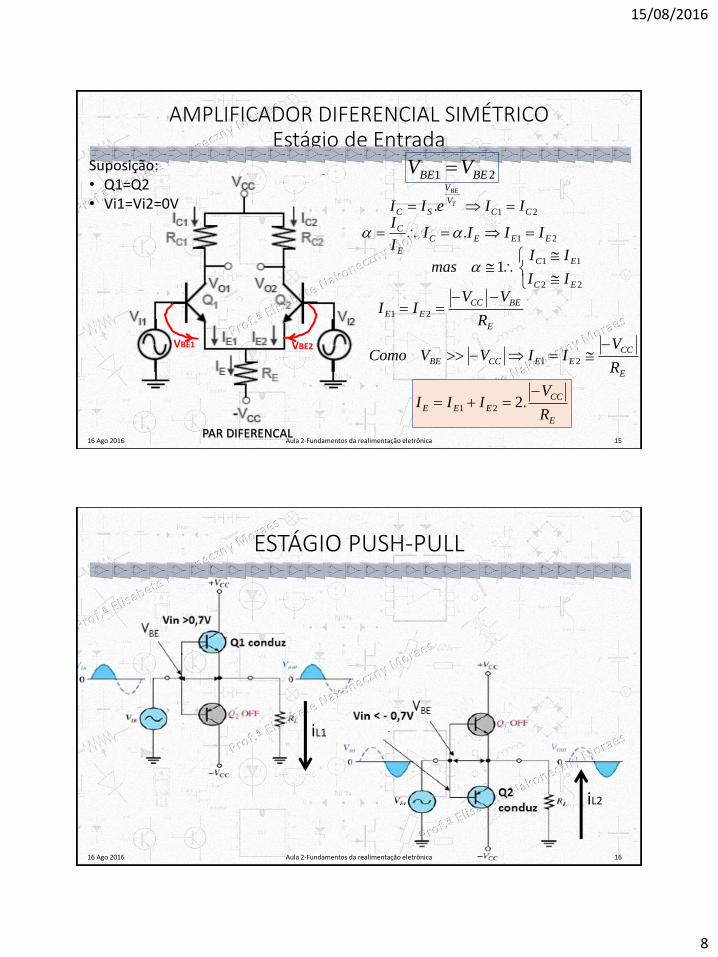
AMPLIFICADOR DIFERENCIAL SIMÉTRICOEstágio de Entrada
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 15
21 BEBE VV Suposição: • Q1=Q2• Vi1=Vi2=0V
22
111
EC
EC
II
IImas
VBE1 VBE2
21. CC
V
V
SC IIeII T
BE
21. EEEC
E
C IIIII
I
E
BECC
EER
VVII
21
E
CC
EECCBER
VIIVVComo
21
E
CC
EEER
VIII
.221
PAR DIFERENCAL
ESTÁGIO PUSH-PULL
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 16
iL1
iL2
15/08/2016
9
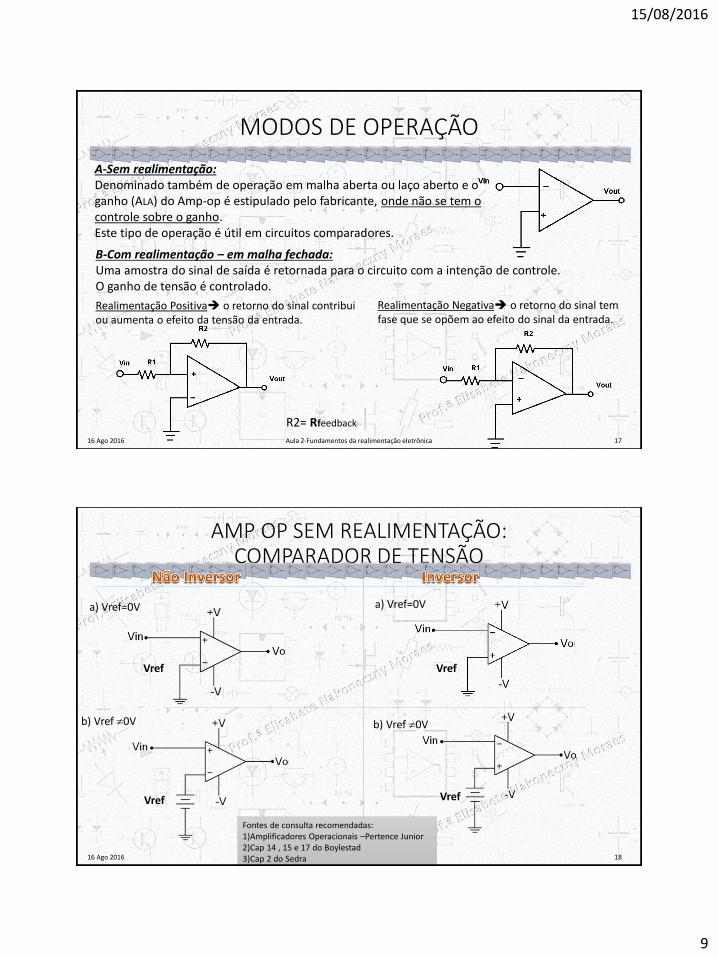
MODOS DE OPERAÇÃO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 17
A-Sem realimentação:Denominado também de operação em malha aberta ou laço aberto e o ganho (ALA) do Amp-op é estipulado pelo fabricante, onde não se tem o controle sobre o ganho. Este tipo de operação é útil em circuitos comparadores.
B-Com realimentação – em malha fechada:Uma amostra do sinal de saída é retornada para o circuito com a intenção de controle. O ganho de tensão é controlado.
Realimentação Positiva o retorno do sinal contribui ou aumenta o efeito da tensão da entrada.
Realimentação Negativa o retorno do sinal tem fase que se opõem ao efeito do sinal da entrada.
R2= Rfeedback
AMP OP SEM REALIMENTAÇÃO: COMPARADOR DE TENSÃO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 18
Fontes de consulta recomendadas:1)Amplificadores Operacionais –Pertence Junior 2)Cap 14 , 15 e 17 do Boylestad3)Cap 2 do Sedra
a) Vref=0V
Vref
b) Vref 0V
Vref
a) Vref=0V
Vref
Vref
b) Vref 0V
15/08/2016
10
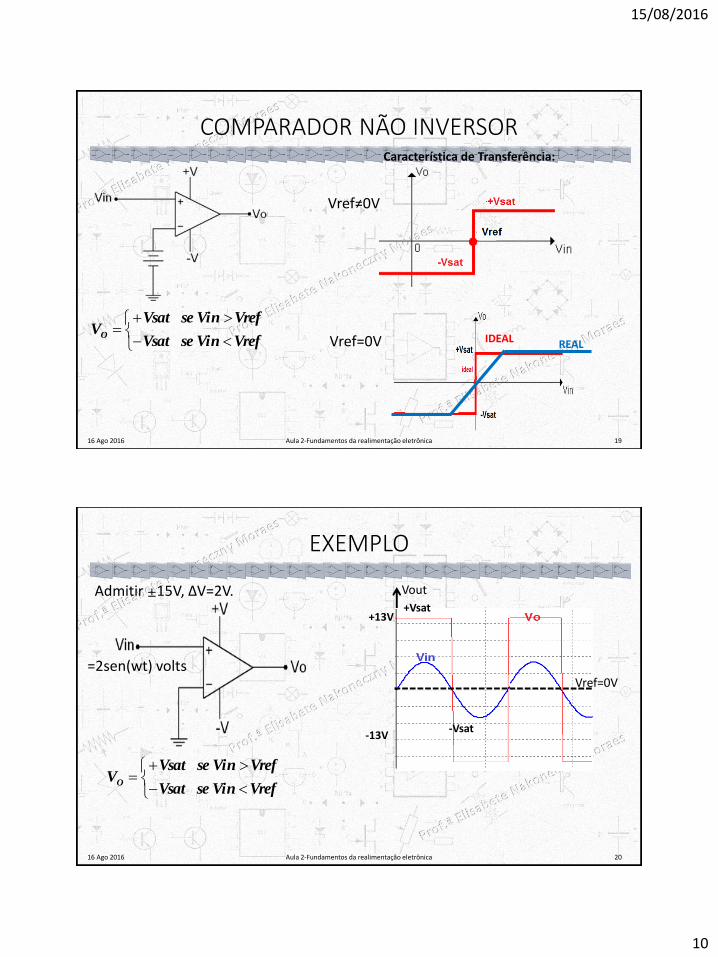
COMPARADOR NÃO INVERSOR
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 19
VrefVinseVsat
VrefVinseVsatVO
Característica de Transferência:
Vref≠0V
Vref=0V REALIDEAL
EXEMPLO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 20
Admitir ±15V, ∆V=2V.
=2sen(wt) volts
Vout
Vref=0V
+Vsat
-Vsat-13V
+13V
VrefVinseVsat
VrefVinseVsatVO
15/08/2016
11
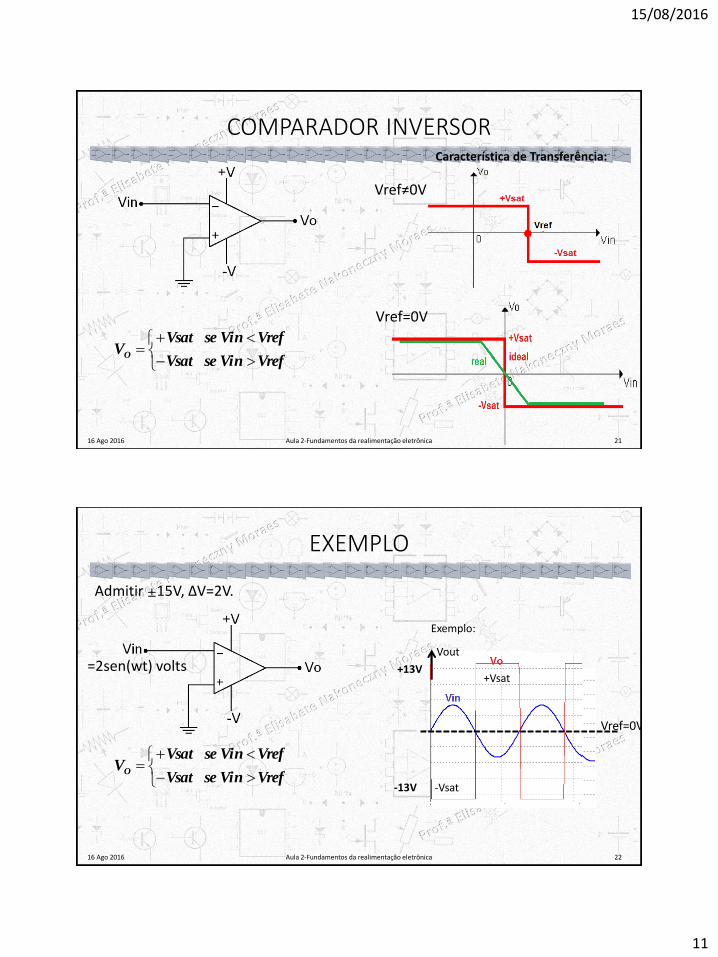
COMPARADOR INVERSOR
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 21
VrefVinseVsat
VrefVinseVsatVO
Característica de Transferência:
Vref≠0V
Vref=0V
EXEMPLO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 22
Exemplo:
+Vsat
-Vsat
Vout
Admitir ±15V, ∆V=2V.
-13V
+13V=2sen(wt) volts
VrefVinseVsat
VrefVinseVsatVO
Vref=0V
15/08/2016
12
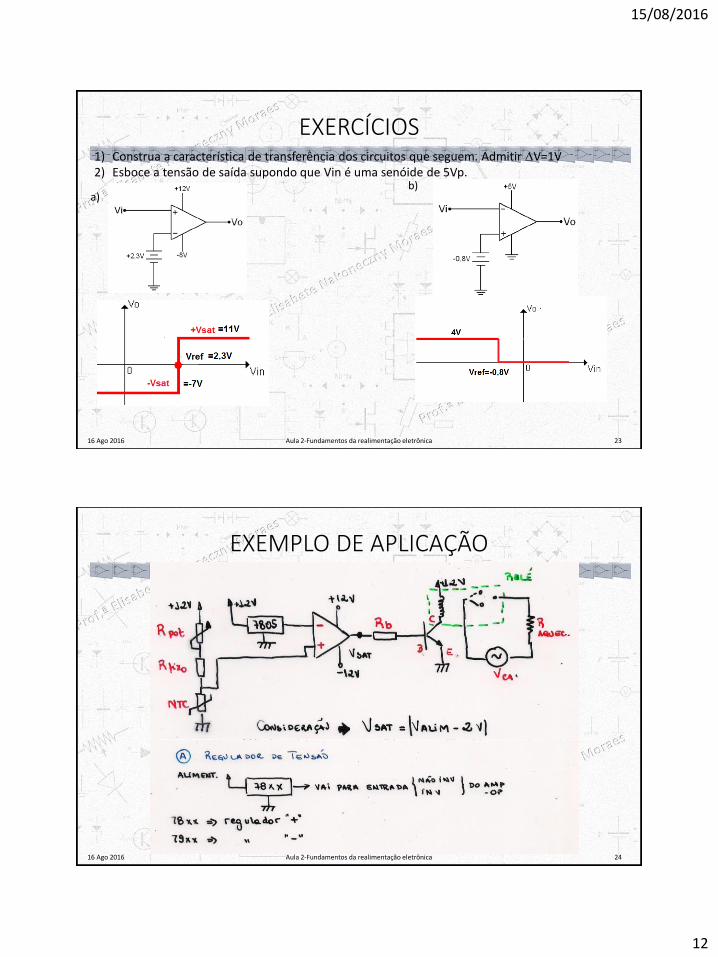
EXERCÍCIOS
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 23
1) Construa a característica de transferência dos circuitos que seguem. Admitir V=1V2) Esboce a tensão de saída supondo que Vin é uma senóide de 5Vp.
a)b)
EXEMPLO DE APLICAÇÃO
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 24

15/08/2016
13
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 25
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 26
15/08/2016
14
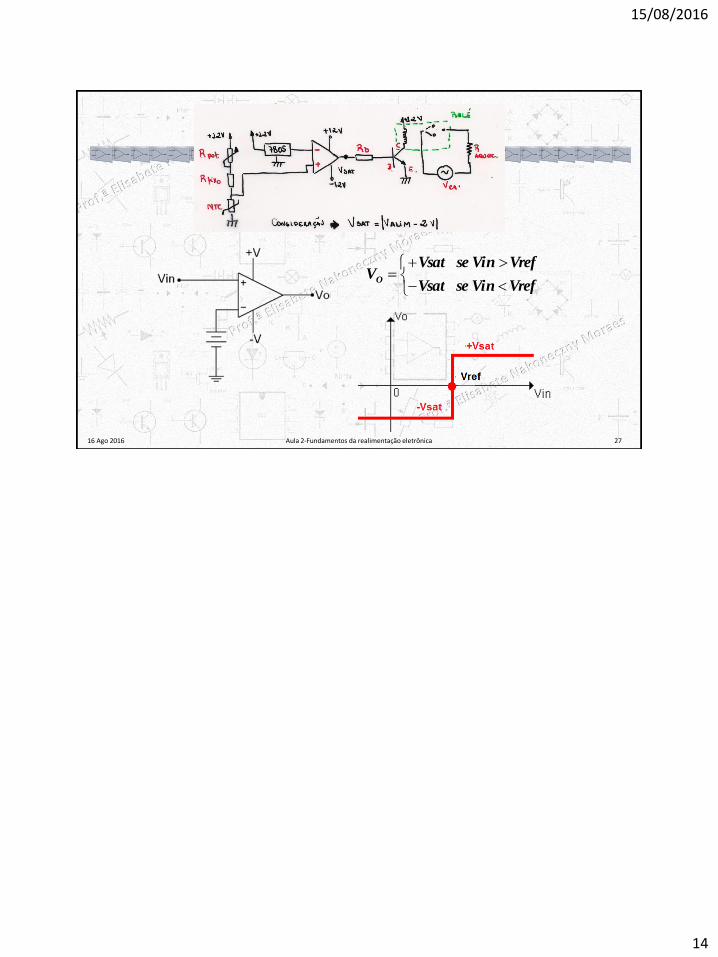
16 Ago 2016 Aula 2-Fundamentos da realimentação eletrônica 27
VrefVinseVsat
VrefVinseVsatVO
Top Related