1 2 1 3 1Centro de F´ısica Teo´rica e Computacional ...
9
arXiv:2111.03901v2 [cond-mat.soft] 1 Mar 2022 Dynamics of two-dimensional liquid bridges Rodrigo C. V. Coelho 1,2 , Lu´ ıs A. R. G. Cordeiro 1,2 , Rodrigo B. Gazola 1,2 and Paulo I. C. Teixeira 1,3 1 Centro de F´ ısica Te´ orica e Computacional, Faculdade de Ciˆ encias, Universidade de Lisboa, 1749-016 Lisboa, Portugal 2 Departamento de F´ ısica, Faculdade de Ciˆ encias, Universidade de Lisboa, 1749-016 Lisboa, Portugal 3 ISEL – Instituto Superior de Engenharia de Lisboa, Instituto Polit´ ecnico de Lisboa, Rua Conselheiro Em´ ıdio Navarro 1, 1959-007 Lisboa, Portugal E-mail: [email protected] and [email protected] Abstract. We have simulated the motion of a single vertical, two-dimensional liquid bridge spanning the gap between two flat, horizontal solid substrates of given wettabilities, using a multicomponent pseudopotential lattice Boltzmann method. For this simple geometry, the Young–Laplace equation can be solved (quasi-)analytically to yield the equilibrium bridge shape under gravity, which provides a check on the validity of the numerical method. In steady-state conditions, we calculate the drag force exerted by the moving bridge on the confining substrates as a function of its velocity, for different contact angles and Bond numbers. We also study how the bridge deforms as it moves, as parametrized by the changes in the advancing and receding contact angles at the substrates relative to their equilibrium values. Finally, starting from a bridge within the range of contact angles and Bond numbers in which it can exist at equilibrium, we investigate how fast it must move in order to break up.
Transcript of 1 2 1 3 1Centro de F´ısica Teo´rica e Computacional ...

arX
iv:2
111.
0390
1v2
[co
nd-m
at.s
oft]
1 M
ar 2
022
Dynamics of two-dimensional liquid bridges
Rodrigo C. V. Coelho1,2, Luıs A. R. G. Cordeiro1,2,
Rodrigo B. Gazola1,2 and Paulo I. C. Teixeira1,3
1Centro de Fısica Teorica e Computacional, Faculdade de Ciencias,Universidade de Lisboa, 1749-016 Lisboa, Portugal2Departamento de Fısica, Faculdade de Ciencias, Universidade de Lisboa,1749-016 Lisboa, Portugal3ISEL – Instituto Superior de Engenharia de Lisboa, Instituto Politecnico deLisboa, Rua Conselheiro Emıdio Navarro 1, 1959-007 Lisboa, Portugal
E-mail: [email protected] and [email protected]
Abstract. We have simulated the motion of a single vertical, two-dimensionalliquid bridge spanning the gap between two flat, horizontal solid substrates ofgiven wettabilities, using a multicomponent pseudopotential lattice Boltzmannmethod. For this simple geometry, the Young–Laplace equation can be solved(quasi-)analytically to yield the equilibrium bridge shape under gravity, whichprovides a check on the validity of the numerical method. In steady-stateconditions, we calculate the drag force exerted by the moving bridge on theconfining substrates as a function of its velocity, for different contact angles andBond numbers. We also study how the bridge deforms as it moves, as parametrizedby the changes in the advancing and receding contact angles at the substratesrelative to their equilibrium values. Finally, starting from a bridge within therange of contact angles and Bond numbers in which it can exist at equilibrium,we investigate how fast it must move in order to break up.

Dynamics of liquid bridges 2
1. Introduction
A liquid bridge, also called capillary bridge, is a wall orcolumn of liquid connecting two bodies, which may besolid surfaces (flat or curved), particles, or other liquids[1]. Liquid bridges are relevant in many contexts,such as sand art [2]; atomic-force microscopy in high-humidity environments [3]; soldering [4]; the testingof weakly-adhesive solid surfaces [5]; in lungs, wherethey may close small airways and impair gas exchange[6]; the wet adhesion of insects and tree frogs [7];the feeding of shore birds [8]; the spontaneous fillingof porous materials [9]; or as tools for contact anglemeasurements [10].
In an earlier paper [11], we investigated thestability of two-dimensional (2D) liquid bridges undergravity: a slab of liquid between two flat, unboundedhorizontal substrates at which the contact angles arefixed. Because of the very simple geometry, we wereable to compute analytically the range of gap widths(as described by a Bond number Bo) for which theliquid bridge can exist, as well as the conditions forthe occurrence of necks, bulges and inflection pointson its surface, for given contact angles at the topand bottom substrates. In addition, the shapes ofthese bridges could be computed by straightforwardnumerical integration.
At least as important as equilibrium bridges aremoving bridges in some of the above situations [12], aswell as in microfluidic devices [13] or in the treatment ofcertain pulmonary diseases [14], which requires liquidplugs to be mobilised, and eventually broken, in orderto re-open the airways. In particular, it would be usefulto know how easily a bridge (also called a ‘liquid plug’)slides along a gap, i.e, what force must be applied tomake it move at a certain velocity, as a function ofgap width and the contact angles at the substrates.Intuitively, one might expect this force to be smallerif the liquid does not wet the substrates. One otherquestion that may be asked is, how hard does one haveto push in order to break a bridge that is a stableequilibrium state? Here we address these problemsusing a popular numerical method for the simulationof multicomponent flows.
This paper is organized as follows: in section 2we describe our general simulation method (2.1),how we implement two-phase flows (2.2), tune thewettabilities of substrates (2.3) and compute the dragforce exerted by the moving liquid bridge on thesolid substrates (2.4). Our results are presented insection 3: first we validate our method by comparingthe shapes it yields for static bridges with the semi-analytical solutions of the Young-Laplace equation [11](3.1); then we establish how the drag force (3.2) andcontact angles (3.3) scale with the bridge velocity, fordifferent combinations of Bond numbers and substrate
wettabilities; finally, we investigate the stability ofmany types of bridges (i.e., the maximum velocityneeded to break them) (3.4). We conclude in section 4.
2. Method
2.1. Lattice-Boltzmann method
We simulate the liquid bridges using a multicomponentlattice Boltzmann method based on the Shan-Chenmodel, also known as pseudopotential model [15,16], sandwiched between two flat, horizontal solidsubstrates a distance Ly apart. Let us denote the twocomponents as A, the liquid bridge component, andB, the surrounding fluid, or, generically as σ (where σis the other component). Each component has its own
distribution function f(σ)i and is evolved independently
according to the Boltzmann-BGK equation:
f(σ)i (x + ci∆t, t+∆t)− f
(σ)i (x, t) =
− ∆t
τ (σ)
[
f(σ)i (x, t)− f
eq(σ)i (x, t)
]
+ S(σ)i (x, t)∆t, (1)
where ci is the i-th velocity vector of the D3Q19 lattice,∆t is the time step, τ is the relaxation time, whichcontrols the kinematic viscosity ν = (τ−1/2)/3, and Si
is the forcing term. We set τ = 1.2 in our simulations.Notice that we use a more generic 3D lattice, butwe set Lz = 1 with periodic boundary conditions inthe z-direction, which is equivalent to simulating a 2Dsystem [16]. The equilibrium distribution function isgiven by
feqi
(σ)=
ρ(σ)wi
[
1 +ci · ueq
c2s+
(ci · ueq)2
2c4s− (ueq)2
2c2s
]
, (2)
where ρ(σ) is the density of component σ, wi are theweights of the D3Q19 lattice (w0 = 1/3 for |c|2 = 0,ws = 1/18 for |c|2 = 1 and wl = 1/36 for |c|2 =2) and cs = 1/
√3 is the speed of sound in this
lattice. Equation (2) is the second-order expansionof the Maxwell-Boltzmann distribution in Hermitepolynomials [16, 17]. The two fluids interact in twoways: through a common macroscopic velocity, and viathe internal forces. The common macroscopic velocitythat enters the equilibrium distribution is
ueq =1
ρ
∑
σ
(
∑
i
f(σ)i ci +
F(σ)∆t
2
)
, (3)
where
ρ =∑
σ
ρ(σ) (4)
is the total density of the fluid. The total force actingon each component F(σ) is a sum of the externalforce applied to the fluid and internal forces which areresponsible for fluid segregation. The external force

Dynamics of liquid bridges 3
Fext on each component is Fext,(σ) = ρ(σ)Fext/ρ. Theforces are implemented in the distribution functionspace using the Guo forcing term [18]:
S(σ)i = wi
(
1− ∆t
2τ (σ)
)
×[
ci
c2s
(
1 +ci · ueq
c2s
)
− ueq
c2s
]
·F(σ). (5)
The dimensional quantities in this paper are given inlattice units, in which the density ρ, the time step ∆tand the lattice spacing ∆x are all unity. The latticeBoltzmann method described here recovers the Navier-Stokes and continuity equations in the macroscopiclimit [16].
2.2. Internal forces
The pseudopotential models consider internal forceswhich are responsible for the segregation between thetwo components. These forces are calculated usingpseudopotentials that depend on the local density ofeach component. The inter-component force reads:
Finter,(σ)(x) =
− ρ(σ)(x)Gσσ
∑
i
wi ρ(σ)(x+ ci∆t) ci ∆t, (6)
where Gσσ controls the force strength and needs to beabove a certain threshold in order to drive segregation.We set Gσσ = Gσσ ≡ GAB = 1.3 in this work, in whichthe positive sign leads to a repulsive force.
Equation (6) is sufficient to simulate two immis-cible fluids. However, because we also want to inves-tigate the effect of gravity on the liquid bridges, weneed the two components to have different densities.For this purpose, we also consider an intra-componentcohesive force acting only on component A:
Fintra,(A)(x) =
− ψ(A)(x)GAA
∑
i
wi ψ(A)(x+ ci∆t) ci ∆t, (7)
where GAA is the strength of the intra-component forceand we set it to GAA = −2. The minus sign meansthe force is attractive, and therefore ρ(A) > ρ(B). Thepseudopotential is ψ(A) = ρ0[1−exp(−ρ(A)/ρ0)], wherewe set the reference density as ρ0 = 1.5. The resultingequation of state is
p = c2sρ(A) + c2sρ
(B) +GABc2s∆t
2ρ(A)ρ(B)
+1
2GAAc
2s∆t
2ψ(A)ψ(A), (8)
where p is the pressure.
2.3. Wetting
We implement the wetting boundary condition as inRefs. [19, 20], which is summarized as follows. A fieldφ(x) is set to one at the solid nodes and zero at the
fluid nodes. This scheme consists in setting a virtualsolid density at the solid nodes which will control thecontact angle. It is calculated using a weighted averageof the density of the fluid neighbours:
ρ(σ)(x) =
χ(σ)
∑
i wiρ(σ)(x + ci∆t)(1− φ(x + ci∆t))∑
iwi(1− φ(x+ ci∆t)). (9)
The parameter χ is different for each component:χ(A) = 1− ξ and χ(B) = 1 + ξ, where ξ is the wettingparameter that controls the contact angle. If ξ < 0, thesubstrate attracts (wants to be wetted by) componentA, whereas if ξ > 0, the substrate attracts (wants tobe wetted by) component B. By abuse of languagewe shall refer to these two situations as ‘hydrophilic’and ‘hydrophobic’ substrates, respectively, althoughneither component need be water. The weights andvelocity vectors are those of the D3Q19 lattice. Theadhesion force is already accounted for in Eqs. (6)and (7) where the sums also extend over the solidnodes. Thus, this scheme treats fluid-fluid and fluid-solid interactions in the same way provided that thesolid density is calculated as in equation (9). Theno-slip boundary condition applies to the fluid at thesolid nodes, which is implemented using the half-waybounce-back conditions.
2.4. Drag force
A moving bridge exerts a hydrodynamic drag force onthe substrates, which is calculated using the momentexchange method [21], as (assuming the plates to be atrest):
Fs =∆x3
∆t
∑
xs,i
2[
fi∗,(A)(xs, t) + fi
∗,(B)(xs, t)]
ci, (10)
where fi∗,(σ) are the reflected distributions in the
bounce-back boundary condition and xs are thepositions of the solid nodes.
3. Results
3.1. Static liquid bridges
In this section, we validate our hydrodynamic modelby comparing its results with predictions for static(equilibrium) liquid bridges [11]. For the simple 2Dgeometry under study, the Young-Laplace equation canbe solved quasi-analytically to yield the equilibriumbridge shape under gravity. In [11] it was assumedthat the bridge is immersed in air, i.e., that thedensity of the surrounding medium is much lower thanthat of the bridge and can be neglected. However,it is straightforward to show that exactly the sameequation, and hence the same solution, is obtainedif the Bond number, which measures the relative

Dynamics of liquid bridges 4
importance of gravity and surface tension, is redefinedas
Bo =∆ρF ext
y L2Y
γ, (11)
where ∆ρ is the density difference between thebridge and the surrounding medium, and F ext is theforce density (or acceleration) applied in the verticaldirection (perpendicular to the substrates). Theshape of the right-hand surface bounding the bridgeis then [11]
x′(y′) = x′(0)−∫ y′
0
[− cos θT y′′ + (1− y′′)
(
cos θB + Bo2 y
′′)
]dy′′√
1−[
− cos θT y′′ + (1− y′′)(
cos θB + Bo2 y
′′
)]2,(12)
where x′ = x/LY and y′ = y/LY are scaledcoordinates, and θT and θB are the contact anglesat the top and bottom substrates, respectively. Oneimportant consequence of equation (12) is that, forgiven θT and θB, the bridge can only exist if Bo liesbetween zero and
Bomax = 2 (2− cos θB + cos θT )
+ 4√
(1− cos θB) (1 + cos θT ). (13)
This is plotted in figure 2 of Ref. [11].In the simulations, we initialize the densities of
the two components as follows: inside the liquid bridgeρ(A) = 4 and ρ(B) = 0.001, and outside ρ(A) = 0.001and ρ(B) = 2; the density difference is thus ∆ρ ≈ 2.Except where stated otherwise, the simulation boxdimensions are Lx × LY = 1024 × 64 and the twoinitially flat interfaces which bound the liquid bridgesare placed at x1 = 3Lx/8 and x2 = 5Lx/8. Using theLaplace test, we obtain for the surface tension betweenthe two fluids with the internal forces described in theprevious section γ = 0.342± 0.001.
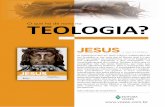
We start by comparing the shape of the liquidbridges obtained analytically and numerically. Figure 1shows this comparison for two liquid contact anglesθ = θT = θB, corresponding to fairly hydrophilic (θ ≈51◦) and fairly hydrophobic (θ ≈ 112◦) substrates,and for each of these three different Bond numbers.For Bo = 0, the bridge surfaces – the interfacesbetween A-rich and B-rich liquids – are circular arcs;they become more top-down asymmetric as Bo isincreased. For each contact angle, the largest Bondnumber considered is close to the maximum for whicha bridge can exist. We conclude that our numericalmodel faithfully reproduces the shape of a staticbridge, except when the Bond number approaches itsmaximum value.
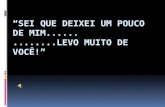
In figure 2 we plot the contact angle θ of thestatic liquid bridges versus the wetting parameter ξ,for Bo = 0. This curve provides a mapping betweenξ and θ under these conditions. Note that ξ controls
a material property of the solid surface and not theangle itself. Thus, the angle may vary for the same ξdepending on Bond number, as will be discussed in thenext sections.
−0.4 −0.2 0.0 0.2 0.4x/L
0.0
0.2
0.4
0.6
0.8
1.0
y/L
Bo=6.6Bo=4.6Bo=0.0
FYext
Figure 1. Interface shape for θ ≈ 51◦ (top) and 112◦ (bottom)and three different Bond numbers. Symbols are simulationresults, solid lines are the semi-analytical predictions for eachBond number. The inset shows a sketch of the system. HereL = LY = 200.
3.2. Force on substrates
We now analyze the fluid friction forces exerted onthe substrates by a moving bridge. In order to makeour results generic, we express them in terms of twonon-dimensional quantities. The capillary number, Ca,quantifies the relative importance of the viscous forcesover the surface tension forces. In our simulations,since the surface tension is constant, Ca will be ameasure of the bridge velocity. We define it as:
Ca =〈ρ〉〈u〉ν
γ, (14)
where 〈ρ〉 is the average density in the simulationdomain, and 〈u〉 is the average velocity of the fluidin the x-direction, which, as we have checked, is thesame as the interface velocity of the liquid bridge inthe steady state. The other non-dimensional quantity

Dynamics of liquid bridges 5
Figure 2. Mapping between the wetting parameter ξ and thecontact angle θ of the liquid bridge (in degrees). The insetsshow two examples of bridge shape for a hydrophilic and ahydrophobic substrate with wetting parameter and contact angleindicated by the arrows.
is the drag coefficient, Cd, which is a measure of thedrag, or frictional, force exerted by the liquid on thesubstrates:
Cd =F drag
〈ρ〉〈u〉2Lx
. (15)
By dimensional analysis, the drag force on thesubstrates is of the form F drag ∝ 〈ρ〉〈u〉νLx. Note thatthis is similar to Stokes’ law for a sphere immersed in aviscous fluid, with the sphere radius replaced by Lx anda proportionality constant equal to 6π. For the liquidbridges, the proportionality constant depends on thecontact angle. We expect that the drag force will besmaller for hydrophobic substrates than for hydrophilicones. Therefore
Cd ∼ 〈ρ〉ν2γ
Ca−1. (16)
We initialize the liquid bridges as described insection 3.1 and apply an external force in the directionx parallel to the substrates. After an initial transient,whose duration depends on the contact angles andthe magnitude of the applied force, a steady-state isestablished in which the bridge moves with a constantvelocity. This requires that the drag force on thesubstrates must have equal magnitude to the forceapplied on the bridge, which provides a check onthe consistency of our results. Figure 3 shows twoexamples of moving liquid bridges, between hydrophilicor hydrophobic substrates. The interfaces are set farenough apart that they do not interact with eachother and a Poiseuille flow develops inside and outsidethe bridges. Only close to the interfaces are theredisruptions to the velocity field. This occurs becausethe two fluids are immiscible, and therefore there is norelative velocity in the direction normal to the interfaceof the liquid bridge.
In figure 4, the expected power law Cd ∝ Ca−1
is confirmed, where the linear fits assume a slope of−1. We note that the hydrophilic substrate (ξ = −0.8)results in a greater drag force on the plates thanthe hydrophobic substrate (ξ = 0.7) with the neutralwetting substrate (ξ = 0) lying in between.
3.3. Dynamic contact angle
In this section, we measure the changes in contactangle when the bridge is moving, with respect to thebridge at rest. We consider three cases: same wettingparameter at both top, ξT , and bottom, ξB , substratesand Bo = 0; different wetting parameters at top andbottom and Bo = 0; and same wetting parameter attop and bottom but with Bo 6= 0. We point out thatthe flow of liquid bridges is laminar: the Reynoldsnumber, defined as Re = 〈u〉LY /ν, varies between 1.1and 3.1.
3.3.1. Identical substrates, no gravity. As illustratedin figure 3, the contact angles become different fromthose of the bridges at rest. Additionally, the anglesof the advancing interface (on the right) increase whilethose of the retreating interface (on the left) decrease,for both hydrophilic and hydrophobic substrates. Thetop and bottom contact angles are the same if Bo = 0and ξT = ξB as here. In figure 5(a), we show how theangle changes as a function of Ca (varying velocities)for three different wetting parameters. We note thatthe slopes of ∆θ for the advancing contact angles arealways positive, but they might vary slightly with thewetting parameter and the slopes of ∆θ for the recedingcontact angles are negative. Since ∆θ × Ca is almostlinear (except for receding angles with ξ = −0.8), weuse the slope of a linear fit ∆θ(x) = αCa as a measureof the angles’ dependence on the wetting parameter.These slopes are shown in Figs. 5(b) and (c) forreceding (αL) and advancing (αR) angles, respectively.(The fit of ∆θ for receding angles with ξ = −0.8 didnot use the four points with largest Ca). Slopes αL
vary more strongly with ξ than αR. We note that |αL|is larger for smaller equilibrium contact angles. Thishappens because the receding angles tend to decreaseand this is easier if they are already small due to thetendency of the interface to become more curved forhigher velocities. Curiously, αR has a minimum closeto ξ = 0. This means that it is more difficult to changethe interface shape when it is flat (θ = 90◦).
3.3.2. Different substrates, no gravity. Here weconsider different wetting parameters at the top andbottom substrates, ξT and ξB respectively. We proceedas in section 3.3.1 and apply an external force in thedirection parallel to the flow. Then we relate the

Dynamics of liquid bridges 6
a)
b)
c)
d)
Figure 3. Example of two liquid bridges moving due to a force F ext = 10−5 lattice units between (a) two hydrophilic substrates,with ξ = −0.8, and (c) two hydrophobic substrates, with ξ = 0.7. Panels (b) and (d) show the velocity fields corresponding to panels(a) and (c) respectively, where the colours denote the velocity magnitude (red for fast and blue for slow) and the arrows indicate itsdirection. Note that the velocity is approximately the same for both fluids and that they are incompressible.
−5.0 −4.8 −4.6 −4.4 −4.2 −4.0log(Ca)
1.6
1.8
2.0
2.2
2.4
2.6
2.8
log(Cd
)
ξ= −0.8ξ=0ξ=0.7
Figure 4. Plot of the drag coefficient Cd vs capillary numberCa for three wetting parameters ξ. The squares are simulationresults, the solid lines are linear fits of the form f(x) = −x+ b.
change ∆θ to the capillary number Ca and measurethe slope of the linear fit for each combination of ξTand ξB, see in figure 6. Because the bridge is movingand the top and bottom wettabilities are different, allfour contact angles are different and their slopes areshown separately. For the contact angles on the right(advancing), the slopes vary over a narrower range,and therefore the errors of the linear fits and othernumerical errors in contact angle measurements aremore visible. These figures have a symmetry: thebottom angle on each side (left and right) for a givencombination ξT = ξ1 and ξB = ξ2 is the same as thetop angle on the same side with exchanged parametersξT = ξ2 and ξB = ξ1. This does not hold for Bo 6= 0since the force in the y direction breaks the top-bottomsymmetry. For the angles on the left, which vary over
b)
a)
c)
right
left
Figure 5. (a) Change in contact angle ∆θ relative toequilibrium vs capillary number Ca for three wetting parametersξ. ∆θ > 0 for the advancing interface (on the right) and ∆θ < 0for the receding interface (on the left). The contact angles arethe same at the top and bottom substrates. The slopes of thelinear fits of ∆θ vs Ca are plotted in (b) and (c) for the receding(left) and advancing (right) angles, respectively.
a wider range, the slopes of the fits are only weaklyaffected by the wetting on the bottom substrate andvice-versa. Hydrophilic substrates (ξ < 0) yield largerabsolute slopes on the left-hand side. For the angles onthe right, the slopes are smaller close to neutral wetting

Dynamics of liquid bridges 7
(ξ = 0).
a) b)
c) d)
Figure 6. Slopes of the linear fits of ∆θ vs Ca for thefour contact angles of the liquid bridge with different wettingparameters at top and bottom, ξT and ξB respectively.
3.3.3. Identical substrates, Bo 6= 0. Now we considerbridges with the same wetting parameter at top andbottom but with an external force (e.g., gravity)perpendicular to the plates. We measure the contactangle change ∆θ as a function of the capillary numberCa as before. Figure 7 shows the variations of thefour angles for three different Bond numbers and twowetting parameters. The external force in the ydirection increases some angles and decreases others.Those angles that decrease on the left interface varymore strongly with capillary number than those onthe right interface. For instance, the top left (TL)angle increases for a hydrophilic top substrate as Boincreases. Thus, its variation with Ca is smaller forlarger Bo as shown in figure 7(a). The oppositehappens for a hydrophobic top substrate: as the TLangle decreases with Bo, its variation with Ca is greaterfor larger Bo. The same analysis holds for the otherthree angles.
3.4. Breaking bridges
In this section we examine the maximum capillarynumber Camax for which the liquid bridge is stableand does not break. Thus, using the same setup as inthe previous sections, we simulate bridges with largerexternal forces applied in the x direction to observebridge rupture. We say the bridge has broken if, aftera long enough time (t = 5 × 105), there is no possiblepath inside the liquid bridge component connecting thetop and bottom substrates.
Figure 8(a) shows Camax for liquid bridges betweenidentical substrates and different Bond numbers. Wenotice that bridges with wetting parameters aroundξ = 0 (neutral wetting) are, in general, more stable
a)
b)
T� ��
B� ��
�� �
� �
Figure 7. Changes in contact angles ∆θ vs capillary numberCa for different Bond numbers (see legend: top left (TL), topright (TR), bottom left (BL), bottom right (BR). The wettingparameter is the same on the top and bottom substrates: (a)ξ = −0.8 and (b) ξ = 0.7.
for any Bo. This is because the interface is straight forξ = 0 and increasing Bo does not much affect its shape.Bridges between hydrophilic substrates are also moreresilient, presumably owing to the larger liquid-solidcontact area that provides greater adhesion. IncreasingBo makes bridges more unstable, especially far fromξ = 0. To have an idea of what these numbersmean in physical units, let us consider a liquid bridgemade of a commercially available aqueous surfactantsolution (Pustefix, Germany) in air, for which ∆ρ ∼103 kg m−3, γ ∼ 28 mJ m−2 and ν ∼ 10−6 m2 s−1.For ξ = −0.6 and Bo = 1.1, which corresponds toLy = 1.8 mm, the maximum capillary number isCamax ≈ 0.1, which gives a bridge velocity of 3 m/s.In this case, the drag coefficient is Cd = 0.95, whencethe drag force on the plates is 250 N. For the same ξand Bo = 6.8, which corresponds to Ly = 4.6 mm,Camax ≈ 0.012, which gives a velocity of 0.36 m/s.The drag coefficient in this case is Cd = 9.1 andthe corresponding drag force is 87 N. Finally, notethat, according to our earlier work [11], the maximumspan of a liquid bridge at equilibrium is four capillary

Dynamics of liquid bridges 8
lengths.In figure 8(b), we plot Camax for bridges with
Bo = 0, but different wetting parameters at top andbottom. Bridges with ξT 6= ξB are more unstable,which effect is stronger close to the extremes, withξT = 0.6 and ξB = −0.6 and ξT = −0.6 and ξB = 0.6.
It is interesting to note that, in all cases consideredhere, the smallest capillary number for which a bridgebreaks is less than that needed to break a thin liquidlamella, Ca ∼ 0.26 [22].
a)
b)
Figure 8. Maximum capillary number Camax for which theliquid bridge does not break. (a) Same wetting parameter ξ attop and bottom substrates and varying Bond number Bo. (b)Bo = 0 and different wetting parameters on top and bottom.
4. Conclusions
We have simulated the motion of a two-dimensionalliquid bridge sandwiched between flat horizontalsubstrates of tunable wettability, using the latticeBoltzmann method. This was validated by comparisonwith quasi-analytic results for equilibrium (static)bridges [11], and found to be reliable except for Bondnumbers very close to the maximum above which anequilibrium bridge breaks.
For steady-state bridges moving between identicalsubstrates, Cd ∼ Ca−1 as required by dimensional
analysis. However the prefactor depends on theliquid contact angles, being larger for hydrophilic thanfor hydrophobic substrates. This accords with theintuitive expectation that bridges of a given volumeshould have a larger contact area with a hydrophilicthan with a hydrophobic substrate, thus leading tohigher drag in the former case than in the latter. Theeffect is, however, not very pronounced: drag reductiondue to hydrophobicity is at most about 20%.
Moving bridges deform from their equilibriumshapes. We quantified this by measuring the deviationsof contact angles from their equilibrium values.For not-too-fast moving bridges these deviations areproportional to the capillary number with slopes thatare always negative on the receding side of a bridge andpositive on the advancing side, but exhibit a complexdependence on the contact angles.
Finally, we investigated bridge stability bymapping the largest capillary number for which abridge will not break, for given contact angles at thetop and bottom substrates and given Bond number.Interestingly, the most stable bridges appear to bethose with equilibrium contact angles around 90◦.Stability (i.e, breakup deferred to larger Ca) is alsofavoured by hydrophilicity and small Bond numbers.
One possible area of future research would bethe detailed breakup of bridges, either as a resultof increasing their velocity (i.e., Ca) or substrateseparation (i.e., Bo). One possible extension wouldbe to non-Newtonian fluids, which occur in manyindustrial and biological contexts.
Acknowledgments
We acknowledge financial support from the Por-tuguese Foundation for Science and Technology (FCT)under the contracts: EXPL/FIS-MAC/0406/2021,PTDC/FIS-MAC/5689/2020, UIDB/00618/2020 andUIDP/00618/2020.
[1] J. N. Israelachvili. Intermolecular and Surface Forces.Elsevier, Inc.,, Amsterdam, third edition, 2011.
[2] M. Pakpour, M. Habib, P. Møller, and D. Bonn. Howto construct the perfect sandcastle. Scientific Reports,2:545, 2012.
[3] Y. Men, X. Zhang, and W. Wang. Capillary liquid bridgesin atomic force microscopy (afm): Formation, rupture,and hysteresis. J. Chem. Phys., 131:184702, 2009.
[4] R. B. Edwards. Joint tolerances in capillary copper pipingjoints. Welding Journal, 6:321–324, 1972.
[5] L. Vagharchakian, F. Restagno, and L. Leger. Capillarybridge formation and breakage: a test to characterizeantiadhesive surfaces. J. Phys. Chem. B, 113:3769–3775,2009.
[6] A. M. Alencar, A. Majumdar, Z. Hantos, S. V. Buldyrev,H. E. Stanley, and B. Suki. Crackles and instabilitiesduring lung inflation. Physica A, 357:18–26, 2005.
[7] B. N. Persson. Wet adhesion with application to tree frog

Dynamics of liquid bridges 9
adhesive toe pads and tires. J. Phys.: Condens. Matter,19:376110, 2007.
[8] M. Prakash, D. Quere, and J. W. M. Bush. Surface tensiontransport of prey by feeding shorebirds: The capillaryratchet. Science, 320:931–934, 2008.
[9] E. W. Washburn. The dynamics of capillary flow. Phys.
Rev., 17:273–283, 1921.[10] N. Nagy. Contact angle determination on hydrophilic and
superhydrophilic surfaces by using r − θ-type capillarybridges. Langmuir, 35:5202–5212, 2019.
[11] P. I. C. Teixeira and M. A. C. Teixeira. The shape of two-dimensional liquid bridges. J. Phys.: Condens. Matter,32(3):034002, oct 2019.
[12] P. D. Howell, S. L. Waters, and J. B. Grotberg. Thepropagation of a liquid bolus along a liquid-lined flexibletube. J. Fluid Mech., 406:309–335, 2000.
[13] C. N. Baroud, F. Gallaire, and R. Dangla. Dynamics ofmicrofluidic droplets,. La. Chip, 10:2032–2045, 2010.
[14] D. Halpern, H. Fujioka, S. Takayama, and J. B. Grotberg.Respir. Physiol. Neurobiol., 163:222–231, 2008.
[15] X. Shan and H. Chen. Lattice boltzmann model forsimulating flows with multiple phases and components.Phys. Rev. E, 47:1815–1819, Mar 1993.
[16] T. Kruger, H. Kusumaatmaja, A. Kuzmin, O. Shardt,G. Silva, and E. Magnus Viggen. The Lattice Boltzmann
Method - Principles and Practice. Springer InternationalPublishing, 10 2016.
[17] R. C. V. Coelho and M. M. Doria. Lattice boltzmannmethod for semiclassical fluids. Computers & Fluids,165:144 – 159, 2018.
[18] Z. Guo, C. Zheng, and B. Shi. Discrete lattice effects onthe forcing term in the lattice boltzmann method. Phys.
Rev. E, 65.[19] R. C. V. Coelho, C. B. Moura, M. M. Telo da Gama,
and N. A. M. Araujo. Wetting boundary conditions formulticomponent pseudopotential lattice boltzmann. Int.
J. Numer. Methods Fluids, 93(8):2570–2580, 2021.[20] M. Sedahmed, R. C. V. Coelho, and H. A. Warda.
An improved multicomponent pseudopotential latticeboltzmann method for immiscible fluid displacement inporous media. Physics of Fluids, 34(2):023102, 2022.
[21] R. Mei, D. Yu, W. Shyy, and L.S. Luo. Force evaluation inthe lattice boltzmann method involving curved geometry.Phys. Rev. E, 65.
[22] I. Cantat. Liquid meniscus friction on a wet plate: Bubbles,lamellae, and foams. Phys. Fluids, 25.






![HE (TEO) - 4 [Modo de Compatibilidade]homepage.ufp.pt/calmeida/HE_ficheiros/HE (TEO) - 4.pdf · zpassar repetidamente através da microcirculação (diâmetro mínimo de 3,5 µm)](https://static.fdocumentos.com/doc/165x107/5befd8cd09d3f2eb288c5e32/he-teo-4-modo-de-compatibilidade-teo-4pdf-zpassar-repetidamente-atraves.jpg)