
Acoplada Material Estrutura Flexívelsites.poli.usp.br/d/pmr5222/pmr5222_aula7.pdf · Equações...
96
Microsensores Piezoresistivos Aplicações: microssensores de pressão, micro- acelerômetros, micro-inclinômetros, células de carga. Aplicações: microssensores de pressão, micro- acelerômetros, micro-inclinômetros, células de carga. Exemplos: Material Piezoresistivo Material Piezoresistivo Sensor Piezoresistivo Sensor Piezoresistivo Estrutura Flexível Acoplada Estrutura Flexível Acoplada = + Estrutura Acoplada Estrutura Acoplada Transformador Mecânico Transformador Mecânico Sensor de Pressão de Membrana
Transcript of Acoplada Material Estrutura Flexívelsites.poli.usp.br/d/pmr5222/pmr5222_aula7.pdf · Equações...

Microsensores Piezoresistivos
Aplicações: microssensores de pressão, micro-acelerômetros, micro-inclinômetros, células de carga.
Aplicações: microssensores de pressão, micro-acelerômetros, micro-inclinômetros, células de carga.
Exemplos:
MaterialPiezoresistivo
MaterialPiezoresistivo
SensorPiezoresistivo
SensorPiezoresistivo
Estrutura FlexívelAcoplada
Estrutura FlexívelAcoplada= +
EstruturaAcopladaEstruturaAcoplada
TransformadorMecânico
TransformadorMecânico
Sensor dePressão deMembrana

Princípio: propriedades de resistividade mudam quando o meio é sujeito a tensões mecânicas.
Princípio: propriedades de resistividade mudam quando o meio é sujeito a tensões mecânicas.
Equações Constitutivas do Meio Piezoresistivo
[ ] JE ρ= φ−∇=E
[ ] [ ] 1−= ρk [ ] [ ][ ] ερσρρ DII mm Π+=Π+= 00
Lei de Ohm:
E - vetor campo elétrico; φ - potencial elétrico[ρ] - matriz de resistividade
Equações Constitutivas do Meio Piezoresistivo
[Π] - Matriz de piezoresistividade; σ - tensões; ε - deformações; [k] - matriz de condutividade;
[D] - matriz de elasticidade; Im - vetor identidade

Equações Constitutivas do Meio Piezoresistivo
[ ] [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zzyzxz
yzyyxy
xzxyxx
zzyzxz
yzyyxy
xzxyxx
kkkkkkkkk
k ;ρρρρρρρρρ
ρ
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
44
44
44
332313
231112
131211
000000000000000000000000
DD
DDDDDDDDDD
D

Equações Constitutivas do Meio Piezoresistivo
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⇒
xy
xz
yz
z
y
x
xy
xz
yz
zz
yy
xx
σσσσσσ
ππ
ππππππππππ
ρ
ρρρρρρ
44
44
44
121212
121112
121211
0
000000000000000000000000
000111
[ ] ⇒Π+= σρρ mI0No caso genérico:

Equações Constitutivas do Meio Piezoresistivo
x
yNo caso unidimensional:
( )yxx σπσπρρ 12110 ++=
Estado plano de tensão:
0
11
0
11
0110
110
2 0;
2100
0101
1
ρσπ
ρεπ
ρρεπρρ
σπρρεσνεε
σεεε
νν
ν
νσσσ
xxxx
xxxxxy
y
xy
y
x
xy
y
x
EE
E
E
==∆
⇒+=⇒
⇒+=⇒=⇒−=⇒
⇒=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
LÁrea da seção: A
b
Equações Constitutivas do Meio Piezoresistivo
Mas:
zyxx
x
x
xxxxxx
Ehh
bb
ll
RR
bhhl
hbbl
Al
AlRdR
bhl
AlR
εεερ
επρρ
ρρρρρρ
−−+=∆
−∆
−∆
+∆
=∆
⇒
⇒∆
−∆
−∆
+∆
=∆≅⇒==
0
11
22
Se: xyz νεεε −=≅ e 0
xefefxx ll
EE
RR σππσ
ρπνε
ρπν =
∆=⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+=⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
∆ ˆ110
11
0
11
, então:
Similar à equação de um “strain-gage”.

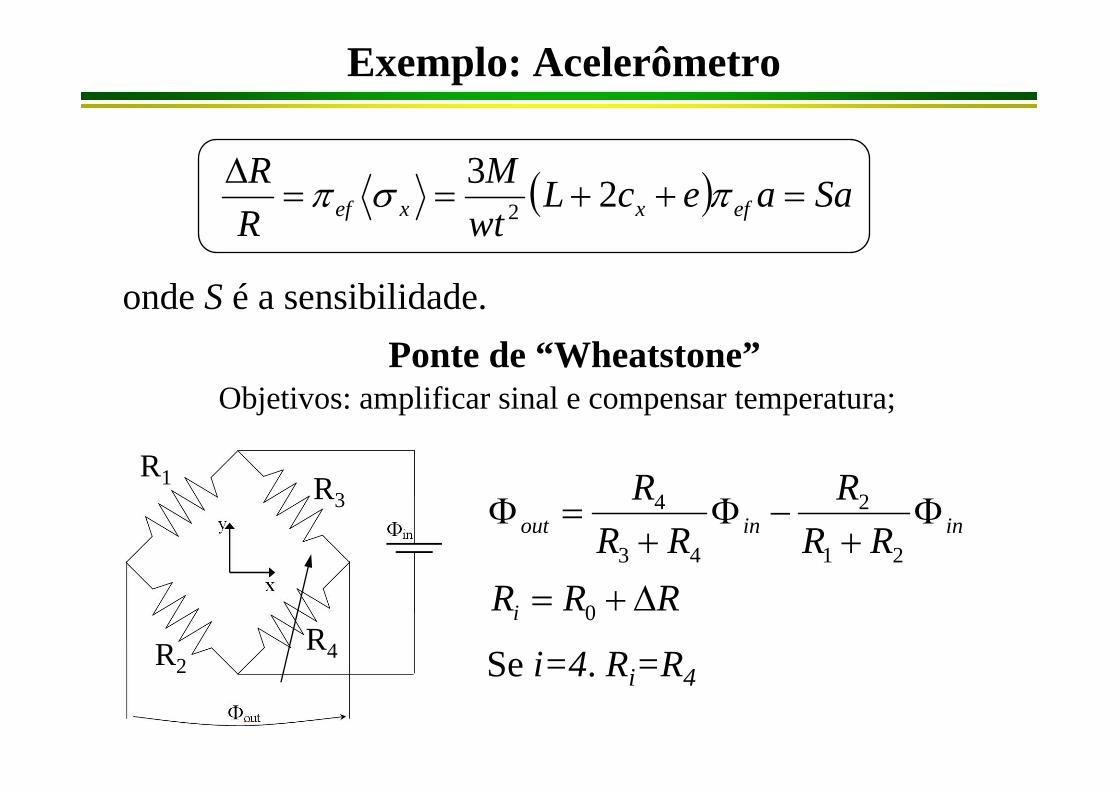
Exemplo: Acelerômetro
( )12
; ;0 ;3wtIMaF
IyxcLF
zyz
xx =−==
−+= σσ
Da resistência dos materiais:
Devemos usar a tensão média ao longo do comprimento ldo piezoresistor de centro x0:
( )22
;10
02/
2/
0
0
L-elxI
txcLFdxl z
xlx
lx xx ==−+
== ∫+
−σσ
l
Exemplo: Acelerômetro
Ponte de “Wheatstone”
( ) SaaecLwtM
RR
efxxef =++==∆ πσπ 23
2
onde S é a sensibilidade.
Objetivos: amplificar sinal e compensar temperatura;
R1
R2
R3
R4
RRRRR
RRR
R
i
ininout
∆+=
Φ+
−Φ+
=Φ
0
21
2
43
4
Se i=4. Ri=R4

Exemplo: Acelerômetro
( )
=Φ⎟⎠⎞⎜
⎝⎛ ∆+
∆=
=Φ∆+
∆=Φ−Φ
∆+∆+
=Φ
in
inininout
RRR
RRR
RRR
RR
0
0
00
0
22
2221
2
Supor: R1=R2=R3=R0, então:
inout RR
RR
Φ∆
≅Φ⇒<<∆
00 4 1 Se

Modelagem por MEF do Meio Piezoresistivo
FUK =][
IK =Φ][ φφ [ ] [ ] [ ]∑∫=
ΩΩ=
Ne
eeee
tee
dk1
][ φφφφ BBK
Solucionar o problema de MEF mecânicoconsiderando cargas aplicadas
Calcular [k] usando as equaçõesconstitutivas piezoresistivas
Solucionar o problema de MEF elétricopara obter os potenciais elétricos nodais

Voltagem de Saída V0: V0 = Vb - Va
Resultado Analítico:
V = 0V = Vs
Vb
Va
WL
x
y
⎟⎠⎞
⎜⎝⎛= xs PV
LWV 440 2
1 π
Px é a pressão de excitação ao longo do eixo x
É utilizado o elemento sólido 2D PLANE223 do ANSYSque possui a formulação de piezoresistividade e o elemento
PLANE183 para a parte estrutural mecânica.
Simulação de um Sensor Piezoresistivo Utilizando o ANSYS
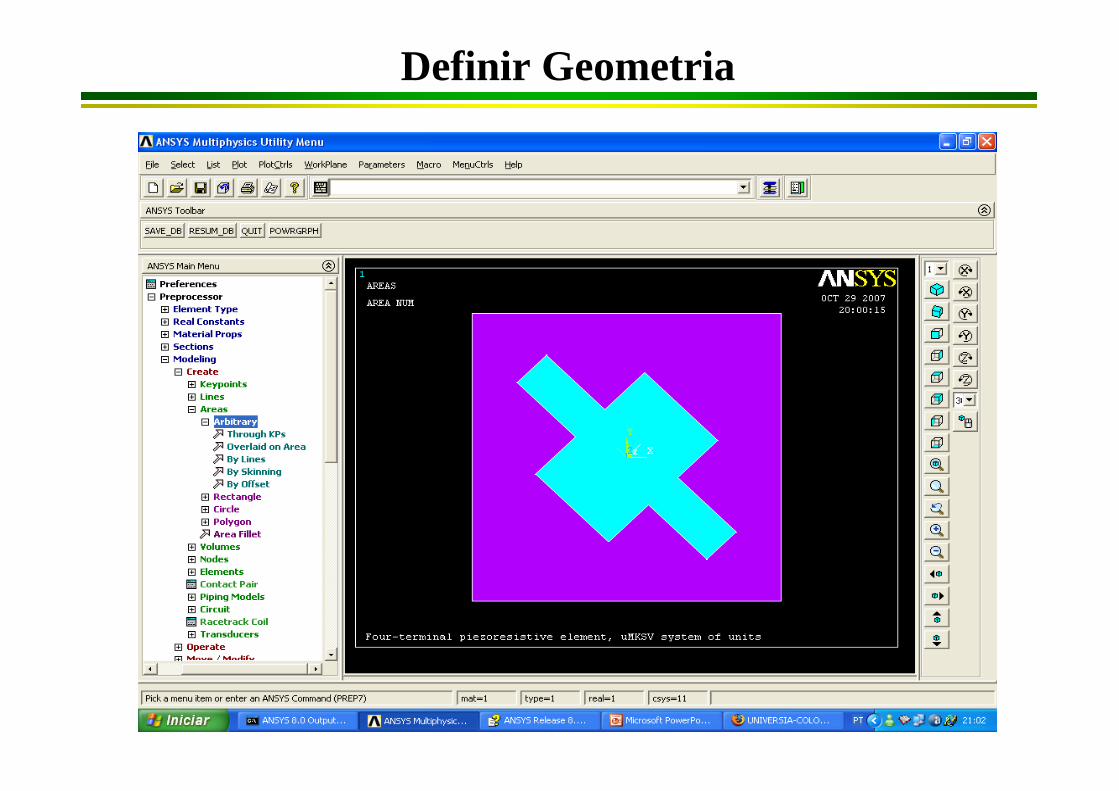
Definir Geometria

Definir Elemento Estrutural

Definir Elemento Estrutural
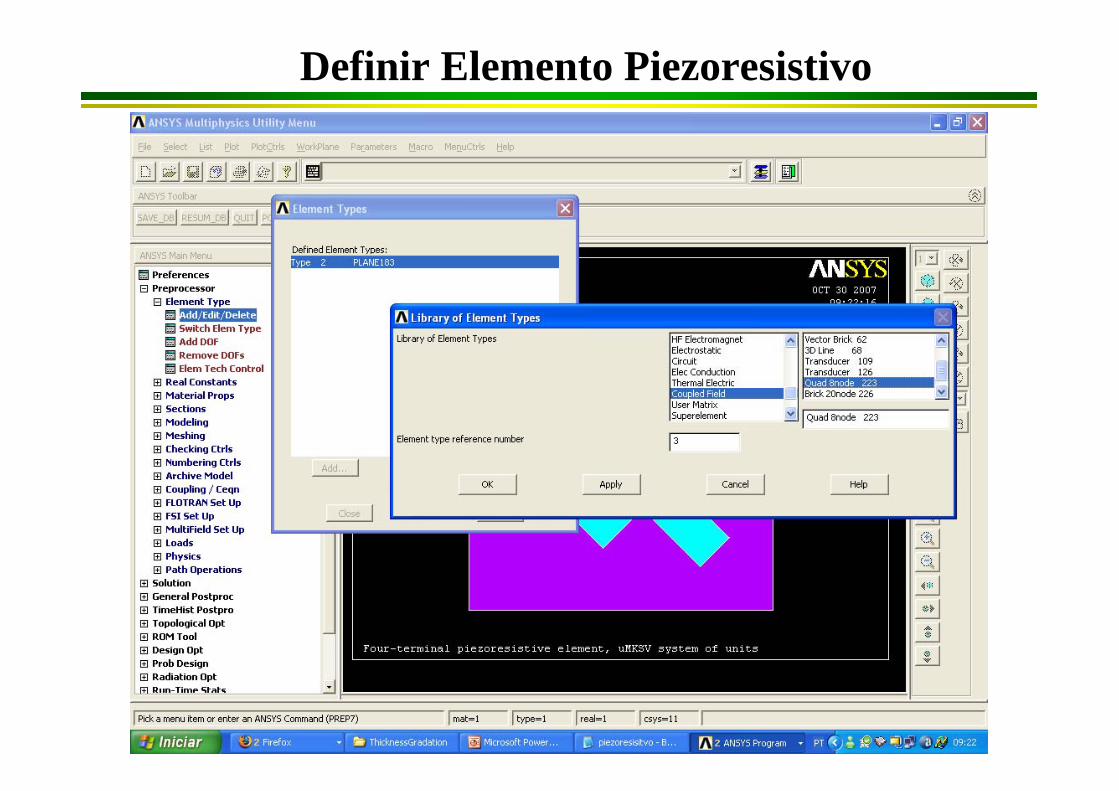
Definir Elemento Piezoresistivo

Definir Elemento Piezoresistivo

Definir Propriedades Elásticas

Definir Propriedades Elétricas

Definir Propriedades Piezoresistivas

Especificar Orientação Material

Especificar Orientação Material
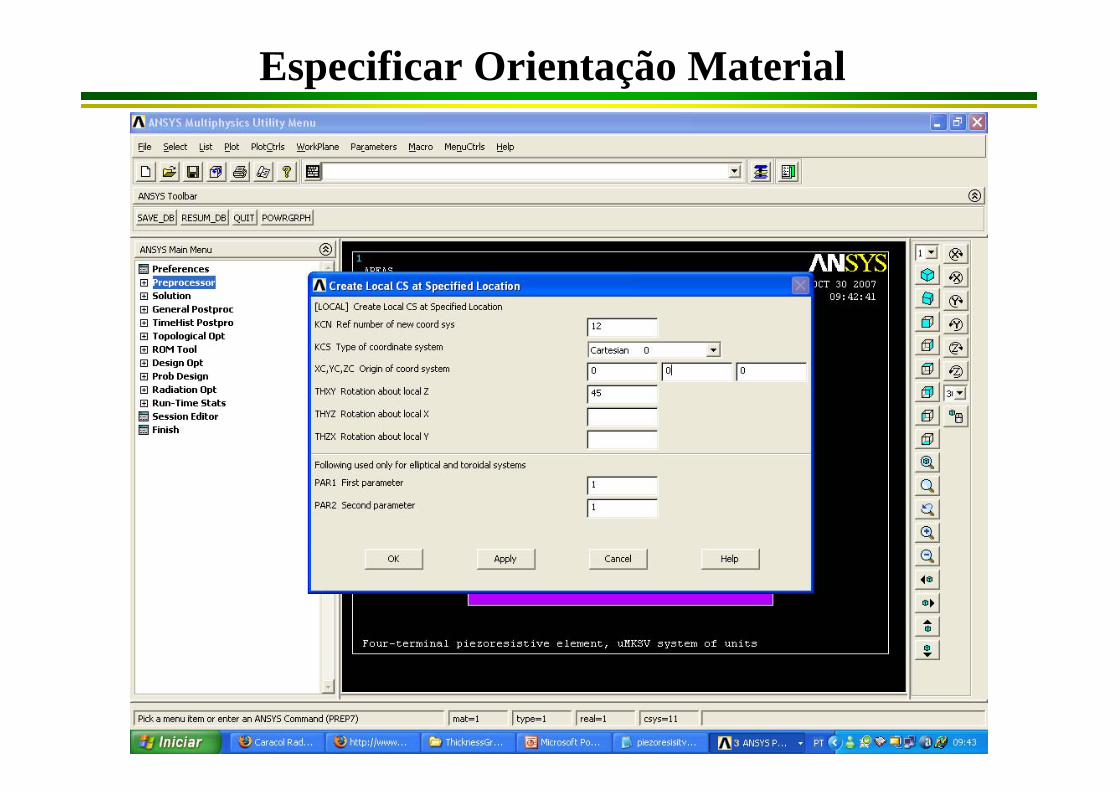
Especificar Orientação Material

Tamanho Elemento Finito

Malha Área 1

Malha Área 1

Malha Área 2

Malha Área 2

Condições de Contorno Elétricas

Condições de Contorno Elétricas

Condições de Contorno Elétricas
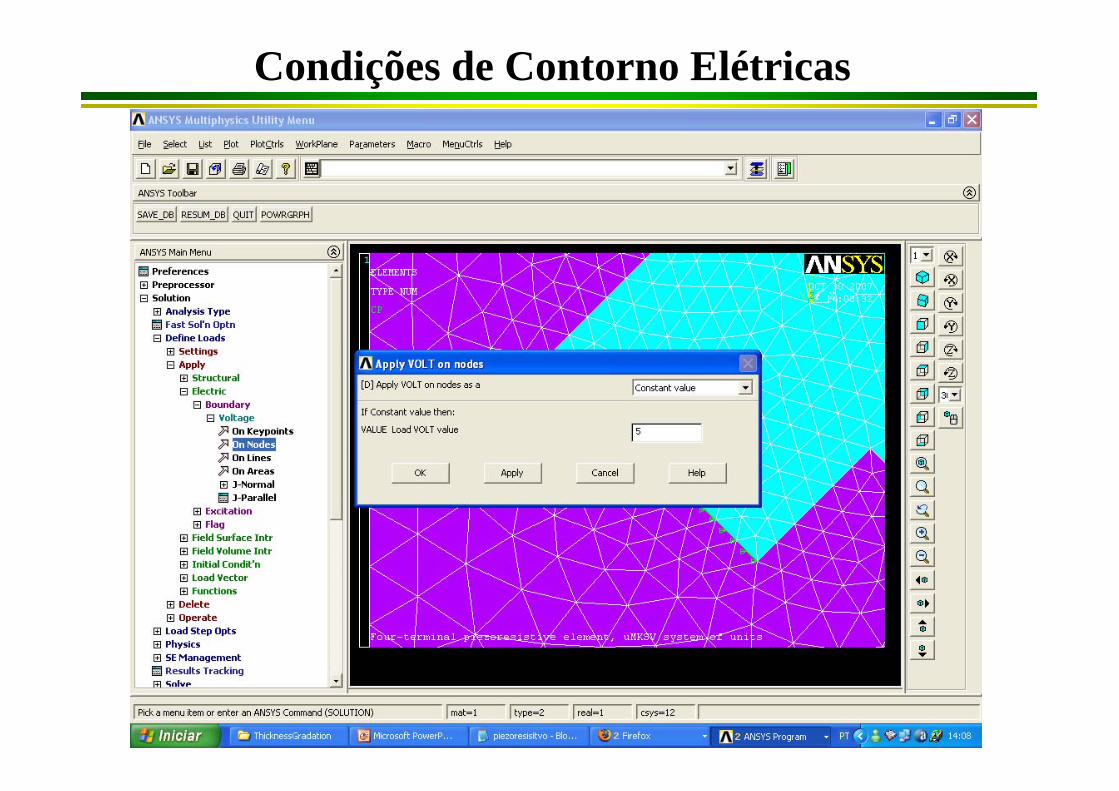
Condições de Contorno Elétricas

Condições de Contorno Elétricas

Condições de Contorno Estruturais

Condições de Contorno Estruturais

Carregamento: Pressão

Carregamento: Pressão

Carregamento: Pressão
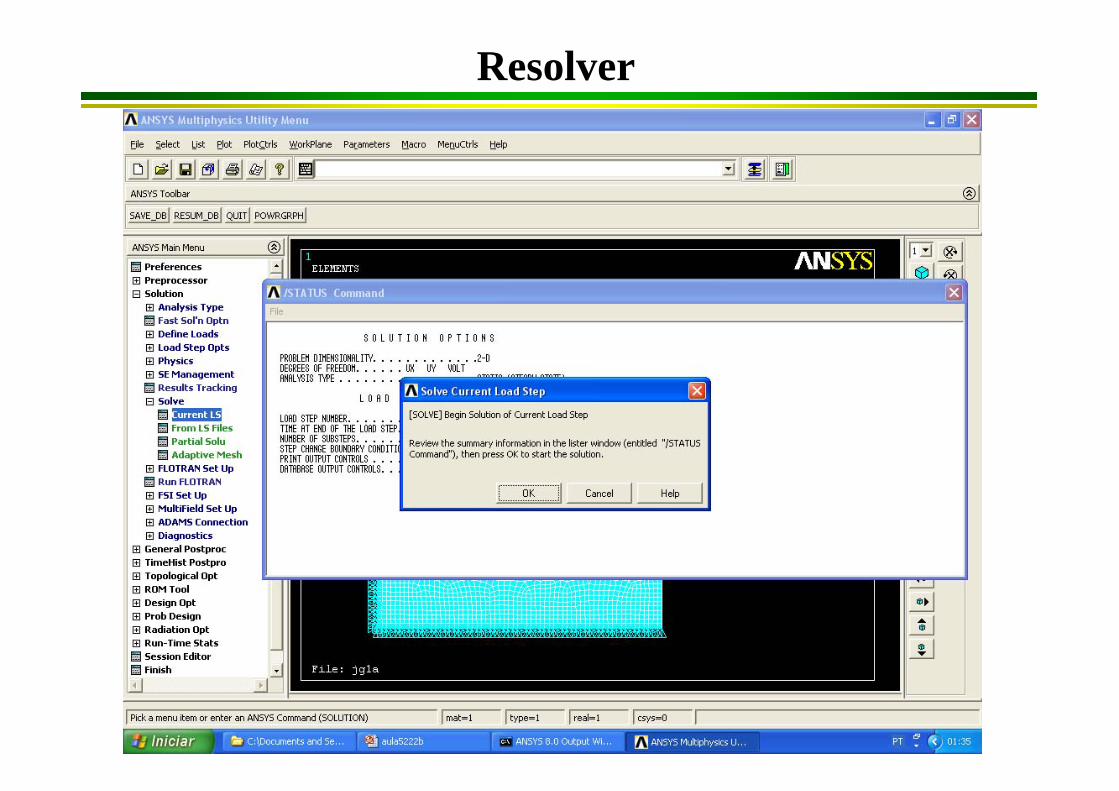
Resolver

Resolver
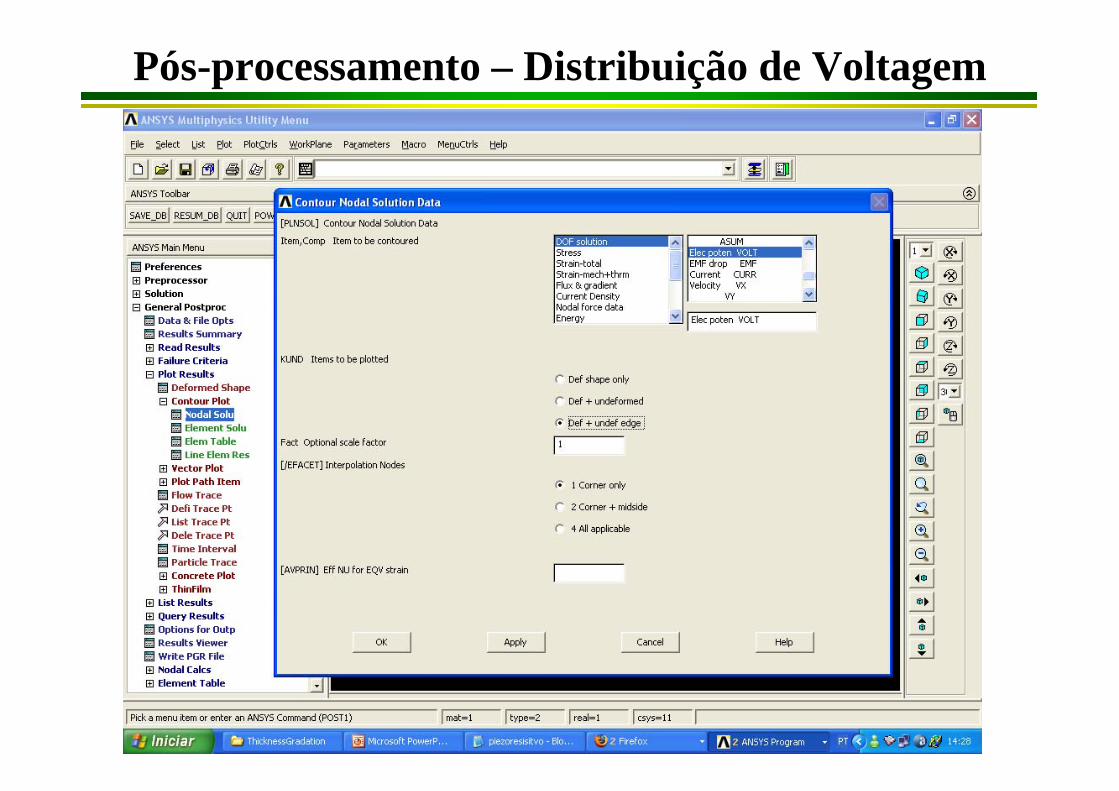
Pós-processamento – Distribuição de Voltagem

Pós-processamento – Distribuição de Voltagem

Pós-processamento – Campo Elétrico Ex
Coordenadas locais
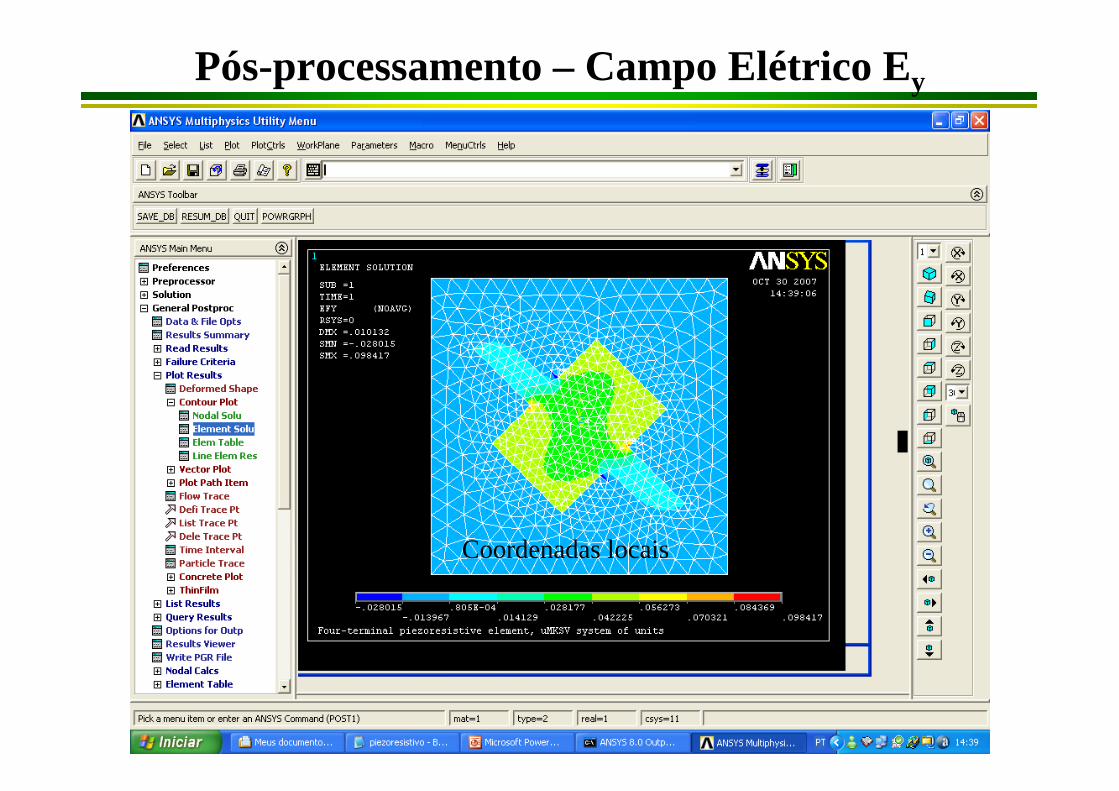
Pós-processamento – Campo Elétrico Ey
Coordenadas locais

Pós-processamento – Voltagem de Saída V0
11.512.83.013.815.52.517.318.42.023.023.11.527.625.91.25
Vo, mV (Analítico)Vo, mV (ANSYS)L/W

Micro-acelerômetros Piezoresistivos
Simulação computacional
Sensores Piezoresistores
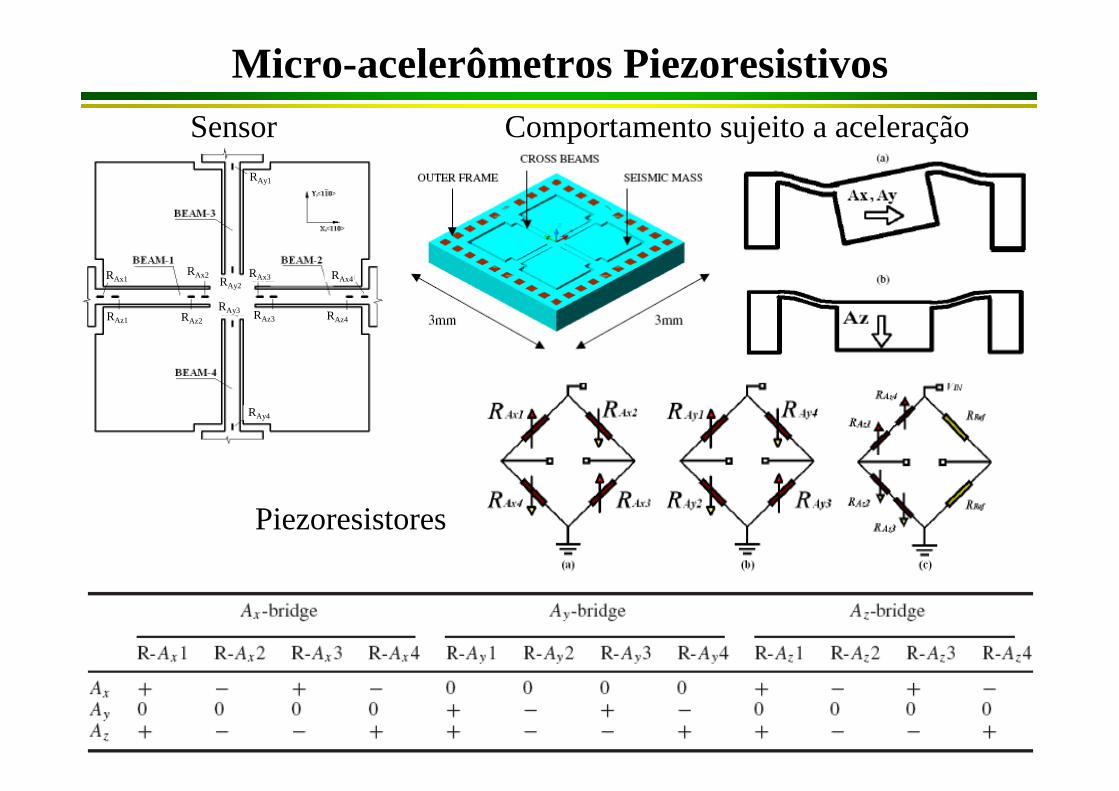
Micro-acelerômetros Piezoresistivos
Piezoresistores
Sensor Comportamento sujeito a aceleração
RAx1RAx2
RAz1 RAz2 RAz3
RAx3 RAx4
RAz4
RAy4
RAy3
RAy2
RAy1

Micro-acelerômetros Piezoresistivos
Máscara Sensor sem massainercial
Sensor final
Simulaçãocomputacional

Micro-acelerômetros PiezoresistivosSensor
Comportamentosujeito a
aceleração
linear
angular

Micro-acelerômetros PiezoresistivosRede de piezoresistores

Micro-acelerômetros Piezoresistivos
Sensor sem massainercial
Sensor final
Simulaçãocomputacional
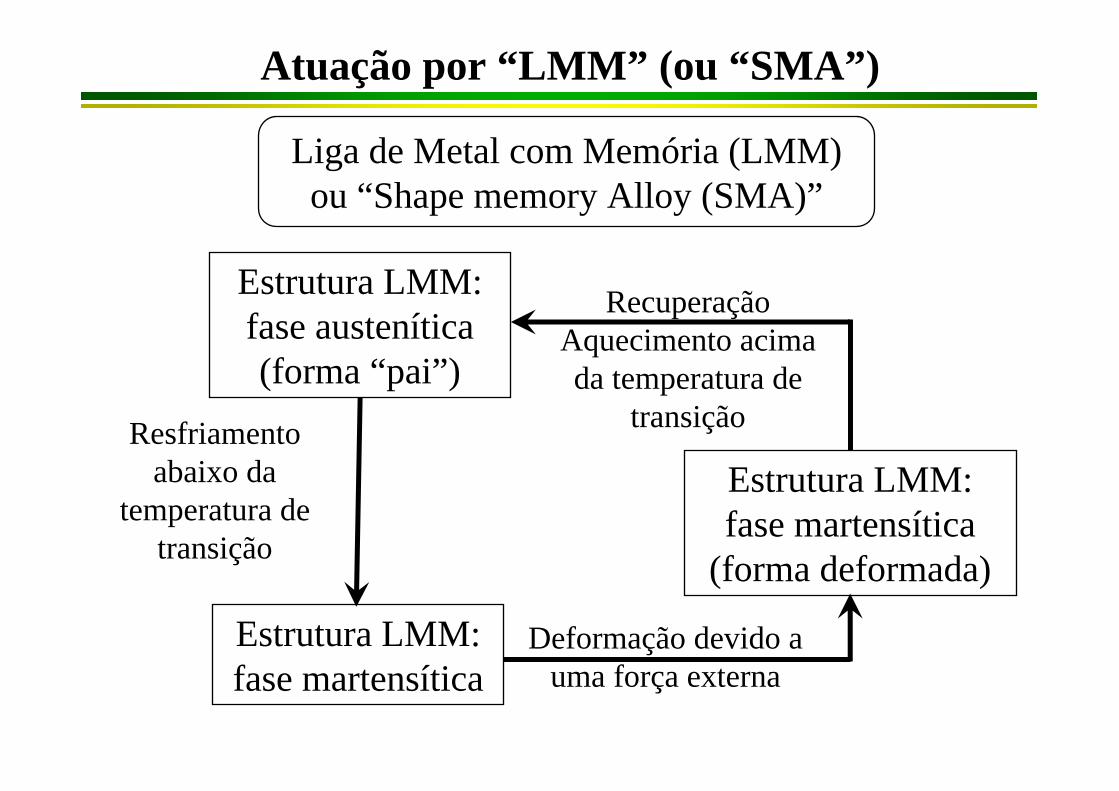
Atuação por “LMM” (ou “SMA”)
Liga de Metal com Memória (LMM) ou “Shape memory Alloy (SMA)”
Estrutura LMM: fase austenítica(forma “pai”)
Estrutura LMM: fase martensítica
Estrutura LMM: fase martensítica
(forma deformada)
RecuperaçãoAquecimento acimada temperatura de
transição
Deformação devido a uma força externa
Resfriamentoabaixo da
temperatura de transição
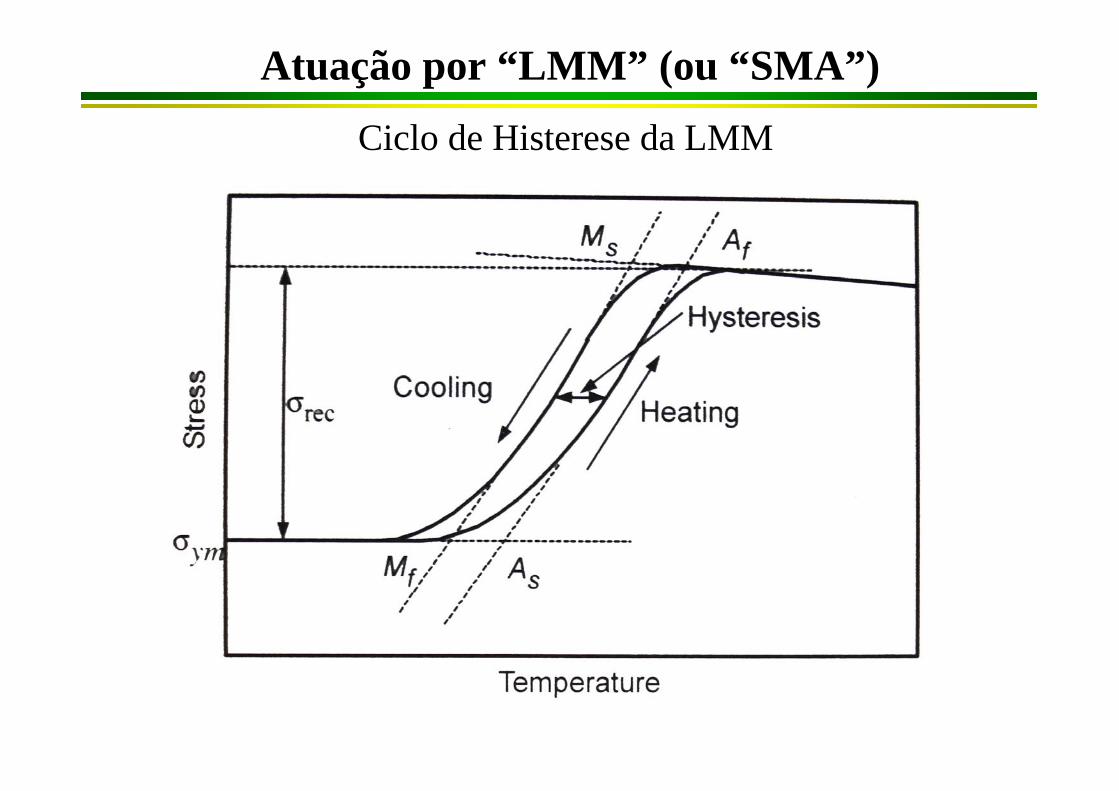
Atuação por “LMM” (ou “SMA”)
Ciclo de Histerese da LMM

Atuação por “LMM” (ou “SMA”)

Exemplos – MEMS LMMMicro-garras LMM
Atuador básico Micro-garra

Exemplos – MEMS LMMAtuadores LMM 3D

Mecanismos Flexíveis - IntroduçãoMecanismos onde o movimento é dado pela flexibilidade de uma
estrutura ao invés da presença de juntas e pinos.
Mecanismostradicionais
Mecanismosflexíveis

Mecanismos Flexíveis - Introdução
Garra de um robô Alicate de pescador
Grampos Célula de carga

Mecanismos Flexíveis - IntroduçãoMEMS

Mecanismos Flexíveis - Introdução
Vantagens:• Fabricação simples (sem montagem) pode ser fabricado em microescala;• Não há juntas não há folgas, não há atrito. Pequenos deslocamentos podem ser transmitidos;• Não há lubrificação ou ruído
Desvantagens:• Fadiga: mas não é crítico (exemplo: artrópodos);• Pequenos deslocamentos em geral;
Aplicações promissoras: Mecânica de precisão (impressoras, DVDs, disco rígido, etc...), MEMS, etc...

Conceito de Resistência e Rigidez
3
33
y
3
3
33
x
3
h4
12bhI;
3
hb4
12hbI ;
3
EbLF
EILF
ELF
EILF
yy
y
yy
xx
x
xx
=⇒==
=⇒==
δδ
δδ
Rigidez (deformação)
Conceito de flexibilidade e rigidezFlexível – alta deformação
Rígida – pouca deformação

Conceito de Resistência e Rigidez
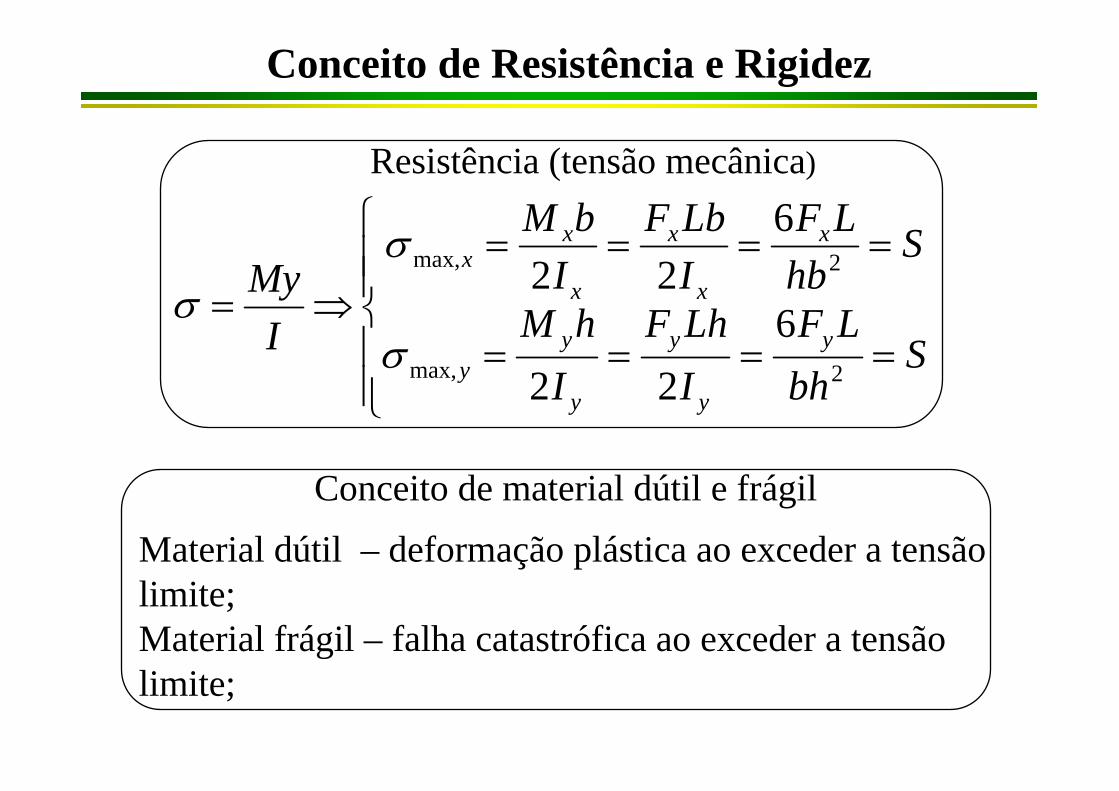
Conceito de Resistência e Rigidez
⎪⎪⎩
⎪⎪⎨
⎧
====
====⇒=
Sbh
LFILhF
IhM
Shb
LFILbF
IbM
IMy
y
y
y
y
yy
x
x
x
x
xx
2max,
2max,
622
622
σ
σσ
Resistência (tensão mecânica)
Conceito de material dútil e frágil
Material dútil – deformação plástica ao exceder a tensão limite;Material frágil – falha catastrófica ao exceder a tensão limite;

2max,2max,
3 ;3
LEh
LEb y
yx
x
δσδσ ==
Conceito de Resistência e Rigidez
≠≠
flexibilidade dutilidaderigidez fragilidade
Ex.: MEMS são feitos de Polisílicio (frágil)
bh
EhSL
EbLF
EbSL
ELF
y
xyy
xx =⇒====
δδδδ
32
h4
;32
hb4 2
3
32
3
3
Deslocamento máximo (deslocar sem falhar)
Portanto o material ideal deve ter alta relação S/E

Conceito de Resistência e Rigidez

Mola Ortoplanar
2
33
23
4
612 ;
2
LEh
IFLh
IMc
EIFL
EIFL
δσ
δδδδ
===
=⇒=′=′

Mola “Comb-Drive”
3
3 66 L
EIFkEI
FL==⇒=
δδPara uma mola:
4 molas em paralelo:33
246*4LEI
LEIkT ==
L
F

Conceito de Enrijecimento (“Stress Stiffening”)
Rigidez aumenta com a deformação da estruturaProblema fica não-linear
Exemplo: Viga ou corda sujeita à flexão
Surgem forças de tração que enrijecem a corda ou viga
Conceito de Enrijecimento (“Stress Stiffening”)
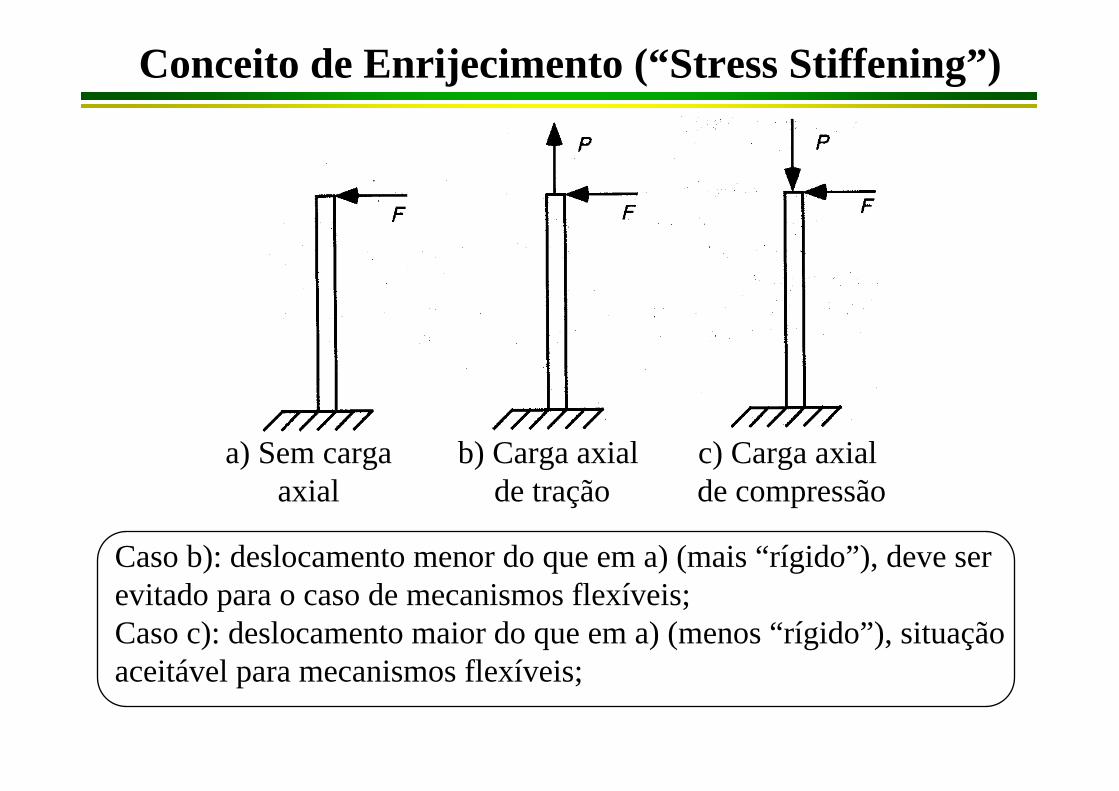
a) Sem carga axial
b) Carga axial de tração
c) Carga axial de compressão
Caso b): deslocamento menor do que em a) (mais “rígido”), deve serevitado para o caso de mecanismos flexíveis;Caso c): deslocamento maior do que em a) (menos “rígido”), situaçãoaceitável para mecanismos flexíveis;

Modelos de Corpo Pseudo-Rígido
Primeiro Caso: Estrutura com Juntas “ Vivas”
Θ=⇒==Θ KTTM ;0θ
( )( )
( )l
EIKKM
lEIM
EIMl
l
l
l
==⇒
⇒=⇒=
;0
0
θ
θθ
L>>l

Modelos de Corpo Pseudo-Rígido
LMM 11
2
1 +=
Ft - força tangencial (ativa)Fn - força normal (passiva)
( )
⎟⎠⎞
⎜⎝⎛−=+=
Θ−=⎟⎠⎞
⎜⎝⎛ +=
n1atan ;1
sin ;2
2 φ
φ
nPF
FFlLFT tt
Modelos de Corpo Pseudo-Rígido
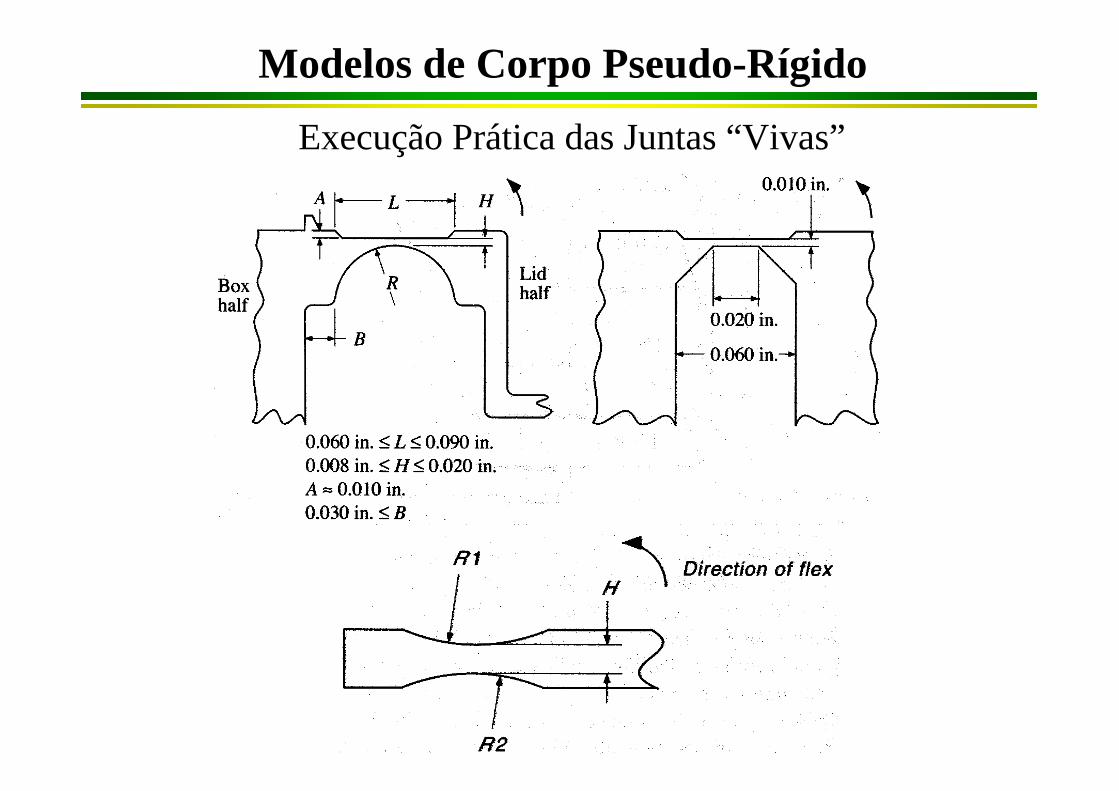
Execução Prática das Juntas “Vivas”

Modelos de Corpo Pseudo-Rígido
lγ
Segundo Caso: Vigas Delgadas
γ é calculado de forma a minimizar oerro acima para o maior valor de Θ
nP
P
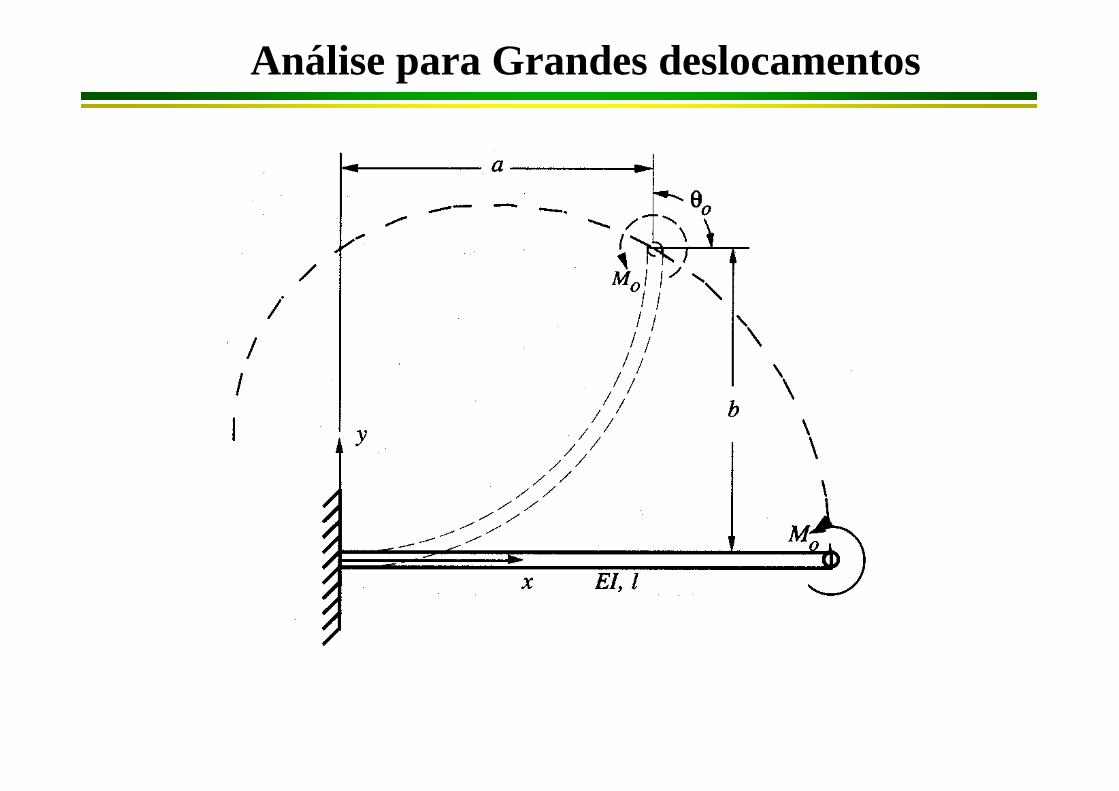
Análise para Grandes deslocamentos

Modelos de Corpo Pseudo-Rígido
Comparação do deslocamentoda viga para n=0
Valor de γem função de n Limite da aproximação (em
termos do ângulo θ)em função de n
n
n
θ
γ
lb
la
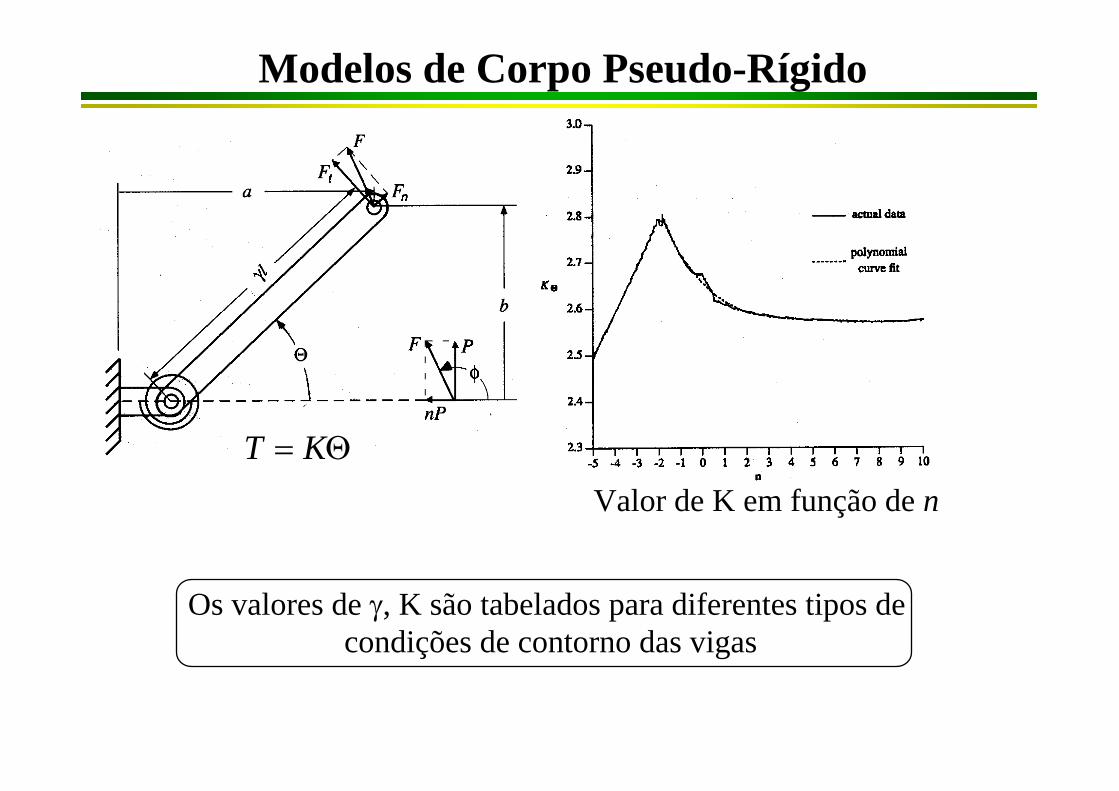
Os valores de γ, K são tabelados para diferentes tipos de condições de contorno das vigas
Modelos de Corpo Pseudo-Rígido
Valor de K em função de nΘ= KT

Modelos de Corpo Pseudo-Rígido
Exemplos de micromecanismos utilizando os conceitos vistos
As pontaspodem ser modeladas
como pinos

Juntas Passivas

Juntas Tipo Q
Junta tipo Paralelogramo

Juntas Tipo Q
Junta tipo Deltóide
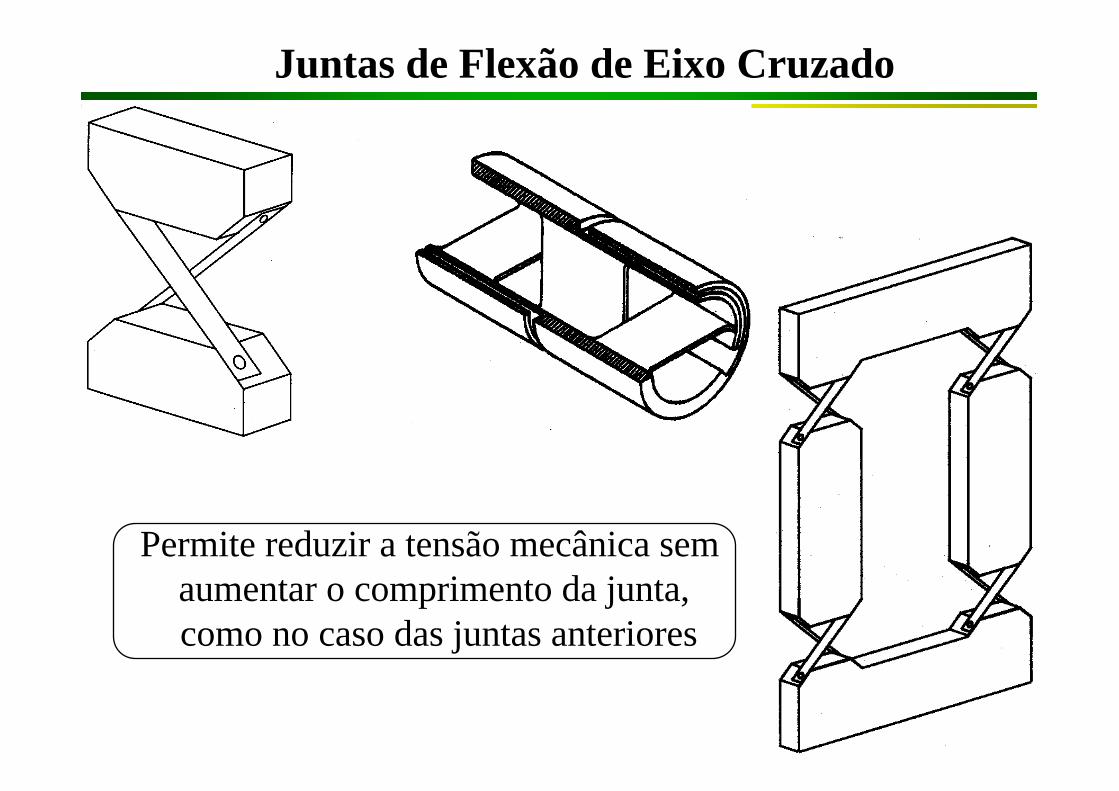
Juntas de Flexão de Eixo Cruzado
Permite reduzir a tensão mecânica sem aumentar o comprimento da junta,como no caso das juntas anteriores

Juntas Torsionais
Microespelho
( )
θθ
νθ
KL
JGT
JGTL
==⇒
⇒+
==12EG ;
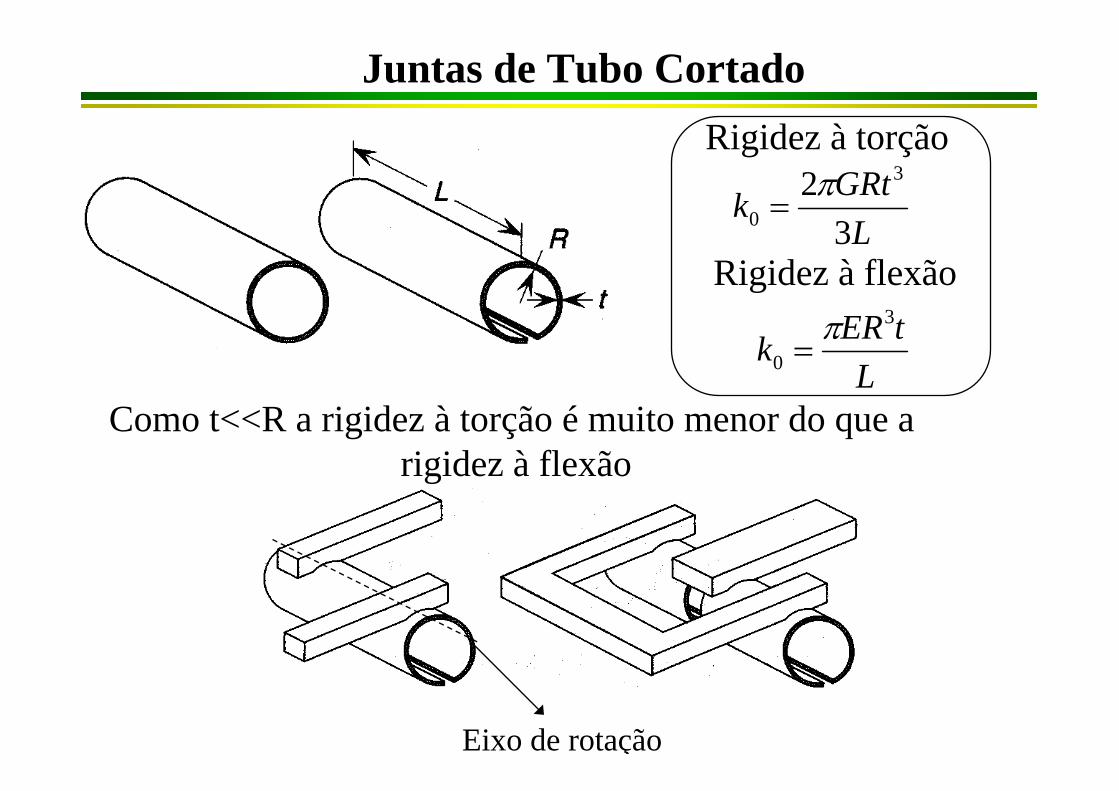
Juntas de Tubo Cortado
LGRtk3
2 3
0π
=
Rigidez à torção
Rigidez à flexão
LtERk
3
0π
=
Eixo de rotação
Como t<<R a rigidez à torção é muito menor do que a rigidez à flexão

Modelagem de MicromecanismosUsando modelos de corpo pseudo-rígidos, podemos modelar
os MEMS usando softwares de simulação de mecanismos que são mais simples de usar do que um software de MEF.
Exemplo: mecanismo paralelogramo

Modelagem de MicromecanismosExemplos de micromecanismos a serem modelados no “Working Model”
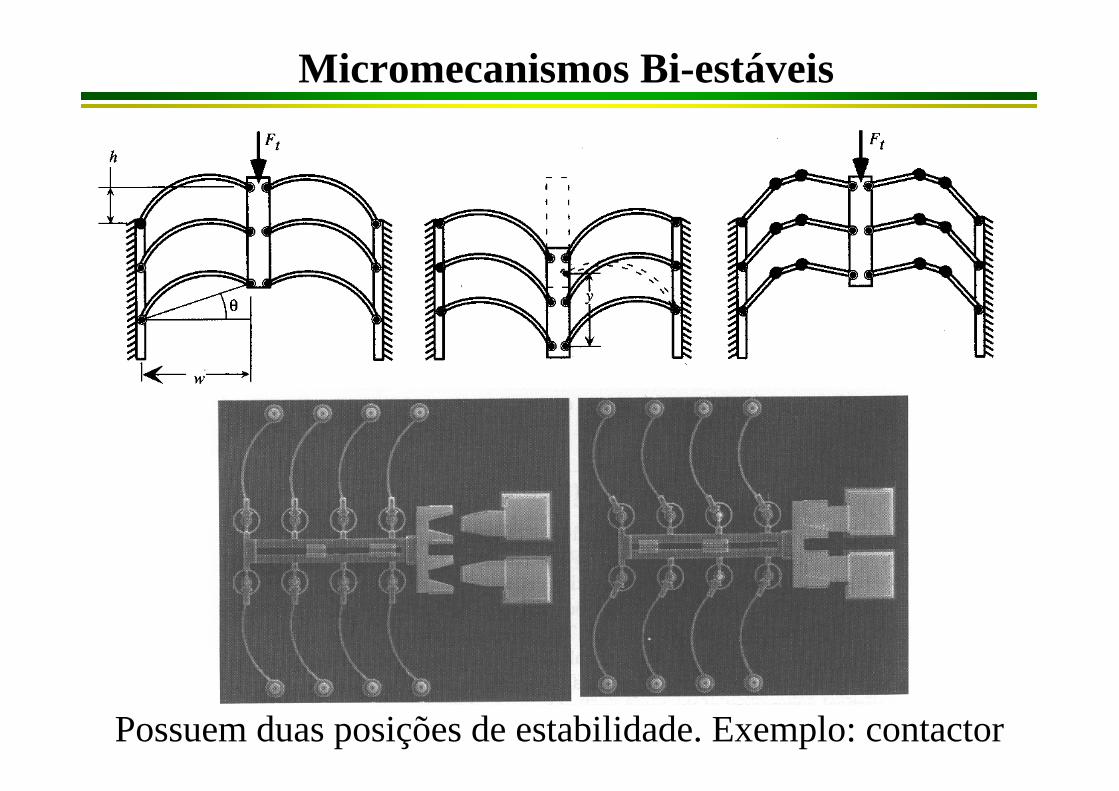
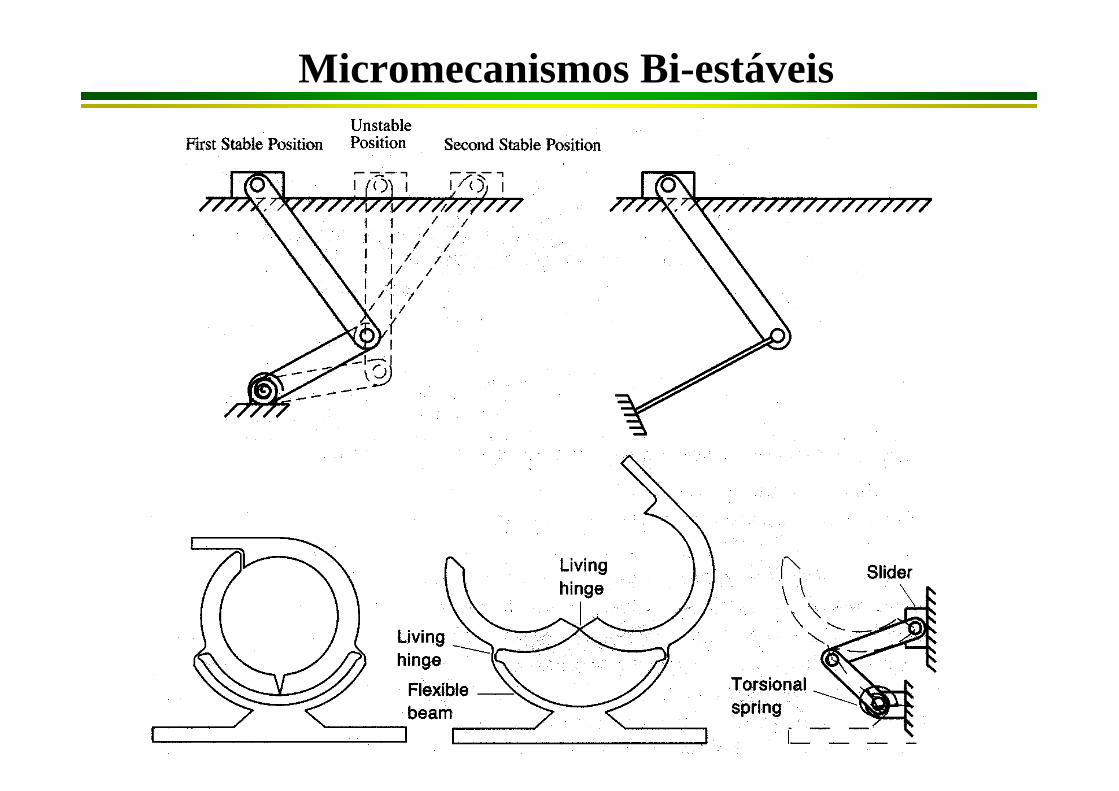
Micromecanismos Bi-estáveis
Possuem duas posições de estabilidade. Exemplo: contactor
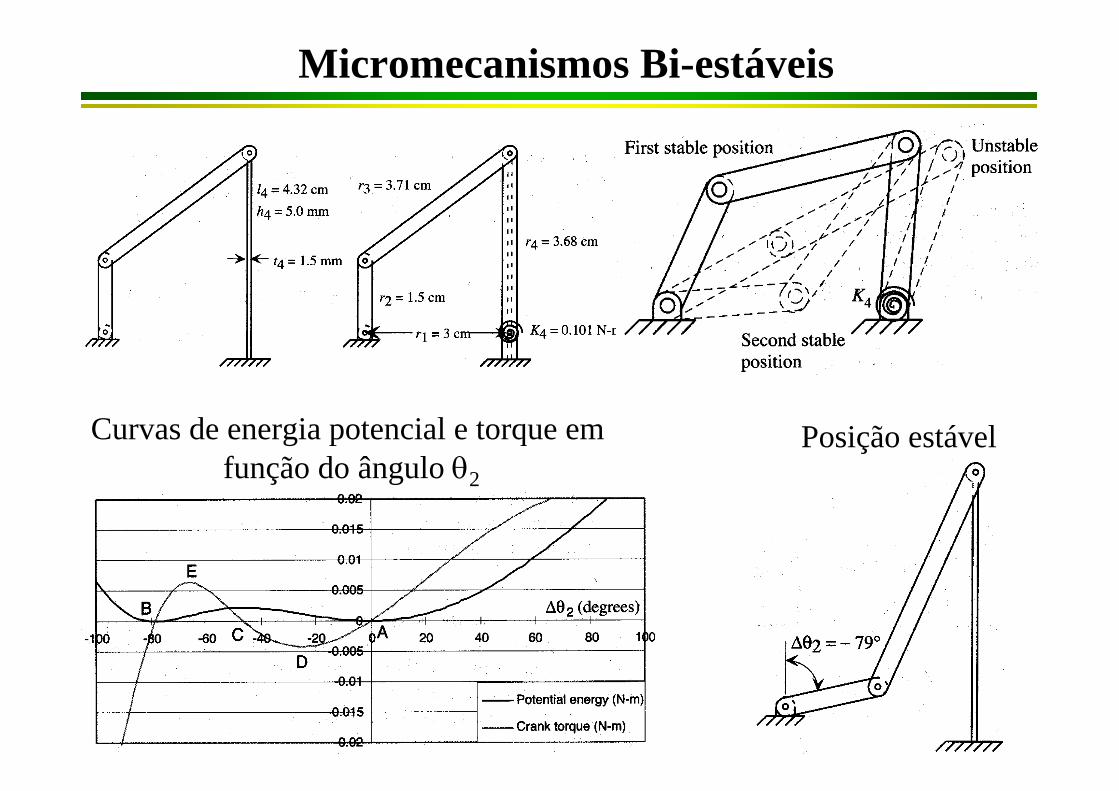
Micromecanismos Bi-estáveis
Curvas de energia potencial e torque em função do ângulo θ2
Posição estável

Micromecanismos Bi-estáveis
Posição estável
Curvas de energia potencial e torque em função do ângulo θ2
Micromecanismos Bi-estáveis

Mancais Flexíveis
Elemento Básico
EIWL12
3
=δ

Mancais Flexíveis
Mola linear simples de folhas
Mola linear compostade folhas

Mancais FlexíveisMecanismos com molas tipo juntas “vivas”
Mola linear simples Mola linear composta

Mancais Flexíveis
Mola linear composta dupla Mecanismo de translação linear
Mecanismo de juntas “vivas”

Mancais Flexíveis
Mola linear composta dupla de folhas
Mola linear simples de folhas de dois eixos

Mancais Flexíveis
Mola linear simples com dois GLs
Mola linear dupla com dois GLs

Mancais Flexíveis
Junta de viga Junta de tiras cruzadas Junta monolítica
Junta com seçãocruciforme
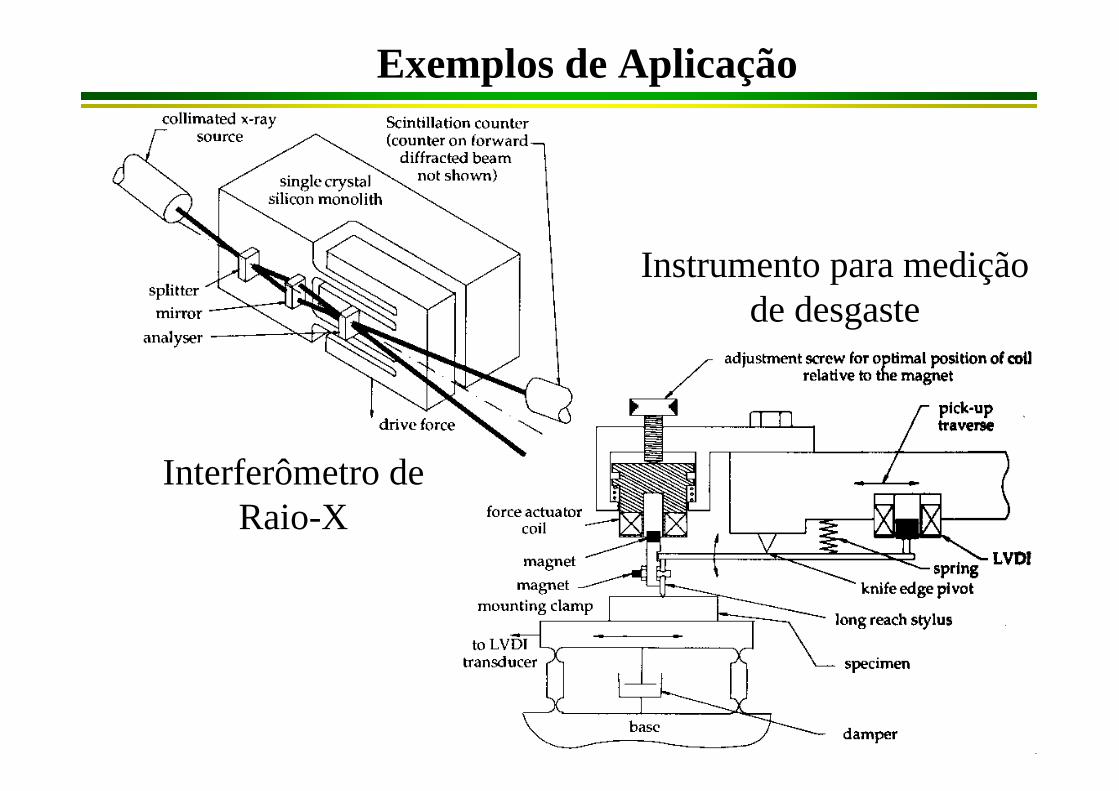
Exemplos de Aplicação
Interferômetro deRaio-X
Instrumento para mediçãode desgaste


















