Analise e aperfeic¸oamento de um sistema did´ atico de ...
69
Mattia Edoardo Maria Vismara An´ alise e aperfeic ¸oamento de um sistema did´ atico de transmiss˜ ao SDR utilizando o Matlab e um par transmissor/receptor FM S˜ ao Jos´ e – SC Julho / 2011
Transcript of Analise e aperfeic¸oamento de um sistema did´ atico de ...
Mattia Edoardo Maria Vismara
Analise e aperfeicoamento de um sistema didatico detransmissao SDR utilizando o Matlab e um par
transmissor/receptor FM
Sao Jose – SC
Julho / 2011
Mattia Edoardo Maria Vismara
Analise e aperfeicoamento de um sistema didatico detransmissao SDR utilizando o Matlab e um par
transmissor/receptor FM
Monografia apresentada a Coordenacao doCurso Superior de Tecnologia em Sistemasde Telecomunicacoes do Instituto Federal deSanta Catarina para a obtencao do diploma deTecnologo em Sistemas de Telecomunicacoes.
Orientador:
Prof. Mario de Noronha Neto, Dr.
CURSO SUPERIOR DE TECNOLOGIA EM SISTEMAS DE TELECOMUNICACOES
INSTITUTO FEDERAL DE SANTA CATARINA
Sao Jose – SC
Julho / 2011

Monografia sob o tıtulo “Analise do sistema didatico de transmissao SDR existente, real-
izada usando Matlab e um par transmissor/receptor FM”, defendida por Mattia Edoardo Maria
Vismara e aprovada em 12 de julho de 2011, em Sao Jose, Santa Catarina, pela banca exami-
nadora assim constituıda:
Prof. Mario de Noronha Neto, Dr. Eng.Orientador
Prof. Marcos Moecke, Dr. Eng.IFSC
Prof. Diego da Silva de Medeiros, Tecg.IFSC

A mudanca e a lei da vida.
E aqueles que confiam somente no passado ou no presente estao destinados a perder o futuro.
John Fitzgerald Kennedy
Agradecimentos
Agradeco todos os docentes dessa Instituicao pela dedicacao e o profissionalismo demon-
strado ao longo desses anos. Um agradecimento especial ao docente orientador pelo suporte e
auxilio oferecidos pela realizacao desse trabalho. Agradeco tambem a minha famılia pelo apoio
fornecido. Cabe-me dizer a todos muito obrigado.
Resumo
Este trabalho analisa, aprimora e acrescenta novas tecnicas e funcionalidades a um codigodesenvolvido com base no conceito de Radio Definido por Software. Este codigo e implemen-tado utilizando o software MATLAB e realiza a transmissao e recepcao de sinais com o auxıliode um transmissor e receptor FM. As analises incluem a maioria dos circuitos do receptorenquanto os aprimoramentos realizados proporcionam um incremento no desempenho globaldo algoritmo e do sistema, diminuindo sensivelmente a complexidade do codigo. As tecnicasde modulacao multinıvel e codificacao de canal sao incorporadas a arquitetura, permitindo aanalise do sistema proposto em diferentes condicoes de operacao e, em seguida, o autor oferecealgumas sugestoes para futuras implementacoes.
Abstract
This document analyses, improves and modifies the existing transceiver algorithm featuresand performance, based on the Software Defined Radio concept and developed with the helpof the MATLAB software and a couple of FM transceivers. Analyses and improvementes arefocused on the receiver code, allowing an overall better performance of the system. Then,additional features were added. This has been achieved inhancing a multilevel modulation,a channel error correction code and several operational tests at different working conditions.Includes and describes actions taken, as well as some suggestions for future academic works.
Sumario
Lista de Figuras
Lista de Tabelas
1 Introducao p. 13
1.1 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 14
1.2 Organizacao do texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 14
2 Conceitos basicos p. 15
2.1 Cosseno levantado e filtro casado . . . . . . . . . . . . . . . . . . . . . . . . p. 15
2.2 Sincronizacao temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 19
2.3 Codificacao de canal e entrelacamento . . . . . . . . . . . . . . . . . . . . . p. 21
2.4 Eficiencia espectral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 24
3 Modelo do sistema implementado p. 27
3.1 Modelo do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 27
3.2 As contribuicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 30
3.3 Detalhamento individual das contribuicoes . . . . . . . . . . . . . . . . . . . p. 30
3.3.1 Modulacao 4-PAM . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 30
3.3.2 Codificacao e Entrelacamento . . . . . . . . . . . . . . . . . . . . . p. 33
3.3.3 Analise da sincronizacao temporal . . . . . . . . . . . . . . . . . . . p. 35
3.3.4 Estudo do fator β e do nıvel do gatilho . . . . . . . . . . . . . . . . p. 38
3.3.5 Estudo do filtro passa faixa . . . . . . . . . . . . . . . . . . . . . . . p. 45
3.3.6 Analise do Controle Automatico de Ganho . . . . . . . . . . . . . . p. 50
3.3.7 Estudo da palavra de treinamento . . . . . . . . . . . . . . . . . . . p. 52
3.3.8 Analise do Costas Loop . . . . . . . . . . . . . . . . . . . . . . . . p. 52
3.3.9 Calculos da eficiencia espectral . . . . . . . . . . . . . . . . . . . . p. 54
3.3.10 Recuperacao completa dos sımbolos . . . . . . . . . . . . . . . . . . p. 55
3.3.11 Envio de qualquer texto . . . . . . . . . . . . . . . . . . . . . . . . p. 56
3.3.12 Ajustes do hardware . . . . . . . . . . . . . . . . . . . . . . . . . . p. 56
4 Conclusoes e trabalhos futuros p. 57
4.1 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 57
4.2 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 57
Apendice A p. 59
Apendice B p. 62
4.0.1 Arquitetura de um sistema SDR . . . . . . . . . . . . . . . . . . . . p. 62
4.0.2 Funcionamento do sistema . . . . . . . . . . . . . . . . . . . . . . . p. 63
4.0.3 Gatilho da placa de som . . . . . . . . . . . . . . . . . . . . . . . . p. 63
4.0.4 Sincronismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 63
Lista de Abreviaturas e Simbologia p. 66
Referencias Bibliograficas p. 68
Lista de Figuras
2.1 Forma de onda do pulso de cosseno levantado e seu espectro na frequencia . . p. 16
2.2 Diagrama do circuito que implementa o pulso cosseno levantado . . . . . . . p. 17
2.3 Acao do filtro casado na deteccao . . . . . . . . . . . . . . . . . . . . . . . p. 17
2.4 Resposta em frequencia do filtro raiz quadrada de cosseno levantado. Fator
β=0,4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 18
2.5 Amostragem feita nos pontos otimos . . . . . . . . . . . . . . . . . . . . . . p. 19
2.6 Acao do interpolador a procura dos pontos denominados -2 e +2 . . . . . . . p. 20
2.7 Codificador convolucional de taxa R=1/2 e comprimento de restricao =2 . . . p. 22
2.8 Diagrama de estado do codificador esquematizado na Figura 2.7 . . . . . . . p. 23
2.9 Diagrama de trelica do codificador esquematizado na Figura 2.7 . . . . . . . p. 23
3.1 Arquitetura do sistema implementado . . . . . . . . . . . . . . . . . . . . . p. 27
3.2 Diagrama de blocos do sistema analisado . . . . . . . . . . . . . . . . . . . p. 29
3.3 Sinal mapeado 4-PAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 31
3.4 Sinal formatado, modulacao 4-PAM, β=0,4 . . . . . . . . . . . . . . . . . . p. 32
3.5 Constelacao do sinal 4-PAM recebido, β=0,4 . . . . . . . . . . . . . . . . . p. 32
3.6 Codificador A, taxa P=1/2 e comprimento de restricao =2 . . . . . . . . . . . p. 33
3.7 Codificador B, taxa P=1/2 e comprimento de restricao =7 . . . . . . . . . . . p. 33
3.8 Explicacao grafica da insercao dos erros por meio da operacao xor . . . . . . p. 34
3.9 a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso com
super amostragem=2, ruıdo=0 dB, β=0,4 . . . . . . . . . . . . . . . . . . . . p. 36
3.10 a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso com
super amostragem=4, ruıdo=0 dB, β=0,4 . . . . . . . . . . . . . . . . . . . . p. 36
3.11 a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso com
super amostragem=4, SNR=7dB, β=0,4 . . . . . . . . . . . . . . . . . . . . p. 37
3.12 a) Estimacao da constelacao BPSK e b) Calculo do atraso do sistema SDR,
super amostragem=100, β=0,4 . . . . . . . . . . . . . . . . . . . . . . . . . p. 37
3.13 Densidade espectral de potencia com β=0,15 - transmissao BPSK . . . . . . p. 38
3.14 Densidade espectral de potencia com β=0,85 - transmissao BPSK . . . . . . p. 39
3.15 Densidade espectral de potencia com β=0,4 - transmissao BPSK . . . . . . . p. 39
3.16 Densidade espectral de potencia com β=0,15 - recepcao BPSK . . . . . . . . p. 40
3.17 Densidade espectral de potencia com β=0,85 - recepcao BPSK . . . . . . . . p. 40
3.18 Densidade espectral de potencia com β=0,4 - recepcao BPSK . . . . . . . . p. 41
3.19 Efeito do volume baixo sobre o desempenho do receptor BPSK, β=0,15,
gatilho=0,1V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 42
3.20 Efeito do volume alto no desempenho do receptor BPSK, β=0,15, gatilho=0,4V p. 43
3.21 Densidade espectral de potencia com modulacao 4-PAM - transmissao, β=0,4 p. 44
3.22 Densidade espectral de potencia com modulacao 4-PAM - recepcao, β=0,4 . p. 44
3.23 Codigos do filtro passa faixa utilizado em (INACIO, 2011) . . . . . . . . . . p. 45
3.24 Codigos do filtro passa faixa modificado . . . . . . . . . . . . . . . . . . . . p. 46
3.25 Resposta ao impulso do filtro passa faixa modificado . . . . . . . . . . . . . p. 46
3.26 Resposta em frequencia do filtro passa faixa original . . . . . . . . . . . . . p. 47
3.27 Resposta em frequencia do filtro passa faixa modificado . . . . . . . . . . . . p. 47
3.28 Espectro do sinal com modulacao BPSK antes do filtro casado, β=0,4 - recepcao p. 48
3.29 Espectro do sinal com modulacao 4-PAM antes do filtro casado, β=0,4 -
recepcao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 48
3.30 Espectro do sinal com modulacao BPSK apos o filtro casado, β=0,4 - recepcao p. 49
3.31 Espectro do sinal com modulacao 4-PAM apos o filtro casado, β=0,4 - recepcao p. 49
3.32 Algoritmo de Controle Automatico de Ganho . . . . . . . . . . . . . . . . . p. 50
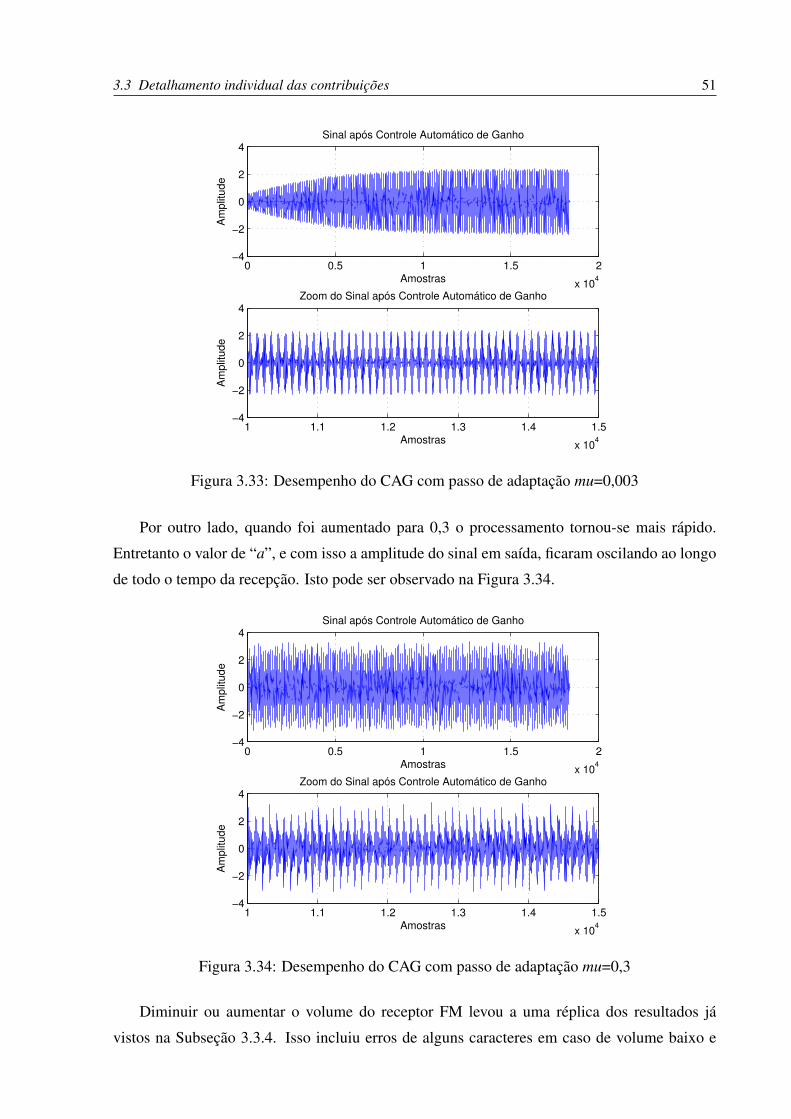
3.33 Desempenho do CAG com passo de adaptacao mu=0,003 . . . . . . . . . . . p. 51
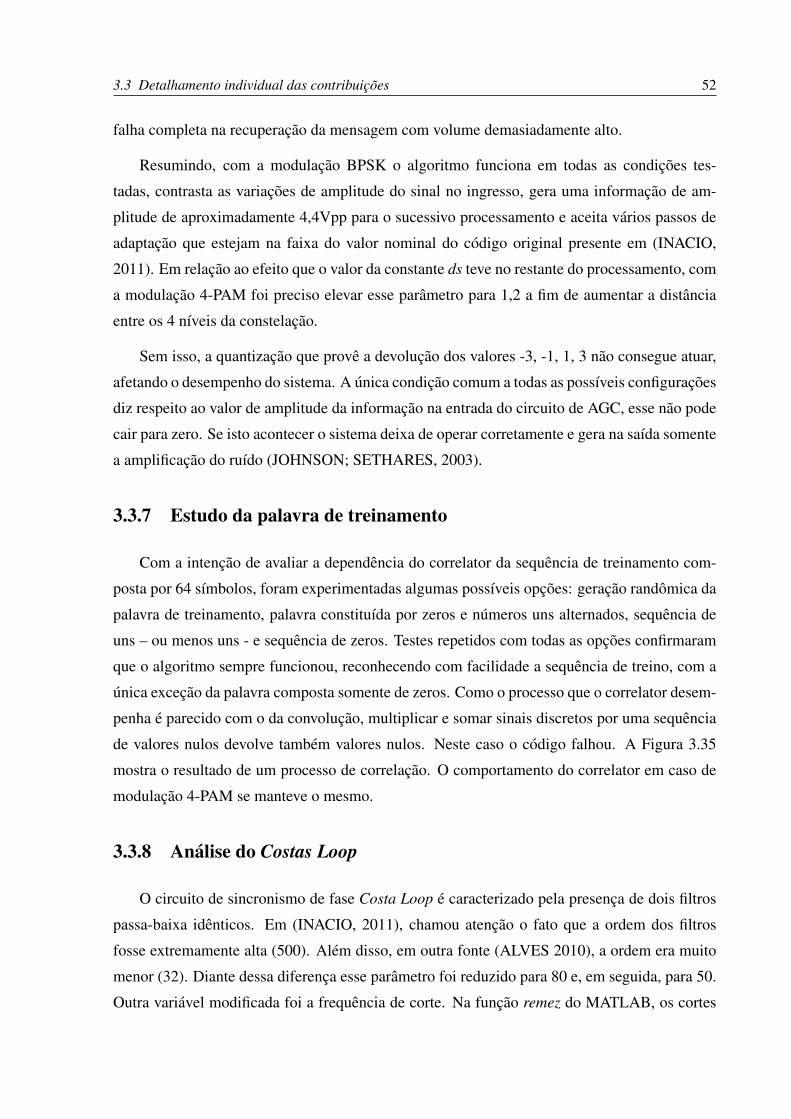
3.34 Desempenho do CAG com passo de adaptacao mu=0,3 . . . . . . . . . . . . p. 51
3.35 Valor de pico da correlacao . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 53
3.36 Resposta em frequencia dos filtros do Costa Loop originais . . . . . . . . . . p. 53
3.37 Resposta em frequencia dos filtros do Costa Loop modificados . . . . . . . . p. 54
3.38 Explicacao grafica da formacao do quadro . . . . . . . . . . . . . . . . . . . p. 55
4.1 Conversor de string texto para sinal BPSK e 4-PAM . . . . . . . . . . . . . . p. 59
4.2 Conversor de sinal modulado BPSK e 4-PAM para string texto . . . . . . . . p. 60
4.3 Codificador A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 60
4.4 Codificador B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 60
4.5 Decodificador A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 60
4.6 Decodificador B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 61
4.7 Sincronizacao temporal Early Late Detector . . . . . . . . . . . . . . . . . . p. 61
4.8 Interpolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 61
4.1 Esquema em blocos de Radio Definido por Software ideal . . . . . . . . . . . p. 62
4.2 Diagrama basico do circuito Costas Loop . . . . . . . . . . . . . . . . . . . p. 64
Lista de Tabelas
2.1 Eficiencia espectral para as modulacoes VSB e QAM . . . . . . . . . . . . . p. 26
3.1 Testes com nıveis do gatilho e do volume do radio FM . . . . . . . . . . . . p. 42
3.2 Testes com o filtro passa faixa . . . . . . . . . . . . . . . . . . . . . . . . . p. 46
3.3 Parametros do circuito de Controle Automatico de Ganho e testes efetuados . p. 50
3.4 Eficiencia espectral para as modulacoes BPSK e 4-PAM . . . . . . . . . . . p. 55
13
1 Introducao
A ampla e irrestrita disponibilidade de informacoes mudou radicalmente a nossa vida, in-
fluenciando muito os aspectos pessoais, sociais, e profissionais das pessoas. Hoje em dia, de-
senvolver sistemas que consigam gerar e manter fluxos de informacoes seguros e confiaveis e
cada vez mais desafiador, principalmente quando se trata de sistemas de comunicacao sem fio.
Por isso, um lugar de destaque e reservado para os sistemas que empregam o conceito de Radio
Definido por Software (Software Defined Radio [SDR]), no qual secoes inteiras de um sistema
de transmissao e recepcao de radio sao substituıdas por dispositivos digitais programaveis.
Isso traz inumeras vantagens do ponto de vista da vida util dos equipamentos e do desem-
penho dos mesmos, sendo que um ponto importante e a possibilidade de atualizar os produtos
sem efetuar modificacoes de hardware. Correcoes de falhas sao tambem rapidamente resolvi-
das por meio da reprogramacao do software embarcado. Trata-se de uma tecnologia muito
promissora da qual o setor de Defesa da Europa e dos Estados Unidos ja estao utilizando (PO,
2008).
Este trabalho e uma continuacao do trabalho de conclusao de curso (INACIO, 2011), o
qual teve como objetivo a implementacao de um SDR puramente didatico. Minha colaboracao
no TCC (INACIO, 2011) foi na analise dos algoritmos inicialmente disponıveis, na redacao
dos primeiros trechos de codigos e principalmente no estudo teorico das componentes de um
sistema real de radiofrequencia. O sistema inicial foi implementado com notavel sucesso pela
colega Juliana por meio do software MATLAB e um par transmissor/receptor FM hardware.
Tal sistema utilizava os blocos basicos de um sistema de comunicacao digital e Modulacao de
Fase Binaria - Binary Phase Shift Keying (BPSK).
Todavia, no programa permaneciam algumas incertezas e restricoes que precisavam ser
estudadas e, na medida do possıvel, removidas. Outras opcoes de funcionamento podiam ser
integradas sem excessivas dificuldades. Nesse sentido, os objetivos deste trabalho foram a
analise de alguns elementos do sistema, a modificacao de trechos do codigo, o melhoramento
de algumas secoes do programa e o estudo dos limites que o sistema utilizado em (INACIO,
1.1 Motivacao 14
2011) apresenta. Alem disso, foram acrescentadas uma modulacao multinıvel e a codificacao
de canal com entrelacamento.
O presente documento nao pretende abordar alguns assuntos ja explicados em (INACIO,
2011). Entre eles podemos enumerar: a arquitetura de um sistema de radio, as teorias da
modulacao BPSK e as etapas de realizacao do sistema original. Entretanto, a fim de permi-
tir uma melhor compreensao do presente trabalho, sao sucintamente explicados outros topicos
envolvidos. A saber: arquitetura SDR, funcionamento do sistema, circuito do gatilho (trigger),
sincronizacoes de fase e de quadro. Para efetuar a analise, alteracoes e adicoes do codigo uti-
lizado neste trabalho foi preciso utilizar textos como (JOHNSON; SETHARES, 2003), (ALVES,
2010), (FERNANDES, 2007), (OPPENHEIM; WILLSKY, 1997), (HAYKIN, 2001), (HAYKIN;
MOHER; NAWAB, 2005) e (INACIO, 2011).
1.1 Motivacao
A leitura de um artigo sobre Radio Definido por Software - Software Defined Radio (SDR)
no setor militar (PO, 2008), juntamente com o interesse na area de processamento dos sinais,
levaram-me a procura de um orientador que tivesse a iniciativa de realizar um sistema SDR
didatico, possivelmente em colaboracao com outro(s) aluno(s). Isso proporcionaria o aproveita-
mento de muitos conceitos aprendidos durante o curso. E possıvel afirmar que o resultado
atendeu aos anseios do(s) autor(es) e do docente orientador.
1.2 Organizacao do texto
A seguir serao apresentados os conceitos basicos e as contribuicoes deste trabalho. No
Capıtulo 2 serao descritos os conceitos relacionados aos circuitos estudados que integram a ar-
quitetura do sistema. No Capıtulo 3 serao apresentados o modelo implementado e os detalhes
das contribuicoes ao programa original. Por ultimo, no Capıtulo 4, temos as conclusoes sobre
esse trabalho e algumas sugestoes para futuras implementacoes. Nos Apendices A e B se en-
contram, respectivamente, as figuras dos codigos MATLAB citados no texto e um resumo dos
conceitos da arquitetura da plataforma desenvolvida em conjunto com (INACIO, 2011).
15
2 Conceitos basicos
Neste capıtulo serao apresentados, de forma sucinta, alguns conceitos basicos que ajudarao
o leitor na compreensao do sistema desenvolvido. Alguns outros conceitos utilizados neste
sistema serao apresentados no Apendice B. A seguir sao descritas as funcoes do pulso cosseno
levantado, do sincronismo temporal, da codificacao de canal e as motivacoes do estudo da
eficiencia espectral.
2.1 Cosseno levantado e filtro casado
A teoria da serie de Fourier mostra que um sinal constituıdo por um trem de pulsos re-
tangulares binarios (escolhendo, por exemplo, os nıveis como sendo 0 e 1) ocupa uma banda,
no espectro de frequencias, extremamente ampla. Seria portanto, irreal propor essa forma de
onda como a mais apta para um sistema de transmissao digital porque o uso que ela faz do
espectro das frequencias e muito ineficiente. O pulso que elimina esse problema ocupando uma
banda limitada em frequencia, e a forma de onda denominada “sinc” que atende as condicoes
de Nyquist.
Esse tipo de pulso e porem irrealizavel em termos praticos porque a sua dimensao no
tempo se estende do menos infinito ate o mais infinito, alem de ser nao causal (JOHNSON;
SETHARES, 2003). O pulso que e um otimo meio termo entre a forma de onda sinc e um
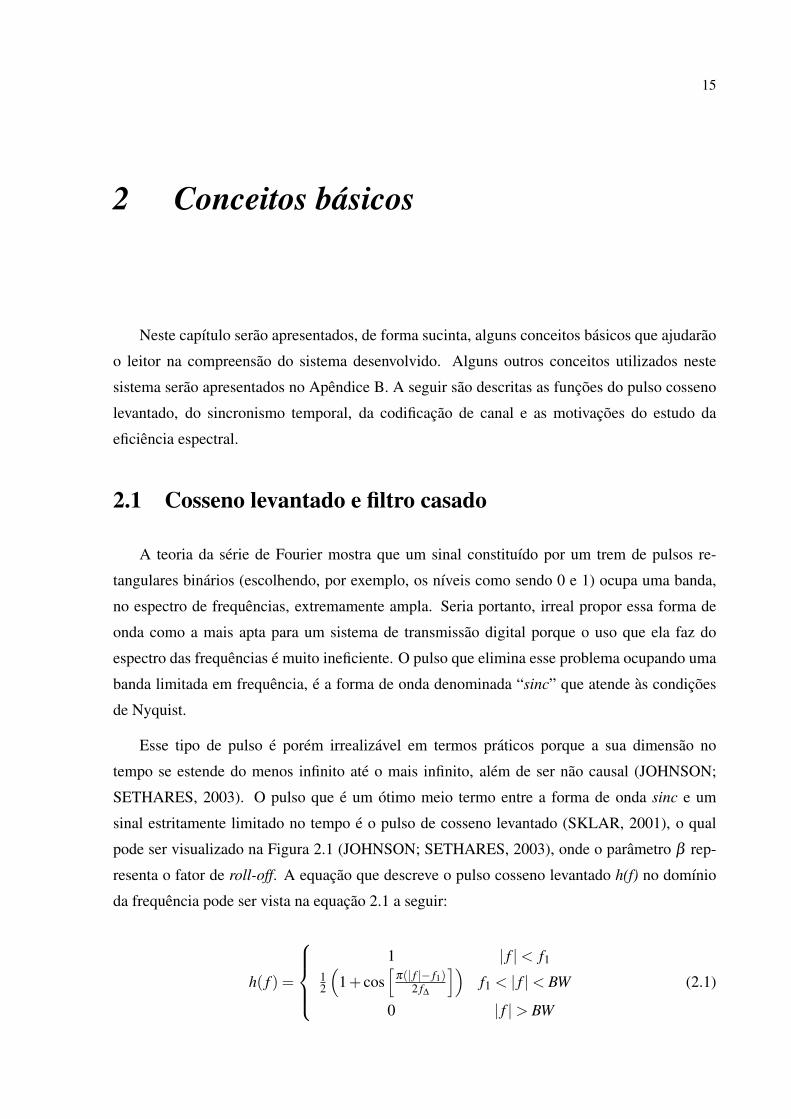
sinal estritamente limitado no tempo e o pulso de cosseno levantado (SKLAR, 2001), o qual
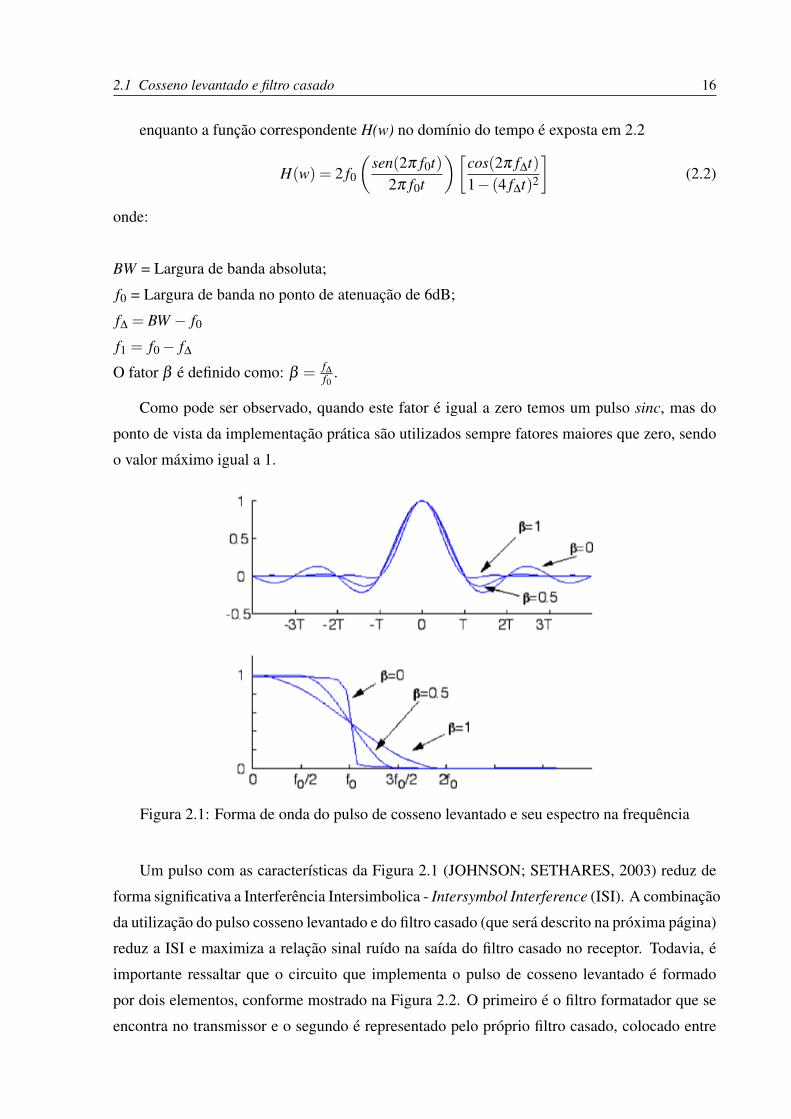
pode ser visualizado na Figura 2.1 (JOHNSON; SETHARES, 2003), onde o parametro β rep-
resenta o fator de roll-off. A equacao que descreve o pulso cosseno levantado h(f) no domınio
da frequencia pode ser vista na equacao 2.1 a seguir:
h( f ) =
1 | f |< f1
12
(1+ cos
[π(| f |− f1)
2 f∆
])f1 < | f |< BW
0 | f |> BW
(2.1)
2.1 Cosseno levantado e filtro casado 16
enquanto a funcao correspondente H(w) no domınio do tempo e exposta em 2.2
H(w) = 2 f0
(sen(2π f0t)
2π f0t
)[cos(2π f∆t)1− (4 f∆t)2
](2.2)
onde:
BW = Largura de banda absoluta;
f0 = Largura de banda no ponto de atenuacao de 6dB;
f∆ = BW − f0
f1 = f0− f∆
O fator β e definido como: β = f∆f0
.
Como pode ser observado, quando este fator e igual a zero temos um pulso sinc, mas do
ponto de vista da implementacao pratica sao utilizados sempre fatores maiores que zero, sendo
o valor maximo igual a 1.
Figura 2.1: Forma de onda do pulso de cosseno levantado e seu espectro na frequencia
Um pulso com as caracterısticas da Figura 2.1 (JOHNSON; SETHARES, 2003) reduz de
forma significativa a Interferencia Intersimbolica - Intersymbol Interference (ISI). A combinacao
da utilizacao do pulso cosseno levantado e do filtro casado (que sera descrito na proxima pagina)
reduz a ISI e maximiza a relacao sinal ruıdo na saıda do filtro casado no receptor. Todavia, e
importante ressaltar que o circuito que implementa o pulso de cosseno levantado e formado
por dois elementos, conforme mostrado na Figura 2.2. O primeiro e o filtro formatador que se
encontra no transmissor e o segundo e representado pelo proprio filtro casado, colocado entre
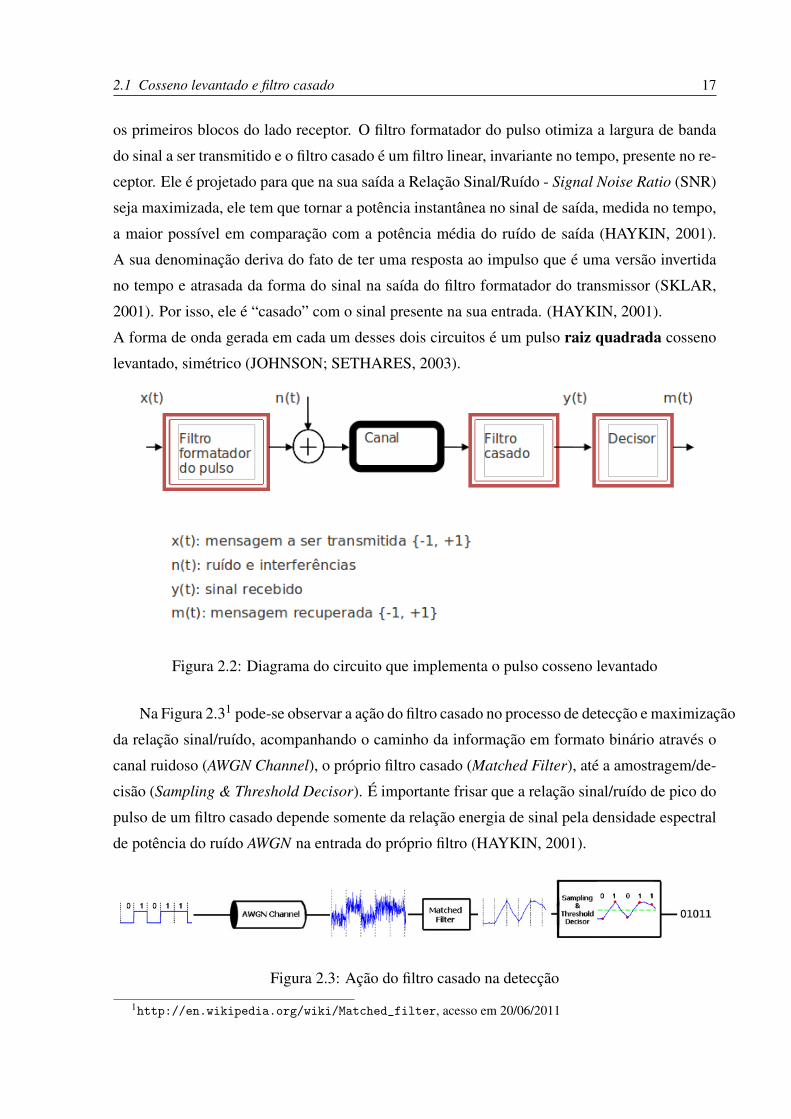
2.1 Cosseno levantado e filtro casado 17
os primeiros blocos do lado receptor. O filtro formatador do pulso otimiza a largura de banda
do sinal a ser transmitido e o filtro casado e um filtro linear, invariante no tempo, presente no re-
ceptor. Ele e projetado para que na sua saıda a Relacao Sinal/Ruıdo - Signal Noise Ratio (SNR)
seja maximizada, ele tem que tornar a potencia instantanea no sinal de saıda, medida no tempo,
a maior possıvel em comparacao com a potencia media do ruıdo de saıda (HAYKIN, 2001).
A sua denominacao deriva do fato de ter uma resposta ao impulso que e uma versao invertida
no tempo e atrasada da forma do sinal na saıda do filtro formatador do transmissor (SKLAR,
2001). Por isso, ele e “casado” com o sinal presente na sua entrada. (HAYKIN, 2001).
A forma de onda gerada em cada um desses dois circuitos e um pulso raiz quadrada cosseno
levantado, simetrico (JOHNSON; SETHARES, 2003).
Figura 2.2: Diagrama do circuito que implementa o pulso cosseno levantado
Na Figura 2.31 pode-se observar a acao do filtro casado no processo de deteccao e maximizacao
da relacao sinal/ruıdo, acompanhando o caminho da informacao em formato binario atraves o
canal ruidoso (AWGN Channel), o proprio filtro casado (Matched Filter), ate a amostragem/de-
cisao (Sampling & Threshold Decisor). E importante frisar que a relacao sinal/ruıdo de pico do
pulso de um filtro casado depende somente da relacao energia de sinal pela densidade espectral
de potencia do ruıdo AWGN na entrada do proprio filtro (HAYKIN, 2001).
Figura 2.3: Acao do filtro casado na deteccao
1http://en.wikipedia.org/wiki/Matched_filter, acesso em 20/06/2011

2.1 Cosseno levantado e filtro casado 18
A implementacao deste pulso no MATLAB realizada pela funcao rcosfir, e utilizada tanto
no codigo de transmissao quanto no da recepcao. Na Figura 2.4, e ilustrada a resposta em
frequencia desse filtro com fator β=0,4. A tal proposito, foi verificado que esse e um filtro de
ordem 801. Este resultado deriva da analise da funcao rcosfir2, na qual se observa que a ordem
e calculada como:
Ordem = [(comprimento∗2)∗ sobremostragem]+1
801=[(25*2)*16]+1
onde:
comprimento = amostras na entrada (25);
sobremostragem = taxa super amostragem do filtro, ou amostras na saıda por uma na entrada
(16);
sendo os valores entre parenteses, os escolhidos em (ALVES, 2010) e (INACIO, 2011). Apesar
de acharmos possıvel otimizar (minimizar) a ordem do filtro, o nosso foco nao era a realizacao
de um estudo aprofundado dos esquemas de filtragem.
0 0.2 0.4 0.6 0.8 1−8000
−6000
−4000
−2000
0
Frequência Normalizada (x Fs/2)
Fa
se
(G
rau
s)
b)
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
Ma
gn
itu
de
(d
B)
a)
Figura 2.4: Resposta em frequencia do filtro raiz quadrada de cosseno levantado. Fator β=0,4
2help do MATLAB
2.2 Sincronizacao temporal 19
2.2 Sincronizacao temporal
Para conseguir uma boa deteccao dos sımbolos, a amostragem do sinal recebido deve ser
efetuada nos momentos corretos, garantindo que os valores amostrados representem um sinal
com o mınimo de interferencia possıvel.
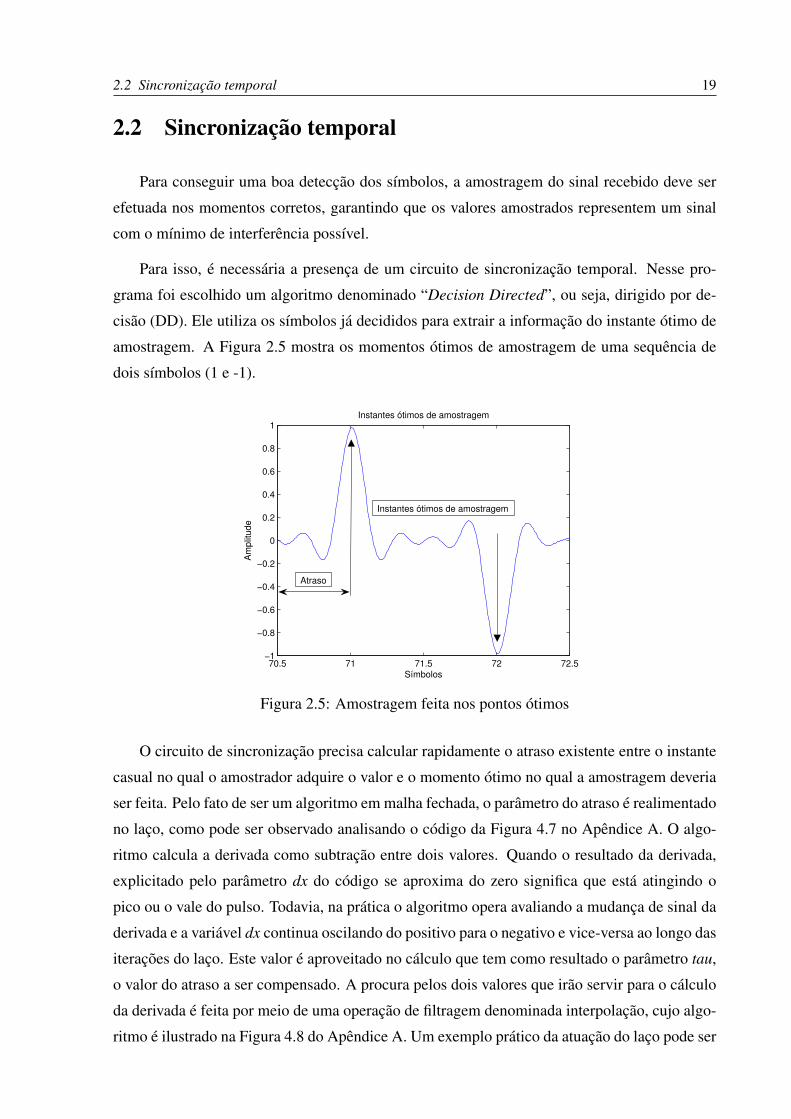
Para isso, e necessaria a presenca de um circuito de sincronizacao temporal. Nesse pro-
grama foi escolhido um algoritmo denominado “Decision Directed”, ou seja, dirigido por de-
cisao (DD). Ele utiliza os sımbolos ja decididos para extrair a informacao do instante otimo de
amostragem. A Figura 2.5 mostra os momentos otimos de amostragem de uma sequencia de
dois sımbolos (1 e -1).
70.5 71 71.5 72 72.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Símbolos
Am
plit
ud
e
Instantes ótimos de amostragem
Instantes ótimos de amostragem
Atraso
Figura 2.5: Amostragem feita nos pontos otimos
O circuito de sincronizacao precisa calcular rapidamente o atraso existente entre o instante
casual no qual o amostrador adquire o valor e o momento otimo no qual a amostragem deveria
ser feita. Pelo fato de ser um algoritmo em malha fechada, o parametro do atraso e realimentado
no laco, como pode ser observado analisando o codigo da Figura 4.7 no Apendice A. O algo-
ritmo calcula a derivada como subtracao entre dois valores. Quando o resultado da derivada,
explicitado pelo parametro dx do codigo se aproxima do zero significa que esta atingindo o
pico ou o vale do pulso. Todavia, na pratica o algoritmo opera avaliando a mudanca de sinal da
derivada e a variavel dx continua oscilando do positivo para o negativo e vice-versa ao longo das
iteracoes do laco. Este valor e aproveitado no calculo que tem como resultado o parametro tau,
o valor do atraso a ser compensado. A procura pelos dois valores que irao servir para o calculo
da derivada e feita por meio de uma operacao de filtragem denominada interpolacao, cujo algo-
ritmo e ilustrado na Figura 4.8 do Apendice A. Um exemplo pratico da atuacao do laco pode ser
2.2 Sincronizacao temporal 20
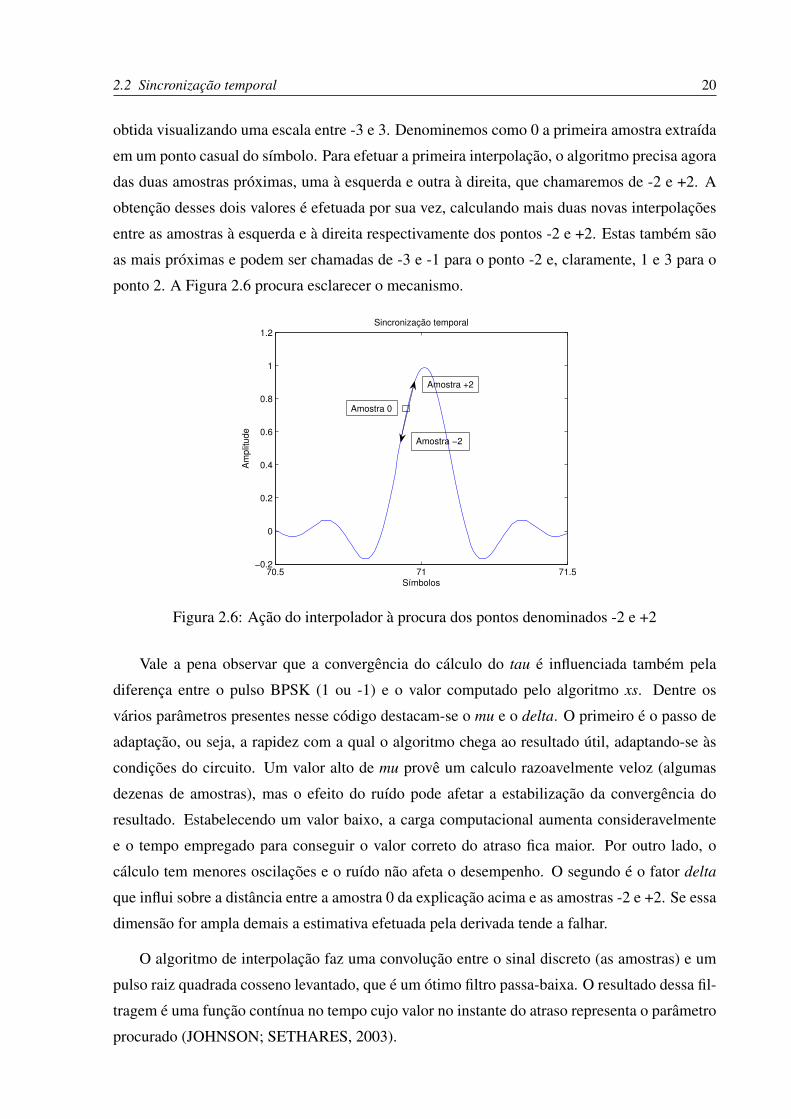
obtida visualizando uma escala entre -3 e 3. Denominemos como 0 a primeira amostra extraıda
em um ponto casual do sımbolo. Para efetuar a primeira interpolacao, o algoritmo precisa agora
das duas amostras proximas, uma a esquerda e outra a direita, que chamaremos de -2 e +2. A
obtencao desses dois valores e efetuada por sua vez, calculando mais duas novas interpolacoes
entre as amostras a esquerda e a direita respectivamente dos pontos -2 e +2. Estas tambem sao
as mais proximas e podem ser chamadas de -3 e -1 para o ponto -2 e, claramente, 1 e 3 para o
ponto 2. A Figura 2.6 procura esclarecer o mecanismo.
70.5 71 71.5−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Símbolos
Am
plit
ud
e
Sincronização temporal
Amostra 0
Amostra −2
Amostra +2
Figura 2.6: Acao do interpolador a procura dos pontos denominados -2 e +2
Vale a pena observar que a convergencia do calculo do tau e influenciada tambem pela
diferenca entre o pulso BPSK (1 ou -1) e o valor computado pelo algoritmo xs. Dentre os
varios parametros presentes nesse codigo destacam-se o mu e o delta. O primeiro e o passo de
adaptacao, ou seja, a rapidez com a qual o algoritmo chega ao resultado util, adaptando-se as
condicoes do circuito. Um valor alto de mu prove um calculo razoavelmente veloz (algumas
dezenas de amostras), mas o efeito do ruıdo pode afetar a estabilizacao da convergencia do
resultado. Estabelecendo um valor baixo, a carga computacional aumenta consideravelmente
e o tempo empregado para conseguir o valor correto do atraso fica maior. Por outro lado, o
calculo tem menores oscilacoes e o ruıdo nao afeta o desempenho. O segundo e o fator delta
que influi sobre a distancia entre a amostra 0 da explicacao acima e as amostras -2 e +2. Se essa
dimensao for ampla demais a estimativa efetuada pela derivada tende a falhar.
O algoritmo de interpolacao faz uma convolucao entre o sinal discreto (as amostras) e um
pulso raiz quadrada cosseno levantado, que e um otimo filtro passa-baixa. O resultado dessa fil-
tragem e uma funcao contınua no tempo cujo valor no instante do atraso representa o parametro
procurado (JOHNSON; SETHARES, 2003).
2.3 Codificacao de canal e entrelacamento 21
2.3 Codificacao de canal e entrelacamento
Quando um sistema de comunicacao digital se aproxima ou tende ao limite descrito pelo
teorema de Shannon, a taxa de erros gerados ao longo do canal de transmissao por causa do
ruıdo e das interferencias atinge nıveis inaceitaveis para um eficaz aproveitamento do sis-
tema. Torna-se entao obrigatorio acrescentar as arquiteturas de transmissao e recepcao uma
codificacao para controle e correcao de erro.
O codificador adiciona redundancia aos bits de informacao a serem transmitidos, enquanto
o decodificador, posto no receptor, explora essa redundancia para decidir quais bits fazem real-
mente parte da informacao transmitida. Isso aumenta a quantia de informacao a ser transmitida,
mas permite a correcao dos erros que eventualmente aparecam ao longo do canal por causa do
ruıdo (HAYKIN, 2001). Nao podemos esquecer que isto incrementa a complexidade do sistema
e o processamento torna-se mais oneroso.
Existem muitos codigos diferentes para correcao de erro, cujos geradores podem ser di-
vididos em duas famılias: os codificadores de bloco e os codificadores convolucionais. Estes
ultimos se diferenciam pelos fatos de dispor de memoria e de efetuar a operacao de codificacao
que pode ser explicada como uma convolucao do sinal discreto na entrada com a resposta ao
impulso do codificador. O comprimento dessa resposta equivale a memoria do codificador.
Alem disso, enquanto os codificadores de bloco aceitam a informacao em “blocos”, aos quais
e acrescentada a redundancia em “blocos”, nos convolucionais os dados entram em forma de
sequencia contınua e a redundancia esta misturada entre os bits de informacao (DECASTRO;
DECASTRO, 2004).
Em termos gerais, o codificador de tipo convolucional se caracteriza pela presenca de um
registrador de deslocamento com E etapas, conectado a S somadores modulo 2 e um multiplexer
na saıda. Se tiver uma sequencia de B bits na entrada teremos uma geracao de T bits na saıda,
determinando assim a taxa de codificacao do sistema conforme a equacao 2.3, onde P representa
a taxa de codificacao:
P =BT
(2.3)
Outro parametro importante desses tipos de codigos e representado pelo comprimento de
restricao C, ou seja, quantos deslocamentos um unico bit ira percorrer no codificador antes de
sair. Se o circuito dispuser de E de etapas, o valor C sera:
2.3 Codificacao de canal e entrelacamento 22
C = E +1 (2.4)
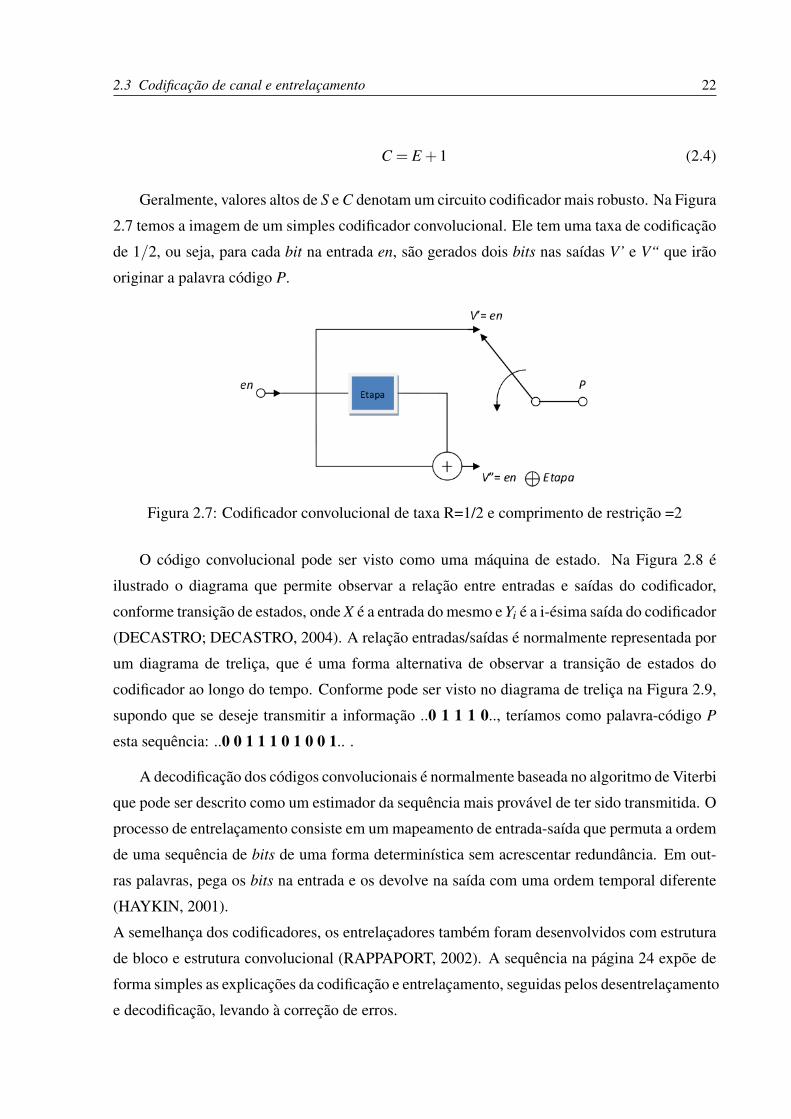
Geralmente, valores altos de S e C denotam um circuito codificador mais robusto. Na Figura
2.7 temos a imagem de um simples codificador convolucional. Ele tem uma taxa de codificacao
de 1/2, ou seja, para cada bit na entrada en, sao gerados dois bits nas saıdas V’ e V“ que irao
originar a palavra codigo P.
Figura 2.7: Codificador convolucional de taxa R=1/2 e comprimento de restricao =2
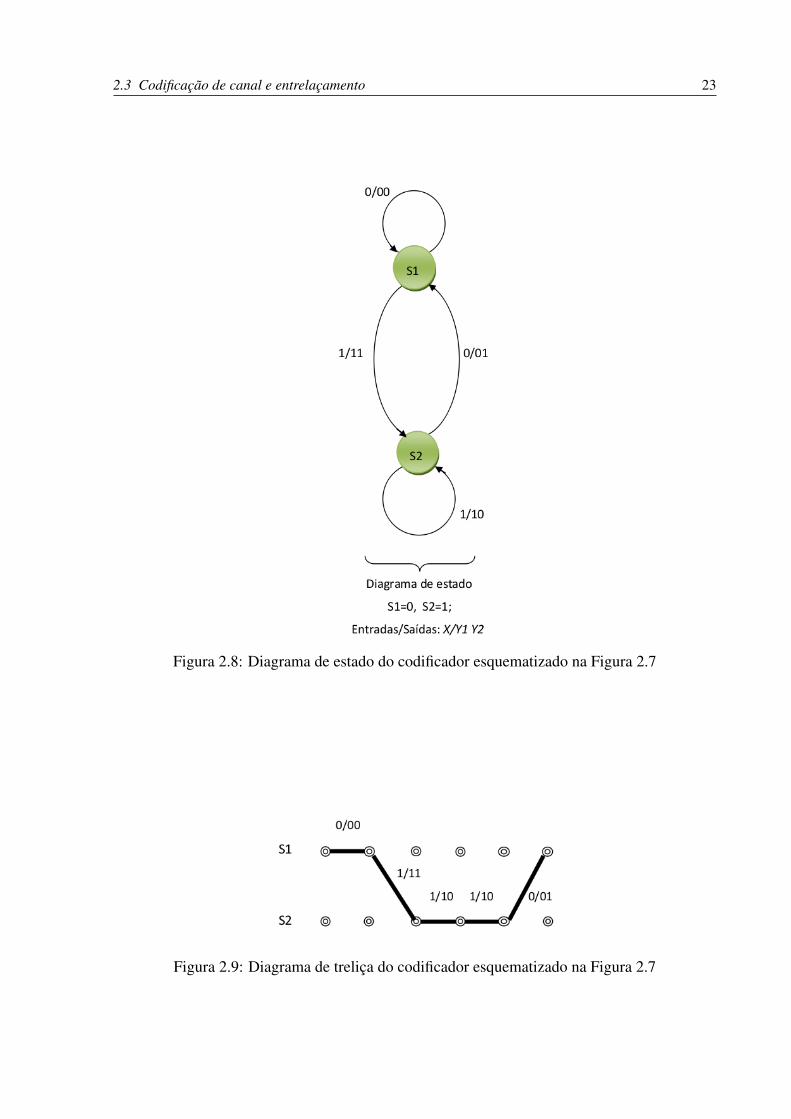
O codigo convolucional pode ser visto como uma maquina de estado. Na Figura 2.8 e
ilustrado o diagrama que permite observar a relacao entre entradas e saıdas do codificador,
conforme transicao de estados, onde X e a entrada do mesmo e Yi e a i-esima saıda do codificador
(DECASTRO; DECASTRO, 2004). A relacao entradas/saıdas e normalmente representada por
um diagrama de trelica, que e uma forma alternativa de observar a transicao de estados do
codificador ao longo do tempo. Conforme pode ser visto no diagrama de trelica na Figura 2.9,
supondo que se deseje transmitir a informacao ..0 1 1 1 0.., terıamos como palavra-codigo P
esta sequencia: ..0 0 1 1 1 0 1 0 0 1.. .
A decodificacao dos codigos convolucionais e normalmente baseada no algoritmo de Viterbi
que pode ser descrito como um estimador da sequencia mais provavel de ter sido transmitida. O
processo de entrelacamento consiste em um mapeamento de entrada-saıda que permuta a ordem
de uma sequencia de bits de uma forma determinıstica sem acrescentar redundancia. Em out-
ras palavras, pega os bits na entrada e os devolve na saıda com uma ordem temporal diferente
(HAYKIN, 2001).
A semelhanca dos codificadores, os entrelacadores tambem foram desenvolvidos com estrutura
de bloco e estrutura convolucional (RAPPAPORT, 2002). A sequencia na pagina 24 expoe de
forma simples as explicacoes da codificacao e entrelacamento, seguidas pelos desentrelacamento
e decodificacao, levando a correcao de erros.
2.3 Codificacao de canal e entrelacamento 23
Figura 2.8: Diagrama de estado do codificador esquematizado na Figura 2.7
Figura 2.9: Diagrama de trelica do codificador esquematizado na Figura 2.7
2.4 Eficiencia espectral 24
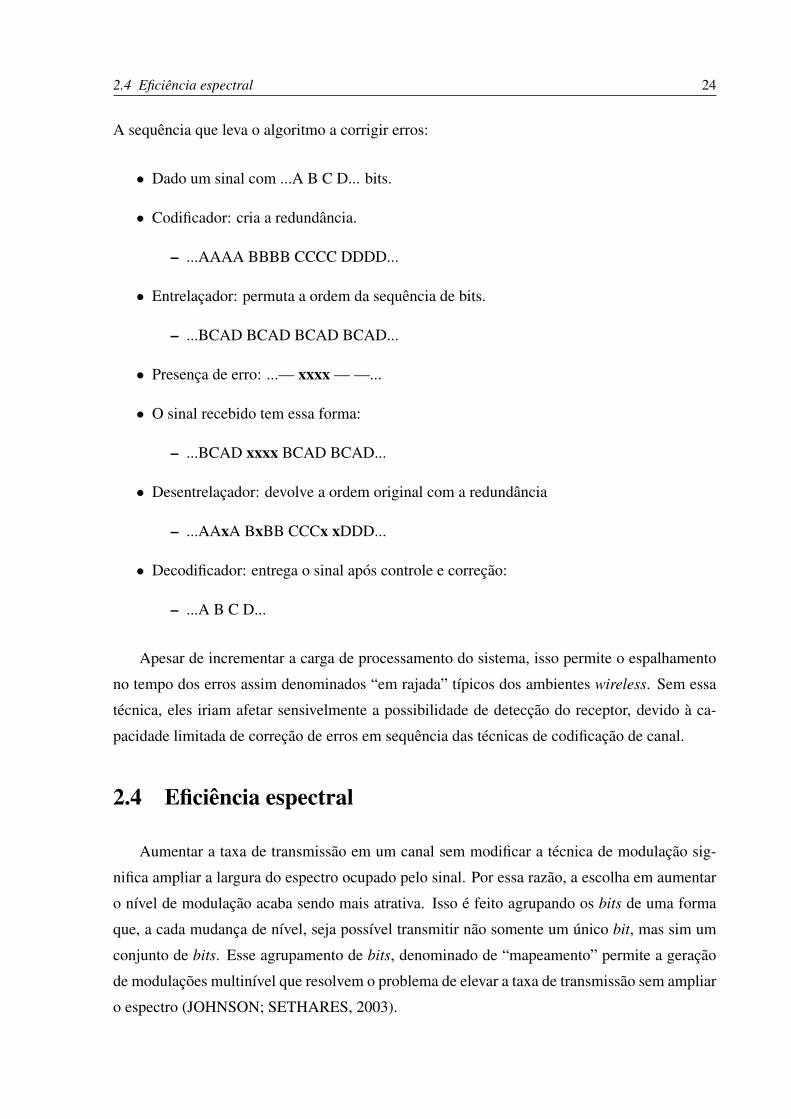
A sequencia que leva o algoritmo a corrigir erros:
• Dado um sinal com ...A B C D... bits.
• Codificador: cria a redundancia.
– ...AAAA BBBB CCCC DDDD...
• Entrelacador: permuta a ordem da sequencia de bits.
– ...BCAD BCAD BCAD BCAD...
• Presenca de erro: ...— xxxx — —...
• O sinal recebido tem essa forma:
– ...BCAD xxxx BCAD BCAD...
• Desentrelacador: devolve a ordem original com a redundancia
– ...AAxA BxBB CCCx xDDD...
• Decodificador: entrega o sinal apos controle e correcao:
– ...A B C D...
Apesar de incrementar a carga de processamento do sistema, isso permite o espalhamento
no tempo dos erros assim denominados “em rajada” tıpicos dos ambientes wireless. Sem essa
tecnica, eles iriam afetar sensivelmente a possibilidade de deteccao do receptor, devido a ca-
pacidade limitada de correcao de erros em sequencia das tecnicas de codificacao de canal.
2.4 Eficiencia espectral
Aumentar a taxa de transmissao em um canal sem modificar a tecnica de modulacao sig-
nifica ampliar a largura do espectro ocupado pelo sinal. Por essa razao, a escolha em aumentar
o nıvel de modulacao acaba sendo mais atrativa. Isso e feito agrupando os bits de uma forma
que, a cada mudanca de nıvel, seja possıvel transmitir nao somente um unico bit, mas sim um
conjunto de bits. Esse agrupamento de bits, denominado de “mapeamento” permite a geracao
de modulacoes multinıvel que resolvem o problema de elevar a taxa de transmissao sem ampliar
o espectro (JOHNSON; SETHARES, 2003).
2.4 Eficiencia espectral 25
Pelo teorema de Nyquist, explicitado na equacao 2.5,
BW =Rs2
(2.5)
e relacionado a banda basica, a lei que rege a maxima taxa de transmissao em um sistema de
comunicacao digital em banda passante e a seguinte:
Rb =BW ∗ logN(1+ rl f )
(2.6)
onde, Rb (bit/s) e a taxa de bits, logN e o logaritmo na base 2 do numero de nıveis da
modulacao3, BW representa a largura de banda disponıvel para um determinado tipo de canal
e rlf e o fator β do filtro cosseno levantado, ja comentado anteriormente. A formula acima
nos sugere duas formas de aumentar a taxa de transmissao sem ampliar a banda ou incorrer
em problemas de ISI. Por um lado e possıvel aumentar o numero de nıveis do mapeamento
(modulacao), por outro, reduzir o fator β .
As duas opcoes apresentam lados positivos e negativos. O incremento dos nıveis deve ser
acompanhado por um aumento na potencia do sinal (SNR maior) para manter a probabilidade de
erro em nıveis aceitaveis. Se nao for feito isso, a potencia do Ruıdo Branco Gaussiano Aditivo
- Additive White Gaussian Noise (AWGN) inviabiliza a possibilidade de distinguir entre os
nıveis. O teorema de Shannon, conforme equacao 2.7 nos oferece uma formula para calcular a
capacidade maxima de um canal e sustentar a escolha de um aumento da SNR:
Rb = BW ∗ log(
1+PsPr
)(2.7)
onde Ps e a potencia do sinal a ser transmitido e Pr a potencia do ruıdo AWGN. Entretanto, a
potencia nao pode ser aumentada indevidamente porque as baterias dos equipamentos, princi-
palmente os sem fio, tem autonomia limitada. Diminuir o fator β e possıvel (as custas de perda
de robustez na ISI) mas influi pouco sobre o incremento da taxa de bit requerida e, de qualquer
forma, nao temos como reduzi-lo para zero (SKLAR, 2001).
Como consequencia, estudos aprofundados permitiram o desenvolvimento de modulacoes
inovadoras com varias combinacoes de chaveamento de fase, amplitude, frequencias ortogo-
3para todo o restante do texto
2.4 Eficiencia espectral 26
nais, com portadora unica, portadoras multiplas, dupla banda lateral ou banda lateral vestigial.
Definimos entao como eficiencia espectral a relacao da taxa de dados, em bits por segundo, pela
largura de banda de canal efetivamente utilizada (HAYKIN, 2001).
O objetivo principal de uma modulacao multinıvel e entao oferecer a maior eficiencia do es-
pectro com relacao a quantidade de bits enviados por hertz. Neste contexto, define-se eficiencia
espectral como sendo a quantidade de bits transmitida por segundo em um hertz (bps/Hz).
Um objetivo secundario consiste em fazer isso com o valor menor da SNR, ou seja, com o
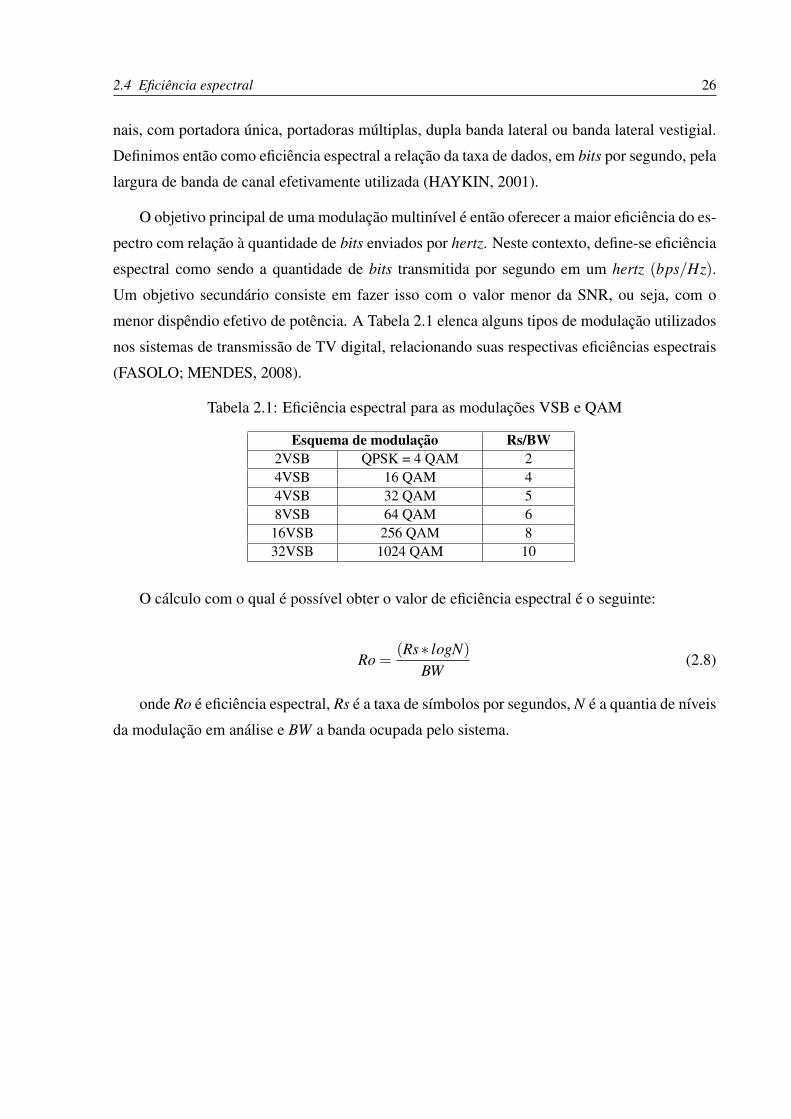
menor dispendio efetivo de potencia. A Tabela 2.1 elenca alguns tipos de modulacao utilizados
nos sistemas de transmissao de TV digital, relacionando suas respectivas eficiencias espectrais
(FASOLO; MENDES, 2008).
Tabela 2.1: Eficiencia espectral para as modulacoes VSB e QAM
Esquema de modulacao Rs/BW2VSB QPSK = 4 QAM 24VSB 16 QAM 44VSB 32 QAM 58VSB 64 QAM 616VSB 256 QAM 832VSB 1024 QAM 10
O calculo com o qual e possıvel obter o valor de eficiencia espectral e o seguinte:
Ro =(Rs∗ logN)
BW(2.8)
onde Ro e eficiencia espectral, Rs e a taxa de sımbolos por segundos, N e a quantia de nıveis
da modulacao em analise e BW a banda ocupada pelo sistema.
27
3 Modelo do sistema implementado
3.1 Modelo do sistema
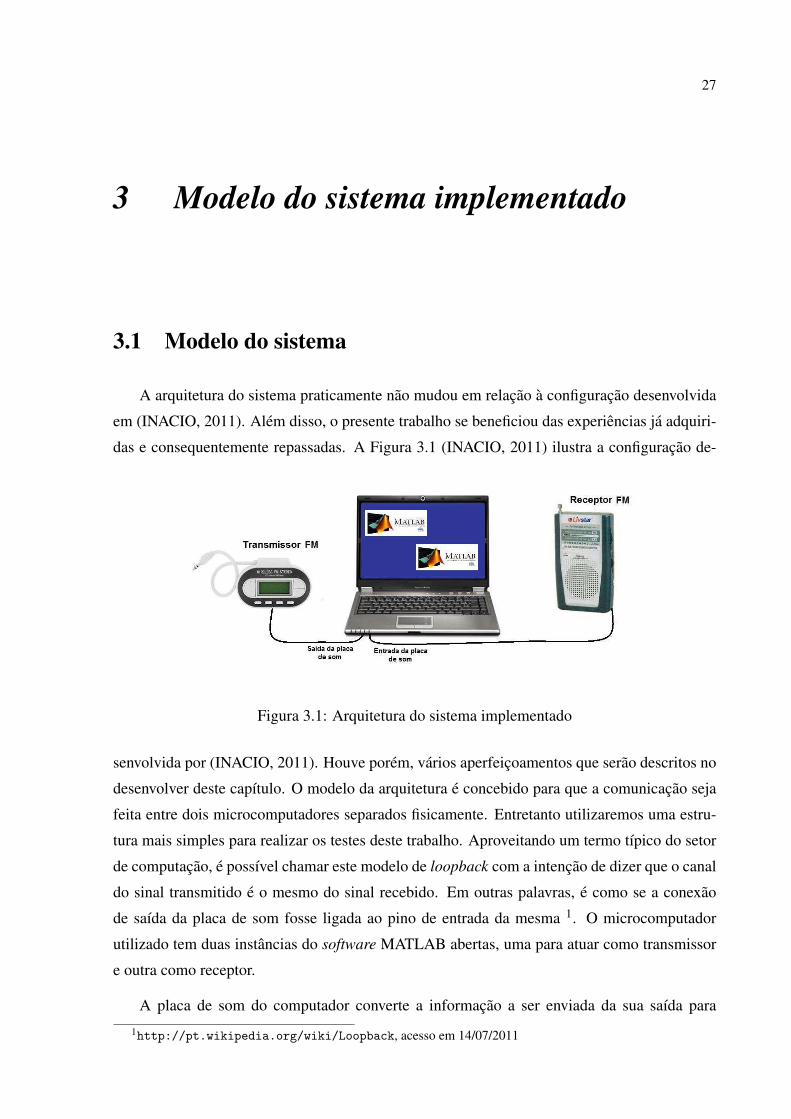
A arquitetura do sistema praticamente nao mudou em relacao a configuracao desenvolvida
em (INACIO, 2011). Alem disso, o presente trabalho se beneficiou das experiencias ja adquiri-
das e consequentemente repassadas. A Figura 3.1 (INACIO, 2011) ilustra a configuracao de-
Figura 3.1: Arquitetura do sistema implementado
senvolvida por (INACIO, 2011). Houve porem, varios aperfeicoamentos que serao descritos no
desenvolver deste capıtulo. O modelo da arquitetura e concebido para que a comunicacao seja
feita entre dois microcomputadores separados fisicamente. Entretanto utilizaremos uma estru-
tura mais simples para realizar os testes deste trabalho. Aproveitando um termo tıpico do setor
de computacao, e possıvel chamar este modelo de loopback com a intencao de dizer que o canal
do sinal transmitido e o mesmo do sinal recebido. Em outras palavras, e como se a conexao
de saıda da placa de som fosse ligada ao pino de entrada da mesma 1. O microcomputador
utilizado tem duas instancias do software MATLAB abertas, uma para atuar como transmissor
e outra como receptor.
A placa de som do computador converte a informacao a ser enviada da sua saıda para
1http://pt.wikipedia.org/wiki/Loopback, acesso em 14/07/2011
3.1 Modelo do sistema 28
o transmissor FM externo. O receptor FM recebe o sinal em banda passante e o encaminha
novamente a mesma placa de som, desta vez na sua entrada. O sinal e convertido e processado
pela segunda instancia do MATLAB. A arquitetura do sistema foi desenvolvida levando em
conta que varios parametros devam ser conhecidos para os dois algoritmos, o de transmissao e
aquele de recepcao, antes que a comunicacao real possa acontecer. Eles sao:
• Palavra de treinamento;
• Tamanho do bloco, constituıdo pela palavra de treinamento mais a informacao util;
• Trelica do codificador, com os dados do comprimento de restricao e tambem do polinomio
gerador;
• Frequencia de amostragem da placa de som;
• Fator de super amostragem;
• Frequencia intermediaria;
• Configuracoes do filtro raiz quadrada cosseno levantado.
A fim de auxiliar na compreensao do texto e importante lembrar que a frequencia de
amostragem Fs e relativa ao processamento do sinal na placa de som e tem valor de 44.100
Hz. Por isso, a taxa de sımbolos, conforme Equacao 3.1, e uma fracao desse parametro, ou seja
taxa =Fs16
= 2756,25 (3.1)
sımbolos por segundo. A nossa plataforma opera com fator de super amostragem de valor
100. Super amostrar significa introduzir amostras de amplitude zero entre as amostras originais
do sinal gerado. Isto e feito com o duplice escopo de reduzir a banda ocupada pelo sinal e limitar
a ISI, conforme explicado em (OPPENHEIM; WILLSKY, 1997). Alem disso, todos os graficos
das funcoes de transferencia dos filtros adotam como valor de fundo escala Fs/2 = 22050 Hz.
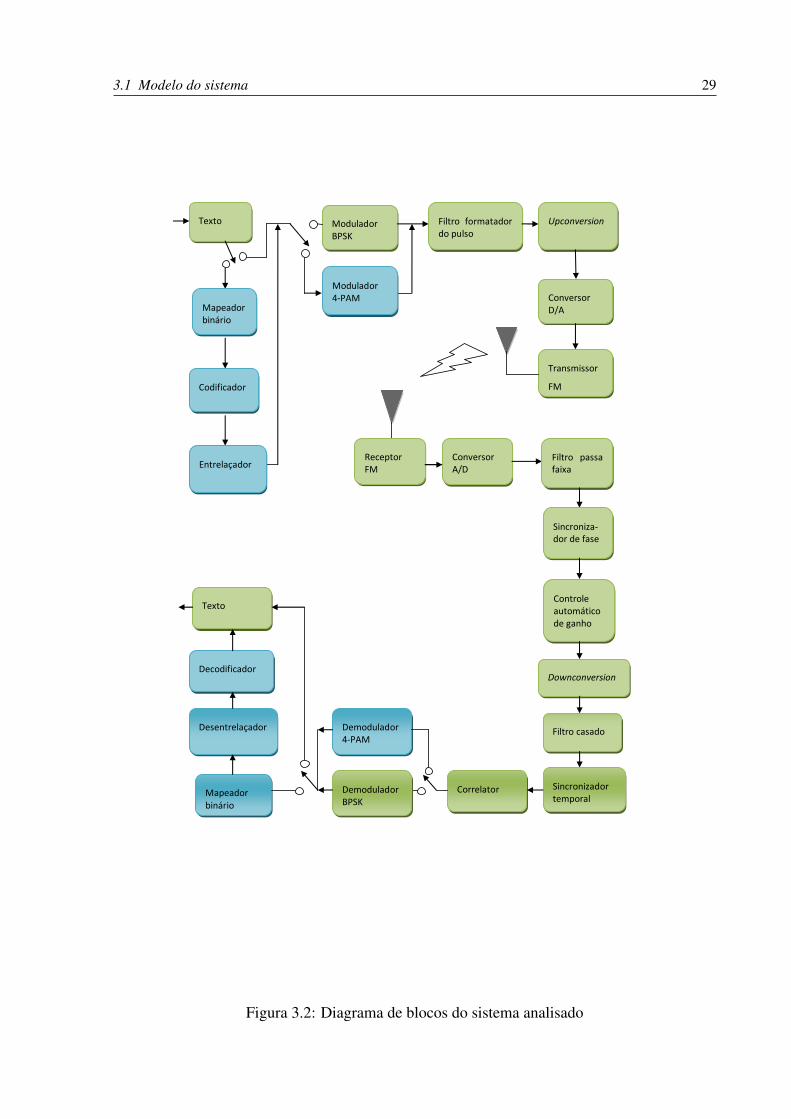
A Figura 3.2 apresenta o diagrama de blocos do sistema com a inclusao das contribuicoes dadas
ao programa original. Elas sao destacadas nos blocos com a cor azul. Como pode ser observado,
existe agora a possibilidade de mapear a informacao com uma modulacao multinıvel 4-PAM
Pulse Amplitude Modulation, e acrescentar a codificacao de canal completa de entrelacamento
no estagio digital do transmissor. Por outro lado, no processamento digital do receptor estao
agora disponıveis a demodulacao multinıvel, o desentrelacamento e a decodificacao.
3.1 Modelo do sistema 29
Texto Modulador
BPSK
Filtro formatador do pulso
Upconversion
Conversor D/A
Transmissor
FM
Receptor FM
Conversor A/D
Filtro passa faixa
Sincroniza-dor de fase
Controle automático de ganho
Downconversion
Filtro casado
Sincronizador temporal
Mapeador binário
Codificador
Entrelaçador
Modulador 4-PAM
Demodulador 4-PAM
Correlator Mapeador binário
Desentrelaçador
Demodulador BPSK
Decodificador
Texto
Figura 3.2: Diagrama de blocos do sistema analisado
3.2 As contribuicoes 30
3.2 As contribuicoes
Apos escrupuloso trabalho de testes e analises, foi possıvel subdividir as atividades desen-
volvidas em quatro grupos. Sao eles:
• Tecnicas incorporadas
– Modulacao 4-PAM
– Codificacao de canal
– Entrelacamento
• Analise e estudo do sistema
– Sincronismo temporal
– Fator β e nıvel do gatilho
– Filtro passa faixa
– Circuito AGC
– Palavra de treinamento
– Filtros do Costas Loop
– Eficiencia espectral
• Melhorias acrescentadas
– Recuperacao completa dos sımbolos
– Possibilidade de envio de qualquer texto
• Problemas na implementacao
– Ajustes do hardware
3.3 Detalhamento individual das contribuicoes
3.3.1 Modulacao 4-PAM
Em virtude das consideracoes apresentadas na secao 2.4, foi complementada ao codigo uma
modulacao multinıvel, nesse caso a modulacao Modulacao a Amplitude de Pulso, 4 Nıveis - 4
- Pulse Amplitude Modulation (4PAM). Dispondo de quatro nıveis, os bits de informacao sao
3.3 Detalhamento individual das contribuicoes 31
agrupados de dois em dois. Cada grupo de dois bits representa um sımbolo e para cada mudanca
de nıvel e transmitida uma quantia dupla de informacao se comparado com a modulacao BPSK
original. A lei que explica esse conceito e:
Rs =Rb
logN(3.2)
cujas variaveis foram ja explicitadas na secao 2.4. Isso significa que, a paridade de banda
ocupada, com a modulacao 4-PAM e possıvel transmitir a uma taxa de bits duas vezes maior em
relacao ao BPSK. Varios trechos do codigo, tanto na transmissao quanto na recepcao, tiveram
que ser modificados para poder realizar esta nova tarefa. Isto pode ser visto na Figura 4.1
presente no Apendice A.
Especificamente, com base na Figura 3.2, mudaram ambos os blocos modulador BPSK e
demodulador BPSK, as secoes que geram a palavra de sincronismo e aquelas que quantizam
os valores recebidos. Em todos esses pontos de processamento a modulacao nao trabalha mais
com dois valores (-1 e +1) que alteram a fase da portadora, mas sim com quatro (-3, -1, 1, 3)
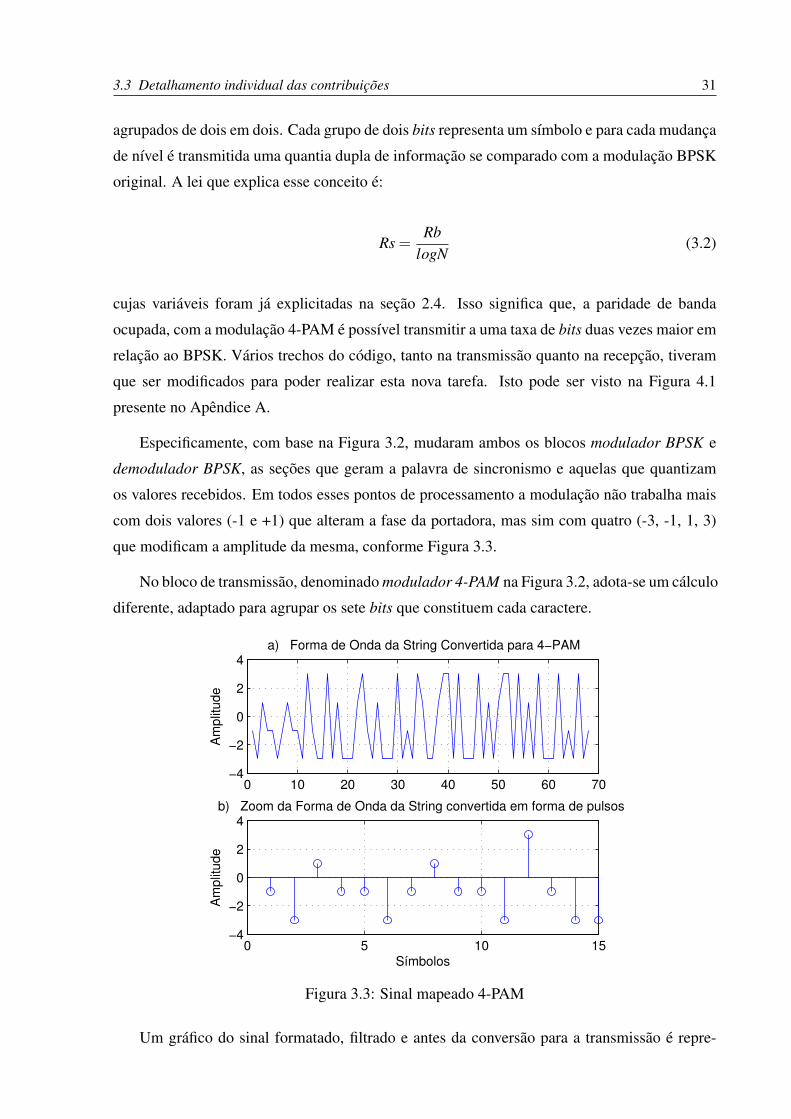
que modificam a amplitude da mesma, conforme Figura 3.3.
No bloco de transmissao, denominado modulador 4-PAM na Figura 3.2, adota-se um calculo
diferente, adaptado para agrupar os sete bits que constituem cada caractere.
0 10 20 30 40 50 60 70−4
−2
0
2
4a) Forma de Onda da String Convertida para 4−PAM
Am
plit
ude
0 5 10 15−4
−2
0
2
4b) Zoom da Forma de Onda da String convertida em forma de pulsos
Am
plit
ude
Símbolos
Figura 3.3: Sinal mapeado 4-PAM
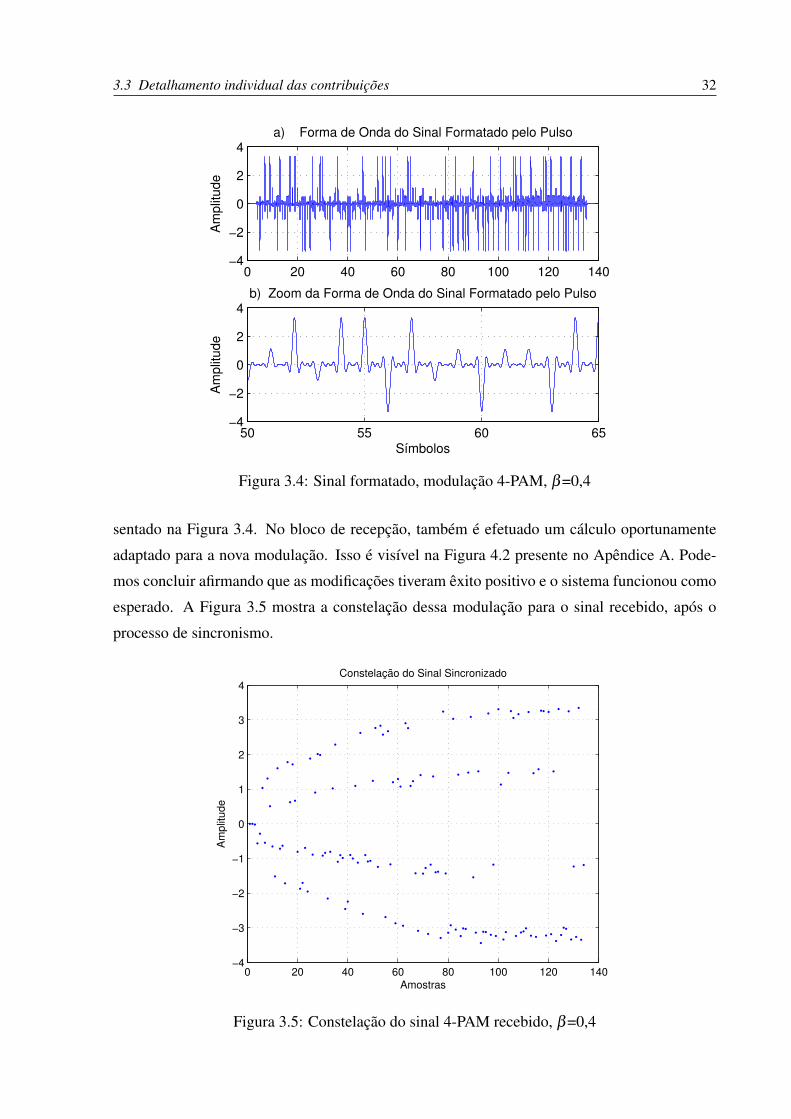
Um grafico do sinal formatado, filtrado e antes da conversao para a transmissao e repre-
3.3 Detalhamento individual das contribuicoes 32
0 20 40 60 80 100 120 140−4
−2
0
2
4
Am
plit
ude
a) Forma de Onda do Sinal Formatado pelo Pulso
50 55 60 65−4
−2
0
2
4
Símbolos
Am
plit
ude
b) Zoom da Forma de Onda do Sinal Formatado pelo Pulso
Figura 3.4: Sinal formatado, modulacao 4-PAM, β=0,4
sentado na Figura 3.4. No bloco de recepcao, tambem e efetuado um calculo oportunamente
adaptado para a nova modulacao. Isso e visıvel na Figura 4.2 presente no Apendice A. Pode-
mos concluir afirmando que as modificacoes tiveram exito positivo e o sistema funcionou como
esperado. A Figura 3.5 mostra a constelacao dessa modulacao para o sinal recebido, apos o
processo de sincronismo.
0 20 40 60 80 100 120 140−4
−3
−2
−1
0
1
2
3
4
Amostras
Am
plit
ude
Constelação do Sinal Sincronizado
Figura 3.5: Constelacao do sinal 4-PAM recebido, β=0,4
3.3 Detalhamento individual das contribuicoes 33
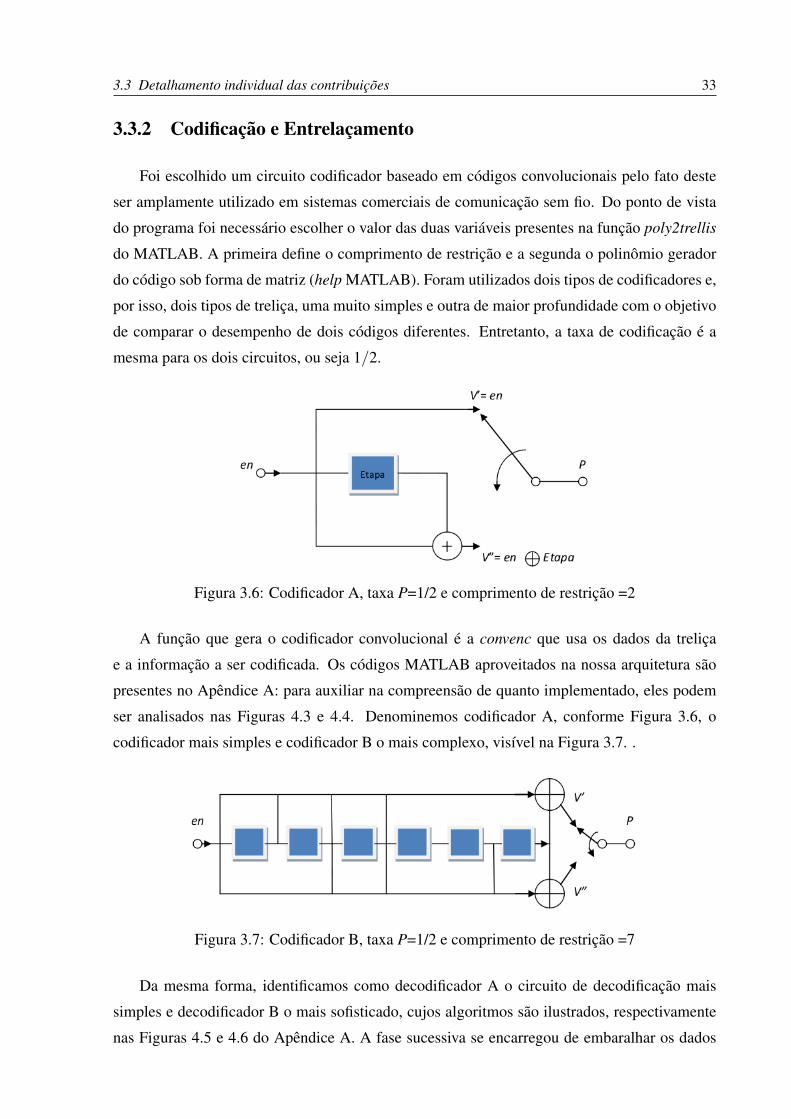
3.3.2 Codificacao e Entrelacamento
Foi escolhido um circuito codificador baseado em codigos convolucionais pelo fato deste
ser amplamente utilizado em sistemas comerciais de comunicacao sem fio. Do ponto de vista
do programa foi necessario escolher o valor das duas variaveis presentes na funcao poly2trellis
do MATLAB. A primeira define o comprimento de restricao e a segunda o polinomio gerador
do codigo sob forma de matriz (help MATLAB). Foram utilizados dois tipos de codificadores e,
por isso, dois tipos de trelica, uma muito simples e outra de maior profundidade com o objetivo
de comparar o desempenho de dois codigos diferentes. Entretanto, a taxa de codificacao e a
mesma para os dois circuitos, ou seja 1/2.
Figura 3.6: Codificador A, taxa P=1/2 e comprimento de restricao =2
A funcao que gera o codificador convolucional e a convenc que usa os dados da trelica
e a informacao a ser codificada. Os codigos MATLAB aproveitados na nossa arquitetura sao
presentes no Apendice A: para auxiliar na compreensao de quanto implementado, eles podem
ser analisados nas Figuras 4.3 e 4.4. Denominemos codificador A, conforme Figura 3.6, o
codificador mais simples e codificador B o mais complexo, visıvel na Figura 3.7. .
Figura 3.7: Codificador B, taxa P=1/2 e comprimento de restricao =7
Da mesma forma, identificamos como decodificador A o circuito de decodificacao mais
simples e decodificador B o mais sofisticado, cujos algoritmos sao ilustrados, respectivamente
nas Figuras 4.5 e 4.6 do Apendice A. A fase sucessiva se encarregou de embaralhar os dados
3.3 Detalhamento individual das contribuicoes 34
codificados por meio da funcao randintrlv. Primeiramente eles foram encaminhados para a
transmissao. No receptor, esta operacao foi desfeita por meio da funcao randdeintrlv. Em
seguida a decodificacao ficou a cargo do algoritmo de Viterbi, por meio da funcao vitdec. Essa
funcao tambem necessita dos dados da trelica.
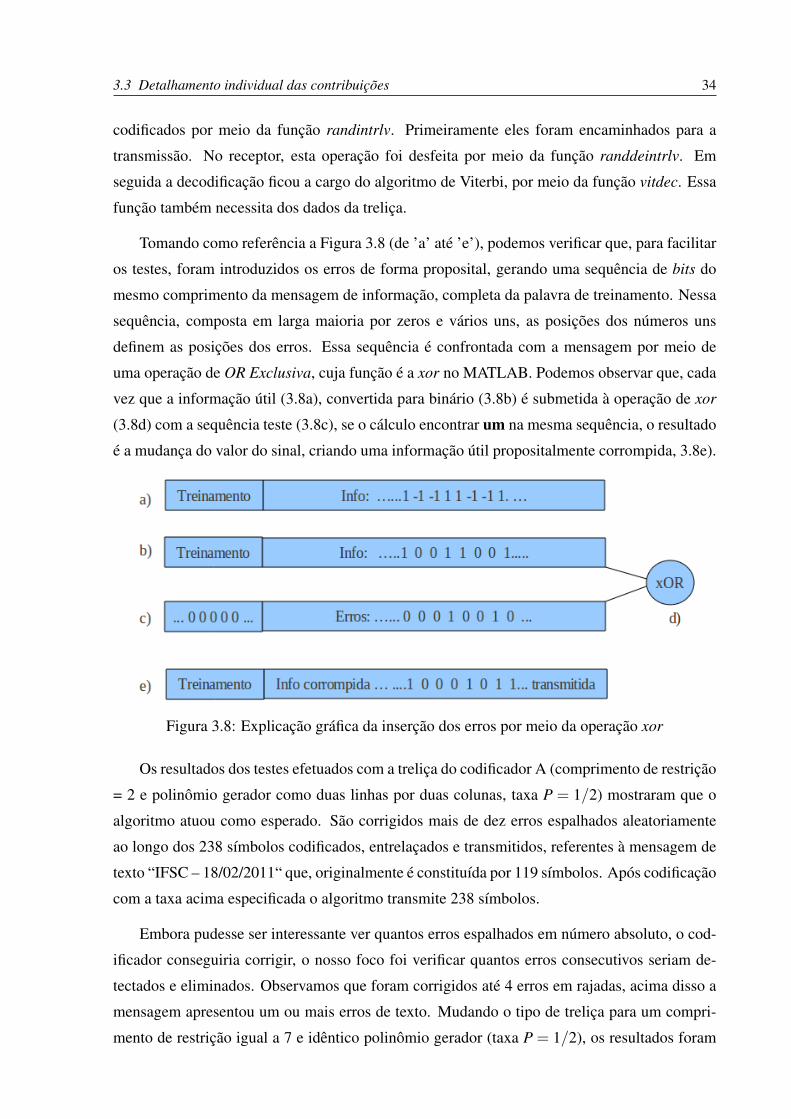
Tomando como referencia a Figura 3.8 (de ’a’ ate ’e’), podemos verificar que, para facilitar
os testes, foram introduzidos os erros de forma proposital, gerando uma sequencia de bits do
mesmo comprimento da mensagem de informacao, completa da palavra de treinamento. Nessa
sequencia, composta em larga maioria por zeros e varios uns, as posicoes dos numeros uns
definem as posicoes dos erros. Essa sequencia e confrontada com a mensagem por meio de
uma operacao de OR Exclusiva, cuja funcao e a xor no MATLAB. Podemos observar que, cada
vez que a informacao util (3.8a), convertida para binario (3.8b) e submetida a operacao de xor
(3.8d) com a sequencia teste (3.8c), se o calculo encontrar um na mesma sequencia, o resultado
e a mudanca do valor do sinal, criando uma informacao util propositalmente corrompida, 3.8e).
Figura 3.8: Explicacao grafica da insercao dos erros por meio da operacao xor
Os resultados dos testes efetuados com a trelica do codificador A (comprimento de restricao
= 2 e polinomio gerador como duas linhas por duas colunas, taxa P = 1/2) mostraram que o
algoritmo atuou como esperado. Sao corrigidos mais de dez erros espalhados aleatoriamente
ao longo dos 238 sımbolos codificados, entrelacados e transmitidos, referentes a mensagem de
texto “IFSC – 18/02/2011“ que, originalmente e constituıda por 119 sımbolos. Apos codificacao
com a taxa acima especificada o algoritmo transmite 238 sımbolos.
Embora pudesse ser interessante ver quantos erros espalhados em numero absoluto, o cod-
ificador conseguiria corrigir, o nosso foco foi verificar quantos erros consecutivos seriam de-
tectados e eliminados. Observamos que foram corrigidos ate 4 erros em rajadas, acima disso a
mensagem apresentou um ou mais erros de texto. Mudando o tipo de trelica para um compri-
mento de restricao igual a 7 e identico polinomio gerador (taxa P = 1/2), os resultados foram
3.3 Detalhamento individual das contribuicoes 35
bem mais animadores: sao corrigidos mais de trinta erros espalhados ao longo da informacao
de 238 sımbolos e dezesseis consecutivos (erro em rajada). As conclusoes as quais se chega
sao que os resultados respeitaram as expectativas e confirmaram as teorias aprendidas durante
o curso.
3.3.3 Analise da sincronizacao temporal
A fim de conseguir uma melhor compreensao do algoritmo de sincronizacao temporal De-
cision Directed do receptor, foi decidido concentrar a maior parte dos testes no codigo didatico
presente em (JOHNSON; SETHARES, 2003) para depois analisar com mais agilidade o pro-
grama SDR desenvolvido em (INACIO, 2011) e objeto de analise do presente documento.
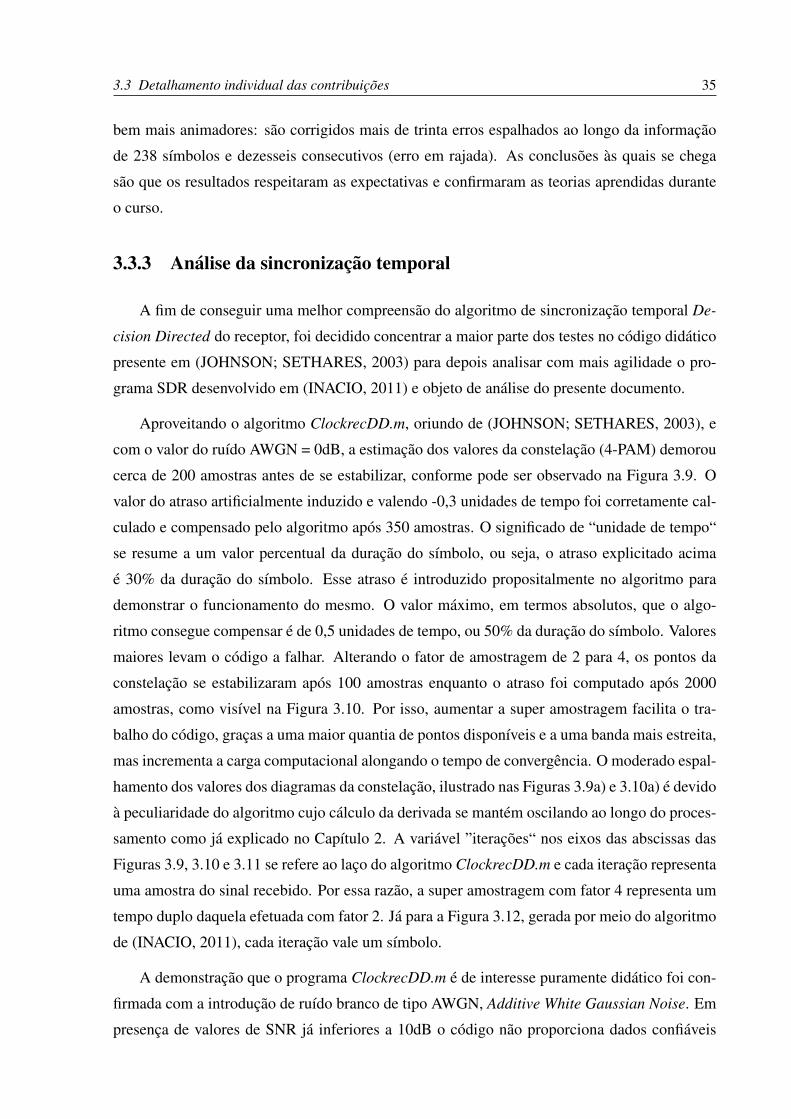
Aproveitando o algoritmo ClockrecDD.m, oriundo de (JOHNSON; SETHARES, 2003), e
com o valor do ruıdo AWGN = 0dB, a estimacao dos valores da constelacao (4-PAM) demorou
cerca de 200 amostras antes de se estabilizar, conforme pode ser observado na Figura 3.9. O
valor do atraso artificialmente induzido e valendo -0,3 unidades de tempo foi corretamente cal-
culado e compensado pelo algoritmo apos 350 amostras. O significado de “unidade de tempo“
se resume a um valor percentual da duracao do sımbolo, ou seja, o atraso explicitado acima
e 30% da duracao do sımbolo. Esse atraso e introduzido propositalmente no algoritmo para
demonstrar o funcionamento do mesmo. O valor maximo, em termos absolutos, que o algo-
ritmo consegue compensar e de 0,5 unidades de tempo, ou 50% da duracao do sımbolo. Valores
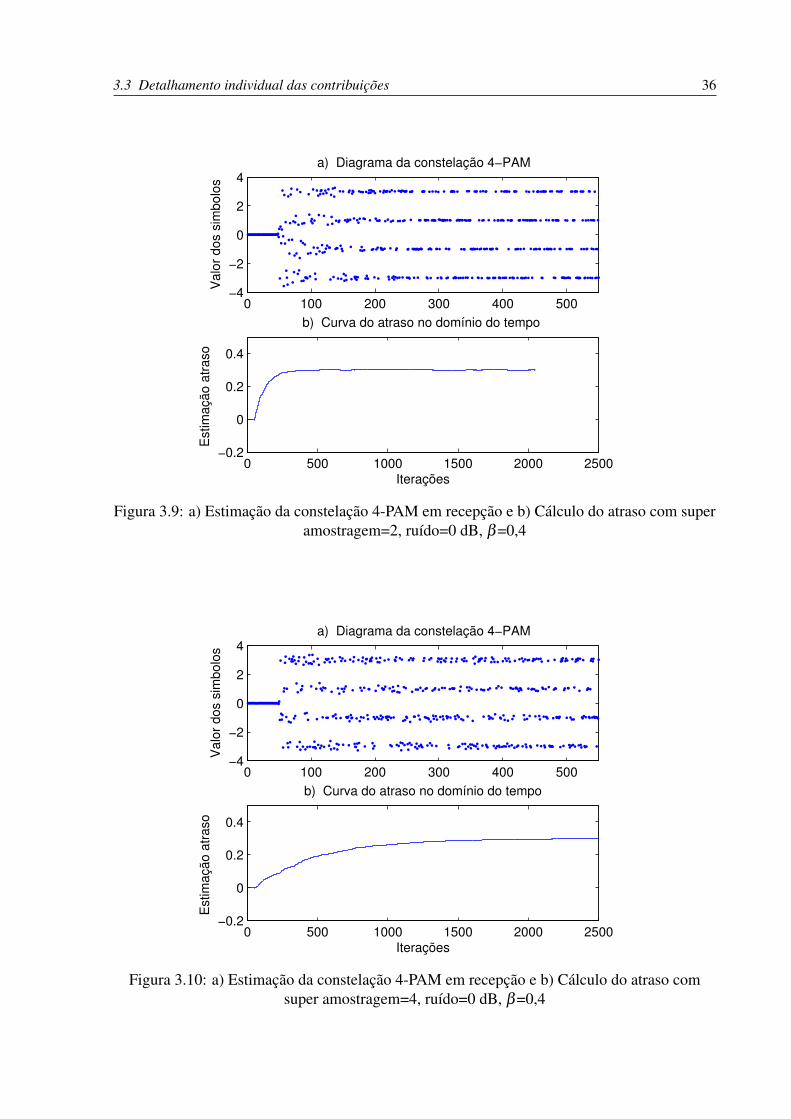
maiores levam o codigo a falhar. Alterando o fator de amostragem de 2 para 4, os pontos da
constelacao se estabilizaram apos 100 amostras enquanto o atraso foi computado apos 2000
amostras, como visıvel na Figura 3.10. Por isso, aumentar a super amostragem facilita o tra-
balho do codigo, gracas a uma maior quantia de pontos disponıveis e a uma banda mais estreita,
mas incrementa a carga computacional alongando o tempo de convergencia. O moderado espal-
hamento dos valores dos diagramas da constelacao, ilustrado nas Figuras 3.9a) e 3.10a) e devido
a peculiaridade do algoritmo cujo calculo da derivada se mantem oscilando ao longo do proces-
samento como ja explicado no Capıtulo 2. A variavel ”iteracoes“ nos eixos das abscissas das
Figuras 3.9, 3.10 e 3.11 se refere ao laco do algoritmo ClockrecDD.m e cada iteracao representa
uma amostra do sinal recebido. Por essa razao, a super amostragem com fator 4 representa um
tempo duplo daquela efetuada com fator 2. Ja para a Figura 3.12, gerada por meio do algoritmo
de (INACIO, 2011), cada iteracao vale um sımbolo.
A demonstracao que o programa ClockrecDD.m e de interesse puramente didatico foi con-
firmada com a introducao de ruıdo branco de tipo AWGN, Additive White Gaussian Noise. Em
presenca de valores de SNR ja inferiores a 10dB o codigo nao proporciona dados confiaveis
3.3 Detalhamento individual das contribuicoes 36
0 100 200 300 400 500−4
−2
0
2
4a) Diagrama da constelação 4−PAM
Valo
r dos s
imbolo
s
0 500 1000 1500 2000 2500−0.2
0
0.2
0.4
Estim
ação a
traso
Iterações
b) Curva do atraso no domínio do tempo
Figura 3.9: a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso com superamostragem=2, ruıdo=0 dB, β=0,4
0 100 200 300 400 500−4
−2
0
2
4a) Diagrama da constelação 4−PAM
Valo
r dos s
imbolo
s
0 500 1000 1500 2000 2500−0.2
0
0.2
0.4
Estim
ação a
traso
Iterações
b) Curva do atraso no domínio do tempo
Figura 3.10: a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso comsuper amostragem=4, ruıdo=0 dB, β=0,4
3.3 Detalhamento individual das contribuicoes 37
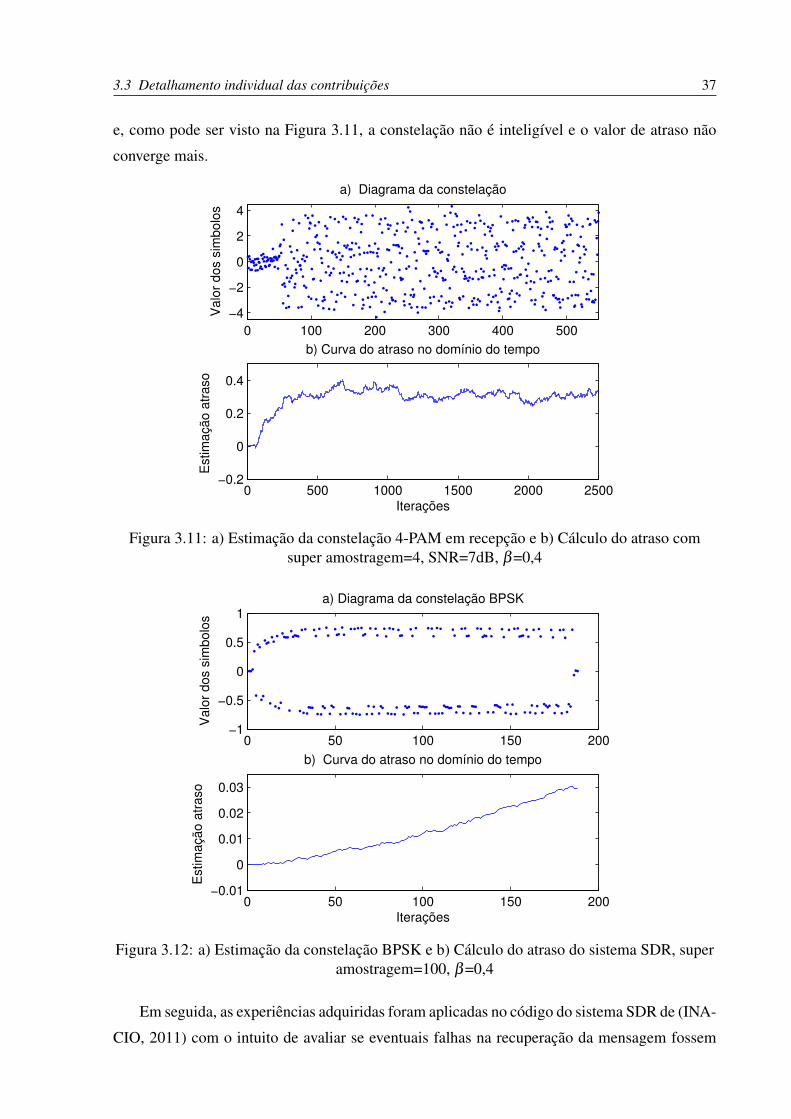
e, como pode ser visto na Figura 3.11, a constelacao nao e inteligıvel e o valor de atraso nao
converge mais.
0 100 200 300 400 500
−4
−2
0
2
4
a) Diagrama da constelação
Valo
r dos s
imbolo
s
0 500 1000 1500 2000 2500−0.2
0
0.2
0.4
Estim
ação a
traso
Iterações
b) Curva do atraso no domínio do tempo
Figura 3.11: a) Estimacao da constelacao 4-PAM em recepcao e b) Calculo do atraso comsuper amostragem=4, SNR=7dB, β=0,4
0 50 100 150 200−1
−0.5
0
0.5
1a) Diagrama da constelação BPSK
Valo
r dos s
imbolo
s
0 50 100 150 200−0.01
0
0.01
0.02
0.03
Estim
ação a
traso
Iterações
b) Curva do atraso no domínio do tempo
Figura 3.12: a) Estimacao da constelacao BPSK e b) Calculo do atraso do sistema SDR, superamostragem=100, β=0,4
Em seguida, as experiencias adquiridas foram aplicadas no codigo do sistema SDR de (INA-
CIO, 2011) com o intuito de avaliar se eventuais falhas na recuperacao da mensagem fossem
3.3 Detalhamento individual das contribuicoes 38
originadas nesse ponto do processamento do receptor. O algoritmo e mostrado na Figura 4.7
do Apendice A. A Figura 3.12 expoe os resultados de um dos varios testes efetuados. Em es-
pecıfico, foram alterados os parametros mu e delta. Esta primeira variavel auxiliar representa o
passo de adaptacao, ou seja, a rapidez com a qual o algoritmo chega ao resultado util, adaptando-
se as condicoes do circuito. O segundo descreve a distancia entre o valor amostrado e os dois
pontos laterais necessarios para que o algoritmo efetue a interpolacao. Todavia, nenhuma dessas
alteracoes influenciaram o desempenho do receptor no que diz respeito a capacidade de recu-
perar com sucesso a mensagem.
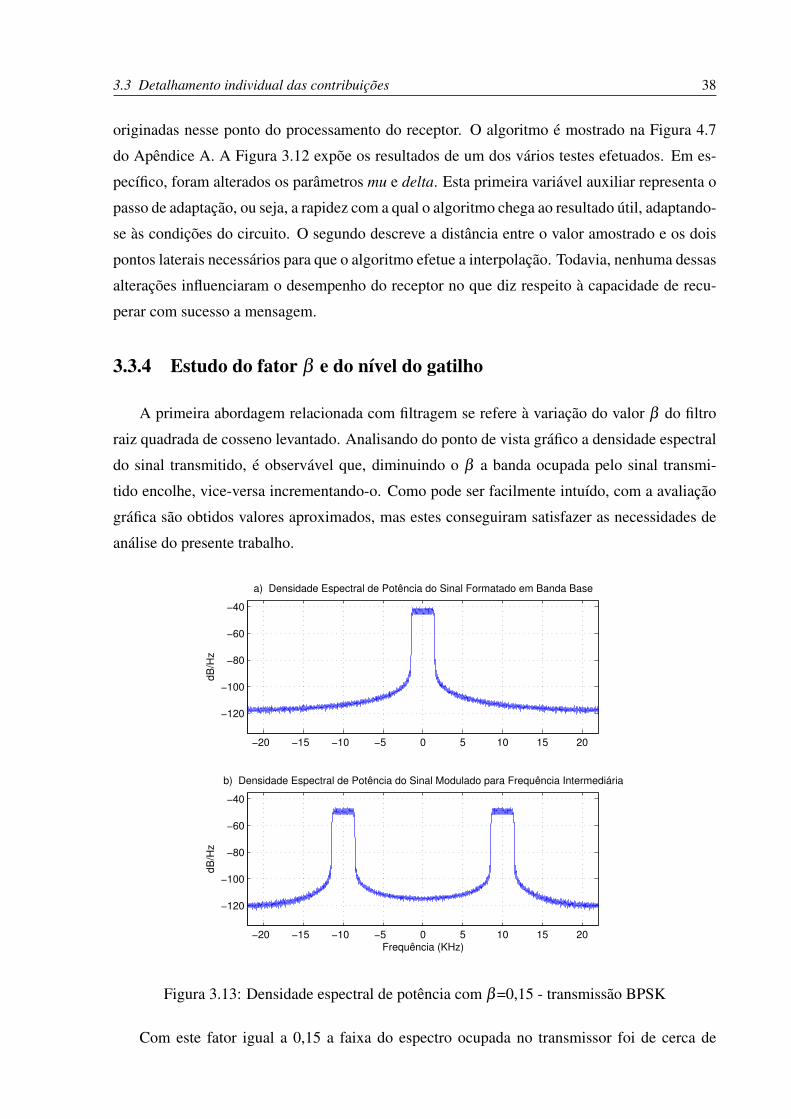
3.3.4 Estudo do fator β e do nıvel do gatilho
A primeira abordagem relacionada com filtragem se refere a variacao do valor β do filtro
raiz quadrada de cosseno levantado. Analisando do ponto de vista grafico a densidade espectral
do sinal transmitido, e observavel que, diminuindo o β a banda ocupada pelo sinal transmi-
tido encolhe, vice-versa incrementando-o. Como pode ser facilmente intuıdo, com a avaliacao
grafica sao obtidos valores aproximados, mas estes conseguiram satisfazer as necessidades de
analise do presente trabalho.
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Formatado em Banda Base
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequência (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Modulado para Frequência Intermediária
Figura 3.13: Densidade espectral de potencia com β=0,15 - transmissao BPSK
Com este fator igual a 0,15 a faixa do espectro ocupada no transmissor foi de cerca de
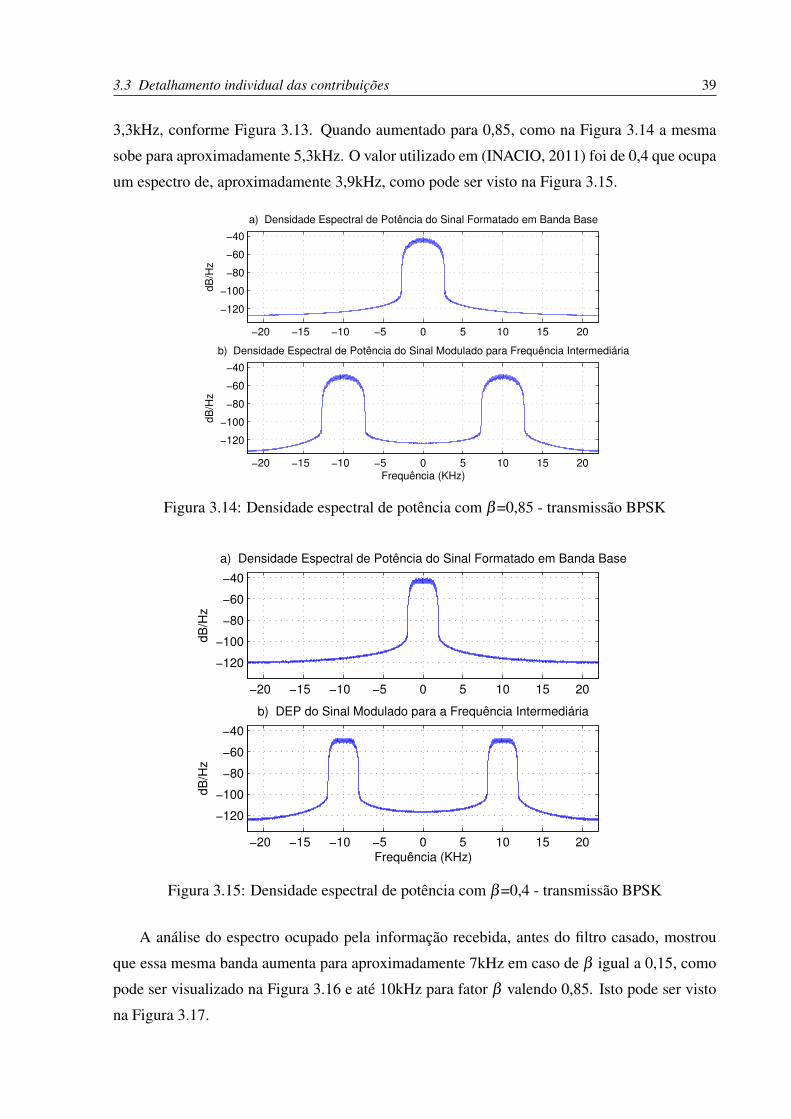
3.3 Detalhamento individual das contribuicoes 39
3,3kHz, conforme Figura 3.13. Quando aumentado para 0,85, como na Figura 3.14 a mesma
sobe para aproximadamente 5,3kHz. O valor utilizado em (INACIO, 2011) foi de 0,4 que ocupa
um espectro de, aproximadamente 3,9kHz, como pode ser visto na Figura 3.15.
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Formatado em Banda Base
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequência (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Modulado para Frequência Intermediária
Figura 3.14: Densidade espectral de potencia com β=0,85 - transmissao BPSK
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Formatado em Banda Base
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequência (KHz)
dB
/Hz
b) DEP do Sinal Modulado para a Frequência Intermediária
Figura 3.15: Densidade espectral de potencia com β=0,4 - transmissao BPSK
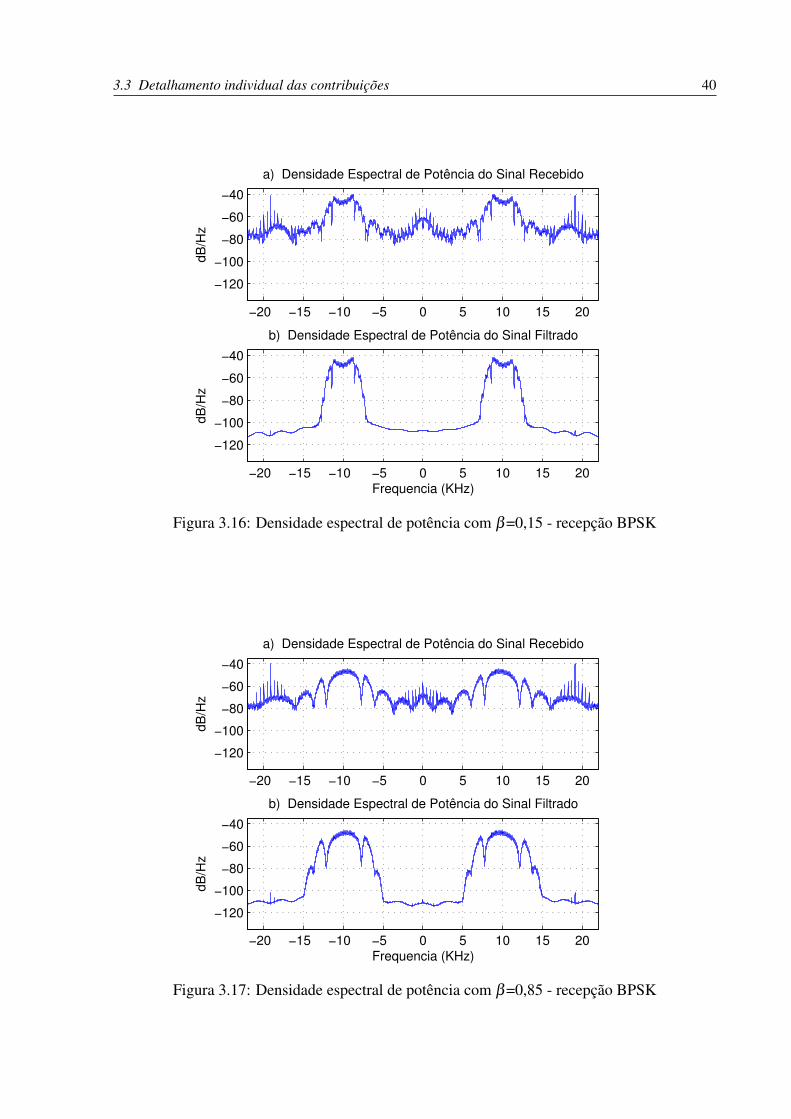
A analise do espectro ocupado pela informacao recebida, antes do filtro casado, mostrou
que essa mesma banda aumenta para aproximadamente 7kHz em caso de β igual a 0,15, como
pode ser visualizado na Figura 3.16 e ate 10kHz para fator β valendo 0,85. Isto pode ser visto
na Figura 3.17.
3.3 Detalhamento individual das contribuicoes 40
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40dB
/Hz
a) Densidade Espectral de Potência do Sinal Recebido
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequencia (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Filtrado
Figura 3.16: Densidade espectral de potencia com β=0,15 - recepcao BPSK
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Recebido
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequencia (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Filtrado
Figura 3.17: Densidade espectral de potencia com β=0,85 - recepcao BPSK
3.3 Detalhamento individual das contribuicoes 41
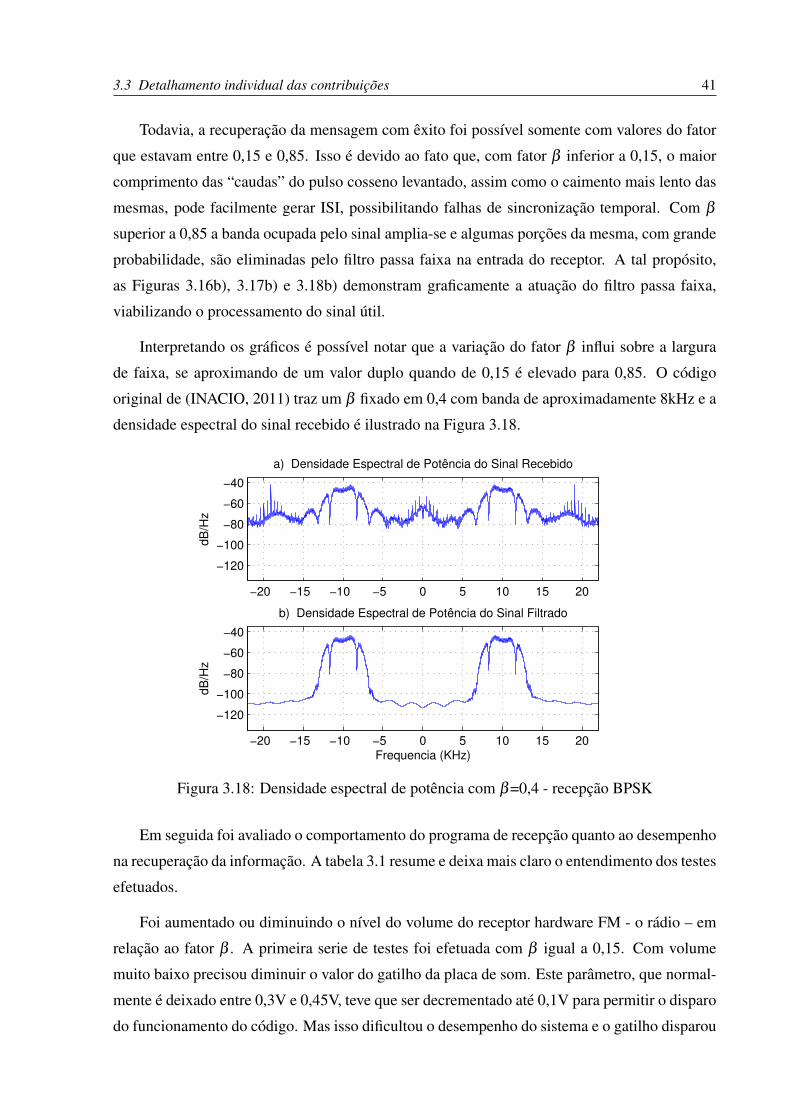
Todavia, a recuperacao da mensagem com exito foi possıvel somente com valores do fator
que estavam entre 0,15 e 0,85. Isso e devido ao fato que, com fator β inferior a 0,15, o maior
comprimento das “caudas” do pulso cosseno levantado, assim como o caimento mais lento das
mesmas, pode facilmente gerar ISI, possibilitando falhas de sincronizacao temporal. Com β
superior a 0,85 a banda ocupada pelo sinal amplia-se e algumas porcoes da mesma, com grande
probabilidade, sao eliminadas pelo filtro passa faixa na entrada do receptor. A tal proposito,
as Figuras 3.16b), 3.17b) e 3.18b) demonstram graficamente a atuacao do filtro passa faixa,
viabilizando o processamento do sinal util.
Interpretando os graficos e possıvel notar que a variacao do fator β influi sobre a largura
de faixa, se aproximando de um valor duplo quando de 0,15 e elevado para 0,85. O codigo
original de (INACIO, 2011) traz um β fixado em 0,4 com banda de aproximadamente 8kHz e a
densidade espectral do sinal recebido e ilustrado na Figura 3.18.
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Recebido
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequencia (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Filtrado
Figura 3.18: Densidade espectral de potencia com β=0,4 - recepcao BPSK
Em seguida foi avaliado o comportamento do programa de recepcao quanto ao desempenho
na recuperacao da informacao. A tabela 3.1 resume e deixa mais claro o entendimento dos testes
efetuados.
Foi aumentado ou diminuindo o nıvel do volume do receptor hardware FM - o radio – em
relacao ao fator β . A primeira serie de testes foi efetuada com β igual a 0,15. Com volume
muito baixo precisou diminuir o valor do gatilho da placa de som. Este parametro, que normal-
mente e deixado entre 0,3V e 0,45V, teve que ser decrementado ate 0,1V para permitir o disparo
do funcionamento do codigo. Mas isso dificultou o desempenho do sistema e o gatilho disparou
3.3 Detalhamento individual das contribuicoes 42
Tabela 3.1: Testes com nıveis do gatilho e do volume do radio FM
β Nıvel gatilho (V) Nıvel volume Resultados0,15 0,1 baixo Erros nos ultimos caracteres0,15 0,4 medio Conforme esperado0,15 0,4 alto Falha na recuperacao da mensagem0,15 0,5 alto Conforme esperado0,4 0,1 baixo Falha na recuperacao da mensagem0,4 0,4 medio Conforme esperado0,4 0,5 alto Conforme esperado0,85 0,1 baixo Erros nos ultimos caracteres0,85 0,4 medio Conforme esperado0,85 0,4 alto Falha na recuperacao da mensagem0,85 0,5 alto Conforme esperado
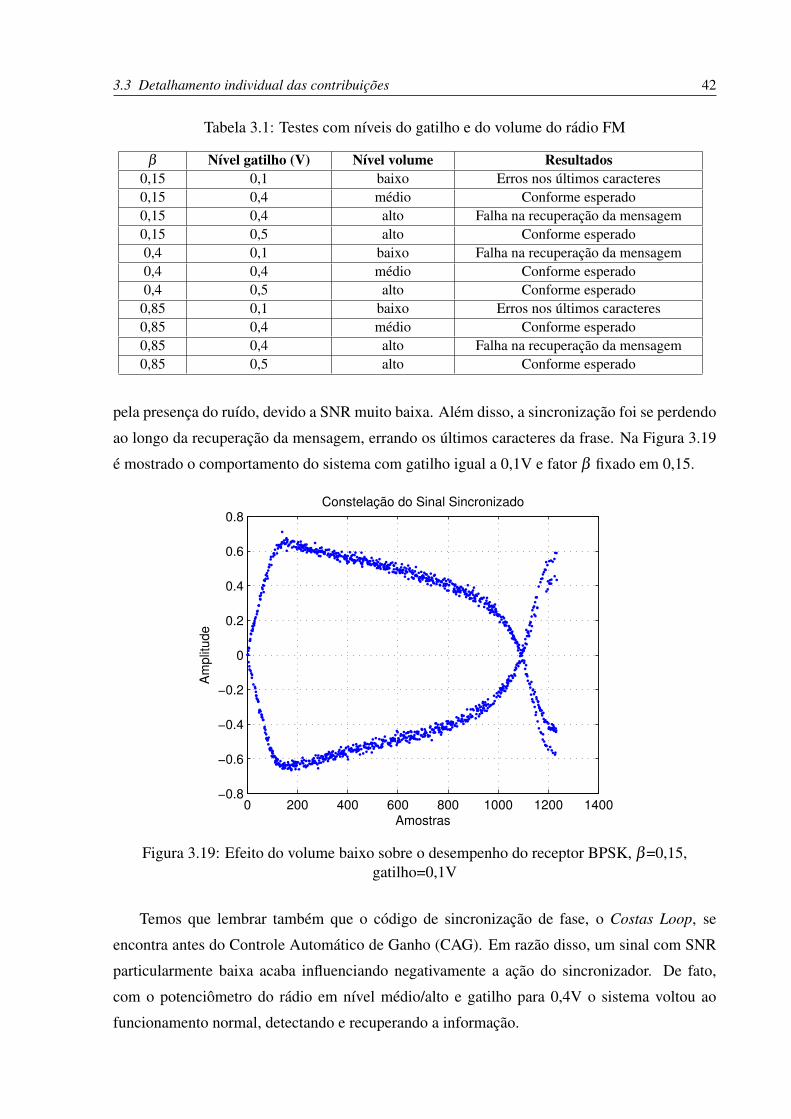
pela presenca do ruıdo, devido a SNR muito baixa. Alem disso, a sincronizacao foi se perdendo
ao longo da recuperacao da mensagem, errando os ultimos caracteres da frase. Na Figura 3.19
e mostrado o comportamento do sistema com gatilho igual a 0,1V e fator β fixado em 0,15.
0 200 400 600 800 1000 1200 1400−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Amostras
Am
plit
ude
Constelação do Sinal Sincronizado
Figura 3.19: Efeito do volume baixo sobre o desempenho do receptor BPSK, β=0,15,gatilho=0,1V
Temos que lembrar tambem que o codigo de sincronizacao de fase, o Costas Loop, se
encontra antes do Controle Automatico de Ganho (CAG). Em razao disso, um sinal com SNR
particularmente baixa acaba influenciando negativamente a acao do sincronizador. De fato,
com o potenciometro do radio em nıvel medio/alto e gatilho para 0,4V o sistema voltou ao
funcionamento normal, detectando e recuperando a informacao.
3.3 Detalhamento individual das contribuicoes 43
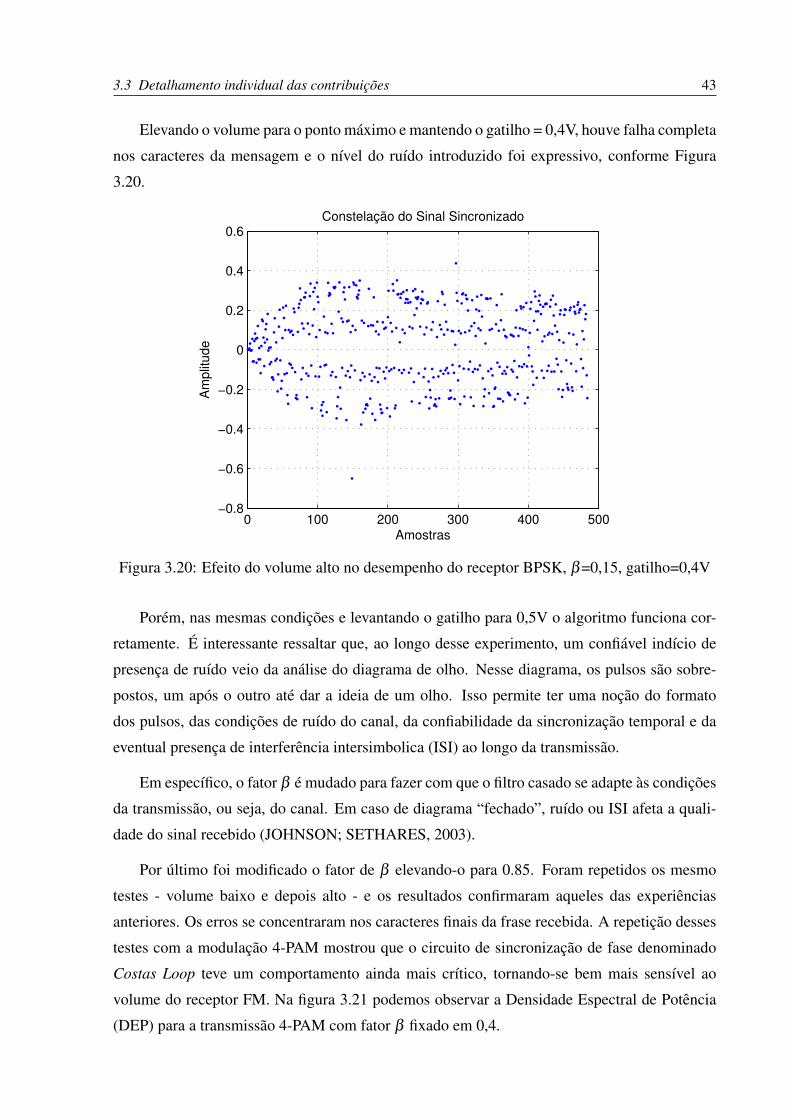
Elevando o volume para o ponto maximo e mantendo o gatilho = 0,4V, houve falha completa
nos caracteres da mensagem e o nıvel do ruıdo introduzido foi expressivo, conforme Figura
3.20.
0 100 200 300 400 500−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Amostras
Am
plit
ude
Constelação do Sinal Sincronizado
Figura 3.20: Efeito do volume alto no desempenho do receptor BPSK, β=0,15, gatilho=0,4V
Porem, nas mesmas condicoes e levantando o gatilho para 0,5V o algoritmo funciona cor-
retamente. E interessante ressaltar que, ao longo desse experimento, um confiavel indıcio de
presenca de ruıdo veio da analise do diagrama de olho. Nesse diagrama, os pulsos sao sobre-
postos, um apos o outro ate dar a ideia de um olho. Isso permite ter uma nocao do formato
dos pulsos, das condicoes de ruıdo do canal, da confiabilidade da sincronizacao temporal e da
eventual presenca de interferencia intersimbolica (ISI) ao longo da transmissao.
Em especıfico, o fator β e mudado para fazer com que o filtro casado se adapte as condicoes
da transmissao, ou seja, do canal. Em caso de diagrama “fechado”, ruıdo ou ISI afeta a quali-
dade do sinal recebido (JOHNSON; SETHARES, 2003).
Por ultimo foi modificado o fator de β elevando-o para 0.85. Foram repetidos os mesmo
testes - volume baixo e depois alto - e os resultados confirmaram aqueles das experiencias
anteriores. Os erros se concentraram nos caracteres finais da frase recebida. A repeticao desses
testes com a modulacao 4-PAM mostrou que o circuito de sincronizacao de fase denominado
Costas Loop teve um comportamento ainda mais crıtico, tornando-se bem mais sensıvel ao
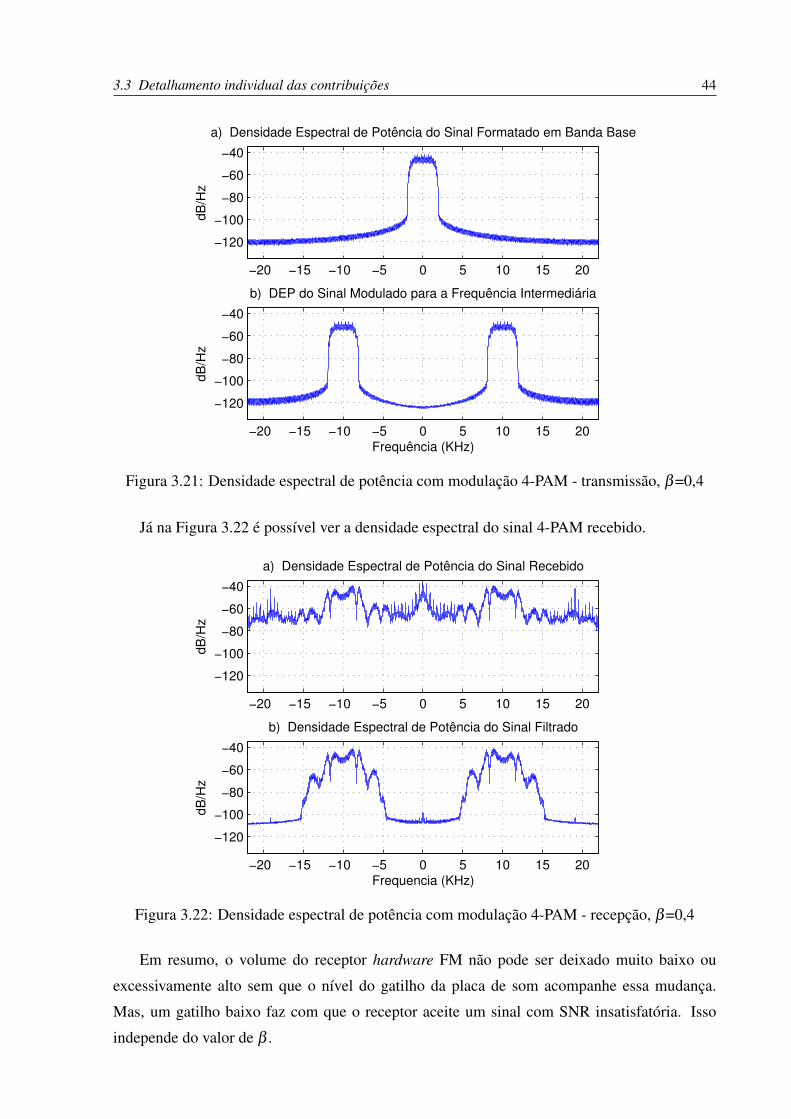
volume do receptor FM. Na figura 3.21 podemos observar a Densidade Espectral de Potencia
(DEP) para a transmissao 4-PAM com fator β fixado em 0,4.
3.3 Detalhamento individual das contribuicoes 44
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Formatado em Banda Base
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequência (KHz)
dB
/Hz
b) DEP do Sinal Modulado para a Frequência Intermediária
Figura 3.21: Densidade espectral de potencia com modulacao 4-PAM - transmissao, β=0,4
Ja na Figura 3.22 e possıvel ver a densidade espectral do sinal 4-PAM recebido.
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
dB
/Hz
a) Densidade Espectral de Potência do Sinal Recebido
−20 −15 −10 −5 0 5 10 15 20
−120
−100
−80
−60
−40
Frequencia (KHz)
dB
/Hz
b) Densidade Espectral de Potência do Sinal Filtrado
Figura 3.22: Densidade espectral de potencia com modulacao 4-PAM - recepcao, β=0,4
Em resumo, o volume do receptor hardware FM nao pode ser deixado muito baixo ou
excessivamente alto sem que o nıvel do gatilho da placa de som acompanhe essa mudanca.
Mas, um gatilho baixo faz com que o receptor aceite um sinal com SNR insatisfatoria. Isso
independe do valor de β .

3.3 Detalhamento individual das contribuicoes 45
3.3.5 Estudo do filtro passa faixa
Um dos pontos do programa original que foi provavelmente subestimado quanto a im-
portancia para um apropriado funcionamento do sistema diz respeito as frequencias de corte
do filtro passa faixa, logo na entrada do receptor. A funcao deste filtro e extremamente impor-
tante porque elimina todas as frequencias indesejadas e as eventuais interferencias. Os circuitos
de sincronizacao do receptor precisam processar unicamente o sinal util, livre do ruıdo e das
frequencias nao desejadas. As frequencias de corte inferior e superior do filtro, centradas em
volta do espectro do sinal util, sao expressas como valor normalizado entre 0 e 1, sendo que,
no codigo em analise, 0 representa o inicio da escala de frequencia e 1 exprime o fundo escala,
valendo 22.050 Hz, metade da frequencia de amostragem. Para esta analise vamos considerar
as expressoes utilizadas no codigo em questao, lembrando que, para obter os valores de largura
de banda que incluam as duas bandas laterais teremos que dobrar os resultados dos calculos que
aparecem nos algoritmos das Figuras 3.23 e 3.24:
Figura 3.23: Codigos do filtro passa faixa utilizado em (INACIO, 2011)
Em que:
bw= largura de banda (somente uma banda lateral);
rlf = fator β , valendo 0,4;
taxa=taxa de transmissao, 44100/16 = 2756,25 bps;
wi= valor normalizado da frequencia de corte inferior;
ws= valor normalizado da frequencia de corte superior;
Fc= portadora, 10kHz;
FPF= filtro passa faixa de ordem 64, gerado pela funcao fir1.
Pode-se observar que, para testar amplas modificacoes das frequencias de corte do filtro, sem
mudar a taxa de transmissao, a unica solucao e diminuir a variavel rlf abaixo do permitido. Por
isso, foi realizada a alteracao do codigo como visıvel na Figura 3.24:
Com a adicao do parametro denominado V podem-se mudar amplamente os valores de
3.3 Detalhamento individual das contribuicoes 46
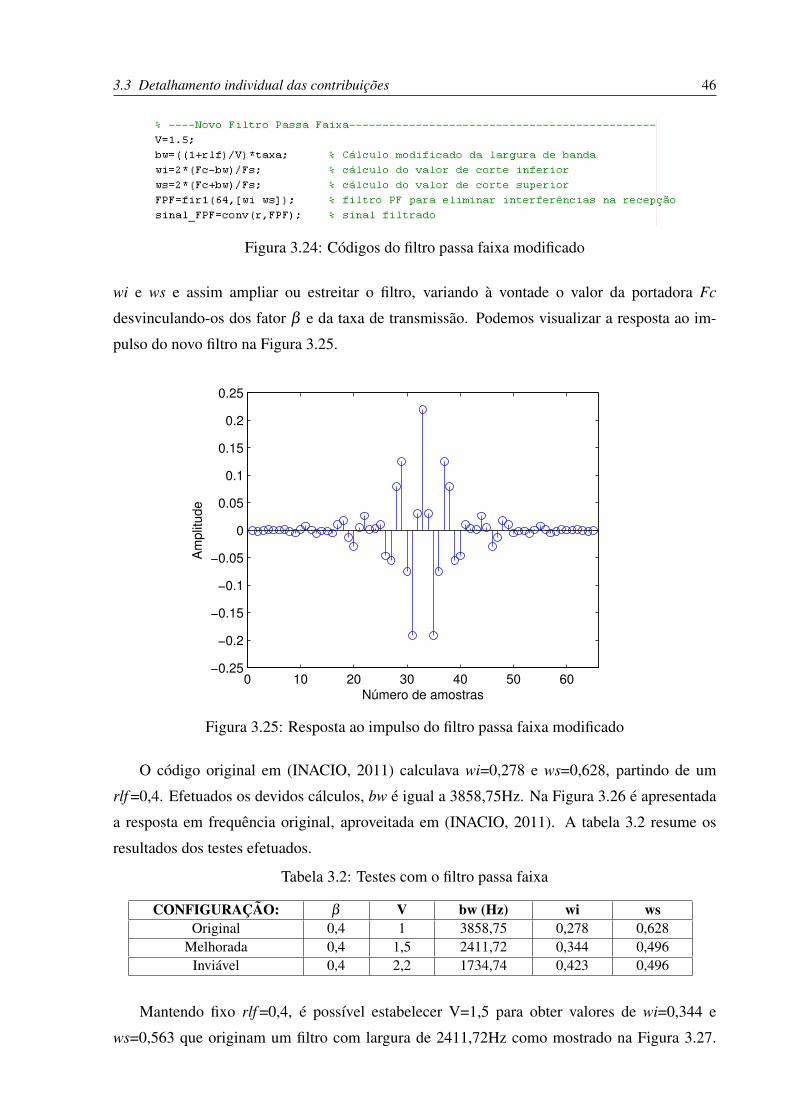
Figura 3.24: Codigos do filtro passa faixa modificado
wi e ws e assim ampliar ou estreitar o filtro, variando a vontade o valor da portadora Fc
desvinculando-os dos fator β e da taxa de transmissao. Podemos visualizar a resposta ao im-
pulso do novo filtro na Figura 3.25.
0 10 20 30 40 50 60−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Número de amostras
Am
plit
ude
Figura 3.25: Resposta ao impulso do filtro passa faixa modificado
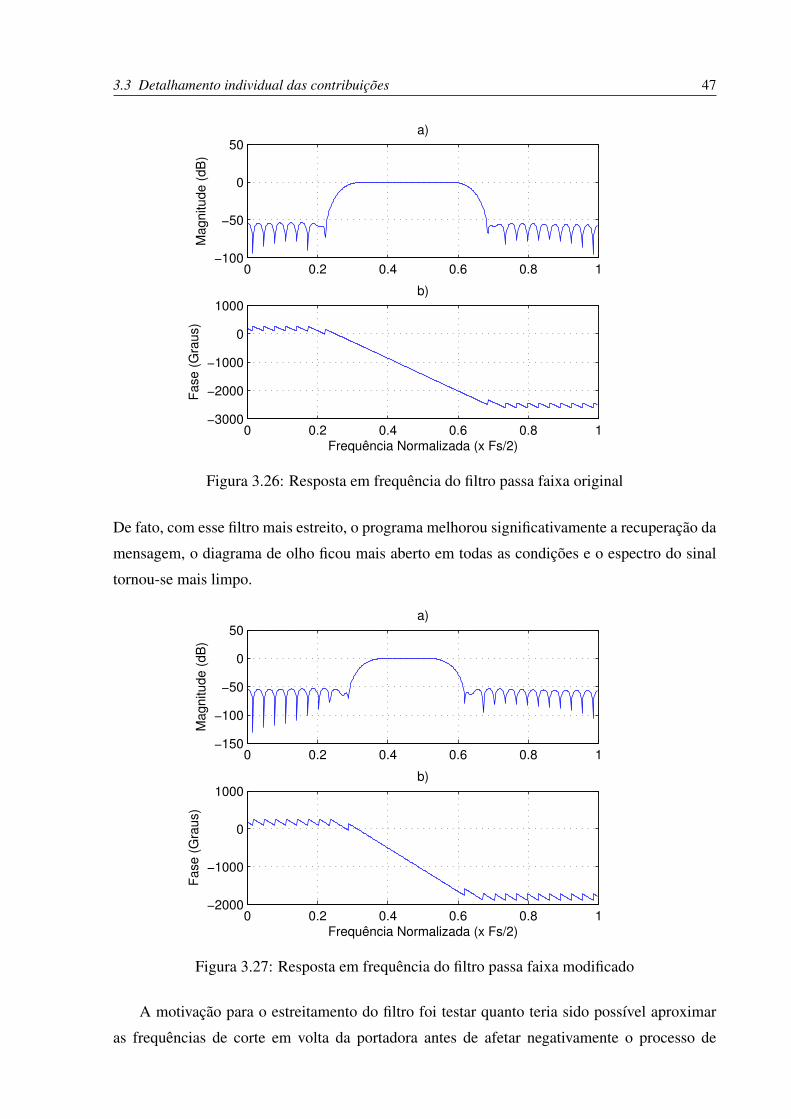
O codigo original em (INACIO, 2011) calculava wi=0,278 e ws=0,628, partindo de um
rlf =0,4. Efetuados os devidos calculos, bw e igual a 3858,75Hz. Na Figura 3.26 e apresentada
a resposta em frequencia original, aproveitada em (INACIO, 2011). A tabela 3.2 resume os
resultados dos testes efetuados.
Tabela 3.2: Testes com o filtro passa faixa
CONFIGURACAO: β V bw (Hz) wi wsOriginal 0,4 1 3858,75 0,278 0,628
Melhorada 0,4 1,5 2411,72 0,344 0,496Inviavel 0,4 2,2 1734,74 0,423 0,496
Mantendo fixo rlf =0,4, e possıvel estabelecer V=1,5 para obter valores de wi=0,344 e
ws=0,563 que originam um filtro com largura de 2411,72Hz como mostrado na Figura 3.27.
3.3 Detalhamento individual das contribuicoes 47
0 0.2 0.4 0.6 0.8 1−3000
−2000
−1000
0
1000
Frequência Normalizada (x Fs/2)
Fase (
Gra
us)
b)
0 0.2 0.4 0.6 0.8 1−100
−50
0
50
Magnitude (
dB
)
a)
Figura 3.26: Resposta em frequencia do filtro passa faixa original
De fato, com esse filtro mais estreito, o programa melhorou significativamente a recuperacao da
mensagem, o diagrama de olho ficou mais aberto em todas as condicoes e o espectro do sinal
tornou-se mais limpo.
0 0.2 0.4 0.6 0.8 1−2000
−1000
0
1000
Frequência Normalizada (x Fs/2)
Fase (
Gra
us)
b)
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
Magnitude (
dB
)
a)
Figura 3.27: Resposta em frequencia do filtro passa faixa modificado
A motivacao para o estreitamento do filtro foi testar quanto teria sido possıvel aproximar
as frequencias de corte em volta da portadora antes de afetar negativamente o processo de
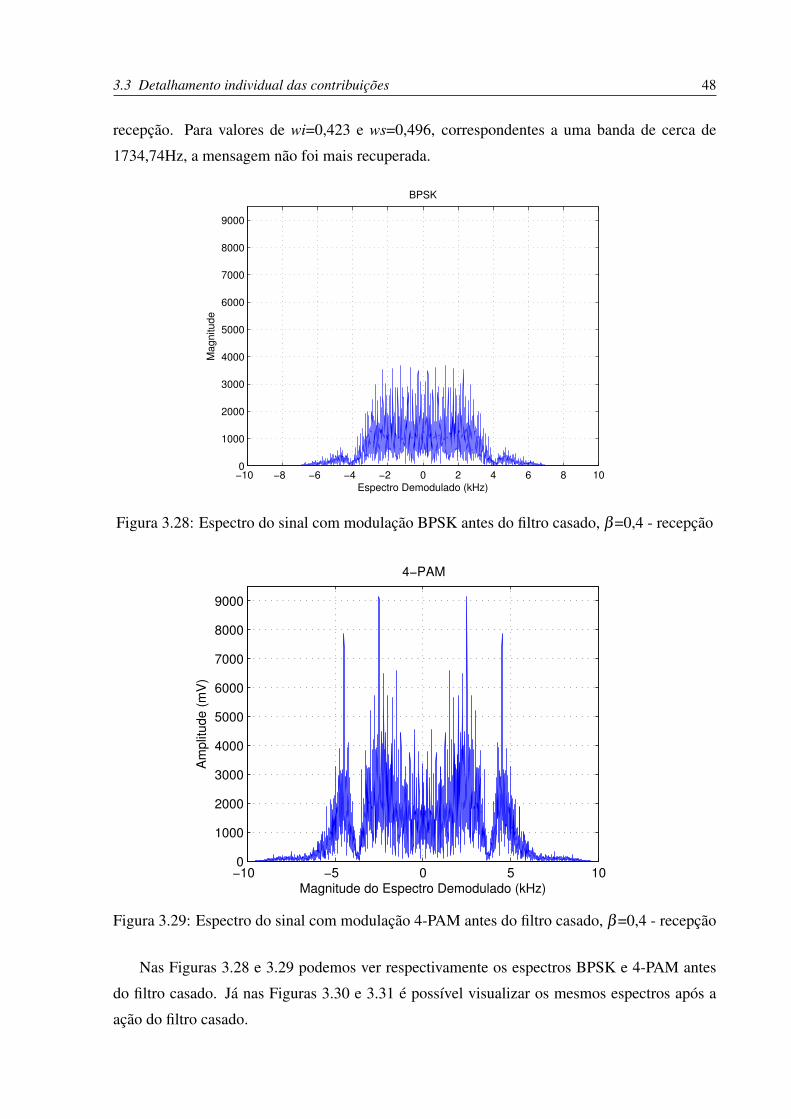
3.3 Detalhamento individual das contribuicoes 48
recepcao. Para valores de wi=0,423 e ws=0,496, correspondentes a uma banda de cerca de
1734,74Hz, a mensagem nao foi mais recuperada.
−10 −8 −6 −4 −2 0 2 4 6 8 100
1000
2000
3000
4000
5000
6000
7000
8000
9000
Espectro Demodulado (kHz)
Magnitude
BPSK
Figura 3.28: Espectro do sinal com modulacao BPSK antes do filtro casado, β=0,4 - recepcao
−10 −5 0 5 100
1000
2000
3000
4000
5000
6000
7000
8000
9000
Magnitude do Espectro Demodulado (kHz)
Am
plit
ude (
mV
)
4−PAM
Figura 3.29: Espectro do sinal com modulacao 4-PAM antes do filtro casado, β=0,4 - recepcao
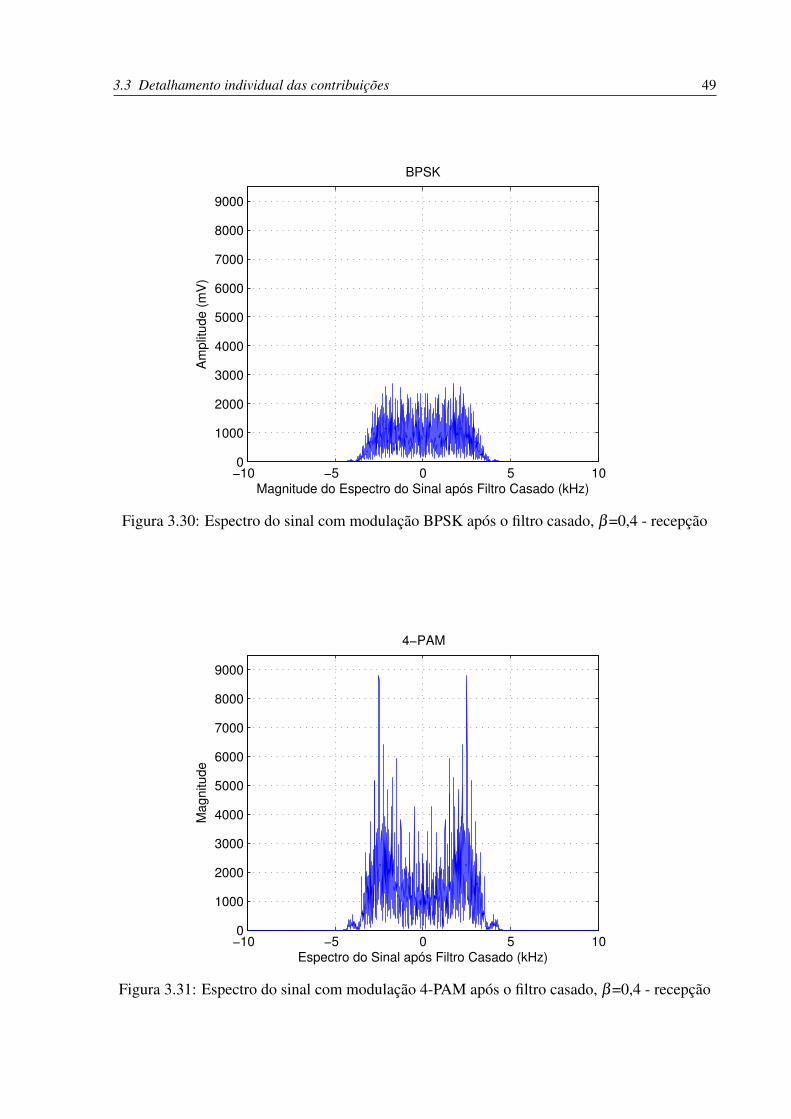
Nas Figuras 3.28 e 3.29 podemos ver respectivamente os espectros BPSK e 4-PAM antes
do filtro casado. Ja nas Figuras 3.30 e 3.31 e possıvel visualizar os mesmos espectros apos a
acao do filtro casado.
3.3 Detalhamento individual das contribuicoes 49
−10 −5 0 5 100
1000
2000
3000
4000
5000
6000
7000
8000
9000
Magnitude do Espectro do Sinal após Filtro Casado (kHz)
Am
plit
ude (
mV
)
BPSK
Figura 3.30: Espectro do sinal com modulacao BPSK apos o filtro casado, β=0,4 - recepcao
−10 −5 0 5 100
1000
2000
3000
4000
5000
6000
7000
8000
9000
Espectro do Sinal após Filtro Casado (kHz)
Magnitude
4−PAM
Figura 3.31: Espectro do sinal com modulacao 4-PAM apos o filtro casado, β=0,4 - recepcao

3.3 Detalhamento individual das contribuicoes 50
3.3.6 Analise do Controle Automatico de Ganho
O proximo passo foi estudar o comportamento do circuito do Controle Automatico de
Ganho - Automatic Gain Control (AGC). Os parametros que o caracterizam sao poucos e de
facil compreensao. Temos a constante ds denominada potencia desejada na saıda, a variavel
a que representa o fator de multiplicacao no circuito de realimentacao e mu que e o passo de
adaptacao do laco. Uma simples analise do codigo na Figura 3.32 permite identificar estes
parametros.
Figura 3.32: Algoritmo de Controle Automatico de Ganho
Basicamente, o laco aproveita o sinal recebido r(k) e aumenta ou diminui o valor da variavel
“a” ate que nao seja atingida a potencia desejada de saıda, a constante ds. Isso e efetuado ao
longo de todo o comprimento da mensagem, incluindo a palavra de treinamento. Como a maio-
ria dos algoritmos de recepcao e colocada apos o AGC, incrementando ou diminuindo proposi-
talmente a constante ds, todos os sinais posteriormente processados sao influenciados em termo
de amplitude ate a quantizacao da constelacao na saıda. A tabela 3.3 resume e esclarece os
testes efetuados.
Tabela 3.3: Parametros do circuito de Controle Automatico de Ganho e testes efetuados
mu ds ’a’: atingido tempo (amostras) Resultados0,01 0,7 4,2 aprox. 1000 Conforme esperado0,01 0,07 5,8 aprox. 1000 Conforme esperado0,003 0,7 4,2 aprox. 6000 Conforme esperado
0,3 0,7 4,2 aprox. 500 Conforme esperado
Todavia, mesmo abaixando o valor de ds em ate dez vezes (0.07), o programa atuou bem.
Foi registrado que a variavel “a” iniciou o processo com valor 1 e cresceu constantemente ate
5,8 ou valores proximos, estabilizando-se em seguida. Esse algoritmo e caracterizado tambem
pela presenca do passo de adaptacao mu que influi sobre a velocidade com a qual o processo
converge ao resultado. Como ilustrado na Figura 3.33, decrementando o passo de adaptacao mu
para 0,003 o codigo ficou mais lento.
3.3 Detalhamento individual das contribuicoes 51
0 0.5 1 1.5 2
x 104
−4
−2
0
2
4
Amostras
Am
plit
ude
Sinal após Controle Automático de Ganho
1 1.1 1.2 1.3 1.4 1.5
x 104
−4
−2
0
2
4
Amostras
Am
plit
ude
Zoom do Sinal após Controle Automático de Ganho
Figura 3.33: Desempenho do CAG com passo de adaptacao mu=0,003
Por outro lado, quando foi aumentado para 0,3 o processamento tornou-se mais rapido.
Entretanto o valor de “a”, e com isso a amplitude do sinal em saıda, ficaram oscilando ao longo
de todo o tempo da recepcao. Isto pode ser observado na Figura 3.34.
0 0.5 1 1.5 2
x 104
−4
−2
0
2
4
Amostras
Am
plit
ude
Sinal após Controle Automático de Ganho
1 1.1 1.2 1.3 1.4 1.5
x 104
−4
−2
0
2
4
Amostras
Am
plit
ude
Zoom do Sinal após Controle Automático de Ganho
Figura 3.34: Desempenho do CAG com passo de adaptacao mu=0,3
Diminuir ou aumentar o volume do receptor FM levou a uma replica dos resultados ja
vistos na Subsecao 3.3.4. Isso incluiu erros de alguns caracteres em caso de volume baixo e
3.3 Detalhamento individual das contribuicoes 52
falha completa na recuperacao da mensagem com volume demasiadamente alto.
Resumindo, com a modulacao BPSK o algoritmo funciona em todas as condicoes tes-
tadas, contrasta as variacoes de amplitude do sinal no ingresso, gera uma informacao de am-
plitude de aproximadamente 4,4Vpp para o sucessivo processamento e aceita varios passos de
adaptacao que estejam na faixa do valor nominal do codigo original presente em (INACIO,
2011). Em relacao ao efeito que o valor da constante ds teve no restante do processamento, com
a modulacao 4-PAM foi preciso elevar esse parametro para 1,2 a fim de aumentar a distancia
entre os 4 nıveis da constelacao.
Sem isso, a quantizacao que prove a devolucao dos valores -3, -1, 1, 3 nao consegue atuar,
afetando o desempenho do sistema. A unica condicao comum a todas as possıveis configuracoes
diz respeito ao valor de amplitude da informacao na entrada do circuito de AGC, esse nao pode
cair para zero. Se isto acontecer o sistema deixa de operar corretamente e gera na saıda somente
a amplificacao do ruıdo (JOHNSON; SETHARES, 2003).
3.3.7 Estudo da palavra de treinamento
Com a intencao de avaliar a dependencia do correlator da sequencia de treinamento com-
posta por 64 sımbolos, foram experimentadas algumas possıveis opcoes: geracao randomica da
palavra de treinamento, palavra constituıda por zeros e numeros uns alternados, sequencia de
uns – ou menos uns - e sequencia de zeros. Testes repetidos com todas as opcoes confirmaram
que o algoritmo sempre funcionou, reconhecendo com facilidade a sequencia de treino, com a
unica excecao da palavra composta somente de zeros. Como o processo que o correlator desem-
penha e parecido com o da convolucao, multiplicar e somar sinais discretos por uma sequencia
de valores nulos devolve tambem valores nulos. Neste caso o codigo falhou. A Figura 3.35
mostra o resultado de um processo de correlacao. O comportamento do correlator em caso de
modulacao 4-PAM se manteve o mesmo.
3.3.8 Analise do Costas Loop
O circuito de sincronismo de fase Costa Loop e caracterizado pela presenca de dois filtros
passa-baixa identicos. Em (INACIO, 2011), chamou atencao o fato que a ordem dos filtros
fosse extremamente alta (500). Alem disso, em outra fonte (ALVES 2010), a ordem era muito
menor (32). Diante dessa diferenca esse parametro foi reduzido para 80 e, em seguida, para 50.
Outra variavel modificada foi a frequencia de corte. Na funcao remez do MATLAB, os cortes
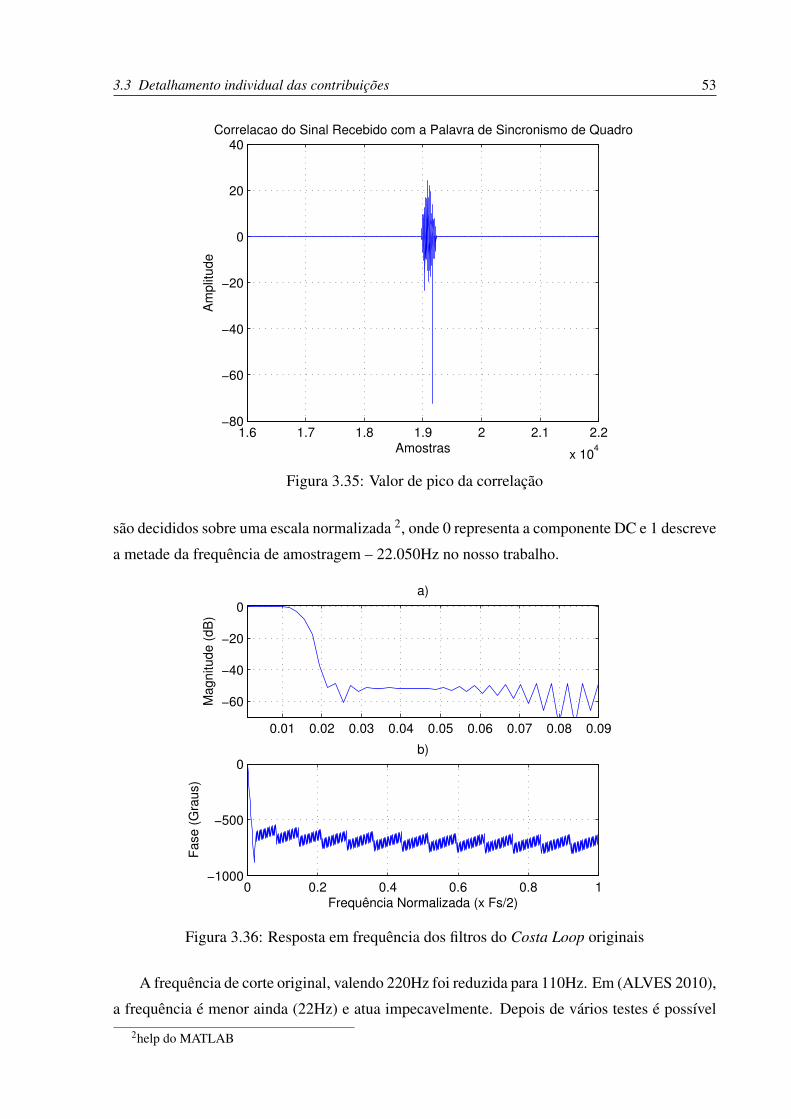
3.3 Detalhamento individual das contribuicoes 53
1.6 1.7 1.8 1.9 2 2.1 2.2
x 104
−80
−60
−40
−20
0
20
40
Amostras
Am
plit
ude
Correlacao do Sinal Recebido com a Palavra de Sincronismo de Quadro
Figura 3.35: Valor de pico da correlacao
sao decididos sobre uma escala normalizada 2, onde 0 representa a componente DC e 1 descreve
a metade da frequencia de amostragem – 22.050Hz no nosso trabalho.
0 0.2 0.4 0.6 0.8 1−1000
−500
0
Frequência Normalizada (x Fs/2)
Fase (
Gra
us)
b)
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
−60
−40
−20
0
Magnitude (
dB
)
a)
Figura 3.36: Resposta em frequencia dos filtros do Costa Loop originais
A frequencia de corte original, valendo 220Hz foi reduzida para 110Hz. Em (ALVES 2010),
a frequencia e menor ainda (22Hz) e atua impecavelmente. Depois de varios testes e possıvel
2help do MATLAB
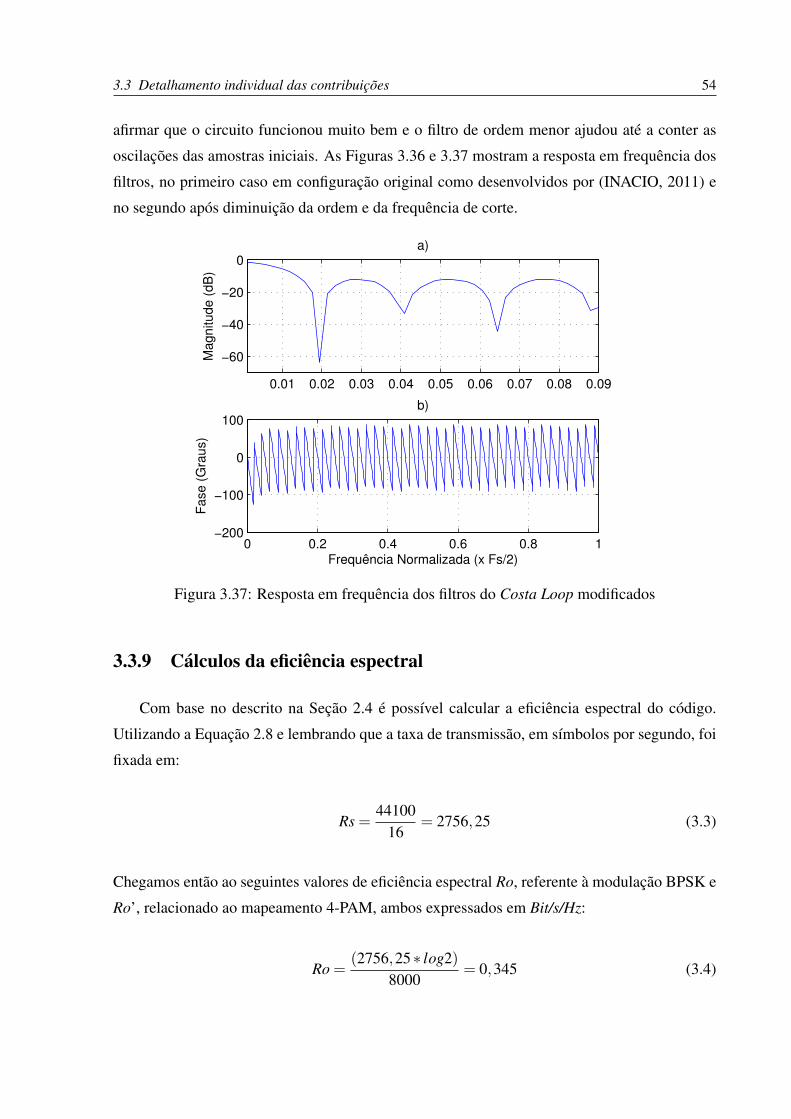
3.3 Detalhamento individual das contribuicoes 54
afirmar que o circuito funcionou muito bem e o filtro de ordem menor ajudou ate a conter as
oscilacoes das amostras iniciais. As Figuras 3.36 e 3.37 mostram a resposta em frequencia dos
filtros, no primeiro caso em configuracao original como desenvolvidos por (INACIO, 2011) e
no segundo apos diminuicao da ordem e da frequencia de corte.
0 0.2 0.4 0.6 0.8 1−200
−100
0
100
Frequência Normalizada (x Fs/2)
Fase (
Gra
us)
b)
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
−60
−40
−20
0
Magnitude (
dB
)
a)
Figura 3.37: Resposta em frequencia dos filtros do Costa Loop modificados
3.3.9 Calculos da eficiencia espectral
Com base no descrito na Secao 2.4 e possıvel calcular a eficiencia espectral do codigo.
Utilizando a Equacao 2.8 e lembrando que a taxa de transmissao, em sımbolos por segundo, foi
fixada em:
Rs =44100
16= 2756,25 (3.3)
Chegamos entao ao seguintes valores de eficiencia espectral Ro, referente a modulacao BPSK e
Ro’, relacionado ao mapeamento 4-PAM, ambos expressados em Bit/s/Hz:
Ro =(2756,25∗ log2)
8000= 0,345 (3.4)
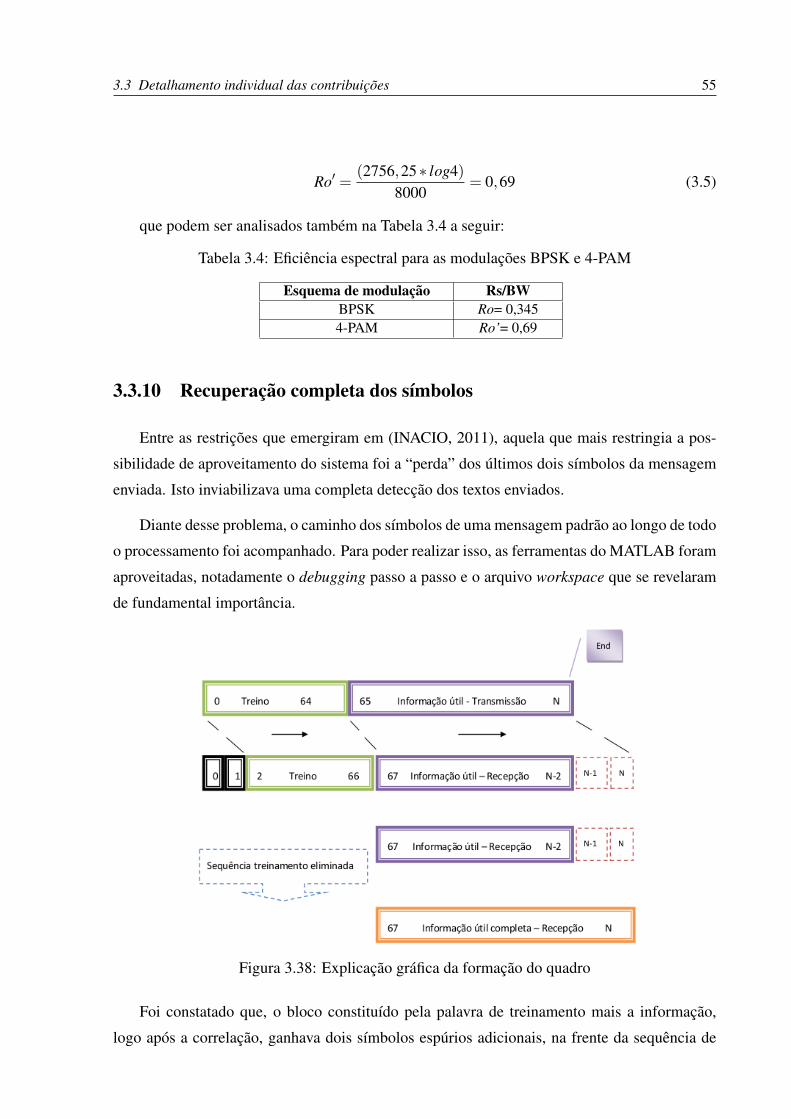
3.3 Detalhamento individual das contribuicoes 55
Ro′ =(2756,25∗ log4)
8000= 0,69 (3.5)
que podem ser analisados tambem na Tabela 3.4 a seguir:
Tabela 3.4: Eficiencia espectral para as modulacoes BPSK e 4-PAM
Esquema de modulacao Rs/BWBPSK Ro= 0,3454-PAM Ro’= 0,69
3.3.10 Recuperacao completa dos sımbolos
Entre as restricoes que emergiram em (INACIO, 2011), aquela que mais restringia a pos-
sibilidade de aproveitamento do sistema foi a “perda” dos ultimos dois sımbolos da mensagem
enviada. Isto inviabilizava uma completa deteccao dos textos enviados.
Diante desse problema, o caminho dos sımbolos de uma mensagem padrao ao longo de todo
o processamento foi acompanhado. Para poder realizar isso, as ferramentas do MATLAB foram
aproveitadas, notadamente o debugging passo a passo e o arquivo workspace que se revelaram
de fundamental importancia.
Figura 3.38: Explicacao grafica da formacao do quadro
Foi constatado que, o bloco constituıdo pela palavra de treinamento mais a informacao,
logo apos a correlacao, ganhava dois sımbolos espurios adicionais, na frente da sequencia de
3.3 Detalhamento individual das contribuicoes 56
treino que e posta no comeco do bloco, conforme ilustrado na Figura 3.38. Assim o frame util
recebia um deslocamento de dois sımbolos para a direita, atrapalhando o processo de deteccao.
3.3.11 Envio de qualquer texto
A ultima melhoria implementada no programa permitiu acrescentar a possibilidade de en-
viar textos digitados em tempo real pelo usuario e nao somente escritos pre-gravados de com-
primento fixo. Para realizar essa tarefa foi preciso utilizar o comando input do MATLAB, por
meio do qual um texto digitado e aceito como string de informacao. Esses dados foram de-
pois encaminhados para a conversao BPSK, exatamente como acontecia com os textos fixos
pre-gravados. A modificacao funcionou perfeitamente.
3.3.12 Ajustes do hardware
Para desenvolver o presente trabalho foi utilizado um microcomputador Pentium Dual Core
disponibilizado pela Instituicao, com sistema operacional Windows XP. Foram necessarios
ajustes na placa de som, relativos aos nıveis do microfone e do alto-falante. Em relacao ao
trabalho (INACIO, 2011), foi preciso ativar o aumento de sensibilidade do microfone, o in-
cremento do nıvel de entrada para 50% e de saıda do alto-falante para 60%. Por outro lado,
o equipamento recusou-se a aceitar o ajuste da placa para “alto-falante” ou “saıda de linha” e
funcionou somente na posicao “fone de ouvido”. Outra observacao foi que o radio possui uma
saıda auxiliar com tomada minijack monofonica 3,5mm, mas em (INACIO, 2011) o plug de
conexao com a placa de som e estereo. E presumıvel que isso tenha gerado ruıdos e provocado
problemas na implementacao inicial. A demonstracao da validade dessa melhoria talvez resida
no fato que atualmente o volume do receptor FM possa ser incrementado ou diminuıdo a von-
tade em um campo bastante amplo de ajustes. Isso, de fato, viabilizou a efetiva execucao dos
varios testes ja descritos no texto.
57
4 Conclusoes e trabalhos futuros
4.1 Conclusoes
Como ja manifestado nas motivacoes, o objetivo do trabalho foi desde o comeco, a uniao
dos esforcos e das capacidades de dois alunos para atingir o resultado de implementar um SDR
didatico que conseguisse enviar, receber e decodificar uma mensagem de texto qualquer digitada
pelo usuario. De acordo com a implementacao e os testes realizados, podemos afirmar que o
objetivo foi alcancado.
Porem, o que mais valorizou a experiencia foi o fato de ter proporcionando uma aprofun-
dada revisao e esclarecimento de inumeros temas e nocoes aprendidas ao longo do Curso. Alem
disso, houve o estudo de varios outros conceitos relacionados a transmissao de sinais digitais
em ambiente sem fio. Este e o melhor enriquecimento que o presente trabalho proporcionou.
4.2 Trabalhos futuros
Este trabalho deixa amplos espacos para melhoramentos e futuras implementacoes. Seria de
particular interesse desenvolver essa arquitetura por meio de Field Programmable Gate Array
(FPGA), lembrando que a ordem dos filtros devera ser reduzida para evitar que a realizacao
pratica no circuito hardware torne-se inviavel.
A seguir podemos citar outras possıveis implementacoes:
• Modulacao de fase em quadratura Modulacao de fase em Quadratura - Quadrature Phase
Shift Keying (QPSK)
• Modulacao de fase e amplitude em quadratura (QAM)
• Modulacao em chaveamento de frequencia (FSK)

4.2 Trabalhos futuros 58
• Modulacao com multiplexacao Multiplexacao Digital por Frequencias Ortogonais - Or-
thogonal Frequency Digital Multiplexing (OFDM)
• Sincronizacao de fase Phase Locked Loop (PLL)
• Implementacao com Field Programmable Gate Array
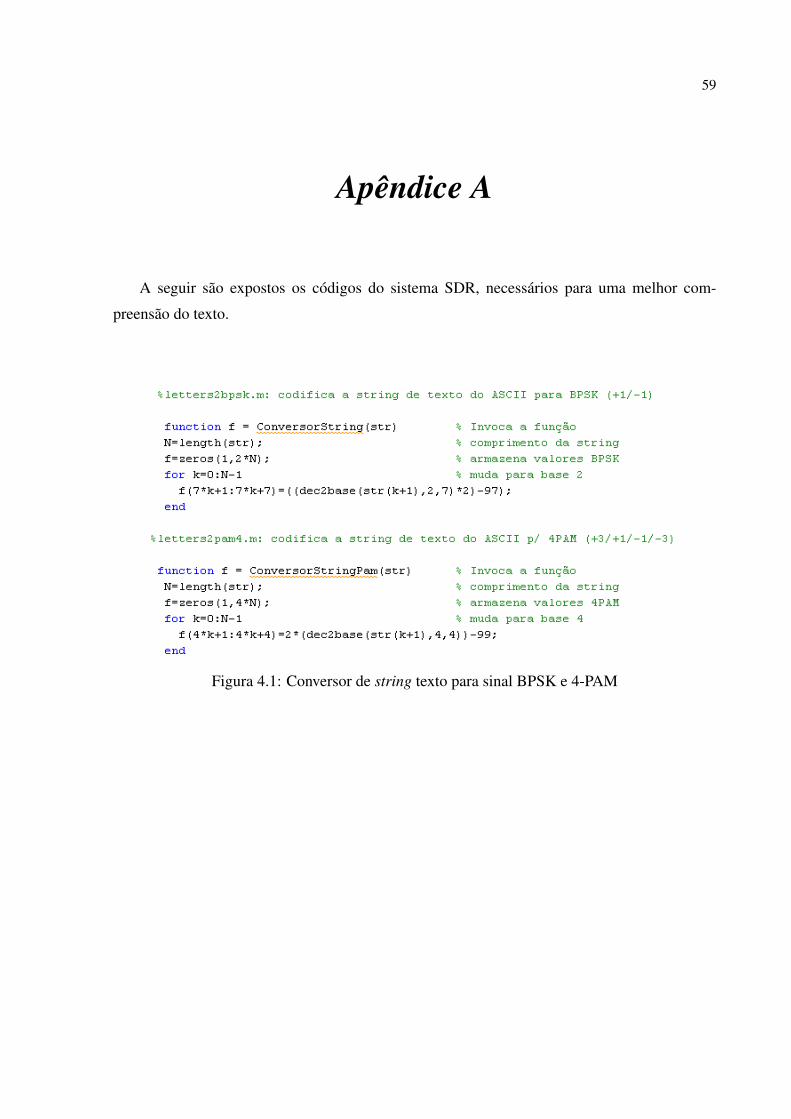
59
Apendice A
A seguir sao expostos os codigos do sistema SDR, necessarios para uma melhor com-
preensao do texto.
Figura 4.1: Conversor de string texto para sinal BPSK e 4-PAM
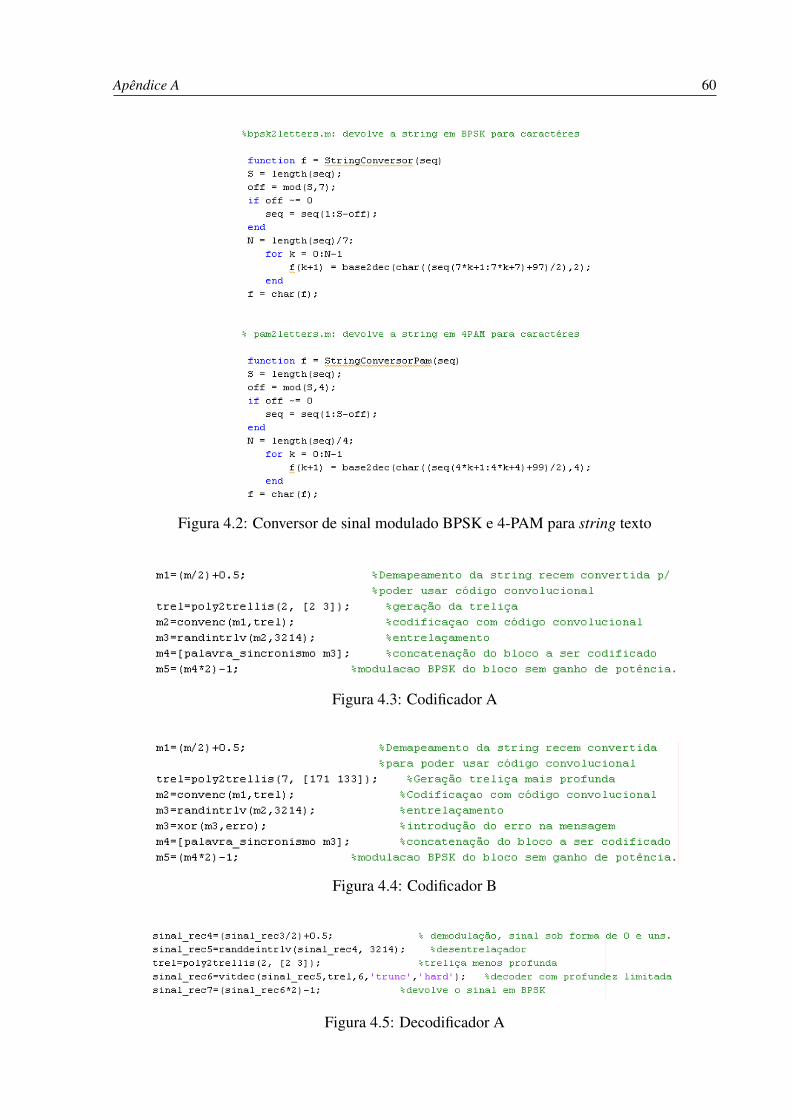
Apendice A 60
Figura 4.2: Conversor de sinal modulado BPSK e 4-PAM para string texto
Figura 4.3: Codificador A
Figura 4.4: Codificador B
Figura 4.5: Decodificador A
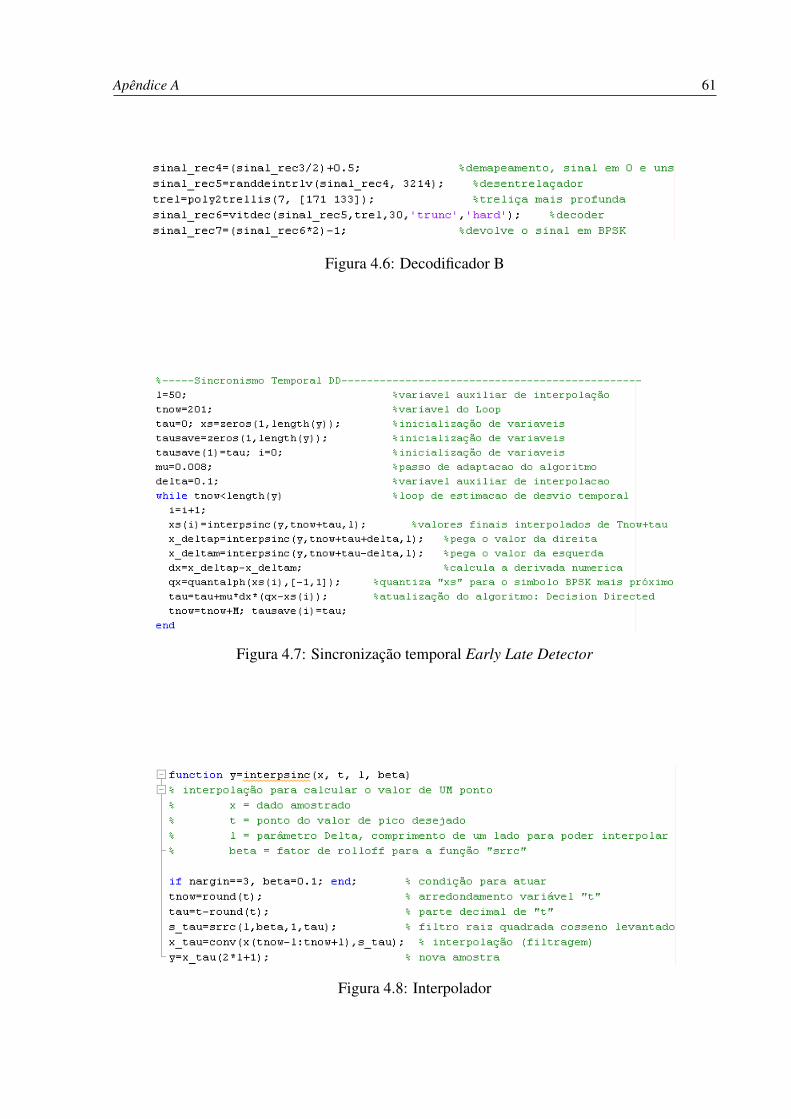
Apendice A 61
Figura 4.6: Decodificador B
Figura 4.7: Sincronizacao temporal Early Late Detector
Figura 4.8: Interpolador
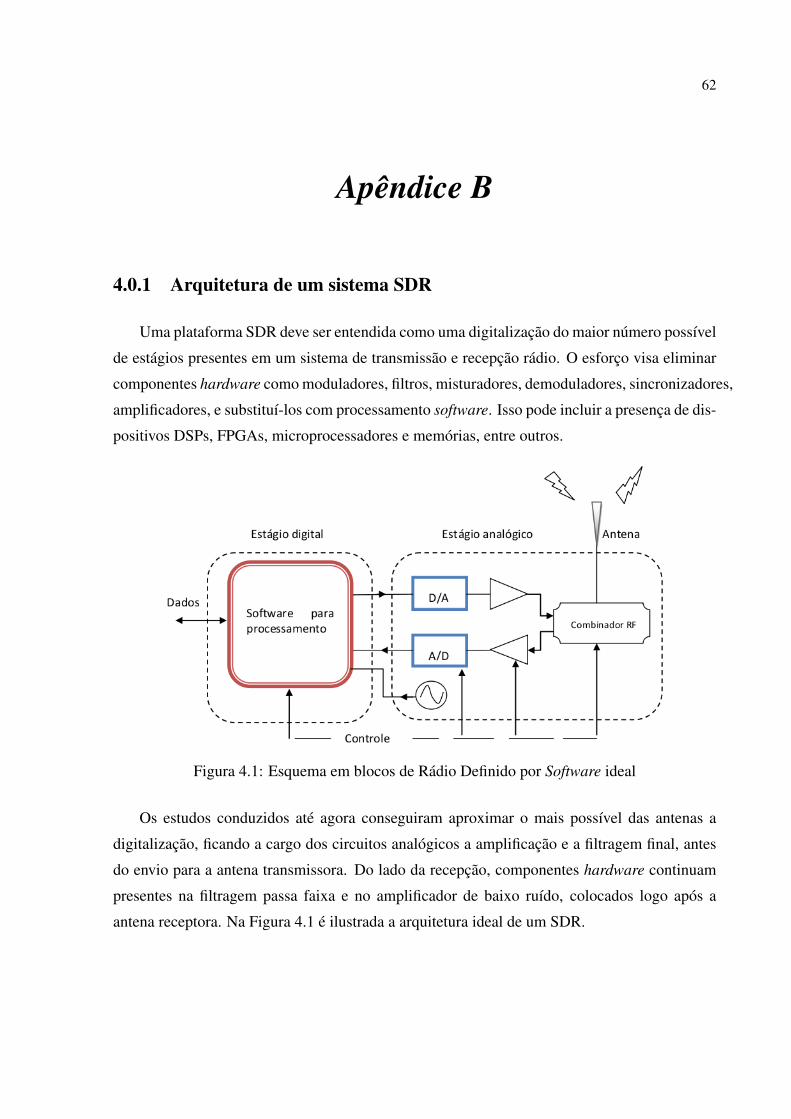
62
Apendice B
4.0.1 Arquitetura de um sistema SDR
Uma plataforma SDR deve ser entendida como uma digitalizacao do maior numero possıvel
de estagios presentes em um sistema de transmissao e recepcao radio. O esforco visa eliminar
componentes hardware como moduladores, filtros, misturadores, demoduladores, sincronizadores,
amplificadores, e substituı-los com processamento software. Isso pode incluir a presenca de dis-
positivos DSPs, FPGAs, microprocessadores e memorias, entre outros.
Figura 4.1: Esquema em blocos de Radio Definido por Software ideal
Os estudos conduzidos ate agora conseguiram aproximar o mais possıvel das antenas a
digitalizacao, ficando a cargo dos circuitos analogicos a amplificacao e a filtragem final, antes
do envio para a antena transmissora. Do lado da recepcao, componentes hardware continuam
presentes na filtragem passa faixa e no amplificador de baixo ruıdo, colocados logo apos a
antena receptora. Na Figura 4.1 e ilustrada a arquitetura ideal de um SDR.
Apendice B 63
4.0.2 Funcionamento do sistema
No sistema desenvolvido conjuntamente com (INACIO, 2011) e ilustrado no inıcio do
Capıtulo 3, transmissor e receptor hardware FM proveem somente a transmissao e recepcao
do sinal em banda passante, todas as outras funcoes e processamentos da informacao sao efetu-
adas pelo software. O funcionamento da plataforma e explicado a seguir:
• Um texto de comprimento limitado e gerado e processado pelos algoritmos do software
de transmissao, ou seja, a primeira instancia de MATLAB;
• O sinal processado e enviado para a placa de som, cuja saıda “fone de ouvido” e conectada
ao transmissor FM;
• O transmissor e o receptor FM hardware estao sintonizados na mesma frequencia, 104,0
MHz;
• O radio FM, o receptor hardware, captura o sinal enviado e o encaminha para a placa de
som;
• Pela entrada microfonica da placa de som a informacao transita novamente para o proces-
samento digital de recepcao, efetivado pelo codigo da segunda instancia de MATLAB,
cujos algoritmos tem caracterısticas diferentes da anterior. Com isso, o texto da frase
digitada e recuperado.
4.0.3 Gatilho da placa de som
Em termos gerais, o gatilho, amplamente conhecido tambem como trigger, e um nıvel de
sinal pre-estabelecido no qual o equipamento de aquisicao permanece na escuta. Uma vez que o
sinal recebido supera o limiar de gatilho (geralmente na subida), o dispositivo captura e amostra
os dados. Esta acao pode ser planejada para que aconteca cada vez que o sinal passar pelo valor
de gatilho ou somente na hora da primeira aquisicao 1. No caso deste trabalho, o nıvel da placa
de som era expressado em Volts.
4.0.4 Sincronismo
Para a comunicacao digital e preciso que os circuitos do receptor estejam sincronizados com
o sinal recebido o qual sofre desvios em relacao ao sinal transmitido. Por isso, sao necessarias
1http://www.ilvg.it/forum/viewtopic.php?p=10567, acesso em 20/08/2011.
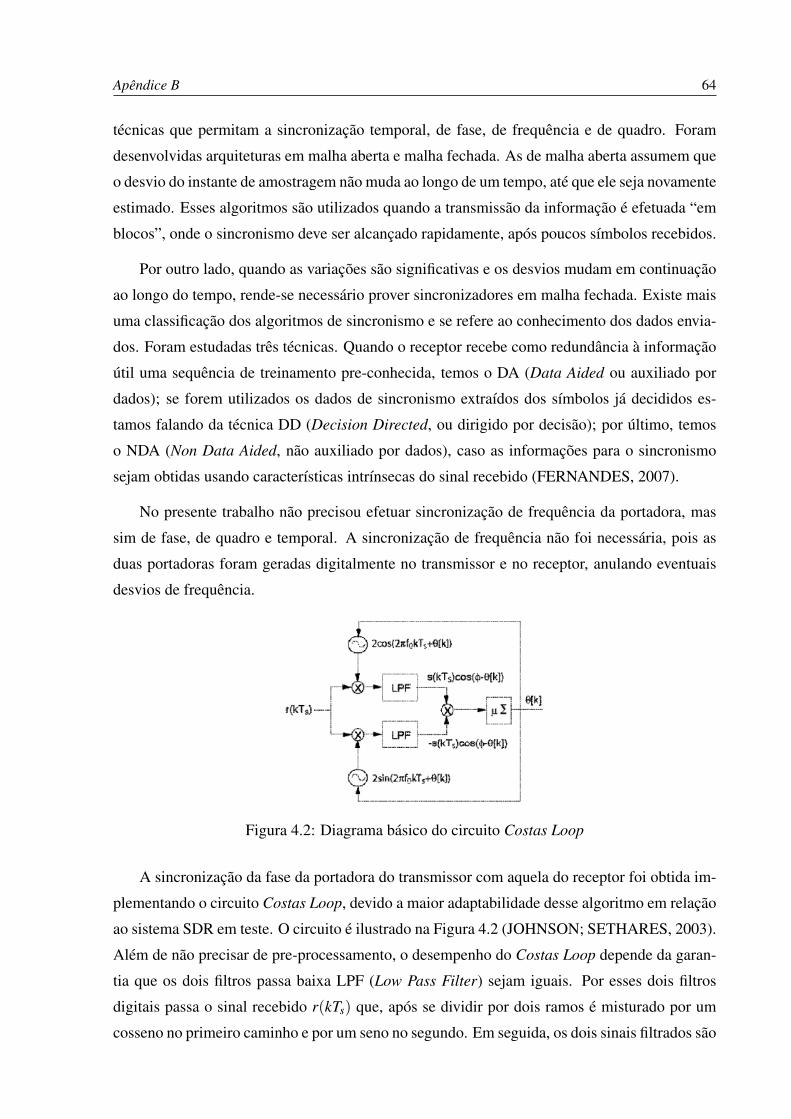
Apendice B 64
tecnicas que permitam a sincronizacao temporal, de fase, de frequencia e de quadro. Foram
desenvolvidas arquiteturas em malha aberta e malha fechada. As de malha aberta assumem que
o desvio do instante de amostragem nao muda ao longo de um tempo, ate que ele seja novamente
estimado. Esses algoritmos sao utilizados quando a transmissao da informacao e efetuada “em
blocos”, onde o sincronismo deve ser alcancado rapidamente, apos poucos sımbolos recebidos.
Por outro lado, quando as variacoes sao significativas e os desvios mudam em continuacao
ao longo do tempo, rende-se necessario prover sincronizadores em malha fechada. Existe mais
uma classificacao dos algoritmos de sincronismo e se refere ao conhecimento dos dados envia-
dos. Foram estudadas tres tecnicas. Quando o receptor recebe como redundancia a informacao
util uma sequencia de treinamento pre-conhecida, temos o DA (Data Aided ou auxiliado por
dados); se forem utilizados os dados de sincronismo extraıdos dos sımbolos ja decididos es-
tamos falando da tecnica DD (Decision Directed, ou dirigido por decisao); por ultimo, temos
o NDA (Non Data Aided, nao auxiliado por dados), caso as informacoes para o sincronismo
sejam obtidas usando caracterısticas intrınsecas do sinal recebido (FERNANDES, 2007).
No presente trabalho nao precisou efetuar sincronizacao de frequencia da portadora, mas
sim de fase, de quadro e temporal. A sincronizacao de frequencia nao foi necessaria, pois as
duas portadoras foram geradas digitalmente no transmissor e no receptor, anulando eventuais
desvios de frequencia.
Figura 4.2: Diagrama basico do circuito Costas Loop
A sincronizacao da fase da portadora do transmissor com aquela do receptor foi obtida im-
plementando o circuito Costas Loop, devido a maior adaptabilidade desse algoritmo em relacao
ao sistema SDR em teste. O circuito e ilustrado na Figura 4.2 (JOHNSON; SETHARES, 2003).
Alem de nao precisar de pre-processamento, o desempenho do Costas Loop depende da garan-
tia que os dois filtros passa baixa LPF (Low Pass Filter) sejam iguais. Por esses dois filtros
digitais passa o sinal recebido r(kTs) que, apos se dividir por dois ramos e misturado por um
cosseno no primeiro caminho e por um seno no segundo. Em seguida, os dois sinais filtrados sao
Apendice B 65
novamente multiplicados e o resultado e integrado para extrair o valor da defasagem θ [k] que
mantem realimentados os osciladores (INACIO, 2011). A descricao da sincronizacao temporal
se encontra no Capıtulo 2.
O sincronismo de quadro tem a funcao de encontrar o comeco do quadro. Cada bloco de
informacao util e precedido por 64 sımbolos, gerados de forma aleatoria e representativos da
sequencia de treinamento, conhecida tambem como palavra de treino ou de sincronismo. A
sincronizacao de quadro e implementada por meio da correlacao entre a palavra de treino e o
sinal recebido, ja oportunamente sincronizado temporalmente e convertido para a banda basica.
Essa correlacao e a somatoria de multiplicacoes ponto a ponto dos dois sinais, onde um deles
e deslocado no tempo. Quando o resultado desta somatoria for muito alto, visıvel na Figura
3.35, isso indica a presenca de muitos sımbolos semelhantes, ou seja, a sequencia de treina-
mento e o inıcio do quadro com o sinal util. Em seguida, o algoritmo efetua a decimacao das
amostras de amplitude zero, acrescentadas por super amostragem no momento da transmissao.
Na sequencia, exclui os sımbolos da palavra de sincronismo e encaminha a informacao para o
algoritmo de conversao e, dessa forma, recupera a mensagem de texto (INACIO, 2011).
66
Lista de Abreviaturas e Simbologia
AGC Controle Automatico de Ganho - Automatic Gain Control
AWGN Ruıdo Branco Gaussiano Aditivo - Additive White Gaussian Noise
BPSK Modulacao de Fase Binaria - Binary Phase Shift Keying
CAG Controle Automatico de Ganho
DEP Densidade Espectral de Potencia
FPGA Field Programmable Gate Array
ISI Interferencia Intersimbolica - Intersymbol Interference
OFDM Multiplexacao Digital por Frequencias Ortogonais - Orthogonal Frequency Digital
Multiplexing
PLL Phase Locked Loop
QPSK Modulacao de fase em Quadratura - Quadrature Phase Shift Keying
SDR Radio Definido por Software - Software Defined Radio
SNR Relacao Sinal/Ruıdo - Signal Noise Ratio
4PAM Modulacao a Amplitude de Pulso, 4 Nıveis - 4 - Pulse Amplitude Modulation
67
Simbologia
Os codigos do sistema utilizam sımbolos diferentes para expressar o mesmo parametro:
BW = bw = W: Largura de banda;
β =rlf : Fator de roll-off ;
Fs: Frequencia de amostragem do sinal (44.100 Hz);
Rb: Taxa de bits;
Rs = taxa: Taxa de sımbolos;
mi = mu: Passo de adaptacao.
68
Referencias Bibliograficas
ALVES, H. Plataforma Didatica de Radio Definido por Software. [S.l.]: UniversidadeTecnologica do Parana, 2010.
DECASTRO, F.; DECASTRO, M. Comunicacao Digital. [S.l.]: PUCRS - Departamento deEngenharia Eletrica, 2004.
FASOLO, S.; MENDES, L. Televisao Digital - Fundamentos e Padroes. [S.l.]: INATEL, 2008.
FERNANDES, F. G. Implementacao de um enlace de comunicacao digital em tempo realutilizando sinais acusticos. [S.l.]: UNICAMP, 2007.
HAYKIN, S. Sistemas de Comunicacao. [S.l.]: Bookman, 2001.
HAYKIN, S.; MOHER, I.; NAWAB, S. H. Sistemas Modernos de Comunicacao Wireless.[S.l.]: Bookman, 2005.
INACIO, J. Implementacao de um Radio Definido por Software usando MATLAB e um parTransmissor/Receptor FM. [S.l.]: Instituto Federal de Santa Catarina - campus Sao Jose, 2011.
JOHNSON, C. R. J.; SETHARES, W. Telecommunication Breakdown. [S.l.]: Prentice - Hall,2003.
OPPENHEIM, A.; WILLSKY, A. Sinais e Sistemas. [S.l.]: Pearson, 1997.
PO, E. La Software Defined Radio di SELEX Communications. [S.l.]: Rivista Italiana Difesa,2008.
RAPPAPORT, T. Wireless Communications - Priciples and Practice. [S.l.]: Prentice - Hall,2002.
SKLAR, B. Digital Communications - Fundamentals and Applications. [S.l.]: Pearson, 2001.