ANDRÉ HENRIQUE BENETTON VERGILIO …repositorio.unicamp.br/bitstream/REPOSIP/321687/1/...RESUMO O...
92
UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO ANDRÉ HENRIQUE BENETTON VERGILIO ALOCAÇÃO ÓTIMA DE CAPACITORES EM REDES DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA TRIFÁSICAS E DESBALANCEADAS CAMPINAS 2016
Transcript of ANDRÉ HENRIQUE BENETTON VERGILIO …repositorio.unicamp.br/bitstream/REPOSIP/321687/1/...RESUMO O...
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO
ANDRÉ HENRIQUE BENETTON VERGILIO
ALOCAÇÃO ÓTIMA DE CAPACITORES EM REDES DE DISTRIBUIÇÃO DE
ENERGIA ELÉTRICA TRIFÁSICAS E DESBALANCEADAS
CAMPINAS
2016
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO
ANDRÉ HENRIQUE BENETTON VERGILIO
ALOCAÇÃO ÓTIMA DE CAPACITORES EM REDES DE DISTRIBUIÇÃO DE
ENERGIA ELÉTRICA TRIFÁSICAS E DESBALANCEADAS
Tese de Doutorado apresentada ao Programa
de Pós-Graduação em Engenharia Elétrica da
Faculdade de Engenharia Elétrica e de Compu-
tação da Universidade Estadual de Campinas
para obtenção do título de Doutor em Enge-
nharia Elétrica, na área de Energia Elétrica
Orientador: Prof. Christiano Lyra Filho
Este exemplar corresponde à versão final da tese
defendida pelo aluno André Henrique Benetton Vergilio
e orientado pelo Prof. Dr. Christiano Lyra Filho
CAMPINAS
2016
Agência(s) de fomento e nº(s) de processo(s): CAPES
Ficha catalográfica Universidade Estadual de Campinas
Biblioteca da Área de Engenharia e Arquitetura Luciana Pietrosanto Milla - CRB 8/8129
Vergilio, André Henrique Benetton, 1983- V587a VerAlocação ótima de capacitores em redes de distribuição de energia elétrica
trifásicas e desbalanceadas / André Henrique Benetton Vergilio. – Campinas,
SP : [s.n.], 2016.
VerOrientador: Christiano Lyra Filho. VerTese (doutorado) – Universidade Estadual de Campinas, Faculdade de
Engenharia Elétrica e de Computação.
Ver1. Engenharia elétrica. 2. Distribuição de energia elétrica. 3. Redes
trifásicas. 4. Otimização. 5. Programação dinâmica. I. Lyra Filho,
Christiano,1951-. II. Universidade Estadual de Campinas. Faculdade de
Engenharia Elétrica e de Computação. III. Título. Informações para Biblioteca Digital
Título em outro idioma: Optimal capacitor placement on unbalanced tree-phase power
distribution networks Palavras-chave em inglês: Electrical engineering
Electric power distribution
Tree-phase networks
Optimization Dynamic programming Área de concentração: Energia Elétrica Titulação: Doutor em Engenharia Elétrica Banca examinadora: Christiano Lyra Filho [Orientador] José Federico Vizcaino González
Geraldo Roberto Martins da Costa
Luiz Carlos Pereira da Silva
Takaaki Ohishi Data de defesa: 23-11-2016 Programa de Pós-Graduação: Engenharia Elétrica
COMISSÃO JULGADORA – TESE DE DOUTORADO
Candidato: André Henrique Benetton Vergilio
Data da Defesa: 23 de novembro de 2016
Título da Tese: “Alocação ótima de capacitores em redes de distribuição de energia elétrica
trifásicas e desbalanceadas”.
Prof. Dr. Christiano Lyra Filho UNICAMP – FEEC
Prof. Dr. José Federico Vizcaino González UNESP – Guaratinguetá
Prof. Dr. Geraldo Roberto Martins da Costa USP – São Carlos
Prof. Dr. Luiz Carlos Pereira da Silva UNICAMP – FEEC
Prof. Dr. Takaaki Ohishi UNICAMP – FEEC
A ata de defesa, com as respectivas assinaturas dos membros da Comissão Julgadora, encon-
tra-se no processo de vida acadêmica do aluno.

À família e amigos
AGRADECIMENTOS
Agradeço aos meus pais, Pedro e Lucinei, que sempre me apoiaram e me deram supor-
te, tanto emocional quanto material durante toda minha trajetória desde pequeno até agora,
para que eu pudesse chegar aqui e defender um doutorado.
Agradeço à minha amada irmã Paula, que sempre esteve ao meu lado em todos os
momentos, mesmo na distância.
Agradeço ao meu orientador, Christiano, pelos conselhos, ensinamentos, convívio
agradável e, sobretudo, pela amizade.
Agradeço aos amigos do Labore; Eduardo, Hugo, Luciana, Laura, José, Fábio, Alan
Caio, Ellen, Mateus e Clayton, pela amizade e por proporcionar o melhor ambiente de traba-
lho da existência.
Agradeço aos amigos da República de Townsville, Alan Godoy e Marcos, pelo com-
panheirismo no dia a dia, pelo apoio compreensão mesmo nas vacas magras, lições aprendi-
das, alegria nas festas e nos G.R.U.D.E.S da vida.
A Deus, que me deu suporte mesmo quando passei pelo vale de tristeza e de morte.

“Complicações surgiram, continuaram e foram superadas.”
Capitão Jack Sparrow
RESUMO
O trabalho desenvolve metodologia para resolver o problema de alocação ótima de ca-
pacitores para gestão de energia reativa em grandes redes de distribuição de energia elétrica,
trifásicas e desequilibradas. A denominação “redes desequilibradas” significa que cada uma
das fases tem distribuição de cargas e, eventualmente, parâmetros elétricos distintos. A estra-
tégia de solução desacopla o problema trifásico em três subproblemas monofásicos, aborda-
dos através de algoritmos de programação dinâmica generalizada, que obtém soluções ótimas
exatas para cada uma das fases através da solução recursiva de equações funcionais que defi-
nem simultaneamente controles e fluxos ótimos. As soluções ótimas dos subproblemas possi-
bilitam um procedimento de reacoplamento, que constrói a solução ótima para o problema
trifásico desequilibrado. Estudos de casos consideram redes padronizadas pelo Institute of
Electrical and Electronics Engineers (IEEE), respectivamente de 13, 34, 37, 128 e 8500 bar-
ras. Os resultados mostram que o esforço computacional do método proposto tem crescimento
aproximadamente linear, proporcional ao número de barras das redes estudadas. Os resultados
mostram também que a metodologia proposta obteve a solução ótima dos problemas de maior
porte em apenas alguns segundos.
ABSTRACT
The thesis proposes an exact method to address the optimal capacitor allocation prob-
lem for large three-phase unbalanced distribution systems. The term "unbalanced networks"
means that each phase has different load distribution and possibly distinct electrical parame-
ters. The solution strategy decouples the unbalanced three-phase problem into three different
single-phase subproblems addressed by a generalized dynamic programming approach, which
gets optimum exact solutions for each of the phases through the recursive solution of func-
tional equations that define both control and optimal flow. The optimal solutions of the sub-
problems allow a recoupling procedure that gives the optimal solution for the unbalanced
three-phase network. Case studies consider test feeders from Institute of Electrical and Elec-
tronics Engineers (IEEE), with 13, 34, 37, 128 and 8500 buses respectively. The results show
that the computational burden of the proposed method has approximately linear increase in
proportion to the number of bars of studied networks. Results show proposed methodology
can obtain optimal for large systems solutions within a few seconds.
LISTA DE ILUSTRAÇÕES
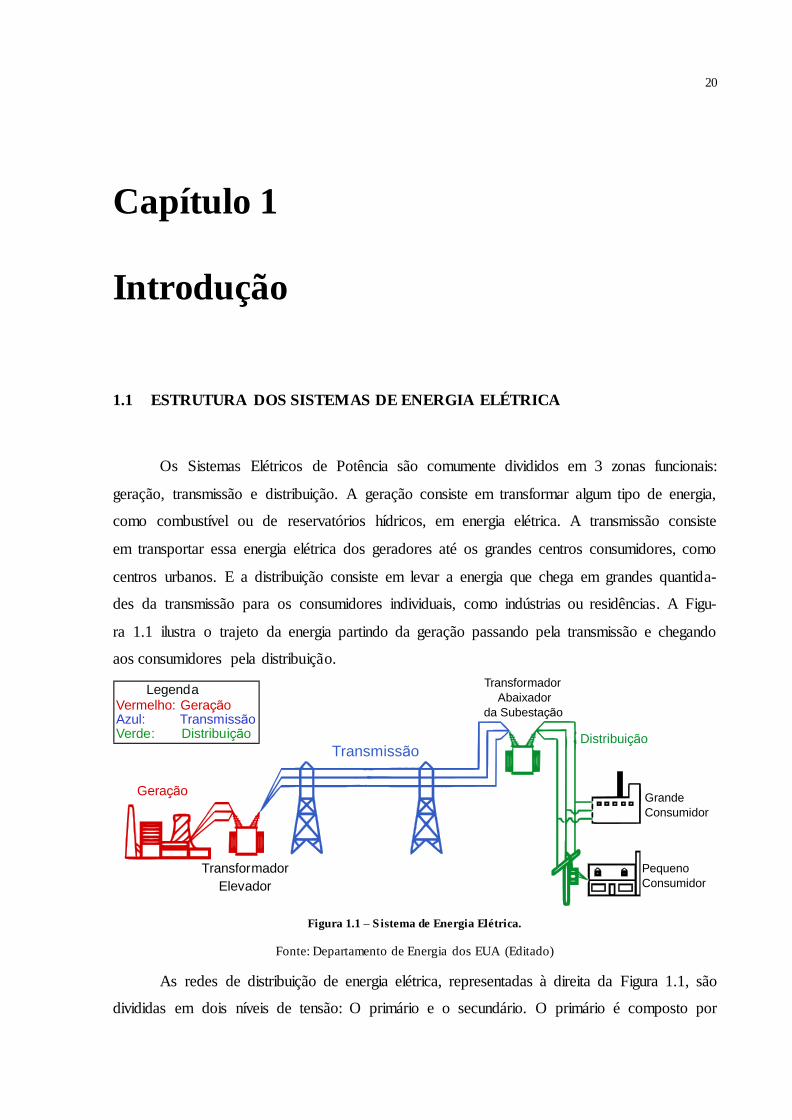
Figura 1.1 – Sistema de Energia Elétrica. ..................................................................... 20
Figura 1.2 – Exemplo de sistema de distribuição ......................................................... 22
Figura 1.3 – Representação do sistema IEEE 13 Barras por equivalente monofásico. 23
Figura 1.4 – Representação trifásica do sistema IEEE 13 Barras ................................. 23
Figura 3.1 – Senoide temporal ...................................................................................... 30
Figura 3.2 – Senodes deslocadas .................................................................................. 31
Figura 3.3 – Correntes em um sistema trifásico equilibrado ........................................ 31
Figura 3.4 – Correntes em um sistema trifásico desequilibrado ................................... 32
Figura 3.5 – Estrutura radial de uma rede de distribuição em operação ....................... 33
Figura 3.6 – Representação de nós e arcos, e seus respectivos índices ........................ 34
Figura 3.7 – Fluxograma da estratégia de solução da alocação de capacitores para
sistemas radiais trifásicos ......................................................................................................... 40
Figura 4.1 - Carga conectada em estrela ....................................................................... 43
Figura 4.2 – Carga conectada em delta ......................................................................... 45
Figura 4.3 – Matriz de impedância para transformadores. ........................................... 49
Figura 4.4 – Exemplo de somatória recursiva para um grafo em árvore. ..................... 51
Figura 5.1 – Variáveis disponíveis após o fluxo de carga ............................................ 53
Figura 6.1 – Associações das variáveis de programação dinâmica ao problema de
Durán ........................................................................................................................................ 61
Figura 6.2 – Estágios, estados e variável de controle para uma barra .......................... 62
Figura 6.3 – Projeção em uma dimensão ...................................................................... 64
Figura 7.1 – Rede teste IEEE 13 Barras........................................................................ 70
Figura 7.2 – Tensões de barra originais da rede IEEE de 13 Barras ............................ 72
Figura 7.3 – Tensão após alocação de capacitores da rede IEEE de 13 Barras ............ 73
Figura 7.4 – Diagrama unifilar da rede de teste IEEE 34 Barras.................................. 74
Figura 7.5 – Tensões de barra originais na rede IEEE de 34 Barras ............................ 75
Figura 7.6 –Tensão após alocação de capacitores na rede IEEE de 34 Barras ............. 75
Figura 7.7 – Diagrama unifilar da rede IEEE de 37 Barras .......................................... 76
Figura 7.8 – Tensões de barra originais na rede IEEE de 37 Barras ............................ 77
Figura 7.9 – Tensão após alocação de capacitores na rede IEEE de 37 Barras ............ 77
Figura 7.10 – Diagrama unifilar da rede IEEE de 128 Barras ...................................... 78
Figura 7.11 – Tensões de barra originais da rede IEEE de 128 Barras ........................ 80
Figura 7.12 – Tensão após alocação de capacitores da rede IEEE de 128 Barras ........ 80
Figura 7.13 – Ilustração do layout da rede IEEE 8500 Barras...................................... 81
Figura 7.14 – Tensões de barra originais na rede IEEE 8500....................................... 82
Figura 7.15 – Tensão após alocação de capacitores na rede IEEE 8500 ...................... 82
Figura 7.16 – Comparação de tempo por barra entre as redes testadas ........................ 84
LISTA DE TABELAS
Tabela 1 – Potência e preços de capacitores monofásicos............................................ 69
Tabela 2 – Cargas na rede IEEE 13 Barras ................................................................... 70
Tabela 3 – Alocação original da rede IEEE 13 Barras ................................................. 71
Tabela 4 – Perfil de tensão original da rede IEEE 13 Barras........................................ 71
Tabela 5 – Alocação ótima da rede IEEE 13 Barras..................................................... 71
Tabela 6 – Perfil de tensão com novos capacitores da rede IEEE 13 Barras ................ 72
Tabela 7 – Custos e tempo de processamento para a rede IEEE 13 Barras .................. 73
Tabela 8 – Alocação original para a rede IEEE 34 Barras............................................ 74
Tabela 9 – Alocação ótima para a rede IEEE 34 Barras ............................................... 74
Tabela 10 – Custos e tempo de processamento para a rede IEEE 34 Barras ................ 76
Tabela 11 – Alocação ótima para a rede IEEE 37 Barras ............................................. 78
Tabela 12 – Custos e tempo de processamento para a rede IEEE 37 Barras ................ 78
Tabela 13 – Alocação original para a rede IEEE de 128 Barras................................... 79
Tabela 14 – Alocação ótima para a rede IEEE de 128 Barras ...................................... 79
Tabela 15 - Custos e tempo de processamento para a rede IEEE 128 Barras .............. 79
Tabela 16 - Custos e tempo de processamento para a rede IEEE 8500 ........................ 83
Tabela 17 – Comparação entre custo original e otimizado nas redes testadas ............. 83
Tabela 18 – Comparação de tempo e barras processadas das redes testadas................ 84
Tabela 19 – Iterações de correção de tensões e tempos de processamento .................. 84
Tabela 20 – Comparação entre o método unifilar e o trifásico ..................................... 85
LISTA DE ABREVIATURAS E SIGLAS
Índices são descritos com letras minúsculas.
Matrizes e vetores são destacados em negrito.
Índices:
𝑘: índice das barras e arcos imediatamente anteriores na rede de distribuição.
𝜙: índice das fases do sistema.
𝑖: unidade de números imaginários, sendo que 𝑖 2 = −1.
𝑎: Índice da fase 𝑎 da distribuição.
𝑏: Índice da fase 𝑏 da distribuição.
𝑐: Índice da fase 𝑐 da distribuição.
Variáveis:
𝐼: Corrente complexa injetada em uma barra, pertencente ao conjunto dos números
complexos (ℂ).
𝐽: Corrente complexa que flui em um arco, pertencente ao conjunto dos números com-
plexos (ℂ).
𝑉: Tensão de barra, pertencente ao conjunto dos números complexos (ℂ).
𝑆 = 𝑃 + 𝑖𝑄: Potência complexa, pertencente ao conjunto dos números complexos (ℂ).
𝑍 = 𝑅 + 𝑖𝑋: Impedância, pertencente ao conjunto dos números complexos (ℂ).
𝑃: Potência Ativa, pertencente ao conjunto dos números reais (ℝ).
𝑄: Potência Reativa, pertence ao conjunto dos números imaginários (𝕀).
x: Potência reativa capacitiva, pertence ao conjunto dos números imaginários (𝕀).
u: Potência de um capacitor, pertence ao conjunto dos números imaginários (𝕀).
𝑅: Resistencia elétrica, pertencente ao conjunto dos números reais (ℝ).
𝑋: Reatância elétrica, pertence ao conjunto dos números imaginários (𝕀).
𝐶: custo do capacitor instalado, dado em Reais (R$).
𝑈: conjunto de capacitores para a possível instalação na rede.
𝑁: conjunto de barras na rede de distribuição.
𝛼: valor da energia, dado em Megawatt-hora (MWh).
𝑇: duração do intervalo de tempo.

Vetores e Matrizes:
𝑰 = (
𝐼𝑎𝐼𝑏𝐼𝑐
) : Vetor de correntes complexas injetadas em barras, nas fases 𝑎, 𝑏, e 𝑐.
𝑱 = (𝐽𝑎𝐽𝑏𝐽𝑐
) : Vetor de correntes complexas que flui nos arcos, nas fases 𝑎, 𝑏, e 𝑐.
𝑺 = (
𝑆𝑎𝑆𝑏𝑆𝑐
) : Vetor de potências complexas nas fases 𝑎, 𝑏, e 𝑐.
𝑽 = (𝑉𝑎𝑉𝑏𝑉𝑐
) : Vetor de tensões nas fases 𝑎, 𝑏, e 𝑐.
𝒁 = (
𝑍𝑎 𝑍𝑎𝑏 𝑍𝑎𝑐𝑍𝑎𝑏 𝑍𝑏 𝑍𝑏𝑐𝑍𝑎𝑐 𝑍𝑏𝑐 𝑍𝑐
) : Matriz característica de impedâncias.
SUMÁRIO
AGRADECIMENTOS.................................................................................................................... VI
RESUMO .................................................................................................................................... VIII
ABSTRACT..................................................................................................................................... IX
LISTA DE ILUSTRAÇÕES ............................................................................................................. X
LISTA DE TABELAS ................................................................................................................... XII
LISTA DE ABREVIATURAS E SIGLAS ................................................................................... XIII
SUMÁRIO..................................................................................................................................... XV
APRESENTAÇÃO ......................................................................................................................... 17
PARTE I: CONTEXTO GERAL.................................................................................................... 19
CAPÍTULO 1 INTRODUÇÃO ...................................................................................................... 20
1.1 ESTRUTURA DOS SISTEMAS DE ENERGIA ELÉTRICA ....................................... 20
1.2 PERDAS EM SISTEMAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA.............. 21
1.3 REDUÇÃO DE PERDAS POR DIMINUIÇÃO DE REATIVOS.................................. 21
1.4 SISTEMAS DE DISTRIBUIÇÃO TRIFÁSICOS .......................................................... 22
CAPÍTULO 2 REVISÃO BIBLIOGRÁFICA ................................................................................ 25
2.1 PRIMEIROS TRABALHOS ........................................................................................... 25
2.2 DÉCADAS DE 60 E 70 .................................................................................................. 26
2.3 DÉCADA DE 80 ............................................................................................................. 26
2.4 DÉCADA DE 90 ............................................................................................................. 27
2.5 DE 2000 ATÉ A ATUALIDADE ................................................................................... 28
2.6 COMENTÁRIO .............................................................................................................. 29
CAPÍTULO 3 MODELO MATEMÁTICO.................................................................................... 30
3.1 DEFINIÇÕES DAS VARIÁVEIS ELÉTRICAS............................................................ 30
3.2 DEFINIÇÕES DE TOPOLOGIA.................................................................................... 33
3.3 MODELO DE OTIMIZAÇÃO MONOFÁSICO ............................................................ 34
3.3.1 FUNÇÃO OBJETIVO ................................................................................................ 34
3.3.2 FUNÇÃO DE PERDAS TÉCNICAS......................................................................... 35
3.3.3 RESTRIÇÃO DE CORRENTE.................................................................................. 35
3.3.4 RESTRIÇÕES DE TENSÃO ..................................................................................... 35
3.3.5 CONJUNTO DE CAPACITORES............................................................................. 36
3.4 EXTENSÃO PARA SISTEMAS TRIFÁSICOS ............................................................ 36
3.5 MODELO DE OTIMIZAÇÃO TRIFÁSICO.................................................................. 37
PARTE II: ESTRATÉGIA DE SOLUÇÃO .................................................................................... 39
CAPÍTULO 4 FLUXO DE CARGA .............................................................................................. 42
4.1 INTRODUÇÃO............................................................................................................... 42
4.2 CALCULO DA INJEÇÃO DE CORRENTE COMPLEXA TRIFÁSICA PELAS
CARGAS .................................................................................................................................. 43
4.3 CÁLCULO DA CORRENTE INJETADA PELOS CAPACITORES ........................... 48
4.4 CÁLCULO DAS IMPEDÂNCIAS EM ARCOS............................................................ 48
4.5 CÁLCULO DOS FLUXOS E CONSIDERAÇÕES ....................................................... 50
CAPÍTULO 5 DESACOPLAMENTO DE FASES ......................................................................... 52
5.1 CONSIDERAÇÕES SOBRE ACOPLAMENTO E VARIÁVEIS ELÉTRICAS .......... 52
5.2 DEMONSTRAÇÃO DE EQUIVALÊNCIA ENTRE ALTERNATIVAS DO CALCULO DE PERDAS ELÉTRICAS .................................................................................. 53
5.3 DECOMPOSIÇÃO POR FASE ...................................................................................... 55
CAPÍTULO 6 ESTRATÉGIA DE OTIMIZAÇÃO POR FASE ..................................................... 58
6.1 SOLUÇÃO DE PROBLEMAS DE CONTROLE ÓTIMO DISCRETO POR PROGRAMAÇÃO DINAMICA .............................................................................................. 58
6.2 ABORDAGEM DO PROBLEMA DE LOCALIZAÇÃO DE CAPACITORES POR PROGRAMAÇÃO DINÂMICA .............................................................................................. 60
6.3 FORMULAÇÃO MATEMÁTICA DO PROBLEMA DE OTMIZAÇÃO POR FASE 61
6.4 ESTRATÉGIA DE PROGRAMAÇÃO DINÂMICA ESTENDIDA ............................. 63
6.4.1 ALGORITMO ............................................................................................................ 65
6.5 CONSIDERAÇÕES ........................................................................................................ 65
PARTE III: ESTUDOS DE CASOS E CONCLUSÕES .................................................................. 67
CAPÍTULO 7 ESTUDOS DE CASOS ........................................................................................... 68
7.1 INTRODUÇÃO............................................................................................................... 68
7.2 PARÂMETROS COMUNS ............................................................................................ 69
7.3 REDE IEEE 13 BARRAS ............................................................................................... 70
7.4 REDE IEEE 34 BARRAS ............................................................................................... 74
7.5 REDE IEEE 37 BARRAS ............................................................................................... 76
7.6 REDE IEEE 123 BARRAS ............................................................................................. 78
7.7 REDE IEEE 8500 ............................................................................................................ 81
7.8 COMPARAÇÕES E DISCUSSÕES............................................................................... 83
7.8.1 COMPARAÇÃO ENTRE CUSTOS .......................................................................... 83
7.8.2 COMPARAÇÕES DE TEMPO ................................................................................. 83
7.8.3 COMPARAÇÕES ENTRE METODOLOGIA TRIFÁSICA E UNIFILAR ............. 85
CAPÍTULO 8 CONCLUSÕES ...................................................................................................... 86
BIBLIOGRAFIA ............................................................................................................................ 88
17
Apresentação
Em sistemas de distribuição de energia elétrica, parte da energia transmitida é consu-
mida pelo próprio sistema. Essa energia perdida é denominada “perda técnica”. Apesar de não
ser possível eliminar totalmente, as perdas técnicas podem ser drasticamente reduzidas.
Uma dos fatores de perdas é a potência reativa, a qual embora seja inerente do sistema
não é responsável por gerar trabalho efetivo, contribuindo para o aumento das perdas. Para
compensar a potência reativa são instalados bancos de capacitores, os quais devem ser aloca-
dos corretamente para promover a melhor redução possível de perdas técnicas. O problema de
alocação de capacitores visa encontrar a melhor localização e tamanho dos capacitores distri-
buídos pela rede de distribuição de energia elétrica.
As redes de distribuição de energia elétrica normalmente apresentam três fases. É co-
mum representar essas fases por um equivalente, onde se representa apenas uma delas e se
supõe que as outras possuem mesmo comportamento, o chamado equivalente unifilar. Contu-
do esse trabalho propõe não utilizar-se dessa simplificação, estudando as três fases e as rela-
ções entre elas.
Esse trabalho visa encontrar a melhor alocação de capacitores em redes de distribuição
de energia trifásicas, sem a simplificação por equivalente monofásico, ou seja, será feita a
alocação de capacitores nas três fases. O método é desenvolvido como sendo econômico, exa-
to, e capaz de encontrar a solução ótima para redes de grande porte. O método é exato no sen-
tido de apresentar sempre a mesma solução para uma mesma instancia, e econômico no senti-
do de buscar melhorar valores monetários.
Será proposto um método de resolução que permite o cálculo da alocação de cada fase
separadamente, mas sem perder as características acopladas do sistema trifásico. Cada fase
será calculada através de programação dinâmica estendida, inspirada pela abordagem proposta
por Vizcaino González, Lyra e Usberti (2012). Esse método tem como característica mais
atraente a propriedade de obter, sob certas circunstancias, a alocação ótima global do proble-
ma de uma fase, sendo que o problema trifásico proposto herdará essa característica.
A tese está organizada em 3 partes, contendo no total 8 capítulos. A primeira parte,
formada pelos capítulos de 1 a 3, apresenta o contexto geral do trabalho e a modelagem ma-
temática. O Capítulo 1 apresenta uma breve introdução à sistemas de energia elétrica, situan-

18
do os temas que serão abordados pelo presente trabalho. O Capítulo 2 faz a revisão bibliográ-
fica histórica do problema e contextualiza o trabalho na literatura. O Capítulo 3 define as va-
riáveis globais do trabalho e o problema de otimização proposto.
A segunda parte, formada pelos capítulos de 4 a 6, apresenta as estratégias de solução
utilizada no trabalho. O Capítulo 4 procura apresentar didaticamente o fluxo de carga utiliza-
do. O Capítulo 5 detalha a estratégia de desacoplamento entre as fases e a modelagem mate-
mática do problema por fase. O Capítulo 6 apresenta a estratégia de alocação de capacitores
monofásica utilizada.
A terceira parte, formada pelos capítulos 7 e 8, contém os estudos e caso e a conclusão
do trabalho. O Capítulo 7 faz estudos de caso e análises em redes de distribuição trifásicas e
desbalanceadas de 13, 34, 37, 128 e 8500 barras. O Capítulo 8 apresenta as conclusões e dis-
posições finais do trabalho. Por último segue a bibliografia utilizada no texto da tese.
19
Parte I: Contexto Geral
20
Capítulo 1
Introdução
1.1 ESTRUTURA DOS SISTEMAS DE ENERGIA ELÉTRICA
Os Sistemas Elétricos de Potência são comumente divididos em 3 zonas funcionais:
geração, transmissão e distribuição. A geração consiste em transformar algum tipo de energia,
como combustível ou de reservatórios hídricos, em energia elétrica. A transmissão consiste
em transportar essa energia elétrica dos geradores até os grandes centros consumidores, como
centros urbanos. E a distribuição consiste em levar a energia que chega em grandes quantida-
des da transmissão para os consumidores individuais, como indústrias ou residências. A Figu-
ra 1.1 ilustra o trajeto da energia partindo da geração passando pela transmissão e chegando
aos consumidores pela distribuição.
Figura 1.1 – S istema de Energia Elétrica.
Fonte: Departamento de Energia dos EUA (Editado)
As redes de distribuição de energia elétrica, representadas à direita da Figura 1.1, são
divididas em dois níveis de tensão: O primário e o secundário. O primário é composto por
Transmissão
Geração
Transformador
Elevador
Geração
Verde:Azul: Transmissão
Distribuição
LegendaVermelho:
Transformador
Abaixador
da Subestação
Grande
Consumidor
Pequeno
Consumidor
Distribuição
21
linhas definidas em sistemas de potência como tendo média tensão, geralmente possuindo
entre 1,0kV e 36,2kV (norma IEEE 1623-2004). São nas linhas primárias que grandes consu-
midores são ligados, como as indústrias. O secundário é composto por linhas de baixa tensão,
geralmente possuindo entre 50V e 1kV (Norma Regulamentadora 10 – NR 10). É no secundá-
rio que os pequenos consumidores são ligados, como residências por exemplo. Este trabalho
dará ênfase à alocação de capacitores em redes primárias de distribuição de energia elétrica.
1.2 PERDAS EM SISTEMAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA
Nem toda energia que sai do gerador chega até o consumidor, pois acontecem perdas
na rede. Usualmente as perdas são classificadas como tendo duas origens: Perdas técnicas e
perdas não técnicas.
As perdas técnicas são as de origem física do sistema, dadas no transporte da energia,
como perdas devido a condução e transformação de energia elétrica.
As demais perdas são classificadas como não técnicas, as quais possuem diversas ori-
gens como erros de medição, fraudes e furto de energia. No Brasil, estima-se que 7,04% das
perdas em sistemas de distribuição de energia elétrica sejam de origem não técnicas, e 7,14%
sejam de origem técnica (Queiroz 2010).
A perda técnica é inerente do sistema, ou seja, não é fisicamente possível retirá-la to-
talmente, contudo pode ser drasticamente reduzida através de técnicas que proporcionam uma
melhor gestão do sistema elétrico, com por exemplo a reconfiguração das redes, gestão do
carregamento de transformadores, e diminuição do fluxo de reativos.
Este trabalho estudará a técnica de diminuição do fluxo de reativos através da coloca-
ção de capacitores ao longo dos sistemas de distribuição. A seguir será brevemente explicada
a técnica de redução de perdas através da diminuição do fluxo de reativos.
1.3 REDUÇÃO DE PERDAS POR DIMINUIÇÃO DE REATIVOS
Um sistema de distribuição de energia elétrica pode ser representado como uma com-
posição de arcos e grafos (barras), como mostrado na Figura 1.2.
22
Figura 1.2 – Exemplo de sistema de distribuição
Cada arco do sistema possui uma perda relativa à dissipação de calor por efeito Joule.
Essa perda pode ser calculada para um arco genérico k como mostrado na Equação 1.1 (Baran
e Wu 1989).
𝐿𝑘 = 𝑟𝑘𝑃𝑘2 +𝑄𝑘
2
𝑉𝑘2 1.1
Em que 𝐿𝑘 é a perda por efeito joule, 𝑟𝑘 é a resistência do arco k, 𝑃𝑘 e, 𝑄𝑘 são res-
pectivamente as potências ativa e reativa que fluem no arco k, e 𝑉𝑘 é a tensão na barra k.
A potência reativa 𝑄𝑘 pode ter características indutivas ou capacitivas. A maior parte
das cargas tem características indutivas; por isso, capacitores com o dimensionamento ade-
quando, colocados em paralelo com as cargas ou em pontos estratégicos das redes, tendem a
reduzir os fluxos de potências indutivas nas linhas e, consequentemente, as perdas por efeito
joule.
A melhor forma de escolher e localizar capacitores em redes de distribuição vem sen-
do estudada há quase 80 anos. O próximo capítulo faz uma avaliação da bibliografia publica-
da ao longo desses anos, procurando colocar em perspectiva a contribuição deste trabalho: a
localização e dimensionamento ótimo de capacitores em redes trifásicas desequilibradas, ou
seja, com cargas de características distintas em cada uma das fases.
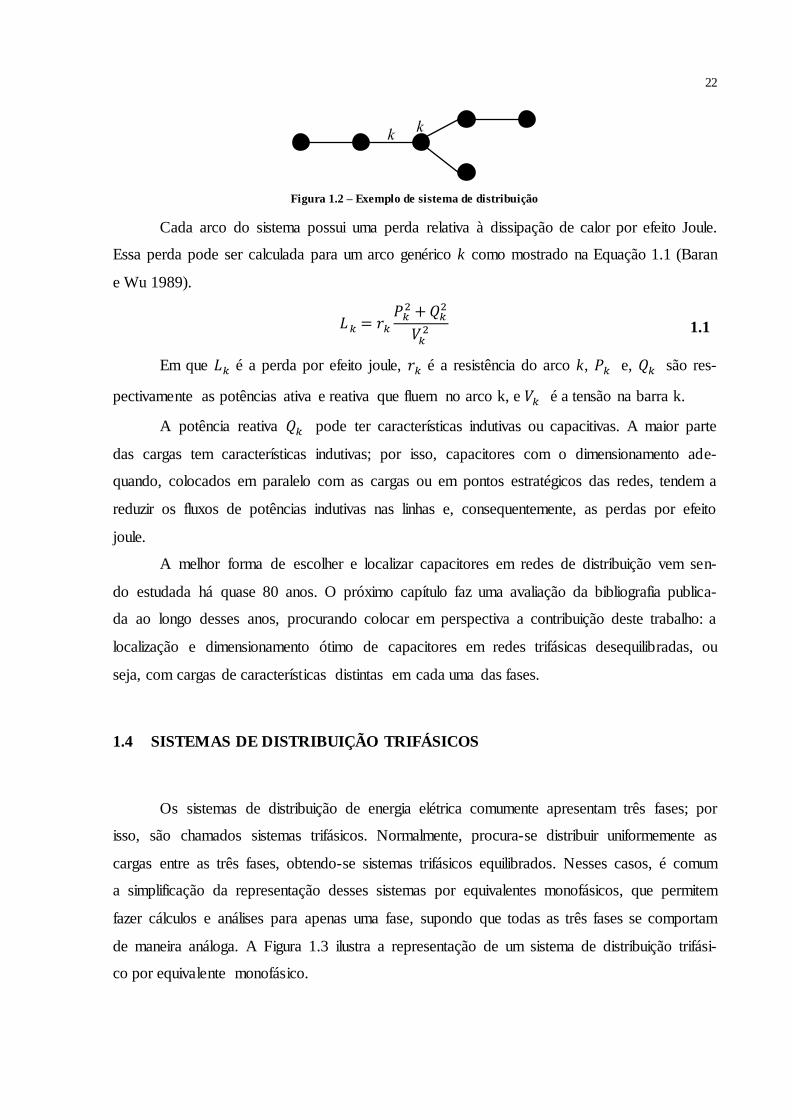
1.4 SISTEMAS DE DISTRIBUIÇÃO TRIFÁSICOS
Os sistemas de distribuição de energia elétrica comumente apresentam três fases; por
isso, são chamados sistemas trifásicos. Normalmente, procura-se distribuir uniformemente as
cargas entre as três fases, obtendo-se sistemas trifásicos equilibrados. Nesses casos, é comum
a simplificação da representação desses sistemas por equivalentes monofásicos, que permitem
fazer cálculos e análises para apenas uma fase, supondo que todas as três fases se comportam
de maneira análoga. A Figura 1.3 ilustra a representação de um sistema de distribuição trifási-
co por equivalente monofásico.
k k
23
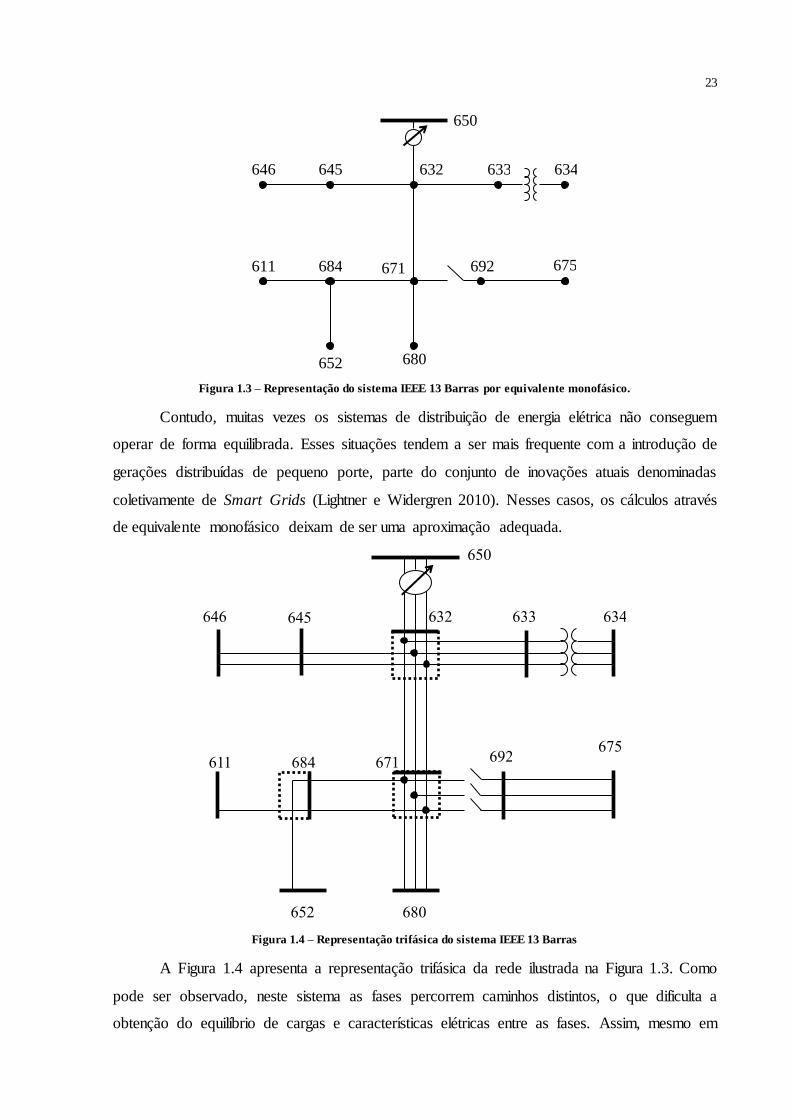
Figura 1.3 – Representação do sistema IEEE 13 Barras por equivalente monofásico.
Contudo, muitas vezes os sistemas de distribuição de energia elétrica não conseguem
operar de forma equilibrada. Esses situações tendem a ser mais frequente com a introdução de
gerações distribuídas de pequeno porte, parte do conjunto de inovações atuais denominadas
coletivamente de Smart Grids (Lightner e Widergren 2010). Nesses casos, os cálculos através
de equivalente monofásico deixam de ser uma aproximação adequada.
Figura 1.4 – Representação trifásica do sistema IEEE 13 Barras
A Figura 1.4 apresenta a representação trifásica da rede ilustrada na Figura 1.3. Como
pode ser observado, neste sistema as fases percorrem caminhos distintos, o que dificulta a
obtenção do equilíbrio de cargas e características elétricas entre as fases. Assim, mesmo em
646 645 632 633 634
650
692 675 611 684
652
671
680
646 645 633 634
650
692 675
611 684
652
671
680
632
24
redes pequenas e sem as inovações características das Smart Grids, o uso de representações
por sistemas monofásicos equivalentes pode não ser adequado.
Como será mostrado no Capítulo 2, atualmente tem-se feito pesquisas sobre a alocação
de capacitores em redes de distribuição trifásicas desbalanceadas e já existem métodos heurís-
ticos que propõe a alocação de capacitores de maneira sub-ótima. Contudo a literatura da área
ainda não registra contribuições sobre abordagens exatas para redes trifásicas desbalanceadas
de porte real, objeto deste trabalho.
25
Capítulo 2
Revisão Bibliográfica
Em redes de distribuição de energia elétrica, os capacitores são equipamentos que po-
dem ser colocados diversos locais, como postes, na caixa de entrada do cliente ou na subesta-
ção. Desde a disponibilização comercial de capacitores para redes de distribuição de energia
elétrica, existe a discussão sobre qual seria a melhor localização destes equipamentos ao lon-
go da rede. Definir o lugar onde serão instalados é um desafio, de fato, existem artigos há
quase 80 anos tratando deste assunto.
Com a evolução das redes de distribuição, principalmente em sua escala abrangendo
literalmente milhares de consumidores, cresceu também a complexidade de se tentar achar os
melhores locais para a instalação dos capacitores. Mesmo com a invenção dos computadores,
e sua crescente evolução durante as décadas, não há um consenso sobre o melhor método a ser
utilizado. Durante décadas vem sendo utilizados diversos métodos para encontrar a melhor
alocação possível, utilizando desde maquetes físicas até algoritmos bioinspirados.
Este capítulo realizará uma leitura histórica sobre o problema abordado, partindo da
década de 1930 até a data do presente trabalho. O nascimento e desenvolvimento do contexto
de redes trifásicas também serão abordados durante a revisão histórica. Por fim será discutida
a inserção do presente trabalho na bibliografia apresentada.
2.1 PRIMEIROS TRABALHOS
O trabalho de Olmsted no final da década de 30 (Olmsted 1939) é provavelmente o
primeiro trabalho publicado sobre redução de perdas por gestão de reativos em redes de dis-
tribuição de energia. Ele utiliza métodos gráficos e medições em circuitos práticos de distri-
buição para estimar a localização e tamanho de capacitores. Na década de 50, Schmidt (1956)
26
propõe uma modelagem matemática por equivalente DC para definir o tamanho do capacitor
utilizando maquetes físicas dos circuitos, orientando sua instalação próximo às cargas.
2.2 DÉCADAS DE 60 E 70
Nos anos 60 são apresentados os primeiros trabalhos utilizando computadores. Nessa
época computadores eram máquinas de difícil acesso, existiam computadores analógicos e
digitais e foram moldados os primeiros algoritmos.
Uma primeira heurística para o cálculo analítico da posição e tamanho dos capacitores
é apresentada em Cook (1961) e o algoritmo é aplicado em uma rede de 20 nós. Durán (1968)
apresentou o primeiro trabalho com caracterização formal de um problema de otimização
combinatória. Ele desenvolve um modelo simplificado para redes de distribuição e propõe um
algoritmo exato baseado em programação dinâmica que calcula o ótimo global para um ramo
da rede sob hipótese de tensões constantes.
2.3 DÉCADA DE 80
Na década de 80 iniciou-se a popularização dos computadores com nascimento dos
primeiros computadores pessoais e o uso de mídia magnética de fácil transporte, como fitas
cassetes e disquetes. Com isso mesmo com as limitações da época tornou possível o estudo de
várias técnicas analíticas em pequenas redes teste.
Grainger e Lee (1981) propõe um procedimento de critério de áreas equivalente no
qual resolve um alimentador sem ramificações com diferentes tamanhos. Kaplan (1984) de-
senvolve um algoritmo considerando redes radiais com ramificações, presença de capacitores
já instalados na rede e distribuição não uniforme de carga ao longo do alimentador, contudo
não apresenta testes e resultados. Salama, Chikhani e Hackam (1985) utilizaram o conceito de
“alimentador equivalente” para determinar a localização e dimensão dos capacitores, e apre-
sentaram resultados em uma pequena rede teste. No mesmo ano, Grainger e Civanlar (1985)
demonstraram em um artigo dividido em 3 partes um problema de alocação de capacitores e
controle de tensões em redes radiais com ramificações. Eles propõe um método desacoplando
o problema de alocação de capacitores do problema de regulação de tensão e mostram
resultados detalhados em uma pequena rede teste. Baran e Wu (1989) formularam um modelo
27
desacoplado que resolve o problema de localização dos capacitores através de programação
inteira e o problema de dimensionamento através de programação não linear.
Também na década de 80 foram iniciados os estudos em alocação de capacitores para
redes trifásicas desbalanceadas, Em Grainger, El-Kib e Lee (1983) é apresentada um método
desacoplado dividido em dois subproblemas: um que calcula o tamanho dos capacitores e
outro que calcula a posição destes na rede, contudo trata apenas de redes sem ramificações
laterais. Esse modelo foi estendido em El-Kib, et al. (1985) para incluir capacitores variáveis
e ramificações laterais, e apresentou testes em uma rede de 30 nós.
2.4 DÉCADA DE 90
Na década de 90 a popularização dos computadores pessoais e o aumento de desem-
penho tanto de processamento possibilitou mais explorações de métodos analíticos de otimi-
zação e também as primeiras explorações em metaheurísticas. Também nessa década há o
início da formulação de geração distribuída em sistemas de distribuição de energia.
Para redes unifilares, Augugliaro, Dusonchet e Mangione (1990) propuseram um mo-
delo de programação não linear para a alocação de capacitores e aplicaram em uma rede de 20
nós. Chung e Shaoyun (1996) propuseram uma abordagem desacoplada em que é feito pro-
gramação linear para achar a localização e capacitância aproximada e depois capacitores dis-
cretos são escolhidos por enumeração. Esse método é aplicado em redes teste de 6 e 14 nós.
Chiang, et al (1990) utiliza técnica de simulated annealing para determinar alocação e tama-
nho de capacitores, e estes mesmos autores (Chiang, Wang e Darling 1995) retomaram essa
técnica considerando redes desbalanceadas, contudo em ambos os artigos não são apresenta-
dos resultados de testes. Buscando amenizar o tempo computacional, Huang, Yang e Huang
(1996) propuseram resolução baseada em busca tabu e apresentaram resultados em redes de
até 69 nós. Estratégias evolutivas também tem destaque na década de 90. Uma primeira ex-
ploração foi proposta por Boone e Chiang (1993) e também testado na mesma rede de 69 nós.
Ghose, Goswami e Basu (1999) propuseram uma codificação binária dividida em strings e
aplicaram em uma redes de até 50 nós.
O estudo de redes trifásicas desbalanceadas foram retomados na década de 90 tanto
com métodos de otimização clássicos como com metaheurísticas. Uma modelo de otimização
clássico é apresentado em Chen, Hsu e Yan (1995). Nesse artigo o valor capacitivo necessá-
rio na linha é calculado através de programação não-linear contínua e posteriormente são es-
28
colhidos valores discretos de capacitores mais próximos da solução obtida. Testes foram fei-
tos em uma pequena rede de 10 nós. Restrições de realocação e controle são apresentadas em
Chiang, Wang e Tong, et al. (Chiang, Wang e Tong, et al. 1995), o qual resolve o problema
através de uma heurística combinando simulated annealing e busca gulosa, e testada em uma
rede desbalanceada de 291 nós. Esses mesmos autores apresentam em Chiang, Wang e Tong,
et al. (1994) uma primeira exploração de geração distribuída, com resolução através de simu-
lated annealing, mas sem demonstrar resultados. Em Miu, Chiang e Darling (1997) é apre-
sentado um modelo de alocação e realocação de capacitores e propõe um algoritmo genético
com inclusão de busca local, resolvendo uma rede de 292 nós.
2.5 DE 2000 ATÉ A ATUALIDADE
Nos anos 2000 foram iniciados estudos de alocação de capacitores em redes de distri-
buição de grande porte. A popularização do processamento paralelo fomentou o enfoque da
adoção de métodos heurísticos de exploração que se beneficiam desse tipo de arquitetura.
Destacam-se também a exploração da geração distribuída em sistemas de distribuição de
energia elétrica e a popularização de técnicas associadas ao termo smart grid (Lightner e
Widergren 2010).
No início do período foi dado destaque às metaheurísticas para as redes unifilares.
Leivtin et al. (2000) propôs um algoritmo genético com representação compacta no cromos-
somo que contém tanto localização quanto tamanho do capacitor, e testado em uma rede de 37
nós. Chiou, Chang e Su (2004) propuseram um algoritmo hibrido baseado em colônia de for-
migas e testado em redes de até 132 nós. A solução de problemas para redes de grande porte
foi iniciada por Mendes et al. (2005), com a solução de redes reais de cidades com até
500.000 habitantes utilizando algoritmos meméticos.
Mais recentemente houve uma retomada dos algoritmos exatos, Jabr (2008) utilizou
novamente a estratégia desacoplada de resolver um sistema não linear e posteriormente achar
os valores discretos dos capacitores. Para isto utilizou o método de pontos interiores para o
subproblema contínuo e programação inteira mista para a determinação dos capacitores. Os
testes foram feitos em redes de até 69 nós. Para aplicações em redes de grande porte,
Vizcaino, Lyra e Usberti (2012) resgataram a ideia de programação dinâmica de Durán (1968)
e expandiram para redes com ramificações. Para isto utilizaram nas ramificações da rede uma
técnica matemática de projeção em uma dimensão, contornando dessa maneira de eventuais
29
explosões combinatórias e ao mesmo tempo sem perda de otimalidade. Esse trabalho utilizou
redes com até 7.500 nós.
Nas redes trifásicas desbalanceadas foi dado destaque a métodos heurísticos desde
2000. Uma heurística para resolver a alocação de capacitores levando em consideração as
distorções harmônicas injetadas nas linhas de distribuição é apresentada em Carpinelli, et al.
(2005) e testado em uma rede de 83 nós. Distorções harmônicas também são levadas em conta
na alocação de capacitores em Eajal e El-Hawary (2010), dessa vez utilizando-se do método
de particle swarm e testado em uma rede de 13 nós. Subrahmanyam e Radhakrishna (2010)
propõe uma algoritmo simplificado e aponta o aumento na complexidade dos métodos trata-
dos em anos anteriores, e apresentam testes em redes de até 37 nós. Taher e Bagherpour
(2013) propõe um modelo considerando também distorções harmônicas e resolvem utilizando
uma heurística baseada em colônia de abelhas, testando em redes de até 37 nós.
2.6 COMENTÁRIO
O presente trabalho apresenta uma abordagem trifásica para o problema de alocação
de capacitores em redes de distribuição de energia elétrica e contribui com uma metodologia
que decompõe o problema trifásico em 3 problemas monofásicos distintos de localização e
dimensionamentos ótimos de capacitores. Os subproblemas são abordados por uma nova lei-
tura das ideias de programação dinâmica estendida, propostas por Vizcaino, Lyra e Usberti
(2012).
30
Capítulo 3
Modelo Matemático
Este capítulo apresenta o modelo matemático para a alocação ótima de capacitores em
redes de distribuição de energia elétrica trifásicas e desbalanceadas. Define as variáveis do
problema, discute o modelo de otimização monofásico e a extensão para o modelo trifásico.
Durante toda a continuidade do trabalho, vetores e matrizes serão representados em
negrito.
3.1 DEFINIÇÕES DAS VARIÁVEIS ELÉTRICAS
Em sistemas elétricos, a energia elétrica é normalmente distribuída em corrente alter-
nada, ou seja, sua magnitude absoluta varia conforme o tempo. O gráfico da variação da mag-
nitude de variáveis elétricas como tensões ou correntes em relação ao tempo resulta em uma
senoide, como na Figura 3.1.
Figura 3.1 – Senoide temporal
Magnitude de tensão ou corrente
Tempo
31
Em sistemas trifásicos, as três fases oscilam na mesma frequência, contudo a senoide
de cada fase está deslocada em relação às outras, resultando em três senoides distintas, como
representado na Figura 3.2.
Figura 3.2 – Senodes deslocadas
Essa representação no tempo pode ser expressa através de formulações matemáticas
utilizando senos e cossenos. Contudo no regime permanente pode-se utilizar a representação
fasorial. Em redes trifásicas, essa representação é utilizada para evidenciar o ângulo de defa-
sagem entre as fases. Por exemplo, em um sistema trifásico equilibrado, as correntes teriam
uma defasagem de 120º entre si, como mostrado na Figura 3.3.
Figura 3.3 – Correntes em um sistema trifásico equilibrado
120º
120º
a
b
c
Magnitude de tensão ou corrente
Tempo
32
Em um sistema desequilibrado, tanto as fases quanto as magnitudes apresentam dife-
renças entre si, como representado na Figura 3.4.
Figura 3.4 – Correntes em um sistema trifásico desequilibrado
Fasores são representados por números complexos. Em sistemas elétricos, a magnitude
do número complexo representa o valor eficaz da variável estudada (também conhecido como
valor RMS). Na representação polar essa magnitude é seguida de seu ângulo. Nesse trabalho,
a indicação de valores de ângulo será precedida pelo símbolo ∠. Exemplo: 𝑉∠𝜃º
A seguir serão discutidas as representações de cada variável elétrica. Note que algu-
mas variáveis serão representadas na forma cartesiana e outras na forma polar, conforme a
conveniência.
As correntes elétricas serão representada por duas variáveis, dependendo de onde são
aplicadas. Correntes representadas por 𝐼 são aquelas injetadas em barras, e correntes represen-
tadas por 𝐽 são correntes que fluem nos arcos.
A corrente elétrica injetada em uma barra é representada por um número complexo
com módulo e ângulo:
𝐼 = |𝐼|∠𝜇
Nos quais:
𝐼 é a corrente complexa, pertence ao conjunto dos números complexos (ℂ), cuja uni-
dade é ampère (A).
|𝐼| é o módulo da corrente.
𝜇 é o ângulo da corrente.
Analogamente, temos notação semelhante para a corrente que flui em um arco:
𝐽 = |𝐽|∠𝜇
A tensão também é representada por um numero complexo com módulo e ângulo:
𝑉 = |𝑉|∠𝜃
115º
128º
a
b
c
33
Nos quais:
𝑉 é a tensão complexa, pertencente ao conjunto dos números complexos (ℂ), cuja uni-
dade é Volt (V).
|𝑉| é o módulo da tensão.
𝜃 é o ângulo da tensão.
A potência é representada por um número complexo na forma cartesiana.
𝑆 = 𝑃 + 𝑖𝑄
Em que 𝑆 representa a potência complexa, |𝑆| representa a potência aparente, cuja
unidade é volt-ampère (VA); 𝑃 representa a potência ativa, cuja unidade é Watt (W); 𝑄 repre-
senta a potência reativa, cuja unidade é o volt-ampère reativo (VAr).
Impedâncias são representadas por números complexos na forma cartesiana, cujas
componentes reais representam resistências e as componentes imaginárias representam rea-
tâncias:
𝑍 = 𝑅 + 𝑖𝑋
Onde 𝑍 é a impedância, 𝑅 é a resistência elétrica, cuja unidade é ohm (Ω) e 𝑋 é a rea-
tância, cuja unidade é ohm (Ω).
3.2 DEFINIÇÕES DE TOPOLOGIA
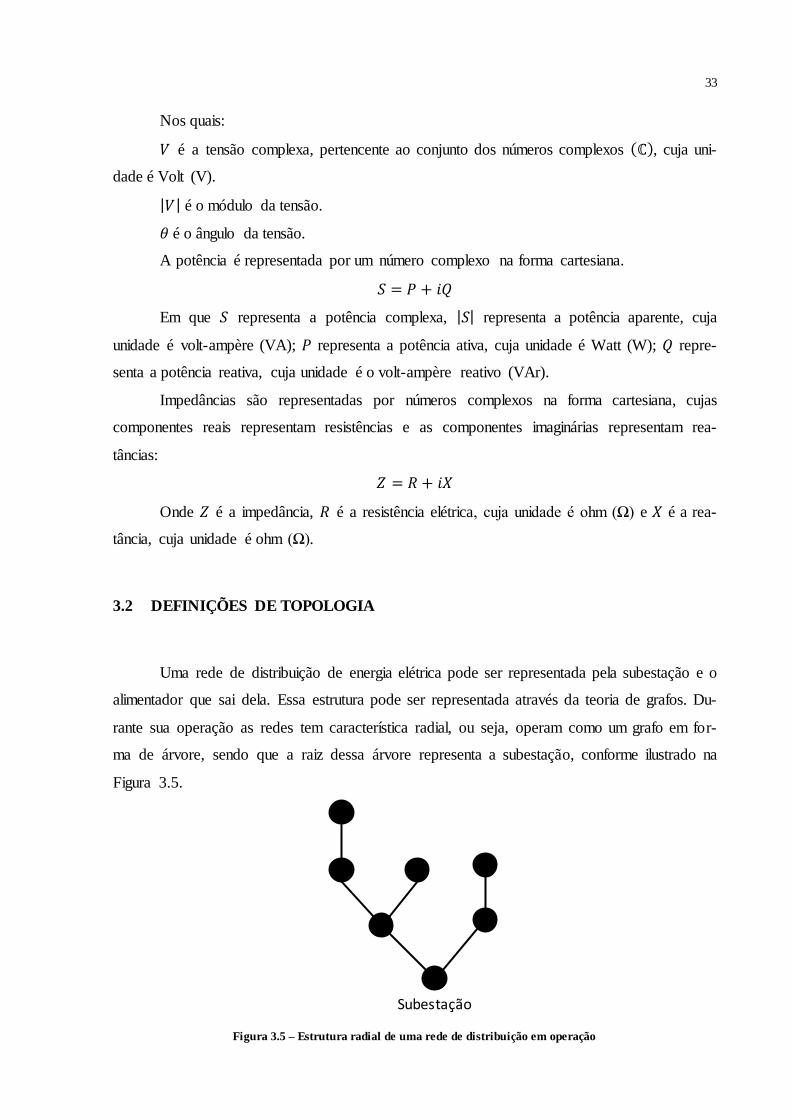
Uma rede de distribuição de energia elétrica pode ser representada pela subestação e o
alimentador que sai dela. Essa estrutura pode ser representada através da teoria de grafos. Du-
rante sua operação as redes tem característica radial, ou seja, operam como um grafo em for-
ma de árvore, sendo que a raiz dessa árvore representa a subestação, conforme ilustrado na
Figura 3.5.
Figura 3.5 – Estrutura radial de uma rede de distribuição em operação
Subestação
34
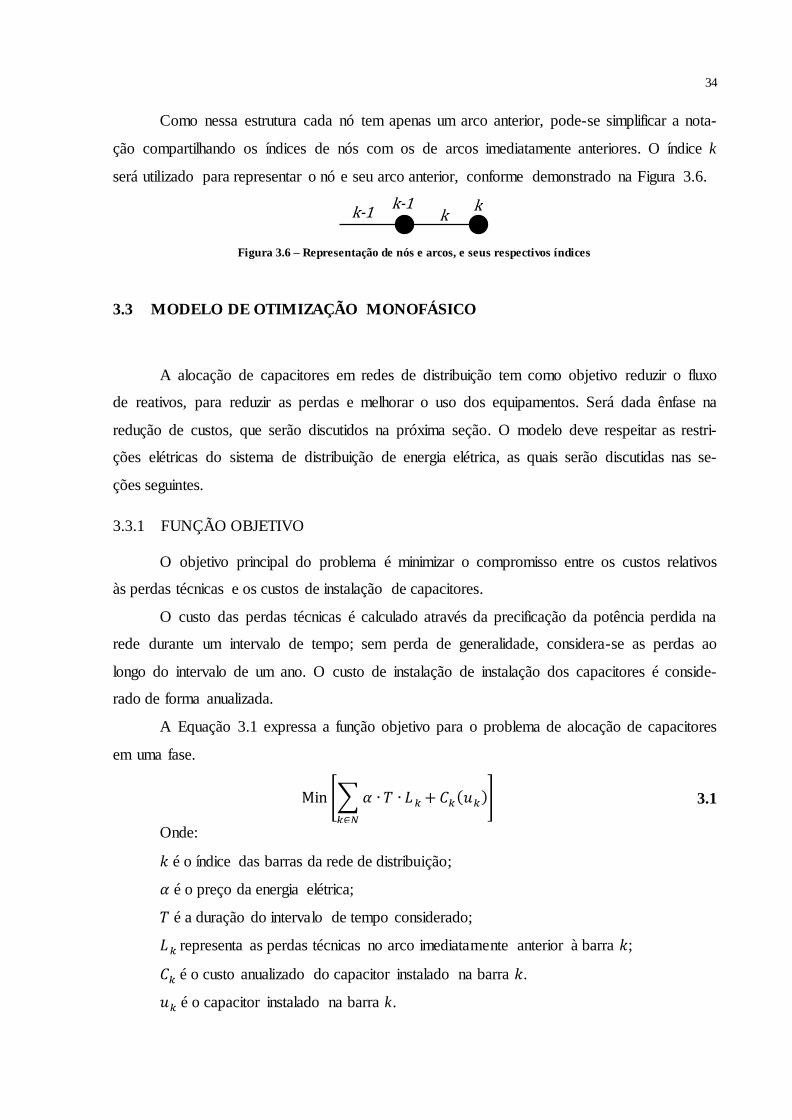
Como nessa estrutura cada nó tem apenas um arco anterior, pode-se simplificar a nota-
ção compartilhando os índices de nós com os de arcos imediatamente anteriores. O índice k
será utilizado para representar o nó e seu arco anterior, conforme demonstrado na Figura 3.6.
Figura 3.6 – Representação de nós e arcos, e seus respectivos índices
3.3 MODELO DE OTIMIZAÇÃO MONOFÁSICO
A alocação de capacitores em redes de distribuição tem como objetivo reduzir o fluxo
de reativos, para reduzir as perdas e melhorar o uso dos equipamentos. Será dada ênfase na
redução de custos, que serão discutidos na próxima seção. O modelo deve respeitar as restri-
ções elétricas do sistema de distribuição de energia elétrica, as quais serão discutidas nas se-
ções seguintes.
3.3.1 FUNÇÃO OBJETIVO
O objetivo principal do problema é minimizar o compromisso entre os custos relativos
às perdas técnicas e os custos de instalação de capacitores.
O custo das perdas técnicas é calculado através da precificação da potência perdida na
rede durante um intervalo de tempo; sem perda de generalidade, considera-se as perdas ao
longo do intervalo de um ano. O custo de instalação de instalação dos capacitores é conside-
rado de forma anualizada.
A Equação 3.1 expressa a função objetivo para o problema de alocação de capacitores
em uma fase.
Min [∑ 𝛼 ∙ 𝑇 ∙ 𝐿𝑘+𝐶𝑘(𝑢𝑘)
𝑘∈𝑁
] 3.1
Onde:
𝑘 é o índice das barras da rede de distribuição;
𝛼 é o preço da energia elétrica;
𝑇 é a duração do intervalo de tempo considerado;
𝐿𝑘 representa as perdas técnicas no arco imediatamente anterior à barra 𝑘;
𝐶𝑘 é o custo anualizado do capacitor instalado na barra 𝑘.
𝑢𝑘 é o capacitor instalado na barra k.
k k-1 k k-1

35
3.3.2 FUNÇÃO DE PERDAS TÉCNICAS
A perda técnica é dada pela potência dissipada através de efeito Joule nos arcos do sis-
tema de distribuição. A Equação 3.2 apresenta uma possível modelagem para as perdas técni-
cas, a qual será discutida em detalhes no Capítulo 5.
𝐿𝑘 = 𝑅𝑒𝑎𝑙((𝑉𝑘−1 − 𝑉𝑘) ∙ 𝐽𝑘∗) 3.2
Onde:
𝐿𝑘 é a perda técnica no arco 𝑘;
𝑅𝑒𝑎𝑙 é o operador que retorna o componente real de um número complexo;
𝑉𝑘−1 é a tensão na barra imediatamente anterior à 𝑘;
𝑉𝑘 é a tensão na barra 𝑘;
𝐽𝑘 é a corrente que flui através do arco imediatamente anterior ao nó 𝑘;
∗ é o operador de conjugado complexo.
3.3.3 RESTRIÇÃO DE CORRENTE
A conservação de correntes em cada barra (1ª lei de Kirchoff) é representada pela
Equação 3.3.
𝐽𝑘 = 𝐼k + ∑ 𝐽𝑚𝑚∈𝐴𝑘
− 𝐼𝑐𝑘 3.3
Onde:
𝐽𝑘 é a corrente complexa que flui no arco 𝑘;
𝐼𝑘 é a de corrente complexa injetada por cargas na barra 𝑘;
𝐴𝑘 é o conjunto de arcos imediatamente posteriores à barra 𝑘;
𝑚 é o índice de um arco imediatamente posterior à barra 𝑘;
𝐽𝑚 é o a corrente complexa que flui no arco 𝑚;
𝐼𝑐𝑘 é a corrente complexa injetada por capacitores instalados barra 𝑘.
3.3.4 RESTRIÇÕES DE TENSÃO
As quedas de tensões podem ser calculadas pela Equação 3.4.
𝑉𝑘 = 𝑉𝑘−1 − (𝑍𝑘 ∙ 𝐽𝑘) 3.4
Onde:
𝑉𝑘 é o valor de tensão na barra 𝑘;
𝑉𝑘−1 é o valor de tensão na barra anterior à barra 𝑘;
𝑍𝑘 é a impedância do arco k;
𝐽𝑘 é a corrente complexa que flui através do arco k.

36
3.3.5 CONJUNTO DE CAPACITORES
O capacitor a ser inserido em uma barra deve pertencer ao conjunto pré-definido. Essa
restrição é representada pela Equação 3.5.
𝑢𝑘 ∈ 𝑈 3.5
3.4 EXTENSÃO PARA SISTEMAS TRIFÁSICOS
Valores de correntes, tensões e potências podem ser expressos por vetores de três ele-
mentos, cada elemento correspondendo a uma fase. Cada uma das três fases será expressa
pelos índices a, b e c.
Variáveis que representam vetores e matrizes serão representadas em negrito.
Assim, uma corrente complexa trifásica injetada em uma barra será representada por
um vetor contendo a corrente complexa de cada uma das fases:
𝑰 = (
𝐼𝑎𝐼𝑏𝐼𝑐
)
Analogamente, as correntes que fluem nos arcos são representadas por 𝑱,
𝑱 = (𝐽𝑎𝐽𝑏𝐽𝑐
)
As tensões complexas trifásicas são representadas por 𝑽,
𝑽 = (
𝑉𝑎𝑉𝑏𝑉𝑐
)
As potências complexas são representadas são representadas pelo vetor 𝑺,
𝑺 = (𝑆𝑎𝑆𝑏𝑆𝑐
)
É possível desmembrar as potências complexas em suas componentes real e imaginá-
ria,
𝑺 = (𝑆𝑎𝑆𝑏𝑆𝑐
) = (𝑃𝑎 + 𝑖𝑄𝑎𝑃𝑏+ 𝑖𝑄𝑏𝑃𝑐 + 𝑖𝑄𝑐
) = (𝑃𝑎𝑃𝑏𝑃𝑐
)
⏟ 𝑷
+ 𝑖 (𝑄𝑎𝑄𝑏𝑄𝑐
)
⏟ 𝑸
= 𝑷 + 𝑖𝑸
As impedâncias trifásicas serão representadas por matrizes contendo as características
indutivas de um arco e suas interdependências.
37
𝒁 = (
𝑍𝑎 𝑍𝑎𝑏 𝑍𝑎𝑐𝑍𝑎𝑏 𝑍𝑏 𝑍𝑏𝑐𝑍𝑎𝑐 𝑍𝑏𝑐 𝑍𝑐
)
De posse das variáveis elétricas fundamentais, pode-se definir as funções utilizadas na
modelagem do problema para a representação trifásica.
3.5 MODELO DE OTIMIZAÇÃO TRIFÁSICO
O modelo matemático monofásico, apresentado nas equações 3.1 à 3.5, pode ser es-
tendido para o modelo trifásico, com a inclusão sistemática das variáveis trifásicas apresenta-
das na seção anterior.
As equações 3.6 à 3.11 apresentam o modelo matemático de alocação ótima para ca-
pacitores em redes trifásicas desbalanceadas. Seguindo, será feita a discussão da extensão do
modelo monofásico para o trifásico.
Função objetivo:
Min [∑ 𝛼 ∙ 𝑇 ∙ 𝐿𝑘+ 𝐶𝑡𝑘𝑘∈𝑁
] 3.6
Nos quais:
𝐿 = 𝑅𝑒𝑎𝑙((𝑽𝑘−1 − 𝑽𝑘)′ ∙ 𝑱𝑘
∗) 3.7
𝐶𝑡𝑘 = ∑𝐂𝑘𝑎,𝑏,𝑐
3.8
Sujeito às restrições:
𝑱𝑚 = 𝑰𝑘 +∑𝑱𝑒𝑒∈𝐸
− 𝑰𝒄𝑘 3.9
𝑽𝑘 = 𝑽𝑘−1 − (𝒁𝑘 ∙ 𝑱𝑘) 3.10
𝑢𝑘 ∈ 𝑈 3.11
Para o modelo trifásico, o custo total de instalação dos capacitores 𝐶𝑡𝑘 pode ser dado
pela soma dos custos dos capacitores em cada uma das fases a, b e c, como em 3.8.
De maneira análoga, a função de perdas 𝐿 descrita em 3.7 deve retornar o valor de cus-
to total das perdas nas três fases. Para isso, deve-se considerar a soma das perdas em cada
uma das fases (a, b e c). Na Equação 3.7, (𝑽𝑘−1 −𝑽𝑘)′ é o transposto do vetor de diferenças
de tensões.
38
A restrição (3.3) apresenta apenas somas e subtrações. Portanto, sua equivalente trifá-
sica é obtida pela substituição de soma e subtração de variáveis por soma e subtração de veto-
res, como representado na Equação em 3.9.
A Equação 3.10 representa o vetor de tensões trifásicas nas barras k, obtido a partir do
vetor de tensões na barra à montante (𝑽𝑘−1), da matriz de impedâncias (𝒁𝑘) e do vetor de
correntes complexas nas linhas (𝑱𝑘).
A próxima parte da tese apresentará uma visão geral da estratégia de solução, com
uma breve discussão de cada uma das etapas principais, que serão detalhadas nos capítulos
seguintes.
39
Parte II: Estratégia de Solução
40
Esta seção discute os passos utilizados na estratégia de solução do problema de otimi-
zação proposto. Cada etapa da estratégia de solução foi separada em módulos, sendo que cada
um deles será descrito em detalhes nos capítulos seguintes.
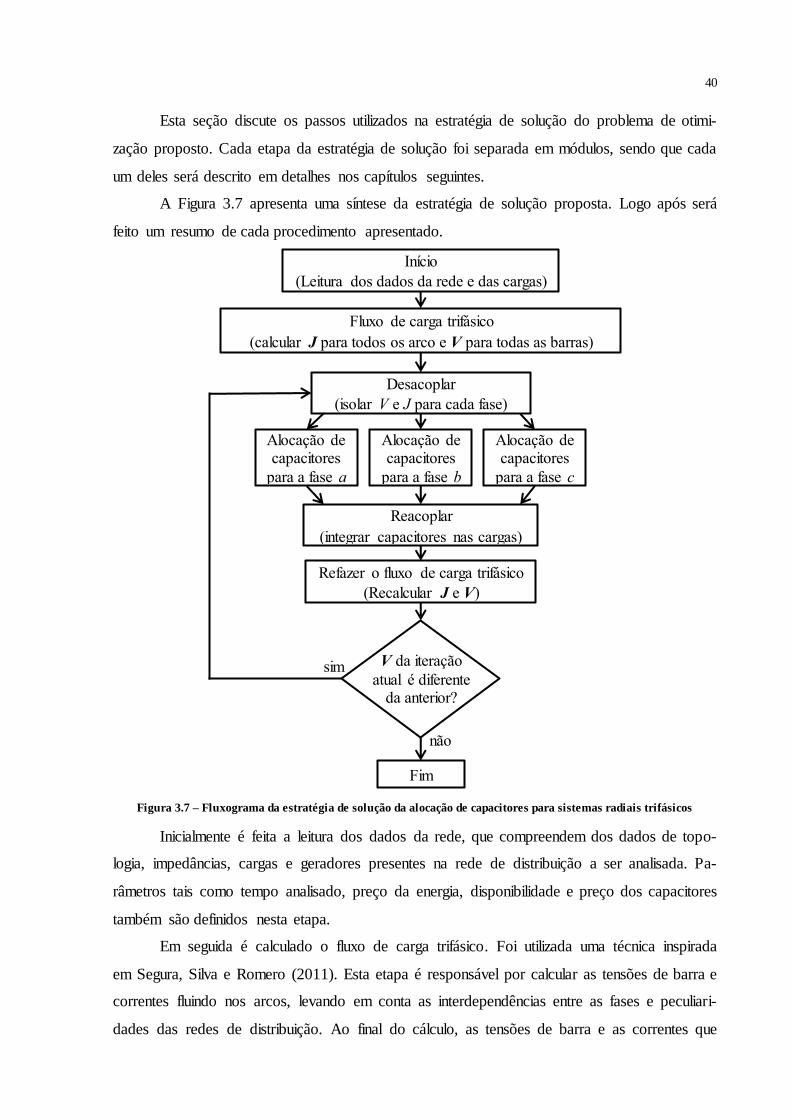
A Figura 3.7 apresenta uma síntese da estratégia de solução proposta. Logo após será
feito um resumo de cada procedimento apresentado.
Figura 3.7 – Fluxograma da estratégia de solução da alocação de capacitores para sistemas radiais trifásicos
Inicialmente é feita a leitura dos dados da rede, que compreendem dos dados de topo-
logia, impedâncias, cargas e geradores presentes na rede de distribuição a ser analisada. Pa-
râmetros tais como tempo analisado, preço da energia, disponibilidade e preço dos capacitores
também são definidos nesta etapa.
Em seguida é calculado o fluxo de carga trifásico. Foi utilizada uma técnica inspirada
em Segura, Silva e Romero (2011). Esta etapa é responsável por calcular as tensões de barra e
correntes fluindo nos arcos, levando em conta as interdependências entre as fases e peculiari-
dades das redes de distribuição. Ao final do cálculo, as tensões de barra e as correntes que
Início
(Leitura dos dados da rede e das cargas)
Fluxo de carga trifásico
(calcular J para todos os arco e V para todas as barras)
Desacoplar
(isolar V e J para cada fase)
Alocação de capacitores
para a fase a
Alocação de capacitores
para a fase b
Alocação de capacitores
para a fase c
Reacoplar
(integrar capacitores nas cargas)
V da iteração
atual é diferente da anterior?
Fim
sim
não
Refazer o fluxo de carga trifásico
(Recalcular J e V)
41
fluem nos arcos contém implicitamente toda a informação sobre as cargas, geradores e peculi-
aridades da rede de distribuição, podendo ser utilizadas como dados simplificadores da rede.
O Capítulo 4 mostra detalhes da técnica do fluxo de carga utilizado.
A seguir os dados de cada fase são desacoplados respeitando a metodologia descrita
no Capítulo 5. Esse método utiliza a resposta do fluxo de carga como parâmetro de entrada e
traça representações de equivalência para decompor o modelo de otimização em uma formu-
lação por fase.
Com os dados de cada fase devidamente preparados, é feito o processo de otimização
da alocação ótima de capacitores para cada fase, o qual é descrito no Capítulo 6. Para a reso-
lução da alocação ótima por fase, é utilizada uma releitura do método de Vizcaino González,
Lyra e Usberti (2012) o qual propõe uma solução para o problema de otimização utilizando
técnicas inspiradas em programação dinâmica.
De posse do resultado da alocação de capacitores, os dados dos capacitores a serem in-
seridos em cada fase são integrados nos dados do sistema trifásico. Essa integração é feita
adicionando os capacitores calculados nos dados de cargas da rede. Com o novo conjunto de
capacitores atualizado, o fluxo de carga trifásico é recalculado, atualizando os valores de ten-
são e correntes do sistema.
Após isso os novos valores de tensão nas barras são comparados com os valores calcu-
lados anteriormente, caso haja diferença significativa o processo de alocação de capacitores é
refeito e o fluxo é recalculado até que a diferença entre iterações não seja significativa.
Os próximos capítulos discutirão em detalhes cada um dos procedimentos relaciona-
dos à estratégia de solução. O Capítulo 4 discutirá o cálculo do fluxo de carga trifásico e suas
peculiaridades. O Capítulo 5 descreverá os passos da estratégia de solução da alocação trifási-
ca de capacitores e a técnica de desacoplamento entre as fases. A técnica de otimização para
cada uma das fases é descrita no Capítulo 6.
42
Capítulo 4
Fluxo de Carga
4.1 INTRODUÇÃO
O fluxo de carga (ou fluxo de potência) é responsável por calcular o estado da rede e a
distribuição dos fluxos em regime permanente. Existem várias maneiras de se calcular um
fluxo de potência, contudo em redes radiais é conveniente a aplicação de métodos que se be-
neficiam de suas peculiaridades.
Para este trabalho, será utilizado um fluxo de carga baseado em Segura, Silva e
Romero (2011). Este método propõe a resolução de duas equações generalizadas especifica-
mente para o fluxo de carga radial, modelando cuidadosamente cada um dos equipamentos e
configurações presentes em um sistema de distribuição. Porém, diferentemente do artigo ori-
ginal, que se baseia em estruturar matrizes de forma a resolver um conjunto de sistemas linea-
res, será utilizada a metodologia de varredura backward forward a qual se baseia nas proprie-
dades de estrutura em árvore das redes radiais. Esta metodologia é particularmente didática, já
que apresenta conceitos que serão reaproveitados nos capítulos seguintes.
O cálculo do fluxo de carga é baseado em duas equações generalizadas, que podem ser
expressas pelas equações 3.9 e 3.10, reescritas a seguir:
𝑱𝑘 = 𝑰k + ∑ 𝑱𝑚𝑚∈𝐴𝑘
− 𝑰𝒄𝒌 3.9
𝑽𝑘 = 𝑽𝑘−1 − (𝒁𝑘 ∙ 𝑱𝑘) 3.10
Este capítulo explicará o cálculo de cada um dos elementos das equações 3.9 e 3.10, e
descreverá o processo iterativo de cálculo dos fluxos de corrente e das tensões de barra.
Inicialmente, todas as tensões são inicializadas como tendo seu valor nominal, e são
calculadas todas as injeções de correntes nas barras (𝑰k e 𝑰𝒄𝒌).
43
As seções a seguir explicarão as estratégias adotadas para calcular as parcelas de inje-
ções de correntes da Equação 3.9 e a impedância da Equação 3.10
4.2 CALCULO DA INJEÇÃO DE CORRENTE COMPLEXA TRIFÁSICA PELAS
CARGAS
Todas as barras do sistema podem conter cargas ou geradores. Os geradores são calcu-
lados de maneira análoga às cargas. Contudo, geradores serão modelados como cargas de si-
nal oposto. Os modelos de carga a seguir podem ser estendidos para geradores, bastando para
isso inverter o sinal adotado.
As cargas em um sistema de distribuição trifásico são costumeiramente modeladas de
3 maneiras, dependendo de sua natureza:
Cargas modeladas como tendo potência constante.
Cargas como corrente constante.
Cargas como impedância constante.
Além da natureza, cargas podem estar ligadas entre si de duas maneiras: em forma de
estrela (Y), ou em forma de delta (Δ). Para o presente trabalho, todas as cargas conectadas em
Y serão consideradas como tendo aterramento em seu ponto comum.
Na ligação em estrela, cada carga é ligada entre uma fase e um ponto em comum:
Figura 4.1 - Carga conectada em estrela
Considerando uma ligação em estrela (𝑌), o cálculo da corrente complexa (𝐼) de cada
fase, a partir de cargas modeladas como sendo potência constante (𝑝), pode ser obtido como
mostrado na Equação 4.1:
𝐼𝑝𝑦𝑘,𝜙 = (𝑆𝑘,𝜙
𝑉𝑘,𝜙)
∗
4.1
𝑎
𝑐
𝑏
44
Nos quais:
𝐼𝑝𝑦𝑘,𝜙 é a corrente complexa (𝐼) calculada a partir de carga com natureza de potencia
constante (𝑝) e ligada com as outras fases em forma de estrela (𝑦), injetada na barra 𝑘, na fase
𝜙.
𝑆𝑘,𝜙 é a potência aparente da carga presente na barra 𝑘, na fase 𝜙.
𝑉𝑘,𝜙 é a tensão na barra 𝑘, na fase 𝜙.
∗ é o operador que simboliza o conjugado de um número complexo.
Definida a corrente calculada para cada fase, a corrente complexa trifásica injetada na
barra pode ser representada como na Equação 4.2:
𝑰𝑘 = (
𝐼𝑝𝑦𝑘,𝑎𝐼𝑝𝑦𝑘,𝑏𝐼𝑝𝑦𝑘,𝑐
) 4.2
Nos quais:
𝐼𝑝𝑦𝑘,𝑎, 𝐼𝑝𝑦𝑘,𝑏 e 𝐼𝑝𝑦𝑘,𝑐 são as correntes complexas calculadas a partir de carga com na-
tureza de potencia constante e ligadas entre si em forma de Y (estrela), injetada na barra 𝑘,
nas fases 𝑎, 𝑏 e 𝑐 respectivamente.
A injeção de corrente complexa (𝐼) a partir de cargas modeladas como sendo corrente
constante (𝑗) e ligadas em estrela (𝑦) são aplicadas diretamente, assim temos a seguinte repre-
sentação de corrente complexa trifásica:
𝑰𝒌 = (
𝐼𝑗𝑦𝑘,𝑎𝐼𝑗𝑦𝑘,𝑏𝐼𝑗𝑦𝑘,𝑐
) 4.3
Sendo 𝐼𝑗𝑦𝑘,𝑎, 𝐼𝑗𝑦𝑘,𝑏 , e 𝐼𝑗𝑦𝑘,𝑐 as correntes complexas calculadas a partir de carga com
natureza de corrente constante ligada em estrela, injetada na barra 𝑘, nas fases 𝑎, 𝑏, e 𝑐 res-
pectivamente.
O cálculo da corrente complexa (𝐼) a partir de cargas modeladas como sendo impe-
dância constante (𝑧) e ligadas estrela (𝑦) pode ser obtida a partir da Equação 4.4:
𝐼𝑧𝑦𝑘,𝜙 =𝑉𝑘,𝜙𝑍𝑘,𝜙
4.4
Em que:
𝐼𝑧𝑦𝑘,𝜙 é a corrente complexa calculada a partir de carga com natureza de impedância
constante (z) ligada em estrela (y), injetada na barra 𝑘, da fase 𝜙.
𝑍𝑘,𝜙 e a impedância da carga presente na barra 𝑘, na fase 𝜙.
45
O cálculo da corrente complexa trifásica a partir de cargas modeladas como sendo im-
pedância constante e ligadas em Y pode ser representada como em 4.5:
𝑰𝑘 = (
𝐼𝑧𝑦𝑘,𝑎𝐼𝑧𝑦𝑘,𝑏𝐼𝑧𝑦𝑘,𝑐
) 4.5
Sendo:
𝐼𝑧𝑦𝑘,𝑎, 𝐼𝑧𝑦𝑘,𝑏 e 𝐼𝑧𝑦𝑘,𝑐 são as correntes complexas calculadas a partir de carga com na-
tureza de impedância constante e ligadas entre si em forma de Y, injetada na barra 𝑘, nas fa-
ses 𝑎, 𝑏 e 𝑐 respectivamente.
Na ligação em delta, cada carga é ligada entre duas fases, completando um ciclo, como
mostrado na Figura 4.2:
Figura 4.2 – Carga conectada em delta
Como existem duas tensões entre os terminais da carga, é necessário calcular a dife-
rença de potencial entre os terminais. Sendo assim, a tensão complexa trifásica de cargas co-
nectadas em delta é calculada da seguinte maneira:
𝑽Δ𝑘 = (
𝑉Δ𝑘,𝑎𝑏
𝑉Δ𝑘,𝑏𝑐
𝑉Δ𝑘,c𝑎
)= (
𝑉𝑘,𝑎 − 𝑉𝑘,𝑏
𝑉𝑘,𝑏 −𝑉𝑘,𝑐
𝑉𝑘,𝑐 −𝑉𝑘,𝑎
) 4.6
Nos quais:
𝑽𝚫𝑘 é o vetor de tensões complexas trifásicas (𝑽) para cargas conectadas em delta (Δ)
na barra 𝑘.
𝑉Δ𝑘,𝑎𝑏 é a diferença de tensão entre as fases 𝑎 e 𝑏, na barra 𝑘.
𝑉Δ𝑘,𝑏𝑐 é a diferença de tensão entre as fases 𝑏 e 𝑐, na barra 𝑘.
𝑉Δ𝑘,c𝑎 é a diferença de tensão entre as fases 𝑐 e 𝑎, na barra 𝑘.
𝑉𝑘,𝑎, 𝑉𝑘,𝑏 e 𝑉𝑘,𝑐 é a tensão complexa da barra 𝑘, nas fases 𝑎, 𝑏 e 𝑐 respectivamente.
bc
a
b
c

46
Como pode-se perceber na Figura 4.2, a corrente que passa em cada carga é diferente
da corrente que passa nas linhas. Como o cálculo de 𝑰𝑘 é feito a partir das correntes nas li-
nhas, é necessário que se calcule estas a partir das correntes nas cargas, como na Equação 4.7.
[
𝐼𝑎𝐼𝑏𝐼𝑐
] = (
𝐼𝑎𝑏 − 𝐼𝑎𝑐
−𝐼𝑎𝑏 + 𝐼𝑏,𝑐
−𝐼𝑏,𝑐 + 𝐼𝑐,𝑎
) 4.7
Uma maneira conveniente de se fazer esse cálculo é através de uma matriz de trans-
formação, a qual se for pré-multiplicada pela corrente trifásica da carga resulta na corrente
trifásica de fase:
𝚫𝒀 = [1 0 −1−1 1 00 −1 1
] 4.8
Assim temos que:
[
𝐼𝑎𝐼𝑏𝐼𝑐
] = [1 0 −1−1 1 00 −1 1
](
𝐼𝑎𝑏
𝐼𝑏,𝑐
𝐼𝑐,𝑎
) = (
𝐼𝑎𝑏 − 𝐼𝑎𝑐
−𝐼𝑎𝑏 + 𝐼𝑏,𝑐
−𝐼𝑏,𝑐 + 𝐼𝑐,𝑎
) 4.9
Que também pode ser expresso pela Equação 4.10:
𝑰𝑘 = 𝚫𝒀 ∙ 𝑰∆𝑘 4.10
Nos quais
𝚫𝒀 é a matriz de transformação da corrente da carga em 𝚫 para as linhas em 𝒀.
𝑰∆𝑘 é a corrente complexa trifásica da carga em ∆, da barra 𝑘.
Para cada tipo de carga é necessário novamente o cálculo da corrente complexa trifási-
ca.
Considerando que as cargas tenham a natureza de potência constante, a corrente com-
plexa é calculada da seguinte maneira:
𝐼𝑝Δ𝑘,𝜙1𝜙2 = (𝑆𝑘,𝜙1𝜙2
𝑉Δ𝑘,𝜙1𝜙2)
∗
4.11
Nos quais:
𝜙1𝜙2 é o índice correspondente ao ramo entre as fases 𝜙1 e 𝜙2.
𝐼𝑝Δ𝑘,𝜙1𝜙2 é a corrente complexa (𝐼) vinda de uma carga de natureza potencia constan-
te (𝑝) conectada em delta (Δ) que flui através do ramo entre as fases 𝜙1 e 𝜙2.
𝑆𝑘,𝜙1𝜙2 é a potência aparente consumida no ramo entre as fases 𝜙1 e 𝜙2.
𝑉Δ𝑘,𝜙1𝜙2 é a diferença de tensão entre as fases 𝜙1 e 𝜙2.
47
E a corrente complexa trifásica para a carga em delta é dada a seguir:
𝑰∆𝑘 = (
𝐼𝑝Δ𝑘,𝑎𝑏
𝐼𝑝Δ𝑘,𝑏𝑐
𝐼𝑝Δ𝑘,𝑐𝑎
) 4.12
Nos quais:
𝑰∆𝑘 é a corrente complexa trifásica que flui no ramo conectado em ∆, da barra 𝑘.
𝐼𝑝Δ𝑘,𝑎𝑏 , 𝐼𝑝Δ𝑘,𝑏𝑐 , 𝐼𝑝Δ𝑘,𝑐𝑎 são as correntes que fluem de uma carga de natureza poten-
cia constante localizadas entre as fases 𝑎𝑏, 𝑏𝑐 e 𝑐𝑎 respectivamente.
Para cargas de natureza corrente constante, a corrente complexa trifásica para a carga
em delta é calculada diretamente:
𝑰∆𝑘 = (
𝐼𝑗Δ𝑘,𝑎𝑏
𝐼𝑗Δ𝑘,𝑏𝑐
𝐼𝑗Δ𝑘,c𝑎
) 4.13
E para carga de natureza impedância constante, a corrente complexa é calculada da se-
guinte maneira:
𝐼𝑧Δ𝑘,𝜙1𝜙2 =𝑉Δ𝑘,𝜙1𝜙2
𝑍Δ𝑘,𝜙1𝜙2 4.14
Nos quais:
𝐼𝑧Δ𝑘,𝜙1𝜙2 é a corrente (𝐼) vinda de uma carga de natureza impedância constante (𝑧),
conectada em delta (Δ), que flui através do ramo que fica entre as fases 𝜙1 e 𝜙2.
𝑍Δ𝑘,𝜙1𝜙2 é a impedância vinda de uma carga conectada entre as fases 𝜙1 e 𝜙2.
A corrente complexa trifásica para carga de impedância constante ligada em delta é
dada a seguir:
𝑰∆𝑘 = (
𝐼𝑧Δ𝑘,𝑎𝑏
𝐼𝑧Δ𝑘,𝑏𝑐
𝐼𝑧Δ𝑘,c𝑎
) 4.15
Nos quais:
𝐼𝑧Δ𝑘,𝑎𝑏 , 𝐼𝑧Δ𝑘,𝑏𝑐, 𝐼𝑧Δ𝑘,𝑐𝑎 são as correntes que fluem de uma carga de natureza impe-
dância constante localizada entre as fases 𝑎𝑏, 𝑏𝑐 e 𝑐𝑎 respectivamente.
48
4.3 CÁLCULO DA CORRENTE INJETADA PELOS CAPACITORES
Capacitores são modelados como cargas, e como tais podem estar em qualquer barra
do sistema. Serão considerados capacitores ligados em Y, e são modelados como tendo potên-
cia constante. Portanto seu cálculo é muito parecido com a Equação 4.1.
𝐼𝑐𝑘 ,𝜙 = (𝑢𝑘,𝜙𝑉𝑘,𝜙
)
∗
4.16
Em que:
𝐼𝑐𝑘,𝜙 é a corrente complexa (𝐼) do capacitor (𝑐), injetada na barra 𝑘, da fase 𝜙.
𝑢𝑘,𝜙 e a potência do capacitor presente na barra 𝑘, na fase 𝜙.
A corrente complexa trifásica injetada na barra por capacitores é dada a seguir:
𝑰𝒄𝑘 = (
𝐼𝑐𝑘 ,𝑎
𝐼𝑐𝑘,b
𝐼𝑐𝑘 ,c
) 4.17
Nos quais:
𝐼𝑐𝑘,𝑎, 𝐼𝑐𝑘,b e 𝐼𝑐𝑘,c são as correntes dos capacitores, injetadas na barra 𝑘, nas fases 𝑎, 𝑏
e 𝑐 respectivamente.
Na estratégia de solução, quando o fluxo é calculado pela primeira vez é desejável que
não haja capacitores instalados, para que a alocação de capacitores feita posteriormente consi-
dere os dados sem capacitores e possa encontrar a alocação ótima para a rede.
4.4 CÁLCULO DAS IMPEDÂNCIAS EM ARCOS
No fluxo de potência trifásico, as barras são ligadas através de arcos. Estes arcos po-
dem ser associados à linhas de distribuição, transformadores ou chaves. Esses equipamentos
podem ser modelados como sendo uma matriz característica de impedância trifásica, que con-
tém as impedâncias de cada fase e também as relações entre elas.
A matriz característica de impedância trifásica é representada pela Equação 4.18:
𝒁𝑚 = (𝑍𝑎 𝑍𝑎𝑏 𝑍𝑎𝑐𝑍𝑎𝑏 𝑍𝑏 𝑍𝑏𝑐𝑍𝑎𝑐 𝑍𝑏𝑐 𝑍𝑐
) 4.18
Nos quais:
𝒁𝑚 é a matriz características das impedâncias o arco 𝑚.

49
𝑍𝑎, 𝑍𝑏 e 𝑍𝑐 são as impedâncias próprias das fases 𝑎, 𝑏 e 𝑐, respectivamente.
𝑍𝑎𝑏 é a relação de impedância entre as fases 𝑎 e 𝑏.
𝑍𝑏𝑐 é a relação de impedância entre as fases 𝑏 e c.
𝑍𝑎𝑐 é a relação de impedância entre as fases 𝑎 e 𝑐.
Para linhas de distribuição, a matriz 𝒁𝑚 de cada arco é dada diretamente de acordo
com a Equação 4.18.
No caso de transformadores, a impedância depende do tipo de ligação da alta (primá-
rio) e da baixa (secundário), pois ambas podem estar em Y ou Δ, e no caso da ligação em Y
esta pode estar aterrada (Yg) ou não. A Figura 4.3 mostra a matriz 𝒁𝑚 para os principais tipos
de ligação.
Figura 4.3 – Matriz de impedância para transformadores.
Fonte: Segura, Silva e Romero (2011)
Nos quais:
[𝑁𝑖]=𝒁𝑚
Y é a conexão em estrela sem aterramento.
Yg é a conexão em estrela com o ponto comum aterrado.
Δ é a conexão em delta.
50
nt é a relação entre espiras do primário e secundário.
𝐼0 é o vetor de correntes de sequência zero no secundário do transformador.
𝑽0 é o vetor de tensão relativo a corrente de sequência zero no secundário do trans-
formador.
No caso da ligação em Δ-Yg a tensão 𝑽0 deve ser subtraída ao cálculo de queda de
tensão da Equação 3.10.
As chaves apresentam tratamento diferenciado, pois elas são arcos responsáveis por
conectar ou desconectar duas barras entre si, mudando a topologia da rede.
Chaves fechadas são consideradas como um arco onde não há impedância, sendo as-
sim elas são modeladas como uma matriz de zeros.
Chaves abertas são responsáveis por desconectar duas barras, sendo assim o arco é re-
tirado do circuito do sistema de distribuição durante o cálculo do fluxo de carga.
4.5 CÁLCULO DOS FLUXOS E CONSIDERAÇÕES
Após calculadas todas as injeções e impedâncias, procede-se a etapa do cálculo do flu-
xo de corrente e das tensões de barra. Como explicado anteriormente, será utilizado o proces-
so backward-forward, que resume-se na aplicação consecutiva de duas fases de varredura: a
fase de cálculo do fluxo corrente, e a fase do cálculo das tensões.
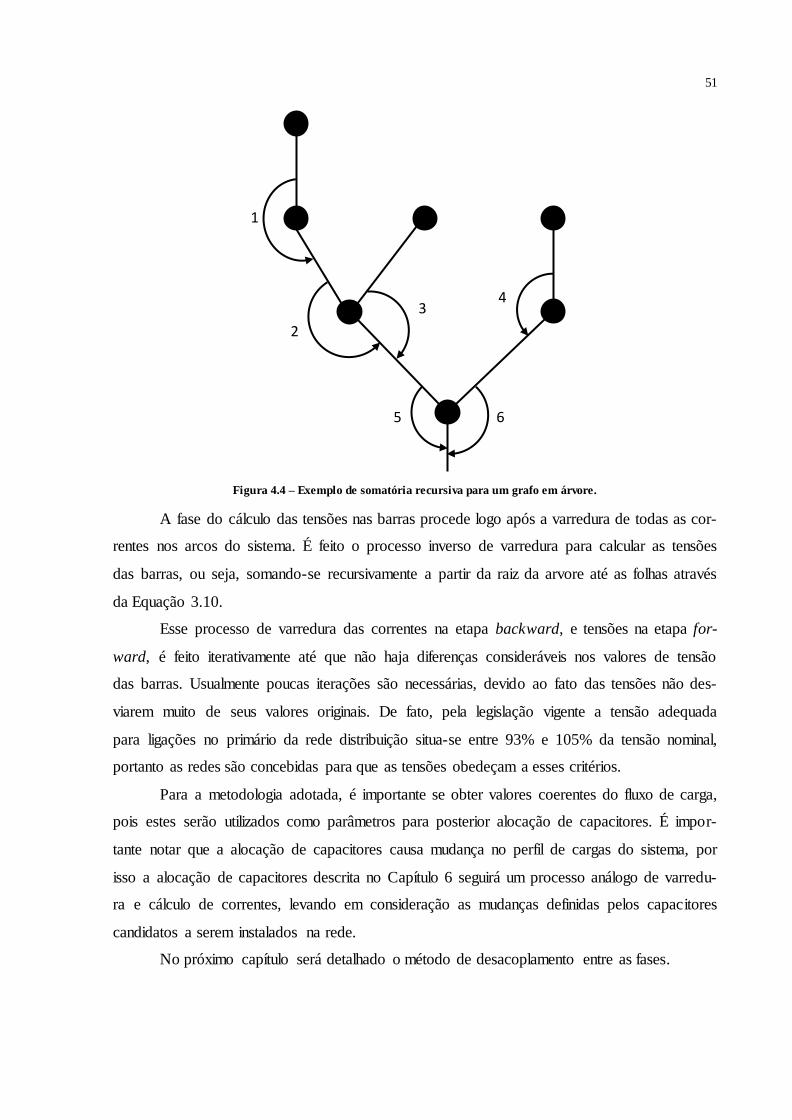
Para a fase do cálculo do fluxo de corrente, a Equação 3.9 é calculada para todos os
arcos, partindo das folhas do grafo em árvore (que representa o sistema radial), e somando-se
recursivamente até a raiz. A Figura 4.4 esboça a sequencia de cálculos, do primeiro ao último
em sequencia crescente, para uma rede de 7 barras.
51
Figura 4.4 – Exemplo de somatória recursiva para um grafo em árvore.
A fase do cálculo das tensões nas barras procede logo após a varredura de todas as cor-
rentes nos arcos do sistema. É feito o processo inverso de varredura para calcular as tensões
das barras, ou seja, somando-se recursivamente a partir da raiz da arvore até as folhas através
da Equação 3.10.
Esse processo de varredura das correntes na etapa backward, e tensões na etapa for-
ward, é feito iterativamente até que não haja diferenças consideráveis nos valores de tensão
das barras. Usualmente poucas iterações são necessárias, devido ao fato das tensões não des-
viarem muito de seus valores originais. De fato, pela legislação vigente a tensão adequada
para ligações no primário da rede distribuição situa-se entre 93% e 105% da tensão nominal,
portanto as redes são concebidas para que as tensões obedeçam a esses critérios.
Para a metodologia adotada, é importante se obter valores coerentes do fluxo de carga,
pois estes serão utilizados como parâmetros para posterior alocação de capacitores. É impor-
tante notar que a alocação de capacitores causa mudança no perfil de cargas do sistema, por
isso a alocação de capacitores descrita no Capítulo 6 seguirá um processo análogo de varredu-
ra e cálculo de correntes, levando em consideração as mudanças definidas pelos capacitores
candidatos a serem instalados na rede.
No próximo capítulo será detalhado o método de desacoplamento entre as fases.
4 2
5
7
1
6
3 1
2
3 4
5 6
52
Capítulo 5
Desacoplamento de Fases
Este capítulo abordará a estratégia de desacoplamento de fases para que se possa utili-
zar a alocação de capacitores monofásica para cada uma das fases separadamente. Os resulta-
dos do fluxo de potência são os parâmetros de entrada desta metodologia, a qual aliada a es-
tratégia de solução apresentada permite a decomposição por fase sem a perda de informação
do acoplamento trifásico.
Primeiramente serão feitas considerações sobre o acoplamento trifásico e a relação en-
tre as variáveis elétricas. Depois será demonstrado uma variação da lei de joule aplicado ao
problema. Finalmente será apresentada a estratégia de decomposição por fase para o problema
de otimização proposto.
5.1 CONSIDERAÇÕES SOBRE ACOPLAMENTO E VARIÁVEIS ELÉTRICAS
Para a alocação de capacitores em redes trifásicas, primeiramente é proposta uma téc-
nica de desacoplamento de fases, para posteriormente utilizar a técnica monofásica de aloca-
ção de capacitores.
Considerando que o fluxo trifásico já esteja calculado, valores de tensão e corrente se-
rão considerados como parâmetros para a etapa atual. Dessa maneira temos que cada fase
apresenta uma tensão já calculada nas barras, uma corrente fluindo nos arcos, e a impedância
trifásica.
A tensão calculada pelo fluxo será mantida inalterada durante a etapa de alocação de
capacitores. A corrente calculada pelo fluxo em cada fase já contém a parcela de corrente
consumida pelas cargas e pelas perdas técnicas, portanto não há necessidade de se ater a con-
siderações como a natureza das cargas, geradores e tipo de ligação. No modelo adotado a im-
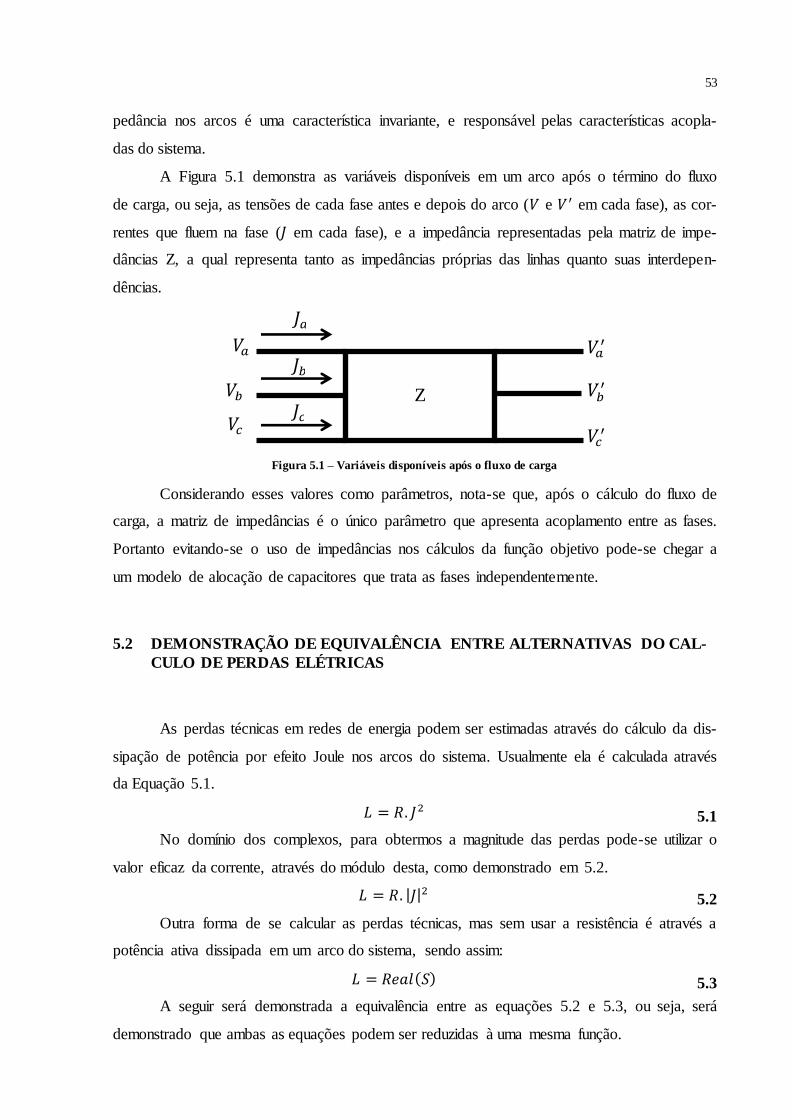
53
pedância nos arcos é uma característica invariante, e responsável pelas características acopla-
das do sistema.
A Figura 5.1 demonstra as variáveis disponíveis em um arco após o término do fluxo
de carga, ou seja, as tensões de cada fase antes e depois do arco (𝑉 e 𝑉′ em cada fase), as cor-
rentes que fluem na fase (𝐽 em cada fase), e a impedância representadas pela matriz de impe-
dâncias Z, a qual representa tanto as impedâncias próprias das linhas quanto suas interdepen-
dências.
Figura 5.1 – Variáveis disponíveis após o fluxo de carga
Considerando esses valores como parâmetros, nota-se que, após o cálculo do fluxo de
carga, a matriz de impedâncias é o único parâmetro que apresenta acoplamento entre as fases.
Portanto evitando-se o uso de impedâncias nos cálculos da função objetivo pode-se chegar a
um modelo de alocação de capacitores que trata as fases independentemente.
5.2 DEMONSTRAÇÃO DE EQUIVALÊNCIA ENTRE ALTERNATIVAS DO CAL-
CULO DE PERDAS ELÉTRICAS
As perdas técnicas em redes de energia podem ser estimadas através do cálculo da dis-
sipação de potência por efeito Joule nos arcos do sistema. Usualmente ela é calculada através
da Equação 5.1.
𝐿 = 𝑅. 𝐽2 5.1
No domínio dos complexos, para obtermos a magnitude das perdas pode-se utilizar o
valor eficaz da corrente, através do módulo desta, como demonstrado em 5.2.
𝐿 = 𝑅. |𝐽|2 5.2
Outra forma de se calcular as perdas técnicas, mas sem usar a resistência é através a
potência ativa dissipada em um arco do sistema, sendo assim:
𝐿 = 𝑅𝑒𝑎𝑙(𝑆) 5.3
A seguir será demonstrada a equivalência entre as equações 5.2 e 5.3, ou seja, será
demonstrado que ambas as equações podem ser reduzidas à uma mesma função.
Z
𝐽𝑎
𝐽𝑏
𝐽𝑐
𝑉𝑎
𝑉𝑐
𝑉𝑏
𝑉𝑎′
𝑉𝑐′
𝑉𝑏′

54
Para a Equação 5.3, temos:
𝐿 = 𝑅𝑒𝑎𝑙(𝑆)
Considerando que 𝑆 = 𝐽∗ ∙ 𝑉
𝐿 = 𝑅𝑒𝑎𝑙(𝐽∗ ∙ 𝑉)
Expandindo os números complexos para sua forma cartesiana, temos:
𝐿 = 𝑅𝑒𝑎𝑙((𝐽𝑟 + 𝑖𝐽𝑖)∗ ∙ (𝑉𝑟 + 𝑖𝑉𝑖))
Em que:
𝐽𝑟 e 𝑉𝑟 representam as parcelas reais de tensão e corrente respectivamente.
𝐽𝑖 e 𝑉𝑖 representam as parcelas imaginárias de tensão e corrente respectivamente.
Aplicando o conjugado complexo:
𝐿 = 𝑅𝑒𝑎𝑙((𝐽𝑟 − 𝑖𝐽𝑖) ∙ (𝑉𝑟 + 𝑖𝑉𝑖))
Expandindo a multiplicação:
𝐿 = 𝑅𝑒𝑎𝑙(𝐽𝑟𝑉𝑟 + 𝑖𝐽𝑟𝑉𝑖 − 𝑖𝐽𝑖𝑉𝑟 + 𝐽𝑖𝑉𝑖)
Colocando i em evidência:
𝐿 = 𝑅𝑒𝑎𝑙(𝐽𝑟𝑉𝑟+ 𝐽𝑖𝑉𝑖 + 𝑖(𝑖𝐽𝑟𝑉𝑖 − 𝑖𝐽𝑖𝑉𝑟))
Finalmente, aplicando o operador de números reais, conclui-se que:
𝐿 = 𝑉𝑟𝐽𝑟 + 𝑉𝑖𝐽𝑖 5.4
A seguir será demonstrada que a Equação 5.2, assim como a Equação 5.3 também é
equivalente à Equação 5.4.
Para a Equação 5.2, temos:
𝐿 = 𝑅. |𝐽|2
Considerando que R é a parte real de Z temos 5.7.
𝐿 = 𝑅𝑒𝑎𝑙(𝑍) ∙ |𝐽|2
Considerando que Z é a tensão pela corrente, temos:
𝐿 = 𝑅𝑒𝑎𝑙 (𝑉
𝐽) ∙ |𝐽|2
Expandindo os números complexos para sua forma cartesiana, temos:
𝐿 = 𝑅𝑒𝑎𝑙 (𝑉𝑟 + 𝑖𝑉𝑖𝐽𝑟 + 𝑖𝐽𝑖
) ∙ |𝐽𝑟 + 𝑖𝐽𝑖 |2
Em que:
Vr e Jr representam as parcelas reais de tensão e corrente respectivamente.
Vi e Ji representam as parcelas imaginárias de tensão e corrente respectivamente.

55
Multiplicando a divisão pelo conjugado complexo no numerador e denominador, e apli-
cando o módulo, temos:
𝐿 = 𝑅𝑒𝑎𝑙 (𝑉𝑟 + 𝑖𝑉𝑖𝐽𝑟 + 𝑖𝐽𝑖
∙𝐽𝑟 − 𝑖𝐽𝑖𝐽𝑟 − 𝑖𝐽𝑖
) ∙ (√𝐽𝑟2 + 𝑖𝐽𝑖
2)
2
Aplicando as operações:
𝐿 = 𝑅𝑒𝑎𝑙 (𝑉𝑟𝐽𝑟− 𝑖𝑉𝑟𝐽𝑖+ 𝑖𝑉𝑖𝐽𝑟+ 𝑉𝑖𝐽𝑖𝐽𝑟2 − 𝑖𝐽𝑟𝐽𝑖+ 𝑖𝐽𝑟𝐽𝑖+ 𝐽𝑖
2 ) ∙ (𝐽𝑟2 + 𝑖𝐽𝑖
2)
Aplicando o operador de números reais:
𝐿 =𝑉𝑟𝐽𝑟 + 𝑉𝑖𝐽𝑖(𝐽𝑟2 + 𝐽𝑖
2)∙ (𝐽𝑟
2 + 𝐽𝑖2)
Finalmente, aplicando a divisão, conclui-se que:
𝐿 = 𝑉𝑟𝐽𝑟 + 𝑉𝑖𝐽𝑖 5.5
Assim, temos que 5.4 e 5.5 representam a mesma função, portanto as equações 5.2 e
5.3 são equivalentes.
É importante lembrar que o objetivo é evitar o uso de impedâncias durante a etapa de
cálculo da alocação de capacitores. Portanto para calcular a perda técnica será utilizada a
Equação 5.3.
5.3 DECOMPOSIÇÃO POR FASE
Continuando o critério de evitar a utilização da variável de impedâncias, tanto a fun-
ção de perdas quanto a função objetivo serão inseridos no contexto trifásico, e então será de-
duzida a decomposição por fase. Lembrando mais uma vez que variáveis em negrito repre-
sentam vetores trifásicos.
Considerando todas as tensões como parâmetros, a diferença de potencial entre uma
barra 𝑉 e a imediatamente posterior 𝑉′ pode ser substituída pela variável ∆𝑉 como mostrado
na Equação 5.6.
∆𝑽 = 𝑽 −𝑽′ 5.6
Considerando a potência aparente em um arco
𝐒 = 𝑱∗ ∙ ∆𝑽 5.7
Em que 𝑱∗ é o transposto e conjugado complexo da corrente trifásica 𝑱;

56
No contexto monofásico, podemos calcular a perda através de efeito joule através da
parcela real de S, como na Equação 5.8.
𝐿 = 𝑅𝑒𝑎𝑙(𝑆) = 𝑅𝑒𝑎𝑙(𝐽∗ ∙ ∆𝑉) 5.8
Em que 𝐿 é a dissipação de potência em um arco, e Real é o operador que retorna a
parcela real de um número complexo. No contexto trifásico temos:
𝐿 = 𝑅𝑒𝑎𝑙(𝑱∗ ∙ ∆𝑽) 5.9
É importante notar que mesmo no contexto trifásico, a função 𝐿 retorna um valor esca-
lar, ou seja, será retornada em um único valor a perda total das três fases.
Aplicando o operador de transposição, e expandindo cada fase de 5.8 obtém-se 5.10.
𝐿 = 𝑅𝑒𝑎𝑙 ([𝐽𝑎∗ 𝐽𝑏
∗ 𝐽𝑐∗] ∙ [
∆𝑉𝑎∆𝑉𝑏∆𝑉𝑐
]) 5.10
Onde, novamente, os índices a, b e c representam as fases do sistema.
Aplicando a multiplicação nas matrizes e agrupando as parcelas de cada fase obtém-se
5.11
𝐿 = 𝑅𝑒𝑎𝑙(∆𝑉𝑎𝐽𝑎∗)⏟
𝐿𝑎
+𝑅𝑒𝑎𝑙(∆𝑉𝑏𝐽𝑏∗)⏟
𝐿𝑏
+𝑅𝑒𝑎𝑙(∆𝑉𝑐𝐽𝑐∗)⏟
𝐿𝑐
5.11
E finalmente substituindo as parcelas indicadas na Equação 5.11 obtém-se a equação
de perdas para cada fase indicada em 5.12
𝐿 = 𝐿𝑎+ 𝐿𝑏+ 𝐿𝑐 5.12
Aplicando a propriedade de 5.12 na função objetivo indicada em 3.6 obtém-se a fun-
ção objetivo separada por fase 5.13
Min [∑ 𝛼 ∙ 𝑇 ∙ 𝐿𝑘 +𝐂𝒌𝑘∈𝑁
] = Min [∑ 𝛼 ∙ 𝑇 ∙ 𝐿𝑘𝑎 +C𝑘
𝑎
𝑘∈𝑁
]
+Min [∑𝛼 ∙ 𝑇 ∙ 𝐿𝑘𝑏 + C𝑘
𝑏
𝑘∈𝑁
]
+Min [∑𝛼 ∙ 𝑇 ∙ 𝐿𝑘𝑐 + C𝑘
𝑐
𝑘∈𝑁
]
5.13

57
É possível expressar o processo de otimização para cada fase em um problema inde-
pendente, com funções objetivo caracterizada pela Equação 5.14
Min∑ 𝑒(𝑥𝑘∅ ,𝑢𝑘
∅)
𝑘∈𝑁
5.14
Em que ∅ é o índice de fase e a função 𝑒(𝑥𝑘∅ ,𝑢𝑘
∅) é definida pela Equação 5.15.
𝑒(𝑥𝑘∅ ,𝑢𝑘
∅) = 𝛼 ∙ 𝑇 ∙ 𝐿𝑘∅ + 𝐶𝑘
∅ 5.15
A solução dos problemas de otimização por fase será discutida no próximo capítulo.
58
Capítulo 6
Estratégia de Otimização por Fase
A resolução da alocação de capacitores por fase é inspirado no modelo de programa-
ção dinâmica descrita em Durán (1968). Esta técnica resolve um ramo de uma rede radial de
distribuição, com garantia de otimalidade global na hipótese de redes não ramificadas e ten-
sões constantes nas barras. O trabalho de Durán foi estendido por Vizcaino González, Lyra e
Usberti (2012) para a inclusão de ramificações da rede, as quais são resolvidas através da pro-
jeção em uma dimensão, com garantias de otimalidade global também para a hipótese de ten-
sões constantes.
Inicialmente será discutida a solução de problemas de controle ótimo discreto por pro-
gramação dinâmica, base para a construção do método de solução proposto. Em seguida serão
definidos os problemas de otimização por fase e discutida a estratégia de programação dinâ-
mica estendida desenvolvida para a solução.
Como o método descrito trata apenas uma fase por vez, será omitido o índice de fases
∅ para uma representação matemática mais limpa.
6.1 SOLUÇÃO DE PROBLEMAS DE CONTROLE ÓTIMO DISCRETO POR
PROGRAMAÇÃO DINAMICA
Considere o problema de controle ótimo a seguir:
𝐷 = min𝑢1 ,𝑢2 ,…𝑢𝑘 ,…𝑢𝑁
∑𝑒𝑘(𝑥𝑘 ,𝑢𝑘)
𝑁
𝑘=1
6.1
Sujeito à
𝑥𝑘+1 = 𝑓𝑘(𝑥𝑘,𝑢𝑘), 𝑘 = 1,… , 𝑁 − 1 6.2
𝑥𝑘 ∈ 𝑋𝑘 , 𝑢𝑘 ∈ 𝑈𝑘 , ∀𝑘 6.3

59
Onde:
k representa os estágios no processo de decisão;
N caracteriza o estágio final;
𝑥𝑘 representa um estado admissível no estágio k;
𝑢𝑘 representa uma decisão admissível no estágio k;
𝑋𝑘 é o conjunto de estados admissíveis no estágio k;
𝑈𝑘 é o conjunto de decisões admissíveis no estágio k.
O problema acima pode ser resolvido por programação dinâmica em duas etapas
(Powell 2011); uma etapa de otimização no sentido inverso (backward) e uma etapa de recu-
peração dos estados e decisões ótimas, no sentido direto (forward).
O processo de otimização no sentido inverso determina recursivamente as soluções
ótimas dos subproblemas de otimização das decisões a partir de todos os estados factíveis 𝑥𝑘,
em todos os estágios.
Especificamente, determina-se o valor das funções de “custo ótimo acumulado”,
𝐹(𝑥𝑘) a partir de cada estado 𝑥𝑘.
𝐹(𝑥𝑘) = min𝑢𝑘 , 𝑢𝑘+1,…𝑢𝑁
∑𝑒𝑖(𝑥𝑖 ,𝑢𝑖)
𝑁
𝑖=𝑘
6.4
Sujeito a
𝑥𝑖+1 = 𝑓𝑖(𝑥𝑖 ,𝑢𝑖), ∀ 𝑖 = 𝑘, … , 𝑁 − 1 6.5
𝑥𝑖 ∈ 𝑋𝑖 , 𝑢𝑖 ∈ 𝑈𝑖 , ∀ 𝑘 6.6
Separando-se o termo para o estágio k dos estágios posteriores na Equação 6.4 tem-se:
𝐹(𝑥𝑘) = min𝑢𝑘 , 𝑢𝑘+1,…𝑢𝑁
[𝑒𝑘(𝑥𝑘 ,𝑢𝑘)+ ∑ 𝑒𝑖(𝑥𝑖 ,𝑢𝑖)
𝑁
𝑖=𝑘+1
] 6.7
Como as decisões 𝑢𝑘+1, … 𝑢𝑁 não afetam o custo 𝑒𝑘(𝑥𝑘 ,𝑢𝑘), tem-se
𝐹(𝑥𝑘) = min𝑢𝑘[𝑒𝑘(𝑥𝑘 ,𝑢𝑘)+ min
𝑢𝑘+1,…𝑢𝑁∑ 𝑒𝑖(𝑥𝑖 ,𝑢𝑖)
𝑁
𝑖=𝑘+1
] 6.8
Por definição,
𝐹(𝑥𝑘+1) = min𝑢𝑘+1,…𝑢𝑁
∑ 𝑒𝑖(𝑥𝑖 ,𝑢𝑖)
𝑁
𝑖=𝑘+1
60
Logo, 𝐹(𝑥𝑘) pode ser calculado recursivamente pelas equações de otimalidade de
Hamilton-Jacobi-Bellman (Powell 2011), a seguir
𝐹(𝑥𝑘) = min𝑢𝑘
[𝑒𝑘(𝑥𝑘 ,𝑢𝑘) + 𝐹(𝑥𝑘+1)] 6.9
Sujeito a
𝑥𝑘+1 = 𝑓𝑘(𝑥𝑘,𝑢𝑘) 6.10
𝑥𝑘 ∈ 𝑋𝑘 , 𝑢𝑘 ∈ 𝑈𝑘 6.11
O problema de otimização para determinação de 𝐹(𝑥𝑘) fornece também as funções
𝜇𝑘ó𝑡𝑖𝑚𝑜 , que definem as decisões ótimas em 𝑥𝑘,
𝜇𝑘ó𝑡𝑖𝑚𝑜(𝑥𝑘) = 𝑢𝑘
ó𝑡𝑖𝑚𝑜
As funções 𝜇𝑘 são usadas posteriormente no processo de recuperação dos estados e
decisões ótimas.
A solução ótima do problema 𝐷 é encontrada quando o processo recursivo no sentido
inverso atinge o estágio inicial. Dessa maneira tem-se:
𝐷 = min𝑥1𝐹(𝑥1) 6.12
O resultado da otimização acima fornece o estado inicial ótimo 𝑥1ó𝑡𝑖𝑚𝑜 . Usando-se a
função 𝜇1ó𝑡𝑖𝑚𝑜 , obtém-se a decisão ótima para o estágio inicial
𝑢1ó𝑡𝑖𝑚𝑜 = 𝜇1
ó𝑡𝑖𝑚𝑜(𝑥1ó𝑡𝑖𝑚𝑜)
Com essas informações, todos os estados e decisões ótimas são obtidos recursivamen-
te, no sentido direto, usando-se a equação de transição de estado e as funções 𝜇1ó𝑡𝑖𝑚𝑜 . Especi-
ficamente:
𝑥𝑘+1ó𝑡𝑖𝑚𝑜 = 𝑓𝑘(𝑥𝑘
ó𝑡𝑖𝑚𝑜, 𝑢𝑘ó𝑡𝑖𝑚𝑜 )
𝑢𝑘+1ó𝑡𝑖𝑚𝑜 = 𝜇𝑘+1
ó𝑡𝑖𝑚𝑜(𝑥𝑘+1ó𝑡𝑖𝑚𝑜)
6.2 ABORDAGEM DO PROBLEMA DE LOCALIZAÇÃO DE CAPACITORES
POR PROGRAMAÇÃO DINÂMICA
Durán (1968) formulou o problema de otimização da localização de capacitores em
redes primárias de distribuição como um problema de controle ótimo discreto, análogo ao
problema descrito na seção anterior. Para isso, adotou a hipótese de que os alimentadores não
tinham ramificações (eram constituídos por um tronco único), e que as tensões mantinham-se
em seus valores nominais.
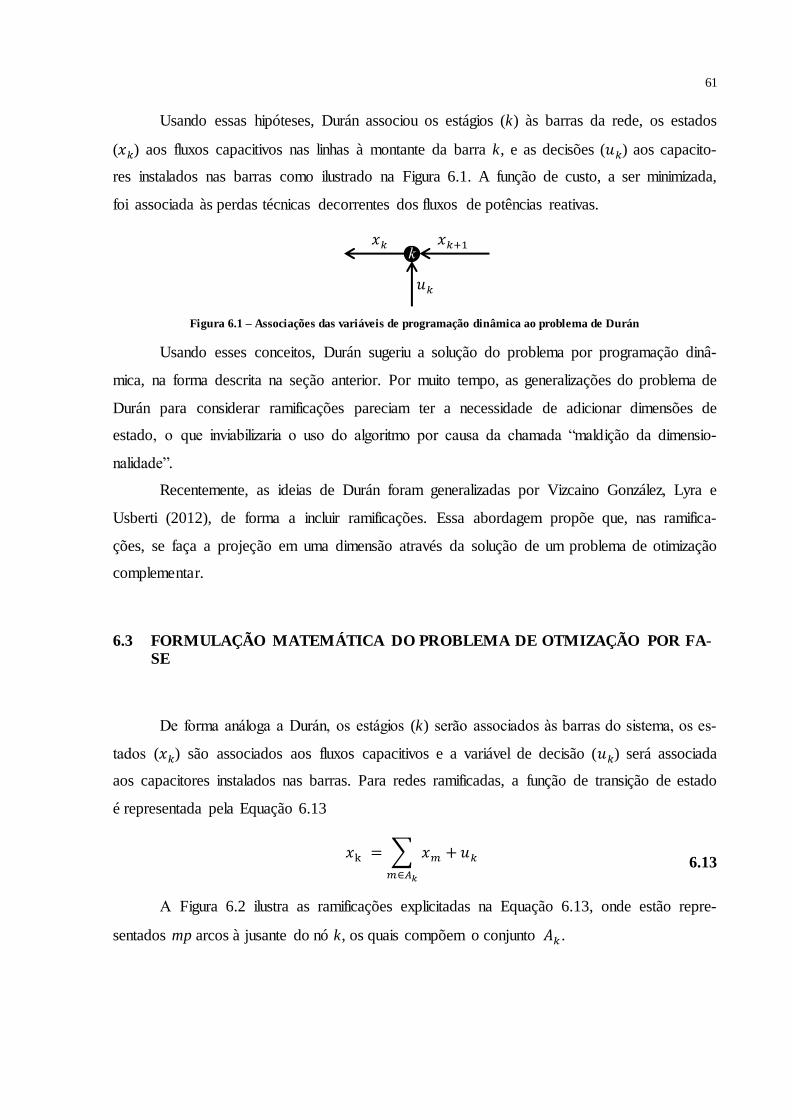
61
Usando essas hipóteses, Durán associou os estágios (k) às barras da rede, os estados
(𝑥𝑘) aos fluxos capacitivos nas linhas à montante da barra k, e as decisões (𝑢𝑘) aos capacito-
res instalados nas barras como ilustrado na Figura 6.1. A função de custo, a ser minimizada,
foi associada às perdas técnicas decorrentes dos fluxos de potências reativas.
Figura 6.1 – Associações das variáveis de programação dinâmica ao problema de Durán
Usando esses conceitos, Durán sugeriu a solução do problema por programação dinâ-
mica, na forma descrita na seção anterior. Por muito tempo, as generalizações do problema de
Durán para considerar ramificações pareciam ter a necessidade de adicionar dimensões de
estado, o que inviabilizaria o uso do algoritmo por causa da chamada “maldição da dimensio-
nalidade”.
Recentemente, as ideias de Durán foram generalizadas por Vizcaino González, Lyra e
Usberti (2012), de forma a incluir ramificações. Essa abordagem propõe que, nas ramifica-
ções, se faça a projeção em uma dimensão através da solução de um problema de otimização
complementar.
6.3 FORMULAÇÃO MATEMÁTICA DO PROBLEMA DE OTMIZAÇÃO POR FA-
SE
De forma análoga a Durán, os estágios (k) serão associados às barras do sistema, os es-
tados (𝑥𝑘) são associados aos fluxos capacitivos e a variável de decisão (𝑢𝑘) será associada
aos capacitores instalados nas barras. Para redes ramificadas, a função de transição de estado
é representada pela Equação 6.13
𝑥k = ∑ 𝑥𝑚𝑚∈𝐴𝑘
+𝑢𝑘 6.13
A Figura 6.2 ilustra as ramificações explicitadas na Equação 6.13, onde estão repre-
sentados mp arcos à jusante do nó k, os quais compõem o conjunto 𝐴𝑘 .
𝑥𝑘 𝑥𝑘+1
𝑢𝑘
k
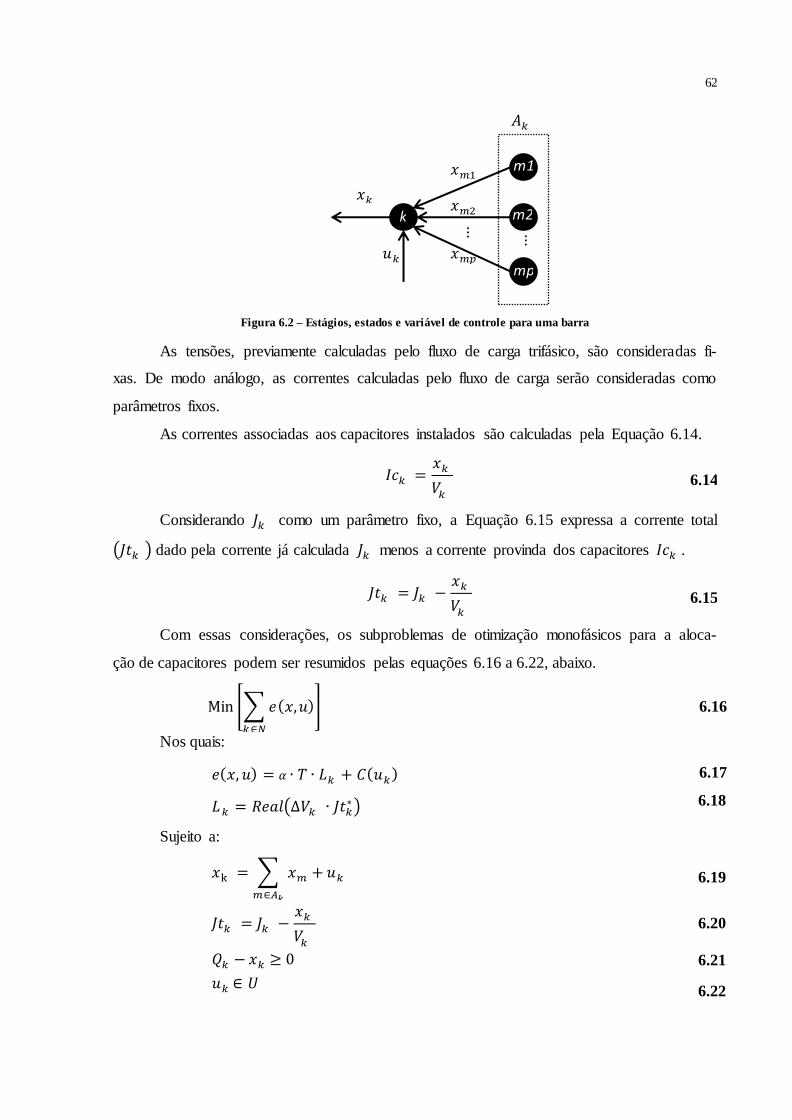
62
Figura 6.2 – Estágios, estados e variável de controle para uma barra
As tensões, previamente calculadas pelo fluxo de carga trifásico, são consideradas fi-
xas. De modo análogo, as correntes calculadas pelo fluxo de carga serão consideradas como
parâmetros fixos.
As correntes associadas aos capacitores instalados são calculadas pela Equação 6.14.
𝐼𝑐𝑘 =𝑥𝑘
𝑉𝑘 6.14 3.10
Considerando 𝐽𝑘 como um parâmetro fixo, a Equação 6.15 expressa a corrente total
(𝐽𝑡𝑘 ) dado pela corrente já calculada 𝐽𝑘 menos a corrente provinda dos capacitores 𝐼𝑐𝑘 .
𝐽𝑡𝑘 = 𝐽𝑘 −𝑥𝑘
𝑉𝑘 6.15 3.10
Com essas considerações, os subproblemas de otimização monofásicos para a aloca-
ção de capacitores podem ser resumidos pelas equações 6.16 a 6.22, abaixo.
Min [∑ 𝑒(𝑥,𝑢)
𝑘∈𝑁
] 6.16
Nos quais:
𝑒(𝑥, 𝑢) = 𝛼 ∙ 𝑇 ∙ 𝐿𝑘 + 𝐶(𝑢𝑘) 6.17
𝐿𝑘 = 𝑅𝑒𝑎𝑙(∆𝑉𝑘 ∙ 𝐽𝑡𝑘∗) 6.18
Sujeito a:
𝑥k = ∑ 𝑥𝑚𝑚∈𝐴𝑘
+𝑢𝑘 6.19
𝐽𝑡𝑘 = 𝐽𝑘 −𝑥𝑘
𝑉𝑘 6.20
𝑄𝑘 −𝑥𝑘 ≥ 0 6.21
𝑢𝑘 ∈ 𝑈
6.22
𝑥𝑚1
𝑥𝑚2
𝑥𝑚𝑝
𝑥𝑘
⋮
𝐴𝑘
𝑢𝑘 ⋮
m1
mp
m2 k

63
As equações 6.16 e 6.17 e 6.18 são equivalentes às equações 5.14, 5.15 e 5.8 respecti-
vamente, discutidas no capítulo anterior.
A restrição 6.21 expressa que a inclusão de capacitores não poderá deixar a potência
reativa negativa, ou seja, a potência reativa não poderá tornar-se capacitiva. Essa restrição é
utilizada para reduzir o espaço de busca.
A Equação 6.22 indica que o capacitor a ser instalado em uma barra pertence a um
conjunto pré-definido de unidades disponíveis (U).
6.4 ESTRATÉGIA DE PROGRAMAÇÃO DINÂMICA ESTENDIDA
A estratégia de solução do problema de otimização por fase apresentado na seção ante-
rior é ume releitura das ideias de Vizcaino González, Lyra e Usberti (2012), que estenderam o
trabalho de Durán para redes com ramificações. Será utilizada a notação matemática adotada
por Vergara, et al. (2016).
Especificamente, as equações recursivas de Hamilton-Jacobi-Bellman discutidas na
Seção 6.1 são generalizadas na forma expressa pelas equações 6.23−6.24.
𝐹(𝑥𝑘) = Min[𝑒(𝑥𝑘 ,𝑢𝑘 ) + 𝐹(𝑥𝑘+1)] 6.23 3.10
Em que 𝑥𝑘+1 é definido por 6.24
𝑥𝑘+1 = ∑ 𝑥𝑚𝑚∈𝐴𝑘
6.24 3.10
Da Equação 6.19, temos 6.25
𝑥𝑘+1 = 𝑥𝑘 −𝑢𝑘 6.25 3.10
A função 𝐹(𝑥𝑘+1) é obtida pela solução do problema de otimização complementar,
definido pelas equações a seguir.
𝐹(𝑥𝑘+1) = min𝑥𝑚 ,𝑚∈𝐴𝑘
𝐹(𝑥𝑚) 6.26 3.10
Sujeito a
𝑥𝑘+1 = 𝑥𝑘 −𝑢𝑘 6.25
∑ 𝑥𝑚𝑚∈𝐴𝑘
= 𝑥𝑘+1 6.24
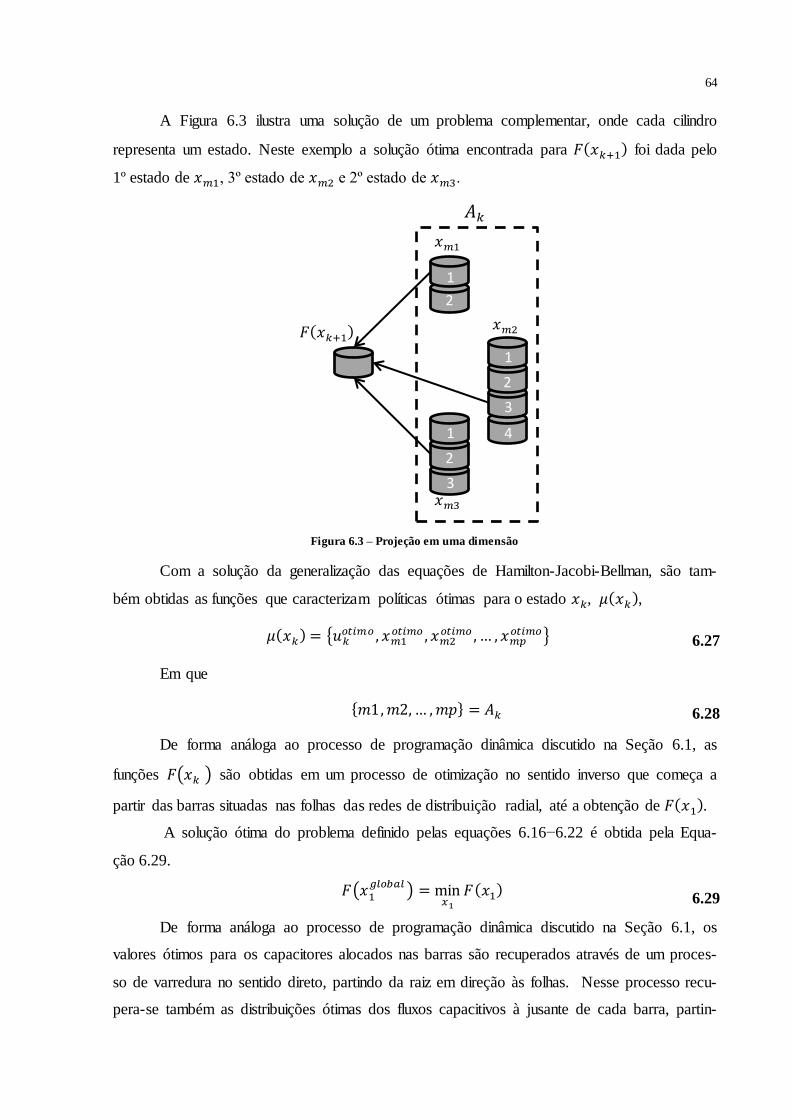
64
A Figura 6.3 ilustra uma solução de um problema complementar, onde cada cilindro
representa um estado. Neste exemplo a solução ótima encontrada para 𝐹(𝑥𝑘+1) foi dada pelo
1º estado de 𝑥𝑚1, 3º estado de 𝑥𝑚2 e 2º estado de 𝑥𝑚3.
Figura 6.3 – Projeção em uma dimensão
Com a solução da generalização das equações de Hamilton-Jacobi-Bellman, são tam-
bém obtidas as funções que caracterizam políticas ótimas para o estado 𝑥𝑘, 𝜇(𝑥𝑘),
𝜇(𝑥𝑘) = 𝑢𝑘𝑜𝑡𝑖𝑚𝑜 , 𝑥𝑚1
𝑜𝑡𝑖𝑚𝑜 , 𝑥𝑚2𝑜𝑡𝑖𝑚𝑜 , … , 𝑥𝑚𝑝
𝑜𝑡𝑖𝑚𝑜 6.27
Em que
𝑚1,𝑚2,… ,𝑚𝑝 = 𝐴𝑘 6.28
De forma análoga ao processo de programação dinâmica discutido na Seção 6.1, as
funções 𝐹(𝑥𝑘 ) são obtidas em um processo de otimização no sentido inverso que começa a
partir das barras situadas nas folhas das redes de distribuição radial, até a obtenção de 𝐹(𝑥1).
A solução ótima do problema definido pelas equações 6.16−6.22 é obtida pela Equa-
ção 6.29.
𝐹(𝑥1𝑔𝑙𝑜𝑏𝑎𝑙 ) = min
𝑥1𝐹(𝑥1) 6.29
De forma análoga ao processo de programação dinâmica discutido na Seção 6.1, os
valores ótimos para os capacitores alocados nas barras são recuperados através de um proces-
so de varredura no sentido direto, partindo da raiz em direção às folhas. Nesse processo recu-
pera-se também as distribuições ótimas dos fluxos capacitivos à jusante de cada barra, partin-
𝑥𝑚1
𝑥𝑚2
𝑥𝑚3
𝐹(𝑥𝑘+1)
1
2
1
2
3
1
2
3
𝐴𝑘
4
65
do-se do estado ótimo inicial 𝑥1𝑔𝑙𝑜𝑏𝑎𝑙
e utilizando-se as funções 𝜇(𝑥𝑘) que caracterizam polí-
ticas ótimas generalizadas para os estados 𝑥𝑘, definidas na Equação 6.27.
6.4.1 ALGORITMO
Para uma melhor compreensão, esta seção apresentará um pseudocódigo computacio-
nal do processo de otimização inverso de alocação de capacitores.
1: Inicio
2: Enquanto ainda existir barras não visitadas
3: k=índice para a próxima barra, seguindo a partir das folhas até a raiz
4: Calcular 𝑄𝑘
5: Encontrar possíveis estados para 𝑥𝑘, partindo de 0 até 𝑄𝑘
6: Para todos os valores de 𝑚 ∈ 𝐴𝑘
7: Para todos os estados 𝑥𝑚
8: 𝑥𝑘+1𝑒𝑠𝑡𝑎𝑑𝑜 = ∑ 𝑥𝑚
𝑒𝑠𝑡𝑎𝑑𝑜𝑚∈𝐴𝑘
(6.24)
9: Para todos os valores de 𝑢𝑘 ∈ 𝑈
10: 𝑥𝑇𝑒𝑚𝑝 = 𝑥𝑚𝑒𝑠𝑡𝑎𝑑𝑜+𝑢𝑘
11: Se xTemp <= 𝑄𝑘 então
12: Ftemp = 𝑒(𝑥𝑇𝑒𝑚𝑝,𝑢𝑘)+ 𝐹(𝑥𝑚𝑒𝑠𝑡𝑎𝑑𝑜) (6.23)
13: Se Ftemp < F(𝑥𝑘𝑒𝑠𝑡𝑎𝑑𝑜) então
14: F(𝑥𝑘𝑠𝑡𝑎𝑡𝑒)=Ftemp
15: Fim Se
16: Fim Se
17: Fim Para
18: Fim Para
19: Fim Para
20: Fim Enquanto
21: Fim
6.5 CONSIDERAÇÕES
A solução por programação dinâmica estendida herda a propriedade de otimalidade
global da programação dinâmica clássica. Contudo, a otimalidade global é atingida sob hipó-
tese de tensão constante. É possível modelar a tensão como uma componente de estado, ga-
rantindo a obtenção de soluções ótimas globais sem a hipótese de tensões constantes. No en-
tanto, a dimensão adicional da variável de estado aumentaria consideravelmente o esforço
computacional sem obter benefícios práticos, pois as variações de tensões são pequenas e as
66
aproximações sucessivas de tensões propostas na estratégia de solução resumida na Figura 3.7
converge em um pequeno número de iterações, como mostrado em Vizcaino González, Lyra e
Usberti (2012) para a representação monofásica.
Na mesma linha de discussão, a programação dinâmica estendida poderia alocar todas
as fases simultaneamente, evitando a necessidade de desacoplamento. Contudo essa aborda-
gem necessitaria dimensões extras, uma para cada fase, o que poderia tornar o problema intra-
tável para sistemas de grande porte.
Para a representação de capacitores chaveados, as variáveis de estado e controle po-
dem ser modeladas em duas dimensões: uma para representar os capacitores fixos e outra para
representar os capacitores chaveados (Vizcaino González, Lyra e Usberti 2012).
Devido a independência da otimização por fase, pode-se proceder ao cálculo da aloca-
ção de capacitores para as três fases com processamento paralelo. Esse procedimento pode ser
atraente para a alocação de capacitores em redes de grande porte, sobretudo em estudos para a
alocação de capacitores fixos e chaveados.
O próximo capítulo apresentará estudos de caso com redes trifásicas de tamanhos e ca-
racterísticas distintas.
67
Parte III: Estudos de Casos e
Conclusões
68
Capítulo 7
Estudos de Casos
7.1 INTRODUÇÃO
Para os estudos de caso, primeiramente serão definidos os parâmetros em comum en-
tre os casos, depois serão feitos testes individuais para cada um deles, e finalmente serão fei-
tas comparações entre os casos estudados.
Os parâmetros em comum serão invariantes e deverão ser respeitados para todos os
casos a serem testados. Também será definida uma metodologia unificada para todos os tes-
tes, os quais serão feitos pelo mesmo algoritmo e no mesmo computador.
Para os testes individuais, serão utilizadas redes radiais trifásicas e desiquilibradas pa-
drão IEEE, as quais possuem seus dados abertos a público para servir de benchmark. Cada
rede será discutida em sua respectiva seção, onde será mostrado o resultado da alocação ótima
de capacitores, com os capacitores instalados em cada barra e os valores totais de custos. Se-
rão utilizadas as redes trifásicas radiais de teste padrão IEEE de 13, 34, 37, 128 e 8500 barras.
Os dados das redes podem ser encontrados em:
http://www.ewh.ieee.org/soc/pes/dsacom/testfeeders/index.html
Após os testes individuais será feita uma comparação entre os valores encontrados pa-
ra as redes. Também será feita a comparações entre o método de alocação de capacitores trifá-
sico e o método unifilar, apontando as diferenças entre os resultados encontrados.

69
7.2 PARÂMETROS COMUNS
Esta seção descreverá os parâmetros em comum, como valores e unidades, e a meto-
dologia que serão utilizados nos os estudos de caso.
Os valores de custo serão apresentados em Reais Brasileiros (R$). Valores de capaci-
tores serão apresentados em quilo volt-ampère reativos (kVAr).
A Tabela 1 mostra os valores de capacitores que serão utilizados e seus respectivos
custos. Os custos foram fornecidos pela empresa ABB em outubro de 2014.
Tabela 1 – Potência e preços de capacitores monofásicos
Capacitância (kVAr)
( 𝑢𝑘 )
Custo(R$)
(𝐶𝑘 )
0 0,00
50 2.722,66 100 2.878,54
150 3.076,73 200 3.410,76 250 4.070,04
300 4.644,00 350 5.312,05
O preço da energia elétrica foi estimado em 300,00 reais por megawatt-hora
(R$/MWh), valor praticado na época do levantamento de preços dos capacitores.
Não foi considerado o efeito dos reguladores de tensão, sendo assim nas subestações
apenas o transformador foi considerado.
Foi estabelecido um intervalo de tempo de 3 anos.
A estratégia de solução foi implementada em linguagem MATLAB.
Para todos os testes foi utilizado um computador com as seguintes caracteristicas:
Processador Intel core i7 4790 3.6GHz;
Memória RAM com 16GB DDR3 1600MHz;
Armazenamento SSD de 240GB;
Sistema Operacional Windows 10 de 64 bits (atualizado até
01/10/2016);
MATLAB versão 2014a.
Os estudos de casos descritos nos itens 7.3 à 7.7 não consideram realimentações nos
níveis de tensão. Esses aspectos serão avaliados no item 7.8.
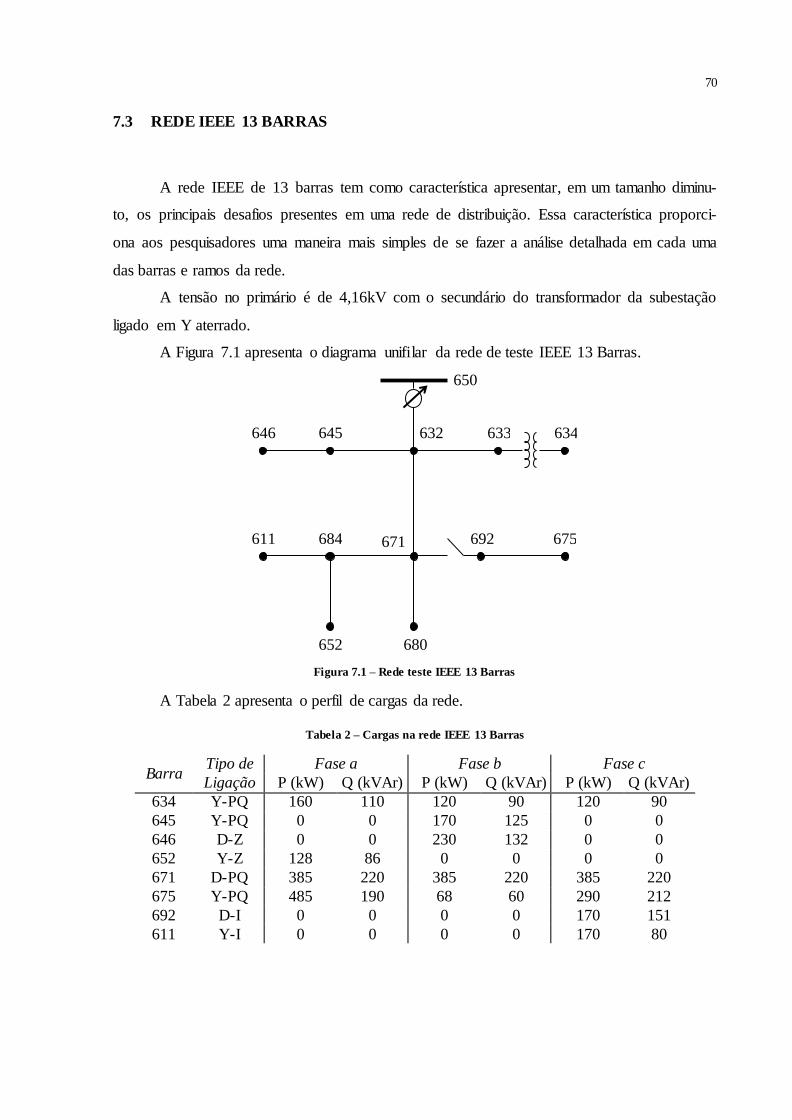
70
7.3 REDE IEEE 13 BARRAS
A rede IEEE de 13 barras tem como característica apresentar, em um tamanho diminu-
to, os principais desafios presentes em uma rede de distribuição. Essa característica proporci-
ona aos pesquisadores uma maneira mais simples de se fazer a análise detalhada em cada uma
das barras e ramos da rede.
A tensão no primário é de 4,16kV com o secundário do transformador da subestação
ligado em Y aterrado.
A Figura 7.1 apresenta o diagrama unifilar da rede de teste IEEE 13 Barras.
Figura 7.1 – Rede teste IEEE 13 Barras
A Tabela 2 apresenta o perfil de cargas da rede.
Tabela 2 – Cargas na rede IEEE 13 Barras
Barra Tipo de
Ligação
Fase a Fase b Fase c
P (kW) Q (kVAr) P (kW) Q (kVAr) P (kW) Q (kVAr)
634 Y-PQ 160 110 120 90 120 90
645 Y-PQ 0 0 170 125 0 0
646 D-Z 0 0 230 132 0 0
652 Y-Z 128 86 0 0 0 0
671 D-PQ 385 220 385 220 385 220
675 Y-PQ 485 190 68 60 290 212
692 D-I 0 0 0 0 170 151
611 Y-I 0 0 0 0 170 80
646 645 632 633 634
650
692 675 611 684
652
671
680

71
A Tabela 3 apresenta a alocação de capacitores original da rede. Serão mostradas so-
mente as barras que apresentam capacitores alocados.
Tabela 3 – Alocação original da rede IEEE 13 Barras
Barra Capacitor já instalado (kVAr)
Fase a Fase b Fase c
675 200 200 200
611 0 0 100
A Tabela 4 apresenta as tensões de barras obtidas através do fluxo de carga conside-
rando a alocação capacitores original.
Tabela 4 – Perfil de tensão original da rede IEEE 13 Barras
Barra Tensões originais (p.u.)
Fase a Fase b Fase c
650 1,000∠ 0,00º 1,000∠ -120,00º 1,000∠ 120,00º
632 0,950∠ -2,75º 0,984∠ -121,69º 0,931∠ 117,75º
671 0,911∠ -5,90º 0,987∠ -122,21º 0,874∠ 115,86º
692 0,911∠ -5,90º 0,987∠ -122,21º 0,874∠ 115,86º
675 0,903∠ -6,08º 0,988∠ -122,31º 0,870∠ 115,97º
680 0,911∠ -5,90º 0,987∠ -122,21º 0,874∠ 115,86º
684 0,909∠ -5,95º - 0,871∠ 115,81º
611 - - 0,868∠ 115,71º
652 0,904∠ -5,87º - -
633 0,947∠ -2,82º 0,982∠ -121,74º 0,928∠ 117,75º
634 0,922∠ -3,58º 0,963∠ -122,23º 0,908∠ 117,20º
645 - 0,974∠ -121,87º 0,929∠ 117,78º
646 - 0,973∠ -121,94º 0,928∠ 117,82º
A Tabela 5 apresenta os resultados das alocações ótimas de capacitores para a rede,
destacando apenas as barras que apresentam capacitores alocados.
Tabela 5 – Alocação ótima da rede IEEE 13 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
632 0 0 150 645 0 150 0
634 100 100 0 671 350 300 350
675 250 0 50
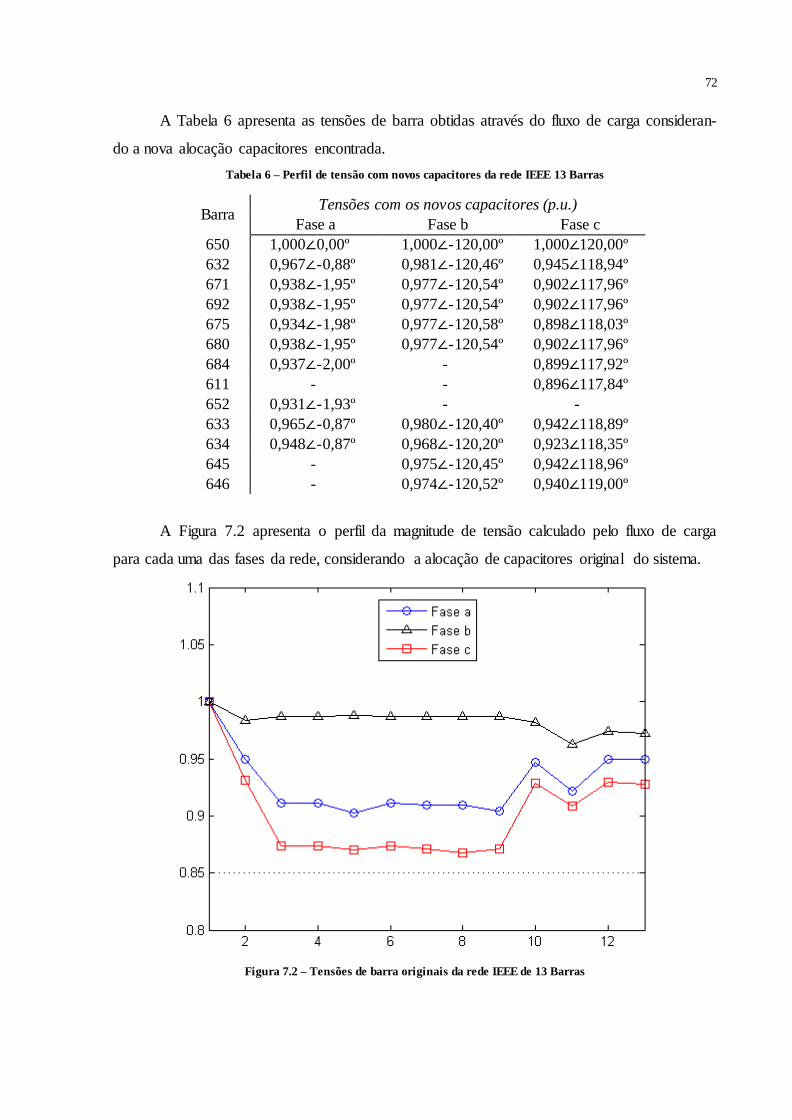
72
A Tabela 6 apresenta as tensões de barra obtidas através do fluxo de carga consideran-
do a nova alocação capacitores encontrada.
Tabela 6 – Perfil de tensão com novos capacitores da rede IEEE 13 Barras
Barra Tensões com os novos capacitores (p.u.)
Fase a Fase b Fase c
650 1,000∠ 0,00º 1,000∠ -120,00º 1,000∠ 120,00º
632 0,967∠ -0,88º 0,981∠ -120,46º 0,945∠ 118,94º
671 0,938∠ -1,95º 0,977∠ -120,54º 0,902∠ 117,96º
692 0,938∠ -1,95º 0,977∠ -120,54º 0,902∠ 117,96º
675 0,934∠ -1,98º 0,977∠ -120,58º 0,898∠ 118,03º
680 0,938∠ -1,95º 0,977∠ -120,54º 0,902∠ 117,96º
684 0,937∠ -2,00º - 0,899∠ 117,92º
611 - - 0,896∠ 117,84º
652 0,931∠ -1,93º - -
633 0,965∠ -0,87º 0,980∠ -120,40º 0,942∠ 118,89º
634 0,948∠ -0,87º 0,968∠ -120,20º 0,923∠ 118,35º
645 - 0,975∠ -120,45º 0,942∠ 118,96º
646 - 0,974∠ -120,52º 0,940∠ 119,00º
A Figura 7.2 apresenta o perfil da magnitude de tensão calculado pelo fluxo de carga
para cada uma das fases da rede, considerando a alocação de capacitores original do sistema.
Figura 7.2 – Tensões de barra originais da rede IEEE de 13 Barras
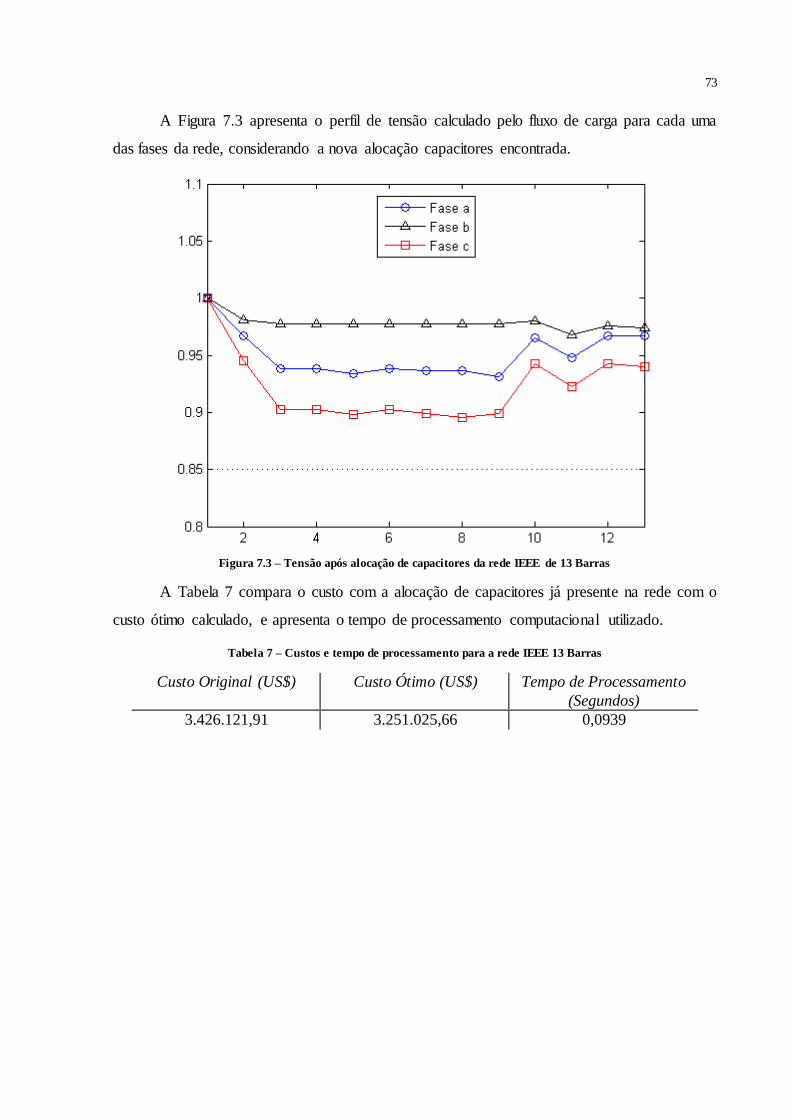
73
A Figura 7.3 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a nova alocação capacitores encontrada.
Figura 7.3 – Tensão após alocação de capacitores da rede IEEE de 13 Barras
A Tabela 7 compara o custo com a alocação de capacitores já presente na rede com o
custo ótimo calculado, e apresenta o tempo de processamento computacional utilizado.
Tabela 7 – Custos e tempo de processamento para a rede IEEE 13 Barras
Custo Original (US$) Custo Ótimo (US$) Tempo de Processamento
(Segundos)
3.426.121,91 3.251.025,66 0,0939

74
7.4 REDE IEEE 34 BARRAS
A rede de teste IEEE 34 barras é uma rede de longos ramos com poucas ramificações,
similar às encontradas em cidades litorâneas, onde o alimentador permeia a costa.
A tensão do primário é de 29kV com o secundário do transformador da subestação li-
gado em Y aterrado.
A Figura 7.4 apresenta o diagrama unifilar da rede de teste IEEE de 34 barras.
Figura 7.4 – Diagrama unifilar da rede de teste IEEE 34 Barras
A Tabela 8 apresenta a alocação de capacitores original da rede. Serão mostradas so-
mente as barras que apresentam capacitores alocados.
Tabela 8 – Alocação original para a rede IEEE 34 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
844 100 100 100 848 150 150 150
A Tabela 9 apresenta os resultados da alocações ótima de capacitores para a rede. Se-
rão mostradas somente as barras que apresentam capacitores alocados.
Tabela 9 – Alocação ótima para a rede IEEE 34 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
816 100 0 0 820 50 0 0
834 150 200 150 890 50 50 50
800
806 808 812 814
810
802 850
818
824 826
816
820
822
828 830 854 856
852
832
888 890
838
862
840836860834
842
844
846
848
864
858
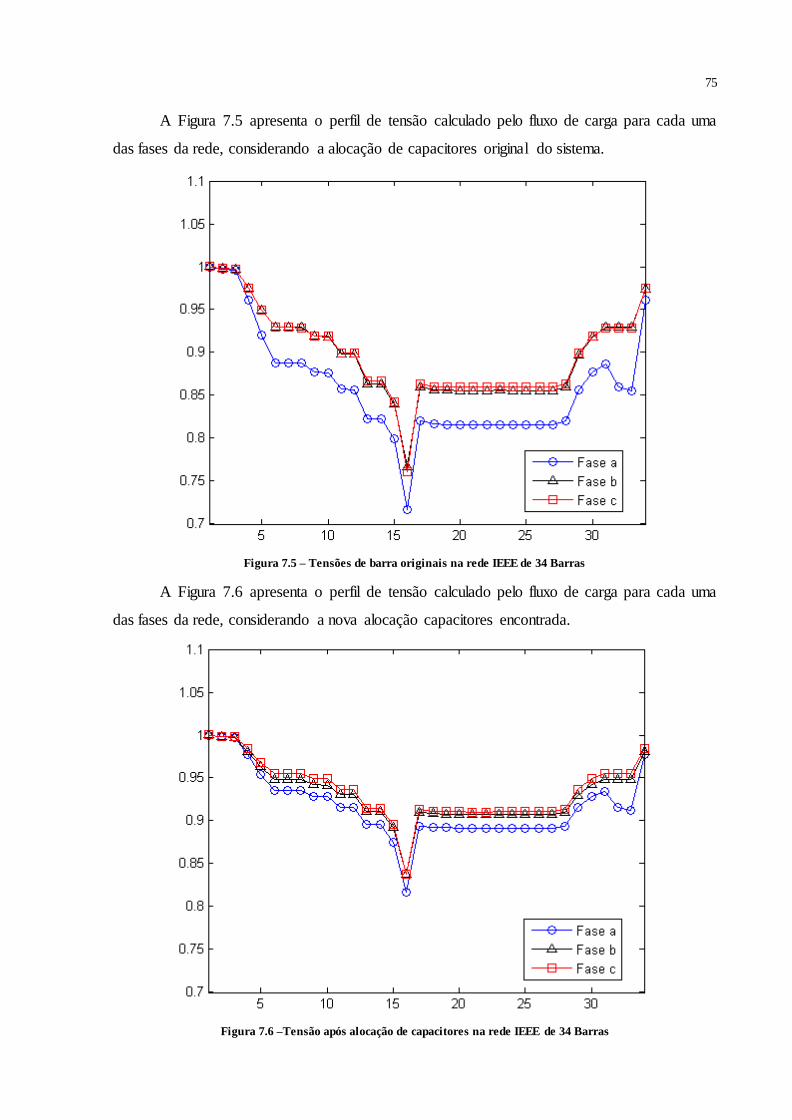
75
A Figura 7.5 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a alocação de capacitores original do sistema.
Figura 7.5 – Tensões de barra originais na rede IEEE de 34 Barras
A Figura 7.6 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a nova alocação capacitores encontrada.
Figura 7.6 –Tensão após alocação de capacitores na rede IEEE de 34 Barras
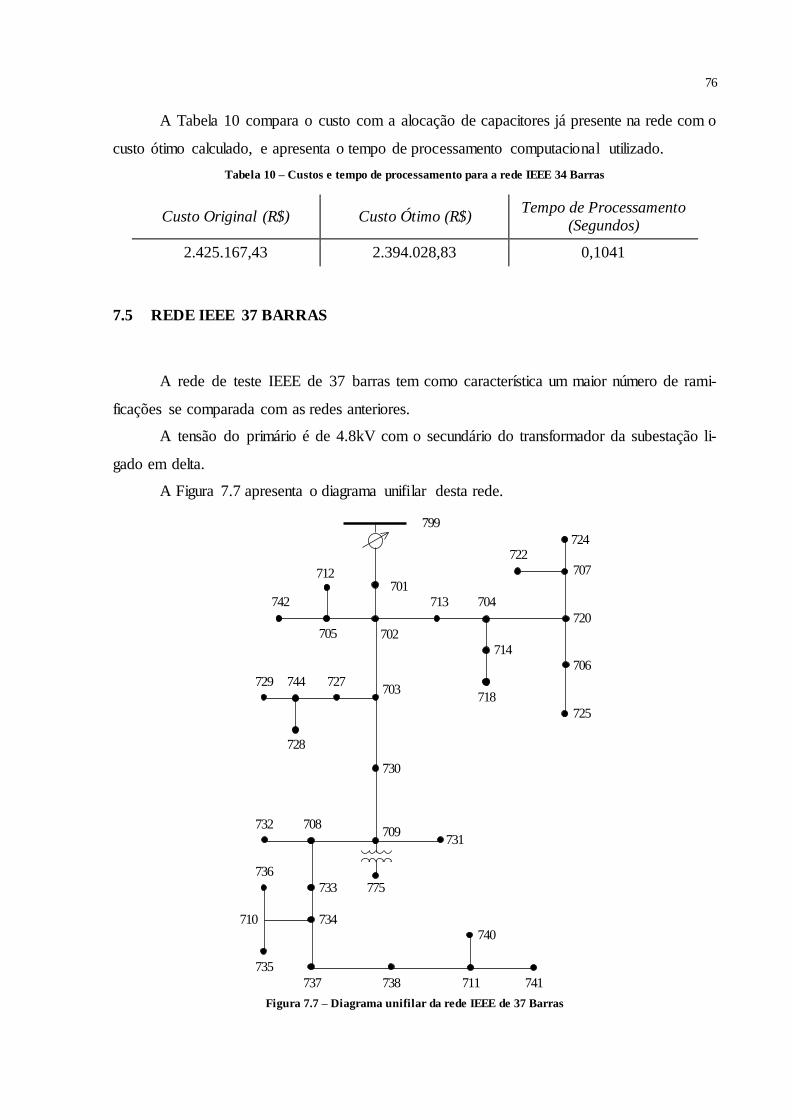
76
A Tabela 10 compara o custo com a alocação de capacitores já presente na rede com o
custo ótimo calculado, e apresenta o tempo de processamento computacional utilizado.
Tabela 10 – Custos e tempo de processamento para a rede IEEE 34 Barras
Custo Original (R$) Custo Ótimo (R$) Tempo de Processamento
(Segundos)
2.425.167,43 2.394.028,83 0,1041
7.5 REDE IEEE 37 BARRAS
A rede de teste IEEE de 37 barras tem como característica um maior número de rami-
ficações se comparada com as redes anteriores.
A tensão do primário é de 4.8kV com o secundário do transformador da subestação li-
gado em delta.
A Figura 7.7 apresenta o diagrama unifilar desta rede.
Figura 7.7 – Diagrama unifilar da rede IEEE de 37 Barras
799
701
742
705 702
720
704713
707
722
703744729
728
727
706
725
718
714
730
731709
708732
775733
736
734710
735
737 738 711 741
740
724
712
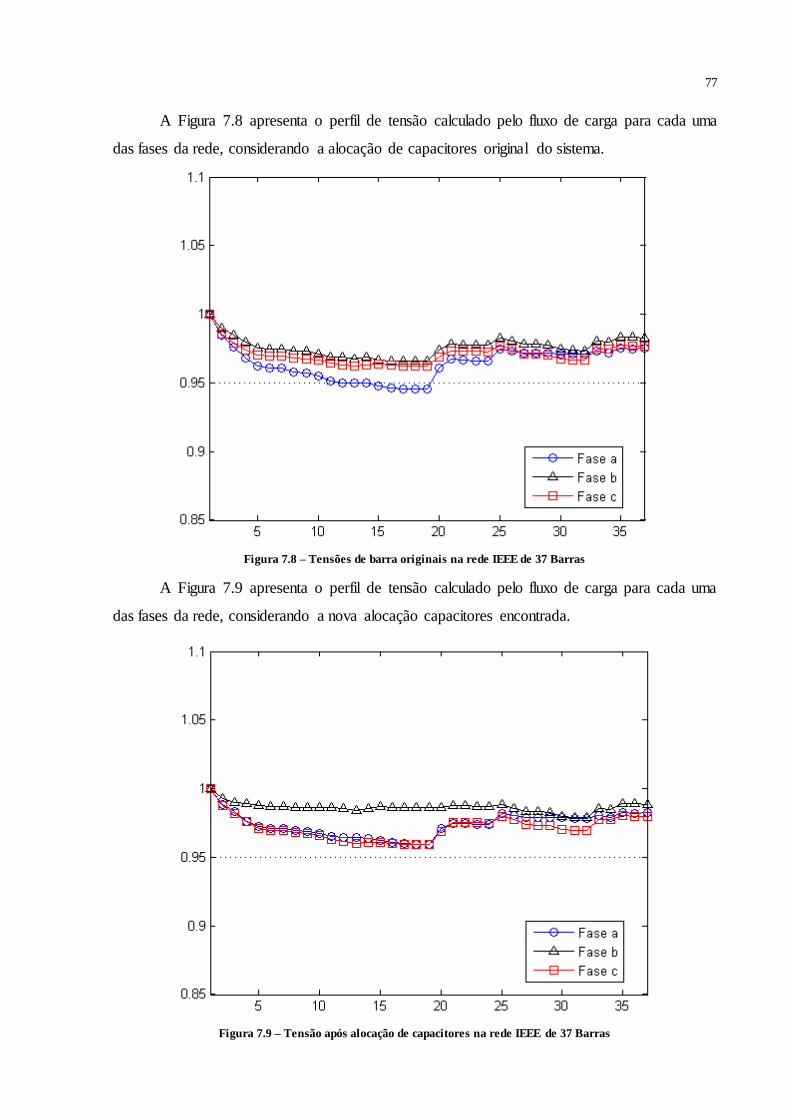
77
A Figura 7.8 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a alocação de capacitores original do sistema.
Figura 7.8 – Tensões de barra originais na rede IEEE de 37 Barras
A Figura 7.9 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a nova alocação capacitores encontrada.
Figura 7.9 – Tensão após alocação de capacitores na rede IEEE de 37 Barras
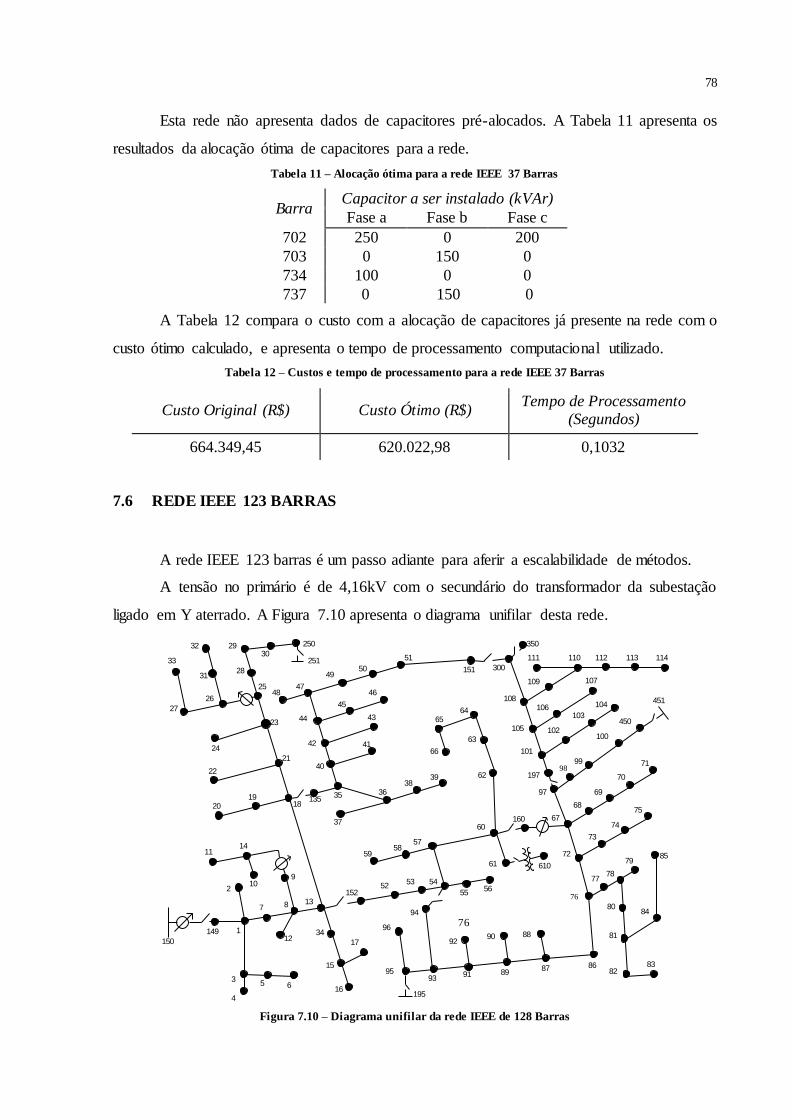
78
Esta rede não apresenta dados de capacitores pré-alocados. A Tabela 11 apresenta os
resultados da alocação ótima de capacitores para a rede.
Tabela 11 – Alocação ótima para a rede IEEE 37 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
702 250 0 200
703 0 150 0
734 100 0 0
737 0 150 0
A Tabela 12 compara o custo com a alocação de capacitores já presente na rede com o
custo ótimo calculado, e apresenta o tempo de processamento computacional utilizado.
Tabela 12 – Custos e tempo de processamento para a rede IEEE 37 Barras
Custo Original (R$) Custo Ótimo (R$) Tempo de Processamento
(Segundos)
664.349,45 620.022,98 0,1032
7.6 REDE IEEE 123 BARRAS
A rede IEEE 123 barras é um passo adiante para aferir a escalabilidade de métodos.
A tensão no primário é de 4,16kV com o secundário do transformador da subestação
ligado em Y aterrado. A Figura 7.10 apresenta o diagrama unifilar desta rede.
Figura 7.10 – Diagrama unifilar da rede IEEE de 128 Barras
1
3
4
5 6
2
7 8
12
1114
10
2019
22
21
1835
37
40
135
33
32
31
27
26
25
28
2930
250
4847
4950
51
44
45
46
42
43
41
3638
39
66
6564
63
62
60160 67
5758
59
545352
5556
13
34
15
16
17
96
95
94
93
152
9290 88
91 8987 86
80
81
8283
84
78
8572
73
74
75
77
79
300
111 110
108
109 107
112 113 114
105
106
101
102
103
104
450
100
97
99
68
69
70
71
197
151
150
61 610
9
24
23
251
195
451
149
350
76
98
76

79
A Tabela 13 apresenta a alocação de capacitores original da rede. Mais uma vez serão
mostradas somente as barras que apresentam capacitores alocados.
Tabela 13 – Alocação original para a rede IEEE de 128 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
83 200 200 200
88 50 0 0
90 0 50 0
A Tabela 14 apresenta os resultados da alocações ótima de capacitores para a rede.
Tabela 14 – Alocação ótima para a rede IEEE de 128 Barras
Barra Capacitor a ser instalado (kVAr)
Fase a Fase b Fase c
18 150 0 150
47 100 200 0
52 150 0 0
60 0 0 150
67 300 0 0
72 0 0 150
76 0 300 0
A Tabela 15 compara o custo com a alocação de capacitores já presente na rede com o
custo ótimo calculado, e apresenta o tempo de processamento computacional utilizado.
Tabela 15 - Custos e tempo de processamento para a rede IEEE 128 Barras
Custo Original (R$) Custo Ótimo (R$) Tempo de Processamento
(Segundos)
1.882.198,84 1.827.064,02 0,1563
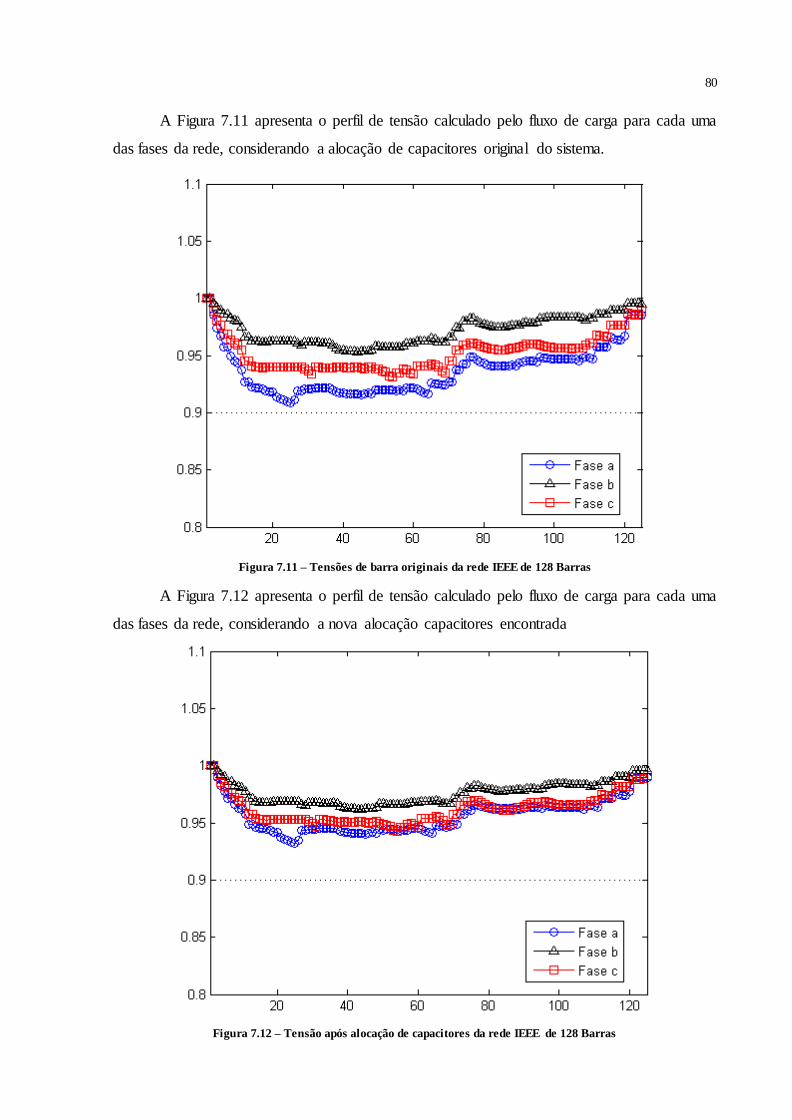
80
A Figura 7.11 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a alocação de capacitores original do sistema.
Figura 7.11 – Tensões de barra originais da rede IEEE de 128 Barras
A Figura 7.12 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a nova alocação capacitores encontrada
Figura 7.12 – Tensão após alocação de capacitores da rede IEEE de 128 Barras
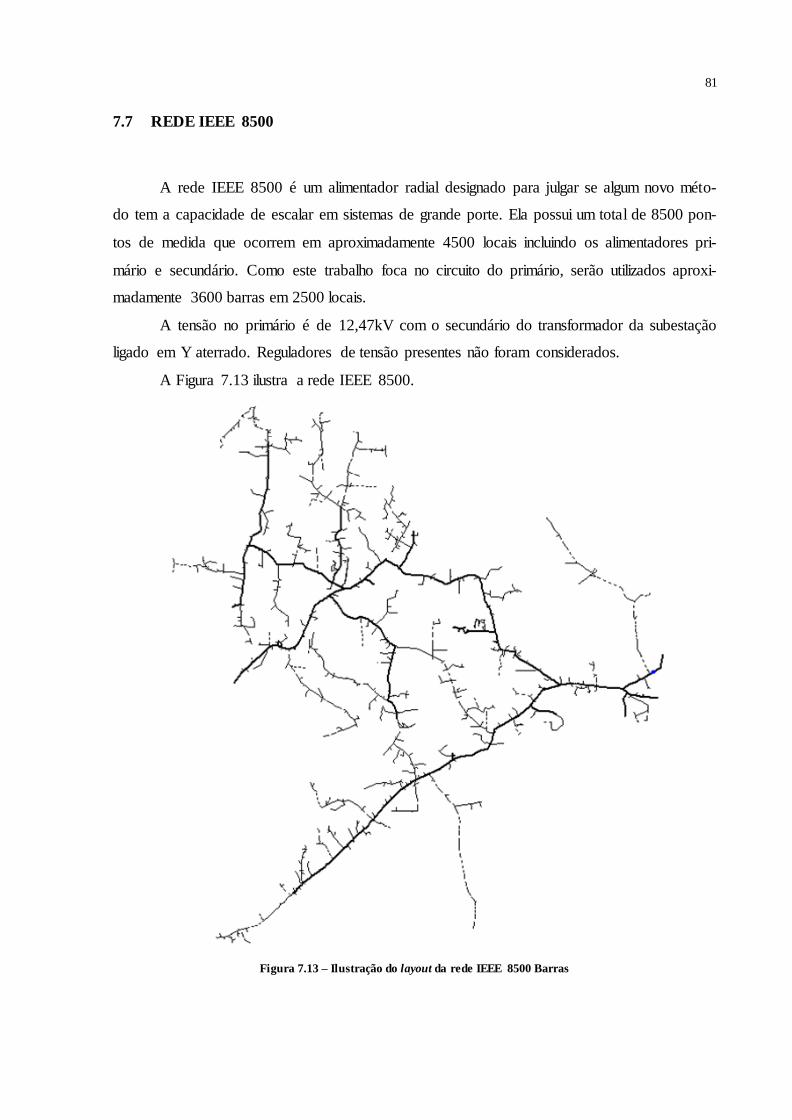
81
7.7 REDE IEEE 8500
A rede IEEE 8500 é um alimentador radial designado para julgar se algum novo méto-
do tem a capacidade de escalar em sistemas de grande porte. Ela possui um total de 8500 pon-
tos de medida que ocorrem em aproximadamente 4500 locais incluindo os alimentadores pri-
mário e secundário. Como este trabalho foca no circuito do primário, serão utilizados aproxi-
madamente 3600 barras em 2500 locais.
A tensão no primário é de 12,47kV com o secundário do transformador da subestação
ligado em Y aterrado. Reguladores de tensão presentes não foram considerados.
A Figura 7.13 ilustra a rede IEEE 8500.
Figura 7.13 – Ilustração do layout da rede IEEE 8500 Barras
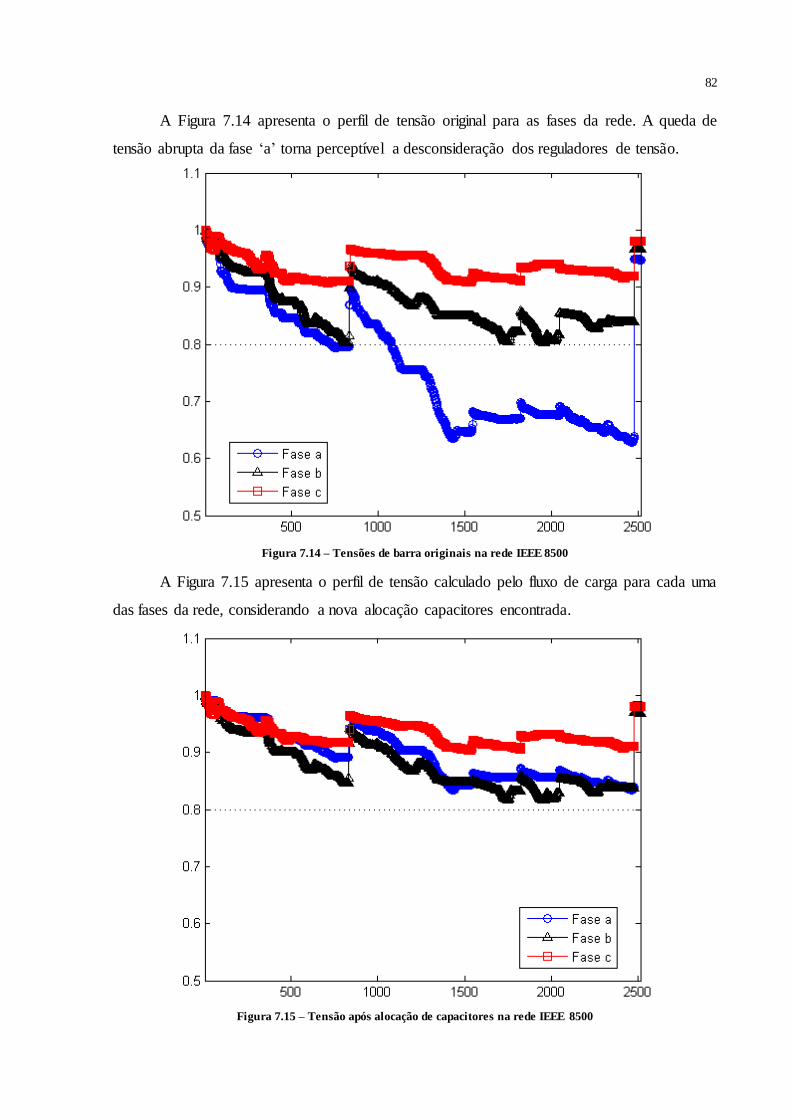
82
A Figura 7.14 apresenta o perfil de tensão original para as fases da rede. A queda de
tensão abrupta da fase ‘a’ torna perceptível a desconsideração dos reguladores de tensão.
Figura 7.14 – Tensões de barra originais na rede IEEE 8500
A Figura 7.15 apresenta o perfil de tensão calculado pelo fluxo de carga para cada uma
das fases da rede, considerando a nova alocação capacitores encontrada.
Figura 7.15 – Tensão após alocação de capacitores na rede IEEE 8500
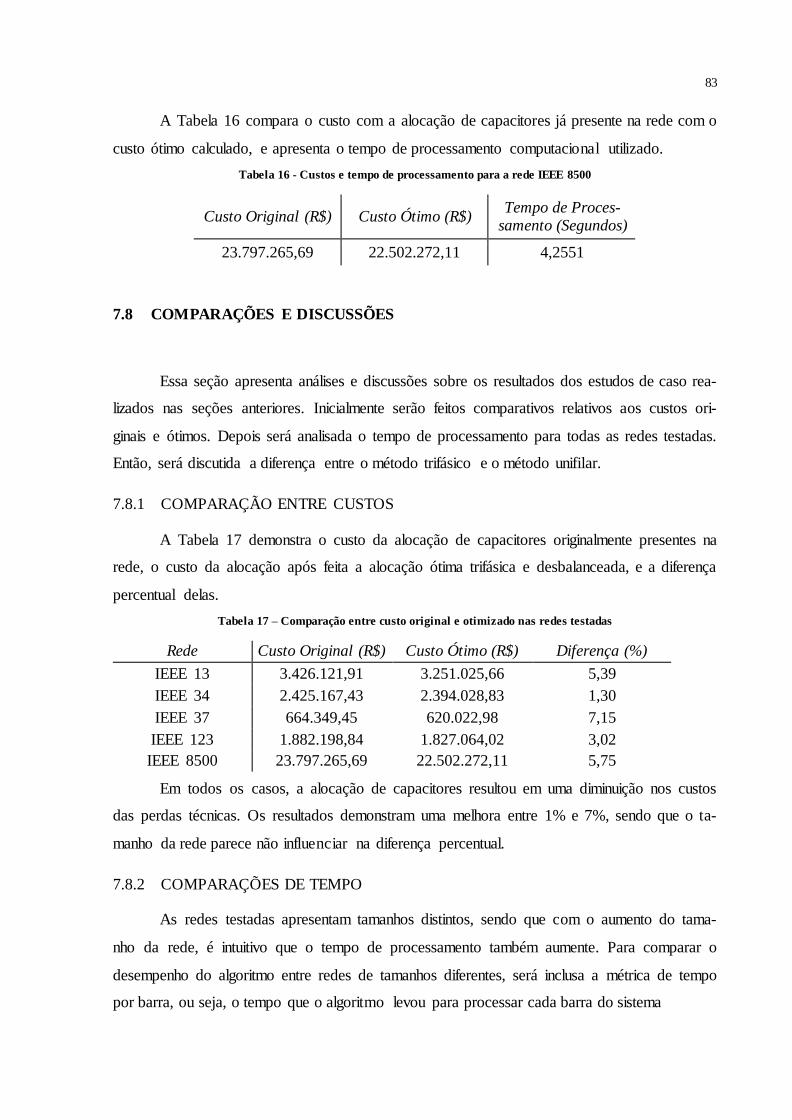
83
A Tabela 16 compara o custo com a alocação de capacitores já presente na rede com o
custo ótimo calculado, e apresenta o tempo de processamento computacional utilizado.
Tabela 16 - Custos e tempo de processamento para a rede IEEE 8500
Custo Original (R$) Custo Ótimo (R$) Tempo de Proces-
samento (Segundos)
23.797.265,69 22.502.272,11 4,2551
7.8 COMPARAÇÕES E DISCUSSÕES
Essa seção apresenta análises e discussões sobre os resultados dos estudos de caso rea-
lizados nas seções anteriores. Inicialmente serão feitos comparativos relativos aos custos ori-
ginais e ótimos. Depois será analisada o tempo de processamento para todas as redes testadas.
Então, será discutida a diferença entre o método trifásico e o método unifilar.
7.8.1 COMPARAÇÃO ENTRE CUSTOS
A Tabela 17 demonstra o custo da alocação de capacitores originalmente presentes na
rede, o custo da alocação após feita a alocação ótima trifásica e desbalanceada, e a diferença
percentual delas.
Tabela 17 – Comparação entre custo original e otimizado nas redes testadas
Rede Custo Original (R$) Custo Ótimo (R$) Diferença (%)
IEEE 13 3.426.121,91 3.251.025,66 5,39
IEEE 34 2.425.167,43 2.394.028,83 1,30
IEEE 37 664.349,45 620.022,98 7,15
IEEE 123 1.882.198,84 1.827.064,02 3,02
IEEE 8500 23.797.265,69 22.502.272,11 5,75
Em todos os casos, a alocação de capacitores resultou em uma diminuição nos custos
das perdas técnicas. Os resultados demonstram uma melhora entre 1% e 7%, sendo que o ta-
manho da rede parece não influenciar na diferença percentual.
7.8.2 COMPARAÇÕES DE TEMPO
As redes testadas apresentam tamanhos distintos, sendo que com o aumento do tama-
nho da rede, é intuitivo que o tempo de processamento também aumente. Para comparar o
desempenho do algoritmo entre redes de tamanhos diferentes, será inclusa a métrica de tempo
por barra, ou seja, o tempo que o algoritmo levou para processar cada barra do sistema
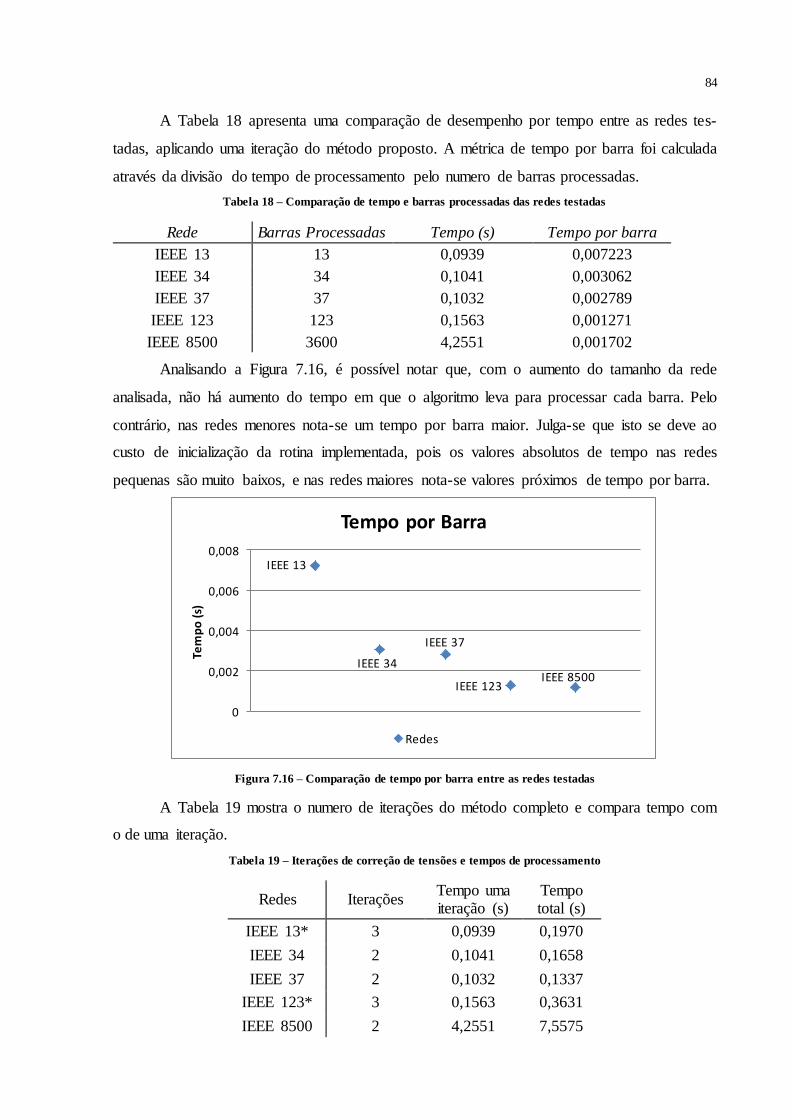
84
A Tabela 18 apresenta uma comparação de desempenho por tempo entre as redes tes-
tadas, aplicando uma iteração do método proposto. A métrica de tempo por barra foi calculada
através da divisão do tempo de processamento pelo numero de barras processadas.
Tabela 18 – Comparação de tempo e barras processadas das redes testadas
Rede Barras Processadas Tempo (s) Tempo por barra
IEEE 13 13 0,0939 0,007223
IEEE 34 34 0,1041 0,003062
IEEE 37 37 0,1032 0,002789
IEEE 123 123 0,1563 0,001271
IEEE 8500 3600 4,2551 0,001702
Analisando a Figura 7.16, é possível notar que, com o aumento do tamanho da rede
analisada, não há aumento do tempo em que o algoritmo leva para processar cada barra. Pelo
contrário, nas redes menores nota-se um tempo por barra maior. Julga-se que isto se deve ao
custo de inicialização da rotina implementada, pois os valores absolutos de tempo nas redes
pequenas são muito baixos, e nas redes maiores nota-se valores próximos de tempo por barra.
Figura 7.16 – Comparação de tempo por barra entre as redes testadas
A Tabela 19 mostra o numero de iterações do método completo e compara tempo com
o de uma iteração.
Tabela 19 – Iterações de correção de tensões e tempos de processamento
Redes Iterações Tempo uma iteração (s)
Tempo total (s)
IEEE 13* 3 0,0939 0,1970
IEEE 34 2 0,1041 0,1658
IEEE 37 2 0,1032 0,1337
IEEE 123* 3 0,1563 0,3631
IEEE 8500 2 4,2551 7,5575
IEEE 13
IEEE 34
IEEE 37
IEEE 123 IEEE 8500
0
0,002
0,004
0,006
0,008
Tem
po
(s)
Tempo por Barra
Redes
85
Para os testes feitos, as redes que utilizaram apenas duas iterações obtiveram exata-
mente a mesma alocação de capacitores da primeira iteração, sendo que a segunda apenas
confirmou o resultado previamente obtido. Nas redes que tiveram necessidade de uma itera-
ção extra (indicadas com *) obteve-se a mesma localização dos capacitores nas redes, mas
com variação no valor de alguns capacitores a serem instalados.
7.8.3 COMPARAÇÕES ENTRE METODOLOGIA TRIFÁSICA E UNIFILAR
Esta seção discute a aplicação da metodologia unifilar em redes desiquilibradas. A me-
todologia unifilar pressupõe que as fases estejam equilibradas, portanto a alocação ótima de
capacitores encontrada em uma fase é considerada como sendo ótima nas três fases.
Para comparar a metodologia trifásica com a unifilar, foi selecionada a alocação ótima
de capacitores apresentada na fase “c” de cada rede, apresentada nas seções anteriores. A fase
“c” qual foi escolhida arbitrariamente, e a alocação ótima de capacitores para esta fase foi
replicada para as outras duas fases, “a” e “b”. Após essa alteração, a função de custo foi rea-
valiada para toda a rede. A diferença entre o método unifilar e o trifásico é apresentado na
Tabela 20.
Tabela 20 – Comparação entre o método unifilar e o trifásico
Rede Custo Unifilar (R$) Custo Trifásico (R$) Diferença (%)
IEEE 13 3.288.186,96 3.251.025,66 1,14 IEEE 34 2.421.655,31 2.394.028,83 1,15
IEEE 37 640.779,04 620.022,98 3,35
IEEE 123 1.844.269,24 1.827.064,02 0,94
IEEE 8500 22.823.244,53 22.502.272,11 1,43
Observa-se que para a maioria dos casos estudados a diferença se dá em torno de 1%,
com exceção da rede IEEE 37 a qual apresentou uma diferença superior a 3%. Vale notar que,
como apenas foi reavaliada a função de custo, não haverá alterações para a fase “c”. Portanto,
embora o valor total seja a soma das três fases, a diferença apresentada é referente apenas às
fases “a” e “b”.
86
Capítulo 8
Conclusões
Esse trabalho desenvolveu uma metodologia para encontrar a alocação ótima de capa-
citores em redes de distribuição de energia elétrica trifásicas e desbalanceadas. O conceito de
otimalidade adotado está associado ao melhor compromisso entre os benefícios obtidos com a
redução de perdas técnicas e o custo de capacitores. A denominação “redes desbalanceadas”
refere-se a redes trifásicas em que cada uma das fases tem diferentes valores de cargas e atri-
butos elétricos, decorrentes de caminhos físicos distintos e de desequilíbrios causados por
geometria assimétrica na colocação dos cabos; são características que tendem a ganhar maior
importância com as inovações associadas ao termo Smart Grids, que incluem a introdução em
larga escala de pequenas fontes de geração distribuídas ao longo das redes. Nesses casos, os
estudos para alocação ótima de capacitores devem considerar as características próprias de
cada uma das fases e a diversidade dos seus parâmetros de acoplamento.
A metodologia desenvolvida propõe a decomposição do problema de otimização da
alocação de capacitores em redes trifásicas desbalanceadas em três subproblemas de otimiza-
ção distintos, abordando cada uma das fases. A etapa inicial da estratégia de decomposição é a
avaliação do estado das redes através de um método para obtenção de fluxos de cargas em
redes desbalanceadas, que define os fluxos de correntes e as tensões nas três fases das redes.
Essas correntes e tensões são grandezas próprias a cada fase que incorporam de forma implí-
cita as informações sobre cargas e acoplamentos trifásicos; elas permitem a definição de três
subproblemas de alocação ótima de capacitores distintos, considerando separadamente cada
uma das fases.
Os subproblemas de alocação ótima de capacitores são resolvidos através de uma re-
leitura de método de programação dinâmica desenvolvido para alocação de capacitores em
redes monofásicas com ramificações. O algoritmo generaliza as equações recursivas de pro-
gramação dinâmica, denominadas atualmente equações de otimalidade de Hamilton-Jacobi-
Bellman, usadas para encontrar a alocação ótima de capacitores nas barras da rede. A genera-
87
lização inclui nas equações recursivas de otimalidade a solução de subproblemas que definem
a melhor distribuição dos fluxos de correntes capacitivas nas linhas que ramificam à jusante
de cada barra. As funções que caracterizam as políticas ótimas são também generalizadas para
incluir, além das decisões ótimas para alocação de capacitores, a melhor distribuição dos flu-
xos capacitivos nos arcos que ramificam a jusante do nó.
Estudos de caso colocam a estratégia em perspectiva, resolvendo problemas de aloca-
ção ótima de capacitores para redes primárias de distribuição propostas pelo Institute of Elec-
trical and Electronics Engineers (IEEE), respectivamente de 13, 34, 37, 128 e 8500 barras. Os
estudos de caso também incluem análises comparativas, que ilustram os benefícios do uso de
representações trifásicas para redes desbalanceadas. Nessas análises comparativas observa-
ram-se melhoras entre 1% e 3% nos valores das funções objetivo dos problemas ao comparar
a alocação por equivalente unifilar com o modelo trifásico proposto.
Outro aspecto a destacar é que a metodologia encontrou soluções ótimas com tempos
de processamento inferiores a 10 segundos para todos os problemas estudados, incluindo os
de maior porte. Por outro lado, observou-se que os esforços computacionais para solução dos
problemas crescem de forma aproximadamente proporcional às dimensões dos mesmos. Estes
resultados são um forte argumento em favor da adequação da metodologia proposta para alo-
cação ótima de capacitores em redes trifásicas desbalanceadas de porte real.
Os próximos passos da pesquisa incluirão o estudo simultâneo da alocação de capaci-
tores fixos e chaveados. É uma etapa necessária para o estudo da localização e controle de
capacitores em redes com gerações distribuídas intermitentes, ou com valores aleatórios.
Os tempos computacionais reduzidos da metodologia proposta permitem também a re-
alização de estudos de alocações de capacitores com a presença de geração distribuída não
controlável, através de simulações de Monte Carlo.
88
Bibliografia
Augugliaro, A., L. Dusonchet, e S Mangione. “Optimal capacitive compensation on radial
distribution systems using nonlinear programming.” Electric Power Systems Research,
Aug. de 1990: 129-135.
Baran, Mesut E., e F. Felix Wu. “Optimal capacitor placement on radial distribution systems.”
IEEE Transactions on Power Delivery, Jan. de 1989: 725-734.
Bellman, Richard. Dynamic Programming. 1ª. Vol. I. Princeton: Princeton Univ. Press, 1957.
Boone, Gary, e Hsiao-Dong Chiang. “Optimal capacitor placement in distribution systems by
genetic algorithm.” International Journal of Electrical Power & Energy Systems, June
de 1993: 155-161.
Carpinelli, G., P. Varilone, V. Di Vito, e A. Abur. “Capacitor placement in three-phase
distribution systems with nonlinear and unbalanced loads.” IEE Proceedings -
Generation, Transmission and Distribution 152, n. 1 (Janeiro 2005): 47 - 52.
Chen, C. S., C. T. Hsu, e Y. H. Yan. “Optimal distribution feeder capacitor placement
considering mutual coupling effect of conductors.” IEEE Transactions on Power
Delivery 10, n. 2 (Abril 1995): 987 - 994.
Chiang, Hsiao-Dong, Jin-Cheng Wang, e Gary Darling. “Optimal capacitor placement,
replacement and control in large-scale unbalanced distribution systems: modeling and
a new formulation.” IEEE Transactions on Power Systems, Feb. de 1995: 356-362.
Chiang, Hsiao-Dong, Jin-Cheng Wang, Jianzhong Tong, e G. Darling. “Optimal capacitor
placement, replacement and control in large-scale unbalanced distribution systems:
system modeling and a new formulation.” Proceedings of the 1994 IEEE Power
Engineering Society Transmission and Distribution Conference. Chicago, 1994. 173 -
179.
Chiang, Hsiao-Dong, Jin-Cheng Wang, Jianzhong Tong, e Gary Darling. “Optimal capacitor
placement, replacement and control in large-scale unbalanced distribution systems:
system solution algorithms and numerical studies.” IEEE Transactions on Power
Systems, Fevereiro de 1995: 363 - 369.
89
Chiang, Hsiao-Dong, Jin-Cheng Wang, Orville Cockitigs, e Hyoun-Duck Shin. “Optimal
capacitor placements in distribution systems. I. A new formulation and the overall
problem.” IEEE Transactions on Power Delivery, Apr. de 1990: 634-642.
Chiou, Ji-Pyng, Chung-Fu Chang, e Ching-Tzong Su. “Ant direction hybrid differential
evolution for solving large capacitor placement problems.” IEEE Transactions on
Power Systems, Nov. de 2004: 1794-1800.
Chung, T. S., e Ge Shaoyun. “A recursive LP-based approach for optimal capacitor allocation
with cost-benefit consideration.” Electric Power Systems Research, Nov. de 1996:
129-136.
Cook, R. F. “Optimizing the Application of Shunt Capacitors for Reactive-Volt-Ampere
Control and Loss Reduction.” Transactions of the American Institute of Electrical
Engineers, April de 1961: 430-441.
Durán, Hernando. “Optimum Number, Location, and Size of Shunt Capacitors in Radial
Distribution Feeders A Dynamic Programming Approach.” IEEE Transactions on
Power Apparatus and Systems PAS-87, n. 9 (Janeiro 1968): 1769-1774.
Eajal, Abdelsalam A., e M. E. El-Hawary. “Optimal Capacitor Placement and Sizing in
Unbalanced Distribution Systems With Harmonics Consideration Using Particle
Swarm Optimization.” IEEE Transactions on Power Delivery, July de 2010: 1734-
1741.
El-Kib, A. A., J. J. Grainger, K. N. Clinard, e L. J. Gale. “Placement of Fixed And/Or Non-
Simultaneously Switched Capacitors on Unbalanced Three-Phase Feeders Involving
Laterals.” IEEE Transactions on Power Apparatus and Systems PAS-104, n. 11
(Novembro 1985): 3298 - 3305.
Elsaiah, Salem, Mohammed Benidris, e Joydeep Mitra. “A three-phase power flow solution
method for unbalanced distribution networks.” North American Power Symposium
(NAPS). Boston: IEEE, 2011. 1-8.
Ghose, T., S. K. Goswami, e S. K. Basu. “Solving Capacitor Placement Problems in
Distribution Systems Using Genetic Algorithms.” Electric Machines & Power
Systems, Oct de 1999: 429-441.
Grainger, J. J., A. A. El-Kib, e S. H. Lee. “OPTIMAL CAPACITOR PLACEMENT ON
THREE-PHASE PRIMARY FEEDERS: LOAD AND FEEDER UNBALANCE
EFFECTS.” IEEE Transactions on Power Apparatus and Systems, Outubro de 1983:
3296 - 3305.
90
Grainger, J. J., e S. Civanlar. “Volt/Var Control on Distribution Systems with Lateral
Branches Using Switched Capacitors and Voltage Regulators, Part I: The Overall
Problem.” IEEE Power Engineering Review, Nov. de 1985: 52.
—. “Volt/Var Control on Distribution Systems with Lateral Branches Using Shunt Capacitors
and Voltage Regulators Part II: The Solution Method.” IEEE Transactions on Power
Apparatus and Systems, Nov. de 1985: 3284-3290.
—. “Volt/Var Control on Distribution Systems with Lateral Branches Using Shunt Capacitors
and Voltage Regulators Part III: The Numerical Results.” IEEE Transactions on
Power Apparatus and Systems, Nov. de 1985: 3291-3297.
Grainger, J. J., e S. H. Lee. “Optimum Size and Location of Shunt Capacitors for Reduction
of Losses on Distribution Feeders.” IEEE Transactions on Power Apparatus and
Systems, March de 1981: 1105-1118.
Huang, Yann-Chang, Hong-Tzer Yang, e Ching-Lien Huang. “Solving the capacitor
placement problem in a radial distribution system using Tabu Search approach.” IEEE
Transactions on Power Systems, Nov de 1996: 1868-1873.
Jabr, R. A. “Optimal placement of capacitors in a radial network using conic and mixed
integer linear programming.” Electric Power Systems Research, June de 2008: 941-
948.
Kaplan, M. “Optimization of Number, Location, Size, Control Type, and Control Setting of
Shunt Capacitors on Radial Distribution Feeders.” IEEE Transactions on Power
Apparatus and Systems, Sept. de 1984: 2659-2665.
Kersting, William H. Distribution System Modeling and Analysis. 2ª. Vol. I. Boca Raton:
CRC Press, 2007.
Levitin, G., A. Kalyuzhny, A. Shenkman, e A. Chertkov. “Optimal capacitor allocation in
distribution systems using a genetic algorithm and a fast energy loss computation
technique.” IEEE Transactions on Power Delivery, Apr. de 2000: 623-628.
Lightner, Eric M., e Steven E. Widergren. “An Orderly Transition to a Transformed
Electricity System.” IEEE Transactions on Smart Grid, April de 2010: 3-10.
Mendes, A., P. M. França, C. Lyra, C. Pissarra, e C. Cavellucci. “Capacitor placement in
large-sized radial distribution networks.” IEE Proceedings - Generation, Transmission
and Distribution, July de 2005: 496-502.
Mishra, Sivkumar. “A simple algorithm for unbalanced radial distribution system load flow.”
TENCON 2008 - 2008 IEEE Region 10 Conference . Hyderabad: IEEE, 2008. 1-6.
91
Miu, Karen Nan, Hsiao-Dong Chiang, e Gary Darling. “Capacitor placement, replacement
and control in large-scale distribution systems by a GA-based two-stage algorithm.”
IEEE Transactions on Power Systems, Aug. de 1997: 1160-1166.
—. “Capacitor placement, replacement and control in large-scale distribution systems by a
GA-based two-stage algorithm.” IEEE Transactions on Power Systems, Agosto de
1997: 1160 - 1166.
Olmsted, Leonard M. “Capacitors .and Automatic Boosters For Economical Correction of
Voltage on Distribution Circuits.” Electrical Entineering, Sept. de 1939: 491-498.
Powell, Warren B. Approximate Dynamic Programming - Solving the Curses of
Dimensionality. New Jersey: John Wiley & Sons, Inc., 2011.
Queiroz, Leonardo Mendonça Oliveira. “Estimação e análise das perdas técnicas na
distribuição de energia elétrica.” Tese de Doutorado. Campinas: UNICAMP:
Programa de Pós-Graduação em Engenharia Elétrica, 2010.
Salama, M. M. A., A. Y. Chikhani, e R. Hackam. “Control of Reactive Power in Distribution
Systems with an End-Load and Fixed Load Condition.” IEEE Transactions on Power
Apparatus and Systems, Oct. de 1985: 2779-2788.
Schmidt, R. A. “D-C Circuit Gives Easy Method of Determining Value of Capacitors in
Reducing I²R Losses.” Transactions of the American Institute of Electrical Engineers,
Jan de 1956: 840-848.
Segura, Salas, Luiz Carlos Pereira Silva, e Rubén Romero. “Generalised single-equation load
flow method for unbalanced distribution systems.” IET Generation, Transmission &
Distribution 5, n. 3 (Março 2011): 347-355.
Subrahmanyam, J. B. V., e C. Radhakrishna. “A Simple Method for Optimal Capacitor
Placement in Unbalanced Radial Distribution System.” Electric Power Components
and Systems, Sep. de 2010: 1269-1284.
Taher, Abbas Seyed, e Reza Bagherpour. “A new approach for optimal capacitor placement
and sizing in unbalanced distorted distribution systems using hybrid honey bee colony
algorithm.” Electrical Power and Energy Systems, July de 2013: 430-448.
Vergara, Perdo P., Juan C. López, Christiano Lyra, e Luiz C. P. da Silva. “Optimal Schedule
of Dispatchable DG in Electrical Distribution Systems with Extended Dynamic
Programming.” 17th International Conference on Harmonics and Quality of Power
(ICHQP). Belo Horizonte, Brazil, 2016.
92
Vieira, J.C.M. Jr., W. Freitas, e A. Morelato. “Phase-decoupled method for three-phase
power-flow analysis of unbalanced distribution systems.” IEE Proceedings -
Generation, Transmission and Distribution 151, n. 5 (Setembro 2004): 568-574.
Vizcaino González, José Federico, Christiano Lyra, e Fábio Luiz Usberti. “A pseudo-
polynomial algorithm for optimal capacitor placement on electric power distribution
networks.” European Journal of Operational Research 222, n. 1 (Outubro 2012): 149-
156.