Aula 03 “Modelização de Sistemas” -...
59
Aula 03 “Modelização de Sistemas”
-
Upload
nguyentram -
Category
Documents
-
view
224 -
download
2
Transcript of Aula 03 “Modelização de Sistemas” -...

Aula 03
“Modelização de Sistemas”

entrada
(input)
saída
(output)
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

carro / massa / mola

carro / massa / mola
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

entrada
(input)
saída
(output)
força aplicada deslocamento
carro / massa / mola
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

2ª Lei de Newton
,uxkxxm +′µ−−=′′logo
Sir Isaac Newton, 1643-1727
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

,uxkdt
dx
dt
xdm
2
2
=+µ+
ou
,ukxxxm =+′µ+′′
carro / massa / mola
e portanto,
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

m = 1 kgµ = 4 N·s/m k = 3 N/m
carro / massa / mola
Agora, se dermos valores para o m, µ e k :
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′µ+′′=+µ+
b)0(x,a)0(x
,ukxxxmxkdt
dx
dt
xdm
2
2
m = 1 kg µ = 4 N·s/m k = 3 N/m
carro / massa / mola
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(x,a)0(x
,ux3x4xx3dt
dx4
dt
xd
2
2
e o modelo torna-se em:m = 1 kg µ = 4 N·s/m k = 3 N/m
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
carro / massa / mola

movimento translacional mecânico

problema similar ao
anterior
carro / massa / mola
movimento translacional mecânico
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

(forma
equivalente
na vertical)
movimento translacional mecânico
problema similar ao
anterior
carro / massa / mola
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

entrada (input)
saída (output)
força aplicada
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
deslocamento
movimento translacional mecânico

,uxkdt
dx
dt
xdm
2
2
=+µ+
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
,ukxxxm =+′µ+′′ou
movimento translacional mecânico
Novamente, usando a 2ª Lei de Newton,obtém-se:

ukxxxm
xkdt
dx
dt
xdm
2
2
=+′µ+′′=
=+µ+
b)0(x,a)0(x ==′
movimento translacional mecânicocarro / massa / mola ou
Portanto, estes 2 sistemas são descritos pela mesma equação diferencial (de 2ª ordem), ou seja, têm o mesmo modelo:
condições iniciais:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′µ+′′=+µ+
b)0(x,a)0(x
,ukxxxmxkdt
dx
dt
xdm
2
2
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
movimento translacional mecânicocarro / massa / mola ou

m = 1 kg
µ = 4 N·s/m
k = 3 N/m
movimento translacional mecânicoAgora, dando os mesmos valores para o m, µ e kque foram dados para o problema carro / massa / mola, temos:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′µ+′′=+µ+
b)0(x,a)0(x
,ukxxxmxkdt
dx
dt
xdm
2
2
m = 1 kg µ = 4 N·s/m k = 3 N/m
carro / massa / mola movimento translacional mecânicoou
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(x,a)0(x
,ux3x4xx3dt
dx4
dt
xd2
2
carro / massa / mola movimento translacional mecânicoou
(ambos possuem o mesmo modelo)
m = 1 kg µ = 4 N·s/m k = 3 N/m
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

movimento translacional mecânico
Observação:
Note que se µ = 0
Este sistema torna-se o “oscilador harmónico”.
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

circuito RLC série

circuito RLC série
tensão na entrada
tensão na saída
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

entrada (input)
saída (output)
tensão na entrada tensão na saída
circuito RLC série
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

,0vvRCvLCv oooi =−′−′′−
Lei de Kirchhoff para malhas:
Gustav Kirchhoff, 1824-1887
logo
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

,vvdt
dvRC
dt
vdLC io
o
2
o
2
=++
,vvvRCvLC iooo =+′+′′
ou
circuito RLC série
e portanto,
Logo, este sistema também é descrito por uma equação diferencial (de 2ª ordem).
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

iooo
oo
2
o
2
vvvLCvRC
vdt
dvRC
dt
vdLC
=+′+′′=
=++
b)0(v,a)0(v oo ==′
circuito RLC série
Ou seja, o modelo deste sistema é uma equação diferencial(de 2ª ordem):
condições iniciais:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(v,a)0(v
,vvvRCvLCvdt
dvRC
dt
vdLC
oo
iooooo
2
o
2
circuito RLC série
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

R = 1000 ΩL = 250 H
C = 1,333 x 10-3 F
circuito RLC série Dando valores
para o R, L e C:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(v,a)0(v
,vvvRCvLCvdt
dvRC
dt
vdLC
oo
iooooo
2
o
2
R = 1000 Ω
L = 250 HC = 1,333 x 10-3 F
circuito RLC série
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(v,a)0(v
,vvvRCvLCvdt
dvRC
dt
vdLC
oo
iooooo
2
o
2
R = 1000 Ω
L = 250 H C = 1,333 x 10-3 F
circuito RLC série
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

==′
=+′+′′=++
b)0(v,a)0(v
,v3v3v4vv3dt
dv4
dt
vd
oo
iooooo
2
o
2
circuito RLC série
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
R = 1000 Ω
L = 250 H C = 1,333 x 10-3 F

movimento rotacional mecânico

movimento rotacional mecânico
x(t) = momento aplicado ao sistema entrada/input [N∙m];
ω(t) = velocidade angular saída/output [rad/s];
J = momento de inércia [kg ∙m2];
µ = coeficiente de fricção viscosa [N∙m /rad/s]
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

entrada (input)
saída (output)
momento (ou torque) aplicado
velocidade angular
movimento rotacional mecânico
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

,x=ωµ+ω′J
movimento rotacional mecânico
Usando a Lei de Newton para sistemas rotacionais
,'momentos ω= J
tem-se que
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

x
dt
d
=µω+ω′=
=ωµ+ω
J
J
a)0( =ω
movimento rotacional mecânico
Logo, este sistema é descrito por uma equação diferencial(de 1ª ordem):
condição inicial:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

=ω
=µω+ω′=µω+ω
a)0(
,xdt
dJJ
movimento rotacional mecânico
Ou seja, o modelo deste sistema é uma equação diferencial(de 1ª ordem):
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

=ω
=µω+ω′=µω+ω
a)0(
,xdt
dJJ
movimento rotacional mecânico
Agora, dando valores para o J e µ:
J = 0,5 kg/m2
µ = 2 N∙m /rad/s
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

=ω
=µω+ω′=µω+ω
a)0(
,xdt
dJJ
movimento rotacional mecânico
Agora, dando valores para o J e µ: µ = 2 N∙m /rad/sJ = 0,5 kg/m2
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

=ω
=ω+ω′=ω+ω
a)0(
,x244dt
d
movimento rotacional mecânico
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

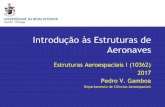
um sismógrafo

xi(t) = deslocamento da caixa em relação ao espaço inercial;
xo(t) = deslocamento da massa m em relação ao espaço inercial;
y(t) = deslocamento da massa m em relação à caixa.
sismógrafo
y(t) = [xo(t) - xi(t)]
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

entrada
(input)
saída
(output)
deslocamento
da caixa
deslocamento
da massa m
sismógrafo
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

Novamente, pela 2ª Lei de Newton
Sir Isaac Newton, 1643-1727
,)xx(k)xx(xm ioioo −−′−′µ−=′′e portanto,
,xm)xx(k)xx()xx(m iioioio′′−=−+′−′+′′−′′ µ
y’’(t) y’(t) y(t)
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

logo,
,xmykyym i′′−=+′µ+′′
ou,
,dt
xdmyk
dt
dy
dt
ydm
2
i
2
2
2
−=+µ+
sismógrafo
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
=′=
′′−=+′µ+′′=
=+µ+
b)0(y,a)0(y
,xmykyym
kydt
dy
dt
ydm
i
2
2
sismógrafo

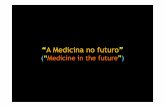
um servomotor hidráulico

servomotor hidráulico
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
entrada do sistema (input)
saída do sistema (output)

obtém-se,
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
ou,
servomotor hidráulico
,)t(xK
AK
dt
dy
K
A
dt
ydm
2
1
2
2
2
2
=
ρ+µ+
,)t(xK
AK)t(y
K
A)t(ym
2
1
2
2
=′
ρ+µ+′′

servomotor hidráulico
,)t(xK
AK)t(y
K
A)t(ym
2
1
2
2
=′
ρ+µ+′′
A = área do pistão [m2];
ρ = densidade do óleo [kg/m3];
Q = taxa do caudal do óleo que vai para o cilindro de potência (taxa de fluxo de massa)[kg/s];
∆P = (P1 – P2) = diferença de pressão no cilindro de potência (queda na pressão do óleo)[N/m2].
Q = K1 ∙ x – K2 ∙ ∆P
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

um sistema térmico

sistema térmico
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________
entrada do sistema
(input)
saída do sistema
(output)
sistema térmico

obtém-se,
onde,
sistema térmico
,)t(hR)t(dt
dRC i=θ+θ
hi(t) = taxa de entrada de calor [cal/s];
θ(t) = temperatura do líquido que sai [ºC];
R = resistência térmica (ganho do sistema) [ºC⋅s/cal];
C = capacitância térmica [cal/ºC];
T = RC = constante de tempo do sistema [s].
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

outros exemplos

)(
2
2
2
2
2
2
2
2
zzyyxx uuuk
z
u
y
u
x
uk
t
u
++=
=
∂∂+
∂∂+
∂∂=
∂∂
sistema linearcontínuo, invariante no tempo, com memória e causal
este sistemadescreve a propagação de uma onda noespaço
por equações diferenciais parciais:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

[ ] [ ]( ) [ ]nxnnxny 422 −=
Sistema discreto, não linear, variante no tempo, sem memória e causal.
ou por equações de diferenças:
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________

[ ]
[ ]
[ ]
+⋅−=
−+−=
+−⋅=
+−++
=
vxmkxxtNx
xxkxxmkx
kxxxmkx
xmkxxxxxx
sx
µµ
µω
µω
µλθ
θ
1114334
3322014113
202214112
411111321
4
1
)()(
)()1(
)(
)(),,(
&
&
&
&
este sistema acima descreve a dinâmicada evolução da SIDA (AIDS)
Sistemas mais complexos são representados não apenas por uma, mas por várias equações.
Modelização de Sistemas ______________________________________________________________________________________________________________________________________________________________________________________