Aula 4 - Roteiro - UFPE• Salinas, Introdução à Física Estatística, EdUsp, (1997), Cap.1...
91
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE Aula 4 - Roteiro 1 1. Revisão sobre Teoria de Probabilidades a) Definições e conceitos básicos b) Processos estocásticos c) Função densidade de probabilidades d) Função distribuição de probabilidades e) Momentos de uma Função Densidade de Probabilidades f) Funções de variável aleatória - covariância e correlação g) Variáveis aleatórias independentes h) A Distribuição Binomial i) Limite Gaussiano da Distribuição Binomial 2. Ensembles estatísticos Sugestões de leitura: • Reichl , A Modern Course in Statistical Mechanics, John Wiley, (1998), Cap. 4, (4A-4E) • Salinas, Introdução à Física Estatística, EdUsp, (1997), Cap.1 quinta-feira, 2 de fevereiro de 2012
Transcript of Aula 4 - Roteiro - UFPE• Salinas, Introdução à Física Estatística, EdUsp, (1997), Cap.1...
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Aula 4 - Roteiro
1
1. Revisão sobre Teoria de Probabilidades
a) Definições e conceitos básicos
b) Processos estocásticos
c) Função densidade de probabilidades
d) Função distribuição de probabilidades
e) Momentos de uma Função Densidade de Probabilidades
f) Funções de variável aleatória - covariância e correlação
g) Variáveis aleatórias independentes
h) A Distribuição Binomial
i) Limite Gaussiano da Distribuição Binomial
2. Ensembles estatísticos
Sugestões de leitura:• Reichl , A Modern Course in Statistical Mechanics, John Wiley, (1998), Cap. 4, (4A-4E)• Salinas, Introdução à Física Estatística, EdUsp, (1997), Cap.1
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
2
• A mecânica estat́ıstica é uma teoria inerentemente probabiĺıstica.
• Busca descrever o comportamento de sistemas macroscópicos a partir doconhecimento microscópico incompleto dos elementos constituintes e de suasinterações.
• A teoria das probabilidades fornece importantes ferramentas para se ter sucessonessa busca.
Definições e conceitos importantes
Variáveis aleatórias ou estocásticasVariável cujo valor é escolhido ao acaso de um conjunto x ∈ S, dito espaço deamostragem (discreto ou cont́ınuo, limitado ou ilimitado).
EventoEvento é a realização do processo de escolha de um ou de mais valores de umavariável aleatória, o qual ocorre com certa probabilidade p(x) definida.
Exemplo: O resultado do lançamento de um dado (evento) é uma váriável aleatória que
resulta dentre os valores discretos do conjunto S ≡ {1, 2, 3, 4, 5, 6}. A probabilidade queo resultado do evento seja certo valor é, por exemplo, p(2) = 1/6.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
2
• A mecânica estat́ıstica é uma teoria inerentemente probabiĺıstica.
• Busca descrever o comportamento de sistemas macroscópicos a partir doconhecimento microscópico incompleto dos elementos constituintes e de suasinterações.
• A teoria das probabilidades fornece importantes ferramentas para se ter sucessonessa busca.
Definições e conceitos importantes
Variáveis aleatórias ou estocásticasVariável cujo valor é escolhido ao acaso de um conjunto x ∈ S, dito espaço deamostragem (discreto ou cont́ınuo, limitado ou ilimitado).
EventoEvento é a realização do processo de escolha de um ou de mais valores de umavariável aleatória, o qual ocorre com certa probabilidade p(x) definida.
Exemplo: O resultado do lançamento de um dado (evento) é uma váriável aleatória que
resulta dentre os valores discretos do conjunto S ≡ {1, 2, 3, 4, 5, 6}. A probabilidade queo resultado do evento seja certo valor é, por exemplo, p(2) = 1/6.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
2
• A mecânica estat́ıstica é uma teoria inerentemente probabiĺıstica.
• Busca descrever o comportamento de sistemas macroscópicos a partir doconhecimento microscópico incompleto dos elementos constituintes e de suasinterações.
• A teoria das probabilidades fornece importantes ferramentas para se ter sucessonessa busca.
Definições e conceitos importantes
Variáveis aleatórias ou estocásticasVariável cujo valor é escolhido ao acaso de um conjunto x ∈ S, dito espaço deamostragem (discreto ou cont́ınuo, limitado ou ilimitado).
EventoEvento é a realização do processo de escolha de um ou de mais valores de umavariável aleatória, o qual ocorre com certa probabilidade p(x) definida.
Exemplo: O resultado do lançamento de um dado (evento) é uma váriável aleatória que
resulta dentre os valores discretos do conjunto S ≡ {1, 2, 3, 4, 5, 6}. A probabilidade queo resultado do evento seja certo valor é, por exemplo, p(2) = 1/6.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
3
Probabilidades:A probabilidade é a quantidade que caracteriza a expectativa da ocorrência de certoevento.
Propriedades:
(a) Positividade: deve ter valor positivo ou nulo, i.e. p(x) ≥ 0.(b) Aditividade: A probabilidade de ocorrência de um dentre dois posśıveis even-
tos descorrelacionados ou independentes é a soma das probabilidades de cadaevento separadamente, i.e. p(x1 ou x2) = p(x1) + p(x2)
(c) Normalização: A probabilidade que o evento resulte em pelo menos um dosvalores posśıveis x ∈ S é igual a um, i.e. p(S) = 1, ou seja é um acontecimentocerto.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
3
Probabilidades:A probabilidade é a quantidade que caracteriza a expectativa da ocorrência de certoevento.
Propriedades:
(a) Positividade: deve ter valor positivo ou nulo, i.e. p(x) ≥ 0.(b) Aditividade: A probabilidade de ocorrência de um dentre dois posśıveis even-
tos descorrelacionados ou independentes é a soma das probabilidades de cadaevento separadamente, i.e. p(x1 ou x2) = p(x1) + p(x2)
(c) Normalização: A probabilidade que o evento resulte em pelo menos um dosvalores posśıveis x ∈ S é igual a um, i.e. p(S) = 1, ou seja é um acontecimentocerto.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
3
Probabilidades:A probabilidade é a quantidade que caracteriza a expectativa da ocorrência de certoevento.
Propriedades:
(a) Positividade: deve ter valor positivo ou nulo, i.e. p(x) ≥ 0.(b) Aditividade: A probabilidade de ocorrência de um dentre dois posśıveis even-
tos descorrelacionados ou independentes é a soma das probabilidades de cadaevento separadamente, i.e. p(x1 ou x2) = p(x1) + p(x2)
(c) Normalização: A probabilidade que o evento resulte em pelo menos um dosvalores posśıveis x ∈ S é igual a um, i.e. p(S) = 1, ou seja é um acontecimentocerto.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
3
Probabilidades:A probabilidade é a quantidade que caracteriza a expectativa da ocorrência de certoevento.
Propriedades:
(a) Positividade: deve ter valor positivo ou nulo, i.e. p(x) ≥ 0.(b) Aditividade: A probabilidade de ocorrência de um dentre dois posśıveis even-
tos descorrelacionados ou independentes é a soma das probabilidades de cadaevento separadamente, i.e. p(x1 ou x2) = p(x1) + p(x2)
(c) Normalização: A probabilidade que o evento resulte em pelo menos um dosvalores posśıveis x ∈ S é igual a um, i.e. p(S) = 1, ou seja é um acontecimentocerto.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
4
Propriedades (continuação):
(d) Medição da Probabilidade: A probabilidade de que certo evento ocorra com resul-tado x ∈ S pode ser medida computando-se o número de vezes NM (x) (frequência)que o resultado x ocorra dentre M eventos independentes, no limite em que M setorna muito grande, i.e
p(x) = limM→∞
NM (x)
M
(e) Estimativa da Probabilidade: A probabilidade da ocorrência de certo eventopode ser estimada por argumentos que caracterizem a incerteza acerca do conhec-imento completo (ou preciso) do resultado do evento.
Exemplo: a probabilidade de ocorrência de algum dos valores do dado é 1/6.
OBS: Em geral, esse é o procedimento (subjetivo) usual na mecânica estat́ıstica, oqual precisa ser validado por experimentos posteriores.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
4
Propriedades (continuação):
(d) Medição da Probabilidade: A probabilidade de que certo evento ocorra com resul-tado x ∈ S pode ser medida computando-se o número de vezes NM (x) (frequência)que o resultado x ocorra dentre M eventos independentes, no limite em que M setorna muito grande, i.e
p(x) = limM→∞
NM (x)
M
(e) Estimativa da Probabilidade: A probabilidade da ocorrência de certo eventopode ser estimada por argumentos que caracterizem a incerteza acerca do conhec-imento completo (ou preciso) do resultado do evento.
Exemplo: a probabilidade de ocorrência de algum dos valores do dado é 1/6.
OBS: Em geral, esse é o procedimento (subjetivo) usual na mecânica estat́ıstica, oqual precisa ser validado por experimentos posteriores.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
4
Propriedades (continuação):
(d) Medição da Probabilidade: A probabilidade de que certo evento ocorra com resul-tado x ∈ S pode ser medida computando-se o número de vezes NM (x) (frequência)que o resultado x ocorra dentre M eventos independentes, no limite em que M setorna muito grande, i.e
p(x) = limM→∞
NM (x)
M
(e) Estimativa da Probabilidade: A probabilidade da ocorrência de certo eventopode ser estimada por argumentos que caracterizem a incerteza acerca do conhec-imento completo (ou preciso) do resultado do evento.
Exemplo: a probabilidade de ocorrência de algum dos valores do dado é 1/6.
OBS: Em geral, esse é o procedimento (subjetivo) usual na mecânica estat́ıstica, oqual precisa ser validado por experimentos posteriores.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
5
Processos estocásticos
Considerar uma variável estocástica X que possui um espaço de amostragem S discreto,contável e infinito, ou seja S = {x1, x2, . . . }.
Cada valor de S pode ser rotulado por um número inteiro de forma ineqúıvoca, i.e.
S = {xi}, (i = 1, 2, . . . )
Definindo pi = p(xi) pelas respectivas probabilidades de ocorrência, temos
pi ≥ 0 e�
i
pi = 1
Função densidade de probabilidade - f.d.p.:
PX(x) =∞�
i=1
pi δ(x− xi) (definição)
onde δ(x− xi) é a função distribuição δ−Dirac.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
5
Processos estocásticos
Considerar uma variável estocástica X que possui um espaço de amostragem S discreto,contável e infinito, ou seja S = {x1, x2, . . . }.
Cada valor de S pode ser rotulado por um número inteiro de forma ineqúıvoca, i.e.
S = {xi}, (i = 1, 2, . . . )
Definindo pi = p(xi) pelas respectivas probabilidades de ocorrência, temos
pi ≥ 0 e�
i
pi = 1
Função densidade de probabilidade - f.d.p.:
PX(x) =∞�
i=1
pi δ(x− xi) (definição)
onde δ(x− xi) é a função distribuição δ−Dirac.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
5
Processos estocásticos
Considerar uma variável estocástica X que possui um espaço de amostragem S discreto,contável e infinito, ou seja S = {x1, x2, . . . }.
Cada valor de S pode ser rotulado por um número inteiro de forma ineqúıvoca, i.e.
S = {xi}, (i = 1, 2, . . . )
Definindo pi = p(xi) pelas respectivas probabilidades de ocorrência, temos
pi ≥ 0 e�
i
pi = 1
Função densidade de probabilidade - f.d.p.:
PX(x) =∞�
i=1
pi δ(x− xi) (definição)
onde δ(x− xi) é a função distribuição δ−Dirac.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
5
Processos estocásticos
Considerar uma variável estocástica X que possui um espaço de amostragem S discreto,contável e infinito, ou seja S = {x1, x2, . . . }.
Cada valor de S pode ser rotulado por um número inteiro de forma ineqúıvoca, i.e.
S = {xi}, (i = 1, 2, . . . )
Definindo pi = p(xi) pelas respectivas probabilidades de ocorrência, temos
pi ≥ 0 e�
i
pi = 1
Função densidade de probabilidade - f.d.p.:
PX(x) =∞�
i=1
pi δ(x− xi) (definição)
onde δ(x− xi) é a função distribuição δ−Dirac.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Revisão sobre Teoria de Probabilidades
5
Processos estocásticos
Considerar uma variável estocástica X que possui um espaço de amostragem S discreto,contável e infinito, ou seja S = {x1, x2, . . . }.
Cada valor de S pode ser rotulado por um número inteiro de forma ineqúıvoca, i.e.
S = {xi}, (i = 1, 2, . . . )
Definindo pi = p(xi) pelas respectivas probabilidades de ocorrência, temos
pi ≥ 0 e�
i
pi = 1
Função densidade de probabilidade - f.d.p.:
PX(x) =∞�
i=1
pi δ(x− xi) (definição)
onde δ(x− xi) é a função distribuição δ−Dirac.� ∞
−∞P (x)dx =
∞�
i=1
pi
� ∞
−∞δ(x− xi) dx
� �� �=1
=∞�
i=1
pi = 1,Observação:
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
6
Propriedades importantes:
1. A função distribuição de probabilidades mede a probabilidade de que a variávelaleatória X tenha seu valor xi no intervalo (−∞, x).Por isso, também referida como a função de probabilidades cumulativa (FPC).
2. A função densidade de probabilidades é a derivada da função distribuição de prob-abilidades, i.e.
PX(x) =dFX(x)
dx
Define-se a função distribuição de probabilidades ou simplesmente distribuição deprobabilidades, pela integral,
FX(x) =
� x
−∞PX(x
�)dx�, ou FX(x) =∞�
i=1
pi Θ(x− xi)
onde Θ(x− xi) é a função Theta de Heaviside.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
6
Propriedades importantes:
1. A função distribuição de probabilidades mede a probabilidade de que a variávelaleatória X tenha seu valor xi no intervalo (−∞, x).Por isso, também referida como a função de probabilidades cumulativa (FPC).
2. A função densidade de probabilidades é a derivada da função distribuição de prob-abilidades, i.e.
PX(x) =dFX(x)
dx
Define-se a função distribuição de probabilidades ou simplesmente distribuição deprobabilidades, pela integral,
FX(x) =
� x
−∞PX(x
�)dx�, ou FX(x) =∞�
i=1
pi Θ(x− xi)
onde Θ(x− xi) é a função Theta de Heaviside.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
6
Propriedades importantes:
1. A função distribuição de probabilidades mede a probabilidade de que a variávelaleatória X tenha seu valor xi no intervalo (−∞, x).Por isso, também referida como a função de probabilidades cumulativa (FPC).
2. A função densidade de probabilidades é a derivada da função distribuição de prob-abilidades, i.e.
PX(x) =dFX(x)
dx
Define-se a função distribuição de probabilidades ou simplesmente distribuição deprobabilidades, pela integral,
FX(x) =
� x
−∞PX(x
�)dx�, ou FX(x) =∞�
i=1
pi Θ(x− xi)
onde Θ(x− xi) é a função Theta de Heaviside.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
6
Propriedades importantes:
1. A função distribuição de probabilidades mede a probabilidade de que a variávelaleatória X tenha seu valor xi no intervalo (−∞, x).Por isso, também referida como a função de probabilidades cumulativa (FPC).
2. A função densidade de probabilidades é a derivada da função distribuição de prob-abilidades, i.e.
PX(x) =dFX(x)
dx
Define-se a função distribuição de probabilidades ou simplesmente distribuição deprobabilidades, pela integral,
FX(x) =
� x
−∞PX(x
�)dx�, ou FX(x) =∞�
i=1
pi Θ(x− xi)
onde Θ(x− xi) é a função Theta de Heaviside.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
7
Propriedades importantes: continuação
3. Para que a função PX(x) seja sempre ≥ 0 é necessário que FX(x) seja uma funçãomonotonicamente crescente de x, e limitada no intervalo (0, 1) com FX(−∞) = 0e FX(∞) = 1
4. Variáveis aleatórias cont́ınuas:Considerar uma variável aleatória é cont́ınua, i.e. x ∈ S = {−∞ ≤ x ≤ ∞}.A probabilidade que um evento tenha resultado no intervalo {a ≤ x ≤ b} deve sercalculada pela integral de uma certa função densidade de probabilidades PX(x) nointervalo [a, b], i.e.
ProbX({a ≤ x ≤ b}) =� b
aPX(x
�) dx�
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
7
Propriedades importantes: continuação
3. Para que a função PX(x) seja sempre ≥ 0 é necessário que FX(x) seja uma funçãomonotonicamente crescente de x, e limitada no intervalo (0, 1) com FX(−∞) = 0e FX(∞) = 1
4. Variáveis aleatórias cont́ınuas:Considerar uma variável aleatória é cont́ınua, i.e. x ∈ S = {−∞ ≤ x ≤ ∞}.A probabilidade que um evento tenha resultado no intervalo {a ≤ x ≤ b} deve sercalculada pela integral de uma certa função densidade de probabilidades PX(x) nointervalo [a, b], i.e.
ProbX({a ≤ x ≤ b}) =� b
aPX(x
�) dx�
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
7
Propriedades importantes: continuação
3. Para que a função PX(x) seja sempre ≥ 0 é necessário que FX(x) seja uma funçãomonotonicamente crescente de x, e limitada no intervalo (0, 1) com FX(−∞) = 0e FX(∞) = 1
4. Variáveis aleatórias cont́ınuas:Considerar uma variável aleatória é cont́ınua, i.e. x ∈ S = {−∞ ≤ x ≤ ∞}.A probabilidade que um evento tenha resultado no intervalo {a ≤ x ≤ b} deve sercalculada pela integral de uma certa função densidade de probabilidades PX(x) nointervalo [a, b], i.e.
ProbX({a ≤ x ≤ b}) =� b
aPX(x
�) dx�
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
8
Comentários:
• Se X é uma variável estocástica, PX(x) é a probabilidade que em um evento oresultado esteja entre x e x+ dx.
• PX(x) satisfaz a todas propriedades da função densidade de probabilidades de umavariável discreta, i.e. � ∞
−∞PX(x
�) dx� = 1
e pode definir uma função distribuição de probabilidades (cumulativa) FX(x), queatende às propriedades (1)-(3) acima mostradas.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
8
Comentários:
• Se X é uma variável estocástica, PX(x) é a probabilidade que em um evento oresultado esteja entre x e x+ dx.
• PX(x) satisfaz a todas propriedades da função densidade de probabilidades de umavariável discreta, i.e. � ∞
−∞PX(x
�) dx� = 1
e pode definir uma função distribuição de probabilidades (cumulativa) FX(x), queatende às propriedades (1)-(3) acima mostradas.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Função Densidade de Probabilidades
8
Comentários:
• Se X é uma variável estocástica, PX(x) é a probabilidade que em um evento oresultado esteja entre x e x+ dx.
• PX(x) satisfaz a todas propriedades da função densidade de probabilidades de umavariável discreta, i.e. � ∞
−∞PX(x
�) dx� = 1
e pode definir uma função distribuição de probabilidades (cumulativa) FX(x), queatende às propriedades (1)-(3) acima mostradas.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
9
O momento de ordem n de uma f.d.p. é definido por
< xn >=
� ∞
−∞xn PX(x) dx
Primeiro Momento:
O primeiro momento é o valor médio dos valores do conjunto SX , i.e. a médiaponderada de todos valores com o peso dado pelas respectivas probabilidades.
< x >=
� ∞
−∞xPX(x) dx (média)
Segundo Momento:
< x2 >=
� ∞
−∞x2 PX(x) dx
Mede a dispersão, i.e. o quanto a f.d.p está deslocalizada em relação à média.Também é chamada de variância e é definida pelo valor médio do quadrado dodesvio em relação à média, i.e.
< (x− < x >)2 >=� ∞
−∞(x− < x >)2 PX(x) dx dispersão ou variância
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
9
O momento de ordem n de uma f.d.p. é definido por
< xn >=
� ∞
−∞xn PX(x) dx
Primeiro Momento:
O primeiro momento é o valor médio dos valores do conjunto SX , i.e. a médiaponderada de todos valores com o peso dado pelas respectivas probabilidades.
< x >=
� ∞
−∞xPX(x) dx (média)
Segundo Momento:
< x2 >=
� ∞
−∞x2 PX(x) dx
Mede a dispersão, i.e. o quanto a f.d.p está deslocalizada em relação à média.Também é chamada de variância e é definida pelo valor médio do quadrado dodesvio em relação à média, i.e.
< (x− < x >)2 >=� ∞
−∞(x− < x >)2 PX(x) dx dispersão ou variância
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
9
O momento de ordem n de uma f.d.p. é definido por
< xn >=
� ∞
−∞xn PX(x) dx
Primeiro Momento:
O primeiro momento é o valor médio dos valores do conjunto SX , i.e. a médiaponderada de todos valores com o peso dado pelas respectivas probabilidades.
< x >=
� ∞
−∞xPX(x) dx (média)
Segundo Momento:
< x2 >=
� ∞
−∞x2 PX(x) dx
Mede a dispersão, i.e. o quanto a f.d.p está deslocalizada em relação à média.Também é chamada de variância e é definida pelo valor médio do quadrado dodesvio em relação à média, i.e.
< (x− < x >)2 >=� ∞
−∞(x− < x >)2 PX(x) dx dispersão ou variância
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
9
O momento de ordem n de uma f.d.p. é definido por
< xn >=
� ∞
−∞xn PX(x) dx
Primeiro Momento:
O primeiro momento é o valor médio dos valores do conjunto SX , i.e. a médiaponderada de todos valores com o peso dado pelas respectivas probabilidades.
< x >=
� ∞
−∞xPX(x) dx (média)
Segundo Momento:
< x2 >=
� ∞
−∞x2 PX(x) dx
Mede a dispersão, i.e. o quanto a f.d.p está deslocalizada em relação à média.Também é chamada de variância e é definida pelo valor médio do quadrado dodesvio em relação à média, i.e.
< (x− < x >)2 >=� ∞
−∞(x− < x >)2 PX(x) dx dispersão ou variância
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
10
x-
x
Σ 2
x
PX!x"A variância é denotada por σ2.
σ é chamado de desvio padrão ouraiz do desvio quadrático médio.
σ2 é um estimador para a largurada distribuição, como indicado nafigura ao lado:
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
11
Terceiro Momento:
< x3 >=
� ∞
−∞x3 PX(x) dx
O terceiro momento está relacionado com a assimetria da f.d.p. ou obliquidade (skewnessem inglês ) definida por
γ =��x− < x >
σ
�3�→ γ = < x
3 > −3 < x2 >< x > +2 < x >3
σ3
Γ>0
x
PX!x"Γ
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
12
Quarto Momento:
< x4 >=
� ∞
−∞x4 PX(x) dx
O quarto momento está relacionado com a Kurtosis ou Curtose, ou ainda com o excessode kurtosis da f.d.p. definida por
κ =< x4 >
< x2 >2− 3
A curtose fornece uma medida do achatamento ou agudeza da função em relação àdistribuição normal.
(a) Mesocúrticas: κ = 0. O exemplo mais proeminente é a distribuição normal ouGaussiana, vista a mais adiante.
(b) Leptocúrticas: κ > 0. Possuem pico agudo e caudas cheias ou gordas. Exemplos:as distribuições de Cauchy, Student-t, Rayleigh, Laplace (κ = 3), Exponencial,Poisson e a Loǵıstica (κ = 1.2), também denominadas de super Gaussianas.
(c) Platicúrticas: κ < 0. Possuem um pico mais arredondado e caudas finas ou magras.O caso mais famoso é o da distribuição de Bernoulli com probabilidade p = 1/2para cada um dos dois eventos, i.e cara ou coroa.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
12
Quarto Momento:
< x4 >=
� ∞
−∞x4 PX(x) dx
O quarto momento está relacionado com a Kurtosis ou Curtose, ou ainda com o excessode kurtosis da f.d.p. definida por
κ =< x4 >
< x2 >2− 3
A curtose fornece uma medida do achatamento ou agudeza da função em relação àdistribuição normal.
(a) Mesocúrticas: κ = 0. O exemplo mais proeminente é a distribuição normal ouGaussiana, vista a mais adiante.
(b) Leptocúrticas: κ > 0. Possuem pico agudo e caudas cheias ou gordas. Exemplos:as distribuições de Cauchy, Student-t, Rayleigh, Laplace (κ = 3), Exponencial,Poisson e a Loǵıstica (κ = 1.2), também denominadas de super Gaussianas.
(c) Platicúrticas: κ < 0. Possuem um pico mais arredondado e caudas finas ou magras.O caso mais famoso é o da distribuição de Bernoulli com probabilidade p = 1/2para cada um dos dois eventos, i.e cara ou coroa.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
12
Quarto Momento:
< x4 >=
� ∞
−∞x4 PX(x) dx
O quarto momento está relacionado com a Kurtosis ou Curtose, ou ainda com o excessode kurtosis da f.d.p. definida por
κ =< x4 >
< x2 >2− 3
A curtose fornece uma medida do achatamento ou agudeza da função em relação àdistribuição normal.
(a) Mesocúrticas: κ = 0. O exemplo mais proeminente é a distribuição normal ouGaussiana, vista a mais adiante.
(b) Leptocúrticas: κ > 0. Possuem pico agudo e caudas cheias ou gordas. Exemplos:as distribuições de Cauchy, Student-t, Rayleigh, Laplace (κ = 3), Exponencial,Poisson e a Loǵıstica (κ = 1.2), também denominadas de super Gaussianas.
(c) Platicúrticas: κ < 0. Possuem um pico mais arredondado e caudas finas ou magras.O caso mais famoso é o da distribuição de Bernoulli com probabilidade p = 1/2para cada um dos dois eventos, i.e cara ou coroa.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
12
Quarto Momento:
< x4 >=
� ∞
−∞x4 PX(x) dx
O quarto momento está relacionado com a Kurtosis ou Curtose, ou ainda com o excessode kurtosis da f.d.p. definida por
κ =< x4 >
< x2 >2− 3
A curtose fornece uma medida do achatamento ou agudeza da função em relação àdistribuição normal.
(a) Mesocúrticas: κ = 0. O exemplo mais proeminente é a distribuição normal ouGaussiana, vista a mais adiante.
(b) Leptocúrticas: κ > 0. Possuem pico agudo e caudas cheias ou gordas. Exemplos:as distribuições de Cauchy, Student-t, Rayleigh, Laplace (κ = 3), Exponencial,Poisson e a Loǵıstica (κ = 1.2), também denominadas de super Gaussianas.
(c) Platicúrticas: κ < 0. Possuem um pico mais arredondado e caudas finas ou magras.O caso mais famoso é o da distribuição de Bernoulli com probabilidade p = 1/2para cada um dos dois eventos, i.e cara ou coroa.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
13
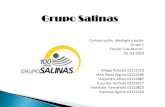
Gráfico comparativo das distribuições de Laplace (D), Secante Hiperbólica (S), Loǵıstica (L), Normal ou
Gaussiana (N), Coseno Elevado (C), Semićırculo de Wigner (W) e Uniforme (U), com suas respectivas curtoses
indicadas na legenda. Fonte: http://en.wikipedia.org/wiki/Kurtosis
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
14
Função de uma variável aleatória:
Considerar GX(x) função de uma variável aleatória X.A função GX(x) será, também, uma variável aleatória associada com uma função densi-dade de probabilidade PGX tal que
PGXdG = ProbG(GX ∈ [GX , GX + dGX ])
PGX satisfaz a todas as propriedades de uma f.d.p. acima descritas. O valor esperado(ou valor médio) para essa função é definido por
< GX >=
� ∞
−∞GX(x)PX(x) dx
Para o caso de mais de uma variável, i.e. GXY (x, y), têm-se
< GXY >=
� ∞
−∞dx
� ∞
−∞GXY (x, y)PXY (x, y)dy
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
14
Função de uma variável aleatória:
Considerar GX(x) função de uma variável aleatória X.A função GX(x) será, também, uma variável aleatória associada com uma função densi-dade de probabilidade PGX tal que
PGXdG = ProbG(GX ∈ [GX , GX + dGX ])
PGX satisfaz a todas as propriedades de uma f.d.p. acima descritas. O valor esperado(ou valor médio) para essa função é definido por
< GX >=
� ∞
−∞GX(x)PX(x) dx
Para o caso de mais de uma variável, i.e. GXY (x, y), têm-se
< GXY >=
� ∞
−∞dx
� ∞
−∞GXY (x, y)PXY (x, y)dy
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
14
Função de uma variável aleatória:
Considerar GX(x) função de uma variável aleatória X.A função GX(x) será, também, uma variável aleatória associada com uma função densi-dade de probabilidade PGX tal que
PGXdG = ProbG(GX ∈ [GX , GX + dGX ])
PGX satisfaz a todas as propriedades de uma f.d.p. acima descritas. O valor esperado(ou valor médio) para essa função é definido por
< GX >=
� ∞
−∞GX(x)PX(x) dx
Para o caso de mais de uma variável, i.e. GXY (x, y), têm-se
< GXY >=
� ∞
−∞dx
� ∞
−∞GXY (x, y)PXY (x, y)dy
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
14
Função de uma variável aleatória:
Considerar GX(x) função de uma variável aleatória X.A função GX(x) será, também, uma variável aleatória associada com uma função densi-dade de probabilidade PGX tal que
PGXdG = ProbG(GX ∈ [GX , GX + dGX ])
PGX satisfaz a todas as propriedades de uma f.d.p. acima descritas. O valor esperado(ou valor médio) para essa função é definido por
< GX >=
� ∞
−∞GX(x)PX(x) dx
Para o caso de mais de uma variável, i.e. GXY (x, y), têm-se
< GXY >=
� ∞
−∞dx
� ∞
−∞GXY (x, y)PXY (x, y)dy
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Covariância
Cov(X,Y ) =< (x− < x >)(y− < y >) > → Cov(X,Y ) =< xy > − < x >< y >
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Covariância
Cov(X,Y ) =< (x− < x >)(y− < y >) > → Cov(X,Y ) =< xy > − < x >< y >
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Covariância
Cov(X,Y ) =< (x− < x >)(y− < y >) > → Cov(X,Y ) =< xy > − < x >< y >
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades - exemplos
15
Covariância
Cov(X,Y ) =< (x− < x >)(y− < y >) > → Cov(X,Y ) =< xy > − < x >< y >
Exemplos:
1) Supor GXY (x, y) = xn, logo
< xn >=
� ∞
−∞dx
� ∞
−∞dy xnPXY (x, y)
2) Supor GXY (x, y) = xnym, logo
< xnym >=
� ∞
−∞dx
� ∞
∞dy xnymPXY (x, y) (momento conjugado)
Correlação ou função de correlação
Cor(X,Y ) =Cov(X,Y )
σxσy=
< xy > − < x >< y >√< x2 > − < x >2
�< y2 > − < y >2
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Momentos de uma Função Densidade de Probabilidades
16
Propriedades:
1. Cor(X,Y ) é adimendional.
2. Cor(X,Y ) mede o grau dependência entre as variáveis X e Y .
3. Cor(X,Y )=Cor(Y,X)
4. −1 ≤ Cor(X,Y ) ≤ 1
5. Cor(X,X) = 1 e Cor(X,−X) = −1
6. Cor(aX + b, c Y + d) = Cor(X,Y ) = 1, se a, c �= 0
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Variáveis Aleatórias Independentes
17
Variáveis Aleatórias Independentes:
PXY (x, y) = PX(x)PY (y)
• < X Y >=< X >< Y >
• Cov(X,Y ) = 0 → Cor(X,Y ) = 0.O reverso não é necessariamente verdadeiro.
• Composição
σ2X+Y = < (X + Y )2 > − < (X + Y ) >2=
= < (X)2 > − < (X) >2 + < (y)2 > − < (Y ) >2== σ2X + σ
2Y
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Variáveis Aleatórias Independentes
17
Variáveis Aleatórias Independentes:
PXY (x, y) = PX(x)PY (y)
• < X Y >=< X >< Y >
• Cov(X,Y ) = 0 → Cor(X,Y ) = 0.O reverso não é necessariamente verdadeiro.
• Composição
σ2X+Y = < (X + Y )2 > − < (X + Y ) >2=
= < (X)2 > − < (X) >2 + < (y)2 > − < (Y ) >2== σ2X + σ
2Y
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Variáveis Aleatórias Independentes
17
Variáveis Aleatórias Independentes:
PXY (x, y) = PX(x)PY (y)
• < X Y >=< X >< Y >
• Cov(X,Y ) = 0 → Cor(X,Y ) = 0.O reverso não é necessariamente verdadeiro.
• Composição
σ2X+Y = < (X + Y )2 > − < (X + Y ) >2=
= < (X)2 > − < (X) >2 + < (y)2 > − < (Y ) >2== σ2X + σ
2Y
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
18
Seja a variável aleatória X(x) onde x ∈ S = {0,+1}.
Definir p(0) = q e p(+1) = p donde p = 1− q.
Considerar uma sequência de N eventos independentes em que ocorrem n0 vezes oresultado 0 e n1 vezes o resultado +1, onde N = n0 + n1.
A probabilidade de ocorrer uma certa sequência com n0 resultados 0, será qn0 pn1 .
Como o número de maneiras de se dispor n0 resultados 0 e n1 resultados +1 em umasequência é N !/n0!n1!, todas equiprováveis, a probabilidade de se obter qualquersequência com n0 resultados 0 e n1 do tipo +1 será
PN (n1) =N !
n0!n1!qn0 pn1
Usando o teorema binomial é imediato verificar que
N�
n1=0
PN (n1) =N�
n1=0
N !
(N − n1)!n1!qN−n1 pn1 = (p+ q)N = 1
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
18
Seja a variável aleatória X(x) onde x ∈ S = {0,+1}.
Definir p(0) = q e p(+1) = p donde p = 1− q.
Considerar uma sequência de N eventos independentes em que ocorrem n0 vezes oresultado 0 e n1 vezes o resultado +1, onde N = n0 + n1.
A probabilidade de ocorrer uma certa sequência com n0 resultados 0, será qn0 pn1 .
Como o número de maneiras de se dispor n0 resultados 0 e n1 resultados +1 em umasequência é N !/n0!n1!, todas equiprováveis, a probabilidade de se obter qualquersequência com n0 resultados 0 e n1 do tipo +1 será
PN (n1) =N !
n0!n1!qn0 pn1
Usando o teorema binomial é imediato verificar que
N�
n1=0
PN (n1) =N�
n1=0
N !
(N − n1)!n1!qN−n1 pn1 = (p+ q)N = 1
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
18
Seja a variável aleatória X(x) onde x ∈ S = {0,+1}.
Definir p(0) = q e p(+1) = p donde p = 1− q.
Considerar uma sequência de N eventos independentes em que ocorrem n0 vezes oresultado 0 e n1 vezes o resultado +1, onde N = n0 + n1.
A probabilidade de ocorrer uma certa sequência com n0 resultados 0, será qn0 pn1 .
Como o número de maneiras de se dispor n0 resultados 0 e n1 resultados +1 em umasequência é N !/n0!n1!, todas equiprováveis, a probabilidade de se obter qualquersequência com n0 resultados 0 e n1 do tipo +1 será
PN (n1) =N !
n0!n1!qn0 pn1
Usando o teorema binomial é imediato verificar que
N�
n1=0
PN (n1) =N�
n1=0
N !
(N − n1)!n1!qN−n1 pn1 = (p+ q)N = 1
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
18
Seja a variável aleatória X(x) onde x ∈ S = {0,+1}.
Definir p(0) = q e p(+1) = p donde p = 1− q.
Considerar uma sequência de N eventos independentes em que ocorrem n0 vezes oresultado 0 e n1 vezes o resultado +1, onde N = n0 + n1.
A probabilidade de ocorrer uma certa sequência com n0 resultados 0, será qn0 pn1 .
Como o número de maneiras de se dispor n0 resultados 0 e n1 resultados +1 em umasequência é N !/n0!n1!, todas equiprováveis, a probabilidade de se obter qualquersequência com n0 resultados 0 e n1 do tipo +1 será
PN (n1) =N !
n0!n1!qn0 pn1
Usando o teorema binomial é imediato verificar que
N�
n1=0
PN (n1) =N�
n1=0
N !
(N − n1)!n1!qN−n1 pn1 = (p+ q)N = 1
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
19
De outra maneira, considerar Xi é uma variável estocástica que fornece o resul-tado da iésima tentativa e que Xi pode resultar em apenas dois valores, 0 comprobabilidade q e +1 com probabilidade p.
A função densidade de probabilidade para a iésima tentativa será
PXi(x) = q δ(x) + p δ(x− 1)
Valor Médio de n1 eventos com resultado +1 em N tentativas.
< n1 >=N�
n1=0
n1 PN (n1) =N�
n1=0
n1N !
n1!n0!pn1 qn0
onde n0 = N − n1 e no final faremos q = 1− p.
< n1 >= p∂
∂p
N�
n1=0
N !
n1!n0!pn1 qn0 = p
∂
∂p(p+ q)N = pN(p+ q)N−1 = pN
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
19
De outra maneira, considerar Xi é uma variável estocástica que fornece o resul-tado da iésima tentativa e que Xi pode resultar em apenas dois valores, 0 comprobabilidade q e +1 com probabilidade p.
A função densidade de probabilidade para a iésima tentativa será
PXi(x) = q δ(x) + p δ(x− 1)
Valor Médio de n1 eventos com resultado +1 em N tentativas.
< n1 >=N�
n1=0
n1 PN (n1) =N�
n1=0
n1N !
n1!n0!pn1 qn0
onde n0 = N − n1 e no final faremos q = 1− p.
< n1 >= p∂
∂p
N�
n1=0
N !
n1!n0!pn1 qn0 = p
∂
∂p(p+ q)N = pN(p+ q)N−1 = pN
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
A Distribuição Binomial
20
por outro lado, < n0 >=< N −n1 >= N− < n1 >= N −pN = N(1−p) = q N ,ou seja
< n1 >= pN, < n0 >= q N, ∴ < n0 > + < n1 >= N
Dispersão em relação à média: σ21 =< n21 > − < n1 >2
< n21 >=N�
n1=0
n21N !
n!!n0!pn!qn0 = p
∂
∂p× p ∂
∂p
�N�
n1=0
N !
n!!n0!pn!qn0
�=
= p∂
∂p
�pN(p+ q)N−1
�= pN + p2N(N − 1)
Logo,
σ21 =< n21 > − < n1 >2= pN + p2N(N − 1)− (pN)2 = N p q
Portanto
σ1 = (p q)1/2
√N ∴ σ1
< n1 >=
�q
p
�1/2 1√N
A distribuição se torna muito fina e centrada em torno da média no limite quando N é grande.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
21
No limite N → ∞, tanto PN (0) = qN → ∞ quanto PN (N) = pN → 0.
Logo PN (n1) deve ter um máximo!
Considerar que próximo ao máximo lnPN (n1) seja quase cont́ınua e diferenciável.Seja
f(n1) = lnPN (n1) = lnN !− lnn! − ln(N − n1)! + n1 ln p+ (N − n1) ln q �
Usando a fórmula de Stirling,
lnN ! � N lnN −N +O(lnN)
f(n1) � N lnN−N−n1 lnn1+n1−(N−n1) ln(N−n1)−(N−n1)+n1 ln p+(N−n1) ln q
Cálculo do máximo,
∂f
∂n1= − lnn1 + ln(N − n!) + ln p− ln q = 0
No limite N → ∞, fica
ln n̄1 + ln(N − n̄1) + ln p− ln q = 0 ∴ n̄1 = N p =< n1 >
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
22
Para a segunda derivada,
∂2f
∂n21= − 1
n1− 1
N − n1, → ∂
2f
∂n21
���n̄1
= − 1N p q
< 0
verifica-se o máximo em n1 = n̄1.
Expandindo-se em série de Taylor em torno do máximo,
f(n1) = lnPN (n1) = lnPN (n̄1)−1
2Npq(n1 − n̄1)2 + . . .
Desprezando-se termos superiores (aproximação gaussiana), resulta
PN (n1) � C0 exp�− (n1 − n̄1)
2
2Npq
�= C0 exp
�− (n1− < n1 >)
2
2(σ21)
�
onde o coeficiente C0 é determinado pela condição de normalização e resulta
C0 =�2πσ21
�1/2 → PN (n1) ��2πσ21
�1/2exp
�− (n1− < n1 >)
2
2(σ21)
�
que é distribuição normal ou gaussiana centrada em < n1 > com variância σ21 .
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
22
Para a segunda derivada,
∂2f
∂n21= − 1
n1− 1
N − n1, → ∂
2f
∂n21
���n̄1
= − 1N p q
< 0
verifica-se o máximo em n1 = n̄1.
Expandindo-se em série de Taylor em torno do máximo,
f(n1) = lnPN (n1) = lnPN (n̄1)−1
2Npq(n1 − n̄1)2 + . . .
Desprezando-se termos superiores (aproximação gaussiana), resulta
PN (n1) � C0 exp�− (n1 − n̄1)
2
2Npq
�= C0 exp
�− (n1− < n1 >)
2
2(σ21)
�
onde o coeficiente C0 é determinado pela condição de normalização e resulta
C0 =�2πσ21
�1/2 → PN (n1) ��2πσ21
�1/2exp
�− (n1− < n1 >)
2
2(σ21)
�
que é distribuição normal ou gaussiana centrada em < n1 > com variância σ21 .
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
22
Para a segunda derivada,
∂2f
∂n21= − 1
n1− 1
N − n1, → ∂
2f
∂n21
���n̄1
= − 1N p q
< 0
verifica-se o máximo em n1 = n̄1.
Expandindo-se em série de Taylor em torno do máximo,
f(n1) = lnPN (n1) = lnPN (n̄1)−1
2Npq(n1 − n̄1)2 + . . .
Desprezando-se termos superiores (aproximação gaussiana), resulta
PN (n1) � C0 exp�− (n1 − n̄1)
2
2Npq
�= C0 exp
�− (n1− < n1 >)
2
2(σ21)
�
onde o coeficiente C0 é determinado pela condição de normalização e resulta
C0 =�2πσ21
�1/2 → PN (n1) ��2πσ21
�1/2exp
�− (n1− < n1 >)
2
2(σ21)
�
que é distribuição normal ou gaussiana centrada em < n1 > com variância σ21 .
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
22
Para a segunda derivada,
∂2f
∂n21= − 1
n1− 1
N − n1, → ∂
2f
∂n21
���n̄1
= − 1N p q
< 0
verifica-se o máximo em n1 = n̄1.
Expandindo-se em série de Taylor em torno do máximo,
f(n1) = lnPN (n1) = lnPN (n̄1)−1
2Npq(n1 − n̄1)2 + . . .
Desprezando-se termos superiores (aproximação gaussiana), resulta
PN (n1) � C0 exp�− (n1 − n̄1)
2
2Npq
�= C0 exp
�− (n1− < n1 >)
2
2(σ21)
�
onde o coeficiente C0 é determinado pela condição de normalização e resulta
C0 =�2πσ21
�1/2 → PN (n1) ��2πσ21
�1/2exp
�− (n1− < n1 >)
2
2(σ21)
�
que é distribuição normal ou gaussiana centrada em < n1 > com variância σ21 .
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Limite Gaussiano da Distribuição Binomial
22
Para a segunda derivada,
∂2f
∂n21= − 1
n1− 1
N − n1, → ∂
2f
∂n21
���n̄1
= − 1N p q
< 0
verifica-se o máximo em n1 = n̄1.
Expandindo-se em série de Taylor em torno do máximo,
f(n1) = lnPN (n1) = lnPN (n̄1)−1
2Npq(n1 − n̄1)2 + . . .
Desprezando-se termos superiores (aproximação gaussiana), resulta
PN (n1) � C0 exp�− (n1 − n̄1)
2
2Npq
�= C0 exp
�− (n1− < n1 >)
2
2(σ21)
�
onde o coeficiente C0 é determinado pela condição de normalização e resulta
C0 =�2πσ21
�1/2 → PN (n1) ��2πσ21
�1/2exp
�− (n1− < n1 >)
2
2(σ21)
�
que é distribuição normal ou gaussiana centrada em < n1 > com variância σ21 .
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
23
O objetivo da Mecânica Estat́ıstica é descrever o comportamento macroscópico
de sistemas f́ısicos a partir do comportamento microscópico (do grande número) das
part́ıculas (ou graus de liberdade) constituintes. Em suma, fazer a conexão entre a
dinâmica microscópica e a dinâmica macroscópica.
A dinâmica microscópica, dependendo da natureza do sistema, pode ser bemdescrita pela dinâmica clássica (lagrangeana ou hamiltoniana) ou pela mecânicaquântica.
Para isso, é necessário possuir toda informação sobre um certo estado mi-croscópico e, mesmo assim, ser posśıvel resolver o enorme conjunto de equaçõesacopladas que descrevem de evolução temporal.
A descrição clássica é feita pela resolução das equações do movimento de Hamil-ton. O conhecimento das coordenadas generalizadas em dado instante (estado ini-cial) permite a determinação precisa de todos os estados passados e futuros.
A descrição quântica é feita pela resolução da equação de Schrödinger. Com oconhecimento da função de onda do estado inicial é posśıvel determinar a evoluçãotemporal para estados passados e futuros com certo grau de incerteza inerente.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
24
Ambas as descrições são baseadas em equações reverśıveis no tempo e resultam
num conjunto completo (enorme) de informações microscópicas, as quais, quando
adequadamente reunidas, são capazes de descrever a leis que governam o compor-
tamento macroscópico. Há porém, certo aspectos da dinâmica macroscópica que
não emergem diretamente do comportamento microscópico como:
◦ A existência dos estados de equiĺıbrio.◦ A evolução (não-reverśıvel) para tais estados de equiĺıbrio.
A mecânica estat́ıstica, por outro lado, tem por objetivo proporcionar a descriçãomacroscópica a partir de um conjunto reduzido das informações microscópicas e depostulados razoáveis que possibilitem a estimativa dos valores médios das grandezasmacroscópicas mensuráveis.
A mecânica estat́ıstica prescinde do cálculo microscópico detalhado, porémretém caracteŕısticas microscópicas essenciais como as propriedades de simetriapara descrever o comportamento macroscópico.
Para realizar este objetivo, lança mão de um conjunto métodos estat́ısticos e dateoria de probabilidades, além das leis da dinâmica – clássica ou quântica – e leis deconservação. Por fim, deve prover uma justificativa teórica para a Termodinâmica.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
24
Ambas as descrições são baseadas em equações reverśıveis no tempo e resultam
num conjunto completo (enorme) de informações microscópicas, as quais, quando
adequadamente reunidas, são capazes de descrever a leis que governam o compor-
tamento macroscópico. Há porém, certo aspectos da dinâmica macroscópica que
não emergem diretamente do comportamento microscópico como:
◦ A existência dos estados de equiĺıbrio.◦ A evolução (não-reverśıvel) para tais estados de equiĺıbrio.
A mecânica estat́ıstica, por outro lado, tem por objetivo proporcionar a descriçãomacroscópica a partir de um conjunto reduzido das informações microscópicas e depostulados razoáveis que possibilitem a estimativa dos valores médios das grandezasmacroscópicas mensuráveis.
A mecânica estat́ıstica prescinde do cálculo microscópico detalhado, porémretém caracteŕısticas microscópicas essenciais como as propriedades de simetriapara descrever o comportamento macroscópico.
Para realizar este objetivo, lança mão de um conjunto métodos estat́ısticos e dateoria de probabilidades, além das leis da dinâmica – clássica ou quântica – e leis deconservação. Por fim, deve prover uma justificativa teórica para a Termodinâmica.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
24
Ambas as descrições são baseadas em equações reverśıveis no tempo e resultam
num conjunto completo (enorme) de informações microscópicas, as quais, quando
adequadamente reunidas, são capazes de descrever a leis que governam o compor-
tamento macroscópico. Há porém, certo aspectos da dinâmica macroscópica que
não emergem diretamente do comportamento microscópico como:
◦ A existência dos estados de equiĺıbrio.◦ A evolução (não-reverśıvel) para tais estados de equiĺıbrio.
A mecânica estat́ıstica, por outro lado, tem por objetivo proporcionar a descriçãomacroscópica a partir de um conjunto reduzido das informações microscópicas e depostulados razoáveis que possibilitem a estimativa dos valores médios das grandezasmacroscópicas mensuráveis.
A mecânica estat́ıstica prescinde do cálculo microscópico detalhado, porémretém caracteŕısticas microscópicas essenciais como as propriedades de simetriapara descrever o comportamento macroscópico.
Para realizar este objetivo, lança mão de um conjunto métodos estat́ısticos e dateoria de probabilidades, além das leis da dinâmica – clássica ou quântica – e leis deconservação. Por fim, deve prover uma justificativa teórica para a Termodinâmica.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatística - Programa de Pós-graduação em Física da UFPE
Ensembles estatísticos
24
Ambas as descrições são baseadas em equações reverśıveis no tempo e resultam
num conjunto completo (enorme) de informações microscópicas, as quais, quando
adequadamente reunidas, são capazes de descrever a leis que governam o compor-
tamento macroscópico. Há porém, certo aspectos da dinâmica macroscópica que
não emergem diretamente do comportamento microscópico como:
◦ A existência dos estados de equiĺıbrio.◦ A evolução (não-reverśıvel) para tais estados de equiĺıbrio.
A mecânica estat́ıstica, por outro lado, tem por objetivo proporcionar a descriçãomacroscópica a partir de um conjunto reduzido das informações microscópicas e depostulados razoáveis que possibilitem a estimativa dos valores médios das grandezasmacroscópicas mensuráveis.
A mecânica estat́ıstica prescinde do cálculo microscópico detalhado, porémretém caracteŕısticas microscópicas essenciais como as propriedades de simetriapara descrever o comportamento macroscópico.
Para realizar este objetivo, lança mão de um conjunto métodos estat́ısticos e dateoria de probabilidades, além das leis da dinâmica – clássica ou quântica – e leis deconservação. Por fim, deve prover uma justificativa teórica para a Termodinâmica.
quinta-feira, 2 de fevereiro de 2012
-
Curso de Verão 2012 - Mecânica Estatí