Aula08
13
CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aula 8 – MODELAGEM NÃO-PARAMÉTRICA DE PROCESSOS INDUSTRIAIS Introdução Sistemas com atraso de transporte Malha aberta Malha fechada Processos auto-regulados Método de obtenção da modelagem não-paramétrica de processos baseados em sistemas de 1° ordem com atraso de transporte Tarefa Introdução Existem muitas razões para usar dados experimentais para obter um modelo do sistema dinâmico a ser controlado. Em primeiro lugar, a construção teórica do modelo através de equações é somente uma aproximação da realidade. Algumas vezes, como no caso de foguetes, o modelo teórico é extremamente bom. Por outro lado, alguns processos químicos, o modelo teórico é muito aproximado. Em todos os casos, antes do projeto final de controle é importante e prudente verificar o modelo teórico com dados experimentais. Em segundo lugar, em situações onde o modelo teórico é muito complicado ou o comportamento do processo é pouco compreendido, a única forma de projetar o controle são os dados experimentais. Por ultimo, algumas vezes os sistemas são submetidos a mudanças. Por exemplo, a velocidade de uma máquina de papel para diferentes composições da fibra, ou um sistema não-linear que se desloca para um novo ponto de operação. Nestas ocasiões é necessário reajustar o controlador, isso requer remodelar para acrescentar as mudanças inseridas no processo, e dados experimentais são freqüentemente são mais efetivos para acrescentar as informações necessárias no novo modelo. As técnicas aqui apresentadas baseiam-se na modelagem não-paramétrica de sistemas e possuem as seguintes características : 1. Os parâmetros do modelo são determinados a partir da resposta em malha - aberta do processo, considerando como sinal de entrada um degrau de amplitude conhecida. Fig. 1: Resposta ao degrau de um sistema desconhecido. 2. Determinação dos parâmetros do modelo é realizada através de construção gráfica e/ou cálculos simples, normalmente sem o auxílio de ferramentas matemáticas complexas. Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves 1
Transcript of Aula08

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Aula 8 – MODELAGEM NÃO-PARAMÉTRICA DE PROCESSOS INDUSTRIAIS
Introdução Sistemas com atraso de transporte
Malha aberta Malha fechada
Processos auto-regulados Método de obtenção da modelagem não-paramétrica de processos baseados em sistemas de 1° ordem com atraso de transporte Tarefa Introdução
Existem muitas razões para usar dados experimentais para obter um modelo do sistema dinâmico a ser controlado. Em primeiro lugar, a construção teórica do modelo através de equações é somente uma aproximação da realidade. Algumas vezes, como no caso de foguetes, o modelo teórico é extremamente bom. Por outro lado, alguns processos químicos, o modelo teórico é muito aproximado. Em todos os casos, antes do projeto final de controle é importante e prudente verificar o modelo teórico com dados experimentais.
Em segundo lugar, em situações onde o modelo teórico é muito complicado ou o comportamento do processo é pouco compreendido, a única forma de projetar o controle são os dados experimentais. Por ultimo, algumas vezes os sistemas são submetidos a mudanças. Por exemplo, a velocidade de uma máquina de papel para diferentes composições da fibra, ou um sistema não-linear que se desloca para um novo ponto de operação. Nestas ocasiões é necessário reajustar o controlador, isso requer remodelar para acrescentar as mudanças inseridas no processo, e dados experimentais são freqüentemente são mais efetivos para acrescentar as informações necessárias no novo modelo.
As técnicas aqui apresentadas baseiam-se na modelagem não-paramétrica de sistemas e possuem as seguintes características :
1. Os parâmetros do modelo são determinados a partir da resposta em malha - aberta do processo, considerando como sinal de entrada um degrau de amplitude conhecida.
Fig. 1: Resposta ao degrau de um sistema desconhecido.
2. Determinação dos parâmetros do modelo é realizada através de construção gráfica e/ou
cálculos simples, normalmente sem o auxílio de ferramentas matemáticas complexas.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
1

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Sistemas com atraso de transporte Consideremos o seguinte sistema processo de primeira-ordem, operando em malha-aberta;
R(s) C(s) 1 1s +
Fig. 2: Sistema de primeira-ordem.
em cuja resposta temporal é dada por:
c(t) 1 e t= − −
Consideremos a seguir, um sistema de primeira ordem, semelhante ao anterior, porém com um atraso de transporte, i.e,
R(s) C(s) e
−
+
θs
s 1
Fig 3: Sistema de primeira ordem com atraso de transporte.
Utilizando o “simulink”, realizar o seguinte diagrama de blocos :
Fig. 4: Sistemas de primeira-ordem sem e com atraso de transporte, em malha aberta.
Observar o comportamento dos sistemas descritos pelo diagrama de blocos anterior, considerando:
1. θ = 0.1 seg; 2. θ = 0.5 seg; 3. θ = 1.0 seg.
Tempo de simulação : 20 seg
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
2

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Frequência da onda quadrada : 0.5 Hz
Fig. 5:Resposta temporal de sistemas de primeira-ordem sem e com atraso de transporte, em malha aberta.
Considera-se então, para os dois casos anteriores, os sistemas operando em malha-fechada.
Fig. 6: Sistemas de primeira-ordem sem e com atraso de transporte, em malha fechada.
Observar a resposta dos sistemas, considerando :
1. θ = 0.5 seg; 2. θ = 1.0 seg; 3. θ = 1.5 seg.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
3

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Fig. 7: Resposta temporal de sistemas de primeira-ordem sem e com atraso de transporte, em malha
fechada.
Observa-se que a resposta ao degrau, para o sistema sem atraso de transporte, operando em malha-fechada, é dado por :
c(t) 0.5 0.5e 2t= − − Naturalmente, sem overshoot. No caso do sistema com atraso de transporte, dependendo do valor de θ, o sistema apresentará maiores ou menores amplitudes de oscilação. Processos auto-regulados Uma classe representativa de processos industriais pode ser modelada, para fins de ajuste de controladores tipo PID, através de funções de primeira ordem com atraso. Estes processos dividem-se em duas classes:
1. Processos auto-regulados; 2. Processos não auto-regulados.
Para a 1° classe de processos considera-se, para exemplificar, um sistema térmico:
Fig. 8: Exemplo de um processo auto-regulável.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
4

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Dada uma determinada tensão nos terminais do resistor, a temperatura irá se estabilizar em um determinado valor. Este processo poderá ser modelado como :
Gp(s)Ke
s 1
s=
+
−θ
τ
Para a segunda classe de processos considera-se o sistema de controle de nível, i.e.,
Fig. 9: Exemplo de um processo não auto-regulável.
Neste caso, considerando-se constante a vazão de entrada de alimentação do tanque, percebe-se claramente que o tanque transbordará. Processos deste tipo apresentam no mínimo um termo integral e, possivelmente, uma ou mais constantes de tempo. Para processos não auto-regulados, a modelagem não-paramétrica é realizada de acordo com a seguinte função de transferência:
Gp(s)Ke s
=−θ
s
Considera-se, para exemplificar, o seguinte processo:
R(s) C(s) 0 6
1 05 1.
( )( .s s s+ + )
Fig. 10: Exemplo de um sistema de terceira-ordem.
Que apresenta a seguinte resposta ao degrau:
Fig. 11: Resposta temporal de um sistema não auto-controlável.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
5

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Na função de transferência aproximada, K representa o coeficiente angular da curva de resposta do
processo, e θ o tempo especificado pela interseção da reta relativa a curva de resposta com o eixo dos tempos. Exercício:
Para o processo anterior, fazer o diagrama de simulação, obter a resposta ao degrau do sistema
operando em malha-aberta, e a partir daí, determinar a função de transferência aproximada.
Fig. 12: Sistema original e aproximado em malha aberta.
Logo, os parâmetros da função de transferencia aproximada são K=0.6 e θ = 1.52seg.
Fig. 13: Resposta temporal do sistema original e o aproximado em malha aberta.
Pode-se comparar, a seguir, a resposta ao degrau para os dois processos, real e estimado, operando
em malha-fechada, i.e.,
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
6

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Fig. 14: Sistema original e aproximado em malha fechada.
Fig. 15: Resposta temporal do sistema original e o aproximado em malha fechada.
Método de obtenção da modelagem não-paramétrica de processos baseados em sistemas de 1° ordem com atraso de transporte ( malha-aberta) Considera-se o processo excitado com uma entrada do tipo degrau de amplitude previamente estabelecida. Para um sistema de 1° ordem sem atraso, do tipo
G(s)a
s b=
+ (1)
excitado com um degrau unitário,i.e.,
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
7

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Y(s)1s
as b
=+
(2)
apresenta a seguinte resposta temporal :
y(t)ab
aeb
dy(t)dt
aebt
bt= − ⇒ =−
− (3)
Naturalmente, considerando b ∈ R+ teremos, a derivada temporal da variável de saída y(t) apresentará um valor máximo em t=0, i.e,
dy(t)
dta
t 0== (4)
Nota-se também que y(∞)=a/b. Considerando a reta de derivada máxima r(t)=at, observa-se que
esta intercepta o valor de regime do sistema em t=(1/b)= τ (Constante de Tempo do Sistema), ou o tempo para saída atingir 63,2% do valor de regime.
Desta forma pode-se determinar os parâmetros da função de transferência de 1° ordem com atraso de transporte, i.e,
1sKeGp(s)
s
+τ=
θ−
(5)
Sendo o ganho “K” , determinado pela seguinte relação:
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
8

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
( )( )trlim
tylimK
t
t
∞→
∞→=entrada dedegrau do amplitude
yregime= (6)
O método descrito acima faz parte de um trabalho seminal proposto por Ziegler and Nichols [2] e
doravante será referenciando como Método 1 para determinação dos parâmetros da função de transferência aproximada do processo.
Outros métodos de modelagem não-paramétrica de processos, baseados em [2] tem sido sugeridos
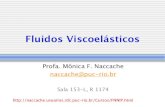
com algumas alterações. A seguir são apresentados dois outros métodos possíveis de serem utilizados para a determinação dos parâmetros θ e τ. Em todos os métodos descritos a seguir admite-se o traçado de uma reta tangente à curva de reação do sistema no ponto de máxima declividade conforme apresentado na Figura 17, logo cada um dos métodos é especificado como:
Tim e (sec .)
Am
plitu
de
0 5 10 15 20 25 30
0
0.2
0.4
0.6
0.8
1
To: Y
(1)
K
0.63K
A B C
0.28K
D
Figura 17: Obtenção através do método gráfico dos parâmetros do modelo aproximado descrito pela
equação (1). 1° Método: A intersecção da reta tangente à curva de reação do sistema com o eixo horizontal
fornece o valor do atraso de transporte θ, determinado pelo ponto A apresentado na Figura 17. O valor da constante de tempo τ é determinado pela subtração do instante de tempo referente à intersecção da reta tangente com o prolongamento do valor de regime da curva de reação do processo, indicado pelo ponto D na Figura 17, e o instante de tempo referente ao atraso de transporte do sistema, indicado pelo ponto A na Figura 17, logo, τ = D – A.
2° Método: Da mesma forma que no primeiro método, o atraso de transporte é determinado pela intersecção da tangente à curva de reação do sistema com o eixo horizontal. O valor da constante de tempo τ é obtido subtraindo-se o instante de tempo referente ao atraso de transporte, do instante de tempo no qual a curva de reação do sistema atinge 63,2% do valor de regime, conforme representado pelo ponto C na Figura 17, logo, τ = C – A.
3° Método: Os valores de τ e θ são obtidos realizando-se a medição dos instantes de tempo em que da curva de reação do sistema apresenta 63,2% e 28,3% do valor de regime, conforme indicado na Figura
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
9

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
17 e pelos pontos C e B, respectivamente. Desta forma, a determinação dos parâmetros τ e θ é realizada pela solução do seguinte sistema de equações lineares:
3τ
+θ=B (7)
τ+θ=C (8) Para avaliar o desempenho dos métodos de determinação dos parâmetros da função de
transferência aproximada pode-se construir um digrama de simulação em Matlab/Simulink conforme apresentado na Figura 18, onde a função de transferência de oitava ordem esta sendo aproximada por diferentes sistemas de primeira ordem com atraso de transporte.
Fig. 18: Avaliação dos parâmetros obtidos através dos três métodos descritos anteriormente. A Figura 19 apresenta a curva de reação do processo original e o desempenho dos sistemas
aproximados através dos três métodos de ajuste de parâmetros discutidos anteriormente. Analisando as curvas dos processos aproximados pelos três métodos descritos anteriormente
percebe-se que em nenhum dos casos a curva real foi aproximada com exatidão, isto porque os métodos utilizados têm como objetivo realizar um modelo aproximando e não um modelo exato. Mesmo assim, pode–se perceber que dependendo do método utilizado para determinação dos parâmetros da função de transferência aproximada, o erro entre a curva de reação do processo real e do processo aproximando sofre variações.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
10

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Figura 19: Desempenho dos modelos aproximados em comparação ao modelo real.
Os métodos para obtenção de modelos não-paramétricos discutidos até aqui são os mais utilizados
para o ajuste automático de controladores do tipo PID [1]. Apesar disto, este métodos não resultam em modelos representativos do processo real, uma vez que a resposta ao degrau dos modelos descritos por (5) não apresentam uma reposta ao em forma de “S”, diferentemente do processo original, como pode ser observado na Figura 19.
Com o objetivo de obter-se uma melhor representação do comportamento dinâmico do processo
pode-se modificar a função de transferência do modelo aproximado, descritos pela equação (5), para a função de transferência representada pela equação (9),
( )θ−
τ+= se
sKGa 21
(9)
cuja reposta ao degrau é dada por
( )
τθ−
+−= τθ−− tetK)t(y 11 (10)
Este modelo apresenta uma resposta ao degrau em forma de “S”, e geralmente possibilita a
obtenção de um melhor modelo aproximado. A determinação dos parâmetros K e θ pode ser realizada de forma idêntica a dos métodos 1 e 2 descritos anteriormente. Entretanto a constante de tempo τ deve ser determinada a partir da solução numérica da equação (10), admitindo-se conhecido pelo menos um valor da resposta ao degrau do processo real para um instante de tempo t específico. A Figura 20 apresenta a reposta ao degrau do modelo aproximado descrito pela equação (9).
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
11

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Fig. 20: Desempenho do modelo aproximando de ordem superior apresentado na eq. (9).
Exercício: Empregando o “Simulink”, implementar o diagrama de blocos referente a um sistema de quarta ordem, apresentado na figura a seguir. Com base nos métodos propostos para determinação do modelo aproximado, através de funções de primeira ordem com atraso de transporte, obtenha o modelo deste processo.
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
12

CONTROLADORES INDUSTRIAIS PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Professores: Luis Fernando Alves Pereira José Felipe Haffner Luciano Fonseca Chaves
13
Fig. 21: Diagrama de simulação e resposta temporal do sistemas original e o aproximado em
malha-fechada.
Atraso de Transporte (θ) Constante de Tempo (T) Ganho (K) Método 1 1.46 4.98 1.0 Método 2 1.46 3.34 1.0 Método 3 1.92 2.88 1.0
Tabela 1: Parâmetros das funções de transferencias aproximadas utilizando os métodos apresentados. Bibliografia: [1] Aström, K. and Hägglund, T.,“PID Controllers: Theory, Design and Tuning”, Instrument Society of America, Second Edition, 1995.
[2] Ziegler, J.G. and Nichols, B.N., “Optimum Settings for Automatic Controllers”, Transactions of the ASME, Vol. 64, no. 11, Nov. 1942.
[3] Smith, C.L., “Digital Computer Process Control” , Intext Educational Publishers, New York, 1972.
[4] PID-TOOL, Manual de Utilização, Altus Sistemas de Informática S.A., Porto Alegre, RS, Brasil.
[5] Ogata, Katsuhiko, "Engenharia de Controle Moderno", Prentice-Hall 1998
[6] Kuo, Benjamin C. "Automatic Control Systems", Prentice Hall ,1987
[7] D'azzo, John J. "Linear control system analysis and desing : conventional and modern", McGraw-Hill Kogakusha 1995.