
Cálculo II
279
CÁLCULO: VOLUME II MAURICIO A. VILCHES - MARIA LUIZA CORRÊA Departamento de Análise - IME UERJ
-
Upload
vitor-dias-do-vale -
Category
Documents
-
view
4.357 -
download
13
description
Apostila de Cálculo II
Transcript of Cálculo II
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 1/279
CÁLCULO: VOLUME II
MAURICIO A. VILCHES - MARIA LUIZA CORRÊA
Departamento de Análise - IMEUERJ

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 2/279
2
Copyright by Mauricio A. VilchesTodos os direitos reservados
Proibida a reprodução parcial ou total

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 3/279
3
PREFÁCIO
"Por favor, poderia me dizer que caminho devo seguir agora?Isso depende bastante de até onde você quer chegar."Lewis Carrol - Alice no País das Maravilhas
Esta notas são a continuação natural do livro CÁLCULO: VOLUME I, que é pré-requisito paraeste livro. Da mesma forma que o Cálculo Diferencial e Integral de uma variável, os conceitoscentrais do Cálculo Diferencial e Integral de várias variáveis são relativamente profundos enão se espera que possam ser assimilados de uma só vez. Neste nível, o importante é que oleitor desenvolva a habilidade de calcular e adquira a compreensão geométrica dos problemas.
Esperamos que o livro permita ao leitor um acesso rápido e agradável ao Cálculo Diferencial eIntegral de uma variável.Não podemos deixar de recomendar aos alunos a utilização, criteriosa, dos softwares de Cál-culo existente no mercado, pois eles são um complemento útil ao aprendizado da disciplina.Desejamos agradecer aos nossos colegas do Departamento de Análise e do IME-UERJ que, dealgum modo, nos motivaram e deram condições para escrever estas notas e à Sra. Sonia MariaAlves pela digitação. Certamente, todos os erros são exclusivamente de responsabilidade dosautores.
Mauricio A. Vilches - Maria Luiza CorrêaRio de Janeiro

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 4/279
4
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 5/279
Conteúdo
1 GEOMETRIA ANALÍTICA 91.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Espaços Euclidianos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.1 O Espaço Euclidiano Tridimensional . . . . . . . . . . . . . . . . . . . . . 91.3 Sistema de Coordenadas Ortogonais no Espaço . . . . . . . . . . . . . . . . . . . 101.4 Produto Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5 Norma Euclidiana de um Vetor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5.1 Ângulos Diretores e Co-senos Diretores . . . . . . . . . . . . . . . . . . . . 131.5.2 Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.6 Produto Vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.6.1 Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Distância emR3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.8 Retas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.8.1 Paralelismo e Perpendicularismo . . . . . . . . . . . . . . . . . . . . . . . . 191.8.2 Forma Simétrica da Equação da Reta . . . . . . . . . . . . . . . . . . . . . . 201.8.3 Distância de um Ponto a uma Reta . . . . . . . . . . . . . . . . . . . . . . 20
1.9 Planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.9.1 Ângulo entre Planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.9.2 Paralelismo e Perpendicularismo entre Planos . . . . . . . . . . . . . . . . 231.9.3 Distância de um Ponto a um Plano . . . . . . . . . . . . . . . . . . . . . . 25
1.10 Generalizações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.10.1 Produto escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.11 Superfícies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.12 Superfícies Quádricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.12.1 Elipsóide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.12.2 Hiperbolóide de uma folha . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.12.3 Hiperbolóide de duas folhas . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.12.4 Parabolóide elítico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.12.5 Parabolóide hiperbólico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341.12.6 Cone elítico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351.12.7 Cilindros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.13 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 6/279
6 CONT
2 FUNÇÕES DE VÁRIAS VARIÁVEIS 2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Domínio e Imagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Gráfico de Funções de Várias Variáveis . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Conjuntos de nível . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 CONJUNTOS ABERTOS, FECHADOS E FRONTEIRA 3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Conjuntos Abertos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Conjunto Fronteira . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Conjuntos Fechados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 LIMITES E CONTINUIDADE 4.1 LIMITES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 CONTINUIDADE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 DERIVADAS PARCIAIS 5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2 Generalizações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3 Interpretação Geométrica das Derivadas Parciais . . . . . . . . . . . . . . . . . 5.4 Derivadas Parciais como Taxa de Variação . . . . . . . . . . . . . . . . . . . . 5.5 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.6 Aproximação Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.7 Derivadas Parciais de Ordem Superior . . . . . . . . . . . . . . . . . . . . . . . 5.8 Regra da Cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.9 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 DERIVADA DIRECIONAL
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2 Derivada Direcional como Taxa de Variação . . . . . . . . . . . . . . . . . . . . 6.3 Gradiente de uma Função . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Observações Geométricas sobre Gradientes . . . . . . . . . . . . . . . 6.4 Funções Implícitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.5 Gradiente e Conjuntos de Nível . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.6 Gradiente e Curvas de Nível . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.1 Ângulo entre Curvas que se Intersectam . . . . . . . . . . . . . . . . . 6.7 Gradiente e Superfícies de Nível . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.1 Ângulo entre Superfícies . . . . . . . . . . . . . . . . . . . . . . . . . . 6.8 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 MÁXIMOS E MINIMOS 7.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Determinação dos Extremos Locais . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.1 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3 Problemas de Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 7/279
CONTEÚDO 7
7.3.1 Mínimos Quadrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1707.4 Máximos e Mínimos Absolutos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1737.5 Método dos Multiplicadores de Lagrange . . . . . . . . . . . . . . . . . . . . . . . 1777.6 Determinação dos Extremos Condicionados . . . . . . . . . . . . . . . . . . . . . 1787.7 Problemas de Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
7.7.1 Generalização do Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1907.8 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
8 INTEGRAÇÃO DUPLA 1958.1 Integração Dupla sobre Retângulos . . . . . . . . . . . . . . . . . . . . . . . . . . . 1958.2 Significado Geométrico da Integral Dupla . . . . . . . . . . . . . . . . . . . . . . . 1968.3 Integrais Iteradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1988.4 Teorema de Fubini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
8.4.1 Extensão do Teorema de Fubini . . . . . . . . . . . . . . . . . . . . . . . . 2038.5 Integração Dupla sobre Regiões mais Gerais . . . . . . . . . . . . . . . . . . . . . 205
8.5.1 Regiões Elementares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2058.6 Extensão da Integral Dupla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2088.7 Integral Dupla e Volume de Sólidos . . . . . . . . . . . . . . . . . . . . . . . . . . 209
8.7.1 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2108.8 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
9 MUDANÇA DE COORDENADAS 2219.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2219.2 Mudança Linear de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2249.3 Mudança Polar de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
9.3.1 Regiões Limitadas por Círculos . . . . . . . . . . . . . . . . . . . . . . . . 2309.3.2 Aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
9.4 Outras Aplicações da Integral Dupla . . . . . . . . . . . . . . . . . . . . . . . . . . 2389.4.1 Massa Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
9.4.2 Momento de Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2399.4.3 Centro de Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2399.4.4 Momento de Inércia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
9.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
10 INTEGRAÇÃO TRIPLA 24510.1 Integração Tripla sobre Paralelepípedos . . . . . . . . . . . . . . . . . . . . . . . . 24510.2 Integrais Triplas sobre Regiões mais Gerais . . . . . . . . . . . . . . . . . . . . . . 248
10.2.1 7.2.1 Regiões Elementares no Espaço . . . . . . . . . . . . . . . . . . . . . . 24810.3 Extensão da Integral Tripla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25010.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
11 MUDANÇA DE COORDENADAS 25511.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25511.2 Coordenadas Cilíndricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25611.3 Coordenadas Esféricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26111.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 8/279
8 CONT
12 APÊNDICE 12.1 Limite e Continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.2 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.3 Integração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliografia

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 9/279
Capítulo 1
GEOMETRIA ANALÍTICA
1.1 Introdução
Neste capítulo estabeleceremos os conceitos básicos para o estudo do Cálculo em várias va-riáveis. Não pretendemos fazer um estudo detalhado de vetores ou de Geometria Analítica,mas recomendamos aos leitores, consultar a bibliografia como complemento necessário destecapítulo.
1.2 Espaços Euclidianos
O espaço euclidiano n-dimensional (n ∈ N) é o produto cartesiano de n fatores iguais a R:
Rn = R× R× . . . . . . × R.
Se n = 1, R1 = R é a reta; se n = 2, R2 é o plano e se n = 3, R3 é o espaço euclidianotridimensional.
1.2.1 O Espaço Euclidiano TridimensionalO espaço euclidiano tridimensional é definido pelo conjunto:
R3 = {(x,y ,z) /x, y, z ∈ R}.
Logo, os elementos de R3 são ternos ordenados. Dados (x,y,z) ∈ R3 e (x1, y1, z1) ∈ R3, tem-se(x,y,z) = (x1, y1, z1) se, e somente se, x = x1, y = y1 e z = z1.
Em R3 podem ser definidas duas operações.
Definição 1.1. Dados (x,y,z), (x1, y1, z1) ∈ R3 e β ∈ R, definimos:
1. Adição de elementos de R3: (x,y,z) + (x1, y1, z1) = (x + x1, y + y1, z + z1).
2. Multiplicação de elementos de R3 por escalares de R: β (x,y ,z) = (β x, β y,β z).
Estas duas operações satisfazem às seguintes propriedades:
Proposição 1.1. Dados x, y, z e 0 = (0, 0, 0) elementos de R3 e α, β ∈ R ; então:
9
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 10/279
10 CAPÍTULO 1. GEOMETRIA ANA
1. x + y = y + x
2. (x + y) + z = x + (y + z)
3. x + 0 = 0 + x = x.
4. α (β x) = (α β )x
5. β (x + y) = β x + β y
6. (α + β )x = αx + β x
7. 1 · x = x · 1 = x
8. ∃ − x ∈ R3 tal quex + (
−x) = (
−x) + x = 0.
Note que, se x = (x,y,z), então −x = (−x, −y, −z)
Em geral, um conjunto onde são definidas as operações de adição e multiplicação pnúmero real (escalar), como na definição anterior, satisfazendo às propriedades antechamado espaço vetorial sobreR e seus elementos são chamados vetores. Logo,R3 é umvetorial (de dimensão 3) sobre R. De forma analoga, R2 é um espaço vetorial de dimsobreR.
1.3 Sistema de Coordenadas Ortogonais no Espaço
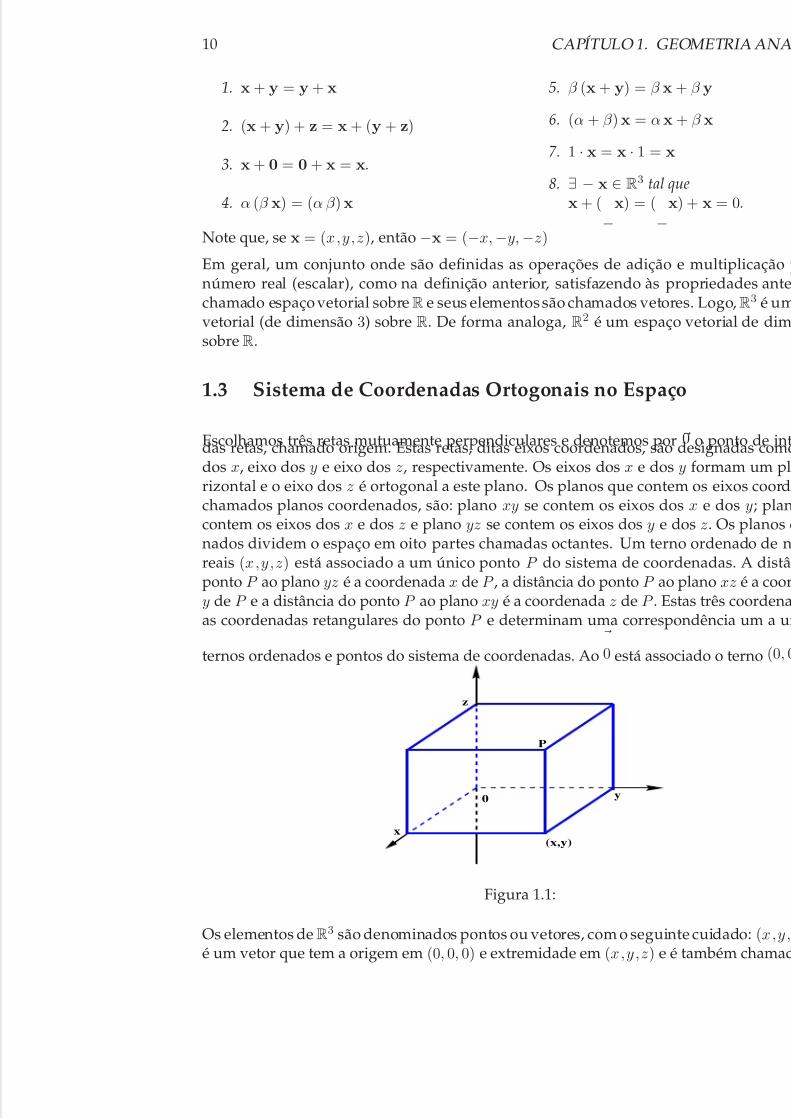
Escolhamos três retas mutuamente perpendiculares e denotemos por 0 o ponto de intdas retas, chamado origem. Estas retas, ditas eixos coordenados, são designadas comodos x, eixo dos y e eixo dos z, respectivamente. Os eixos dos x e dos y formam um plrizontal e o eixo dos z é ortogonal a este plano. Os planos que contem os eixos coordchamados planos coordenados, são: plano xy se contem os eixos dos x e dos y; plancontem os eixos dos x e dos z e plano yz se contem os eixos dos y e dos z. Os planos cnados dividem o espaço em oito partes chamadas octantes. Um terno ordenado de nreais (x,y,z) está associado a um único ponto P do sistema de coordenadas. A distânponto P ao plano yz é a coordenada x de P , a distância do ponto P ao plano xz é a coory de P e a distância do ponto P ao plano xy é a coordenada z de P . Estas três coordenaas coordenadas retangulares do ponto P e determinam uma correspondência um a um
ternos ordenados e pontos do sistema de coordenadas. Ao 0 está associado o terno (0, 0
P
x
y
z
0
(x,y)
Figura 1.1:
Os elementos deR3 são denominados pontos ou vetores, com o seguinte cuidado: (x,y,é um vetor que tem a origem em (0, 0, 0) e extremidade em (x,y,z) e é também chamad
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 11/279
1.4. PRODUTO ESCALAR 11
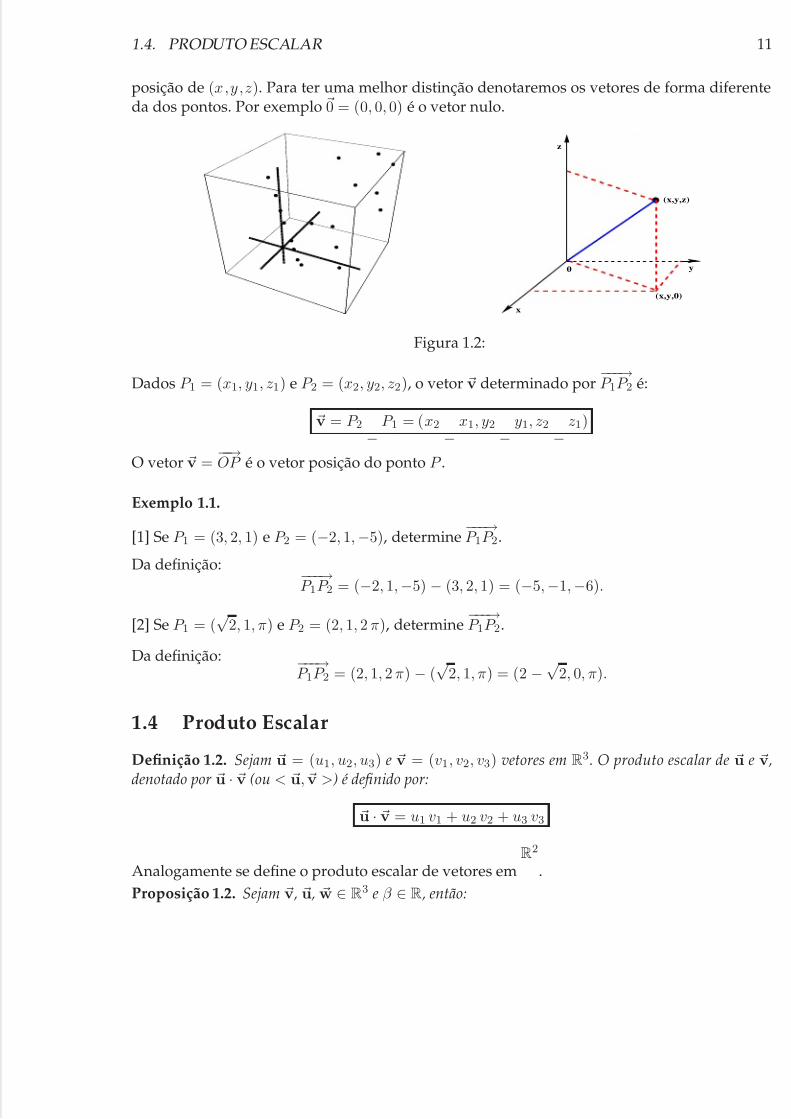
posição de (x,y,z). Para ter uma melhor distinção denotaremos os vetores de forma diferenteda dos pontos. Por exemplo 0 = (0, 0, 0) é o vetor nulo.
(x,y,0)
(x,y,z)
z
x
0 y
Figura 1.2:
Dados P 1 = (x1, y1, z1) e P 2 = (x2, y2, z2), o vetor v determinado por−−−→P 1P 2 é:
v = P 2−
P 1 = (x2
−x1, y2
−y1, z2
−z1)
O vetor v =−−→OP é o vetor posição do ponto P .
Exemplo 1.1.
[1] Se P 1 = (3, 2, 1) e P 2 = (−2, 1, −5), determine−−−→P 1P 2.
Da definição: −−−→P 1P 2 = (−2, 1, −5) − (3, 2, 1) = (−5, −1, −6).
[2] Se P 1 = (√
2, 1, π) e P 2 = (2, 1, 2 π), determine−−−→P 1P 2.
Da definição: −−−→P 1P 2 = (2, 1, 2 π) − (
√2, 1, π) = (2 −
√2, 0, π).
1.4 Produto Escalar
Definição 1.2. Sejam u = (u1, u2, u3) e v = (v1, v2, v3) vetores em R3. O produto escalar de u e v,denotado por u · v (ou < u, v >) é definido por:
u · v = u1 v1 + u2 v2 + u3 v3
Analogamente se define o produto escalar de vetores emR2
.Proposição 1.2. Sejam v, u, w ∈ R3 e β ∈ R, então:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 12/279
12 CAPÍTULO 1. GEOMETRIA ANA
1. v · v ≥ 0
2. v · v = 0 se e somente se, v = 0.
3. v · u = u · v.
4. v · 0 = 0.
5. (β u) · v = u · (β v) = β ( u · v).
6. w · ( u + v) = ( w · u) + ( w · v).
As propriedades podem ser provadas diretamente da definição.
Definição 1.3. O vetor v é ortogonal a w se e somente se
v · w = 0
O vetor 0 é o único vetor ortogonal a todos os vetores de R3. Se w ∈ R2 e w = (x, y), evetores (−y, x) e (y, −x) são ortogonais a w.
1.5 Norma Euclidiana de um Vetor
Definição 1.4. Seja v = (v1, v2, v3) ∈ R3. A norma euclidiana de v é denotada por v e defin
v =√
v · v =
v21 + v22 + v23
O vetor v é dito unitário se v = 1.
Proposição 1.3.
1. Se w = 0 não é unitário, então o vetor definido por v = w
w , é unitário e tem a mesma
de w.
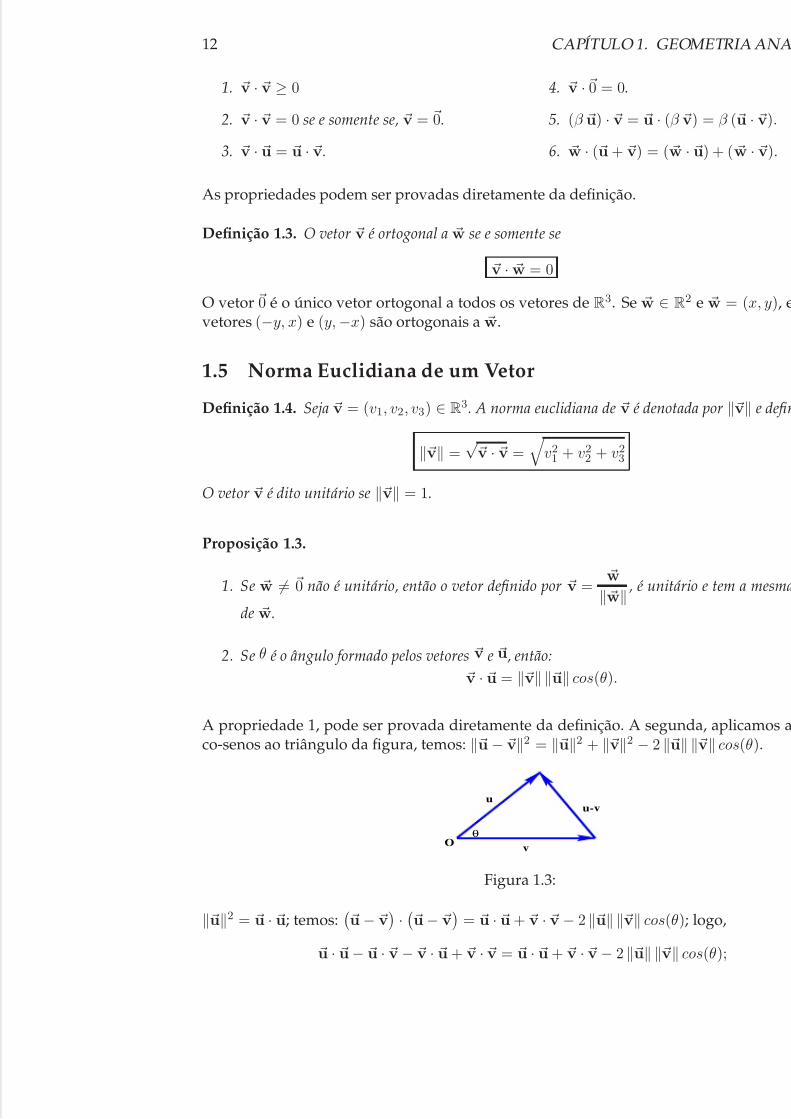
2. Se θ é o ângulo formado pelos vetores v e u, então: v · u = v u cos(θ).
A propriedade 1, pode ser provada diretamente da definição. A segunda, aplicamos aco-senos ao triângulo da figura, temos: u− v2 = u2 + v2 − 2 u v cos(θ).
v
u-v
O
u
θ
Figura 1.3:
u2 = u · u; temos:
u− v · u− v
= u · u + v · v− 2 u v cos(θ); logo,
u · u− u · v− v · u + v · v = u · u + v · v− 2 u v cos(θ);
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 13/279
1.5. NORMA EUCLIDIANA DE UM VETOR 13
então, u · v = u v cos(θ).
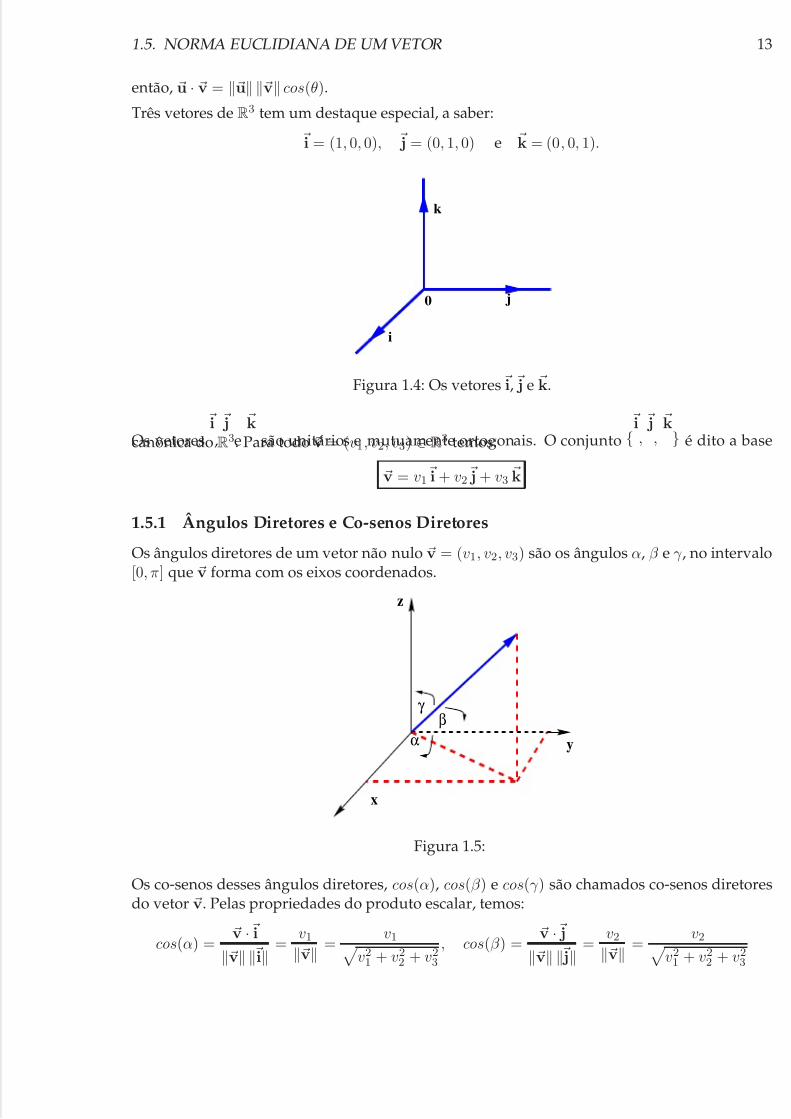
Três vetores de R3 tem um destaque especial, a saber:
i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1).
0
k
j
i
Figura 1.4: Os vetores i, j e k.
Os vetores i,
je
ksão unitários e mutuamente ortogonais. O conjunto {
i,
j,
k} é dito a basecanônica do R3. Para todo v = (v1, v2, v3) ∈ R3 temos:
v = v1 i + v2 j + v3 k
1.5.1 Ângulos Diretores e Co-senos Diretores
Os ângulos diretores de um vetor não nulo v = (v1, v2, v3) são os ângulos α, β e γ , no intervalo[0, π] que v forma com os eixos coordenados.
γ
α
β
y
z
x
Figura 1.5:
Os co-senos desses ângulos diretores, cos(α), cos(β ) e cos(γ ) são chamados co-senos diretoresdo vetor v. Pelas propriedades do produto escalar, temos:
cos(α) = v · i
v i=
v1 v =
v1 v21 + v22 + v23
, cos(β ) = v · j
v j=
v2 v =
v2 v21 + v22 + v23

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 14/279
14 CAPÍTULO 1. GEOMETRIA ANA
e
cos(γ ) = v · k
v k=
v3 v =
v3 v21 + v22 + v23
.
O vetor v fica univocamente determinado conhecendo seu comprimento e seus ângulotores. De fato:
v1 = v cos(α), v2 = v cos(β ) e v3 = v cos(γ ).
Note que cos2
(α) + cos2
(β ) + cos2
(γ ) = 1.Exemplo 1.2.
[1] Sejam v = (1, 2, 3) e w = (−2, 1, 3). Determine v · w e os vetores unitários nas direçõe w, respectivamente.
Primeiramente calculamos v · w = −2 + 2 + 9 = 9. Agora devemos determinar v v
v =√
1 + 4 + 9 =√
14 e w =√
4 + 1 + 9 =√
14; logo, 1√14
,2√14
,3√14
e
− 2√14
,1√14
,3√14
,
são os vetores unitários nas direções de v e w, respectivamente.
[2] Sejam v = (x, −2, 3) e u = (x,x, −5). Determine o valor de x para que v e u sejam nais.
Da definição v e u são ortogonais se v · u = 0; então, v · u = x2 − 2 x − 15 = 0, equação qsoluções x = 5 e x = −3; logo: v = (5, −2, 3) e u = (5, 5, −5) são ortogonais e v = (−3, u = (−3, −3, −5) são ortogonais.
[3] Sejam P 1 = (3, −2, −1), P 2 = (1, 4, 1), P 3 = (0, 0, 1) e P 4 = (−1, 1, −1). Determine o formado pelos vetores
−−−→P 1P 2 e
−−−→P 3P 4.
Sejam v =−−−→P 1P 2 = (1 − 3, 4 + 2, 1 + 1) = (−2, 6, 2) e w =
−−−→P 3P 4 = (−1, 1, −2). O ângulo fo
por v e w é:
cos(θ) = v
· w
v w= 2
33.
[4] Calcule os co-senos diretores de u = (−2, 1, 2).
Como u = 3, cos(α) = −2
3, cos(β ) =
1
3e cos(γ ) =
2
3.
1.5.2 Trabalho
Suponha que uma força constante F move uma partícula de um ponto P até um ponttrabalho realizado pela partícula é dado por:
W = F · −−→P Q
Se a unidade de comprimento é dada em metros e a força é dada em Newtons, o trabdado em Joules (J ).
Exemplo 1.3.
Uma força dada por F = (1, 2, 3) move uma partícula do ponto (1, 1, 1) ao ponto (4, 2, 3W = (1, 2, 3) · (3, 1, 2) = 3 + 2 + 6 = 11 J .
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 15/279
1.6. PRODUTO VETORIAL 15
1.6 Produto Vetorial
Definição 1.5. Dados v = (v1, v2, v3) e w = (w1, w2, w3) vetores em R3, o produto vetorial de v e w,denotado por v× w é definido por:
v
× w = v2 v3
w2 w3 i
− v1 v3
w1 w3 j + v1 v2
w1 w2 k
Logo, da definição segue:
v × w =
v2 w3 − v3 w2
i +
v3 w1 − v1 w3
j +
v1 w2 − v2 w1
k.
Proposição 1.4. Sejam v, w e u vetores do R3 e β ∈ R. Então:
1. v× v = 0.
2. 0 × v = v× 0 = 0.
3. v× w = − w× v.
4. v × ( w + u) = v× w + v× u.
5. β v× w = v× β w = β ( v× w).
6. v× w = v w sen(θ), onde θ é o ângulo formado por v e w.
7. Os vetores v e w são paralelos se e somente se v× w = 0.
8. O vetor v× w é ortogonal aos vetores v e w.
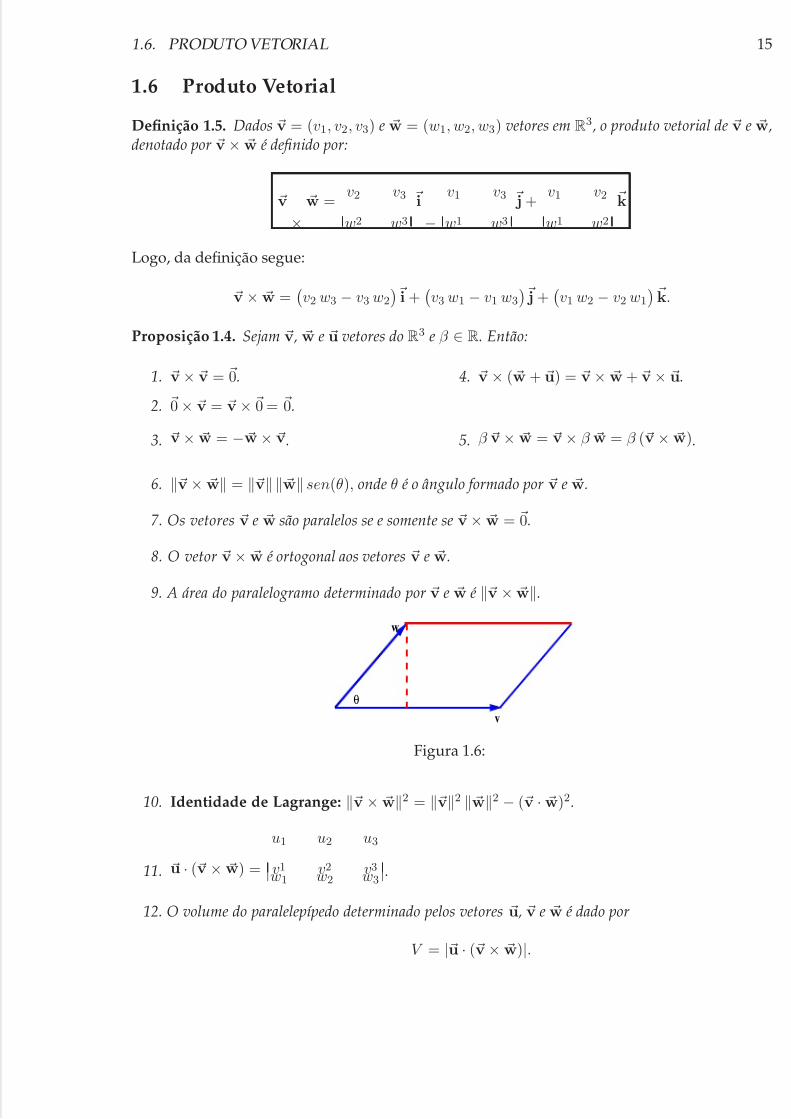
9. A área do paralelogramo determinado por v e w é v × w.
v
w
θ
Figura 1.6:
10. Identidade de Lagrange: v × w2 = v2 w2 − ( v · w)2.
11. u · ( v × w) =
u1 u2 u3
v1 v2 v3w1 w2 w3
.12. O volume do paralelepípedo determinado pelos vetores u, v e w é dado por
V = | u · ( v× w)|.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 16/279
16 CAPÍTULO 1. GEOMETRIA ANA
Prova: As provas seguem diretamente das definições. Por exemplo:
7. Se v× w = 0 o ângulo formado pelos vetores é zero ou π; logo, os vetores são parale
9. A base do paralelogramo é v e sua altura é w sen(θ), onde θ é o ângulo entre v e
10. v× w2 = v2 w2 sen2(θ) = v2 w2 (1 − cos2(θ)) = | v2 w2 − ( v · w)2.
12. A área da base é A =
v
× w
; seja θ o ângulo formado por u e v
× w; logo, a al
paralelepípedo é h = u |cos(θ)|; então, V = | u · ( v × w)|.
Exemplo 1.4.
[1] Sejam v = (−3, −2, 2) e w = (−1, 1, 2). Calcule v× w, ( w× v) × v e ( w× v) × u.
Da definição e das propriedades temos: v × w = (−6, 4, −5) e ( w × v) × v = (2, −27( w× v) × w = (−13, −18, 2).
[2] Calcule i× j, i× k, j× k e ( i× j) × ( j× k).
Da definição temos: i × j = (0, 0, 1) = k, i × k = (0, −1, 0) = − j, j × k = (1, 0, 0( i
× j)
×( j
× k) = k
× i = j.
[3] Calcule a área do triângulo determinado por P = (2, 2, 0), Q = (−1, 0, 2) e R = (0, 4,
A área do triângulo é a metade da área do paralelogramo determinado por u =−−→P Q e v
logo:
A = u× v
2=
(−10, 5, −10)2
=15
2.
[4] Calcule o volume do paralelepípedo determinado pelos vetores u = (2, −3, 4), v = (1e w = (3, −1, 2).
Como v× w = (3, −5, −7), temos V = | u · ( v × w)| = | − 7| = 7.
[5] Determine o valor de k tal que u = (2, −1, 1), v = (1, 2, −3) e w = (3, k, 5) sejam coplSe u, v e w são coplanares, então, u · ( v × w) = 0; caso contrário, determinariam um ppípedo e, portanto, os vetores não poderiam ser coplanares.
v× w = (10 + 3 k, −14, k − 6);
logo, u · ( v× w) = 7 k + 28; resolvendo 7 k + 28 = 0, temos k = −4.
1.6.1 Torque
Se uma força F age num ponto de um corpo rígido, de vetor posição r, então essa forç
a girar o corpo em torno de um eixo que passa pela origem do vetor posição e é perpenao plano de r e F . O vetor torque (relativo à origem) é dado por τ = r × F . O torque uma medida do efeito de um corpo rígido ao rodar em torno de um eixo. A direção de τo eixo de rotação.
Exemplo 1.5.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 17/279
1.7. DISTÂNCIA EM R3 17
[1] Uma força F = (2, 5, 8) age num ponto de um corpo rígido, de coordenadas (1, 1, 2). Calculeo torque. Da definição r = (1, 1, 2); logo, τ = r × F = (1, 1, 2)× (2, 5, 8) = (−2, −4, 3). A direçãode (−2, −4, 3) indica o eixo de rotação.
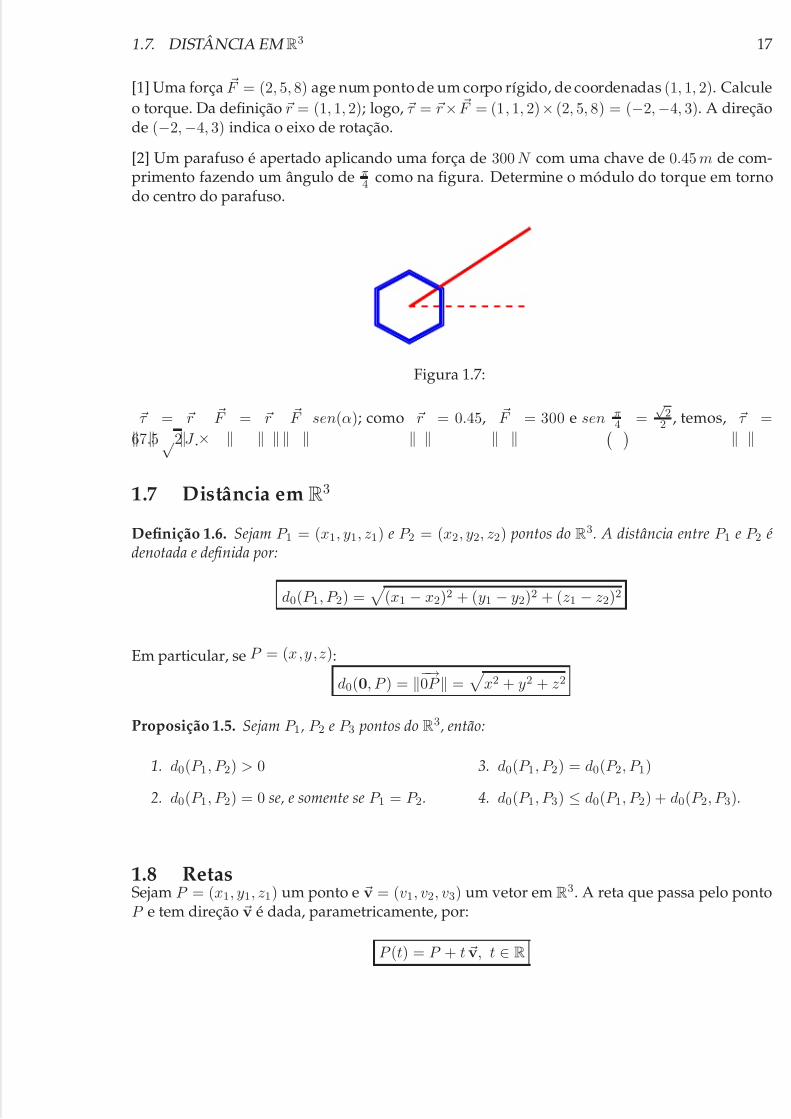
[2] Um parafuso é apertado aplicando uma força de 300 N com uma chave de 0.45 m de com-primento fazendo um ângulo de π
4 como na figura. Determine o módulo do torque em tornodo centro do parafuso.
Figura 1.7:
τ
=
r
× F
=
r
F
sen(α); como
r
= 0.45,
F
= 300 e senπ
4 =√22 , temos,
τ
=
67.5 √2 J .
1.7 Distância emR3
Definição 1.6. Sejam P 1 = (x1, y1, z1) e P 2 = (x2, y2, z2) pontos do R3. A distância entre P 1 e P 2 édenotada e definida por:
d0(P 1, P 2) =
(x1 − x2)2 + (y1 − y2)2 + (z1 − z2)2
Em particular, se P = (x,y,z):
d0(0, P ) = −→0P =
x2 + y2 + z2
Proposição 1.5. Sejam P 1, P 2 e P 3 pontos do R3, então:
1. d0(P 1, P 2) > 0
2. d0(P 1, P 2) = 0 se, e somente se P 1 = P 2.
3. d0(P 1, P 2) = d0(P 2, P 1)
4. d0(P 1, P 3) ≤ d0(P 1, P 2) + d0(P 2, P 3).
1.8 RetasSejam P = (x1, y1, z1) um ponto e v = (v1, v2, v3) um vetor em R3. A reta que passa pelo pontoP e tem direção v é dada, parametricamente, por:
P (t) = P + t v, t ∈ R
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 18/279
18 CAPÍTULO 1. GEOMETRIA ANA
Em coordenadas:
x(t) = x1 + t v1
y(t) = y1 + t v2
z(t) = z1 + t v3, t ∈ R.
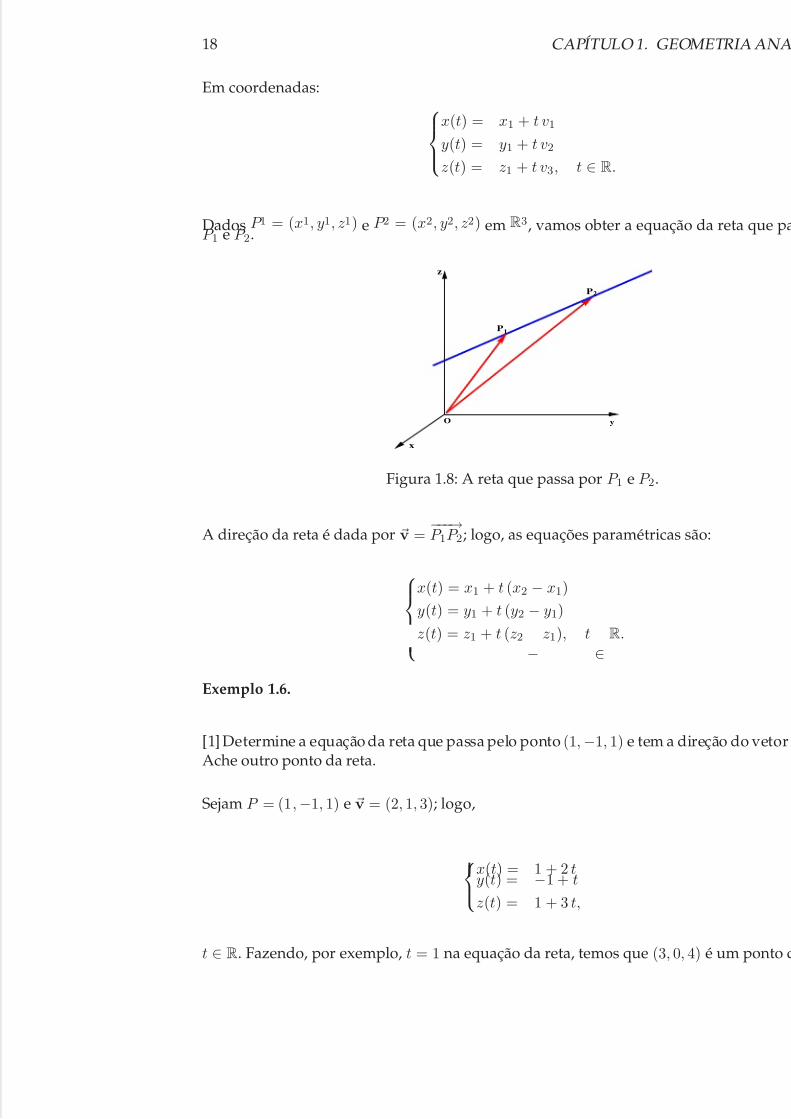
Dados P 1 = (x1, y1, z1) e P 2 = (x2, y2, z2) em R3, vamos obter a equação da reta que paP 1 e P 2.
P
1
2
z
O
x
y
P
Figura 1.8: A reta que passa por P 1 e P 2.
A direção da reta é dada por v =−−−→P 1P 2; logo, as equações paramétricas são:
x(t) = x1 + t (x2 − x1)
y(t) = y1 + t (y2 − y1)
z(t) = z1 + t (z2−
z1), t
∈R.
Exemplo 1.6.
[1] Determine a equação da reta que passa pelo ponto (1, −1, 1) e tem a direção do vetorAche outro ponto da reta.
Sejam P = (1, −1, 1) e v = (2, 1, 3); logo,
x(t) = 1 + 2 ty(t) = −1 + t
z(t) = 1 + 3 t,
t ∈ R. Fazendo, por exemplo, t = 1 na equação da reta, temos que (3, 0, 4) é um ponto d
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 19/279
1.8. RETAS 19
-2.5
0
2.5
5
-20
2
-5
0
5
-2.5
0
2.5
5
-2
Figura 1.9: A reta do exemplo [1].
[2] Determine a equação da reta que passa pelos pontos P 1 = (−2, −1, 3) e P 2 = (3, 2, 7).A direção da reta é v =
−−−→P 1P 2 = (5, 3, 4); logo a equação é:
x(t) = −2 + 5 t
y(t) = −1 + 3 t
z(t) = 3 + 4 t, t ∈ R.
-5
0
5
-50
5
-5
0
5
-5
0
5
-50
Figura 1.10: A reta do exemplo [2].
1.8.1 Paralelismo e Perpendicularismo
Sejam l1 e l2 retas de direções v1 e v2, respectivamente; então:
1. l1 é paralela a l2 se, e somente se, v1 × v2 = 0.
2. l1 é perpendicular a l2 se, e somente se, v1 · v2 = 0.
A prova segue diretamente das definições.
Exemplo 1.7.[1] As retas
x = 1 + 2 t
y = −3 + 6 t
z = 1 + 4 t
e
x = 4 − t
y = −3 t
z = −5 − 2 t
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 20/279
20 CAPÍTULO 1. GEOMETRIA ANA
são paralelalas. De fato, v1 = (2, 6, 4), v2 = (−1, −3, −2) e v1 × v2 = 0.
[2] As retas
x = 1 + 2 t
y = −3 + 6 t
z = 1 + 4 t
e
x = 5 − t
y = 3 + t
z = −5 − t
são perpendiculares. De fato, v1 = (2, 6, 4), v2 = (−
1, 1,−
1) e v1·
v2 = 0.
[3] As retas
x = 1 + 2 t
y = −2 + 3 t
z = 4 + t
e
x = 5 t
y = 3 + 2 t
z = −3 + 3 t
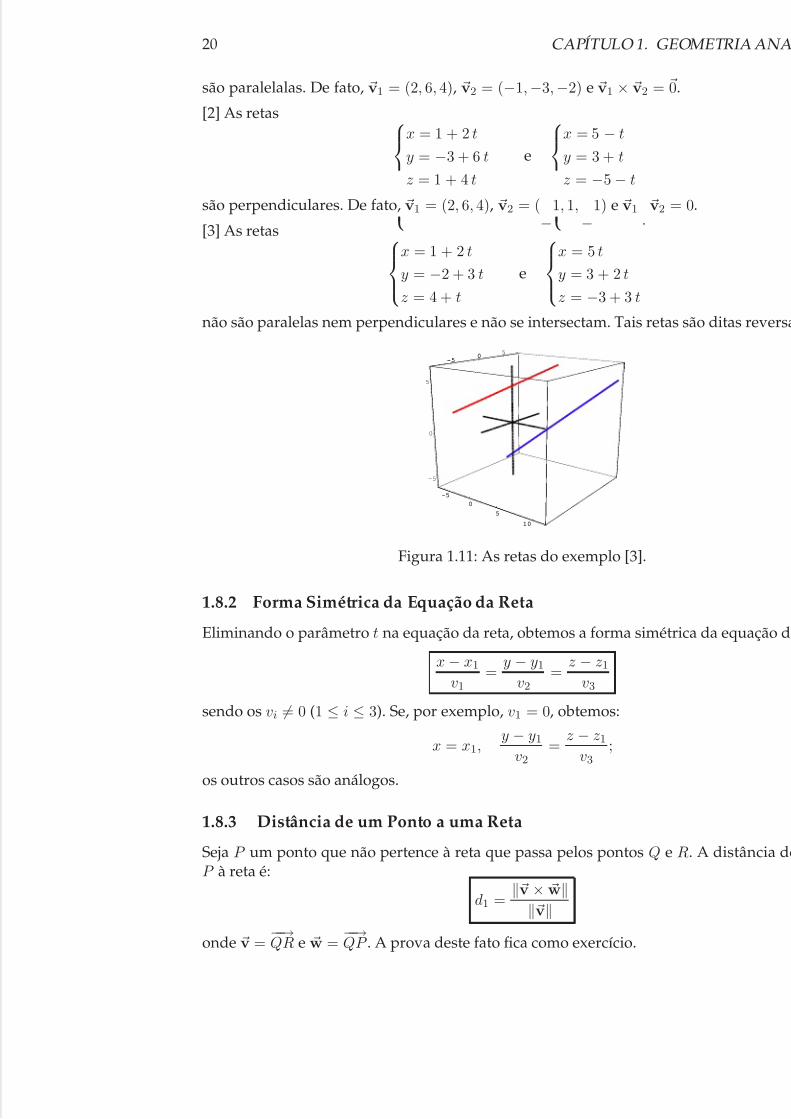
não são paralelas nem perpendiculares e não se intersectam. Tais retas são ditas reversa
-5
0
5
10
-50
5
-5
0
5
-5
0
5
10
-50
Figura 1.11: As retas do exemplo [3].
1.8.2 Forma Simétrica da Equação da Reta
Eliminando o parâmetro t na equação da reta, obtemos a forma simétrica da equação da
x − x1
v1=
y − y1v2
=z − z1
v3
sendo os vi = 0 (1 ≤ i ≤ 3). Se, por exemplo, v1 = 0, obtemos:
x = x1,y − y1
v2=
z − z1v3
;
os outros casos são análogos.
1.8.3 Distância de um Ponto a uma Reta
Seja P um ponto que não pertence à reta que passa pelos pontos Q e R. A distância doP à reta é:
d1 = v × w
vonde v =
−−→QR e w =
−−→QP . A prova deste fato fica como exercício.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 21/279
1.9. PLANOS 21
Exemplo 1.8.
[1] Ache a distância do ponto P = (2, 1, −1) à reta que passa pelos pontos Q = (2, 0, 1) eR = (−2, −2, 1).
Como v =−−→QR = (−4, −2, 0), w =
−−→QP = (0, 1, −2); logo, d1 =
v× w v = 245 .
1.9 Planos
Definição 1.7. Sejam o vetor n = 0 e o ponto P 0 = (x0, y0, z0) ∈ R3, fixado. O conjunto de todos os pontos P = (x,y,z) ∈ R3 tais que:
n · −−→P 0P = 0
é chamado plano passando por P 0 e tendo normal n. Em particular, se n = (a,b,c), o plano passando
por P 0 e de normal n, tem a equação em coordenadas:
a (x − x0) + b (y − y0) + c (z − z0) = 0
Exemplo 1.9.
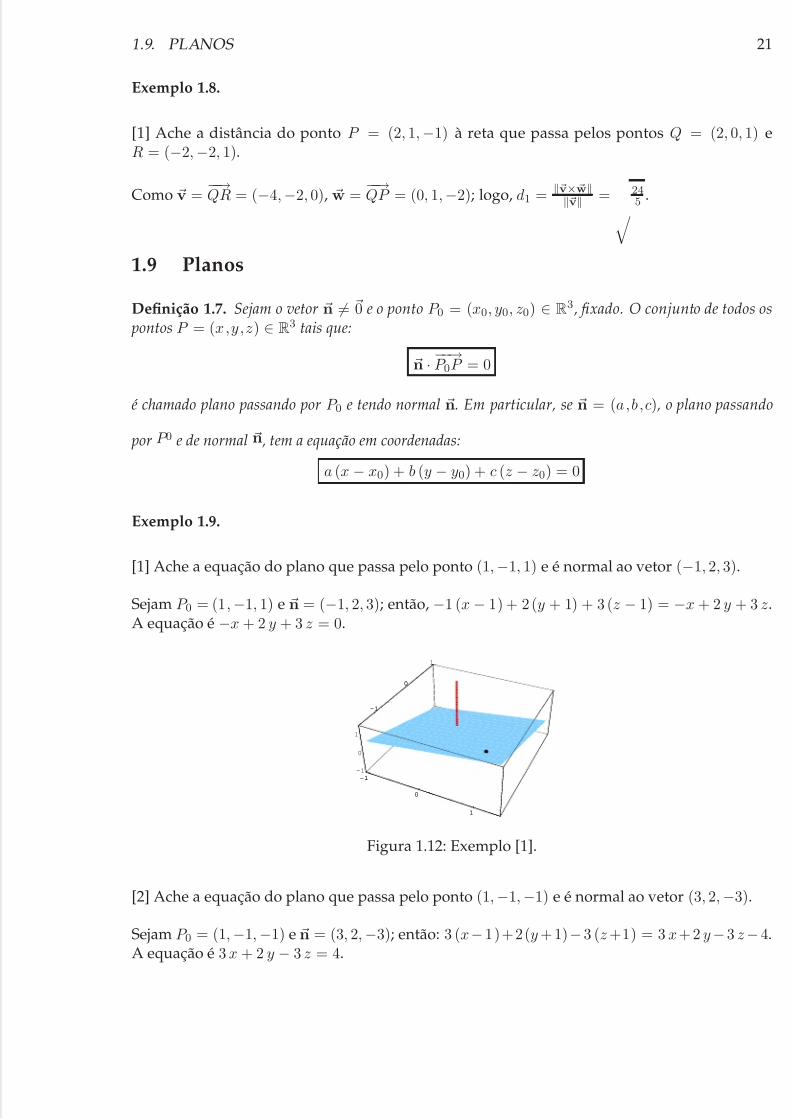
[1] Ache a equação do plano que passa pelo ponto (1, −1, 1) e é normal ao vetor (−1, 2, 3).
Sejam P 0 = (1, −1, 1) e n = (−1, 2, 3); então, −1 (x − 1) + 2 (y + 1) + 3 (z − 1) = −x + 2 y + 3 z.A equação é −x + 2 y + 3 z = 0.
-1
0
1
-1
0
1
-1
0
1
-1
0
1
-1
0
Figura 1.12: Exemplo [1].
[2] Ache a equação do plano que passa pelo ponto (1, −1, −1) e é normal ao vetor (3, 2, −3).
Sejam P 0 = (1, −1, −1) e n = (3, 2, −3); então: 3 (x−1)+ 2(y + 1)−3 (z +1) = 3 x + 2 y −3 z −4.A equação é 3 x + 2 y − 3 z = 4.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 22/279
22 CAPÍTULO 1. GEOMETRIA ANA
-3
0
3
-3
0
2
-3
0
3
-3
0
2
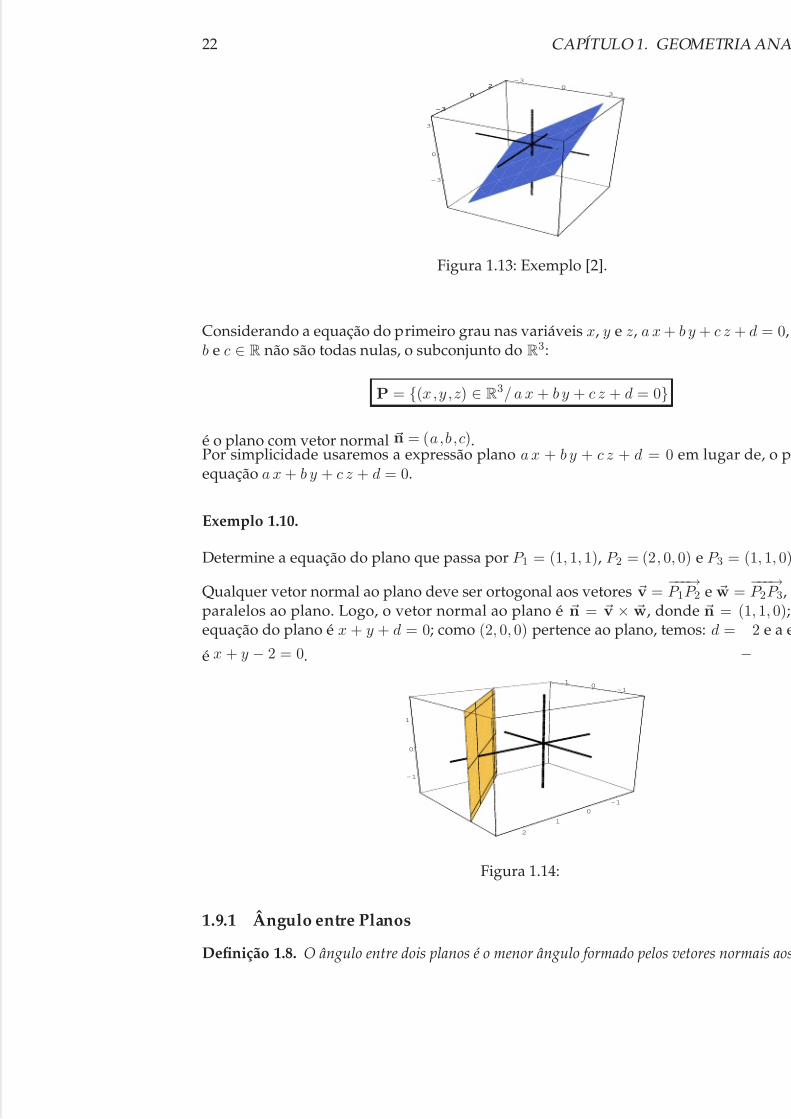
Figura 1.13: Exemplo [2].
Considerando a equação do primeiro grau nas variáveis x, y e z, a x + b y + c z + d = 0, b e c ∈ R não são todas nulas, o subconjunto do R3:
P = {(x,y ,z) ∈ R3/ a x + b y + c z + d = 0}
é o plano com vetor normal n = (a,b,c).Por simplicidade usaremos a expressão plano a x + b y + c z + d = 0 em lugar de, o pequação a x + b y + c z + d = 0.
Exemplo 1.10.
Determine a equação do plano que passa por P 1 = (1, 1, 1), P 2 = (2, 0, 0) e P 3 = (1, 1, 0)
Qualquer vetor normal ao plano deve ser ortogonal aos vetores v =−−−→P 1P 2 e w =
−−−→P 2P 3, q
paralelos ao plano. Logo, o vetor normal ao plano é n = v × w, donde n = (1, 1, 0); equação do plano é x + y + d = 0; como (2, 0, 0) pertence ao plano, temos: d =
−2 e a e
é x + y − 2 = 0.
-10
1
-1
0
1
2
-1
0
1
Figura 1.14:
1.9.1 Ângulo entre Planos
Definição 1.8. O ângulo entre dois planos é o menor ângulo formado pelos vetores normais aos
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 23/279
1.9. PLANOS 23
Logo, se n1 e n2 são os vetores normais aos planos, então:
cos(θ) = n1 · n2
n1 n2Exemplo 1.11.
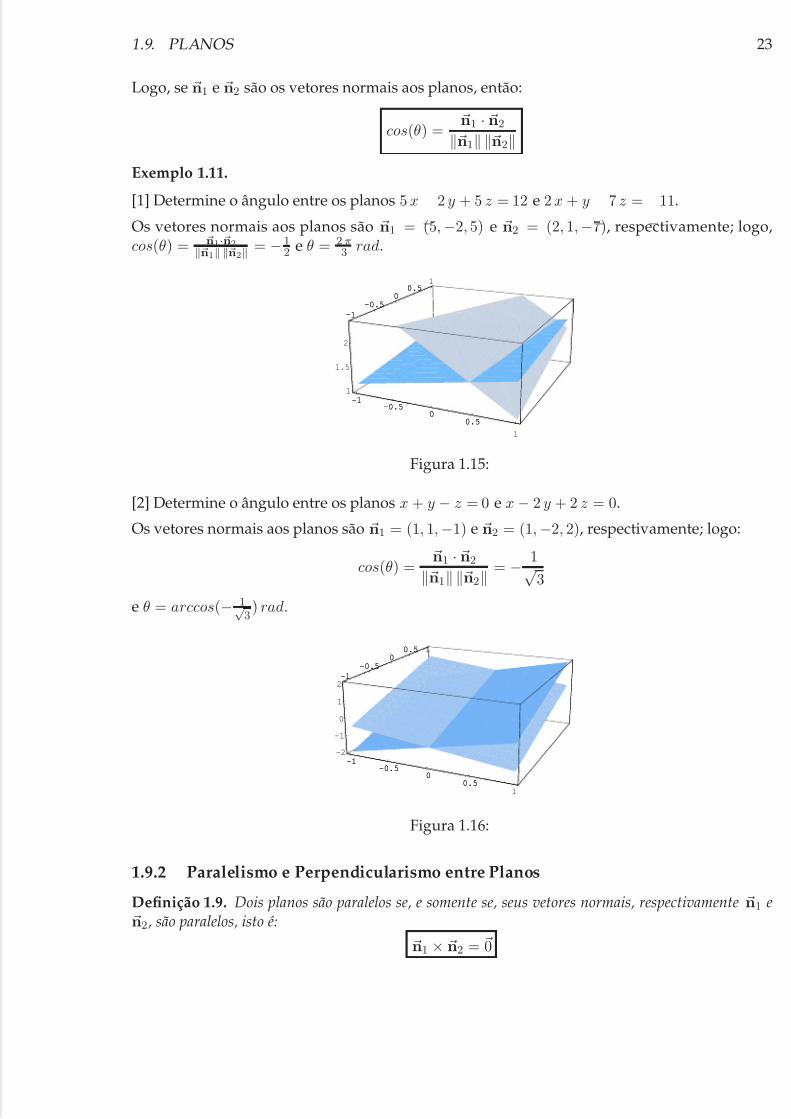
[1] Determine o ângulo entre os planos 5 x
−2 y + 5 z = 12 e 2 x + y
−7 z =
−11.
Os vetores normais aos planos são n1 = (5, −2, 5) e n2 = (2, 1, −7), respectivamente; logo,cos(θ) = n1· n2
n1 n2 = −12 e θ = 2π
3 rad.
-1-0.5
00.5
1
-1
-0.50
0.51
1
1.5
2
-1-0.5
00.5
-1
-0.50
0.5
Figura 1.15:
[2] Determine o ângulo entre os planos x + y − z = 0 e x − 2 y + 2 z = 0.
Os vetores normais aos planos são n1 = (1, 1, −1) e n2 = (1, −2, 2), respectivamente; logo:
cos(θ) = n1 · n2
n1 n2 = − 1√3
e θ = arccos(− 1√3
) rad.
-1-0.5
00.5
1
-1
-0.50
0.5 1
-2
-1
0
1
2
-1-0.5
00.5
-1
-0.50
0.5
Figura 1.16:
1.9.2 Paralelismo e Perpendicularismo entre Planos
Definição 1.9. Dois planos são paralelos se, e somente se, seus vetores normais, respectivamente n1 e n2, são paralelos, isto é:
n1 × n2 = 0
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 24/279
24 CAPÍTULO 1. GEOMETRIA ANA
Dois planos são perpendiculares se, e somente se, seus vetores normais, respectivamen n2, são ortogonais, isto é:
n1 · n2 = 0.
Proposição 1.6. Os planos a x + b y + c z = d e a1 x + b1 y + c1 z = d1 são:
1. paralelos, se existe k ∈ R tal que a = k a1, b = k b1 e c = k c1 ;
2. perpendiculares, se a a1 + b b1 + c c1 = 0.
A prova segue das definições.
Exemplo 1.12.
Determine a equação do plano paralelo ao plano 3 x + y − 6 z + 8 = 0 e que passa peloP = (0, 0, 1).
O vetor normal ao plano é n = (3, 1, −6); logo, a equação do plano é 3 x + y − 6 z + d = 0o ponto P pertence ao plano temos −6 + d = 0, logo, a equação do plano é
3 x + y − 6 z + 6 = 0.
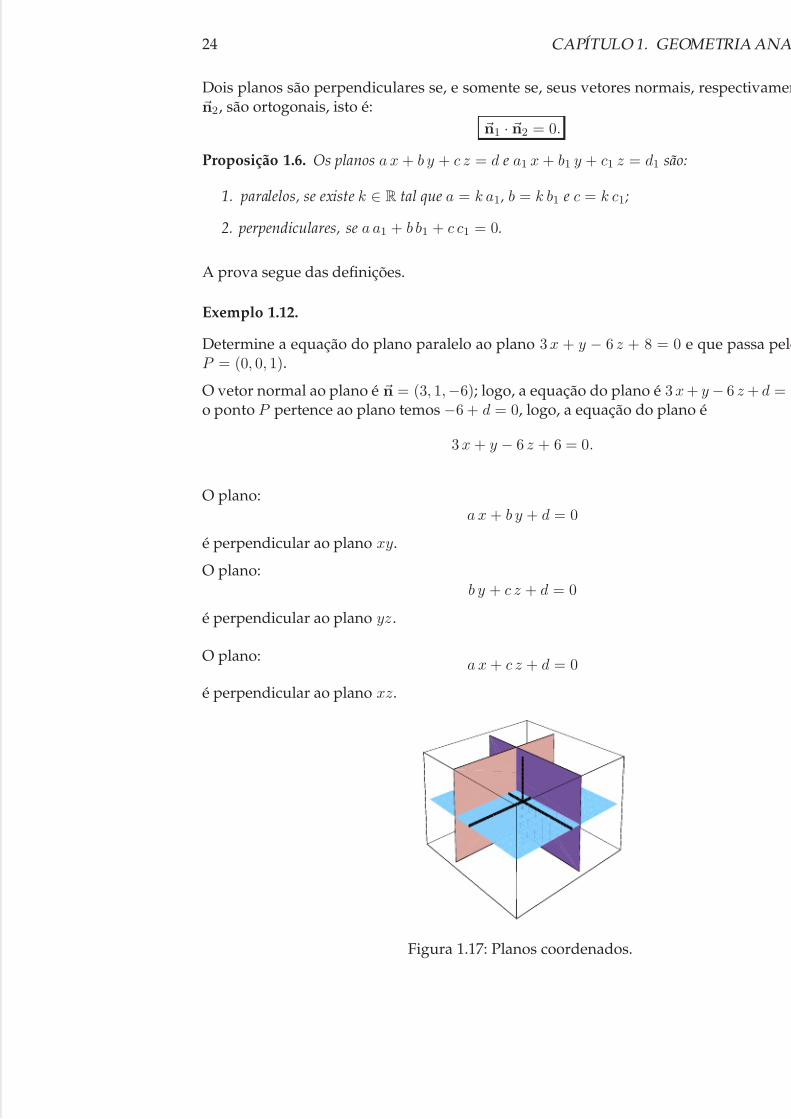
O plano:a x + b y + d = 0
é perpendicular ao plano xy.
O plano:b y + c z + d = 0
é perpendicular ao plano yz.
O plano:a x + c z + d = 0
é perpendicular ao plano xz.
Figura 1.17: Planos coordenados.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 25/279
1.10. GENERALIZAÇÕES 25
1.9.3 Distância de um Ponto a um Plano
Definição 1.10. A distância do ponto P 0 = (x0, y0z0) ao plano a x + b y + c z + d = 0 é dada por:
d2 =|a x0 + b y0 + c z0 + d|√
a2 + b2 + c2
Exemplo 1.13.
[1] Determine a distância do ponto (1, 1, −5) ao plano 12 x + 13 y + 5 z + 2 = 0.
Aplicando diretamente a fórmula: d2 =
√2
13.
[2] Determine a distância entre os planos paralelos: x + 2 y − z = 8 e 4 x + 8 y − 4 z = 10.
A distância entre dois planos paralelos é a distância entre um ponto qualquer do planox + 2 y − z = 8 ao plano 4 x + 8 y − 4 z = 10. O ponto (1, 4, 1) pertence ao plano x + 2 y − z = 8.A distância do ponto (1, 4, 1) ao plano 4 x + 8 y − 4 z = 10 é:
d2 = |4 + 32 − 4 − 10|√16 + 64 + 16
= 112√
6.
Em geral, se a x + b y + c z = d e a x + b y + c z = d1 são planos paralelos, a distância entre osplanos é:
d3 =|d1 − d|√
a2 + b2 + c2
1.10 Generalizações
Podemos fazer as seguintes generalizações para Rn
, n ≥ 3.Os pontos x ∈ Rn são x = (x1, x2, x3,....,xn) onde xi ∈ R. Dados x,y ∈ Rn, dizemos que x = y
se e somente se xi = yi, para todo i = 1,....,n. (0, ......., 0) é a origem do Rn. Em Rn podem serdefinidas duas operações. Dados x = (x1, x2, x3,....,xn),y = (y1, y2, y3,....,yn) ∈ Rn e β ∈ R:
Adição de elementos de Rn:
x + y = (x1 + y1, x2 + y2, ........,xn + yn).
Multiplicação de elementos de Rn por escalares de R:
β · x = (β · x1, β · x2, .........., β · xn).
Estas duas operações satisfazem as propriedades análogas às enunciadas para R3. Logo, Rn
é um espaço vetorial de dimensão n sobre R. Os elementos do Rn são denominados pontosou vetores, com o seguinte cuidado: v ∈ Rn é um vetor que tem a origem em (0, ......., 0) eextremidade em v. Para ter uma melhor distinção denotaremos os vetores de forma diferenteda utilizada para os pontos. Por exemplo, 0 = (0, ......., 0) é o vetor nulo.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 26/279
26 CAPÍTULO 1. GEOMETRIA ANA
1.10.1 Produto escalar
Se u = (u1, u2, u3,....,un) e v = (v1, v2, v3,....,vn) são vetores do Rn, o produto escalar ddenotado por u · v é definido por:
u · v = u1 · v1 + u2 · v2 + ......... + un · vn.
O produto escalar tem as seguintes propriedades:
1. (β u) · v = u · (β v) = β ( u · v).
2. w · ( u + v) = ( w · u) + ( w · v).
3. v é ortogonal a w se, e somente se, u · v = 0.
Norma euclidiana: Se v ∈ Rn não é nulo:
v =√
v · v.
Distância: Se x = (x1, x2,....,xn) e y = (y1, y2,....,yn) são pontos do Rn, então:
d(x,y) =x
−y
= (x1
−y1)2 + (x2
−y2)2 + ........ + (xn
−yn)2.
1.11 Superfícies
Em R3 temos dois tipos de objetos de nosso interesse: os sólidos e as superfícies. Deintuitiva podemos dizer que os sólidos são os objetos de R3 que possuem volume e asfícies são objetos de R3 que possuem área, mas tem espessura irrelevante. Para leitorconhecimentos mais profundos, podemos dizer que um sólido é um objeto de dimensãR3 e as superfícies são objetos de dimensão 2 em R3. Os sólidos nos permitem mode
exemplo, depósitos de combustíveis, turbinas de aviões ou carros. As superfícies nos tem modelar, por exemplo, folhas de papel, membranas ou lâminas de metal. As dematemáticas destes objetos estão fora do contexto destas notas e, por isso, ficaremos coidéias intuitivas. Do Cálculo de uma variável, conhecemos os sólidos de revolução. Poplo, o sólido de revolução obtido girando em torno do eixo dos y a região limitada pelode (x − b)2 + y2 = a2, 0 < a < b. Veja o seguinte desenho:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 27/279
1.12. SUPERFÍCIES QUÁDRICAS 27
Figura 1.18: Uma superfície em R3.
Os planos são exemplos de superfícies. A seguir definiremos um novo tipo de superfície: assuperfícies quádricas.
1.12 Superfícies Quádricas
Sabemos que o conjunto de todos os pontos (x, y) ∈ R2 que satisfazem a equação geral dosegundo grau nas variáveis x e y é uma seção cônica: parábola, elipse, hipérbole ou algumaforma degenerada dessas curvas, como um ponto ou um par de retas. Em R3, a equação geraldo segundo grau nas variáveis x, y e z é F (x,y,z) = 0, onde:
F (x,y ,z) = A x2 + B y2 + C z2 + D x y + E x z + F y z + G x + H y + I z + J,
onde os coeficientes dos termos de segundo grau não são todos nulos, de modo que o grau daequação é 2. O subconjunto Q
⊂R3, definido por:
Q = {(x,y,z) ∈ R3 / F (x,y,z) = 0}
é chamado superfície quádrica ou quádrica central. Usando rotações e translações é possívelmostrar que existem os seguintes tipos de superfícies quádricas não degeneradas:
1) Elipsóides.
2) Hiperbolóide elítico ou de uma folha.
3) Hiperbolóide de duas folhas.
4) Parabolóide elítico.
5) Parabolóide hiperbólico.6) Cones.
7) Cilindros.
Apresentaremos as equações que definem as quádricas centradas na origem. As outras formasmais gerais podem ser determinadas a partir de translações e rotações. Uma forma básica
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 28/279
28 CAPÍTULO 1. GEOMETRIA ANA
de esboçar uma superfície quádrica é determinar os interseptos com os eixos coordendesenhar suas seções retas, ou seja, as interseções da superfície com os planos coordtambém chamadas traços da quádrica. As quádricas centrais apresentam simetrias em a cada um dos planos coordenados. Se na equação que define a quádrica substituimos xe a equação não se altera, a quádrica é simétrica em relação ao plano yz; se substituimo−y e a equação não se altera, a quádrica é simétrica em relação ao plano xz; se substitupor
−z e a equação não se altera, a quádrica é simétrica em relação ao plano xy e se subst
(x,y,z) por (−x, −y, −z) e a equação não se altera, a quádrica é simétrica em relação à o
1.12.1 Elipsóide
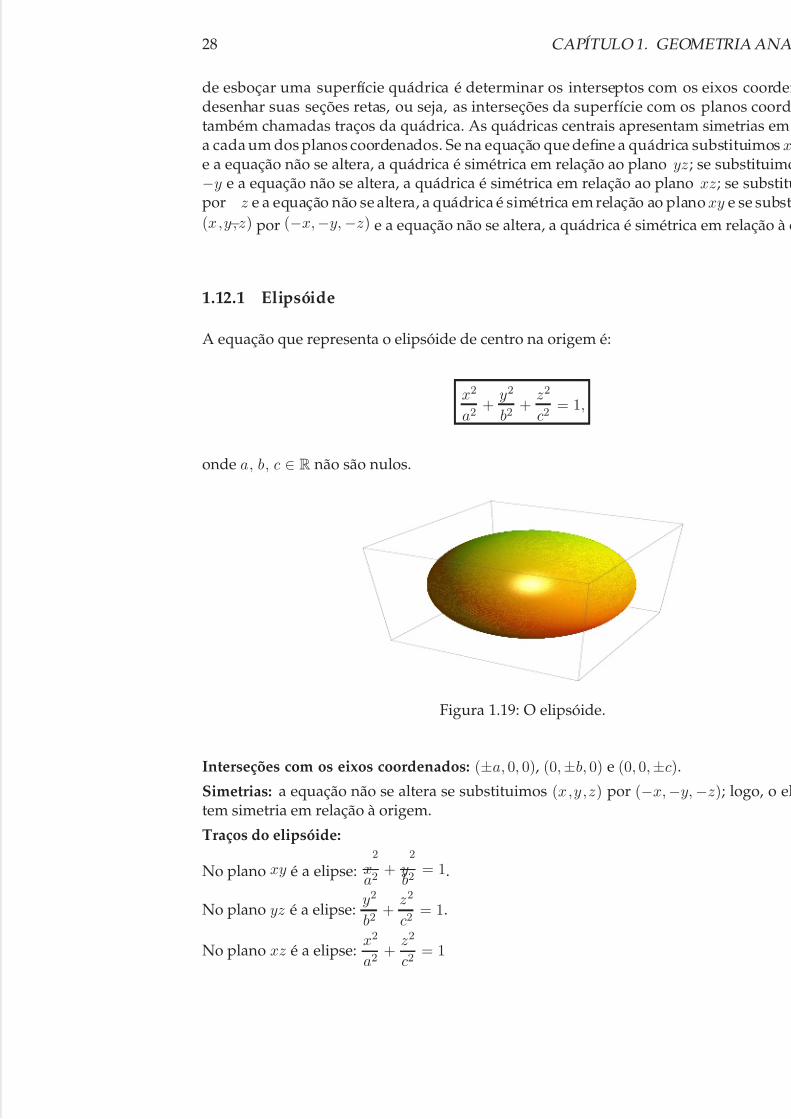
A equação que representa o elipsóide de centro na origem é:
x2
a2+
y2
b2+
z2
c2= 1,
onde a, b, c ∈ R não são nulos.
Figura 1.19: O elipsóide.
Interseções com os eixos coordenados: (±a, 0, 0), (0, ±b, 0) e (0, 0, ±c).
Simetrias: a equação não se altera se substituimos (x,y,z) por (−x, −y, −z); logo, o eltem simetria em relação à origem.
Traços do elipsóide:
No plano xy é a elipse: x2
a2+ y
2
b2= 1.
No plano yz é a elipse:y2
b2+
z2
c2= 1.
No plano xz é a elipse:x2
a2+
z2
c2= 1
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 29/279
1.12. SUPERFÍCIES QUÁDRICAS 29
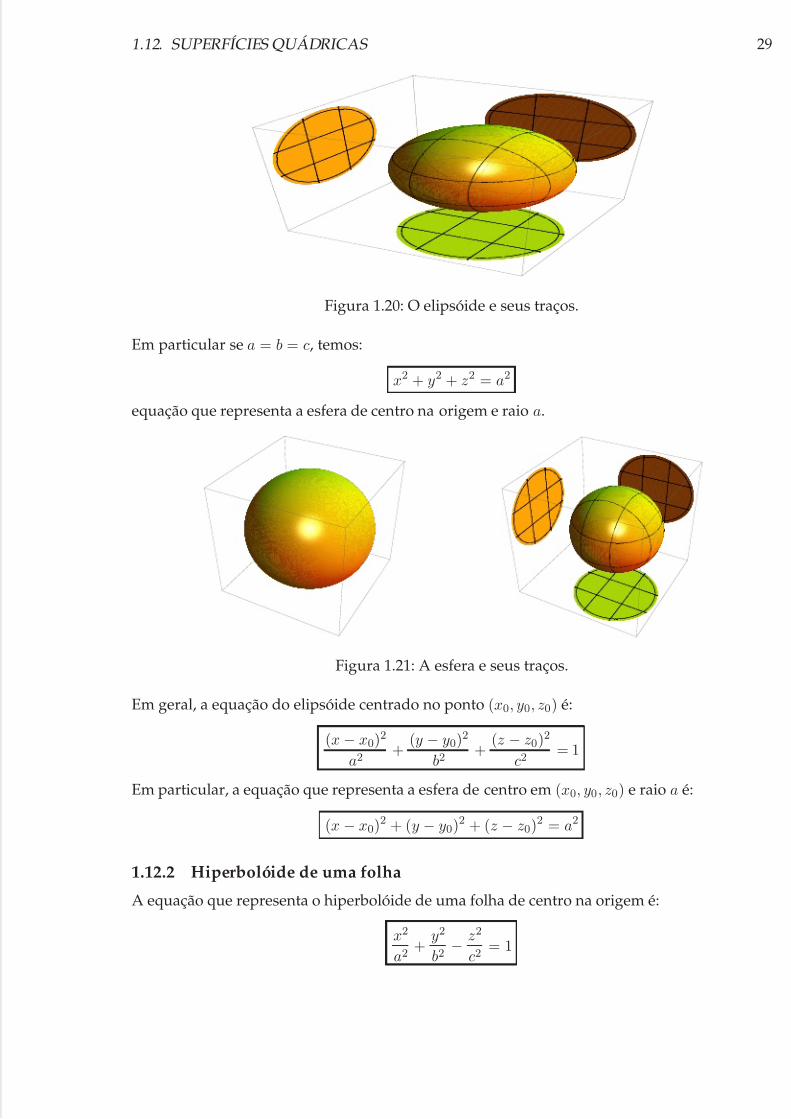
Figura 1.20: O elipsóide e seus traços.
Em particular se a = b = c, temos:
x2 + y2 + z2 = a2
equação que representa a esfera de centro na origem e raio a.
Figura 1.21: A esfera e seus traços.
Em geral, a equação do elipsóide centrado no ponto (x0, y0, z0) é:
(x − x0)2
a2+
(y − y0)2
b2+
(z − z0)2
c2= 1
Em particular, a equação que representa a esfera de centro em (x0, y0, z0) e raio a é:
(x − x0)2 + (y − y0)2 + (z − z0)2 = a2
1.12.2 Hiperbolóide de uma folha
A equação que representa o hiperbolóide de uma folha de centro na origem é:
x2
a2+
y2
b2− z2
c2= 1
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 30/279
30 CAPÍTULO 1. GEOMETRIA ANA
onde a, b, c ∈ R não são nulos.
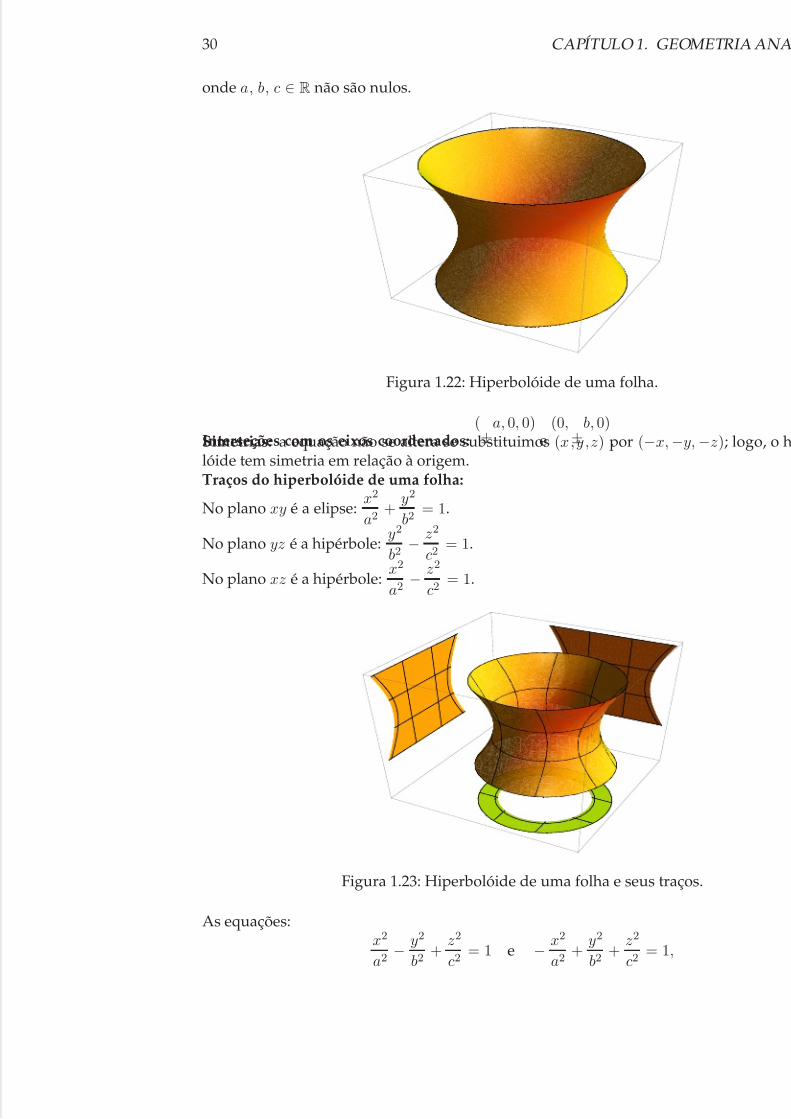
Figura 1.22: Hiperbolóide de uma folha.
Interseções com os eixos coordenados:(±
a, 0, 0)e
(0,±
b, 0).Simetrias: a equação não se altera se substituimos (x,y,z) por (−x, −y, −z); logo, o h
lóide tem simetria em relação à origem.Traços do hiperbolóide de uma folha:
No plano xy é a elipse:x2
a2+
y2
b2= 1.
No plano yz é a hipérbole:y2
b2− z2
c2= 1.
No plano xz é a hipérbole:x2
a2− z2
c2= 1.
Figura 1.23: Hiperbolóide de uma folha e seus traços.
As equações:x2
a2− y2
b2+
z2
c2= 1 e − x2
a2+
y2
b2+
z2
c2= 1,
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 31/279
1.12. SUPERFÍCIES QUÁDRICAS 31
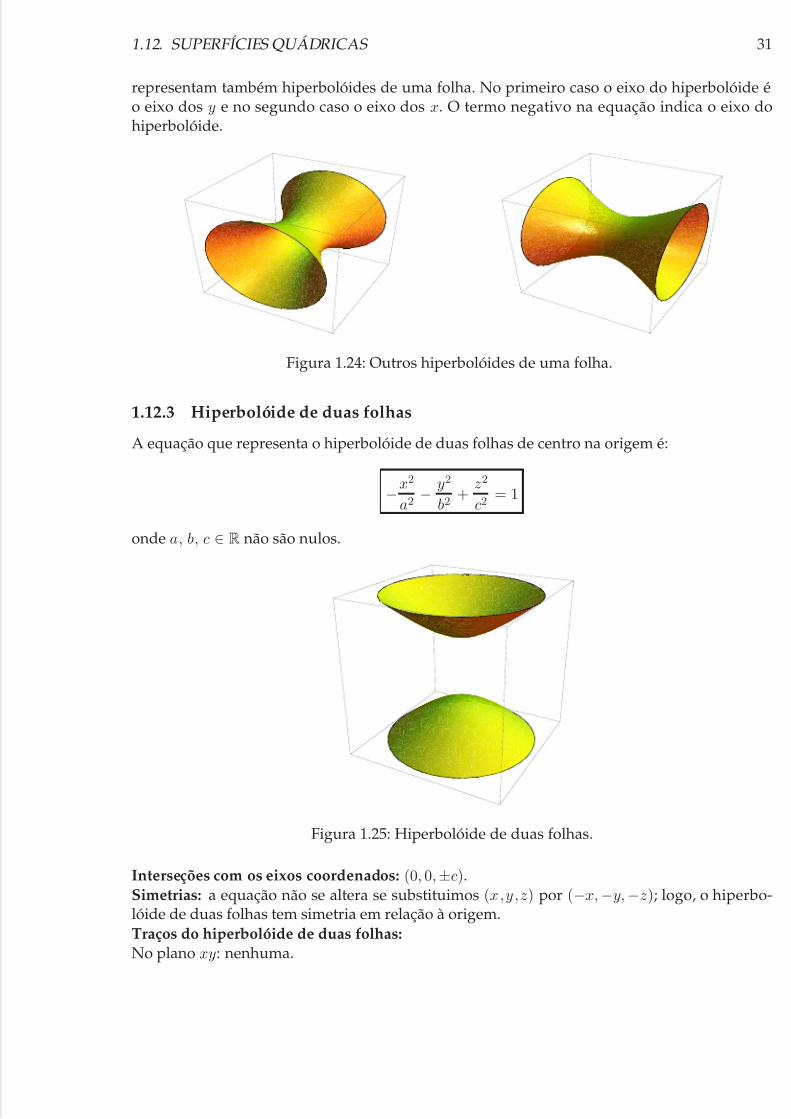
representam também hiperbolóides de uma folha. No primeiro caso o eixo do hiperbolóide éo eixo dos y e no segundo caso o eixo dos x. O termo negativo na equação indica o eixo dohiperbolóide.
Figura 1.24: Outros hiperbolóides de uma folha.
1.12.3 Hiperbolóide de duas folhas
A equação que representa o hiperbolóide de duas folhas de centro na origem é:
−x2
a2− y2
b2+
z2
c2= 1
onde a, b, c ∈ R não são nulos.
Figura 1.25: Hiperbolóide de duas folhas.
Interseções com os eixos coordenados: (0, 0, ±c).Simetrias: a equação não se altera se substituimos (x,y,z) por (−x, −y, −z); logo, o hiperbo-lóide de duas folhas tem simetria em relação à origem.Traços do hiperbolóide de duas folhas:No plano xy: nenhuma.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 32/279
32 CAPÍTULO 1. GEOMETRIA ANA
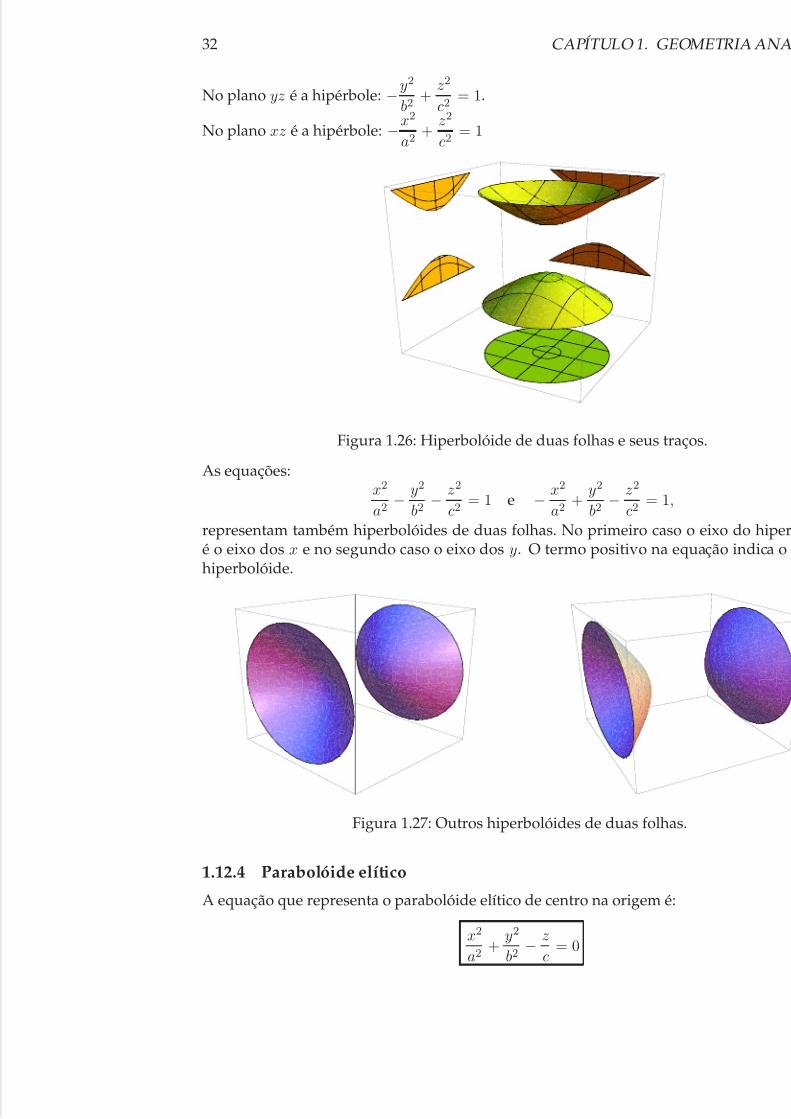
No plano yz é a hipérbole: −y2
b2+
z2
c2= 1.
No plano xz é a hipérbole: −x2
a2+
z2
c2= 1
Figura 1.26: Hiperbolóide de duas folhas e seus traços.
As equações:x2
a2− y2
b2− z2
c2= 1 e − x2
a2+
y2
b2− z2
c2= 1,
representam também hiperbolóides de duas folhas. No primeiro caso o eixo do hiperé o eixo dos x e no segundo caso o eixo dos y. O termo positivo na equação indica o hiperbolóide.
Figura 1.27: Outros hiperbolóides de duas folhas.
1.12.4 Parabolóide elítico
A equação que representa o parabolóide elítico de centro na origem é:
x2
a2+
y2
b2− z
c= 0
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 33/279
1.12. SUPERFÍCIES QUÁDRICAS 33
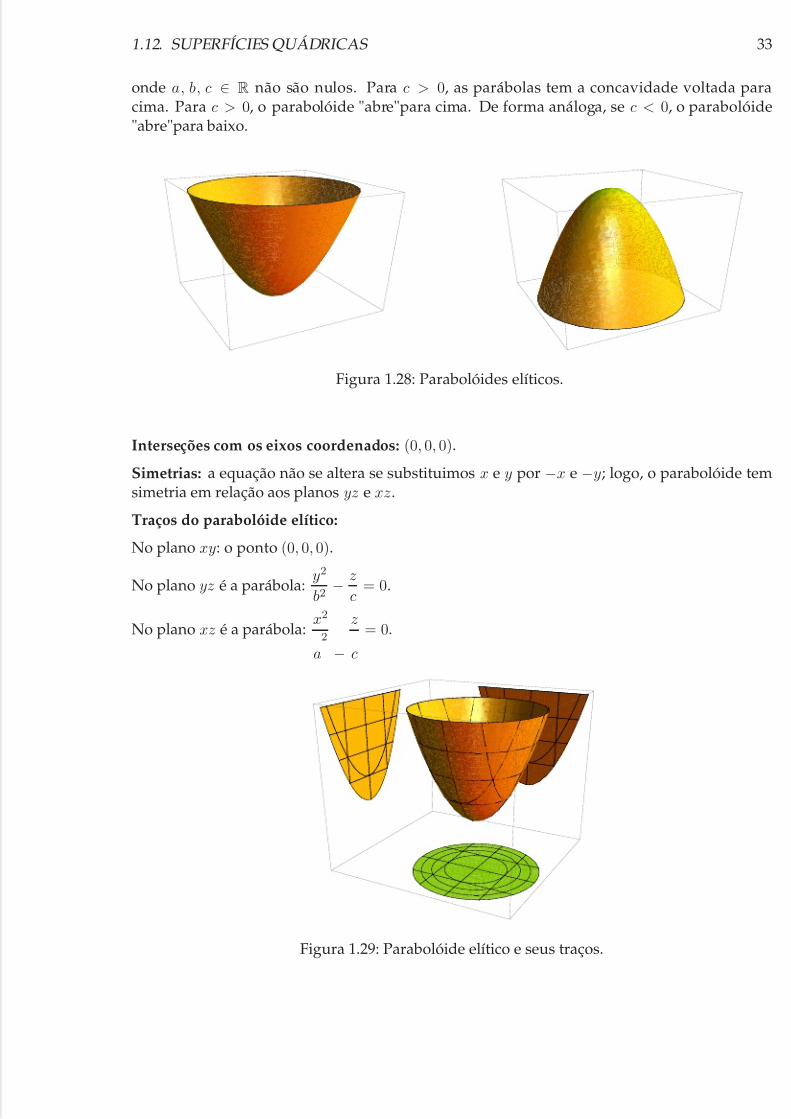
onde a, b, c ∈ R não são nulos. Para c > 0, as parábolas tem a concavidade voltada paracima. Para c > 0, o parabolóide "abre"para cima. De forma análoga, se c < 0, o parabolóide"abre"para baixo.
Figura 1.28: Parabolóides elíticos.
Interseções com os eixos coordenados: (0, 0, 0).
Simetrias: a equação não se altera se substituimos x e y por −x e −y; logo, o parabolóide temsimetria em relação aos planos yz e xz.
Traços do parabolóide elítico:
No plano xy: o ponto (0, 0, 0).
No plano yz é a parábola:y2
b2− z
c= 0.
No plano xz é a parábola:x2
a2
−
z
c
= 0.
Figura 1.29: Parabolóide elítico e seus traços.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 34/279
34 CAPÍTULO 1. GEOMETRIA ANA
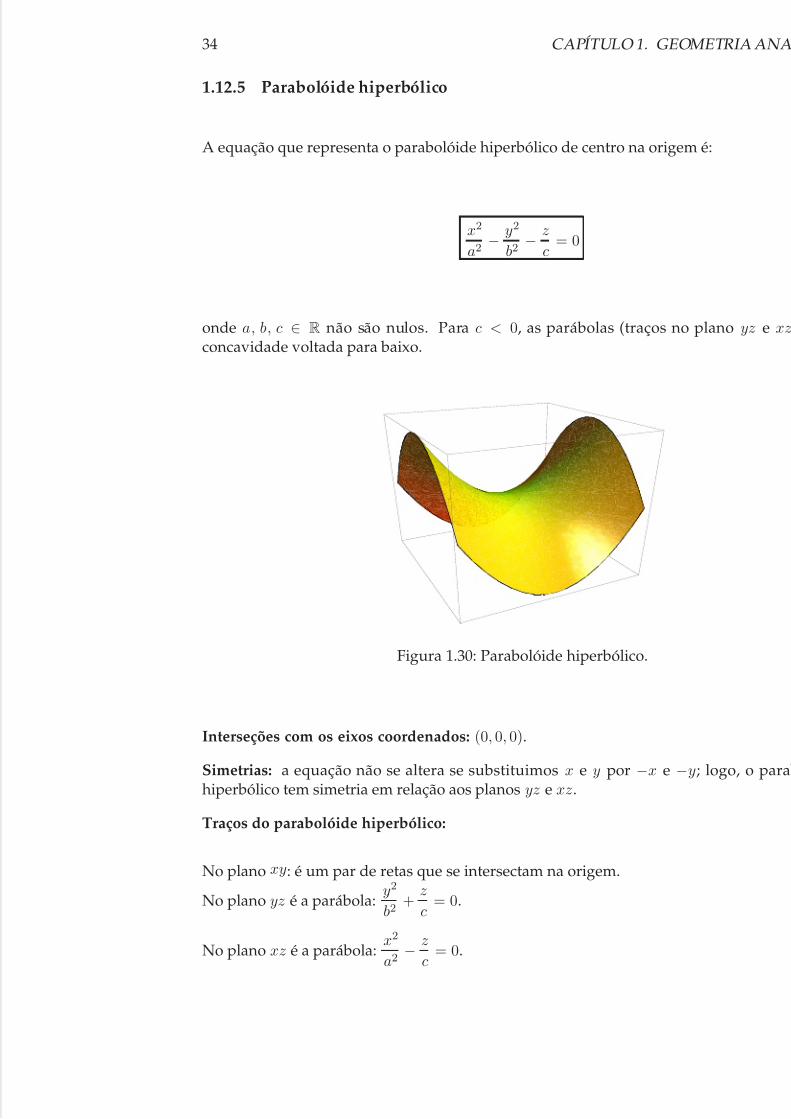
1.12.5 Parabolóide hiperbólico
A equação que representa o parabolóide hiperbólico de centro na origem é:
x2
a2− y2
b2− z
c= 0
onde a, b, c ∈ R não são nulos. Para c < 0, as parábolas (traços no plano yz e xzconcavidade voltada para baixo.
Figura 1.30: Parabolóide hiperbólico.
Interseções com os eixos coordenados: (0, 0, 0).
Simetrias: a equação não se altera se substituimos x e y por −x e −y; logo, o parabhiperbólico tem simetria em relação aos planos yz e xz.
Traços do parabolóide hiperbólico:
No plano xy: é um par de retas que se intersectam na origem.
No plano yz é a parábola:y2
b2+
z
c= 0.
No plano xz é a parábola:x2
a2− z
c= 0.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 35/279
1.12. SUPERFÍCIES QUÁDRICAS 35
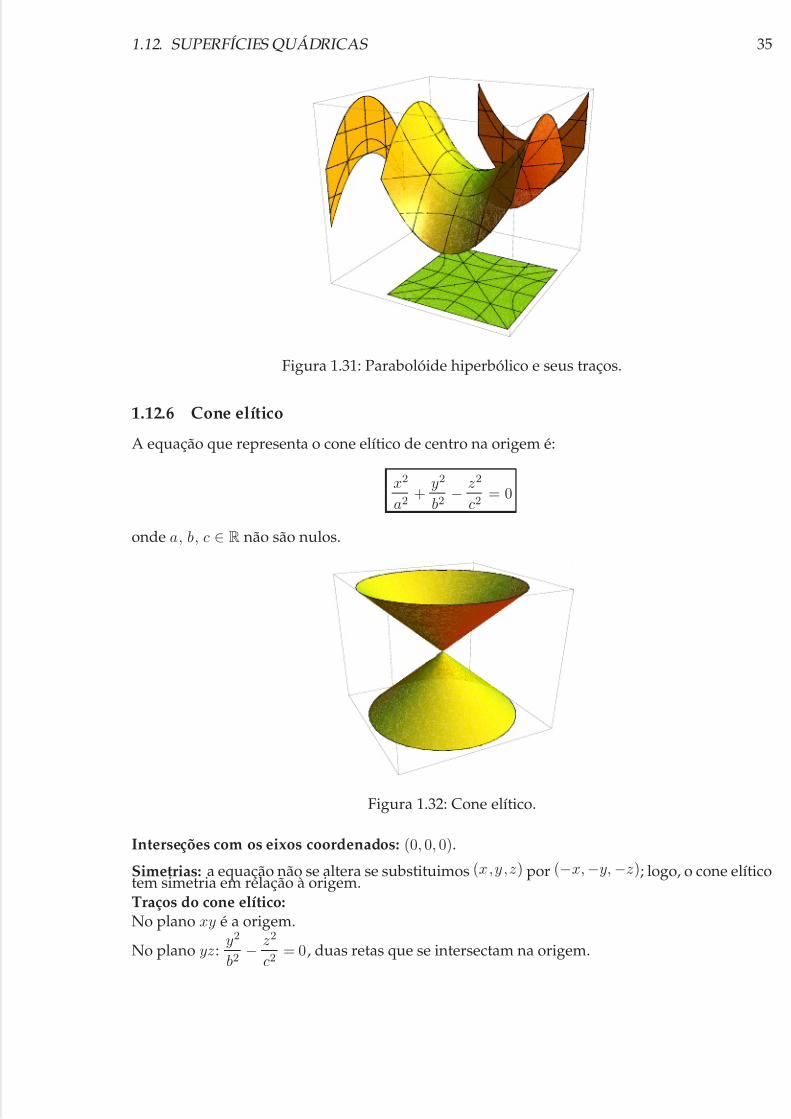
Figura 1.31: Parabolóide hiperbólico e seus traços.
1.12.6 Cone elítico
A equação que representa o cone elítico de centro na origem é:
x2
a2+
y2
b2− z2
c2= 0
onde a, b, c ∈ R não são nulos.
Figura 1.32: Cone elítico.
Interseções com os eixos coordenados: (0, 0, 0).
Simetrias: a equação não se altera se substituimos (x,y,z) por (−x, −y, −z); logo, o cone elíticotem simetria em relação à origem.Traços do cone elítico:No plano xy é a origem.
No plano yz:y2
b2− z2
c2= 0, duas retas que se intersectam na origem.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 36/279
36 CAPÍTULO 1. GEOMETRIA ANA
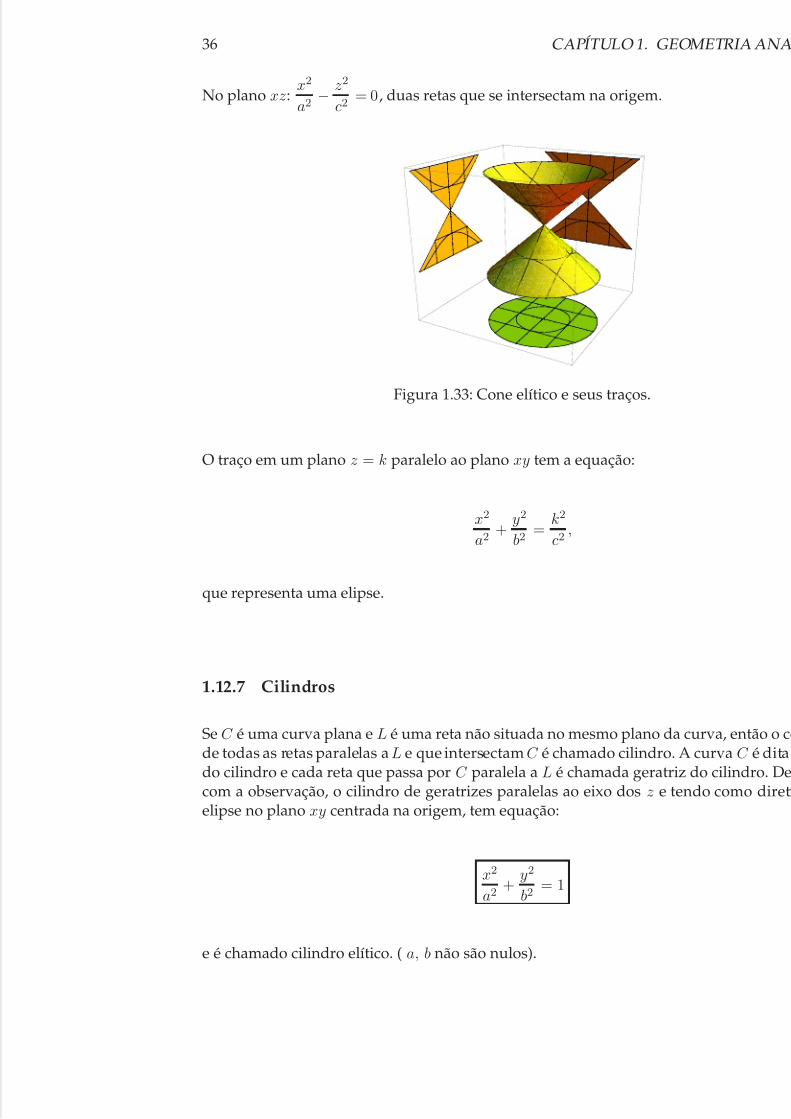
No plano xz:x2
a2− z2
c2= 0, duas retas que se intersectam na origem.
Figura 1.33: Cone elítico e seus traços.
O traço em um plano z = k paralelo ao plano xy tem a equação:
x2
a2+
y2
b2=
k2
c2,
que representa uma elipse.
1.12.7 Cilindros
Se C é uma curva plana e L é uma reta não situada no mesmo plano da curva, então o code todas as retas paralelas a L e que intersectam C é chamado cilindro. A curva C é ditado cilindro e cada reta que passa por C paralela a L é chamada geratriz do cilindro. Decom a observação, o cilindro de geratrizes paralelas ao eixo dos z e tendo como diretrelipse no plano xy centrada na origem, tem equação:
x2
a2+
y2
b2= 1
e é chamado cilindro elítico. ( a, b não são nulos).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 37/279
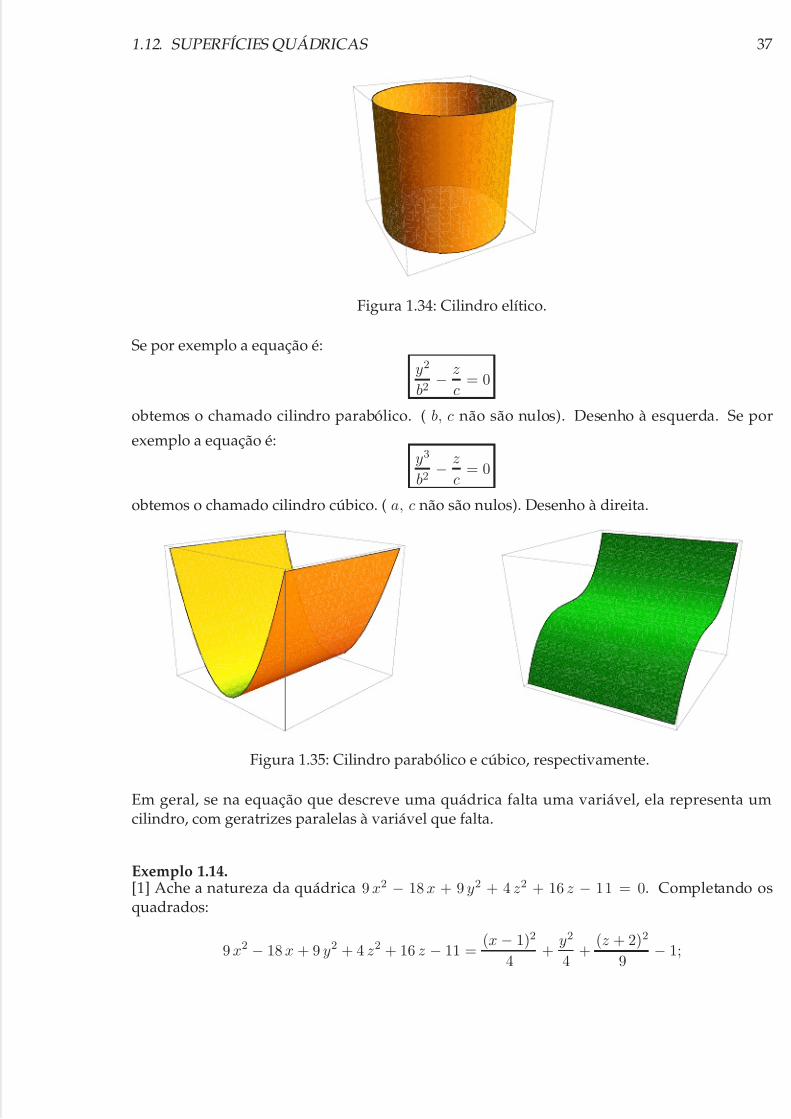
1.12. SUPERFÍCIES QUÁDRICAS 37
Figura 1.34: Cilindro elítico.
Se por exemplo a equação é:
y2
b2− z
c= 0
obtemos o chamado cilindro parabólico. ( b, c não são nulos). Desenho à esquerda. Se por
exemplo a equação é:y3
b2− z
c= 0
obtemos o chamado cilindro cúbico. ( a, c não são nulos). Desenho à direita.
Figura 1.35: Cilindro parabólico e cúbico, respectivamente.
Em geral, se na equação que descreve uma quádrica falta uma variável, ela representa umcilindro, com geratrizes paralelas à variável que falta.
Exemplo 1.14.[1] Ache a natureza da quádrica 9 x2 − 18 x + 9 y2 + 4 z2 + 16 z − 11 = 0. Completando osquadrados:
9 x2 − 18 x + 9 y2 + 4 z2 + 16 z − 11 =(x − 1)2
4+
y2
4+
(z + 2)2
9− 1;
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 38/279
38 CAPÍTULO 1. GEOMETRIA ANA
a equação representa um elipsóide centrado no ponto (1, 0, −2).
[2] Determine a equação da esfera concêntrica à esfera x2 + y2 + z2 + 4x + 2y −6z + 10 =passa pelo ponto (−4, 2, 5). Como as esferas são concêntricas, completamos os quadraddeterminar o centro da esfera dada: x2+y2+z2+4x+2y−6z+10 = (x+2)2+(y+1)2+(z−então, o centro é (−2, −1, 3) e a equação é (x + 2)2 + (y + 1)2 + (z − 3)2 = a2. Para detea usamos o fato de que o ponto (
−4, 2, 5) pertence à esfera; logo a2 = 17. A equação é:
(x + 2)2 + (y + 1)2 + (z − 3)2 = 17.
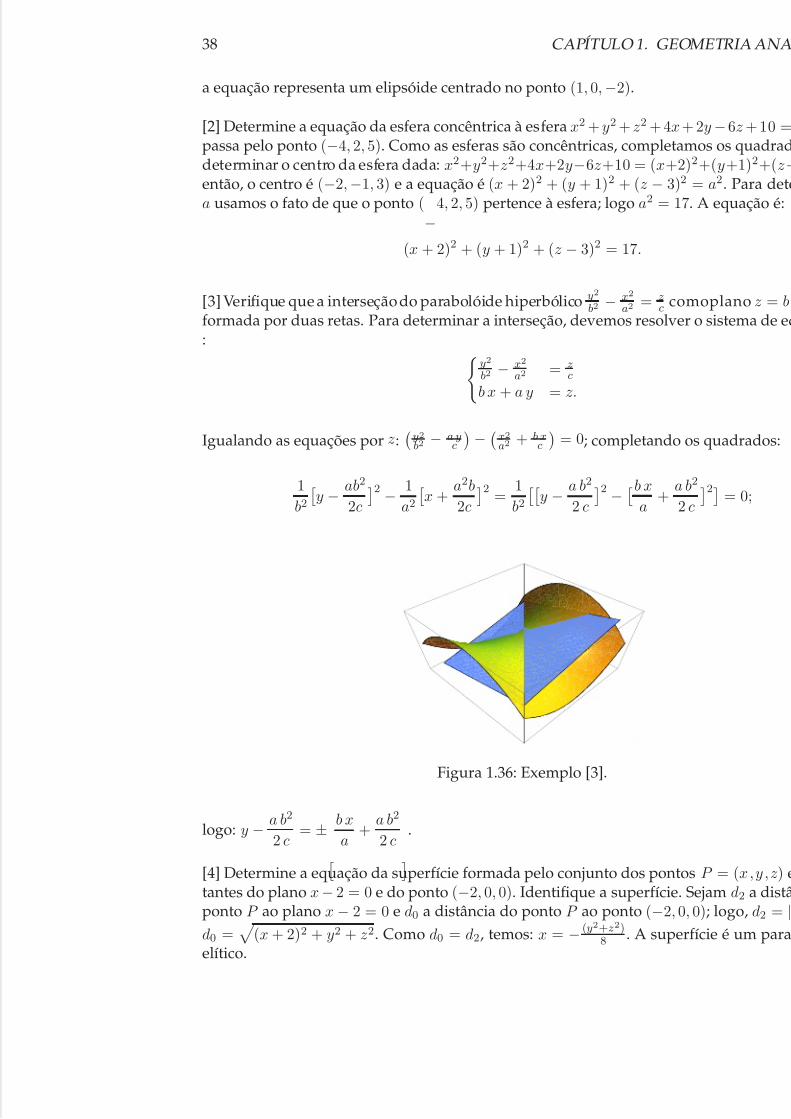
[3] Verifique que a interseção do parabolóide hiperbólico y2
b2− x2
a2= z
c comoplano z = bformada por duas retas. Para determinar a interseção, devemos resolver o sistema de eq:
y2
b2 − x2
a2 = zc
b x + a y = z.
Igualando as equações por z:
y2b2
− a yc
− x2a2 + b x
c
= 0; completando os quadrados:
1
b2
y − ab2
2c
2 − 1
a2
x +a2b
2c
2=
1
b2
y − a b2
2 c
2 − b x
a+
a b2
2 c
2= 0;
Figura 1.36: Exemplo [3].
logo: y − a b2
2 c= ±
b x
a+
a b2
2 c .
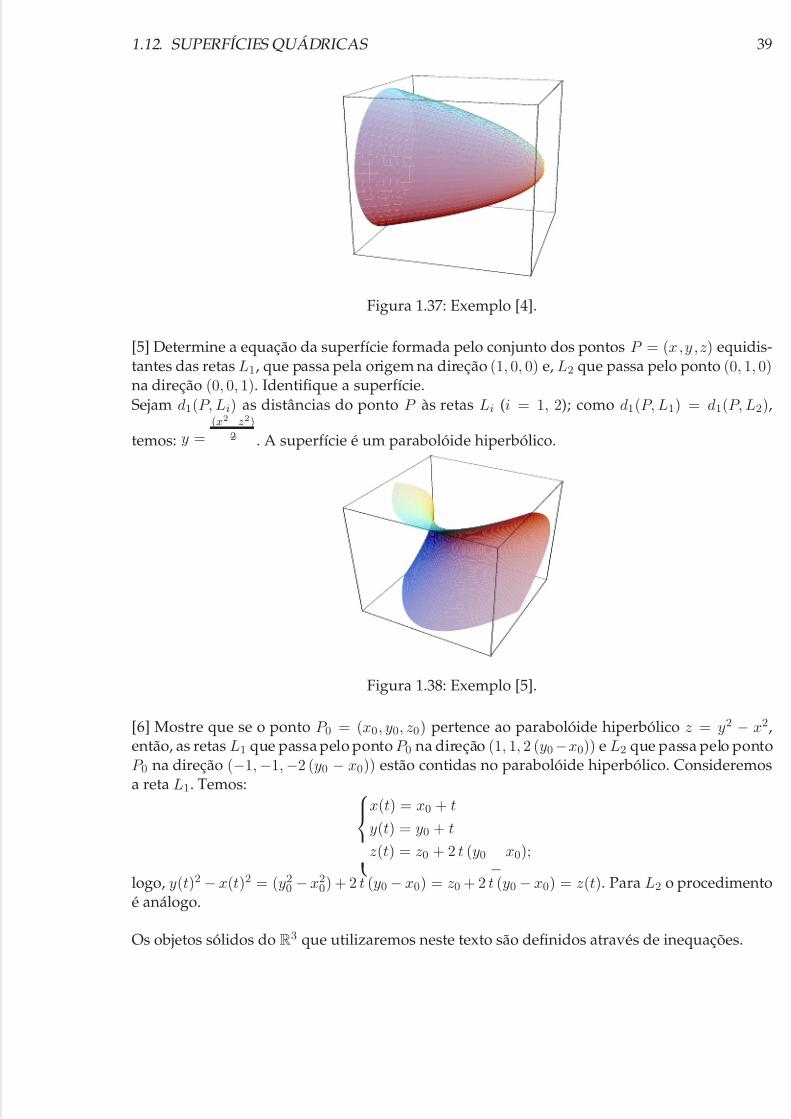
[4] Determine a equação da superfície formada pelo conjunto dos pontos P = (x,y ,z) etantes do plano x − 2 = 0 e do ponto (−2, 0, 0). Identifique a superfície. Sejam d2 a distâponto P ao plano x − 2 = 0 e d0 a distância do ponto P ao ponto (−2, 0, 0); logo, d2 = |d0 =
(x + 2)2 + y2 + z2. Como d0 = d2, temos: x = − (y2+z2)
8 . A superfície é um parabelítico.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 39/279
1.12. SUPERFÍCIES QUÁDRICAS 39
Figura 1.37: Exemplo [4].
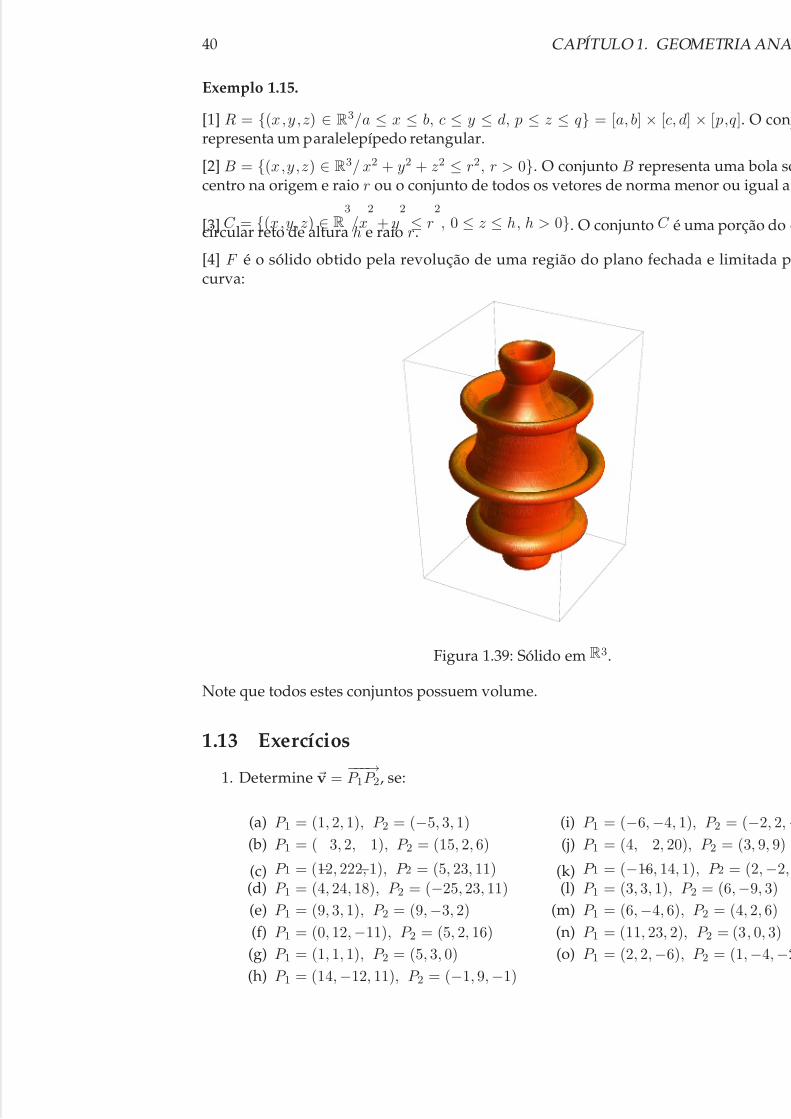
[5] Determine a equação da superfície formada pelo conjunto dos pontos P = (x,y ,z) equidis-tantes das retas L1, que passa pela origem na direção (1, 0, 0) e, L2 que passa pelo ponto (0, 1, 0)na direção (0, 0, 1). Identifique a superfície.Sejam d1(P, Li) as distâncias do ponto P às retas Li (i = 1, 2); como d1(P, L1) = d1(P, L2),
temos: y =(x2
−z2)
2 . A superfície é um parabolóide hiperbólico.
Figura 1.38: Exemplo [5].
[6] Mostre que se o ponto P 0 = (x0, y0, z0) pertence ao parabolóide hiperbólico z = y2 − x2,então, as retas L1 que passa pelo ponto P 0 na direção (1, 1, 2 (y0−x0)) e L2 que passa pelo pontoP 0 na direção (−1, −1, −2 (y0 − x0)) estão contidas no parabolóide hiperbólico. Consideremosa reta L1. Temos:
x(t) = x0 + t
y(t) = y0 + t
z(t) = z0 + 2 t (y0−
x0);
logo, y(t)2 − x(t)2 = (y20 − x20) + 2 t (y0 − x0) = z0 + 2 t (y0 − x0) = z(t). Para L2 o procedimento
é análogo.
Os objetos sólidos do R3 que utilizaremos neste texto são definidos através de inequações.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 40/279
40 CAPÍTULO 1. GEOMETRIA ANA
Exemplo 1.15.
[1] R = {(x,y ,z) ∈ R3/a ≤ x ≤ b, c ≤ y ≤ d, p ≤ z ≤ q} = [a, b] × [c, d] × [ p,q]. O conjrepresenta um paralelepípedo retangular.
[2] B = {(x,y,z) ∈ R3/ x2 + y2 + z2 ≤ r2, r > 0}. O conjunto B representa uma bola sócentro na origem e raio r ou o conjunto de todos os vetores de norma menor ou igual a
[3] C = {(x,y,z) ∈ R3
/x2
+ y2
≤ r2
, 0 ≤ z ≤ h, h > 0}. O conjunto C é uma porção do ccircular reto de altura h e raio r.
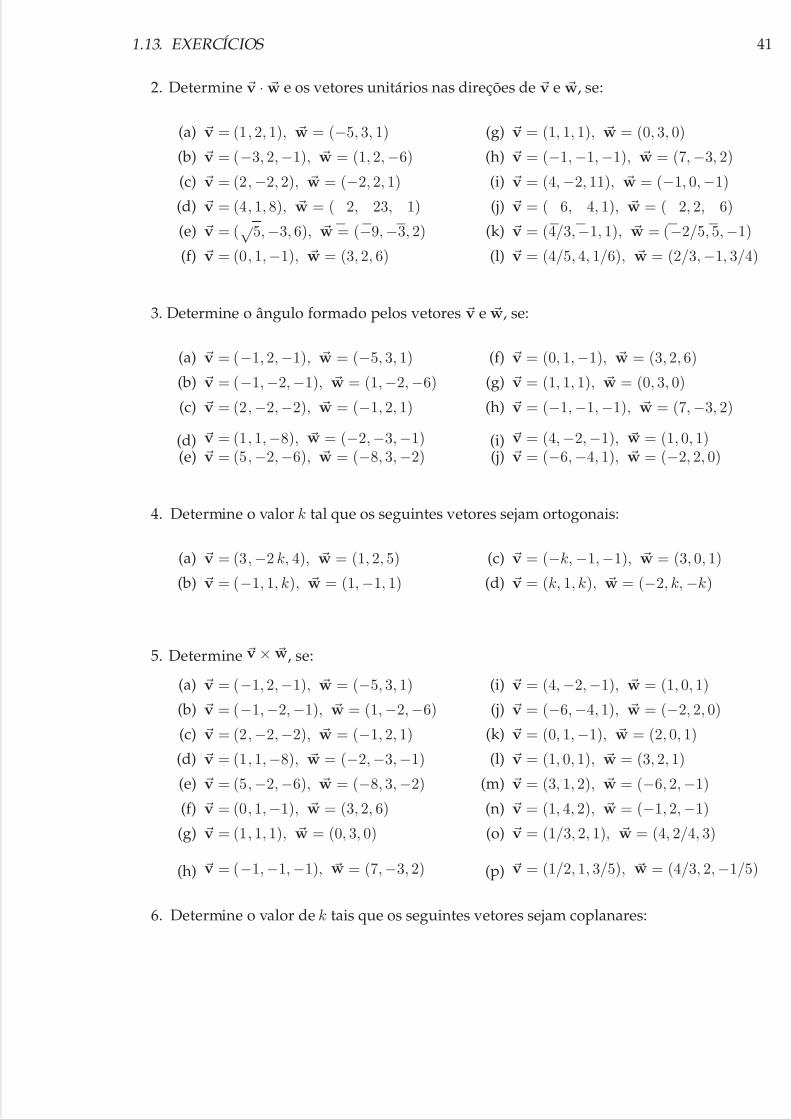
[4] F é o sólido obtido pela revolução de uma região do plano fechada e limitada pcurva:
Figura 1.39: Sólido em R3.
Note que todos estes conjuntos possuem volume.
1.13 Exercícios
1. Determine v =−−−→P 1P 2, se:
(a) P 1 = (1, 2, 1), P 2 = (−5, 3, 1)
(b) P 1 = (
−3, 2,
−1), P 2 = (15, 2, 6)
(c) P 1 = (12, 222, 1), P 2 = (5, 23, 11)(d) P 1 = (4, 24, 18), P 2 = (−25, 23, 11)
(e) P 1 = (9, 3, 1), P 2 = (9, −3, 2)
(f) P 1 = (0, 12, −11), P 2 = (5, 2, 16)
(g) P 1 = (1, 1, 1), P 2 = (5, 3, 0)
(h) P 1 = (14, −12, 11), P 2 = (−1, 9, −1)
(i) P 1 = (−6, −4, 1), P 2 = (−2, 2, −(j) P 1 = (4,
−2, 20), P 2 = (3, 9, 9)
(k) P 1 = (−16, 14, 1), P 2 = (2, −2,(l) P 1 = (3, 3, 1), P 2 = (6, −9, 3)
(m) P 1 = (6, −4, 6), P 2 = (4, 2, 6)
(n) P 1 = (11, 23, 2), P 2 = (3, 0, 3)
(o) P 1 = (2, 2, −6), P 2 = (1, −4, −2
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 41/279
1.13. EXERCÍCIOS 41
2. Determine v · w e os vetores unitários nas direções de v e w, se:
(a) v = (1, 2, 1), w = (−5, 3, 1)
(b) v = (−3, 2, −1), w = (1, 2, −6)
(c) v = (2, −2, 2), w = (−2, 2, 1)
(d) v = (4, 1, 8), w = (−
2,−
23,−
1)
(e) v = (√
5, −3, 6), w = (−9, −3, 2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)
(h) v = (−1, −1, −1), w = (7, −3, 2)
(i) v = (4, −2, 11), w = (−1, 0, −1)
(j) v = (−
6,−
4, 1), w = (−
2, 2,−
6)
(k) v = (4/3, −1, 1), w = (−2/5, 5, −1)
(l) v = (4/5, 4, 1/6), w = (2/3, −1, 3/4)
3. Determine o ângulo formado pelos vetores v e w, se:
(a) v = (−1, 2, −1), w = (−5, 3, 1)
(b) v = (−1, −2, −1), w = (1, −2, −6)
(c) v = (2, −2, −2), w = (−1, 2, 1)
(d) v = (1, 1, −8), w = (−2, −3, −1)(e) v = (5, −2, −6), w = (−8, 3, −2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)
(h) v = (−1, −1, −1), w = (7, −3, 2)
(i) v = (4, −2, −1), w = (1, 0, 1)(j) v = (−6, −4, 1), w = (−2, 2, 0)
4. Determine o valor k tal que os seguintes vetores sejam ortogonais:
(a) v = (3, −2 k, 4), w = (1, 2, 5)
(b) v = (−1, 1, k), w = (1, −1, 1)
(c) v = (−k, −1, −1), w = (3, 0, 1)
(d) v = (k, 1, k), w = (−2, k, −k)
5. Determine v× w, se:
(a) v = (−1, 2, −1), w = (−5, 3, 1)
(b) v = (−1, −2, −1), w = (1, −2, −6)
(c) v = (2, −2, −2), w = (−1, 2, 1)
(d) v = (1, 1, −8), w = (−2, −3, −1)
(e) v = (5, −2, −6), w = (−8, 3, −2)
(f) v = (0, 1, −1), w = (3, 2, 6)
(g) v = (1, 1, 1), w = (0, 3, 0)
(h) v = (−1, −1, −1), w = (7, −3, 2)
(i) v = (4, −2, −1), w = (1, 0, 1)
(j) v = (−6, −4, 1), w = (−2, 2, 0)
(k) v = (0, 1, −1), w = (2, 0, 1)
(l) v = (1, 0, 1), w = (3, 2, 1)
(m) v = (3, 1, 2), w = (−6, 2, −1)
(n) v = (1, 4, 2), w = (−1, 2, −1)
(o) v = (1/3, 2, 1), w = (4, 2/4, 3)
(p) v = (1/2, 1, 3/5), w = (4/3, 2, −1/5)
6. Determine o valor de k tais que os seguintes vetores sejam coplanares:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 42/279
42 CAPÍTULO 1. GEOMETRIA ANA
(a) u = (1, 2, −3), v = (1, k, 1), w = (3, 2, 1)
(b) u = (−1, k, 2), v = (3, 2, 5), w = (−1, 0, 1)
(c) u = (1, k, 0), v = (1, 2, 1), w = (1, 0, k)
(d) u = (0, 1, −1), v = (k, 0, 1), w = (1, 1, 2 k)
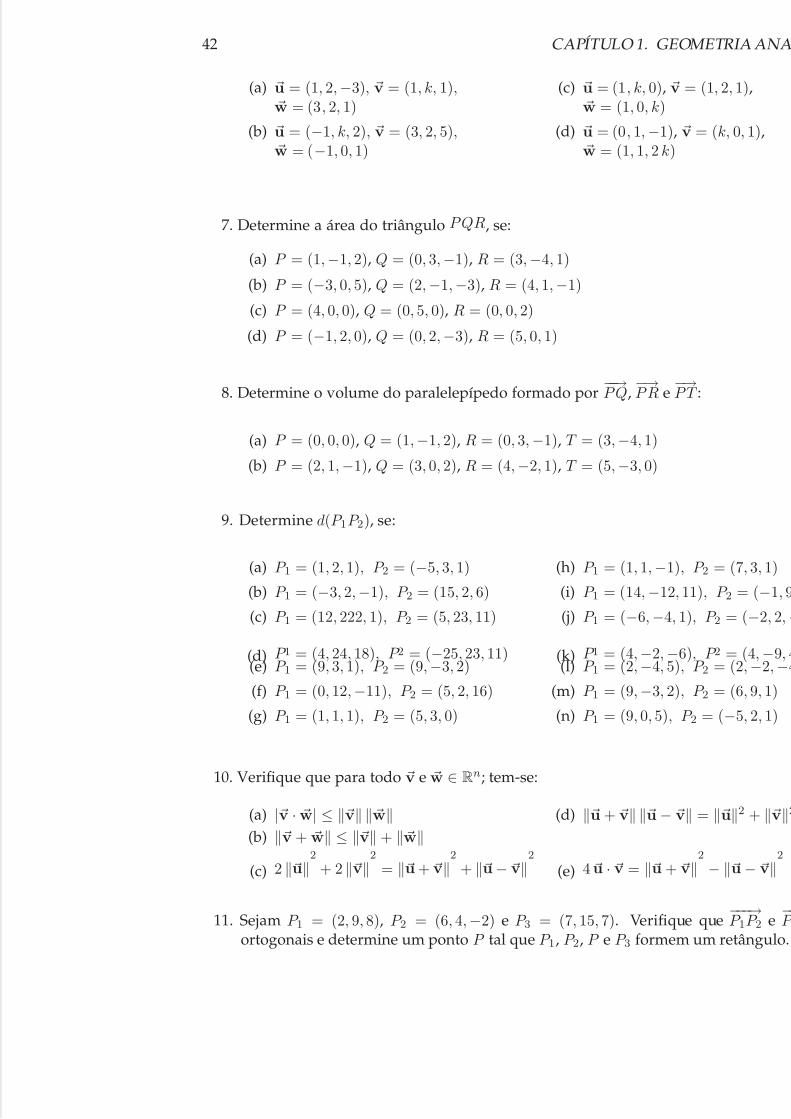
7. Determine a área do triângulo P QR, se:
(a) P = (1, −1, 2), Q = (0, 3, −1), R = (3, −4, 1)
(b) P = (−3, 0, 5), Q = (2, −1, −3), R = (4, 1, −1)
(c) P = (4, 0, 0), Q = (0, 5, 0), R = (0, 0, 2)
(d) P = (−1, 2, 0), Q = (0, 2, −3), R = (5, 0, 1)
8. Determine o volume do paralelepípedo formado por−−→P Q,
−→P R e
−→P T :
(a) P = (0, 0, 0), Q = (1, −1, 2), R = (0, 3, −1), T = (3, −4, 1)
(b) P = (2, 1, −1), Q = (3, 0, 2), R = (4, −2, 1), T = (5, −3, 0)
9. Determine d(P 1P 2), se:
(a) P 1 = (1, 2, 1), P 2 = (−5, 3, 1)
(b) P 1 = (−3, 2, −1), P 2 = (15, 2, 6)
(c) P 1 = (12, 222, 1), P 2 = (5, 23, 11)
(d) P 1 = (4, 24, 18), P 2 = (−25, 23, 11)(e) P 1 = (9, 3, 1), P 2 = (9, −3, 2)
(f) P 1 = (0, 12, −11), P 2 = (5, 2, 16)
(g) P 1 = (1, 1, 1), P 2 = (5, 3, 0)
(h) P 1 = (1, 1, −1), P 2 = (7, 3, 1)
(i) P 1 = (14, −12, 11), P 2 = (−1, 9
(j) P 1 = (−6, −4, 1), P 2 = (−2, 2, −
(k) P 1 = (4, −2, −6), P 2 = (4, −9, 4(l) P 1 = (2, −4, 5), P 2 = (2, −2, −4
(m) P 1 = (9, −3, 2), P 2 = (6, 9, 1)
(n) P 1 = (9, 0, 5), P 2 = (−5, 2, 1)
10. Verifique que para todo v e w ∈ Rn; tem-se:
(a) | v · w| ≤ v w(b) v + w ≤ v + w
(c) 2 u2
+ 2 v2
= u+ v2
+ u− v2
(d) u + v u− v = u2 + v2
(e) 4 u · v = u + v2
− u− v2
11. Sejam P 1 = (2, 9, 8), P 2 = (6, 4, −2) e P 3 = (7, 15, 7). Verifique que−−−→P 1P 2 e
−−P
ortogonais e determine um ponto P tal que P 1, P 2, P e P 3 formem um retângulo.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 43/279
1.13. EXERCÍCIOS 43
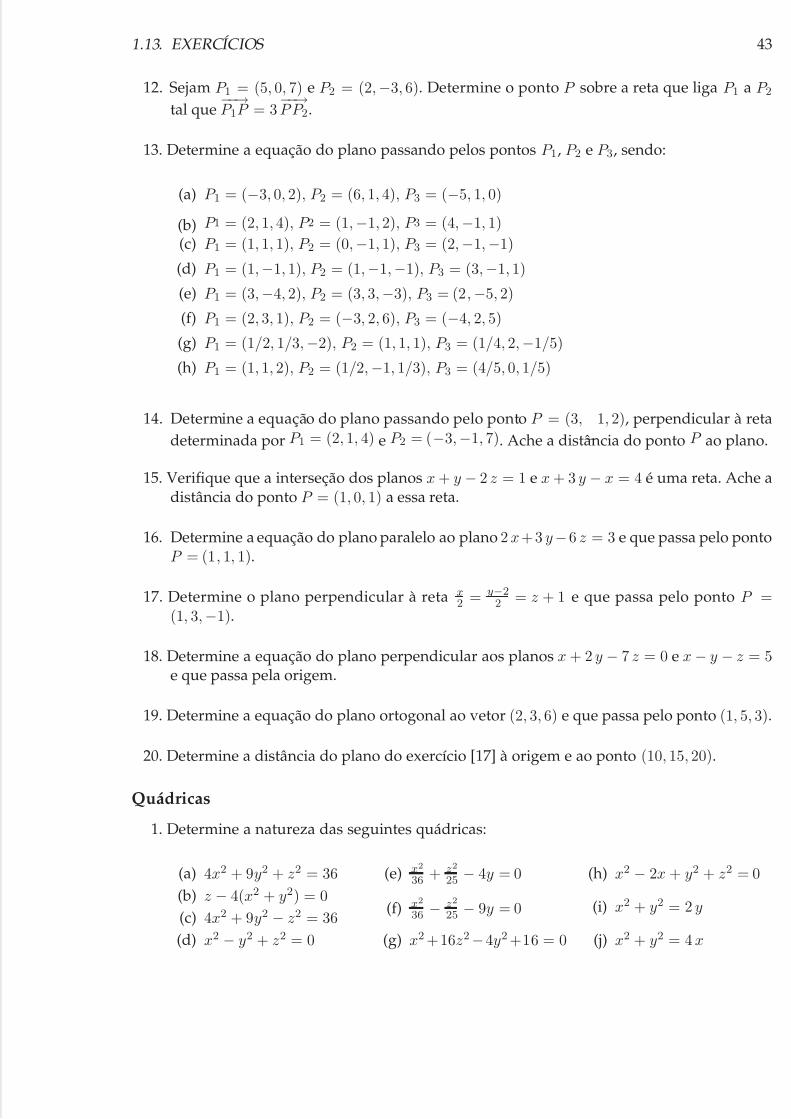
12. Sejam P 1 = (5, 0, 7) e P 2 = (2, −3, 6). Determine o ponto P sobre a reta que liga P 1 a P 2
tal que−−→P 1P = 3
−−→P P 2.
13. Determine a equação do plano passando pelos pontos P 1, P 2 e P 3, sendo:
(a) P 1 = (−3, 0, 2), P 2 = (6, 1, 4), P 3 = (−5, 1, 0)
(b) P 1 = (2, 1, 4), P 2 = (1, −1, 2), P 3 = (4, −1, 1)
(c) P 1 = (1, 1, 1), P 2 = (0, −1, 1), P 3 = (2, −1, −1)
(d) P 1 = (1, −1, 1), P 2 = (1, −1, −1), P 3 = (3, −1, 1)
(e) P 1 = (3, −4, 2), P 2 = (3, 3, −3), P 3 = (2, −5, 2)
(f) P 1 = (2, 3, 1), P 2 = (−3, 2, 6), P 3 = (−4, 2, 5)
(g) P 1 = (1/2, 1/3, −2), P 2 = (1, 1, 1), P 3 = (1/4, 2, −1/5)
(h) P 1 = (1, 1, 2), P 2 = (1/2, −1, 1/3), P 3 = (4/5, 0, 1/5)
14. Determine a equação do plano passando pelo ponto P = (3,
−1, 2), perpendicular à reta
determinada por P 1 = (2, 1, 4) e P 2 = (−3, −1, 7). Ache a distância do ponto P ao plano.
15. Verifique que a interseção dos planos x + y − 2 z = 1 e x + 3 y − x = 4 é uma reta. Ache adistância do ponto P = (1, 0, 1) a essa reta.
16. Determine a equação do plano paralelo ao plano 2 x + 3 y −6 z = 3 e que passa pelo pontoP = (1, 1, 1).
17. Determine o plano perpendicular à reta x2 = y−2
2 = z + 1 e que passa pelo ponto P =(1, 3, −1).
18. Determine a equação do plano perpendicular aos planos x + 2 y − 7 z = 0 e x − y − z = 5e que passa pela origem.
19. Determine a equação do plano ortogonal ao vetor (2, 3, 6) e que passa pelo ponto (1, 5, 3).
20. Determine a distância do plano do exercício [17] à origem e ao ponto (10, 15, 20).
Quádricas
1. Determine a natureza das seguintes quádricas:
(a) 4x2 + 9y2 + z2 = 36
(b) z − 4(x2 + y2) = 0
(c) 4x2 + 9y2 − z2 = 36
(d) x2 − y2 + z2 = 0
(e) x2
36 + z2
25 − 4y = 0
(f) x2
36 − z2
25 − 9y = 0
(g) x2 + 16z2−4y2+16 = 0
(h) x2 − 2x + y2 + z2 = 0
(i) x2 + y2 = 2 y
(j) x2 + y2 = 4 x
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 44/279
44 CAPÍTULO 1. GEOMETRIA ANA
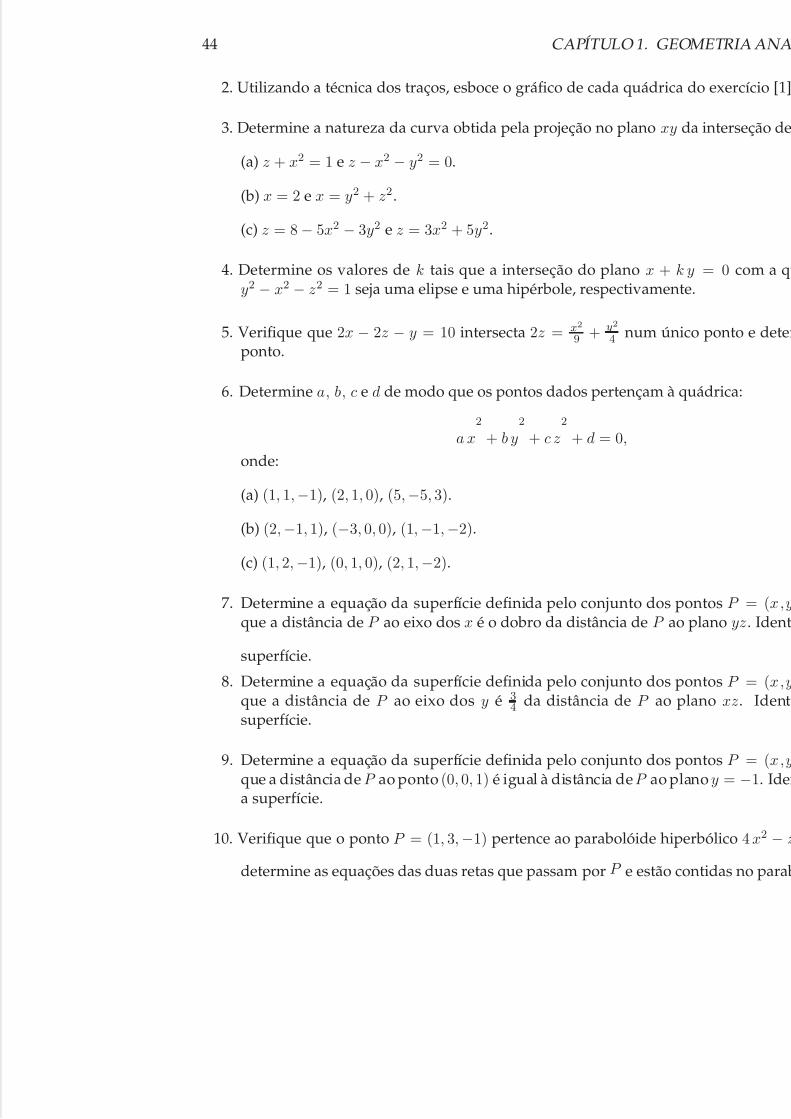
2. Utilizando a técnica dos traços, esboce o gráfico de cada quádrica do exercício [1]
3. Determine a natureza da curva obtida pela projeção no plano xy da interseção de
(a) z + x2 = 1 e z − x2 − y2 = 0.
(b) x = 2 e x = y2 + z2.
(c) z = 8 − 5x2 − 3y2 e z = 3x2 + 5y2.
4. Determine os valores de k tais que a interseção do plano x + k y = 0 com a quy2 − x2 − z2 = 1 seja uma elipse e uma hipérbole, respectivamente.
5. Verifique que 2x − 2z − y = 10 intersecta 2z = x2
9 + y2
4 num único ponto e deterponto.
6. Determine a, b, c e d de modo que os pontos dados pertençam à quádrica:
a x2
+ b y2
+ c z2
+ d = 0,
onde:
(a) (1, 1, −1), (2, 1, 0), (5, −5, 3).
(b) (2, −1, 1), (−3, 0, 0), (1, −1, −2).
(c) (1, 2, −1), (0, 1, 0), (2, 1, −2).
7. Determine a equação da superfície definida pelo conjunto dos pontos P = (x,yque a distância de P ao eixo dos x é o dobro da distância de P ao plano yz. Ident
superfície.
8. Determine a equação da superfície definida pelo conjunto dos pontos P = (x,yque a distância de P ao eixo dos y é 3
4 da distância de P ao plano xz. Identisuperfície.
9. Determine a equação da superfície definida pelo conjunto dos pontos P = (x,yque a distância de P ao ponto (0, 0, 1) é igual à distância de P ao plano y = −1. Idena superfície.
10. Verifique que o ponto P = (1, 3, −1) pertence ao parabolóide hiperbólico 4 x2 − z
determine as equações das duas retas que passam por P e estão contidas no parab
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 45/279
Capítulo 2
FUNÇÕES DE VÁRIAS VARIÁVEIS
2.1 Introdução
Como no Cálculo de uma variável, neste capítulo estudaremos uma das noções centrais daMatemática, o conceito de função. Uma função de várias variáveis reais é uma regra que des-creve como uma quantidade é determinada por outras quantidades, de maneira única. Atravésdas funções de várias variáveis poderemos modelar uma grande quantidade de fenômenos dosmais diversos ramos da Ciência.
Definição 2.1. Seja A ⊂ Rn, n = 2 ou n = 3. Uma função f definida no subconjunto A com valoresem R é uma regra que associa a cada u ∈ A um único número real f (u).
u é chamada variável independente da função e a notação é:
f : A ⊂ Rn −→ R.
Se n = 3, denotamos a variável independente por u = (x,y,z) e a função por w = f (x,y,z).Se n = 2, denotamos a variável independente por u = (x, y) e a função por z = f (x, y).
Exemplo 2.1.
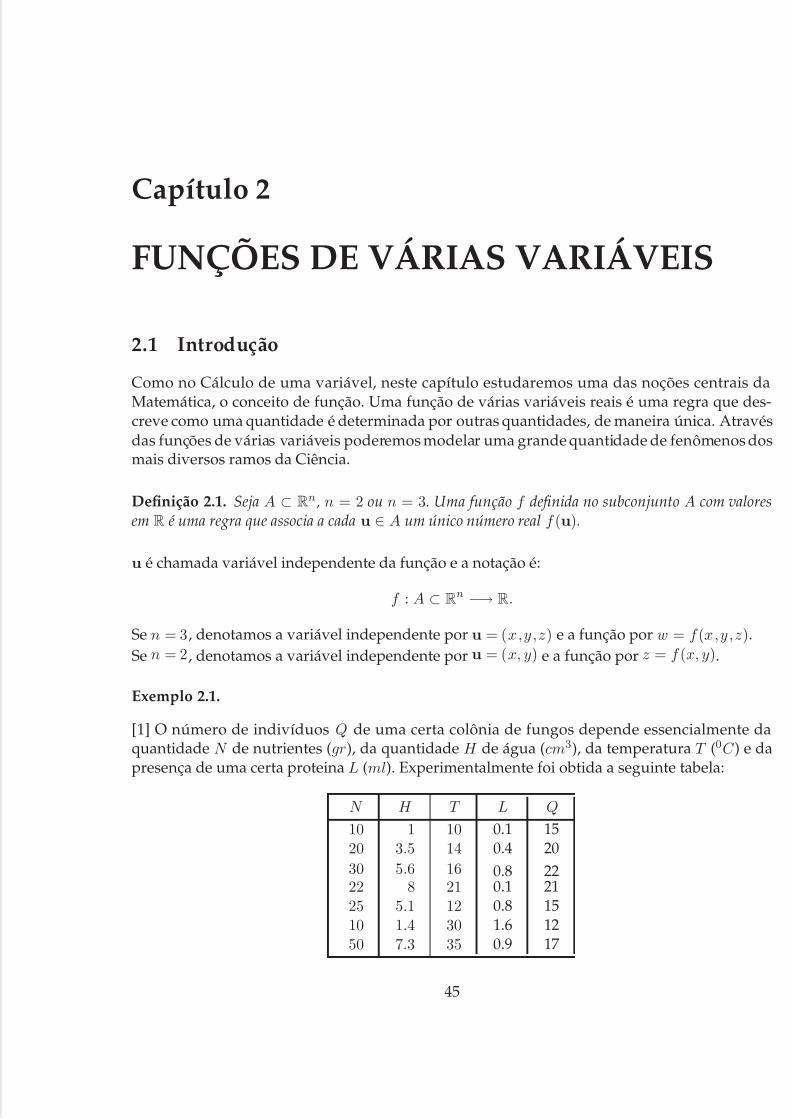
[1] O número de indivíduos Q de uma certa colônia de fungos depende essencialmente daquantidade N de nutrientes (gr), da quantidade H de água (cm3), da temperatura T (0C ) e dapresença de uma certa proteina L (ml). Experimentalmente foi obtida a seguinte tabela:
N H T L Q
10 1 10 0.1 1520 3.5 14 0.4 2030 5.6 16 0.8 2222 8 21 0.1 2125 5.1 12 0.8 1510 1.4 30 1.6 1250 7.3 35 0.9 17
45
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 46/279
46 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
Q possivelmente não tem uma formulação matemática explícita, mas é uma função benida: Q = Q(N , H , T , L)
[2] O volume V de um cilindro é função do raio r de sua base e de sua altura h:
V (r, h) = π r2 h.
Logo, um cilindro de altura h = 10 cm e raio r = 2 cm tem volume: V (2, 10) = 40
aproximadamente, 125.663 cm3
[3] Um tanque para estocagem de oxigênio líquido num hospital deve ter a forma de umdro circular reto de raio r e de altura l m (m =metros), com um hemisfério em cada edade. O volume do tanque é descrito em função da altura l e do raio r.
r
l
Figura 2.1: O tanque do exemplo [3].
O volume do cilindro é π l r2 m3 e o dos dois hemisférios é 4π r3
3 m3; logo, o volume tot
V (l, r) = π
4 r3
3+ l r2
m3.
Por exemplo, se a altura for 8 m e o raio r = 1 m, o volume é V (8, 1) = 28 π3 m3.
[4] O índice de massa corporal humano (IMC) é expresso por:
IM C (P, A) =
P
A2 ,
onde P é o peso em quilos e A a altura em m. O IMC indica se uma pessoa está acima oudo peso ideal, segundo a seguinte tabela da OMS (Organização Mundial da Saude):
Condição IMC
Abaixo do peso < 18.5Peso normal 18.5 ≤ IM C ≤ 25
Acima do peso 25 ≤ IM C ≤ 30Obeso > 30
Por exemplo, uma pessoa que mede 1.65 m e pesa 98 quilos, tem IM C (98, 1.65) = 35segundo a tabela está obeso. Agora uma pessoa que mede 1.80 m e pesa 75 kg, tem
IM C (98, 1.65) = 23.1;
logo, segundo a tabela tem peso normal.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 47/279
2.1. INTRODUÇÃO 47
[5] Da lei gravitacional universal de Newton segue que dada uma partícula de massa m0 naorigem de um sistema de coordenadas x y z, o módulo da força F exercida sobre outra partículade massa m situada no ponto (x,y,z) é dado por uma função de 5 variáveis independentes:
Figura 2.2: Exemplo [5].
F (m0,m,x,y ,z) =g m0 m
x2 + y2 + z2,
onde g é a constante de gravitação universal.
[6] A lei de um gás ideal confinado (lei de Gay - Lussac) é P V = k T , onde P é a pressão emN/u3 (N =Newton, u=unidades de medida), V é o volume em u3, T é a temperatura em grause k > 0 uma constante que depende do gás. Podemos expressar o volume do gás em funçãoda pressão e da temperatura; a pressão do gás em função do volume e da temperatura ou atemperatura do gás em função da pressão e do volume:
V (P, T ) = k T P
, P (V, T ) = k T V e T (P, V ) = P V
k.
[7] Quando um poluente é emitido por uma chaminé de h metros de altura, a concentração dopoluente, a x quilômetros da origem da emissão e a y metros do chão pode ser aproximada por:
P (x, y) =a
x2
eh(x,y) + ek(x,y)
,
onde h(x, y) = − b
x2
y − h
2 e k(x, y) = − b
x2
y + h
2.
O poluente P é medido em µg/m (µg=microgramas), onde a e b são constantes que dependemdas condições atmosféricas e da taxa de emissão do poluente. Sejam a = 200 e b =
−0.002. Por
exemplo, para uma chaminé de 10 m, a contaminação a 1 km de distância e a uma altura de 2 mé P (1000, 2) = 0.004 µg/m.
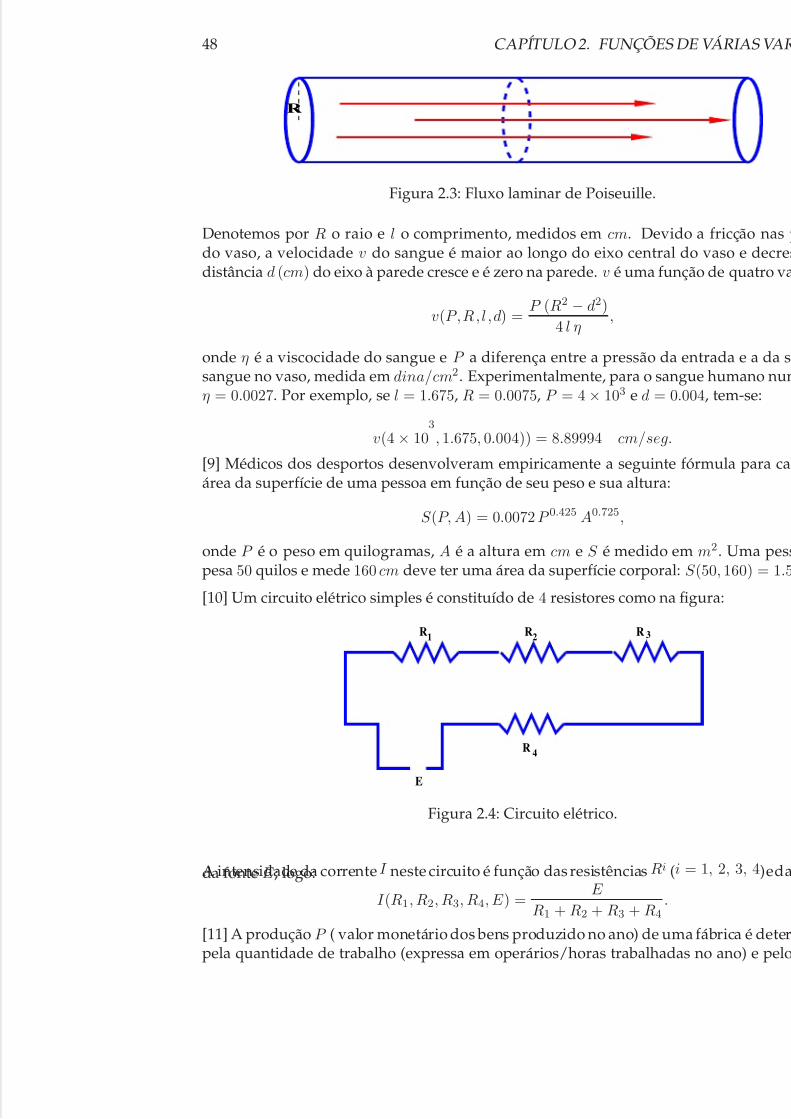
[8] Lei do fluxo laminar de Poiseuille: Fluxo sanguíneo através de um vaso, como artérias ouveias. Como as quantidades envolvidas são pequenas, podemos considerar que vasos temformato cilíndrico não elástico.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 48/279
48 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
R
Figura 2.3: Fluxo laminar de Poiseuille.
Denotemos por R o raio e l o comprimento, medidos em cm. Devido a fricção nas pdo vaso, a velocidade v do sangue é maior ao longo do eixo central do vaso e decresdistância d (cm) do eixo à parede cresce e é zero na parede. v é uma função de quatro va
v(P,R,l ,d) =P (R2 − d2)
4 l η,
onde η é a viscocidade do sangue e P a diferença entre a pressão da entrada e a da ssangue no vaso, medida em dina/cm2. Experimentalmente, para o sangue humano numη = 0.0027. Por exemplo, se l = 1.675, R = 0.0075, P = 4 × 103 e d = 0.004, tem-se:
v(4 × 103
, 1.675, 0.004)) = 8.89994 cm/seg.
[9] Médicos dos desportos desenvolveram empiricamente a seguinte fórmula para calárea da superfície de uma pessoa em função de seu peso e sua altura:
S (P, A) = 0.0072 P 0.425 A0.725,
onde P é o peso em quilogramas, A é a altura em cm e S é medido em m2. Uma pesspesa 50 quilos e mede 160 cm deve ter uma área da superfície corporal: S (50, 160) = 1.5
[10] Um circuito elétrico simples é constituído de 4 resistores como na figura:
R R R
R
E
1 2 3
4
Figura 2.4: Circuito elétrico.
A intensidade da corrente I neste circuito é função das resistências Ri (i = 1, 2, 3, 4)edada fonte E ; logo:
I (R1, R2, R3, R4, E ) =E
R1 + R2 + R3 + R4.
[11] A produção P ( valor monetário dos bens produzido no ano) de uma fábrica é deterpela quantidade de trabalho (expressa em operários/horas trabalhadas no ano) e pelo

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 49/279
2.2. DOMÍNIO E IMAGEM 49
investido (dinheiro, compra de maquinarias, matéria prima, etc.). A função que modela aprodução é chamada de Cobb-Douglas e é dada por:
P (L, K ) = A K α L1−α,
onde L é a quantidade de trabalho, K é o capital investido, A e α são constantes positivas(0 < α < 1). Por exemplo, se o capital investido é de R$600.000 e são empregados 1000
operários/hora, a produção é dada pela seguinte função de Cobb-Douglas:P (L, K ) = 1.01 L
34 K
14 ;
então, P (1000, 600.000) = 4998.72. A função de produção de Cobb-Douglas tem a seguintepropriedade para todo n ∈ N, P (n L , n K ) = A n K α L1−α, isto é, para acréscimos iguais naquantidade de trabalho e de capital investido obtemos o mesmo acréscimo na produção.
2.2 Domínio e Imagem
De forma análoga ao Cálculo de uma variável, os conjuntos Domínio e Imagem de uma função
são relevantes para o estudo das funções de várias variáveis.Definição 2.2. Seja f : A ⊂ Rn −→ R uma função.
1. O conjunto de todas as variáveis independentes u ∈ Rn tais que f (u) existe é chamado domíniode f e é denotado por Dom(f ).
2. O conjunto dos z ∈ R tais que f (u) = z e u ∈ Dom(f ) é chamado imagem de f e é denotado porIm(f ).
Na prática o domínio de uma função é determinado pelo contexto do problema.
Exemplo 2.2.[1] O volume V de um cilindro é função do raio r de sua base e de sua altura h. Logo,
V (r, h) = π r2 h.
Como o raio e a altura de um cilindro devem ser positivos, temos que:
Dom(f ) = {(r, h) ∈ R2 / r > 0, h > 0} = (0, +∞) × (0, +∞)
e Im(f ) = (0, +∞). No caso de não estar considerando a função como volume, teríamos queDom(f ) = Im(f ) = R2.
[2] Seja z = f (x, y) =
1 − x2
− y2
. Note que f é definida se, e somente se:1 − x2 − y2 ≥ 0,
ou seja x2 + y2 ≤ 1; logo:
Dom(f ) = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 50/279
50 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
Por outro lado 0 ≤ z =
1 − x2 − y2 ≤ 1; logo, Im(f ) = [0, 1].
1
1
Figura 2.5: Exemplo [2].
[3] Seja z = f (x, y) =x
x − y. Note que f é definida se o denominador x − y = 0; então, x
Dom(f ) = {(x, y) ∈ R2/x = y} = R2 − {(x, x)/x ∈ R}.
1
1
Figura 2.6: Exemplo [3].
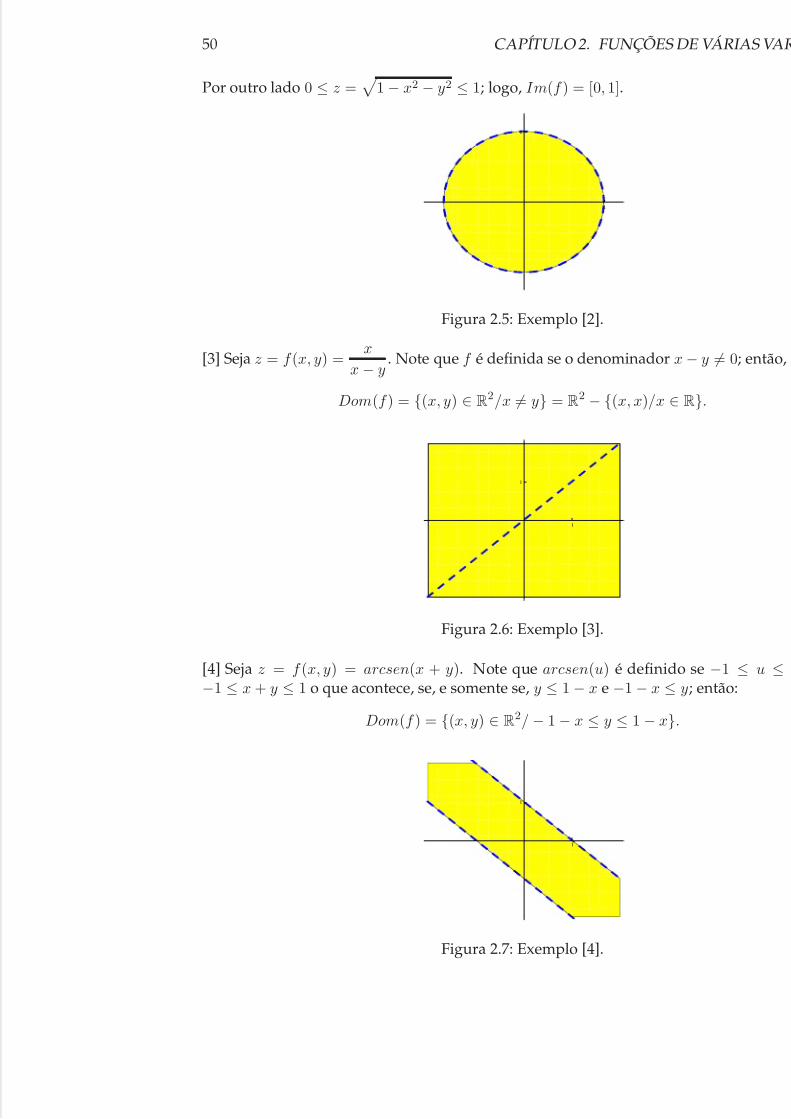
[4] Seja z = f (x, y) = arcsen(x + y). Note que arcsen(u) é definido se −1 ≤ u ≤−1 ≤ x + y ≤ 1 o que acontece, se, e somente se, y ≤ 1 − x e −1 − x ≤ y; então:
Dom(f ) = {(x, y) ∈ R2/ − 1 − x ≤ y ≤ 1 − x}.
1
1
Figura 2.7: Exemplo [4].
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 51/279
2.2. DOMÍNIO E IMAGEM 51
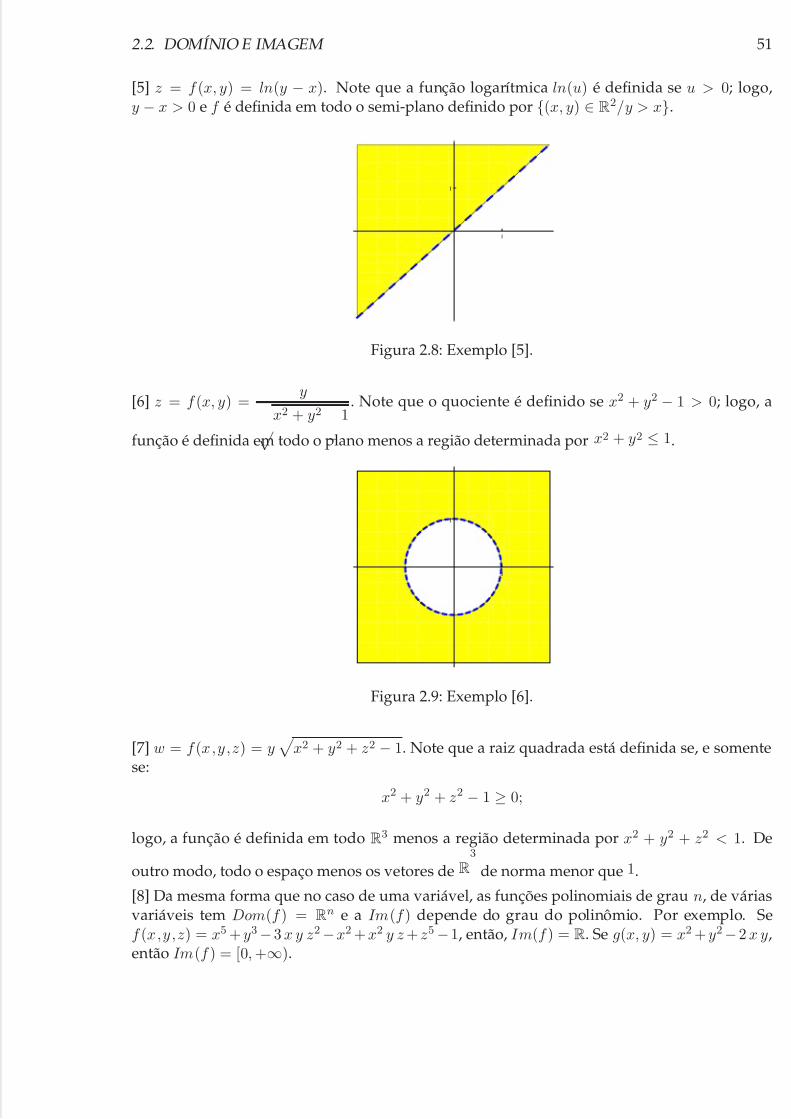
[5] z = f (x, y) = ln(y − x). Note que a função logarítmica ln(u) é definida se u > 0; logo,y − x > 0 e f é definida em todo o semi-plano definido por {(x, y) ∈ R2/y > x}.
1
1
Figura 2.8: Exemplo [5].
[6] z = f (x, y) =y
x2 + y2
−1
. Note que o quociente é definido se x2 + y2 − 1 > 0; logo, a
função é definida em todo o plano menos a região determinada por x2 + y2 ≤ 1.
1
1
Figura 2.9: Exemplo [6].
[7] w = f (x,y,z) = y
x2 + y2 + z2 − 1. Note que a raiz quadrada está definida se, e somentese:
x2 + y2 + z2 − 1 ≥ 0;
logo, a função é definida em todo R3 menos a região determinada por x2 + y2 + z2 < 1. De
outro modo, todo o espaço menos os vetores de R3
de norma menor que 1.
[8] Da mesma forma que no caso de uma variável, as funções polinomiais de grau n, de váriasvariáveis tem Dom(f ) = Rn e a Im(f ) depende do grau do polinômio. Por exemplo. Sef (x,y,z) = x5 + y3−3 x y z2−x2 + x2 y z + z5−1, então, Im(f ) = R. Se g(x, y) = x2 + y2−2 x y,então Im(f ) = [0, +∞).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 52/279
52 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
2.3 Gráfico de Funções de Várias Variáveis
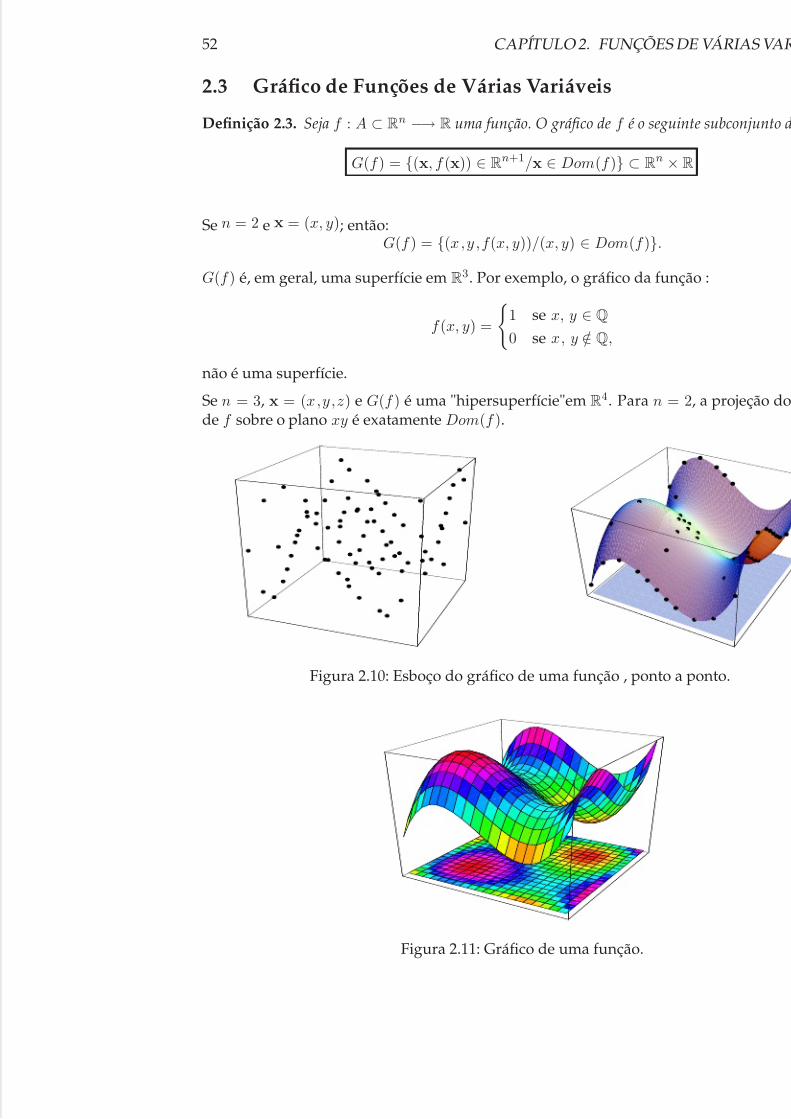
Definição 2.3. Seja f : A ⊂ Rn −→ R uma função. O gráfico de f é o seguinte subconjunto d
G(f ) = {(x, f (x)) ∈ Rn+1/x ∈ Dom(f )} ⊂ Rn ×R
Se n = 2 e x = (x, y); então:G(f ) = {(x,y ,f (x, y))/(x, y) ∈ Dom(f )}.
G(f ) é, em geral, uma superfície em R3. Por exemplo, o gráfico da função :
f (x, y) =
1 se x, y ∈ Q0 se x, y /∈ Q,
não é uma superfície.
Se n = 3, x = (x,y,z) e G(f ) é uma "hipersuperfície"em R4. Para n = 2, a projeção dode f sobre o plano xy é exatamente Dom(f ).
Figura 2.10: Esboço do gráfico de uma função , ponto a ponto.
Figura 2.11: Gráfico de uma função.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 53/279
2.3. GRÁFICO DE FUNÇÕES DE VÁRIAS VARIÁVEIS 53
2.3.1 Conjuntos de nível
Definição 2.4. O conjunto de nível de f com valor c ∈ R é definido por:
{x ∈ Dom(f )/f (x) = c}
Em particular:
Se n = 2, o conjunto de nível c é dito curva de nível c de f :
C c = {(x, y) ∈ Dom(f )/f (x, y) = c}
Se n = 3, o conjunto de nível c é dito superfície de nível c de f :
S c = {(x,y,z) ∈ Dom(f )/f (x,y,z) = c}
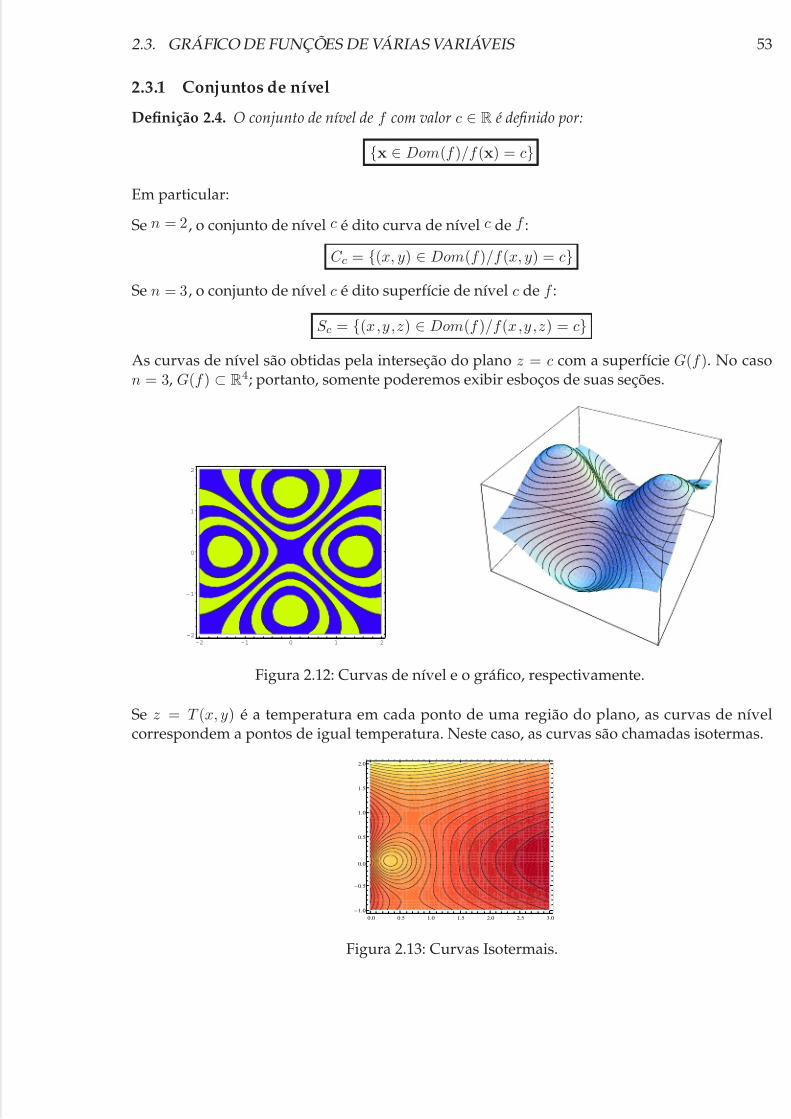
As curvas de nível são obtidas pela interseção do plano z = c com a superfície G(f ). No cason = 3, G(f ) ⊂ R4; portanto, somente poderemos exibir esboços de suas seções.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.12: Curvas de nível e o gráfico, respectivamente.
Se z = T (x, y) é a temperatura em cada ponto de uma região do plano, as curvas de nívelcorrespondem a pontos de igual temperatura. Neste caso, as curvas são chamadas isotermas.
0.0 0.5 1.0 1.5 2.0 2.5 3.0
1.0
0.5
0.0
0.5
1.0
1.5
2.0
Figura 2.13: Curvas Isotermais.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 54/279
54 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
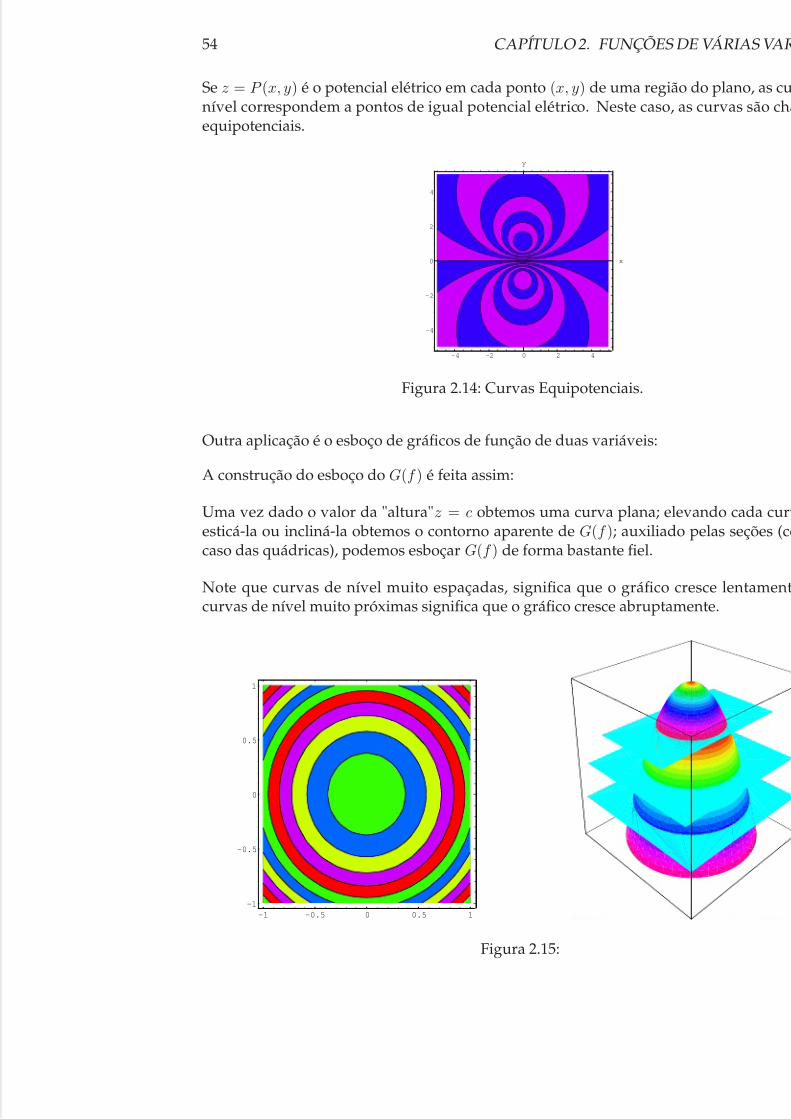
Se z = P (x, y) é o potencial elétrico em cada ponto (x, y) de uma região do plano, as cunível correspondem a pontos de igual potencial elétrico. Neste caso, as curvas são chaequipotenciais.
-4 -2 0 2 4
-4
-2
0
2
4
x
y
Figura 2.14: Curvas Equipotenciais.
Outra aplicação é o esboço de gráficos de função de duas variáveis:
A construção do esboço do G(f ) é feita assim:
Uma vez dado o valor da "altura"z = c obtemos uma curva plana; elevando cada curvesticá-la ou incliná-la obtemos o contorno aparente de G(f ); auxiliado pelas seções (cocaso das quádricas), podemos esboçar G(f ) de forma bastante fiel.
Note que curvas de nível muito espaçadas, significa que o gráfico cresce lentamentcurvas de nível muito próximas significa que o gráfico cresce abruptamente.
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 2.15:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 55/279
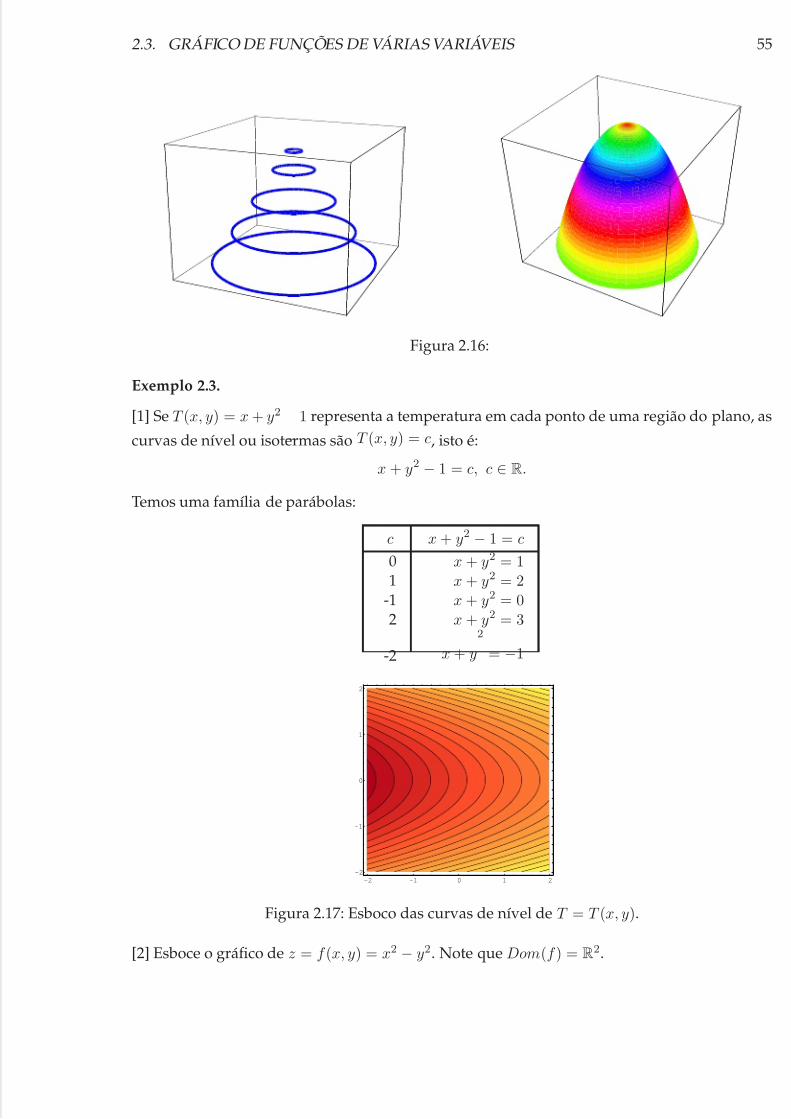
2.3. GRÁFICO DE FUNÇÕES DE VÁRIAS VARIÁVEIS 55
Figura 2.16:
Exemplo 2.3.
[1] Se T (x, y) = x + y2
−1 representa a temperatura em cada ponto de uma região do plano, as
curvas de nível ou isotermas são T (x, y) = c, isto é:
x + y2 − 1 = c, c ∈ R.
Temos uma família de parábolas:
c x + y2 − 1 = c
0 x + y2 = 11 x + y2 = 2
-1 x + y2 = 02 x + y2 = 3
-2 x + y
2
= −1
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.17: Esboco das curvas de nível de T = T (x, y).
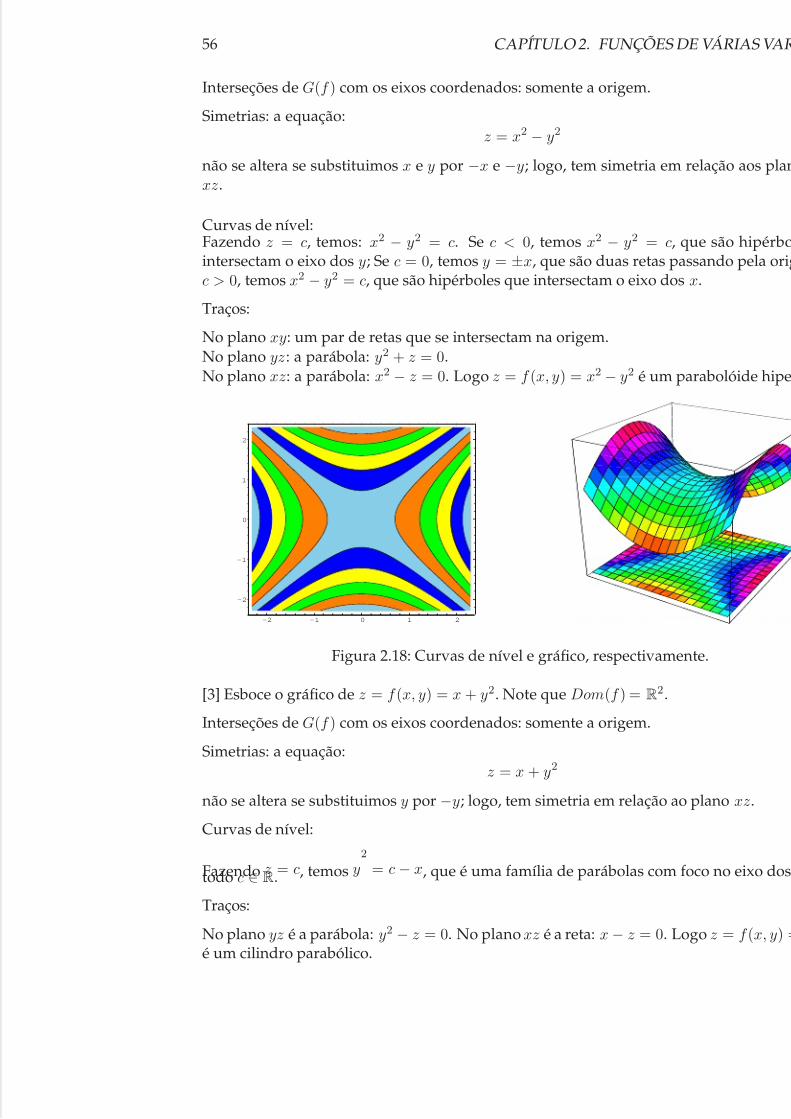
[2] Esboce o gráfico de z = f (x, y) = x2 − y2. Note que Dom(f ) = R2.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 56/279
56 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
Interseções de G(f ) com os eixos coordenados: somente a origem.
Simetrias: a equação:z = x2 − y2
não se altera se substituimos x e y por −x e −y; logo, tem simetria em relação aos planxz.
Curvas de nível:Fazendo z = c, temos: x2 − y2 = c. Se c < 0, temos x2 − y2 = c, que são hipérbointersectam o eixo dos y; Se c = 0, temos y = ±x, que são duas retas passando pela origc > 0, temos x2 − y2 = c, que são hipérboles que intersectam o eixo dos x.
Traços:
No plano xy: um par de retas que se intersectam na origem.No plano yz: a parábola: y2 + z = 0.No plano xz: a parábola: x2 − z = 0. Logo z = f (x, y) = x2 − y2 é um parabolóide hipe
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.18: Curvas de nível e gráfico, respectivamente.
[3] Esboce o gráfico de z = f (x, y) = x + y2. Note que Dom(f ) = R2.
Interseções de G(f ) com os eixos coordenados: somente a origem.
Simetrias: a equação:z = x + y2
não se altera se substituimos y por −y; logo, tem simetria em relação ao plano xz.
Curvas de nível:
Fazendo z = c, temos y2
= c − x, que é uma família de parábolas com foco no eixo dostodo c ∈ R.
Traços:
No plano yz é a parábola: y2 − z = 0. No plano xz é a reta: x − z = 0. Logo z = f (x, y) =é um cilindro parabólico.
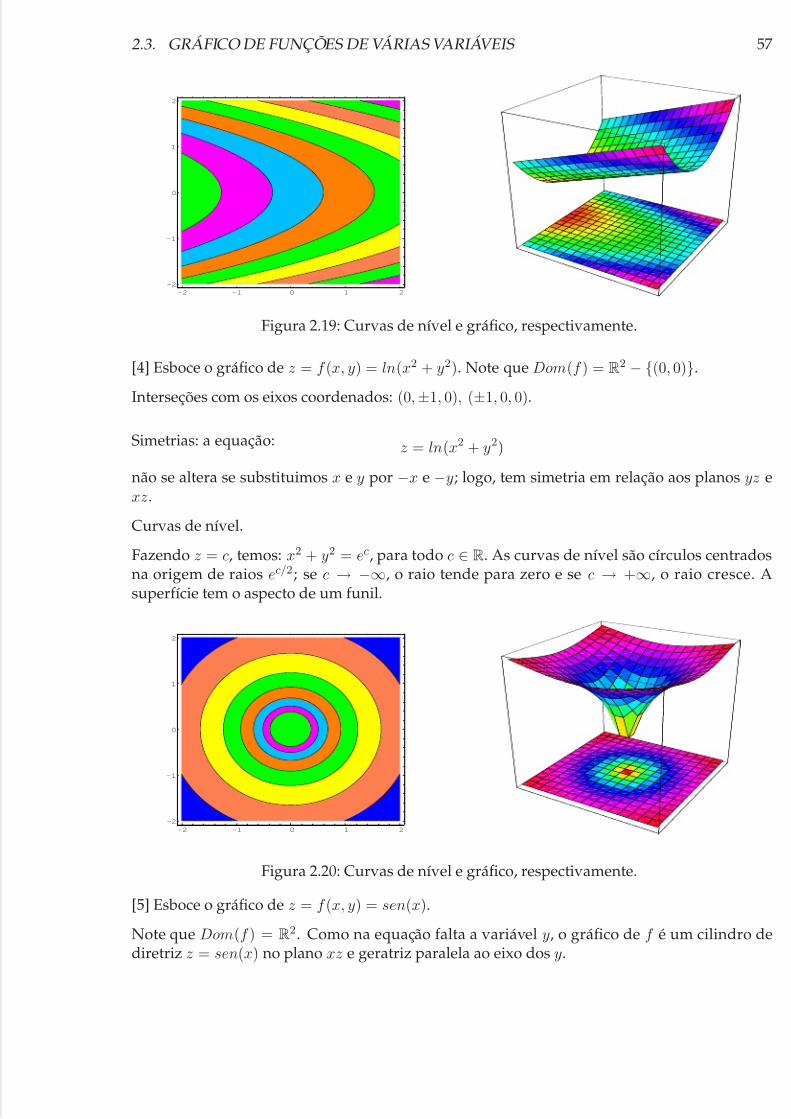
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 57/279
2.3. GRÁFICO DE FUNÇÕES DE VÁRIAS VARIÁVEIS 57
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.19: Curvas de nível e gráfico, respectivamente.
[4] Esboce o gráfico de z = f (x, y) = ln(x2 + y2). Note que Dom(f ) = R2 − {(0, 0)}.
Interseções com os eixos coordenados: (0, ±1, 0), (±1, 0, 0).
Simetrias: a equação: z = ln(x2 + y2)
não se altera se substituimos x e y por −x e −y; logo, tem simetria em relação aos planos yz exz.
Curvas de nível.
Fazendo z = c, temos: x2 + y2 = ec, para todo c ∈ R. As curvas de nível são círculos centradosna origem de raios ec/2; se c → −∞, o raio tende para zero e se c → +∞, o raio cresce. Asuperfície tem o aspecto de um funil.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.20: Curvas de nível e gráfico, respectivamente.
[5] Esboce o gráfico de z = f (x, y) = sen(x).
Note que Dom(f ) = R2. Como na equação falta a variável y, o gráfico de f é um cilindro dediretriz z = sen(x) no plano xz e geratriz paralela ao eixo dos y.
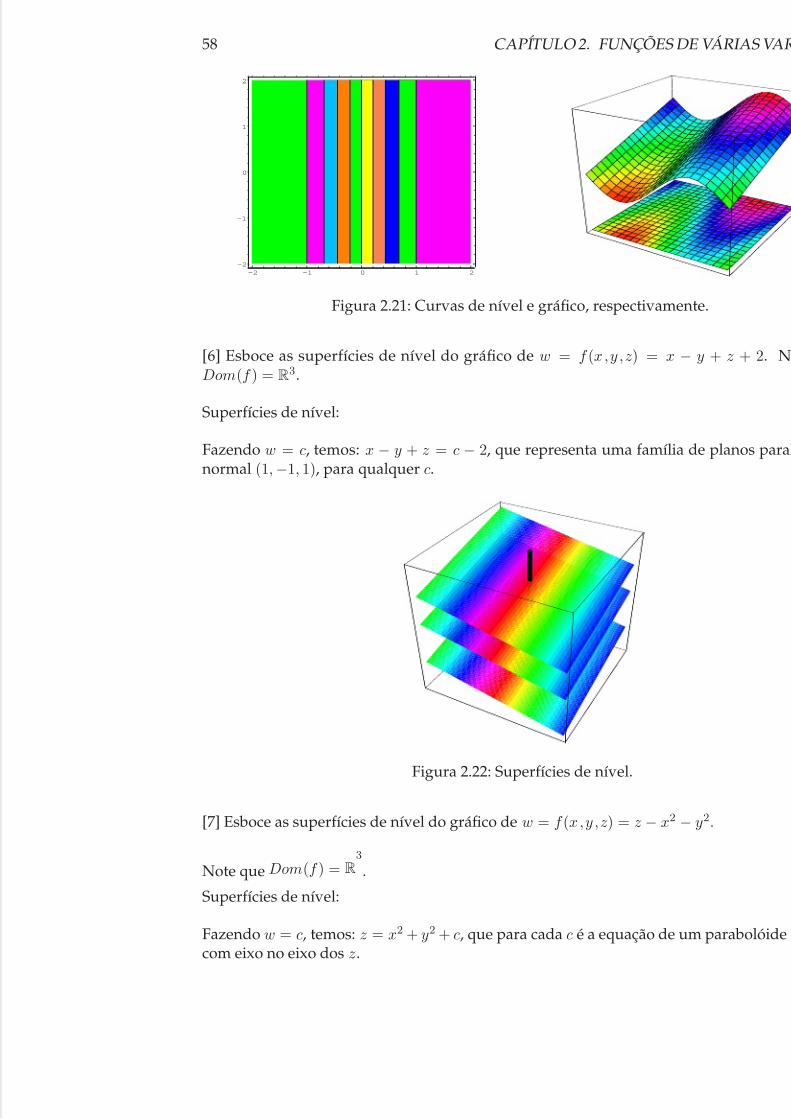
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 58/279
58 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.21: Curvas de nível e gráfico, respectivamente.
[6] Esboce as superfícies de nível do gráfico de w = f (x,y ,z) = x − y + z + 2. NDom(f ) = R3.
Superfícies de nível:
Fazendo w = c, temos: x − y + z = c − 2, que representa uma família de planos paralnormal (1, −1, 1), para qualquer c.
Figura 2.22: Superfícies de nível.
[7] Esboce as superfícies de nível do gráfico de w = f (x,y ,z) = z − x2 − y2.
Note que Dom(f ) = R3
.
Superfícies de nível:
Fazendo w = c, temos: z = x2 + y2 + c, que para cada c é a equação de um parabolóide com eixo no eixo dos z.
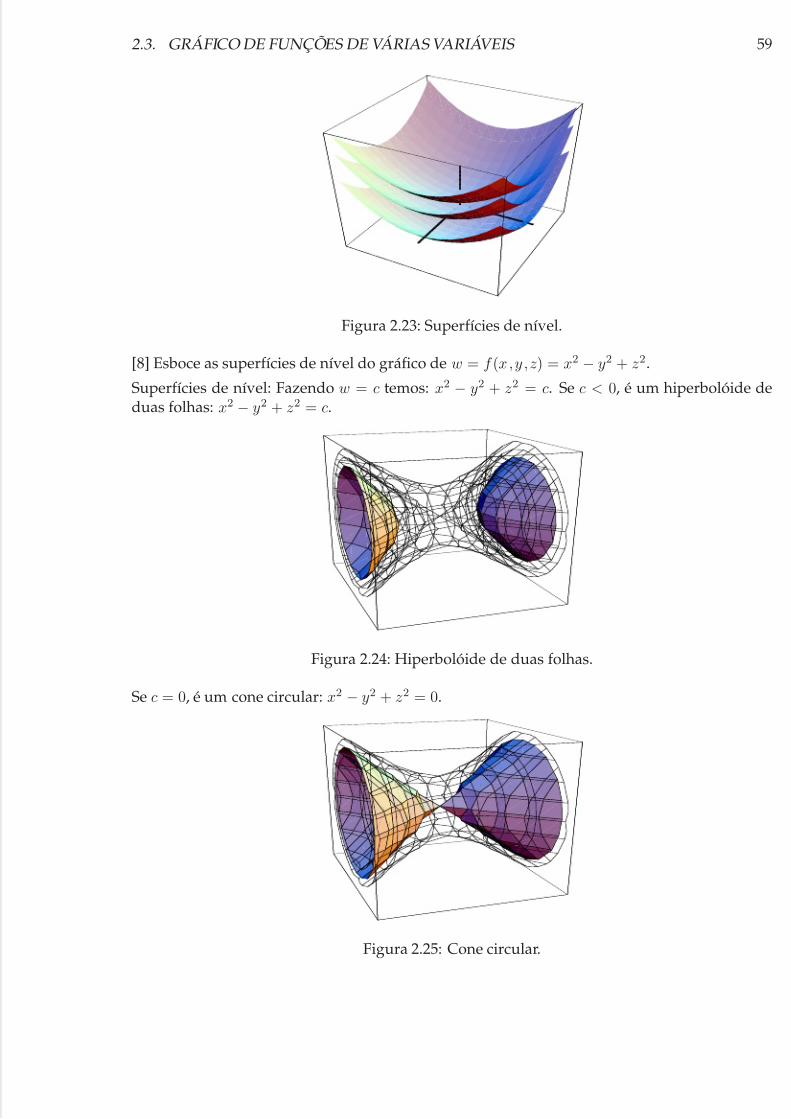
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 59/279
2.3. GRÁFICO DE FUNÇÕES DE VÁRIAS VARIÁVEIS 59
Figura 2.23: Superfícies de nível.
[8] Esboce as superfícies de nível do gráfico de w = f (x,y ,z) = x2 − y2 + z2.
Superfícies de nível: Fazendo w = c temos: x2 − y2 + z2 = c. Se c < 0, é um hiperbolóide deduas folhas: x2 − y2 + z2 = c.
Figura 2.24: Hiperbolóide de duas folhas.
Se c = 0, é um cone circular: x2 − y2 + z2 = 0.
Figura 2.25: Cone circular.
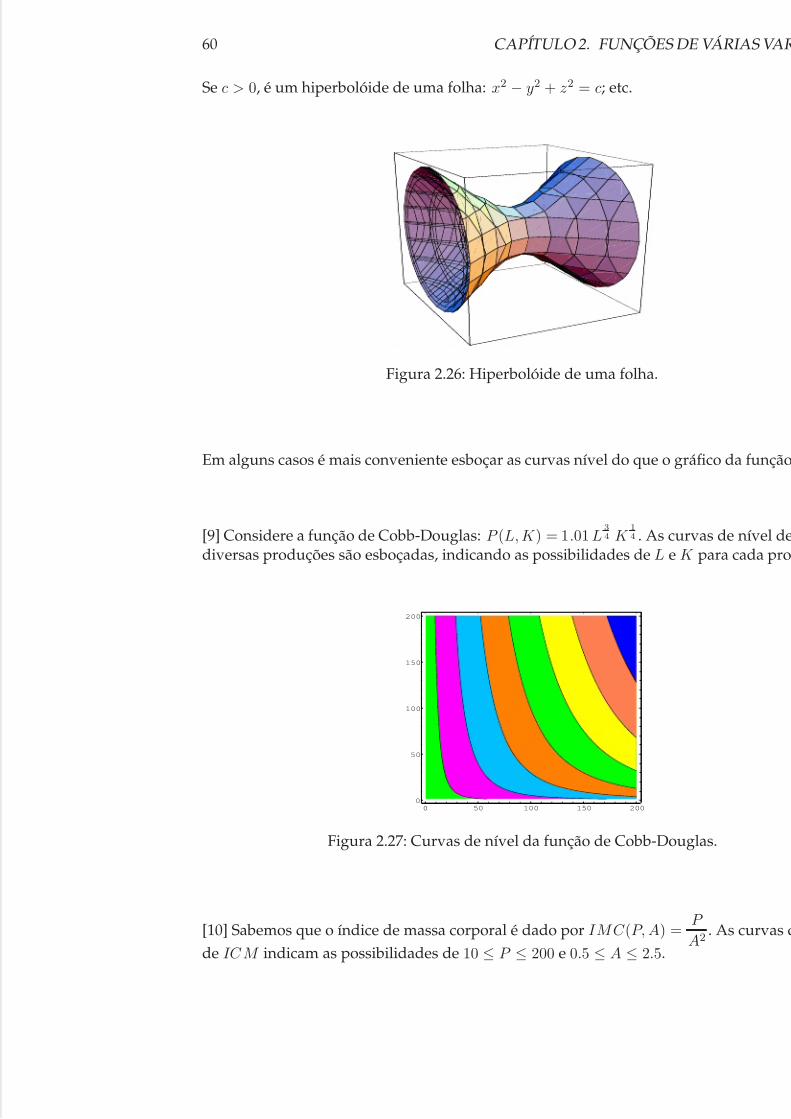
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 60/279
60 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
Se c > 0, é um hiperbolóide de uma folha: x2 − y2 + z2 = c; etc.
Figura 2.26: Hiperbolóide de uma folha.
Em alguns casos é mais conveniente esboçar as curvas nível do que o gráfico da função
[9] Considere a função de Cobb-Douglas: P (L, K ) = 1.01 L34 K
14 . As curvas de nível de
diversas produções são esboçadas, indicando as possibilidades de L e K para cada pro
0 50 100 150 200
0
50
100
150
200
Figura 2.27: Curvas de nível da função de Cobb-Douglas.
[10] Sabemos que o índice de massa corporal é dado por IM C (P, A) =P
A2. As curvas d
de IC M indicam as possibilidades de 10 ≤ P ≤ 200 e 0.5 ≤ A ≤ 2.5.
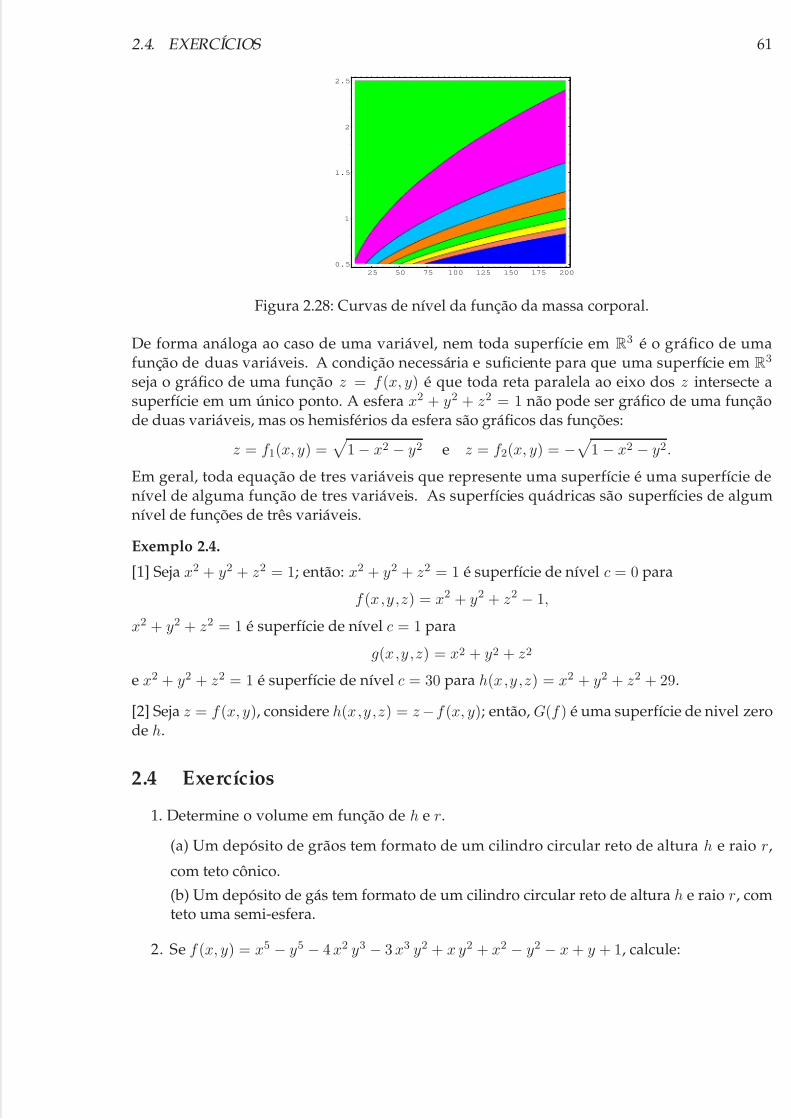
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 61/279
2.4. EXERCÍCIOS 61
25 50 75 100 125 150 175 200
0.5
1
1.5
2
2.5
Figura 2.28: Curvas de nível da função da massa corporal.
De forma análoga ao caso de uma variável, nem toda superfície em R3 é o gráfico de umafunção de duas variáveis. A condição necessária e suficiente para que uma superfície em R3
seja o gráfico de uma função z = f (x, y) é que toda reta paralela ao eixo dos z intersecte asuperfície em um único ponto. A esfera x2 + y2 + z2 = 1 não pode ser gráfico de uma funçãode duas variáveis, mas os hemisférios da esfera são gráficos das funções:
z = f 1(x, y) =
1 − x2 − y2 e z = f 2(x, y) = −
1 − x2 − y2.
Em geral, toda equação de tres variáveis que represente uma superfície é uma superfície denível de alguma função de tres variáveis. As superfícies quádricas são superfícies de algumnível de funções de três variáveis.
Exemplo 2.4.
[1] Seja x2 + y2 + z2 = 1; então: x2 + y2 + z2 = 1 é superfície de nível c = 0 para
f (x,y,z) = x2 + y2 + z2 − 1,
x2 + y2 + z2 = 1 é superfície de nível c = 1 para
g(x,y,z) = x2 + y2 + z2
e x2 + y2 + z2 = 1 é superfície de nível c = 30 para h(x,y,z) = x2 + y2 + z2 + 29.
[2] Seja z = f (x, y), considere h(x,y,z) = z −f (x, y); então, G(f ) é uma superfície de nivel zerode h.
2.4 Exercícios
1. Determine o volume em função de h e r.
(a) Um depósito de grãos tem formato de um cilindro circular reto de altura h e raio r,
com teto cônico.
(b) Um depósito de gás tem formato de um cilindro circular reto de altura h e raio r, comteto uma semi-esfera.
2. Se f (x, y) = x5 − y5 − 4 x2 y3 − 3 x3 y2 + x y2 + x2 − y2 − x + y + 1, calcule:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 62/279
62 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
(a) f (0, 0)
(b) f (1, 1)
(c) f (x, x)
(d) f (y, −y)
(e) f (x2,√
x y)
(f) f (1, h)
(g) f (h, 0)
(h) f (x+h,y)−f (x,y)h
(i) f (x,y+h)−f (x,y)h
3. Se f (x,y,z) = (x y z)2, calcule:
(a) f (0, 0, 0)
(b) f (1, 1, π)
(c) f (x,x,x)
(d) f (y ,z ,z)
(e) f (x2,√
x y z , z3 y)
(f) f (x+h,y,z)−f (x,y,z)h
(g) f (x,y+h,z)−f (x,y,zh
(h) f (x,y,z+h)−f (x,y,zh
(i) f (x+h,y+h,z+h)−fh
4. Determine Dom(f ) se:
(a) f (x, y) =
x−yx+y
(b) f (x, y) =
x2
−y2
x−y
(c) f (x, y) = x+yx y
(d) f (x, y) = 16 − x2 − y2
(e) f (x, y) = |x|e y
x
(f) f (x, y) = |x| − |y|
(g) f (x, y) = x−ysen(x)−sen(y)
(h) f (x, y) =√
y − x +√
1 − y
(i) f (x,y,z) = x y z − x4 + x5 − z7
(j) f (x,y,z) = sen(x2
−y2 + z2)
(k) f (x,y,x) = yz x
(l) f (x,y,z) = x2 sec(y) + z
(m) f (x,y,z) = ln(x2 + y2 + z2 − 1
(n) f (x,y,z) =
1 − x2 − y2 − z2
(o) f (x,y,z) = ex2+y2+z2
(p) f (x,y,z) = 3
1 − x2 − y2 − z2.
5. Esboce Dom(f ) no plano de cada função do exercício [4].
6. Seja x ∈ Rn. Uma função f (x) é dita homogênea de grau n ∈ Z se para todof (tx) = tn f (x). Verifique que as seguintes funções são homogêneas e determine o
(a) f (x, y) = 3 x2 + 5 x y + y2
(b) f (x, y) = 2x2+y2
(c) f (x, y) =
x2 + y2 sen( yx ), x = 0
(d) f (x,y,z) = xy3
+ yz3
+ zx3
(e) f (x,y,z) = 1x+y+z
(f) f (x,y,z) = x2 e−y
z
7. Esboce as curvas de nível de f , para os seguintes c:
(a) f (x, y) =
100 − x2 − y2, c = 0, 8, 10.
(b) f (x, y) =
x2 + y2, c = 0, 1, 2, 3, 4
(c) f (x, y) = 4 x2 + 9 y2, c = 0, 2, 4, 6
(d) f (x, y) = 3x − 7y, c = 0, ±1, ±2
(e) f (x, y) = x2 + xy, c = 0, ±1, ±(f) f (x, y) = x2
y2+1, c = 0, ±1, ±2, ±
(g) f (x, y) = (x − y)2, c = 0, ±1, ±(h) f (x, y) = ln(x2 + y2 − 1), c = 0

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 63/279
2.4. EXERCÍCIOS 63
(i) f (x, y) = xx2+y2+1
, c = ±1, ±2 (j) f (x, y) = ex2+y2 , c = 1, 2
8. Esboce as superfícies de nível de f , para os seguintes c:
(a) f (x,y,z) = −x2 − y2 − z2, c =0, ±1, ±2
(b) f (x,y,z) = 4x
2
+ y
2
+ 9z
2
, c =0, ±12 , ±1
(c) f (x,y,z) = x2 + y2 + z, c = 0, ±1, ±2
(d) f (x,y,z) = x − y2 + z2,
c = 0, ±1, ±2
(e) f (x,y,z) = x y z,c = 0, ±1, ±2
(f) f (x,y,z) = e−(x2+y2+z2),c = 0, ±1, ±2
9. Esboce o gráfico das seguintes funções, utilizando as curvas de nível de f :
(a) f (x, y) = x − y − 2
(b) f (x, y) = x2 + 4 y2
(c) f (x, y) = x y
(d) f (x, y) = 2 x2
−3 y2
(e) f (x, y) = |y|(f) f (x, y) =
16 − x2 − y2
(g) f (x, y) =
9 x2 + 4 y2
(h) f (x, y) = e−(x2+y2)
(i) f (x, y) = 1 −
x2 + y2
(j) z = 1 + y2 − x2
(k) z = x2
(l) z =
1 + x2 + y2
(m) z = y3
(n) z = sen(x)
(o) z = ey
10. Função de DuBois-DuBois: Em Medicina, às vezes, se utiliza a seguintefunção para deter-minar a superfície corporal de uma pessoa: S (P, h) = 0.0072 P 0.425 h0.725, que estabeleceuma relação entre a área da superfície S (m2) de uma pessoa, o seu peso P (Kg) e suaaltura h (cm).
(a) Se uma criança pesa 15 kg e mede 87 cm, qual é sua superfície corporal?(b) Esboce as curvas de nível da função S .(c) Esboce o gráfico de S .
11. De forma análoga ao que ocorre no Cálculo de uma variável, dadas f e g funções defini-das em A ⊂ Rn, definimos:
f + g
(u) = f (u) + g(u).f g
(u) = f (u) g(u); em particular,
λ f
(u) = λ f (u), para todo λ ∈ R.
f
g(u) =
f (u)
g(u)
, se g(u)
= 0.
(a) Calcule: f + g, f g, e f g , se f (x, y) = x3 − x y2 − x2 y − y3 + x2 + y2 e g(x, y) =
= x2 y + x y2 − x3 + y3 + x y.(b) Sejam f (x,y,z) = x y z − x2 z2 e g(x,y ,z) = x y z − y2 z2, calcule: f + g, f g, e f
g .

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 64/279
64 CAPÍTULO 2. FUNÇÕES DE VÁRIAS VAR
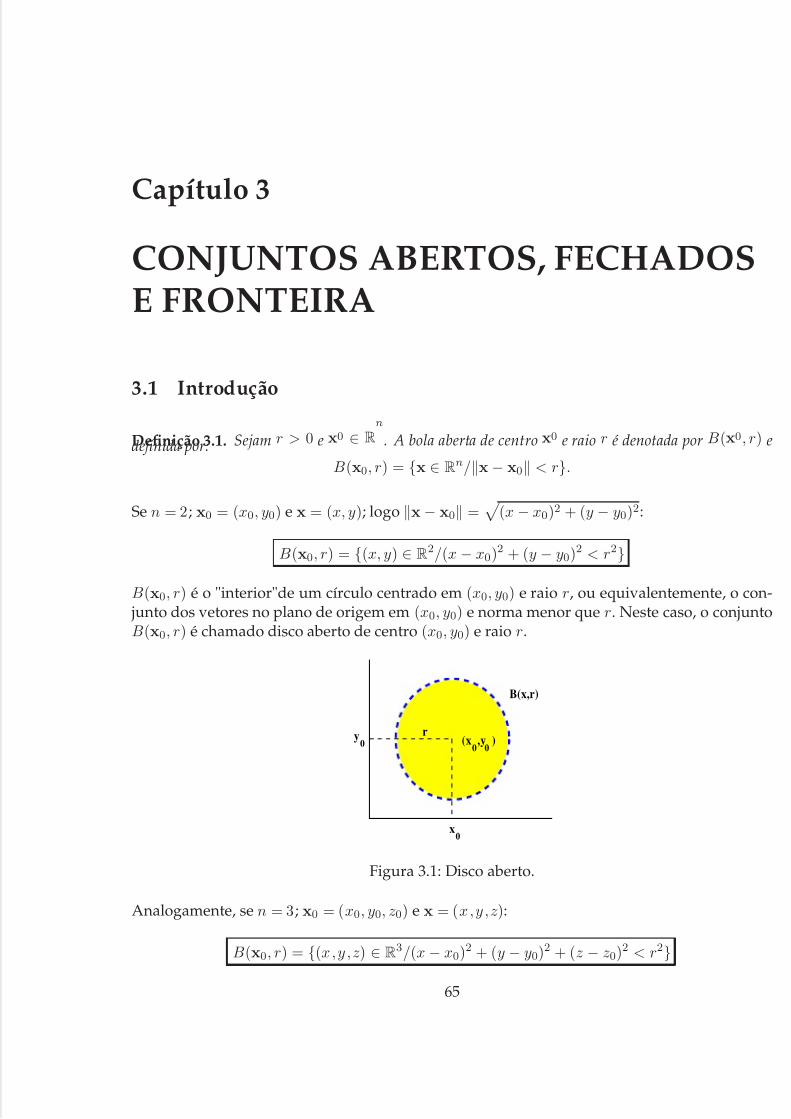
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 65/279
Capítulo 3
CONJUNTOS ABERTOS, FECHADOSE FRONTEIRA
3.1 Introdução
Definição 3.1. Sejam r > 0 e x0 ∈ Rn
. A bola aberta de centro x0 e raio r é denotada por B(x0, r) edefinida por:B(x0, r) = {x ∈ Rn/x− x0 < r}.
Se n = 2; x0 = (x0, y0) e x = (x, y); logo x− x0 =
(x − x0)2 + (y − y0)2:
B(x0, r) = {(x, y) ∈ R2/(x − x0)2 + (y − y0)2 < r2}
B(x0, r) é o "interior"de um círculo centrado em (x0, y0) e raio r, ou equivalentemente, o con- junto dos vetores no plano de origem em (x0, y0) e norma menor que r. Neste caso, o conjuntoB(x0, r) é chamado disco aberto de centro (x0, y0) e raio r.
B(x,r)
x0
0y r
(x ,y )00
Figura 3.1: Disco aberto.
Analogamente, se n = 3; x0 = (x0, y0, z0) e x = (x,y ,z):
B(x0, r) = {(x,y ,z) ∈ R3/(x − x0)2 + (y − y0)2 + (z − z0)2 < r2}
65

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 66/279
66 CAPÍTULO 3. CONJUNTOS ABERTOS, FECHADOS E FRON
B(x0, r) é o "interior"de uma esfera "sólida"centrada em (x0, y0, z0) e raio r, ou equivmente, o conjunto dos vetores no espaço de origem em (x0, y0, z0) e norma menor que r
B(x,r)
r
x
Figura 3.2: Bola aberta.
Observe que em ambos os casos a desigualdade é estrita.
3.2 Conjuntos Abertos
Definição 3.2. A ⊂ Rn é dito aberto em Rn se para todo x ∈ A, existe B(x, r) tal que B(x, r)
A
Figura 3.3: Conjunto aberto.
Estes conjuntos são a generalização natural de intervalos abertos em R. Por definição junto vazio e Rn são conjuntos abertos em Rn.
Exemplo 3.1.
[1] Pela definição, {x} não é aberto em Rn, pois toda bola ou disco aberto de centro x ncontido em {x}. Em geral, os conjuntos do tipo {x1, x2, x3, ....., xn / xi ∈ Rn} não são a
[2] R "pensado"como a reta {(x, 0) / x ∈ R} ⊂ R2 não é aberto no plano, pois qualqueaberto centrado em (x, 0) não está contido em R.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 67/279
3.3. CONJUNTO FRONTEIRA 67
x
Figura 3.4: Exemplo [2].
[3] A = (a, b) × (c, d) é aberto em R2. De fato, para todo (x, y) ∈ A, a < x < b e c < y < d,denote por ε o menor número do conjunto {|x − a|, |x − b|, |y − c|, |y − d|}, onde | | é a distânciaentre números reais. Então, por exemplo, considerando r = ε
6 , temos, B((x, y), r) ⊂ A. Logo Aé um conjunto aberto.
A
c
d
a b
Figura 3.5: Exemplo [3].
[4] A = R2 ⊂ R3 não é aberto no espaço, pois qualquer bola aberta centrada em (x,y, 0) nãoestá contida em R2.
[5] B(x0, r) é um conjunto aberto. De fato, denotando por d(x,y) a distância entre os pontosx, y emRn, sex ∈ B(x0, r) então d(x,x0) < r; tomando r1 = r−d(x,x0) < r , temos: B(x, r1) ⊂B(x0, r).
Será útil dar um nome especial para um conjunto aberto que contenha um ponto dado x. A talconjunto chamaremos de vizinhança do ponto x.
3.3 Conjunto Fronteira
Definição 3.3. Seja A ⊂ Rn. Um ponto x ∈ Rn é dito ponto da fronteira ou do bordo de A se todavizinhança de x intersecta A e Rn − A.
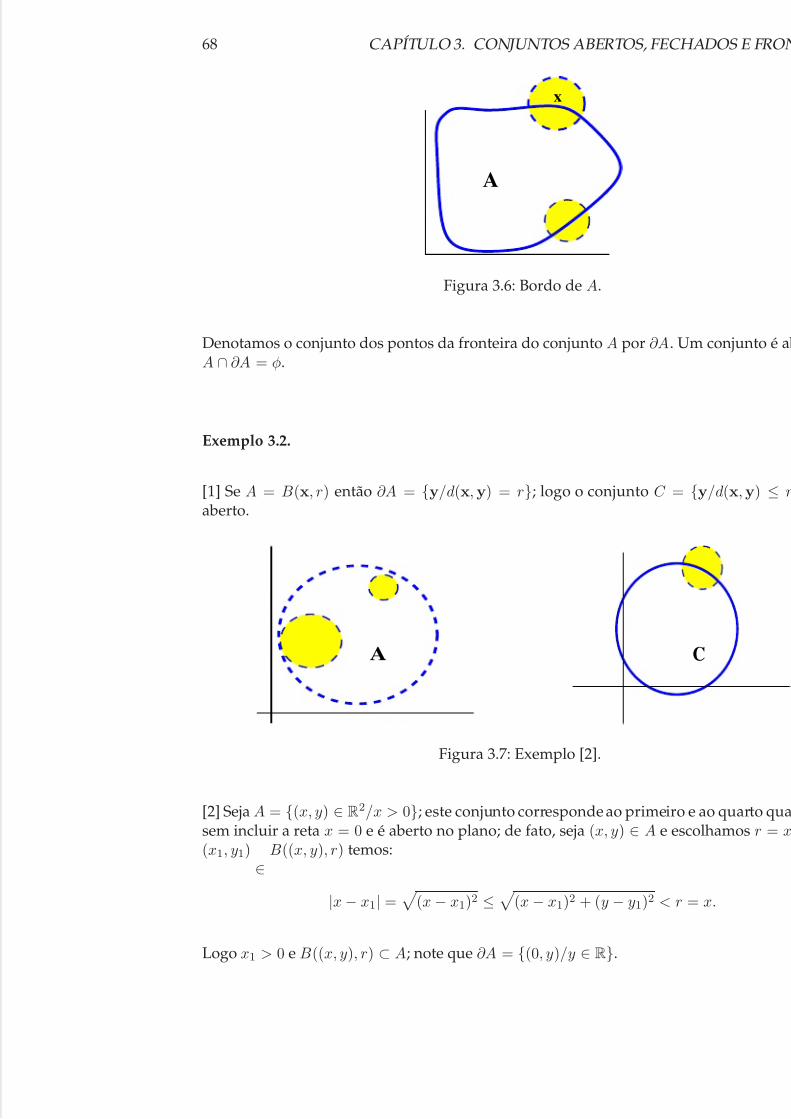
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 68/279
68 CAPÍTULO 3. CONJUNTOS ABERTOS, FECHADOS E FRON
A
x
Figura 3.6: Bordo de A.
Denotamos o conjunto dos pontos da fronteira do conjunto A por ∂A. Um conjunto é abA ∩ ∂A = φ.
Exemplo 3.2.
[1] Se A = B(x, r) então ∂A = {y/d(x,y) = r}; logo o conjunto C = {y/d(x,y) ≤ raberto.
A C
Figura 3.7: Exemplo [2].
[2] Seja A = {(x, y) ∈ R2/x > 0}; este conjunto corresponde ao primeiro e ao quarto quasem incluir a reta x = 0 e é aberto no plano; de fato, seja (x, y) ∈ A e escolhamos r = x(x1, y1)
∈B((x, y), r) temos:
|x − x1| =
(x − x1)2 ≤
(x − x1)2 + (y − y1)2 < r = x.
Logo x1 > 0 e B((x, y), r) ⊂ A; note que ∂A = {(0, y)/y ∈ R}.
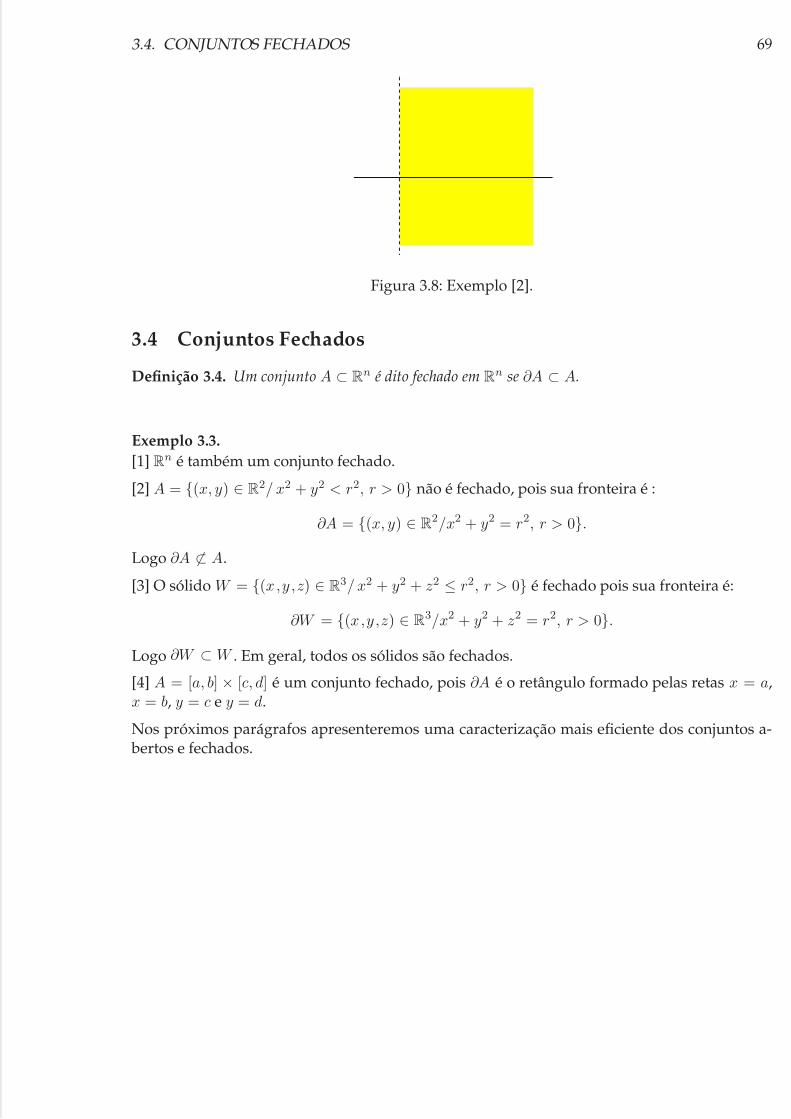
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 69/279
3.4. CONJUNTOS FECHADOS 69
Figura 3.8: Exemplo [2].
3.4 Conjuntos Fechados
Definição 3.4. Um conjunto A ⊂ Rn é dito fechado em Rn se ∂A ⊂ A.
Exemplo 3.3.[1] Rn é também um conjunto fechado.
[2] A = {(x, y) ∈ R2/ x2 + y2 < r2, r > 0} não é fechado, pois sua fronteira é :
∂A = {(x, y) ∈ R2/x2 + y2 = r2, r > 0}.
Logo ∂A ⊂ A.
[3] O sólido W = {(x,y ,z) ∈ R3/ x2 + y2 + z2 ≤ r2, r > 0} é fechado pois sua fronteira é:
∂W = {(x,y,z) ∈ R3/x2 + y2 + z2 = r2, r > 0}.
Logo ∂W ⊂ W . Em geral, todos os sólidos são fechados.
[4] A = [a, b] × [c, d] é um conjunto fechado, pois ∂A é o retângulo formado pelas retas x = a,x = b, y = c e y = d.
Nos próximos parágrafos apresenteremos uma caracterização mais eficiente dos conjuntos a- bertos e fechados.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 70/279
70 CAPÍTULO 3. CONJUNTOS ABERTOS, FECHADOS E FRON
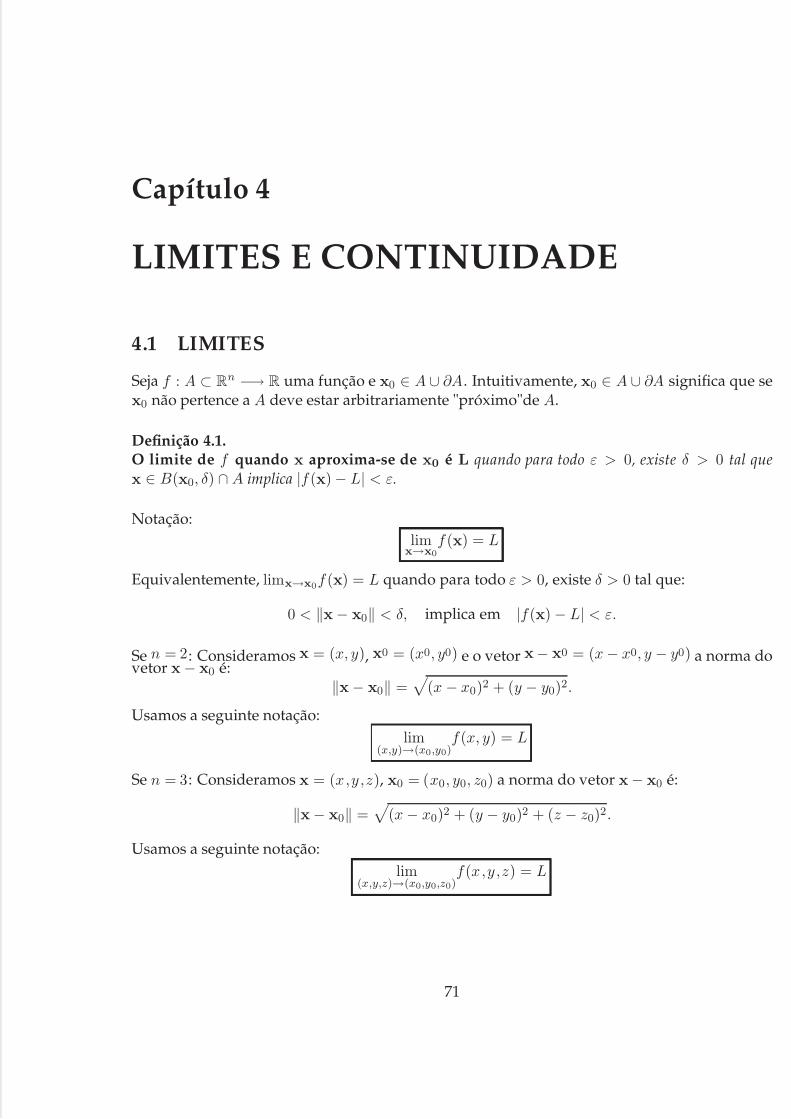
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 71/279
Capítulo 4
LIMITES E CONTINUIDADE
4.1 LIMITES
Seja f : A ⊂ Rn −→ R uma função e x0 ∈ A ∪ ∂A. Intuitivamente, x0 ∈ A ∪ ∂A significa que sex0 não pertence a A deve estar arbitrariamente "próximo"de A.
Definição 4.1.O limite de f quando x aproxima-se de x0 é L quando para todo ε > 0, existe δ > 0 tal quex ∈ B(x0, δ) ∩ A implica |f (x) − L| < ε.
Notação:limx→x0
f (x) = L
Equivalentemente, limx→x0f (x) = L quando para todo ε > 0, existe δ > 0 tal que:
0 < x− x0 < δ, implica em |f (x) − L| < ε.
Se n = 2: Consideramos x = (x, y), x0 = (x0, y0) e o vetor x− x0 = (x − x0, y − y0) a norma dovetor x− x0 é:
x− x0 =
(x − x0)2 + (y − y0)2.
Usamos a seguinte notação:lim
(x,y)→(x0,y0)f (x, y) = L
Se n = 3: Consideramos x = (x,y,z), x0 = (x0, y0, z0) a norma do vetor x− x0 é:
x− x0 =
(x − x0)2 + (y − y0)2 + (z − z0)2.
Usamos a seguinte notação:lim
(x,y,z)→(x0,y0,z0)f (x,y,z) = L
71

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 72/279
72 CAPÍTULO 4. LIMITES E CONTINU
Exemplo 4.1.
Verifique que lim(x,y)→(1,2)
(x + 2 y) = 5. De fato:
|x + 2 y − 5| = |x − 1 + 2 (y − 2)| ≤ |x − 1| + 2 |y − 2|≤
(x − 1)2 + (y − 2)2 + 2
(x − 1)2 + (y − 2)2
≤ 3 (x, y) − (1, 2).
Dado ε > 0, seja δ = ε3 ; (x, y) − (1, 2) < δ implica em |x + 2 y − 5| < 3 δ = ε. Logo:
lim(x,y)→(1,2)
(x + 2 y) = 5.
As propriedades dos limites são análogas às dos limites de funções de uma variávelprovas seguem diretamente da definição.
Teorema 4.1. Seja f : A ⊂ Rn −→ R uma função. Se o limite de f quando x aproxima-se de xentão ele é único.
Este teorema permite fazer simplificações no cálculo de limites.
Proposição 4.1. Sejam f, g : A ⊂ Rn −→ R, x0 ∈ A ∪ ∂A e c ∈ R, tal que limx→x0
f (x
limx→x0
g(x) = M , então:
1. limx→x0
c f (x) = c · L,
2. limx→x0
(f (x) + g(x)) = L + M,
3. limx→x0
(f (x) · g(x)) = L · M,
4. limx→x0
f (x)g(x)
= LM
se M = 0.
5. Em particular, se P = P (x) é um polinômio de várias variáveis:
limx→x0
P (x) = P (x0).
6. Se f (x) = P (x)Q(x) é uma função racional:
limx→x0
P (x)
Q(x)=
P (x0)
Q(x0),
se x0 ∈ Dom(f ).
Do teorema, podemos concluir que se duas curvas passam pelo ponto de abcissa x0 e orvalores diferentes para o limite de uma função quando restrita às curvas, então o limfunção quando x se aproxima de x0 não existe. Veja o exemplo [2].
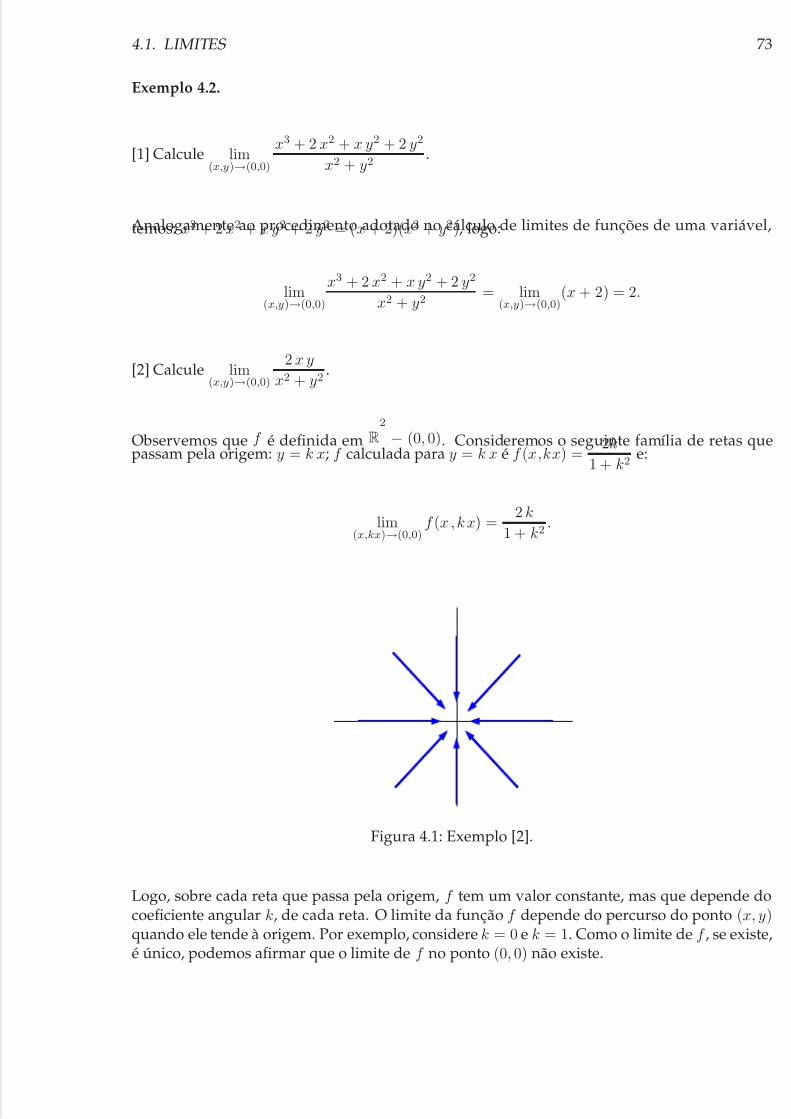
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 73/279
4.1. LIMITES 73
Exemplo 4.2.
[1] Calcule lim(x,y)→(0,0)
x3 + 2 x2 + x y2 + 2 y2
x2 + y2.
Analogamente ao procedimento adotado no cálculo de limites de funções de uma variável,temos: x3 + 2 x2 + x y2 + 2 y2 = (x + 2)(x2 + y2), logo:
lim(x,y)→(0,0)
x3 + 2 x2 + x y2 + 2 y2
x2 + y2= lim
(x,y)→(0,0)(x + 2) = 2.
[2] Calcule lim(x,y)→(0,0)
2 x y
x2 + y2.
Observemos que f é definida em R2
− (0, 0). Consideremos o seguinte família de retas quepassam pela origem: y = k x; f calculada para y = k x é f (x,kx) =
2k
1 + k2e:
lim(x,kx)→(0,0)
f (x , k x) =2 k
1 + k2.
Figura 4.1: Exemplo [2].
Logo, sobre cada reta que passa pela origem, f tem um valor constante, mas que depende docoeficiente angular k, de cada reta. O limite da função f depende do percurso do ponto (x, y)quando ele tende à origem. Por exemplo, considere k = 0 e k = 1. Como o limite de f , se existe,é único, podemos afirmar que o limite de f no ponto (0, 0) não existe.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 74/279
74 CAPÍTULO 4. LIMITES E CONTINU
-0.1 -0.05 0 0.05 0.1
-0.1
-0.05
0
0.05
0.1
Figura 4.2: Curvas de nível do gráfico de f .
[3] Calcule lim(x,y)→(0,0)
x2 y
x4 + y2.
Sejam a reta y = 0 e a parabóla y = x2. Então, f (x, 0) = 0 e:
lim(x,y)−→(0,0)
x2y
x4 + y2 = 0.
Por outro lado, f (x, x2) = 12 e:
lim(x,y)−→(0,0)
x2y
x4 + y2=
1
2.
Logo, o limite não existe. Veja as curvas de nível do G(f ):
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 4.3: Curvas de nível do gráfico de f .
[4] Calcule lim(x,y)→(0,0)
sen(x2 + y2)
x2 + y2.
Do cálculo em uma variável sabemos que limx−→0
sen(x)x
= 1. Logo, para todo ε > 0, exist
tal que 0 < |x| < δ < 1, implica sen(x)
x −1 < ε. Poroutroladose v = (x, y), então v2 =
e:
lim(x,y)→(0,0)
sen(x2 + y2)
x2 + y2= lim
v→0
sen(v2)
v2 ;
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 75/279
4.1. LIMITES 75
se 0 < v < δ, então 0 < v2 < δ2 < δ pois 0 < δ < 1, e
|f (v) − 1| =sen(v2)
v2 − 1 < ε.
Logo,
lim
(x,y)→(0,0)
sen(x2 + y2)
x2
+ y2
= 1.
Observemos que as curvas de nível e o gráfico de f são bem "comportados"numa vizinhançade (0.0).
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 4.4: Curvas de nível e gráfico, respectivamente.
[5] Calcule lim(x,y)→(0,0)
x2 y
x2 + y2.
A função f é definida em R2 − {(0, 0)}. Consideremos a família de retas y = k x; f calculadaem y = k x é f (x , k x) = k x
1+k2 . Logo:
lim(x,y)→(0,0)
x2 y
x2 + y2= lim
(x,kx)→(0,0)
k x
k2 + 1= 0.
Mas, isto não nos garante que o limite:
lim(x,y)→(0,0)
f (x, y) = 0.
Temos que utilizar a definição de limite. De fato, como x2 ≤ x2 + y2 e |y| ≤
x2 + y2, temos:
x2y
x2 + y2 =x2 |y|
x2 + y2≤ (x2 + y2)
x2 + y2
x2 + y2= x2 + y2,
Tomando δ = ε, concluimos que x2 y
x2+y2
< ε, se 0 <
x2 + y2 < δ. Portanto,
lim(x,y)→(0,0)
x2 y
x2 + y2= 0.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 76/279
76 CAPÍTULO 4. LIMITES E CONTINU
A seguir, apresentaremos uma observação e um algoritmo para verificar a não existêum limite, gentilmente cedidos pela Professora Patrícia Nunes da Silva do DepartamAnálise do IME-UERJ. Consideremos o seguinte exemplo:
lim(x,y)→(0,0)
f (x, y) = lim(x,y)→(0,0)
x3
x2 + y.
É fácil verificar que x
3
x2+y tende a zero, se nos aproximamos da origem ao longo de rcurvas do tipo y = xk. No entanto, o limite acima não existe. Para determinar umsegundo a qual o valor do limite de f quando (x, y) se aproxima da origem seja diferzero, devemos proceder do seguinte modo:
i) Procuramos uma curva da forma y(x) = α(x) − x2 com α(x) = 0. Temos:
f (x, y(x)) = f (x, α(x) − x2) =x3
α(x).
Como queremos nos aproximar da origem, a escolha de α(x) deve ser tal que:
limx→0
y(x) = limx→0
(α(x)
−x2) = 0.
Por outro lado, desejamos que x3
α(x) não se aproxime de zero. Por exemplo, se α(x) = x3,
lim(x,y)→(0,0)
f (x, x3 − x2) = lim(x,y)→(0,0)
x3
x3= 1.
ii) Agora, vamos generalizar esta idéia. Devemos calcular o limite de uma função f q(x, y) se aproxima de um ponto (x0, y0) e encontramos várias curvas ao longo das quaição tende a zero. Sabemos que a função é dada pelo quociente de duas funções que se aem (x0, y0), isto é:
lim(x,y)→(x0,y0)f (x, y) = lim(x,y)→(x0,y0)
p(x, y)
q(x, y) , tal que
p(x0, y0) = q(x0, y0) = 0.
Além disso, a função q = q(x, y) se anula ao longo de uma curva γ (x) que passa pelo(x0, y0) e, nesta curva, p = p(x, y) só se anula no ponto (x0, y0). Isto é:
γ (x0) = y0, q(x, γ (x)) = 0 e p(x, γ (x)) = 0,
para todo x = x0. Para encontrar uma curva ao longo da qual a função f não tendedevemos proceder do seguinte modo:
i) Procuramos uma curva da forma y(x) = γ (x) + α(x) com α(x) = 0.
ii) Avaliamos a função f (x, γ (x) + α(x)).
iii) Analisamos a função f (x, γ (x) + α(x)) a fim de determinar uma expressão convenienα(x).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 77/279
4.1. LIMITES 77
Exemplo 4.3.
Verifique que lim(x,y)→(0,0)
x3 + y3
x − ynão existe. Considere p(x, y) = x3 + y3, q(x, y) = x − y e
p(0, 0) = q(0, 0) = 0.
i) Seja γ (x) = x, γ (0) = 0, q(x, γ (x)) = 0, p(x, γ (x)) = 2 x3 = 0 se x = 0. Seja y(x) = x + α(x)com α(x)
= 0.
ii) Por outro lado:
f (x, x + α(x)) =x3 + (x + α(x))3
x − x − α(x)=
x3 + (x + α(x))3
−α(x)= − x3
α(x)− (x + α(x))3
α(x).
Seja α(x) = x3; logo: f (x, x + x3) = −1 − (1 + x2)3 e:
lim(x,y)→(0,0)
f (x, x + x3) = −1 − 1 = −2.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 78/279
78 CAPÍTULO 4. LIMITES E CONTINU
4.2 CONTINUIDADE
Seja A ⊂ Rn e f : A ⊂ Rn −→ R uma função.
Definição 4.2. f é contínua em x0 ∈ A quando:
1. limx→x0
f (x) existe
2. limx→x0
f (x) = f (x0)
Equivalentemente, f contínua em x0, quando para todo ε > 0 existe δ > 0 tal que se:
x− x0 < δ, então |f (x) − f (x0)| < ε.
Definição 4.3. Dizemos que f é contínua em A se f é contínua em cada x0 ∈ A.
Exemplo 4.4.
[1] Se P = P (x) é uma função polinomial de várias variáveis, então P é contínua em quponto do Rn.
[2] A seguinte função não é contínua na origem:
f (x, y) =
2 x y
x2+y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
De fato:
lim(x,y)→(0,0)
f (x, y) = lim(x,kx)→(0,0)
2 k
k2 + 1=
2 k
k2 + 1
isto é, o limite não existe pois depende de k; logo, f não é contínua.
[3] A seguinte função é contínua na origem:
f (x, y) =
x2y
x2+y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
De fato:
lim(x,y)→(0,0)
x2y
x2 + y2= f (0, 0) = 0.
Veja os desenhos da curvas de nível e gráfico de f , respectivamente:
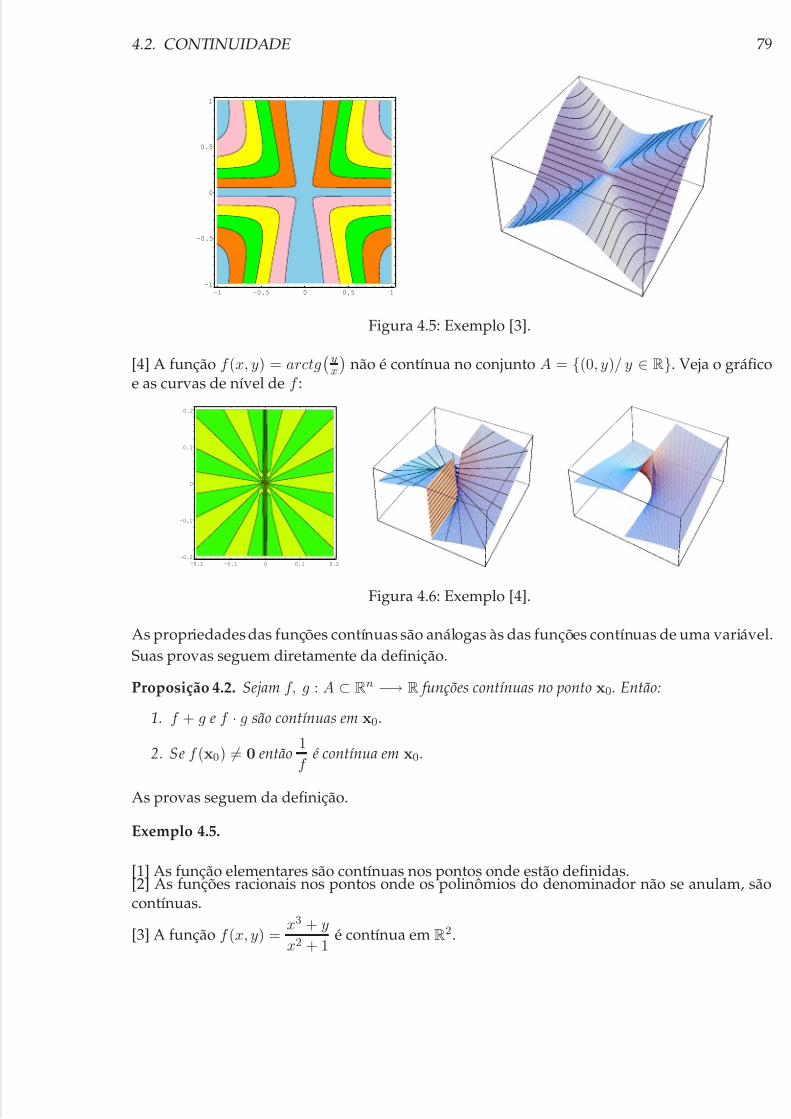
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 79/279
4.2. CONTINUIDADE 79
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 4.5: Exemplo [3].
[4] A função f (x, y) = arctg y
x
não é contínua no conjunto A = {(0, y)/ y ∈ R}. Veja o gráfico
e as curvas de nível de f :
-0.2 -0.1 0 0.1 0.2
-0.2
-0.1
0
0.1
0.2
Figura 4.6: Exemplo [4].
As propriedades das funções contínuas são análogas às das funções contínuas de uma variável.Suas provas seguem diretamente da definição.
Proposição 4.2. Sejam f, g : A ⊂ Rn −→ R funções contínuas no ponto x0. Então:
1. f + g e f · g são contínuas em x0.
2. Se f (x0) = 0 então1
f é contínua em x0.
As provas seguem da definição.
Exemplo 4.5.
[1] As função elementares são contínuas nos pontos onde estão definidas.[2] As funções racionais nos pontos onde os polinômios do denominador não se anulam, sãocontínuas.
[3] A função f (x, y) =x3 + y
x2 + 1é contínua em R2.
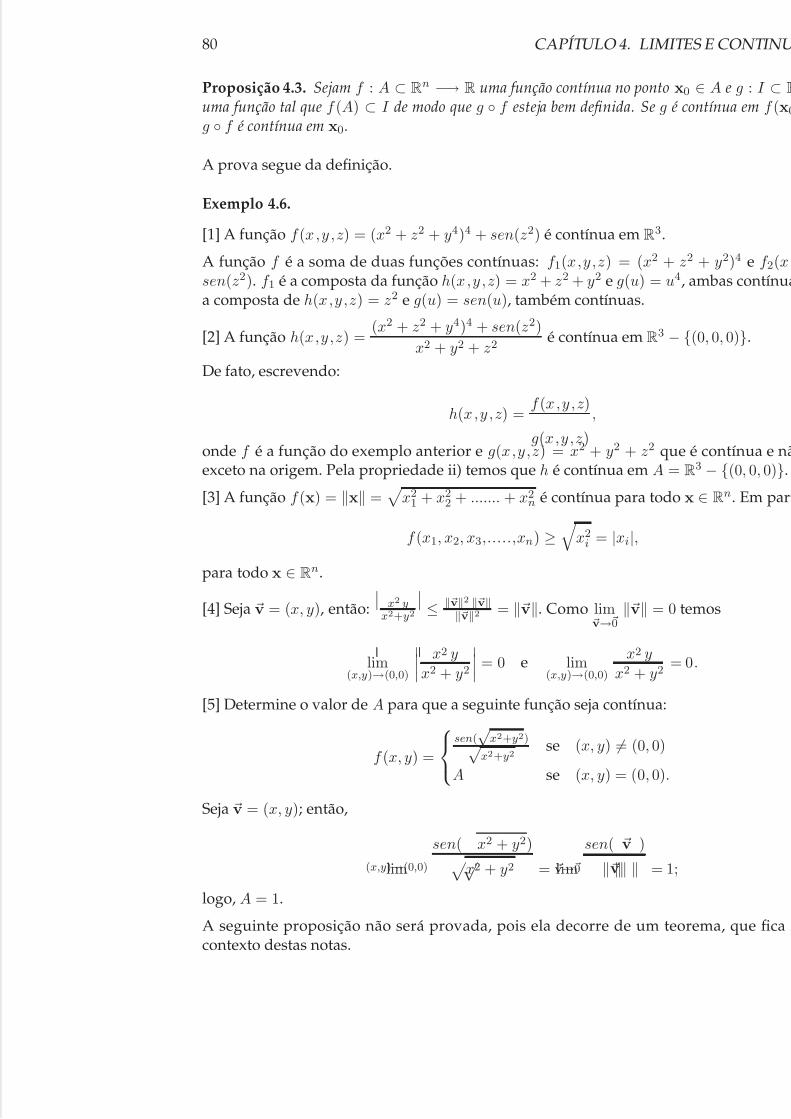
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 80/279
80 CAPÍTULO 4. LIMITES E CONTINU
Proposição 4.3. Sejam f : A ⊂ Rn −→ R uma função contínua no ponto x0 ∈ A e g : I ⊂ R
uma função tal que f (A) ⊂ I de modo que g ◦ f esteja bem definida. Se g é contínua em f (x0g ◦ f é contínua em x0.
A prova segue da definição.
Exemplo 4.6.
[1] A função f (x,y ,z) = (x2 + z2 + y4)4 + sen(z2) é contínua em R3.
A função f é a soma de duas funções contínuas: f 1(x,y,z) = (x2 + z2 + y2)4 e f 2(x,sen(z2). f 1 é a composta da função h(x,y ,z) = x2 + z2 + y2 e g(u) = u4, ambas contínuaa composta de h(x,y,z) = z2 e g(u) = sen(u), também contínuas.
[2] A função h(x,y,z) =(x2 + z2 + y4)4 + sen(z2)
x2 + y2 + z2é contínua em R3 − {(0, 0, 0)}.
De fato, escrevendo:
h(x,y ,z) =f (x,y ,z)
g(x,y,z)
,
onde f é a função do exemplo anterior e g(x,y,z) = x2 + y2 + z2 que é contínua e nãexceto na origem. Pela propriedade ii) temos que h é contínua em A = R3 − {(0, 0, 0)}.
[3] A função f (x) = x =
x21 + x2
2 + ....... + x2n é contínua para todo x ∈ Rn. Em part
f (x1, x2, x3,.....,xn) ≥
x2i = |xi|,
para todo x ∈ Rn.
[4] Seja v = (x, y), então:
x2 yx2+y2
≤ v2 v
v2 = v. Como lim v→ 0
v = 0 temos
lim(x,y)→(0,0)
x2 y
x2 + y2
= 0 e lim(x,y)→(0,0)
x2 y
x2 + y2= 0.
[5] Determine o valor de A para que a seguinte função seja contínua:
f (x, y) =
sen(√
x2+y2)√x2+y2
se (x, y) = (0, 0)
A se (x, y) = (0, 0).
Seja v = (x, y); então,
lim(x,y)→(0,0)
sen( x2 + y2) x2 + y2 = lim v→ 0
sen(
v
)
v = 1;
logo, A = 1.
A seguinte proposição não será provada, pois ela decorre de um teorema, que fica fcontexto destas notas.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 81/279
4.3. EXERCÍCIOS 81
Proposição 4.4. Seja h : Rn −→ R uma função contínua; então:
1. A = {x ∈ Rn / 0 < h(x)} é aberto em Rn.
2. F = {x ∈ Rn / 0 ≤ h(x)} é fechado em Rn.
3. ∂A = {x ∈ Rn / h(x) = 0}.
Exemplo 4.7.
[1] Os planos em R3 são conjuntos fechados. De fato, considere:
h(x,y ,z) = a x + b y + c z − d.
A função h é contínua em R3.
[2] O sólido W = {(x,y,z) ∈ R3/ x2 + y2 + z2 ≤ r2, r > 0} é um conjunto fechado. De fato,considere:
h(x,y ,z) = x2
+ y2
+ z2
− r2
.A função h é contínua em R3 e pela proposição W é fechado.
[3] A parábola A = {(x, y) ∈ R2/y = x2} é um conjunto fechado. De fato, considere:
h(x, y) = y − x2.
A função é contínua em R2 e pela proposição A é fechado.
4.3 Exercícios
1. Utilizando as propriedades de limite, calcule:
(a) lim(x,y)→(0,1)
x3y
(b) lim(x,y)→(0,1)
exy
(c) lim(x,y)→(0,0)
xy
x2 + y2 + 2
(d) lim(x,y)→(0,0)
sen(xy)
xy
(e) lim(x,y)→(1,1)
x3y + y3 + 3
(f) lim(x,y)→(0,0)
sen2(xy)
(xy)2
(g) lim(x,y)→(1,1)
ln(|1 + x2 y3|)
(h) lim(x,y,z)→(1,2,6)
1
x+
1
y+
1
z
2. Verifique se os limites das seguintes funções dadas existem no ponto (0, 0):
(a) f (x, y) = x2
x2+y2
(b) f (x, y) = x3+y3
x2+y
(c) f (x, y) = 6x2y2+2xy3
(x2+y2)2
(d) f (x, y) = x2y2
x3+y3
(e) f (x, y) = x3+y3
(x2+y)2
(f) f (x, y) = x4+3x y2
x2+y2

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 82/279
82 CAPÍTULO 4. LIMITES E CONTINU
3. Verifique que os limites das seguintes funções existem se (x, y) → (0, 0):
(a) f (x, y) = x3+y3
x2+y2(b) f (x, y) = xy√
x2+y2
4. Verifique que:
(a) lim(x,y)→(0,0)
1 − cos√x y
x
= 0 (b) lim(x,y)→(0,0)
sen(x2 + y2)1 − cos
x2 + y2
=
5. Verifique que: limx→0
limy→0
x2
x2 + y2 = lim
y→0
limx→0
x2
x2 + y2.
6. Seja: f (x, y) =
xsen
1y
se y = 0
0 se y = 0.. Verifique que:
(a) lim(x,y)
→(0,0)
f (x, y) = 0
(b) limx→0
limy→0
f (x, y) = lim
y→0
limx→0
f (x, y).
7. Discuta a continuidade das seguintes funções:
(a) f (x, y) =
xy√x2+y2
se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(b) f (x, y) =
x2y
x4+y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(c) f (x, y) =
x+y
x2+y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(d) f (x, y) =
x3+y3
x2+y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(e) f (x, y) =
x3 y3
x2+y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
(f) f (x, y) =
sen(x+y)
x+y se (x, y) = (0, 0)
2 se (x, y) = (0, 0).
(g) f (x,y,z) =
x z−y2
x2+y2+z2 se (x,y,z) = (0, 0, 0)
0 se (x,y,z) = (0, 0, 0).
8. Usando a composição de funções, verifique que as seguintes funções são contínua
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 83/279
4.3. EXERCÍCIOS 83
(a) f (x, y) =
x2 + y2
(b) f (x, y) = xyx2+y2+1
(c) f (x, y) =
x4 + y4 + 1
(d) f (x, y) = sen(x2y + y2x)
(e) f (x, y) = sen(xy)x2+y2
; x, y = 0
(f) f (x, y) = cos3(xy3)
(g) f (x, y) = 1√3−sen(xy)
; x, y = 0
(h) f (x, y) = sech3(xy3)
(i) f (x,y,z) = ln(
x2 + y2 + z2 − 1)
(j) f (x,y,z) = 1x2
−y2
−z+1
9. Calcule o valor de a para que a função
f (x, y) =
x2 y2√y2+1−1 se (x, y) = (0, 0)
a − 4 se (x, y) = (0, 0),
seja contínua.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 84/279
84 CAPÍTULO 4. LIMITES E CONTINU
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 85/279
Capítulo 5
DERIVADAS PARCIAIS
5.1 Introdução
Definição 5.1. Sejam A ⊂ R3 um conjunto aberto e f : A −→ R uma função.
1. A derivada parcial de f em relação à variável x , no ponto (x,y,z)
∈A é denotada por
∂f ∂x
(x,y,z) e definida por:
∂f
∂x(x,y,z) = lim
t−→0
f (x + t,y,z) − f (x,y,z)
t
se o limite existe.
2. A derivada parcial de f em relação à variável y , no ponto (x,y,z) ∈ A é denotada por∂f
∂y(x,y,z) e definida por:
∂f ∂y
(x,y,z) = limt−→0
f (x, y + t, z) − f (x,y,z)t
se o limite existe.
3. A derivada parcial de f em relação à variável z , no ponto (x,y,z) ∈ A é denotada por∂f
∂z(x,y,z) e definida por:
∂f
∂z(x,y,z) = lim
t−→0
f (x,y,z + t) − f (x,y,z)
t
se o limite existe.
De forma análoga são definidas as derivadas parciais para funções de duas variáveis. Observeque o conjunto A deve ser aberto, pois para todo x ∈ A é necessário que x+ tei ∈ A i = 1, 2, 3,o que é verdadeiro se |t| < η (η > 0 pequeno). Veja a bibliografia.
85
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 86/279
86 CAPÍTULO 5. DERIVADAS PA
Exemplo 5.1.
[1] Se z = f (x, y) = x y, calcule suas derivadas parciais. Estamos no caso n = 2:
∂f
∂x(x, y) = lim
t−→0
f (x + t, y) − f (x, y)
t= lim
t−→0
(x + t) y − x y
t= lim
t−→0
t y
t= y,
∂f ∂y
(x, y) = limt−→0
f (x, t + y) − f (x, y)t
= limt−→0
x (t + y) − x yt
= limt−→0
t xt
= x.
[2] Se w = f (x,y ,z) = x2 y z2, calcule suas derivadas parciais. Estamos no caso n = 3:
∂f
∂x(x,y ,z) = lim
t−→0
f (x + t,y ,z) − f (x,y,z)
t= lim
t−→0
(x + t)2 y z2 − x2 y z2
t
= limt−→0
2 x y z2 t + t2yz2
t= 2 x y z2,
∂f
∂y(x,y ,z) = lim
t−→0
f (x, t + y, z) − f (x,y,z)
t= lim
t−→0
x2 (t + y) z2 − x2 y z2
t
= limt−→0
t x2 z2
t= x2 z2,
∂f
∂z(x,y ,z) = lim
t−→0
f (x,y,t + z) − f (x,y,z)
t= lim
t−→0
x2 y (t + z)2 − x2 y z2
t
= limt−→0
t2 x2 y + 2 t x2 y z
t= 2 x2 y z.
Observação 5.1.
Seja y = c, fixado e consideremos g(x) = f (x, c); logo:
g′(x) = limt−→0
g(x + t) − g(x)
t= lim
t−→0
f (x + t, c) − f (x, c)
t=
∂f
∂x(x, c);
se h(y) = f (c, y), então:
h′(y) =∂f
∂y(c, y).
Analogamente para mais variáveis. Consequentemente, para derivar parcialmente umaem relação a x, as demais variáveis são consideradas como constantes e a derivaçãocomo em R. Em relação às outras variáveis o procedimento é análogo. Assim, todas as
de derivação estudadas para funções em R podem ser aplicadas.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 87/279
5.1. INTRODUÇÃO 87
Exemplo 5.2.
[1] Se z = f (x, y) =
x2 + y2, calcule suas derivadas parciais. Calculemos, primeiramente,a derivada parcial de f em relação a x. Pela observação anterior consideramos z =
√x2 + c,
onde c = y2; derivando como em R:
∂f
∂x
(x, y) =x
√x2
+ c
=x
x2
+ y2
;
analogamente para y: fazemos c = x2:
∂f
∂y(x, y) =
y c + y2
=y
x2 + y2.
[2] Se z = f (x, y) = (x2 + y2) cos(x y), calcule suas derivadas parciais no ponto (1, π). Cal-culemos, primeiramente, a derivada parcial de f em relação a x. Pela observação anteriorconsideramos z = (x2 + c2) cos(c x), onde y = c; derivando como em R:
∂f
∂x
(x, y) = (x2 + c2) cos(c x))′ = 2 xcos(c x)
−c (x2 + c2) sen(c x)
= 2 xcos(x y) − y (x2 + y2) sen(x y);
analogamente para y: fazemos z = (c2 + y2) cos(c y):
∂f
∂y(x, y) =
(c2 + y2) cos(c y)
′= 2 y cos(c y) − c (c2 + y2) sen(c y)
= 2 y cos(x y) − x (x2 + y2) sen(x y));
∂f ∂x (1, π) = −2, ∂f
∂y (1, π) = −2 π.
[3] Se w = f (x,y,z) = ln(x2 + y2 + z2), calcule suas derivadas parciais. Calculemos, primeira-
mente, a derivada parcial de f em relação a x. Seja w = ln(x
2
+ c), onde c = y
2
+ z
2
; derivandocomo em R, temos:∂f
∂x(x,y,z) =
2 x
x2 + c=
2 x
x2 + y2 + z2;
analogamente para y: fazemos c = x2 + z2 e para z: c = x2 + y2:
∂f
∂y(x,y,z) =
2 y
y2 + c=
2 y
x2 + y2 + z2e
∂f
∂z(x,y,z) =
2 z
c + z2=
2 z
x2 + y2 + z2.
[4] Se w = f (x,y,z) = senx y
z
, calcule suas derivadas parciais. Calculemos, primeiramente, a
derivada parcial de f em relação a x; seja w = sen(c x), onde c = yz ; derivando:
∂f ∂x
(x,y,z) = ccos(c x) = yz
cos
x yz
;
analogamente para y; fazemos c = xz e para z; fazemos c = x y:
∂f
∂y(x,y,z) = ccos(c y) =
x
zcosx y
z
e
∂f
∂z(x,y,z) = −c z−2cos(
c
z) = −x y
z2cosx y
z
.
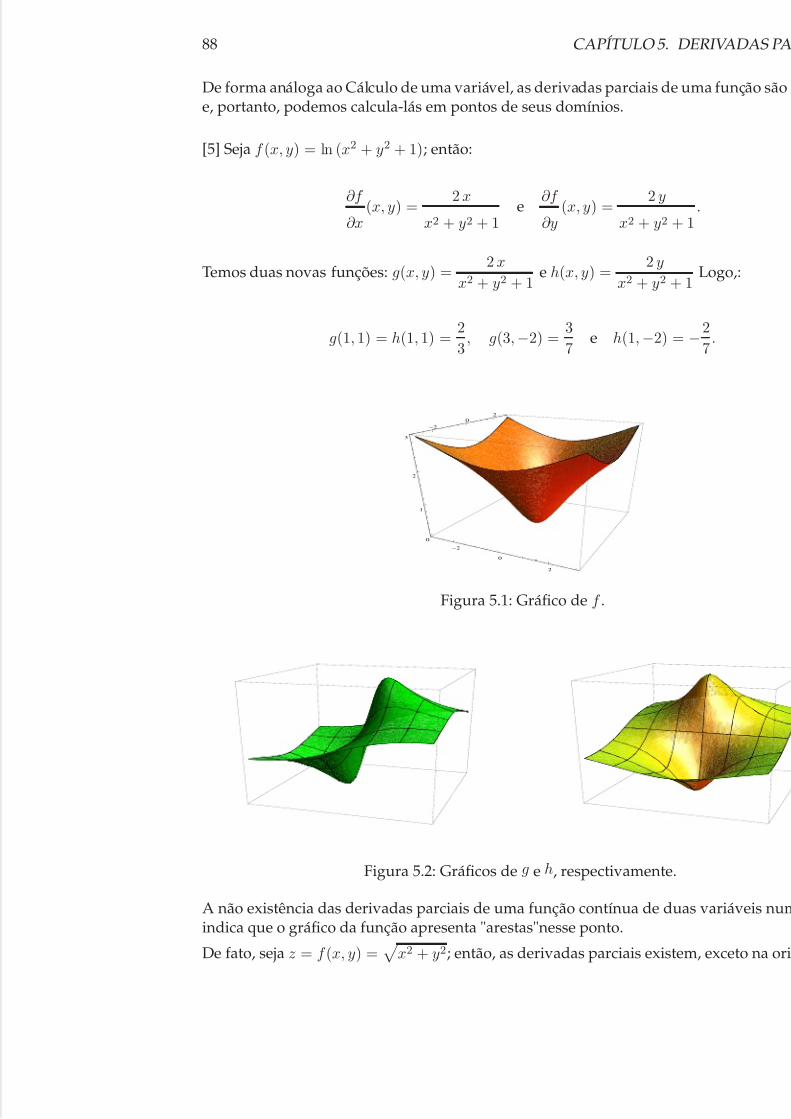
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 88/279
88 CAPÍTULO 5. DERIVADAS PA
De forma análoga ao Cálculo de uma variável, as derivadas parciais de uma função são fe, portanto, podemos calcula-lás em pontos de seus domínios.
[5] Seja f (x, y) = ln (x2 + y2 + 1); então:
∂f
∂x(x, y) =
2 x
x2 + y2 + 1e
∂f
∂y(x, y) =
2 y
x2 + y2 + 1.
Temos duas novas funções: g(x, y) =2 x
x2 + y2 + 1e h(x, y) =
2 y
x2 + y2 + 1Logo,:
g(1, 1) = h(1, 1) =2
3, g(3, −2) =
3
7e h(1, −2) = −2
7.
2
0
2
2
0
2
0
1
2
3
Figura 5.1: Gráfico de f .
Figura 5.2: Gráficos de g e h, respectivamente.
A não existência das derivadas parciais de uma função contínua de duas variáveis numindica que o gráfico da função apresenta "arestas"nesse ponto.
De fato, seja z = f (x, y) =
x2 + y2; então, as derivadas parciais existem, exceto na ori
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 89/279
5.2. GENERALIZAÇÕES 89
Figura 5.3: Gráfico de f (x, y) =
x2 + y2.
5.2 Generalizações
Definição 5.2. Seja A ⊂ Rn um conjunto aberto, x = (x1, x2,...,xn) ∈ A e f : A −→ R uma função. A derivada parcial de f em relação à j-ésima variável no ponto x ∈ A é denotada por ∂f
∂xj(x) e definida
por:∂f
∂x j (x) = limt−→0
f (x1,...,x j + t,..,xn)
−f (x1,....,xn)
t ,
se o limite existe.
Fazendo j = 1,...,n, temos as derivadas parciais de f em relação à primeira, à segunda, àterceira, ......., à n-ésima variáveis, respectivamente. Denotando por e j = (0,...., 1,....0) o vetorque tem todas as componentes zero exceto a j-ésima, que é igual a 1, temos:
∂f
∂x j(x) = lim
t−→0
f (x + te j) − f (x)
t.
5.3 Interpretação Geométrica das Derivadas ParciaisO gráfico de uma função de duas variáveis z = f (x, y) é, em geral, uma superfície em R3. Ainterseção desta superfície com um plano paralelo ao plano xz, que passa pelo ponto (0, y0, 0)é uma curva plana (ou um ponto) que satisfaz às condições:
z = f (x, y)
y = y0.
Como a curva é plana, podemos considerá-la como o gráfico de uma função de uma variável, asaber: g(x) = f (x, y0). Logo, o coeficiente angular da reta tangente à curva no ponto x0, relativa
ao plano, é:
g′(x0) =∂f
∂x(x0, y0)
Analogamente, a curva plana definida pela interseção do gráfico de f com o plano que passapor (x0, 0, 0) paralelo ao plano yz pode ser definida por h(y) = f (x0, y). Logo, o coeficiente
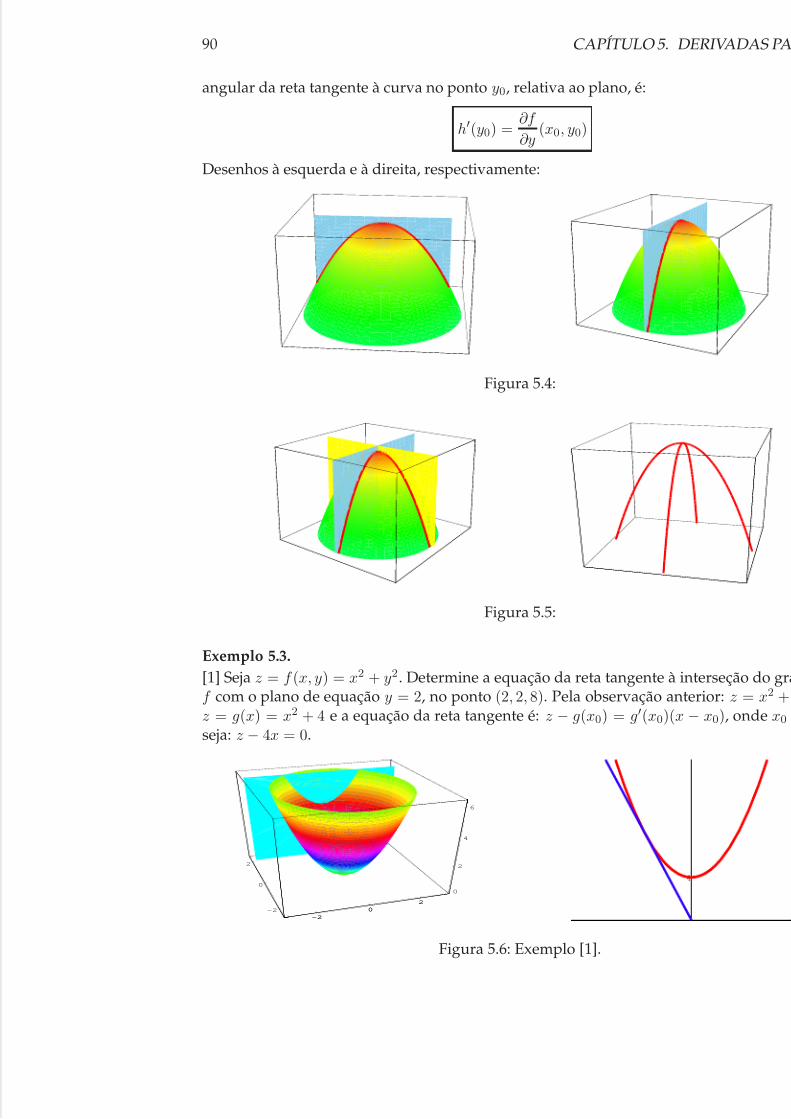
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 90/279
90 CAPÍTULO 5. DERIVADAS PA
angular da reta tangente à curva no ponto y0, relativa ao plano, é:
h′(y0) =∂f
∂y(x0, y0)
Desenhos à esquerda e à direita, respectivamente:
Figura 5.4:
Figura 5.5:
Exemplo 5.3.[1] Seja z = f (x, y) = x2 + y2. Determine a equação da reta tangente à interseção do gráf com o plano de equação y = 2, no ponto (2, 2, 8). Pela observação anterior: z = x2 + z = g(x) = x2 + 4 e a equação da reta tangente é: z − g(x0) = g′(x0)(x − x0), onde x0
seja: z − 4x = 0.
-2
0
2
-2
0
2
0
2
4
6
-2
0
2
4
Figura 5.6: Exemplo [1].
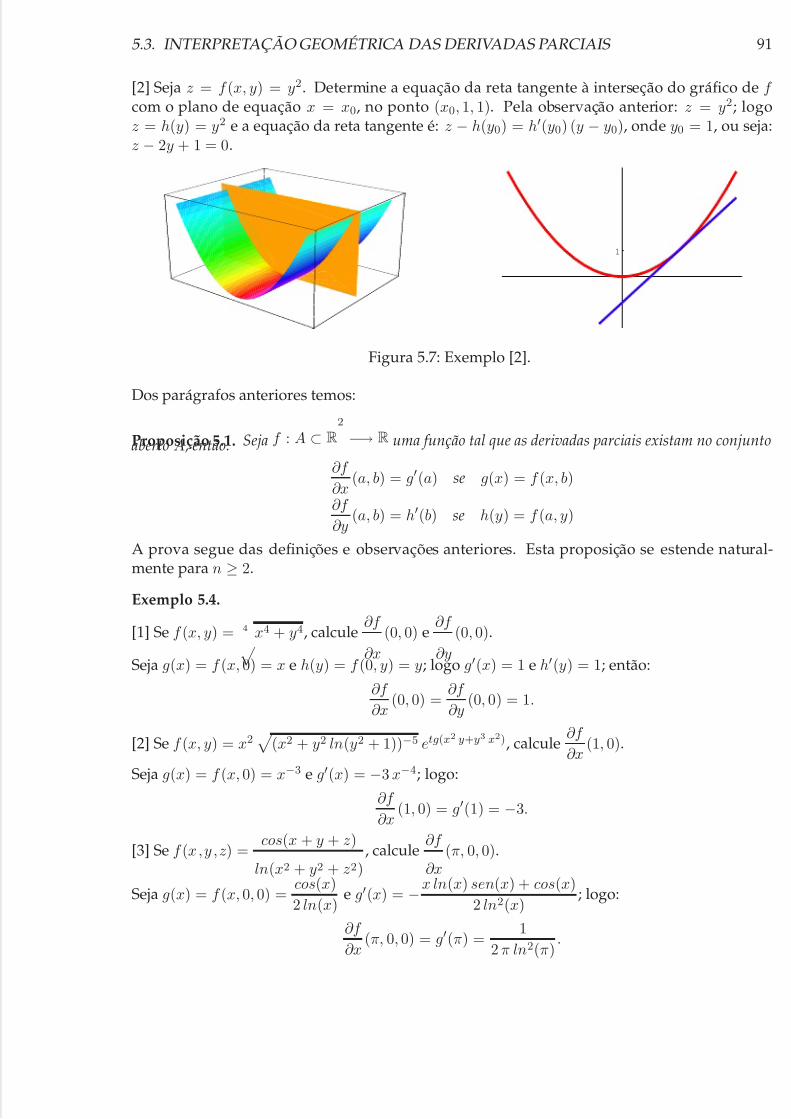
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 91/279
5.3. INTERPRETAÇÃO GEOMÉTRICA DAS DERIVADAS PARCIAIS 91
[2] Seja z = f (x, y) = y2. Determine a equação da reta tangente à interseção do gráfico de f com o plano de equação x = x0, no ponto (x0, 1, 1). Pela observação anterior: z = y2; logoz = h(y) = y2 e a equação da reta tangente é: z − h(y0) = h′(y0) (y − y0), onde y0 = 1, ou seja:z − 2y + 1 = 0.
1
Figura 5.7: Exemplo [2].
Dos parágrafos anteriores temos:
Proposição 5.1. Seja f : A ⊂ R2
−→ R uma função tal que as derivadas parciais existam no conjuntoaberto A, então:∂f
∂x(a, b) = g′(a) se g(x) = f (x, b)
∂f
∂y(a, b) = h′(b) se h(y) = f (a, y)
A prova segue das definições e observações anteriores. Esta proposição se estende natural-mente para n ≥ 2.
Exemplo 5.4.
[1] Se f (x, y) = 4 x4 + y4, calcule∂f
∂x
(0, 0) e∂f
∂y
(0, 0).
Seja g(x) = f (x, 0) = x e h(y) = f (0, y) = y; logo g′(x) = 1 e h′(y) = 1; então:
∂f
∂x(0, 0) =
∂f
∂y(0, 0) = 1.
[2] Se f (x, y) = x2
(x2 + y2 ln(y2 + 1))−5 etg(x2 y+y3 x2), calcule∂f
∂x(1, 0).
Seja g(x) = f (x, 0) = x−3 e g′(x) = −3 x−4; logo:
∂f
∂x(1, 0) = g′(1) = −3.
[3] Se f (x,y ,z) =cos(x + y + z)
ln(x2 + y2 + z2), calcule
∂f
∂x(π, 0, 0).
Seja g(x) = f (x, 0, 0) =cos(x)
2 ln(x)e g′(x) = −x ln(x) sen(x) + cos(x)
2 ln2(x); logo:
∂f
∂x(π, 0, 0) = g′(π) =
1
2 π ln2(π).
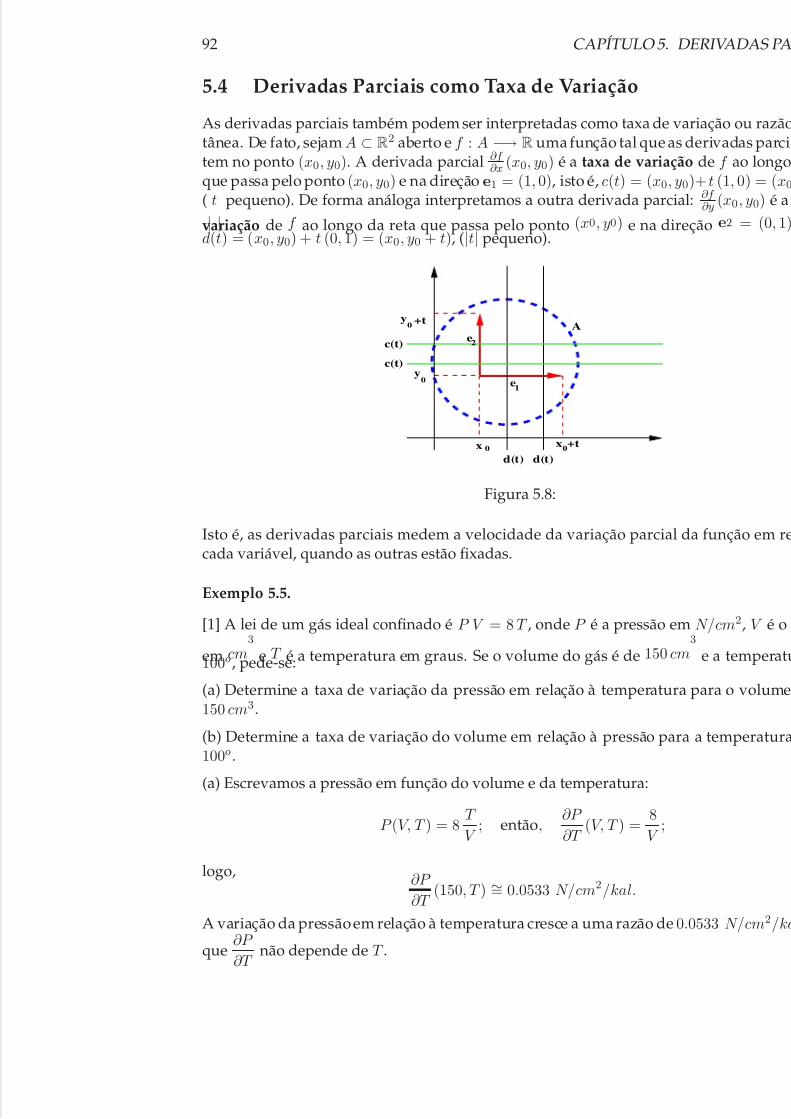
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 92/279
92 CAPÍTULO 5. DERIVADAS PA
5.4 Derivadas Parciais como Taxa de Variação
As derivadas parciais também podem ser interpretadas como taxa de variação ou razãotânea. De fato, sejam A ⊂ R2 aberto e f : A −→ R uma função tal que as derivadas parciatem no ponto (x0, y0). A derivada parcial ∂f
∂x (x0, y0) é a taxa de variação de f ao longoque passa pelo ponto (x0, y0) e na direção e1 = (1, 0), isto é, c(t) = (x0, y0)+ t (1, 0) = (x0
(|t
|pequeno). De forma análoga interpretamos a outra derivada parcial: ∂f
∂y (x0, y0) é a
variação de f ao longo da reta que passa pelo ponto (x0, y0) e na direção e2 = (0, 1)d(t) = (x0, y0) + t (0, 1) = (x0, y0 + t), (|t| pequeno).
0
0+t
0 0+t
e
e
2
1
Ay
y
x x
d(t) d(t)
c(t)
c(t)
Figura 5.8:
Isto é, as derivadas parciais medem a velocidade da variação parcial da função em recada variável, quando as outras estão fixadas.
Exemplo 5.5.
[1] A lei de um gás ideal confinado é P V = 8 T , onde P é a pressão em N/cm2, V é o v
em cm3
e T é a temperatura em graus. Se o volume do gás é de 150 cm3
e a temperatu100o, pede-se:
(a) Determine a taxa de variação da pressão em relação à temperatura para o volume 150 cm3.
(b) Determine a taxa de variação do volume em relação à pressão para a temperatura100o.
(a) Escrevamos a pressão em função do volume e da temperatura:
P (V, T ) = 8T
V ; então,
∂P
∂T (V, T ) =
8
V ;
logo,∂P
∂T (150, T ) ∼= 0.0533 N/cm2/kal.
A variação da pressão em relação à temperatura cresce a uma razão de 0.0533 N/cm2/ka
que∂P
∂T não depende de T .

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 93/279
5.4. DERIVADAS PARCIAIS COMO TAXA DE VARIAÇÃO 93
(b) Escrevemos o volume em função da pressão e da temperatura:
V (P, T ) = 8T
P ; então,
∂V
∂P (P, T ) = −8
T
P 2.
Por outro lado, P = 8 T V e para T = 100 e V = 150, obtemos P = 16
3 ; logo:
∂V ∂P
( 163
, 100) = −28.13 cm3/N.
A variação do volume em relação à pressão diminui a uma razão de 28.13 cm3/N .
[2] O potencial elétrico no ponto (x,y ,z) é dado por:
V (x,y ,z) =x
x2 + y2 + z2,
onde V é dado em volts e x, y e z em cm. Determine a taxa de variação instantânea de V emrelação à distância em (1, 2, 3) na direção do:
(a) eixo dos x;(b) eixo dos y;
(c) eixo dos z.
(a) Devemos calcular∂V
∂x(1, 2, 3). Seja g(x) = f (x, 2, 3) =
x√x2 + 13
; então:
∂V
∂x(x, 2, 3) = g′(x) =
13
(x + 13)3/2,
logo;∂V
∂x
(1, 2, 3) =13
14 √14
volts/cm.
(b) Devemos calcular∂V
∂y(1, 2, 3): Seja h(y) = f (1, y, 3) =
1 y2 + 10
; então:
∂V
∂y= h′(y) = − y
(y2 + 10)3/2,
logo;∂V
∂y(1, 2, 3) = − 1
7√
14volts/cm.
(c) Devemos calcular∂V
∂z(1, 2, 3): Seja k(z) = f (1, 2, z) =
1√z2 + 5
; então:
∂V
∂z= k′(z) = − z
(z2 + 5)3/2,
logo;∂V
∂z(1, 2, 3) = − 3
14√
14volts/cm.
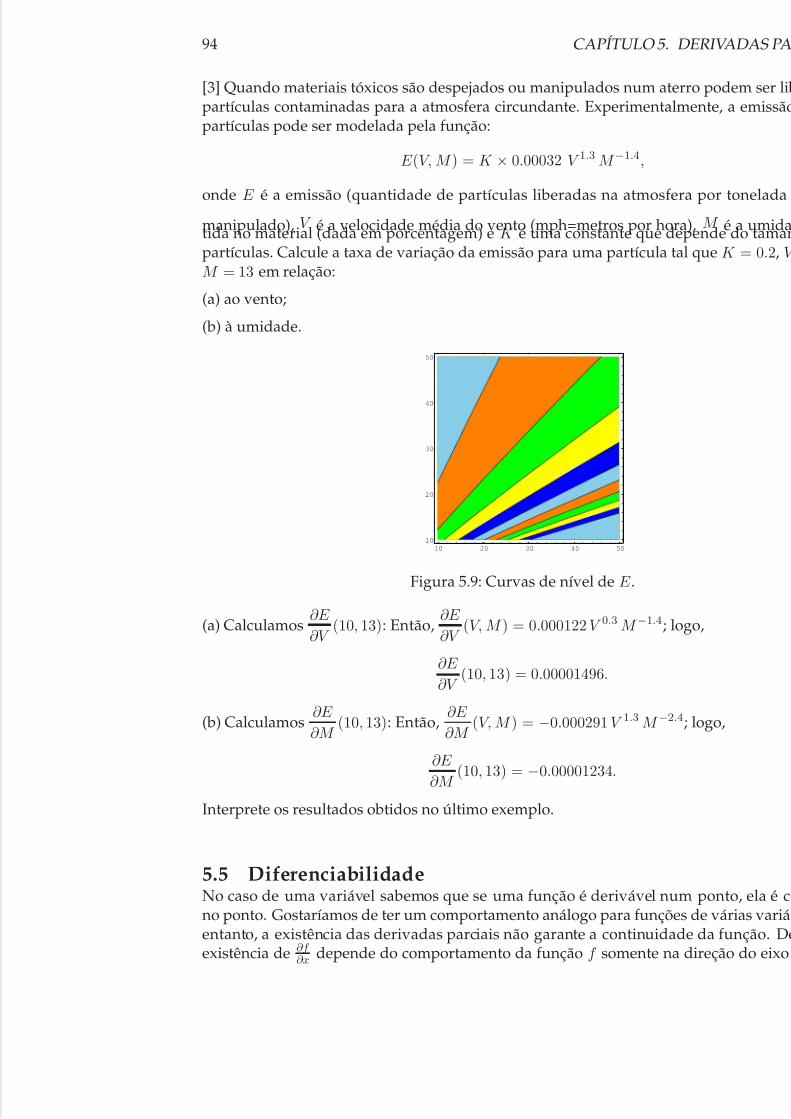
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 94/279
94 CAPÍTULO 5. DERIVADAS PA
[3] Quando materiais tóxicos são despejados ou manipulados num aterro podem ser libpartículas contaminadas para a atmosfera circundante. Experimentalmente, a emissãopartículas pode ser modelada pela função:
E (V, M ) = K × 0.00032 V 1.3 M −1.4,
onde E é a emissão (quantidade de partículas liberadas na atmosfera por tonelada
manipulado), V é a velocidade média do vento (mph=metros por hora), M é a umidatida no material (dada em porcentagem) e K é uma constante que depende do tamanpartículas. Calcule a taxa de variação da emissão para uma partícula tal que K = 0.2, VM = 13 em relação:
(a) ao vento;
(b) à umidade.
10 20 30 40 50
10
20
30
40
50
Figura 5.9: Curvas de nível de E .
(a) Calculamos∂E
∂V (10, 13): Então,
∂E
∂V (V, M ) = 0.000122 V 0.3 M −1.4; logo,
∂E
∂V (10, 13) = 0.00001496.
(b) Calculamos∂E
∂M (10, 13): Então,
∂E
∂M (V, M ) = −0.000291 V 1.3 M −2.4; logo,
∂E
∂M (10, 13) = −0.00001234.
Interprete os resultados obtidos no último exemplo.
5.5 DiferenciabilidadeNo caso de uma variável sabemos que se uma função é derivável num ponto, ela é cono ponto. Gostaríamos de ter um comportamento análogo para funções de várias variáventanto, a existência das derivadas parciais não garante a continuidade da função. Deexistência de ∂f
∂x depende do comportamento da função f somente na direção do eixo

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 95/279
5.5. DIFERENCIABILIDADE 95
a existência de ∂f ∂y depende do comportamento da função f somente na direção do eixo dos y.
Por exemplo, sabemos que a função:
f (x, y) =
2 x y
x2+y2 se (x, y) = (0, 0)
0 se (x, y) = (0, 0),
não é contínua na origem. No entanto, as derivadas parciais existem em todos os pontos,
inclusive na origem. De fato, sejam g(x) = f (x, 0) = 0 e h(y) = f (0, y) = 0; logo:
∂f
∂x(0, 0) = g′(0) = 0 e
∂f
∂y(0, 0) = h′(0) = 0.
As derivadas parciais para (x, y) = (0, 0) são:
∂f
∂x=
2 y3 − 2 x2 y
(x2 + y2)2e
∂f
∂y=
2 x3 − 2 x y2
(x2 + y2)2.
Em uma variável, a existência da derivada de uma função num ponto, garante que nas proxi-midades desse ponto o gráfico da função fica bastante próximo da reta tangente a esse gráfico
no ponto considerado. Seguiremos esta idéia para estender o conceito de diferenciabilidadepara funções de várias variáveis. Correspondendo à reta tangente num ponto do gráfico deuma função em R temos o "plano tangente"num ponto do G(f ) e este plano deve ser uma"boa"aproximação para o G(f ) numa vizinhança do ponto.
Definição 5.3. Seja f : A ⊂ Rn −→ R uma função definida no conjunto aberto A. Dizemos que f édiferenciável no ponto x0 ∈ A se existem as derivadas parciais de f em x0 e:
limh→0
f (x) − f (x0) −n
j=1
∂f ∂xj
(x0)h j
h = 0,
onde h = x− x0, h j é a componente j-ésima de h e x ∈ A.
Para n = 2, este limite expressa o que pensamos ao dizer que:
f (x0, y0) +∂f
∂x(x0, y0) (x − x0) +
∂f
∂y(x0, y0) (y − y0),
é uma boa aproximação para f numa vizinhança de x0 = (x0, y0).
Definição 5.4. f é diferenciável em A ⊂ Rn, se é diferenciável em cada ponto de A.
Exemplo 5.6.
Considere a função:
f (x, y) =
x2y
x2 + y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0),

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 96/279
96 CAPÍTULO 5. DERIVADAS PA
f é contínua em (0, 0); suas derivadas parciais são:
∂f
∂x(0, 0) =
∂f
∂y(0, 0) = 0,
∂f
∂x(x, y) =
2 x y3
(x2 + y2)2e
∂f
∂y(x, y) =
x2 (x2 − y2)
(x2 + y2)2.
Agora, apliquemos a definição de diferenciabilidade para f no ponto (0, 0):
lim(x,y)−→(0,0) |f (x, y)
|(x, y) = lim(x,y)−→(0,0) |x2y
|(x2 + y2)
x2 + y2 ;
considere y = k x, k > 0:
lim(x,y)→(0,0)
|x2y|(x2 + y2)
32
= lim(x,y)→(0,0)
|kx3|(x2 + k2x2)
32
= lim(x,y)→(0,0)
±k
(1 + k2)32
= ± k
(1 + k2)
o limite depende de k; logo f não é diferenciável em (0, 0).
Figura 5.10: Gráfico de f .
Aplicar diretamente a definição de função diferenciável pode ser, em muitos casos, bcomplicado. Por isso, apresentamos o seguinte teorema:
Teorema 5.1. Seja f : A ⊂ Rn −→ R uma função definida no conjunto aberto A tal que existeas derivadas parciais em cada ponto de A e cada uma delas é contínua no ponto x0 ∈ A. Endiferenciável em x0.
O teorema estabelece apenas uma condição suficiente, ou seja, nem todas as funções dciáveis num ponto x0 devem ter derivadas parciais contínuas numa vizinhança de x0.prova do teorema, veja o apêndice.
Exemplo 5.7.
[1] Considere a seguinte função
f (x, y) =
x2y2
x2 + y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 97/279
5.5. DIFERENCIABILIDADE 97
As derivadas parciais são:
∂f
∂x(0, 0) =
∂f
∂y(0, 0) = 0,
∂f
∂x(x, y) =
2xy4
(x2 + y2)2e
∂f
∂y(x, y) =
2x4y
(x2 + y2)2.
As derivadas parciais existem em todo ponto. Aplicaremos o teorema para provar a diferen-ciabilidade de f no ponto (0, 0). Para isto provaremos que as derivadas parciais são contínuas
no ponto (0, 0).
lim(x,y)→(0,0)
∂f
∂x(x, y) = lim
(x,y)→(0,0)
2xy4
(x2 + y2)2=
∂f
∂x(0, 0) = 0.
De fato, |x| ≤
x2 + y2 e y4 ≤ (x2 + y2)2; logo, |2x y4|(x2+y2)2
≤ 2
x2 + y2; se δ = ε2 , teremos 2 x y4
(x2+y2)2
< ε se 0 <
x2 + y2 < δ. Analogamente para a outra derivada parcial.
Figura 5.11: Exemplo [1].
[2] Os polinômios em várias variáveis são claramente diferenciáveis em todo ponto de Rn.[3] A função z = f (x, y) =
x2 + y2 é diferenciável em R2 − {(0, 0)}. De fato:
∂f
∂x=
x x2 + y2
e∂f
∂y=
y x2 + y2
e ambas são funções contínuas em R2 − {(0, 0)}.
Definição 5.5. Uma função é dita de classe C 1 em A quando existem as derivadas parciais em cada ponto de A e estas são contínuas. Logo f de classe C 1 implica em f diferenciável.
Proposição 5.2. Se f e g são funções de classe C 1 no ponto x0, então:
1. f + g é de classe C 1 em x0.
2. f g é de classe C 1 em x0.
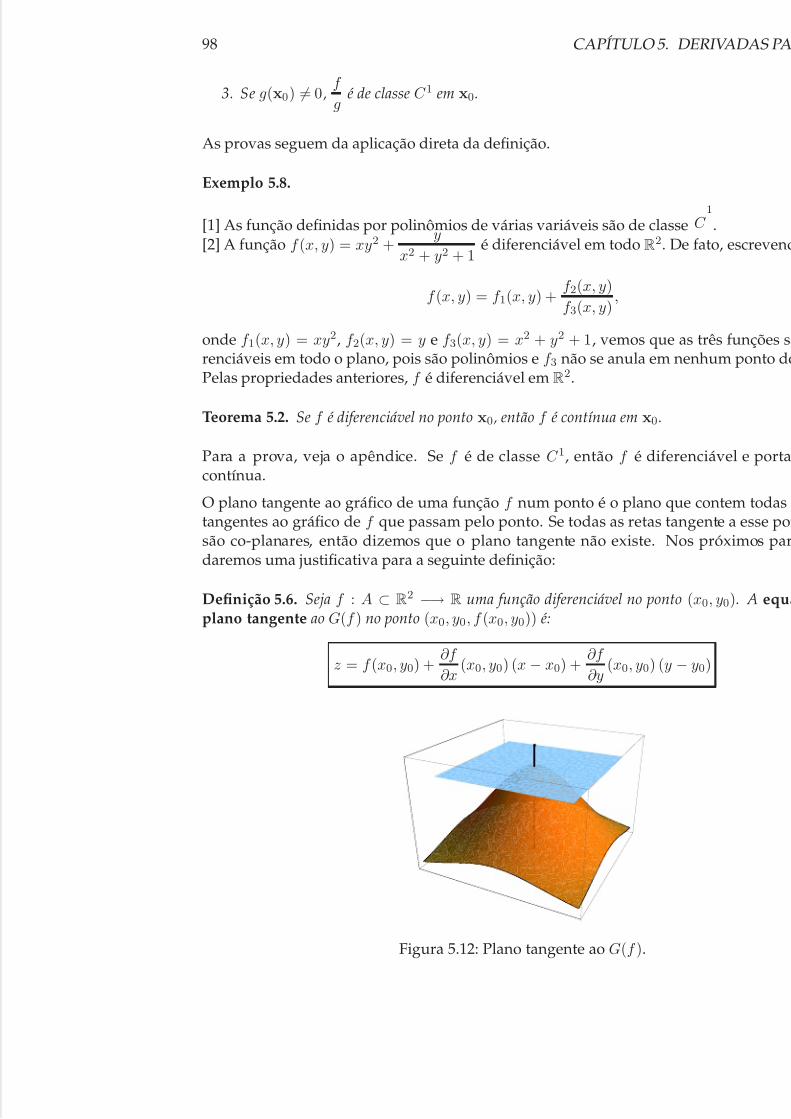
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 98/279
98 CAPÍTULO 5. DERIVADAS PA
3. Se g(x0) = 0,f
gé de classe C 1 em x0.
As provas seguem da aplicação direta da definição.
Exemplo 5.8.
[1] As função definidas por polinômios de várias variáveis são de classe C 1
.[2] A função f (x, y) = xy2 +
y
x2 + y2 + 1é diferenciável em todo R2. De fato, escrevend
f (x, y) = f 1(x, y) +f 2(x, y)
f 3(x, y),
onde f 1(x, y) = xy2, f 2(x, y) = y e f 3(x, y) = x2 + y2 + 1, vemos que as três funções sãrenciáveis em todo o plano, pois são polinômios e f 3 não se anula em nenhum ponto doPelas propriedades anteriores, f é diferenciável em R2.
Teorema 5.2. Se f é diferenciável no ponto x0, então f é contínua em x0.
Para a prova, veja o apêndice. Se f é de classe C 1, então f é diferenciável e portacontínua.
O plano tangente ao gráfico de uma função f num ponto é o plano que contem todas tangentes ao gráfico de f que passam pelo ponto. Se todas as retas tangente a esse ponsão co-planares, então dizemos que o plano tangente não existe. Nos próximos pardaremos uma justificativa para a seguinte definição:
Definição 5.6. Seja f : A ⊂ R2 −→ R uma função diferenciável no ponto (x0, y0). A equaplano tangente ao G(f ) no ponto (x0, y0, f (x0, y0)) é:
z = f (x0, y0) +∂f
∂x(x0, y0) (x − x0) +
∂f
∂y(x0, y0) (y − y0)
Figura 5.12: Plano tangente ao G(f ).
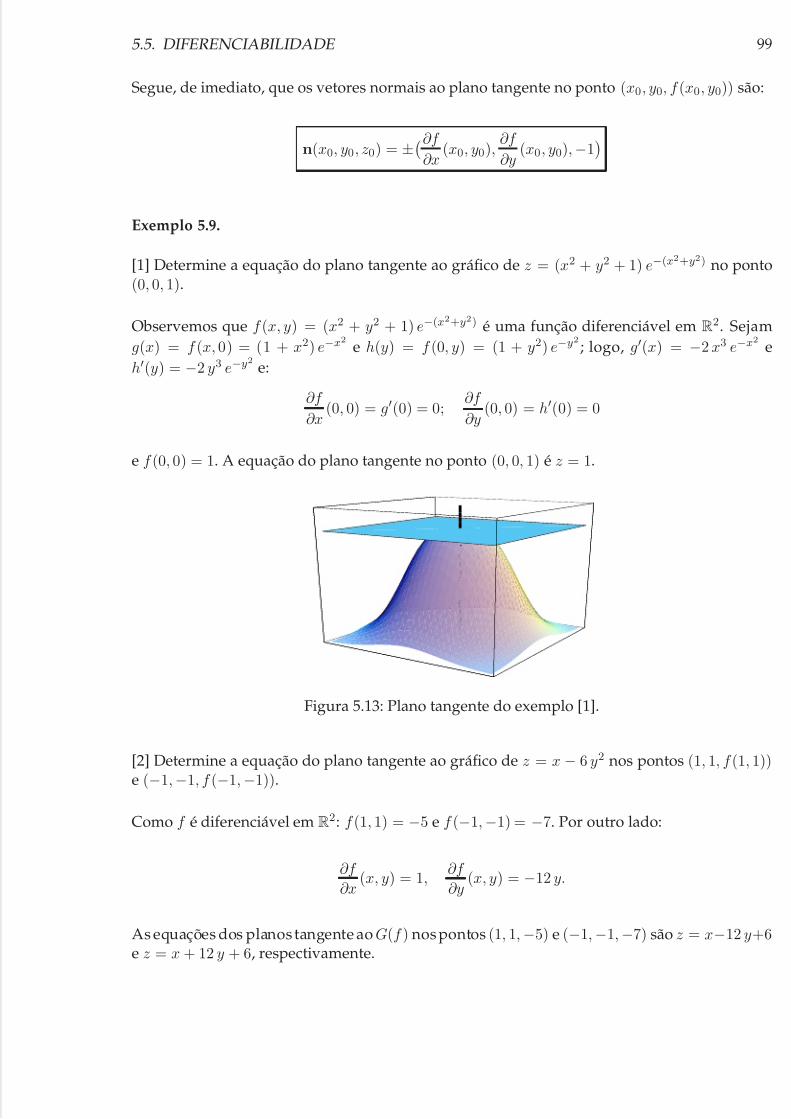
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 99/279
5.5. DIFERENCIABILIDADE 99
Segue, de imediato, que os vetores normais ao plano tangente no ponto (x0, y0, f (x0, y0)) são:
n(x0, y0, z0) = ±∂f
∂x(x0, y0),
∂f
∂y(x0, y0), −1
Exemplo 5.9.
[1] Determine a equação do plano tangente ao gráfico de z = (x2 + y2 + 1) e−(x2+y2) no ponto(0, 0, 1).
Observemos que f (x, y) = (x2 + y2 + 1) e−(x2+y2) é uma função diferenciável em R2. Sejamg(x) = f (x, 0) = (1 + x2) e−x2 e h(y) = f (0, y) = (1 + y2) e−y2 ; logo, g′(x) = −2 x3 e−x2 eh′(y) = −2 y3 e−y2 e:
∂f
∂x(0, 0) = g′(0) = 0;
∂f
∂y(0, 0) = h′(0) = 0
e f (0, 0) = 1. A equação do plano tangente no ponto (0, 0, 1) é z = 1.
Figura 5.13: Plano tangente do exemplo [1].
[2] Determine a equação do plano tangente ao gráfico de z = x − 6 y2 nos pontos (1, 1, f (1, 1))e (−1, −1, f (−1, −1)).
Como f é diferenciável em R2: f (1, 1) = −5 e f (−1, −1) = −7. Por outro lado:
∂f
∂x(x, y) = 1,
∂f
∂y(x, y) = −12 y.
As equações dos planos tangente ao G(f ) nos pontos (1, 1, −5) e (−1, −1, −7) são z = x−12 y+6e z = x + 12 y + 6, respectivamente.
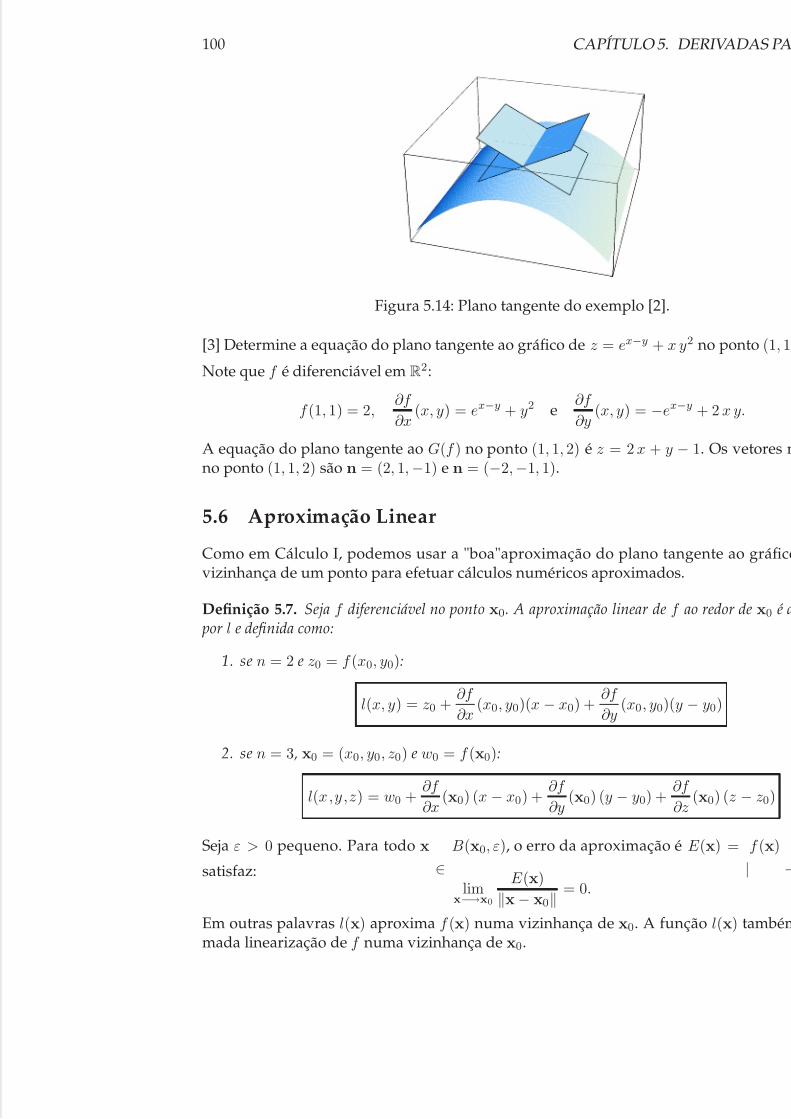
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 100/279
100 CAPÍTULO 5. DERIVADAS PA
Figura 5.14: Plano tangente do exemplo [2].
[3] Determine a equação do plano tangente ao gráfico de z = ex−y + x y2 no ponto (1, 1
Note que f é diferenciável em R2:
f (1, 1) = 2,∂f
∂x(x, y) = ex−y + y2 e
∂f
∂y(x, y) = −ex−y + 2 x y.
A equação do plano tangente ao G(f ) no ponto (1, 1, 2) é z = 2 x + y − 1. Os vetores nno ponto (1, 1, 2) são n = (2, 1, −1) e n = (−2, −1, 1).
5.6 Aproximação Linear
Como em Cálculo I, podemos usar a "boa"aproximação do plano tangente ao gráficovizinhança de um ponto para efetuar cálculos numéricos aproximados.
Definição 5.7. Seja f diferenciável no ponto x0. A aproximação linear de f ao redor de x0 é d por l e definida como:
1. se n = 2 e z0 = f (x0, y0):
l(x, y) = z0 +∂f
∂x(x0, y0)(x − x0) +
∂f
∂y(x0, y0)(y − y0)
2. se n = 3, x0 = (x0, y0, z0) e w0 = f (x0):
l(x,y,z) = w0 +∂f
∂x(x0) (x − x0) +
∂f
∂y(x0) (y − y0) +
∂f
∂z(x0) (z − z0)
Seja ε > 0 pequeno. Para todo x
∈B(x0, ε), o erro da aproximação é E (x) =
|f (x)
−satisfaz:lim
x−→x0
E (x)
x− x0 = 0.
Em outras palavras l(x) aproxima f (x) numa vizinhança de x0. A função l(x) tambémmada linearização de f numa vizinhança de x0.
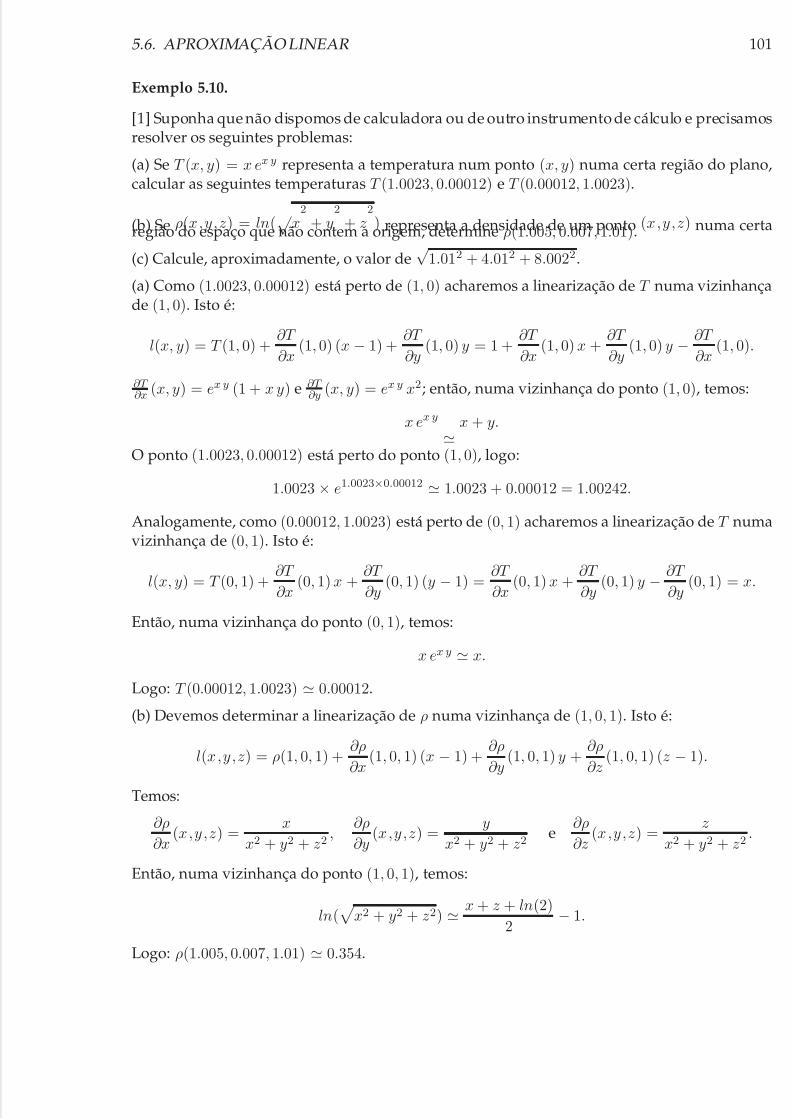
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 101/279
5.6. APROXIMAÇÃO LINEAR 101
Exemplo 5.10.
[1] Suponha que não dispomos de calculadora ou de outro instrumento de cálculo e precisamosresolver os seguintes problemas:
(a) Se T (x, y) = x ex y representa a temperatura num ponto (x, y) numa certa região do plano,calcular as seguintes temperaturas T (1.0023, 0.00012) e T (0.00012, 1.0023).
(b) Se ρ(x,y,z) = ln(
x2
+ y2
+ z2
) representa a densidade de um ponto (x,y,z) numa certaregião do espaço que não contem a origem, determine ρ(1.005, 0.007, 1.01).
(c) Calcule, aproximadamente, o valor de√
1.012 + 4.012 + 8.0022.
(a) Como (1.0023, 0.00012) está perto de (1, 0) acharemos a linearização de T numa vizinhançade (1, 0). Isto é:
l(x, y) = T (1, 0) +∂T
∂x(1, 0) (x − 1) +
∂T
∂y(1, 0) y = 1 +
∂T
∂x(1, 0) x +
∂T
∂y(1, 0) y − ∂T
∂x(1, 0).
∂T ∂x (x, y) = ex y (1 + x y) e ∂T
∂y (x, y) = ex y x2; então, numa vizinhança do ponto (1, 0), temos:
x ex y
≃x + y.
O ponto (1.0023, 0.00012) está perto do ponto (1, 0), logo:
1.0023 × e1.0023×0.00012 ≃ 1.0023 + 0.00012 = 1.00242.
Analogamente, como (0.00012, 1.0023) está perto de (0, 1) acharemos a linearização de T numavizinhança de (0, 1). Isto é:
l(x, y) = T (0, 1) +∂T
∂x(0, 1) x +
∂T
∂y(0, 1) (y − 1) =
∂T
∂x(0, 1) x +
∂T
∂y(0, 1) y − ∂T
∂y(0, 1) = x.
Então, numa vizinhança do ponto (0, 1), temos:
x ex y ≃ x.
Logo: T (0.00012, 1.0023) ≃ 0.00012.
(b) Devemos determinar a linearização de ρ numa vizinhança de (1, 0, 1). Isto é:
l(x,y,z) = ρ(1, 0, 1) +∂ρ
∂x(1, 0, 1) (x − 1) +
∂ρ
∂y(1, 0, 1) y +
∂ρ
∂z(1, 0, 1) (z − 1).
Temos:
∂ρ
∂x(x,y,z) =
x
x2 + y2 + z2,
∂ρ
∂y(x,y,z) =
y
x2 + y2 + z2e
∂ρ
∂z(x,y,z) =
z
x2 + y2 + z2.
Então, numa vizinhança do ponto (1, 0, 1), temos:
ln(
x2 + y2 + z2) ≃ x + z + ln(2)
2− 1.
Logo: ρ(1.005, 0.007, 1.01) ≃ 0.354.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 102/279
102 CAPÍTULO 5. DERIVADAS PA
(c) Seja f (x,y,z) =
x2 + y2 + z2. Consideremos o ponto (x0, y0, z0) = (1, 4, 8) e detemos a linearização de f numa vizinhança do ponto (1, 4, 8):
l(x,y,z) = f (1, 4, 8) +∂f
∂x(1, 4, 8) (x − 1) +
∂f
∂y(1, 4, 8) (y − 4) +
∂f
∂z(1, 4, 8) (z − 8)
Temos:
∂f
∂x(x,y,z) =
x
f (x,y,z),
∂f
∂y(x,y ,z) =
y
f (x,y,z)e
∂f
∂z(x,y,z) =
z
f (x,y,z).
Logo, f (1, 4, 8) = 9, ∂f ∂x (1, 4, 8) = 1
9 , ∂f ∂y (1, 4, 8) = 4
9 e ∂f ∂z (1, 4, 8) = 8
9 ; então, numa vizinhaponto (1, 4, 8), temos:
x2 + y2 + z2 ≃ 1
9(x + 4 y + 8 z),
Em particular, no ponto (1.01, 4.01, 8.002):
1.01
2
+ 4.012
+ 8.0022
≃1
9 (1.01 + 4 × (4.01) + 8 × (8.002)) ≃ 9.0073.
[2] Lei de gravitação de Newton. A força de atração entre dois corpos de massa m epectivamente, situados a uma distância r é dada por:
F (m,M ,r) =G m M
r2,
onde G é a constante de gravitação. Determinemos a linearização da função F ao reponto (m0, M 0, r0).
∂F
∂m (m,M ,r) =G M
r2 ,∂F
∂M (m,M ,r) =G m
r2 e∂F
∂r (m,M ,r) = −2 G m M
r3 ;
logo, no ponto (m0, M 0, r0), temos:
l(m,M,r) =G
r30(M 0 r0 m + m0 r0 M − 2 m0 M 0 r + m0 M 0 r0).
Por exemplo, se m0 = 1, M 0 = 2 e r0 = 1, temos que:
F (m,M,r) ≃ G (2 m + M − 4 r + 2),
para todo (m,M ,r) numa vizinhança de (1, 2, 1).
[3] Um depósito de material radioativo tem o formato de um cilindro circular reto e devsuir altura no lado interno igual a 6 cm, raio interno com 2 cm e espessura de 0.1 cm. Sede fabricação do depósito é de 10 cv por cm3. (cv= centavos), determine o custo aproximmaterial usado.
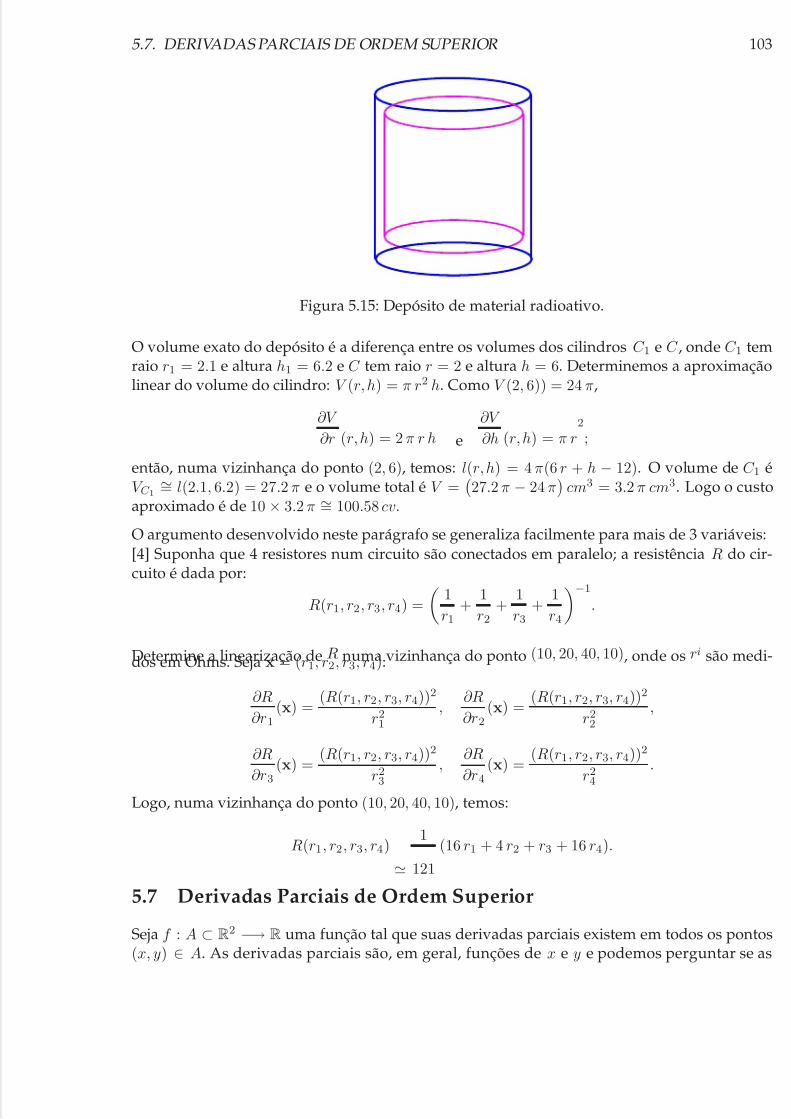
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 103/279
5.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 103
Figura 5.15: Depósito de material radioativo.
O volume exato do depósito é a diferença entre os volumes dos cilindros C 1 e C , onde C 1 temraio r1 = 2.1 e altura h1 = 6.2 e C tem raio r = 2 e altura h = 6. Determinemos a aproximaçãolinear do volume do cilindro: V (r, h) = π r2 h. Como V (2, 6)) = 24 π,
∂V
∂r (r, h) = 2 π r h e
∂V
∂h (r, h) = π r2
;
então, numa vizinhança do ponto (2, 6), temos: l(r, h) = 4 π(6 r + h − 12). O volume de C 1 éV C 1
∼= l(2.1, 6.2) = 27.2 π e o volume total é V =
27.2 π − 24 π
cm3 = 3.2 π cm3. Logo o custoaproximado é de 10 × 3.2 π ∼= 100.58 cv.
O argumento desenvolvido neste parágrafo se generaliza facilmente para mais de 3 variáveis:[4] Suponha que 4 resistores num circuito são conectados em paralelo; a resistência R do cir-cuito é dada por:
R(r1, r2, r3, r4) =
1
r1+
1
r2+
1
r3+
1
r4
−1.
Determine a linearização de R numa vizinhança do ponto (10, 20, 40, 10), onde os ri são medi-dos em Ohms. Seja x = (r1, r2, r3, r4):
∂R
∂r1(x) =
(R(r1, r2, r3, r4))2
r21,
∂R
∂r2(x) =
(R(r1, r2, r3, r4))2
r22,
∂R
∂r3(x) =
(R(r1, r2, r3, r4))2
r23,
∂R
∂r4(x) =
(R(r1, r2, r3, r4))2
r24.
Logo, numa vizinhança do ponto (10, 20, 40, 10), temos:
R(r1, r2, r3, r4)
≃
1
121
(16 r1 + 4 r2 + r3 + 16 r4).
5.7 Derivadas Parciais de Ordem Superior
Seja f : A ⊂ R2 −→ R uma função tal que suas derivadas parciais existem em todos os pontos(x, y) ∈ A. As derivadas parciais são, em geral, funções de x e y e podemos perguntar se as

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 104/279

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 105/279
5.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 105
Em geral, se f : A ⊂ Rn −→ R é uma função tal que suas derivadas parciais existem em todosos pontos x ∈ A, definimos as derivadas parciais de segunda ordem de f da seguinte forma:
∂
∂x j
∂f
∂xi
(x) = lim
t→0
∂f ∂xi
(x + te j) − ∂f ∂xi
(x)
t,
se os limites existem. A notação é
∂
∂x j ∂f
∂xi
(x) =
∂ 2f
∂x j ∂xi (x). Logo, definimos n2
funções:
∂
∂x j
∂f
∂xi
: A ⊂ Rn −→ R.
Se n = 2 temos 4 derivadas parciais de segunda ordem e se n = 3 temos 9 derivadas parciaisde segunda ordem. Se i = j:
∂
∂xi
∂f
∂xi
(x) =
∂ 2f
∂x2i
(x).
Analogamente, definimos as derivadas de ordem 3, 4, etc. Por exemplo, para i, j, k = 1....n:
∂ 3
f ∂x j ∂xi∂xk
(x) = ∂ ∂x j
∂ 2
f ∂xi∂xk
(x).
Exemplo 5.12.
[1] Calcule as derivadas parciais de segunda ordem de f (x,y,z) = x y z.
Calculemos as de primeira ordem:∂f
∂x= y z,
∂f
∂y= x z e
∂f
∂z= x y, logo:
∂ 2f
∂x2=
∂
∂x(y z) = 0,
∂ 2f
∂y2=
∂
∂y(x z) = 0,
∂ 2f
∂z2=
∂
∂z(x y) = 0,
∂ 2f
∂x∂y =
∂
∂x (x z) = z,
∂ 2f
∂x∂z =
∂
∂x (x y) = y,
∂ 2f
∂y∂x =
∂
∂y (y z) = z,
∂ 2f
∂y∂z=
∂
∂y(x y) = x,
∂ 2f
∂z∂x=
∂
∂z(y z) = y,
∂ 2f
∂z∂y=
∂
∂z(x z) = x.
[2] Calcule as derivadas parciais de segunda ordem de f (x,y,z) = sen(x y z).
Calculemos as de primeira ordem:∂f
∂x= y z cos(x y z),
∂f
∂y= xzcos(x y z) e
∂f
∂z= xycos(x y z);
logo:
∂ 2f
∂x2== −y2 z2 sen(x y z),
∂ 2f
∂y2= −x2 z2 sen(x y z),
∂ 2f
∂z2= −x2 y2 sen(x y z),
∂ 2f
∂x∂y= z cos(x y z) − x y z2 sen(x y z),
∂ 2f
∂x∂z= y cos(x y z) − x y2 z sen(x y z),
∂ 2f
∂y∂x= z cos(x y z) − x y z2 sen(x y z),
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 106/279
106 CAPÍTULO 5. DERIVADAS PA
∂ 2f
∂y∂z= xcos(x y z) − x2 y z s e n(x y z),
∂ 2f
∂z∂x= y cos(x y z) − x y2 z sen(x y z),
∂ 2f
∂z∂y= xcos(x y z) − x2 y z s e n(x y z).
[3] Equação de Laplace: Seja u = u(x, y) uma função duas vezes diferenciável num co
aberto do plano. A equação de Laplace é:∂ 2u
∂x2+
∂ 2u
∂y2= 0.
A equação de Laplace está associada a fenômenos estacionários, isto é, independentempo, como por exemplo potenciais eletrostáticos. As soluções desta equação são chafunções harmônicas. A função u(x, y) = sen(x) ey é harmônica. De fato:
∂ 2u
∂x2= −sen(x) ey e
∂ 2u
∂y2= sen(x) ey.
0 2 4 6 8
1
2
3
4
5
6
Figura 5.16: Curvas de nível da função u(x, y) = sen(x) ey.
[4] Equação da onda: Seja u = u(x, t) uma função duas vezes diferenciável num coaberto do plano. A equação homogênea da onda é:
∂ 2u
∂t2= c2
∂ 2u
∂x2,
onde c > 0 (c é chamada a velocidade de propagação da onda). u(x, t) descreve o deslocvertical de uma corda vibrante. A função :
u(x, t) = (x + c t)n + (x − c t)m, n, m ∈ N
satisfaz à equação da onda. De fato.∂ 2u
∂x2= m (m − 1) (x − c t)m−2 + n (n − 1) (x + c t)n−2,
∂ 2u
∂t2= c2 (m (m − 1) (x − c t)m−2 + n (n − 1) (x + c t)n−2).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 107/279
5.7. DERIVADAS PARCIAIS DE ORDEM SUPERIOR 107
Figura 5.17: Gráfico de z = u(x, t) para c = 16 , n = m = 3.
Analogamente, a função: u(x, t) =sen(x + c t) + cos(x − c t)
2satisfaz à equação da onda. De
fato.
∂ 2u
∂x2= −1
2(sen(x + c t) + cos(x − c t)),
∂ 2u∂t2
= −c2
2(sen(x + c t) + cos(x − c t)).
Figura 5.18: Gráfico de z = u(x, t) para c = 2.
Definição 5.9. A função f : A −→ R é de classe C 2 quando existem as derivadas parciais até a segundaordem em todos os pontos de A e as funções
∂
∂x j
∂f
∂xi
: A ⊂ Rn → R
são contínuas.
Notamos que nos exemplos estudados sempre verificamos que:∂
∂x j
∂f
∂xi
=
∂
∂xi
∂f
∂x j
.
Isto é consequencia do seguinte teorema.medskip
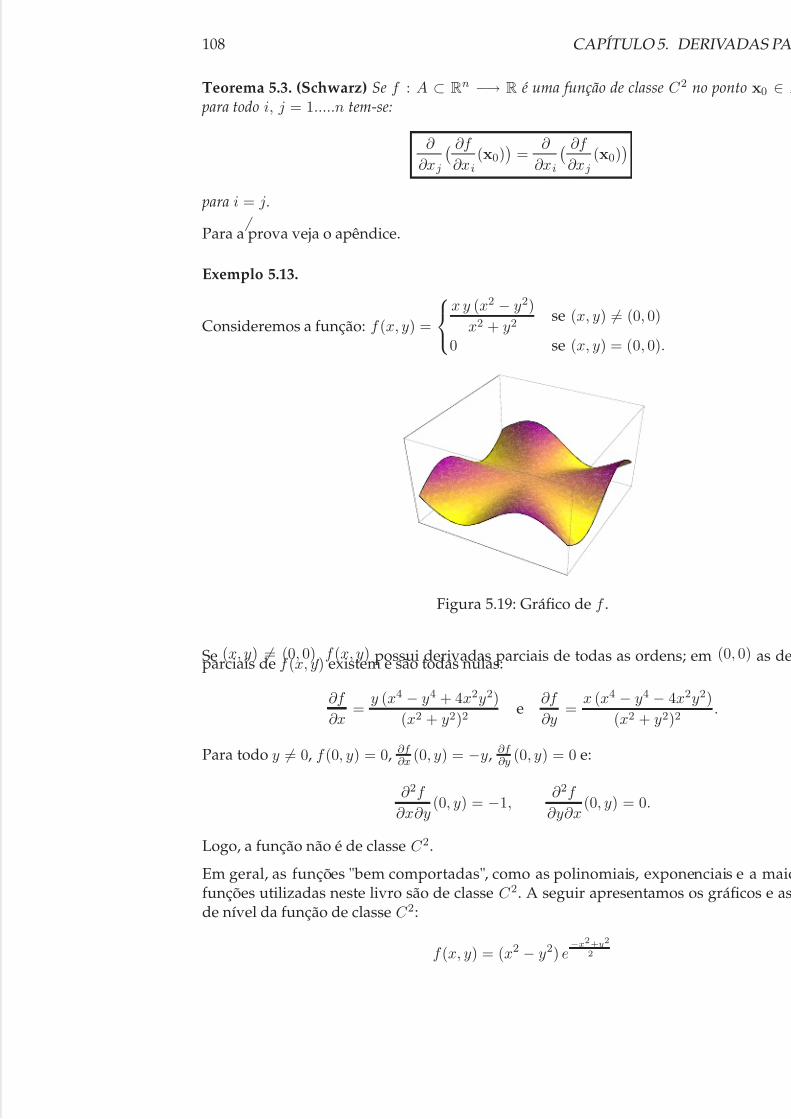
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 108/279
108 CAPÍTULO 5. DERIVADAS PA
Teorema 5.3. (Schwarz) Se f : A ⊂ Rn −→ R é uma função de classe C 2 no ponto x0 ∈ A para todo i, j = 1.....n tem-se:
∂
∂x j
∂f
∂xi(x0)
=
∂
∂xi
∂f
∂x j(x0)
para i
= j.
Para a prova veja o apêndice.
Exemplo 5.13.
Consideremos a função: f (x, y) =
x y (x2 − y2)
x2 + y2se (x, y) = (0, 0)
0 se (x, y) = (0, 0).
Figura 5.19: Gráfico de f .
Se (x, y) = (0, 0), f (x, y) possui derivadas parciais de todas as ordens; em (0, 0) as deparciais de f (x, y) existem e são todas nulas:
∂f
∂x=
y (x4 − y4 + 4x2y2)
(x2 + y2)2e
∂f
∂y=
x (x4 − y4 − 4x2y2)
(x2 + y2)2.
Para todo y = 0, f (0, y) = 0, ∂f ∂x (0, y) = −y, ∂f
∂y (0, y) = 0 e:
∂ 2f
∂x∂y(0, y) = −1,
∂ 2f
∂y∂x(0, y) = 0.
Logo, a função não é de classe C 2.
Em geral, as funções "bem comportadas", como as polinomiais, exponenciais e a maiofunções utilizadas neste livro são de classe C 2. A seguir apresentamos os gráficos e asde nível da função de classe C 2:
f (x, y) = (x2 − y2) e−x2+y2
2
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 109/279
5.8. REGRA DA CADEIA 109
e de suas derivadas parciais de primeira e segunda ordem mistas, respectivamente:
Figura 5.20: Gráficos.
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
Figura 5.21: Curvas de nível
O teorema de Schwarz também é valido para derivadas mistas de ordem superior a dois. Defato, se as terceiras derivadas de f são contínuas (f de classe C 3), temos:
∂ 3f
∂x∂x∂y=
∂
∂x
∂ 2f
∂x∂y
=
∂
∂x
∂ 2f
∂y∂x
=
∂ 3f
∂x∂y∂x.
Por outro lado, fazendo g =∂f
∂x :
∂ 3f
∂x∂y∂x=
∂ 2g
∂x∂y=
∂ 2g
∂y∂x=
∂ 3f
∂y∂x∂x.
Fica como exercício determinar as outras igualdades. Em geral, f é de classe C k (k ≥ 1), noconjunto aberto A se as derivadas parciais até ordem k existem e são contínuas em A. f e declasse C ∞ se é de classe C k para todo k ≥ 1.
5.8 Regra da Cadeia
Teorema 5.4. Se n = 2, z = f (x, y) é uma função de classe C 1, x = x(r, s) e y = y(r, s) são funçõestais que suas derivadas parciais existem, então:
∂z
∂r=
∂z
∂x
∂x
∂r+
∂z
∂y
∂y
∂re
∂z
∂s=
∂z
∂x
∂x
∂s+
∂z
∂y
∂y
∂s
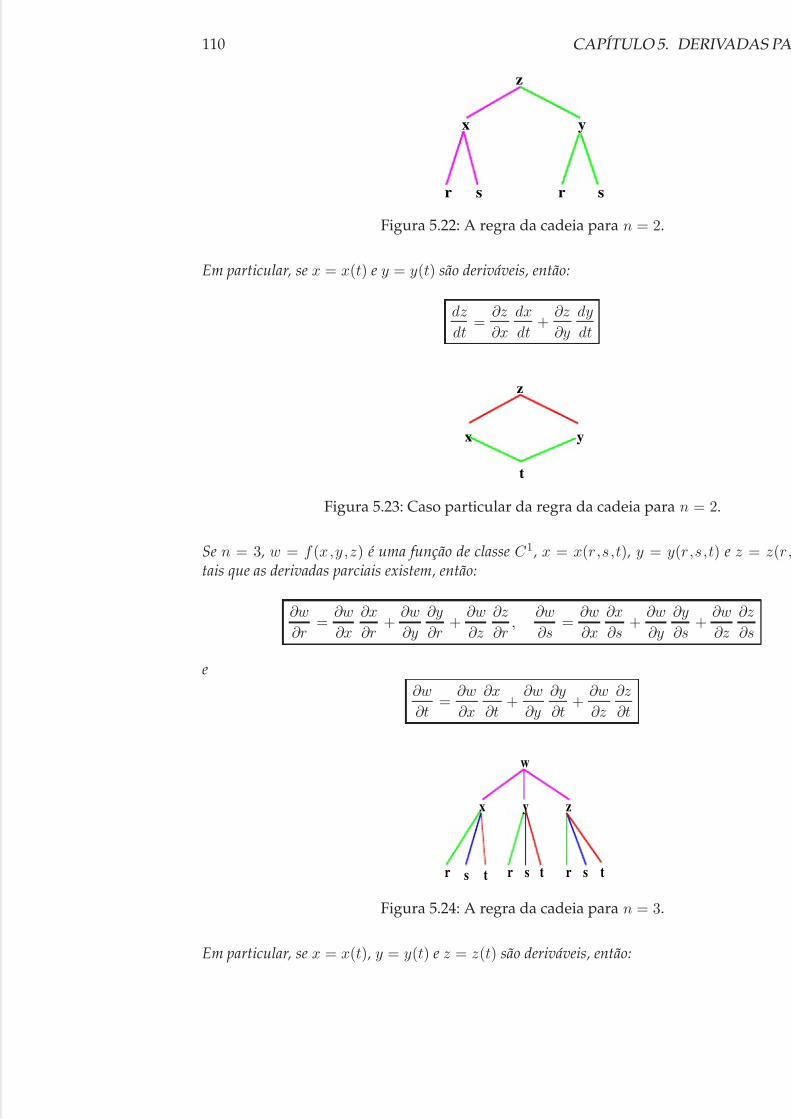
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 110/279
110 CAPÍTULO 5. DERIVADAS PA
r
x
z
y
rs s
Figura 5.22: A regra da cadeia para n = 2.
Em particular, se x = x(t) e y = y(t) são deriváveis, então:
dz
dt=
∂z
∂x
dx
dt+
∂z
∂y
dy
dt
x
z
y
t
Figura 5.23: Caso particular da regra da cadeia para n = 2.
Se n = 3, w = f (x,y,z) é uma função de classe C 1, x = x(r,s,t), y = y(r,s,t) e z = z(r,tais que as derivadas parciais existem, então:
∂w
∂r=
∂w
∂x
∂x
∂r+
∂w
∂y
∂y
∂r+
∂w
∂z
∂z
∂r,
∂w
∂s=
∂w
∂x
∂x
∂s+
∂w
∂y
∂y
∂s+
∂w
∂z
∂z
∂s
e∂w
∂t=
∂w
∂x
∂x
∂t+
∂w
∂y
∂y
∂t+
∂w
∂z
∂z
∂t
x
w
y z
r r s t r s tts
Figura 5.24: A regra da cadeia para n = 3.
Em particular, se x = x(t), y = y(t) e z = z(t) são deriváveis, então:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 111/279
5.8. REGRA DA CADEIA 111
x y
t
z
w
Figura 5.25: Caso particular da regra da cadeia para n = 3.
dw
dt=
∂w
∂x
dx
dt+
∂w
∂y
dy
dt+
∂w
∂z
dz
dt
Exemplo 5.14.
[1] Calculedw
dtse w = f (x,y,z) = x y z onde x = x(t) = t2, y = y(t) = t e z = z(t) = t4.
dw
dt=
∂w
∂x
dx
dt+
∂w
∂y
dy
dt+
∂w
∂z
dz
dt,
∂w∂x = y z = t × t4 = t5, ∂w
∂y = x z = t2 × t4 = t6 e ∂w∂z = x y = t2 × t = t3. Por outro lado, temos
que dxdt = 2 t, dy
dt = 1 e dzdt = 4 t3; então;
dw
dt= 2 t6 + t6 + 4 t6 = 7 t6.
Observe que podemos obter o mesmo resultado fazendo a composição das funções:
w = f (t2, t , t4) = t2 × t × t4 = t7, entãodw
dt= 7 t6.
Pode explicar por que isto ocorre?
[2] Seja w = f (x,y,z) = x2 + y2 + 2 z2, se:
x(ρ,α,θ) = ρsen(α) cos(θ), y(ρ,α,θ) = ρsen(α) sen(θ) e z(ρ,α,θ) = ρcos(α).
Calcule∂w
∂ρ,
∂w
∂αe
∂w
∂θ.
∂w
∂ρ=
∂w
∂x
∂x
∂ρ+
∂w
∂y
∂y
∂ρ+
∂w
∂z
∂z
∂ρ= 2 xsen(α) cos(θ) + 2 y sen(α) sen(θ) + 4 z cos(α);
logo, utilizando a definição das funções x, y e z temos:
∂w
∂ρ = 2 ρsen2(α)
cos2(θ) + sen2(θ)
+ 4 ρcos2(α) = 2 ρ + 2 ρcos2(α).
Como antes, se fazemos w = f (ρ,α,θ) = ρ2 + ρ2cos2(α), obtemos:
∂w
∂ρ= 2 ρ + 2 ρcos2(α),
∂w
∂α= −2 ρ2cos(α) sen(α) e
∂w
∂θ= 0.
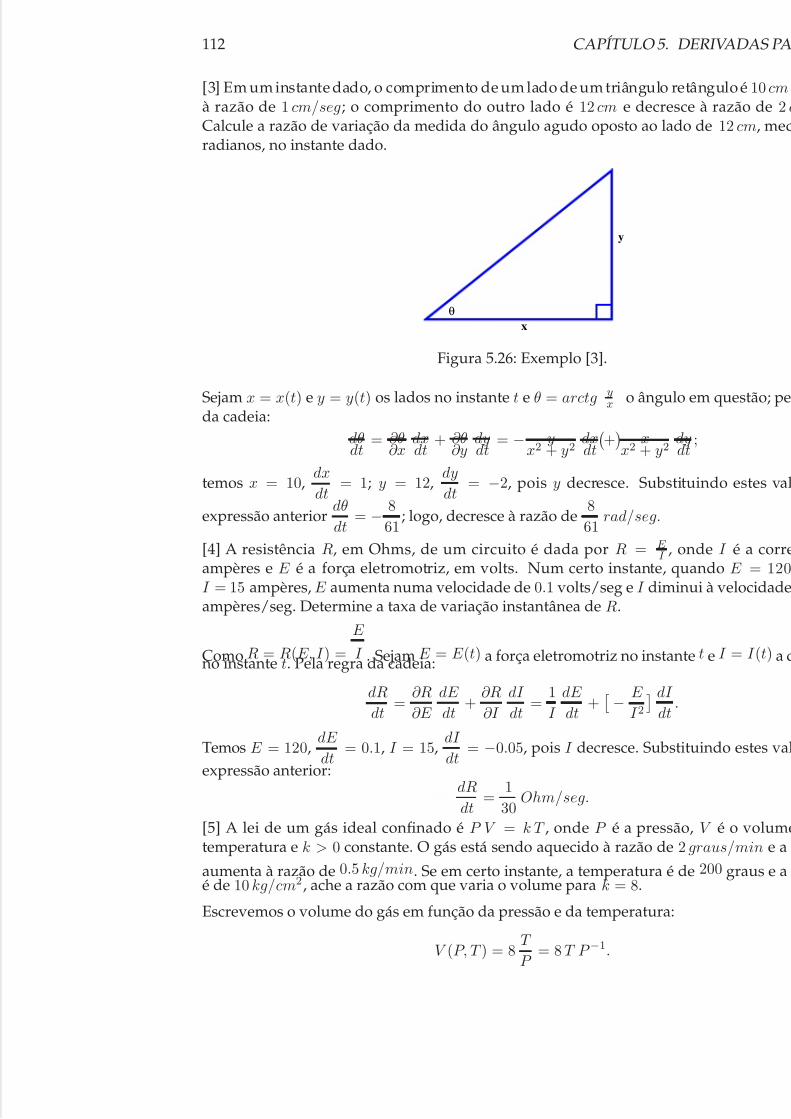
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 112/279
112 CAPÍTULO 5. DERIVADAS PA
[3] Em um instante dado, o comprimento de um lado de um triângulo retângulo é 10 cmà razão de 1 cm/seg; o comprimento do outro lado é 12 cm e decresce à razão de 2 cCalcule a razão de variação da medida do ângulo agudo oposto ao lado de 12 cm, medradianos, no instante dado.
x
y
θ
Figura 5.26: Exemplo [3].
Sejam x = x(t) e y = y(t) os lados no instante t e θ = arctg
yx
o ângulo em questão; pe
da cadeia:dθdt
= ∂θ∂x
dxdt
+ ∂θ∂y
dydt
= − yx2 + y2
dxdt
+ xx2 + y2
dydt
;
temos x = 10,dx
dt= 1; y = 12,
dy
dt= −2, pois y decresce. Substituindo estes val
expressão anteriordθ
dt= − 8
61; logo, decresce à razão de
8
61rad/seg.
[4] A resistência R, em Ohms, de um circuito é dada por R = E I , onde I é a corre
ampères e E é a força eletromotriz, em volts. Num certo instante, quando E = 120I = 15 ampères, E aumenta numa velocidade de 0.1 volts/seg e I diminui à velocidadeampères/seg. Determine a taxa de variação instantânea de R.
Como R = R(E, I ) =
E
I . Sejam E = E (t) a força eletromotriz no instante t e I = I (t) a cno instante t. Pela regra da cadeia:
dR
dt=
∂R
∂E
dE
dt+
∂R
∂I
dI
dt=
1
I
dE
dt+− E
I 2 dI
dt.
Temos E = 120,dE
dt= 0.1, I = 15,
dI
dt= −0.05, pois I decresce. Substituindo estes val
expressão anterior:dR
dt=
1
30Ohm/seg.
[5] A lei de um gás ideal confinado é P V = k T , onde P é a pressão, V é o volumetemperatura e k > 0 constante. O gás está sendo aquecido à razão de 2 graus/min e a p
aumenta à razão de 0.5 kg/min. Se em certo instante, a temperatura é de 200 graus e a pé de 10 kg/cm2, ache a razão com que varia o volume para k = 8.
Escrevemos o volume do gás em função da pressão e da temperatura:
V (P, T ) = 8T
P = 8 T P −1.
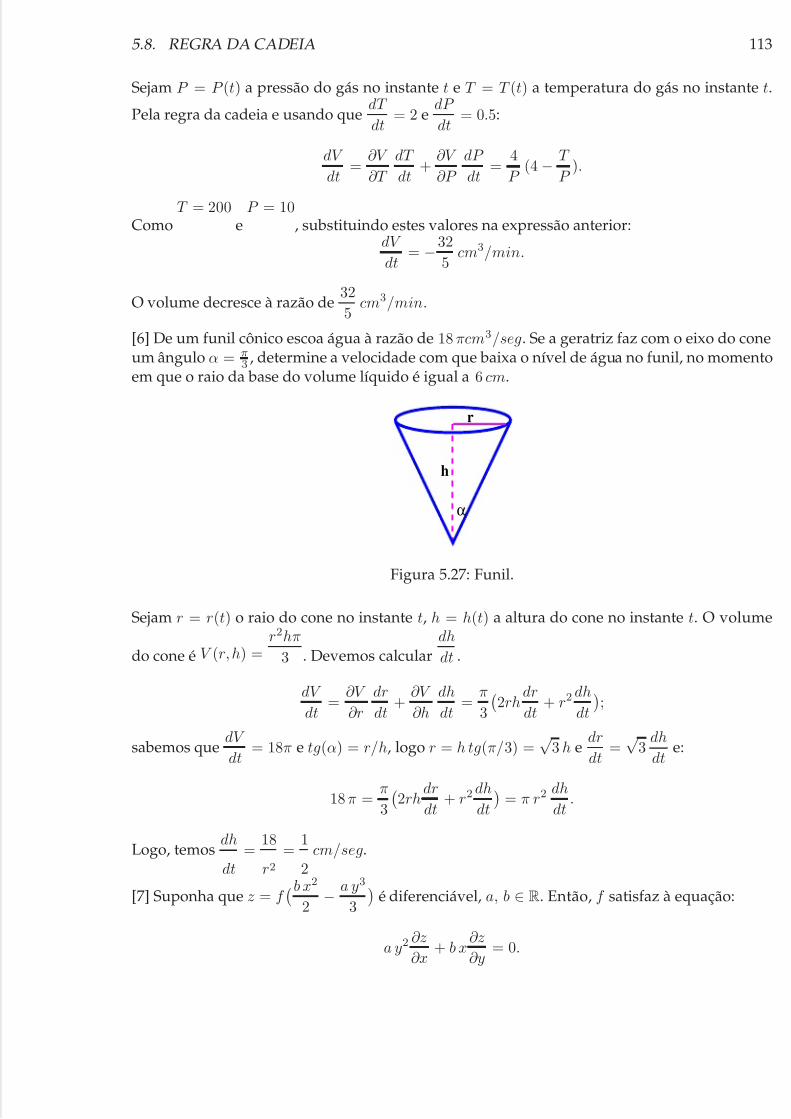
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 113/279
5.8. REGRA DA CADEIA 113
Sejam P = P (t) a pressão do gás no instante t e T = T (t) a temperatura do gás no instante t.
Pela regra da cadeia e usando quedT
dt= 2 e
dP
dt= 0.5:
dV
dt=
∂V
∂T
dT
dt+
∂V
∂P
dP
dt=
4
P (4 − T
P ).
ComoT = 200
eP = 10
, substituindo estes valores na expressão anterior:dV
dt= −32
5cm3/min.
O volume decresce à razão de32
5cm3/min.
[6] De um funil cônico escoa água à razão de 18 πcm3/seg. Se a geratriz faz com o eixo do coneum ângulo α = π
3 , determine a velocidade com que baixa o nível de água no funil, no momentoem que o raio da base do volume líquido é igual a 6 cm.
r
h
α
Figura 5.27: Funil.
Sejam r = r(t) o raio do cone no instante t, h = h(t) a altura do cone no instante t. O volume
do cone é V (r, h) =r2hπ
3 . Devemos calculardh
dt .
dV
dt=
∂V
∂r
dr
dt+
∂V
∂h
dh
dt=
π
3
2rh
dr
dt+ r2
dh
dt
;
sabemos quedV
dt= 18π e tg(α) = r/h, logo r = h tg(π/3) =
√3 h e
dr
dt=
√3
dh
dte:
18 π =π
3
2rh
dr
dt+ r2
dh
dt
= π r2
dh
dt.
Logo, temosdh
dt=
18
r2=
1
2cm/seg.
[7] Suponha que z = f b x2
2− a y3
3
é diferenciável, a, b ∈ R. Então, f satisfaz à equação:
a y2∂z
∂x+ b x
∂z
∂y= 0.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 114/279
114 CAPÍTULO 5. DERIVADAS PA
De fato, seja u =b x2
2− a y3
3; então, z = f (u). Pela regra da cadeia:
∂z
∂x=
dz
du
∂u
∂x= f ′(u) b x e
∂z
∂y=
dz
du
∂u
∂y= −f ′(u) a y2;
logo, a y2∂z
∂x+ b x
∂z
∂y= f ′(u) (a b x y2 − a b x y2) = 0.
[8] Equação da onda: Seja u = u(x, t) de classe C 2. A equação homogênea da onda é da
∂ 2u
∂t2= c2
∂ 2u
∂x2,
A solução (chamada de d’Alambert) desta equação é dada por:
u(x, t) = f (x + c t) + g(x − c t),
onde f e g são funções reais de uma variável duas vezes diferenciáveis. De fato, pela recadeia:
∂ 2u∂x2
= f ′′(x + c t) + g′′(x − c t) e ∂ 2u∂t2
= c2 (f ′′(x + c t) + g′′(x − c t)),
ou seja,∂ 2u
∂t2= c2
∂ 2u
∂x2.
5.9 Exercícios
1. Calcule as derivadas parciais das seguintes funções:
(a) z = x2 y − x y2
(b) z = x3 y3
(c) z = x2 y3 − 3 x4 y4
(d) z = arctg(x2 + y)
(e) z = sec(x2 y)
(f) z = senh(√
x y)
(g) z = x yx+y
(h) z = x−yx+y
(i) z = 1√x2+y2
(j) z = tg( 4 yx )
(k) z = arcsec( xy3 )
(l) z = cos(x y4)
(m) w = x y z + z sen(x y z)
(n) w = exyz2
(o) w = x+y+zx2+y2+z2
(p) w = arctg(x + y + z)
(q) w = arcsec(x y z)
(r) w = argsenh(x y z)
(s) w = x2 y3 z4
(t) w = cos(x y + z
(u) w = 6√
x y z
(v) w = ln(x2 y3 z4)
(w) w = x y+z x1+x2+y3 z4
(x) w = sen(ln(x y z
(y) w = ex2 y3 z4
(z) w = cos(ln(x y z
2. Seja∂w
∂x+
∂w
∂y+
∂w
∂z= 0. Verifique se as seguintes funções satisfazem à equação:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 115/279
5.9. EXERCÍCIOS 115
(a) w = ex−y + cos(y − z) +√
z − x
(b) w = sen(ex + ey + ez )
(c) w = ln(ex + ey + ez)
(d) w = cos(x2 + y2 + z2)
3. Ligando-se em paralelo n resitências R1, R2, ........, Rn a resistência total R é dada por
1
R =
ni=1
1
Ri.
Verifique que:∂R
∂Ri= R
Ri
2.
4. Determine a equação do plano tangente ao gráfico da função z = f (x, y) no ponto P se:
(a) z = x2 + y, P = (1, 1, f (1, 1)).
(b) z = x2 − y2, P = (0, 0, 0).
(c) z = x2 + 4 y2, P = (2, 1, f (2, 1)).
(d) z = x2 y + y3, P = (−1, 2, f (−1, 2)). .(e) z = x√
x2+y2, P = (3, −4, f (3, −4)).
(f) z = sen(x y), P = (1, π, 0).
(g) z = x2+4 y2
5 , P = (3, −2, 5).
(h) z = 4−x yx+y , P = (2, 2, f (2, 2)).
(i) z = x ex2−y2 , P = (2, 2, f (2, 2)).
(j) z = 3 x3 y − x y, P = (1, −1, f (1, −1)).
(k) z = 1x y , P = (1, 1, f (1, 1)).
(l) z = cos(x) sen(y), P = (0, π2 , f (0, π
2 )).
5. Determine o plano tangente ao gráfico de z = x y que passa pelos pontos (1, 1, 2) e(−1, 1, 1).
6. Determine o plano tangente ao gráfico de z = x2 + y2 que seja paralelo ao plano z − 2 x −y = 0.
7. Verifique que o plano tangente ao gráfico de z = x2 − y2 na origem intersecta o gráficosegundo duas retas.
8. Determine a linearização das seguintes funções, ao redor dos pontos dados:
(a) f (x, y) = sen(x y), (0, 1).
(b) f (x,y,z) = 4
x2 + y2 + z2, (1, 0, 0).
(c) f (x,y,z) = x y z, (1, 1, 1).
(d) f (x,y,z) = (x y)z , (12, 10, 1).
(e) f (x,y,z) = x y3 + cos(π z), (1, 3, 1)
(f) f (x,y,z) = x2− y2− z2 + x y z, (1, 1, 0)
9. Calcule, aproximadamente:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 116/279
116 CAPÍTULO 5. DERIVADAS PA
(a) 4√
1.00222 + 0.00232 + 0.000982.
(b) 0.98 × 0.99 × 1.02.
(c) 3.001 × (2.0023)3 × cos((1.002) π).
(d) (12.03 × 10.04)1.08.
(e) 8.99 × √9.99 − 1.013
(f) 1.0023 × 2.99313 + cos(1.00012π
10. Calcule as derivadas parciais de segunda e terceira ordem de:
(a) z = x3 y − 2 x2 y2 + 5 x y − 2 x
(b) z = xcos(x y) − y sen(x y)
(c) z = cos(x3 + x y)
(d) z = arctg(x2 − 2 x y)
(e) z = ex2+y2
(f) w = x2y3 z4
(g) w = cos(x + y + z)
(h) w = x3 y2 z + 2 (x + y + z)
(i) w = x3−y3
x2+y3
(j) w = exyz
(k) w = log4(x2 + y z + x y z)
(l) w = exy2z3
11. Verifique que as funções dadas satisfazem à equação de Laplace:∂ 2f
∂x2+
∂ 2f
∂y2= 0.
(a) f (x, y) = e−x cos(y).(b) f (x, y) = ln(
x2 + y2).
(c) f (x, y) = arctg
yx
, x > 0.
12. Verifique que as funções dadas satisfazem à equação de Laplace em dimensão 3:
∂ 2f
∂x2+
∂ 2f
∂y2+
∂ 2f
∂z2= 0.
(a) f (x,y,z) = x2 + y2 − 2 z2. (b) f (x,y,z) = e3x+4y cos(5z).
13. Usando a regra da cadeia para z = f (x, y) e w = f (x,y,z), calculedz
dt
edw
dt
:
(a) z = x2 + 2y2, x = sen(t), , y = cos(t)
(b) z = arctg( yx ), x = ln(t), y = et
(c) z = tg( xy ), x = t, y = et
(d) z = exy, x = 3t + 1, y = t2
(e) z = x2cos(y) − x, x = t2, y = 1t
(f) z = ln(x) + ln(y) + xy, x = et, y = e−t
(g) w = xyz, x = t2, y = t3, z = t4
(h) w = e−
xy2sen(z), x = t, y = 2t, z = 3t
(i) w = x2 + y2 + z2, x = et, y = ez = etsen(t)
(j) w = x2+y2
1+x2+y2+z2 , x = cos(t),y = sen(t), z = et
(k) w = x+y+zx2+y2+z2 , x = cos(t),
y = sen(t), z = et
(l) w = (x2− y2) ln(
z3
x2−y2), x =
y = senh(t), z = t
14. Usando a regra da cadeia para z = f (x, y) e w = f (x,y,z), calcule:∂z
∂t,
∂z
∂se
∂w
∂t∂w
∂r.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 117/279
5.9. EXERCÍCIOS 117
(a) z = x2 − y2, x = 3t − s, y = t + 2s
(b) z = ey
x , x = 2scos(t), y = 4ssen(t)
(c) z = x2 + y2, x = cosh(s) cos(t),y = senh(s) sen(t)
(d) z = x2y−2, x = s2 − t, y = 2st
(e) z = cosh(
y
x ), x = 3t2
s, y = 6tes
(f) ) z =
1 + x2 + y2, x = set, y = se−t
(g) z = arcsen(3x+y), x = s2, y = sen(st)
(h) w = xey, x = arctg(rst), y = ln(3rs +5st)
(i) w = x2 + y2 + z2, x = rsen(t)cos(s),y = rsen(t)sen(s), z = rcos(t)
(j) w =
x2 + y2 + z2, x = tg(t), y =cos(r), z = sen(s)
(k) w = xy + yz + zx, x = tr, y = st, z = ts
(l) w = log5(xy+yz+zx), x = t2r, y = st2,z = t2s
15. Se o raio r e a altura h de um tanque cônico decrescem à razão de 0.3 cm/h e 0.5 cm/hrespectivamente, determine a razão de decrescimento do volume do tanque quando r =6 cm e h = 30 cm.
16. Num certo instante, a altura de um cone é 30 cm e o raio da base é 20 cm e cresce à razãode 1 cm/seg. Qual é a velocidade com que a altura aumenta no instante em que o volumecresce à razão de 2000
3 π cm3/seg?
17. Considere a lei de um gás ideal confinado, para k = 10. Determine a taxa de variação datemperatura no instante em que o volume do gás é de 120 cm3 e o gás está sob pressãode 8 din/cm2, sabendo que o volume cresce à razão de 2 cm3/seg e a pressão decresce àrazão de 0.1 din/cm2.
18. Se z = f (x, y) é diferenciável, x = rcos(θ) e y = rsen(θ), verifique:
∂z
∂x=
∂z
∂rcos(θ) − ∂z
∂θ
sen(θ)
re
∂z
∂y=
∂z
∂rsen(θ) +
∂z
∂θ
cos(θ)
r.
19. Sejam f (x, y) e g(x, y) funções diferenciáveis tais que:
∂f
∂x=
∂g
∂ye
∂f
∂y= − ∂g
∂x.
Se x = rcos(θ), y = rsen(θ) verifique que:
∂f
∂r=
1
r
∂g
∂θe
∂g
∂r= −1
r
∂f
∂θ.
20. Verifique que se w = f (x,y ,z) é diferenciável e homogênea de grau n, então:
x∂f
∂x+ y
∂f
∂y+ z
∂f
∂z= nf (x,y,z).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 118/279
118 CAPÍTULO 5. DERIVADAS PA
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 119/279
Capítulo 6
DERIVADA DIRECIONAL
6.1 Introdução
Suponha que estamos numa ladeira de uma montanha e desejamos determinar a inclinação damontanha na direção do eixo dos z. Se a montanha fosse representada pelo gráfico da funçãoz = f (x, y), então, já saberíamos determinar a inclinação em duas direções diferentes, a saber,na direção do eixo dos x utilizando ∂f
∂x (x, y) e na direção do eixo dos y utilizando ∂f ∂y (x, y). Neste
parágrafo veremos como utilizar derivada para determinar a inclinação em qualquer direção;para isto definimos um novo tipo de derivada chamada direcional. Este conceito generaliza ode derivada parcial, isto é, as derivadas parciais de uma função podem ser obtidas como casosparticulares das derivadas direcionais.
Definição 6.1. Sejam A ⊂ Rn aberto, f : A ⊂ Rn −→ R uma função, x ∈ A e v um vetor unitárioem Rn. A derivada direcional de f no ponto x e na direção v é denotada por:
∂f
∂ v(x)
e definida por: ∂f
∂ v(x) = lim
t−→0
f (x + t v) − f (x)
t,
se o limite existe.
Se n = 3, A ⊂ R3 aberto, f : A ⊂ R3 −→ R uma função, x = (x,y,z) ∈ A e v = (v1, v2, v3) umvetor unitário em R3. A derivada direcional de f no ponto (x,y,z) e na direção v é denotada
por:∂f
∂ v(x,y,z) e definida por:
∂f
∂ v(x,y ,z) = lim
t−→0
f (x + t v1, y + t v2, z + t v3) − f (x,y,z)
t
se o limite existe. Analogamente para n = 2:
∂f
∂ v(x, y) = lim
t−→0
f (x + t v1, y + t v2) − f (x, y)
t
se o limite existe.
119

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 120/279
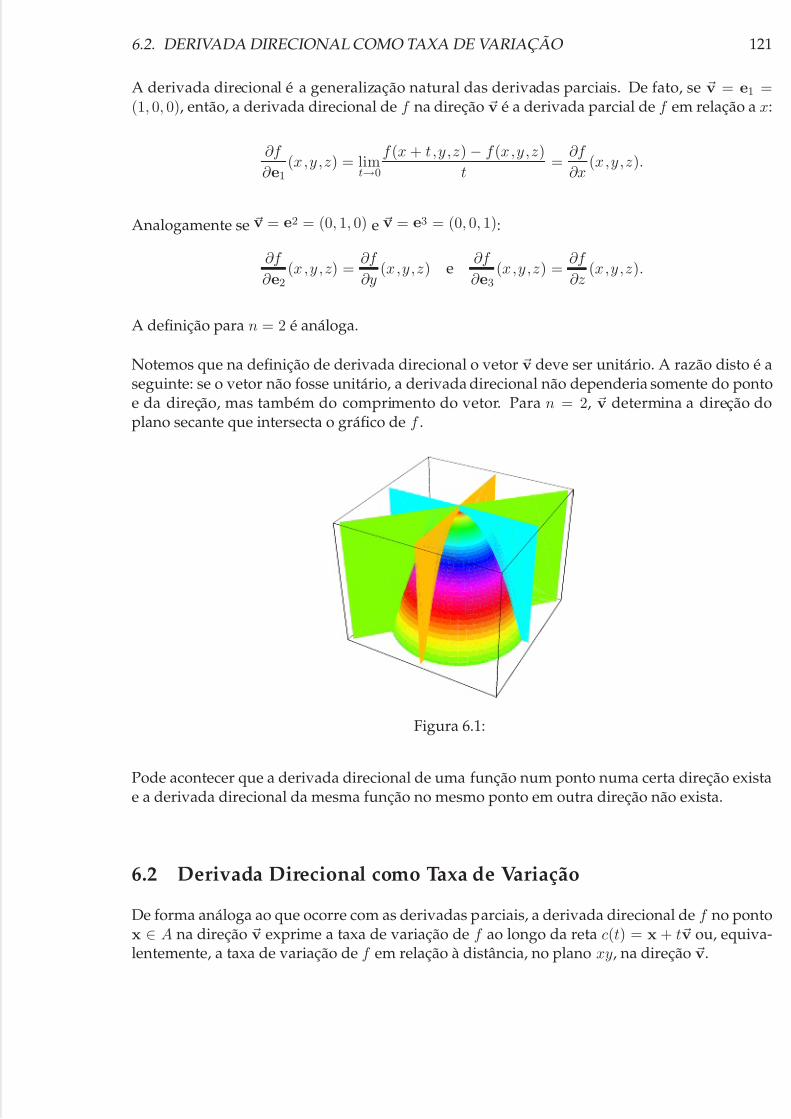
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 121/279
6.2. DERIVADA DIRECIONAL COMO TAXA DE VARIAÇÃO 121
A derivada direcional é a generalização natural das derivadas parciais. De fato, se v = e1 =(1, 0, 0), então, a derivada direcional de f na direção v é a derivada parcial de f em relação a x:
∂f
∂ e1(x,y,z) = lim
t→0
f (x + t,y,z) − f (x,y,z)
t=
∂f
∂x(x,y,z).
Analogamente se v = e2 = (0, 1, 0) e v = e3 = (0, 0, 1):
∂f
∂ e2(x,y ,z) =
∂f
∂y(x,y,z) e
∂f
∂ e3(x,y,z) =
∂f
∂z(x,y,z).
A definição para n = 2 é análoga.
Notemos que na definição de derivada direcional o vetor v deve ser unitário. A razão disto é aseguinte: se o vetor não fosse unitário, a derivada direcional não dependeria somente do pontoe da direção, mas também do comprimento do vetor. Para n = 2, v determina a direção doplano secante que intersecta o gráfico de f .
Figura 6.1:
Pode acontecer que a derivada direcional de uma função num ponto numa certa direção existae a derivada direcional da mesma função no mesmo ponto em outra direção não exista.
6.2 Derivada Direcional como Taxa de Variação
De forma análoga ao que ocorre com as derivadas parciais, a derivada direcional de f no pontox ∈ A na direção v exprime a taxa de variação de f ao longo da reta c(t) = x + t v ou, equiva-lentemente, a taxa de variação de f em relação à distância, no plano xy, na direção v.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 122/279
122 CAPÍTULO 6. DERIVADA DIREC
y0
y0
+t
x0x
0+t
Ae
e
2
1
v
c(t)
Figura 6.2:
Novamente, a existência de todas as derivadas direcionais de uma função num ponto nrante a continuidade da função no ponto, pois, equivale a aproximar-se do ponto por re
Exemplo 6.2.
O potencial elétrico numa região do espaço é dado por V (x,y ,z) = x2 + 4 y2 + 9 z2. Achde variação de V no ponto (2, −1, 3) e na direção de (2, −1, 3) para a origem.
O vetor (2, −1, 3) não é unitário; logo, v =(2, −1, 3)
(2, −1, 3) =1√14
2, −1, 3
. Então:
f
x +2 t√
14, y − t√
14, z +
3 t√14
=
x +2 t√
14
2+ 4
y − t√
14
2+ 9
z +
3 t√14
2;
e,
f
x +
2 t√14
, y − t√14
, z +3 t√
14− f (x,y ,z) =
1
14t
89 t + 2
√14(2 x − 4 y + 27 z)
Logo,
∂f
∂ v= lim
t−→0
1
14
89 t + 2
√14(2 x − 4 y + 27 z)
=
√14
7(2 x − 4 y + 27 z). Então:
∂f
∂ v(2, −1, 3) =
89√
14
7.
Se f é diferenciável no ponto x0, então, f possui todas as derivadas direcionais emrecíproca é falsa. Procure exemplos.
6.3 Gradiente de uma Função
Definição 6.2. Sejam A ⊂ Rn aberto, x ∈ A e f : A ⊂ Rn −→ R uma função tal que as de parciais existem em x. O gradiente de f no ponto x é o vetor do Rn denotado por ∇f (x) e por:
∇f (x) = ∂f
∂x1(x),
∂f
∂x2(x), . . . ,
∂f
∂xn(x)
.
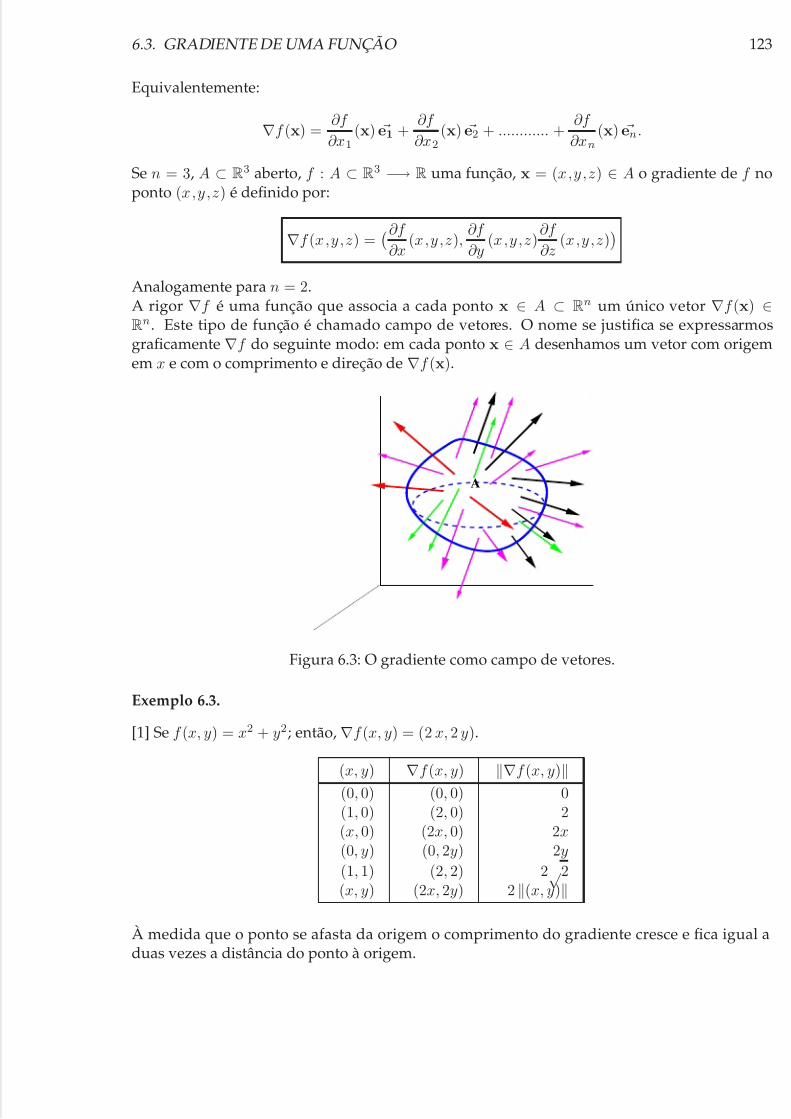
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 123/279
6.3. GRADIENTE DE UMA FUNÇÃO 123
Equivalentemente:
∇f (x) =∂f
∂x1(x) e1 +
∂f
∂x2(x) e2 + ............ +
∂f
∂xn(x) en.
Se n = 3, A ⊂ R3 aberto, f : A ⊂ R3 −→ R uma função, x = (x,y,z) ∈ A o gradiente de f noponto (x,y,z) é definido por:
∇f (x,y,z) =∂f
∂x(x,y,z),
∂f
∂y(x,y,z)
∂f
∂z(x,y,z)
Analogamente para n = 2.A rigor ∇f é uma função que associa a cada ponto x ∈ A ⊂ Rn um único vetor ∇f (x) ∈Rn. Este tipo de função é chamado campo de vetores. O nome se justifica se expressarmosgraficamente ∇f do seguinte modo: em cada ponto x ∈ A desenhamos um vetor com origemem x e com o comprimento e direção de ∇f (x).
A
Figura 6.3: O gradiente como campo de vetores.
Exemplo 6.3.
[1] Se f (x, y) = x2 + y2; então, ∇f (x, y) = (2 x, 2 y).
(x, y) ∇f (x, y) ∇f (x, y)(0, 0) (0, 0) 0(1, 0) (2, 0) 2(x, 0) (2x, 0) 2x(0, y) (0, 2y) 2y
(1, 1) (2, 2) 2√2(x, y) (2x, 2y) 2 (x, y)
À medida que o ponto se afasta da origem o comprimento do gradiente cresce e fica igual aduas vezes a distância do ponto à origem.
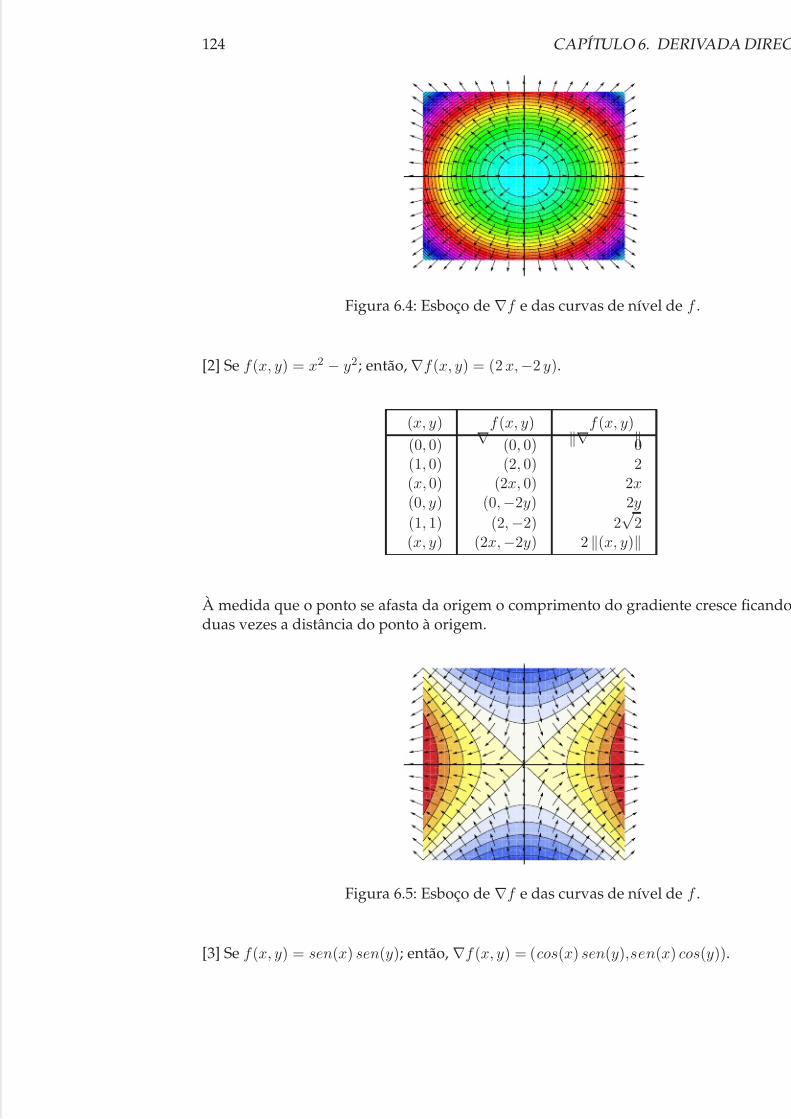
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 124/279
124 CAPÍTULO 6. DERIVADA DIREC
Figura 6.4: Esboço de ∇f e das curvas de nível de f .
[2] Se f (x, y) = x2 − y2; então, ∇f (x, y) = (2 x, −2 y).
(x, y)∇
f (x, y)∇
f (x, y)(0, 0) (0, 0) 0
(1, 0) (2, 0) 2(x, 0) (2x, 0) 2x(0, y) (0, −2y) 2y
(1, 1) (2, −2) 2√
2(x, y) (2x, −2y) 2 (x, y)
À medida que o ponto se afasta da origem o comprimento do gradiente cresce ficandoduas vezes a distância do ponto à origem.
Figura 6.5: Esboço de ∇f e das curvas de nível de f .
[3] Se f (x, y) = sen(x) sen(y); então, ∇f (x, y) = (cos(x) sen(y),sen(x) cos(y)).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 125/279
6.3. GRADIENTE DE UMA FUNÇÃO 125
Figura 6.6: Esboço de ∇f e das curvas de nível de f .
[4] Se f (x,y ,z) = x2 + y2 + z2, então: ∇f (x,y,z) = (2 x, 2 y, 2 z) e:
∇f (x,y,z) = 2
x2 + y2 + z2.
Figura 6.7: Esboço de ∇f .
Proposição 6.1. Se f é uma função diferenciável então:
∂f
∂ v(x) = ∇f (x) · v
Para a prova, veja o apêndice. Se n = 2, qualquer vetor unitário v pode ser escrito na formacos(θ),sen(θ)
, onde θ é o ângulo diretor de v. Logo:
∂f ∂ v
(x, y) = cos(θ) ∂f ∂x
(x, y) + sen(θ) ∂f ∂y
(x, y)
Exemplo 6.4.
[1] Calcule as derivadas direcionais de z = f (x, y) = ln(
x2 + y2) na direção do vetor (1, 1).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 126/279
126 CAPÍTULO 6. DERIVADA DIREC
O ângulo formado por (1, 1) e o eixo positivo dos x é θ = π4 , logo:
∂f
∂ v(x, y) = cos(
π
4)
x
x2 + y2+ sen(
π
4)
y
x2 + y2=
√2
2
x + y
x2 + y2
.
[2] Calcule as derivadas direcionais de w = f (x,y,z) = x y z na direção do vetor (1, 2, 2
Consideremos o vetor unitário v =(1, 2, 2)
(1, 2, 2) =1
3 ,2
3 ,2
3; logo:
∂f
∂ v(x,y,z) =
y z , x z , x y
· 1
3,
2
3,
2
3
=
y z + 2 x z + 2 x y
3.
[3] Calcule as derivadas direcionais de w = f (x,y,z) = ex + y z na direção do vetor (−1
O vetor (−1, 5, −2) não é unitário; logo v =1√30
(−1, 5, −2).
∂f
∂ v(x,y ,z) =
1√30
(ex, z , y) · (−1, 5, −2) =−ex + 5 z − 2 y√
30.
6.3.1 Observações Geométricas sobre Gradientes
Sejam f : A ⊂ Rn −→ R uma função diferenciável tal que ∇f = 0, v um vetor unitárângulo formado por v e ∇f . Então:
∇f · v = ∇f v cos(α) = ∇f cos(α);
como cos(α) atinge o máximo em α = 0, então: ∂f ∂ v ≤ ∇f . Se α =
π
2, então, ∇f é orto
v. Se consideramos o vetor unitário v = ∇f ∇f , então,
∂f ∂ v
= ∇f · ∇f ∇f = ∇f 2
∇f = ∇f .
Logo, temos a igualdade quando derivamos na direção de ∇f .
Proposição 6.2. Se ∇f = 0, então:
1. A taxa máxima de crescimento de f no ponto x0 ocorre na direção e no sentido do gr Analogamente, a taxa mínima de crescimento de f no ponto x0 ocorre na direção contrá gradiente.
2. O valor máximo de ∂f
∂ v
no ponto x0 é∇
f (x0)
.
3. Se ∇f (x) = 0, então, ∂f ∂ v = 0 para todo v.
O gradiente de f no ponto x0 indica a direção, no plano xy (Dom(f )), de maior crescde f numa vizinhança do ponto x0.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 127/279
6.3. GRADIENTE DE UMA FUNÇÃO 127
Figura 6.8:
Exemplo 6.5.
[1] Se T (x, y) =100 x y
x2 + 4 y2 + 4é a temperatura em graus Celsius, sobre uma lâmina metálica, x
e y medidos em cm, determine a direção de crescimento máximo de T a partir do ponto (1, 1) ea taxa máxima de crescimento de T , nesse ponto.
Pela proposição anterior, no ponto (1, 1), a função cresce mais rapidamente na direção de∇T (1, 1) e a taxa máxima de crescimento nesta direção é ∇T (1, 1).
∇T (x, y) =100
(4 + x2 + 4 y2)2
y (4 − x2 + 4 y2), x (4 + x2 − 4 y2)
;
∇T (1, 1) =100
92
7, 1
e ∇T (1, 1) =500
√2
92∼= 8.729o por centímetro.
A solução apresentada pode ser enganosa, pois, apesar de o gradiente apontar na direção demaior crescimento da temperatura, não necessariamente indica o lugar mais quente da lâmina,isto é, o gradiente nos dá uma solução num pequeno aberto ao redor do ponto (1, 1); se mu-damos este ponto a direção de maior crescimento muda. Desenhos do gradiente ao redor doponto (1, 1) numa região do plano, respectivamente:
0.5 1 1.5 2
0.5
1
1.5
2
0 0.5 1 1.5 2
0
0.5
1
1.5
2
Figura 6.9:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 128/279
128 CAPÍTULO 6. DERIVADA DIREC
[2] Suponha que o potencial numa lâmina plana é dado por V (x, y) = 80 − 20 x e−x2
volts, x e y em cm.
(a) Determine a taxa de variação do potencial em qualquer direção paralela ao eixo dos
(b) Determine a taxa de variação do potencial em qualquer direção paralela ao eixo dos
(c) Determine a taxa de variação do potencial na direção do vetor (1, 1).
(d) Qual é a taxa máxima de variação do potencial no ponto (1, 2)?
(e) Em que direção, a partir da origem, o potencial aumenta e diminui?
(a) Qualquer direção paralela ao eixo dos x é dada pelo vetor v = (1, 0); logo:
∂V
∂ v(x, y) =
∂V
∂ x(x, y) = 2 (x2 − 10) e−
x2+y2
20 .
(b) Analogamente, qualquer direção paralela ao eixo dos y é dada pelo vetor v = (0, 1);
∂V
∂ v(x, y) =
∂V
∂ y(x, y) = 2 x y e−
x2+y2
20 .
(c) O vetor (1, 1) não é unitário; normalizando o vetor obtemos v =√22 (1, 1) e calculam
∂V
∂ v(x, y) = ∇V (x, y) · v.
Então:
∇V (x, y) =
∂V
∂ x(x, y),
∂V
∂ y(x, y)
= 2 e−
x2+y2
20 (x2 − 10, x y);
∂V
∂ v(x, y) =
√2 ∇V (x, y) · (1, 1) =
√2 e−
x2+y2
20 (x2 + x y − 10).
(d) A taxa máxima do potencial no ponto (1, 2) é ∇V (1, 2).
∇V (x, y) = 2 e−x2−y2
20
100 + x4 + x2 (y2 − 20);
logo, ∇V (1, 2) =
2√
85
4√e volts.
(e) A direção do gradiente é aquela onde o potencial cresce mais rapidamente. Logoque ∇V (0, 0) = (−20, 0). A partir da origem o potencial cresce mais rapidamente na do vetor (−20, 0) e decresce mais rapidamente na direção do vetor −∇V (0, 0) = (20, 0)seguinte desenho:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 129/279
6.3. GRADIENTE DE UMA FUNÇÃO 129
Figura 6.10: Exemplo [3].
[3] A temperatura do ar em certa altitude é dada por f (x,y,z) = x y2 z3 + x2 y z3 + x2 y3 z. Umavião está localizado no ponto (−1, 2, 1). Em que direção deve voar para que o motor resfrie omais rapidamente possível?
De todas as direções possíveis, a direção do gradiente é aquela onde a função cresce maisrapidamente. Logo, o avião deverá voar na direção contrária a do gradiente.
∂f
∂x(x, y) = y z (2 x y2 + 2 x z2 + y z2),
∂f
∂y(x, y) = x z (3 x y2 + x z2 + 2 y z2),
∂f
∂z(x, y) = x y (x y2 + 3 x z2 + 3 y z2), e ∇f (−1, 2, 1) = (−16, 9, 2).
O avião deverá voar na direção de (16, −9, −2).
[4] Uma lâmina metálica está situada no plano xy de modo que a temperatura T = T (x, y), emgraus Celsius, em cada ponto, seja proporcional à distância do ponto à origem. Se a tempera-tura no ponto (3, 4) é de 150oC , pede-se:
(a) Ache a taxa de variação de T no ponto (3, 4) na direção (−1, 1).
(b) Em que direções a taxa de variação é zero?
Note que T (x, y) = k
x2 + y2; então, 150 = T (3, 4) = 5 k; logo k = 30 e:
T (x, y) = 30
x2 + y2 e o gradiente ∇T (x, y) =30
x2 + y2(x, y).
Logo, ∇T (3, 4) = 6(3, 4). Esboço de ∇f :
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 130/279
130 CAPÍTULO 6. DERIVADA DIREC
Figura 6.11: Exemplo [4].
(a) (−1, 1) não é unitário; logo, v =− 1√
2,
1√2
; então,
∂T
∂ v(3, 4) = ∇T (3, 4) · v = 3
√2.
(b) Seja v = (a, b) tal que a2 + b2 = 1;∂T
∂ v(3, 4) = 0 se (3, 4) · (a, b) = 0; logo, obtemos o s
sistema: a2 + b2 = 13 a + 4 b = 0,
com solução a = ±4
5e b = ∓3
5. As direções solicitadas são (4, −3) e (−4, 3).
[5] A equação da superfície de uma montanha é z = f (x, y) = 1200 − 3 x2 − 2 y2, odistâncias são medidas em metros. Suponha que os pontos do eixo positivo dos x estãoe os pontos do eixo positivo dos y ao norte e que um alpinista está no ponto (−10, 5, 850
Figura 6.12: Exemplo [5].
(a) Qual é a direção da parte que tem a inclinação mais acentuada?(b) Se o alpinista se mover na direção leste, ele estará subindo ou descendo e qual svelocidade?
(c) Se o alpinista se mover na direção sudoeste, ele estará subindo ou descendo e qual svelocidade?
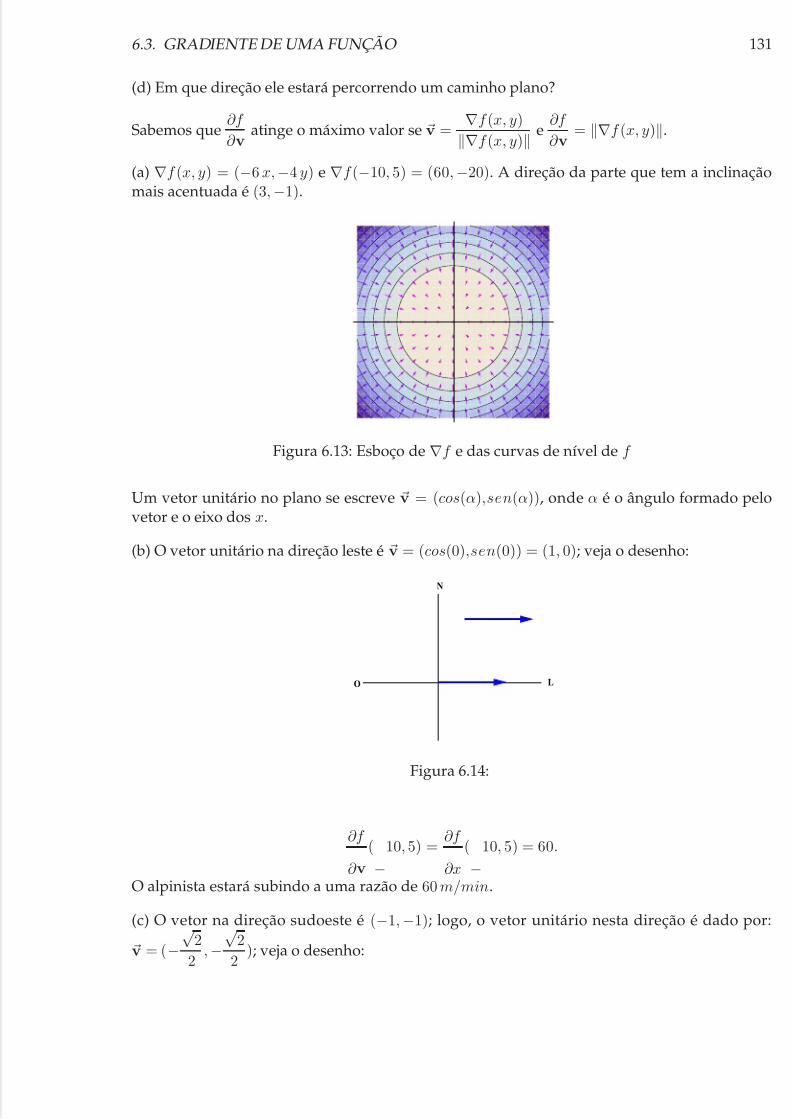
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 131/279
6.3. GRADIENTE DE UMA FUNÇÃO 131
(d) Em que direção ele estará percorrendo um caminho plano?
Sabemos que∂f
∂ vatinge o máximo valor se v =
∇f (x, y)
∇f (x, y) e∂f
∂ v= ∇f (x, y).
(a) ∇f (x, y) = (−6 x, −4 y) e ∇f (−10, 5) = (60, −20). A direção da parte que tem a inclinaçãomais acentuada é (3, −1).
Figura 6.13: Esboço de ∇f e das curvas de nível de f
Um vetor unitário no plano se escreve v = (cos(α),sen(α)), onde α é o ângulo formado pelovetor e o eixo dos x.
(b) O vetor unitário na direção leste é v = (cos(0),sen(0)) = (1, 0); veja o desenho:
L
N
O
Figura 6.14:
∂f
∂ v
(
−10, 5) =
∂f
∂x
(
−10, 5) = 60.
O alpinista estará subindo a uma razão de 60 m/min.
(c) O vetor na direção sudoeste é (−1, −1); logo, o vetor unitário nesta direção é dado por:
v = (−√
2
2, −
√2
2); veja o desenho:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 132/279
132 CAPÍTULO 6. DERIVADA DIREC
O
S
Figura 6.15:
∂f
∂ v(−10, 5) = ∇f (−10, 5) · v = −20
√2.
O alpinista estará descendo a uma razão de 20√
2 m/min.
(d) Seja v = (cos(α),sen(α)) vetor unitário. Devemos determinar α tal que:
∂f
∂ v (−10, 5) = ∇f (−10, 5) · v = 0,
que é equivalente a 3 cos(α) − sen(α) = 0; logo tg(α) = 3. Utilizando a seguinte iden
trigonométrica: sen2(α) =tg2(α)
1 + tg2(α), obtemos sen(α) = ±3
√10
10e cos(α) =
1 − sen
= ±√1010 . O alpinista estará percorrendo um caminho plano na direção de (1, 3) ou de (−
6.4 Funções Implícitas
Sejam A ⊂ R2 um conjunto aberto, f : A −→ R2 e c ∈ R fixado. A equação f (x, y) = c d
implicitamente como função dex
, quando existeg : I
−→R
tal quey = g(x)
ef (x, g(x
Isto significa que:f −1(c) = {(x, y) ∈ A / f (x, y) = c}
é o gráfico de g.
Em geral uma equação do tipo f (x, y) = c quando define y em função de x o faz apenamente (ou seja numa vizinhança de um ponto). Como veremos nos exemplos, nem sempequação do tipo f (x, y) = c define alguma função implicitamente. Para isto, basta conc /∈ Im(f ).
Exemplo 6.6.
[1] Seja f (x, y) = x2
+ y2
. Se c = −1, f não define implicitamente nehuma função. Seentão x = 0 e y = 0 e f não define implicitamente nenhuma função definida num intervdegenerado. Se c = 1, f não define implicitamente nehuma função. Considerando x(−1, 1), podemos definir:
g1(x) =
1 − x2 se A1 = {(x, y) ∈ R2 / y > 0},
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 133/279
6.4. FUNÇÕES IMPLÍCITAS 133
eg2(x) = −
1 − x2 se A2 = {(x, y) ∈ R2 / y < 0}.
[2] Seja f (x, y) = x y e c ∈ R; então, f define implícitamente:
y = g(x) =c
xse x = 0.
Nosso objetivo é dar condições suficientes para que seja possível obter uma função definidaimplicitamente. Exceto para as equações mais simples, por exemplo, lineares, quadráticas, estaquestão não é simples. O estudo das funções definidas implicitamente tem muitas aplicaçõesnão só na Matemática como em outras Ciências.
[3] A lei de Gay-Loussac para gases ideais confinados: P V = k T , onde P é a pressão, V ovolume e T a temperatura.
[4] O sistema: x2 + y2 + z2 = 1
x + y + z = 0,
estabelece uma relação entre as coordenadas de um ponto da esfera unitária centrada na ori-gem.
No estudo das funções definidas implicitamente surgem dois problemas:1. Dada f (x, y) = c, f de classe C k, (k > 1), em que casos existe g definida implicitamente porf (x, y) = c?2. Se existe g diferenciável definida implicitamente por f (x, y) = c, como calcular a derivadade g?
Teorema 6.1. (Função Implícita) Sejam A ⊂ R2 um conjunto aberto, f : A −→ R de classe C k e
c ∈ R fixo. Se (x0, y0) ∈ A é tal que f (x0, y0) = c e∂f
∂y(x0, y0) = 0, então, existe um retângulo aberto
I 1 ×
I 2
centrado em (x0
, y0
) tal que f −1(c)
∩ I 1 ×
I 2 é o gráfico da função g : I
1 −→I 2
de classe C k
e:
y′ = −∂F
∂x(x, g(x))
∂F
∂y(x, g(x))
.
Ix
g(x)
1
I2
f=c
Figura 6.16:
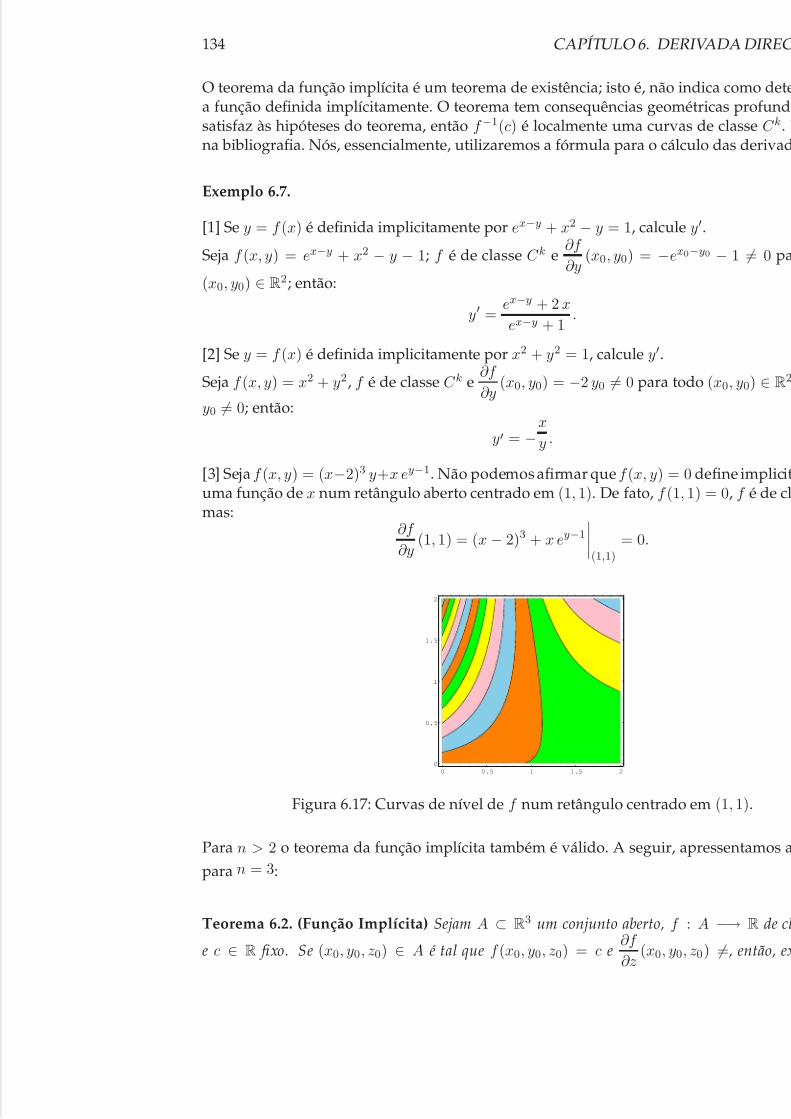
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 134/279
134 CAPÍTULO 6. DERIVADA DIREC
O teorema da função implícita é um teorema de existência; isto é, não indica como detea função definida implícitamente. O teorema tem consequências geométricas profundasatisfaz às hipóteses do teorema, então f −1(c) é localmente uma curvas de classe C k. Vna bibliografia. Nós, essencialmente, utilizaremos a fórmula para o cálculo das derivad
Exemplo 6.7.
[1] Se y = f (x) é definida implicitamente por ex−y + x2 − y = 1, calcule y′.
Seja f (x, y) = ex−y + x2 − y − 1; f é de classe C k e∂f
∂y(x0, y0) = −ex0−y0 − 1 = 0 pa
(x0, y0) ∈ R2; então:
y′ =ex−y + 2 x
ex−y + 1.
[2] Se y = f (x) é definida implicitamente por x2 + y2 = 1, calcule y′.
Seja f (x, y) = x2 + y2, f é de classe C k e∂f
∂y(x0, y0) = −2 y0 = 0 para todo (x0, y0) ∈ R2
y0 = 0; então:
y′ = −x
y .
[3] Seja f (x, y) = (x−2)3 y+x ey−1. Não podemos afirmar que f (x, y) = 0 define implicituma função de x num retângulo aberto centrado em (1, 1). De fato, f (1, 1) = 0, f é de clmas:
∂f
∂y(1, 1) = (x − 2)3 + x ey−1
(1,1)
= 0.
0 0.5 1 1.5 2
0
0.5
1
1.5
2
Figura 6.17: Curvas de nível de f num retângulo centrado em (1, 1).
Para n > 2 o teorema da função implícita também é válido. A seguir, apressentamos a
para n = 3:
Teorema 6.2. (Função Implícita) Sejam A ⊂ R3 um conjunto aberto, f : A −→ R de cl
e c ∈ R fixo. Se (x0, y0, z0) ∈ A é tal que f (x0, y0, z0) = c e∂f
∂z(x0, y0, z0) =, então, ex
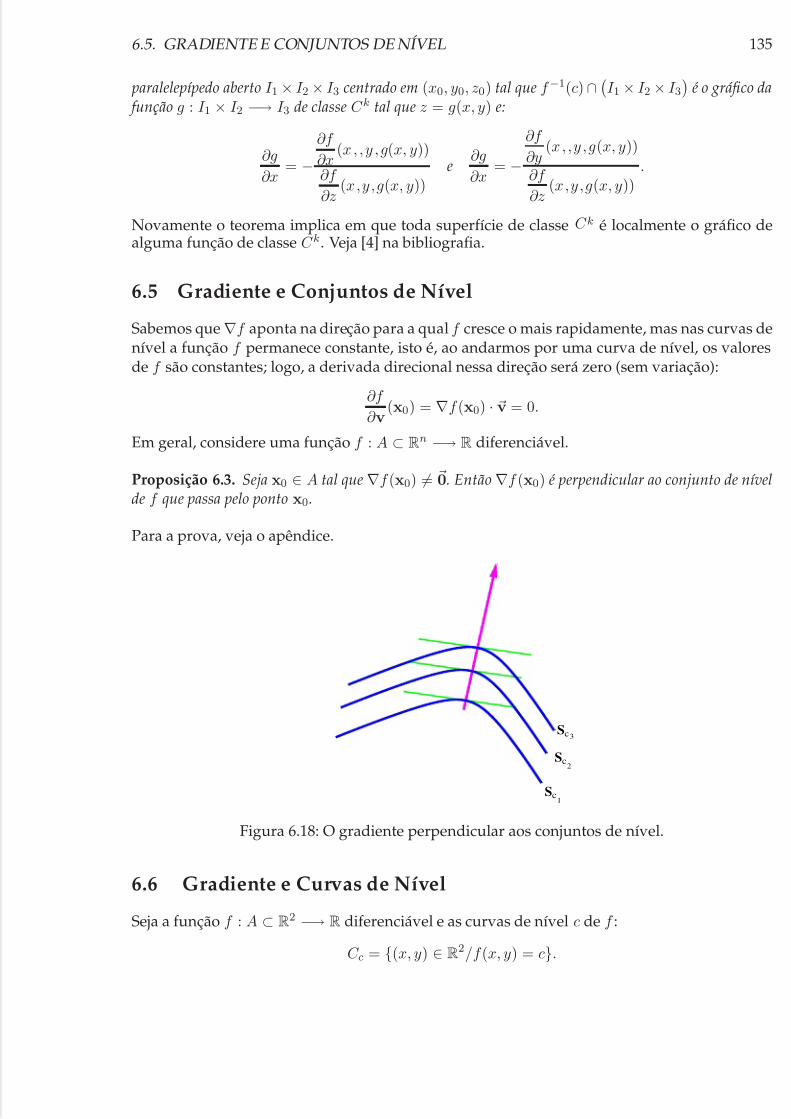
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 135/279
6.5. GRADIENTE E CONJUNTOS DE NÍVEL 135
paralelepípedo aberto I 1 × I 2 × I 3 centrado em (x0, y0, z0) tal que f −1(c) ∩ I 1 × I 2 × I 3
é o gráfico da função g : I 1 × I 2 −→ I 3 de classe C k tal que z = g(x, y) e:
∂g
∂x= −
∂f
∂x(x , , y , g(x, y))
∂f
∂z(x,y,g(x, y))
e∂g
∂x= −
∂f
∂y(x,,y ,g(x, y))
∂f
∂z(x,y,g(x, y))
.
Novamente o teorema implica em que toda superfície de classe C k é localmente o gráfico dealguma função de classe C k. Veja [4] na bibliografia.
6.5 Gradiente e Conjuntos de Nível
Sabemos que ∇f aponta na direção para a qual f cresce o mais rapidamente, mas nas curvas denível a função f permanece constante, isto é, ao andarmos por uma curva de nível, os valoresde f são constantes; logo, a derivada direcional nessa direção será zero (sem variação):
∂f
∂ v(x0) = ∇f (x0) · v = 0.
Em geral, considere uma função f : A ⊂ Rn −→ R diferenciável.
Proposição 6.3. Seja x0 ∈ A tal que ∇f (x0) = 0. Então ∇f (x0) é perpendicular ao conjunto de nívelde f que passa pelo ponto x0.
Para a prova, veja o apêndice.
Sc3
S
Sc2
c1
Figura 6.18: O gradiente perpendicular aos conjuntos de nível.
6.6 Gradiente e Curvas de Nível
Seja a função f : A ⊂ R2 −→ R diferenciável e as curvas de nível c de f :
C c = {(x, y) ∈ R2/f (x, y) = c}.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 136/279
136 CAPÍTULO 6. DERIVADA DIREC
Se (x0, y0) ∈ C c tal que ∇f (x0, y0) = 0. Pela proposição 6.3, segue que a equação tangente à curva de nível f (x, y) = c no ponto (x0, y0) é
∇f (x0, y0) · (x − x0, y − y0) = 0
ou:∂f
∂x(x
0, y
0)(x
−x0
) +∂f
∂y(x
0, y
0)(y
−y0
) = 0
e a equação da reta normal é:
∂f
∂x(x0, y0)(y − y0) − ∂f
∂y(x0, y0)(x − x0) = 0
Exemplo 6.8.
[1] Determine as equações da reta tangente e da reta normal no ponto (x0, y0) da elipse cna origem.
A equação da elipse centrada na origem é x2
a2+ y
2
b2= 1, (a, b = 0). Consideremos:
f (x, y) =x2
a2+
y2
b2− 1;
então, ∇f (x0, y0) = 2x0
a2,
y0b2; as equações das retas tangente e normal são, respectivam
b2 x0 x + a2 y0 y = a2 b2,
b2 x0 y − a2 y0 x = (b2 − a2) x0 y0.
Em particular, se a = b temos um círculo de raio a e as equações da reta tangente e normal são, respectivamente, x0 x + y0 y = a2
x0 y − y0 x = 0.
[2] Determine a equação da reta tangente à elipsex2
16+
y2
9= 1, que é paralela à reta x +
Seja f (x, y) =x2
16+
y2
9e g(x, y) = x + y. Pelo exercício anterior para a = 4 e b = 3, temo
9 x x0 + 16 y y0 = 144;
esta reta deve ser paralela à reta x + y = 0; logo, os vetores normais devem ser paralelosdevemos resolver o sistema:
∇f (x0, y0) = λ∇g(x0, y0)
x20
16+
y209
= 1.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 137/279
6.6. GRADIENTE E CURVAS DE NÍVEL 137
Ou, equivalentemente:
(1) x0 = 8 λ
(2) 2 y0 = 9 λ
(3)x20
16+
y209
= 1.
Fazendo (1) = (2) e utilizando (3), temos: (x0, y0) = ±165
, 95; logo, no ponto
165
, 95, temos
x + y = 5 e no ponto− 16
5, −9
5
, temos
x + y = −5.
-4 -2 2 4
-4
-2
2
4
Figura 6.19: Exemplo [2].
[3] Determine a equação da reta normal à parábola y2 =
−8 x que passa pelo ponto (
−5, 0).
Primeiramente, observamos que o ponto (−5, 0) não pertence à parábola. Seja:
f (x, y) = y2 + 8 x;
logo, ∇f (x, y) = 2 (4, y). A equação da reta normal no ponto (x0, y0) é:
−x y0 + 4 y − 4 y0 + x0 y0 = 0.
Como esta reta deve passar por (−5, 0), temos x0 = −1 ou y0 = 0. Como o ponto (x0, y0)pertence à parábola y20 =
−8 x0. Se y0 = 0, então a equação é: y = 0. Se x0 =
−1, então
y0 = ±2 √2 e as equações são:
2 y −√
2 x = 5√
2 e 2 y +√
2 x = −5√
2,
nos pontos (−1, 2√
2) e (−1, −2√
2), respectivamente.
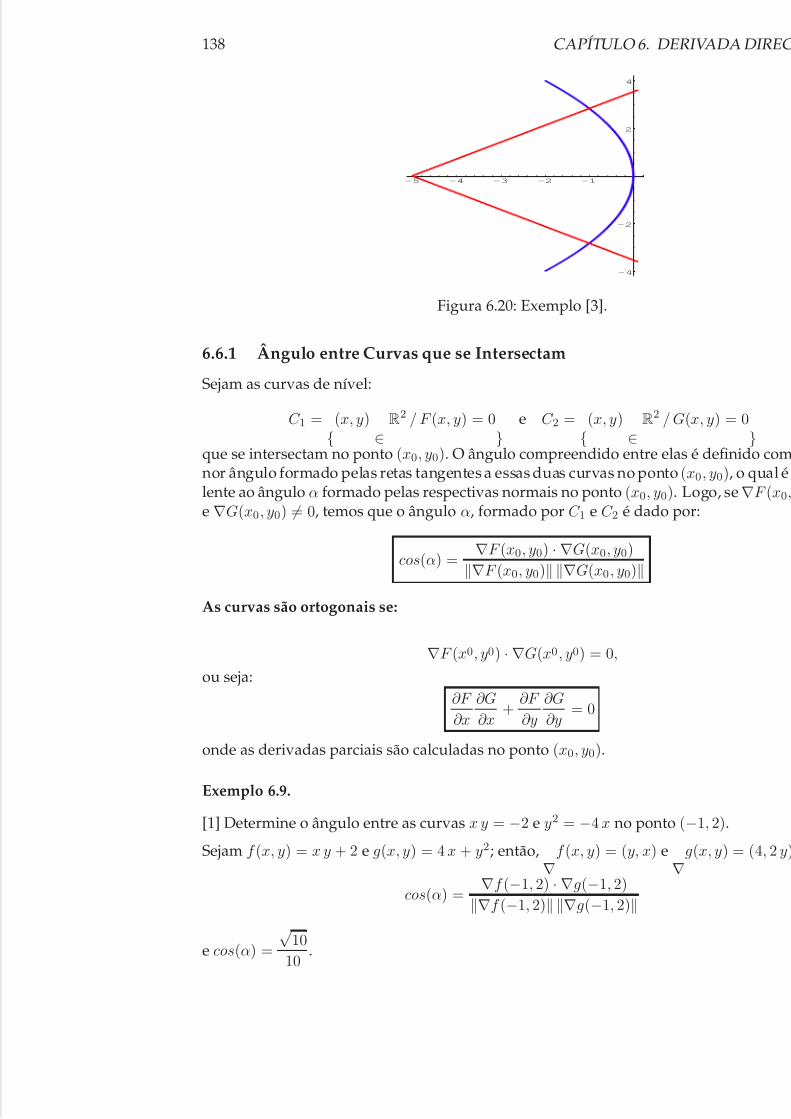
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 138/279
138 CAPÍTULO 6. DERIVADA DIREC
-5 -4 -3 -2 -1
-4
-2
2
4
Figura 6.20: Exemplo [3].
6.6.1 Ângulo entre Curvas que se Intersectam
Sejam as curvas de nível:
C 1 ={
(x, y)∈R2 / F (x, y) = 0
}e C 2 =
{(x, y)
∈R2 / G(x, y) = 0
}que se intersectam no ponto (x0, y0). O ângulo compreendido entre elas é definido comnor ângulo formado pelas retas tangentes a essas duas curvas no ponto (x0, y0), o qual élente ao ângulo α formado pelas respectivas normais no ponto (x0, y0). Logo, se ∇F (x0,e ∇G(x0, y0) = 0, temos que o ângulo α, formado por C 1 e C 2 é dado por:
cos(α) =∇F (x0, y0) · ∇G(x0, y0)
∇F (x0, y0) ∇G(x0, y0)
As curvas são ortogonais se:
∇F (x0, y0) · ∇G(x0, y0) = 0,
ou seja:∂F
∂x
∂G
∂x+
∂F
∂y
∂G
∂y= 0
onde as derivadas parciais são calculadas no ponto (x0, y0).
Exemplo 6.9.
[1] Determine o ângulo entre as curvas x y = −2 e y2 = −4 x no ponto (−1, 2).
Sejam f (x, y) = x y + 2 e g(x, y) = 4 x + y2; então,∇
f (x, y) = (y, x) e∇
g(x, y) = (4, 2 y)
cos(α) =∇f (−1, 2) · ∇g(−1, 2)
∇f (−1, 2) ∇g(−1, 2)
e cos(α) =
√10
10.
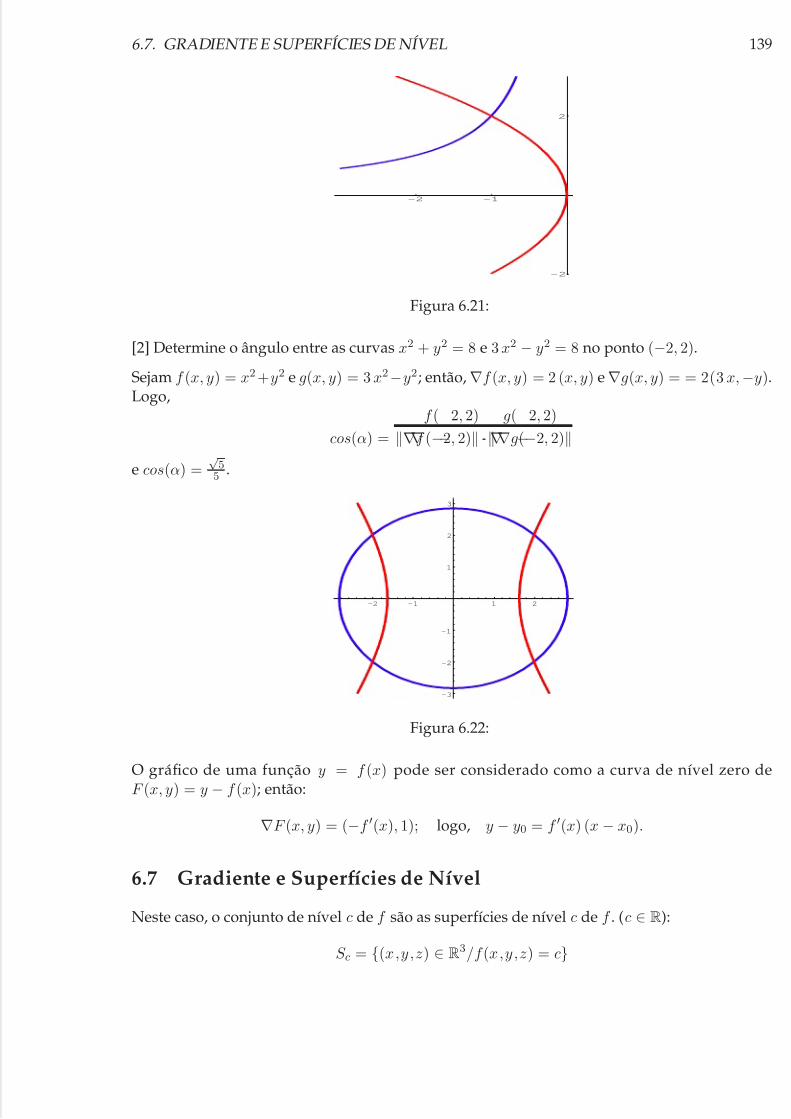
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 139/279
6.7. GRADIENTE E SUPERFÍCIES DE NÍVEL 139
-2 -1
-2
2
Figura 6.21:
[2] Determine o ângulo entre as curvas x2 + y2 = 8 e 3 x2 − y2 = 8 no ponto (−2, 2).
Sejam f (x, y) = x2+y2 e g(x, y) = 3 x2−y2; então, ∇f (x, y) = 2 (x, y) e ∇g(x, y) = = 2(3 x, −y).Logo,
cos(α) = ∇f (
−2, 2)
· ∇g(
−2, 2)
∇f (−2, 2) · ∇g(−2, 2)e cos(α) =
√55 .
-2 -1 1 2
-3
-2
-1
1
2
3
Figura 6.22:
O gráfico de uma função y = f (x) pode ser considerado como a curva de nível zero deF (x, y) = y − f (x); então:
∇F (x, y) = (−f ′(x), 1); logo, y − y0 = f ′(x) (x − x0).
6.7 Gradiente e Superfícies de Nível
Neste caso, o conjunto de nível c de f são as superfícies de nível c de f . (c ∈ R):
S c = {(x,y,z) ∈ R3/f (x,y,z) = c}
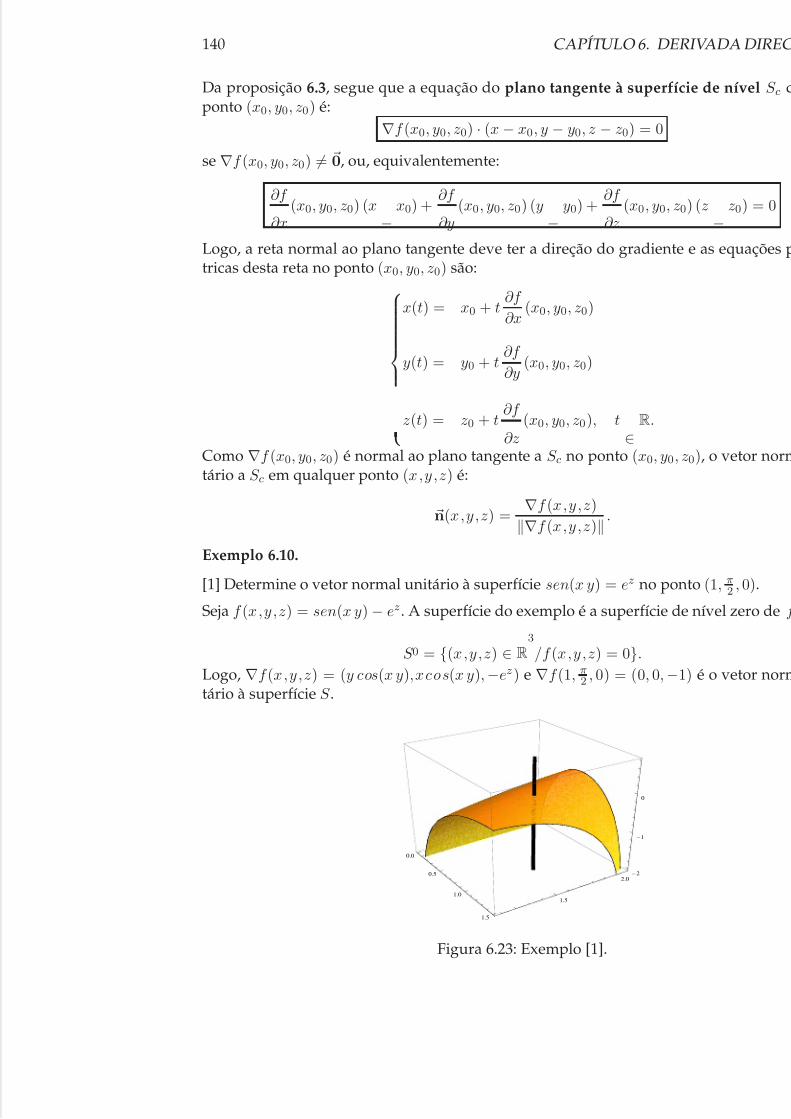
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 140/279
140 CAPÍTULO 6. DERIVADA DIREC
Da proposição 6.3, segue que a equação do plano tangente à superfície de nível S c dponto (x0, y0, z0) é:
∇f (x0, y0, z0) · (x − x0, y − y0, z − z0) = 0
se ∇f (x0, y0, z0) = 0, ou, equivalentemente:
∂f
∂x(x0, y0, z0) (x
−x0) +
∂f
∂y(x0, y0, z0) (y
−y0) +
∂f
∂z(x0, y0, z0) (z
−z0) = 0
Logo, a reta normal ao plano tangente deve ter a direção do gradiente e as equações ptricas desta reta no ponto (x0, y0, z0) são:
x(t) = x0 + t∂f
∂x(x0, y0, z0)
y(t) = y0 + t∂f
∂y(x0, y0, z0)
z(t) = z0 + t∂f
∂z(x0, y0, z0), t
∈R.
Como ∇f (x0, y0, z0) é normal ao plano tangente a S c no ponto (x0, y0, z0), o vetor normtário a S c em qualquer ponto (x,y,z) é:
n(x,y,z) =∇f (x,y,z)
∇f (x,y,z) .
Exemplo 6.10.
[1] Determine o vetor normal unitário à superfície sen(x y) = ez no ponto (1, π2 , 0).
Seja f (x,y,z) = sen(x y) − ez. A superfície do exemplo é a superfície de nível zero de f
S 0 = {(x,y,z) ∈ R3
/f (x,y,z) = 0}.
Logo, ∇f (x,y,z) = (y cos(x y),xcos(x y), −ez ) e ∇f (1, π2 , 0) = (0, 0, −1) é o vetor norm
tário à superfície S .
0.0
0.5
1.0
1.5
1.5
2.02
1
0
Figura 6.23: Exemplo [1].
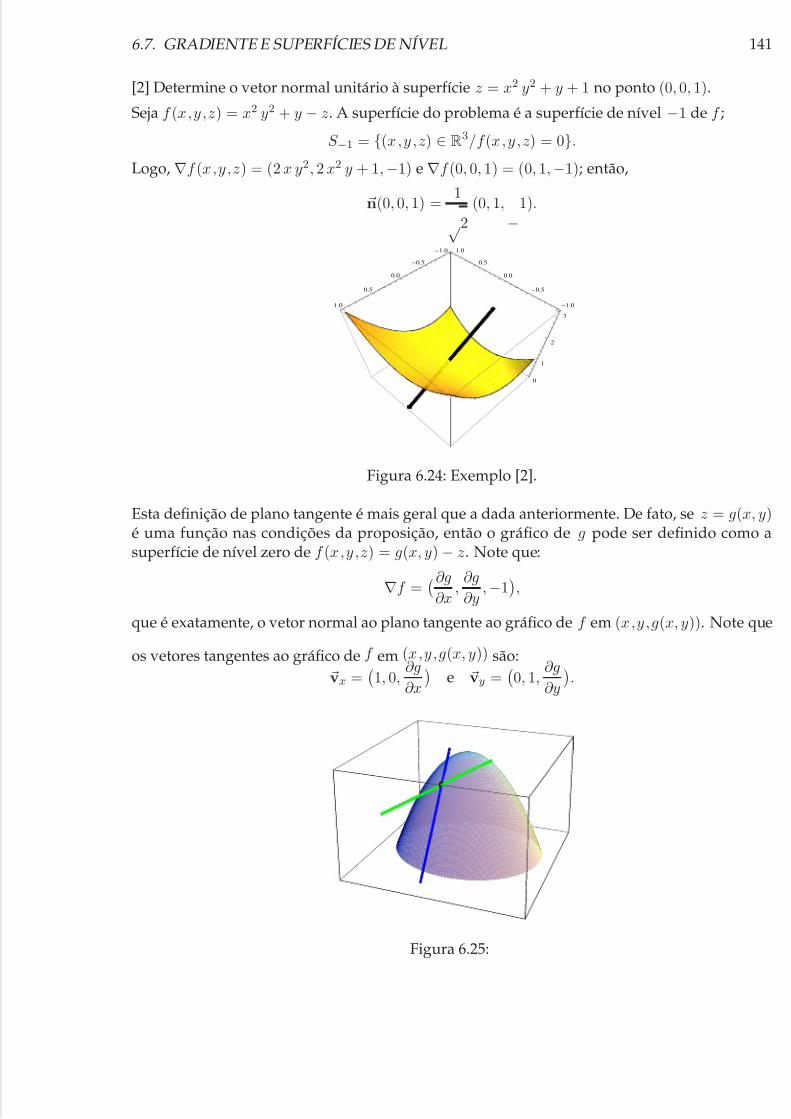
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 141/279
6.7. GRADIENTE E SUPERFÍCIES DE NÍVEL 141
[2] Determine o vetor normal unitário à superfície z = x2 y2 + y + 1 no ponto (0, 0, 1).
Seja f (x,y,z) = x2 y2 + y − z. A superfície do problema é a superfície de nível −1 de f ;
S −1 = {(x,y ,z) ∈ R3/f (x,y ,z) = 0}.
Logo, ∇f (x,y,z) = (2 x y2, 2 x2 y + 1, −1) e ∇f (0, 0, 1) = (0, 1, −1); então,
n(0, 0, 1) =1
√2
(0, 1,
−1).
1.0
0.5
0.0
0.5
1.01.0
0.5
0.0
0.5
1.0
0
1
2
3
Figura 6.24: Exemplo [2].
Esta definição de plano tangente é mais geral que a dada anteriormente. De fato, se z = g(x, y)é uma função nas condições da proposição, então o gráfico de g pode ser definido como asuperfície de nível zero de f (x,y,z) = g(x, y) − z. Note que:
∇f =∂g
∂x,
∂g
∂y, −1
,
que é exatamente, o vetor normal ao plano tangente ao gráfico de f em (x,y,g(x, y)). Note que
os vetores tangentes ao gráfico de f em (x,y,g(x, y)) são: vx =
1, 0,
∂g
∂x
e vy =
0, 1,
∂g
∂y
.
Figura 6.25:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 142/279
142 CAPÍTULO 6. DERIVADA DIREC
Lembramos, que todas as superfícies definidas por equações em três variáveis, como as cas, podem ser consideradas como superfícies de algum nível de uma função de tres va
Exemplo 6.11.
[1] Seja f uma função de classe C 1 tal que f (1, 1, 2) = 1 e ∇f (1, 1, 2) = (2, 1, 3). A ef (1, 1, 2) = 1 define implícitamente uma função g? No caso afirmativo, determine a edo plano tangente ao gráfico de g no ponto (1, 1, 2).
Como ∇f (1, 1, 2) = (2, 1, 3); então,∂f
∂x(1, 1, 2) = 2,
∂f
∂y(1, 1, 2) = 1 e
∂f
∂z(1, 1, 2) =
teorema da função implícita, existe z = g(x, y) de classe C 1 no ponto (1, 1), g(1, 1) = 2 e
∂g
∂x(1, 1) =
∂f
∂x(1, 1, 2))
∂f
∂z(1, 1, 2))
= −2
3e
∂g
∂y(1, 1) = −
∂f
∂y(1, 1, 2)
∂f
∂z(1, 1, 2)
= −1
3.
Logo, a equação do plano tangente ao gráfico de g no ponto (1, 1, 2) é:
z = g(1, 1) +∂g
∂x(1, 1) (x − 1) +
∂g
∂y(1, 1) (y − 1) =
6 − 2 x − y
3;
equivalentemente, 3 z + 2 x + y = 6.
[2] O cone x2 + y2 − z2 = 0 pode ser considerado como a superfície de nível c = 0 daf (x,y ,z) = x2 + y2 − z2. Determinaremos as equações do plano tangente e da reta nosuperfície no ponto (1, 1,
√2):
∇f (1, 1,√
2) · (x − 1, y − 1, z −√
2) = 0.
Temos ∇f (x,y,z) = (2 x, 2 y, −2 z) e ∇f (1, 1,√
2) = 2(1, 1, −√2); então, a equação do
tangente é x + y − √2z = 0 e a reta normal passando por (1, 1,
√2) tem equações param
x = 1 + 2 t
y = 1 + 2 tz =
√2 − 2
√2 t;
o plano tangente à superfície contem a reta na direção (1, 1,√
2) perpendicular ao ∇f (1
-2
-1
0
1
2
-2
-1
0
1
2
0
0.5
1
1.5
2
-2
-1
0
1
-2
-1
0
1
Figura 6.26:
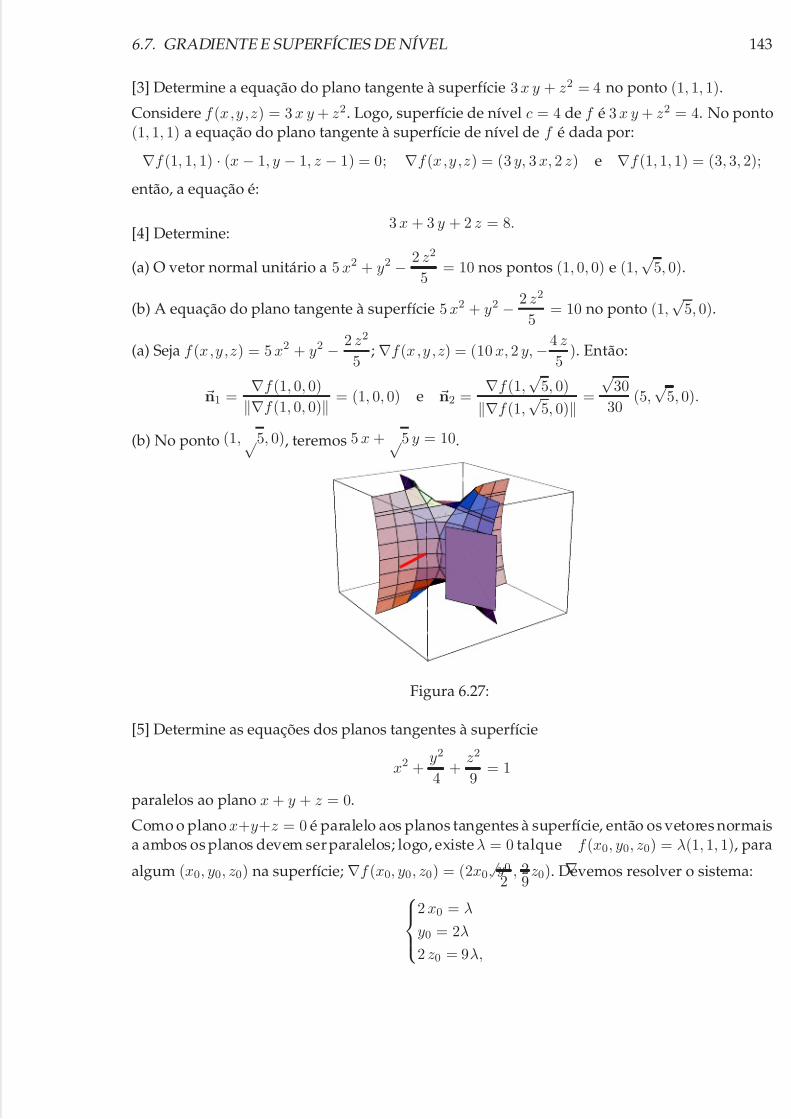
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 143/279
6.7. GRADIENTE E SUPERFÍCIES DE NÍVEL 143
[3] Determine a equação do plano tangente à superfície 3 x y + z2 = 4 no ponto (1, 1, 1).
Considere f (x,y,z) = 3 x y + z2. Logo, superfície de nível c = 4 de f é 3 x y + z2 = 4. No ponto(1, 1, 1) a equação do plano tangente à superfície de nível de f é dada por:
∇f (1, 1, 1) · (x − 1, y − 1, z − 1) = 0; ∇f (x,y,z) = (3 y, 3 x, 2 z) e ∇f (1, 1, 1) = (3, 3, 2);
então, a equação é:
3 x + 3 y + 2 z = 8.[4] Determine:
(a) O vetor normal unitário a 5 x2 + y2 − 2 z2
5= 10 nos pontos (1, 0, 0) e (1,
√5, 0).
(b) A equação do plano tangente à superfície 5 x2 + y2 − 2 z2
5= 10 no ponto (1,
√5, 0).
(a) Seja f (x,y,z) = 5 x2 + y2 − 2 z2
5; ∇f (x,y ,z) = (10 x, 2 y, −4 z
5). Então:
n1 =∇f (1, 0, 0)
∇f (1, 0, 0) = (1, 0, 0) e n2 =∇f (1,
√5, 0)
∇f (1,√
5, 0) =
√30
30(5,
√5, 0).
(b) No ponto (1, √5, 0), teremos 5 x + √5 y = 10.
Figura 6.27:
[5] Determine as equações dos planos tangentes à superfície
x2 +y2
4+
z2
9= 1
paralelos ao plano x + y + z = 0.
Como o plano x+y+z = 0 é paralelo aos planos tangentes à superfície, então os vetores normaisa ambos os planos devem serparalelos; logo, existe λ
= 0 talque
∇f (x0, y0, z0) = λ(1, 1, 1), para
algum (x0, y0, z0) na superfície; ∇f (x0, y0, z0) = (2x0, y02
, 29
z0). Devemos resolver o sistema:
2 x0 = λ
y0 = 2λ
2 z0 = 9λ,
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 144/279
144 CAPÍTULO 6. DERIVADA DIREC
sendo x02 +
y204
+z209
= 1; logo λ = ±
2
7; obtemos, assim, os pontos p = ±
2
7
1
2, 2,
9
2
∇f p
= ±√
14
7
1, 1, 1
; então, as equações dos planos tangentes nestes pontos, são:
x + y + z = ±√
14.
[6] Determine a equação do plano tangente no ponto (x0, y0, z0) à superfície definida po
A x2 + B y2 + C z2 = D
onde A, B, C, D ∈ R.
Consideremos f (x,y,z) = A x2 + B y2 + C z2 − D; logo, temos que:
∇f (x0, y0, z0) = (2 A x0, 2 B y0, 2 C z0)
e a equação do plano tangente no ponto (x0, y0, z0) é:
A x0 x + B y0 y + C z0 z = D
onde usamos o fato de que (x0, y0, z0) pertence à superfície. Em particular, o plano tang
ponto (x0, y0, z0) de:1. um elipsóide centrado na origem é:
x0 x
a2+
y0 y
b2+
z0 z
c2= 1
2. um parabolóide hiperbólico centrado na origem é:
2x0x
a2− 2
y0y
b2− z
c= 0
6.7.1 Ângulo entre Superfícies
Em diversas áreas da ciência é importante saber determinar o ângulo formado pela intde duas superfícies num ponto dado. O ângulo entre duas superfícies num ponto commenor ângulo formado pelas normais a essas superfícies nesse ponto.
Figura 6.28: Interseção de superfícies.
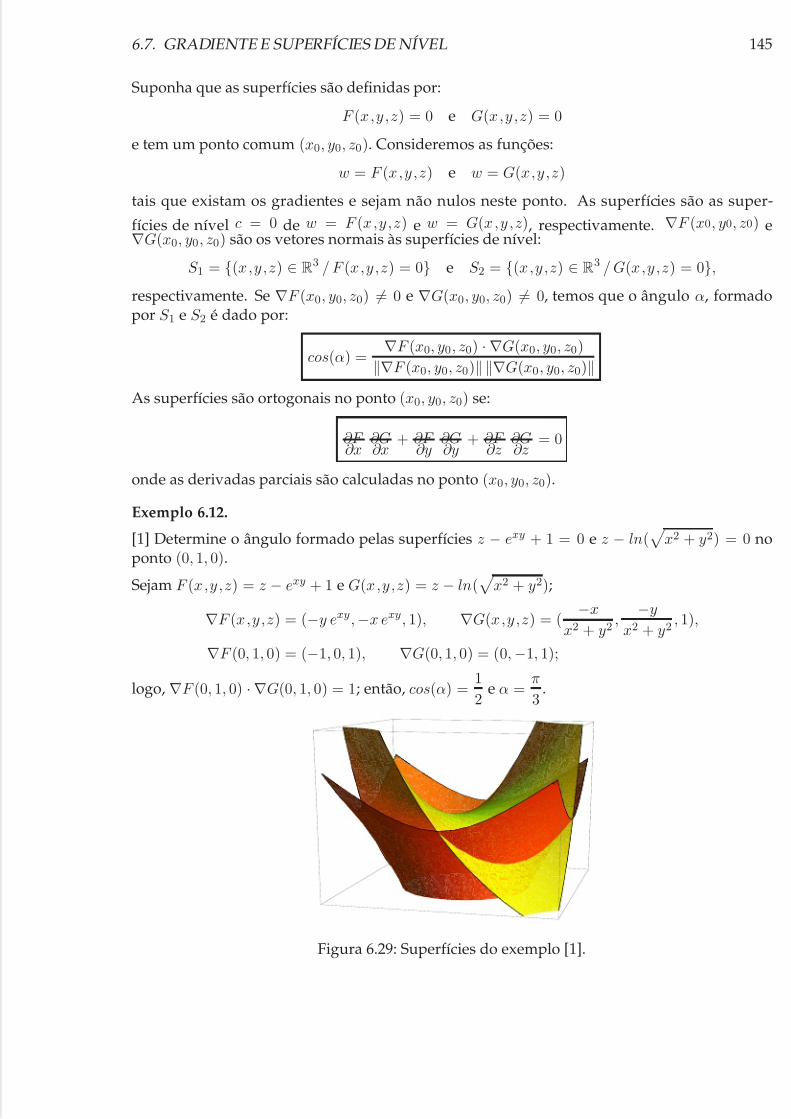
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 145/279
6.7. GRADIENTE E SUPERFÍCIES DE NÍVEL 145
Suponha que as superfícies são definidas por:
F (x,y,z) = 0 e G(x,y,z) = 0
e tem um ponto comum (x0, y0, z0). Consideremos as funções:
w = F (x,y,z) e w = G(x,y,z)
tais que existam os gradientes e sejam não nulos neste ponto. As superfícies são as super-
fícies de nível c = 0 de w = F (x,y,z) e w = G(x,y ,z), respectivamente. ∇F (x0, y0, z0) e∇G(x0, y0, z0) são os vetores normais às superfícies de nível:
S 1 = {(x,y,z) ∈ R3 / F (x,y,z) = 0} e S 2 = {(x,y,z) ∈ R3 / G(x,y,z) = 0},
respectivamente. Se ∇F (x0, y0, z0) = 0 e ∇G(x0, y0, z0) = 0, temos que o ângulo α, formadopor S 1 e S 2 é dado por:
cos(α) =∇F (x0, y0, z0) · ∇G(x0, y0, z0)
∇F (x0, y0, z0) ∇G(x0, y0, z0)As superfícies são ortogonais no ponto (x0, y0, z0) se:
∂F ∂x
∂G∂x
+ ∂F ∂y
∂G∂y
+ ∂F ∂z
∂G∂z
= 0
onde as derivadas parciais são calculadas no ponto (x0, y0, z0).
Exemplo 6.12.
[1] Determine o ângulo formado pelas superfícies z − exy + 1 = 0 e z − ln(
x2 + y2) = 0 noponto (0, 1, 0).
Sejam F (x,y,z) = z − exy + 1 e G(x,y,z) = z − ln(
x2 + y2);
∇F (x,y,z) = (−y exy, −x exy, 1), ∇G(x,y,z) = (−x
x2 + y2,
−y
x2 + y2, 1),
∇F (0, 1, 0) = (−1, 0, 1), ∇G(0, 1, 0) = (0, −1, 1);
logo, ∇F (0, 1, 0) · ∇G(0, 1, 0) = 1; então, cos(α) =1
2e α =
π
3.
Figura 6.29: Superfícies do exemplo [1].
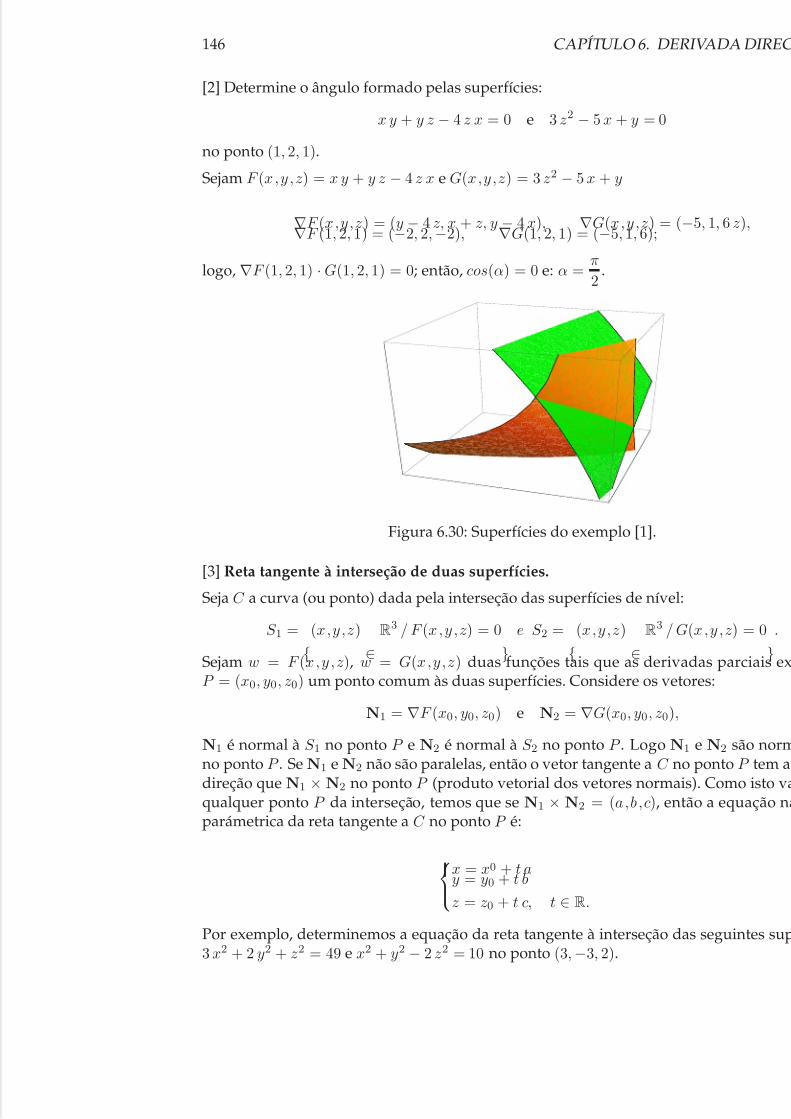
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 146/279
146 CAPÍTULO 6. DERIVADA DIREC
[2] Determine o ângulo formado pelas superfícies:
x y + y z − 4 z x = 0 e 3 z2 − 5 x + y = 0
no ponto (1, 2, 1).
Sejam F (x,y ,z) = x y + y z − 4 z x e G(x,y,z) = 3 z2 − 5 x + y
∇F (x,y,z) = (y − 4 z, x + z, y − 4 x), ∇G(x,y,z) = (−5, 1, 6 z),∇F (1, 2, 1) = (−2, 2, −2), ∇G(1, 2, 1) = (−5, 1, 6);
logo, ∇F (1, 2, 1) · G(1, 2, 1) = 0; então, cos(α) = 0 e: α =π
2.
Figura 6.30: Superfícies do exemplo [1].
[3] Reta tangente à interseção de duas superfícies.
Seja C a curva (ou ponto) dada pela interseção das superfícies de nível:
S 1 =
{(x,y,z)
∈R3 / F (x,y ,z) = 0
}e S 2 =
{(x,y,z)
∈R3 / G(x,y ,z) = 0
}.
Sejam w = F (x,y ,z), w = G(x,y,z) duas funções tais que as derivadas parciais exP = (x0, y0, z0) um ponto comum às duas superfícies. Considere os vetores:
N1 = ∇F (x0, y0, z0) e N2 = ∇G(x0, y0, z0),
N1 é normal à S 1 no ponto P e N2 é normal à S 2 no ponto P . Logo N1 e N2 são normno ponto P . Se N1 e N2 não são paralelas, então o vetor tangente a C no ponto P tem a direção que N1 × N2 no ponto P (produto vetorial dos vetores normais). Como isto vaqualquer ponto P da interseção, temos que se N1 × N2 = (a,b,c), então a equação naparámetrica da reta tangente a C no ponto P é:
x = x0 + t ay = y0 + t b
z = z0 + t c, t ∈ R.
Por exemplo, determinemos a equação da reta tangente à interseção das seguintes sup3 x2 + 2 y2 + z2 = 49 e x2 + y2 − 2 z2 = 10 no ponto (3, −3, 2).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 147/279
6.8. EXERCÍCIOS 147
Sejam F (x,y,z) = 3 x2 + 2 y2 + z2 − 49 e G(x,y,z) = x2 + y2 − 2 z2 − 10: então:
N1 = ∇F (3, −3, 2) = 2(9, −6, 2) e N2 = ∇G(3, −3, 2) = 2(3, −3, −4)
logo, (9, −6, 2) × (3, −3, −4) = 3(10, 14, −3); a equação, na forma paramétrica, da reta tangentepedida é:
x = 3 + 10 t
y = −3 + 14 t
z = 2 − 3 t.
6.8 Exercícios
1. Calcule o gradiente das seguintes funções:
(a) z = 2 x2 + 5 y2
(b) z = 1x2+y2
(c) w = 3 x2 + y2
−4 z2
(d) w = cos(x y) + sen(y z)
(e) w = ln(x2 + y2 + z2)
(f) w = cos(2 x) cos(3 y) senh(4 x)
(g) w = x y ez + y z ex
(h) w = x yz
(i) w = ln(x2 + y2 + z2 + 1)
(j) w = 1x2+y2+z2+1
(k) w = log6(x + y2 + z3)
(l) w =x y2 z3
x2 + y2 + z2 + 1
2. Determine a derivada direcional da função dada na direção v:
(a) z = 2 x2 + 5 y2, v = (cos( π2 ),sen( π
2 )).
(b) z =
1
x2+y2 , v
= (1, 1).(c) z = x2y3, v = 1
5 (3, −4).
(d) z = x2 + x y + y2 + 3 x − 3 y + 3, v = 1√5
(1, 2).
(e) z = y2 tg2(x), v = 12 (−√
3, 1).
(f) w = 3 x2 + y2 − 4 z2, v = (cos( π3 ),cos( π
4 ),cos(2π3 ).
(g) w = cos(x y) + sen(y z), v = (−13 , 23 , 23).
(h) w = ln(x2 + y2 + z2), v =√33 (1, −1, −1).
(i) w = cos(2 x) cos(3 y) senh(4 z), v =√33 (1, −1, 1).
(j) w = x y e
z
+ y z e
x
, v
= (2, 2, 1).(k) w = x yz , v = (1, 1, 1).
(l) w = xsen(y) + y sen(z) + z sen(x), v = (1, 1, 1).
(m) w = exyz , v = (1, 1, 1).
(n) w = e1+x2+y2+z2, v = (1, 0, 1).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 148/279
148 CAPÍTULO 6. DERIVADA DIREC
(o) w = arcsec(x y z), v = (0, 0, 1).
(p) w = 1x + 2
y + 3z , v = (1, 1, 1).
(q) w = 1x2 + 2
y2 + 3z3 , v = (1, 1, 1).
(r) w = sen(log3(x + y + z)), v = (2, 1, 2).
3. Determine o valor máximo da derivada direcional de f no ponto dado P e a direque ocorre:
(a) z = 2 x2 + 3 y2, P = (1, −1).
(b) z =
4 − x2 − y2, P = (1, 1).
(c) z = x y, P = (1, 0).
(d) z = e2y arctg( y3 x ), P = (1, 3).
(e) w = sen(x y) + cos(y z), P = (−3, 0, 7).
(f) w = ex cos(y) + ey cos(z) + ez cP = (0, 0, 0).
(g) w = 2 x y z + y2 + z2, P = (2, 1
(h) w = exyz , P = (1, 1, 1).
(i) w = cosh(x y z), P = (1, 0, 1).
(j) w =
x2 + y2 + z2 + 1, P = (1
4. Verifique as seguintes identidades:
(a) ∇(f + g) = ∇f + ∇g
(b) ∇(f g) = f ∇g + g ∇f
(c) ∇f g
= g∇f −f ∇g
g2se g = 0
5. Se f (x, y) = 2 e−x2 + e−3y2 é a altura de uma montanha na posição (x, y), em que dpartindo de (1, 0) se deveria caminhar para subir a montanha mais rapidamente?
6. Em que direção a derivada direcional de f (x, y) =
x2
−y2
x2 + y2 no ponto (1, 1) é zero?
7. Uma função tem derivada direcional igual a 2 na direção do vetor (2, 2), no pontoigual a −3 na direção do vetor (1, −1), no mesmo ponto. Determine o gradiente d no ponto (1, 2).
8. Verifique que os gráficos de z = x2 + y2 e z = −x2 − y2 − xy3 são tangentes na or
9. Uma lámina de metal está situada num plano de modo que a temperatura T =num ponto (x, y) é inversamente proporcional á distância do ponto á origem. Sque a temperatura no ponto P = (3, 4) é 100oC , determine:
(a) A taxa de variação de T no ponto P e na direção o vetor (1, 1).
(b) A direção em que T aumenta mais rapidamente no ponto P .
(c) A direção em que T decresce mais rapidamente no ponto P .
(d) A direção em que a taxa de variação é zero..
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 149/279
6.8. EXERCÍCIOS 149
10. Determine o plano tangente e a reta normal às superfícies no ponto P :
(a) x2 + x y2 + y3 + z + 1 = 0, P = (2, −3, 4).
(b) x2 + 2 x y + y2 + z − 7 = 0, P = (1, −2, 6).
(c) x2 − y2 − z2 = 1, P = (3, 2, 2).
(d) x2 + y2
−z2 = 25, P = (5, 5, 5).
(e) x − y − z2 = 3, P = (3, 4, 2).
(f) 3√
x2 + 3
y2 +3√
z2 =3√
a2, P = (x0, y0, z0).
(g) ln( y2z ) − x = 0, P = (0, 2, 1).
(h) x2
a2− y2
b2 + z2
c2 = 1, P = (x0, y0, z0).
(i) x2
a2− y2
b2− z2
c2 = 1, P = (x0, y0, z0).
(j) x2
a2 + y2
b2 − z2
c2 = 1, P = (x0, y0, z0).
11. Um nave está perto da órbita de um planeta na posição (1, 1, 1). Sabendo que a tempera-
tura da blindagem da nave em cada ponto é dada por T (x,y,z) = e−(x2
+3y2
+2z2
) graus,determine a direção que a nave deve tomar para perder temperatura o mais rapidamentepossível.
12. Determine a equação do plano tangente à x2 − 2 y2 − 4 z2 = 16 e que é paralelo ao plano4 x − 2 y + 4 z = 5.
13. A densidade de uma bola esférica de centro na origem, num ponto (x,y ,z) é proporcionalao quadrado da distncia do ponto á origem. E fetuando um deslocamento a partir doponto (1, 2, 3) do interior da bola, na direção do vetor (1, 1/2, −1), a densidade aumentaou diminui? Justifique.
14. Determine o ângulo entre as seguintes superfícies no ponto P .
(a) x2 y2 + 2 x + z2 = 16, 3 x2 + y2 − 2 z = 9 e P = (2, 1, 2).
(b) x2 + 3 y2 + 2 z2 = 9, x2 + y2 + z2 − 8 x − 8 y − 6 z + 24 = 0 e P = (2, 1, 1).
(c) 3 x2 + 2 y2 − 2 z = 1, x2 + y2 + z2 − 4 y − 2 z + 2 = 0 e P = (1, 1, 2).
(d) z − x2 − y2 + 2 x y = 0, z − x2 + y2 = 0 e P = (0, 0, 0).
(e) x2 − y2 = 1, 3 x2 + y2 − 2 z = 9 e P = (1, 0, 0).
(f) x2 − 2 y z + y3 = 4, x2 + (4 c − 2) y2 − c z2 + 1 = 0 e P = (1, −1, 2), (c ∈ R).
15. Determine o ponto (ou pontos) em que o gradiente da função : f (x, y) = ln(x + y−1) éigual a (1, −16/9).
16. Determine a equação da reta tangente à interseção das superfícies x2−y = 0 e y + z2 = 16no ponto (4, 16, 0).
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 150/279
150 CAPÍTULO 6. DERIVADA DIREC
17. Determine o ângulo entre os gradientes da função : f (x, y) = ln( yx ) nos pontos (1
e (1, 1).
18. Sejam as seguintes superfícies x2 + y2 + z2 = 6 e 2 x2 + 3 y2 + z2 = 9.
(a) Determine as equações dos planos tangentes a cada superfície no ponto (1, 1,pectivamente.
(b) Determine o ângulo entre as superfícies no ponto (1, 1, 2).
(c) Determine a equação da reta tangente à interseção das superfícies no ponto (1
19. O potencial V associado a um campo elétrico E é dado por V (x, y) = 1√x2+y2
. S
que E = −grad(V ), determine E (4, 3). Em que direção, a partir do ponto (4, 3) a variação do potencial é máxima?
20. Sejam φ, η e ψ funções de uma variável real com derivadas de segunda ordem zendo:
φ′′(x) + λ
2
φ(x) = 0 e ψ′′(t) + c
2
λ
2
ψ(t) = 0,sendo λ, c constantes. Verifique que u(x, t) = φ(x) ψ(t) é solução da equação da o
21. Verifique que w(x, t) = 1√t
e−x2
4kt , t > 0 e k constante, é solução da equação do calo
∂w
∂t− k
∂ 2w
∂x2= 0.
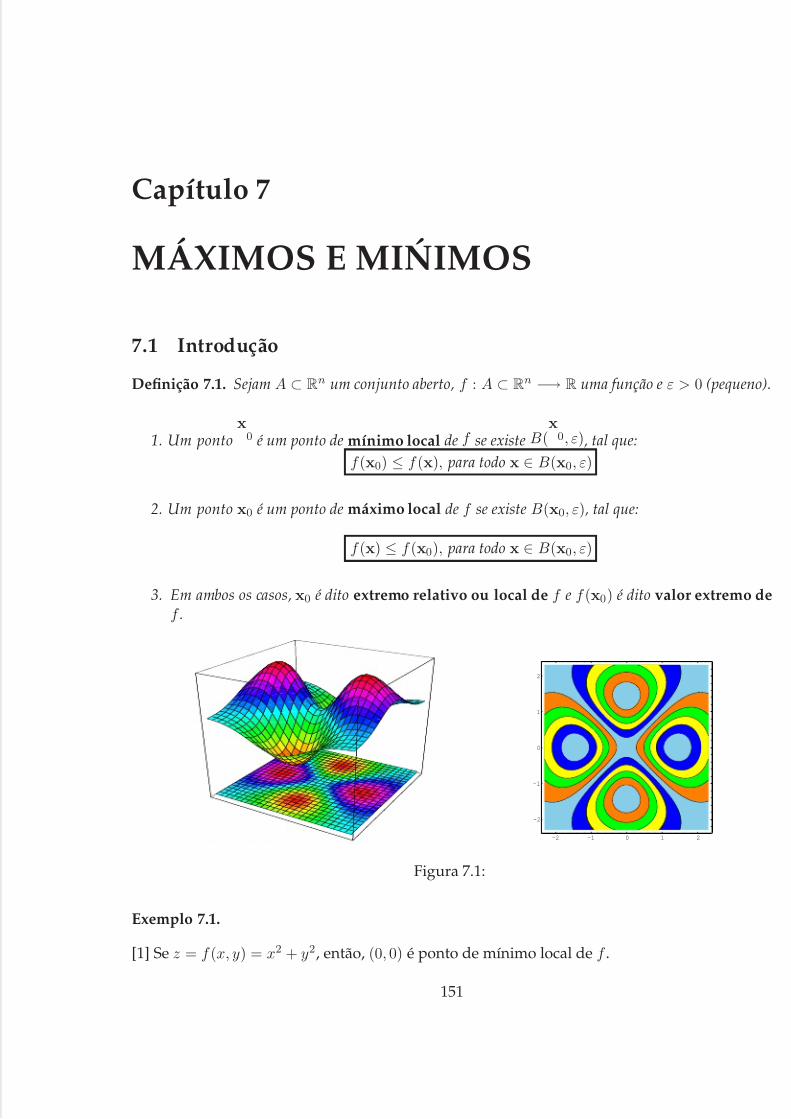
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 151/279
Capítulo 7
MÁXIMOS E MINIMOS
7.1 Introdução
Definição 7.1. Sejam A ⊂ Rn um conjunto aberto, f : A ⊂ Rn −→ R uma função e ε > 0 (pequeno).
1. Um pontox0 é um ponto de mínimo local de f se existe B(
x0, ε), tal que:
f (x0) ≤ f (x), para todo x ∈ B(x0, ε)
2. Um ponto x0 é um ponto de máximo local de f se existe B(x0, ε), tal que:
f (x) ≤ f (x0), para todo x ∈ B(x0, ε)
3. Em ambos os casos, x0 é dito extremo relativo ou local de f e f (x0) é dito valor extremo def .
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.1:
Exemplo 7.1.
[1] Se z = f (x, y) = x2 + y2, então, (0, 0) é ponto de mínimo local de f .
151
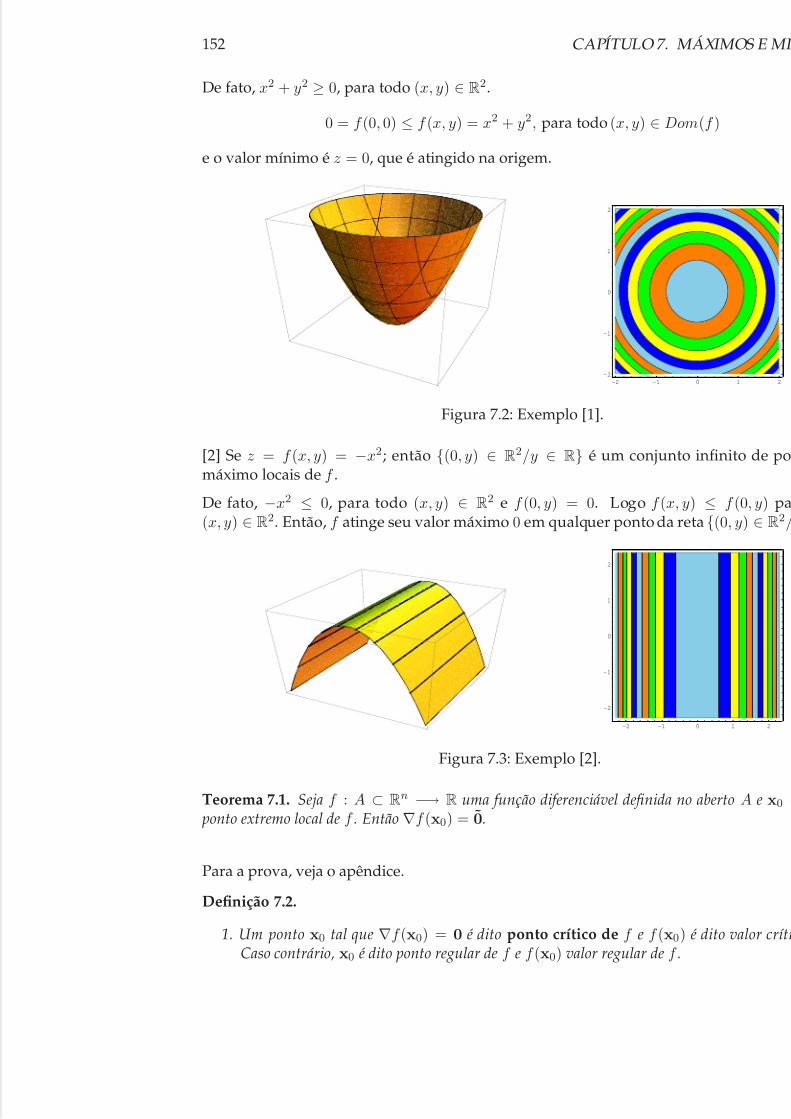
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 152/279
152 CAPÍTULO 7. MÁXIMOS E MI N
De fato, x2 + y2 ≥ 0, para todo (x, y) ∈ R2.
0 = f (0, 0) ≤ f (x, y) = x2 + y2, para todo (x, y) ∈ Dom(f )
e o valor mínimo é z = 0, que é atingido na origem.
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.2: Exemplo [1].
[2] Se z = f (x, y) = −x2; então {(0, y) ∈ R2/y ∈ R} é um conjunto infinito de pomáximo locais de f .
De fato, −x2 ≤ 0, para todo (x, y) ∈ R2 e f (0, y) = 0. Logo f (x, y) ≤ f (0, y) pa(x, y) ∈ R2. Então, f atinge seu valor máximo 0 em qualquer ponto da reta {(0, y) ∈ R2/
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.3: Exemplo [2].
Teorema 7.1. Seja f : A ⊂ Rn −→ R uma função diferenciável definida no aberto A e x0 ∈ ponto extremo local de f . Então ∇f (x0) = 0.
Para a prova, veja o apêndice.
Definição 7.2.
1. Um ponto x0 tal que ∇f (x0) = 0 é dito ponto crítico de f e f (x0) é dito valor crítiCaso contrário, x0 é dito ponto regular de f e f (x0) valor regular de f .

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 153/279
7.1. INTRODUÇÃO 153
2. Um ponto crítico que não é máximo local nem mínimo local é chamado de ponto de sela.
Para n = 3, ∇f (x,y,z) = 0 é equivalente a resolver o seguinte sistema de equações:
∂f
∂x(x,y ,z) = 0
∂f ∂y
(x,y ,z) = 0
∂f
∂z(x,y ,z) = 0.
Analogamente para n = 2:
∂f
∂x(x, y) = 0
∂f
∂y(x, y) = 0.
Agora, podemos enunciar o Teorema da função implícita de uma forma mais geométrica:Seja f uma função de classe C k (k > 0) definida num aberto de Rn. Para todo valor regular cde f , o conjunto f −1(c) ( se não for vazio) é uma superfície (curva) de classe C k.
Exemplo 7.2.
[1] Seja z = f (x, y) = x2 + y2. Então ∇f (x, y) = (2 x, 2 y) e:2 x = 0
2 y = 0;
a única solução do sistema é x = 0 e y = 0; (0, 0) é ponto crítico de f .
[2] Seja z = f (x, y) = 4 x y2 − 2 x2 y − x.
(1)∂f
∂x(x, y) = 4 y2 − 4 x y − 1 = 0
(2)∂f
∂y(x, y) = 8 x y − 2 x2 = 0;
o sistema é equivalente a:
(1) 4 y2
−4 x y = 1
(2) 2 x (4 y − x) = 0;
de (2): as soluções são x = 0 ou 4y − x = 0.
Se x = 0, então, de (1), 4 y2 = 1, y = ±12 e (0, ±1
2 ) são os pontos críticos. Se 4 y = x, então, de(1), 3 x2 = −4, que não tem solução real.
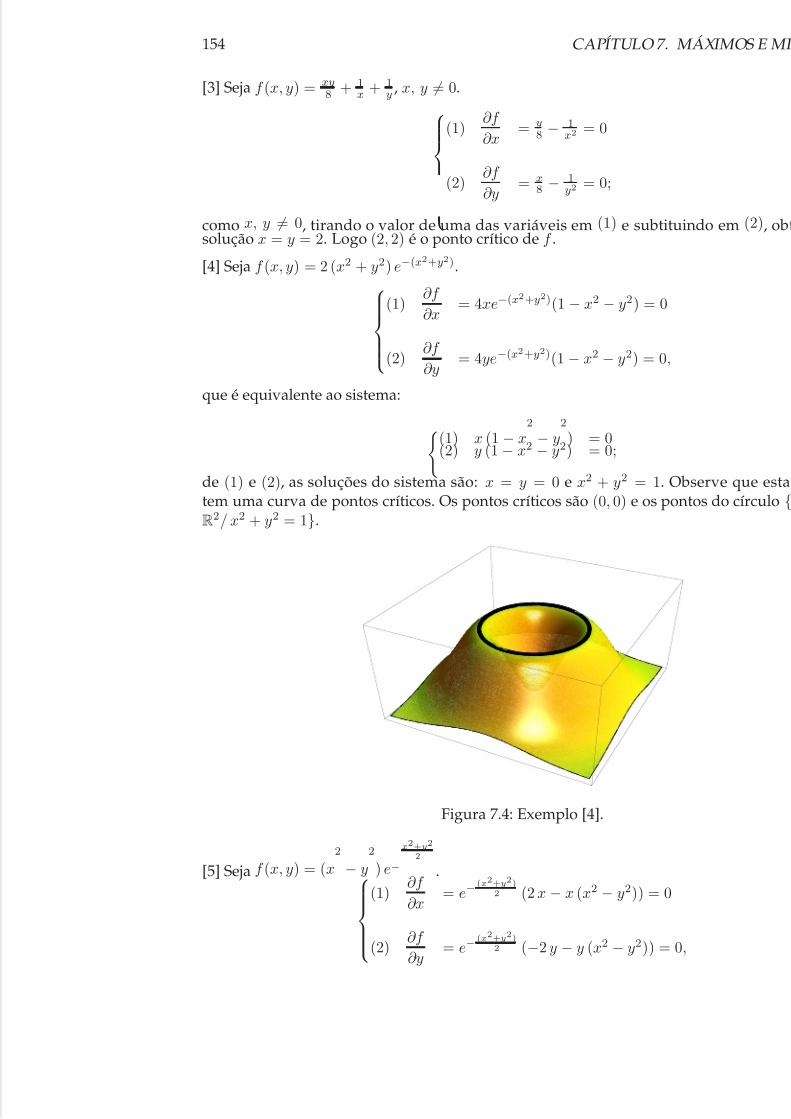
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 154/279
154 CAPÍTULO 7. MÁXIMOS E MI N
[3] Seja f (x, y) = xy8 + 1
x + 1y , x, y = 0.
(1)∂f
∂x= y
8 − 1x2 = 0
(2)∂f
∂y= x
8 − 1y2
= 0;
como x, y = 0, tirando o valor de uma das variáveis em (1) e subtituindo em (2), obtsolução x = y = 2. Logo (2, 2) é o ponto crítico de f .
[4] Seja f (x, y) = 2 (x2 + y2) e−(x2+y2).
(1)∂f
∂x= 4xe−(x2+y2)(1 − x2 − y2) = 0
(2)∂f
∂y= 4ye−(x2+y2)(1 − x2 − y2) = 0,
que é equivalente ao sistema:
(1) x (1 − x
2
− y2
) = 0(2) y (1 − x2 − y2) = 0;
de (1) e (2), as soluções do sistema são: x = y = 0 e x2 + y2 = 1. Observe que esta tem uma curva de pontos críticos. Os pontos críticos são (0, 0) e os pontos do círculo {R2/ x2 + y2 = 1}.
Figura 7.4: Exemplo [4].
[5] Seja f (x, y) = (x2
− y2
) e−x2+y2
2
.
(1)∂f
∂x= e−
(x2+y2)2 (2 x − x (x2 − y2)) = 0
(2)∂f
∂y= e−
(x2+y2)2 (−2 y − y (x2 − y2)) = 0,
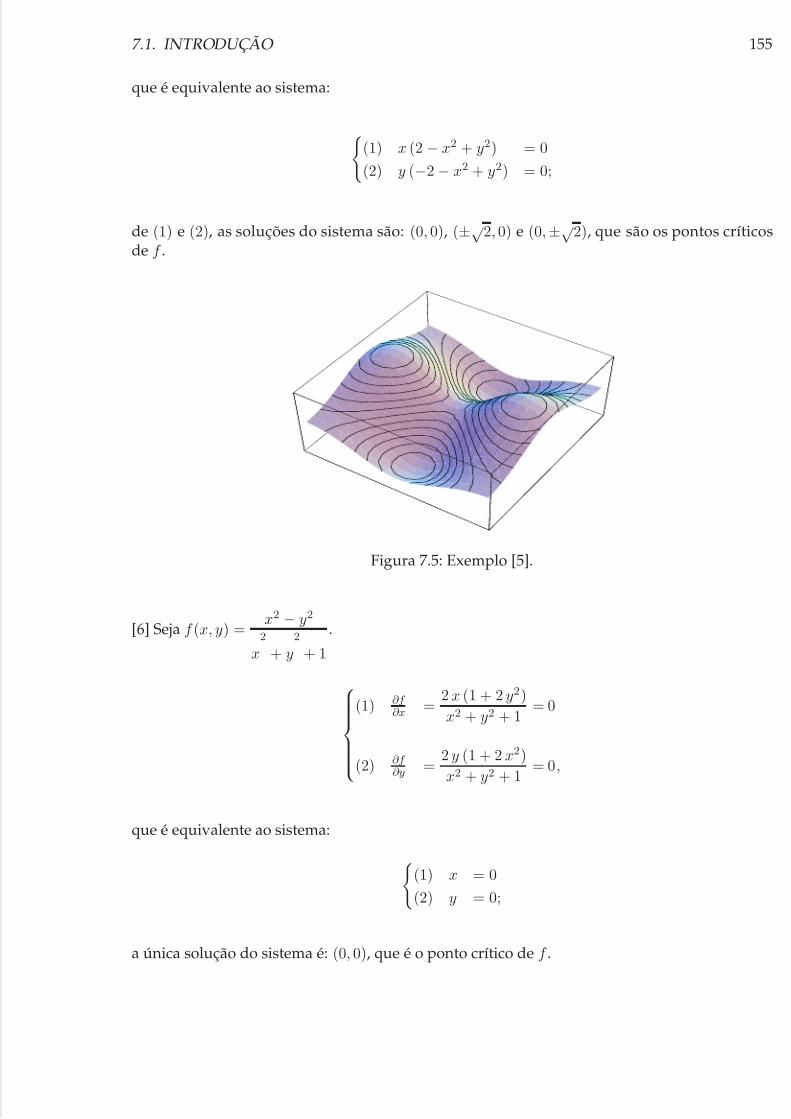
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 155/279
7.1. INTRODUÇÃO 155
que é equivalente ao sistema:
(1) x (2 − x2 + y2) = 0
(2) y (−2 − x2 + y2) = 0;
de (1) e (2), as soluções do sistema são: (0, 0), (±√2, 0) e (0, ±√
2), que são os pontos críticosde f .
Figura 7.5: Exemplo [5].
[6] Seja f (x, y) =x2 − y2
x2
+ y2
+ 1
.
(1) ∂f ∂x =
2 x (1 + 2 y2)
x2 + y2 + 1= 0
(2) ∂f ∂y =
2 y (1 + 2 x2)
x2 + y2 + 1= 0,
que é equivalente ao sistema:
(1) x = 0
(2) y = 0;
a única solução do sistema é: (0, 0), que é o ponto crítico de f .
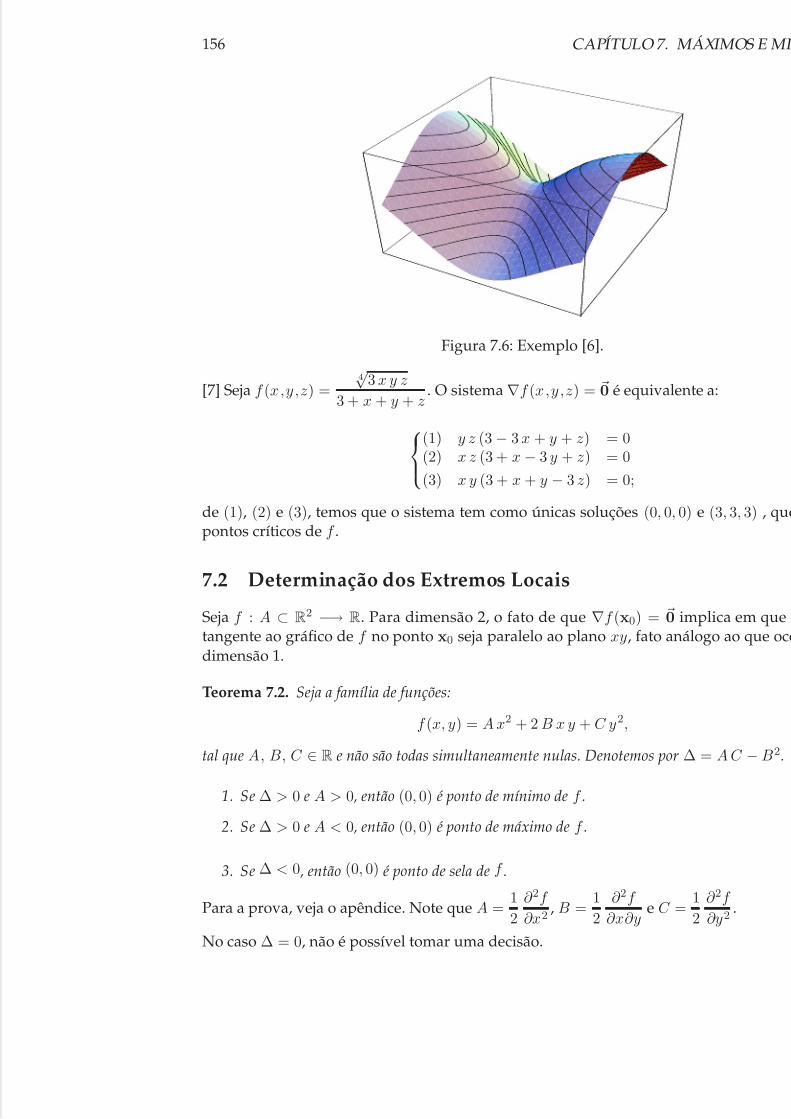
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 156/279
156 CAPÍTULO 7. MÁXIMOS E MI N
Figura 7.6: Exemplo [6].
[7] Seja f (x,y,z) =4√
3 x y z
3 + x + y + z. O sistema ∇f (x,y,z) = 0 é equivalente a:
(1) y z (3 − 3 x + y + z) = 0(2) x z (3 + x − 3 y + z) = 0
(3) x y (3 + x + y − 3 z) = 0;
de (1), (2) e (3), temos que o sistema tem como únicas soluções (0, 0, 0) e (3, 3, 3) , quepontos críticos de f .
7.2 Determinação dos Extremos Locais
Seja f : A ⊂ R2 −→ R. Para dimensão 2, o fato de que ∇f (x0) = 0 implica em que otangente ao gráfico de f no ponto x0 seja paralelo ao plano xy, fato análogo ao que ocodimensão 1.
Teorema 7.2. Seja a família de funções:
f (x, y) = A x2 + 2 B x y + C y2,
tal que A, B, C ∈ R e não são todas simultaneamente nulas. Denotemos por ∆ = A C − B2.
1. Se ∆ > 0 e A > 0, então (0, 0) é ponto de mínimo de f .
2. Se ∆ > 0 e A < 0, então (0, 0) é ponto de máximo de f .
3. Se ∆ < 0, então (0, 0) é ponto de sela de f .
Para a prova, veja o apêndice. Note que A =1
2
∂ 2f
∂x2, B =
1
2
∂ 2f
∂x∂ye C =
1
2
∂ 2f
∂y2.
No caso ∆ = 0, não é possível tomar uma decisão.
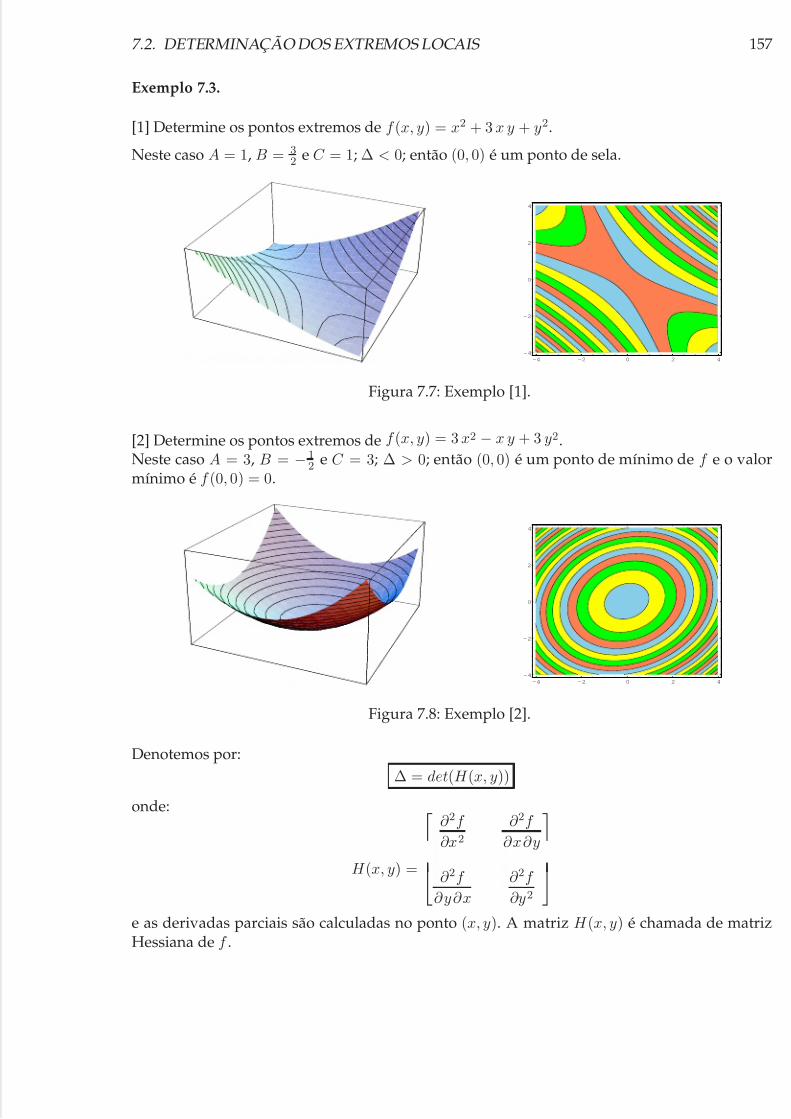
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 157/279
7.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 157
Exemplo 7.3.
[1] Determine os pontos extremos de f (x, y) = x2 + 3 x y + y2.
Neste caso A = 1, B = 32 e C = 1; ∆ < 0; então (0, 0) é um ponto de sela.
-4 -2 0 2 4
-4
-2
0
2
4
Figura 7.7: Exemplo [1].
[2] Determine os pontos extremos de f (x, y) = 3 x2 − x y + 3 y2.Neste caso A = 3, B = −1
2 e C = 3; ∆ > 0; então (0, 0) é um ponto de mínimo de f e o valormínimo é f (0, 0) = 0.
-4 -2 0 2 4
-4
-2
0
2
4
Figura 7.8: Exemplo [2].
Denotemos por:∆ = det(H (x, y))
onde:
H (x, y) =
∂ 2f
∂x2
∂ 2f
∂x∂y
∂ 2f
∂y ∂x
∂ 2f
∂y2
e as derivadas parciais são calculadas no ponto (x, y). A matriz H (x, y) é chamada de matrizHessiana de f .
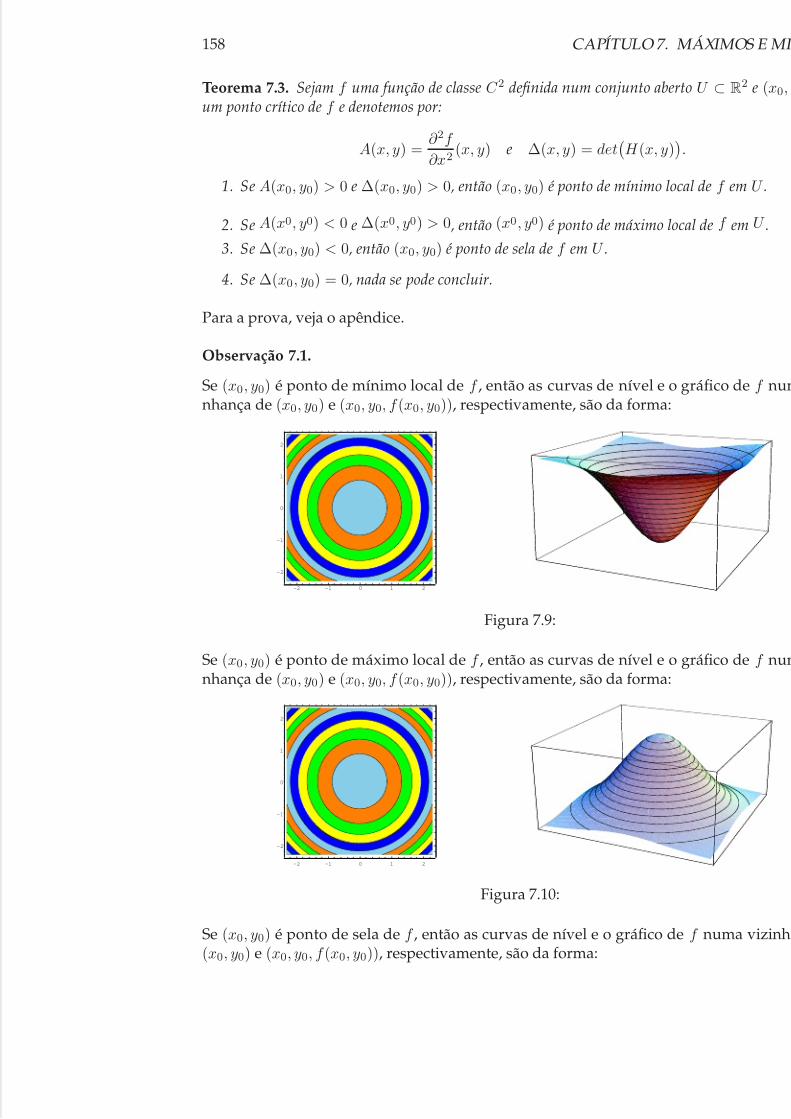
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 158/279
158 CAPÍTULO 7. MÁXIMOS E MI N
Teorema 7.3. Sejam f uma função de classe C 2 definida num conjunto aberto U ⊂ R2 e (x0, yum ponto crítico de f e denotemos por:
A(x, y) =∂ 2f
∂x2(x, y) e ∆(x, y) = det
H (x, y)
.
1. Se A(x0, y0) > 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de mínimo local de f em U .
2. Se A(x0, y0) < 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de máximo local de f em U .
3. Se ∆(x0, y0) < 0, então (x0, y0) é ponto de sela de f em U .
4. Se ∆(x0, y0) = 0, nada se pode concluir.
Para a prova, veja o apêndice.
Observação 7.1.
Se (x0, y0) é ponto de mínimo local de f , então as curvas de nível e o gráfico de f numnhança de (x0, y0) e (x0, y0, f (x0, y0)), respectivamente, são da forma:
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.9:
Se (x0, y0) é ponto de máximo local de f , então as curvas de nível e o gráfico de f numnhança de (x0, y0) e (x0, y0, f (x0, y0)), respectivamente, são da forma:
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.10:
Se (x0, y0) é ponto de sela de f , então as curvas de nível e o gráfico de f numa vizinha(x0, y0) e (x0, y0, f (x0, y0)), respectivamente, são da forma:
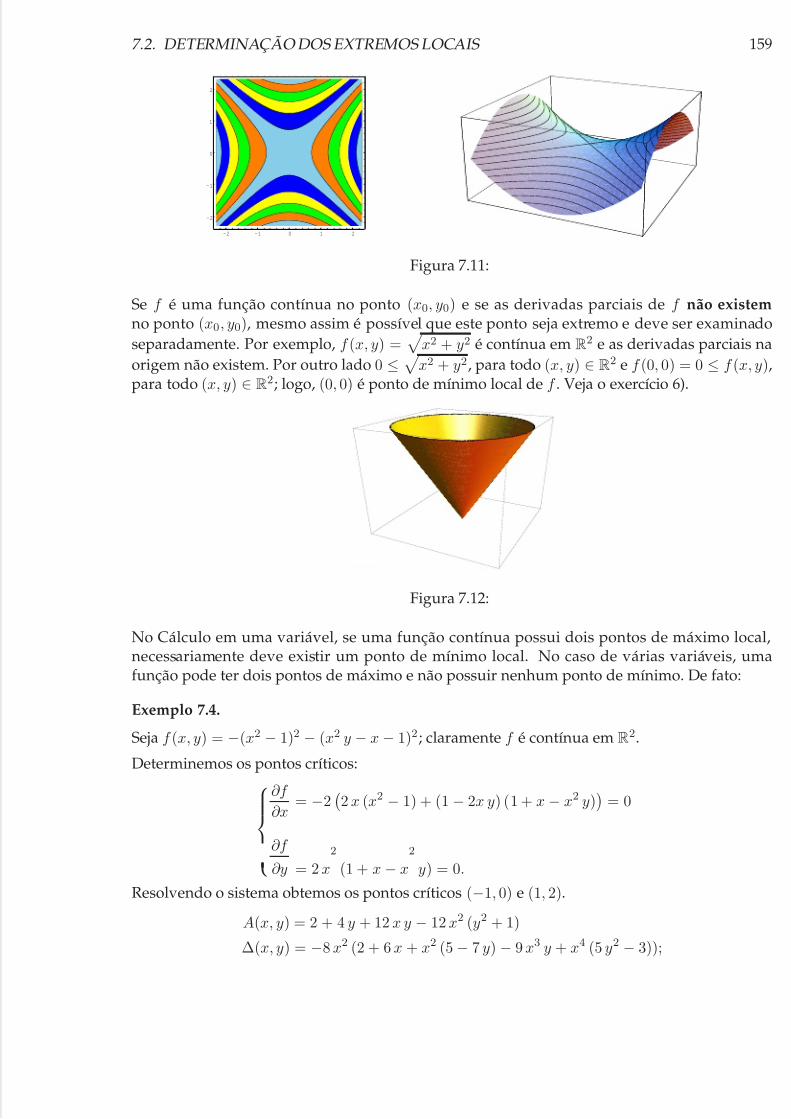
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 159/279
7.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 159
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.11:
Se f é uma função contínua no ponto (x0, y0) e se as derivadas parciais de f não existemno ponto (x0, y0), mesmo assim é possível que este ponto seja extremo e deve ser examinadoseparadamente. Por exemplo, f (x, y) =
x2 + y2 é contínua em R2 e as derivadas parciais na
origem não existem. Por outro lado 0 ≤
x2 + y2, para todo (x, y) ∈ R2 e f (0, 0) = 0 ≤ f (x, y),para todo (x, y) ∈ R2; logo, (0, 0) é ponto de mínimo local de f . Veja o exercício 6).
Figura 7.12:
No Cálculo em uma variável, se uma função contínua possui dois pontos de máximo local,necessariamente deve existir um ponto de mínimo local. No caso de várias variáveis, umafunção pode ter dois pontos de máximo e não possuir nenhum ponto de mínimo. De fato:
Exemplo 7.4.
Seja f (x, y) = −(x2 − 1)2 − (x2 y − x − 1)2; claramente f é contínua em R2.
Determinemos os pontos críticos:
∂f
∂x= −2
2 x (x2 − 1) + (1 − 2x y) (1 + x − x2 y)
= 0
∂f
∂y = 2 x2
(1 + x − x2
y) = 0.
Resolvendo o sistema obtemos os pontos críticos (−1, 0) e (1, 2).
A(x, y) = 2 + 4 y + 12 x y − 12 x2 (y2 + 1)
∆(x, y) = −8 x2 (2 + 6 x + x2 (5 − 7 y) − 9 x3 y + x4 (5 y2 − 3));
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 160/279
160 CAPÍTULO 7. MÁXIMOS E MI N
logo, A(−1, 0) = −10 e ∆(−1, 0) = 16; A(1, 2) = −26 e ∆(1, 2) = 16. Ambos os pontosmáximo local de f e f não possui pontos de mínimo.
Figura 7.13: Desenhos do gráfico de f ao redor dos pontos de máximo local e o gráfico
-1.4 -1.2 -1 -0.8 -0.6
-0.4
-0.2
0
0.2
0.4
0.6 0.8 1 1.2 1.4
1.6
1.8
2
2.2
2.4
-1 -0.5 0 0.5 1 1
-1
0
1
2
3
Figura 7.14: As respectivas curvas de níveis.
Pode existir um ponto de sela quando existem dois pontos de máximo ou de mínimo. Dseja:
f (x, y) = x4 + y4 − 4 x y + 1;
claramente f é contínua em R2. Os pontos críticos são (0, 0), (−1, −1) e (1, 1) e (0, 0) é psela, (−1, −1) e (1, 1) são pontos de mínimo local de f .
Se consideramos g(x, y) = −f (x, y), o ponto (0, 0) é ponto de sela e (−1, −1) e (1, 1) sãode máximo local de f .

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 161/279
7.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 161
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Figura 7.15: Curvas de nível e gráfico de f (x, y) = x4 + y4 − 4 x y + 1
7.2.1 Exemplos
[1] Classifique os pontos críticos de f (x, y) = x2 + y2 + x2 y + 4.
Determinemos os pontos críticos: Resolvemos o sistema:
∂f
∂x= 2 x + 2 x y = 2 x (1 + y) = 0
∂f
∂y= 2 y + x2 = 0,
que é equivalente a:
x (1 + y) = 0
2 y + x2 = 0.
Os pontos críticos são (0, 0), (√
2, −1) e (−√2, −1).
H (x, y) =
2 (y + 1) 2 x
2 x 2
.
A(x, y) = 2 (y + 1), ∆(x, y) = 4 (1 + y − x2).
Ptos. Críticos A ∆ T ipo V alor
(0, 0) 2 4 mín 4(√
2, −1) 0 −8 sela(−
√2, −1) 0 −8 sela
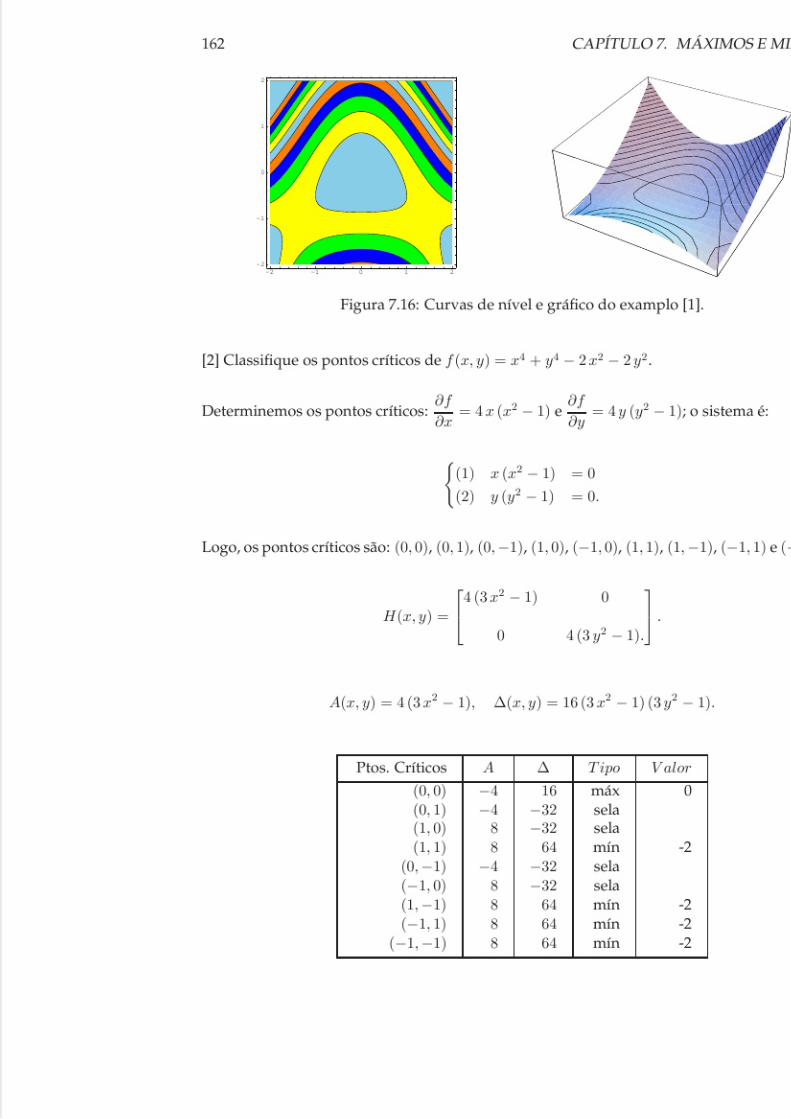
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 162/279
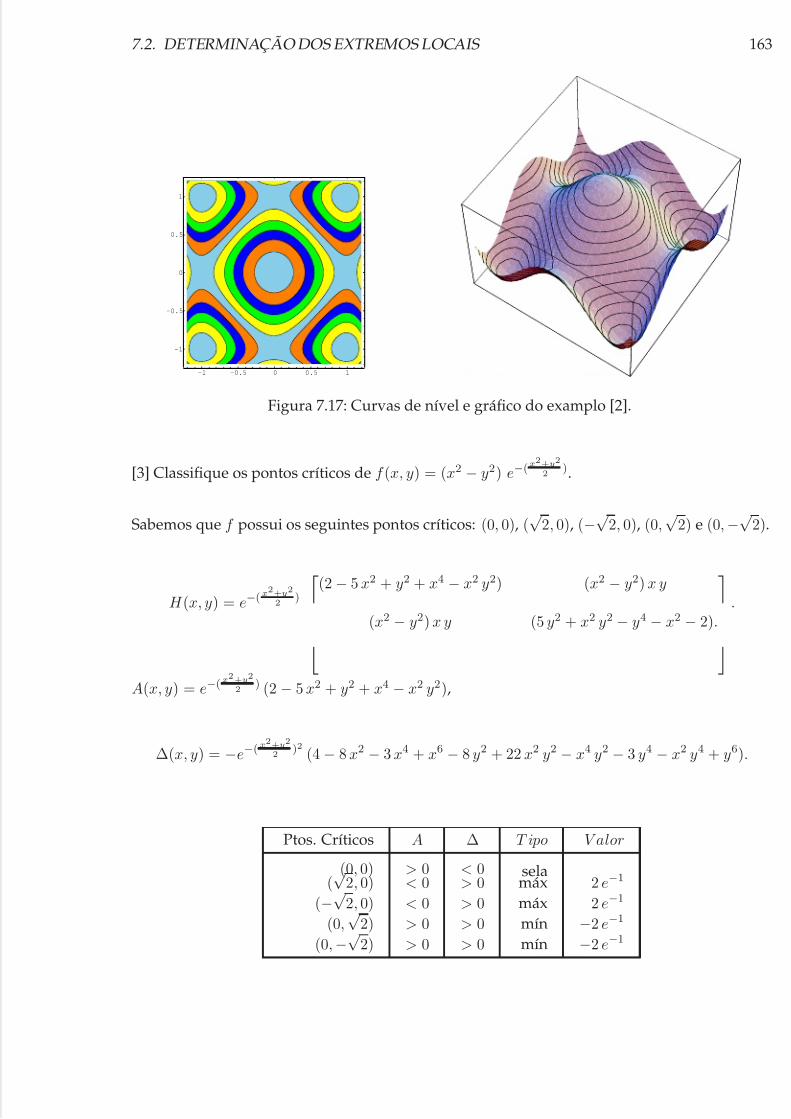
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 163/279
7.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 163
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figura 7.17: Curvas de nível e gráfico do examplo [2].
[3] Classifique os pontos críticos de f (x, y) = (x2 − y2) e−(x2+y2
2).
Sabemos que f possui os seguintes pontos críticos: (0, 0), (√
2, 0), (−√2, 0), (0,
√2) e (0, −√
2).
H (x, y) = e−(x2+y2
2)
(2 − 5 x2 + y2 + x4 − x2 y2) (x2 − y2) x y
(x2 − y2) x y (5 y2 + x2 y2 − y4 − x2 − 2).
.
A(x, y) = e−(x2+y2
2) (2 − 5 x2 + y2 + x4 − x2 y2),
∆(x, y) = −e−(x2+y2
2)2 (4 − 8 x2 − 3 x4 + x6 − 8 y2 + 22 x2 y2 − x4 y2 − 3 y4 − x2 y4 + y6).
Ptos. Críticos A ∆ T ipo V alor
(0, 0) > 0 < 0 sela(√
2, 0) < 0 > 0 máx 2 e−1
(−√
2, 0) < 0 > 0 máx 2 e−1
(0,√
2) > 0 > 0 mín −2 e−1
(0, −√
2) > 0 > 0 mín −2 e−1
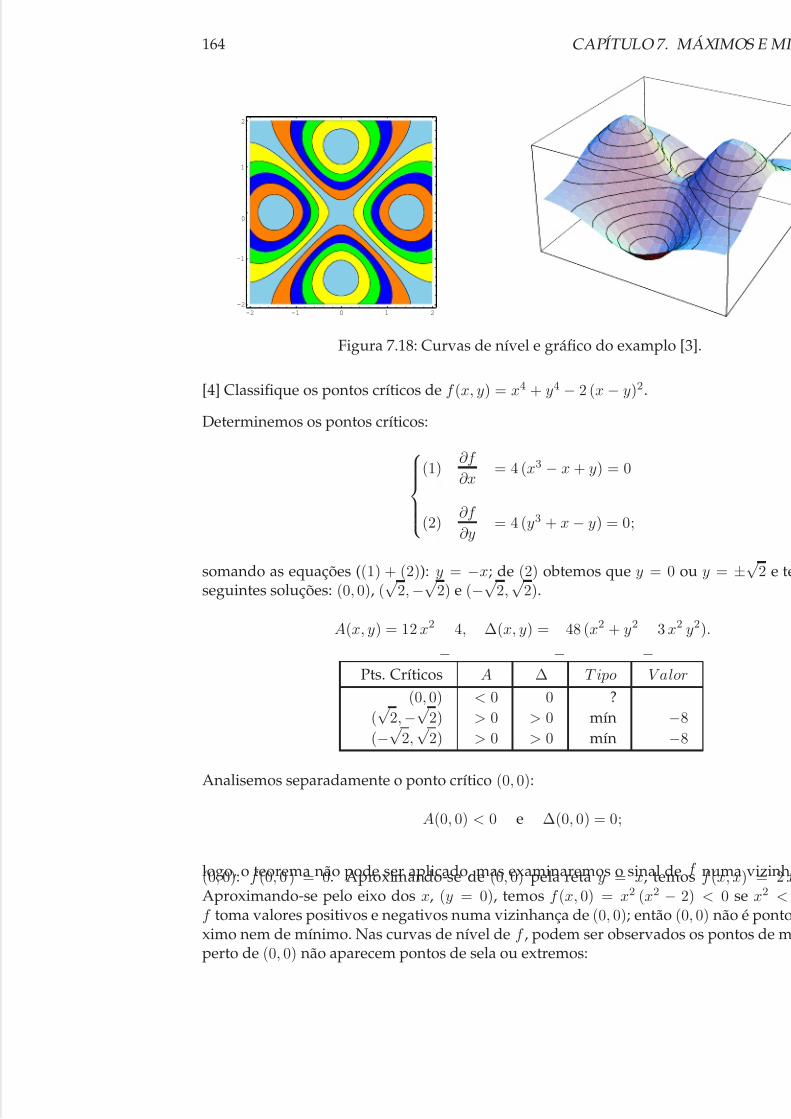
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 164/279
164 CAPÍTULO 7. MÁXIMOS E MI N
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.18: Curvas de nível e gráfico do examplo [3].
[4] Classifique os pontos críticos de f (x, y) = x4 + y4 − 2 (x − y)2.
Determinemos os pontos críticos:
(1)∂f
∂x= 4 (x3 − x + y) = 0
(2)∂f
∂y= 4 (y3 + x − y) = 0;
somando as equações ((1) + (2)): y = −x; de (2) obtemos que y = 0 ou y = ±√2 e te
seguintes soluções: (0, 0), (√
2, −√2) e (−√
2,√
2).
A(x, y) = 12 x2
−4, ∆(x, y) =
−48 (x2 + y2
−3 x2 y2).
Pts. Críticos A ∆ T ipo V alor
(0, 0) < 0 0 ?(√
2, −√
2) > 0 > 0 mín −8
(−√
2,√
2) > 0 > 0 mín −8
Analisemos separadamente o ponto crítico (0, 0):
A(0, 0) < 0 e ∆(0, 0) = 0;
logo, o teorema não pode ser aplicado, mas examinaremos o sinal de f numa vizinha(0, 0): f (0, 0 ) = 0. Aproximando-se de (0, 0) pela reta y = x, temos f (x, x) = 2 xAproximando-se pelo eixo dos x, (y = 0), temos f (x, 0) = x2 (x2 − 2) < 0 se x2 <f toma valores positivos e negativos numa vizinhança de (0, 0); então (0, 0) não é pontoximo nem de mínimo. Nas curvas de nível de f , podem ser observados os pontos de mperto de (0, 0) não aparecem pontos de sela ou extremos:
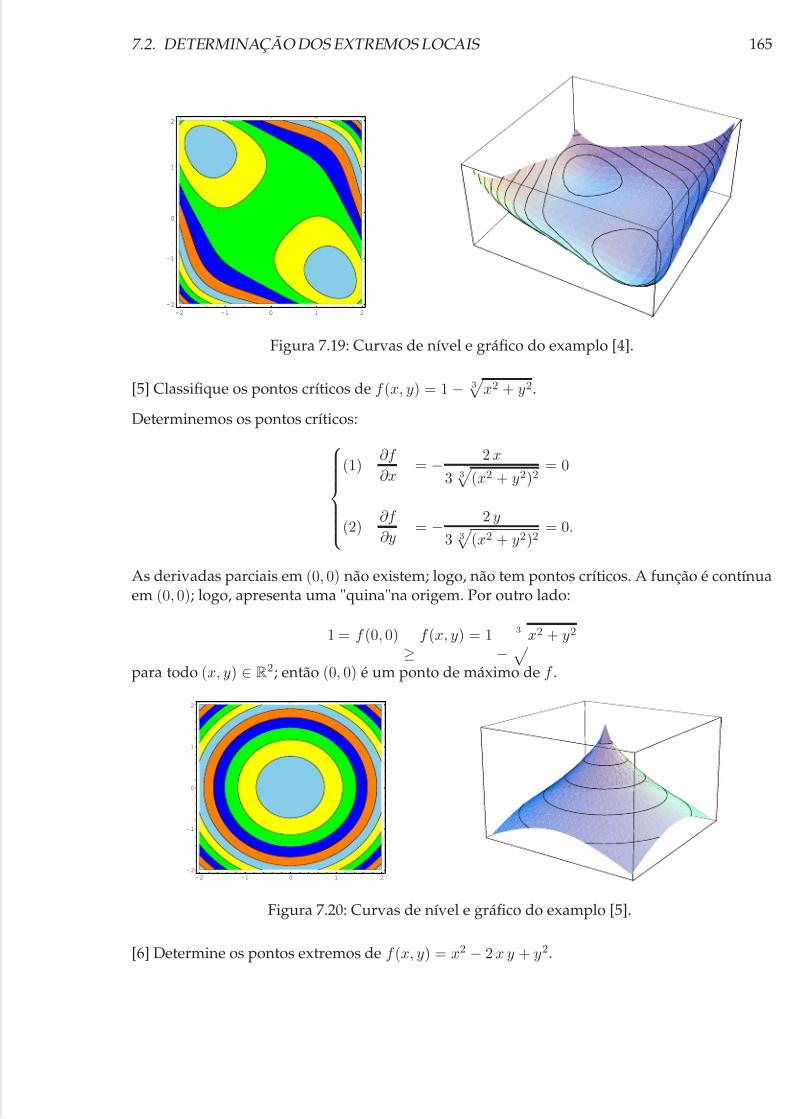
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 165/279
7.2. DETERMINAÇÃO DOS EXTREMOS LOCAIS 165
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.19: Curvas de nível e gráfico do examplo [4].
[5] Classifique os pontos críticos de f (x, y) = 1 − 3
x2 + y2.
Determinemos os pontos críticos:
(1)∂f
∂x= − 2 x
3 3
(x2 + y2)2= 0
(2)∂f
∂y= − 2 y
3 3
(x2 + y2)2= 0.
As derivadas parciais em (0, 0) não existem; logo, não tem pontos críticos. A função é contínuaem (0, 0); logo, apresenta uma "quina"na origem. Por outro lado:
1 = f (0, 0)≥
f (x, y) = 1−
3 x2 + y2
para todo (x, y) ∈ R2; então (0, 0) é um ponto de máximo de f .
-2 -1 0 1 2
-2
-1
0
1
2
Figura 7.20: Curvas de nível e gráfico do examplo [5].
[6] Determine os pontos extremos de f (x, y) = x2 − 2 x y + y2.
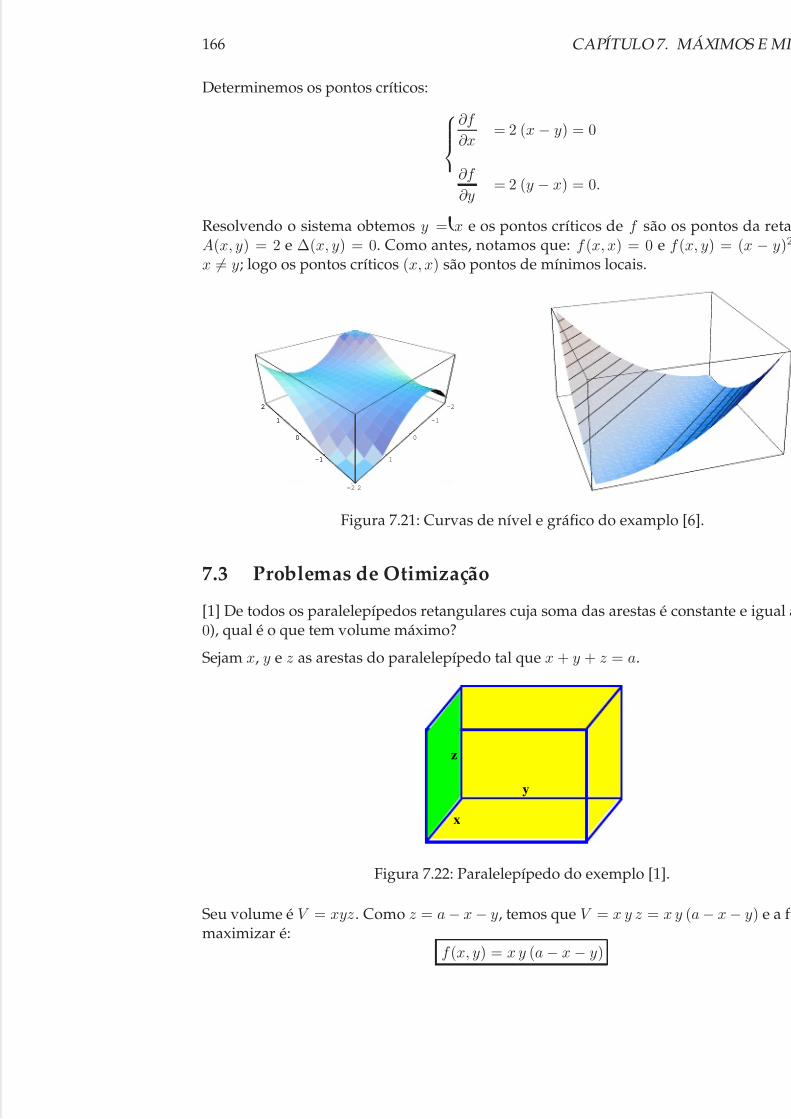
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 166/279
166 CAPÍTULO 7. MÁXIMOS E MI N
Determinemos os pontos críticos:
∂f
∂x= 2 (x − y) = 0
∂f
∂y= 2 (y − x) = 0.
Resolvendo o sistema obtemos y = x e os pontos críticos de f são os pontos da retaA(x, y) = 2 e ∆(x, y) = 0. Como antes, notamos que: f (x, x) = 0 e f (x, y) = (x − y)2
x = y; logo os pontos críticos (x, x) são pontos de mínimos locais.
-2
-1
0
1
2 -2
-1
0
1
2-
-1
0
1
2
Figura 7.21: Curvas de nível e gráfico do examplo [6].
7.3 Problemas de Otimização
[1] De todos os paralelepípedos retangulares cuja soma das arestas é constante e igual a0), qual é o que tem volume máximo?
Sejam x, y e z as arestas do paralelepípedo tal que x + y + z = a.
x
y
z
Figura 7.22: Paralelepípedo do exemplo [1].
Seu volume é V = xyz. Como z = a − x − y, temos que V = x y z = x y (a − x − y) e a fumaximizar é:
f (x, y) = x y (a − x − y)
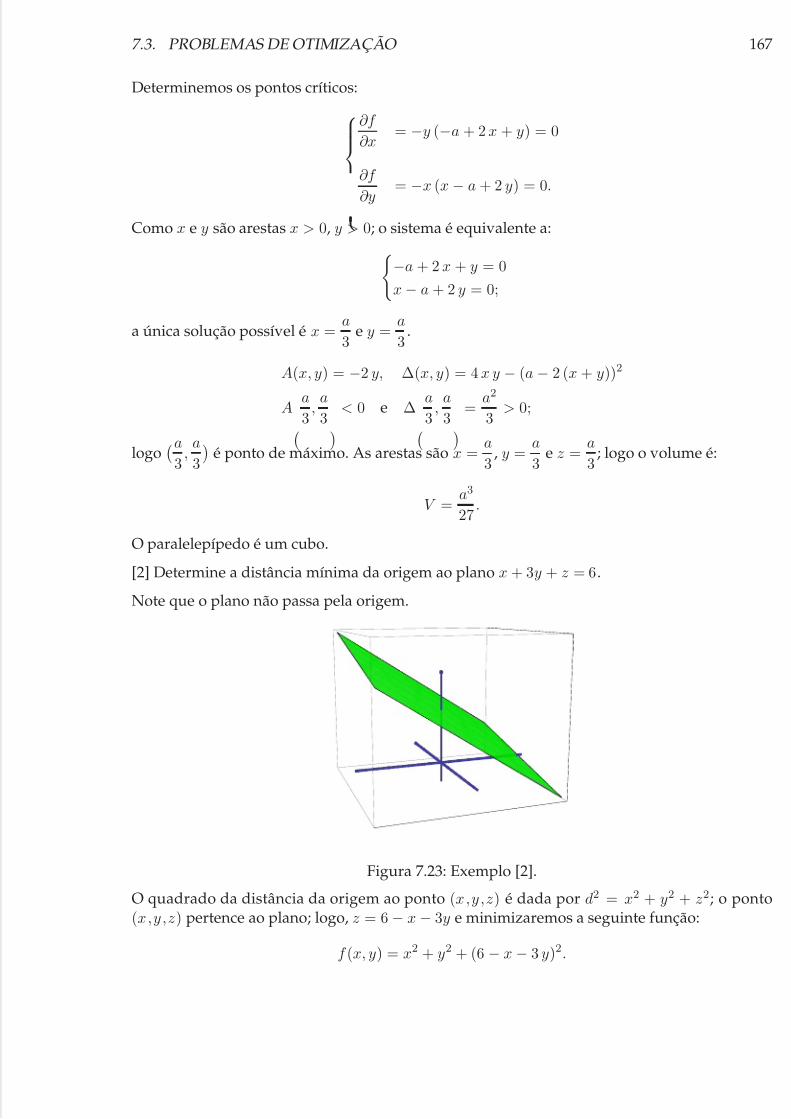
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 167/279
7.3. PROBLEMAS DE OTIMIZAÇÃO 167
Determinemos os pontos críticos:
∂f
∂x= −y (−a + 2 x + y) = 0
∂f
∂y= −x (x − a + 2 y) = 0.
Como x e y são arestas x > 0, y > 0; o sistema é equivalente a:−a + 2 x + y = 0
x − a + 2 y = 0;
a única solução possível é x =a
3e y =
a
3.
A(x, y) = −2 y, ∆(x, y) = 4 x y − (a − 2 (x + y))2
Aa
3,
a
3 < 0 e ∆a
3,
a
3 =a2
3> 0;
logoa
3,
a
3
é ponto de máximo. As arestas são x =
a
3, y =
a
3e z =
a
3; logo o volume é:
V =a3
27.
O paralelepípedo é um cubo.
[2] Determine a distância mínima da origem ao plano x + 3y + z = 6.
Note que o plano não passa pela origem.
Figura 7.23: Exemplo [2].
O quadrado da distância da origem ao ponto (x,y,z) é dada por d2 = x2 + y2 + z2; o ponto(x,y,z) pertence ao plano; logo, z = 6 − x − 3y e minimizaremos a seguinte função:
f (x, y) = x2 + y2 + (6 − x − 3 y)2.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 168/279
168 CAPÍTULO 7. MÁXIMOS E MI N
Determinemos os pontos críticos:
∂f
∂x= 2(2 x + 3 y − 6) = 0
∂f
∂y= 2(3 x + 10 y − 18) = 0;
o sistema tem uma única solução:
611
, 1811
, que é o ponto crítico de f .
Por outro lado, A(x, y) = 4 e ∆(x, y) = 44. Em particular,
A 6
11,
18
11
> 0, e ∆
6
11,
18
11
> 0;
então 6
11,
18
11
é um ponto de mínimo local de f ; z =
6
11; logo,
d =6√
11
11.
[3] Determine o valor máximo da soma dos co-senos dos ângulos de um triângulo.
Devemos maximizar:w = cos(x) + cos(y) + cos(z),
onde x, y, z são os ângulos do triângulo dado. Mas, x + y + z = π; logo z = π − x − y.
f (x, y) = cos(x) + cos(y) + cos(π − (x + y)) = cos(x) + cos(y) − cos(x + y).
Determinemos os pontos críticos:
(1)∂f
∂x= −sen(x) + sen(x + y) = 0
(2)∂f
∂y=
−sen(y) + sen(x + y) = 0;
fazendo (1) − (2), temos sen(x) = sen(y); então, x = y ou x = π − y.
(a) Se x = y, da primeira equação obtemos:
sen(x) − sen(2 x) = 0;
logo sen(x) = 0 ou cos(x) =1
2. Se sen(x) = 0, x = 0 ou x = π, o que é impossí
cos(x) =1
2, x =
π
3; como x = y, tem-se y =
π
3, logo o ponto crítico é
π
3,
π
3
.
(b) se x = π − y, da segunda equação obtemos; sen(y) = 0; logo y = 0 ou y = π, oimpossível.
Portanto,π
3,
π
3
é o único ponto crítico de f . Por outro lado:
A(x, y) = −cos(x) + cos(x + y), ∆(x, y) = cos(x) (cos(y) − cos(x + y)) − cos(y) cos(x
Aπ
3,
π
3
< 0 e ∆
π
3,
π
3
> 0;

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 169/279
7.3. PROBLEMAS DE OTIMIZAÇÃO 169
logo,π
3,
π
3
é um ponto de máximo local para f . Como z = π − x − y, z =
π
3e o valor máximo
da soma é:cosπ
3
+ cos
π
3
+ cos
π
3
=
3
2.
[4] Uma caixa retangular tem três faces nos planos coordenados e um vértice P = (x,y,z) noprimeiro octante sobre a superfície x2 + y2 + z = 1. Calcule o volume da maior caixa com essascaracterísticas.
O volume da caixa é V = xyz onde x, y e z são os comprimentos das arestas da caixa; z =1 − x2 − y2. Seja f (x, y) = x y (1 − x2 − y2). Determinemos os pontos críticos:
∂f
∂x= y (1 − 3 x2 − y2) = 0
∂f
∂y= x (1 − x2 − 3 y2) = 0;
x e y são arestas, logo x > 0, y > 0 e o sistema é equivalente a:
1 − 3 x2 − y2 = 0
1 − x2 − 3 y2 = 0;
logo, o único ponto crítico admissível é:1
2,
1
2
, pois x e y são comprimentos das arestas da
caixa (x > 0 e y > 0).
A(x, y) = −6 x y, ∆(x, y) = 36 x2y2 − (1 − 3 x2 − 3 y2)2, A1
2,
1
2
= −3
2e ∆
1
2,
1
2
=
35
4;
então1
2,
1
2
é um ponto de máximo, z =
1
2e V =
1
8u.v.
[5] De todos os triângulos de perímetro fixado, determine o de maior área.
Sejam x, y e z os lados do triângulo. Usando a fórmula de Heron, o quadrado da área do
triângulo é: A2 = s (s − x) (s − y) (s − z), onde 2 s = x + y + z. Maximizemos a função:f (x, y) = s (s − x) (s − y) (x + y − s).
Determinemos os pontos críticos:
∂f
∂x= (s − y)(2s − 2x − y) = 0
∂f
∂y= (s − x)(2s − x − 2y) = 0;
como s = x e s = y, obtemos: x =2s
3e y =
2s
3. Por outro lado:
A(x, y) = −2 s (s − y), ∆(x, y) = −s2 (5 s2 − 8 s (x + y) + 4 (x2 + x y + y2)),
A2s
3,
2s
3
< 0, ∆
2s
3,
2s
3
> 0;
logo,2s
3,
2s
3
é ponto de máximo e z =
2s
3. O triângulo é equilátero.
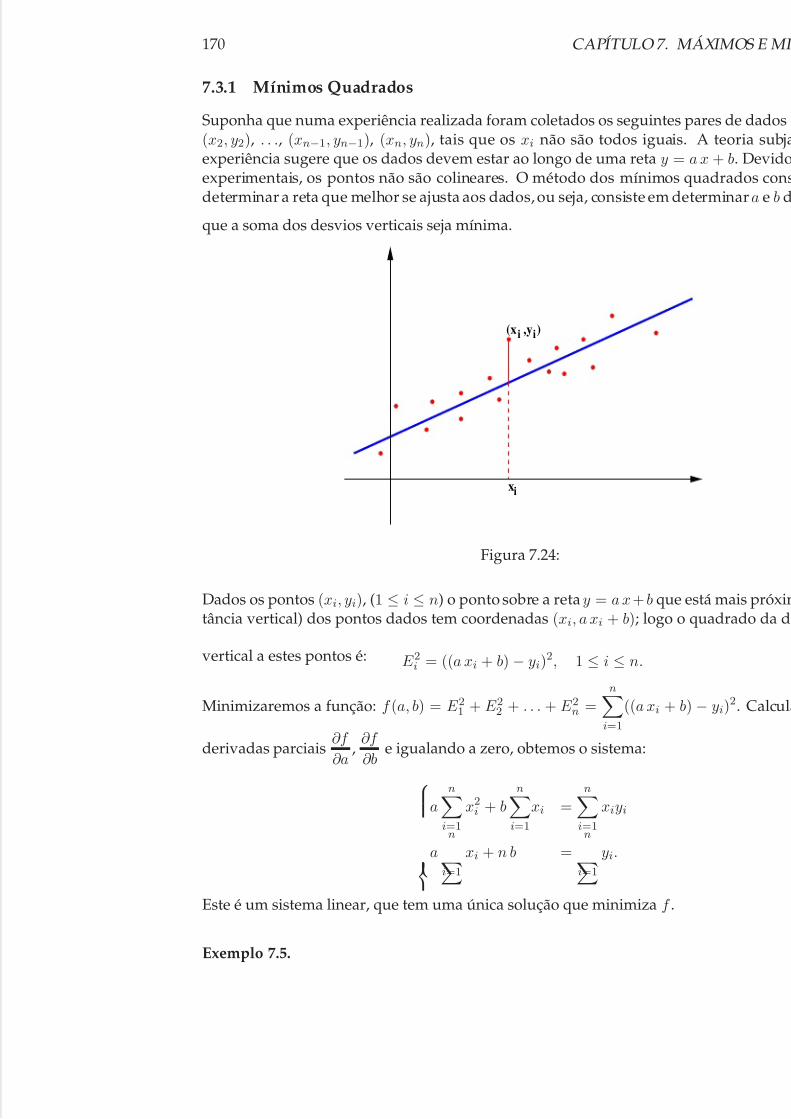
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 170/279
170 CAPÍTULO 7. MÁXIMOS E MI N
7.3.1 Mínimos Quadrados
Suponha que numa experiência realizada foram coletados os seguintes pares de dados(x2, y2), . . ., (xn−1, yn−1), (xn, yn), tais que os xi não são todos iguais. A teoria subjaexperiência sugere que os dados devem estar ao longo de uma reta y = a x + b. Devidoexperimentais, os pontos não são colineares. O método dos mínimos quadrados consdeterminar a reta que melhor se ajusta aos dados, ou seja, consiste em determinar a e b d
que a soma dos desvios verticais seja mínima.
xi
(xi ,yi)
Figura 7.24:
Dados os pontos (xi, yi), (1 ≤ i ≤ n) o ponto sobre a reta y = a x + b que está mais próximtância vertical) dos pontos dados tem coordenadas (xi, a xi + b); logo o quadrado da di
vertical a estes pontos é: E 2i = ((a xi + b) − yi)2, 1 ≤ i ≤ n.
Minimizaremos a função: f (a, b) = E 21 + E 22 + . . . + E 2n =n
i=1
((a xi + b) − yi)2. Calcula
derivadas parciais∂f
∂a,
∂f
∂be igualando a zero, obtemos o sistema:
a
ni=1
x2i + b
ni=1
xi =
ni=1
xiyi
an
i=1
xi + n b =n
i=1
yi.
Este é um sistema linear, que tem uma única solução que minimiza f .
Exemplo 7.5.
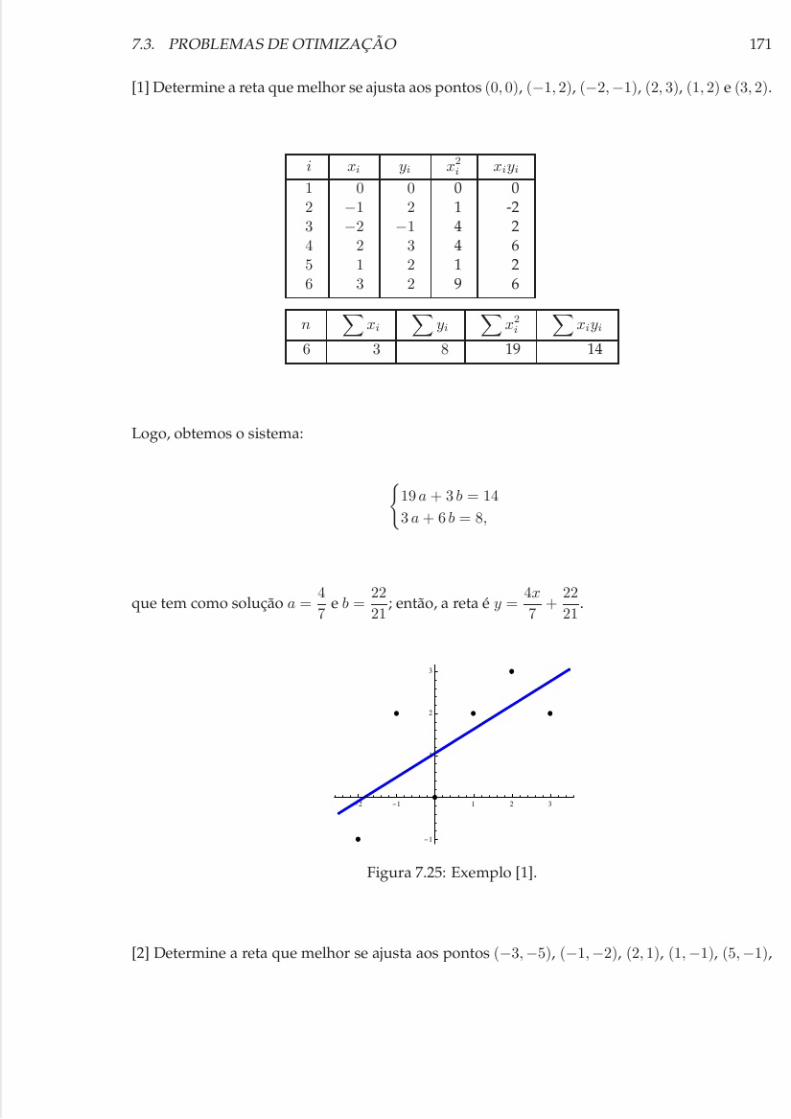
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 171/279
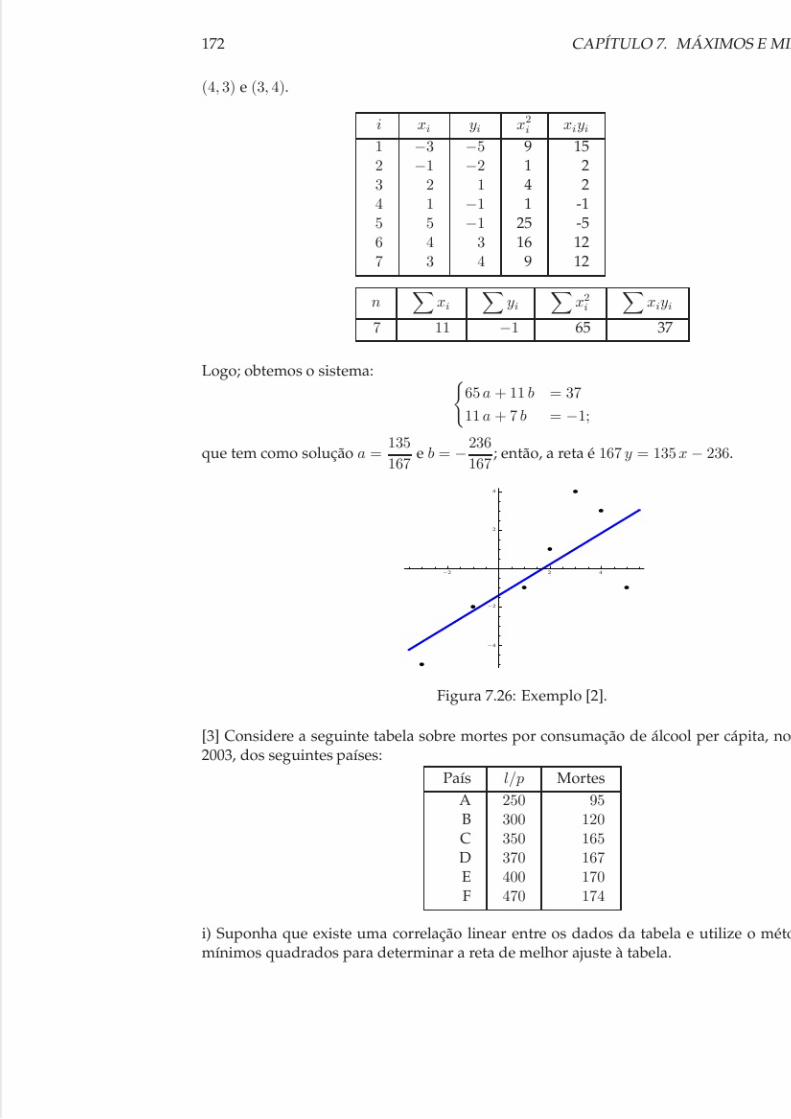
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 172/279
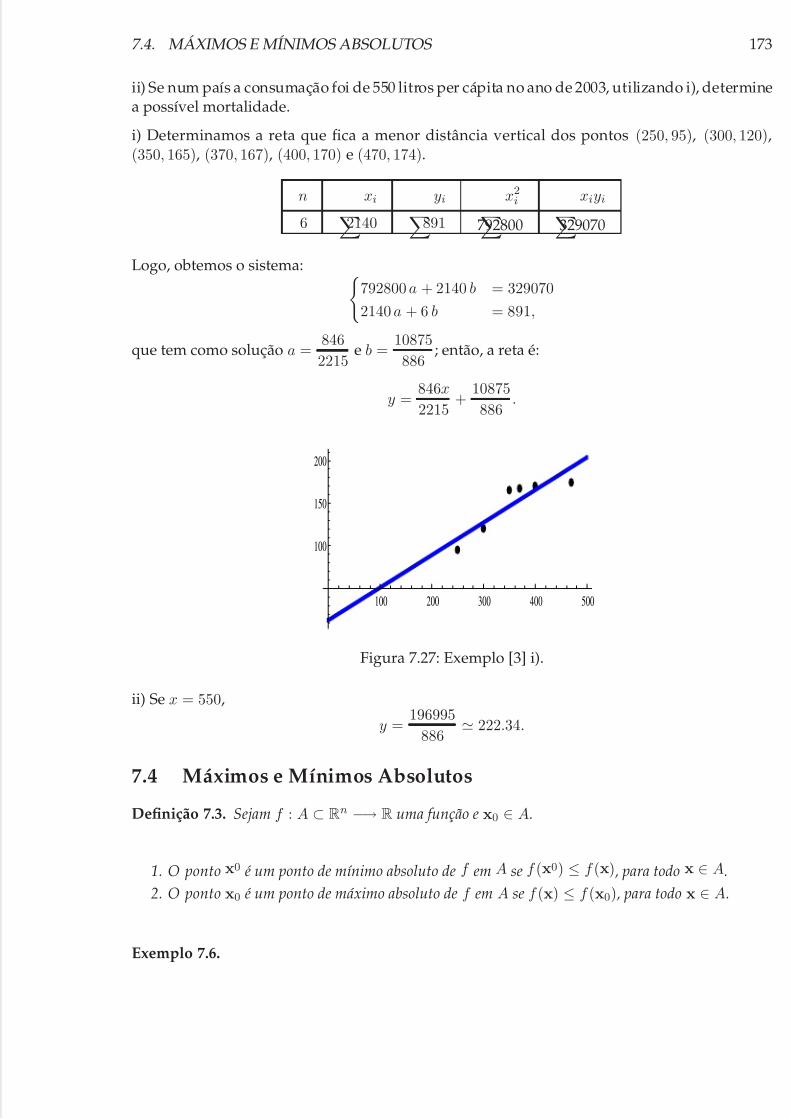
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 173/279
7.4. MÁXIMOS E MÍNIMOS ABSOLUTOS 173
ii) Se num país a consumação foi de 550 litros per cápita no ano de 2003, utilizando i), determinea possível mortalidade.
i) Determinamos a reta que fica a menor distância vertical dos pontos (250, 95), (300, 120),(350, 165), (370, 167), (400, 170) e (470, 174).
n xi yi x2i xiyi
6 2140 891 792800 329070
Logo, obtemos o sistema: 792800 a + 2140 b = 329070
2140 a + 6 b = 891,
que tem como solução a =846
2215e b =
10875
886; então, a reta é:
y =846x
2215+
10875
886.
100 200 300 400 500
100
150
200
Figura 7.27: Exemplo [3] i).
ii) Se x = 550,
y =196995
886≃ 222.34.
7.4 Máximos e Mínimos Absolutos
Definição 7.3. Sejam f : A ⊂ Rn −→ R uma função e x0 ∈ A.
1. O ponto x0 é um ponto de mínimo absoluto de f em A se f (x0) ≤ f (x), para todo x ∈ A.2. O ponto x0 é um ponto de máximo absoluto de f em A se f (x) ≤ f (x0), para todo x ∈ A.
Exemplo 7.6.
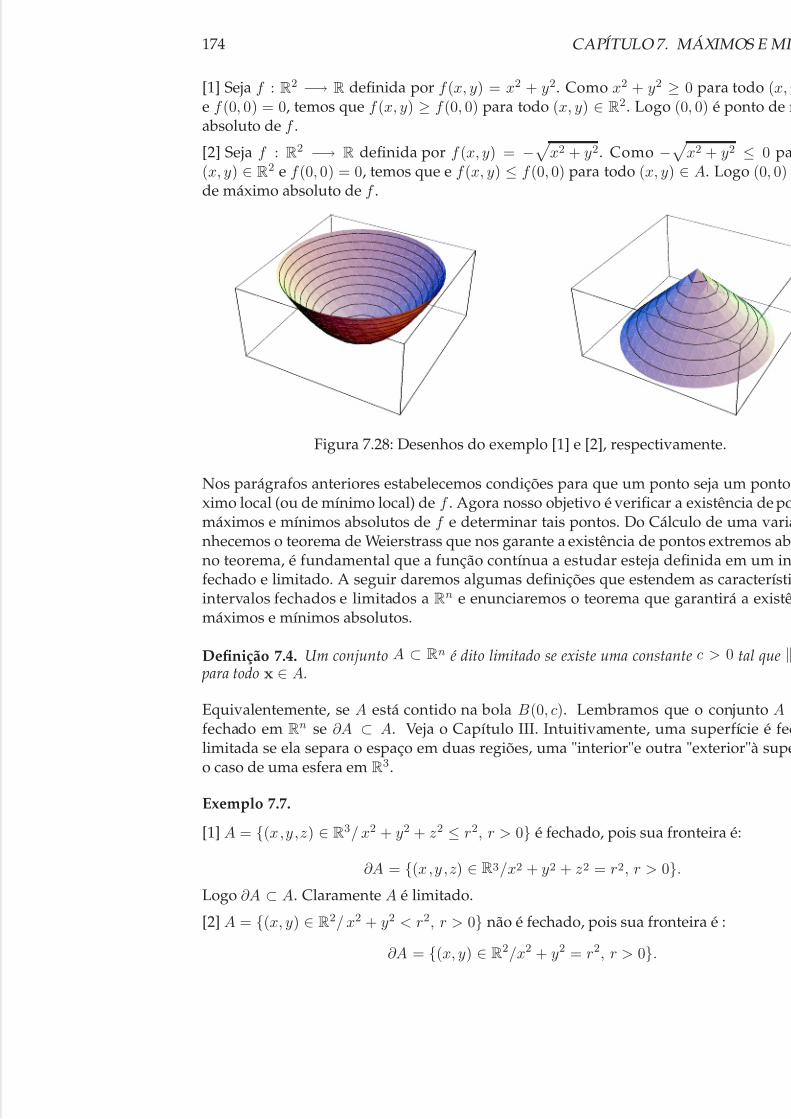
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 174/279
174 CAPÍTULO 7. MÁXIMOS E MI N
[1] Seja f : R2 −→ R definida por f (x, y) = x2 + y2. Como x2 + y2 ≥ 0 para todo (x, ye f (0, 0) = 0, temos que f (x, y) ≥ f (0, 0) para todo (x, y) ∈ R2. Logo (0, 0) é ponto de mabsoluto de f .
[2] Seja f : R2 −→ R definida por f (x, y) = −
x2 + y2. Como −
x2 + y2 ≤ 0 pa(x, y) ∈ R2 e f (0, 0) = 0, temos que e f (x, y) ≤ f (0, 0) para todo (x, y) ∈ A. Logo (0, 0)de máximo absoluto de f .
Figura 7.28: Desenhos do exemplo [1] e [2], respectivamente.
Nos parágrafos anteriores estabelecemos condições para que um ponto seja um ponto ximo local (ou de mínimo local) de f . Agora nosso objetivo é verificar a existência de pomáximos e mínimos absolutos de f e determinar tais pontos. Do Cálculo de uma variánhecemos o teorema de Weierstrass que nos garante a existência de pontos extremos abno teorema, é fundamental que a função contínua a estudar esteja definida em um infechado e limitado. A seguir daremos algumas definições que estendem as característiintervalos fechados e limitados a Rn e enunciaremos o teorema que garantirá a existêmáximos e mínimos absolutos.
Definição 7.4. Um conjunto A ⊂ Rn é dito limitado se existe uma constante c > 0 tal que para todo x ∈ A.
Equivalentemente, se A está contido na bola B(0, c). Lembramos que o conjunto Afechado em Rn se ∂A ⊂ A. Veja o Capítulo III. Intuitivamente, uma superfície é feclimitada se ela separa o espaço em duas regiões, uma "interior"e outra "exterior"à supeo caso de uma esfera em R3.
Exemplo 7.7.
[1] A = {(x,y,z) ∈ R3/ x2 + y2 + z2 ≤ r2, r > 0} é fechado, pois sua fronteira é:
∂A = {(x,y ,z) ∈ R3/x2 + y2 + z2 = r2, r > 0}.
Logo ∂A ⊂ A. Claramente A é limitado.
[2] A = {(x, y) ∈ R2/ x2 + y2 < r2, r > 0} não é fechado, pois sua fronteira é :
∂A = {(x, y) ∈ R2/x2 + y2 = r2, r > 0}.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 175/279
7.4. MÁXIMOS E MÍNIMOS ABSOLUTOS 175
Logo ∂A ⊂ A. A é limitado
[3] A = [a, b] × [c, d] é um conjunto fechado e limitado, pois ∂A é o retângulo formado pelasretas x = a, x = b, y = c e y = d.
[4] Os planos em R3 são fechados e não limitados.
Teorema 7.4. (Weierstrass) Seja f : A
⊂Rn
−→R uma função contínua no conjunto A fechado e
limitado. Então, existem pontos de máximo e mínimo absoluto de f em A, isto é, existem x0, x1 ∈ Atais que f (x0) ≤ f (x) ≤ f (x1) para todo x ∈ A.
Exemplo importantes
[1] Sejam A = {(x, y) ∈ R2/x2 + y2 < 1} e f : A ⊂ R2 −→ R definida por f (x, y) = y.
i) f é diferenciável em R2; logo, é diferenciável em A; por outro lado ∇f (x, y) = (0, 1); então, afunção não possui pontos críticos e portanto não possui pontos extremos em A (nem em R2).
ii) Suponhamos que agora, f tome valores no conjunto B = {(x, y) ∈ R2/x2 + y2 ≤ 1}. O con- junto B é fechado e limitado; f é, claramente, contínua; o teorema de Weierstrass nos asegura
a existência de pontos extremos absolutos de f em B.iii) Por i) os pontos extremos de f devem estar em ∂B = {(x, y) ∈ R2/x2 + y2 = 1}. De fato, afunção f associa a cada par ordenado sua ordenada; então:
−1 = f (0, −1) ≤ f (x, y) ≤ f (0, 1) = 1,
para todo (x, y) ∈ B. Logo (0, −1) e (0, 1) são pontos de mínimo e máximo absolutos de f emB. Note que estes pontos não são pontos críticos de f .
A seguir faremos algumas considerações geométricas sobre o exemplo, que serão importantesnos parágrafos seguintes. Consideremos g(x, y) = x2 + y2 − 1; então ∇g(x, y) = (2 x, 2 y); logo,não é difícil ver que os únicos pontos onde ∇g(x, y) e ∇f (x, y) são paralelos são os nos pontos
de mínimo e máximo (0, −1) e (0, 1).
g(0,1)
∆g(0,-1)
∆
∆f(x,y)
-1
1
f=c
Figura 7.29: Mínimo e máximo de g.
Se um extremo absoluto de f ocorre em A − ∂A, então, também é um extremo local de f ; logo,um extremo absoluto que não seja um extremo local, necessariamente está na ∂A. Portanto,
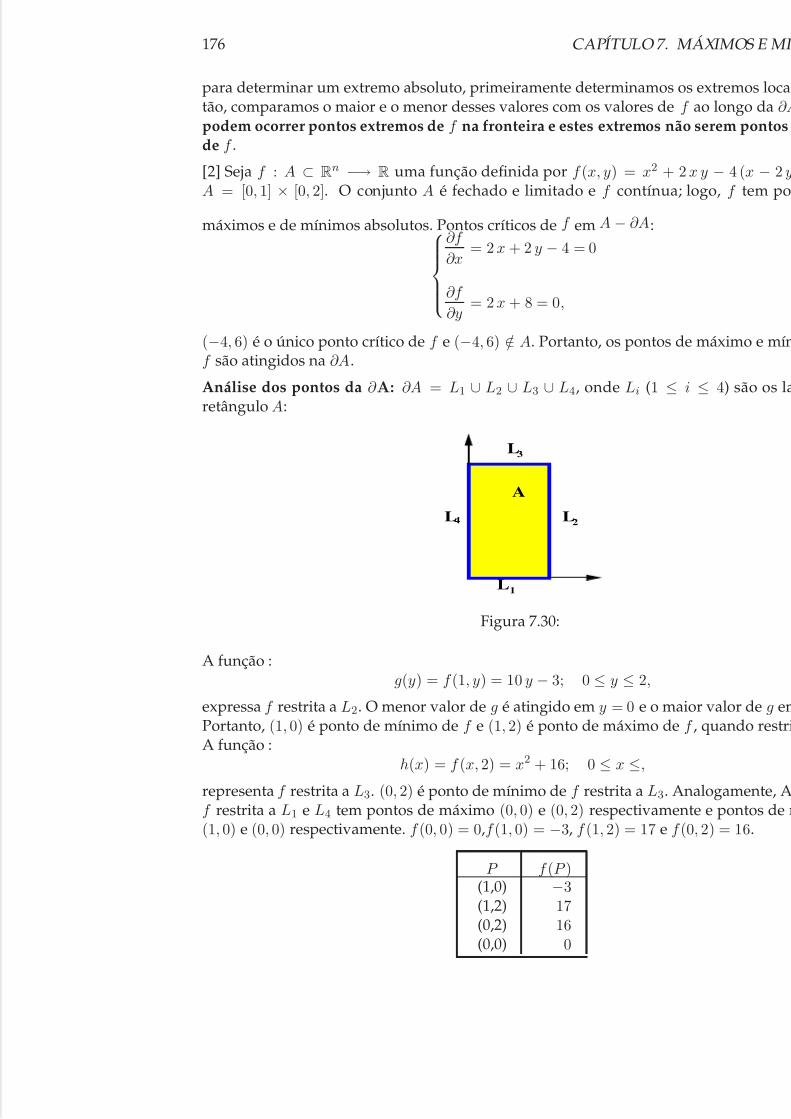
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 176/279
176 CAPÍTULO 7. MÁXIMOS E MI N
para determinar um extremo absoluto, primeiramente determinamos os extremos locaitão, comparamos o maior e o menor desses valores com os valores de f ao longo da ∂Apodem ocorrer pontos extremos de f na fronteira e estes extremos não serem pontos de f .
[2] Seja f : A ⊂ Rn −→ R uma função definida por f (x, y) = x2 + 2 x y − 4 (x − 2 yA = [0, 1] × [0, 2]. O conjunto A é fechado e limitado e f contínua; logo, f tem po
máximos e de mínimos absolutos. Pontos críticos de f em A − ∂A:
∂f
∂x= 2 x + 2 y − 4 = 0
∂f
∂y= 2 x + 8 = 0,
(−4, 6) é o único ponto crítico de f e (−4, 6) /∈ A. Portanto, os pontos de máximo e mínf são atingidos na ∂A.
Análise dos pontos da ∂ A: ∂A = L1 ∪ L2 ∪ L3 ∪ L4, onde Li (1 ≤ i ≤ 4) são os laretângulo A:
L
LL
1
2
3
4
L
A
Figura 7.30:
A função :g(y) = f (1, y) = 10 y − 3; 0 ≤ y ≤ 2,
expressa f restrita a L2. O menor valor de g é atingido em y = 0 e o maior valor de g emPortanto, (1, 0) é ponto de mínimo de f e (1, 2) é ponto de máximo de f , quando restriA função :
h(x) = f (x, 2) = x2 + 16; 0 ≤ x ≤,
representa f restrita a L3. (0, 2) é ponto de mínimo de f restrita a L3. Analogamente, Af restrita a L1 e L4 tem pontos de máximo (0, 0) e (0, 2) respectivamente e pontos de m(1, 0) e (0, 0) respectivamente. f (0, 0) = 0,f (1, 0) = −3, f (1, 2) = 17 e f (0, 2) = 16.
P f (P )(1,0) −3(1,2) 17(0,2) 16(0,0) 0
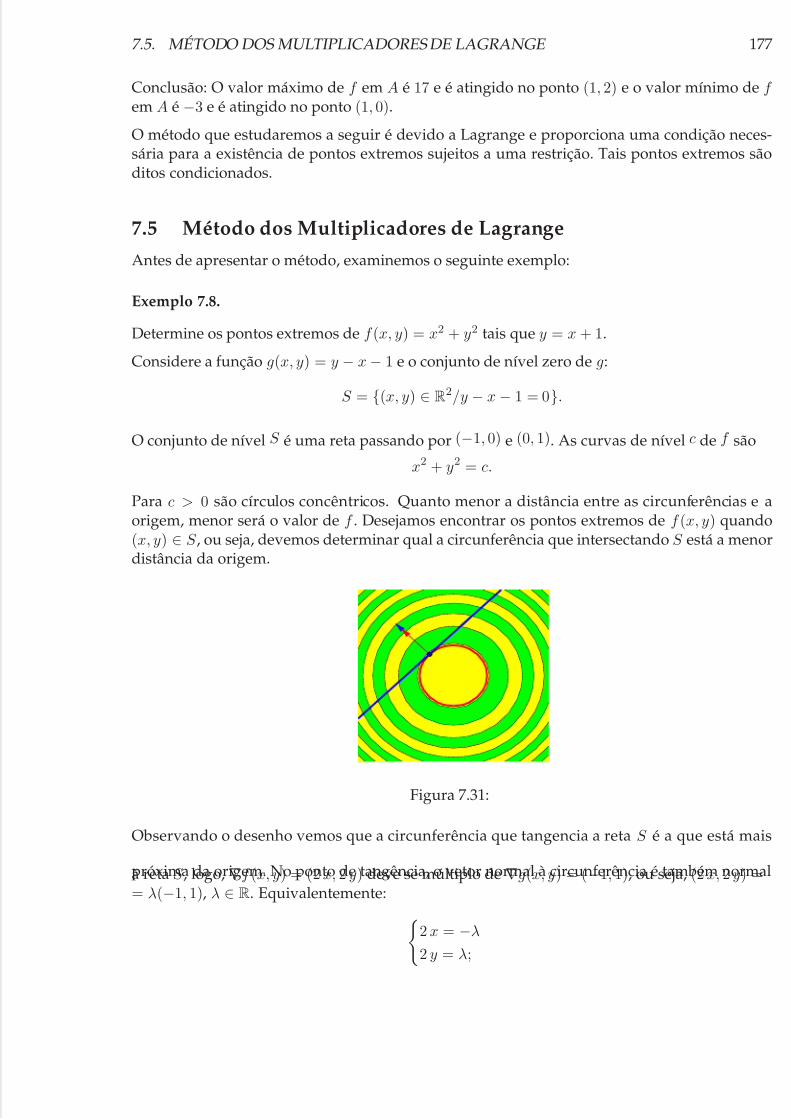
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 177/279
7.5. MÉTODO DOS MULTIPLICADORES DE LAGRANGE 177
Conclusão: O valor máximo de f em A é 17 e é atingido no ponto (1, 2) e o valor mínimo de f em A é −3 e é atingido no ponto (1, 0).
O método que estudaremos a seguir é devido a Lagrange e proporciona uma condição neces-sária para a existência de pontos extremos sujeitos a uma restrição. Tais pontos extremos sãoditos condicionados.
7.5 Método dos Multiplicadores de Lagrange
Antes de apresentar o método, examinemos o seguinte exemplo:
Exemplo 7.8.
Determine os pontos extremos de f (x, y) = x2 + y2 tais que y = x + 1.
Considere a função g(x, y) = y − x − 1 e o conjunto de nível zero de g:
S = {(x, y) ∈ R2/y − x − 1 = 0}.
O conjunto de nível S é uma reta passando por (−1, 0) e (0, 1). As curvas de nível c de f são
x2 + y2 = c.
Para c > 0 são círculos concêntricos. Quanto menor a distância entre as circunferências e aorigem, menor será o valor de f . Desejamos encontrar os pontos extremos de f (x, y) quando(x, y) ∈ S , ou seja, devemos determinar qual a circunferência que intersectando S está a menordistância da origem.
Figura 7.31:
Observando o desenho vemos que a circunferência que tangencia a reta S é a que está mais
próxima da origem. No ponto de tangência, o vetor normal à circunferência é também normalà reta S , logo, ∇f (x, y) = (2 x, 2 y) deve se múltiplo de ∇g(x, y) = (−1, 1), ou seja, (2 x, 2 y) == λ(−1, 1), λ ∈ R. Equivalentemente:
2 x = −λ
2 y = λ;
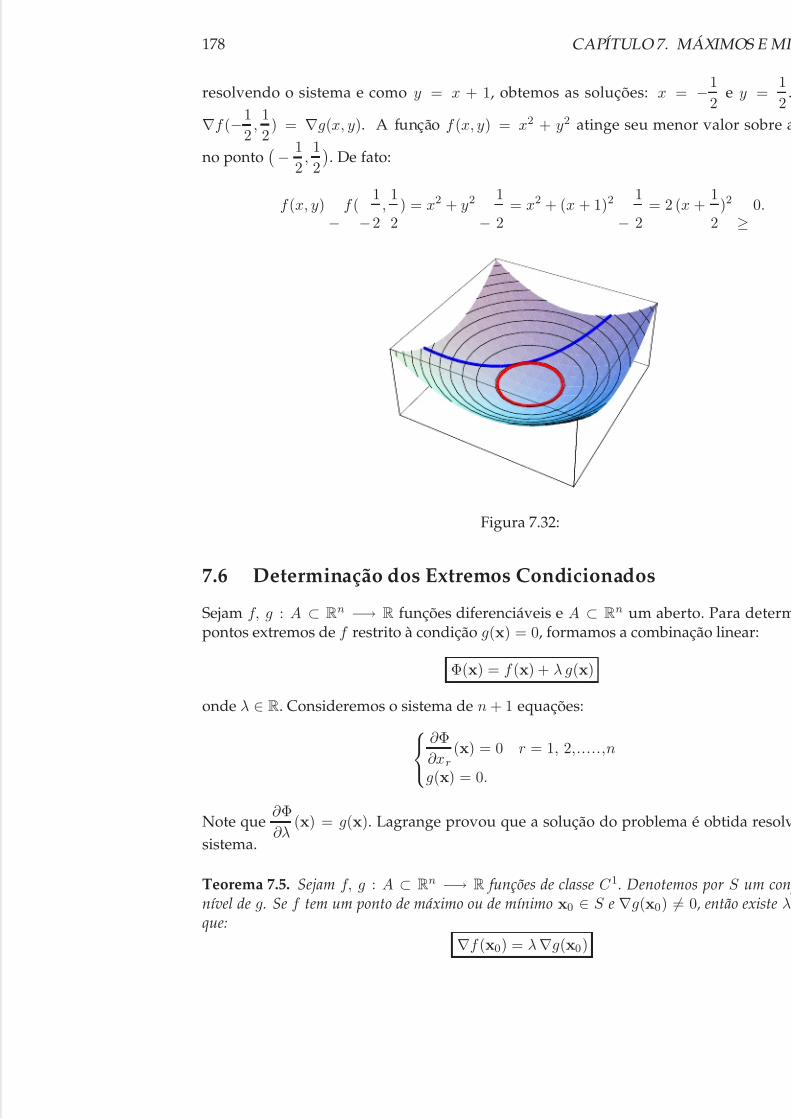
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 178/279
178 CAPÍTULO 7. MÁXIMOS E MI N
resolvendo o sistema e como y = x + 1, obtemos as soluções: x = −1
2e y =
1
2.
∇f (−1
2,
1
2) = ∇g(x, y). A função f (x, y) = x2 + y2 atinge seu menor valor sobre a
no ponto− 1
2,
1
2
. De fato:
f (x, y)−
f (−
1
2,
1
2) = x2 + y2
−1
2= x2 + (x + 1)2
−1
2= 2 (x +
1
2)2
≥0.
Figura 7.32:
7.6 Determinação dos Extremos Condicionados
Sejam f, g : A ⊂ Rn −→ R funções diferenciáveis e A ⊂ Rn um aberto. Para determpontos extremos de f restrito à condição g(x) = 0, formamos a combinação linear:
Φ(x) = f (x) + λ g(x)
onde λ ∈ R. Consideremos o sistema de n + 1 equações:
∂ Φ
∂xr(x) = 0 r = 1, 2,.....,n
g(x) = 0.
Note que∂ Φ
∂λ(x) = g(x). Lagrange provou que a solução do problema é obtida resolv
sistema.
Teorema 7.5. Sejam f, g : A ⊂ Rn −→ R funções de classe C 1. Denotemos por S um conjnível de g. Se f tem um ponto de máximo ou de mínimo x0 ∈ S e ∇g(x0) = 0, então existe λque:
∇f (x0) = λ ∇g(x0)
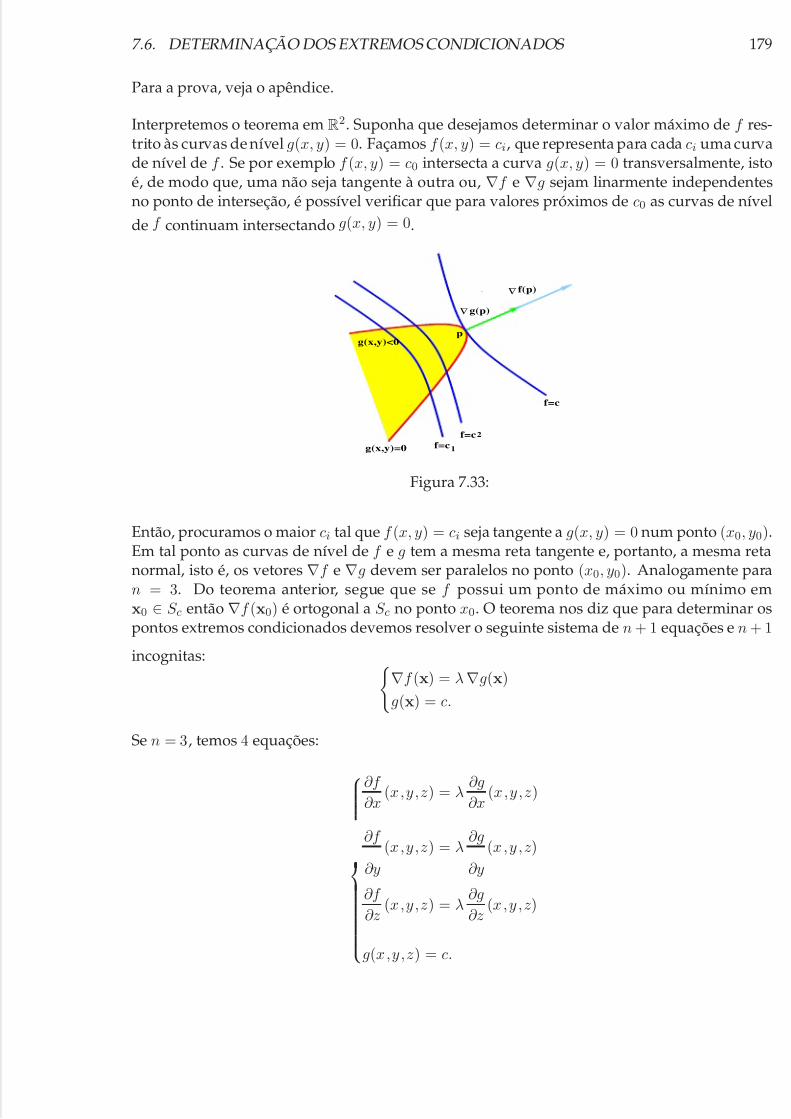
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 179/279
7.6. DETERMINAÇÃO DOS EXTREMOS CONDICIONADOS 179
Para a prova, veja o apêndice.
Interpretemos o teorema em R2. Suponha que desejamos determinar o valor máximo de f res-trito às curvas de nível g(x, y) = 0. Façamos f (x, y) = ci, que representa para cada ci uma curvade nível de f . Se por exemplo f (x, y) = c0 intersecta a curva g(x, y) = 0 transversalmente, istoé, de modo que, uma não seja tangente à outra ou, ∇f e ∇g sejam linarmente independentesno ponto de interseção, é possível verificar que para valores próximos de c0 as curvas de nível
de f continuam intersectando g(x, y) = 0.
g(x,y)<0
∆
∆
g(p)
f(p)
g(x,y)=0
p
f=c
f=c2
f=c1
Figura 7.33:
Então, procuramos o maior ci tal que f (x, y) = ci seja tangente a g(x, y) = 0 num ponto (x0, y0).Em tal ponto as curvas de nível de f e g tem a mesma reta tangente e, portanto, a mesma retanormal, isto é, os vetores ∇f e ∇g devem ser paralelos no ponto (x0, y0). Analogamente paran = 3. Do teorema anterior, segue que se f possui um ponto de máximo ou mínimo emx0 ∈ S c então ∇f (x0) é ortogonal a S c no ponto x0. O teorema nos diz que para determinar ospontos extremos condicionados devemos resolver o seguinte sistema de n + 1 equações e n + 1
incognitas: ∇f (x) = λ ∇g(x)
g(x) = c.
Se n = 3, temos 4 equações:
∂f
∂x(x,y,z) = λ
∂g
∂x(x,y,z)
∂f
∂y
(x,y,z) = λ∂g
∂y
(x,y ,z)
∂f
∂z(x,y,z) = λ
∂g
∂z(x,y ,z)
g(x,y,z) = c.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 180/279
180 CAPÍTULO 7. MÁXIMOS E MI N
Analogamente para n = 2:
∂f
∂x(x, y) = λ
∂g
∂x(x, y)
∂f
∂y(x, y) = λ
∂g
∂y(x, y)
g(x, y) = c.
A diferença entre os problemas de máximos e mínimos não condicionados e os condicié que nos últimos não temos critérios simples para distinguir os pontos de mínimo máximo. Cada ponto obtido pelo metódo de Lagrange deve ser examinado separadautilizando os dados do problema e/ou, argumentos geométricos.
Exemplo 7.9.
[1] Determine os pontos extremos de f (x, y) = x y tais que x2 + y2 = 1.
Utilizando o método de Lagrange, devemos resolver o sistema:
∇f (x, y) = λ ∇g(x, y)
x2 + y2 = 1.
Logo,
(y, x) = λ (2 x, 2 y)
x2 + y2 = 1, que é equivalente a:
(1) y = 2 λ x(2) x = 2 λ y
(3) x2 + y2 = 1.
De (1) e (2) obtemos y (1 − 4 λ2) = 0. Se y = 0, utilizando (3), temos, x = ±1; se λ =1
2,
y = x; de (3), temos x = ± 1√2
e y = ± 1√2
. Por outro lado:
(x, y) f (x, y)
(±
1, 0) 0
(±1/√2, ∓1/√2) −1/2
(±1/√
2, ±1/√
2) 1/2
Logo± 1√
2, ∓ 1√
2, −1
2
são pontos de mínimo e
± 1√2
, ± 1√2
,1
2
são pontos de máxi
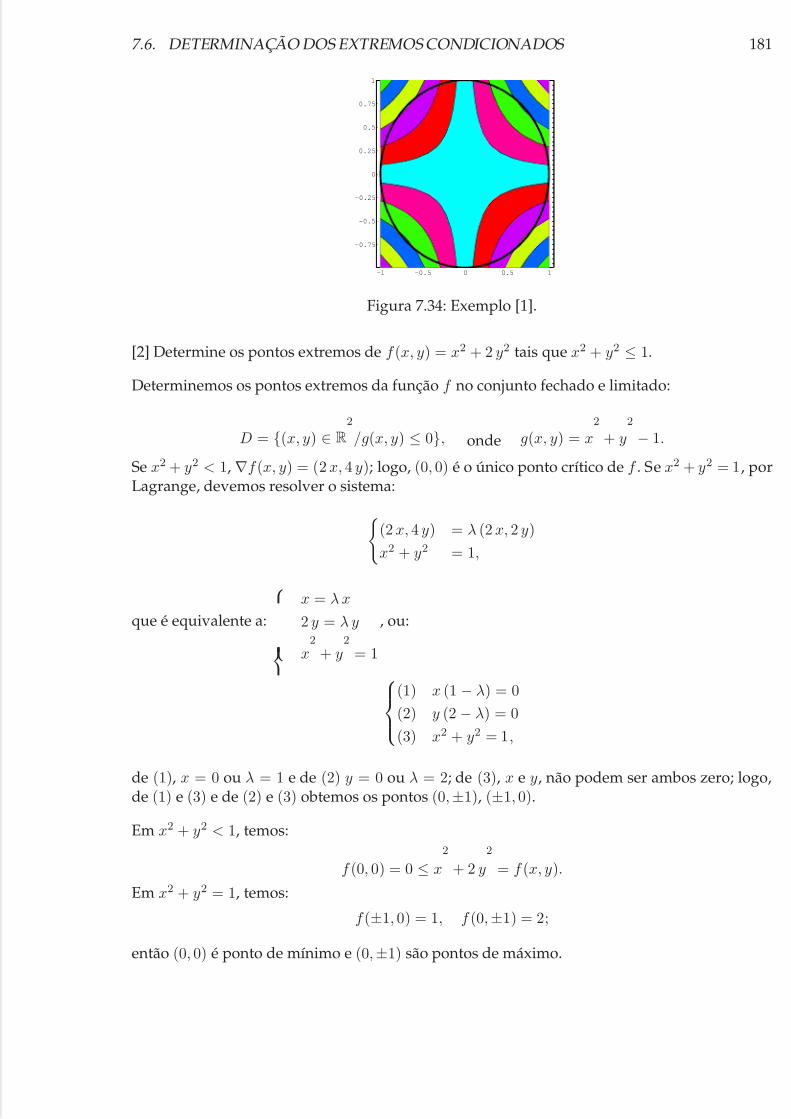
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 181/279
7.6. DETERMINAÇÃO DOS EXTREMOS CONDICIONADOS 181
-1 -0.5 0 0.5 1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
Figura 7.34: Exemplo [1].
[2] Determine os pontos extremos de f (x, y) = x2 + 2 y2 tais que x2 + y2 ≤ 1.
Determinemos os pontos extremos da função f no conjunto fechado e limitado:
D = {(x, y) ∈ R2
/g(x, y) ≤ 0}, onde g(x, y) = x2
+ y2
− 1.
Se x2 + y2 < 1, ∇f (x, y) = (2 x, 4 y); logo, (0, 0) é o único ponto crítico de f . Se x2 + y2 = 1, porLagrange, devemos resolver o sistema:
(2 x, 4 y) = λ (2 x, 2 y)
x2 + y2 = 1,
que é equivalente a:
x = λ x
2 y = λ y
x2
+ y2
= 1
, ou:
(1) x (1 − λ) = 0
(2) y (2 − λ) = 0
(3) x2 + y2 = 1,
de (1), x = 0 ou λ = 1 e de (2) y = 0 ou λ = 2; de (3), x e y, não podem ser ambos zero; logo,de (1) e (3) e de (2) e (3) obtemos os pontos (0, ±1), (±1, 0).
Em x2 + y2 < 1, temos:
f (0, 0) = 0 ≤ x
2
+ 2 y
2
= f (x, y).
Em x2 + y2 = 1, temos:
f (±1, 0) = 1, f (0, ±1) = 2;
então (0, 0) é ponto de mínimo e (0, ±1) são pontos de máximo.
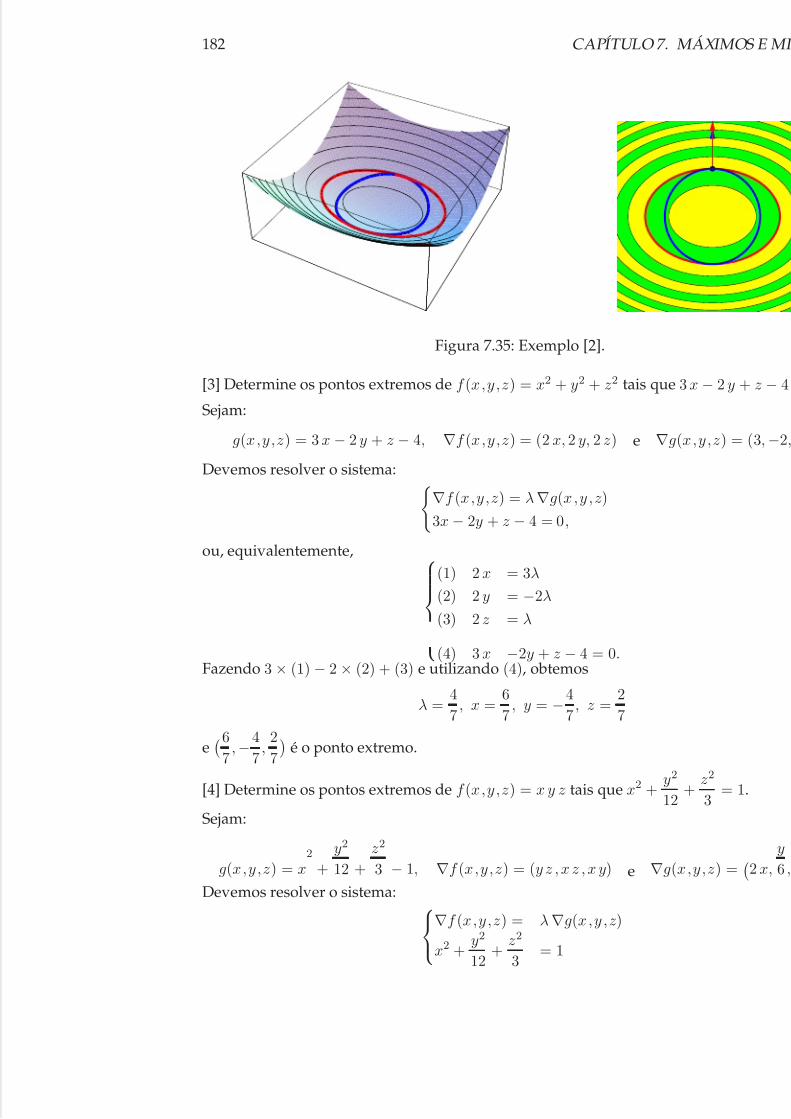
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 182/279
182 CAPÍTULO 7. MÁXIMOS E MI N
Figura 7.35: Exemplo [2].
[3] Determine os pontos extremos de f (x,y,z) = x2 + y2 + z2 tais que 3 x − 2 y + z − 4
Sejam:
g(x,y,z) = 3 x − 2 y + z − 4, ∇f (x,y,z) = (2 x, 2 y, 2 z) e ∇g(x,y,z) = (3, −2,
Devemos resolver o sistema: ∇f (x,y,z) = λ ∇g(x,y ,z)
3x − 2y + z − 4 = 0,
ou, equivalentemente,
(1) 2 x = 3λ
(2) 2 y = −2λ
(3) 2 z = λ
(4) 3 x −2y + z − 4 = 0.Fazendo 3 × (1) − 2 × (2) + (3) e utilizando (4), obtemos
λ =4
7, x =
6
7, y = −4
7, z =
2
7
e6
7, −4
7,
2
7
é o ponto extremo.
[4] Determine os pontos extremos de f (x,y,z) = x y z tais que x2 +y2
12+
z2
3= 1.
Sejam:
g(x,y,z) = x2
+
y2
12 +
z2
3 − 1, ∇f (x,y,z) = (y z , x z , x y) e ∇g(x,y,z) =
2 x,
y
6 ,
Devemos resolver o sistema:
∇f (x,y,z) = λ ∇g(x,y ,z)
x2 +y2
12+
z2
3= 1

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 183/279
7.7. PROBLEMAS DE OTIMIZAÇÃO 183
ou, equivalentemente,
(1) y z = 2 xλ
(2) x z = y6λ
(3) x y = 23 zλ
(4) x2 + y2
12 + z2
3 = 1;
multiplicando (1) por x, (2) por y e (3) por z obtemos:
(1′) x y z = 2 x2λ
(2′) x y z = y2
6 λ
(3′) x y z = 23z2λ
(4) x2 + y2
12 + z2
3 = 1
somando (1′) + (2′) + (3′) e tendo em vista (4), temos 3 x y z = 2 λ (x2 +y2
12+
z2
3) = 2λ;
substituindo x y z por2λ
3a em (1′), (2′) e (3′):
λ (3x2 − 1) = 0
λ (y2 − 4) = 0
λ (z2 − 1) = 0
Se λ = 0, x = ±√
3
3, y = ±2 e z = ±1. Se λ = 0, x, y e z podem ser nulos aos pares: x = y = 0 e
z = ±√3, x = z = 0 e y = ±2
√3, y = z = 0 e x = ±1. Os pontos extremos de f são:
(±√
3
3, ±2, ±1), (0, 0, ±
√3), (0, ±2
√3, 0) e (±1, 0, 0).
(x,y,z) f (x,y ,z) Ponto
(√
3/3, 2, 1) 2√
3/3 máximo(−
√3/3, −2, −1) −2
√3/3 mínimo
7.7 Problemas de Otimização
[1] De todos os paralelepípedos retangulares cuja soma das arestas é constante e igual a 4 a
(a > 0), qual é o que tem volume máximo?Sejam x, y e z as arestas do paralelepípedo; seu volume é V (x,y,z) = x y z tal que x + y + z = a.Seja g(x,y,z) = x + y + z.
∇V (x,y,z) = λ ∇g(x,y,z)
g(x,y,z) = a,

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 184/279
184 CAPÍTULO 7. MÁXIMOS E MI N
ou, equivalentemente:
(1) y z = λ
(2) x z = λ
(3) x y = λ
(4) x + y + z = a.
Fazendo (1) = (2) obtemos x = y e fazendo (2) = (3) obtemos y = z; logo, x = y = z;temos x = y = z =
a
3e:
V a
3,
a
3,
a
3
=
a3
27
é o volume máximo.
[2] Determine as dimensões do paralelepípedo retangular de volume máximo sabenas 3 faces do paralelepípedo estão nos planos coordenados e um vértice pertence aox
a+
y
b+
z
c= 1 (a, b, c > 0). Calcule o volume.
O volume é V (x,y,z) = x y z. Seja g(x,y,z) =x
a+
y
b+
z
c −1; então,
∇V (x,y,z) = λ ∇g(x,y,z)x
a+
y
b+
z
c= 1,
ou, equivalentemente,
(1) a y z = λ
(2) b x z = λ
(3) c x y = λ
(4)x
a+
y
b+
z
c= 1;
fazendo (1) = (2), como x, y, z = 0, temos y =b x
a; analogamente, fazendo (1) = (3)
z =c x
a, de (4) obtemos que x =
a
3, y =
b
3e z =
c
3. O ponto de máximo é
1
3(a,b,c) e:
V = V
a
3,
b
3,
c
3
=
a b c
27.
[3] Determine a distância mínima entre a superfície 4 x2 + y2 − z = 0 e o ponto (0, 0, 8).
Como antes utilizamos o quadrado da distância: f (x,y,z) = x2 + y2 + (z − 8)2. Consid
g(x,y ,z) = 4x2 + y2 − z; então,
(1) 2 x = 8 λ x
(2) 2 y = 2 λ y
(3) 2 (z − 8) = −λ
(4) 4 x2 + y2 = z,

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 185/279

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 186/279
186 CAPÍTULO 7. MÁXIMOS E MI N
são pontos extremos.
(x,y ,z) T (x,y ,z) Temperatura
(±1/2, ±1, 2, ±√
2/2)√
2/2 máxima
(±
√2/2,
∓√
2/2, 0) 0mínima
[5] Se a densidade na placa x y + x z + y z = a, (x, y, z = 0) é dada por D(x,y,z) =determine os pontos da placa onde a densidade é máxima e onde é mínima.
Seja g(x,y,z) = x y + x z + y z − a:
(1) y z = λ (y + z)
(2) x z = λ (x + z)
(3) x y = λ (x + y)
(4) x y + x z + y z = a;
multiplicando (1) por x, (2) por y, (3) por z e somando, temos:
3 x y z = λ(2 x y + 2 x z + 2 y z) = 2 a λ,
onde, na última igualdade utilizamos (4); substituindo λ por3 x y z
2ano sistema, obtemo
(1) 3 x (y + z) = 2 a
(2) 3 y (x + z) = 2 a
(3) 3 z (x + y) = 2 a.
Igualando (1) a (2) obtemos x = y e igualando (2) a (3) obtemos z = y; logo x = y = z
temos x = ±
a3
e os pontos extremos são:±
a3
, ±
a3
, ±
a3
.
(x,y ,z) D(x,y,z) Densidade
(
a/3,
a/3,
a/3) a√
3a/9 máxima
(−
a/3, −
a/3, −
a/3) −a√
3a/9 mínima
[6] Determine a equação do elipsóidex2
a2+
y2
b2+
z2
c2= 1 que passa pelo ponto (1, 2, 3
menor volume.Note que as incógnitas são a, b e c. Seja V = f (a,b,c) = 4a b c π
3 o volume do elipsóide. Cponto (1, 2, 3) pertence à superfície:
1
a2+
4
b2+
9
c2= 1;

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 187/279
7.7. PROBLEMAS DE OTIMIZAÇÃO 187
logo, consideramos g(a,b,c) =1
a2+
4
b2+
9
c2− 1; então,
(1)4 π
3a b c = − 2
a2λ
(2)4 π
3a b c = − 8
b2λ
(3)4 π
3a b c = −18
c2λ
(4)1
a2+
4
b2+
9
c2= 1,
fazendo (1) = (2) e como λ = 0, obtemos que b2 = 4 a2; fazendo (2) = (3), obtemos 4 c2 = 9 b2;logo, c2 = 9 a2 e de (4): a2 = 3, b2 = 12 e c2 = 27; a equação do elipsóide é:
x2
3+
y2
12+
z2
27= 1.
[7] Um depósito cilíndrico de aço fechado deve conter 2 litros de um fluido. Determine asdimensões do depósito de modo que a quantidade de material usada em sua construção sejamínima.
Sejam x e y o raio e a altura do cilindro, respectivamente. Devemos minimizar a área total docilindro, incluindo as tampas:
f (x, y) = 2 π x2 + 2 π x y , sendo π x2 y = 2.
Denote por g(x, y) = πx2y −2, ∇f (x, y) = (4πx + 2πy, 2πx) e ∇g(x, y) = (2πxy,πx2). O sistemaé:
(1) 2 x + y = λ x y(2) 2 x = λ x2
(3) π x2 y = 2.
De (2), x(2 − λx) = 0 e λx = 2; logo, de (1), y = 2x; ou seja, a altura é igual ao diâmetro da base; de (3) obtemos: x = π−
13 e y = 2π−
13 , que são as coordenadas do ponto de mínimo (por
que ?). f (π−13 , 2π−
13 ) = 6 3
√π.
[8] Um fio de cobre de comprimento a, deve ser dividido em 3 partes tais que o produto doscomprimentos das partes seja máximo. Determine o produto.
Se x, y e z são os comprimentos das partes, então devemos maximizar f (x,y,z) = x y z tal que
x + y + z = a. O sistema é:
(1) y z = λ
(2) x z = λ
(3) x y = λ
(4) x + y + z = a.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 188/279
188 CAPÍTULO 7. MÁXIMOS E MI N
Fazendo (1) = (2) e (2) = (3), obtemos x = y = z; de (4) x =a
3= y = z; (
a
3,
a
3,
a
3) é o p
máximo e f (a
3,
a
3,
a
3) =
a3
27.
[9] Determine os pontos da curva x6 + y6 = 1 mais afastados e os mais próximos da ori
Novamente utilizamos o quadrado da distância da origem ao ponto (x, y): f (x, y) = xsendo x6 + y6 = 1. Seja g(x, y) = x6 + y6
−1. O sistema é:
(1) x = 3 λ x5
(2) y = 3 λ y5
(3) x6 + y6 = 1,
ou, equivalentemente,
(1) x (1 − 3λx4) = 0
(2) y (1 − 3λy4) = 0
(3) x6 + y6 = 1.
Se x = 0, de (3) obtemos y = ±1 e em (2), λ =1
3 ; se y = 0, de (3) obtemos x = ±1 e
λ =1
3; os pontos são (±1, 0) e (0, ±1). Se x, y = 0, o sistema fica:
(1) (1 − 3λx4) = 0
(2) (1 − 3λy4) = 0
(3) x6 + y6 = 1.
Fazendo (2)-(1), λ(x4 − y4) = 0, λ = 0 e y = ±x; de (3) obtemos:
2−1/6, 2−1/6, 2−1/6, −2−1/6, − 2−1/6, 2−1/6 e − 2−1/6, −2−1/6,
onde λ =223
3.
(x, y) f (x, y) Ponto
(±1, 0) 1 mínimo
(0, ±1) 1 mínimo
2−1/6, 2−1/6
22/3 máximo
2−1/6, −2−1/6
22/3 máximo− 2−1/6, 2−1/6
22/3 máximo
− 2−1/6, −2−1/6
22/3 máximo
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 189/279
7.7. PROBLEMAS DE OTIMIZAÇÃO 189
-1 -0.5 0.5 1
-1
-0.5
0.5
1
Figura 7.36:
O método de Lagrange não é restrito a duas ou três variáveis. O método só depende de umafunção e uma restrição. É o que mostrará o exemplo a seguir.
[10] Determine o valor máximo da raiz n-ésima de um produto de n números positivos tal quea soma dos números seja constante. Conclua que
n
√x1 x2 .......... xn ≤1
n
n
i=1xi.
Sejam x = (x1, x2, x3, ........., xn), onde, xi > 0 para todo i = 1, 2.......n, e :
f (x) = n√
x1 x2 .......... xn,
tal que: x1 + x2 + x3 + ....... + xn = a. Denotando por g(x) = x1 + x2 + x3 + ....... + xn − a,então, ∇g(x) = (1, 1, 1, ......, 1). Cálculo do gradiente de f : Se denotamos f (x) = n
u(x) onde
u(x) = x1 x2 .......... xn, então:
∂f
∂xi
=∂u∂xi
n(u(x))n−1
n
=x1 x2 ...xi−1 xi+1 ...xn
n(u(x))n−1
n
;
para não escrever demais, denote por K (x) = n(u(x))n−1n ; o sistema é:
x2 x3 ...xn = λK (x) (1)
x1 x3 ...xn = λK (x) (2)
x1 x2 x4 ...xn = λK (x) (3)
. .
. .
. .
. .
. .
x1 x3 ...xn−2 xn = λK (x) (n − 1)
x1 x3 ...xn−2 xn−1 = λK (x) (n)
x1 + x2 + x3 + ....... + xn = a (n + 1).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 190/279
190 CAPÍTULO 7. MÁXIMOS E MI N
Fazendo (1) = (2), temos x1 = x2; de (2) = (3), x2 = x3; assim, em geral, igualando as eq( j) = ( j + 1) com j = 1,...,n − 1, obtemos x j = x j+1 e x1 = x2 = x3 = .... = xn; usequação (n + 1) temos:
x1 = x2 = x3 = ...... = xn =a
n,
e f ( an , a
n ,....., an ) = a
n que é o valor máximo. Em particular,
f (x) ≤ f ( an, an ,....., an ) = an ;
por outro lado, a =n
i=1
xi; portanto:
n√
x1 x2 .......... xn ≤ 1
n
ni=1
xi.
7.7.1 Generalização do Método
Seja S um conjunto de nível definido por:
g1(x0) = c1
g2(x0) = c2
g3(x0) = c3
. .
. .
. .
gk(x0) = ck.
S é, em geral, interseção de superfícies. O teorema pode ser generalizado da seguinte fo
f tem um ponto de máximo ou mínimo emx0 ∈ S i, para todo i, então, devem existir conλ1, λ2 ...... λk tais que:
∇f (x0) = λ1∇g1(x0) + λ2∇g2(x0) + ........... + λk∇gk(x0).
Devemos resolver o sistema:
∇f (x0) = λ1∇g1(x0) + λ2∇g2(x0) + ........... + λk∇gk(x0)
g1(x0) = c1
g2(x0) = c2
g3(x0) = c3
. .
. .
. .
gk(x0) = ck.
Exemplo 7.10.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 191/279
7.8. EXERCÍCIOS 191
[1] Determine o ponto da interseção dos planos x + y + z = 1 e 3x + 2y + z = 6 mais próximoda origem.Sejam f (x,y ,z) = x2 + y2 + z2, g1(x,y,z) = x + y + z − 1 e g2(x,y,z) = 3x + 2y + z − 6; temos:
2 x = λ1 + 3 λ2 (1)
2 y = λ1 + 2 λ2 (2)
2 z = λ1 + λ2 (3)x + y = 1 − z (4)
3x + 2y = 6 − z, (5)
fazendo (1) + (2) + (3) obtemos, usando (4) e (5), o seguinte sistema:3 λ1 + 6 λ2 = 2
3 λ1 + 8 λ2 = 10;
logo λ2 = 4 e λ1 = −22
3e x =
7
3, y =
1
3e z = −5
3. A distância é:
5√
3
3.
7.8 Exercícios
1. Determine os pontos críticos de:
(a) z = e1+x2+y2
(b) z = 3x2 + 2xy + 2x + y2 + y + 4
(c) z = (x2 − 1) (y2 − 4)
(d) z = x2y − 8 x − 4 y
(e) z = 1x
−64y + xy
(f) z = 1x2+y2+1
(g) z = 2 x+2 y+1x2+y2+1
(h) z = x5 + y5 − 5x − 5y
(i) z = x2 − 4 x y + y2 + 1
(j) z = x4 + x y + y2 − 6 x − 5 y
(k) z = 3 x2 + x y − y2 + 1
(l) w = log4(x2 + y2 + z2 + 1)
(m) w = x2 + y3 + z4
(n) w =
x2 + y2 + z2
2. Determine se a origem é ponto de mínimo, de máximo ou sela de:
(a) z = x2.(b) z = x2 − 4y2
(c) z = −x2 + 2xy − y2
(d) z = x4 + y4
(e) z = x3 + y3
(f) z = 4xy − 3x2 + 4y2
(g) z = 2x2 + y2 − 3xy
(h) z = 5x2 + y2 − 4xy
(i) z = x2
−y2 + 6xy
(j) z = −x2 + y2 − xy
(k) z =xy
4− x2 − y2
2
(l) z = 7y2 − xy
3. Classifique os pontos críticos de:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 192/279
192 CAPÍTULO 7. MÁXIMOS E MI N
(a) z = e1+x2+y2
(b) z = 3x2 + 2xy + 2x + y2 + y
(c) z = (x2 − 1)(y2 − 4)
(d) z = x2y − 8x − 4y
(e) z = 1x − 64
y + xy
(f) z =1
x2+y2+1
(g) z = 2x+2y+1x2+y2+1
(h) z = x5 + y5 − 5x − 5y
(i) z = x2 − 4xy + 4y2 − x + 3y + 1
(j) z = x4 + xy + y2 − 6x − 5y
(k) z = (x − 2)2 + (y − 3)2
(l) z = x − y2 − x3
(m) z = x2 + y3
(n) z = 3x4 − 4x2y + y2
(o) z = x2 + y2 + x y + x
(p) z = 1 + x2 + y2
(q) z = 1 + x2 − y2
(r) z = x3
+ 3 x2
+ 4 x y + y2
(s) z = x2 y2 (1 − x − y)
(t) z = x y − ln(x2 + y2)
(u) z = 2 − (x + 2)2 + (y + 1)2
(v) z = (x − 1)2 + 2 (y + 2)2 + 3
(w) z = ey + ex − ex+y
(x) z = xsen(y), 0 ≤ x, y ≤ π.
4. Determine a reta que melhor se ajusta aos seguintes pontos:
(a) (0, 0), (1, 1) e (2, 3).(b) (0, 0), (12 , 14), (1, 1), (32 , 92 ) e (2, 4).(c) (−2, −4), (−1, −2), (1, 1), (2, 3), (4, 2) e (3, 5).(d) (−5, −4), (−3, −2), (−1, −1), (0, 0), (1, 1), (2, 3), (4, 2) e (3, 5).
5. Calcule os pontos de z2 − xy = 1 mais próximos da origem.
6. Determine a menor distância de x2 − 4y = 0 ao ponto (0, b).
7. Determine o valor máximo do produto de três numeros positivos tais que
2 x y + x z + 3 y z = 72.
8. Determine a distância mínima entre 4x2 + 4y − z = 0 e o ponto (0, 0, 8).
9. Se os vértices de um triângulo são (0, 0), (2, 1) e (1, 3), determine o ponto P do trital que a soma dos quadrados das distâncias aos vértices seja mínima.
10. Determine as dimensões do paralelepípedo de volume máximo, com lados paraleeixos coordenados, inscrito no elipsóide: x2
a2+ y2
b2+ z2
c2= 1.
11. Ache a equação do plano que passa por (1, 2, 1) e forma com os planos coordentetraedro de volume mínimo.
12. Uma calha deve ser construída com uma folha de aço, de largura a e comprimento
seção da calha é um trapézio isósceles, qual deve ser a largura da base e a inclinaçfaces para que sua capacidade seja máxima?
13. Uma aplicação num doente de x miligramas de um remédio A e y miligramasmedicamento B ocasiona uma resposta R = R(x, y) = x2 y3 (c − x − y), (c > 0quantidade de cada remédio dará a melhor resposta?

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 193/279
7.8. EXERCÍCIOS 193
Multiplicadores de Lagrange
1. Determine os pontos extremos de:
(a) z = 25 − x2 − y2 tais que x2 + y2 − 4 y = 0.
(b) z = x2 + 2 x y + y2 tais que x − y = 3.
(c) z = 4 x2 + 2 y2 + 5 tais que x2 + y2 − 2 y = 0.(d) w = x2 + y2 + z2 tais que 3 x − 2 y + z − 4 = 0.
(e) w = x + y + z tais que x2 − y2 + z2 = 4.
(f) w = (x + y + z)2 tais que x2 + 2 y2 + 3 z2 = 1.
2. Determine os pontos extremos de: w = x2 + y2 + z2 tais que x2 + y2 + z2 ≤ 1.
3. Determine a menor distância de y = x2 ao ponto (0, b), b > 0.
4. Determine o maior e o menor valor de xy tal que 2 x + y = 2, x e y positivos.
5. Determine o maior e o menor valor de x2 + y2 tal que x4 + y4 = 1.
6. Determine o maior valor de 2 y − x tal que y = sen(x), 0 ≤ x ≤ 2π.
7. Determine os valores máximos e mínimos de f (x,y ,z) = x + 2 y + z se x2 + y2 = 1 ey + z = 1.
8. Seja 0 < p < q. Determine o máximo e mínimo de x p + y p + z p tal que xq + yq + zq = 1,x, y e z não negativos.
9. Determine os valores extremos de z = cos2(x) + cos2(y) se 4x + 4y = π.
10. Determine as dimensões do retângulo de menor perímetro e de área 16 cm2
.11. De todos os triângulos de perímetro fixo, determine o de maior área.
12. Determine o valor máximo de:
(a) f (x,y,z) = x + y + z tal que x2 + y2 + z2 = a2 e conclua que:
(x + y + z)2 ≤ 3 (x2 + y2 + z2).
(b) f (x,y,z) = x y z tal que x + y + x = s e conclua que: 3 3√
xyz ≤ x + y + z.
(c) f (x,y,z) = x y z tal que x2 + y2 + z2 = s, x, y e z positivos; conclua que:
3√
x y z ≤
x2 + y2 + z2
3.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 194/279
194 CAPÍTULO 7. MÁXIMOS E MI N
13. Se a temperatura em qualquer ponto (x,y,z) do espaço é dada por:
T (x,y,z) = 100 x2 y z,
determine a temperatura máxima e a temperatura mínima sobre x2 + y2 + z2 ≤ 4
14. Determine o ponto P na elipse x2 + 2 y2 = 6 e o ponto Q na reta x + y = 4 ta
distância de P a Q seja a menor possível.
15. Determine os pontos mais afastados da origem tais que x2 + 4 y2 + z2 = 4 e x + y +
16. Determine as dimensõesdo paralelepípedo retangular de área total 2 a2 cuja diagomínima.
17. Dentre todos os triângulos de área S determine o que tem o perímetro menor.
18. Determine as dimensões do cilindro de maior volume inscrito numa esfera de rai
19. Dentre todos os triângulos retângulos de área S determine o que tem hipotenusa m
20. Determine o maior produto que podem ter 10 números positivos se a soma é 10 k
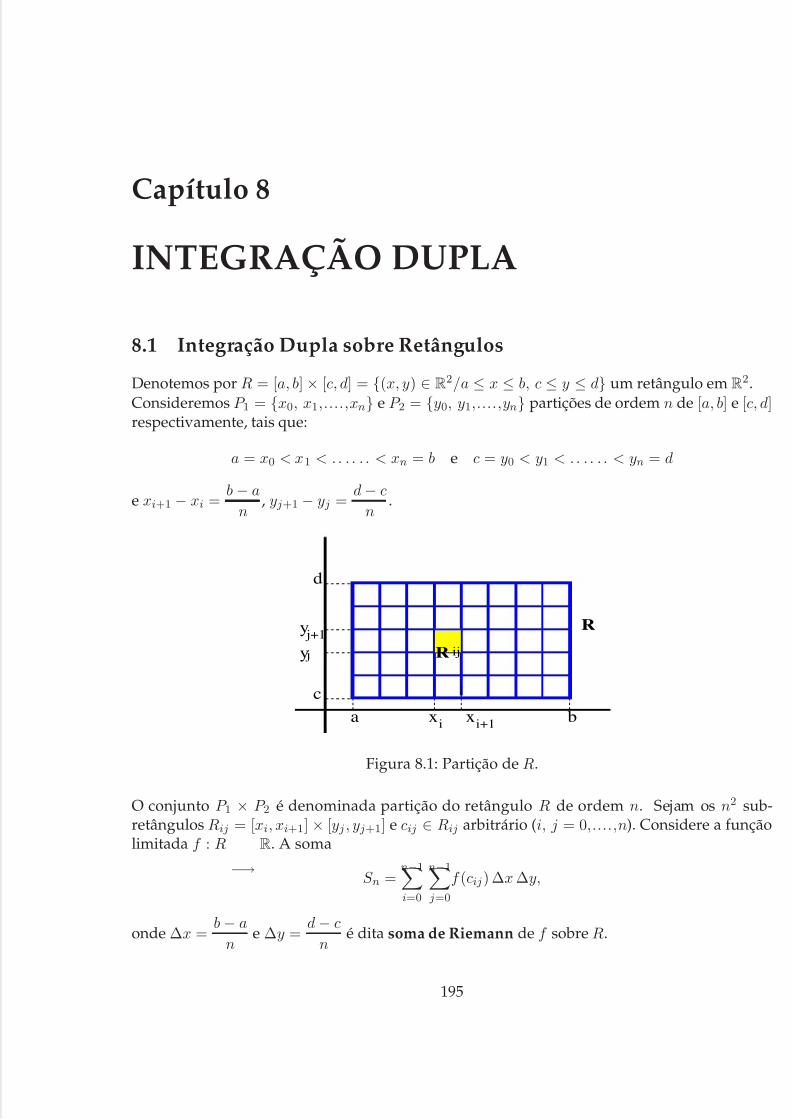
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 195/279
Capítulo 8
INTEGRAÇÃO DUPLA
8.1 Integração Dupla sobre Retângulos
Denotemos por R = [a, b] × [c, d] = {(x, y) ∈ R2/a ≤ x ≤ b, c ≤ y ≤ d} um retângulo em R2.Consideremos P 1 = {x0, x1,....,xn} e P 2 = {y0, y1,....,yn} partições de ordem n de [a, b] e [c, d]respectivamente, tais que:
a = x0 < x1 < . . . . . . < xn = b e c = y0 < y1 < . . . . . . < yn = d
e xi+1 − xi =b − a
n, y j+1 − y j =
d − c
n.
a b
c
d
x x
R
i i+1
y j+1
y j R ij
Figura 8.1: Partição de R.
O conjunto P 1 × P 2 é denominada partição do retângulo R de ordem n. Sejam os n2 sub-retângulos Rij = [xi, xi+1] × [y j , y j+1] e cij ∈ Rij arbitrário (i, j = 0,....,n). Considere a funçãolimitada f : R
−→R. A soma
S n =n−1i=0
n−1 j=0
f (cij ) ∆x ∆y,
onde ∆x =b − a
ne ∆y =
d − c
né dita soma de Riemann de f sobre R.
195
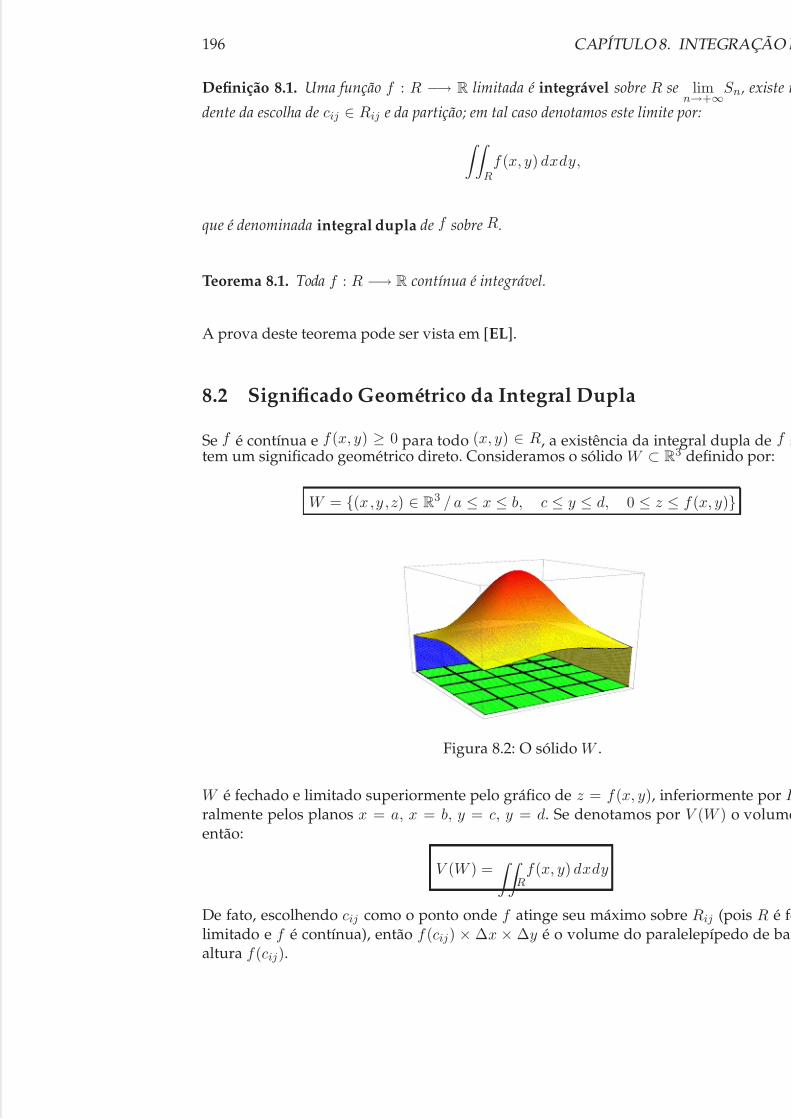
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 196/279
196 CAPÍTULO 8. INTEGRAÇÃO D
Definição 8.1. Uma função f : R −→ R limitada é integrável sobre R se limn→+∞S n, existe i
dente da escolha de cij ∈ Rij e da partição; em tal caso denotamos este limite por:
R
f (x, y) dxdy,
que é denominada integral dupla de f sobre R.
Teorema 8.1. Toda f : R −→ R contínua é integrável.
A prova deste teorema pode ser vista em [EL].
8.2 Significado Geométrico da Integral Dupla
Se f é contínua e f (x, y) ≥ 0 para todo (x, y) ∈ R, a existência da integral dupla de f stem um significado geométrico direto. Consideramos o sólido W ⊂ R3 definido por:
W = {(x,y ,z) ∈ R3 / a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f (x, y)}
Figura 8.2: O sólido W .
W é fechado e limitado superiormente pelo gráfico de z = f (x, y), inferiormente por Rralmente pelos planos x = a, x = b, y = c, y = d. Se denotamos por V (W ) o volumeentão:
V (W ) =
Rf (x, y) dxdy
De fato, escolhendo cij como o ponto onde f atinge seu máximo sobre Rij (pois R é felimitado e f é contínua), então f (cij) × ∆x × ∆y é o volume do paralelepípedo de basaltura f (cij).
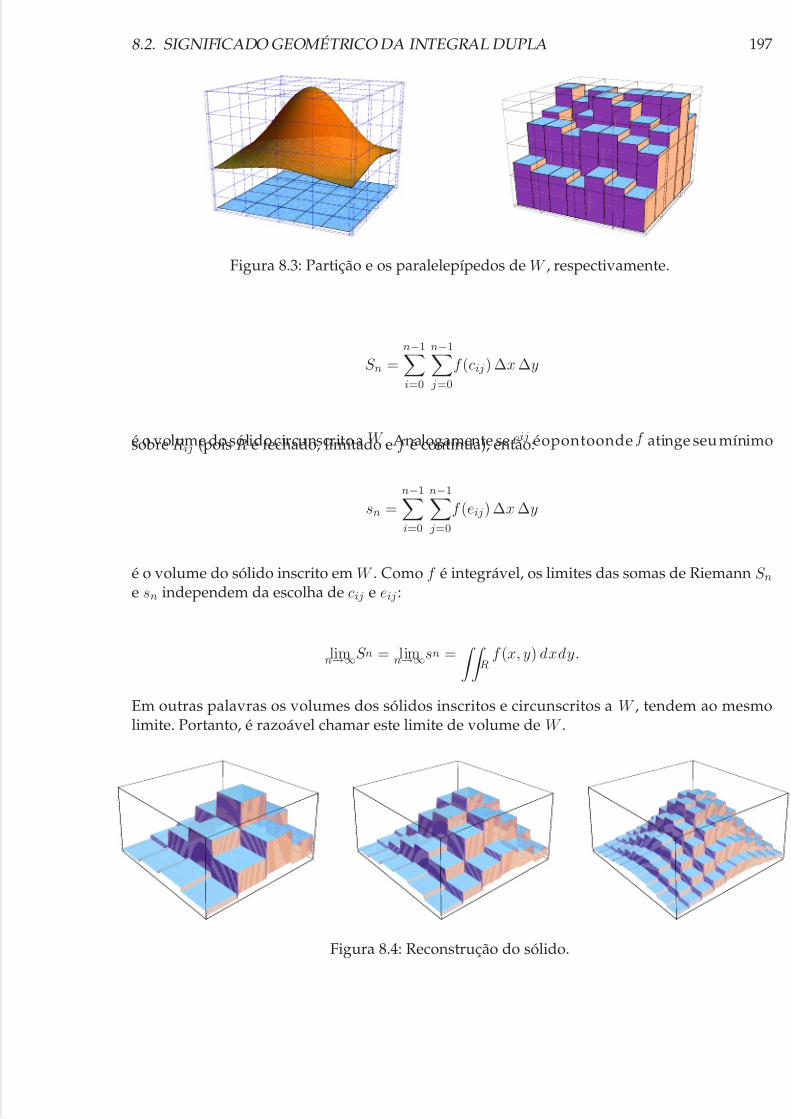
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 197/279
8.2. SIGNIFICADO GEOMÉTRICO DA INTEGRAL DUPLA 197
Figura 8.3: Partição e os paralelepípedos de W , respectivamente.
S n =n−1i=0
n−1 j=0
f (cij ) ∆x ∆y
é o volume do sólido circunscrito a W . Analogamente se eij éopontoonde f atinge seu mínimosobre Rij (pois R é fechado, limitado e f é contínua), então:
sn =
n−1i=0
n−1 j=0
f (eij) ∆x ∆y
é o volume do sólido inscrito em W . Como f é integrável, os limites das somas de Riemann S ne sn independem da escolha de cij e eij :
limn→∞S n = limn→∞sn =
Rf (x, y) dxdy.
Em outras palavras os volumes dos sólidos inscritos e circunscritos a W , tendem ao mesmolimite. Portanto, é razoável chamar este limite de volume de W .
Figura 8.4: Reconstrução do sólido.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 198/279
198 CAPÍTULO 8. INTEGRAÇÃO D
Figura 8.5: Reconstrução do sólido.
Novamente notamos que é possível mostrar rigorosamente que o significado geométintegral dupla independe da escolha da partição e dos pontos cij e eij .
A integral dupla tem propriedades análogas às das integrais das funções de uma variáv
Proposição 8.1.
1. Linearidade da integral dupla. Se f e g são funções integraveis sobre R então paα, β ∈ R, α f + β g é integrável sobre R, e:
R
α f (x, y) + β g(x, y)
dxdy = α
R
f (x, y) dxdy + β
R
g(x, y) dxdy.
2. Se f e g são integráveis sobre R e g(x, y) ≤ f (x, y), para todo (x, y) ∈ R, então: R
g(x, y) dxdy ≤
Rf (x, y) dxdy.
3. Se R é subdividido em k retângulos e f é integrável sobre cada Ri, i = 1,...,k então f é insobre R e,
Rf (x, y) dxdy =
ki=1
Ri
f (x, y) dxdy.
8.3 Integrais Iteradas
Uma integral iterada de f sobre R é uma integral do tipo: d
c
b
af (x, y) dx
dy.
Para calculá-la fixamos y e calculamos a integral b
af (x, y) dx como integral de uma v
em x; o resultado é uma função de y que é novamente integrada em y, com limites de intec e d.
A integral b
a
d
cf (x, y) dy
dx é calculada de forma análoga.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 199/279
8.3. INTEGRAIS ITERADAS 199
Exemplo 8.1.
[1] Calcule 20
31
x2y dy
dx.
3
1x2y dy = x2
3
1y dy = 4x2 e
2
0 3
1x2y dydx =
2
04x2 dx =
32
3.
[2] Calcule π
0
π
0cos(x + y) dx
dy.
π
0cos(x + y) dx = sen(x + y)
x=π
x=0= sen(y + π) − sen(y),
e π
0
π
0cos(x + y) dx
dy =
π
0(sen(y + π) − sen(y)) dy = −4.
[3] Calcule 1
−1 1
−2(x2 + y2) dxdy.
1−2
(x2 + y2) dx =x3
3+ x y2
x=1x=−2
= 3 + 3 y2
e 1−1
1−2
(x2 + y2) dx
dy =
1−1
(3 + 3 y2) dy = 8.
[4] Calcule π
3
π6
40
ρ2 eρ3 sen(φ) dρ
dφ.
40
ρ2 eρ3
sen(φ) dρ = sen(φ) 40
ρ2 eρ3
dρ = sen(φ)eρ3
340
= sen(φ)e64
−1
3
e π
3
π6
40
ρ2 eρ3 sen(φ) dρ
dφ =
e64 − 1
3
π3
π6
sen(φ) dφ =(e64 − 1) (
√3 − 1)
6.
[5] Calcule 10
√1−y2
0
1 − y2 dx
dy.
√1−y2
0 1 − y2 dx = 1 − y2, e
10
√1−y2
0 1 − y2 dx
dy =
10
(1 − y2) dy =2
3.
[6] Seja a função f : [0, 1] × [0, 1] −→ R definida por:
f (x, y) =
1 se x ∈ Q2 y se x /∈ Q.
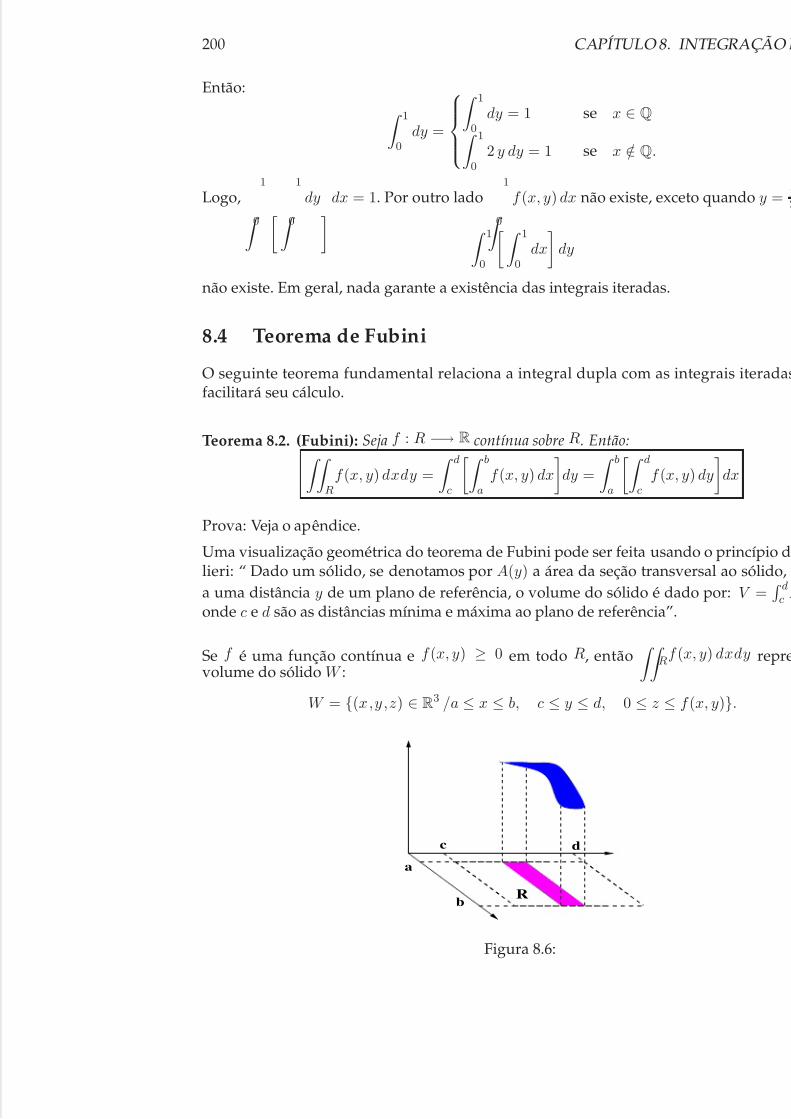
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 200/279
200 CAPÍTULO 8. INTEGRAÇÃO D
Então: 10
dy =
10
dy = 1 se x ∈ Q 10
2 y dy = 1 se x /∈ Q.
Logo, 1
0
1
0
dy dx = 1. Por outro lado 1
0
f (x, y) dx não existe, exceto quando y = 12
10
10
dx
dy
não existe. Em geral, nada garante a existência das integrais iteradas.
8.4 Teorema de Fubini
O seguinte teorema fundamental relaciona a integral dupla com as integrais iteradasfacilitará seu cálculo.
Teorema 8.2. (Fubini): Seja f : R −→ R contínua sobre R. Então: R
f (x, y) dxdy =
d
c
b
af (x, y) dx
dy =
b
a
d
cf (x, y) dy
dx
Prova: Veja o apêndice.
Uma visualização geométrica do teorema de Fubini pode ser feita usando o princípio dlieri: “ Dado um sólido, se denotamos por A(y) a área da seção transversal ao sólido, a uma distância y de um plano de referência, o volume do sólido é dado por: V =
dc A
onde c e d são as distâncias mínima e máxima ao plano de referência”.
Se f é uma função contínua e f (x, y) ≥ 0 em todo R, então
Rf (x, y) dxdy repre
volume do sólido W :
W = {(x,y,z) ∈ R3 /a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f (x, y)}.
c
Rb
d
a
Figura 8.6:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 201/279
8.4. TEOREMA DE FUBINI 201
Se intersectamos o sólido por um plano paralelo ao plano yz a uma distância x da origem,obtemos uma seção plana que tem como área A(x) =
dc f (x, y) dy. Pelo princípio de Cavalieri,
o volume total do sólido é:
R
f (x, y) dxdy =
b
aA(x) dx =
b
a
d
cf (x, y) dy
dx.
Analogamente, se intersectamos o sólido por um plano paralelo ao plano xz a uma distância y
da origem obtemos uma seção plana de área A(y) = b
a f (x, y) dx e pelo princípio de Cavalieri:
R
f (x, y) dxdy =
d
cA(y) dy =
d
c
b
af (x, y) dx
dy.
Exemplo 8.2.
[1] Calcule R
dxdy, onde R = [a, b]
×[c, d].
R
dxdy =
b
a
d
cdy
dx =
b
a(d − c) dx = (b − a) (d − c);
numericamente a integral dupla
Rdxdy, corresponde a área de R ou ao volume do parale-
lepípedo de base R e altura 1.
[2] Calcule
Rf (x, y) dxdy, onde R = [a, b] × [c, d] e f (x, y) = h, h constante positiva.
R
f (x, y) dxdy = h
R
dxdy = h × A(R) = h (b − a) (d − c),
onde a última igualdade expressa o volume do paralelepípedo de base R e altura h.
[3] Calcule
R(x y + x2) dxdy, onde R = [0, 1] × [0, 1].
R
(x y + x2) dxdy =
10
10
(x y + x2) dx
dy =
10
x2 y
2+
x3
3
x=1
x=0
dy
= 10
y2
+ 13
dy = 7
12.
O número7
12representa o volume do sólido limitado superiormente pelo gráfico da função
f (x, y) = x y + x2 e pelos planos coordenados. ((x, y) ∈ [0, 1] × [0, 1]).
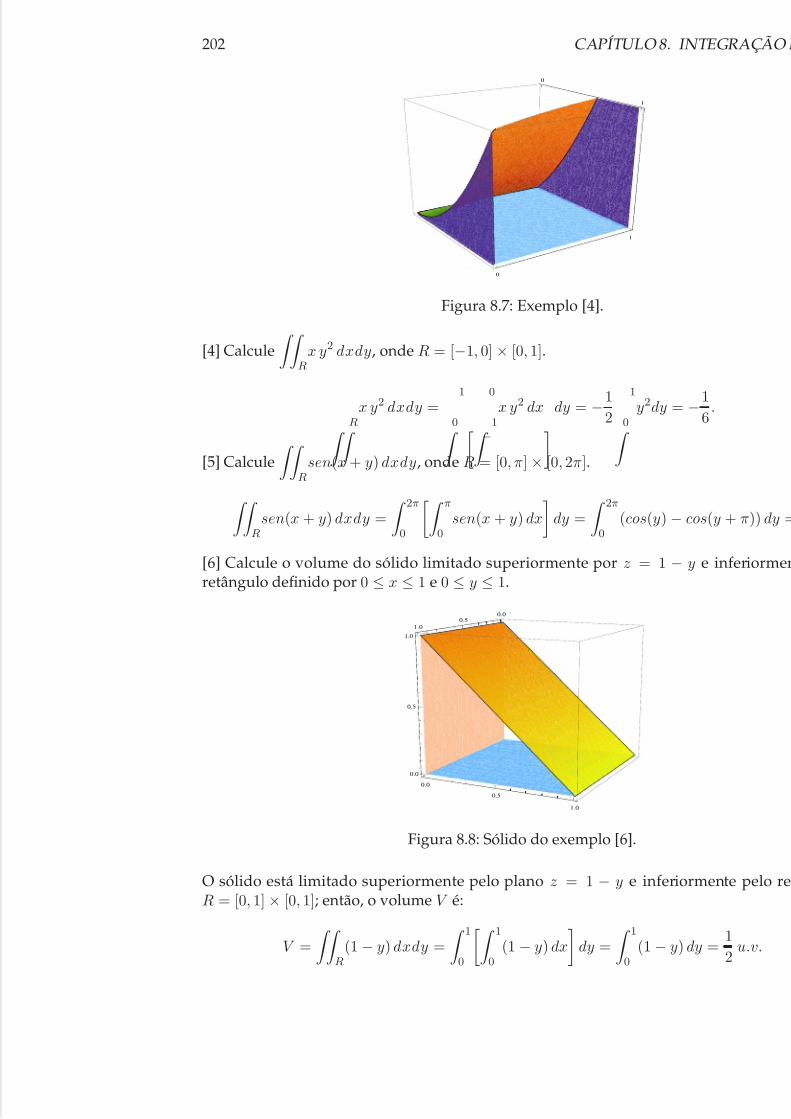
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 202/279
202 CAPÍTULO 8. INTEGRAÇÃO D
0
1
0
1
Figura 8.7: Exemplo [4].
[4] Calcule
Rx y2 dxdy, onde R = [−1, 0] × [0, 1].
Rx y2 dxdy = 1
0 0
−1
x y2 dxdy = −1
2 1
0y2dy = −1
6.
[5] Calcule
Rsen(x + y) dxdy, onde R = [0, π] × [0, 2π].
R
sen(x + y) dxdy =
2π
0
π
0sen(x + y) dx
dy =
2π
0(cos(y) − cos(y + π)) dy =
[6] Calcule o volume do sólido limitado superiormente por z = 1 − y e inferiormenretângulo definido por 0 ≤ x ≤ 1 e 0 ≤ y ≤ 1.
0.00.5
1.0
0.0
0.5
1.0
0.0
0.5
1.0
Figura 8.8: Sólido do exemplo [6].
O sólido está limitado superiormente pelo plano z = 1 − y e inferiormente pelo reR = [0, 1] × [0, 1]; então, o volume V é:
V =
R
(1 − y) dxdy =
10
10
(1 − y) dx
dy =
10
(1 − y) dy =1
2u.v.
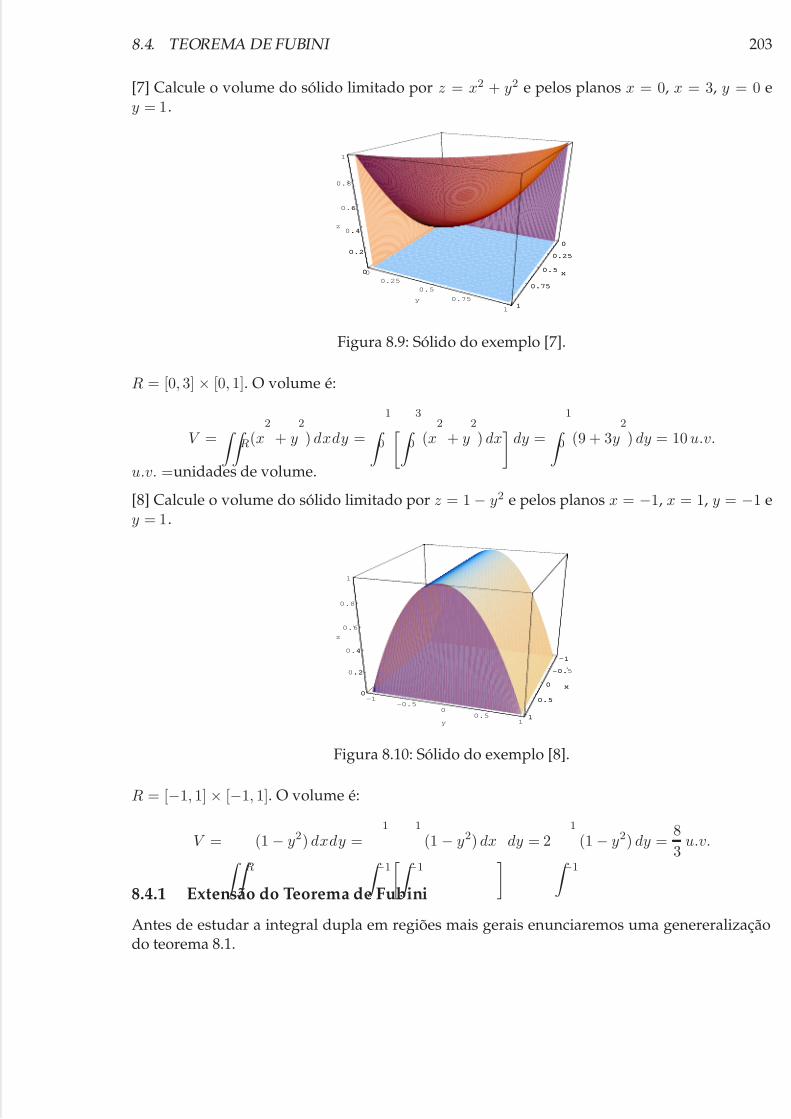
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 203/279
8.4. TEOREMA DE FUBINI 203
[7] Calcule o volume do sólido limitado por z = x2 + y2 e pelos planos x = 0, x = 3, y = 0 ey = 1.
0
0.25
0.5
0.75
1
x0
0.25
0.5
0.75
1
y
0
0.2
0.4
0.6
0.8
1
z
0
0.25
0.5
0.75
1
x0
0.2
.4
6
Figura 8.9: Sólido do exemplo [7].
R = [0, 3] × [0, 1]. O volume é:
V =
R(x2
+ y2
) dxdy = 10
30 (x
2
+ y2
) dx
dy = 10 (9 + 3y
2
) dy = 10 u.v.
u.v. =unidades de volume.
[8] Calcule o volume do sólido limitado por z = 1 − y2 e pelos planos x = −1, x = 1, y = −1 ey = 1.
-1
-0.5
0
0.5
1
x
-1-0.5
00.5
1y
0
0.2
0.4
0.6
0.8
1
z
-1
-0.
0
0.5
1
x
0
.2
4
Figura 8.10: Sólido do exemplo [8].
R = [−1, 1] × [−1, 1]. O volume é:
V = R
(1 − y2) dxdy = 1
−1 1
−1
(1 − y2) dx dy = 2 1
−1
(1 − y2) dy =8
3u.v.
8.4.1 Extensão do Teorema de Fubini
Antes de estudar a integral dupla em regiões mais gerais enunciaremos uma genereralizaçãodo teorema 8.1.
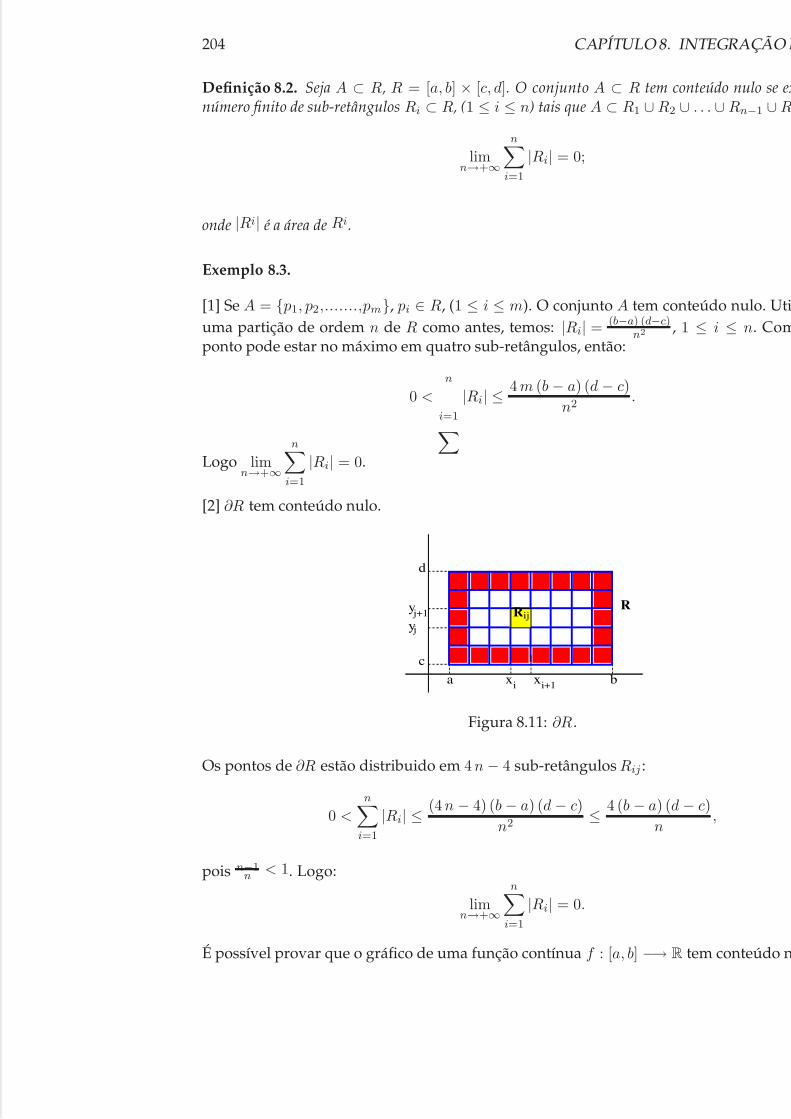
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 204/279
204 CAPÍTULO 8. INTEGRAÇÃO D
Definição 8.2. Seja A ⊂ R, R = [a, b] × [c, d]. O conjunto A ⊂ R tem conteúdo nulo se exnúmero finito de sub-retângulos Ri ⊂ R, (1 ≤ i ≤ n) tais que A ⊂ R1 ∪ R2 ∪ . . . ∪ Rn−1 ∪ R
limn→+∞
ni=1
|Ri| = 0;
onde |Ri| é a área de Ri.
Exemplo 8.3.
[1] Se A = { p1, p2,.......,pm}, pi ∈ R, (1 ≤ i ≤ m). O conjunto A tem conteúdo nulo. Utiuma partição de ordem n de R como antes, temos: |Ri| =
(b−a) (d−c)n2 , 1 ≤ i ≤ n. Com
ponto pode estar no máximo em quatro sub-retângulos, então:
0 <
n
i=1|Ri| ≤ 4 m (b − a) (d − c)
n2.
Logo limn→+∞
ni=1
|Ri| = 0.
[2] ∂R tem conteúdo nulo.
b
c
d
x xai i+1
y j+1
y
RRij
j
Figura 8.11: ∂R.
Os pontos de ∂R estão distribuido em 4 n − 4 sub-retângulos Rij :
0 <n
i=1
|Ri| ≤ (4 n − 4) (b − a) (d − c)
n2≤ 4 (b − a) (d − c)
n,
pois n−1n < 1. Logo:
limn→+∞
ni=1
|Ri| = 0.
É possível provar que o gráfico de uma função contínua f : [a, b] −→ R tem conteúdo n
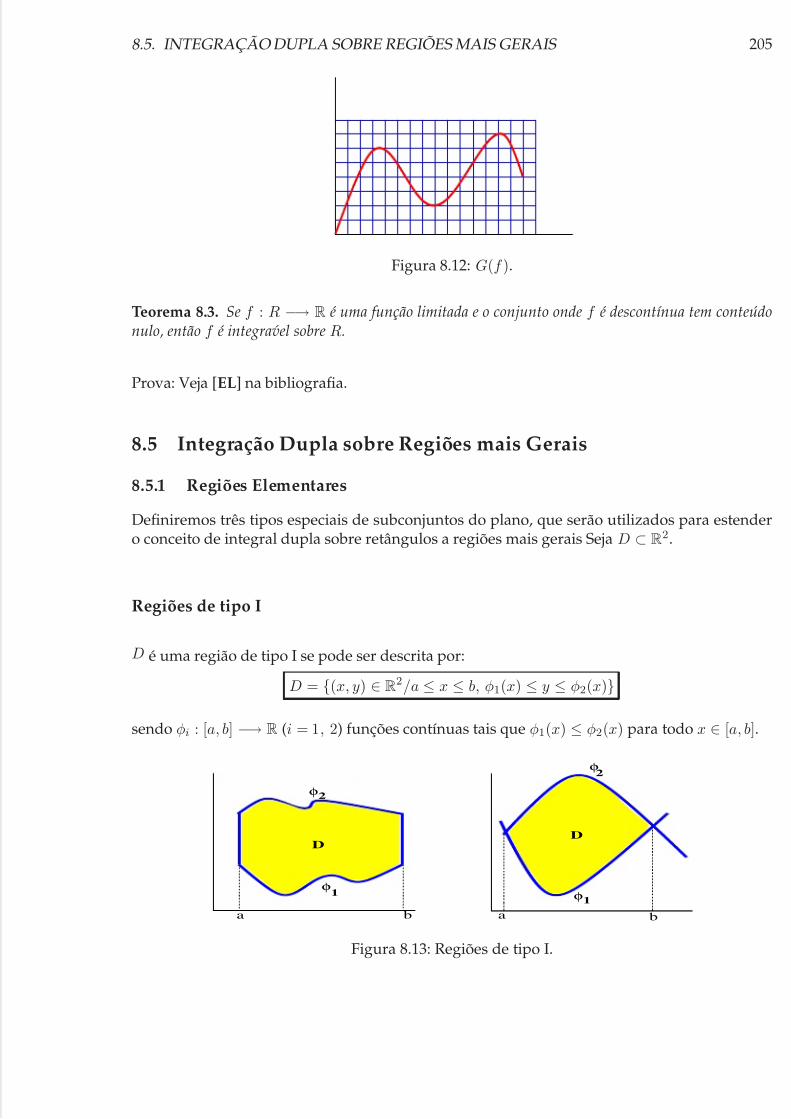
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 205/279
8.5. INTEGRAÇÃO DUPLA SOBRE REGIÕES MAIS GERAIS 205
Figura 8.12: G(f ).
Teorema 8.3. Se f : R −→ R é uma função limitada e o conjunto onde f é descontínua tem conteúdonulo, então f é integra´ vel sobre R.
Prova: Veja [EL] na bibliografia.
8.5 Integração Dupla sobre Regiões mais Gerais
8.5.1 Regiões Elementares
Definiremos três tipos especiais de subconjuntos do plano, que serão utilizados para estendero conceito de integral dupla sobre retângulos a regiões mais gerais Seja D ⊂ R2.
Regiões de tipo I
D é uma região de tipo I se pode ser descrita por:
D = {(x, y) ∈ R2/a ≤ x ≤ b, φ1(x) ≤ y ≤ φ2(x)}
sendo φi : [a, b] −→ R (i = 1, 2) funções contínuas tais que φ1(x) ≤ φ2(x) para todo x ∈ [a, b].
a b
D
D
ba
φφ
φ
φ
1
2
2
1
Figura 8.13: Regiões de tipo I.
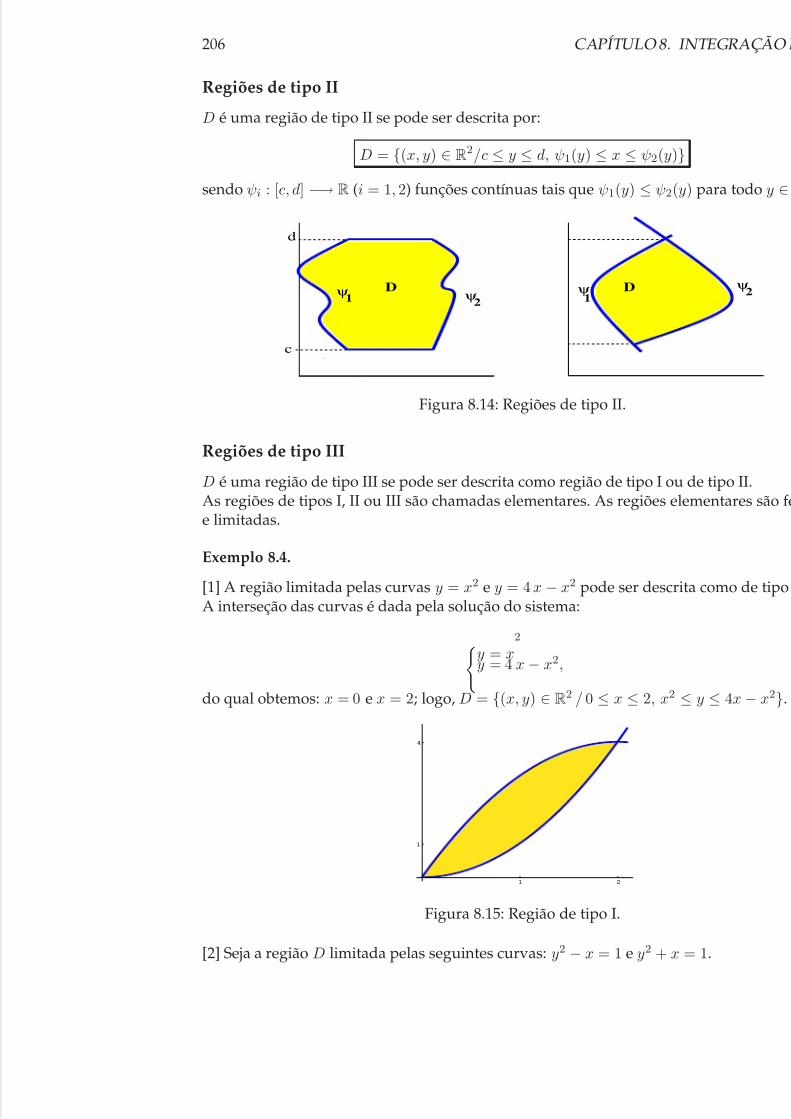
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 206/279
206 CAPÍTULO 8. INTEGRAÇÃO D
Regiões de tipo II
D é uma região de tipo II se pode ser descrita por:
D = {(x, y) ∈ R2/c ≤ y ≤ d, ψ1(y) ≤ x ≤ ψ2(y)}
sendo ψi : [c, d] −→ R (i = 1, 2) funções contínuas tais que ψ1(y) ≤ ψ2(y) para todo y ∈
D
d
c
ψ Dψ
ψ 1 2
ψ
12
Figura 8.14: Regiões de tipo II.
Regiões de tipo III
D é uma região de tipo III se pode ser descrita como região de tipo I ou de tipo II.As regiões de tipos I, II ou III são chamadas elementares. As regiões elementares são fee limitadas.
Exemplo 8.4.
[1] A região limitada pelas curvas y = x2 e y = 4 x − x2 pode ser descrita como de tipo A interseção das curvas é dada pela solução do sistema:
y = x
2
y = 4 x − x2,
do qual obtemos: x = 0 e x = 2; logo, D = {(x, y) ∈ R2 / 0 ≤ x ≤ 2, x2 ≤ y ≤ 4x − x2}.
1 2
1
4
1 2
1
4
Figura 8.15: Região de tipo I.
[2] Seja a região D limitada pelas seguintes curvas: y2 − x = 1 e y2 + x = 1.
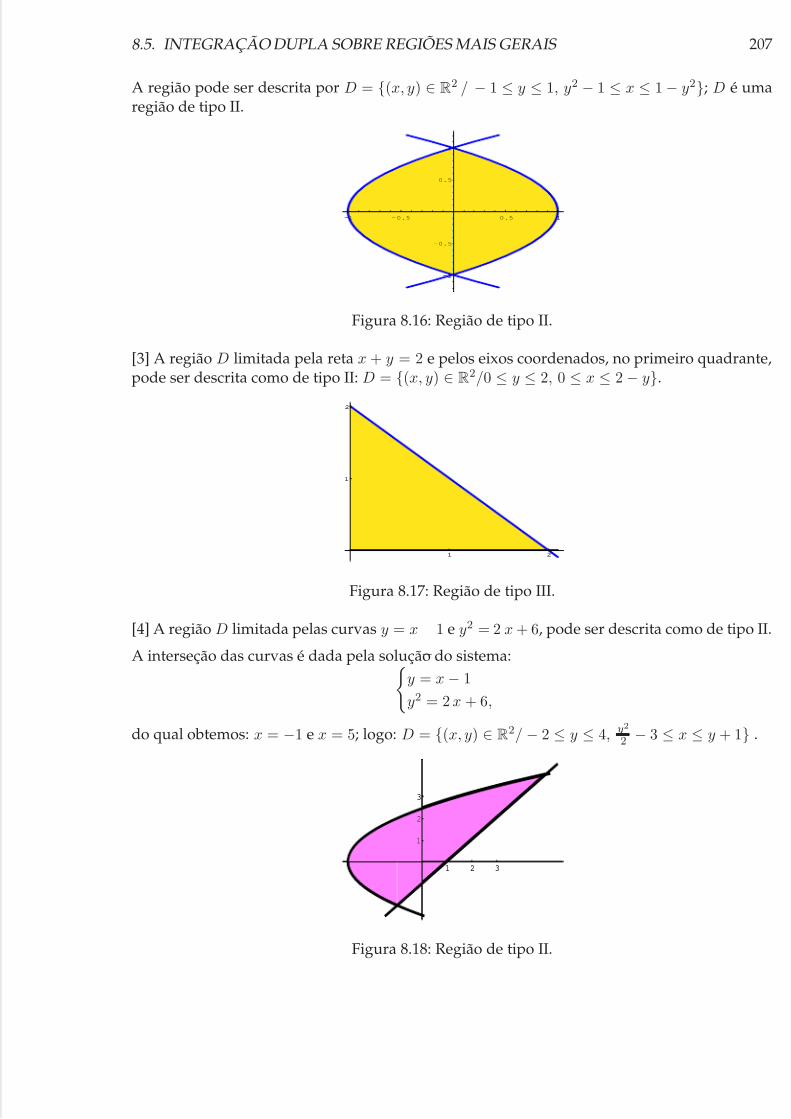
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 207/279
8.5. INTEGRAÇÃO DUPLA SOBRE REGIÕES MAIS GERAIS 207
A região pode ser descrita por D = {(x, y) ∈ R2 / − 1 ≤ y ≤ 1, y2 − 1 ≤ x ≤ 1 − y2}; D é umaregião de tipo II.
-1 - 0.5 0.5 1
-1
-0.5
0.5
1
-1 - 0.5 0.5 1
-1
-0.5
0.5
1
Figura 8.16: Região de tipo II.
[3] A região D limitada pela reta x + y = 2 e pelos eixos coordenados, no primeiro quadrante,pode ser descrita como de tipo II: D = {(x, y) ∈ R2/0 ≤ y ≤ 2, 0 ≤ x ≤ 2 − y}.
1 2
1
2
1 2
1
2
Figura 8.17: Região de tipo III.
[4] A região D limitada pelas curvas y = x
−1 e y2 = 2 x + 6, pode ser descrita como de tipo II.
A interseção das curvas é dada pela solução do sistema:y = x − 1
y2 = 2 x + 6,
do qual obtemos: x = −1 e x = 5; logo: D = {(x, y) ∈ R2/ − 2 ≤ y ≤ 4, y2
2 − 3 ≤ x ≤ y + 1} .
1 2 3
1
2
3
1 2 3
1
2
3
Figura 8.18: Região de tipo II.
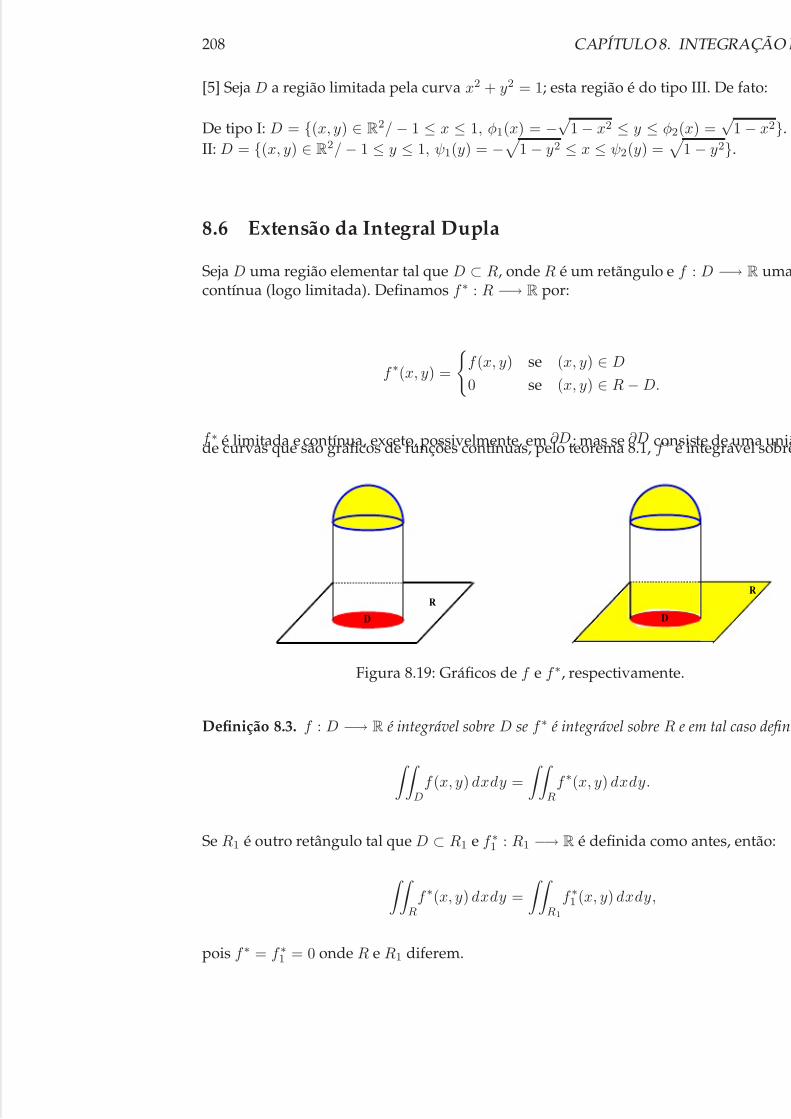
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 208/279
208 CAPÍTULO 8. INTEGRAÇÃO D
[5] Seja D a região limitada pela curva x2 + y2 = 1; esta região é do tipo III. De fato:
De tipo I: D = {(x, y) ∈ R2/ − 1 ≤ x ≤ 1, φ1(x) = −√1 − x2 ≤ y ≤ φ2(x) =
√1 − x2}.
II: D = {(x, y) ∈ R2/ − 1 ≤ y ≤ 1, ψ1(y) = −
1 − y2 ≤ x ≤ ψ2(y) =
1 − y2}.
8.6 Extensão da Integral Dupla
Seja D uma região elementar tal que D ⊂ R, onde R é um retãngulo e f : D −→ R umacontínua (logo limitada). Definamos f ∗ : R −→ R por:
f ∗(x, y) =
f (x, y) se (x, y) ∈ D
0 se (x, y) ∈ R − D.
f ∗ é limitada e contínua, exceto, possivelmente, em ∂D; mas se ∂D consiste de uma uniãde curvas que são gráficos de funções contínuas, pelo teorema 8.1, f ∗ é integrável sobre
D
R
R
D
Figura 8.19: Gráficos de f e f ∗, respectivamente.
Definição 8.3. f : D −→ R é integrável sobre D se f ∗ é integrável sobre R e em tal caso defini
D
f (x, y) dxdy =
R
f ∗(x, y) dxdy.
Se R1 é outro retângulo tal que D ⊂ R1 e f ∗1 : R1 −→ R é definida como antes, então:
R
f ∗(x, y) dxdy =
R1
f ∗1 (x, y) dxdy,
pois f ∗ = f ∗1 = 0 onde R e R1 diferem.
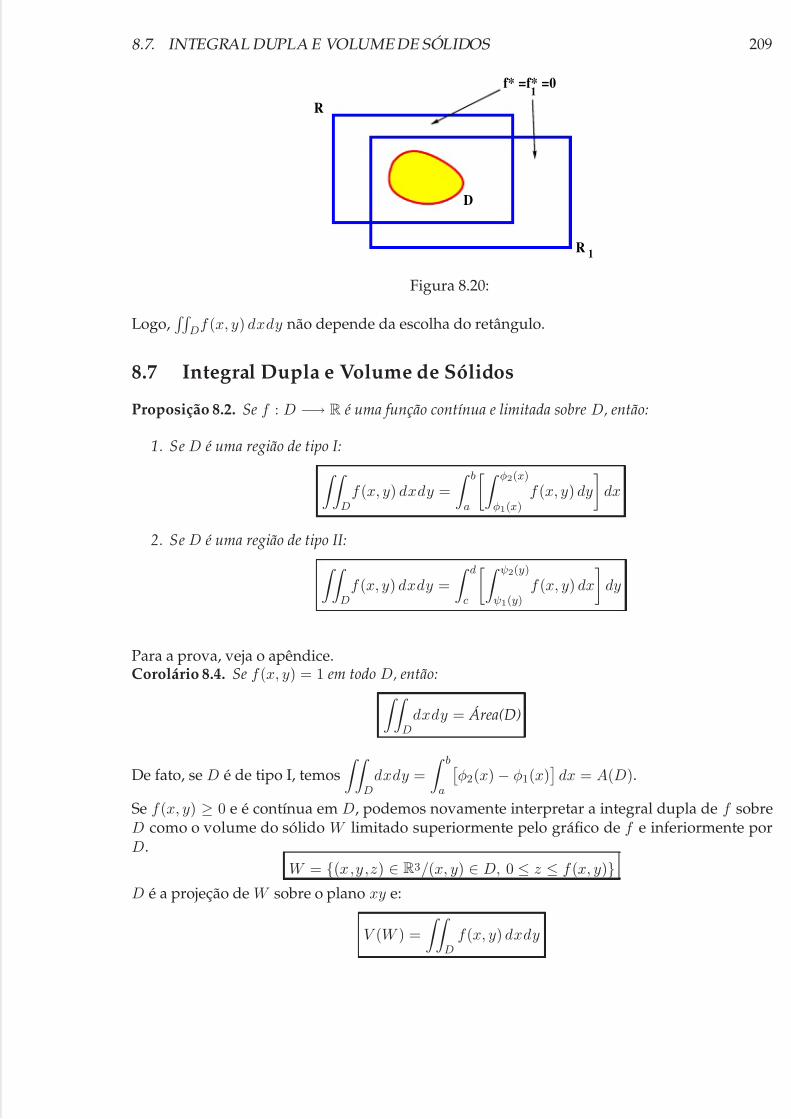
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 209/279
8.7. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 209
R
D
R
f* =f* =0
1
1
Figura 8.20:
Logo,
Df (x, y) dxdy não depende da escolha do retângulo.
8.7 Integral Dupla e Volume de Sólidos
Proposição 8.2. Se f : D −→ R é uma função contínua e limitada sobre D, então:
1. Se D é uma região de tipo I:
D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)f (x, y) dy
dx
2. Se D é uma região de tipo II:
D
f (x, y) dxdy =
d
c
ψ2(y)
ψ1(y)f (x, y) dx
dy
Para a prova, veja o apêndice.Corolário 8.4. Se f (x, y) = 1 em todo D, então:
Ddxdy = Área(D)
De fato, se D é de tipo I, temos
Ddxdy =
b
a
φ2(x) − φ1(x)
dx = A(D).
Se f (x, y) ≥ 0 e é contínua em D, podemos novamente interpretar a integral dupla de f sobreD como o volume do sólido W limitado superiormente pelo gráfico de f e inferiormente porD.
W = {(x,y,z) ∈ R3/(x, y) ∈ D, 0 ≤ z ≤ f (x, y)}D é a projeção de W sobre o plano xy e:
V (W ) =
D
f (x, y) dxdy
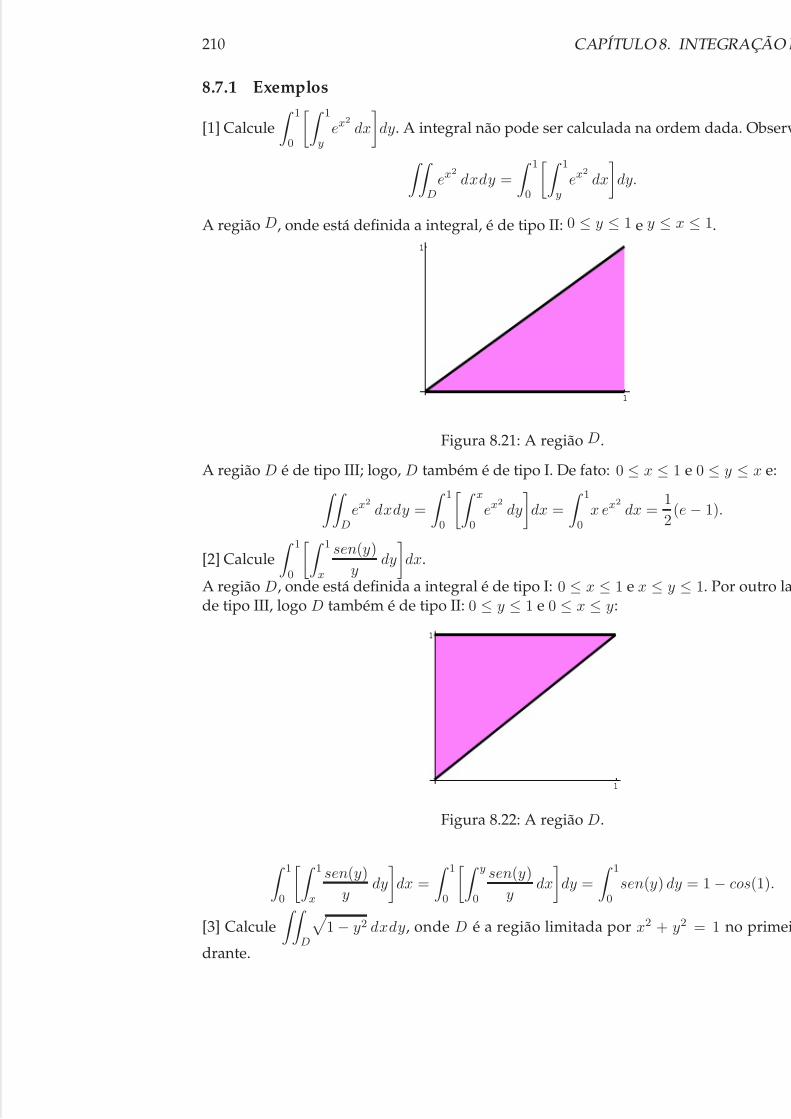
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 210/279
210 CAPÍTULO 8. INTEGRAÇÃO D
8.7.1 Exemplos
[1] Calcule 10
1y
ex2 dx
dy. A integral não pode ser calculada na ordem dada. Observ
D
ex2 dxdy =
10
1y
ex2 dx
dy.
A região D, onde está definida a integral, é de tipo II: 0 ≤ y ≤ 1 e y ≤ x ≤ 1.
1
1
1
1
Figura 8.21: A região D.
A região D é de tipo III; logo, D também é de tipo I. De fato: 0 ≤ x ≤ 1 e 0 ≤ y ≤ x e: D
ex2 dxdy =
10
x
0ex2 dy
dx =
10
x ex2 dx =1
2(e − 1).
[2] Calcule 10
1x
sen(y)
ydy
dx.
A região D, onde está definida a integral é de tipo I: 0 ≤ x ≤ 1 e x ≤ y ≤ 1. Por outro lade tipo III, logo D também é de tipo II: 0 ≤ y ≤ 1 e 0 ≤ x ≤ y:
1
1
1
1
Figura 8.22: A região D.
10
1x
sen(y)
ydy
dx =
10
y
0
sen(y)
ydx
dy =
10
sen(y) dy = 1 − cos(1).
[3] Calcule
D
1 − y2 dxdy, onde D é a região limitada por x2 + y2 = 1 no primei
drante.
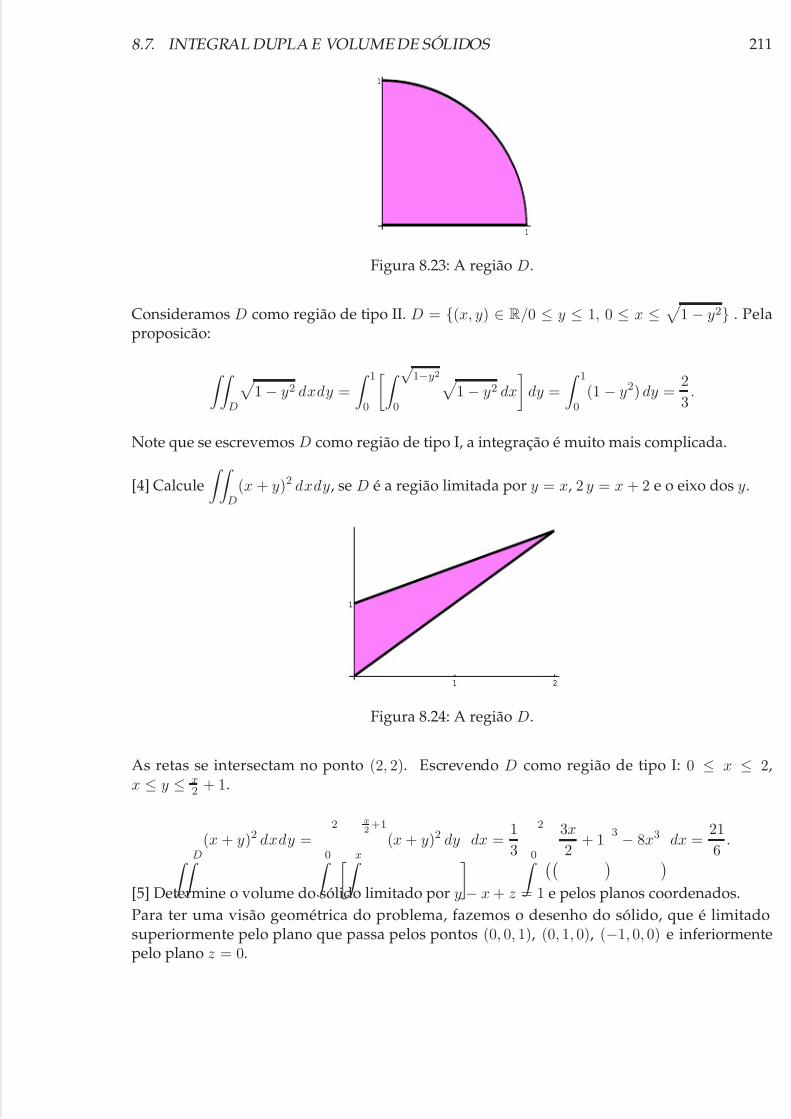
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 211/279
8.7. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 211
1
1
1
1
Figura 8.23: A região D.
Consideramos D como região de tipo II. D = {(x, y) ∈ R/0 ≤ y ≤ 1, 0 ≤ x ≤
1 − y2} . Pelaproposicão:
D
1 − y2 dxdy =
10
√1−y2
0
1 − y2 dx
dy =
10
(1 − y2) dy =2
3.
Note que se escrevemos D como região de tipo I, a integração é muito mais complicada.
[4] Calcule
D(x + y)2 dxdy, se D é a região limitada por y = x, 2 y = x + 2 e o eixo dos y.
1 2
1
1 2
1
Figura 8.24: A região D.
As retas se intersectam no ponto (2, 2). Escrevendo D como região de tipo I: 0 ≤ x ≤ 2,x ≤ y ≤ x
2 + 1.
D(x + y)2 dxdy = 2
0 x2+1
x(x + y)2 dydx =
1
3 2
0 3x
2+ 1
3 − 8x3
dx =21
6.
[5] Determine o volume do sólido limitado por y − x + z = 1 e pelos planos coordenados.Para ter uma visão geométrica do problema, fazemos o desenho do sólido, que é limitadosuperiormente pelo plano que passa pelos pontos (0, 0, 1), (0, 1, 0), (−1, 0, 0) e inferiormentepelo plano z = 0.
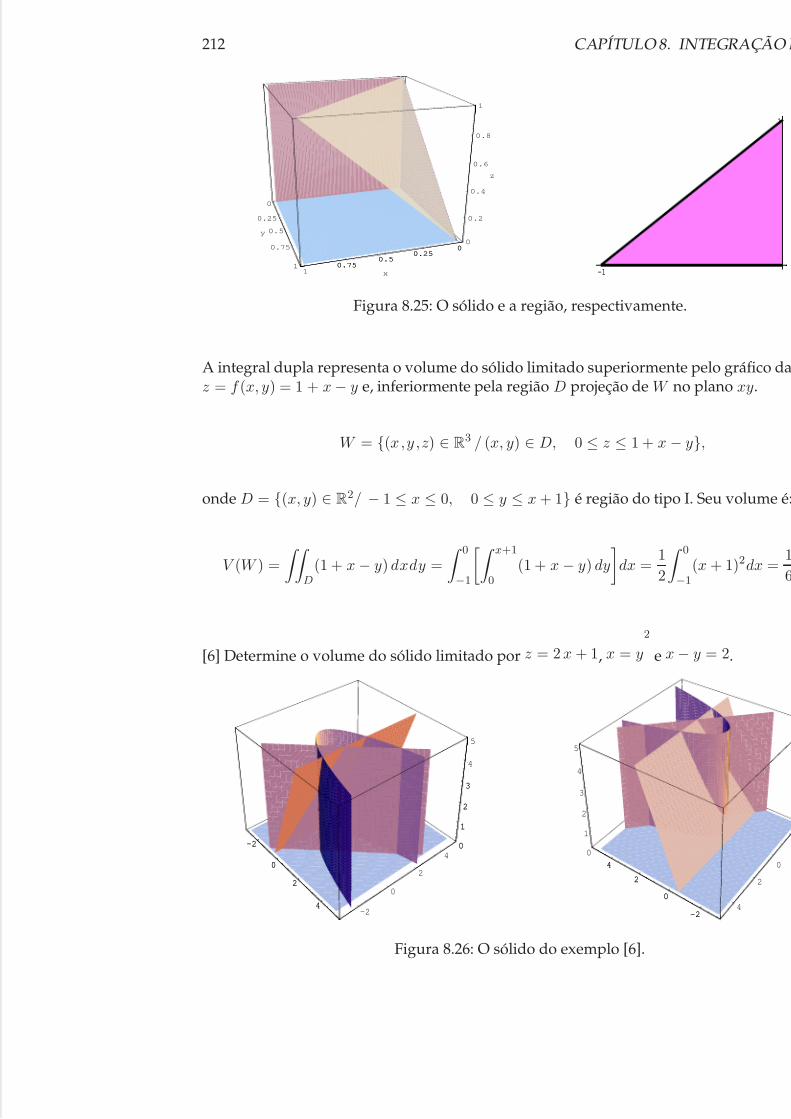
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 212/279
212 CAPÍTULO 8. INTEGRAÇÃO D
00.25
0.50.75
1 x
0
0.25
0.5
0.75
1
y
0
0.2
0.4
0.6
0.8
1
z
00.25
0.50.75
-1
1
-1
1
Figura 8.25: O sólido e a região, respectivamente.
A integral dupla representa o volume do sólido limitado superiormente pelo gráfico daz = f (x, y) = 1 + x − y e, inferiormente pela região D projeção de W no plano xy.
W = {(x,y ,z) ∈ R3 / (x, y) ∈ D, 0 ≤ z ≤ 1 + x − y},
onde D = {(x, y) ∈ R2/ − 1 ≤ x ≤ 0, 0 ≤ y ≤ x + 1} é região do tipo I. Seu volume é:
V (W ) =
D
(1 + x − y) dxdy =
0−1
x+1
0(1 + x − y) dy
dx =
1
2
0−1
(x + 1)2dx =1
6
[6] Determine o volume do sólido limitado por z = 2 x + 1, x = y
2
e x − y = 2.
-2
0
2
4-2
0
2
4
0
1
2
3
4
5
-2
0
2
4
0
1
2
3
-2
0
2
4 0
2
4
0
1
2
3
4
5
-2
0
2
4
Figura 8.26: O sólido do exemplo [6].
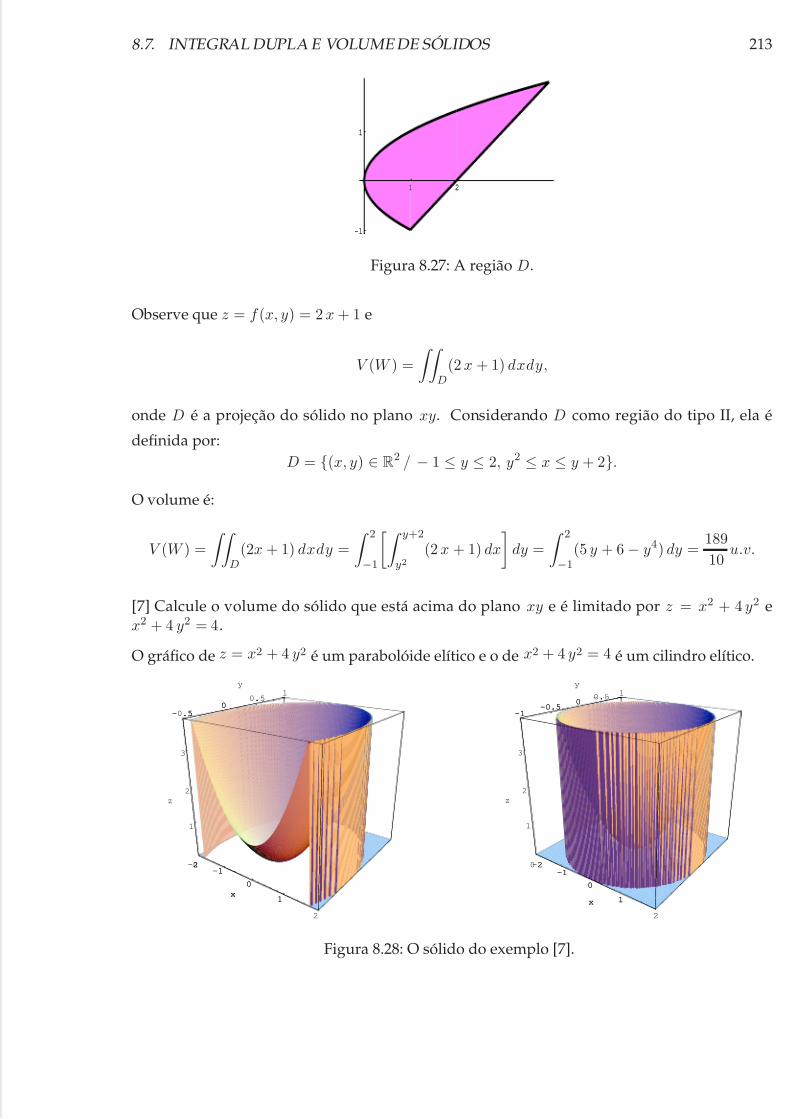
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 213/279
8.7. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 213
1 2
-1
1
1 2
-1
1
Figura 8.27: A região D.
Observe que z = f (x, y) = 2 x + 1 e
V (W ) =
D
(2 x + 1) dxdy,
onde D é a projeção do sólido no plano xy. Considerando D como região do tipo II, ela é
definida por:D = {(x, y) ∈ R2 / − 1 ≤ y ≤ 2, y2 ≤ x ≤ y + 2}.
O volume é:
V (W ) =
D
(2x + 1) dxdy =
2−1
y+2
y2(2 x + 1) dx
dy =
2−1
(5 y + 6 − y4) dy =189
10u.v.
[7] Calcule o volume do sólido que está acima do plano xy e é limitado por z = x2 + 4 y2 ex2 + 4 y2 = 4.
O gráfico de z = x2 + 4 y2 é um parabolóide elítico e o de x2 + 4 y2 = 4 é um cilindro elítico.
-2-1
0
1
2
x
-0.50
0.51
y
0
1
2
3
z
-2-1
0
1x
- .50
.
-2-1
0
1
2
x
-1-0.5
00.5
1
y
0
1
2
3
z
-2-1
0
1x
-1-0.5
0.
Figura 8.28: O sólido do exemplo [7].
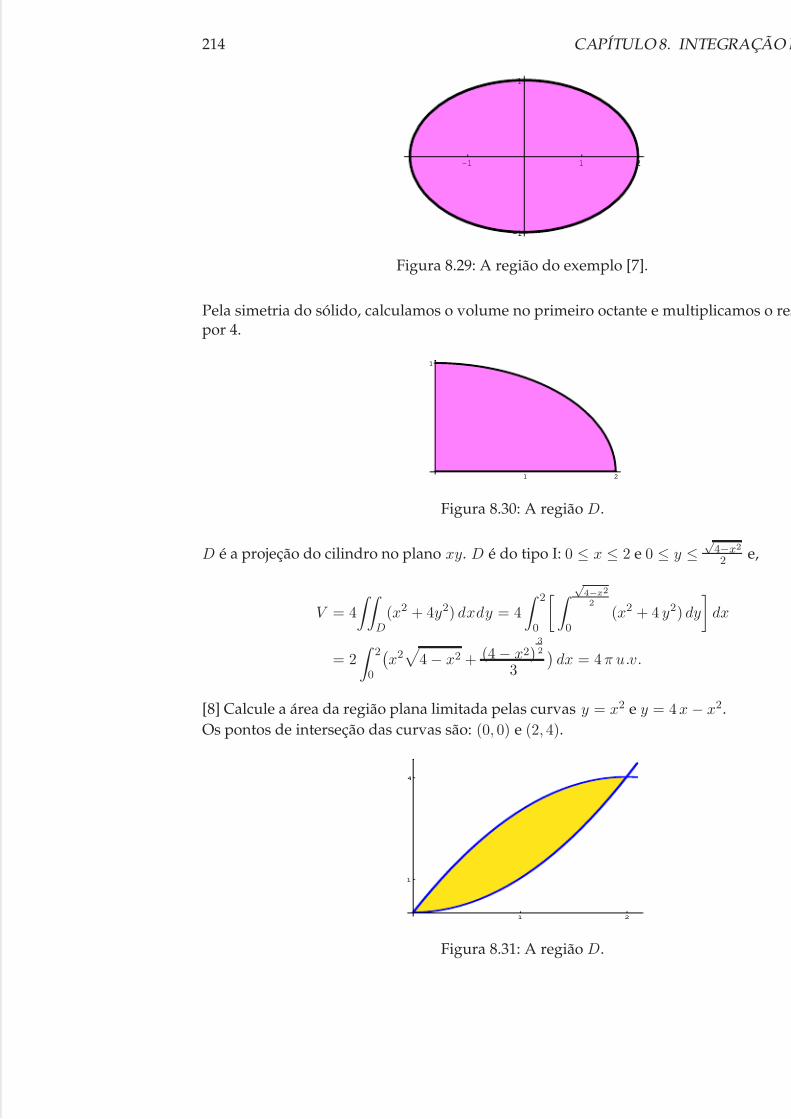
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 214/279
214 CAPÍTULO 8. INTEGRAÇÃO D
1-1 2
-1
1
1-1 2
-1
1
Figura 8.29: A região do exemplo [7].
Pela simetria do sólido, calculamos o volume no primeiro octante e multiplicamos o respor 4.
1 2
1
1 2
1
Figura 8.30: A região D.
D é a projeção do cilindro no plano xy. D é do tipo I: 0 ≤ x ≤ 2 e 0 ≤ y ≤√4−x2
2 e,
V = 4
D
(x2 + 4y2) dxdy = 4
20
√4−x2
2
0(x2 + 4 y2) dy
dx
= 2
2
0
x2
4 − x2 + (4 − x2)32
3
dx = 4 π u.v.
[8] Calcule a área da região plana limitada pelas curvas y = x2 e y = 4 x − x2.Os pontos de interseção das curvas são: (0, 0) e (2, 4).
1 2
1
4
1 2
1
4
Figura 8.31: A região D.
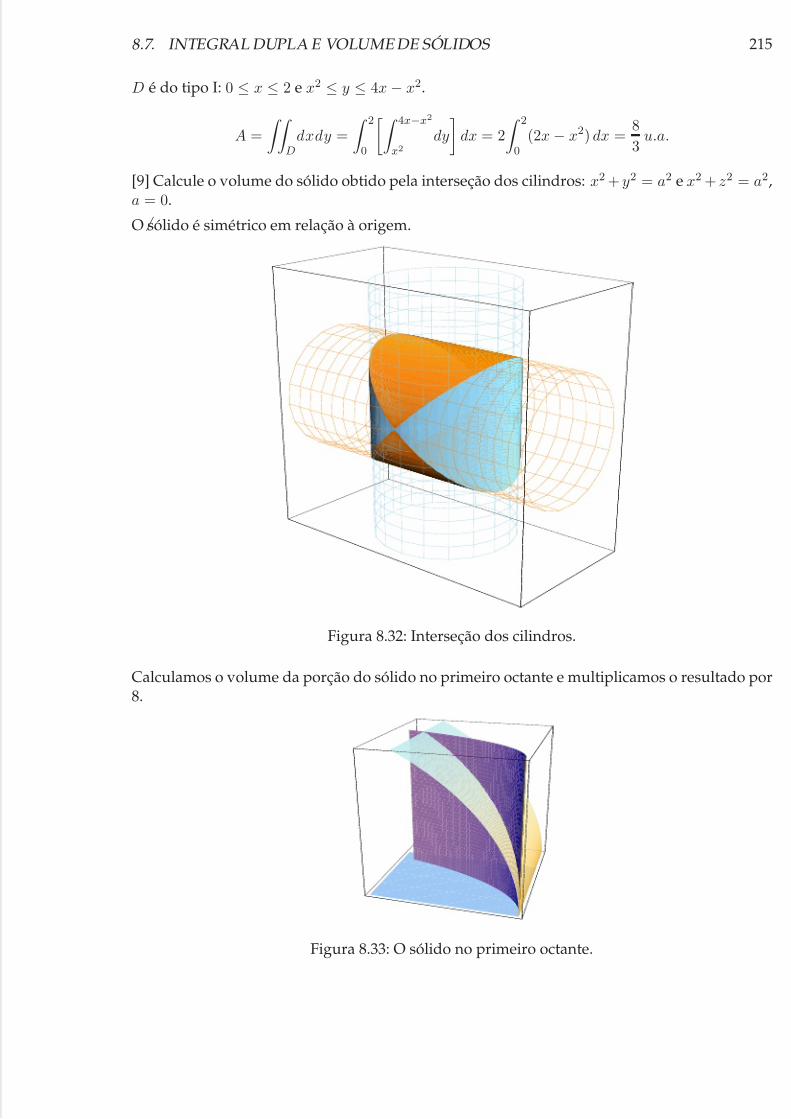
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 215/279
8.7. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 215
D é do tipo I: 0 ≤ x ≤ 2 e x2 ≤ y ≤ 4x − x2.
A =
D
dxdy =
20
4x−x2
x2dy
dx = 2
20
(2x − x2) dx =8
3u.a.
[9] Calcule o volume do sólido obtido pela interseção dos cilindros: x2 + y2 = a2 e x2 + z2 = a2,a
= 0.
O sólido é simétrico em relação à origem.
Figura 8.32: Interseção dos cilindros.
Calculamos o volume da porção do sólido no primeiro octante e multiplicamos o resultado por8.
Figura 8.33: O sólido no primeiro octante.
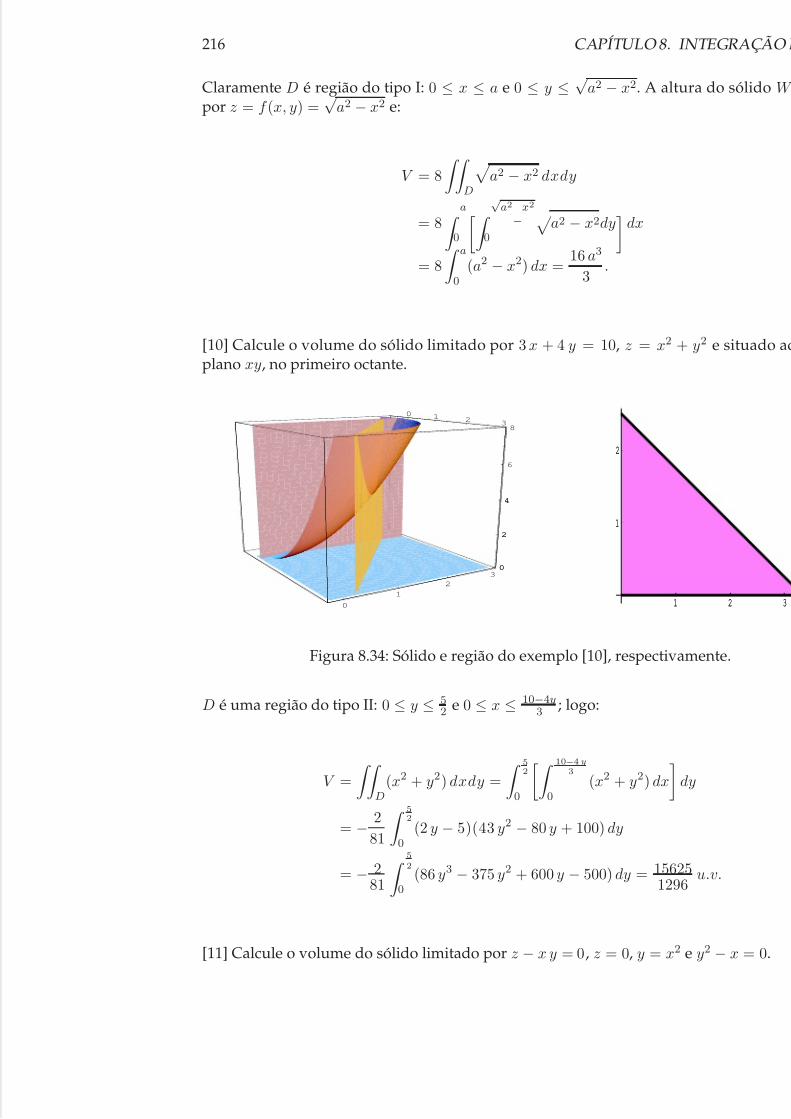
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 216/279
216 CAPÍTULO 8. INTEGRAÇÃO D
Claramente D é região do tipo I: 0 ≤ x ≤ a e 0 ≤ y ≤ √a2 − x2. A altura do sólido W
por z = f (x, y) =√
a2 − x2 e:
V = 8
D
a2 − x2 dxdy
= 8 a
0
√a2
−x2
0
a2 − x2dy
dx
= 8
a
0(a2 − x2) dx =
16 a3
3.
[10] Calcule o volume do sólido limitado por 3 x + 4 y = 10, z = x2 + y2 e situado acplano xy, no primeiro octante.
0 12
3
0
1
2
30
2
4
6
8
0
2
4
1 2 3
1
2
1 2 3
1
2
Figura 8.34: Sólido e região do exemplo [10], respectivamente.
D é uma região do tipo II: 0 ≤ y ≤ 52 e 0 ≤ x ≤ 10−4y
3 ; logo:
V =
D
(x2 + y2) dxdy =
52
0
10−4 y3
0(x2 + y2) dx
dy
= − 2
81
52
0(2 y − 5)(43 y2 − 80 y + 100) dy
= − 281
52
0(86 y3 − 375 y2 + 600 y − 500) dy = 15625
1296u.v.
[11] Calcule o volume do sólido limitado por z − x y = 0, z = 0, y = x2 e y2 − x = 0.
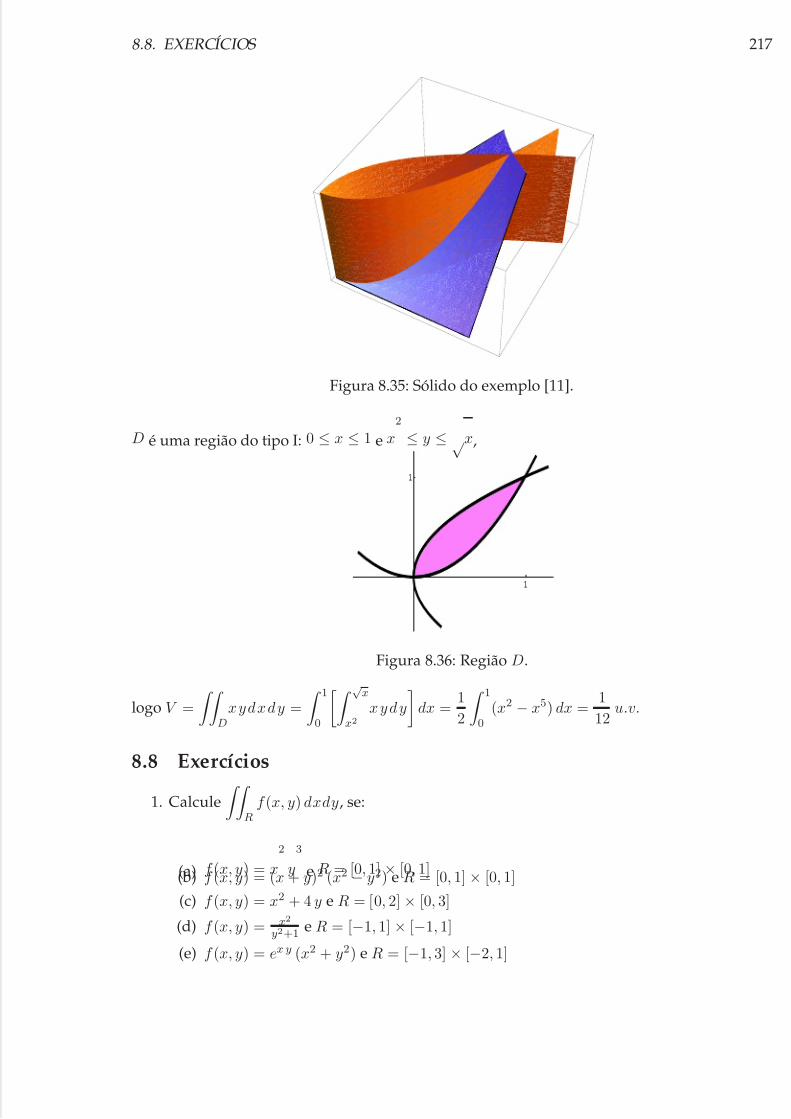
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 217/279
8.8. EXERCÍCIOS 217
Figura 8.35: Sólido do exemplo [11].
D é uma região do tipo I: 0 ≤ x ≤ 1 e x2
≤ y ≤ √x,
1
1
1
1
Figura 8.36: Região D.
logo V =
D
xy dxdy =
10
√x
x2x y d y
dx =
1
2
10
(x2 − x5) dx =1
12u.v.
8.8 Exercícios
1. Calcule
Rf (x, y) dxdy, se:
(a) f (x, y) = x
2
y
3
e R = [0, 1] × [0, 1](b) f (x, y) = (x + y)2 (x2 − y2) e R = [0, 1] × [0, 1]
(c) f (x, y) = x2 + 4 y e R = [0, 2] × [0, 3]
(d) f (x, y) = x2
y2+1e R = [−1, 1] × [−1, 1]
(e) f (x, y) = ex y (x2 + y2) e R = [−1, 3] × [−2, 1]

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 218/279
218 CAPÍTULO 8. INTEGRAÇÃO D
(f) f (x, y) = x y − y2 e R = [0, 5] × [0, 4]
(g) f (x, y) = 5 x y2 e R = [1, 3] × [1, 4]
(h) f (x, y) = 2 x + c2 y e R = [−2, 2] × [−1, 1]
(i) f (x, y) = x2 − y2 e R = [1, 2] × [−1, 1].
2. Calcule o volume do sólido limitado superiormente pelo gráfico da função e inmente pelo retângulo dado:
(a) z =
9 − y2 e R = [0, 4] × [0, 2]
(b) z = x2 + y2 e R = [−2, 2] × [−3, 3]
(c) z = y2 − x2 e R = [−1, 1] × [1, 3]
(d) z = 2 x + 3 y + 6 e R = [−1, 2] × [2, 3]
(e) z = acos(2 θ) + bsen(2 α) e R = [0, π2 ] × [0, π
2 ]
(f) z = xsen(y) e R = [0, π] × [0, π]
3. Calcule as seguintes integrais mudando a ordem de integração:
(a) 10
1y
tg(x2) dx
dy
(b) 21
x
1
x2
y2dy
dx
(c) 10
√1−x2
0 1 − y2 dy
dx
(d) 10
1x
sen(y2) dy
dx
(e) 10
y
3yex2 dx
dy
(f) 30
9y2
y cos(x2) dx
dy
4. Calcule as seguintes integrais sabendo que D é limitada pelas curvas dadas:
(a)
Dydxdy; y = 2 x2 − 2, y = x2 + x
(b)
Dxy dxdy; x2
a2 + y2
b2 = 1, x, y ≥ 0
(c)
Dxdxdy; x − y2 = 0, x = 1
(d)
D
dxdy
x2 + 1 ; y − x2 = 0, y = 1
(e)
D(x2 + y2) dxdy; y = 0, y = x − 1 e x = 1, x = 0
(f)
Dex+y dxdy; y = 0, y = x e x − 1 = 0
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 219/279
8.8. EXERCÍCIOS 219
(g)
Dxcos(y) dxdy; y = 0, y = x2 e x = 1
(h)
D4 y3 dxdy; y = x − 6 e y2 = x
(i)
D(y2 − x) dxdy; y2 = x e x = 3 − 2 y2
(j)
D(x2 + 2 y) dxdy; y = 2 x2 e y = x2 + 1
(k)
D(1 + 2 x) dxdy; x = y2 e y + x = 2
(l)
Ddxdy; y2 = x3 e y = x

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 220/279
220 CAPÍTULO 8. INTEGRAÇÃO D
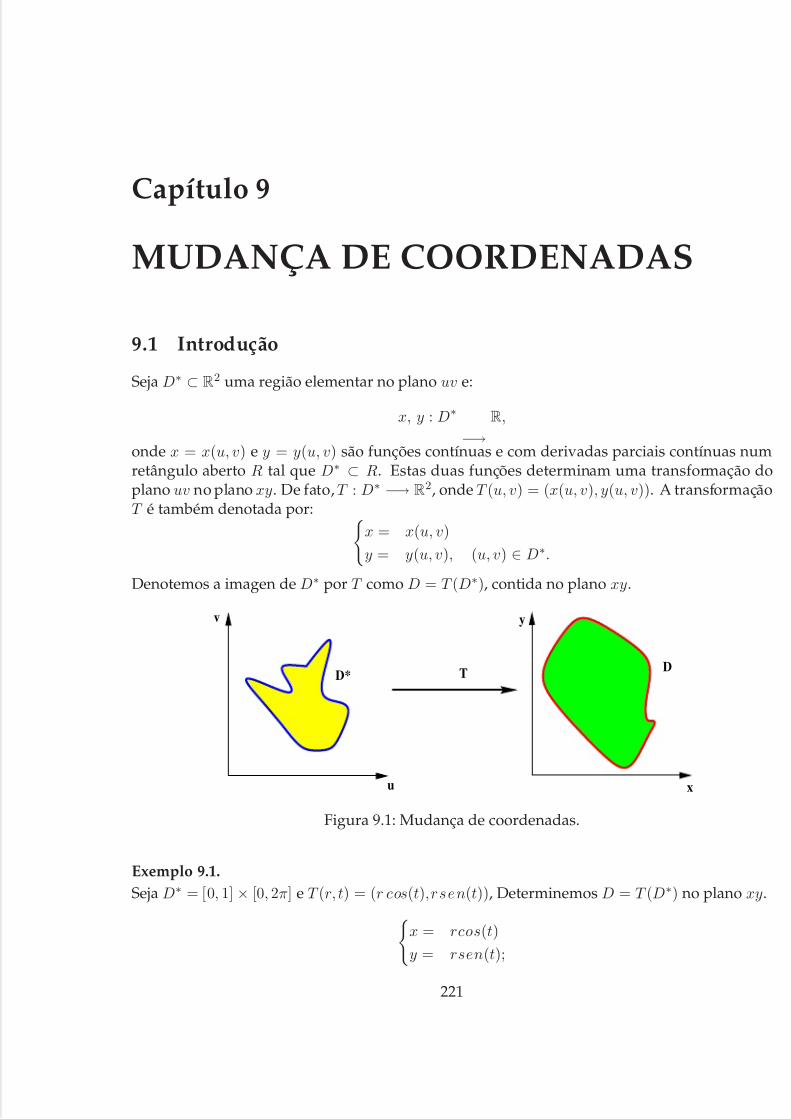
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 221/279
Capítulo 9
MUDANÇA DE COORDENADAS
9.1 Introdução
Seja D∗ ⊂ R2 uma região elementar no plano uv e:
x, y : D∗
−→R,
onde x = x(u, v) e y = y(u, v) são funções contínuas e com derivadas parciais contínuas numretângulo aberto R tal que D∗ ⊂ R. Estas duas funções determinam uma transformação doplano uv no plano xy. De fato, T : D∗ −→ R2, onde T (u, v) = (x(u, v), y(u, v)). A transformaçãoT é também denotada por:
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Denotemos a imagen de D∗ por T como D = T (D∗), contida no plano xy.
TD*D
y
x
v
u
Figura 9.1: Mudança de coordenadas.
Exemplo 9.1.Seja D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)), Determinemos D = T (D∗) no plano xy.
x = rcos(t)
y = rsen(t);
221
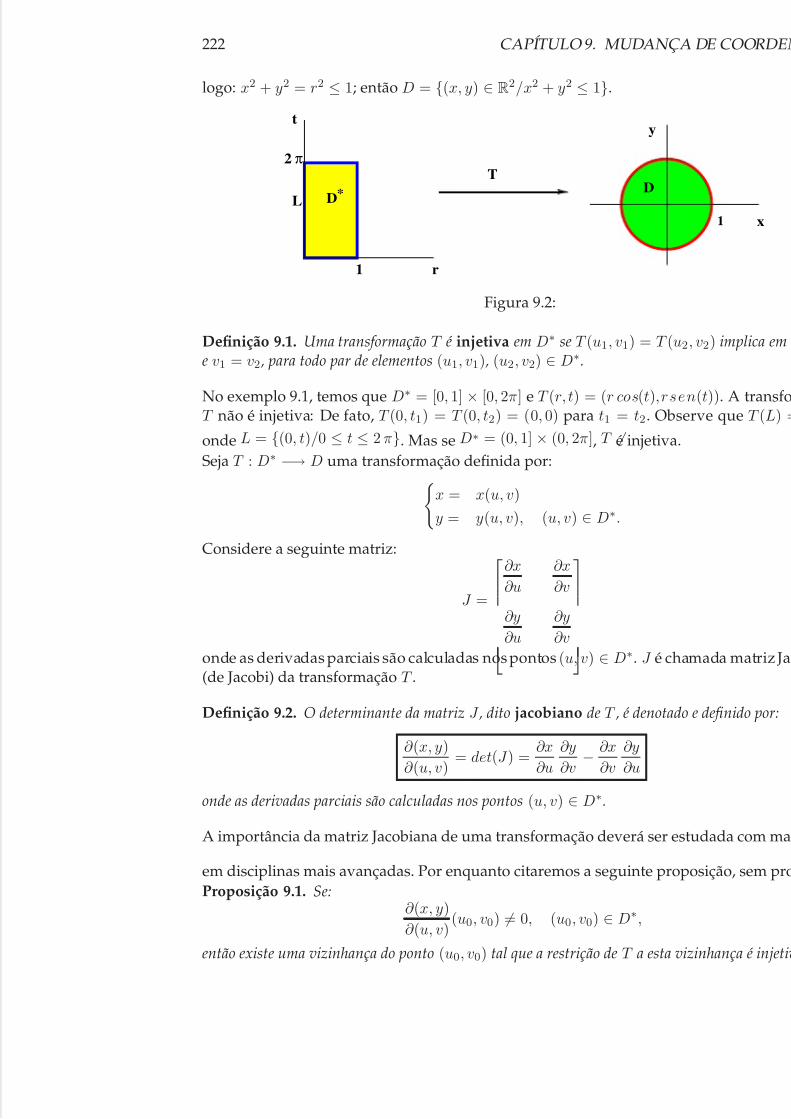
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 222/279
222 CAPÍTULO 9. MUDANÇA DE COORDEN
logo: x2 + y2 = r2 ≤ 1; então D = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
π2
L D
t
1 r
* D
x
y
1
T
Figura 9.2:
Definição 9.1. Uma transformação T é injetiva em D∗ se T (u1, v1) = T (u2, v2) implica eme v1 = v2, para todo par de elementos (u1, v1), (u2, v2) ∈ D∗.
No exemplo 9.1, temos que D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)). A transfoT não é injetiva: De fato, T (0, t1) = T (0, t2) = (0, 0) para t1
= t2. Observe que T (L) =
onde L = {(0, t)/0 ≤ t ≤ 2 π}. Mas se D∗ = (0, 1] × (0, 2π], T é injetiva.Seja T : D∗ −→ D uma transformação definida por:
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Considere a seguinte matriz:
J =
∂x
∂u
∂x
∂v
∂y
∂u
∂y
∂v
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗. J é chamada matriz Ja(de Jacobi) da transformação T .
Definição 9.2. O determinante da matriz J , dito jacobiano de T , é denotado e definido por:
∂ (x, y)
∂ (u, v)= det(J ) =
∂x
∂u
∂y
∂v− ∂x
∂v
∂y
∂u
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗.
A importância da matriz Jacobiana de uma transformação deverá ser estudada com mai
em disciplinas mais avançadas. Por enquanto citaremos a seguinte proposição, sem proProposição 9.1. Se:
∂ (x, y)
∂ (u, v)(u0, v0) = 0, (u0, v0) ∈ D∗,
então existe uma vizinhança do ponto (u0, v0) tal que a restrição de T a esta vizinhança é injetiv
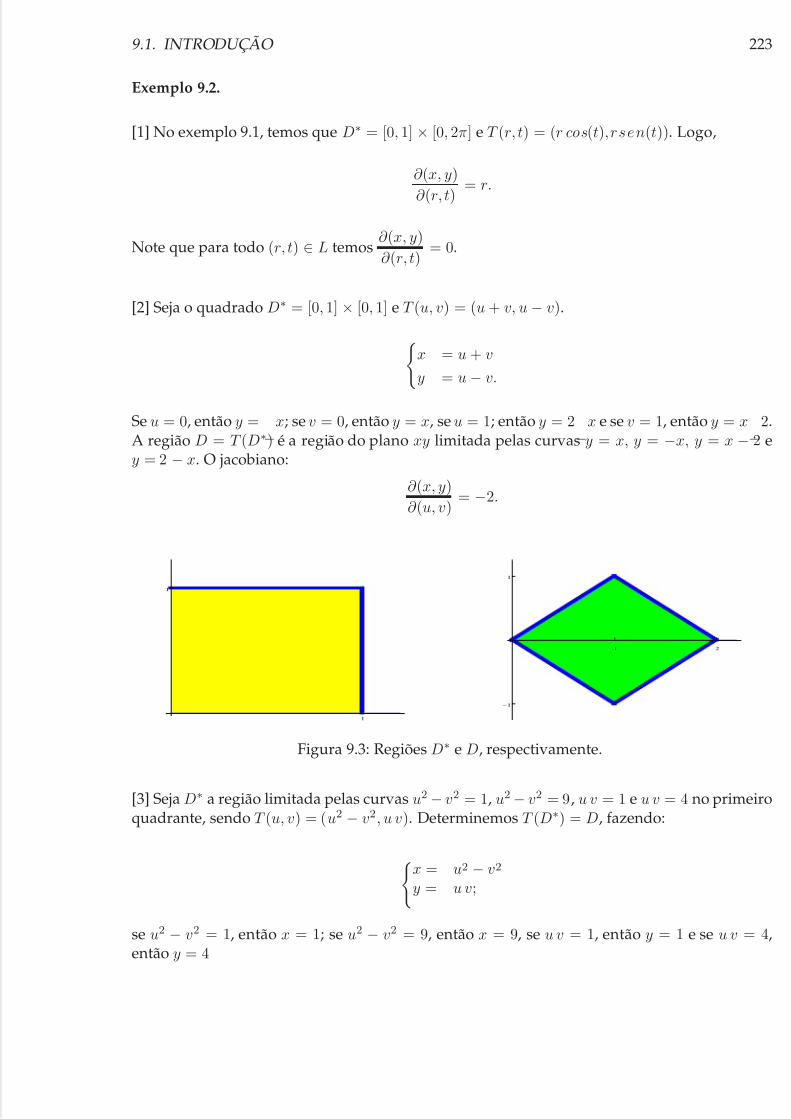
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 223/279
9.1. INTRODUÇÃO 223
Exemplo 9.2.
[1] No exemplo 9.1, temos que D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t),rsen(t)). Logo,
∂ (x, y)
∂ (r, t)= r.
Note que para todo (r, t) ∈ L temos∂ (x, y)
∂ (r, t)= 0.
[2] Seja o quadrado D∗ = [0, 1] × [0, 1] e T (u, v) = (u + v, u − v).
x = u + v
y = u − v.
Se u = 0, então y =−
x; se v = 0, então y = x, se u = 1; então y = 2−
x e se v = 1, então y = x−
2.A região D = T (D∗) é a região do plano xy limitada pelas curvas y = x, y = −x, y = x − 2 ey = 2 − x. O jacobiano:
∂ (x, y)
∂ (u, v)= −2.
1
1
1 2
1
1
Figura 9.3: Regiões D∗ e D, respectivamente.
[3] Seja D∗ a região limitada pelas curvas u2 − v2 = 1, u2 − v2 = 9, u v = 1 e u v = 4 no primeiroquadrante, sendo T (u, v) = (u2 − v2, u v). Determinemos T (D∗) = D, fazendo:
x = u2 − v2
y = u v;
se u2 − v2 = 1, então x = 1; se u2 − v2 = 9, então x = 9, se u v = 1, então y = 1 e se u v = 4,então y = 4
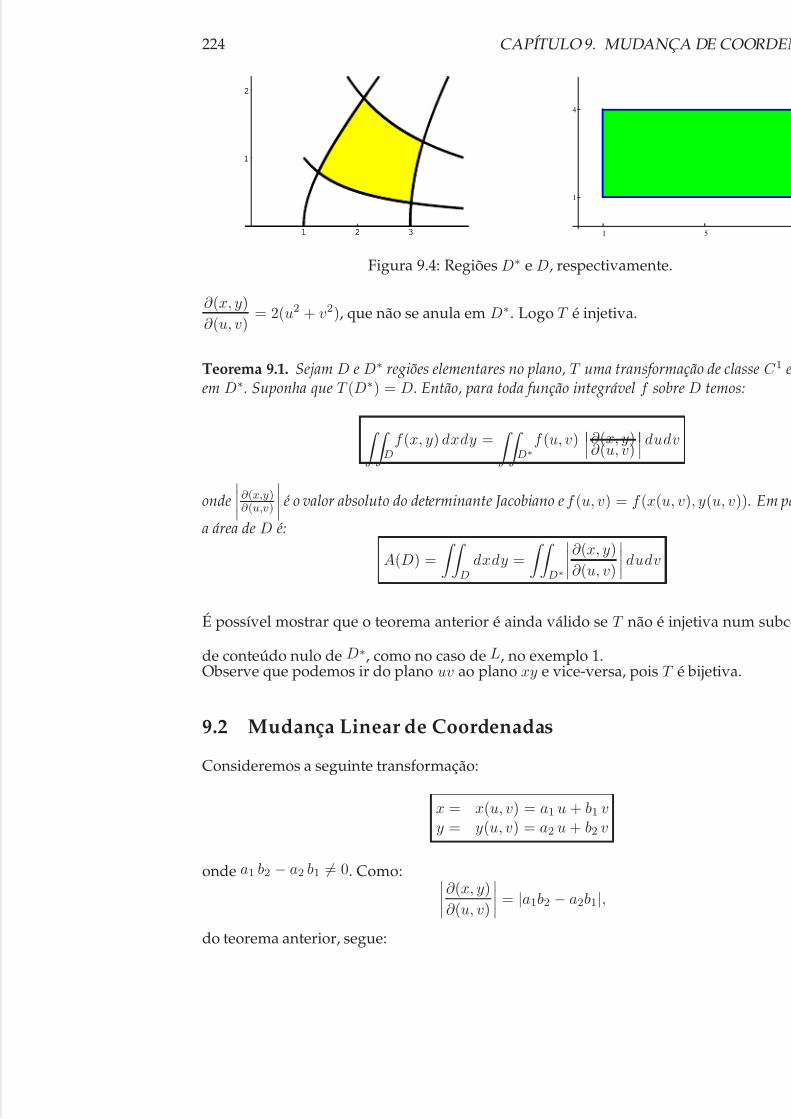
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 224/279
224 CAPÍTULO 9. MUDANÇA DE COORDEN
1 2 3
1
2
1 2 3
1
2
1 5
1
4
Figura 9.4: Regiões D∗ e D, respectivamente.
∂ (x, y)
∂ (u, v)= 2(u2 + v2), que não se anula em D∗. Logo T é injetiva.
Teorema 9.1. Sejam D e D∗ regiões elementares no plano, T uma transformação de classe C 1 eem D∗. Suponha que T (D∗) = D. Então, para toda função integrável f sobre D temos:
D
f (x, y) dxdy =
D∗
f (u, v)∂ (x, y)
∂ (u, v)
dudv
onde∂ (x,y)
∂ (u,v)
é o valor absoluto do determinante Jacobiano e f (u, v) = f (x(u, v), y(u, v)). Em pa
a área de D é:
A(D) =
D
dxdy =
D∗
∂ (x, y)
∂ (u, v)
dudv
É possível mostrar que o teorema anterior é ainda válido se T não é injetiva num subco
de conteúdo nulo de D∗, como no caso de L, no exemplo 1.Observe que podemos ir do plano uv ao plano xy e vice-versa, pois T é bijetiva.
9.2 Mudança Linear de Coordenadas
Consideremos a seguinte transformação:
x = x(u, v) = a1 u + b1 vy = y(u, v) = a2 u + b2 v
onde a1 b2 − a2 b1 = 0. Como: ∂ (x, y)
∂ (u, v)
= |a1b2 − a2b1|,
do teorema anterior, segue:
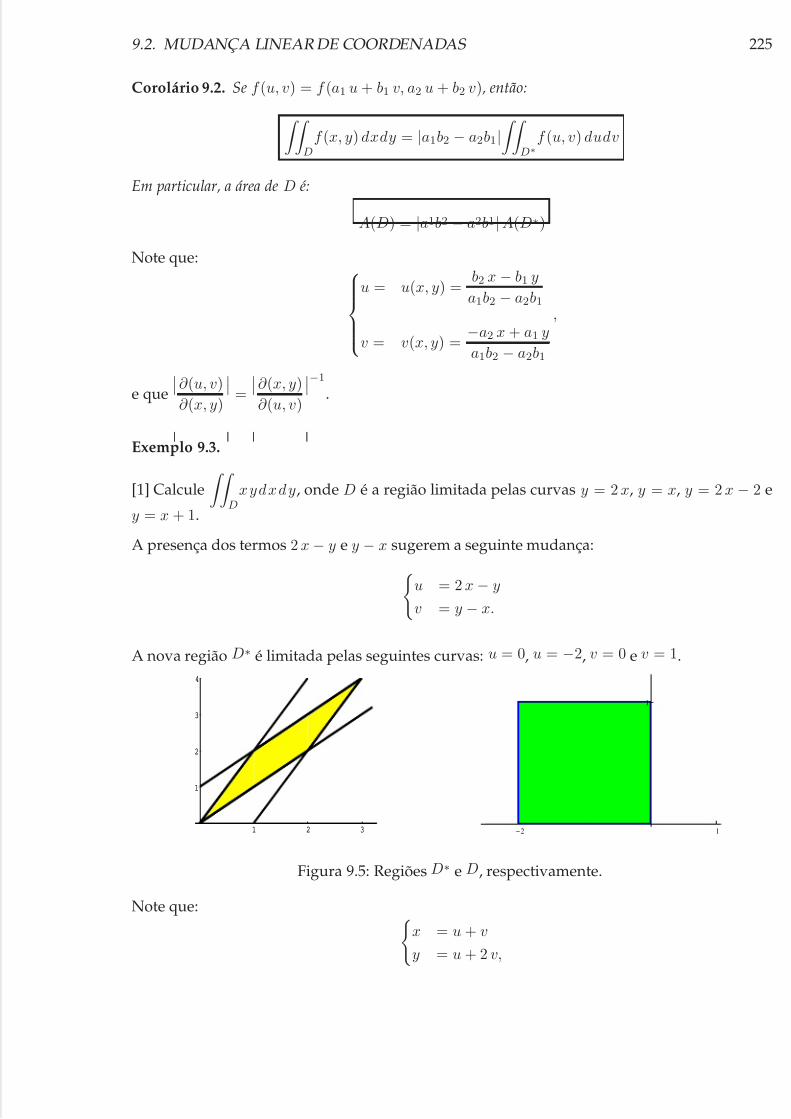
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 225/279
9.2. MUDANÇA LINEAR DE COORDENADAS 225
Corolário 9.2. Se f (u, v) = f (a1 u + b1 v, a2 u + b2 v), então:
D
f (x, y) dxdy = |a1b2 − a2b1|
D∗
f (u, v) dudv
Em particular, a área de D é:
A(D) = |a1b2 − a2b1| A(D∗)
Note que:
u = u(x, y) =b2 x − b1 y
a1b2 − a2b1
v = v(x, y) =−a2 x + a1 y
a1b2 − a2b1
,
e que
∂ (u, v)
∂ (x, y)
=
∂ (x, y)
∂ (u, v)
−1
.
Exemplo 9.3.
[1] Calcule
Dxy dxdy, onde D é a região limitada pelas curvas y = 2 x, y = x, y = 2 x − 2 e
y = x + 1.
A presença dos termos 2 x − y e y − x sugerem a seguinte mudança:
u = 2 x − y
v = y − x.
A nova região D∗ é limitada pelas seguintes curvas: u = 0, u = −2, v = 0 e v = 1.
1 2 3
1
2
3
4
1 2 3
1
2
3
4
2 1
1
Figura 9.5: Regiões D∗ e D, respectivamente.
Note que: x = u + v
y = u + 2 v,
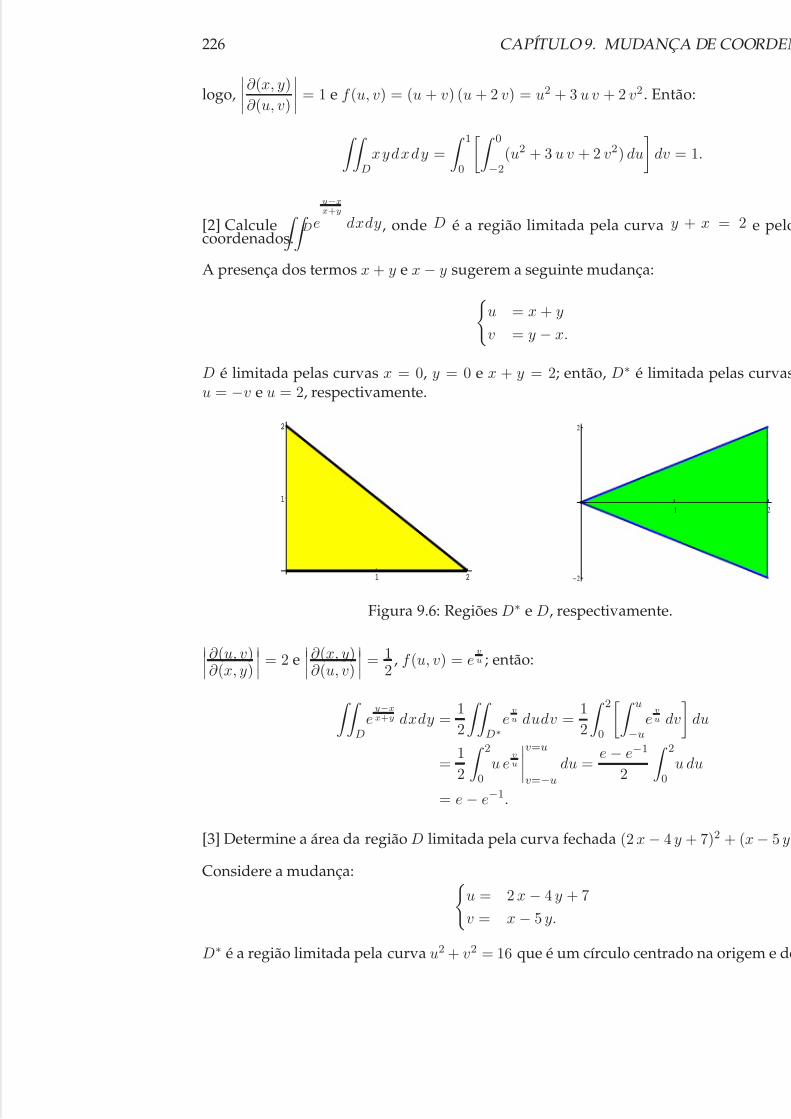
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 226/279
226 CAPÍTULO 9. MUDANÇA DE COORDEN
logo,∂ (x, y)
∂ (u, v)
= 1 e f (u, v) = (u + v) (u + 2 v) = u2 + 3 u v + 2 v2. Então:
D
xy dxdy =
10
0−2
(u2 + 3 u v + 2 v2) du
dv = 1.
[2] Calcule
De
y−x
x+y
dxdy, onde D é a região limitada pela curva y + x = 2 e pelocoordenados.
A presença dos termos x + y e x − y sugerem a seguinte mudança:
u = x + y
v = y − x.
D é limitada pelas curvas x = 0, y = 0 e x + y = 2; então, D∗ é limitada pelas curvasu = −v e u = 2, respectivamente.
1 2
1
2
1 2
1
2
1 2
2
2
Figura 9.6: Regiões D∗ e D, respectivamente.
∂ (u, v)∂ (x, y)
= 2 e∂ (x, y)
∂ (u, v)
= 12
, f (u, v) = evu ; então:
D
ey−x
x+y dxdy =1
2
D∗
evu dudv =
1
2
20
u
−uevu dv
du
=1
2
20
u evu
v=u
v=−u
du =e − e−1
2
20
u du
= e − e−1.
[3] Determine a área da região D limitada pela curva fechada (2 x − 4 y + 7)2 + (x − 5 y)
Considere a mudança: u = 2 x − 4 y + 7
v = x − 5 y.
D∗ é a região limitada pela curva u2 + v2 = 16 que é um círculo centrado na origem e de
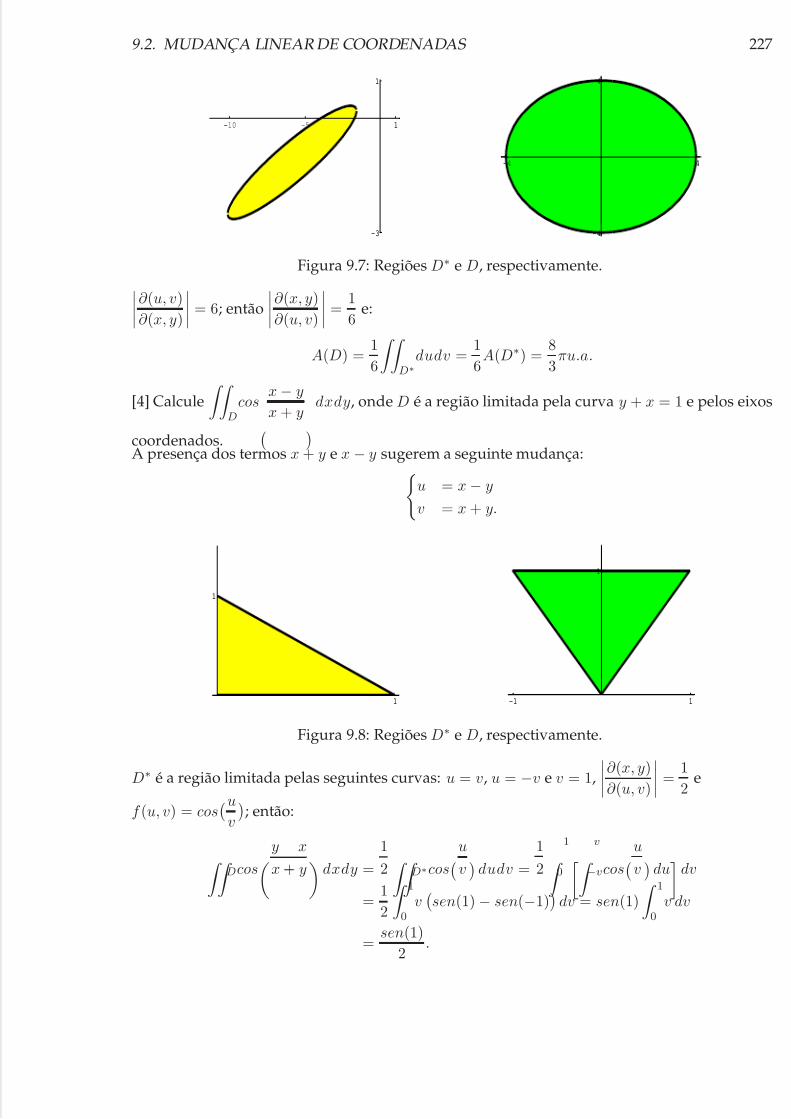
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 227/279
9.2. MUDANÇA LINEAR DE COORDENADAS 227
-10 -5 1
-3
1
-10 -5 1
-3
1
-4 4
4
-4
-4 4
4
-4
Figura 9.7: Regiões D∗ e D, respectivamente.∂ (u, v)
∂ (x, y)
= 6; então∂ (x, y)
∂ (u, v)
=1
6e:
A(D) =1
6
D∗
dudv =1
6A(D∗) =
8
3πu.a.
[4] Calcule
Dcos
x − y
x + y dxdy, onde D é a região limitada pela curva y + x = 1 e pelos eixos
coordenados.A presença dos termos x + y e x − y sugerem a seguinte mudança:
u = x − y
v = x + y.
1
1
1
1
1-1
1
1-1
1
Figura 9.8: Regiões D∗ e D, respectivamente.
D∗ é a região limitada pelas seguintes curvas: u = v, u = −v e v = 1,∂ (x, y)
∂ (u, v)
=1
2e
f (u, v) = cosu
v
; então:
Dcos
y
−x
x + y
dxdy =
1
2
D∗cosu
v
dudv =
1
2 10 v
−vcosu
v
du
dv
=1
2
10
v
sen(1) − sen(−1)
dv = sen(1)
10
v dv
=sen(1)
2.
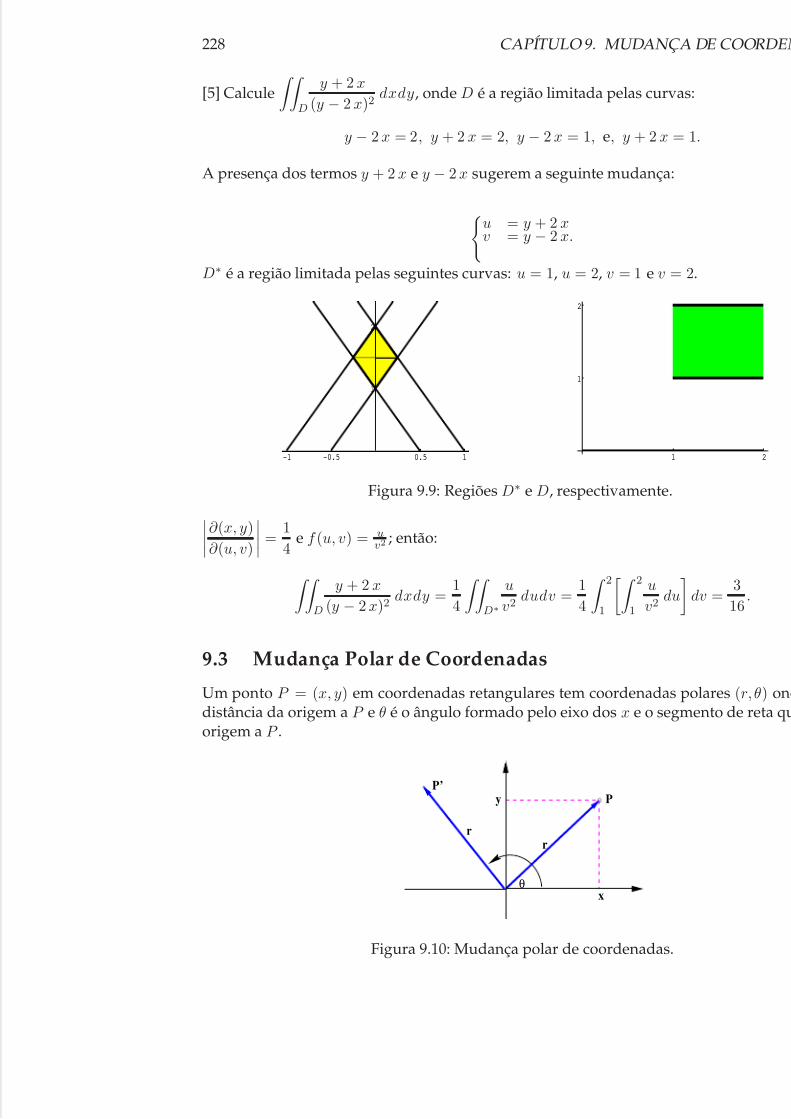
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 228/279
228 CAPÍTULO 9. MUDANÇA DE COORDEN
[5] Calcule
D
y + 2 x
(y − 2 x)2dxdy, onde D é a região limitada pelas curvas:
y − 2 x = 2, y + 2 x = 2, y − 2 x = 1, e, y + 2 x = 1.
A presença dos termos y + 2 x e y − 2 x sugerem a seguinte mudança:
u = y + 2 xv = y − 2 x.
D∗ é a região limitada pelas seguintes curvas: u = 1, u = 2, v = 1 e v = 2.
-0.5-1 10.5
1
2
-0.5-1 10.5
1
2
1 2
1
2
1 2
1
2
Figura 9.9: Regiões D∗ e D, respectivamente.
∂ (x, y)
∂ (u, v)
=1
4e f (u, v) = u
v2; então:
D
y + 2 x
(y − 2 x)2dxdy =
1
4
D∗
u
v2dudv =
1
4
21
21
u
v2du
dv =
3
16.
9.3 Mudança Polar de Coordenadas
Um ponto P = (x, y) em coordenadas retangulares tem coordenadas polares (r, θ) onddistância da origem a P e θ é o ângulo formado pelo eixo dos x e o segmento de reta quorigem a P .
r
x
y
θ
P’
r
P
Figura 9.10: Mudança polar de coordenadas.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 229/279
9.3. MUDANÇA POLAR DE COORDENADAS 229
A relação entre as coordenadas (x, y) e (r, θ) é dada por:
x = r cos(θ)
y = r sen(θ)
onde r = x2 + y2 e θ = arctg
yx, x = 0.
Esta mudança é injetiva em D∗ = {(r, θ)/r > 0, θ0 < θ < θ0 + 2π}, θ0 =constante.Note que a região circular D = {(x, y) /x2 + y2 ≤ a2} corresponde, em coordenadas polares, àregião retangular D∗ = {(r, θ) /0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π} = [0, a] × [0, 2 π].
Exemplo 9.4.
[1] A cardióide é uma curva de equação cartesiana x2 + y2 =
x2 + y2 − y; em coordenadaspolares fica r = 1 − sen(θ), r ≥ 0.
[2] A lemniscata de Bernoulli é uma curva de equação cartesiana (x2 + y2)2 = a2 (x2 − y2); emcoordenadas polares fica r2 = a2 cos(2θ).
-1 1
-1
-2
Figura 9.11: Cardióide e lemniscata, respectivamente.
[3] O cilindro circular reto de raio a, em coordenadas cartesianas é definido como o seguinteconjunto C =
{(x,y,z)
∈R3/ x2 + y2 = a2, a
≥0
}; em coordenadas polares:
C = {(r,θ,z) ∈ R3/r = a, 0 ≤ θ ≤ 2 π}.
Calculemos o jacobiano da mudança de coordenadas polares:∂ (x, y)
∂ (u, v)
= r > 0. Do teorema
anterior, segue:
Corolário 9.3. Se f (r, θ) = f (r cos(θ),rsen(θ)), então:
D
f (x, y) dxdy =
D∗
r f (r, θ) drdθ
Esta igualdade ainda é válida se D∗ = {(r, θ)/r ≥ 0, θ0 ≤ θ ≤ θ0 + 2π}.Em particular a área de D é:
A(D) =
D
dxdy =
D∗
r drdθ
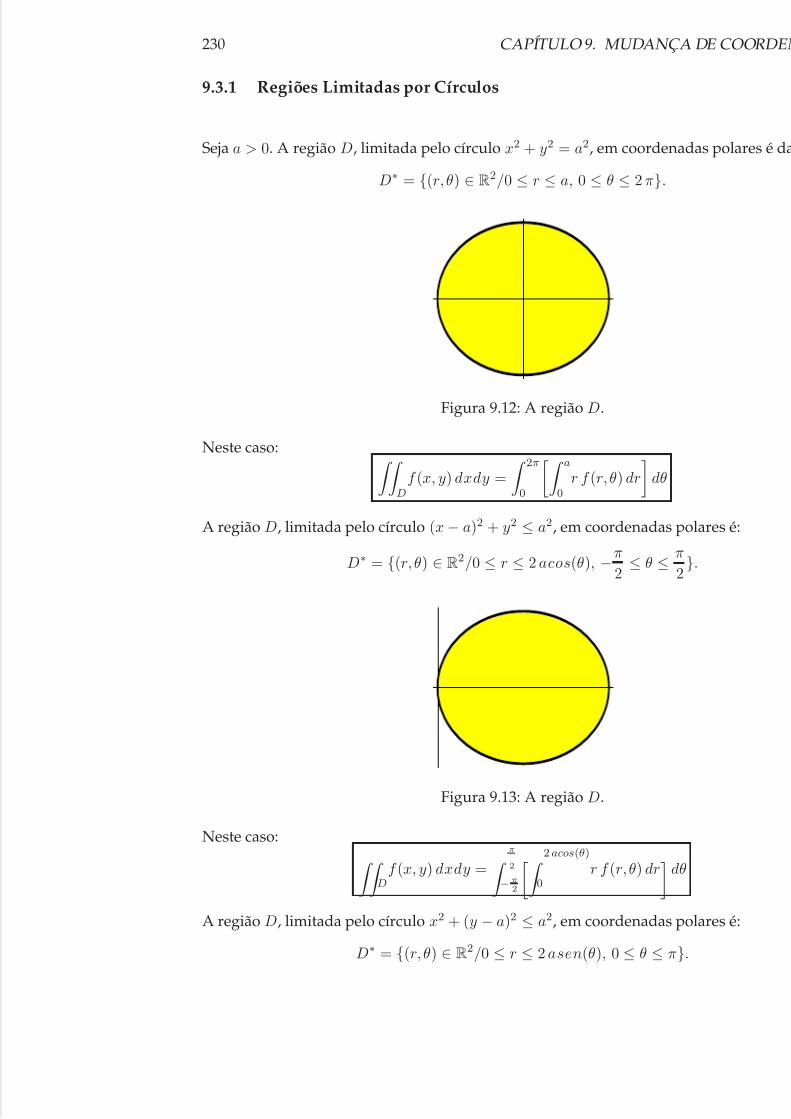
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 230/279
230 CAPÍTULO 9. MUDANÇA DE COORDEN
9.3.1 Regiões Limitadas por Círculos
Seja a > 0. A região D, limitada pelo círculo x2 + y2 = a2, em coordenadas polares é da
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ a, 0 ≤ θ ≤ 2 π}.
Figura 9.12: A região D.
Neste caso: D
f (x, y) dxdy =
2π
0
a
0r f (r, θ) dr
dθ
A região D, limitada pelo círculo (x − a)2 + y2 ≤ a2, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 acos(θ), −π
2≤ θ ≤ π
2}.
Figura 9.13: A região D.
Neste caso: D
f (x, y) dxdy = π
2
−π2
2acos(θ)
0r f (r, θ) dr
dθ
A região D, limitada pelo círculo x2 + (y − a)2 ≤ a2, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 asen(θ), 0 ≤ θ ≤ π}.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 231/279
9.3. MUDANÇA POLAR DE COORDENADAS 231
Figura 9.14: A região D.
Neste caso: D
f (x, y) dxdy =
π
0
2asen(θ)
0r f (r, θ) dr
dθ
Exemplo 9.5.
[1] Calcule
D(x2 + y2) dxdy, onde D é a região limitada pelas curvas:
x2 + y2 = 1, x2 + y2 = 4, y = x e y =
√3 x
3,
no primeiro quadrante.
1 2
1
1 2
1
Figura 9.15: A região D.
Usando coordenadas polares, a nova região D∗ no plano rθ é determinada por:
D∗ = {(r, θ) /1 ≤ r ≤ 2,
π
6 ≤ θ ≤π
4 }.
Como x2 + y2 = r2, temos:
D
(x2 + y2) dxdy =
D∗
r3 drdθ =
π4
π6
21
r3 dr
dθ =
5 π
16.
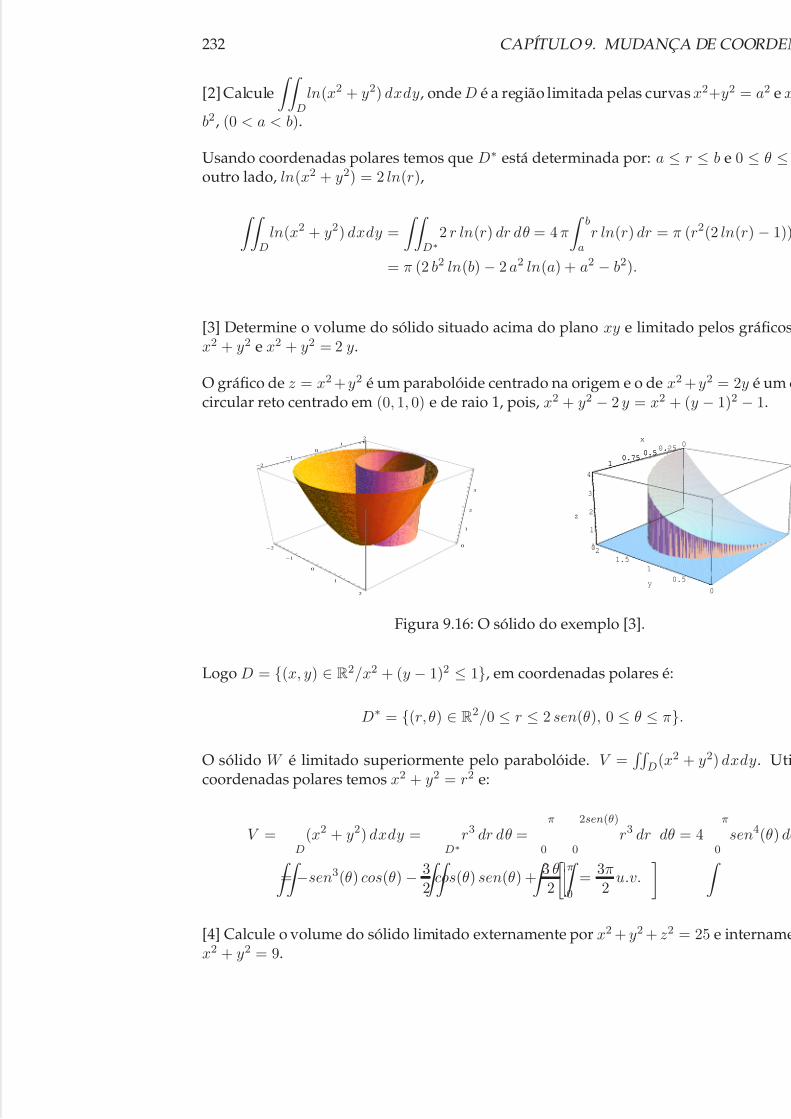
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 232/279
232 CAPÍTULO 9. MUDANÇA DE COORDEN
[2] Calcule
Dln(x2 + y2) dxdy, onde D é a região limitada pelas curvas x2+y2 = a2 e x
b2, (0 < a < b).
Usando coordenadas polares temos que D∗ está determinada por: a ≤ r ≤ b e 0 ≤ θ ≤outro lado, ln(x2 + y2) = 2 ln(r),
D
ln(x2 + y2) dxdy =
D∗
2 r ln(r) dr dθ = 4 π
b
ar ln(r) dr = π (r2(2 ln(r) − 1))
= π (2 b2 ln(b) − 2 a2 ln(a) + a2 − b2).
[3] Determine o volume do sólido situado acima do plano xy e limitado pelos gráficosx2 + y2 e x2 + y2 = 2 y.
O gráfico de z = x2 + y2 é um parabolóide centrado na origem e o de x2 + y2 = 2y é um ccircular reto centrado em (0, 1, 0) e de raio 1, pois, x2 + y2 − 2 y = x2 + (y − 1)2 − 1.
2
1
0
1
2
2
1
0
1
2
0
1
2
3
00.25
0.50.75
1
x
0
0.5
1
1.5
2
y
0
1
2
3
4
z
.0.5
0.751
Figura 9.16: O sólido do exemplo [3].
Logo D = {(x, y) ∈ R2/x2 + (y − 1)2 ≤ 1}, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 sen(θ), 0 ≤ θ ≤ π}.
O sólido W é limitado superiormente pelo parabolóide. V =
D(x2 + y2) dxdy. Uticoordenadas polares temos x2 + y2 = r2 e:
V =
D(x2 + y2) dxdy =
D∗
r3 dr dθ =
π
0 2sen(θ)
0r3 dr
dθ = 4
π
0sen4(θ) dθ
= −sen3(θ) cos(θ) − 32
cos(θ) sen(θ) +3 θ2
π0
=3π2
u.v.
[4] Calcule o volume do sólido limitado externamente por x2 + y2 + z2 = 25 e internamex2 + y2 = 9.
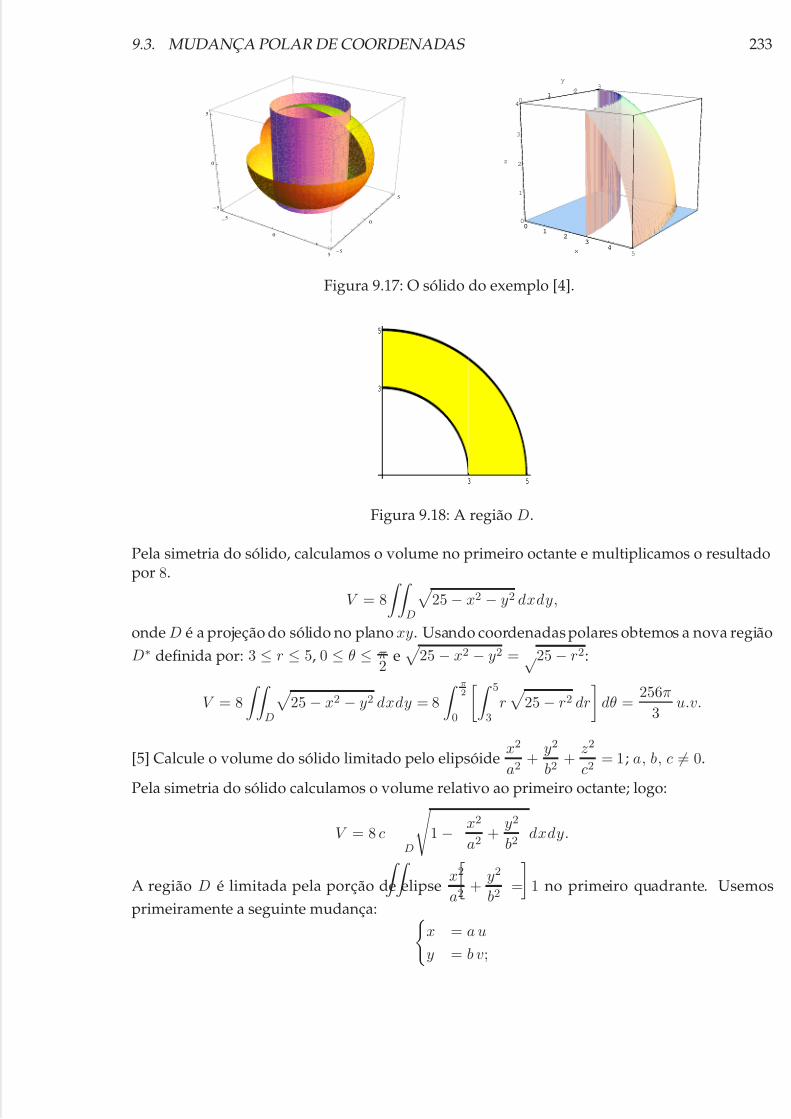
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 233/279
9.3. MUDANÇA POLAR DE COORDENADAS 233
5
0
55
0
5
5
0
5
01
23
45
x
01
23
y
0
1
2
3
4
z
01
23
4
1
Figura 9.17: O sólido do exemplo [4].
3 5
3
5
3 5
3
5
Figura 9.18: A região D.
Pela simetria do sólido, calculamos o volume no primeiro octante e multiplicamos o resultadopor 8.
V = 8
D
25 − x2 − y2 dxdy,
onde D é a projeção do sólido no plano xy. Usando coordenadas polares obtemos a nova regiãoD∗ definida por: 3 ≤ r ≤ 5, 0 ≤ θ ≤ π
2e
25 − x2 − y2 = √25 − r2:
V = 8
D
25 − x2 − y2 dxdy = 8
π2
0
53
r
25 − r2 dr
dθ =
256π
3u.v.
[5] Calcule o volume do sólido limitado pelo elipsóidex2
a2+
y2
b2+
z2
c2= 1; a, b, c = 0.
Pela simetria do sólido calculamos o volume relativo ao primeiro octante; logo:
V = 8 c
D
1 −
x2
a2+
y2
b2 dxdy.
A região D é limitada pela porção de elipsex2
a2+
y2
b2= 1 no primeiro quadrante. Usemos
primeiramente a seguinte mudança: x = a u
y = b v;

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 234/279
234 CAPÍTULO 9. MUDANÇA DE COORDEN
o determinante Jacobiano da mudança é a b e D∗ é limitada por u2 + v2 = 1. Temos:
V = 8 c
D
1 −
x2
a2+
y2
b2
dxdy = 8 a b c
D∗
1 − u2 − v2 dudv.
Agora, usamos coordenadas polares:
u = r cos(θ)
v = r sen(θ).
O determinante Jacobiano é r;√
1 − u2 − v2 =√
1 − r2 e a nova região D∗∗ é defin0 ≤ r ≤ 1 e 0 ≤ θ ≤ π
2:
V = 8 a b c
D∗∗
r
1 − r2 dr dθ =4 a b c π
3u.v.
Em particular, se a = b = c temos uma esfera de raio a e V =4 π a3
3u.v.
[6] Calcule +∞0
e−x2 dx.
Esta integral é muito utilizada em Estatística. Seja R = [−a, a] × [−a, a]. Então: R
e−(x2+y2) dxdy =
a
−a
a
−ae−x2 e−y2 dy
dx =
a
−ae−x2 dx
a
−ae−y2 dy
.
O gráfico de f (x, y) = e−(x2+y2) é:
Figura 9.19:
Se denotamos por L(a) = a
−a
e−u2 du = 2 a
0e−u2 du, temos:
L2(a) =
R
e−(x2+y2) dxdy.
Sejam D e D1 regiões elementares tais que D ⊂ R ⊂ D1 onde D é a região limitada peloinscrito em R e D1 é a região limitada pelo círculo circunscrito a R:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 235/279
9.3. MUDANÇA POLAR DE COORDENADAS 235
R
D1
D
Figura 9.20:
Como f (x, y) = e−(x2+y2) é contínua em D1 e e−(x2+y2) > 0, para todo x, y,
D
e−(x2+y2) dxdy ≤ L2(a) ≤
D1
e−(x2+y2) dxdy.
Usando coordenadas polares, D é definida por 0
≤r
≤a e 0
≤θ
≤2π, D1 é definida por
0 ≤ r ≤ √2 a e 0 ≤ θ ≤ 2π; e−(x2+y2) = e−r2 e:
2π
0
a
0r e−r2 dr
dθ = π (1 − e−a2);
então, π (1 − e−a2) ≤ L(a) ≤
π (1 − e−2a2).
Como lima
→+
∞ a
0e−u2 du =
+∞
0e−u2 du, temos:
+∞0
e−u2 du =
√π
2.
[7] Se D = {(x, y) ∈ R2/1 ≤ (x − y)2 + (x + y)2 ≤ 4, y ≤ 0, x + y ≥ 0}, calcule:
D
ex+y
x−y
(x − y)2dxdy.
Usamos mudança linear: u = x − y
v = x + y.
Logo, a nova região D∗ é limitada pelas curvas u2 + v2 = 1, u2 + v2 = 4, v ≤ u e 0 ≤ v:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 236/279
236 CAPÍTULO 9. MUDANÇA DE COORDEN
1 2
1
2
1 2
1
2
Figura 9.21: Região D.
∂ (u, v)
∂ (x, y)= 2 então
∂ (x, y)
∂ (u, v)=
1
2e
D
ex+y
x−y
(x − y)2dxdy =
1
2
D∗
evu
u2dudv.
Usando coordenadas polares obtemos a região D∗∗ definida por: 1 ≤ r ≤ 2 e 0 ≤ θ ≤π
4
1
2
D∗
evu
u2dudv =
1
2
D∗∗
r etg(θ)
r2 cos2(θ)dr dθ =
ln(2)
2(e − 1).
9.3.2 Aplicação
Seja D região do tipo II, limitada por curvas de equações (em forma polar): r = g(θ) e re definida por:
D = {(r, θ)/g(θ) ≤ r ≤ h(θ), θ1 ≤ θ ≤ θ2},
onde g, h : [θ1, θ2] −→ R são funções contínuas tais que 0 ≤ g(θ) ≤ h(θ).
D
h
g
y
x
θ1
θ2
r
θ
D*
θ2
θ1
Figura 9.22:
Então: D
f (x, y) dxdy =
θ2
θ1
h(θ2)
g(θ1)r f (r, θ) dr
dθ
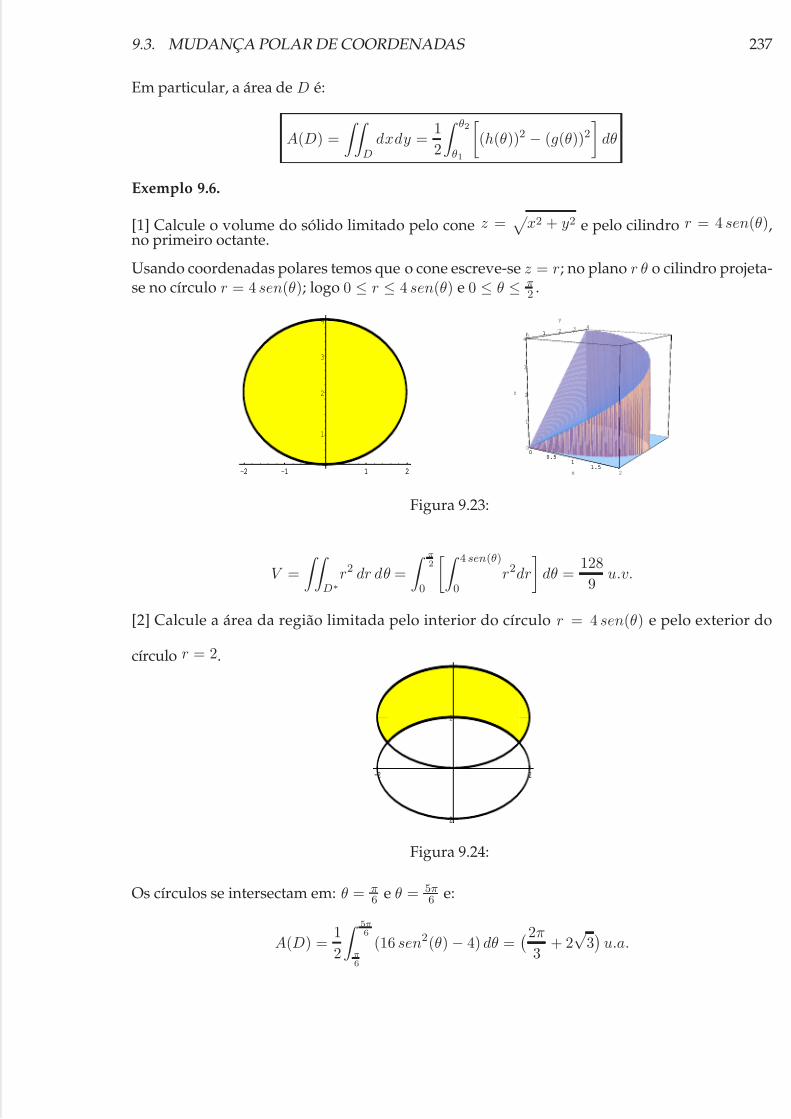
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 237/279
9.3. MUDANÇA POLAR DE COORDENADAS 237
Em particular, a área de D é:
A(D) =
D
dxdy =1
2
θ2
θ1
(h(θ))2 − (g(θ))2
dθ
Exemplo 9.6.
[1] Calcule o volume do sólido limitado pelo cone z =
x2 + y2 e pelo cilindro r = 4 sen(θ),no primeiro octante.
Usando coordenadas polares temos que o cone escreve-se z = r; no plano r θ o cilindro projeta-se no círculo r = 4 sen(θ); logo 0 ≤ r ≤ 4 sen(θ) e 0 ≤ θ ≤ π
2 .
-2 -1 1 2
1
2
3
4
-2 -1 1 2
1
2
3
4
00.5
11.5
2x
01 2 3 4
y
0
1
2
3
4
z
00.5
11.5
1
Figura 9.23:
V =
D∗
r2 dr dθ =
π2
0
4 sen(θ)
0r2dr
dθ =
128
9u.v.
[2] Calcule a área da região limitada pelo interior do círculo r = 4 sen(θ) e pelo exterior do
círculo r = 2.
-2 2
-2
2
-2 2
-2
2
Figura 9.24:
Os círculos se intersectam em: θ = π6 e θ = 5π
6 e:
A(D) =1
2
5π6
π6
(16 sen2(θ) − 4) dθ =2π
3+ 2
√3
u.a.
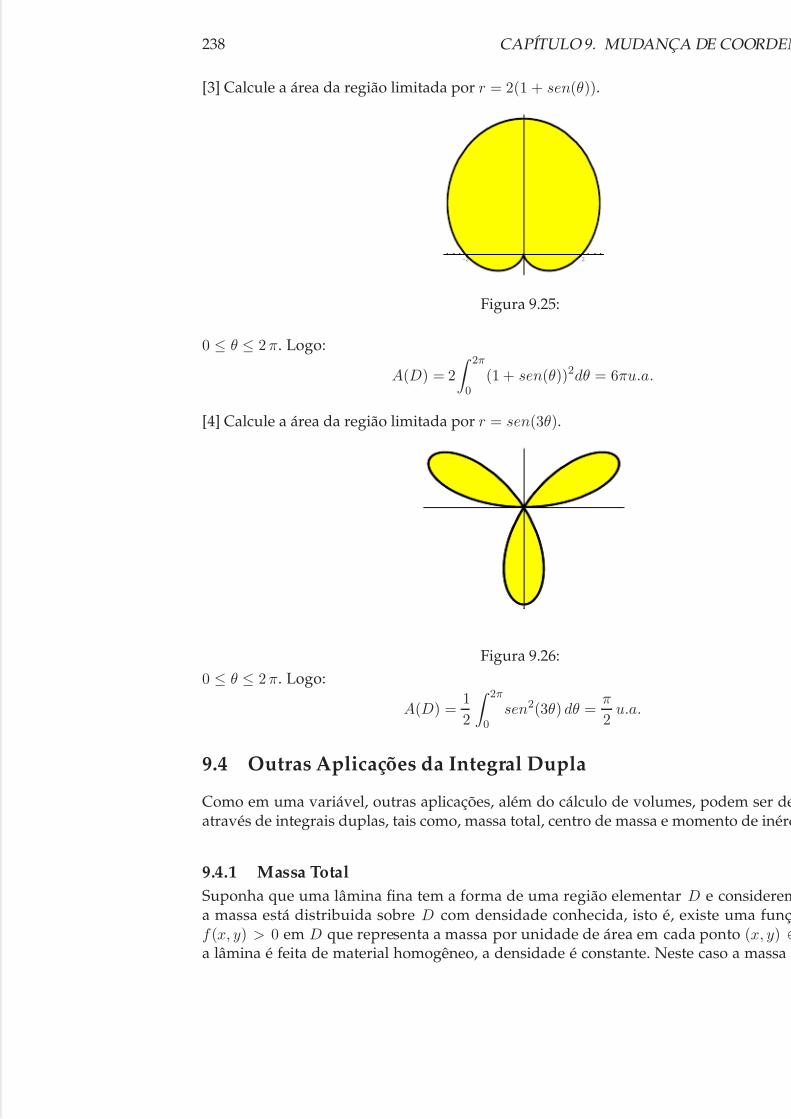
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 238/279
238 CAPÍTULO 9. MUDANÇA DE COORDEN
[3] Calcule a área da região limitada por r = 2(1 + sen(θ)).
-2 -1 1 2
1
2
3
4
Figura 9.25:
0 ≤ θ ≤ 2 π. Logo:
A(D) = 2
2π
0(1 + sen(θ))2dθ = 6πu.a.
[4] Calcule a área da região limitada por r = sen(3θ).
Figura 9.26:
0 ≤ θ ≤ 2 π. Logo:
A(D) =1
2
2π
0sen2(3θ) dθ =
π
2u.a.
9.4 Outras Aplicações da Integral Dupla
Como em uma variável, outras aplicações, além do cálculo de volumes, podem ser deatravés de integrais duplas, tais como, massa total, centro de massa e momento de inérc
9.4.1 Massa TotalSuponha que uma lâmina fina tem a forma de uma região elementar D e considerema massa está distribuida sobre D com densidade conhecida, isto é, existe uma funçf (x, y) > 0 em D que representa a massa por unidade de área em cada ponto (x, y) ∈a lâmina é feita de material homogêneo, a densidade é constante. Neste caso a massa t
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 239/279
9.4. OUTRAS APLICAÇÕES DA INTEGRAL DUPLA 239
lâmina é o produto da densidade pela área da lâmina. Quando a densidade f varia de ponto aponto em D e f é uma função integrável sobre D, a massa total M (D) de D é dada por:
M (D) =
D
f (x, y) dxdy
9.4.2 Momento de MassaO momento de massa de uma partícula em torno de um eixo é o produto de sua massa peladistância (na perpendicular) ao eixo. Então, os momentos de massa da lâmina D em relação aoeixo dos x e dos y são respectivamente:
M x =
D
y f (x, y) dx dy, M y =
D
x f (x, y) dxdy
x
y (x,y) D
Figura 9.27:
9.4.3 Centro de Massa
O centro de massa da lâmina é definido por (x, y), onde:
x =M y
M (D), y =
M xM (D)
Fisicamente (x, y) é o ponto em que a massa total da lâmina poderia estar concentrada semalterar seu momento em relação a qualquer dos eixos. Se f (x, y) = k, (k > 0) em todo D, (x, y)é chamado centróide de D. Neste caso o centro de massa é o centro geométrico da região D.
Exemplo 9.7.
[1] Calcule o centro de massa do retângulo [0, 1] × [0, 1] se a densidade é dada pela função:f (x, y) = ex+y.
A massa total de D = [0, 1] × [0, 1] é:
M (D) =
10
10
ex+y dx
dy = e2 − 2e + 1.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 240/279
240 CAPÍTULO 9. MUDANÇA DE COORDEN
Os momentos de massa respectivos são:
M x =
10
10
y ex+y dx
dy = e − 1 e M y =
10
10
x ex+y dx
dy = e − 1
e o centro de massa de D é (1
e − 1,
1
e − 1).
[2] Determine o centro de massa da região limitada por um semicírculo D de raio a cena origem, sabendo que sua densidade em cada ponto é proporcional à distância do porigem.
Figura 9.28:
f (x, y) = k
x2 + y2. Calculamos a massa total usando coordenadas polares. A novaD∗ é definida por: 0 ≤ r ≤ a e 0 ≤ θ ≤ π;
x2 + y2 = r:
M (D) = k
π
0
a
0r2 dr
dθ =
k π a3
3.
Os momentos de massa respectivos são:
M x = a
0
π
0r3 cos(θ) dθ
dr = 0 e M y =
a
0
π
0r3 sen(θ) dθ
dr = a
4
2;
o centro de massa de D é (0,3 a
2 k π).
[3] Determine o centróide da região limitada pelas curvas y = x2 e y = 4 x − x2.
1 2
4
2
1 2
4
2
Figura 9.29:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 241/279
9.4. OUTRAS APLICAÇÕES DA INTEGRAL DUPLA 241
Neste caso f (x, y) = 1 para todo (x, y) ∈ D, onde:
D = {(x, y) ∈ R2/0 ≤ x ≤ 2, x2 ≤ y ≤ 4 x − x2}
e M (D) = A(D) =8
3. Esta área já foi calculada anteriormente.
M x = 2
0
4x−x2
x2
y dy dx =16
3
e M y = 2
0
4x−x2
x2
x dy dx =8
3
;
o centróide de D é (2, 1).
[4] Determine o centro de massa da região limitada pelas curvas y = x + x2, y = 0 e x = 2 se adensidade em cada ponto é f (x, y) = y
1+x .
M (D) =
20
x(x+1)
0
y
1 + xdy
dx =
1
2
20
(x3 + x2) dx =10
3,
M x =
20
x(x+1)
0
y2
1 + xdy
dx =
1
2
20
(x4 + x3) dx =412
45,
M y = 2
0
x(x+1)
0
x y
1 + xdy dx =
1
3
2
0
(x5 + 2 x4 + x3) dx =26
5;
o centro de massa de D é (39
25,
206
75).
9.4.4 Momento de Inércia
Sejam L uma reta no plano, D uma lâmina como antes e δ(x, y) = d((x, y), L), onde d é adistância no plano e (x, y) ∈ D.
D
L(x,y)
δ
Figura 9.30:
Se f (x, y) é a densidade em cada ponto de D, o momento de inércia da lâmina em relação à retaL é:
I L =
Dδ2(x, y) f (x, y) dxdy
Em particular, se L é o eixo dos x:
I x =
D
y2 f (x, y) dxdy
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 242/279
242 CAPÍTULO 9. MUDANÇA DE COORDEN
Se L é o eixo dos y:
I y =
D
x2 f (x, y) dxdy
O momento de inércia polar em relação à origem é:
I 0 = I x + I y = D(x2 + y2) f (x, y) dxdy
O momento de inércia de um corpo em relação a um eixo é sua capacidade de resistir àração angular em torno desse eixo.
Exemplo 9.8.
[1] Determine o momento de inércia polar da região limitada pelas curvas y = ex, x = e x = 0, se a densidade em cada ponto é f (x, y) = x y.
I x =
D
xy3 dxdy =
10
ex
0x y3 dy
dx =
1
64(3 e4 + 1),
I y = D
yx3 dxdy = 1
0
ex
0
y x3 dydx =1
16(e2 + 3);
logo, o momento de inércia polar é:
I 0 = I x + I y =1
64(3 e4 + 4 e2 + 13).
[2] Uma lâmina fina com densidade constante k é limitada por x2 + y2 = a2 e x2 + y(0 < a < b). Calcule o momento de inércia polar da lâmina.
Usando coordenadas polares, a nova região é definida por: a ≤ r ≤ b e 0 ≤ θ ≤ 2 π e o mde inércia polar é:
I 0 = k
2π
0
b
ar3 dr
dθ =
k (b4 − a4)π
2.
9.5 Exercícios
1. Determine o volume dos seguintes sólidos:
(a) Limitado superiormente por z = x2 + y2 e inferiormente pela região limitay = x2 e x = y2.
(b) Limitado superiormente por z = 3 x2 + y2 e inferiormente pela região limitay = x e x = y2 − y.
(c) Limitado por y2 + z2 = 4 , x = 2 y, x = 0 e z = 0, no primeiro octante.(d) Limitado por z = x2 + y2 + 4 , x = 0, y = 0, z = 0 e x + y = 1.
(e) Limitado por x2 + y2 = 1 , y = z, x = 0 e z = 0, no primeiro octante.
2. Calcule a área da região limitada pelo eixo dos y e as curvas y = sen(x) e y = cos(
3. Calcule a área das regiões limitadas pelas seguintes curvas:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 243/279
9.5. EXERCÍCIOS 243
(a) y = x2, y = 2x + 54
(b) y = −x2 − 4, y = −8
(c) y = 5 − x2, y = x + 3
(d) x = y2, y = x + 3, y = −2, y = 3
(e) y3 = x, y = x
(f) y = −x2 − 1, y = −2x − 4
(g) x = y2 + 1, y + x = 7
(h) y = 4 − x2, y = x2 − 14
4. Determine o centro de massa da lâmina plana R, no plano xy e densidade dada f :
(a) R é limitado por x2 + y2 = 1 no primeiro quadrante e f (x, y) = x y
(b) R é limitado por y = x e y = x2 e f (x, y) = x2 + y2
5. Definimos o valor médio de f sobre a região D por:
V M =1
A
D
f (x, y) dxdy,
onde A é a área de D. Calcule V M se:
(a) f (x, y) = x2, e D do retângulo de vértices (0, 0), (4, 0), (4, 2) e (0, 2)
(b) f (x, y) = x2 y2 e D do retângulo de vértices (0, 0), (4, 0), (4, 2) e (0, 2)
(c) f (x, y) = x2 y2 e D do triângulo de vértices (0, 0), (4, 0), e (0, 2)
(d) f (x, y) = x2 y2 e D do triângulo de vértices (−1, 0), (1, 0), e (0, 1)
Mudanças de Variáveis
1. Utilizando a mudança de variáveis: x = u + v e y = u − v, calcule:
10
10
x2 + y2
dx
dy.
2. Utilizando a mudança de variáveis: x + y = u e x − y = v, calcule: D
x + y
2(x − y)2 dxdy,
onde D é limitado pelo quadrado de vértices (1, 0), (2, 1) e (0, 1).
3. Utilizando a mudança de variáveis: u = x − y e v = x + y, calcule: D
x2 − y2
sen2(x + y) dxdy,
onde D = {(x, y)/ − π ≤ x + y ≤ π, −π ≤ x − y ≤ π}.
4. Utilizando coordenadas polares, calcule as seguintes integrais duplas:
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 244/279
244 CAPÍTULO 9. MUDANÇA DE COORDEN
(a)
Dex2+y2 dxdy, sendo D = {(x, y)/x2 + y2 ≤ 1}
(b)
Dln(x2 + y2) dxdy, sendo D = {(x, y)/x ≥ 0, y ≥ 0, a2 ≤ x2 + y2 ≤ b2}
(c)
D
sen(
x2 + y2)
x2 + y2dxdy, sendo D limitadas por x2 + y2 = π2
4 e x2 + y2 = π
5. Calcule a área da região limitada pelas seguintes curvas: x = 4 − y2 e x + 2 y − 4
6. Utilizando coordenadas polares, calcule a área da região limitada pelas curvas:
(a) r = 1 e r =2cos(θ)√
3(fora a circunferência r = 1).
(b) r = 2 (1 + cos(θ)) e r = 2 cos(θ).
(c) r = 2(1 − cos(θ)) e r = 2.
7. Calcule
Dsen(x2 + y2) dxdy, sendo D o disco unitário centrado na origem.
8. Sendo dadas a parábola y2 = x + 1 e a reta x + y = 1, calcule o momento de inérelação a cada eixo e o momento de inércia polar.
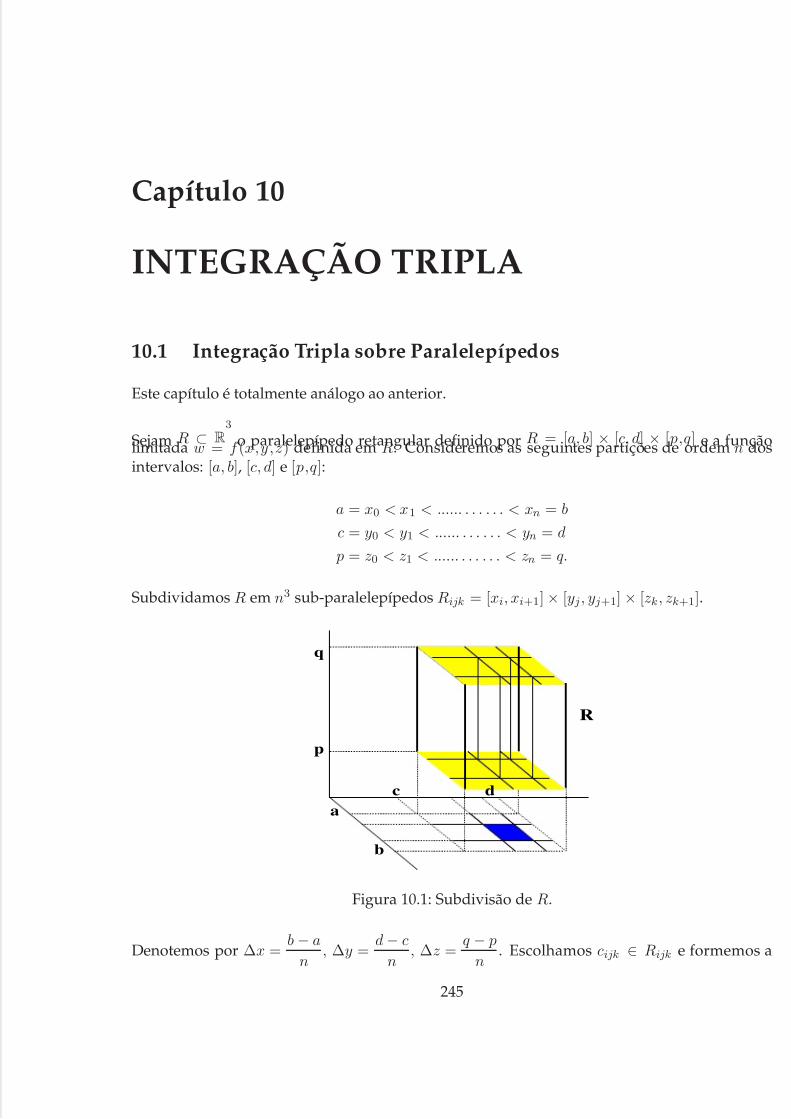
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 245/279
Capítulo 10
INTEGRAÇÃO TRIPLA
10.1 Integração Tripla sobre Paralelepípedos
Este capítulo é totalmente análogo ao anterior.
Sejam R ⊂ R3
o paralelepípedo retangular definido por R = [a, b] × [c, d] × [ p,q] e a funçãolimitada w = f (x,y,z) definida em R. Consideremos as seguintes partições de ordem n dosintervalos: [a, b], [c, d] e [ p,q]:
a = x0 < x1 < ...... . . . . . . < xn = b
c = y0 < y1 < ...... . . . . . . < yn = d
p = z0 < z1 < ...... . . . . . . < zn = q.
Subdividamos R em n3 sub-paralelepípedos Rijk = [xi, xi+1] × [y j, y j+1] × [zk, zk+1].
b
c d
a
p
q
R
Figura 10.1: Subdivisão de R.
Denotemos por ∆x =b − a
n, ∆y =
d − c
n, ∆z =
q − p
n. Escolhamos cijk ∈ Rijk e formemos a
245
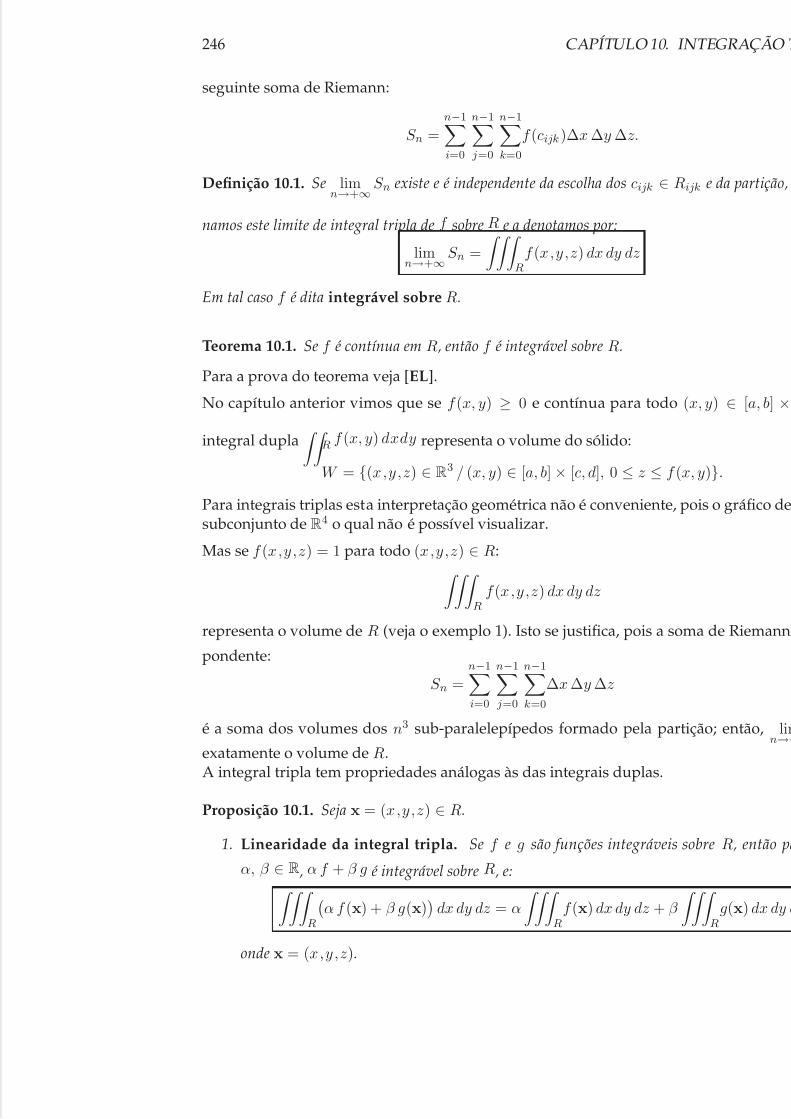
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 246/279
246 CAPÍTULO 10. INTEGRAÇÃO T
seguinte soma de Riemann:
S n =
n−1i=0
n−1 j=0
n−1k=0
f (cijk )∆x ∆y ∆z.
Definição 10.1. Se limn→+∞S n existe e é independente da escolha dos cijk ∈ Rijk e da partição,
namos este limite de integral tripla de f sobre R e a denotamos por:
limn→+∞S n =
R
f (x,y,z) dx dy dz
Em tal caso f é dita integrável sobre R.
Teorema 10.1. Se f é contínua em R, então f é integrável sobre R.
Para a prova do teorema veja [EL].
No capítulo anterior vimos que se f (x, y) ≥ 0 e contínua para todo (x, y) ∈ [a, b] ×
integral dupla
R f (x, y) dxdy representa o volume do sólido:
W = {(x,y,z) ∈ R3 / (x, y) ∈ [a, b] × [c, d], 0 ≤ z ≤ f (x, y)}.
Para integrais triplas esta interpretação geométrica não é conveniente, pois o gráfico desubconjunto de R4 o qual não é possível visualizar.
Mas se f (x,y,z) = 1 para todo (x,y,z) ∈ R: R
f (x,y,z) dx dy dz
representa o volume de R (veja o exemplo 1). Isto se justifica, pois a soma de Riemann
pondente:
S n =n−1i=0
n−1 j=0
n−1k=0
∆x ∆y ∆z
é a soma dos volumes dos n3 sub-paralelepípedos formado pela partição; então, limn→+
exatamente o volume de R.A integral tripla tem propriedades análogas às das integrais duplas.
Proposição 10.1. Seja x = (x,y,z) ∈ R.
1. Linearidade da integral tripla. Se f e g são funções integráveis sobre R, então pa
α, β ∈ R, α f + β g é integrável sobre R, e: R
α f (x) + β g(x)
dx dy dz = α
R
f (x) dx dy dz + β
R
g(x) dx dy d
onde x = (x,y,z).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 247/279
10.1. INTEGRAÇÃO TRIPLA SOBRE PARALELEPÍPEDOS 247
2. Se f e g são integráveis sobre R e g(x) ≤ f (x), para todo x ∈ R, então: R
g(x) dx dy dz ≤
Rf (x) dx dy dz
3. Se R é subdividido em k paralelepípedos e f é integrável sobre cada Ri, i = 1,...,k então f éintegrável sobre R e,
R
f (x) dx dy dz =k
i=1
Ri
f (x) dx dy dz
A prova segue diretamente das definições.
A noção de conteúdo nulo poder ser estendida ao paralelepípedo R de forma completamenteanáloga ao caso do retângulo; mudando sub-retângulos por sub-paralelepípedos e área porvolume. Como antes, o teorema é válido se o conjunto de descontinuidades de f é de con-teúdo nulo. Para integrais triplas continua valendo o teorema de Fubini. Agora temos 3! = 9possíveis integrais iteradas.
Teorema 10.2. (Fubini) Seja f : R −→ R contínua em R. Então: R
f (x,y ,z) dx dy dz =
b
a
d
c
q
pf (x,y ,z) dz
dy
dx
=
q
p
d
c
b
af (x,y ,z) dx
dy
dz
=
d
c
b
a
q
pf (x,y ,z) dz
dx
dy
=
b
a
q
p
d
cf (x,y ,z) dy
dz
dx
= ..................
A prova do teorema de Fubini para integrais triplas é completamente análoga à das integraisduplas, que pode ser vista no apêndice.
Exemplo 10.1.
[1] Calcule
Rdx dy dz, onde R = [a, b] × [c, d] × [ p,q].
R
dx dy dz =
b
a
q
p
d
cdy
dz
dx = (d − c) (q − p) (b − a),
que é o volume de R.
[2] Calcule
Rxyz dx dy dz, onde R = [0, 1] × [1, 2] × [0, 3].
R
xyz dx dy dz =
21
10
30
xyz dz
dx
dy =
9
2
21
10
x y d x
dy =
27
8.
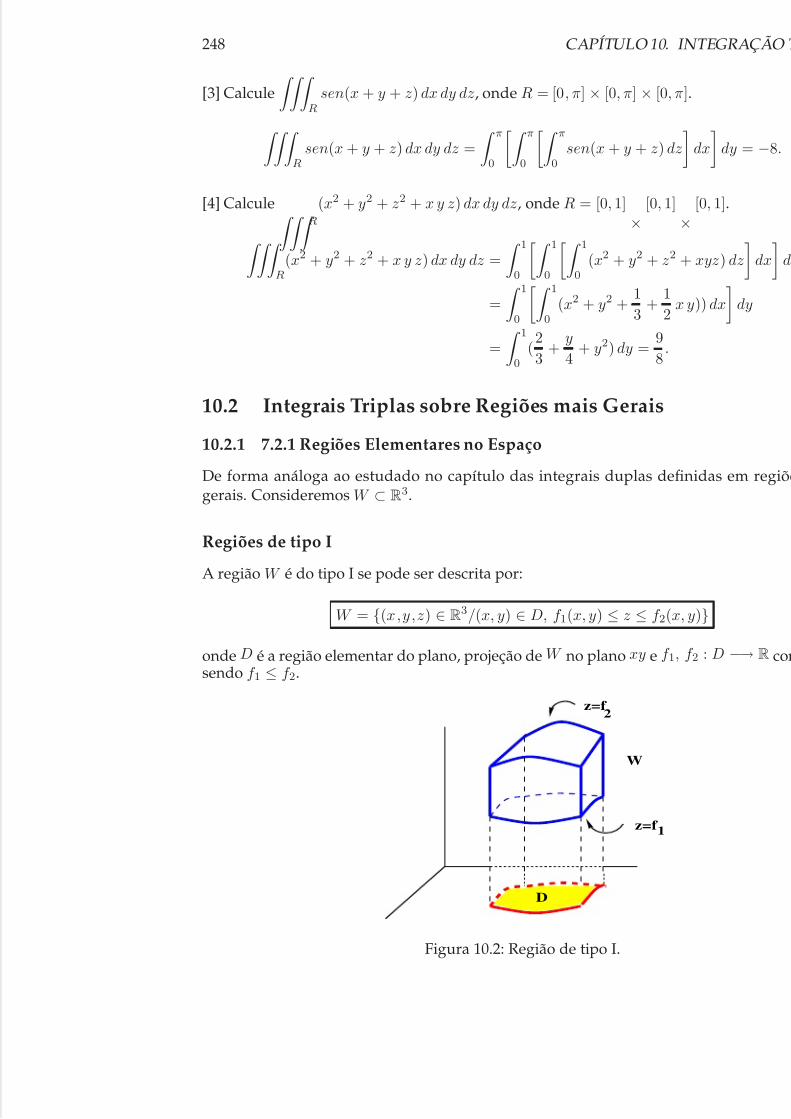
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 248/279
248 CAPÍTULO 10. INTEGRAÇÃO T
[3] Calcule
Rsen(x + y + z) dx dy dz, onde R = [0, π] × [0, π] × [0, π].
R
sen(x + y + z) dx dy dz =
π
0
π
0
π
0sen(x + y + z) dz
dx
dy = −8.
[4] Calcule R
(x2 + y2 + z2 + x y z) dx dy dz, onde R = [0, 1]
×[0, 1]
×[0, 1].
R
(x2 + y2 + z2 + x y z) dx dy dz =
10
10
10
(x2 + y2 + z2 + xyz) dz
dx
d
=
10
10
(x2 + y2 +1
3+
1
2x y)) dx
dy
=
10
(2
3+
y
4+ y2) dy =
9
8.
10.2 Integrais Triplas sobre Regiões mais Gerais
10.2.1 7.2.1 Regiões Elementares no Espaço
De forma análoga ao estudado no capítulo das integrais duplas definidas em regiõegerais. Consideremos W ⊂ R3.
Regiões de tipo I
A região W é do tipo I se pode ser descrita por:
W = {(x,y,z) ∈ R3/(x, y) ∈ D, f 1(x, y) ≤ z ≤ f 2(x, y)}
onde D é a região elementar do plano, projeção de W no plano xy e f 1, f 2 : D −→ R consendo f 1 ≤ f 2.
D
W
z=f
z=f
2
1
Figura 10.2: Região de tipo I.
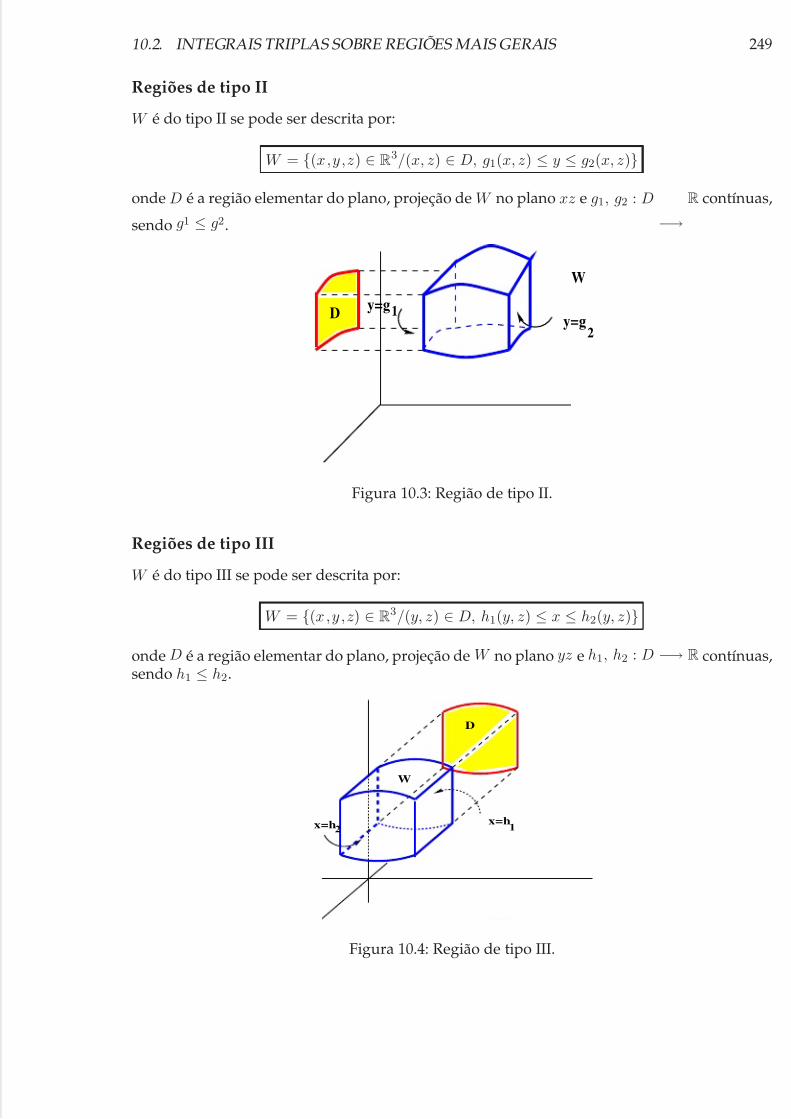
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 249/279
10.2. INTEGRAIS TRIPLAS SOBRE REGIÕES MAIS GERAIS 249
Regiões de tipo II
W é do tipo II se pode ser descrita por:
W = {(x,y,z) ∈ R3/(x, z) ∈ D, g1(x, z) ≤ y ≤ g2(x, z)}
onde D é a região elementar do plano, projeção de W no plano xz e g1, g2 : D
−→R contínuas,
sendo g1 ≤ g2.
W
y=gy=g
2
1D
Figura 10.3: Região de tipo II.
Regiões de tipo III
W é do tipo III se pode ser descrita por:
W = {(x,y ,z) ∈ R3/(y, z) ∈ D, h1(y, z) ≤ x ≤ h2(y, z)}
onde D é a região elementar do plano, projeção de W no plano yz e h1, h2 : D −→ R contínuas,sendo h1 ≤ h2.
W
D
x=hx=h 12
Figura 10.4: Região de tipo III.
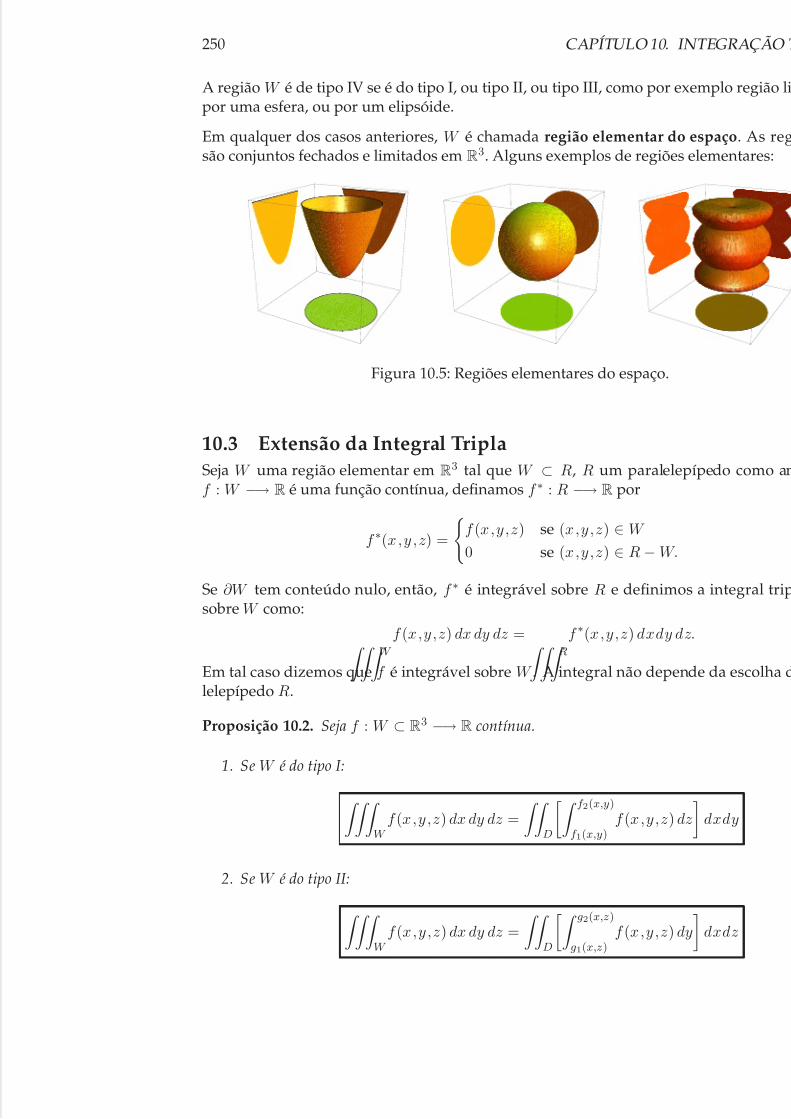
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 250/279
250 CAPÍTULO 10. INTEGRAÇÃO T
A região W é de tipo IV se é do tipo I, ou tipo II, ou tipo III, como por exemplo região lipor uma esfera, ou por um elipsóide.
Em qualquer dos casos anteriores, W é chamada região elementar do espaço. As regsão conjuntos fechados e limitados em R3. Alguns exemplos de regiões elementares:
Figura 10.5: Regiões elementares do espaço.
10.3 Extensão da Integral TriplaSeja W uma região elementar em R3 tal que W ⊂ R, R um paralelepípedo como anf : W −→ R é uma função contínua, definamos f ∗ : R −→ R por
f ∗(x,y ,z) =
f (x,y,z) se (x,y,z) ∈ W
0 se (x,y,z) ∈ R − W.
Se ∂W tem conteúdo nulo, então, f ∗ é integrável sobre R e definimos a integral tripsobre W como:
W
f (x,y,z) dx dy dz = R
f ∗(x,y,z) dxdy dz.
Em tal caso dizemos que f é integrável sobre W . A integral não depende da escolha dlelepípedo R.
Proposição 10.2. Seja f : W ⊂ R3 −→ R contínua.
1. Se W é do tipo I:
W
f (x,y,z) dx dy dz =
D
f 2(x,y)
f 1(x,y)f (x,y,z) dz
dxdy
2. Se W é do tipo II:
W
f (x,y,z) dx dy dz =
D
g2(x,z)
g1(x,z)f (x,y,z) dy
dxdz
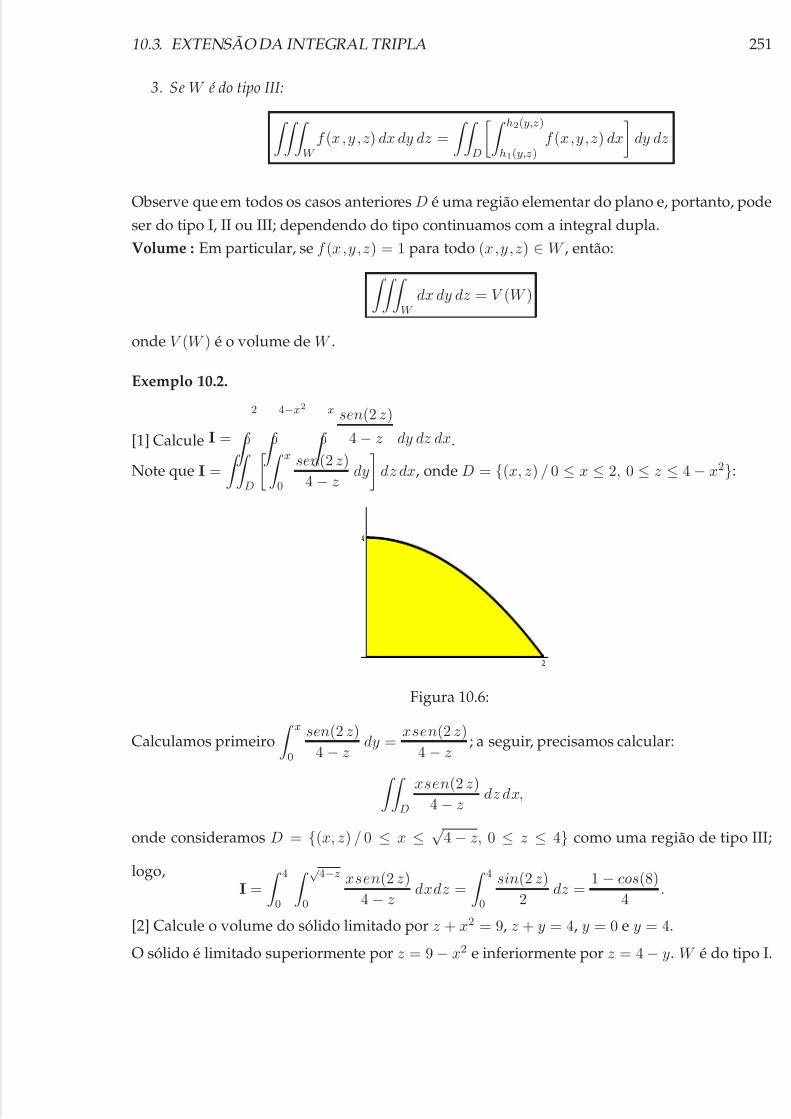
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 251/279
10.3. EXTENSÃO DA INTEGRAL TRIPLA 251
3. Se W é do tipo III:
W
f (x,y ,z) dx dy dz =
D
h2(y,z)
h1(y,z)f (x,y,z) dx
dy dz
Observe que em todos os casos anteriores D é uma região elementar do plano e, portanto, pode
ser do tipo I, II ou III; dependendo do tipo continuamos com a integral dupla.
Volume : Em particular, se f (x,y,z) = 1 para todo (x,y,z) ∈ W , então:
W
dx dy dz = V (W )
onde V (W ) é o volume de W .
Exemplo 10.2.
[1] Calcule I = 20 4−x2
0 x
0
sen(2 z)
4 − z dy dz dx.
Note que I =
D
x
0
sen(2 z)
4 − zdy
dz dx, onde D = {(x, z) / 0 ≤ x ≤ 2, 0 ≤ z ≤ 4 − x2}:
2
4
2
4
Figura 10.6:
Calculamos primeiro x
0
sen(2 z)
4 − zdy =
xsen(2 z)
4 − z; a seguir, precisamos calcular:
D
xsen(2 z)
4 − zdz dx,
onde consideramos D = {(x, z) / 0 ≤ x ≤ √4 − z, 0 ≤ z ≤ 4} como uma região de tipo III;
logo,I =
40
√4−z
0
xsen(2 z)
4 − zdxdz =
40
sin(2 z)
2dz =
1 − cos(8)
4.
[2] Calcule o volume do sólido limitado por z + x2 = 9, z + y = 4, y = 0 e y = 4.
O sólido é limitado superiormente por z = 9 − x2 e inferiormente por z = 4 − y. W é do tipo I.
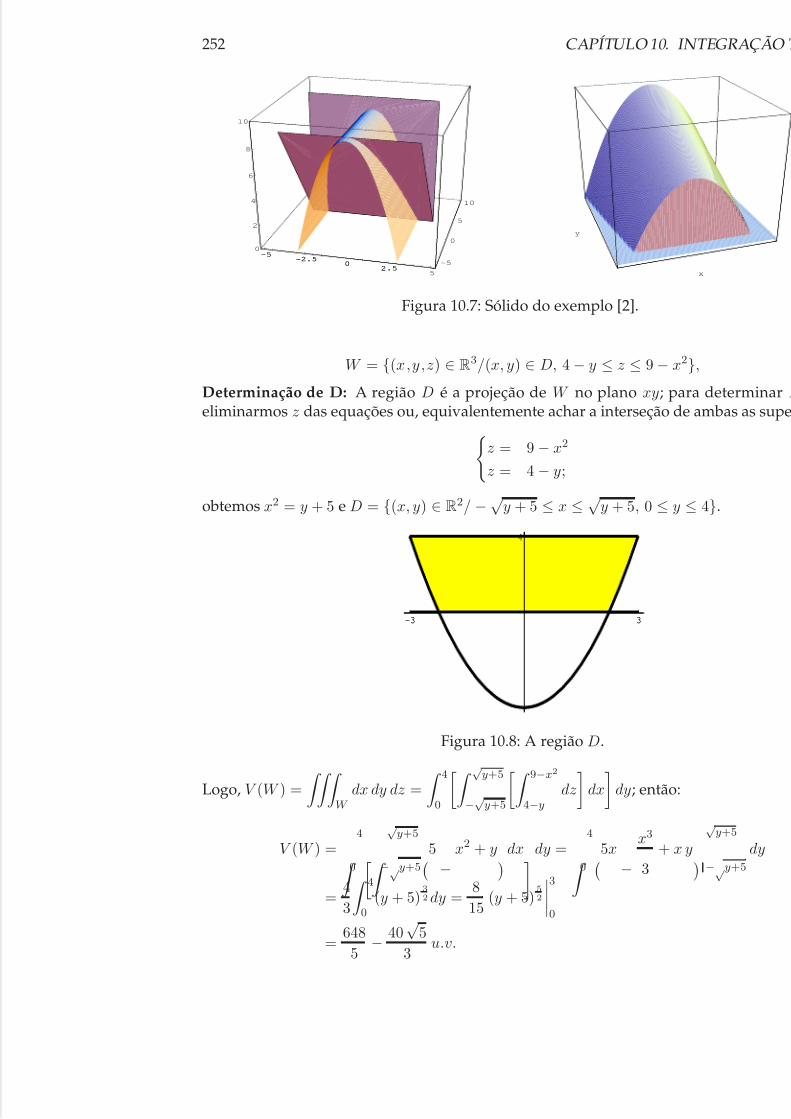
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 252/279
252 CAPÍTULO 10. INTEGRAÇÃO T
-5-2.5
02.5
5
-5
0
5
10
0
2
4
6
8
10
-5-2.5
02.5
x
y
Figura 10.7: Sólido do exemplo [2].
W = {(x,y,z) ∈ R3/(x, y) ∈ D, 4 − y ≤ z ≤ 9 − x2},
Determinação de D: A região D é a projeção de W no plano xy; para determinar Deliminarmos z das equações ou, equivalentemente achar a interseção de ambas as supe
z = 9 − x2
z = 4 − y;
obtemos x2 = y + 5 e D = {(x, y) ∈ R2/ − √y + 5 ≤ x ≤ √
y + 5, 0 ≤ y ≤ 4}.
-3 3
4
-3 3
4
Figura 10.8: A região D.
Logo, V (W ) =
W
dx dy dz =
40
√y+5
−√y+5
9−x2
4−ydz
dx
dy; então:
V (W ) = 4
0
√y+5
−√y+55
−x2 + y dx dy =
4
05x
−x3
3
+ x y√
y+5
−√y+5
dy
=4
3
40
(y + 5)32 dy =
8
15(y + 5)
52
30
=648
5− 40
√5
3u.v.
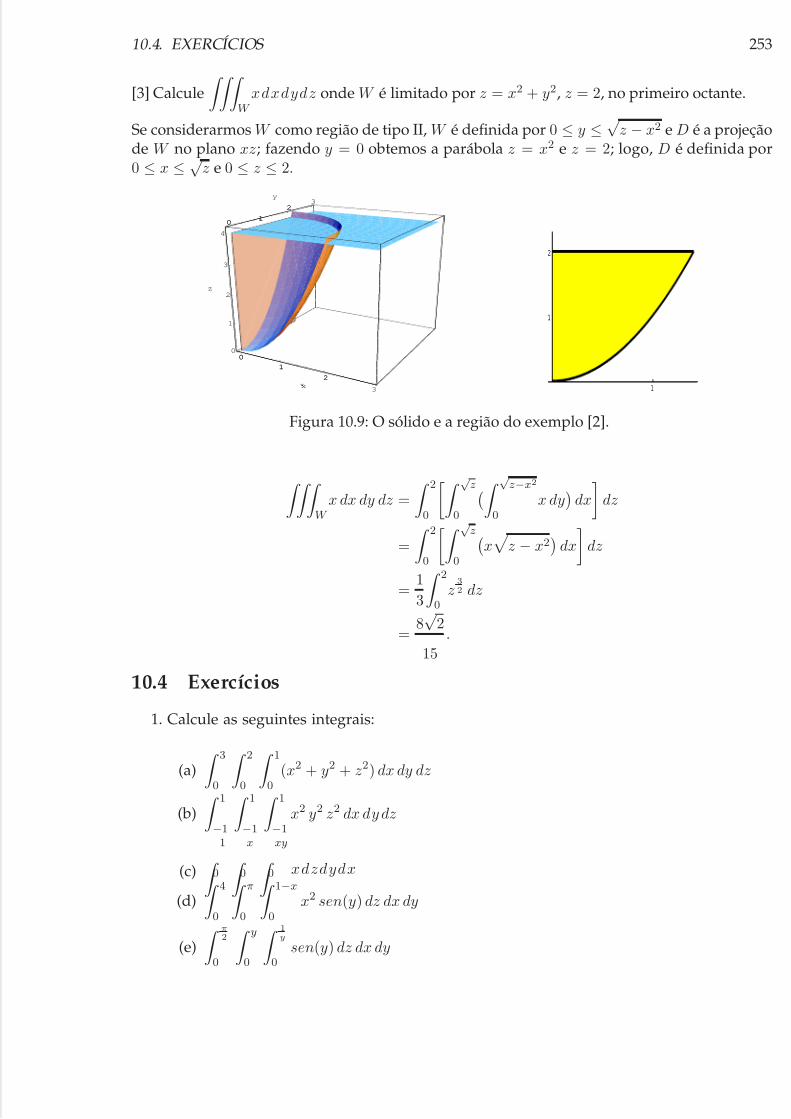
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 253/279
10.4. EXERCÍCIOS 253
[3] Calcule
W xdxdydz onde W é limitado por z = x2 + y2, z = 2, no primeiro octante.
Se considerarmos W como região de tipo II, W é definida por 0 ≤ y ≤ √z − x2 e D é a projeção
de W no plano xz; fazendo y = 0 obtemos a parábola z = x2 e z = 2; logo, D é definida por0 ≤ x ≤ √
z e 0 ≤ z ≤ 2.
0
1
2
3x
01
23
y
0
1
2
3
4
z
0
1
2
01
2
1
2
1
1
2
1
Figura 10.9: O sólido e a região do exemplo [2].
W
x dx dy dz =
20
√z
0
√z−x2
0x dy
dx
dz
=
20
√z
0
x
z − x2
dx
dz
=1
3
20
z32 dz
=8√
2
15
.
10.4 Exercícios
1. Calcule as seguintes integrais:
(a) 30
20
10
(x2 + y2 + z2) dx dy dz
(b) 1−1
1−1
1−1
x2 y2 z2 dx dy dz
(c) 10 x
0 xy
0 xdzdydx
(d) 40
π
0
1−x
0x2 sen(y) dz dx dy
(e) π
2
0
y
0
1y
0sen(y) dz dx dy
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 254/279
254 CAPÍTULO 10. INTEGRAÇÃO T
(f) 1−2
x
0
y
0x2 z4 dz dy dx
2. Considere o sólido limitado por x + y + z = 3, x + y − z = 1 e os planos coordCalcule o volume do sólido, fazendo:
(a)
dz
dy
dx
(b)
dx
dy
dz
(c)
dy
dx
dz
(d)
dx
dz
dy
3. Calcule
W x dx dy dz se W é o paralelepípedo limitado pelos planos x = 2, yz = 1.
4. Calcule
W z2 dx dy dz se W é o sólido limitado pelo cilindro x2+y2 = 1 e pelos
z = 0 e z = 4.
5. Calcule
W
dx dy dz
(x + y + z + 1)3se W é o sólido limitado pelo plano x + y + z = 1
planos coordenados.
6. Calcule
W (x3 + y3 + z3) dx dy dz se W é o sólido limitado pela esfera:
(x − a)2 + (y − a)2 + (z − a)2 = a2.
7. Calcule
W z
x2 + y2 dx dy dz se W é o sólido limitado pelo cilindro x2 + y2
os planos y = 0, z = 0 e z = a.
8. Determine o volume do sólido limitado pelos planos 4 y + 2 x + z = 8, x = 0, yz = 0.
9. Determine o volume do sólido limitado por z = 9 − x2, z = 5 − y, y = 0 e y = 5.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 255/279
Capítulo 11
MUDANÇA DE COORDENADAS
11.1 Introdução
Sejam W ∗ uma região elementar no espaço e x, y e z as seguintes funções:
x, y, z : W ∗ −→ R,
onde x = x(u,v,w), y = y(u,v,w) e z = z(u,v,w) são funções contínuas e com derivadas par-ciais contínuas num paralelepípedo aberto R tal que W ∗ ⊂ R, Estas três funções determinamuma transformação do espaço uvw no espaço xyz. De fato:
T : W ∗ −→ R3,
onde T (u,v,w) = (x(u,v,w), y(u,v,w), z(u,v,w)).
A transformação T é também denotada por:
x = x(u,v,w)
y = y(u,v,w)
z = z(u,v,w), (u,v,w) ∈ W ∗Denotemos a imagem de W ∗ por T como W = T (W ∗), contida no espaço xyz.
Definição 11.1.
1. T é injetiva em W ∗ se T ((u1, v1, w1)) = T ((u2, v2, w2)) para todos (u1, v1, w1), (u2, v2, w2) ∈W ∗ implica em u1 = u2, v1 = v2 e w1 = w2.
2. O determinante Jacobiano de T é denotado e definido por:
∂ (x,y,z)∂ (u,v,w)
= det
∂x
∂u
∂x
∂v
∂x
∂w
∂y∂u
∂y∂v
∂y∂w
∂z
∂u
∂z
∂v
∂z
∂w
,
onde as derivadas parciais são calculadas no ponto (u,v,w) ∈ W ∗.
255
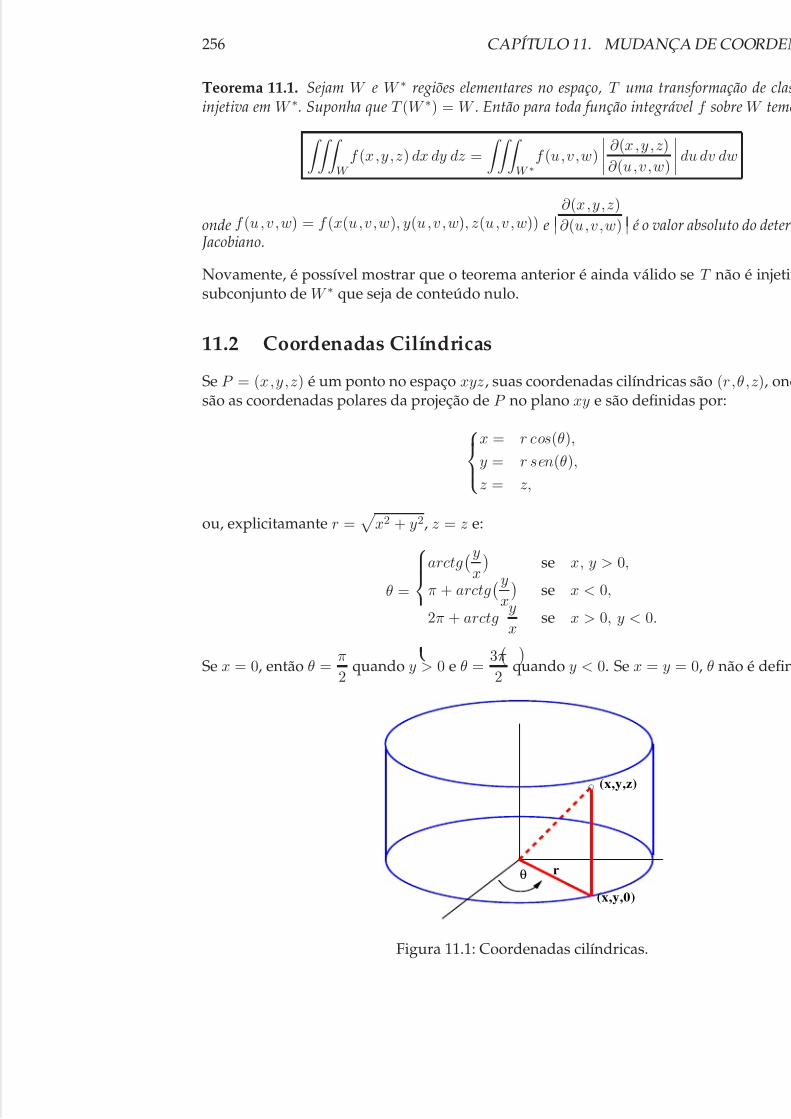
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 256/279
256 CAPÍTULO 11. MUDANÇA DE COORDEN
Teorema 11.1. Sejam W e W ∗ regiões elementares no espaço, T uma transformação de clasinjetiva em W ∗. Suponha que T (W ∗) = W . Então para toda função integrável f sobre W temo
W
f (x,y,z) dx dy dz =
W ∗
f (u,v,w)
∂ (x,y ,z)
∂ (u,v,w)
du dv dw
onde f (u,v,w) = f (x(u,v,w), y(u,v,w), z(u,v,w)) e ∂ (x,y,z)
∂ (u,v,w) é o valor absoluto do determ
Jacobiano.
Novamente, é possível mostrar que o teorema anterior é ainda válido se T não é injetivsubconjunto de W ∗ que seja de conteúdo nulo.
11.2 Coordenadas Cilíndricas
Se P = (x,y,z) é um ponto no espaço xyz, suas coordenadas cilíndricas são (r,θ,z), ondsão as coordenadas polares da projeção de P no plano xy e são definidas por:
x = r cos(θ),
y = r sen(θ),
z = z,
ou, explicitamante r =
x2 + y2, z = z e:
θ =
arctgy
x
se x, y > 0,
π + arctgy
x
se x < 0,
2π + arctg
y
xse x > 0, y < 0.
Se x = 0, então θ =π
2quando y > 0 e θ =
3π
2quando y < 0. Se x = y = 0, θ não é defin
(x,y,z)
rθ
(x,y,0)
Figura 11.1: Coordenadas cilíndricas.
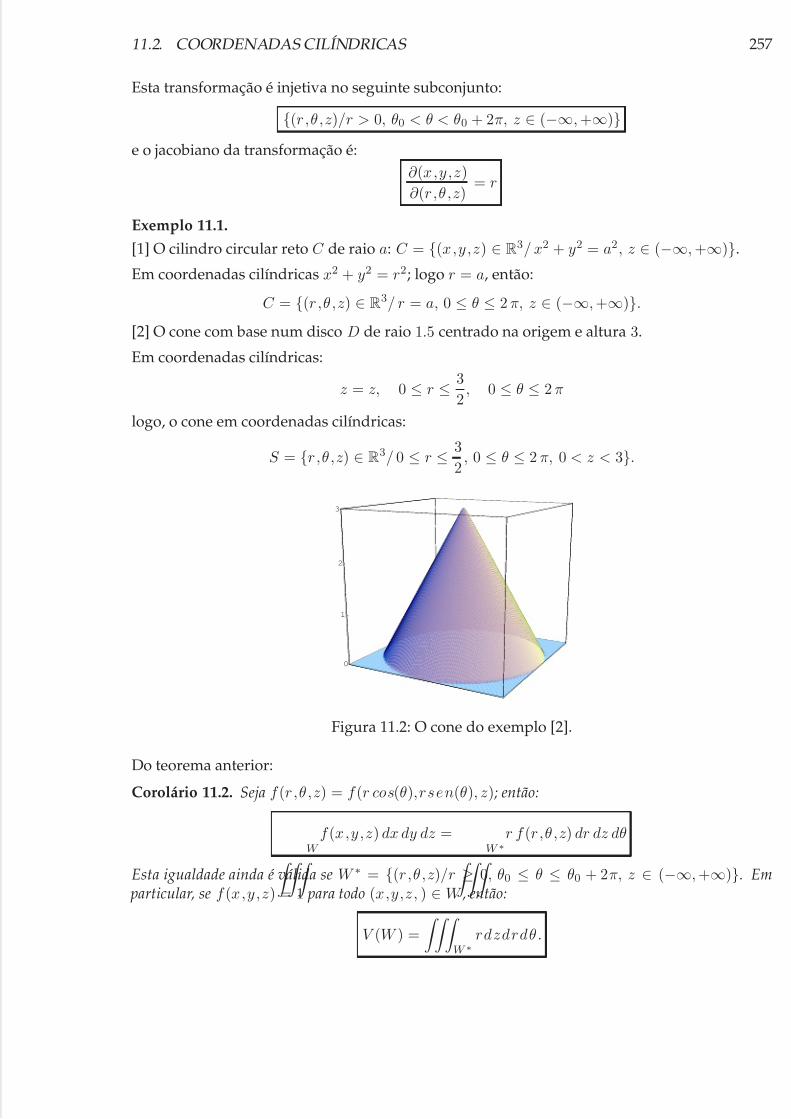
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 257/279
11.2. COORDENADAS CILÍNDRICAS 257
Esta transformação é injetiva no seguinte subconjunto:
{(r,θ,z)/r > 0, θ0 < θ < θ0 + 2π, z ∈ (−∞, +∞)}e o jacobiano da transformação é:
∂ (x,y,z)
∂ (r,θ,z)= r
Exemplo 11.1.
[1] O cilindro circular reto C de raio a: C = {(x,y,z) ∈ R3/ x2 + y2 = a2, z ∈ (−∞, +∞)}.
Em coordenadas cilíndricas x2 + y2 = r2; logo r = a, então:
C = {(r,θ,z) ∈ R3/ r = a, 0 ≤ θ ≤ 2 π, z ∈ (−∞, +∞)}.
[2] O cone com base num disco D de raio 1.5 centrado na origem e altura 3.
Em coordenadas cilíndricas:
z = z, 0 ≤ r ≤ 3
2, 0 ≤ θ ≤ 2 π
logo, o cone em coordenadas cilíndricas:
S = {r,θ,z) ∈ R3/ 0 ≤ r ≤ 3
2, 0 ≤ θ ≤ 2 π, 0 < z < 3}.
0
1
2
3
Figura 11.2: O cone do exemplo [2].
Do teorema anterior:
Corolário 11.2. Seja f (r,θ,z) = f (r cos(θ),rsen(θ), z) ; então:
W f (x,y,z) dx dy dz =
W ∗r f (r,θ,z) dr dz dθ
Esta igualdade ainda é válida se W ∗ = {(r,θ,z)/r ≥ 0, θ0 ≤ θ ≤ θ0 + 2π, z ∈ (−∞, +∞)}. Em particular, se f (x,y,z) = 1 para todo (x,y,z, ) ∈ W , então:
V (W ) =
W ∗
rdzdrdθ.
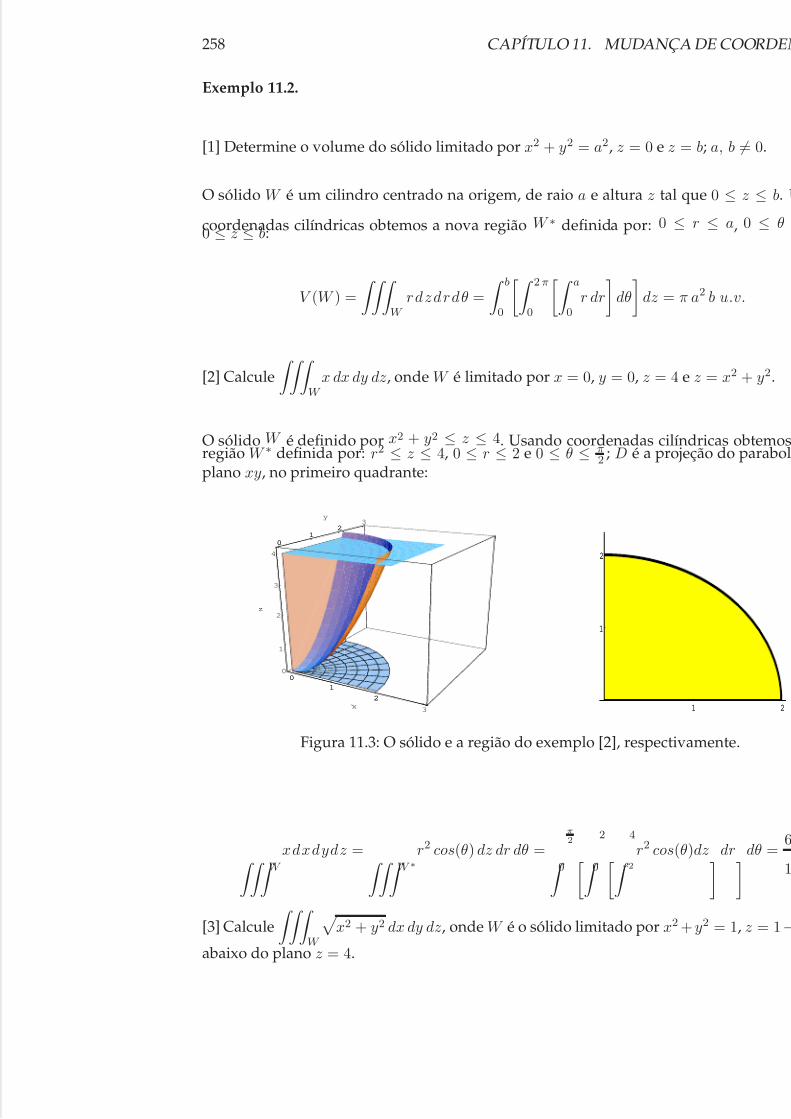
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 258/279
258 CAPÍTULO 11. MUDANÇA DE COORDEN
Exemplo 11.2.
[1] Determine o volume do sólido limitado por x2 + y2 = a2, z = 0 e z = b; a, b = 0.
O sólido W é um cilindro centrado na origem, de raio a e altura z tal que 0 ≤ z ≤ b. U
coordenadas cilíndricas obtemos a nova região W ∗ definida por: 0 ≤ r ≤ a, 0 ≤ θ0 ≤ z ≤ b:
V (W ) =
W
r dz dr dθ =
b
0
2π
0
a
0r dr
dθ
dz = π a2 b u.v.
[2] Calcule
W x dx dy dz, onde W é limitado por x = 0, y = 0, z = 4 e z = x2 + y2.
O sólido W é definido por x2 + y2 ≤ z ≤ 4. Usando coordenadas cilíndricas obtemosregião W ∗ definida por: r2 ≤ z ≤ 4, 0 ≤ r ≤ 2 e 0 ≤ θ ≤ π
2 ; D é a projeção do parabolplano xy, no primeiro quadrante:
0
1
2
3x
0
12
3y
0
1
2
3
4
z
0
1
2
0
12
1 2
2
1
1 2
2
1
Figura 11.3: O sólido e a região do exemplo [2], respectivamente.
W
xdxdydz = W ∗
r2 cos(θ) dz dr dθ = π2
0
2
0
4
r2r2 cos(θ)dz drdθ =
6
1
[3] Calcule
W
x2 + y2 dx dy dz, onde W é o sólido limitado por x2 + y2 = 1, z = 1−
abaixo do plano z = 4.
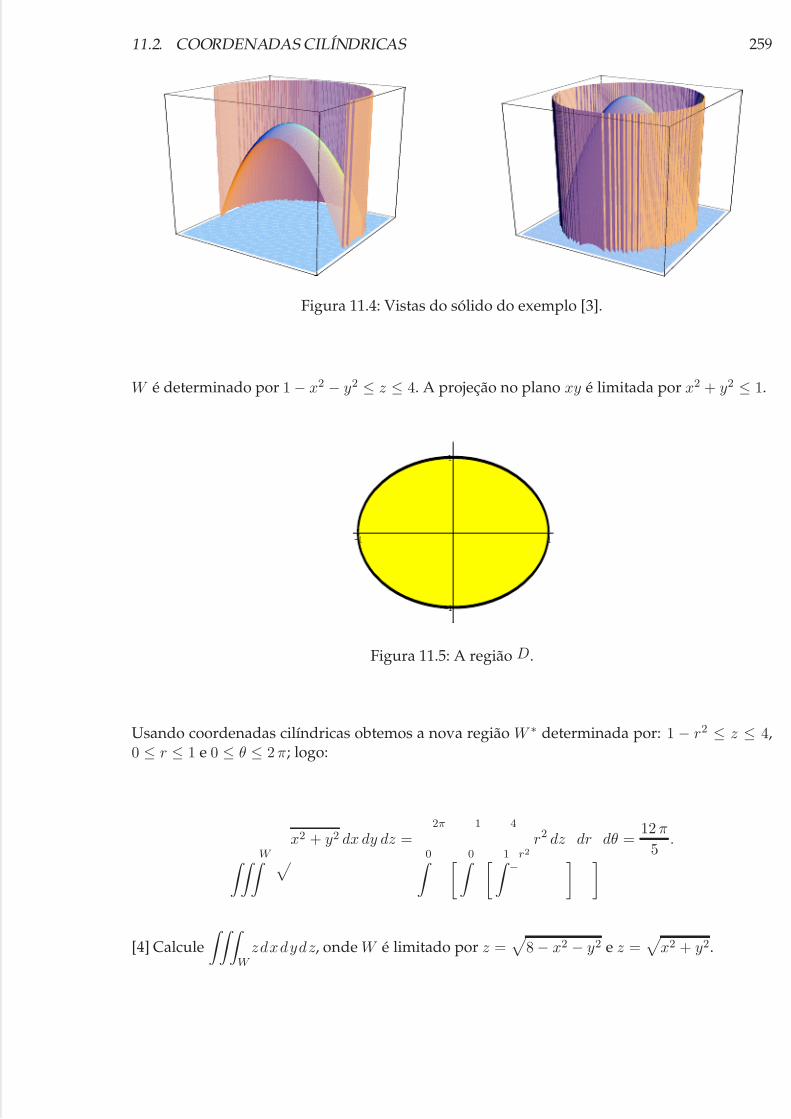
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 259/279
11.2. COORDENADAS CILÍNDRICAS 259
Figura 11.4: Vistas do sólido do exemplo [3].
W é determinado por 1 − x2 − y2 ≤ z ≤ 4. A projeção no plano xy é limitada por x2 + y2 ≤ 1.
1-1
-1
1
1-1
-1
1
Figura 11.5: A região D.
Usando coordenadas cilíndricas obtemos a nova região W ∗ determinada por: 1 − r2 ≤ z ≤ 4,0 ≤ r ≤ 1 e 0 ≤ θ ≤ 2 π; logo:
W x2 + y2 dx dy dz =
2π
0 1
0 4
1−
r2r2 dz drdθ =
12 π
5.
[4] Calcule
W z dxdy dz, onde W é limitado por z =
8 − x2 − y2 e z =
x2 + y2.
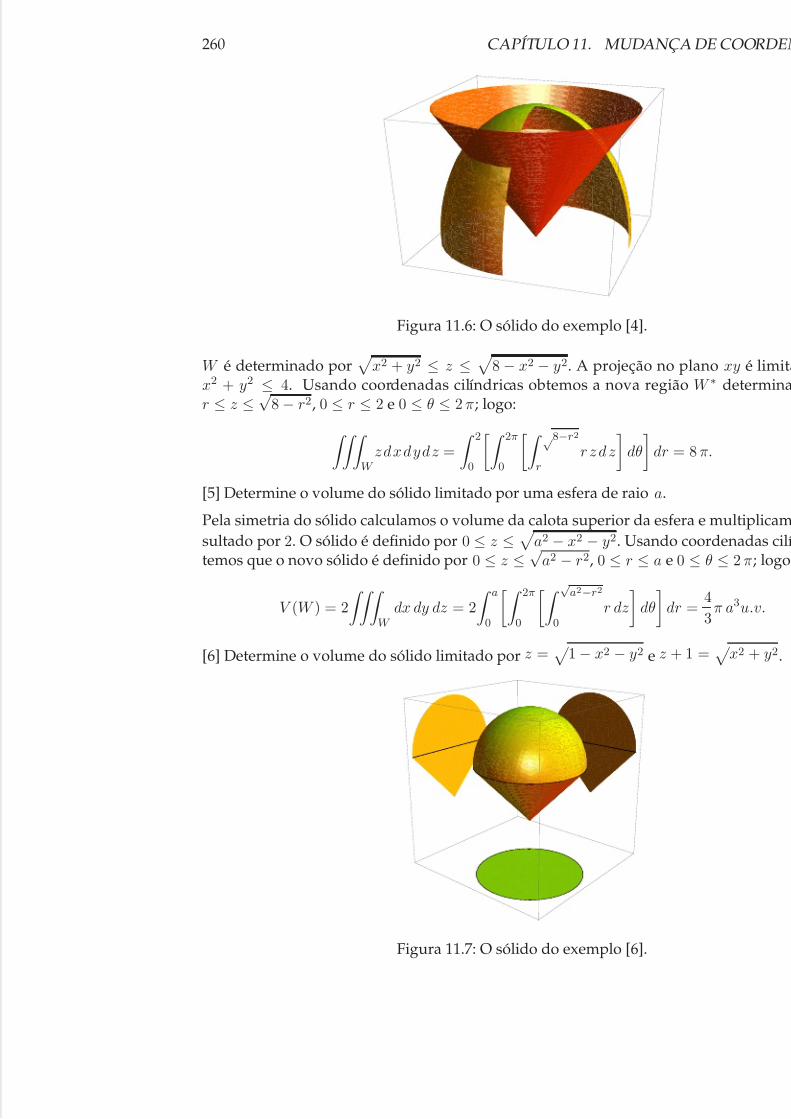
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 260/279
260 CAPÍTULO 11. MUDANÇA DE COORDEN
Figura 11.6: O sólido do exemplo [4].
W é determinado por
x2 + y2 ≤ z ≤
8 − x2 − y2. A projeção no plano xy é limitax2 + y2 ≤ 4. Usando coordenadas cilíndricas obtemos a nova região W ∗ determinar ≤ z ≤ √
8 − r2, 0 ≤ r ≤ 2 e 0 ≤ θ ≤ 2 π; logo:
W
z dxdy dz =
20
2π
0
√8−r2
rr z d z
dθ
dr = 8 π.
[5] Determine o volume do sólido limitado por uma esfera de raio a.
Pela simetria do sólido calculamos o volume da calota superior da esfera e multiplicamsultado por 2. O sólido é definido por 0 ≤ z ≤
a2 − x2 − y2. Usando coordenadas cilí
temos que o novo sólido é definido por 0 ≤ z ≤ √a2 − r2, 0 ≤ r ≤ a e 0 ≤ θ ≤ 2 π; logo
V (W ) = 2
W
dx dy dz = 2
a
0
2π
0
√a2−r2
0r dz
dθ
dr =
4
3π a3u.v.
[6] Determine o volume do sólido limitado por z =
1 − x2 − y2 e z + 1 =
x2 + y2.
Figura 11.7: O sólido do exemplo [6].
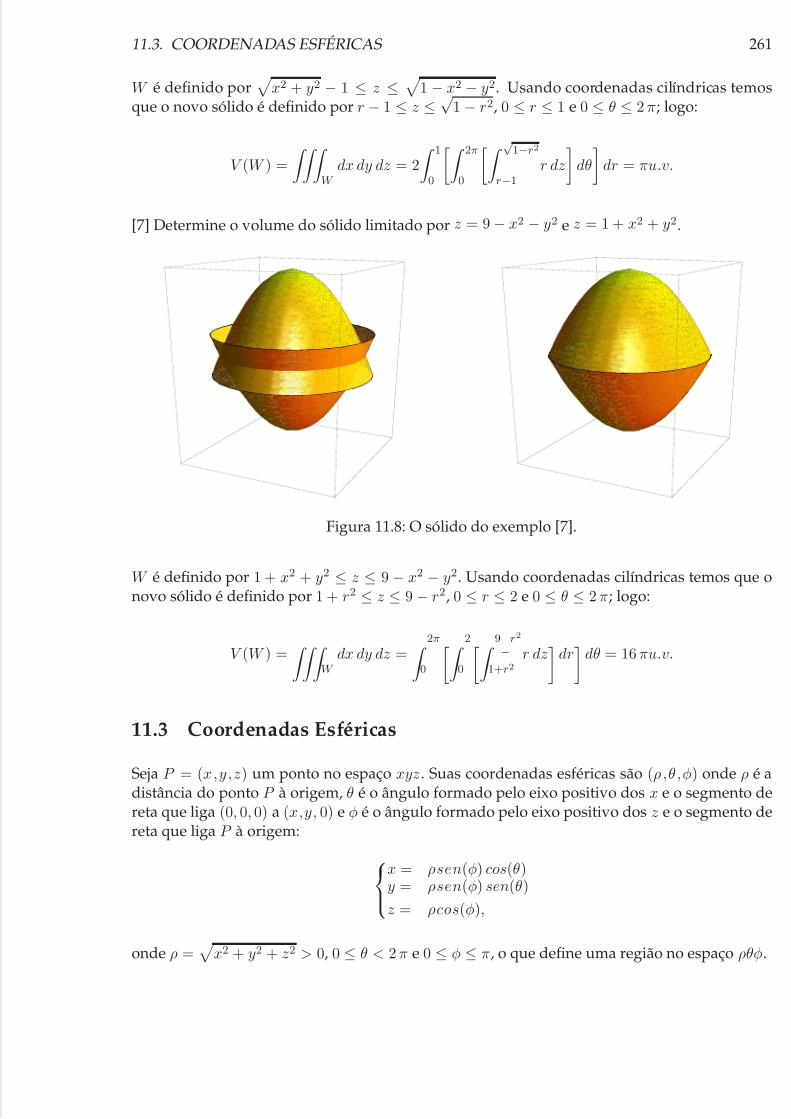
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 261/279
11.3. COORDENADAS ESFÉRICAS 261
W é definido por
x2 + y2 − 1 ≤ z ≤
1 − x2 − y2. Usando coordenadas cilíndricas temosque o novo sólido é definido por r − 1 ≤ z ≤ √
1 − r2, 0 ≤ r ≤ 1 e 0 ≤ θ ≤ 2 π; logo:
V (W ) =
W
dx dy dz = 2
10
2π
0
√1−r2
r−1r dz
dθ
dr = πu.v.
[7] Determine o volume do sólido limitado por z = 9 − x2 − y2 e z = 1 + x2 + y2.
Figura 11.8: O sólido do exemplo [7].
W é definido por 1 + x2 + y2 ≤ z ≤ 9 − x2 − y2. Usando coordenadas cilíndricas temos que onovo sólido é definido por 1 + r2 ≤ z ≤ 9 − r2, 0 ≤ r ≤ 2 e 0 ≤ θ ≤ 2 π; logo:
V (W ) =
W dx dy dz =
2π
0
20
9−r2
1+r2r dz
dr
dθ = 16 πu.v.
11.3 Coordenadas Esféricas
Seja P = (x,y,z) um ponto no espaço xyz. Suas coordenadas esféricas são (ρ,θ,φ) onde ρ é adistância do ponto P à origem, θ é o ângulo formado pelo eixo positivo dos x e o segmento dereta que liga (0, 0, 0) a (x,y, 0) e φ é o ângulo formado pelo eixo positivo dos z e o segmento dereta que liga P à origem:
x = ρsen(φ) cos(θ)y = ρsen(φ) sen(θ)
z = ρcos(φ),
onde ρ =
x2 + y2 + z2 > 0, 0 ≤ θ < 2 π e 0 ≤ φ ≤ π, o que define uma região no espaço ρθφ.
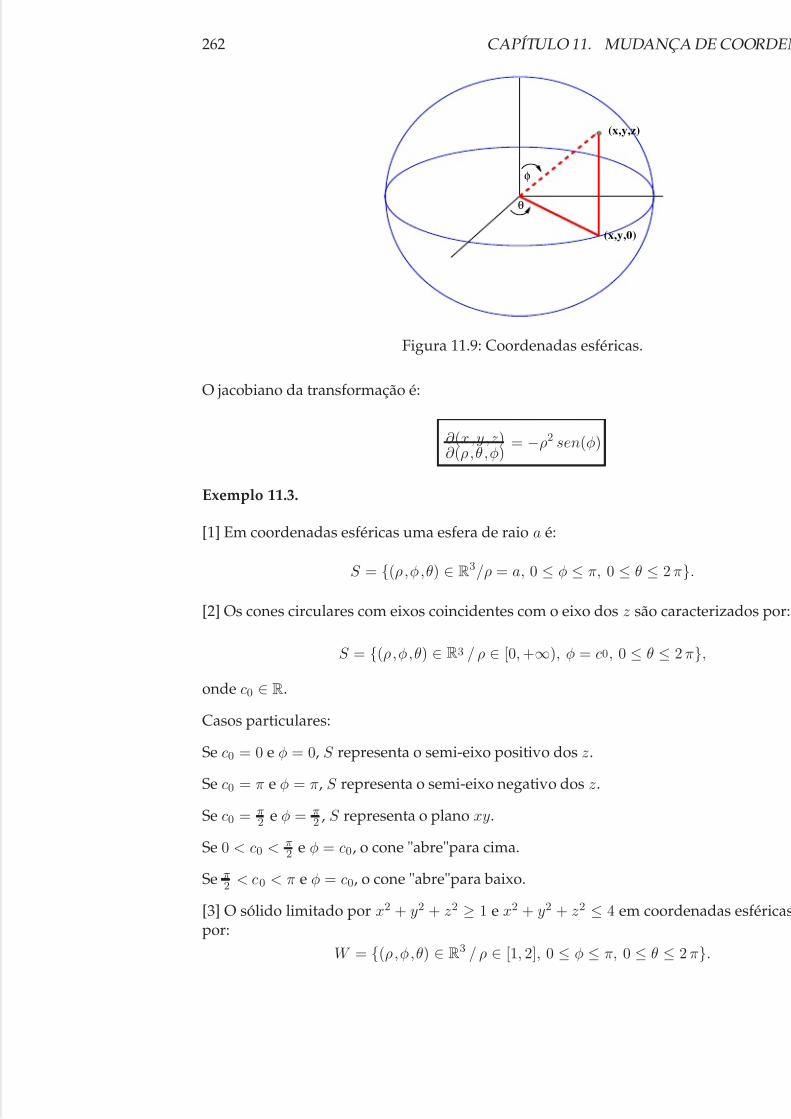
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 262/279
262 CAPÍTULO 11. MUDANÇA DE COORDEN
(x,y,z)
(x,y,0)
θ
φ
Figura 11.9: Coordenadas esféricas.
O jacobiano da transformação é:
∂ (x,y,z)∂ (ρ,θ,φ)
= −ρ2 sen(φ)
Exemplo 11.3.
[1] Em coordenadas esféricas uma esfera de raio a é:
S = {(ρ,φ,θ) ∈ R3/ρ = a, 0 ≤ φ ≤ π, 0 ≤ θ ≤ 2 π}.
[2] Os cones circulares com eixos coincidentes com o eixo dos z são caracterizados por:
S = {(ρ,φ,θ) ∈ R3 / ρ ∈ [0, +∞), φ = c0, 0 ≤ θ ≤ 2 π},
onde c0 ∈ R.
Casos particulares:
Se c0 = 0 e φ = 0, S representa o semi-eixo positivo dos z.
Se c0 = π e φ = π, S representa o semi-eixo negativo dos z.
Se c0 = π2 e φ = π
2 , S representa o plano xy.
Se 0 < c0 < π2 e φ = c0, o cone "abre"para cima.
Se π2 < c0 < π e φ = c0, o cone "abre"para baixo.
[3] O sólido limitado por x2 + y2 + z2 ≥ 1 e x2 + y2 + z2 ≤ 4 em coordenadas esféricaspor:
W = {(ρ,φ,θ) ∈ R3 / ρ ∈ [1, 2], 0 ≤ φ ≤ π, 0 ≤ θ ≤ 2 π}.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 263/279
11.3. COORDENADAS ESFÉRICAS 263
2
1
0
1
2
21 0 1 2
2
1
0
1
2
Figura 11.10: Sólido do exemplo [3].
Do teorema anterior:
Corolário 11.3. Seja f (ρ,θ,φ) = f (ρcos(θ)sen(φ),ρsen(θ)sen(φ), ρcos(φ)), então:
W
f (x,y ,z) dx dy dz =
W ∗
ρ2sen(φ) f (ρ,θ,φ) dρ dθ dφ
Esta igualdade ainda é válida se W ∗ = {(ρ,θ,φ) / ρ ∈ [0, +∞), 0 ≤ θ ≤ 2 π, 0 ≤ φ ≤ π}. Em particular, se f (x,y,z) = 1 para todo (x,y,z, ) ∈ W , então:
V (W ) =
W ∗
ρ2sen(φ) dρdθ dφ
Exemplo 11.4.
[1] Calcule o volume do sólido limitado por uma esfera de raio a centrada na origem.
W
dx dy dz =
a
0
π
0
2π
0ρ2sen(φ) dθ
dφ
dρ
= 2π
a
0
π
0ρ2sen(φ) dφ
dρ
=2
3πa3
π
0sen(φ) dπ
=4
3πa3u.v.
[2] Calcule
W e√
(x2+y2+z2)3dx dy dz onde W é o sólido limitado por x2 + y2 + z2 = 1.
Usando coordenadas esféricas temos 0 ≤ ρ ≤ 1, 0 ≤ θ ≤ 2 π e 0 ≤ φ ≤ π, que define uma região
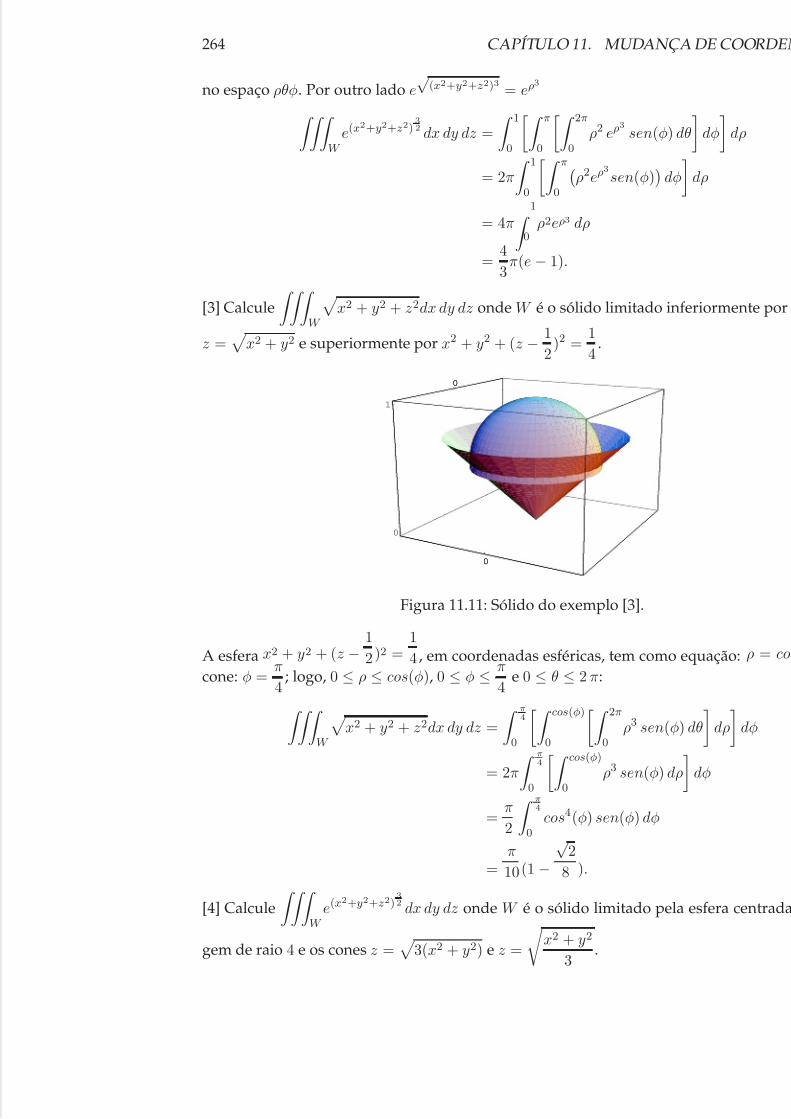
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 264/279
264 CAPÍTULO 11. MUDANÇA DE COORDEN
no espaço ρθφ. Por outro lado e√
(x2+y2+z2)3 = eρ3
W
e(x2+y2+z2)32 dx dy dz =
10
π
0
2π
0ρ2 eρ3 sen(φ) dθ
dφ
dρ
= 2π
10
π
0
ρ2eρ3sen(φ)
dφ
dρ
= 4π 10
ρ2eρ3 dρ
=4
3π(e − 1).
[3] Calcule
W
x2 + y2 + z2dx dy dz onde W é o sólido limitado inferiormente por
z =
x2 + y2 e superiormente por x2 + y2 + (z − 1
2)2 =
1
4.
0
0
0
1
0
0
Figura 11.11: Sólido do exemplo [3].
A esfera x2 + y2 + (z −1
2 )2 =1
4 , em coordenadas esféricas, tem como equação: ρ = cos
cone: φ =π
4; logo, 0 ≤ ρ ≤ cos(φ), 0 ≤ φ ≤ π
4e 0 ≤ θ ≤ 2 π:
W
x2 + y2 + z2dx dy dz =
π4
0
cos(φ)
0
2π
0ρ3 sen(φ) dθ
dρ
dφ
= 2π
π4
0
cos(φ)
0ρ3 sen(φ) dρ
dφ
=π
2
π4
0cos4(φ) sen(φ) dφ
=π
10 (1 −√
2
8 ).
[4] Calcule
W e(x2+y2+z2)
32 dx dy dz onde W é o sólido limitado pela esfera centrada
gem de raio 4 e os cones z =
3(x2 + y2) e z =
x2 + y2
3.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 265/279
11.4. EXERCÍCIOS 265
-4-2
02
4
-4
-2
0
2
40
1
2
3
4
0
1
2
Figura 11.12: Sólido do exemplo [4].
Usando coordenadas esféricas a equação da esfera x2 + y2 + z2 = 16 é ρ = 4 e as dos cones
z = 3(x2 + y2) e z = x2 + y2
3são, φ =
π
6e φ =
π
3, respectivamente; logo, a região no
espaço ρθφ é definida por: 0 ≤ ρ ≤ 4, 0 ≤ θ ≤ 2π eπ
6≤ φ ≤ π
3:
W
e(x2+y2+z2)32 dx dy dz =
2π
0
π3
π6
40
ρ2 eρ3 sen(φ) dρ
dφ
dθ =
π
3(√
3 − 1)(e64 − 1).
11.4 Exercícios
1. Faça a mudança de variável necessária para calcular as seguintes integrais:
(a) 2−2
√4−x2
−√4−x2
4x2+y2
xdzdydx.
(b) 20
√4−x2
0
√16−x2−y2
0
x2 + y2 dz dy dx.
(c) 1−1
√1−x2
−√1−x2
1+√1−x2−y2
1xdz dydx.
(d) 10
√1−x2
0
√1−x2−y2
0 x2 + y2 + z2 dz dy dx.
2. Calcule:
(a)
W xdxdydz, onde W é o sólido limitado pelos planos x = 0, y = 0, z = 2 e peloparabolóide z = x2 + y2.
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 266/279
266 CAPÍTULO 11. MUDANÇA DE COORDEN
(b)
W xdxdydz, onde W é o sólido limitado pelo parabolóide x = 4 z2 + 4 y2
plano x = 4.
(c)
W 6 xy dxdy dz , onde W está acima da região plana limitada pelas curvas yy = 0, x = 1 e abaixo do plano z = 1 + x + y.
(d)
W xy dxdy dz, onde W é o tetraedro de vértices (0, 0, 0), (1, 0, 0), (0, 2, 0) e
3. Determine o volume:
(a) do sólido limitado pelo cilindro x = y2 e pelos planos z = 0 e x + z = 1.
(b) do sólido limitado pelo cilindro y = cos(x) e pelos planos z = y, x = 0, xz = 0.
4. O valor médio de uma função w = f (x,y ,z) sobre a região W é definido por:
V M =1
vol(W )
W
f (x,y,z) dxdy dz.
Determine o valor médio da função f (x,y,z) = x y z sobre o cubo com lados de cmento L que está no primeiro octante com um vértice na origem e arestas paraleeixos coordenados.
5. Calcule, usando coordenadas cilíndricas:
(a)
W
x2 + y2 dx dy dz, onde W é a região contida dentro do cilindro x2 +
e entre os planos z = −5 e z = 4.
(b)
W x2 + y2
dx dy dz, onde W é o cone
x2 + y2 ≤ z ≤ 1.
(c)
W
1 +
x2 + y2
dx dy dz, onde W = {(x,y,z) ∈ R3 /
x2 + y2 ≤ z ≤ 1
6. Calcule, usando coordenadas esféricas:
(a)
W
x2 + y2 + z2 dx dy dz, onde W é o sólido limitado por abaixo pelo co
π6 e acima pela esfera ρ = 2.
(b)
W
x2 + y2 + z2
dx dy dz, onde W = {(x,y,z) ∈ R3 / x2 + y2 + z2 ≤ 1}.
(c)
W
dxdydz x2 + y2 + z2
3 , onde W é o sólido limitado pelas esferas x
2
+ y2
+
e x2 + y2 + z2 = b2, (a < b).
(d)
W
dx dy dz
z2, onde W é o sólido limitado pelas superfícies
z =
x2 + y2, z =
1 − x2 − y2 e z =
4 − x2 − y2.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 267/279
11.4. EXERCÍCIOS 267
(e)
W
x2 + y2 + z2 dx dy dz, onde
W = {(x,y,z) ∈ R3 / x2 + y2 + z2 ≤ 2 z , 1 ≤ z}.
7. Calcule o volume do sólido limitado:
(a) Por z = 4 − x2 − y2 e pelo plano xy.(b) Por z = x2 + y2 e x2 + y2 + z2 = 2.
(c) Por z = x2 + 9 y2 e z = 18 − x2 − 9 y2.
(d) Por z = 2 x2 + 2 y2 e z = 48 − x2 − y2.
8. Calcule
W
x2
a2+
y2
b2+
y2
c2
dx dy dz, onde a, b, c > 0 e o sólido definido por:
W = {(x,y,z) ∈ R3 / x2
a2+ y2
b2+ y2
c2≤ 1}.
9. Calcule
W x y z d x d y d z, onde W é formado pelo primeiro octante do elipsóide do
exercício anterior, (x, y, z ≥ 0).
10. Utilizando coordenadas cilíndricas, calcule:
(a)
W (x2 + y + z2)3 dx dy dz, onde W é o sólido limitado pelo cilindro x2 + z2 = 1 e
pelos planos y = 0 e y = 1.
(b)
W (x2 + y2) dx dy dz, onde W é o sólido limitado por 2 z = x2 + y2 e z = 2.
(c)
W dx dy dz, onde W é o sólido limitado por x2
+ y2
+ z2
= 2 R z, x2
+ y2
= z2
eque contem o ponto (0, 0, R).
11. Utilizando coordenadas esféricas, calcule:
(a)
W (x2 + y2) dx dy dz, onde W = {(x,y,z) ∈ R3 / x2 + y2 + z2 ≤ a2, z ≥ 0}.
(b)
W
1 + (x2 + y2 + z2)3/2 dx dy dz, onde W = {(x,y ,z) ∈ R3 / x2 + y2 + z2 ≤ 1}.
(c)
W x2 + y2 + z2 dx dy dz, onde W = {(x,y,z) ∈ R3 / x2 + y2 + z2 ≤ x}.
(d)
W adxdydz, onde W = {(x,y,z) ∈ R3 / x2 + y2 + z2 ≤ 1, x ≥ 0}.
12. Calcule o volume do sólido limitado:
(a) pelo cilindro x2 + 4 y2 = 4 e pelos planos z = 0 z = x + 2
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 268/279
268 CAPÍTULO 11. MUDANÇA DE COORDEN
(b) pelo parabolóide z = x2 + y2 e pelo plano z = x
(c) pelos parabolóides z = 9 x2 + y2 e z = 18 − 9 x2 − y2
(d) pelas superfícies z =
x2 + y2 e z = x2 + y2
(e) pela superfície z = 4 − 4 x2 − y2 e o plano xy
(f) pelos cilindros x2 + z2 = 1 e y2 + z2 = 1.(g) pelos planos z = 0, y = 0, z = x e pelo cilindro x2 + y2 = 9
13. Se W é um sólido não homogêneo com densidade em cada ponto dada por w = f (a massa de W é definida por:
M W =
W
f (x,y,z) dx dy dz.
As coordenadas do centro de massa do sólido W são definidas por:
x =
W
x f (x,y,z) dx dy dz
M W , y =
W
y f (x,y,z) dx dy dz
M W
e
z =
W
z f (x,y,z) dx dy dz
M W
(a) Calcule a massa de W = {(x,y,z) ∈ R3 / x2 + y2 ≤ 9, 0 ≤ z ≤ 9 − x2 − ydensidade é f (x,y ,z) = z
(b) Calcule o centro de massa do sólido limitado por z2 = x y, x = 5, y = 5 e z =densidade é f (x,y ,z) = 1
(c) Calcule o centro de massa do sólido limitado pela esfera x2 + y2 + z2 = a2 e acima do plano z = 0, sabendo que a densidade em cada ponto é proporcdistância do ponto ao centro da esfera.
(d) Se a densidade num ponto de uma estrla esférica gaseosa é dada por f = C eonde C > 0, R é o raio da estrela e ρ é a distância do ponto ao centro da Calcule a massa da estrela
14. Se W é um sólido não homogêneo com densidade em cada ponto dada por w = f (então os momentos de inércia em torno dos eixos coordenados são definido por:
I x =
W
(y2 + z2) f (x,y,z) dx dy dz, I y =
W
(x2 + z2) f (x,y ,z) dx dy
e
I z =
W
(x2 + y2) f (x,y ,z) dx dy dz
Determine o momento de inércia de cada sólido em relação ao eixo indicado suque a densidade é K constante.
(a) W = {(x,y,z) ∈ R3 / x2 + y2 ≤ a2, 0 ≤ z ≤ h} em relação ao eixo dos x
(b) W = {(x,y,z) ∈ R3 / a2 ≤ x2 + y2 ≤ b2, 0 ≤ z ≤ h} em relação ao eixo dos z

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 269/279
Capítulo 12
APÊNDICE
12.1 Limite e Continuidade
Teorema 12.1. Seja f : A ⊂ Rn −→ R uma função. Se o limite de f quando x aproxima-se de x0existe, então ele é único.
Suponha que limx→x0f (x) = L e limx→x0f (x) = M . Então, para todo ε > 0 existe δ > 0 tal que0 < x− x0 < δ implica em |f (x) − L| <
ε
2e |f (x) − M | <
ε
2. Como x0 ∈ A ∪ ∂A, podemos
escolher x ∈ A tal que 0 < x− x0 < δ, o que acarretará:
|L − M | ≤ |L − f (x)| + |f (x) − M | <ε
2+
ε
2= ε.
Como ε é arbitrário, L = M .
12.2 Diferenciabilidade
Teorema 12.2. Seja f : A ⊂ Rn
−→ R uma função definida no conjunto aberto A tal que existemtodas as derivadas parciais em cada ponto de A e cada uma delas é contínua no ponto x0 ∈ A. Então f édiferenciável em x0.
Faremos a prova do teorema para n = 2. O caso geral é análogo. Sejamx0 = (x0, y0) e h = (h, k)tal que x0 + h ∈ A. Denotemos por M = f (x0 + h, y0 + k) − f (x0, y0); então:
M = (f (x0 + h, y0 + k) − f (x0, y0 + k)) + (f (x0, y0 + k) − f (x0, y0)).
Definamos a função g(t) = f (x0 + t h , y0 + k), t ∈ [0, 1]; pelo teorema do valor médio parafunções de uma variável, existe θ1 ∈ (0, 1) tal que g(1) − g(0) = g′(θ1), ou equivalentemente:
f (x0
+ h, y0
+ k)−
f (x0
, y0
+ k) = h∂f
∂x(x
0+ θ
1h, y
0+ k).
Definamos a função h(t) = f (x0, y0 + t k), t ∈ [0, 1]; pelo teorema do valor médio para funçõesde uma variável, existe θ2 ∈ (0, 1) tal que h(1) − h(0) = h′(θ2) ou:
f (x0, y0 + k) − f (x0, y0) = k∂f
∂y(x0, y0 + θ2 k).
269

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 270/279
270 CAPÍTULO 12. APÊ
Então M = h∂f
∂x(x0 + θ1 h, y0 + k) + k
∂f
∂y(x0, y0 + θ2 k), ou:
f (x0 + h, y0 + k) − f (x0, y0) = h∂f
∂x(x0 + θ1 h, y0 + k) + k
∂f
∂y(x0, y0 + θ2 k).
Denote por: K = f (x0 + h, y0 + k) − f (x0, y0) − h∂f
∂x(x0, y0) − k
∂f
∂y(x0, y0),
L = ( ∂f ∂x
(x0 + θ1 h, y0 + k) − ∂f ∂x
(x0, y0)) e S = (∂f ∂y
(x0, y0 + θ2 k) − ∂f ∂y
(x0, y0)). Então
|K |√h2 + k2
≤ |h|√h2 + k2
|L| +|k|√
h2 + k2|S |.
0 ≤ |h|√h2 + k2
≤ 1 e 0 ≤ |k|√h2 + k2
≤ 1. Pela continuidade das derivadas parciais no po
segue que f é diferenciável no ponto x0.
Proposição 12.1. Se f é diferenciável no ponto x0, então f é contínua em x0.
(n = 2). O caso geral é análogo. Devemos provar, que para todo ε > 0 existe δ > 0
|f (x, y)
−f (x0, y0)
|< ε se 0 <
x
−x0
< δ. Se f é diferenciável no ponto x0, então, para
existe δ1 > 0 tal que:
|f (x, y) − f (x0, y0) − ∂f
∂x(x0)(x − x0) − ∂f
∂y(x0)(y − y0)| < x− x0,
se 0 < x − x0 < δ1. Denotaremos por: k(x, y) = ( ∂f ∂x (x0, y0) (x − x0) + ∂f
∂y (x0, y0) (yentão:
|f (x, y) − f (x0, y0)| = |f (x, y) − f (x0, y0) − k(x, y) + k(x, y)|≤ |f (x, y) − f (x0, y0) − k(x, y)| + |k(x, y)|< x− x0 + |k(x, y)|.
Por outro lado, ∂f
∂x(x0)(x − x0)
≤ ∂f
∂x(x0)
(x − x0)2 + (y − y0)2,
∂f
∂y(x0)(y − y0)
≤ ∂f
∂y(x0)
(x − x0)2 + (y − y0)2.
Denotemos por M o maior entre |∂f
∂x(x0)| e |∂f
∂y(x0)|. Teremos: |k(x, y)| ≤ 2 M x− x0
|f (x, y) − f (x0, y0)| < (2 M + 1) x− x0.
Dado ε > 0, seja δ = min{δ1,ε
2 M + 1}; se x− x0 < δ, temos |f (x, y) − f (x0, y0) < ε.
Teorema 12.3. (Schwarz) Se f : A ⊂ Rn −→ R é uma função de classe C 2 no ponto x0, entodo i, j = 1.....n tem-se:
∂
∂x j
∂f
∂xi(x0)
=
∂
∂xi
∂f
∂x j(x0)
,
para i = j.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 271/279
12.2. DIFERENCIABILIDADE 271
Faremos a prova do teorema para n = 2. O caso geral é análogo. Consideremos x0 = (x0, y0).Sejam ε > 0 tal que (x0 − ε, x0 + ε) × (y0 − ε, y0 + ε) ⊂ A e t ∈ (−ε, ε). Definamos as funções:
φ(t) = f (x0 + t, y0 + t) − f (x0 + t, y0) − f (x0, y0 + t) + f (x0, y0) e r(x) = f (x, y0 + t) − f (x, y0);
então φ(t) = r(x0 + t) − r(x0). Aplicando o teorema do valor médio para funções de umavariável à função: r(x) onde x ∈ [x0, x0 + t], existe θ1 ∈ (0, 1) tal que r(x0 + t) − r(x0) =t r′(x0 + t θ1) ou:
φ(t) = t (∂f ∂x
(x0 + t θ1, y0 + t) − ∂f ∂x
(x0 + t θ1, y0)).
As funções∂f
∂xe
∂f
∂ysão contínuas no ponto (x0, y0). Aplicando o teorema do valor médio para
funções de uma variável a m(y) =∂f
∂x(x0 + t θ1, y), y ∈ [y0, y0 + t], existe θ2 ∈ (0, 1) tal que
m(y0 + t) − m(y0) = t∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2) ou:
φ(t) = t2∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2).
De forma análoga para s(y) = f (x0 + t, y)−f (x0, y), obtemos: φ(t) = t2 ∂ 2f ∂x∂y (x0 + t θ3, y0 + t θ4),
θ3, θ4 ∈ (0, 1), e:
∂ 2f
∂y∂x(x0 + t θ1, y0 + t θ2) =
∂ 2f
∂x∂y(x0 + t θ3, y0 + t θ4);
fazendo t −→ 0 e lembrando que as derivadas parciais de segunda ordem são contínuas, pro-vamos o teorema.
Proposição 12.2. Se f é uma função de classe C 1 então:
∂f
∂ v
(x) =
∇f (x)
· v.
Seja g(t) = f (x + t v1, y + t v2, z + t v3); g é uma função derivável de uma variável; utilizando aregra da cadeia, derivamos g:
g′(0) =∂f
∂ xv1 +
∂f
∂ yv2 +
∂f
∂ yv3 = ∇f (x,y,z) · v;
por outro lado∂f
∂ v(x,y,z) = g′(0).
Definição 12.1.
1. Uma curva diferenciável parametrizada γ pasando por x0 em R
n
é determinada por n funçõesdiferenciáveis:xi : I ⊂ R −→ R,
i = 1, 2,...,n tal que γ (t) = (x1(t), x2(t), ........, xn (t)) e γ (t0) = x0, onde I ⊂ R.
2. A derivada de γ é γ ′(t) = (x′
1(t), x′
2(t),........,x′
n(t)).

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 272/279
272 CAPÍTULO 12. APÊ
3. Uma curva parametrizada γ em A ⊂ Rn é tal que γ (I ) ⊂ A.
Proposição 12.3. Seja (x0, y0, z0) ∈ S c . Se ∇f (x0, y0, z0) = 0, então ∇f (x0, y0, z0) é no plano tangente a S c no ponto (x0, y0, z0).
Seja γ uma curva sobre a superfície S c tal que γ (t0) = (x0, y0, z0), para algum t0 ∈ R
f (γ (t)) = c, pois γ pertence à S c.
ddt
(f (γ (t))
t=t0
= 0 e ∇f (γ (t)) · γ ′(t) = 0;
logo: ∇f (x0, y0, z0) · γ ′(t0) = 0.Isto é válido para qualquer curva em S c passando por (x0, y0, z0).
Teorema 12.4. Seja f : A ⊂ Rn −→ R uma função diferenciável definida no aberto A e x0 uextremo local de f . Então
∇f (x0) = 0.
Suponha que x0 é ponto de máximo de f . Para todo v ∈ Rn a função real h(t) = f (xpossui um ponto de máximo em t = 0; pela regra da cadeia:
0 =d
dth(t)|t=0 = ∇f (x0) · v
e a igualdade vale para todo v; então ∇f (x0) = 0. A prova é análoga se x0 é ponto de mlocal de f .
Teorema 12.5. Seja a família de funções:
f (x, y) = A x2 + 2 B x y + C y2,
tal que A, B, C ∈ R e não são todas simultaneamente nulas. Denotemos por ∆ = A C − B2.
1. Se ∆ > 0 e A > 0, então (0, 0) é ponto de mínimo de f .2. Se ∆ > 0 e A < 0, então (0, 0) é ponto de máximo de f .
3. Se ∆ < 0, então (0, 0) é ponto de sela de f .
Suponha que ∆ > 0; logo A = 0.
f (x, y) = A
x +B y
A
2+
1
A∆ y2;
ambas as parcelas tem o mesmo sinal que A e f (x, y) = 0 se e somente se:
x + B yA = 0
y = 0;
então f (x, y) = 0 se e somente se x = y = 0.
1. Se A > 0, temos 0 = f (0, 0) < f (x, y) e (0, 0) é ponto de mínimo de f .

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 273/279
12.2. DIFERENCIABILIDADE 273
2. Se A < 0, temos f (x, y) < f (0, 0) = 0 e (0, 0) é ponto de máximo de f .
3. Suponha que ∆ < 0 e A = 0; denotando por E =
√B2 − AC
A, temos:
f (x, y) = A
x +B y
A
− E y
x +B y
A
+ E y
;
f (x, y) = 0 se, e somente se: y = A xA E −B ou y = − A xA E +B ; logo, f (x, y) > 0 se y > A xA E −B ouy > − A x
A E +B e f (x, y) < 0 se y < A xA E −B ou y < − A x
A E +B . Portanto, numa vizinhança de (0, 0) f
toma valores negativos e positivos. Se A = 0, então f (x, y) = 2 B x y + C y2; logo B = 0, casocontrário ∆ = 0; então:
f (x, y) = y (2 B x + C y);
portanto: f (x, y) > 0 se, e somente sey > 0 e B x + C y > 0 ou
y < 0 e B x + C y < 0.
f (x, y) < 0 se, e somente se y > 0 e B x + C y < 0ou
y < 0 e B x + C y > 0.
Teorema 12.6. Sejam z = f (x, y) uma função de classe C 2 definida num conjunto aberto U ⊂ R2 e(x0, y0) ∈ U um ponto crítico de f . Denotemos por:
A(x, y) =∂ 2f
∂x2(x, y), B(x, y) =
∂ 2f
∂x∂y(x, y), C (x, y) =
∂ 2f
∂y2(x, y) e
∆(x, y) = A(x, y) C (x, y) − B2(x, y).
Então:
1. Se A(x0, y0) > 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de mínimo local de f em U .
2. Se A(x0, y0) < 0 e ∆(x0, y0) > 0, então (x0, y0) é ponto de máximo local de f em U .
3. Se ∆(x0, y0) < 0, então (x0, y0) é ponto de sela de f em U .
4. Se ∆(x0, y0) = 0, nada se pode concluir.
Seja θ ∈ [0, 2 π]. Consideramos a seguinte função de uma variável:
h(r) = f (x0 + r cos(θ), y0 + r sen(θ));
h(r) descreve o comportamento de f ao longo da reta que passa pelo ponto (x0, y0) e na direção(cos(θ),sen(θ)). Denotemos por a = x0 + rcos(θ) e b = y0 + rsen(θ); usando a regra da cadeia,derivemos a função h:

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 274/279
274 CAPÍTULO 12. APÊ
h′(r) =∂f
∂x(a,b) cos(θ) +
∂f
∂y(a,b) sen(θ);
então, r = 0 é ponto crítico de h. Derivando novamente:
h′′(r) = ∂ 2
f ∂x2
(a,b) cos2(θ) + 2 ∂ 2
f ∂x∂y
(a,b) cos(θ) sen(θ) + ∂ 2
f ∂y2
(a,b) sen2(θ).
Fazendo A =∂ 2f
∂x2(x0, y0), B =
∂ 2f
∂x∂y(x0, y0), C =
∂ 2f
∂y2(x0, y0), x = cos(θ) e y =
obtemos:
h′′(0) = A x2 + 2 B x y + C y2
Como A > 0 e ∆ > 0, pelo teorema anterior h′′(0) > 0; então h possui um ponto de mín
r = 0. O argumento vale para todo θ ∈ [0, 2 π]. Logo f possui um ponto de mínimo lo(x0, y0). Os demais casos ficam como exercícios.
Teorema 12.7. Sejam f, g : A ⊂ Rn −→ R funções de classe C 1. Denotemos por S um conjnível de g. Se f tem um ponto de máximo ou de mínimo x0 ∈ S e ∇g(x0) = 0, então existe λque ∇f (x0) = λ ∇g(x0).
Faremos a prova para n = 2, o caso n = 3 é análogo. Suponha que a curva de nível escreva na forma paramétrica γ (t) = (x(t), y(t)) e que γ ′(t) = (x′(t), y′(t)) = 0; considerseguinte função de uma variável β (t) = f (γ (t)) = f (x(t), y(t)) tal que t ∈ (a, b). Como fum ponto extremo em x0, então, existe t0 ∈ (a, b) tal que β possui um ponto extremologo, β ′(t0) = 0 e pela regra da cadeia:
β ′(t) =∂f
∂x(x(t), y(t))
dx
dt+
∂f
∂y(x(t), y(t))
dy
dt= ∇f (x(t), y(t)) γ ′(t).
Denotando x0 = (x(t0), y(t0)) e calculando β ′(t0) = 0; temos, ∇f (x0) · γ ′(t0) = 0; p∇f (x0) e γ ′(t0) = 0 são ortogonais. Como ∇f é ortogonal às curvas de nível de f , no pas curvas de nível de g e de f devem ser tangentes e ∇f (x0) = λ ∇g(x0).
12.3 Integração
Teorema 12.8. (Fubini) Seja f : R −→ R2
contínua sobre R. Então: R
f (x, y) dxdy =
d
c
b
af (x, y) dx
dy =
b
a
d
cf (x, y) dy
dx,
onde R = [a, b] × [c, d].

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 275/279
12.3. INTEGRAÇÃO 275
Fixemos x0 ∈ [a, b] e consideremos a função f x0 : [c, d] −→ R definida por f x0(y) = f (x0, y),para todo y ∈ [c, d]. Como f x0 é contínua em [c, d], é integrável em [c, d]; definamos A(x0) = d
cf (x0, y) dy. Provaremos que a função: A : [a, b] −→ R é integrável em [a, b] e:
b
aA(x) dx = Rf (x, y) dxdy.
Como antes, seja c = y0 < y1 < ..... < yn = d uma partição de ordem n de [c, d] tal que∆y = d−c
n ; logo:
A(x) =n−1k=0
yk+1
yk
f (x, y) dy.
Pelo teorema do valor médio para integrais, temos: yk+1
yk
f (x, y) dy = f (x, y∗k(x)) (yk+1 − yk),
onde y∗k(x) ∈ [yk, yk+1] (y∗k(x) possívelmente depende de x); então:
A(x) =
n−1k=0
f (x, y∗k(x)) (yk+1 − yk).
Pela definição de integral para funções de uma variável:
b
a
d
cf (x, y) dy
dx =
b
aA(x) dx = lim
n→+∞
n−1k=0
A( p j) (x j+1 − x j ),
onde a = x0 < x1 < ..... < xn = b é uma partição de ordem n de [a, b] tal que ∆x = b−an e
p j ∈
[x j
, x j+1
]. Considere c jk
= ( p j
, yk
( p j
))∈
R jk
, logo A( p j
) =
n−1
k=0
f (c jk
) (yk+1 −
yk
) e
b
a
d
cf (x, y) dy
dx =
b
aA(x) dx = lim
n→+∞
n−1 j=0
A( p j ) (x j+1 − x j )
= limn→+∞
n−1 j=0
n−1k=0
f (c jk ), (yk+1 − yk) (x j+1 − x j) =
R
f (x, y) dxdy.
De forma análoga prova-se que d
c
b
af (x, y) dx
dy =
R
f (x, y) dxdy.
Proposição 12.4. Se f : D −→ R é contínua e limitada sobre D, então:1. Se D é uma região de tipo I:
D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)f (x, y) dy
dx.
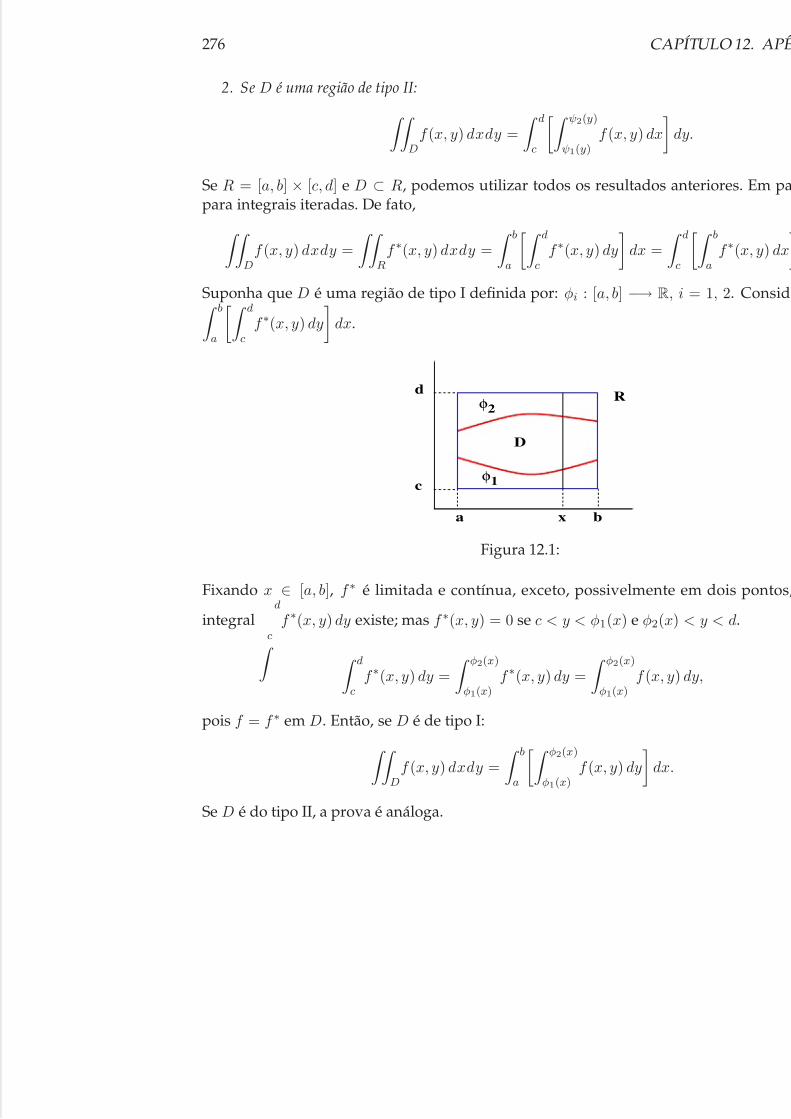
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 276/279
276 CAPÍTULO 12. APÊ
2. Se D é uma região de tipo II:
D
f (x, y) dxdy =
d
c
ψ2(y)
ψ1(y)f (x, y) dx
dy.
Se R = [a, b] × [c, d] e D ⊂ R, podemos utilizar todos os resultados anteriores. Em papara integrais iteradas. De fato,
D
f (x, y) dxdy =
R
f ∗(x, y) dxdy =
b
a
d
cf ∗(x, y) dy
dx =
d
c
b
af ∗(x, y) dx
Suponha que D é uma região de tipo I definida por: φi : [a, b] −→ R, i = 1, 2. Conside b
a
d
cf ∗(x, y) dy
dx.
φ
1
2
φc
dR
D
bxa
Figura 12.1:
Fixando x ∈ [a, b], f ∗ é limitada e contínua, exceto, possivelmente em dois pontos,
integral d
cf ∗(x, y) dy existe; mas f ∗(x, y) = 0 se c < y < φ1(x) e φ2(x) < y < d.
d
cf ∗(x, y) dy =
φ2(x)
φ1(x)f ∗(x, y) dy =
φ2(x)
φ1(x)f (x, y) dy,
pois f = f ∗ em D. Então, se D é de tipo I:
D
f (x, y) dxdy =
b
a
φ2(x)
φ1(x)f (x, y) dy
dx.
Se D é do tipo II, a prova é análoga.

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 277/279
12.3. INTEGRAÇÃO 277
]

5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 278/279
278 CAPÍTULO 12. APÊ
5/12/2018 Cálculo II - slidepdf.com
http://slidepdf.com/reader/full/calculo-ii-55a35c212196c 279/279
Bibliografia
[TA] T. Apostol: Mathematical Analysis: A Modern Approach to Advanced Calculus, Reading,Mass, Addison-Wesley Pub. Co.
[EL] E. Lima: Curso de Análise, Vol. II , Ed. Universitaria.
[MW] J. Marsden- A. Weinstein: Calculus, Vol. II e III , Springer-Verlag.
[RO] R. Osserman: Principles of Mathematical Analysis, Mc Graw-Hill.
[ JS] J. Stewart: Calculus, concepts and contex, Brooks/Cole Publishing Company, Itp.[VC] M. Vilches - M. Corrêa: Cálculo: Volume I , www.ime.uerj.br/∼calculo.


















