Cap.4 - Vetores
13
Álgebra Linear - Vetores 1 VETORES Grandezas Escalares Grandezas físicas como tempo, por exemplo, 10 segundos, ficam perfeitamente definidas quando são especificados o seu módulo (10) e sua unidade de medida (segundo). Estas grandezas físicas que são completamente definidas quando são especificados o seu módulo e a sua unidade de medida são denominadas grandezas escalares. A temperatura, área, volume, são também grandezas escalares. Grandezas Vetoriais Quando você está se deslocando de uma posição para outra, basta você dizer que percorreu uma distância igual a 5 m? Você precisa especificar, além da distância (módulo), a direção e o sentido em que ocorre este deslocamento. Estas grandezas que são completamente definidas quando são especificados o seu módulo, direção e sentido, são denominadas grandezas vetoriais. Direção: é aquilo que existe de comum num feixe de retas paralelas. Sentido: podemos percorrer uma direção em dois sentidos.
-
Upload
jaime-igor-viegas -
Category
Documents
-
view
64 -
download
14
description
lista de exercicios
Transcript of Cap.4 - Vetores

Álgebra Linear - Vetores
1
VETORES
Grandezas Escalares
Grandezas físicas como tempo, por exemplo, 10 segundos, ficam perfeitamente
definidas quando são especificados o seu módulo (10) e sua unidade de medida (segundo). Estas
grandezas físicas que são completamente definidas quando são especificados o seu módulo e a
sua unidade de medida são denominadas grandezas escalares. A temperatura, área, volume, são
também grandezas escalares.
Grandezas Vetoriais
Quando você está se deslocando de uma posição para outra, basta você dizer que
percorreu uma distância igual a 5 m?
Você precisa especificar, além da distância (módulo), a direção e o sentido em que
ocorre este deslocamento.
Estas grandezas que são completamente definidas quando são especificados o seu
módulo, direção e sentido, são denominadas grandezas vetoriais.
Direção: é aquilo que existe de comum num
feixe de retas paralelas.
Sentido: podemos percorrer uma direção em
dois sentidos.

Álgebra Linear - Vetores
2
Definindo um vetor
Considere dois pontos distintos P1 e P2, eles determinam uma única reta r que passa por
eles. Além disso, o segmento de reta entre os pontos P1 e P2 também é único. Nesse segmento
de reta, são possíveis dois sentidos de percurso: o de P1 para P2 e o de P2 para P1. O segmento
de reta ao qual atribuímos um sentido é chamado de segmento de reta orientado. Para abreviar a
linguagem, chamamos um segmento de reta orientado simplesmente de seta.
Ao fazer o desenho de uma seta, indicamos que ela tem sentido, ou orientação, de P1
para P2, desenhando uma ponta no seu ponto final, como mostra a Figura abaixo:
Nesse caso, o ponto P1 é chamado de ponto inicial da seta, ou origem da seta, e o ponto
P2, de ponto final da seta. Vamos representar a seta acima por P1P2.
Setas com a mesma direção, o mesmo sentido e o mesmo módulo são setas
equipolentes. Considere agora o conjunto de todas as setas equipolentes à seta P1P2:
Setas equipolentes que representam o vetor a em diferentes pontos do espaço
Todos os segmentos orientados que têm a mesma direção, o mesmo sentido e o mesmo
comprimento são representantes de um mesmo vetor.
Notação de Vetores: u, v, w, z.
VETOR OPOSTO
Dado o vetor u , existe o vetor - u , que possui o mesmo módulo e mesma direção do
vetor u, porém , de sentido oposto.

Álgebra Linear - Vetores
3
VETOR UNITÁRIO (VERSOR)
Chamaremos de VERSOR ou VETOR UNITÁRIO, ao vetor cujo módulo seja igual à
unidade, ou seja: | u | = 1.
VETOR NULO
Qualquer ponto do espaço é representante do vetor zero (ou vetor nulo), que é indicado
por O.
A PROJEÇÃO DE UM VETOR SOBRE UM EIXO
Veja a figura abaixo, na qual o vetor u forma um ângulo com o eixo x.
Teremos que o vetor ux será a componente de u segundo o eixo x, de medida algébrica
igual a ux = u . cos . Observe que se = 90º, teremos cos = 0 e, portanto, a projeção do vetor
segundo o eixo r, será nula.
Um vetor no plano como um par ordenado
Considere o vetor u, representado no plano cartesiano Oxy, conforme figura abaixo:
Se considerarmos que o ponto O é a origem do sistema de coordenadas cartesianas e,
por conseguinte, O(0, 0) e que as coordenadas de P sejam x (abcissa) e y (ordenada), teremos o
ponto P(x, y). Substituindo acima, vem:
u = P - O = (x, y) - (0, 0) = (x - 0 , y - 0 ) = (x, y). Portanto, u = (x, y)

Álgebra Linear - Vetores
4
Logo, o vetor u, fica expresso através de um par ordenado, referido à origem do sistema
de coordenadas cartesianas. Neste caso, o módulo do vetor u (distância do ponto P à origem O)
será dado por:
Um Vetor no Plano, em função dos Versores dos Eixos Coordenados.
Vimos que um VERSOR é um VETOR de módulo unitário. Vamos associar um versor
a cada eixo, ou seja: o versor i no eixo dos x e o versor j no eixo dos y, conforme figura abaixo:
O par ordenado de versores (i, j) constitui o que chamamos de BASE do plano R2, ou
seja, base do plano cartesiano Oxy.
Verifica-se que um vetor u = (x, y) , pode ser escrito univocamente como: u = x.i + y.j
Analogamente, se em vez do plano R2, estivéssemos trabalhando no espaço R3, poderíamos
considerar os versores i, j e k , respectivamente dos eixos Ox, Oy e Oz , conforme figura abaixo,
e a representação do vetor u, no espaço seria: u = (x, y, z) = x.i + y.j + z.k. Analogamente, o
terno (i, j, k) , será a BASE do espaço R3 .
O módulo do vetor u = x.i + y.j + z.k será dado por:

Álgebra Linear - Vetores
5
OPERAÇÕES COM VETORES
Adição de vetores:
a) Regra do Paralelogramo para a Adição Vetorial.
Se u e v são vetores no plano ou no espaço que estão posicionados de tal modo que seus
pontos iniciais coincidem então os dois vetores formam lados adjacentes de um paralelogramo e
a soma de u + v é o vetor representado pela seta desde o ponto inicial comum de u e v até o
vértice oposto do paralelogramo.
b) Regra do Triângulo para a Adição Vetorial.
Se u e v são vetores no plano ou no espaço que estão posicionados de tal modo que o
ponto inicial de v é o ponto terminal de u, então a soma u + v é o vetor representado pela seta
desde o ponto inicial de u até o ponto terminal de v.
Adição Vetorial na Física e na Engenharia
A regra do paralelogramo para a adição vetorial descreve corretamente o
comportamento aditivo de forças, velocidades e deslocamentos na Engenharia e na Física. Por
exemplo, o efeito de aplicar duas forças F1 e F2 ao bloco na figura abaixo é o mesmo que
aplicar a única força F1+F2 ao bloco. Analogamente, se o motor do barco impõe uma
velocidade v1 e o vento impõe uma velocidade v2, então o efeito combinado de motor e vento
impõem a velocidade v1+v2 ao barco.
Álgebra Linear - Vetores
6
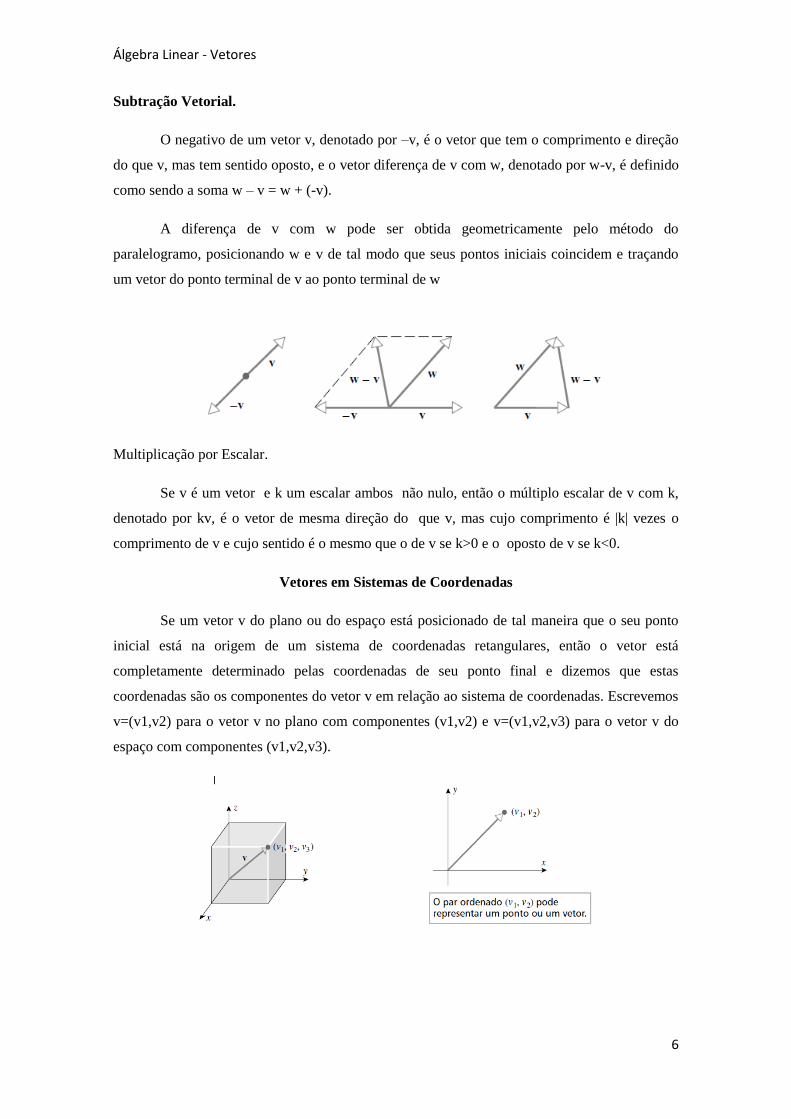
Subtração Vetorial.
O negativo de um vetor v, denotado por –v, é o vetor que tem o comprimento e direção
do que v, mas tem sentido oposto, e o vetor diferença de v com w, denotado por w-v, é definido
como sendo a soma w – v = w + (-v).
A diferença de v com w pode ser obtida geometricamente pelo método do
paralelogramo, posicionando w e v de tal modo que seus pontos iniciais coincidem e traçando
um vetor do ponto terminal de v ao ponto terminal de w
Multiplicação por Escalar.
Se v é um vetor e k um escalar ambos não nulo, então o múltiplo escalar de v com k,
denotado por kv, é o vetor de mesma direção do que v, mas cujo comprimento é |k| vezes o
comprimento de v e cujo sentido é o mesmo que o de v se k>0 e o oposto de v se k<0.
Vetores em Sistemas de Coordenadas
Se um vetor v do plano ou do espaço está posicionado de tal maneira que o seu ponto
inicial está na origem de um sistema de coordenadas retangulares, então o vetor está
completamente determinado pelas coordenadas de seu ponto final e dizemos que estas
coordenadas são os componentes do vetor v em relação ao sistema de coordenadas. Escrevemos
v=(v1,v2) para o vetor v no plano com componentes (v1,v2) e v=(v1,v2,v3) para o vetor v do
espaço com componentes (v1,v2,v3).

Álgebra Linear - Vetores
7
Componentes de um vetor cujo ponto inicial não está na origem.
Às vezes precisamos encontrar os componentes de um vetor v em R2 ou R
3 que não tem
seu ponto inicial na origem. Para obter isso, seja v um vetor em R2 com seu ponto inicial
P1(x1,y1) e ponto final P2(x2,y2). Podemos expressar v em termos dos vetores
como
V = (x2 – x1 , y2 – y1)
Ou seja, os componentes de v são obtidos subtraindo as coordenadas do ponto inicial das
coordenadas correspondentes do ponto final. O mesmo resultado vale no espaço R3.
Exemplo: O vetor v que tem ponto inicial em P1(2, -1, 4) e ponto terminal em P2(7,5, -8) tem
componentes v = (7-2, 5-(-1), -8-4) = (5, 6, -12)
Isto significa que se o vetor P1P2 é transladado de tal modo que seu ponto inicial está na
origem, então seu ponto final cai no ponto (5, 6, -12).
Igualdade de Vetores
Dois vetores v = (v1, v2, . . . ,vn) e w = (w1, w2, . . . ,wn) de Rn são equivalentes (iguais)
se v1 = w1, v2 = w2, . . . , vn = wn, indicamos esta equivalência escrevendo v = w.
Propriedades: Se v= (v1, v2, . . ., vn) e w = (w1, w2, . . . ,wn) são vetores em Rn e se k é um
escalar, então definimos
P1) v + w = (v1 + w1, v2 + w2, . . . , vn + wn)
P2) kv = (kv1, kv2, . . . , kvn)
P3) –v = (–v1, –v2, . . . , –vn)
P4) w – v = w + (–v) = (w1 – v1, w2 – v2, . . . , wn – vn)

Álgebra Linear - Vetores
8
Vetores Paralelos e Colineares
Dois vetores de Rn são ditos paralelos ou, então, colineares, se um dos vetores é um
múltiplo escalar do outro. Se este escalar for positivo os dois vetores têm a mesma direção e
sentido. Se o escalar for negativo os dois vetores têm a mesma direção e sentido oposto.
Exercícios
1) Esboce os vetores com seus pontos iniciais na origem.
a) v1 = (3, 6) b) v2 = (-4, -8) c) v3 = (3, 3, 0) d) v4 = (0, 0, -3)
2) Esboce os vetores com seus pontos iniciais na origem.
a) v1 = (-1, 2) b) v2 = (3, 4) c) v3 = (1,2,3) d) v4 = (-1, 6, 1)
3) Esboce os vetores com seus pontos iniciais na origem, sabendo que u=(1,1) e que v=(-1,1).
a) 2u b) u+v c) 2u+2v d) u-v e) u + 2v
4) Esboce os vetores com seus pontos iniciais na origem, sabendo que u=(1,1) e que v=(-1,1).
a) –u+v b) 3u+2v c) 2u+5v d) -2u-v e) 2u - 3v
Norma de um Vetor
O comprimento de um vetor v de R2 ou R
3 é usualmente denotado pelo símbolo ||v||. Dado um
vetor v = (v1,v2) de R2 o comprimento de v é:
Definição: Se v = (v1, v2, . . . ,vn) é um vetor em Rn, então o comprimento de v, também
denominado norma de v ou magnitude de v, é denotado por ||v|| e definido pela fórmula

Álgebra Linear - Vetores
9
Exemplo
Calcule a norma do vetor v = (-3, 2, 1) em R3.
Solução:
Teorema
Se v é um vetor em Rn e se k é qualquer escalar, então:
a) ||v|| ≥ 0
b) ||v|| = 0 se, e somente se, v=0
c) ||kv|| = |k|.||v||
Vetores Unitários
Um vetor de comprimento 1 é denominado um vetor unitário. Se v é um vetor não nulo em Rn,
então um vetor unitário u que tem a mesma direção e sentido do que v é dado pela fórmula:
Exemplo
Encontre um vetor unitário u que tem a mesma direção e sentido do que v = (2, 2, -1).
Solução:
Assim, u = (2/3, 2/3, -1/3)
Combinação Linear
Um vetor w de Rn é uma combinação linear dos vetores v1, v2, . . . , vk de Rn se w pode
ser expresso na forma w = c1v1 + c2v2 +, . . . +Cn vk os escalares c1, c2, . . . , ck são denominados
coeficientes da combinação linear.

Álgebra Linear - Vetores
10
Distância entre Pontos
Se P1 e P2 são pontos em R2 ou R
3, então o comprimento do vetor P1P2 é igual à
distância d entre os dois pontos. Especificamente, se P1(x1, y1) e P2(x2, y2) são pontos em R2,
então:
Se P1(x1, y1, z1) e P2(x2, y2, z2) são pontos em R3, então
Produto Escalar
Se u = (u1, u2, u3, . . . , un) e v = (v1, v2, v3, . . . ,vn) são vetores em Rn, então o produto
escalar de u e v, também denominado produto interno euclidiano de u e v, é denotado pela
fórmula:
u.v = u1.v1 + u2.v2 + . . . +unvn

Álgebra Linear - Vetores
11
O produto escalar é calculado multiplicando componentes correspondentes dos
vetores e somando os produtos resultantes.
Exemplo
Calcular o produto escalar de u = (-1, 3, 5, 7) e v = (5, -4, 7, 0) em R4.
u.v = (-1).5 + 3.(-4) + 5.7 + 7.0 = -5 -12 +35 = 18
No caso especial em que u = v, temos que:
v.v = v12 + v2
2 + . . . + vn
2 = ||v||
2
Isto fornece a seguinte fórmula para expressar o comprimento de um vetor em termos do
produto escalar
Propriedades do Produto Escalar
Sejam u, v e w vetores em Rn e α um escalar.
P1) u.v = v.u [comutativa]
P2) u.(v + w) = u.v + u.w [Distributiva]
P3 (u + v).w = u.w + v.w
P4) α(u.v) = (αu).v [Homogeneidade]
P5) v.v ≥ 0 e v.v = 0 se, e somente se, v = 0 [positividade]
P6) 0.v = v.0 = 0 [elemento neutro]
P7) u.(v – w) = u.v – u.w
P8) (u – v).w = u.w – v.w
Exemplo
(u – 2v).(3u + 4v) = 3(u.u) + 4(u.v) – 6(v.u) – 8(v.v)
=3||u||2 – 2.(u.v) – 8 ||v||
2

Álgebra Linear - Vetores
12
Ângulo entre Vetores
Se u e v são vetores não nulos em R2 ou R
3 e se é o ângulo entre estes vetores, então:
Ortogonalidade
Dois vetores u e v em Rn são ditos ortogonais se u.v = 0 e um conjunto não vazio de
vetores de Rn é denominado um conjunto ortogonal se cada par de vetores distintos do conjunto
é ortogonal
Exemplo
Mostre que os vetores v1 = (1, 2, 2, 4), v2 = (-2, 1, -4, 2) e v3 = (-4, 2, 2, -1) formam um
conjunto ortogonal de R4.
Solução: é preciso confirmar que v1.v2 = 0, v1.v3 = 0 e v2.v3 = 0
v1.v2 = 1.(-2) + 2.1 + 2.(-4) + 4.2 = -2 + 2 + (-8) + 8 = 0
v1.v3 = 1.(-4) + 2.2 + 2.2 + 4.(-1) = -4 + 4 + (-8) + 8 = 0
v2.v3 = (-2).(-4) + 1.2 + (-4).2 + 2.(-1) = 8 + 2 + (-8) + (-2) = 0
logo, os vetores v1, v2 e v3 formam um conjunto ortogonal em R4.
Exercícios
1) Sejam u = (1, -2, 5), v = (3, 1, -2). Calcule:
a) u + v; b) -6u; c) 2u – 5v; d) u.v; e) ||u|| e ||v||; f) d(u,v).
2) Sejam u = (2, 1, -3, 0, 4), v = (5, -3, -1, 2, 7). Calcule:
a) u + v; b) 3u – 2v; c) u.v; d) ||u|| e ||v||; e) d(u, v).
3) Determine k de modo que os vetores u e v sejam ortogonais.
a) u = (3, k, -2), v = (6, -4, -3); b) u = (5, k, -4, 2), v = (1, -3, 2, 2k).

Álgebra Linear - Vetores
13
4) Determine x e y se: a) (x, x+y) = (y-2, 6) b) x(1, 2) = -4(y, 3)
5) Determine x, y e z, se:
a) (3, -1, 2) = x(1, 1, 1) + y(1, -1, 0) + z(1, 0, 0)
b) (-1, 3, 3) = x(1, 1, 0) + y(0, 0, -1) + z(0, 1, 1)
6) Sejam e1=(1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1). Mostre que, para qualquer vetor
u = (a, b, c) de R3, u = ae1 + be2 + ce3.
7) Qualquer par de pontos P = (a1, a2, ..., an) e Q = (b1, b2, ..., bn) no Rn define o segmento
orientado de reta de P para Q, representado por PQ.
Identificamos PQ com o vetor v = Q – P: PQ = v = (b1-a1, b2-a2, ..., bn-an) ..
Encontre o vetor v identificado por PQ e represente geometricamente os vetores PQ e v,
onde:
a) P = (2, 5), Q(-3, 4); b) P = (2, 2), Q = (5, 3) c) P = (-1, -3), Q = (3, -1)
Gabarito
3a) k = 6; 3b) k = 3.
4a) x=2 e y=4; 4b) x=-6 e y=3/2
5a) x=2, y=3, z=-2; 5b) x=-1, y=1, z=4
7a) v = (-5, -1) ; 7b) v = (3, 1) ; 7c) v = (4, 2)