Capítulo 11 Rolamento, torque e momento angular
30
Capítulo 11 – Rolamento, torque e momento angular Neste capítulo, cobriremos os seguintes tópicos: - Rolamento de objetos circulares e sua relação com o atrito. - Redefinição de torque como um vetor para descrever problemas rotacionais mais complexos do que a rotação de um corpo rígido em torno de um eixo fixo. - Momento angular de partículas isoladas e sistema de partículas - Segunda lei de Newton para movimento rotacional - Conservação de Momento Angular - Aplicações de conservação de momento angular
Transcript of Capítulo 11 Rolamento, torque e momento angular

Capítulo 11 – Rolamento, torque e momento angular
Neste capítulo, cobriremos os seguintes tópicos:
- Rolamento de objetos circulares e sua relação com o atrito.
- Redefinição de torque como um vetor para descrever problemas
rotacionais mais complexos do que a rotação de um corpo rígido em
torno de um eixo fixo.
- Momento angular de partículas isoladas e sistema de partículas
- Segunda lei de Newton para movimento rotacional
- Conservação de Momento Angular
- Aplicações de conservação de momento angular
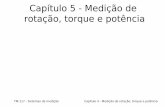
Rolamento como combinação de Translação e Rotação
O movimento de um objeto circular rolando sem escorregar sobre uma
superfície é complicado mas pode ser simplificado tratando-o como a
combinação da translação do centro de massa do objeto e a rotação do
mesmo em torno de seu centro de massa.
t1 = 0 t2 = t Para um observador em repouso, o centro de
massa da roda em O se move para a direita
com velocidade constante vcm. O ponto P que
toca o solo também se move com essa
velocidade. Durante o intervalo de tempo t,
ambos os pontos O e P cobrem a distância s.
Durante t o ciclista vê a roda girar de em torno de O tal que
A condição para o rolamento sem deslizamento é:

Mov. rotacional: O vetor velocidade Ԧ𝑣𝑐𝑚 = 𝜔𝑅 depende de cada ponto. A
magnitude é R sendo R a distância do ponto até O. A direção é tangente a
órbita circular (a)
A velocidade resultante é a soma vetorial desses dois termos (c)

Rolamento como Rotação Pura
Outra maneira de olhar para o rolamento é considerá-lo como uma rotação
pura em torno do ponto de contato P. A velocidade angular é
Os vetores mostram velocidades lineares instantâneas de pontos escolhidos
da roda. Em cada ponto, a velocidade linear escalar é dada por vcm = R em
que r é a distância entre o ponto em questão e P. Em T, r = 2R, vT = 2R =
2vcm. No ponto O, r = R, vO = R = vcm; Em P, r = 0, vP = 0
A
B
vA
vB
vT
vO

Energia Cinética de Rolamento
Considerando-se rotação pura em torno de P de um objeto com massa
M e raio R, a energia cinética é escrita como onde Ip é a
inércia rotacional em torno do eixo em P, que pode ser determinada
através do teorema dos eixos paralelos.
2
2
1The kinetic energy is then given by the equation: . Here is the
2
rotational inertia of the rolling body about point P. We can determine using
the parallel axis theorem.
P P
P
P com
K K I I
I
I I MR
=
= + → ( )
( )
2 2
2 2 2 2 2
1
2
1 1 1
2 2 2
The expression for the kinetic energy consists of two terms. The first term
corresponds to the rotation about the center of mass O with angular velocity .
com
com com
K I MR
K I MR I MR
= +
= + = +
The second term is associated with the kinetic energy due to the translational
motion of evey point with speed comv
2
2
1The kinetic energy is then given by the equation: . Here is the
2
rotational inertia of the rolling body about point P. We can determine using
the parallel axis theorem.
P P
P
P com
K K I I
I
I I MR
=
= + → ( )
( )
2 2
2 2 2 2 2
1
2
1 1 1
2 2 2
The expression for the kinetic energy consists of two terms. The first term
corresponds to the rotation about the center of mass O with angular velocity .
com
com com
K I MR
K I MR I MR
= +
= + = +
The second term is associated with the kinetic energy due to the translational
motion of evey point with speed comv
2
2
1The kinetic energy is then given by the equation: . Here is the
2
rotational inertia of the rolling body about point P. We can determine using
the parallel axis theorem.
P P
P
P com
K K I I
I
I I MR
=
= + → ( )
( )
2 2
2 2 2 2 2
1
2
1 1 1
2 2 2
The expression for the kinetic energy consists of two terms. The first term
corresponds to the rotation about the center of mass O with angular velocity .
com
com com
K I MR
K I MR I MR
= +
= + = +
The second term is associated with the kinetic energy due to the translational
motion of evey point with speed comv
Movimento
rotacional c/
em torno de O
Movimento
translacional c/ vcm
em todos os pontos

2
2
1The kinetic energy is then given by the equation: . Here is the
2
rotational inertia of the rolling body about point P. We can determine using
the parallel axis theorem.
P P
P
P com
K K I I
I
I I MR
=
= + → ( )
( )
2 2
2 2 2 2 2
1
2
1 1 1
2 2 2
The expression for the kinetic energy consists of two terms. The first term
corresponds to the rotation about the center of mass O with angular velocity .
com
com com
K I MR
K I MR I MR
= +
= + = +
The second term is associated with the kinetic energy due to the translational
motion of evey point with speed comv

0coma =
coma R=
The rolling condition results in a connection beteen the magnitude of the
acceleration of the center of mass and its angular acceleration
We take time derivetives of both sides
com
com com
a
v R a
= → = comdv dR R
dt dt
= =
The rolling condition results in a connection beteen the magnitude of the
acceleration of the center of mass and its angular acceleration
We take time derivetives of both sides
com
com com
a
v R a
= → = comdv dR R
dt dt
= =

acom
2
sin
1com
com
ga
I
MR
= −
+
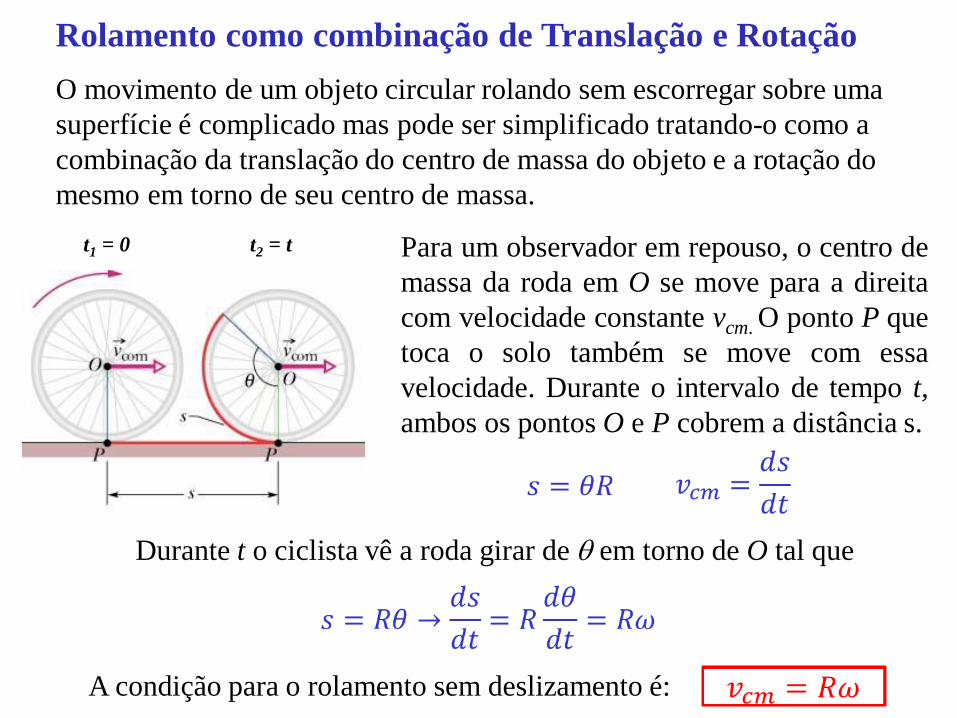
Rolamento rampa a baixo
Um corpo uniforme e redondo de massa M
e raio R rola sobre um plano inclinado com
ângulo . A acm ao longo de x é calculada
pela 2a Lei de Newton para os movimentos
rotacional e translacional.
Newton's second law for motion along the -axis: sin (eqs.1)
Newton's second law for rotation about the center of mass:
We substitute in the second equation and g
s com
s com
com
x f Mg Ma
Rf I
a
R
− =
= =
= −
2
2
et:
(eqs.2) We substitute from equation 2 into equation 1
sin
coms com
coms com s
comcom com
aRf I
R
af I f
R
aI Mg Ma
R
= − →
= − →
− − =
Translação:
Rotação:
Newton's second law for motion along the -axis: sin (eqs.1)
Newton's second law for rotation about the center of mass:
We substitute in the second equation and g
s com
s com
com
x f Mg Ma
Rf I
a
R
− =
= =
= −
2
2
et:
(eqs.2) We substitute from equation 2 into equation 1
sin
coms com
coms com s
comcom com
aRf I
R
af I f
R
aI Mg Ma
R
= − →
= − →
− − =
Newton's second law for motion along the -axis: sin (eqs.1)
Newton's second law for rotation about the center of mass:
We substitute in the second equation and g
s com
s com
com
x f Mg Ma
Rf I
a
R
− =
= =
= −
2
2
et:
(eqs.2) We substitute from equation 2 into equation 1
sin
coms com
coms com s
comcom com
aRf I
R
af I f
R
aI Mg Ma
R
= − →
= − →
− − =
Newton's second law for motion along the -axis: sin (eqs.1)
Newton's second law for rotation about the center of mass:
We substitute in the second equation and g
s com
s com
com
x f Mg Ma
Rf I
a
R
− =
= =
= −
2
2
et:
(eqs.2) We substitute from equation 2 into equation 1
sin
coms com
coms com s
comcom com
aRf I
R
af I f
R
aI Mg Ma
R
= − →
= − →
− − =

2
2
1The kinetic energy is then given by the equation: . Here is the
2
rotational inertia of the rolling body about point P. We can determine using
the parallel axis theorem.
P P
P
P com
K K I I
I
I I MR
=
= + → ( )
( )
2 2
2 2 2 2 2
1
2
1 1 1
2 2 2
The expression for the kinetic energy consists of two terms. The first term
corresponds to the rotation about the center of mass O with angular velocity .
com
com com
K I MR
K I MR I MR
= +
= + = +
The second term is associated with the kinetic energy due to the translational
motion of evey point with speed comv

y
acom
B
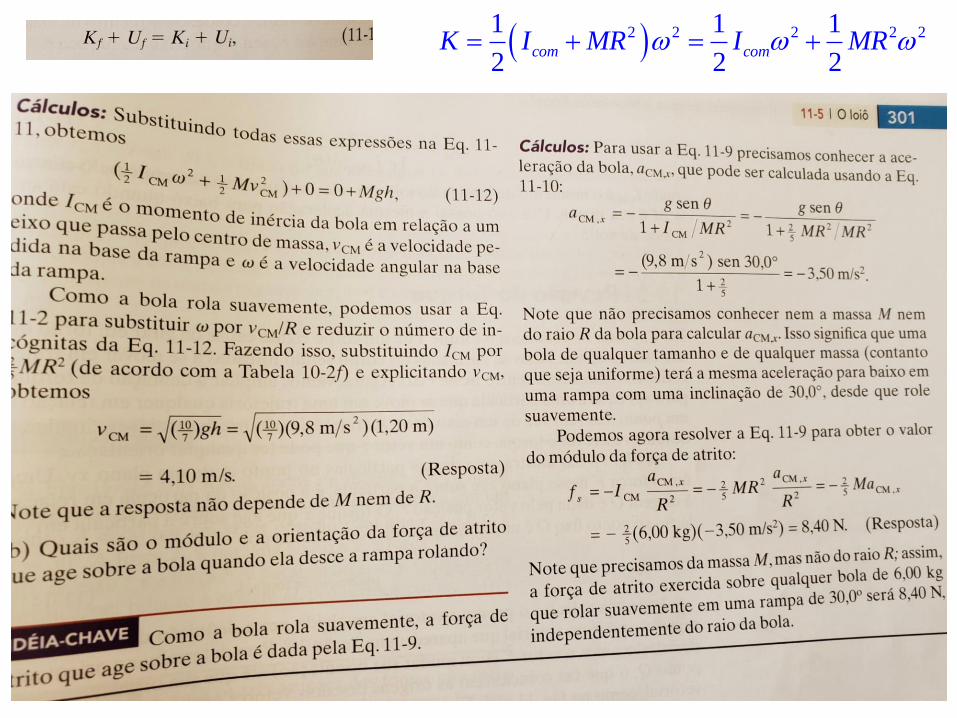
r F =


( )r p m r v= = mvr⊥=


Segunda Lei de Newton para Rotações e Momento
𝑭𝒓𝒆𝒔 =𝒅𝒑
𝒅𝒕
Para movimentos lineares, a 2a Lei de Newton
pode ser escrita em termos do momento linear
Para uma partícula em movimento rotacional temos:
( )
Newton's second law for linear motion has the form: . Below we
will derive the angular form of Newton's sec
Newton's Second
ond law for a pa
Law in Angul
rticle
r Form
.
a
net
dpF
dt
d dm r v m r
dt dt
=
= → = ( ) ( )
( ) ( ) ( )0
Thus: Compar e with:
net ne
n n
t
e ett
dv drv m r v m r a v v
dt dt
dv v m r
dpF
d
a r ma r Ft
d
d
dt t
= + = +
= → = = =
==
=
𝝉𝒓𝒆𝒔 =𝒅Ԧ𝒍
𝒅𝒕

O
m1
m3
m2
ℓ1
ℓ2
ℓ3
x y
z
net
dL
dt=
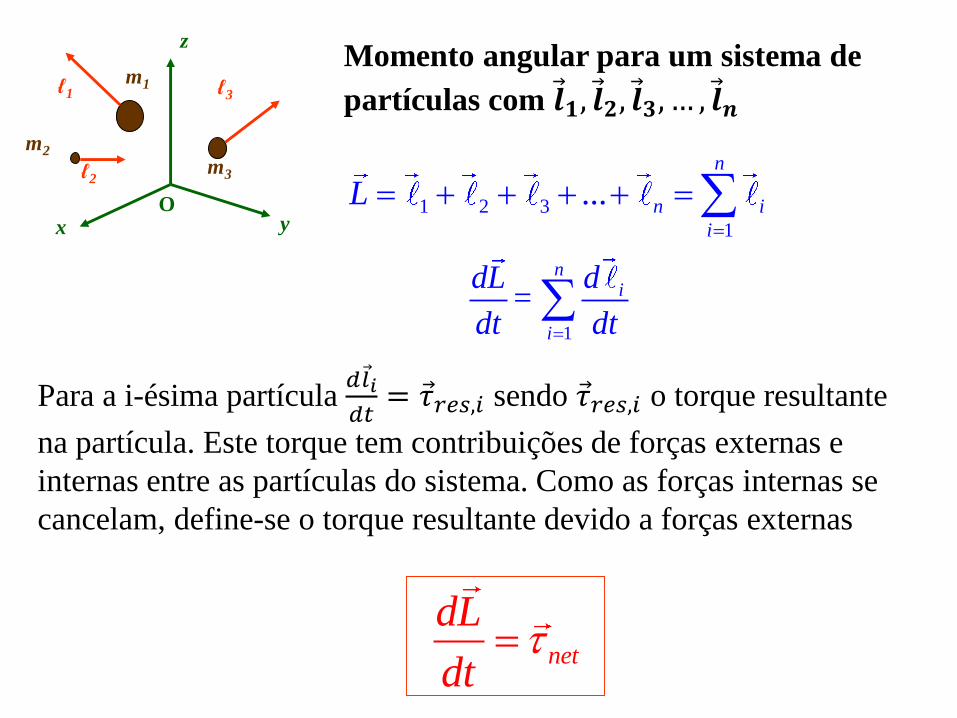
Momento angular para um sistema de
partículas com Ԧ𝒍𝟏, Ԧ𝒍𝟐, Ԧ𝒍𝟑, … , Ԧ𝒍𝒏
1 2 3
1
1
The angular momentum of the system is ...
The time derivative of the angular momentum is =
The time derivative for the angular momentum of the i-th part
n
n i
i
ni
i
L L
ddL
dt dt
=
=
= + + + + =
,
,
,
icle
Where is the net torque on the particle. This torque has contributions
from external as well as internal forces between the particles of the system. Thus
inet i
net i
net i
d
dt
dL
dt
=
= =1
Here is the net torque due to all the external forces.
By virtue of Newton's third law the vector sum of all internal torques is zero.
Thus Newton's second law for a system in ang
n
net net
i
=
ular form takes the form:
1 2 3
1
1
The angular momentum of the system is ...
The time derivative of the angular momentum is =
The time derivative for the angular momentum of the i-th part
n
n i
i
ni
i
L L
ddL
dt dt
=
=
= + + + + =
,
,
,
icle
Where is the net torque on the particle. This torque has contributions
from external as well as internal forces between the particles of the system. Thus
inet i
net i
net i
d
dt
dL
dt
=
= =1
Here is the net torque due to all the external forces.
By virtue of Newton's third law the vector sum of all internal torques is zero.
Thus Newton's second law for a system in ang
n
net net
i
=
ular form takes the form:
Para a i-ésima partícula 𝑑Ԧ𝑙𝑖
𝑑𝑡= Ԧ𝜏𝑟𝑒𝑠,𝑖 sendo Ԧ𝜏𝑟𝑒𝑠,𝑖 o torque resultante
na partícula. Este torque tem contribuições de forças externas e
internas entre as partículas do sistema. Como as forças internas se
cancelam, define-se o torque resultante devido a forças externas

zL I=
Momento angular de um corpo rígido girando em torno de eixo fixo
Toma-se o eixo z como o eixo de rotação,
determinaremos a componente z do momento
angular resultante. Divide-se o corpo em n
elementos com massa mi com vetor posição Ԧ𝑟𝑖.
O momento angular é Ԧ𝑙𝑖 = Ԧ𝑟𝑖 × Ԧ𝑝𝑖. A magnitude
é 𝑙𝑖 = 𝑟𝑖𝑝𝑖 sen90° = 𝑟𝑖Δ𝑚𝑖𝑣𝑖
We take the z-axis to be the fixed rotation axis. We will determine
the z-component of the net angular momentum. The body is
divided n elements of mass that have a position vector
The angula
i im r
( )
( )( )
r momentum of the i-the element is:
Its magnitude sin90 = The z-compoment
of is: sin sin
The z-component of the angular momentu
i i i i
i i i i i i
iz i iz i i i i i i i
r p
r p r m v
r m v r m v ⊥
=
=
= = =
( ) 2
1 1 1 1
2
1
m is the sum:
The sum is the rotational inertia of the rigid body
Thus:
z
n n n n
z iz i i i i i i i i
i i i i
n
i i
i
z
L
L r m v r m r m r
m r I
L I
⊥ ⊥ ⊥ ⊥
= = = =
⊥
=
= = = =
=
We take the z-axis to be the fixed rotation axis. We will determine
the z-component of the net angular momentum. The body is
divided n elements of mass that have a position vector
The angula
i im r
( )
( )( )
r momentum of the i-the element is:
Its magnitude sin90 = The z-compoment
of is: sin sin
The z-component of the angular momentu
i i i i
i i i i i i
iz i iz i i i i i i i
r p
r p r m v
r m v r m v ⊥
=
=
= = =
( ) 2
1 1 1 1
2
1
m is the sum:
The sum is the rotational inertia of the rigid body
Thus:
z
n n n n
z iz i i i i i i i i
i i i i
n
i i
i
z
L
L r m v r m r m r
m r I
L I
⊥ ⊥ ⊥ ⊥
= = = =
⊥
=
= = = =
=


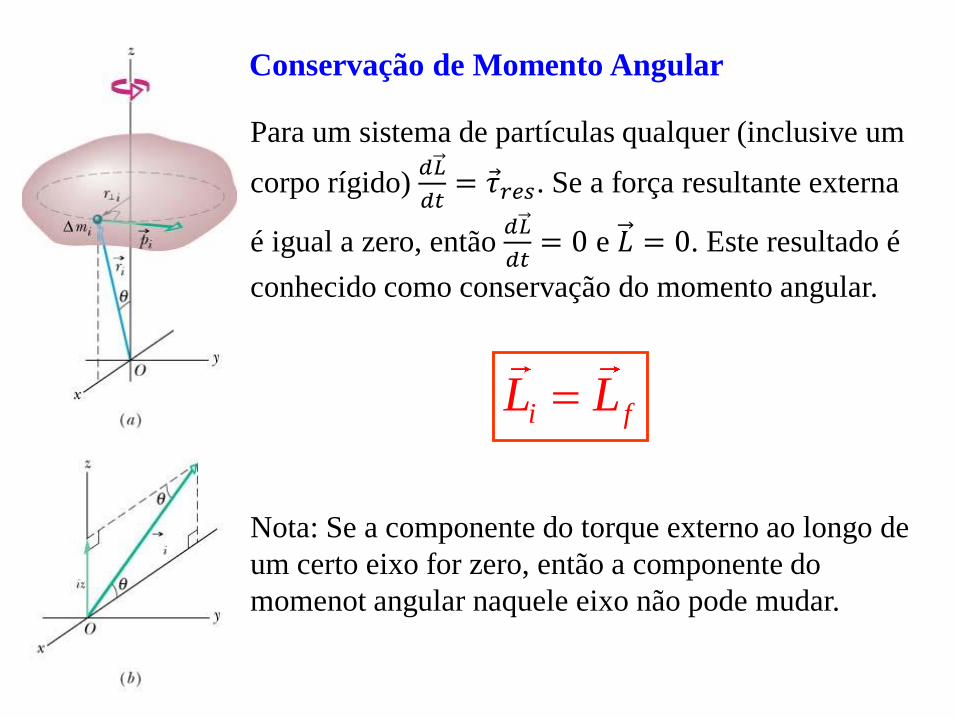
i fL L=
Conservação de Momento Angular
Para um sistema de partículas qualquer (inclusive um
corpo rígido) 𝑑𝐿
𝑑𝑡= Ԧ𝜏𝑟𝑒𝑠. Se a força resultante externa
é igual a zero, então𝑑𝐿
𝑑𝑡= 0 e 𝐿 = 0. Este resultado é
conhecido como conservação do momento angular.
Nota: Se a componente do torque externo ao longo de
um certo eixo for zero, então a componente do
momenot angular naquele eixo não pode mudar.
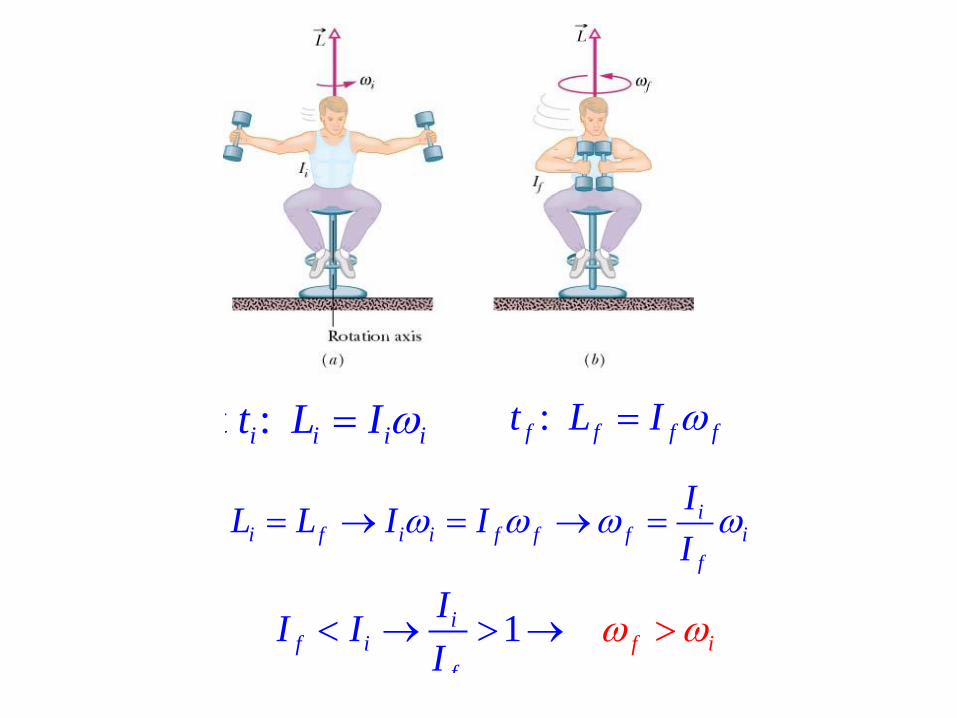
The student then pulls in his hands as shown in fig.b. This action reduces the
rotational inertia from an initial value to a smaller final value .
No net external torque acts on the student-st
i fI I
ool system. Thus the
angular momentum of the system remains unchanged.
Angular momentum at : Angular momentum at :
Since 1
i i i i f f f f
i ii f i i f f f i f
f
fi
f
t L I t L I
I IL L I I I I
I I
= =
= → = → = → →
The rotation rate of the student in fig.b is faster
i
The student then pulls in his hands as shown in fig.b. This action reduces the
rotational inertia from an initial value to a smaller final value .
No net external torque acts on the student-st
i fI I
ool system. Thus the
angular momentum of the system remains unchanged.
Angular momentum at : Angular momentum at :
Since 1
i i i i f f f f
i ii f i i f f f i f
f
fi
f
t L I t L I
I IL L I I I I
I I
= =
= → = → = → →
The rotation rate of the student in fig.b is faster
i
The student then pulls in his hands as shown in fig.b. This action reduces the
rotational inertia from an initial value to a smaller final value .
No net external torque acts on the student-st
i fI I
ool system. Thus the
angular momentum of the system remains unchanged.
Angular momentum at : Angular momentum at :
Since 1
i i i i f f f f
i ii f i i f f f i f
f
fi
f
t L I t L I
I IL L I I I I
I I
= =
= → = → = → →
The rotation rate of the student in fig.b is faster
i
The student then pulls in his hands as shown in fig.b. This action reduces the
rotational inertia from an initial value to a smaller final value .
No net external torque acts on the student-st
i fI I
ool system. Thus the
angular momentum of the system remains unchanged.
Angular momentum at : Angular momentum at :
Since 1
i i i i f f f f
i ii f i i f f f i f
f
fi
f
t L I t L I
I IL L I I I I
I I
= =
= → = → = → →
The rotation rate of the student in fig.b is faster
i






Rotational Motion
Analogies betwee
Translati
n translational and r
onal Moti
otational M
on
otio
n
x
v
22
2
2
a
p
mvK
m
F
IK
ma
I
=
=
=
net net
F
P Fv
dpF
dt
p m
d
t
v
I
P
d
=
=
=
=
=
=
L I=
Analogia entre movimentos translacional e rotacional
Movimento translacional Movimento rotacional