PERTURBAÇÕES NO EQUILÍBRIO DOS ECOSSISTEMAS NATURAISANTRÓPICAS.

Universidade Estadual de LondrinaCentro de Tecnologia e UrbanismoDepartamento de Engenharia Elétrica
Guilherme Augusto Gil Bonato
Controle misto H2/H∞ com base em LMIs eanálise de performance para um pêndulo
rotacional invertido
Londrina2017

Universidade Estadual de Londrina
Centro de Tecnologia e UrbanismoDepartamento de Engenharia Elétrica
Guilherme Augusto Gil Bonato
Controle misto H2/H∞ com base em LMIs e análisede performance para um pêndulo rotacional invertido
Trabalho de Conclusão de Curso orientado pelo Prof. Dr. MárcioRoberto Covacic intitulado “Controle misto H2/H∞ com base emLMIs e análise de performance para um pêndulo rotacional inver-tido” e apresentado à Universidade Estadual de Londrina, comoparte dos requisitos necessários para a obtenção do Título de Ba-charel em Engenharia Elétrica.
Orientador: Prof. Dr. Márcio Roberto Covacic
Londrina2017

Ficha Catalográfica
Guilherme Augusto Gil BonatoControle misto H2/H∞ com base em LMIs e análise de performance para umpêndulo rotacional invertido - Londrina, 2017 - 102 p., 30 cm.Orientador: Prof. Dr. Márcio Roberto Covacic1. Controle Robusto. 2. Rejeição de Distúrbio . 3. Controle Ótimo.I. Universidade Estadual de Londrina. Curso de Engenharia Elétrica. II.Controle misto H2/H∞ com base em LMIs e análise de performance para umpêndulo rotacional invertido.

Guilherme Augusto Gil Bonato
Controle misto H2/H∞ com base em LMIs eanálise de performance para um pêndulo
rotacional invertido
Trabalho de Conclusão de Curso apresentado ao Curso deEngenharia Elétrica da Universidade Estadual de Londrina,como requisito parcial para a obtenção do título de Bacharelem Engenharia Elétrica.
Comissão Examinadora
Prof. Dr. Márcio Roberto CovacicUniversidade Estadual de Londrina
Orientador
Prof. Dr. Ruberlei GainoUniversidade Estadual de Londrina
Profa. Dra. Maria Bernadete de MoraisFrança
Universidade Estadual de Londrina
Londrina, 16 de janeiro de 2018

Dedico este trabalho aos meus pais, quepossibilitaram a minha formação acadêmica
e me guiaram durante esta jornada.

Agradecimentos
Gostaria de agradecer aos meus pais e irmãs, que possibilitaram essa incrível experi-ência e desempenharam papel fundamental em minha formação, me orientando e confor-tando durante a minha jornada.
Agradeço também aos amigos que conheci na universidade pelos momentos inesquecí-veis compartilhados e a ajuda mútua compartilhada entre nós, que facilitou a conclusãodo curso.
Gostaria de agradecer também aos professores Márcio Roberto Covacic e RuberleiGaino por abrirem as portas para mim como aluno de iniciação científica no laboratóriode Controle e Automação, além de toda a orientação prestada, tanto na iniciação científicaquanto no trabalho de conclusão de curso, o que culminou na realização deste trabalho.A professora Maria Bernadete pela participação da banca examinadora e ao professorLeonimer Flávio de Melo pela participação da pré-banca.
Agradeço a minha querida Ana Balko, que sempre me incentivou e ajudou nos mo-mentos difíceis encontrados durante a elaboração deste trabalho e ao longo de toda agraduação.
Agradeço a Universidade Estadual de Londrina pela estrutura que possibilitou a rea-lização deste trabalho e a minha formação acadêmica.

"Sábio é aquele que conhece os limites da própria ignorância"Sócrates

Guilherme Augusto Gil Bonato. Controle misto H2/H∞ com base em LMIs eanálise de performance para um pêndulo rotacional invertido. 2017. 102 p.Trabalho de Conclusão de Curso em Engenharia Elétrica - Universidade Estadual deLondrina, Londrina.
ResumoDistúrbios estão frequentemente presentes em sistemas de controle reais, que podem serprovenientes de sinais externos ou do erro na leitura de dados de sensores, por exem-plo. Se estes distúrbios não forem considerados nos projetos das estratégias de controle,a performance do sistema pode ser prejudicada. As normas H2 e H∞ de sistemas semostram naturalmente como medidas de performance. Assim, minimizar estas normasimplica em uma melhor performance do sistema com relação a rejeição de distúrbios.Neste trabalho, são apresentados os problemas de otimização do controle H2, controleH∞ e controle misto H2/H∞, sujeitos a restrição da norma do controlador K, via LMIs,aplicados ao sistema do pêndulo rotacional invertido ROTPEN SRV02, fabricado pelaQuanser R©. Para a verificação da performance dos controladores, foram considerados trêsdistúrbios modelados como um sinal de tensão aplicados ao atuador do sistema: distúrbioimpulsivo, distúrbio senoidal e distúrbio constante. Os resultados obtidos mostram queos problemas de otimização são eficientes em relação a minimização das normas H2 e H∞
quando comparadas com a lei de controle obtida através das desigualdades de Lyapunov.Em termos de performance, o controle misto apresentou um melhor resultado para o casodos distúrbios impulsivo e senoidal. Para o caso do distúrbio constante, o controle H2
foi o que se mostrou mais eficiente. A partir das análises apresentadas, conclui-se quecada estratégia de controle desenvolvida tem um melhor resultado para cada aspecto, nãopossuindo uma técnica que se mostra superior em todos os critérios.
Palavras-Chave: 1. Controle Robusto. 2. Rejeição de Distúrbio . 3. Controle Ótimo.

Guilherme Augusto Gil Bonato. H2/H∞ mixed control via LMIs and performanceanalyze for a rotational inverted pendulum. 2017. 102 p. Monograph in ElectricalEngineering - Londrina State University, Londrina.
AbstractDisturbances are often present in real control systems, that can be coming from exter-nal signals or from error in reading sensor data, for example. If these disturbances arenot considered in the control strategys projects, the performance of the system may beimpaired. The H2 and H∞ norms of systems are naturally shown as measures for perfor-mance. Therefore, minimizing these norms implies a better performance of the system inrelation to disturbance rejection. In this work the optimization problems of the H2 con-trol, H∞ control and mixed H2/H∞ control , subject to the restriction of the controllerK norm, via LMIs are presented, applying these controllers to the ROTPEN SRV02 in-verted rotational pendulum system, produced by Quanser R©. To verify the performanceof the controllers, three disturbances were considered as a voltage signal applied to thesystem actuator: impulsive disturbance, sinusoidal disturbance and constant disturbance.The obtained results showed that the optimization problems are efficient in relation tothe minimization of the H2 and H∞ norms when compared with the control law obtainedthrough the inequalities of Lyapunov. In terms of performance, the mixed control pre-sented a better result for the case of impulsive and sinusoidal disturbance. For the caseof the constant disturbance, the H2 control was the most efficient. From the analysispresented, it is concluded that each control strategy developed has a better result foreach aspect, not having a technique that is superior in all the criteria.
Key-words: 1. Robust Control. 2. Disturbance Rejection. 3. Optimize Control.

Lista de ilustrações
Figura 3.1 – Diagrama esquemático do ROTPEN SRV02. . . . . . . . . . . . . . . . 28Figura 3.2 – Variáveis do ROTPEN SRV02 e suas convenções. . . . . . . . . . . . . 29Figura 4.1 – Plantas generalizadas para diferentes números de canais. . . . . . . . . 43Figura 5.1 – Diagrama de blocos desenvolvido para a simulação não linear do sistema
ROTPEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Figura 5.2 – Sub Sistema Planta ROTPEN Não Linear. . . . . . . . . . . . . . . . . 50Figura 5.3 – Bloco Controle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Figura 5.4 – Bloco Distúrbio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Figura 5.5 – Sistema ROTPEN SRV02. . . . . . . . . . . . . . . . . . . . . . . . . . 53Figura 5.6 – Placa de dados Q8-USB. . . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 5.7 – Amplificador VoltPAQ-X1. . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 5.8 – Diagrama de blocos utilizados para a implementação. . . . . . . . . . . 57Figura 5.9 – Bloco Calcula Estados HPF. . . . . . . . . . . . . . . . . . . . . . . . . 58Figura 5.10–Bloco SRV02-ET+ROTPEN-E para a implementação. . . . . . . . . . 59Figura 6.1 – Diferença entre as modelagens. . . . . . . . . . . . . . . . . . . . . . . 63Figura 6.2 – Valores singulares para a matriz de transferência de malha fechada Tzw,
para os diferentes controladores ótimos projetados. . . . . . . . . . . . 65Figura 6.3 – Resultados obtidos para o Controle H2 aplicado na simulação da planta
não linear do sistema ROTPEN SRV02 para o distúrbio impulsivo. . . 67Figura 6.4 – Resultados obtidos para o Controle H∞ aplicado na simulação da
planta não linear do sistema ROTPEN SRV02 para o distúrbio im-pulsivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figura 6.5 – Resultados obtidos para o Controle misto H2/H∞ aplicado na simula-ção da planta não linear do sistema ROTPEN SRV02 para o distúrbioimpulsivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Figura 6.6 – Resultados obtidos para o Controle H2 aplicado na simulação da plantanão linear do sistema ROTPEN SRV02 para o distúrbio senoidal. . . . 69
Figura 6.7 – Resultados obtidos para o Controle H∞ aplicado na simulação daplanta não linear do sistema ROTPEN SRV02 para o distúrbio senoidal. 70
Figura 6.8 – Resultados obtidos para o Controle misto H2/H∞ aplicado na simula-ção da planta não linear do sistema ROTPEN SRV02 para o distúrbiosenoidal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figura 6.9 – Resultados obtidos para o Controle H2 aplicado na simulação da plantanão linear do sistema ROTPEN SRV02 para o distúrbio constante. . . 72

Figura 6.10–Resultados obtidos para o Controle H∞ aplicado na simulação daplanta não linear do sistema ROTPEN SRV02 para o distúrbio constante. 72
Figura 6.11–Resultados obtidos para o Controle misto H2/H∞ aplicado na simula-ção da planta não linear do sistema ROTPEN SRV02 para o distúrbioconstante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figura 6.12–Resultados obtidos para o Controle H2 na implementação para o dis-túrbio impulsivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figura 6.13–Resultados obtidos para o Controle H∞ na implementação para o dis-túrbio impulsivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figura 6.14–Resultados obtidos para o Controle misto H2/H∞ na implementaçãopara o distúrbio impulsivo. . . . . . . . . . . . . . . . . . . . . . . . . . 76
Figura 6.15–Resultados obtidos para o Controle H2 na implementação para o dis-túrbio senoidal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figura 6.16–Resultados obtidos para o Controle H∞ na implementação para o dis-túrbio senoidal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Figura 6.17–Resultados obtidos para o Controle misto H2/H∞ na implementaçãopara o distúrbio senoidal. . . . . . . . . . . . . . . . . . . . . . . . . . 78
Figura 6.18–Resultados obtidos para o Controle H2 na implementação para o dis-túrbio constante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figura 6.19–Resultados obtidos para o Controle H∞ na implementação para o dis-túrbio constante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figura 6.20–Resultados obtidos para o Controle misto H2/H∞ na implementaçãopara o distúrbio constante. . . . . . . . . . . . . . . . . . . . . . . . . . 81

Lista de quadros
Quadro 5.1 – Especificações do sistema ROTPEN. . . . . . . . . . . . . . . . . . . . 54Quadro 5.2 – Principais Parâmetros para o atuador da base SRV02. . . . . . . . . . 55Quadro 6.1 – Resultados obtidos com os scripts do software MATLAB desenvolvidos. 64

Lista de Siglas e Abreviaturas
BRL Bounded Real Lemma (Lema Real Limitado)CCW Counter Clockwise (Sentido Anti-Horário)LMI Linear Matrix Inequalities (Inequações Matriciais Lineares)LQR Linear Quadratic Regulator (Regulador Quadrático Linear)MIMO Multiple Input Multiple Output (Múltiplas Entradas e Múltiplas Saídas)MPC Model Predictive Control (Modelo de Controle Preditivo)ROTPEN Pêndulo rotacional invertidoSISO Single Input Single Output (Uma Entrada e Uma Saída)SLIT Sistema Linear Invariante no Tempo

Sumário
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.1.1 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . 181.2 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . 18
2 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . 202.1 Representação em Espaço de Estados . . . . . . . . . . . . . . . 202.2 Inequações matriciais lineares (LMIs) . . . . . . . . . . . . . . . 212.3 Estabilidade no sentido Lyapunov . . . . . . . . . . . . . . . . . 222.3.1 Estabilidade no sentido Lyapunov descrita em LMIs . . . . . . 232.3.2 Teoria de Lyapunov - sistema com realimentação de estados . 232.4 Valores Singulares de sistemas . . . . . . . . . . . . . . . . . . . . 242.5 Normas de sinais e sistemas . . . . . . . . . . . . . . . . . . . . . 252.5.1 Norma de sinais L∞ . . . . . . . . . . . . . . . . . . . . . . . . . . 252.5.2 Norma de sinais L2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.5.3 Norma de sistemas H∞ . . . . . . . . . . . . . . . . . . . . . . . . 262.5.4 Norma de sistemas H2 . . . . . . . . . . . . . . . . . . . . . . . . . 262.6 Complemento de Schur . . . . . . . . . . . . . . . . . . . . . . . . 27
3 PÊNDULO ROTACIONAL INVERTIDO . . . . . . . . . . . . 283.1 Modelagem matemática . . . . . . . . . . . . . . . . . . . . . . . . 283.1.1 Linearização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.1.2 Representação em espaço de estados . . . . . . . . . . . . . . . . 343.1.3 Inserção da dinâmica do atuador ao sistema . . . . . . . . . . . 363.2 Conclusões Parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4 CONTROLE ÓTIMO VIA LMIS . . . . . . . . . . . . . . . . . 374.1 Controle H2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2 Controle H∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.3 Controle Misto H2/H∞ . . . . . . . . . . . . . . . . . . . . . . . . 434.4 Restrição da norma do controlador K . . . . . . . . . . . . . . . 454.5 Conclusões Parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.1 Distúrbio Considerados . . . . . . . . . . . . . . . . . . . . . . . . 475.1.1 Distúrbio Impulsivo . . . . . . . . . . . . . . . . . . . . . . . . . . 47

5.1.2 Distúrbio Constante . . . . . . . . . . . . . . . . . . . . . . . . . . 475.1.3 Distúrbio Senoidal . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.2 Simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.2.1 Diagrama de Blocos para a simulação. . . . . . . . . . . . . . . . 495.3 Implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.3.1 Módulo ROTPEN SRV02 . . . . . . . . . . . . . . . . . . . . . . . 535.3.2 Placa de dados Q8-USB . . . . . . . . . . . . . . . . . . . . . . . . 555.3.3 Amplificador VoltPAQ-X1 . . . . . . . . . . . . . . . . . . . . . . 565.3.4 Montagem e conexões entre os dispositivos . . . . . . . . . . . . 575.3.5 Diagrama de blocos para a implementação . . . . . . . . . . . . 575.3.6 Procedimentos realizados na implementação . . . . . . . . . . . 60
6 RESULTADOS E DISCUSSÕES . . . . . . . . . . . . . . . . . . 616.1 Representação do ROTPEN SRV02 no Espaço de Estados . . 616.2 Síntese dos Controladores . . . . . . . . . . . . . . . . . . . . . . . 636.3 Simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.3.1 Distúrbio Impulsivo . . . . . . . . . . . . . . . . . . . . . . . . . . 666.3.2 Distúrbio Senoidal . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.3.3 Distúrbio Constante . . . . . . . . . . . . . . . . . . . . . . . . . . 716.4 Implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.4.1 Distúrbio Impulsivo . . . . . . . . . . . . . . . . . . . . . . . . . . 746.4.2 Distúrbio Senoidal . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.4.3 Distúrbio Constante . . . . . . . . . . . . . . . . . . . . . . . . . . 796.5 Discussão Geral dos Resultados . . . . . . . . . . . . . . . . . . . 816.6 Conclusões Parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
7 CONCLUSÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . 837.1 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Lista de Apêndices . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A SCRIPT DA FUNÇÃO DE MATLAB QUE CALCULA OVALOR DA ACELERAÇÃO ANGULAR DO BRAÇO CHA-MADA NA SIMULAÇÃO NÃO LINEAR. . . . . . . . . . . . 89
B SCRIPT DA FUNÇÃO DE MATLAB QUE CALCULA OVALORDAACELERAÇÃOANGULARDO PÊNDULO CHA-MADA NA SIMULAÇÃO NÃO LINEAR. . . . . . . . . . . . 91

C SCRIPTMATLAB QUE CALCULA ASMATRIZES NUMÉ-RICAS DO SISTEMA ROTPEN SRV02 DESCRITO EM ES-PAÇO DE ESTADOS . . . . . . . . . . . . . . . . . . . . . . . . 93
D SCRIPT MATLAB CONTROLE H2 COM RESTRIÇÃO DENORMA DO CONTROLADOR K . . . . . . . . . . . . . . . . 95
E SCRIPT MATLAB CONTROLE H∞ COM RESTRIÇÃO DENORMA DO CONTROLADOR K . . . . . . . . . . . . . . . . 97
F SCRIPT MATLAB CONTROLE MISTO H2/H∞ COM RES-TRIÇÃO DE NORMA DO CONTROLADOR K . . . . . . . . 99
G SCRIPT MATLAB CONTROLE QUE GARANTE A ESTA-BILIDADE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101

16
1 Introdução
Projetos de controladores para pêndulos rotacionais invertidos sempre foram muito uti-lizados em estudos ((FURUTA; YAMAKITA; KOBAYASHI, 1991), (CHOI; KIM, 2003),(VENDRAMINI; SILVA, 2010), (MANDIC; LAZAREVIC, 2014)) tanto na área de con-trole clássico como na área de controle robusto, pois o mesmo é dinamicamente instável emseu estado natural. De acordo com Anderson (1989), o estudo e o controle da dinâmicade movimento do pêndulo invertido podem ser comparados a situações em que envol-vam a manutenção do equilíbrio, como por exemplo controlar o propulsor de um foguete(ZHENG; CHENG; GAO, 1995) ou o andar de um robô (GONÇALVES; ZAMPIERI,2006).
Ogata (2010) apresenta as principais diferenças entre as teorias de controle clássi-cos e modernos (robusto), onde o mesmo comenta que a teoria de controle clássico éfundamentada basicamente em uma abordagem no domínio da frequência complexa e ateoria moderna, é essencialmente uma abordagem no domínio do tempo e para algunscasos, como o do controle H∞, no domínio da frequência, fazendo com que seja possívelaplicá-las a sistemas mais complexos, como por exemplo, sistemas multivariáveis.
García, Buitrago e Ramírez (2015) apresentam uma revisão do estado da arte parao pêndulo de Furuta, ou pêndulo rotacional invertido, verificando as formas utilizadaspara realizar o modelamento matemático do sistema como: Equações de Euler-LaGrange,método de Newton iterativo, algoritmo de Denavit-Hartembeg entre outros. São apre-sentadas no artigo também, as principais técnicas de controle aplicadas ao sistema dopêndulo rotacional invertido, sendo a técnica de realimentação de estados uma das maisutilizadas.
Muitas vezes em uma aplicação real, sistemas de controle são expostos a distúrbiosexternos provenientes do ambiente, sendo que na maioria dos casos, estes distúrbios podemdeteriorar a performance de controle (ALAGOZ et al., 2014), assim, faz-se necessáriootimizar certos índices de desempenho para que o sistema responda de forma desejada,tais como as normas H2 e H∞, minimizando os efeitos destes distúrbios externos na saídado sistema.
Como visto em Zhou et al. (1996), as normas H2 e H∞ se mostram naturalmentecomo medições em situações de pior caso para a análise de performance de um sistema decontrole para uma grande variedade de sinais de distúrbio na entrada do sistema. Sendoassim, é possível utilizar as normas H2 e H∞ como índices de desempenho para analisara performance de um sistema com relação a rejeição de distúrbios.
Diversos trabalhos utilizam estas figuras de mérito para o desenvolvimento de estraté-gias de controle, como pode ser observado em (DU; ZHANG; NGUYEN, 2008), (ZHANG;LI; GUO, 2013), (FRUTUOSO; SANTOS; SALES, 2014), (ROSA FILHO, 2015), (AN-

Capítulo 1. Introdução 17
DRADE; AGULHARI, 2016), (KROKAVEC; FILASOVA, 2016), (LI et al., 2017) e (LIUet al., 2017).
Em (DU; ZHANG; NGUYEN, 2008) é apresentado um controle misto H2/H∞ uti-lizando realimentação de saída via inequações matriciais lineares (LMIs) aplicado a umprédio de 20 andares modelado com a técnica de ordem reduzida, no qual foi consideradoum distúrbio sísmico aplicado ao sistema, onde o controlador apresentou uma supressãosatisfatória do distúrbio.
Zhang, Li e Guo (2013) mostram uma metodologia para o desenvolvimento de um con-trole H∞ por realimentação de estados para uma nave espacial flexível sujeita a distúrbiosexternos e atrasos variantes no tempo na entrada do sistema. O problema foi solucionadovia LMIs e apresentou um controlador que garante que o sistema será assintoticamenteestável e com um certo nível de atenuação para distúrbios.
Já Frutuoso, Santos e Sales (2014) mostram o desenvolvimento de um controle H2
utilizando a realimentação de estados via LMIs tomando como restrição a D-Estabilidade,isto é, a definição de uma região D no plano complexo no qual os polos de malha fechadadevem ser posicionados, aplicando esta lei de controle em um pêndulo linear invertido. Odistúrbio considerado foi modelado como uma força aplicada na extremidade do pêndulo,sendo o mesmo aplicado de maneira empírica. Os resultados mostraram que o sistemapermaneceu equilibrado mesmo após a aplicação do distúrbio, concluindo que o sistemapossuía robustez com relação a distúrbios de baixa intensidade, enquanto que (ROSAFILHO, 2015) apresenta um projeto de controle realimentado de estados H2 com base emLMIs aplicado a simulação não linear de um pêndulo linear invertido sujeito a incertezas namodelagem do sistema. Seus resultados obtidos são comparados com um controle LQR(Linear Quadratic Regulator) em termos de norma H2, obtidas no sistema em malhafechada, no qual o controle H2 se mostrou mais eficiente.
Este trabalho tem como proposta o desenvolvimento de controladores ótimos por re-alimentação de estados com base em LMIs sujeitos a restrição de norma do controladorK, onde KK ′ é limitado por um valor definido com parâmetros de entrada do algoritmo,cujo objetivo dos problemas de otimização é minimizar as normas H2 e H∞ da matrizde transferência que relaciona a saída do sistema pela entrada do distúrbio, aplicandoestas leis de controle no sistema ROTPEN SRV02, fabricado pela Quanser R©, sujeito aperturbações externas modeladas como um sinal de tensão no atuador, analisando seucomportamento para diferentes distúrbios aplicados e a eficiência destes problemas deotimização com relação a minimização das normas H2 e H∞, quando comparadas a leide controle que garante a estabilidade de Lyapunov.

Capítulo 1. Introdução 18
1.1 Objetivos
Este trabalho tem como objetivo analisar a performance, na simulação e implementa-ção em hardware, dos controles H2, H∞ e misto H2/H∞, sujeitos a restrição da normado controlador K e aplicados a um pêndulo rotacional invertido ROTPEN SRV02, desen-volvido pela Quanser R©. Além disso, tem-se como objetivo, verificar a eficiência destasestratégias de controle em relação a minimização das normas H2 e H∞ quando compa-radas com a lei de controle obtida pelas desigualdades de Lyapunov.
1.1.1 Objetivos Específicos
• Estudar o modelo matemático do sistema pêndulo rotacional invertido SRV02;
• Estudar as formulações dos problemas de controle ótimos H2, H∞ e misto com baseem LMIs;
• Desenvolver os controladores propostos;
• Simular os controladores desenvolvidos na planta não linear do sistema;
• Realizar a implementação dos controladores no sistema físico ROTPEN SRV02;
• Analisar a performance obtida para os diferentes controladores aplicados com relaçãoa três distúrbios aplicados: senoidal, impulsivo e constante, verificando qual obtémo melhor comportamento para diferentes critérios.
1.2 Organização do trabalho
O presente trabalho foi desenvolvido em formato de capítulos e seções em cada capí-tulo. No Capítulo 2, foi realizado um levantamento teórico sobre a Representação de umsistema em Espaço de Estado, Inequações matriciais lineares, Estabilidade no sentido deLyapunov e suas consequências em LMIs, Normas de sinais e sistemas e o Complementode Schur, a fim de possibilitar o desenvolvimento do trabalho, alcançando seus objetivos.
No Capítulo 3, é apresentado o sistema utilizado neste trabalho, o pêndulo rotacionalinvertido, analisando seu comportamento físico e descrevendo-o matematicamente atravésde equações diferenciais não lineares. A partir das equações não lineares foi realizada alinearização das mesmas por meio da expansão de Taylor, descrevendo o sistema de formalinear no ponto de operação e realizando a representação do mesmo em espaço de estadose, consequentemente, a aplicação das técnicas de controle que serão apresentas no Capítulo4.
As técnicas de controle H2, H∞ e misto são problemas de otimização cujas formulaçõescom base em LMIs podem ser verificadas no Capítulo 4.

Capítulo 1. Introdução 19
No Capítulo 5, é apresentada a metodologia utilizada para a realização deste traba-lho, discutindo inicialmente os distúrbios utilizados, a forma no qual foram realizadas assimulações e a implementação em hardware.
No Capítulo 6 tem-se os resultados obtidos ao aplicar as metodologias descritas nocapítulo anterior, onde os mesmos são analisados e discutidos.
Por fim, no Capítulo 7, são apresentadas as conclusões finais para o trabalho e suges-tões para pesquisas futuras.

20
2 Fundamentação Teórica
A fim de alcançar os objetivos propostos no capítulo anterior faz-se necessário apresen-tar os conceitos teóricos que permeiam o presente trabalho, tais como: Representação deum sistema em Espaço de Estado, Inequações matriciais lineares, Estabilidade no sentidode Lyapunov e suas consequências em LMIs, Normas de sinais e sistemas e o Complementode Schur.
2.1 Representação em Espaço de Estados
De acordo com Ogata (2010), a tendência moderna nos sistemas de engenharia éaumentar sua complexidade, principalmente pelo fato de realizar tarefas complexas ede alta precisão. Em função deste aumento de complexidade nos sistemas, aumentodas exigências em questões de desempenho e ao fácil acesso a computadores, tornou-senecessária uma nova abordagem para a análise e projeto de sistemas de controle complexos,a chamada teoria de controle moderno. A teoria de controle moderno é baseada noconceito de estado.
Segundo Dorf e Bishop (2001) o estado de um sistema é um conjunto de variáveis talque o conhecimento dos valores destas variáveis e das funções de entrada, com as equaçõesque descrevem a dinâmica, fornecem os estados futuros e a saída futura do sistema.
Um sistema invariante no tempo, genérico e descrito em espaço de estados, pode serrepresentado da seguinte forma:
x(t) = Ax(t) +Bu(t), (2.1)
z(t) = Cx(t) +Du(t), (2.2)
onde A,B,C e D representam matrizes que descrevem o sistema a ser representado emespaço de estados, u(t) representa o sinal de entrada ao sistema, z(t) o sinal de saída dosistema e x(t) os estados do sistema.
A matriz de transferência G(s) de um sistema descrito no espaço de estados, pode serobtida através de (OGATA, 2010):
G(s) = Z(s)U(s) = C(sI− A)−1B +D = Q(s)
|sI− A|, (2.3)
sendo I a matriz identidade e Q(s) = CAdj(sI − A)B + D|sI − A|, com Adj(sI − A) amatriz Adjunta de sI− A.
Verifica-se que |sI−A| é igual ao polinômio característico de G(s), ou seja, os autova-lores da matriz característica A são idênticos aos polos de G(s). Esta igualdade permite

Capítulo 2. Fundamentação Teórica 21
a análise da estabilidade do sistema através dos autovalores de sua matriz característicaA (OGATA, 2010).
2.2 Inequações matriciais lineares (LMIs)
As LMIs constituem uma ferramenta matemática amplamente utilizada em projetos decontroladores robustos na engenharia de controle, pelo fato de muitos problemas encontra-dos nos processos de desenvolvimento de leis de controle serem facilmente transformadosem LMIs.
De acordo com Boyd et al. (1994) a primeira LMI surgiu em 1890 através de umasolução analítica para a LMI de Lyapunov obtida através da equação de Lyapunov. Nadécada de 1940, começaram a ser aplicados os métodos de Lyapunov em problemas reaisde engenharia de controle utilizando pequenas LMIs resolvidas “a mão”. No início dadécada de 1980, foi observado que muitas LMIs poderiam ser resolvidas por computadoresatravés de programação convexa e, no final da década de 80, iniciou-se o desenvolvimentode algoritmos de ponto-interior para a resolução de LMIs.
Em muitos casos, a formulação de um problema através de LMIs evita diversas restri-ções obtidas por formulações convencionais da literatura clássica de controle, tornando-seuma alternativa para quando os métodos convencionais falham ou não possuem solução(SKOGESTAD; POSTLETHWAITE, 2005).
Covacic (2006) cita dois motivos que tornam as técnicas de LMIs especiais: o fatode uma grande variedade de especificações e restrições de projeto poderem ser expressascomo LMIs e, uma vez formulado o problema através de LMIs, ser possível solucioná-laspor algoritmos de otimização bastante eficientes, quando factíveis.
Na Equação (2.4), tem-se uma forma generalizada para uma LMI (BOYD et al., 1994).
F (x) , F0 +m∑i=1
xiFi > 0, (2.4)
sendo x ∈ Rm um vetor que contém as variáveis de decisão da LMI e Fi = F ′i ∈ Rn×n
matrizes características do sistema a ser descrito.Segundo Boyd et al. (1994) a Equação (2.4) é uma restrição convexa em x, isto é,
qualquer mínimo local de F (x) é também mínimo global de F (x) (PALHARES, 2014).Isto torna possível a representação de diversos tipos de restrições convexas em x, comopor exemplo, no caso da teoria de controle, as restrições de Lyapunov e inequações dematrizes quadráticas convexas podem ser representas em forma de LMI.

Capítulo 2. Fundamentação Teórica 22
2.3 Estabilidade no sentido Lyapunov
Um ponto de equilíbrio xe é considerado estável no sentido de Lyapunov, se paraqualquer t0 e qualquer ε > 0, existe δ = δ(t0, ε) positivo tal que, se ||x0 − xe|| < δ então||x(x0, t)− xe|| < ε para todo t > t0 (BHAYA, 2007).
De acordo com Murray et al. (1994), o método para a análise de estabilidade deLyapunov é a generalização da ideia de que, se existe uma “medição da energia” em umsistema, então é possível estudar a taxa de variação desta energia medida de forma averificar as condições de estabilidade do sistema.
Considere uma função V (x) descrita na forma quadrática tal que, V (x) = x′Px comP = P ′ ∈ Rn×n, x ∈ Rn, como pode ser observado em sua forma estendida:
V (x) = x′Px =[x1 x2 x3 ... xn
]
p11 p12 p13 ... p1n
p12 p22 p23 ... p2n
p13 p23 p33 ... p3n
: : : ... :p1n p2n p3n ... pnn
x1
x2
x3
:xn
, (2.5)
de forma que V (x) representa a energia de um sistema.A teoria de Lyapunov diz que um sistema é assintoticamente estável, isto é, os estados
do sistema x(t) convergem para o ponto de equilibro xe, se e somente se, V (x) for umafunção definida positiva e, sua derivada V (x), seja definida negativa.
Assim, se faz necessário apresentar a definição de matrizes definidas positivas, matrizessemidefinidas positivas, matrizes definidas negativas e matrizes semidefinidas negativas(HORN; JOHNSON, 2013).
Matriz Definida Positiva: Uma matriz P = P ′ ∈ Rn×n é dita definida positivase a função da forma quadrática x′Px, com x ∈ Rn resulta em um valor maior que zeropara ∀x 6= 0, isto é, x′Px > 0 , ∀x 6= 0. Esta definição é equivalente à característica deque todos os autovalores λi de P são positivos, e reais pois P é simétrica, e também nacondição em que todos os menores principais de P são positivos.
Matriz Semidefinida Positiva: Uma matriz P = P ′ ∈ Rn×n é dita semidefinidapositiva se a função da forma quadrática x′Px, com x ∈ Rn resulta em um valor maiorou igual a zero para ∀x 6= 0, isto é, x′Px ≥ 0 , ∀x 6= 0, ou seja, existe outros pontos alémda origem na qual a função x′Px é nula.
Matriz Definida Negativa: Uma matriz P = P ′ ∈ Rn×n é dita definida negativacaso a matriz −P seja definida positiva.
Matriz Semidefinida Negativa: Uma matriz P = P ′ ∈ Rn×n é dita semidefinidanegativa caso a matriz −P seja semidefinida positiva.

Capítulo 2. Fundamentação Teórica 23
2.3.1 Estabilidade no sentido Lyapunov descrita em LMIs
Considere um sistema linear autônomo e invariante no tempo descrito em
x(t) = Ax(t), (2.6)
sendo x(t) um vetor que contém os estados do sistema e A sua matriz característica.Como visto anteriormente, um sistema é considerado assintoticamente estável caso
exista uma função escalar V (x) definida positiva e V (x) seja definida negativa, ou seja,−V (x) seja definida positiva.
Partindo da função quadrática de Lyapunov V (x) = x′Px, com P = P ′, tem-se suaderivada da seguinte forma:
V (x) = x′Px+ x′Px. (2.7)
Aplicando a propriedade de matrizes transpostas:
x(t)′ = x(t)′A′, (2.8)
resulta a equação (2.7) como:
V (x) = x′A′Px+ x′PAx = x′(A′P + PA)x. (2.9)
Desta forma, aplicando a teoria de Lyapunov são obtidas as desigualdades de Lyapu-nov, que garantem a estabilidade do sistema caso exista uma matriz P que satisfaça asLMIs representadas em (2.10)(OLIVEIRA; PERES, 2010).
V (x) > 0↔ x′Px > 0⇔ P = P ′ > 0 e
V (x) < 0⇔ x′(A′P + PA)x < 0⇔ A′P + PA < 0.(2.10)
2.3.2 Teoria de Lyapunov - sistema com realimentação de esta-dos
Considere um sistema linear invariante no tempo descrito em espaço de estados deacordo com as equações (2.1) e (2.2), com uma lei de controle u(t) = −Kx(t).
Substituindo a lei de controle na equação (2.1):
x(t) = Ax(t) +B(−Kx(t)) = (A−BK)x(t). (2.11)
Aplicando o conceito da teoria de Lyapunov, utilizando a função V (x) = x′Px, sãoobtidos os seguintes resultados para um sistema realimentado de variáveis de estado coma lei de controle u(t) = −Kx(t):
P = P ′ > 0 (2.12)

Capítulo 2. Fundamentação Teórica 24
e
(A−BK)′P + P (A−BK) < 0⇔ A′P −K ′B′P + PA− PBK < 0. (2.13)
Realizando a multiplicação de P−1 antes e depois de todos os termos das equações(2.12) e (2.13) obtém-se:
P−1PP−1 > 0⇔ P−1 > 0 e (2.14)
P−1A′PP−1 − P−1K ′B′PP−1 + P−1PAP−1 − P−1PBKP−1 < 0, (2.15)
resultando em:
P−1A′ + AP−1 − P−1K ′B′ −BKP−1 < 0. (2.16)
Considerando P−1 = X, a equação (2.16) resulta em:
XA′ + AX −XK ′B′ −BKX < 0. (2.17)
Finalmente considerando Z = KX e as equações (2.14) e (2.17), obtêm-se as LMIs que,se satisfeitas, garantem estabilidade assintótica ao sistema para uma lei de controle u(t) =−Kx, representadas em (2.18), com o controlador dado por K = ZX−1 (OLIVEIRA;PERES, 2010).
X > 0 e
XA′ + AX − Z ′B′ −BZ < 0.(2.18)
2.4 Valores Singulares de sistemas
De acordo com Toscano (2013), a análise de ganhos no domínio da frequência de siste-mas SISO (single input single output) pode ser expandida para sistemas MIMO (multipleinput multiple output) considerando os valores singulares da matriz de transferência dosistema.
Dada uma matriz de transferência G(jω), de um sistema com p entradas e q saídas,seus valores singulares, σi, são definidos como a raiz quadrada dos autovalores, λi, deG(jω)G(−jω)′, assim como mostrado em
σi(G(jω)) =√λi (G(jω)G(−jω)′), (2.19)
onde i representa o menor valor entre p e q.

Capítulo 2. Fundamentação Teórica 25
2.5 Normas de sinais e sistemas
Na engenharia de controle, um dos objetivos mais importantes é prover ao sistema,além da estabilidade, critérios de desempenho de forma que o mesmo responda de maneiradesejada. Uma forma de descrever estes critérios, segundo Zhou et al. (1996), é atravésde uma medida do “tamanho” dos sinais e do sistema como um todo, isto é, através denormas de sinais em sistemas.
Nesta seção são apresentados alguns conceitos básicos sobre normas de sinais, maisespecificamente sobre as normas de Lebesgue de sinais L2 e L∞, e as normas de HardyH2 e H∞ para sistemas, tomando como base (TOGNETTI, 2014), (ZHOU et al., 1996),(GREEN; LIMEBEER, 1995) e (TOSCANO, 2013).
2.5.1 Norma de sinais L∞
A norma L∞ de um sinal é também comumente chamada de norma de pico. Sejau(t) um sinal contínuo unidimensional, tem-se sua norma L∞ definida por (ZHOU et al.,1996):
‖u(t)‖∞ , maxt≥0|u(t)|. (2.20)
Desta forma, tem-se a interpretação que, se um sinal contínuo possui norma L∞ finita,sua amplitude é limitada pelo valor assumido pela norma (TOGNETTI, 2014).
Para um sinal u(t) multidimensional a norma L∞ é obtida pelo valor supremo dosvalores assumidos por u(t)(TOSCANO, 2013).
2.5.2 Norma de sinais L2
Dado um sinal u(t) contínuo unidimensional, sua norma L2 pode ser definida como(ZHOU et al., 1996):
‖u(t)‖2 ,(∫ ∞
0u(t)2dt
) 12. (2.21)
A norma L2 de um sinal pode ser interpretada como a raiz quadrada da energiatotal do sinal u(t), ou seja, se u(t) possui L2 finita, u(t) é um sinal de energia finita(TOGNETTI, 2014).
A energia total de um sinal analisado no tempo é igual a energia de um sinal analisadona frequência de acordo com o Teorema de Parseval. Desta forma é possível expressara definição para a norma L2 de um sinal no domínio da frequência complexa (GREEN;

Capítulo 2. Fundamentação Teórica 26
LIMEBEER, 1995). Considerando U(jω) como a transformada de Fourier do sinal u(t),tem-se sua norma L2 da seguinte forma:
‖u(t)‖2 ,( 1
2π
∫ ∞−∞|U(jw)|2
) 12. (2.22)
Para o caso de um sinal multidimensional u(t) = [u1(t) ... un(t)], sua norma L2 podeser descrita por (TOSCANO, 2013):
‖u(t)‖2 =(∫ ∞
0
n∑i=1
ui(t)2) 1
2
=(∫ ∞
0u(t)′u(t)dt
) 12. (2.23)
2.5.3 Norma de sistemas H∞
Um sistema linear invariante no tempo (SLIT) pode ser representado como um ma-peamento de sinais de entrada em sinais de saída. Considere um SLIT com entrada w esaída z, onde a matriz de transferência que relaciona a saída pela entrada é dada por Tzw.
A norma H∞ é definida como o valor supremo dos valores singulares da matriz detransferência que relaciona a saída z pela entrada w, Tzw. Na Equação (2.24) tem-se adefinição para a norma H∞ para a matriz de transferência Tzw(jw)(ZHOU et al., 1996).
‖Tzw‖∞ , supω∈R
σ(Tzw(jw)). (2.24)
Para o caso de um sistema SISO, a matriz de transferência Tzw é dada como umafunção de transferência. Desta forma, a norma H∞ é equivalente ao maior ganho obtidono diagrama de Bode de magnitude(TOSCANO, 2013).
A norma H∞ de um sistema é equivalente ao ganho induzido L2, ou seja, é equivalentea razão entre a norma L2 da saída pela norma L2 da entrada, como mostrado na equação(2.25)(ZHOU et al., 1996).
‖Tzw‖∞ = ‖z‖2‖w‖2
. (2.25)
2.5.4 Norma de sistemas H2
A norma H2 para uma matriz de transferência que relaciona a saída com a entradade um sistema Tzw é definida da seguinte forma (TOSCANO, 2013):
‖Tzw‖2 ,( 1
2π
∫ ∞−∞
Tr(Tzw(jω)∗.Tzw(jω))dω) 1
2, (2.26)
sendo Tzw(jw)∗ o conjugado transposto de Tzw(jw) e Tr a função traço.Uma interpretação que pode ser realizada para a norma H2 no domínio da frequência é
que a mesma é proporcional ao ganho médio da matriz de transferência Tzw (TOGNETTI,2014).

Capítulo 2. Fundamentação Teórica 27
Para o caso de um sinal de entrada impulsivo w(t) = n0δ(t), onde n0 representa aamplitude do impulso unitário, tem-se a norma L2 do sinal de saída proporcional à normaH2 do sistema, ou seja, quanto menor a norma H2 de um sistema menor a limitação emenergia do sinal de saída quando um sinal impulsivo é aplicado em sua entrada. A relaçãoentre a norma L2 da saída do sistema z com a norma H2 da matriz de transferência Tzw,quando w = n0δ(t) pode ser observada na equação (2.27) (GREEN; LIMEBEER, 1995).
‖z‖2 = ‖n0Tzw‖2 para: w = n0δ(t). (2.27)
2.6 Complemento de Schur
O complemento de Schur é uma ferramenta matemática utilizada muitas vezes paratransformar uma inequação matricial não linear em uma LMI. Sua definição é descrita aseguir (BOYD et al., 1994).
Definição Complemento de Schur: Dado uma matriz complexa M(x), formadapor submatrizes tal que
M(x) =Q(x) S(x)S(x)′ R(x)
> 0,
com a sub matriz Q(x) e R(x) simétricas e a submatriz S(x) dependente de forma afimde x, seu complemento de Schur é dado por: Q(x) − S(x)R(x)−1S ′(x) > 0, sendo R(x)definida positiva (R(x) > 0), ou R(x) − S(x)′Q(x)−1S(x) > 0, com Q(x) uma matrizdefinida positiva (Q(x) > 0).

28
3 Pêndulo Rotacional InvertidoO pêndulo utilizado neste trabalho foi desenvolvido pela Quanser R©, empresa cana-
dense que desenvolve módulos didáticos que possibilitam o desenvolvimento de diversasleis de controle e o estudo de diversos sistemas.
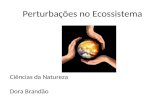
O ROTPEN SRV02 (QUANSER, 2011d),(QUANSER, 2011a),(QUANSER, 2011b),consiste em um braço fixo à mesa com livre movimento, acoplado ao pêndulo rotativo, ouseja, um sistema com dois graus de liberdade, como representado no diagrama esquemáticona Figura 3.1.
Figura 3.1 – Diagrama esquemático do ROTPEN SRV02.
Fonte: (QUANSER, 2011d)
Seu método de funcionamento consiste em desenvolver uma lei de controle que esta-bilize o pêndulo equilibrado na posição vertical para cima, isto é, α = 0.
A seguir será apresentada uma modelagem matemática que descreve o comportamentoda dinâmica de movimento do sistema.
3.1 Modelagem matemática
Nesta seção, é discutida a modelagem do sistema ROTPEN SRV02, em equações deespaço de estado, tomando como referência (QUANSER, 2011b) e (NEGRÃO, 2013),

Capítulo 3. Pêndulo Rotacional Invertido 29
sendo as principais diferença das referências citadas a consideração da eficiência do motore da caixa de engrenagem do sistema bem como a forma em que a dinâmica do atuador dosistema é adicionada à modelagem, com o objetivo de desenvolver os controladores ótimosvia LMIs, estes que utilizam em sua formulação as matrizes que descrevem o sistema emespaço de estados.
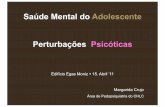
A Figura 3.2 mostra no diagrama esquemático as variáveis referentes ao ROTPENSRV02.
Figura 3.2 – Variáveis do ROTPEN SRV02 e suas convenções.
Fonte: (QUANSER, 2011b)
A partir da Figura 3.2 observa-se que o braço do sistema possui comprimento Lr,momento de inércia Jr e seu ângulo é representado por θ com uma convenção positivano sentido anti-horário(CCW-Counter Clockwise), ou seja, ao aplicar uma tensão positivano servomotor da base SRV02 o braço do pêndulo move-se no sentido anti-horário e,ao aplicar uma tensão negativa, no sentido horário. Observa-se também que, o pêndulopossui um comprimento Lp, com um momento de inércia no centro de massa do pêndulo,dado em Lp
2 , de Jp, seu ângulo é dado por α e possui como referência a posição verticalpara cima, fazendo com que o mesmo varie de −180o a 180o, com a mesma convençãoadotada para θ.
Um ponto q, localizado na ponta do pêndulo de comprimento Lp acoplado a um braço

Capítulo 3. Pêndulo Rotacional Invertido 30
de comprimento Lr, pode ser definido no espaço através de um vetor posição assim comomostra a Equação (3.1).
rq = (x(Lr, Lp), y(Lr, Lp), z(Lr, Lp)) . (3.1)
Ao derivar a posição espacial do ponto q em relação ao tempo, obtém-se sua velocidade,assim como indicado na equação (3.2).
rq = vq = (vx(Lr, Lp), vy(Lr, Lp), vz(Lr, Lp)). (3.2)
Realizam-se equivalências trigonométricas de forma a obter a posição para cada eixode coordenada, obtendo os seguintes resultados para os três eixos.
xq = Lrsin(θ)− Lpsin(α)cos(θ), (3.3)
yq = Lrcos(θ)− Lpsin(α)sin(θ), (3.4)
zq = Lpcos(α). (3.5)
Ao realizar a derivada em relação ao tempo nas posições para cada eixo das coorde-nadas obtêm-se as velocidades para os três eixos, representadas a seguir.
vx,q = xq = Lrθcos(θ) + Lpθsin(α)sin(θ)− Lpαcos(α)cos(θ), (3.6)
vy,q = yq = −Lrθsin(θ)− Lpθsin(α)cos(θ)− Lpαcos(α)sin(θ), (3.7)
vz,q = zq = −Lpαsin(α). (3.8)
Desta forma, a velocidade total ao quadrado do ponto q é obtida através da somadas velocidades de cada eixo ao quadrado, ou seja, v2
q = v2x,q + v2
y,q + v2z,q, resultando na
equação (3.9).
v2q =
(L2r +
L2p
2(1− cos(α)2
))θ2 − 2LrLpcos(α)αθ + L2
pα2. (3.9)
Para o desenvolvimento das equações de movimento do sistema utilizou-se o métodode Euler-Lagrange, que é mais utilizado para sistemas mais complexos como por exemplorobôs de múltiplas juntas. Para o sistema ROTPEN SRV02 tem-se a equação de Euler-Lagrange representada em (3.10), que relaciona a dinâmica de movimento do braço e dopêndulo em relação ao torque aplicado ao servo motor.
∂2L
∂t∂qi− ∂L
∂qi= Qi, (3.10)
sendo qi variáveis genéricas do sistema e Qi forças não conservativas aplicadas ao sistema.

Capítulo 3. Pêndulo Rotacional Invertido 31
Para o caso do ROTPEN, qi pode ser representado na Equação (3.11) e sua derivadaem relação ao tempo na Equação (3.12).
q′ = [θ α], (3.11)
q′ = [θ α], (3.12)
sendo θ o ângulo do braço e α o ângulo do pêndulo como já descrito anteriormente.Desta forma a Equação (3.10) resulta nas seguinte equações:
∂2L
∂t∂θ− ∂L
∂θ= Q1, (3.13)
∂2L
∂t∂α− ∂L
∂α= Q2. (3.14)
O Lagrangiano L presente nas equações é descrito como a energia cinética total dosistema T , subtraída da energia potencial total do sistema V , isto é, L = T − V .
Sua energia cinética total do sistema, T , pode ser descrita como:
T = 12Jrθ
2 + 12Jpα
2 + 12mv
2q , (3.15)
sendo Jr o momento de inércia do braço, Jp o momento de inércia do pêndulo e m a massado pêndulo.
Já sua energia potencial total, V , pode ser escrita como a soma da energia potencialdo braço somada a energia potencial do pêndulo:
V = Vb + Vp = mgLr +mgLp, (3.16)
sendo g a aceleração da gravidade.Como existe a relação r = Lpcos(α) a Equação (3.16) se torna:
V = mgLp (cos(α) + 1) . (3.17)
Assim tem-se o Lagrangiano do sistema representado na Equação (3.18).
L = 12Jrθ
2 + 12Jpα
2 + 12mθ
2L2r + 1
2mL2pθ
2 − 12mθ
2L2pcos(α)2
−mLrLpcos(α)αθ + 12mL
2pα
2 −mgLp (cos(α) + 1) .(3.18)
Para o sistema do pêndulo rotacional invertido, as forças não conservativas aplicadasao sistema podem ser descritas nas Equações (3.19) e (3.20).
Q1 = τ −Brθ, (3.19)

Capítulo 3. Pêndulo Rotacional Invertido 32
Q2 = −Bpα, (3.20)
sendo τ o torque fornecido pelo motor, Br o coeficiente de amortecimento viscoso para obraço e Bp o coeficiente de amortecimento viscoso para o pêndulo.
Resolvem-se as equações de Euler-Lagrange a partir das variáveis já descritas anteri-ormente.
Primeiramente tem-se a derivada parcial do Lagrangiano em relação a θ e α, estasque se encontram nas Equações (3.21) e (3.22) respectivamente. Note que a derivada doLagrangiano em relação a θ é nula pelo fato do Lagrangiano não depender de θ.
∂L
∂θ= 0, (3.21)
∂L
∂α= 1
2mL2pθ
2sin(α)cos(α) +mLpsin(α)αθ +mgLpsin(α). (3.22)
Resolvendo a derivada parcial do Lagrangiano em relação à velocidade angular dobraço e do pêndulo, isto é, θ e α obtêm-se:
∂L
∂θ= Jrθ +mθL2
r +mL2pθ −mθL2
pcos(α)2 −mLrLpcos(α)α, (3.23)
∂L
∂α= Jpα−mLrLpcos(α)θ +mL2
pα. (3.24)
Derivando a equação (3.23) em relação ao tempo, resulta-se em (3.25).
∂2L
∂t∂θ= Jrθ +mθL2
r +mL2pθ −mθL2
pcos(α)2
+mθL2psin(α)cos(α)α−mLrLpcos(α)α +mLrLpsin(α)α2.
(3.25)
Finalmente, realizando a derivada da Equação (3.24) em relação ao tempo:
∂2L
∂t∂α= −Jpα +mLrLpsin(α)αθ −mLrLpcos(α)θ +mL2
pα. (3.26)
Assim, substituindo todos os parâmetros nas equações (3.13) e (3.14), e a condição emque o centro de massa do pêndulo localiza-se em Lp
2 , obtêm-se as equações não linearesque descrevem a dinâmica de movimento para o sistema ROTPEN SRV02, descritas em(3.27) e (3.28).
(mL2
r + 14mL
2p + 1
4mL2pcos(α)2 + Jr
)θ −
(12mLpLrcos(α)
)α
+(1
2mL2psin(α)cos(α)
)θα+
(12mL
2pL
2rsin(α)
)α = τ −Brθ,
(3.27)
(−1
2mLpLrcos(α))θ +
(Jp + 1
4mL2p
)α
−(1
4mL2pcos(α)sin(α)
)θ2 −
(12mLpgsin(α)
)= −Bpα.
(3.28)

Capítulo 3. Pêndulo Rotacional Invertido 33
3.1.1 Linearização
De acordo com Teixeira et al. (2007) e Gaino et al. (2007), equações não linearespodem ser linearizadas em um ponto de operação através de ferramentas matemáticas.
A fim de permitir a aplicação das técnicas de controle linear que serão apresentadasneste trabalho, foi feita a linearização das equações de movimento do sistema no ponto zocom:
zo = [θ α θ α θ α] = [0 0 0 0 0 0]. (3.29)
Desta forma a linearização realizada através da equação de Taylor, para este sistema,pode ser descrita como
fz1 = f(zo) + ∂f(z1)∂θ
|z1=zo θ + ∂f(z1)∂α
|z1=zoα+ ∂f(z1)∂θ
|z1=zo θ
+∂f(z1)∂α
|z1=zoα+ ∂f(z1)∂θ
|z1=zoθ + ∂f(z1)∂α
|z1=zoα.
(3.30)
Desta forma define-se as funções a serem linearizadas como:
f1(z) =(mL2
r + 14mL
2p + 1
4mL2pcos(α)2 + Jr
)θ −
(12mLpLrcos(α)
)α
+(1
2mL2psin(α)cos(α)
)θα +
(12mL
2pL
2rsin(α)
)α
(3.31)
e
f2(z) =(−1
2mLpLrcos(α))θ +
(Jp + 1
4mL2p
)α
−(1
4mL2pcos(α)sin(α)
)θ2 −
(12mLpgsin(α)
),
(3.32)
sendo f1(z) referente a (3.27) e f2(z) referente a (3.28).Observa-se que, tanto f1(zo) e f2(zo) são nulas. Assim, basta solucionar as derivadas
descritas em (3.30) para as duas funções, f1 e f2, de forma a se obter as duas equaçõesda dinâmica de movimento do sistema linearizadas.
Para o caso da função f1, as derivadas são descritas a seguir:

Capítulo 3. Pêndulo Rotacional Invertido 34
∂f1(z1)∂θ
|z1=zo = mL2r + Jr, (3.33)
∂f1(z1)∂α
|z1=zo = −12mLpLr, (3.34)
∂f1(z1)∂θ
|z1=zo = 0, (3.35)
∂f1(z1)∂α
|z1=zo = 0, (3.36)
∂f1(z1)∂θ
|z1=zo = 0, (3.37)
∂f1(z1)∂α
|z1=zo = 0. (3.38)
Para o caso de f2 as derivadas são cáculadas a seguir:
∂f2(z1)∂θ
|z1=zo = −12mLpLr, , (3.39)
∂f2(z1)∂α
|z1=zo = −Jp + 14mL
2p, , (3.40)
∂f2(z1)∂θ
|z1=zo = 0, (3.41)
∂f2(z1)∂α
|z1=zo = 0, (3.42)
∂f2(z1)∂θ
|z1=zo = 0, (3.43)
∂f2(z1)∂α
|z1=zo = −12mLpg, (3.44)
Assim, substituindo os valores das derivadas obtidas, tanto para a primeira equação,f1, como para a segunda, f2, na equação de Taylor (3.30), obtêm-se as equações lineari-zadas para a dinâmica de movimento do sistema:
(mL2r + Jr)θ −
12mLpLrα = τ −Brθ, (3.45)
−12mLrLpθ +
(Jp + 1
4mL2p
)α− 1
2mLpgα = −Bpα. (3.46)
3.1.2 Representação em espaço de estados
As equações linearizadas (3.45) e (3.46) são organizadas de forma matricial, comodescrito em (3.47).
mL2r + Jr −1
2mLrLp
−12mLrLp Jp + 1
4mL2p
θα
= τ −Brθ
12mLpgα−Bpα
←→ L
θα
= M. (3.47)

Capítulo 3. Pêndulo Rotacional Invertido 35
Isolando as variáveis θ e α tem-se: θα
= 1Dt
Jp + 14mL
2p
12mLrLp
12mLpLr mL2
r + Jr
τ −Brθ12mLpgα−Bpα
, (3.48)
sendo Dt o determinante da matriz L da equação (3.47):
Dt = JpmL2r + JpJr + 1
4JrmL2p. (3.49)
Considerando os estado x1 do sistema como sendo o ângulo do braço, x2 o ângulo dopêndulo, x3 a velocidade angular do braço e x4 a velocidade angular do pêndulo tem-se:
x1 = θ,
x2 = α,
x3 = x1 = θ,
x4 = x2 = α.
(3.50)
Tomando as derivadas dos estados dos sistemas descritos em (3.50) obtém-se
x1 = x3 = θ,
x2 = x4 = α,
x3 = θ,
x4 = α.
(3.51)
Considerando a posição angular do braço como a primeira saída do sistema e a posiçãoangular do pêndulo como a segunda saída, obtém-se a seguinte relação:
z1 = θ = x1,
z2 = α = x2.(3.52)
Assim, ajustando a equação (3.48) para um sistema descrito em espaços de estado,como mostrado na equação (3.53)(OGATA, 2010), obtêm-se (3.54) e (3.55).
x(t) = Ax(t) +Bu(t),
z(t) = Cx(t) +Du(t).(3.53)

Capítulo 3. Pêndulo Rotacional Invertido 36
x1
x2
x3
x4
= 1Dt
0 0 1 00 0 0 10 1
4m2L2
pLrg −(Jp + 14mL
2p)Br −1
2mLrLpBp
0 12mLpg(Jr +mL2
r) −12mrLpBr −(Jr +mL2
r)Bp
x1
x2
x3
x4
+ 1Dt
00
Jp + 14mL
2p
12mLrLp
τ,(3.54)
z1
z2
=1 0 0 0
0 1 0 0
x1
x2
x3
x4
+0
0
τ. (3.55)
3.1.3 Inserção da dinâmica do atuador ao sistema
Como o controle do motor é feito através de tensão e não de torque, torna-se necessárioadicionar a dinâmica do motor à modelagem do sistema.
A conversão de tensão, v, em torque, τ , pode ser obtida de acordo com (3.56)(QUAN-SER, 2011b).
τ = ηgKgηmkt(v −Kgkmθ)Rm
, (3.56)
sendo ηg a eficiência da caixa de engrenagens, ηm a eficiência do motor, Kg a relação totalde transmissão, kt uma constante, km a força eletromotriz inversa e Rm a resistência daarmadura do motor.
A partir da Equação (3.56) substitui-se o torque na representação do sistema emespaço de estados de forma a obter o sistema modelado matematicamente em função deuma tensão aplicada ao motor.
3.2 Conclusões Parciais
De posse da representação do sistema ROTPEN SRV02 em espaço de estados serãoaplicadas as técnicas de controle ótimo, que terão suas formulações apresentadas no Ca-pítulo 4. A partir do modelamento não linear do sistema apresentado nas equações (3.27)e (3.28) as estratégias de controle desenvolvidas são aplicadas em simulações utilizandoa planta não linear do sistema, a fim de obter resultados mais fieis à realidade, uma vezque a modelagem não linear representa o sistema real de forma mais fidedigna.

37
4 Controle ótimo via LMIsAo desenvolver leis de controle, geralmente, busca-se atingir ou otimizar certos índices
de desempenho para que o sistema responda de maneira desejada, como, por exemplo,garantir a estabilidade interna e minimizar o consumo de energia, definir parâmetros paraa resposta transitória ou minimizar efeitos de distúrbios externos ao sistema.
Neste capítulo, são discutidas as definições e deduções necessárias para chegar a umaformulação do controle ótimo H2, controle ótimo H∞ e o controle multiobjetivo mistoH2/H∞ utilizando a metodologia por LMIs, tomando como referência (PALHARES;GONÇALVES, 2007) e (OLIVEIRA; PERES, 2010). Estas estratégias de controle têmcomo objetivo reduzir o efeito de distúrbios presentes na entrada de um sistema em suasaída.
Considere um sistema genérico descrito em espaço de estados com um vetor de saídae um vetor de entrada de distúrbio conforme a equação (4.1).
x(t) = Ax(t) +Buu(t) +Bww(t),
z(t) = Cx(t) +Du(t),(4.1)
sendo x(t) o vetor que contém as variáveis de estado do sistema, u(t) o sinal de controle,w(t) o distúrbio aplicado ao sistema, z(t) a saída do sistema e A,Bu, Bw, C e D matrizesque descrevem o sistema.
Ao aplicar uma realimentação de estados do sistema de forma negativa, isto é, umalei de controle u(t) = −Kx(t), a matriz de transferência de malha fechada que relacionaa saída do sistema pela entrada do distúrbio pode ser descrita através das matrizes naequação (4.2).
Tzw(s) =Af Bw
Cf 0
, (4.2)
sendo Af = A−BuK e Cf = C −DK.Nas seções subsequentes é apresentado a formulação dos problemas de otimização uti-
lizando como ferramenta LMIs do Controle H2, Controle H∞ e Controle Misto H2/H∞,respectivamente.
4.1 Controle H2
Como visto no Capítulo 2, a norma H2 de uma matriz de transferência é dada por:
‖Tzw‖2 ,( 1
2π
∫ ∞−∞
Tr(Tzw(jω)∗.Tzw(jω))dω) 1
2. (4.3)

Capítulo 4. Controle ótimo via LMIs 38
Calcular a norma H2 pela definição pode ser uma tarefa muito complexa, entretantopode-se transformar a equação com a relação entre função de transferência e espaço deestados Tzw(t) = L−1 (Cf (sI− Af )−1Bw), sendo L−1 a transformada inversa de Laplace,resultando na equação (4.4)(TOSCANO, 2013).
‖H(s)‖22 = Tr(B′w.Lo.Bw) = Tr(Cf .Lc.C ′f ), (4.4)
com Lo e Lc sendo respectivamente os grammianos de observabilidade e controlabilidade,matrizes positivas definidas que resolvem, respectivamente, as igualdades a seguir.
A′fLo + LoAf + C ′fCf = 0. (4.5)
AfLc + LcA′f +BfB
′f = 0. (4.6)
Para obter um controlador K que minimiza a norma H2 é necessário descrever o pro-jeto como um problema de otimização utilizando uma metodologia por LMIs, no qual oobjetivo é minimizar a norma H2 da matriz de transferência que relaciona a saída dosistema pelo distúrbio aplicado, resultando nas seguintes condições (PALHARES; GON-ÇALVES, 2007):
‖Tzw‖22 = min
Xc>0Tr(CfXcC
′f ),
sujeito a : AfXc +XcA′f +BwB
′w ≤ 0,
(4.7)
ou
‖Tzw‖22 = min
Xo>0Tr(B′wXoBw),
sujeito a : A′fXo +XoAf + C ′fC′f ≤ 0.
(4.8)
Assim, utilizando a condição da Equação (4.8) e substituindo os termos de acordo coma equação (4.2) obtém-se:
(A−BuK)′Xo +Xo(A−BuK) + (C −DK)′I(C −DK) ≤ 0. (4.9)
Ao aplicar o complemento de Schur em (4.9) resulta-se em (4.10).(A−BK)′Xo +Xo(A−BuK) (C −DK)′
(C −DK) −I
≤ 0. (4.10)
Multiplicando a Equação (4.10) em ambos os lados porX−1
o 00 I
tem-se:X−1
o (A−BuK)′ + (A−BuK)X−1o X−o 1(C −DK)′
(C −DK)X−1o -I
≤ 0. (4.11)

Capítulo 4. Controle ótimo via LMIs 39
De modo a transformar o equacionamento em um problema linear considera-se X =X−1o e Z = KX−1
o = KX, desta forma a Equação (4.11) resulta-se em:AX +XA′ −BuZ − Z ′B′u XC ′ − Z ′D′
CX −DZ -I
≤ 0. (4.12)
Ao realizar a transformação de variáveis X−1o = X modifica-se a função objetivo do
problema, descrito na Equação (4.8) para uma condição não linear:
‖Tzw‖22 = min
X−1>0Tr(B′wX−1Bw). (4.13)
Assim, torna-se necessária a inserção de uma variável J = J ′ com dimensões iguais àquantidade de variáveis de entrada do sistema de forma a limitar superiormente a normaH2 do sistema, assim:
Tr(J) ≥ Tr(B′wX−1Bw). (4.14)
Como a função traço é uma função linear, obtém-se (4.15) a partir de (4.14).
J −B′wX−1Bw ≥ 0. (4.15)
Aplicando o complemento de Schur na equação (4.15), obtém-se a seguinte LMI: J B′w
Bw X
≥ 0. (4.16)
Assim, com as Equações (4.12) e (4.16) é obtido um controlador K = ZX−1 queminimiza a norma H2 do sistema como uma formulação linear de LMIs, descrito em(4.17) (OLIVEIRA; PERES, 2010).
minTr(J)
sujeito a :
J B′w
Bw X
≥ 0,AX +XA′ −BuZ − Z ′B′u XC ′ − Z ′D′
CX −DZ −I
≤ 0,
(4.17)
sendo a norma H2 garantida para o sistema em malha fechada dada por ‖Tzw‖2 ≤√Tr(J).
4.2 Controle H∞
Para o caso do controle H∞ formula-se o problema de maneira a encontrar um con-trolador que minimize a norma H∞, de forma análoga ao caso do controle H2.

Capítulo 4. Controle ótimo via LMIs 40
A norma H∞ é, por definição, o máximo valor absoluto dos valores singulares dosistema, assim como já descrito no Capítulo 2.
‖Tzw(s)‖∞ = maxω∈R
σ(Tzw(jw)). (4.18)
Assim, limita-se a condição ‖Tzw‖∞ superiormente por um valor γ.
‖Tzw(s)‖∞ < γ. (4.19)
A norma H∞ do sistema é equivalente ao ganho induzido L2 do sistema (ZHOU etal., 1996), assim, partindo da Equação (4.19) obtém-se:
‖Tzw(s)‖∞ = ‖z(t)‖2‖w(t)‖2
< γ → ‖z(t)‖22 < γ2 ‖w(t)‖2
2 . (4.20)
Aplicando a definição de norma L2 de sinais multidimensionais na Equação (4.20),resulta-se na Equação (4.21).
∫ ∞0
z′(t)z(t)dt < γ2∫ ∞
0w′(t)w(t)dt→
∫ ∞0
(z′(t)z(t)− γ2w′(t)w(t))dt < 0. (4.21)
Assim, define-se o índice de desempenho I∞.
I∞ ,∫ ∞
0(z′(t)z(t)− γ2w′(t)w(t))dt. (4.22)
Considerando V (x) como uma função escalar da forma quadrática V (x) = x′Px esua derivada representada na equação (2.9), realiza-se uma manipulação no índice dedesempenho I∞, realizando a adição e subtração de V (x) dentro da integral.
I∞ =∫ ∞
0(z′(t)z(t)− γ2w′(t)w(t) + V (x)− V (x))dt,
I∞ =∫ ∞
0(z′(t)z(t)− γ2w′(t)w(t) + V (x))dt+ V (x)|t=0 − V (x)|t→∞.
(4.23)
Considerando o sistema com condições iniciais nulas (x(0) = 0) e assintoticamenteestável, têm-se as seguinte condições:
V (x)|t=0 = 0,
V (x)|t→∞ → 0.(4.24)
Utilizando a notação de um sistema descrito em espaço de estados, que relaciona osistema somente ao ruído com matrizes que descrevem o sistema A,B,C eD, tal que x(t) =Ax(t)+Bw(t) e z(t) = Cx(t)+Dw(t) e substituindo as condições descritas anteriormentena Equação (4.23), o seguinte resultado é obtido para o índice de desempenho I∞.
I∞ =∫ ∞
0(x′(t)(A′P+PA+C ′C)x(t)+2w′(t)(B′P+D′C)x(t)−w′(t)(γ2I−D′D)w(t))dt. (4.25)

Capítulo 4. Controle ótimo via LMIs 41
Definindo-se η(t) = [x′(t) w′(t)]′ e rearranjando a equação (4.25), tem-se o índice dedesempenho I∞ descrito como sendo:
I∞ =∫ ∞
0η′(t)
A′P + PA+ C ′C PB + CD
B′P +D′C −γ2I +D′D
η(t)dt. (4.26)
Para atender a condição da limitação da norma H∞ por um valor γ, é necessárioque o índice de desempenho I∞ seja negativo, como mostra a Equação (4.21), tendo-se aseguinte condição:
I∞ < 0→ Ψ =A′P + PA+ C ′C PB + CD
B′P +D′C −γ2I +D′D
< 0. (4.27)
Aplicando o complemento de Schur em Ψ, obtém-seA′P + PA PB C ′
B′P −I D′
C D −γ2I
< 0. (4.28)
Este resultado é chamado de Bounded Real Lemma (BRL), no qual se o mesmo forsatisfeito, a norma H∞ do sistema é limitada por um valor γ (PALHARES; GONÇALVES,2007).
Para o caso do sistema descrito pelas equações (4.2) realimentado por variáveis deestados e com uma lei de controle da forma u(t) = −Kx(t), tem-se a equação (4.28) daforma:
A′fP + PAf PB C ′f
B′P −I D′zw
Cf Dzw −γ2I
< 0→
(A−BuK)′P + P (A−BuK) PBw (C −DK)′
B′wP −I 0(C −DK) 0 −γ2I
< 0.
(4.29)Desta forma multiplica-se ambos os lados pela matriz
P−1 0 00 I 00 0 I
e realiza-se a substituição de variáveis tal que X = P−1 e Z = KX. Assim, a LMI quelimita superiormente a norma H∞ do sistema realimentado de estados negativamente porum valor γ é representada por
AX +XA′ −BuZ − Z ′B′u Bw XC ′ − Z ′D′
B′w −I 0CX −DZ 0 −γ2I
< 0. (4.30)

Capítulo 4. Controle ótimo via LMIs 42
Como o controlador H∞ busca minimizar a norma H∞ e não somente limitá-la supe-riormente é necessário formular um problema de otimização:
min(‖Tzw(s)‖∞ < γ)→ min γ. (4.31)
Desta forma, realiza-se uma manipulação de variável, com o objetivo de transformara variável de otimização linear junto a LMI: ρ = γ2.
Assim, a resolução do problema de otimização do controle H∞ é descrita como (OLI-VEIRA; PERES, 2010):
min ρ,
sujeito a: X > 0,AX +XA′ −BuZ − Z ′B′u Bw XC ′ − Z ′D′
B′w −I 0
CX −DZ 0 −ρI
< 0,
(4.32)
com o controlador calculado da forma K = ZX−1 e a norma H∞ garantida do sistemaem malha fechada dada por ‖Tzw(s)‖∞ ≤
√ρ.

Capítulo 4. Controle ótimo via LMIs 43
4.3 Controle Misto H2/H∞
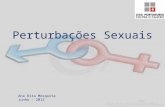
O termo “canal” em sistemas, indica a relação entre diferentes vetores de saídas eentradas isolados do sistema, por exemplo, um sistema que possui um vetor de entradaw1 e dois vetores de saída z1 e z2 possui dois canais, isto é w1 → z1 e w1 → z2, noqual é analisado suas características separadamente, com duas matrizes de transferênciasdistintas Tz1w1 e Tz2w1 .
A Figura 4.1 mostra diferentes tipos de sistemas de maneira genérica em relação adiferentes situações de números de vetores de entradas e saídas. Na Figura 4.1.d, tem-seuma situação em que existem múltiplos vetores de entrada de ruído e múltiplos vetorespara a saída do sistema. Na Figura 4.1.c, um sistema com múltiplos vetores de entrada deruído mas somente um vetor de saída do sistema. Na Figura 4.1.b, um sistema com umvetor de entrada de ruído e múltiplos vetores de saída do sistema e por fim, a Figura 4.1.arepresenta um sistema onde possui somente um vetor de entrada de ruído e um vetor desaída no sistema, resultando somente em um canal.
Figura 4.1 – Plantas generalizadas para diferentes números de canais.
(a) (b)
(c) (d)
Fonte: Adaptado de (PALHARES; GONÇALVES, 2007).
Para o caso do sistema ROTPEN-SRV02 utilizado neste trabalho, tem-se a condiçãode um sistema de somente um canal (Figura 4.1.a), onde o mesmo recebe uma entradade ruído e possui somente um vetor de saída. O controle misto H2/H∞ para este tipo de

Capítulo 4. Controle ótimo via LMIs 44
sistema é comumente chamado de controle central H2/H∞, onde se busca a minimizaçãodas normas H2 e H∞ para o mesmo canal w → z.
Para o caso do controle misto H2/H∞, tem-se um problema de otimização multiob-jetivo, onde se busca calcular um controlador K que minimize a norma H2 ao mesmotempo que também minimiza a norma H∞ da matriz de transferência que relaciona asaída do sistema com a entrada do distúrbio. Problemas multiobjetivos podem ser muitocomplexos de serem computados. Uma estratégia para evitar esta complicação é trans-formar a formulação do controle misto em um problema de otimização ε-restrito, isto é,quando minimiza-se um dos objetivos do problema dado um limitante superior para ooutro objetivo (PALHARES; GONÇALVES, 2007).
Formula-se então o problema de otimização para o controlador misto H2/H∞, repre-sentado como
min ‖Tzw‖22 ,
sujeito a: ‖Tzw‖∞ = ‖z(t)‖2‖w(t)‖2
< γ.(4.33)
Como visto na seção 4.2, para que a norma H∞ da função de transferência de malhafechada Tzw seja limitada superiormente por um valor γ é necessário que o BRL (Equação(4.29)) seja satisfeito. Aplicando o complemento de Schur na equação (4.29) até retirar aequivalência da forma matricial, obtém-se uma função de Ricatti, descrita como
AfP + PA′f +B′wBw + γ−2PC ′fCfP ≤ 0. (4.34)
A norma H2 da função de transferência de malha fechada Tzw do sistema pode sercalculada de acordo com a equação (4.35), como já visto na seção 4.1.
‖Tzw‖22 = Tr(CfXcC
′f ),
sujeito a: AfXc +XcA′f +BwB
′w = 0.
(4.35)
Isolando o termo BwB′w na equação do grammiano de controlabilidade obtém-se:
BwB′w = −(AfXc +XcA
′f ). (4.36)
Substituindo a Equação (4.36) na Equação (4.34) e agrupando os termos, resulta naEquação (4.37).
Af (P −Xc) + (P −Xc)A′f < −γ−2PC ′fCfP. (4.37)

Capítulo 4. Controle ótimo via LMIs 45
Para que o sistema seja assintoticamente estável, tem-se a condição de Lyapunov repre-sentada na Equação (2.10), chamando-se Q = (P −Xc) de forma a facilitar a visualizaçãoda condição, a Equação (4.37) é resultada em:
AfQ+QA′f < −γ−2PC ′fCfP < 0⇔ γ−2PC ′fCfP > 0,
Q = P −Xc > 0⇔ P > Xc.(4.38)
A partir das condições na Equação (4.38) conclui-se que uma matriz P = P ′ quesatisfaça a condição do BRL é limitante superior para o grammiano de controlabilidade.
Para satisfazer às duas condições do problema fixa-se a matriz P igual a grammiano decontrolabilidade Xc, sendo que esta suposição faz com que o problema de otimização sejamais restrito, introduzindo conservadorismo ao problema (PALHARES; GONÇALVES,2007).
Desta forma a norma H2 do sistema é obtida da seguinte forma:
‖Tzw‖22 < Tr(C ′fPCf ). (4.39)
Assim, manipulando as Equações (4.39) e (4.29), introduzindo o limitante superiorpara a norma H2 do sistema igual a J e realizando a alteração de variáveis do sistematal que: X = P−1 e Z = KX, obtém-se o equacionamento do problema de otimizaçãoε-restrito do controle misto H2/H∞ descrito como (PALHARES; GONÇALVES, 2007):
minTr(J),
sujeito a:
J CX −DZ
XC ′ − Z ′D′ X
> 0,
AX +XA′ −BuZ − Z ′B′u Bw XC ′ + Z ′D′
Bw −I 0
CX −DZ 0 −γ2I
< 0,
(4.40)
sendo o controlador calculado como K = ZX−1, a norma H2 garantida para o sistemaem malha fechada dada por ‖Tzw‖2 ≤
√TrJ e a norma H∞ garantida para o sistema em
malha fechada calculada como ‖Tzw‖∞ ≤ γ.
4.4 Restrição da norma do controlador K
Para a obtenção dos controladores ótimos, tornou-se necessário utilizar um conjuntode LMIs que restringem a norma do controlador K de forma a obter uma solução possívelde ser implementada, uma vez que existem limitações nos hardwares utilizados para aimplementação, como a tensão nominal do servo motor por exemplo.

Capítulo 4. Controle ótimo via LMIs 46
As LMIs que restringem a norma do controlador K, no qual KK ′ < ηIµ2 , com µ > 0,
são descritas em (4.41)(ASSUNÇÃO et al., 2007).
ηI Z
Z ′ I
> 0,
X > µI,
(4.41)
sendo Z = KX e a lei de controle K calculada da forma K = ZX−1.
4.5 Conclusões Parciais
Neste capítulo foram apresentadas metodologias para a formulação de problemas deotimização dos controladores H2, H∞ e misto H2/H∞, que têm como objetivo geralrealizar a rejeição de distúrbios externos ao sistema.
Para o caso do controle H2 tem-se como objetivo minimizar a norma H2 da função detransferência que relaciona a saída do sistema z(t) pela entrada do distúrbio w(t), onde amesma apresenta uma relação íntima com a norma L2 da saída quando um distúrbio dotipo impulsivo é aplicado ao sistema.
O controle H∞ tem como objetivo minimizar a norma H∞ da matriz de transferênciaque relaciona a saída do sistema pela entrada do distúrbio, isto é, minimizar o maiorvalor singular da matriz de transferência Tzw e, por consequência, aumentar a atenuaçãomínima que o sistema apresenta ao distúrbio na frequência de pior caso.
Por fim tem-se o controlador misto H2/H∞, que leva em consideração ambas asnormas da matriz de transferência do sistema, sendo que, na metodologia apresentadaneste trabalho para o controle misto, busca-se a minimização da norma H2 dado umlimitante superior para a norma H∞ para um mesmo canal w → z.

47
5 MetodologiaNeste capítulo, serão apresentados todos os procedimentos realizados, tanto para as
simulações com os controladores ótimos presentes neste trabalho da planta não linear dosistema ROTPEN SRV02, bem como os materiais e procedimentos utilizados na imple-mentação dos mesmos ao sistema real.
5.1 Distúrbio Considerados
Para realizar a análise de performance, foi considerado um distúrbio aplicado ao sis-tema modelado como um sinal de tensão aplicada no servo motor da base SRV02. Demodo a verificar a eficiência na resposta do sistema quanto a rejeição de distúrbio, con-siderando tanto a norma H2 como a norma H∞. Foram realizados testes com três tiposde distúrbios diferentes: um distúrbio impulsivo, um constante e outro senoidal.
5.1.1 Distúrbio Impulsivo
Para o distúrbio do tipo impulsivo foi considerado um pulso com amplitude de tensãoigual a 5 V e duração de 20 ms, o que resulta em, aproximadamente, um distúrbio de0, 1δ(t), sendo δ(t) o impulso unitário, pelo fato da área abaixo da curva do pulso ter valorde 0,1. Desta forma tem-se o distúrbio impulsivo da seguinte forma:
w(t) ≈ 0, 1δ(t) V. (5.1)
A partir deste tipo de distúrbio, observa-se a eficiência do sistema com relação anorma H2, uma vez que, como já visto no Capítulo 2, quando se insere um distúrbiodo tipo impulsivo na entrada do sistema, tem-se a norma H2 da matriz de transferênciaproporcional à norma L2 do sinal de saída, isto é, ‖z(t)‖2 = ‖n0Tzw(s)‖2.
Tem-se o distúrbio impulsivo como uma representação de um sinal intenso mas de curtaduração na tensão do atuador. Outro fator no qual o mesmo pode ser analisado é emrelação a um distúrbio modelado como uma força na haste do pêndulo, no qual o distúrbioimpulsivo representa uma força de grande intensidade aplicada instantaneamente.
5.1.2 Distúrbio Constante
Para o distúrbio do tipo constante foi considerado um sinal como um nível de tensãoconstante de 1 V , como pode ser visto a seguir:
w(t) = 1 V. (5.2)

Capítulo 5. Metodologia 48
Este distúrbio pode representar uma mudança de referência da posição na qual oângulo do braço do sistema se equilibra, ou ainda a interferência de um sinal de baixafrequência. Outra maneira que o distúrbio constante pode ser analisado é quando semodela o distúrbio como uma força aplicada na haste do braço, onde o mesmo poderepresentar uma força constante sendo aplicada, o que implicaria, assim como no caso domesmo modelado como um sinal de tensão no atuador, a mudança da posição no qual obraço se equilibra.
O distúrbio do tipo constante não possui relação com relação as normas H2 e H∞ dosistema.
5.1.3 Distúrbio Senoidal
Para o caso do distúrbio do tipo senoidal tem-se uma senoide com amplitude de 0, 5 Ve frequência variável, ω, dependendo do controlador utilizado (frequência na qual a normaH∞ se aplica), isto é:
w(t) = 0, 5sen(ωt) V. (5.3)
Este distúrbio foi selecionado pelo fato de que, como a norma H∞ é definida como omaior ganho dos valores singulares da função de transferência que relaciona a saída dosistema pela entrada de ruído e a função seno possui somente uma componente espectral, aresposta do sistema no pior caso de operação pode ser observada, uma vez que a frequênciado sinal senoidal é definida pela frequência na qual a norma H∞ se aplica, verificando ocomportamento da saída do sistema no pior caso de distúrbio possível.
O distúrbio do tipo senoidal pode significar, por exemplo, possíveis interferências deondas de radio que podem ser captadas pelos cabeamentos utilizados no sistema, assimcomo fazem as antenas.
5.2 Simulação
Para realizar as simulações neste trabalho foi utilizado o software Simulink/ MATLAB R©2012, no qual foram desenvolvidos programas utilizando a programação em diagramas deblocos, de modo a aplicar os controladores ótimos presentes neste trabalho, bem como ocontrolador que garante a estabilidade, na planta não linear modelada matematicamentedo sistema ROTPEN SRV02 fornecido pela Quanser R©, de forma a verificar suas respostasem um ambiente simulado. Foi analisado a eficiência dos controladores ótimos com relaçãoao controle que garante a estabilidade de Lyapunov, no que se diz respeito a minimizaçãodas normas do sistema. Por fim foi realizado a comparação de performance obtida entreo controle H2, H∞ e misto em relação a rejeição de distúrbios.

Capítulo 5. Metodologia 49
5.2.1 Diagrama de Blocos para a simulação.
De modo a verificar o comportamento dos controladores ótimos projetados em umambiente simulado, foi desenvolvido um programa em diagrama de blocos no ambienteSimulink do simulador matemático MATLAB para aplicação das leis de controle na plantanão linear do sistema ROTPEN SRV02. Todos os blocos, seus equacionamentos e expli-cações serão apresentados nesta subseção.
A simulação foi realizada utilizando esta planta pelo fato de que a mesma apresenta umcomportamento mais fidedigno com o sistema real em comparação da planta linearizada.A Figura 5.1 mostra o diagrama de blocos desenvolvido para realizar as simulações.
Figura 5.1 – Diagrama de blocos desenvolvido para a simulação não linear do sistemaROTPEN.
Ref erência
Distúrbio
Alpha
Estados
Lei de controle u(t)
Tensão a ser aplicada
Controle
Tensão
Theta
Alpha
Estados
Planta ROTPENNão Linear
Referência
Out1
Distúrbio
Lei de controleu(t)
Ângulo Braço
Ângulo Pêndulo
Fonte: O Autor.
A planta não linear do sistema ROTPEN SRV02 é descrita por suas equações de dinâ-mica de movimento (3.27) e (3.28), apresentadas na seção 3.1. Assim, foram desenvolvidasfunções para o software MATLAB que calculam a aceleração angular do braço, θ, e a ace-leração angular do pêndulo, α, em função dos parâmetros do sistema em um instanteanterior. Estes parâmetros são: o ângulo do pêndulo e do braço, a velocidade angular dopendulo e do braço, a aceleração angular do pêndulo e do braço e a tensão aplicada noservo motor da base SRV02. Os Apêndices A e B descrevem a programação desenvolvidapara calcular a aceleração angular do braço e do pêndulo respectivamente. A Figura 5.2mostra o sub sistema “Planta ROTPEN Não Linear” apresentada na programação emblocos da figura 5.1.

Capítulo 5. Metodologia 50
Figura 5.2 – Sub Sistema Planta ROTPEN Não Linear.
MATLAB
Calcula Theta_pp
1s
1s
1s
>
Estados iniciais
Estados Iniciais MATLAB
Calcula alpha_pp1
Tensão
3Estados
1Theta
2Alpha
R2D
R2D
Função do
Função do
Integrador
Integrador1 Integrador2
Integrador3
Radianos para Graus
Radianos para Graus
Chave
Tempo
Fonte: O Autor.
O bloco “Função do MATLAB” chama as funções desenvolvidas para o cálculo dasacelerações angulares do braço (apêndice A, referente a equação (3.27)) e do pêndulo(apêndice B, referente a equação (3.28)), realizando a integração dos sinais resultantesda função, de modo a obter os parâmetros de velocidade angular do braço, θ, velocidadeangular do pêndulo, α, ângulo do braço, θ, e ângulo do pêndulo, α.
Estes parâmetros são multiplexados junto ao sinal de tensão aplicado ao atuador dosistema e realimentados como parâmetros de entrada para as funções que calculam asequações da dinâmica de movimento. Os estados do sistemas são selecionados conformea modelagem realizada, onde x1 = θ, x2 = α, x3 = θ e x4 = α.
O bloco “Switch” é responsável por chavear os parâmetros inseridos aos blocos querealizam o cálculo das equações de dinâmica de movimento do sistema entre os parâme-tros iniciais escolhidos e os estados atuais obtidos após os cálculos. Este chaveamento érealizado com base no tempo de simulação e foi setado para acontecer após 0,01 segundosde simulação.
Os parâmetros iniciais escolhidos para a simulação foram todos iguais a zero comexceção do ângulo do braço, θ, e do ângulo do pêndulo, α, estes que foram selecionadocomo θ = α = 0, 02 rad. Este valor foi selecionado para a condição inicial do sistemajustamente para representar de maneira mais fidedigna a situação na implementação, umavez que na implementação, o pêndulo será posicionado manualmente na posição vertical

Capítulo 5. Metodologia 51
para cima, pelo fato de técnicas de controle que realizam a auto elevação do pêndulo nãofornecerem a precisão necessária para posicionar o pêndulo na condição inicial de estadosnulas, que são mais facilmente obtidas posicionando o pêndulo de forma manual.
O bloco que contém a lógica de controle é representado na Figura 5.3.
Figura 5.3 – Bloco Controle.
K*u
Gain
[1 0 0 0]
Converte Referenciapara vetor
D2R
Graus paraRadianos
0
Constante0
*, 1
Verica alpha
|u|
|alpha|
<= 10
Comparador
Saturador1Referência
2Tensão a
ser aplicada
2Distúrbio
4Estados
3Alpha
1Lei de controle
u(t)
Fonte: O Autor.
A lógica de controle foi realizada utilizando a topologia de realimentação de estados,que são obtidos no bloco que descreve a planta não linear do sistema ROTPEN. Os estadosrealimentados são comparados com a referência de posição para o braço e, esta compa-ração, é amplificada pelo controlador K desenvolvido, obtidos atraves dos problemas deotimização (4.17), (4.32) e (4.40) com a restrição (4.41), gerando uma lei de controle daforma u(t) = K(xref (t)− x(t)). Como este trabalho tem como objetivo analisar a perfor-mance do sistema com relação a rejeição de distúrbios e não a capacidade de rastreamentoda saída com relação a referência, o valor para a referência do braço foi configurado comozero, gerando desta forma uma lei de controle u(t) = −Kx(t).
Para este trabalho foi determinado que a lei de controle ótima só fosse aplicada aosistema para os casos em que o módulo do ângulo do pêndulo fosse menor que dez graus,isto é, |α| < 10o de forma que, caso algum distúrbio aplicado ao sistema gere uma oscilaçãona saída que faça o valor do módulo do ângulo do pêndulo ultrapassar dez graus, a leide controle desenvolvida é desligada. Esta condição foi inserida ao sistema pelo fato deque, no sistema real do pêndulo, quando o ângulo α é maior que dez graus, a estratégiade controle utilizada para a manutenção do equilíbrio não é eficaz para retornar o sistemaà posição de equilíbrio, fazendo com que o pêndulo ceda para a posição vertical parabaixo, não havendo mais sentido da aplicação da lei de controle até que o pêndulo sejaposicionado novamente na posição vertical para cima.
É adicionado um saturador no valor da tensão aplicada ao motor do pêndulo de ±5 V ,pelo fato do mesmo ser aplicado no diagrama de blocos da implementação, com o objetivo

Capítulo 5. Metodologia 52
de proteger o atuador do sistema, evitando uma tensão excessiva. Assim, tem-se inserido àtensão aplicada no motor, v(t), o sinal de distúrbio, w(t), de forma que v(t) = u(t)+w(t).
O bloco que gera os sinais de distúrbios é apresentado na figura 5.4.
Figura 5.4 – Bloco Distúrbio.
2 - Distúrbio Impulsivo3 - Distúrbio Senoidal
1
Seleção do Distúrbio
1Out1
0
4 - Sem Distúrbio
> 7
0
Constante
1 - Distúrbio Constante
Tempo
Chave
Chave de Múltiplas Portas
Fonte: O Autor.
No bloco “Distúrbio” tem-se a geração dos sinais de distúrbios já comentados no iníciodeste capítulo: um distúrbio constante, um impulsivo e outro senoidal. O Bloco “Seleçãode Distúrbio” é utilizado para selecionar o tipo de distúrbio desejado para a simulação,de forma que se o mesmo contém o valor “1”, o distúrbio constante é adicionado, “2” odistúrbio impulsivo, “3” o distúrbio senoidal e por fim “4” nenhum distúrbio é aplicadoao sistema. Os distúrbios foram programados para serem inseridos ao sistema após 7 s
de simulação.
5.3 Implementação
Inicialmente será realizado uma descrição dos equipamentos utilizados para a imple-mentação. Na subseção 5.3.1 é apresentado o sistema ROTPEN SRV02, descrevendo-oe apresentando seus principais parâmetros e sensores. Na subseção 5.3.2 A placa de da-dos utilizada para realizar a comunicação entre o computador e o sistema é apresentada.Em 5.3.3 é descrito o amplificador utilizado para tratar o sinal de tensão enviado parao atuador do sistema ROTPEN SRV02. Os procedimentos realizados para a montagemfísica do sistema e as conexões elétricas entre os materiais utilizados na implementação

Capítulo 5. Metodologia 53
são comentadas na seção 5.3.4. A programação em blocos desenvolvida para a implemen-tação do sistema é descrita na subseção 5.3.5 e por fim, na subseção 5.3.6 é apresentadoos procedimentos realizados na implementação.
5.3.1 Módulo ROTPEN SRV02
Como já explorado no Capítulo 3, o módulo ROTPEN SRV02 consiste em um braçoplano que contém eixo de metal em uma das pontas e um pivô na outra. O pivô é conectadoà base SRV02 através de parafusos e no eixo metálico é inserido o pêndulo, sendo quea mesma possui um sensor digital que realiza a medição angular do eixo (encoder). NaFigura 5.5 é apresentado o sistema ROTPEN SRV02.
Figura 5.5 – Sistema ROTPEN SRV02.
Fonte: (QUANSER, 2011d).
A base SRV02 consiste em um motor de corrente contínua revestido por uma estruturade alumínio sólido e equipado com um conjunto de engrenagens planetárias. Existem duasconfigurações para a disposição das engrenagens, uma que oferece uma alta transmissãode torque e uma que oferece uma baixa transmissão de torque. Neste trabalho foi utilizadaa configuração que oferece uma alta transmissão, chamada de “High Gear”.

Capítulo 5. Metodologia 54
A base SRV02 possui três sensores: Um encoder digital que realiza a medição angularno eixo da engrenagem central, um sensor com base em um potenciômetro para umaleitura analógica da posição angular do eixo da engrenagem central e um tacômetro, queé conectado diretamente ao atuador do sistema e realiza uma leitura precisa da velocidadedo mesmo.
Para este trabalho foi utilizado somente o encoder digital para realizar a medição daposição angular do braço para o sistema ROTPEN SRV02.
O Quadro 5.1 mostra as principais variáveis, descrições e grandezas para o ROTPENSRV02.
Quadro 5.1 – Especificações do sistema ROTPEN.
Símbolo Descrição Valor Unidademp Massa do pêndulo 0, 127 kgLp Tamanho do Pêndulo 0, 337 m
lpDistância da articulaçãoaté o centro de massa 0, 156 m
Jp,cm
Momento de inercia docentro de massa do
pêndulo0, 0012 kg.m2
Bp
Coeficiente de amortecimentoviscoso do pêndulo no eixo
da articulação0, 0024 N.m.s/rad
marmMassa do braço com dois
parafusos 0, 257 kg
rComprimento do braço daarticulação até a ponta 0, 216 m
larm
Comprimento do braço daarticulação até o centro de
massa0, 0619 m
Jarm,cmMomento de inércia do braçoem relação ao centro de massa 9, 98× 10−4 kg.m2
mb
Coeficiente de amortecimentoviscoso do braço no eixo da
articulação0, 0024 N.m.s/rad
JarmMomento de inércia do braço
em relação a articulação 0, 0020 kg.m2
Kenc Resolução do encoder 4.096 counts/ver
Fonte: Adaptado de (QUANSER, 2011d)
No Quadro 5.1, Kenc representa a resolução dos dispositivos que codificam a posiçãoangular do braço e do pêndulo para sinais digitais, neste caso trata-se de um encoderincremental óptico de 12 bits.
O atuador do sistema é um motor DC Faulhaber Coreless modelo 2338S006, que

Capítulo 5. Metodologia 55
consiste em um motor de alta eficiência e de baixa indutância, o que permite obter umaresposta muito mais rápida que motores convencionais.
O Quadro 5.2 mostra os principais parâmetros para o atuador do sistema.
Quadro 5.2 – Principais Parâmetros para o atuador da base SRV02.
Símbolo Descrição Valor UnidadeVm Tensão Nominal do Motor 6 VRm Resistência da armadura do motor 2, 6 Ωkt Constante Torque-Corrente do motor 0, 0077 N.m/Akm Constante da força eletromotriz inversa do motor 0, 0077 V/rad/s
KgA relação de transmissão das engrenagenspara a configuração de alta transmissão 70 Sem Unidade
ηm Eficiência do motor 0, 69 Sem Unidadeηg Eficiência da caixa de engrenagens 0, 9 Sem Unidade
Fonte: Adaptado de (QUANSER, 2011a)
5.3.2 Placa de dados Q8-USB
A placa Q8-USB consiste em uma placa de dados de alta performance para a aquisiçãoe escrita de dados. Ela é utilizada neste trabalho com o objetivo de realizar a ponte decomunicação entre o sistema ROTPEN SRV02, realizando a leitura dos sensores de posiçãoangular, o amplificador VoltPAQ-X1, onde a mesma envia o sinal de tensão a ser tratadopelo amplificador e aplicado no atuador da base SRV02, e o computador, onde todos osdados são trados e as lógicas de controle são aplicadas de forma a se construir um ambientede implementação em tempo real.
Na Figura 5.6 é apresentada a placa de dados Q8-USB.

Capítulo 5. Metodologia 56
Figura 5.6 – Placa de dados Q8-USB.
Fonte: (QUANSER, 2011c).
5.3.3 Amplificador VoltPAQ-X1
O sistema VoltPAQ consiste em um amplificador linear desenvolvido para realizar aimplementação de sistemas Quanser R©. O termo X1 indica que o mesmo possui um canal,possibilitando a alimentação de um atuador através deste amplificador. Possui uma chaveseletora que indica a amplificação realizada ao sinal em sua saída, podendo ser selecionadaentre uma e três vezes. Neste trabalho utilizou-se o amplificador setado na posição para aamplificação de 1 vez. Sua capacidade é de um sinal de até 24 V e 4, 16 A em sua saída.
Na Figura 5.7 é apresentado o amplificador VoltPAQ-X1.
Figura 5.7 – Amplificador VoltPAQ-X1.
Fonte: (QUANSER, 2010).

Capítulo 5. Metodologia 57
5.3.4 Montagem e conexões entre os dispositivos
Todas os procedimentos necessários para realizar a montagem física para o móduloROTPEN SRV02 e todas as conexões elétricas entre o sistema ROTPEN SRV02, a placade dados Q8-USB e o amplificador VoltPAQ-X1 podem ser encontradas em (QUANSER,2011d).
5.3.5 Diagrama de blocos para a implementação
Para a implementação foi realizada uma programação em diagrama de blocos utili-zando o ambiente Simulink do simulador matemático MATLAB 2011a junto ao QuarC,software desenvolvido pela Quanser R©, que possibilita a comunicação entre o computa-dor e os componentes citados acima, possibilitando a realização do controle do sistemaROTPEN SRV02 em tempo real.
O diagrama de blocos para a implementação pode ser observado na Figura 5.8.
Figura 5.8 – Diagrama de blocos utilizados para a implementação.
Ângulo do Pêndulo
Ângulo do Braço
Para área de trabalho4
Para área de trabalho1
Para área de trabalho3
Para área de trabalho2
tempo
angulodopendulo
angulodobraco
disturbioaplicado
>
SRV02-ET+ROTPEN-E
u (V)
theta (rad)
alpha (rad
Referência
R2D
R2D
Lei de Controle
Distúrbio
Out1
Disturbio
Desliga Distúrbio1
0
Desliga Distúrbio
0
Controle
Referência
Distúrbio
Alpha
Estados
Lei de controle
Tensão a ser aplicada Calcula Estados HPF
theta (rad)
alpha (rad)
Estados4
4
Tempo1
Tempo
Radianospara Graus
Radianospara Graus1
Chave Manual
Chave
Fonte: O Autor.
A interpretação do diagrama de blocos para a implementação é equivalente ao dia-grama projetado para as simulações, já comentadas anteriormente neste capítulo.
Sua diferença consiste que, na implementação, o sinal de tensão é aplicado ao motordo sistema real, e a leitura das posições angulares para o braço e pendulo são realizadasatravés dos encoders ópticos, de modo que a velocidade angular do braço e do pêndulo são

Capítulo 5. Metodologia 58
obtidas realizando a derivada das posições angulares medidas através de um filtro passaalta, com frequência de corte igual a fc = 10Hz e função de transferência como
HPF (s) = 62, 8319ss+ 62, 8319 , (5.4)
e o bloco “Calcula Estados HPF” é mostrado na figura 5.9.
Figura 5.9 – Bloco Calcula Estados HPF.
1
Estados2*pi*10s
s+2*pi*10
Filtro Passa Alta
2*pi*10s
s+2*pi*10
Filtro Passa Alta1
2
alpha (rad)
1
theta (rad)
Fonte: O autor.
A figura 5.10 mostra a lógica do envio do sinal de tensão para o motor e a leitura dasposições angulares do sistema.

Capítulo 5. Metodologia 59
Figura 5.10 – Bloco SRV02-ET+ROTPEN-E para a implementação.
alpha (rad)2
theta (rad)1
Proteção
Lê contagem dosencoders
(HIL-1)
HILLer
Encoder
Inverso do GanhoUtilizado no ampli dor
1
HIL InitializeHIL-1 (q8_usb-0)Envia o sinal de tensão
para o ampli cador/motor(HIL-1)
HILEscrever0
Convenção Adotadana modelagem
-1
Calibração dosencoders
-K-
Altera Referênciade alpha
alpha (rad) alpha_up (rad)
u (V)1
22
tensaono motor
Para área de trabalho1
Analógico
Fonte: O autor.
O sinal de tensão aplicado ao motor inicialmente é invertido de modo a respeitar ascondições adotadas na modelagem do sistema, onde um sinal de tensão positiva gera ummovimento do braço no sentindo anti-horário. Após ser invertido, o sinal passa por umsaturador, que limita o sinal de tensão a ser aplicado ao motor em ±5 V , desta forma osinal é enviado para a saída analógica da placa de dados Q8, e conectada ao amplificador,de modo a fornecer a tensão para o atuador do sistema.
O bloco “Calibração dos encoders” faz a mudança de variáveis dos valores lidos pelosenconders, transformando de contagens para ângulo. Como a resolução dos encoders uti-lizados é de 4.096 contagens por volta, cada contagem representa um ângulo de 2π
4.096rad,enquanto o bloco “Altera a referência de alpha” altera a referência do ângulo do pêndulosomando 180o ao seu valor, de forma que o ângulo nulo é obtido quando o pêndulo seencontra na posição vertical para cima, assim como convencionado em sua modelagem.Esta alteração é necessária pelo fato dos encoders utilizados para a medição das posiçõesangulares serem incrementais, isto é, o mesmo toma como referência nula a posição que opêndulo se encontra ao iniciar o programa de implementação, tornando necessário adici-onar este off-set de 180o ao ângulo do pêndulo pelo fato do mesmo iniciar na posição derepouso, isto é, na posição vertical para baixo.

Capítulo 5. Metodologia 60
5.3.6 Procedimentos realizados na implementação
Inicialmente foi posicionado o pêndulo na posição de repouso com θ = 0 e α = 180o, deforma a obter uma precisão maior na leitura dos dados, uma vez que o encoder utilizadoé incremental, ou seja, ao iniciar o programa de implementação a contagem na qual seencontra o enconder é considerado como nula.
Assim, o pêndulo foi posicionado manualmente na posição vertical para cima o maispróximo possível da posição de equilíbrio, onde θ = 0o e α = 0o e, a partir daí, os controlesótimos projetados começam a operar, equilibrando o sistema.

61
6 Resultados e Discussões
Neste capítulo, são apresentados os resultados obtidos, tanto no ambiente de simulaçãopara a planta do sistema ROTPEN SRV02 como para a implementação em hardware, docomportamento obtidos do sistema aos controladores ótimos projetados para diferentesdistúrbios de tensão aplicados no servomotor do sistema. Também é apresentado umaanálise de performance comparando as diferentes formulações dos problemas de otimizaçãoem relação à rejeição dos distúrbios aplicados e à eficiência destes controladores em relaçãoà minimização de normas, comparando-se a lei de controle que garante a estabilidade deLyapunov.
6.1 Representação do ROTPEN SRV02 no Espaço deEstados
Inicialmente, é necessário representar o modelo da planta do sistema ROTPEN SRV02em espaço de estados, de forma a obter as matrizes que descrevem o sistema A, Bu, Bw, Ce D, possibilitando a aplicação dos problemas de otimização formulados através de LMIsapresentados no Capítulo 4.
Foi utilizado o script de MATLAB descrito no Apêndice C deste trabalho para cal-cular as matrizes numéricas que caracterizam o sistema de acordo com a modelagemdescrita no Capítulo 2, bem como adicionar a dinâmica do atuador do sistema, realizandoa transformação de sua entrada u(t) de torque para tensão.
As matrizes numéricas que caracterizam o sistema em espaço de estados (4.1) sãodescritos em (6.1) a (6.4).
A =
0 0 1 00 0 0 10 81, 3263 −28, 9504 −0, 93190 121, 9573 −27, 8526 −1, 3963
(6.1)
Bu = Bw =
00
51, 915749, 9471
(6.2)
C =1 0 0 0
0 1 0 0
(6.3)

Capítulo 6. Resultados e Discussões 62
D =0
0
(6.4)
De modo a verificar a atualização do modelo matemático realizada neste trabalho comrelação ao trabalho de (NEGRÃO, 2013), foi desenvolvido um controlador que garante aestabilidade de Lyapunov (apêndice G) utilizando tanto as matrizes numéricas descritasneste trabalho, o que resultou em um controladorKg = [−0, 2864 9, 5183 −0, 9097 0, 7467],como as matrizes obtidas por (NEGRÃO, 2013), que são descritas nas equações de (6.5) a(6.8), obtendo um controle Kj = [−0, 4220 11, 7079 −0, 7632 1, 1872]. A figura 6.1 mostraos resultados obtidos para a simulação da planta não linear para os dois controladoresgerados, de forma a verificar se a atualização do modelo matemático apresentou resultadossatisfatórios.
A =
0 0 1 00 0 0 10 81, 3263 −10, 2536 −0, 93190 121, 9573 −10, 3320 −1, 3963
(6.5)
Bu = Bw =
00
83, 465980, 3162
(6.6)
C =1 0 0 0
0 1 0 0
(6.7)
D =0
0
(6.8)

Capítulo 6. Resultados e Discussões 63
Figura 6.1 – Diferença entre as modelagens.
Fonte: O autor.
A partir da figura, observa-se que a modelagem apresentada neste trabalhou, gerouum controlador muito mais satisfatório do que a modelagem apresentada por (NEGRÃO,2013), o que justifica a atualização do modelo apresentada.
6.2 Síntese dos Controladores
De posse das matrizes numéricas que caracterizam o sistema ROTPEN SRV02 na re-presentação de espaço de estados, foram desenvolvidos os scripts no simulador matemáticoMATLAB que solucionam os problemas de otimização dos controladores H2 (4.17), H∞
(4.32) e misto (4.40), assim como a solução que garante a estabilidade do sistema pelasdesigualdades de Lyapunov (2.18), descritos respectivamente nos apêndices D, E, F e G.
Para as LMIs que restringem a norma do controlador K (4.41), foram utilizados osparâmetros µ = 0, 7 e η = 15.000, estes que foram parametrizados de forma empirica,de forma que o controlador calculado satisfaça a condição KK ′ < 30.612, 25 e, para ocontrole misto, foi utilizado o parâmetro de limitação para a norma H∞ de γ = 0, 98,que é o valor mínimo de γ que ainda torna o problema de otimização do controle mistofactível.
Os resultados obtidos para os ganhos do controlador K = [K1 K2 K3 K4], bem comoas normas H2 e H∞ garantidas, obtidas pelo resultado dos problemas de otimização de

Capítulo 6. Resultados e Discussões 64
acordo com o controlador utilizado e as normas H2 e H∞ calculadas são dados no Quadro6.1.
As normas H2 e H∞ calculadas são obtidas utilizando o comando “norm” do soft-ware MATLAB do sistema em malha fechada com os respectivos controladores calculadosdependendo da estratégia de controle.
Quadro 6.1 – Resultados obtidos com os scripts do software MATLAB desenvolvidos.
ControleH2
ControleH∞
ControleMisto
Controle Estabilidade
LyapunovK1 -13,8037 -8,6255 -8,5445 -0,2864K2 34,7023 28,4289 31,4007 9,5183K3 -4,4693 -3,4767 -3,5421 -0,9097K4 4,9530 3,9304 3,9547 0,7467
Norma H2 Garantida 0,4196 - 3,9725 -Norma H∞ Garantida - 0,9555 0,9800 -Norma H2 Calculada 0,4176 0,4212 0,3789 1,7030Norma H∞ Calculada 0,1858 0,1759 0,1396 2,37
Fonte: O Autor.
A partir dos resultados obtidos, observa-se que todos os problemas de otimizaçãoobtiveram uma norma H2 calculada para o sistema em malha fechada de pelo menos4, 09 vezes menor com relação a lei de controle que garante a estabilidade do sistema,já para a norma H∞ foi obtido um resultado de pelo menos 12, 75 vezes, o que mostraque os problemas de otimização descritos foram eficientes com relação a minimização dasnormas do sistema.
Em termos de norma H2 garantida, o problema de otimização do controle H2 foi oque se mostrou mais eficiente, garantindo que o controlador calculado projeta uma normaH2 na matriz de transferência de malha fechada menor que 0,4196.
Para a norma H∞ garantida, o melhor caso foi obtido com o problema de otimizaçãodo controle H∞, que garante que o controlador calculado projeta uma norma H∞ nosistema em malha fechada menor que 0,9555.
Embora o controle misto H2/H∞ não tenha obtido os melhores resultados com re-lação às normas garantidas para o sistema, o controlador calculado forneceu as menoresnormas H2 e H∞ calculadas para a matriz de transferência em malha fechada do sistemaROTPEN SRV02 em específico.
De modo a analisar o comportamento do sistema em malha fechada para os diferentescontroladores ótimos, é mostrado o diagrama de valores singulares da matriz de trans-ferência que relaciona a saída do sistema pela entrada do distúrbio, pois através deleé possível prever certos comportamentos do sistema, como o comportamento em baixas

Capítulo 6. Resultados e Discussões 65
frequências, o que pode indicar qual estratégia de controle irá ser mais eficiente com re-lação ao distúrbio constante, por exemplo, além de ser possível verificar a frequência naqual se tem a menor atenuação do sistema, isto é, onde a norma H∞ se aplica. Estediagrama é mostrado na Figura 6.2.
Figura 6.2 – Valores singulares para a matriz de transferência de malha fechada Tzw, paraos diferentes controladores ótimos projetados.
Fonte: O autor.
A partir da Figura 6.2, observa-se a frequência na qual ocorre a menor atenuação dosistema, ou seja, a frequência no qual a norma H∞ é verificada para os sistemas em malhafechada. Para o controle H2 tem-se o pior caso de atenuação para a frequência 13, 1 rad/sna qual o ganho fornecido pelo sistema é de 0, 1858. Para o controle H∞ o maior ganho dosistema é obtida em 10, 8 rad/s e tem valor de 0, 1759. Por fim, o controle misto H2/H∞
apresenta o pior caso em relação a atenuação do distúrbio para a frequência de 5, 91 rad/s

Capítulo 6. Resultados e Discussões 66
com um ganho de 0, 1396.Identifica-se, também, através do diagrama de valores singulares, que para frequên-
cias mais altas(ω > 100 rad/s), tem-se um comportamento em relação a atenuação dedistúrbios semelhante para os três controladores e que, para frequências muito baixas, ocontrole H2 apresenta uma maior atenuação, com valores de amplificação de aproximada-mente 0, 072, enquanto os controles H∞ e misto tiveram um comportamento semelhantecom amplificações médias de 0, 116 e 0, 117 respectivamente.
6.3 Simulação
Nesta seção, são apresentados os resultados obtidos para a simulação da planta nãolinear do sistema ROTPEN SRV02 para os três controladores ótimos projetados sujeitosaos diferentes distúrbios aplicados no sistema, conforme descritos no Capítulo 5.
Para uma melhor visualização dos resultados, esta seção é divida em subseções nasquais os resultados obtidos são agrupados para cada um dos controladores em relação acada tipo de distúrbio.
6.3.1 Distúrbio Impulsivo
Ao aplicar um distúrbio do tipo impulsivo no sistema, espera-se obter uma variaçãoinstantânea tanto do ângulo do braço como do ângulo do pêndulo, de forma a ser possívelmedir esta variação em termos de energia utilizando a norma L2 de sinais.
As figuras 6.3, 6.4 e 6.5 apresentam os resultados obtidos para o ângulo do braço,ângulo do pêndulo, lei de controle e o distúrbio impulsivo aplicado, para o controle H2,controle H∞ e controle misto H2/H∞ respectivamente, aplicados à planta não linear dosistema ROTPEN SRV02 em simulação.

Capítulo 6. Resultados e Discussões 67
Figura 6.3 – Resultados obtidos para o Controle H2 aplicado na simulação da planta nãolinear do sistema ROTPEN SRV02 para o distúrbio impulsivo.
Fonte: O autor.
Figura 6.4 – Resultados obtidos para o Controle H∞ aplicado na simulação da planta nãolinear do sistema ROTPEN SRV02 para o distúrbio impulsivo.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 68
Figura 6.5 – Resultados obtidos para o Controle misto H2/H∞ aplicado na simulação daplanta não linear do sistema ROTPEN SRV02 para o distúrbio impulsivo.
Fonte: O autor.
A partir das figuras, observa-se que, para a planta não linear do sistema, os resultadosobtidos para o distúrbio impulsivo com amplitude de 5 V e duração de 20 ms foramsemelhantes para os três controladores. De forma a analisar seu desempenho foi utilizadaa equivalência existente entre a norma L2 da saída do sistema e a norma H2 do sistemaem malha fechada quando um sinal impulsivo é aplicado em sua entrada, descrita naequação (2.27).
O distúrbio impulsivo aplicado equivale a 0, 1δ(t), pelo fato de sua área ser igual a0, 1. Como o distúrbio aplicado equivale a aproximadamente 0, 1δ(t) tem-se que ‖z(t)‖2
esperada equivale a 10% do valor obtido para a norma H2 calculada para o sistema emmalha fechada. Assim obtém-se uma norma L2 esperada para a saída do sistema de‖z(t)‖2,esp,H2 = 0, 04176 para o controle H2, ‖z(t)‖2,esp,Hinf = 0, 04212 para o controleH∞ e ‖z(t)‖2,esp,misto = 0, 03789 para o controle misto.
Assim, foi utilizada a equação (2.23) para realizar o cálculo da norma L2 da saída dosistema z(t) = [θ(t) α(t)], obtendo um valor de ‖z(t)‖2,H2 = 0, 0431 para o controle H2,‖z(t)‖2,Hinf = 0, 0435 para o controle H∞ e ‖z(t)‖2,misto = 0, 0364 para o controle misto.
Os valores obtidos foram bem próximos dos valores esperados e, a partir de seusresultados, verifica-se que, para a simulação da planta não linear, o controle misto foi o queobteve uma maior atenuação do distúrbio impulsivo, pelo fato de que o mesmo apresentauma menor norma L2 da saída, e portanto uma melhor performance com relação ao

Capítulo 6. Resultados e Discussões 69
distúrbio impulsivo, seguido do controle H2 e por fim o controle H∞, assim como podeser esperado quando verificado as normas H2 calculadas para o sistema em malha fechada.
6.3.2 Distúrbio Senoidal
Ao aplicar um distúrbio do tipo senoidal no sistema, é esperado que ocorra umavariação senoidal de suas saídas (ângulo do braço e ângulo do pêndulo), de forma que aamplitude desta variação será variável de acordo com a eficiência dos controladores emrejeitar o distúrbio do tipo senoidal aplicado.
Para o caso do distúrbio senoidal, foi aplicada uma senoide como amplitude de 0, 5 Vonde sua frequência escolhida é a frequência na qual o sistema possui menor atenuaçãode acordo com seu diagrama de valores singulares, ou seja, onde a norma H∞ do sistemaem malha fechada se aplica.
Para o controle H2 foi aplicada uma senoide com frequência igual a 13, 1 rad/s, parao controle H∞ uma frequência de 10, 8 rad/s e para o controle misto 5, 91 rad/s.
As Figuras 6.6, 6.7 e 6.8 apresentam os resultados obtidos para o ângulo do braço,ângulo do pêndulo, lei de controle e seus respectivos distúrbios senoidais aplicados parao controle H2, controle H∞ e o controle misto respectivamente.
Figura 6.6 – Resultados obtidos para o Controle H2 aplicado na simulação da planta nãolinear do sistema ROTPEN SRV02 para o distúrbio senoidal.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 70
Figura 6.7 – Resultados obtidos para o Controle H∞ aplicado na simulação da planta nãolinear do sistema ROTPEN SRV02 para o distúrbio senoidal.
Fonte: O autor.
Figura 6.8 – Resultados obtidos para o Controle misto H2/H∞ aplicado na simulação daplanta não linear do sistema ROTPEN SRV02 para o distúrbio senoidal.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 71
A partir das figuras, observa-se que as respostas obtidas do sistema para o distúrbiosenoidal são também senóides. Para o caso do controle H2 foi obtida uma variaçãosenoidal para o ângulo do braço e do pêndulo com amplitudes de 4, 25 e 3, 25 grausrespectivamente. Para o controle H∞ foi obtida uma variação senoidal com amplitudeigual a 4, 11 graus para o ângulo do braço e 2, 87 graus para o ângulo do pêndulo. Parao controle misto, a variação obtida foi de 3, 67 graus para o ângulo do braço e 1, 56 grauspara o ângulo do pêndulo.
A partir dos resultados obtidos, verifica-se que o controle misto foi o que obteve umamelhor performance para a questão de rejeição do distúrbio senoidal na simulação daplanta não linear do sistema ROTPEN SRV02, pelo fato de que o mesmo apresenta umamenor variação da angulação das saídas do sistema, seguido do controle H∞ e por fim ocontrole H2, assim como pode ser verificado através de suas normas H∞ calculadas.
6.3.3 Distúrbio Constante
Ao aplicar o distúrbio do tipo constante no sistema, é esperado que o mesmo gere umavariação instantânea na saída do sistema no instante em que o mesmo é aplicado, assimcomo esperado para o distúrbio do tipo impulsivo, porém como o distúrbio se mantemconstante após o chaveamento, espera-se que ocorra uma alteração da posição na qual obraço do sistema se equilibra.
As Figuras 6.9, 6.10 e 6.11 apresentam os resultados obtidos para o ângulo do braço,ângulo do pêndulo, lei de controle e o distúrbio constante aplicado, para o controle H2,controle H∞ e controle misto H2/H∞ respectivamente.

Capítulo 6. Resultados e Discussões 72
Figura 6.9 – Resultados obtidos para o Controle H2 aplicado na simulação da planta nãolinear do sistema ROTPEN SRV02 para o distúrbio constante.
Fonte: O autor.
Figura 6.10 – Resultados obtidos para o Controle H∞ aplicado na simulação da plantanão linear do sistema ROTPEN SRV02 para o distúrbio constante.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 73
Figura 6.11 – Resultados obtidos para o Controle misto H2/H∞ aplicado na simulação daplanta não linear do sistema ROTPEN SRV02 para o distúrbio constante.
Fonte: O autor.
A partir das figuras, verifica-se que existe um pico de variação angular no momentoem que o distúrbio constante é aplicado. Isto ocorre pelo fato de que o mesmo é chaveadoinstantaneamente de 0 V para 1 V . Verifica-se também que, um tempo após a aplicaçãodo distúrbio constante, o mesmo teve um efeito no sistema de forma a alterar a posiçãode referência no qual o ângulo do braço permanece em equilíbrio . Para o controle H2 aposição no qual o ângulo do braço se manteve em equilíbrio após a aplicação do distúrbioconstante foi em −4, 15 graus. Para o controle H∞ o valor obtido foi de −6, 64 graus e,para o controle misto, −6, 71 graus.
Assim, conclui-se que o controle H2 apresenta uma melhor rejeição de distúrbios defrequências muito baixas para a simulação da planta não linear do sistema ROTPENSRV02, pelo fato de que o distúrbio constante aplicado no mesmo apresenta um valorde offset menor em relação à posição de equilíbrio para o ângulo do braço em relaçãoaos outros controladores ótimos. O controle H∞ e misto tiveram um desempenho muitopróximo com relação a rejeição de distúrbio de baixas frequências. Os resultados obtidosestão de acordo com o diagrama de valores singulares da matriz de transferência de malhafechada do sistema Tzw, onde esses comportamentos obtidos na simulação foram previstos.

Capítulo 6. Resultados e Discussões 74
6.4 Implementação
Nesta seção, são apresentados os resultados obtidos para a implementação no sis-tema ROTPEN SRV02 para os diferentes controladores ótimos projetados sujeito aos trêsdistúrbios considerados para a análise de performance: o distúrbio impulsivo, distúrbiosenoidal e distúrbio constante.
A implementação em hardware foi realizada conforme a descrição realizada no Capítulo5 e os resultados obtidos foram separados em subseções de acordo com os distúrbiosaplicados, para uma melhor organização dos dados obtidos.
É válido pontuar também que, na implementação, os resultados obtidos tiveram umcomportamento oscilatório, no qual o braço oscila em torno de um ponto de equilíbriode forma a equilibrar o pêndulo na posição vertical para cima, comportamento que não édescrito na modelagem do sistema e não aparece nos resultados obtidos para a simulaçãoda planta não linear do sistema ROTPEN SRV02.
6.4.1 Distúrbio Impulsivo
Para o caso do distúrbio impulsivo na implementação, espera-se um comportamentosemelhante da simulação, porém com uma variação instantânea sobreposta a uma oscila-ção natural do sistema, onde a eficiência sobre sua rejeição é analisada através da energiado sinal de saída novamente.
As Figuras 6.12, 6.13 e 6.14 apresentam os resultados obtidos na implementação parao ângulo do braço, ângulo do pêndulo, lei de controle e o distúrbio impulsivo aplicado,para o controle H2, controle H∞ e controle misto H2/H∞ respectivamente.

Capítulo 6. Resultados e Discussões 75
Figura 6.12 – Resultados obtidos para o Controle H2 na implementação para o distúrbioimpulsivo.
Fonte: O autor.
Figura 6.13 – Resultados obtidos para o Controle H∞ na implementação para o distúrbioimpulsivo.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 76
Figura 6.14 – Resultados obtidos para o Controle misto H2/H∞ na implementação parao distúrbio impulsivo.
Fonte: O autor.
Para verificar a performance em relação a rejeição do distúrbio impulsivo, foi utilizadaa norma L2 da saída z(t) do sistema, assim como realizado para a simulação. É válidonotar que, como o sistema possui um comportamento oscilatório, a norma L2 da saídado sistema não reflete somente a variação provocada na saída do sistema pela aplicaçãodo distúrbio impulsivo, mas também a variação do sinal de saída que oscila para mantero pêndulo equilibrado na posição vertical para cima.
Para o caso do controle H2 foi obtida uma norma L2 da saída do sistema de ‖z(t)‖2,H2 =0, 0936. Para o controle H∞ o valor obtido foi de ‖z(t)‖2,Hinf = 0, 0966. Por fim, o resul-tado obtido para a norma L2 para o sinal de saída do sistema z(t) para o controle mistofoi de ‖z(t)‖2,misto = 0, 0867.
A partir dos resultados obtidos para a implementação verifica-se que, assim como nasimulação, o controle misto apresenta uma menor norma L2 da saída do sistema o queimplica que o mesmo possui uma melhor performance com relação a rejeição de distúrbiosdo tipo impulsivo, seguido do controle H2 e por fim o controle H∞.
6.4.2 Distúrbio Senoidal
Ao aplicar o distúrbio do tipo senoidal na implementação, espera-se o mesmo compor-tamento já comentado para o caso da simulação, porem desta vez, uma oscilação senoidalsobreposta a oscilação natural do sistema.

Capítulo 6. Resultados e Discussões 77
Assim como realizado na simulação, a frequência do distúrbio senoidal foi escolhidana qual o sistema possui a menor atenuação, como pode ser verificado na Figura 6.2.
As figuras 6.15, 6.16 e 6.16 apresentam os resultados obtidos na implementação parao ângulo do braço, ângulo do pêndulo, lei de controle e o distúrbio senoidal aplicado aocontrole H2, controle H∞ e controle misto, respectivamente.
Figura 6.15 – Resultados obtidos para o Controle H2 na implementação para o distúrbiosenoidal.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 78
Figura 6.16 – Resultados obtidos para o Controle H∞ na implementação para o distúrbiosenoidal.
Fonte: O autor.
Figura 6.17 – Resultados obtidos para o Controle misto H2/H∞ na implementação parao distúrbio senoidal.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 79
Assim como na simulação, os resultados obtidos obtiveram um comportamento senoi-dal com a aplicação do distúrbio senoidal. Para o controle H2 foi obtida uma variaçãosenoidal do ângulo do braço com amplitude média de 9, 50 graus e, para o ângulo dopêndulo, uma amplitude média de 7, 30 graus. Para o controle H∞ as amplitudes médiasobtidas foram de 6, 41 graus e 4, 61 graus para as variações do ângulo do braço e do pên-dulo respectivamente. O controle misto H2/H∞ obteve uma amplitude média de 4, 79graus para a variação senoidal do ângulo do braço e 2, 07 graus para o ângulo do pêndulo.
A partir dos resultados obtidos, verifica-se que, o controle misto foi o que obteve omelhor desempenho com relação a rejeição do distúrbio do tipo senoidal na frequênciade pior caso de atenuação do sistema, pelo fato de que o mesmo apresenta as menoresamplitudes de oscilação, seguido do controle H∞ e por fim o controle H2, assim comotambém verificado no ambiente de simulação da planta não linear do sistema ROTPENSRV02.
Verifica-se também que, as variações na saída do sistema obtidas na implementaçãoforam maiores que as variações dos resultados apresentados para a simulação, o que reforçanovamente que a modelagem apresentada do sistema não o descreve completamente.
6.4.3 Distúrbio Constante
Para o caso do distúrbio constante na implementação, espera-se o mesmo comporta-mento já comentado para o caso da simulação.
As Figuras 6.18, 6.19 e 6.20 apresentam os resultados obtidos na implementação parao ângulo do braço, ângulo do pêndulo, lei de controle e o distúrbio constante aplicado aocontrole H2, controle H∞ e controle misto, respectivamente.

Capítulo 6. Resultados e Discussões 80
Figura 6.18 – Resultados obtidos para o Controle H2 na implementação para o distúrbioconstante.
Fonte: O autor.
Figura 6.19 – Resultados obtidos para o Controle H∞ na implementação para o distúrbioconstante.
Fonte: O autor.

Capítulo 6. Resultados e Discussões 81
Figura 6.20 – Resultados obtidos para o Controle misto H2/H∞ na implementação parao distúrbio constante.
Fonte: O autor.
Como o sistema possui um comportamento oscilatório, foi utilizado o ponto de equilí-brio em torno do qual o ângulo do braço do sistema oscila, de forma a verificar a perfor-mance dos controladores ótimos com relação a rejeição do distúrbio constante. Atravésdos resultados obtidos verifica-se que o o ponto de equilíbrio no qual o ângulo do braçooscila para o controle H2 após o distúrbio constante ser aplicado é na posição de −3, 87graus. Para o controle H∞ tem-se a posição 5, 62 graus e, para o controle misto, 6, 24graus.
Assim, verifica-se, novamente, que os resultados obtidos estão de acordo com os resul-tados obtidos para a simulação da planta não linear do sistema em relação à performancedos controladores ótimos, no qual o controle H2 se mostrou mais eficiente com relação arejeição do distúrbio constante, seguido do controle H∞ e por fim o controle misto.
6.5 Discussão Geral dos Resultados
A partir dos resultados obtidos da síntese dos controladores, verifica-se que o problemade otimização do Controle H2 formulado com base em LMIs obteve um resultado satisfa-tório, uma vez que a norma H2 projetada no sistema em malha fechada com o controladorcalculado foi bem próximo da norma H2 garantida pelo problema de otimização. No casodos controladores H∞ e misto, as normas garantidas obtidas pelos problemas de otimiza-

Capítulo 6. Resultados e Discussões 82
ção tiveram uma grande diferença em relação as normas projetadas no sistema em malhafechada. Uma possível explicação para esta diferença se deve ao fato do conjunto de LMIsutilizados nestes problemas serem muito conservativas. Assim, verifica-se a oportunidadede pesquisas futuras, de forma a reformular tais problemas de otimização com LMIs maisrelaxadas, reduzindo esta diferença entre as normas garantidas e calculadas no sistema.
Verifica-se também que, o problema de otimização do controle H2, foi o que obteve ummelhor resultado em relação a norma H2 garantida. Para o caso da norma H∞ garantida,observa-se que, o problema de otimização do controle H∞, é mais eficiente.
Em termos de performance do sistema com relação a rejeição de distúrbios para oscasos do distúrbio impulsivo e senoidal, verifica-se uma maior eficiência do controle mistoem relação ao controle H2 e H∞. Pode-se notar uma relação direta do desempenhoreferente a rejeição destes distúrbios considerados com as normas H2 e H∞ calculadaspara o sistema, sendo a norma H2 relacionada ao distúrbio impulsivo e a norma H∞
relacionada ao distúrbio senoidal, uma vez que os melhores resultados de performanceobtidos foram para os sistemas que possuem as menores normas calculadas.
Para o caso do distúrbio constante, o controle H2 foi o que obteve a melhor perfor-mance em relação a sua rejeição, pelo fato do mesmo provocar uma menor alteração navariação da posição do qual o ângulo do braço se equilibra. Verifica-se também que, parao distúrbio constante, não existe uma relação em termos de performance com as normasH2 e H∞ calculadas para a matriz de transferência de malha fechada do sistema.
6.6 Conclusões Parciais
A partir dos resultados descritos neste capítulo, conclui-se que, os problemas de oti-mização com base em LMIs para realizar a minimização de normas do sistema em malhafechada são bastante eficientes, uma vez que as normas projetadas no sistema, obtidaspor esses problemas de otimização, são muito menores que as normas projetadas por umalei de controle desenvolvida pelo critério de estabilidade de Lyapunov.
Conclui-se também, através dos resultados obtidos para as análises de performance,que o controle misto é mais eficiente para a rejeição de distúrbios do tipo impulsivo esenoidal com frequência igual a frequência na qual se tem a norma H∞ e, para o caso deum distúrbio constante, o controle H2 apresenta melhores resultados.

83
7 Conclusões
Neste trabalho foi apresentado o projeto de controladores ótimos utilizando comoferramenta LMIs, no qual os objetivos dos problemas de otimização eram de minimizaras normas da matriz de transferência que relaciona a saída do sistema pela entrada dodistúrbio.
Os resultados obtidos mostraram uma grande eficiência em relação a minimização dasnormas da matriz de transferência do sistema em malha fechada quando comparadas alei de controle calculada através da formulação pelo critério de Lyapunov que determinaapenas a estabilidade.
Em termos de norma H2 garantida do sistema em malha fechada, obtida como resul-tado do problema de otimização, o controle H2 se mostrou mais eficiente que os demais.Já para a norma H∞ garantida, o controle H∞ foi mais eficiente. Embora o controlemisto H2/H∞ não tenha obtido os melhores resultados para as normas garantidas, foi oque obteve o melhor resultado para as normas calculadas da matriz de transferência demalha fechada.
De forma a verificar a performance do sistema em relação a rejeição de distúrbios,foram aplicados três distúrbios diferentes modelados como um sinal de tensão no atuadordo sistema, um como sendo um nível constante, um como um sinal impulsivo e por fim,um distúrbio senoidal de frequência na qual o sistema possui uma menor atenuação, deacordo com o diagrama de valores singulares.
Tanto na simulação quanto na implementação os resultados obtidos em termos deperformance para a rejeição dos distúrbios aplicados, os controladores H2, H∞ e mistotiveram um resultado semelhante.
Para o caso do distúrbio impulsivo, o controle misto foi o que obteve a melhor per-formance com relação aos controladores ótimos projetados neste trabalho, pelo fato domesmo ter obtido uma menor norma L2 do vetor de saída do sistema z(t), implicandoem uma maior rejeição do distúrbio impulsivo.
Em relação ao distúrbio senoidal, o controle misto se mostrou novamente o mais efici-ente em relação a rejeição do mesmo, pelo fato do distúrbio senoidal aplicado na entradado sistema provocar uma oscilação de menor amplitude em sua saída, isto é, no ângulodo braço e no ângulo do pêndulo, indicando uma menor influência deste sinal senoidal naentrada na saída.
Em termos de performance para sinais de baixas frequências, foi utilizado o distúrbioconstante para a verificação. Sua aplicação ao sistema tem como efeito a mudança daposição de referência de equilíbrio para o ângulo do braço. Para este sinal de distúrbio ocontrole H2 foi mais eficiente em relação a sua rejeição, pelo fato do mesmo obter umamenor mudança da posição de equilíbrio quando o distúrbio é aplicado, com relação aos

Capítulo 7. Conclusões 84
outros controladores.A partir dos resultados obtidos em relação a performance dos controladores ótimos é
possível concluir que, embora não haja uma estratégia de controle mais eficiente em todosos aspectos analisados neste trabalho, cada estratégia se mostra mais eficiente para cadaespecificação desejada. Sendo assim, com os resultados obtidos é possível realizar umatomada de decisões assertiva em diferentes contextos e objetivos para o caso específico dosistema ROTPEN SRV02.
7.1 Trabalhos Futuros
Para trabalhos futuros, sugere-se:
• Realizar a análise de performance presente neste trabalho para diferentes plantase/ou diferentes distúrbios, de forma a se obter uma visão holística em relação aperformance dos controladores ótimos;
• Comparar os resultados dos problemas de otimização que visam minimizar as normasda matriz de transferência formuladas através de LMIs e outros métodos, comoalgoritmos genéticos e heurísticos;
• Comparar a performance entre os controles presentes neste trabalho e outros contro-ladores que visam a rejeição de distúrbios, como o Controle Preditivo MPC (ModelPredictive Control) e controladores com base no Observador de Distúrbio (Distur-bance Observer) ;
• Descrever uma modelagem para o sistema do pêndulo rotacional invertido mais pre-cisa, de forma a reduzir diferenças obtidas entre os resultados para sua modelageme o sistema real;
• Reformular os problemas de otimização do controle H∞ e misto H2/H∞ com LMIsmenos conservativas, de modo a obter melhores resultados dos que os obtidos nestetrabalho.

85
Referências
ALAGOZ, B. et al. Disturbance rejection performance analyses of closed loop controlsystems by reference to disturbance ratio. ISA Transactions, 2014. 16
ANDERSON, C. Learning to control an inverted pendulum using neural networks. IEEEControl systems maganize, Vol.9, p. 31–37, 1989. 16
ANDRADE, L. H. S. de; AGULHARI, C. M. Robust mixed H2/H∞ control of anonlinear multivariable system. 12th IEEE International Conference on IndustryApplications (INDUSCON), 2016. 17
ASSUNÇÃO, E. et al. Robust state-derivative feedback lmi-based desings formultivariable linear systems. International Journal of Control, p. 1260–1270, 2007. 46
BHAYA, A. Estabilidade de Sistemas Dinâmicos Lineares. In: AGUIRRE, L. A.Enciclopédia de Automática: Controle e Automação vol.II. São Paulo: Blutcher, 2007. 22
BOYD, S. et al. Linear Matrix Inequalities in System and Control Theory. Filadélfia:SIAM, 1994. 21, 27
CHOI, J.; KIM, J. S. Robust control for rotational inverted pendulum using outputfeedback sliding mode controller and disturbance observer. KSME International JournalVolume 17 Issue 10, p. 1466–1474, 2003. 16
COVACIC, M. R. Síntese de sistemas ERP baseada em LMIs e controle com estruturavariável. Tese (Doutorado) — Universidade Estadual Paulista, Ilha Solteira, 2006. 21
DORF, R.; BISHOP, R. Sistemas de controle modernos. 8ed. Rio de Janeiro: LTCEditora, 2001. 20
DU, H.; ZHANG, N.; NGUYEN, H. Mixed H2/H∞ control of tall buildings withreduced-order modeling technique. Structural Control and Health Monitoring, p. 64–89,2008. 16, 17
FRUTUOSO, A.; SANTOS, A. L.; SALES, D. C. Estabilização de um pêndulo invertidousando controlador H2 contínuo. Congresso Brasileiro de Automática, p. 4130–4136,2014. 16, 17
FURUTA, K.; YAMAKITA, M.; KOBAYASHI, S. Swing up control of invertedpendulum. Journal of Systems and Control Engineering Volume 206 Issue 6, p. 263–269,1991. 16
GAINO, R. et al. Controle digital para fes no estímulo do músculo quadríceps empacientes paraplégicos. Dincon, p. 764–771, 2007. 33
GARCíA, G.; BUITRAGO, J.; RAMíREZ, J. Control de un péndulo de furuta, unarevisión del estado del arte. Scientia et Technica, Vol.20, 2015. 16
GONÇALVES, J. B.; ZAMPIERI, D. E. An integrated control for a biped walking robot.Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2006. 16

Referências 86
GREEN, M.; LIMEBEER, D. J. N. Linear Robust Control. Nova Jersey: Prentice Hall,1995. 25, 26, 27
HORN, R. A.; JOHNSON, C. R. Matrix Analysis. Nova York: Cambridge UniversityPress, 2013. 22
KROKAVEC, D.; FILASOVA, A. On enhanced mixed H2/H∞ design conditionsfor control of linear time-invariant systems. 17th International Carpathian ControlConference (ICCC), 2016. 17
LI, Z. et al. Control of a grid-forming inverter based on sliding-mode and mixed H2/H∞control. IEEE Transactions on Industrial Eletronics, Volume:64, Issue:5, p. 3862–3872,2017. 17
LIU, C. et al. Robust high-precision attitude control for flexible spacecraft with improvedmixed H2/H∞ control strategy under poles assignment constraint. Acta AstronauticaVolume:136, p. 166–175, 2017. 17
MANDIC, P.; LAZAREVIC, M. Real time control of rotary inverted pendulum.International Journal of Engineering Volume 12 Issue 2, p. 211–214, 2014. 16
MURRAY, R. M. et al. A mathematical Introduction to Robotic Manipulation. Flórida:CRC Press, 1994. 22
NEGRÃO, J. L. Análise matemática e Técnicas de controle aplicadas ao pêndulorotacional invertido. Monografia. Universidade Estadual de Londrina, Londrina, 2013.28, 62, 63
OGATA, K. Engenharia de controle moderno. 5ed. São Paulo: Pearson Prentice Hall,2010. 16, 20, 21, 35
OLIVEIRA, R. C. L. F.; PERES, P. L. D. Análise e Controle de Sistemas LinearesIncertos Por Meio de Desigualdade Matriciais Lineares. 2010. Congresso Brasileiro deAutomática. Mini-Curso. 23, 24, 37, 39, 42
PALHARES, R. M. Fundamentos de Controle Robusto via Otimização. 2014.Universidade Federal de Minas Gerais. Notas de Aula. 21
PALHARES, R. M.; GONÇALVES, E. N. Desigualdade Matriciais Lineares em Controle.In: AGUIRRE, L. A. Enciclopédia de Automática: Controle e Automação vol.I. SãoPaulo: Blutcher, 2007. 37, 38, 41, 43, 44, 45
QUANSER. VoltPAQ-X1 : User Manual. Canadá: Quanser Inc, 2010. 56
QUANSER. User Manual: SRV02 Rotary Servo Base Unit. Canadá: Quanser Inc, 2011a.28, 55
QUANSER. Student Workbook: Inverted Pendulum Experiment for MATLAB/SimulinkUsers. Canadá: Quanser Inc, 2011b. 28, 29, 36
QUANSER. User Manual: Q8-USB Data Aquisition Device. Canadá: Quanser Inc,2011c. 56

Referências 87
QUANSER. Quanser Rotary Servo: User Manual SRV02. Canadá: Quanser Inc., 2011d.28, 53, 54, 57
ROSA FILHO, J. E. A. Controle robusto H2 aplicado ao pêndulo invertido sujeito aincertezas. Dissertação (Mestrado) — Universidade Estadual de Londrina, Londrina,2015. 16, 17
SKOGESTAD, S.; POSTLETHWAITE, I. Multivariable Feedback Analysis and Design.2ed. Nova Jersey: Wiley, 2005. 21
TEIXEIRA, M. C. M. et al. Projeto de um controlador linear para variar o ângulo dearticulação do joelho de um paciente paraplégico. Dincon, p. 950–956, 2007. 33
TOGNETTI, E. S. Controle Robusto. Análise e Controle via LMIs: Normas de sinais esistemas. 2014. Universidade de Brasília. Notas de Aula. 25, 26
TOSCANO, R. Structured Controllers for Uncertain Systems : A StochasticOptimazation Approach. Londres: Springer-Verlag London, 2013. 24, 25, 26, 38
VENDRAMINI, G.; SILVA, S. Controle de um pêndulo invertido sobre uma plataformamóvel utilizando pid e mfac(model-free adaptive control). 9th Brazilian Conference onDynamics, Control and their Aplications, 2010. 16
ZHANG, R.; LI, T.; GUO, L. H∞ control for flexible spacecraft with time-varying inputdelay. Mathematical Problems in Engineering, 2013. 16, 17
ZHENG, F.; CHENG, M.; GAO, W.-B. Variable structure control of time-delay systemswith a simulation study on stabilizing combustion in liquid propellant rocket motors.Automatica Volume 31 Issue 7, p. 1031–1037, 1995. 16
ZHOU, K. et al. Robust and optimal control. Nova Jersey: Prentice Hall, 1996. 16, 25,26, 40

Apêndices

89
A Script Da função de MATLABque calcula o valor da Acelera-ção Angular do braço chamadana simulação não linear.
Função que calcula a equação da dinâmica do movimento do pêndulo (3.27). A mesmaé chamada pelo bloco “Calcula Theta_pp” na simulação do sistema
1 %%% Calcula a Equacao d i f e r e n c i a l da a c e l e r a c a o angular do braco para aimplementacao da s imulacao nao l i n e a r%%%
2
3 f unc t i on theta_pp=calc_theta_pp ( x )4
5 % Angulo do braco6 theta=x (1) ;7
8 % Veloc idade Angular do braco9 theta_p=x (2) ;
10
11 % Aceleracao Angular do braco12 theta_pp=x (3) ;13
14 % Angulo do pendulo15 alpha=x (4) ;16
17 % Veloc idade Angular do pendulo18 alpha_p=x (5) ;19
20 % Aceleracao Angular do pendulo21 alpha_pp=x (6) ;22
23 % Tensao ap l i cada ao servo motor24 Vm=x (7) ;25
26 % Def ine os v a l o r e s dos parametros do pendulo27 mp = 0 . 1 2 7 ; Lp = 0 . 3 3 6 5 ; Jp = 0 . 0 0 1 2 ; Bp = 0 . 0 0 2 4 ;28
29 % Def ine os v a l o r e s dos parametros do braco30 Lr = 0 . 2 1 5 9 ; Jr = 9.9829 e−4; Br = 0 . 0 0 2 4 ;31
32 % Def ine parametros do motor

Apêndice A. Script Da função de MATLAB que calcula o valor da Aceleração Angular do braçochamada na simulação não linear. 90
33 Kg = 70 ; kt = 0 . 0 0 7 7 ; km = 0 . 0 0 7 7 ; Rm = 2 . 6 ; eta_g = 0 . 9 ; eta_m =0 . 6 9 ;
34
35 % Def ine v a l o r e s de parametros g e n e r i c o s36 g = 9 . 8 1 ;37
38 % Calcula a equacao d i f e r e n c i a l de segunda ordem39 theta_pp =(1/(mp∗Lr^2+0.25∗mp∗Lp^2−0.25∗mp∗Lp^2∗( cos ( alpha ) )^2+Jr ) ) ∗ ( ( 0 . 5∗mp
∗Lp∗Lr∗ cos ( alpha ) ) ∗alpha_pp40 −(0.5∗mp∗Lp^2∗ s i n ( alpha ) ∗ cos ( alpha ) ) ∗ theta_p∗alpha_p−(0.5∗mp∗Lp∗Lr∗ s i n (
alpha ) ) ∗alpha_p^2−41 ( (Kg^2∗km∗kt∗eta_m∗eta_g ) /Rm+Br) ∗ theta_p+(Kg∗kt∗eta_m∗eta_g/Rm) ∗Vm) ;42
43 end

91
B Script Da função de MATLABque calcula o valor da AceleraçãoAngular do pêndulo chamada nasimulação não linear.
Função que calcula a equação da dinâmica do movimento do pêndulo (3.28). A mesmaé chamada pelo bloco “Calcula alpha_pp” na simulação do sistema.
1
2 %%% Calcula a Equacao d i f e r e n c i a l da a c e l e r a c a o angular do pendulo para aimplementacao da s imulacao nao l i n e a r%%%
3
4 f unc t i on alpha_pp=calc_alpha_pp ( x )5
6 % Angulo do braco7 theta=x (1) ;8
9 % Veloc idade Angular do braco10 theta_p=x (2) ;11
12 % Aceleracao Angular do braco13 theta_pp=x (3) ;14
15 % Angulo do pendulo16 alpha=x (4) ;17
18 % Veloc idade Angular do pendulo19 alpha_p=x (5) ;20
21 % Aceleracao angular do pendulo22 alpha_pp=x (6) ;23
24 % Tensao ap l i cada no servo motor25 Vm=x (7) ;26
27 % Def ine os v a l o r e s dos parametros do pendulo28 mp = 0 . 1 2 7 ; Lp = 0 . 3 3 6 5 ; Jp = 0 . 0 0 1 2 ; Bp = 0 . 0 0 2 4 ;29
30 % Def ine os v a l o r e s dos parametros do braco31 Lr = 0 . 2 1 5 9 ; Jr = 9.9829 e−4; Br = 0 . 0 0 2 4 ;32

Apêndice B. Script Da função de MATLAB que calcula o valor da Aceleração Angular do pêndulochamada na simulação não linear. 92
33 % Def ine parametros do motor34 Kg = 70 ; kt = 0 . 0 0 7 7 ; km = 0 . 0 0 7 7 ; Rm = 2 . 6 ; eta_g = 0 . 9 ; eta_m =
0 . 6 9 ;35
36 % Def ine v a l o r e s de parametros g e n e r i c o s37 g = 9 . 8 1 ;38
39 % Calcula a equacao d i f e r e n c i a l de segunda ordem40 alpha_pp=(1/(Jp+0.25∗mp∗Lp^2) ) ∗ ( ( 0 . 25∗mp∗Lp^2∗ cos ( alpha ) ∗ s i n ( alpha ) ) ∗
theta_p^241 +(0.5∗mp∗Lp∗Lr∗ cos ( alpha ) ) ∗ theta_pp +(0.5∗mp∗Lp∗g∗ s i n ( alpha )−Bp∗alpha_p ) ) ;42 end

93
C Script MATLAB que calcula asmatrizes numéricas do sistemaROTPEN SRV02 descrito em es-paço de estados
Script Que calcula as matrizes numéricas que descrevem o sistema ROTPEN SRV02.O modelo do sistema pode ser verificado nas equações (3.54) e (3.55) e os parâmetros dosistema nos quadros 5.1 e 5.2
1 %%% Calculo matr i ze s numericas da repre s entacao em espaco de es tados dos i s tema ROTPEN%%%
2
3 % Def ine os v a l o r e s dos parametros do pendulo4 Mp = 0 . 1 2 7 ; Lp = 0 . 3 3 6 5 ; Jp = 0 . 0 0 1 2 ; Bp = 0 . 0 0 2 4 ;5
6 % Def ine os v a l o r e s dos parametros do braco7 Lr = 0 . 2 1 5 9 ; Jr = 9.9829 e−4; Br = 0 . 0 0 2 4 ;8
9 % Def ine parametros do motor10 Kg = 70 ; kt = 0 . 0 0 7 7 ; km = 0 . 0 0 7 7 ; Rm = 2 . 6 ;11
12 % Def ine v a l o r e s de parametros g e n e r i c o s13
14 g = 9 . 8 1 ;15 % Modelo matematico com entrada torque16
17 Dt = Jr∗Jp + Mp∗(Lp/2) ^2∗ Jr + Jp∗Mp∗Lr ^2;18 A = [ 0 0 1 0 ;19 0 0 0 1 ;20 0 Mp^2∗(Lp/2) ^2∗Lr∗g/Dt −Br∗( Jp+Mp∗(Lp/2) ^2)/Dt −Mp∗(Lp/2) ∗Lr∗Bp/Dt ;21 0 Mp∗g ∗(Lp/2) ∗( Jr+Mp∗Lr ^2)/Dt −Mp∗(Lp/2) ∗Lr∗Br/Dt −Bp∗( Jr+Mp∗Lr ^2)/Dt
] ;22
23 B = [ 0 ; 0 ; ( Jp+Mp∗(Lp/2) ^2)/Dt ; Mp∗(Lp/2) ∗Lr/Dt ] ;24 C = [ 1 0 0 0 ;0 1 0 0 ] ;25 D = [ 0 ; 0 ]26
27 % Adiciona a dinamica do motor , convertendo a entrada do s i s tema de torquepara tensao
28 A(3 ,3 )=A(3 , 3 )−Kg^2∗km∗kt∗eta_g∗eta_m∗B(3) /Rm;29 A(4 ,3 )=A(4 , 3 )−Kg^2∗km∗kt∗eta_g∗eta_m∗B(4) /Rm;

Apêndice C. Script MATLAB que calcula as matrizes numéricas do sistema ROTPEN SRV02 descritoem espaço de estados 94
30
31 B=Kg∗km∗eta_g∗eta_m∗B/Rm;32
33 % Dis turb io modelado como um s i n a l de tensao no motor34 Bu=B;35 Bw=B;36
37 % Representacao em espaco de es tados ( malha aberta )38 ROTPEN=ss (A, Bu ,C,D)

95
D Script MATLAB Controle H2com restrição de norma do con-trolador K
Script que soluciona o problema de otimização do controle H2 (4.17) com a restriçãoda norma do controlador K (4.41).
1 %%% Contro le H2 com r e s t r i c a o da norma do cont ro l ador KK’ <( eta ∗ I ) /mi^2para o s i s tema ROTPEN %%%
2 A=[0 0 1 0 ;0 0 0 1 ; 0 81 .3263 −28.9504 −0.9311; 0 121.9573 −27.8526−1 .3963 ] ;
3 Bu= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;4 C=[1 0 0 0 ;0 1 0 0 ] ;5 D= [ 0 ; 0 ] ;6 Bw= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;7
8 % Def ine parametros para a r e s t r i c a o do cont ro l ador K9 mi=0.7;
10 eta =15000;11
12 % Declara as v a r i a v e i s das LMIs13 s e t l m i s ( [ ] ) ;14 J=lmivar ( 1 , [ 1 1 ] ) ;15 X=lmivar ( 1 , [ 4 1 ] ) ;16 Z=lmivar ( 2 , [ 1 4 ] ) ;17
18 % Declara as LMIs que solucionam o problema de ot imizacao do c o n t r o l e H219 lmiterm ([−1 1 1 J ] , 1 , 1 ) ;20 lmiterm ([−1 2 1 0 ] ,Bw) ;21 lmiterm ([−1 2 2 X] , 1 , 1 ) ;22
23 lmiterm ( [ 2 1 1 X] ,A, 1 , ’ s ’ ) ;24 lmiterm ( [ 2 1 1 Z] ,−Bu, 1 , ’ s ’ ) ;25 lmiterm ( [ 2 2 1 X] ,C, 1 ) ;26 lmiterm ( [ 2 2 1 Z] ,−D, 1 ) ;27 lmiterm ( [ 2 2 2 0] ,−1) ;28
29 % Declara as LMIs que garantem a r e s t r i c a o na norma do cont ro l ador K30 lmiterm ([−3 1 1 0 ] , e ta ) ;31 lmiterm ([−3 1 2 Z ] , 1 , 1 ) ;32 lmiterm ([−3 2 2 0 ] , 1 ) ;33
34 lmiterm ( [ 4 1 1 0 ] , mi∗1) ;

Apêndice D. Script MATLAB Controle H2 com restrição de norma do controlador K 96
35 lmiterm ([−4 1 1 X] , 1 , 1 ) ;36
37 % Adiciona o conjunto de LMIs a v a r i a v e l LMIS38 LMIS=ge t lm i s ;39
40 % Def ine a v a r i a v e l de ot imizacao para o conjunto de LMIs41 sigma1=ze ro s (1 ,15 ) ;42 sigma1 (1) =1;43
44 % Soluc iona as LMIs minimizando o va lo r de J45 [ Fotimo , Xotimo]=mincx (LMIS , sigma1 ) ;46 Jotimo=dec2mat (LMIS , Xotimo , J ) ;47 Xotimo2=dec2mat (LMIS , Xotimo ,X) ;48 Zotimo=dec2mat (LMIS , Xotimo , Z) ;49
50 % Rea l i za o c a l c u l o do cont ro l ador H251 Kh2=Zotimo∗ inv ( Xotimo2 )52
53 % Norma H2 garant ida pe lo problema de ot imizacao54 normah2sysh2garantida=sq r t ( Jotimo )55
56 % Def ine as matr i ze s que caracte r i zam o s i s tema em malha fechada em r e l a c a o57 % a sa ida do s i s tema com a entrada do d i s t u r b i o58 sysh2=s s (A−Bu∗Kh2 ,Bw,C,D) ;59
60 % Calcula as normas H2 e Hinf do s i s tema rea l imentado de es tados com o61 % c o n t r o l e otimo H262 normah2sysh2calculada=norm( sysh2 , 2 )63 normahin f sysh2ca lcu lada=norm( sysh2 , i n f )64

97
E Script MATLAB Controle H∞com restrição de norma do con-trolador K
Script que soluciona o problema de otimização do controle H∞ (4.32) com a restriçãoda norma do controlador K (4.41).
1 %%%Contro le Hinf com r e s t r i c a o da norma do cont ro l ador KK’ <( eta ∗ I ) /mi^2para o s i s tema ROTPEN%%%
2
3 % Def ine as matr i ze s c a r a c t e r i s t i c a s do s i s tema ROTPEN4 A=[0 0 1 0 ;0 0 0 1 ; 0 81 .3263 −28.9504 −0.9311; 0 121.9573 −27.8526
−1 .3963 ] ;5 Bu= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;6 C=[1 0 0 0 ;0 1 0 0 ] ;7 D= [ 0 ; 0 ] ;8 Bw= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;9
10
11 % Def ine parametros para a r e s t r i c a o do cont ro l ador K12 mi=0.7;13 eta =15000;14
15 % Declara as v a r i a v e i s das LMIs16 s e t l m i s ( [ ] ) ;17 Mi=lmivar ( 1 , [ 1 1 ] ) ;18 X=lmivar ( 1 , [ 4 1 ] ) ;19 Z=lmivar ( 2 , [ 1 4 ] ) ;20
21 % Declara as LMIs que solucionam o problema de ot imizacao do c o n t r o l e Hinf22 lmiterm ([−1 1 1 X] , 1 , 1 ) ; % X>023
24 lmiterm ( [ 2 1 1 X] ,A, 1 , ’ s ’ ) ;25 lmiterm ( [ 2 1 1 Z] ,−Bu, 1 , ’ s ’ ) ;26 lmiterm ( [ 2 2 1 0 ] ,Bw’ ) ;27 lmiterm ( [ 2 3 1 X] ,C, 1 ) ;28 lmiterm ( [ 2 3 1 Z] ,−D, 1 ) ;29 lmiterm ( [ 2 2 2 0] ,−1) ;30 lmiterm ( [ 2 3 3 Mi] ,1 ,−1) ;31
32 % Declara as LMIs que garantem a r e s t r i c a o da norma do cont ro l ador K33 lmiterm ([−3 1 1 0 ] , e ta ) ;34 lmiterm ([−3 1 2 Z ] , 1 , 1 ) ;

Apêndice E. Script MATLAB Controle H∞ com restrição de norma do controlador K 98
35 lmiterm ([−3 2 2 0 ] , 1 ) ;36
37 lmiterm ( [ 4 1 1 0 ] , mi∗1) ;38 lmiterm ([−4 1 1 X] , 1 , 1 ) ;39
40 % Adiciona o conjunto de LMIs a v a r i a v e l LMIS41 LMIS=ge t lm i s ;42
43 % Def ine a v a r i a v e l de ot imizacao para o conjunto de LMIs44 sigma1=ze ro s (1 ,15 ) ;45 sigma1 (1) =1;46
47 % Soluc iona as LMIs minimizando o va lo r de Mi48 [ Fotimo , Xotimo]=mincx (LMIS , sigma1 ) ;49 Xotimo2=dec2mat (LMIS , Xotimo ,X) ;50 Zotimo=dec2mat (LMIS , Xotimo , Z) ;51 Miotimo=dec2mat (LMIS , Xotimo , Mi) ;52
53 % Rea l i za o c a l c u l o do cont ro l ador H254 Khinf=Zotimo∗ inv ( Xotimo2 )55
56 %Norma Hinf garant ida pe lo problema de ot imizacao57 normah in f sy sh in fgarant ida=sq r t ( Miotimo )58
59 %Def ine as matr i ze s que caracte r i zam o s i s tema em malha fechada em r e l a c a o60 %a sa ida do s i s tema com a entrada do d i s t u r b i o61 s y s h i n f=s s (A−Bu∗Khinf ,Bw,C,D) ;62
63 %Calcula as normas H2 e Hinf do s i s tema rea l imentado de es tados com o64 %c o n t r o l e otimo Hinf65 normah2sysh in fca lcu lada=norm( sysh in f , 2 )66 normah in f sy sh in f ca l cu l ada=norm( sysh in f , i n f )

99
F Script MATLAB Controle MistoH2/H∞ com restrição de normado controlador K
Script que soluciona o problema de otimização do controle misto H2/H∞ (4.40) coma restrição da norma do controlador K (4.41).
1 %%%Contro le Misto H2/ Hinf e−r e s t r i t o com r e s t r i c a o da norma do cont ro l adorKK’ <( eta ∗ I ) /mi^2 para o s i s tema ROTPEN%%%
2
3 % Def ine as matr i ze s c a r a c t e r i s t i c a s do s i s tema ROTPEN4 A=[0 0 1 0 ;0 0 0 1 ; 0 81 .3263 −28.9504 −0.9311; 0 121.9573 −27.8526
−1 .3963 ] ;5 Bu= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;6 C=[1 0 0 0 ;0 1 0 0 ] ;7 D= [ 0 ; 0 ] ;8 Bw= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;9
10 % Def ine a l im i t a cao gamma para a norma Hinf11 l i m i t e =1;12
13 % Def ine parametros para a r e s t r i c a o do cont ro l ador K14 mi=0.7;15 eta =15000;16
17 % Declara as v a r i a v e i s das LMIs18 s e t l m i s ( [ ] ) ;19 J=lmivar ( 1 , [ 1 1 ] ) ;20 X=lmivar ( 1 , [ 4 1 ] ) ;21 Z=lmivar ( 2 , [ 1 4 ] ) ;22
23 % Declara as LMIs que solucionam o problema de ot imizacao do c o n t r o l e MistoH2/ Hinf e−r e s t r i t o
24 lmiterm ([−1 1 1 J ] , 1 , 1 ) ;25 lmiterm ([−1 1 2 X] ,C, 1 ) ;26 lmiterm ([−1 1 2 Z] ,−D, 1 ) ;27 lmiterm ([−1 2 2 X] , 1 , 1 ) ;28
29 lmiterm ( [ 2 1 1 X] ,A, 1 , ’ s ’ ) ;30 lmiterm ( [ 2 1 1 Z] ,−Bu, 1 , ’ s ’ ) ;31 lmiterm ( [ 2 2 1 0 ] ,Bw’ ) ;32 lmiterm ( [ 2 2 2 0] ,−1) ;33 lmiterm ( [ 2 3 1 X] ,C, 1 ) ;

Apêndice F. Script MATLAB Controle Misto H2/H∞ com restrição de norma do controlador K 100
34 lmiterm ( [ 2 3 1 Z] ,−D, 1 ) ;35 lmiterm ( [ 2 3 3 0 ] , l i m i t e ^2∗−1) ;36
37 % Declara as LMIs que garantem a r e s t r i c a o da norma do cont ro l ador K38 lmiterm ([−3 1 1 0 ] , e ta ) ;39 lmiterm ([−3 1 2 Z ] , 1 , 1 ) ;40 lmiterm ([−3 2 2 0 ] , 1 ) ;41
42 lmiterm ( [ 4 1 1 0 ] , mi∗1) ;43 lmiterm ([−4 1 1 X] , 1 , 1 ) ;44
45 % Adiciona o conjunto de LMIs a v a r i a v e l LMIS46 LMIS=ge t lm i s ;47
48 % Def ine a v a r i a v e l de ot imizacao para o conjunto de LMIs49 sigma1=ze ro s (1 ,15 ) ;50 sigma1 (1) =1;51
52 % Soluc iona as LMIs minimizando o va lo r de J53 [ Fotimo , Xotimo]=mincx (LMIS , sigma1 ) ;54 Jotimo=dec2mat (LMIS , Xotimo , J ) ;55 Xotimo2=dec2mat (LMIS , Xotimo ,X) ;56 Zotimo=dec2mat (LMIS , Xotimo , Z) ;57
58 % Rea l i za o c a l c u l o do cont ro l ador Misto H2/ Hinf59 Kmisto=Zotimo∗ inv ( Xotimo2 )60
61 %Normas H2 e Hinf garant idas pe lo problema de ot imizacao62 normah2sysmistogarantido=sq r t ( Fotimo )63 normahin f sysmistogarant ido=l i m i t e64
65 %Def ine as matr i ze s que caracte r i zam o s i s tema em malha fechada em r e l a c a o66 %a sa ida do s i s tema com a entrada do d i s t u r b i o67 sysmisto=s s (A−Bu∗Kmisto , Bu ,C,D) ;68
69 %Calcula as normas H2 e Hinf do s i s tema rea l imentado de es tados com o70 %c o n t r o l e misto H2/ Hinf71 normah2sysmistocalculado=norm( sysmisto , 2 )72 normahin f sysmis toca l cu lado=norm( sysmisto , i n f )

101
G Script MATLAB Controle quegarante a estabilidade
Script que soluciona as desigualdades de Lyapunov (2.18)1 %%%Contro le que garante a e s t a b i l i d a d e para o s i s tema ROTPEN%%%2
3 % Def ine as matr i ze s c a r a c t e r i s t i c a s do s i s tema ROTPEN4 A=[0 0 1 0 ;0 0 0 1 ; 0 81 .3263 −28.9504 −0.9311; 0 121.9573 −27.8526
−1 .3963 ] ;5 Bu= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;6 C=[1 0 0 0 ;0 1 0 0 ] ;7 D= [ 0 ; 0 ] ;8 Bw= [ 0 ; 0 ; 5 1 . 9 1 5 7 ; 4 9 . 9 4 7 1 ] ;9
10 % Declara as v a r i a v e i s das LMIs11 s e t l m i s ( [ ] )12 X=lmivar ( 1 , [ 4 1 ] ) ;13 Z=lmivar ( 2 , [ 1 4 ] ) ;14
15 % Def ine LMIs que garantem a e s t a b i l i d a d e do s i s tema16 lmiterm ([−1 1 1 X] , 1 , 1 ) ;17
18 lmiterm ( [ 2 1 1 X] ,A, 1 , ’ s ’ ) ;19 lmiterm ( [ 2 1 1 Z] ,−Bu, 1 , ’ s ’ ) ;20
21 % Adiciona o conjunto de LMIs a v a r i a v e l LMIS22 LMIS=ge t lm i s ;23
24 % Soluc iona o conjunto de LMIs25 [ tmin , xo]= f ea sp (LMIS) ;26 Xf=dec2mat (LMIS , xo ,X) ;27 Zf=dec2mat (LMIS , xo , Z) ;28
29 % Rea l i za o c a l c u l o do cont ro l ador que garante a e s t a b i l i d a d e30 K=Zf∗ inv ( Xf )31
32 %Def ine as matr i ze s que caracte r i zam o s i s tema em malha fechada em r e l a c a o33 %a sa ida do s i s tema com a entrada do d i s t u r b i o34 s y s e s t=s s (A−Bu∗K,Bw,C,D) ;35
36 %Calcula as normas H2 e Hinf do s i s tema rea l imentado de es tados com o37 %c o n t r o l e que garante a e s t a b i l i d a d e38 normah2sysestca lcu lada=norm( syse s t , 2 )

Apêndice G. Script MATLAB Controle que garante a estabilidade 102
39 normah in f sy s e s t ca l cu l ada=norm( syse s t , i n f )