CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LAURA...
27
1 _____________________________________________________________________________ Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura” CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LAURA APARECIDA JACINTO GARRA ROBÓTICA Garça 2017
Transcript of CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL LAURA...

1
_____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho
Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LAURA APARECIDA JACINTO
GARRA ROBÓTICA
Garça 2017

2
_____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho
Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
LAURA APARECIDA JACINTO
GARRA ROBÓTICA
Trabalho apresentado à Faculdade de Tecnologia de Garça-Fatec, como requisito para conclusão do curso de Tecnologia em Mecatrônica Industrial.
Data de aprovação: 05/ 07/ 2017
__________________________________
Prof. Ms. Ildeberto, de Genova Bugatti
FATEC Garça
Garça 2017

3
Gostaria de agradecer primeiro a Deus por que sem ele nada teríamos, a família pelo apoio incondicional, aos meus queridos professores por tudo que aprendi nesses belíssimos anos dentro desta instituição. E a todos que diretamente e indiretamente me ajudaram a chegar até aqui. A todos vocês muito obrigado

4
Sumário
Resumo .................................................................................................................................... 5
Abstract .................................................................................................................................... 5
1.Introdução................................................................................................................................. 6
2.Referencial Teórico ............................................................................................................... 10
Conceitos e características de Garras .............................................................................. 11
Conceitos e características dos motores .......................................................................... 14
3. Desenvolvimento .................................................................................................................. 16
Programando – Biblioteca ................................................................................................... 16
Estrutura Mecânica .............................................................................................................. 18
4. Considerações Finais .......................................................................................................... 23
5. Referencias ........................................................................................................................... 24
APÊNDICE A - Programa criado no compilador Arduino ................................................... 26

5
GARRA ROBÓTICA
Laura Aparecida Jacinto [email protected]
Resumo
O crescimento de uso de robôs nas indústrias é motivado pelos seguintes principais fatores: aumento de produtividade; melhoria de qualidade de produtos; aumentar segurança dos trabalhadores; diminuir acidentes de trabalho e diminuir custos de produção. Para tanto, os robôs substituem o homem em realizações de tarefas que necessitam de rapidez, precisão e repetitividade de movimentos. O objetivo geral desse trabalho foi desenvolver uma garra robótica para manusear objetos em uma linha de manufatura genérica e substituir a ação humana por um robô em ambientes e em atividades que comprometem a saúde do colaborador com movimentos repetitivos e exaustivos. Para atingir os objetivos do trabalho, foi desenvolvido um protótipo de uma garra robótica com movimentos simples controlada por um microcontrolador da família Arduino. No projeto mecânico e controle eletrônico da garra desenvolvida, foram utilizados conceitos, técnicas e ferramentas da mecatrônica industrial. Os resultados obtidos através de testes foram animadores, conseguindo diminuir os riscos ocupacionais dos colaboradores e agregar recursos de automação para aumentar a produtividade e a qualidade do processo de manufatura que exigem movimentos repetitivos. Palavras-chave: Automação Industrial; L.E.R; Garra Robótica, Sistemas
Microcontrolados; Servo Motores.
Abstract
The growth of the use of robots in the industries is motivated by the following main factors: increase of productivity; Product quality improvement; Increase worker safety; Reduce work accidents and reduce production costs. To do so, robots replace man in task accomplishments that require speed, accuracy, and repeatability of movement. The general objective of this work was to develop a robotic grip to manipulate objects in a generic manufacturing line and to replace human action by a robot in environments and activities that compromise the health of the collaborator with repetitive and exhaustive movements. To achieve the objectives of the work, a prototype of a robot with simple movements controlled by a microcontroller of the Arduino family was developed. In the mechanical design and electronic control of developed claw, concepts, techniques and tools of industrial mechatronics were used. The results obtained through tests were encouraging, reducing employees' occupational hazards and adding automation resources to increase productivity and the quality of the manufacturing process that require repetitive movements. Keywords: Industrial Automation, DORT;Robotic Claw, Microcontrolling Systems; Servo Motors

6
1.Introdução
Este projeto é fruto de pesquisa para o Trabalho de Conclusão de Curso da
Faculdade de Tecnologia de Garça do curso Superior em Mecatrônica
Industrial. Com foco no aumento dos custos causados pela falta da ergonomia
na indústria buscou-se uma solução que emprega conhecimentos adquiridos
no decorrer do curso motivado pela necessidade de um sistema que manipule
e transfira objetos para diferentes localidades em ambiente de chão de fábrica.
Um dos fatores que contribuem para gerar qualidade e boa produtividade
em processos de manufatura industriais está relacionado ao bem estar e
motivação dos colaboradores que atuam nesses processos. Estudos
comprovam que a ergonomia apropriada dos equipamentos e ferramentas
utilizadas pelos colaboradores contribui de forma efetiva para gerar maior
conforto no ambiente de trabalho, possibilitando aumento na produtividade
além de diminuir e ou evitar as lesões ocupacionais, diminuindo tanto
afastamentos temporários de funcionários da atividade produtiva necessidades
de alteração frequente das equipes de produção.
Um ambiente de trabalho ergonomicamente incorreto pode provocar
limitações físicas e mentais para o funcionário que insatisfeitos e
desconfortáveis produzem menos, sofre dores além de gerar desmotivação.
Um ambiente bem planejado que busque diminuir tais dificuldades é o primeiro
passo para se atingir a qualidade de trabalho dos colaboradores e
consequentemente uma melhor qualidade e produtividade dos funcionários.
Um dos grandes problemas atualmente encontrados nas lesões entre os
funcionários é o L.E.R (Lesões por Esforços Repetitivos) também chamada de
D.O.R.T. (Distúrbio Osteomuscular Relacionado ao Trabalho), L.T.C. (Lesão
por Trauma Cumulativo), A.M.E.R.T. (Afecções Musculares Relacionadas ao
Trabalho) ou síndrome dos movimentos repetitivos, L.E.R. é causada por
mecanismos de agressão, que vão desde esforços repetidos continuadamente
ou que exigem muita força na sua execução, até vibração, postura inadequada
e estresse. Não sendo necessariamente uma doença o L.E.R provocam um
grupo de doenças tais como tendinite, tenossinovite, bursite, síndrome do

7
desfiladeiro torácico, síndrome do pronador redondo, mialgias entre outras que
atingem nervos, tendões e músculos na maioria dos casos dos membros
superiores que inflamados provocam dores e impedem que os colaboradores
realizem suas funções de forma correta e produtiva chegando a alguns casos
impedi-los de realizar suas funções.
Acredita-se que o primeiro médico a descrever o L.E.R tenha sido Bernardo
Ramazzini em 1713, hoje considerado o pai da Medicina Ocupacional,
descreveu um grupo de afecções músculo esqueléticas entre as quais a
encontrada em notários e escreventes que, acreditava ele, ser pelo uso
excessivo das mãos no trabalho de escrever, com o passar do tempo e a
implementação de novos ofícios dependentes de movimentos repetitivos
constantes mais e mais casos foram surgindo.
No Brasil, a primeira referência oficial a esse grupo de afecções do sistema músculo-esquelético foi feita pela Previdência Social, com a terminologia tenossinovite do digitador, através da portaria nº 4.062, de 06/08/87. Em 1992, a Secretaria de Estado da Saúde de São Paulo publicou a resolução SS 197/92, já introduzindo oficialmente a terminologia Lesões por Esforços Repetitivos (LER), após amplo processo de discussão entre os mais diferentes segmentos sociais. Nesse mesmo ano, a Secretaria de Estado do Trabalho e Ação Social e Secretaria de Estado da Saúde de Minas Gerais publicaram a resolução 245/92, baseada na resolução SS 197/92, de São Paulo. (SETTIMI, TOLEDO, PAPARELLI, MARTINS, SOUZA, SILVA,2000,p 9).
No tratamento do L.E.R além do uso de anti-inflamatórios em muitos casos
é indicado o repouso dos membros afetados e fisioterapia chegando a
situações mais graves a intervenção cirúrgica que afasta durante um grande
período o colaborador causando assim custos para as empresas.
E os setores com mais casos de LER são: Bancário; Comércio; Processamento
de dados; Têxtil; Confecção; Químico; Plástico; Serviços e Telecomunicações.
(SETTIMI, TOLEDO, PAPARELLI, MARTINS, SOUZA, SILVA,2000)
Ou seja, as indústrias estão em grande parte incluídas nessa situação onde
a tecnologia e as inovações podem vir trazer certo alivio e onde soluções são
bem vindas. Um sistema de transporte e que realize funções pode diminuir ou
até mesmo impedir que os casos de L.E.R possam a vir acontecer dentro da
empresa, apesar da sociedade temer que as máquinas tirem dos colabores
seus trabalhos a inovação surge para facilitar a vida, trazendo mais conforto,
saúde e facilidade a todos nós.

8
No Brasil as lesões por esforços repetitivos e distúrbios ósteos-musculares
relacionados ao trabalho são quase uma epidemia que atinge e afasta do
trabalho cerca de 100 mil trabalhadores por ano. A Pesquisa nacional da
Saúde que é realizada todo ano pelo IBGE apontou que em 2013 cerca,
3.569.095 trabalhadores disseram ter sido diagnosticado com L.E.R, que nas
últimas décadas tem sido a doença ocupacional mais frequente no Instituto
Nacional de Seguro Nacional em suas estáticas.
Dados divulgados pelo site oficial do Instituto Nacional de Seguro Social, no
período de 2000 a 2011 apontam um crescimento de 163% na concessão do
auxílio doença previdenciário aquele ao qual é concedido a quem recebe
atestado de mais de que 15 dias pelo médico, benefício esse oferecido pelo
Ministério da Previdência Social no Brasil, tais afastamento tem um custo aos
cofres públicos de mais de 669 milhões ao ano.
Muitos acreditam que a evolução das máquinas vem para substituir os
trabalhadores de suas áreas de trabalho, no entanto a mecanização das
funções antes realizada por tais trabalhadores melhora sua qualidade de vida,
diminuindo riscos a saúde, doenças e acidentes até fatais.
Proprietários de empresas ao adquirir tecnologia não deve somente pensar
no lucro, mas também nos benefícios que com ela irão ter, um funcionário pode
sim ter um custo menor que uma máquina, mas em caso de acidente e risco de
saúde o custo pode ser maior. Um exemplo disso é o manuseio de produtos
químicos no qual o risco ao colaborador é maior que o custo de compra de uma
máquina especifica para tal trabalho.
Para atingir o objetivo de diminuir a incidência de problemas gerados aos
colaboradores de uma empresa que atuam em processos de manufatura
industrial que exigem movimentos repetitivos e exaustivos (L.E.R.) Foi
desenvolvida uma garra robótica para substituir o homem em atividades
repetitivas. Como consequência da utilização de garras robóticas é obtida
resultados animadores na uniformidade e aumento de qualidade dos objetos
manufaturados em chão de fábrica. O projeto verifica a viabilidade de substituir
a atuação humana em atividades que exijam movimentos repetitivos e
exaustivos em ambiente fabris através da utilização de garras robóticas que
apresentem uma boa relação de custo benefício. A garra robótica proposta

9
pode ser utilizada em uma diversidade de atividades, possibilitando aumento
no padrão de qualidade e uniformidade nos produtos manufaturados.
O braço mecânico é um manipulador projetado para realizar diferentes
tarefas e ser capaz de repeti-las (ROSARIO 2005) funções que desde do séc.
IV AC já vinham sendo buscadas por Aristóteles, Leonardo da Vinci, Charles
Babbage, Nikola Tesla entre outro, mas somente foram atingidas na tecnologia
moderna.
A empresa Universal Automation Inc. fundada por George Devol e Joseph
F. Engelberger em 1956 juntamente com alguns engenheiros e programadores
da Universidade de Stanford teria sido a primeira companhia a produzir um
robô manipulador industrial, conhecidos na época como Máquinas de
transferência programadas, pois era essa a sua função transferir objetos de um
ponto ao outro ponto utilizando-se atuadores hidráulicos que eram
programados a partir de coordenadas. A Fig.1 mostra o primeiro manipulador
robótico utilizado pela General Motors (GM).
Figura 1 - UNIMATE o primeiro robô manipulador patenteado instalado na linha de produção da GM
Fonte: http://exame.abril.com.br/ciencia/a-historia-dos-robos-em-imagens/
O grande fator que elevou a robótica para o patamar que hoje ela se
encontra ocorreu nos anos 70, onde grandes empresas visualizaram suas
vantagens e se renderam a nova tecnologia. Dentre elas é possível citar a
General Eletric e a General Motors.

10
2.Referencial Teórico
A norma ISO 10218 é a norma que especifica requisitos e diretrizes para o
design seguro inerentes, medidas de proteção e informações para uso de
robôs industriais. Ele descreve perigos básicos associados com robôs e
fornece requisitos para eliminar ou reduzir adequadamente os riscos
associados a esses perigos.
Segundo a ISO um robô industrial é um manipulador reprogramável,
multifuncional, projetado para mover materiais, peças, ferramentas ou
dispositivos especiais em movimentos variáveis programados para a realização
de uma variedade de tarefas.
Para a realização do projeto foi necessária uma pesquisa teórica exaustiva
de temas envolvidos com mecatrônica tais como: mecânica, sistemas
microcotrolados, microcontroladores, linguagens de programação, braços
robóticos, servo motores, sensores e atuadores. Para realizar os movimentos
previstos para a garra robótica foram utilizados servos motores, que
apresentam dimensões reduzidas e torque relevante. A utilização de servo
motores proporciona ã obtenção de movimentos precisos e robustos.
Os movimentos em servo motores são gerados por pulsos elétricos
aplicados em seus terminais (PWM). Na garra desenvolvida, os pulsos elétricos
são gerados por um microcontrolador Arduino programado utilizando linguagem
C para gerar movimentos precisos e com potência adequada.
A substituição do ser humano por um equipamento automatizado gera
uniformidade no processo de manufatura consequentemente maior qualidade
do produto final. Para tanto, o sistema de controle deve ser projetado e
programado adequadamente para realizar movimentos sincronizados para
obter os resultados esperados em uma determinada aplicação.
O controle da garra robótica é realizado utilizando uma placa de
programação de desenvolvimento contendo um microcontrolador Arduino. O
sistema utilizado caracteriza-se como uma plataforma de prototipagem de
sistema de controle muito utilizada por propiciar um sistema de
desenvolvimento colaborativo, gerando maior velocidade de desenvolvimento.
Avaliações e dimensionamentos realizados contribuíram para definir o
microcontrolar Arduino utilizado.
11
A placa utilizada neste projeto utiliza a linguagem de programação C, que é
uma linguagem de programação compilada de uso geral sendo uma das mais
utilizadas em sistemas microcontrolados, e diversas placas de programação
tais como PIC, ADK, Raspberry entre outras, tanto que é ensinada como
linguagem básica em cursos superiores de tecnologia.
Conceitos e características de Garras
Segundo Rosário (2005) ”O braço do robô executa movimentos espaço,
transferindo objetos e ferramentas de um ponto para outro. Na extremidade do
braço, existe um atuador usado na execução de suas tarefas.” O atuador na
extremidade do braço é próprio para a realização da atividade da qual o robô
foi projetado tendo, como o atuador é um dos elementos mais importantes para
a execução é necessário que seja adequado às condições e sua área de
trabalho que pode ser carregar e descarregar máquinas, manipular e paletizar
objetos e até mesmo realizar atividades mais precisas como cirurgias e solda.
Os atuadores existentes são classificados em dois tipos principais:
Garras e Ferramentas especializadas.
Existem vários tipos de Garras ou mãos mecânicas no mercado, cada
uma delas adequada a uma atividade ou aplicação específica:
Com sujeição por pressão – onde as laterais da garra realizam força para apoiar o objeto;
Com sujeição magnética – onde por meio de um imã o objeto é mantido na posição;
Com sujeição a vácuo – na qual a utilização do ar comprimido permanece a peça apoiada;
Com sujeição de peças a temperaturas elevadas;
Resistentes a produtos corrosivos e/ou perigosos;
Com sensores e entres outros.
As Ferramentas especializadas mais utilizadas são:
Pistolas pulverizadas – como, por exemplo, em pintura, metalização;
Soldagem por resistência por pontos;
Soldagem por arco;
Dispositivos de furação – com brocas ou outros equipamentos próprio em sua extremidade;
12
Polidoras e entre outras.
A garra ou mão mecânica busca o manuseamento dos objetos sendo
comparada a mão humana, mas, no entanto ela não é capaz de simular seus
movimentos tanto pela dificuldade de sua construção quanto pelo valor
agregado ao braço por tal tecnologia que em muitos casos nem se tem a
necessidade, limitando assim os movimentos a uma faixa de operação.
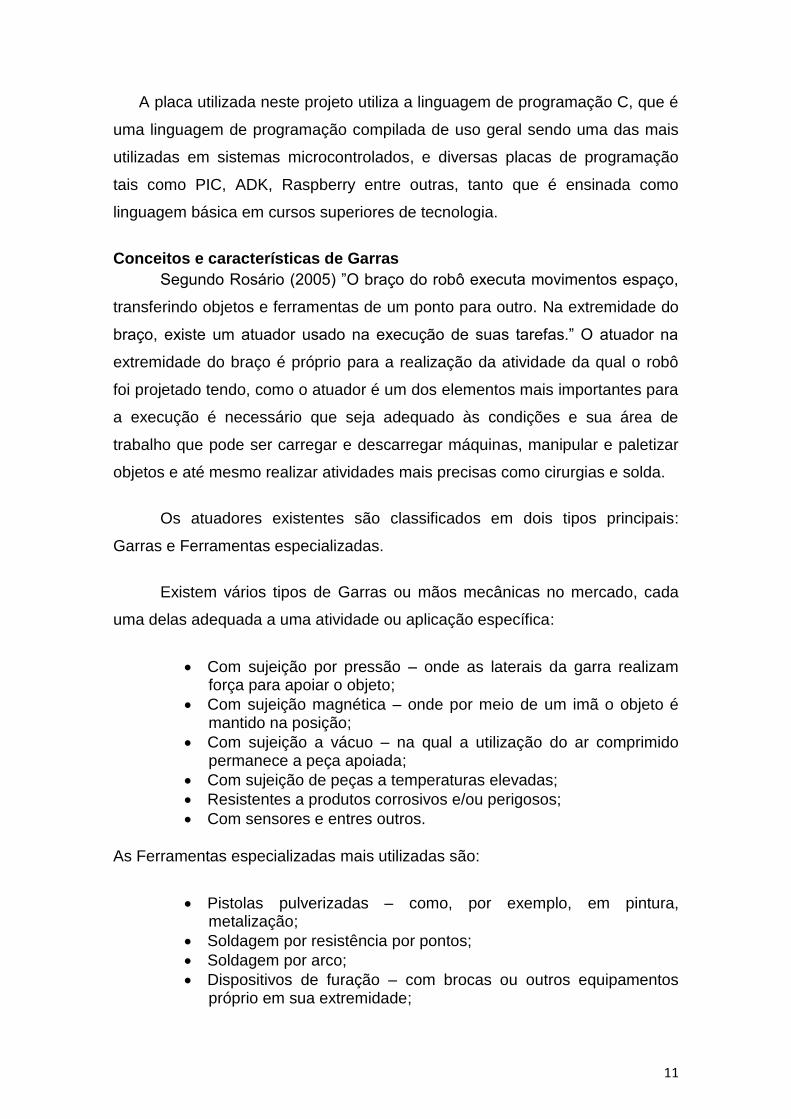
Como em alguns casos são necessários apenas alguns movimentos
que a mão humana realiza, cada tipo de garra busca reproduzir tais
movimentos adaptando sua construção para tal. A Fig. 2. Mostra os principais
movimentos que uma garra robótica deve realizar, tais como: cilíndrico, ponta
de dedo, gancho, palmar (movimento de pinça entre polegar e indicativo),
esférico e lateral.
Figura 2- Formas de Preensão
Robson Merli (2016)
Conforme foi crescendo a demanda em diferentes ambientes foi sendo
desenvolvido diversos tipos de garras para que pudesse se adaptar a objetos
de diferentes tamanhos, formas e matérias cada qual própria a um tipo
especifico de atividades na área industrial, sendo assim podemos classificar
em:
Garra de dois dedos;
Garra de três dedos;
Garra para objetos cilíndricos;
Garra para objetos frágeis;
Garra articulada;
Garra a vácuo e eletromagnética, entre outras. Para a realização desse projeto foi determinada o uso da garra de dois
dedos, que se trata de uns dos tipos mais comuns que se encontra em diversas

13
indústrias, além da classificação do tipo de garra dentro de cada uma há
também a classificação por número de contatos mecânico com o objeto, o tipo
e quantidade de contato do manipulador com o objeto interfere em muito em
sua precisão e na segurança no decorrer da peça se caso houver no perímetro.
Podemos definir os contatos em:
Simples - quando a peça é apoiada em apenas um contato (dedo) da garra;
Duplo – quando a peça é apoiada em dois elementos mecânicos; De acordo com o tipo de contato que a peça tem com garra:
Contato externo ou interno;
Encaixe, Fricção e Retenção;
Contato em “V”. A garra de dois dedos realiza a função de pinça que a partir de dois
contatos mecânicos que seria no caso da mão humana o dedo indicador e o
polegar, que o movimento que diferencia os seres humanos dos outros
animais. Tal movimento foi uma habilidade que adquirimos no processo
evolucionário e que permitiu a possível realização de diversos trabalhos pelo
homem desde grandes como as construções de até o preciso movimento de
escrita, com tal capacidade a garra tem uma precisão e força para realizar o
transporte de objetos desde que este possa ser encaixado de forma correta
nos contatos.
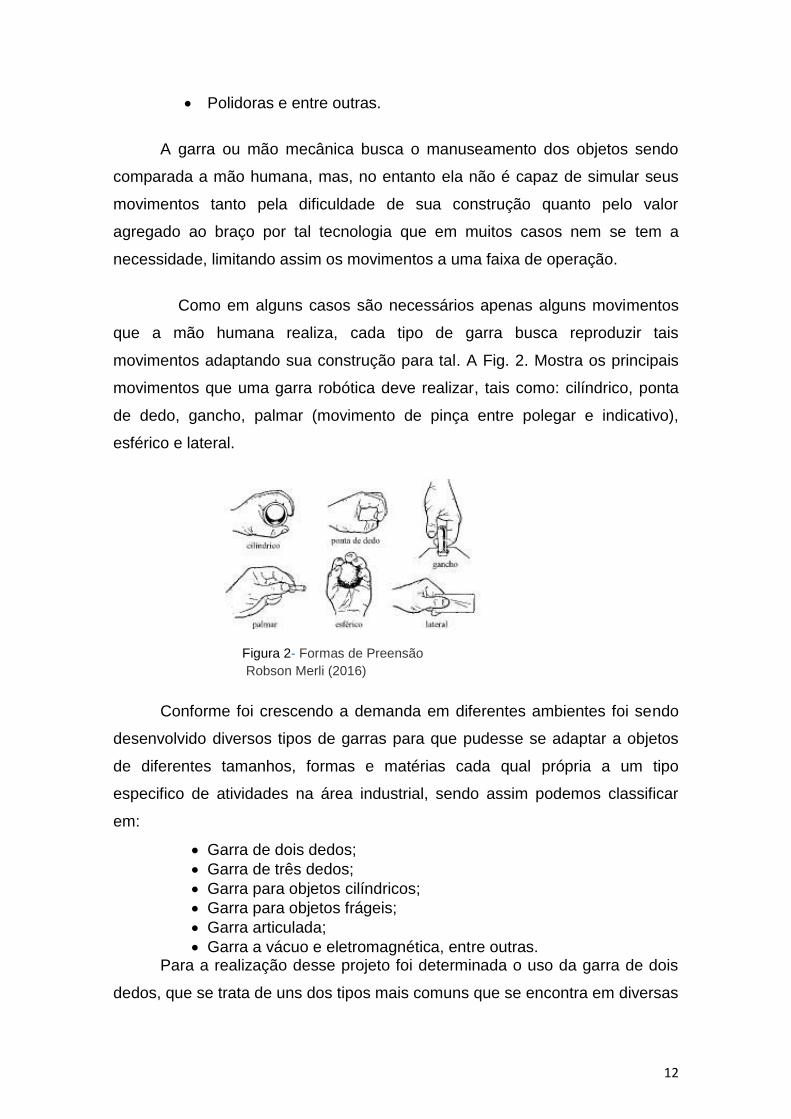
Tal garra pode ter dois tipos de movimentos que pode facilitar o trabalho
e aumentar sua precisão. Um deles é o movimento paralelo no qual os contatos
da garra que se movimento linearmente deslizando no apoio e prensando o
objeto ficando assim preso a partir da pressão dos contatos.
O segundo movimento que uma garra de dois dedos pode realizar é o
movimento rotativo, no qual os dois contatos estão conectados a um eixo
rotativo e a partir da movimentação deste eixo central é realizado o fechamento
e a pressão dos contatos no objeto, uma das grandes dificuldades deste tipo de
garra é a limitação da abertura dos dedos que faz com que seja a restritos
objetos de tamanhos que exceda a abertura máxima da garra, mas em
comparação com o movimento paralelo o movimento rotativo permite uma
maior abertura da garra e consequentemente uma oportunidade de trabalhos
realizados com objetos de maior volume, como podemos na fig.3.
14
Figura 3- Formas de movimentação de garras. Rosário (2005)
Conceitos e características dos motores
Para controlar velocidade e precisão dos motores mais comuns
determinamos a quantidade de passos que ele dará no decorrer do tempo, ou
variando a tensão que se é aplicada nele. No servo motor diferente dos outros
motores é possível determinar a posição, em graus, com excelente precisão a
partir da programação, mas em comparação aos outros o servo motor não
completa o giro total chegando a apenas 180 graus.
O servo motor trabalha com servomecanismos que usa o feedback de
posição para controlar a velocidade e a posição final do motor, em seu interior
ele é composto por um motor com um circuito de realimentação, um
controlador e outros circuitos complementares. Ele usa um codificador
ou sensor de velocidade (encoder) que tem a função de fornecer o feedback de
velocidade e posição.
Ele contém três fios como é possível ver na Fig.4 a seguir, o fio preto,
vermelho, o branco, cada qual com sua função específica. O fio preto é o terra
(GND) para desviar corrente de uma sobrecarga evitando que o equipamento
entre em curto e que o usuário leve um choque. O fio vermelho é a alimentação
do motor que neste caso será utilizada 5 Volts vindos do controlador. Já o fio
branco é por onde será enviado o comando vindo da placa já programada.

15
Figura-4 Constituição e funcionamento
André Tomaz de Carvalho
O servo motor é alimentado com tensões de 5 V e recebe um sinal no
formato PWM (Pulse Width Modulation - Modulação de largura de pulso). Este
sinal é 0 V ou 5 V. O circuito de controle do servo fica monitorando este sinal
em intervalos de 20 ms. Se neste intervalo de tempo, o controle detecta uma
alteração do sinal na largura do sinal, ele altera a posição do eixo para que a
sua posição coincida com o sinal recebido.
Um sinal com largura de pulso de 1 ms corresponde à posição do servo
todo a esquerda ou zero grau. Um sinal com largura de pulso de 1,5 ms
corresponde à posição central do servo ou de 90 graus. Um sinal com largura
de pulso de 2 ms corresponde à posição do servo todo a direita ou 180 graus,
como é possível ver na Fig.5 que se segue.
Figura-5 Pulsos para controle de um servo motor Wagner Ramb (2017)
Uma vez que o servo recebe um sinal de 1,5 ms (por exemplo), ele
verifica se o potenciômetro encontra-se na posição correspondente, se ele
estiver nada é feito. Se o potenciômetro não estiver na posição correspondente
ao sinal recebido, o circuito de controle aciona o motor até que o potenciômetro
esteja na posição correta. A direção de rotação do servo motor depende da
posição do potenciômetro. O motor vai girar na direção leva o potenciômetro
16
mais rapidamente na posição correta. Ao se tentar alterar a posição do servo
motor, verifica-se uma resistência feita pelo motor.
3. Desenvolvimento
Para o desenvolvimento do projeto foi utilizado à placa Arduino R3 Uno
por causa de sua facilidade de programação e por usar a linguagem C já
estudada no decorrer do curso. A placa Arduino se trata de uma placa de
prototipagem eletrônica de hardware livre e de placa única com programação
padrão baseada na linguagem C, sua placa consiste em um
microcontrolador Atmel AVR de 8 bits, um regulador linear de 5 volts e
um oscilador de cristal de 16 MHz, que além de ser microcontrolador também é
pré-programado com um bootloader (programa para ativar sistemas), o que
simplifica o carregamento de programas para o chip de memória
flash embutido, em comparação com outros aparelhos que geralmente
demandam um chip programador externo, o Arduino utilizado possui 28 pinos,
sendo que 23 desses podem ser utilizados como I/O.
Quando é usado um computador para realizar a alimentação e/ou o
controle das funções pré-programadas da à tensão não precisa ser estabilizada
pelo regulador de tensão. Dessa forma a placa é alimentada diretamente pela
USB. O circuito da USB apresenta alguns componentes que protegem a porta
USB do computador em caso de alguma anormalidade.
Programando – Biblioteca
Dentro da estrutura dos copiladores encontramos bibliotecas que
facilitam a programação para que não seja necessária a busca contínua de
certos comandos e suas produções dentro do corpo do programa, como por
exemplo, a biblioteca “math.h” que o compilador Dev- C++ tem na sua
constituição na qual é utilizado para realizar funções matemáticas de maneira
simples.
Para a realização deste projeto foi utilizado o compilador próprio da
placa Arduino oferecido pela empresa desenvolvedora, juntamente com o
compilador vem diversas bibliotecas e entre elas será utilizada para a
programação a biblioteca “Servo.h”. Esta biblioteca no software do Arduino

17
permite que ele controle até 12 servos motores na maioria das placas Arduino
e 48 no Arduino Mega. O uso da biblioteca desabilita o usa da função
analogWrite (desabilitando o sinal analógico e permitindo o sinal digital) nos
pinos 9 e 10 (exceto no Arduino Mega). No Mega o uso de 12 a 23
servomotores desabilitará o a função analogWrite nos pinos 11 e 12.
Para o controle do protótipo foi definido a utilização do teclado do
computador por se tratar de um método de controle comum dentro de uma
indústria, por causa da memória relativamente pequena não foi possível a
utilização da variável “char” para declarar as entradas por ser tratar de uma
variável que ocuparia um certo espaço na memória.
Ao utilizar a variável “int” na programação para se ter acesso ao teclado
foi necessário o uso da tabela ASCII (American Standard Code for Information
Interchange; "Código Padrão Americano para o Intercâmbio de Informação") é
um código binário que codifica um conjunto de 128 sinais: 95 sinais gráficos
(letras do alfabeto latino, sinais de pontuação e sinais matemáticos) e 33 sinais
de controle, utilizando portanto apenas 7 bits para representar todos os seus
símbolos, como é possível visualizar na figura 6 a seguir.
Figura 6 -Tabela ASCII(códigos de caracteres 0 – 127) Fonte - http://nunovictor.blogspot.com.br/2015/10/padroes-de-codificacao-de-
carateres.html
No programa é definido que os sinais enviados do teclado são inseridos
na variável inserida anteriormente “n”, que utilizando uma sequência de “if’s”
envia para a o servo motor o valor já definido em graus, como é possível ver
nas tabelas a seguir.
Com o programa é controlado três (3) servos motores, o motor
responsável pela movimentação da base da garra que a permite que gire 0º

18
,90º e 180º em relação ao possível braço que ele seja inserido (tabela 1),
o segundo motor permite a movimentação de um dedo da garra em 20º,
45º e 65º (tabela 2) e o terceiro motor que realiza a movimentação do
segundo dedo da garra que contém dois dedos em 45º, 70º e 90º (tabela
3). O programa permite que se movimente os dedos da garra tanto de
maneira isolada quanto os dois dedos a partir de outras teclas diferentes
como é possível ver na tabela 4.
Tabela 1 - Base
Servo Motor – Base
Tecla Valor tabela Ascii Graus
1 49 90º
2 50 180º
3 51 0º
Tabela 2 – Garra 1
Servo Motor – Garra 1
Tecla Valor tabela Ascii Graus
q 113 20º
w 119 45º
e 101 65º
Tabela 3 – Garra 1
Servo Motor – Garra 2
Tecla Valor tabela Ascii Graus
a 97 45º
s 115 70º
d 100 90º
Tabela 4 – Garra 1 e 2
Servo Motor – Garra 1 e 2
Tecla Valor tabela Ascii Braço 1- Graus Braço 2 - Graus
z 122 20º 45º
x 120 45º 70º
c 99 65º 90º
Estrutura Mecânica
Para o desenvolvimento foi utilizado 3 (três) servos 9g SG90
TowerPro por causa de mesmo tendo uma pequena estrutura ele tem uma
velocidade considerável e um grande torque conhecido por ser muito utilizado
em projetos de robótica e aeromodelismos.
O projeto tem como objetivo principal a produção de uma garra que
transporte objetos e cargas para posições diferentes no perímetro de uma

19
empresa, mas para a tal realização foi visto que havia a necessidade de
produção de suporte para ela que se movimentasse e levasse a garra a realizar
este objetivo original.
Para a adaptação do projeto foi necessário uma estrutura que na atual
condição seria a garra encontrará em seu extremo de um braço robótico, a
garra realizará o movimento de pinça como explicado anteriormente que é
movimento em que no caso da mão humana é realizado pelo dedo polegar e
indicador o qual utilizamos, por exemplo, para segurar objetos pequenos e/ou
finos tais como canetas, chaves e etc., mas sua construção a permite que
utilize o arco que cria ao fazer o movimento de pinça para segurar e transportar
objetos maiores desde que seu volume possa ser suportado.
A garra robótica construída foi produzida a partir da substância de
MDF (Medium Density Fiberboard – “Fibra de Média Densidade, um material
oriundo da madeira) cortado a laser que encaixado e parafusado suporta tanta
a estrutura da garra quanto dos três servos motores que realizam os
movimentos da garra. Foram utilizados para este protótipo 3 (três) servos
motores, no qual um deles é utilizado na base e os outros dois motores para os
dedos da garra.
O servo base é o responsável para o movimento da garra, como dito
anteriormente o servo motor realiza movimento até 180 graus levando a
estrutura a se movimentar da esquerda para direita que conforme a
programação realiza a volta da direita para a esquerda atingindo os valores de
0º,90º e 180º.
Figura 7 – Garra na posição inicial da base Fonte – Autor

20
Figura 8 - Garra com a base em movimento Fonte – Autor
Já os dois motores restantes realizam a movimento dois dedos da garra,
o servo motor do braço 1 que contém apenas um dedo controla ele permitindo
a ela três posições, a posição da base de descanso que se encontra a 20º
permitindo que ele atinja a 45º que seria a metade do trajeto deixando a garra
semiaberta posição esta que permite que a garra segure um objeto de maior
volume e a posição em 65º no qual o dedo se encontrará como segundo dedo
totalizando o fechamento da garra. O terceiro motor se encontra na garra 2 que
contém na sua construção dois dedos permitindo que ele realize três
movimentos, a posição da base de descanso se encontra em 45º a segunda
posição que seria a metade do trajeto se encontra a 70º e a última posição no
qual os dois dedos se encontram a 90º para que assim as duas se encontrem e
fechem por completo a garra em volta do objeto que será transportado dentro
do perímetro da empresa. A programação permite o controle isolado de cada
servo motor e com isso a estrutura própria que ele movimenta, porém há um
comando que permite o controle dos dois servos motores responsáveis pelos
dedos da garra permitindo assim uma facilidade e velocidade para o transporte
do objeto, como é possível visualizar nas imagens a seguir a garra aberta,
semiaberta e completamente fechada.

21
Figura 9 - Garra totalmente aberta Fonte – Autor
Figura 10 – Garra semiaberta com dois dedos na posição média Fonte – Autor
Figura 11 – Garra totalmente fechada com os dedos na posição final Fonte – Autor
22
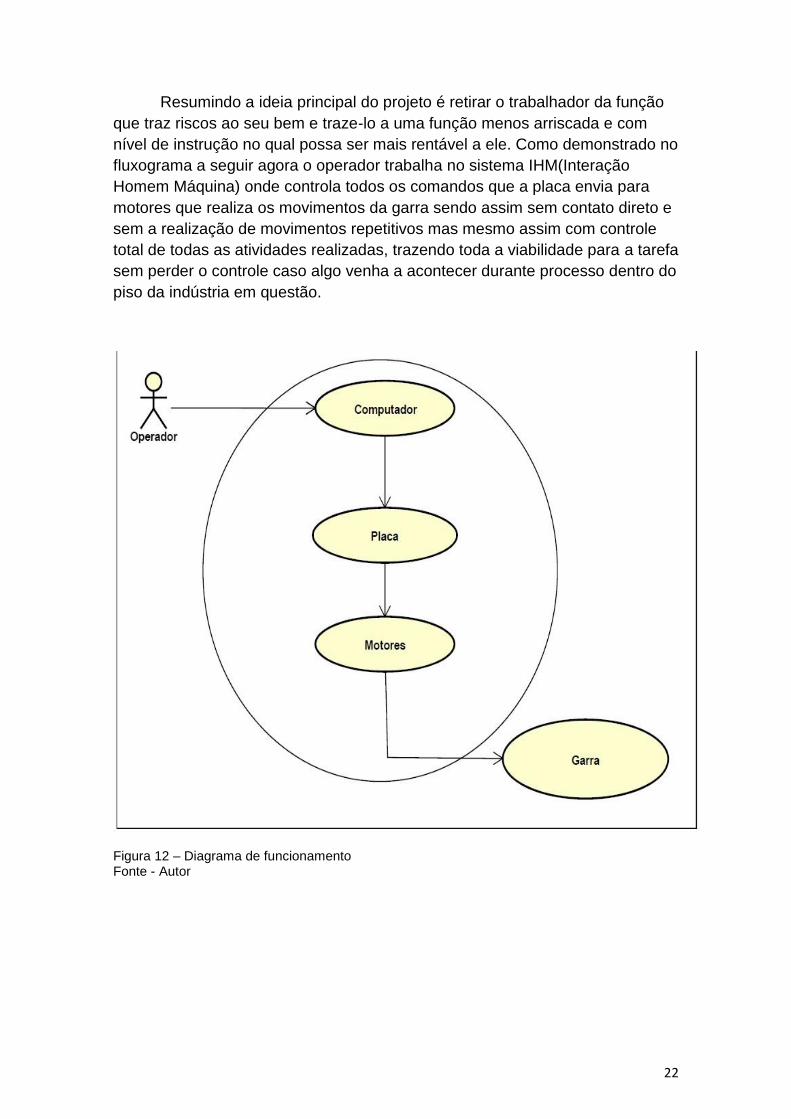
Resumindo a ideia principal do projeto é retirar o trabalhador da função
que traz riscos ao seu bem e traze-lo a uma função menos arriscada e com
nível de instrução no qual possa ser mais rentável a ele. Como demonstrado no
fluxograma a seguir agora o operador trabalha no sistema IHM(Interação
Homem Máquina) onde controla todos os comandos que a placa envia para
motores que realiza os movimentos da garra sendo assim sem contato direto e
sem a realização de movimentos repetitivos mas mesmo assim com controle
total de todas as atividades realizadas, trazendo toda a viabilidade para a tarefa
sem perder o controle caso algo venha a acontecer durante processo dentro do
piso da indústria em questão.
Figura 12 – Diagrama de funcionamento Fonte - Autor
23
4. Considerações Finais
A garra produzida como protótipo para o projeto realizou ao
realizar os movimentos necessários dentro de uma empresa e de forma
repetitiva de maneira simples e rápida onde a tempo e a simplicidade é de
extrema necessidade.
Porém mesmo com a adaptação para que fosse alterada para um
modelo mais próprio para ser capaz de manusear objetos de mais diferentes
tipos, a garra manteve seu tipo físico original de dois dedos que realiza o
movimento de pinça, tipo esse que inibe o manuseio de objetos que fuja do
padrão. Ainda se encontra a necessidade da produção de um braço que a
garra possa ser inserida e que permita o movimento da base.
O projeto para sua inserção no meio comercial teria a necessidade de
diversas alterações inicialmente tais como o material usado, adaptar os
movimentos em graus da garra para o objeto que será transportado e alterar o
programa para realizarem loop a partir da existência de peça sendo claro que
teria que ser inseridos sensores no modelo final.
A partir do projeto foi concluído que sua utilização reduz as doenças
causadas pela falta de ergonomia no meio industrial, e que sua produção
realizada com uma placa que permite uma nova programação facilita que sua
adaptação na diversos meios e atividades, pois cada empresa pode alterar sua
programação original e produzir uma própria a partir dos aspectos de sua linha
de produção, atividades necessárias e consequentemente ao ser atualizado
toda sua linha ou apenas uma parte não haverá necessidade de adquirir um
novo mecanismo.
A necessidade de um robô neste meio vem crescendo a cada dia que
passa, pois os colaboradores já não têm velocidade e repetitividade exigida e
com isso correm o risco de desenvolver LER que afeta tanto o colaborador,
quanto a empresa e a economia do Brasil. Aos nos adaptamos ao novo
aspecto industrial evitamos tais riscos e criamos novas e melhores vagas de
emprego onde o colaborador possa manter sua saúde ao exercer atividades
24
menos desgastantes e maiores salários gerados por uma qualificação maior,
onde tanto a empresa quanto todos do país.
5. Referencias
Abergo,Brasil,2000.O que é ergonomia. Disponível em
<http://www.abergo.org.br/internas.php?pg=o_que_e_ergonomia> Acesso em
06 de março 2017.
Arduino,2017.Servo Library. Disponível em
<https://www.arduino.cc/en/reference/servo> Acesso em 02 abril 2017
Barbosa Filho,Antonio Nunes.Segurança do trabalho&Gestão ambiental.São
Paulo:atlas,2001.
Circutar eletrônicos,2013. Programação para Arduino - Primeiros Passos.
Disponível em <https://www.circuitar.com.br/tutoriais/programacao-para-
arduino-primeiros-passos/#introduo> Acesso em 240de fev 2017.
Ebah,Robotica Industrial,Robson Merli,Brasil,2016. Disponível em
<http://www.ebah.com.br/content/ABAAAfP1cAG/robotica-industrial?part=6>
Aceso em 24 de março 2017.
FundaCentro,Brasil,27 de fevereiro de 2015. Casos de LER/Dort ainda
preocupam. Disponível em <http://www.fundacentro.gov.br/noticias/detalhe-
da-noticia/2015/2/casos-de-lerdort-ainda-preocupam> Acesso em 14 fev.2017
Fundacentro,Brasil, 25 de fevereiro de2016. LER/DORT atinge 3,5 milhões de trabalhadores <http://www.fundacentro.gov.br/noticias/detalhe-da-noticia/2016/2/pesquisadores-da-fundacentro-comentam-sobre-a-lerdort>Acesso em 25/fev/2017 Iso,Iso 10218-1:2011,2001. Disponível em
<https://www.iso.org/standard/51330.html> Acesso em 02 de março 2017
LER/DORT. Dr. Antonio Carlos Novaes, Histórico do fenômeno LER/DORT .,29 de maio de 2017.Disponivel em < https://www.lerdort.com.br/editorial/82/conceitos-gerais/historico-do-fen-meno-ler-dort> Acesso em 02 de maio 2017. Nunovictor,Aplicações informáticas B,João,Brasil,2015.Disponível
em<http://nunovictor.blogspot.com.br/2015/10/padroes-de-codificacao-de-
carateres.html>Acesso em 10 de abril 2017.
Portal Brasil,2010.Lesão por esforço repetitivo: Ler. Disponível em <http://www.brasil.gov.br/saude/2012/04/lesao-por-esforco-repetitivo-ler>Acesso em 24 de fev de 2017.

25
Revista Cipa,Brasil, 10 de julho de 2015. Prevenção de afastamento médico
pode economizar milhões para empresas e governo. Disponível em
<http://revistacipa.com.br/prevencao-de-afastamento-medico-pode-economizar-
milhoes-para-empresas-e-governo/>Acesso em 14 de março 2017
Ribeiro neto,João Batista M.Sistemas de gestão integrados:qualidade,meio
ambiente,responsabilidades social,segurança e saúde no trabalho.São
Paulo:Editora Senac São Paulo,2008.
ROSÁRIO, João Maurício. Princípios da mecatrônica. São Paulo: Prentice
Hall, 2005.
SETTIMI,Maria Maeno;TOLEDO,Lúcia Fonseca de; PAPARELLI, Renata;
MARTINS,Milton; SOUZA,Ildeberto Muniz de; SILVA,João Alexandre Pinheiro.
Lesões por esforços repetitivos(ler)/distúrbios osteomusculares
relacionados ao trabalho(dort). Brasil: Ministério da Saúde,2000.
26
APÊNDICE A - Programa criado no compilador Arduino
#include <Servo.h> //incluir a biblioteca de servo Servo base, braco2, braco1; //Inclusao do servo int n = 0; //Entradas das teclas do teclado nos valores da tabela ASCII void setup() { Serial.begin(9600); //Ativando a porta serial e a frequência de trabalho base.attach(8); //Pino do arduino utilizado para o motor da base base.write(180); //Servo motor da base iniciado em 180º braco2.attach(7); //Pino do arduino utilizado para o motor do braço 2 braco2.write(45); //Servo motor da base iniciado em 45º braco1.attach(6); //Pino do arduino utilizado para o motor do braço 1 braco1.write(20); //Servo motor da base iniciado em 20º Serial.flush(); //Limpando a memoria do serial caso haja um programa antes Serial.println("Digite: \n 1(90º) 2(180º) 3(0º) \n Q (20º) W (45º) E(65º) \n A (45º) S (70º) D (90º) \n Z (45º e 20º) X (70º e 45º) C (90º e 65º)"); //criação de um cabeçalho no serial } void loop() { if(Serial.available()>0) //Teste se porta serial esta recebendo dados { n = Serial.read(); //leitura de dados Serial.print("Valor lido: "); Serial.println(n); //Printa o valor teclado if(n==49) //tecla 1- girar 90 { base.write(90); delay(500); } if(n==50) // tecla 2 - girar 180 { base.write(180); delay(500); } if(n==51) //tecla 3 - volta para 0 { base.write(-180); delay(500); } if (n==97) // tecla a - girar 45 { braco2.write(45); delay(500); }

27
if (n==115) // tecla s - girar 70 { braco2.write(70); delay(500); } if (n==100) // tecla d - girar 90 { braco2.write(90); delay(500); } if (n==113) // tecla q - girar 20 { braco1.write(20); delay(500); } if (n==119) // tecla w - girar 45 { braco1.write(45); delay(500); } if (n==101) // tecla e - girar 65 { braco1.write(65); delay(500); } if (n==122) // tecla z - girar 45 e 20 { braco2.write(45); braco1.write(20); } if (n==120) // tecla x - girar 70 e 45 { braco2.write(70); braco1.write(45); } if (n==99) // tecla c - girar 90 e 65 { braco2.write(90); braco1.write(65); } } Serial.flush(); // comando para limpar a entrada da porta serial para não atrapalhar o novo valor digitado }