CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL · GUSTAVO VINICIUS SANTANA ... Figura 4: Esquema...
19
____________________________________________________________________________ Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura” CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL GENILDO CARLOS PERPETUO DADA GUSTAVO VINICIUS SANTANA DIREÇÃO AUTOMOTIVA PARA DEFICIENTES GARÇA 2015
Transcript of CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL · GUSTAVO VINICIUS SANTANA ... Figura 4: Esquema...

____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
GENILDO CARLOS PERPETUO DADA
GUSTAVO VINICIUS SANTANA
DIREÇÃO AUTOMOTIVA PARA DEFICIENTES
GARÇA
2015

____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
Genildo Carlos Perpetuo Dada
Gustavo Vinicius Santana
DIREÇÃO AUTOMOTIVA PARA DEFICIENTES
Artigo Científico apresentado à Faculdade de
Tecnologia de Garça – FATEC, como requisito
para conclusão do Curso de Tecnologia em
Mecatrônica Industrial, examinado pela seguinte
comissão de professores:
Data da avaliação:___/___/___
________________________________
Prof. Edson Mancuzo
FATEC – Garça
________________________________
Prof.
FATEC – Garça
________________________________
Prof.
FATEC – Garça
GARÇA
2015

DIREÇÃO AUTOMOTIVA PARA DEFICIENTES
Genildo Carlos Perpetuo Dada1 [email protected]
Gustavo Vinicius Santana2
Prof° Edson Mancuzo3
Resumo: A tecnologia mecatrônica supervisiona o gerenciamento de sistemas complexos integrados, por meio da mecânica, da eletrônica e da computação. Nesse contexto, nasceu o tema
escolhido como objeto de estudo para a pesquisa, o qual se constituirá no Trabalho de Conclusão
do Curso (TCC). O tema em questão objetiva colocar em prática o conhecimento teórico e prático adquirido durante o curso, em prol dos deficientes físicos com dificuldade em girar o volante do
automóvel, propiciando conforto, mobilidade, autonomia e melhor qualidade de vida com um
automóvel adaptado. O exposto justifica a relevância e o desenvolvimento de um protótipo de
interface para o uso de deficientes físicos na direção de um veículo automotivo adaptado, para isso, utilizou-se de guia um joystick devido a sua sensibilidade de movimentos e seu baixo custo,
semelhante aos existentes em cadeiras de rodas elétricas. Essa interface contém um motor redutor
de corrente contínua (DC) para o movimento do volante (horário e anti-horário), um par de engrenagens (coroa e pinhão) para a transferência de torque do motor para a coluna de direção,
um circuito eletrônico ponte H para a inversão de rotação do motor, uma bateria (a própria do
automóvel) para a alimentação do sistema e, por fim, um joystick que tem a mesma função que o
volante.
Palavras-chave: Automóvel. Direção. Acessibilidade. Mecânica. Eletrônica.
Abstract: The mechatronics technology oversees the management of integrated complex
systems, through mechanical engineering, electronics and computing. In this context, the theme chosen as an object of study for research was born, which will constitute the Course Completion
Work (TCC). The subject in question aims to put into practice the theoretical knowledge and
practical acquired during the course, for the benefit of disabled people who have difficulty turning
the car's steering wheel, providing comfort, mobility, autonomy and better quality of life, with an adapted car. The foregoing justifies the relevance and aims to develop a prototype interface for
the use of disabled people towards an adapted motor vehicle, for that, we used to guide a joystick
due to their sensitivity to movement and its low cost, similar to those existing in electric wheelchairs This interface contains a DC geared motor (DC) to the steering wheel movement
(clockwise and counterclockwise), a pair of gears (crown and pinion) for the engine torque
transfer to the steering column, an electronic H-bridge circuit for reversing of the motor, a battery (the own automobile) for the system power and, lastly, a joystick which has the same function as
the wheel.
Keywords: Car. Direction. Accessibility. Mechanics. Electronics. Car.
1 - Aluno do curso de tecnologia em Mecatrônica Industrial – FATEC – Garça
2 - Aluno do curso de tecnologia em Mecatrônica Industrial – FATEC – Garça
3 - Docente da Faculdade de Tecnologia de Garça

LISTA DE FIGURAS E QUADROS
Figura 1: Joystick utilizado no protótipo. ..................................................................... 9
Figura 2: Motor FGP 8,9 w. ......................................................................................... 9
Figura 3: Desenho técnico do motor. .......................................................................... 10
Figura 4: Esquema elétrico do comando do circuito ponte H. ..................................... 12
Figura 5: Montagem inicial moto redutor e sistemas de engrenagens.......................... 14
Figura 6: Montagem no veiculo de teste. .................................................................... 15
Figura 7: Diagrama eletrico do controle. .................................................................... 16
Figura 8: montagem mecânica do protótipo................................................................ 17
Quadro 1: Abreviações e significados da figura1. ...................................................... 10

SUMÁRIO
1 INTRODUÇÃO .................................................................................................... 6
2 DESENVOLVIMENTO ...................................................................................... 7
2.1 Revisão Bibliográfica ................................................................................... 7
2.2 Metodologia do Protótipo ............................................................................ 8
2.2.1 Cálculos gerais ........................................................................................ 11
3 RESULTADOS E DISCUSSÃO ......................................................................... 15
4 CONCLUSÃO ..................................................................................................... 18
REFERÊNCIAS..................................................................................................... 19

6
1 INTRODUÇÃO
Após um acidente, a pessoa que perde parte dos seus movimentos (conforme o
nível e grau da lesão e dependendo dos movimentos e força que permaneceram e/ou
retornaram) poderá ou não dirigir veículos adaptados com comandos manuais que
existem hoje no mercado.
Na maioria das vezes a falta de recursos financeiros dificulta a possibilidade de
uma pessoa deficiente voltar a dirigir, como foi o caso de um colega da faculdade, que
além dos recursos financeiros limitados, o mesmo tem dificuldades para girar o volante
nos carros adaptados que existem hoje no mercado.
Com isso, surgiu a ideia de desenvolver um protótipo de controle de direção
automotiva de baixo custo, facilitando a mobilidade, confiança autonomia e melhor
qualidade de vida das pessoas portadoras de deficiências físicas onde os movimentos dos
membros superiores não possibilita o movimento de girar o volante de um automóvel.
Segundo o instituto Brasileiro de geografia e estatística (IBGE)4, no Brasil 45,6
milhões de pessoas possui alguma deficiência, 16,6% são deficientes físicos que
enfrentam dificuldades diariamente. A que se destaca mais é acessibilidade no transporte
e por esse motivo dependem do cuidado de outra pessoa para ajudar a se locomover.
Esse protótipo viabilizará a locomoção confortável de pessoas portadoras de
alguma deficiência, seja física, motora ou quaisquer outras limitações para qual este
projeto poderá ser utilizado. O controle de direção com joystick possibilitará ao individuo
adaptação ao meio comum.
Neste protótipo foi utilizado a própria bateria do automóvel como fonte de
alimentação, e uma placa eletrônica com um circuito ponte H para inverter a rotação do
motor que irá alternar o lado do giro da direção permitindo que o usuário possa controlar
o volante de um veiculo através de um Joystick, fazendo o movimento horário e anti-
horário da coluna de direção por um motor (moto redutor) de corrente continua, que será
controlado por esse Joystick e poderá ser colocado em qualquer posição atendendo a
necessidade do deficiente físico, podendo ser aplicado em vários tipos de automóveis ,
como por exemplo, com caixa de direção mecânica, elétrica ou hidráulica.
A metodologia aplicada é o desenvolvimento experimental de um protótipo
utilizando os recursos a as ferramentas da mecatrônica, para verificar a viabilidade para
a resolução do problema de pesquisa proposto.
4 - Segundo pesquisa realizada em 2010

7
O objetivo geral deste trabalho é desenvolver um controle de direção automotiva
para deficientes físicos que tenham dificuldade para girar o volante dos carros adaptados
que existem hoje no mercado, buscando uma solução de baixo custo que possibilite o
usuário realizar suas atividades cotidianas como: ir ao médico, ao supermercado, sem
depender de outra pessoa.
2 DESENVOLVIMENTO
2.1 Revisão Bibliográfica
Segundo Rosário (2005), a Mecatrônica se constitui na aplicação de complexos
sistemas integrados decorrente das áreas de mecânica, eletroeletrônica, ciência da
computação, e devemos extrair o que é de mais adequado em cada uma das áreas, que os
resultados sejam de tal maneira a simples soma de especialidades, o conceito de
mecatrônica representa a combinação adequada das matérias.
Uma sinergia ocorre entre elas para desenvolver máquinas automáticas que
facilitam o trabalho do homem no chão de fabrica, proporcionando maior qualidade no
processo de fabricação, aumentando a produtividade e diminuindo as despesas.
A metodologia utilizada para a elaboração do protótipo, é embasada em um
aprofundamento teórico sobre o sistema de controle eletrônico de um moto-redutor
(circuito ponte H) e conjunto de engrenagens mecânicas (coroa pinhão). A eletrônica é o
conjunto de tecnologias que permite o controle sobre grandezas físicas, como a tensão
elétrica e a corrente elétrica, processando informações através dos sinais emitidos pelos
sensores elétricos em um circuito, gerando assim o acionamento do motor.
As engrenagens são componentes mecânicos que consistem basicamente de dois
cilindros nos quais são fabricados dentes. A transmissão de força é realizada através do
contado entre os dentes de duas ou mais engrenagens, obtendo o ganho de torque (ou
velocidade).
Conforme Cunha (2005), em sistemas mecânicos podemos contar com
sistemas de engrenagens cilíndricas de dentes retos, que de acordo com o conceito de
relação de transmissão (i) é definida como a relação entre o eixo motor e do eixo movido,
já a relação (fi) representa o inverso da relação.
O motor elétrico é uma máquina destinada a transformar energia elétrica em
mecânica, trabalhando pela interação entre campos eletromagnéticos, fornecendo assim
uma força mecânica necessária para girar a coluna de direção do veiculo.

8
Segundo Albuquerque e Seabra (2011), o transistor Fet de potência pertence á
classe dos dispositivos a condução de corrente elétrica, sendo os dispositivos de potência
com maior velocidades de operação.
Assim, no circuito eletrônico de ponte H (Full Bridge, ou Ponte completa) usando
o transistor fet, é possível conseguir uma excelente resposta do controle para acionamento
do motor.
Conforme Sanches (2000), os relés são componentes eletromecânicos (chaves de
contato) de comutação, abrem e fecham circuitos através de seus contatos, quando a sua
bobina é energizada, normalmente aplicados quando se quer controlar circuitos de
potência maiores do que a capacidade do circuito de controle com tensões diferentes
(CA/CC, CC/CA), ou ate para isolar circuitos por questões de segurança.
2.2 Metodologia do Protótipo
A metodologia utilizada é a elaboração de um protótipo, o qual se constitui em
um experimento sobre o sistema de controle elétrico de um moto redutor, um circuito
ponte H e um conjunto de engrenagens mecânicas (coroa pinhão).
O protótipo em questão é o desenvolvimento de um controle de direção
automotiva para deficientes físicos que tenham dificuldades para girar o volante dos
carros adaptados que existem hoje, controlando a direção com um circuito eletrônico e
um Joystick, fazendo o movimento horário e anti-horário na coluna de direção por um
motor de corrente continua, que será controlado por esse Joystick e poderá ser colocado
em qualquer posição, atendendo a necessidade do deficiente físico, esse sistema será
aplicado juntamente ao original do automóvel, como por exemplo, com caixa de direção
mecânica, elétrica ou hidráulica.
A pesquisa foi desenvolvida por meio de revisão da bibliografia exploratória e
estudo de casos, dividida em três etapas.
Etapa 1: pesquisa e revisão bibliográfica, leitura e interpretação do material.
Etapa 2: estudo de casos em especifico de um aluno com limitações da Fatec,
escolhido para analise e desenvolvimento do protótipo.
Etapa 3: definir os componentes e circuitos necessários para esta automação.
Foi utilizado um joystick semelhante ao da cadeira de roda elétrica, um motor
redutor de corrente contínua de 12V e um sistema de transmissão por engrenagem coroa
e pinhão para elevar o torque do motor redutor elétrico.

9
A fonte de alimentação será a própria bateria do automóvel, foi usada uma placa
eletrônica, com um circuito ponte H, para inverter a rotação do motor para alternar o lado
do giro da direção.
o joystick utilizado no sistema de controle, fornecendo sinais elétricos através dos
movimentos da direita para esquerda para acionamento do motor (moto redutor) acoplado
no sistema de engrenagens, conforme figura 1.
Figura 1: Joystick utilizado no protótipo.
Fonte: Os Autores
O moto redutor utilizado para atender o trabalho parametros do protótipo com
eficácia foi FPG 12 V 8,9 W.
Na figura 2, os dados técnicos do motor.
Figura 2: Motor FGP 8,9 w.
Fonte: Bosch (2015).

10
Quadro 1: Abreviações e significados da figura1.
Abreviações Significado das abreviações
U n Tensão normal
P n Potência nominal
N n Rotação nominal
I n Corrente nominal
I max Corrente máxima
M n Torque nominal
M a Toque de bloqueio
I Redução mecânica
Rot. Direção de rotação
S Classe de funcionamento
Ip Grau de proteção
Kg Peso do motor
E Numeração do motor
Fonte: Os Autores.
A Figura 3 demonstra o desenho técnico do motor (moto redutor) utilizado no
projeto.
Figura 3: Desenho técnico do motor.
Fonte: Manual Bosch (2015).
O torque necessário para girar o volante, medido por um torquímetro na coluna
de direção de um automóvel popular com caixa de direção mecânica é de 10,8 Nm.

11
Como o torque do motor (moto redutor) fornecido pela bosch de 6Nm
considerando o ponto de maior rendimento, foi utilizado um par de engrenagem para
aumentar o torque.
2.2.1 Cálculos gerais
Potência de entrada (P1):
Potência oferecida pelo motor em funcionamento usando a tensão e a corrente
nominal.
P1= 𝑈 ∗ 𝐼
P1= 12 ∗ 15
P1= 180W
Onde:
P1: potência de entrada (W)
U: Tensão em (V)
I: Corrente em (A)
Potência de saída (P2):
Potência de saída fornecida no eixo do motor redutor após o torque necessário
para realizar o trabalho requerido .
P2=2 ∗𝜋
60∗ 𝑚 ∗ 𝑛
P2=2 ∗𝜋
60∗ 6 ∗ 48
P2= 30W
Onde:
P2: Potência de saída (W)
M: Torque (Nm)
n: Rotação (rpm)
O par de engrenagens é de um pinhão de 14 dentes e uma coroa com 30 dentes e
como a engrenagem encontrasse acoplada ao eixo arvore do motor, conclui-se que a
rotação do pinhão é a mesma do motor redutor. Assim calculamos o torque entregue no
eixo da coluna de direção

12
MT = 30
𝜋∗
𝑃
𝑁∗
𝑍2
𝑍1
MT= 30
𝜋∗
30
48∗
30
14
MT= 12Nm
Onde:
P: potência (W)
MT: torque (Nm)
n: rotação (rpm)
Z1: pinhão (14)
Z2 :coroa (30)
O torque obtido de 12Nm, entregue ao eixo da coluna de direção é satisfatório
para o movimento na caixa de direção mecânica de um automóvel.
O protótipo também pode ser adaptado em carros com sistemas de direção
hidráulica e elétrica, pois o esforço aplicado nesse sistema é menor do que em uma caixa
de direção mecânica.
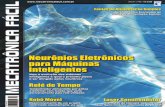
Figura 4: Esquema elétrico do comando do circuito ponte H.
Fonte: Os Autores.

13
O circuito de controle principal de acionamento bidirecional do motor mais
conhecido como ponte H é utilizada em varias aplicações por ser simples e eficaz.
O movimento de girar o motor no sentido horário se dá polarizando os transistores
Q1 e Q4, sendo que o motor ficará com tensão positiva de um lado e negativa do outro
lado.
Para que o motor gire em sentido anti-horário basta desligar os transistores Q1 e
Q4 e polarizar os transistores Q2 e Q3, sendo que o sentido da corrente (e tensão) será
invertido.
Se acionados os transistores Q1 e Q3 ou Q2 e Q4 simultaneamente colocaremos
o motor em curto mantendo o motor travado sem danos, mas não pode ser acionado os
transistores Q1 e Q2 ou Q3 e Q4 ao mesmo tempo, pois isso causará um curto entre o
potencial positivo e o potencial negativo causando danos no circuito e na fonte de
alimentação.
A ponte H pode ser montada com relés eletromecânicos, transistores, mosfet
encontrados nas mais diferentes potencias facilitando a montagem para a qual seja
utilizada.
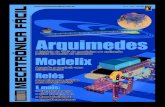
Conforme Figura 6, inicio da montagem da transmissão por engrenagens sendo
dimensionada para um torque de 10,8Nm.

14
Figura 5 – Montagem inicial moto redutor e sistemas de engrenagens.
Fonte: Elaborado pelo autores.

15
3 RESULTADOS E DISCUSSÃO
Conseguimos a força necessária através do motor com suas engrenagens, para
mover a coluna de direção no sentido horário e anti-horário sendo controlado por um
joystick e um circuito de ponte H para inverter a rotação do motor com o sinal do controle,
assim a pessoa com deficiência conseguiu controlar a direção do veiculo com comodidade
segurança e precisão, com um baixo custo nesse conjunto de adaptações, foram feito teste
em um protótipo de veiculo, e foram atingidos os resultados esperados.
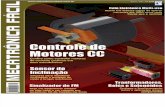
Conforme demonstrado na Figura 8, o protótipo foi montado na coluna de direção
de um kart cross, que possui a mecânica semelhante a do veiculo fusca da Volkswagen,
com caixa de direção mecânica. Foi necessário realizar adaptações para aplicação desse
sistema de direção. Os testes foram realizados, sendo possível observar resultados e
possíveis falhas.
Figura 6: Montagem no veiculo de teste.
Fonte: Elaborado pelo autor.
Diagrama eletrico do circuito ponte h, que foi montado para controle do prototipo
figura 9.

16
Figura 7: Diagrama eletrico do controle.
Fonte: Elaborado pelos autores,

17
Montagem final da estrutura mecânica do protótipo na bancada para apresentações
figura 10.
Figura 8: Montagem mecânica do protótipo.
Fonte: Os autores.

18
4 CONCLUSÃO
Neste trabalho, foi desenvolvido um protótipo de controle de direção automotiva
para deficientes, voltado para pessoas que possuem algum tipo de limitações físicas nos
membros superiores que impossibilita a força necessária para virar o volante de um
automóvel adaptado que existe hoje no mercado.
Podemos concluir que esse processo de adaptação de um controle joystick nos
automóveis, trouxe uma série de benefícios ao portador de deficiência, resultados muito
satisfatório, não só para essas pessoas, mas também para a sociedade e demostrar que
com a tecnologia que possuímos hoje em dia viabiliza resolver problemas como a
acessibilidade de uma pessoa com limitações.
O objetivo desse projeto foi alcançado. Desenvolvemos o controle, testamos em
prática e os resultados foram os esperados. Funcionou corretamente e o mais importante
é o baixo custo desse projeto, que ajuda os interessados com um custo viável.
Este trabalho foi satisfatório, por explorar a área da mecatrônica possibilitando
colocar em prática os conhecimentos teóricos durante o curso de mecatrônica Industrial.

19
REFERÊNCIAS
BOLTON, W. Mecatrônica: uma abordagem multidisciplinar. 4. ed. Porto Alegre:
Bookman, 2010.
BOSCH. Catálogo geral: motores elétricos. Disponível em:
<http://www.kalatec.com.br/Motor_Bosch/catalago2011_Bosch_ktc.pdf>. Acesso em:
10 ago. 2015.
CIPELLI, A. M.; SANDRINI, W. J.; Markus, O. Teoria e desenvolvimentos de
projetos de circuitos eletrônicos. 22. ed. São Paulo: Érica, 2006.
CAPELLI, A. Automação industrial: controle do movimento e processos contínuos. 2.
ed. São Paulo: Érica, 2011.
DURVAL, S. Eletrônica industrial montagem, Rio de Janeiro Interciência -2000.
ESTADÃO. Brasil tem 45,6 milhões de deficientes. Disponivel em:
<http://www.estadao.com.br/noticias/geral,brasil-tem-45-6-milhoes-de-
deficientes,893424>. Acesso em: 29 out. 2015.
Introdução engrenagens. Disponivel em:
<http://www.ebah.com.br/content/ABAAABjtoAB/captulo-01-introducao-
engrenagens>. Acesso em: 10 nov. 2015.
NASCIMENTO, G. C. S. Maquinas elétricas 4 ed. São Paulo: Erica 2011.
RÔMULO, O. A.; SEABRA. A. C. Utilizando eletrônica com AO, SCR, TRIAC, UJT,
PUT, CI555, LDR, LED, IGBT e FET de Potência. 3º Reimpressão. São Paulo. 2011-
Editora Érica Ltda.
ROSÁRIO, J. M. Automação industrial. São Paulo: Baraúna, 2009.
______. Princípios de mecatrônica. 6. ed. Reimpressão. São Paulo: Baraúna, 2011.
SANKIS, M. Elementos de máquinas. 9. ed. Reimpressão. São Paulo: 2011.