
DESENVOLVIMENTO DE UM MECANISMO DE CONTAGEM DE …
66
UNIVERSIDADE FEDERAL DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP INSTITUTO DE CIÊNCIAS AGRÁRIAS E AMBIENTAIS ENGENHARIA AGRÍCOLA E AMBIENTAL DESENVOLVIMENTO DE UM MECANISMO DE CONTAGEM DE PLANTAS DE MILHO PARA ESTIMATIVA DA DENSIDADE POPULACIONAL WAGNER ZAY FERRARI SINOP MATO GROSSO - BRASIL 2016
Transcript of DESENVOLVIMENTO DE UM MECANISMO DE CONTAGEM DE …

UNIVERSIDADE FEDERAL DE MATO GROSSO
CAMPUS UNIVERSITÁRIO DE SINOP
INSTITUTO DE CIÊNCIAS AGRÁRIAS E AMBIENTAIS
ENGENHARIA AGRÍCOLA E AMBIENTAL
DESENVOLVIMENTO DE UM MECANISMO DE
CONTAGEM DE PLANTAS DE MILHO PARA
ESTIMATIVA DA DENSIDADE POPULACIONAL
WAGNER ZAY FERRARI
SINOP
MATO GROSSO - BRASIL
2016
WAGNER ZAY FERRARI
DESENVOLVIMENTO DE UM MECANISMO DE CONTAGEM DE
PLANTAS DE MILHO PARA ESTIMATIVA DA DENSIDADE
POPULACIONAL
Orientador: Prof. Dr. Rodrigo Sinaidi Zandonadi
Trabalho de curso apresentado à Universidade Federal de Mato Grosso - UFMT - Campus universitário de Sinop, como parte das exigências para obtenção do Título de Engenheiro Agrícola e Ambiental.
SINOP
2016

A todos que de alguma forma me auxiliaram a
concluir este trabalho, aos amigos e familiares
que me apoiaram, me incentivaram e
acreditaram no meu potencial. Principalmente
aqueles que sempre estiveram ao meu lado
na busca pelos meus sonhos.
DEDICO
AGRADECIMENTOS
A Deus por me dar saúde e força para prosseguir em meu caminho e guiar em
minhas escolhas.
Aos meus pais, Selito Luís Ferrari e Ezonéia Zaions Ferrari, que não mediram
esforços para que eu chegasse a esta etapa de minha vida, pelo amor incondicional, por
todo apoio e por moldarem meu caráter. A vocês expresso o meu maior agradecimento.
Ao meu irmão Wellington Luís Ferrari pela confiança e fraternidade, sua existência
é um presente para mim.
A todos os familiares que mesmo distantes torceram por mim.
Ao meu orientador Professor Dr. Rodrigo Sinaidi Zandonadi, pela paciência na
orientação, pelo tempo dedicado, pela amizade, ensinamentos e pelas oportunidades
oferecidas durante essa etapa de minha formação.
A todos os professores do curso de Engenharia Agrícola e Ambiental que me
guiaram pela jornada do conhecimento durante todo o período de graduação mostrando o
caminho do saber e me fazendo crescer.
Aos amigos Angelo Joaquim Seolin da Silva e Bruno Lima da Mota, pela grande
amizade formada, pela troca de experiências, e dos muitos bons momentos partilhados
juntos.
A toda minha turma e colegas de graduação pela amizade construída dentro e fora
da sala de aula, aos que compartilharam da minha caminhada e tornaram as dificuldades
pequenas dividindo os bons momentos.
A FAPEMAT por contribuir com a realização deste trabalho
Ao meu grande amigo Carlos Mezzalira Júnior pelo companheirismo durante todo
esse tempo de graduação e os bons momentos que ficarão na memória desse período de
convívio.
A todos, muito Obrigado!

“A maior recompensa para o trabalho do homem não é o que ele
ganha com isso, mas o que ele se torna com isso.”
John Ruskin
SUMÁRIO
1. INTRODUÇÃO 10
2. REVISÃO DE LITERATURA 12
2.1. Aplicações da técnica de detecção de plantas .........................................13
2.2. Métodos de avaliação ..............................................................................15
2.3. Sistemas de Medição ...............................................................................18
2.3.1. Exatidão e repetitividade .....................................................................18
2.3.2. Erros ...................................................................................................18
3. MATERIAL E MÉTODOS 20
3.1. Projeto informacional ...............................................................................20
3.2. Projeto conceitual .....................................................................................21
3.3. Desenvolvimento do Protótipo ..................................................................21
3.3.1. Projeto Preliminar ................................................................................22
3.3.2. Plataforma de locomoção ....................................................................23
3.3.3. Mecanismo de contagem ....................................................................23
3.3.4. Mecanismo de medição de distância ...................................................25
3.4. Sistema de aquisição de dados ................................................................26
3.5. Desenvolvimento do Algoritmo para Aquisição de Dados ........................28
3.6. Interface ...................................................................................................29
3.7. Ensaios do Protótipo ................................................................................29
3.6.7. Ensaios de Laboratório .......................................................................29
3.6.8. Pré-Testes...........................................................................................30
3.7. Ensaio de validação .................................................................................31
4. RESULTADOS E DISCUSSÃO 34
4.1. Projeto Preliminar .....................................................................................34
4.2. Instrumentação ........................................................................................34
4.3. Algoritmo para Aquisição de Dados .........................................................36
4.4. Interface ...................................................................................................38
4.5. Ensaio de laboratório ...............................................................................39

4.6. Pré-ensaios e Reprojeto ...........................................................................40
4.6.2. Mecanismo de contagem ........................................................................41
4.6.3. Algoritmo ................................................................................................44
4.7. Projeto final ..............................................................................................44
4.8. Material utilizado na fabricação ................................................................44
4.9. Avaliação Final .........................................................................................45
4.9.1. Medição de distância ..............................................................................45
4.9.2. Contagem de obstáculos ........................................................................46
4.9.3. Medição dos intervalos entre obstáculos ................................................48
4.9.4. Tempo de operação ................................................................................51
5. CONCLUSÕES 53
6. SUGESTÕES PARA TRABALHOS FUTUROS 54
ANEXO A 58
Detalhe dos custos e material para construção. ..................................................58
ANEXO B 59
Algoritmo Desenvolvido .......................................................................................59
I
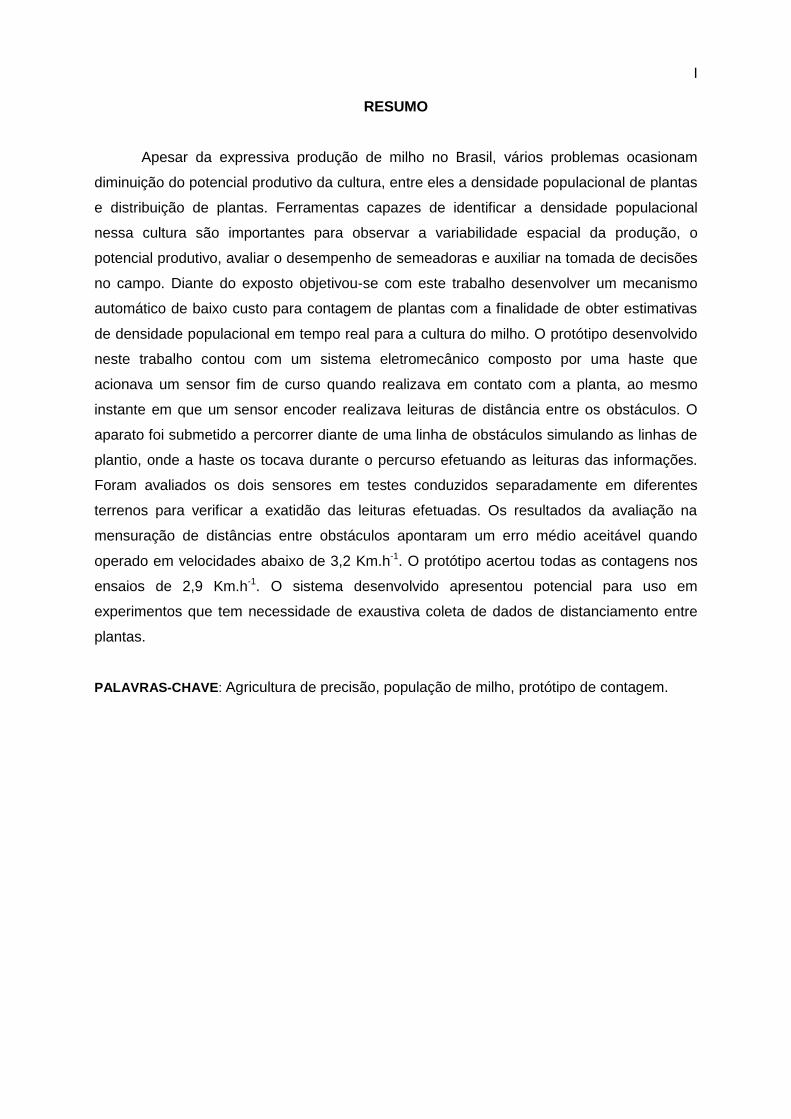
RESUMO
Apesar da expressiva produção de milho no Brasil, vários problemas ocasionam
diminuição do potencial produtivo da cultura, entre eles a densidade populacional de plantas
e distribuição de plantas. Ferramentas capazes de identificar a densidade populacional
nessa cultura são importantes para observar a variabilidade espacial da produção, o
potencial produtivo, avaliar o desempenho de semeadoras e auxiliar na tomada de decisões
no campo. Diante do exposto objetivou-se com este trabalho desenvolver um mecanismo
automático de baixo custo para contagem de plantas com a finalidade de obter estimativas
de densidade populacional em tempo real para a cultura do milho. O protótipo desenvolvido
neste trabalho contou com um sistema eletromecânico composto por uma haste que
acionava um sensor fim de curso quando realizava em contato com a planta, ao mesmo
instante em que um sensor encoder realizava leituras de distância entre os obstáculos. O
aparato foi submetido a percorrer diante de uma linha de obstáculos simulando as linhas de
plantio, onde a haste os tocava durante o percurso efetuando as leituras das informações.
Foram avaliados os dois sensores em testes conduzidos separadamente em diferentes
terrenos para verificar a exatidão das leituras efetuadas. Os resultados da avaliação na
mensuração de distâncias entre obstáculos apontaram um erro médio aceitável quando
operado em velocidades abaixo de 3,2 Km.h-1. O protótipo acertou todas as contagens nos
ensaios de 2,9 Km.h-1. O sistema desenvolvido apresentou potencial para uso em
experimentos que tem necessidade de exaustiva coleta de dados de distanciamento entre
plantas.
PALAVRAS-CHAVE: Agricultura de precisão, população de milho, protótipo de contagem.

II
ABSTRACT
Despite the considerable amount of corn produced in Brazil, many problems lead to a
decrease the productive potential of the crop, such as plant population and plant distribution.
Tools capable of identifying the population density in this crop are important to observe the
spatial variability of production, the productive potential, evaluate the performance of
mechanical planters and assist in decision making in the field. Therefore, the objective of this
work was to develop a low cost mechanism for plant counting to obtain estimates of
population density in real time for corn. The prototype developed in this work had a
electromechanical system composed of a rod that activated a microswitch when it came in
contact with the plant while a encoder sensor was used to measure distance between plants.
The apparatus was subjected to evaluation using artificial obstacles, with controlled spacing
simulating the plant row. Both sensors were evaluated in different terrains to verify
measurement accuracy. . The results indicated an acceptable error when operated at
speeds below 3.2 Km.h-1. The prototype was able to count 100% of the obstacles in speed of
the 2.9 km.h-1. The developed system presented potential for use in experiments that need
exhaustive collection of distancing data between plants.
KEYWORDS: Precision agriculture, corn population, count prototype.
III
LISTA DE ILUSTRAÇÕES
Figura 1. Chave fim de curso modelo S2A6B1 Metaltex. ......................................................24
Figura 2. Detalhe do batente da haste. .................................................................................24
Figura 3. Sensor rotativo ......................................................................................................25
Figura 4. Detalhe da ligação entre o sensor rotativo e o eixo da roda. .................................26
Figura 5. Leitura do sinal de contagem a partir do interruptor fim de curso. ..........................26
Figura 6. Placa microprocessada arduino MEGA 2560. .......................................................27
Figura 7. Bateria 9A 12V. .....................................................................................................28
Figura 8. Caixa de instrumentação onde era alocada a placa de processamento. ...............28
Figura 9. Estrutura montada para testes no laboratório. .......................................................30
Figura 10. Desenho tridimensional feito em software CAD. ..................................................34
Figura 11. Esquema de ligação entre os sensores e a placa de aquisição de dados. ..........35
Figura 12. Circuito que facilita a ligação dos sensores ao microcontrolador. ........................35
Figura 13. Sistema de aquisição de dados. ..........................................................................36
Figura 14. Fluxograma do algoritmo de contagem. ...............................................................37
Figura 15. Interface desenvolvida para leitura e controle. .....................................................38
Figura 16. Oscilação do sinal no momento do chaveamento ................................................39
Figura 17. Sistema de contagem instalado na trena de roda. ...............................................40
Figura 18. (a) primeira versão da plataforma de transporte; (b) modificações na plataforma
de transporte. .......................................................................................................................41
Figura 19. Modificações no mecanismo de contagem; (a) haste metálica; (b) haste de tecnil.
.............................................................................................................................................41
Figura 20. Sistema de regulagem da força de torção da mola. .............................................42
Figura 21. Incremento da mola e modificações no batente. ..................................................43
Figura 22. Ocorrência do número de contagens observadas durante o pré-teste; 25% das
repetições tiveram acerto, 65% superestimaram o número de obstáculos e 10% das
repetições subestimaram. ....................................................................................................43
Figura 23. Estrutura do protótipo com sistemas integrados ..................................................44
Figura 24. Obstáculos dispostos em terreno pavimentado. ..................................................45
Figura 25. Obstáculos dispostos em terreno não pavimentado. ...........................................45
Figura 26. Box plot das leituras de distanciamento. ..............................................................46
Figura 27. Contagem automática vs contagem manual em pavimento. ................................49
Figura 28. Contagem automática vs contagem manual em terreno não pavimentado. .........49
Figura 29. Variação do erro das leituras de distancia entre obstáculos para a configuração
de obstáculos distanciados aleatoriamente. .........................................................................50

IV
Figura 30. Detalhe do acúmulo de terra no pneu que possivelmente causou aumento nos
valores das leituras de distancia entre obstáculos espaçados aleatoriamente. ....................50
Figura 31. Variação do erro das leituras de distância entre obstáculos espaçados igualmente
em 30 centímetros. ...............................................................................................................51
Figura 32. Comparação dos tempos totais entre medição manual e com o uso do protótipo
na velocidade de 2,9 km.h-1 para uma distância de cinquenta metros. .................................52

10
1. INTRODUÇÃO
O agronegócio é responsável por grande parte da geração de empregos no Brasil e
de incrementar o PIB nacional na balança comercial, é classificado dentro do cenário
mundial como sendo de grande contribuição na geração de produtos.
Apresentando grande crescimento recentemente, o setor agrícola expressou-se
consideravelmente nos últimos anos, isso se deve ao fato do aumento na implantação de
tecnologia, estudo, e técnicas de campo que aliadas com a modernização do setor de
máquinas e equipamentos, trouxe grandes avanços para a agricultura. Toda essa
modernização no meio rural começou a ser desenvolvido em um período de substituição das
importações, onde produtos e insumos começaram a ser industrializados em empresas
nacionais, com isso, a partir deste momento o desenvolvimento da agricultura não foi mais
considerado autônomo (VIEIRA FILHO, 2012).
A produção Brasileira estimada para o ano 2015/2016 é de 186,4 milhões de
toneladas de grãos, com destaque para o milho que tem estimativa que sua área de plantio
seja de 15,9 milhões de hectares, com produção de 66,9 milhões de toneladas. (CONAB,
2016).
Apesar da expressiva produção de milho, vários problemas ocasionam diminuição
do potencial produtivo da cultura, entre eles, o tipo de manejo que emprega-se nas
diferentes cultivares, seja a densidade populacional de plantas, distribuição de plantas, e
espaçamento entre as plantas. Estes problemas são fatores de grande influência no setor
agrícola, pois encarece o produto, e aumenta os custos de produção.
Continuamente o desenvolvimento de diversas tecnologias visam à melhoria da
produção e o aumento da eficiência dentro do processo produtivo juntamente com a busca
de maior confiabilidade dos resultados esperados para determinada cultura. Devido aos
custos de produção, e incertezas na variação dos preços dos produtos, maiores são os
cuidados que devem ser empregados para garantir sucesso no ciclo produtivo.
Pela falta de instrução na semeadura e adoção de práticas antigas de plantio,
produtores acabam não utilizando combinações adequadas de arranjo espacial para a
cultura do milho, ocorrendo um manejo inadequado ao longo do ciclo produtivo. Esse fato
acarreta em mau desenvolvimento da planta ou inexploração do potencial de sua
capacidade (DEMÉTRIO et al., 2008).
Para determinação da densidade populacional e do espaçamento entre plantas
utilizando-se os métodos citados por Kurachi et al. (1989), exige-se tempo e mão de obra, já
que modo de medição é feio com auxílio de fita métrica e a contagem é feita manualmente.
11
Para o procedimento citado, é medido o distanciamento entre cada planta, onde a
população total de espaçamentos é dividida em subpopulações, correspondendo os
múltiplos do espaçamento nominal, e os valores são adotados para toda a área que é o
espaçamento recomendado agronomicamente. Esse método primitivo vem se mostrando
eficaz até os dias atuais, porém, torna-se um processo lento e propício a falhas humanas, já
que o sujeito está exposto as condições adversas que podem causar estresse.
A população de plantas é conhecida por ter um efeito considerável no rendimento
de milho (ALMEIDA et. al., 2000). Informações da população de plantas nessa cultura
podem ser um fator importante na tomada de decisões realizadas no campo e adotar um
manejo mais adequado. Os dados podem ajudar na interpretação do rendimento da cultura,
na criação de possíveis mapas que identificam áreas problemáticas, na avaliação de
sistemas de semeadura, e no acompanhamento do desenvolvimento da cultura.
Considerando-se a importância do estudo de avaliação de distribuição espacial das
plantas na cultura do milho, objetivou-se com este trabalho desenvolver um sistema
eletromecânico que permitisse a coleta de dados de distanciamento entre plantas voltado
para a cultura do milho, que identificasse o número de plantas por metro linear percorrido,
de maneira que minimize o tempo necessário para obter essas informações assim como a
mão-de-obra necessária no campo durante as coletas, e, validar o funcionamento do
sistema por meio de comparação com informações coletadas manualmente em ensaios
simulados.
12
2. REVISÃO DE LITERATURA
O Brasil ocupa a terceira posição no ranking mundial de produtores de milho, sendo
que as posições iniciais são ocupadas por EUA e China, o país obtém uma produção de
67,0 milhões de toneladas produzidas na safra de 2015/16 (FIESP, 2016). Tendo projeções
futuras para a produção de 90,3 milhões de toneladas para a safra de 2020/21 (MAPA,
2013).
Ficando na terceira colocação também como exportador, o país consome grande
quantidade do que é produzido em seu território. Tradicionalmente o milho é utilizado na
atividade de criação de aves e suínos por ser uma fonte de proteína de fácil de obtenção,
sendo destinado aproximadamente entre 70 e 80% de toda produção nacional para servir de
base de alimentação a esses animais. Por este fato, a baixa produção da safra e a elevação
no preço do milho acarretam diretamente no preço da carne desses no bolso do consumidor
final, elevando o valor na hora da compra caso o custo de criação a base de proteína de
milho esteja alto (EMBRAPA, 2011).
No Mato Groso a maior parte da produção de milho é concentrada na segunda
safra, sendo grande a participação do estado na balança comercial, entretanto no período
da safra de verão possui participação quase insignificante, isso decorre do fato da cultura
ser rotacionada com a soja nesse período (EMBRAPA, 2011).A busca pela maior
capacidade de produção desse grão está diretamente ligada com a busca de novas
tecnologias que propiciem a exploração do potencial da cultura, uma vez que novas técnicas
de semeadura e manejo das plantas acarretam em melhor desenvolvimento coletivo
(MEROTTO et al., 1997).
Resende et al. (2003) classifica o melhoramento genético da cultura do milho como
sendo um fator de grande avanço nos últimos anos para o aumento de produtividade.
Diversos fatores contribuíram para o desenvolvimento de cultivares que suportam o menor
espaçamento entre si devido a sua arquitetura melhorada acompanhada de aumento no uso
de fertilizantes e melhor controle de pragas e plantas daninhas (MEROTTO et al., 1977)
(ARGENTA, 2001). E devido a esse desenvolvimento, as cultivares de ciclo curto se
beneficiam com o uso de menores espaçamentos pelo fato da menor produção de massa.
(MUDSTOCK, 1978).
As vantagens da redução do espaçamento são relacionadas com a cobertura do
solo, perdas de água por evaporação, competição com plantas invasoras, e melhor
aproveitamento do espaço pela planta para absorção de água e nutrientes diminuindo a
competição intraespecífica que segundo Mudstock (1978), e Sangoi et al. ( 2012) produz os
melhores rendimentos.

13 O incremento na densidade de plantas é uma das formas mais fáceis e eficientes
de se aumentar a interceptação da radiação solar incidente pela população de plantas de
milho. No entanto, o uso de densidades muito elevadas pode reduzir a atividade
fotossintética da cultura e a eficiência da conversão de fotoassimilados em produção de
grãos, resultando em decréscimo progressivo na produtividade da lavoura. Entre as várias
práticas e técnicas empregadas para a obtenção de maior produtividade de milho (Zea mays
L.), a escolha do arranjo espacial de plantas na área é um dos mais importantes fatores a
serem observados, pois tem grandes efeitos na produção, e influencia consideravelmente na
produtividade (ALMEIDA et al., 2000). Assim, a densidade populacional ótima para
determinado híbrido, corresponde ao número ideal de plantas por unidade de área que induz
à maior produtividade e depende basicamente de três fatores: cultivar, disponibilidade de
água e de nutrientes (BUSO, 2012).
No Mato Grosso, entre híbridos simples, duplos, triplos e variedades de polinização
aberta, as densidades recomendadas variam entre 40 e 70 mil plantas por hectare, porém já
se encontram recomendações ainda maiores (75 mil plantas.ha-1) para materiais híbridos
superprecoces (SILVA et al., 2013).
2.1. Aplicações da técnica de detecção de plantas
Medição e manejo da população de plantas no campo que sofreram variabilidade
no espaçamento decorrente de incorreta distribuição ou mortalidade é um exemplo da
utilização de agricultura de precisão que é caracterizada como uma estratégia de gestão
que utiliza informação de múltiplas fontes para suportar as decisões associadas à
agricultura.
Uma ferramenta capaz de estimar a densidade de plantas pode beneficiar
produtores e pesquisadores, pois tem o potencial de fornecer informações precisas de
características populacionais pontuais em determinada localidade da lavoura, podendo ser
utilizado como ferramenta que possibilita melhorar o rendimento de aplicação de insumos
em sistemas que permitem a aplicação localizada de fertilizantes e defensivos diretamente
na cultura, onde segundo Antuniassi (2000) esse tipo de operação gera grande sucesso nas
operações agrícolas, pois diminui o desperdício de material.
Utilizando dessa informação os produtores podem obter um mapa de população de
plantas que mostra as diferenças específicas deste atributo em cada localidade dentro da
propriedade. Isso permite aos agricultores responderem de forma adequada a essa variação
no estande populacional e melhorar a eficiência da produção de acordo com o sistema de
manejo adotado ao longo de diferentes safras. O acompanhamento da população de plantas
na cultura fornece informações importantes para a gestão de campo, pois a população de

14
plantas corresponde a um reflexo do que está se passando na cultura. Além disso, é uma
ferramenta indicadora de possíveis fatores de condições que atuam no desenvolvimento da
planta, como irrigação, drenagem, fertilidade e outras características que quando mal
manejadas causam estresse a planta afetando o estande populacional.
Diferentes problemas são apontados como responsáveis pela redução do número
de plantas de milho no campo no momento de semeadura e pós-semeadura, entre elas
podemos citar as doenças na semente (DA LUZ, 2003), regulagem da semeadora, uso
inadequado de discos dosadores (MAPA, 2002), a transposição da palha da cultura
antecedente (SATTLER et al., 1996), e também a velocidade de trabalho da semeadora,
que tem correlação negativa com as variáveis de resposta que indicam a qualidade do
processo de semeadura, já que a distribuição longitudinal de sementes fica comprometida
(KURACHI et al., 1989).
Um aspecto em determinar a informação da população de plantas de milho está
relacionado a áreas de pesquisa. As informações de densidade podem auxiliar a
pesquisadores a quantificar o impacto de diferentes manejos adotados para a cultura e o
efeito direto causado no número de plantas em grandes campos de experimentação. O
resultado possibilita maior controle de experimentos em relação a esta variável.
Outro benefício obtido com uma ferramenta capaz de estimar a densidade
populacional de plantas de milho, está relacionado a quantificação de taxas de germinação
e de sobrevivências de plantas até atingirem a fase adulta, uma vez que vários insetos
atacam as sementes, raízes e plântulas do milho após a semeadura, impossibilitando que a
planta se desenvolva até o estágio adulto. O tipo de ataque reduz o número de plantas na
área cultivada e o potencial produtivo da lavoura (EMBRAPA, 2010). As informações do
estande de milho em estágio de desenvolvimento mais avançado indicam as taxas de
sobrevivência da cultura, e o conhecimento desse parâmetro é importante para ter uma
estimativa de possíveis rendimentos (MAPA, 2002).
Dados de densidades populacionais podem indicar uma relação de população-
rendimento, obtendo valores ideais desta variável para determinada propriedade quando
sobrepostos com outras informações como as de produtividade, sendo possível realizar uma
análise de correlações entre os dois parâmetros criando um plano de gestão para a
propriedade (VIAN et al., 1996).
Mapas de produtividade são uteis para analisar o desempenho das culturas, isso se
deve ao fato de a área mapeada ser dividida em seções menores sendo que a produtividade
é media pontualmente dentro de cada secção (MOLIN, 2002). As dimensões de cada seção
são influenciadas devido a diversos fatores, como tamanho da plataforma de colheita e
capacidade do sistema de aquisição de dados. Contudo a produtividade é calculada de
acordo com a largura da plataforma independente de uma área menor estar sendo

15
efetivamente colhida, como é o caso de situações de bordadura de talhão. Isso acarreta em
subestimação do rendimento naquela localidade. Um sensor de detecção de planta montado
na plataforma de corte pode informar o número real de linhas que está sendo colhida,
gerando melhores mapas de rendimento em situações semelhantes.
2.2. Métodos de avaliação
Desde que a distribuição espacial de plantas passou a ser conhecida por ter
influência considerável no rendimento de grãos, esse parâmetro tem sido tema de pesquisa
para a agricultura de precisão que consiste em técnicas e metodologias que buscam
otimizar a utilização racional de insumos, obtendo máxima eficiência em lugares onde
ocorrem problemas de desuniformidade provenientes do solo ou da própria cultura (MAPA,
2011). Devido aos benefícios de manejo esperados ao obter as informações de densidade
populacional na cultura do milho, alguns trabalhos foram realizados com o intuito de
desenvolver equipamentos e métodos que pudessem mensurar o número de plantas em
determinado espaço amostral.
Os meios de pesquisa sobre a população de plantas ou medição de espaçamento
podem ser categorizados como dois tipos, os aéreos e os terrestres. A maior parte das
abordagens de detecção aéreas utiliza sensoriamento remoto, através de imagens
multiespectrais com alta resolução espacial, que é baseada na interação da radiação
eletromagnética com o alvo. As imagens podem ser capturadas com o uso de diferentes
tipos de plataforma, tais como aeromodelos, balões e aeronaves de pequeno porte,
juntamente com essas plataformas são embarcados sensores que possibilitam a obtenção
das imagens. A coleta torna-se dinâmica, devido à frequência de aquisição de imagens, o
sistema permite chegar a resultados de boa qualidade para culturas de maneira rápida e
possibilitam a captura de dados em um curto espaço de tempo (QUIRÓS, 2015).
THORP (2007), avaliou o potencial de estimativa da densidade populacional de
milho utilizando imagens de sensoriamento remoto com auxilio de um monomotor e obteve
resultados promissores com este tipo de metodologia quando as imagens foram coletadas
nos estágios de crescimento vegetativo.
O uso de imagens com diferentes bandas multiespectrais de alta resolução obtidas
por satélites são úteis para permitir um diagnóstico fidedigno da população de plantas
existentes em determinada área, porém, o método é limitado a resolução espacial fornecida
pela imagem, já que em culturas menores, o espaçamento adotado é pequeno, de maneira
que torna-se difícil distinguir plantas individuais na fotografia. Os custos envolvidos com o
uso aplicado de imagens de satélite também são elevados de acordo com a resolução
16
desejada, isso faz com que a utilização desta ferramenta se torne pouco utilizada, sendo
recomendada sua aplicação em grandes áreas.
No entanto, apesar dos bons resultados encontrados nestes estudos, obtendo
informação de maneira remota, rápida e precisa, a maioria deles utiliza metodologias
complexas, as quais envolvem uma intensa utilização de cálculos e algoritmos matemáticos.
Tal complexidade dificulta a replicação destas metodologias por parte dos diferentes
usuários das ferramentas de geoprocessamento (QUIRÓS, 2015).
Outra limitação nesse método é a utilização de imagens capturadas quando o milho
se encontra em estágio avançado de desenvolvimento. Isso se deve pelo fato da
diferenciação de plantas individuais se tornar extremamente difícil em plantas adultas,
devido a densidade do dossel das plantas ser muito elevada sobrepondo em grande parte
umas nas plantas, impossibilitando o uso de modelos de contagem por esta metodologia.
Métodos de detecções terrestres têm sido utilizados para obtenção de informações
mais detalhadas sobre a cultura. Essa técnica pode ser efetuada simultaneamente junto
com operações de colheita e pulverização quando embarcados nas máquinas, ou mesmo
por sistemas independentes que são utilizados nas linhas de plantio individuais empurrados
manualmente. As abordagens baseadas em terra são classificadas pelos pesquisadores em
métodos de contato direto e métodos indiretos capazes de determinar o número de plantas
e o espaçamento entre elas (LI et al., 2007).
Os métodos diretos ou mecânicos consistem em medir a população de plantas por
meio de força de resistência dos colmos em que um sistema faz contado com a planta (SHI,
2013). Um dispositivo de deslocamento manual para contar talos de milho foi apresentado
em 1996 (Easton, 1996). O dispositivo identificava as plantas com uma pequena alavanca
de rotação sobressalente que era deslocada pelo contato com as plantas. Também foi
medida a distância dos sinais enviados por sensor que lia os dentes de um disco circular
acionado por uma roda de circunferência conhecida. Cada impulso enviado pelo
microcontrolador indicava a distância de aproximadamente 17 mm.
Hummel et al, (2001) desenvolveu um analisador de população de plantas que
consistia em um potenciômetro e uma haste onde o acionamento era feita de maneira
mecânica, ao passar pelas plantas, a haste tocava o talo alterando a corrente que passava
pelo potenciômetro.
Outros métodos utilizados para detectar as plantas de milho são por meios
indiretos. Os métodos indiretos são considerados os mais adequados para milho em estágio
inicial, pois não tem contato direto com a planta, evitando algum dano que possa prejudicá-
la. Eles se utilizam de equipamentos mais desenvolvidos e sistemas mais complexos para
efetuar sua função.
17 Li et al. (2009) desenvolveram um sensor de proximidade capacitivo para detectar
biomassa. Eles simularam e testaram diferentes intensidades capacitivas no laboratório.
Depois disso, o sensor foi avaliado por quantificação da população de biomassa no campo
para detectar talos de milho. O sensor tinha menos de 5% de erro na população de plantas
para cinco das seis linhas colhidas. Além disso os resultados mostraram menos que 2% de
erro na média das seis linhas avaliadas.
Shi et al (2013) utilizou um laser scanner de linha para detectar os talos e a
distância entre eles. O sensor foi configurado para operar em varredura de linha contínua e
o número de talos em uma varredura dependia da distância entre o sensor e a linha de
plantio.
Shrestha (2003) por meio de visão artificial, obteve imagens digitais com o uso de
uma câmera, e com a aplicação de algoritmos desenvolvido para sequenciar quadros de
vídeo e segmentá-los, conseguiu contar plantas de milho e associar o número de plantas
com a distância percorrida. A câmera era montada em veículo e o desempenho deste
sistema foi avaliado fazendo-se a comparação com contagens manuais em 60 unidades
experimentais de 6 m de secções de milho apresentando um coeficiente de variação de
5,4% no estande populacional. Porém o experimento não foi conduzido em situações onde
ocorriam plantas daninhas, e esta condição poderia gerar uma grande limitação para este
sistema.
Luck et al (2008) processou sinais de sensores infra-vermelho para a contagem
plantas. O sensor percorria um lado da linha, e uma placa acompanhava paralelamente o
sensor na próxima linha para eliminar a possibilidade de detectar as plantas da linha
seguinte. Usando um algoritmo desenvolvido MatLab eles obtiveram as populações de
plantas. O sensor foi utilizado em um trator com velocidade constante de 3,2 km/h para
testes de campo. A superestimação da população de plantas, com erros que variavam entre
+ 0,7% a + 4,4% aconteceram devido a interferência de folhas, plantas daninhas ou outros
objetos nas linhas que foram considerados como plantas de milho.
Diferentes técnicas têm sido estudadas, porém em cada situação ocorrem
desvantagens para a sua utilização assim como maiores susceptibilidade a erros, seja o
método mecânico por subestimar o número de caules ou pelos métodos de capacitância que
limitam a distância de operação e o de infravermelho e visão artificial por sofrer interferência
de plantas daninhas. Outros métodos como o de ressonância magnética e micro-ondas são
métodos precisos de detecção de caule através de umidade, mas são demasiadamente
caros e fisicamente muito grandes para dispositivos móveis, tornando inviáveis suas
utilizações em plataformas portáteis (SHRESTA, 2004).
Portanto, métodos de contagem de plantas podem ser adequados para cada tipo de
planta, por diferentes sistemas de contagem. Dados obtidos quando são associados a
18
agricultura de precisão para solucionar necessidades tornam-se informações importantes,
uma vez que a agricultura de precisão disponibiliza sistemas que possibilitam o tratamento
diferenciado das diversas operações agrícolas (QUEIROZ, 2006). Especialmente no Brasil,
as soluções existentes mais utilizadas estão focadas na otimização do uso e aplicação de
fertilizantes e corretivos em taxa variável. Porém não se deve perder de vista que AP é um
sistema de gestão de todas as variáveis do campo. A busca por maiores produtividades com
o uso de AP implica em estratégias mais elaboradas que normalmente estão associadas a
aqueles usuários que investiram mais em dados e conhecimento e dispõem de mapas da
lavoura (MAPA, 2011).
2.3. Sistemas de Medição
De acordo com (WENDLING, 2003) sensor é definido com um dispositivo sensível
que possa transformar alguma forma de energia em um sinal possível de ser convertido em
informação sobre o ambiente e que possa ser mensurável.
Segundo o Vocabulário Internacional de Medidas (VIM), medir é o processo de
obtenção de um ou mais valores por meio de comparação de grandezas compatíveis com o
procedimento específico, esta comparação pode envolver erros de operação, dos
instrumentos e dos processos de medida.
2.3.1. Exatidão e repetitividade
Uma das maneiras de avaliar a qualidade do resultado de uma medição é fornecida
pelo conceito de exatidão, que se refere à proximidade da medida com seu valor alvo. Mas
outra qualidade muito importante de uma medida experimental é seu grau de precisão, que
se refere à dispersão entre medidas repetidas sob as mesmas condições. Medidas precisas
são menos dispersas, ou seja, quando repetidas, elas tendem a fornecer os mesmos
resultados (mas não necessariamente resultados mais próximos do valor alvo). Assim,
diferente do que ocorre com a exatidão, a avaliação da precisão de uma medida não leva
em consideração o valor verdadeiro (LIMA JUNIOR, 2012).
2.3.2. Erros
De acordo com o VIM de 2012, os erros observados em medições podem ser
classificados em diferentes tipos, e podem ser divididos nas diferentes denominações:
Erro Aleatório: É a diferença entre o resultado de uma medição e a média de um
determinado número de medições. Os erros aleatórios ocorrem devido a motivos
19
imprevisíveis e irregulares e dificilmente são extintos. Os erros aleatórios ocasionam
medições de forma que os resultados ficam espalhados em volta do valor médio.
Erro Sistemático: Este tipo de erro que se oriunda do método empregado ou do
equipamento mal calibrado, pois geralmente ocorre por motivo de uma causa constante.
Este erro faz com que a média das medições se afastem do valor verdadeiro e afetam a
exatidão dos resultados em um mesmo sentido, ou para mais, ou para menos.
O VIM ainda descreve que acontece uma incerteza de medição associado ao
resultado de uma medição, que significa a incerteza dos valores, ou seja, o valor é
representado dentro de um intervalo com certa margem de confiança.
Portanto, equipamentos de medição estão susceptíveis a erros, e por mais
rigorosos que possam ser não devemos esperar que os resultados sejam exatos. Porém, as
leituras fornecidas por equipamentos quando regulados e operados de maneira correta,
apresentam um grau de confiabilidade muito alto, pois mesmo não gerando informações
exatas seus erros tornam-se insignificantes (CABRAL, 2004).
20
3. MATERIAL E MÉTODOS
O objetivo deste trabalho foi desenvolver e avaliar uma ferramenta capaz de
mensurar o número de plantas e também o espaçamento entre plantas de milho na linha de
plantio, identificando esses dois parâmetros de maneira simultânea, com base em um
sistema eletromecânico.
O protótipo de contagem e medição de espaçamento entre plantas foi desenvolvido
no Laboratório de Mecanização da Universidade Federal de Mato Grosso – Campus Sinop
(UFMT - Sinop). A construção do protótipo se fez durante os anos de 2015/2016 e o ensaio
de validação foi realizado nas imediações da Universidade Federal do Mato Grosso nos
meses de Outubro e Novembro de 2016. Os ensaios para validação das características de
funcionalidade foram realizados na própria instituição. As etapas do projeto do produto
foram baseadas seguindo a metodologia composta pelas etapas de desenvolvimento de
produto proposta por (ROMANO et.al., 2003).
3.1. Projeto informacional
Os pré-requisitos iniciais foram definidos e a ordem de construção buscou seguir as
seguintes especificações:
(i) Desenvolver um sistema de baixo custo
A utilização de equipamentos de baixo custo se fez presente ao longo do
desenvolvimento do projeto, o protótipo foi construído com materiais encontrados facilmente
em lojas especializadas.
(ii) Ser portátil
O mecanismo desenvolvido para contagem das plantas buscou proporcionar
dimensões adequadas para que possa ser montado em uma plataforma de transporte que
abriga todos os componentes e que consiga percorrer a linha de plantio.
(iii) Funcionalidade adequada
O funcionamento do protótipo deve suportar as condições encontradas em campo,
tais como vibrações, choques mecânicos, e poeira, essas não podem interferir nas leituras
das informações, nem causar dano nos componentes, garantindo uma confiabilidade nas
leituras durante o seu uso.
21
(iv) Permitir o uso em cultura de milho para diferentes espaçamentos entre linhas
As dimensões do protótipo se fizeram respeitando a limite entre linhas usualmente
adotado na cultura do milho de 45 cm para o Mato Grosso, de modo que seu uso dentro do
campo ocorresse de maneira prática, sem que o seu deslocamento seja dificultado no
momento da avaliação dos parâmetros propostos devido a proximidade entre as linhas de
plantio.
(v) Visualização dos dados em tempo real
Os resultados prévios obtidos das leituras podem ser analisados instantaneamente
pelo operador do protótipo, através do uso de interface simples, ficando somente necessário
o processamento das informações para avaliações mais específicas como é o caso de uma
bateria de ensaios.
3.2. Projeto conceitual
Como ponto de partida para a construção deste trabalho, alguns objetivos foram
pontuados de maneira a acompanhar o desenvolvimento do mesmo. As etapas propostas
foram categorizadas da seguinte maneira:
1. Desenvolver em laboratório um protótipo baseado em uma técnica que
permita mensurar o distanciamento entre plantas e o número de plantas na linha e
que registre de maneira automatizada o espaço entre as plantas em tempo real;
2. Realizar um pré-ensaio e avaliar sob diferentes condições o desempenho do
protótipo, e analisar por processamento das informações coletadas as diferenças
entre os valores obtidos pelo uso do sistema e os valores verdadeiros;
3. Estabelecer as características de funcionamento adequadas.
3.3. Desenvolvimento do Protótipo
Como ponto de partida para o trabalho de construção do aparato proposto e com os
seguintes critérios de projeto definidos foram iniciadas as etapas de desenvolvimento do
sistema de medição e contagem. Para melhor entendimento do projeto essa parte foi
dividida em três etapas distintas. Na primeira foram levantadas propostas com base nas
metodologias pelas quais o projeto utilizaria para mensurar as características pretendidas
em campo. Na segunda foram desenvolvidos os mecanismos propostos na etapa anterior,
ou seja, a parte de construção propriamente dita, seguindo as avaliações e os critérios feitos
22
anteriormente, esta etapa envolveu as fases de desenvolvimento da estrutura do protótipo,
que consiste em dois mecanismos distintos, o mecanismo de contagem, e o mecanismo de
medição de distancia, também nesta mesma etapa foi desenvolvido o sistema de aquisição
de dados utilizado para controlar os sensores embarcados. Na terceira etapa, os
mecanismos foram integrados entre si, formando todo o protótipo para posteriormente
serem feitas as avaliações do desempenho operacional.
3.3.1. Projeto Preliminar
A etapa do projeto preliminar foi caracterizada pela identificação dos problemas da
utilização das diferentes metodologias de mensuração e detecção de plantas. O primeiro
passo desta fase foi de estabelecer a estrutura funcional do sistema caracterizando as
funções do sistema, e também a busca de combinações dos princípios de solução para
estas funções, ou seja, utilizando de quais técnicas poderia ser possível identificar os
obstáculos e medir o distanciamento entre eles. Assim, obtiveram-se concepções que ao
final foram avaliadas seguindo os critérios estabelecidos.
Antes que os modelos de princípio de solução fossem evoluídos em concepções,
eles foram analisados. O principal objetivo desta análise foi reduzir o número de modelos
selecionados, com a finalidade de descartar princípios pouco interessantes, ou previamente
julgados como ineficientes para esta finalidade.
Como critério de escolha foram observados nos trabalhos já relatados ao longo do
tempo, as vantagens e desvantagens do uso dos diferentes métodos de contato direto e
indireto. Visto da dificuldade em solucionar problemas de leituras devido a interferência de
plantas daninhas e folhas, o método indireto de contagem que utiliza meios mais
sofisticados de detecção foi descartado. O modelo de principio de solução adotado
correspondeu ao uso do método que utiliza de contato direto com a planta, que baseia-se de
um sistema que ao percorrer entre as linhas de plantio, entra em contato com a planta e
coleta as informações necessárias para a mensuração dos parâmetros.
Após determinado isso, foram iniciadas as propostas para elaboração do sistema
de contagem com diferentes princípios de atuação. Para que o modelo de princípio de
solução pudesse ser melhor avaliado nesta etapa, foram realizados esboços em escala para
verificar como os componentes mecânicos atuariam. Foi desenvolvida uma representação
por modelagem tridimensional para oferecer maiores detalhes do funcionamento e suprir
informações de dimensões aproximadas dos componentes para alocação do sensor na
estrutura principal.

23
3.3.2. Plataforma de locomoção
A plataforma de locomoção denominada de estrutura principal consistia em um
carrinho de uma roda que se movimentava facilmente entre as linhas de plantio, podendo
ser considerado como o chassi do protótipo, suas dimensões de 380 milímetros de largura e
peso de aproximadamente 10 Kg, tornavam sua usabilidade simples. Esta plataforma se
encarregava de transportar todos os componentes, pois permitia a integração dos dois
mecanismos desenvolvidos. Nela eram acomodados os sistemas de contagem, medição de
distância e demais componentes necessários para o funcionamento do protótipo.
A estrutura foi desenvolvida utilizando-se cantoneiras de aço carbono SAE 1020 e
chapas de aço, de maneira a facilitar a fabricação e visando à redução dos custos
oferecendo uma boa resistência para toda estrutura com peso adequado para que sua
usabilidade não fosse comprometida. A construção do chassi foi feita por uso de solda, e
como elemento de união entre os componentes foi feito a utilização de parafusos para
fixação, de maneira a facilitar nos processos de montagem e desmontagem. Dois mancais
foram utilizados para ligar o eixo da roda na estrutura principal.
3.3.3. Mecanismo de contagem
Para realizar a contagem das plantas, foi desenvolvido um mecanismo que
identifica a presença de obstáculos rígidos através do contato direto. A identificação da
presença dos obstáculos consiste em uma haste metálica que realiza movimento horizontal
em torno de um eixo, e ao percorrer na linha de plantio toca no colmo da planta e aciona a
chave fim de curso, este por vez, envia um sinal para o microcontrolador que realiza a
contagem.
A escolha chave fim de curso foi baseada devido a sua robustez, ou seja, a
capacidade de suportar as condições encontradas em campo e os choques mecânicos
causados pelo retorno da haste sem que ocorra dano nos seus componentes internos. Um
sensor chave fim de curso, ou interruptor de posição refere-se a um comutador elétrico que
é capaz de ser atuado por uma força física muito pequena, de modo que liga ou desliga
seus contatos internos quando uma ação mecânica acontece no seu elemento atuador. Para
esta finalidade de acionamento eletrônico dos sinais, foi utilizado uma sensor modelo
S2A6B1 Metaltex (Figura 1) que tem característica de possuir vida mecânica de 2 milhões
de ciclos, sua capacidade de suportar cargas de até 12 volts e baixa resistência em
ambiente normal, permite que o sinal que passa por este interruptor seja detectado pelo
microcontrolador.

24
Figura 1. Chave fim de curso modelo S2A6B1 Metaltex.
Tabela 1. Especificações do sensor mecânico.
Parâmetro Informações
Resistência de contato 15mΩ máx.
Temperatura de operação -25°C ~ +80°C
Vida Mecânica 20x105 operações mín.
Vida elétrica 500.000 operações mín.
Frequência de operação mecânica 240 operações/minuto
Arranjo de contatos Reversível (NA/NF)
Após o contato da haste com a planta, uma mola tinha a função de fazer com que a
haste retornasse para a posição inicial para que fosse efetuada a próxima contagem, para
isso foi utilizada uma mola de torção que se localizava no eixo onde a haste era
posicionada.
Um batente limitava o curso da haste atuando como um amortecedor de choque
mecânico para evitar que a chave fim de curso sofresse danos, também tinha finalidade de
manter a haste na posição de operação, de maneira que ficasse pronta para a contagem
subsequente (Figura 2).
Figura 2. Detalhe do batente da haste.
25 O mecanismo de contagem estava montado na plataforma de transporte onde era
posicionado a uma altura de 40 cm do solo, oque permitia seu uso em plantas adultas em
fase de pré-colheita, porém limitava o sua utilização em plantas nos estágios iniciais de
desenvolvimento devido a pequena altura das plantas e a impossibilidade da planta exercer
uma força de resistência contraria maior que força necessária para o acionamento da haste,
impossibilitando o acionamento da chave fim de curso.
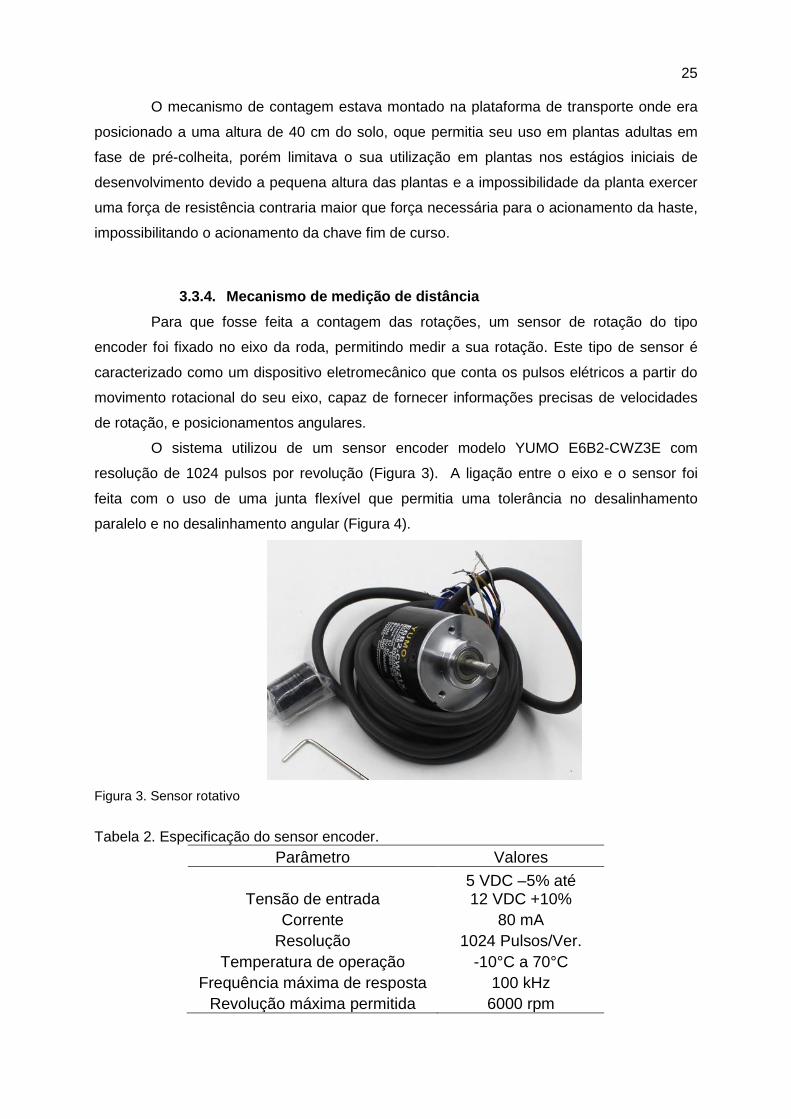
3.3.4. Mecanismo de medição de distância
Para que fosse feita a contagem das rotações, um sensor de rotação do tipo
encoder foi fixado no eixo da roda, permitindo medir a sua rotação. Este tipo de sensor é
caracterizado como um dispositivo eletromecânico que conta os pulsos elétricos a partir do
movimento rotacional do seu eixo, capaz de fornecer informações precisas de velocidades
de rotação, e posicionamentos angulares.
O sistema utilizou de um sensor encoder modelo YUMO E6B2-CWZ3E com
resolução de 1024 pulsos por revolução (Figura 3). A ligação entre o eixo e o sensor foi
feita com o uso de uma junta flexível que permitia uma tolerância no desalinhamento
paralelo e no desalinhamento angular (Figura 4).
Figura 3. Sensor rotativo
Tabela 2. Especificação do sensor encoder.
Parâmetro Valores
Tensão de entrada 5 VDC –5% até 12 VDC +10%
Corrente 80 mA
Resolução 1024 Pulsos/Ver.
Temperatura de operação -10°C a 70°C
Frequência máxima de resposta 100 kHz
Revolução máxima permitida 6000 rpm

26
Figura 4. Detalhe da ligação entre o sensor rotativo e o eixo da roda.
A cada movimento que a roda percorria, era enviado um pulso ao microcontrolador
que poderia ser traduzido em informação de distância de acordo com o raio de giro da roda.
A maneira para determinar a velocidade que o protótipo se deslocava era baseada
nas rotações identificadas pelo sensor rotativo e o tempo decorrente a essas rotações, isso
possibilitava determinar a velocidade em que o equipamento se deslocava durante os
ensaios de validação.
3.4. Sistema de aquisição de dados
O objetivo da aquisição de dados foi de identificar o número de vezes que a chave
fim de curso era acionada e determinar o tempo entre duas bordas de descida dos sinais.
Com as informações de rotação, tempo e perímetro da roda, foi possível determinar a
distância percorrida entre os acionamentos da chave conforme mostrado na Figura 5.
Figura 5. Leitura do sinal de contagem a partir do interruptor fim de curso.
O dispositivo utilizado para a aquisição de dados foi uma placa controladora
microprocessada Arduino MEGA 2560 (Figura 6). A placa é baseada em ATmega2560,
dispõe de pinos de entradas e saídas digitais, e entradas analógicas, com interface serial
USB (Universal Serial Bus) para comunicação entre o microcontrolador e outro dispositivo
como computador ou tablet. A placa pode ser alimentada por conexão USB ou fonte externa
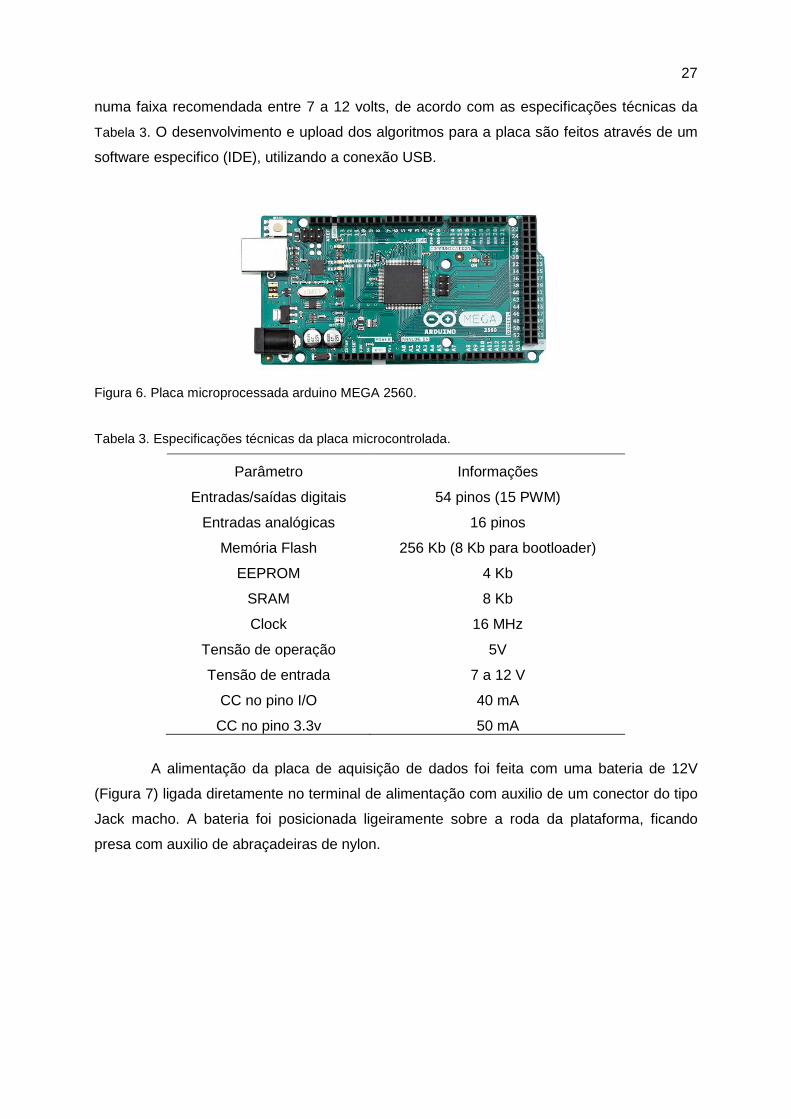
27
numa faixa recomendada entre 7 a 12 volts, de acordo com as especificações técnicas da
Tabela 3. O desenvolvimento e upload dos algoritmos para a placa são feitos através de um
software especifico (IDE), utilizando a conexão USB.
Figura 6. Placa microprocessada arduino MEGA 2560.
Tabela 3. Especificações técnicas da placa microcontrolada.
Parâmetro Informações
Entradas/saídas digitais 54 pinos (15 PWM)
Entradas analógicas 16 pinos
Memória Flash 256 Kb (8 Kb para bootloader)
EEPROM 4 Kb
SRAM 8 Kb
Clock 16 MHz
Tensão de operação 5V
Tensão de entrada 7 a 12 V
CC no pino I/O 40 mA
CC no pino 3.3v 50 mA
A alimentação da placa de aquisição de dados foi feita com uma bateria de 12V
(Figura 7) ligada diretamente no terminal de alimentação com auxilio de um conector do tipo
Jack macho. A bateria foi posicionada ligeiramente sobre a roda da plataforma, ficando
presa com auxilio de abraçadeiras de nylon.
28
Figura 7. Bateria 9A 12V.
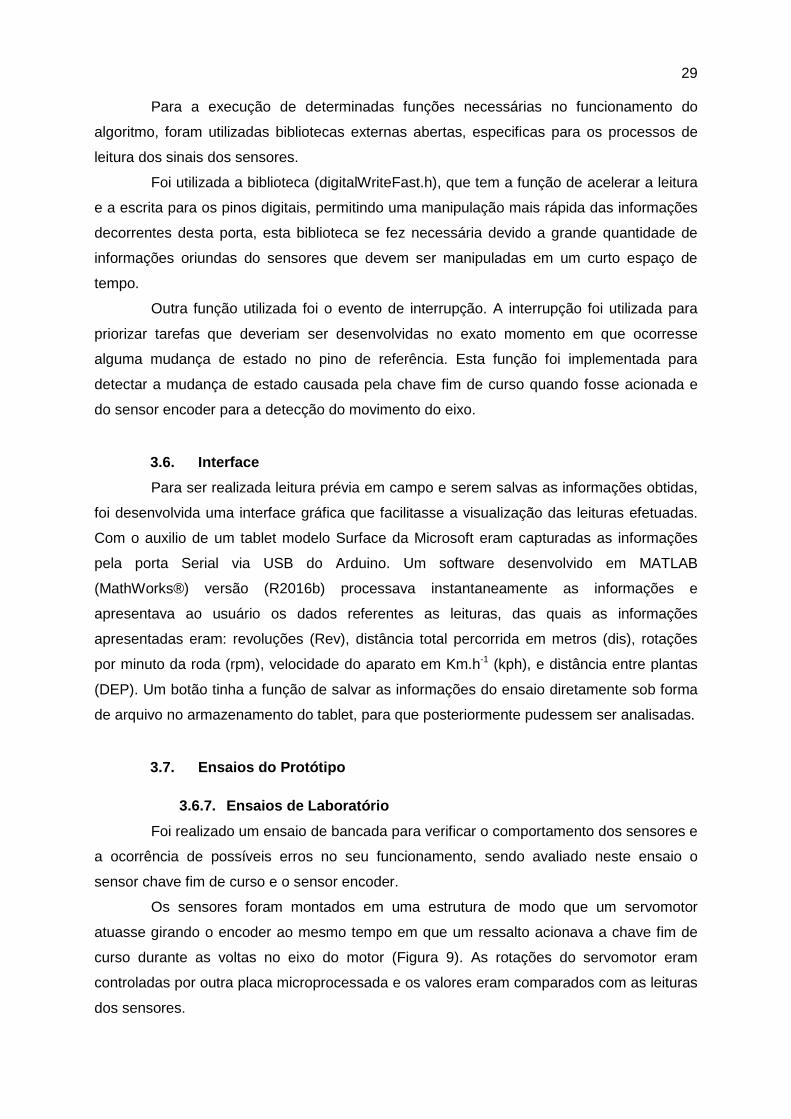
Os sensores foram ligados na placa microprocessada com auxilio de um circuito,
feito com uma placa de fenolite, borns e barras de pinos para que facilitasse a ligação dos
cabos dos sensores. Três canais digitais foram configurados para a leitura do encoder
rotativo, e outro canal foi utilizado para medir o sinal oriundo do interruptor fim de curso.
A placa foi alocada em uma caixa de instrumentação onde seu ambiente de
operação ficasse o mínimo possível em contato com o ambiente externo assegurando que o
microcontrolador suportasse as condições decorrentes as exposições no campo (Figura 8).
A caixa foi selecionada de maneira a apresentar espaço suficiente para comportar o circuito,
sua fixação é dada através de parafusos ligados a uma barra no braço metálico por onde o
aparato é conduzido. As ligações entre os sensores e o microcontrolador através da caixa
foram feitas com o auxilio de conectores do tipo Mic, utilizaram de conector 5 pinos para o
encoder e conector 2 pinos para a chave fim de curso.
Figura 8. Caixa de instrumentação onde era alocada a placa de processamento.
3.5. Desenvolvimento do Algoritmo para Aquisição de Dados
Para o desenvolvimento do algoritmo foi utilizado um ambiente integrado de
desenvolvimento de software (IDE), este é um programa específico para a plataforma
Arduino que permite a criação de algoritmos e programação de microcontroladores em
placas Arduino.
29 Para a execução de determinadas funções necessárias no funcionamento do
algoritmo, foram utilizadas bibliotecas externas abertas, especificas para os processos de
leitura dos sinais dos sensores.
Foi utilizada a biblioteca (digitalWriteFast.h), que tem a função de acelerar a leitura
e a escrita para os pinos digitais, permitindo uma manipulação mais rápida das informações
decorrentes desta porta, esta biblioteca se fez necessária devido a grande quantidade de
informações oriundas do sensores que devem ser manipuladas em um curto espaço de
tempo.
Outra função utilizada foi o evento de interrupção. A interrupção foi utilizada para
priorizar tarefas que deveriam ser desenvolvidas no exato momento em que ocorresse
alguma mudança de estado no pino de referência. Esta função foi implementada para
detectar a mudança de estado causada pela chave fim de curso quando fosse acionada e
do sensor encoder para a detecção do movimento do eixo.
3.6. Interface
Para ser realizada leitura prévia em campo e serem salvas as informações obtidas,
foi desenvolvida uma interface gráfica que facilitasse a visualização das leituras efetuadas.
Com o auxilio de um tablet modelo Surface da Microsoft eram capturadas as informações
pela porta Serial via USB do Arduino. Um software desenvolvido em MATLAB
(MathWorks®) versão (R2016b) processava instantaneamente as informações e
apresentava ao usuário os dados referentes as leituras, das quais as informações
apresentadas eram: revoluções (Rev), distância total percorrida em metros (dis), rotações
por minuto da roda (rpm), velocidade do aparato em Km.h-1 (kph), e distância entre plantas
(DEP). Um botão tinha a função de salvar as informações do ensaio diretamente sob forma
de arquivo no armazenamento do tablet, para que posteriormente pudessem ser analisadas.
3.7. Ensaios do Protótipo
3.6.7. Ensaios de Laboratório
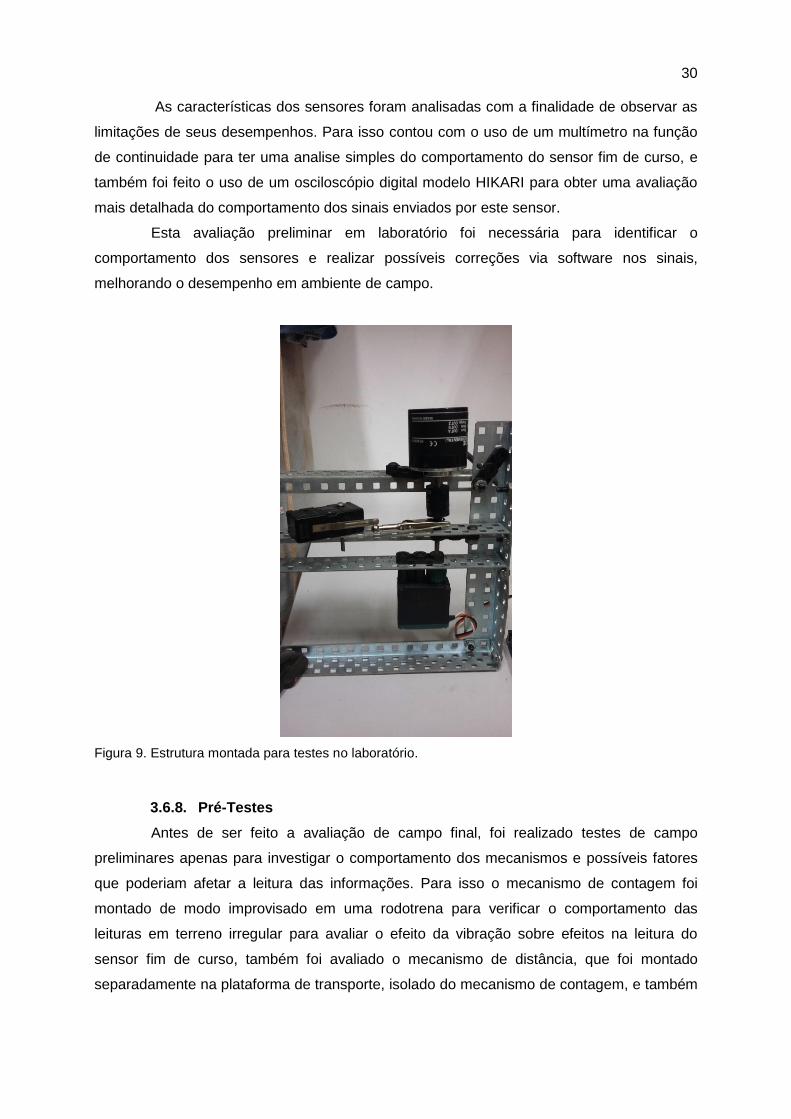
Foi realizado um ensaio de bancada para verificar o comportamento dos sensores e
a ocorrência de possíveis erros no seu funcionamento, sendo avaliado neste ensaio o
sensor chave fim de curso e o sensor encoder.
Os sensores foram montados em uma estrutura de modo que um servomotor
atuasse girando o encoder ao mesmo tempo em que um ressalto acionava a chave fim de
curso durante as voltas no eixo do motor (Figura 9). As rotações do servomotor eram
controladas por outra placa microprocessada e os valores eram comparados com as leituras
dos sensores.
30 As características dos sensores foram analisadas com a finalidade de observar as
limitações de seus desempenhos. Para isso contou com o uso de um multímetro na função
de continuidade para ter uma analise simples do comportamento do sensor fim de curso, e
também foi feito o uso de um osciloscópio digital modelo HIKARI para obter uma avaliação
mais detalhada do comportamento dos sinais enviados por este sensor.
Esta avaliação preliminar em laboratório foi necessária para identificar o
comportamento dos sensores e realizar possíveis correções via software nos sinais,
melhorando o desempenho em ambiente de campo.
Figura 9. Estrutura montada para testes no laboratório.
3.6.8. Pré-Testes
Antes de ser feito a avaliação de campo final, foi realizado testes de campo
preliminares apenas para investigar o comportamento dos mecanismos e possíveis fatores
que poderiam afetar a leitura das informações. Para isso o mecanismo de contagem foi
montado de modo improvisado em uma rodotrena para verificar o comportamento das
leituras em terreno irregular para avaliar o efeito da vibração sobre efeitos na leitura do
sensor fim de curso, também foi avaliado o mecanismo de distância, que foi montado
separadamente na plataforma de transporte, isolado do mecanismo de contagem, e também
31
o protótipo montado com todos os sistemas embarcados. Os objetivos dos pré-testes em
campo foram:
1) Verificar o comportamento do mecanismo de contagem desenvolvido;
2) Realizar análises simples do sinal enviado ao micro controlador.
3) Verificar o sistema de mensuração de distância;
4) Pré-calibração do mecanismo de determinação de distância
5) Montar o conjunto dos mecanismos na plataforma de coleta de informações,
6) Testar o algoritmo para aquisição de dados;
Para isso, os pré-testes foram conduzidos com o protótipo percorrendo terreno não
pavimentado e pavimentado. Estruturas tubulares foram estaqueadas, posicionadas para
serem utilizadas como obstáculos.
O primeiro teste teve o objetivo de verificar a precisão do distanciamento indicado,
portanto, dois obstáculos foram dispostos a 6 metros de distância entre si e realizaram-se 15
repetições para aferir a precisão dos resultados.
Outra avaliação feita consistia em determinar a acurácia do mecanismo de
contagem, para isso, foram distribuídos 15 obstáculos de maneira ordenada ao longo de
uma trajetória retilínea em solo firme, representando as plantas de milho no campo. Uma
verificação simples do comportamento das leituras foi realizada com finalidade de averiguar
se o aparato contabilizava os obstáculos impostos.
3.7. Ensaio de validação
O ensaio em campo foi realizado com obstáculos posicionados simulando as
plantas de milho. Tubos metálicos rígidos foram estaqueados em distâncias previamente
estipuladas para os diferentes tratamentos e em duas condições individuais. A primeira
condição consistia em guiar manualmente o sistema de aquisição de dados paralelamente
aos obstáculos sobre o solo pavimentado, reduzindo as interferências do relevo sobre as
coletas, servindo de referência para a calibração do sistema de coleta de informações. A
segunda condição consistia em efetuar os mesmos ensaios em condições de solo não
pavimentado, simulando as condições de campo. A comparação entre as duas condições e
os valores reais, tinham finalidade de fornecer possíveis limitações do uso do protótipo em
diferentes ambientes.
O primeiro ensaio realizado teve o objetivo de avaliar o sistema de determinação de
distância por meio da medição do distanciamento entre os obstáculos, neste ensaio dois
tubos foram posicionados a um valor de referência de 100 metros de distância medidos com
uma trena, e logo em seguida a plataforma de aquisição de dados foi guiada em linha reta
32
entre os dois obstáculos de maneira que iniciasse a medição quando tocasse o primeiro
obstáculo e do mesmo modo terminasse quando tocasse o segundo, obtendo assim a
distância entre os dois pontos medida pelo protótipo. Uma análise de tendência foi realizada
para verificar o quanto as medidas variavam em torno do valor de referência com o uso da
Equação 1.
𝑇 = �̅� − 𝑉𝑅 (1)
Em que:
T = Tendência
�̅� = Média dos valores obtidos nas leituras de distância;
𝑉𝑅 = Valor de referência da distância percorrida (100 metros).
Para os ensaios de detecção de plantas foram posicionados 30 (trinta) tubos
metálicos distribuídos em fileira em distâncias aleatórias que variavam entre 17 e 32
centímetros, representando uma situação de desuniformidade na distribuição de plantas. As
distancias fora estipuladas de acordo com o espaçamento de plantas normalmente utilizado
para o estado de Mato Grosso (SILVA et al., 2013), Esta configuração foi escolhida para
identificar somente espaçamentos aceitáves entre plantas, ignorando a contagem de duplos.
Os tratamentos foram diferenciados de acordo com a velocidade em que o protótipo se
deslocava para a leitura das informações. As velocidades adotadas foram 2,9 km h-1, 3,2 km
h-1, 3,8 km h-1 e 4,5 kmh-1. Foram realizadas 20 (vinte) repetições efetuadas pelo protótipo
para cada velocidade de operação, totalizando 80 repetições realizadas em cada terreno.
O desempenho do sistema foi avaliado comparando as medições do número de
obstáculos detectados com os valores reais. Com os dados da quantidade de obstáculos
estimada e real, obteve-se o valor absoluto da porcentagem de erro (E%) de estimação
para cada velocidade ensaiada (Equação 2).
𝐸% = 𝑉𝑎𝑙𝑜𝑟 𝑒𝑠𝑡𝑖𝑚𝑎𝑑𝑜
𝑉𝑎𝑙𝑜𝑟 𝑟𝑒𝑎𝑙 × 100% (2)
Para as repetições onde não ocorreu erro na detecção dos obstáculos, foi realizada
uma analise de linha de tendência dos valores de distâncias entre obstáculos obtidos pelo
aparato e o valor de distância mensurados manualmente. Para isso foram utilizados os
dados que previamente foram salvos na memória do dispositivo de interface.
Outro ensaio foi realizado com o intuito de avaliar a confiabilidade das leituras
realizadas, este último se fez guiando a plataforma em velocidade superior a que o
mecanismo detectou todos os obstáculos. Essa avaliação consistiu em distribuir 30
33
obstáculos distanciados igualmente a 30 centímetros para também verificar as leituras de
distanciamento entre eles. Foram realizadas quinze repetições para cada terreno neste
ensaio.
Uma avaliação final foi realizada com o intuito de comparar a praticidade de uso do
protótipo. Para isso, foi determinado o tempo total necessário para realizar a medição do
distanciamento entre os obstáculos manualmente com uso de trena e o tempo necessário
para que fossem feitas as coletas com o aparato na velocidade de operação em que
detectou todos os obstáculos.
Algumas ressalvas devem ser feitas a respeito do processo de medição do tempo
para a comparação entre rapidez na coleta de dados. Entre os tempos contabilizados o
processo de contagem manual foi feito por uma pessoa e abrangeu o tempo de medição
feita com a trena e de anotação do valor em planilha de papel. O tempo em que o operador
levou para registrar os dados das leituras no dispositivo eletrônico não foi contabilizado por
se tratar de um tempo insignificante, exceto quando se desejou nomear ou salvar os
arquivos obtidos em pastas específicas no dispositivo de interface.

34
4. RESULTADOS E DISCUSSÃO
4.1. Projeto Preliminar
A fase de Projeto Preliminar mostrou-se de extrema importância para se chegar a
um modelo conceitual, partindo-se da lista de especificações do projeto. O uso da
criatividade foi fundamental para se chegar a uma solução que atendesse a finalidade,
buscando-se princípios de solução nas diferentes áreas de mecânica e elétrica para atender
às funções do produto.
Para que os modelos e os princípios de solução fossem melhor avaliados eles
foram expostos aos pré-requisitos, esses requisitos continham as especificações de custo
de construção, usabilidade, entre outros que foram levados em consideração na escolha da
metodologia utilizada.
Um modelo conceitual foi desenhado a partir dos esboços iniciais, para ter um
modelo mais detalhado a fim de suprir informações sobre dimensões e a forma com que os
mecanismos iriam atuar. Para isso foi utilizada de ferramentas computacionais CAD para
representar a concepção do mecanismo de contagem em um desenho tridimensional
(Figura 10).
Figura 10. Desenho tridimensional feito em software CAD do mecanismo de contagem.
No Projeto Preliminar foram detalhados dimensões e materiais utilizados na
fabricação do protótipo, isso possibilitou um desenvolvimento mais seguro do mecanismo,
pois indicava uma direção em que os processos de construção deveriam seguir.
4.2. Instrumentação
Observa-se na Figura 11 o esquema de instrumentação do protótipo desenvolvido
com os circuitos de como ficaram as ligações com os sensores. A alimentação do sistema
foi feita através de uma bateria selada, de 12V, sendo a placa de aquisição de dados

35
alimentada diretamente no terminal de alimentação, sem a necessidade de um componente
intermediário que alterasse a voltagem de alimentação.
Figura 11. Esquema de ligação entre os sensores e a placa de aquisição de dados.
O sensor encoder utilizado no sistema de medição de distância foi alimentado
diretamente pela placa de aquisição através do pino de 5V disponível.
A fim de tornar a ligação dos sensores com a placa micropocessada mais prático,
um terminal simples composto de placa de fenolite, borns e barras de pino foi elaborado de
maneira a evitar que ocorresse uma incorreta ligação dos fios dos sensores no momento de
montagem do sistema (Figura 12). Isso se fez também para que evitasse o mau contato
durante o uso do equipamento nos ensaios devido à trepidação provocada pelo terreno.
Figura 12. Terminal para ligação dos sensores ao microcontrolador.

36 Na Figura 13 é mostrado como ficou o sistema de aquisição de dados montado na
caixa de instrumentação.
Figura 13. Sistema de aquisição de dados.
4.3. Algoritmo para Aquisição de Dados
Esta etapa foi caracterizada como a implantação do software para o controle das
informações. Na Figura 14 é apresentado o fluxograma dos processos implementados via
software (IDE) para a realização das leituras das informações pela placa microcontroladora.

37
Figura 14. Fluxograma do algoritmo de contagem.
Inicialmente as variáveis iniciais são declaradas e então o programa começa a ser
executado dentro de um laço contínuo. Basicamente funciona da seguinte maneira, caso
ocorra uma variação do estado do pino oriundo do acionamento da chave fim de curso na
porta digital do microcontrolador, são habilitadas condicionais dentro do laço principal que
permite a realização de outros procedimentos de leituras, cálculos e atualizações dos dados
de distância, e de processos que operam como uma correção do sinal recebido, eliminando
contagens involuntárias decorrentes da chave fim de curso com o uso de intervalo de tempo
fixo (delay).

38 Esses intervalos são entendidos como períodos de tempo em que o
microprocessador ignora qualquer sinal oriundo dos sensores, sendo reservado somente
para cobrir o tempo que ocorre o ruído da chave fim de curso. Essas operações se realizam
constantemente em um laço contínuo que é iniciado no momento em que a placa de
aquisição de dados é ligada e conectada com o dispositivo de interface.
4.4. Interface
Uma interface foi desenvolvida para integrar o protótipo. Esta interface foi
desenvolvida em plataforma MATLAB (MathWorks®) versão (R2016b) de modo a
apresentar ao operador as informações decorrentes das leituras instantâneas que se
realizavam (Figura 15). Uma janela de comunicação (A) possuía um espaço que destinava-
se a preencher com a identificação da porta em que a placa microcontrolada estava
conectada ao dispositivo. Uma vez feito isso, e pressionado o botão “Abre” a comunicação
entre placa controladora e o software de interface era estabelecida, possibilitando a
visualização das leituras apresentadas no campo Dados (B). A caixa (C) apresentava os
valores não processados, ou seja, os dados brutos oriundos do microprocessador na
configuração de linha separada por ponto e vírgula. Pressionando o botão “Grava” as
informações da coleta eram salvas em arquivo extensão “.m” que então poderiam ser
analisadas posteriormente.
A vantagem da utilização dessa interface é que ela permitia o uso por diferentes
dispositivos computacionais que admitiam interação com o arduino via porta USB.
Figura 15. Interface desenvolvida para leitura e controle.
A B
C
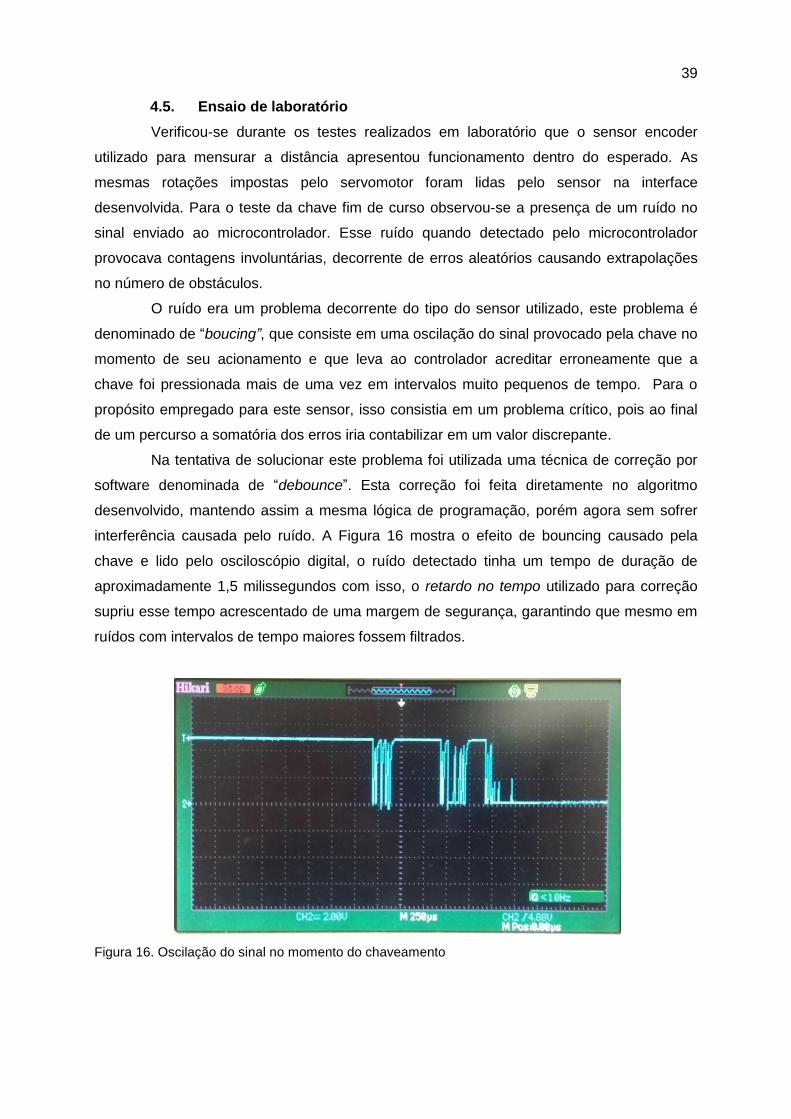
39 4.5. Ensaio de laboratório
Verificou-se durante os testes realizados em laboratório que o sensor encoder
utilizado para mensurar a distância apresentou funcionamento dentro do esperado. As
mesmas rotações impostas pelo servomotor foram lidas pelo sensor na interface
desenvolvida. Para o teste da chave fim de curso observou-se a presença de um ruído no
sinal enviado ao microcontrolador. Esse ruído quando detectado pelo microcontrolador
provocava contagens involuntárias, decorrente de erros aleatórios causando extrapolações
no número de obstáculos.
O ruído era um problema decorrente do tipo do sensor utilizado, este problema é
denominado de “boucing”, que consiste em uma oscilação do sinal provocado pela chave no
momento de seu acionamento e que leva ao controlador acreditar erroneamente que a
chave foi pressionada mais de uma vez em intervalos muito pequenos de tempo. Para o
propósito empregado para este sensor, isso consistia em um problema crítico, pois ao final
de um percurso a somatória dos erros iria contabilizar em um valor discrepante.
Na tentativa de solucionar este problema foi utilizada uma técnica de correção por
software denominada de “debounce”. Esta correção foi feita diretamente no algoritmo
desenvolvido, mantendo assim a mesma lógica de programação, porém agora sem sofrer
interferência causada pelo ruído. A Figura 16 mostra o efeito de bouncing causado pela
chave e lido pelo osciloscópio digital, o ruído detectado tinha um tempo de duração de
aproximadamente 1,5 milissegundos com isso, o retardo no tempo utilizado para correção
supriu esse tempo acrescentado de uma margem de segurança, garantindo que mesmo em
ruídos com intervalos de tempo maiores fossem filtrados.
Figura 16. Oscilação do sinal no momento do chaveamento
40 4.6. Pré-ensaios e Reprojeto
No desenvolvimento deste protótipo, os testes foram de fundamental importância,
pois indicavam quais eram os erros e os motivos da sua causa. Em função de não estar em
período para o cultivo do milho, decidiu-se pela realização de vários testes preliminares em
simulações da cultura. Assim, estes testes acompanharam todo o desenvolvimento do
protótipo e serviram de subsídio para algumas tomadas de decisões ao decorrer do
trabalho.
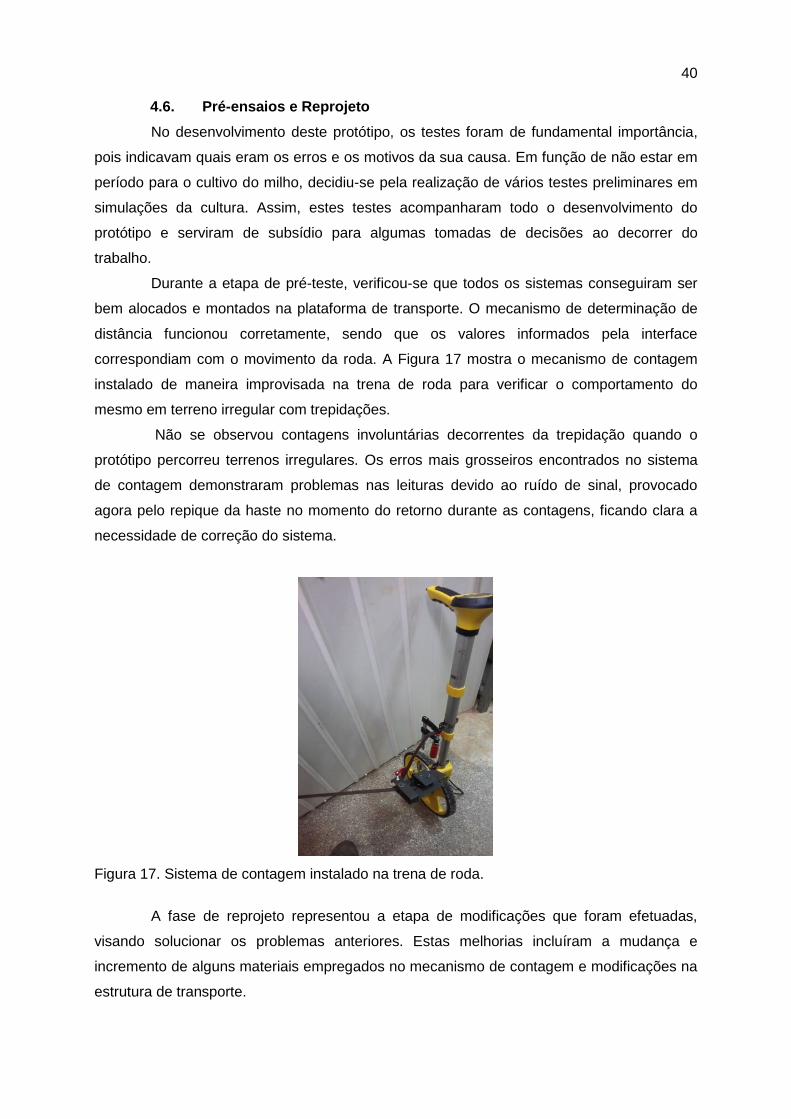
Durante a etapa de pré-teste, verificou-se que todos os sistemas conseguiram ser
bem alocados e montados na plataforma de transporte. O mecanismo de determinação de
distância funcionou corretamente, sendo que os valores informados pela interface
correspondiam com o movimento da roda. A Figura 17 mostra o mecanismo de contagem
instalado de maneira improvisada na trena de roda para verificar o comportamento do
mesmo em terreno irregular com trepidações.
Não se observou contagens involuntárias decorrentes da trepidação quando o
protótipo percorreu terrenos irregulares. Os erros mais grosseiros encontrados no sistema
de contagem demonstraram problemas nas leituras devido ao ruído de sinal, provocado
agora pelo repique da haste no momento do retorno durante as contagens, ficando clara a
necessidade de correção do sistema.
Figura 17. Sistema de contagem instalado na trena de roda.
A fase de reprojeto representou a etapa de modificações que foram efetuadas,
visando solucionar os problemas anteriores. Estas melhorias incluíram a mudança e
incremento de alguns materiais empregados no mecanismo de contagem e modificações na
estrutura de transporte.

41
4.6.1. Estrutura principal
A primeira versão do chassi (Figura 18a), continha apena um braço por onde o
protótipo era conduzido. Porém, logo nos primeiros testes observou-se a dificuldade em
guiar o aparato com apenas uma das mãos. Modificações foram realizadas a tornar mais
fácil o manuseio do protótipo, com isso foram inseridos dois braços metálicos bipartidos,
resolvendo o problema e facilitando o seu uso (Figura 18b).
Figura 18. (a) primeira versão da plataforma de transporte; (b) modificações na plataforma
de transporte.
4.6.2. Mecanismo de contagem
Para o mecanismo de contagem verificou-se a dificuldade na haste em retornar a
sua posição normal após tocar o obstáculo. A substituição da haste metálica (Figura 19a)
por uma de material como o tecnil (Figura 19b), se fez satisfatória, pois o material
apresentou resistência aceitável para resistir aos esforços solicitados, além de ser mais
leve, fator que foi levado em consideração, pois a inércia apresentada pela haste metálica
dificultava muito o seu movimento rápido de retorno. O tamanho da haste útil para que
ocorresse o contato com as plantas foi de 28 centímetros.
Figura 19. Modificações no mecanismo de contagem; (a) haste metálica; (b) haste de tecnil.
42
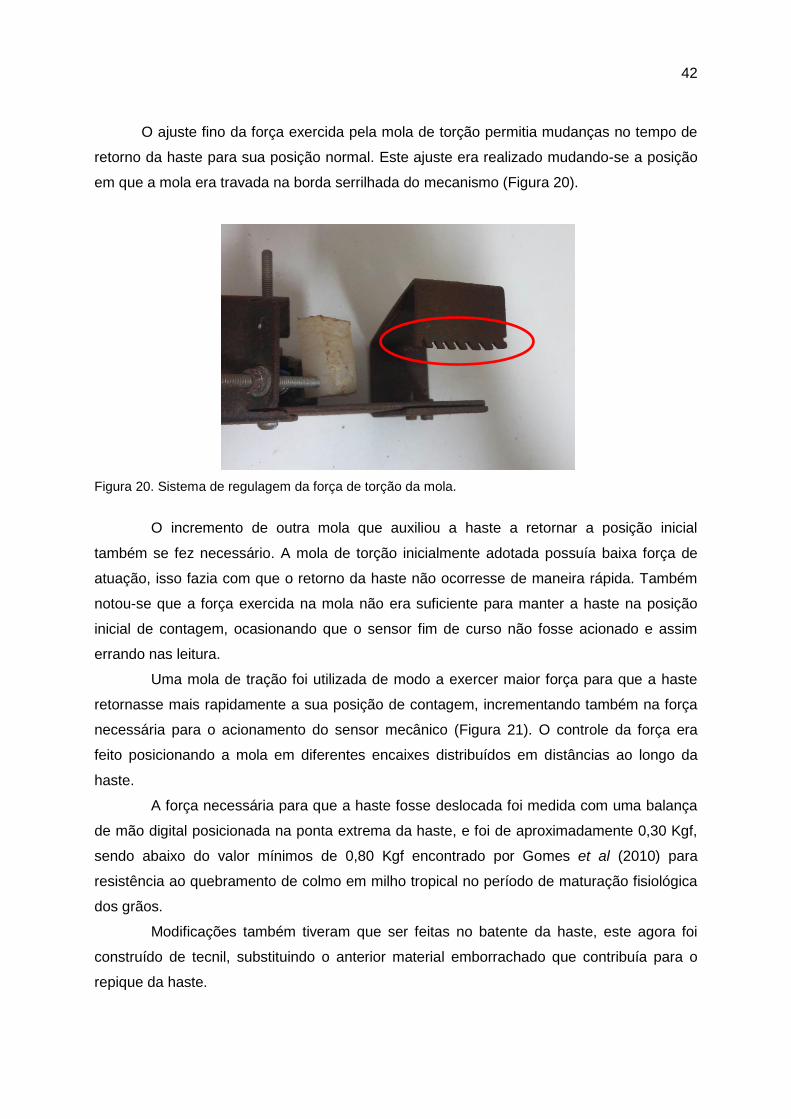
O ajuste fino da força exercida pela mola de torção permitia mudanças no tempo de
retorno da haste para sua posição normal. Este ajuste era realizado mudando-se a posição
em que a mola era travada na borda serrilhada do mecanismo (Figura 20).
Figura 20. Sistema de regulagem da força de torção da mola.
O incremento de outra mola que auxiliou a haste a retornar a posição inicial
também se fez necessário. A mola de torção inicialmente adotada possuía baixa força de
atuação, isso fazia com que o retorno da haste não ocorresse de maneira rápida. Também
notou-se que a força exercida na mola não era suficiente para manter a haste na posição
inicial de contagem, ocasionando que o sensor fim de curso não fosse acionado e assim
errando nas leitura.
Uma mola de tração foi utilizada de modo a exercer maior força para que a haste
retornasse mais rapidamente a sua posição de contagem, incrementando também na força
necessária para o acionamento do sensor mecânico (Figura 21). O controle da força era
feito posicionando a mola em diferentes encaixes distribuídos em distâncias ao longo da
haste.
A força necessária para que a haste fosse deslocada foi medida com uma balança
de mão digital posicionada na ponta extrema da haste, e foi de aproximadamente 0,30 Kgf,
sendo abaixo do valor mínimos de 0,80 Kgf encontrado por Gomes et al (2010) para
resistência ao quebramento de colmo em milho tropical no período de maturação fisiológica
dos grãos.
Modificações também tiveram que ser feitas no batente da haste, este agora foi
construído de tecnil, substituindo o anterior material emborrachado que contribuía para o
repique da haste.
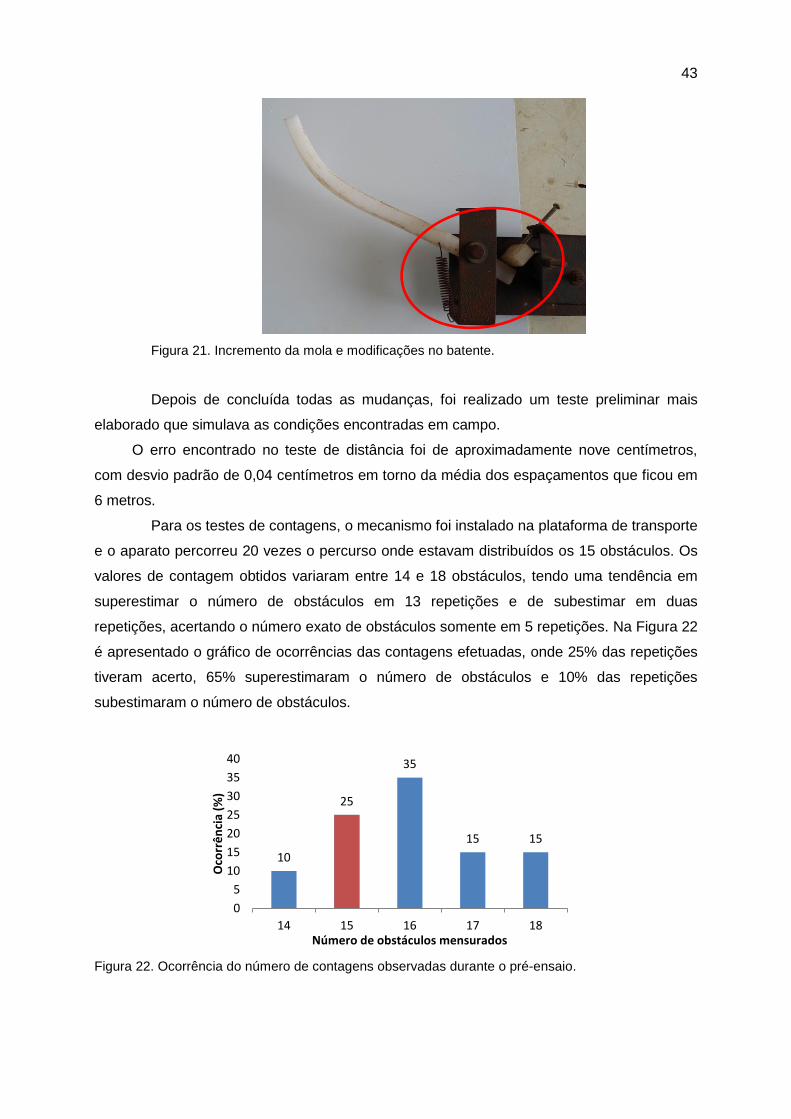
43
Figura 21. Incremento da mola e modificações no batente.
Depois de concluída todas as mudanças, foi realizado um teste preliminar mais
elaborado que simulava as condições encontradas em campo.
O erro encontrado no teste de distância foi de aproximadamente nove centímetros,
com desvio padrão de 0,04 centímetros em torno da média dos espaçamentos que ficou em
6 metros.
Para os testes de contagens, o mecanismo foi instalado na plataforma de transporte
e o aparato percorreu 20 vezes o percurso onde estavam distribuídos os 15 obstáculos. Os
valores de contagem obtidos variaram entre 14 e 18 obstáculos, tendo uma tendência em
superestimar o número de obstáculos em 13 repetições e de subestimar em duas
repetições, acertando o número exato de obstáculos somente em 5 repetições. Na Figura 22
é apresentado o gráfico de ocorrências das contagens efetuadas, onde 25% das repetições
tiveram acerto, 65% superestimaram o número de obstáculos e 10% das repetições
subestimaram o número de obstáculos.
Figura 22. Ocorrência do número de contagens observadas durante o pré-ensaio.
10
25
35
15 15
0
5
10
15
20
25
30
35
40
14 15 16 17 18
Oco
rrê
nci
a (%
)
Número de obstáculos mensurados
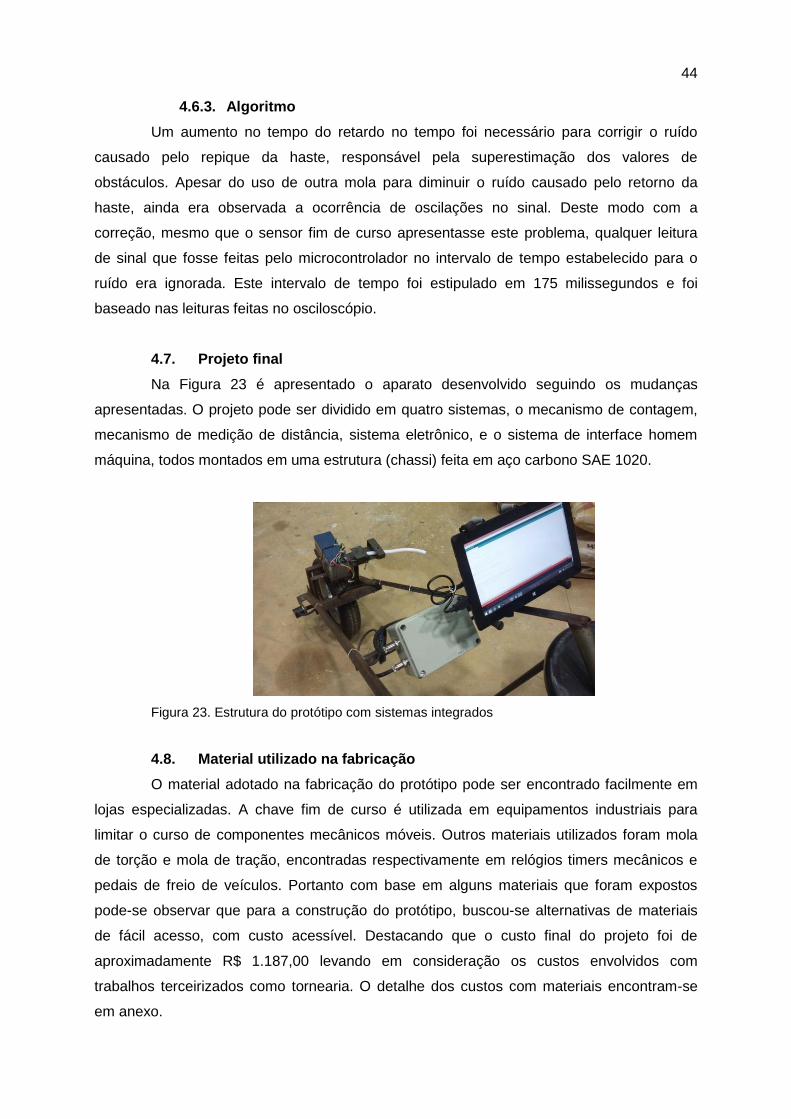
44
4.6.3. Algoritmo
Um aumento no tempo do retardo no tempo foi necessário para corrigir o ruído
causado pelo repique da haste, responsável pela superestimação dos valores de
obstáculos. Apesar do uso de outra mola para diminuir o ruído causado pelo retorno da
haste, ainda era observada a ocorrência de oscilações no sinal. Deste modo com a
correção, mesmo que o sensor fim de curso apresentasse este problema, qualquer leitura
de sinal que fosse feitas pelo microcontrolador no intervalo de tempo estabelecido para o
ruído era ignorada. Este intervalo de tempo foi estipulado em 175 milissegundos e foi
baseado nas leituras feitas no osciloscópio.
4.7. Projeto final
Na Figura 23 é apresentado o aparato desenvolvido seguindo os mudanças
apresentadas. O projeto pode ser dividido em quatro sistemas, o mecanismo de contagem,
mecanismo de medição de distância, sistema eletrônico, e o sistema de interface homem
máquina, todos montados em uma estrutura (chassi) feita em aço carbono SAE 1020.
Figura 23. Estrutura do protótipo com sistemas integrados
4.8. Material utilizado na fabricação
O material adotado na fabricação do protótipo pode ser encontrado facilmente em
lojas especializadas. A chave fim de curso é utilizada em equipamentos industriais para
limitar o curso de componentes mecânicos móveis. Outros materiais utilizados foram mola
de torção e mola de tração, encontradas respectivamente em relógios timers mecânicos e
pedais de freio de veículos. Portanto com base em alguns materiais que foram expostos
pode-se observar que para a construção do protótipo, buscou-se alternativas de materiais
de fácil acesso, com custo acessível. Destacando que o custo final do projeto foi de
aproximadamente R$ 1.187,00 levando em consideração os custos envolvidos com
trabalhos terceirizados como tornearia. O detalhe dos custos com materiais encontram-se
em anexo.
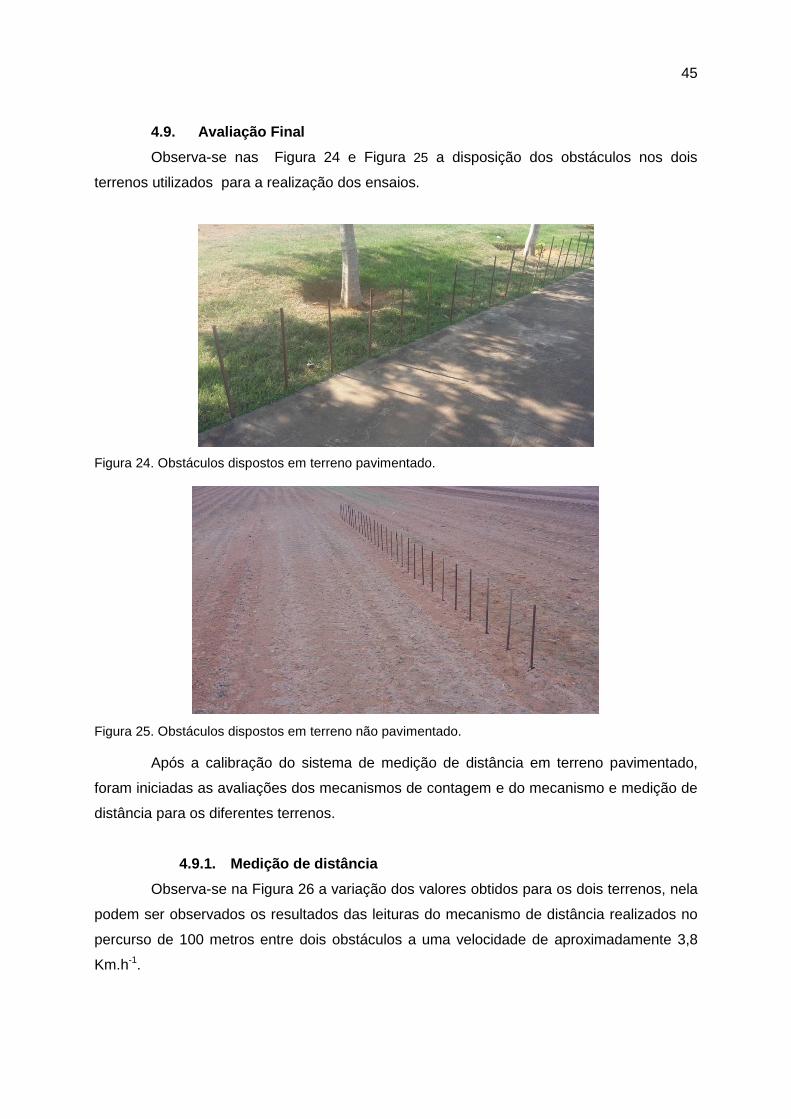
45
4.9. Avaliação Final
Observa-se nas Figura 24 e Figura 25 a disposição dos obstáculos nos dois
terrenos utilizados para a realização dos ensaios.
Figura 24. Obstáculos dispostos em terreno pavimentado.
Figura 25. Obstáculos dispostos em terreno não pavimentado.
Após a calibração do sistema de medição de distância em terreno pavimentado,
foram iniciadas as avaliações dos mecanismos de contagem e do mecanismo e medição de
distância para os diferentes terrenos.
4.9.1. Medição de distância
Observa-se na Figura 26 a variação dos valores obtidos para os dois terrenos, nela
podem ser observados os resultados das leituras do mecanismo de distância realizados no
percurso de 100 metros entre dois obstáculos a uma velocidade de aproximadamente 3,8
Km.h-1.
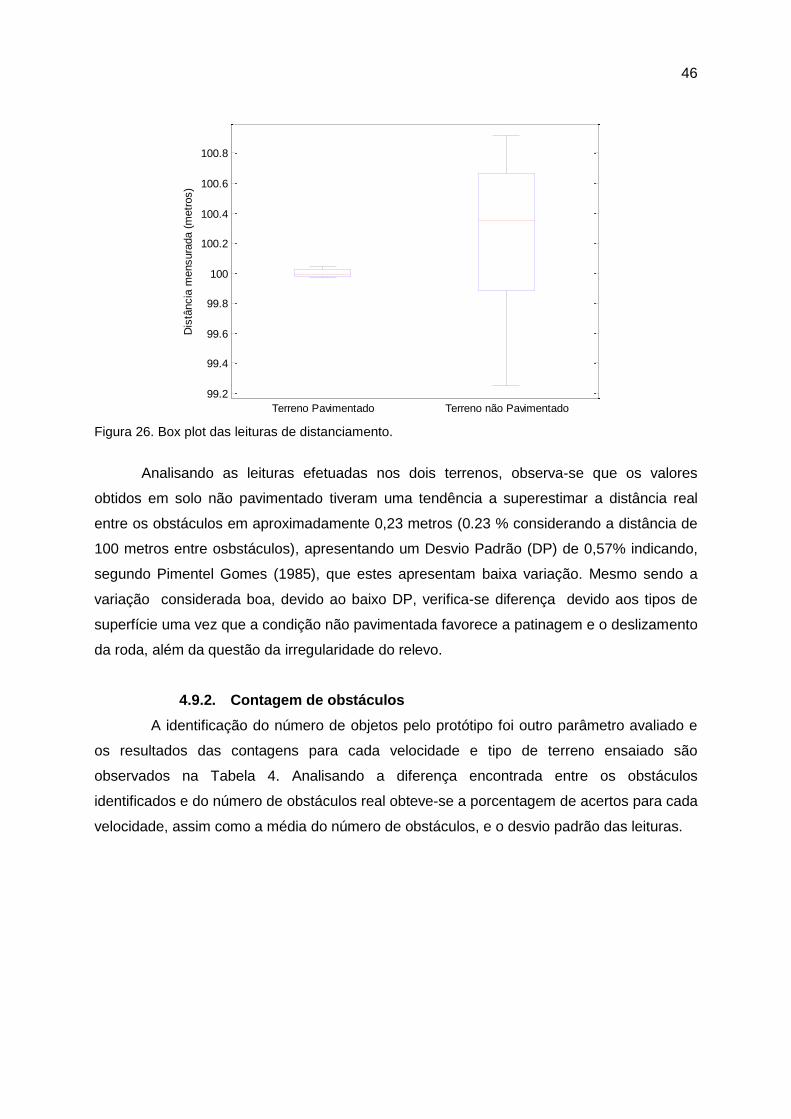
46
Figura 26. Box plot das leituras de distanciamento.
Analisando as leituras efetuadas nos dois terrenos, observa-se que os valores
obtidos em solo não pavimentado tiveram uma tendência a superestimar a distância real
entre os obstáculos em aproximadamente 0,23 metros (0.23 % considerando a distância de
100 metros entre osbstáculos), apresentando um Desvio Padrão (DP) de 0,57% indicando,
segundo Pimentel Gomes (1985), que estes apresentam baixa variação. Mesmo sendo a
variação considerada boa, devido ao baixo DP, verifica-se diferença devido aos tipos de
superfície uma vez que a condição não pavimentada favorece a patinagem e o deslizamento
da roda, além da questão da irregularidade do relevo.
4.9.2. Contagem de obstáculos
A identificação do número de objetos pelo protótipo foi outro parâmetro avaliado e
os resultados das contagens para cada velocidade e tipo de terreno ensaiado são
observados na Tabela 4. Analisando a diferença encontrada entre os obstáculos
identificados e do número de obstáculos real obteve-se a porcentagem de acertos para cada
velocidade, assim como a média do número de obstáculos, e o desvio padrão das leituras.
99.2
99.4
99.6
99.8
100
100.2
100.4
100.6
100.8
Terreno Pavimentado Terreno não Pavimentado
Dis
tância
mensura
da (
metr
os)
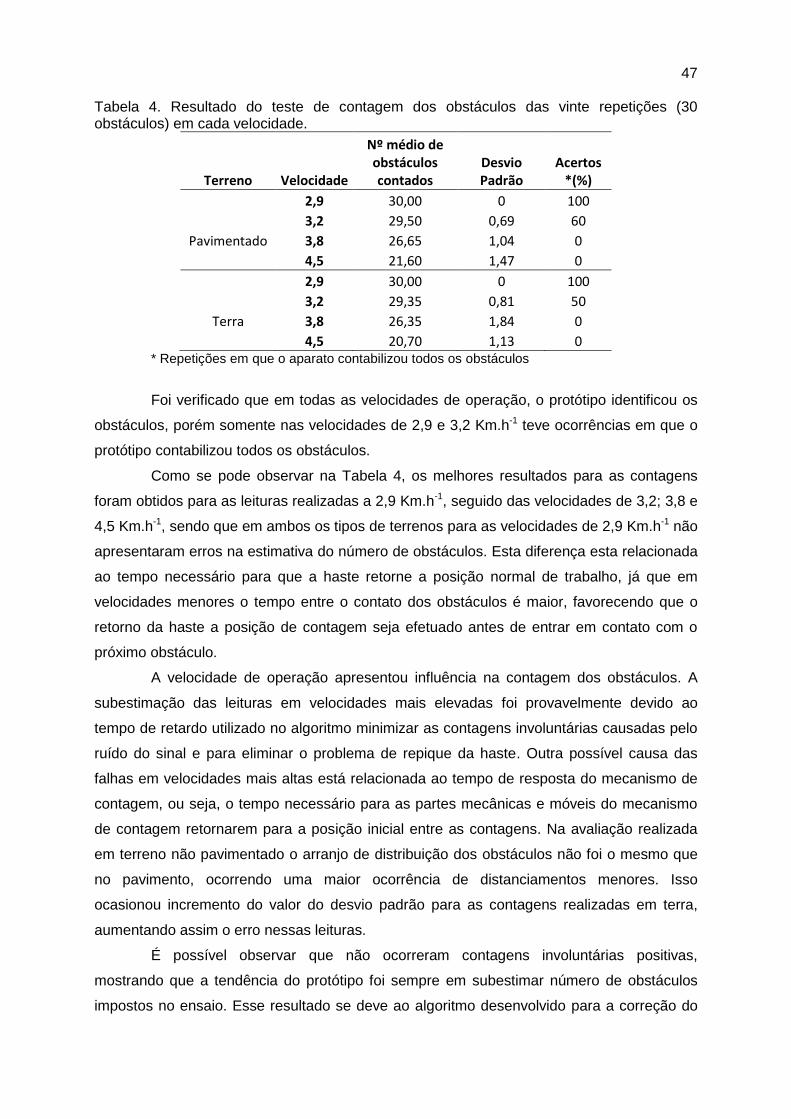
47
Tabela 4. Resultado do teste de contagem dos obstáculos das vinte repetições (30 obstáculos) em cada velocidade.
Terreno Velocidade
Nº médio de obstáculos contados
Desvio Padrão
Acertos *(%)
2,9 30,00 0 100
3,2 29,50 0,69 60
Pavimentado 3,8 26,65 1,04 0
4,5 21,60 1,47 0
2,9 30,00 0 100
3,2 29,35 0,81 50
Terra 3,8 26,35 1,84 0
4,5 20,70 1,13 0
* Repetições em que o aparato contabilizou todos os obstáculos
Foi verificado que em todas as velocidades de operação, o protótipo identificou os
obstáculos, porém somente nas velocidades de 2,9 e 3,2 Km.h-1 teve ocorrências em que o
protótipo contabilizou todos os obstáculos.
Como se pode observar na Tabela 4, os melhores resultados para as contagens
foram obtidos para as leituras realizadas a 2,9 Km.h-1, seguido das velocidades de 3,2; 3,8 e
4,5 Km.h-1, sendo que em ambos os tipos de terrenos para as velocidades de 2,9 Km.h-1 não
apresentaram erros na estimativa do número de obstáculos. Esta diferença esta relacionada
ao tempo necessário para que a haste retorne a posição normal de trabalho, já que em
velocidades menores o tempo entre o contato dos obstáculos é maior, favorecendo que o
retorno da haste a posição de contagem seja efetuado antes de entrar em contato com o
próximo obstáculo.
A velocidade de operação apresentou influência na contagem dos obstáculos. A
subestimação das leituras em velocidades mais elevadas foi provavelmente devido ao
tempo de retardo utilizado no algoritmo minimizar as contagens involuntárias causadas pelo
ruído do sinal e para eliminar o problema de repique da haste. Outra possível causa das
falhas em velocidades mais altas está relacionada ao tempo de resposta do mecanismo de
contagem, ou seja, o tempo necessário para as partes mecânicas e móveis do mecanismo
de contagem retornarem para a posição inicial entre as contagens. Na avaliação realizada
em terreno não pavimentado o arranjo de distribuição dos obstáculos não foi o mesmo que
no pavimento, ocorrendo uma maior ocorrência de distanciamentos menores. Isso
ocasionou incremento do valor do desvio padrão para as contagens realizadas em terra,
aumentando assim o erro nessas leituras.
É possível observar que não ocorreram contagens involuntárias positivas,
mostrando que a tendência do protótipo foi sempre em subestimar número de obstáculos
impostos no ensaio. Esse resultado se deve ao algoritmo desenvolvido para a correção do
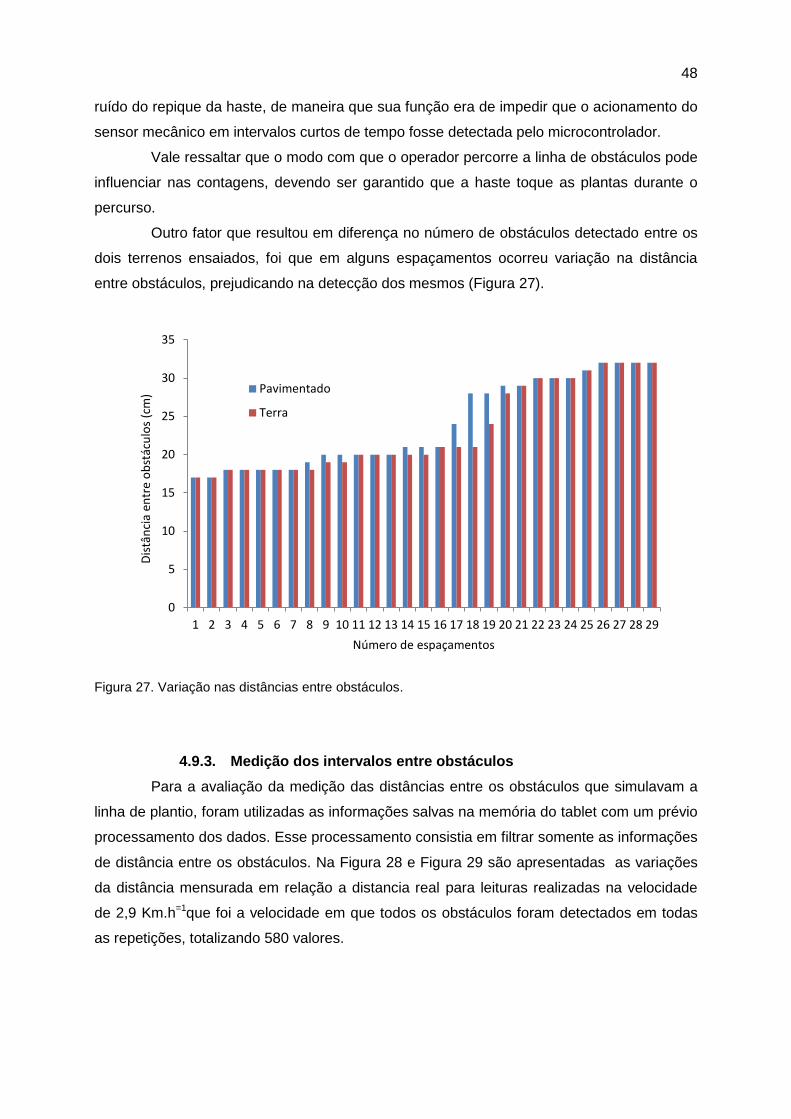
48
ruído do repique da haste, de maneira que sua função era de impedir que o acionamento do
sensor mecânico em intervalos curtos de tempo fosse detectada pelo microcontrolador.
Vale ressaltar que o modo com que o operador percorre a linha de obstáculos pode
influenciar nas contagens, devendo ser garantido que a haste toque as plantas durante o
percurso.
Outro fator que resultou em diferença no número de obstáculos detectado entre os
dois terrenos ensaiados, foi que em alguns espaçamentos ocorreu variação na distância
entre obstáculos, prejudicando na detecção dos mesmos (Figura 27).
Figura 27. Variação nas distâncias entre obstáculos.
4.9.3. Medição dos intervalos entre obstáculos
Para a avaliação da medição das distâncias entre os obstáculos que simulavam a
linha de plantio, foram utilizadas as informações salvas na memória do tablet com um prévio
processamento dos dados. Esse processamento consistia em filtrar somente as informações
de distância entre os obstáculos. Na Figura 28 e Figura 29 são apresentadas as variações
da distância mensurada em relação a distancia real para leituras realizadas na velocidade
de 2,9 Km.h=1que foi a velocidade em que todos os obstáculos foram detectados em todas
as repetições, totalizando 580 valores.
0
5
10
15
20
25
30
35
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Dis
tân
cia
entr
e o
bst
ácu
los
(cm
)
Número de espaçamentos
Pavimentado
Terra
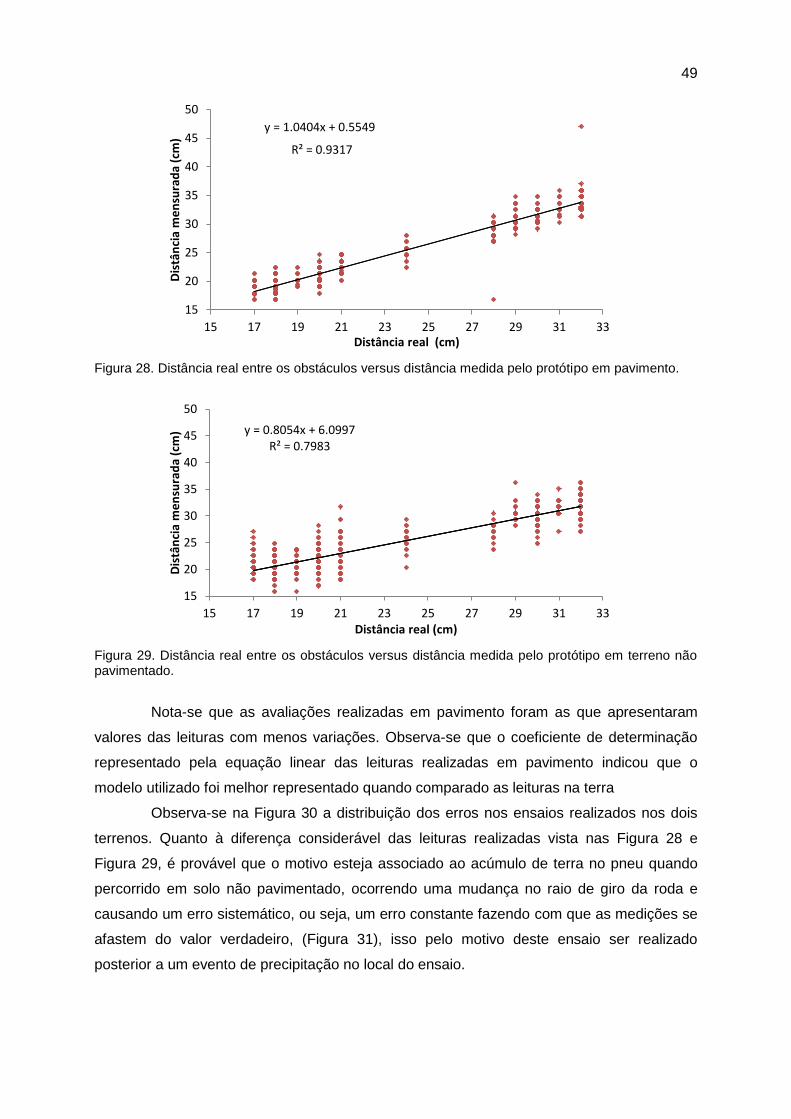
49
Figura 28. Distância real entre os obstáculos versus distância medida pelo protótipo em pavimento.
Figura 29. Distância real entre os obstáculos versus distância medida pelo protótipo em terreno não pavimentado.
Nota-se que as avaliações realizadas em pavimento foram as que apresentaram
valores das leituras com menos variações. Observa-se que o coeficiente de determinação
representado pela equação linear das leituras realizadas em pavimento indicou que o
modelo utilizado foi melhor representado quando comparado as leituras na terra
Observa-se na Figura 30 a distribuição dos erros nos ensaios realizados nos dois
terrenos. Quanto à diferença considerável das leituras realizadas vista nas Figura 28 e
Figura 29, é provável que o motivo esteja associado ao acúmulo de terra no pneu quando
percorrido em solo não pavimentado, ocorrendo uma mudança no raio de giro da roda e
causando um erro sistemático, ou seja, um erro constante fazendo com que as medições se
afastem do valor verdadeiro, (Figura 31), isso pelo motivo deste ensaio ser realizado
posterior a um evento de precipitação no local do ensaio.
R² = 0.9317
y = 1.0404x + 0.5549
15
20
25
30
35
40
45
50
15 17 19 21 23 25 27 29 31 33
Dis
tân
cia
me
nsu
rad
a (c
m)
Distância real (cm)
y = 0.8054x + 6.0997 R² = 0.7983
15
20
25
30
35
40
45
50
15 17 19 21 23 25 27 29 31 33
Dis
tân
cia
me
nsu
rad
a (c
m)
Distância real (cm)

50
Figura 30. Variação do erro das leituras de distância entre obstáculos para a configuração de obstáculos distanciados aleatoriamente.
Figura 31. Detalhe do acúmulo de terra no pneu que possivelmente causou aumento nos valores das leituras de distancia entre obstáculos espaçados aleatoriamente.
Após as avaliações anteriores, outra avaliação foi realizada para verificar a
confiabilidade das leituras. Na Figura 32 é apresentado o gráfico das leituras de distâncias
entre os obstáculos que foram igualmente espaçados em intervalos de 30 centímetros.
Neste ensaio a velocidade de deslocamento do protótipo foi de 3,2 Km.h-1, e não houve
interferência no acumulo de terra.
-40
-30
-20
-10
0
10
20
30
40
50
60
Solo Pavimentado Solo não Pavimentado
Err
o (
%)
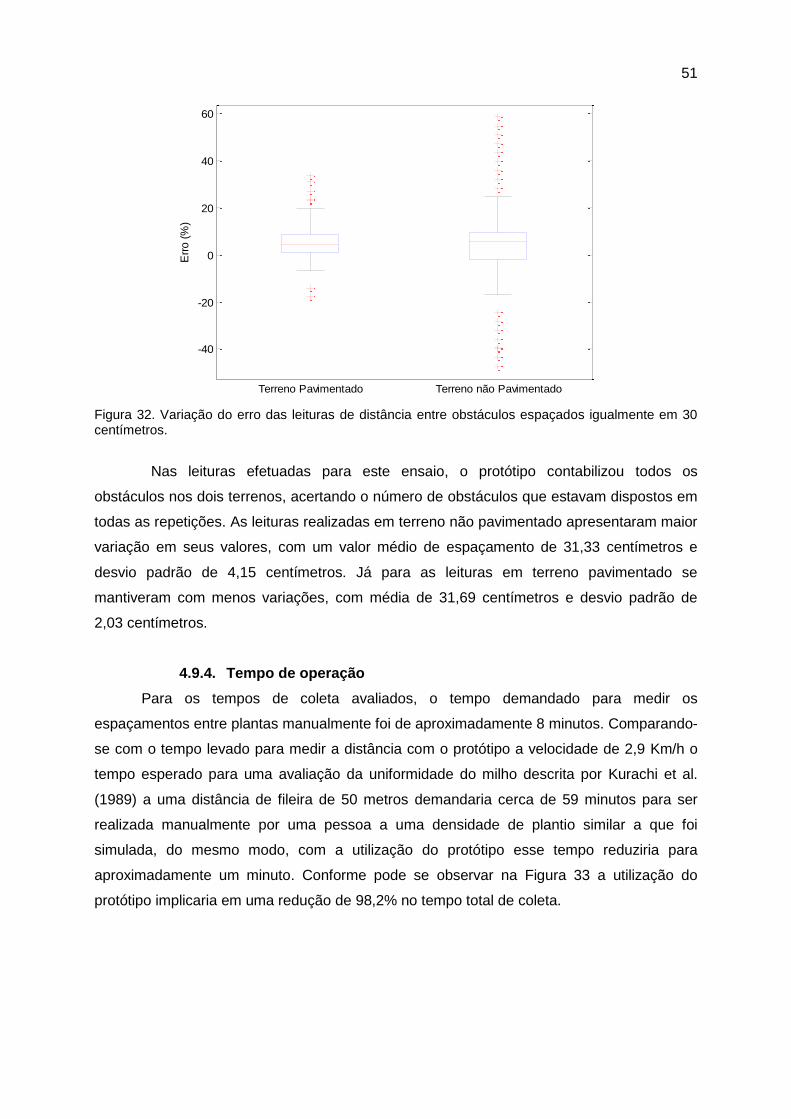
51
Figura 32. Variação do erro das leituras de distância entre obstáculos espaçados igualmente em 30 centímetros.
Nas leituras efetuadas para este ensaio, o protótipo contabilizou todos os
obstáculos nos dois terrenos, acertando o número de obstáculos que estavam dispostos em
todas as repetições. As leituras realizadas em terreno não pavimentado apresentaram maior
variação em seus valores, com um valor médio de espaçamento de 31,33 centímetros e
desvio padrão de 4,15 centímetros. Já para as leituras em terreno pavimentado se
mantiveram com menos variações, com média de 31,69 centímetros e desvio padrão de
2,03 centímetros.
4.9.4. Tempo de operação
Para os tempos de coleta avaliados, o tempo demandado para medir os
espaçamentos entre plantas manualmente foi de aproximadamente 8 minutos. Comparando-
se com o tempo levado para medir a distância com o protótipo a velocidade de 2,9 Km/h o
tempo esperado para uma avaliação da uniformidade do milho descrita por Kurachi et al.
(1989) a uma distância de fileira de 50 metros demandaria cerca de 59 minutos para ser
realizada manualmente por uma pessoa a uma densidade de plantio similar a que foi
simulada, do mesmo modo, com a utilização do protótipo esse tempo reduziria para
aproximadamente um minuto. Conforme pode se observar na Figura 33 a utilização do
protótipo implicaria em uma redução de 98,2% no tempo total de coleta.
-40
-20
0
20
40
60
Terreno Pavimentado Terreno não Pavimentado
Err
o (
%)

52
Figura 33. Comparação dos tempos totais entre medição manual e com o uso do protótipo na velocidade de 2,9 km.h
-1 para uma distância de cinquenta metros.
0
10
20
30
40
50
60
70
Coleta manual Uso do protótipo
Tem
po
(m
inu
tos)
53
5. CONCLUSÕES
O protótipo atendeu o objetivo do trabalho, sendo possível identificar o número de
obstáculos que simulavam a linha de semeadura da cultura do milho, e também mensurar o
distanciamento entre obstáculos, possibilitando a estimativa de densidade populacional. O
desempenho do sistema foi satisfatório para velocidade de até a 2,9 Km.h-1. Para
espaçamento entre plantas iguais a 30 centímetros foi possível identificar o número exato de
obstáculos quando operado a velocidades de até 3,2 Km.h-1.
O tempo de resposta dinâmico do mecanismo de contagem foi fator limitante na
velocidade de operação, juntamente com o tempo de retardo utilizado para corrigir o ruído
do repique da haste.
A distância mínima para a detecção de obstáculos foi de 17 cm, devido ao fato de
que distancias menores no espaçamento de obstáculos ocasionavam falhas na contagem,
causando erros de leitura para qualquer velocidade de operação, impossibilitando o
protótipo de identificar a contagem de duplos quando fosse utilizado para a contagem de
plantas de milho.
Durante a avaliação de campo, o uso do protótipo apresentou menor tempo para
medir o distanciamento entre obstáculos quando comparado a coleta manual.
O protótipo pode ser uma ferramenta para ser utilizado em campos de pesquisa,
onde ocorre a necessidade da coleta de grandes extensões de linhas sem que a velocidade
de operação seja um agravante nas leituras, poupando tempo e mão de obra.
54
6. SUGESTÕES PARA TRABALHOS FUTUROS
Algumas sugestões podem ser feitas para uma futura versão do aparato e futuros
trabalhos que podem ser conduzidos, sendo:
Desenvolver uma equação de ajuste para as distâncias realizadas em terra para
obter valores mais precisos, reduzindo o efeito da irregularidade do terreno e do
deslizamento causado.Utilizar configuração diferente de haste de maneira a diminuir os
erros de contagem a velocidades mais elevadas e melhorar o tempo de resposta das partes
mecânicas
Testar o protótipo diretamente na cultura do milho, e avaliar o desempenho nas
situações reais que a planta se encontra.
55
7. REFERÊNCIAS BIBLIOGRÁFICAS
ALMEIDA, M. L.; MEROTTO JUNIOR, A.; SANGOI, L.; ENDER, M.; GUIGDOLIN, A. F. Incremento na densidade de plantas: uma alternativa para aumentar o rendimento de grãos de milho em regiões de curta estação estival de crescimento. Ciência Rural, Santa Maria, v. 30, n. 1. p. 23 - 29,jan./mar. 2000. ANTUNIASSI, Ulisses Rocha; GADANHA JR, C. D. Aplicação localizada de produtos fitossanitários. Em: BÓREM, A. et al., Agricultura de Presisão, p. 182-202, 2000. ARGENTA, Gilber; SILVA, Paulo Regis Ferreira da; SANGOI, Luís. Arranjo de plantas em milho: análise do estado-da-arte. Ciência rural. Santa Maria. Vol. 31, n. 6 (nov./dez. 2001), p. 1075-1084, 2001. BUSO, WILIAN H. D; FIRMIANO, R. S; SILVA, L. B; SOUZA, D. G; ARNHOLD, E. Influência da Densidade Populacional e do Espaçamento nos Parâmetros Agronômicos e Produtivos na Cultura do Milho. 29º Congresso nacional de milho e sorgo. Aguas de Lindóia, 26 - 30 Agosto 2012. CABRAL, Paulo. Erros e incertezas nas medições. sítio da Internet, disponível no endereço http://www. peb. ufrj. br/cursos/COB783/ErrosIncertezas. pdf, último acesso em Agosto/2016, 2004. CONAB - COMPANHIA NACIONAL DE ABASTECIMENTO. Acompanhamento da safra brasileira de grãos: V.3 - N. 12- Décimo Segundo levantamento. Brasília. 182p. Setembro-2016. DA LUZ, Wilmar Cório. Combinação dos tratamentos biológico e químico de semente de milho. Fitopatol. bras, v. 28, p. 1, 2003. SILVA, Alexandre Ferreira da; NETO, Miguel Marques Gontijo; DESSAUNE, Flávio. AVALIAÇÃO DE DESEMPENHO DE CULTIVARES DE MILHO SAFRINHA NO MUNICÍPIO DE SINOP-MT. XII Seminário Nacianal de Milho Safrinha. Novembro 2013. DEMÉTRIO, Claudia Sousa et al. Desempenho de híbridos de milho submetidos a diferentes espaçamentos e densidades populacionais. Pesquisa Agropecuária Brasileira, v. 43, n. 12, p. 1691-1697, 2008. EASTON, D.T. and Easton, D. J. Device to measure and provide data for plant population and spacing variability. U.S. Patent No. 5,568,405. 1996. EMBRAPA. Cultivo do milho. 7ª edição. Embrapa Milho e Sorgo. Set. 2011. Disponível em: <http://www.cnpms.embrapa.br/publicacoes/milho_7_ed/mercado.htm>. Acesso em 14 Maio 2016. EMBRAPA. Cultivo do Milho. Sistemas de Produção: Milho e Sorgo, Versão Eletrônica - 6 ª edição Set./2010. Disponível em: <http://www.cnpms.embrapa.br/publicacoes/milho_6_ed/plantio.htm>. Acesso em: 11 Maio de 2016. FIESP. Informativo Deagro. Safra Mundial de Milho 2016/17 - 5º Levantamento do USDA. 1p. Setembro 2016.

56
GOMES, Luiz Savelli et al. Resistência ao acamamento de plantas e ao quebramento do colmo em milho tropical. Pesquisa Agropecuária Brasileira, v. 45, n. 2, p. 140-145, 2010. HUMMEL, J. W. et al. SENSING CORN POPULATION--ANOTHER VARIABLE IN THE YIELD EQUATION. In: InfoAg Conference. 2001. INSTITUO NACIONAL DE METROLOGIA, QUALIDADE E TECNOLOGIA; OLIVEIRA, J. C. V. de. Vocabulário Internacional de Metrologia: conceitos fundamentais e gerais e termos associados. Rio de Janeiro: Inmetro, 2009. KURACHI, Sérgio Augusto Hiroaki et al. Avaliação tecnológica de semeadoras e/ou adubadoras: tratamento de dados de ensaios e regularidade de distribuição longitudinal de sementes. Bragantia, v. 48, n. 2, p. 249-262, 1989. LI, H.; WORLEY, S. K.; WILKERSON, J. B. Design and optimization of a biomass proximity sensor. Transactions of the ASABE, v. 52, n. 5, p. 1441-1452, 2009. LIMA JUNIOR, P. et al. O laboratório de mecânica: Fundamentos de Metrologia. Porto Alegre: IF-UFRGS, 2012. LUCK, Joe D.; PITLA, Santosh K.; SHEARER, Scott A. Sensor ranging technique for determining corn plant population. In: 2008 Providence, Rhode Island, June 29–July 2, 2008. American Society of Agricultural and Biological Engineers, p. 1. 2008. MAPA. Boletim Técnico. Agricultura de Precisão. BINAGRI. Brasília, n° 2, 36 p. 2011. MAPA. PROJEÇÕES DO AGRONEGÓCIO. Brasília. Biblioteca Nacional de Agricultura. Jun. 2013. 4. ed. 96p. Disponível em: <http://www.agricultura.gov.br/arq_editor/file/Ministerio/gestao/projecao.pdf>. Acesso em 09 Maio 2016. MEROTTO JUNIOR, Aldo; ALMEIDA, Milton Luiz de; FUCHS, Orlando. Aumento no rendimento de grãos de milho através do aumento da população de plantas. Ciencia Rural. Santa Maria. vol. 27, n. 4 (out./dez. 1997), p. 549-554, 1997. Ministério da Agricultura, Pecuária e Abastecimento (MAPA). CULTIVO DO MILHO Plantio, espaçamento, densidade, quantidade de sementes. Comunicado técnico 46 ISSN 1679-0162, Sete Lagoas, MG. Dezembro, 2002. MOLIN, JOSÉ PAULO. Definição de unidades de manejo a partir de mapas de produtividade. Engenharia Agrícola, v. 22, n. 1, p. 83-92, 2002. MUDSTOCK, C. M. Efeitos de espacamentos entre linhas de populacoes de plantas em milho (Zea mays) de tipo precoce. Pesquisa agropecuaria brasileira, 1978. PIMENTEL, G., Curso de Estatística Experimental, Piracicaba-SP. ESALQ/USP, 1985. QUEIROZ, CAROLINA APARECIDA DE SOUZA; ANTUNIASSI, ULISSES ROCHA. AVALIAÇÃO DE UM SENSOR DE DETECÇÃO DE PLANTAS DANINHAS POR ANÁLISE DE IMAGENS1. Botucatu, vol. 21, n.4, p. 1-11, 2006. QUIRÓS, Juan; TAVARES, Tiago R; MARTELLO, Maurício. Contagem de plantas de dendê (Elaeis guineensis) a partir de imagens multiespectrais obtidas utilizando VANT. X SBIAGRO, 21-23 Outubro 2015.
57
RESENDE, SÉRGIO GERALDO DE; VON PINHO, RENZO GARCIA; VASCONCELOS, RAMON CORREA DE. Influência do espaçamento entre linhas e da densidade de plantio no desempenho de cultivares de milho. Revista Brasileira de Milho e Sorgo, v. 2, n. 03, 2003. ROMANO, Leonardo Nabaes et al. Modelo de referência para o processo de desenvolvimento de máquinas agrícolas.pág,11. 2003. SANGOI, Luis et al. Rendimento de grãos, produção e distribuição de massa seca de híbridos de milho em função do aumento da densidade de plantas. Current Agricultural Science and Technology, v. 11, n. 1, 2012. SATTLER, A. et al. Avaliação do desempenho de semeadoras de precisão em plantio direto de milho. Passo Fundo, v. 1, n. 33, p. 27, 1996. SHI, Yeyin et al. Automatic corn plant location and spacing measurement using laser line-scan technique. Precision Agriculture, v. 14, n. 5, p. 478-494, 2013. SHRESTHA, Dev Sagar; Development of a machine vision system for corn plant population, spacing and height measurement. 2004. SHRESTHA, Dev Sagar; STEWARD, Brian L. Automatic corn plant population measurement using machine vision. American Society of Agricultural Engineers, v. 46, n. 2, p. 559, 2003. THORP, Kelly R. et al. Using aerial hyperspectral remote sensing imagery to estimate corn plant stand density. Transactions of the ASABE, v. 51, n. 1, p. 311-320, 2007. VIAN, André Luis et al. ESTIMATIVA DA POPULAÇÃO DE PLANTAS E POTENCIAL PRODUTIVO DA CULTURA DO MILHO ATRAVÉS DE SENSOR ÓPTICO DE VEGETAÇÃO. ConBAP, Goiânia, 2016. VIEIRA FILHO, José Eustáquio Ribeiro; VIEIRA, ACP. Panorama das inovações na pesquisa agrícola no Brasil: o sistema de propriedade intelectual. Revista Radar n, v. 24. n.1, 2012. WENDLING, Marcelo. Sensores. Universidade Estadual Paulista- UNESP, v2. 2010.

58
ANEXO A
Detalhe dos custos e material para construção.
Lista de Material e Custo
Item Unidade Quantidade Preço Unitário (R$) Valor Total (R$)
Roda Carriola Unid. 1 150,00 150,00
Metal Kg 8 19,00 240,00
Rolamentos e Mancais Unid. 2 42,00 84,00
Microcontrolador Unid. 1 150 150
Chave fim de curso Unid. 1 8,00 8,00
Bateria Unid. 1 130 130
Componentes eletrônicos Unid. 1 35,00 35,00
Sensor Encoder Unid. 1 412,00 412,00
Parafusos e arruelas Unid. 1 20,00 20,00
Caixa de instrumentação Unid. 1 26,00 26,00
Serviços de terceiros (Tornearia) Hora 7 60,00 420,00
TOTAL
1.625,00

59
ANEXO B
Algoritmo Desenvolvido
/* Rodrigo S. Zandonadi Wagner Z. Ferrari Algoritmo conta plantas */ String versao = "versao IX - 9"; #include "Arduino.h" #include <digitalWriteFast.h> #define Rr 0.18 // Raio da Giro da roda int ct_it = 0; int it_ma = 42; long tem_i = 0; long tem_f = 0; float dis_i = 0; float dis_f = 0; long d_tem= 0; float d_dis = 0; float rev_i = 0; float rev_f = 0; float d_rev = 0; float rpm = 0; float kph = 0; /// VARIAVEIS PARA CALCULO DA REVOLUÇÃO, E VELOCIDADE (ANGULAR E LINEAR)//// long l_rev = 0; long d_tick = 0; long rev_par = 0; float f_rev = 0; float dis = 0; float Kdis = 0; float f_revi = 0; float f_revf = 0; float f_drev = 0; long ti = 0; long tf = 0; long dt = 0; /// VARIAVEIS PARA CALCULOD DA DISTANCIA ENTRE PLANTAS////// float dep = 0; float dpi = 0; float dpp = 0; volatile bool contaflag = LOW; volatile bool controler_delay = LOW; #define c_ChaveInterrupt 4 #define c_ChavePin 19 #define c_EncoderInterruptA 0 #define c_EncoderInterruptB 1 #define c_EncoderPinA 2
60
#define c_EncoderPinB 3 #define EncoderIsReversed volatile bool _EncoderASet; volatile bool _EncoderBSet; volatile bool _EncoderAPrev; volatile bool _EncoderBPrev; volatile long _EncoderTicks = 0; volatile long _contavolta = 0; volatile long conta = 0; volatile bool chave_est; String inputString = ""; boolean stringComplete = false; void setup() { pinMode(c_EncoderPinA, INPUT); digitalWrite(c_EncoderPinA, LOW); pinMode(c_EncoderPinB, INPUT); digitalWrite(c_EncoderPinB, LOW); pinMode(c_ChavePin, INPUT_PULLUP); digitalWrite(c_ChavePin, HIGH); // INICIAM AGORA AS INTERRUPÇÕES EXTERNAS attachInterrupt(c_EncoderInterruptA, HandleInterruptA, CHANGE); attachInterrupt(c_EncoderInterruptB, HandleInterruptB, CHANGE); attachInterrupt(c_ChaveInterrupt, HandleInterruptChave, CHANGE); Serial.begin(38400); Serial.println("ready.."); Serial.println(versao); Kdis = 2*3.1415*Rr; Serial.println(Kdis); delay(3000); tem_i = millis(); dis_i = 0; rev_i = 0; } void loop(){ l_rev = _EncoderTicks/4096; if (_EncoderTicks > 0) { ct_it = ct_it+1; } if (ct_it > it_ma) { tem_f = millis(); d_tem = tem_f - tem_i; tem_i = tem_f; dis_f = dis; d_dis = dis_f - dis_i; dis_i = dis_f; rev_f = f_rev; d_rev = rev_f-rev_i; rev_i = rev_f; rpm = (d_rev/float(d_tem))*60000; kph = ((Kdis*rpm)/60)*3.6;

61
ct_it = 0; } d_tick = _EncoderTicks - l_rev*4096; rev_par = d_tick*100/4096; f_rev = float(l_rev)+float(rev_par)/100; dis = f_rev*Kdis; f_drev= f_rev-f_revi; f_revi = f_rev; tf = millis(); dt = tf-ti; ti = tf; if(contaflag == HIGH) { if (controler_delay == HIGH) { delay(15); controler_delay = LOW; } chave_est = digitalReadFast(c_ChavePin); if(chave_est == LOW) { conta = conta + 1; dpp = dis; dep = dpp - dpi; dpi = dpp; delay(175);e attachInterrupt(c_ChaveInterrupt, HandleInterruptChave, CHANGE); attachInterrupt(c_ChaveInterrupt, HandleInterruptChave, CHANGE); contaflag = LOW; } } Serial.print("$;"); Serial.print(_EncoderTicks);Serial.print(";");Serial.print(f_rev); Serial.print(dis); Serial.print(";"); Serial.print(dt); Serial.print(";"); Serial.print(f_drev); Serial.print(rpm); Serial.print(";");Serial.print(kph); Serial.print(";"); Serial.print(conta); Serial.print(";"); Serial.print(dep); Serial.println(";"); if (stringComplete) { String pre = ""; for (int i = 0; i < 3; i++){ pre += inputString.charAt(i); } if (pre == "#,V") { String snum = ""; int numi = 0; for (int i = 4; i<=6; i++) { snum += inputString.charAt(i); numi = inputString.charAt(i)- '0'; Serial.println(numi); } Char2Int(snum); } inputString = ""; stringComplete = false; } } int Char2Int(String snum) { int le = snum.length(); int numi = 0; float numdec = 0; Serial.println(le);
62
for(int i = 1;i <= le; i++) { numi = snum.charAt(i-1)-'0'; numdec = numdec+numi*pow(10,(le-i)); } } //FUNCAO CAPTURA EVENTO NA PORTA SERIAL // void serialEvent() { while (Serial.available()) { char inChar = (char)Serial.read(); inputString += inChar; if (inChar == '\n') { stringComplete = true; } } } // Interrupt service routines para chave de fim de curso void HandleInterruptChave(){ detachInterrupt(4); contaflag = HIGH; controler_delay = HIGH; } // Interrupt service routines for the quadrature encoder void HandleInterruptA(){ _EncoderBSet = digitalReadFast(c_EncoderPinB); _EncoderASet = digitalReadFast(c_EncoderPinA); _EncoderTicks+=ParseEncoder(); _EncoderAPrev = _EncoderASet; _EncoderBPrev = _EncoderBSet; } // Interrupt service routines for the quadrature encoder void HandleInterruptB(){ // Test transition; _EncoderBSet = digitalReadFast(c_EncoderPinB); _EncoderASet = digitalReadFast(c_EncoderPinA); _EncoderTicks+=ParseEncoder(); _EncoderAPrev = _EncoderASet; _EncoderBPrev = _EncoderBSet; } int ParseEncoder(){ if(_EncoderAPrev && _EncoderBPrev){ if(!_EncoderASet && _EncoderBSet) return 1; if(_EncoderASet && !_EncoderBSet) return -1; }else if(!_EncoderAPrev && _EncoderBPrev){ if(!_EncoderASet && !_EncoderBSet) return 1; if(_EncoderASet && _EncoderBSet) return -1; }else if(!_EncoderAPrev && !_EncoderBPrev){ if(_EncoderASet && !_EncoderBSet) return 1; if(!_EncoderASet && _EncoderBSet) return -1; }else if(_EncoderAPrev && !_EncoderBPrev){ if(_EncoderASet && _EncoderBSet) return 1; if(!_EncoderASet && !_EncoderBSet) return -1; } }


















