Dinamica Das Maquinas Biela Manivela
24
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE ENGENHARIA MECÂNICA GRADUAÇÃO EM ENGENHARIA MECÂNICA GEM 15 – DINÂMICA DAS MÁQUINAS PROF: ELIAS BITENCOURT TEODORO Mecanismo biela manivela: Estudo do movimento e dos esforços atuantes no sistema Nomes: Nº Antônio Ricardo Fernandes Zaiden 84961 Bruno Alexandre Roque 85732 Guilherme Augusto de Oliveira 85733 Thiago Silva Longo 84996 Welder Teixeira de Souza 84997 Uberlândia, 07 de julho de 2009
-
Upload
leonardo-pereira -
Category
Documents
-
view
148 -
download
3
Transcript of Dinamica Das Maquinas Biela Manivela

UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE ENGENHARIA MECÂNICA GRADUAÇÃO EM ENGENHARIA MECÂNICA
GEM 15 – DINÂMICA DAS MÁQUINAS PROF: ELIAS BITENCOURT TEODORO
Mecanismo biela manivela:
Estudo do movimento e dos esforços atuantes no sist ema
Nomes: Nº
Antônio Ricardo Fernandes Zaiden 84961
Bruno Alexandre Roque 85732
Guilherme Augusto de Oliveira 85733
Thiago Silva Longo 84996
Welder Teixeira de Souza 84997
Uberlândia, 07 de julho de 2009

2
Resumo
Este relatório tem como objetivo a aplicação dos conhecimentos adquiridos através do estudo
da disciplina Dinâmica das Máquinas, na solução de um problema real de engenharia. O problema
em questão é um mecanismo biela-manivela, composto por quatro barras, que é maciçamente usado,
principalmente em máquinas e motores térmicos. Inicialmente, foi feita uma análise dinâmica do
problema, para facilitar no desenvolvimento matemático das equações do movimento. Optou-se pelo
uso do método dos números complexos, dada a sua simplicidade para proceder as derivações das
equações obtidas. Em posse destas equações, realizou-se a implementação computacional, através
de um programa desenvolvido na plataforma MatLab®.
Utilizando o código computacional na plataforma Matlab®, calcularam-se as posições,
velocidades, e acelerações das barras do mecanismo. Foi feito também o cálculo das forças e
torques de inércia, bem como das forças de atrito atuantes nas juntas das barras. Também se
determinou o torque de equilíbrio que deveria ser aplicado para “anular” o efeito de giro provocado
por uma força horizontal aplicada em uma das barras do mecanismo.
Com o intuito de facilitar o entendimento e a interpretação do problema, confeccionaram-se
vários gráficos, mostrando a variação das posições, velocidades, acelerações, forças e torques em
função da variação angular.
Através dos resultados obtidos, pode-se concluir que os movimentos das barras do
mecanismo se aproximam de funções harmônicas. Verificou-se que os maiores torques de equilíbrio
ocorrem quando o mecanismo não possui atrito nas juntas das barras, o que era esperado. Os
resultados obtidos serão explicitados no decorrer deste relatório

3
Sumário
1. Introdução ............................................................. 0Erro! Indicador não definido.
2. Desenvolvimento Teórico .................................................................................... 05
3. Análise dos Resultados Obtidos .......................................................................... 10
4. Conclusão ........................................................................................................... 18
5. Bibliografia .............................................................. Erro! Indicador não definido.
6. Anexos ................................................................................................................ 19

4
1) Introdução
Com o propósito de analisar o movimento, a posição, a aceleração, o atrito, as forças e os
torques de inércia do mecanismo biela manivela, usou-se o método dos números complexos para a
determinação das equações cinemáticas e dinâmicas. Através de uma programação em MatLab®,
serão apresentados os resultados obtidos em forma de gráficos.
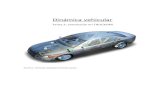
O sistema biela-manivela de uma máquina motriz é composto de uma biela AB cujo extremo
A, chamado base de biela, é deslocado ao longo de uma reta, enquanto que o outro extremo B,
chamado cabeça de biela, articulado em B com uma manivela OB, descreve uma circunferência de
raio OB. A base de biela está articulada no denominado “patim”, solidário com o pistão que é
deslocado entre duas guias. O pistão descreve um movimento oscilatório, muito próximo a um
movimento harmônico simples, como será mostrado neste relatório.
Figura 1.1 – Desenho esquemático do movimento de um mecanismo biela manivela
Figura 1.2 – Sistemas biela-manivela aplicados a um a locomotiva

5
Figura 1.3 – Ilustração de um mecanismo biela maniv ela usada em motores térmicos
2) Desenvolvimento Teórico
Para a análise da posição, tomou-se como base a nomenclatura presente na figura 2.1 a seguir:
Figura 2.1– Dados da posição do mecanismo
Como dados de entrada, informou-se o valor R2, do comprimento da barra 2, R3, do
comprimento da barra 3, bem como o ângulo da barra 2 com a horizontal (θ2). Neste trabalho, criou-
se um vetor ( θ2 ) no software computacional MatLab® para análise de várias posições, velocidades,
acelerações, forças de atrito, de inércia e torque de inércia e de equilíbrio à força externa aplicada.

6
Através do método dos números complexos, tem-se a equação cíclica:
R1 = R2 + R3 (2.1)
Como a equação acima é dada na forma de duas componentes (real e imaginária), separa-se
a equação (2.1), da seguinte forma:
Componente Real: R1r = R2 (6ós θ2) + R3(6ós θ3)
Componente Imaginária: R1i = 0 = R2 (sen θ2) + R3(sen θ3)
(2.2)
Por meio da lei dos senos, isola-se o ângulo θ3 e chega-se a seguinte equação:
θ3 = sen -1 ( -R2 / R3 (sen θ2) )
(2.3)
Assim, derivando as equações (2.2), obtém-se a velocidade real e imaginária:
Componente Real: V1r = -R2 ω2 sen(θ2) - R3 ω3 sen(θ3)
Componente Imaginária: V1i = 0 = R2 ω2 cos(θ2) - R3 ω3 cos(θ3) (2.4)
Isolando a velocidade angular da barra 3 (ω3), tem-se:
ω3 = - ω2.( R2 cos(θ2) / R3 cos(θ3) ) (2.5)
Derivando as equações (2.4), obtém-se a aceleração real e imaginária:

7
Componente Real: A1 = -r2 (ω22 cos(θ2) + α2 sen(θ2) ) - r3 (ω3
2 cos(θ3) + α3 sen(θ3))
Componente Imaginária: 0 = r2 (-ω22 sen(θ2) + α2 cos(θ2) ) + r3 (-ω3
2 sen(θ3) + α3 cos(θ3)) (2.6)
Isolando a aceleração angular da barra 3 (α3), tem-se:
α3 = r2 ( ω22 sen(θ2) – α2 cos(θ2)) / ( r3 cos(θ3)) + (r3 ω3
2 sen(θ3)) / ( 7ós(θ3)) (2.7)
Como se determinou o valor da aceleração angular da barra 3, foi possível a determinação da
aceleração da barra 4(cursor):
a4 = -r2 (ω22 cos(θ2) + α2 sen(θ2)) -r3 (ω3
2 cos(θ3) + α3 sen(θ3)) (2.8)
Para o cálculo dos torques de inércia, é necessário determinar a aceleração em relação ao
centro de gravidade das barras do mecanismo. A aceleração do centro de gravidade da barra 2, nas
componentes real e imaginária, é dada da seguinte forma:
Componente Real: ag2r = (0.5)r2 ω22 cos(θ2)
Componente Imaginária: ag2r = -(0.5)r2 ω22 sen(θ2)) (2.9)
Para a barra 3, tem-se as seguintes equações para a aceleração do centro de gravidade: Componente Real: ag3r = -r2 ω2
2 cos(θ2) – (0.5) r3 α3 sen(θ3) – (0.5) r3 ω3
2 cos(θ3)
Componente Imaginária: ag3i = -r2 ω22 sen(θ2) + (0.5) r3 α3
cos(θ3) – (0.5) r3 ω32 sen(θ3) (2.10)

8
Após o cálculo da aceleração dos centros de gravidade das barras, calcularam-se
primeiramente, os torques de inércia e de equilíbrio considerando que há atrito nas juntas das barras,
considerando os seguintes dados de entrada:
mi = 0.3; Coeficiente de atrito ns juntas das barras
r=0.0254; Raio de cada pino [m]
fi=atan(mi); Ângulo de atrito [rad]
rca=r*sin(fi); Raio do círculo de atrito [m]
p = 200; Força externa aplicada ao bloco, em [N]
m2 = 0.3;
m3 = 0.45; Massa das barras, concentradas no C.G [Kg]
m4 = 0.60;
Fazendo o D.C.L (Diagrama de corpo livre), das barras do mecanismo, encontram-se as
seguintes forças:
Força que a barra 3 faz na barra 4 (cursor) f34 = (p – m4 . a4)./(8ós(-θ3) –mi. Sin(-θ3). Sign(-v1)) (2.11) Força que a barra 2 faz na barra 3 f23 = (m3.ag3r + f34.*8ós(-θ3))/8ós(-θ3) (2.12) Força que a barra 3 faz na barra 2 f32 = -f23 (2.13) Força vertical que a barra 1 faz em 2 f12x = f23.cos(-θ3) + m2.( -θ3).(0.5 r2). 8ós(θ2) (2.14) Força horizontal da barra 1 na 2 f12y = -f23. Sin(ω2
2)+ m2.( ω22).(0.5 . r2 ). Sin(θ2) (2.15)

9
Momento devido ao atrito nas juntas: c32 =mi. Rca. Sqrt((-f23. 9ós(-θ3))
2 + (-f23. Sin(-θ3))2).sign(ω3- ω2) (2.16)
c12=mi. rca.sqrt((f12x
2+ (f12y2)).sign(ω1- ω2) (2.17)
Considerando secção das barras quadradas e de lados iguais a l, tem-se:
l=0.04 [m]
I=(l^4)/12; [m4]
Onde I representa o momento de inércia de área da seção transversal das barras. Para
encontrar o torque de equilíbrio, faz-se o somatório de momentos no ponto inferior da barra 2:
Teqca =
-c32-c12 + m2. Ag2i. 9ós(θ2)*(0.5 r2) –m2. Ag2r. sin(θ2). (0.5 r2 ) + I.α2+ f23.cos(-θ3).sin(-θ3).r2 +
f23.sin(-θ3).cos(-θ3).r2 (2.18)
Para o caso sem atrito, adotou-se com coeficiente de atrito igual a zero, utilizou-se as mesmas
equações.

10
3) Análise dos resultados obtidos
Após o desenvolvimento das equações matemáticas através do método dos números
complexos, calcularam-se, inicialmente, os valores das posições, velocidades, acelerações para
cada uma das barras do mecanismo.
Em consulta ao livro Norton, Robert L. – Design of Machinery, em um mecanismo biela
manivela é amplamente usada a relação de tamanho das barras de 1 para 3, ou seja , o tamanho da
barra da biela é três vezes maior que o da manivela. Fornecendo tais valores de entrada, assim como
a velocidade angular e a aceleração angular, têm-se os seguintes gráficos para as posições das
barras:
Figura 3.1 – Posição horizontal da barra 4 (cursor) [m] em função do ângulo [graus]

11
Figura 3.2 – Posição horizontal da barra 2 [m] em f unção do ângulo [graus]
Figura 3.3 – Posição vertical da barra 2 [m] em fun ção do ângulo [graus]

12
Figura 3.4 – Posição horizontal da barra 3 [m] em f unção do ângulo [graus]
Figura 3.5 – Posição vertical da barra 3 [m] em fun ção do ângulo [graus]

13
Figura 3.6 – Posição horizontal da barra 3 [m] em f unção do ângulo [graus]
O comportamento da curva ângulo [graus] e a velocidade da barra 4(cursor) é :
Figura 3.7 – Velocidade da barra 4 [m/s] em função do ângulo [graus]

14
A aceleração da barra 4(cursor), em função do ângulo [graus] é dada a seguir:
Figura 3.8- Aceleração da barra 4 em função do ângu lo [graus].
Abaixo, constam os gráficos das posições, acelerações, e velocidades, oriundos do livro
Norton, Robert L. – Design of Machinery:
Figura 3.9 – Posição da manivela em função do ângul o [graus]

15
Figura 3.10 – Velocidade (horizontal) do cursor em função do ângulo [graus]
Figura 3.11 – Aceleração do cursor (horizontal) em função do ângulo [graus]

16
Percebe-se que há uma grande semelhança entre o comportamento gráfico obtido neste
relatório com o oriundo da literatura técnica (Norton, Robert L. – Design of Machinery). Nota-se que o
movimento das barras do mecanismo assemelha-se a uma função harmônica simples, uma senóide,
por exemplo.
Figura 3.12 – Comparação entre os torques de equilí brio para as juntas com e sem atrito
Como o esperado, o torque de equilíbrio, para o caso em que não há atrito nas juntas das
barras do mecanismo biela manivela e entre o cursor e sua superfície de contato, é maior. Os
esforços gerados pelo atrito colaboram para que o torque de equilíbrio seja de menor magnitude.
Através do programa na plataforma MatLab®, obteve-se os seguintes resultados:
(Torque de equilíbrio máximo para o caso com atrito)
Teqcamax =2.1968e+003 [N.m]

17
(Torque de equilíbrio máximo para o caso sem atrito)
Teqsamax = 2.4678e+003 [N.m]
Determinou-se também a proporção entre os torques de equilíbrio com e sem o atrito,
obtendo-se os seguintes resultados:
eficiência = Teqca./Teqsa
max =24.8727 (proporção máxima , para um ângulo de aproximadamente 90º)
rmin = 4.5174e+007 (Proporção mínima, para um ângulo de aproximadamente 0º)

18
4) Conclusão
Através dos gráficos obtidos do movimento, confirmou-se o que havia sido citado na literatura
técnica (Norton, Robert L. – Design of Machinery), ou seja, o comportamento das curvas da
velocidade e da posição é semelhante a uma senóide. Através do programa computacional
desenvolvido em plataforma Matlab®, pode-se estimar a relação entre o torque de equilíbrio nas
duas situações abordadas neste relatório (com atrito nas juntas e no cursor e sem o mesmo).
Confeccionado os gráficos para uma variação angular da manivela de 0º a 720º,é possível
visualizar o movimento da mesma em 2 ciclos, comprovando assim o comportamento periódico do
mecanismo. Em posse dos valores das acelerações dos centros de massa das barras, foi possível
determinar as forças e os torques de inércia, com isso, calculou-se o torque de equilíbrio para cada
posição angular, considerando o sistema com e sem atrito entre os seus componentes.

19
5) Bibliografia
(Norton, Robert L. – Design of Machinery - Mc Graw Hill
Mabie, Hamilton H. Dinâmica das Máquinas -1980
http://www.emc.uji.es/d/IngMecDoc/Mecanismos/Barras /MBM_index.html
http://www.dem.feis.unesp.br/cdrom_creem2005/pdf/mn 16.pdf
http://www.fisica.ufs.br/CorpoDocente/egsantana/osc ilaciones/biela/biela.htm
http://pt.wikipedia.org/wiki/Mecanismo_de_quatro_ba rras
http://www.poli.usp.br/p/ricardo.ibrahim/sint_11.pd f
http://www.abcm.org.br/xi_creem/resumos/MC/CRE04-MC 12.pdf
http://www.sorocaba.unesp.br/professor/waldemar/PMN /PMN%20Slides%202.pdf

20
6) Anexos Abaixo, consta o programa em MATLAB®: clc; clear all ; %Dados de entrada r2=0.150; %Manivela [m] r3=0.450; %Biela [m] Teta1=0; %Ângulo da barra fixa com a horizontal [radianos] w1=0; %Velocidade angular da barra fixa [rad/s] n=500; Teta2=linspace(0*(pi/180),720*(pi/180),n); %Ângulo da barra 2 com a horizontal [radianos] w2=6000*(2*pi/60); %Velocidade angular da barra 2 [rad/s] alfa2 = 10; %Aceleração angular da barra2 [rad/s²] gama = asin((r2/r3)*sin(Teta2)) ; %Ângulo auxiliar de construção [radianos] Teta3 = -gama; %Ângulo da barra 3 com a horizontal [radianos] Teta3g = (180/pi)*Teta3; Teta2g = (180/pi)*Teta2; %Posição das barras do mecanismo x3 = r3*cos(Teta3); %Posição cartesiana da barra 3 y3 = r3*sin(Teta3); x2=r2*cos(Teta2); %Posição cartesiana da barra 2 y2=r2*sin(Teta2); x1 = x2+x3; %Posição cartesiana da barra 1 y1 = y2+y3; %Análise da Velocidade das barras do mecanismo A = -r2*cos(Teta2)*w2; B = (r3*cos(Teta3)); w3 = (-w2*r2*cos(Teta2))./(r3*cos(Teta3)); %Velocidade angular da barra 3 [rad/s] C = -r2*sin(Teta2)*w2; D = -r3.*w3.*sin(Teta3);

21
v1 = C+D %Velocidade linear da barra 1 [m/s] E = (1./(r3*cos(Teta3))); F = (r2*w2^2*sin(Teta2))./(r3.*cos(Teta3)); G = (-r2*alfa2*cos(Teta2))./(r3.*cos(Teta3)); H = (w3.*w3.*sin(Teta3))./(cos(Teta3)); alfa3 = F + G + H; %Aceleração angular da barra 3 %alfa3 (1./(r3.*cos(Teta3)))*(r2.*w2^2.*sin(Teta2)-r2.*alf a2.*cos(Teta2)+ 1/cos(Teta3).*(r3.*w3.^2.*sin(Teta3)); I = -r2*w2^2.*cos(Teta2); J = -r2*alfa2*sin(Teta2); %Aceleração linear da barra 1[m/s] K = -r3.*w3.*w3.*cos(Teta3); L = -r3.*alfa3.*sin(Teta3); a1 = I + J + K + L; %a1= -r2*(w2^2*cos(Teta2) + alfa2*sin(Teta2)) - r3*(w3^2*cos(Teta3)+alfa3*sin(T eta3)); % Acelerações dos C.Gs das barras, para o cálculo dos torques ag3r = I + 0.5*L + 0.5*K; %Aceleração centro de gravidade real %ag3r = (-r2*w2^2*cos(Teta2)-(r3/2)*alfa3*sin(Teta3)-(r3/2)*w3^2*cos(Teta3)); M = (r3/2)*alfa3.*cos(Teta3); N = -(r3/2)*w3.^2.*sin(Teta3); %Aceleração centro de gravidade imaginaria % ag3i = -F + M + N ag3i=(-r2*w2^2*sin(Teta2)+(r3/2)*alfa3.*cos(Teta3)- (r3/2)*w3.^2.*sin(Teta3)); ag2r = 0.5*I; %ag2r=-w2^2*(r2/2)*cos(Teta2); ag2i=-w2^2*(r2/2)*sin(Teta2); % Cálculo dos torques considerando atrito nas junta s das barrase mi = 0.3; %Coeficiente de atrito ns juntas das barras r=0.0254; %Raio de cada pino fi=atan(mi); %Ângulo de atrito rca=r*sin(fi); %Raio do circulo de atrito p = 200; %Força externa aplicada ao bloco, em [N] m2 = 0.3; m3 = 0.9; %Massa das barras, concentradas no C.G [Kg] m4 = 0.45;

22
% Fazendo DCL das barras 4,3 e 2 encontramos: f34=(p-m4.*a1)./(cos(gama)-mi.*sin(gama).*sign(-v1) ) %Força da barra 3 na barra 4 f23=(m3.*ag3r + f34.*cos(gama))./cos(gama) %Força da barra 2 na barra 3 f32=-f23 %Força da barra 3 na barra 2 f12x=f23.*cos(gama) + m2*(w2^2)*(r2/2).*cos(Teta2) %Força horizontal da barra 1 na 2 f12y=-f23.*sin(gama)+ m2*(w2^2).*(r2/2).*sin(Teta2) %Força vertical da barra 1 na 2 c32=mi*rca.*sqrt((-f23.*cos(gama)).^2 + (-f23.*sin( gama)).^2).*sign(w3-w2) %Momento devido ao atrito nas juntas c12=mi*rca.*sqrt((f12x.^2)+ (f12y.^2)).*sign(w1-w2) % Considerando secção das barras quadradas e de lad os iguais a l l=0.04; %Lados da seção transversal quadrada das barras I=(l^4)/12; %Momento de inércia de área da barra % Encontrando torque de equilibrio, fazendo somator io de momento no ponto % inferior da barra2 %Torque de equilíbrio com atrito Teqca= +c32+c12 + m2.*ag2i.*cos(Teta2)*(r2/2) - m2. *ag2r.*sin(Teta2)*(r2/2) + I.*alfa2+ f23.*cos(gama).*sin(Teta2)*r2 + f23.*sin( gama).*cos(Teta2)*r2; %Torque de equilíbrio sem o atrito das juntas das b arras mis = 0; %Coeficiente de atrito ns juntas das barras = 0 r=0.0254; %Raio de cada pino fis=atan(mis); %Ângulo de atrito rcas=r*sin(fis); %Raio do circulo de atrito %Fazendo DCL das barras 4,3 e 2 encontramos: f34s=(p-m4.*a1)./(cos(gama)-mis.*sin(gama).*sign(-v 1)) f23s=(m3.*ag3r + f34s.*cos(gama))./cos(gama) f32s=-f23s f12xs=f23s.*cos(gama) + m2*(w2^2)*(r2/2).*cos(Teta2 ) f12ys=-f23s.*sin(gama)+ m2*(w2^2).*(r2/2).*sin(Teta 2) c32s=mis*rcas.*sqrt((-f23s.*cos(gama)).^2 + (-f23s. *sin(gama)).^2).*sign(w3-w2) c12s=mis*rcas.*sqrt((f12xs.^2)+ (f12ys.^2)).*sign(w 1-w2) %Encontrando torque de equilibrio, fazendo somatori o de momento no ponto inferior da barra2 Teqsa= +c32s+c12s+ m2.*ag2i.*cos(Teta2)*(r2/2) - m 2.*ag2r.*sin(Teta2)*(r2/2) + I.*alfa2+ f23s.*cos(gama).*sin(Teta2)*r2 + f23s.*si n(gama).*cos(Teta2)*r2;

23
%Proporção dos torques de equilíbrio com e sem atri to para cada ângulo teta eficiencia = Teqca./Teqsa; rmax = max(eficiencia); rmin = min(eficiencia); [i,j]=find(eficiencia==rmax) %Localiza os pontos onde há o toque máximo e o mínimo [i,j]=find(eficiencia==rmin) Teqcamax = max(Teqca) Teqsamax = max(Teqsa) Teqcamin = min(Teqca) Teqsamin = min(Teqsa) % Gráficos das posições, velocidades, acelerações e torques em função dos ângulos (graus) figure(1) plot([Teta2g],[v1]) grid on; ylabel( 'Velocidade da barra 4 - bloco em [m/s]' ) xlabel( 'Ângulo - em graus' ) figure(2) plot([Teta2g],[a1]) grid on; ylabel( 'Aceleração da barra 4 - bloco em [m/s²]' ) xlabel( 'Ângulo - em graus' ) figure(3) plot([Teta2g],[x2]) grid on; ylabel( 'Posição horizontal da barra 2[m]' ) xlabel( 'Ângulo - em graus' ) figure(4) plot([Teta2g],[y2]) grid on; ylabel( 'Posição vertical da barra 2[m]' ) xlabel( 'Ângulo - em graus' ) figure(5) plot([Teta2g],[x3]) grid on; ylabel( 'Posição horizontal da barra 3[m]' ) xlabel( 'Ângulo - em graus' ) figure(6)

24
plot([Teta2g],[y3]) grid on; ylabel( 'Posição vertical da barra 3[m]' ) xlabel( 'Ângulo - em graus' ) figure(7) hold on; plot([Teta2g],[Teqca], 'r' ) plot([Teta2g],[Teqsa]) grid on; ylabel( 'Torques de equilíbrio com e sem o atrito ' ) xlabel( 'Ângulo- em graus' ) hold off ; figure(8) plot([Teta2g],[x1]) grid on; ylabel( 'Posição da barra 4 - bloco em [m/s]' ) xlabel( 'Ângulo - em graus' )