
Estabilidade segundo Lyapunov: continuação. - UFBA · Objetivos da aula de hoje: Apresentar...
27
Estabilidade segundo Lyapunov: continua¸ c˜ ao. ENGC65: Sistemas de controle III Departamento de Engenharia El´ etrica - DEE Universidade Federal da Bahia - UFBA 9 de julho de 2014 Prof. Tito Luís Maia Santos 1/ 22
Transcript of Estabilidade segundo Lyapunov: continuação. - UFBA · Objetivos da aula de hoje: Apresentar...

Estabilidade segundo Lyapunov: continuacao.
ENGC65: Sistemas de controle III
Departamento de Engenharia Eletrica - DEE
Universidade Federal da Bahia - UFBA
9 de julho de 2014
Prof. Tito Luís Maia Santos 1/ 22
Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 2/ 22

Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 3/ 22

IntroducaoEstudo de sistemas nao-lineares de segunda ordem
Objetivos da aula de hoje:
Apresentar alguns comentarios sobre o conceito de estabilidadesegundo Lyapunov.
Apresentar o princıpio da invariancia e o Teorema de LaSalle.
Discutir sobre a particularizacao do Teorema de Lyapunov para ocaso linear.
Prof. Tito Luís Maia Santos 4/ 22
Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 5/ 22

RevisaoTeorema de Lyapunov
Teorema 1
Seja x = 0 um ponto de equilıbrio para o sistemas x = f (x) e V (x) umafuncao continuamente diferenciavel dos estados tal que V : D → R sendoD ⊂ R
n que contem a origem.
Se V (x) e definida positiva e V (x) semi-definida negativa, entao x = 0e um ponto de equilıbrio estavel.
Se V (x) e definida positiva e V (x) definida negativa, entao x = 0 e umponto de equilıbrio assintoticamente estavel.
Prof. Tito Luís Maia Santos 6/ 22
Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 7/ 22

Comentarios relevantesTeorema de Lyapunov
A superfıcie definida por V (x) = c para algum c > 0 e chamada decurva de nıvel.
Uma classe de util de funcoes escaleres pode ser representada por
V (x) = x tPx =n
∑
i=1
n∑
j=1
pijxixj
sendo P uma matriz simetrica com elementos reais.
Se todos os autovalores de P sao positivos ⇒ P > 0 ⇒ V (x) edefinida positiva.Se todos os autovalores de P nao sao negativos ⇒ P ≥ 0 ⇒V (x) e semi-definida positiva.Se todos os autovalores de P sao negativo ⇒ P < 0 ⇒ V (x) edefinida negativa.Se todos os autovalores de P nao sao negativo ⇒ P ≤ 0 ⇒ V (x)e semi-definida negativa.
Prof. Tito Luís Maia Santos 8/ 22

Comentarios relevantesTeorema de Lyapunov
A superfıcie definida por V (x) = c para algum c > 0 e chamada decurva de nıvel.
Uma classe de util de funcoes escaleres pode ser representada por
V (x) = x tPx =n
∑
i=1
n∑
j=1
pijxixj
sendo P uma matriz simetrica com elementos reais.
Se todos os autovalores de P sao positivos ⇒ P > 0 ⇒ V (x) edefinida positiva.Se todos os autovalores de P nao sao negativos ⇒ P ≥ 0 ⇒V (x) e semi-definida positiva.Se todos os autovalores de P sao negativo ⇒ P < 0 ⇒ V (x) edefinida negativa.Se todos os autovalores de P nao sao negativo ⇒ P ≤ 0 ⇒ V (x)e semi-definida negativa.
Prof. Tito Luís Maia Santos 8/ 22

Comentarios relevantesTeorema de Lyapunov
Seja P uma matriz simetrica com elementos reais.
Se todos os menores complementares principais de P sao positivos⇒ P > 0.Se todos os menores complementares principais de P nao saonegativos ⇒ P ≥ 0.Se todos os menores complementares principais de P sao negativo⇒ P < 0.Se todos os menores complementares principais de P nao saonegativo ⇒ P ≤ 0.
Exemplo - Considere:
V (x) = ax21 + 2x1x3 + ax22 + 4x2x3 + ax23
Prof. Tito Luís Maia Santos 9/ 22

Comentarios relevantesTeorema de Lyapunov
Seja P uma matriz simetrica com elementos reais.
Se todos os menores complementares principais de P sao positivos⇒ P > 0.Se todos os menores complementares principais de P nao saonegativos ⇒ P ≥ 0.Se todos os menores complementares principais de P sao negativo⇒ P < 0.Se todos os menores complementares principais de P nao saonegativo ⇒ P ≤ 0.
Exemplo - Considere:
V (x) = ax21 + 2x1x3 + ax22 + 4x2x3 + ax23
Prof. Tito Luís Maia Santos 9/ 22

Comentarios relevantesTeorema de Lyapunov
Seja P uma matriz simetrica com elementos reais.
Se todos os menores complementares principais de P sao positivos⇒ P > 0.Se todos os menores complementares principais de P nao saonegativos ⇒ P ≥ 0.Se todos os menores complementares principais de P sao negativo⇒ P < 0.Se todos os menores complementares principais de P nao saonegativo ⇒ P ≤ 0.
Exemplo - Considere:
V (x) = ax21 + 2x1x3 + ax22 + 4x2x3 + ax23
= [x1 x2 x3]
a 0 10 a 21 2 a
x1x2x3
.
Prof. Tito Luís Maia Santos 10/ 22

Comentarios relevantesTeorema de Lyapunov
Seja P uma matriz simetrica com elementos reais.
Se todos os menores complementares principais de P sao positivos⇒ P > 0.Se todos os menores complementares principais de P nao saonegativos ⇒ P ≥ 0.Se todos os menores complementares principais de P sao negativo⇒ P < 0.Se todos os menores complementares principais de P nao saonegativo ⇒ P ≤ 0.
Exemplo - Considere:
V (x) = ax21 + 2x1x3 + ax22 + 4x2x3 + ax23
= [x1 x2 x3]
a 0 10 a 21 2 a
x1x2x3
.
Prof. Tito Luís Maia Santos 10/ 22

Comentarios relevantesTeorema de Lyapunov
Nao ha um procedimento sistematico para escolha de V (x).
Quando possıvel, tenta-se escolher uma funcao baseada na energia dosistemas.
O Teorema de Lyapunov e muito importante na etapa de projeto.
As curvas de nıvel (V (x) < c) dao uma estimativa do domınio deatracao (basin).
Caso do pendulo (baseado em energia)[
x1x2
]
=
[
x2−asen(x1)− bx2
]
com
V (x) =
∫ x1
0
asen(x1) +1
2x22 = a(1− cos(x1)) +
1
2x22 .
Funcao de Lyapunpunov mais geral
V (x) =
∫ x1
0
asen(x1)+1
2x22 = a(1−cos(x1))+
1
2p11x
21 + p12x1x2 +
1
2p22x
22 .
Prof. Tito Luís Maia Santos 11/ 22
Comentarios relevantesTeorema de Lyapunov
Nao ha um procedimento sistematico para escolha de V (x).
Quando possıvel, tenta-se escolher uma funcao baseada na energia dosistemas.
O Teorema de Lyapunov e muito importante na etapa de projeto.
As curvas de nıvel (V (x) < c) dao uma estimativa do domınio deatracao (basin).
Caso do pendulo (baseado em energia)[
x1x2
]
=
[
x2−asen(x1)− bx2
]
com
V (x) =
∫ x1
0
asen(x1) +1
2x22 = a(1− cos(x1)) +
1
2x22 .
Funcao de Lyapunpunov mais geral
V (x) =
∫ x1
0
asen(x1)+1
2x22 = a(1−cos(x1))+
1
2p11x
21 + p12x1x2 +
1
2p22x
22 .
Prof. Tito Luís Maia Santos 11/ 22

Comentarios relevantesTeorema de Lyapunov
Nao ha um procedimento sistematico para escolha de V (x).
Quando possıvel, tenta-se escolher uma funcao baseada na energia dosistemas.
O Teorema de Lyapunov e muito importante na etapa de projeto.
As curvas de nıvel (V (x) < c) dao uma estimativa do domınio deatracao (basin).
Caso do pendulo (baseado em energia)[
x1x2
]
=
[
x2−asen(x1)− bx2
]
com
V (x) =
∫ x1
0
asen(x1) +1
2x22 = a(1− cos(x1)) +
1
2x22 .
Funcao de Lyapunpunov mais geral
V (x) =
∫ x1
0
asen(x1)+1
2x22 = a(1−cos(x1))+
1
2p11x
21 + p12x1x2 +
1
2p22x
22 .
Prof. Tito Luís Maia Santos 11/ 22

Comentarios relevantesTeorema de Barbashin-Krasovskii
Teorema 2
Seja x = 0 um ponto de equilıbrio para o sistemas x = f (x) e V (x) umafuncao continuamente diferenciavel dos estados tal que V : Rn → R .
Se V (x) e definida positiva e V (x) definida negativa e
||x || → ∞ ⇒ V (x) ⇒ ∞
entao x = 0 e um ponto de equilıbrio globalmente assintoticamenteestavel.
Se um ponto de equilıbrio e globalmente assintoticamente estavel,entao ele e o unico ponto de equilıbrio.
Prof. Tito Luís Maia Santos 12/ 22

Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 13/ 22

Teorema de LaSalleTeorema de LaSalle
Teorema 3
Seja Ω ⊂ D um conjunto compacto que e positivamente invariante comrespeito a x = f (x).
V (x) : D → R uma funcao continuamente diferenciavel tal queV (x) ≤ 0 em Ω.
Seja E = x ∈ Ω|V (x) = 0.
Seja M o maior conjunto invariante em E .
Entao, toda solucao comecando em Ω tende a M quando t → ∞.
Prof. Tito Luís Maia Santos 14/ 22
Teorema de LaSalleTeorema de LaSalle
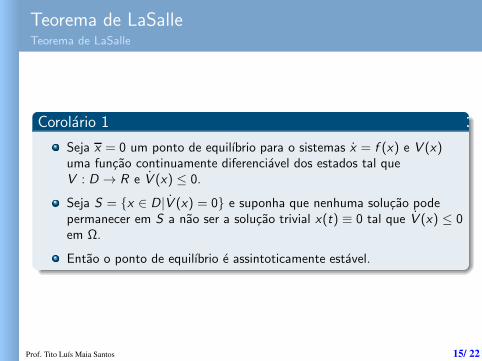
Corolario 1
Seja x = 0 um ponto de equilıbrio para o sistemas x = f (x) e V (x)uma funcao continuamente diferenciavel dos estados tal queV : D → R e V (x) ≤ 0.
Seja S = x ∈ D|V (x) = 0 e suponha que nenhuma solucao podepermanecer em S a nao ser a solucao trivial x(t) ≡ 0 tal que V (x) ≤ 0em Ω.
Entao o ponto de equilıbrio e assintoticamente estavel.
Prof. Tito Luís Maia Santos 15/ 22

Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 16/ 22

Particularizacao para sistemas linearesEstabilidade
Teorema 4
O ponto de equilıbrio x = 0 do sistema linear autonomo x = Ax eestavel se e somente se todos os autovalores de A satisfazemReλi < 0 e para cada autovalor de com Reλi = 0 e multiplicidadealgebrica qi ≥ 2, o posto e dado por posto(A− λi ) = n − qi , sendo n adimensao de x .
O ponto de equilıbrio x = 0 e globalmente assintoticamente estavel se esomente se todos os autovalores de A satisfazem Reλi < 0.
Prof. Tito Luís Maia Santos 17/ 22

Particularizacao para sistemas linearesEstabilidade - Lyapunov
Considere um sistema linear autonomo dado por x = Ax .
Considere a equacao matricial abaixo
PA+ ATP = −Q. (1)
Teorema 5
A matriz A e Hurwitz, isto e, Reλi < 0 para todos os autovalores deA, se e somente se para uma dada matriz simetrica positiva definidapositiva Q existe uma matriz simetrica positiva definida P que satisfaza equacao (1). Alem disso, se a matriz A e Hurwitz, entao a matriz P ea unica solucao de (1).
Prof. Tito Luís Maia Santos 18/ 22

Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 19/ 22

Formalizacao para sistemas nao-linearesVizinhanca do ponto de equilıbrio
Teorema 6
Seja x = 0 um ponto de equilıbrio para o sistema nao-linear
x = f (x)
onde f : D → Rn e uma funcao contınua diferenciavel e D e uma
vizinhanca da origem. Seja
A =∂f
∂x(x)
∣
∣
∣
∣
x=0
.
Entao:
1 A origem e assintoticamente estavel se Reλi < 0 para todos osautovalores de A.
2 A origem e instavel se Reλi > 0 para algum autovalor de A.
Prof. Tito Luís Maia Santos 20/ 22

Sumario
1 Introducao
2 Revisao
3 Comentarios relevantes
4 Teorema de LaSalle
5 Particularizacao para sistemas lineares
6 Formalizacao para sistemas nao-lineares
7 Comentarios Finais
Prof. Tito Luís Maia Santos 21/ 22

Comentarios Finais
Nesta aula discutimos sobre algumas caracterısticas da estabilidade deLyapunov.
Apresentou-se o Teorema de LaSalle.
Particularizamos o Teorema de Lyapunov para o caso linear.
Na proxima aula discutiremos sobre:
Realimentacao linearizante.
Prof. Tito Luís Maia Santos 22/ 22











![Quest Coment CESPE UnB.pdf[1]](https://static.fdocumentos.com/doc/165x107/577d22421a28ab4e1e96f44e/quest-coment-cespe-unbpdf1.jpg)



![LP-Prova 6%c2%b0 EF-Coment%c3%a1rios e Recomenda%c3%a7%c3%b5es[1]](https://static.fdocumentos.com/doc/165x107/548a7d50b47959d30c8b5dce/lp-prova-6c2b0-ef-comentc3a1rios-e-recomendac3a7c3b5es1.jpg)