Inct Icmc Usp e Pucrs
7
CURSO DE PROGRAMAÇÃO CURSO DE PROGRAMAÇÃO DE DE ROBÔS MÓVEIS ROBÔS MÓVEIS USP - ICMC – LRM: Laboratório de Robótica Móvel USP - ICMC – LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício Dias, Leandro Couto, Leandro Fernandes Maurício Dias, Leandro Couto, Leandro Fernandes PUC-RS – GSE: Grupo de Sistemas Embarcados PUC-RS – GSE: Grupo de Sistemas Embarcados Profs. Fabiano Hessel, Eduardo Bezerra, César Marcon Profs. Fabiano Hessel, Eduardo Bezerra, César Marcon Aluno - Luiz Eduardo Giampaoli Aluno - Luiz Eduardo Giampaoli GAPH – Profs. Ney Calazans, Fernando Moraes GAPH – Profs. Ney Calazans, Fernando Moraes Programação de Robôs Móveis São Carlos/SP e Porto Alegre/RS Sete
-
Upload
usp-icmc-lrm -
Category
Technology
-
view
491 -
download
0
description
Curso de Programação de Robôs Móveis
Transcript of Inct Icmc Usp e Pucrs

CURSO DE PROGRAMAÇÃO CURSO DE PROGRAMAÇÃO DE DE
ROBÔS MÓVEISROBÔS MÓVEISUSP - ICMC – LRM: Laboratório de Robótica MóvelUSP - ICMC – LRM: Laboratório de Robótica Móvel
Profs. Denis Wolf, Eduardo Simões, Fernando Osório Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato,Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato,
Maurício Dias, Leandro Couto, Leandro FernandesMaurício Dias, Leandro Couto, Leandro Fernandes
PUC-RS – GSE: Grupo de Sistemas EmbarcadosPUC-RS – GSE: Grupo de Sistemas EmbarcadosProfs. Fabiano Hessel, Eduardo Bezerra, César MarconProfs. Fabiano Hessel, Eduardo Bezerra, César Marcon
Aluno - Luiz Eduardo GiampaoliAluno - Luiz Eduardo GiampaoliGAPH – Profs. Ney Calazans, Fernando MoraesGAPH – Profs. Ney Calazans, Fernando Moraes
Programação de Robôs Móveis São Carlos/SP e Porto Alegre/RS Setembro, 2009

Programação de Programação de Robôs MóveisRobôs Móveis
IP addresses and the port numbers of the components.
Curso Remoto
• USP ICMC: Robôs Pioneer e Erratic Equipados com: - Sonar, Laser, e Câmera de Vídeo
• PUC/RS: Alunos do curso controlando os robôs à distância
• Envio de Dados Sensoriais (Video, Sonar, Laser)• Recepção de Comandos de Controle
•Programação Remota
It works!

EquipamentosEquipamentos
IP addresses and the port numbers of the components.
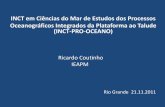
Robôs e Sensores
• Pioneer DX and AT• Laser SICK LMS• Erratic Robot• Laser Hokuyo• Cameras on-board with pan-tilt• Wireless Camera
Erratic – Era Mobi
Pioneer DX

EquipamentosEquipamentos
IP addresses and the port numbers of the components.
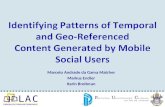
Robôs e Sensores
• Pioneer DX and AT• Laser SICK LMS• Erratic Robot• Laser Hokuyo• Cameras on-board with pan-tilt• Wireless Camera
Erratic – Era Mobi
Pioneer AT

AgendaAgenda
IP addresses and the port numbers of the components.
Dia 1 - 16/09 - 14h as 17h
* Introdução a robótica móvel- Aplicações práticas de Robôs Móveis- Conceitos: Sensores, Atuadores e Controle
* Ferramentas de Simulação para robótica- Plataformas de simulação de robôs móveis- Programação de Robôs usando o player-stage
* Player-Stage- Arquitetura e componentes- Player-Stage, Playerv, simulação- Conexão com o robô: simulado e remoto- Acesso ao dados dos sensores (laser, sonar) e comandos remotos
Prática: Acesso ao robô no LRM (USP-ICMC)

AgendaAgenda
IP addresses and the port numbers of the components.
Dia 2 - 17/09 - 14h as 17h
* Conceitos de programação no Player-Stage- Comandos em "C", Compilação, Teste- Desenvolvimento de programas para uso do player-stage em modo simulado
* Programação de Comportamentos no Robô- Criando programas para o robô real- Testando no simulador- Testando no robô real
Prática: Controle programado a distância para o robô do LRM (USP-ICMC)

AgendaAgenda
IP addresses and the port numbers of the components.
Dia 3 - 18/09 - 14h as 17h
* Desenvolvimento de programas de controle "inteligente" de robôs móveis
- Conceitos de controle inteligente e tarefas executadas em modo autônomo;
- Programação de tarefas: Seguir parede, desvio de obstáculos, exploração do ambiente
- Desenvolvimento e testes de programas
Prática: Controle programado a distância para o robô do LRM (USP-ICMC)