Introducao a Algebra Linear - Hamilton Prado Bueno
95
Para Franciele, Lilian e Paulo Henrique.
-
Upload
ronaldo1314 -
Category
Documents
-
view
234 -
download
6
description
Algelin
Transcript of Introducao a Algebra Linear - Hamilton Prado Bueno

ParaFranciele, Lilian e Paulo Henrique.

ApresentacaoEste texto foi redigido para a disciplina Algebra Linear I, do
curso de licenciatura em Matematica da UFMG, na modalidade adistancia.
Ha alguns anos, escrevi um livro para um curso de Algebra Li-near. Ele destinava-se a alunos mais avancados, que ja haviam es-tudado a parte basica dessa disciplina. Apesar de introduzir todosos conceitos de um primeiro curso de Algebra Linear, essa parte dotexto foi escrita com o proposito de ser sucinta e nao detalhava re-sultados considerados conhecidos.
A oportunidade de escrever este texto tornou possıvel apresen-tar, com um enfoque que julgo adequado, topicos de um primeirocurso de Algebra Linear. Contudo, a estrutura do curso a distanciafez com que meu texto se tornasse mais abstrato do que intencio-nava: para tornar possıvel o ensino de assuntos basicos da AlgebraLinear em apenas dois meses, a estrutura euclidiana – quer dizer,produtos internos e normas – foram relegados a um segundo curso,continuacao deste. Assim, aspectos geometricos que julgo funda-mentais foram postergados para esse futuro curso.
Para sanar essa deficiencia, tentei apresentar uma visao geome-trica dos assuntos abordados. Uma vez concluıda a redacao destelivro, julguei o resultado final como bastante aceitavel, ainda maislevando em conta o exıguo perıodo em que ele foi redigido. Com aoportunidade de ensina-lo e entao ouvir a opiniao dos alunos sobreele, melhorias podem ser implementadas e suas deficiencias mino-radas.
O desafio de escrever sobre topicos basicos me fez procurar pordemonstracoes particularmente simples de resultados fundamen-tais. As demonstracoes aqui apresentadas contaram com o auxıliodo Prof. Helder Candido Rodrigues. Nao existem palavras de agra-decimento capazes de dar uma ideia do quanto essa colaboracao foidecisiva.
Muitos dos exercıcios propostos neste texto tem sua origem noslivros de Algebra Linear do Prof. Reginaldo Santos. Tomei a liber-dade de utiliza-los, conhecedor do enorme desprendimento que ocaracteriza.
Agradeco a Profa. Maria Cristina Costa Ferreira por sugestoes ecorrecoes que muito aprimoraram este texto.
Hamilton Prado Buenojulho de 2009
iii


Ao Aluno
Os assuntos apresentados neste livro dao continuidade a obra“Geometria Analıtica e Algebra Linear: uma Visao Geometrica”, deD. Avritzer. Assim, muitos resultados daquele texto sao supostosconhecidos. Por outro lado, meu enfoque sobre alguns assuntos di-fere do apresentado naquele texto. Isso motivou-me a apresenta-losnovamente.
Ha uma enorme diferenca entre um texto de Geometria Analıtica(mesmo com uma abordagem utilizando a Algebra Linear, como notexto de D. Avritzer) e um texto de Algebra Linear, como este livro.A apresentacao torna-se muito mais abstrata, o que e uma imposicaopara se conseguir resultados mais gerais. Assim, ao estudar estetexto, voce se defrontara com resultados que tera dificuldades paracompreender qual o seu significado. Essa situacao e normal e so serasuperada com muitas horas de estudo.
O curso apresenta muitos calculos. Apesar deles serem impor-tantes, o principal objetivo e que voce entenda o porque deles fun-cionarem. Quer dizer, voce precisa compreender bem o assunto queesta sendo exposto; caso contrario, voce chegara em contas que naoterao qualquer significado.
A compreensao da estrutura da Algebra Linear e o desafio quevoce tera que enfrentar neste curso. A demonstracao dos resultadosexpostos (teorema, lemas, proposicoes) esclarece esta estrutura, naosendo apenas uma parte “desagradavel e incompreensıvel” do as-sunto. Cada resultado deve ser lido e relido ate que seu significadoaflore. Se isso nao for suficiente, tente seguir sua demonstracao emum exemplo particular, que voce mesmo pode elaborar. Alem disso,voce dispoe de contato quase direto com os monitores ou profes-sores, contato esse que lhe ajudara nessa compreensao. Mas vocetera que se dedicar bastante ao curso para superar suas dificuldades.Esse desafio e o mesmo enfrentado por alunos de cursos presenciais.
O fato do curso ser a distancia apresenta – o que a primeira vistaparece paradoxal – a possibilidade de uma interacao mais profundaentre voce e seus professores ou tutores. Duvidas podem ser sana-das praticamente no momento em que voce esta estudando, gracasa comunicacao por meio da internet. Mas, se voce desprezar esse ca-nal de comunicacao, o ritmo do curso fara com que voce logo se sintacompletamente desorientado. Assim, a sua participacao no curso,por meio desses canais de comunicacao, e decisiva para o seu apren-dizado.
v

Sumario
Apresentacao iii
Ao Aluno v
1 Conceitos Fundamentais 11.1 Vetores na Fısica e na Matematica . . . . . . . . . . . . 11.2 Sistemas Lineares e o Metodo de Gauss-Jordan . . . . 61.3 Calculo de Determinantes . . . . . . . . . . . . . . . . 111.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 O Espaco Rn 172.1 Equacao Parametrica do Plano . . . . . . . . . . . . . 172.2 Sistemas Lineares em 3 variaveis . . . . . . . . . . . . 192.3 O Espaco Rn . . . . . . . . . . . . . . . . . . . . . . . . 212.4 Espacos Vetoriais Abstratos . . . . . . . . . . . . . . . 242.5 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Subespacos do Rn e Bases 273.1 Subespacos e Combinacoes Lineares . . . . . . . . . . 273.2 Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3 Dimensao . . . . . . . . . . . . . . . . . . . . . . . . . 373.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Aplicacoes Lineares 434.1 Aplicacoes Lineares e Matrizes – Parte I . . . . . . . . 434.2 Espaco Linha e Espaco Coluna . . . . . . . . . . . . . 484.3 Multiplicacao de Matrizes . . . . . . . . . . . . . . . . 544.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5 O Teorema do Nucleo e da Imagem 575.1 Teorema (da dimensao) do Nucleo e da Imagem . . . 575.2 Isomorfismos e Inversas . . . . . . . . . . . . . . . . . 585.3 Obtencao da Inversa de uma Matriz . . . . . . . . . . 615.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6 Mudancas de Base 656.1 Representacao de um Vetor em uma Base . . . . . . . 656.2 Aplicacoes Lineares e Matrizes – Parte II . . . . . . . . 676.3 Aplicacao: Diagonalizacao de uma Matriz . . . . . . . 726.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 76
vii
viii SUMARIO
7 O Teorema de Cayley-Hamilton 797.1 Polinomios de Aplicacoes Lineares . . . . . . . . . . . 797.2 Subespacos Invariantes . . . . . . . . . . . . . . . . . . 807.3 O teorema de Cayley-Hamilton . . . . . . . . . . . . . 817.4 Aplicacoes . . . . . . . . . . . . . . . . . . . . . . . . . 837.5 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Referencias Bibliograficas 85
Indice Remissivo 86
Capıtulo 1
Conceitos Fundamentais
Objetivos: No final do Capıtulo o aluno deve saber:
1. distinguir o uso de vetores na Fısica e na Matematica;
2. resolver sistema lineares pelo metodo de Gauss-Jordan;
3. calcular determinantes por meio do escalonamento de umamatriz.
1.1 Vetores na Fısica e na Matematica
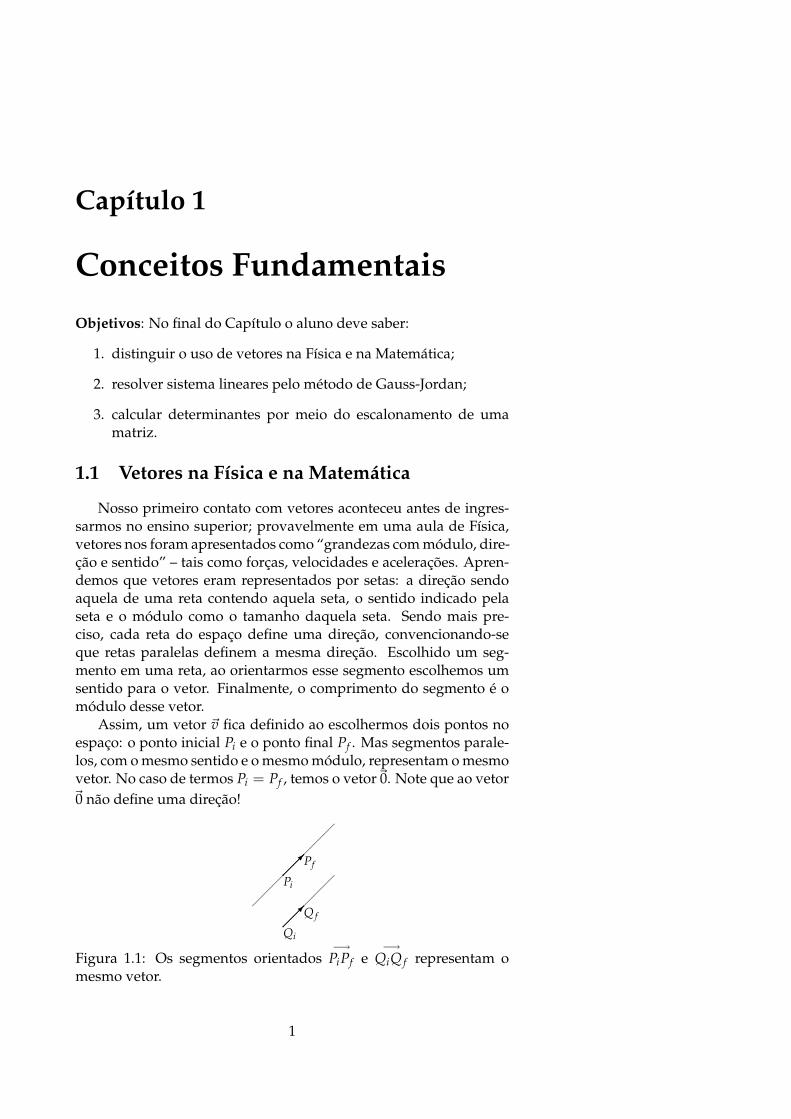
Nosso primeiro contato com vetores aconteceu antes de ingres-sarmos no ensino superior; provavelmente em uma aula de Fısica,vetores nos foram apresentados como “grandezas com modulo, dire-cao e sentido” – tais como forcas, velocidades e aceleracoes. Apren-demos que vetores eram representados por setas: a direcao sendoaquela de uma reta contendo aquela seta, o sentido indicado pelaseta e o modulo como o tamanho daquela seta. Sendo mais pre-ciso, cada reta do espaco define uma direcao, convencionando-seque retas paralelas definem a mesma direcao. Escolhido um seg-mento em uma reta, ao orientarmos esse segmento escolhemos umsentido para o vetor. Finalmente, o comprimento do segmento e omodulo desse vetor.
Assim, um vetor ~v fica definido ao escolhermos dois pontos noespaco: o ponto inicial Pi e o ponto final Pf . Mas segmentos parale-los, com o mesmo sentido e o mesmo modulo, representam o mesmovetor. No caso de termos Pi = Pf , temos o vetor~0. Note que ao vetor~0 nao define uma direcao!
��
��
��
��
���
`
`
Pi
Pf
��
��
�
���
`
`
Qi
Q f
Figura 1.1: Os segmentos orientados−→
PiPf e−→
QiQ f representam omesmo vetor.
1

2 CAPITULO 1. CONCEITOS FUNDAMENTAIS
Aprendemos ainda que vetores podem ser somados e multipli-cados por escalares (o nome que passamos a utilizar para nos referira numeros reais). A soma dos vetores ~v e ~w, definidos pelos pon-tos Pi, Pf e Qi, Q f e obtida ao transladarmos o vetor ~w, de modo queseu ponto inicial seja o ponto Pf ; o vetor~v + ~w e dado pelo segmentoorientado unindo Pi e Q f .
-Pi Pf = Qi
����
��������1Q f
~u
~v
~u +~v
Figura 1.2: A adicao de vetores.
Exercıcio 1.1 Na figura 1.2, os vetores v e w pertencem ao “plano” do papel deste livro.Se os vetores pertencem ao espaco, ainda assim a figura esta correta?
A multiplicacao do vetor~v pelo escalar α e definida como o vetorα~v com a mesma direcao do vetor ~v, com o mesmo sentido, se α > 0,e com sentido contrario, se α < 0. O modulo do vetor α~v e definidopor ‖α~v‖ = |α| ‖~v‖, em que |α| e o valor absoluto do escalar α.
���
��
���
��
��
��
v
2v
−3v
Figura 1.3: A multiplicacao de um vetor por um escalar.
Exercıcio 1.2 Como e definido α~v, se α = 0?
Se a ideia da soma de vetores e clara, a sua obtencao pratica nocaso de vetores definidos pelas coordenadas de seus pontos iniciale final nao e tao simples: dados dois vetores ~v =
−−→PiPf e ~w =
−−−→QiQ f
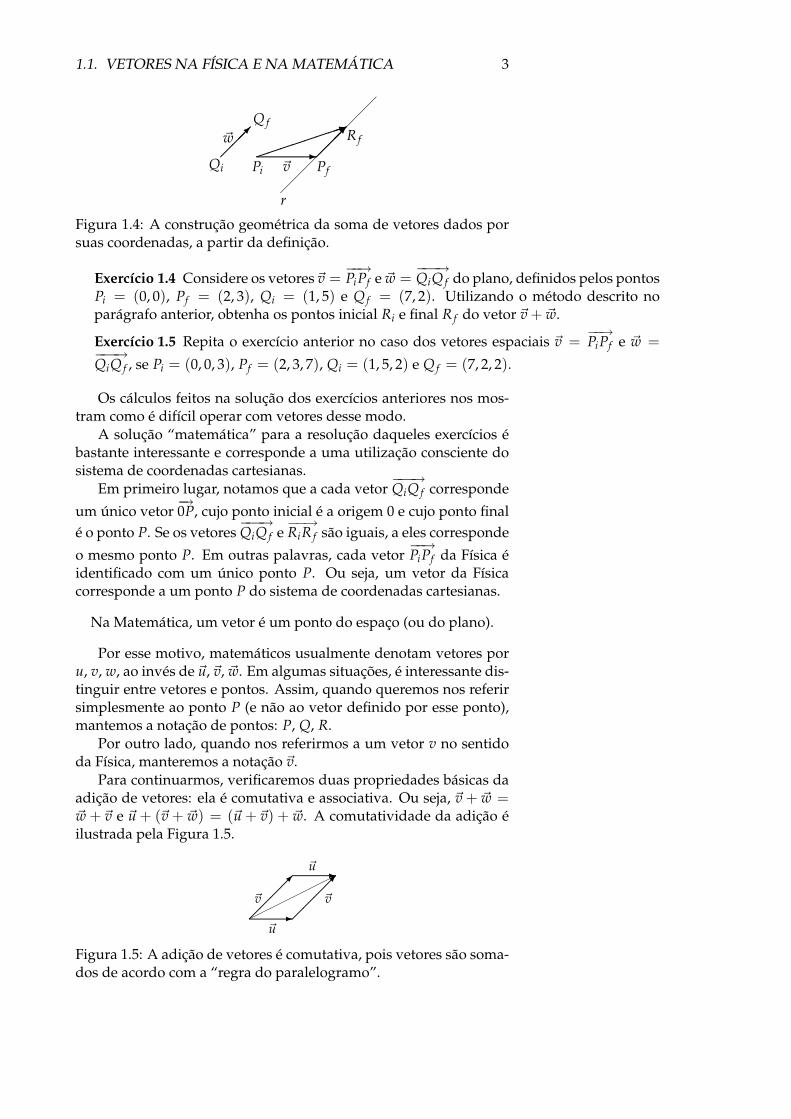
(isto e, dois segmentos orientados de retas), o vetor ~v + ~w e obtidopor meio de uma reta r, paralela a reta definida por ~w, passando peloponto Pf . Nessa reta, obtemos dois pontos cuja distancia ao ponto Pfe a mesma que a distancia entre Qi e Q f . Ao escolhermos a solucao
R f que define o mesmo sentido de−−−→QiQ f , o segmento orientado
−−→PiR f
e o vetor ~v + ~w. Veja a Figura 1.4.
Observacao 1.3 Observe que nao podemos descrever a reta r comoPf + t~w, pois (ainda) nao sabemos como somar as coordenadas doponto Pf com as coordenadas do vetor w. Assim, ainda nao sabemoscomo obter a solucao R f = Pf + 1~w! ¢
1.1. VETORES NA FISICA E NA MATEMATICA 3
-Pi Pf~v
����
Qi
Q f
~w
��
��
��
��
r
����R f
��������1
Figura 1.4: A construcao geometrica da soma de vetores dados porsuas coordenadas, a partir da definicao.
Exercıcio 1.4 Considere os vetores~v =−−→PiPf e ~w =
−−−→QiQ f do plano, definidos pelos pontos
Pi = (0, 0), Pf = (2, 3), Qi = (1, 5) e Q f = (7, 2). Utilizando o metodo descrito noparagrafo anterior, obtenha os pontos inicial Ri e final R f do vetor ~v + ~w.
Exercıcio 1.5 Repita o exercıcio anterior no caso dos vetores espaciais ~v =−−→PiPf e ~w =−−−→
QiQ f , se Pi = (0, 0, 3), Pf = (2, 3, 7), Qi = (1, 5, 2) e Q f = (7, 2, 2).
Os calculos feitos na solucao dos exercıcios anteriores nos mos-tram como e difıcil operar com vetores desse modo.
A solucao “matematica” para a resolucao daqueles exercıcios ebastante interessante e corresponde a uma utilizacao consciente dosistema de coordenadas cartesianas.
Em primeiro lugar, notamos que a cada vetor−−−→QiQ f corresponde
um unico vetor−→0P, cujo ponto inicial e a origem 0 e cujo ponto final
e o ponto P. Se os vetores−−−→QiQ f e
−−→RiR f sao iguais, a eles corresponde
o mesmo ponto P. Em outras palavras, cada vetor−−→PiPf da Fısica e
identificado com um unico ponto P. Ou seja, um vetor da Fısicacorresponde a um ponto P do sistema de coordenadas cartesianas.
Na Matematica, um vetor e um ponto do espaco (ou do plano).
Por esse motivo, matematicos usualmente denotam vetores poru, v, w, ao inves de ~u, ~v, ~w. Em algumas situacoes, e interessante dis-tinguir entre vetores e pontos. Assim, quando queremos nos referirsimplesmente ao ponto P (e nao ao vetor definido por esse ponto),mantemos a notacao de pontos: P, Q, R.
Por outro lado, quando nos referirmos a um vetor v no sentidoda Fısica, manteremos a notacao ~v.
Para continuarmos, verificaremos duas propriedades basicas daadicao de vetores: ela e comutativa e associativa. Ou seja, ~v + ~w =~w +~v e ~u + (~v + ~w) = (~u +~v) + ~w. A comutatividade da adicao eilustrada pela Figura 1.5.
-��
���
��
���
-
��
��
��
��*
~u
~v~v
~u
Figura 1.5: A adicao de vetores e comutativa, pois vetores sao soma-dos de acordo com a “regra do paralelogramo”.
4 CAPITULO 1. CONCEITOS FUNDAMENTAIS
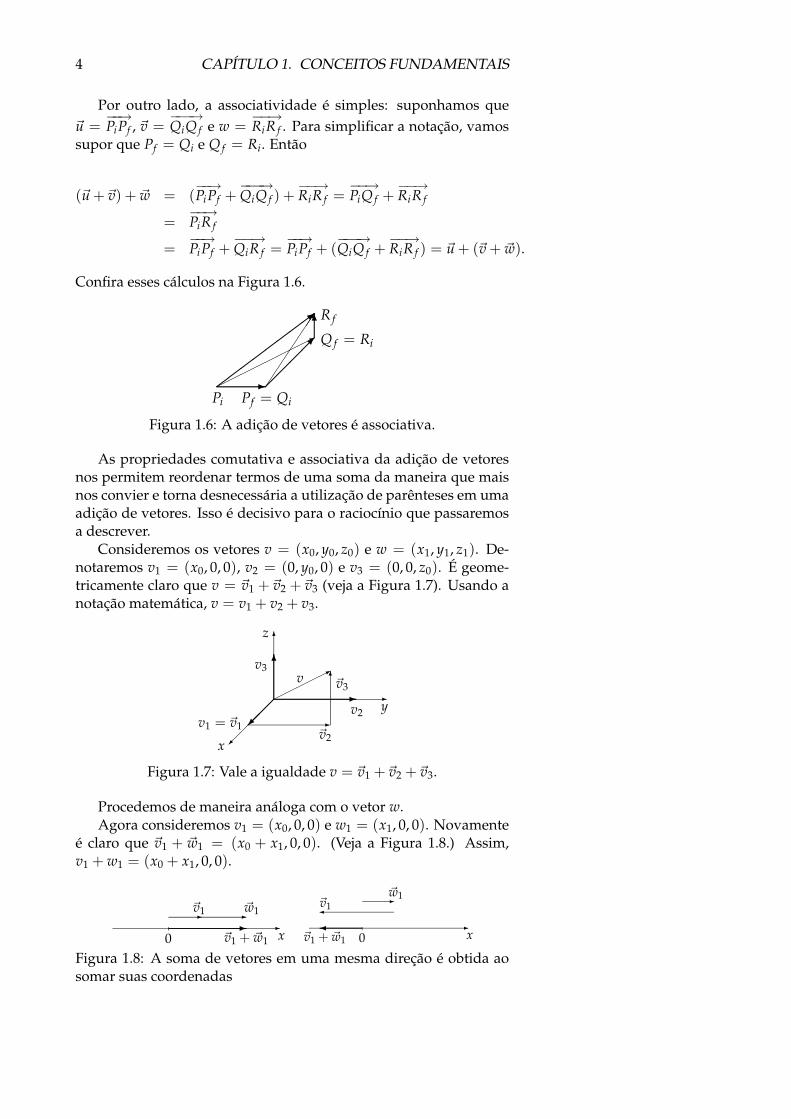
Por outro lado, a associatividade e simples: suponhamos que~u =
−−→PiPf , ~v =
−−−→QiQ f e w =
−−→RiR f . Para simplificar a notacao, vamos
supor que Pf = Qi e Q f = Ri. Entao
(~u +~v) + ~w = (−−→PiPf +
−−−→QiQ f ) +
−−→RiR f =
−−→PiQ f +
−−→RiR f
=−−→PiR f
=−−→PiPf +
−−→QiR f =
−−→PiPf + (
−−−→QiQ f +
−−→RiR f ) = ~u + (~v + ~w).
Confira esses calculos na Figura 1.6.
-��
���
��������*
6
��
��
��
��>
�
Pi Pf = Qi
Q f = Ri
R f
Figura 1.6: A adicao de vetores e associativa.
As propriedades comutativa e associativa da adicao de vetoresnos permitem reordenar termos de uma soma da maneira que maisnos convier e torna desnecessaria a utilizacao de parenteses em umaadicao de vetores. Isso e decisivo para o raciocınio que passaremosa descrever.
Consideremos os vetores v = (x0, y0, z0) e w = (x1, y1, z1). De-notaremos v1 = (x0, 0, 0), v2 = (0, y0, 0) e v3 = (0, 0, z0). E geome-tricamente claro que v = ~v1 +~v2 +~v3 (veja a Figura 1.7). Usando anotacao matematica, v = v1 + v2 + v3.
6
-�
��
�
6
-�
��
6
-v1 = ~v1
~v2
~v3
v2
v3
x
y
z
�����*v
Figura 1.7: Vale a igualdade v = ~v1 +~v2 +~v3.
Procedemos de maneira analoga com o vetor w.Agora consideremos v1 = (x0, 0, 0) e w1 = (x1, 0, 0). Novamente
e claro que ~v1 + ~w1 = (x0 + x1, 0, 0). (Veja a Figura 1.8.) Assim,v1 + w1 = (x0 + x1, 0, 0).
-
x0
- -
~v1 ~w1
-
~v1 + ~w1
-
x0
-
�
~v1
~w1
�
~v1 + ~w1
Figura 1.8: A soma de vetores em uma mesma direcao e obtida aosomar suas coordenadas

1.1. VETORES NA FISICA E NA MATEMATICA 5
Naturalmente, o mesmo procedimento tambem se aplica as so-mas ~v2 + ~w2 e ~v3 + ~w3. Ora, entao temos
v + w = (v1 + v2 + v3) + (w1 + w2 + w3)= (v1 + w1) + (v2 + w2) + (v3 + w3)= (x0 + x1, 0, 0) + (0, y0 + y1, 0) + (0, 0, z0 + z1)= (x0 + x1, y0 + y1, z0 + z1).
Em outras palavras, o tratamento anterior nos mostra que pode-mos encontrar facilmente a soma de dois vetores, se conhecemos ascoordenadas de ambos: basta somar as coordenadas corresponden-tes.
Exercıcio 1.6 Justifique: se v = (x0, y0, z0), entao αv = (αx0, αy0, αz0). Em particular,−v = (−1)v = (−x0,−y0,−z0), de modo que esta definida a subtracao de dois vetores:v− w = v + (−w).
Uma vez resolvido o exercıcio anterior, falta apenas um passopara encontrarmos uma solucao pratica para os Exercıcios 1.4 e 1.5.
Consideremos o vetor−−→PiPf definido pelos pontos inicial Pi =
(x0, y0, z0) e final Pf = (x1, y1, z1). Qual o ponto P que correspondea esse vetor da Fısica? Em outras palavras, qual o vetor v da Ma-tematica correspondente a esse vetor da Fısica?
Examinando a Figura 1.9, vemos que−→0Pi +
−−→PiPf =
−→0Pf . Assim,−−→
PiPf =−→0Pf −−→0Pi. Como os vetores do lado direito da ultima igual-
dade tem seu ponto inicial na origem (correspondendo assim a veto-res da Matematica), acabamos de verificar que
−−→PiPf corresponde ao
vetor v = (x1 − x0, y1 − y0, z1 − z0) da Matematica.
��
��
��
���B
BBBBBN
����������:
Pi
Pf
0
Figura 1.9: Se Pi = (x0, y0, z0) e Pf = (x1, y1, zi), entao−→
PiPf corres-ponde ao vetor v = (x1 − x0, y1 − y0, z1 − z0) da Matematica.
Exercıcio 1.7 Refaca os Exercıcios 1.4 e 1.5.Exercıcio 1.8 Verifique que o todo o procedimento descrito anteriormente permanecevalido para vetores do plano. Em outras palavras, verifique que a adicao dos vetoresu = (a, b) e v = (c, d) e dada pelo vetor u + v = (a + c, b + d) e que λu = (λa, λb). Se~u = ~PiPf for um vetor (da Fısica) determinado pelos pontos Pi = (x0, y0) e Pf = (x1, y1),verifique que ao vetor ~u corresponde o vetor (da Matematica) u = (x1 − x0, y1 − y0).
Essa abordagem de vetores tem inumeras vantagens. Mas tambemtem desvantagens: em alguns casos, o fato geometrico a ser descritofica muito mais claro utilizando o conceito de vetor no sentido fısico.Veja a Figura 1.10.

6 CAPITULO 1. CONCEITOS FUNDAMENTAIS
6
�� ��
~n
Figura 1.10: O vetor ~n = (0, 0, 1) e normal a esfera x2 + y2 + z2 = 1no ponto (0, 0, 1).
Exercıcio 1.9 Porque a figura anterior nao corresponde ao sentido de vetor utilizado naMatematica?
Quando conveniente, ilustramos figuras utilizando o conceitofısico de vetor. Essa situacao ocorre com frequencia no estudo da Ge-ometria Analıtica, abordada no texto “Geometria Analıtica e AlgebraLinear: uma Visao Geometrica”, de D. Avritzer. Voce esta convidadoa rever os Capıtulos 1 a 4 do tomo II daquele livro.
1.2 Sistemas Lineares e o Metodo de Gauss-Jordan
Para 1 ≤ i ≤ m e 1 ≤ j ≤ n, suponhamos conhecidos os valoresaij e os valores bj. Um sistema linear em m equacoes e n incognitasprocura a solucao x1, . . . , xn que satisfaz
a11x1 + . . . + a1nxn = b1a21x1 + . . . + a2nxn = b2
......
...am1x1 + . . . + amnxn = bm.
Como sabemos, esse sistema pode ser escrito utilizando matrizes
a11 a12 · · · a1na21 a22 · · · a2n...
.... . .
...am1 am2 · · · amn
x1x2...
xn
=
b1b2...
bm
,
ou,Ax = b
Se b = 0, o sistema e chamado homogeneo; se b 6= 0, o sistemae nao homogeneo. Os sistemas Ax = b e Ax = 0 relacionam- se deum modo especial, de modo que informacoes sobre as solucoes deum fornecem dados importantes para a solucao do outro. Por essemotivo, no estudo do sistema Ax = b, o sistema Ax = 0 e chamadosistema homogeneo associado.
Vamos estudar o sistema Ax = b. Para isso, mais sinteticamenteainda, representaremos esse sistema por uma unica matriz, chama-da matriz aumentada do sistema:
1.2. SISTEMAS LINEARES E O METODO DE GAUSS-JORDAN 7
A = (A | b) =
a11 a12 · · · a1n∣∣ b1
a21 a22 · · · a2n∣∣ b2
......
. . ....
∣∣∣∣...
am1 am2 · · · amn∣∣ bm
E facil verificar que as seguintes operacoes sobre as linhas damatriz A nao alteram o conjunto de solucoes do sistema Ax = b:
(a) Transpor as linhas i e j;
(b) Multiplicar a linha i por um escalar nao nulo;
(c) Substituir a linha j por sua soma com um multiplo da linha i.1
As operacoes (a), (b) e (c) sao as operacoes elementares sobre aslinhas da matriz A.
Consideremos entao uma matriz satisfazendo as seguintes pro-priedades:
- se existir o primeiro elemento nao nulo da linha i (chamadopivo da linha i) e se esse ocorrer na coluna j, entao, se existir opivo da linha i + `, esse ocorre numa coluna k > j, para todo` ∈ {1, . . . , m− i};
- o pivo de cada linha e igual a 1, se ocorrer na matriz A.
Dizemos entao que essa matriz (ou o sistema) esta na forma es-calonada e uma sucessao de operacoes elementares utilizadas paralevar uma matriz qualquer C ate uma matriz na forma escalonada eum escalonamento da matriz C.
Dada uma matriz arbitraria C = (cij), a sucessiva aplicacao deoperacoes elementares (sobre suas linhas) pode leva-la ate uma formaescalonada. De fato, se existir algum elemento nao nulo na primeiracoluna de C, ao aplicarmos as operacoes elementares (a) e (b) ob-temos uma nova matriz C′ = (c′ij), com c′11 = 1. A aplicacao daoperacao elementar (c) torna possıvel transformar em zero qual-quer outro elemento nao nulo da primeira coluna. O resultado entaosegue-se daı por inducao sobre o numero de linhas de C.
Contudo, dada uma matriz A, a sucessiva aplicacao de opera-coes elementares pode conduzir a diferentes formas escalonadas paraessa matriz. E o que veremos no proximo exemplo.
1Com relacao a operacao (c), note que x = (x1, x2, . . . , xn) satisfaz
ai1x1 + . . . + ainxn = biaj1x1 + . . . + ajnxn = bj
se, e somente se, satisfizer
ai1x1 + . . . + ainxn = bi(aj1 + αai1)x1 + . . . + (ajn + αain)xn = bj + αbi.

8 CAPITULO 1. CONCEITOS FUNDAMENTAIS
Exemplo 1.10 Considere o sistema
A = (A | b) =(
1 2 3∣∣ 4
2 2 2∣∣ 2
).
Subtraindo da segunda linha duas vezes a primeira e entao divi-dindo por (−2) a (nova) segunda linha, obtemos
(1 2 3
∣∣ 40 1 2
∣∣ 3
),
matriz que esta na forma escalonada.Por outro lado, trocando as duas linhas da matriz original A, di-
vidindo a (nova) primeira linha por 2 e entao subtraindo a segundalinha, chegamos a (
1 1 1∣∣ 1
0 1 2∣∣ 3
),
que tambem esta na forma escalonada.Assim, a uma mesma matriz podem corresponder diferentes for-
mas escalonadas! Note, entretanto, que os pivos sao os mesmos nasduas formas obtidas. ¢
Suponhamos agora que uma matriz C esteja na forma escalonada.Se cada pivo for o unico elemento nao nulo de sua coluna, dizemosque a matriz esta em sua forma escalonada reduzida por linhas. Apli-cando a operacao elementar (c), podemos fazer com que uma matrizna forma escalonada atinja sua forma reduzida por linhas. De fato,consideremos o pivo da ultima linha nao-nula de C. A aplicacao daoperacao elementar (c) torna possıvel zerar os elementos que estaoacima do pivo, mantendo ainda a matriz na forma escalonada. Ademonstracao agora segue-se daı por inducao, aplicando o mesmoprocedimento ao pivo da penultima linha nao-nula de C e assim su-cessivamente.
A forma escalonada reduzida por linhas de uma matriz e unica.Mostraremos esse resultado no Teorema 1.17.
Exemplo 1.11 Consideremos o sistema Ax = b, cuja matriz aumen-tada e dada por
1 0 0 0 0 0∣∣ b1
−1 0 0 0 0 0∣∣ b2
0 1 0 0 0 0∣∣ b3
1 1 1 1 0 0∣∣ b4
0 0 0 0 1 −3∣∣ b5
Queremos determinar para quais valores de b1, . . . , b5 o sistematem solucao. Se ele tiver solucao, queremos determina-la.
Levando a matriz aumentada do sistema a forma escalonada re-duzida por linhas, obtemos
1 0 0 0 0 0∣∣ b1
0 1 0 0 0 0∣∣ b3
0 0 1 1 0 0∣∣ b4 − b1 − b3
0 0 0 0 1 −3∣∣ b5
0 0 0 0 0 0∣∣ b1 + b2
.
1.2. SISTEMAS LINEARES E O METODO DE GAUSS-JORDAN 9
A ultima linhas nos mostra que esse sistema apenas possui solu-cao se tivermos b1 + b2 = 0. Quer dizer, se tivermos b1 + b2 6= 0, osistema nao tem solucao.
Se o sistema tiver solucao, podemos determina-las.2 Suponha-mos, portanto, que b1 + b2 = 0. Escrevemos as variaveis corres-pondentes aos pivos em termos das demais variaveis (chamadasvariaveis livres):
x1 = b1x2 = b3x3 = (b4 − b1 − b3)− x4x4 = x4x5 = b5 + 3x6x6 = x6
Podemos escrever essa resposta de uma maneira que se mostrarabastante util:
x1x2x3x4x5x6
=
b1b3
b4 − b1 − b30b50
+ x4
00
−1100
+ x6
000031
. (1.1)
Quer dizer, para quaisquer valores de b1, b3, b4 e b5, e para quais-quer valores escolhidos para as variaveis livres x4 e x6, a solucao dosistema Ax = b (com b1 + b2 = 0) e dada pela expressao anterior.O sistema tem infinitas solucoes, resultantes da escolha de valorespara x4 e x6. ¢
Observacao 1.12 O exemplo anterior deixa claro que a existencia desolucoes para um sistema Ax = b, sendo A uma matriz m× n, naodepende diretamente de m e n. Ele nao possuira solucao se, na formaescalonada reduzida por linhas de (A|b), nao tivermos uma linha noformato (0, c), com c 6= 0. (Esse e o formato da ultima linha no sis-tema anterior, se tivermos b1 + b2 6= 0.) Se esse nao for o caso, osistema sempre possuira solucao: se existirem variaveis livres (querdizer, o numero de pivos nao for igual a n), entao o sistema pos-suira infinitas solucoes, resultantes das infinitas escolhas de valorespara as variaveis livres. Se nao existirem variaveis livres, o sistemapossuira uma unica solucao. ¢
Exercıcio 1.13 Escreva explicitamente o sistema considerado no Exemplo 1.11.Exercıcio 1.14 De um exemplo de um sistema com uma equacao e duas incognitas quepossua as mesmas solucoes de um sistema com duas equacoes e duas incognitas.Exercıcio 1.15 De um exemplo de um sistema com duas equacoes e duas incognitas quenao possua solucao.
2Sendo mais explıcito, estou dizendo que a denominacao “sistema indetermi-nado”, utilizada no ensino medio, e inadequada.

10 CAPITULO 1. CONCEITOS FUNDAMENTAIS
E claro que, se estivermos tratando de um sistema homogeneoAx = 0, nao ha necessidade de trabalhar com a matriz aumentadado sistema. E o que faremos ao tratar esse tipo de sistema.
Exercıcio 1.16 Justifique a afirmacao anterior em termos de operacoes elementares.
Teorema 1.17 Qualquer que seja a matriz A, ela possui uma unica formaescalonada reduzida por linhas.
Demonstracao: Faremos inducao no numero de colunas da matrizA. Se A possuir uma unica coluna, sua forma escalonada reduzidapor linhas e
10...0
ou
00...0
,
a primeira possibilidade ocorrendo se A possuir um elemento naonulo e a segunda, caso contrario.
Suponhamos, portanto, o resultado valido para qualquer matrizcom n − 1 colunas e consideremos uma matriz A com n colunas.Suponhamos que R1 e R2 sejam formas escalonadas reduzidas porlinhas da matriz A. Interpretando essas matrizes como matrizes au-mentadas de um sistema, entao R1 = (R|a) e R2 = (R|b), ja quenossa hipotese de inducao aplica-se as colunas de R. Agora con-sideramos duas opcoes para a coluna a: se ela possuir um pivo,entao o sistema Rx = a nao possui solucao, pois a linha de R cor-respondente a posicao desse pivo seria identicamente nula, ja queR1 esta na forma escalonada reduzida por linhas. Como as solucoesde Rx = a e Rx = b sao as mesmas, b tambem tem um pivo e, por-tanto, a = b, ja que R1 e R2 estao na forma escalonada reduzida porlinhas. Se em a nao existir um pivo, entao o sistema Rx = a possuiuma solucao x0. Mas entao a = Rx0 = b, provando que a = b e queR1 = R2. 2
Vamos agora explicitar a relacao entre o sistema Ax = b e seu sis-tema homogeneo associado, Ax = 0. Partimos de uma observacaomuito simples: o sistema homogeneo sempre tem solucao! De fato,se tomarmos o valor de todas as incognitas como sendo igual a zero,obtemos uma solucao do sistema, chamada solucao trivial.
A solucao trivial sera unica, se nao existirem variaveis livres. Issoimplica, em particular, que a forma escalonada reduzida por linhasdo sistema possui o mesmo numero de pivos e de incognitas. As-sim, desprezadas as possıveis linhas identicamente nulas da formaescalonada reduzida por linhas, o que resta e a matriz identidade.
Exercıcio 1.18 Justifique a afirmacao feita no paragrafo anterior.
Se existirem variaveis livres (ou uma variavel livre), o sistemaAx = 0 possuira infinitas solucoes, obtidas ao se atribuir diferentesvalores a cada variavel livre. E o que acontece no proximo resultado:
1.3. CALCULO DE DETERMINANTES 11
Teorema 1.19 Considere um sistema homogeneo Ax = 0. Se A for umamatriz m× n, com m < n, entao Ax = 0 possui infinitas solucoes. Ouseja, qualquer sistema homogeneo com mais incognitas do que equacoespossui infinitas solucoes.
Demonstracao: A forma escalonada reduzida por linhas de A pos-sui um numero r de pivos que e, no maximo, igual ao numero deequacoes. Assim, ela possui n − r de variaveis livres e, portanto,infinitas solucoes. 2
Definicao 1.20 Sejam A uma matriz m× n. Definimos o nucleo de A,denotado ker A,3 como sendo o conjunto de solucoes do sistema Ax = 0.
Teorema 1.21 Suponha que x0 seja uma solucao do sistema Ax = b, istoe, Ax0 = b. Se x1 tambem for uma solucao do sistema Ax = b, entaox1 = x0 + z, em que z ∈ ker A. Em particular, se Ax = 0 so possuir asolucao trivial, a solucao de Ax = b sera unica.
Demonstracao: Suponhamos que z ∈ ker A. Entao x0 + z e solucaodo sistema Ax = b, pois A(x0 + z) = Ax0 + Az = b + 0 = b. Querdizer, x0 + z e solucao de Ax = b, para todo z ∈ ker A.
Suponhamos agora que Ax1 = b, ou seja, que x1 seja tambemsolucao de Ax = b. Consideremos x1 − x0. Entao A(x1 − x0) =Ax1 − Ax0 = b − b = 0, que dizer, (x1 − x0) ∈ ker A. Denotandoz = x1 − x0, temos x1 = x0 + (x1 − x0) = x0 + z, o que completa ademonstracao. 2
Voltando ao Exemplo 1.11, podemos agora interpretar a equacao(1.1). O primeiro termo do lado direito (o termo dependente de b) euma solucao particular de Ax = b (no caso b1 + b2 = 0). Os termosseguintes (correspondentes as variaveis livres x4 e x6 nos fornecemtodas as solucoes do sistema homogeneo associado. Observe queisso e imediato, pois corresponde a escolha b1 = · · · = b6 = 0.
Exercıcio 1.22 Considere o sistema
3x + 2y + 3z = 8x + y + z = 3
2x + y − z = 2.
Sabendo que (1, 1, 1) e uma de suas solucoes, ache todas as solucoes do sistema.
1.3 Calculo de Determinantes
Definicao 1.23 Uma matriz quadrada e triangular superior se todas assuas entradas abaixo da diagonal principal sao nulas.
Exercıcio 1.24 Mostre que o determinante de uma matriz triangular superior e o pro-duto de suas entradas na diagonal principal. Defina matriz triangular inferior e mostre oresultado analogo.
3A notacao ker vem do alemao: kernel quer dizer nucleo.

12 CAPITULO 1. CONCEITOS FUNDAMENTAIS
Exercıcio 1.25 Justifique: se uma matriz quadrada estiver na forma escalonada, entao elae triangular superior.
O escalonamento de uma matriz (e o fato do determinante deuma matriz triangular superior ser o produto das entradas diago-nais dessa matriz) nos fornece um metodo eficiente para o calculodo determinante de uma matriz.
De fato, sabemos que a aplicacao da operacao fundamental (a)a uma matriz faz com que seu determinante seja multiplicado por−1. A operacao fundamental (b) faz com que o determinante sejamultiplicado pelo valor c, enquanto a operacao fundamental (c) naoaltera o valor do determinante. (As operacoes fundamentais (a), (b)e (c) foram descritas na Secao 1.2.)
Vejamos um exemplo do calculo do determinante de uma matriz:
Exemplo 1.26 Consideremos a matriz
A =
1 1 1 11 2 2 21 1 3 34 3 2 1
.
Multiplicando a primeira linha por −1 e somando a segunda e aterceira e, entao, multiplicando a primeira linha por −4 e somandoa quarta linha, nao alteramos o valor do determinante:
det A = det
1 1 1 11 2 2 21 1 3 34 3 2 1
= det
1 1 1 10 1 1 10 0 2 20 −1 −2 −3
. (1.2)
Continuando o escalonamento, obtemos (de acordo com as pro-priedades do determinante)
det A = det
1 1 1 10 1 1 10 0 2 20 −1 −2 −3
= (2) det
1 1 1 10 1 1 10 0 1 10 0 −1 −2
.
Entao,
det A = (2) det
1 1 1 10 1 1 10 0 1 10 0 −1 −2
= −(2) det
1 1 1 10 1 1 10 0 1 10 0 0 1
.
A ultima matriz e triangular superior, de modo que seu determi-nante e o produto de suas entradas na diagonal principal. Assim,
det A = −2.

1.3. CALCULO DE DETERMINANTES 13
Observe, contudo, que tambem poderıamos obter o determinanteda matriz A sem utilizar a operacao fundamental (b). De (1.2) vem
det A = det
1 1 1 10 1 1 10 0 2 20 0 −1 −2
= det
1 1 1 10 1 1 10 0 2 20 0 0 −1
,
o que implica que det A = −2, pois a ultima matriz e triangularsuperior. ¢
Exercıcio 1.27 Calcule o determinante da matriz
2 1 3 11 0 1 10 2 1 00 1 2 3
.
Algumas vezes, a divisao de uma matriz quadrada em blocospode ser muito util para o calculo de seu determinante. Por exem-plo, a matriz
Q =
0 1 2 1 2 3 3 3 1 01 1 2 2 2 2 3 3 1 11 2 2 1 3 1 3 1 1 10 1 0 0 1 1 0 0 1 10 0 0 0 1 2 3 1 2 10 0 0 0 1 1 1 2 1 10 0 0 0 2 2 2 7 1 10 0 0 0 3 4 3 4 1 40 0 0 0 3 1 4 1 5 60 0 0 0 6 3 4 1 2 1
pode ser escrita na forma
Q =(
A B0 D
),
em que
A =
0 1 2 11 1 2 21 2 2 10 1 0 0
e D =
1 2 3 1 2 11 1 1 2 1 12 2 2 7 1 13 4 3 4 1 43 1 4 1 5 66 3 4 1 2 1
.
Os blocos A e D ajudam no calculo do determinante da matriz Q.De fato, vale o seguinte resultado:

14 CAPITULO 1. CONCEITOS FUNDAMENTAIS
Teorema 1.28 Seja Q uma matriz n× n com a forma
Q =(
A B0 D
),
em que A e uma matriz m×m e D uma matriz (n−m)× (n−m). Entao,
det Q = det A det D.
Demonstracao: Utilizando as operacoes elementares (a) e (c), trans-formamos os blocos A e D em matrizes triangulares superior. Aoperacao elementar (c) nao altera o determinante de Q (nem o deA ou D), mas a operacao (a) inverte o sinal do determinante de Q.Mas, se ela for aplicada em uma linha da matriz A (ou da matriz Q)ela tambem altera o sinal do determinante de A (respectivamente,de D). Assim, suponhamos que ao transformar A e D em matrizestriangulares superior tenhamos feito j e k trocas de linhas, respecti-vamente. Teremos
(−1)j(−1)k det Q =(
A′ B′0 D′
),
em que A′ e D′ sao matrizes triangulares superior. Como a matriz Qe triangular superior, seu determinante e o produto de suas entradasdiagonais, de modo que
(−1)j(−1)k det Q = a′11 · · · a′mmd′11 · · · d′(n−m)(n−m)
= det A′ det D′,
em que a′11, . . . , a′mm sao as entradas diagonais da matriz A′, enquantod′11, . . . , d′(n−m)(n−m) sao as entradas diagonais de D′.
Mas det A = (−1)j det A′ e det D = (−1)k det D′, como vimosanteriormente. Substituindo na igualdade anterior, obtemos
det Q = det A det D. 2
Exercıcio 1.29 Considere a matriz
1 1 1 11 2 1 13 1 1 13 2 1 2
(i) Utilizando operacoes elementares, leve essa matriz a forma(
A B0 D
),
em que os blocos A e D sao 2× 2.
(ii) Utilizando o item anterior, calcule seu determinante.

1.4. EXERCICIOS 15
1.4 Exercıcios
1. Considere a matriz
A =
1 −2 12 −5 13 −7 2
.
Considere o sistema Ax = b, sendo b igual a
(a)
b1b2b3
; (b)
1−2−1
; (c)
2−1
2
; (d)
111
.
Encontre, em cada caso, todas as solucoes do sistema Ax = b, se existirem. Em (a),imponha condicoes sobre b para que a solucao exista.
2. Considere o sistema cuja matriz aumentada e
0 0 3 −9∣∣ 6
5 15 −10 40∣∣ − 45
1 3 −1 5∣∣ − 7
.
Determine uma solucao particular do sistema nao homogeneo, bem como todas assolucoes do sistema homogeneo associado. Escreva sua resposta como no Exemplo1.11.
3. Utilizando o procedimento do Exemplo 1.26, calcule o determinante das matrizes
(a)
1 2 21 1 20 1 2
; (b)
1 1 1 11 3 1 21 2 −1 15 9 1 6
; (c)
1 1 1 11 2 −1 21 −1 2 11 3 3 2
.
16 CAPITULO 1. CONCEITOS FUNDAMENTAIS
Capıtulo 2
O Espaco Rn
Objetivos: No final do Capıtulo o aluno deve saber:
1. obter a representacao parametrica do plano;
2. reconhecer a importancia de “sistemas de coordenadas” emcasos simples;
3. efetuar operacoes basicas no Rn.
2.1 Equacao Parametrica do Plano
Suponhamos que n = (a, b, c) nao seja o vetor nulo. Como sabe-mos, uma equacao
ax + by + cz = d
representa um plano com vetor normal n = (a, b, c). Se d 6= 0, entaoo plano nao passa pela origem (0, 0, 0) do sistema de coordenadas.Um ponto (x0, y0, z0) do espaco pertence ao plano se, e somente se,ax0 + by0 + cz0 = d.
Existe uma outra maneira de expressar a equacao de um plano.Vejamos inicialmente em um exemplo:
Exemplo 2.1 Consideremos o plano π, de equacao
x− 2y− 3z = 5.
Vamos proceder como no Exemplo 1.11. Para isso, levamos aforma matricial do sistema (com uma equacao!) a forma escalonadareduzida por linhas e escrevemos as solucoes do mesmo:
xyz
=
500
+ λ
210
+ µ
301
. (2.1)
Interpretando como no Teorema 1.21, o primeiro termo do ladodireito da equacao e uma solucao particular do sistema: verifiqueque (5, 0, 0) satisfaz a equacao do plano. Os dois termos seguintesformam o conjunto de solucoes do sistema homogeneo associado:x− 2y− 3z = 0.
17
18 CAPITULO 2. O ESPACO RN
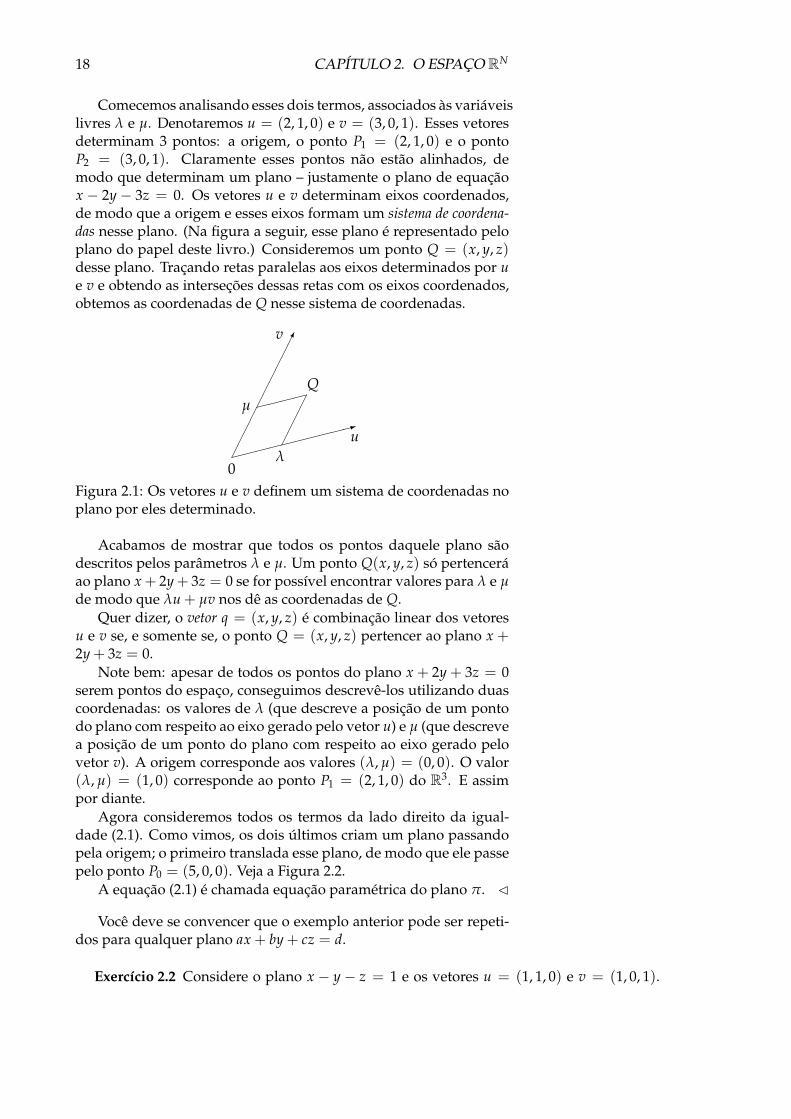
Comecemos analisando esses dois termos, associados as variaveislivres λ e µ. Denotaremos u = (2, 1, 0) e v = (3, 0, 1). Esses vetoresdeterminam 3 pontos: a origem, o ponto P1 = (2, 1, 0) e o pontoP2 = (3, 0, 1). Claramente esses pontos nao estao alinhados, demodo que determinam um plano – justamente o plano de equacaox − 2y − 3z = 0. Os vetores u e v determinam eixos coordenados,de modo que a origem e esses eixos formam um sistema de coordena-das nesse plano. (Na figura a seguir, esse plano e representado peloplano do papel deste livro.) Consideremos um ponto Q = (x, y, z)desse plano. Tracando retas paralelas aos eixos determinados por ue v e obtendo as intersecoes dessas retas com os eixos coordenados,obtemos as coordenadas de Q nesse sistema de coordenadas.
�����������
����������:
0
��������Q
v
u
λ
µ
Figura 2.1: Os vetores u e v definem um sistema de coordenadas noplano por eles determinado.
Acabamos de mostrar que todos os pontos daquele plano saodescritos pelos parametros λ e µ. Um ponto Q(x, y, z) so pertenceraao plano x + 2y + 3z = 0 se for possıvel encontrar valores para λ e µde modo que λu + µv nos de as coordenadas de Q.
Quer dizer, o vetor q = (x, y, z) e combinacao linear dos vetoresu e v se, e somente se, o ponto Q = (x, y, z) pertencer ao plano x +2y + 3z = 0.
Note bem: apesar de todos os pontos do plano x + 2y + 3z = 0serem pontos do espaco, conseguimos descreve-los utilizando duascoordenadas: os valores de λ (que descreve a posicao de um pontodo plano com respeito ao eixo gerado pelo vetor u) e µ (que descrevea posicao de um ponto do plano com respeito ao eixo gerado pelovetor v). A origem corresponde aos valores (λ, µ) = (0, 0). O valor(λ, µ) = (1, 0) corresponde ao ponto P1 = (2, 1, 0) do R3. E assimpor diante.
Agora consideremos todos os termos da lado direito da igual-dade (2.1). Como vimos, os dois ultimos criam um plano passandopela origem; o primeiro translada esse plano, de modo que ele passepelo ponto P0 = (5, 0, 0). Veja a Figura 2.2.
A equacao (2.1) e chamada equacao parametrica do plano π. ¢
Voce deve se convencer que o exemplo anterior pode ser repeti-dos para qualquer plano ax + by + cz = d.
Exercıcio 2.2 Considere o plano x − y − z = 1 e os vetores u = (1, 1, 0) e v = (1, 0, 1).

2.2. SISTEMAS LINEARES EM 3 VARIAVEIS 19
�����������
����������:
P
��������Q
~v
~u
λ
µ
������������������
���������������������������������
���������������
6
6x
0
Figura 2.2: O ponto P translada o plano determinado pelos vetoresu e v; note a mudanca de notacao: aqui, ~u e ~v.
Esboce o sistema de coordenadas no plano x− y− z = 0 determinado pelos vetores u e v.Ache valores para λ e µ de modo que (2, 1, 1) = λu + µv. Esboce o plano x− y− z = 1.Exercıcio 2.3 Considere o plano π de equacao ax + by + cz = d. (Isso quer dizer que(a, b, c) 6= (0, 0, 0)!) Procedendo como no Exemplo 2.1, encontre vetores u e v e asequacoes parametricas do plano π. Verifique que os vetores u e v encontrados sao li-nearmente independentes.
2.2 Sistemas Lineares em 3 variaveis
Comecemos com um exemplo simples:
Exemplo 2.4 Consideremos o sistema
x + 2y + z = 3x + y + 3z = 1 (2.2)
Aplicando o metodo de Gauss-Jordan, chegamos a forma escalo-nada reduzida por linhas
(1 2 1
∣∣ 31 1 3
∣∣ 1
)−→
(1 0 5
∣∣ − 10 1 −2
∣∣ 1
).
Portanto, a solucao do sistema e
xyz
=
−1
10
+ z
−5
21
. (2.3)
A equacao (2.3) nos da a equacao da reta, intersecao dos planosdados.
Consideremos, por outro lado, o sistema homogeneo associadoa (2.2). Sua solucao e dada por
xyz
= z
−5
21
.

20 CAPITULO 2. O ESPACO RN
Essa solucao estabelece um sistema de coordenadas na reta r(z) =z(−5, 2, 1). Para o valor z = 0, estamos na origem. Para z = 1, esta-mos no ponto (−5, 2, 1) e assim por diante. Assim, todos os pontosdessa reta sao descritos por apenas um valor do parametro z. Querdizer, se estamos interessados apenas em pontos dessa reta, qual-quer ponto (x, y, z) dela pode ser representado utilizando uma unicacoordenada: o valor de z. ¢
Em geral, ao procurarmos solucoes de um sistema
a11x + a12y + a13z = b1
a21x + a22y + a23z = b2,
estamos verificando se esses dois planos1 sao paralelos ou, caso con-trario, determinando a reta formada pela intersecao de ambos.
Expressando o sistema anterior em forma matricial, obtemos
(a11 a12 a13a21 a22 a23
)
xyz
=
(b1b2
).
Um ponto (x0, y0, z0) do espaco pertence a intersecao dos planos(se essa existir) se ele satisfizer a equacao matricial
(a11 a12 a13a21 a22 a23
)
x0y0z0
=
(b1b2
). (2.4)
A forma matricial (2.4) tem muitos significados e consequencias.Nesta secao abordaremos um deles, ao notar que em (2.4) o ponto(x0, y0, z0) aparece na forma de uma matriz coluna. Ou seja, se A foruma matriz m× 3 (em que m e arbitrario), na equacao matricial
Ax = b,
x representa um ponto do espaco:
(x0, y0, z0) ←→
x0y0z0
.
Ora, sistemas Ax = b acontecem com matrizes m× n arbitrarias.A interpretacao
x1x2...
xn
←→ (x1, . . . , xn),
1Estamos supondo que (a11, a12, a13) 6= (0, 0, 0) e (a21, a22, a23) 6= (0, 0, 0).

2.3. O ESPACO RN 21
em que (x1, . . . , xn) designa um ponto generico de um espaco abs-trato (que denotaremos porRn) nos permitira, como veremos no de-correr deste curso, interpretar geometricamente o sistema Ax = b, demaneira semelhante a que fizemos nos Exemplos 2.1 e 2.4.
Essa ultima frase parece muito pretensiosa: se n > 3, como in-terpretar geometricamente a solucao de um sistema m × n, se naopodemos vislumbrar o espaco Rn? Bom, esse e um dos objetivosdeste curso, de modo que nao podemos justificar nossa pretensaoneste momento; mas tambem nao podemos deixar de destacar asemelhanca entre as equacoes (1.1), (2.1) e (2.3)!
2.3 O Espaco Rn
Definimos o conjunto Rn por
Rn = {x = (x1, x2, . . . , xn) : xi ∈ R} .
O numero de coordenadas x1, . . . , xn dependera do problema con-siderado. Os casos n = 2 e n = 3 correspondem a pontos do plano edo espaco, respectivamente. Ao mostrarmos que algum resultado evalido para oRn, esse resultado sera verdadeiro para qualquer valorde n = {1, 2, . . .}.
Se x e y sao pontos do Rn e λ um numero real, definimos
x + y = (x1 + y1, . . . , xn + yn) (2.5)λx = (λx1, . . . , λxn) (2.6)
(Designamos por (y1, . . . , yn) as coordenadas de y ∈ Rn.)Observe que essas definicoes estao de acordo com os resultados
mostrados na Secao 1.1.
Teorema 2.5 Se x, y, z ∈ Rn e λ, µ ∈ R, as seguintes propriedades saosatisfeitas
(i) x + y ∈ Rn (fechamento);
(ii) (x + y) + z = x + (y + z) (associatividade);
(iii) x + y = y + x (comutatividade);
(iv) existe 0 ∈ Rn tal que x + 0 = x (elemento neutro);
(v) existe (−x) ∈ Rn tal que x + (−x) = 0 (inverso aditivo);
(vi) λx ∈ Rn (fechamento);
(vii) µ(λx) = (µλ)x (associatividade);
(viii) λ(x + y) = λx + λy (distributividade);
(ix) (λ + µ)x = λx + µx (distributividade);
(x) 1x = x (regra da unidade).
22 CAPITULO 2. O ESPACO RN
Demonstracao: Mostraremos apenas algumas dessas propriedades.Vejamos a propriedade comutativa:
x + y = (x1 + y1, x2 + y2, . . . , xn + yn)= (y1 + x1, y2 + x2, . . . , yn + yn) = y + x.
Note que a adicao noRn e feita adicionando cada coordenada; comoem cada coordenada temos uma adicao de numeros reais, que e co-mutativa, chegamos ao resultado desejado.
Vejamos a propriedade (viii):
λ(x + y) = λ(x1 + y1, . . . , xn + yn)=
(λ(x1 + y1), . . . , λ(xn + yn)
)
= (λx1 + λy1, . . . , λxn + λyn)= (λx1, . . . + λxn) + (λy1, . . . , λyn)= λx + λy.
2
Observe que 0 tem, nessa definicao, dois significados distintos:descreve tanto o vetor 0 = (0, 0, . . . , 0) ∈ Rn como o escalar 0 ∈ R.
Exercıcio 2.6 Mostre as demais propriedades do Teorema 2.5.
Exercıcio 2.7 Considere a igualdade 0x = 0 para todo x ∈ Rn. Interprete e prove essaigualdade.
Definicao 2.8 Por satisfazer as propriedades (i)− (x), dizemos que Rn eum espaco vetorial. Os elementos de um espaco vetorial sao chamadosvetores. Elementos λ ∈ R sao chamados escalares. Se x, y ∈ Rn e λ ∈R, a soma x + y e a soma dos vetores x e y, enquanto λx e a multiplicacaodo escalar λ pelo vetor x. Tambem chamamos um vetor x ∈ Rn de umponto do Rn.
Sinteticamente, dizemos que Rn possui uma soma (de vetores)e uma multiplicacao por escalar. Utilizaremos corriqueiramente aidentificacao
(x1, . . . , xn) ∈ Rn ↔
x1x2...
xn
,
que permite compreender um ponto do Rn como uma matriz co-luna e que faz corresponder as operacoes entre matrizes colunas asoperacoes definidas no Rn. Podemos mesmo ate levar mais adianteessa interpretacao, identificando pontos do Rn com colunas de umamatriz!
2.3. O ESPACO RN 23
Exemplo 2.9 Consideremos o sistema homogeneo representado ma-tricialmente por
A =
1 −1 0 10 3 −1 00 1 1 00 −1 0 0
.
A cada vetor (x1, x2, x3, x4) ∈ R4 corresponde a matriz coluna
(x1, x2, x3, x4) ←→
x1x2x3x4
e cada coluna de A pode ser vista como um vetor do R4.Levando a matriz A a forma escalonada reduzida por linhas, ob-
temos
1 0 0 10 1 0 00 0 1 00 0 0 0
,
de modo que sua solucao e
x1x2x3x4
= x4
−1001
.
Quer dizer, as solucoes do sistema sao os multiplos do vetoru = (−1, 0, 0, 1) ∈ R4. Lembrando que a equacao de uma reta pas-sando pela origem no R3 e dada pelos multiplos de um vetor fixo,nao parece natural dizer que a solucao desse sistema e uma reta (pas-sando pela origem) no espaco R4?
Note: se estivermos interessados em vetores do R4 que perten-cem a essa reta, entao cada vetor fica caracterizado por uma unicacoordenada! ¢
Exercıcio 2.10 Como feito nos Exemplos 2.1 e 2.4, indique o sistema de coordenadas es-tabelecido ao se obter a solucao do Exemplo 2.9.
Exercıcio 2.11 Encontre as solucoes do sistema
x1 + 2x2 + 3x3 + x4 = 8x1 + 3x2 + 0x3 + x4 = 7x1 + 0x2 + 2x3 + x4 = 3
Interprete geometricamente as solucoes desse sistema.
24 CAPITULO 2. O ESPACO RN
2.4 Espacos Vetoriais Abstratos
Na Secao anterior definimos Rn e mostramos que ele satisfaz aspropriedades descritas no Teorema 2.5. Com base nessas proprieda-des, podemos definir abstratamente um espaco vetorial.
Definicao 2.12 Um espaco vetorial real X e um conjunto cujos elemen-tos (chamados vetores) podem ser somados e multiplicados por escalares,isto e, numeros reais.2 Se x, y, z ∈ X e λ, µ ∈ R, as seguintes propriedadesdevem ser satisfeitas pela adicao e multiplicacao por escalar:
(i) x + y ∈ X (fechamento);
(ii) (x + y) + z = x + (y + z) (associatividade);
(iii) x + y = y + x (comutatividade);
(iv) existe 0 ∈ X tal que x + 0 = x (elemento neutro);
(v) existe (−x) ∈ X tal que x + (−x) = 0 (inverso aditivo);
(vi) λx ∈ X (fechamento);
(vii) µ(λx) = (µλ)x (associatividade);
(viii) λ(x + y) = λx + λy (distributividade);
(ix) (λ + µ)x = λx + µx (distributividade);
(x) 1x = x (regra da unidade).
Neste texto nao daremos muita enfase a espacos vetoriais abstra-tos. Mas alguns exemplos sao importantes:
Exemplo 2.13 Seja P = {a0 + a1t + . . . + antn} o conjunto de po-linomios em t com coeficientes reais e grau menor do que ou igual an. Com a adicao usual de polinomios e a multiplicacao de polinomiopor um numero real, P e um espaco vetorial. ¢
Exemplo 2.14 SejaMm×n o conjunto de todas as matrizes m× n comentradas reais. Com a adicao de matrizes e multiplicacao de umamatriz por um numero λ ∈ R,Mm×n e um espaco vetorial. ¢
Exercıcio 2.15 Prove as afirmacoes dos Exemplos 2.13 e 2.14.
Observe que o significado das operacoes de adicao e multipli-cacao foi diferente em cada exemplo. No caso de um espaco vetorialabstrato, nao sabemos como as operacoes de adicao e multiplicacaopor escalar sao realizadas; apenas sabemos que elas satisfazem as
2Tambem podemos admitir numeros complexos, isto e, escalares λ ∈ C. Nestecaso, temos um espaco vetorial complexo.

2.5. EXERCICIOS 25
propriedades (i)− (x) da Definicao 2.12. Muitas vezes, para salien-tarmos esse fato, denotamos essas operacoes como ⊕ e ¯, respecti-vamente. Assim, a propriedade (iii) pode ser descrita por x ⊕ y =y⊕ x, enquanto (vii), µ¯ (λ¯ x) = (µλ)¯ x. Note que µλ indica aoperacao usual de multiplicacao de numeros reais.
O significado abstrato das operacoes de adicao de vetores e mul-tiplicacao de vetor por escalar torna difıcil a verificacao de algumaspropriedades que sao obvias no caso do Rn. Temos, por exemplo,
Proposicao 2.16 Existe um unico elemento neutro em um espaco vetorial.Quer dizer, se x + 0 = x = x + 0′ para todo x ∈ X, entao 0 = 0′.
Demonstracao: Como 0 ∈ X, escolhendo x = 0 na igualdade x +0′ = x, concluımos que 0 + 0′ = 0. Por outro lado, escolhendox = 0′ ∈ X na igualdade x + 0 = x, concluımos 0′ + 0 = 0′. Comoa adicao de vetores e comutativa, temos 0 = 0 + 0′ = 0′, mostrandoque 0 = 0′. 2
Observe que nao podemos falar em coordenadas de um vetor doespaco X! Quer dizer, nao existe nenhuma expressao analoga a 0 =(0, . . . , 0) ∈ Rn.
Exercıcio 2.17 Mostre que, em um espaco vetorial X, vale a lei do cancelamento: se x + a =x + b, entao a = b. Conclua, entao, que o elemento inverso aditivo (−x) de um elementox ∈ X e unico.
Observacao 2.18 Comparando as Secoes 2.3 e 2.4 com a Secao 1.1,nao podemos ignorar uma diferenca: na Secao 1.1 foi utilizado oconceito de norma de um vetor, conceito esse que nao foi definido noespaco Rn ou em espacos vetoriais abstratos. Tambem nao foi defi-nido o produto escalar de dois vetores. Isso aconteceu por uma razaomuito simples: este curso trata apenas das propriedades algebricasde espacos vetoriais; propriedades topologicas, isto e, propriedadesrelacionadas com os conceitos de distancia e ortogonalidade serao tra-tadas no curso de Algebra Linear II. ¢
2.5 Exercıcios
1. Em cada caso, encontre a equacao parametrica do plano
(a) x + 2y + z = 3; (b) x− y + 2z = 5; (c) x + y + z = 1.
2. Encontre as solucoes do sistema
(a){
x + y + z = 7x − y + 2z = 2;
(b){
x − 5y + 3z = 02x + y − z = 1.
3. Resolva o sistema homogeneo Ax = 0, a matriz A sendo dadapor
(a)
1 0 0 0 60 1 0 0 30 0 1 1 2
; (b)
1 7 0 0 −8 −30 0 1 0 6 50 0 0 1 3 90 0 0 0 0 0
.

26 CAPITULO 2. O ESPACO RN
Em cada caso, interprete geometricamente a solucao obtida.
4. Seja P o conjunto de todos os polinomios com coeficientes re-ais (com todos os graus possıveis). Mostre que P e um espacovetorial com a adicao de polinomios e a multiplicacao de umpolinomio por um escalar definidos da maneira usual.
Capıtulo 3
Subespacos do Rn e Bases
Objetivos: No final do Capıtulo o aluno deve saber:
1. verificar se um subconjunto e um subespaco;
2. verificar se um conjunto e linearmente independente;
3. verificar que um conjunto e uma base de um subespaco;
4. operar com o conceito de dimensao de um subespaco.
3.1 Subespacos e Combinacoes Lineares
Definicao 3.1 Seja S um subconjunto qualquer do Rn. Dizemos que S eum subespaco do Rn se, para quaisquer x, y ∈ S e, para qualquer λ ∈ R,temos
(i) x + y ∈ S;
(ii) λx ∈ S.
Uma vez que 0x = 0 para qualquer x ∈ Rn, vemos que 0 ∈ Rn eum elemento de qualquer subespaco do Rn.
Exemplo 3.2 Considere o subconjunto S = {0} ⊂ Rn. Entao S eum subespaco de Rn, pois 0 + 0 = 0 ∈ S e λ0 = 0 ∈ S, para todoλ ∈ R. Considere tambem o subconjunto S′ = Rn. Claramente S′ eum subespaco do Rn. Os subespacos S e S′ sao chamados subespacostriviais do Rn. ¢
Exemplo 3.3 Seja 0 6= v ∈ Rn um vetor fixo e Y = {tv : t ∈ R}.(No caso de n = 2 ou n = 3, sabemos que Y descreve uma retapassando pela origem.) Entao Y e um subespaco de Rn. De fato,se y1, y2 ∈ Y, entao y1 = t1v e y2 = t2v, para certos escalares t1, t2.Logo, y1 + y2 = t1v + t2v = (t1 + t2)v e um elemento de Y. Tambem,se λ ∈ R, entao λy1 = λ(t1v) = (λt1)v ∈ Y. Isso mostra o afirmado.Imitando os casos n = 2 e n = 3, dizemos que Y descreve uma retapassando pela origem no espaco Rn. Note que o vetor v gera umsistema de coordenadas em que os pontos da reta Y sao descritospor um unico parametro: o valor do numero real t. Compare com oExemplo 2.4. ¢
27
28 CAPITULO 3. SUBESPACOS DO RN E BASES
Exercıcio 3.4 Sejam u, v vetores do Rn e Z = {αu + βv : α, β ∈ R}. Mostre que Z e umsubespaco do Rn. Agora suponha que u e v nao sejam colineares, quer dizer, um naoe multiplo do outro. Justifique a denominacao: Z e um plano passando pela origem noRn. Verifique que os vetores u, v geram um sistema de coordenadas em que os pontos doplano Z sao descritos por dois parametros: α e β. (Compare com o Exemplo 2.1.)
Observacao 3.5 No Exercıcio 3.4, voce pode achar estranha a exigenciados vetores u, v nao serem colineares. Ora, caso contrario, terıamosu = µv, por exemplo. Mas entao
Z = {αµv + βv} = {(αµ + β)v}descreve o conjunto dos multiplos escalares do vetor v. De acordocom o Exemplo 3.3, esse conjunto e uma reta no Rn e todos os ele-mentos desse conjunto sao multiplos de v. ¢
Exercıcio 3.6 A afirmacao “R2 nao e um subespaco do R3” e verdadeira. Discuta essaafirmacao.Exercıcio 3.7 Seja S um subconjunto do Rn. Mostre que S e um subespaco se, e somentese, λx + y ∈ S para quaisquer x, y ∈ S e λ ∈ R.Exercıcio 3.8 Seja X um subespaco do Rn. Mostre que X satisfaz todas as propriedadesda Definicao 2.12 sendo, portanto, um espaco vetorial.
O exercıcio anterior garante assim que, com as operacoes de adicaoe multiplicacao por escalar restritas aos elementos de um subespacoS ⊂ Rn, esse conjunto e um espaco vetorial.
No proximo resultado identificamos qualquer solucao x de Ax =0 com um ponto do Rn:
Proposicao 3.9 Sejam A uma matriz m× n. Entao o nucleo de A,
ker A = {x ∈ Rn : Ax = 0}e um subespaco do Rn.
Demonstracao: Sejam x1, x2 ∈ ker A. Entao Ax1 = 0 e Ax2 = 0, demodo que A(x1 + x2) = Ax1 + Ax2 = 0 + 0 = 0. Similarmente, seλ ∈ R, entao A(λx1) = λAx1 = λ0 = 0. 2
Examine novamente os Exemplos 1.11, 2.1 e 2.4, passando sem-pre ao sistema homogeneo associado. Em todos eles encontramossubespacos do Rn (em que o valor de n depende do exemplo).
Exercıcio 3.10 Se b 6= 0, entao as solucoes do sistema Ax = b nao formam um subespacodo Rn.
Seja S um subespaco do Rn. Nosso objetivo neste Capıtulo podeser descrito como a introducao de um sistema (linear) de coordena-das em S, de maneira semelhante ao que foi feito no Exemplo 3.3 e

3.1. SUBESPACOS E COMBINACOES LINEARES 29
no Exercıcio 3.4. Mas nosso caminho ate alcancar esse objetivo aindae longo...
Em primeiro lugar, precisamos definir o que e um sistema de coor-denadas (linear) ou, como os matematicos preferem denominar, umabase. Esse conceito depende, em certa extensao, do problema con-siderado: no caso de um plano, um sistema de coordenadas uti-liza dois eixos coordenados; no espaco, usa tres eixos. Dizer queuma base e um sistema de eixos coordenados parece bom, mas pre-ferimos usar, provisoriamente, uma linguagem mais pictorica, poracreditarmos ser ela mais elucidativa. Assim, definimos provisoria-mente uma base como um conjunto B de vetores satisfazendo:
(i) Os elementos de B fazem parte do problema considerado;
(ii) O conjunto B contem todas as informacoes relevantes para oproblema considerado;
(iii) O conjunto B nao contem informacoes superfluas.
No Exemplo 3.3, uma base seria constituıda por um unico ve-tor: o vetor v. Qualquer ponto da reta pode ser descrito utilizandoapenas uma coordenada, de modo a obter-se o multiplo adequadodo vetor v. No Exercıcio 3.4, se fosse u = µv, entao o vetor u se-ria superfluo: todos os elementos do conjunto seriam multiplos dovetor v e estarıamos na situacao do Exemplo 3.3. Se u e v nao fo-rem colineares, uma base e constituıda pelos vetores u e v. Qualquerponto do plano e descrito por duas coordenadas (os valores de α eβ) e, para se obter todos os pontos do plano, nao podemos usar umnumero menor de coordenadas.
Existem varias questoes que precisam ser tratadas para chegar-mos ao conceito de base. E claro, precisamos dizer o que significaum conjunto ter todas as informacoes relevantes (para o problemaconsiderado) e nao ter informacoes superfluas. Definidos esses con-ceitos, varias questoes praticas passam a ser pertinentes: como ob-ter um conjunto que possui todas as informacoes relevantes sobreo problema considerado? Como verificar se esse conjunto possuiinformacoes superfluas? Como retirar do conjunto as informacoessuperfluas? Essas perguntas serao tratadas neste capıtulo.
Comecamos generalizando a construcao feita no Exemplo 3.3 eno Exercıcio 3.4, agora utilizando qualquer numero de vetores noRn:
Proposicao 3.11 Sejam v1, v2, . . . , vk vetores quaisquer do Rn. Entao,
< v1, v2, . . . , vk > = {α1v1 + . . . + αkvk : α1, . . . , αk ∈ R}
e um subespaco doRn, chamado subespaco gerado pelos vetores v1, . . . , vk.
Demonstracao: Sejam x, y ∈ < v1, . . . , vk >. Entao existem escalaresα1, . . . , αk e β1, . . . , βk tais que
x = α1v1 + . . . + αkvk e y = β1v1 + . . . + βkvk.
30 CAPITULO 3. SUBESPACOS DO RN E BASES
Consequentemente,
x + y = (α1 + β1)v1 + . . . + (αk + βk)vk
eλx = (λα1)v1 + . . . + (λαk)vk
sao elementos de < v1, . . . , vk >, provando o afirmado. 2
Exemplo 3.12 Sejam v1 = (1, 2, 1, 1), v2 = (2, 1, 1, 1), v3 = (1, 1, 1, 1),v4 = (0, 1, 0, 1) e v5 = (0, 0, 1, 0) vetores do espaco R4. Vamos des-crever o espaco < v1, . . . , v5 >.
Temos, por definicao,
< v1, . . . , v5 > = {αv1 + βv2 + γv3 + δv4 + εv5},
em que α, β, γ, δ e ε sao escalares. Assim,
< v1, . . . , v5 > = {(α, 2α, α, α) + (2β, β, β, β) + (γ, γ, γ, γ) + (0, δ, 0, δ) + (0, 0, ε, 0)}= {(α + 2β + γ, 2α + β + γ + δ, α + β + γ + ε, α + β + γ + δ)}.
Em particular, se α = 1, β = 0, γ = 0, δ = 1 e ε = 2, temos que ovetor (1, 3, 3, 2) pertence a < v1, . . . , v5 >. ¢
Nao podemos denominar o espaco < v1, . . . , vk > de acordo como numero de elementos k utilizados na definicao desse espaco. Porexemplo, se k = 2, < v1, v2 > pode nao ser um plano, como vimosna Observacao 3.5.
Exercıcio 3.13 Sejam v1 = (1, 0, 0), v2 = (0, 1, 0) e v3 = (1, 1, 0). Descreva o subespaco< v1, v2, v3 >.
Definicao 3.14 Um vetor v e combinacao linear dos vetores v1, . . . , vkse existem escalares α1, . . . , αk tais que
α1v1 + . . . + αkvk = v. (3.1)
Quer dizer, v ∈< v1, . . . , vk > e o mesmo que v ser combinacaolinear dos vetores v1, . . . , vk.
A equacao vetorial (3.1) da origem a um sistema nao homogeneo,se v 6= 0. E o que veremos no proximo exemplo.
Exemplo 3.15 O vetor (5, 2, 3,−1) e combinacao linear dos vetoresv1, . . . , v5 do Exemplo 3.12? Essa pergunta tera uma resposta afirma-tiva se existirem escalares α, β, γ, δ e ε tais que
α(1, 2, 1, 1) + β(2, 1, 1, 1) + γ(1, 1, 1, 1) + δ(0, 1, 0, 1) + ε(0, 0, 1, 0) = (5, 2, 3,−1)ou seja, se
(α + 2β + γ, 2α + β + γ + δ, α + β + γ + ε, α + β + γ + δ) = (5, 2, 3,−1)

3.1. SUBESPACOS E COMBINACOES LINEARES 31
w
���������
���������
������
-v
< v1, . . . , vk >
Figura 3.1: Se representarmos o subespaco < v1, . . . , vk >⊂ Rn
como um plano, entao v ∈ < v1, . . . , vk >, enquanto w 6∈ <v1, . . . , vk >.
A ultima igualdade da origem ao sistema nao homogeneo
1 2 1 0 02 1 1 1 01 1 1 0 11 1 1 1 0
αβγδε
=
523
−1
.
Note que a matriz e formada tendo justamente os vetores v1, . . . , v5como colunas. Escalonando a matriz aumentada do sistema, obtemos
1 2 1 0 0∣∣ 5
2 1 1 1 0∣∣ 2
1 1 1 0 1∣∣ 3
1 1 1 1 0∣∣ − 1
−→
1 0 0 0 0∣∣ 11
0 1 0 0 −1∣∣ 2
0 0 1 0 2∣∣ − 10
0 0 0 1 −1∣∣ − 4
.
Assim, sua solucao e dada por
αβγδε
=
112 + ε
−10− 2ε−4 + ε
ε
=
112
−10−4
0
+ ε
01
−211
.
Como o sistema tem solucao, vemos que o vetor v = (5, 2, 3,−1)pertence ao espaco < v1, v2, v3, v4, v5 >. ¢
Exercıcio 3.16 Sejam
v1 = (2, 3, 1, 1), v2 = (−2,−2, 2, 1), e v3 = (1, 0,−2,−1).
O vetor v = (1, 1, 1, 1) pertence a < v1, v2, v3 >?
Agora estamos em condicoes de dizer quando um conjunto Bcontem todas as informacoes relevantes sobre o subespaco S.
Definicao 3.17 Um conjunto B = {v1, . . . , vk} ⊂ S e um conjuntogerador do subespaco S ⊂ Rn se todo elemento de S for combinacao lineardos elementos de B. Tambem dizemos que B gera S.

32 CAPITULO 3. SUBESPACOS DO RN E BASES
Assim, se o problema que estivermos considerando tratar dosubespaco S, estamos garantindo que B tem todas as informacoesrelevantes sobre S. Note que B possui um numero finito de elemen-tos; se S 6= {0}, entao S possui infinitos elementos.
Exercıcio 3.18 Mostre que {v1, . . . , vj} ⊂ Rn gera o subespaco < v1, . . . , vj >
Como vimos no Exemplo 3.15, a equacao (3.1) da origem a umsistema nao homogeneo, se v 6= 0. Como sabemos, o estudo deum sistema nao homogeneo esta intrinsecamente relacionado com osistema homogeneo que lhe e associado. Esse e o objeto da proximadefinicao.
Definicao 3.19 Dizemos que os vetores v1, . . . , vk doRn sao linearmenteindependentes se
α1v1 + . . . + αkvk = 0 (3.2)
so tem a solucao trivial α1 = . . . = αk = 0. Caso contrario, dizemos queos vetores v1, . . . , vk sao linearmente dependentes.
Um conjunto B = {v1, . . . , vk} e linearmente independente, se os ve-tores v1, . . . , vk forem linearmente independentes; caso contrario, B e line-armente dependente.
A equacao (3.2) da origem ao sistema homogeneo associado a(3.1). Assim, para verificar se o conjunto {v1, . . . , vk} e linearmenteindependente, formamos a matriz A = (v1 . . . vk), que tem os ve-tores v1, . . . , vk como colunas, e consideramos o sistema Ax = 0. Seesse sistema tiver apenas a solucao trivial x = 0, entao {v1, . . . , vk}e linearmente independente; caso contrario, e linearmente depen-dente.
Consideraremos esse sistema em uma situacao particularmentesimples, que melhor nos fara entender a Definicao 3.19:
Exemplo 3.20 Consideremos os vetores e1 = (1, 0, 0), e2 = (0, 1, 0) ev = (1, 1, 0). Queremos verificar se esses vetores sao linearmente in-dependentes ou linearmente dependentes. Para isso, consideramosa igualdade vetorial
α1e1 + α2e2 + α3v = 0. (3.3)
Como ja vimos, essa igualdade e o mesmo que o sistema ho-mogeneo
1 0 10 1 10 0 0
α1α2α3
=
000
.
(Repetimos: os vetores e1, e2 e v constituem as colunas da matriz3× 3, que denotaremos por A.)
A solucao do sistema homogeneo e dada por
α1α2α3
= α3
−1−1
1
.

3.1. SUBESPACOS E COMBINACOES LINEARES 33
Como o sistema homogeneo possui solucao nao trivial, concluı-mos que os vetores e1, e2 e v sao linearmente dependentes.
Substituindo a solucao (α1, α2, α3) = (−1,−1, 1) em (3.3), obte-mos
−e1 − e2 + v = 0,
ou, o que e o mesmo,v = e1 + e2. (3.4)
Essa equacao garante que v e combinacao linear dos vetores e1e e2. Geometricamente, isso significa que v pertence ao plano π ge-rado pelos vetores e1 e e2. Quer dizer, se tivermos os vetores e1 e e2,entao duas coordenadas bastarao para descrever todos os pontos doplano gerado por esses vetores e o vetor v nao e necessario. O vetorv e uma informacao superflua.
-e1
6e2
��
��
��v
0π
Figura 3.2: O vetor v e combinacao linear dos vetores e1 e e2, poispertence ao plano gerado por estes vetores.
Compare esse exemplo com o Exercıcio 3.13. ¢
Exercıcio 3.21 Verifique se os vetores
v1 = (1, 1, 1), v2 = (1, 1, 0) e v3 = (1, 0, 0)
sao linearmente dependentes.
E claro que, no Exemplo 3.20, tambem podemos escrever e1 (oue2) como combinacao linear dos vetores restantes. Nesse caso, e1 (ou,respectivamente, e2) seria a informacao superflua.
Podemos formular abstratamente o que aconteceu no exemploanterior. Veja que a equacao (3.2) e tratada sem considerar as coor-denadas dos vetores envolvidos!
Proposicao 3.22 O conjunto {v1, . . . , vk} e linearmente dependente se, esomente se, algum desses vetores e combinacao linear dos vetores restantes.
Demonstracao: Suponhamos que {v1, . . . , vk} seja linearmente de-pendente. Entao existem escalares α1, . . . , αk, nem todos nulos, taisque
α1v1 + . . . + αkvk = 0.
Para simplificar a notacao, vamos supor que α1 6= 0. Nesse caso,temos
α1v1 = −α2v2 − . . .− αkvk, (3.5)

34 CAPITULO 3. SUBESPACOS DO RN E BASES
ou seja,v1 = β2v2 + . . . + βkvk,
em que βi = αi/α1 para i = 2, . . . , k. Assim, v1 e combinacao lineardos vetores {v2, . . . , vk}.
Reciprocamente, se (por exemplo) v1 = α2v2 + . . . + αkvk, entao
1v1 − α2v2 − . . .− αkvk = 0
e ao menos um dos escalares (qual seja, o coeficiente de v1) e naonulo, mostrando que esse conjunto e linearmente dependente. 2
Note que, se tivermos α1v1 + . . . + αkvk = 0, podemos escreverqualquer vetor relacionado a um coeficiente αi 6= 0 como combina-cao linear dos vetores restantes: na demonstracao anterior, esse fatoe usado ao dividirmos a equacao (3.5) pelo escalar α1 6= 0.
Observacao 3.23 Retirado um vetor “superfluo” de um conjunto li-nearmente dependente, nao podemos garantir que o conjunto res-tante seja formado apenas por vetores essenciais. Isto e, pode serque o conjunto restante ainda seja linearmente dependente. Vere-mos, posteriormente, um metodo para retirar de uma vez todos osvetores superfluos de um conjunto linearmente dependente. Veja aObservacao 4.23. ¢
Exercıcio 3.24 Verifique se o conjunto {(1, 1, 2, 1), (1, 1, 1, 1), (2, 1, 1, 1), (2, 1, 2, 1)} e line-armente dependente ou linearmente independente. Se for linearmente dependente, es-creva um dos vetores como combinacao linear dos vetores restantes.Exercıcio 3.25 Suponha que o vetor v pertenca ao espaco < v1, . . . , vk >. Mostre que oconjunto {v, v1, . . . , vk} e linearmente dependente.
Exemplo 3.26 Sejam v2, . . . , vk vetores quaisquer do Rn. Entao oconjunto {0, v2, . . . , vk} e linearmente dependente. (Aqui, 0 denotao vetor nulo.) Assim, qualquer conjunto que contenha o vetor nuloe linearmente dependente.
De fato, temos que
α10 + α2v2 + . . . + αkvk = 0
possui a solucao nao trivial α1 = 1, α2 = . . . = αn = 0. Voce e capazde exibir outras solucoes? ¢
Exercıcio 3.27 Suponha que o conjunto {v1, . . . , vk} ⊂ Rn seja linearmente dependente.Mostre que {v1, . . . , vk, v} ⊂ Rn e linearmente dependente, qualquer que seja o vetorv ∈ Rn.
Observacao 3.28 Pela Proposicao 3.22, se v ∈ Rn nao for combi-nacao linear dos vetores v1, . . . , vk, entao v 6∈ 〈v1, . . . , vk〉. Com alinguagem pictorica introduzida anteriormente, isso quer dizer que
3.2. BASES 35
o vetor v traz uma informacao que nao esta contida no subespaco< v1, . . . , vk >.
Mas nao podemos garantir que o conjunto {v, v1, . . . , vk} ⊂ Rn
seja linearmente independente, pois nao sabemos se seu subcon-junto {v1, . . . , vk} e linearmente independente, conforme o Exercıcio3.27.
Se {v1, . . . , vk} for linearmente independente e se v nao perten-cer a esse subespaco, entao {v1, . . . , vk, v} e linearmente indepen-dente. Esse resultado e uma consequencia imediata da Proposicao3.22, mas vamos dar uma demonstracao direta dele: suponhamosque
α1v1 + . . . + αkvk + βv = 0. (3.6)
Entao β = 0 pois, caso contrario, v seria combinacao linear dos ve-tores v1, . . . , vk. Mas entao temos
α1v1 + . . . + αkvk = 0
e, como esses vetores sao linearmente independentes, αi = 0 para i ∈{1, . . . , k}. Assim, todos os escalares em (3.6) sao nulos, mostrandonossa afirmacao. ¢
Exercıcio 3.29 Seja v 6= 0 um vetor do Rn. Mostre que o conjunto {v} e linearmenteindependente.
3.2 Bases
Definicao 3.30 Uma base B = {v1, . . . , vk} de um subespaco S do Rn eum conjunto ordenado de vetores de S que gera esse subespaco e e linear-mente independente.
Por conjunto ordenado queremos dizer que a ordem dos elemen-tos e importante. Em outras palavras, os conjuntos ordenados {u, v, w},{u, w, v} e {w, u, v} sao distintos! Posteriormente explicaremos arazao de definirmos uma base como um conjunto ordenado. (Vejaa Observacao 6.3.)
Assim, para verificar que um conjuntoB e uma base do subespacoS, precisamos verificar tres afirmacoes independentes:
(i) os elementos de B pertencem a S;
(ii) todo elemento de S e combinacao linear dos elementos de B;
(iii) o conjunto B e linearmente independente.
Essas tres exigencias sao a expressao, em termos matematicos, dascondicoes (i), (ii) e (iii) apresentadas na pagina 29.

36 CAPITULO 3. SUBESPACOS DO RN E BASES
Exemplo 3.31 Os vetores e1 = (1, 0, . . . , 0), e2 = (0, 1, 0, . . . , 0), . . . ,en = (0, 0, . . . , 0, 1) formam uma base do espaco Rn. De fato, sex = (x1, . . . , xn) ∈ Rn, temos
x = (x1, . . . , xn) = x1(1, 0, . . . , 0) + x2(0, 1, 0, . . . , 0)+ . . . + xn(0, . . . , 0, 1)
= x1e1 + x2e2 + . . . + xnen,
mostrando que {e1, . . . , en} gera o Rn. Alem disso,
0 = α1e1 + . . . + αnen
= (α1, 0, . . . , 0) + (0, α2, 0, . . . , 0) + . . . + (0, . . . , 0, αn)= (α1, . . . , αn),
o que implica que α1 = . . . = αn = 0.A base B = {e1, . . . , en} e chamada base canonica do Rn. ¢
Exercıcio 3.32 Verifique se {v1, v2, v3} ⊂ Rn e uma base do R3, sendo
v1 = (1, 3, 3), v2 = (2, 1, 1) e v3 = (1, 1, 1).
A base canonica introduz no Rn um sistema de coordenadas se-melhante ao sistema com eixos x, y e z doR3. Assim, a base canonicaproduz um sistema de coordenadas completamente natural. Paraque estudar outras bases noRn? A resposta e simples: a base canoni-ca produz um sistema de coordenadas que pode nao ser o mais ade-quado ao problema que estamos tratando. Com um sistema de eixosmais adequado, a obtencao da resposta para o nosso problema podeser bem mais simples.
Alem disso, muitas vezes estamos interessados em um subespacoparticular doRn, subespaco esse que pode funcionar como um planoou uma reta, por exemplo. Pode acontecer que nenhum (!) dos ve-tores da base canonica pertenca a esse subespaco. Alem disso, ospontos desse subespaco podem ser caracterizados por um numeromenor de coordenadas do que as n coordenadas utilizadas para ca-racterizar um ponto do Rn: x = (x1, . . . , xn). Essa situacao ocorreuquando consideramos sistemas de coordenadas em retas e planos doRn, como no Exemplo 3.3 e Exercıcio 3.4.
Exemplo 3.33 O conjunto {v} e uma base do subespaco
Y = {tv : t ∈ R}
do Exemplo 3.3. De fato, esse conjunto e linearmente independente,de acordo com o Exercıcio 3.29. Alem disso, qualquer elemento deY e multiplo de v, o que mostra que {v} gera o subespaco Y. ¢

3.3. DIMENSAO 37
Exemplo 3.34 Seja B = {v1, . . . , vj} um conjunto linearmente inde-pendente de vetores do Rn. Entao o subespaco < v1, . . . , vj >⊂Rn tem B como base. De fato, todo elemento de < v1, . . . , vj > euma combinacao linear de elementos de B; como esse conjunto elinearmente independente e esta contido em < v1, . . . , vj >, nossaafirmacao esta provada. ¢
Exercıcio 3.35 Se u e v nao forem colineares, mostre que {u, v} e uma base do subespacoZ do Exercıcio 3.4.Exercıcio 3.36 Mostre que o conjunto {(1, 1, 1, 1), (1, 1, 1, 0), (1, 1, 0, 0), (1, 0, 0, 0)} e umabase do espaco R4.
Proposicao 3.37 Se B = {v1, . . . , vk} for a base de um subespaco V ⊂Rn, entao cada vetor v ∈ V e escrito de maneira unica como combinacaolinear dos elementos de B
Demonstracao: Suponhamos a existencia de v ∈ V tal que
α1v1 + α2v2 + . . . + αkvk = v = β1v1 + β2v2 + . . . + βkvk.
Queremos mostrar que αi = βi para i ∈ {1, . . . , k}. Ora, da igual-dade anterior deduzimos que
(α1 − β1)v1 + (α2 − β2)v2 + . . . + (αk − βk)vk = 0.
Como B e linearmente independente, necessariamente temos αi −βi = 0 para todo i ∈ {1, . . . , k}, o que prova nosso resultado. 2
3.3 Dimensao
Agora passamos a considerar o conceito de dimensao de umsubespaco; esse conceito pode ser utilizado para caracterizar todosos subespacos do Rn.
Exemplo 3.38 Consideremos novamente o Exercıcio 3.4 no caso emque u = (1, 0, 0) e v = (0, 1, 0) sao vetores do R3. De acordo com oExercıcio 3.35, {u, v} e uma base do subespaco
Z = {αu + βv : α, β ∈ R}.
Afirmamos que {u, u + v} e outra base de Z. Seja w = u + v =(1, 1, 0). Queremos mostrar que {u, w} tambem e base de Z.
Temos que w ∈ Z, pois w = 1u + 1v. Assim, {u, w} ⊂ Z. Sex ∈ Z, entao
x = αu + βv = α(1, 0, 0) + β(0, 1, 0) = (α, β, 0).
Entao x e combinacao linear de u e w. De fato,
(α, β, 0) = λ1u + λ2w ⇔ (α, β, 0) = (λ1 + λ2, λ2, 0).

38 CAPITULO 3. SUBESPACOS DO RN E BASES
E claro entao que λ2 = β e λ1 + λ2 = α, o que implica λ1 =α − λ2 = α − β. Mostramos assim que qualquer elemento de Z ecombinacao linear dos elementos u e w.
Mas esses elementos tambem sao linearmente independentes,pois
(0, 0, 0) = λ1u + λ2w ⇔ (0, 0, 0) = (λ1 + λ2, λ2, 0).
Assim, λ1 = λ2 = 0 e a unica solucao de 0 = λ1u + λ2w. ¢
O Exemplo mostra que o mesmo subespaco doRn tem diferentesbases. Todas essas bases possuem algo em comum: o numero de ele-mentos. Utilizaremos, para mostrar esse fato, o seguinte resultado:
Teorema 3.39 Seja B = {v1, . . . , vk} uma base do subespaco S ⊂ Rn.Entao qualquer conjunto C ⊂ S com mais que k elementos e linearmentedependente.
Demonstracao: Mostraremos esse resultado em uma situacao parti-cular, com uma notacao mais simples. Para isso, suponhamos queB = {v1, v2} seja uma base de um subespaco Y ⊂ Rn. Conside-remos um conjunto C = {u1, u2, u3} ⊂ Y. Vamos mostrar que C elinearmente dependente.
Para isso, consideremos a equacao
λ1u1 + λ2u2 + λ3u3 = 0. (3.7)
Como B e uma base de Y, cada elemento de C e combinacaolinear dos elementos em B. Assim,
u1 = α11v1 + α21v2
u2 = α12v1 + α22v2
u3 = α13v1 + α23v2
para determinados escalares αij, com i ∈ {1, 2} e j ∈ {1, 2, 3}. Notebem: se conhecessemos as coordenadas dos vetores envolvidos, po-derıamos determinar esses escalares. Mas, como os vetores v1 e v2sao arbitrarios, so sabemos que esses escalares existem!
Substituindo essas expressoes de u1, u2 e u3 em (3.7), obtemos
λ1(α11v1 + α21v2) + λ2(α12v1 + α22v2) + λ3(α13v1 + α23v2) = 0,
ou seja,
(λ1α11 + λ2α12 + λ3α13)v1 + (λ1α21 + λ2α22 + λ3α23)v2 = 0.
Como B e um conjunto linearmente independente, devemos ter
λ1α11 + λ2α12 + λ3α13 = 0λ1α21 + λ2α22 + λ3α23 = 0,
isto e,(
α11 α12 α13α21 α22 α23
)
λ1λ2λ3
=
000
.

3.3. DIMENSAO 39
Como o numero de equacoes nesse sistema homogeneo e menordo que o numero de incognitas, o Teorema 1.19 garante que existesolucao nao trivial para o sistema, o que prova que C e linearmentedependente. 2
Exercıcio 3.40 Diga se os conjuntos sao linearmente dependentes ou linearmente inde-pendentes:
(a) S = {(1, 1), (2, 1), (1, 0)} ⊂ R2;
(b) R = {(1, 1, 1, 1), (0, 0, 0, 0), (1, 2, 1, 1)} ⊂ R4
(c) P = {(1, 1, 2), (1, 0, 1), (1, 2, 1), (0, 0, 1)} ⊂ R3.
Exercıcio 3.41 SeB = {v1, . . . , vk} e C = {u1, . . . , uk, uk+1},
demonstre o Teorema 3.39. Deduza daı entao o caso C = {u1, . . . , uk, uk+1, . . . , uk+r}, emque r ≥ 1.
Corolario 3.42 Todas as bases de um subespaco S ⊂ Rn possuem o mesmonumero de elementos.
Demonstracao: Suponhamos que existam bases B e B′, com B tendomenos elementos do que B′. De acordo com o Teorema 3.39, o con-junto B′ seria linearmente dependente. Mas isso e impossıvel, poisB′ e uma base de S e, consequentemente, um conjunto linearmenteindependente. Chegamos a uma contradicao que mostra que todasas bases devem ter o mesmo numero de elementos. 2
Mas qualquer subespaco S do Rn possui uma base? Note que japrovamos que Rn possui uma base. Assim, todos os elementos doRn (e, em particular, os elementos de S) podem ser escritos comocombinacao linear dos elementos da base do Rn. Alem disso, essabase e um conjunto linearmente independente. Isso nao prova queS possui uma base?
Nao! Ha uma exigencia que precisa ser cumprida: os elementosda base devem pertencer todos ao subespaco S.
Teorema 3.43 Seja C = {u1, . . . , uj} ⊂ S um conjunto linearmenteindependente. Entao existem vetores uj+1, . . . , uj+k em S de modo que{u1, . . . , uj, uj+1, . . . , uj+k} seja uma base de S.
Demonstracao: Como S e um subespaco e C ⊂ S, toda combinacaolinear de elementos de C pertence a S. Assim,
< u1, . . . , uj > ⊂ S.
Se < u1, . . . , uj > = S, entao C e uma base de S, de acordo com oExemplo 3.34. Caso contrario, existiria um vetor uj+1 ∈ S tal queuj+1 6∈ < u1, . . . , uj >. De acordo com a Observacao 3.28, o conjunto{u1, . . . , uj+1} e linearmente independente.
Agora repetimos o raciocınio. Se < u1, . . . , uj, uj+1 > = S, entaoo conjunto {u1, . . . , uj+1} e uma base de S. Caso contrario, existiria

40 CAPITULO 3. SUBESPACOS DO RN E BASES
uj+2 ∈ S tal que uj+2 6∈< u1, . . . , uj, uj+1 > e, entao, o conjunto{u1, . . . , uj, uj+1, uj+2} seria linearmente independente.
Esse processo tem fim, pois qualquer conjunto com n + 1 elemen-tos no Rn e linearmente dependente, de acordo com o Teorema 3.39.Ou seja, temos
< u1, . . . , uj, . . . , uj+k > = S
para algum k ∈ {0, 1, . . . , n− j}. 2
Corolario 3.44 Todo subespaco S 6= {0} do Rn possui uma base.
Demonstracao: De fato, basta tomar um vetor 0 6= v1 ∈ S e aplicaro Teorema 3.43 ao conjunto C = {v1}. 2
Note que o subespaco {0} ⊂ Rn nao possui base. De fato, se Bfosse uma base do subespaco {0}, entao 0 seria um elemento de B.De acordo com o Exemplo 3.26, esse conjunto seria linearmente de-pendente!
Por outro lado, a demonstracao do Corolario 3.44 garante que aexistencia de uma infinidade de bases para qualquer subespaco S doRn.
Definicao 3.45 Seja S um subespaco do Rn. Definimos a dimensao de Scomo o numero de elementos de uma de suas bases. Escrevemos dim S =k, se {v1, . . . , vk} for uma base de S. Se S = {0}, dizemos que S temdimensao 0.
Como todas as bases de um subespaco tem o mesmo numero deelementos, esta bem definida a dimensao do subespaco S.
Exemplo 3.46 Ja vimos que o Rn tem dois subespacos triviais: o {0}e o proprio Rn. Agora podemos caracterizar todos os subespacos doRn. Alem desses, existem todas as retas passando pela origem (quesao os subespacos de dimensao 1), todos os planos passando pelaorigem (que sao os subespacos de dimensao 2), todos os subespacosde dimensao 3 e assim por diante, ate chegarmos a todos os subespa-cos de dimensao n − 1. O proprio Rn e seu unico subespaco comdimensao n. (Note que, por falta de nomes adequados, mudamos amaneira de nos referir aos subespacos do Rn: comecamos com retase planos e passamos a falar de subespacos de dimensao 3 etc.) ¢
De acordo com o Teorema 3.43, podemos obter uma base a partirde qualquer conjunto linearmente independente. Mas tambem po-demos obter uma base a partir de qualquer conjunto que gera umsubespaco:
Proposicao 3.47 Suponha que o conjunto {v1, . . . , vk} ⊂ S gere o su-bespaco S 6= {0}. Entao um subconjunto de {v1, . . . , vk} e uma base deS.

3.4. EXERCICIOS 41
Demonstracao: Se {v1, . . . , vk} for linearmente dependente, um dosvetores desse conjunto e combinacao linear dos vetores restantes.Retirando esse vetor, o conjunto restante continua gerando S. Conti-nuamos retirando vetores que sao combinacao linear dos elementosrestantes ate obter um conjunto linearmente independente que con-tinua gerando S. 2
A demonstracao da Proposicao 3.47 mostra como obter uma basea partir de um conjunto que gera um subespaco. Contudo, esse pro-cesso e muito trabalhoso: em cada etapa, precisamos verificar se oconjunto de vetores e linearmente independente; caso contrario, ob-ter entao um vetor como combinacao linear dos vetores restantes,retirar esse vetor do conjunto e novamente verificar se o conjuntorestante e linearmente independente, repetindo o processo, se ne-cessario. Em cada etapa, retiramos apenas um vetor superfluo. Gos-tarıamos, entretanto, de retirar de uma unica vez todos os vetoressuperfluos. Mostraremos como faze-lo na Observacao 4.23.
Se ja sabemos qual a dimensao do subespaco S ⊂ Rn, entao averificacao de que um conjunto e uma base de S pode ser simplifi-cada.
Teorema 3.48 Sejam Y ⊂ Rn um subespaco de dimensao k e
B = {v1, . . . , vk} ⊂ Y.
Entao, se uma das condicoes seguintes for satisfeita, B e uma base de S:
(i) o conjunto B gera Y;
(ii) o conjunto B e linearmente independente.
Demonstracao: Suponhamos inicialmente queB gere Y. Se esse con-junto fosse linearmente dependente, aplicando a Proposicao 3.47 ob-terıamos entao um subconjunto de B, com menos que k elementos,que seria uma base de Y. Mas isso contradiz Y ter dimensao k.
Por outro lado, se B fosse linearmente independente e nao ge-rasse Y, existiria vk+1 ∈ Y que nao e combinacao linear dos vetoresde B. De acordo com a Proposicao 3.22 (ou a Observacao 3.28), oconjunto {v1, . . . , vk, vk+1} seria linearmente independente. Mas issocontradiz o Teorema 3.39, pois existiria um conjunto linearmente in-dependente com mais vetores do que a dimensao do espaco. 2
3.4 Exercıcios
1. Determine os valores de a, b e c para que o vetor v = (a, b, c) seja combinacao lineardos vetores u1 = (1, 1, 1), u2 = (1, 2, 3) e u3 = (2,−1, 1).
2. Sem utilizar determinantes, verifique se os vetores (−1, 2, 3), (−2,−3, 1) e (3, 2, 1)sao linearmente dependentes ou linearmente independentes.

42 CAPITULO 3. SUBESPACOS DO RN E BASES
3. Seja
A =(
1 34 −3
).
Determine x 6= 0 tal que Ax = 3x.
4. Encontre um conjunto de geradores para o nucleo da matriz A, dada por
(a)
1 0 1 11 2 1 22 4 2 40 1 1 2
; (b)
−1 2 2 0−1 2 1 0−1 1 2 0
0 0 0 1
.
5. Encontre uma base para o nucleo de A, se
(a)
2 2 3 40 2 3 20 0 1 10 0 0 1
; (b)
1 1 −2−1 2 1
0 1 −1
.
6. Considere os vetores v1 = (4, 2,−3), v2 = (2, 1,−2) e v3 = (−2,−1, 0) e definaU = < v1, v2, v3 >.
(a) Mostre que {v1, v2, v3} e linearmente dependente;(b) calcule a dimensao de U;(c) descreva geometricamente U;(d) ache uma base para U.
7. Sejam v1 = (1, 1, 1) e v2 = (1, 2, 1).
(a) Determine < v1, v2 >. Qual a dimensao desse subespaco do R3?(b) Determine um vetor v3 ∈ R3 de modo que o conjunto {v1, v2, v3} seja uma base
do R3.
8. Seja V = {(3a + 4b− 4c, 2a− 4b− 6c,−2a− 4b + 2c) : a, b, c ∈ R}.
(a) Mostre que V e um subespaco do R3;(b) Ache uma base para V.
9. Seja A uma matriz m× n e b uma ponto doRm. Com a identificacao usual de pontoscom matrizes coluna, mostre que o conjunto
im A = {b ∈ Rm : ∃ x ∈ Rn com Ax = b}
e um subespaco do Rm.
10. Seja B = {v1, . . . , vk} um subconjunto de vetores do subespaco V ⊂ Rn. Suponhaque cada vetor v ∈ V se escreva, de maneira unica, como combinacao linear dosvetores de B. Mostre que B e uma base de V. (Compare com a Proposicao 3.37.)
Capıtulo 4
Aplicacoes Lineares
Objetivos: No final do Capıtulo o aluno deve saber:
1. reconhecer uma aplicacao linear;
2. obter sua representacao matricial;
3. obter bases para o nucleo e imagem de uma aplicacao linear.
4.1 Aplicacoes Lineares e Matrizes – Parte I
Ja vimos o tipo de conjunto que estudaremos neste curso: os(sub)espacos vetoriais. Agora veremos o tipo especial de funcoesentre esses conjuntos: as aplicacoes lineares.
Definicao 4.1 Uma aplicacao linear e uma funcao T : Rn → Rm talque
T(x + λy) = Tx + λTy. (4.1)
Essa definicao merece varios comentarios. Em primeiro lugar,notamos que estamos representando a imagem do ponto x ∈ Rn porTx ao inves de T(x). Essa sera nossa pratica: parenteses so serao uti-lizados para esclarecer o significado de uma expressao. Em segundolugar, notamos que a soma de vetores e a multiplicacao por esca-lar presentes em (4.1) possuem significados diferentes: no lado es-querdo da igualdade, a soma de vetores e a multiplicacao por escalarocorrem no espaco Rn, enquanto no lado direito da igualdade acon-tecem no Rm. Finalmente, tambem e usual chamar uma aplicacaolinear de transformacao linear.
Exemplo 4.2 Seja I : Rn → Rn, dada por Ix = x. Entao I e umaaplicacao linear pois, para x, y ∈ Rn e α ∈ R, temos I(x + αy) =x + αy = Ix + αIy. A aplicacao linear I e chamada aplicacao identidade(no espaco Rn). ¢
Exemplo 4.3 Seja N : Rn → Rm a aplicacao definida por Nx = 0para todo x ∈ Rn. A aplicacao N e chamada aplicacao nula, qualquerque seja m, dimensao do espaco Rm. Tambem se denota por 0 aaplicacao nula: 0x = 0 para todo x ∈ Rn. (Note que esse e o terceiroemprego distinto do sımbolo 0.) ¢
43

44 CAPITULO 4. APLICACOES LINEARES
Exemplo 4.4 Na Secao 2.2 vimos que a identificacao de pontos (nocaso, do R3) com matrizes coluna nos permitiu interpretar geome-tricamente um sistema linear em 3 incognitas. Mas essa mesmaidentificacao, no caso geral doRn, nos permite mais: ela nos permiteinterpretar uma matriz m × n com uma aplicacao linear A : Rn →Rm. De fato, dado o ponto x = (x1, . . . , xn) ∈ Rn, escrevendo esseponto como uma matriz coluna temos que
a11 a12 . . . a1na21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
x1x2...
xn
=
a11x1 + a12x2 + . . . + a1nxna21x1 + a22x2 + . . . + a2nxn
...am1x1 + am2x2 + . . . + amnxn
= Ax ∈ Rm.
Assim, a matriz A = (aij) associa a cada ponto x ∈ Rn, um pontoAx ∈ Rm. Para mostrar que essa funcao e linear (e, portanto, umaaplicacao linear) basta relembrar propriedades basicas de matrizes:
A(x + λy) = Ax + λAy. ¢
Exercıcio 4.5 Considere a matriz
A =(
2 1 7 51 1 1 1
).
Quais sao o domınio e o contra domınio da aplicacao linear definida por A? CalculeAx, se x = (1, 1, 1, 1).
Exemplo 4.6 Seja f : R → R definida por f (x) = x2. A funcao f euma aplicacao linear? (Lembre-se: R = R1 e um espaco vetorial!)
Uma vez que f (x + y) = (x + y)2 = x2 + 2xy + y2 = f (x) +f (y) + 2xy, vemos que f nao e linear. ¢
Exemplo 4.7 Consideremos T : Rn → Rm definida por
T(x1, . . . , xn) = (a11x1 + . . . + a1nxn, a21x1 + . . . + a2nxn, . . . , am1x1 + . . . + amnxn),
em que os escalares aij, i ∈ {1, . . . , m} e j ∈ {1, . . . , n} sao arbitrarios.Um caso particular seria T : R3 → R2 dada por
T(x1, x2, x3) = (3x1 + 2x2, x1 + x2 + 2x3).
Afirmamos que, no caso geral, T e uma aplicacao linear. De fato,basta notar que, em cada uma das coordenadas de T, temos
ai1(x1 + λy1) + . . . + ain(xn + λyn) = (ai1x1 + . . . + ainxn) + . . . +λ(ai1y1 + . . . + ainyn).

4.1. APLICACOES LINEARES E MATRIZES – PARTE I 45
Dessa igualdade, valida para todo i ∈ {1, . . . , m}, deduzimosque T e linear.
Se compararmos a definicao de Tx com a expressao de Ax noExemplo 4.6, nao podemos deixar de perceber a semelhanca: cadauma das coordenadas de Tx coincide com as coordenadas de Ax.Vamos explicar essa semelhanca. Para isso, consideremos a basecanonica E = {e1, . . . , en} do Rn. (Veja o Exemplo 3.31.)
Temos que x = (x1, . . . , xn) = x1e1 + . . . + xnen. Assim, comocada xi e um escalar e ei um vetor, temos
Tx = T(x1e1 + . . . + xnen) = x1Te1 + . . . + xnTen.
De acordo com a definicao de Tx, escrevendo a imagem de cadavetor Tei como uma matriz coluna, obtemos
Tei =
a1ia2i...
ami
e, portanto,
Tx = x1
a11a21...
am1
+ x2
a12a22...
am2
+ . . . + xn
a1na2n
...amn
=
a11 a12 . . . a1na21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
x1x2...
xn
(4.2)
A matriz A = (aij) e chamada representacao de T com relacao asbases canonicas do Rn e Rm. ¢
Exercıcio 4.8 Considere T : R2 → R3 definida por
Tx = T(x1, x2) = (3x1 + x2, x1 + x2, x2).
Verifique que T e uma aplicacao linear. Calcule a matriz A que representa T comrelacao as bases canonicas do R2 e R3.
Exercıcio 4.9 Seja T : Rn → Rm uma aplicacao linear qualquer. Mostre que T(0) = 0.
Exemplo 4.10 Consideremos uma aplicacao linear qualquer T : Rn →Rm. Vamos mostrar que, como no Exemplo 4.7, podemos identificarT com uma matriz. Para isso, notamos que, escolhida a base canonicado Rn, temos, como antes,
Tx = x1Te1 + . . . + xnTen. (4.3)
46 CAPITULO 4. APLICACOES LINEARES
Cada Tei (i ∈ {1, . . . , n}) e um ponto do Rm. Denotando
Tei =
a1ia2i...
ami
∈ Rm
e substituindo em (4.3), chegamos, como no exemplo anterior, a igual-dade
Tx =
a11 a12 . . . a1na21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
x1x2...
xn
= Ax.
Quer dizer, escolhendo as bases canonicas do Rn e do Rm, qual-quer aplicacao linear pode ser representada por uma matriz, cha-mada representacao de T com relacao a essas bases canonicas, demodo que Tx = Ax. (Posteriormente veremos porque a base canoni-ca do Rm foi apenas implicitamente utilizada neste exemplo.) ¢
Salientamos o resultado que acabamos de mostrar:
Teorema 4.11 Seja T : Rn → Rm uma aplicacao linear. Entao a matrizque representa T com relacao as bases canonicas do Rn e Rm e dada por
(Te1 Te2 . . . Ten),
em que Tei e uma matriz coluna.
Cada aplicacao linear T : Rn → Rm define uma matriz m × n evice-versa. Assim, qual e a diferenca entre aplicacoes lineares e ma-trizes? Essa diferenca e sutil: uma aplicacao linear nao depende deescolha de bases no domınio e contra-domınio; se escolhermos essasbases, toda aplicacao linear e representada por uma matriz. Dito deoutra maneira, falamos de aplicacao linear quando os espacos envol-vidos (Rn e Rm) sao considerados sem quaisquer bases. Escolhidasbases nesses espacos, aı entao obtemos matrizes. (Por enquanto, soescolhemos as bases canonicas no Rn e Rm.)
Exemplo 4.12 Seja T : R3 → R2 uma aplicacao linear. Suponhamosque
Te1 =(
11
), Te2 =
(31
)e Te3 =
(12
).
Entao podemos determinar Tx, qualquer que seja o vetor x ∈ R3.De fato, se x = (3, 2, 1) ∈ R3, entao
Tx = 3Te1 + 2Te2 + 1Te2
= 3(
11
)+ 2
(31
)+ 1
(12
)=
(107
).
¢

4.1. APLICACOES LINEARES E MATRIZES – PARTE I 47
O Exemplo 4.12 nos mostra que aplicacoes lineares T : Rn → Rm
sao funcoes muito rıgidas: basta conhecermos seu valor em todosos pontos da base canonica {e1, . . . , en} do Rn para conhecermos seuvalor em qualquer ponto do Rn! (No caso de T : R → R, isso signi-fica que basta conhecer a imagem de Te1 = T(1) para conhecermosseu valor em qualquer ponto de R. Compare essa situacao com ade uma funcao qualquer f : R → R.) Mas a base canonica nao temnada de extraordinario: o mesmo resultado vale para qualquer basedo Rn.
Teorema 4.13 Seja {v1, . . . , vn} uma base do Rn. Fixados vetores ar-bitrarios w1, . . . , wn ∈ Rm, existe uma unica aplicacao linear T : Rn →Rm tal que Tvi = wi.
Demonstracao: Dado v ∈ Rn, existem unicos escalares α1, . . . , αn taisque v = α1v1 + . . . + αnvn. Definimos entao
Tv = α1w1 + . . . + αnwn.
Temos que T e linear. De fato, se v = α1v1 + . . . + αnvn e u =β1v1 + . . . + βnvn, entao v + γu = (α1 + γβ1)v1 + . . . + (αn + γβn)vn,de modo que
T(v + γu) = (α1 + γβ1)w1 + . . . + (αn + γβn)wn
= α1w1 + . . . + αnwn + γ(β1w1 + . . . + βnwn)= Tv + γTu.
Suponhamos agora que S : Rn → Rm seja uma aplicacao linearcom Svi = wi. Vamos mostrar que Sv = Tv para todo v ∈ Rn, o quegarante a unicidade de T. De fato, se v = α1v1 + . . . + αnvn, entaotemos
Sv = S(α1v1 + . . . + αnvn)= α1Sv1 + . . . + αnSvn = α1w1 + . . . + αnwn = Tv,
mostrando o afirmado. 2
Exercıcio 4.14 Sejam B = {v1 = (1, 1, 0), v2 = (1, 2, 0), v3 = (1, 1, 1)}. Ache a aplicacaolinear T : R3 → R4 tal que Tv1 = (1, 0, 0, 0), Tv2 = (0, 0, 0, 1) e Tv3 = (1, 1, 1, 1).
A rigidez de uma aplicacao linear produz resultados surpreen-dentes. Por exemplo,
Proposicao 4.15 Sejam T : Rn → Rm uma aplicacao linear e {v1, . . . , vn}um conjunto qualquer. Se {Tv1, . . . , Tvn} for linearmente independente,entao {v1, . . . , vn} e linearmente independente e, portanto, uma base doRn.
Demonstracao: Suponhamos que
α1v1 + . . . + αnvn = 0. (4.4)
48 CAPITULO 4. APLICACOES LINEARES
Queremos provar que αi = 0 para todo i ∈ {1, . . . , n}. Aplicando Tem ambos os lados da igualdade (4.4), obtemos
0 = T(α1v1 + . . . + αnvn) = α1(Tv1) + . . . + αn(Tvn).
Como os vetores Tv1, . . . , Tvn sao linearmente independentes, temosα1 = . . . = αn = 0, como querıamos provar. O fato de {v1, . . . , vn}ser uma base do Rn e consequencia do Teorema 3.48. 2
4.2 Espaco Linha e Espaco Coluna
Definimos agora os dois subespacos fundamentais associados auma aplicacao linear:
Definicao 4.16 Seja T : Rn → Rm uma aplicacao linear. Definimos aimagem de T, denotada por im T, por
im T = {y ∈ Rm : y = Tx}.
Definimos o nucleo de T, denotado por ker T, por
ker T = {x ∈ Rn : Tx = 0}.
O nucleo e a imagem de T sao subespacos vetoriais do domıniode T (isto e, o Rn) e do contradomınio de T (isto e, o Rm), respecti-vamente. De fato, se x1, x2 ∈ ker T e λ ∈ R, entao T(x1 + λx2) =T(x1) + λT(x2) = 0 + λ0 = 0, provando que x1 + λx2 ∈ ker T. Sey1, y2 ∈ im T, entao existem x1, x2 ∈ X tais que y1 = T(x1) e y2 =T(x2). Logo, se λ ∈ R, y1 + λy2 = T(x1) + λT(x2) = T(x1 + λx2), oque mostra que y1 + λy2 ∈ im T.
O subespaco ker T ja havia sido definido para uma matriz A.Existe alguma diferenca entre as duas definicoes dadas? Como dis-semos, ao definirmos ker T, o espacoRn esta sendo considerado semqualquer base (ou seja, sem qualquer sistema de eixos coordenados);se A for a matriz que representa T (com relacao as bases canonicasdo Rn e Rm), entao os elementos de ker T estao sendo descritos emrelacao a base canonica do Rn. Os elementos de cada conjunto saoos mesmos, mas nao existem coordenadas envolvidas na definicaode ker T!
Muitos problemas envolvem a obtencao de bases para esses doissubespacos. Em geral, partimos da base canonica para entao obter-mos uma base adequada para cada um deles. Por esse motivo, muitodo que faremos utiliza a linguagem de matrizes.
Por isso, nesta secao estudaremos mais detalhadamente a matrizA = (aij). Como sabemos, ela pode ser vista por meio de suas linhasou colunas:
A =
a11 . . . a1n...
. . ....
am1 . . . amn
= (c1 . . . cn) =
`1...
`m
. (4.5)

4.2. ESPACO LINHA E ESPACO COLUNA 49
Os vetores colunas c1, . . . , cn sao naturalmente identificados comvetores do Rm. Se C = {c1, . . . , cn}, chamamos de espaco coluna oespaco gerado por C, isto e, < C > ⊂ Rm.
Por outro lado, podemos interpretar as linhas de A como elemen-tos do proprio espaco Rn. Se denotarmos L = {`1, . . . , `m} ⊂ Kn,chamamos de espaco linha o espaco gerado porL, isto e, < L >⊂ Kn.
Observacao 4.17 Um vetor e identificado com uma matriz coluna:
(x1, . . . , xn) ←→
x1x2...
xn
.
A identificacao de um vetor com uma matriz linha
(x1, . . . , xn) ←→ (x1 x2 . . . xn),
como feita na definicao do espaco linha, e excepcional e deve serevitada, pelo menos neste primeiro curso. ¢
Exemplo 4.18 Considere a matriz
A =(
2 1 11 1 2
).
O espaco coluna de A e o subespaco do R2
< C > ={
α
(21
)+ β
(11
)+ γ
(12
): α, β, γ ∈ R
}.
Como as duas primeiras colunas de A sao dadas por vetores linear-mente independentes, e claro que < C > = R2.
Por outro lado, o espaco linha de A e o subespaco do R3
< L > = {α(2, 1, 1) + β(1, 1, 2) : α, β ∈ R} .
Como as duas primeiras linhas de A sao dadas por vetores linear-mente independentes, < L > e um plano do R3. Note que as di-mensoes de < L > e < C > sao iguais. ¢
Mas, qual o significado dos subespacos < C > e < L >? Comeca-mos interpretando o espaco coluna de uma matriz.
Lema 4.19 Considere o sistema linear nao homogeneo Ax = b, em queA = (aij) e uma matriz m× n. Entao sao equivalentes:
(i) Existe solucao x para Ax = b;
(ii) O vetor b e combinacao linear das colunas de A.

50 CAPITULO 4. APLICACOES LINEARES
Demonstracao: Basta notar que o sistema Ax = b e equivalente aequacao
x1
a11a21...
am1
+ x2
a12a22...
am2
+ . . . + xn
a1na2n
...amn
=
b1b2...
bm
, (4.6)
de acordo com a equacao (4.2).Quer dizer, se x = (x1, . . . , xn) ∈ Rn for uma solucao de Ax = b,
entao b e combinacao linear das colunas de A por meio dos escalaresx1, . . . , xn. Reciprocamente, se existirem escalares x1, . . . , xn de modoque b seja combinacao linear das colunas de A, entao o vetor x =(x1, . . . , xn) ∈ Rn e solucao de Ax = b. 2
Em outras palavras, acabamos de mostrar que < C > e o subespacoim A.
Definicao 4.20 Se A = (aij) for uma matriz m× n, definimos a trans-posta de A como a matriz n×m At = (at
ij), com atij = aji.
Logo, se A for a matriz dada por (4.5), entao
At =
a11 . . . am1...
. . ....
a1n . . . amn
.
Assim, as colunas da matriz At sao justamente as linhas da ma-triz A. Como consequencia imediata do Lema 4.19, temos que
< L > = im At. (4.7)
Utilizando essas interpretacoes para os espacos linha e coluna deuma matriz, estamos em condicoes de resolver um problema funda-mental: dada uma matriz A, encontrar bases para os espacos ker Ae im A. Para isso, enunciamos o seguinte
Corolario 4.21 Seja A uma matriz m × n e R sua forma escalonada re-duzida por linhas. Entao as colunas de A correspondentes aos pivos de Rformam uma base do espaco coluna de A.
Demonstracao: Considere a matriz aumentada (A|b), com b ∈ im Ae sua forma escalonada reduzida por linhas (R|b′). E facil ver queas colunas de R correspondentes aos pivos formam uma base doespaco coluna de R. Quer dizer, existe uma solucao x de (R|b′)com coordenadas nao nulas apenas nas posicoes correspondentesaos pivos. Como as solucoes de Ax = b e Rx = b′ sao as mesmas,a equacao (4.6) garante que combinacoes lineares de colunas de Rproduzem combinacoes lineares das colunas correspondentes de A.Em particular, as colunas de A correspondentes aos pivos de R saolinearmente independentes e geram o espaco coluna de A. 2
Estude o proximo exemplo e entao releia a demonstracao do Co-rolario 4.21.
4.2. ESPACO LINHA E ESPACO COLUNA 51
Exemplo 4.22 Vamos obter bases para o nucleo e a imagem da ma-triz
A =
3 1 2 4 11 1 1 1 22 2 2 1 1
.
Para obter o nucleo, resolvemos Ax = 0 levando a matriz A asua forma escalonada reduzida por linhas:
3 1 2 4 11 1 1 1 22 2 2 1 1
−→
1 0 1/2 0 −50 1 1/2 0 40 0 0 1 3
.
Escrevendo as variaveis correspondentes aos pivos em termosda variaveis livres, obtemos a solucao geral do sistema homogeneoassociado.
x1x2x3x4x5
= x3
−1/2−1/2
100
+ x5
5−4
0−3
1
(4.8)
Assim, podemos concluir que o nucleo de A e um subespaco de di-mensao 2, gerado pelos vetores
u1 =
−1/2−1/2
100
∈ R5 e u2 =
5−4
0−3
1
∈ R5.
De acordo com o Corolario 4.21, temos que os vetores
v1 =
312
, v2 =
112
e v3 =
411
formam uma base da imagem de A, pois estes vetores coluna cor-respondem as posicoes dos pivos na forma escalonada reduzida porlinhas de A.
Vamos aproveitar este exemplo e ilustrar a demonstracao do Co-rolario 4.21. Se quisermos escrever a ultima coluna da matriz Acomo combinacao linear das colunas de A correspondentes aos pivos,basta tomar o vetor correspondente a variavel livre x5. Esse vetortem a quinta coordenada nao nula.
5−4
0−3
1
.

52 CAPITULO 4. APLICACOES LINEARES
Essa e uma solucao de Ax = 0. Assim,
5
312
− 4
112
+ 0
212
− 3
411
+ 1
121
=
000
.
Ou seja,
121
= −5
312
+ 4
112
+ 3
411
.
Veja que esses mesmos escalares escrevem a ultima coluna da matrizR como combinacao linear das colunas correspondentes aos pivos:
−5
43
= −5
100
+ 4
010
+ 3
001
.
¢
Observacao 4.23 Resulta do Corolario 4.21 um metodo simples paraa obtencao de uma base do subespaco < v1, . . . , vk >⊂ Rn: bastaformar a matriz A = (v1 v2 . . . vk) e entao selecionar as colunascorrespondentes aos pivos da sua forma escalonada reduzida porlinhas. Compare com a Observacao 3.23.
Um outro metodo para obter-se uma base para a imagem da ma-triz A consiste em escrever suas colunas como linhas, ou seja, con-siderar a matriz transposta. Uma vez que o processo de escalona-mento de uma matriz (no caso, de At) produz apenas combinacoeslineares das linhas envolvidas, faz com que o espaco gerado por es-sas linhas seja conservado no processo de escalonamento. Assim,as linhas nao nulas da forma escalonada de At sao linearmente in-dependentes e, escritas novamente como colunas, produzem umabase para im A.
Note, contudo, que ao utilizar esse metodo, temos que escalonarduas matrizes distintas: a matriz A, para obter uma base para ker A,e a matriz At, para produzir uma base para im A. Quer dizer, aaplicacao do Corolario 4.21 e um metodo muito mais eficaz! ¢
Vamos agora relacionar as dimensoes dos subespacos < C > e< L > de uma matriz A. Mostraremos que esses espacos tem amesma dimensao; isso e um fato notavel, pois eles sao subespacosde espacos vetoriais diferentes!
Teorema 4.24 Dada uma matriz m × n, seu espaco linha tem a mesmadimensao de seu espaco coluna.
Demonstracao: Suponhamos que os vetores
b1 = (b11, b12, . . . , b1n), b2 = (b21, b22, . . . , b2n), . . . , br = (br1, br2, . . . , brn)
4.2. ESPACO LINHA E ESPACO COLUNA 53
formem uma base do espaco linha da matriz A. Entao cada linha `ide A e combinacao linear desses elementos:
`1 = λ11b1 + . . . + λ1rbr
`2 = λ21b1 + . . . + λ2rbr... =
...`m = λm1b1 + . . . + λmrbr
Igualando a componente j de cada uma dessas equacoes, obtemos
a1j = λ11b1j + λ12b2j + . . . + λ1rbrj
a2j = λ21b1j + λ22b2j + . . . + λ2rbrj
... =...
amj = λm1b1j + λm2b2j + . . . + λmrbrj.
Assim,
a1ja2j...
amj
= b1j
λ11λ21
...λm1
+ b2j
λ12λ22
...λm2
+ . . . + brj
λ1rλ2r
...λmr
,
mostrando que as colunas de A sao combinacoes lineares dos r ve-tores
λ11λ21
...λm1
, . . . ,
λ1rλ2r
...λmr
.
Isso quer dizer que o espaco coluna tem dimensao, no maximo, iguala r, ou seja,
dim < C > ≤ dim < L > .
Procedendo da mesma maneira com relacao a uma base do espacocoluna, mostramos que
dim < L > ≤ dim < C > .
Assim, essas duas dimensoes sao iguais.1 2
Definicao 4.25 Definimos o posto da matriz A, denotado por posto A,como sendo
dim < C > = dim < L > .
Se A for uma representacao matricial da aplicacao linear T, definimos
posto T = posto A.
O seguinte resultado decorre imediatamente do Teorema 4.24:
Corolario 4.26 Seja A uma matriz m× n. Entao
dim(im A) = dim(im At).1De maneira mais elegante, podemos notar que mostramos dim < C > ≤
dim < L > para qualquer matriz. Aplicando esse fato a matriz At, obtemos oresultado.

54 CAPITULO 4. APLICACOES LINEARES
4.3 Multiplicacao de Matrizes
Sem duvida, uma das definicoes mais estranhas da Matematicaparece ser a da multiplicacao de matrizes: dadas as matrizes B =(bik), p × m, e A = (akj), m × n, e entao o produto BA e a matrizd = (dij), definida por
dij =m
∑k=1
bikakj = (bi1 bi2 . . . bim)
a1ja2j...
amj
,
correspondente a multiplicacao da linha `i da matriz B pela colunacj da matriz A.
Historicamente, a definicao da multiplicacao de matrizes foi im-posicao de um fato muito mais elementar: a composicao de funcoes(no caso, aplicacoes lineares). Comecamos mostrando que a compo-sicao de aplicacoes lineares tambem define uma aplicacao linear:
Lema 4.27 Sejam T : Rn → Rm e S : Rm → Rp duas aplicacoes lineares.Entao a composta S ◦ T : Rn → Rp e uma aplicacao linear:
Rn T→ Rm S→ Rp.
Demonstracao: De fato, se x + λy ∈ Rn, entao
(S ◦ T)(x + λy) = S(T(x + λy)
)
= S(Tx + λTy
)= S(Tx) + λS(Ty)
= (S ◦ T)x + λ(S ◦ T)y,
provando o afirmado. 2
Suponhamos que T : Rn → Rm e S : Rm → Rp sejam representa-das (com relacao as bases canonicas dos espacos envolvidos) pelasmatrizes A e B, respectivamente. Assim,
Tx = Ax ∀ x ∈ Rn e Sy = By ∀ y ∈ Rm. (4.9)
Uma vez que Tx ∈ Rm, temos entao que
(S ◦ T)x = S(Tx) = B(Ax) = (BA)x,
vemos que a composta S ◦ T e representada pela matriz BA. Essefato justifica usa notacao frequentemente usada: ao inves de deno-tarmos S ◦ T, escrevemos simplesmente ST.
Mas, como obter a definicao da multiplicacao de matrizes BA apartir da composicao ST de aplicacoes lineares? E o que passaremosa mostrar.
Partimos da linearidade da aplicacao S:
Sx = S(x1e1 + . . . + xmem) = x1Se1 + . . . + xmSem. (4.10)
4.4. EXERCICIOS 55
Denotando
Sej =
b1jb2j...
bmj
,
concluımos que
Sx =
b11x1 + . . . + b1mxmb21x1 + . . . + b2mxm
...bp1x1 + . . . + apmxm
, (4.11)
expressao resultante de (4.10) e da definicao da adicao de vetores noRm.
Suponhamos que T : Rn → Rm e S : Rm → Rp sejam representa-das (com relacao as bases canonicas dos espacos envolvidos) pelasmatrizes A e B, respectivamente. Quer dizer,
A =(Te1 Te2 . . . Ten
)=
(c1 c2 . . . cn
)
e
B = (Se1 Se2 . . . Sem) =
b11 b12 . . . b1mb21 b22 . . . b2m...
.... . .
...bp1 bp2 . . . bpm
,
em que a matriz A esta sendo denotada por suas colunas.A aplicacao linear ST : Rn → Rp e representada, com relacao as
bases canonicas do Rn e Rp, por uma matriz D (denotada por suascolunas) definida por
D =((ST)e1 (ST)e2 . . . (ST)en
).
Para obter D, notamos que (ST)ej = S(Tej) = Scj, o que implica
D =(Sc1 Sc2 . . . Scn
).
Uma vez que (ST)x = (BA)x, obtemos a definicao do produtoBA, de acordo com a equacao (4.11): a j-esima coluna de BA e dadapor
b11 b12 . . . b1mb21 b22 . . . b2m...
.... . .
...bp1 bp2 . . . bpm
a1ja2j...
amj
=
b11a1j + b12a2j + . . . + b1mamjb21a1j + b22a2j + . . . + b2mamj
...bp1a1j + bp2a2j + . . . + bpmamj
.
4.4 Exercıcios

56 CAPITULO 4. APLICACOES LINEARES
1. Considere as aplicacoes do R2
(a) Π1 : R2 → R2
Π1(x1, x2) = (x1, 0) (b) Π2 : R2 → R2
Π1(x1, x2) = (0, x2)
(c) R1 : R2 → R2
R1(x1, x2) = (x1,−x2)(d) R2 : R2 → R2
R2(x1, x2) = (−x1, x2).
Mostre que cada uma dessas aplicacoes e linear e encontre sua representacao matri-cial (com relacao a base canonica do R2). Interprete-as geometricamente.
2. Verifique se a aplicacao linear definida pela matriz A e injetora, se
(a) A =
1 1 11 2 32 3 4
; (b) A =
1 1 11 2 31 2 1
; (c) A =
0 1 11 1 20 0 1
.
3. Escreva a equacao
123
= x1
123
+ x2
258
+ x3
323
na forma de um sistema nao homogeneo Ax = b. Resolva-o, se esse sistema possuirsolucao.
4. Encontre bases para o espaco linha e para o espaco coluna da matriz A, dada por
(a)
1 2 1 12 1 2 10 1 1 0
; (b)
1 2 1 12 1 2 10 1 1 01 0 0 0
(c)
1 −2 12 1 −20 −1 1
.
5. Encontre bases para o nucleo e imagem da matriz
1 2 2 3 1 42 4 5 5 4 93 6 7 8 5 9
.
Determine o posto dessa matriz.
6. Seja T : Rn → Rm uma aplicacao linear e {v1, . . . , vn} uma base do Rn. Mostre queim T e gerada pelos vetores Tv1, Tv2, . . . , Tvn.
7. Seja A = (c1 c2 . . . cn) uma matriz quadrada, dada por suas colunas. Mostre que{c1, . . . , cn} e linearmente dependente se, e somente se, det A = 0.
8. Sejam A, B matrizes n× n. Mostre que AB = 0 se, e somente se, o espaco coluna deB estiver contido no nucleo de A.

Capıtulo 5
O Teorema do Nucleo e daImagem
Objetivos: No final do Capıtulo o aluno deve saber:
1. aplicar o teorema (da dimensao) do nucleo e da imagem;
2. obter a inversa de uma matriz por meio da forma escalonadareduzida por linhas.
5.1 Teorema (da dimensao) do Nucleo e da Ima-gem
Nesta Secao mostraremos um dos resultados mais importantesda Algebra Linear, com implicacoes importantes no estudo de siste-mas lineares.
Teorema 5.1 (do Nucleo e da Imagem)Seja T : Rn → Rm uma aplicacao linear. Entao
n = dim ker T + dim im T.
Demonstracao: Se ker T 6= {0}, seja {x1, . . . , xj} uma base de ker T.Esse e um conjunto linearmente independente no espacoRn, de mo-do que podemos aplicar o Teorema 3.43 e obter uma base
B = {x1, . . . , xj, wj+1, . . . , wn}
do Rn. (Se ker T = {0}, simplesmente tomamos uma base do Rn.)Afirmamos que {Twj+1, . . . , Twn} e uma base de im T ⊂ Y. De
fato, suponhamos que
αj+1Twj+1 + . . . + αnTwn = 0.
Daı decorre que T(αj+1wj+1 + . . . + αnwn) = 0; definindo
w = αj+1wj+1 + . . . + αnwn,
57
58 CAPITULO 5. O TEOREMA DO NUCLEO E DA IMAGEM
concluımos que w ∈ ker T. Como {x1, . . . , xj} e uma base de ker T,temos que
w = β1x1 + . . . + β jxj.
Ou seja,
β1x1 + . . . + β jxj − αj+1wj − . . .− αnwn = 0.
Como B e uma base do Rn, concluımos que β1 = . . . = β j =−αj+1 = . . . = −αn = 0. Isso mostra que os vetores Twj+1, . . . , Twnsao linearmente independentes.
Seja agora y ∈ im T. Entao existe x ∈ Rn tal que Tx = y. ComoB e base de Rn, x = α1x1 + . . . + αjxj + αj+1wj+1 + . . . + αnwn e,portanto,
y = Tx = α1Tx1 + . . . + αjTxj + αj+1Twj+1 + . . . + αnTwn
= αj+1Twj+1 + . . . + αnTwn,
pois Txi = 0, i ∈ {1, . . . , j}. Isso mostra que {Twj+1, . . . , Twn} geraim T e conclui a prova. 2
5.2 Isomorfismos e Inversas
Definicao 5.2 Seja T : Rn → Rm uma aplicacao linear. Dizemos que T eum isomorfismo se T for uma bijecao.1
Em geral, nao e facil verificar que uma funcao f : X → Y e inje-tora ou sobrejetora. No caso de aplicacoes lineares, essa verificacaoe muito mais simples, como veremos.
Vamos mostrar que, se n 6= m, entao T : Rn → Rm nao e umisomorfismo.
Lema 5.3 Se m > n, entao T : Rn → Rm nao e sobrejetora.
Demonstracao: Pelo Teorema do Nucleo e da Imagem, temos que
dim im T = n− dim ker T ≤ n.
Como n < m, nao podemos ter dim im T = m. 2
Exemplo 5.4 Considere a aplicacao linear S : R2 → R3 dada por
S(x1, x2) = (x1, x2, x1 + x2).
E facil verificar que S e injetora. Mas S nao e sobrejetora, pois naoexiste x = (x1, x2) ∈ R2 tal que Sx = (1, 1, 0). ¢
1Uma funcao f : X → Y e injetora, se f (x1) = f (x2) implicar x1 = x2; umafuncao f : X → Y e sobrejetora se, para todo y ∈ Y, existir x ∈ X tal que f (x) = y.Uma funcao f : X → Y e uma bijecao, se f for injetora e sobrejetora.

5.2. ISOMORFISMOS E INVERSAS 59
Lema 5.5 Uma aplicacao linear T : Rn → Rm e injetora se, e somente se,ker T = {0}.
Demonstracao: Se existir x 6= 0 tal que Tx = 0, entao T nao e inje-tora, pois tambem temos T(0) = 0.
Suponhamos agora ker T = {0} e que existam x1, x2 tais queTx1 = Tx2. Daı decorre que Tx1 − Tx2 = 0, ou seja, T(x1 − x2) = 0.A ultima igualdade garante que x1 − x2 ∈ ker T, isto e, x1 − x2 = 0e, portanto, x1 = x2. Isso mostra que T e injetora. 2
Exercıcio 5.6 Seja T : R2 → R2 definida por T(x, y) = (2x + y, 3x + 2y). Mostre que T einjetora. Conclua que T e um isomorfismo. Obtenha a expressao de T−1.
Corolario 5.7 Seja T : Rn → Rm uma aplicacao linear. Se m < n, entaoker T 6= {0}.
Demonstracao: Pelo Teorema do Nucleo e da imagem, temos
n = dim ker T + dim im T ≤ dim ker T + m,
pois dim im T ≤ m. Como m < n, temos dim ker T ≥ 1. 2
Observe que o Corolario 5.7 nada mais e do que uma parafrasedo Teorema 1.19. De fato, a aplicacao T pode ser representada poruma matriz A, m × n. Pelo Teorema 1.19, Ax = 0 possui infinitassolucoes. Ou seja, dim ker A ≥ 1 ou, o que e o mesmo, dim ker T ≥1.
Resulta imediatamente dos Lemas 5.3 e 5.5 que
Teorema 5.8 Uma aplicacao linear T : Rn → Rm so pode ser um isomor-fismo se tivermos n = m.
Exemplo 5.9 A aplicacao linear S : R3 → R3 dada por S(x1, x2, x3) =(x1, x2, 0) nao e uma bijecao, pois S(0, 0, 1) = (0, 0, 0). ¢
A verificacao de que uma aplicacao T : Rn → Rn e um isomor-fismo e bastante simples:
Teorema 5.10 Uma aplicacao linear T : Rn → Rn e injetora se, e somentese, for sobrejetora.
Demonstracao: De fato, se tivermos ker T = {0}, entao
dim im T = n− dim ker T = n.
Como a dimensao da imagem de T e igual a dimensao do contra-domınio de T, temos que T e sobrejetora. Da mesma forma, se Tfor sobrejetora, entao dim im T = n e daı deduzimos, como antes,dim ker T = 0. 2
A formulacao do Teorema 5.10 em termos de sistemas lineares ea seguinte:

60 CAPITULO 5. O TEOREMA DO NUCLEO E DA IMAGEM
Corolario 5.11 Seja A uma matriz n× n. Entao o sistema nao homogeneoAx = b tem solucao unica para todo b ∈ Y se, e somente se, o sistemahomogeneo Ax = 0 tiver solucao unica.
(Note que o Corolario 5.11 nada mais e do que o Teorema 1.21.)De acordo com o Corolario 4.26, temos dim im A = dim im At
para toda matriz A. Em geral, temos dim ker A 6= dim ker At, aigualdade sendo valida apenas para matrizes quadradas:
Corolario 5.12 Seja A uma matriz n× n. Entao
dim(ker A) = dim(ker At).
Demonstracao: De fato, denotando r := dim(im A) = dim(im At),a aplicacao do Teorema do Nucleo e da Imagem garante que:
dim(ker A) = n− r e dim(ker At) = n− r.
Daı decorre o afirmado. 2
Suponhamos que T : Rn → Rn seja um isomorfismo. (Isso querdizer, em particular, que T e linear.) Sabemos que T−1 : Rn → Rn
existe. Tambem temos que T−1 e uma aplicacao linear?
Proposicao 5.13 Suponhamos que T : Rn → Rn seja um isomorfismo.Entao T−1 : Rn → Rn e uma aplicacao linear.
Demonstracao: Como T e linear, vale T(x1 + αx2) = Tx1 + αTx2.Aplicando T−1 em ambos os lados dessa igualdade, obtemos x1 +αx2 = T−1(Tx1 + αTx2). Denotando z1 = Tx1 e z2 = Tx2, temosT−1z1 = x1, T−1z2 = x2 e
T−1(z1 + αz2) = x1 + αx2 = T−1z1 + αT−1z2,
provando a linearidade de T−1. 2
Observacao 5.14 Um isomorfismo T : Rn → Rn (veja o Teorema 5.8)corresponde a um “tradutor perfeito” entre o domınio de T (que etodo o Rn) e a imagem de T (que tambem e todo o Rn). O resul-tado de cada operacao realizada no domınio de T corresponde, pormeio de T, a mesma operacao realizada na imagem de T, por meioda lei T(x1 + αx2) = Tx1 + αTx2. Alem disso, o resultado de cadaoperacao realizada em im T corresponde a mesma operacao reali-zada no domınio de T, por meio da lei: T−1(y1 + αy2) = T−1y1 +αT−1y2.
Comparemos com uma bijecao simples: f : R → R definida porf (x) = x3. Para verificar que f e injetora temos que provar quef (x1) = f (x2) implica x1 = x2. Ou seja, de x3
1 = x32 devemos obter
x1 = x2. Ora,
x31 = x3
2 ⇔ 3√
x31 = 3
√x3
2 ⇔ x1 = x2.

5.3. OBTENCAO DA INVERSA DE UMA MATRIZ 61
Seja agora y ∈ R. Queremos provar que y ∈ im f , ou seja, que existex ∈ R tal que f (x) = y. Essa igualdade e o mesmo que x3 = y,de onde vem x = 3
√y. Assim, f e uma bijecao. Mas 8 = f (2) =
f (1 + 1) 6= f (1) + f (1) = 13 + 13 = 1 + 1 = 2.Para verificar que uma aplicacao linear T : Rn → Rn e uma bijecao,
nao precisamos verificar que T e injetora e sobrejetora: basta verifi-car que T e injetora, de acordo com Teorema 5.10! ¢
Exercıcio 5.15 Na demonstracao do Teorema do Nucleo e da Imagem 5.1, mostre que Testabelece um isomorfismo entre < wk+1, . . . , wn > e im T.
5.3 Obtencao da Inversa de uma Matriz
Dada um isomorfismo T : Rn → Rn, como obter a aplicacao in-versa T−1 : Rn → Rn? Em geral, e mais facil obter uma matriz A querepresenta T e entao a inversa da matriz A. Relembramos:
Definicao 5.16 Uma matriz B e inversa da matriz quadrada A se
AB = BA = I,
em que I e a matriz identidade. Se A possuir inversa, dizemos que A einvertıvel.
E facil ver que uma matriz invertıvel A possui uma unica in-versa, que denotaremos por A−1. De fato, suponhamos que AB =BA = I e AC = CA = I. Queremos mostrar que B = C. Temos
B = B(AC) = (BA)C = IC = C,
provando o afirmado.
Proposicao 5.17 Seja A uma matriz quadrada. Suponhamos que existauma matriz quadrada B tal que BA = I. Entao
AB = I,
de modo que B = A−1 e a inversa de A.
Demonstracao: Da igualdade BA = I deduzimos que ker A = {0}.De fato, se existisse x 6= 0 tal Ax = 0, entao BAx = B(0) = 0, oque contradiz BAx = Ix = x 6= 0. Como A e uma matriz quadrada,isso quer dizer que A e sobrejetora, de acordo com o Teorema 5.10.Portanto, A possui inversa A−1. Como BA = I, multiplicando essaigualdade a direita por A−1, vem BAA−1 = A−1, ou seja, provamosque B = A−1. 2
O calculo da inversa de uma matriz por meio da adjunta (classi-ca) da matriz quadrada A nao e um metodo eficiente. Vamos mos-trar uma maneira mais simples de obter a inversa de uma matrizquadrada.
62 CAPITULO 5. O TEOREMA DO NUCLEO E DA IMAGEM
Decorre do Lema 5.5 que uma matriz quadrada A e invertıvelse, e somente se, ker A = {0}. Em termos da forma escalonadareduzida por linhas da matriz A, isto quer dizer que nao existemvariaveis livres, pois a existencia dessas garante a existencia de in-finitos elementos x tais que Ax = 0. (Veja, a esse respeito, a Obser-vacao 1.12.) Uma vez que a forma escalonada R da matriz n× n Apossui n pivos, vemos que R = I, a matriz identidade.
Definicao 5.18 Uma matriz E e elementar se puder ser obtida da matrizidentidade m×m por meio da aplicacao de uma operacao elementar.
O proximo resultado mostra que a aplicacao de uma operacaoelementar sobre as linhas da matriz A e equivalente a multiplicacaodessa matriz por uma matriz elementar.
Proposicao 5.19 Seja e uma operacao elementar sobre (as linhas de) amatriz A, m× n e E a matriz elementar e(I), sendo I a matriz identidadem×m. Entao e(A) = EA.
Demonstracao: A demonstracao deve ser feita para todos os tiposde operacao elementar. Consideraremos apenas a aplicacao de umaoperacao elementar (c): a linha j sera substituıda pela soma da linhaj com λ vezes a linha i. A matriz E, nesse caso, e dada por
E =
1 0 . . . 0...
...0 . . . λ . . . 1 . . . 0...
...0 0 . . . 1
← linha j
↑coluna j
Entao
EA =
1 0 . . . 0...
...0 . . . λ . . . 1 . . . 0...
...0 0 . . . 1
a11 a12 . . . a1n...
...aj1 aj2 . . . ajn...
...am1 am2 . . . amn
=
a11 a12 . . . a1n...
...aj1 + λai1 aj2 + λai2 . . . ajn + λain
......
am1 am2 . . . amn
,
que e justamente e(A). 2

5.4. EXERCICIOS 63
Ora, uma sequencia de operacoes elementares produz a formaescalonada reduzida por linhas da matriz invertıvel A, isto e, produza matriz identidade. Quer dizer,
ekek−1 . . . e1(A) = I.
Exercıcio 5.20 Justifique a afirmacao anterior. Isto e, mostre que a forma escalonada re-duzida por linhas de uma matriz n× n invertıvel e a matriz identidade n× n.
Em termos das matrizes elementares, isso quer dizer que
EkEk−1 . . . E1 A = I.
Definindo a matriz B = EkEk−1 . . . E1, acabamos de mostrar queBA = I. Mas isso significa que B = A−1, de acordo com a Proposicao5.17. Para obter B, basta entao aplicar a sequencia de operacoes ele-mentares ek . . . e1 a matriz I, pois
ek . . . e1(A) = Ek . . . E1I = Ek . . . E1 = B.
Exemplo 5.21 Para obter a inversa da matriz
A =
1 1 1 02 1 4 02 3 5 00 0 0 1
,
consideramos (A|I), em que I e a matriz identidade 4× 4 e levamosa matriz A a sua forma escalonada reduzida por linhas:
1 1 1 0∣∣ 1 0 0 0
2 1 4 0∣∣ 0 1 0 0
2 3 5 0∣∣ 0 0 1 0
0 0 0 1∣∣ 0 0 0 1
→
1 1 1 0∣∣ 1 0 0 0
0 1 −2 0∣∣ 2 −1 0 0
0 1 3 0∣∣ −2 0 1 0
0 0 0 1∣∣ 0 0 0 1
→
1 0 3 0∣∣ −1 1 0 0
0 1 −2 0∣∣ 2 −1 0 0
0 0 5 0∣∣ −4 1 1 0
0 0 0 1∣∣ 0 0 0 1
→
1 0 3 0∣∣ −1 1 0 0
0 1 −2 0∣∣ 2 −1 0 0
0 0 1 0∣∣ − 4
515
15 0
0 0 0 1∣∣ 0 0 0 1
→
1 0 0 0∣∣∣ 7
525 − 3
5 0
0 1 0 0∣∣∣ 2
5 − 35
25 0
0 0 1 0∣∣∣ − 4
515
15 0
0 0 0 1∣∣∣ 0 0 0 1
A matriz do lado direito e a inversa da matriz A. ¢
5.4 Exercıcios1. De exemplos de aplicacoes lineares T : R3 → R3 tais que

64 CAPITULO 5. O TEOREMA DO NUCLEO E DA IMAGEM
(a) ker T = {x ∈ R3 : x3 = −x1};(b) im T = {x ∈ R3 : x1 = x2}.
2. Seja ` : R3 → R uma aplicacao linear.
(a) Mostre que existem escalares a, b e c tais que `(x1, x2, x3) = ax1 + bx2 + cx3;(b) Descreva geometricamente todas as possibilidade para ker `.
3. Verdadeiro ou falso? Se for verdadeiro, justifique. Se for falso, de um contraexem-plo.Seja T : Rn → Rm uma aplicacao linear.
(a) Uma base de im T e obtida ao se completar uma base de ker T, de modo a teruma base do Rn e entao calcular a imagem desses vetores adicionais por T;
(b) Uma base de im T e Te1, . . . , Ten;(c) Toda funcao f : R→ R e bijetora.
4. Seja T : Rn → Rm uma aplicacao linear. Mostre que T e injetora se, e somente se, aimagem de todo conjunto linearmente independente (no Rn) for um conjunto line-armente independente (no Rm).
5. Encontre, se possıvel, as inversas das seguintes matrizes:
(a)
1 2 21 3 11 3 2
; (b)
1 1 1 11 2 −1 21 −1 2 11 3 3 2
; (c)
1 1 1 11 3 1 21 2 −1 15 9 1 6
.
6. Encontre todos os valores de a para os quais a matriz
A =
1 1 01 0 01 2 a
possui inversa.
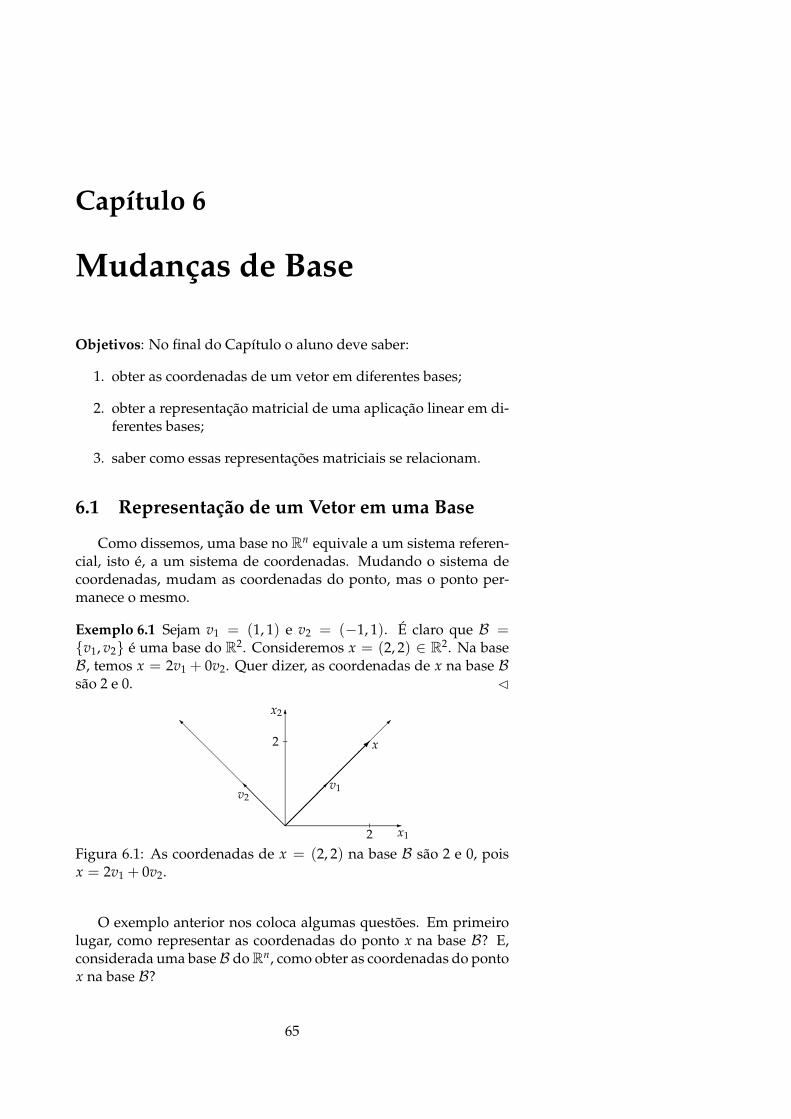
Capıtulo 6
Mudancas de Base
Objetivos: No final do Capıtulo o aluno deve saber:
1. obter as coordenadas de um vetor em diferentes bases;
2. obter a representacao matricial de uma aplicacao linear em di-ferentes bases;
3. saber como essas representacoes matriciais se relacionam.
6.1 Representacao de um Vetor em uma Base
Como dissemos, uma base no Rn equivale a um sistema referen-cial, isto e, a um sistema de coordenadas. Mudando o sistema decoordenadas, mudam as coordenadas do ponto, mas o ponto per-manece o mesmo.
Exemplo 6.1 Sejam v1 = (1, 1) e v2 = (−1, 1). E claro que B ={v1, v2} e uma base do R2. Consideremos x = (2, 2) ∈ R2. Na baseB, temos x = 2v1 + 0v2. Quer dizer, as coordenadas de x na base Bsao 2 e 0. ¢
-
6
x1
x2
v1
2
2
��
���
@@
@@I
��
��
��
��� x
��
��
��
��
���
@@
@@
@@
@@
@@I
v2
Figura 6.1: As coordenadas de x = (2, 2) na base B sao 2 e 0, poisx = 2v1 + 0v2.
O exemplo anterior nos coloca algumas questoes. Em primeirolugar, como representar as coordenadas do ponto x na base B? E,considerada uma base B doRn, como obter as coordenadas do pontox na base B?
65

66 CAPITULO 6. MUDANCAS DE BASE
Definicao 6.2 Seja B = {v1, . . . , vn} uma base do Rn. Se x ∈ Rn, entaoexistem (unicos) escalares λ1, . . . , λn ∈ R tais que
x = λ1v1 + . . . + λnvn.
O vetor
[x]B =
λ1λ2...
λn
= λ1e1 + . . . + λnen ∈ Rn
e chamado representacao de x na base B e λ1, . . . , λn as coordenadas dex na base B.
Se E for a base canonica do Rn, escrevemos simplesmente x ao inves de[x]E .
Observacao 6.3 A Definicao 6.2 merece alguns comentarios. Emprimeiro lugar, ao escrever o vetor x como combinacao linear dosvetores da base B, estamos justamente encontrando as coordenadasdo vetor x no sistema de coordenadas formado por B.
Um segundo fato precisa ser ressaltado: uma base do Rn e umconjunto ordenado. Apenas essa ordenacao permite dar sentido arepresentacao de um vetor em uma base. ¢
Exemplo 6.4 Seja x = (3, 2) ∈ R2. Considere a base
B = {v1 = (1, 1), v2 = (−1, 1)}
do R2. Para encontrar [x]B , resolvemos o sistema
x = λ1v1 + λ2v2,
isto e,(3, 2) = λ1(1, 1) + λ2(−1, 1).
Como o sistema tem apenas duas incognitas, nao e necessarioutilizar o metodo de Gauss-Jordan. Contudo, vamos aplicar essemetodo, pois ele e bastante util em sistemas maiores. Levamos amatriz aumentada do sistema anterior a forma escalonada reduzidapor linhas:1
(1 −1
∣∣ 31 1
∣∣ 2
)→
(1 −1
∣∣ 30 1
∣∣ − 12
)→
1 0
∣∣∣ 52
0 1∣∣∣ − 1
2
.
Assim,
[x]B =
(52
− 12
).
1Repetimos mais uma vez: os vetores dados aparecem como colunas da matriz!
6.2. APLICACOES LINEARES E MATRIZES – PARTE II 67
Proposicao 6.5 Seja B = {v1, . . . , vn} uma base do Rn. Se x = λ1v1 +. . . + λnvn, a aplicacao B : Rn → Rn dada por
Bx = [x]B =
λ1λ2...
λn
= λ1e1 + . . . + λnen ∈ Rn
e um isomorfismo. Para ressaltar que a imagem de B esta sendo consideradacom a base canonica, escreveremos B : Rn → (Rn, E).
Demonstracao: Se x = λ1v1 + . . . + λnvn e y = γ1v1 + . . . + γnvn,entao
B(x + αy) = B ((λ1 + αγ1)v1 + . . . + (λn + αγn)vn)
=
λ1 + αγ1λ2 + αγ2
...λn + αγn
=
λ1λ2...
λn
+ α
γ1γ2...
γn
= Bx + αBy,
mostrando a linearidade de B.Se Bx = 0, entao x = 0v1 + . . . + 0vn = 0, mostrando que ker B =
{0}. O resultado decorre entao do Teorema 5.10. 2
Observacao 6.6 Uma vez que vi = 0v1 + . . . + 0vi−1 + 1vi + 0vi+1 +. . . + 0vn, vemos que
Bvi =
0...1...0
= ei,
o i-esimo vetor da base canonica do Rn. ¢
6.2 Aplicacoes Lineares e Matrizes – Parte II
Na primeira Secao do Capıtulo 4 mostramos como associar acada aplicacao linear T : Rn → Rm uma matriz A = (aij), que repre-senta T com relacao as bases canonicas do Rn e Rm. Mostraremosagora que a mesma associacao entre aplicacoes lineares e matrizese valida para quaisquer escolhas de bases B do espaco Rn e C doespaco Rm.
Escolhendo uma base arbitraria B = {v1, . . . , vn} do espaco Rn eescrevendo x = λ1v1 + . . . + λnvn, ja vimos que a aplicacao
B : Rn → (Rn, E)
68 CAPITULO 6. MUDANCAS DE BASE
definida por
Bx =
λ1λ2...
λn
e um isomorfismo.Da mesma forma, ao se escolher uma base C = {w1, . . . , wm} no
espaco Rm, obtem-se um isomorfismo C entre Rm e Rm. (Note queas imagens das aplicacoes B e C chegam, respectivamente, no Rn eRm, esses espacos considerados com suas bases canonicas.)
Seja T : Rn → Rm uma aplicacao linear. Vamos considerar umabase B no espaco Rn e uma base C no espaco Rm. Nosso objetivo emostrar como associar uma matriz a aplicacao T, levando em contaas bases escolhidas B e C.
Temos o seguinte diagrama (as setas verticais sempre indicaraoisomorfismos):
TRn −→ Rm
B ↓ ↓ C(Rn, E) −→ (Rm, E)
A
(6.1)
em que o mesmo sımbolo E esta representando as bases canonicasdos espacos Rn e Rm.
A aplicacao linear A e definida como composta de aplicacoes li-neares (estamos usando a notacao de composta para enfatizar)
A = C ◦ T ◦ B−1
e e representada por uma matriz, de acordo com o que vimos naprimeira secao do Capıtulo 4. E usual chamar essa matriz de repre-sentacao da aplicacao linear T com respeito as bases B e C (dos espacosRn e Rm, respectivamente) e denota-la por TCB . Veja que A = TCB euma aplicacao linear de (Rn, E) no espaco (Rm, E).
Exemplo 6.7 Consideremos os espacos Rn e Rm com as bases B ={v1, . . . , vn} e C = {w1, . . . , wm}, respectivamente. Seja T : Rn → Rm
uma aplicacao linear. Vejamos como obter TCB . Para isso, usamos odiagrama (6.1):
TRn −→ Rm
B ↓ ↓ C(Rn, E) −→ (Rm, E)
TCB
.
Como vimos na primeira secao do Capıtulo 4, a i-esima colunada matriz procurada e obtida ao se calcular TCBei = (CTB−1)ei. Mas,Bvi = ei, de modo que (CTB−1)ei = (CT)B−1ei = (CT)vi. Como Ce a aplicacao que associa a Tvi ∈ Rm as suas coordenadas na base C,temos que a i-esima coluna da matriz procurada e [Tvi]C . ¢
6.2. APLICACOES LINEARES E MATRIZES – PARTE II 69
No caso de aplicacoes lineares T : Rn → Rn, a mesma base Bpode ser escolhida tanto no domınio quanto no contradomınio. Nessecaso, denotamos TB ao inves de TBB .
Exemplo 6.8 Considere a aplicacao linear T : R2 → R2 definida por
T(x, y) = (4x− 2y, 2x + y).
Seja B a base do R2 formada pelos vetores v1 = (1, 1) e v2 =(−1, 0). Vamos achar a matriz que representa T com relacao a baseB. (Quer dizer, estamos utilizando a mesma base no domınio e nocontradomınio e procuramos a matriz TB .) Para isso, calculamos
T(v1) = (2, 3) = 3(1, 1) + (−1, 0) = 3v1 + v2.
Note que escrevemos a imagem de T(v1) na base B, utilizada tam-bem no contradomınio. De acordo com a notacao introduzida naDefinicao 6.2, temos
[T(v1)]B =(
31
).
Da mesma forma, T(v2) = (−4,−2) = −2(1, 1)+ 2(−1, 0) = −2v1 +2v2 e, portanto,
[T(v2)]B =( −2
2
).
Assim,
TB =([Tv1]B [Tv2]B
)=
(3 −21 2
).
As colunas de TB sao as imagens dos vetores da base B, escritas napropria base B utilizada, nesse caso, tambem no contradomınio.
Se quisermos calcular a imagem do vetor (1, 2) = 1e1 + 2e2 ∈ R2
utilizando a matriz TB , primeiro expressamos esse vetor na base B:
(1, 2) = 2(1, 1) + 1(−1, 0) = 2v1 + v2.
Calculando
TB(
21
)=
(3 −21 2
) (21
)=
(44
),
obtemos a “resposta” na base B. Se quisermos a resposta na basecanonica, precisamos escrever o resultado obtido nessa base:
4v1 + 4v2 = 4(1, 1) + 4(−1, 0) = (0, 4) = 0e1 + 4e2,
que e o mesmo resultado que obtemos ao calcular T(1, 2) utilizandoa expressao T(x, y) = (4x− 2y, 2x + y). ¢
Escolhidas as bases B do Rn e C do Rm, associamos, assim, acada aplicacao linear T : Rn → Rm a matriz TCB , cuja expressao de-pende das bases B e C. Uma vez que cada escolha de base B no Rn

70 CAPITULO 6. MUDANCAS DE BASE
produz um isomorfismo diferente entre (Rn,B) e (Rn, E) e o mesmoacontece com (Rm, C) e (Rm, E), vemos que existem muitas maneirasdistintas de representar uma transformacao linear por meio de umamatriz. Como se relacionam essas diferentes matrizes que represen-tam a aplicacao linear T?
Para responder a essa pergunta, comecamos estudando como serelacionam as representacoes de x em bases B = {v1, . . . , vn} e B ={v′1, . . . , v′n} do espaco Rn. O mesmo procedimento anterior podeser utilizado (I denota a aplicacao identidade):
IRn −→ Rn
B ↓ ↓ B(Rn, E) −→ (Rn, E)
PBB
.
(Para sermos coerentes com a notacao anterior, deverıamos escreverIBB ao inves de PBB . Entretanto, e usual denotar esse tipo de matrizpela letra P.)
De acordo com o Exemplo 6.7, a i-esima coluna de PBB e obtidacalculando-se a expressao de BIB−1(ei) = BI(vi) = B(vi) = [vi]B .A matriz PBB e chamada matriz mudanca2 da base B para a base B.Dadas as coordenadas de x na base B, isto e, [x]B , as coordenadas dex na base B sao dadas por
PBB [x]B = [x]B . (6.2)
Claramente a matriz PBB possui inversa PBB .
Exercıcio 6.9 Utilizando o diagrama anterior, justifique a ultima afirmacao.
Exemplo 6.10 Voltemos ao Exemplo 6.8. Vamos obter a matriz PBE ,matriz mudanca da base E para a base B. Ela e calculada pelomesmo metodo: escrevemos a imagem dos vetores e1, e2 pela aplica-cao identidade na base B. Temos
(1, 0) = 0(1, 1)− 1(−1, 0) = 0v1 − v2
e(0, 1) = 1(1, 1) + 1(−1, 0) = 1v1 + 1v2.
A matriz PBE e, entao,
PBE =(
0 1−1 1
).
¢
Exercıcio 6.11 Continuando o Exemplo 6.8, calcule a matriz PEB . Ve-rifique que (PBE )−1 = PEB .
2Alguns autores preferem chamar essa matriz de “matriz de passagem” da baseB para a base B. Assim, a terminologia utilizada por eles fica invertida com relacaoa nossa.

6.2. APLICACOES LINEARES E MATRIZES – PARTE II 71
E usual condensar o diagrama (6.1) e escrever
(Rn,B)TCB→ (Rm, C),
salientando as bases utilizadas para se produzir a matriz TCB . Note,contudo, que (Rn,B) e apenas uma notacao para o espaco Rn com abase canonica!
Passemos entao a pergunta feita anteriormente, utilizando essanova notacao: como se relacionam as matrizes TCB e T CB? Temos odiagrama
TCB(Rn,B) −→ (Rm, C)
PBB ↓ ↓ QCC
(Rn, B) −→ (Rm, C)T CB
.
Esse diagrama, cujas componentes sao matrizes, nos mostra que
TCB = [QCC ]−1T CBPBB = QC
CT CBPBB .
O caso em que n = m permite que se tome a mesma base nodomınio e contradomınio. Nesse caso, a relacao entre TB e TB e dadapor
TB = [PBB ]−1TBPBB = PBB TBPBB ,
para qualquer outra base B do Rn.
Observacao 6.12 Dada uma aplicacao linear T : Rn → Rn, a escolhade bases B e C no Rn pode fazer com que a representacao matricialde T assuma formas bem gerais. Por exemplo, se T for invertıvel,TCB pode ser a matriz identidade! Assim, a representacao de T embases completamente arbitrarias quase nao nos passa informacao re-levante sobre a aplicacao T. Voltaremos a esse assunto no proximocurso de Algebra Linear. ¢
Exemplo 6.13 Voltemos ao Exemplo 6.8. Temos a aplicacao linearT : R2 → R2 definida por
T(x, y) = (4x− 2y, 2x + y).
A representacao de T na base canonica e a matriz cujas colunassao
T(1, 0) =(
42
)e T(0, 1) =
( −21
),
ou seja
TE =(
4 −22 1
).
Por outro lado, no Exemplo 6.8 calculamos a matriz TB :
TB =(
3 −21 2
).

72 CAPITULO 6. MUDANCAS DE BASE
Vamos entender a relacao entre as matrizes TE e TB . Para isso,analisamos o seguinte diagrama
TE(R2, E) −→ (R2, E)
PBE ↓ ↓ PBE(R2,B) −→ (R2,B)
TB
.
A matriz PBE e a matriz mudanca da base E para a base B foicalculada no Exemplo 6.10:
PBE =(
0 1−1 1
).
O diagrama anterior garante que
TE = [PBE ]−1TBPBE ,
ou seja,
(4 −22 1
)=
(0 1
−1 1
)−1 (3 −21 2
) (0 1
−1 1
)
Se calcularmos a inversa da matriz PBE , verificaremos esse fato.Entretanto, e facil obter PEB . Essa matriz tem como colunas a ex-pressao dos vetores v1 e v2 na base canonica. Assim, e claro que
PEB =(
1 −11 0
).
Verifique que PEB = [PBE ]−1 e que TE = PEBTBPBE .Note que a ultima igualdade e coerente: dado um vetor x = [x]E
(na base canonica), podemos calcular diretamente TE x = TE [x]E =[Tx]E = Tx, de acordo com a nossa convencao de denotar [y]E sim-plesmente por y. Por outro lado, calculando pelo lado direito daigualdade, temos
PEBTBPBE x = PEBTBPBE [x]E = PEBTB [x]B = PEB [Tx]B = [Tx]E = Tx,
o que produz o mesmo resultado. ¢
6.3 Aplicacao: Diagonalizacao de uma Matriz
Definicao 6.14 Seja A uma matriz quadrada. O polinomio caracterısticoda matriz A e o polinomio
p(z) = det(zI−A).

6.3. APLICACAO: DIAGONALIZACAO DE UMA MATRIZ 73
Exemplo 6.15 Vamos calcular o polinomio caracterıstico da matriz
A =(
1 −12 4
).
Para isso, devemos calcular o determinante da matriz
zI−A = z(
1 00 1
)−
(1 −12 4
)=
(z− 1 1−2 z− 4
).
Assim,
p(z) = det(
z− 1 1−2 z− 4
)= (z− 1)(z− 4) + 2 = z2 − 5z + 6.
¢
Exercıcio 6.16 Calcule o polinomio caracterıstico p(z) da matriz
A =
2 2 31 2 12 −2 1
.
Vamos agora mostrar que podemos definir o polinomio carac-terıstico de uma aplicacao linear T : Rn → Rn. Para isso, escolhe-mos uma base B e calculamos a matriz A = TB . Sabemos calcularo polinomio caracterıstico da matriz A. Mas esse polinomio carac-terıstico nao depende da base B escolhida? Vamos mostrar que nao.Para isso, seja C for uma outra base do Rn e se a matriz B = TC fora representacao de T na base C, ja vimos que A = P−1BP, sendoP = PCB a matriz de mudanca da base B para a base C. Temos que
det(zI−A) = det(P−1(zI− B)P)= det P−1 det(zI− B) det P = det(zI− B) det(P−1P)= det(zI− B),
mostrando que qualquer representacao de T numa base do Rn pos-sui o mesmo polinomio caracterıstico. Em consequencia, podemosdefinir:
Definicao 6.17 O polinomio caracterıstico da aplicacao linear
T : Rn → Rn
e o polinomio caracterıstico de qualquer uma de suas representacoes matri-ciais TB , sendo B uma base do Rn.
Uma vez definido o polinomio caracterıstico de uma aplicacaolinear T, estamos em condicoes de definir autovalores e autovetoresde T.
Definicao 6.18 As raızes λ ∈ K do polinomio caracterıstico sao os au-tovalores de T. Se λ for um autovalor de T, os elementos 0 6= v ∈ker(λI− T) sao os autovetores de T associados ao autovalor λ.

74 CAPITULO 6. MUDANCAS DE BASE
Se 0 6= v for um autovetor de T associado ao autovalor λ, entao(λI− T)v = 0, ou seja, Tv = λv. Lembramos que, dada uma matrizquadrada A, existe v 6= 0 tal que Av = 0 se, e somente se, det A = 0.Assim, os autovalores de T nos fornecem justamente os valores λtais que λI − T nao e invertıvel. Mais precisamente, se B for umarepresentacao matricial de T e λ um autovalor de T, entao a matrizA = λI − B nao e invertıvel.
Dada uma aplicacao linear T : Rn → Rn, a obtencao de uma baseB do Rn formada por autovetores de T resolve um problema impor-tante: nessa base, a representacao de T, isto e, TB , e particularmentesimples.
De fato, se B = {v1, . . . , vn} for uma base de autovetores deT : Rn → Rn associados, respectivamente, aos autovalores λ1, . . . , λn,entao
TB = ([Tv1]B [Tv2]B . . . [Tvn]B)= ([λ1v1]B [λ2v2]B . . . [λnvn]B)
=
λ1 0 . . . 00 λ2 . . . 0...
.... . .
...0 0 . . . λn
Exemplo 6.19 Seja T : R2 → R2 dada por
T(x1, x2) = (x1 + 4x2, 2x1 + 3x2).
Encontramos o polinomio caracterıstico de T ao escolher uma desuas representacoes matriciais. Escolhendo a base canonica E do R2,encontramos
B = TE =(
1 42 3
).
O polinomio caracterıstico de T e, portanto,
det(zI− B) = det(
z− 1 −4−2 z− 3
)= z2 − 4z− 5.
Os autovalores de T sao as raızes de p(z) = z2 − 4z − 5, quesao dadas por λ = −1 e µ = 5. Para encontrarmos os autovetoresassociados a λ = −1, basta resolvermos o sistema (−I− B)v = 0,obtido ao substituir z = λ = −1 em (zI− B). Logo, temos
( −2 −4−2 −4
)→
(1 20 0
),
que nos fornece a solucao
v = α
( −21
).
Tomamos α = 1 e o vetor
v1 =( −2
1
),

6.3. APLICACAO: DIAGONALIZACAO DE UMA MATRIZ 75
pois qualquer outro autovetor associado a λ = −1 e multiplo de v1.Do mesmo modo, encontramos os autovetores associados a µ =
5 resolvendo o sistema (5I− B)v = 0, obtido ao substituir z = µ = 5em zI− B, ou seja,
(4 −4
−2 2
)→
(1 −10 0
),
cuja solucao e
v = α
(11
).
Tomamos α = 1 e o vetor
v2 =(
11
),
pois qualquer outro autovetor associado a µ = 5 e multiplo de v2.Encontramos assim a base B = {v1, v2}, formada por autoveto-
res da aplicacao T. A representacao de T na base B e:
TB =( −1 0
0 5
)
(justifique!) e nos mostra como a escolha de uma base adequadapode simplificar a representacao matricial da aplicacao linear T. ¢
Exemplo 6.20 Nem todas as matrizes (ou aplicacoes lineares) pos-suem uma base formada por autovalores. De fato, consideremos amatriz
A =(
0 10 0
).
O polinomio caracterıstico de A e p(z) = z2, de modo que o unicoautovalor de A e λ = 0. Associado a esse autovalor existe apenasum autovetor linearmente independente: o sistema Av = 0 possui asolucao
v = α
(10
),
que nos fornece, ao escolhermos α = 1, o autovalor
v1 =(
10
).
Qualquer outro autovetor de A e multiplo de v1, de modo que Anao possui uma base formada por autovetores. ¢
Observacao 6.21 A existencia de uma base B do Rn na qual umauma aplicacao linear T : Rn → Rn tem representacao matricial TBdiagonal e um dos principais objetivos do curso de Algebra LinearII. ¢

76 CAPITULO 6. MUDANCAS DE BASE
Exercıcio 6.22 Considere a matriz
A =
0 1 00 0 14 −17 18
.
Mostre que existe uma base B = {v1, v2, v3} do R3 formada por autovetores da matriz A.Encontre a representacao de A na base B e a matriz PEB .
6.4 Exercıcios
1. Considera a aplicacao linear T : R3 → R3 definida por meio da matriz
A =
3 −1 −20 0 −20 0 −1
.
Seja B = {v1 = (1, 0, 0), v2 = (1, 2, 0), v3 = (0,−2, 1)}.
(a) Mostre que B e uma base do R3;(b) Calcule B = TB ;(c) Calcule as matrizes mudanca de base PEB e PBE(d) Escreva B em termos de A utilizando essas matrizes mudanca de base.
2. Seja T : R3 → R3 a aplicacao linear definida por
T(x1, x2, x3) = (x1 + x2 + 2x3, x2 + 2x3, x3).
(a) Ache A = TE , em que E e a base canonica do R3;(b) Calcule A−1;(c) Obtenha entao a expressao de T−1.
3. Sejam T(x, y, x) = (x + y + z, y + z, x) e B = {(1, 0, 1), (0, 1, 0), (−1, 0, 1)}. Entao:
(a) ache a matriz TB ;(b) usando essa matriz, especifique uma base para ker T e im T;(c) calcule T(1, 1, 1) utilizando a representacao matricial calculada em (a).
4. Considere a matriz
A =
1 −2 0−2 0 2
0 2 −1
.
(a) Encontre o polinomio caracterıstico de A;(b) Obtenha os autovalores de A e uma base B do R3 formada por autovetores de
A;(c) Ache a matriz TB ;(d) Calcule TE , a matriz PEB e sua inversa PBE ;(e) Verifique que PBE = (PEB )t;(f) Utilizando as matrizes do item anterior, ache a relacao entre TE e TB .

6.4. EXERCICIOS 77
5. Seja
B =
0 1 00 0 14 −17 8
.
Obtenha os autovalores de B e uma base B do R3 formada por autovetores de B.Encontre a representacao de B na base B.

78 CAPITULO 6. MUDANCAS DE BASE
Capıtulo 7
O Teorema deCayley-Hamilton
Objetivos: No final do Capıtulo o aluno deve saber:
1. Calcular polinomios de matrizes e de aplicacoes lineares;
2. Saber calcular o polinomio caracterıstico de uma aplicacao li-near;
3. Aplicar o Teorema de Cayley-Hamilton em situacoes simples.
7.1 Polinomios de Aplicacoes Lineares
Seja A uma matriz quadrada. Entao faz sentido calcular A2 e, emgeral, a potencia Ak, qualquer que seja o numero natural k ≥ 1.
Exemplo 7.1 Seja A a matriz quadrada
A =(
1 22 1
).
Entao
A2 =(
5 44 5
), e A3 =
(13 1414 13
),
de modo que
3A3 + 1A2 + 5I =(
49 4646 49
).
Observe que 3A3 + 1A2 + 5I resulta da substituicao de z = Ano polinomio 3z3 + z2 + 5, com a convencao de que a constante 5 esubstituıda por 5I, em que I e a matriz identidade 2× 2. ¢
Um pouco mais geralmente, seja T : Rn → Rn uma aplicacaolinear. Podemos definir, para todo k ∈ N, Tk = T ◦ Tk−1 = T(Tk−1),se k ≥ 1 e T0 = I, em que I : Rn → Rn e a aplicacao identidade.Denotaremos q ∈ R[z] para indicar que o polinomio
q(z) = akzk + ak−1zk−1 + a1z + a0z0
79

80 CAPITULO 7. O TEOREMA DE CAYLEY-HAMILTON
tem coeficientes no corpo R. Podemos entao calcular
q(T) := akTk + ak−1Tk−1 + · · ·+ a1T + a0 I.
(Aqui, I a aplicacao identidade I : Rn → Rn). Note que q(T) e umaaplicacao linear do Rn em Rn, que e representada por uma matrizn× n ao se escolher uma base do Rn.
Exercıcio 7.2 Seja
A =
1 2 22 1 21 1 1
.
Calcule q(A), se q(z) = z5 + 3z2 + z + 1.
7.2 Subespacos Invariantes
Definicao 7.3 Um subespaco W ⊂ Rn e invariante por T : Rn → Rn seT(W) ⊂ W, isto e, Tw ∈ W para todo w ∈ W.
Exemplo 7.4 Considere a aplicacao T : R3 → R3 definida por
T(x1, x2, x3) = (x1 − x2, x1 + x2, 3x3)
e o subespaco W = {(x1, x2, 0) : x1, x2 ∈ R} ⊂ R3. Afirmamos queW e invariante por T. De fato, se w ∈ W, entao w = (x1, x2, 0) parax1, x2 ∈ R. Logo,
Tw = T(x1, x2, 0) = (x1 − x2, x1 + x2, 0) ∈ W,
mostrando o afirmado. ¢
Para verificar que um subespaco W ⊂ Rn e invariante pela aplica-cao linear T : Rn → Rn basta considerar uma base {w1, . . . , wm} doespaco W.
Proposicao 7.5 Seja B = {w1, . . . , wm} uma base do subespaco W ⊂Rn. Entao W e invariante pela aplicacao linear T : Rn → Rn se, e somentese, Twi ∈ W para todo i ∈ {1, . . . , m}.
Demonstracao: E claro que se W for invariante por T, entao Twi ∈ Wpara todo i ∈ {1, . . . , m}. Reciprocamente, se w ∈ W, entao existem(unicos) escalares α1, . . . , αn tais que w = α1w1 + . . . + αnwn. ComoT e linear,
Tw = T(α1w1 + . . . + αnwn) = α1(Tw1) + . . . + αn(Twn).
Como Twi ∈ W para i ∈ {1, . . . , m}, concluımos que Tw ∈ W, poisW e um subespaco. 2
7.3. O TEOREMA DE CAYLEY-HAMILTON 81
Seja T : Rn → Rn uma aplicacao linear e W ⊂ Rn um subespaco.Suponhamos que T(W) ⊂ W, isto e, Tw ∈ W para todo w ∈ W. Con-sideremos uma base {w1, . . . , wm} de W. De acordo com o Teorema3.43, existem vetores {xm+1, . . . , xn} de modo que
B = {w1, . . . , wm, xm+1, . . . , xn}seja uma base do Rn. Vamos representar T nessa base, que dizer,vamos obter TB = TBB . Temos que
TB = ([Tw1]B . . . [Twm]B [Txm+1]B . . . [Txn]B) .
Como Twj ∈ W, temos que
[Twj]B =
a1j...
amj0...0
.
Por outro lado, nada sabemos sobre Txj para j ∈ {m + 1, . . . , n}.Assim,
[Txj]B =
a1j...
amjb(m+1)j
...bnj
.
Em outras palavras, a matriz TB tem a forma
TB =
a11 a12 . . . a1m a1(m+1) . . . a1na21 a22 . . . a2m a2(m+1) . . . a2n... . . .
. . ....
... . . ....
am1 am2 . . . amm am(m+1) . . . amn0 0 . . . 0 a(m+1)(m+1) . . . a(m+1)n...
... . . ....
... . . ....
0 0 0 0 bn(m+1) . . . bnn
,
que pode ser escrita na forma
TB =(
A B0 D
).
7.3 O teorema de Cayley-Hamilton
Teorema 7.6 (Cayley-Hamilton)Se p ∈ R[z] for o polinomio caracterıstico de T : Rn → Rn, entao
p(T) = 0.

82 CAPITULO 7. O TEOREMA DE CAYLEY-HAMILTON
Demonstracao: Seja 0 6= v ∈ Rn arbitrario. Queremos mostrar quep(T)v = 0. Seja m o maior natural tal que o conjunto
S = {v, Tv, . . . , Tm−1v}
e linearmente independente. Entao
Tmv = α0v + . . . + αm−1Tm−1v. (7.1)
Seja W = < S > o subespaco gerado por S. Entao os elementos deS formam uma base de W. O subespaco W e invariante por T, deacordo com a Proposicao 7.5 e a igualdade (7.1).
Completamos entao a base S de modo a obter uma base B doRn.Como vimos na Secao 7.2, a representacao de TB e dada por
(A B0 D
),
em que a matriz A e definida por
A =
0 0 · · · 0 α01 0 · · · 0 α1
0 1. . . 0 α2
......
. . ....
...0 0 · · · 1 αm−1
.
O polinomio caracterıstico de TB e
p(z) = det(
zI−A B0 zI−D
)= det(zI−A) det(zI−D) = q1(z)q2(z),
como consequencia do Teorema 1.28. (Em cada expressao, os tama-nhos das matrizes I sao diferentes.)
Vamos calcular q1(z) = det(zI−A). Temos:
det(zI− A) = det
z 0 · · · 0 −α0−1 z · · · 0 −α1
0 −1. . . 0 −α2
......
. . ....
...0 0 · · · −1 z− αm−1
= z det
z 0 · · · −α1−1 z · · · −α2
... · · · . . ....
0 · · · −1 z− αm−1
+
(−α0)(−1)m+1 det
−1 z · · · 00 −1 · · · 0...
.... . .
...0 0 · · · −1
.

7.4. APLICACOES 83
Como o determinante da ultima matriz e (−1)m−1, o ultimo termo ejustamente −α0. Assim,
det(zI− A) = z det
z 0 · · · −α1−1 z · · · −α2
... · · · . . ....
0 · · · −1 z− αm−1
− α0.
Procedendo do mesmo modo, obtemos
q1(z) = det(zI− A) = zm − αm−1zm−1 − . . .− α0.
Substituindo z por T e entao calculando q1(T)v, a equacao (7.1)nos mostra que q1(T)v=0. Assim, p(T)v = q2(T)q1(T)v = 0. Comov foi escolhido arbitrariamente, concluımos que p(T) = 0. 2
7.4 Aplicacoes
Exemplo 7.7 Consideremos a matriz
A =
2 0 03 −1 00 4 3
.
O polinomio caracterıstico de A e
p(z) = (z− 2)(z + 1)(z− 3) = z3 − 4z2 + z + 6.
Se quisermos calcular, por exemplo, q(A), sendo q(z) = z8 −4z7 + z6 + 13z5 − 28z4 + 7z3 + 42z2 + z + 1, podemos efetuar a di-visao euclidiana de q(z) por p(z) e obter
q(z) = (z5 + 7z2)p(z) + z + 1.
O Teorema de Cayley-Hamilton garante que p(A) = 0; assim,q(A) = (A5 + 7A2)p(A) + A + I = A + I. Logo,
q(A) = A + I =
3 0 03 0 00 4 4
.
¢
7.5 Exercıcios
1. Considere a matriz
A =
2 1 11 2 11 1 2
.

84 CAPITULO 7. O TEOREMA DE CAYLEY-HAMILTON
(a) Mostre que, se m(z) = (z− 1)(z− 4), entao m(A) = 0. (O polinomio m nao e opolinomio caracterıstico de A.)
(b) Procedendo como no Exemplo 7.7, calcule A1000. Para isso, efetue a divisaoeuclidiana de z1000 por m(z) e obtenha o resto r(z) = c−1
3 z + 4−c3 , em que c =
41000. Conclua que
A1000 =
c+23
c−13
c−13
c−13
c+23
c−13
c−13
c−13
c+23
.
2. Se k ∈ {1, 2, . . .}, calcule Ak, se
(a) A =
2 1 20 0 00 −2 3
; (b) A =
0 0 00 0 −1
−1 1 0
.
Referencias Bibliograficas
[1] D. Avritzer: Geometria Analıtica e Algebra Linear: uma VisaoGeometrica, tomos I e II, Editora UFMG, Belo Horizonte, 2009.
[2] H. Bueno: Algebra Linear: um Segundo Curso, Sociedade Bra-sileira de Matematica, Rio de Janeiro, 2006.
[3] R. J. Santos: Um Curso de Geometria Analıtica e Algebra Li-near, Imprensa Universitaria da UFMG, Belo Horizonte, 2007.
[4] R. J. Santos: Introducao a Algebra Linear, Imprensa Univer-sitaria da UFMG, Belo Horizonte, 2008.
[5] R. J. Santos: Algebra Linear e Aplicacoes, Imprensa Univer-sitaria da UFMG, Belo Horizonte, 2006.
85

Indice Remissivo
aplicacao linear, 43autovalor, 73autovetor, 73identidade, 43imagem de uma, 48inversa, 60nucleo de uma, 48nula, 43representacao em bases, 68
autovalorde uma aplicacao linear, 73
autovetorde uma aplicacao linear, 73
basecanonica do Rn, 36de um subespaco, 35
calculo da matriz inversa, 63calculo de determinantes
de matrizes em bloco, 14por meio do escalonamento,
12combinacao linear, 30conjunto
gerador, 31ordenado, 35
coordenadas de um vetor, 66
dimensaode um subespaco, 40
espacocoluna, 49linha, 49vetorialRn, 21complexo, 24real, 24
Gauss-Jordan, 6
isomorfismo, 58
metodo de Gauss-Jordan, 6matriz
aumentada de um sistema, 6calculo da inversa de uma, 63elementar, 62escalonamento de uma, 7espaco coluna de uma, 49espaco linha de uma, 49forma escalonada, 7
reduzida por linhas, 8inversa, 61mudanca de base, 70posto de uma, 53transposta, 50
multiplicacao de matrizesdefinicao, 55
nucleode uma aplicacao linear, 48de uma matriz, 11
operacoes elementaressobre as linhas de uma ma-
triz, 7
pivo, 7polinomio
caracterıstico, 72de uma aplicacao linear, 80de uma matriz, 79
postode uma matriz, 53
regrada unidade, 21, 24
sistema linear, 6escalonamento, 7forma escalonada, 7
reduzida por linhas, 8homogeneo, 6matriz aumentada de um, 6
86
INDICE REMISSIVO 87
nao homogeneo, 6homogeneo associado, 6
operacoes elementares, 7pivo, 7variavel livre, 9
subespaco, 27gerado por um conjunto de
vetores, 29invariante, 80
teoremada base do espaco coluna, 50da dimensao dos espacos li-
nha e coluna, 52de Cayley-Hamilton, 81de unicidade da forma esca-
lonada reduzida por linhas,10
do nucleo e da imagem, 57transformacao linear, 43transposta
de uma matriz, 50
variavel livre, 9vetor, 24
multiplicacao por escalar, 22representacao em uma base,
66vetores
linearmente dependentes, 32linearmente independentes, 32soma de, 22








![|Introducao a Algebra Abstrata (CCOMP e criptog RSA) [Evaristo&Perdigao][fev2012].pdf](https://static.fdocumentos.com/doc/165x107/55721203497959fc0b8fe271/introducao-a-algebra-abstrata-ccomp-e-criptog-rsa-evaristoperdigaofev2012pdf.jpg)


![[Algebra a] Fundamentos de Algebra](https://static.fdocumentos.com/doc/165x107/55cf9bca550346d033a76685/algebra-a-fundamentos-de-algebra.jpg)




