introdução dinamica não linear e teoria do caos

of 131
-
Upload
jorley-huy -
Category
Documents
-
view
1.429 -
download
6
description
Dinâmica não linear teoria do caos
Transcript of introdução dinamica não linear e teoria do caos
Introduo Dinmica No-Linear e CaosRicardo L. Viana Departamento de Fsica Universidade Federal do Paran Curitiba, Paran, Brasil 6 de setembro de 2011
2
Sumrio1 Introduo 1.1 1.2 1.3 1.4 1.5 1.6 1.7 Dinmica No-Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A dinmica e o problema de N corpos . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 8
Poincar e o nascimento da dinmica no-linear . . . . . . . . . . . . . . . . . . . . 10 Caos determinstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Lorenz e o efeito borboleta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 May e o mapa logstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Sistemas dinmicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 17
2 Mapas unidimensionais 2.1 2.1.1 2.1.2 2.1.3 2.2 2.3 2.4 2.5 2.2.1 2.3.1 2.4.1 2.5.1
Mapas unidimensionais lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Mapa linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Diagramas de escada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Pontos xos e sua estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . 19 Mapa discreto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Pontos nalmente xos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 Mapa logstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 Estabilidade das rbitas peridicas . . . . . . . . . . . . . . . . . . . . . . . . 31 3
Mapas unidimensionais no-lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Iteraes sucessivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Estabilidade dos Pontos Fixos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 rbitas peridicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4 2.5.2 2.6 2.6.1 2.6.2 2.6.3 2.7
SUMRIOMapa logstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 Uso de planilhas eletrnicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 Programa de computador para iteraes do mapa . . . . . . . . . . . . . . . 40 Uso de software matemtico . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Solues numricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 51
3 Bifurcaes em mapas unidimensionais 3.1 3.2
Diagrama de bifurcaes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 Obteno numrica do diagrama de bifurcaes . . . . . . . . . . . . . . . . . . . . 53 3.2.1 3.2.2 3.2.3 3.2.4 Programa em linguagem C . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Uso do Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 Uso do Mathematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 Uso do Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 Bifurcao no mapa logstico em r = 3 . . . . . . . . . . . . . . . . . . . . . . 62
3.3 3.4 3.5 3.6 3.7 3.8
Bifurcao de duplicao de perodo . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 3.3.1 Bifurcao tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 Bifurcao transcrtica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 Cascata de bifurcaes de duplicao de perodo . . . . . . . . . . . . . . . . . . . . 65 3.6.1 Universalidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67 Teoria de renormalizao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 79
4 Caos em mapas unidimensionais 4.1 4.1.1 4.1.2 4.2 4.2.1 4.2.2
Comportamento catico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 Aperiodicidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 Sensibilidade s condies iniciais . . . . . . . . . . . . . . . . . . . . . . . . 82 Perodo 3 implica em caos . . . . . . . . . . . . . . . . . . . . . . . . . . . 87 Sequncia-U . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Janelas peridicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
SUMRIO4.2.3 4.3 4.3.1 4.3.2 4.3.3 4.4 4.4.1 4.4.2 4.4.3 4.5 4.5.1 4.5.2 4.5.3 4.5.4 4.5.5 4.5.6 4.6 4.6.1 4.6.2 4.6.3 4.6.4 4.7 4.7.1 4.7.2 4.8
5 Derivada Schwarziana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 Intermitncia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 Mecanismo da intermitncia do tipo I . . . . . . . . . . . . . . . . . . . . . . 93 Crise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 Denio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 Clculo do expoente de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . 103 Um exemplo: o mapa da tenda . . . . . . . . . . . . . . . . . . . . . . . . . . 104 Uso do Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106 Uso do Mathematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107 Uso do Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 Diagrama de bifurcao de Lyapunov . . . . . . . . . . . . . . . . . . . . . . 109 Uso do Mathematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111 Uso do Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111 O deslocamento de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . 113 Transitividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116 Caos forte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118 Conjugao Topolgica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119 Densidade de probabilidade do mapa logstico . . . . . . . . . . . . . . . . . 122 Expoente de Lyapunov e densidade de probabilidade . . . . . . . . . . . . . 124
Outras rotas para o caos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Expoente de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Determinao numrica do expoente de Lyapunov . . . . . . . . . . . . . . . . . . . 105
Transitividade e caos forte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Densidade de probabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Exerccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6
SUMRIO
Captulo 1
Introduo1.1 Dinmica No-LinearA dinmica no-linear uma teoria matemtica que estuda sistemas de equaes de evoluo, ou seja, equaes onde o tempo uma varivel independente. Se tais equaes forem lineares, h solues gerais que nos permitem determinar o comportamento futuro do sistema descrito de forma exata, em funo do estado atual do sistema. J se as equaes forem no-lineares, essas solues exatas, em geral, no existem numa forma fechada. Uma srie de comportamentos, alguns deles bastante complicados, podem aparecer quando estudamos a evoluo temporal de sistemas descritos por equaes no-lineares: rbitas peridicas e quase-peridicas, cicloslimite, transientes, e caos. A dinmica no-linear concentra-se nos comportamentos a longos perodos do sistema que est sendo estudado. O comportamento futuro a pequenos tempos, normalmente, pode ser facilmente obtido por soluo numrica (computacional) das equaes de evoluo. No entanto, estamos particularmente interessados em estudar propriedades gerais, como equilbrio, estabilidade, tipos de convergncia ou divergncia, etc. A isso denominamos uma teoria qualitativa. O campo de aplicaes da dinmica no-linear muito extenso pois abrange qualquer sistema fsico, biolgico, etc. que possa ser descrito por equaes de evoluo. Na fsica, por exemplo, a dinmica de partculas e corpos rgidos apresenta uma srie de exemplos interessantes de sistemas dinmicos no-lineares. As equaes que descrevem circuitos eltricos com componentes no-lineares, como diodos e transistores, tambm aparecem em estudos de dinmica no-linear. Mas as idias de dinmica podem tambm ser aplicadas, com sucesso, no estudo de fenmenos biolgicos, como o crescimento de uma populao de bactrias, ou do nmero de clular de um tumor canceroso, ou ainda do nmero de indivduos infectados por uma doena contagiosa, apenas para dar alguns exemplos. Mesmo em cincias sociais, como a Economia, 7
8
CAPTULO 1. INTRODUO
o modelamento matemtico da evoluo de preos de um dado bem, ou de ndices macroeconmicos como taxas de inao e desemprego, tambm recam com frequncia em sistemas dinmicos no-lineares. Podemos concluir que o estudo da dinmica no-linear ajuda o estudante no s a ter uma viso nova e bastante motivadora da dinmica que ele j conhece dos cursos de Mecnica Clssica, como tambm abre uma perspectiva imensamente ampla de problemas interessantes em outras reas do conhecimento onde a experincia e a versatilidade do fsico fazem-no um prossional bastante procurado, como a meteorologia, a oceanograa, e at mesmo o mercado nanceiro.
1.2 A dinmica e o problema de N corposO estudo da dinmica de partculas surge logo no incio da Fsica Bsica, o que atesta a importncia que esse ramo da mecnica tem na compreenso do mundo fsico. Falando em termos da dinmica de uma partcula de massa m, ns partimos da equao do movimento (segunda lei de Newton): d2 r m 2 = F(r), (1.1) dt onde r : (x, y, z) o vetor posio da partcula, e F a fora resultante que age sobre ela. Aqui, (x, y, z) so as variveis dependentes do tempo, que a varivel independente na equao. Por simplicidade, consideramos o caso de um movimento unidimensional, para o qual podemos desdobrar a equao (1.1) (que de segunda ordem em relao ao tempo) em um sistema de duas equaes de primeira ordem: dx dt dv dt = v, = 1 F (x), m (1.2) (1.3) (1.4)
onde introduzimos uma nova varivel, a velocidade da partcula. Como veremos posteriormente, melhor trabalhar com sistemas de equaes diferenciais de primeira ordem. O objetivo da dinmica descrever o comportamento das variveis x(t), e v(t) em funo do tempo; dadas as condies iniciais x(0), v(0). A equao do movimento (1.1) pode ser facilmente generalizada para um sistema de N partculas interagentes entre si. Se usarmos, ainda, a expresso Newtoniana para a fora de atrao gravitacional entre duas partculas (Fij = Gmi mi /|ri rj |2 ), onde G a constante gravitacional, chegamos ao chamado sistema de N -corpos, cujo estudo est no mago da Mecnica Celeste.
1.2. A DINMICA E O PROBLEMA DE N CORPOS
9
Como sabemos da Mecnica Clssica, o problema de dois corpos (N = 2) tem uma soluo exata, ou seja, podemos prever de maneira exata as posies e velocidades de cada partcula para quaisquer tempos: futuros (t > 0) ou passados (t < 0) [1]. Quando h mais corpos no sistema, porm, a situao ca bem mais complicada. Um exemplo interessante do problema de N = 3 corpos o sistema formado pelo Sol e dois planetas gigantes como Jpiter e Saturno movendo-se em torno dele. A interao mtua entre Jpiter e Saturno interfere nas rbitas de ambos. O prprio Newton, nos Principia Mathematica, j havia estudado o efeito da atrao Solar e Terrestre sobre o movimento Lunar. Infelizmente, porm, nesse caso j no mais possvel obter, em geral, uma expresso fechada para as posies e velocidades dos trs corpos em funo do tempo. Ainda assim, podemos obter resultados analticos aproximados em alguns casos especcos, como o problema restrito de trs corpos, onde um deles tem massa muito menor que os outros dois, de tal modo que o movimento do terceiro s afetado pelos outros dois corpos, no afetando, por sua vez, o movimento deles. Para simplicar ainda mais, supe-se que os dois corpos tem massas iguais e giram em rbitas circulares em torno do seu centro de massa (como estrelas binrias, por exemplo). Esse problema discutido em alguns livros de Mecnica Clssica [2]. De modo geral, para N 3, no h solues exatas para o problema de N -corpos. Entretanto, podemos sempre recorrer a mtodos numricos (computacionais) para resolver as equaes de movimento de cada partcula, e procurar determinar as suas posies e velocidades para quaisquer instantes de tempo que queiramos. O sucesso desse procedimento atestado pelo grande desenvolvimento da Mecnica Celeste, desde os tempos de Newton at os dias de hoje, passando pelos trabalhos fundamentais de Laplace, Delaunay, e outros, culminando em Poincar, considerado o pai da Dinmica No-Linear. A Mecnica Celeste permitiu uma exatido incomparvel nas previses do comportamento de planetas, estrelas e cometas; um dos pontos altos tendo sido a espetacular descoberta do planeta Netuno em 1846, que foi previsto por Le Verrier meses antes com base unicamente nas previses feitas a partir das perturbaes que este exerce sobre a rbita do vizinho planeta Urano [3]. Tal grau de conana no poder determinstico da Mecnica Newtoniana levou Laplace, em 1814, a armar que [4] Uma inteligncia que, para um instante dado, conhecesse todas as foras de que est animada a natureza, e a situao respectiva dos seres que a compes, e se alm disso essa inteligncia fosse ampla o suciente para submeter esses dados anlise, ela abarcaria na mesma frmula os movimentos dos maiores corpos do Universo e os do mais leve tomo: nada seria incerto para ela, e tanto o futuro como o passado estariam presentes aos seus olhos. O esprito humano oferece, na perfeio que foi capaz de dar astronomia, um pequeno esboo dessa inteligncia. De fato, atualmente possvel predizer a trajetria futura dos planetas no Sistema Solar por milhares de anos, com o auxlio de modelos essencialmente Newtonianos [5].
10
CAPTULO 1. INTRODUO
No entanto, como veremos nos prximos captulos, esse paradigma (chamado determinismo Laplaciano) foi abalado consideravelmente pela descoberta, por Poincar, de comportamentos irregulares e imprevisveis a tempos grandes, que atualmente chamamos de caos. Dessa forma, mesmo que as equaes de um sistema catico estejam corretas, de um ponto de vista fsico, as suas previses podem estar comprometidas por caractersticas matemticas do sistema de equaes. Entender como o caos emerge das solues de sistemas no-lineares um dos objetivos desta disciplina.
1.3 Poincar e o nascimento da dinmica no-linearO problema dos N corpos, como vimos, resistiu durante sculos s tentativas de encontrar uma soluo geral, fechada e analtica, por parte de matemticos, fsicos e astrnomos do primeiro time. Quem primeiro demonstrou, de forma rigorosa, que essa soluo no pode ser encontrada, de maneira geral, foi o genial matemtico francs Henri Poincar. Em ns do Sculo XIX o Rei Oscar II da Sucia e da Noruega instituiu um prmio (de 2500 coroas) - em homenagem a seu sexagsimo aniversrio - a quem resolvesse a questo da estabilidade do movimento dos corpos do Sistema Solar, que essencialmente o problema de N corpos se ignorarmos as perturbaes no-gravitacionais devido radiao eletromagntica, por exemplo. O organizador do concurso, o matemtico Gustav Mittag-Lefer, props a seguinte questo [3]: Dado um sistema de um nmero arbitrrio de massas puntuais que atraem-se mutuamente de acordo com a Lei de Newton, sob a hiptese de que dois pontos nunca colidem, tentar encontrar uma representao das coordenadas de cada ponto como uma srie em uma varivel que seja uma funo conhecida do tempo e tal que, para todos os seus valores a srie converge uniformemente. Poincar escreveu um celebrado ensaio em 1885, com o qual ganhou o prmio do Rei Oscar II [6]. Ainda que Poincar no tenha, de fato, resolvido esse problema (cuja soluo, de resto, continua, at o momento, ainda desconhecida), seu ensaio contm as idias essenciais da moderna teoria dos sistemas dinmicos, entre as quais o conceito de caos determinstico. O matemtico alemo Carl Weierstrass, que foi um dos rbitros do concurso, escreveu a MittagLefer, que o organizou [3]: Pode dizer ao seu soberano que este trabalho no pode, de fato, ser considerado como tendo fornecido a soluo completa do problema proposto, mas que , de qualquer forma, de tal importncia que sua publicao ir inaugurar uma nova era na histria da Mecnica Celeste. A nalidade que Sua Majestade tinha em mente na abertura da competio pode portanto ser considerada como tendo sido atingida.
1.4. CAOS DETERMINSTICO
11
1.4 Caos determinsticoPor caos determinstico ns entendemos a existncia de comportamento irregular, ou aperidico, e com dependncia sensvel das condies iniciais: dois processos originados por condies iniciais ligeiramente diferentes divergem exponencialmente com o tempo. Quando um modelo determinstico exibe caos, aparecem problemas quanto previsibilidade do comportamento futuro do sistema, j que a diferena entre duas condies iniciais ligeiramente distintas pode estar dentro do intervalo de incerteza com o qual estas condies iniciais so conhecidas. Nesse caso, no possvel dizer, com segurana, de qual das duas condies iniciais estamos falando. Logo, no se pode prever o comportamento futuro do sistema, pelo menos para um tempo arbitrariamente longo, a partir dessas condies iniciais. Essa ltima observao de fundamental importncia para apreciar corretamente o papel do caos na limitao que um sistema determinstico catico apresenta. comum que, embora os processos gerados por condies iniciais prximas divirjam com o tempo, essa discrepncia s signicativa a partir de um horizonte, chamado tempo de predio, que pode ser estimado como o inverso do chamado expoente de Lyapunov mximo do sistema (a ser denido mais adiante). possvel fazer previses conveis at esse tempo de predio caracterstico do sistema, mesmo quando o sistema catico. O prprio problema de N -corpos enfrentado por Poincar ilustra esse fato. Ainda que, atualmente, se saiba que haja solues caticas desse problema, o tempo de predio , em geral, grande o suciente para permitir predies absolutamente conveis. Como um exemplo, a trajetria de uma sonda espacial enviada a Marte representa um problema de, pelo menos, trs corpos - a sonda e os planetas Terra e Marte. A posio da sonda durante a longa viagem a Marte, que dura da ordem de sete meses, prevista com exatido pela Mecnica Newtoniana, a despeito do comportamento a tempo innito ser, a princpio, desconhecido. Como contraexemplo, h corpos celestes, como Hyperion, que um satlite exterior do planeta Netuno com a forma um tanto irregular de uma batata, e cuja trajetria altamente catica, de modo que o tempo de predio curto demais [7].
1.5 Lorenz e o efeito borboletaEmbora Poincar tenha sido capaz de vislumbrar a possibilidade de comportamentos caticos, que desaam a idia de haver uma soluo fechada e vlida para quaisquer instantes de tempo, ele no pde avanar nessa descrio, devido impossibilidade prtica de resolver as equaes do movimento por um tempo sucientemente longo, a ponto de evidenciar as consequncias de um possvel comportamento catico. Podemos dizer que o desenvolvimento da dinmica no-linear s ocorreu na medida em que a tecnologia da informao possibilitou, com o advento do computador eletrnico a soluo numrica de sistemas de equaes diferenciais para tempos bastante longos, de forma a
12
CAPTULO 1. INTRODUO
comprovar a existncia de comportamentos no-triviais como bifurcaes e caos. Edward Lorenz (1917-2008) foi um meteorologista americano que trabalhou durante muitos anos no MIT, na rea de previso numrica do tempo, uma rea em que as equaes que descrevem o sistema (no caso, a atmosfera) so no-lineares. O seu trabalho nessa rea envolvia a soluo numrica de sistemas de 12 equaes diferenciais acopladas descrevendo a forma em que o ar se move na atmosfera. A soluo destas equaes continha elementos como velocidades do vento, temperatura, presso, etc. e poderia ser usada na previso do tempo, ainda que na poca houvesse um grande ceticismo em relao eccia desses mtodos. O computador usado por Lorenz no inverno de 1961 para resolver numericamente o sistema de equaes acima era um Royal McBee LGP-30, com 113 tubos de vcuo e 1450 diodos: um monstrengo de quase duas toneladas que ocupava o espao de uma mesa de trabalho e custava a bagatela de 40 mil dlares! No obstante, sua velocidade era de apenas 120 kHz, Como seu computador era bastante lento, a soluo do sistema de equaes levava tipicamente vrias horas. Para economizar tempo, ao invs de reiniciar uma soluo desde o incio, ele recomeou de um ponto intermedirio da soluo antiga. Lorenz colocou como novas condies inicias no os valores com seis casas decimais que o computador gerou, mas sim digitou os valores que sairam diretamente da impressora, com apenas trs decimais, portanto ligeiramente diferentes daqueles realmente obtidos na soluo. Supondo que essa pequena diferena nas condies iniciais (cerca de uma parte em mil!) no fosse alterar nada relevante, ele saiu para tomar uma xcara de caf. Ao retornar, uma hora depois, para sua surpresa a sequncia de valores da soluo numrica tinha sido diferente da anterior! Ele tinha descoberto, meio que por acaso, as consequncias do caos determinstico. Mas Lorenz foi alm: procurou estudar esse intrigante fenmeno usando a teoria qualitativa dos sistemas dinmicos introduzida por Poincar. Uma dos suas primeiras preocupaes foi tentar achar sistemas mais simples de equaes que exibissem o mesmo tipo de propriedade que ele havia observado nas equaes para a atmosfera. Como resultado, Lorenz chegou a apenas trs equaes diferenciais dx dt dy dt dz dt = 10(y x), = x(28 z) y, 8 = xy z, 3 (1.5) (1.6) (1.7)
que so no-lineares devido aos produtos cruzados das variveis x, y e z, e que tambm exibia a dependncia sensvel s condies iniciais, tal qual seus modelos mais complicados para previso do tempo. Lorenz resumiu seus resultados num clebre artigo publicado em 1963 [8]), e que deu a ele a segunda paternidade da teoria do caos. Nesse artigo, Lorenz descreveu geometricamente as caractersticas da soluo catica que encontrou. Ele imaginou um espao abstrato
1.6. MAY E O MAPA LOGSTICO
13
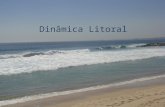
Figura 1.1: Atrator borboleta para o sistema de Lorenz.
em cujos eixos indicou os valores das variveis x(t), y(t) e z(t) para cada instante de tempo. O conjunto desses pontos forma curvas que tm uma estrutura matemtica bastante complicada (falaremos dela quando estudarmos fractais, mais frente), chamado atrator borboleta devido sua forma de asas de borboleta [Fig. 1.1]. A sensibilidade s condies iniciais que caracteriza o comportamento catico no atrator borboleta ilustrada numa alegoria devida ao prprio Lorenz. Em 1972, este apresentou na 139.a reunio da American Association for the Advancement of Science a palestra Does the ap of a butterys wings in Brazil set off a tornado in Texas? (o bater das asas de uma borboleta no Brasil pode ocasionar um tornado no Texas?). Em outras palavras, uma inuncia to pequena como o bater das asas de uma borboleta poderia alterar as condies iniciais de um sistema catico (como a formao de ventos na atmosfera) a ponto de levar a um comportamento futuro imprevisvel, como um tornado. Essa alegoria gerou a expresso efeito borboleta, que frequentemente usada para representar o efeito que pequenas alteraes podem ter sobre o comportamento futuro dos sistemas.
1.6 May e o mapa logsticoUma aplicao bastante interessante da dinmica so modelos de crescimento populacional. Uma populao biolgica com alimento suciente, espao para crescer e ausncia de predadores reproduz-se e aumenta exponencialmente, de acordo com o modelo que veremos a seguir.
14
CAPTULO 1. INTRODUO
Numa populao animal, por exemplo, costume fazer a contagem a tempos regulares, como anos ou meses, os quais podemos representar por uma varivel discreta t = 0, 1, 2, . . .. Vamos designar por Pt o tamanho da populao no instante t. Quando a populao pouco numerosa, a cada perodo t esta aumenta de um nmero R, que da ordem de 2 a 3 para mamferos de pequeno porte. Logo, a populao num instante t dada, em funo da populao no instante anterior, t 1, pela relao Pt = rPt1 , (1.8) que chamada equao a diferenas nitas, ou simplesmente mapa. Aqui r = R + 1, onde R a taxa de crescimento da populao, igual diferena entre a taxa de natalidade e mortalidade 1 . Se a primeira maior do que a segunda (nascem mais indivduos do que morrem), a taxa R positiva (ou seja, r > 1); caso contrrio R negativa (ou r < 1). Com uma taxa de crescimento positiva, seja qual for a populao inicial P0 , o nmero de indivduos aumentar exponencialmente com o tempo, produzindo rapidamente super-populao. Na verdade, h vrios fatores que limitam o nmero de indivduos que podem co-habitar em uma regio geogrca limitada, e com uma capacidade limitada de produo de alimentos. Uma forma de se exprimir essa tendncia saturao populacional consiste em supor que a taxa de crescimento no seja constante, mas sim diminuiria medida em que a populao atingisse um valor limite K, conhecido como capacidade de sustentao r r 1 Pt1 K
de modo que, caso a populao atingisse esse valor limite (Pt1 = K) a taxa de crescimento seria nula. Vamos denir uma populao reduzida dividindo-a pelo seu valor crtico K, que a capacidade de sustentao. Pt (1.9) xt , K Desta forma, enquanto Pt mede-se em nmero de habitantes, xt torna-se uma quantidade adimensional tal que 0 xt 1. Obtemos, ento, o chamado mapa logstico xt = rxt1 (1 xt1 ). (1.10)
As propriedades desse mapa foram notadas por Robert May na dcada de 70, quando era professor de fsica terica (na Universidade de Sydney) e de zoologia (na Universidade de Princeton). May estava estudando as propriedades do mapa logstico para diversos valores de r, entre 0 e o valor 3, 5699 , mas no conseguia entender o que ocorria aps este valor. Como sabemos atualmente, tal comportamento justamente o caos determinstico.1
Usualmente as taxas so expressas em percentagens, aps serem multiplicadas por 100%
1.7. SISTEMAS DINMICOSMay recalls giving an invited seminar on the topic at the University of Maryland: When I got to the point in the talk when I said that I didnt understand what was going on once (r) got bigger than 3.57, Jim Yorke interrupted. I know what comes next, he said. Yorke and his colleague Tien-Yien Li had investigated the chaotic region of the map. Indeed it was Yorke and Li who coined the term chaos in a paper they went on to publish in 1975 with the enigmatic title Period three implies chaos.
15
James Yorke um matemtico da Universidade de Maryland que, inspirado pelo trabalho de Lorenz, publicara um artigo onde a palavra caos apareceu pela primeira vez na literatura cientca com a acepo que damos a ela atualmente [9]. Em 1976 May publicou um artigo bastante conhecido na revista Nature, que popularizou vrias propriedades interessantes do mapa logstico [10]. Entre os valores 3, 5699 e 4, o mapa logstico exibe predominantemente comportamento catico. O caso r = 4 j havia sido estudado muito antes, em 1947, pelos matemticos Stanislaw Ulam (1909-1984) e John von Neumann (1903-1957), como geradores de nmeros pseudoaleatrios, usados nos primeiros computadores eletrnicos fabricados.
1.7 Sistemas dinmicosPodemos subdividir os sistemas dinmicos em duas categorias, de acordo com o tipo de varivel que designa o tempo. A primeira categoria consiste dos chamados uxos ou equaes diferenciais, onde o tempo uma varivel contnua. Costumamos escrever os uxos como sistemas de equaes diferenciais de primeira ordem em relao ao tempo: dx1 = f1 (x1 , xN ), dt . . . dxN dt = fN (x1 , xN ), (1.11) (1.12) (1.13)
onde (x1 , xN ) so as variveis dependentes do tempo, e f1 , fN so funes arbitrrias destas variveis. Este chamado um uxo N -dimensional. Como um exemplo, as equaes de movimento para uma partcula deslocando-se ao longo do eixo x, dadas por (1.2)-(1.3), so um uxo bidimensional. J o sistema de Lorenz (1.5)(1.7), por exemplo, um uxo tridimensional. Finalmente, o problema geral de n corpos um uxo 6N -dimensional. A segunda categoria de sistemas dinmicos que nos interessam so as equaes a diferenas, ou mapas, onde o tempo uma varivel discreta, ou seja, s assume valores inteiros
16 t = 0, 1, 2, . A forma geral de um mapa N -dimensional x1t = f1 (x1t1 , xN t1 ), . . . xN t = fN (x1t1 , xN t1 ), O mapa logstico (1.10) um exemplo de mapa unidimensional.
CAPTULO 1. INTRODUO
(1.14) (1.15) (1.16)
No estudo da fsica ns nos deparamos com mais frequncia com equaes diferenciais, e por isso alguns livros-texto comeam por elas o estudo da dinmica no-linear [11]. No entanto, as equaes diferenciais s comeam a exibir um comportamento dinmico interessante (como caos) a partir de uxos tridimensionais (como o sistema de Lorenz). Isso faz com que se tenha de trilhar uma exposio relativamente longa para chegar a aspectos interessantes da dinmica do sistema. Por outro lado, os mapas tm a propriedade notvel de apresentar comportamento dinmico no-trivial j a partir do caso simples unidimensional, o que ilustrado pelo mapa logstico. Ento, mesmo no sendo os mapas to familiares aos estudantes de fsica, optamos por introduzir os conceitos bsicos de dinmica no-linear e caos de forma to rpida quanto possvel, usando mapas como sistemas dinmicos de referncia [12]. Mais tarde, veremos que possvel conectar de uma forma elegante e sucientemente geral uma descrio de uxos a tempo contnuo usando mapas.
Captulo 2
Mapas unidimensionais2.1 Mapas unidimensionais lineares2.1.1 Mapa linear
Vamos imaginar uma aplicao nanceira a uma taxa de juros 100% ao ms, onde 0 < < 1. Vamos denominar xt o montante (em reais) da aplicao no ms t = 0, 1, 2, . . ., de modo que x0 o montante inicial da mesma, no ms t = 0. O montante no ms t, em funo do montante no ms anterior t 1, ser dado por xt = xt1 + xt1 = (1 + )xt1 . (2.1) Agora suponhamos que, a cada ms, o investidor faa um depsito xo de A reais. O mapa resultante ser xt = (1 + )xt1 + A. (2.2) Este um exemplo de mapa (onde h uma nica varivel, no caso, o montante da aplicao) denominado mapa am, e que escrito de forma geral como xt = f (xt1 ) = xt1 + , onde e so nmeros reais. O mapa (2.2) corresponde escolha = (1 + ) e = A. O mapa (2.3) uma relao de recorrncia para a qual, dado o valor da varivel num dado instante, obtemos o valor da varivel no instante seguinte. Por exemplo, supondo conhecida a condio inicial x0 , no prximo instante teremos x1 = f (x0 ) = x0 + , e no instante seguinte x2 = f (x1 ) = x1 + = (x0 + ) + = 2 x0 + (1 + ). 17 (2.3)
18
CAPTULO 2. MAPAS UNIDIMENSIONAIS
Usaremos a seguinte notao: x2 = f (x1 ) = f (f (y0 )) f [2] (x0 ), onde f [2] (x) f (f (x)) denota a segunda iterada da funo f (x), ou seja, a funo composta com ela mesma, e que no deve ser confundida com a funo elevada ao quadrado, ou [f (x)]2 . Da mesma forma, f [t] (x) a t-sima iterada de f , ou seja, a funo f (x) composta com ela mesma t vezes. Analogamente, as iteradas subsequentes do mapa resultam da composio da funo f repetidas vezes: x3 = f (x2 ) = f (f (x1 )) = f (f (f (x0 ))) f [3] (x0 ) = x2 + = (2 x0 + (1 + )) + = 3 x0 + (1 + + 2 ) (2.4)
A sequncia de iteradas sucessivas do mapa, {x0 , x1 , x2 , . . . xn , . . .}, chamada de rbita gerada pelo mapa f (x), a partir da condio inicial x0 . Podemos usar o princpio de induo nita para determinar o valor da t-sima iterada xt , em funo da condio inicial x0 . xt = f (xt1 ) = xt1 + = (xt2 + ) + = 2 xt2 + (1 + ) . . = . . . . = t x0 + (1 + + 2 + . . . t1 ). (2.5)
A expresso entre parnteses na ltima das equaes anteriores igual soma dos t primeiros termos de uma progresso geomtrica de razo e termo inicial 1. Usando a frmula para a soma dos termos de uma progresso geomtrica, temos xt = t x0 + (t 1) = 1 x0 + 1 t , 1 (2.6)
que a soluo geral do mapa linear (2.3), pois fornece o valor de xt para qualquer valor do tempo t > 0, sem a necessidade de se calcular as iteradas intermedirias. S nos foi possvel obter esta soluo geral devido ao fato da funo f (x) ser linear.
2.1.2
Diagramas de escada
Uma maneira conveniente de visualizar as sucessivas iteradas de um mapa unidimensional xt = f (xt1 ), seja ele linear ou no, construir o diagrama de escada correspondente. Usamos dois eixos cartesianos representando as variveis xt (eixo das ordenadas) e xt1 (eixo das abscissas), e neste sistema traamos o grco da funo f (x). No caso da funo linear (2.7)
2.1. MAPAS UNIDIMENSIONAIS LINEARESx x t+1 = tg f(x ) = x + t t t+1 =x t x x* x3 x2
19x t+1 t+1 =x t
(a)
(b)
x
1
x
t
x0
x1
x2 x3 x*
x
t
Figura 2.1: (a) Mapa linear. (b) Diagrama de escada de um mapa linear.
x + o grco uma reta com coecientes angular e linear iguais, respectivamente, a e [Fig. 2.1(a)]. Da geometria analtica, sabemos que = tan , onde o ngulo entre a reta e o eixo horizontal, medido no sentido anti-horrio (declividade da reta); e a ordenada do ponto de interseo da reta com o eixo vertical. Traamos tambm a primeira bissetriz, que o grco da funo identidade xt = xt1 , e que uma reta que passa pela origem e faz 45O com o eixo horizontal. Localizamos no eixo horizontal o valor correspondente condio inicial x0 , e subimos uma perpendicular at encontrar o grco da funo f (x), no caso a reta x + [Fig. 2.1(b)]. O valor correspondente no eixo vertical ser x1 = f (x0 ). Ns traamos uma paralela ao eixo horizontal a partir deste ponto at interceptar a primeira bissetriz. A abscissa do ponto de interseo obviamente igual a x1 . A partir deste ponto repetimos o processo: construimos uma perpendicular ao eixo horizontal passando por x1 at encontrar o grco da funo obtendo x2 = f (x1 ), rebatemos no eixo horizontal e assim por diante. O diagrama resultante assemelha-se a uma escada, onde o incio de cada degrau indica o valor da iterada do mapa.
2.1.3
Pontos xos e sua estabilidade
Na gura 2.1(b) observamos que a sequncia de iteraes aproxima-se do ponto de interseo entre o grco da funo linear e a primeira bissetriz. A coordenada x deste ponto a soluo da equao x = x + , ou seja x = , 1 (2.8)
20x x
CAPTULO 2. MAPAS UNIDIMENSIONAIS
t+1
(a)x = xt t+1 x
x
t+1 x
(b)=x t+1 t
2
1
x1 x*
x x
*
2
x*x x0
1
x
2
x
t
x0 x2
x*
x1
x
t
Figura 2.2: (a) Mapa linear com inclinao maior que 45o . (b) Mapa linear com inclinao negativa.
desde que = 1. Caso = 1 e = 0, no h ponto de interseo entre a reta da funo e a primeira bissetriz - elas so retas paralelas. Se = 1 e = 0 as duas retas coincidem, de modo que todos os seus pontos satisfazem (2.8). O ponto x mais comumente chamado ponto xo do mapa f (x), pois ele um ponto que mapeia a si prprio. Esta denio se aplica a qualquer tipo de mapa, seja ele linear ou no-linear. De modo geral, para o mapa unidimensional xt = f (xt1 ), o ponto xo a soluo da equao x = f (x ). (2.10) Voltando ao mapa linear (2.3), podemos usar o ponto xo (2.8) para reescrever a sua soluo geral (2.6) como xt = (x0 x )t + x . (2.11) Os pontos xos representam solues estacionrias de um mapa, seja qual for. importante, porm, estudar tambm a sua estabilidade, ou seja, o comportamento das iteraes do mapa em relao a pequenos desvios do ponto xo. Vamos, pois, analisar com mais detalhes as situaes ilustradas pelas Figuras 2.1(b) e 2.2(a). No primeiro caso, as iteraes do mapa aproximam-se do ponto xo x quando t , o que ocorrer tanto se x0 estiver esquerda como direita do ponto xo. Neste caso, o ponto xo x assintoticamente estvel, pois pequenas perturbaes fazem o sistema retornar a ele quando o tempo t tende a innito. Por outro lado, na Figura 2.2(a), tomando-se uma condio inicial prxima ao ponto xo, observamos que as iteradas subsequentes do mapa afastam-se de x . Se zermos o tempo tendendo ao innito, (2.9)
2.1. MAPAS UNIDIMENSIONAIS LINEARESx(a)x
21(b)
x2
t+1 x = xt t+1
t+1 x = xt t+1
x1
x
0
x0
x1
x2
x
t
x
0
x
t
Figura 2.3: Diagrama de escada de um mapa linear para (a) = 1 e = 0, (b) = 1 e = 0.
tambm o valor das iteradas tender ao innito. Neste caso o ponto xo instvel, pois qualquer condio inicial em sua vizinhana produz uma rbita que afasta-se do ponto xo. Para obter um critrio que determine se um ponto xo estvel ou instvel, vamos tomar a soluo geral do mapa linear (2.11), lembrando que xt depende do tempo basicamente segundo as potncias t . Se || < 1 as sucessivas potncias de vo fornecendo nmeros cada vez menores, e t 0 quando t tende ao innito. Usando (2.11) temos, portanto, que xt x quando t 0, ou seja, o ponto xo x assintoticamente estvel. Por outro lado, se || > 1, as potncias de vo crescendo com o passar do tempo, e t quando t tende ao innito, de forma que tambm xt diverge, e o ponto xo x instvel. Como = tan , onde o ngulo que o grco faz com o eixo das abscissas, se > 0 o ponto xo estvel desde que o ngulo seja agudo e menor que 450 (j que tan 450 = 1). Podemos ter, ainda, um grco com inclinao negativa, como exemplicado pela Figura (2.2(b). Agora, para negativo o ponto xo estvel se 1 < < 0, desde que o ngulo seja obtuso e maior que 900 + 450 = 1350 . Na situao onde || = 1, h duas possibilidades: caso = 1 e = 0, como tan 450 = 1, a reta do grco paralela primeira bissetriz e no haver ponto xo x . O diagrama de escada mostra que, partindo de uma condio inicial qualquer x0 as iteraes subsequentes vo para innito [Fig. 2.3(a)]. Se = 0, a reta do grco passar pela origem e, na verdade, coincidir com a primeira bissetriz [Fig. 2.3(b)]. Podemos dizer, ento, que h innitos pontos xos, que no podem ser classicados nem como estveis nem como instveis. Se = 1, ento t igual a 1 se t for par, e 1, se t for mpar. Como x = /1 (1) =
22(a) x x t+1 x = xt t+11
CAPTULO 2. MAPAS UNIDIMENSIONAIS(b) t
x
x* x0
x0
x*
x1
x
t
0 1 2 3 4 5
t
Figura 2.4: (a) Diagrama de escada de um mapa linear para = 1 e = 0; (b) Srie temporal correspondente.
/2, as iteraes subsequentes sero x1 = (1)1 (x0 x ) + x = x0 , x2 = (1)2 (x0 x ) + x = x0 , {x0 , x1 , x0 , x1 , . . .}, j que a cada duas iteraes o valor inicial se repete. O diagrama de escada correspondente uma gura fechada, diferente para cada condio inicial [Fig. 2.4(a)]. As iteraes sucessivas do mapa oscilam indenidamente em torno do ponto xo x sem jamais alcan-lo, seja qual for a condio inicial [Fig. 2.4(b)]. Podemos associar esse tipo de comportamento a um equilbrio indiferente. Finalmente, se = 0 a mesma situao repetir-se-, mas com o ponto xo na origem x = 0. Podemos resumir nossa anlise no seguinte critrio de estabilidade para mapas lineares ans: || < 1: x assintoticamente estvel, || > 1: x instvel, = 1 e = 0: no existe ponto xo, = 1 e = 0: existem innitos ponto xos (nem estveis nem instveis), = 1: ciclo de perodo 2 em torno do ponto xo. e assim sucessivamente, formando um ciclo de perodo 2
2.2. MAPAS UNIDIMENSIONAIS NO-LINEARES
23
2.2 Mapas unidimensionais no-linearesO mapa linear possui uma soluo geral, ou seja, dado qualquer tempo t, podemos saber qual o valor de xt . H poucos comportamentos dinmicos possveis nesse caso: os valores de xt podem convergir assintoticamente para um ponto xo, divergir para innito, ou ainda estacionar num equilbrio nem estvel nem instvel (e que pode ser um nico ponto ou um ciclo com dois pontos). Mapas no-lineares, por outro lado, apresentam uma dinmica bem mais rica e complicada, que no se restringe aos comportamentos listados acima, incluindo outras possibilidades, como rbitas peridicas, bifurcaes, caos, crise, intermitncia, etc. Como um mapa no-linear no tem uma soluo geral, somos quase sempre obrigados a determinar numericamente as iteradas sucessivas, a partir de uma dada condio inicial. Embora existam innitos mapas que possam ser classicados como no-lineares, ns tradicionalmente introduzimos o seu estudo a partir de um paradigma, que o mapa logstico.
2.2.1
Mapa discreto
O mapa logstico tem a forma xt = f (xt1 ) = rxt1 (1 xt1 ), (2.12)
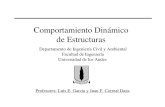
onde 0 xt 1 e 0 > r 4. O grco do mapa uma parbola cujo vrtice (ponto de mximo) tem coordenadas (xt1 = 1/2, xt = r/4) [Fig. 2.5(a)]. Quando r = 4 o vrtice da parbola logstica est em x = 1; logo se r > 4 a condio que x esteja no intervalo [0, 1] deixa de ser satisfeita. Da mesma forma, se r = 0 a parbola reduz-se ao eixo horizontal, e para valores negativos de r a concavidade da parbola invertida, o que tambm leva x a valores fora do domnio [0, 1]. O nome logstico para o mapa (2.12) vem do fato deste ser uma verso discreta do modelo logstico de Verhulst para o crescimento populacional (veja a Introduo para mais detalhes). Os pontos xos do mapa logstico so dados por x = 0, a 1 x = 1 , b r (r = 0). (2.13)
No entanto, se r < 1 segue que x necessariamente negativo, ou seja, fora do intervalo de b denio do mapa [0, 1]. Neste caso, portanto, apenas o ponto xo na origem, x = 0, existe. a Podemos conferir este fato no exemplo da gura 2.5(a), que mostra haver apenas uma interseo do grco da funo (no caso para r = 0, 7) e a primeira bissetriz. J se 1 < r < 4 haver tambm o segundo ponto xo x [Fig. 2.5(b)]. b
24
CAPTULO 2. MAPAS UNIDIMENSIONAIS
1
1
(a)0,8 0,8 0,6 0,6
(b)
xt+10,4
xt+10,4
0,2
0,2
0
0
0,2
0,4
0,6
0,8
1
0
0
0,2
0,4
0,6
0,8
1
xt
xt
Figura 2.5: Primeira iterada do mapa logstico com (a) r = 0, 7; (b) r = 1, 5.
2.3 Iteraes sucessivasNo possuimos uma soluo geral para o mapa logstico, nem para modelos no-lineares, no caso de tempo t arbitrrio e r qualquer 1 .Temos, pois, de calcular as iteraes sucessivas a partir de uma condio inicial x0 , para obter xt : x2 = f (x1 ) = f (f (x0 )) = f [2] (x0 ) = rx1 (1 x1 ) x1 = f (x0 ) = rx0 (1 x0 )
x3 = f (x2 ) = f (f (f (x0 ))) = f [3] (x0 ) = rx2 (1 x2 ) . . . . . . xt = f (xt1 ) = f (f ( f (x0 ) )) = f [t] (x0 ). (2.14)
As iteradas sucessivas podem se tornar funes extremamente complicadas. Por exemplo, a segunda iterada do mapa logstico a funo f [2] (x) = f (f (x)) = rf (x)(1 f (x)) = r2 x(1 x) r3 x2 (1 x)2 ,1
= r[rx(1 x)][1 rx(1 x)]
(2.15)
Esse procedimento leva rapidamente a funes polinomiais de grau bastante alto.Alguns casos particulares, porm, tm soluo geral (vide Problema 1)
2.3. ITERAES SUCESSIVASx 1 t+1x
25(a)1 0 2 1 0 t+1 1 0 1 0 1 0
(b)
T(x)
1111111111 0000000000 1111111111 0000000000 [2] 1111111111 0000000000 1111111111 0000000000 1111111111 0000000000 f(f(x))=f (x) 1111111111 0000000000 1111111111 0000000000
T(T(x))
0
__ x* 1 2
1
x
t
0
__ 1 4
1 x * __ 1 2
3 x* __x * 4 2
1
x
t
Figura 2.6: (a) Primeira e (b) segunda iteradas do modelo da tenda
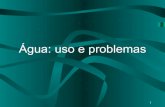
Um mapa cujas iteradas sucessivas so relativamente mais fceis de ser obtidas, e que nos permitir chegar a resultados analticos em sees futuras, o chamado mapa da tenda [12] 2xt1 se 0 xt1 1 , 2 xt = T (xt1 ) = (2.16) 2(1 xt1 ) se 1 < xt1 1, 2 cujo grco tem a forma de uma tenda [Fig. 2.6(a)], sendo linear por partes nos intervalos [0, 1/2] e (1/2, 1]. No ponto x = 1/2 a funo T (x) contnua, mas no diferencivel, o que signica que a derivada do mapa T (x) em relao a x neste ponto no nica, ou seja, depende se estamos olhando esquerda ou direita de x = 1/2 2 . Um mapa linear por partes, como o modelo da tenda, comporta-se de forma mais prxima de um mapa no-linear, como o logstico. O modelo da tenda tem dois pontos xos, que so as solues da equao x = T (x ). Como T (x) denida de forma diferente nos intervalos [0, 1/2] e (1/2, 1], temos de impor ambas as formas do mapa na equao que fornece o ponto xo. No intervalo [0, 1/2] a condio x = 2x satisfeita por x = 0; ao passo que no intervalo (1/2, 1] temos que x = 2(1 x ) resulta em x = 2/3. Na Figura 2.6(b) mostramos a segunda quatro intervalos: 4x, 2(1 2x), T [2] (x) = 4(1 + 2x), 4(1 x), iterada do modelo da tenda, que dada em se se se se 0 x 1/4, 1/4 < x 1/2, 1/2 < x 3/4, 3/4 < x 1.
(2.17)
2 As derivadas so diferentes numa vizinhana do ponto crtico xc = 1/2: T (x ) = 2 e T (x+ ) = 2. Dizemos c c tambm que T (x) no suave neste ponto.
26
CAPTULO 2. MAPAS UNIDIMENSIONAIS
Neste caso, a funo tem trs pontos crticos, a saber: x = 1/4, 1/2 e 3/4. Observe que a segunda iterada uma espcie de cpia reduzida e duplicada da primeira iterada do modelo da tenda. De forma semelhante, a terceira iterada duplica novamente o grco, o que pode ser visto na gura 2.7(b). A primeira iterada do modelo da tenda T (x) = T [1] (x) tem um (= 20 ) vrtice no ponto crtico x = 1/2, e a declividade (coeciente angular) das retas (1)/(1/2) = 2 = 21 . A segunda iterada, T [2] (x), tem dois (= 21 ) vrtices, sendo a declividade (1)/(1/4) = 4 = 22 ; ao passo que a terceira iterada T [3] (x) tem quatro (= 22 ) vrtices e declividade (1)/(1/8) = 8 = 23 . Por induo nita, o grco da t-sima iterada do modelo da tenda deve ter 2t1 vrtices, e a declividade de cada segmento de reta 2t .
2.3.1
Pontos nalmente xos
Pontos que, se usados como condies iniciais num mapa f (x), levam depois de um certo nmero nito de iteraes ao ponto xo x so chamados de pontos nalmente xos. Dito de maneira mais formal, x um ponto nalmente xo de f (x) se existe um inteiro positivo n tal que f [n] (x) um ponto xo de f . Como um exemplo, no modelo da tenda x = 1/8 um ponto eventualmente xo, pois as imagens de x por meio do mapa T (x) convergem ao ponto xo x = 0 em n = 4 iteraes: T (1/8) = 1/4, T (1/4) = 1/2, T (1/2) = 1, T (1) = 0, T (0) = 0. De forma geral pode-se mostrar que, se x = k/2n , onde k e m so inteiros positivos, e 0 < k/2n 1, ento x um ponto nalmente xo do modelo da tenda. Se o mapa f (x) for inversvel, ele possui uma nica funo inversa f [1] . Nesse caso, os pontos nalmente xos so dados pelas suas imagens inversas (ou pr-imagens) f [t] , ou seja, as suas imagens pela t-sima iterada da funo inversa. No entanto, mesmo que o mapa no seja inversvel, como no exemplo do modelo da tenda (onde a funo inversa no nica), ainda assim podemos falar nas imagens inversas de um ponto xo e associ-las aos pontos nalmente xos. O conceito de pr-imagens aplica-se mesmo quando x no um ponto xo do mapa. Como um exemplo, 2/5 a imagem de dois pontos pelo modelo da tenda, a saber, x = 1/5 e 4/5. Logo h duas pr-imagens do ponto 2/5 pela primeira iterada, 1/5 = T [1] (2/5), quatro pr-imagens pela segunda iterada, 1/10 = T [2] (2/5), 2/5 = T [2] (2/5), 11/20 = T [2] (2/5), 11/10 = T [2] (2/5), e assim por diante. Concluimos que um mapa inversvel tem uma nica rbita para tempos negativos, ao passo que se ele for no-inversvel, h um nmero innito de pr-imagens (e rbitas) possveis. 4/5 = T [1] (2/5)
2.4. ESTABILIDADE DOS PONTOS FIXOS
27
2.4 Estabilidade dos Pontos FixosNo caso de mapas lineares, a anlise da estabilidade de um ponto xo importante para que saibamos: (i) se ele ou no assintoticamente estvel, caso contrrio no ser alcanado por condies iniciais tpicas; (ii) se as iteraes do mapa convergem ou no ao ponto xo (estvel) de forma amortecida ou oscilatria. O critrio que usamos anteriormente para a determinao da estabilidade do ponto xo no caso linear depende da existncia de uma soluo geral e, portanto, no se aplica para mapas no-lineares, como o logstico, nem para mapas lineares por partes, como o da tenda. Para eles, um novo critrio deve ser deduzido, baseado nas propriedades do mapa nas vizinhanas do ponto xo. Faremos a linearizao do mapa nas vizinhanas do ponto xo, o que vlido apenas se esta vizinhana for muito pequena em comparao com o domnio da varivel do mapa. Por exemplo, no caso do mapa logstico, o ponto xo x = 2/3 pertencente ao intervalo [0, 1] ser estudado em um pequeno intervalo aberto nele centrado (2/3 , 2/3 + ), onde 2/3. Consideremos, pois, um mapa no-linear xt = f (xt1 ) com ponto xo x = f (x ), e seja xt uma iterao do mapa prxima ao ponto xo, ou seja, vamos supor que xt pertence a uma pequena vizinhana de x . Vamos denir uma distncia entre estes pontos como t = |xt x |. (2.18)
Naturalmente, como o valor de xt muda conforme iteramos o mapa, assim tambm esperamos que a distncia t varie com o tempo. Se ela diminuir medida em que passa o tempo t, (t < t1 ) ento o ponto xo x assintoticamente estvel; se aumentar, (t > t1 ) o ponto xo instvel. Calculando t1 teremos t = |xt x | = |f (xt1 ) x | = |f (x + t1 ) x )|, (2.19)
tal que, sendo t1 um nmero pequeno por hiptese, podemos expandir a funo do mapa f (x) em uma srie de Taylor em torno de x = x , em potncias de t1 : f (x + t1 ) = f (x ) + t1 df (x) dx 1 2 d2 f (x) + t1 2 dx2 + ...,x=x
(2.20)
x=x
onde desprezaremos os termos da expanso contendo potncias de t de ordem igual ou superior a 2. Lembramos que para que esta linearizao seja vlida, t1 deve ser sucientemente 2 3 pequeno: por exemplo, se t1 = 0, 1, ento t1 = 0, 01 0, 1, t1 = 0, 001 0, 1, e assim por diante. Desta forma, o erro cometido neste truncamento sempre signicativamente menor que os termos que estamos retendo. O termo que multiplica t1 a derivada do mapa f (x), calculada no ponto xo x = x , portanto uma constante, que vamos escrever como df (x) dx .x=x
(2.21)
28 || < 1 || = 0 || > 1 || = 1
CAPTULO 2. MAPAS UNIDIMENSIONAISx estvel super-estvel x instvel o critrio de linearizao falha x
Tabela 2.1: Estabilidade do ponto de equilbrio de um mapa unidimensional 0 1 para 0 x 1/2, o ponto xo x = 0 instvel e a divergncia das iteraes monotnica. Como = 2 < 1 para 1/2 < x 1, o ponto xo x = 2/3 tambm instvel e com divergncia monotnica.
2.5. RBITAS PERIDICAS
29
2.4.1
Mapa logstico
Lembramos que o mapa logstico tem dois pontos xos, a saber, x = 0, e x = 1 1/r. A a b estabilidade da origem determinada pela derivada do mapa, calculada no ponto xo df dx = r(1 2xt )|x=x = r. a (2.23)
x=x a
Logo, como impusemos que r > 0, o ponto xo x = 0 ser estvel desde que r < 1, caso contrrio ser instvel. Quando r = 1 sabemos que o critrio linear adotado no suciente para determinar a estabilidade. Alm disso, a convergncia ao ponto assintoticamente estvel monotnica, e no oscilante. J para o segundo ponto xo a derivada do mapa df dx = r(1 2xt )|x=x = r 1 2 1 b
x=x b
1 r
= 2 r,
(2.24)
tal que x ser assintoticamente estvel se |f (x )| = |2 r| < 1, ou seja, para 1 < 2 r < +1. b b Subtraindo 2 e invertendo o sinal de todos os termos das desigualdades, obtemos que o intervalo de estabilidade 1 < r < 3. Se r < 2, podemos facilmente vericar que o ponto xo x menor b que o ponto crtico 1/2, e maior que ele caso contrrio [veja a gura 2.5(b)]. A propsito, como para r = 2 a derivada do mapa se anula, ento o ponto xo x = 1 (1/2) = 1/2 super-estvel. b Vejamos o que ocorreu at o momento: para 0 < r 1 apenas a origem ponto xo, e estvel. Quando r passa pelo valor 1, a origem torna-se instvel, e surge o segundo ponto xo, x = 1 (1/r), que estvel at que r = 3. Este um exemplo de bifurcao, ou seja, b uma alterao abrupta na estabilidade um ponto xo ou rbita peridica, medida em que um parmetro do sistema variado.
2.5 rbitas peridicasMapas unidimensionais no-inversveis possuem um comportamento dinmico complexo, como a presena de rbitas peridicas, bifurcaes e at mesmo caos. Recordemos que um ponto xo x de um mapa xt = f (xt1 ) um ponto que mapeia a si prprio, ou seja, tal que x = f (x ). Uma rbita peridica de perodo 2, tambm chamada 2-ciclo, um conjunto de dois pontos {x , x } tais que um mapeia no outro, e vice-versa: 1 2 x = f (x ), 1 2 x = f (x ), 2 1 (2.25) Como x = f (x ) = f (f (x )) = f [2] (x ), ento x , assim como x , um ponto xo da segunda 2 1 2 2 2 1 iterada do mapa f (x). Logo, os pontos de uma rbita de perodo 2 so solues de x = f [2] (x ) = f (f (x )). (2.26)
30x1 0 2 t+1 1 0 1 0 1 0
CAPTULO 2. MAPAS UNIDIMENSIONAISx
(a)111111111111 00000000000 11111111111 00000000000 11111111111 00000000000 [2] 11111111111 00000000000 11111111111 00000000000 f(f(x))=f (x) 11111111111 00000000000 11111111111 00000000000 11111111111 00000000000
11 00 3 t+1 11 00
11 00
(b)
T(T(x))
1111111111 0000000000 1111111111 0000000000 [3] 1111111111 0000000000 1111111111 0000000000 f(f(x))=f 1111111111 0000000000 T(T(T(x))) (x) 1111111111 0000000000 1111111111 0000000000
0
__ 1 4
1 x * __ 1 2
3 x* __x * 4 2
1
x
t
1 1 0 __ __ 8 4
__ 1 2
__ 3 4
1
x
t
Figura 2.7: (a) Segunda e (b) terceira iteradas do modelo da tenda
Vamos tomar como um exemplo o modelo da tenda T (x), visto na seo anterior. Os pontos {x , x } pertencentes a uma rbita de perodo 2 so solues de x = T [2] (x ), onde 1 2 a segunda iterada do modelo da tenda dada por (2.17). Como h quatro intervalos onde denida a segunda iterada, precisamos analisar os quatro casos possveis [Fig. 2.7(a)]: x [0, 1/4]: a equao x = 4x tem apenas a soluo x = 0, que um dos pontos xos do mapa; x (1/4, 1/2]: a equao do primeiro grau x = 2(1 2x ) tem raiz x = 2/5, que um 1 dos pontos do 2-ciclo; x (1/2, 3/4]: o segundo ponto xo x = 2/3 do mapa a soluo de x = 2[1 2(1 x )]; x (3/4, 1]: o segundo ponto do 2-ciclo, x = 4/5 raiz da equao x = 4(1 x ). 2 Observe que h quatro pontos com essa propriedade, dos quais dois j so os pontos xos, restando apenas dois pontos que compem a rbita de perodo 2: {2/5, 4/5}.
Para generalizar essa discusso, dizemos que x um ponto de perodo m (ou mperidico) do mapa f (x) se ele for um ponto xo da m-sima iterada do mapa: x = f [m] (x ). (2.27)
e se, adicionalmente, os pontos x , f (x ), f [2] (x ), f [m1] (x ) forem distintos. Se x for um ponto de perodo m, as suas imagens formam uma rbita de perodo m (ou m-ciclo): {x , f (x ), f [2] (x ), f [m1] (x )} (2.28)
2.5. RBITAS PERIDICAS
31
Um m-ciclo um conjunto de m pontos de perodo m {x , x , x , . . . x }, tais que um m 1 2 3 mapeia o outro de forma cclica, ou seja: x i+1 = f (xi ),
x 1
=
f (x ). m
(i = 1, 2, . . . m 1),
(2.29)
Aplicando sucessivamente as condies acima a qualquer um dos pontos do m-ciclo, por exemplo x , vemos que m x = f (x ) = f (f (x )) = f (f (f (x ))) = . . . = f [m] (x ), m m1 m2 m3 m (2.30)
De forma geral, h 2m pontos xos da m-sima iterada do mapa, T [m] (x). Alguns desses pontos so tambm pontos xos de T [k] (x) com k < m; os pontos restantes juntando-se para formar rbitas de perodo m. Para encontrar o nmero de m-ciclos (rbitas de perodo m), ns subtraimos o nmero total de pontos de perodo k para todos os valores de k < m e tais que k divide m. Por exemplo, quando m = 4, h 24 = 16 pontos xos da quarta iterada T [4] (x), ou ainda 16 pontos de perodo 4. Dois desses pontos tambm so pontos xos de T (x), e dois outros so pontos xos de T [2] (x). Sobram 16 2 2 = 12 pontos xos de T [4] (x) que formam 12/4 = 3 rbitas de perodo quatro. Pontos nalmente perodicos so aqueles cujas imagens pelo mapa f (x) levam, aps um nmero nito de iteraes, a um ponto peridico do mapa. Por exemplo, x = 7/10 um ponto eventualmente peridico para o modelo da tenda, pois suas imagens levam, aps duas iteradas de T (x), a um 2-ciclo: T (7/10) = 3/5, T (3/5) = 4/5, T (4/5) = 2/5, Pode-se mostrar que, para o mapa da tenda, se x um nmero racional pertencente ao intervalo (0, 1), ento x um ponto eventualmente peridico e vice-versa. Em particular, se x = k/m, onde k um inteiro par e m um inteiro mpar, ento x ponto peridico, sendo a recproca verdadeira. Um ponto nalmente xo se e s se ele tiver a forma x = k/2m ou k/(3.2m ), sendo k e m inteiros no-negativos [12]. T (2/5) = 4/5,
importante salientar que nem todos os pontos de perodo m pertencem a um m-ciclo, como vimos no exemplo do modelo da tenda para m = 2. A terceira iterada do modelo da tenda, T [3] (x) tem quatro vrtices, delimitando oito regies, de forma que h um total de oito pontos de perodo 3 [Fig. 2.7(b)]. Desses oito pontos, dois j so os pontos xos de T , mas no esto aqui incluidos os pontos do 2-ciclo, j que 2 no divide 3 (isto , so primos entre si). Ento restam 8 2 = 6 pontos de perodo 3 para T . Como cada 3-ciclo contm 3 pontos, h dois 3-ciclos. Um deles {2/7, 4/7, 6/7}, como pode-se mostrar facilmente.
2.5.1
Estabilidade das rbitas peridicas
Assim como os pontos xos, tambm as rbitas peridicas podem ser estveis ou instveis. Por exemplo, um 2-ciclo {x , x } assintoticamente estvel se, dada uma condio inicial suciente1 2
32
CAPTULO 2. MAPAS UNIDIMENSIONAIS
mente prxima a ele, as iteraes subsequentes do mapa vo aproximando-se, alternadamente, dos pontos peridicos. A anlise de estabilidade de uma rbita de perodo m, ou m-ciclo, pode ser feita a partir da observao que todos os m pontos dessa rbita so pontos xos do mapa m vezes iterado f [m] (x): x = f [m] (x ), para i = 1, 2, . . . m. Caso um destes pontos seja estvel, i i todos os outros tambm o sero, e o ciclo como um todo ser assintoticamente estvel. A mesma observao vale para os outros casos de estabilidade tal que, desta forma, podemos adaptar o critrio deduzido na seo anterior. No caso de rbitas peridicas (que formam um sub-conjunto dos pontos de perodo m), o parmetro determinante da estabilidade a derivada do mapa m vezes iterado em relao a x, calculada em qualquer um dos pontos do m-ciclo, por exemplo x : 1 m df [m] (x) dx ,x=x 1
(2.31)
Sendo as iteradas sucessivas nada mais que funes compostas, podemos utilizar regra da cadeia para computar a derivada da m-sima iterada do mapa. Por exemplo, se f (x) e g(x) so duas funes do mesmo argumento, a derivada da funo composta h(x) = f (g(x)) dh(x) df (g(x)) df (g) dg(x) df (x) = = = dx dx dg dx dx dg(x) . x=g(x) dx (2.32)
Para calcular a derivada da composio de m funes, usamos a propriedade evidente f [m] (x) = f (f [m1] (x)) na regra da cadeia (2.32). Logo df [m] (x) dx =x=x 1
df (f [m1] (x)) dx
=x=x 1
df (x) dx
df [m1] (x) dx x=f [m1] (x )1
.x=x 1
(2.33)
Como os pontos de um m-ciclo mapeiam uns aos outros, ou seja, ym1 = f [m1] (x ), temos que 1
df [m] (x) dx
=x=x 1
df (x) dx
x=x m1
df [m1] (x) dx
.x=x 1
(2.34)
Procedendo de forma anloga para a derivada de f [m1] , teremos df [m] (x) dx =x=x 1
df (x) dx
x=x m1
df (x) dx
x=x m2
df [m2] (x) dx
,x=x 1
(2.35)
que podemos generalizar, usando induo nita, para o produto de m fatores, iguais s derivadas do mapa em cada ponto da rbita peridica: df [m] (x) dx =x=x 1
df (x) dx
x=x m1
df (x) dx
x=x m2
df (x) dx
x=x 2
df (x) dx
,x=x 1
(2.36)
2.5. RBITAS PERIDICASde modo que m = df [m] (x) dxm1
33
=x=x 1 i=0
df (x) dx
.x=x i
(2.37)
Assim, os pontos do m-ciclo sero: Assintoticamente estveis se |m | < 1, Super-estveis se m = 0, Instveis caso |m | > 1. No caso estvel, a convergncia rbita peridica ser: Monotnica se 0 < m < 1, Oscilatria se 1 < m < 0. Se a rbita peridica for instvel, a divergncia ser: Monotnica se m > 1, Oscilatria se m < 1. Finalmente, se |m | = 1, a linearizao no suciente para decidir sobre a estabilidade do m-ciclo. Considere novamente o modelo da tenda (4.27), como um exemplo simples de aplicao desse critrio. Como sabemos, por induo, que a m-sima iterada do mapa consiste numa sucesso de m tendas de altura 1 e largura da base 1/2m , a derivada (T [m] ) = m = 2m que sempre maior que um, para m = 0, logo todas as rbitas de perodo m que possamos encontrar para este mapa sero instveis, com divergncia monotnica.
2.5.2
Mapa logstico
Retornando, guisa de exemplo, ao mapa logstico f (x) = rx(1 x), vamos analisar agora a existncia e a estabilidade de rbitas de perodo superior, a partir do caso mais smples, as rbitas de perodo 2, ou 2-ciclos: {x , x }, cujos integrantes so pontos xos da segunda iterada 1 2 do modelo: x = f [2] (x ). A segunda iterada , por sua vez, f [2] (x) = rf (x)(1 f (x))
= r[rx(1 x)][1 rx(1 x)]
= r2 [rx4 + 2rx3 (1 + r)x2 + x],
(2.38)
34
CAPTULO 2. MAPAS UNIDIMENSIONAIS
1
1
0,8
0,8
0,6
0,6
xt+10,4
xt+10,40,2
0,2
0
0
0,2
0,4
0,6
0,8
1
0
xt
0
0,2
0,4
xt
0,6
0,8
1
Figura 2.8: Segunda iterada do mapa logstico para (a) r = 1, 5; (b) r = 3, 2.
tal que os pontos do 2-ciclo sejam solues da seguinte equao algbrica de quarto grau x = r2 [rx 4 + 2rx 3 (1 + r)x 2 + x ]. (2.39)
Pelo teorema fundamental da lgebra [13], esta equao ter quatro razes, reais ou complexas. No entanto, os pontos xos da primeira iterada do mapa f (x) tambm so pontos xos da segunda iterada f [2] (x), j que f [2] (x ) = f (f (x )) = f (x ) = x . (2.40)
Logo, das quatro solues esperadas para (2.39), duas j so conhecidas, a saber: x = 0, e a x = 1 (1/r). A forma cannica de uma equao algbrica do quarto grau b (x x )(x x )(x x )(x x ) = 0, 1 2 3 4 (2.41)
onde x , i = 1, 2, 3, 4, so as razes, das quais x = x e x = x . Logo os pontos do 2-ciclo so os a 3 4 i b zeros restantes do polinmio P (x) (x x )(x x )(x 0) x 1 + 1 2 = r2 [rx4 + 2rx3 (1 + r)x2 + x]. 1 r (2.42)
2.5. RBITAS PERIDICAS
35
Como x (1 1/r) um divisor do polinmio P (x), usando o dispositivo de BriotRufni, obtemos 1 [r2 x2 + r(1 + r)x r 1], (2.43) P (x) = rx x 1 + r donde os pontos do 2-ciclo so as razes do trinmio quadrtico entre colchetes: r(r + 1) r2 (r + 1)2 4r2 (r + 1) 2
x 1,2
=
,
(2.44)
onde o sinal positivo refere-se a x , e o negativo a x . 2 1 O discriminante desta soluo = r2 (r + 1)2 4r2 (r + 1) = r2 (r2 2r 3).
(2.45)
O trinmio quadrtico entre parnteses tem razes r = 1 e r = 3. Logo, se 1 < r < 3 este trinmio ser negativo. Como r2 sempre positivo, o discriminante ser negativo para 0 < r < 3, e consequentemente os pontos x sero complexos, ou seja, no h um 2-ciclo 1,2 neste caso. A Figura 2.8(a) ajuda a entender o motivo: exceo dos pontos xos, no h outras intersees da segunda iterada com a reta de 45o . J para r > 3 os pontos do 2-ciclo so as razes (reais) dadas por (2.44) [Fig. 2.8(b)] x = 1,2 1 1 1 + 2 2r 2r (r 3)(r + 1). (2.46)
A estabilidade desta rbita peridica determinada pelo fator 2 = f (x )f (x ) = r(1 2x ).r(1 2x ) 1 2 1 2 = r2 2r2 (x + x ) + 4r2 x x 1 2 1 2 1 1 + 4r 1 + = r2 2r2 1 + r r = r2 + 2r + 4.
(2.47)
O 2-ciclo ser assintoticamente estvel se |2 | = |r2 2r 4| = |(r 1)2 5| < 1, que equivalente ao par de inequaes do segundo grau: 1 < (r 1)2 5 < 1. Resolvendo para r, temos que o intervalo de valores para os quais o ciclo estvel 3 < r < 1 + 6 3, 4495. O aparecimento do 2-ciclo no ponto r = 3 e a consequente perda de estabilidade do ponto xo x um segundo exemplo de bifurcao, j que houve em r = 3 uma mudana sbita tanto na b existncia como na estabilidade de rbitas peridicas.
36
CAPTULO 2. MAPAS UNIDIMENSIONAIS
Figura 2.9: Planilha e grco das 16 primeiras iteraes do mapa logstico para r = 0, 5.
2.6 Solues numricas2.6.1 Uso de planilhas eletrnicas
O carter recursivo do clculo das iteraes de um mapa faz com que esta seja uma tarefa bastante smples para planilhas eletrnicas. Vamos exemplicar o procedimento para o mapa logstico (2.12) para o valor do parmetro r = 0, 5: xt = f (xt1 ) = 0, 5xt1 (1 xt1 ). (2.48)
Considerando a condio inicial x0 = 0, 1, por exemplo, vamos computar a sequncia das quinze primeiras iteraes do mapa. Colocamos o valor de r (0, 5), na clula C1, e o valor de x0 (0, 1), na clula B1. A frmula matemtica do mapa, Eq. (2.48), escrita simbolicamente na clula B2 como +$C$1 B1 (1 B1) (2.49)
onde o smbolo $C$1 indica o endereo absoluto da varivel (a planilha sempre buscar o valor de r na clula C1). J B1 um endereo relativo. O nmero na clula B1 copiado na rea de transferncia. O valor armazenado na rea de transferncia copiado quatorze (= 16 2) vezes para baixo, o que pode ser feito com o mouse copiando a clula e colando em bloco. O resultado
2.6. SOLUES NUMRICAS
37
Figura 2.10: Planilha e grco das 16 primeiras iteraes do mapa logstico para r = 2, 0.
o conjunto das quinze primeiras iteraes do mapa na segunda coluna (a primeira coluna lista os tempos t = 0, 1, 2, . . .), e que podem ser mostradas em um grco xt versus t usando-se os recursos grcos especcos da planilha (Fig. 2.9) A operao de colar em bloco faz cada clula referenciar a clula anterior, que justamente o princpio de recorrncia envolvido na iterao de um mapa. Por exemplo, se deslocarmos o cursor (usando o mouse) para a clula B3, onde encontra-se o valor da segunda iterao x2 , vemos a seguinte operao simblica: +$C$1 B2 (1 B2), e assim por diante, at o ltimo valor de t que colocamos nas clulas da coluna A. Caso quisssemos obter as 50 primeiras iteraes, deveramos colocar os respectivos valores em A, e colar a clula B2 no bloco que abrange todos estes valores. Podemos observar, pela Fig. 2.9, que as iteraes do modelo logstico convergem para o ponto xo na origem. Este , de fato, assintoticamente estvel, pois, computando a derivada da funo logstica d df (x) = (rx(1 x)) = r(1 2x), (2.50) dx dx e calculando seu valor no ponto xo, para r = 0, 5, vemos que (0) = df (x) dx = 0, 5 (1 2 0) = 0, 5 < 1. (2.51)
x=0
Uma das vantagens de usar uma planilha eletrnica a possibilidade de refazer os
38
CAPTULO 2. MAPAS UNIDIMENSIONAIS
Figura 2.11: Planilha e grco das 16 primeiras iteraes do mapa logstico para r = 3, 2.
clculos simplesmente atualizando os valores das clulas. Suponha, por exemplo, que desejssemos refazer a sequncia de iteraes para outro valor do parmetro r, digamos 2, 0. Para tal, basta alterar o valor de r na clula C1, de modo que os valores na coluna B so atualizados simultaneamente, bem como o grco [Fig. 2.10]. No caso exemplicado pela Figura 2.10, observamos pela srie temporal que, aps cinco iteraes (que chamamos transitrias) a rbita do mapa converge para o ponto xo x = 1 (1/r) = 1 (1/2) = 0, 5. Para saber da estabilidade deste ponto xo, ns calculamos o fator de estabilidade correspondente (x ) = df (x) dx =r 12 1 1 r = (2.52) (2.53)
x=x
= r 1 + df (x) dx
2 r
=2r =22=0 1. (2.54)
x=0
Mudando o valor de r para 3, 2, vemos na gura 2.11 que as iteraes convergem para uma rbita de perodo 2, ou 2-ciclo, aps cerca de 15 iteraes transitrias: x 0, 799 x 0, 513 x x . 1 2 1 2
2.6. SOLUES NUMRICAS
39
Figura 2.12: Planilha e grco das 16 primeiras iteraes do mapa logstico para r = 3, 54.
O fator de estabilidade correspondente a esta rbita , por (2.31), dado por 2 = df [2] (x) dx = df (x) dx df (x) dx
(3, 2)2 (1 2 0, 80)(1 2 0, 51) 0, 12 < 1,
= [r(1
x=x 1 2x )][r(1 1
x=x 1
x=x 2
2x )] 2
(2.55)
mostrando que este ciclo , de fato, assintoticamente estvel, e com uma convergncia monotnica. Alm disso, o ponto xo x = 1 1/r tornou-se instvel para esse valor de r, j que o fator de estabilidade df (x) (x ) = = 2 3, 2 = 1, 2 (2.56) dx x=x tem mdulo maior que um. Uma rbita de perodo 4 pode ser observada quando aumentamos o valor do parmetro r para 3, 54, por exemplo. Aps menos de 10 iteraes transitrias, temos o 4-ciclo (Fig. 2.12) x 0, 517 x 0, 884 x 0, 367 x 0, 822 x x , 1 2 3 2 1 2
40(a)1
CAPTULO 2. MAPAS UNIDIMENSIONAIS(b)1
0,5 0,8
0,8
0,4 0,6
0,6
xt
0,3
xt0,4
xt0,4
0,2
0,2 0,1
0,2
0
0
10
20
30
40
50
0
0
10
20
30
40
50
0
0
10
20
30
40
50
t
t
t
Figura 2.13: Iteraes do mapa logstico para (a) r = 2, 0, (b) r = 3, 2, (c)r = 3, 54.
o fator de estabilidade correspondente sendo df [4] (x) 4 = dx4
=x=x 1 i=1
df (x) dx
4
=rx=x i
4 i=1
(1 2x ) 0, 943 < 1, i
(2.57)
conrmando ser esta uma rbita assintoticamente estvel com convergncia monotnica. No prximo captulo aprofundaremos essa anlise de estabilidade das rbitas peridicas, mostrando a existncia de bifurcaes, que so alteraes da estabilidade e da natureza de pontos xos e rbitas peridicas.
2.6.2
Programa de computador para iteraes do mapa
Podemos usar um programa simples para calcular um certo nmero de iteraes do mapa logstico, para valores dados do parmetro r e da condio inicial x0 . Os passos necessrios para programao desta tarefa so os seguintes 1. Escolhemos um valor para o parmetro r (por exemplo, r = 2, 0); 2. Escolhemos a condio inicial x0 (por exemplo, x0 = 0, 1); 3. Inicializamos o valor da iterao com a condio inicial; 4. Iteramos o mapa logstico f (x) = rx(1 x). No necessrio o uso de duas variveis, para xt e xt1 . O uso do comando de atribuio (que em linguagem C o smbolo =) permite que o valor de xt seja sempre atualizado a cada chamada da funo f (x); 5. Repetimos o passo anterior at o nmero de pontos desejado, por exemplo 100.
2.6. SOLUES NUMRICAS
41
Incluimos abaixo um programa de computador em linguagem C que implementa este procedimento. Nas Figuras 2.13(a), (b), e (c) mostramos os resultados da aplicao do programa acima para valores do parmetro iguais a r = 2, 0, 3, 2, e 3, 54, respectivamente.
/* iteracoes_logistico.c: produz uma serie temporal para o modelo logistico discreto. Saida dos dados no arquivo iteracoes_logistico.dat (tabela com duas colunas) */ #include #include FILE *fp; main( ) { int n, points; /* declaracoes de variaveis */ float x_n, x_0, r; fp = fopen("iteracoes_logistico.dat","w");/* abre arquivo */ r = 2.0; /* valor inicial de r */ points = 100; /* numero total de iteracoes */ x_ 0 = 0.1; /* condicao inicial */ x_n = x_0; /* inicializa o valor de x_n */ n = 0; fprintf(fp,"\%d \%f \n", n, x_n); for (n = 1; n r*x*(1-x): r := 3.2: orbita(f, 0.1, 100, 10); cujo resultado o seguinte: [[100, [101, [102, [103, [104, [105, [106, .5130445093, .7994554906, .5130445093, .7994554906, .5130445093, .7994554906, .5130445093, 110, 111, 112, 113, 114, 115, 116, .5130445093, .7994554906, .5130445093, .7994554906, .5130445093, .7994554906, .5130445093, 120, 121, 122, 123, 124, 125, 126, .5130445093], .7994554906], .5130445093], .7994554906], .5130445093], .7994554906], .5130445093],
2.6. SOLUES NUMRICAS[107, .7994554906, 117, .7994554906, 127, .7994554906], [108, .5130445093, 118, .5130445093, 128, .5130445093], [109, .7994554906, 119, .7994554906, 129, .7994554906]]
43
Para visualizar o grco de xt em funo do tempo usamos a procedure orbitagraf, onde o primeiro parmetro o mapa F, o segundo a condio inicial x0, o terceiro(list) uma lista de pares de nmeros, e o quarto (legenda) a legenda do grco. O primeiro nmero em cada par o nmero de iteraes transitrias a serem descartadas e o segundo o nmero de iteraes a serem colocadas no grco, etc. Por exemplo, para descartar as primeiras 100 iteraes, traar as 200 iteraes seguintes, voltar a descartas 100 iterales e traar as prximas 100, usamos a lista [100, 200, 100, 100], o que gera dois grcos para as sries temporais. orbitagraf := proc(f, x0, lista) local x, xf, i1, i2, s, k, intervalo, pontos, p1, p2, transit, iter; x := x0: i1 := 0; i2 := 0; for s from 1 to nops(lista)/2 do transit := op(2*s-1,lista); iter := op(2*s,lista); i1 := i2 + transit; i2 := i1 + iter; for k from 1 to transit do x := f(x); od: pontos := array(1..iter+1); for k from 1 to iter+1 do pontos[k] := [i1+k-1, x]; xf := x; x := f(x); od: x := xf; intervalo := i1..i2, 0..1; p1 := plot(pontos, intervalo, color=black, style=LINE): p2 := plot(pontos, intervalo, color=black, symbol=BOX, style=POINT): print(plots[display]([p1, p2])); od: end: As Figuras 2.14(a) at (d) exemplicam o comportamento do mapa logstico para ponto xo na origem, fora da origem, 2-ciclo e 4-ciclo, respectivamente, que so geradas, por sua vez, pelos seguintes comandos:
441
CAPTULO 2. MAPAS UNIDIMENSIONAIS(a)1
(b)
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0 0 10 20 30 40 50
0 0 10 20 30 40 50
(c)1 1
(d)
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0 0 10 20 30 40 50
0 0 10 20 30 40 50
Figura 2.14: Iteraes do mapa logstico, obtidas com o uso do Maple, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
f r r r r
:= := := := :=
x -> r*x*(1-x): 0.5: orbitagraf(f, 0.8, [0,50]); 2.00: orbitagraf(f, 0.1, [0,50]); 3.20: orbitagraf(f, 0.1, [0,50]); 3.54: orbitagraf(f, 0.1, [0,50]);
Outro recurso disponvel no Maple a construo do diagrama de escada. Para o caso de r = 0, 5 o respectivo diagrama obtido usando a seguinte sequncia de comandos f := (r,x) -> r*x*(1-x): r := 0.5: n := 20: x[0] := 0.9: for i from 1 to n do x[i] := f(r,x[i-1]); od: p := seq( op([[x[i-1],x[i]],[x[i],x[i]]]),i=1..n): OPTS := x=0.0..0.25, color=black: diag := plot(x,OPTS): stair := plot([p],OPTS): parabola := plot(f(r,x),OPTS): plots[display]([diag,parabola,stair],scaling=CONSTRAINED);} cujo resultado pode ser visto na Fig. 2.15(a). Para os outros valores de r j considerados anteriormente alteramos a segunda linha para r := 2.0: n := 20: x[0] := 0.01: [Fig.
2.6. SOLUES NUMRICAS(a)0,25 0,5
45(b)
0,2
0,4
0,15
0,3
0,1
0,2
0,05
0,1
0 0 0,05 0,1 x 0,15 0,2 0,25
0 0 0,1 0,2 x 0,3 0,4 0,5
(c)1 1
(d)
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0 0 0,2 0,4 x 0,6 0,8 1
0 0 0,2 0,4 x 0,6 0,8 1
Figura 2.15: Diagramas de escada do mapa logstico, obtidos com o uso do Maple, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
2.15(b)], r := 3.2: n := 50: x[0] := 0.01: [Fig. 2.15(c)], e r := 3.54: 100: x[0] := 0.01: [Fig. 2.15(d)]. Mathematica
n :=
A iterao de modelos discretos unidimensionais pode ser feita facilmente no Mathematica por meio da funo NestList [17, 18]. Para obter, por exemplo, as 10 primeiras iteraes do mapa logstico quando r = 0, 5, a partir da condio inicial x0 = 0.1, podemos usar os comandos r = 0.9; NestList[r # (1 - #) &, 0.1, 10]; para obter a Fig. 2.16(a). Mudando o valor de r para 2, 0, 3, 20, e 3, 54, resultam as Figuras 2.16(b) a (e), respectivamente. Para traar os grcos da primeira iterao do mapa logstico, bem como os diagramas de escada, podemos usar a seguinte sequncia de comandos (para r = 0, 5, com condio inicial x0 = 0, 3, e desenhando 8 degraus da escada): T[x_] := 0.5 x (1- x); o = {{0.3, T[0.3]}};
46x 0.1 0.08 0.06
CAPTULO 2. MAPAS UNIDIMENSIONAISx 0.5 0.4 0.3 0.04 0.02 4 x 0.8 0.6 0.6 0.4 0.2 0.4 6 8
(a)10 n
0.2
(b)4 6 8 10 n
x 0.8
(c)10 20 30 40 50 n
0.2 10 20 30 40
(d)50 n
Figura 2.16: Sries temporais do mapa logstico, obtidas com o uso do Mathematica, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
p = {{0.3,0},{0.3,T[0.3]}}; Do[I = Last[Last[o]]; o = Append[o,{I,I}]; o = Append[o,{I,T[I]}],{8}]; Show[Plot[{T[x],x},{x,0,1}],Graphics[{Line[p],Line[o]}]]; resultando na Fig. 2.17(a). O resultado, quando o valor de r alterado para 2, 0, 3, 20, e 3, 54, pode ser visto nas Figuras 2.17(b) a (e), respectivamente. Matlab Para gerar sries temporais do mapa logstico usando o Matlab, escrevemos um pequeno programa que usa o comando de repetio for, e onde os valores das iteraes so armazenados num vetor (matriz coluna) de dados x(i) [19, 20]. Por exemplo, para r = 0, 5, e condio inicial x0 = 0, 9, usamos os seguintes comandos para traar as 50 primeiras iteraes: r = 0.5; x0 = 0.9; N = 50; x(1) = x0; for i=1:N x(i+1) = r * x(i) * (1 - x(i)); end figure(1); hold off; plot(x,k*); hold on; plot(x,k);
2.6. SOLUES NUMRICAS0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.2 1 0.8 0.6 0.4 0.2 0.2 0.4 0.6 0.8 1 0.4 0.6 0.8 1 1
470.7 0.6 0.5 0.4 0.3 0.2 0.1 0.2 0.4 0.6 0.8 1
(a)
(b)
(c)
0.8 0.6 0.4 0.2
(d)
0.2
0.4
0.6
0.8
1
Figura 2.17: Diagramas de escada do mapa logstico, obtidos com o uso do Mathematica, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
axis([1 N 0 1]); mostradas na Fig. 2.18(a). Alterando o valor de r para 2, 0, 3, 20, e 3, 54, obtemos as Figuras 2.18(b) a (e), respectivamente. O diagrama de escada para o mapa logstico obtido por meio de um programa dividido em trs partes: a primeira traa os grcos da funo logstica e da primeira bissetriz. A segunda calcula os pontos do grco, tal como na gerao das sries temporais. A terceira e ltima parte traa os degraus da escada usando os comandos line e plot. O programa-exemplo para r = 0, 5 : fplot(2.0*y*(1-y),[0,1],k);hold on; axis(square); axis([0 1 0 1]); set(gca,XTick,(0:0.1:1),YTick,(0:0.1:1)) grid on; fplot(1*y,[0 1],k); r=2.0;x0=0.9;N=50; x(1) = x0; for i=1:N x(i+1)=r*x(i)*(1-x(i)); end line([x(1) x(1)],[0 x(2)],Color,k) plot(x(1),x(1),ko); for j=1:N-1
48
CAPTULO 2. MAPAS UNIDIMENSIONAIS
1
1
0.9
(a)
0.9
(b)
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
5
10
15
20
25
30
35
40
45
50
0
5
10
15
20
25
30
35
40
45
50
1
1
0.9
(c)
0.9
(d)
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
5
10
15
20
25
30
35
40
45
50
0
5
10
15
20
25
30
35
40
45
50
Figura 2.18: Sries temporais do mapa logstico, obtidas com o uso do Matlab, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
1
1
(a)0.9 0.8
0.9
(b)
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1
(c)0.9 0.9 0.8 0.8
(d)
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figura 2.19: Diagramas de escada do mapa logstico, obtidos com o uso do Matlab, para (a) r = 0, 5; (b) r = 2, 0; (c) r = 3, 2; (d) r = 3, 54.
2.7. EXERCCIOSline([x(j) x(j+1)],[x(j+1) x(j+1)],Color,k) line([x(j+1) x(j+1)],[x(j+1) x(j+2)],Color,k) plot(x(j+1),x(j+1),ko); end
49
conforme mostrado na Fig. 2.19(a); ao passo que os casos r = 2, 0; 3, 2 e 3, 54 esto representados nas Figs. 2.19(b) a (d), respectivamente.
2.7 Exerccios1. Considere o mapa xt = sin(xt1 ). (a) Mostre que x = 0 o nico ponto xo (Sugesto: use o teorema do valor mdio do clculo). (b) Mostre que as iteradas de qualquer ponto x convergem para x = 0. (c) Mostre que a estabilidade de x = 0 no pode ser determinada pelo critrio de linearizao. 2. (a) Mostre que (2/7, 4/7, 6/7) uma rbita de perodo 3 para o modelo da tenda T (x). Este ciclo estvel ou instvel? (b) Determine todos os pontos xos da terceira iterada do modelo da tenda, T [3] (x). (c) Ache o nmero de pontos xos de T [m] (x), o nmero de pontos de perodo m para T (x), o nmero de rbitas de perodo m e o nmero de m-ciclos para T (x), quando m = 1, 2, 3, 4, 5.
m nmero de pontos xos para nmero de pontos de perodo m para T nmero de m-ciclos para T T [m]
1
2
3
4
5
3. Considere o mapa xt = f (xt1 ). (a) No caso f (x) = x1/3 mostre que x = 1 um ponto assintoticamente estvel de perodo 2; (b) No caso f (x) = x2 3x + 2 mostre que {0, 2} um 2-ciclo instvel; 4. Seja a famlia de mapas a um parmetro: xt = f (xt1 ), com f (x) = x2 + . Ache os pontos xos do mapa e estude sua estabilidade nos casos: (a) 0 < < 1/4 e (b) > 1/4. 5. Considere a seguinte generalizao do modelo da tenda xt = Ta (xt1 ) = 2axt1 2a(1 xt1 )1 se 0 xt1 2 , 1 se 2 < xt1 1,
(a) Determine os pontos xos do mapa e estude sua estabilidade, para os casos 0 < a < 1/2, 1/2 < a 1, a = 1/2, e 1/2 < a < 1. (b) Mostre que4a2 2a 1+4a2 , 1+4a2
um 2-ciclo instvel do mapa.
6. Para o mapa da tenda, mostre que x = 3/16 um ponto nalmente xo, x = 6/13 um ponto peridico (de perodo 6), e que x = 7/10 um ponto nalmente peridico (de perodo 2).
50
CAPTULO 2. MAPAS UNIDIMENSIONAIS7. Obtenha numericamente e trace o grco correspondente das iteraes do mapa xt = x2 + , t1 onde xt [0, 1] e 0. Escolha valores diversos para o parmetro , bem como para as condies iniciais x0 , usando uma planilha eletrnica, adaptando o programa iteracoeslogistico.c, ou algum dos softwares matemticos. 8. O chamado modelo de Ricker xt = xt1 erxt1 (1xt1 )
um modelo usado no estudo de populaes animais, sendo x a populao e r a taxa de crescimento. (a) Determine analiticamente os pontos xos e estude sua estabilidade. (b) Use algum dos softwares matemticos para traar sries temporais e diagramas de escada para valores do parmetro r que levem a pontos xos, rbitas de perodo 2 e 4. (c) Use o Mathematica (ou outro software) para determine numericamente uma rbita de perodo 2, estudando sua estabilidade. Como um exemplo, para achar o ponto xo do mapa logstico, usamos o comando [17] Solve[x = rx(1-x), x] 9. Use o Mathematica (ou outro software) para determinar analiticamente os pontos da rbita de perodo 2 do mapa logstico (veja o tem (c) do problema anterior). 10. (a) Mostre que o mapa logstico xt = rxt1 (1 xt1 ) tem, no caso r = 4, a soluo exata: xt = sin2 2t1 onde uma funo da condio inicial: (x0 ) = (b) Mostre que, no caso r = 2, a soluo exata xt = 1 1 2n (1 2x0 ) 2 2 1 arcsin x0
(b) Use o resultado do tem (b) para mostrar que, a no ser que x0 = 0, temos que as iteraes do mapa convergem assintoticamente para 1/2. Explique este resultado. 11. Seja x (0, 1). Demonstre que x nalmente peridico para o mapa da tenda T (x) se, e somente se, x um racional, ou seja, um nmero da forma k/p, onde k e p so inteiros primos entre si.
Captulo 3
Bifurcaes em mapas unidimensionaisAt agora, concentramos nossa anlise no comportamento peridico dos modelos dinmicos, tanto a tempo discreto como contnuo. Vimos, basicamente, a existncia de pontos xos, interpretados como solues de equilbrio; e rbitas peridicas, indicando um comportamento repetitivo aps um certo intervalo de tempo. Em ambos os casos, a dinmica nos fornece indicaes precisas do comportamento futuro do sistema, caso este seja adequadamente descrito pelo modelo matemtico adotado. A partir de uma condio inicial, se esperarmos at os transientes decairem, teremos previsto o comportamento do sistema para quaisquer tempos futuros. No entanto, o comportamento peridico no a nica possibilidade para os sistemas dinmicos. Caos determinstico pode evoluir a partir de diversas rotas, a partir da evoluo das rbitas peridicas, quando um parmetro do sistema variado. Esta evoluo pode ocorrer tanto pela criao ou destruio de pontos xos e/ou rbitas peridicas, mas tambm pelas chamadas bifurcaes, que representam alteraes na sua estabilidade. Neste captulo, vamos abordar estes aspectos da dinmica de sistemas no-lineares, focalizando os modelos discretos unidimensionais. Vamos, em particular, revisitar o mapa logstico, introduzido no Captulo 2, e que ser usado como paradigma para a discusso de bifurcaes e caos em modelos discretos unidimensionais xt = f (xt1 ) = rxt1 (1 xt1 ), (3.1)
e que denido para os seguintes intervalos 0 xt 1 e 0 > r 4. Fora deles, as iteraes divergem, ou seja, tendem a menos innito com o passar do tempo.
3.1 Diagrama de bifurcaesO diagrama de bifurcaes um grco dos valores assintticos da varivel de estado x versus o parmetro de controle, suposto varivel dentro do seu intervalo de denio. Por valores assin51
52
CAPTULO 3. BIFURCAES EM MAPAS UNIDIMENSIONAIS
tticos entendemos o comportamento das rbitas aps um intervalo de tempo sucientemente grande: podemos ter pontos xos, rbitas peridicas, ou caticas; de modo que as iteraes transitrias no so consideradas. No exemplo do mapa logstico, uma parte do diagrama de bifurcaes pode ser traada com base nos resultados obtidos no Captulo anterior. Conforme a Fig. 3.1, no eixo das abscissas representamos os valores do parmetro r, e no eixo das ordenadas os valores assintticos de xt . Para 0 < r < 1 s existe o ponto xo estvel na origem x = 0, logo neste intervalo os valores a assintticos de xt so iguais a zero, formando um segmento de linha cheia reta. Para o intervalo 1 < r < 2, a origem torna-se instvel, donde o segmento de reta tracejado; ao passo que aparece o segundo ponto xo x = 1 (1/r), que estvel e menor que b 1/2, sendo representado por um ramo de parbola cheia em funo de r variando dentro do intervalo (1, 2). J para o intervalo 2 < r < 3 os mesmos fatos so vericados, exceto o segundo ponto xo, que agora maior que 1/2. O ponto xo super-estvel em r = 2 corresponde interseo entre este ramo de parbola e uma reta horizontal em x = 1/2. Se traarmos uma reta vertical neste intervalo veremos que a tendncia das iteraes atrativa em relao a x , e b repulsiva em relao origem. Finalmente, no intervalo 3 < r < 1 + 6 3, 449 o segundo ponto xo perde estabilidade, sendo representado por um ramo tracejado de parbola, ao passo que surge uma rbita de perodo 2 estvel. Esta rbita representada por dois ramos cheios de parbola, que correspondem aos dois sinais da expresso dada por (2.44), ou seja: x e x . Este o estado assinttico 1 2 da imensa maioria das rbitas. Na verdade, as nicas excees seriam rbitas cujas condies iniciais fossem colocadas exatamente sobre os pontos xos instveis - e que neles permaneceriam por toda a eternidade. Entretanto, ns jamais conseguimos especicar com preciso innita um nmero qualquer na prtica. Por exemplo, se usarmos trs casas decimais (aps a vrgula) para uma condio inicial, como x0 = 0, 004, a quarta casa decimal j completamente incerta, no sentido que arredondamos o seu conteudo usando a regra conhecida. Os nmeros 0, 0039, 0, 0041, 0, 0037, etc... seriam todos arredondados para 0, 004, de modo que h uma innidade de valores prximos porm diferentes de 0, 004, que so para ele arredondados. impossvel colocar uma condio inicial exatamente num ponto xo ou rbita peridica instvel, pois qualquer pequeno desvio (como aquele provocado pelos erros de arredondamento) j suciente para afastar as iteraes subsequentes do ponto xo ou rbita instvel. Para obter o 2-ciclo superestvel ns igualamos a zero o fator de estabilidade 2 = r2 2r 4, o que fornece como nica raiz positiva o valor r2 = 1 + 5 3, 236. fcil ver que x = 1/2 um dos pontos deste 2-ciclo super-estvel, de modo que a reta horizontal que passa por ele intercepta o diagrama de bifurcao (ramo cheio) nos pontos pertencentes a rbitas peridicas super-estveis. Este fato subsiste para qualquer perodo, e ser usado mais tarde na discusso da rota de Feigenbaum para o caos.
3.2. OBTENO NUMRICA DO DIAGRAMA DE BIFURCAES
53
3,4491 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0
3,57...
x
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3 3,2 3,4 3,6 3,8 4
r
Figura 3.1: Diagrama de bifurcaes do mapa logstico no intervalo 0 < r < 4.
3.2 Obteno numrica do diagrama de bifurcaes3.2.1 Programa em linguagem C
Para r > 1 + 6 um estudo puramente analtico, como o que foi mostrado aqui, impraticvel, de forma que o diagrama de bifurcaes para o mapa logstico deve ser feito numericamente. Vamos descrever a metodologia usada para obter este diagrama: 1. Escolhemos um intervalo de valores para o parmetro r. No caso do mapa logstico, [0, 4]; 2. Fixamos o valor inicial do parmetro r;