
Lucas Costa Castelli Projeto de Graduação apresentado ao ... · COMPUTATIONAL TOOL FOR CONCEPTUAL...
101
FERRAMENTA COMPUTACIONAL PARA PROJETO CONCEITUAL DE EMBARCAÇÕES DE PLANEIO E SEU SISTEMA PROPULSIVO Lucas Costa Castelli Projeto de Graduação apresentado ao Curso de Engenharia Naval e Oceânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro Naval e Oceânico. Orientador: Richard David Schachter, Ph. D. Rio de Janeiro Agosto de 2015
-
Upload
duongkhuong -
Category
Documents
-
view
225 -
download
1
Transcript of Lucas Costa Castelli Projeto de Graduação apresentado ao ... · COMPUTATIONAL TOOL FOR CONCEPTUAL...
FERRAMENTA COMPUTACIONAL PARA PROJETO CONCEITUAL DE
EMBARCAÇÕES DE PLANEIO E SEU SISTEMA PROPULSIVO
Lucas Costa Castelli
Projeto de Graduação apresentado ao Curso
de Engenharia Naval e Oceânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários
à obtenção do título de Engenheiro Naval e
Oceânico.
Orientador: Richard David Schachter, Ph. D.
Rio de Janeiro
Agosto de 2015

iii
Castelli, Lucas Costa
Ferramenta Computacional para projeto conceitual
de embarcações de planeio e seu sistema propulsivo/ Lucas
Costa Castelli – Rio de Janeiro: UFRJ/Escola Politécnica,
2015.
ix, 92 p.: il.; 29,7 cm.
Orientador: Richard David Schachter
Projeto de Graduação – UFRJ/Escola Politécnica/
Curso de Engenharia Naval e Oceânica, 2015.
Referências Bibliográficas: p. 90-92.
1. Ferramenta de Projeto de Embarcações 2.
Embarcações de Planeio 3. Equilíbrio Dinâmico 4.
Resistência ao Avanço. 5. Sistema Propulsivo.
I. Schachter, Richard David. II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Naval e Oceânica. III. Título

iv
“Dubito, ergo Cogito, ergo Sum”
(René Descartes)

v
Primeiramente dedico à minha bisavó, matriarca da
família, que pôde ver seu primeiro bisneto se formar.
À minha mãe, que não apenas sonhou, mas com
muita luta, me permitiu construir este momento.
Aos meus avós maternos, que foram as raízes que
fixaram os sonhos a realidade.
Por fim a minha esposa e meu filho, que dão novos
objetivos à minha vida.
vi
AGRADECIMENTOS
Agradeço ao meu orientador, Richard, por seus conselhos, orientação, incentivo e
entusiasmo ao longo de todo o desenvolvimento do EqDin.
Agradeço também a ANP, pelo suporte financeiro a este projeto, sem o qual o
mesmo não teria sido executado.
À minha mãe, Patricia, que sempre batalhou muito para garantir meus estudos e
sempre me manteve ao seu lado em todas nossas inúmeras aventuras.
A meus avós maternos, Paulo e Eleusa, que sempre deram suporte a minha mãe.
Um agradecimento especial a minha avó, que sempre auxiliou a no meu desenvolvimento
acadêmico e pessoal.
À minha esposa, Paula, que me deu muito apoio ao longo desses cinco árduos
anos de graduação, e com muita paciência e amor se manteve sempre ao meu lado.
A meus amigos, de longe ou perto, com quem convivo ou dos quais recordo, que
ao longo desses anos me acompanharam em diversos momentos. Em especial ao meu
compadre, Pietro, que me ajudou a realizar inúmeras empreitadas nesta jornada.
À minha família, por todo apoio e expectativa. Em especial meu filho, Gabriel, e
meu pequeno irmão, Pedro, por me darem inúmeros momentos de alegria infantil.
vii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Naval e
Oceânico.
FERRAMENTA COMPUTACIONAL PARA PROJETO CONCEITUAL DE
EMBARCAÇÕES DE PLANEIO E SEU SISTEMA PROPULSIVO
Lucas Costa Castelli
Agosto/2015
Orientador: Richard David Schachter
Curso: Engenharia Naval e Oceânica
O trabalho desenvolvido é uma tentativa de se criar uma ferramenta
computacional versátil, robusta e simples para o desenvolvimento de projetos conceituais
de embarcações planeio.
A ferramenta foi desenvolvida a partir da aplicação de um dos módulos do SFD,
um sistema integrado de projeto com a filosofia “Solution Focused Design”. O módulo
utilizado foi o de equilíbrio dinâmico de embarcações de alto desempenho (EqDin)
baseadas em sustentação hidrodinâmica, aerodinâmica ou aerostática, aplicando-se a
parte hidrodinâmica de lanchas.
O estudo foi baseado em métodos analíticos-empíricos e estatísticos para análise
de resistência ao avanço: Savitsky, VPH e Holtrop. Além da pesquisa feita sobre
resistência ao avanço, este trabalho acopla ainda a série de propulsores supercavitantes
de Newton-Rader.
O programa, todavia, não se limita a análise de resistência. As análises do mesmo
vão além, abrange de maneira confiável o equilíbrio dinâmico, bem como a estabilidade
dinâmica longitudinal, porpoising. Por se tratar do aspecto central da ferramenta, a mesma
foi batizada de EqDin, de equilíbrio dinâmico.
A ferramenta foi elaborada para permitir a interação de maneira simples e rápida,
seguindo o princípio do SFD. Com diversas opções que simplificam e agilizam inúmeras
avaliações a respeito do projeto, incluindo dados, diversos gráficos e imagens, o EqDin
mantém sempre os dados de entrada e saída exibidos lado a lado.
viii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial
fulfillment of the requirements for the degree of Naval and Ocean Engineer
COMPUTATIONAL TOOL FOR CONCEPTUAL DESIGN OF PLANING BOATS
AND YOUR PROPULSIVE SYSTEM
Lucas Costa Castelli
August/2015
Advisor: Richard David Schachter
Course: Naval and Ocean Engineering
The work is an attempt to create a versatile, robust and simple computational tool
for the development of conceptual designs of planing boats.
The tool was developed from the application of a module from the SFD, a design’s
integrated system with the “Solution Focused Design” philosophy. The used module was
the dynamic equilibrium (DynEq) of high performance vessels based on hydrodynamics,
aerodynamics or aerostatics lift, applying the hydrodynamic part of planing boats.
The study was based on analytical, empirical and statistical methods for resistance
analysis: Savitsky, VPH and Holtrop. In addition to the research done on drag, this work
also engages the Newton-Rader series of supercavitating propellers.
The program, however, is not limited to analysis of resistance. It covers the
dynamic equilibrium and the longitudinal dynamic stability, porpoising. As it is the
central aspect of the tool, it was named DynEq, dynamic equilibrium.
The tool was designed to allow iterations with simplicity and quickly, following
the SFD’s principles. With several options that simplify and speed up numerous
evaluations along the design, including data, graphics and various images, DynEq always
keeps the input and output data displayed side by side.
ix
Sumário 1. Introdução ................................................................................................... 1
2. Estado da arte.............................................................................................. 2
3. Sistema SFD ............................................................................................... 6
4. Programa EqDin ......................................................................................... 6
4.1 Conceito .................................................................................................. 6
4.2 Teorias .................................................................................................... 7
4.2.1 Método de Savitsky ........................................................................... 7
4.2.2 Resistência de Spray – Hadler ........................................................ 12
4.2.3 Whisker Spray ................................................................................. 12
4.2.4 Método VPH ................................................................................... 12
4.2.5 Método de Holtrop .......................................................................... 14
4.2.6 Série de Newton Rader ................................................................... 15
4.3 Implementação ...................................................................................... 18
4.3.1 Savitsky ........................................................................................... 18
4.3.2 VPH ................................................................................................. 22
4.3.3 Holtrop ............................................................................................ 24
4.3.4 Propulsão ......................................................................................... 27
4.4 Fluxo de trabalho proposto ................................................................... 27
5. Manual de utilização ................................................................................. 31
5.1 Ambiente global .................................................................................... 31
5.2 Ambiente do método de Savitsky ......................................................... 38
5.3 Ambiente do método VPH .................................................................... 45
5.4 Ambiente do método de Holtrop .......................................................... 51
5.5 Ambiente da propulsão ......................................................................... 58
6. Exemplo de aplicação ............................................................................... 68
7. Conclusão ................................................................................................. 89
8. Referências ............................................................................................... 90
1
1. Introdução
No início das atividades offshore de exploração de petróleo as plataformas
operavam sobre uma pequena lamina d’água e razoavelmente próximas a costa. A curta
distância poderia ser superada com embarcações crew boat de baixas velocidades.
Com o desenvolvimento tecnológico, reservas em águas profundas se tornaram
viáveis de serem exploradas. Os crew boats não mais poderiam operar em baixas
velocidades, ou estas reservas em águas profundas e distantes seriam alcançadas apenas
depois de uma longa viagem. Dessa maneira, esse tipo de embarcação foi adaptado,
passando a serem projetadas para operarem em alta velocidade, em regime de planeio e
deslocamento de alta velocidade, (Savitsky, 2014), antigamente denotados como semi-
planeio.
As embarcações de planeio possuem uma sustentação atípica: dinâmica, por isso
seu projeto é completamente distinto de embarcações comuns. Pensando nisso decidiu-se
criar uma ferramenta computacional capaz de auxiliar todo o projeto conceitual de
embarcações de planeio, o EqDin.
O EqDin, todavia, não surgiu desta demanda. Este trabalho apresenta uma
aplicação parcial do programa original, que é um dos principais componentes de um
sistema integrado de projeto, o SFD. Este sistema é baseado na filosofia “Solution
Focused Design” e conta com diversos módulos, com telas e interfaces
multidisciplinares, dentre eles o EqDin original. O mesmo é um trabalho que engloba a
sustentação dinâmica e a resistência ao avanço de diversos conceitos de embarcações de
alto desempenho. Não se limitando ao fenômeno de planeio, nem mesmo a fenômenos
hidrodinâmicos, a versão original do programa abrange ainda embarcações de sustentação
aerodinâmica e aerostática.
Projetado de forma ergonômica, pensando no conforto e eficiência o EqDin foi
idealizado para elaborações de projetos conceituais de embarcações de planeio. Cobrindo
todas as etapas relacionadas à predefinição da forma, avaliação de deslocamento e CG,
resistência ao avanço, estabilidade dinâmica e propulsão. Além de ser um programa mais
abrangente do que a maioria do mercado, o EqDin surge com o intuito de cobrir uma
2
grande lacuna nas análises deste tipo de embarcação: poder avaliar com alta
confiabilidade planadores não prismáticos.
Este trabalho irá apresentar o desenvolvimento e aplicação do EqDin, conforme a
divisão a seguir:
Seção 2: é feito um breve apanhado sobre a situação atual de softwares
que possuem propósitos similares ao aqui proposto.
Seção 3: é dedicada a explicar resumidamente o sistema SFD, que
originou o programa tema deste projeto de graduação.
Seção 4: é dedicada a explicar detalhadamente o programa EqDin, seu
conceito, fundamentos teóricos, implementação de cada método, validar
essas implementações e propor um fluxo de trabalho.
Seção 5: por sua vez é um manual completo de utilização do software,
demonstrando a interface, explicando cada dado de entrada e saída e as
possibilidades de visualização dos dados via gráficos.
Seção 6: demonstra a utilização do programa em um exemplo prático de
uma embarcação do tipo crew boat.
Seção 7: faz a conclusão deste projeto.
2. Estado da arte
Em Arquitetura Naval é tradicional tratar-se da Flutuabilidade das embarcações,
como corpos flutuantes que são, e suas posições de equilíbrio estático em cada condição
de carregamento. Para embarcações com sustentação dinâmica em velocidades altas,
surge a necessidade de se tratar não apenas dos aspectos estáticos, mas também dos
dinâmicos. Faz-se necessário avaliar em que posição se dará o equilíbrio de forças e
momentos a cada velocidade. Para velocidades baixas predomina o efeito estático,
comum à vasta maioria das embarcações do mundo, as ditas embarcações de
deslocamento (displacement hulls). É o regime de velocidade de deslocamento. Com o
aumento da velocidade surgem as componentes dinâmicas de sustentação e arrasto,
modificando o equilíbrio de forças e momentos, forçando a embarcação a uma nova
posição de equilíbrio. São os regimes de deslocamento de alta velocidade e o regime de
planeio.
3
As forças dinâmicas que sustentam o casco de planeio são as mesmas que resistem
ao seu avanço. Dessa maneira a resistência ao avanço em qualquer regime dinâmico de
sustentação está intimamente ligada à posição de equilíbrio.
Além dos dois aspectos anteriormente citados, que são peculiares a embarcações
de sustentação dinâmica há mais um aspecto crucial no projeto destas embarcações: a
estabilidade dinâmica. A estabilidade estática está relacionada à capacidade de a
embarcação suportar solicitações externas que tendem a emborcar o casco. A estabilidade
dinâmica não é diferente, mas mais abrangente. Esta estuda não só a capacidade de
restauração a jogo (roll, o chamado ‘chine walking’), mas também a arfagem (caturro, ou
pitch, na instabilidade denominada ‘porpoising’) e/ou na combinação dos dois, o
‘corkskwewing’. Nestes casos se considera não só o efeito de restauração de componente
estática devido à modificação do corpo submerso, mas também os efeitos dinâmicos,
embora o porpoising seja o mais estudado e muito mais provável de ocorrer.
O sistema propulsivo é sem sombra de dúvidas o principal sistema a ser instalado
em uma lancha planadora de pequeno a médio porte e é obviamente o sistema mecânico
mais essencial da embarcação. No caso de grandes planadores, como o Ferry Aquastrada
(103 m) ou os Ferries da Incat, o sistema propulsivo não é mais o componente de maior
peso e ocupação, mas ainda é mais importante e essencial à embarcação. Não somente
por fornecer a potência necessária para alcançar altas velocidades, mas também por ser
um item bastante pesado com relação à capacidade da embarcação. Desse modo um bom
projeto deste tipo de embarcação possui um equilíbrio entre a forma e o sistema
propulsivo, minimizando o arrasto e o trim.
Atualmente existem diversas técnicas para estimar a resistência ao avanço de
diversos tipos de embarcações: testes em escala reduzida, simulação computacional,
métodos estatísticos, modelos analíticos e modelos analítico-empíricos (Almeter, 1993).
Na fase de projeto preliminar os três últimos são os mais adequados, sendo o último o
mais robusto.
Como dito anteriormente os modelos físicos e computacionais não são adequados
a fase de projeto preliminar, já que os mesmos demandam muitos recursos e tempo a cada
análise. Os modelos estatísticos são bastante confiáveis, porém limitados a classe de
embarcação utilizada. Os modelos analíticos são bastante robustos, porém a
confiabilidade é proporcional à complexidade dos modelos, o que dificulta sua aplicação,
4
levando a um consumo de recurso e tempo similar ao do CFD. A última opção é mais
robusta que os modelos estatísticos já que podem ser feitas combinações entre as opções
mapeadas, mas também é limitada ao conjunto de características estudadas. Ainda assim
é um modelo simples, fácil e rápido de aplicar, sendo perfeito para essa fase de projeto.
Atualmente existem diversos programas comerciais de cálculo de resistência que
englobam as embarcações de planeio e deslocamento de alta velocidade, na grande
maioria há o método de Savitsky e o de Holtrop. Outra característica comum é uma
interface CAD/CAE para modelagem do casco.
Um exemplo, bastante conhecido, disso é o antigo “Hull Speed®” atual “Maxsurf
Resistance®”. Ele faz parte de um sistema de programas focado em projetos navais.
Contém diversos métodos de estimativa, incluindo Savitsky e Holtrop, e necessita da
definição geométrica da forma pelo programa responsável pela modelação no sistema.
Além disso, a estimativa de resistência é baseada na posição imposta pelo projetista, sem
considerar o efeito dinâmico que sustenta a embarcação.
Outro exemplo comercial, que assim como anterior faz parte de um pacote de
renome, é o “Autopower®” do pacote “Autoship®”. Diferentemente do “Maxsurf
Resistance®”, não é mandatório que o projetista modele a forma, ele pode fornecer os
parâmetros manualmente, o que o torna vantajoso frente ao anterior.
Outro exemplo comercial: “Orca 3D®” é um add-on de um programa de CAD
bastante conhecido, o “Rhino®”. As estimativas de resistência são feitas apenas por
Savitsky e Holtrop. Ao contrário do exemplo anterior, as estimativas consideram a
sustentação dinâmica e estima o equilíbrio dinâmico. Como diferencial, o programa ainda
faz análise de porpoising, aspecto importante para esse tipo de embarcação. Infelizmente
é necessário definir completamente a forma do casco para utilizar tais estimativas.
Um último exemplo, não tão conhecido como os outros dois, é o “Wolfsom
Unit®” desenvolvido pela universidade de Southampton. Desenvolvido para
embarcações de planeio e deslocamento de alta velocidade, possui diversos métodos
estatísticos e séries sistemáticas, bem como o método de Savitsky, porém não contém o
tradicional método de Holtrop. Possui uma interface mais simples, baseada apenas em
parâmetros da forma. Considera o equilíbrio dinâmico na estimativa de Savitsky, mas não
exibe os dados obtidos. O programa, contudo, foi feito para planadores, assim um módulo
para projeto de propulsão foi incluído, permitindo a estimativa do peso da propulsão.
5
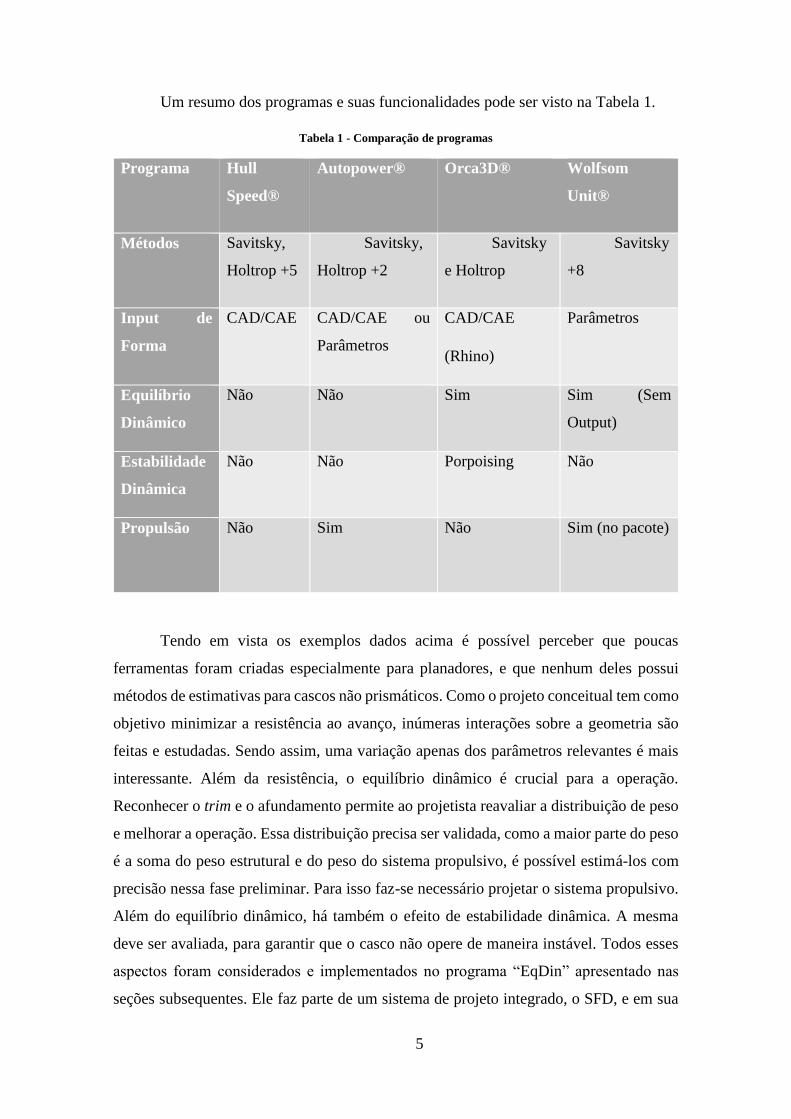
Um resumo dos programas e suas funcionalidades pode ser visto na Tabela 1.
Tabela 1 - Comparação de programas
Programa Hull
Speed®
Autopower® Orca3D® Wolfsom
Unit®
Métodos Savitsky,
Holtrop +5
Savitsky,
Holtrop +2
Savitsky
e Holtrop
Savitsky
+8
Input de
Forma
CAD/CAE CAD/CAE ou
Parâmetros
CAD/CAE
(Rhino)
Parâmetros
Equilíbrio
Dinâmico
Não Não Sim Sim (Sem
Output)
Estabilidade
Dinâmica
Não Não Porpoising Não
Propulsão Não Sim Não Sim (no pacote)
Tendo em vista os exemplos dados acima é possível perceber que poucas
ferramentas foram criadas especialmente para planadores, e que nenhum deles possui
métodos de estimativas para cascos não prismáticos. Como o projeto conceitual tem como
objetivo minimizar a resistência ao avanço, inúmeras interações sobre a geometria são
feitas e estudadas. Sendo assim, uma variação apenas dos parâmetros relevantes é mais
interessante. Além da resistência, o equilíbrio dinâmico é crucial para a operação.
Reconhecer o trim e o afundamento permite ao projetista reavaliar a distribuição de peso
e melhorar a operação. Essa distribuição precisa ser validada, como a maior parte do peso
é a soma do peso estrutural e do peso do sistema propulsivo, é possível estimá-los com
precisão nessa fase preliminar. Para isso faz-se necessário projetar o sistema propulsivo.
Além do equilíbrio dinâmico, há também o efeito de estabilidade dinâmica. A mesma
deve ser avaliada, para garantir que o casco não opere de maneira instável. Todos esses
aspectos foram considerados e implementados no programa “EqDin” apresentado nas
seções subsequentes. Ele faz parte de um sistema de projeto integrado, o SFD, e em sua
6
versão original o conceito é expandido para outras embarcações de sustentação dinâmica,
e não apenas planadores. Neste trabalho o “EqDin” foi aplicado apenas para planadores.
3. Sistema SFD
O sistema SFD, Solution Focused Design, é baseado no processo cognitivo de
projeto focado na solução, e não no problema, como o processo tradicional. O conceito
prioriza uma situação futura, para estimular um possível processo criativo, melhor do que
a simples resolução de um problema.
Enquanto o processo tradicional se baseia em formular um problema e todos os
seus parâmetros para então encontrar uma solução, o pensamento focado na solução
procura a mesma enquanto a descobre e explora, podendo inclusive a trabalhar com um
cenário de múltiplas soluções na busca da ideal.
O sistema de qual esta seção se dedica a falar é baseado na metodologia proposta
em (Schachter, 1990), (Schachter, et al., 2006) e (Keanet, Price, & Schachter, 1990). O
mesmo integra diversos programas criados para ele. Cada um com uma função especifica
como: definição da geometria do casco, síntese e analise estrutural, equilíbrio dinâmico e
resistência ao avanço, arranjo geral, comportamento em ondas e outros. Além da
integração em ambientes similares, os mesmos são integrados em uma mesma unidade,
compartilhando todos os seus dados, e nos casos pertinentes, usam-se telas e interfaces
multidisciplinares, que permite trabalhar simultaneamente com diversos fatores de
projeto, e permitindo, assim, infinitas possibilidades de fluxo de trabalho.
Como todas as disciplinas de projeto podem ser aplicadas na mesma interface que
garante a integração das mesmas há um ganho enorme de produtividade e tempo.
4. Programa EqDin
4.1 Conceito
O programa EqDin recebe esse nome pela sua função: cálculo de equilíbrio
dinâmico. Nele é possível estimar o equilíbrio de uma embarcação cuja sustentação não
é predominantemente hidrostática. Tal processo abrange os três principais aspectos que
7
dominam o projeto de qualquer embarcação de alto desempenho: força de sustentação,
resistência ao avanço e centro de pressão, contrapondo o peso e a distribuição de massa.
O EqDin é um dos programas centrais no sistema SFD e abrange diversos métodos
de cálculo, sendo cada um deles específico para um conceito de embarcação. Para este
projeto fez-se uma adaptação do mesmo para aplicações a crew boats, embarcações
tipicamente de planeio ou deslocamento de alta velocidade, (Savitsky, 2014).
Essa adaptação conta basicamente com quatro módulos integrados. Dois deles
destinados à estimativa de equilíbrio dinâmico em planeio, no qual faz-se necessário
conhecer ou supor uma forma e sua distribuição de massa. Um módulo dedicado ao
cálculo de resistência ao avanço em velocidades baixas. E por fim um módulo de
propulsão, que auxilia o projeto do sistema propulsivo e ajuda a validar inicialmente a
distribuição de massa suposta.
4.2 Teorias
Esta seção é dedicada a explicar os métodos aplicados neste programa e seus
fundamentos teóricos. As quatro primeiras subseções são dedicadas às estimativas da
embarcação em planeio. A terceira complementa os outros dois métodos para velocidades
mais baixas, incluindo deslocamento de alta velocidade, onde predomina a sustentação
estática. Por fim a última subseção explica a série de propulsores supercavitantes
utilizadas como base para estimativas da propulsão.
4.2.1 Método de Savitsky
Este método foi publicado pela primeira vez em 1964 (Savitsky, 1964). Desde
então é a principal referência para estimativas de sustentação dinâmica e resistência ao
avanço de embarcações de planeio.
O conceito deste método é bastante simples: trata-se a lancha como um casco com
ângulo de pé de caverna constante de comprimento semi-infinito, e estima-se a força de
pressão atuante no casco tratando-o como uma placa plana. A consideração geométrica
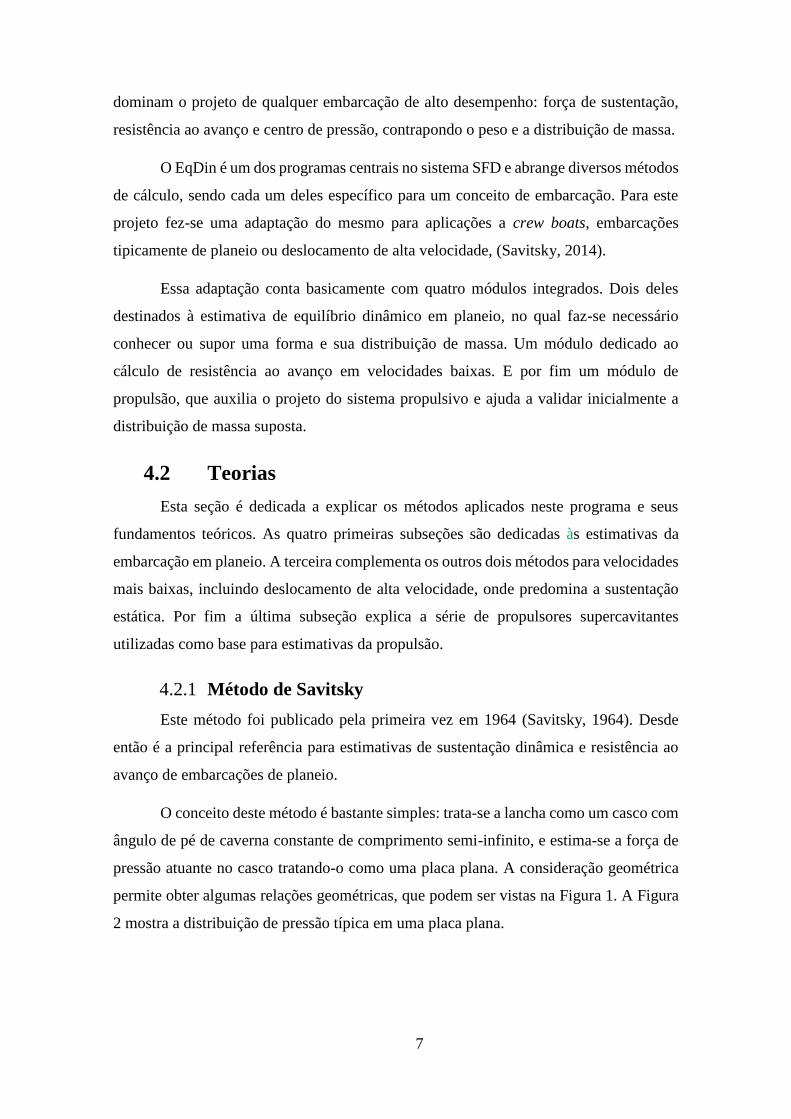
permite obter algumas relações geométricas, que podem ser vistas na Figura 1. A Figura
2 mostra a distribuição de pressão típica em uma placa plana.
8
Figura 1 - Interseções com a linha d'água
Os seguintes parâmetros geométricos são definidos na Figura 1:
𝐿𝐾: comprimento molhado na quilha;
𝐿𝑐: comprimento molhado na quina;
𝜏: trim;
𝑑: afundamento do casco medido do ponto mais baixo no espelho até a
linha d’água;
𝑆𝑝𝑟𝑎𝑦 𝑟𝑜𝑜𝑡: ponto onde o spray inverte de direção com relação ao fluxo
da água;
𝛽: ângulo de pé de caverna, deadrise.
9
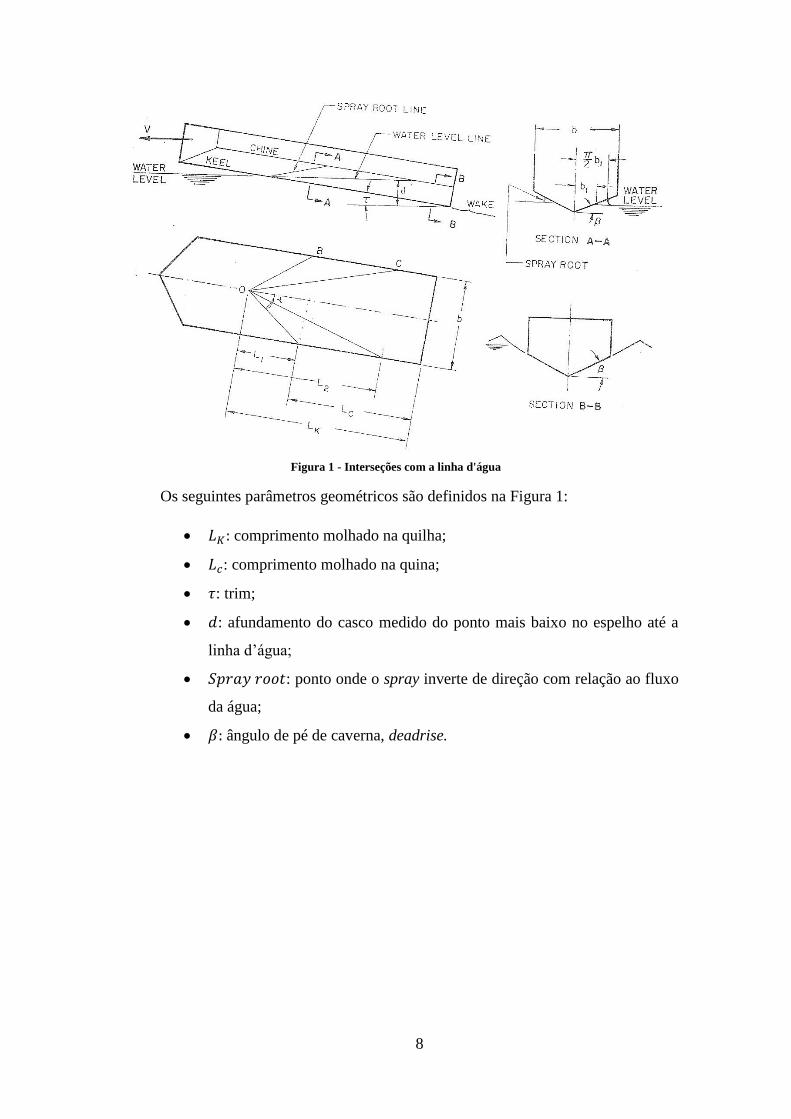
Figura 2 - Distribuição de pressão em uma placa plana
Os seguintes parâmetros geométricos são definidos na Figura 2:
𝜏: ângulo de trim;
Stagnation Line: Linha de corrente que atinge velocidade nula ao se aproximar
do casco;
Spray Root: raiz do spray, ponto onde a direção do jato inverte de sentido;
𝛿 − 𝑆𝑝𝑟𝑎𝑦 𝑇ℎ𝑖𝑐𝑘𝑛𝑒𝑠𝑠: espessura do jato, distância medida da linha d’água
para a linha de estagnação, associada a quantidade de fluxo que irá inverter de
sentido;
1
2𝜌𝑉2: considerando um fluido não viscoso, por Bernoulli o pico de pressão
acontece no ponto de estagnação, assim a pressão máxima tem seu valor igual
ao valor máximo da energia cinética, já que não há velocidade no ponto.
Primeiramente são desenvolvidas as expressões de sustentação para placas planas
e depois uma relação para formas com deadrise constante. Sabe-se que o escoamento
possui componentes longitudinais e transversais. Tem-se conhecimento, da aerodinâmica,
que superfícies com alta razão de aspecto terão um fluxo predominantemente
longitudinal, nesse caso o lift será diretamente proporcional ao trim. No caso oposto o
escoamento seria predominante na outra direção da placa, e então a sustentação seria
proporcional ao quadrado do trim. Sendo assim pode-se expressar uma relação inicial
entre o coeficiente de sustentação, 𝐶𝐿, e o trim, 𝜏, dado pela equação 1.
𝐶𝐿 = 𝐴𝜏 + 𝐵𝜏2 (1)
10
Como as embarcações possuem alto 𝐿
𝐵, o segundo termo da equação 1 se torna
apenas uma pequena correção do primeiro, então descobriu-se que o lift poderia ser
tratado como função de 𝜏1.1. Separou-se os termos dinâmicos e estáticos, para o primeiro
utilizou-se a formulação proposta por Sottorft (Sottorf, 1934). Para o segundo
componente utilizou-se uma formulação analítica. Por fim obteve-se os valores das
constantes desconhecidas empiricamente, obtendo-se a equação 2.
𝐶𝐿 = 𝜏1.1 [0.0120𝜆1
2 +0.0055𝜆
52
𝐶𝑣2 ] (2)
𝑜𝑛𝑑𝑒:
𝜆: 𝑅𝑎𝑧ã𝑜 𝑒𝑛𝑡𝑟𝑒 𝑜 𝑐𝑜𝑚𝑝𝑟𝑖𝑚𝑒𝑛𝑡𝑜 𝑚𝑜𝑙ℎ𝑎𝑑𝑜 𝑚é𝑑𝑖𝑜 𝑒 𝑎 𝑏𝑜𝑐𝑎, 𝐿𝑚/𝑏;
𝐶𝑉: 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒𝑉
√𝑔𝑏
Com o aumento do ângulo de pé de caverna a sustentação se reduz. Conclui-se em
(Savitsky & Neidinger, 1954) e (Korvin-Kroukovsky, Savitsky, & Lehman, 1949) que o
coeficiente de sustentação de uma superfície com deadrise não nulo pode ser dado pela
equação 3.
𝐶𝐿β= 𝐶𝐿0
− 0.0065𝛽𝐶𝐿0
0.60 (3)
Onde
𝛽: 𝐷𝑒𝑎𝑑𝑟𝑖𝑠𝑒 ou ângulo de pé de caverna
Em seu método Savitsky descreve o arrasto para águas tranquilas fazendo uso de
dois termos: pressão e arrasto viscoso. Sabe-se que a pressão atua sempre normal a
superfície, é possível decompor essa pressão em lift e drag. No equilíbrio a primeira
componente se iguala ao deslocamento e por relações geométricas pode-se obter a
equação 4. A componente viscosa pode ser calculada utilizando o coeficiente friccional
de Schoenherr, e assim obtém-se a equação 5.
𝐷𝑝 = Δtan (𝜏) (4)
𝐷 = Δ tan(𝜏) +𝐶𝑓𝑉1
2(𝜆𝑏2)
2cos (𝛽)cos (𝜏) (5)
Onde:
11
𝐷𝑝 = 𝐶𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡𝑒 𝑑𝑒 𝑝𝑟𝑒𝑠𝑠ã𝑜 𝑑𝑜 𝑎𝑟𝑟𝑎𝑠𝑡𝑜
𝐷 = 𝑎𝑟𝑟𝑎𝑠𝑡𝑜,
𝐶𝑓 = 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑓𝑟𝑖𝑐𝑐𝑖𝑜𝑛𝑎𝑙 𝑡𝑢𝑟𝑏𝑢𝑙𝑒𝑛𝑡𝑜 𝑑𝑒 𝑆𝑐ℎ𝑜𝑒𝑛ℎ𝑒𝑟𝑟
𝑉1 = 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑚é𝑑𝑖𝑎 𝑛𝑜 𝑓𝑢𝑛𝑑𝑜 𝑑𝑜 𝑐𝑎𝑠𝑐𝑜
𝜆𝑏2
cos(𝛽)= á𝑟𝑒𝑎 𝑚𝑜𝑙ℎ𝑎𝑑𝑎
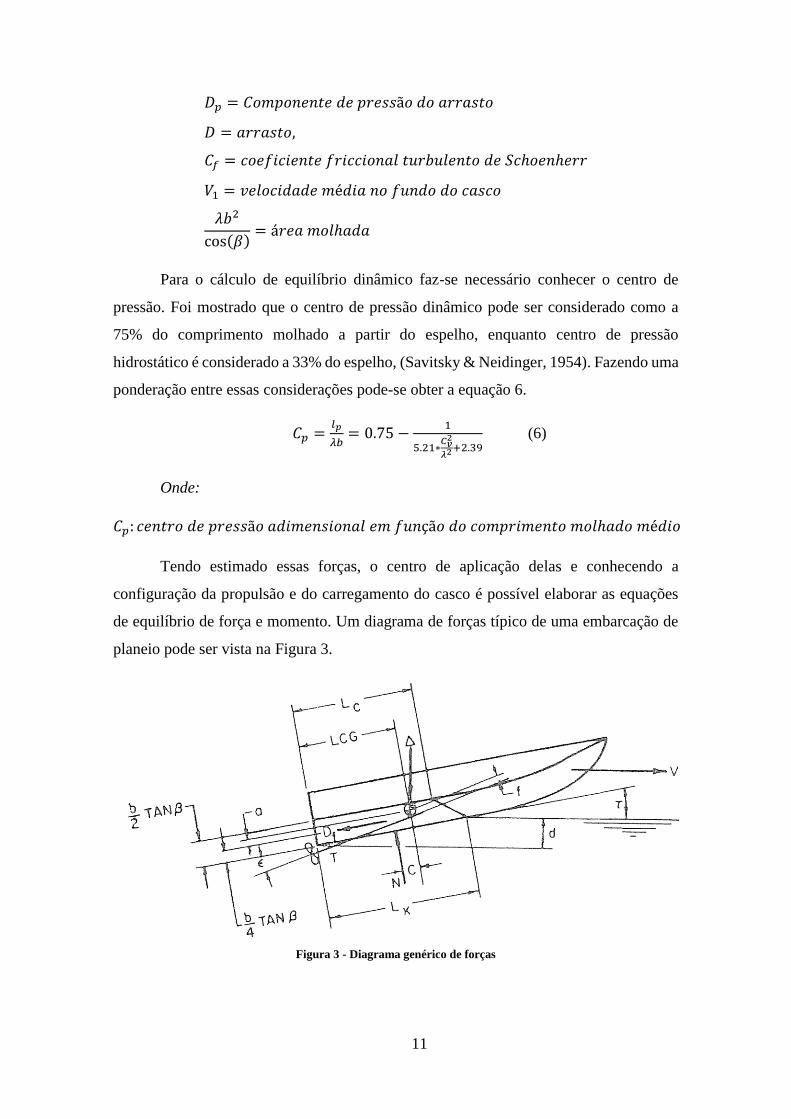
Para o cálculo de equilíbrio dinâmico faz-se necessário conhecer o centro de
pressão. Foi mostrado que o centro de pressão dinâmico pode ser considerado como a
75% do comprimento molhado a partir do espelho, enquanto centro de pressão
hidrostático é considerado a 33% do espelho, (Savitsky & Neidinger, 1954). Fazendo uma
ponderação entre essas considerações pode-se obter a equação 6.
𝐶𝑝 =𝑙𝑝
𝜆𝑏= 0.75 −
1
5.21∗𝐶𝑣
2
𝜆2+2.39 (6)
Onde:
𝐶𝑝: 𝑐𝑒𝑛𝑡𝑟𝑜 𝑑𝑒 𝑝𝑟𝑒𝑠𝑠ã𝑜 𝑎𝑑𝑖𝑚𝑒𝑛𝑠𝑖𝑜𝑛𝑎𝑙 𝑒𝑚 𝑓𝑢𝑛çã𝑜 𝑑𝑜 𝑐𝑜𝑚𝑝𝑟𝑖𝑚𝑒𝑛𝑡𝑜 𝑚𝑜𝑙ℎ𝑎𝑑𝑜 𝑚é𝑑𝑖𝑜
Tendo estimado essas forças, o centro de aplicação delas e conhecendo a
configuração da propulsão e do carregamento do casco é possível elaborar as equações
de equilíbrio de força e momento. Um diagrama de forças típico de uma embarcação de
planeio pode ser vista na Figura 3.
Figura 3 - Diagrama genérico de forças
12
4.2.2 Resistência de Spray – Hadler
No método apresentado anteriormente a componente viscosa do arrasto considera
apenas a superfície molhada do casco, desprezando o efeito do spray no costado do casco.
O spray é o jato de água e ar que o casco lança para frente no encontro com a linha d’água.
Essa massa de água causa uma fricção no casco gerando resistência adicional.
Hadler, (Hadler, 1966), propõem uma formulação que inclui esse efeito.
Analogamente ao arrasto da superfície molhada tem-se a equação 7. Que é
complementada pela equação 8, e o coeficiente friccional é proveniente do ITTC, bem
como a correção devido a rugosidade Δ𝐶𝑓.
𝐷𝑠𝑝𝑟𝑎𝑦 =𝜌
2𝑉2𝑆𝑠𝑝𝑟𝑎𝑦𝑐𝑜𝑠𝜃(𝐶𝑓 + Δ𝐶𝑓) (7)
Onde:
𝐶𝑓: 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑓𝑟𝑖𝑐𝑐𝑖𝑜𝑛𝑎𝑙 𝐴𝑇𝑇𝐶|𝑆𝑐ℎ𝑜𝑒𝑛ℎ𝑒𝑟𝑟
Δ𝐶𝑓: 𝑐𝑜𝑟𝑟𝑒çã𝑜 𝑑𝑒 𝐶𝑓 , 𝑝𝑟𝑜𝑝𝑜𝑠𝑡𝑎 𝑛𝑜 𝐴𝑇𝑇𝐶, 𝑑𝑒𝑣𝑖𝑑𝑜 𝑎 𝑟𝑢𝑔𝑜𝑠𝑖𝑑𝑎𝑑𝑒 𝑑𝑎 𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒
𝑆𝑠𝑝𝑟𝑎𝑦𝑐𝑜𝑠𝜃 =(Δ𝜆)𝑏2
𝑐𝑜𝑠𝛽 (8)
4.2.3 Whisker Spray
Hadler não foi o único a considerar o efeito do spray sobre o desempenho dos
planadores. Savitsky, DeLorme e Datla fazem uma nova proposição para essa
componente de resistência e a batizam de whisker spray, (Savitsky, DeLorme, & Datla,
2007). O primeiro nome desse batismo faz referência ao bigode dos gatos, em analogia a
forma do spray. A equação 9 e a equação 10 podem ser utilizadas para calcular a
resistência viscosa devido a spray.
𝑅𝑠𝑝𝑟𝑎𝑦 =1
2𝜌𝑉2Δ𝜆𝑏2𝐶𝑓 (9)
Δ𝜆 =𝑐𝑜𝑠Θ
4𝑠𝑒𝑛(2𝛼)𝑐𝑜𝑠𝛽 (10)
4.2.4 Método VPH
O VPH, Virtual Prismatic Hull (Ribeiro, 2002), foi criado a partir do método de
Savitsky. Devido às considerações de que um casco com ângulo de pé de caverna e boca
constantes são bastante razoáveis nas estimativas dos termos dinâmicos, mas muito
13
aquém quando se trata dos termos estáticos. O VPH é então proposto para considerar uma
geometria completamente arbitraria e aumentar a precisão de ambos os termos.
O método consiste basicamente em reconhecer a influência de cada seção
longitudinal na sustentação do casco. Para cada seção é associado um casco prismático
virtual, cuja distribuição de pressão é conhecida, e pode-se obter a sustentação da seção.
A sustentação, tanto dinâmica quanto estática, e seu centro de aplicação podem ser
obtidos então por integração numérica.
O método propõe uma função polinomial formada por radicais, equação 11. Os
coeficientes da mesma podem ser obtidos em função de quatro condições de contorno:
1. O coeficiente de sustentação seccional, 𝐶𝐿𝑆𝑃(𝑥), em sua forma
adimensional possui valor unitário no ponto de estagnação – equação 12
2. A pressão no bordo de fuga, considerando a condição de espelho seco,
deve assumir o valor da pressão atmosférica – equação 13;
3. A integral de 𝐶𝐿𝑆𝑃(𝑥) ao longo de 𝑥 deve resultar na sustentação dinâmica
do casco prismático, que pode ser obtido do primeiro termo da equação 2
– equação 14;
4. A integral de momento longitudinal de 𝐶𝐿𝑆𝑃(𝑥) deve resultar no momento
longitudinal da sustentação – equação 15
𝐶𝐿𝑆𝑃(𝑥) = 𝑎0 + 𝑎12𝑥1
2 + 𝑎13𝑥1
3 + 𝑎1𝑥 (11)
𝐶𝐿𝑆𝑃(0) = 1 (12)
𝐶𝐿𝑆𝑃(1) = −2𝑔(ℎ−
𝐵
4𝑡𝑎𝑛𝛽)
𝑈2 (13)
∫ 𝐶𝐿𝑆𝑃(𝑥)�̅�(𝑥)𝑑𝑥 =𝐵
𝐿𝑘𝐶𝐿𝛽𝐷
1
0 (14)
∫ 𝐶𝐿𝑆𝑃(𝑥)�̅�(𝑥)𝑥𝑑𝑥 =𝐵
𝐿𝑘𝐶𝐿𝛽𝐷 (
𝐶𝑃𝐷
𝐿𝑘)
1
0 (15)
14
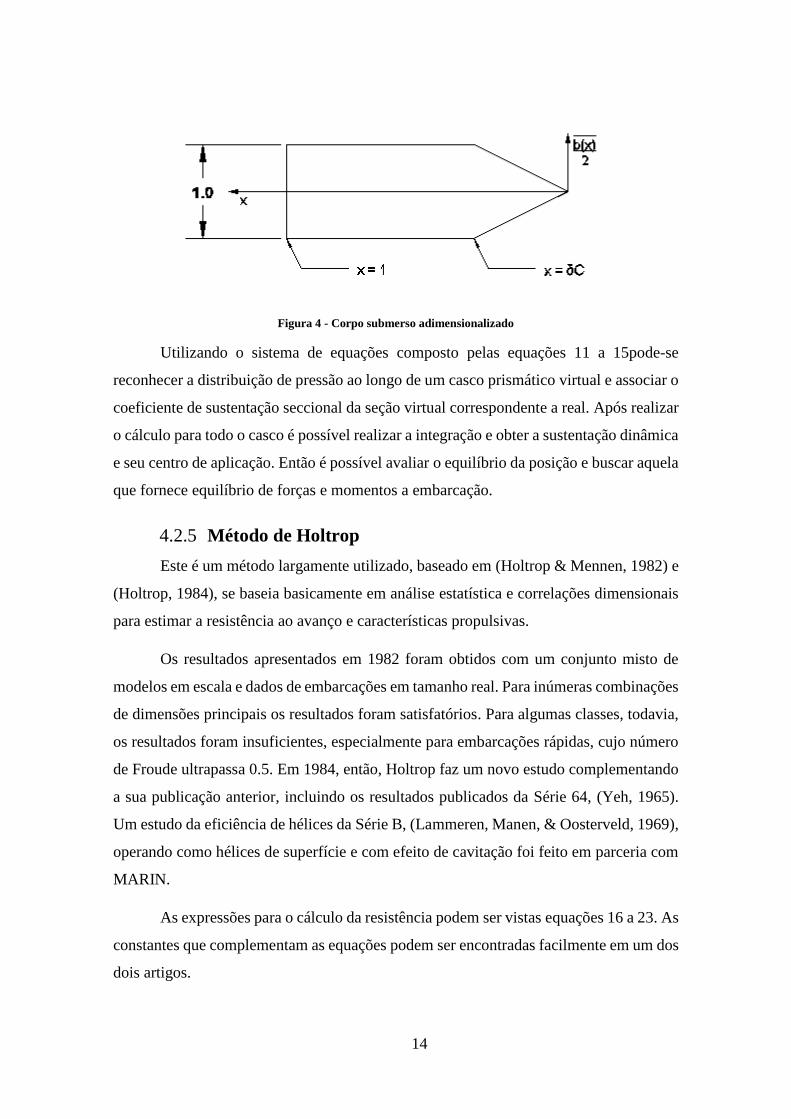
Figura 4 - Corpo submerso adimensionalizado
Utilizando o sistema de equações composto pelas equações 11 a 15pode-se
reconhecer a distribuição de pressão ao longo de um casco prismático virtual e associar o
coeficiente de sustentação seccional da seção virtual correspondente a real. Após realizar
o cálculo para todo o casco é possível realizar a integração e obter a sustentação dinâmica
e seu centro de aplicação. Então é possível avaliar o equilíbrio da posição e buscar aquela
que fornece equilíbrio de forças e momentos a embarcação.
4.2.5 Método de Holtrop
Este é um método largamente utilizado, baseado em (Holtrop & Mennen, 1982) e
(Holtrop, 1984), se baseia basicamente em análise estatística e correlações dimensionais
para estimar a resistência ao avanço e características propulsivas.
Os resultados apresentados em 1982 foram obtidos com um conjunto misto de
modelos em escala e dados de embarcações em tamanho real. Para inúmeras combinações
de dimensões principais os resultados foram satisfatórios. Para algumas classes, todavia,
os resultados foram insuficientes, especialmente para embarcações rápidas, cujo número
de Froude ultrapassa 0.5. Em 1984, então, Holtrop faz um novo estudo complementando
a sua publicação anterior, incluindo os resultados publicados da Série 64, (Yeh, 1965).
Um estudo da eficiência de hélices da Série B, (Lammeren, Manen, & Oosterveld, 1969),
operando como hélices de superfície e com efeito de cavitação foi feito em parceria com
MARIN.
As expressões para o cálculo da resistência podem ser vistas equações 16 a 23. As
constantes que complementam as equações podem ser encontradas facilmente em um dos
dois artigos.
15
𝑅𝑇𝑜𝑡𝑎𝑙 = 𝑅𝐹(1 + 𝑘1) + 𝑅𝐴𝑃𝑃 + 𝑅𝑤 + 𝑅𝑏 + 𝑅𝑇𝑅 + 𝑅𝐴 (16)
𝑅𝐹 =1
2𝜌𝑉2𝐶𝑓𝑆 (17)
1 + 𝑘1 = 0.93 + 0.487118𝑐14 ∗ (𝐵
𝐿)
1.06806
∗ (𝑇
𝐿)
0.46106
∗ (𝐿
𝐿𝑅)
0.121563
∗
(𝐿3
∇)
0.36486
∗ (1 − 𝐶𝑝)−0.604247
(18)
𝑅𝐴𝑃𝑃 = 0.5𝜌𝑉2𝑆𝐴𝑃𝑃(1 + 𝑘2)𝑒𝑞𝐶𝑓 (19)
{
𝑅𝑊−𝐴(𝐹𝑛) = 𝑐1𝑐2𝑐5𝛻𝜌𝑔𝑒𝑚1𝐹𝑛𝑑+𝑚2 𝑐𝑜𝑠(𝜆𝐹𝑛
−2)𝐹𝑛 ≤ 0.4
𝑅𝑊−𝐵(𝐹𝑛) = 𝑐17𝑐2𝑐5𝛥𝜌𝑔𝑒𝑚3𝐹𝑛𝑑+𝑚4 𝑐𝑜𝑠(𝜆𝐹𝑛
−2)𝐹𝑛 ≥ 0.55
𝑅𝑤(𝐹𝑛) = 𝑅𝑊−𝐴(0.4) +10𝐹𝑛−4
1.5(𝑅𝑊−𝐵(0.55) − 𝑅𝑊−𝐴) 0.4 < 𝐹𝑛 < 0.55
(20)
𝑅𝐵 =0.11𝑒−3𝑃𝐵
−2𝐹𝑛𝑖
3 𝐴𝐵𝑇1.5𝜌𝑔
1+𝐹𝑛2 (21)
𝑅𝑇𝑅 = 0.5𝜌𝑉2𝐴𝑇𝑐6 (22)
𝑅𝐴 = 0.5𝜌𝑉2𝑆𝐶𝐴 (23)
4.2.6 Série de Newton Rader
Na década de 60 a teoria dos vórtices estava muito bem estabelecida para projetos
de propulsores. A utilização desse método era bastante complicada devido às
características de eficiência estarem intimamente ligadas a velocidade e ao grau de
cavitação. Mesmo a teoria de escoamento bidimensional em fólios supercavitantes não
era capaz de fornecer todas as respostas aos problemas desses projetos. Para superar essa
problemática propôs-se então uma série de hélices supercavitantes com três pás e doze
combinações de razão de área e razão de passo (Newton & Rader, 1961).
As razões de área e passo foram sistematicamente variadas, a princípio. Ajustes
finos para eliminar a cavitação na face da pá resultaram nos modelos listados na Tabela
2.
Tabela 2 - Modelos de hélice
Razão de Área Razão de passo
0.48 1.05 1.26 1.67 2.08
0.71 1.05 1.25 1.66 2.06
0.95 1.04 1.24 1.65 2.04
16
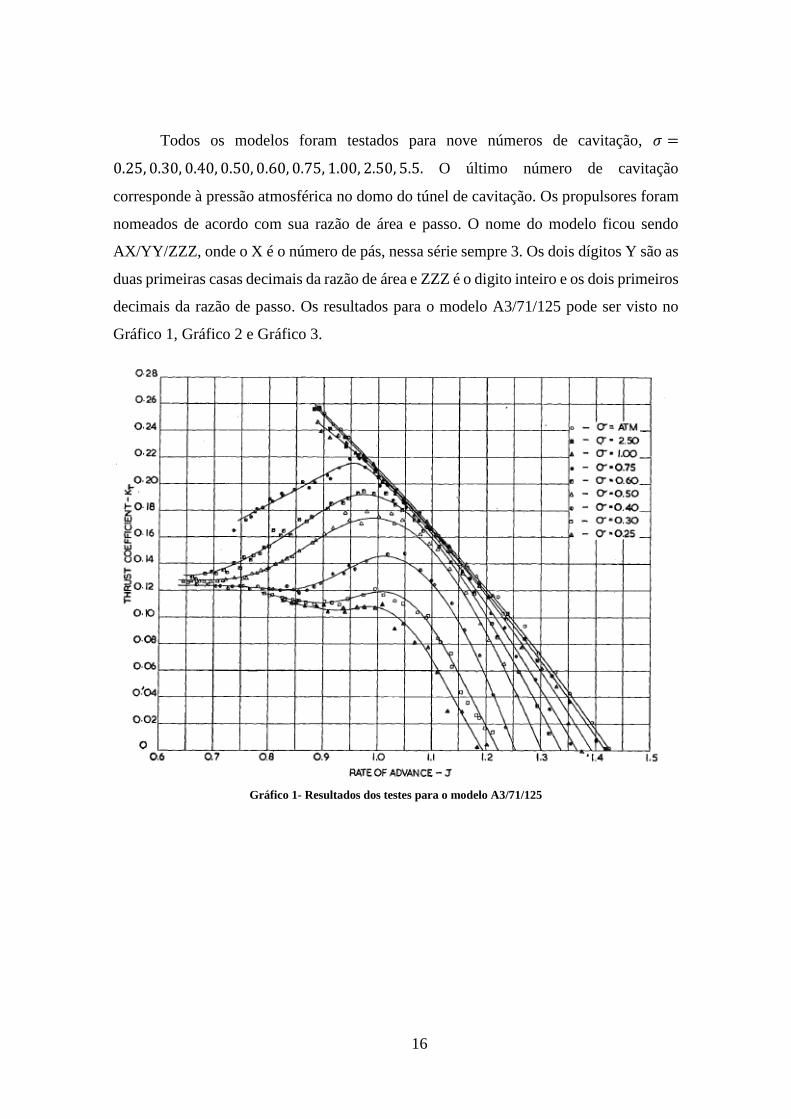
Todos os modelos foram testados para nove números de cavitação, 𝜎 =
0.25, 0.30, 0.40, 0.50, 0.60, 0.75, 1.00, 2.50, 5.5. O último número de cavitação
corresponde à pressão atmosférica no domo do túnel de cavitação. Os propulsores foram
nomeados de acordo com sua razão de área e passo. O nome do modelo ficou sendo
AX/YY/ZZZ, onde o X é o número de pás, nessa série sempre 3. Os dois dígitos Y são as
duas primeiras casas decimais da razão de área e ZZZ é o digito inteiro e os dois primeiros
decimais da razão de passo. Os resultados para o modelo A3/71/125 pode ser visto no
Gráfico 1, Gráfico 2 e Gráfico 3.
Gráfico 1- Resultados dos testes para o modelo A3/71/125
17
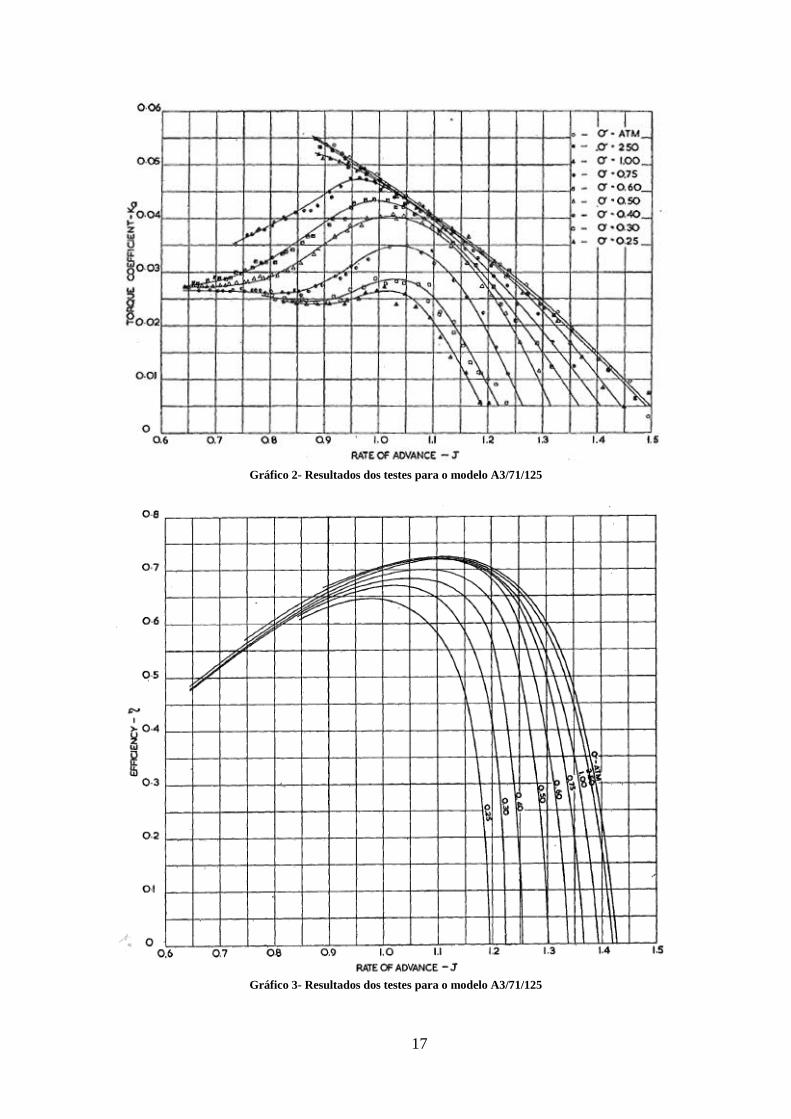
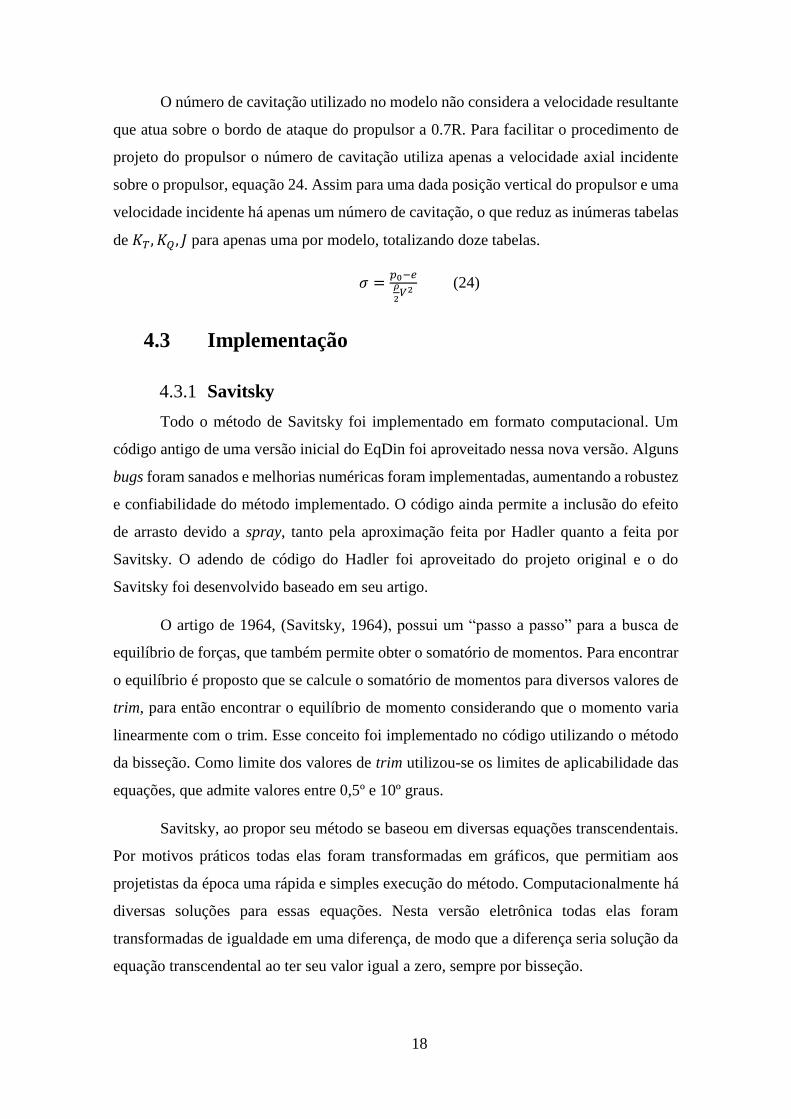
Gráfico 2- Resultados dos testes para o modelo A3/71/125
Gráfico 3- Resultados dos testes para o modelo A3/71/125
18
O número de cavitação utilizado no modelo não considera a velocidade resultante
que atua sobre o bordo de ataque do propulsor a 0.7R. Para facilitar o procedimento de
projeto do propulsor o número de cavitação utiliza apenas a velocidade axial incidente
sobre o propulsor, equação 24. Assim para uma dada posição vertical do propulsor e uma
velocidade incidente há apenas um número de cavitação, o que reduz as inúmeras tabelas
de 𝐾𝑇 , 𝐾𝑄 , 𝐽 para apenas uma por modelo, totalizando doze tabelas.
𝜎 =𝑝0−𝑒𝜌
2𝑉2
(24)
4.3 Implementação
4.3.1 Savitsky
Todo o método de Savitsky foi implementado em formato computacional. Um
código antigo de uma versão inicial do EqDin foi aproveitado nessa nova versão. Alguns
bugs foram sanados e melhorias numéricas foram implementadas, aumentando a robustez
e confiabilidade do método implementado. O código ainda permite a inclusão do efeito
de arrasto devido a spray, tanto pela aproximação feita por Hadler quanto a feita por
Savitsky. O adendo de código do Hadler foi aproveitado do projeto original e o do
Savitsky foi desenvolvido baseado em seu artigo.
O artigo de 1964, (Savitsky, 1964), possui um “passo a passo” para a busca de
equilíbrio de forças, que também permite obter o somatório de momentos. Para encontrar
o equilíbrio é proposto que se calcule o somatório de momentos para diversos valores de
trim, para então encontrar o equilíbrio de momento considerando que o momento varia
linearmente com o trim. Esse conceito foi implementado no código utilizando o método
da bisseção. Como limite dos valores de trim utilizou-se os limites de aplicabilidade das
equações, que admite valores entre 0,5º e 10º graus.
Savitsky, ao propor seu método se baseou em diversas equações transcendentais.
Por motivos práticos todas elas foram transformadas em gráficos, que permitiam aos
projetistas da época uma rápida e simples execução do método. Computacionalmente há
diversas soluções para essas equações. Nesta versão eletrônica todas elas foram
transformadas de igualdade em uma diferença, de modo que a diferença seria solução da
equação transcendental ao ter seu valor igual a zero, sempre por bisseção.
19
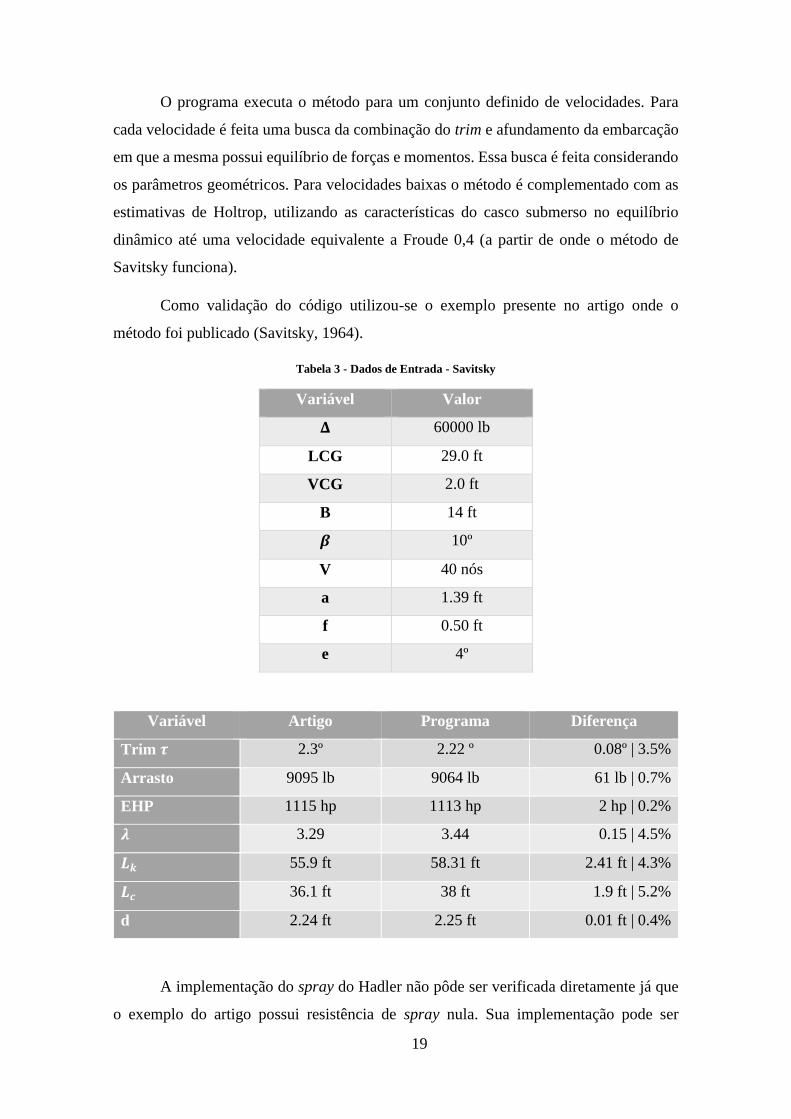
O programa executa o método para um conjunto definido de velocidades. Para
cada velocidade é feita uma busca da combinação do trim e afundamento da embarcação
em que a mesma possui equilíbrio de forças e momentos. Essa busca é feita considerando
os parâmetros geométricos. Para velocidades baixas o método é complementado com as
estimativas de Holtrop, utilizando as características do casco submerso no equilíbrio
dinâmico até uma velocidade equivalente a Froude 0,4 (a partir de onde o método de
Savitsky funciona).
Como validação do código utilizou-se o exemplo presente no artigo onde o
método foi publicado (Savitsky, 1964).
Tabela 3 - Dados de Entrada - Savitsky
Variável Valor
𝚫 60000 lb
LCG 29.0 ft
VCG 2.0 ft
B 14 ft
𝜷 10º
V 40 nós
a 1.39 ft
f 0.50 ft
e 4º
Variável Artigo Programa Diferença
Trim 𝝉 2.3º 2.22 º 0.08º | 3.5%
Arrasto 9095 lb 9064 lb 61 lb | 0.7%
EHP 1115 hp 1113 hp 2 hp | 0.2%
𝝀 3.29 3.44 0.15 | 4.5%
𝑳𝒌 55.9 ft 58.31 ft 2.41 ft | 4.3%
𝑳𝒄 36.1 ft 38 ft 1.9 ft | 5.2%
d 2.24 ft 2.25 ft 0.01 ft | 0.4%
A implementação do spray do Hadler não pôde ser verificada diretamente já que
o exemplo do artigo possui resistência de spray nula. Sua implementação pode ser
20
validada unicamente em comparação ao spray de Savitsky, comparando a ordem de
grandeza dos dois.
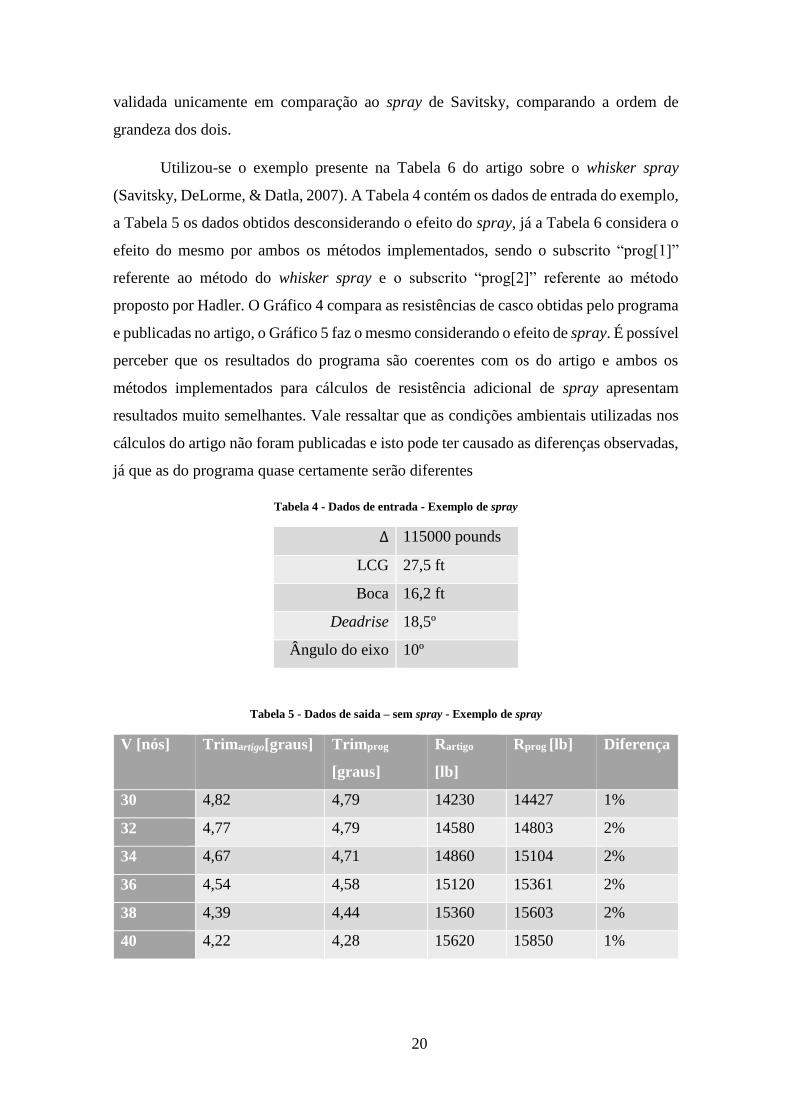
Utilizou-se o exemplo presente na Tabela 6 do artigo sobre o whisker spray
(Savitsky, DeLorme, & Datla, 2007). A Tabela 4 contém os dados de entrada do exemplo,
a Tabela 5 os dados obtidos desconsiderando o efeito do spray, já a Tabela 6 considera o
efeito do mesmo por ambos os métodos implementados, sendo o subscrito “prog[1]”
referente ao método do whisker spray e o subscrito “prog[2]” referente ao método
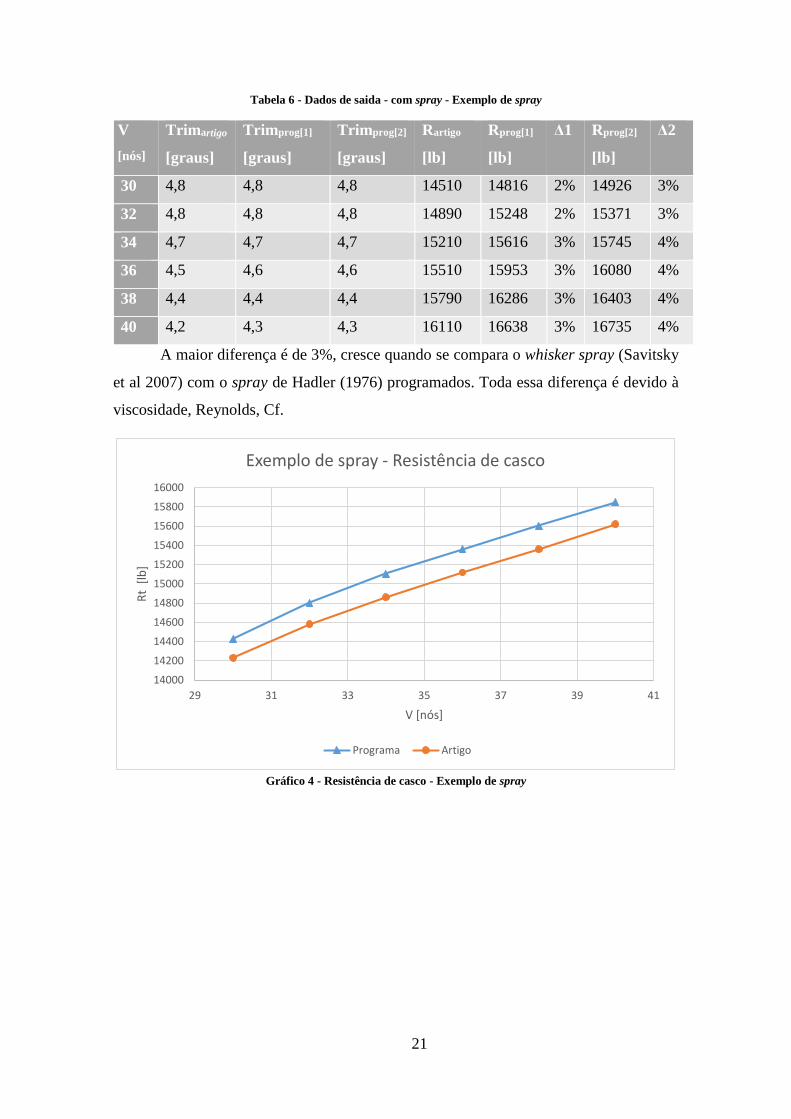
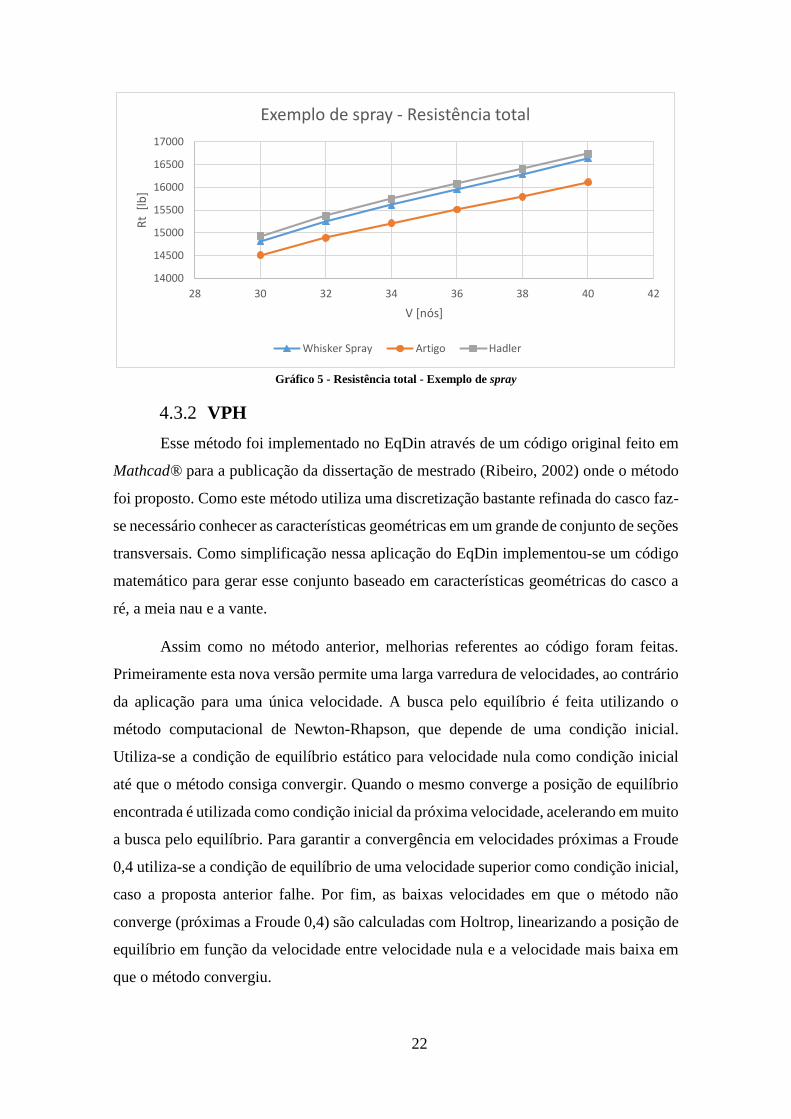
proposto por Hadler. O Gráfico 4 compara as resistências de casco obtidas pelo programa
e publicadas no artigo, o Gráfico 5 faz o mesmo considerando o efeito de spray. É possível
perceber que os resultados do programa são coerentes com os do artigo e ambos os
métodos implementados para cálculos de resistência adicional de spray apresentam
resultados muito semelhantes. Vale ressaltar que as condições ambientais utilizadas nos
cálculos do artigo não foram publicadas e isto pode ter causado as diferenças observadas,
já que as do programa quase certamente serão diferentes
Tabela 4 - Dados de entrada - Exemplo de spray
Δ 115000 pounds
LCG 27,5 ft
Boca 16,2 ft
Deadrise 18,5º
Ângulo do eixo 10º
Tabela 5 - Dados de saida – sem spray - Exemplo de spray
V [nós] Trimartigo[graus] Trimprog
[graus]
Rartigo
[lb]
Rprog [lb] Diferença
30 4,82 4,79 14230 14427 1%
32 4,77 4,79 14580 14803 2%
34 4,67 4,71 14860 15104 2%
36 4,54 4,58 15120 15361 2%
38 4,39 4,44 15360 15603 2%
40 4,22 4,28 15620 15850 1%
21
Tabela 6 - Dados de saida - com spray - Exemplo de spray
V
[nós]
Trimartigo
[graus]
Trimprog[1]
[graus]
Trimprog[2]
[graus]
Rartigo
[lb]
Rprog[1]
[lb]
Δ1 Rprog[2]
[lb]
Δ2
30 4,8 4,8 4,8 14510 14816 2% 14926 3%
32 4,8 4,8 4,8 14890 15248 2% 15371 3%
34 4,7 4,7 4,7 15210 15616 3% 15745 4%
36 4,5 4,6 4,6 15510 15953 3% 16080 4%
38 4,4 4,4 4,4 15790 16286 3% 16403 4%
40 4,2 4,3 4,3 16110 16638 3% 16735 4%
A maior diferença é de 3%, cresce quando se compara o whisker spray (Savitsky
et al 2007) com o spray de Hadler (1976) programados. Toda essa diferença é devido à
viscosidade, Reynolds, Cf.
Gráfico 4 - Resistência de casco - Exemplo de spray
14000
14200
14400
14600
14800
15000
15200
15400
15600
15800
16000
29 31 33 35 37 39 41
Rt
[lb
]
V [nós]
Exemplo de spray - Resistência de casco
Programa Artigo
22
Gráfico 5 - Resistência total - Exemplo de spray
4.3.2 VPH
Esse método foi implementado no EqDin através de um código original feito em
Mathcad® para a publicação da dissertação de mestrado (Ribeiro, 2002) onde o método
foi proposto. Como este método utiliza uma discretização bastante refinada do casco faz-
se necessário conhecer as características geométricas em um grande de conjunto de seções
transversais. Como simplificação nessa aplicação do EqDin implementou-se um código
matemático para gerar esse conjunto baseado em características geométricas do casco a
ré, a meia nau e a vante.
Assim como no método anterior, melhorias referentes ao código foram feitas.
Primeiramente esta nova versão permite uma larga varredura de velocidades, ao contrário
da aplicação para uma única velocidade. A busca pelo equilíbrio é feita utilizando o
método computacional de Newton-Rhapson, que depende de uma condição inicial.
Utiliza-se a condição de equilíbrio estático para velocidade nula como condição inicial
até que o método consiga convergir. Quando o mesmo converge a posição de equilíbrio
encontrada é utilizada como condição inicial da próxima velocidade, acelerando em muito
a busca pelo equilíbrio. Para garantir a convergência em velocidades próximas a Froude
0,4 utiliza-se a condição de equilíbrio de uma velocidade superior como condição inicial,
caso a proposta anterior falhe. Por fim, as baixas velocidades em que o método não
converge (próximas a Froude 0,4) são calculadas com Holtrop, linearizando a posição de
equilíbrio em função da velocidade entre velocidade nula e a velocidade mais baixa em
que o método convergiu.
14000
14500
15000
15500
16000
16500
17000
28 30 32 34 36 38 40 42
Rt
[lb
]
V [nós]
Exemplo de spray - Resistência total
Whisker Spray Artigo Hadler
23
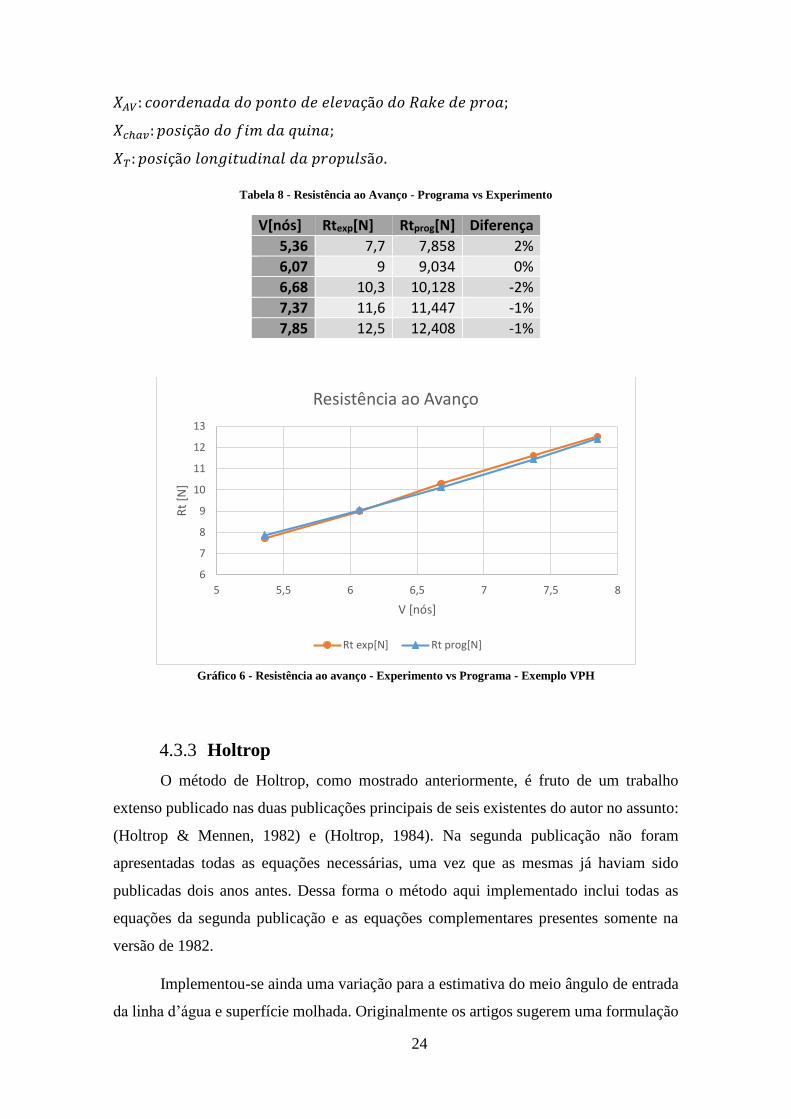
Para validar a implementação utilizou-se um casco da série “Keuning e
Gerritsma”, (Keuning & Gerritsma, 1982), os mesmos usados no trabalho original. Os
dados de entrada utilizados no programa podem ser vistos na Tabela 7. Os dados de saída
podem ser vistos na Tabela 8 e no Gráfico 6.
Figura 5 - Modelo 190 - Série Keuning e Gerritsma (1982)
Tabela 7 - Dados de Entrada - Exemplo VPH
Loa [m] 1,617
B [m] 0,280
D [m] 0,151
BPX [m] 0,214
BPT [m] 0,137
𝛿 12º
XAV [m] 1,303
CV 0,750
Xchav[m] 1,527
𝛽𝑀𝑁 25º
𝛽𝐴𝑅 25º
𝛽𝐴𝑉 25º
𝜖 5,75º
xT [m] 0,220
Δ [kg] 7,5
LCG [m] 0,672
VCG [m] 0,075
𝑂𝑛𝑑𝑒:
𝐵𝑃𝑋: 𝑏𝑜𝑐𝑎 𝑚á𝑥𝑖𝑚𝑎 𝑛𝑎 𝑞𝑢𝑖𝑛𝑎;
𝐵𝑃𝑇: 𝑏𝑜𝑐𝑎 𝑛𝑎 𝑞𝑢𝑖𝑛𝑎 𝑛𝑜 𝑡𝑟𝑎𝑛𝑠𝑜𝑚;
𝛿: 𝑎𝑛𝑔𝑢𝑙𝑜 𝑑𝑜 𝑅𝑎𝑘𝑒 𝑑𝑒 𝑝𝑜𝑝𝑎;
24
𝑋𝐴𝑉: 𝑐𝑜𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑎 𝑑𝑜 𝑝𝑜𝑛𝑡𝑜 𝑑𝑒 𝑒𝑙𝑒𝑣𝑎çã𝑜 𝑑𝑜 𝑅𝑎𝑘𝑒 𝑑𝑒 𝑝𝑟𝑜𝑎;
𝑋𝑐ℎ𝑎𝑣: 𝑝𝑜𝑠𝑖çã𝑜 𝑑𝑜 𝑓𝑖𝑚 𝑑𝑎 𝑞𝑢𝑖𝑛𝑎;
𝑋𝑇: 𝑝𝑜𝑠𝑖çã𝑜 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑙 𝑑𝑎 𝑝𝑟𝑜𝑝𝑢𝑙𝑠ã𝑜.
Tabela 8 - Resistência ao Avanço - Programa vs Experimento
V[nós] Rtexp[N] Rtprog[N] Diferença
5,36 7,7 7,858 2%
6,07 9 9,034 0%
6,68 10,3 10,128 -2%
7,37 11,6 11,447 -1%
7,85 12,5 12,408 -1%
Gráfico 6 - Resistência ao avanço - Experimento vs Programa - Exemplo VPH
4.3.3 Holtrop
O método de Holtrop, como mostrado anteriormente, é fruto de um trabalho
extenso publicado nas duas publicações principais de seis existentes do autor no assunto:
(Holtrop & Mennen, 1982) e (Holtrop, 1984). Na segunda publicação não foram
apresentadas todas as equações necessárias, uma vez que as mesmas já haviam sido
publicadas dois anos antes. Dessa forma o método aqui implementado inclui todas as
equações da segunda publicação e as equações complementares presentes somente na
versão de 1982.
Implementou-se ainda uma variação para a estimativa do meio ângulo de entrada
da linha d’água e superfície molhada. Originalmente os artigos sugerem uma formulação
6
7
8
9
10
11
12
13
5 5,5 6 6,5 7 7,5 8
Rt
[N]
V [nós]
Resistência ao Avanço
Rt exp[N] Rt prog[N]
25
estatística desses dois parâmetros, mas caso eles já sejam conhecidos a estimativa de
resistência pode ser significativamente melhorada, desse modo foi possibilitado que o
usuário utilize a aproximação ou indique manualmente um ou ambos os valores.
Os parâmetros propulsivos implementados se referem unicamente ao paper de
1982: coeficiente de esteira, coeficiente de redução de empuxo e eficiência relativa
propulsiva. A utilização dessas estimativas não é obrigatória para estimar a resistência ao
avanço.
O método considera diversas parcelas para a resistência ao avanço, uma delas é
fruto da fricção extra devido à existência de apêndices. O método se baseia na área desses
apêndices e um coeficiente de forma ponderado para o conjunto. No programa o usuário
tem a opção de fornecer os dados totais do conjunto ou utilizar uma tabela auxiliar e
indicar item a item o conjunto de apêndices do casco estudado.
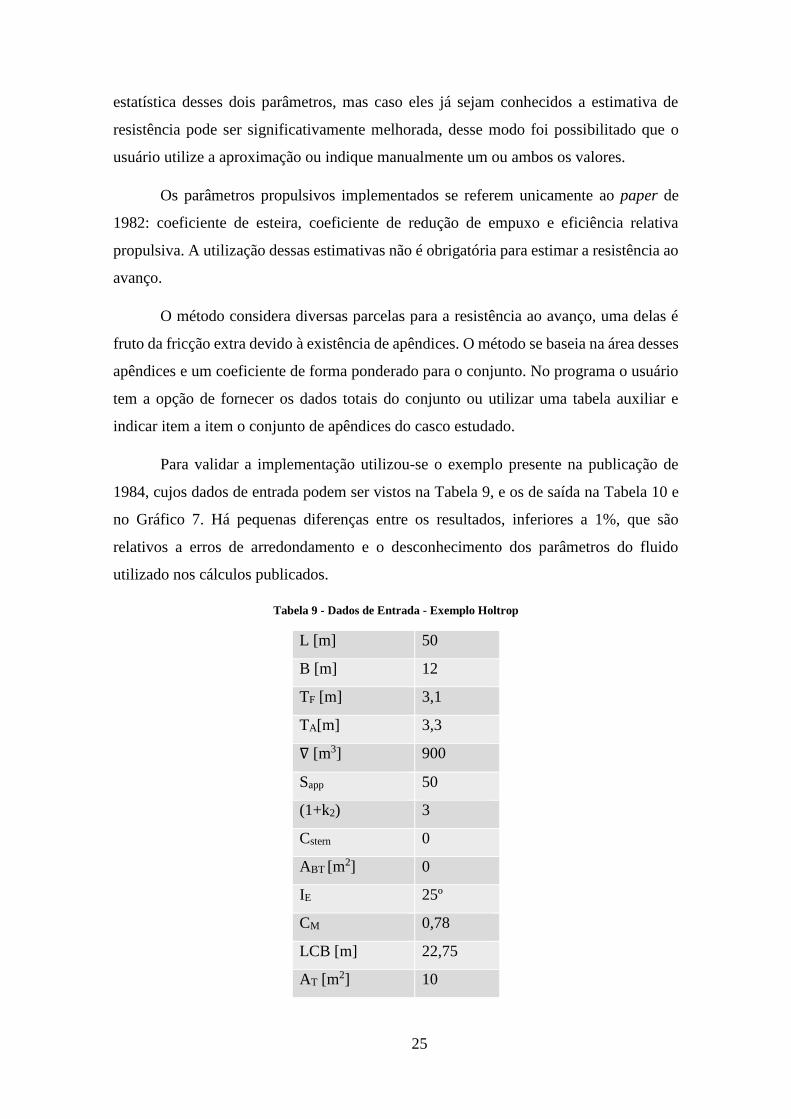
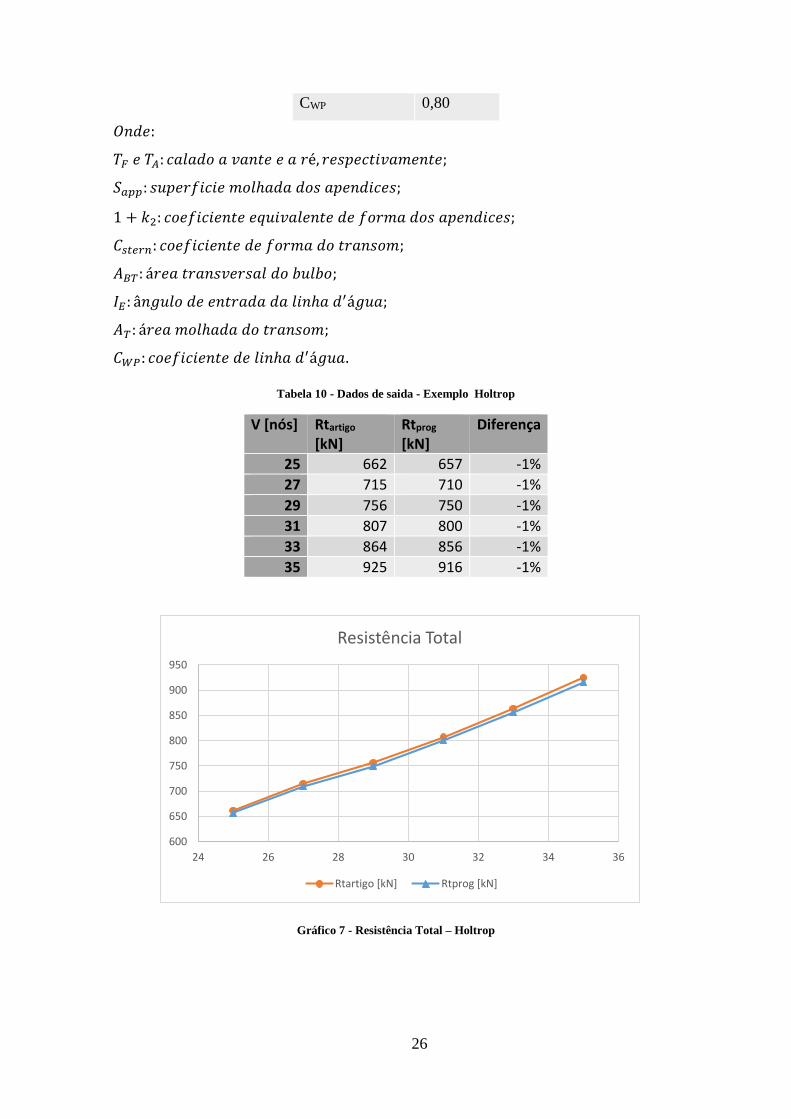
Para validar a implementação utilizou-se o exemplo presente na publicação de
1984, cujos dados de entrada podem ser vistos na Tabela 9, e os de saída na Tabela 10 e
no Gráfico 7. Há pequenas diferenças entre os resultados, inferiores a 1%, que são
relativos a erros de arredondamento e o desconhecimento dos parâmetros do fluido
utilizado nos cálculos publicados.
Tabela 9 - Dados de Entrada - Exemplo Holtrop
L [m] 50
B [m] 12
TF [m] 3,1
TA[m] 3,3
∇ [m3] 900
Sapp 50
(1+k2) 3
Cstern 0
ABT [m2] 0
IE 25º
CM 0,78
LCB [m] 22,75
AT [m2] 10
26
CWP 0,80
𝑂𝑛𝑑𝑒:
𝑇𝐹 𝑒 𝑇𝐴: 𝑐𝑎𝑙𝑎𝑑𝑜 𝑎 𝑣𝑎𝑛𝑡𝑒 𝑒 𝑎 𝑟é, 𝑟𝑒𝑠𝑝𝑒𝑐𝑡𝑖𝑣𝑎𝑚𝑒𝑛𝑡𝑒;
𝑆𝑎𝑝𝑝: 𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒 𝑚𝑜𝑙ℎ𝑎𝑑𝑎 𝑑𝑜𝑠 𝑎𝑝𝑒𝑛𝑑𝑖𝑐𝑒𝑠;
1 + 𝑘2: 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 𝑑𝑒 𝑓𝑜𝑟𝑚𝑎 𝑑𝑜𝑠 𝑎𝑝𝑒𝑛𝑑𝑖𝑐𝑒𝑠;
𝐶𝑠𝑡𝑒𝑟𝑛: 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑓𝑜𝑟𝑚𝑎 𝑑𝑜 𝑡𝑟𝑎𝑛𝑠𝑜𝑚;
𝐴𝐵𝑇: á𝑟𝑒𝑎 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙 𝑑𝑜 𝑏𝑢𝑙𝑏𝑜;
𝐼𝐸: â𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝑑𝑎 𝑙𝑖𝑛ℎ𝑎 𝑑′á𝑔𝑢𝑎;
𝐴𝑇: á𝑟𝑒𝑎 𝑚𝑜𝑙ℎ𝑎𝑑𝑎 𝑑𝑜 𝑡𝑟𝑎𝑛𝑠𝑜𝑚;
𝐶𝑊𝑃: 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑙𝑖𝑛ℎ𝑎 𝑑′á𝑔𝑢𝑎.
Tabela 10 - Dados de saida - Exemplo Holtrop
V [nós] Rtartigo [kN]
Rtprog [kN]
Diferença
25 662 657 -1%
27 715 710 -1%
29 756 750 -1%
31 807 800 -1%
33 864 856 -1%
35 925 916 -1%
Gráfico 7 - Resistência Total – Holtrop
600
650
700
750
800
850
900
950
24 26 28 30 32 34 36
Resistência Total
Rtartigo [kN] Rtprog [kN]
27
4.3.4 Propulsão
O último módulo do programa consiste em uma seleção preliminar de propulsores,
que já permite fazer uma pré-seleção dos motores e assim reconhecer um dos
componentes mais pesados do projeto, ajudando a validar a estimativa de peso e CG
utilizada no equilíbrio dinâmico.
Nessa aba o usuário pode fornecer os dados de resistência a ser vencida ou coletar
tal informação de um dos outros módulos. Depois é necessário configurar o sistema
propulsivo no que diz respeito a número de propulsores e suas posições. Por fim
especificações quanto aos parâmetros propulsivos e diâmetros possíveis para os
propulsores devem ser indicados para que o programa então encontre o conjunto de
hélices da série Newton-Rader que fornecem o empuxo necessário ao menor consumo de
potência. Essa seleção é feita calculando o 𝐾𝑇 requerido e buscando-o na curva 𝐾𝑇 , 𝐾𝑄 , 𝐽
de todos os possíveis hélices.
Além de apresentar todos os dados referentes a cada hélice ainda é possível
identificar todas as possíveis soluções e filtrá-las de acordo com uma faixa de rotação e
potência, considerando ainda um conjunto especificado de razões de redução.
Os dados desse módulo já foram vastamente conferidos, e sua implementação será
validada no exemplo de aplicação deste programa.
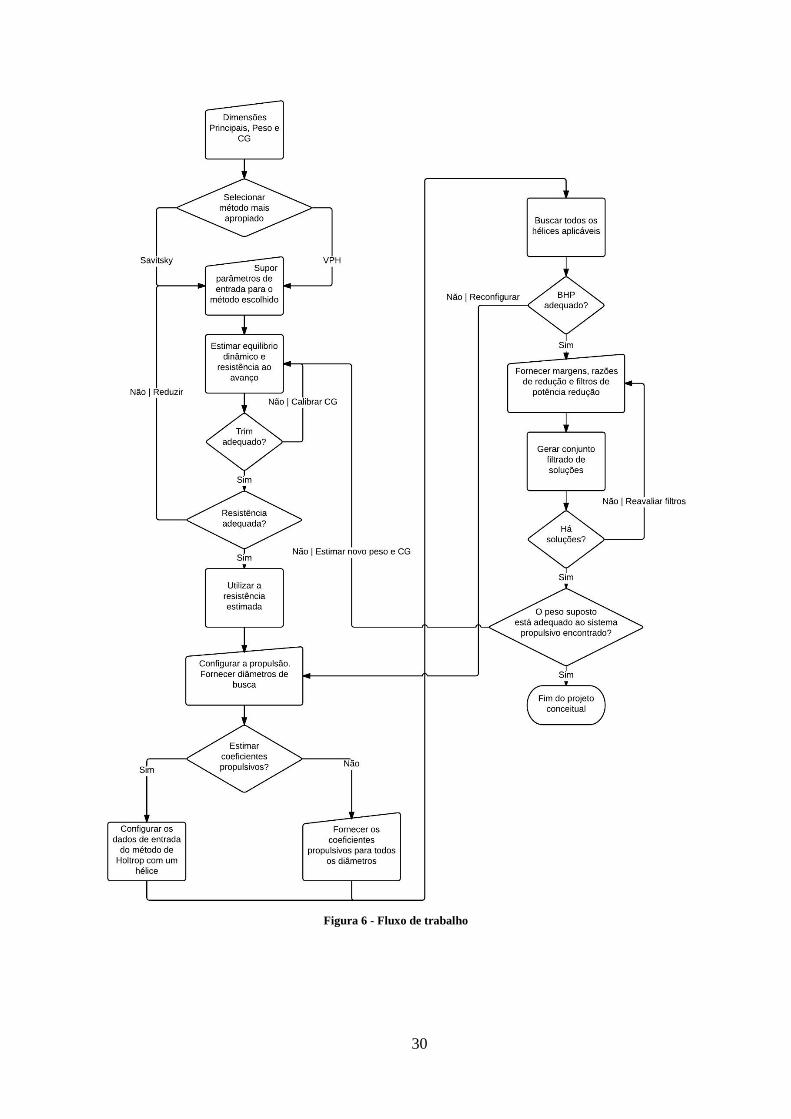
4.4 Fluxo de trabalho proposto
No caso de uma embarcação de planeio o projeto é centrado em dois problemas
principais: propulsão e equilíbrio dinâmico. Ambos são intimamente ligados e também
altamente dependentes da distribuição de peso aplicada.
O SFD é uma ferramenta robusta e interdisciplinar capaz de lidar com um projeto
preliminar desse tipo de embarcação, e o EqDin original seria um dos cores do projeto.
Nesse trabalho, todavia, uma proposta de adaptação do EqDin foi feita para aplicá-lo
somente ao projeto conceitual de embarcações de planeio. A Figura 6 ilustra em um
fluxograma a proposta de utilização desse programa.
[1]- O projetista deve ter boas estimativas das dimensões principais, requisitos
de projeto, características dominantes da geometria, peso e estimativa de
faixas de LCG (típicas de lancha) e do VCG da embarcação projetada.
28
[2]- De acordo com as características da forma utilizada e preferência do
projetista ele deve escolher entre utilizar o método de Savitsky ou o VPH.
Essa escolha deve ser feita considerando que o Savitsky é um método
tradicional e consagrado, porém limitado a embarcações prismáticas, e
quaisquer análises por equivalências requerem experiência e critica
aguçada do projetista. Em contrapartida há o VPH, desenvolvido para
embarcações não-prismáticas, porém é novo e ainda não se consagrou.
[3]- De acordo com o método escolhido deve-se supor ou estimar todos os
parâmetros geométricos necessários a execução do programa.
[4]- Com os dados fornecidos e o método selecionado o projetista executará o
programa, obtendo os dados de equilíbrio dinâmico e resistência. Na tela
integrada ele poderá avaliar a evolução do equilíbrio e resistência.
[5]- O projetista deverá então avaliar se o equilíbrio dinâmico é adequado a
aplicação do projeto. Caso não seja ele deverá estimar novamente o CG
voltando ao passo [4]. Caso contrário ele deve prosseguir.
[6]- Agora o projetista deve avaliar se a resistência está adequada. Caso ele
considere que alguma alteração na forma pode reduzir a resistência
mantendo um bom equilíbrio dinâmico ele deve voltar ao passo [3]. Caso
contrário ele prossegue.
[7]- O projetista irá usar a resistência estimada nos cálculos de propulsão.
[8]- O projetista deve fornecer os dados de entrada configurando o sistema
propulsivo do modo desejado: quantidade de eixos, posição vertical,
diâmetros a serem estudados.
[9]- Será necessário fornecer os coeficientes propulsivos ao programa. Ele
pode fornecê-los manualmente e partir para o passo [11] ou utilizar as
estimativas estatísticas de Holtrop no passo [10].
[10]- Para utilizar as estimativas de Holtrop para os coeficientes propulsivos é
necessário configurar os dados de entrada do método como se fosse
estimar a resistência, e mais, deve-se dar os dados de um hélice.
[11]- Já é possível executar o programa em busca de todos os hélices capazes de
propelir a embarcação na velocidade requerida.
[12]- Visualizando graficamente todos os candidatos a solução é possível avaliar
se o BHP está adequado ou não. Em caso negativo deve se reconfigurar o
sistema propulsivo retornando ao passo [8].
29
[13]- Caso o BHP inicial seja razoável o projetista deverá refinar o estudo
fornecendo as margens: mar, rotação e motor. Indicar ainda todas as razões
de redução que ele deseja utilizar, bem como as faixas de rotação e
potência de que dispõem.
[14]- É possível então aplicar os filtros e margens a todos os hélices,
considerando cada um individualmente com cada razão de redução. Isso
deve ser feito com o auxílio de experiência ou catálogos comerciais.
[15]- Caso não haja nenhuma solução o projetista deve reavaliar os filtros com
auxilio gráfico das diversas possibilidades.
[16]- Dentre as diversas soluções possíveis deve-se avaliar se alguma delas será
adotada e se o peso desse sistema propulsivo definido está de acordo com
a estimativa de peso proposta inicialmente e caso necessário retornar ao
passo [4].
Essa proposta será aplicada em um exemplo prático mais adiante nesse trabalho.
Ao longo do exemplo os dados numéricos, bem como as telas e ferramentas do programa
serão apresentados por figuras, gráficos e tabelas, todos retirados diretamente do
programa ou através da função report.
30
Figura 6 - Fluxo de trabalho
31
5. Manual de utilização
5.1 Ambiente global
A interface do programa foi elaborada de modo que cada método pudesse ser
aplicado e o projetista mantivesse dados de entrada e saída sempre disponíveis, lado a
lado. Além da própria aplicação dos métodos, algumas ferramentas foram criadas em um
planejamento ergonômico, de modo a facilitar o processo de projeto, o fluxo de
informações e trabalhar com os dados em outros programas e sistemas.
Todos os dados fornecidos pelo projetista ao longo da execução do programa
possuem as unidades indicada ao lado do campo, sempre com uma dupla opção: unidade
métrica ou inglesa. Independentemente da opção escolhida para os dados de saída, o
usuário pode fornecer qualquer dado, a qualquer instante em ambas as unidades, que o
programa automaticamente converte e completa a lacuna equivalente no outro sistema de
medidas.
O programa trabalha apenas com um referencial para a geometria da embarcação.
Esse referencial é cartesiano, com origem no extremo de ré, no plano diametral no ponto
mais baixo da embarcação.
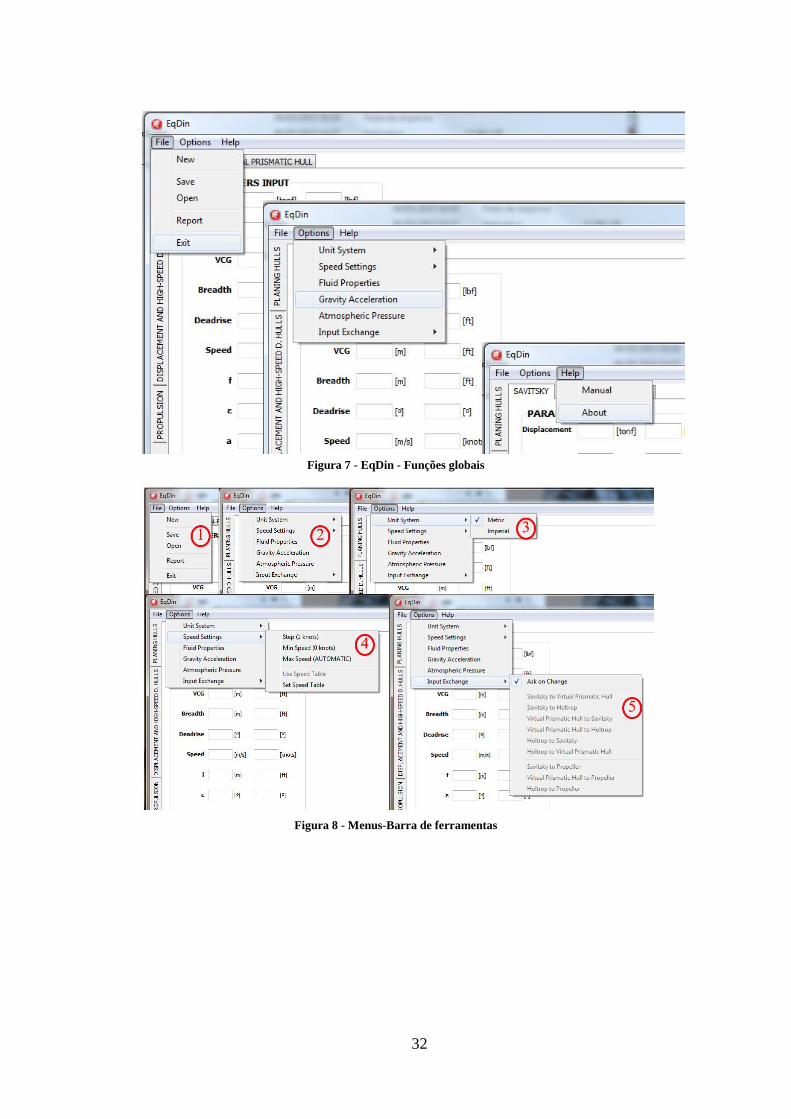
O programa conta com opções corriqueiras a todo o tipo de programa: novo, salvar
e abrir. Conta ainda com opções simples para configurar os parâmetros ambientais
utilizados nas estimativas: propriedades do fluido, aceleração da gravidade e pressão
atmosférica. Opções de controle do sistema de unidade do output, velocidades utilizadas
nas estimativas, troca de dados entre os métodos e report também estão disponíveis.
32
Figura 7 - EqDin - Funções globais
Figura 8 - Menus-Barra de ferramentas
33
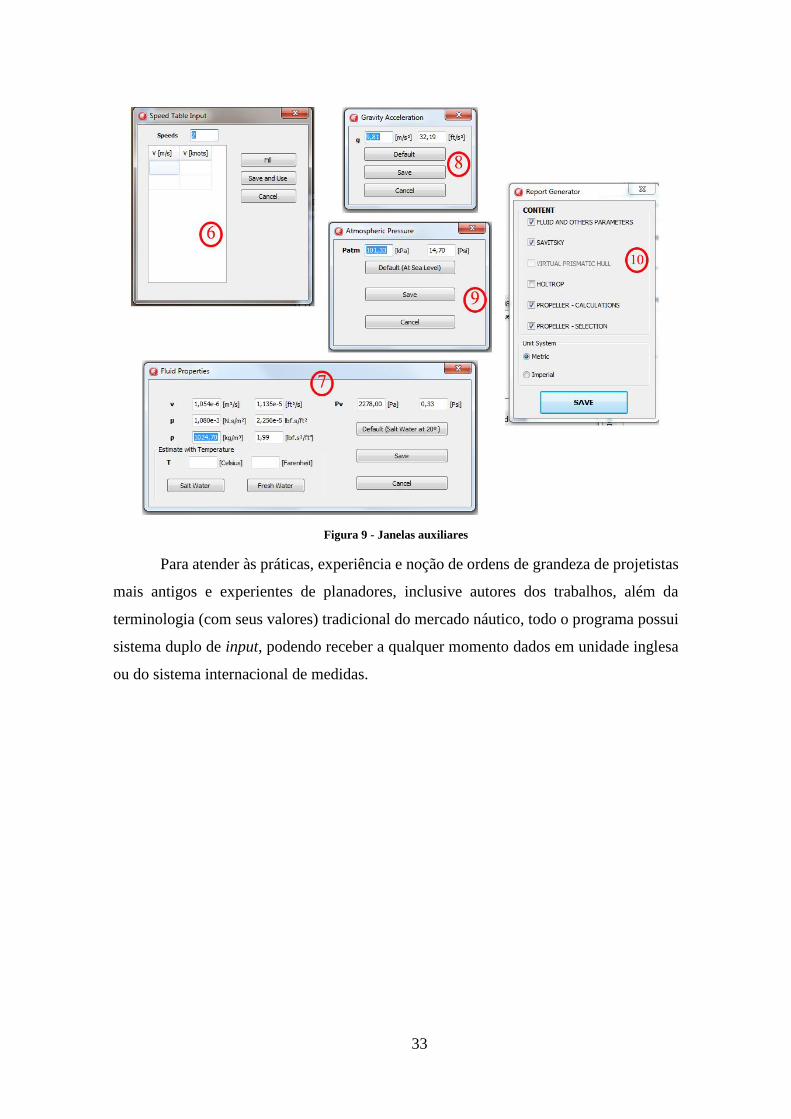
Figura 9 - Janelas auxiliares
Para atender às práticas, experiência e noção de ordens de grandeza de projetistas
mais antigos e experientes de planadores, inclusive autores dos trabalhos, além da
terminologia (com seus valores) tradicional do mercado náutico, todo o programa possui
sistema duplo de input, podendo receber a qualquer momento dados em unidade inglesa
ou do sistema internacional de medidas.
34
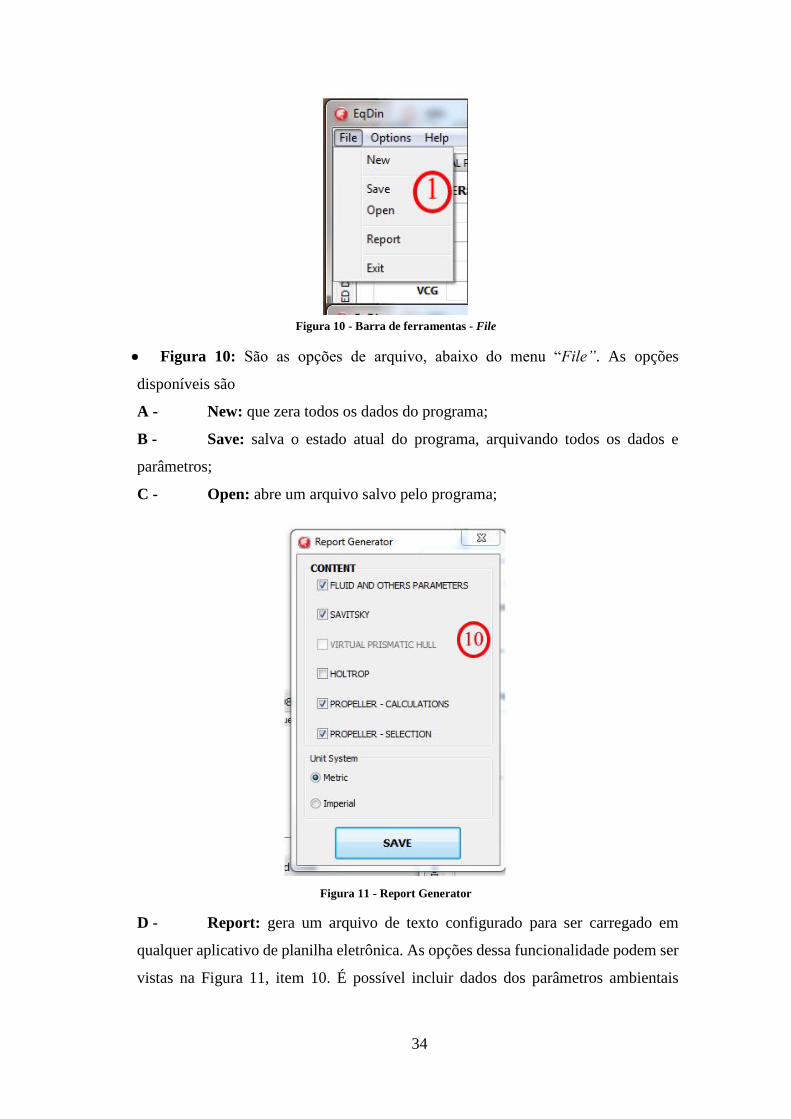
Figura 10 - Barra de ferramentas - File
Figura 10: São as opções de arquivo, abaixo do menu “File”. As opções
disponíveis são
A - New: que zera todos os dados do programa;
B - Save: salva o estado atual do programa, arquivando todos os dados e
parâmetros;
C - Open: abre um arquivo salvo pelo programa;
Figura 11 - Report Generator
D - Report: gera um arquivo de texto configurado para ser carregado em
qualquer aplicativo de planilha eletrônica. As opções dessa funcionalidade podem ser
vistas na Figura 11, item 10. É possível incluir dados dos parâmetros ambientais
35
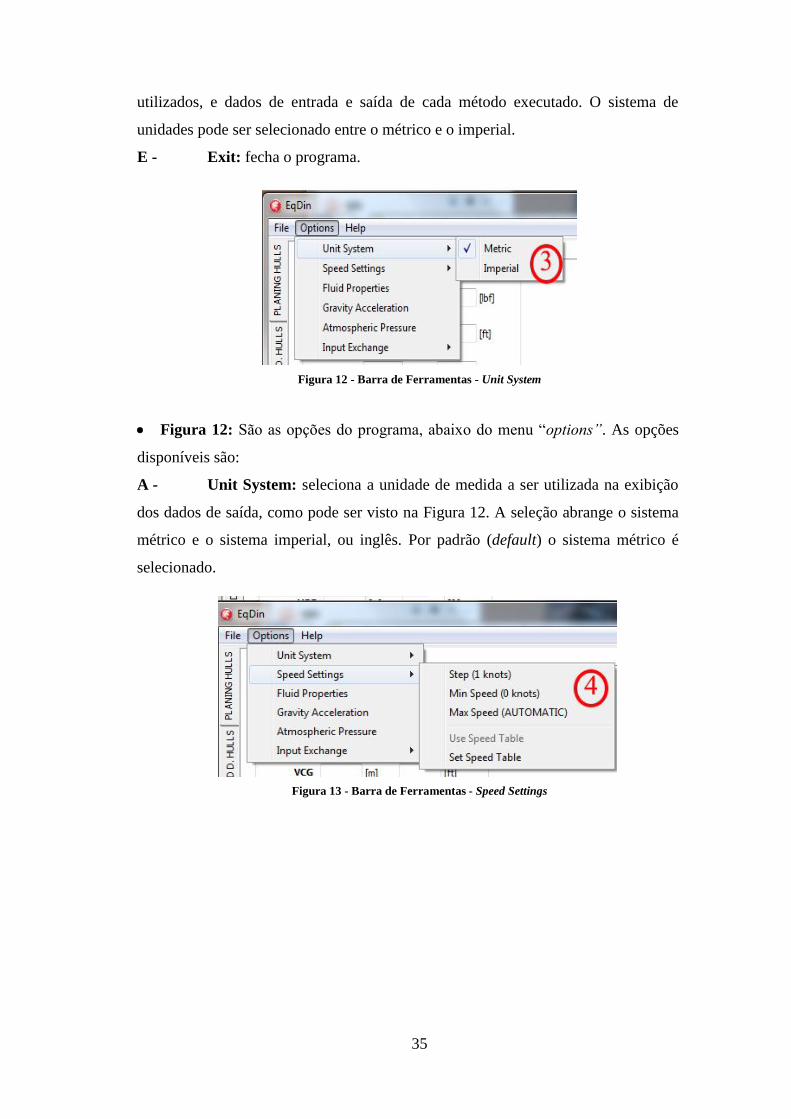
utilizados, e dados de entrada e saída de cada método executado. O sistema de
unidades pode ser selecionado entre o métrico e o imperial.
E - Exit: fecha o programa.
Figura 12: São as opções do programa, abaixo do menu “options”. As opções
disponíveis são:
A - Unit System: seleciona a unidade de medida a ser utilizada na exibição
dos dados de saída, como pode ser visto na Figura 12. A seleção abrange o sistema
métrico e o sistema imperial, ou inglês. Por padrão (default) o sistema métrico é
selecionado.
Figura 12 - Barra de Ferramentas - Unit System
Figura 13 - Barra de Ferramentas - Speed Settings
36
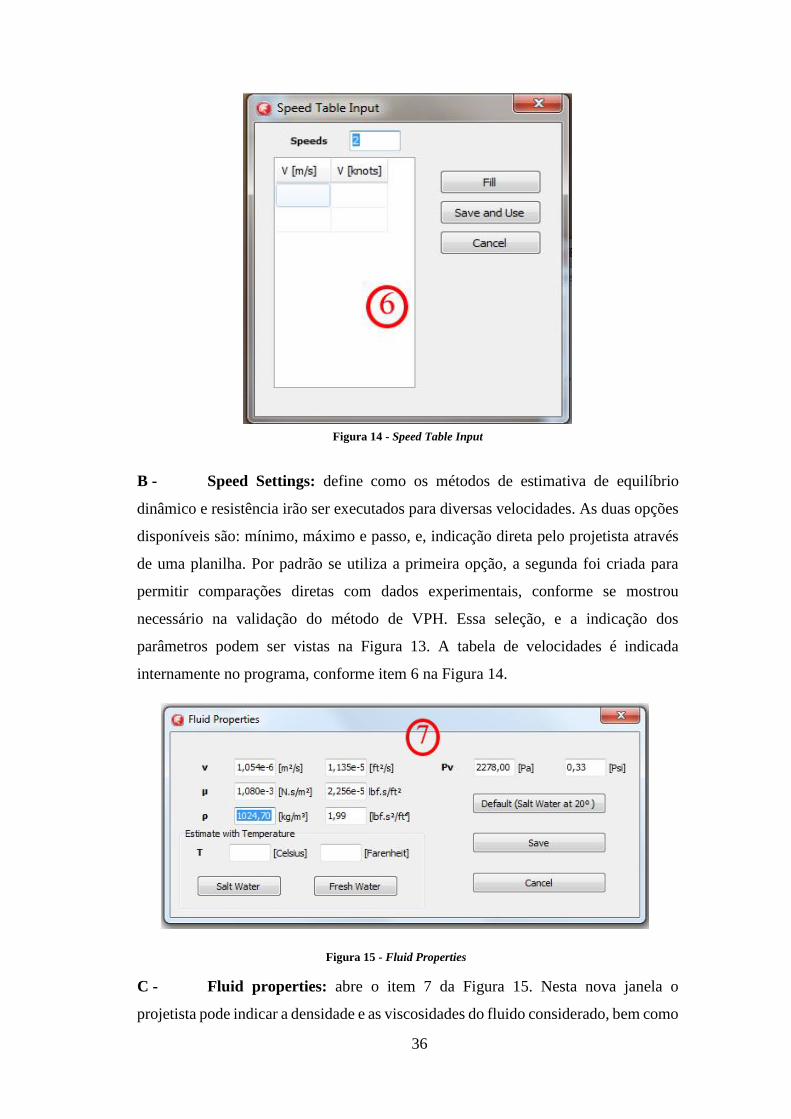
B - Speed Settings: define como os métodos de estimativa de equilíbrio
dinâmico e resistência irão ser executados para diversas velocidades. As duas opções
disponíveis são: mínimo, máximo e passo, e, indicação direta pelo projetista através
de uma planilha. Por padrão se utiliza a primeira opção, a segunda foi criada para
permitir comparações diretas com dados experimentais, conforme se mostrou
necessário na validação do método de VPH. Essa seleção, e a indicação dos
parâmetros podem ser vistas na Figura 13. A tabela de velocidades é indicada
internamente no programa, conforme item 6 na Figura 14.
Figura 15 - Fluid Properties
C - Fluid properties: abre o item 7 da Figura 15. Nesta nova janela o
projetista pode indicar a densidade e as viscosidades do fluido considerado, bem como
Figura 14 - Speed Table Input
37
a pressão de saturação do mesmo. Para facilitar a aplicação os três primeiros
parâmetros foram parametrizados com a temperatura, tanto para água salgada como
doce. Para utilizar esse recurso o projetista indica a temperatura de projeto, e seleciona
água doce ou salgada. O programa então calcula os parâmetros e preenche a interface.
Por padrão é utilizado água salgada a 20ºC, informação que pode ser recuperada a
qualquer momento.
Figura 16 - Gravity Acceleration/Atmospheric Pressure
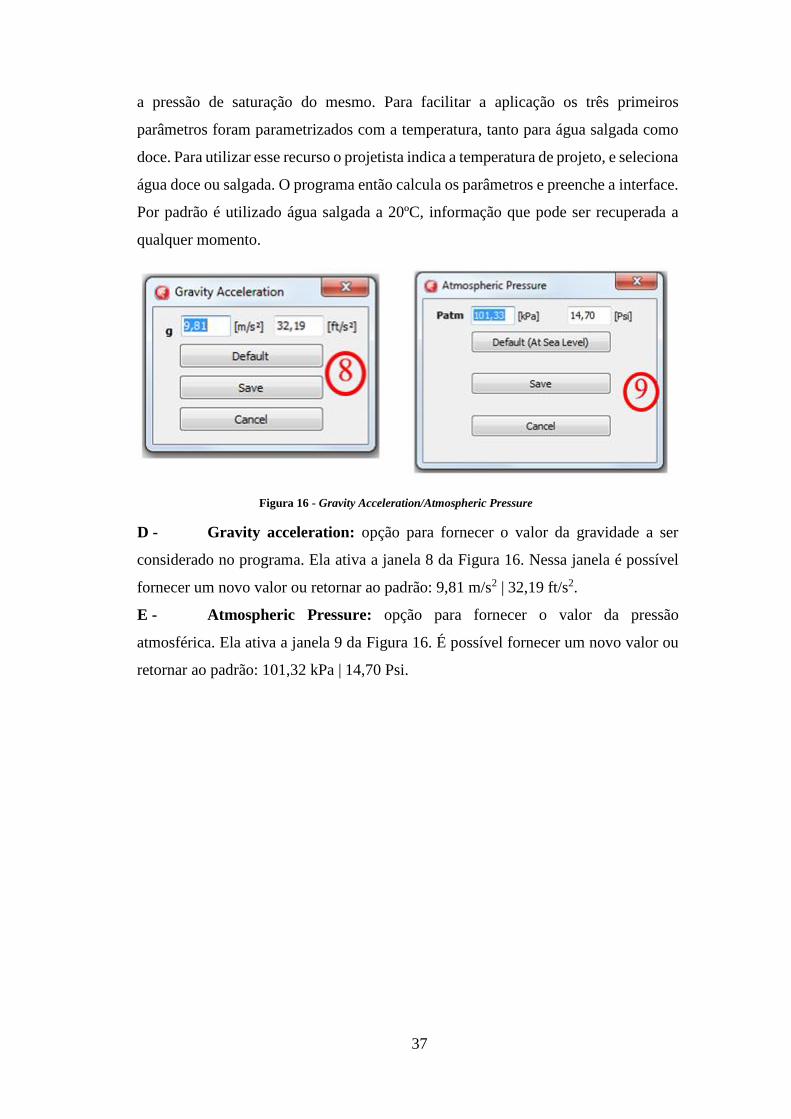
D - Gravity acceleration: opção para fornecer o valor da gravidade a ser
considerado no programa. Ela ativa a janela 8 da Figura 16. Nessa janela é possível
fornecer um novo valor ou retornar ao padrão: 9,81 m/s2 | 32,19 ft/s2.
E - Atmospheric Pressure: opção para fornecer o valor da pressão
atmosférica. Ela ativa a janela 9 da Figura 16. É possível fornecer um novo valor ou
retornar ao padrão: 101,32 kPa | 14,70 Psi.
38
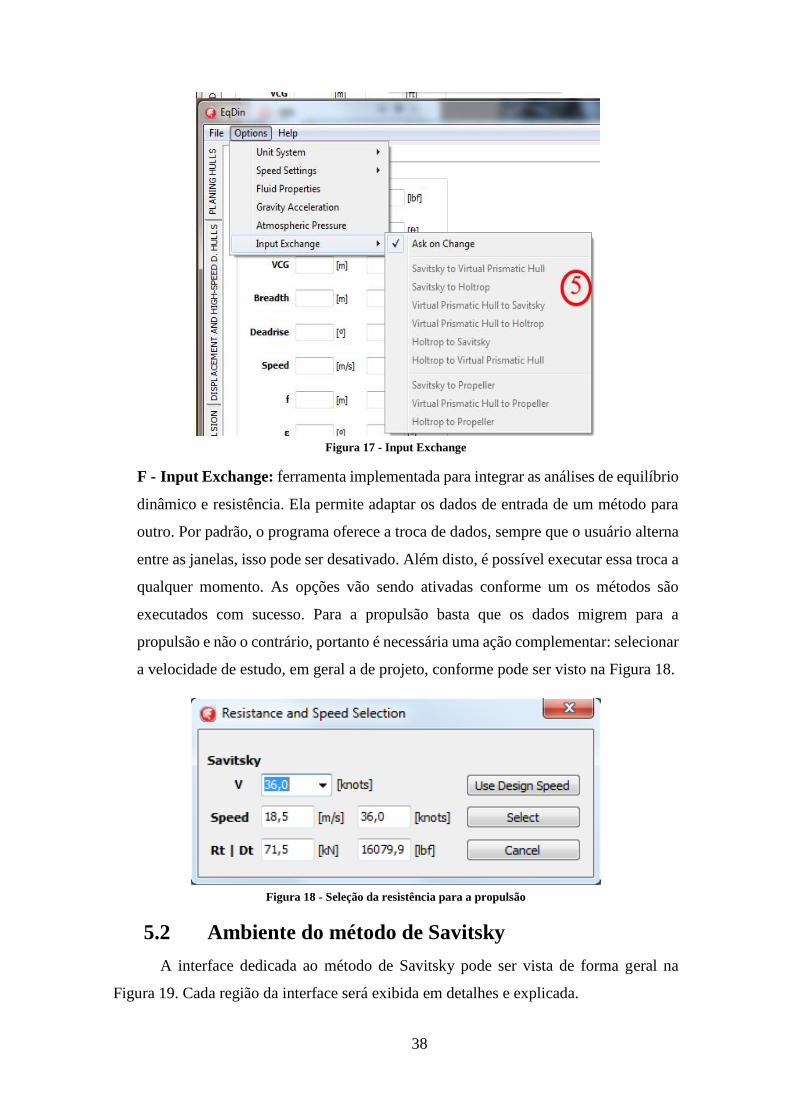
Figura 17 - Input Exchange
F - Input Exchange: ferramenta implementada para integrar as análises de equilíbrio
dinâmico e resistência. Ela permite adaptar os dados de entrada de um método para
outro. Por padrão, o programa oferece a troca de dados, sempre que o usuário alterna
entre as janelas, isso pode ser desativado. Além disto, é possível executar essa troca a
qualquer momento. As opções vão sendo ativadas conforme um os métodos são
executados com sucesso. Para a propulsão basta que os dados migrem para a
propulsão e não o contrário, portanto é necessária uma ação complementar: selecionar
a velocidade de estudo, em geral a de projeto, conforme pode ser visto na Figura 18.
Figura 18 - Seleção da resistência para a propulsão
5.2 Ambiente do método de Savitsky
A interface dedicada ao método de Savitsky pode ser vista de forma geral na
Figura 19. Cada região da interface será exibida em detalhes e explicada.
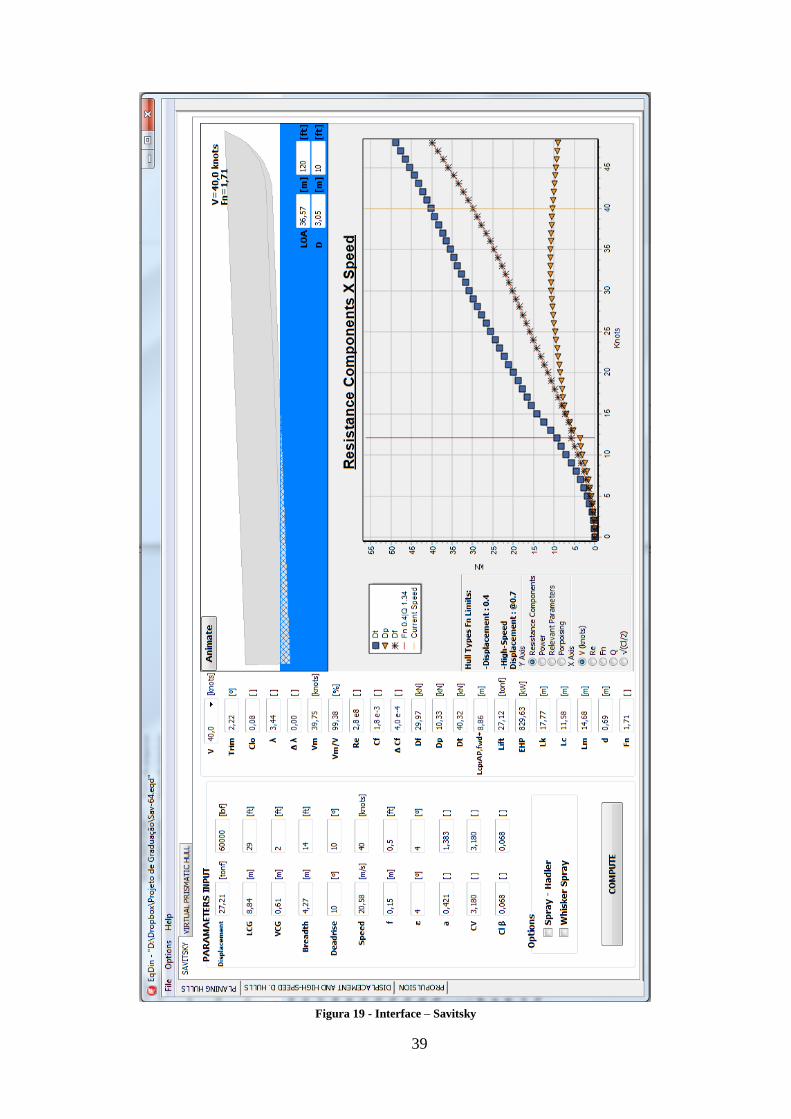
39
Figura 19 - Interface – Savitsky
40
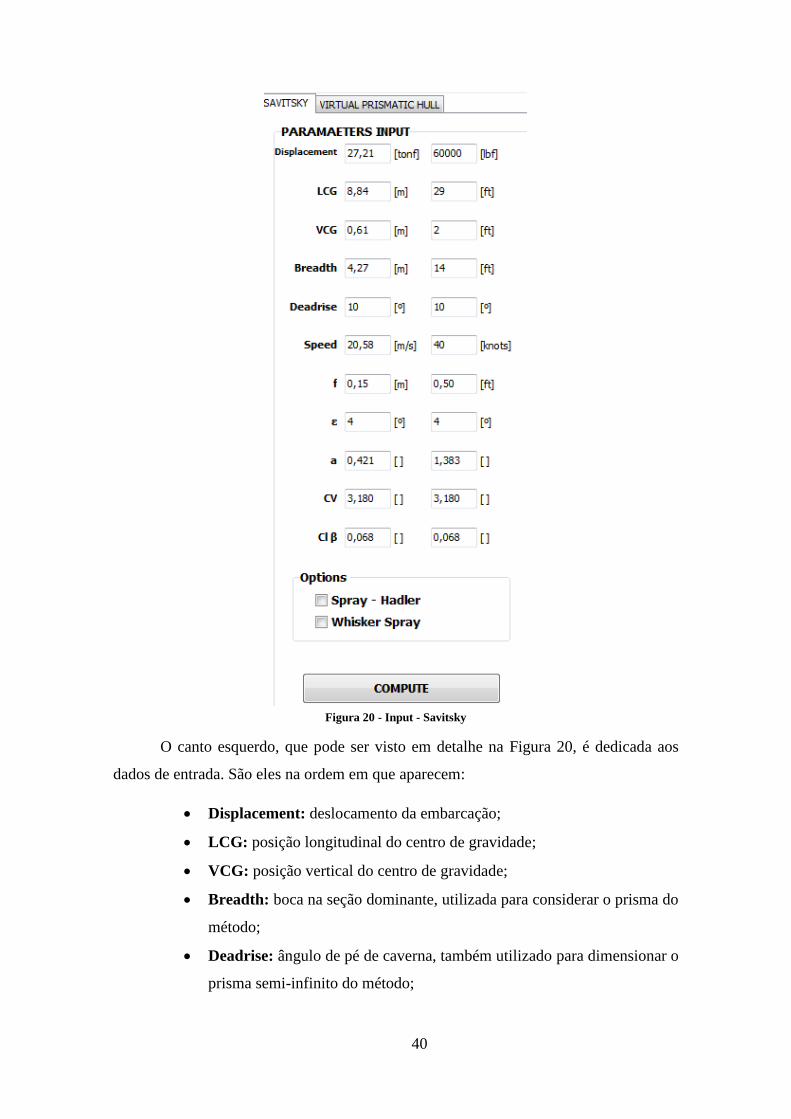
Figura 20 - Input - Savitsky
O canto esquerdo, que pode ser visto em detalhe na Figura 20, é dedicada aos
dados de entrada. São eles na ordem em que aparecem:
Displacement: deslocamento da embarcação;
LCG: posição longitudinal do centro de gravidade;
VCG: posição vertical do centro de gravidade;
Breadth: boca na seção dominante, utilizada para considerar o prisma do
método;
Deadrise: ângulo de pé de caverna, também utilizado para dimensionar o
prisma semi-infinito do método;
41
Speed: velocidade de projeto. Caso a opção de utilizar uma tabela com as
velocidades esteja selecionada, ela não poderá ser preenchida, e conterá o
texto “table”. Se a velocidade mínima, máxima ou o passo de aplicação
dessas velocidades conflitar com a velocidade de projeto, elas são
automaticamente ajustadas para: 0 nós (mínima), 120% da velocidade de
projeto (máxima), 1 nó (passo);
f: posição longitudinal de aplicação da força propulsiva;
𝝐: ângulo entre a linha de base e a força propulsiva;
a: distância vertical entre o arrasto e o cetro de gravidade, medido normal
ao arrasto. Parâmetro calculado automaticamente;
𝑪𝑽: coeficiente de velocidade, análogo ao número de froude, considerado
transversalmente. Parâmetro calculado automaticamente.
𝑪𝒍𝜷: coeficiente de sustentação para o prisma considerado. Parâmetro
calculado automaticamente.
Spray – Hadler: inclui o efeito de resistência devido ao spray através das
estimativas proposta por Hadler, 1976;
Whisker Spray: análogo a opção anterior, mas considerando as
estimativas propostas por Savitsky et al (2007).
As opções de spray são excludentes, portanto ao selecionar um dos métodos, o
programa desmarca a outra opção.
Após preencher todo o input, é possível utilizar o botão “compute”, então o
programa encontrará o equilíbrio dinâmico para todas as velocidades, habilitando o
output, os gráficos e o desenho da forma.
42
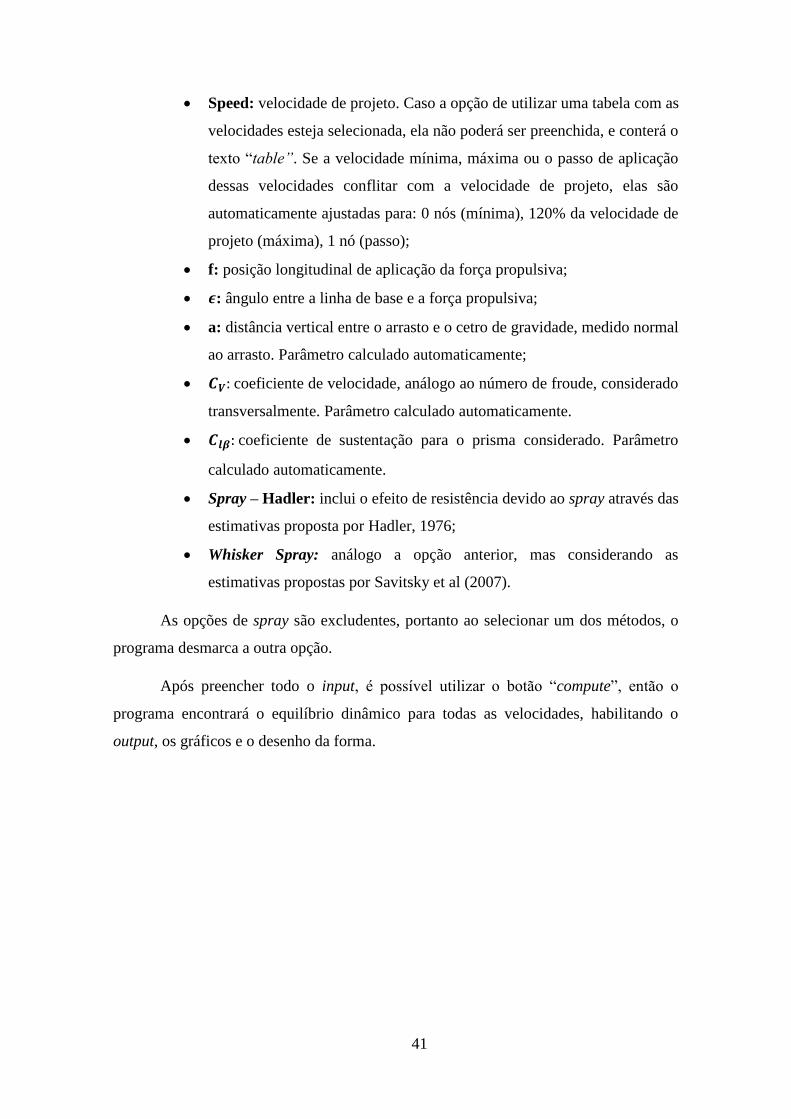
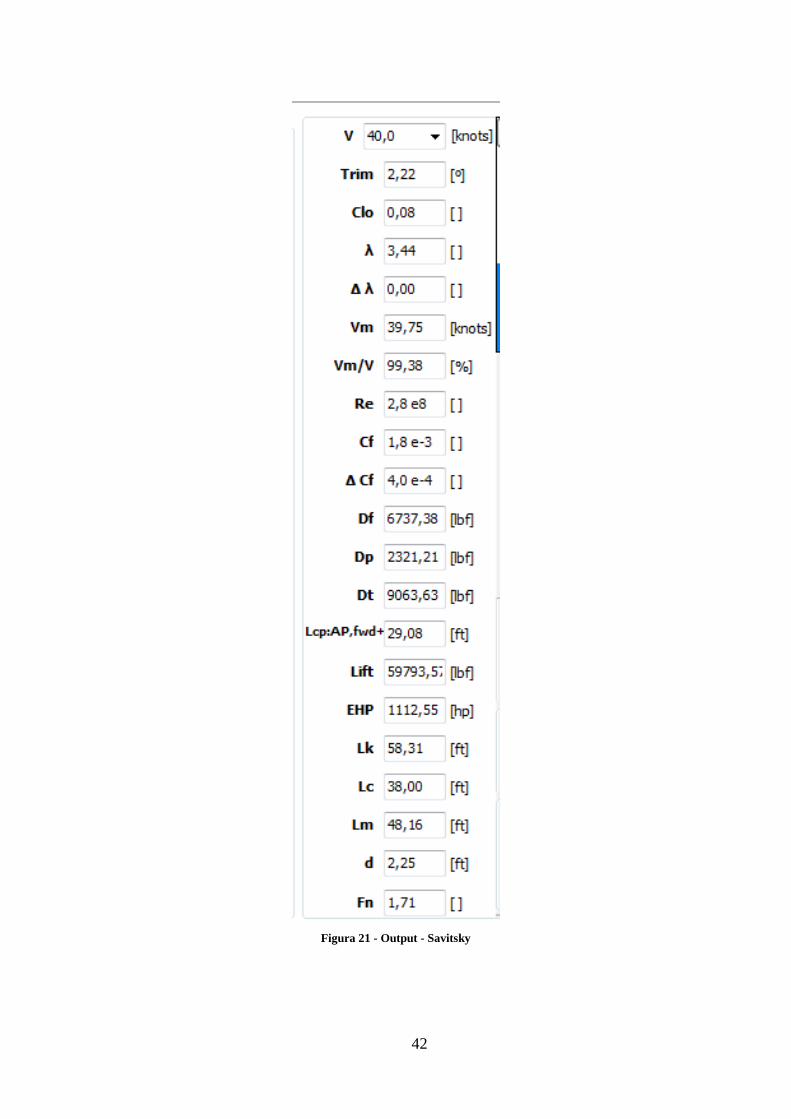
Figura 21 - Output - Savitsky
43
Logo ao lado dos dados de entrada se encontram os dados de saída. Sua
apresentação numérica pode ser vista em detalhes na Figura 21. Os dados de saída são:
V: velocidade. Por padrão se exibe a velocidade de projeto, mas pode-se
investigar qualquer outra velocidade calculada. Basta selecionar outra no
campo;
Trim: ângulo de trim alcançado no equilíbrio dinâmico. Positivo a vante.
𝑪𝒍𝟎: coeficiente de sustentação do prisma desconsiderando o ângulo de pé
de caverna, ou deadrise;
𝝀: razão entre o comprimento molhado médio e a boca;
𝚫𝝀: incremento na razão acima devido o spray.
𝐕𝐦: velocidade média no fundo do casco;
𝑽𝒎
𝑽: razão entre a velocidade média no fundo do caso e a velocidade de
projeto;
Re: número de Reynolds;
𝑪𝒇: coeficiente friccional de Schoenherr;
𝚫𝑪𝒇: incremento no coeficiente friccional devido a rugosidade do casco;
𝑫𝒇: arrasto de origem friccional;
𝑫𝒑: arrasto de origem de pressão;
𝑫𝒕: arrasto total;
𝑳𝒄𝒑: posição longitudinal do centro de pressão;
Lift: sustentação total atuando no casco;
EHP: potência efetiva;
𝑳𝒌: comprimento de quilha molhada;
𝑳𝒄: comprimento de quina molhada;
𝑳𝒎: média entre os comprimentos de quina e quilha;
d: afundamento do casco;
Fn: número de Froude.
44
Figura 22 - Gráfico - Savitsky
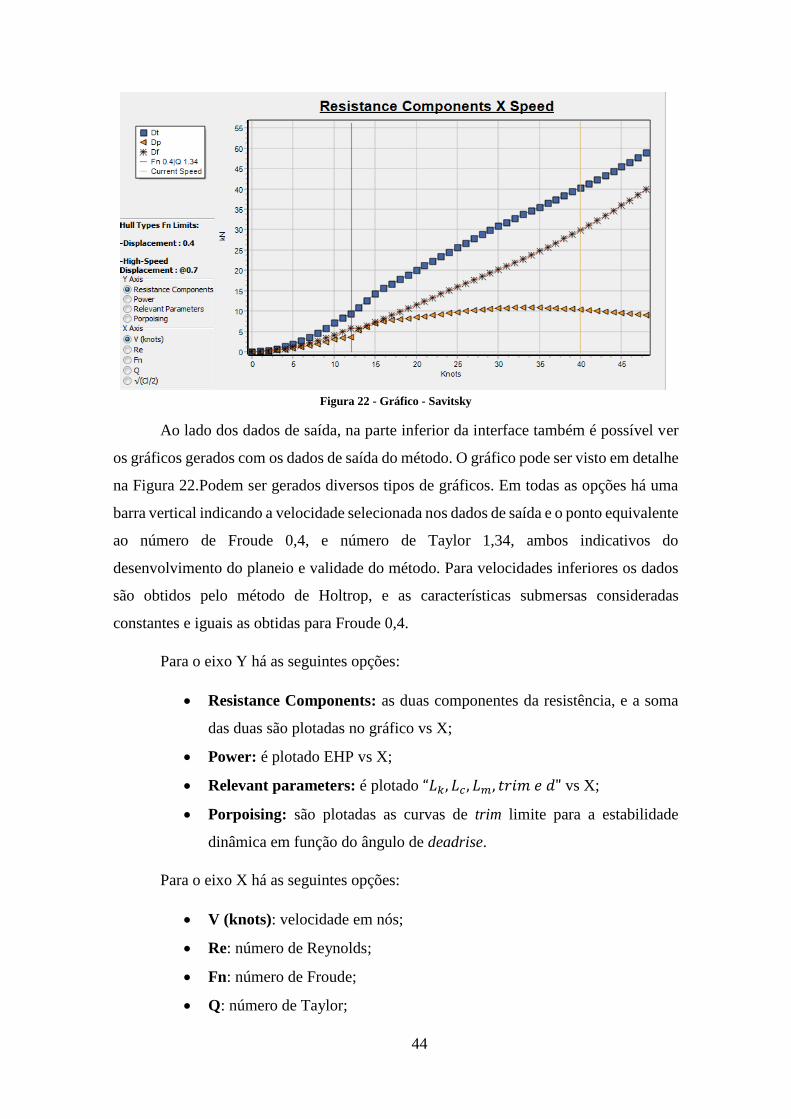
Ao lado dos dados de saída, na parte inferior da interface também é possível ver
os gráficos gerados com os dados de saída do método. O gráfico pode ser visto em detalhe
na Figura 22.Podem ser gerados diversos tipos de gráficos. Em todas as opções há uma
barra vertical indicando a velocidade selecionada nos dados de saída e o ponto equivalente
ao número de Froude 0,4, e número de Taylor 1,34, ambos indicativos do
desenvolvimento do planeio e validade do método. Para velocidades inferiores os dados
são obtidos pelo método de Holtrop, e as características submersas consideradas
constantes e iguais as obtidas para Froude 0,4.
Para o eixo Y há as seguintes opções:
Resistance Components: as duas componentes da resistência, e a soma
das duas são plotadas no gráfico vs X;
Power: é plotado EHP vs X;
Relevant parameters: é plotado “𝐿𝑘, 𝐿𝑐 , 𝐿𝑚, 𝑡𝑟𝑖𝑚 𝑒 𝑑" vs X;
Porpoising: são plotadas as curvas de trim limite para a estabilidade
dinâmica em função do ângulo de deadrise.
Para o eixo X há as seguintes opções:
V (knots): velocidade em nós;
Re: número de Reynolds;
Fn: número de Froude;
Q: número de Taylor;
45
√𝑪𝒍
𝟐: Raiz de coeficiente de sustentação sobre dois. Parâmetro utilizado
originalmente para avaliação da estabilidade dinâmica. Implementado
para preservar a análise original proposta por Savitsky, disponível apenas
para a opção de Porpoising.
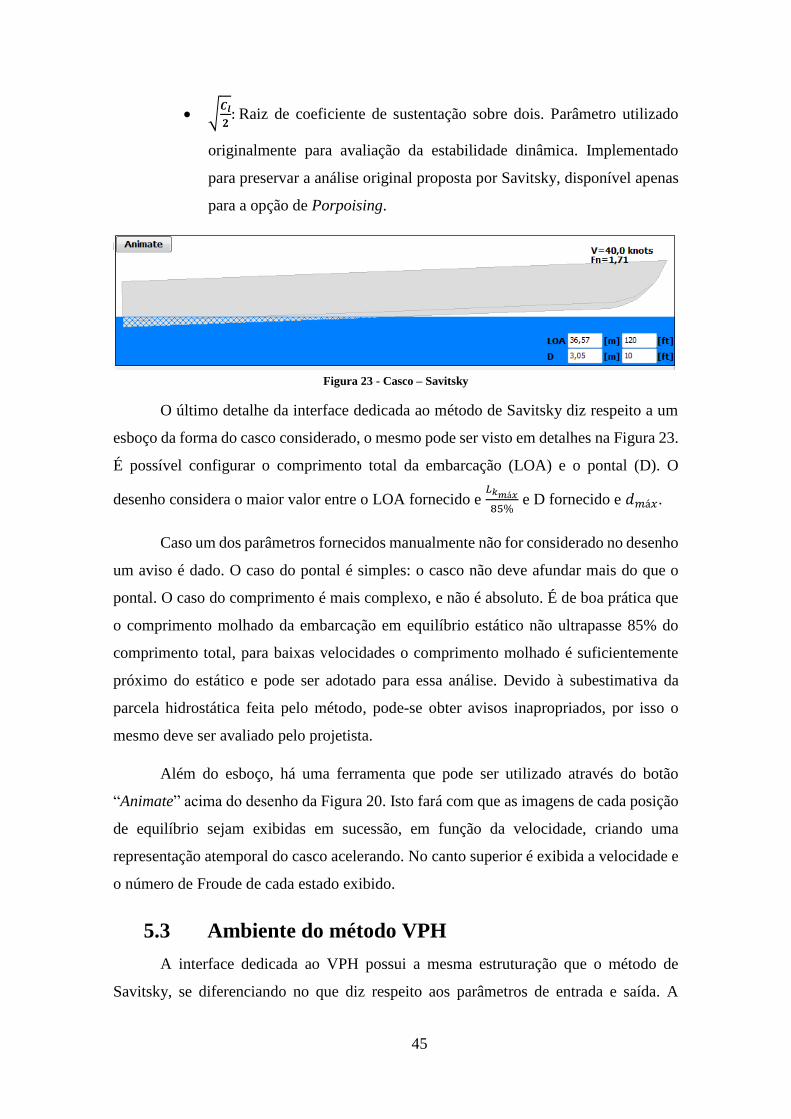
Figura 23 - Casco – Savitsky
O último detalhe da interface dedicada ao método de Savitsky diz respeito a um
esboço da forma do casco considerado, o mesmo pode ser visto em detalhes na Figura 23.
É possível configurar o comprimento total da embarcação (LOA) e o pontal (D). O
desenho considera o maior valor entre o LOA fornecido e 𝐿𝑘𝑚á𝑥
85% e D fornecido e 𝑑𝑚á𝑥.
Caso um dos parâmetros fornecidos manualmente não for considerado no desenho
um aviso é dado. O caso do pontal é simples: o casco não deve afundar mais do que o
pontal. O caso do comprimento é mais complexo, e não é absoluto. É de boa prática que
o comprimento molhado da embarcação em equilíbrio estático não ultrapasse 85% do
comprimento total, para baixas velocidades o comprimento molhado é suficientemente
próximo do estático e pode ser adotado para essa análise. Devido à subestimativa da
parcela hidrostática feita pelo método, pode-se obter avisos inapropriados, por isso o
mesmo deve ser avaliado pelo projetista.
Além do esboço, há uma ferramenta que pode ser utilizado através do botão
“Animate” acima do desenho da Figura 20. Isto fará com que as imagens de cada posição
de equilíbrio sejam exibidas em sucessão, em função da velocidade, criando uma
representação atemporal do casco acelerando. No canto superior é exibida a velocidade e
o número de Froude de cada estado exibido.
5.3 Ambiente do método VPH
A interface dedicada ao VPH possui a mesma estruturação que o método de
Savitsky, se diferenciando no que diz respeito aos parâmetros de entrada e saída. A
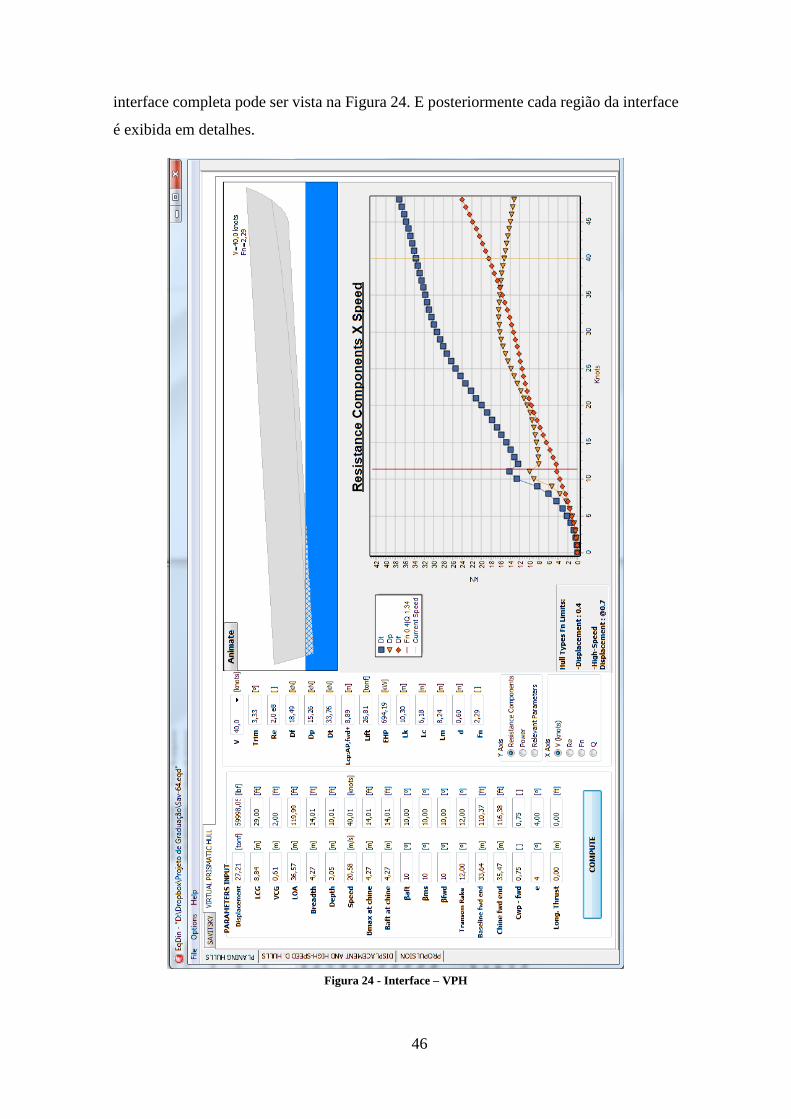
46
interface completa pode ser vista na Figura 24. E posteriormente cada região da interface
é exibida em detalhes.
Figura 24 - Interface – VPH
47
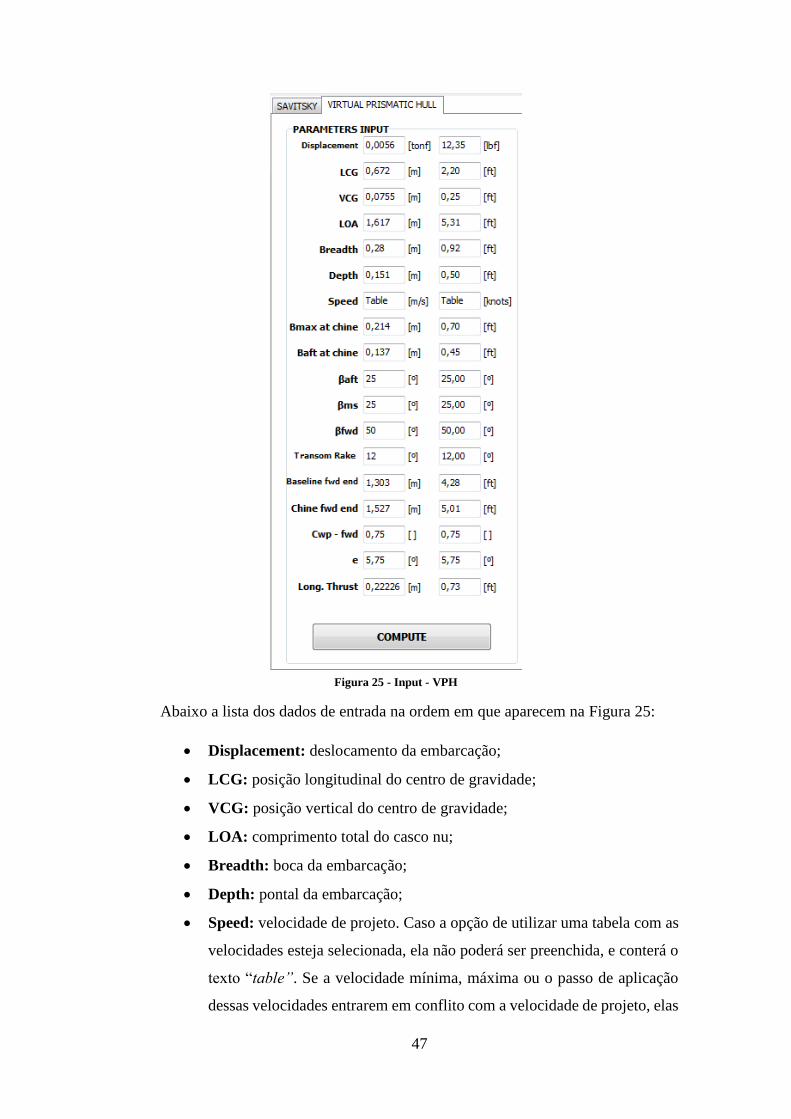
Figura 25 - Input - VPH
Abaixo a lista dos dados de entrada na ordem em que aparecem na Figura 25:
Displacement: deslocamento da embarcação;
LCG: posição longitudinal do centro de gravidade;
VCG: posição vertical do centro de gravidade;
LOA: comprimento total do casco nu;
Breadth: boca da embarcação;
Depth: pontal da embarcação;
Speed: velocidade de projeto. Caso a opção de utilizar uma tabela com as
velocidades esteja selecionada, ela não poderá ser preenchida, e conterá o
texto “table”. Se a velocidade mínima, máxima ou o passo de aplicação
dessas velocidades entrarem em conflito com a velocidade de projeto, elas
48
são automaticamente ajustadas para: 0 nós (mínima), 120% da velocidade
de projeto (máxima), 1 nó (passo);
𝐁𝐦á𝐱 at chine: boca máxima na quina;
𝐁𝐚𝐟𝐭 at chine: boca no extremo de ré da quina, medida na mesma;
𝜷𝒂𝒇𝒕: ângulo de pé de caverna a ré do casco;
𝜷𝒎𝒔: ângulo de pé de caverna a meia seção;
𝜷𝒇𝒘𝒅: ângulo de pé de caverna a vante do casco;
Transom Rake: ângulo de Rake no espelho de popa;
Baseline fwd end: posição longitudinal onde a quilha começa a se elevar;
Chine fwd end: posição longitudinal onde a quina encontra a quilha,
deixando de existir;
Cwp – fwd: coeficiente de área a vante;
𝝐: ângulo entre a linha de base e a força propulsiva;
Long. Thrust: posição longitudinal de aplicação da força propulsiva;
Após preencher todo o input, é possível utilizar o botão “compute”, então o
programa encontrará o equilíbrio dinâmico para todas as velocidades, habilitando o
output, os gráficos e o desenho da forma.
49
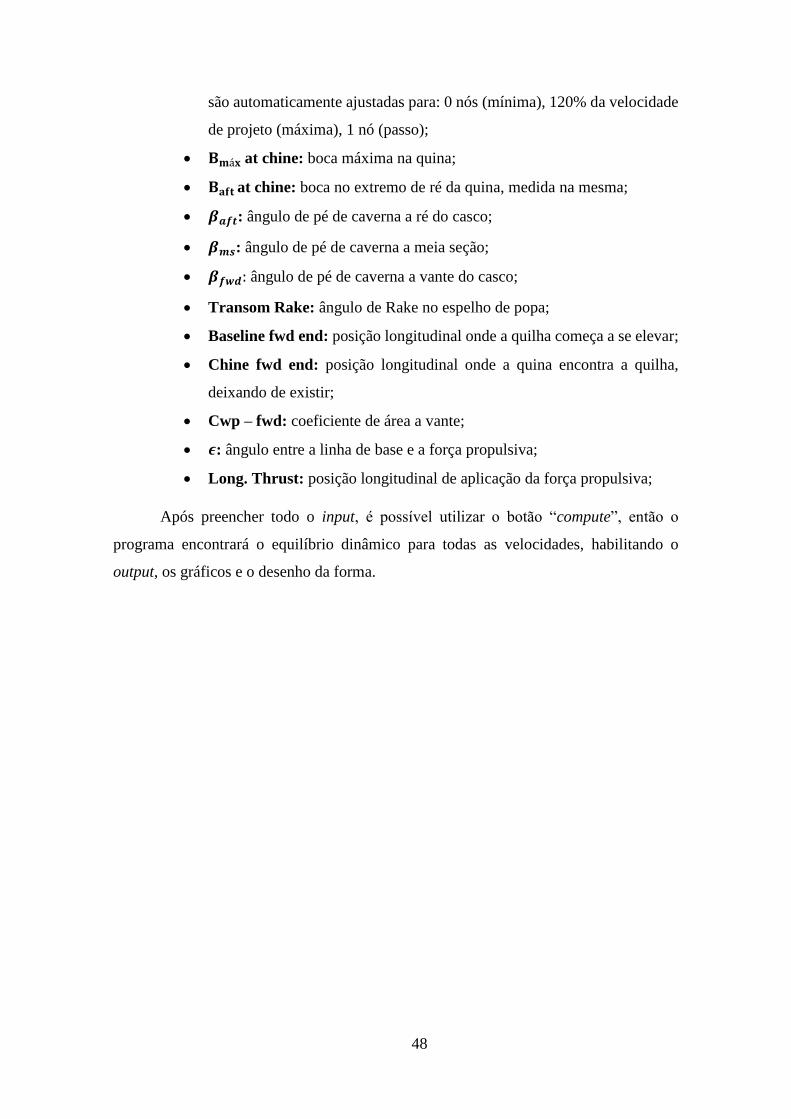
Figura 26 - Output - VPH
O output pode ser visto na Figura 26, abaixo a lista de dados obtidos após a
execução do método:
V: velocidade. Por padrão se exibe a velocidade de projeto, mas pode-se
investigar qualquer outra velocidade calculada. Basta selecionar outra no
campo;
Trim: ângulo de trim alcançado no equilíbrio dinâmico. Positivo a vante.
Re: número de Reynolds;
𝑫𝒇: arrasto de origem friccional;
𝑫𝒑: arrasto de origem de pressão;
𝑫𝒕: arrasto total;
𝑳𝒄𝒑: posição longitudinal do centro de pressão em relação à popa;
Lift: sustentação total atuando no casco;
EHP: potência efetiva;
50
𝑳𝒌: comprimento de quilha molhada;
𝑳𝒄: comprimento de quina molhada;
𝑳𝒎: média entre os comprimentos de quina e quilha;
d: afundamento do casco;
Fn: número de Froude.
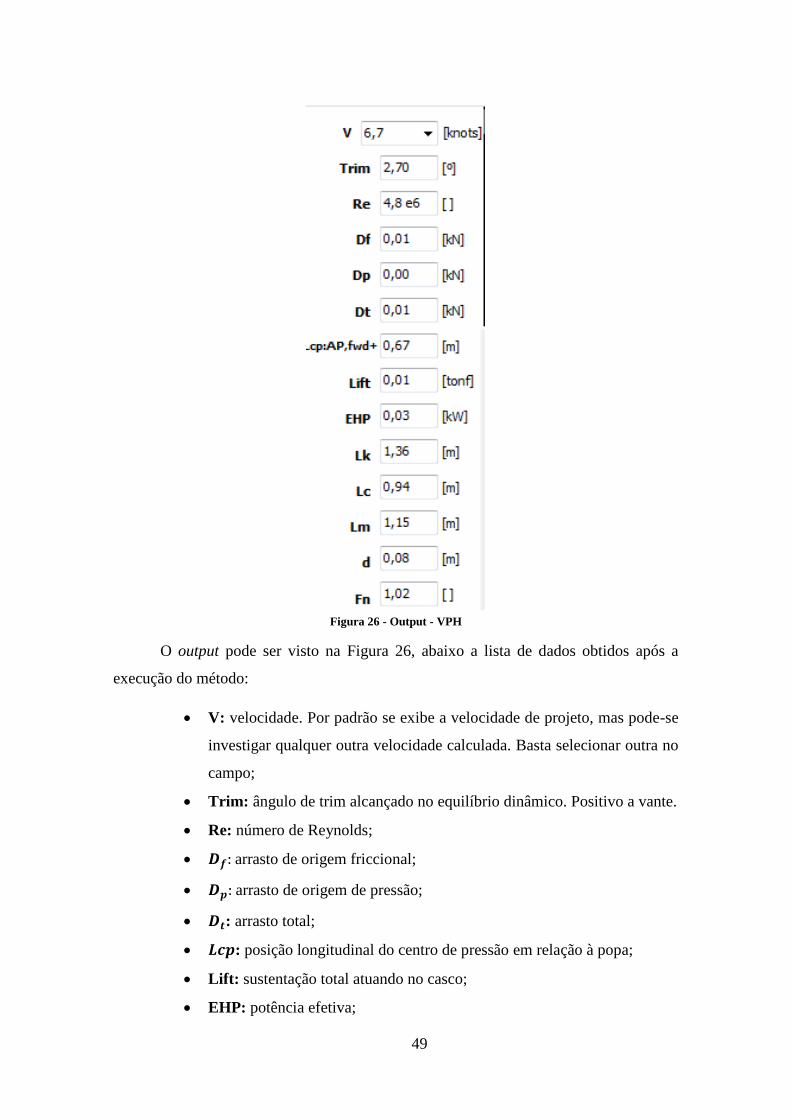
Figura 27 - Casco - VPH
Diferentemente do método anterior o casco analisado pelo método corresponde a
geometria real do projeto, a mesma pode ser vista na Figura 27. Assim como o método
anterior é possível utilizar o recurso “Animate” que irá gerar uma breve sucessão de todas
as posições de equilíbrio analisadas.
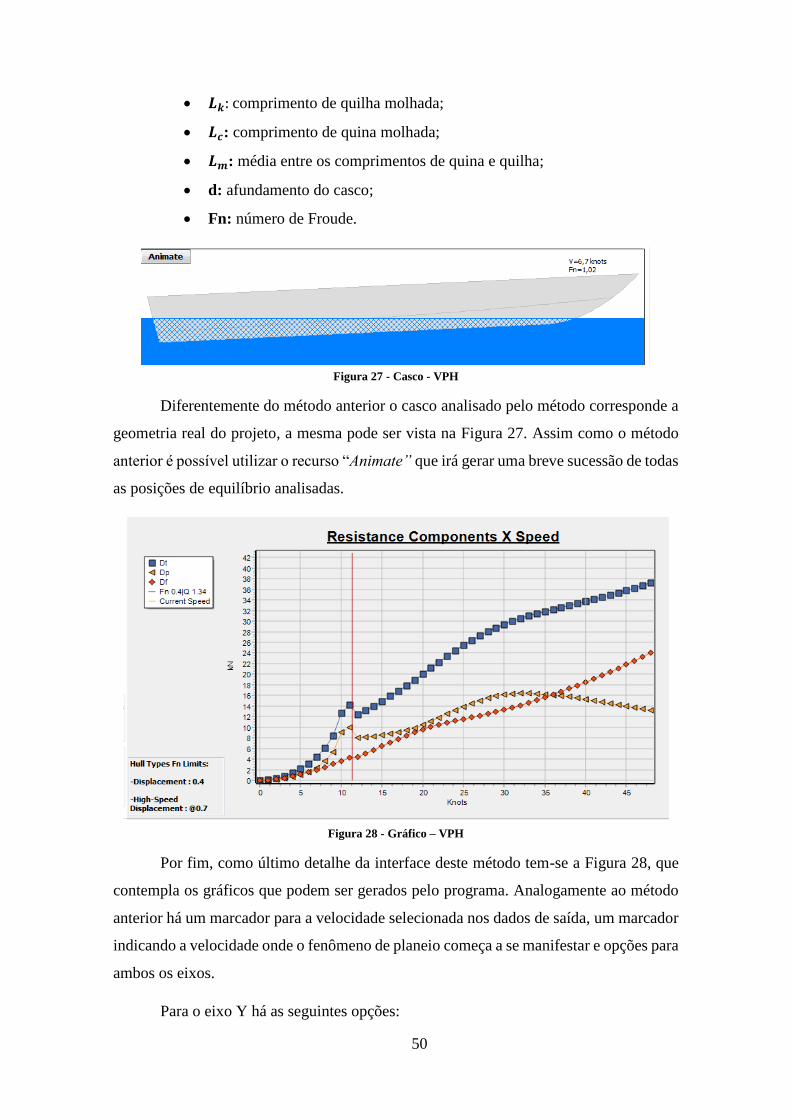
Figura 28 - Gráfico – VPH
Por fim, como último detalhe da interface deste método tem-se a Figura 28, que
contempla os gráficos que podem ser gerados pelo programa. Analogamente ao método
anterior há um marcador para a velocidade selecionada nos dados de saída, um marcador
indicando a velocidade onde o fenômeno de planeio começa a se manifestar e opções para
ambos os eixos.
Para o eixo Y há as seguintes opções:

51
Resistance Components: as duas componentes da resistência, e a soma
das duas são plotadas no gráfico vs X;
Power: é plotado EHP vs X;
Relevante parameters: é plotado “𝐿𝑘, 𝐿𝑐, 𝐿𝑚, 𝑡𝑟𝑖𝑚 𝑒 𝑑" vs X;
Para o eixo X há as seguintes opções:
V (knots): velocidade em nós;
Re: número de Reynolds;
Fn: número de Froude;
Q: número de Taylor;
5.4 Ambiente do método de Holtrop
Assim como ambos os métodos de equilíbrio dinâmico apresentados
anteriormente a interface do Holtrop exibe simultaneamente dados de entrada e saída,
bem como um gráfico. O desenho da forma foi retirado deste método. Além dessa
diferença, os dados de entrada possuem duas abas: “Main Particulars”, que é a principal,
e “Appendages, Stern and Thruster”, que auxiliar a outra. A interface pode ser vista na
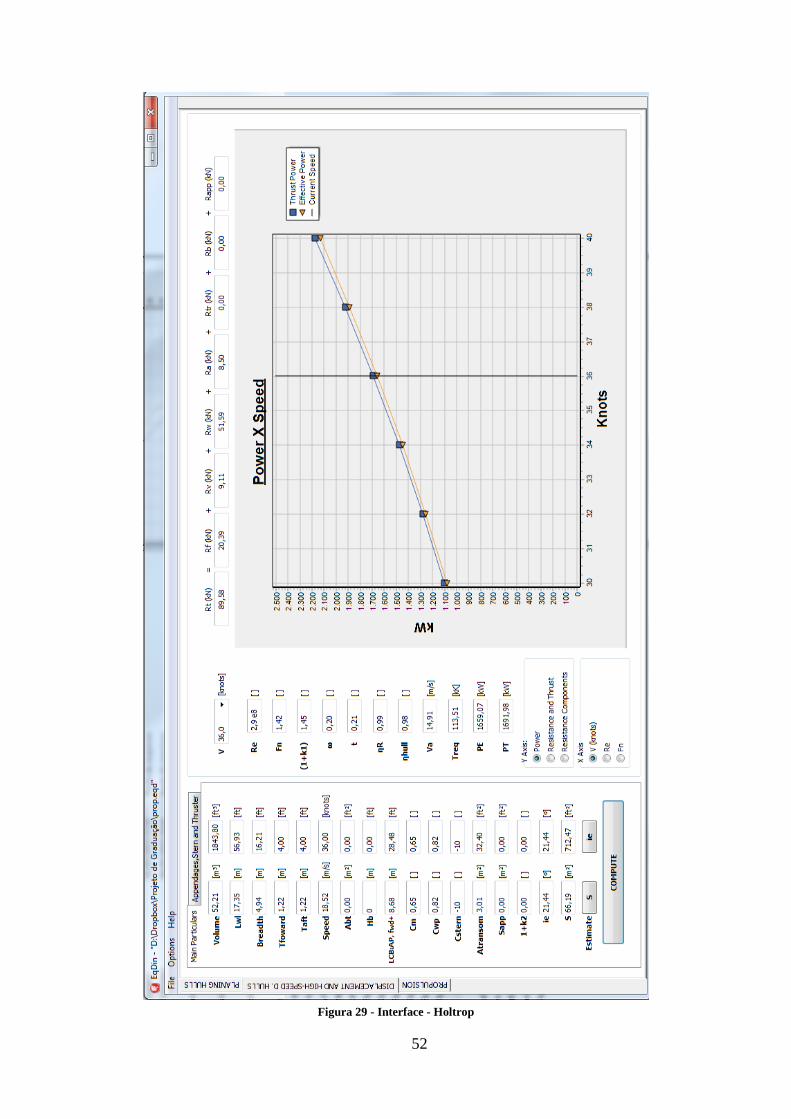
Figura 29. Posteriormente cada região é exibida em detalhes e explicada.
52
Figura 29 - Interface - Holtrop
53
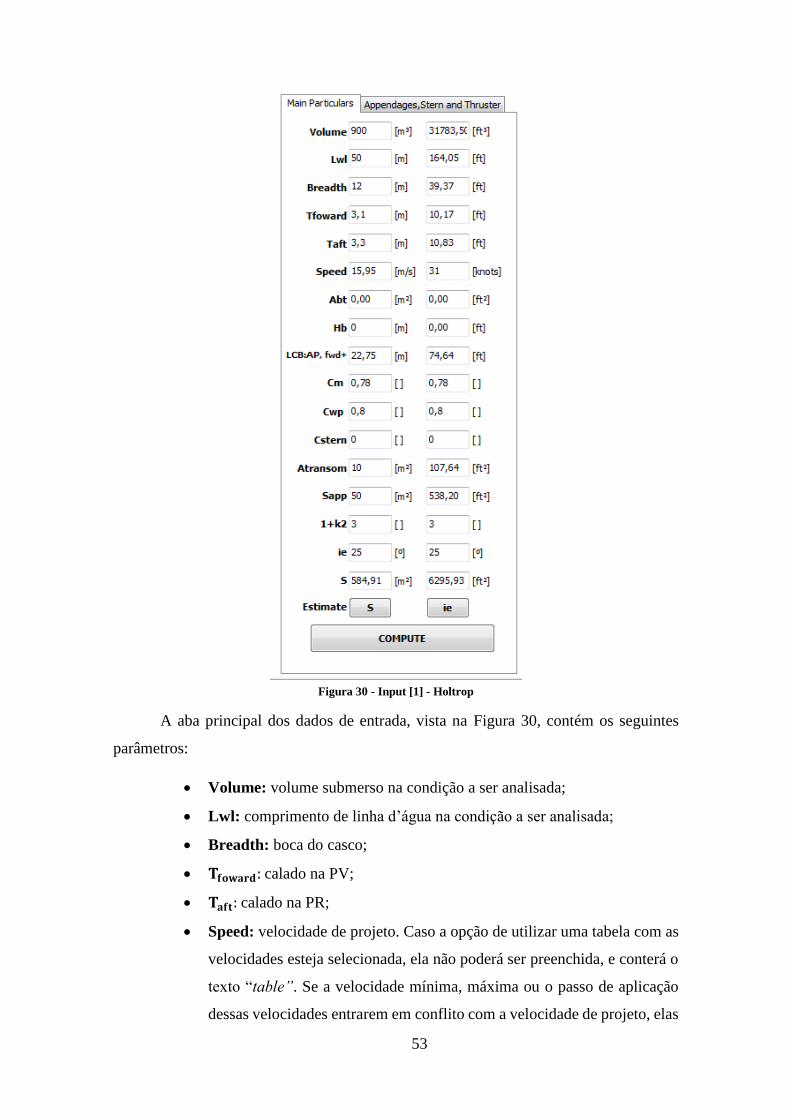
Figura 30 - Input [1] - Holtrop
A aba principal dos dados de entrada, vista na Figura 30, contém os seguintes
parâmetros:
Volume: volume submerso na condição a ser analisada;
Lwl: comprimento de linha d’água na condição a ser analisada;
Breadth: boca do casco;
𝐓𝐟𝐨𝐰𝐚𝐫𝐝: calado na PV;
𝐓𝐚𝐟𝐭: calado na PR;
Speed: velocidade de projeto. Caso a opção de utilizar uma tabela com as
velocidades esteja selecionada, ela não poderá ser preenchida, e conterá o
texto “table”. Se a velocidade mínima, máxima ou o passo de aplicação
dessas velocidades entrarem em conflito com a velocidade de projeto, elas
54
são automaticamente ajustadas para: 0 nós (mínima), 120% da velocidade
de projeto (máxima), 1 nó (passo);
𝐀𝐛𝐭: área transversal do bulbo;
𝐇𝐛: posição vertical do centroide de 𝐴𝑏𝑡;
LCB: posição longitudinal do centro de carena;
𝐂𝐦: coeficiente de seção mestra;
𝐂𝐰𝐩: coeficiente de linha d’água;
𝐂𝐒𝐭𝐞𝐫𝐧: coeficiente da forma da popa;
𝐀𝐭𝐫𝐚𝐧𝐬𝐨𝐦: área do espelho de popa;
𝐒𝐚𝐩𝐩: área total de apêndices, pode ser fornecida diretamente ou com
auxílio de uma tabela contida na segunda aba de input deste método;
𝟏 + 𝒌𝟐: coeficiente de forma equivalente a todos os apêndices, pode ser
fornecido diretamente ou com auxílio de uma tabela na segunda aba de
input deste método;
ie: ângulo de entrada da linha d’água, pode ser fornecido diretamente ou
com uso do botão “ie” na linha “Estimate”;
S: área molhada, pode ser fornecido diretamente ou com uso do botão “S”
na linha “Estimate”.
55
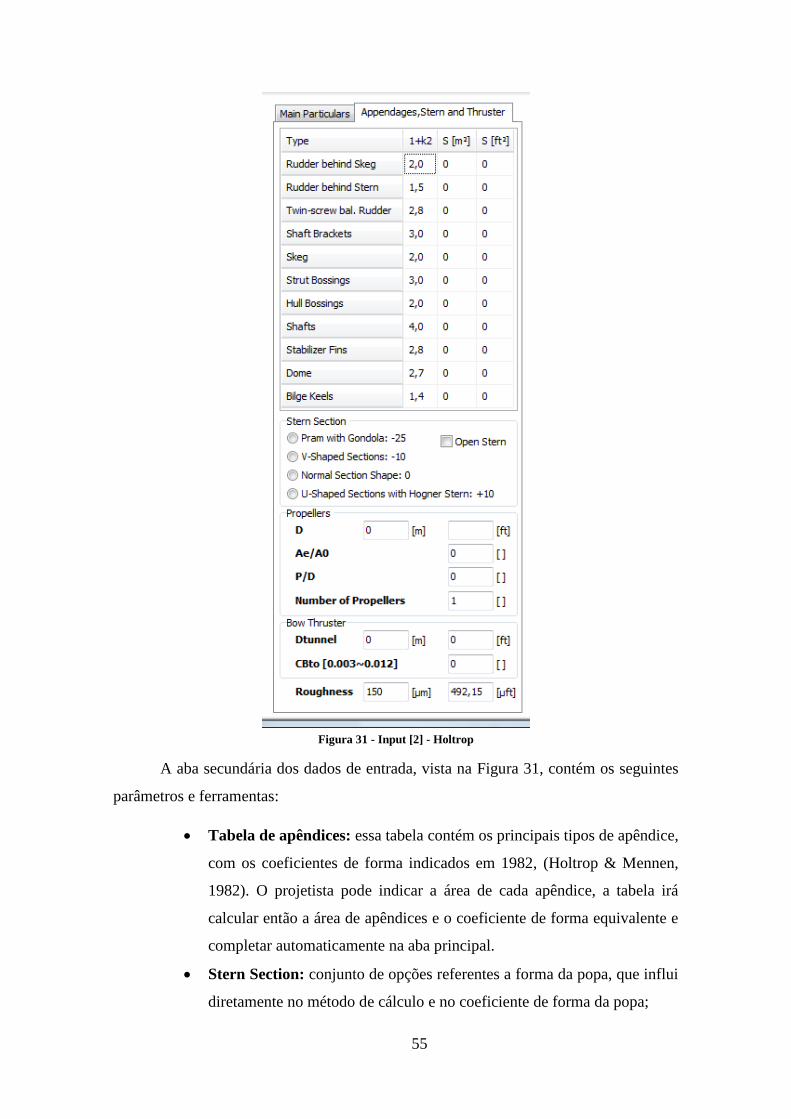
Figura 31 - Input [2] - Holtrop
A aba secundária dos dados de entrada, vista na Figura 31, contém os seguintes
parâmetros e ferramentas:
Tabela de apêndices: essa tabela contém os principais tipos de apêndice,
com os coeficientes de forma indicados em 1982, (Holtrop & Mennen,
1982). O projetista pode indicar a área de cada apêndice, a tabela irá
calcular então a área de apêndices e o coeficiente de forma equivalente e
completar automaticamente na aba principal.
Stern Section: conjunto de opções referentes a forma da popa, que influi
diretamente no método de cálculo e no coeficiente de forma da popa;
56
D: diâmetro do propulsor;
𝑨𝒆/𝑨𝟎 ∶ razão de área do propulsor;
𝑷/𝑫: razão de passo do propulsor;
Number of Propellers: quantidade de propulsores;
𝐃𝐭𝐮𝐧𝐧𝐞𝐥: diâmetro do túnel do propulsor transversal;
𝐂𝐁𝐓𝐎: coeficiente de resistência devido aos tuneis de Bow Thrusters;
Roughness: rugosidade média da superfície molhada do casco.
A aba secundária, como dito anteriormente, foi criada para auxiliar o projetista.
Caso ele esteja interessado apenas na resistência e conheça o coeficiente de forma da
popa, a área total dos apêndices e seu coeficiente de forma, ele nem mesmo precisará
utilizar a aba secundária.
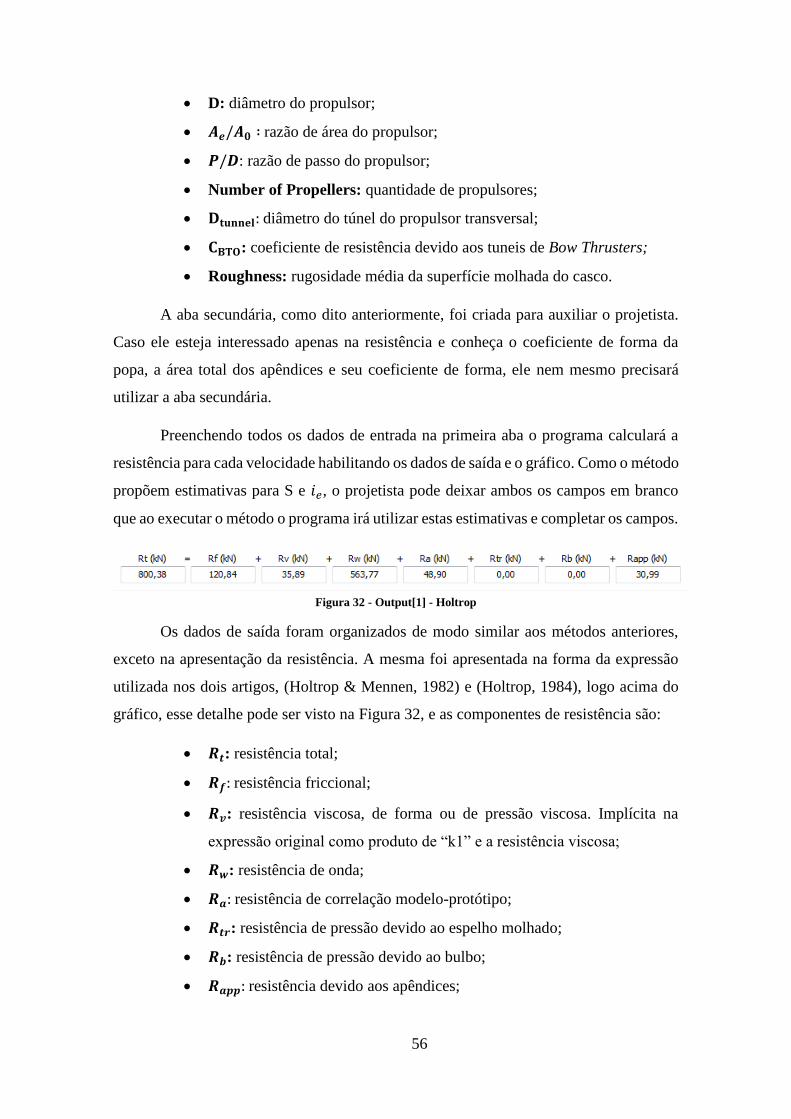
Preenchendo todos os dados de entrada na primeira aba o programa calculará a
resistência para cada velocidade habilitando os dados de saída e o gráfico. Como o método
propõem estimativas para S e 𝑖𝑒, o projetista pode deixar ambos os campos em branco
que ao executar o método o programa irá utilizar estas estimativas e completar os campos.
Figura 32 - Output[1] - Holtrop
Os dados de saída foram organizados de modo similar aos métodos anteriores,
exceto na apresentação da resistência. A mesma foi apresentada na forma da expressão
utilizada nos dois artigos, (Holtrop & Mennen, 1982) e (Holtrop, 1984), logo acima do
gráfico, esse detalhe pode ser visto na Figura 32, e as componentes de resistência são:
𝑹𝒕: resistência total;
𝑹𝒇: resistência friccional;
𝑹𝒗: resistência viscosa, de forma ou de pressão viscosa. Implícita na
expressão original como produto de “k1” e a resistência viscosa;
𝑹𝒘: resistência de onda;
𝑹𝒂: resistência de correlação modelo-protótipo;
𝑹𝒕𝒓: resistência de pressão devido ao espelho molhado;
𝑹𝒃: resistência de pressão devido ao bulbo;
𝑹𝒂𝒑𝒑: resistência devido aos apêndices;
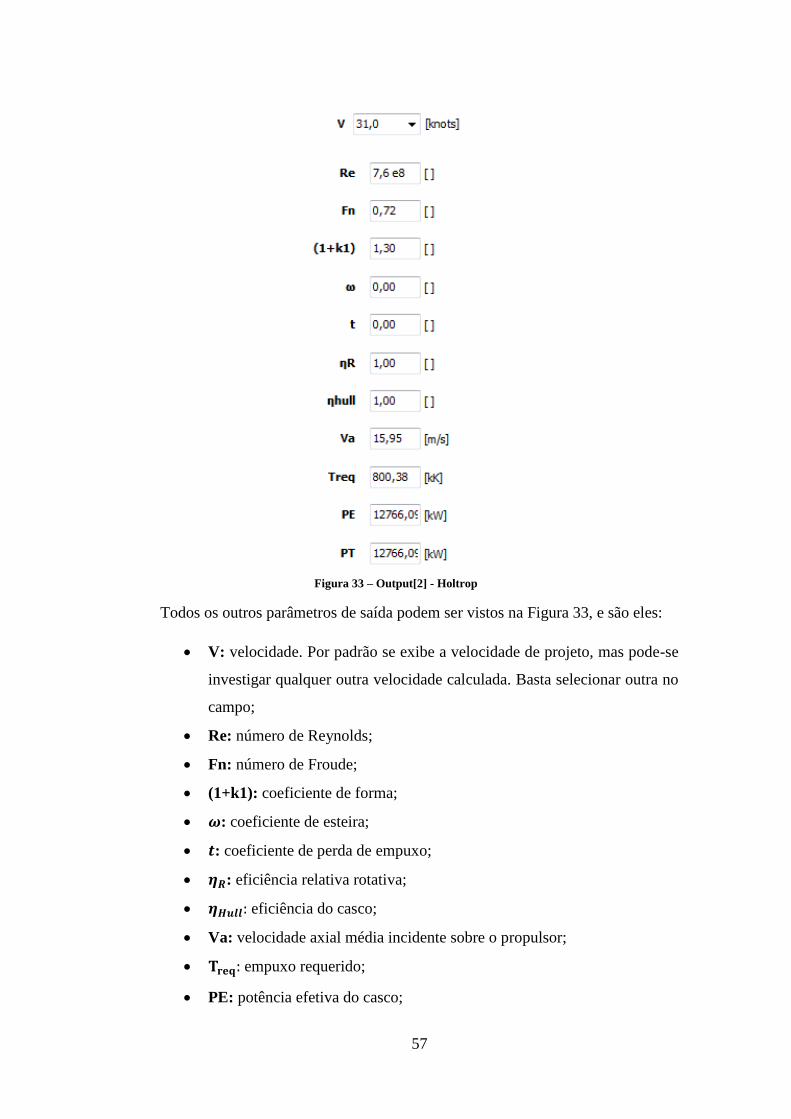
57
Figura 33 – Output[2] - Holtrop
Todos os outros parâmetros de saída podem ser vistos na Figura 33, e são eles:
V: velocidade. Por padrão se exibe a velocidade de projeto, mas pode-se
investigar qualquer outra velocidade calculada. Basta selecionar outra no
campo;
Re: número de Reynolds;
Fn: número de Froude;
(1+k1): coeficiente de forma;
𝝎: coeficiente de esteira;
𝒕: coeficiente de perda de empuxo;
𝜼𝑹: eficiência relativa rotativa;
𝜼𝑯𝒖𝒍𝒍: eficiência do casco;
Va: velocidade axial média incidente sobre o propulsor;
𝐓𝐫𝐞𝐪: empuxo requerido;
PE: potência efetiva do casco;
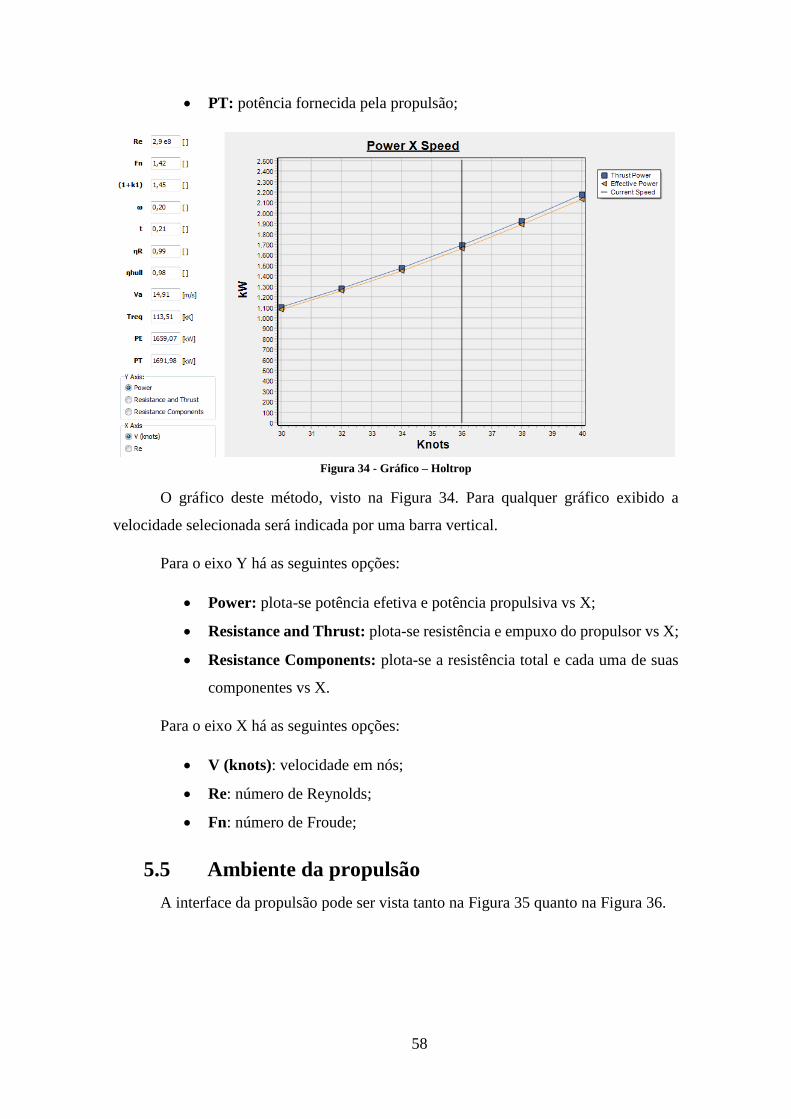
58
PT: potência fornecida pela propulsão;
Figura 34 - Gráfico – Holtrop
O gráfico deste método, visto na Figura 34. Para qualquer gráfico exibido a
velocidade selecionada será indicada por uma barra vertical.
Para o eixo Y há as seguintes opções:
Power: plota-se potência efetiva e potência propulsiva vs X;
Resistance and Thrust: plota-se resistência e empuxo do propulsor vs X;
Resistance Components: plota-se a resistência total e cada uma de suas
componentes vs X.
Para o eixo X há as seguintes opções:
V (knots): velocidade em nós;
Re: número de Reynolds;
Fn: número de Froude;
5.5 Ambiente da propulsão
A interface da propulsão pode ser vista tanto na Figura 35 quanto na Figura 36.
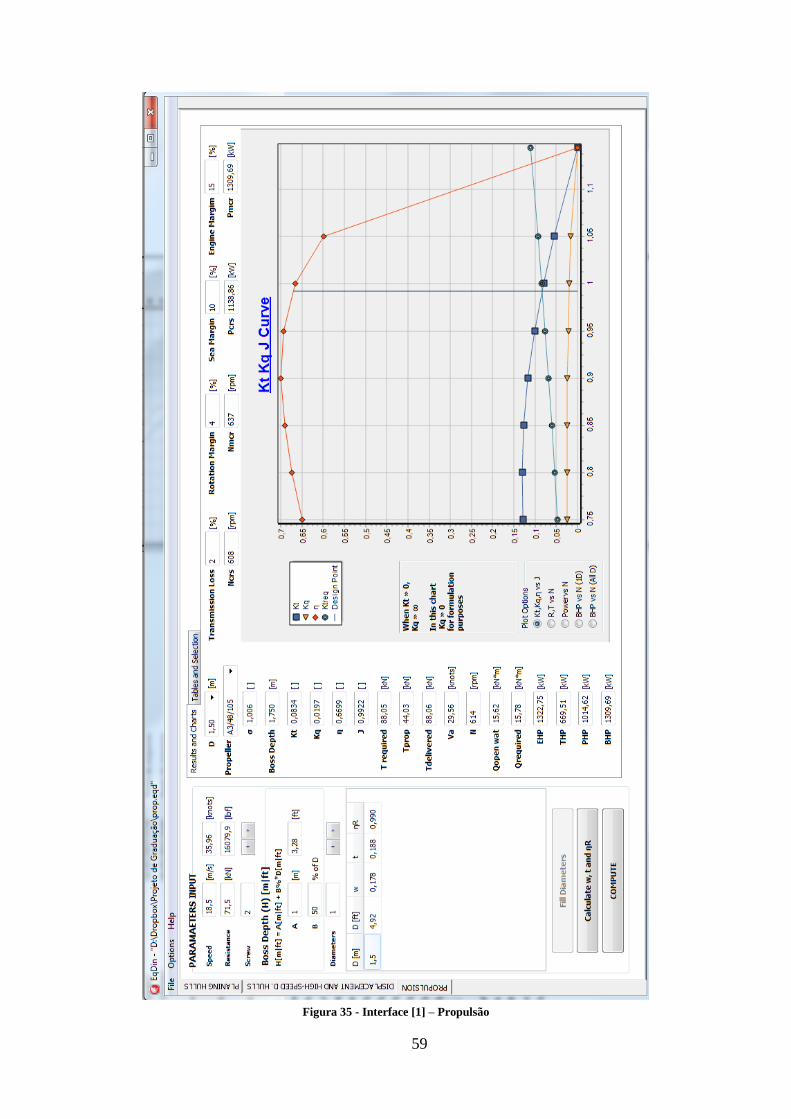
59
Figura 35 - Interface [1] – Propulsão
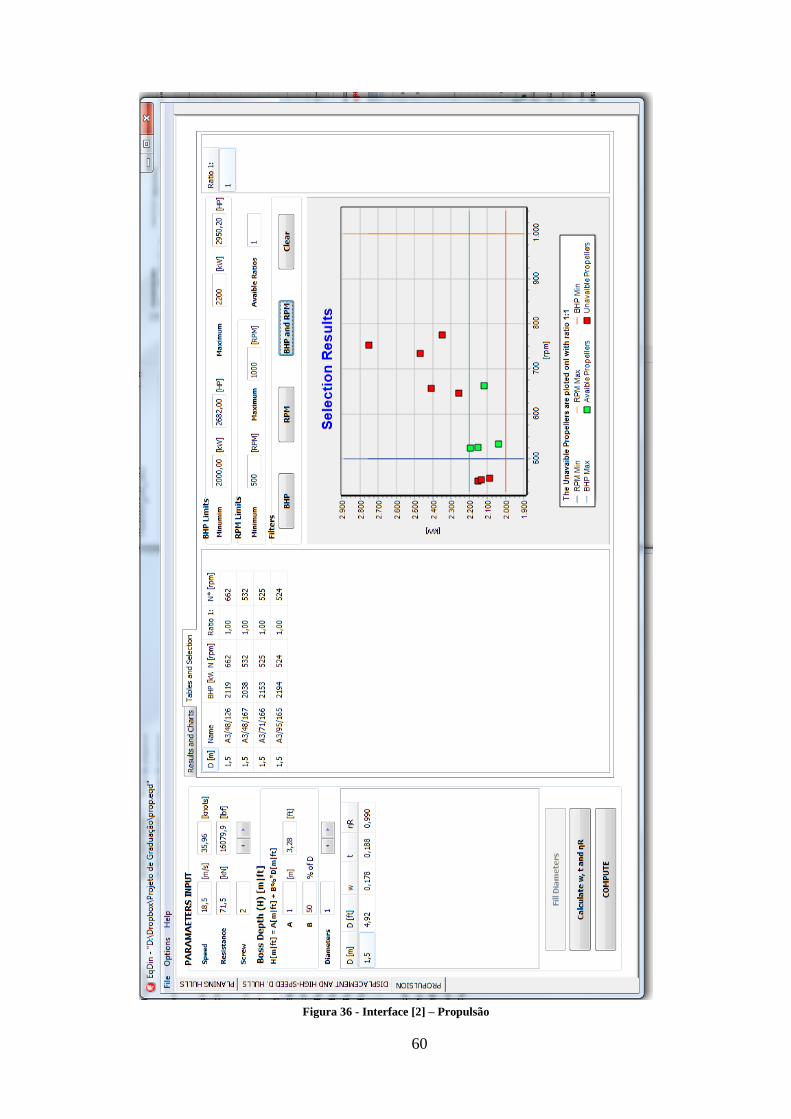
60
Figura 36 - Interface [2] – Propulsão
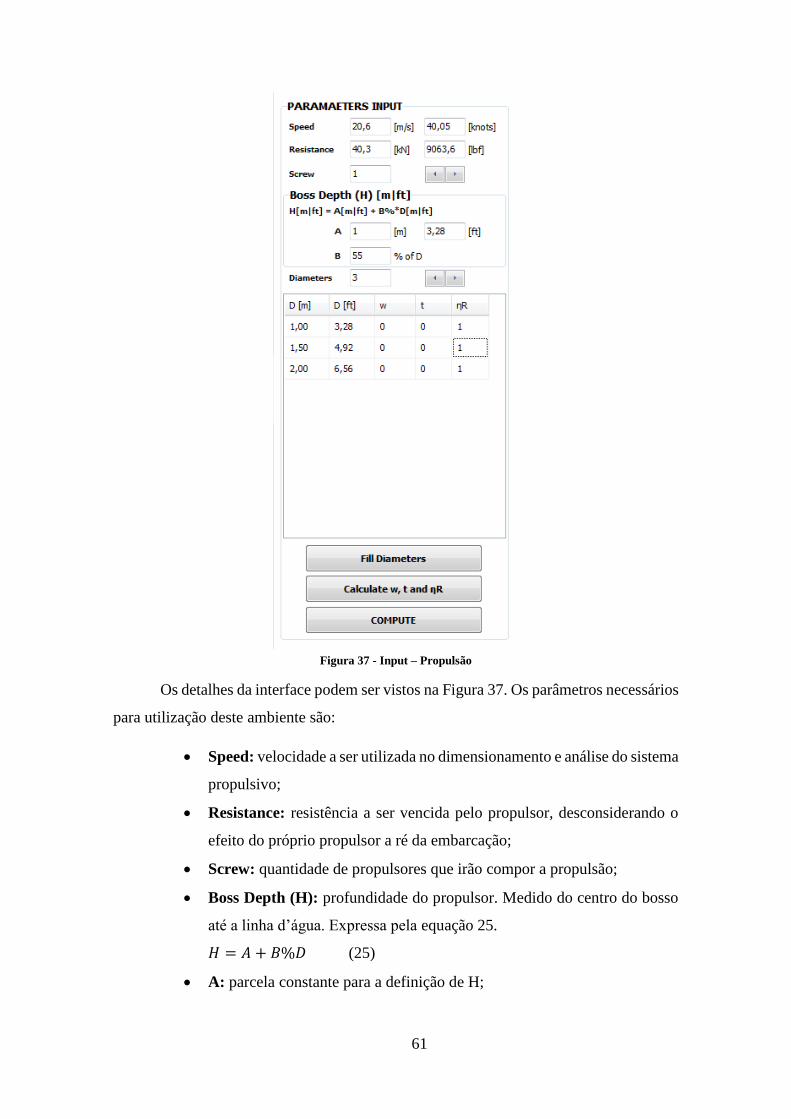
61
Figura 37 - Input – Propulsão
Os detalhes da interface podem ser vistos na Figura 37. Os parâmetros necessários
para utilização deste ambiente são:
Speed: velocidade a ser utilizada no dimensionamento e análise do sistema
propulsivo;
Resistance: resistência a ser vencida pelo propulsor, desconsiderando o
efeito do próprio propulsor a ré da embarcação;
Screw: quantidade de propulsores que irão compor a propulsão;
Boss Depth (H): profundidade do propulsor. Medido do centro do bosso
até a linha d’água. Expressa pela equação 25.
𝐻 = 𝐴 + 𝐵%𝐷 (25)
A: parcela constante para a definição de H;
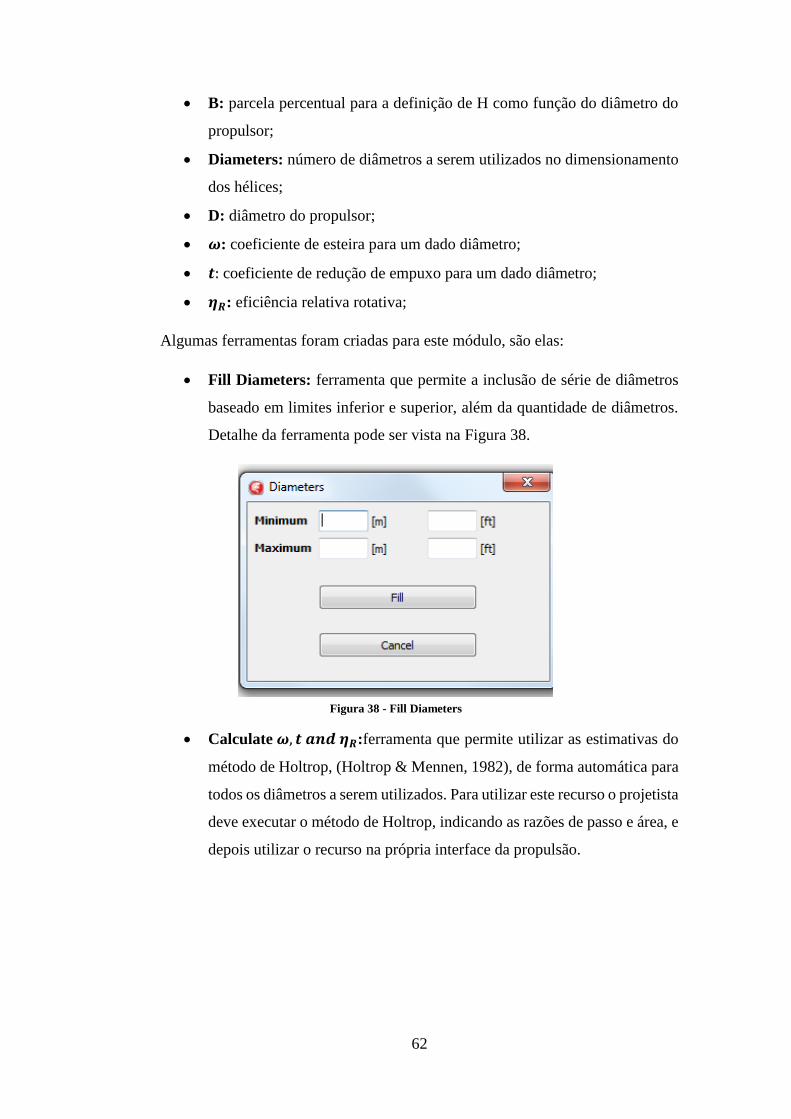
62
B: parcela percentual para a definição de H como função do diâmetro do
propulsor;
Diameters: número de diâmetros a serem utilizados no dimensionamento
dos hélices;
D: diâmetro do propulsor;
𝝎: coeficiente de esteira para um dado diâmetro;
𝒕: coeficiente de redução de empuxo para um dado diâmetro;
𝜼𝑹: eficiência relativa rotativa;
Algumas ferramentas foram criadas para este módulo, são elas:
Fill Diameters: ferramenta que permite a inclusão de série de diâmetros
baseado em limites inferior e superior, além da quantidade de diâmetros.
Detalhe da ferramenta pode ser vista na Figura 38.
Figura 38 - Fill Diameters
Calculate 𝝎, 𝒕 𝒂𝒏𝒅 𝜼𝑹:ferramenta que permite utilizar as estimativas do
método de Holtrop, (Holtrop & Mennen, 1982), de forma automática para
todos os diâmetros a serem utilizados. Para utilizar este recurso o projetista
deve executar o método de Holtrop, indicando as razões de passo e área, e
depois utilizar o recurso na própria interface da propulsão.
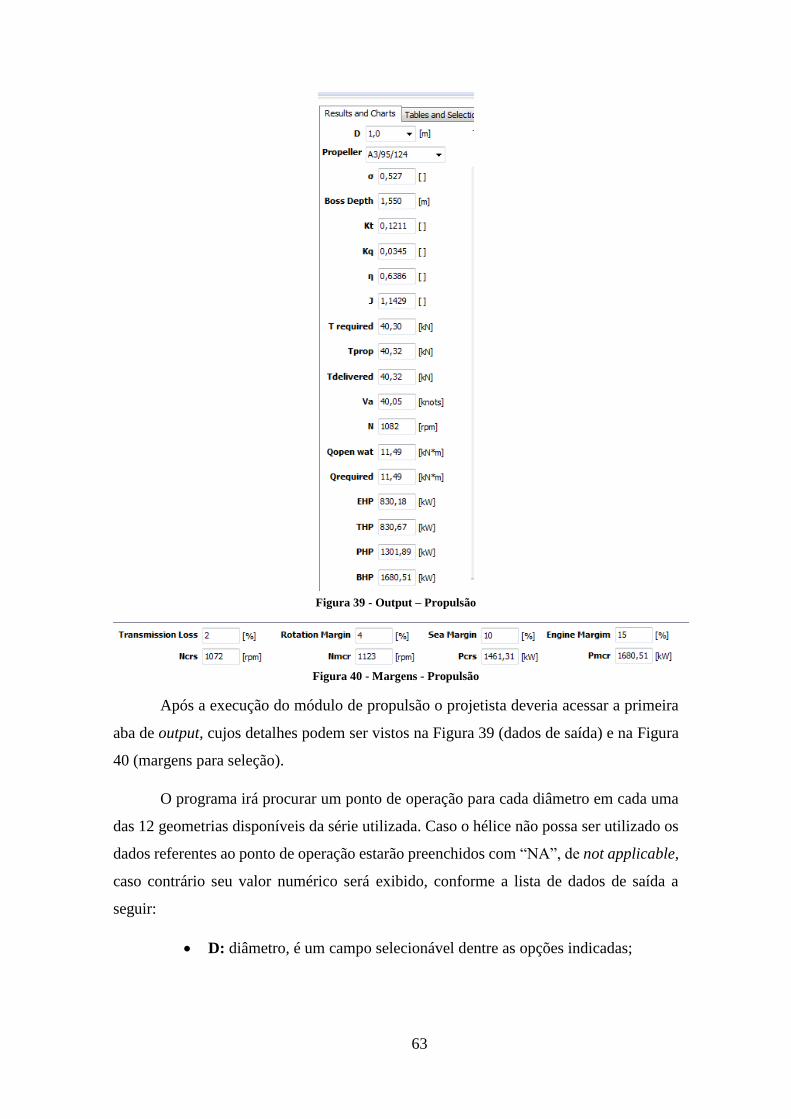
63
Figura 39 - Output – Propulsão
Figura 40 - Margens - Propulsão
Após a execução do módulo de propulsão o projetista deveria acessar a primeira
aba de output, cujos detalhes podem ser vistos na Figura 39 (dados de saída) e na Figura
40 (margens para seleção).
O programa irá procurar um ponto de operação para cada diâmetro em cada uma
das 12 geometrias disponíveis da série utilizada. Caso o hélice não possa ser utilizado os
dados referentes ao ponto de operação estarão preenchidos com “NA”, de not applicable,
caso contrário seu valor numérico será exibido, conforme a lista de dados de saída a
seguir:
D: diâmetro, é um campo selecionável dentre as opções indicadas;
64
Propeller: nomenclatura da geometria de acordo com proposta da série,
(Newton & Rader, 1961). Também é um campo selecionável dentre as 12
opções;
𝝈: número de cavitação expresso pela equação 24;
Boss Depth: profundidade do propulsor, calculado com os parâmetros
fornecidos de acordo com a equação 25;
𝑲𝒕: coeficiente de empuxo do hélice no ponto de operação;
𝑲𝒒: coeficiente de torque do hélice no ponto de operação;
𝜼: eficiência do hélice no ponto de operação;
J: coeficiente de avanço do hélice no ponto de operação;
𝑻𝒓𝒆𝒒𝒖𝒊𝒓𝒆𝒅: empuxo requerido em cada propulsor;
𝑻𝒑𝒓𝒐𝒑: empuxo fornecido por cada propulsor;
𝑻𝒅𝒆𝒍𝒊𝒗𝒆𝒓𝒆𝒅: empuxo total fornecido pelo conjunto de propulsores;
𝑽𝒂: velocidade axial média incidente sobre o hélice;
N: rotação do hélice no ponto de operação;
𝑸𝒐𝒑𝒆𝒏 𝒘𝒂𝒕: torque requerido por cada propulsores em águas abertas;
𝑸𝒓𝒆𝒒𝒖𝒊𝒓𝒆𝒅: torque requerido por cada propulsor considerando o efeito do
casco;
EHP: potência efetiva consumida pelo casco nu e seus apêndices;
THP: potência entregue por cada propulsor;
PHP: potência requerida por cada propulsor, ou potência de eixo;
BHP: potência entregue pelo motor a cada eixo, já considerando todas as
margens de seleção/operação.
A Figura 40 mostra em detalhes as margens que podem ser aplicadas a seleção
dos hélices bem como alguns parâmetros influenciados por essa ação, são eles:
Transmission loss: perda devido a atrito de mancais e torção do eixo.
Adotada como 2% como padrão, podendo ser alterada;
Rotation margin: margem de rotação, para considerar o efeito de
deterioração sobre o propulsor. Adotada como 4% como padrão, podendo
ser alterada;
Sea margin: margem de mar, para considerar os efeitos de incremento
sobre a resistência do casco, tendo em vista que a resistência calculada
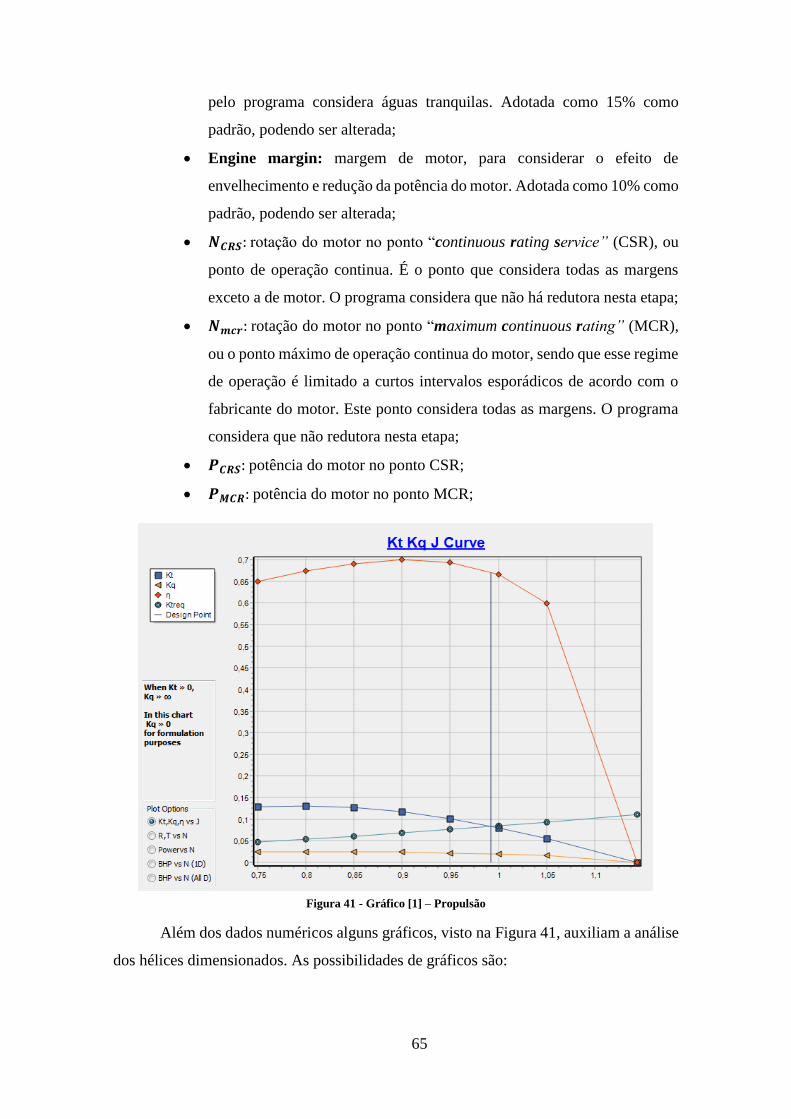
65
pelo programa considera águas tranquilas. Adotada como 15% como
padrão, podendo ser alterada;
Engine margin: margem de motor, para considerar o efeito de
envelhecimento e redução da potência do motor. Adotada como 10% como
padrão, podendo ser alterada;
𝑵𝑪𝑹𝑺: rotação do motor no ponto “continuous rating service” (CSR), ou
ponto de operação continua. É o ponto que considera todas as margens
exceto a de motor. O programa considera que não há redutora nesta etapa;
𝑵𝒎𝒄𝒓: rotação do motor no ponto “maximum continuous rating” (MCR),
ou o ponto máximo de operação continua do motor, sendo que esse regime
de operação é limitado a curtos intervalos esporádicos de acordo com o
fabricante do motor. Este ponto considera todas as margens. O programa
considera que não redutora nesta etapa;
𝑷𝑪𝑹𝑺: potência do motor no ponto CSR;
𝑷𝑴𝑪𝑹: potência do motor no ponto MCR;
Figura 41 - Gráfico [1] – Propulsão
Além dos dados numéricos alguns gráficos, visto na Figura 41, auxiliam a análise
dos hélices dimensionados. As possibilidades de gráficos são:
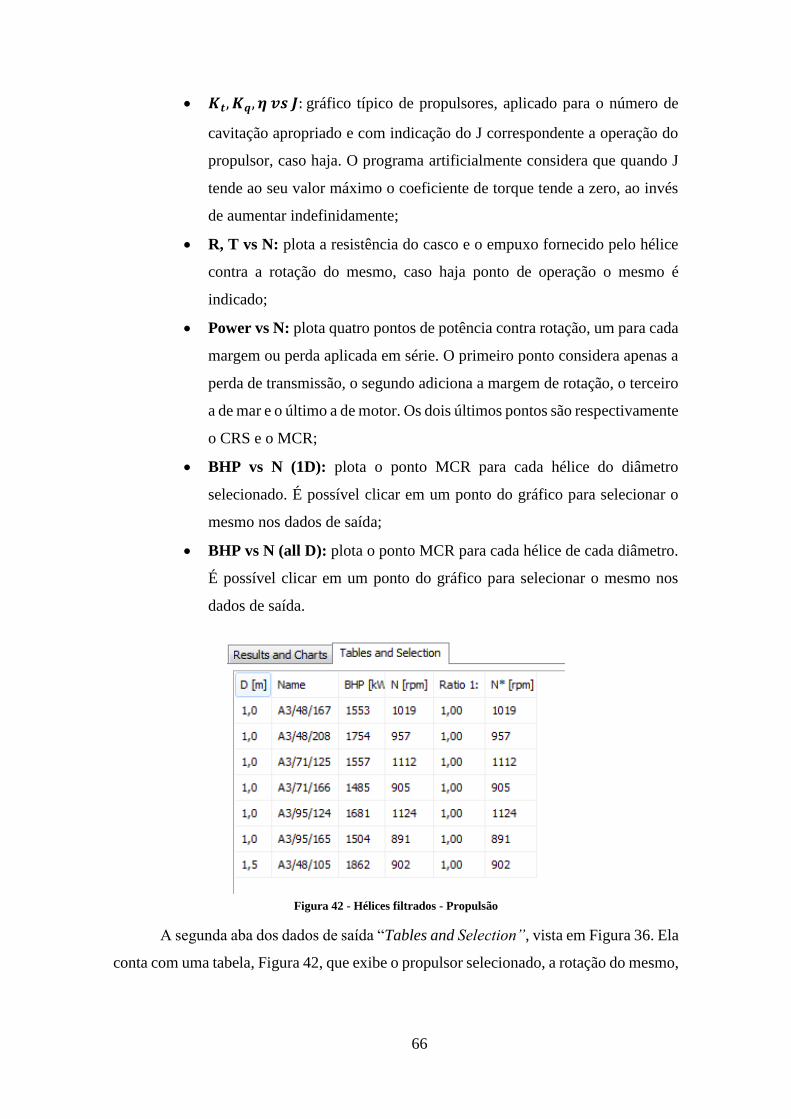
66
𝑲𝒕, 𝑲𝒒, 𝜼 𝒗𝒔 𝑱: gráfico típico de propulsores, aplicado para o número de
cavitação apropriado e com indicação do J correspondente a operação do
propulsor, caso haja. O programa artificialmente considera que quando J
tende ao seu valor máximo o coeficiente de torque tende a zero, ao invés
de aumentar indefinidamente;
R, T vs N: plota a resistência do casco e o empuxo fornecido pelo hélice
contra a rotação do mesmo, caso haja ponto de operação o mesmo é
indicado;
Power vs N: plota quatro pontos de potência contra rotação, um para cada
margem ou perda aplicada em série. O primeiro ponto considera apenas a
perda de transmissão, o segundo adiciona a margem de rotação, o terceiro
a de mar e o último a de motor. Os dois últimos pontos são respectivamente
o CRS e o MCR;
BHP vs N (1D): plota o ponto MCR para cada hélice do diâmetro
selecionado. É possível clicar em um ponto do gráfico para selecionar o
mesmo nos dados de saída;
BHP vs N (all D): plota o ponto MCR para cada hélice de cada diâmetro.
É possível clicar em um ponto do gráfico para selecionar o mesmo nos
dados de saída.
Figura 42 - Hélices filtrados - Propulsão
A segunda aba dos dados de saída “Tables and Selection”, vista em Figura 36. Ela
conta com uma tabela, Figura 42, que exibe o propulsor selecionado, a rotação do mesmo,
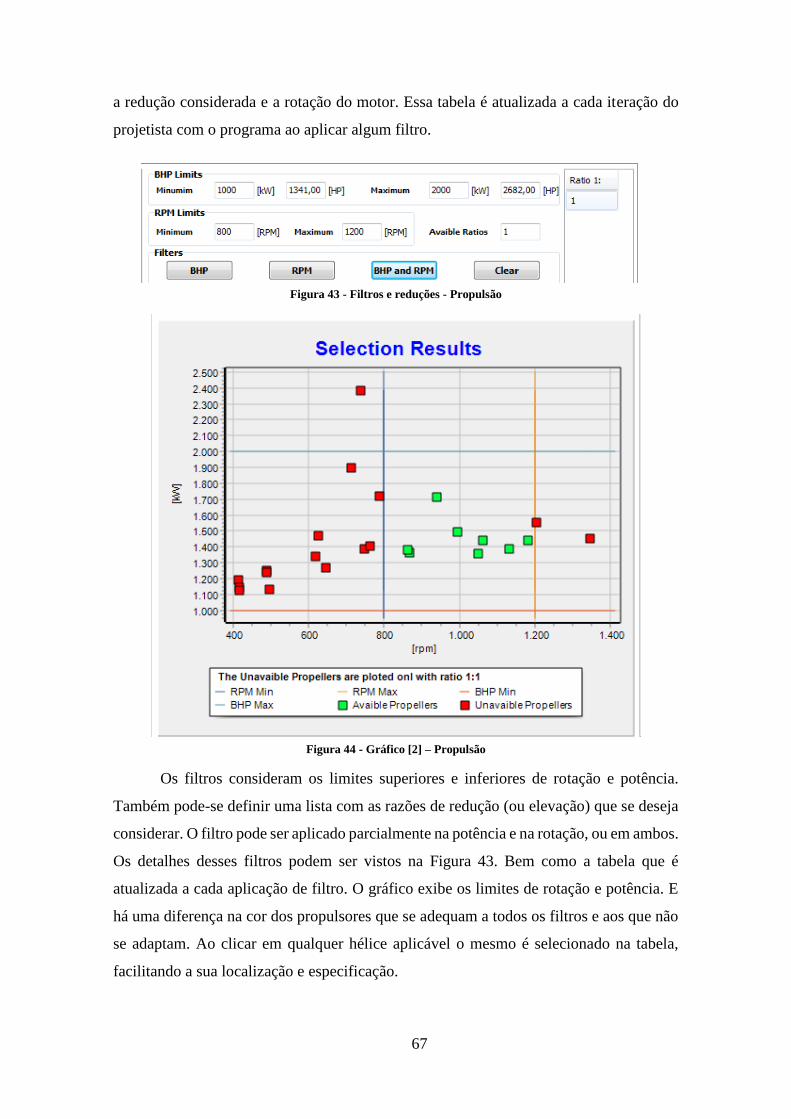
67
a redução considerada e a rotação do motor. Essa tabela é atualizada a cada iteração do
projetista com o programa ao aplicar algum filtro.
Figura 43 - Filtros e reduções - Propulsão
Figura 44 - Gráfico [2] – Propulsão
Os filtros consideram os limites superiores e inferiores de rotação e potência.
Também pode-se definir uma lista com as razões de redução (ou elevação) que se deseja
considerar. O filtro pode ser aplicado parcialmente na potência e na rotação, ou em ambos.
Os detalhes desses filtros podem ser vistos na Figura 43. Bem como a tabela que é
atualizada a cada aplicação de filtro. O gráfico exibe os limites de rotação e potência. E
há uma diferença na cor dos propulsores que se adequam a todos os filtros e aos que não
se adaptam. Ao clicar em qualquer hélice aplicável o mesmo é selecionado na tabela,
facilitando a sua localização e especificação.
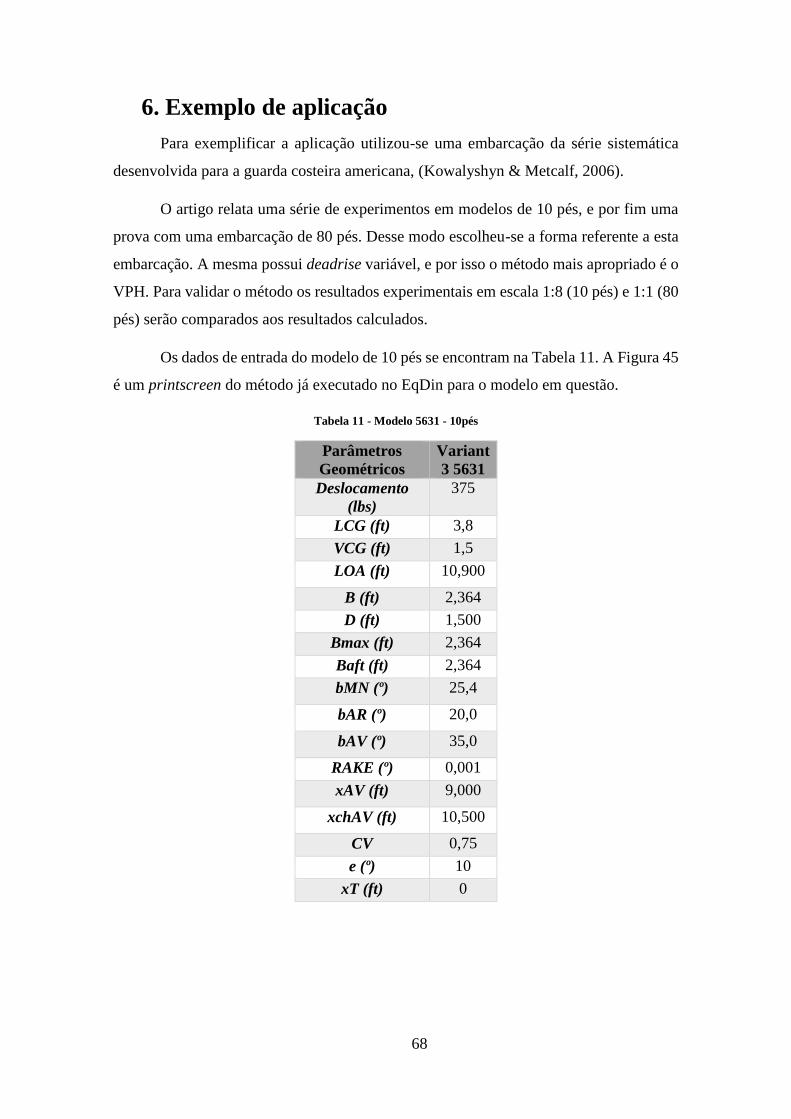
68
6. Exemplo de aplicação
Para exemplificar a aplicação utilizou-se uma embarcação da série sistemática
desenvolvida para a guarda costeira americana, (Kowalyshyn & Metcalf, 2006).
O artigo relata uma série de experimentos em modelos de 10 pés, e por fim uma
prova com uma embarcação de 80 pés. Desse modo escolheu-se a forma referente a esta
embarcação. A mesma possui deadrise variável, e por isso o método mais apropriado é o
VPH. Para validar o método os resultados experimentais em escala 1:8 (10 pés) e 1:1 (80
pés) serão comparados aos resultados calculados.
Os dados de entrada do modelo de 10 pés se encontram na Tabela 11. A Figura 45
é um printscreen do método já executado no EqDin para o modelo em questão.
Tabela 11 - Modelo 5631 - 10pés
Parâmetros
Geométricos
Variant
3 5631
Deslocamento
(lbs)
375
LCG (ft) 3,8
VCG (ft) 1,5
LOA (ft) 10,900
B (ft) 2,364
D (ft) 1,500
Bmax (ft) 2,364
Baft (ft) 2,364
bMN (º) 25,4
bAR (º) 20,0
bAV (º) 35,0
RAKE (º) 0,001
xAV (ft) 9,000
xchAV (ft) 10,500
CV 0,75
e (º) 10
xT (ft) 0
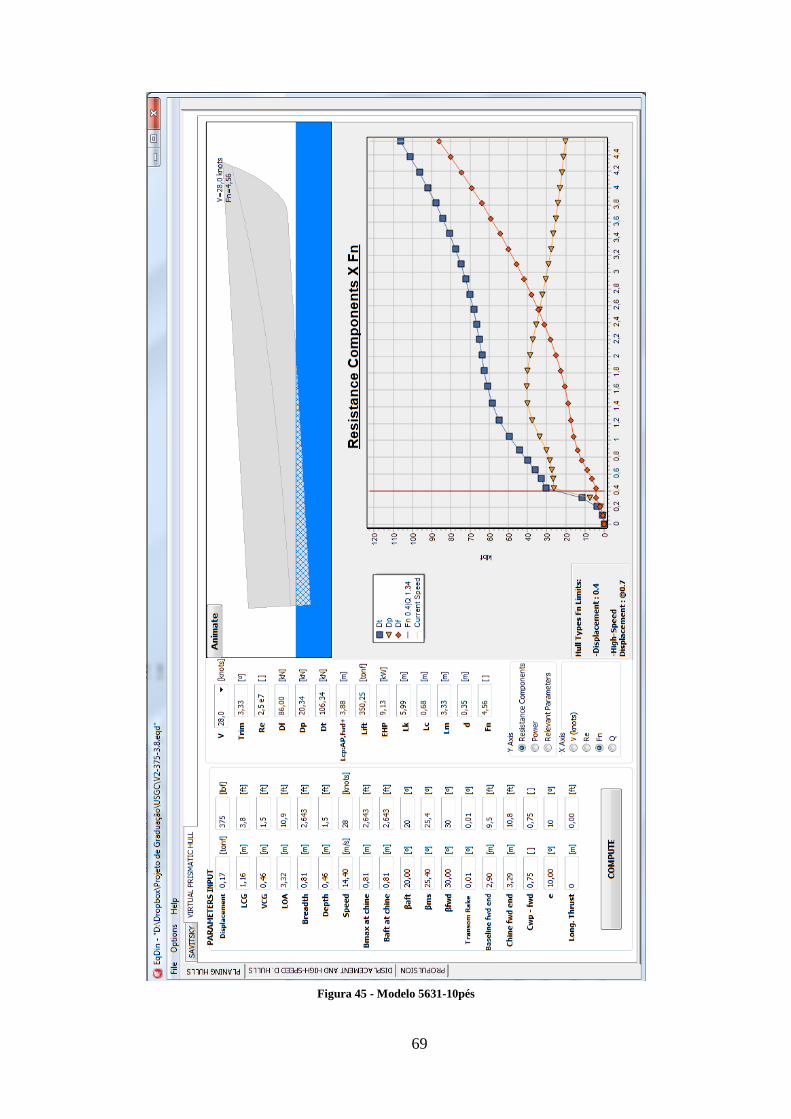
69
Figura 45 - Modelo 5631-10pés
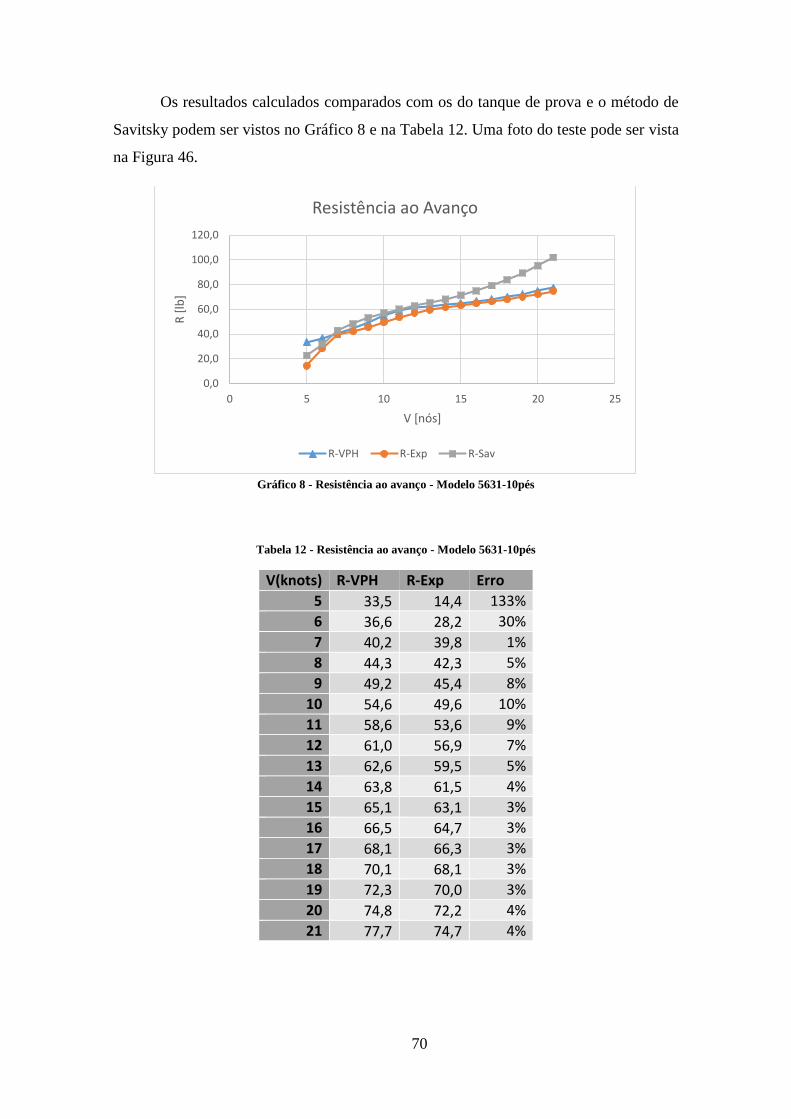
70
Os resultados calculados comparados com os do tanque de prova e o método de
Savitsky podem ser vistos no Gráfico 8 e na Tabela 12. Uma foto do teste pode ser vista
na Figura 46.
Gráfico 8 - Resistência ao avanço - Modelo 5631-10pés
Tabela 12 - Resistência ao avanço - Modelo 5631-10pés
V(knots) R-VPH R-Exp Erro
5 33,5 14,4 133%
6 36,6 28,2 30%
7 40,2 39,8 1%
8 44,3 42,3 5%
9 49,2 45,4 8%
10 54,6 49,6 10%
11 58,6 53,6 9%
12 61,0 56,9 7%
13 62,6 59,5 5%
14 63,8 61,5 4%
15 65,1 63,1 3%
16 66,5 64,7 3%
17 68,1 66,3 3%
18 70,1 68,1 3%
19 72,3 70,0 3%
20 74,8 72,2 4%
21 77,7 74,7 4%
0,0
20,0
40,0
60,0
80,0
100,0
120,0
0 5 10 15 20 25
R [
lb]
V [nós]
Resistência ao Avanço
R-VPH R-Exp R-Sav
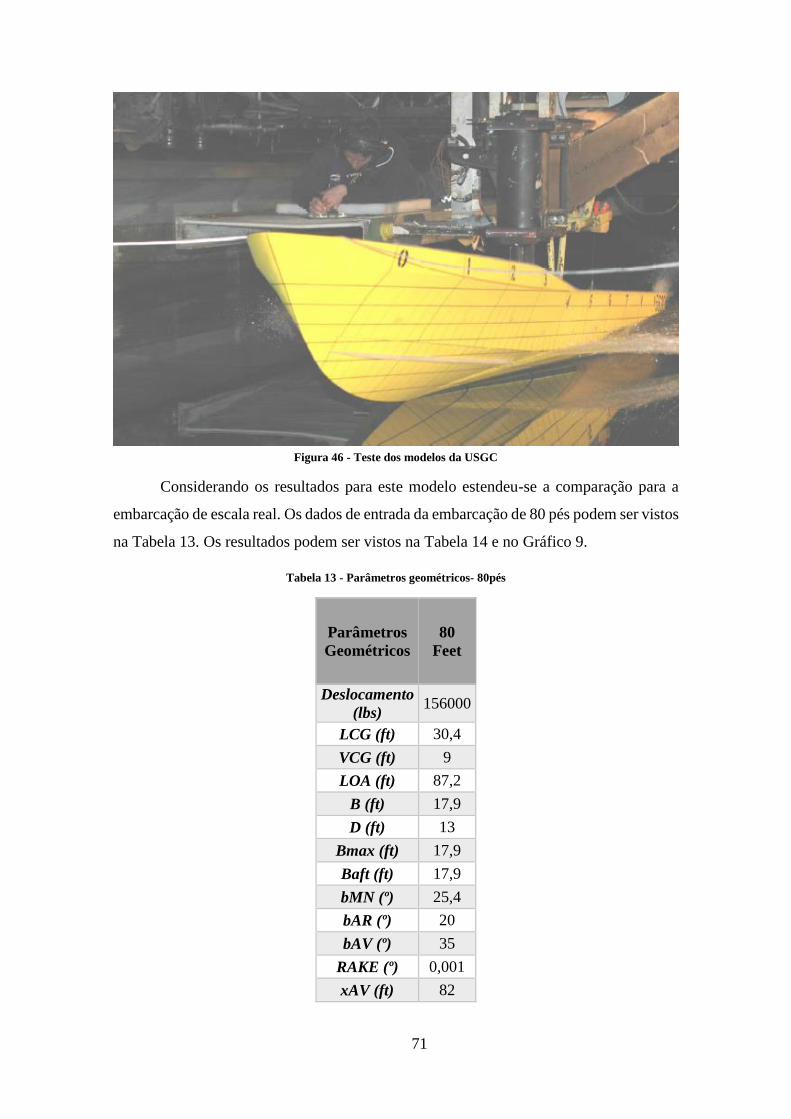
71
Figura 46 - Teste dos modelos da USGC
Considerando os resultados para este modelo estendeu-se a comparação para a
embarcação de escala real. Os dados de entrada da embarcação de 80 pés podem ser vistos
na Tabela 13. Os resultados podem ser vistos na Tabela 14 e no Gráfico 9.
Tabela 13 - Parâmetros geométricos- 80pés
Parâmetros
Geométricos
80
Feet
Deslocamento
(lbs) 156000
LCG (ft) 30,4
VCG (ft) 9
LOA (ft) 87,2
B (ft) 17,9
D (ft) 13
Bmax (ft) 17,9
Baft (ft) 17,9
bMN (º) 25,4
bAR (º) 20
bAV (º) 35
RAKE (º) 0,001
xAV (ft) 82
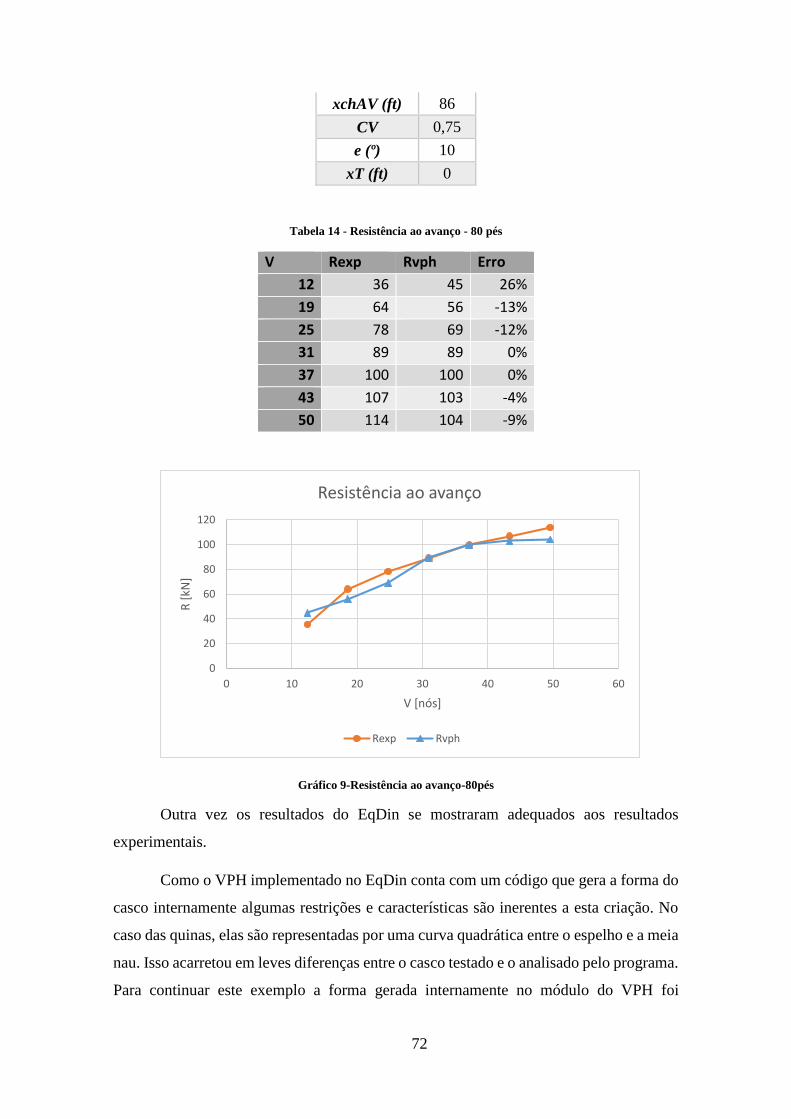
72
xchAV (ft) 86
CV 0,75
e (º) 10
xT (ft) 0
Tabela 14 - Resistência ao avanço - 80 pés
V Rexp Rvph Erro
12 36 45 26%
19 64 56 -13%
25 78 69 -12%
31 89 89 0%
37 100 100 0%
43 107 103 -4%
50 114 104 -9%
Gráfico 9-Resistência ao avanço-80pés
Outra vez os resultados do EqDin se mostraram adequados aos resultados
experimentais.
Como o VPH implementado no EqDin conta com um código que gera a forma do
casco internamente algumas restrições e características são inerentes a esta criação. No
caso das quinas, elas são representadas por uma curva quadrática entre o espelho e a meia
nau. Isso acarretou em leves diferenças entre o casco testado e o analisado pelo programa.
Para continuar este exemplo a forma gerada internamente no módulo do VPH foi
0
20
40
60
80
100
120
0 10 20 30 40 50 60
R [
kN]
V [nós]
Resistência ao avanço
Rexp Rvph
73
modelada em 3D no Free!ship®. O plano de linhas pode ser visto na Figura 47, enquanto
o plano de balizas original de um casco deste modelo escalado para 47 pés pode ser visto
na Figura 48.
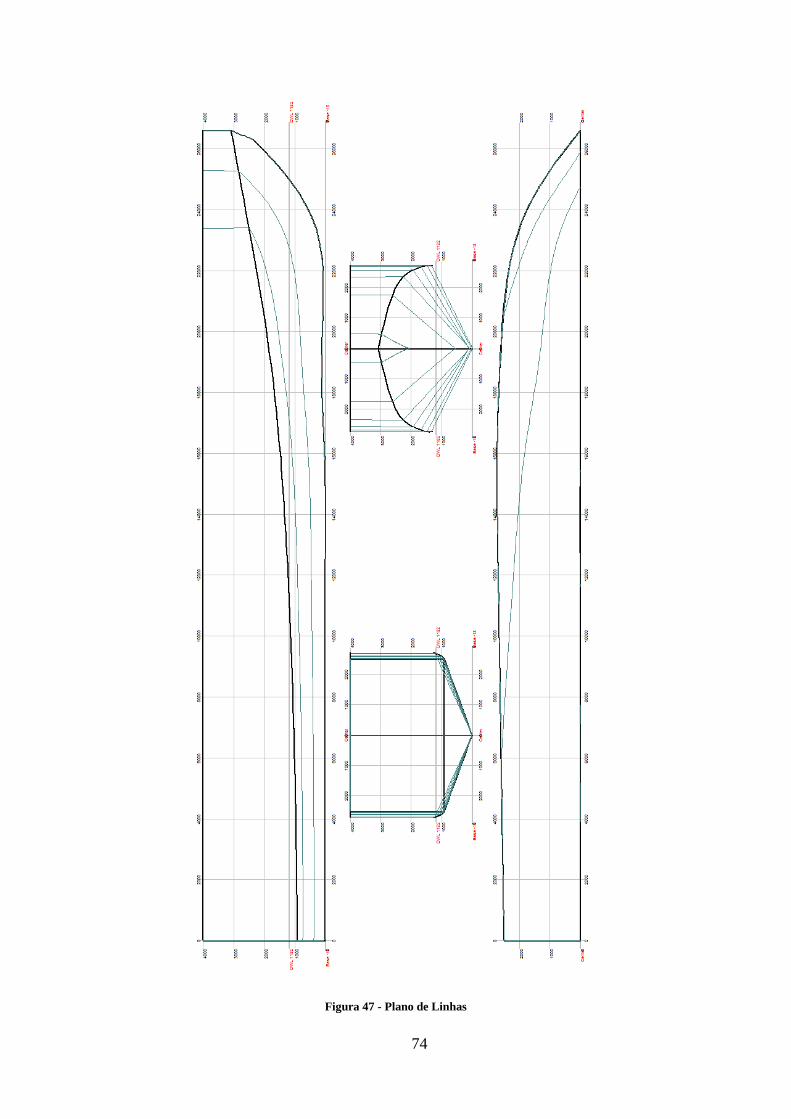
74
Figura 47 - Plano de Linhas
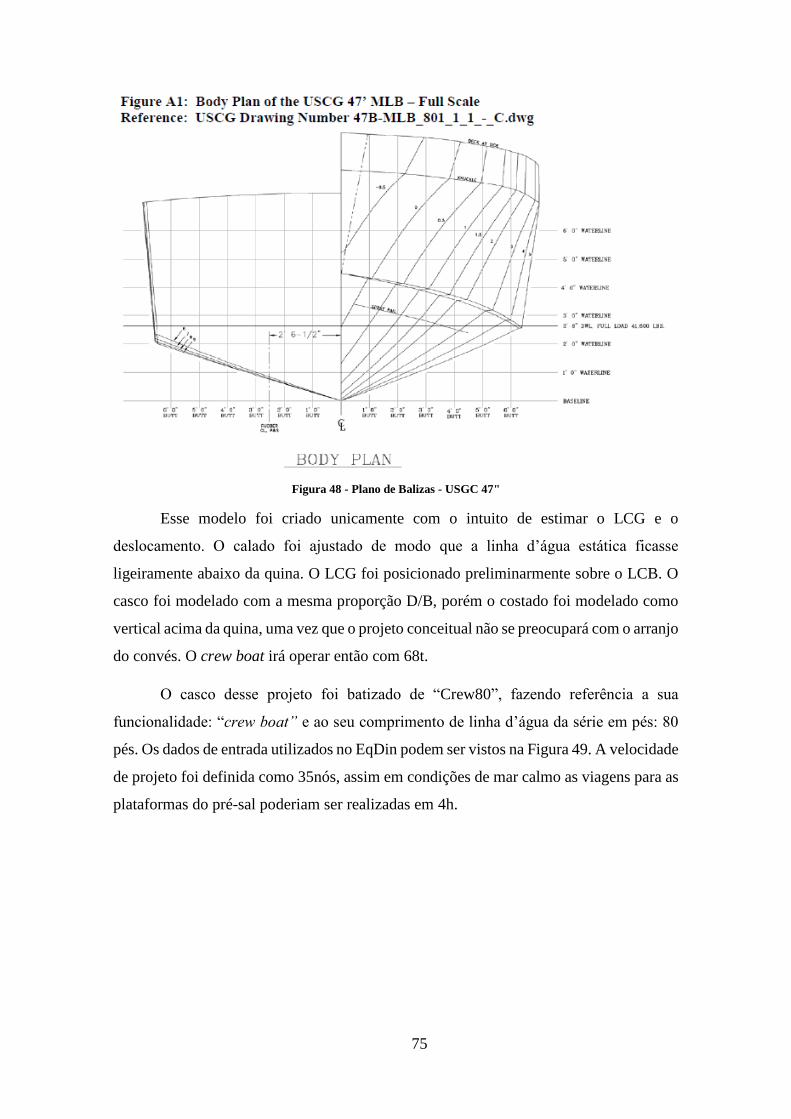
75
Figura 48 - Plano de Balizas - USGC 47"
Esse modelo foi criado unicamente com o intuito de estimar o LCG e o
deslocamento. O calado foi ajustado de modo que a linha d’água estática ficasse
ligeiramente abaixo da quina. O LCG foi posicionado preliminarmente sobre o LCB. O
casco foi modelado com a mesma proporção D/B, porém o costado foi modelado como
vertical acima da quina, uma vez que o projeto conceitual não se preocupará com o arranjo
do convés. O crew boat irá operar então com 68t.
O casco desse projeto foi batizado de “Crew80”, fazendo referência a sua
funcionalidade: “crew boat” e ao seu comprimento de linha d’água da série em pés: 80
pés. Os dados de entrada utilizados no EqDin podem ser vistos na Figura 49. A velocidade
de projeto foi definida como 35nós, assim em condições de mar calmo as viagens para as
plataformas do pré-sal poderiam ser realizadas em 4h.
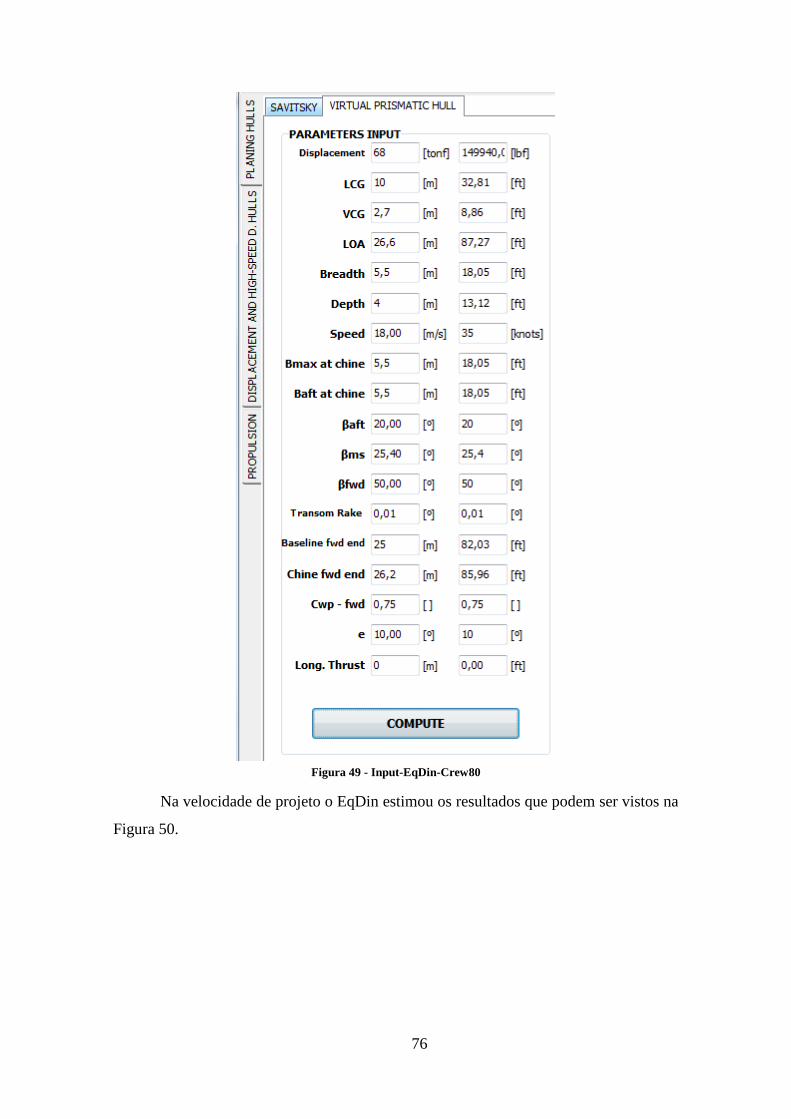
76
Figura 49 - Input-EqDin-Crew80
Na velocidade de projeto o EqDin estimou os resultados que podem ser vistos na
Figura 50.
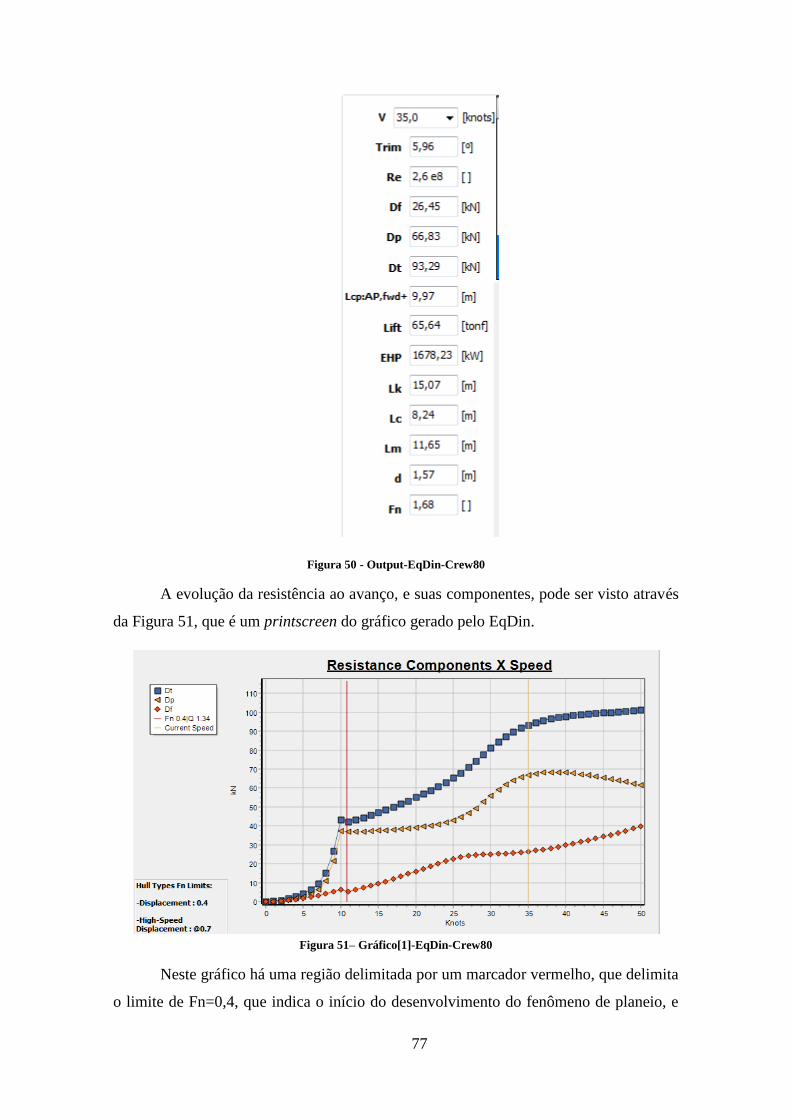
77
Figura 50 - Output-EqDin-Crew80
A evolução da resistência ao avanço, e suas componentes, pode ser visto através
da Figura 51, que é um printscreen do gráfico gerado pelo EqDin.
Figura 51– Gráfico[1]-EqDin-Crew80
Neste gráfico há uma região delimitada por um marcador vermelho, que delimita
o limite de Fn=0,4, que indica o início do desenvolvimento do fenômeno de planeio, e
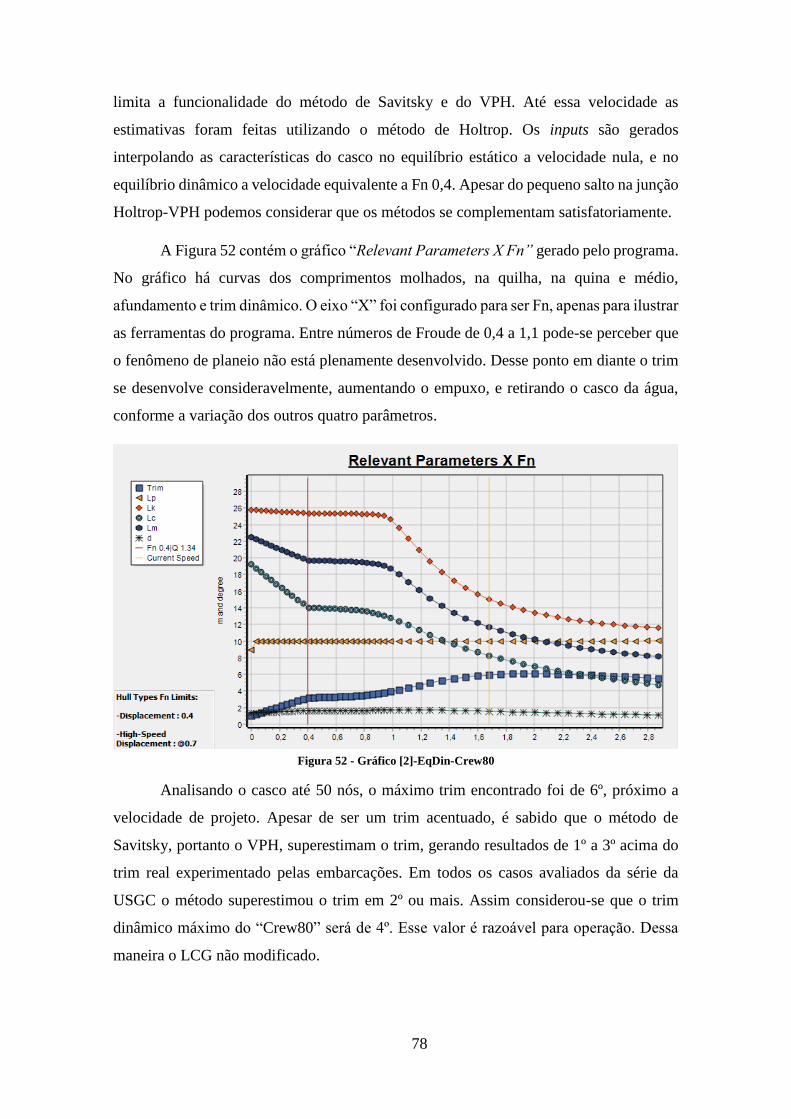
78
limita a funcionalidade do método de Savitsky e do VPH. Até essa velocidade as
estimativas foram feitas utilizando o método de Holtrop. Os inputs são gerados
interpolando as características do casco no equilíbrio estático a velocidade nula, e no
equilíbrio dinâmico a velocidade equivalente a Fn 0,4. Apesar do pequeno salto na junção
Holtrop-VPH podemos considerar que os métodos se complementam satisfatoriamente.
A Figura 52 contém o gráfico “Relevant Parameters X Fn” gerado pelo programa.
No gráfico há curvas dos comprimentos molhados, na quilha, na quina e médio,
afundamento e trim dinâmico. O eixo “X” foi configurado para ser Fn, apenas para ilustrar
as ferramentas do programa. Entre números de Froude de 0,4 a 1,1 pode-se perceber que
o fenômeno de planeio não está plenamente desenvolvido. Desse ponto em diante o trim
se desenvolve consideravelmente, aumentando o empuxo, e retirando o casco da água,
conforme a variação dos outros quatro parâmetros.
Figura 52 - Gráfico [2]-EqDin-Crew80
Analisando o casco até 50 nós, o máximo trim encontrado foi de 6º, próximo a
velocidade de projeto. Apesar de ser um trim acentuado, é sabido que o método de
Savitsky, portanto o VPH, superestimam o trim, gerando resultados de 1º a 3º acima do
trim real experimentado pelas embarcações. Em todos os casos avaliados da série da
USGC o método superestimou o trim em 2º ou mais. Assim considerou-se que o trim
dinâmico máximo do “Crew80” será de 4º. Esse valor é razoável para operação. Dessa
maneira o LCG não modificado.
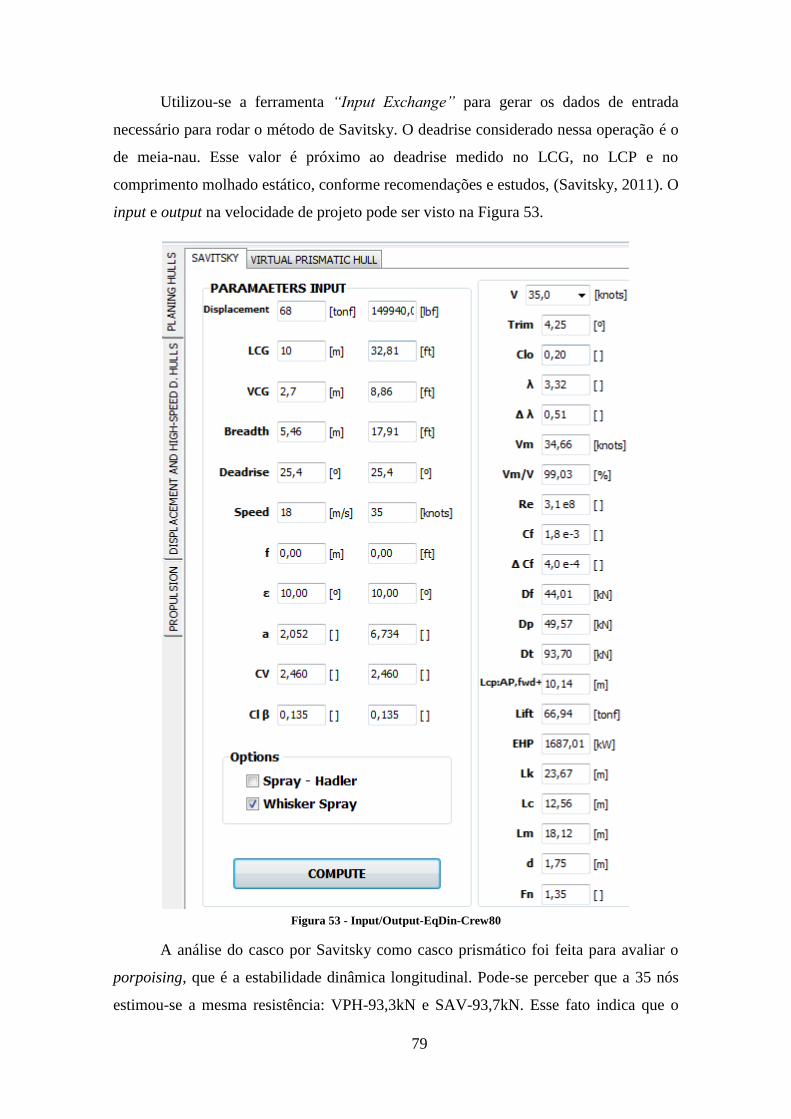
79
Utilizou-se a ferramenta “Input Exchange” para gerar os dados de entrada
necessário para rodar o método de Savitsky. O deadrise considerado nessa operação é o
de meia-nau. Esse valor é próximo ao deadrise medido no LCG, no LCP e no
comprimento molhado estático, conforme recomendações e estudos, (Savitsky, 2011). O
input e output na velocidade de projeto pode ser visto na Figura 53.
Figura 53 - Input/Output-EqDin-Crew80
A análise do casco por Savitsky como casco prismático foi feita para avaliar o
porpoising, que é a estabilidade dinâmica longitudinal. Pode-se perceber que a 35 nós
estimou-se a mesma resistência: VPH-93,3kN e SAV-93,7kN. Esse fato indica que o
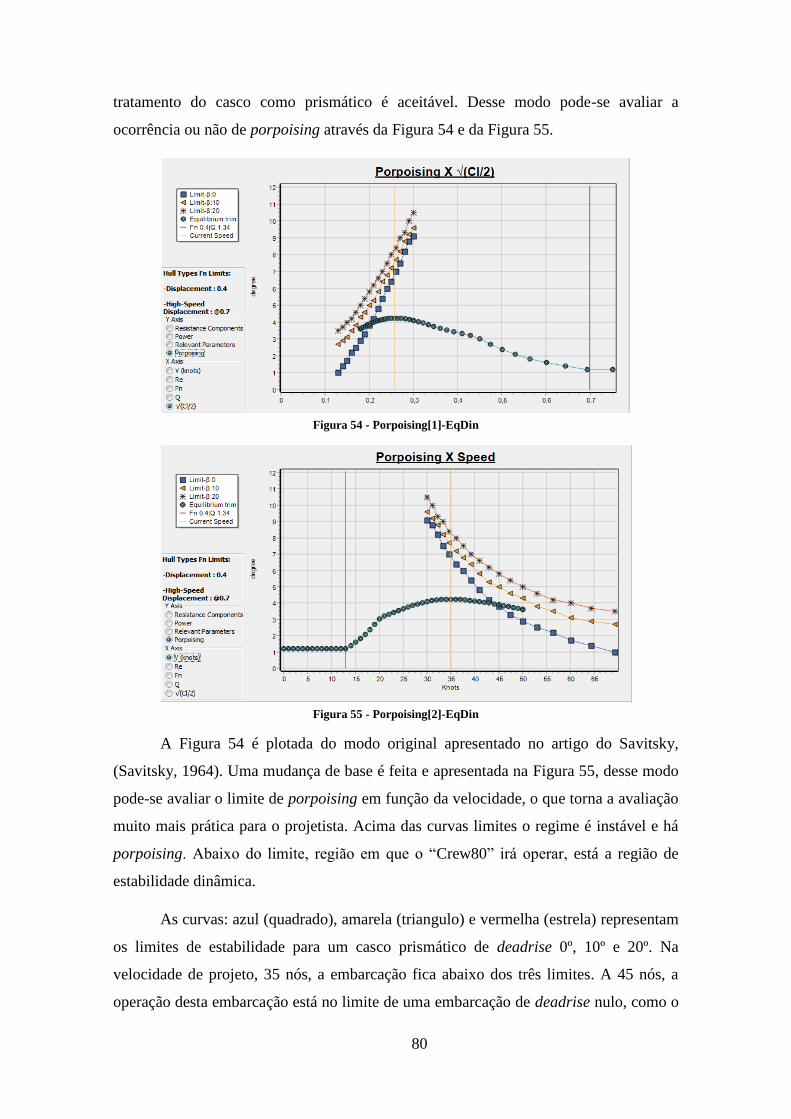
80
tratamento do casco como prismático é aceitável. Desse modo pode-se avaliar a
ocorrência ou não de porpoising através da Figura 54 e da Figura 55.
Figura 54 - Porpoising[1]-EqDin
Figura 55 - Porpoising[2]-EqDin
A Figura 54 é plotada do modo original apresentado no artigo do Savitsky,
(Savitsky, 1964). Uma mudança de base é feita e apresentada na Figura 55, desse modo
pode-se avaliar o limite de porpoising em função da velocidade, o que torna a avaliação
muito mais prática para o projetista. Acima das curvas limites o regime é instável e há
porpoising. Abaixo do limite, região em que o “Crew80” irá operar, está a região de
estabilidade dinâmica.
As curvas: azul (quadrado), amarela (triangulo) e vermelha (estrela) representam
os limites de estabilidade para um casco prismático de deadrise 0º, 10º e 20º. Na
velocidade de projeto, 35 nós, a embarcação fica abaixo dos três limites. A 45 nós, a
operação desta embarcação está no limite de uma embarcação de deadrise nulo, como o
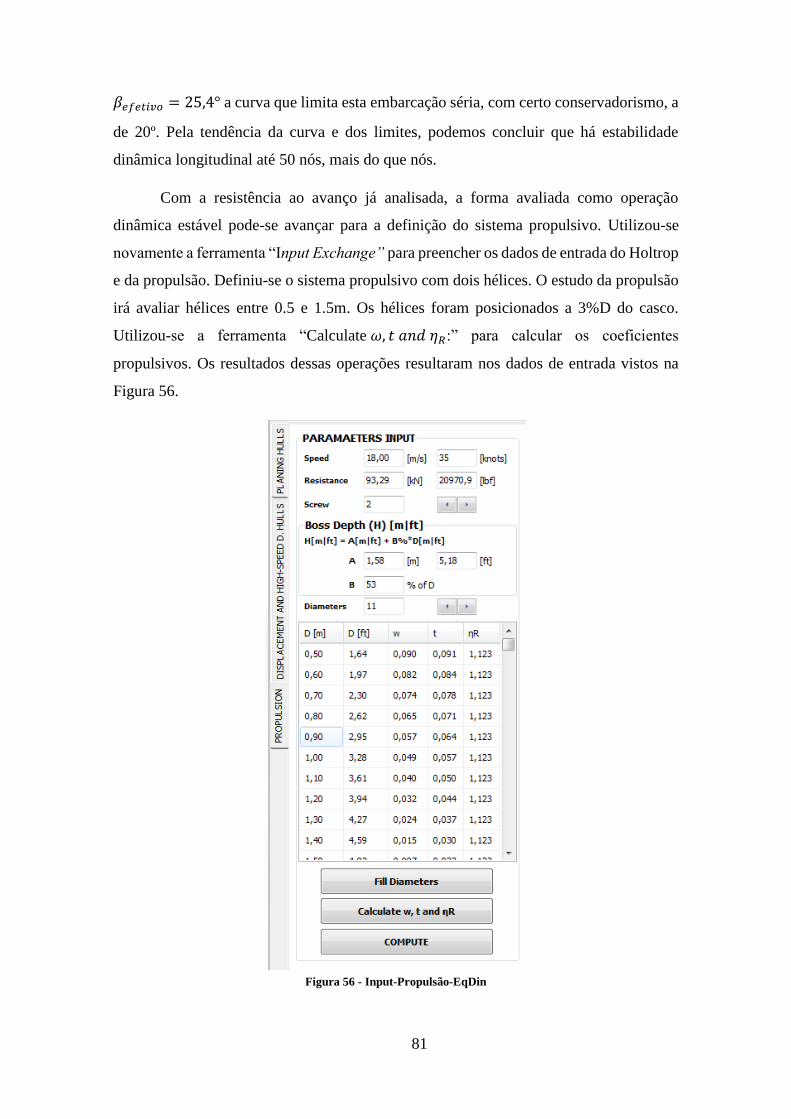
81
𝛽𝑒𝑓𝑒𝑡𝑖𝑣𝑜 = 25,4° a curva que limita esta embarcação séria, com certo conservadorismo, a
de 20º. Pela tendência da curva e dos limites, podemos concluir que há estabilidade
dinâmica longitudinal até 50 nós, mais do que nós.
Com a resistência ao avanço já analisada, a forma avaliada como operação
dinâmica estável pode-se avançar para a definição do sistema propulsivo. Utilizou-se
novamente a ferramenta “Input Exchange” para preencher os dados de entrada do Holtrop
e da propulsão. Definiu-se o sistema propulsivo com dois hélices. O estudo da propulsão
irá avaliar hélices entre 0.5 e 1.5m. Os hélices foram posicionados a 3%D do casco.
Utilizou-se a ferramenta “Calculate 𝜔, 𝑡 𝑎𝑛𝑑 𝜂𝑅:” para calcular os coeficientes
propulsivos. Os resultados dessas operações resultaram nos dados de entrada vistos na
Figura 56.
Figura 56 - Input-Propulsão-EqDin
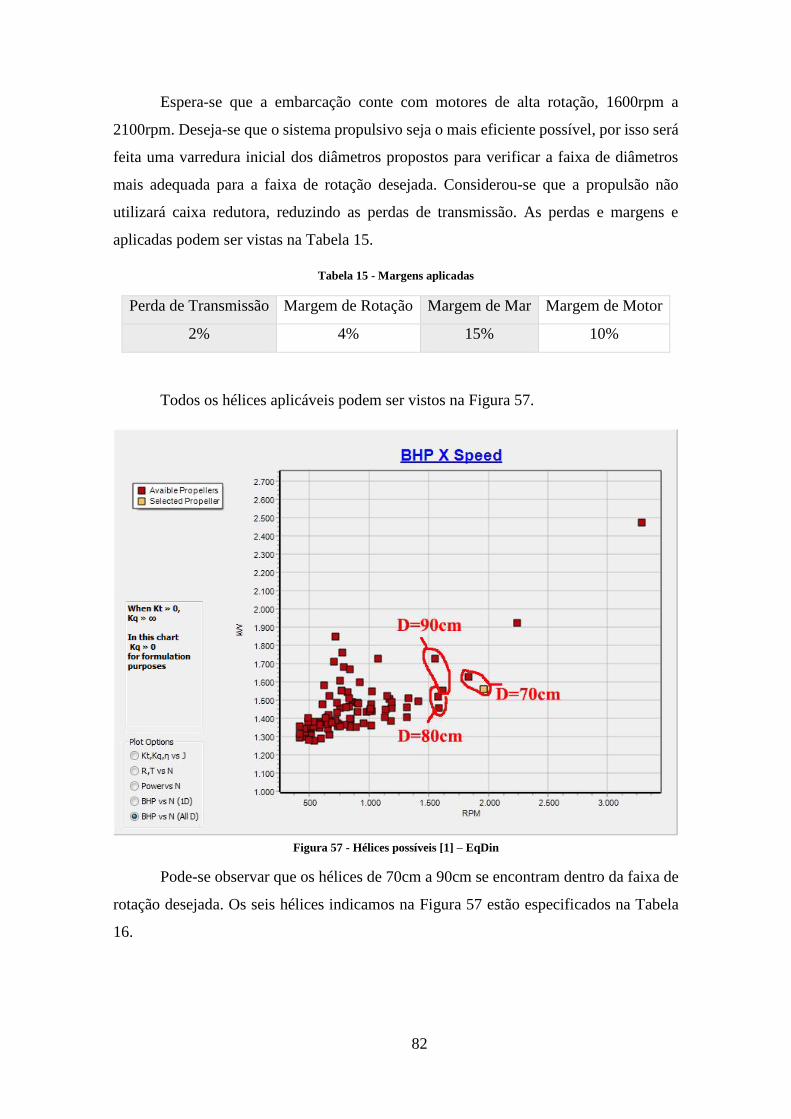
82
Espera-se que a embarcação conte com motores de alta rotação, 1600rpm a
2100rpm. Deseja-se que o sistema propulsivo seja o mais eficiente possível, por isso será
feita uma varredura inicial dos diâmetros propostos para verificar a faixa de diâmetros
mais adequada para a faixa de rotação desejada. Considerou-se que a propulsão não
utilizará caixa redutora, reduzindo as perdas de transmissão. As perdas e margens e
aplicadas podem ser vistas na Tabela 15.
Tabela 15 - Margens aplicadas
Perda de Transmissão Margem de Rotação Margem de Mar Margem de Motor
2% 4% 15% 10%
Todos os hélices aplicáveis podem ser vistos na Figura 57.
Figura 57 - Hélices possíveis [1] – EqDin
Pode-se observar que os hélices de 70cm a 90cm se encontram dentro da faixa de
rotação desejada. Os seis hélices indicamos na Figura 57 estão especificados na Tabela
16.
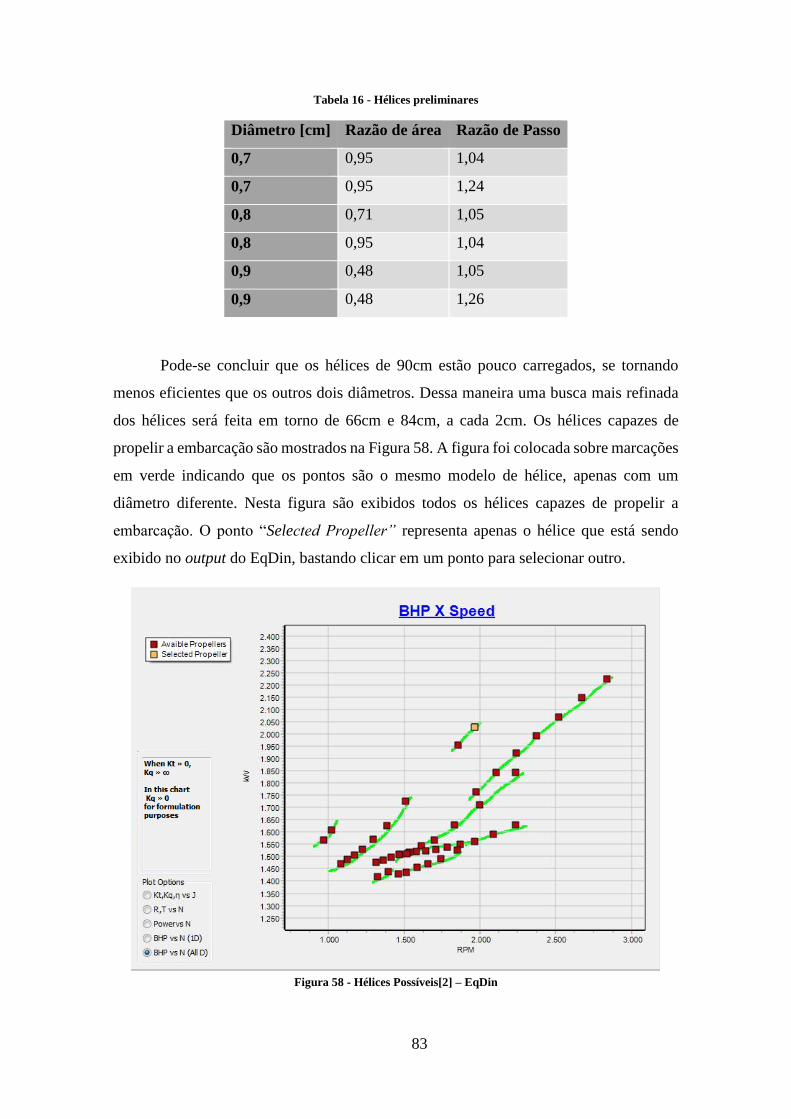
83
Tabela 16 - Hélices preliminares
Diâmetro [cm] Razão de área Razão de Passo
0,7 0,95 1,04
0,7 0,95 1,24
0,8 0,71 1,05
0,8 0,95 1,04
0,9 0,48 1,05
0,9 0,48 1,26
Pode-se concluir que os hélices de 90cm estão pouco carregados, se tornando
menos eficientes que os outros dois diâmetros. Dessa maneira uma busca mais refinada
dos hélices será feita em torno de 66cm e 84cm, a cada 2cm. Os hélices capazes de
propelir a embarcação são mostrados na Figura 58. A figura foi colocada sobre marcações
em verde indicando que os pontos são o mesmo modelo de hélice, apenas com um
diâmetro diferente. Nesta figura são exibidos todos os hélices capazes de propelir a
embarcação. O ponto “Selected Propeller” representa apenas o hélice que está sendo
exibido no output do EqDin, bastando clicar em um ponto para selecionar outro.
Figura 58 - Hélices Possíveis[2] – EqDin
84
Com esse largo conjunto de hélices apropriados a propelir a embarcação sobre as
condições especificadas pode-se então procurar o motor mais eficiente e adequado a
algum deles.
Procurou-se então motores de alta rotação capazes de fornecer entre 1400kW e
1600kW, com rotações entre 1600rpm e 2100rpm. Diversos fabricantes foram
pesquisados: Yanmar® (Yanmar, 2015), Niigata® (Niigata, 2015), Mitsubishi®
(Mitsubishi Heavy Industries, 2015), MTU® (MTU engines, 2015), Caterpillar®
(Caterpillar, 2015) e Cummins® (Cummins, 2015). Destes apenas os dois últimos se
adequaram a faixa de operação encontrada, porém apenas a Cummins possui uma boa
quantidade de informações facilmente acessíveis para a realização deste projeto
conceitual.
A primeira opção de motor foi o modelo “QSK60-M”, (Cummins, 2015). Que
possui os pontos de operação próximos a rotação de interesse mostrados na Tabela 17.
Tabela 17 - Motor QSK60-M
Rotação [rpm] Potência [kW] Consumo [L/hr]
1800 1641 404,4
1700 1596 334,9
1600 1515 276,7
Filtrando os dados de acordo com os limites operacionais do motor, o programa
gerou o gráfico visto na Figura 59, e a tabela com os propulsores visto na Figura 60.
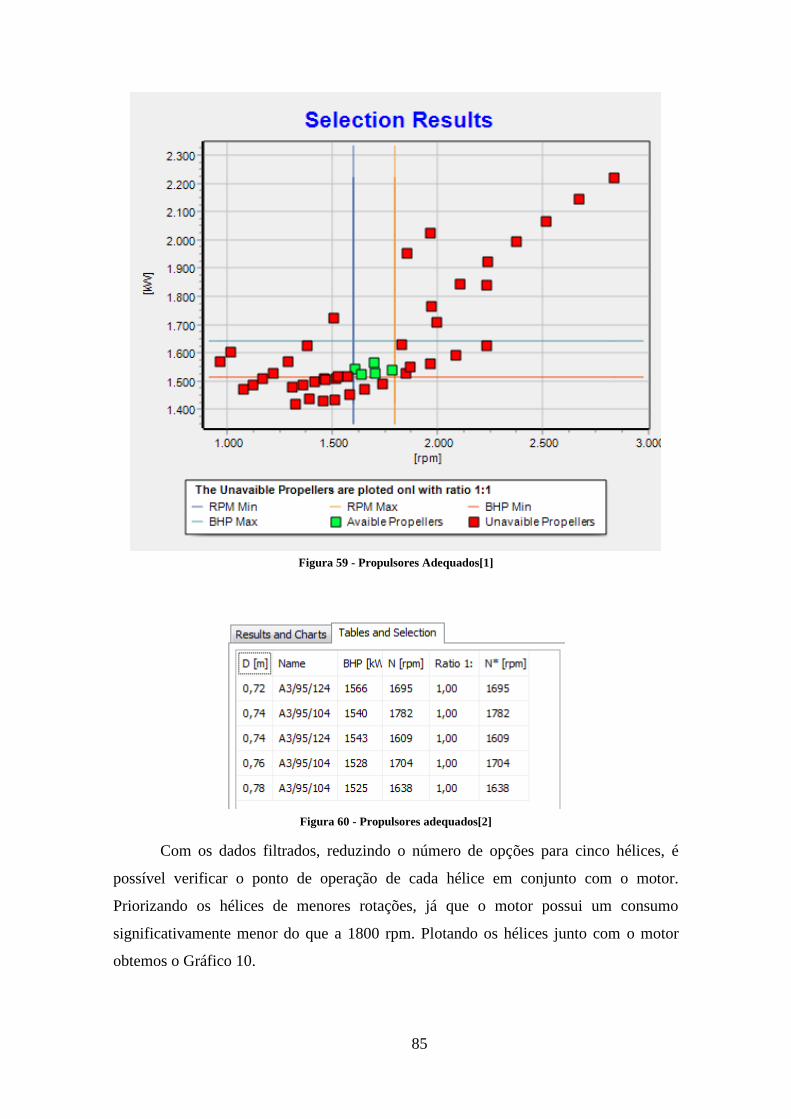
85
Figura 59 - Propulsores Adequados[1]
Figura 60 - Propulsores adequados[2]
Com os dados filtrados, reduzindo o número de opções para cinco hélices, é
possível verificar o ponto de operação de cada hélice em conjunto com o motor.
Priorizando os hélices de menores rotações, já que o motor possui um consumo
significativamente menor do que a 1800 rpm. Plotando os hélices junto com o motor
obtemos o Gráfico 10.
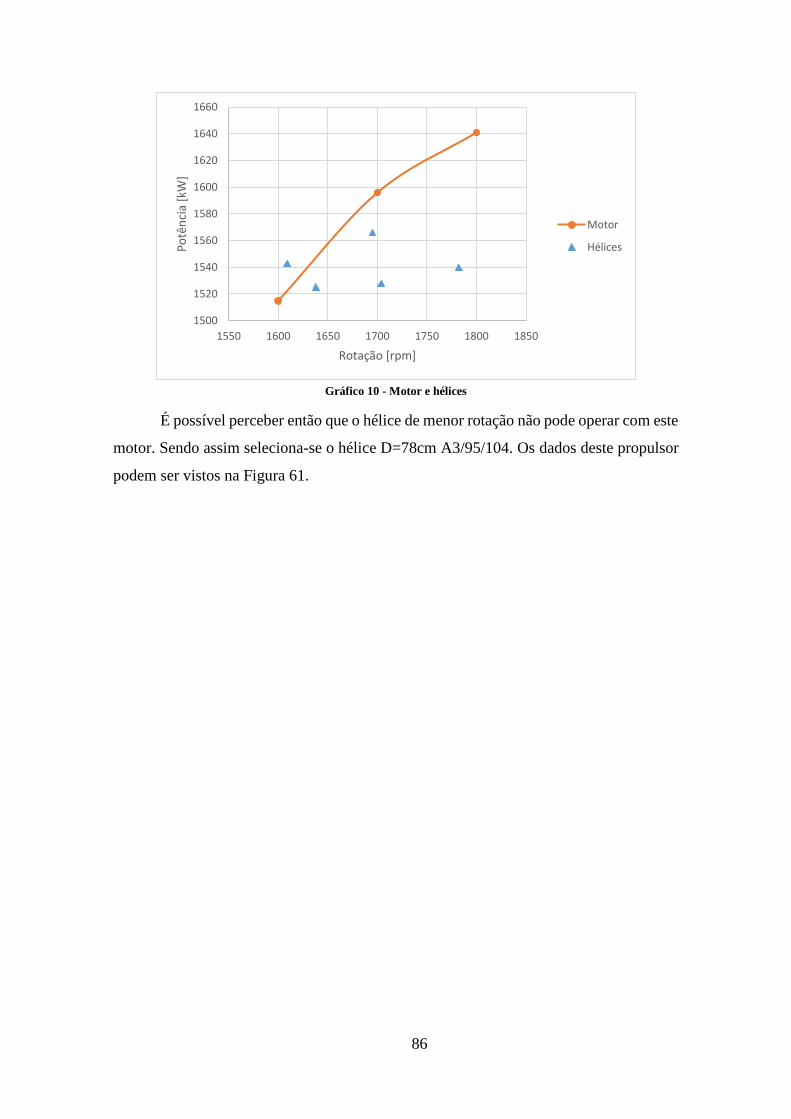
86
Gráfico 10 - Motor e hélices
É possível perceber então que o hélice de menor rotação não pode operar com este
motor. Sendo assim seleciona-se o hélice D=78cm A3/95/104. Os dados deste propulsor
podem ser vistos na Figura 61.
1500
1520
1540
1560
1580
1600
1620
1640
1660
1550 1600 1650 1700 1750 1800 1850
Po
tên
cia
[kW
]
Rotação [rpm]
Motor
Hélices
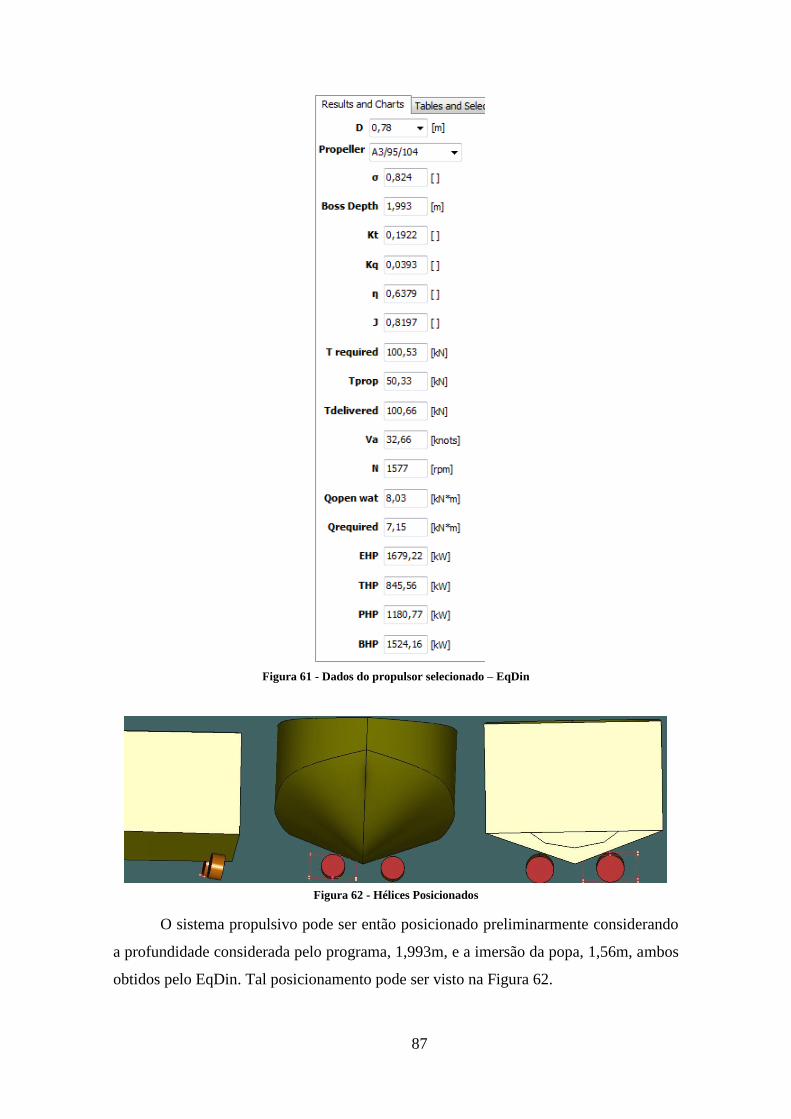
87
Figura 61 - Dados do propulsor selecionado – EqDin
Figura 62 - Hélices Posicionados
O sistema propulsivo pode ser então posicionado preliminarmente considerando
a profundidade considerada pelo programa, 1,993m, e a imersão da popa, 1,56m, ambos
obtidos pelo EqDin. Tal posicionamento pode ser visto na Figura 62.

88
Para validar as conclusões do projeto preliminar faz-se necessário validar o peso
e CG. O peso de combustível pode ser calculado facilmente com os dados do fabricante,
o ponto de operação e se considerarmos um raio de alcance de 300 milhas náuticas,
conforme a equação 26.
𝑃𝑒𝑠𝑜𝑐𝑜𝑚𝑏𝑢𝑠𝑡í𝑣𝑒𝑙 =(𝜌𝑑𝑖𝑒𝑠𝑒𝑙∗
𝑅𝑎𝑖𝑜 𝑑𝑒 𝑎𝑙𝑐𝑎𝑛𝑐𝑒
𝑉𝑠∗
𝐶ℎ𝑟1000
)
90%∗ 𝑁𝑚𝑜𝑡𝑜𝑟 ≅ 4,7𝑡 (26)
Sabendo que o peso estrutural, sistema propulsivo e combustível compõem
parcela significativa do deslocamento de projeto podemos então comparar o peso e CG
destes elementos ao deslocamento e CG.
O peso estrutural pode ser estimado nesta etapa através de fórmulas estatísticas.
Para a superestrutura há uma formulação baseada na área da base desta região, (Ventura,
2002), conforme a equação 27. A estrutura principal pela equação 28, (Karayannis,
Molland, & Sarac-Williams, 1999) em (Grubisic, 2008).
𝑃𝑒𝑠𝑜𝑆𝑢𝑝𝑒𝑟𝑒𝑠𝑡𝑟𝑢𝑡𝑢𝑟𝑎 = 0.062 ∗ 𝐴 = 4𝑡 (27 )
𝑃𝑒𝑠𝑜𝐸𝑠𝑡𝑟𝑢𝑡𝑢𝑟𝑎 = 𝐾 ∗ 𝐸𝑚1.36 = 29.5 𝑡 (28)
𝐾 = 0.0169
𝐸𝑚 = 𝐿 ∗ (𝐵 + 𝑇) + 0.85 ∗ 𝐿(𝐷 − 𝑇) = 242
Tabela 18 - Peso Preliminar
Nome Peso [t] LCG [m]
Estrutura 29,5 11,6
Superestrutura 4 14
Motores 17 4
Combustível 4,7 13
Total Conhecido 57,2 9,5
Deslocamento 68 10
Diferença 12,8 0,5
Após esta etapa de projeto o peso estrutural pode sofrer pequenas alterações, bem
como todos os LCGs. A folga de peso, 12,8t, será utilizada para colocar as mobílias da
área de passageiros, os sistemas de rádio e navegação, um pequeno gerador, um pequeno
propulsor transversal e um sistema de fundeio. As mobílias devem ter seu LCG próximo
ao da superestrutura, um pouco mais a ré. O gerador é posicionado a ré, o sistema de rádio
89
e controle a vante, bem como fundeio e bow thruster. Ao fim da definição destes
elementos o deslocamento e LCG pode ser ajustado para coincidir com a premissa de
projeto. Caso contrário uma rápida revisão do equilíbrio dinâmico, resistência ao avanço
e propulsão pode ser refeita através do EqDin.
7. Conclusão
Ao fim deste trabalho podemos concluir que o EqDin é uma ferramenta que pode
ser aperfeiçoada para se tornar algo sem igual no mercado. Possui métodos empírico-
analíticos e estatístico de alta confiabilidade, corretamente implementados, conforme
demonstrado nas seções anteriores. Tais métodos permitem avaliar cascos de planeio
prismáticos, Savitsky, ou não, VPH.
De maneira rápida e fácil o projetista pode alterar sua forma preliminar, baseada
apenas em parâmetros de forma, para obter novos resultados de equilíbrio dinâmico e
resistência ao avanço. Dessa forma é possível garantir a eficiência e segurança do projeto.
O arranjo da área de convés poderia ganhar mais liberdade, já que os impactos do arranjo
na forma poderiam rapidamente ser avaliados e reorganizados. O trim dinâmico pode ser
ajustado para garantir o conforto das pessoas a bordo. E por fim pode-se maximizar a
velocidade do projeto, de modo a minimizar a viagem.
Utilizando a troca de dados entre os métodos é realmente simples fazer uma breve
avaliação de porpoising como proposta por Savitsky, (Savitsky, 1964), através de gráficos
simples de velocidade, Froude ou Reynolds.
Com uma forma bem definida o projetista pode facilmente procurar entre centenas
de propulsores da série Newton-Rader, aquele que não só é mais eficiente como melhor
se adequa aos motores disponíveis.
Finalizando o projeto conceitual o projetista pode verificar a veracidade do
deslocamento e LCG pressupostos no início do desenvolvimento.
Além de um conjunto eficiente de ferramentas terem sido agrupadas (equilíbrio
dinâmico, estabilidade dinâmica, resistência ao avanço, coeficientes propulsivos e
propulsão), diversas ferramentas para facilitar as atividades dos projetistas foram criadas,
desde funções básicas como abrir e salvar, como um controle de parâmetros intuitivo e
um report fácil de aberto em programas externos e analisado de maneiras diversas.
90
8. Referências
Almeter, J. M. (1993). Resistance Prediction of Planing Hulls: State of Art. Marine
Technology Vol.30, 297-307.
Autoship Systems Corporation. (22 de Julho de 2015). Autopower. Fonte: Site do
Autoship:
http://cadcam.autoship.com/cadproductsservices/autopower/autopower.htm
Bentley®. (06 de Julho de 2015). Maxsurf Product Line. Fonte: Site da Bentley:
http://ftp2.bentley.com/dist/collateral/docs/maxsurf/MAXSURF_ProductLineBr
ochure.pdf
Caterpillar. (08 de Agosto de 2015). Marine Power Systems. Fonte: Site da Caterpillar:
http://www.cat.com/en_MX/products/new/power-systems/marine-power-
systems.html
Cummins. (08 de Agosto de 2015). Cummins Marine Propulsion. Fonte: Site da
Cummins Marine:
https://marine.cummins.com/marine/public/content.action?friendlyUrl=/Propulsi
on
Cummins. (08 de Agosto de 2015). QSK60 MCRS Performance Curve. Fonte: Site da
Cummins:
https://marine.cummins.com/MarineECM/MarineContent/SiteContent/en/Binary
_Asset/attachments/Products/Commercial_Propulsion/QSK60_MCRS/Performa
nce_Curve_Tab/FR6767_2200_1800_PC.pdf
DRS Technologies Inc. (02 de Agosto de 2015). Orca Manual. Fonte: Site do Orca3D:
http://orca3d.com/wp-content/uploads/2015/07/Orca3D_Help.pdf
Engeland, M. V. (07 de Agosto de 2015). Manual do Free!ship. Fonte: Site da NTNU:
http://www.ntnu.no/documents/14574940/15027837/Freeship_Manual_2.6.pdf/9
2cf9231-e674-4dca-8550-f12e6b587ffc
Grubisic, I. (2008). Reliability of weigth prediction in the small craft concept design.
Proceedings of the HIPER, (pp. 215-226). Naples.
Hadler, J. B. (10 de Novembro de 1966). The prediction of Power Performance on
Planing Craft. Nova York: SNAME.
91
Holtrop, J. (1984). A statistical Re-Analysis of Resistance and Propulsion Data.
Holtrop, J., & Mennen, G. G. (1982). An approximate Power Prediction Method.
International Shipbuilding Progress.
Karayannis, T., Molland, A., & Sarac-Williams. (1999). Design data for high-speed
vessels. FAST'99, (pp. 605-615). Seattle.
Keanet, A. J., Price, W. G., & Schachter, R. D. (1990). Optimization Techniques in Ship
Concept Design. London meeting of RINA.
Keuning, J. A., & Gerritsma, J. (1982). Resistance Tests of a Series of Planing Hull Forms
with 25 Degrees Deadrise Angle. International Shipbuilding Progress.
Korvin-Kroukovsky, B. V., Savitsky, D., & Lehman, W. F. (1949). Wettes Area dn Center
of Pressure of Planing Surfaces. Stevens Institute of Technology, Davidson
Laboratory Report.
Kowalyshyn, D. H., & Metcalf, B. (2006). A USGC Systematic Series Of High Speed
Planing Hulls. Transactions SNAME, 268-309.
Lammeren, W. P., Manen, J. D., & Oosterveld, M. W. (1969). The Wageningen B-screw
Series. SNAME.
Mitsubishi Heavy Industries. (08 de Agosto de 2015). SA/R Series. Fonte: Site da
Mitsubishi: https://www.mhi-global.com/products/expand/sa-r_series_01.html
MTU engines. (08 de Agosto de 2015). Diesel Engines for Fast Vessels with High Load
Factor. Fonte: Site da MTU: http://www.mtu-online.com/mtu/products/engine-
program/diesel-engines-for-marine-main-propulsion-dieselelectric-drives-and-
onboard-power-generation/diesel-engines-for-passenger-ships-and-
ferries/?L=16Orion
Newton, R. N., & Rader, H. P. (Abril de 1961). Performance data of propellers for high-
speed craft. the Royal Intitution of Naval Architects - Quartely Transactions.
Niigata. (08 de Agosto de 2015). Marine Products. Fonte: Site da Niigata:
http://www.niigata-power.com/English/products/marine/index.html#hs
Ribeiro, H. J. (2002). Equilíbrio Dinâmico de Cascos Planadores. Rio de Janeiro:
COPPE - UFRJ.
92
Savitsky, D. (1964). Hydrodynamic Design of Paning Hulls. Marine Technology, 71-95.
Savitsky, D. (2011). The Effect of Bottom Warp on the Performance of Planing Hulls.
3rd SNAME Chesapeake Power Boat Symposium.
Savitsky, D. (2014). Semi-Displacement Hulls---A Misnomer? 4th Chesapeake Power
Boat Symposium.
Savitsky, D., & Neidinger, J. W. (1954). Wetted Area and Center of Pressure of Planing
Surfaces at Very Low Speed Coefficientes. Stevens Institute of Technology,
Davidson Laboratory Report.
Savitsky, D., DeLorme, M. F., & Datla, R. (2007). Inclusion of Whisker Spray Drag in
Performance Prediction Metod for High-Speed Planing Hulls. Marine
Technology, 35-56.
Schachter, R. D. (Novembro de 1990). Optimization Techniques with knowledge based
control in ship concept design. PH. D. Thesis, Department of Mechanical
Engineering, Brunel University.
Schachter, R. D., Fernandes, A. C., Bogosin Neto, S., Jordani, G., C., & Castro, G. A.
(Novembro de 2006). The Solution-Focused design process organization
approach applied from ship design to offshore platforms design. ASME
Transactions, Journal of OMAE, OMAE-05-1042, pp. 1-10.
Sottorf, W. (1934). Experiments With Planing Surfaces. NACA TM.
University of Southampton. (21 de Julho de 2015). Power Prediction Program. Fonte:
Site da Wolfson Unit:
http://www.wumtia.soton.ac.uk/sites/default/files/uploads/software/PowerPredic
tionBrochure.pdf
Ventura, M. (2002). Estimation Methods for basic ship design.
Yanmar. (08 de Agosto de 2015). Marine Commercial Propulsion Engines. Fonte: Site
da Yanmar:
https://www.yanmar.com/global/support/documents/marinecommercial.html
Yeh, H. Y. (1965). Series 64 resistance experiments on high-speed displacement forms.
Marine Technology.


















