M etodos matem aticos para el an alisis de epidemias y ...
88
FACULTAD DE CIENCIAS CARRERA DE MATEM ´ ATICAS M´ etodos matem´ aticos para el an´ alisis de epidemias y propagaci´ on de gusanos en redes de sensores inal´ ambricos PAOLA VARGAS BERNAL Director: RENATO COLUCCI Ph.D. PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE CIENCIAS CARRERA DE MATEM ´ ATICAS BOGOT ´ A D.C. NOVIEMBRE, 2013.
Transcript of M etodos matem aticos para el an alisis de epidemias y ...
FACULTAD DE CIENCIAS
CARRERA DE MATEMATICAS
Metodos matematicos para el analisis de
epidemias y propagacion de gusanos en redes
de sensores inalambricos
PAOLA VARGAS BERNAL
Director:RENATO COLUCCI Ph.D.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE CIENCIAS
CARRERA DE MATEMATICAS
BOGOTA D.C.
NOVIEMBRE, 2013.

2

FACULTAD DE CIENCIAS
CARRERA DE MATEMATICAS
Metodos matematicos para el analisis de
epidemias y propagacion de gusanos en redes
de sensores inalambricos
PAOLA VARGAS BERNAL
TRABAJO DE GRADOPresentado como requisito para obtar al titulo de
MATEMATICA
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE CIENCIAS
CARRERA DE MATEMATICAS
BOGOTA D.C.
NOVIEMBRE, 2013.


Dedicado aMis padres, Luis Alfonso Vargas, Cecilia Bernal, a mi hermana Fernanda
Vargas, a mi gran amigo Juan Sebastian y a todos mis amigos que siempreme han apoyado y acompanado.
I

II

Indice general
Lista de figuras V
1. Introduccion 1
2. Introduccion a Dinamica 52.1. Puntos fijos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3. Linealizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4. Funcion de Liapunov . . . . . . . . . . . . . . . . . . . . . . . 112.5. Variedades invariantes . . . . . . . . . . . . . . . . . . . . . . 18
2.5.1. Subespacios estables, inestables y centrales de sistemasde ecuaciones diferenciales lineales . . . . . . . . . . . . 18
2.5.2. Variedades estables, inestables y centrales de sistemasde ecuaciones diferenciales no lineales . . . . . . . . . . 19
2.6. Orbitas periodicas . . . . . . . . . . . . . . . . . . . . . . . . . 262.7. Comportamiento asintotico: estudio cualitativo . . . . . . . . . 28
2.7.1. Teorema de Poincare-Bendixson: sistemas en el plano R2 302.7.2. Caso general: sistemas en Rn . . . . . . . . . . . . . . . 34
2.8. Analisis global: Isoclinas . . . . . . . . . . . . . . . . . . . . . 38
3. Modelos de epidemiologıa 433.1. Modelo SIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2. Modelo SIRS . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4. Vacunacion 574.0.1. El numero de reproduccion basico . . . . . . . . . . . . 574.0.2. Modelo de vacunacion . . . . . . . . . . . . . . . . . . 59
5. Modelo de propagacion de gusanos en WSN 655.1. Analisis del modelo de propagacion de gusanos en WSN . . . . 65
6. Conclusiones 75
III

IV INDICE GENERAL
Bibliografıa 77

Indice de figuras
2.1. El campo vectorial en la frontera de U. . . . . . . . . . . . . . 112.2. Curvas de nivel de V . . . . . . . . . . . . . . . . . . . . . . . 122.3. Curva de nivel de V y ∇V . . . . . . . . . . . . . . . . . . . . 132.4. Seleccion de las trayectorias y vecindades de la prueba del
teorema 2.4.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5. Variedad estable e inestable en (x,y)=(0,0). . . . . . . . . . . 252.6. El punto x0 ∈ γ es el punto ω-lımite de x . . . . . . . . . . . . 292.7. Un pedazo de la orbita O+(p) entre lo puntos pi−1 a pi. . . . . 322.8. Seleccion de las trayectorias y curvas de trasversas para la
prueba del Lema 2.7.10. . . . . . . . . . . . . . . . . . . . . . 332.9. Conjunto de atraccion . . . . . . . . . . . . . . . . . . . . . . 372.10. Las isoclinas y el punto fijo. . . . . . . . . . . . . . . . . . . . 392.11. Direccion del campo vectorial en todo el plano. . . . . . . . . 402.12. Diagrama fase del sistema. . . . . . . . . . . . . . . . . . . . . 42
3.1. Diagrama de flujo . . . . . . . . . . . . . . . . . . . . . . . . . 443.2. Isoclinas y direccion del campo vectorial en el modelo SIR . . 473.3. Diagrama de fase del sistema SIR . . . . . . . . . . . . . . . . 483.4. Diagrama de flujo . . . . . . . . . . . . . . . . . . . . . . . . . 493.5. La region ∆ y la direccion del campo vectorial sobre su frontera. 523.6. Isoclinas y diagrama de fase del sistema SIRS . . . . . . . . . 54
4.1. La region ∆ y la direccion del campo vectorial sobre su frontera. 61
5.1. Estructura del WSN. . . . . . . . . . . . . . . . . . . . . . . . 665.2. Relaciones de los nodos. . . . . . . . . . . . . . . . . . . . . . 685.3. Region ∆. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
V

VI INDICE DE FIGURAS

Capıtulo 1
Introduccion
El ser humano siempre ha sido vulnerable al contagio de enfermedades,tales como la malaria, la tuberculosis, el sarampion, la gripe, la viruela, entreotras. Esto ha sido de preocupacion y de estudio para el hombre ya que atraves de la historia se han presentado las denominadas plagas que han reper-cutido directa e indirectamente en la caida de los grandes imperios como elimperio Romano, el imperio Han en China, el imperio Inca y Azteca por citaralgunos. Uno de los casos mas sobresalientes sobre pestes, fue la famosa muer-te negra, que afecto aproximadamente a un tercio de la poblacion europea [4].
En la segunda mitad del siglo XIX, con el desarrollo de la bacteriologıapor parte de Pasteur y Koch se muestran en sus trabajos las primeras pautasde la trasmicion de enfermedades infecciosas. En 1906, Hammer propone queun factor importante en las epidemias es el promedio de contacto entre losindividuos susceptibles e infectados, donde el primero son las personas vulne-rables a contagiarse y el segundo aquellos que tienen la enfermedad [5]. Para1927, Kermack y McKendrick formulan un modelo simple en la matematicaepidemiologica, conocido como modelo SIR, el cual es un modelo compar-timental que se basa en la razon de flujo entre los miembros de las clasessusceptibles, infectados y recuperados[4]. En este modelo se asume que luegode recuperarse de la enfermedad, el individuo ya no se volvera a contagiar deesta. Las enfermedades que se comportan de esta manera, son las causadaspor virus como el sarampion o la varicela que cumplen con el esquema delSIR. Despues, se desarrolla un modelo mas complejo, llamado SIRS, en elcual se asume que el individuo que ya se ha recuperado de la enfermedad,puede volver a ser vulnerable a la misma, es decir, esta persona puede volvera adquirir la enfermedad. Las enfermedades que tienen este comportamientoson las causadas por bacterias como la tuberculosis, pero dentro de este gru-po tambien esta por ejemplo la gripe causada por otro tipo de agente [2].
1
2 CAPITULO 1. INTRODUCCION
Estos modelos no solo analizan la propagacion de enfermedades, si noque tambien se sirven de otras areas como la informatica para poder modelarcomo en este caso la propagacion de gusanos en redes de sensores inalambri-cos. Y es por eso que este documento de trabajo, tiene como proposito elanalisis dinamico de este punto especıfico, ya que este proceso es similar a lapropagacion de virus. Los gusanos son codigos computacionales que danan oroban informacion y las redes de sensores inalambricos son una coleccion denodos que tienen energıa y comunicacion limitada. El modelo de propagacionde gusanos en redes inalambricas, consiste en un modelo mejorado del SIR,en el cual los nodos infectados, es decir, los que tienen algun tipo de gusano,solo pueden infectar a los nodos que esten susceptibles y sean vecinos de este.Ademas, cuando los nodos se comunican entre ellos, consumen energıa de unamicro-baterıa no recargable que tiene cada nodo; una vez se agota la energıade un nodo, este pasara a ser un nodo muerto en el sistema. Los nodos muer-tos no participan en el proceso de propagacion de gusanos, es decir, que yano pueden ser infectados. A este nuevo modelo se le llamara modelo iSIRS [3].
Esta tesis tiene la siguiente estructura: en el segundo capıtulo se hace unaintroduccion a la dinamica, en donde se desarrolla toda la teorıa matemati-ca para poder estudiar y analizar un sistema dinamico; se empieza con unanalisis local del sistema, es decir, haciendo un estudio sobre una vecindadde los puntos fijos. Tambien se estudian las orbitas periodicas que son otrotipo de soluciones del sistema, y los conjuntos ω y α lımites, y se enunciany demuestran teoremas como el teorema de Poincare-Bendixson o el criteriode Bendixson-Dulac. Ademas, se habla de conjuntos positivamente invarian-tes, para luego hablar de variedades estables, inestables y centrales [1]. Porultimo, se hace un analisis global del sistema con la ayuda de las isoclinas,las cuales dividen a Rn en distintas regiones, para luego determinar el campovectorial de cada una de las regiones, y de esta forma concluir como es elcomportamiento del sistema globalmente [2].
En el tercer capıtulo se analizara y estudiara dos modelos epidemiologi-cos: el modelo SIR y el modelo SIRS, basandose en la teorıa expuesta enel segundo capıtulo y se vera bajo que condiciones se puede considerar quela enfermedad que se esta estudiando, se puede considerar una epidemia ouna endemia. Ambos modelos, generan un sistema de ecuaciones que estancontenidos en R3, los cuales se pueden reducir a un sistema contenido en R2
facilitando en gran medida el estudio del sistema. Mas aun, en el segundomodelo podemos encontrar un conjunto positivamente invariante ∆ ⊂ R2
+,conjunto sobre el cual se hara todo el estudio de la dinamica. En ambos sis-

3
temas se hallan los puntos fijos y se estudia la estabilidad de estos. Ademas,se hace un analisis global del sistema mediante el estudio de las isoclinas, yse observa el comportamiento del campo vectorial sobre la region de interesen cada caso.
En el cuarto capıtulo, se definira el numero de reproduccion basico yluego, se analizara y estudiara un modelo SIR con vacunacion. Este modelogenera un sistema de ecuaciones diferenciales contenido en R3 [11], que sepuede reducir a un sistema de ecuaciones contenido en R2. Mas aun, se en-cuentra una region positivamente invariante ∆ ⊂ R2
+, en la cual se realizara elestudio dinamico del sistema. Se hallaran sus puntos fijos y se estudiara laestabilidad de estos. Se hallaran las isoclinas para un estudio mas global delsistema. Por ultimo, se determinaran el porcentaje de poblacion que debe servacunado para alcanzar la inmunidad de gran parte de la poblacion.
En el quinto capıtulo, se hara un analisis de la dinamica del modelo depropagacion de gusanos en redes de sensores inalambricos, inicialmente sedice en que consiste el modelo y por que se puede modelar de forma similar acomo se modelan las enfermedades infecciosas, de donde se obtiene un sistemade ecuaciones diferenciales contenido en R4 [3], que se puede reducir a unsistema contenido en un conjunto positivamente invariante en R3
+. Luego, sehace todo el estudio dinamico del modelo sobre este conjunto, hallando lasisoclinas y a partir de estas, los puntos fijos, mirando su estabilidad. Porultimo, se mira el comportamiento asintotico del sistema.

4 CAPITULO 1. INTRODUCCION

Capıtulo 2
Introduccion a Dinamica
La siguiente ecuacion se denomina un sistema dinamico,
x′ = f(x, t;µ) (2.0.1)
con x ∈ U ⊂ Rn, t ∈ R y µ ∈ V ⊂ Rp, donde U y V son abiertos de Rn yRp, respectivamente, y la variable µ se considera un parametro. En el estudiode los sistemas dinamicos, la variable independiente se refiere a la variabletiempo. Ademas, (2.0.1) se refiere a una ecuacion diferencial ordinaria.
Una solucion del sistema (2.0.1) esta dada por,
x : I ⊂ R→ Rn
t→ x(t)
tal que, x(t) satisface (2.0.1), es decir,
x(t)′ = f(x(t), t;µ).
El espacio fase del sistema (2.0.1) se refiere al espacio de la variable de-pendiente de (2.0.1). En la mayorıa de los casos este espacio es Rn, perotambien, puede ser un espacio cilındrico, esferico o toroidal.
Por otra parte, los sistema de ecuaciones diferenciales ordinarias que de-penden explıcitamente del tiempo, es decir, x′ = f(x, t;µ) se les conoce comosistemas no autonomos, y los sistema de ecuaciones diferenciales ordinariasque no dependen explıcitamente del tiempo, es decir, x′ = f(x;µ) se lesconoce como sistemas autonomos.
5

6 CAPITULO 2. INTRODUCCION A DINAMICA
Por ultimo, la orbita a traves de x0, donde x0 es un punto del espaciofase de (2.0.1), es el conjunto de puntos del espacio fase que se encuentranen una trayectoria (solucion de (2.0.1)) que pasan a traves de x0.
2.1. Puntos fijos
El primer paso en el estudio de los sistemas dinamicos, consiste en estu-diar particulares clases de soluciones. Las soluciones mas sencillas se llamanpuntos fijos. La primera pregunta es conocer el comportamiento del sistema,cerca a algunas soluciones conocidas, en este caso los puntos fijos. Por estarazon, se introduce el concepto de estabilidad del punto fijo.
Se considera el siguiente sistema autonomos de ecuaciones diferenciales
x′ = f(x), x,x′ ∈ Rn. (2.1.2)
Definicion 2.1.1. Un punto fijo, x ∈ Rn, es una solucion del sistema (2.1.2)tal que
f(x) = 0.
Esta es una solucion que es constante en el tiempo. Tambien se conocecomo punto de equilibrio o solucion de equilibrio.
Cuando se encuentra una solucion del sistema (2.1.2), se desea saber sobrela estabilidad de la solucion.
2.2. Estabilidad
Sea x un punto fijo del sistema (2.1.2), x se dice estable si solucionescercanas a este punto permanecen cercanas en tiempos futuros y asintotica-mente estable, si ademas las soluciones cercanas convergen a x cuando t→∞.
Definicion 2.2.1. El punto x se dice estable, si para cualquier vecindad Ude x, existe una vecindad W de x(t) contenida en U, tal que cada solucionX(t) en W permanece en U para todo t > 0.
Si el punto x, no es estable, entonces se dice que el punto es inestable.

2.3. LINEALIZACION 7
Definicion 2.2.2. El punto x se dice asintoticamente estable, si es establey ademas se tiene
lımt→∞
x(t) = x.
En las anteriores definiciones, se da una nocion matematica de los tipos deestabilidad, pero aun no se tiene un metodo para determinar si una solucion esestable o inestable. A continuacion se tratara de dar respuesta a esa pregunta.
2.3. Linealizacion
Para determinar la estabilidad de x, primero se observara como es lanaturaleza de las soluciones que estan cercanas a x. Sea
x = x + y. (2.3.3)
La expansion de Taylor de f(x) alrededor de x es
f(x) = f(x) + Df(x)(x− x) +D2f(x)
2(x− x) + · · · (2.3.4)
Reemplazando (2.3.3) en (2.1.2) y en (2.3.4) se obtiene
x′ = x′ + y′ = f(x) + Df(x)y +O(|y|2) (2.3.5)
donde Df es la derivada de f y | · | es una norma en Rn (f debe ser por lomenos C2). Como x′ = f(x) entonces (2.3.5) sera
y′ = Df(x)y +O(|y|2) (2.3.6)
La ecuacion (2.3.6) conocida como ecuacion variacional, describe la evo-lucion de las orbitas cerca del punto fijo x. Para ver si el punto fijo es estableo inestable se debe observar el comportamiento de las soluciones que estancerca del punto x. A continuacion se muestra el sistema de primer orden.
y′ = Df(x)y (2.3.7)
Por lo tanto, para estudiar la estabilidad de x, se deben seguir los siguien-tes dos pasos:
1. Determinar si la solucion de (2.3.7), y=0 , es estable.

8 CAPITULO 2. INTRODUCCION A DINAMICA
2. Mostrar que la estabilidad o inestabilidad de la solucion de (2.3.7),y=0, implica la estabilidad o inestabilidad de la solucion x.
Resolver el paso 1 puede ser igual de complicado que la pregunta inicial,ya que no hay un metodo analıtico para resolver problemas de ecuacionesdiferenciales lineales con coeficientes que dependan del tiempo. Sin embargo,si x es punto fijo, entonces Df(x) sera una matriz con entradas constantes,y (2.3.7) sera una ecuacion diferencial autonoma.
La solucion de (2.3.7) con condicion inicial y(0) = y0 ∈ Rn sera
y(t) = y0eDf(x)t (2.3.8)
donde
eDf(x)t = id+ Df(x)t+(Df(x)t)2
2!+
(Df(x)t)3
3!+ · · ·
con id la matriz identidad de tamano n× n.
Por lo tanto, y(t) sera asintoticamente estable si todos los autovalores deDf(x) tienen parte real negativa.
Del siguiente teorema se obtiene la respuesta al paso 2.
Teorema 2.3.1. Se supone que todos los autovalores de Df(x) tienen partereal negativa, entonces el punto fijo x = x del sistema de ecuaciones diferen-ciales no lineales (2.1.2) es asintoticamente estable.
La demostracion del Teorema 2.3.1, se dara en la siguiente seccion cuandose halla introducido la funcion de Liapunov.
Definicion 2.3.2 (Punto fijo hiperbolico). Sea x = x un punto fijo de(2.1.2), entonces x se dice que es un punto fijo hiperbolico si ninguno delos autovalores de Df(x) tiene parte real cero.
Las soluciones del sistema no lineal, cerca a los puntos fijos se parecera asu parte lineal, solo en el caso donde el punto fijo es hiperbolico.
Ejemplo 2.3.3 (Oscilador no forzado de Duffing). Las ecuaciones del osci-lador no forzado de Duffing estan dadas por
x′ = y
y′ = x− x3 − δy, δ ≥ 0 (2.3.9)

2.3. LINEALIZACION 9
para hallar los puntos fijos, se mira cuando x e y se anulan.
y = 0
x− x3 − δy = 0
Reemplazando la primera ecuacion en la segunda se obtiene
x− x3 = 0
x(1− x2) = 0
Por lo tanto, el sistema (2.3.9) tiene tres puntos fijos, P1 = (0, 0), P2 =(1, 0) y P3 = (−1, 0).
La matriz asociada a la linealizacion esta dada por
A =
(0 1
1− 3x2 −δ
).
i. Punto fijo P1.
La matriz asociada es
AP1 =
(0 11 −δ
).
Se determinaran los autovalores de la matriz AP1
det(AP1 − λI) = 0∣∣∣∣ −λ 11 −δ − λ
∣∣∣∣ = 0
−λ(−δ − λ)− 1 = 0
λ2 + δλ− 1 = 0
entonces

10 CAPITULO 2. INTRODUCCION A DINAMICA
λ1,2 =−δ ±
√δ2 + 4
2
ii. Puntos fijos P2 y P3.
La matriz asociada es
AP2,3 =
(0 1−2 −δ
).
Se determinaran los autovalores de la matriz AP2,3
det(AP2,3 − λI) = 0∣∣∣∣ −λ 1−2 −δ − λ
∣∣∣∣ = 0
−λ(−δ − λ) + 2 = 0
λ2 + δλ+ 2 = 0
entonces
λ1,2 =−δ ±
√δ2 − 8
2
Luego, P1 es inestable para δ ≥ 0, ya que λ1 > 0 y λ2 < 0. Para δ > 0, P2
y P3 son asintoticamente estable ya que λ1,2 < 0 y para δ = 0, λ1,2 = ±√
2i,entonces P2 y P3 son linealmente estables.
Observacion 2.3.4. Alguna terminologıa asociada con puntos fijos.
Un punto fijo hiperbolico x de un sistema de ecuaciones diferencialesautonomo se llamara
1. Punto de silla: si algunos de los autovalores de la linealizacion aso-ciada tienen parte real positiva, y el resto de los autovalores parte realnegativa.
2. Nodo estable o sumidero: si todos los autovalores de la linealizacionasociada tienen parte real negativa.
2.4. FUNCION DE LIAPUNOV 11
Fuente: S. Wiggins (2003).
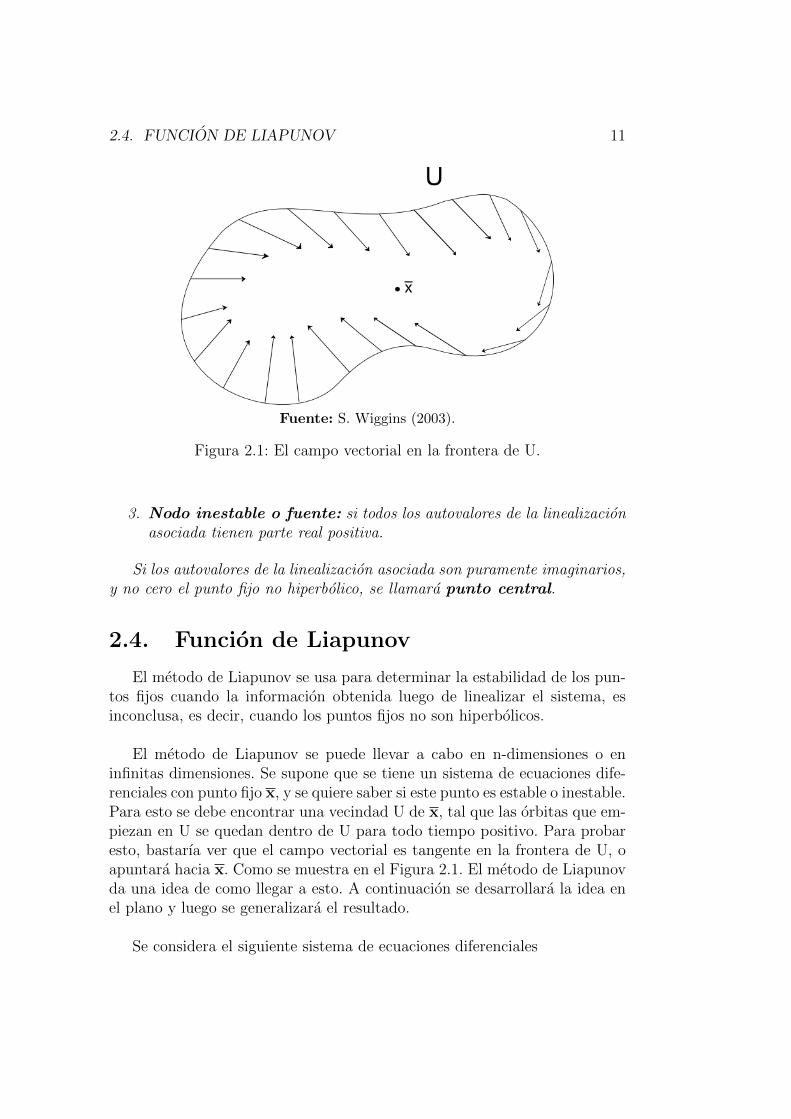
Figura 2.1: El campo vectorial en la frontera de U.
3. Nodo inestable o fuente: si todos los autovalores de la linealizacionasociada tienen parte real positiva.
Si los autovalores de la linealizacion asociada son puramente imaginarios,y no cero el punto fijo no hiperbolico, se llamara punto central.
2.4. Funcion de Liapunov
El metodo de Liapunov se usa para determinar la estabilidad de los pun-tos fijos cuando la informacion obtenida luego de linealizar el sistema, esinconclusa, es decir, cuando los puntos fijos no son hiperbolicos.
El metodo de Liapunov se puede llevar a cabo en n-dimensiones o eninfinitas dimensiones. Se supone que se tiene un sistema de ecuaciones dife-renciales con punto fijo x, y se quiere saber si este punto es estable o inestable.Para esto se debe encontrar una vecindad U de x, tal que las orbitas que em-piezan en U se quedan dentro de U para todo tiempo positivo. Para probaresto, bastarıa ver que el campo vectorial es tangente en la frontera de U, oapuntara hacia x. Como se muestra en el Figura 2.1. El metodo de Liapunovda una idea de como llegar a esto. A continuacion se desarrollara la idea enel plano y luego se generalizara el resultado.
Se considera el siguiente sistema de ecuaciones diferenciales

12 CAPITULO 2. INTRODUCCION A DINAMICA
x′ = f(x, y)
y′ = g(x, y), (x, y) ∈ R2 (2.4.10)
sea (x, y) un punto fijo del sistema (2.4.10). Se supone que este punto esestable y se demostrara que para alguna vecindad U de (x, y) se cumple lacondicion que el campo vectorial es tangente en la frontera de U, o apun-tara hacia (x, y).
Se introduce una funcion escalar V : R2 → R, al menos de clase C1, conV (x, y) = 0, y tal que las curvas de nivel de V (x, y) encierran al punto (x, y)con V (x, y) > 0 en una vecindad de (x, y). Ver Figura 2.2.
Fuente: S. Wiggins (2003).
Figura 2.2: Curvas de nivel de V
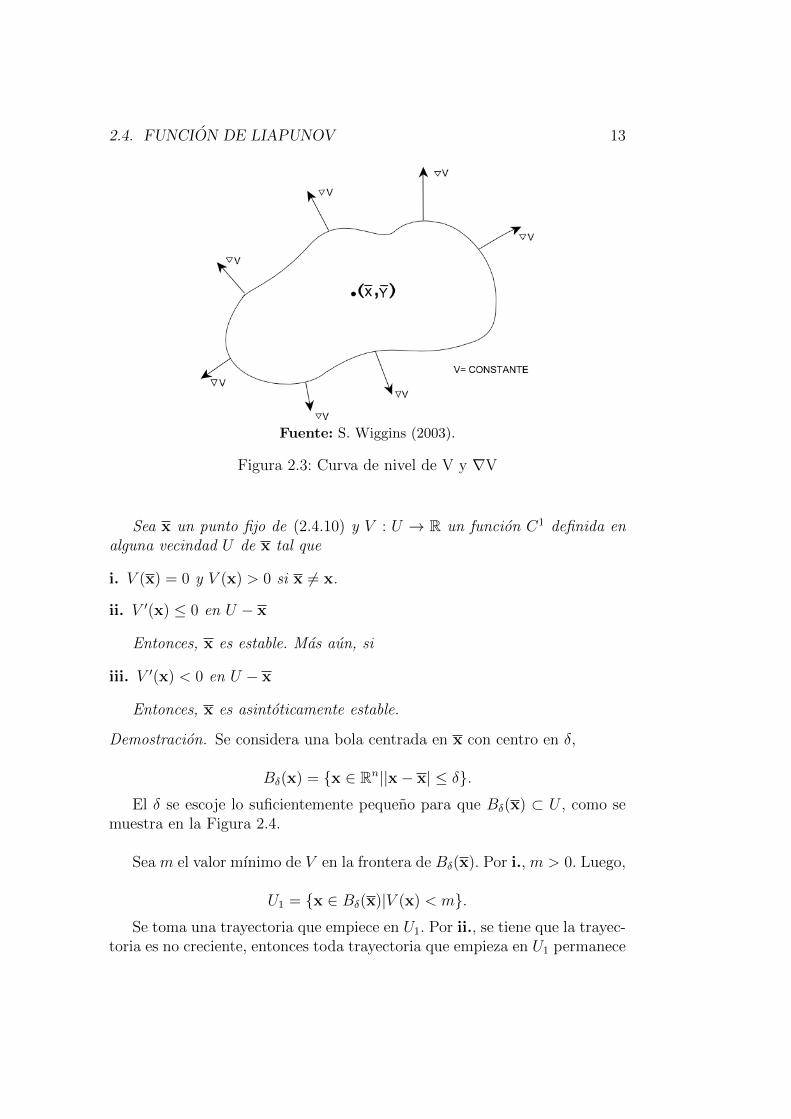
El vector gradiente de V , es un vector perpendicular al vector tangentede cada curva V = C, y apunta en la direccion de incremento de V , comoen la Figura 2.3. Como el campo vectorial es tangente en la frontera de cadauna de las curvas que encierran a (x, y), o apunta hacia este punto. Entoncesse tiene que
V ′(x, y) = ∇V (x, y) · (x′, y′) ≤ 0.
El siguiente teorema da la idea general del metodo de Liapunov.
Teorema 2.4.1. Se considera el siguiente sistema de ecuaciones diferencia-les
x′ = f(x), x ∈ Rn. (2.4.11)
2.4. FUNCION DE LIAPUNOV 13
Fuente: S. Wiggins (2003).
Figura 2.3: Curva de nivel de V y ∇V
Sea x un punto fijo de (2.4.10) y V : U → R un funcion C1 definida enalguna vecindad U de x tal que
i. V (x) = 0 y V (x) > 0 si x 6= x.
ii. V ′(x) ≤ 0 en U − x
Entonces, x es estable. Mas aun, si
iii. V ′(x) < 0 en U − x
Entonces, x es asintoticamente estable.
Demostracion. Se considera una bola centrada en x con centro en δ,
Bδ(x) = {x ∈ Rn||x− x| ≤ δ}.El δ se escoje lo suficientemente pequeno para que Bδ(x) ⊂ U , como se
muestra en la Figura 2.4.
Sea m el valor mınimo de V en la frontera de Bδ(x). Por i., m > 0. Luego,
U1 = {x ∈ Bδ(x)|V (x) < m}.Se toma una trayectoria que empiece en U1. Por ii., se tiene que la trayec-
toria es no creciente, entonces toda trayectoria que empieza en U1 permanece

14 CAPITULO 2. INTRODUCCION A DINAMICA
en Bδ(x) para todo tiempo t ≥ 0. Por lo tanto, x es estable.
Ahora, se supone que iii. se cumple, es decir, V es estrictamente decre-ciente en orbitas de U − {x}. Se toma X(t) una trayectoria que empieza enU1 − {x}. Como Bδ(x) es compacta, se puede encontrar una subsucesion detiempos {tn} con tn →∞ cuando n→∞ tal que X(tn) converge a x0 cuandon→∞. Ahora, se quiere demostrar que x0 = x.
Se probara esto por contradiccion. Se supone que x0 6= x, entonces, existeε > 0 lo suficientemente pequeno para que x0 /∈ Bε(x). Se aplica el mismoargumento de la parte anterior y se obtiene que existe una vecindad de x,U1 ⊂ Bε(x), tal que cualquier trayectoria que empieza en U1 permanece enBε(x), como se muestra en la Figura 2.4.
Fuente: S. Wiggins (2003).
Figura 2.4: Seleccion de las trayectorias y vecindades de la prueba del teorema2.4.1.
Como X(t) es una trayectoria que converge a x0 y x0 /∈ Bε(x), entoncesdicha trayectoria no puede entrar a U1. Luego, en U1 − U1, V ′ sera estricta-mente acotado lejos del cero, entonces se tiene la siguiente estimacion:
V ′ ≤ −K < 0, para algun K > 0.

2.4. FUNCION DE LIAPUNOV 15
Como X(t) no puede entrar a U1, esta estimacion se puede aplicar a todala trayectoria X(t) y se obtiene:
V (x(tn))− V (x(0)) =
∫ tn
0
V ′(x(s))ds,
≤ −Ktn,
por lo tanto,
V (x(tn)) ≤ V (x(0))−Ktn.
Cuando n → ∞, por la desigualdad anterior se obtiene que V (x(tn))sera negativo, lo cual es una contradiccion. Por lo tanto, x0 = x y x sera asintoti-camente estable.
Ejemplo 2.4.2. Se considera el siguiente sistema de ecuaciones diferenciales
x′ = y
y′ = −x+ εx2y, (2.4.12)
para hallar los puntos fijos se mira cuando x e y se anulan
y = 0
−x+ εx2y = 0
Reemplazando la primera ecuacion, en la segunda se obtiene
x = 0.
Por lo tanto, el sistema (2.4.12) tiene un punto fijo en (0, 0).La matriz asociada a la linealizacion es
A =
(0 1
−1 + 2εxy εx2
).
en el punto fijo (0, 0) la matriz asociada es
A(0,0) =
(0 1−1 0
).

16 CAPITULO 2. INTRODUCCION A DINAMICA
Se determinaran los autovalores de la matriz A(0,0)
det(A(0,0) − λI) = 0∣∣∣∣ −λ 1−1 −λ
∣∣∣∣ = 0
λ2 + 1 = 0
(λ+ i)(λ− i) = 0.
Por lo tanto, el punto fijo es no hiperbolico.
Ahora se quiere determinar si el punto fijo (0, 0) es estable.
Sea,
V (x, y) =(x2 + y2)
2
i. V (0, 0) = 0.
ii. V (x, y) > 0 para alguna vecindad de (0, 0).
iii.
V ′(x, y) = ∇V (x, y) · (x′, y′)= (x, y) · (y,−x+ εx2y)
= xy + εx2y2 − xy= εx2y2.
Entonces, por el Teorema 2.4.1, el punto (0, 0) es estable para ε < 0.
Ahora, se realizara la demostracion del Teorema 2.3.1, usando la teorıade Liapunov.
Se considera el siguiente sistema de ecuaciones diferenciales
x′ = f(x), x ∈ Rn. (2.4.13)
Se empieza translandando el punto fijo x = x de (2.4.13) al origen atraves de y = x− x. Entonces,

2.4. FUNCION DE LIAPUNOV 17
x′ = y′ + x′
= y′ + f(x)
= y′
Por lo tanto, (2.4.13) se transformara en,
y′ = f(x + y), y ∈ Rn. (2.4.14)
La expansion de Taylor de f(x + y) alrededor de x es
f(x + y) = f(x) + Df(x)y +D2f(x)
2y + · · · (2.4.15)
Luego,
y′ = Df(x)y +R(y), y ∈ Rn, (2.4.16)
donde R(y) ≡ O(|y|2).Ahora se utiliza el siguiente cambio de escala de coordenadas
y = εu, 0 < ε < 1. (2.4.17)
Si ε es pequeno entonces y sera pequena. Utilizando (2.4.17) en (2.4.16)se obtiene,
u′ = Df(x)u+R(u, ε), (2.4.18)
donde R(u, ε) = R(εu)/ε. Como R(y) ≡ O(|y|2), entonces R(u, 0) = 0. Seescoge la siguiente funcion de Liapunov
V (u) =1
2|u|2.
Por lo tanto,
V ′(u) = ∇(u) · u′
= (u · Df(x)u) + (u ·R(u, ε)). (2.4.19)
Como todos los autovalores de Df(x) tienen parte real negativa, entoncesexiste una base tal que
(u · Df(x)u) < k|u|2 < 0,
para algun numero real k y para todo u. Si se escoge ε lo suficientementepequeno, (2.4.19) es estrictamente negativo, por lo tanto, el punto fijo x = xes asintoticamente estable.

18 CAPITULO 2. INTRODUCCION A DINAMICA
2.5. Variedades invariantes
Otra idea importante en el estudio de los sistemas dinamicos son las va-riedades estables, inestables y centrales que son conjuntos invariantes, y unade las propiedades de estos conjuntos es que las trayectorias que empiezanen el conjunto, permanecen en el conjunto, para todo tiempo futuro y pasado.
Definicion 2.5.1 (Conjunto invariante). Sea S ⊂ Rn un conjunto, entonces,se dice que S es invariante sobre el sistema de ecuaciones x′ = f(x), si paracualquier x0 ∈ S, se tiene que
x(t,x0) ∈ S para todo t ∈ R.
Si la Definicion 2.5.1 se restringe a tiempos positivos, es decir, t ≥ 0, sedice que el conjunto S es positivamente invariante.
Definicion 2.5.2 (Variedad invariante). Un conjunto invariante S ⊂ Rn, esuna variedad invariante Cr con r ≥ 1, si S tiene la estructura de una variedaddiferenciable Cr. De forma similar, un conjunto positivamente invarianteS ⊂ Rn, es una variedad positivamente invariante Cr, con r ≥ 1, si S tienela estructura de una variedad diferenciable Cr.
Observacion 2.5.3. La idea de variedad es:
1. Conjuntos lineales: Subespacio de vectores lineales en Rn.
2. Conjuntos no lineales: Una superficie m-dimensional que puede ser en-cajada en Rn, la cual es localmente suave.
2.5.1. Subespacios estables, inestables y centrales desistemas de ecuaciones diferenciales lineales
En el caso de sistemas lineales y = Ay,y ∈ Rn, el espacio Rn se puedeescribir como suma directa de Es, Eu y Ec, donde Es es el subespacio estable,Eu el subespacio inestable y Ec el subespacio central.
Sea x ∈ Rn un punto fijo del sistema de ecuaciones diferenciales
x′ = f(x), x ∈ Rn. (2.5.20)
Se considera el sistema linealizado
y′ = Ay, y ∈ Rn. (2.5.21)

2.5. VARIEDADES INVARIANTES 19
donde A ≡ Df(x) es la matriz jacobiana de f en el punto x de tamano n×n.La solucion de (2.5.21) con valor inicial y(0) = y0 ∈ Rn es
y(t) = eAty0, (2.5.22)
donde
eAt = id+ At+(At)2
2!+
(At)3
3!+ · · · (2.5.23)
con id la matriz identidad de tamano n× n.
Se puede representar a Rn como la suma directa de tres subespacios de-notados Es, Eu y Ec, que se define de la siguiente manera:
Es = span{e1, · · · , es},Eu = span{es+1, · · · , es+u}, s+ u+ c = n, (2.5.24)
Ec = span{es+u+1, · · · , es+u+n},
donde
{e1, · · · , es} son los autovectores (generalizados) de A, correspondientesa los autovalores de A que tienen parte real negativa.
{es+1, · · · , es+u} son los autovectores (generalizados) de A, correspon-dientes a los autovalores de A que tienen parte real positiva.
{es+u+1, · · · , es+u+n} son los autovectores (generalizados) de A, corres-pondientes a los autovalores de A que tienen parte real igual a cero.
Estos subespacios son invariantes ya que soluciones de (2.5.21) con con-dicion inicial que esten totalmente contenidas en Es, Eu o Ec, permaneceranpara todo tiempo en el subespacio correspondiente. Ademas, las solucionesque empiecen en Es, se aproximaran asintoticamente a y = 0 cuando t→∞,y las soluciones que empiecen en Eu se aproximaran asintoticamente a y = 0cuando t→ −∞.
2.5.2. Variedades estables, inestables y centrales desistemas de ecuaciones diferenciales no lineales
Se va a ver que en el caso de sistemas no lineales se tendra una situacionparecida al caso lineal, solo que en lugar de subespacios se tendran variedades.

20 CAPITULO 2. INTRODUCCION A DINAMICA
La motivacion para estudiar sistemas lineales
y′ = Ay, y ∈ Rn, (2.5.25)
donde A ≡ Df(x), es para obtener informacion de la naturaleza de las solu-ciones cerca a los puntos fijos x = x de los sistemas de ecuaciones diferencialesno lineales
x′ = f(x), x ∈ Rn. (2.5.26)
Se empieza translandando el punto fijo x = x de (2.5.26) al origen atraves de y = x− x. Entonces
x′ = y′ + x′
= y′ + f(x)
= y′
Por lo tanto, (2.5.26) se transformara en
y′ = f(x + y), y ∈ Rn. (2.5.27)
La expansion de Taylor de f(x + y) alrededor de x es
f(x + y) = f(x) + Df(x)y +D2f(x)
2y + · · · (2.5.28)
Luego,
y′ = Df(x)y +R(y), y ∈ Rn, (2.5.29)
donde R(y) = O(|y|2). Ahora, se introduce la siguiente transformacion decoordenadas
y = T
uvw
donde T es una matriz constante distinta de cero. Ademas, u,v y w son
vectores con la misma dimension que Es, Eu y Ec respectivamente. Se obtieneque

2.5. VARIEDADES INVARIANTES 21
T
u′
v′
w′
= Df(x)T
uvw
+R
T u
vw
u′
v′
w′
= T−1Df(x)T
uvw
+ T−1R
T u
vw
Se escoge la transformacion lineal T de tal forma que
T−1Df(x)T =
As 0 00 Au 00 0 Ac
, (2.5.30)
donde As es una matriz de tamano s× s que tiene autovalores con partereal negativa, Au es una matriz de tamano u × u que tiene autovalores conparte real positiva, y Ac es una matriz de tamano c× c que tiene autovalorescon parte real igual a cero. La nueva ecuacion que se obtiene es
u′ = Asu+Rs(u, v, w),
v′ = Auv +Ru(u, v, w), (2.5.31)
w′ = Acw +Rc(u, v, w),
donde Rs(u, v, w), Ru(u, v, w) y Rc(u, v, w) son las primeras s, u y c com-ponentes respectivamente, del vector T−1R(y).
Si se considera la parte lineal del sistema de ecuaciones de (2.5.31), porlo hecho anteriormente se tendrıa que ese sistema lineal tiene una variedads-dimensional, estable e invariante, una variedad u-dimensional, inestablee invariante, y una variedad c-dimensional, central e invariante, todas in-tersectandose en el origen. El siguiente teorema muestra como cambia estaestructura cuando se considera el sistema de ecuaciones diferenciales no lineal(2.5.31).
Teorema 2.5.4. Puntos fijos de variedades localmente estables,inestables y centrales. Se supone que (2.5.31) es Cr, r ≥ 2, entoncesel punto fijo (u, v, w) = 0 de (2.5.31) posee una variedad local s-dimensional,Cr, estable e invariante, W s
loc(0), una variedad local u-dimensional, Cr, ines-table e invariante, W u
loc(0), y una variedad local c-dimensional, Cr, central

22 CAPITULO 2. INTRODUCCION A DINAMICA
e invariante, W cloc(0). Todos se intersectan en (u, v, w) = 0. Estas varieda-
des son tangentes a su respectivo subespacio invariante de la parte lineal delsistema de ecuaciones diferenciales (2.5.31) en el origen. En particular, setiene
W sloc(0) = {(u, v, w) ∈ Rs × Ru × Rc|v = hsv(u), w = hsw(u);
Dhsv(0) = 0,Dhsw(0) = 0; |u|es suficientemente pequena}
W uloc(0) = {(u, v, w) ∈ Rs × Ru × Rc|u = hsu(v), w = hsw(v);
Dhuu(0) = 0,Dhuw(0) = 0; |v|es suficientemente pequena}
W cloc(0) = {(u, v, w) ∈ Rs × Ru × Rc|u = hsu(w), v = hsv(w);
Dhcu(0) = 0,Dhcv(0) = 0; |w|es suficientemente pequena}
donde hsv(u), hsw(u), hsu(v), hsw(v), hsu(w) y hsv(w) son funciones Cr. Ademaslas trayectorias en W s
loc(0) y W uloc(0), tiene la misma propiedad asintotica que
las trayectorias en los subespacios Es y Eu respectivamente. Las trayectoriasde (2.5.31) con condicion inicial en W s
loc(0) (respectivamente, W uloc(0)), se
aproxima al origen asintoticamente en una razon exponencial cuando t→∞(respectivamente, t→ −∞).
Observacion 2.5.5. Se consideran algunos comentarios al teorema anterior.
i. Las condiciones Dhsv(0) = 0,Dhsw(0) = 0,Dhuu(0) = 0, Dhuw(0) = 0,Dhcu(0) = 0 y Dhcv(0) = 0, muestran que las variedades no linealesson tangentes a la variedad lineal asociada en el origen.
ii. En el teorema se menciona que la variedad estable, inestable y centralson invariantes y locales. El termino local se refiere al hecho que lasvariedades solo estan definidas en una vecindad del punto fijo. Por locual, se puede decir que estas variedades tienen frontera. Por lo tanto,las variedades son localmente invariantes.
iii. Se supone que el punto fijo es hiperbolico, es decir, Ec = ∅. En este caso,se puede afirmar del teorema, que las trayectorias del sistema de ecua-ciones diferenciales no lineales en una vencindad del origen lo suficien-temente pequena, el comportamiento es el mismos de las trayectoriasdel sistema de ecuaciones diferenciales lineales asociado.
iv. El comportamiento de las trayectorias que estan en W cloc(0), no puede ser
inferido del comportamiento de las trayectorias en Ec.
2.5. VARIEDADES INVARIANTES 23
v. Las variedades globales, estables, inestables y centrales, W s(0),W u(0) yW c(0), se pueden obtener extendiendo todas las trayectorias de las va-riedades locales, W s
loc(0),W uloc(0) y W c
loc(0) , en tiempos pasados y fu-turos.
Tambien, hay casos mas generales de variedades invariantes. En la si-guiente observacion se vera si una superficie es invariante con respecto a ladinamica generada por un sistema de ecuaciones diferenciales.
Observacion 2.5.6. Suponiendo que se tiene un sistema de ecuaciones di-ferenciales de la forma
x′ = f(x,y)
y′ = g(x,y), (x,y) ∈ Rn × Rm,
y que se tiene una superficie, la cual es representada en el espacio fasepor la grafica de una funcion
y = h(x),
Esta superficie es invariante si el campo vectorial es tangente a la super-ficie. La condicion de tagencia se expresa de la siguiente manera
Dh(x)x′ = y′,
o,
Dh(x)f(x, h(x)) = g(x, h(x)).
Se debe tener en cuenta que todas las funciones que toman parte de laanterior expresion tiene dominios comunes, y que la derivacion existe.
Ejemplo 2.5.7. Se considera el siguiente sistema de ecuaciones diferenciales
x′ = x
y′ = −y + x2, (x, y) ∈ R× R, (2.5.32)
se observa que este sistema tiene un punto fijo en (x, y) = (0, 0). Elsistema lineal asociado a (0, 0) sera(
x′
y′
)=
(1 00 −1
)(xy
),

24 CAPITULO 2. INTRODUCCION A DINAMICA
Los autovalores de la matriz asociada son
λ = ±1
Por lo tanto, el punto fijo es hiperbolico. Por otro lado, los autovectoresasociados a los autovalores son
λ1 = 1
(1 00 −1
)(xy
)=
(xy
)(
x−y
)=
(xy
)Por lo tanto, e1 = {(x, y) ∈ R2|y = 0}.
λ2 = −1
(1 00 −1
)(xy
)= −
(xy
)(
x−y
)=
(−x−y
)Por lo tanto, e2 = {(x, y) ∈ R2|x = 0}.
Por lo tanto, el subespacio estable e inestable esta dado por
Es = {(x, y) ∈ R2|x = 0},Eu = {(x, y) ∈ R2|y = 0}.
Ahora, se observa la parte no lineal del sistema de ecuaciones. En estecaso, la solucion se obtiene explicitamente.
y′
x′=dy
dx=−yx
+ x,
Resolviendo esta ecuacion se obtiene una familia de soluciones
y(x) =x2
3+c
x,

2.5. VARIEDADES INVARIANTES 25
Fuente: S. Wiggins (2003).
Figura 2.5: Variedad estable e inestable en (x,y)=(0,0).
donde c es una constante. Ahora, W uloc(0, 0) se puede representar por un grafi-
ca sobre la variable x, es decir,
y = h(x)
con h(0) = h′(0) = 0. Se busca un valor de c que cumpla las condicionesanteriores, este es c = 0. Por lo tanto, se tiene
W uloc(0, 0) =
{(x, y) ∈ R2 | y =
x2
3
},
W sloc(0, 0) = {(x, y) ∈ R2|x = 0}.
Se verificara que W uloc(0, 0) es invariante, luego se debe ver que
y′ = Dh(x)x′
por (2.5.32) se deberıa ver que
−y + x2 =2
3x · x
Y la anterior igualdad se cumple debido a que y =x2
3.
(Ver Figura 2.5).
26 CAPITULO 2. INTRODUCCION A DINAMICA
2.6. Orbitas periodicas
Otra clase importante de soluciones son las orbitas periodicas, es decir,soluciones en las cuales su dinamica se determina conociendo un intervalo detiempo finito, su perıodo. Se considera un sistema de ecuaciones diferenciales,
x′ = f(x, t), x ∈ Rn. (2.6.33)
Definicion 2.6.1. Una solucion de (2.6.33), a traves del punto x0 es pe-riodica con perıodo T , si existe T > 0 tal que,
x(t,x0) = x(t+ T,x0) para todo t ∈ R.
El perıodo de una orbita periodica es el menor T > 0, que satisface laDefinicion 2.6.1.
En general, es difıcil demostrar la existencia de orbirtas periodicas. EnR2, hay un importante criterio para establecer la no existencia de orbitasperiodicas en un sistema de ecuaciones diferenciales autonomas.
Sea,
x = f(x, y)
y = g(x, y) (x, y) ∈ R2, (2.6.34)
con f y g al menos C1.
Teorema 2.6.2 (Criterio de Bendixson). Si en una region simplemente co-nexa D ⊂ R2, la expresion, ∂f
∂x+ ∂g
∂yno es identicamente cero y no cambia de
signo, entonces (2.6.34) no tiene orbitas cerradas completamente contenidasen D.
Demostracion. Se supone que existe una orbita cerrada Γ en D, entonces setiene, ∫
Γ
fdy − gdx =
∫Γ
fgdt− gfdt = 0 (2.6.35)
Por teorema de Green se obtiene,

2.6. ORBITAS PERIODICAS 27
∫S
(∂f
∂x+∂g
∂y
)dxdy = 0, (2.6.36)
donde S es la region limitada por Γ. Como ∂f∂x
+ ∂g∂y6= 0 y no cambia de signo.
La ecuacion (2.6.36) no puede ser cierta.
Por lo tanto, no existe orbitas cerradas completamente contenidas enD.
Este criterio se puede generalizar y se conoce como criterio de Bendixson-Dulac.
Teorema 2.6.3 (Criterio de Bendixson-Dulac). Sea, B(x, y) una funcion C1
en una region simplemente conexa D ⊂ R2. Si ∂(Bf)∂x
+ ∂(Bg)∂y
, no es identica-mente cero, y no cambia de signo, entonces 2.6.34 no tiene orbitas cerradascompletamente contenidas en D.
Demostracion. Se considera el sistema,
x = B(x, y)f(x, y)
y = B(x, y)g(x, y) (x, y) ∈ R2, (2.6.37)
al cual se le aplica el criterio de Bendixson, y se obtiene el criterio deBendixson-Dulac.
Vamos a considerar un ejemplo en el cual se aplicara el criterio de Ben-dixson:
Ejemplo 2.6.4 (Oscilador no forzado de Duffing). Se considera el siguientesistema de ecuaciones diferenciales,
x = y ≡ f(x, y)
y = x− x3 − δy ≡ g(x, y), δ ≥ 0 (2.6.38)
Se observa que,
∂f
∂x+∂g
∂y= −δ
Por lo tanto, para δ > 0, (2.6.38), no tiene orbitas cerradas.

28 CAPITULO 2. INTRODUCCION A DINAMICA
2.7. Comportamiento asintotico: estudio cua-
litativo
En la mayorıa de los casos, no se pueden encontrar soluciones explıcitasde un sistema no lineal, pero se pueden estudiar las propiedades de las solu-ciones entre las cuales tiene particular interes el estudio del comportamientoasintotico, es decir, el comportamiento de las soluciones para tiempos gran-des.
Se considera el siguiente sistema autonomo de ecuaciones diferenciales
x′ = f(x), x ∈ Rn. (2.7.39)
El flujo generado por (2.7.39) se denota por φ(t,x).
Se empezara con unas definiciones basicas sobre conjuntos ω y α lımite,y se daran algunas propiedades sobre estos conjuntos.
Definicion 2.7.1 (Puntos ω y α lımite de trayectorias). Un punto x0 ∈ Rn,es un punto ω-lımite de x ∈ Rn, y se escribe ω(x), si existe una sucesion detiempos {tk}, tk →∞, tal que,
φ(tk,x)→ x0.
De forma similar, un punto x0 ∈ Rn, es un punto α-lımite de x ∈ Rn yse escribe α(x), si existe una sucesion de tiempos {tk}, tk → −∞, tal que,
φ(tk,x)→ x0.
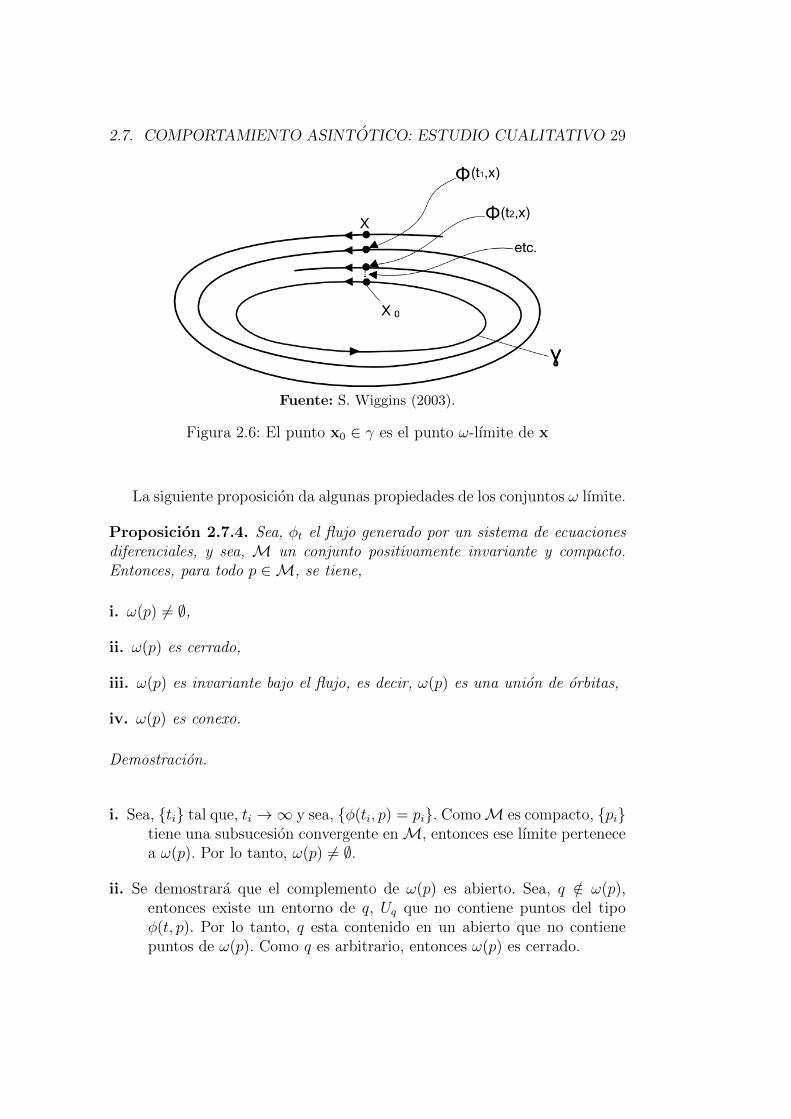
Ejemplo 2.7.2. Se supone que γ, es una orbita periodica que atrae a todaorbita, entonces cada orbita hace una espiral alrededor de γ, como se muestraen la Figura 2.7.
Ahora, para cada punto en γ, se puede encontrar una subsucesion detiempos {ti}, tal que, φ(ti,x),x ∈ R2 se aproxima al punto cuando t → ∞.Por lo tanto, γ es el conjunto ω lımite de x.
Ahora se considera la definicion de conjuntos ω y α lımite de flujo.
Definicion 2.7.3 (Conjuntos ω y α lımite de flujo). El conjunto de todoslos puntos ω-lımite de un flujo, se llama conjunto ω lımite. Similarmente, elconjunto de todos los puntos α-lımite de un flujo, se llama conjunto α lımite.
2.7. COMPORTAMIENTO ASINTOTICO: ESTUDIO CUALITATIVO 29
Fuente: S. Wiggins (2003).
Figura 2.6: El punto x0 ∈ γ es el punto ω-lımite de x
La siguiente proposicion da algunas propiedades de los conjuntos ω lımite.
Proposicion 2.7.4. Sea, φt el flujo generado por un sistema de ecuacionesdiferenciales, y sea, M un conjunto positivamente invariante y compacto.Entonces, para todo p ∈M, se tiene,
i. ω(p) 6= ∅,
ii. ω(p) es cerrado,
iii. ω(p) es invariante bajo el flujo, es decir, ω(p) es una union de orbitas,
iv. ω(p) es conexo.
Demostracion.
i. Sea, {ti} tal que, ti →∞ y sea, {φ(ti, p) = pi}. ComoM es compacto, {pi}tiene una subsucesion convergente enM, entonces ese lımite pertenecea ω(p). Por lo tanto, ω(p) 6= ∅.
ii. Se demostrara que el complemento de ω(p) es abierto. Sea, q /∈ ω(p),entonces existe un entorno de q, Uq que no contiene puntos del tipoφ(t, p). Por lo tanto, q esta contenido en un abierto que no contienepuntos de ω(p). Como q es arbitrario, entonces ω(p) es cerrado.
30 CAPITULO 2. INTRODUCCION A DINAMICA
iii. Sea, q ∈ ω(p) y φ(s, q) = q. Sea {ti} tal que, ti → ∞ y φ(ti, p) → q.Entonces, φ(ti+s, p) = φ(s, φ(ti, p))→ q. Por lo tanto, q ∈ ω(p) y ω(p)es invariante.
Falta definir bien φ(s, q) para todo s. Como M es positivamente inva-riante, entonces φ(s, q) esta definido para todo s > 0. Vamos a demos-trar que esta definido para todo s < 0.
Sea q ∈ ω(p), entonces existe {ti} tal que, ti → ∞ y φ(ti, p) → q.Se organiza la susecion de tal forma que, t1 < t2 < · · · < ti < · · · .φ(s, φ(ti, p)) = φ(s + ti, p) esta definido para todo s ∈ [−ti, 0], consi-derando el lımite ti →∞, la continuidad y φ(ti, p)→ q se obtiene queφ(s, q) existe para todo s ∈ (−∞, 0].
iv. Se demostrara por contradiccion. Se supone que ω(p) no es conexo, en-tonces existen V1, V2 abiertos tales que, ω(p) ⊂ V1 ∪ V2, ω(p) ∩ V1 6= ∅,ω(p) ∩ V2 6= ∅ y V1 ∩ V2 = ∅. Las orbitas de p convergen hacia puntosque estan en V1 y V2. Entonces, para todo T > 0 existe t > T tal que,φ(t, p) ∈ M− (V1 ∪ V2) = K. Luego, podemos encontrar {tn} tal que,tn → ∞ con φ(tn, p) ∈ K. Como K es compacto, φ(tn, p) → q, q ∈ K(si es necesario utilizamos un subsucesion de {tn}).Entonces q ∈ ω(p),esto implica que q ∈ V1 ∪ V2. Esto es una contradiccion. Por lo tanto,ω(p) es conexo.
2.7.1. Teorema de Poincare-Bendixson: sistemas en elplano R2
En esta seccion se va a estudiar el caso particular de sistemas en dosdimensiones. En este caso la dinamica asintotica esta completamente deter-minada. En el teorema de Poincare-Bendixson se muestra este resultado.
Teorema 2.7.5 (Poincare-Bendixson). SeaM una region positivamente in-variante que contiene un numero finito de puntos fijos. Sea p ∈M, entoncessolamente uno de los siguientes casos se cumple:
i. ω(p) es un punto fijo,
ii. ω(p) es una orbita periodica,

2.7. COMPORTAMIENTO ASINTOTICO: ESTUDIO CUALITATIVO 31
iii. ω(p) consiste de un numero finito de puntos fijos p1, p2, . . . , pn y orbitasγ tal que α(γ) = pi y ω(γ) = pj.
Antes de demostrar el resultado principal de esta seccion, se daran algu-nas definiciones y resultados que ayudaran a demostrar el teorema.
Se considera el siguiente sistema de ecuaciones diferenciales,
x′ = f(x, y)
y′ = g(x, y) (x, y) ∈ P , (2.7.40)
donde P representa el espacio fase, que puede ser el plano, el cilindro odos esferas.
Definicion 2.7.6. Sea, Σ una curva conexa en P, entonces, Σ es transversaal campo vectorial, si el producto punto de la normal al camino con el campovectorial, N ·F 6= 0 y no cambia de signo en Σ. O de otra forma, si el campovectorial no tiene puntos fijos en Σ y no es tangente a Σ.
Ahora se demostraran algunos lemas que haran mas facil la demostraciondel teorema de Poincare-Bendixson.
Lema 2.7.7. SeaM un conjunto positivamente invariante. Sea Σ ⊂M unacurva transversa al campo vectorial. Entonces para todo p ∈ M, O+(p) ={φ(t, p), t ≥ 0} intersecta Σ en una sucesion monotona, es decir, si pi es lai-esima interseccion entonces pi ∈ [pi−1, pi+1].
Demostracion. Se considera un pedazo de la orbita O+(p), entre lo puntospi−1 a pi y el segmento [pi−1, p1] ⊂ Σ. Como se muestra en la Figura 2.7,esto sera la frontera de una region positivamente invariante, D. Entonces,O+(pi) ⊂ D, luego, pi+1 ⊂ D (si existe). Por lo tanto, pi ∈ [pi−1, pi+1].
Corolario 2.7.8. El conjunto ω-lımite de una trayectoria γ, (ω(γ)), inter-secta a Σ en a lo sumo un punto.
Demostracion. Se demostrara por contradiccion. Se supone que ω(γ) inter-secta a Σ en dos puntos, q1 y q2. Sea, {pn} los puntos de γ sobre Σ, entoncesexiste subsucesiones de {pn} que convergen hacia q1 y q2, pero esto contradi-ce la monotonıa de {pn}. Por lo tanto, ω(γ) intersecta a Σ en a lo sumo unpunto.

32 CAPITULO 2. INTRODUCCION A DINAMICA
Fuente: S. Wiggins (2003).
Figura 2.7: Un pedazo de la orbita O+(p) entre lo puntos pi−1 a pi.
El siguiente lema dice cuando el conjunto ω-lımite es una orbita cerrada.
Lema 2.7.9. Si ω(γ) no contiene puntos fijos, entonces ω(γ) es un orbitacerrada.
Demostracion. Sea, q ∈ ω(γ). Se demotrara que O+(q) es cerrada. Sea x ∈ω(q), por hipotesis no es un punto fijo. Se considera un curva transversa Σ alcampo vectorial tal que x ∈ Σ. Por el Lema 2.7.7, la orbita O+(q) intersectaa Σ en una sucesion monotona qn → x. Como ω(γ) es invariante entonces,qn ∈ ω(γ), pero por el Colorario 2.7.8, ω(γ) ∩ Σ = {x}. Por lo tanto, qn = xpara todo n y O+(q) es una orbita cerrada.
Ahora, se demostrara que ω(γ) = {O(q)} := C. Por la invarianza de ω(γ),como q ∈ ω(γ) entonces, O(q) ⊂ ω(γ). Sea E la parte de afuera de O+(q),y D la parte del interior de O+(q). Para demostrar la otra contenencia seconsideran dos casos:
Caso 1. γ ⊂ E.E ∪ C es cerrado, entonces los puntos lımites estan en E ∪ C. Porlo tanto, ω(γ) ∩ D = ∅. Se supone que existe p ∈ E ∩ ω(γ). Se puedecontruir un entorno U de O(q) que no contenga a p. Se considera Σ unacurva transversa al campo vectorial en q. Luego, existe una sucesionmonotona {pn} en Σ tal que pn → q y con pn ⊂ γ. Se escoge un N lo
2.7. COMPORTAMIENTO ASINTOTICO: ESTUDIO CUALITATIVO 33
suficientemente grande tal que {pn} ⊂ U para todo n > N . Se puedecontruir un conjunto positivamente invariante A, que contenga a O(q),contenido en U , y que no contenga a p. Luego, ω(γ) ⊂ A. Pero comop /∈ A entonces p /∈ ω(γ). Lo cual es una contradiccion.
Caso 2. γ ⊂ D.D ∪ C es cerrado, entonces los puntos lımites estan en D ∪ C. Por lotanto, ω(γ) ∩ E = ∅. Se supone que existe p ∈ D ∩ ω(γ). Sea V unentorno de O(q), se puede contruir un anillo U = V r Dp(ε), que nocontenga a p. Se considera Σ una curva transversa al campo vectorialen q. Luego, existe una sucesion monotona {pn} en Σ tal que pn → q ycon pn ⊂ γ. Se escoge un N lo suficientemente grande tal que {pn} ⊂U para todo n > N . Se puede construir un conjunto positivamenteinvariante A que contenga a O(q), contenido en U y que no contengaa p. Luego, ω(γ) ⊂ A pero como p /∈ A entonces p /∈ ω(γ). Lo cual esuna contradiccion.
Entonces, ω(γ) ⊂ O(q). Por lo tanto, ω(γ) = {O(q)}.
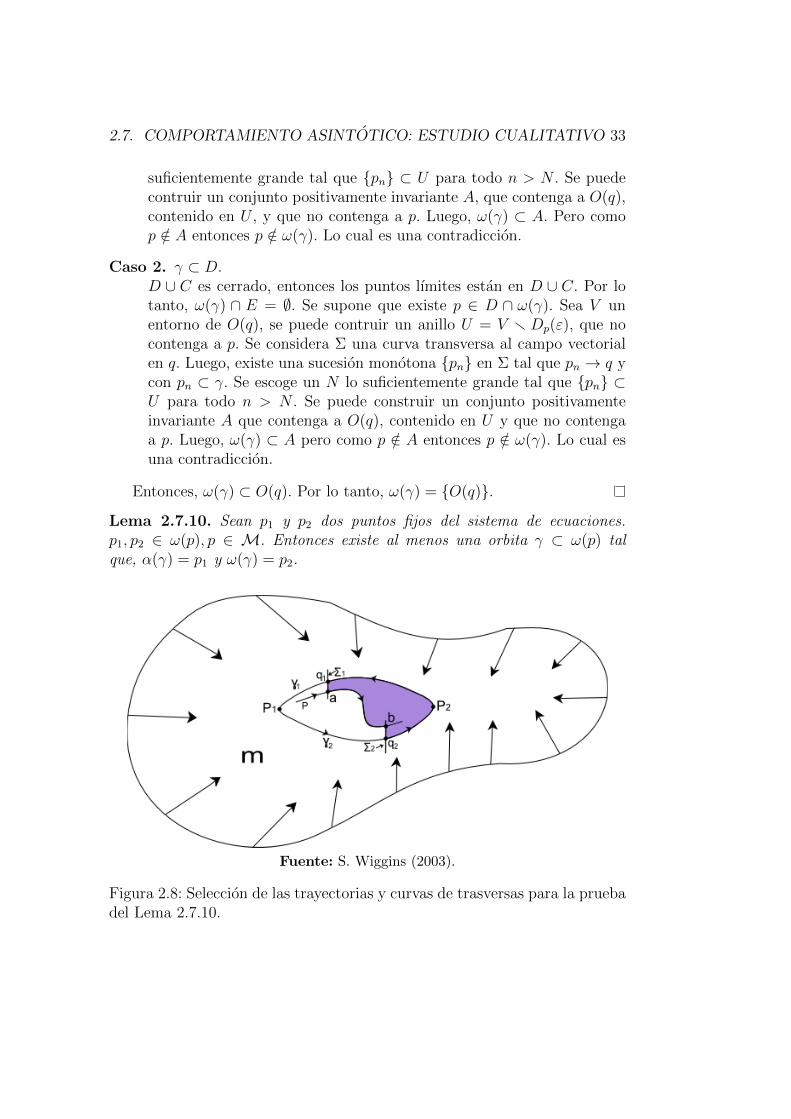
Lema 2.7.10. Sean p1 y p2 dos puntos fijos del sistema de ecuaciones.p1, p2 ∈ ω(p), p ∈ M. Entonces existe al menos una orbita γ ⊂ ω(p) talque, α(γ) = p1 y ω(γ) = p2.
Fuente: S. Wiggins (2003).
Figura 2.8: Seleccion de las trayectorias y curvas de trasversas para la pruebadel Lema 2.7.10.

34 CAPITULO 2. INTRODUCCION A DINAMICA
Demostracion. Se demostrara por contradiccion. Se supone que existen γ1, γ2 ⊂ω(p), tal que α(γi) = p1 y ω(γi) = p2 con i = 1, 2. Sea, q1 ∈ γ1 y q2 ∈ γ2. Seconsidera Σ1 y Σ2 curvas transversas al campo vectorial en q1 y q2 respecti-vamente. Como se muestra en la Figura 2.8.
Como γ1, γ2 ⊂ ω(p), O+(p) tiene que pasar cerca a γ1 y γ2, entonces,existen puntos a, b tal que,
a = O+(p) ∩ Σ1 y b = O+(p) ∩ Σ2.
Entonces, la region abierta acotada por el segmento de orbita y los cami-nos transversos que conectan los puntos a, q1 y b, q2 (la region morada en laFigura 2.8), es positivamente invariante. Esto es una contradiccion, pues deser ası solamente pedazos de γ1 y γ2 estarıan contenidos en ω(p). Por lo tanto,existe al menos una orbita γ ⊂ ω(p) tal que, α(γ) = p1 y ω(γ) = p2.
Ahora, se realizara la demostracion del teorema de Poincare-Bendixson.
Demostracion. Si ω(p) contiene solamente puntos fijos, como ω(p) es conexo,y M contiene un numero finito de puntos fijos, entonces ω(p) contiene soloun punto fijo. Si ω(p) no contiene puntos fijos, por el Lema 2.7.9, ω(p) es unaorbita cerrada.
Se supone que ω(p) contiene puntos fijos y puntos no fijos (tambien co-nocidos como puntos regulares). Sea, γ ⊂ ω(p) una trayectoria de puntosregulares. Se demostrara por contradiccion que ω(γ) y α(γ) tienen que serpuntos fijos. Se supone que ω(γ) y α(γ) no contienen puntos fijos, entoncespor el Lema 2.7.9, ω(γ) y α(γ) son curvas cerradas. Luego, ω(p) contienenpuntos fijos y orbitas cerradas. Por lo anterior, ω(p) no serıa conexo. Lo cuales una contradiccion. Por lo tanto, ω(γ) y α(γ) son puntos fijos.
2.7.2. Caso general: sistemas en Rn
Para n ≥ 3, la dinamica es mucho mas compleja. Los conjuntos lımitespueden ser puntos, orbitas periodicas, orbitas heteroclinas y fractales. Luego,para estudiar este caso se debe introducir la definicion de atractor. Para estose vera la teorıa en detalle.
Definicion 2.7.11 (Conjunto atractor). Un conjunto invariante A ⊂ Rn esun conjunto atractor si existe un conjunto U de A tal que,

2.7. COMPORTAMIENTO ASINTOTICO: ESTUDIO CUALITATIVO 35
Para todo t ≥ 0, φ(t, U) ⊂ U y⋂t>0
φ(t, U) = A.
Definicion 2.7.12 (Region de atraccion). El conjunto abierto U de la Defi-nicion 2.7.11, se conoce como region de atraccion.
Para encontrar una region de atraccion se estudia el campo vectorial en lafrontera del conjunto. Si se tiene una funcion de Liapunov esto es automaticoya que una region de atraccion es equivalente a las curvas de nivel.
Definicion 2.7.13 (Conjunto absorbente). Un conjunto compacto y positi-vamente invariante B ⊂ Rn, es un conjunto absorbente si existe U ⊂ Rn
acotado con B ⊂ U , y tU tal que,
φ(t, U) ⊂ B para todo t ≥ tU .
Definicion 2.7.14 (Dominio de atraccion). El dominio de atraccion de unconjunto atractor A esta dado por,⋃
t≤0
φ(t, U)
donde U es una region de atraccion.
Ejemplo 2.7.15. Se considera el siguiente sistema de ecuaciones diferen-ciales,
x′ = x− x3
y′ = −y (x, y) ∈ R2,
Este sistema tiene tres puntos fijos, P1 = (0, 0), P2 = (1, 0) y P3 =(−1, 0).
La matriz asociada a la linealizacion esta dada por,
A =
(1− 3x2 0
0 −1
).
i. Punto fijo P1.
La matriz asociada es,

36 CAPITULO 2. INTRODUCCION A DINAMICA
AP1 =
(1 00 −1
).
Los autovalores de la matriz AP1 son,
λ1,2 = ±1
ii. Puntos fijos P2 y P3.
La matriz asociada es,
AP2,3 =
(−2 00 −1
).
Los autovalores de la matriz AP2,3 son,
λ1 = −2 y λ2 = −1
Por lo tanto, P1 es un punto de silla y P2, P3 son sumideros.
Se considera una elipse,M, alrededor de los puntos fijos. Como en laFigura 2.9, M es una region de atraccion y el intervalo cerrado,
A = [−1, 1] =⋂t≥0
φ(t,M)
es un conjunto de atraccion.
El conjunto de atraccion del ejemplo anterior no es muy preciso [−1, 1].En realidad las orbitas convergen hacia el subconjunto (±1, 0).
Se considerara una definicion que no tiene en cuenta el caso en el cualun conjunto atractor esta constituido por mas de un atractor, es decir, lasorbitas se acercan a cualquier punto del conjunto atractor.
Definicion 2.7.16 (Transitividad topologica). Un conjunto cerrado e inva-riante A, es topologicamente transitivo si, para todo U, V ⊂ A,
existe t ∈ R tal que, φ(t, U) ∩ V 6= ∅.
Definicion 2.7.17 (Atractor). Un atractor es un conjunto atractor que estopologicamente transitivo.

2.7. COMPORTAMIENTO ASINTOTICO: ESTUDIO CUALITATIVO 37
Fuente: S. Wiggins (2003).
Figura 2.9: Conjunto de atraccion
En el caso en que n → m con n ≥ 3 hay un resultado muy importantesobre el estudio de conjuntos lımites. Esto es el principio de invariancia deLaSalle.
Se considera el siguiente sistema de ecuaciones diferenciales,
x′ = f(x), x ∈ Rn,
con f ∈ Cr, r ≥ 1. Sea,M⊂ Rn una region positivamente invariante y com-pacta con una frontera al menos C1, entoncesM es una region de atraccion.Sea, V (x) una funcion de Liapunov en M, es decir, V ′(x) ≤ 0 en M. Seconsideran los siguientes dos conjuntos.
E = {x ∈M|V ′(x) = 0}.
M = {La union de cada trayectoria que empieza en E y se queda en E para t > 0}.
M , es la parte positivamente invariante de E.
Teorema 2.7.18 (LaSalle). Para todo x ∈M, φ(t,x)→M cuando t→∞.
Demostracion. Sea x ∈ M, entonces, φ(t,x) ∈ M para todo t ≥ 0. Sea,y ∈ ω(x). V (φ(t,x)) es no creciente respecto a t y como V ≥ 0 entoncesexiste,

38 CAPITULO 2. INTRODUCCION A DINAMICA
lımt→∞
V (φ(t,x)) = c ≥ 0.
Por la continuidad de V se tiene que V (z) = c para todo z ∈ ω(x). Comoω(p) es invariante, entonces V (φ(t, y)) = c para todo t ∈ R. Derivando seobtiene que V ′ = ∇V · φ(y) = 0. Por lo tanto, y ∈ E. Como y es arbitrarioentonces ω(x) ⊂ E. Por la invarianza de ω(x) se tiene que ω(x) ⊂M .
Por lo tanto, φ(t,x)→M cuando t→∞.
2.8. Analisis global: Isoclinas
En los metodos utilizados anteriormente, se realizaba un analisis local delsistema, como estudiar el comportamiento del mismo en una vecindad delpunto fijo, haciendo un estudio asintotico del sistema o diciendo cuando nose tienen orbitas cerradas en el plano. Ahora, se vera una nueva tecnica enla cual se hace un analisis global del sistema de ecuaciones diferenciales nolineal. Esta son las isoclinas.
Se considera el siguiente sistema de ecuaciones diferenciales,
x′1 = f1(x1, . . . , xn)...
x′n = fn(x1, . . . , xn) (2.8.41)
Definicion 2.8.1. Se definen las xj-isoclina, con j = 1, 2, · · · , n, como elconjunto de puntos donde x′j se anula, es decir, las xj-isoclina es el conjuntode puntos determinado por fj(x1, . . . , xn) = 0.
Las xj-isoclina permiten descomponer a Rn en una coleccion de conjuntosabiertos, en donde el campo vectorial de los puntos de cada region apuntantodos en cierta direccion. Ademas, las isoclinas se intersectan todas en lospuntos fijos del sistema. Un diagrama de las iscolinas y la direccion del cam-po vectorial en cada region permite entender el diagrama de fase del sistemadesde un punto de vista cualitativo.
Para entender mejor el concepto de isoclinas se desarrollara el siguienteejemplo.

2.8. ANALISIS GLOBAL: ISOCLINAS 39
Ejemplo 2.8.2. Se considera el siguiente sistema,
x′ = y − x2
y′ = x− 2. (2.8.42)
Las x-isoclinas es el conjunto de puntos donde y − x2 se anula, y lasy-iscolinas es el conjunto de puntos donde x − 2 se anula. Por lo tanto, lax-isoclina es la parabola y = x2 y la y-isoclina la recta vertical x = 2.
Las iscolinas se intersectan en el punto (2, 4), entonces este es el unicopunto fijo del sistema. Las isoclinas dividen a R2 en cuatro regiones, comose muestra en la Figura 2.10.
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 2.10: Las isoclinas y el punto fijo.
Ahora, se escoge un punto en cada region y se determina la direcciondel campo vectorial en el punto, la direccion del campo vectorial del restode puntos de la region queda determinado por la direccion del punto que seescogio anteriormente.
i. Region A Escogemos el punto (0, 1), el campo vectorial en este punto es(1,−2). Por lo tanto, la direccion del campo vectorial apunta hacia elsudeste.

40 CAPITULO 2. INTRODUCCION A DINAMICA
ii. Region B Escogemos el punto (3, 10), el campo vectorial en este puntoes (1, 1). Por lo tanto, la direccion del campo vectorial apunta hacia elnordeste.
iii. Region C Escogemos el punto (3, 1), el campo vectorial en este puntoes (−8, 1). Por lo tanto, la direccion del campo vectorial apunta haciael noroeste.
iv. Region D Escogemos el punto (−2,−1), el campo vectorial en este puntoes (−5,−4). Por lo tanto, la direccion del campo vectorial apunta haciael sudoeste.
Sobre la x-isoclina, a la izquierda del punto fijo la direccion del campovectorial apunta al sur, y a la derecha del punto fijo la direccion del campovectorial apunta hacia el norte. Sobre la y-isoclina, arriba del punto fijo ladireccion del campo vectorial apunta al este, y abajo del punto fijo la direcciondel campo vectorial apunta hacia el oeste. En la Figura 2.11, se muestra ladireccion del campo vectorial en todo el plano.
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 2.11: Direccion del campo vectorial en todo el plano.
Observando la direccion del campo vectorial en todo el plano, pareciera queel punto fijo es un punto de silla. De hecho, este es el caso ya que linealizandoel sistema en el punto (2, 4) se obtiene,

2.8. ANALISIS GLOBAL: ISOCLINAS 41
X ′ =
(−4 11 0
)X.
Ahora hallando los autovalores se obtiene,
∣∣∣∣ −4− λ 11 −λ
∣∣∣∣ = 0
λ2 + 4λ− 1 = 0
De donde se obtiene que los autovalores son,
λ = −2±√
5
Uno de los autovalores es positivo y el otro es negativo. Por lo tanto, elpunto fijo es un punto de silla.
Por otro lado, se observa que las soluciones en la region B, deben empezaren la region B para todo tiempo y tienden a ∞ en direccion al nordeste. Demanera similar, las soluciones en la region D, deben empezar en la regionD para todo tiempo y tienden a ∞ en direccion al sudoeste. Las solucionesque empiezan en las regiones A y C, despues de un tiempo cruzan una de lasisoclinas, y pasan a las regiones B y D, o tambien tienden al punto fijo. Enla Figura 2.4.12, se muestra el diagrama de fase de este sistema.

42 CAPITULO 2. INTRODUCCION A DINAMICA
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 2.12: Diagrama fase del sistema.

Capıtulo 3
Modelos de epidemiologıa
Las enfermedades estan siempre presentes en la vida del ser humano. Lasenfermedades trasmisibles han sido de gran influencia en la historia de lahumanidad, como en la caida de los grandes imperios o el crecimiento dela poblacion. Una epidemia se describe como un brote repentino de algunaenfermedad que infecta a gran parte de la poblacion de alguna region. En lasepidemias no todas las personas son infectadas. Estos brotes suelen repetirsecon intervalos de varios anos, pero cada vez con menos intensidad debido aque las poblaciones van generando cierta inmunidad. Si la enfermedad per-manece a lo largo del tiempo se estarıa hablando de una situacion endemica.Los mecanismos de trasmision de las enfermedades son los virus, las bacteriasy los agentes externos.
Los primeros enfoques en epidemiologıa matematica a partir de modeloscompartimentales fueron hechos por los medicos de salud publica Kermacky McKendrick (1927), estos son modelos en donde se divide la poblacion deestudio en clases disjuntas. Se estudiaran los modelos compartimentales queestos dos medicos propusieron, y que son el modelo SIR y el SIRS. El primermodelo se utiliza para enfermedades que son causadas por algunos virus yen estas enfermedades los individuos infectados que se han recuperado, novuelven a adquirir la enfermedad. El segundo modelo se utiliza para enfer-medades que son causadas por bacterias, y en este tipo de enfermedades elindividuo infectado que se ha recuperado vuelve a ser susceptibles, es decir,puede volver a adquirir la enfermedad. Para ambos modelos se tomara unapoblacion y se dividira en tres grupos disjuntos S, I y R. El numero de indi-viduos que son susceptibles a la enfermedad se denota por S. El numero deindividuos que estan infectados de la enfermedad, por I, y el numero de in-dividuos que se han recuperado de la enfermedad, por R. Ademas, se asumeque la poblacion elegida es constante, S+I+R = τ , por lo tanto (S+I+R)′
43

44 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
es cero.
3.1. Modelo SIR
El modelo de Kermack-McKendrick, tambien conocido como SIR, modelalas enfermedades que son causadas por agentes virales como el sarampion,la varicela, las paperas, etc., en las cuales el individuo que se infecta, unavez recuperado adquiere inmunidad contra reinfeccion. El modelo SIR, es unmodelo compartimental simple, basado en la razon de flujo de los miembrosde las distintas clases. En este modelo se asumira lo siguiente:
1. Si un individuo ha sido infectado y luego se recupera, entonces, esteindividuo no puede volver a adquirir la enfermedad.
2. La razon de trasmision de la enfermedad es proporcional al numero deencuentros entre los individuos susceptibles e infectados.
3. La razon por la que la poblacion infectada se recupera, es proporcionalal numero de infectados.
Fuente: F. Brauer, C. Castillo-Chavez (2012).
Figura 3.1: Diagrama de flujo
Por lo tanto, las ecuaciones del modelo SIR seran:
S ′ = −βSI,I ′ = (βS − ν)I,
R′ = νI, (3.1.1)
donde un individuo pasa de estar susceptible a infectado, con una posibili-dad β y pasa de estar infectado a recuperado, con una posibilidad ν. Losparametros β y ν son positivos.

3.1. MODELO SIR 45
Las soluciones que son de interes son las positivas, y en las ecuacionesse observa que el eje S es invariante, y el eje I es positivamente invariante.Ademas, como S + I + R es constante, una vez se determina I(t) y S(t), sepuede hallar R(t). De esta manera, se puede considerar el siguiente sistemabidimensional.
S ′ = −βSI,I ′ = (βS − ν)I, (3.1.2)
Se estudiara la dinamica de este sistema. Un primer paso consiste en estu-diar los puntos fijos del sistema (3.1.2). Basta para ello resolver las siguienteecuaciones
−βSI = 0, (3.1.3)
I(βS − ν) = 0, (3.1.4)
De (3.1.3) se obtiene que S = 0 o I = 0, y de (3.1.4) que I = 0 o S = ν/β.Por lo tanto, los puntos fijos interesantes para el sistema (3.1.2) son (S, 0)para todo S ≥ 0.
Para estudiar el caracter de estabilidad de los puntos fijos se considera elsistema linealizado dado por,
Y ′ =
(−βI −βSβI βS − ν
)Y.
La matriz que resulta de la linealizacion en los puntos fijos (S, 0) es,
A =
(0 −βS0 βS − ν
).
Los autovalores de la matriz A son,
λ1 = 0 y λ2 = βS − ν.El segundo autovalor sera negativo si 0 < S < ν/β y positivo si S > ν/β.
El sistema linealizado es no hiperbolico.

46 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
Ahora se vera cual es el autovector correspondiente al autovalor λ1 = 0.
(0 −βS0 βS − ν
)(xy
)=
(00
),(
−βSy(βS − ν)y
)=
(00
),
Por lo tanto,
V1 = {(x, 0)|x ∈ R}.
Se puede decir que W c sera el eje S. Ademas, W s ⊂ R2+ y los puntos fijos
que estan a la derecha deν
β, son inestables, y los que estan a la izquierda
son estables.
Para estudiar el comportamiento del sistema en detalle en R2 se conside-ran las S-isoclinas e I-isoclinas, es decir, el conjunto de puntos donde S ′ eI ′ se anulan respectivamente, las cuales son utiles para entender la direcciondel campo vectorial en las distintas regiones en las que las isoclinas dividenal plano R2.
Las S-isoclinas, seran el conjunto de puntos donde −βSI se anula, y lasI-isoclinas seran el conjunto de puntos donde βSI−νI se anula. Por lo tanto,las S-isoclinas son el eje S y el eje I, y las I-isoclinas son el eje I y la lıneavertical S = ν/β.
Se observara como es la direccion del campo vectorial sobre las isoclinas.
i. Sobre el eje I.
Se obtiene que S ′ = 0 e I ′ = −νI, entonces, las soluciones tienden a elpunto (0,0) a lo largo de esta lınea.
ii. Sobre la recta S = ν/β.
Se obtiene que I ′ = 0 y S ′ = −νI, entonces, el campo vectorial sobreesta lınea vertical, apunta al oeste.
iii. Si se toma un punto (S0, I0), con I0 > 0 y S0 > ν/β.
Se obtiene que βSI > νI, entonces, S ′ sera negativo, e I ′ sera positivo,y el campo vectorial, apuntara hacia el nordeste.

3.1. MODELO SIR 47
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 3.2: Isoclinas y direccion del campo vectorial en el modelo SIR
iv. Si se toma un punto (S0, I0), con I0 > 0 y S0 < ν/β.
Se obtiene que I ′ y S ′ seran negativos, y las soluciones, apuntaran haciael sudoeste.
En la Figura 3.2 se observa el diagrama de las isoclinas. Confirmandosela informacion que se tenıa sobre la estabilidad de los puntos fijos.
Para estudiar la dinamica mas en detalle en este caso, se pueden dar expli-citamente las curvas soluciones. Notese que la pendiente del campo vectoriales una funcion que solo depende de S:
I ′
S ′=βSI − νI−βSI
= −1 +ν
βS.
Entonces tenemos que,
dI/dt
dS/dt=dI
dS= −1 +
ν
βS,
luego,
∫dI =
∫ (−1 +
ν
βS
)dS
I = −∫dS +
ν
β
∫1
SdS + C,

48 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 3.3: Diagrama de fase del sistema SIR
de donde se obtiene,
I = I(S) = −S +ν
βlogS + C,
donde C es una constante.
El punto maximo de esta funcion se alcanza en (ν/β,I), y ademas I +S − (ν/β) logS es constante. Por lo tanto, hay una unica curva que une acada punto fijo del intervalo ν/β < S <∞ con algun punto fijo del intervalo0 < S < ν/β. En la Figura 3.3 se muestra el diagrama de fase del modelo SIR.
Esto demuestra que la variedad inestable W u, de algun punto fijo queesta entre ν/β < S < ∞, sera la variedad estable W s, del punto fijo con elque se une en el intervalo 0 < S < ν/β. En este caso, se tienen conexionesheteroclinas entre la variedad estable y la variedad inestable.
3.2. Modelo SIRS
Hay otro tipo de enfermedades como la gripe, la malaria o la tuberculosis,en donde el individuo que ya se ha recuperado puede volver a ser susceptiblede tener nuevamente la enfermedad. Este es un modelo mas complejo sobreenfermedades infecciosas. De igual manera, este modelo es compartimental

3.2. MODELO SIRS 49
y se basa en la razon de flujo entre miembros de distintas clases. Para estemodelo se asume que:
1. Las personas recuperadas pueden perder su inmunidad y ası volverse ainfectar.
2. La razon de trasmision de la enfermedad, es proporcional al numero deencuentros entre los individuos susceptibles y los infectados.
3. La razon por la que la poblacion infectada se recupera, es proporcionalal numero de infectados.
4. La razon que lleva a que los individuos recuperados vuelvan a ser sus-ceptibles a la enfermedad, es proporcional a la poblacion de individuosrecuperados.
Fuente: Elaboracion propia.
Figura 3.4: Diagrama de flujo
Por lo tanto, las ecuaciones del modelo SIRS(donde la ultima S representalos individuos recuperados que pueden pasar a ser susceptibles) seran,
S ′ = −βSI + µR,
I ′ = (βS − ν)I,
R′ = νI − µR, (3.2.5)
un individuo pasa de estar susceptible a infectado con una posibilidad β,pasa de estar infectado a recuperado con una posibilidad ν, y pasa de estarrecuperado a susceptible con una posibilidad µ. Los parametros β, ν y µ sonpositivos.
Como asumimos que la poblacion dada es constante, entonces, S+I+R =τ . De esta ecuacion se obtine que, R = τ − S − I y por lo tanto, podemosconsiderar el siguiente sistema bidimensional:

50 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
S ′ = −βSI + µ(τ − S − I),
I ′ = (βS − ν)I, (3.2.6)
con β, µ, ν y τ parametros positivos.
Un primer paso consiste en estudiar los puntos fijos. Para encontrar lospuntos fijos del sistema (3.2.6), se debe observar en que puntos I ′ y S ′ seanulan.
−βSI + µ(τ − S − I) = 0, (3.2.7)
I(βS − ν) = 0, (3.2.8)
Se puede ver que (3.2.8) se anula en I = 0 y S = ν/β. Entonces,
i. Si I = 0.
De (3.2.7) se obtiene que µ(τ − S) = 0. Por lo tanto, el primer puntofijo sera P1 = (τ, 0).
ii. Si S =ν
β.
De (3.2.7) se obtiene que −β(νβ
)I + µ
(τ − ν
β− I)
= 0, entonces,
µ
(τ − ν
β− I)
= β
(ν
β
)I,
µ
(τ − ν
β
)= I (µ+ ν) ,
I =µ(τ − ν
β
)µ+ ν
.
Por lo tanto, el segundo punto fijo es,
P2 =
(ν
β,µ(τ − ν
β)
ν + µ
).

3.2. MODELO SIRS 51
El segundo punto fijo existe cuando τ ≥ ν/β. Cuando τ = ν/β, se obser-va que los dos puntos de equilibrio tomaran el valor de (τ, 0), y entonces, nosera un punto endemico.
Para estudiar el caracter de estabilidad de los puntos fijos, se considerael sistema linealizado dado por,
Y ′ =
(−βI − µ −βS − µ
βI βS − ν
)Y.
La matriz asociada a la linealizacion de P1 es,
A =
(−µ −βτ − ν0 βτ − ν
).
Los autovalores de la matriz A son,
λ1 = −µ y λ2 = βτ − ν.
Como βτ ≥ ν. Si βτ > ν se obtiene que λ2 > 0 y λ1 < 0. Por lo tanto,P1 es un punto inestable. Si βτ = ν entonces, λ2 = 0.
La matriz asociada a la linealizacion del punto P2 es,
B =
−β
(µ(τ − ν
β)
ν + µ
)− µ −β
(νβ
)− µ
β
(µ(τ − ν
β)
ν + µ
)β(νβ
)− ν
=
−µ(τβ + µ)
ν + µ−ν − µ
µ(τβ − ν)
ν + µ0
.
Se halla la traza y el determinante de la matriz B:
Traza B = −µ(τβ + µ)
ν + µ

52 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
det B = (ν + µ)
(µ(τβ − ν)
ν + µ
)= µ(τβ − ν)
Se sabe que, βτ ≥ ν. Si βτ > ν, entonces la traza de B sera negativa y eldeterminante de B sera positivo. Como la traza es la suma de los autovalores,y el determinante es el producto de los autovalores, entonces, los autovaloresde B, tienen parte real negativa. Por lo tanto, P2 es asintoticamente establey sera un punto endemico.
El sistema es de interes solo cuando las variables S, I, R ≥ 0. Por loanterior, se tiene que S+I ≤ τ . Por lo tanto, el modelo SIRS sera interesanteen la region triangular ∆ = {(S, I) ∈ R2 : S, I ≥ 0, S + I ≤ τ}.
Fuente: Elaboracion propia.
Figura 3.5: La region ∆ y la direccion del campo vectorial sobre su frontera.
Proposicion 3.2.1. La region ∆ es positivamente invariante.
Demostracion. Para ver que ∆ es positivamente invariante, se mira la direc-cion del campo vectorial, a traves de la frontera de ∆. Sobre el eje S tenemosque I ′ = 0 y S ′ = µ(τ − S), y como S ≤ τ , el campo vectorial es tangenteal eje S, apuntando hacia el punto fijo (τ ,0). Sobre el eje I, se tiene queI ′ = −νI y S ′ = µ(τ − I), como I ≤ τ , entonces, S ′ < 0, y por lo tanto elcampo vectorial apunta hacia el sudeste. Ahora se observa que,

3.2. MODELO SIRS 53
S ′ + I ′ = µ(τ − S − I)− νI,Q′ = µ(τ −Q)− νI,
cuando Q ≥ τ , se obtiene que Q′ < 0, esto implica que Q = S + I esdecreciente, por lo tanto el campo vectorial sobre la hipotenusa apunta haciaadentro de la region ∆. Por lo tanto,
∆ = {(S, I) ∈ R2 : S, I ≥ 0, S + I ≤ τ},
es positivamente invariante.
Vamos a estudiar la dinamica en ∆. Para esto se empieza considerandolas isoclinas. Luego se vera como es el campo vectorial sobre las distintasregiones en las que las isoclinas dividiran a ∆.
Las I-isoclinas son I = 0 y S = ν/β, como en el modelo SIR. Las S-isoclinas seran los puntos determinados por −βSI + µ(τ − S − I) = 0, esdecir, que estaran dadas por la grafica de la funcion,
I = I(S) =µ(τ − S)
βS + µ.
Calculando la primera y segunda derivada de esta funcion se obtiene,
I ′(S) =−µ(βS + µ)− βµ(τ − S)
(βS + µ)2=−µ2 − βµτ(βS + µ)2
< 0,
I ′′(S) =2β(βS + µ)(µ2 + βµτ)
(βS + µ)4> 0,
cuando 0 ≤ S < τ . Por consiguiente, la funcion es decreciente y convexa, ypasa por los puntos (τ ,0) y (0,τ). Como se muestra en la Figura 3.6
Se observara como es la direccion del campo vectorial sobre las isoclinas.
i. Sobre la I-isoclina S = νβ.
Se obtiene que S ′ = −νI + µ(τ − ν
β− I)
. Ahora, se vera cuando es
positivo S ′,

54 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA
Fuente: M.W.Hirsh, S.Smale, R.L.Devaney (2004).
Figura 3.6: Isoclinas y diagrama de fase del sistema SIRS
−νI + µ
(τ − ν
β− I)> 0
µ
(τ − ν
β− I)> νI
µ
(τ − ν
β
)> I(ν + µ)
µ(τ − ν
β
)ν + µ
> I.
Analogamente, se puede ver que S ′ es negativo cuando,
µ(τ − ν
β
)ν + µ
< I
Por lo tanto, el campo vectorial en los puntos(νβ, I0
), apuntara al oeste
cuando I0 >µ(τ− νβ )ν+µ
, y al este cuando I0 <µ(τ− νβ )ν+µ
.

3.2. MODELO SIRS 55
ii. Sobre la S-isoclina I(S) = µ(τ−S)ν+µ
y S < νβ,
Si S < νβ
entonces, βSI < νI. Luego, se obtiene que,
I ′ = βSI − νI < νI − νI < 0.
Por lo tanto, en este caso el campo vectorial apunta hacia el sur.
iii. Sobre la S-isoclina I(S) = µ(τ−S)ν+µ
y S > νβ,
Si S > νβ
entonces βSI > νI. Luego, se obtiene que,
I ′ = βSI − νI > νI − νI > 0.
Por lo tanto, en este caso el campo vectorial apunta hacia el norte.
Las enfermedades que se modelan con el modelo SIRS, llegaran a serestables en la poblacion, cuando el numero total de personas en la comunidad
sea mayor aν
β. Ademas, en el diagrama de fase se observa que todas las
soluciones tienden al punto fijo P2, y la proporcion de individuos infectadosque pasan a ser susceptibles, tendera a estabilizarse.

56 CAPITULO 3. MODELOS DE EPIDEMIOLOGIA

Capıtulo 4
Vacunacion
Como uno de los principales objetivos en la epidemiologıa es lograr quela mayor cantidad de la poblacion sea inmune a las enfermedades, es poresto que se desarrollaron las vacunas, cuyo fin consiste en inocular al pacien-te con una dosis mınima y controlada del virus o la bacteria logrando que elsistema inmune lo reconozca, obligandolo a producir las defensas para quesi el paciente llega a ser tocado por el virus o bacteria su organismo lo (a)detecte, ataque y protega al individuo de la enfermedad.
En este capıtulo se pretende introducir al tema de las vacunas. Para estose definira el numero de reproduccion basico, para luego, definir un modeloSIR de vacunacion. Por ultimo, se definira el porcentaje de poblacion quedebe ser vacunado para lograr inmunidad en cuanto a las enfermedades.
4.0.1. El numero de reproduccion basico
El numero de reproduccion basico, denotado como R0, es una cantidadque es de gran importancia en la epidemiologıa. R0 se define como el numeropromedio de casos secundarios producidos por un individuo que se encuentrainfectado en una poblacion donde todos son susceptibles, es decir, S = τ .
El numero de reproduccion basico, es aquel que indica si una enfermedadpuede invadir a cierta poblacion. Si R0 > 1, entonces, un individuo infectadotrasmitira la enfermedad a mas de una persona, lo cual provoca que la en-fermedad se extienda. Si R0 < 1, entonces la enfermedad se extinguira.
Se vera un tabla donde se muestra el valor de R0 para enfermedades queson muy conocidas. Se puede observar que el numero R0 depende tanto de
57

58 CAPITULO 4. VACUNACION
la enfermedad como del medio donde esta se desarrolla.
Enfermedad R0(aproximado)Viruela 5Rubeola 17Varicela 11VIH(Hombres homosexuales en Inglaterra y Gales) 4VIH(Mujeres prostitutas en Kenya) 11Malaria ≈ 100
Fuente: Cambridge University(2001).
Cuadro 4.1: Numero de reproduccion basico de algunas enfermedades
Ahora, se calcula el numero de reproduccion basico para el modelo SIR.Este modelo esta dado por,
S ′ = −βSI,I ′ = (βS − ν)I,
R′ = νI, (4.0.1)
un individuo pasa de estar susceptible a infectado con una posibilidad β y pa-sa de estar infectado a recuperado con una posibilidad ν. Con β y ν positivos.
Como el numero de reproduccion basico esta dado por la razon en quelos casos secundarios son producidos en el perıodo de infeccion promedio,entonces, R0 en este modelo es,
R0 = (βS)×(
1
ν
)=β
ν.
Por lo tanto, si I > 0 y S > 1/R0, entonces, se tiene que I ′ > 0, esdecir, que el numero de infectados aumentara y la enfermedad llegara a seruna epidemia. Por el contrario, si I > 0 y S < 1/R0, entonces, se tiene queI ′ < 0, y la enfermedad tendera a acabarse.

59
4.0.2. Modelo de vacunacion
Si un individuo de la poblacion recibe una vacunacion exitosa, este pasadirectamente al grupo de personas recuperadas, es decir, que esta persona yano puede ni recibir ni trasmitir la enfermedad. Se va a introducir un modeloen donde se considera que la razon de individuos vacunados es V . Ademas,los unicos individuos que son vacunados son los susceptibles ya que si se llegaa vacunar un individuo infectado o un individuo recuperado, la vacuna notendra ningun efecto.
El modelo de Kermack y McKendrick, o modelo SIR con individuos va-cunados es:
S ′ = (−βI − V )SI ′ = (βS − ν)IR′ = νI + V S
(4.0.2)
un individuo pasa de estar susceptible a infectado, con una posibilidad β ypasa de estar infectado a recuperado con una posibilidad ν. Los parametrosβ y ν son positivos.
Las soluciones que son de interes son las positivas. En las ecuacionesse observa que los ejes S e I son positivamente invariante. Ademas, comoS+I+R = τ es constante, una vez determinadas I(t) y S(t), se puede hallarR(t). De esta manera, se puede considerar el siguiente sistema bidimensional.
S ′ = (−βI − V )S,
I ′ = (βS − ν)I. (4.0.3)
Un primer paso consiste en estudiar los puntos fijos. Para encontrar lospuntos fijos del sistema (4.0.3), se debe observar en que puntos I ′ y S ′ seanulan.
S(−βI − V ) = 0, (4.0.4)
I(βS − ν) = 0, (4.0.5)
Se puede ver que (4.0.5) se anula en I = 0 y S = ν/β. Entonces,
i. Si I = 0.
De (4.0.4) se obtiene que −V S = 0, entonces, S = 0.

60 CAPITULO 4. VACUNACION
ii. Si S =ν
β.
De (4.0.4) se obtiene queν
β(−βI − V ) = 0, entonces, I = −ν
β.
Como las ecuaciones solo tienen sentido para S, I ≥ 0, entonces, el siste-ma en R2
+, el unico punto fijo que admite es P = (0, 0).
Para estudiar el caracter de estabilidad de los puntos fijos, se considerael sistema linealizado dado por,
Y ′ =
(−βI − V −βS
βI βS − ν
)Y.
La matriz que resulta de la linealizacion en los puntos fijos P = (0, 0) es,
A =
(−V 00 −ν
).
Los autovalores de la matriz A son,
λ1 = −V y λ2 = −ν.
Como los autovalores son todos negativos, entonces, el punto fijo P eslocalmente estable.
Como el sistema es de interes solo cuando las variables son positivas ycomo S + I +R = τ , entonces, se tiene que S + I ≤ τ .
Proposicion 4.0.2. La region ∆ = {(I, S) ∈ R2|I, S ≥ 0, I + S ≤ τ} espositivamente invariante.
Demostracion. Se vera que ∆ es positivamente invariante.
Sobre el eje I, se tiene que S = 0, entonces, S ′ = 0 e I ′ = −νI. Por lotanto, el eje I es positivamente invariante.
Sobre el eje S, se tiene que I = 0, entonces, S ′ = −V S e I ′ = 0. Por lotanto, el eje S es positivamente invariante.

61
Se observa que,
S ′ + I ′ = −βIS − V S + βIS − νI,Q′ = −(V S + νI),
se obtiene que Q′ < 0, lo que implica que Q = S+ I es decreciente, porlo tanto, el campo vectorial sobre la hipotenusa apunta hacia adentrode la region ∆.
Por lo tanto, ∆ = {(S, I) ∈ R2|S, I ≥ 0, S + I ≤ τ}.
Fuente: Elaboracion propia.
Figura 4.1: La region ∆ y la direccion del campo vectorial sobre su frontera.
Por lo tanto, las soluciones en el modelo de vacunacion, tienden al pun-to fijo P = (0, 0) cuando t → ∞, es decir, que el estado final del sistemasera S = I = 0 y R = τ .
Por otro lado, en el modelo de Kermack-McKendrick, se obtenıa que ladifusion de un enfermedad se iba a detener si se cumplıa que R0S < 1, esdecir, que la fraccion de individuos susceptibles debe ser lo suficientementepequena, para que el individuo infectado, en promedio, trasmita la enferme-dad a menos de una persona mientras se encuentra en ese estado.
Como uno de los fines en epidemiologıa es buscar que el mayor numerode personas sean inmunes a la enfermedad, es vacunando a la poblacion
62 CAPITULO 4. VACUNACION
susceptible. Si la fraccion de individuos que son inmunes por vacunacion esVc, entonces, S = 1 − Vc, cuando I = 0. Por lo tanto, la inmunidad de granparte de la poblacion se alcanza si R0(1− Vc) < 1 o
Vc > 1− 1
R0
. (4.0.6)
Por ejemplo, en la viruela donde R0 = 5 al menos el 80 % de la pobla-cion debe ser vacunada, en el caso de la rubeola donde R0 = 17 se debevacunar al menos el 94 % de la poblacion, y en el caso de la malaria, dondeR0 ≈ 100 entonces, al menos un 99 % de los individuos deben ser vacunados.Los resultados anteriores es lo que se esperarıa tener, ya que a mayor numerode reproduccion basico, la enfermedad se propaga mas rapidamente y porlo tanto, se necesita un mayor porcentaje de individuos inmunes. Ademas,las enfermedades que tienen un numero de reproduccion basico pequeno, sepueden erradicar con la vacunacion, como ocurrio en el caso de la viruela,pero las que tienen un numero de reproduccion basico grande como la mala-ria, o la rubeola, es mas complicado erradicarlas incluso con la ayuda de lavacunacion.
Un factor importante en el tema de la vacunacion es la eficacia de lasvacunas, ya que hay una fraccion de la poblacion que despues de recibir lavacuna no se vuelve inmune a la enfermedad. Esta fraccion usualmente seencuentra entre los valores 0,05 a 0,10, aunque en algunas enfemedades comola gripe puede tomar el valor de 0,4. Se define la eficacia como la fraccion dela poblacion que son vacunados y se vuelven inmunes a dicha enfermedad, yse denotara por Ve.
Si se considera la eficacia de la vacuna, entonces, la fraccion R0 de inmunesy vacunados debe satisfacer,
Vc = V · Ve, (4.0.7)
donde V es la razon de individuos vacunados. Si se reemplaza (4.0.7) en ladesigualdad (4.0.6), se obtiene que la inmunidad de gran parte de la poblacionse alcanza si,
V >
(1− 1
R0
)(1
Ve
). (4.0.8)
La desigualdad (4.0.8) nos indica la cantidad de la poblacion que debeser vacunada, teniendo en cuenta la eficacia de la vacuna. Por ejemplo, la

63
vacunacion en contra de la rubeola para bebes de 15 meses, tiene una eficaciaaproximadamente del 0,95. Como el numero de reproduccion basico de larubeola es R0 = 17, entonces, de (4.0.8) se obtiene que V > 0,99, es decir,que se debe vacunar al 99 % de la poblacion para obtener inmunidad a larubeola.

64 CAPITULO 4. VACUNACION

Capıtulo 5
Modelo de propagacion degusanos en WSN
Los modelos epidemiologicos, no solo son usados para modelar epidemiaso endemias, si no que tambien pueden ser usados por ejemplo, para modelarla propagacion de gusanos en la internet, debido a que este proceso es similaral proceso de propagacion de virus en el ser humano, o la propagacion degusanos en redes de sensores inalambricos (WSN).
En este capıtulo se explicara sobre el proceso de propagacion de gusanosen redes de sensores inalambricos, luego, se modelara este proceso obteniendoun sistema de ecuaciones diferenciales, no lineales, contenido en R3, y porultimo se hara un estudio del comportamiento asintotico del modelo.
5.1. Analisis del modelo de propagacion de
gusanos en WSN
Los gusanos son codigos de programas de computacion daninos, ya queestos pueden propagarse en redes computacionales para danar o robar in-formacion del sistema. Una red de sensores inalambricos (WSN), es una co-leccion de muchos sensores que tambien se conocen como nodos. Los nodostiene energıa y capacidad de comunicacion limitada. Los gusanos que estanen un nodo de WSN, solo se pueden propagar a los nodos que estan en elrango de comunicacion del nodo, es decir, a los vecinos del nodo. Ademas,cuando los nodos se comunican entre ellos consumen energıa que proviene deunas micro-baterıas que no son recargables.
65

66CAPITULO 5. MODELO DE PROPAGACION DE GUSANOS EN WSN
El modelo de propagacion de gusanos en las redes de sensores inalambri-cos se basa en el modelo SIR, aunque este, propone algunas mejoras a estemodelo. Este nuevo modelo se conocera como modelo iSIRS. En el modeloiSIRS, se introduce la variable muerte, la cual representa la falta de baterıa(muerte) de los nodos de WSN. Ahora, se veran los detalles del modelo.
Una red de sensores, en una conexion inalambrica que consiste de Nsensores inalambricos estaticos e identicos. Los nodos estaran ubicados uni-formemente en un cırculo de radio q. Cada nodo tiene una antena omnidi-reccional y el rango de la comunicacion inalalmbrica es un cırculo con radior. La estructura del WSN se muestra en la figura 5.1.
Fuente: X. Wang, Y. Li (2009).
Figura 5.1: Estructura del WSN.
Los nodos se clasificaran en cuatro estados:
Conjunto de nodos susceptibles S: Estos nodos no han sido infectadospor ningun gusano de WSN, pero son vulnerables a los gusanos.
Conjunto de nodos infectados I: Estos nodos han sido infectados porgusanos de WSN, y pueden infectar a los vecinos que son susceptibles.
Conjunto de nodos recuperados R: Estos nodos fueron infectados poralgun gusano, pero ya no tienen el gusano. Son inmunes al gusano quelos infecto, pero aun pueden ser infectados por otros gusanos de WSN.
Conjunto de nodos muertos D: Estos nodos son aquellos que han ago-tado su energıa. No pueden ser infectados por algun gusano, y no par-ticipan en el proceso de propagacion de gusanos de WSN.

5.1. ANALISIS DEL MODELO DE PROPAGACION DE GUSANOS EN WSN67
En un instante t, el numero de nodos en cada estado se denota porS(t), I(t), R(t) y D(t).
En el modelo de propagacion de gusanos en las redes de sensores inalambri-cos en una unidad de tiempo, se asume lo siguiente:
Un nodo susceptible, llega a ser un nodo infectado con posibilidad α1.El parametro α1 es positivo.
Un nodo infectado, llega a ser un nodo recuperado con posibilidad α4.El parametro α4 es positivo.
Un nodo recuperado, llega a ser un nodo susceptible con posibilidadα5. El parametro α5 es positivo.
Un nodo susceptible, infectado o recuperado, llega a ser un nodo muertocon posibilidad α2, α3 o α6, respectivamente. Los parametros α2, α3 yα6 son positivos.
El numero promedio de gusanos en cada nodo infectado en WSN es k.
Ahora se vera la relacion de transicion entre los estados de los nodos. En Shay α2S(t) nodos que pasaran a D con posibilidadα2. En I hay α3I(t) nodosque pasaran a D con posibilidad α3. En R hay α6R(t) nodos que pasaran aD con posibilidad α6. En I hay α4I(t) nodos que pasaran a R con posibilidadα4. En R hay α5S(t) nodos que pasaran a S con posibilidad α5. En S hayα1kS
′(t)I(t) nodos que pasaran a I con posibilidad α1, donde k es el numeropromedio de gusanos que hay en cada nodo infectado, y S ′(t) es el numerode nodos susceptibles que estan alrededor del nodo infectado. Como el rangode comunicacion entre los nodos es limitado, es por esto que, el numero denodos que son susceptibles y estan al lado de un nodo infectado, es menorque el numero de nodos susceptibles en WSN, por tal razon S ′(t), es menorque S(t). Ver Figura 5.2.
Por otro lado, se denota el area de comunicacion de un nodo por Sr, yel numero de nodos susceptibles en una unidad de area en WSN por p(t).Luego, se tienen las siguientes ecuaciones,
Sr = πr2, (5.1.1)
p(t) =S(t)
πq2, (5.1.2)
S ′(t) = Srp(t). (5.1.3)

68CAPITULO 5. MODELO DE PROPAGACION DE GUSANOS EN WSN
Fuente: X. Wang, Y. Li (2009).
Figura 5.2: Relaciones de los nodos.
De las ecuaciones (5.1.1), (5.1.2) y (5.1.3) se obtiene que,
S ′(t) =r2
q2S(t). (5.1.4)
De acuerdo con la relacion de transicion entre los estados de los nodosque se observa en la Figura 5.2, y la ecuacion (5.1.4), se derivan las siguientesecuaciones diferenciales,
I ′ =r2
q2α1kSI − α3I − α4I
S ′ = α5R−r2
q2α1kSI − α2S
R′ = α4I − α5R− α6RD′ = α2S + α3I − α6R
(5.1.5)
El numero total de nodos en WSN es N , y por eso, en cualquier instantet se sostiene la siguiente ecuacion,
I + S +R +D = N. (5.1.6)
El modelo de propagacion de gusanos en las redes de sensores inalambri-cos o modelo iSIRS, esta dado por (5.1.5), y es un sistema de ecuacionesdiferenciales no lineal.

5.1. ANALISIS DEL MODELO DE PROPAGACION DE GUSANOS EN WSN69
Ahora se estudiara la dinamica del sistema (5.1.5). Como la variable Dsolo depende de S,R e I, entonces, basta considerar el siguiente sistema,
I ′ = (δS − α3 − α4)IS ′ = α5R− (δI − α2)SR′ = α4I − (α5 − α6)R
donde δ =r2
q2α1k.
El sistema es de interes solo cuando las variables I, S,R y D son mayoreso iguales a cero. Por lo anterior, se tiene que I + S +R ≤ N .
Fuente: Elaboracion propia.
Figura 5.3: Region ∆.
Proposicion 5.1.1. La region ∆ = {(I, S,R) ∈ R3|I, S,R ≥ 0, I + S +R ≤N} es positivamente invariante.
Demostracion. Se vera que ∆ es positivamente invariante.
Si I = 0, entonces, I ′ = 0.
Por lo tanto, el plano RS es invariante.
Si R = 0, entonces, R′ = α4I ≥ 0.
Por lo tanto, las soluciones se saldran del plano SI, pero permanecera enel interior de R3
+.
Si S = 0, entonces, S ′ = α5R ≥ 0.
Por lo tanto, las soluciones se saldran del plano RI, pero permane-cera en el interior de R3
+.

70CAPITULO 5. MODELO DE PROPAGACION DE GUSANOS EN WSN
Se observa que,
(I + S +R)′ = δIS − α3I − α4I + α5R− δIS − α2S + α4I − α5R− α6R
Q′ = −(α3I + α2S + α6R).
Entonces, Q′ < 0, lo que implica que Q = S + I + R, es decreciente,por lo tanto el campo vectorial sobre el plano S + I + R = N , apuntahacia adentro de la region ∆.
Sobre el eje I, se tiene que R = S = 0. Entonces, S ′ = 0 y R′ = α4I.
Por lo tanto, las soluciones se salen del eje I y se quedan en el planoRI.
Sobre el eje S, se tiene que R = I = 0. Entonces, R′ = 0, I ′ = 0 yS ′ = −Sα2.
Por lo tanto, S(t)→ 0, y el eje S sera invariante.
Sobre el eje R, se tiene que I = S = 0. Entonces, I ′ = 0 y S ′ = α5R.
Por lo tanto, las soluciones se salen del eje R, y se quedan en el planoRS.
Por lo tanto, ∆ es positivamente invariante.
Para estudiar el comportamiento del sistema en detalle en R3, se consi-deran las S-isoclinas, I-isoclinas y R-isoclinas, es decir, el conjunto de puntosdonde S, I y R se anulan respectivamente. Los puntos donde se intersectantodas las isoclinas son los puntos fijos del sistema.
Las I-isoclinas es el conjunto de puntos donde (δS−α3−α4)I = 0, las S-isoclinas es el conjunto de puntos donde α5R−(δI−α2)S = 0 y las R-iscolinases el conjunto de puntos donde α4I − (α5 − α6)R = 0. Por lo tanto,
Las I-isoclinas seran,
I = 0 y S =α3 + α4
δ. (5.1.7)
La S-isoclina esS(δI + α2) = α5R. (5.1.8)
La R-isoclina es
R
(α5 + α6
α4
)= I. (5.1.9)

5.1. ANALISIS DEL MODELO DE PROPAGACION DE GUSANOS EN WSN71
Para encontrar los puntos fijos se va a calcular todas las posibles inter-secciones entre las isoclinas. Entonces se tiene que,
i. Si I = 0, entonces,
α2S = α5R
R = 0
Por lo tanto, el punto P = (0, 0, 0) es un punto fijo.
ii. Si S =α3 + α4
δ, entonces,
α3 + α4
δ(δI + α2) = α5R
I =
(α5 + α6
α4
)R
Combinando las dos ultimas ecuaciones se obtiene,
α3 + α4
δ
(δR
(α5 + α6
α4
)+ α2
)= α5R
R
((α3 + α4)(α5 + α6)
α4
)+α2(α3 + α4)
δ= α5R
R
((α3 + α4)(α5 + α6)− α4α5
α4
)= −α2(α3 + α4)
δ
R
(α3α5 + α3α6 + α4α6
α4
)= −α2(α3 + α4)
δ
Las ecuaciones solo tienen sentido para R, S, I ≥ 0, entonces, el sistemaen R3
+, el unico punto fijo que admite es P = (0, 0, 0).
Para estudiar el caracter de estabilidad del punto fijo se considera elsistema linealizado dado por,
Y ′ =
δS − α3 − α4 δI 0−δS δI − α2 α5
α4 0 −α5 − α6
Y.
La matriz que resulta de la linealizacion en el punto fijo P = (0, 0, 0) es,

72CAPITULO 5. MODELO DE PROPAGACION DE GUSANOS EN WSN
A =
−α3 − α4 0 00 −α2 α5
α4 0 −α5 − α6
.
Ahora se determinan los autovalores de la matriz A,
det(A− λI) = 0∣∣∣∣∣∣−λ− α3 − α4 0 0
0 −λ− α2 α5
α4 0 −λ− α5 − α6
∣∣∣∣∣∣ = 0
(−λ− α3 − α4)(λ− α2)(−λ− α5 − α6) = 0
De la ultima ecuacion se obtiene que los autovalores son,
λ1 = −(α3 + α4)
λ2 = −α2
λ3 = −(α5 + α6)
Como los autovalores son todos negativos, entonces, el punto fijo P eslocalmente estable. Se vera que este punto atrae todas las orbitas de R3
+.
Proposicion 5.1.2. Para todo dato inicial en R3+ se tiene que,
lımt→∞
S(t) = lımt→∞
I(t) = lımt→∞
R(t) = 0 y lımt→∞
D(t) = N.
Demostracion. Sumando las ecuaciones se obtiene que,
(I + S +R)′ = δIS − α3I − α4I + α5R− δIS − α2S + α4I − α5R− α6R
= −α3I − α2S − α6R
≤ −min{α2, α3, α6}(I + S +R).
Sea Q = S + I +R y α = min{α2, α3, α6}. Entonces, Q′ ≤ −α Q. Luego,la solucion de esta desigualdad sera
Q(t) ≤ Q(0)e−αt.
Por lo tanto, las soluciones del modelo de propagacion de gusanos en lasredes de sensores inalambricos tienden al punto fijo P = (0, 0, 0) cuandot→∞.

5.1. ANALISIS DEL MODELO DE PROPAGACION DE GUSANOS EN WSN73
De la Proposicion 5.1.2, se obtiene que la dinamica asintotica del modelode propagacion de gusanos en las WSN es trivial.
Observacion 5.1.3. Otra diferencia respecto al estudio epidemiologico con-siste en la seleccion de los datos iniciales, ya que en el caso de la epide-miologıa hay diferentes formas de elegir estos datos iniciales, mientras queen este sistema, los unicos datos iniciales que tiene sentido considerar son
I ∼ 0, S ∼ N, R = 0 y D = 0.
74CAPITULO 5. MODELO DE PROPAGACION DE GUSANOS EN WSN

Capıtulo 6
Conclusiones
Los modelos de epidemiologıa no solo son utilizados para modelar la pro-pagacion de enfermedades en el ser humano, sino que tambien se sirven dedistintas areas como la informatica para modelar otro tipo de situacionestales como la propagacion de gusanos en redes de sensores inalambricos.
La dinamica asintotica del modelo de propagacion de gusanos en redesde sensores inalambricos es trivial, ya que las micro-baterıas tienen energıalimitada, y es de esperar que para tiempos grandes todos los nodos estenmuertos, a diferencia del caso de epidemiologıa donde el comportamientoasintotico daba la informacion mas importante del sistema.
A partir de lo trabajado en este documento, se evidencio que lo interesantedel modelo de propagacion de gusanos en redes de sensores inalambricos serıamaximizar el tiempo que se demora las WSN en llegar a su estado final(S = I = R = 0 y D = N), y buscar el tiempo en que los nodos infectadosalcanzan su maximo. Este tema queda abierto para futuras investigaciones.
75

76 CAPITULO 6. CONCLUSIONES
Bibliografıa
[1] S. Wiggins, Introduction to Applied Nonlinear Dynamical Systems andChaos, Springer-Verlag, New York, USA, 2003.
[2] M.W.Hirsh, S.Smale, R.L.Devaney, Differential Equations, DynamicalSystems, and An Introduction to Chaos, Elsevier, 2004.
[3] X. Wang, Y. Li, An Improved SIR Model for Analyzing the Dynamicsof Worm Propagation in Wireless Sensor Networks, Chinese Journal ofElectronics, vol.18, No.1, pp.8-12, 2009.
[4] F. Brauer, y C. Castillo-Chavez, Mathematical Models in PopulationBiology and Epidemiology, Springer, New York, USA, 2012.
[5] F. Sanchez-Garduno, P. Miramontes y J. L. Gutierrez-Sanchez, Clasicosde la biologıa matematica, Universidad Nacional Autonoma de Mexico,2003.
[6] A. Kramer, M. Kretzschmar y K. Krickeberg, Modern Infectious DiseaseEpidemiology, Springer, New York, USA, 2009.
[7] H. Hoppensteadt, Mathematical Methods for Analysis of a Complex Di-sease, American Mathematical Society, 2011.
[8] B. Blasius, J. Kurths y L. Stone, Complex Population Dynamics, WorldScientific, 2007.
[9] S. Khayam y H. Radha, Using Signal Processing Techniques to ModelWorm Propagation over Wireless Sensor Networks, IEEE Signal Pro-cessing Magazine, Vol.23,No.2,pp.164-169, 2006.
[10] J. Frauenthal, Mathematical Modeling in Epidemiology, Springer-Verlag,New York, USA, 1980.
77

78 BIBLIOGRAFIA
[11] Cambridge University, Population Dynamics, Recuperado en: http ://www.maths.warwick.ac.uk/ ∼ keeling/Teaching index.html,2001.
[12] F. Brauer, P. van den Driessche y J. Wu, Mathematical Epidemiology,Springer, New York, USA, 2008.