MVO-10 Desempenho de Aeronaves - aer.ita.brflaviojs/sites/default/files/cursos/grad/mvo10/MVO... ·...
47
MVO-10 Desempenho de Aeronaves (carga hor´ aria: 64 horas) Fl´ avio Silvestre / Maur´ ıcio Morales Departamento de Mecˆ anica do Vˆ oo Divis˜ ao de Engenharia Aeron´ autica Instituto Tecnol´ ogico de Aeron´ autica 2012
Transcript of MVO-10 Desempenho de Aeronaves - aer.ita.brflaviojs/sites/default/files/cursos/grad/mvo10/MVO... ·...

MVO-10 Desempenho de Aeronaves(carga horaria: 64 horas)
Flavio Silvestre / Maurıcio Morales
Departamento de Mecanica do VooDivisao de Engenharia AeronauticaInstituto Tecnologico de Aeronautica
2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Ementa da disciplina
MVO-10 - DESEMPENHO DE AERONAVES
I Requisito: nocoes de aerodinamica.
I Horas semanais: 2-1-1-6.
I Conteudo: Desempenho pontual: planeio, voo horizontal, subida,voo retilıneo nao-permanente, manobras de voo, diagramaaltitude-numero de Mach. Desempenho integral: cruzeiro, voohorizontal nao-permanente, subida e voos curvilıneos. Decolagem eaterrissagem.
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Bibliografia recomendada
I Vinh, N. K., Flight mechanics of high-performance aircraft, NewYork, University Press, 1993;
I Paglione, P., Apostila de MVO-02: Desempenho de Aeronaves, 1985;I Asselin, M., An introduction to aircraft performance, AAIA, 1997
(AIAA Education Series);I Ojha, S. K., Flight performance of aircraft, Washington, AAIA, 1995
(AIAA Ed. Series).
Bibliografia auxiliar:I Talay, T. A., Introduction to the Aerodynamics of Flight. NASA
SP-367, 1975;I Yechout, T. R., Introduction to Aircraft Flight Mechanics. AIAA
Education Series, 2003;I Olson, W. M., Aircraft Performance Flight Testing. Technical
Information Handbook, Air Force Flight Test Center, Edwards AirForce Base, California, 2000;
I Cook, M. V., Flight Dynamics Principles. Elsevier AerospaceEngineering Series, 2007.Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Plano do curso
I Introducao: Prof. MoralesI introducao ao MatLabI modelo atmosfericoI modelo aerodinamicoI modelo propulsivoI componentes de um aviao
I Deducao das equacoes do movimento
I Desempenho nos diversos seguimentos da trajetoriaI cruzeiroI subidaI descida e planeioI decolagem e aterrissagemI curvas
I outras figuras de merito
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
PARTE I
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Introducao
I aeronave concebida pararealizar determinada missao
I ex: PAX, carga, aplicacoesmilitares (alto desempenho),planadores (competicao), ...
I missao: requer uma trajetoriaI decolagem, subida, cruzeiro,
manobras (ex: curvas),descida, aterrissagem
I controle da trajetoriaI tracaoI resultante
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Introducao
Caracterısticas de desempenho de interesse:
I intervalo de velocidades de operacao: velocidade mınima, velocidademaxima
I teto de voo
I manobrabilidade: taxa de subida, raio de curvatura, velocidade decurva
I alcance, para uma data quantidade de combustıvel
I tempo de voo, para uma data quantidade de combustıvel
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Introducao
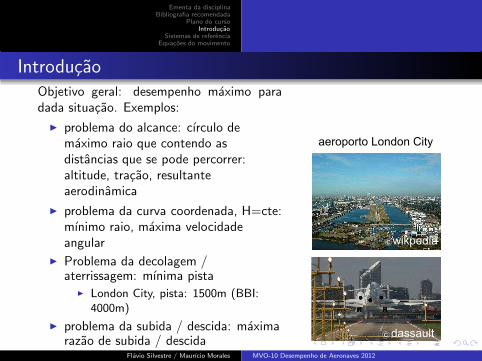
Objetivo geral: desempenho maximo paradada situacao. Exemplos:
I problema do alcance: cırculo demaximo raio que contendo asdistancias que se pode percorrer:altitude, tracao, resultanteaerodinamica
I problema da curva coordenada, H=cte:mınimo raio, maxima velocidadeangular
I Problema da decolagem /aterrissagem: mınima pista
I London City, pista: 1500m (BBI:4000m)
I problema da subida / descida: maximarazao de subida / descida
I London City, steep approach: 5,5◦
c dassault
c wikpedia
aeroporto London City
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
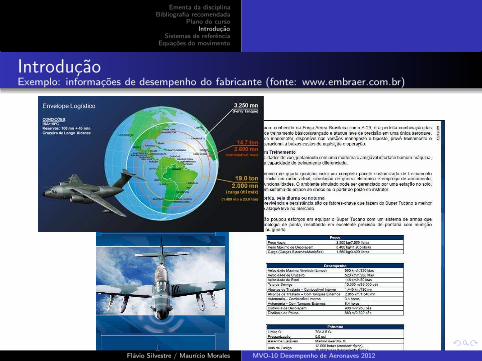
IntroducaoExemplo: informacoes de desempenho do fabricante (fonte: www.embraer.com.br)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
IntroducaoExemplo: informacoes de desempenho do fabricante (fonte: www.embraer.com.br)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
IntroducaoExemplo: informacoes de desempenho do fabricante (fonte: www.embraer.com.br)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
IntroducaoExemplo: informacoes de desempenho do fabricante (fonte: www.embraer.com.br)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciadefinicao
I sistema terrestre fixoI origem: ponto fixo sobre a superfıcie da TerraI zI : “vertical”, apontando para o centro da TerraI xI e yI : repousam sobre o plano horizontal
I sistema terrestre movelI eixos paralelos ao fixoI origem no CM
I sistema inercial: considerado coincidente com o terrestre fixoI sistema do corpo (“body reference frame”BRF,“body axes”):
velocidades e aceleracoes da aeronaveI sistema aerodinamico: resultante aerodinamicaI sistema propulsivo: tracao
transformacao entre sistemas de referencia
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciadefinicao
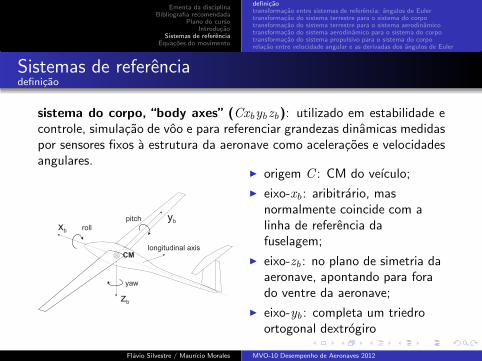
sistema do corpo, “body axes” (Cxbybzb): utilizado em estabilidade econtrole, simulacao de voo e para referenciar grandezas dinamicas medidaspor sensores fixos a estrutura da aeronave como aceleracoes e velocidadesangulares.
yb
xb
zb
CM
longitudinal axis
roll
pitch
yaw
I origem C : CM do veıculo;
I eixo-xb: aribitrario, masnormalmente coincide com alinha de referencia dafuselagem;
I eixo-zb : no plano de simetria daaeronave, apontando para forado ventre da aeronave;
I eixo-yb : completa um triedroortogonal dextrogiro
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciadefinicao
sistema aerodinamico (Cxayaza): tambem chamado de sistema de tra-jetoria em relacao ao ar, utilizado nos estudos de desempenho de aeronavese para expressar as forcas aerodinamicas
yb
xb
zazb
ya
xa
CM
b
a
plano formadopor x e ya b
plano desimetria x zb b
V
I origem C : CM da aeronave;
I eixo-xa : coincide com o vetorvelocidade da aeronave emrelacao ao ar (“vento relativo”)
I eixo-za : no plano de simetriada aeronave, apontando parafora do ventre da aeronave
I eixo-ya : completa um triedroortogonal dextrogiro
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao entre sistemas de referencia: angulos de Euler
Os angulos de Euler expressam a orientacao relativa entre dois sistemasde referencia. Rotacoes sucessivas, numa ordem determinada, levam umsistema a coincidir com o outro. Os tres principais conjuntos de angulosde Euler usados na mecanica do voo sao:
I sistema terrestre movel → sistema do corpo: ψ, θ, φ (proa, atitudelongitudinal, inclinacao lateral)
I sistema terrestre movel → sistema aerodinamico: χ, γ, µ (rumo,angulo de trajetoria, rolamento aerodinamico)
I sistema aerodinamico → sistema do corpo: −β, α, 0 (angulo dederrapagem, angulo de ataque)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
Do sistema terrestre para o sistema do corpo sao necessarias tres rotacoessucessivas:
yb
xb
zb
θ
ψ
ϕ
x1
y1
z1
x2 y2
z2≡
x3≡
z3
y3≡
CM
xE
yE
zE
O
sistematerrestrefixo
I rotacao de ψ em torno do eixoz1 (vertical)
(x1, y1, z1) → (x2, y2, z2)
I rotacao de θ em torno do eixoy2
(x2, y2, z2) → (x3, y3, z3)
I rotacao de φ em torno do eixox3 ≡ xb do corpo
(x3, y3, z3) → (xb , yb , zb)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
1a rotacao: angulo ψ em torno do eixo z do sistema terrestre movel. Nofinal o eixo x esta no plano oxbzb do corpo.
u2 = u1 cosψ + v1 sinψv2 = −u1 sinψ + v1 cosψw2 = w1
u2v2w2
=
cosψ sinψ 0− sinψ cosψ 0
0 0 1
︸ ︷︷ ︸
Lψ
u1v1w1
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
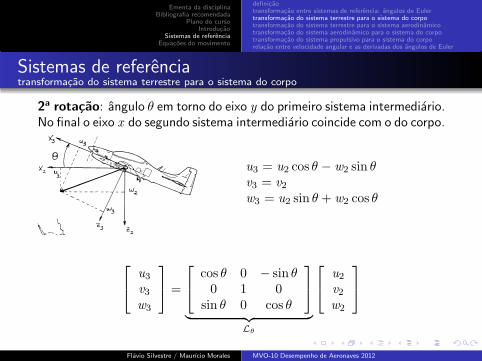
2a rotacao: angulo θ em torno do eixo y do primeiro sistema intermediario.No final o eixo x do segundo sistema intermediario coincide com o do corpo.
u3 = u2 cos θ − w2 sin θv3 = v2w3 = u2 sin θ + w2 cos θ
u3v3w3
=
cos θ 0 − sin θ0 1 0
sin θ 0 cos θ
︸ ︷︷ ︸
Lθ
u2v2w2
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
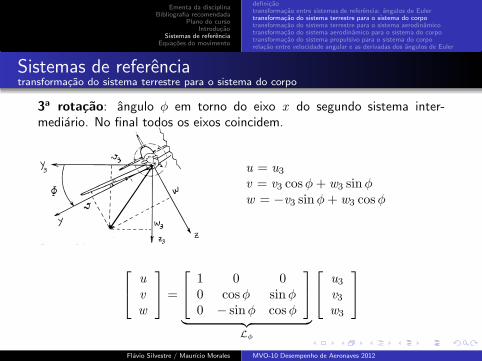
3a rotacao: angulo φ em torno do eixo x do segundo sistema inter-mediario. No final todos os eixos coincidem.
u = u3v = v3 cosφ+ w3 sinφw = −v3 sinφ+ w3 cosφ
u
v
w
=
1 0 00 cosφ sinφ0 − sinφ cosφ
︸ ︷︷ ︸
Lφ
u3v3w3
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
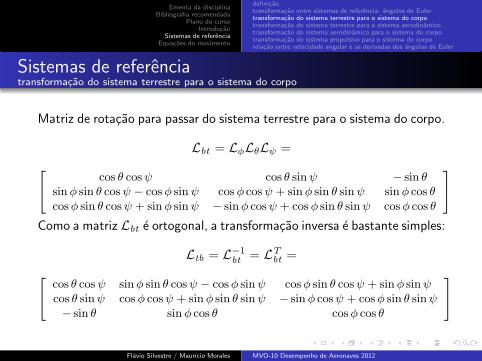
Matriz de rotacao para passar do sistema terrestre para o sistema do corpo.
Lbt = LφLθLψ =
cos θ cosψ cos θ sinψ − sin θ
sinφ sin θ cosψ − cos φ sinψ cos φ cosψ + sinφ sin θ sinψ sinφ cos θ
cosφ sin θ cosψ + sinφ sinψ − sinφ cosψ + cos φ sin θ sinψ cosφ cos θ
Como a matriz Lbt e ortogonal, a transformacao inversa e bastante simples:
Ltb = L−1
bt = LTbt =
cos θ cosψ sinφ sin θ cosψ − cosφ sinψ cosφ sin θ cosψ + sinφ sinψ
cos θ sinψ cosφ cosψ + sinφ sin θ sinψ − sinφ cosψ + cosφ sin θ sinψ
− sin θ sinφ cos θ cosφ cos θ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
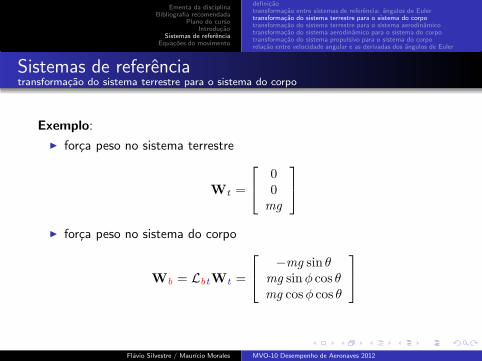
Exemplo:
I forca peso no sistema terrestre
Wt =
00mg
I forca peso no sistema do corpo
Wb = LbtWt =
−mg sin θmg sinφ cos θmg cosφ cos θ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema do corpo
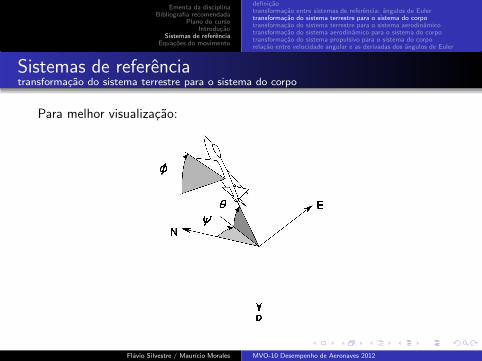
Para melhor visualizacao:
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema aerodinamico
Lembrando que:
I sistema terrestre movel → sistema do corpo: ψ, θ, φ (proa, altitudelongitudinal, inclinacao lateral)
I sistema terrestre movel → sistema aerodinamico: χ, γ, µ (rumo,angulo de trajetoria, rolamento aerodinamico)
Entao a matriz de rotacao para passar do sistema terrestre movel para osistema aerodinamico e analoga a matriz que passa do do sistema terrestremovel para o sistema do corpo, bastando apenas trocar ψ, θ e φ por χ, γe µ.
Lat =
cos γ cosχ cos γ sinχ − sinγ
sinµ sinγ cosχ− cosµ sinχ cosµ cosχ+ sinµ sin γ sinχ sinµ cos γcosµ sin γ cosχ+ sinµ sinχ − sinµ cosχ+ cos µ sinγ sinχ cos µ cos γ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema terrestre para o sistema aerodinamico
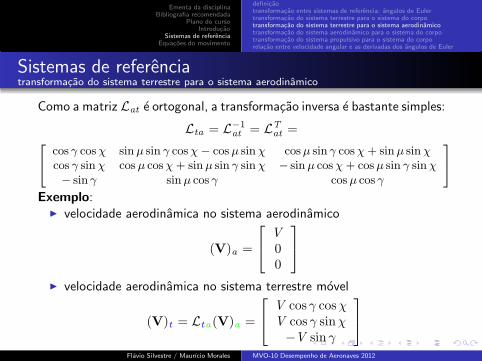
Como a matriz Lat e ortogonal, a transformacao inversa e bastante simples:
Lta = L−1
at = LTat =
cos γ cosχ sinµ sin γ cosχ− cosµ sinχ cosµ sin γ cosχ+ sinµ sinχ
cos γ sinχ cosµ cosχ+ sinµ sin γ sinχ − sinµ cosχ+ cosµ sin γ sinχ
− sin γ sinµ cos γ cosµ cos γ
Exemplo:I velocidade aerodinamica no sistema aerodinamico
(V)a =
V
00
I velocidade aerodinamica no sistema terrestre movel
(V)t = Lta(V)a =
V cosγ cosχV cos γ sinχ−V sin γ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
Do sistema aerodinamico para o sistema do corpo sao necessarias DUASrotacoes sucessivas:
yb
xb
zazb
ya
xa
CM
b
a
plano formadopor x e ya b
plano desimetria x zb b
V
I rotacao de −β em torno doeixo za , pertencente pordefinicao ao plano xbzb daaeronave (plano de simetria)
(xa , ya , za) → (xe , ye , ze)
I rotacao de α em torno do eixoye ≡ yb
(xe , ye , ze) → (xb , yb , zb)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
1a rotacao: angulo −β em torno do eixo z . No final os eixos y coincidem
u2 = u1 cosβ − v1 sinβv2 = u1 sinβ + v1 cosβw2 = w1
u2v2w2
=
cosβ − sinβ 0sinβ cosβ 00 0 1
︸ ︷︷ ︸
Lβ
u1v1w1
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
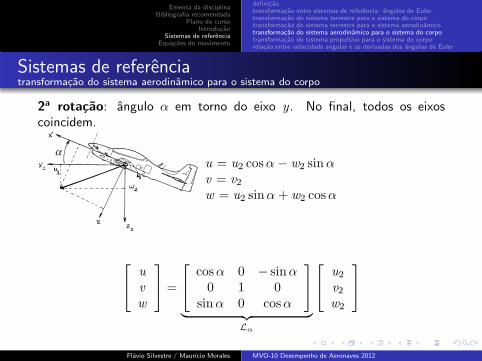
2a rotacao: angulo α em torno do eixo y. No final, todos os eixoscoincidem.
u = u2 cosα− w2 sinαv = v2w = u2 sinα+ w2 cosα
u
v
w
=
cosα 0 − sinα0 1 0
sinα 0 cosα
︸ ︷︷ ︸
Lα
u2v2w2
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
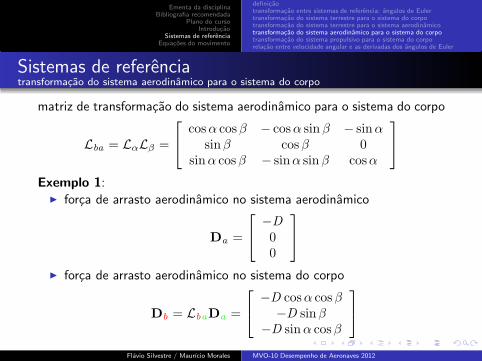
matriz de transformacao do sistema aerodinamico para o sistema do corpo
Lba = LαLβ =
cosα cosβ − cosα sinβ − sinαsinβ cosβ 0
sinα cosβ − sinα sinβ cosα
Exemplo 1:I forca de arrasto aerodinamico no sistema aerodinamico
Da =
−D
00
I forca de arrasto aerodinamico no sistema do corpo
Db = LbaDa =
−D cosα cosβ−D sinβ
−D sinα cosβ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
I forca de sustentacao aerodinamica no sistema do corpo
Lb = Lα
00−L
=
L sinα0
−L cosα
I forca lateral aerodinamica no sistema do corpo
Yb =
0Ya
0
I resultante aerodinamica no sistema do corpo
Ab = Db +Yb + Lb =
−D cosα cosβ + L sinα−D sinβ + Ya
−D sinα cosβ − L cosα
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
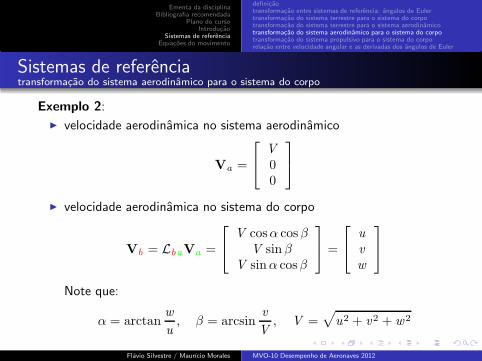
Exemplo 2:
I velocidade aerodinamica no sistema aerodinamico
Va =
V
00
I velocidade aerodinamica no sistema do corpo
Vb = LbaVa =
V cosα cosβV sinβ
V sinα cosβ
=
u
v
w
Note que:
α = arctanw
u, β = arcsin
v
V, V =
√
u2 + v2 + w2
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema aerodinamico para o sistema do corpo
Em outras palavras:
I o angulo de derrapagem (β) e o angulo entre o vetor-velocidade e oplano de simetria da aeronave;
I o angulo de ataque (α) e o angulo formado pela componente dovetor-velocidade no plano de simetria da aeronave e a linha dereferencia da fuselagem (LRF).
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema propulsivo para o sistema do corpo
A transformacao e identica a anterior (do sistema aerodinamico para osistema do corpo), sendo o sistema propulsivo equivalentemente definidopelos angulos αT e βT .1a rotacao: angulo −βT em torno do eixo z do motor. No final os eixosy coincidem.
LβT=
cos(βT ) − sin(βT ) 0sin(βT ) cos(βT ) 0
0 0 1
2a rotacao: angulo αT em torno do eixo y do motor. No final todos oseixos coincidem.
LαT=
cos(αT ) 0 − sin(αT )0 1 0
sin(αT ) 0 cos(αT )
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciatransformacao do sistema propulsivo para o sistema do corpo
matriz de transformacao do sistema do motor para o sistema do corpo:
Lbp = LαTLβT
=
cos(αT ) cos(βT ) − cos(αT ) sin(βT ) − sin(αT )sin(βT ) cos(βT ) 0
sin(αT ) cos(βT ) − sin(αT ) sin(βT ) cos(αT )
Exemplo:I forca propulsiva no sistema de referencia do motor
(~T )p =
T
00
I forca propulsiva no sistema de referencia do corpo
(~T )b = Lbp(~T )p =
T cos(αT ) cos(βT )T sin(βT )
T sin(αT ) cos(βT )
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciarelacao entre velocidade angular e as derivadas dos angulos de Euler
ψ, θ e φ sao componentes nao ortogonais de ω
I a velocidade angular φ ja esta no sistema do corpo;
I a velocidade angular θ necessita de uma rotacao φ para ser expressano sistema do corpo;
I a velocidade angular ψ necessita de duas rotacoes (θ e φ) para serexpressa no sistema do corpo.
ωb =
p
q
r
=
φ00
+ Lφ
0
θ0
+ LφLθ
00
ψ
⇔
p
q
r
=
1 0 − sin θ0 cosφ sinφ cos θ0 − sinφ cosφ cos θ
φ
θ
ψ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciarelacao entre velocidade angular e as derivadas dos angulos de Euler
Invertendo a expressao anterior obtem-se:
φ
θ
ψ
=
1 sinφ tan θ cosφ tan θ0 cosφ − sinφ0 sinφ/ cos θ cosφ/ cos θ
p
q
r
Ou entao:
φ = p + tan θ(q sinφ+ r cosφ)
θ = q cosφ− r sinφ
ψ =q sinφ+ r cosφ
cos θ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
definicaotransformacao entre sistemas de referencia: angulos de Eulertransformacao do sistema terrestre para o sistema do corpotransformacao do sistema terrestre para o sistema aerodinamicotransformacao do sistema aerodinamico para o sistema do corpotransformacao do sistema propulsivo para o sistema do corporelacao entre velocidade angular e as derivadas dos angulos de Euler
Sistemas de referenciarelacao entre velocidade angular e as derivadas dos angulos de Euler
Analogamente, tem-se a relacao entre o vetor velocidade angular ω daaeronave nos eixos aerodinamicos e as derivadas dos angulos de Euler χ,γ, µ:
ωa =
paqara
=
1 0 − sin γ0 cosµ sinµ cos γ0 − sinµ cosµ cos γ
µγχ
Ou entao:
pa = µ− χ sin γ
qa = γ cosµ+ χ sinµ cosγ
ra = −γ sinµ+ χ cosµ cos γ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
I Aplicacao da 2a. Lei de Newton
I Casos particulares da dinamica da aeronave:I estudo do desempenho (MVO-10)I estudo da estabilidade (MVO-30)I controle automatico (MVO-20 + MVO-30)
I Estudo do desempenho, hipoteses:I Terra plana (g = cte) e sem rotacao: assumida referencial inercialI movimento de translacao do CG da aeronaveI massa variavel, POREM: variacao no momento linear associada a
queima de combustıvel (mV) e desprezıvel
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
I 2a. Lei de Newton para translacao:
mdV
d t=
∑
Fext = W
︸︷︷︸
gravidade
+ A︸︷︷︸
aero
+ T︸︷︷︸
prop
(1)
I relacao cinematica:dR
d t= V (2)
I variacao de massa:
dm
d t= − CF (H ,M , π)
︸ ︷︷ ︸
consumo especıfico de combustıvel
(3)
deducao no sistema aerodinamico: sistema da trajetoria
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
Seja:
IdV
d t= derivada temporal do vetor velocidade, medida pelo
observador fixo no referencial inercial;
IδV
δt= derivada temporal do vetor velocidade, medida pelo
observador fixo no sistema nao-inercial, que gira em torno doinercial com velocidade angular ω
Da analise vetorial, tem-se que:
dV
d t=δV
δt+ ω ×V
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
Sejam:I a velocidade angular ωa do sistema aerodinamico em relacao ao
referencial inercial, expressa no sistema aerodinamico:
ωa =
paqara
=
µ− χ sin γγ cosµ+ χ sinµ cos γ−γ sinµ+ χ cosµ cos γ
I a velocidade do CM da aeronave expressa no sistema aerodinamico:
Va =
V
00
I as forcas externas descritas no sistema aerodinamico:
∑
Fext
a =
Xa
Ya
Za
= Aa +Wa +Ta
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
Aplicando a 2a Lei de Newton:
∑
Fext
a = m
[δVa
δt+ ωa ×Va
]
⇔
∑~F exta = m
V
00
+m
paqara
×
V
00
= m
V
raV
−qaV
Substituindo as relacoes entre velocidade angular w e as derivadas doangulos de Euler:
Xa
Ya
Za
=
mV
mV (χ cos γ cosµ− γ sinµ)−mV (χ cosγ sinµ+ γ cosµ)
Agora basta expressar as forcas externas no sistema aerodinamicoFlavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
Forcas externas:
I forca aerodinamica
Aa =
−D
Ya
−L
I forca peso
Wa = Lat
00mg
=
−mg sin γmg cos γ sinµmg cos γ cosµ
I forca de tracao
Ta = Lab
F cos(αF ) cos(βF )F sin(βF )
F sin(αF ) cos(βF )
≈
F cos(α− αF ) cos(β − βF )−F cos(α − αF ) sin(β − βF )
−F sin(α− αF )
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
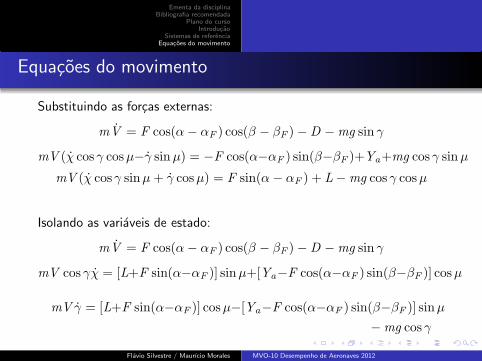
Substituindo as forcas externas:
mV = F cos(α− αF ) cos(β − βF )−D −mg sin γ
mV (χ cos γ cosµ−γ sinµ) = −F cos(α−αF ) sin(β−βF )+Ya+mg cos γ sinµ
mV (χ cosγ sinµ+ γ cosµ) = F sin(α− αF ) + L−mg cos γ cosµ
Isolando as variaveis de estado:
mV = F cos(α− αF ) cos(β − βF )−D −mg sin γ
mV cos γχ = [L+F sin(α−αF )] sinµ+[Ya−F cos(α−αF ) sin(β−βF )] cosµ
mV γ = [L+F sin(α−αF )] cosµ−[Ya−F cos(α−αF ) sin(β−βF )] sinµ
−mg cos γ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012

Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
Da velocidade aerodinamica descrita no sistema terrestre movel temos asequacoes cinematicas:
Vt = LtaVa =
V cos γ cosχV cos γ sinχ−V sin γ
=
xtyt
−h
Ou seja:
xt = V cos γ cosχ
yt = V cos γ sinχ
h = V sin γ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
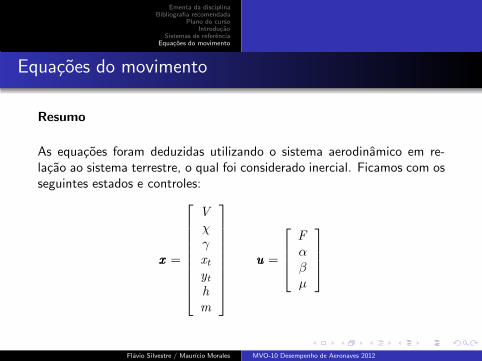
Resumo
As equacoes foram deduzidas utilizando o sistema aerodinamico em re-lacao ao sistema terrestre, o qual foi considerado inercial. Ficamos com osseguintes estados e controles:
xxx =
V
χγxtyth
m
uuu =
F
αβµ
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012
Ementa da disciplinaBibliografia recomendada
Plano do cursoIntroducao
Sistemas de referenciaEquacoes do movimento
Equacoes do movimento
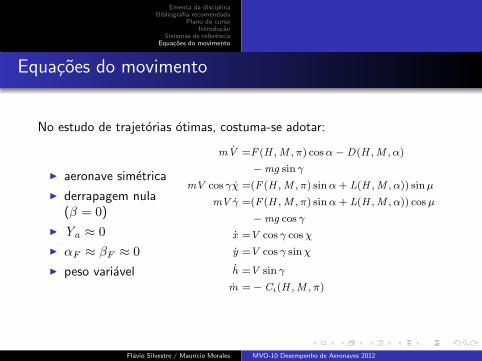
No estudo de trajetorias otimas, costuma-se adotar:
I aeronave simetrica
I derrapagem nula(β = 0)
I Ya ≈ 0
I αF ≈ βF ≈ 0
I peso variavel
mV =F (H ,M , π) cosα− D(H ,M , α)
−mg sin γ
mV cos γχ =(F (H ,M , π) sinα+ L(H ,M , α)) sinµ
mV γ =(F (H ,M , π) sinα+ L(H ,M , α)) cosµ
−mg cos γ
x =V cos γ cosχ
y =V cos γ sinχ
h =V sin γ
m =− Ci (H ,M , π)
Flavio Silvestre / Maurıcio Morales MVO-10 Desempenho de Aeronaves 2012