Pazini 1996 Apostila Dinamica de Estruturas Parte1
53
FUNDAMENTOS DA DIN ˆ AMICA DE ESTRUTURAS Maur´ ıcio Pazini Brand˜ ao c 1996
-
Upload
gabriel-klein-lunkes -
Category
Documents
-
view
27 -
download
10
description
Primeira parte da apostila Pazzini 96
Transcript of Pazini 1996 Apostila Dinamica de Estruturas Parte1
-
FUNDAMENTOS DA
DINA^MICA DE ESTRUTURAS
Maurcio Pazini Brand~aoc1996
-
Apresentac~ao
Sempre foi nossa intenc~ao possuir um texto em portugue^s que servisse de apoio didaticoadequado a um curso introdutorio em Dina^mica de Estruturas. A necessidade de um textodeste tipo foi percebida desde que este autor iniciou seu magisterio na area, ha mais de dezanos. Este texto deveria ser indicado para alunos avancados de graduac~ao ou alunos iniciantesde pos-graduac~ao em engenharia. Porem, alunos com menor preparac~ao basica tambem delepoderiam se beneflciar pela selec~ao de trechos adequados sob a orientac~ao de um instrutor. Otexto deveria abordar aspectos fundamentais da atividade e aprofundar aqueles que tivessemmaior utilidade em aplicac~oes de engenharia.
Da veriflcac~ao dessa necessidade a apresentac~ao daquilo que aqui segue, passou um bomtempo, enquanto ideias eram amadurecidas. Para produzir este texto, o autor fez uso de suaexperie^ncia acade^mica e do conhecimento adquirido em envolvimento com colegas dos setoresindustrial e de desenvolvimento. O texto busca apresentar fundamentos que permitam ao leitorresolver problemas. No entanto, este pragmatismo n~ao exclui detalhes e variac~oes sobre os temasabordados, desde que relevantes para a consecuc~ao deste objetivo.
No Captulo 1, a guisa de introduc~ao, apresentamos nossos objetivos a atingir, a seque^nciade apresentac~ao do material, indicac~ao de problemas avancados de vibrac~ao em engenharia ea bibliografla recomendada para estudo adicional. No Captulo 2 apresentamos fundamentosde analise, com ferramentas da Meca^nica Newtoniana e Lagrangeana que permitem ao analistaobter as equac~oes de movimento de sistemas meca^nicos.
Uma vez dominada a arte de modelar sistemas e de obter suas equac~oes de movimento,preocupamo-nos com a resoluc~ao dessas equac~oes. No Captulo 3 estudamos as vibrac~oes livresde sistemas de um grau de liberdade do ponto de vista teorico e experimental. No Captulo4 estudamos as vibrac~oes desses mesmos sistemas quando excitados por forcas harmo^nicas,periodicas e arbitrarias.
A perfeita compreens~ao do comportamento de sistemas de um grau de liberdade e funda-mental para o domnio da Dina^mica de Estruturas. Completada esta fase, dedicamo-nos noCaptulo 5 ao estudo das vibrac~oes livres e forcadas de sistemas de multiplos graus de liberdade.Neste estudo aparecem os conceitos basicos de modos e freque^ncias naturais de vibrac~ao. Ocaptulo e completado pela aplicac~ao de metodos de superposic~ao modal largamente emprega-dos na industria.
Os problemas de vibrac~ao estrutural de sistemas contnuos, tambem chamados de sistemascom propriedades distribudas, s~ao considerados no Captulo 6. Ali s~ao discutidos problemas devibrac~ao em trac~ao, compress~ao, cisalhamento, ex~ao e tors~ao de estruturas uni e bidimensionais.O captulo e completado com a apresentac~ao de metodos de discretizac~ao de sistemas contnuose de seus metodos numericos associados.
Cada captulo traz em seu flnal uma serie de exerccios que se destinam a flxar os funda-mentos discutidos no texto. N~ao s~ao fornecidas respostas para alguns desses exerccios. Istoe intencional, de forma a estimular o leitor a realizar uma analise crtica de sua resoluc~ao,comparando-a com a de seus colegas (o que estimula tambem o trabalho em equipe). Alguns
i
-
exerccios s~ao extremamente simples, pois envolvem apenas aplicac~oes numericas imediatas.Outros s~ao mais elaborados, por envolverem aplicac~oes de conceitos. Outros mais n~ao admitemuma unica resposta, pois envolvem projeto de sistemas, sendo, portanto, quest~oes abertas. Final-mente, existem ainda perguntas e estmulos a discuss~ao, onde pretende-se que o leitor pratiquea arte de redigir, de colocar as suas ideias em termos de um texto claro, sucinto e de leituraagradavel.
Nos aproveitamos os exerccios resolvidos para flxar, atraves de aplicac~oes, os conceitosfundamentais apresentados nos captulos. Tambem aproveitamos esses mesmos exerccios paraapresentar alguns aspectos novos da teoria, que complementam e ampliam a vis~ao dos assuntostratados.
Cada captulo tambem apresenta a bibliografla que lhe e pertinente ou que lhe completa, oque permite ao leitor aprofundar e considerar variac~oes sobre os conceitos basicos requeridos paradominar a materia. As refere^ncias bibliograflcas, na sua maioria livros textos, est~ao agrupadasem segmentos de mesma area de interesse ou aplicac~ao.
Muitas foram as pessoas, professores, engenheiros e alunos, que contriburam para que estetexto pudesse ser produzido. A elas posso atribuir o que ha nele de melhor. Os erros e omiss~oess~ao de minha unica responsabilidade. Agradeceria muito se o(a) nobre leitor(a) pudesse apontar-me estes ultimos para a devida correc~ao.
S~ao Jose dos Campos, marco de 1996.
M. P. Brand~ao
ii
-
Dedicatoria
A Silmara, Ludmila e Lucas,
por terem completado minha presente experie^ncia de vida!
iii
-
Indice
1 Introduc~ao 1
1.1 Deflnic~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 11.2 Sistemas Dina^micos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
1.2.1 Projeto : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 21.2.2 Analise : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 41.2.3 Teste : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 4
1.3 Objetivos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 51.4 Seque^ncia : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 61.5 Estudos Posteriores : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 61.6 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 71.7 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 9
2 Fundamentos de Analise 11
2.1 Introduc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 112.2 Modelo Analtico : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 11
2.2.1 Considerac~oes Gerais : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 112.2.2 Um Modelo Prototipo : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 13
2.3 Modelo Matematico : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 162.4 Meca^nica Newtoniana : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 16
2.4.1 Segunda Lei de Newton : : : : : : : : : : : : : : : : : : : : : : : : : : : : 162.4.2 Princpio de DAlembert : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18
2.5 Meca^nica Lagrangeana : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 192.5.1 Considerac~oes Iniciais : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 192.5.2 Princpio dos Deslocamentos Virtuais : : : : : : : : : : : : : : : : : : : : 212.5.3 Princpio da Conservac~ao de Energia : : : : : : : : : : : : : : : : : : : : : 222.5.4 Equac~oes de Lagrange : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 242.5.5 Princpio de Hamilton : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
2.6 Importa^ncia da Posic~ao de Equilbrio : : : : : : : : : : : : : : : : : : : : : : : : : 272.7 Vibrac~oes em Engenharia : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 29
2.7.1 Efeito do Movimento da Base : : : : : : : : : : : : : : : : : : : : : : : : : 302.7.2 Esforcos Transmitidos a Base : : : : : : : : : : : : : : : : : : : : : : : : : 31
2.8 Conclus~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 312.9 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 322.10 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 32
iv
-
3 Vibrac~oes Livres de Sistemas de Um Grau de Liberdade 39
3.1 Introduc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 393.2 Vibrac~oes Livres sem Amortecimento : : : : : : : : : : : : : : : : : : : : : : : : : 393.3 Vibrac~oes Livres com Amortecimento Viscoso : : : : : : : : : : : : : : : : : : : : 43
3.3.1 Soluc~ao Geral : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 443.3.2 Caso Subcrtico : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 453.3.3 Caso Crtico : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 463.3.4 Caso Supercrtico : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 473.3.5 Determinac~ao Experimental do Amortecimento : : : : : : : : : : : : : : : 49
3.4 Vibrac~oes Livres com Atrito Seco : : : : : : : : : : : : : : : : : : : : : : : : : : : 513.5 Conclus~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 543.6 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 543.7 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 54
4 Vibrac~oes Forcadas de Sistemas de Um Grau de Liberdade 61
4.1 Introduc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 614.2 Excitac~oes Harmo^nicas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 61
4.2.1 Considerac~oes Gerais : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 624.2.2 Ressona^ncia Meca^nica : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 634.2.3 Resposta em Freque^ncia : : : : : : : : : : : : : : : : : : : : : : : : : : : : 634.2.4 Transmiss~ao e Controle da Vibrac~ao : : : : : : : : : : : : : : : : : : : : : 66
4.3 Excitac~oes Periodicas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 694.3.1 Analise do Sinal Externo : : : : : : : : : : : : : : : : : : : : : : : : : : : 694.3.2 Resposta do Sistema : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 70
4.4 Excitac~oes Arbitrarias : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 754.4.1 Respostas Fundamentais : : : : : : : : : : : : : : : : : : : : : : : : : : : : 754.4.2 Tecnicas de Convoluc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : 78
4.5 Tecnicas Experimentais : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 824.6 Conclus~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 844.7 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 844.8 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 85
5 Vibrac~oes de Sistemas de Multiplos Graus de Liberdade 955.1 Introduc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 955.2 Deduc~ao das Equac~oes de Movimento : : : : : : : : : : : : : : : : : : : : : : : : 95
5.2.1 Segunda Lei de Newton : : : : : : : : : : : : : : : : : : : : : : : : : : : : 965.2.2 Princpio da Conservac~ao de Energia : : : : : : : : : : : : : : : : : : : : : 985.2.3 Equac~oes de Lagrange : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 99
5.3 Vibrac~oes Livres - Freque^ncias e Modos de Vibrac~ao : : : : : : : : : : : : : : : : 995.4 Vibrac~oes Forcadas - Analise Modal : : : : : : : : : : : : : : : : : : : : : : : : : 1025.5 Metodos Numericos para o Problema de Auto-Valor : : : : : : : : : : : : : : : : 106
5.5.1 Metodo do Determinante : : : : : : : : : : : : : : : : : : : : : : : : : : : 1075.5.2 Metodo Q-R : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 107
5.6 Conclus~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1095.7 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1095.8 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 110
v
-
6 Vibrac~oes de Sistemas Contnuos 129
6.1 Introduc~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1296.2 Princpio de Hamilton e Equac~oes de Lagrange : : : : : : : : : : : : : : : : : : : 1296.3 Vibrac~oes Axiais e Torcionais de Barras : : : : : : : : : : : : : : : : : : : : : : : 131
6.3.1 Deflnic~ao do Problema : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1316.3.2 Deduc~ao da Equac~ao de Movimento : : : : : : : : : : : : : : : : : : : : : 1326.3.3 Vibrac~ao Axial Livre de uma Barra Uniforme : : : : : : : : : : : : : : : : 1346.3.4 Vibrac~ao Axial Forcada de uma Barra Uniforme : : : : : : : : : : : : : : 1356.3.5 Vibrac~oes Torcionais : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 136
6.4 Dina^mica de Vigas em Flex~ao : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1376.4.1 Deflnic~ao do Problema : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1376.4.2 Vigas de Euler-Bernoulli : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1386.4.3 Vibrac~oes Livres em Flex~ao de uma Viga Uniforme : : : : : : : : : : : : : 1416.4.4 Vibrac~oes Forcadas de uma Viga Uniforme : : : : : : : : : : : : : : : : : 142
6.5 Vigas de Timoshenko : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1436.5.1 Aplicac~ao do Princpio de Hamilton : : : : : : : : : : : : : : : : : : : : : 1436.5.2 Vigas de Propriedades Uniformes : : : : : : : : : : : : : : : : : : : : : : : 146
6.6 Vibrac~oes de Placas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1476.6.1 Deflnic~ao do Problema : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1486.6.2 Aplicac~ao do Princpio de Hamilton : : : : : : : : : : : : : : : : : : : : : 1486.6.3 Vibrac~oes Livres : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1516.6.4 Vibrac~oes Forcadas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 152
6.7 Metodos Numericos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1546.7.1 Metodos de Galerkin : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1546.7.2 Metodos de Integrac~ao Direta : : : : : : : : : : : : : : : : : : : : : : : : : 156
6.8 Conclus~oes : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1606.9 Bibliografla : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1606.10 Exerccios : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 162
vi
-
Lista de Figuras
Captulo 1
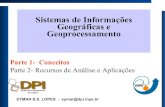
1.1 Algoritmo das atividades relacionadas com a Dina^mica de Sistemas. : : : : : : : 3
Captulo 2
2.1 Sistema prototipo de um unico grau de liberdade. : : : : : : : : : : : : : : : : : : 132.2 Comportamento tpico de uma mola resistindo a deslocamentos. : : : : : : : : : : 142.3 Diagrama de corpo livre do oscilador prototipo da Figura 2.1. : : : : : : : : : : : 172.4 Diagrama de corpo livre para aplicac~ao do Princpio de DAlembert. : : : : : : : 192.5 Sistema de um grau de liberdade com restric~ao cinematica. : : : : : : : : : : : : 202.6 Trajetorias dina^micas de um sistema entre duas condic~oes flxas. : : : : : : : : : : 262.7 Sistema prototipo sob ac~ao de um campo gravitacional. : : : : : : : : : : : : : : 292.8 Sistema prototipo excitado pelo movimento da base. : : : : : : : : : : : : : : : : 302.9 Dois sistemas equivalentes, com e^nfase na quest~ao de rigidez. : : : : : : : : : : : 332.10 Dois sistemas equivalentes, com e^nfase na quest~ao de massa. : : : : : : : : : : : : 342.11 Sistema de um grau de liberdade em oscilac~ao livre. : : : : : : : : : : : : : : : : 352.12 Modelo de uma balanca. : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 372.13 Modelo de uma controlador de posic~ao. : : : : : : : : : : : : : : : : : : : : : : : 37
Captulo 3
3.1 Diagrama de Argand do oscilador harmo^nico sem amortecimento. : : : : : : : : : 433.2 Lugar das razes do sistema linear amortecido como func~ao de . : : : : : : : : : 453.3 Efeito da velocidade inicial na resposta de um sistema com amortecimento crtico. 473.4 Efeito do fator de amortecimento na resposta livre para mesmas condic~oes iniciais. 493.5 Sistema de um grau de liberdade com atrito de Coulomb. : : : : : : : : : : : : : 523.6 Resposta do sistema de um grau de liberdade com atrito seco. : : : : : : : : : : : 533.7 Modelo de um controlador de posic~ao rotacional. : : : : : : : : : : : : : : : : : : 573.8 Um modelo mais soflsticado de controlador de posic~ao rotacional. : : : : : : : : : 60
Captulo 4
4.1 Fator de ampliflcac~ao da resposta permanente a excitac~ao harmo^nica. : : : : : : 644.2 A^ngulo de fase da resposta permanente a excitac~ao harmo^nica. : : : : : : : : : : 654.3 Amplitude da oscilac~ao excitada pelo movimento da base. : : : : : : : : : : : : : 674.4 Fator de transmissibilidade de vibrac~oes como func~ao de e . : : : : : : : : : : 684.5 Forca externa periodica que excita o sistema prototipo. : : : : : : : : : : : : : : : 724.6 Resposta do sistema prototipo a excitac~ao periodica da Figura 4.5. : : : : : : : : 734.7 Espectro de freque^ncias da onda quadrada da Figura 4.5. : : : : : : : : : : : : : 73
vii
-
4.8 Espectro de freque^ncias da resposta do sistema apresentada na Figura 4.6. : : : : 744.9 Resposta do sistema prototipo a um impulso unitario. : : : : : : : : : : : : : : : 764.10 Resposta do sistema prototipo a um degrau unitario. : : : : : : : : : : : : : : : : 774.11 Duas representac~oes de uma forca generica por elementos de impulso. : : : : : : 794.12 Perfll da excitac~ao descrita pela equac~ao (4.40). : : : : : : : : : : : : : : : : : : : 794.13 Resposta do sistema prototipo a excitac~ao da equac~ao (4.40). : : : : : : : : : : : 824.14 Determinac~ao experimental do fator de amortecimento . : : : : : : : : : : : : : 834.15 Um sinal periodico de excitac~ao. : : : : : : : : : : : : : : : : : : : : : : : : : : : 894.16 Espectro de freque^ncias da forca disposta na Figura 4.15. : : : : : : : : : : : : : 914.17 Uma excitac~ao periodica representativa de folgas de acionamento. : : : : : : : : : 934.18 Uma excitac~ao periodica em forma de onda triangular. : : : : : : : : : : : : : : : 934.19 Excitac~ao impulsiva em forma de \rampa". : : : : : : : : : : : : : : : : : : : : : 944.20 Modelo de acionamento de um acelerador na retomada de velocidade. : : : : : : 94
Captulo 5
5.1 Modelo analtico do sistema prototipo de dois graus de liberdade. : : : : : : : : : 965.2 Diagrama de corpos livres do sistema da Figura 5.1. : : : : : : : : : : : : : : : : 975.3 Modelo analtico simpliflcado de uma molecula diato^mica. : : : : : : : : : : : : : 1115.4 Modelo analtico de um sistema meca^nico em batimento. : : : : : : : : : : : : : : 1145.5 Resposta do sistema da Figura 5.4 em batimento. : : : : : : : : : : : : : : : : : : 1185.6 Modelo analtico simpliflcado de um avi~ao no solo. : : : : : : : : : : : : : : : : : 1195.7 Modelo analtico de um pe^ndulo duplo, com seus graus de liberdade. : : : : : : : 1225.8 Modelo analtico de um sistema com dois graus de liberdade em translac~ao. : : : 1235.9 Modelo analtico simpliflcado do Pe^ndulo de Wilberforce. : : : : : : : : : : : : : 1245.10 Sistema de dois graus de liberdade excitado por um \shaker". : : : : : : : : : : : 1255.11 Modelo analtico de um controlador passivo de velocidade de rotac~ao. : : : : : : 1265.12 Modelo analtico simpliflcado de um carrinho equilibrista. : : : : : : : : : : : : : 127
Captulo 6
6.1 Barra de sec~ao transversal variavel em solicitac~ao axial dina^mica. : : : : : : : : : 1316.2 Viga de propriedades variaveis em solicitac~ao lateral dina^mica. : : : : : : : : : : 1376.3 Placa quadrada em solicitac~ao lateral dina^mica. : : : : : : : : : : : : : : : : : : : 1486.4 Barra de propriedades variaveis ao longo de seu comprimento. : : : : : : : : : : : 1636.5 Modelo de uma barra em ressona^ncia axial. : : : : : : : : : : : : : : : : : : : : : 1666.6 Viga apoiada sobre uma fundac~ao elastica. : : : : : : : : : : : : : : : : : : : : : : 1726.7 Uma estrutura em duas situac~oes de carregamento axial. : : : : : : : : : : : : : : 173
viii
-
Simbologia
a comprimento do lado de uma placa quadradaan n-esima parte cossenoidal da excitac~ao periodica de um sistema meca^nico~a vetor acelerac~ao de um pontoA amplitude de uma oscilac~ao ou area da sec~ao transversal de uma barraAn n-esima parte cossenoidal da resposta de um sistema meca^nico a excitac~ao
periodicafaog vetor de acelerac~ao inicial de um sistema discretizadobn n-esima parte senoidal da excitac~ao periodica de um sistema meca^nicoBn n-esima parte senoidal da resposta de um sistema meca^nico a excitac~ao
periodicac coeflciente de amortecimento viscoso equivalente de um sistema meca^nicoC amplitude de uma resposta dina^mica ou constante de integrac~aoCi constante de integrac~ao (i = 1; 2; 3; : : :)ccr coeflciente de amortecimento crtico[C] matriz de amortecimento do sistema[C] matriz de amortecimento generalizado do sistemaD rigidez em ex~ao de uma placa ou amplitude de uma excitac~aoD func~ao dissipac~ao de Rayleigh de um sistema[D] matriz dina^mica do sistemaE modulo de elasticidade de um material (modulo de Young) ou
amplitude de uma resposta dina^micaE energia meca^nica de um sistemaf fator de forma da sec~ao transversal de uma viga em cisalhamentofd freque^ncia natural amortecida de um sistema meca^nico, medida em Hzfn freque^ncia natural n~ao-amortecida de um sistema meca^nico, medida em Hzfo freque^ncia fundamental de uma excitac~ao periodica, medida em HzF (t) forca externa aplicada ao sistemaFa(t) forca de atrito entre duas superfcies em movimento relativoFc(t) forca produzida por um amortecedor em reac~ao a velocidade de um sistemaFk(t) forca produzida por uma mola em reac~ao ao deslocamento de um sistema~F vetor de forca resultantefF(t)g vetor de excitac~ao externa do sistemafFeg vetor de forcas externas estaticas do sistemafFg vetor de forcas generalizadas do sistema[F ] matriz de exibilidade do sistema, inversa da matriz de rigidez [K]g coeflciente de amortecimento estrutural ou acelerac~ao da gravidadeG modulo de elasticidade em cisalhamento de um materialh espessura de uma placa~h vetor quantidade de movimento angularH(t) func~ao degrau (func~ao generalizada)
ix
-
jH()j fator de ampliflcac~ao de um sistema meca^nico em vibrac~ao forcada harmo^nicade raz~ao de freque^ncias
i unidade imaginaria ou designativo de numero ou grau de liberdadeI momento de inercia de uma sec~ao transversal em ex~aoIp momento polar de inercia de uma sec~ao transversal em torc~aoI tensor de inercia de um sistema ou componente meca^nico[I] matriz identidade, elemento neutro da multiplicac~ao matricialJ momento de inercia de area da sec~ao transversal de uma barra em torc~aoJm momento de inercia de massa de uma sec~ao transversal em ex~aok coeflciente de rigidez de uma mola ou componente elastico de um sistema
ou raio de girac~ao de uma sec~ao transversalK coeflciente de rigidez de uma mola torcional[K] matriz de rigidez do sistema K matriz de rigidez modiflcada do metodo de Newmark[K] matriz de rigidez generalizada do sistemal; L comprimentos de refere^ncia em situac~ao n~ao-deformadaL func~ao Lagrangeana ou designativo de transformada de LaplaceL1 transformada inversa de Laplacem massa de um sistema meca^nico ou massa por unidade de comprimento de
uma barra ou numero de modos de vibrac~ao em uma soluc~ao aproximadaM momento etor distribudo aplicado a uma viga~M vetor de momento resultante
[M ] matriz de massa do sistema[M] matriz de massa generalizada do sisteman designativo do numero de graus de liberdade de um sistema ou
da ordem da componente harmo^nica de um sinal periodico oudo numero de modos de vibrac~ao adotados em uma soluc~ao aproximada
O indicativo de ordem de grandeza de um termo matematicop(x; t) carga axial de uma barra em solicitac~ao dina^micaP (x; y; t) carga lateral distribuda em uma placa em solicitac~ao dina^mica~p vetor quantidade de movimento de translac~aoP pote^ncia instanta^nea de um sistemaPc pote^ncia instanta^nea dissipada em um amortecedorq(x; t) carga lateral de uma viga em solicitac~ao dina^micaqi designativo generico de grau de liberdadeQi forca generalizada associada ao grau de liberdade qifqg vetor de deslocamentos[Q] matriz ortogonal do metodo Q-R de auto-valorr raio de um disco ou sec~ao transversal cilndricaR resduo do metodo de Galerkin~r vetor posic~ao de um determinado ponto[R] matriz triangular superior do metodo Q-R de auto-valor ou
matriz de metodo de integrac~aos argumento da transformada de Laplace ou argumento de integrac~aoS carga de cisalhamento distribuda aplicada a uma vigaS designativo da area de uma estrutura[S] matriz de metodo de integrac~aosinal ( _x) func~ao sinal da velocidade de parte de um sistema meca^nicot tempo (usualmente uma variavel independente)
x
-
Td perodo da oscilac~ao natural amortecida de um sistema meca^nico, medido em sTn perodo da oscilac~ao natural n~ao-amortecida de um sistema meca^nico,
medido em sTo perodo fundamental de uma excitac~ao periodicaT energia cinetica de um sistemaT (x; t) torque dina^mico por unidade de comprimento aplicado a uma barra em torc~aojT ()j fator de transmissibilidade de um sistema meca^nico em vibrac~ao
forcada harmo^nica de raz~ao de freque^ncias [T ] matriz do metodo de integrac~ao de Newmarku coordenada espacial genericaU(x) modo de vibrac~ao axial de uma barrau(x; t) deslocamento axial de uma barra em solicitac~ao dina^micaU energia potencial de um sistemav modulo do vetor velocidade de um ponto de um sistema ou
coordenada espacial genericavo velocidade inicial de um sistema meca^nico de um grau de liberdade~v vetor velocidade de um ponto em relac~ao a um referencial inercialfvog vetor de velocidade inicial de um sistema discretizadow(x; t) grau de liberdade de translac~ao, func~ao do tempo e do espacow(x; y; t) deslocamento lateral de uma placa em solicitac~ao dina^micaW (x; y) modo de vibrac~ao lateral de uma placax variavel independente espacialxe posic~ao de equilbrio de um sistema meca^nico de um grau de liberdadexh(t) parte homoge^nea da resposta de um sistema meca^nicoxo deslocamento inicial de um sistema meca^nico de um grau de liberdadexp(t) parte particular da resposta de um sistema meca^nicox um deslocamento adimensionalizado de refere^nciax(t) grau de liberdade de translac~aofxg vetor de deslocamentos do sistemafxeg vetor de deslocamentos da posic~ao de equilbrio do sistemafxog vetor de deslocamento inicial de um sistema discretizadof _xg vetor de velocidades do sistemafxg vetor de acelerac~oes do sistemay variavel independente espacialy(x; t) deslocamento lateral de uma viga em solicitac~ao dina^micay(t) grau de liberdade de translac~aoY (x) modo de vibrac~ao de uma viga em ex~ao
Letras Gregas
fi a^ngulo generico ou numero real~fi vetor acelerac~ao angular de um referencialfl a^ngulo de rotac~ao de uma sec~ao transversal de viga em cisalhamento ou
para^metro do metodo de integrac~ao de Newmark ou numero real para^metro do metodo de integrac~ao de Newmark ou numero real designativo do operador de variac~ao ou de decremento logartmico(t) func~ao delta de Dirac (func~ao generalizada)ij delta de Kronecker dos ndices i e j
xi
-
qi designativo do deslocamento virtual associado ao grau de liberdade qiW designativo de trabalho virtualt intervalo de tempo (diferencas flnitas)fqg vetor de deslocamentos virtuais" um numero realfg vetor de deslocamentos ou coordenadas modais do sistema` a^ngulo de fase['] matriz modal do sistema, \colec~ao" ordenada de auto-vetores (modos)(t) grau de liberdade de rotac~ao, func~ao do tempo(x; t) deslocamento angular de uma barra em torc~ao dina^mica designativo de auto-valor coeflciente de atrito medio (no tempo) entre duas superfcies em movimento
relativo ou auto-valor coeflciente de Poissonr operador gradiente a^ngulo de rotac~ao de uma sec~ao transversal de viga em ex~ao massa especflca do material de uma estrutura! freque^ncia de excitac~ao de um sistema meca^nico!d freque^ncia natural circular amortecida de um sistema meca^nico,
medida em rad/s!g freque^ncia circular de excitac~ao de uma rajada!n freque^ncia natural circular n~ao-amortecida de um sistema meca^nico,
medida em rad/s!o freque^ncia circular fundamental de uma excitac~ao periodica, medida em rad/s! uma relac~ao entre freque^ncias de vibrac~ao, valida para o caso supercrtico~! vetor velocidade angular raz~ao entre as freque^ncias de excitac~ao e natural n~ao-amortecida de um sistemao raz~ao entre a freque^ncia fundamental de um sinal periodico e a
freque^ncia natural n~ao-amortecida de um sistema tempo de relaxac~ao de um sistema meca^nico, medido em s, ou
argumento de integrac~ao das integrais de convoluc~ao fator de amortecimento
Subscritos
a referente a carga externa aplicada a um sistema meca^nico ouindicativo de soluc~ao aproximada
b designativo de basec referente ao amortecimento de um sistema meca^nico ou
indicativo de parte conservativa de uma quantidade fsicacr designativo de condic~ao crticad designativo de sistema em vibrac~ao amortecida (do ingle^s \damped")e referente a condic~ao de equilbrio estatico de um sistemah referente a soluc~ao homoge^nea de uma equac~ao diferenciali referente a um numero, grau de liberdade, ou designativo de inerciak referente a rigidez de um sistema meca^nicomax designativo de valor maximo de uma func~aon designativo de sistema em vibrac~ao natural n~ao-amortecida ou
ordem de harmo^nico de uma freque^ncia fundamental
xii
-
nc indicativo de parte n~ao-conservativa de uma quantidade fsicao designativo de condic~ao inicial ou de freque^ncia fundamental de um sinal
periodicop referente a soluc~ao particular de uma equac~ao diferencialr designativo de uma refere^ncia ou de ordemrms designativo de media \root mean square"s designativo de ordemsub designativo de amortecimento subcrticosup designativo de amortecimento supercrticot referente a total ou a esforco transmitido a uma base ou
a quantidade fsica tomada no instante t de um esquema de diferencas flnitastt referente a quantidade fsica tomada no instante tt de um esquema
de diferencas flnitast+t referente a quantidade fsica tomada no instante t+ t de um esquema
de diferencas flnitas referente a uma relac~ao de freque^ncias do caso supercrtico
Superscritos
T designativo de matriz ou vetor transposto1 designativo de invers~ao (matriz ou transformada) designativo de deslocamento adimensionalizado designativo de media_ designativo de primeira derivada em relac~ao ao tempo designativo de segunda derivada em relac~ao ao tempo
xiii
-
xiv
-
Captulo 1
Introduc~ao
1.1 Deflnic~oes
O assunto Dina^mica de Estruturas comporta um conjunto de atividades bastante amplo na En-genharia. Devido a esta amplitude, devemos, antes de mais nada, deflnir claramente o contextode nosso trabalho, o que se pretende fazer nesta sec~ao.
A palavra estruturas permite uma serie de interpretac~oes. No presente contexto, pretendemosinvestigar os sistemas meca^nicos que servem para resistir de alguma maneira a cargas. Poroutro lado, a palavra cargas tambem admite muitas interpretac~oes. Aqui, estamos interessadosnaquilo que possa ser suportado por tais sistemas meca^nicos. Podemos, ent~ao, aflrmar quetodas as engenharias encontram-se representadas em nosso interesse, pois todas, sem excec~ao,te^m interface com tais sistemas.
Cargas s~ao entes fsicos de carater vetorial. Possuem, portanto, magnitude, direc~ao, sentidoe ponto de aplicac~ao. Durante a maior parte do estudo da Engenharia de Estruturas em nossasescolas, flca-se restrito a problemas onde estruturas s~ao carregadas estaticamente. Neste caso,dizemos que a magnitude, direc~ao, sentido e ponto de aplicac~ao dessas cargas independe dotempo. Neste texto estamos interessados em explorar um quadro mais amplo.
Um carregamento e dito dina^mico quando sua magnitude, direc~ao, sentido e/ou ponto deaplicac~ao s~ao func~oes do tempo. Com esta deflnic~ao, um carregamento estatico passa a serum caso particular do dina^mico. O leitor podera facilmente elaborar situac~oes onde uma oumais dessas caractersticas vetoriais do carregamento variam com o tempo. Por exemplo, umavi~ao taxiando ao longo de uma reta com velocidade uniforme sobre uma pista de pouso semondulac~oes representa um caso de carregamento estatico para o avi~ao, mas de carregamentodina^mico para a pista. Neste caso, a pista \enxerga" um carregamento de magnitude, direc~ao esentido constantes no tempo, mas o mesmo n~ao acontece com o seu ponto de aplicac~ao.
Um carregamento dina^mico pode ser determinstico ou aleatorio. Um carregamento deter-minstico tem como descric~ao uma func~ao temporal que pode ser deflnida analiticamente. Poroutro lado, um carregamento aleatorio requer um tratamento estatstico devido a impossibili-dade de ser caracterizado plenamente por uma func~ao do tempo. Neste texto tratamos apenaso caso de carregamentos determinsticos.
Uma situac~ao que leva uma estrutura a reagir dinamicamente introduz nela mesma cargas ques~ao func~ao da acelerac~ao e velocidade de seus componentes. Tais cargas podem ser apreciaveisem termos de amplitude e podem, dentro do regime linear, ser superpostas as cargas estaticas.Assim, uma analise estrutural estatica pode ser recomendada se e somente se ha certeza de quecargas resultantes de acelerac~oes e velocidades s~ao pequenas.
Como engenheiros, estamos interessados em avaliar o efeito de cargas dina^micas na esta-bilidade e/ou resposta estrutural . Por estabilidade entendemos a propriedade da estrutura de,
1
-
sob ac~ao de cargas, manter essencialmente a geometria deflnida pela sua condic~ao de equilbrioestatico. Ja por resposta estrutural , entendemos a evoluc~ao no tempo da estrutura apos aplicac~aodas cargas. Neste texto enfatizamos a resposta estrutural, por ser de tratamento mais simples,deixando os aspectos ligados a estabilidade para contextos mais especflcos.
No trato de um sistema dina^mico qualquer, como uma estrutura, podem ser exercidas ativi-dades de projeto, analise e teste. A Figura 1.1 mostra o relacionamento entre essas atividades,validas para muitas outras func~oes em Engenharia. Dentro deste contexto, a ser detalhado maistarde, podemos flnalmente deflnir Dina^mica de Estruturas como sendo a arte de projetar, ana-lisar e/ou testar estruturas para que estas sejam estaveis e tenham respostas desejaveis, dentrode certo criterio, quando solicitadas por cargas que mudem com o tempo.
S~ao requisitos para plena compreens~ao deste texto conhecimentos basicos em Dina^mica eMeca^nica de Solidos. Fica tambem implcita a necessidade de que o leitor possua conhecimentosmatematicos basicos associados a estes dois ramos da Fsica.
1.2 Sistemas Dina^micos
A Figura 1.1 mostra o inter-relacionamento entre as diversas atividades ligadas a investigac~aode sistemas dina^micos. Tais atividades podem ser classiflcadas em tre^s grupos basicos: projeto,analise e teste. Neste texto temos e^nfase nas tarefas de analise. No entanto, sempre que possvelestabelecemos os elos de ligac~ao com atividades de projeto e teste.
1.2.1 Projeto
Projeto e tido como a atividade mais difcil e, em conseque^ncia, mais nobre da Engenharia. Estatarefa requer conhecimentos de sntese e bastante capacidade de integrac~ao, caractersticas quen~ao est~ao presentes no perfll de todos os engenheiros.
Um projeto tem incio na especiflcac~ao de requisitos a serem atendidos pelo produto. Essesrequisitos s~ao apresentados pelo cliente ou \adivinhados" pelo produtor apos uma pesquisa demercado.
Uma vez de posse dos requisitos, havendo interesse e recursos por parte do produtor, temincio a fase de concepc~ao. Aqui e elaborado o \esprito" do projeto. E a fase mais criativa,mais difcil e de maior responsabilidade do projeto. Criativa, por tratar da propria criac~ao dealgo inexistente; difcil, por envolver o maior numero de variaveis livres, n~ao flxadas, de todoo projeto; e de maior responsabilidade, porque erros cometidos nesta fase poder~ao propagar-seem cascata, levando todo o projeto a inviabilidade econo^mica. E tambem a fase que requer omenor numero de engenheiros e projetistas.
Concluda a concepc~ao, veriflcada a existe^ncia de clientes interessados e havendo recursos,pode-se passar para a fase de anteprojeto. Aqui a concepc~ao e aprofundada e varias variaveiss~ao congeladas. A equipe envolvida cresce. Ao flnal, o produto toma forma com detalhessuflcientes para convencer autoridades da empresa e agentes flnanceiros a decidir sobre o futurodo projeto. Caso positivo, comeca o projeto propriamente dito, quando o produto e detalhadonos seus mnimos pormenores. E quando ocorre o maior importe de capital e esforco humano nodesenvolvimento. Ocorre simultaneamente a produc~ao de ferramental de serie e de prototipos,acompanhados de maior desembolso flnanceiro e de esforco de marketing.
Finalmente, veriflcada a viabilidade econo^mica do projeto e a colocac~ao de pedidos porclientes, comeca a produc~ao seriada. Obviamente, esta descric~ao e bastante simpliflcada face aoescopo deste texto. Na realidade existem diversos ciclos de iterac~ao que tentam levar o projetona direc~ao do otimo. Nesta fase, testes com prototipos, tarefas de reprojeto e realimentac~oes deoperadores s~ao muito importantes para a melhoria da qualidade do produto.
2
-
Proje
to
An
lise
Rep
rojet
o
M
odel
oA
nalt
ico
M
odel
oM
atem
tic
oEs
tabi
lidad
e o
u r
espo
sta
Mud
ana
de
Hip
tes
es
Mud
ana
de
Par
met
ros
Mod
elo
Ana
ltic
o O
K
sim
no
Test
e
Si
stem
a di
spon
veln
o
si
m
sim
no
Test
e Fi
m
Mod
elo
Fsi
co
Test
eD
inm
ico
Mud
ana
sde
Pro
jeto
no
sim
Pass
os e
m u
ma
In
vest
iga
o D
inm
ica
Inc
io
Espe
cific
ae
s
Conc
ep
oA
nte-
proje
toPr
ojeto
Figura 1.1: Algoritmo das atividades relacionadas com a Dina^mica de Sistemas.
3
-
1.2.2 Analise
Vamos admitir agora que um determinado sistema exista em forma fsica ou em forma de imagemde projeto. Ambos os casos s~ao analisaveis, competindo ao projetista determinar a profundidadecom que uma analise deva ser efetuada.
A analise propriamente dita compreende tre^s fases distintas, que s~ao:
1. Modelamento Analtico - dado um sistema, esta fase signiflca adotar um conjunto dehipoteses e simpliflcac~oes de maneira a permitir a construc~ao de um modelo matematico domesmo. Em outras palavras, consiste em colecionar hipoteses, desenhos e para^metros paraa reduc~ao de um sistema real a um sistema que possa ser analisado. Esta claro que quantomais soflsticado, mais o modelo aproxima-se da realidade fsica. Entretanto, deve-se pagaro preco de uma analise mais complexa, de maior custo, e que demande maior prazo paraser completada.
2. Modelamento Matematico - a partir de um modelamento analtico pode-se, ent~ao, gerar asequac~oes de movimento do modelo adotado. Para obtermos essas equac~oes diferenciais demovimento e suas condic~oes associadas (iniciais e/ou de contorno) podemos fazer uso detecnicas da Meca^nica Newtoniana, que enfatizam esforcos, ou da Meca^nica Lagrangeana,que destacam conceitos de energia.
3. Comportamento Dina^mico - consiste em, uma vez de posse das equac~oes de movimento econdic~oes acessorias, resolve^-las. Desta forma, podemos determinar as caractersticas deestabilidade e/ou de resposta dina^mica do modelo analtico do sistema. Vale ressaltar queos resultados obtidos nesta fase n~ao ser~ao necessariamente verdadeiros, mas sim merasconseque^ncias do modelamento analtico adotado.
1.2.3 Teste
A atividade de teste implica a necessidade de se dispor de um modelo fsico para ser testado.Este modelo pode ser o proprio sistema ou partes dele, como tambem pode ser representado porprototipos em escala. Por exemplo, os modelos para ensaio aeroelastico em tunel de vento s~aoescalas geometricas e dina^micas do sistema real. Escalas geometricas levam em conta somente aforma do objeto de interesse, enquanto escalas dina^micas consideram tambem a distribuic~ao depropriedades de massa e de rigidez, de forma que sejam reproduzidas as caractersticas intrnsecasdo sistema fsico no modelo de teste. Portanto, a fase de testes tem incio somente quando umprojeto ja se encontra em estagio bastante avancado.
O teste tem por objetivo coletar dados para serem confrontados com analises teoricas e paraservirem de base para processos decisorios relativos ao projeto. Serve, portanto, para validar ummodelamento analtico e/ou determinar falhas de projeto. Na validac~ao, talvez possa vir a serrecomendada a troca de para^metros, hipoteses simpliflcadoras ou outros detalhes concernentesao modelo analtico. Caso falhas sejam detectadas, estas devem ser corrigidas da maneira maisapropriada do ponto de vista de engenharia, ou seja, buscando-se um compromisso entre oscaminhos do otimo em termos de qualidade, preco e prazo de mercado do produto.
A atividade de teste de sistemas dina^micos exige profundo conhecimento de sensores, instru-mentos de medic~ao, integrac~ao de sistemas de aquisic~ao de dados, processamento e interpretac~aode resultados e, flnalmente, emiss~ao de recomendac~oes para melhoria do produto, com o suportede simulac~oes computacionais. Esta atividade deflne uma carreira propria no amplo espectrodas atividades de Engenharia, criando interfaces cada vez mais amplas entre as engenhariasmeca^nica, eletro^nica e de computac~ao. Tera sucesso nesta carreira quem possuir uma formac~aointerdisciplinar.
4
-
1.3 Objetivos
Dentre as atividades discutidas na sec~ao anterior e ligadas a investigac~ao de sistemas dina^micose de estruturas e objetivo deste texto enfatizar aquelas relacionadas com a analise. No entanto,sempre que possvel, a discuss~ao faz uso de argumentos tpicos de projeto, assim como apontacorrelac~oes entre teoria e experimento.
Quanto ao modelamento analtico, e nosso objetivo desenvolver metodologias que permitamao leitor decidir entre uma representac~ao contnua ou discreta de uma estrutura, bem como entreas hipoteses e simpliflcac~oes mais adequadas a cada caso. Quanto ao modelamento matematico,e nosso objetivo discutir as diversas tecnicas que permitam ao leitor, a partir de um modeloanaltico, deduzir as equac~oes de movimento correspondentes. Dentre essas tecnicas, vamosnos concentrar nas abordagens Lagrangeanas, as quais envolvem conceitos de energia, s~ao maissistematicas e menos sujeitas a produzir erros de deduc~ao a medida que os sistemas se tornammais complexos.
O modelo matematico da dina^mica de uma estrutura discretizada de n graus de liberdadepode ser apresentado de maneira simpliflcada e didatica na forma da seguinte equac~ao:
[M ] fxg+ [C] f _xg+ [K] fxg = fF (fxg ; f _xg ; fxg ; t)g (1:1)
Nesta equac~ao, os termos do lado esquerdo do sinal de igualdade representam respectivamenteas propriedades de inercia, amortecimento e rigidez da estrutura, enquanto o lado direito re-presenta a carga dina^mica a que a estrutura esta exposta. Embora pareca simples, a equac~ao(1.1) sintetiza n~ao somente problemas de Dina^mica de Estruturas, como tambem problemas deAeroelasticidade, ja que a carga fFg depende do deslocamento, velocidade e acelerac~ao do sis-tema. Neste texto vamos tratar casos em que a carga depende apenas do tempo, simpliflcandoa equac~ao (1.1) para
[M ] fxg+ [C] f _xg+ [K] fxg = fF (t)g (1:2)e interessante observar que na equac~ao (1.2) a depende^ncia do sistema com o tempo e represen-tada por efeitos de inercia, amortecimento e excitac~ao externa. Para reduzirmos o problema aocaso estatico, necessitamos que
1. velocidades e acelerac~oes aplicadas a estrutura sejam de pequenas magnitudes e
2. a carga externa independa do tempo, i.e., fF (t)g seja uma constante fFeg.Caso as condic~oes acima se veriflquem, o problema estatico pode ser escrito como
[K] fxeg = fFeg (1:3)
A equac~ao (1.3) representa o problema estrutural estatico que ocupa a maior parte do tra-balho e do tempo de engenheiros estruturistas nas industrias e de currculos de estruturas nasuniversidades. Neste texto vamos evoluir para o estudo de problemas que possam ser represen-tados pela equac~ao (1.2), que inclui o caso estatico como situac~ao particular. Posteriormente,em outro texto, poderemos evoluir ainda mais para o estudo de problemas do tipo representadopela equac~ao (1.1).
Obter o comportamento dina^mico de uma estrutura signiflca, no presente contexto, resolverum problema do tipo (1.2) sujeito a condic~oes iniciais apropriadas. E nosso objetivo veriflcartecnicas de soluc~ao desses problemas. Uma vez tal soluc~ao seja alcancada, podemos ent~ao inferiresforcos, tens~oes e nvel de solicitac~ao de cada parte da estrutura. Da podemos concluir sobre asua estabilidade, resposta, conflabilidade, bem como fornecer subsdios para a avaliac~ao da suaresiste^ncia a fadiga.
5
-
1.4 Seque^ncia
Os objetivos que s~ao citados na sec~ao anterior podem ser atingidos de diversas formas. Aquifazemos breves considerac~oes sobre a seque^ncia dos topicos apresentados no texto de forma acumprir as metas propostas.
O problema fundamental da Dina^mica de Estruturas esta centrado na vibrac~ao de um sis-tema de um unico grau de liberdade. Portanto, e por onde comecamos. Para este tipo de sistemaestudamos as vibrac~oes livres n~ao-amortecidas e amortecidas. Seguem-se os problemas de vi-brac~oes forcadas por cargas harmo^nicas, periodicas e arbitrarias, que s~ao cargas determinsticas.Alguma e^nfase e colocada na resoluc~ao numerica de tais problemas nos domnios do tempo e dafreque^ncia.
Uma vez absorvidos os conceitos basicos ligados ao problema fundamental, passamos a estu-dar os modelos discretos com dois ou mais graus de liberdade. Voltamos a considerar o problemade vibrac~oes livres, desta vez para introduzir os conceitos de modos e freque^ncias naturais devibrac~ao. Finalmente, discutimos a resposta dina^mica de tais sistemas a excitac~oes externaspelo metodo da superposic~ao modal.
A compreens~ao do comportamento estrutural de sistemas com multiplos graus de liberdadepode ser estendido ao limite de inflnitos graus de liberdade com os problemas de estruturasmodeladas como elementos contnuos. Consideramos a deduc~ao das equac~oes de movimentopara estruturas idealizadas e tecnicas de obtenc~ao de suas freque^ncias e modos naturais devibrac~ao. Para completar, estudamos a resposta de tais estruturas a varios tipos de cargasdina^micas.
Sabemos que uma estrutura real pode ser modelada analiticamente como um conjunto deelementos discretos ou contnuos. Sabemos tambem que cargas dina^micas determinsticas podemassumir diversas formas, sendo os tipos harmo^nico, periodico e arbitrario plenamente represen-tativos da maioria das situac~oes encontradas na pratica. A proposta deste texto e de apresen-tar problemas de estruturas submetidas a cargas dina^micas na seque^ncia aqui descrita. Comisto pretende-se dar ao leitor elementos basicos para considerar com seguranca problemas deDina^mica de Estruturas encontrados na industria.
1.5 Estudos Posteriores
Como este texto tem um carater introdutorio, foge ao escopo proposto discutir topicos maisavancados. No entanto, nada nos impede nesta Introduc~ao de apontar alguns deles com oobjetivo de indicar ao leitor como proceder para aumentar o seu conhecimento sobre Dina^micade Estruturas.
No que se refere a cargas, flca o texto restrito a casos determinsticos. No entanto, cargasaleatorias representam importantes casos em Engenharia. O comportamento n~ao-determinsticoda atmosfera atuando sobre um avi~ao, do mar sobre um navio, de uma rodovia sobre umautomovel, ou ainda de um terremoto sobre um edifcio, s~ao exemplos dos quais se depreendea importa^ncia deste assunto. Para lidar com problemas desse tipo e recomendavel uma certaexperie^ncia com estatstica e processos estocasticos.
Problemas particularmente interessantes de estabilidade e resposta estrutural dina^mica apare-cem quando cargas aplicadas a estruturas s~ao produzidas por uidos escoando internamenteou externamente a elas. Tais problemas deflnem areas de conhecimento mais gerais, poremenganosamente percebidas por pessoas n~ao devidamente esclarecidas como sendo mais restritasou especflcas. Dentre essas areas est~ao a Aeroelasticidade e Hidroelasticidade. Como ja apon-tado na sec~ao 1.3, feno^menos desta classe podem ser didaticamente representados pela equac~ao1.1, que n~ao sera estudada neste texto por estar alem dos objetivos propostos.
6
-
O texto n~ao espelha uma preocupac~ao em limitar o escopo, embora enfatize problemase tecnicas essencialmente lineares. Vibrac~oes n~ao-lineares requerem tratamentos matematicosespeciais de carater geometrico, tipo espaco de fase, ou de carater analtico, tipo metodo de per-turbac~ao. Problemas n~ao-lineares podem levar a resultados surpreendentes, tais como respostasde sistemas envolvendo bifurcac~oes e caos.
As equac~oes da Dina^mica de Estruturas podem ser resolvidas utilizando-se diversas tecnicasanalticas e computacionais. No entanto, a medida que sistemas tornam-se mais complexos,tecnicas computacionais tornam-se as unicas opc~oes viaveis para resoluc~ao. Dentre essas tecnicas,o metodo de elementos flnitos tem sua popularidade contnua e merecidamente ampliada. O usodesta tecnica requer conhecimento e treinamento que n~ao s~ao cobertos neste texto.
A aplicac~ao do metodo de elementos flnitos pressup~oe em uma de suas fases a discretizac~aodo domnio do problema em elementos. Estudos de converge^ncia levam usuarios do metodo adiminuir o tamanho dos elementos ou, mantendo-os, a aumentar o grau das func~oes de inter-polac~ao. Qualquer dessas sistematicas acarreta um aumento no numero de graus de liberdadedo problema. Sistemas estruturais complexos, como um avi~ao, navio ou automovel, requerem,portanto, para avaliac~ao global, a resoluc~ao de sistemas de equac~oes de altssima ordem. Comoalternativa, apresenta-se o conceito de subestruturac~ao. A ideia consiste em resolver o pro-blema por partes, que podem ser a posteriori integradas utilizando-se tecnicas apropriadas.Assim, e possvel, no caso do avi~ao, resolver-se separadamente as asas, empenagens e fuselagem,promovendo-se o acoplamento das partes depois de individualmente solucionadas. Obviamente,tal assunto foge aos objetivos apresentados na sec~ao 1.3.
Vale a pena observar que a resoluc~ao das equac~oes que descrevem a dina^mica de sistemasestruturais pode requerer metodos numericos dedicados, alem da tradicional tecnica de elementosflnitos. Dependendo do tipo de problema e de seu modelamento, alguns metodos te^m vantagenssobre outros. O leitor encontra neste texto o emprego de alguns deles, tanto para sistemasdiscretos como para sistemas contnuos. No entanto, esta alem de nossos objetivos fazer umarevis~ao completa deste topico.
Finalmente, n~ao podemos deixar de lembrar todo o conjunto de esforcos e conhecimentosrelacionados com a parte experimental ligada a Vibrac~ao de Sistemas Meca^nicos e Aeroelasti-cidade. O funcionamento e aplicac~ao de sensores, a adaptac~ao de tuneis de vento para testesdina^micos, a integrac~ao com sistemas de aquisic~ao e tratamento de sinais, bem como a posterioranalise e interpretac~ao de resultados formam um grupo de atividades t~ao extenso que mereceum texto especflco. Aqui discutimos apenas alguns detalhes dessas atividades.
Os assuntos relativos a cargas aleatorias e aerodina^micas, efeitos de n~ao-linearidade, mode-lamento por subestruturas, emprego do metodo de elementos flnitos, uso de tecnicas numericasdedicadas e veriflcac~oes experimentais de modelos teoricos representam somente parte dos aspec-tos avancados que interessam aqueles que trabalham com Dina^mica de Estruturas. Esperamoscom estas indicac~oes mostrar ao leitor a amplitude da atividade e a parcela da mesma sobre aqual depositamos a nossa atenc~ao. Por tentar discutir os fundamentos da atividade, esperamosfornecer ao leitor as ferramentas necessarias para desenvolver com seguranca estudos posteriores.
1.6 Bibliografla
Este texto e o resultado da experie^ncia acumulada pelo autor sobre a Dina^mica de Sistemas, ede Estruturas em particular, como estudante, engenheiro e professor. Embora as palavras aquicolocadas sejam de minha autoria, a grande maioria das ideias e tomada emprestada de diversosoutros autores que se interessaram pelo assunto antes de mim e de conhecimento estabelecidoha tanto tempo que constitui hoje legado de toda a humanidade. Enquanto as ideias corretasdevem ser atribudas devidamente a seus autores, erros de interpretac~ao das mesmas ideias
7
-
s~ao de exclusiva responsabilidade deste autor. Portanto, agradeco a todos aqueles que puderemgentilmente indicar-me as falhas aqui incorridas. Com respeito a isto, faco minhas as palavras doProfessor Daniel Antipofi no trabalho Instituto Tecnologico de Aeronautica { sua Organizac~aoe Problemas Humanos da Comunidade: \O consolo que se tem, de lancar ideias porventuraconsideradas erradas, e que a outros se da uma oportunidade de acertarem".
O projeto de um grande sistema como um avi~ao, navio ou automovel envolve, como mostradona Figura 1.1, atividades de projeto, analise e teste. Diversos conceitos modernos como enge-nharia simulta^nea e qualidade total visam reduzir a necessidade de testes, reprojetos, custosenvolvidos e prazo para mercado do produto. Para progredir nesta direc~ao, um projeto deveser executado segundo tecnicas integradoras de conhecimento, em que o computador atua comoferramenta fundamental. O que aqui discutimos sobre projeto deve ser reobservado a luz destaaflrmac~ao, que considera a multidisciplinariedade requerida para o desenvolvimento de tais sis-temas. Em outras palavras, ao estudarmos Dina^mica de Estruturas, devemos compreendero contexto maior em que esta arte se insere, sem o que estaremos apresentando apenas umaperspectiva limitada da atividade.
Apontamos abaixo refere^ncias que foram utilizadas algum dia por este autor para aprenderalgo novo, esclarecer alguma duvida ou ilustrar alguma quest~ao sobre Projeto, Vibrac~oes emgeral, Dina^mica de Estruturas, metodos computacionais, estabilidade e resposta de sistemasdina^micos e topicos mais avancados e especializados, como Vibrac~oes N~ao-lineares, Vibrac~oesAleatorias e Aeroelasticidade. Esta lista e limitada e incompleta, devendo ser encarada comomera refere^ncia. Ela exclui dezenas de outros livros que tratam de Vibrac~oes Meca^nicas, quee aqui entendido como um topico mais restrito. Note que a maioria das refere^ncias apontadass~ao apresentadas na lngua inglesa, justiflcando a necessidade n~ao apenas de traduc~oes para oportugue^s, mas de textos modernos e adequados a nossa realidade.
Sobre Vibrac~oes
Inman, D. - Vibration with Control, Measurement and Stability, Prentice-Hall, EnglewoodClifis, 1989.
Meirovitch, L. - Analytical Methods in Vibrations, Macmillan, New York, 1967. Meirovitch, L. - Elements of Vibration Analysis, McGraw-Hill, New York, 1975. Thomson, W. T. - Theory of Vibration with Applications, Prentice-Hall, Englewood
Clifis, 1972.
Sobre Dina^mica Estrutural
Brebbia, C. A., Tottenham, H., Warburton, G. B., Wilson, J. M. e Wilson,R. R. - Vibrations of Engineering Structures, Springer-Verlag, Berlin, 1985.
Clough, R. W. e Penzien, J. - Dynamics of Structures, McGraw-Hill, New York, 1975. Craig, R. R. Jr. - Structural Dynamics - An Introduction to Computer Methods, John
Wiley, New York, 1981.
Sobre Estabilidade Dina^mica
Bolotin, V. V. - The Dynamic Stability of Elastic Systems, Holden-Day, San Francisco,1964.
Rocard, Y. - Dynamic Instability, Frederick Ungar, New York, 1957.
8
-
Sobre Metodos Computacionais em Dina^mica Estrutural
Bathe, K. e Wilson, E. L. - Numerical Methods in Finite Element Analysis, Prentice-Hall, Englewood Clifis, 1976.
Meirovitch, L. - Computational Methods in Structural Dynamics, Sijthofi & Noordhofi,Rockville, 1980.
Przemieniecki, J. S. - Theory of Matrix Structural Analysis, Dover, Mineola, 1985.
Sobre Vibrac~oes N~ao-Lineares e Aleatorias
Dinca, F. e Teodosiu, C. - Nonlinear and Random Vibrations, Academic Press, NewYork, 1973.
Newland, D. E. - Random Vibration and Spectral Analysis, Longman, New York, 1984.
Sobre Aeroelasticidade
Bisplinghoff, R. L., Ashley, H. e Halfman, R. L. - Aeroelasticity, Addison-Wesley,Reading, 1955.
Dowell, E. H., Curtiss, H. C., Scanlan, R. H. e Sisto, F. - A Modern Course inAeroelasticity, Sijthofi & Noordhofi, Rockville, 1978.
Sobre Manufatura Integrada por Computador
Bedworth, D. D., Henderson, M. R. e Wolfe, P. M. - Computer Integrated Designand Manufacturing, McGraw-Hill, New York, 1991.
Almeida, S. F. M., Brand~ao, M. P. e Gerencer, R. - A Filosofla CIM e a Tec-nologia da Mobilidade, SAE Technical Paper Series no 931654P, II Congresso e Exposic~aoInternacionais de Tecnologia da Mobilidade, S~ao Paulo, Outubro de 1993.
1.7 Exerccios
Como este captulo e fortemente conceitual, apresentamos aqui como desaflo para o leitor algu-mas perguntas ou propostas para reex~ao e dissertac~ao.
1. Deflna o que voce^ entende por carregamento dina^mico no contexto de Dina^mica de Estru-turas. Forneca exemplos que ilustrem a sua deflnic~ao.
2. O que signiflca uma carga ser determinstica? Idem, aleatoria? Que alternativas s~aodisponveis para resolver problemas que envolvam tais cargas?
3. Descreva com suas proprias palavras o conceito de Dina^mica Estrutural.
4. Tente comparar as areas de Vibrac~oes Meca^nicas e Dina^mica Estrutural.
5. Quais s~ao as fases classicas do projeto de um grande sistema? O que separa cada umadessas fases?
6. Reita sobre a evoluc~ao dos custos e da responsabilidade dos projetistas ao longo dodesenvolvimento de um grande projeto.
9
-
7. Quais s~ao as etapas fundamentais do processo de analise? Qual e a importa^ncia do mode-lamento analtico neste contexto?
8. Estabeleca distinc~oes entre os conceitos de estabilidade estatica e estabilidade dina^micade um sistema. Que problema matematico e usualmente associado a um problema fsicode estabilidade?
9. O que voce^ entende por um problema de resposta estrutural? Qual e a variavel indepen-dente utilizada neste tipo de problema?
10. Que preparac~ao e/ou conhecimentos deve possuir o engenheiro encarregado de realizartestes em sistemas ou partes de sistemas?
11. Qual e o procedimento logico adotado no tratamento dos problemas de Dina^mica de Es-truturas? Descreva o relacionamento entre as atividades de projeto, analise e teste.
12. Que condic~oes necessitam ser satisfeitas para que possa ser considerado seguro o projetode um sistema utilizando apenas criterios de estatica?
13. O que signiflca Manufatura Integrada por Computador { em ingle^s CIM (Computer Inte-grated Manufacturing)?
10
-
Captulo 2
Fundamentos de Analise
2.1 Introduc~ao
Neste captulo introduzimos conceitos basicos relativos a analise de sistemas estruturais solici-tados dinamicamente. Comecamos por discutir um pouco mais profundamente o que chamamosde modelamento analtico. A seguir, apresentamos ideias relativas ao modelamento matematicodessas estruturas. Discutimos tanto metodos ligados a Meca^nica Newtoniana quanto a Meca^nicaLagrangeana. Nesta discuss~ao, fazemos uso de um sistema prototipo de um grau de liberdadeem todos os casos, de forma a deixar clara a diferenca existente entre as diversas metodolo-gias. Segue-se uma apreciac~ao da importa^ncia no contexto de vibrac~oes da posic~ao de equilbriodo sistema. Em particular, analisamos o efeito da acelerac~ao da gravidade nas equac~oes demovimento. Finalmente, discutimos dois problemas de grande importa^ncia na engenharia devibrac~oes: primeiro, o do movimento de sistemas que est~ao conectados a bases moveis (e.g.,terremotos) e segundo, o das forcas transmitidas por sistemas em oscilac~ao a bases rgidas asquais estes est~ao ligados.
Com esses topicos cobrimos aspectos fundamentais da analise da Dina^mica de Estruturas,com excec~ao do comportamento dina^mico propriamente dito, o qual deixamos para discutir noscaptulos seguintes.
2.2 Modelo Analtico
2.2.1 Considerac~oes Gerais
Quando fazemos o desenho de uma estrutura em um quadro negro, em um papel, ou mesmo natela de um monitor de sistema CAD, estamos implicitamente executando uma parte fundamentaldo modelamento analtico da estrutura. Esta tarefa flca completada com a adic~ao de hipotesessimpliflcadoras, com a deflnic~ao de propriedades de inercia, amortecimento e rigidez, bem comocom a determinac~ao do tipo de carregamento aplicado a estrutura.
Esta fase da analise, por ser a primeira, e de grande importa^ncia, porque determina todoo procedimento a ser seguido em fases posteriores. Em conseque^ncia, e a fase que mais imp~oeduvidas ao analista. Uma asa de avi~ao, por exemplo, do ponto de vista estrutural e um compli-cado conjunto de longarinas, nervuras, reforcadores, chapas de revestimento, parafusos, juntase rebites, preenchido em parte por uma massa movel e variavel de combustvel, completadopor condutos e sistemas hidraulicos, cablagens eletricas, sistemas de aquecimento, superfciesde controle moveis, sensores, atuadores, trens de pouso e grupos moto-propulsores, submetido aum ambiente aerodina^mico tridimensional, n~ao-linear, viscoso, turbulento, compressvel e n~ao-estacionario. Como modelar esta complexa realidade?
11
-
Temos que ter sempre em mente que o modelamento analtico adotado deve prioritariamentepermitir que a analise possa prosseguir em fases posteriores. Um modelo soflsticado e, portanto,mais real, pode requerer recursos analticos indisponveis e implicar custos para os quais n~ao es-tejamos preparados. Por isso, o nvel de soflsticac~ao do modelo deve ser devidamente ponderadopelo analista.
Estruturas podem ser modeladas como sistemas unidimensionais, bidimensionais ou tridi-mensionais. Embora o mundo real comporte tre^s dimens~oes, podemos idealizar uma estruturaesquecendo uma ou mais de suas caractersticas espaciais. Por exemplo, vigas s~ao fortes candi-datas a serem modeladas como estruturas unidimensionais se uma de suas dimens~oes for bemmaior que as demais. Isto pode ser verdade para uma asa de grande alongamento, mas certa-mente n~ao o e para uma asa em delta. Da mesma maneira, chapas podem ser representadas comoestruturas bidimensionais se tiverem espessura pequena face a largura e ao comprimento. Final-mente, cascas devem ser consideradas como estruturas tridimensionais se envolverem curvaturasque n~ao permitam um modelamento simpliflcado.
Vamos supor que estejamos interessados em investigar o comportamento de uma asa emex~ao como conseque^ncia da aplicac~ao da forca que sustenta a aeronave em vo^o. Se o prazodisponvel para analise for pequeno, podemos representar a asa por uma linha exvel w(x; t), semmassa, ao longo da qual est~ao concentrados n grupos massicos que substituem, por exemplo, tremde pouso, grupo moto-propulsor, combustvel, superfcies moveis, sistemas e a propria estruturada asa. Esta linha normalmente coincide com o eixo elastico da asa. Este modelo e chamadounidimensional porque utiliza uma unica variavel espacial x para descrever o deslocamentow da asa. O modelo e tambem denominado discreto por concentrar a massa distribuda doconjunto em pontos discretos ao longo do eixo, fazendo-nos buscar a soluc~ao para n variaveiswi(xi; t), com i = 1; 2; 3; : : : ; n. Como a posic~ao das n massas concentradas e deflnida a priori ,o problema deixa de depender da variavel espacial x. Um problema dina^mico, entretanto,pressup~oe uma depende^ncia temporal. Assim, modelos unidimensionais discretos produzem nequac~oes diferenciais ordinarias para representar o movimento das n massas.
Podemos associar, no exemplo acima, um grau de liberdade a cada uma das massas concen-tradas. Em conseque^ncia, quanto maior for o nvel de discretizac~ao das massas, tanto maiorsera o numero de equac~oes de movimento. Se estendermos a discretizac~ao ate o limite teorico deinflnitos graus de liberdade, obtemos uma viga contnua, com propriedades distribudas. Nestecaso, os deslocamentos em ex~ao da estrutura passam a ser func~ao n~ao somente do tempo, mastambem da variavel espacial x. O resultado deste processo de limite e que as inflnitas equac~oesde movimento da estrutura coalescem em uma unica equac~ao diferencial parcial.
Se estivermos interessados na ex~ao w(x; t) e torc~ao (x; t) da asa, o problema torna-se maiscomplexo. Neste caso, para um modelamento discreto o numero de graus de liberdade dobra,isto e, para n grupos massicos teremos 2n equac~oes diferenciais ordinarias. Por outro lado, seas propriedades de inercia e rigidez da asa forem consideradas distribudas ao longo do eixoelastico, teremos duas equac~oes diferenciais parciais a duas variaveis independentes: x e t.
Eventualmente necessitamos analisar uma asa de baixo alongamento ou, talvez, o prazodisponvel para analise seja mais amplo. Ambos os casos recomendam a adoc~ao de um modeloanaltico bidimensional para a asa. Assim, tanto ex~ao w como torc~ao passam a ser func~oesdas variaveis espaciais x e y e do tempo t. Apesar de bidimensional, um modelamento de pro-priedades discretizadas em posic~oes predeflnidas continua levando a um conjunto de equac~oesdiferenciais ordinarias. Ja um modelamento de propriedades distribudas produz equac~oes dife-renciais parciais, mas desta vez a tre^s variaveis independentes: x, y e t.
Asas de baixo alongamento e bastante espessas recomendam por sua propria natureza mode-lamento como estruturas tridimensionais. O mesmo pode acontecer a uma asa flna e de grandealongamento, como a de um planador, se houver prazo suflciente para analise. Modelos do tipo
12
-
kc
m
referencial do laboratrio
x (t)
F (t)referencial do corpo
viga-casca, ou o chamado \caix~ao estrutural da asa", te^m sido comumente adotados. Hipotesesdo tipo Euler-Bernoulli, Timoshenko, com ou sem retorc~ao, te^m sido utilizadas no desenvolvi-mento das equac~oes de movimento. De novo, as propriedades da asa podem estar concentradasem pontos pre-deflnidos ou distribudas, levando respectivamente a equac~oes diferenciais or-dinarias ou parciais. Em ambos os casos, o numero de graus de liberdade do modelo cresce aproporc~ao do nvel de soflsticac~ao das hipoteses adotadas.
Condic~oes de contorno tambem devem ser modeladas com criterio, particularmente se aestrutura sendo analisada e uma subestrutura de um conjunto maior. Cabe ao analista decidir seum contorno e livre, simplesmente apoiado ou engastado com relac~ao a um determinado grau deliberdade. Pode ser que condic~oes de contorno mistas tenham de ser adotadas em determinadosproblemas, particularmente no caso de estruturas automobilsticas e aeroespaciais.
N~ao e nosso objetivo nesta fase do texto discutir tecnicas de modelamento analtico comprofundidade. Tais tecnicas precisam ser exercitadas para um aprendizado efetivo. Tomamosaqui o exemplo de uma asa de avi~ao para ilustrar os aspectos a serem abordados. Temos certezaque o leitor sabera estender a aplicac~ao desses aspectos, quando necessario, a outros sistemasestruturais.
Assim, limitamo-nos a resumir o assunto observando que estruturas podem ser representadascomo sistemas uni, bi ou tridimensionais. Em qualquer desses casos, propriedades massicas eestruturais podem ser concentradas em pontos deflnidos a priori ou distribudas ao longo dodomnio considerado. No caso de sistemas discretos, obtemos para descrever o movimentode cada ponto considerado uma ou mais equac~oes diferenciais ordinarias, enquanto que parasistemas distribudos a mesma func~ao e descrita por equac~oes diferenciais parciais. Finalmente,em ambos os casos, o numero de graus de liberdade e a diflculdade de soluc~ao crescem a proporc~aodo nvel de discretizac~ao e soflsticac~ao do modelo.
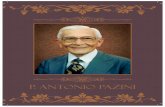
Figura 2.1: Sistema prototipo de um unico grau de liberdade.
2.2.2 Um Modelo Prototipo
A Figura 2.1 mostra o modelo analtico de um sistema meca^nico simples que possui carac-tersticas de inercia, amortecimento, rigidez e carregamento externo. A inercia do sistema erepresentada por um carro de massa m que rola sem qualquer perda de energia sobre um planohorizontal. A rigidez do sistema e associada a uma mola linear de coeflciente de rigidez k, semmassa, que opera tambem de maneira ideal, isto e, sem perdas energeticas. Todas essas perdase outras mais que possam existir podem ser associadas a atuac~ao de um amortecedor do tipoviscoso e comportamento linear, de coeflciente c. O sistema e ligado a uma base flxa pela molae amortecedor e desloca-se uma dista^ncia x(t) de uma posic~ao de refere^ncia a que denominamosposic~ao de equilbrio. O sistema e movimentado por uma forca externa F (t) aplicada a massa.
13
-
mola mole
mola mole
mola dura
mola dura
x (t)
F k
Este sistema e o prototipo que utilizaremos para discutir tecnicas de obtenc~ao de equac~oes demovimento, de forma a permitir uma comparac~ao entre as caractersticas e os resultados dessastecnicas.
O carro do sistema mostrado na Figura 2.1 possui a capacidade de deslocar-se apenas aolongo da direc~ao horizontal. Se conhecermos a posic~ao do referencial do carro a todo instante,saberemos determinar o que ocorre com os demais componentes do sistema. Portanto, o sistemapossui uma unica incognita ou grau de liberdade. O deslocamento x(t) e deflnido a partirda coincide^ncia dos referenciais do corpo e do laboratorio, quando n~ao ha qualquer solicitac~aoda mola, quer seja em trac~ao, quer seja em compress~ao. Esta coincide^ncia de referenciais einexiste^ncia de forca na mola caracteriza a situac~ao de equilbrio.
A Figura 2.2 mostra o comportamento tpico da forca Fk(t) aplicada ao carro pela molaem resiste^ncia ao deslocamento x(t). Esta implcito nesta flgura que na posic~ao de equilbrion~ao ha forca resistindo ao movimento, o que signiflca que x(t) e medido a partir da posic~aon~ao-deformada da mola. Note que, dentro de certos limites, a forca varia linearmente com odeslocamento, esteja ele provocando trac~ao ou compress~ao na mola. No entanto, se os desloca-mentos forem grandes, o comportamento da mola passa a ser n~ao-linear, podendo exibir doistipos de caractersticas:
1. Mola mole - o material da mola, com grandes tens~oes, escoa, e produz maiores taxas dedeslocamento com menores taxas de carga.
2. Mola dura - o material da mola, com grandes tens~oes, encrua, e produz menores taxas dedeslocamento com maiores taxas de carga.
Figura 2.2: Comportamento tpico de uma mola resistindo a deslocamentos.
Embora seja interessante o conhecimento dessas possibilidades, neste texto flcaremos restritosa deslocamentos dentro do limite de comportamento linear de rigidez das estruturas. Destaforma, essa constante de rigidez pode ser determinada experimentalmente atraves de testes e darelac~ao
k =dFkdx
o que, no regime linear, forneceFk(t) = k x(t) (2:1)
14
-
Ja com respeito a amortecimento, nosso conhecimento ainda e muito incipiente para modela-lo adequadamente. Na realidade, necessitamos de um modelo fsico capaz de descrever as perdasenergeticas veriflcadas em Dina^mica de Estruturas. Essas perdas acontecem devido principal-mente as mutuas interfere^ncias entre estruturas e o ar que as circunda, bem como entre osconstituintes em escala microscopica da propria estrutura. Alem disso, muitas vezes podemoster que dotar o sistema estrutural de um amortecedor fsico, como em suspens~oes de automoveise trens de pouso de avi~oes.
O chamado amortecimento estrutural e um modelo de perda energetica proporcional aodeslocamento sofrido pela estrutura, porem em fase com a velocidade desse deslocamento. Eledescreve perdas que ocorrem no interior de uma estrutura em vibrac~ao devido basicamente amecanismos de atrito entre os constituintes primarios da estrutura, como cristais e inclus~oes,no caso de metais, ou flbras e resina, no caso de materiais conjugados. Esse efeito pode sermatematicamente descrito por uma forca de resiste^ncia ao movimento dada por
Fc(t) = i g x(t)
onde g e uma constante a ser determinada experimentalmente e i =p1.
Ja o chamado amortecimento viscoso e um modelo de perda proporcional e em fase coma velocidade que anima uma estrutura. Ele representa bem o desempenho de amortecedoresfsicos que envolvem o escoamento forcado de uidos atraves de orifcios. Neste caso, a forca deresiste^ncia e dada pelo produto da velocidade por uma constante
Fc(t) = fl _x(t)
Finalmente, a interac~ao entre a estrutura em movimento e uidos exteriores pode acarretarum modelo em que perdas energeticas sejam proporcionais em parte a acelerac~ao do sistema eem parte ao seu deslocamento, isto e
Fc(t) = fi x(t) + x(t)
Se juntarmos essas informac~oes, poderamos modelar uma forca flctcia que levaria a perdasenergeticas em uma estrutura do tipo
Fc(t) = fi x(t) + fl _x(t) + x(t) (2:2)
onde os para^metros fi, fl e poderiam ser determinados experimentalmente para cada sistema.Isto, porem, e muito complicado do ponto de vista de engenharia, pelo menos nas fases deprojeto e analise preliminar. Para contornar essa diflculdade, costuma-se adotar o conceito deamortecimento viscoso equivalente, o qual pressup~oe a reduc~ao da forca dissipativa dada em(2.2) para simplesmente
Fc(t) = c _x(t) (2:3)
onde c e chamado coeflciente de amortecimento, um para^metro determinado experimental-mente, quando possvel, ou estimado pelo analista em face da experie^ncia industrial. Noteque o valor desse para^metro deve ser tal a substituir em media os efeitos descritos pelo modelomatematico (2.2).
Tendo modelado o comportamento da mola e do amortecedor, resta-nos dizer algo a respeitodo carro e da forca externa aplicada. Toda a massa do sistema e suposta estar concentrada nocentro de massa do carro. Portanto, o leitor pode considerar que estamos tentando descrever omovimento de um unico ponto. Ja a forca externa e prescrita e aplicada neste ponto. Fazemosa hipotese adicional de que esta forca n~ao se altera com o comportamento do sistema, o que edifcil de se conseguir na realidade.
15
-
Este foi o esforco utilizado aqui para exempliflcar o modelamento analtico de um sistemameca^nico simples de um grau de liberdade. Esperamos com esta discuss~ao fornecer ao leitorelementos suflcientes para que este tenha um panorama da tarefa de modelagem analtica quelhe competira ao trabalhar com Dina^mica de Estruturas, quando certamente sera solicitado aanalisar sistemas muito mais complexos.
2.3 Modelo Matematico
Apos adotado um modelo analtico para uma estrutura, o problema de analise consiste emobter as equac~oes que descrevem o movimento da mesma. Portanto, o analista deve ser capazde transformar desenhos, esquemas e hipoteses em equac~oes matematicas. Diversas tecnicasexistem para cumprir esta tarefa. Didaticamente, essas tecnicas dividem-se em duas abordagensbasicas, a saber:
1. Abordagem Newtoniana - utiliza um linguajar baseado em grandezas vetoriais, como pode-mos observar na Segunda Lei de Newton e no Princpio de DAlembert. Trata-se de umaabordagem mais tradicional, sendo recomendada apenas para problemas de geometriasimples.
2. Abordagem Lagrangeana - utiliza conceitos escalares do tipo energia, como veriflcamos noPrincpio dos Deslocamentos Virtuais, Princpio da Conservac~ao de Energia, Equac~oes deLagrange e Princpio de Hamilton. Trata-se de uma abordagem mais geral, sistematica epoderosa. Em conseque^ncia, representa o caminho a ser trilhado para atender aos requi-sitos de analise das complexas estruturas modernas.
Nas duas proximas sec~oes pretendemos enunciar brevemente a teoria basica de cada umadessas tecnicas e demonstrar a aplicac~ao delas ao modelo analtico prototipo apresentado nasec~ao anterior. Apos esta discuss~ao, colocamos e^nfase nas Equac~oes de Lagrange e Princpio deHamilton, por representarem ferramentas de analise de carater mais geral.
2.4 Meca^nica Newtoniana
Vamos considerar aqui a teoria e a aplicac~ao da Segunda Lei de Newton e do Princpio deDAlembert na analise de sistemas meca^nicos em solicitac~ao dina^mica.
2.4.1 Segunda Lei de Newton
A lei fundamental de movimento de Newton, em tratando de translac~oes, pode ser colocada naseguinte forma:
Vista de um referencial inercial, a resultante das forcas aplicadas ao centro de massade um sistema e igual a variac~ao temporal da quantidade de movimento linear domesmo.
Este enunciado e adequado para os sistemas estruturais que s~ao objeto de nosso estudo. Mate-maticamente, isto pode ser escrito como
~F =d
dt(~p ) (2:4)
A quantidade de movimento linear do sistema e dada por
~p = m ~v
16
-
m F (t)Fk
Fc
onde m e a massa do sistema e ~v e o vetor velocidade do seu centro de massa em relac~ao a umreferencial inercial. Como estamos preocupados, a princpio, com sistemas de massa constante,podemos reescrever a lei (2.4) na forma familiar
~F = m ~a (2:5)
onde ~a e a acelerac~ao do centro de massa do sistema. Esta lei, com suas formidaveis con-seque^ncias, foi publicada em 1687 em Principia, possuindo, portanto, mais de tre^s seculos deexiste^ncia.
Note que a lei (2.4) utiliza um linguajar vetorial e representa na verdade tre^s equac~oes es-calares. Analogamente, podemos obter outras tre^s equac~oes escalares que tratam do movimentode rotac~ao de uma estrutura em torno de eixos ortogonais deflnidos com origem em um pontoda estrutura. Podemos enunciar o teorema que trata desses movimentos rotacionais como segue:
Os momentos resultantes aplicados em torno de eixos ortogonais com origem numponto de um sistema s~ao iguais a variac~ao temporal da quantidade de movimentoangular do mesmo sistema em relac~ao aos eixos considerados.
Matematicamente, isto pode ser colocado na forma
~M =d
dt
~h
(2:6)
Sabemos que a quantidade de movimento angular e dada por
~h = I ~!
onde I e o tensor de inercia do sistema em relac~ao ao sistema de eixos considerado e ~! e ovetor velocidade angular do sistema do corpo em relac~ao a um referencial inercial. Assim, comoestamos interessados em sistemas onde, a princpio, as propriedades de inercia s~ao constantes,podemos reescrever o teorema (2.6) na forma simpliflcada
~M = I ~fi (2:7)
onde ~fi e a acelerac~ao angular do sistema de eixos em relac~ao a um referencial inercial.
Figura 2.3: Diagrama de corpo livre do oscilador prototipo da Figura 2.1.
Para ilustrar o uso da Lei de Newton na deduc~ao das equac~oes de movimento de estruturas,vamos aqui tomar o exemplo do modelo analtico desenvolvido na sec~ao anterior. O primeiropasso dessa aplicac~ao consiste em considerar o diagrama de corpo livre do carro de massa mcomo aparece na Figura 2.3. A partir desse diagrama, a aplicac~ao da equac~ao (2.4) fornece
F (t) Fc Fk = m x (2:8)
17
-
Se substituirmos no resultado (2.8) as relac~oes (2.1) para Fk e (2.3) para Fc e rearranjarmosos termos resultantes, nos obtemos
m x+ c _x+ k x = F (t) (2:9)
Esta e, portanto, a equac~ao diferencial que governa o movimento do carro do sistema em pe-quenas vibrac~oes em torno da sua posic~ao de equilbrio. Esta e a raz~ao pela qual esta equac~aoe chamada de equac~ao de movimento. Note que trata-se de uma equac~ao diferencial ordinarian~ao-homoge^nea de segunda ordem no tempo e, usualmente, de coeflcientes constantes.
Como pudemos observar, a aplicac~ao da Segunda Lei de Newton na obtenc~ao de equac~oesde movimento de sistemas dina^micos tem duas fases:
1. determinac~ao do diagrama de corpo livre do sistema e
2. aplicac~ao da lei na forma (2.4) para translac~oes e/ou (2.6) para rotac~oes.
Embora pareca simples, a maior diflculdade deste metodo reside exatamente na elaborac~ao dodiagrama de corpo livre. Esta diflculdade flca mais evidente quando os sistemas em estudo s~aomulticorpos e cargas s~ao tridimensionais, pois corre-se sempre o risco de confundir as direc~oesdos esforcos aplicados e suas reac~oes.
2.4.2 Princpio de DAlembert
Uma extens~ao as leis de Newton do movimento foi publicada pelo france^s Jean Ronde DAlembertem 1743. O Princpio que leva o nome de seu criador pode ser descrito em sua poderosasimplicidade pelo seguinte enunciado:
Qualquer sistema de forcas e/ou momentos esta em equilbrio se adicionarmos asforcas e/ou momentos aplicados as forcas e/ou momentos de inercia.
Para compreendermos melhor esse enunciado, devemos deflnir os esforcos de inercia como sendoesforcos de reac~ao ao movimento dados por
~Fi = ddt
(m ~v ) (2:10)
para variac~oes de quantidade de movimento linear do centro de massa de um sistema e
~Mi = ddt
(I ~! ) (2:11)
para variac~oes de quantidade de movimento angular em torno dos eixos considerados. Essasdeflnic~oes permitem escrever o Princpio de DAlembert na forma
~F + ~Fi = ~0 e=ou ~M + ~Mi = ~0 (2:12 13)
onde ~F e ~M representam respectivamente as resultantes de forcas e de momentos aplicadas aosistema em analise.
A importa^ncia dessas equac~oes pode ser percebida pelo fato de que elas representam maisdo que uma mera reformulac~ao da Segunda Lei de Newton. Com efeito, sabemos que o desapa-recimento de forcas resultantes na Meca^nica Newtoniana signiflca equilbrio. Assim, se existemcriterios de equilbrio para problemas de estatica, podemos com isto estende^-los a problemasde dina^mica. Em outras palavras, o Princpio de DAlembert permite reduzir problemas dedina^mica a problemas de estatica.
18
-
F (t)Fk
Fc
Fi
A aplicac~ao desse Princpio ao nosso sistema prototipo e ilustrada no diagrama de corpolivre da Figura 2.4. Ali, a massa do sistema tem seus efeitos substitudos pela forca de inerciaFi. A inclus~ao dessa forca flctcia permite escrever
F (t) + Fi Fc Fk = 0 (2:14)
o que representa uma condic~ao de equilbrio. Se aqui substituirmos as relac~oes (2.1), (2.3) e adeflnic~ao (2.10), recuperamos a equac~ao de movimento (2.9), como seria de se esperar. Assim,embora existam profundas diferencas fllosoflcas entre a Segunda Lei de Newton e o Princpio deDAlembert, em termos de resultados n~ao ha qualquer diferenca entre eles.
Figura 2.4: Diagrama de corpo livre para aplicac~ao do Princpio de DAlembert.
Nota-se que para a aplicac~ao do Princpio de DAlembert seguem-se os mesmos passos daaplicac~ao da Segunda Lei de Newton. A diflculdade esta novamente na confecc~ao do diagramade corpo livre. E comum confundir-se em sistemas complexos ac~oes com reac~oes. Note na Figura2.4 que Fi aponta na direc~ao da forca externa aplicada F (t), mas tem sinal negativo, de acordocom a deflnic~ao (2.10).
Em conclus~ao, tanto a Segunda Lei de Newton (Equac~oes (2.4) e (2.6)) quanto o Princpio deDAlembert (Equac~oes (2.10) e (2.11)) s~ao matematicamente descritos por equac~oes vetoriais.Portanto, no caso geral, ambas as formulac~oes representam conjuntos de 6 equac~oes escalares.A medida que os sistemas dina^micos tornam-se mais soflsticados, a aplicac~ao dessas abordagenstorna-se mais complicada e mais sujeita a erros de tratamento. Assim, abordagens mais geraise sistematicas tornam-se necessarias para investigar problemas mais complexos. Neste mister, aMeca^nica Newtoniana cede lugar a Meca^nica Lagrangeana.
2.5 Meca^nica Lagrangeana
2.5.1 Considerac~oes Iniciais
Antes de discutirmos qualquer metodo da Meca^nica Lagrangeana, devemos apresentar algumasdeflnic~oes para estabelecermos o linguajar apropriado para essa discuss~ao.
Comecemos por apresentar o conceito de conflgurac~ao de um sistema. Se estabelecermos umsistema de coordenadas inercial de refere^ncia, o estado de um ponto de um sistema meca^nicopassa a ser conhecido, em relac~ao a refere^ncia, se conhecermos a posic~ao e velocidade desseponto. Este conhecimento permite estabelecer uma localizac~ao exata do ponto em um graflcovelocidade versus posic~ao. A colec~ao de todos os estados do ponto do sistema ao longo do tempo,que estabelece uma trajetoria dina^mica, fornece uma curva a que denominamos plano de fasedo ponto considerado.
Se o sistema meca^nico considerado for um corpo rgido, basta concentrarmos nossa atenc~aona analise de um sistema de eixos flxo ao corpo e com origem em seu centro de massa. Se osistema for composto por uma colec~ao de n corpos rgidos, conectados ou n~ao entre si, basta
19
-
yx
m
L
u
v
d u
d v
q
dq
F(t)
analisarmos o estado dos sistemas de eixos com origem nos centros de massa desses n corpos.Se, porem, tivermos sob analise um sistema composto por um ou mais corpos exveis, que sedeformam sob ac~ao de cargas, necessitamos concentrar nossa atenc~ao sobre todos os inflnitospontos que constituem o sistema. Nesses termos, entendemos por conflgurac~ao de um sistemaem um determinado instante de tempo a colec~ao de estados que deflnem completamente o estadodo sistema.
Um corpo rgido livre no espaco possui seis graus de liberdade: tre^s translac~oes, uma em cadadirec~ao do sistema de coordenadas de refere^ncia, e tre^s rotac~oes, cada uma estabelecida em tornodos mesmos eixos do sistema de coordenadas. Se este corpo for impedido de se movimentar emqualquer dessas direc~oes, estara enfrentando o que chamamos de uma restric~ao. Por exemplo,se o mesmo corpo for limitado a se deslocar em um plano, o numero de graus de liberdade flcarareduzido a tre^s: duas translac~oes e uma rotac~ao. Um sistema composto por dois ou mais corposrgidos conectados entre si possui uma serie de restric~oes estabelecidas entre esses corpos.
Aprofundando mais esses conceitos, entendemos deslocamento como uma quantidade usadapara especiflcar uma troca de conflgurac~ao de um sistema. Portanto, deslocamento n~ao e neces-sariamente medido em metros, podendo se^-lo em radianos, metros por segundo ou radianos porsegundo. Entendemos restric~ao como uma condicionante cinematica nas conflgurac~oes que umsistema tenha que assumir. Na maioria das situac~oes, restric~oes podem ser expressas matemati-camente, como func~oes do espaco e do tempo. Com essas deflnic~oes, entendemos deslocamentovirtual como uma troca inflnitesimal e imaginaria de conflgurac~ao de um sistema que seja con-sistente com suas restric~oes.
Entendemos um grupo de coordenadas generalizadas como um conjunto linearmente inde-pendente de deslocamentos que s~ao consistentes com as restric~oes do sistema e que s~ao suflcientespara descrever qualquer conflgurac~ao arbitraria e, portanto, possvel do sistema. Um sistema den graus de liberdade possui para sua descric~ao equac~oes expressas em termos de n coordenadasgeneralizadas.
Figura 2.5: Sistema de um grau de liberdade com restric~ao cinematica.
Para tentarmos esclarecer melhor essas deflnic~oes, tomemos o exemplo que aparece naFigura 2.5. Consideremos o movimento de uma massa m no plano, presa por uma barra rgida decomprimento L a uma articulac~ao na origem do sistema. Este sistema possui um unico grau deliberdade, qual seja, a rotac~ao da barra em torno do eixo que passa pela origem do sistema x; yperpendicularmente ao plano. A posic~ao da massa pode ser descrita pelas coordenadas linearesu e v, ou pela coordenada angular . Sabemos que, por si so, e suflciente para descrever aconflgurac~ao do sistema sendo, portanto, uma coordenada generalizada. No entanto, a posic~ao
20
-
da massa m no plano tambem pode ser descrita pelos deslocamentos u e v. A diferenca nestecaso e que existe uma restric~ao entre essas coordenadas dada por
u2 + v2 = L2
Assim, u e v s~ao coordenadas, mas n~ao s~ao coordenadas generalizadas. A relac~ao entre u, v e e dada por
u = L cos v = L sen
Em conseque^ncia, como mostrado na Figura 2.5, ao deslocamento virtual correspondem osseguintes deslocamentos virtuais
u = L sen v = L cos
Este exemplo complica-se bastante se a haste que conecta a massa m a articulac~ao n~ao forrgida. Nes