
PID - Felipe de Sousa Barros Dias
8
Click here to load reader
-
Upload
rafael-gianini -
Category
Documents
-
view
7 -
download
0
Transcript of PID - Felipe de Sousa Barros Dias

Controle PID
Felipe De Sousa Barros Dias
Disciplina de controle
IFCE – Campus Sobral
Dezembro de 2012

Introdução
Em muitos processos, do uso domestico ao industrial, há a necessidade de manter um
ou mais parâmetros estáveis, ou pelo menos dentro de certo limite de variação. Podendo ser
aplicados a rotação de um motor, pressão de um gás, nível de um reservatório e etc.
O controle mais comum é o ON/OFF, entretanto este tem suas limitações quanto a
precisão e estabilidade, para resolver isso é necessário tem um controlador mais robusto,
como o controlador PID (Proporcional + Integrativo + Derivativo). A maioria dos controladores
industriais em uso no mercado já utiliza da tecnologia PID.
Quando se têm um modelo matemático no processo, é possível aplicar varias técnicas
visando a determinação dos parâmetros do controlador que atenda as especificações
necessária.
Este trabalho visa analisar as curvas de saída dos controladores PID e de seus
componentes isolados, para isso foi utilizado o software de simulação Matlab e a planta
mostrada na figura1 a baixo:
Figura 1: Planta de simulação.

Controle Proporcional (P)
O modo de controle proporcional pode ser considerado como uma evolução do modo
de controle de duas posições, a saída de um controlador proporcional pode assumir qualquer
valor desde que compreendido entre os limites de saída máxima e mínima, em função do o
set verificado.
Este faz a correção proporcional
proporção do erro entre o valor real e o
Abaixo na figura 1 segue a forma de onda referente ao controle Proporcional
baixo valor:
Figura 1: Forma de o
Observa-se que há um pequeno tempo de transição, porém quando se estabiliza fica
em um valor abaixo do esperado (0,7V).
A equação referente ao controlador P é:
Controle Proporcional (P)
O modo de controle proporcional pode ser considerado como uma evolução do modo
de controle de duas posições, a saída de um controlador proporcional pode assumir qualquer
valor desde que compreendido entre os limites de saída máxima e mínima, em função do o
az a correção proporcional ao erro, quando aplicada ao processo deve crescer na
o erro entre o valor real e o valor desejado.
segue a forma de onda referente ao controle Proporcional
Figura 1: Forma de onda do controlador proporcional.
se que há um pequeno tempo de transição, porém quando se estabiliza fica
em um valor abaixo do esperado (0,7V).
A equação referente ao controlador P é:
O modo de controle proporcional pode ser considerado como uma evolução do modo
de controle de duas posições, a saída de um controlador proporcional pode assumir qualquer
valor desde que compreendido entre os limites de saída máxima e mínima, em função do off-
quando aplicada ao processo deve crescer na
segue a forma de onda referente ao controle Proporcional com um
se que há um pequeno tempo de transição, porém quando se estabiliza fica

Controle Integrativo
Os controladores com ação integral são considerados de ação dinâmica, pois a saída
dos mesmos é uma função do tempo da variável de entrada.
A saída de um controlador com ação integral é proporcional à integração do erro ao
longo do tempo de integração, ou seja, a velocidade da correção no sinal de saída é
proporcional a amplitude do desvio
longo do tempo, na figura 2
pequenos valores:
Figura
Vimos que o valor se mantém exatamente igual ao valor de entrada,
os possíveis erros do sistema,
controle lento, e quando maior o valor no controlador maior será o tempo do transitório.
A equação para o controle
Integrativo (I)
Os controladores com ação integral são considerados de ação dinâmica, pois a saída
mesmos é uma função do tempo da variável de entrada.
A saída de um controlador com ação integral é proporcional à integração do erro ao
longo do tempo de integração, ou seja, a velocidade da correção no sinal de saída é
proporcional a amplitude do desvio. Enquanto houver erro, a saída estará aumentando ao
a seguir pode observar-se o comportamento do controlador com
Figura 2: Forma de onda do controlador integrativo.
Vimos que o valor se mantém exatamente igual ao valor de entrada,
do sistema, porém o tempo de transição é bem elevado,
e quando maior o valor no controlador maior será o tempo do transitório.
A equação para o controle integrativo é:
Os controladores com ação integral são considerados de ação dinâmica, pois a saída
A saída de um controlador com ação integral é proporcional à integração do erro ao
longo do tempo de integração, ou seja, a velocidade da correção no sinal de saída é
. Enquanto houver erro, a saída estará aumentando ao
se o comportamento do controlador com
eliminando todos
bem elevado, tornando o
e quando maior o valor no controlador maior será o tempo do transitório.

Controle Derivativo (D)
O derivativo só atua quando houver erro, se o processo esta
nulo, durante perturbações ou na partida do processo, qu
atua no sentido de diminuir suas
desempenho do processo, como visto na figura
Figura
Podemos notar que ocorre
termina o período transitório
que não há mais variações.
A equação para o controle
Controle Derivativo (D)
tivo só atua quando houver erro, se o processo esta estável
ou na partida do processo, quando o erro ainda esta variando, ele
atua no sentido de diminuir suas variações, portando sua principal funç
desempenho do processo, como visto na figura 3 a baixo:
Figura 3: Forma de onda do controlador derivativo.
Podemos notar que ocorre alguma perturbação na partida do processo, quando
transitório que o processo se estabiliza o controle derivativo tende a zero, já
A equação para o controle derivativo é:
estável ele tende a ser
ando o erro ainda esta variando, ele
portando sua principal função é melhorar o
na partida do processo, quando
que o processo se estabiliza o controle derivativo tende a zero, já

Controle PI
O integrador não é isoladamente uma técnica de controle, pois não pode ser
empregado separado de um controle proporcional, a ação integral tem como função eliminar
o desvio no período transitório
A curva acima aprese
do controle proporcional no
variável integrativa, quando o
que esta é uma característica
O integrador não é isoladamente uma técnica de controle, pois não pode ser
um controle proporcional, a ação integral tem como função eliminar
transitório característico de um controle proporcional.
Figura 4: Forma de onda do controlador PI.
A curva acima apresenta característica dos dois controladores, um pouco de oscilação
no período do transitório, no qual esta oscilação foi reduzida pela
, quando o valor final se estabiliza o valor esta bem próxima
característica do controlador integrativo.
O integrador não é isoladamente uma técnica de controle, pois não pode ser
um controle proporcional, a ação integral tem como função eliminar
adores, um pouco de oscilação
a oscilação foi reduzida pela
esta bem próxima do valor real, já

Controle PD
O controle derivativo não é sozi
empregado separado de uma ação proporci
velocidade da variação do erro
Podemos observar na figura
transitório, já que é característica
saída é menor do que o desejado, já que essa é uma
Controle PD
O controle derivativo não é sozinho uma técnica de controle já que não pode ser
o de uma ação proporcional, nesta a saída do controlado
velocidade da variação do erro na entrada.
Figura 5: Forma de onda do controlador PD.
Podemos observar na figura 5 acima, que o controlar PD reduzir o
característica do derivativo fazer esse controle do erro, porém o valor de
é menor do que o desejado, já que essa é uma característica do Integrativo.
nho uma técnica de controle já que não pode ser
do controlador é proporcional a
acima, que o controlar PD reduzir o período do
esse controle do erro, porém o valor de
do Integrativo.

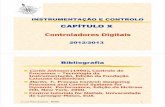
Controle PID
Ao unir o controle bás
redução das oscilações do derivativo, a
ideal seria a da figura, onde não h
o valor é exatamente igual ao desejado
E sua equação pode ser obtida pela soma das três que o compõe:
Bibliografia
• SILVA, Flávio Couto, Planta
Universidade positivo, núcleo de ciências exatas e
computação
• Controle PID básico, Manual de sintonia de control
Controle PID
e básico do proporcional, com a eliminação de erros do Integrativo e a
redução das oscilações do derivativo, assim formando o controlador PID, no qual um
ideal seria a da figura, onde não há oscilações, um curto período até que o valor se estabilize, e
exatamente igual ao desejado, podendo ser comprovado na figura 6:
Figura 6: Forma de onda do controlador PID
E sua equação pode ser obtida pela soma das três que o compõe:
Bibliografia
, Planta didática – Controle PID digital para motores DC,
Universidade positivo, núcleo de ciências exatas e tecnológicas de engenharia da
Manual de sintonia de controlador Novus
ico do proporcional, com a eliminação de erros do Integrativo e a
ssim formando o controlador PID, no qual uma curva
até que o valor se estabilize, e
, podendo ser comprovado na figura 6:
PID digital para motores DC,
de engenharia da











![UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE …5].pdf · iii CONTROLADORES PID AUTO-AJUSTÁVEL E NEBULOSO APLICADOS EM PLANTAS INDUSTRIAIS. Felipe de Azevedo Guimarães Esta dissertação](https://static.fdocumentos.com/doc/165x107/5bba48ec09d3f28f6c8df58b/universidade-federal-do-ceara-centro-de-5pdf-iii-controladores-pid-auto-ajustavel.jpg)




