PMR5222 / PMR2722 Projeto e Fabricac¸ao de Sistemas...
16
PMR-EPUSP PMR-EPUSP PMR-EPUSP PMR-EPUSP PMR-EPUSP PMR5222 / PMR2722 Projeto e Fabricac ¸˜ ao de Sistemas Microeletromecˆ anicos (MEMS) Emilio Carlos Nelli Silva Ricardo Cury Ibrahim PMR/EPUSP 2009 1
Transcript of PMR5222 / PMR2722 Projeto e Fabricac¸ao de Sistemas...

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PMR5222 / PMR2722Projeto e Fabricacao de Sistemas Microeletromecanicos
(MEMS)
Emilio Carlos Nelli Silva
Ricardo Cury Ibrahim
PMR/EPUSP
2009
1

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSPSumario
Capıtulo 1. Introducao ao Curso 1-11. O Curso 1-12. MEMS 1-23. O Mercado de MEMS 1-34. Evolucao Historica 1-65. Reducao de Escala e Seus Efeitos 1-86. Exemplos de Dispositivos MEMS 1-11
Referencias Bibliograficas 1-15
CAPıTULO 1
Introducao ao Curso1. O Curso
Este curso tem por objetivo introduzir os conceitos basicos de sistemas microeletromecanicos(MEMS) aplicados a Engenharia Mecatronica, monstrando as suas aplicacoes, conceitos de fabricacao,de modelagem e de projeto usando ferramentas computacionais modernas. Dessa forma, pretende-se daruma visao generica de forma a introduzir o tema entre os alunos de pos-graduacao.
Neste curso daremos maior enfase a integracao de conceitos mecanicos, eletricos e oticos no projeto efabricacao de micro-dispositivos. O curso se desenvolve da seguinte forma:
- Na primeira aula e apresentada a proposta do curso (ementa, regras de avaliacao, bibliografia); oconceito de MEMS e introduzido e sao explicados diversos dispositivos ja disponıveis no mercadode forma a motivar o aluno. Tambem e dada uma visao inicial do conceito de reducao de escala ecomo isso afeta as propriedades dos MEMS.
- Nas tres aulas seguintes sao apresentados conceitos basicos de materiais (focando nosmateriais utilizados pela tecnologia MEMS), e propriedades fısicas de materiais solidos(formas de representacao tensorial e matricial). Revisao de Mecanica dos Solidos; conceitosbasicos de materiais isolantes, condutores e semicondutores; eletrostatica; piezoeletricidade;piezoresistividade.
- Nas tres aulas seguintes sao apresentados metodos computacionais para o projeto de dispositivosMEMS envolvendo: modelagem e simulacao analıtica de modelos simplificados; metodoscomputacionais de modelagem e simulacao para modelos mais complexos; tecnicas de otimizacao.
- Duas aulas sobre processos de fabricacao e caracterizacao de MEMS.- Uma aula para estudo de casos reais de dispositivos a venda no mercado.- Uma aula sobre nanotecnologia.- Prova final.
A partir da segunda aula, havera uma lista de exercıcios por aula, para ser feita em dupla ouindividualmente. Prazo de entrega: uma semana.
1-1

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
1.1. Encontrando Livros e Artigos da Area
Existem diversos livros introdutorios sobre MEMS, em ingles que podem ser acessados eletronicamentevia um computador de dentro da USP. O site da biblioteca tem links para diversas bases de livros eperiodicos. Em particular, o site da CRC possui otimos livros disponıveis em formato PDF para acomunidade USP.
* http://www.usp.br/sibi (procure ‘Acesso a e-books’)* http://www.crcnetbase.com (otimos livros)
Com relacao a artigos de revistas tecnicas, existe um site muito bom para fazer buscas por temas oupor outras palavras-chave. O site e o ‘Engineering Village’, e pode ser acessado de dentro da USP gracasa assinatura feita pela CAPES. O site de ‘Periodicos Capes’ lista todas as publicacoes assinadas. A listaseguinte traz os enderecos de alguns sites para busca de artigos tecnicos.
* http://www.periodicos.capes.gov.br
* http://www.engineeringvillage.com/
* http://ieeexplore.ieee.org (periodicos e simposios do IEEE)
2. MEMSNosso curso aborda sistemas de pequenas dimensoes e de grande interesse tecnologico. Varios termos
sao utilizados para denominar esses sistemas.
MEMS: abreviacao do termo ingles MicroElectroMechanical Systems. Atualmente, e a formamais comum para denominar esses sistemas de dimensoes reduzidas. Seu nome foi derivado dosprimeiros micro-sistemas que integravam efeitos eletricos e mecanicos no mesmo dispositivo.
MOEMS: abreviacao do termo ingles MicroOptoElectroMechanical Systems. E uma derivacaodo termo MEMS aplicada para micro-sistemas que utilizam no mesmo dispositivo efeitos oticos,alem dos eletricos e mecanicos.
NEMS: abreviacao do termo ingles NanoElectroMechanical Systems. Tem dimensoes maisreduzidas ainda que os MEMS, e se insere na area de nanotecnologia.
Microsystems: era a denominacao usada pelos europeus. Mas, atualmente, estao preferindo usaros termos derivados de MEMS.
Micromachines: era a denominacao usada pelos japoneses. Mas, atualmente, estao preferindousar os termos derivados de MEMS.
Utilizaremos o termo MEMS com maior frequencia nas apostilas e nas aulas.O termo MEMS pode estar associado tanto aos microdispositivos propriamente ditos como a tecnologia.
• Assim, na primeira acepcao, MEMS se refere a dispositivos atuadores ou sensores, de dimensoesreduzidas, com funcionamento baseado em propriedades eletromecanicas e, eventualmente, oticas.
• Na segunda acepcao, a tecnologia MEMS se refere a metodologia de desenvolvimento (projeto,fabricacao, caracterizacao) desses microdispositivos. Neste caso, os MEMS se posicionam entreos dispositivos de dimensoes convencionais (macroscopicos) e os dispositivos da nanotecnologia.Sao empregadas tecnicas tıpicas da microeletronica.
Os dispositivos MEMS constituem uma area tecnologica multidisciplinar, de grande interesse paraengenheiros, fısicos, quımicos, biologos e medicos. Por ser muito abrangente, envolve integracao deconceitos de fısica, quımica, biologia, engenharia e medicina.
1-2

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
2.1. MEMS - Classificacao
Os MEMS podem ser classificados em: atuadores e sensores.
Atuador: segundo o dicionario Houaiss, e um ‘dispositivo para mover a carga, em umservomecanismo.’
Sensor: segundo o dicionario Houaiss, ‘diz-se de ou dispositivo que responde a estımulos fısicos(calorico, luminoso, sonoro, pressional, magnetico, motor) e transmite um impulso (mensuravelou operante) correspondente.’
Exemplos de MEMS atuadores: bocais de cartuchos de impressoras (micro bombas); DLP movimentode microespelhos; microgarras; micromotores.
Exemplos de MEMS sensores: pressao; microacelerometros; microgiroscopios; microfones; RF-ID;microfones; antenas; analises quımicas/bioquımicas.
2.2. MEMS - Dimensoes
Quais as dimensoes maximas aceitaveis de um dispositivo MEMS?Em geral, consideram-se MEMS como dispositivos formados por estruturas com largura muito fina (ate
algumas poucas centenas de mıcron), e cujas dimensoes finais nao ultrapassem alguns milımetros. Mas, emalguns casos, as dimensoes finais podem chegar a alguns milımetros.
Quais as dimensoes mınimas aceitaveis de um dispositivo MEMS?Nao ha um limite bem definido, infelizmente. Entretanto, podemos considerar algumas centenas de
nanometros como limite mınimo aceitavel. Dispositivos eletromecanicos com dimensoes menores podemser classificados como NEMS (NanoElectroMechanical Systems).
Assim, as tecnicas convencionais da microeletronica sao suficientes para a microfabricacao de MEMS.Por outro lado, tecnicas de projeto devem ser diferenciadas das tecnicas usuais da microeletronica (quetratam basicamente do movimento de portadores de carga em semicondutores). Algumas tecnicas decaracterizacao tambem devem ser especializadas (medicao de forca, deslocamento, flexao, etc.).
3. O Mercado de MEMSHa uma empresa francesa de consultoria, Yole Developpement, muito respeitada pela comunidade
que trabalha com MEMS pelas suas analises e projecoes de mercado. Infelizmente, os relatorios anuaiscompletos sao relativamente caros. Entretanto, e possıvel encontrar varios artigos na Internet queapresentam muitos dados desses relatorios. A referencia [Tolfree] apresenta um capıtulo sobre o mercadode MEMS escrito pelo presidente da Yole. E uma leitura recomendada para os interessados no assunto; olivro em formato PDF pode ser acessado pela comunidade USP no site da editora CRC Press [CRC].
Devido a crise economica iniciada em setembro de 2008, e interessante comparar relatorios anteriores eposteriores a crise. Apesar desta ser uma area muito dinamica, ha alguns dispositivos MEMS que possuemmercado ja consolidado. Entre eles, as cabecas de impressao dos cartuchos tipo jato de tinta tem sidocampeas de mercado por varios anos consecutivos; porem, esta area esta ficando saturada. Em seguida,aparecem os DLP (sistemas atuadores com microespelhos para projetores) e diversos tipos de sensoresinerciais. A tendencia e que o mercado de sensores inerciais cresca com a maior aceitacao em veıculos,eletrodomesticos, brinquedos, residencias automatizadas, etc. A area medica e de analise biologica tambem
1-3

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
tende a crescer. Ha outros nichos que podem ser interessantes, especialmente para o Brasil, entre elessensores para o agronegocio, para o monitoramento de usinas hidroeletricas, e para a industria petrolıfera epetroquımica.
O grafico das 30 maiores empresas de MEMS nos anos 2005 e 2006 pode ser visto na figura 1.As projecoes do mercado de MEMS de 2006 a 2011 podem ser vistas na figura 2.
Figura 1. Relacao dos 30 maiores produtores de MEMS em 2005 e em 2006. Fonte:Yole Developpement.
As estimativas da Yole em 2007 apontavam para um mercado de quase US$6bi em 2006 e umaprojecao para quase US$11bi para 2011. Os dados para o mercado da Yole nao incluem os MEMS paracabecas de leitura/gravacao (usados em discos rıgidos de computadores). Se esse setor for incluıdo osvalores praticamente dobram. Assim, o maior consumidor de MEMS e o mercado de TI (Tecnologia daInformacao).
Os produtos com maior tendencia de crescimento do mercado sao: microfones (para celulares eequipamentos de multimedia), sensores inerciais (acelerometros e giroscopios), micro-espelhos para DLP(Digital Light Processing), RF-MEMS.
Projecoes de mercado entre os anos 2007 e 2012, divulgadas em fevereiro de 2008 pela Yole, podemser vistas nas figuras 3 e 4.
Entretanto, com a crise economica a partir do segundo semestre de 2008, os resultados foram de quedado mercado, figura 5. A projecao tambem e de queda para 2009, mas preve uma normalizacao a partir de2010.
Os resultados referentes ao ano de 2008 mostram que a crise afetou o mercado de produtos tradicionaisde MEMS (cartuchos de impressoras jato de tinta, DLP para projetores, sensores automotivos). Entretanto,houve crescimento no setor de MEMS inerciais (microacelerometros e giroscopios). A recuperacao domercado, provavelmente, so vai ocorrer a partir de 2010.
1-4
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
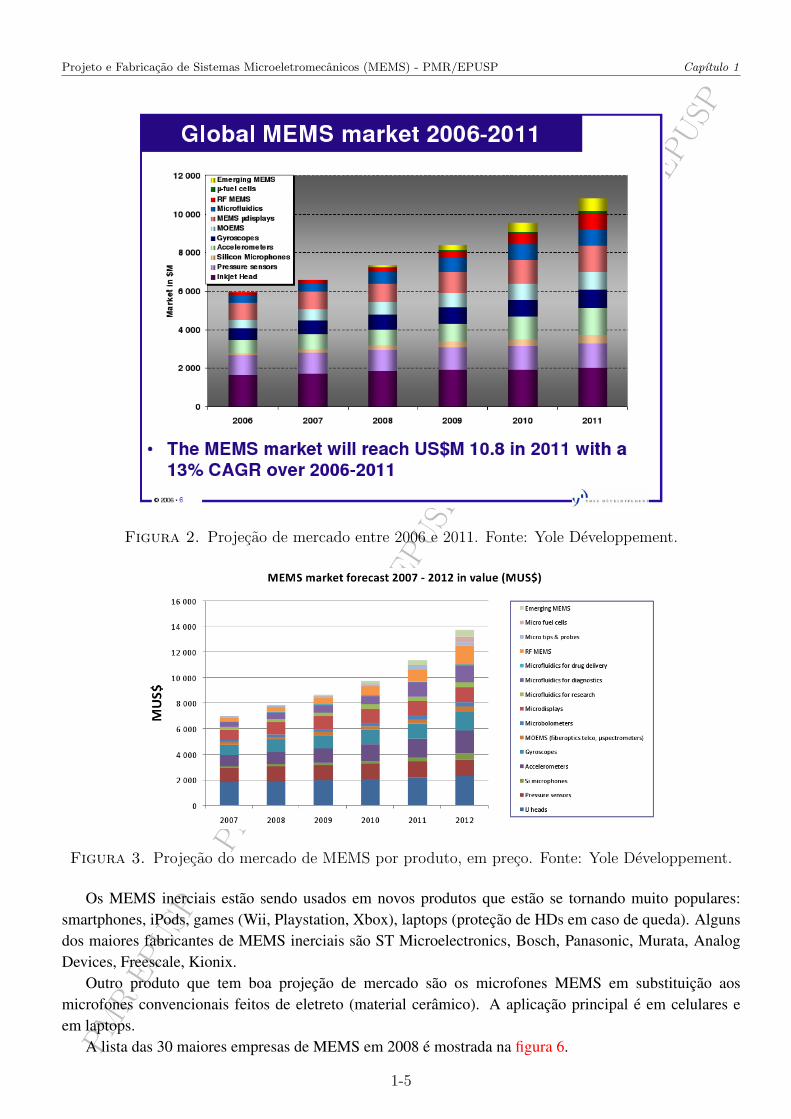
Figura 2. Projecao de mercado entre 2006 e 2011. Fonte: Yole Developpement.
Figura 3. Projecao do mercado de MEMS por produto, em preco. Fonte: Yole Developpement.
Os MEMS inerciais estao sendo usados em novos produtos que estao se tornando muito populares:smartphones, iPods, games (Wii, Playstation, Xbox), laptops (protecao de HDs em caso de queda). Algunsdos maiores fabricantes de MEMS inerciais sao ST Microelectronics, Bosch, Panasonic, Murata, AnalogDevices, Freescale, Kionix.
Outro produto que tem boa projecao de mercado sao os microfones MEMS em substituicao aosmicrofones convencionais feitos de eletreto (material ceramico). A aplicacao principal e em celulares eem laptops.
A lista das 30 maiores empresas de MEMS em 2008 e mostrada na figura 6.
1-5

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
Figura 4. Projecao do mercado de MEMS por produto, em unidades (quantidade).Fonte: Yole Developpement.
Figura 5. Resultados e projecoes apos a crise de 2008. Fonte: Yole Developpement.
3.1. Estrategias para Entrar no Mercado de MEMS
A referencia [Tolfree] e um livro lancado em 2008 sobre estrategias e estudo de casos reais de empresasna area de MEMS. Assim, fica a sugestao de leitura desse livro aos interessados nessa area, pelo menos oscapıtulos 1 e 6.
A figura 7 mostra um diagrama dos ‘passos para a comercializacao de MEMS’, encontrada no capıtulo1 da referencia [Tolfree].
4. Evolucao HistoricaPara este topico e sugerida a leitura do capıtulo 1 da referencia [Allen].A miniaturizacao de mecanismos acompanha a historia de desenvolvimento dos relogios mecanicos.
Os primeiros relogios foram inventados no seculo 14 e eram usados em igrejas. Possuıam dimensoesenormes. No seculo 17 foi criado o relogio de pendulo, representando uma reducao significativa de
1-6

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
Figura 6. Lista das 30 maiores empresas de MEMS no ano de 2008. Fonte: Yole Developpement.
Figura 7. Estrategia para iniciar um negocio em MEMS. Fonte: referencia [Tolfree].
1-7

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
tamanho. Entretanto, foi somente no seculo 19 que apareceu o relogio de pulso, sendo que Santos Dumontfoi um dos primeiros a utiliza-lo. Os novos mecanismos criados para miniaturizar o relogio tambem foramutilizados em outros dispositivos.
Os MEMS foram produtos derivados diretamente do avanco da eletronica. Assim, somente em meadosdo seculo 20, com a invencao do transistor usando material semicondutor e que houve um impulsosignificativo na area da eletronica: em 1947 Schokley, Brittain e Bardeen apresentaram o primeiro transistor,em germanio. E, em 1954, aparece o primeiro transistor em silıcio.
Apesar de representar um avanco importante na eletronica, essa fase ainda consistia em componentesmontados individualmente, ou seja, utilizava componentes discretos. O Primeiro circuito integrado (CI, ouIC em ingles), aparece em 1958 na Texas Instrument; e em 1959 na Fairchild. Esse marco representao aparecimento da microeletronica, com mudancas radicais no processo de fabricacao e montagem decircuitos eletro-eletronicos.
A reducao do tamanho dos componentes eletronicos tem sido muito rapida, e segue a famosa Lei deMoore (foi um dos fundadores da Intel): a diminuicao de tamanho e de aproximadamente uma ordem demagnitude a cada dois anos. Dessa forma, atualmente e possıvel fabricar mais de um bilhao de transistoresnuma area de alguns poucos centımetros quadrados. Maiores informacoes podem ser encontradas no siteda Intel.
Paralelamente, o efeito piezoresistivo foi encontrado no silıcio em 1954. Essa propriedade e quepossibilitou o aparecimento dos primeiros MEMS nos anos 1960, em sensores de pressao.
A tecnologia de microfabricacao comeca a se desenvolver nos anos 1960, usando tecnicas de corrosaoquımica. A corrosao anisotropica do silıcio foi introduzida em 1976, possibilitando a fabricacao deestruturas tipo membrana, cantilever, etc. Tambem, possibilitou a fabricacao de micro-orifıcios que foramusados mais adiante para a fabricacao de cartuchos para impressoras jato de tinta.
O silıcio policristalino (as vezes chamado de polisilıcio) comecou a ser usado para a fabricacao deestruturas mecanicas nos anos 1980.
Foi nos anos 1980 e 1990 que ocorreram avancos na integracao entre MEMS e circuitos eletronicos deacionamento e condicionamento de sinal.
Diversos processos de microfabricacao especıficos para MEMS continuam a ser desenvolvidos ate hoje,particularmente a fabricacao e montagem de estruturas 3D.
5. Reducao de Escala e Seus EfeitosEste topico pode ser visto com mais detalhes nas referencias [Allen, cap. 4] e [Gad-el-Hak, cap. 2].Os MEMS sao dispositivos miniaturizados, onde suas dimensoes sao bem menores que as dos objetos
do mundo macroscopico a que estamos habituados. Assim, o efeito da reducao de escala e de grandeimportancia para um projeto adequado de um novo dispositivo MEMS.
Considere ‘fator de escala’ representado por S. Para representar uma reducao de escala, S devesatisfazer a condicao 0 < S ≤ 1. Assim, uma reducao de um comprimento L0 para L e representada porL = SL0. Uma reducao de area de A0 = L0W0 para A = LW e representada por: A = (SL0)(SW0) =
S2L0W0, ou seja, A = S2A0. E, analogamente para um volume: V = S3V0.Com relacao a massa, lembrando que a massa M de um corpo e o produto de sua densidade ρ (que e
uma constante) pelo seu volume V , a reducao de escala afetara diretamente o volume. Assim, a um corpo
1-8

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
de volume V0 corresponde uma massa M0 = ρV0. Com a reducao para um volume V resultara uma massaM dada por: M = ρV = ρS3V0. Ou seja, M = S3M0.
Reducao de escala para varios tipos de forcas. Existem forcas que sao de interesse para a tecnologiaMEMS que variam segundo S, ou S2, ou S3, ou S4. A forca de tensao superficial de lıquidos varia segundoS. Forcas eletrostaticas em capacitores variam segundo S2. Um tipo comum de forca magnetica variasegundo S3. A forca de atracao gravitacional entre dois corpos varia segundo S4; mas, note que a forcapeso (P = mg) varia segundo S3 admitindo que a aceleracao da gravidade g e constante.
5.1. Tensao Superficial
As superfıcies de substancias lıquidas ou solidas possuem propriedades diferentes do seu interior. Umamolecula no interior de uma substancia lıquida ou solida normalmente sofre uma forca resultante medianula devido a simetria (e cercada por outras moleculas por todos os lados). Ja uma molecula na superfıcieesta submetida a uma forca resultante nao nula, que a mantem ligada a substancia. A figura 8 mostra variostipos de superfıcies entre substancias: lıquido-gas, lıquido-solido, lıquido-lıquido, solido-gas.
Figura 8. Tensao superficial entre substancias solidas, lıquidas, gasosas.
Tensao superficial, γ, e definida como a energia potencial de superfıcie de uma dada substancia. Atensao superficial depende da substancia e da temperatura entre outros fatores. E medida em J/m2 noSI. Fisicamente, corresponde a energia por unidade de area necessaria para aumentar a superfıcie de umasubstancia solida ou lıquida.
Especificamente no caso de lıquidos, essa energia corresponde ao trabalho de uma forca tangencial asuperfıcie e perpendicular ao nıvel por um determinado ponto. Considere uma solucao de agua e sabaocomo a que e usada para fazer bolinhas de sabao. Ao mergulhar um pedaco de arame formando umretangulo, forma-se uma pelıcula de agua e sabao no interior da area retangular. Essa pelıcula tem 2 faces.Ao tentar aumentar a area do retangulo deslocando-se um dos lados de ∆x, o trabalho W de uma forca Faplicada sera: W = F∆x. Na figura 9, a area e aumentada de l∆x em cada face. Assim, o aumento daenergia energia potencial de superfıcie correspondente a esse trabalho por unidade de area corresponde atensao superficial:
(5.1)W
A=
F∆x
2(l∆x)=F
2l
1-9

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
(5.2) γ =F
2l
Figura 9. Aumento da tensao superficial de uma pelıcula lıquida.
Se, ao inves de uma pelıcula de duas faces, fosse considerado um copo com perımetro (parede)expansıvel com lıquido em seu interior, o aumento da tensao superficial corresponderia a apenas uma face.Supondo o perımetro p, a tensao superficial seria expressa por:
(5.3) γ =F
p
Uma possıvel interpretacao e que a tensao superficial exprime a forca por unidade de comprimentonecessaria para manter o perımetro da superfıcie de uma substancia fechada.
Assim, em geral, a forca de tensao superficial varia com o perımetro:
(5.4) F = γp
E, para uma reducao de escala S:
(5.5) F = SF0
5.2. Exemplo NSumerico
Note que a reducao de escala de um corpo com dimensao da ordem de 1 metro para outro de mesmomaterial mas da ordem de 1 milımetro significa usar um S = 1/1000 = 0.001. Assim, comprimentofica reduzido a 1/1000, milesimo); area fica reduzida a (1/1000)2, milionesimo; volume e massa ficamreduzidos de (1/1000)3, trilionesimo. Essa e, aproximadamente, a ordem de reducao entre um humano eum inseto.
Assim, da reducao de tamanho de um humano para um inseto, pode-se concluir que a massa e a forcapeso se reduzem segundo S3, enquanto que a forca de tensao superficial na superfıcie de um rio se reduzapenas de S. Portanto, varios insetos conseguem ficar parados sobre a superfıcie da agua. Note que outrosfatores tambem influem tais como formato e material das pernas dos insetos.
1-10

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
6. Exemplos de Dispositivos MEMSNesta secao serao vistos alguns exemplos de dispositivos MEMS muito comuns no mercado.
6.1. Micro-acelerometro capacitivo
Acelerometro e um dispositivo sensor utilizado para medir aceleracao. Podem ser usados em medidoresde vibracao, inclinometros, sensores de impacto para disparo de air-bags em automoveis; sistemas inerciaisde orientacao; etc.
A reducao de dimensao no caso de MEMS traz diversos benefıcios, como: espaco e massa reduzidos,menor consumo de energia, reducao de custo de fabricacao (producao em batelada).
Existem varias configuracoes propostas para micro-acelerometros. Aqui sera considerada aconfiguracao capacitiva em comb-drive. A estrutura comb-drive consiste de uma serie de eletrodosdispostos lado a lado, formando um conjunto semelhante a um pente (daı o nome). Veja a figura 10.Normalmente, um conjunto de dentes e fixo, enquanto que o outro e suspenso por molas de flexao e podese movimentar. Dependendo da configuracao das molas, o movimento pode ser na direcao paralela ou nadirecao normal (lateral). Esse movimento relativo entre os dentes causa variacao na atracao eletrostatica ouna capacitancia medida. Aplicando-se uma tensao alternada entre os dois pentes a estrutura se comportacomo um atuador. Medindo-se a variacao de capacitancia devido a algum movimento relativo entre ospentes, a estrutura se comporta como um sensor de deslocamento.
Figura 10. Configuracao da estrutura comb-drive contendo dois conjuntos de pentesemparelhados.
Um micro-acelerometro consiste, normalmente, de uma massa de prova suspensa por molas de flexao.Essa massa suspensa se desloca de acordo com a aceleracao recebida. A aceleracao e determinada,indiretamente, pela medicao do deslocamento da massa de prova. No caso, a estrutura comb-drive forma umconjunto de eletrodos de capacitores associados em paralelo. O conjunto de eletrodos suspenso se deslocade acordo com a aceleracao recebida, modificando a capacitancia do conjunto. Neste caso, a variacao deposicao da massa de prova esta relacionada com a variacao de capacitancia da estrutura. Assim, medindo-sea capacitancia com um circuito em ponte pode-se determinar a aceleracao.
A figura 11 apresenta uma foto de um dispositivo real produzido pela empresa Analog Devices, omicro-acelerometro modelo ADXL150. A figura 12 apresenta o modelo ADXL202. Ambos medem aaceleracao em duas direcoes (X e Y) no plano paralelo a sua superfıcie principal.
6.2. Sensor de pressao piezoresistivo
Todo material que se comporta como um condutor ohmico (relacao linear entre tensao aplicada ecorrente eletrica) tem sua resistencia eletrica alterada sempre que sujeito a mudancas de forma devido asolicitacoes mecanicas. Por exemplo, se o material prismatico da figura 13 for tracionado sofrera aumentode comprimento e reducao da area da seccao transversal. Com isso, sua resistencia eletrica entre as
1-11

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
Figura 11. Micro-acelerometro modelo ADXL150, da Analog Devices.
Figura 12. Micro-acelerometro modelo ADXL202, da Analog Devices.
extremidades A e B sera aumentada. Isso ocorre porque sua resistividade, que e uma propriedade inerenteao material, se mantem constante.
Figura 13. Variacao de forma de um condutor ohmico.
1-12

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
Para um condutor ohmico de formato prismatico ou cilındrico, de seccao uniforme, vale a expressao:
(6.1) R = ρl
A
onde R e a resistencia eletrica entre as extremidades; ρ e a resistividade do material; l e o comprimento(distancia entre as extremidades); e A e a area da seccao transversal. Em geral, a resistencia eletrica de umcondutor ohmico qualquer e dada por sua resistividade multiplicada por um fator de forma.
Por outro lado, alguns materiais apresentam o efeito da “piezoresistividade”. Neste caso, alem davariacao com a mudanca de forma, a resistencia sofre grande variacao proporcional a tensao mecanicaaplicada. O prefixo piezo significa pressao em grego. Esse efeito e usado em sensores de pressao ou deforca.
O silıcio apresenta esse efeito pronunciado quando convenientemente dopado. A figura 14 mostra umaestrutura cantilever (engastada em uma extremidade e livre na outra)do lado esquerdo, e uma estruturaem forma de membrana do lado direito. As tecnicas de fabricacao serao vistas em outro capıtulo docurso. No cantilever a extremidade livre e a que sofre maior deslocamento por flexao, enquanto que aextremidade engastada e a que sofre maior tensao mecanica. Na membrana o centro e que sofre maiordeflexao, enquanto que a regiao central das arestas e que sofre a maior tensao. Assim, e possıvel relacionara variacao de resistencia eletrica (que pode ser medida por um circuito em ponte) com a tensao mecanicaaplicada. A vantagem e que a resistencia sofre uma variacao bem maior do que um condutor ohmicosimples, aumentando a sensibilidade e reduzindo a area do sensor.
Figura 14. Configuracao de dispositivos baseados no efeito piezoresistivo de certasregioes selecionadas.
6.3. Atuadores Eletrotermomecanicos
Esse tipo de atuador e baseado no efeito de dilatacao da maioria dos materiais com o aquecimento.Uma barra metalica sofre expansao se for aquecida, ou sofre encolhimento se for resfriada. Ha inumerosmetodos para transferir calor: laser, combustao, efeito Joule em resistores, etc. A maior parte dos MEMSeletrotermomecanicos atuais utiliza aquecimento pelo efeito Joule, e resfriamento ao ar ambiente.
E mais conveniente escolher um material com resistividade relativamente alta. Assim, o nıquel ousilıcio policristalino sao muito mais adequados do que cobre, alumınio, ouro ou prata (que sao otimos
1-13

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
Projeto e Fabricacao de Sistemas Microeletromecanicos (MEMS) - PMR/EPUSP Capıtulo 1
condutores). A figura 15 mostra uma configuracao muito comum de atuador eletrotermomecanico. Repareque a estrutura consiste de duas barras suspensas de mesmo comprimento, sendo uma muito mais estreitado que a outra. Supondo que a espessura e a mesma, a barra mais fina tera uma resistencia muito maior porapresentar area de seccao transversal menor. Ao aplicar uma diferenca de potencial entre os terminais, abarra mais estreita se aquecera muito mais (pelo efeito Joule) e sofrera uma dilatacao muito maior do que aoutra barra. Como as duas barras estao conectadas a ancora por molas de flexao (barras bem finas), a pontasuspensa do conjunto tendera a descrever um arco, podendo empurrar outras estruturas (efeito atuador).Zerando a diferenca de potencial, o dispositivo se resfria ao ambiente e volta ao estado inicial caso tenhasofrido apenas deformacao no regime elastico. E importante tomar muito cuidado pois a temperatura podeatingir valores muito altos na barra mais fina, levando a uma deformacao plastica.
Figura 15. Atuador eletrotermomecanico bilaminar.
6.4. Dispositivos baseados no efeito piezoeletrico
A piezeletricidade esta relacionada a uma geracao de carga eletrica devido a uma pressao mecanicaaplicada em um material especial, figura 16. Esse e o chamado efeito piezeletrico direto. Tambem epossıvel observar o efeito inverso no mesmo material, ou seja, a geracao de uma deformacao mecanica coma aplicacao de um campo eletrico. O efeito e causado por uma polarizacao permanente que pode existir emcertos materiais e em certas condicoes. Maiores detalhes serao vistos em outro capıtulo do curso.
Figura 16. Efeito piezoeletrico direto (acima) e inverso (abaixo).
O efeito piezoeletrico direto e usado em sensores de forca, pressao, aceleracao; enquanto que oefeito piezoeletrico inverso e usado em atuadores. E possıvel conseguir posicionamento com precisao e
1-14

PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSP
PM
R-E
PUSPrespostas rapidas com dispositivos piezoeletricos. Entretanto, esse efeito so ocorre em certos materiais com
simetrias especiais e dentro de uma faixa de temperatura. O silıcio monocristalino, por exemplo, apresentapiezoresistividade em condicoes especiais, mas nao pode apresentar piezoeletricidade.
6.5. Cartucho de impressoras jato de tinta
Esse e o maior mercado de MEMS atualmente. Um cartucho de impressora tipo jato de tinta consiste,basicamente, de um ou mais reservatorios de tinta e de um sistema de varios orifıcios para saıda de gotasde tinta impelidas por microatuadores. Foram desenvolvidos entre as decadas de 1970 e 1980. Envolveas areas de microfluıdica e de microatuadores, bem como a quımica das tintas. Referencia para consulta:MEMS Handbook [Gad-el-Hak], capıtulo 30.
Os orifıcios de saıda das gotas de tinta sao denominados ‘nozzle’ em ingles. Traducao de nozzle: bocal,esguicho. Segundo o dicionario Houaiss, entre as varias possıveis definicoes de bocal: tubo curto ou anelque se prende na extremidade de um duto ou se adapta ao orifıcio de um reservatorio ou recipiente, com ofim de regularizar um jato lıquido, ou servir de conexao na passagem de um fluido. Esguicho: dispositivoque se coloca na extremidade de um tubo ou de uma mangueira para fazer a agua esguichar.
Existem, basicamente, dois tipos principais de atuadores para cartuchos jato de tinta: termico epiezoeletrico. A figura 17 mostra as respectivas configuracoes.
Figura 17. Sistemas de geracao de gotas de tinta para impressoras jato de tinta:piezoeletrico a esquerda e termico a direita.Fonte: referencia [Gad-el-Hak].
Referencias Bibliograficas
[Apostila] Notas de aula e artigos disponibilizados durante o curso.[Allen] J. J. Allen, Micro Electro Mechanical System Design, CRC/Taylor & Francis, 2005.[Brand] O. Brand & G. K. Fedder (Eds.), CMOS-MEMS, Wiley-VCH, 2005. Tem na biblioteca.[Gad-el-Hak] M. Gad-el-Hak (Ed.), The MEMS Handbook, CRC Press, 2002.[Tolfree] D. Tolfree & M. J. Jackson (Eds.), Commercializing Micro-Nanotechnology Products, CRC Press, 2008.[CRC] http://www.crcnetbase.com o site da CRC possui otimos livros disponıveis para a comunidade
USP em formato PDF.
1-15