
PROJETO DE MONITORAMENTO DE UMA VIGA - … · centro de uma sala conforme a planta e elevação ......
31
PROJETO DE MONITORAMENTO DE UMA VIGA PROF. CARLOS AURÉLIO NADAL TOPOGRAFIA INDUSTRIAL
Transcript of PROJETO DE MONITORAMENTO DE UMA VIGA - … · centro de uma sala conforme a planta e elevação ......
PROJETO DE MONITORAMENTO
DE UMA VIGA
PROF. CARLOS AURÉLIO NADAL
TOPOGRAFIA INDUSTRIAL
MONITORAMENTO DE UMA VIGA
Seja monitorar os deslocamentos de uma viga de seção
retangular (0,30mx0,50m) situada em um pórtico, no
centro de uma sala conforme a planta e elevação
fornecidos a seguir.
Será utilizada estação total a ser instalada no ponto T1,
para visar os alvos a1, a2..., a7 situados no centro da face
da viga.
A precisão nominal angular da estação utilizada é de 5”,
já sua precisão nominal linear é de 3mm±3ppm. A
precisão da medida da altura da estação total é igual a
±1mm.
Calcular qual a precisão das coordenadas dos alvos
projetando o levantamento.
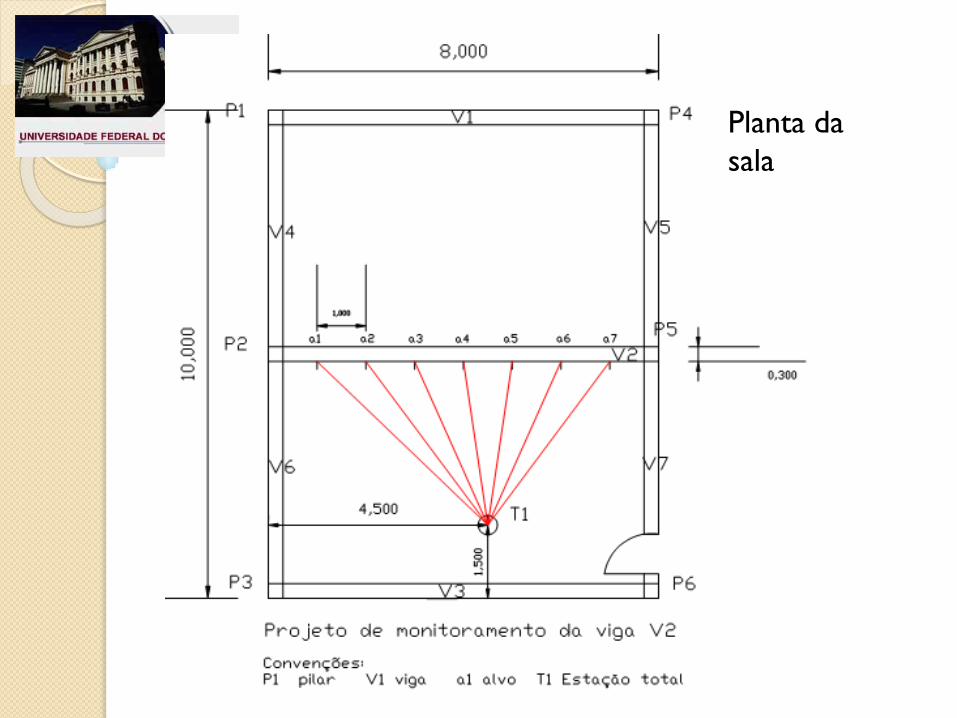
Planta da
sala
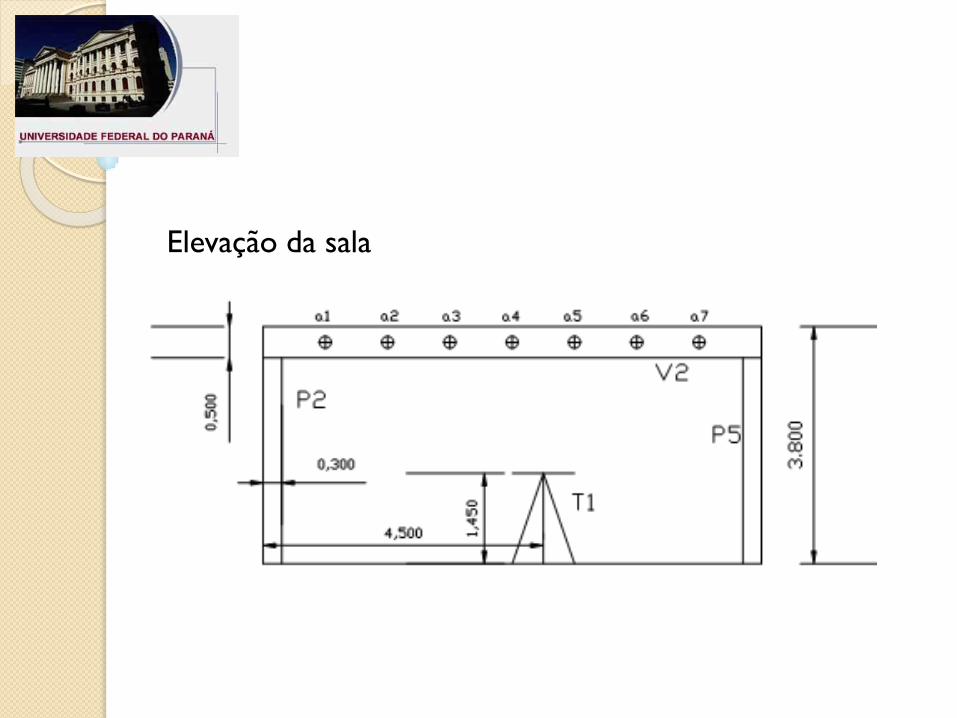
Elevação da sala
VISÃO TRIDIMENSIONAL DA SALA
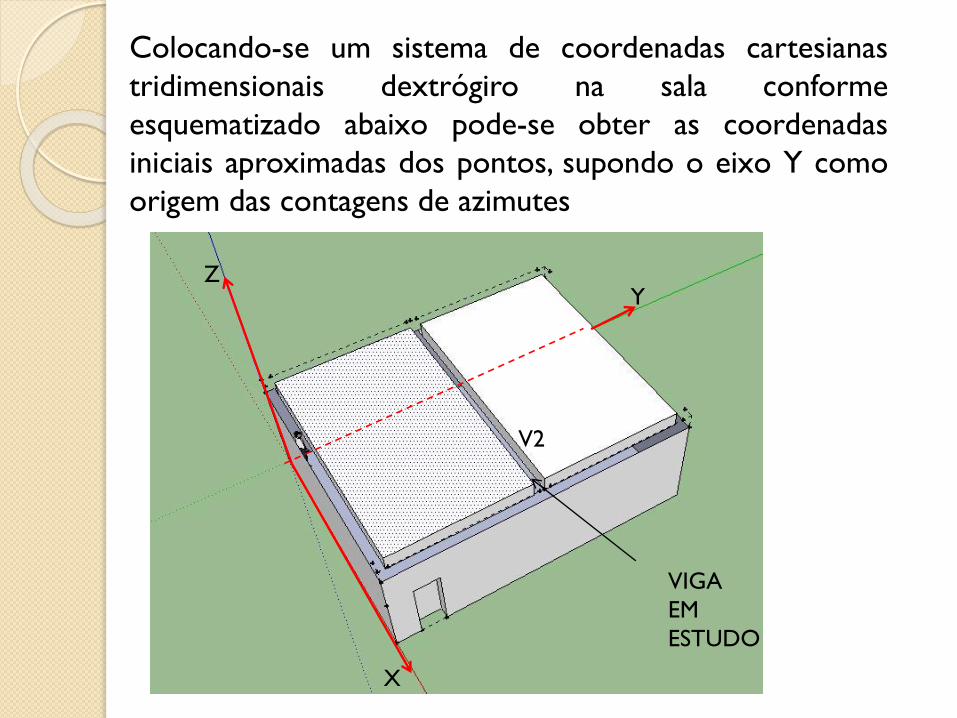
Colocando-se um sistema de coordenadas cartesianas
tridimensionais dextrógiro na sala conforme
esquematizado abaixo pode-se obter as coordenadas
iniciais aproximadas dos pontos, supondo o eixo Y como
origem das contagens de azimutes
ZY
X
V2
VIGA
EM
ESTUDO
T1
ZY
X
a1a2
a7a5
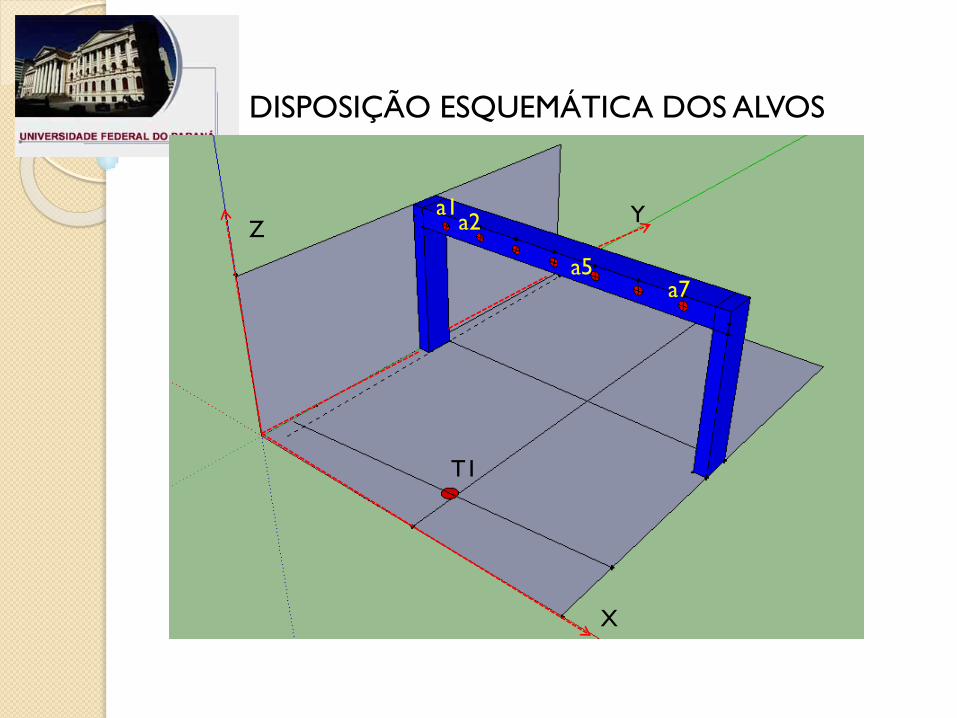
DISPOSIÇÃO ESQUEMÁTICA DOS ALVOS
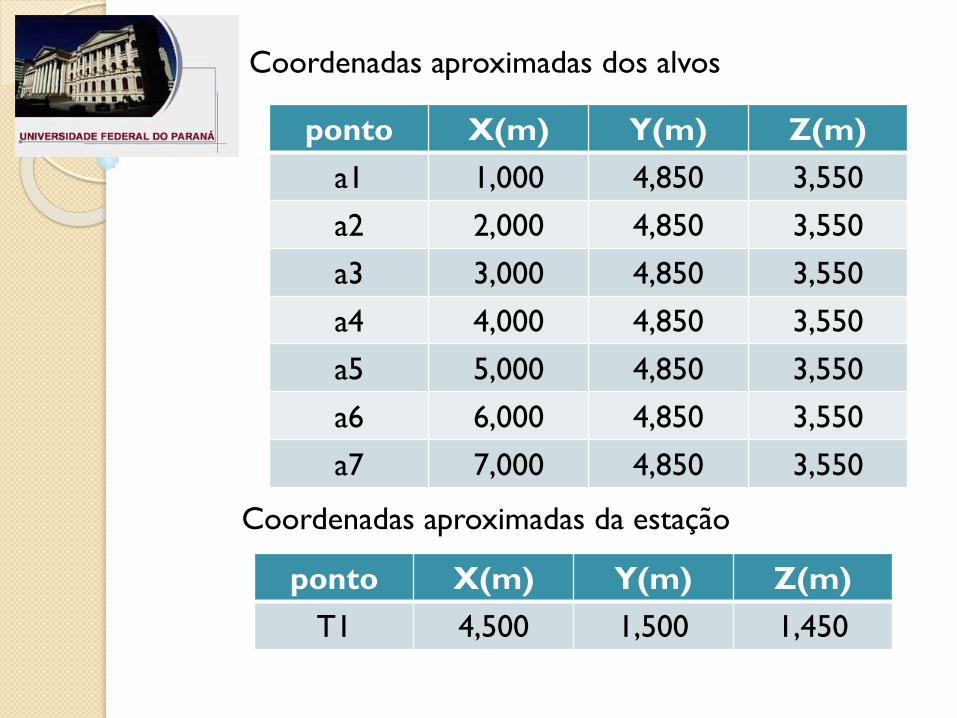
ponto X(m) Y(m) Z(m)
a1 1,000 4,850 3,550
a2 2,000 4,850 3,550
a3 3,000 4,850 3,550
a4 4,000 4,850 3,550
a5 5,000 4,850 3,550
a6 6,000 4,850 3,550
a7 7,000 4,850 3,550
Coordenadas aproximadas dos alvos
Coordenadas aproximadas da estação
ponto X(m) Y(m) Z(m)
T1 4,500 1,500 1,450
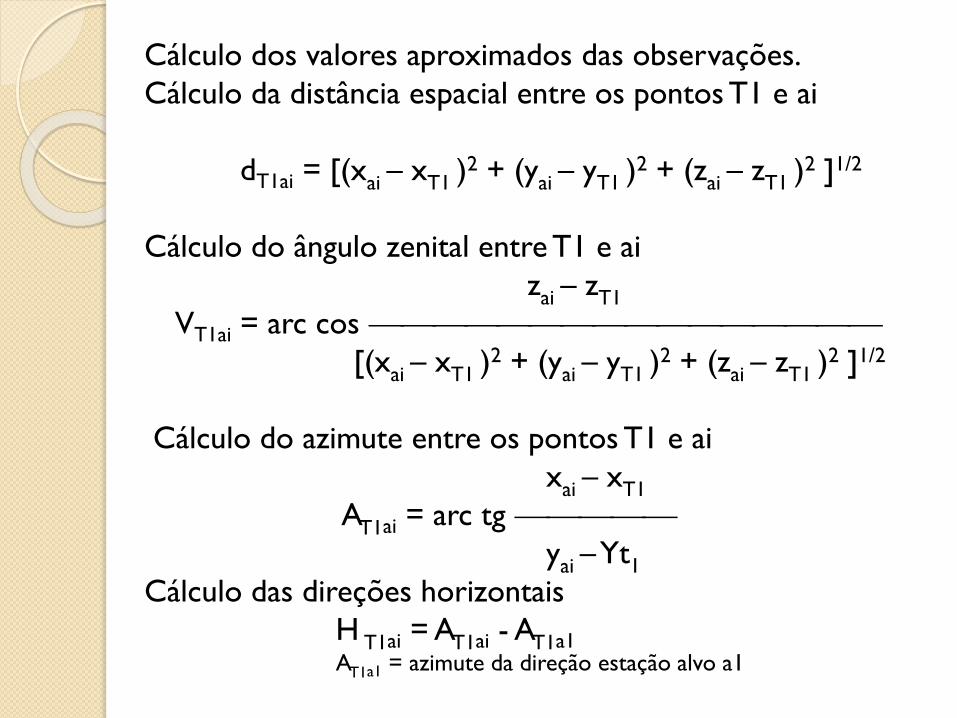
Cálculo dos valores aproximados das observações.
Cálculo da distância espacial entre os pontos T1 e ai
dT1ai = [(xai – xT1 )2 + (yai – yT1 )
2 + (zai – zT1 )2 ]1/2
Cálculo do ângulo zenital entre T1 e ai
zai – zT1
VT1ai = arc cos
[(xai – xT1 )2 + (yai – yT1 )
2 + (zai – zT1 )2 ]1/2
Cálculo do azimute entre os pontos T1 e ai
xai – xT1
AT1ai = arc tg
yai –Yt1
Cálculo das direções horizontais
H T1ai = AT1ai - AT1a1AT1a1 = azimute da direção estação alvo a1
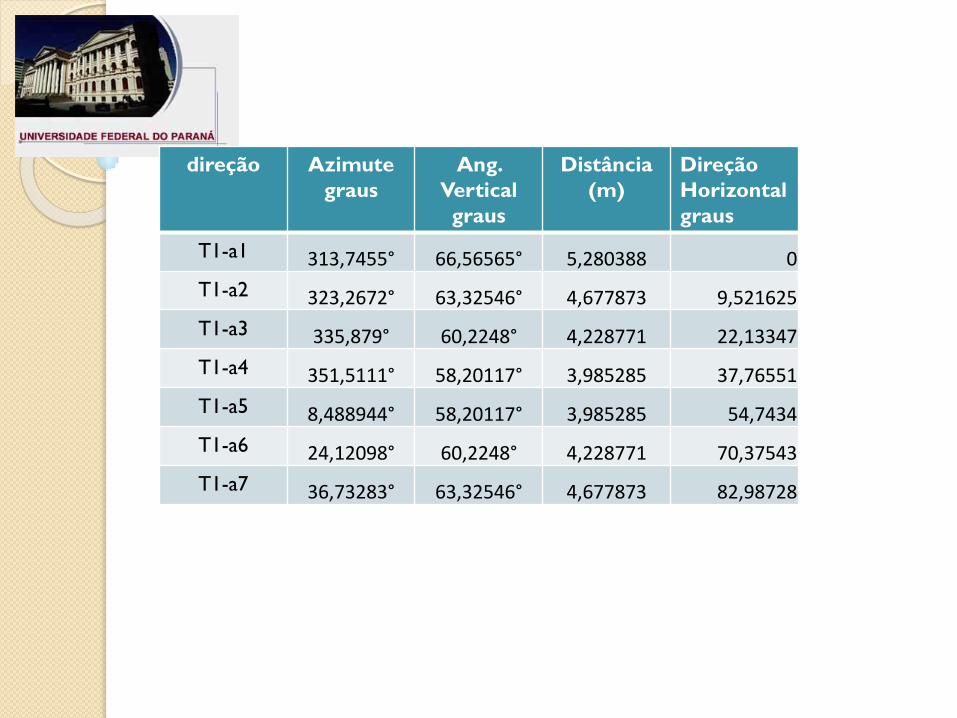
direção Azimute
graus
Ang.
Vertical
graus
Distância
(m)
Direção
Horizontal
graus
T1-a1 313,7455° 66,56565° 5,280388 0
T1-a2 323,2672° 63,32546° 4,677873 9,521625
T1-a3 335,879° 60,2248° 4,228771 22,13347
T1-a4 351,5111° 58,20117° 3,985285 37,76551
T1-a5 8,488944° 58,20117° 3,985285 54,7434
T1-a6 24,12098° 60,2248° 4,228771 70,37543
T1-a7 36,73283° 63,32546° 4,677873 82,98728

Para estudo de propagação de variâncias num
projeto de levantamentos, adota-se o preconizado
por Chrzanowski 1977 “Design and error analysis
of surveying projects” a tolerância (erro máximo
admissível) igual a 3, equivalente a probabilidade
normal de 99,9%.
Tolerância angular = 15”
Tolerância linear = 9mm±9ppm
Tolerância na altura da estação =3mm

Considerando um sistema de coordenadas
com origem no ponto cardã (O)
y
x
z
ai
p’
xp
yp
zp
Aop
o
v dop
p”
ângulo vertical
ângulo horizontal
(azimute)
distância espacial
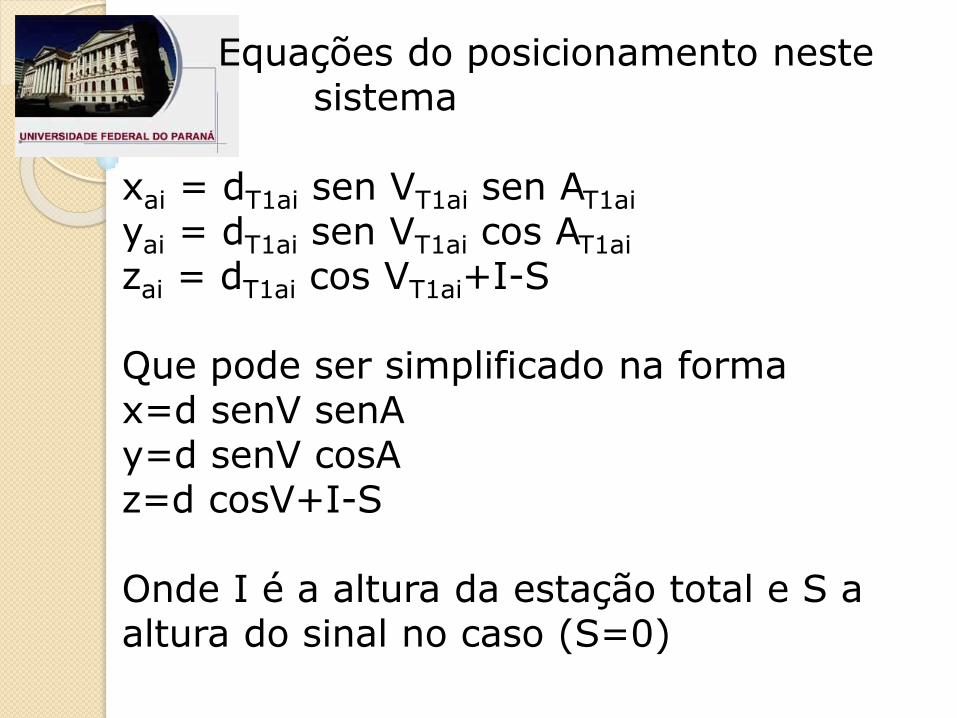
Equações do posicionamento neste sistema
xai = dT1ai sen VT1ai sen AT1ai
yai = dT1ai sen VT1ai cos AT1ai
zai = dT1ai cos VT1ai+I-S
Que pode ser simplificado na formax=d senV senAy=d senV cosAz=d cosV+I-S
Onde I é a altura da estação total e S a altura do sinal no caso (S=0)

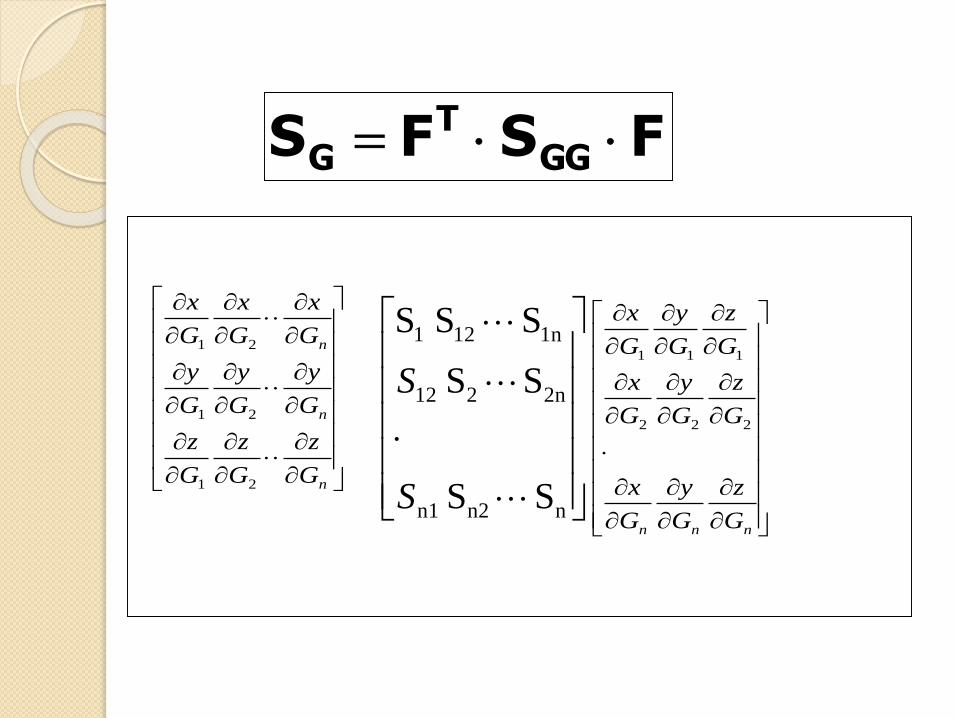
A propagação de variância da grandeza SGGna grandeza SG é dada matricialmente por:
FSFS GG
T
G
Onde F é a matriz das derivadas parciais de dafunção original e SGG é a matriz variânciacovariância das observaveis.
nn2n1
2n212
1n121
S S
S S
S S S
S
SSGG
nnn G
z
G
y
G
x
G
z
G
y
G
x
G
z
G
y
G
x
F 222
111

Derivadas parciais das funções
senVsenAd
x
VsenAdV
xcos
AdsenVA
xcos
0
I
x
0
S
x
AsenVd
ycos
AVdV
ycoscos
dsenVsenAA
y
0
I
y
0
S
y
Vd
zcos
dsenVV
z
0
A
z
1
I
z
1
S
z

Matriz variância-covariância das observações
σd=a mm b ppm
σ²d=(σd/1000)² m²
σV=a“
σ²V=[(a/3600)*/180]² rad²
σA=a“σ²A=[(a/3600)*/180]² rad²
σI=a mm
σ²I=(a/1000)² m²
σS=a mm
σ²S=(a/1000)² m²
FSFS GGT
G
n
n
n
G
z
G
z
G
z
G
y
G
y
G
y
G
x
G
x
G
x
21
21
21
nn2n1
2n212
1n121
S S
S S
S S S
S
S
nnn G
z
G
y
G
x
G
z
G
y
G
x
G
z
G
y
G
x
222
111
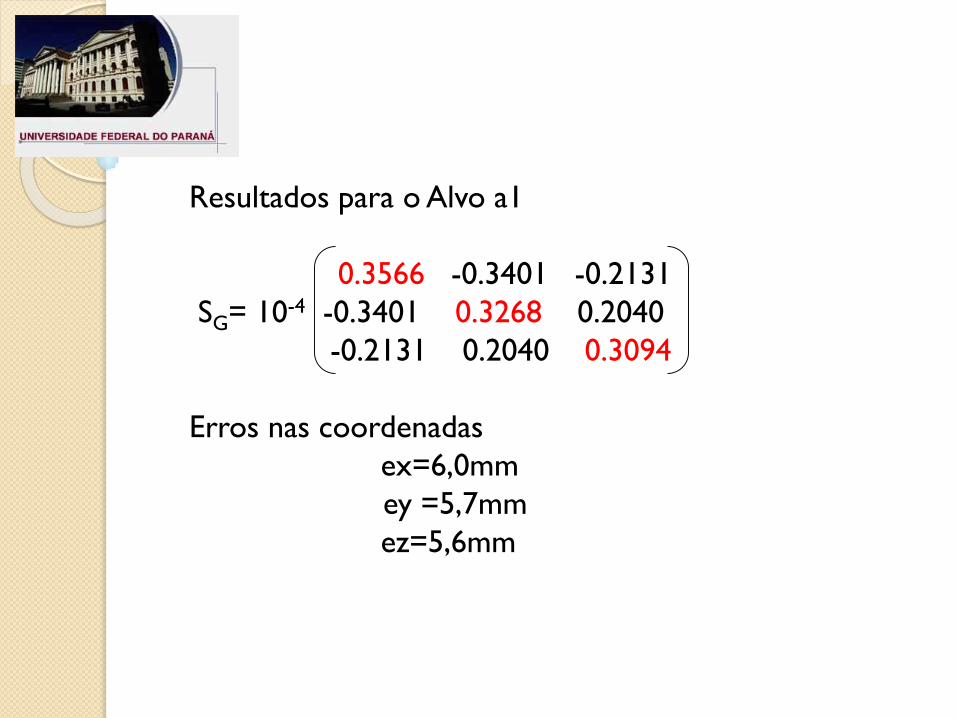
Resultados para o Alvo a1
0.3566 -0.3401 -0.2131
SG= 10-4 -0.3401 0.3268 0.2040
-0.2131 0.2040 0.3094
Erros nas coordenadas
ex=6,0mm
ey =5,7mm
ez=5,6mm
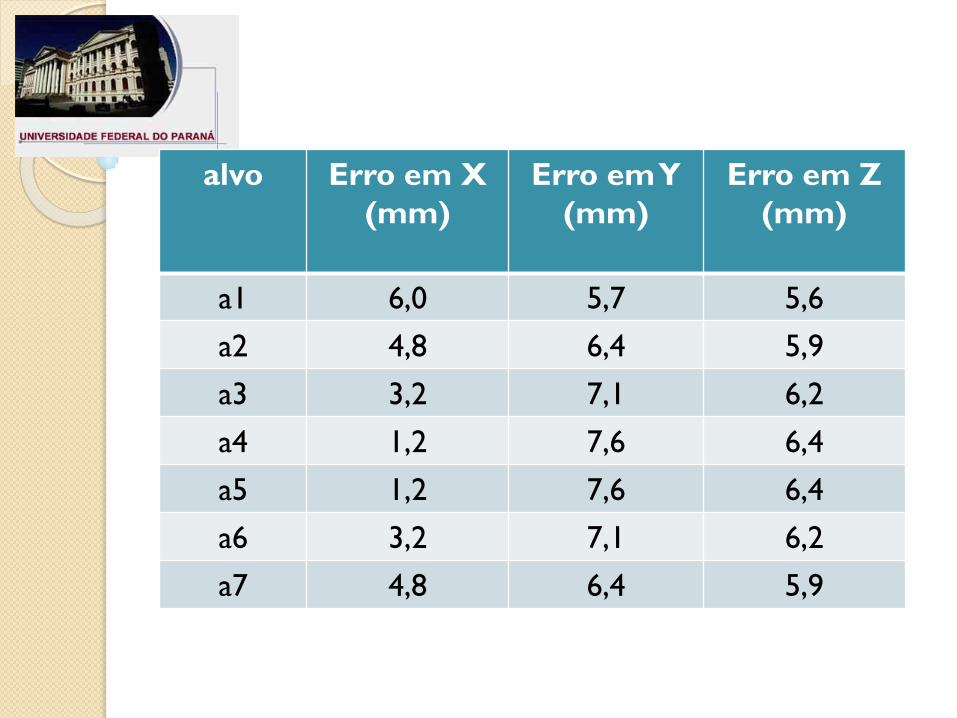
alvo Erro em X
(mm)
Erro em Y
(mm)
Erro em Z
(mm)
a1 6,0 5,7 5,6
a2 4,8 6,4 5,9
a3 3,2 7,1 6,2
a4 1,2 7,6 6,4
a5 1,2 7,6 6,4
a6 3,2 7,1 6,2
a7 4,8 6,4 5,9

Conclusão:
Com um instrumento desta qualidade
somente será possível detectar
deslocamentos superiores a 05mm em média.

MUDANÇA DE SISTEMA DE
COORDENADAS
Na maioria dos trabalhos de monitoramento de
obras o sistema de coordenadas utilizado para
observar os deslocamentos não deve estar
situado na estação total, mas na própria
estrutura.
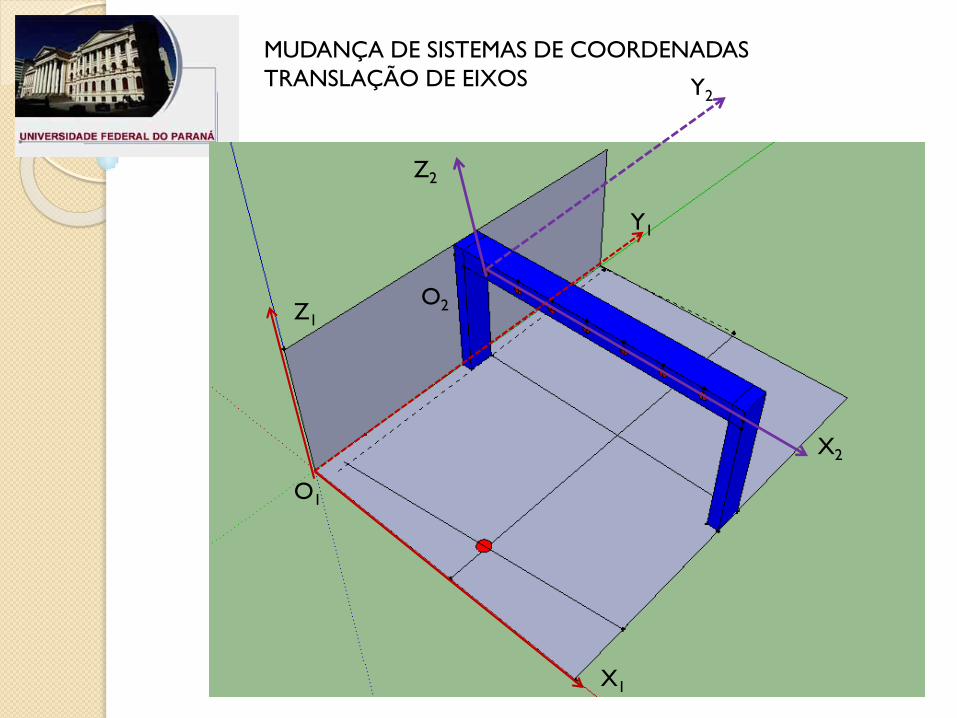
MUDANÇA DE SISTEMAS DE COORDENADAS
TRANSLAÇÃO DE EIXOS
Z1
Y1
X1
Z2
Y2
X2
O1
O2

MODELO DE TRANSLAÇÃO DE EIXOS
DO SISTEMA 01X1Y1Z1 PARA 02X2Y2Z2
TX=-Xa1 (coordenadas X1 do alvo a1)
TY= -Ya1 (coordenadas Y1 do alvo a1)
Tz= -Za1 (coordenadas X1 do alvo a1)
COORDENADAS DOS OUTROS ALVOS
X2i= X1i+ TX o indice i diz respeito ao alvo ai
Y2i = Y1i+ TY
Z2i = Z1i+ TZ
Obs.: os sistemas 01X1Y1Z1 e 02X2Y2Z2 tem seus eixos
paralelos
T1
Z1Y1
X1
a1a2
a7a5
Z3
X3
Y3
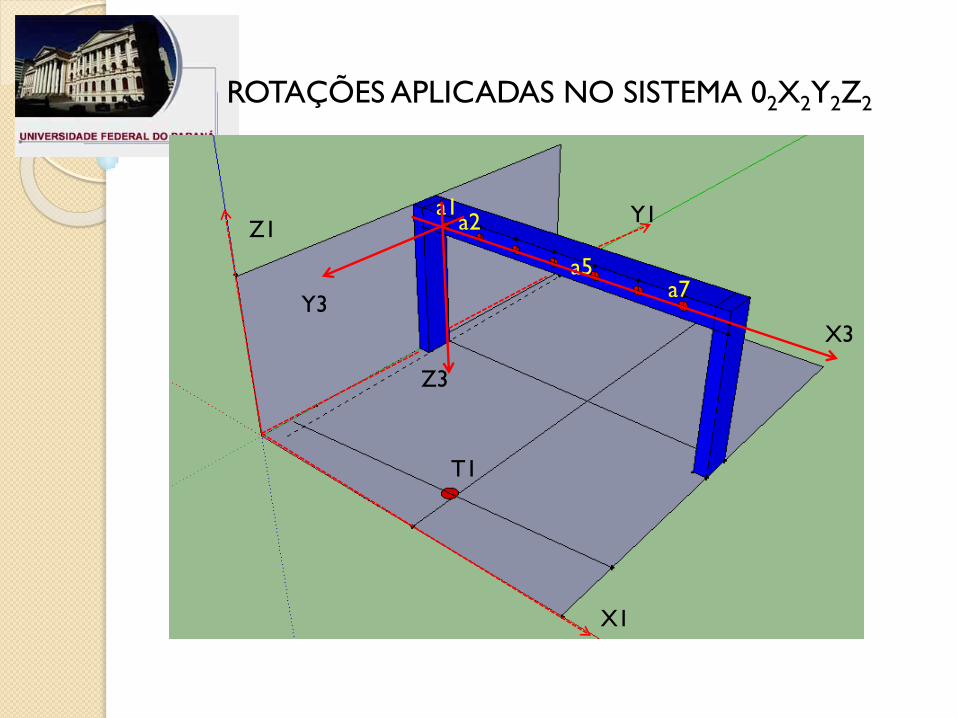
ROTAÇÕES APLICADAS NO SISTEMA 02X2Y2Z2

MODELO DE ROTAÇÃO DE EIXOS DO
SISTEMA 02X2Y2Z2 PARA 03X3Y3Z3
a) Rotação em torno de Z2 para concidir o eixo X3 com
a direção a1-a7 (alvo a1 para alvo a7)
Calculo do azimute da direção 1-7
x2ai – x2a7
Aa1a7 = arc tg
y2a1i – y2a7
Calculo do ângulo de rotação
= 90º - Aa1a7
Matriz de rotação em torno do eixo Z2
cos sen 0
R3 () = -sen cos 0
0 0 1
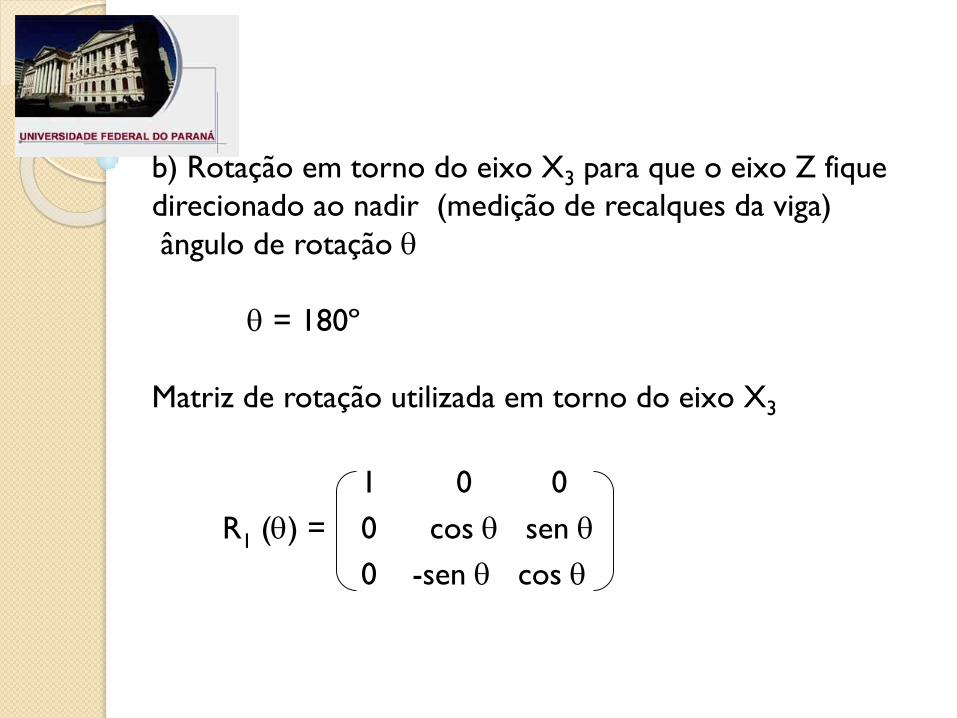
b) Rotação em torno do eixo X3 para que o eixo Z fique
direcionado ao nadir (medição de recalques da viga)
ângulo de rotação
= 180º
Matriz de rotação utilizada em torno do eixo X3
1 0 0
R1 () = 0 cos sen
0 -sen cos
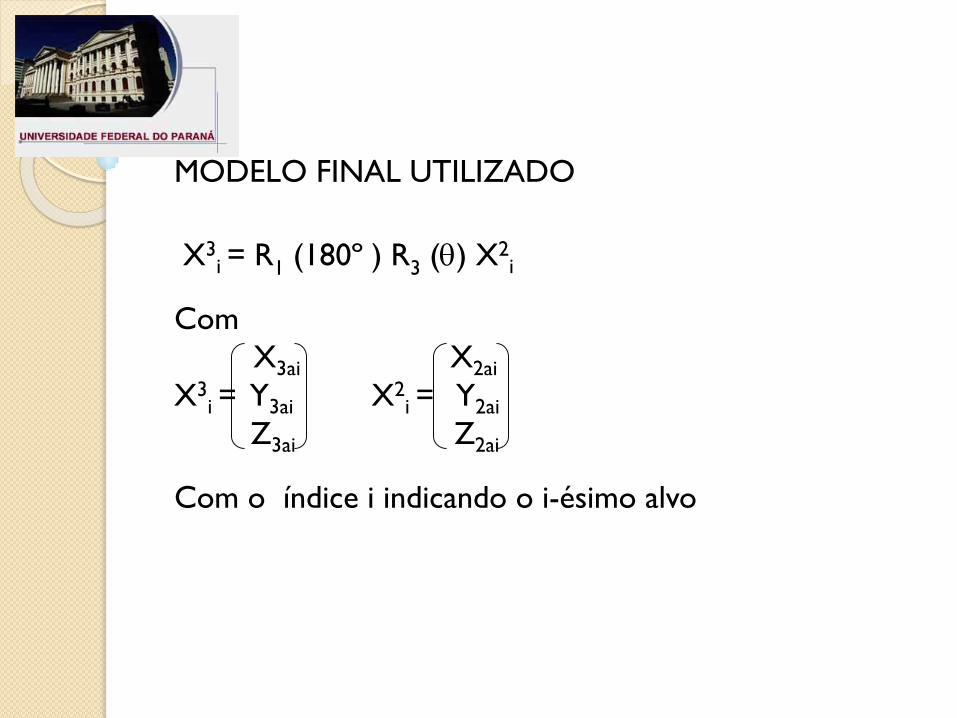
MODELO FINAL UTILIZADO
X3i = R1 (180º ) R3 () X2
i
Com
X3ai X2ai
X3i = Y3ai X2
i = Y2ai
Z3ai Z2ai
Com o índice i indicando o i-ésimo alvo
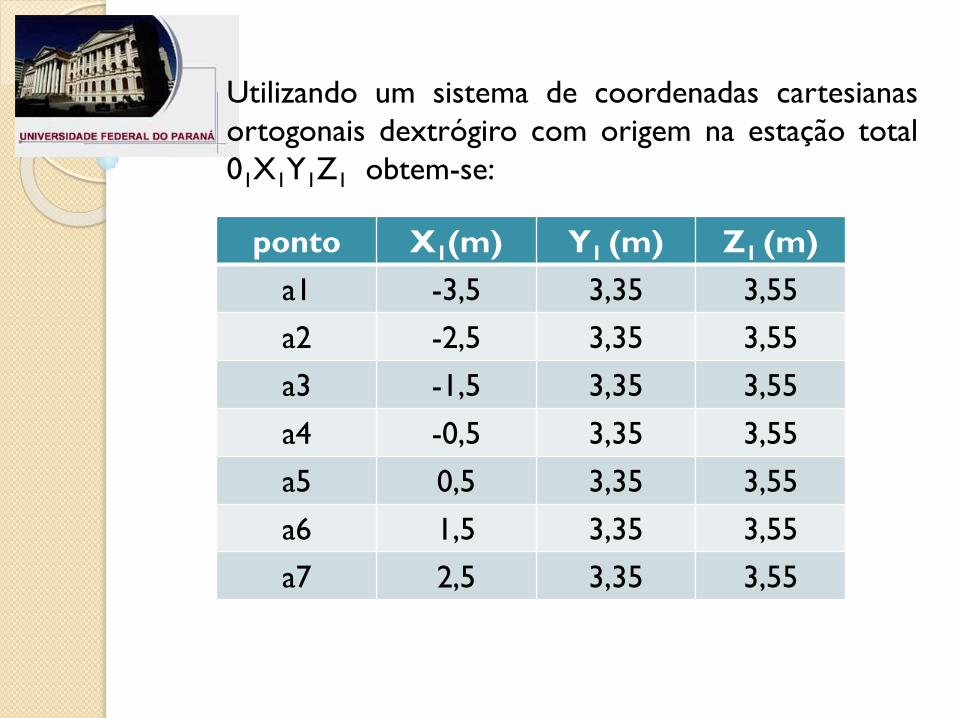
ponto X1(m) Y1 (m) Z1 (m)
a1 -3,5 3,35 3,55
a2 -2,5 3,35 3,55
a3 -1,5 3,35 3,55
a4 -0,5 3,35 3,55
a5 0,5 3,35 3,55
a6 1,5 3,35 3,55
a7 2,5 3,35 3,55
Utilizando um sistema de coordenadas cartesianas
ortogonais dextrógiro com origem na estação total
01X1Y1Z1 obtem-se:

Transferindo-se a origem do novo sistema para o alvo a1
Mantendo-se a orientação paralela ao sistema da estação
Parametros de translação
Dx=+3,5m Dy= -3,35m Dz=-3,55m

ponto X2(m) Y2 (m) Z12(m)
a1 0 0 0
a2 1 0,089 0
a3 2 0,133 0
a4 3 0,133 0
a5 4 0,133 0
a6 5 0,133 0
a7 6 0,089 0
Sistema dextrógiro origem no alvo a1 02X2Y2Z2
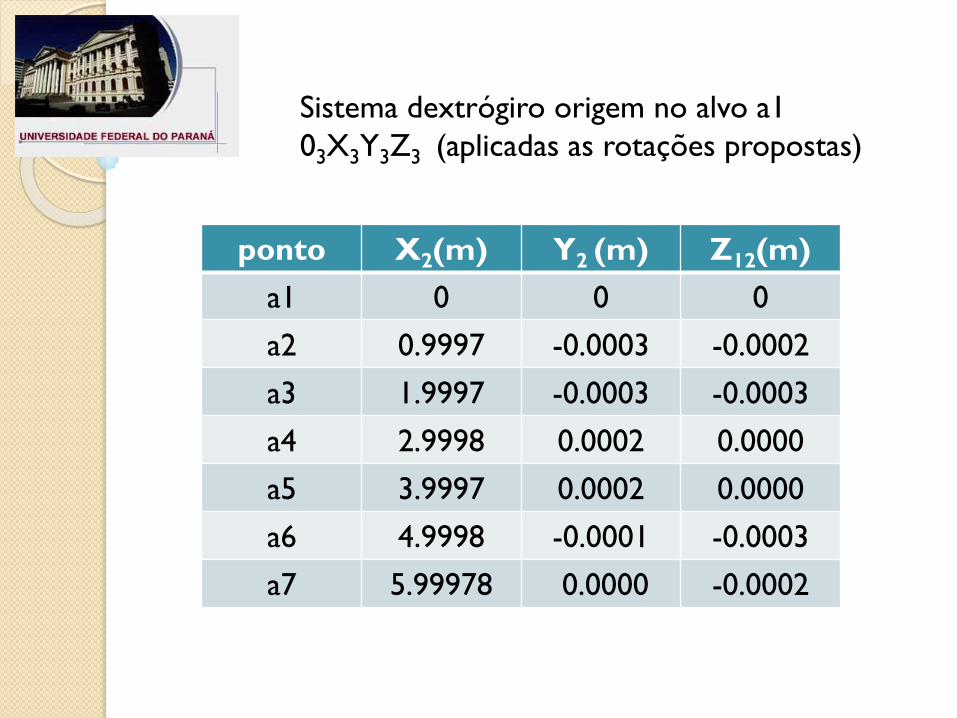
ponto X2(m) Y2 (m) Z12(m)
a1 0 0 0
a2 0.9997 -0.0003 -0.0002
a3 1.9997 -0.0003 -0.0003
a4 2.9998 0.0002 0.0000
a5 3.9997 0.0002 0.0000
a6 4.9998 -0.0001 -0.0003
a7 5.99978 0.0000 -0.0002
Sistema dextrógiro origem no alvo a1
03X3Y3Z3 (aplicadas as rotações propostas)














![D ^WZK& Ð D Z/ 1>/ /& E' Z DWK yW Z/ E / W &W/ í r · ^ ] D µ v ] ] o µ } D ^WZK& Ð D Z/ 1>/ /& E' Z _ >hEK ~ z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z z](https://static.fdocumentos.com/doc/165x107/60424deb8ee6026fbb00a908/d-wzk-d-z-1-e-z-dwk-yw-z-e-w-w-r-d-v-.jpg)



