Projeto e desenvolvimento do sistema propulsor de um ... · Projeto e desenvolvimento do sistema...
29
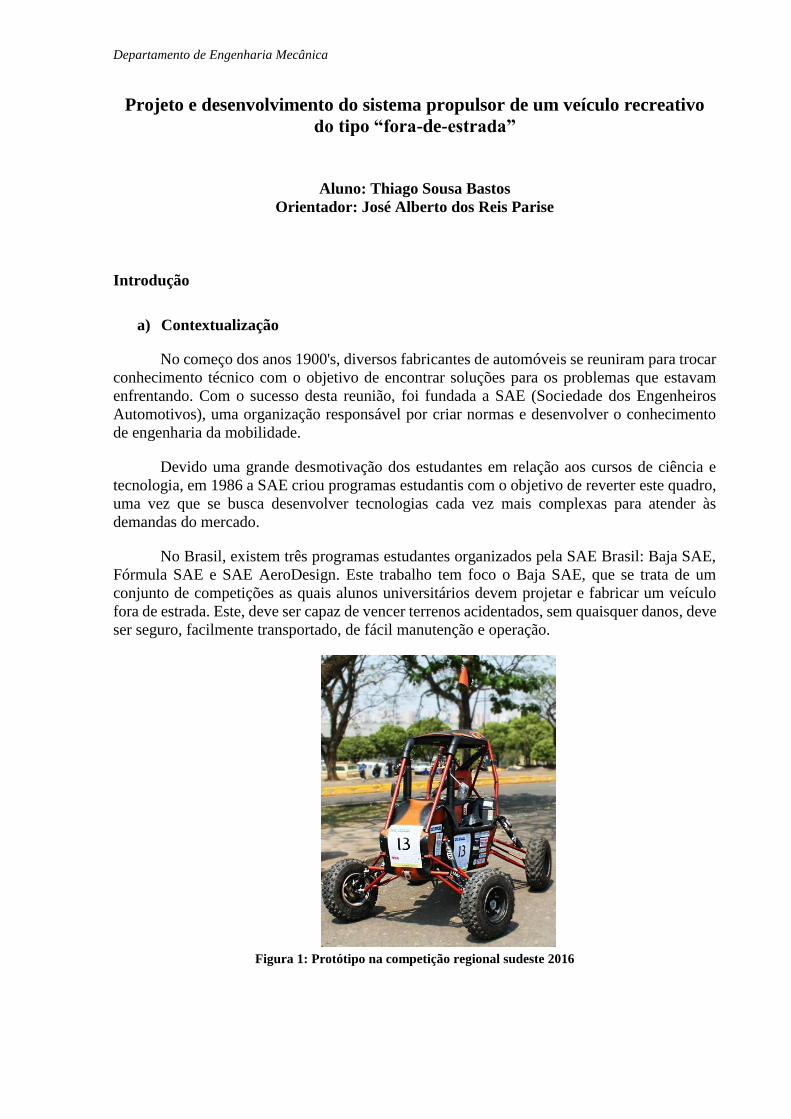
Departamento de Engenharia Mecânica Projeto e desenvolvimento do sistema propulsor de um veículo recreativo do tipo “fora-de-estrada” Aluno: Thiago Sousa Bastos Orientador: José Alberto dos Reis Parise Introdução a) Contextualização No começo dos anos 1900's, diversos fabricantes de automóveis se reuniram para trocar conhecimento técnico com o objetivo de encontrar soluções para os problemas que estavam enfrentando. Com o sucesso desta reunião, foi fundada a SAE (Sociedade dos Engenheiros Automotivos), uma organização responsável por criar normas e desenvolver o conhecimento de engenharia da mobilidade. Devido uma grande desmotivação dos estudantes em relação aos cursos de ciência e tecnologia, em 1986 a SAE criou programas estudantis com o objetivo de reverter este quadro, uma vez que se busca desenvolver tecnologias cada vez mais complexas para atender às demandas do mercado. No Brasil, existem três programas estudantes organizados pela SAE Brasil: Baja SAE, Fórmula SAE e SAE AeroDesign. Este trabalho tem foco o Baja SAE, que se trata de um conjunto de competições as quais alunos universitários devem projetar e fabricar um veículo fora de estrada. Este, deve ser capaz de vencer terrenos acidentados, sem quaisquer danos, deve ser seguro, facilmente transportado, de fácil manutenção e operação. Figura 1: Protótipo na competição regional sudeste 2016
Transcript of Projeto e desenvolvimento do sistema propulsor de um ... · Projeto e desenvolvimento do sistema...
Departamento de Engenharia Mecânica
Projeto e desenvolvimento do sistema propulsor de um veículo recreativo
do tipo “fora-de-estrada”
Aluno: Thiago Sousa Bastos
Orientador: José Alberto dos Reis Parise
Introdução
a) Contextualização
No começo dos anos 1900's, diversos fabricantes de automóveis se reuniram para trocar
conhecimento técnico com o objetivo de encontrar soluções para os problemas que estavam
enfrentando. Com o sucesso desta reunião, foi fundada a SAE (Sociedade dos Engenheiros
Automotivos), uma organização responsável por criar normas e desenvolver o conhecimento
de engenharia da mobilidade.
Devido uma grande desmotivação dos estudantes em relação aos cursos de ciência e
tecnologia, em 1986 a SAE criou programas estudantis com o objetivo de reverter este quadro,
uma vez que se busca desenvolver tecnologias cada vez mais complexas para atender às
demandas do mercado.
No Brasil, existem três programas estudantes organizados pela SAE Brasil: Baja SAE,
Fórmula SAE e SAE AeroDesign. Este trabalho tem foco o Baja SAE, que se trata de um
conjunto de competições as quais alunos universitários devem projetar e fabricar um veículo
fora de estrada. Este, deve ser capaz de vencer terrenos acidentados, sem quaisquer danos, deve
ser seguro, facilmente transportado, de fácil manutenção e operação.
Figura 1: Protótipo na competição regional sudeste 2016
Departamento de Engenharia Mecânica
Neste contexto, o presente trabalho busca selecionar a altura do ponto de reboque para
que o veículo (figura 2) da equipe Reptiles PUC-Rio obtenha um resultado satisfatório na prova
de tração da 23º Competição Nacional.
b) Objetivos
Este trabalho tem como objetivo estudar o comportamento dinâmico do veículo durante a
prova, com foco nos seguintes aspectos:
Observar se ocorre capotamento do veículo.
Verificar se o pneu tende a deslizar no solo.
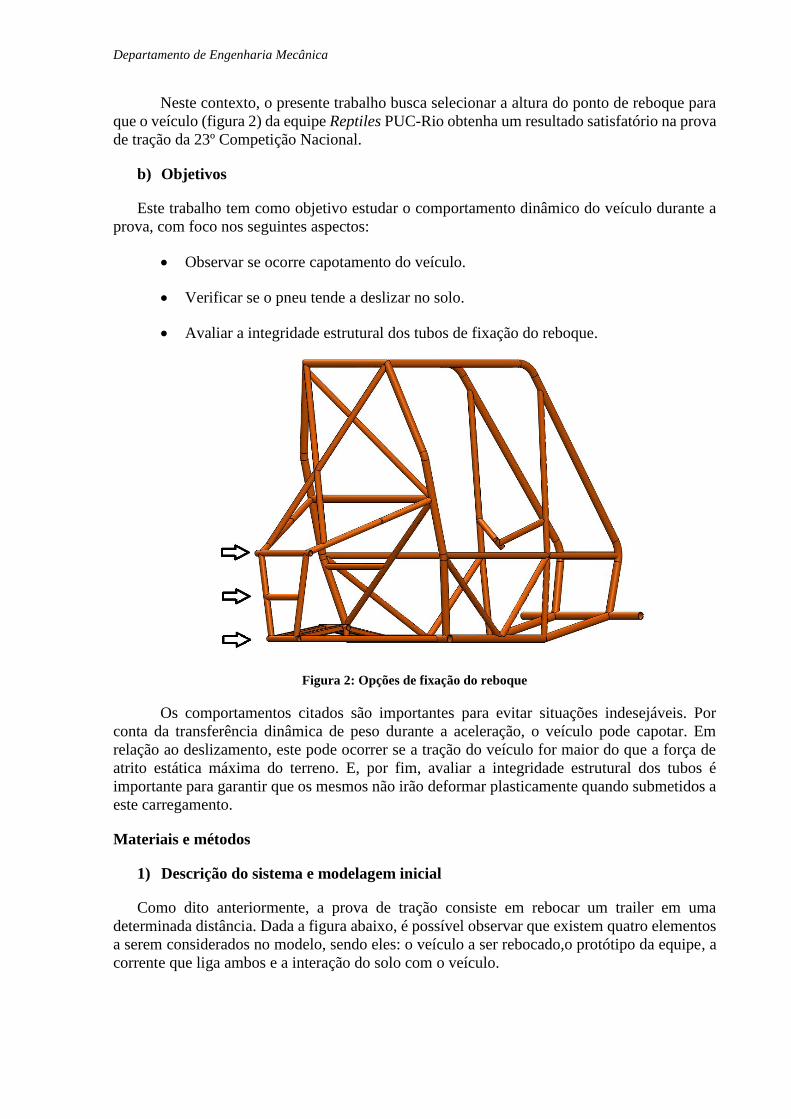
Avaliar a integridade estrutural dos tubos de fixação do reboque.
Figura 2: Opções de fixação do reboque
Os comportamentos citados são importantes para evitar situações indesejáveis. Por
conta da transferência dinâmica de peso durante a aceleração, o veículo pode capotar. Em
relação ao deslizamento, este pode ocorrer se a tração do veículo for maior do que a força de
atrito estática máxima do terreno. E, por fim, avaliar a integridade estrutural dos tubos é
importante para garantir que os mesmos não irão deformar plasticamente quando submetidos a
este carregamento.
Materiais e métodos
1) Descrição do sistema e modelagem inicial
Como dito anteriormente, a prova de tração consiste em rebocar um trailer em uma
determinada distância. Dada a figura abaixo, é possível observar que existem quatro elementos
a serem considerados no modelo, sendo eles: o veículo a ser rebocado,o protótipo da equipe, a
corrente que liga ambos e a interação do solo com o veículo.

Departamento de Engenharia Mecânica
Figura 3: Prova de tração da competição regional sul 2013
Para toda modelagem matemática deste trabalho, considere o sistema de coordenadas
abaixo:
Figura 4: Sistema de coordenadas da norma ISO
a) Modelagem do veículo a ser rebocado
Uma vez que os casos mais críticos de trailers são veículos com tração nas quatro rodas,
optou-se por um veículo do modelo Pajero Full 3200, visto que além do mesmo ter massa e
dimensões parecidas com o Troller T4, havia disponibilidade deste para validação do modelo.
Figura 5: Veículo utilizado como trailer nas simulações
Departamento de Engenharia Mecânica
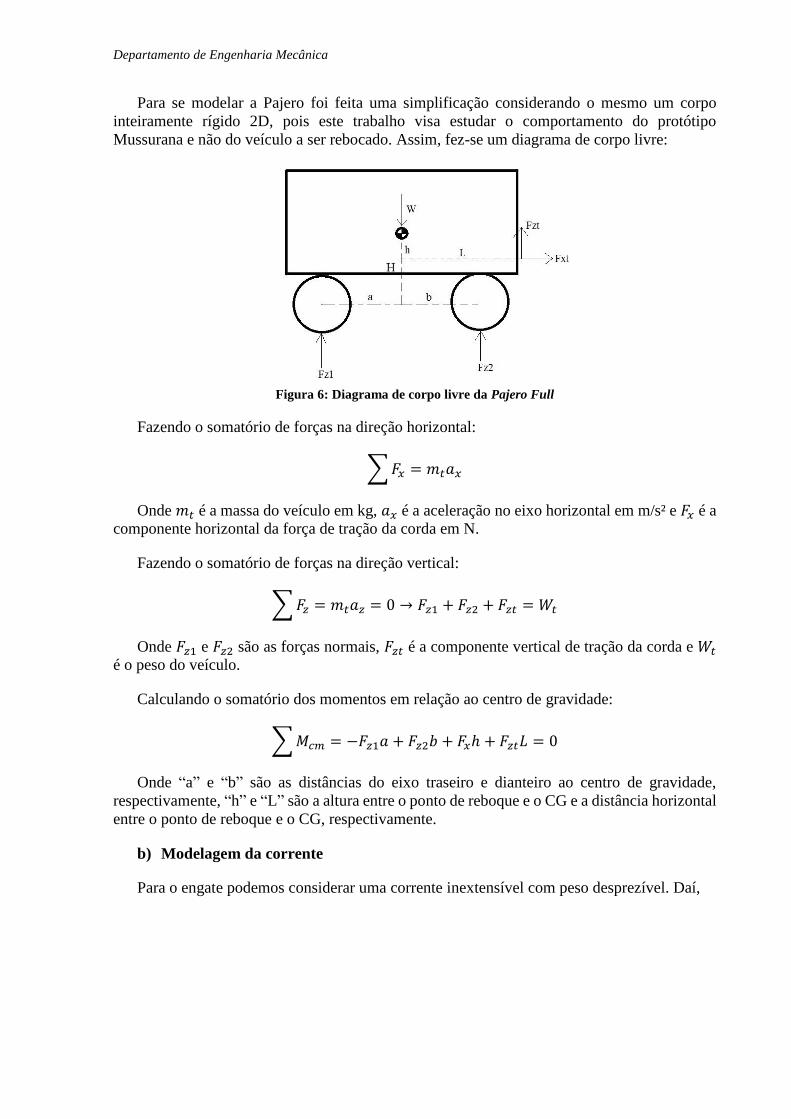
Para se modelar a Pajero foi feita uma simplificação considerando o mesmo um corpo
inteiramente rígido 2D, pois este trabalho visa estudar o comportamento do protótipo
Mussurana e não do veículo a ser rebocado. Assim, fez-se um diagrama de corpo livre:
Figura 6: Diagrama de corpo livre da Pajero Full
Fazendo o somatório de forças na direção horizontal:
∑𝐹𝑥 = 𝑚𝑡𝑎𝑥
Onde 𝑚𝑡 é a massa do veículo em kg, 𝑎𝑥 é a aceleração no eixo horizontal em m/s² e 𝐹𝑥 é a
componente horizontal da força de tração da corda em N.
Fazendo o somatório de forças na direção vertical:
∑𝐹𝑧 = 𝑚𝑡𝑎𝑧 = 0 → 𝐹𝑧1 + 𝐹𝑧2 + 𝐹𝑧𝑡 = 𝑊𝑡
Onde 𝐹𝑧1 e 𝐹𝑧2 são as forças normais, 𝐹𝑧𝑡 é a componente vertical de tração da corda e 𝑊𝑡
é o peso do veículo.
Calculando o somatório dos momentos em relação ao centro de gravidade:
∑𝑀𝑐𝑚 = −𝐹𝑧1𝑎 + 𝐹𝑧2𝑏 + 𝐹𝑥ℎ + 𝐹𝑧𝑡𝐿 = 0
Onde “a” e “b” são as distâncias do eixo traseiro e dianteiro ao centro de gravidade,
respectivamente, “h” e “L” são a altura entre o ponto de reboque e o CG e a distância horizontal
entre o ponto de reboque e o CG, respectivamente.
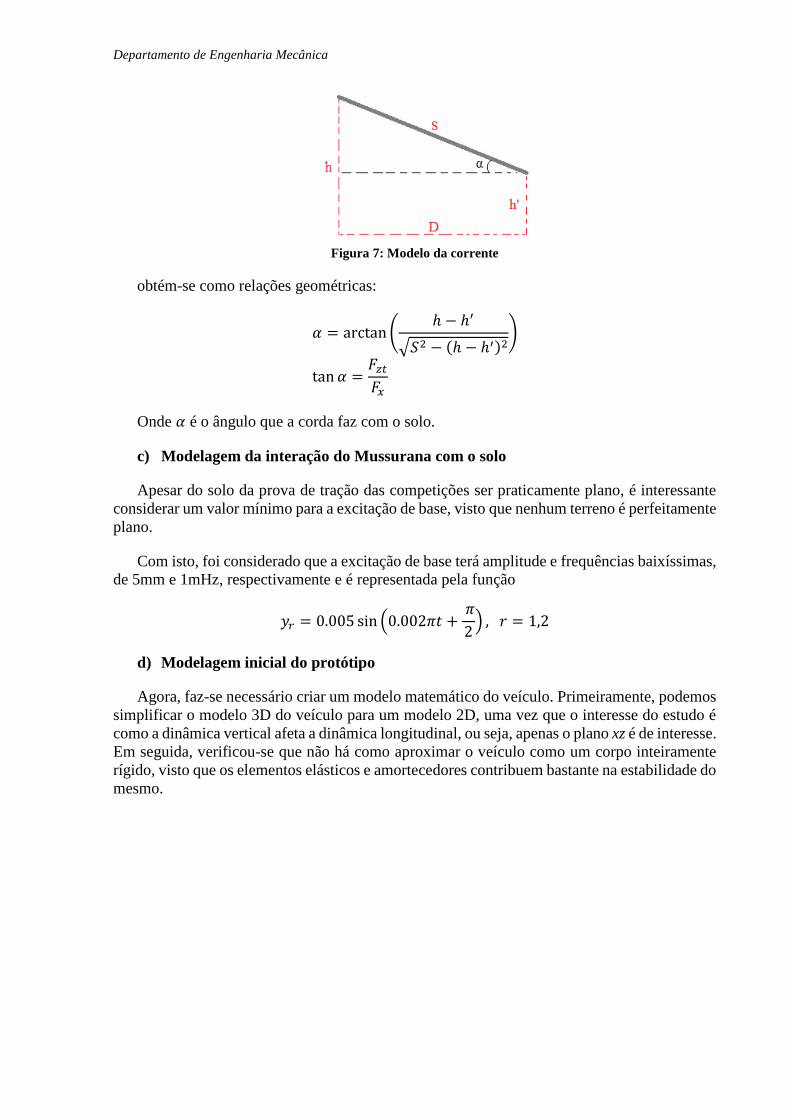
b) Modelagem da corrente
Para o engate podemos considerar uma corrente inextensível com peso desprezível. Daí,
Departamento de Engenharia Mecânica
Figura 7: Modelo da corrente
obtém-se como relações geométricas:
𝛼 = arctan (ℎ − ℎ′
√𝑆2 − (ℎ − ℎ′)2)
tan 𝛼 =𝐹𝑧𝑡
𝐹𝑥
Onde 𝛼 é o ângulo que a corda faz com o solo.
c) Modelagem da interação do Mussurana com o solo
Apesar do solo da prova de tração das competições ser praticamente plano, é interessante
considerar um valor mínimo para a excitação de base, visto que nenhum terreno é perfeitamente
plano.
Com isto, foi considerado que a excitação de base terá amplitude e frequências baixíssimas,
de 5mm e 1mHz, respectivamente e é representada pela função
𝑦𝑟 = 0.005 sin (0.002𝜋𝑡 + 𝜋
2) , 𝑟 = 1,2
d) Modelagem inicial do protótipo
Agora, faz-se necessário criar um modelo matemático do veículo. Primeiramente, podemos
simplificar o modelo 3D do veículo para um modelo 2D, uma vez que o interesse do estudo é
como a dinâmica vertical afeta a dinâmica longitudinal, ou seja, apenas o plano xz é de interesse.
Em seguida, verificou-se que não há como aproximar o veículo como um corpo inteiramente
rígido, visto que os elementos elásticos e amortecedores contribuem bastante na estabilidade do
mesmo.
Departamento de Engenharia Mecânica
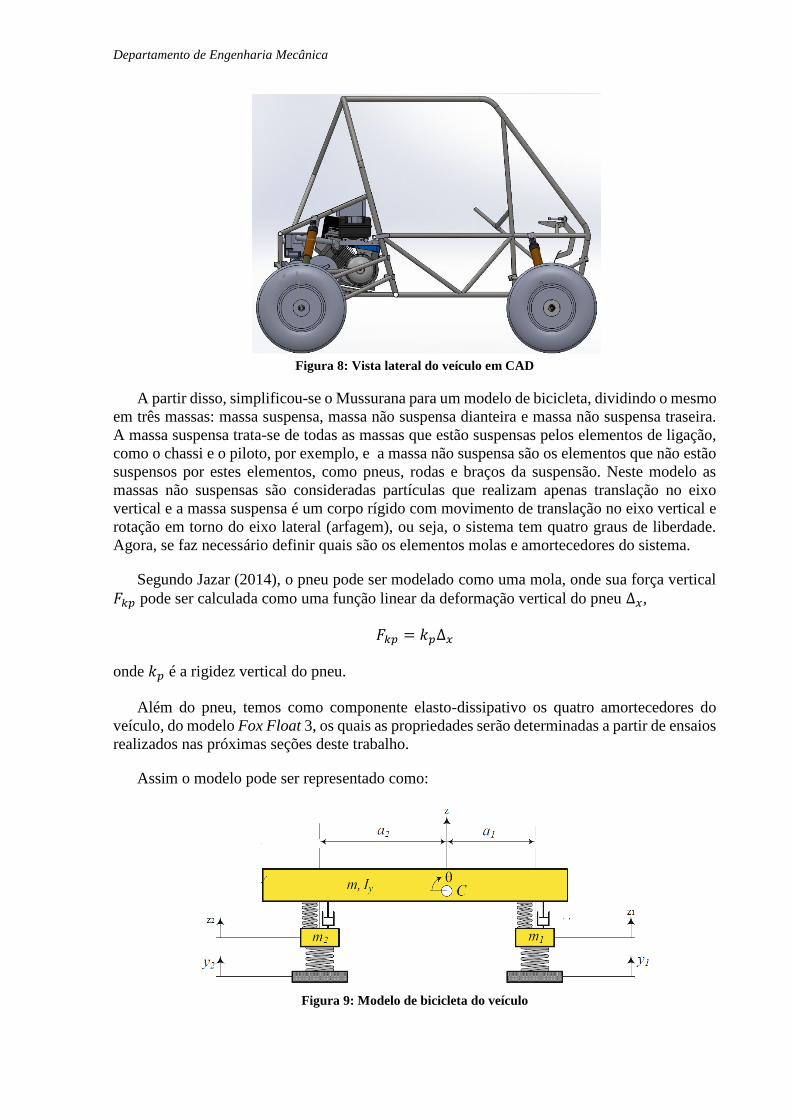
Figura 8: Vista lateral do veículo em CAD
A partir disso, simplificou-se o Mussurana para um modelo de bicicleta, dividindo o mesmo
em três massas: massa suspensa, massa não suspensa dianteira e massa não suspensa traseira.
A massa suspensa trata-se de todas as massas que estão suspensas pelos elementos de ligação,
como o chassi e o piloto, por exemplo, e a massa não suspensa são os elementos que não estão
suspensos por estes elementos, como pneus, rodas e braços da suspensão. Neste modelo as
massas não suspensas são consideradas partículas que realizam apenas translação no eixo
vertical e a massa suspensa é um corpo rígido com movimento de translação no eixo vertical e
rotação em torno do eixo lateral (arfagem), ou seja, o sistema tem quatro graus de liberdade.
Agora, se faz necessário definir quais são os elementos molas e amortecedores do sistema.
Segundo Jazar (2014), o pneu pode ser modelado como uma mola, onde sua força vertical
𝐹𝑘𝑝 pode ser calculada como uma função linear da deformação vertical do pneu Δ𝑥,
𝐹𝑘𝑝 = 𝑘𝑝Δ𝑥
onde 𝑘𝑝 é a rigidez vertical do pneu.
Além do pneu, temos como componente elasto-dissipativo os quatro amortecedores do
veículo, do modelo Fox Float 3, os quais as propriedades serão determinadas a partir de ensaios
realizados nas próximas seções deste trabalho.
Assim o modelo pode ser representado como:
Figura 9: Modelo de bicicleta do veículo
Departamento de Engenharia Mecânica
Até o momento, pode-se calcular as forças da dinâmica longitudinal:
∑𝐹𝑥 = 𝐹𝑥1 + 𝐹𝑥2 − 𝐹𝑥𝑡 = (𝑚 + 𝑚1 + 𝑚2)𝑎𝑥
Onde 𝐹𝑥1 e 𝐹𝑥2 são as forças trativas nos eixos traseiro e dianteiro, respectivamente, m é a
massa suspensa, 𝑚1 é massa não suspensa dianteira e 𝑚2 é a massa não suspensa traseira. Para
considerar o caso mais crítico possível, suponha que as forças trativas ao longo de todo o
percurso será máxima. Daí, é necessária a massa total do veículo para calcular estas forças.
Para finalizar o modelo, precisamos obter o restantes dos parâmetros do Mussurana, sendo
eles: massa dos elementos, comportamento do Fox Float 3, rigidez vertical do pneu e as
coordenadas dos centros de massa dos elementos (condições iniciais do sistema).
2) Obtenção de parâmetros
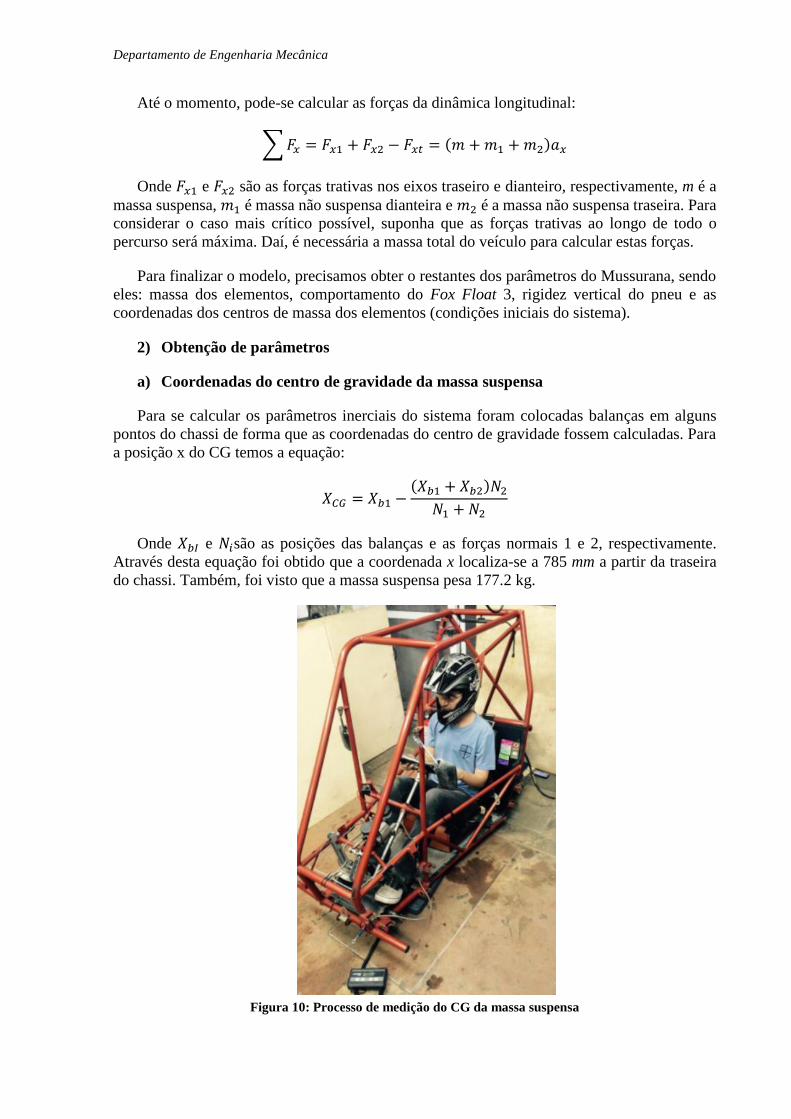
a) Coordenadas do centro de gravidade da massa suspensa
Para se calcular os parâmetros inerciais do sistema foram colocadas balanças em alguns
pontos do chassi de forma que as coordenadas do centro de gravidade fossem calculadas. Para
a posição x do CG temos a equação:
𝑋𝐶𝐺 = 𝑋𝑏1 −(𝑋𝑏1 + 𝑋𝑏2)𝑁2
𝑁1 + 𝑁2
Onde 𝑋𝑏𝐼 e 𝑁𝑖são as posições das balanças e as forças normais 1 e 2, respectivamente.
Através desta equação foi obtido que a coordenada x localiza-se a 785 mm a partir da traseira
do chassi. Também, foi visto que a massa suspensa pesa 177.2 kg.
Figura 10: Processo de medição do CG da massa suspensa
Departamento de Engenharia Mecânica
Para a obtenção da coordenada da altura inclinou-se o chassi a um ângulo $\theta$,
utilizando os mesmos pontos de apoio anteriores. Deste modo:
𝑍𝐶𝐺 = 𝑋𝐶𝐺 −[𝑋𝑏1 −
(𝑋𝑏1 − 𝑋𝑏2)𝑁𝑃 ]
tan𝜃
A partir disso, a altura do CG a partir do assoalho é igual a 215 mm.
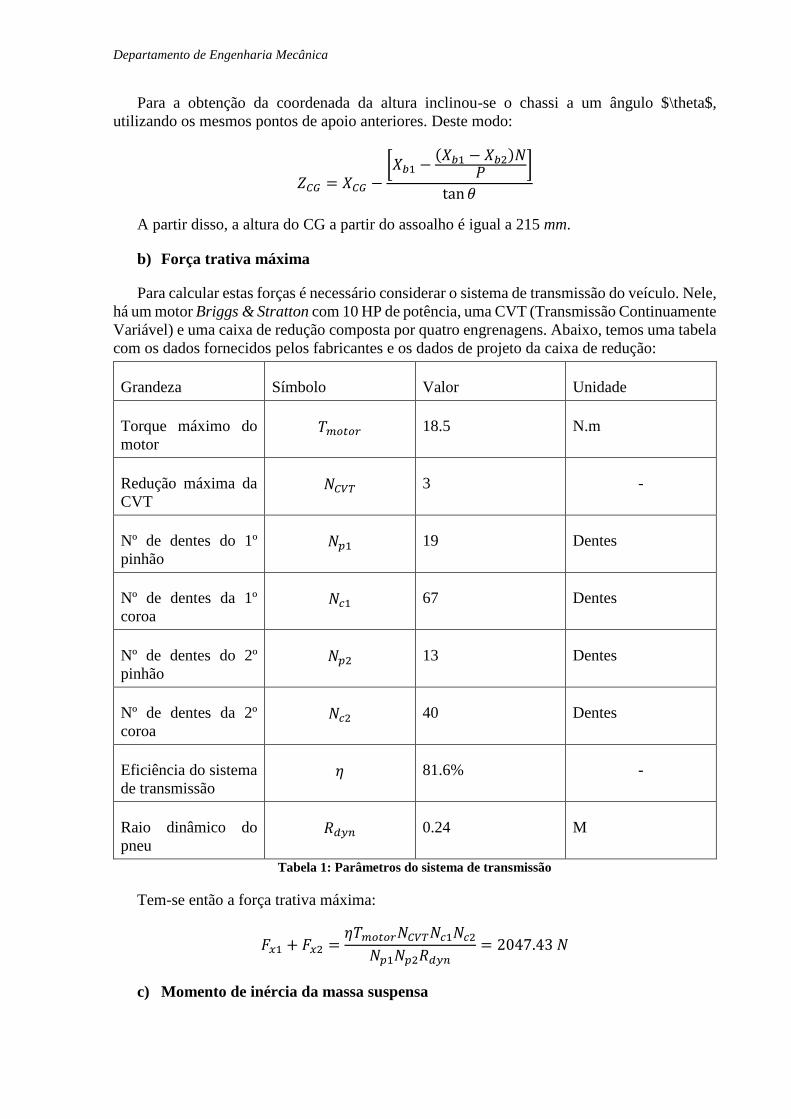
b) Força trativa máxima
Para calcular estas forças é necessário considerar o sistema de transmissão do veículo. Nele,
há um motor Briggs & Stratton com 10 HP de potência, uma CVT (Transmissão Continuamente
Variável) e uma caixa de redução composta por quatro engrenagens. Abaixo, temos uma tabela
com os dados fornecidos pelos fabricantes e os dados de projeto da caixa de redução:
Grandeza Símbolo Valor Unidade
Torque máximo do
motor 𝑇𝑚𝑜𝑡𝑜𝑟 18.5 N.m
Redução máxima da
CVT 𝑁𝐶𝑉𝑇 3 -
Nº de dentes do 1º
pinhão 𝑁𝑝1 19 Dentes
Nº de dentes da 1º
coroa 𝑁𝑐1 67 Dentes
Nº de dentes do 2º
pinhão 𝑁𝑝2 13 Dentes
Nº de dentes da 2º
coroa 𝑁𝑐2 40 Dentes
Eficiência do sistema
de transmissão 𝜂 81.6% -
Raio dinâmico do
pneu 𝑅𝑑𝑦𝑛 0.24 M
Tabela 1: Parâmetros do sistema de transmissão
Tem-se então a força trativa máxima:
𝐹𝑥1 + 𝐹𝑥2 =𝜂𝑇𝑚𝑜𝑡𝑜𝑟𝑁𝐶𝑉𝑇𝑁𝑐1𝑁𝑐2
𝑁𝑝1𝑁𝑝2𝑅𝑑𝑦𝑛= 2047.43 𝑁
c) Momento de inércia da massa suspensa

Departamento de Engenharia Mecânica
Para fazer o cálculo do momento de inércia, optou-se por medí-lo em torno dos eixos x,y e
z. Seu procedimento se resume a amarrar o conjunto chassi-piloto em um ponto fixo de forma
que o podemos usar o veículo como um pêndulo. Desta maneira,
∑𝑀𝑎 = 𝐼𝑎�� + 𝑚𝑔ℎ sin 𝜃 = 0
Onde 𝑀𝑎 e 𝐼𝑎 são o somatório dos momentos e o momento de inércia de massa em torno do
ponto de ancoragem, respectivamente, m é a massa suspensa, h é a distância do CG ao ponto de
ancoragem e 𝜃 é o ângulo do pêndulo em relação à normal deste ponto.
Por hipótese, o ângulo de oscilação é pequeno. Assim, pela série de Taylor:
sin 𝜃 = 𝜃 −𝜃3
3!+
𝜃5
5!−
𝜃7
7!+ ⋯ → sin 𝜃 ≈ 𝜃
Daí:
�� + 𝜔𝑛2𝜃 = 0
𝜔𝑛 = √𝑚ℎ𝑔
𝐼𝑎
𝐼𝑎 =1
4𝜋2𝑚𝑔ℎ𝑇𝑛
2
Pelo teorema dos eixos paralelos podemos obter o momento de inércia no CG:
𝐼𝑎 = 𝐼𝐶𝐺 + 𝑚ℎ2
𝐼𝐶𝐺 =1
4𝜋2𝑚𝑔ℎ𝑇𝑛
2 − 𝑚ℎ2
Onde 𝑇𝑛2 é o período natural de oscilação.
Figura 11: Medição do momento de inércia de arfagem
Departamento de Engenharia Mecânica
Com isto, obteve-se um momento de inércia de arfagem 𝐼𝑦 igual a 40 kg.m².
d) Rigidez vertical dos pneus
Dado que os pneus podem ser modelados como molas, foi necessária a realização de um
ensaio de compressão para se obter seus coeficientes de rigidez.
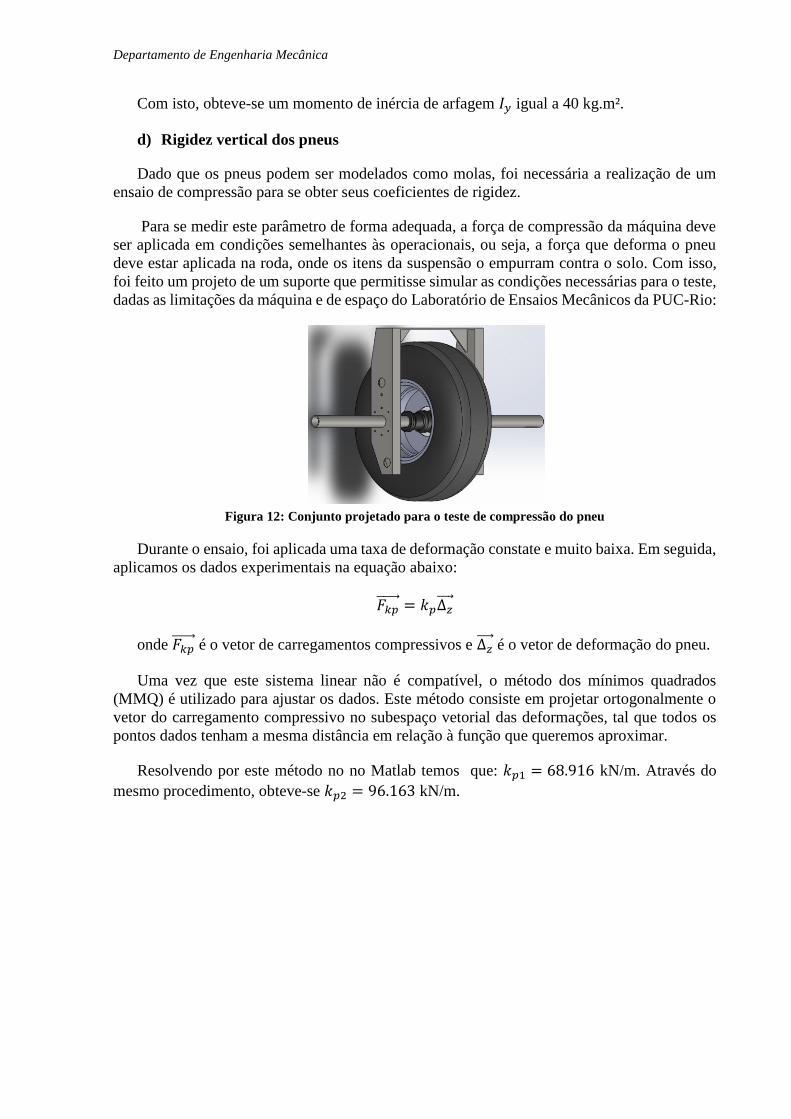
Para se medir este parâmetro de forma adequada, a força de compressão da máquina deve
ser aplicada em condições semelhantes às operacionais, ou seja, a força que deforma o pneu
deve estar aplicada na roda, onde os itens da suspensão o empurram contra o solo. Com isso,
foi feito um projeto de um suporte que permitisse simular as condições necessárias para o teste,
dadas as limitações da máquina e de espaço do Laboratório de Ensaios Mecânicos da PUC-Rio:
Figura 12: Conjunto projetado para o teste de compressão do pneu
Durante o ensaio, foi aplicada uma taxa de deformação constate e muito baixa. Em seguida,
aplicamos os dados experimentais na equação abaixo:
𝐹𝑘𝑝 = 𝑘𝑝Δ𝑧
onde 𝐹𝑘𝑝 é o vetor de carregamentos compressivos e Δ𝑧
é o vetor de deformação do pneu.
Uma vez que este sistema linear não é compatível, o método dos mínimos quadrados
(MMQ) é utilizado para ajustar os dados. Este método consiste em projetar ortogonalmente o
vetor do carregamento compressivo no subespaço vetorial das deformações, tal que todos os
pontos dados tenham a mesma distância em relação à função que queremos aproximar.
Resolvendo por este método no no Matlab temos que: 𝑘𝑝1 = 68.916 kN/m. Através do
mesmo procedimento, obteve-se 𝑘𝑝2 = 96.163 kN/m.
Departamento de Engenharia Mecânica
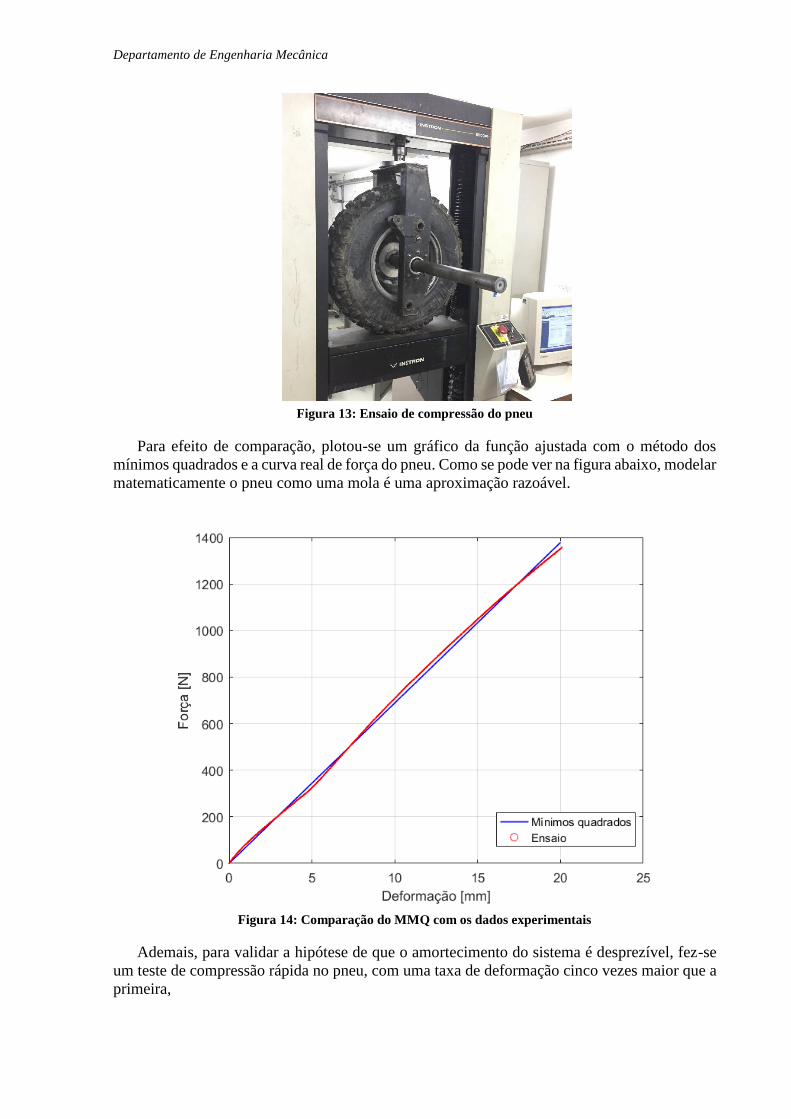
Figura 13: Ensaio de compressão do pneu
Para efeito de comparação, plotou-se um gráfico da função ajustada com o método dos
mínimos quadrados e a curva real de força do pneu. Como se pode ver na figura abaixo, modelar
matematicamente o pneu como uma mola é uma aproximação razoável.
Figura 14: Comparação do MMQ com os dados experimentais
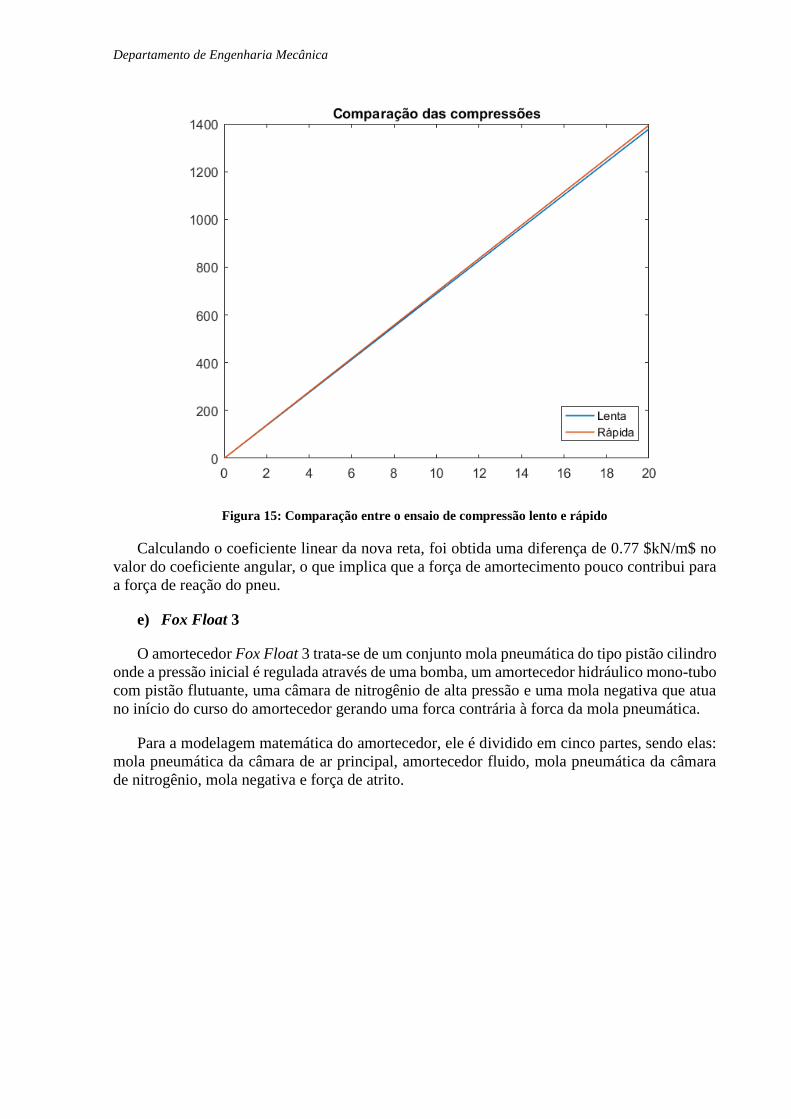
Ademais, para validar a hipótese de que o amortecimento do sistema é desprezível, fez-se
um teste de compressão rápida no pneu, com uma taxa de deformação cinco vezes maior que a
primeira,
Departamento de Engenharia Mecânica
Figura 15: Comparação entre o ensaio de compressão lento e rápido
Calculando o coeficiente linear da nova reta, foi obtida uma diferença de 0.77 $kN/m$ no
valor do coeficiente angular, o que implica que a força de amortecimento pouco contribui para
a força de reação do pneu.
e) Fox Float 3
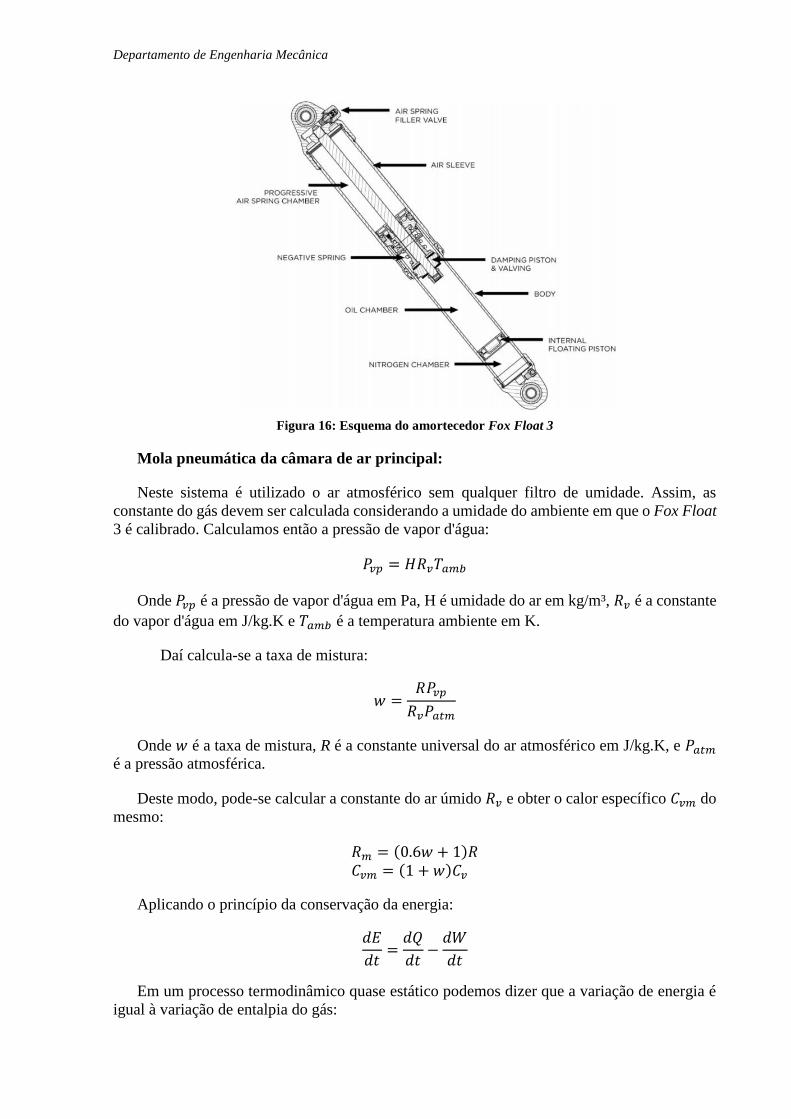
O amortecedor Fox Float 3 trata-se de um conjunto mola pneumática do tipo pistão cilindro
onde a pressão inicial é regulada através de uma bomba, um amortecedor hidráulico mono-tubo
com pistão flutuante, uma câmara de nitrogênio de alta pressão e uma mola negativa que atua
no início do curso do amortecedor gerando uma forca contrária à forca da mola pneumática.
Para a modelagem matemática do amortecedor, ele é dividido em cinco partes, sendo elas:
mola pneumática da câmara de ar principal, amortecedor fluido, mola pneumática da câmara
de nitrogênio, mola negativa e força de atrito.
Departamento de Engenharia Mecânica
Figura 16: Esquema do amortecedor Fox Float 3
Mola pneumática da câmara de ar principal:
Neste sistema é utilizado o ar atmosférico sem qualquer filtro de umidade. Assim, as
constante do gás devem ser calculada considerando a umidade do ambiente em que o Fox Float
3 é calibrado. Calculamos então a pressão de vapor d'água:
𝑃𝑣𝑝 = 𝐻𝑅𝑣𝑇𝑎𝑚𝑏
Onde 𝑃𝑣𝑝 é a pressão de vapor d'água em Pa, H é umidade do ar em kg/m³, 𝑅𝑣 é a constante
do vapor d'água em J/kg.K e 𝑇𝑎𝑚𝑏 é a temperatura ambiente em K.
Daí calcula-se a taxa de mistura:
𝑤 =𝑅𝑃𝑣𝑝
𝑅𝑣𝑃𝑎𝑡𝑚
Onde 𝑤 é a taxa de mistura, R é a constante universal do ar atmosférico em J/kg.K, e 𝑃𝑎𝑡𝑚
é a pressão atmosférica.
Deste modo, pode-se calcular a constante do ar úmido 𝑅𝑣 e obter o calor específico 𝐶𝑣𝑚 do
mesmo:
𝑅𝑚 = (0.6𝑤 + 1)𝑅 𝐶𝑣𝑚 = (1 + 𝑤)𝐶𝑣
Aplicando o princípio da conservação da energia:
𝑑𝐸
𝑑𝑡=
𝑑𝑄
𝑑𝑡−
𝑑𝑊
𝑑𝑡
Em um processo termodinâmico quase estático podemos dizer que a variação de energia é
igual à variação de entalpia do gás:

Departamento de Engenharia Mecânica
𝑑𝐸
𝑑𝑡= 𝑚
𝑑𝑢
𝑑𝑡= 𝑚𝐶𝑣𝑚
𝑑𝑇
𝑑𝑡
Onde m é a massa do gás, T é a temperatura em K e u é a entalpia.
A taxa de variação do trabalho pode ser escrita como:
𝑑𝑊
𝑑𝑡= 𝑃𝐶𝑀
𝑑𝑉
𝑑𝑡= 𝑃𝑐𝑚𝐴𝑐
𝑑𝑧
𝑑𝑡
Onde 𝑃𝑐𝑚 e V são, respectivamente, a pressão e o volume da câmara, 𝐴𝑐 é a área da seção
transversal do cilindro e z é a posição do êmbolo.
A taxa de variação de calor pode ser escrita como:
𝑑𝑄
𝑑𝑡= (𝑇𝑝 − 𝑇)𝐴𝑡𝜙
Onde 𝑇𝑝 e 𝑇 são as temperaturas da parede do cilindro e do ar, respectivamente, 𝐴𝑡 é a área
de troca de calor e 𝜙 é o coeficiente de troca de calor em W/m²K. Com isto:
𝑑𝑇
𝑑𝑡=
1
𝑚𝐶𝑣𝑚[(𝑇𝑝 − 𝑇)𝐴𝑡𝜙 − 𝑃𝑐𝑚𝐴𝑐
𝑑𝑧
𝑑𝑡]
Utilizando a lei dos gases ideais, podemos definir a pressão 𝑃𝑐 do cilindro:
𝑃𝑐 =𝑚𝑅𝑚
𝑉∫(
1
𝑚𝐶𝑣𝑚[(𝑇𝑝 − 𝑇)𝐴𝑡𝜙 − 𝑃𝑐𝑚𝐴𝑐
𝑑𝑧
𝑑𝑡]) 𝑑𝑡
Onde a massa m pode ser escrita através das condições iniciais do sistema:
𝑚 =𝑃𝑜𝑉𝑜
𝑅𝑚𝑇𝑎𝑚𝑏
Com isto, a força 𝐹𝑐 gerada pela mola pneumática pode ser escrita como:
𝐹𝑐 = −(𝑃𝑐 − 𝑃𝑎𝑡𝑚)𝐴𝑐
Uma vez que na situação da prova de tração ocorrem compressões lentas no amortecedor,
podemos simplificar o modelo para uma compressão isotérmica:
𝐹𝑐 = −𝐴𝑐𝑃𝑜 (𝑉𝑜
𝑉𝑜 − 𝐴𝑐𝑧)
Amortecedor fluido:
O amortecimento do sistema ocorre devido à passagem de óleo por orifícios presentes em
um pistão, que trabalha dentro de um cilindro. No pistão, por sua vez, há válvulas que limitam

Departamento de Engenharia Mecânica
a passagem de fluido nos orifícios dependendo da direção do movimento, fazendo com que o
amortecimento seja diferente nos movimentos de extensão e compressão
O sistema de amortecimento também conta com um pistão flutuante e uma câmara de
nitrogênio de alta pressão que mantém o óleo pressurizado, diminuindo a possibilidade de
ocorrer cavitação\footnote{Formação de bolhas de gás num líquido}.
O modelo adotado para esta parte do sistema considera que o amortecimento aumenta com
a velocidade de compressão de acordo com uma constante que está ligada à passagem de óleo
pelos orifícios do pistão. Além disso, conforme dito anteriormente haverão duas constantes de
amortecimento: uma para compressão e outra para extensão.
Onde ce e cc são as constantes de amortecimento de extensão e compressão,
respectivamente.
Mola pneumática da câmara de nitrogênio:
Apesar de ter como função principal aumentar a pressão do óleo, a câmara de nitrogênio
gera uma força sobre a haste, funcionando assim como um segunda mola pneumática.
De forma análoga à câmara de ar, decidiu-se simplificar o modelo considerando apenas uma
compressão isotérmica:
𝐹𝑁 = −𝐴ℎ𝑃𝑜𝑁 (𝑉𝑜𝑁
𝑉𝑜𝑁 − 𝐴ℎ𝑧)
Onde 𝐴ℎ é a área da seção da haste, 𝑃𝑜𝑁 e 𝑉𝑜𝑁 são a pressão inicial e o volume inicial da
câmara de nitrogênio.
Mola negativa:
É uma mola linear com comprimento menor que o curso total do Fox Float 3 que faz força
contra a mola pneumática, diminuindo a força total.
Esta mola tem como papel aumentar a rigidez do sistema, pois uma vez que no início da
compressão a mola pneumática tem uma baixa rigidez, as frequências naturais seriam menores
durante essa fase. O equacionamento da mola negativa pode ser dado como:
Sendo Lmn o comprimento da mola e Kmn sua rigidez.
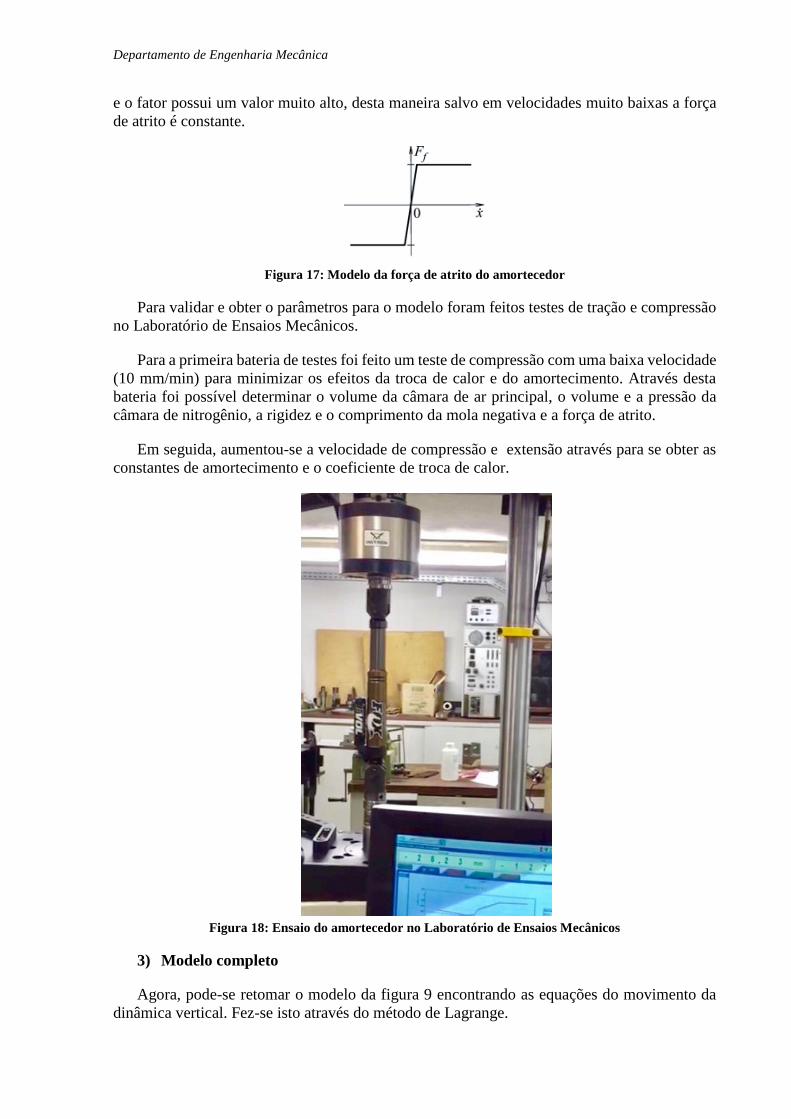
Atrito:
Para o modelo matemático do atrito é considerado um fator $F_f$ que multiplicado pela
velocidade gera a forca de atrito, porém a mesma não ultrapassa uma determinada força máxima
Departamento de Engenharia Mecânica
e o fator possui um valor muito alto, desta maneira salvo em velocidades muito baixas a força
de atrito é constante.
Figura 17: Modelo da força de atrito do amortecedor
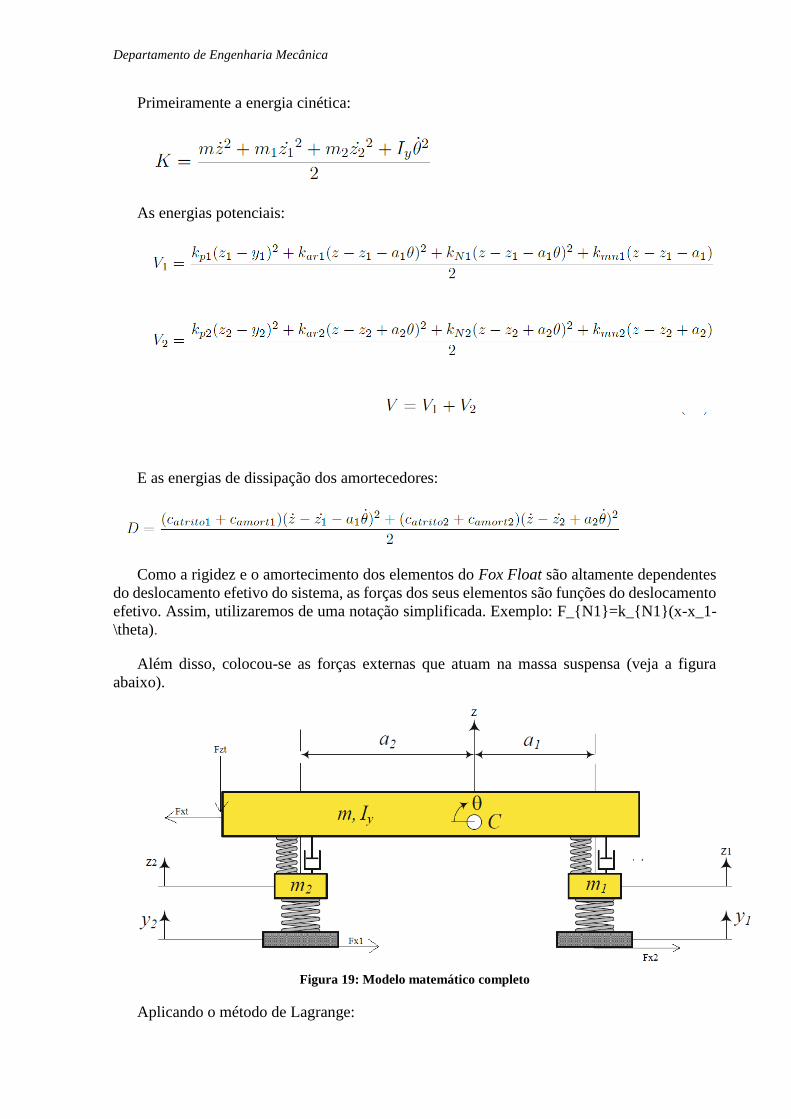
Para validar e obter o parâmetros para o modelo foram feitos testes de tração e compressão
no Laboratório de Ensaios Mecânicos.
Para a primeira bateria de testes foi feito um teste de compressão com uma baixa velocidade
(10 mm/min) para minimizar os efeitos da troca de calor e do amortecimento. Através desta
bateria foi possível determinar o volume da câmara de ar principal, o volume e a pressão da
câmara de nitrogênio, a rigidez e o comprimento da mola negativa e a força de atrito.
Em seguida, aumentou-se a velocidade de compressão e extensão através para se obter as
constantes de amortecimento e o coeficiente de troca de calor.
Figura 18: Ensaio do amortecedor no Laboratório de Ensaios Mecânicos
3) Modelo completo
Agora, pode-se retomar o modelo da figura 9 encontrando as equações do movimento da
dinâmica vertical. Fez-se isto através do método de Lagrange.
Departamento de Engenharia Mecânica
Primeiramente a energia cinética:
As energias potenciais:
E as energias de dissipação dos amortecedores:
Como a rigidez e o amortecimento dos elementos do Fox Float são altamente dependentes
do deslocamento efetivo do sistema, as forças dos seus elementos são funções do deslocamento
efetivo. Assim, utilizaremos de uma notação simplificada. Exemplo: F_{N1}=k_{N1}(x-x_1-
\theta).
Além disso, colocou-se as forças externas que atuam na massa suspensa (veja a figura
abaixo).
Figura 19: Modelo matemático completo
Aplicando o método de Lagrange:

Departamento de Engenharia Mecânica
Onde f_r são os esforços externos aplicados no sistema. Assim, tem-se então as equações
do movimento:
Onde \delta h é a diferença de altura entre o ponto de reboque e o CG e j é a distância
horizontal entre eles. É importante comentar que apesar destes dois parâmetros variarem por
conta da arfagem do protótipo, pode-se desprezar este efeito, uma vez que o ângulo de rotação
no eixo y será muito pequeno.
Conclusões
A partir do equacionamento foi criado um modelo de malha fechada com realimentação
no Simulink utilizando o solver ode45 para simular os três tubos que poderiam ser escolhidos.
A análise de resultados se dá em quatro etapas: monitoramento do deslocamento das
inércias, monitoramento das forças normais, monitoramento das força trativa máxima e análise
de tensões no tubo.
Monitora-se as inércias para ver qual sistema tem um comportamento mais estável em
relação ao outro. Assim, o sistema que tender a estabilizar mais rápido tende a ser mais
confiável.
Para o monitoramento das forças normais, basta calculá-las fazendo somatório de
momentos e forças e considerando o problema estático. Caso a força de reação normal seja
abaixo de zero, significa que o carro tende a capotar nesta situação. Isto acontece porque a
tração proveniente do motor e as componentes de tração da corrente tendem a fazer o eixo
dianteiro rotacionar no sentido anti-horário.
Uma vez que temos os valores das forças normais, podemos calcular a força trativa
máxima que o terreno permite.
𝐹𝑡𝑟𝑎𝑡𝑖𝑣𝑎𝑚𝑎𝑥 = 𝜇𝑁
Onde 𝜇 é o coeficiente de atrito estático entre o pneu e o solo, com valor de 0.4 (terra
batida) Caso a força trativa do veículo de cada eixo exceda o valor da força trativa máxima que
o terreno permite, o veículo derrapa.
Por fim, temos a análise de tensões nos tubos. Para tal, consideramos cada tubo como
uma viga biengastada que recebe os esforços 𝐹𝑥𝑡 e 𝐹𝑧𝑡, daí calculamos o momento fletor
causado pelos esforços para enfim encontrar a tensão que age em cada tubo.
Departamento de Engenharia Mecânica
A tensão do material pode ser dada por:
𝜎 =𝑀𝑌
𝐼
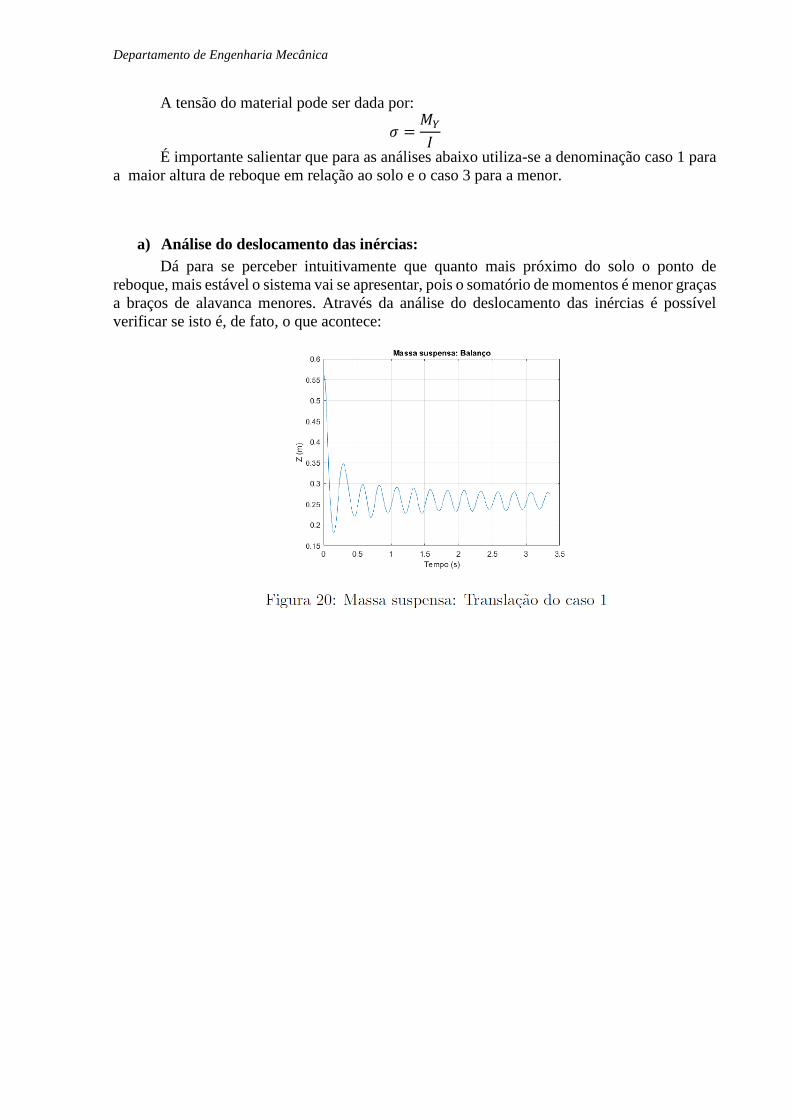
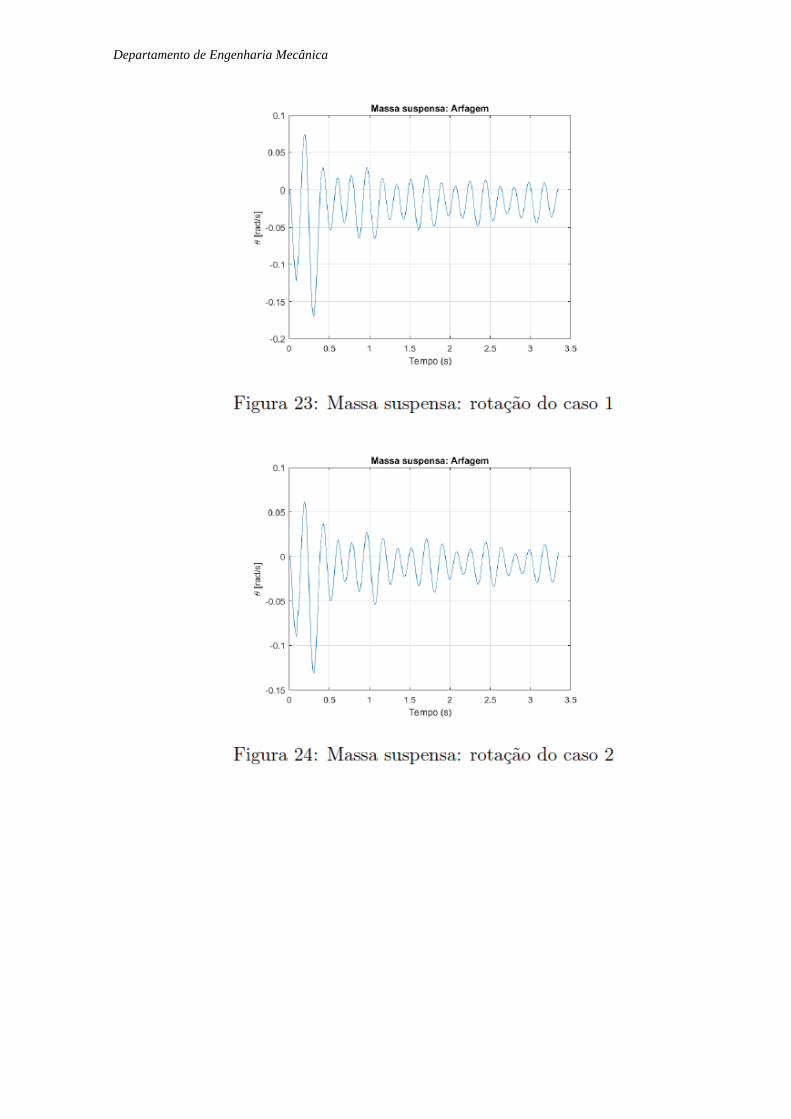
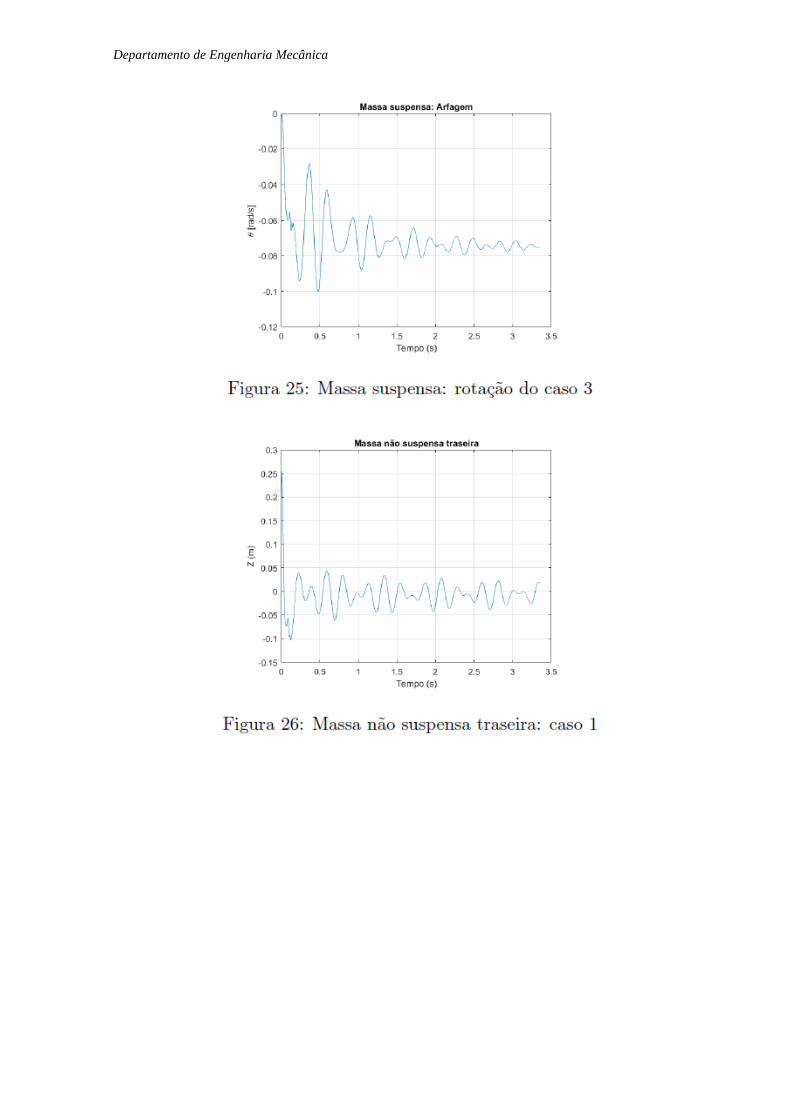
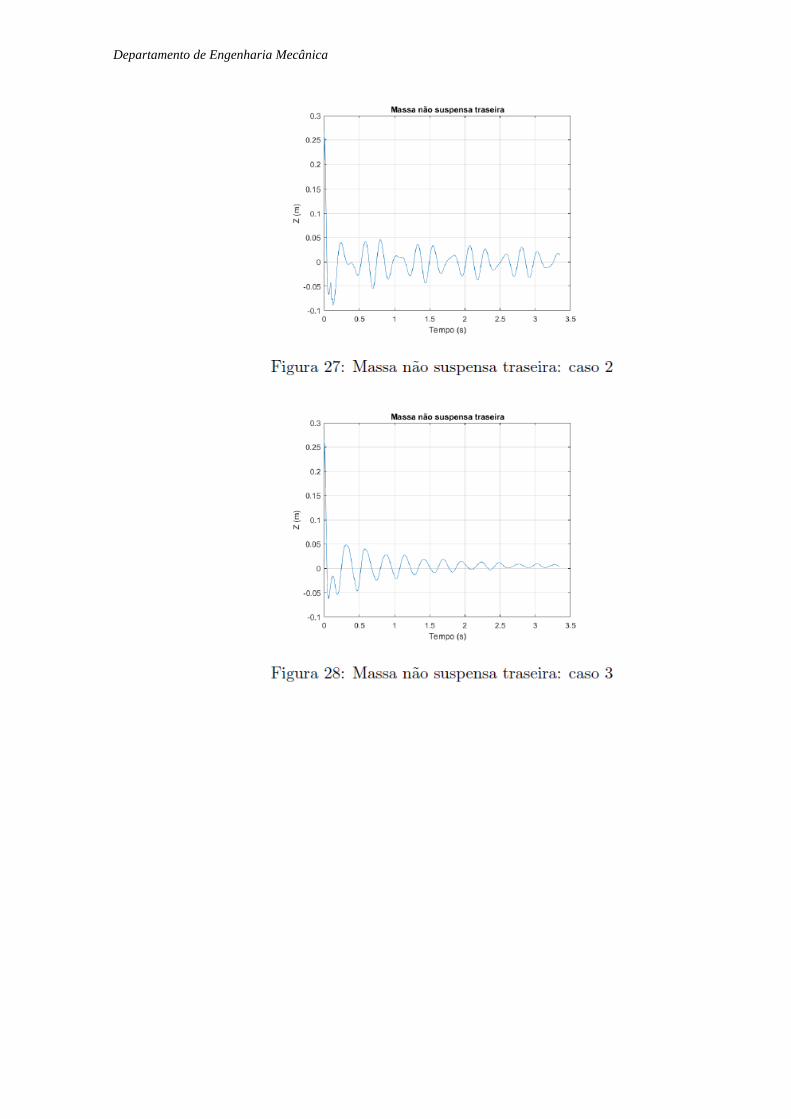
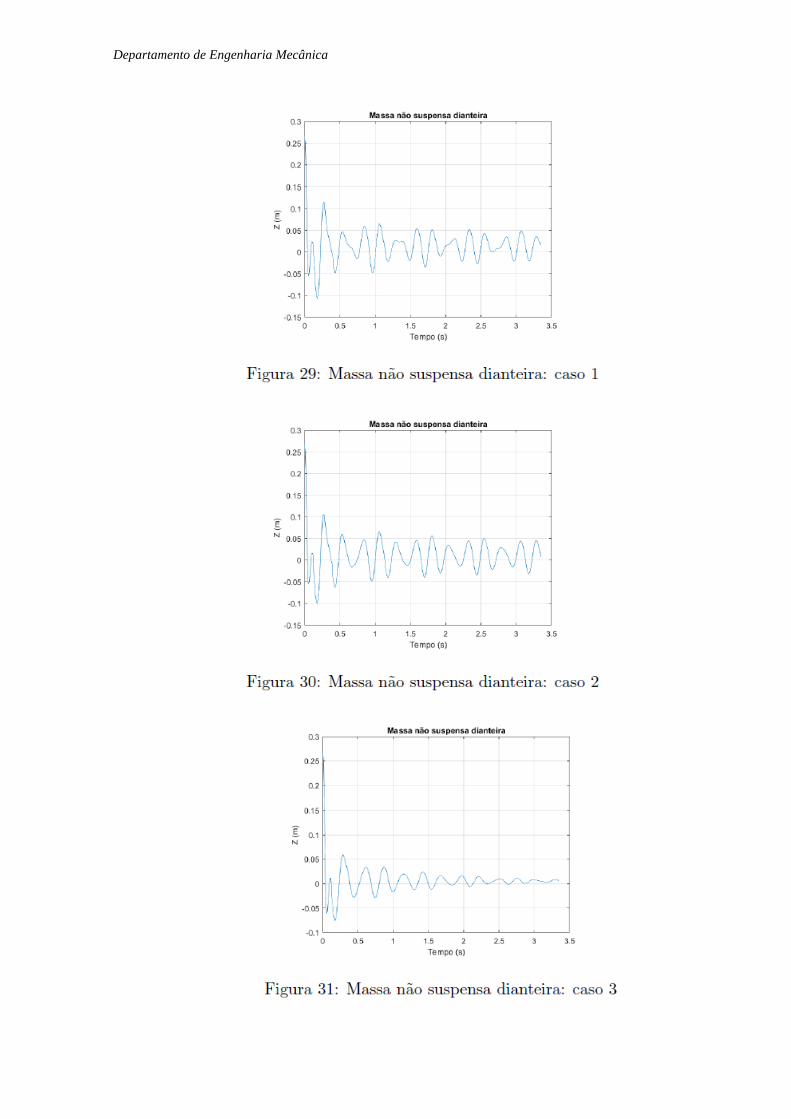
É importante salientar que para as análises abaixo utiliza-se a denominação caso 1 para
a maior altura de reboque em relação ao solo e o caso 3 para a menor.
a) Análise do deslocamento das inércias:
Dá para se perceber intuitivamente que quanto mais próximo do solo o ponto de
reboque, mais estável o sistema vai se apresentar, pois o somatório de momentos é menor graças
a braços de alavanca menores. Através da análise do deslocamento das inércias é possível
verificar se isto é, de fato, o que acontece:
Departamento de Engenharia Mecânica
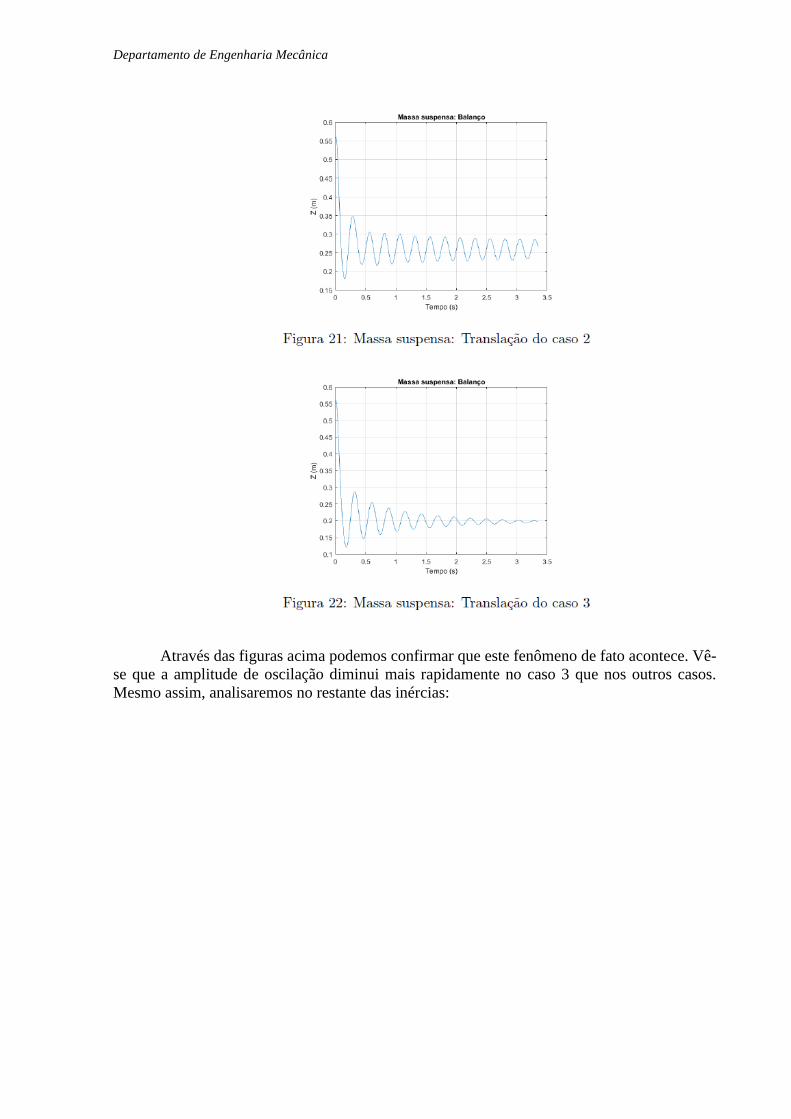
Através das figuras acima podemos confirmar que este fenômeno de fato acontece. Vê-
se que a amplitude de oscilação diminui mais rapidamente no caso 3 que nos outros casos.
Mesmo assim, analisaremos no restante das inércias:
Departamento de Engenharia Mecânica
Departamento de Engenharia Mecânica
Departamento de Engenharia Mecânica
Departamento de Engenharia Mecânica
Departamento de Engenharia Mecânica
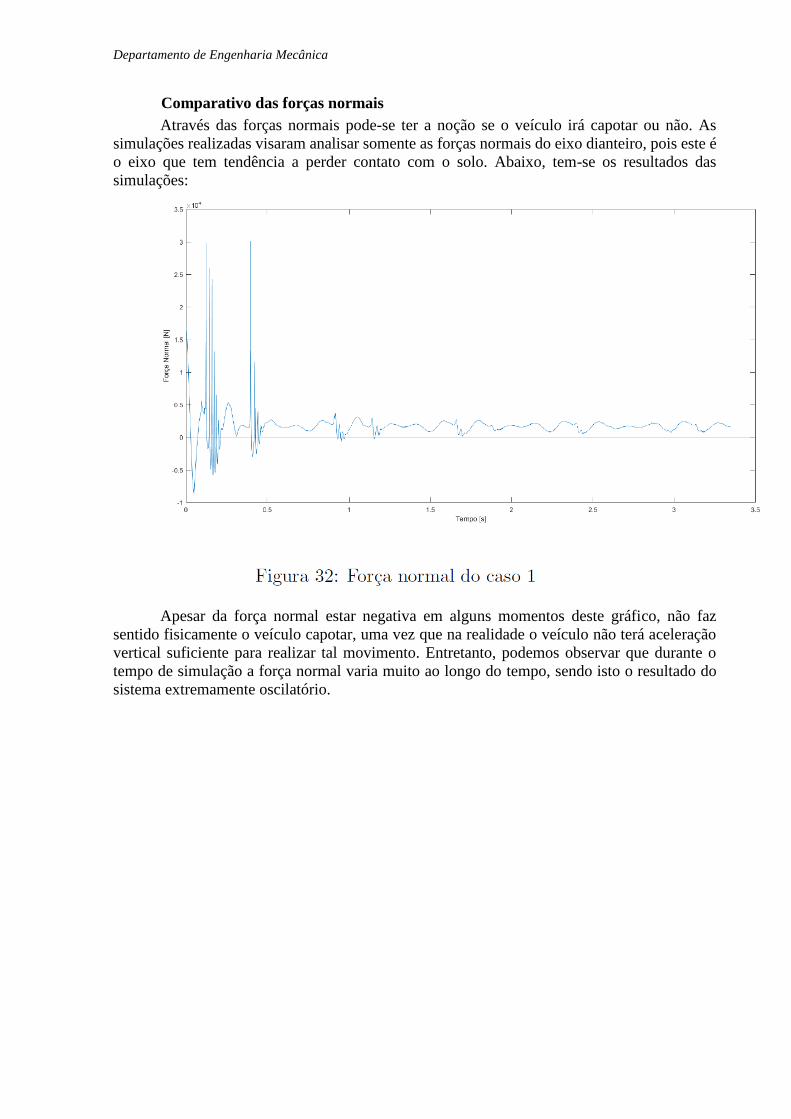
Comparativo das forças normais
Através das forças normais pode-se ter a noção se o veículo irá capotar ou não. As
simulações realizadas visaram analisar somente as forças normais do eixo dianteiro, pois este é
o eixo que tem tendência a perder contato com o solo. Abaixo, tem-se os resultados das
simulações:
Apesar da força normal estar negativa em alguns momentos deste gráfico, não faz
sentido fisicamente o veículo capotar, uma vez que na realidade o veículo não terá aceleração
vertical suficiente para realizar tal movimento. Entretanto, podemos observar que durante o
tempo de simulação a força normal varia muito ao longo do tempo, sendo isto o resultado do
sistema extremamente oscilatório.
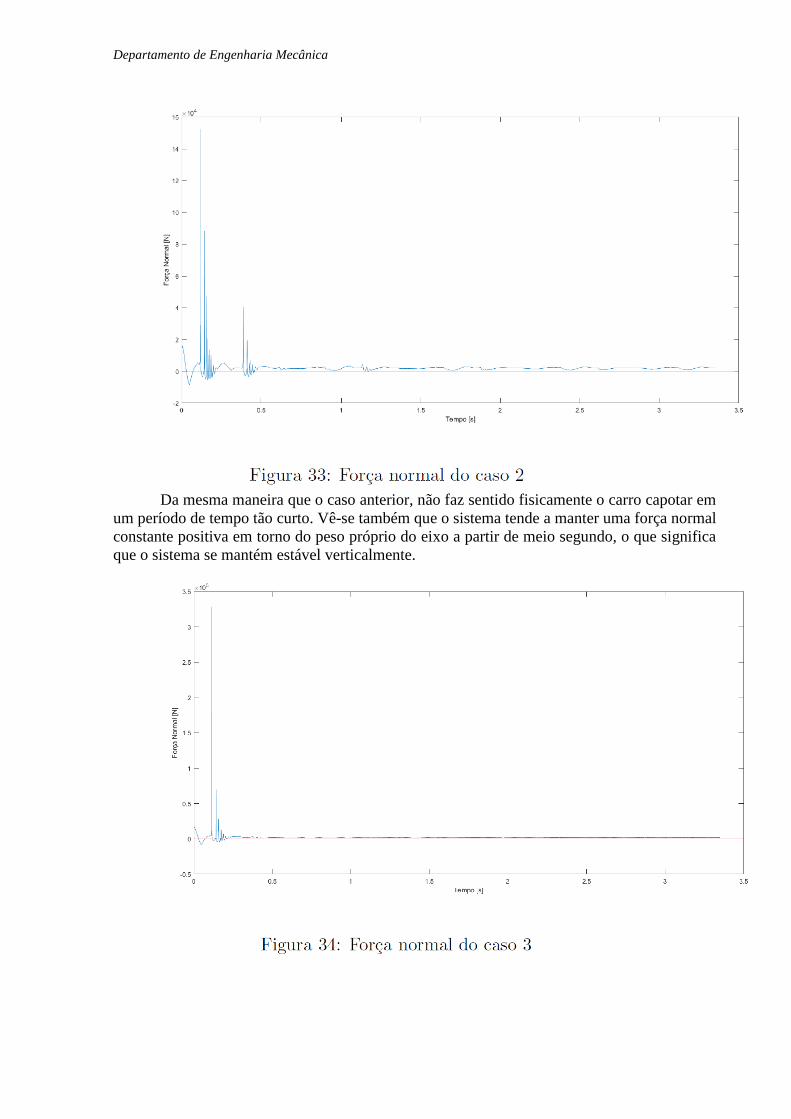
Departamento de Engenharia Mecânica
Da mesma maneira que o caso anterior, não faz sentido fisicamente o carro capotar em
um período de tempo tão curto. Vê-se também que o sistema tende a manter uma força normal
constante positiva em torno do peso próprio do eixo a partir de meio segundo, o que significa
que o sistema se mantém estável verticalmente.
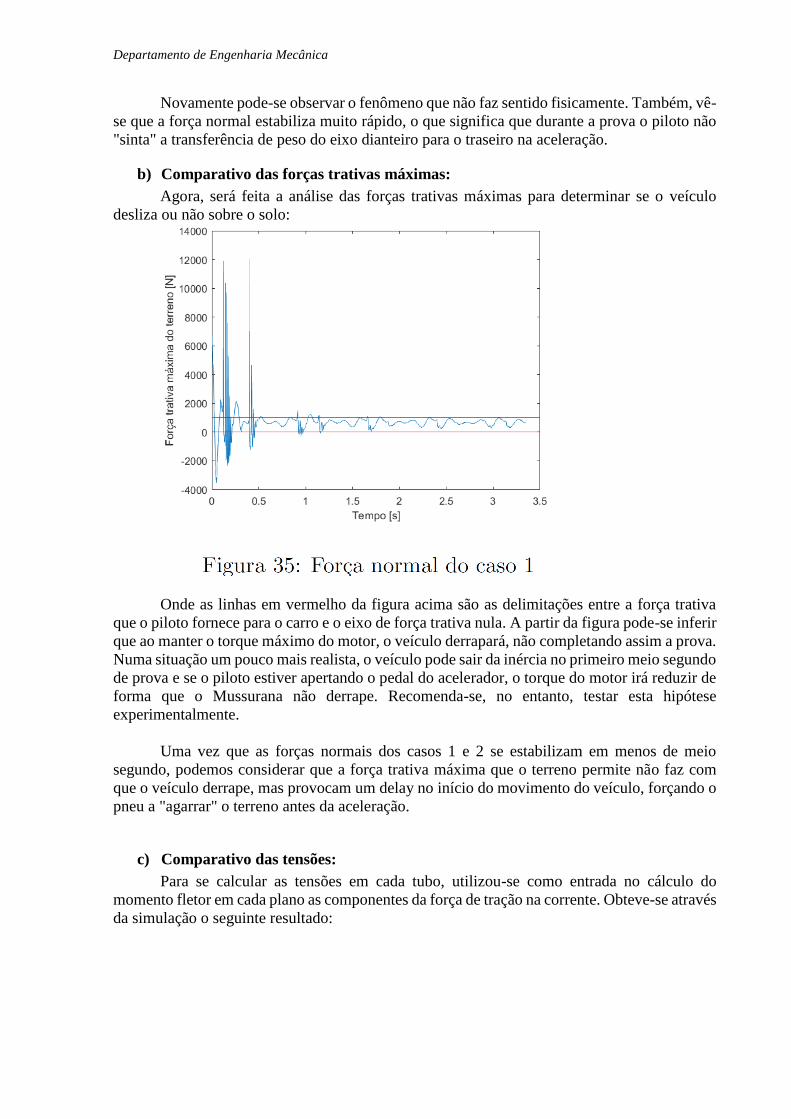
Departamento de Engenharia Mecânica
Novamente pode-se observar o fenômeno que não faz sentido fisicamente. Também, vê-
se que a força normal estabiliza muito rápido, o que significa que durante a prova o piloto não
"sinta" a transferência de peso do eixo dianteiro para o traseiro na aceleração.
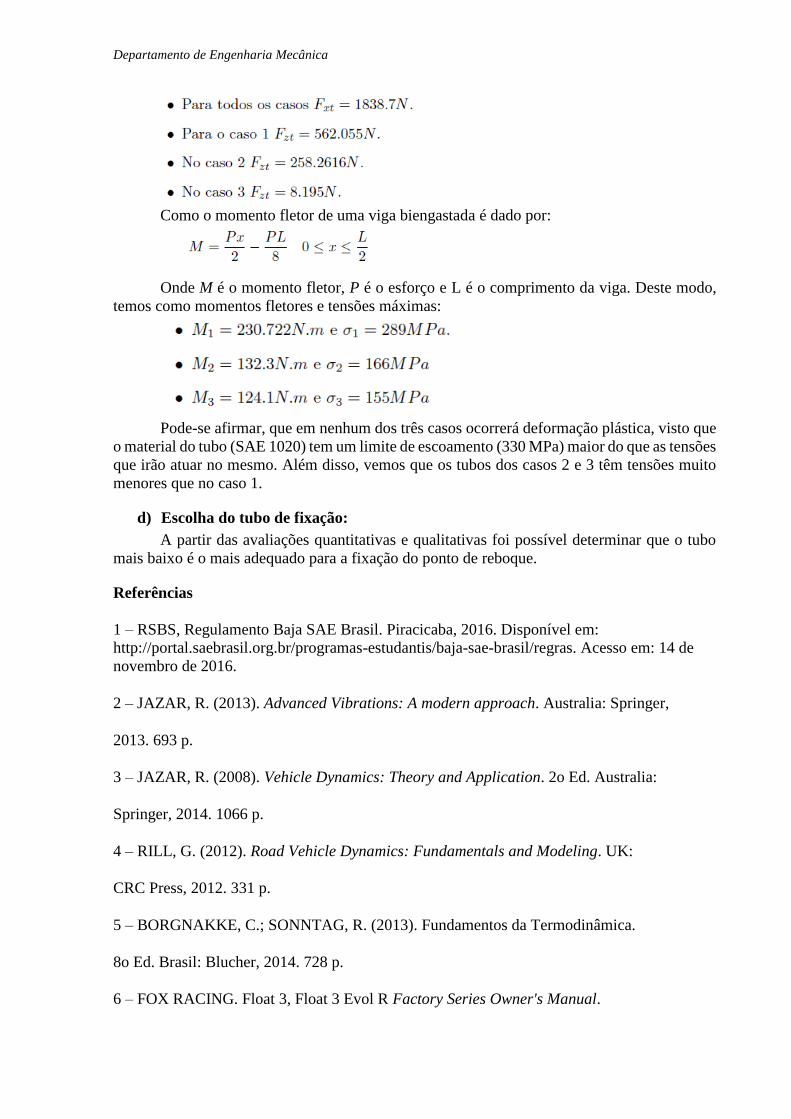
b) Comparativo das forças trativas máximas:
Agora, será feita a análise das forças trativas máximas para determinar se o veículo
desliza ou não sobre o solo:
Onde as linhas em vermelho da figura acima são as delimitações entre a força trativa
que o piloto fornece para o carro e o eixo de força trativa nula. A partir da figura pode-se inferir
que ao manter o torque máximo do motor, o veículo derrapará, não completando assim a prova.
Numa situação um pouco mais realista, o veículo pode sair da inércia no primeiro meio segundo
de prova e se o piloto estiver apertando o pedal do acelerador, o torque do motor irá reduzir de
forma que o Mussurana não derrape. Recomenda-se, no entanto, testar esta hipótese
experimentalmente.
Uma vez que as forças normais dos casos 1 e 2 se estabilizam em menos de meio
segundo, podemos considerar que a força trativa máxima que o terreno permite não faz com
que o veículo derrape, mas provocam um delay no início do movimento do veículo, forçando o
pneu a "agarrar" o terreno antes da aceleração.
c) Comparativo das tensões:
Para se calcular as tensões em cada tubo, utilizou-se como entrada no cálculo do
momento fletor em cada plano as componentes da força de tração na corrente. Obteve-se através
da simulação o seguinte resultado:
Departamento de Engenharia Mecânica
Como o momento fletor de uma viga biengastada é dado por:
Onde M é o momento fletor, P é o esforço e L é o comprimento da viga. Deste modo,
temos como momentos fletores e tensões máximas:
Pode-se afirmar, que em nenhum dos três casos ocorrerá deformação plástica, visto que
o material do tubo (SAE 1020) tem um limite de escoamento (330 MPa) maior do que as tensões
que irão atuar no mesmo. Além disso, vemos que os tubos dos casos 2 e 3 têm tensões muito
menores que no caso 1.
d) Escolha do tubo de fixação:
A partir das avaliações quantitativas e qualitativas foi possível determinar que o tubo
mais baixo é o mais adequado para a fixação do ponto de reboque.
Referências
1 – RSBS, Regulamento Baja SAE Brasil. Piracicaba, 2016. Disponível em:
http://portal.saebrasil.org.br/programas-estudantis/baja-sae-brasil/regras. Acesso em: 14 de
novembro de 2016.
2 – JAZAR, R. (2013). Advanced Vibrations: A modern approach. Australia: Springer,
2013. 693 p.
3 – JAZAR, R. (2008). Vehicle Dynamics: Theory and Application. 2o Ed. Australia:
Springer, 2014. 1066 p.
4 – RILL, G. (2012). Road Vehicle Dynamics: Fundamentals and Modeling. UK:
CRC Press, 2012. 331 p.
5 – BORGNAKKE, C.; SONNTAG, R. (2013). Fundamentos da Termodinâmica.
8o Ed. Brasil: Blucher, 2014. 728 p.
6 – FOX RACING. Float 3, Float 3 Evol R Factory Series Owner's Manual.
Departamento de Engenharia Mecânica
USA. 15 p.
Nota
O presente trabalho foi parte integrante do relatório final para o curso de “Vibrações mecânicas”
ministrado pelo professor Rubens Sampaio.