RAFAEL DE OLIVEIRA SALVARANI -...
59
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE LORENA RAFAEL DE OLIVEIRA SALVARANI Análise da estabilidade do controle proporcional de um processo químico Lorena 2015
Transcript of RAFAEL DE OLIVEIRA SALVARANI -...

UNIVERSIDADE DE SÃO PAULO
ESCOLA DE ENGENHARIA DE LORENA
RAFAEL DE OLIVEIRA SALVARANI
Análise da estabilidade do controle proporcional de um processo químico
Lorena
2015

RAFAEL DE OLIVEIRA SALVARANI
Análise da estabilidade do controle proporcional de um processo químico
Monografia apresentada à Escola de
Engenharia de Lorena – Universidade de
São Paulo como requisito parcial para
obtenção de título de Engenheiro Químico.
Área de Concentração: Engenharia Química
Orientador: Prof. Dr. Luiz Carlos de Queiroz
Lorena
2015

Dedico esta conquista aos meus
pais, Roberto e Rosângela, que
com muita dedicação, amor e
apoio fizeram o possível para que
eu pudesse alcançar esta conquista.

AGRADECIMENTOS
À minha família, que tornou tudo isso possível.
À minha namorada, Carla, que me apoia em todos os momentos, me conforta e
me motiva a continuar e melhorar sempre.
Ao meu orientador, Luiz Carlos, pela paciência, pontualidade, disponibilidade,
ensinamentos e pelos conselhos em relação à vida profissional e pessoal.
Aos meus amigos, em especial Vinicius, Edson e Alexandre, pelo
companheirismo, momentos de descontração, e pela amizade que se estendeu desde o
início da graduação.
Aos docentes que contribuíram para minha formação acadêmica e que nos
aconselham e nos apoiam durante cada fase dessa jornada.
Aos meus mentores que, nos bastidores, dão apoio e garra para vencer os
obstáculos independente da dificuldade.

“Procure ser um home de valor,
em vez de ser um home de
sucesso.”
Albert Einsten.

RESUMO
SALVARANI, R. O. Análise da estabilidade do controle proporcional de um processo
químico. 2015. 59 f. Monografia (Trabalho de conclusão de curso) – Escola de
Engenharia de Lorena, Universidade de São Paulo, Lorena, 2015.
Muitos processos químicos trabalham em condições severas de temperatura, de
pressão, vazão, além de utilizarem substâncias químicas muitas vezes tóxicas tanto para o
homem quanto para o meio ambiente. Por este motivo, o monitoramento, ou mais
especificamente, o controle desses processos deve garantir a segurança e as rígidas
especificações de qualidade dos produtos que vão para o mercado. Para tanto, é necessário
trabalhar considerando os parâmetros dimensionados no projeto do processo, os quais irão
torná-lo estável, portanto robusto e confiável, além de lucrativo. Esta monografia tem
como objetivo analisar a estabilidade do controle proporcional de um processo químico,
que ocorre num reator CSTR isotérmico, cuja reação química se comporta como de
pseudo-primeira ordem. As perturbações causadas são devido às variações na composição
do reagente em excesso e o controle é feito pela manipulação da vazão mássica do reagente
limitante, tendo como objetivo principal, o controle da concentração do produto desejado o
mais próximo possível do valor de referência projetado. Deste modo, o valor crítico para o
ganho proporcional foi calculado de duas formas: utilizando o critério de estabilidade de
Routh-Hurwitz e o método da Bissecção. Além disso, para determinar as raízes da
equação característica que descreve o sistema, foram utilizados dois métodos, o analítico,
método de Newton-Raphson com divisões sintéticas e o gráfico, método do Lugar das
Raízes. O valor encontrado para o ganho proporcional crítico foi de 75,1495. A partir deste
resultado, realizou-se a simulação do comportamento dinâmico do processo controlado no
software matemático MATLAB, gerando gráficos como resposta. Dependendo do valor do
ganho proporcional adotado, o sistema se mostra estável, todavia, mesmo dentro das
condições de estabilidade, é inerente ao controle proporcional um erro residual e por
consequência, o processo pode tornar-se inadequado considerando os limites de
especificação requisitados pelo cliente.
Palavras-chave: Análise da Estabilidade. Controle proporcional. Simulação.

ABSTRACT
SALVARANI, R. O. Analysis of the stability of the proportional control of a chemical
process. 2015. 59 s. Monograph (Work of conclusion course) – Escola de Engenharia de
Lorena, Universidade de São Paulo, Lorena, 2015.
Many chemical processes works under severe conditions of temperature, pressure,
flow, besides using toxic chemicals both to man and to the environment. For this reason,
the monitoration, or more specifically, the control of these processes must ensure the safety
and the strict quality specifications of the products that go to market. Therefore, it is
necessary to work considering the parameters scaled in the project of the process, which
will make it stable, hence robust and reliable, besides profitable. This paper aims to
analyze the stability of the proporcional gain of a chemical process, which takes place in a
reactor isothermal CSTR, whose chemical reaction behaves as a pseudo-first order. The
disorders are caused due to variations in the excess reagent composition and the control is
done by manipulating the mass flow rate of the limiting reagent, with the primary goal, the
control of the concentration of the desired product as close to the reference value designed.
Thus, the critical value for the proportional gain was calculated in two ways: using the
criterion Routh-Hurwitz stability and Bisection method. Furthermore, to determine the
roots of the characteristic equation describing the system, two methods were used, the
analytic, Newton-Raphson method with synthetic divisions method and the graphic, Place
of the roots method. The critic value founded for the proportional gain was 75.1495. From
this result, it carried out the simulation of the dynamic behavior of the controlled process in
the mathematical software MATLAB, creating graphics as answers. Depending on the value
of proportional gain adopted, the system shows itself stable, however, even under the
conditions of stability is inherent to the proportional control a residual error and therefore,
the process can become inappropriate considering the specification limits required by the
cliente.
Keywords: Analysis of Stability. Proportional control. Simulation.
LISTA DE FIGURAS
FIGURA 1 - ESTABILIDADE DAS VARIÁVEIS DE TEMPERATURA E FRAÇÃO MOLAR DE UM
SISTEMA AO LONGO DO TEMPO, PARA UM DETERMINADO VALOR DE GANHO
PROPORCIONAL. ................................................................................................. 18
FIGURA 2 - RESULTADOS DAS RAÍZES QUANDO SE VARIA O VALOR DE K ............................. 21
FIGURA 3 - DIAGRAMA DO LUGAR DAS RAÍZES .................................................................... 22
FIGURA 4 - CURVA DO NÍVEL DE UM LÍQUIDO EM UM TANQUE EM RELAÇÃO AO TEMPO.
UTILIZA DIFERENTES GANHOS
POPORCIONAIS....................................................................................................24
FIGURA 5 - CURVA DO NÍVEL DE UM TANQUE EM RELAÇÃO AO TEMPO, UTILIZANDO
CONTROLADORES P E PI ..................................................................................... 25
FIGURA 6 - REATOR CSTR, COM VAZÕES DE ENTRADA (Q-Q) E Q, PARA OS REAGENTES “R”
E “A”, RESPECTIVAMENTE, E VAZÃO DE SAÍDA “Q” ............................................ 32
FIGURA 7 - REPRESENTAÇÃO GRÁFICA DAS TRÊS PRIMEIRAS ITERAÇÕES PARA A PESQUISA
DAS RAÍZES PELO MÉTODO DA BISSECÇÃO. ........................................................ 36
FIGURA 8 - REPRESENTAÇÃO GRÁFICA DO MÉTODO DE NEWTON-RAPHSON ....................... 37
FIGURA 9 - RESULTADOS DOS CÁLCULOS PARA PESQUISA DE UM VALOR CRÍTICO PARA 𝐾𝑐. 44
FIGURA 10 - MÉTODO DO LOCAL DAS RAÍZES DA EQUAÇÃO CARACTERÍSTICA PARA
𝐾𝑐 = 50. ......................................................................................................... 45
FIGURA 11 - MÉTODO DO LOCAL DAS RAÍZES DA EQUAÇÃO CARACTERÍSTICA PARA
𝐾𝑐 = 75,1495. ............................................................................................... 46
FIGURA 12 – MÉTODO DO LOCAL DAS RAÍZES DA EQUAÇÃO CARACTERÍSTICA PARA
𝐾𝑐 = 100. ..................................................................................................... 46
FIGURA 14– COMPORTAMENTO DINÂMICO DO PROCESSO CONTROLADO, ADOTANDO
𝐾𝑐 = 75,1495 ................................................................................................ 49
FIGURA 16 – ERRO RESIDUAL PRESENTE APÓS A ESTABILIZAÇÃO DO SISTEMA REALIZADA
PELO CONTROLE PROPORCIONAL ................................................................... 50

LISTA DE TABELAS
TABELA 1 - ARRANJO DE ROUTH .......................................................................................... 19
TABELA 2 - ARRANJO DE ROUTH PARA O PROBLEMA PROPOSTO ........................................... 39
LISTA DE QUADROS
QUADRO 1- SIMULAÇÕES USANDO RESIDUE PARA CADA VALOR DE K_C, DADOS OS
COEFICIENTES POLINOMIAIS DA FUNÇÃO DE TRANSFERÊNCIA DO NUMERADOR E
DENOMINADOR ................................................................................................... 40
QUADRO 2 - SIMULAÇÕES USANDO RLOCUS PARA CADA VALOR DE K_C, DADOS OS
COEFICIENTES POLINOMIAIS DA FUNÇÃO DE TRANSFERÊNCIA DO NUMERADOR E
DENOMINADOR. .................................................................................................. 42

LISTA DE SIGLAS
A Ação
D Decisão
CSTR Continuous Stirred Tank-Reactor
M Medição
MATLAB Matrix Laboratory
P Proporcional
PBR Packed Bed Reactor
PFR Plug Flow Reactor
PI Proporcional-Integral
PID Proporcional-Integral-Derivativo
USP Universidade de São Paulo
SUMÁRIO
1 INTRODUÇÃO ............................................................................................... 14
2 REVISÃO BIBLIOGRÁFICA ......................................................................... 16
2.1 CONTROLE DE PROCESSOS .................................................................... 16
2.2 VARIÁVEL DESVIO ................................................................................... 17
2.3 ESTABILIDADE .......................................................................................... 18
2.4 CRITÉRIO DE ESTABILIDADE DE ROUTH-HURWITZ ....................... 19
2.5 MÉTODO DO LUGAR DAS RAÍZES ........................................................ 20
2.6 CONTROLADORES .................................................................................... 22
2.6.1 Controlador Proporcional (P) ............................................................... 23
2.6.2 Controlador Proporcional-Integral (PI) ................................................ 24
2.6.3 Controlador Proporcional-Integral-Derivativo (PID) ........................... 25
2.7 CINÉTICA QUÍMICA .................................................................................. 26
2.7.1 Lei de Velocidade ................................................................................. 26
2.7.2 Constante de Velocidade ...................................................................... 27
2.7.3 Ordem de Reação .................................................................................. 28
2.8 REATORES .................................................................................................. 28
2.8.1 Reator Contínuo de Tanque Agitado (CSTR) ...................................... 29
3 METODOLOGIA ............................................................................................ 31
3.1 PROBLEMA PROPOSTO ............................................................................ 31
3.2 SOFTWARE ................................................................................................. 33
3.3 DESENVOLVIMENTO DA PROGRAMAÇÃO ....................................... 34
3.3.1 Método da Bissecção ............................................................................ 34
3.3.2 Método de Newton Raphson com Divisões Sintéticas ......................... 36
3.3.3 Determinação da Estabilidade do Sistema ............................................ 38
3.4 SIMULAÇÃO PARA DIFERENTES VALORES DO GANHO
PROPORCIONAL .................................................................................. 40
4 RESULTADOS E DISCUSSÃO ..................................................................... 43
5 CONCLUSÃO... .............................................................................................. 52
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................ 53
APÊNDICE A – Programação para o método do lugar das raízes. .................... 54
APÊNDICE B – Programação para resultado gráfico do comportamento
dinâmico do processo controlado. ........................................... 55
APÊNDICE C – Programação para calcular o valor crítico do ganho
proporcional. ........................................................................... 56
APÊNDICE D – Programação para função NRsdivision criada para executar o
método de Newton-Raphson com divisões sintéticas. ............ 58

14
1 INTRODUÇÃO
Numa planta química, o controle de processos químicos é uma ferramenta
fundamental e indispensável para o funcionamento e segurança de todos os elementos que
a constituem. Além disso, esta ferramenta não faz distinção de tipos de processos ou
condições de trabalho, ou seja, pode-se dizer que é intrínseco à planta química que deseja
obter bons resultados e com segurança, utilizar os conceitos e ferramentas do controle de
processos químicos.
As vantagens de se aplicar o controle são inúmeras, dentre elas tornar o sistema
mais confiável, robusto, aumentar a vida útil dos equipamentos, aumentar a capacidade dos
processos, enfim, de modo geral, o controle de processos químicos auxilia a planta química
a aumentar sua produtividade e diminuir seus gastos. Ou seja, é indispensável para a
lucratividade da indústria química (KWONG, 2002, p. 9).
Além disso, o primeiro fator a se considerar quando se fala em configurar um
processo químico é a segurança. Desta maneira, elementos que possam causar distúrbios ao
sistema e possíveis catástrofes, devem ser controlados por um sistema rigoroso e confiável,
portanto, o controle de processos químicos se torna indispensável.
O meio ambiente é o segundo fator em escala de importância, já que é de
conhecimento geral o impacto que a indústria causou ao meio ambiente ao longo dos anos
e o reflexo deste descuido para a população mundial. Assim, um controlador bem
dimensionado pode evitar vazamentos de líquidos e gases, explosões e inúmeros acidentes,
cujo impacto ao meio ambiente podem causar repercussões severas. Além do mais, evitar
impactos ao meio ambiente contribui para o benchmarking da empresa, já que, atualmente,
um dos requisitos solicitados pelos clientes é que a empresa seja ecologicamente correta.
Existem dois modos para a ação de um controlador: manual e automática. O modo
manual, em que o operador analisa uma informação de medição enviada por um
transmissor e toma a ação necessária para atuar no elemento final de controle a fim de
manter o sistema estável, não é constante e deveras simplória. Cada operador possui uma
bagagem de conhecimento, além disso, o controle manual está sujeito ao erro humano e
por estas razões pode afetar na eficiência do processo e consequentemente a qualidade do
produto e até mesmo a segurança.

15
Já o controle automático, a ação tomada para atuar no elemento final de controle é
feita por um controlador previamente dimensionado para avaliar a diferença entre um valor
de referência e o valor da medição. Este tipo de controle atua de maneira constante e
elimina os erros humanos, o que torna o sistema mais robusto e uniforme. Todavia, por se
tratar de um equipamento dimensionado para realizar determinados cálculos, a tarefa de
encontrar um tipo de controle que atenda ao processo em questão e considere todos os
parâmetros necessários, os quais evolvem diversas áreas da engenharia química, é
complexa.
Um dos fatores essenciais para o controle de um processo químico é a estabilidade
do sistema. Esta, para ser alcançada, deve considerar não somente os parâmetros que
envolvem o controle do sistema, mas também a necessidade que o processo possui de ser
eficiente e produtivo, ou seja, de gerar lucro. Portanto, para manter a estabilidade do
sistema em determinado valor de referência, deve-se considerar a segurança, a
lucratividade e a qualidade, seja do processo em si ou do produto final desejado.
Deste modo, o objetivo desta monografia é realizar uma análise da estabilidade do
processo de um reator químico contínuo e agitado, em que ocorre uma reação química de
pseudo-primeira ordem e cuja necessidade é manter a concentração do produto gerado em
determinado valor de referência. Para tanto, foram feitas simulações com um software
matemático, utilizando métodos numéricos e gráficos para encontrar o valor crítico do
ganho proporcional, que torna o sistema estável.

16
2 REVISÃO BIBLIOGRÁFICA
2.1 CONTROLE DE PROCESSOS
O processo de uma planta química, seja ele qual for, é um conjunto de operações
unitárias nas quais, ocorrem reações químicas. Dessa forma, a maneira como se faz a
distribuição dessas operações e reações, segue uma lógica de raciocínio cujo objetivo é
transformar matéria-prima em um produto desejado. A partir do momento em que a planta
química se estabelece como projeto, o planejamento do controle da unidade é de suma
importância para que o resultado esperado, ou produto almejado, seja obtido de maneira
segura, barata, dentro da margem de especificação requerida, que atenda aos regulamentos
e normas ambientais e que opere dentro das restrições de cada operação antes da
implementação física do processo (KWONG, 2002, p. 9).
Para tanto, é preciso estabelecer alguns parâmetros de controle às operações, os
quais são base para o controle de processos (SMITH; CORRIPIO, 2008, p. 3):
1. Sensor-Transmissor: responsáveis por captar a informação pontual,
num determinado instante, e transmiti-la, respectivamente. Podem ser chamados de
elementos primário e secundário.
2. Controlador: responsável por captar a informação transmitida pelo
transmissor e compará-la a uma base de dados estabelecida no projeto, chamada de
ponto fixo (set point). Dependendo do resultado o controlador decide o que será
feito para manter a variável que se quer controlar no valor desejado.
3. Elemento final de controle: responsável por executar uma ação
estabelecida pelo controlador, a qual irá manter a variável que se quer controlar no
valor do set point. Exemplo: válvula (elemento final de controle) abre para
liberação de um líquido refrigerante, no intuito de diminuir a temperatura (variável
que se quer controlar) para atingir o set point.
Estes componentes são responsáveis por três operações básicas e fundamentais do
controle de processos:

17
1. Medição (M): realizada, normalmente, pela combinação entre os
elementos primário e secundário de controle. Há casos de equipamentos em que a
função do transmissor é dispensada, pois o controlador possui o sensor, então a
medição e controle são feitas num mesmo elemento.
2. Decisão (D): realizada pelo controlador.
3. Ação (A): realizada pelo elemento final de controle.
Este tipo de controle, em que as decisões tomadas são baseadas num desvio que já
ocorreu no sistema e que deve ser corrigido, é chamado de controle de realimentação.
2.2 VARIÁVEL DESVIO
A variável de saída sofre alterações não somente pelas entradas como também
pelas condições iniciais do sistema. Para eliminar o efeito das condições inicias do sistema
considera-se que no início o sistema está no estado estacionário. Isso torna sua derivada
igual a zero, sem eliminar o valor inicial da saída, todavia o valor inicial da variável desvio
será sempre zero. Para eliminar o valor inicial da saída, passamos a usar o desvio do valor
inicial, que é chamado de variável desvio, dada pela equação 2.1 (SMITH; CORRIPIO,
2008, p. 24):
Y(t) = y(t) – y(0) (2.1)
Onde:
Y(t) – variável desvio;
y(t) – variável de saída;
y(0)- variável no estado estacionário.
A equação 2.2, é um exemplo do porquê pode-se substituir as variáveis absolutas
pelas variáveis desvio, já que suas derivadas possuem a mesma inclinação.
𝑑(𝑌(𝑡))
𝑑𝑡=
𝑑(𝑦(𝑡)−𝑦(0))
𝑑𝑡=
𝑑(𝑦(𝑡))
𝑑𝑡−
𝑑(𝑦(0))
𝑑𝑡=
𝑑(𝑦(𝑡))
𝑑𝑡 (2.2)
Sendo:
𝑑𝑦(0)
𝑑𝑡= 0 (2.3)
18
2.3 ESTABILIDADE
Segundo Smith e Corripio (2008, p. 30), “Estabilidade é a habilidade da resposta
de permanecer limitada (permanecer dentro de limites) quando sujeita a entradas
limitadas”.
Já para Stephanopoulos (1984, p. 282), “Um sistema dinâmico é considerado
estável quando para toda entrada limitada se produz uma resposta limitada, independente
do seu estado inicial”.
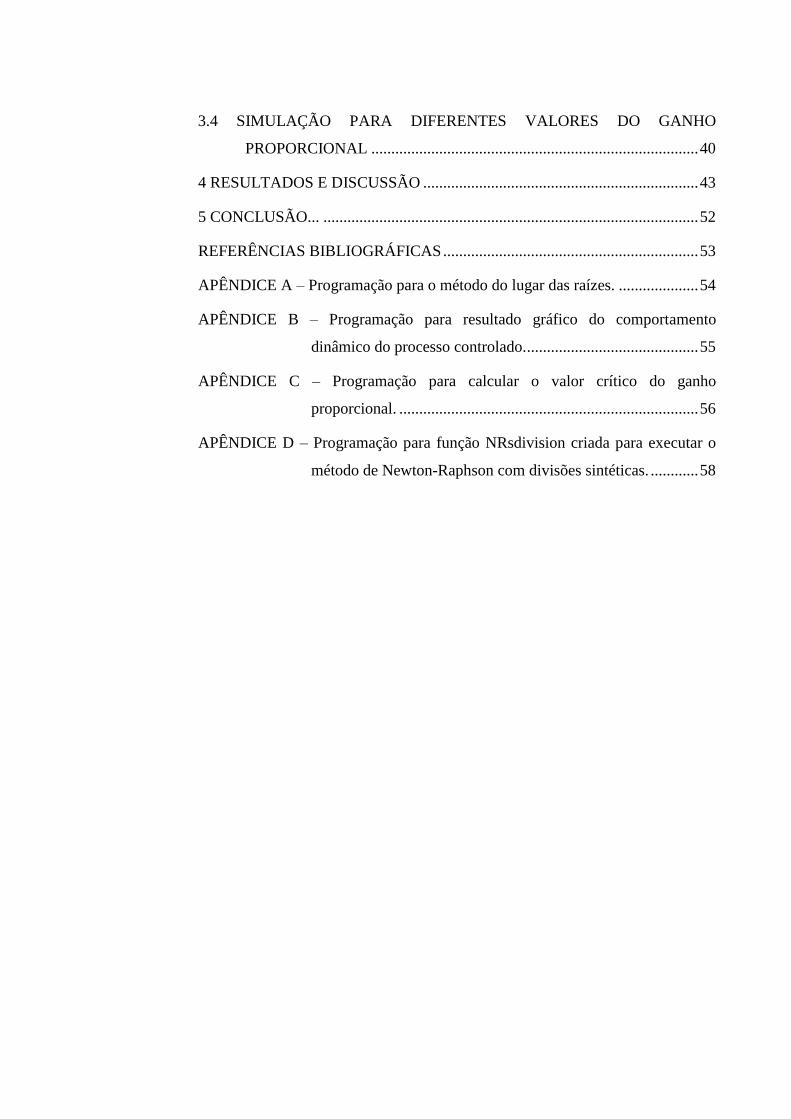
A Figura 1 apresenta o comportamento oscilatório, obtida de Igarashi (2013, p.
51). Nota-se que o sistema atinge a estabilidade quando a variável saída atinge um valor
constante ao longo do tempo, ou seja, quando não há mais oscilações.
Fonte: IGARASHI, 2013, p.51
Figura 1 - Estabilidade das variáveis de temperatura e fração molar de um
sistema ao longo do tempo, para um determinado valor de ganho proporcional.

19
2.4 CRITÉRIO DE ESTABILIDADE DE ROUTH-HURWITZ
Este critério citado e posteriormente utilizado por (COUGHANOWR; KOPPEL
1991, p. 169), visa determinar se o sistema é estável ou instável de acordo com as raízes da
equação característica desse sistema. Para tanto, é preciso organizar o polinômio do
denominador da equação característica, representado pela equação 2.4, na forma canônica:
𝑎0𝑠𝑛 + 𝑎1𝑠𝑛−1 + 𝑎2𝑠𝑛−2 … + 𝑎𝑛 = 0 (2.4)
Caso o termo de mais alto grau não seja positivo, é necessário multiplicar os dois
lados da equação 2.4 por (-1).
Assim, analisa-se somente os coeficientes polinomiais 𝑎0, 𝑎1, 𝑎2 … 𝑎𝑛.
Se qualquer um deles possuir parte real negativa, caracterizará que o sistema é
instável. Caso todos os coeficientes possuam partes reais positivas, então o sistema poderá
ser tanto estável como instável, por isso precisa-se fazer o arranjo de Routh para poder
caracterizar o sistema.
O arranjo se dá como ilustrado pela Tabela 1, em que o número de linhas é o
número de elementos da equação característica mais um (n+1) e os demais elementos são
determinados pelas equações 2.5, 2.6, 2.7 e 2.8.
Tabela 1 - Arranjo de Routh
Fonte: COUGHANOWR; KOPPEL 1991, p. 169
Linha
1 a0 a2 a4
2 a1 a3 a5
3 b1 b2 b3
4 c1 c2
5 d1
n + 1 e1

20
𝑏1 = 𝑎1 𝑎2 − 𝑎0 𝑎3
𝑎1 (2.5)
𝑏2 = 𝑎1 𝑎4 − 𝑎0 𝑎5
𝑎1 (2.6)
𝑐1 = 𝑏1 𝑎3 − 𝑎1 𝑏2
𝑏1 (2.7)
𝑐2 = 𝑏1 𝑎5 − 𝑎1 𝑏3
𝑏1 (2.8)
Os elementos "𝑑1" 𝑒 "𝑒1 " são calculados analogamente às equações 2.5, 2.6, 2.7 e
2.8.
Então, se todos os elementos da primeira coluna (𝑎0, 𝑎1,𝑏1, 𝑐1, 𝑑1, 𝑒1) forem
positivos, o sistema é estável. Se um desses elementos for negativo, o sistema será instável
e o número de trocas de sinais na primeira coluna será igual ao número de raízes da
equação característica localizadas no semiplano direito do plano “s”.
2.5 MÉTODO DO LUGAR DAS RAÍZES
O método do Lugar das Raízes é um procedimento para obter graficamente as
raízes da equação característica do sistema, quando se varia o parâmetro ganho do
controlador, 𝐾𝑐 (COUGHANOWR; KOPPEL; 1991, p.157).
Para exemplificar o método do Lugar das Raízes, Coughanowr e Koppel (1991.
p.157) propuseram a malha fechada a seguir, cuja equação característica é dada em 2.9.
1 + 𝐾
(𝑠+1)(𝑠+2)(𝑠+3)= 0 (2.9)
Sendo:
𝐾 = 6𝐾𝑐
𝐾𝑐 = 4,41
Deste modo, pode-se tratar algebricamente a equação e escrevê-la como na
equação 2.10, considerando 𝐾𝑐 = 4,41.
𝑠3 + 6𝑠2 + 11𝑠1 + 32,5 = 0 (2.10)

21
Para equação 2.10, obtem-se as raízes (-5,1), (-0,4 – 2,5i) e (-0,4 + 2,5i).
Da mesma forma a Figura 2 demonstra as raízes para equação 2.9, adotando-se
diferentes valores para 𝐾.
Fonte: COUGHANOWR; KOPPEL; 1978, p.157
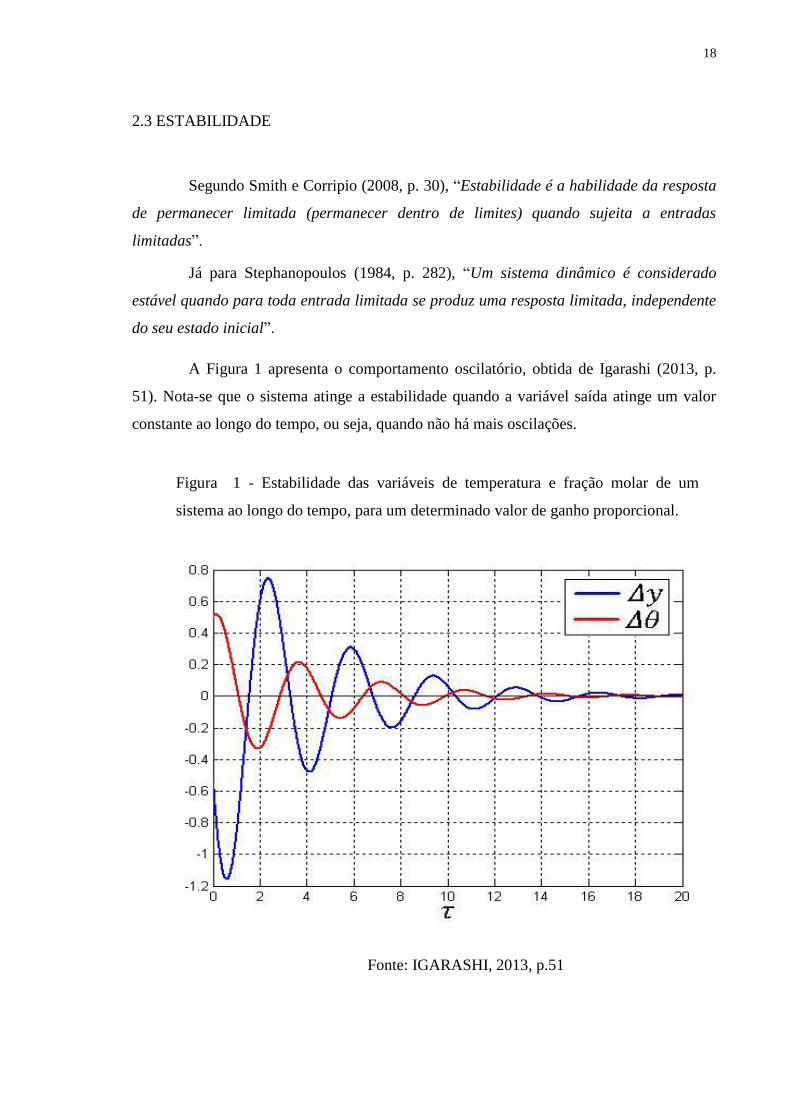
A Figura 3 representa o diagrama do lugar das raízes, em que é possível
representa-las no plano complexo. Neste diagrama os “ramos” são gerados a partir dos três
polos iniciais, onde 𝐾 = 0, e a partir destes pontos são plotadas todas as raízes obtidas pelo
aumento do valor de 𝐾 e o sentido deste fluxo é indicado pelas setas nos “ramos”.
A grande vantagem deste diagrama é a visualização da característica da resposta,
ou seja, se as raízes forem reais a resposta não será oscilatória, não obstante, se as raízes
forem complexas, irão gerar uma resposta oscilatória. Além disso, para raízes complexas
com partes reais negativas, as oscilações serão amortecidas, ao passo que, para raízes
complexas com partes reais positivas, as oscilações serão crescentes.
Figura 2 - Resultados das raízes quando se varia o valor de 𝐾. Figura 2 - Resultados das raízes quando se varia o valor de K
22
Fonte: COUGHANOWR; KOPPEL; 1978, p.158
2.6 CONTROLADORES
Os controladores são o “cérebro” do sistema de controle de processos e podem ser
automáticos ou manuais (SMITH; CORRIPIO, 2008, p. 3).
Os controladores manuais recebem a informação do primeiro e segundo elementos
de controle e ficam responsáveis por apresentar a informação recebida para o operador
responsável pelo sistema. Assim, o operador irá tomar a decisão de quanto será necessário
alterar a variável manipulada para diminuir ao máximo o erro entre a variável que se quer
controlar e o set point e então enviar a informação para o elemento final de controle.
Contudo, este tipo de controle depende muito de cada operador, pois está atrelado à
experiência, conhecimento e atenção da pessoa que opera o sistema, o que torna as
decisões suscetíveis a erros.
Já os controladores automáticos recebem a informação da mesma maneira que os
manuais, contudo operam de acordo com uma lógica pré-estabelecida que irá comparar a
informação recebida com o set point, tomar a decisão e enviar a resposta para o elemento
final de controle, para este, tomar a ação necessária para o controle do processo. Este tipo
de controle possibilita maior uniformidade nas respostas e evita erros humanos.
Existem três tipos de controladores: controlador proporcional (P), controlador
proporcional-integral (PI) e o proporcional-integral-derivativo (PID); em que a maneira
como é solucionada a equação de lógica de controle baseada na diferença entre a variável
Figura 3 - Diagrama do Lugar das Raízes
Figura 3 - Diagrama do Lugar das Raízes

23
controlada e o set point, é diferente para cada um deles (SMITH; CORRIPIO, 2008, p.
158).
2.6.1 Controlador Proporcional (P)
É o tipo mais simples de controlador. Segundo Smith e Corripio (2008, p. 159),
pode ser descrito pela equação 2.11.
𝑚(𝑡) = �̅� + 𝐾𝑐𝑒(𝑡) (2.11)
Onde:
𝑚(𝑡) – saída ou resposta do sistema;
�̅� – saída do controlador quando o erro é zero, ou seja, no estado
estacionário;
𝐾𝑐 – ganho proporcional;
𝑒(𝑡) – erro.
A função de transferência do controlador proporcional pode ser obtida escrevendo
a equação 2.9, na forma de variável desvio, conforme a equação 2.12
𝑀(𝑡) = 𝐾𝑐𝐸(𝑡) (2.12)
Onde:
M(t) = m(t) - �̅�;
E(t) = R(t) – C(t), sendo R(t) e C(t) variáveis desvio do ponto fixo e
da variável controlada, respectivamente.
Assim, aplicando a transformada de Laplace para a equação 2.12, tem-se a
equação 2.13:
𝐺(𝑠) = 𝑀(𝑠)
𝐸(𝑠)= 𝐾𝑐 (2.13)
A vantagem de trabalhar com este controlador é que ele possui somente um
parâmetro de sintonização (Kc), quando se trata de uma resposta ao degrau unitário,
todavia a desvantagem é que sua operação se dá com um erro residual (SMITH;
CORRIPIO, 2008, p. 163).

24
O erro residual é a distância entre a reta que representa o ponto fixo ao longo do
tempo e o patamar de estabilização da resposta do sistema quando se utiliza o controlador
proporcional, como mostra a Figura 4.
Fonte: SMITH; CORRIPIO, 2008, p. 160
Portanto, a correção feita por este controle é proporcional à diferença entre, por
exemplo, a temperatura num reator e a temperatura média de um líquido de resfriamento
(ARIS; AMUNDSON, 1958, p. 132), sendo um conceito aplicável a qualquer tipo de
processo em que se utiliza o controle proporcional.
2.6.2 Controlador Proporcional-Integral (PI)
Este tipo de controlador remove o erro residual causado pelo controlador
proporcional. A equação 2.14 descreve o sistema (SMITH; CORRIPIO, 2008, p. 163).
𝑚(𝑡) = �̅� + 𝐾𝑐𝑒(𝑡) + 𝐾𝑐
𝜏1∫ 𝑒(𝑡)
𝑡
0 (2.14)
Onde:
𝜏1 – tempo integral ou tempo de restauração.
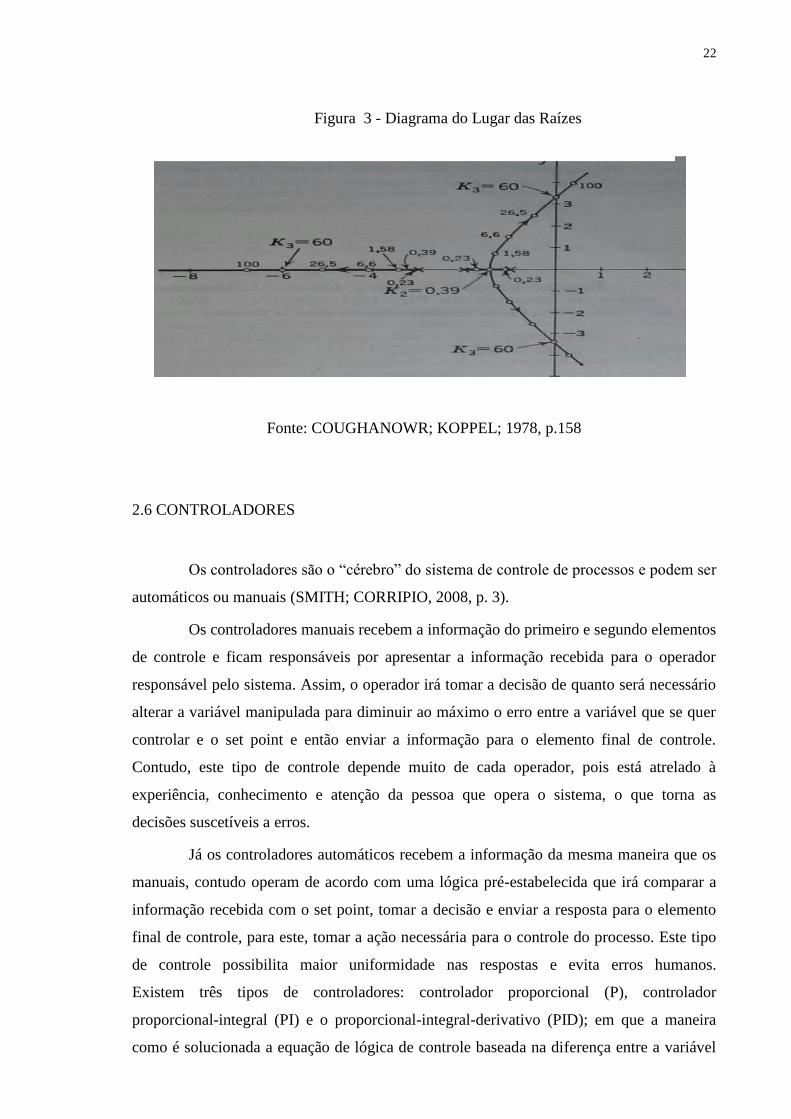
O termo da integral remove o erro residual, pois, sempre que o erro estiver
presente, o controlador PI varia sua saída, o que vai diminuindo o erro até zerar. Quando o
erro zera o termo do erro residual é anulado, contudo o termo da integral não se anula.
Pensando ainda no mesmo exemplo do tanque que se quer controlar o nível, o termo da
integral adquire o valor necessário para aumentar a vazão de saída, ou seja, o controlador
PI irá anular o erro residual e aumentar a vazão de modo a manter o nível do tanque no set
point, como pode ser visto na Figura 5.
Figura 4 - Curva do nível de um líquido em um tanque em relação ao
tempo. Utiliza diferentes ganhos proporcionais.
25
.
Fonte SMITH; CORRIPIO, 2008, p. 164
A função de transferência deste controlador pode ser obtida da mesma maneira
que para o controlador proporcional, dada pela equação 2.15:
𝐺(𝑠) = 𝑀(𝑠)
𝐸(𝑠)= 𝐾𝑐 (1 +
1
𝜏1𝑠) (2.15)
2.6.3 Controlador Proporcional-Integral-Derivativo (PID)
Este controlador adiciona o modo de controle chamado de ação derivativa ou ação
prévia. A equação 2.16 descreve este controlador (SMITH; CORRIPIO, 2008, p. 165).
𝑚(𝑡) = �̅� + 𝐾𝑐𝑒(𝑡) + 𝐾𝑐
𝜏1∫ 𝑒(𝑡) + 𝐾𝑐
𝑡
0𝜏𝐷
𝑑𝑒(𝑡)
𝑑𝑡 (2.16)
Onde:
𝜏𝐷 – tempo derivativo ou tempo de proporção.
O termo da derivada é responsável por traçar uma reta tangente à curva do erro,
isto faz com que o controlador possa prever que o sistema está se afastando do ponto fixo.
Com isso, o peso dessa parcela em relação às outras duas é grande e tende a diminuir o
erro que foi gerado. Conforme o erro vai diminuindo e consequentemente a derivada
também, o peso das parcelas proporcional e integral aumenta, o que indica que a variável
controlada está se aproximando do ponto fixo. Ou seja, o modo derivativo tem a função de
diminuir a quantidade de oscilações até a estabilização do sistema.
Este tipo de controlador é utilizado para processos lentos, onde a constante de
tempo é grande. Em processos rápidos, onde a constante de tempo é pequena, há presença
Figura 5 - Curva do nível de um tanque em relação ao
tempo, utilizando controladores P e PI

26
de ruídos, o que torna o valor da derivada grande durante todo o processo. Isso fará com
que as oscilações tendam a aumentar e não a diminuir.
Assim como para os controladores P e PI, a função de transferência para este
controlador pode descrita pela equação 2.17.
𝐺(𝑠) = 𝑀(𝑠)
𝐸(𝑠)= 𝐾𝑐 (1 +
1
𝜏1𝑠+
𝜏𝐷𝑠
𝛼𝜏𝐷𝑠+1) (2.17)
Onde:
α – constante adimensional
2.7 CINÉTICA QUÍMICA
2.7.1 Lei de Velocidade
Normalmente, para o estudo cinético das reações químicas se relacionam as
concentrações dos reagentes (tendo como base o reagente limitante para a base de cálculos
dos outros reagentes e produtos) e a constante cinética de reação (será tratada no próximo
item), as quais são dispostas numa expressão, chamada de lei de velocidade, dada equação
2.18 (FOGLER, 2002, p.69).
A equação 2.18, demonstra a equação de velocidade para reação química dada em
2.19.
-rA= kA CACB (2.18)
Onde:
(−𝑟𝐴) – taxa de consumo da espécie A;
kA – constante de velocidade da espécie A;
CA – concentração da espécie A;
CB – concentração da espécie B.
Para:
aA + bB cC + dD (2.19)
Sendo A e B os reagentes e C e D os produtos, respectivamente, e “a”, ”b”, ”c” e
“d” os coeficientes estequiométricos de cada espécie química.
.

27
A expressão 2.20, representa a quantidade, seja em mols ou massa, em relação ao
tempo de formação (produtos) ou consumo (reagentes) de certa espécie da reação. Na
maioria dos casos utiliza-se a velocidade do reagente limitante para análise da cinética da
reação, contudo podemos relacionar as velocidades de consumo ou formação de qualquer
espécie da reação química tratada, 2.19, considerando os coeficientes estequiométricos.
Este tipo de raciocínio é usado, pois nem sempre o reagente limitante é a espécie que se
quer analisar. Assim, podemos relacionar as velocidades, dada a equação 2.20 (FOGLER,
2002, p.72).:
(−𝑟)𝐴
𝑎=
(−𝑟)𝐵
𝑏=
(−𝑟)𝐶
𝑐=
(−𝑟)𝐷
𝑑 (2.20)
2.7.2 Constante de Velocidade
É uma constante que depende principalmente da temperatura, pois está
relacionada aos choques efetivos entre as espécies reagentes para formação do produto,
além da vibração dessas espécies para romper as ligações e formar novas, também está
relacionada com a área dos choques e forças de repulsão estérica e eletrônica. Em sistemas
líquidos, depende de outros parâmetros como pressão total, força iônica e tipo de fluido. Já
em sistemas gasosos, o catalisador e a pressão total do sistema, também influenciam no
valor da constante de velocidade (FOGLER, 2002, p. 63).
Com intenção de simplificar os cálculos e devido à pequena influência dos outros
parâmetros na constante de velocidade, se comparados à temperatura, é utilizada somente
um fator principal para o cálculo da constante de velocidade, a temperatura. Esta, é o
parâmetro mais utilizado, inclusive por indústrias e laboratórios, para compor a equação de
Arrhenius, equação 2.21 (FOGLER, 2002, p. 63).
𝑘 = 𝐴 𝑒−𝐸
(𝑅𝑇)⁄ (2.21)
Onde:
A – fator pré-exponencial ou fator de frequência;
E – energia de ativação;
R – constante dos gases;
T – temperatura do sistema.

28
2.7.3 Ordem de Reação
A ordem de uma reação química desconhecida só pode ser obtida através de
experimentos. Um exemplo é variar a concentração de uma espécie reagente mantendo-se
todos os possíveis parâmetros do sistema constantes, inclusive a concentração de outras
espécies reagentes. A partir desses resultados, é possível descobrir a ordem da espécie em
questão e representá-la na equação de velocidade como um expoente da concentração
dessa espécie, assim como demonstra a equação 2.22.
-r = k CAαCB
β (2.22)
A partir da ordem de cada espécie encontra-se a ordem da reação pela soma dos
expoentes de cada reagente. Então, a ordem da reação dada pela equação 2.23 é n
(FOGLER, 2002, p. 65).
n = α + β (2.23)
Conforme a ordem da reação, temos unidades correspondentes para a constante de
velocidade em casa situação, como por exemplo:
Reação de ordem zero: {k} = mol / L .s ;
Reação de primeira ordem: {k} = s-1
;
Reação de segunda ordem: {k} = L / mol . s;
Reação de terceira ordem: {k} = ( L / mol )2
. s-1
.
2.8 REATORES
Existem vários tipos de reatores químicos, os quais são subdivididos de acordo
com seu modo básico de operação. Essas diferenças se dão devido à ênfase nas condições
de reação que esses equipamentos irão dar ou até mesmo de acordo com a demanda de
produtividade que a planta tem como objetivo. Ou seja, são criados mecanismos que
favorecem as condições de reação e produtividade para melhor atender a demanda de
mercado (LEVENSPIEL, 2000, p. 31).
Os tipos mais conhecidos de reatores são (LEVENSPIEL, 2000, p. 31):

29
Batelada ou Descontínuo – geralmente são usados para operações em
pequena escala, reações de condições de trabalho muito específicas de controle e teste de
novos produtos. Sua principal vantagem é que possibilita altas conversões, contudo possui
alto custo de operação, dificuldade com alta produtividade e diferença de produto de uma
batelada para outra.
Reatores com Escoamento Contínuo – os principais tipos são: reator
contínuo de tanque agitado (CSTR), reator com escoamento empistonado (PFR) e reator de
leito fixo (PBR). Esses reatores possuem a principal característica de um fluxo contínuo de
entrada e saída de fluidos, o que proporciona alta produtividade. Contudo estes não
resultam altas conversões e seu controle de operação é mais sensível.
2.8.1 Reator Contínuo de Tanque Agitado (CSTR)
O reator CSTR, sigla para Continuous Stirred-Tank Reactor, segundo Fogler
(2002, p. 10), opera em estado estacionário, ou seja, o reator atingiu um nível volumétrico
em que e as vazões de entrada e saída o mantêm constante. Além disso, considera-se que a
agitação é tal que torna a mistura homogênea (ideal) ao longo de todo o tanque,
influenciando as condições de temperatura, pressão, concentração de espécies, velocidade
de reação e outros aspectos. Como essas condições são as mesmas em qualquer ponto do
reator pode-se considerar que a corrente de saída do reator representa o que está
acontecendo dentro dele.
A partir dessas considerações, pode-se encontrar a equação de projeto para o
CSTR. Então, a equação geral de balanço molar é dada pela equação 2.24 (FOGLER,
2002, p. 10).
𝐹𝑗0 − 𝐹𝑗 + ∫ 𝑟𝑗𝑉
0𝑑𝑉 =
𝑑𝑁𝑗
𝑑𝑡 (2.24)
Onde:
𝐹𝑗0 – vazão de entrada da espécie “j”;
𝐹𝑗 – vazão de saída da espécie “j”;
𝑟𝑗 – velocidade de reação da espécie “j”;
V – volume do reator;
Nj – número de mols da espécie “j”;

30
t – tempo.
Como o CSTR trabalha no estado estacionário, tem-se que 𝑑𝑁𝑗
𝑑𝑡= 0, ou seja, não
há variação do número de mols com o tempo. Além disso, como a mistura é perfeita, tem-
se a equação 2.25.
∫ 𝑟𝑗𝑉
0𝑑𝑉 = 𝑉 𝑟𝑗 (2.25)
Então, a equação de projeto pode ser escrita como mostra a equação 2.26.
𝑉 = 𝐹𝑗𝑜− 𝐹𝑗
−𝑟𝑗 (2.26)

31
3 METODOLOGIA
3.1 PROBLEMA PROPOSTO
O sistema proposto por Douglas (1972) contempla um reator CSTR isotérmico,
em que são adicionados dois reagentes, “A” e “R”, sob constante agitação e cujas vazões
mássicas de entrada são Q e (q – Q), respectivamente. Estes geram o produto “C”, que sai a
uma vazão mássica “q”. Para posterior análise, considera-se que o sistema atingiu o estado
estacionário de trabalho, ou seja, as vazões de entrada (reagentes) e saída (produto) foram
dimensionadas para manter o volume do reator a um nível constante. Além disso, as
condições de agitação para homogeneização das substâncias e consequente reação química,
são ideais.
As seguintes proposições foram sugeridas para análise do sistema:
O sistema pode ser descrito a partir de uma equação de pseudo-primeira ordem;
São adotados valores de set point para as concentrações de alimentação, taxa de
alimentação, constante cinética de reação e volume do reator;
Os distúrbios no sistema serão analisados somente em relação à variação da
composição do componente de entrada R.
O objetivo do controle é manter a concentração do produto “C” (variável resposta)
o mais próximo do estipulado (set point), apesar dos distúrbios causados pela variação na
composição do reagente “R” (variável de entrada). Este objetivo é alcançado medindo a
concentração atual de “C” e usando a diferença entre este valor e o set point para
manipular a vazão mássica de entrada do reagente “A” (variável manipulada), ou seja,
manipular a concentração de “A” no sistema.
Considerar o sistema de pseudo-primeira ordem significa que o reagente “R” está
consideravelmente em excesso, desta forma as variações em sua concentração não irão
alterar significativamente a taxa de conversão para o produto “C”. Por outro lado, sabe-se
que a indústria trabalha com um limite de especificação requerido pelo cliente, para tanto
seu processo deve apresentar resultados dentro de uma curva normal que atendam estes
limites. Isto quer dizer que, de acordo com os distúrbios na concentração do reagente “R”,
dever-se-á adicionar mais ou menos do reagente limitante “A”, para atingir o objetivo do
controle.

32
A Figura 6 apresenta o esquema de um reator CSTR que representa o sistema
proposto.
Fonte: CONSTANTINIDES; MOSTOUFI, 2000; p. 40
Segundo, Constantinides e Mostoufi, as reações químicas que ocorrem no reator
são:
A + R B
B + R C
Na prática, a formação da substância intermediária “B”, não causa efeito
significativo, devido à alta velocidade de formação do produto “C”.
Douglas (1972) propôs um modelo matemático por meio da função de
transferência global dada pela equação 3.1 e considerou um controlador proporcional na
modelagem.
𝐶𝑐(𝑠)
𝐶𝑅(𝑠) =
(𝑠+1,45)(𝑠+2,85)²(𝑠+4,35)
[2,98(𝑠+2,25)𝐾𝑐]+[(𝑠+1,45)(𝑠+2,85)²(𝑠+4,35)] (3.1)
Para:
𝐶𝑅(𝑡) = 𝛿(𝑡) → 𝐶𝑅(𝑠) = 1 (3.2)
proposta pela função de transferência global.
Sendo:
𝐾𝑐 – ganho proporcional
Figura 6 - Reator CSTR, com vazões de entrada (q-Q) e Q, para
os reagentes “R” e “A”, respectivamente, e vazão de saída “q”

33
𝐶𝑅(𝑡) – concentração do reagente “R” em função do tempo.
𝛿(𝑡) – impulso unitário.
𝐶𝑅(𝑠) – transformada de Laplace da concentração do reagente “R”.
𝐶𝐶(𝑠) – transformada de Laplace da concentração do produto “C”.
Além disso, para eliminar o efeito das condições iniciais do sistema no modelo
matemático, as variáveis foram descritas como variáveis desvio, dada pela equação 3.3.
𝐶𝑖(𝑡) = 𝑐𝑖(𝑡) − 𝑐𝑖(0) (3.3)
Onde:
𝐶𝑖(𝑡) – variável desvio da concentração de uma espécie.
𝑐𝑖(𝑡) – concentração de determinada espécie em função do tempo.
𝑐𝑖(0) – concentração de determinada espécie no estado estacionário.
Para analisar a dinâmica do processo controlado, será calculado o valor crítico de
𝐾𝑐, cujo valor ou intervalo representa o limite para estabilidade do sistema. Para tanto, foi
considerada uma entrada impulso unitário, conforme apresentado na equação 3.2.
3.2 SOFTWARE
O software utilizado para encontrar o valor crítico de 𝐾𝑐 foi o MATLAB 7.1. Para
tanto, foi necessário alguns conhecimentos de linguagem de programação do software,
além de conhecer algumas funções para, por exemplo, plotar gráficos, realizar a
transformada inversa de Laplace, criar uma nova função no MATLAB, dentre outros.
O principal ambiente trabalhado ao utilizar o software foi o “Editor”, onde é
possível criar uma série de comandos e posteriormente executá-los de uma só vez.
Contudo, este ambiente aceita somente os comandos, ou seja, todas as respostas para as
funções e blocos de programação criados, são geradas na janela “Command Window”. Esta
janela também aceita entrada de funções, todavia é inviável criar linhas de programação
neste ambiente já que ele serve para gerar respostas ou executar funções simples seguidas
de seus resultados.
34
Uma das grandes vantagens do software MATLAB, é a possibilidade que o usuário
possui de criar novas funções. A sintaxe utilizada para realizar este desenvolvimento é:
function x = nomedafunção(variáveis).
Graças a esta alternativa, foi criada a função NRsdivision, para calcular as raízes
de um polinômio de grau n com até um par de raízes complexas, baseada no método de
Newton-Raphson com divisões sintéticas (CONSTANTINIDES; MOSTOUFI, 2000; p.
41), o qual será tratado no item 3.3.3.
Além disso, foi de extrema importância o uso das funções “while” e “for”, pois a
partir delas foi possível gerar blocos loops de programação. Estes têm o objetivo de
realizar comandos até que determinada condição seja estabelecida (CAMPOS; 2013, p.
56).
As duas funções geram blocos loops, contudo devido à maneira como se
estruturam os comandos dentro do loop de cada função, pode ser mais fácil migrar o
raciocínio utilizado pelo programador para uma função do que para outra.
Por fim, utilizada na fase de resultados e discussão da monografia, é importante
ressaltar o uso da função “ilaplace”, a qual foi executada para realizar a transformada
inversa de Laplace e gerar a função que descreve o sistema proposto por Douglas (1972).
3.3 DESENVOLVIMENTO DA PROGRAMAÇÃO
3.3.1 Método da Bissecção
Segundo Chapra e Canale (2008, p. 101), o método da bissecção consiste em
procurar as raízes de uma função por inspeção de uma faixa de pesquisa, ou seja, adotam-
se dois valores de x de uma função, sendo que:
𝑓(𝑥𝑖) 𝑓(𝑥𝑠) < 0
Sendo:
𝑥𝑖 - limite inferior de pesquisa
𝑥𝑠 – limite superior de pesquisa
𝑓(𝑥𝑖) – resultado da função no ponto 𝑥𝑖

35
𝑓(𝑥𝑠) – resultado da função no ponto 𝑥𝑠
Assim que a faixa de pesquisa for estabelecida, o método da bissecção segue os
seguintes passos:
1. Cálculo de 𝑥𝑚 = 𝑥𝑖 + 𝑥𝑠
2 (3.4)
2. Cálculo de:
𝑓(𝑥𝑖) 𝑓(𝑥𝑚) (3.5)
Se 𝑓(𝑥𝑖) 𝑓(𝑥𝑚) < 0 → 𝑥′𝑖 = 𝑥𝑖 𝑒 𝑥′𝑠 = 𝑥𝑚 (segue para o passo 3) (3.6)
Se 𝑓(𝑥𝑖) 𝑓(𝑥𝑚) > 0 → 𝑥′𝑖 = 𝑥𝑚 𝑒 𝑥′𝑠 = 𝑥𝑠 (segue para o passo 3) (3.7)
Se 𝑓(𝑥𝑖) 𝑓(𝑥𝑚) = 0 → 𝑥𝑚 = 𝑟𝑎𝑖𝑧 𝑑𝑎 𝑓𝑢𝑛çã𝑜 (fim das iterações) (3.8)
3. 𝑥𝑚 = 𝑥′𝑖 + 𝑥′𝑠
2 (3.9)
4. € = |𝑥𝑚
𝑛𝑜𝑣𝑜− 𝑥𝑚𝑣𝑒𝑙ℎ𝑜
2| 𝑥100 (3.10)
Se € ≤ Tolerância Encerra o processo
Se € ≥ Tolerância Volte para o passo 1
Sendo:
𝑥𝑚 – média entre os limites superior e inferior escolhidos para faixa
de pesquisa
𝑓(𝑥𝑚) – resultado da função no ponto 𝑥𝑚
€ - erro gerado pela diferença entre as médias dos valores de 𝑥𝑚𝑛𝑜𝑣𝑜e
𝑥𝑚𝑣𝑒𝑙ℎ𝑜. Este, quando comparado com a tolerância, estabelece se o método iterativo
da bissecção será finalizado ou se continua com a pesquisa.
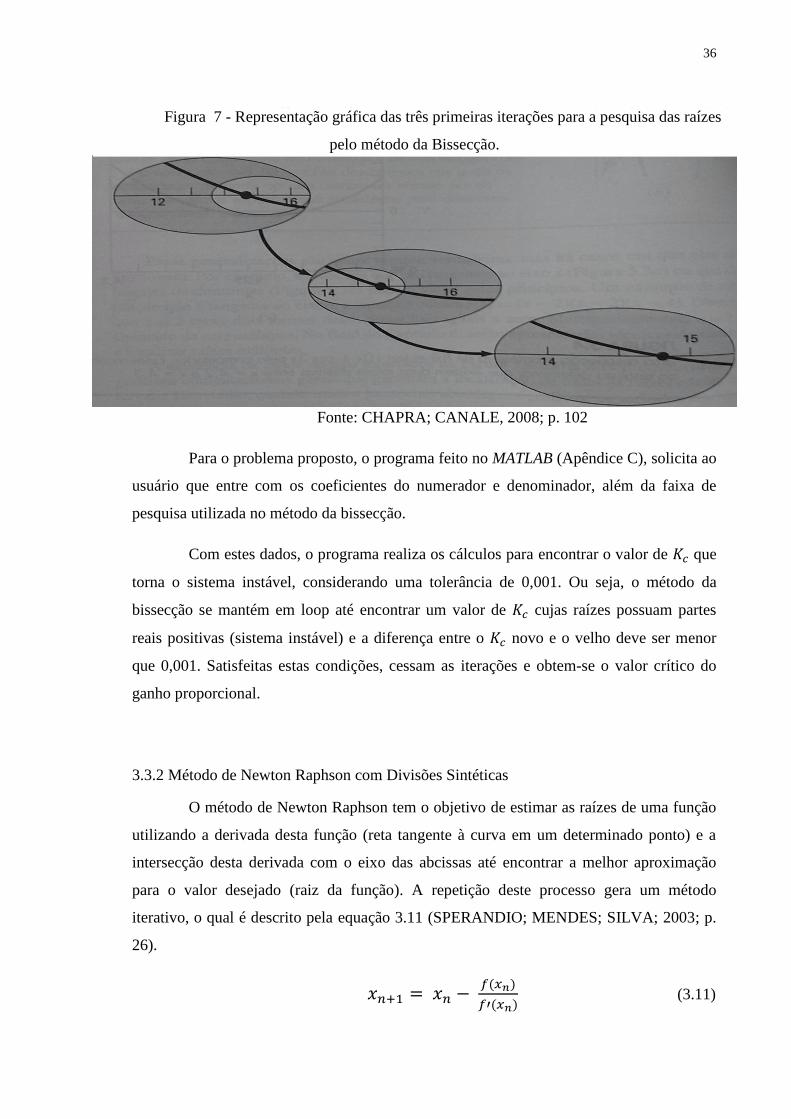
A Figura 7 ilustra as três primeiras iterações do método da bissecção, em que é
possível observar a convergência dos valores até que se satisfaça uma condição de
tolerância pré-estabelecida.
36
Fonte: CHAPRA; CANALE, 2008; p. 102
Para o problema proposto, o programa feito no MATLAB (Apêndice C), solicita ao
usuário que entre com os coeficientes do numerador e denominador, além da faixa de
pesquisa utilizada no método da bissecção.
Com estes dados, o programa realiza os cálculos para encontrar o valor de 𝐾𝑐 que
torna o sistema instável, considerando uma tolerância de 0,001. Ou seja, o método da
bissecção se mantém em loop até encontrar um valor de 𝐾𝑐 cujas raízes possuam partes
reais positivas (sistema instável) e a diferença entre o 𝐾𝑐 novo e o velho deve ser menor
que 0,001. Satisfeitas estas condições, cessam as iterações e obtem-se o valor crítico do
ganho proporcional.
3.3.2 Método de Newton Raphson com Divisões Sintéticas
O método de Newton Raphson tem o objetivo de estimar as raízes de uma função
utilizando a derivada desta função (reta tangente à curva em um determinado ponto) e a
intersecção desta derivada com o eixo das abcissas até encontrar a melhor aproximação
para o valor desejado (raiz da função). A repetição deste processo gera um método
iterativo, o qual é descrito pela equação 3.11 (SPERANDIO; MENDES; SILVA; 2003; p.
26).
𝑥𝑛+1 = 𝑥𝑛 − 𝑓(𝑥𝑛)
𝑓′(𝑥𝑛) (3.11)
Figura 7 – Representação gráfica das três primeiras iterações para a pesquisa das raízes pelo método
da Bissecção.
Figura 7 - Representação gráfica das três primeiras iterações para a pesquisa das raízes
pelo método da Bissecção.

37
A Figura 8 demonstra como funciona cada iteração no método de Newton-
Raphson, em que 𝑥𝑖 é a estimativa inicial, 𝑓(𝑥𝑖) é o valor da função neste ponto, 𝑓′(𝑥𝑖) é a
derivada ou reta tangente à curva neste ponto e 𝑥𝑖+1 é a intersecção da derivada com o eixo
das abcissas, o que gera a estimativa para a iteração seguinte.
Fonte: CHAPRA; CANALE, 2008; p. 121
O diferencial do método de Newton Raphson com divisões sintéticas consiste em
utilizar a equação 3.13 para gerar a primeira aproximação, ou seja, o usuário não necessita
entrar com uma estimativa inicial para a raiz da função. Contudo, este tipo de tratamento
só é possível para polinômios que possuem não mais que um par de raízes complexas
(CONSTANTINIDES; MOSTOUFI; 2000; p. 38)
𝑓(𝑥) = 𝑎0𝑠𝑛 + 𝑎1𝑠𝑛−1 + 𝑎2𝑠𝑛−2 + (… ) + 𝑎4 (3.12)
𝑥0 = −𝑎2
𝑎1 (3.13)
Sendo:
𝑓(𝑥) – um polinômio de grau n
𝑎𝑛 – coeficientes do polinômio
𝑠𝑛 – variáveis da transformada de Laplace
Figura 8 - Representação gráfica do Método de Newton-Raphson

38
𝑥0 – estimativa inicial para raiz da função
Após o cálculo da primeira raiz, utilizando o valor inicial proveniente da equação
3.5, obtêm-se um novo polinômio de grau n-1. Este polinômio é gerado pelo bloco de
programação descrito abaixo, em que “a” é o vetor com os coeficientes do polinômio de
grau n, “b” é o vetor com os coeficientes do polinômio de grau n-1 e “r” é o vetor que
indica a posição dos coeficientes dentro dos vetores. Assim que são calculados todos os
coeficientes do polinômio n-1 utilizando a raiz, inicia-se uma nova pesquisa pelo método
de Newton-Rhapson e pela equação 3.5 (CONSTANTINIDES; MOSTOUFI; 2000; p. 38),
retornando a próxima raiz.
for r = 2:k b(r) = a(r) + b(r-1)*x1;
end
Sendo:
k – vetor que começa em 5 e decresce de uma unidade até 3
r – vetor que começa em 2 e vai até 5
b(r)- novo coeficiente do polinômio associado à variável de
grau estipulado por r
b(r-1) – coeficientes do polinômio de grau n-1 associado à
variável de grau estipulado por (r – 1)
a(r) – coeficiente do polinômio de grau n.
Este procedimento é repetido até que o polinômio atinja o grau 2, então as raízes
passam a ser calculadas pela equação 3.14, fórmula de Bhaskara.
𝑥 =−𝑏±√𝑏2−4𝑎𝑐
2𝑎 (3.14)
As linhas de programação para o método de Newton-Raphson com divisões
sintéticas estão descritas na íntegra no Apêndice D.
3.3.3 Determinação da Estabilidade do Sistema
O critério de estabilidade utilizado para análise da estabilidade do sistema é o
Critério de Routh-Hurwitz, cujo desenvolvimento teórico foi apresentado no item 2.4.
39
Assim, considerando o denominador da equação característica (equação 3.1) para
a análise da estabilidade, tem-se as equações 3.15, 3.16 e 3.17, as quais devem satisfazer a
primeira etapa do Critério de Routh-Hurwitz, em que todos os coeficientes do polinômio
do denominador devem ser positivos.
𝐾𝑐 > 0 (3.15)
83,0632 + 2,98𝐾𝑐 > 0 (3.16)
51,2327 + 6,705𝐾𝑐 > 0 (3.17)
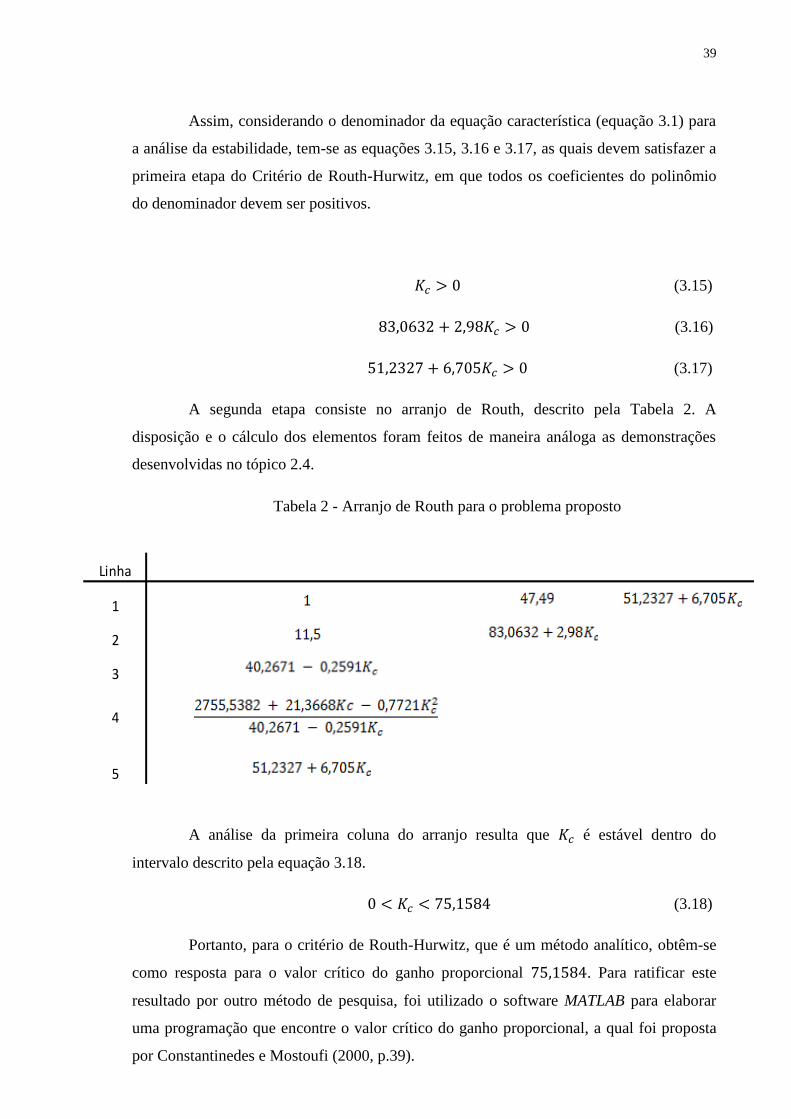
A segunda etapa consiste no arranjo de Routh, descrito pela Tabela 2. A
disposição e o cálculo dos elementos foram feitos de maneira análoga as demonstrações
desenvolvidas no tópico 2.4.
A análise da primeira coluna do arranjo resulta que 𝐾𝑐 é estável dentro do
intervalo descrito pela equação 3.18.
0 < 𝐾𝑐 < 75,1584 (3.18)
Portanto, para o critério de Routh-Hurwitz, que é um método analítico, obtêm-se
como resposta para o valor crítico do ganho proporcional 75,1584. Para ratificar este
resultado por outro método de pesquisa, foi utilizado o software MATLAB para elaborar
uma programação que encontre o valor crítico do ganho proporcional, a qual foi proposta
por Constantinedes e Mostoufi (2000, p.39).
Linha
1
2
3
4
5
Tabela 2 - Arranjo de Routh para o problema proposto

40
3.4 SIMULAÇÃO PARA DIFERENTES VALORES DO GANHO PROPORCIONAL
Após encontrar o valor crítico para o ganho proporcional utilizando o método
numérico da bissecção, proposto pro Constantinedes e Mostoufi (2000, p.39), elegeram-se
três valores de Kc: 50 (região de estabilidade) , 75,1495 (ponto crítico) e 100 (região de
instabilidade); afim de realizar a análise da estabilidade do sistema.
Desta feita, obtiveram-se três equações características para o sistema, de acordo
com os valores do ganho proporcional (equações 3.19 a 3.21).
𝐺(𝑠) =𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 232,0632𝑠+ 386,4826
𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 83,0632𝑠+ 51,2326 𝑝𝑎𝑟𝑎 𝐾𝑐 = 50 (3.19)
𝐺(𝑠) =𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 307,0087𝑠+ 555,1100
𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 83,0632𝑠+ 51,2326 𝑝𝑎𝑟𝑎 𝐾𝑐 = 75,1495 (3.20)
𝐺(𝑠) =𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 381,0632𝑠+721,5326
𝑠4+ 11,5𝑠3+ 47,49𝑠2+ 83,0632𝑠+ 51,2326 𝑝𝑎𝑟𝑎 𝐾𝑐 = 100 (3.21)
Assim, o Quadro 1 demonstra em detalhes a simulação de cada sistema proposto.
Kc = 50
Kc = 75,1495
Kc = 100
Quadro 1- Simulações usando residue para cada valor de K_c, dados os
coeficientes polinomiais da função de transferência do numerador e denominador
41
Para a simulação feita, foi utilizada a função “residue”, cuja sintaxe está descrita
abaixo. Esta função possibilita obter a expansão em frações parciais da equação
característica do sistema, com os resultados das raízes (p), coeficientes das variáveis (C) e
constantes (k). A partir disso, foi possível realizar a transformada inversa de Laplace para
análise do comportamento dinâmico do sistema proposto por Douglas (1972).
[C,p,k]= residue(vetor1,vetor2)
Sendo:
vetor1 – vetor com os coeficientes do numerador
vetor2 – vetor com os coeficientes do denominador
Um detalhe importante é que todos os cálculos feitos até então foram realizados
na transformada de Laplace da equação que descreve o sistema. Além disso, a resposta
para a função “residue” facilita a transformada inversa de Laplace, ou seja, ela retorna
respostas algebricamente tratadas para aplicar a transformada inversa de Laplace
diretamente, como poderá ser visto no tópico 4 Resultados e Discussão.
Outra alternativa para o cálculo das raízes da equação característica, é o Método
do Lugar das Raízes (GRUPO PET – ENG ELÉTRICA UFMS Junho – 2003, pág. 12)
Para aplicá-lo no software MATLAB, basta entrar com os coeficientes do polinômio do
numerador e do denominador, utilizando a função cuja sintaxe é:
rlocus(vetor1,vetor2)
O Quadro 2 demonstra as linhas de programação para simulação utilizando o
método do lugar das raízes (linhas de programação no Apêndice A).

42
Kc = 50
Kc = 75,1495
Kc = 100
Quadro 2 - Simulações usando rlocus para cada valor de K_c, dados os coeficientes
polinomiais da função de transferência do numerador e denominador.

43
4 RESULTADOS E DISCUSSÃO
Ao executar o programa criado para procura do valor crítico para o ganho
proporcional, entrou-se com os coeficientes do numerador e denominador da equação
característica. Posteriormente, entrou-se com a faixa de pesquisa ou limites inferior e
superior, sendo que neste caso foi utilizada a faixa de 0 a 100. Finalmente, entrou-se com o
tipo de pesquisa, que foi o método de Newton-Raphson com divisões sintéticas e o
programa executa todos os cálculos.
Após a execução do programa e consequente obtenção do valor crítico para o
ganho proporcional, foi feita a simulação para os três casos citados no tópico 3.4. A figura
11, exemplificada no tópico anterior, demonstra com detalhes da simulação utilizada e o
Quadro 3, a seguir, demonstra os resultados para estas simulações.
A Figura 9 mostra na tela “Command Window” os resultados que o programa
retorna durante a pesquisa para o valor de Kc, o qual torna o sistema instável e satisfaz a
condição de tolerância, dada pela equação 4.1:
|𝐾𝑐1 − 𝐾𝑐2 | < 0,001 (4.1)
Sendo:
𝐾𝑐1- Limite inferior de pesquisa
𝐾𝑐2- Limite superior de pesquisa
Coeficientes Raízes Constante
1,7320 -8,4951 1
-0,0041 -2,2452
0,8681 + 1,5679i -0,3798 - 4,485i
0,8681 - 1,5679i -0,3798 + 4,485i
Coeficientes Raízes Constante
-1,9932 -9,2527 1
-0,0027 -2,2466
0,9980 + 1,7853i -0,0000 + 5,1669i
0,9980 - 1,7853i -0,0000 - 5,1669i
Coeficientes Raízes Constante
-2,1981 -9,8512 1
-0,0021 -2,2473
1,1001 + 1,9573i 0,2992 + 5,701i
1,1001 - 1,9573i 0,2992 - 5,701i
Kc = 50
Kc = 75,1495
Kc = 100
Quadro 3 – Resultados dos cálculos para pesquisa de um valor crítico para o ganho
proporcional.

44
Figura 9– Resultados dos cálculos para pesquisa de um valor crítico para 𝐾𝑐. Figura 9 - Resultados dos cálculos para pesquisa de um valor crítico para 𝐾𝑐.

45
O segundo procedimento para calcular as raízes, foi o método do lugar das raízes.
Este retornou os mesmos resultados, contudo, para respostas gráficas.
As figuras 10, 11 e 12 demonstram os resultados das raízes da equação
característica para os valores do ganho proporcional de 50 (região de estabilidade),
75,1495 (região crítica) e 100 (região de instabilidade).
-9 -8 -7 -6 -5 -4 -3 -2 -1 0-5
-4
-3
-2
-1
0
1
2
3
4
50.160.30.460.60.720.84
0.92
0.98
0.160.30.460.60.720.84
0.92
0.98
123456789
Método do Lugar das Raízes para Kc = 50
Real Axis
Imagin
ary
Axis
Figura 100 - Método do Local das raízes da equação característica para 𝐾𝑐 = 50.
Figura 10 - Método do Local das raízes da equação característica para 𝐾𝑐 = 50.

46
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0-6
-4
-2
0
2
4
60.140.280.420.560.70.82
0.91
0.975
0.140.280.420.560.70.82
0.91
0.975
246810
Método do Lugar das Raízes para Kc = 75,1495
Real Axis
Imagin
ary
Axis
-10 -8 -6 -4 -2 0 2-6
-4
-2
0
2
4
60.160.340.50.640.76
0.86
0.94
0.985
0.160.340.50.640.760.86
0.94
0.985
246810
Método do Lugar das Raízes para Kc = 100
Real Axis
Imagin
ary
Axis
Figura 11 – Método do Local das raízes da equação característica para 𝐾𝑐 = 75,1495.
Figura 12 – Método do Local das raízes da equação característica para 𝐾𝑐 = 100.
\\\\\\\\\\\\
Figura 11 - Método do Local das raízes da equação característica para 𝐾𝑐 = 75,1495.
Figura 12 - Método do Local das raízes da equação característica para Kc = 100.

47
Sabendo que as raízes localizadas no semiplano esquerdo tornam o sistema
estável e raízes localizadas no semiplano direito tornam o sistema instável, fica clara a
visualização da estabilidade do sistema utilizando o método do Llugar das Raízes. Este
resultado será ratificado ao plotar o gráfico do comportamento dinâmico da variável saída
(concentração do produto “C”) em relação ao tempo (t).
A partir destes resultados estruturou-se as frações parciais, em seguida, a
transformada inversa de Laplace e posteriormente a análise do comportamento dinâmico
do sistema.
As equações 4.2 a 4.4 são os resultados da transformada inversa de Laplace para
cada valor do ganho proporcional adotado.
𝑐1(𝑡) = 𝛿(𝑡) + 1,732𝑒−8,4951𝑡 − 0,0041𝑒−2,2452𝑡 + 2𝑒−0,3798𝑡⌈0.8681𝑐𝑜𝑠(−4,485𝑡) + 1,5679𝑠𝑒𝑛(−4,485𝑡)⌉ (4.2)
𝑐2(𝑡) = 𝛿(𝑡) − 1,9932𝑒−9,2527𝑡 − 0,0027𝑒−2,2473𝑡 + 2⌈0,9980𝑐𝑜𝑠(5,1669𝑡) + 1,7853𝑠𝑒𝑛(5,1669𝑡)⌉ (4.3)
𝑐3(𝑡) = 𝛿(𝑡) − 2,1981𝑒−9,8512𝑡 − 0,0021𝑒−2,2473𝑡 + 2𝑒0,2992𝑡⌈1,001𝑐𝑜𝑠(−5,701𝑡) + 1,9573𝑠𝑒𝑛(−5,701𝑡)⌉ (4.4)
Sendo:
𝑐1(𝑡)- resposta da equação para um ganho proporcional de 50 (concentração
do produto, “C”).
𝑐2(𝑡)- resposta da equação para um ganho proporcional de 75,1495
(concentração do produto, “C”).
𝑐3(𝑡)- resposta da equação para um ganho proporcional de 100
(concentração do produto, “C”).
𝑡- tempo.
𝛿(𝑡) - transformada inversa de Laplace de 1 (resposta ao impulso).
𝑒- exponencial
A partir das equações 4.2, 4.3 e 4.4, pode-se plotar os gráficos e fazer a análise do
comportamento dinâmico do processo controlado.
As Figuras 13, 14 e 15 demonstram os resultados dos comportamentos dinâmicos
para os valores de 𝐾𝑐: 50 (região de estabilidade), 75,1495 (ponto crítico) e 100 (região de
instabilidade); respectivamente. As linhas de programação para plotar estas equações estão
descritas em detalhes no Apêndice B.

48
A Figura 13 representa o comportamento dinâmico do processo controlado para
𝐾𝑐 = 50, ou seja, as raízes da equação característica com partes reais no semiplano
esquerdo (região de estabilidade).
Neste caso, para um ganho proporcional na região de estabilidade (𝐾𝑐 = 50),
observa-se que há um amortecimento do desvio gerado até que o sistema estabilize, ou
seja, amplitude das oscilações diminui até tender ao valor em estado estacionário, dentro
do intervalo de tempo analisado (0 a 10 minutos).
Em sua maioria, as plantas químicas procuram este tipo de resposta para o
sistema, já que os controladores são utilizados para manter as variáveis resposta o mais
próximo possível do set point (estado estacionário).
Figura 13 – Comportamento dinâmico do processo controlado, adotando 𝐾𝑐 = 50
0 1 2 3 4 5 6 7 8 9 10-4
-3
-2
-1
0
1
2
3
Tempo
C(t
)
Comportamento Dinâmico do Processo, para Kc = 50
Tempo (min)
49
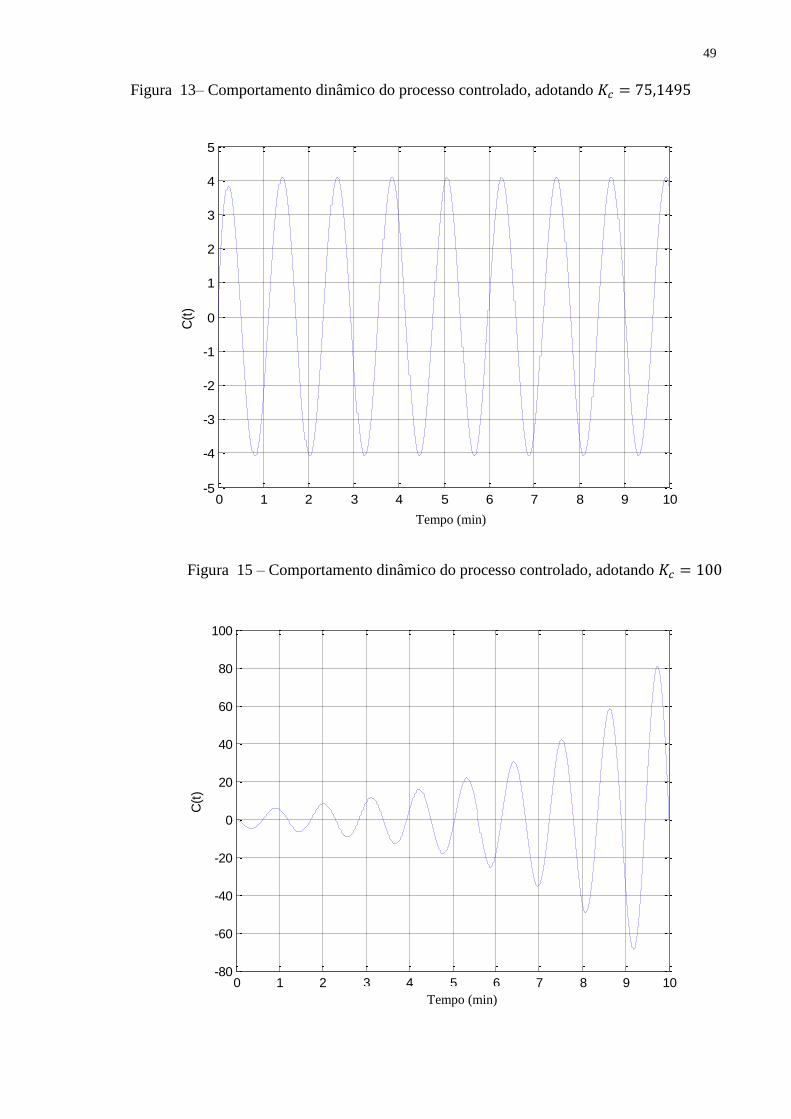
Figura 13– Comportamento dinâmico do processo controlado, adotando 𝐾𝑐 = 75,1495
Figura 15 – Comportamento dinâmico do processo controlado, adotando 𝐾𝑐 = 100
0 1 2 3 4 5 6 7 8 9 10-5
-4
-3
-2
-1
0
1
2
3
4
5
Tempo
C(t
)
Comportamento Dinâmico do Processo, para Kc = 75,1495
0 1 2 3 4 5 6 7 8 9 10-80
-60
-40
-20
0
20
40
60
80
100
Tempo
C(t
)
Comportamento Dinâmico do Processo, para Kc = 100
Tempo (min)
Tempo (min)

50
O segundo caso (figura 14) é para o ganho proporcional em seu ponto crítico.
Observa-se que as oscilações neste ponto tendem a se manter dentro de uma mesma
amplitude, no limiar da região de instabilidade. Qualquer desequilíbrio no sistema levará o
processo para região de instabilidade, portanto, nas plantas químicas, o ponto crítico é
utilizado como parâmetro para o dimensionamento do controlador e associado a ele, um
coeficiente de segurança (SMITH; CORRIPIO, 2008, p. 192).
O terceiro caso, representado pela figura 15, ilustra o comportamento dinâmico do
processo controlado para um ganho proporcional que gera raízes com partes reais
positivas, ou seja, no semiplano direito. Desta maneira, é notável o aumento da amplitude
das oscilações, caracterizando a instabilidade do sistema e a ineficiência do controlador
para o ganho proporcional adotado.
É válido lembrar que o resultado do comportamento dinâmico do processo
controlado é dado em variável desvio, por isso as curvas possuem o zero como valor inicial
ou de referência. Além disso, ao ampliar a curva em que 𝐾𝑐 = 50 (figura 16), ou seja, em
que o comportamento é estável, nota-se a presença do off-set (erro residual), característico
do controle proporcional.
25.32 25.34 25.36 25.38 25.4 25.42 25.44 25.46 25.48
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
x 10-3
Tempo
C(t
)
Comportamento Dinâmico do Processo, para Kc = 50
Figura 14 – Erro residual presente após a estabilização do sistema realizada pelo controle
proporcional
Tempo (min)

51
Portanto, obteve-se 𝐾𝑐 = 75,1495 para o método numérico da bissecção. Deste
modo, para valores do ganho proporcional acima do ponto crítico, terão raízes com partes
reais positivas (sistema instável) e para valores inferiores ao ponto crítico, terão raízes com
partes reais negativas (sistema estável).
É importante destacar que a diferença entre o valor crítico do ganho proporcional
encontrado pelo critério de Routh-Hurwitz e pelo método da Bissecção se dá pois este é
um método numérico e portanto trabalha por aproximações, ao contrário do primeiro que é
um método analítico.

52
5 CONCLUSÃO
Através da análise da estabilidade, foi possível concluir que para um reator CSTR
isotérmico em condições de trabalho estacionárias, onde ocorre uma reação química de
pseudo-primeira ordem e com o objetivo de manter a concentração do produto em um
determinado set point, o controle proporcional apresenta uma resposta satisfatória
dependendo do valor adotado para o ganho proporcional e da aceitação deste tipo de
controle.
Neste caso, obteve-se o valor de 75,1495 como o valor crítico para o ganho
proporcional. A análise do comportamento dinâmico do processo controlado através do
gráfico da variável desvio concentração do produto “C” em relação ao tempo comprova
que o sistema é estável, contudo qualquer aumento na grandeza da perturbação acarretará
na instabilidade do processo. Assim sendo, para o controle atuar na prática, o valor crítico
para o ganho proporcional deve ser associado a um coeficiente de segurança, definido no
projeto de elaboração do controle.
Para valores do ganho proporcional maiores do que 75,1495, o comportamento
dinâmico do processo controlado apresentou oscilações com amplitudes crescentes,
caracterizando a instabilidade do sistema. Deste modo, para valores a cima deste limite o
controle se torna insatisfatório.
Para valores do ganho proporcional menores do que 75,1495, o comportamento
dinâmico do processo controlado apresentou oscilações com amplitudes decrescentes,
caracterizando a estabilidade do sistema. Assim, o valor adotado para o ganho proporcional
dentro da faixa de estabilidade dependerá da necessidade do projeto, já que quanto maior a
velocidade de estabilização do sistema maior o custo do controle.
Além disso, o erro residual gerado impacta diretamente no limite de especificação
requisitado pelo cliente. Portanto, o controle proporcional deve ser usado com cautela, já
que em muitos casos a concentração de um produto deve obedecer a uma faixa de
especificação restrita.

53
REFERÊNCIAS BIBLIOGRÁFICAS
ARIS, R.; AMUNDSON, N. R. Na analysis of chemical reactor stability and
control. Minneapolis, Minnesota, 1958.
CAMPOS, F. F., Introdução ao MATLAB. Belo Horizonte: UFMG ; 2013.
CHAPRA, S. C.; CANALE, R. P. Métodos Numéricos para Engenharia. São
Paulo: McGraw-Hill, 2008.
CONSTANTINIDES, A.; MOSTOUFI, N. Numerical Methods for Chemical
Engineers with MATLAB Applications. Rio de Janeiro: Prentice-Hall do Brasil,Ltda,
2000.
COUGHANOWR, D. R.; KOPPEL, L. B. Análise e controle de processos. Rio de
Janeiro: Guanabara Dois, 1991.
DOUGLAS, J. M., Process Dynamics and Control, vol. 2, Prentice Hall,
Englewood, Cliffs, NJ,1972.
FOGLER, H. S. Elementos da Engenharia das Reações Químicas. Rio de
Janeiro: LTC, 2002. 3ed.
GRUPO PET – ToolBox de Sistema de Controle de MATLAB, Campo Grande:
UFMS – 2003.
IGARASHI, E. M. S. Análise de estabilidade de um processo controlado.
Monografia (Trabalho de conclusão de curso) – Escola de Engenharia de Lorena,
Universidade de São Paulo, Lorena, 2013.
KWONG, W. H. Introdução ao controle de processos químicos com
MATLAB, vol. 1, São Carlos: EdUFSCar, 2002.
LEVENSPIEL, O. Engenharia das Reações Químicas. São Paulo: Edgard
Blücher, 2000, 3ed.
SMITH, C. S.; CORRIPIO, A. B. Princípios e prática do controle automático
de processos. Rio de Janeiro: LTC, 2008. 3 ed.
SPERANDIO, D.; MENDES, J. T.; SILVA, L. H. M. Cálculo Numérico
Características Matemáticas e Computacionais dos Métodos Numéricos. São Paulo:
Pearson Prentice Hall, 2003;
STEPHANOPOULOS, G. Chemical process control: An introduction to theory
and practice. New Jersey: Prentice Hall, 1984.
54
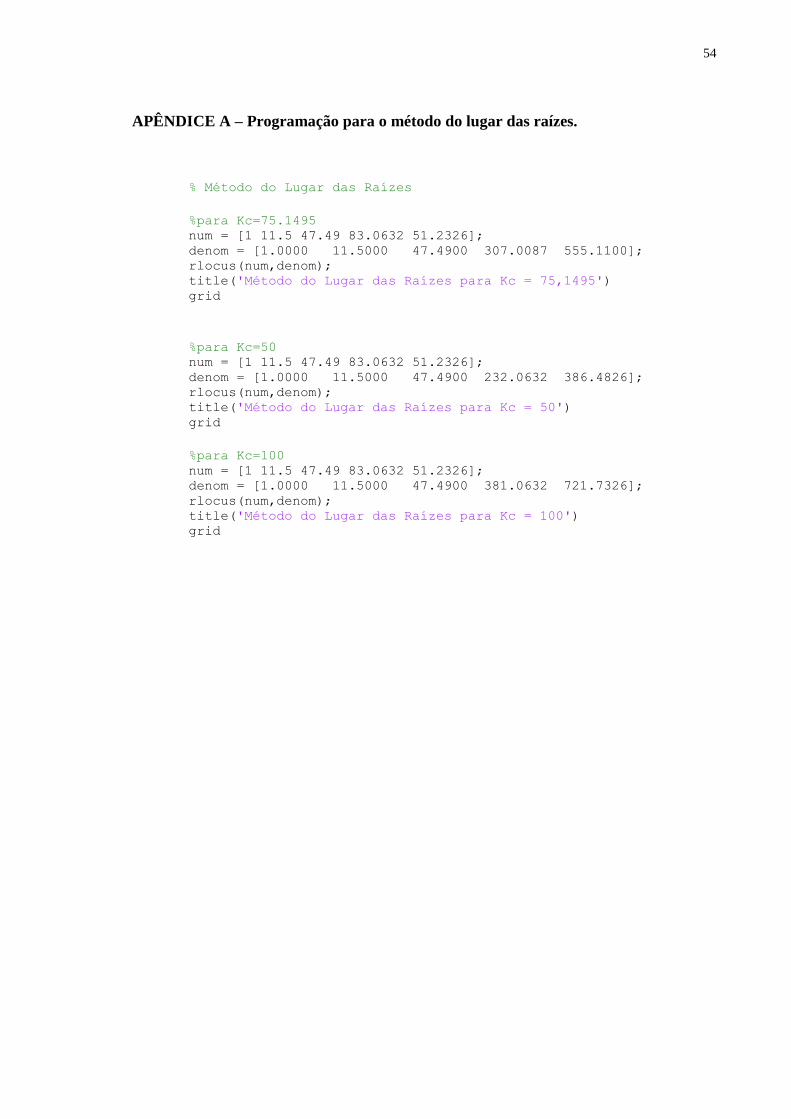
APÊNDICE A – Programação para o método do lugar das raízes.
% Método do Lugar das Raízes
%para Kc=75.1495 num = [1 11.5 47.49 83.0632 51.2326]; denom = [1.0000 11.5000 47.4900 307.0087 555.1100]; rlocus(num,denom); title('Método do Lugar das Raízes para Kc = 75,1495') grid
%para Kc=50 num = [1 11.5 47.49 83.0632 51.2326]; denom = [1.0000 11.5000 47.4900 232.0632 386.4826]; rlocus(num,denom); title('Método do Lugar das Raízes para Kc = 50') grid
%para Kc=100 num = [1 11.5 47.49 83.0632 51.2326]; denom = [1.0000 11.5000 47.4900 381.0632 721.7326]; rlocus(num,denom); title('Método do Lugar das Raízes para Kc = 100') grid

55
APÊNDICE B – Programação para resultado gráfico do comportamento dinâmico do
processo controlado.
%GRÁFICOS PLOTADOS ISOLADAMENTE %para Kc=75.1495 t=linspace(0,10); a=2*(exp(0*t)); b=1.9934*exp(-9.2527*t); c=0.0027*exp(-2.2473*t); y=-b-c+a.*((0.9980*cos(5.1669*t))+(1.7853*sin(5.1669*t))); plot(t,y) y=dirac(t)-b-c+a.*((0.9981*cos(5.1670*t))+(1.7855*sin(5.1670*t))); plot(t,y) grid on xlabel('Tempo') ylabel('C(t)') title('Comportamento Dinâmico do Processo, para Kc = 75,1495')
%para Kc=50 t=linspace(0,100); a=2*(exp(-0.3798*t)); b=1.7320*exp(-8.4951*t); c=0.0041*exp(-2.2452*t); y=dirac(t)-b-c+a.*((0.8681*cos(-4.485*t))+(1.5679*sin(-4.485*t))); plot(t,y) grid on xlabel('Tempo') ylabel('C(t)') title('Comportamento Dinâmico do Processo, para Kc = 50')
%para Kc=100 t=linspace(0,10); a=2*(exp(0.2992*t)); b=2.1981*exp(-9.8512*t); c=0.0021*exp(-2.2473*t); y=dirac(t)-b-c+a.*((1.001*cos(-5.701*t))+(1.9573*sin(-5.701*t))); plot(t,y) grid on xlabel('Tempo') ylabel('C(t)') title('Comportamento Dinâmico do Processo, para Kc = 100')

56
APÊNDICE C – Programação para calcular o valor crítico do ganho proporcional.
clear all clc %usuário entra com os coef. do num e denom num = input ('coef. numerador polinomio = '); denom = input('coef. denominador polinomio = ');
disp('') %usuário entra com os limites de pesquisa para Kc Kc1 = input('Limite inferior da faixa de pesquisa= '); Kc2 = input('Limite superior da faixa de pesquisa= '); % pula uma linha disp('') disp(' 1) Newton-Raphson com divisão sintética')
method = input('Entre com 1 para o Método para Encontrar Raízes de
NR = ')
iter = 0; n1= length(num); % comprimento do numerador n2= length(denom); % comprimento do denominador c(1:n2-n1)= denom(1:n2-n1); % c é um vetor que retorna os
coeficientes do denom
%Loop para encontrar Kc crítico
while abs(Kc1 - Kc2) > 0.001 % Condição Inicial de tolerância iter = iter +1; if iter ==1 Kc = Kc1; % Limite inferior elseif iter==2 Kc = Kc2; % Limite superior else Kc = (Kc1 + Kc2)/2; % Aproximação seguinte (NOVO Kc) end
%Cálculo dos coef. do polinômio da forma canônica
for m= n2-n1+1:n2; c(m)= denom(m) + Kc*num(m-n2+n1); end
% Encontrar Raízes
switch method % calcula de acordo com o número para o método
inserido no início case 1 %Newton Raphson com divisões sintéticas root = NRsdivision(c); case 2 %Método do Autovalor root = roots(c); end
realpart = real(root); imagpart = imag (root);
%mosta os resultados dos cálculos para cada valor de Kc

57
fprintf('\n Kc = %6.4f\n Roots = ',Kc) for k = 1:length(root) if isreal(root(k)) fprintf('%7.5g ',root(k)) else fprintf('%6.4g',realpart(k)) if imagpart(k)>=0 fprintf('+%5.4gi ',imagpart(k)) else fprintf('-%5.4gi ',abs(imagpart(k))) end end end % Condição de Estabilidade do Sistema que Determina Quando o
Programa Deve Cessar
stbl=1; for m= 1: length(root) if realpart(m)> 0 stbl = 0; %sistema é instável break; end end
if iter == 1 stbl1= stbl; elseif iter == 2 stbl2 = stbl; if stbl1 == stbl2 error('Valor crítico está fora da faixa de pesquisa') break end else if stbl == stbl1 Kc1 = Kc; else Kc2 = Kc; end end end

58
APÊNDICE D – Programação para função NRsdivision criada para executar o
método de Newton-Raphson com divisões sintéticas.
%FUNÇÃO DE NEWTON RAPHSON
function x = NRsdivision(c,tol)
if nargin < 2 | isempty(tol) % número de argumentos de entrada de
uma função tol = 1e-6; end if tol == 0 tol = 1e-6; end
n = length(c)-1; a = c;
%Loop for k = n:-1:3 x0= -a(2)/a(1); x1 = x0 + 0.1; iter = 0; maxiter = 100;
% Resolução pelo Método de Newton Raphson
while abs(x0 - x1) > tol & iter < maxiter iter = iter + 1; x0 = x1; fnk = polyval(a,x0); %function fnkp = polyval(polyder(a),x0); %derivada if fnkp ~= 0 x1 = x0 - fnk/fnkp; %Next approximation else x1 = x0 + 0.01; end end
x(n-k+1) = x1; % raíz
% Cálculo dos Novos Coef. após a divisão feita pela raíz
encontrada anteriormente % b(1)= a(1); for r = 2:k b(r) = a(r) + b(r-1)*x1;
end if iter == maxiter disp ('Aviso: Maior Iteração Atingida!') end
clear a
a = b; clear b end

59
% Raízes que restaram do polinômio quadrático delta = a(2)^2 - 4*a(1)*a(3); x(n-1)= (-a(2) - sqrt(delta))/2*(a(1)); x(n)= (-a(2) + sqrt(delta))/2*(a(1));
x=x';