
Redespacho de reativos como ac¸ao corretiva para al˜ ´ıvio ... · des de transmiss˜ao com base...
162
Campus de Ilha Solteira Redespacho de reativos como ac ¸˜ ao corretiva para al´ ıvio de sobrecargas em redes de transmiss ˜ ao Eduardo Shigueo Hoji Ilha Solteira - SP Fevereiro - 2011
Transcript of Redespacho de reativos como ac¸ao corretiva para al˜ ´ıvio ... · des de transmiss˜ao com base...

Campus de Ilha Solteira
Redespacho de reativos como acao corretiva para alıvio desobrecargas em redes de transmissao
Eduardo Shigueo Hoji
Ilha Solteira - SP
Fevereiro - 2011
PROGRAMA DE POS-GRADUACAO EM ENGENHARIA ELETRICA
Redespacho de reativos como acao corretiva para alıvio desobrecargas em redes de transmissao
Eduardo Shigueo Hoji
Orientador: Antonio Padilha FeltrinCoorientador: Javier Contreras Sanz
Tese apresentada a Faculdade de Enge-nharia - UNESP - Campus de Ilha Sol-teira, para obtencao do tıtulo de Doutorem Engenharia Eletrica.Area de Conhecimento: Automacao.
Ilha Solteira - SPFevereiro de 2011

FICHA CATALOGRÁFICA
Elaborada pela Seção Técnica de Aquisição e Tratamento da Informação Serviço Técnico de Biblioteca e Documentação da UNESP - Ilha Solteira.
Hoji, Eduardo Shigueo. H719r Redespacho de reativos como ação corretiva para alívio de sobrecargas em Redes de transmissão / Eduardo Shigueo Hoji. -- Ilha Solteira : [s.n.], 2011. 160 f. : il. Tese (doutorado) - Universidade Estadual Paulista. Faculdade de Engenharia de Ilha Solteira. Área de conhecimento: Automação, 2011 Orientador: Antonio Padilha Feltrin Co-orientador: Javier Contreras Sanz Inclui bibliografia
1. Energia elétrica – Transmissão. 2. Alívio de sobrecargas. 3. Potência reativa (Engenharia elétrica). 4. Análise de sensibilidade. 5. Programação linear. 6. Teoria dos jogos.


Dedico esta tese a minha esposa, Rosana,e ao nosso primeiro filho, Hugo, que esta a caminho.

AGRADECIMENTOS
A Deus, primeiramente, por conceder-me saude e disposicao para enfrentar e transpor maisuma etapa em minha vida;
Aos meus pais, Paulo e Nanci , por todo apoio, carinho e dedicacao incondicional ao longode tantos anos;
Aos meus irmaos, Willian e Fernanda , pelo apoio, amizade, compreensao e pelos eternosvotos de sucesso;
A minha esposa, Rosana, pela compreensao, carinho e cuidados a mim por ela dedicadosem todos os momentos;
Ao Prof. Antonio Padilha Feltrin, pela orientacao na realizacao neste trabalho, pela dedicacao,amizade e pela confianca em mim creditada durante toda minha vida academica;
Ao Prof. Javier Contreras, pela coorientacao, ideias e discussoes proporcionadas durante eapos meu estagio na Espanha, fundamentais para a conclusao deste trabalho;
Ao Prof. Jose Roberto Sanchez Mantovani, pelas sugestoes para a conclusao deste trabalhoe pela amizade e prontidao;
Aos companheiros do LaPSEE, pelos anos de convıvio e aprendizado constante;
Aos professores e funcionarios da FEIS-UNESP, pela colaboracao e presteza;
Aos professores e companheiros da UCLM, por me receberem tao bem em seu paıs, o queajudou a enfrentar a saudade de casa durante minha estada na Espanha;
A todos os companheiros de republica ao longo desses onze anos de vida academica, pelaamizade e pelos bons momentos vividos;
A FEPISA e a CAPES, pelo apoio financeiro, indispensavel para a realizacao deste trabalho;
A todos aqueles de quem me esqueci neste momento, meu pedido de perdao e meus agra-decimentos sinceros.

“O futuro nao pode ser previsto, maspode ser inventado. E a nossa
habilidade de inventar o futuro quenos da esperanca para fazer de nos o
que somos.”Gabor Denes (1900–1979),
engenheiro eletricista hungaro.

RESUMO
Com a necessidade de atender com qualidade a crescente demanda por energia eletrica, compoucas interrupcoes e com nıveis de tensao satisfatorios, e tendo em vista as restricoes ambi-entais existentes, que dificultam a implantacao de novos recursos aos sistemas de transmissao,como linhas, usinas, sub-estacoes, etc., as empresas de transmissao tem buscado otimizar osrecursos existentes, operando os sistemas com menos folga o que, em alguns casos, pode oca-sionar pequenas sobrecargas nas linhas.
Nas estruturas atuais de operacao, acoes corretivas usualmente aplicadas ao alıvio dos sis-temas de transmissao, como alteracoes nos nıveis de geracao e corte de cargas, fazem parte dasatribuicoes do operador do sistema e estao fora do escopo de acao das empresas transmissorasque podem, contudo, alterar as condicoes de operacao de seus dispositivos, como transforma-dores, compensadores, etc.
Neste trabalho e apresentada uma proposta para o alıvio de pequenas sobrecargas em re-des de transmissao com base no controle do fluxo reativo das linhas. As acoes corretivas saodeterminadas com base na linearizacao dos parametros do sistema em torno de seu ponto deoperacao inicial, solucionando-se um problema de programacao linear (PL) cuja funcao obje-tivo a ser minimizada e o produto entre o custo dos servicos de suporte de reativos prestadospelos dispositivos e o desvio do sistema de seu ponto de operacao inicial.
Haja vista a grande quantidade de dispositivos instalados no sistema que podem fornecerservicos de suporte de reativos e que problemas relativos a potencia reativa sao solucionadoslocalmente, e possıvel reduzir a quantidade de dispositivos “candidatos” a realizacao das acoescorretivas e, consequentemente, o numero de variaveis e restricoes no PL a ser solucionado.Para isso, sao utilizados fatores de sensibilidade lineares, que relacionam as variacoes nos fluxosdas linhas sobrecarregadas com as variacoes nos parametros de controle dos dispositivos, epermitem determinar o conjunto dos “n” dispositivos mais eficientes para o alıvio do sistema.
Em muitas estruturas de mercado, os servicos de suporte de reativos sao consideradosservicos ancilares e fornecidos em carater compulsorio, sem remuneracao. Porem, apesar deseu baixo custo frente a potencia ativa, e necessario remunerar adequadamente aos proprietariosdos equipamentos pelos servicos de potencia reativa prestados. Nesse sentido, e proposto ummecanismo de pagamento baseado nos conceitos de solucao da teoria de jogos cooperativos(Core, Valor Shapley e Nucleolus), de modo a ilustrar os aspectos economicos da abordagemproposta e determinar o pagamento dos dispositivos conforme sua contribuicao para o alıviodas sobrecargas.
Para isso, os dispositivos sao combinados em 2n− 1 coalizoes nao vazias e essa mesmaquantidade de PLs e solucionada para determinar as funcoes caracterısticas de cada coalizao equal delas e capaz de aliviar as sobrecargas ao menor custo.
Na avaliacao da proposta sao utilizados dois sistemas teste. Um sistema de 6 barras, usadopara ilustrar e auxiliar o entendimento dos conceitos apresentados e o sistema IEEE de 118
barras, com o qual sao avaliados diversos casos. Os resultados obtidos demonstram a eficienciada proposta, permitindo eliminar sobrecargas do sistema sem a necessidade de interferir nodespacho de ativos, com baixo custo e mınimo desvio do ponto de operacao inicial. As acoescorretivas sao definidas rapidamente, o que demonstra a aplicabilidade do metodo em temporeal.
Palavras-chave: transmissao de energia eletrica, alıvio de sobrecargas, potencia reativa,analise de sensibilidades, programacao linear, teoria de jogos.
ABSTRACT
The growing demand for electric power associated with the environmental limitations im-posed to the expansion of power systems hamper the installation of new facilities, such as trans-mission lines, substations and power plants, and leads the transmission companies to optimizethe existing resources. In consequence, transmission systems operate closer to their boundariesand small overloads may surge.
In the deregulated operating environment, the standard overload relief procedures, basedon generation redispatch and load shedding, are in charge of the system operator and cannot beperformed by the transmission companies, which can, otherwise, modify the control parametersof the transmission system devices, such as transformers, shunt compensators, etc.
An overload relief procedure based on reactive power control applicable to small disturban-ces is presented in this paper. The corrective actions are determined by linearizing the systemparameters around the initial operating point and solving a linear problem (LP), that minimizesthe product between the total cost of the reactive power support provided by the devices and thedeviation of the system from its initial operating point.
Considering that reactive sources are spread over the whole system and the solution forreactive power problems can be found locally, the set of devices to be applied for the correctiveactions can be reduced and, consequently, the number of variables and constraints to be addedto the LP problem. To accomplish that, linear sensitivity factors which relate the reactive flowvariation in the overloaded line to the devices’ control parameters are applied and the “n” mosteffective devices to mitigate the overloads can be determined.
In many market structures reactive power support is a mandatory service and, in some cases,it is not remunerated. However, despite the low cost of production of reactive power, the deviceowners must be adequately remunerated by their contribution to the system relief. Therefore,a payment mechanism based on cooperative game theory concepts of Core, Shapley value andNucleolus is applied to illustrate the economic aspects of the proposed procedure and, thus,the payments to the devices are determined based on their contribution to the solution of theproblem.
For doing this, the devices are arranged within 2n− 1 non-empty coalitions and a LP issolved for each one in order to determine their characteristic functions and which one producesthe lowest cost solution.
A 6 bus test system is used to illustrate and to assit the reader to understand the methodo-logy, and extensive tests have been conducted with the IEEE-118 test system, which demons-trate the overloads can be mitigated with no need for redispatch, allowing the system operatorto identify the most economical solution with the minimum deviation from the initial operatingpoint and suggesting the procedure is suitable for real-time applications in systems close to theirlimits.

Keywords: electric power transmission, overload relief, reactive power, sensitivity analy-sis, linear programming, game theory.

LISTA DE FIGURAS
2.1 Estados de operacao dos sistemas de potencia. . . . . . . . . . . . . . . . . . p. 28
3.1 Maquina sıncrona representada pelo modelo classico. . . . . . . . . . . . . . p. 48
3.2 Curva de capacidade de uma maquina sıncrona desconsiderando os efeitos dasaliencia dos polos e da saturacao. . . . . . . . . . . . . . . . . . . . . . . . p. 50
3.3 Estrutura dos custos para producao de potencia reativa por um gerador sıncrono. p. 51
4.1 Core de um jogo com tres jogadores. . . . . . . . . . . . . . . . . . . . . . . p. 58
5.1 Sistema de 6 barras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 68
5.2 Sistema de 2 barras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 72
5.3 Instalacao de fonte virtual no sistema de 6 barras. . . . . . . . . . . . . . . . p. 78
5.4 Fluxos resultantes do ajuste do suporte de reativos na barra 6 do sistema de 6barras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 79
5.5 Fluxos resultantes do ajuste do suporte de reativos na barra 2 do sistema de 6barras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 79
5.6 Variacao do custo resultante das acoes corretivas definidas para a grande coa-lizao em funcao da faixa de variacao permitida para os parametros de controledos dispositivos (|Δxmaxi |) para o sistema de 6 barras. . . . . . . . . . . . . . p. 82
5.7 Fluxograma da metodologia para alıvio de sobrecargas utilizando reativos. . . p. 92
6.1 Variacao do custo resultante das acoes corretivas definidas para a grande coa-lizao em funcao da faixa de variacao permitida para os parametros de controledos dispositivos (|Δxmaxi |) para o sistema IEEE-118. . . . . . . . . . . . . . . p. 96
A.1 Sistema IEEE 118 barras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 160
LISTA DE TABELAS
4.1 Valor Shapley para um jogo com tres jogadores . . . . . . . . . . . . . . . . p. 60
4.2 Nucleolus para um jogo com tres jogadores . . . . . . . . . . . . . . . . . . p. 64
5.1 Dados das barras de geracao do sistema teste de 6 barras . . . . . . . . . . . p. 68
5.2 Dados das barras de carga do sistema teste de 6 barras . . . . . . . . . . . . . p. 68
5.3 Dados das linhas de transmissao e transformadores do sistema teste de 6 barras p. 68
5.4 Fatores de sensibilidade para todas as barras do sistema de 6 barras com so-brecarga na linha 2-6 tendo a barra 1 como referencia . . . . . . . . . . . . . p. 76
5.5 Fatores de sensibilidade para o sistema de 6 barras com sobrecarga na linha2-6 tendo a barra 4 como referencia . . . . . . . . . . . . . . . . . . . . . . p. 77
5.6 Fatores de sensibilidade para o sistema de 6 barras com sobrecarga na linha2-6 considerando a instalacao de uma fonte virtual na barra 6 . . . . . . . . . p. 78
5.7 Estado dos dispositivos, valores da funcao caracterıstica e custos totais aposa execucao de acoes corretivas para o alıvio da linha 2−6 do sistema teste de6 barras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 90
6.1 Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma so-brecarga na linha 65-68 do sistema IEEE-118 barras com referencia na barra69 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 96
6.2 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para uma sobrecarga na linha 65−68 do sistema IEEE-118 com referencia na barra 69 . . . . . . . . . . . . . . . . . . . . . . . . . p. 98
6.3 Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma so-brecarga na linha 65-68 do sistema IEEE-118 barras com referencia na barra82 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 101
6.4 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para uma sobrecarga na linha 65−68 do sistema IEEE-118 com referencia na barra 82 . . . . . . . . . . . . . . . . . . . . . . . . . p. 103
6.5 Alocacao dos benefıcios pagos pelo alıvio da sobrecarga na linha 65−68 dosistema IEEE-118 com base nos conceitos da teoria de jogos cooperativos . . p. 107
6.6 Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobre-carga na linha 65− 68 do sistema IEEE-118, com ocorrencia simultanea desobrecarga na linha 68−81 . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 109
6.7 Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobre-carga na linha 68− 81 do sistema IEEE-118, com ocorrencia simultanea desobrecarga na linha 65−68 . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 109
6.8 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para uma sobrecarga na linha 65−68 do sistema IEEE-118, com ocorrencia de uma sobrecarga simultanea na linha 68−81 . . . . . p. 111
6.9 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para uma sobrecarga na linha 68−81 do sistema IEEE-118, com ocorrencia de uma sobrecarga simultanea na linha 65−68 . . . . . p. 115
6.10 Comparacao entre as acoes corretivas definidas para algumas coalizoes con-siderando os conjuntos de dispositivos selecionados para as sobrecargas naslinhas 65−68 e 68−81 do sistema IEEE-118 . . . . . . . . . . . . . . . . . p. 118
6.11 Condicoes iniciais dos dispositivos e fatores de sensibilidade para sobrecar-gas simultaneas nas linhas 65−68 e 68−81 do sistema IEEE-118 . . . . . . p. 120
6.12 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para sobrecargas simultaneas nas linhas 65−68 e 68−81do sistema IEEE-118 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 121
6.13 Condicoes iniciais dos dispositivos e fatores de sensibilidade para sobrecar-gas simultaneas nas linhas 65− 68 e 68− 81 do sistema IEEE-118, comocorrencia de outra sobrecarga na linha 12−16 . . . . . . . . . . . . . . . . p. 125
6.14 Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobre-carga na linha 12−16 do sistema IEEE-118, com ocorrencia de sobrecargassimultaneas nas linhas 65−68 e 68−81 . . . . . . . . . . . . . . . . . . . . p. 125

6.15 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para alıvio de sobrecargas simultaneas nas linhas 65−68e 68− 81 do sistema IEEE-118, retirando-se as restricoes de fluxo da linha12−16 do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 127
6.16 Condicoes dos dispositivos e custos resultantes apos a execucao das acoescorretivas definidas para alıvio da sobrecarga na linha 12− 16 do sistemaIEEE-118, retirando-se as restricoes de fluxo das linhas 65−68 e 68−81 doproblema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 131
6.17 Comparacao entre as acoes corretivas para alıvio das linhas 65−68, 68−81e 12−16 do sistema IEEE-118 definidas separadamente para linhas distantes(S1 e S2) e as acoes definidas em um unico conjunto de dispositivos (S1 ∪ S2) p. 135
6.18 Alocacao dos benefıcios pelo alıvio das linhas 12−16, 65−68 e 68−81 dosistema IEEE-118, com base nos conceitos da teoria de jogos cooperativos . . p. 136
6.19 Tempos medios de processamento para determinacao das acoes corretivas deacordo com a quantidade de dispositivos considerados na solucao do pro-blema para o sistema IEEE-118 . . . . . . . . . . . . . . . . . . . . . . . . . p. 138
A.1 Dados de barras do sistema IEEE de 118 barras . . . . . . . . . . . . . . . . p. 150
A.2 Dados de linhas do sistema IEEE de 118 barras . . . . . . . . . . . . . . . . p. 154

LISTA DE SIMBOLOS
QC,i
riEg,θVtXdP,QQBasePNominalPMaxa0,i
m1,i,m2,i
m3,iQi
QG,i
Vi,θiPG,QGPD,QDR,X ,BSHFSJa f tapYjk,γ jka jk,ak jbshjkbshj ,bshknb,nt
potencia reativa fornecida por um compensador estatico conectado a barrai;taxa de depreciacao de um conpensador estatico conectado a barra i;magnitude e angulo da tensao interna de uma maquina sıncronatensao terminal de uma maquina sıncrona;reatancia sıncrona de eixo direto de uma maquina sıncrona;potencia ativa e reativa de um gerador sıncrono;potencia reativa necessaria para o funcionamento do gerador sıncrono;potencia ativa nominal da maquina sıncrona;potencia ativa maxima da maquina sıncrona;parcela de custo por disponibilidade para producao de potencia reativa porum gerador sıncrono;parcela de custo devido as perdas internas da maquina para producao depotencia reativa por um gerador sıncrono;parcela de custo de oportunidade para producao de potencia reativa porum gerador sıncrono;potencia reativa fornecida pelo gerador conectado a barra i;magnitude e angulo da tensao na barra i;potencia ativa e reativa gerada na barra;potencia ativa e reativa consumida na barra;resistencia, reatancia e susceptancia shunt da linha;vetor de fatores de sensibilidade para barras;vetor de fatores de sensibilidade para transformadores;magnitude e angulo da admitancia da linha j− k;relacao de transformacao vista pelos lados j e k da linha j− k;susceptancia shunt da linha j− k;susceptancias shunt das barras j e k;numero de barras e de transformadores do sistema;

a jkΔxi|Δxmaxi |CTotal
|ΔVi||ΔQi||Δai|V 0i
Q0i
a0i
P0jk
Q0jk
ΔViΔQiΔaiΔQjkVmini ,Vmaxi
Qmini ,Qmaxi
Qminjk ,Qmaxjkamini ,amaxi
SmaxjkCTotal [S]
x
x(i)
relacao de transformacao do transformador conectado entre a linha j− k;variacao no parametro de controle do dispositivo i;faixa de variacao permitida para o parametro de controle do dispositivo i;custo total dos servicos de reativo fornecidos pelo conjunto de dispositivosselecionados pelos fatores de sensibilidade;modulo da variacao de tensao na barra i;modulo da variacao no suporte de reativos na barra i;modulo da variacao no tap do transformador i;tensao inicial na barra is;suporte de reativos inicial na barra i;tap inicial do transformador i;fluxo ativo inicial na linha j− k;fluxo reativo inicial na linha j− k;variacao de tensao na barra i;variacao no suporte de reativos na barra i;variacao no tap do transformador i;variacao no fluxo reativo na linha j− k;limites inferior e superior de tensao para a barra i;limites inferior e superior de geracao de Mvar na barra i;limites inferior e superior de fluxo reativo na linha j− k;limites inferior e superior de tap para o transformador i;limite maximo de fluxo aparente na linha j− k;custo total dos servicos de reativos considerando a atuacao apenas dosdispositivos membros da coalizao S;vetor de pagamentos destinado aos dispositivos pelo alıvio das sobrecar-gas;benefıcio obtido pelo jogador i dentro da coalizao;

SUMARIO
1 Introducao p. 19
1.1 Motivacao do uso de reativos para alıvio de sobrecargas . . . . . . . . . . . . p. 21
1.2 Motivacao do uso da teoria de jogos cooperativos . . . . . . . . . . . . . . . p. 22
1.3 Contribuicoes do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 23
1.4 Organizacao dos capıtulos . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 25
2 Acoes corretivas em sistemas eletricos p. 26
2.1 Acoes corretivas em sistemas de transmissao . . . . . . . . . . . . . . . . . . p. 30
2.1.1 Reserva Girante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 30
2.1.2 Chaveamento Corretivo . . . . . . . . . . . . . . . . . . . . . . . . p. 31
2.1.3 Redespacho da geracao . . . . . . . . . . . . . . . . . . . . . . . . . p. 32
2.1.4 Corte de cargas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 32
2.1.5 Dispositivos FACTS . . . . . . . . . . . . . . . . . . . . . . . . . . p. 32
2.1.6 Controle dos nıveis de reativos . . . . . . . . . . . . . . . . . . . . . p. 34
2.2 Acoes corretivas para alıvio de sobrecargas . . . . . . . . . . . . . . . . . . p. 35
3 Gerenciamento da potencia reativa: consideracoes tecnicas e economicas p. 40
3.1 Fornecimento do suporte de potencia reativa como um servico ancilar . . . . p. 41
3.1.1 AUSTRALIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 41
3.1.2 CANADA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 42
3.1.3 NOVA IORQUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 43
3.1.4 REINO UNIDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 44

3.1.5 PJM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 44
3.1.6 BRASIL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 45
3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia . . . . p. 45
3.2.1 Capacitores e indutores shunt . . . . . . . . . . . . . . . . . . . . . p. 46
3.2.2 Transformadores com tap variavel sob carga (OLTC) . . . . . . . . . p. 47
3.2.3 Geradores sıncronos . . . . . . . . . . . . . . . . . . . . . . . . . . p. 48
3.2.4 Compensadores sıncronos . . . . . . . . . . . . . . . . . . . . . . . p. 52
4 Tecnicas de solucao de jogos cooperativos p. 53
4.1 Elementos do jogo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 54
4.2 Teoria dos jogos cooperativos . . . . . . . . . . . . . . . . . . . . . . . . . . p. 55
4.2.1 Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 57
4.2.2 Valor Shapley . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 59
4.2.3 Valor Shapley Bilateral . . . . . . . . . . . . . . . . . . . . . . . . . p. 61
4.2.4 Nucleolus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 63
4.2.5 Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 64
5 Metodologia para alıvio de sobrecargas com base no gerenciamento de reati-vos p. 66
5.1 Sistema teste de 6 barras . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 67
5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controlede reativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 68
5.2.1 Obtencao da matriz de sensibilidades reativas Lc . . . . . . . . . . . p. 72
5.2.2 Fatores de sensibilidade de barras . . . . . . . . . . . . . . . . . . . p. 73
5.2.3 Fatores de sensibilidade de transformadores . . . . . . . . . . . . . . p. 74
5.2.4 Influencia da barra de referencia no calculo das sensibilidades . . . . p. 75
5.2.5 Fontes Virtuais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 77
5.3 Problema de otimizacao linear . . . . . . . . . . . . . . . . . . . . . . . . . p. 78
5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos . . . . . . . . p. 84
5.4.1 Identificacao dos jogadores . . . . . . . . . . . . . . . . . . . . . . . p. 86
5.4.2 Regras do jogo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 86
5.4.3 Funcao de Custos/Benefıcios . . . . . . . . . . . . . . . . . . . . . . p. 87
5.4.4 Resultado do jogo . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 87
5.4.5 Conceitos de solucao aplicados . . . . . . . . . . . . . . . . . . . . p. 88
6 Apresentacao dos Resultados p. 93
6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas . . p. 95
6.1.1 Definicao das acoes corretivas com a referencia do sistema na barra 69 p. 95
6.1.2 Definicao das acoes corretivas alterando-se a referencia do sistemapara a barra 82 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 101
6.1.3 Alocacao dos benefıcios entre os dispositivos . . . . . . . . . . . . . p. 107
6.2 Sobrecargas simultaneas em linhas eletricamente proximas . . . . . . . . . . p. 108
6.2.1 Alocacao dos benefıcios entre os dispositivos . . . . . . . . . . . . . p. 124
6.3 Sobrecargas simultaneas em linhas eletricamente distantes . . . . . . . . . . p. 124
6.3.1 Alocacao dos benefıcios entre os dispositivos . . . . . . . . . . . . . p. 136
6.4 Tempos de processamento para determinacao das acoes corretivas . . . . . . p. 137
6.5 Conclusoes parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 139
7 Consideracoes finais e trabalhos futuros p. 141
Referencias p. 144
Apendice A -- Dados do sistema IEEE de 118 barras p. 150

19
1 Introducao
Um dos maiores problemas existentes atualmente na operacao dos sistemas eletricos depotencia em ambientes desregulados esta relacionado com as violacoes dos limites operacionaise a manutencao da seguranca do sistema. Entende-se por seguranca dos sistemas de potencia, anao existencia de risco de interrupcao da operacao continuada dos mesmos. Em outras palavras,a seguranca de um sistema pode ser definida como a probabilidade de seu ponto de operacaomanter-se dentro de um espaco de estados viavel dadas as possibilidades de mudancas no sis-tema (contingencias) e em sua vizinhanca (mudancas climaticas, variacoes de demanda, etc.)(EL-HAWARY, 2000).
Para ser seguro, um sistema deve ser estavel na ocorrencia de uma contigencia e operarem condicoes tais que nenhuma restricao fısica seja violada. Tais violacoes podem ocorrer du-rante qualquer estagio da operacao do sistema, desde o mercado de dia seguinte (day-aheadmarket) ate a operacao em tempo real, e impedir o uso de fontes mais baratas para suprir ademanda, alem de facilitar a manipulacao do mercado (DENNY; DISMUKES, 2002). Comoconsequencia, as redes de transmissao tem sofrido sobrecargas nas linhas de maneira cada vezmais frequente. Em paıses em desenvolvimento, este cenario e agravado pelo aumento da de-manda e pelas restricoes existentes, principalmente as de natureza ambiental, para instalacao denovos recursos ao sistema, como linhas de transmissao, usinas e sub-estacoes.
Sob condicoes desfavoraveis, acoes corretivas rapidas sao necessarias, principalmente emsistemas interligados, para evitar falhas em cascata. Uma sobrecarga severa, persistindo pormuito tempo, pode danificar um equipamento do sistema, mas geralmente um rele atuara eisolara o dispositivo em falha. Isso pode levar a retirada de operacao de outro dispositivo que,por sua vez, causa variacoes nos fluxos e tensoes da rede e pode tornar a sobrecarga ainda maissevera. Dessa maneira, uma serie de falhas em cascata resultaria no desligamento de uma partesignificativa do sistema.
O redespacho (HAZRA; SINHA, 2007; FU; WANG, 2007) e o corte de cargas (HAZRA;SINHA, 2007; FU; WANG, 2007; FARANDA; PIEVATOLO; TIRONI, 2007) sao as acoes cor-

1 Introducao 20
retivas mais comuns no alıvio do sistema. Contudo, o controle de alguns dispositivos necessitade um tempo significativo para ser acionado, nao sendo adequados para aplicacao na ocorrenciade sobrecargas severas, situacao na qual acoes corretivas mais rapidas devem ser executadas.Um exemplo e o tempo exigido pela rampa dos geradores para alteracoes em seus nıveis degeracao, o que pode restringir a velocidade com que o fluxo ativo das linhas seja redirecio-nado. Alem disso, o custo dessas acoes em ambientes desregulados tornou-se muito alto para ooperador do sistema.
Neste trabalho e apresentada uma proposta para alıvio de sobrecargas em linhas de trans-missao baseada no controle dos fluxos reativos. Dependendo dos tipos de dispositivos utiliza-dos, o gerenciamento de reativos pode ser realizado de maneira mais rapida que o redespacho.Alem disso, sob certas circunstancias, o fluxo reativo em uma linha de transmissao pode serconsideravelmente alto e nao pode ser desprezado (MEDEIROS; SALGADO; ZURN, 2003).
O custo de se produzir potencia reativa e outro fator importante. Em sistemas bem pla-nejados, esse valor chega a menos de 1% do preco da energia ativa (RABIEE; SHAYANFAR;AMJADY, 2009). Esse fato pode se refletir no custo das acoes corretivas necessarias para alıviode sobrecargas do sistema. Por exemplo, em (KUMAR; SRIVASTAVA; SINGH, 2004), o usode reativos para alıvio de congestionamentos diminuiu a necessidade de redespacho e reduziuconsideravelmente o custo do congestionamento. Porem, precificar a potencia reativa nao e umatarefa trivial (XU et al., 2001; GROSS et al., 2002; LIN et al., 2006; XU; YU; WEN, 2007).
Os servicos de suporte de reativos visam garantir a seguranca do sistema no que diz respeitoa nıveis de tensao e, em varias estruturas de mercado, sao fornecidos em carater compulsoriosendo, em alguns casos, nao remunerados (RABIEE; SHAYANFAR; AMJADY, 2009). Alemdisso, a natureza local da potencia reativa dificulta a estruturacao de um mercado, permitindoaos agentes exercer poder de mercado e elevar os precos da potencia reativa (ZHONG; BHAT-TACHARYA, 2002; ZHONG et al., 2004). Dessa maneira, e necessario criar incentivos paraos agentes se disporem a prestacao desse servico com fins de aliviar os fluxos das linhas dosistema.
A metodologia proposta neste trabalho busca explorar as caracterısticas da potencia reativaexpostas nos paragrafos anteriores. Seguindo a ideia das areas de controle de tensao apresen-tada em (ZHONG et al., 2004), os dispositivos a serem utilizados no processo corretivo dosistema podem ser selecionados dentro de um conjunto reduzido, que e determinado com baseem fatores de sensibilidade lineares (HOJI; PADILHA-FELTRIN, 2006). Para um conjuntocom n dispositivos e possıvel formar 2n−1 combinacoes entre eles e as acoes corretivas para aeliminacao da sobrecarga e os custos decorrente em cada coalizao sao calculados utilizando um

1.1 Motivacao do uso de reativos para alıvio de sobrecargas 21
algoritmo simplex revisado de programacao linear, que minimiza o produto entre o custo dasacoes e o desvio do sistema de seu ponto de operacao. A solucao de menor custo e encontradae os incentivos destinados a cada dispositivo dentro da coalizao sao determinados com base nosconceitos de solucao da teoria de jogos cooperativos do Core (GILLIES, 1953), valor Shapley(SHAPLEY, 1953) e Nucleolus (SCHMEIDLER, 1969).
1.1 Motivacao do uso de reativos para alıvio de sobrecargas
Em ambientes desverticalizados, o controle da geracao, transmissao e distribuicao de ener-gia sao independentes entre si. Nesses cenarios, e papel do agente transmissor garantir o livreacesso a geradores e cargas do sistema. Contudo, acoes corretivas usuais para o alıvio de so-brecargas, como redespacho e corte de cargas, tornaram-se menos acessıveis, uma vez quedispositivos independentes do sistema de transmissao devem ser acionados para que elas sejamcumpridas. Alem disso, a interferencia nas transacoes de energia pode levar ao nao cumpri-mento dos contratos ou, em casos onde exista mercado de energia, do despacho definido poreste.
Apesar de nao estar entre os procedimentos padrao para alıvio de sobrecargas, o controle dofluxo reativo das linhas pode ajudar a reduzir a necessidade de redespacho e de corte de cargas.Embora muitos trabalhos tratem do problema com base em analises CC, os autores de (MEDEI-ROS; SALGADO; ZURN, 2003) mostraram que a potencia reativa tem papel importante no quediz respeito ao congestionamento do sistema e, para isso, utilizaram dois casos. No primeiro,o suporte de reativos para manter nıveis aceitaveis de tensao nas barras da rede nao pode serfornecido devido as limitacoes de geracao (ou absorcao) de reativos pelos geradores e, assim, oredespacho da geracao e necessario para garantir a operacao segura do sistema. Essa situacaoeleva o custo de operacao da rede, devido ao custo de oportunidade. No segundo caso, o fluxoreativo nas linhas de transmissao devido ao uso de fontes distantes dos pontos de consumo levaao congestionamento das linhas.
Outro fator importante refere-se ao custo de producao da potencia reativa, que e muitomenor do que o custo para se produzir ativos, uma vez que nao envolve custos de combustıveis.Em sistemas bem planejados, o custo de producao de potencia reativa chega a menos de 1% dopreco da energia ativa (RABIEE; SHAYANFAR; AMJADY, 2009) e esse fato pode se refletirno custo das acoes corretivas necessarias para o alıvio de sobrecargas do sistema.
Alem disso, um grande numero de dispositivos instalados nos sistemas de transmissao po-dem ser utilizados no controle dos nıveis de reativos, como capacitores e compensadores shunt;

1.2 Motivacao do uso da teoria de jogos cooperativos 22
dispositivos FACTS, transformadores e geradores sıncronos (MILLER, 1982), o que denota anecessidade de fornecimento desses servicos proximos aos pontos de consumo. Sendo assim,o alıvio do sistema pode ser obtido com a atuacao de grupos de dispositivos proximos as linhassobrecarregadas, o que reduz o esforco computacional necessario.
As acoes corretivas podem ser definidas por meio da solucao de um problema de otimizacaolinear, de maneira rapida e precisa. Em (HOBSON, 1980), verificou-se que o uso de programacaolinear no controle dos nıveis de reativos de sistemas de grande porte e preciso, versatil e ade-quado a aplicacoes em tempo real, sendo que essas caracterısticas foram exploradas no de-senvolvimento dos fluxos de potencia desacoplados (MONTICELLI; GARCIA; SAAVEDRA,1990).
Portanto, aplicar o redespacho de reativos no alıvio de sobrecargas permite determinar ra-pidamente as acoes corretivas necessarias, com boa precisao e baixo custo para o operador, semnecessidade de interferir no despacho de ativos do sistema para o alıvio de pequenas sobrecar-gas.
1.2 Motivacao do uso da teoria de jogos cooperativos
A nao existencia de um mercado bem definido de potencia reativa torna a remuneracaopor esse servico uma tarefa complicada. Em muitas estruturas de mercado, o servico de su-porte de reativos e compulsorio e, em alguns casos, nao remunerado (RABIEE; SHAYANFAR;AMJADY, 2009). Alem disso, a natureza local da potencia reativa facilita a criacao de poderde mercado por parte dos agentes e o consequente aumento do preco dos reativos (ZHONG;BHATTACHARYA, 2002; ZHONG et al., 2004).
Dessa maneira, apesar de seu baixo custo, e necessario estabelecer um mecanismo de paga-mento justo pela potencia reativa gerada (ou absorvida) para aliviar as sobrecargas, de maneiraa fornecer os incentivos necessarios, para que os agentes do sistema estejam dispostos a atuarnesse sentido.
Nesse sentido, os conceitos da teoria de jogos cooperativos podem ser utilizados para definiros pagamentos aos dispositivos com base na responsabilidade assumida por cada um deles parao alıvio do sistema, gerando assim, os incentivos necessarios para cada agente.
Em vista do numero reduzido de dispositivos envolvidos na solucao do problema, e possıvelavaliar todas as combinacoes formadas entre eles para encontrar a solucao mais economica.Alem disso, considerar os elementos da rede como fornecedores de servico ancilar de suporte

1.3 Contribuicoes do trabalho 23
de reativos pode auxiliar na reducao dos custos a serem pagos para os geradores e, consequen-temente, tornar a metodologia mais atrativa para o operador do sistema.
A teoria de jogos cooperativos vem sendo amplamente aplicada a sistemas eletricos depotencia (CONTRERAS, 1997; SILVA; MORALES; MELO, 2001; YANG; SHI; DUAN, 2003;SANHUEZA, 2004; LIMA; CONTRERAS; PADILHA-FELTRIN, 2008). Essa tecnica desolucao considera os jogadores atuando de maneira conjunta para solucionar um determinadoproblema e fornece a divisao justa dos benefıcios obtidos, de acordo com a contribuicao indivi-dual dos dispositivos para a resolucao do problema.
Todos os elementos necessarios para sua aplicacao podem ser encontrados neste problema.Os dispositivos utilizados no controle de reativos sao os jogadores; as regras do jogo sao defi-nidas por cada estrutura de mercado e pelos limites impostos a cada dispositivo; o resultado dojogo e a eliminacao da sobrecarga e a funcao de custos/benefıcios e a divisao entre os jogadoresdos benefıcios pagos pela eliminacao das sobrecargas.
Alem de fornecer o vetor de benefıcios a ser pago aos dispositivos atuantes e criar mecanis-mos que nao favorecam o poder de mercado, distribuindo os benefıcios obtidos de maneira equi-tativa entre os jogadores, os conceitos da teoria de jogos cooperativos fornecem informacoesrelevantes sobre a disposicao dos geradores e do agente transmissor em realizar as acoes corre-tivas indicadas.
1.3 Contribuicoes do trabalho
Neste trabalho e apresentada uma proposta para alıvio de sobrecargas em redes de trans-missao de energia eletrica utilizando o redespacho de reativos. Capacitores e indutores shunt,compensadores sıncronos e estaticos, transformadores e geradores sıncronos sao utilizadoscomo fontes de reativos, cujas saıdas sao alteradas de maneira a obter-se a reducao dos flu-xos reativos nas linhas sobrecarregadas aliviando, desta maneira, o sistema, de modo a permitira continuidade de seu funcionamento.
Dada a natureza local da potencia reativa, fatores de sensibilidade sao utilizados para deter-minar quais os dispositivos mais eficientes para controle dos fluxos reativos das linhas sobrecar-regadas e limitar o numero de possıveis acoes corretivas (HOJI; PADILHA-FELTRIN, 2006).Os dispositivos selecionados sao agrupados dentro de coalizoes e os ajustes nos seus parametrossao determinados em um processo de otimizacao baseado em programacao linear, que visa mi-nimizar o custo total das acoes corretivas. Os aspectos tecnicos, como os limites de geracao dereativos, nıveis de tensao e limites termicos das linhas sao tidos como restricoes do problema

1.3 Contribuicoes do trabalho 24
e garantem a operacao dentro de nıveis seguros. Um fluxo de potencia CA convencional eutilizado para avaliar os novos pontos de operacao obtidos.
A teoria de jogos cooperativos e aplicada para determinar os benefıcios economicos obti-dos pelos participantes da coalizao responsavel pelo alıvio do sistema. A princıpio, todos osdispositivos participantes do processo de alıvio do sistema sao considerados como jogadorese, portanto, sao passıveis de receber incentivos para sua participacao, em forma de benefıcioseconomicos. Assim, apesar do servico de suporte de reativos ser compulsorio em varias estrutu-ras de mercado e, usualmente, apenas os geradores serem remunerados pelo servico, espera-secobrir os custos operacionais de todos os equipamentos.
Mesmo em casos nos quais nao seja possıvel eliminar completamente as sobrecargas uti-lizando apenas reativos, espera-se que ocorra uma reducao na necessidade de redespacho depotencia ativa e no corte de cargas, reduzindo, dessa maneira, os custos resultantes para o agentetransmissor devido as acoes necessarias para correcao do ponto de operacao do sistema.
Em suma, as principais contribuicoes deste trabalho consistem em:
• Propor uma alternativa para o alıvio de pequenas sobrecargas em redes de transmissaobaseada no redespacho de reativos e aplicavel a procedimentos em tempo real, elimi-nando, ou reduzindo dessa maneira, a necessidade de interferir no despacho de ativos eminimizando os custos resultantes para o operador do sistema;
• Promover, com base em fatores de sensibilidade lineares, a selecao e classificacao dosdispositivos que podem ser utilizados para o alıvio das sobrecargas correntes no sistema,possibilitando o conhecimento previo de seus efeitos e reduzindo o espaco de busca parao operador;
• Estabelecer um mecanismo justo de remuneracao pelos servicos de suporte de reativos,utilizando os conceitos da teoria dos jogos cooperativos, com base na contribuicao de cadadispositivos para o alıvio do sistema e de maneira a fornecer os incentivos necessariospara a sua atuacao.
E importante ressaltar que a metodologia apresentada neste trabalho nao constitui uma pro-posta de fluxo de potencia otimo, uma vez que se restringe apenas a parte do sistema onde estaoocorrendo as violacoes.

1.4 Organizacao dos capıtulos 25
1.4 Organizacao dos capıtulos
Nesta tese e apresentada a metodologia proposta, desde as premissas adotadas ate as con-clusoes obtidas dos testes realizados, e o seu texto foi estruturado da seguinte maneira:
No Capıtulo 2 e apresentada uma breve revisao bibliografica sobre as acoes corretivas exe-cutadas em sistemas de transmissao, dando enfase aquelas aplicadas ao alıvio de sobrecargas.A descricao das acoes usualmente executadas para o alıvio do sistema, com seus pros e contrasno que diz respeito a tempo de atuacao e custo de operacao, ajuda o leitor a entender a essenciada metodologia proposta neste trabalho.
As caracterısticas tecnicas e economicas da producao de potencia reativa sao discutidas noCapıtulo 3, onde sao apresentados os princıpios de funcionamento e as estruturas de custo dosdispositivos utilizados no controle dos nıveis de reativos do sistema. O potencial de aplicacaodesses dispositivos a proposta deste trabalho, ressaltando as limitacoes e os benefıcios que po-dem ser obtidos pelo uso das diferentes fontes, e avaliado nesse capıtulo.
Uma introducao a teoria dos jogos e a descricao dos conceitos de solucao aplicados paradeterminacao dos benefıcios a serem pagos aos dispositivos sao apresentadas no Capıtulo 4.Um exemplo com tres jogadores e utilizado para ilustrar a aplicacao desses conceitos e permiteao leitor compreender os princıpios de cada um deles no calculo dos vetores de pagamento.
No Capıtulo 5 e apresentada a metodologia proposta para o alıvio de sobrecargas com baseno redespacho de reativos. Os fundamentos que justificam a proposta apresentada sao introdu-zidos e servem de base para as consideracoes adotadas no processo de solucao do problema.Nesse capıtulo, os principais passos do algoritmo proposto sao explicados em detalhes e umsistema teste de 6 barras e utilizado para ilustrar a metodologia.
Os testes realizados para avaliacao da proposta sao apresentados no Capıtulo 6. A eficienciae a aplicabilidade da proposta a solucao de problemas em tempo real foram avaliadas com osistema teste IEEE de 118 barras, considerando-se tres diferentes condicoes de operacao. Noprimeiro caso, foi considerada a ocorrencia de uma unica sobrecarga no sistema e a influenciada barra de referencia sobre o calculo dos fatores de sensibilidade foi avaliada. O desempenhoda metodologia no alıvio de sobrecargas simultaneas em linhas localizadas proximas no sistemae em linhas distantes no sistema foi avaliado nos outros dois casos apresentados.
As conclusoes e as sugestoes para a realizacao de trabalhos futuros sao apresentadas noCapıtulo 7 e no Apendice A sao apresentados os dados do sistema IEEE de 118 barras, utilizadonos testes.

26
2 Acoes corretivas em sistemas eletricos
A funcao de um sistema eletrico de potencia e converter a energia de uma das formas na-turalmente disponıveis na natureza para energia eletrica e transporta-la aos pontos de consumo.Assim, ele deve ser projetado de maneira a atender as seguintes condicoes (KUNDUR, 1994):
• O sistema deve ser capaz de atender continuamente as mudancas de demanda por potenciaativa e reativa;
• O sistema deve fornecer energia ao mınimo custo e com mınimo impacto ambiental;
• A potencia fornecida deve atender a padroes mınimos de qualidade relativos a frequencia,tensao e confiabilidade.
Na operacao em regime permanente, um sistema eletrico de potencia esta sujeito as restricoesde carga e as restricoes de operacao. As restricoes de carga representam as injecoes de potenciaativa e reativa especificadas nas barras de carga e as injecoes de potencia ativa nas barras degeracao. Entre as restricoes de operacao encontram-se os limites de tensao, os fluxos nas linhase transformadores e as injecoes de potencia reativa nas barras de geracao. A essas restricoespodem ser acrescentadas as chamadas restricoes de seguranca, cuja definicao esta associada aum conjunto pre-estabelecido de contingencias possıveis.
Para atender a essas condicoes, varios nıveis de controle, envolvendo um complexo con-junto de dispositivos, sao necessarios. Na transmissao, dispositivos como compensadores estaticosde Mvar, compensadores sıncronos e transformadores com tap variavel, sao utilizados para ocontrole de tensao e de potencia, e contribuem para a operacao satisfatoria do sistema, mantendotensoes, frequencia e outras variaveis dentro de limites aceitaveis, alem de afetar o desempenhodinamico dos sistemas e sua capacidade de suportar a ocorrencia de disturbios.
No entanto, os objetivos do controle dependem do estado de operacao do sistema, uma vezque, em muitos casos, os limites de operacao do sistema e de equipamentos nao sao rıgidos epodem ser violados por algum tempo. Por exemplo, sob condicoes de operacao normal, o obje-tivo e operar da maneira mais eficiente possıvel, com tensoes e frequencia proximas aos valores

2 Acoes corretivas em sistemas eletricos 27
nominais, enquanto que, sob uma condicao anormal, novos objetivos devem ser estabelecidospara restaurar o sistema a condicao de operacao normal. Dessa maneira, e possıvel definir osseguintes estados de operacao do sistema (MONTICELLI, 1983):
Seguro
Neste estado, o sistema opera obedecendo aos tres conjuntos de restricoes: carga, operacaoe seguranca; e a demanda e totalmente suprida sem que ocorram violacoes nos limites deoperacao. A observancia das restricoes de seguranca significa que a ocorrencia de uma dascontingencias listadas como possıveis nao levara o sistema ao estado de emergencia. Contudo,a ocorrencia de uma contingencia nao listada podera provocar uma emergencia.
Alerta
No estado de alerta, apenas as restricoes de carga e operacao sao totalmente obedecidas e, damesma maneira que no estado seguro, todas as cargas sao atendidas sem que ocorram violacoesnos limites de operacao. No entanto, a ocorrencia de pelo menos uma das contingencias listadascomo possıveis podera levar o sistema a uma situacao de emergencia.
Neste estado, acoes preventivas podem ser executadas de maneira a restaurar o sistema aoestado normal. Se essas acoes nao funcionarem, o sistema permanecera em estado de alerta.
Emergencia
O que caracteriza o estado de emergencia e a violacao das restricoes de operacao, que podeser provocada por uma contingencia e subsequente desligamento de um ou mais componentesdo sistema. Neste estado, o sistema continua intacto e pode ser restaurado ao estado de alertapor meio de acoes de controle emergenciais ou, entao, pelo desligamento de partes do sistema,o que leva ao estado restaurativo.
Restaurativo
Este estado e atingido quando uma emergencia e eliminada por desligamento de partes dosistema. As restricoes operacionais sao obedecidas, mas existem cargas nao atendidas.
As transicoes entre os estados de operacao podem ocorrer em funcao de perturbacoes nosistema ou devido a acoes de controle e sao ilustrados na figura 2.1 (MONTICELLI, 1983).

2 Acoes corretivas em sistemas eletricos 28
EMERGÊNCIA RESTAURATIVO ALERTA SEGURO
Segurança - preventivo
Segurança - corretivo
Emergência - corretivo
Restaurativo
Restaurativo
Emergência - crise
Controles - locais
Contingências previstas ou não
Contingências não previstas
Estados
Ações do centro de controle
Perturbações,contingências e controles locais
Emergência - preventivo
Figura 2.1: Estados de operacao dos sistemas de potencia.
Seguro→ alerta
Uma contingencia, ou mesmo a evolucao normal da demanda, pode levar o sistema do es-tado seguro ao estado de alerta.
Alerta→ seguro
Esta transicao e realizada pela execucao de acoes de controle pelo operador do sistema, pormeio do redespacho da geracao ou do aumento da reserva.
Seguro→ seguro
A previsao de demanda a curto-prazo permite ao operador verificar a possibilidade do sis-tema, mesmo operando em estado normal, encontrar-se em estado de alerta em um proximocenario. Assim, e possıvel realizar acoes de controle preventivo para garantir a operacao segurapara as condicoes previstas.
Alerta→ emergencia
O estado de emergencia ocorre quando, durante o estado de alerta, uma ou mais das con-tingencias consideradas possıveis ocorrem antes que sejam adotadas as medidas necessariaspara colocar o sistema em estado seguro.

2 Acoes corretivas em sistemas eletricos 29
Emergencia→ alerta
A transicao emergencia → alerta e realizada por meio de acoes de controle corretivo, quepodem envolver, por exemplo, redespacho da geracao, chaveamento de capacitores/indutores,mudanca nos taps de transformadores, etc, mantendo-se o atendimento da demanda e a integri-dade do sistema.
Emergencia→ restaurativo
A transicao do estado de emergencia ao estado de alerta nem sempre e possıvel e, em algu-mas situacoes, dispositivos locais de controle e protecao atuam, colocando o sistema em estadorestaurativo pelo desligamento de cargas/circuitos. Em outros casos, esses desligamentos po-dem ser ordenados pelo proprio operador do sistema para evitar falhas em cascata.
Alerta→ alerta
Se o sistema opera em estado de alerta e e prevista uma situacao de emergencia para um es-tado futuro, o operador pode atuar para mudar o ponto de operacao atual do sistema de maneiraque, para o estado previsto, nao se verifique mais a emergencia anteriormente detectada.
Restaurativo→ alerta
A funcao do controle restaurativo e religar as cargas e os circuitos do sistema, desligadosdurante uma emergencia, e recolocar o sistema de volta no estado seguro ou, pelo menos, noestado de alerta.
Em (KUNDUR, 1994), e definido ainda um quinto estado de operacao, denominado inextremis, ou modo de crise, no qual ocorrem falhas em cascata e o possıvel desligamento demaior parte do sistema. Esse estado decorre da ineficiencia das acoes corretivas no estadode emergencia e requer acoes de controle como corte de cargas e a separacao no controle dosistema.
Em vista do aumento na demanda, associado a maior exigencia dos consumidores e asrestricoes existentes a expansao dos sistemas, principalmente as relacionadas a preservacaodo meio ambiente, os sistemas tem operado cada vez com menos folga e, em alguns casos,congestionamentos e pequenas sobrecargas podem surgir durante a operacao, levando ao estadode emergencia.

2.1 Acoes corretivas em sistemas de transmissao 30
Sendo assim, um dos maiores problemas existentes atualmente nos sistemas eletricos depotencia esta relacionado com as violacoes dos limites operacionais e a manutencao da segurancado sistema. Para evitar falhas em cascatas, principalmente em sistemas interligados, e ne-cessario que sejam tomadas algumas medidas para corrigir os problemas existentes no sistemaeletrico e garantir a operacao do sistema em nıveis seguros. Nesse sentido, as empresas detransmissao tem investido na otimizacao dos recursos existentes.
Neste capıtulo, sao apresentadas uma breve descricao de algumas acoes que podem serexecutadas para a correcao de violacoes durante a operacao dos sistemas de transmissao e umasıntese dos trabalhos encontrados na literatura a respeito das acoes corretivas realizadas parao alıvio de sobrecargas. Basicamente, os trabalhos analisados referem-se a aplicacao de acoescomo redespacho, corte de cargas e chaveamento corretivo ao alıvio dos sistemas e deixam claroque o uso de reativos e mais direcionado a problemas de tensao.
2.1 Acoes corretivas em sistemas de transmissao
Entre as acoes corretivas que podem ser executadas em um sistema de transmissao estaoo uso da reserva girante rapida (GOOI et al., 1999; MOYA, 2005); o chaveamento corretivo(SHAO; VITTAL, 2005; HEDMAN et al., 2008); o redespacho da geracao (HAZRA; SINHA,2007; FU; WANG, 2007); o corte de cargas (HAZRA; SINHA, 2007; FU; WANG, 2007; FA-RANDA; PIEVATOLO; TIRONI, 2007); o ajuste de dispositivos FACTS (SHAO; VITTAL,2006) e o controle dos nıveis de reativos do sistema (MILLER, 1982; CUTSEM; VOURNAS,2001).
A execucao das acoes corretivas esta condicionada ao tipo de violacao existente no sistema.Por exemplo, o redespacho e o corte de cargas podem ser utilizados para aliviar os fluxos naslinhas, enquanto que o uso da reserva girante auxilia na manutencao da estabilidade dos siste-mas. Uma breve descricao das acoes corretivas citadas anteriormente e apresentada nesta secao,indicando suas aplicacoes e ressaltando alguns de seus aspectos tecnicos e economicos.
2.1.1 Reserva Girante
A demanda por potencia eletrica e dinamica e e impossıvel prever com exatidao seu valorem um instante a frente. Porem, a todo momento na operacao, e necessario que exista o balancode potencia, ou seja, desprezando-se as perdas do sistema, a energia eletrica gerada deve serigual a energia eletrica consumida. Quando esse balanco nao ocorre, o sistema fica sujeito a

2.1 Acoes corretivas em sistemas de transmissao 31
variacoes de frequencia.
A reserva girante e fornecida como servico ancilar e tem importancia economica em ambi-entes desregulados. Esse servico pode ser definido como a capacidade nao utilizada que podeser ativada por decisao do operador do sistema e e fornecida por dispositivos sincronizados arede e capazes de afetar sua potencia ativa. Usualmente, a reserva girante e ativada para mantero balanco de potencia em caso de variacoes na demanda e regular a frequencia do sistema.
Basicamente, o controle de frequencia e dividido em duas acoes: o controle de frequenciaprimario e um controle automatico local que ajusta a geracao de potencia ativa das unidadesgeradoras e, eventualmente, o consumo de cargas controlaveis, para restaurar rapidamente obalanco geracao-carga e se contrapor as variacoes de frequencia. O controle de frequenciasecundario e um controle automatico centralizado, que ajusta a producao de potencia ativa pararestaurar a frequencia e os intercambios entre as areas a seus valores nominais. Esse controle etambem chamado Controle Automatico da Geracao (CAG ou AGC). Um estudo detalhamentodesses servicos pode ser encontrado em (GALVIS, 2010).
Geralmente, esse servico e fornecido por quantos geradores forem necessarios, pois e maisfacil obter uma resposta rapida com pequenos ajustes em varias unidades que com um grandeajuste em uma unica unidade geradora. O custo desse tipo de servico varia de acordo com aestrutura de mercado e muitas vezes pode ser maior que o custo da energia ativa despachada.
2.1.2 Chaveamento Corretivo
O chaveamento corretivo vem sendo objeto de muitos estudos recentemente. Esse proce-dimento afeta minimamente os nıveis de geracao e cargas. Alem disso, o chaveamento corre-tivo possui grandes vantagens economicas comparado aos outros metodos de controle corretivo(SHAO; VITTAL, 2005). Outro fator positivo deste tipo de acao e que os fluxos de potencia eos nıveis de tensao podem ser alterados rapidamente, o que permite o uso do chaveamento emsituacoes de emergencia.
Linhas de transmissao, dispositivos shunt, barramentos e transformadores sao alguns dosdispositivos que podem ser utilizados para acoes de chaveamento corretivo. Porem, quandoo sistema esta operando proximo a seus limites, problemas de instabilidade e na isolacao deequipamentos devido a sobretensoes podem ocorrer com a tomada de acoes corretivas dessetipo (ROLIM; MACHADO, 1999; SHAO; VITTAL, 2005) e acoes mais severas, como corte decarga, devem ser realizadas.

2.1 Acoes corretivas em sistemas de transmissao 32
2.1.3 Redespacho da geracao
O redespacho da geracao consiste em alterar os nıveis de potencia entregues pelas maquinasde maneira a aliviar as violacoes dos parametros do sistema e e uma das principais acoes corre-tivas adotadas no alıvio de sistemas de potencia. Usualmente e realizado em estruturas compe-titivas para evitar congestionamentos no fechamento dos mercados (KUMAR; SRIVASTAVA;SINGH, 2004; CAPITANESCU; CUTSEM, 2007; HAZRA; SINHA, 2007). Algumas pro-postas para sua aplicacao no alıvio de sobrecargas tambem sao apresentadas (LACHS, 1987;BIJWE; KOTHARI; ARYA, 1993; ELA; SPEA, 2009; GATTA et al., 2009), mas o redespachoda geracao nao se mostra muito eficaz quando acoes corretivas imediatas sao necessarias, porexemplo, na ocorrencia de sobrecargas severas, pois as unidades geradoras necessitam tempopara aumentar seus nıveis de saıda. Esse tempo de rampa depende do tipo e da capacidade dasunidades.
Em ambientes desverticalizados, o impacto economico devido ao redespacho pode ser alto.Daı a importancia do uso de metodos de otimizacao, visando reduzir esses custos. Usualmente,o redespacho e realizado em concordancia com o corte de cargas.
2.1.4 Corte de cargas
O corte de cargas e utilizado como ultimo recurso no alıvio de violacoes das restricoes dosistema, devido ao alto custo que implica para o operador do sistema em ambientes desverti-calizados. Consiste em desligar uma quantidade de cargas do sistema durante um intervalo detempo para que outras acoes corretivas possam ser realizadas. Novas propostas para o cortede cargas tem sido apresentadas na literatura (FARANDA; PIEVATOLO; TIRONI, 2007), bus-cando amenizar os impactos economicos e aumentar o benefıcio social ocasionado por estaforma de controle.
Apesar dos custos e de nao ser uma acao corretiva preferencial, o corte de cargas continuasendo adotado em muitas situacoes em que as violacoes do sistema nao podem ser aliviadascom as demais acoes corretivas apresentadas como, por exemplo, na ocorrencia de sobrecargasseveras em linhas de transmissao.
2.1.5 Dispositivos FACTS
O conceito de FACTS (Flexible Alternate Current Transmission Systems) propoe o usoextensivo de eletronica de potencia para o controle de sistemas de potencia CA e tem recebido

2.1 Acoes corretivas em sistemas de transmissao 33
muita atencao recentemente, reultando na concepcao de novos dispositivos, com dois objetivosprincipais: aumentar a capacidade de transmissao de potencia das redes; e controlar diretamenteo fluxo de potencia em rotas especıficas de transmissao (WATANABE et al., 1998).
Os dispositivos FACTS podem fornecer compensacao em derivacao, compensacao serie oucompensacao de angulo de fase e sao aplicaveis, de forma mais direta,as restricoes de trans-missao de potencia relacionadas com problemas de estabilidade, tanto que a estabilidade dossistemas de potencia passou a ter mais graus de liberdade com a utilizacao desses equipamentos.
Nos estudos de estabilidade transitoria, estes dispositivos podem propiciar o aumento dolimite de transferencia de grandes blocos de energia como, por exemplo, com o chaveamento degrandes capacitores serie em determinadas linhas de transmissao. Nos estudos de estabilidadedinamica (frente a pequenas perturbacoes), o amortecimento das oscilacoes do sistema pode seraumentado com a modulacao de pequenos capacitores em serie com as linhas de transmissao.
A maioria dos controladores FACTS atua sobre os fluxos reativos para controlar os perfisde tensao e melhorar a estabilidade do sistema. O controle desses dispostivos pode ser realizadousando tiristores que, apesar da alta confiabilidade, possuem capacidade de controle limitadaapenas ao processo de disparo. Chaves semicondutoras autocomutadas tambem podem serutilizadas na implementacao dos controladores FACTS e sua principal vantagem e a significantereducao no tamanho e a potencial reducao nos custos, em vista da eliminacao de grande partedos componente passivos (MORAN et al., 2007).
A compensacao em derivacao e utilizada para influenciar as caracterısticas eletricas naturaisdas linhas de transmissao de maneira a aumentar a capacidade de transmissao de potencia emregime permanente e controlar os nıveis de tensao ao longo das linhas. Entre os principaisdispositivos em derivacao controlados por tiristor encontram-se o capacitor chaveado a tiristor(TSC - tryristor-switched capacitor) e o reator controlado a tiristor (TCR - tryristor-controlledreactor).
O compensador sıncrono estatico (STATCOM - STATic COMpensator) e o principal dis-positivo em derivacao controlado por chave autocomutada e baseia-se em uma fonte de tensaode estado solido, implementada com um inversor e conectada em paralelo com o sistema pormeio de uma indutancia de acoplamento, gerando tensoes senoidais trifasicas a frequencia fun-damental, com amplitude e defasamento angular controlaveis.
A compensacao serie e aplicada para alterar a impedancia das linhas de transmissao e ealtamente eficiente no controle do fluxo na linha e na melhoria da estabilidade do sistema. Oprincipal compensador serie controlado por tiristores e o capacitor serie controlado a tiristor

2.1 Acoes corretivas em sistemas de transmissao 34
(TCSC - Thyristor Controlled Series Capacitor), enquanto que o compensador serie avancado(SSSC - Static Synchronous Series Compensator) e o mais conhecido compensador serie comchave autocomutada, que injeta uma tensao em serie com a linha, defasada de 90o coma correnteda carga, operando como um capacitor serie controlavel. A diferenca basica com os capacitoresserie e que a tensao injetada pelo SSSC nao esta relacionada com a corrente de linha e pode sercontrolada de maneira independente.
Alem disso, e possıvel integrar dois compensadores avancados, um em serie e outro emderivacao, tendo um elo CC comum, constituindo dispositivos de compensacao hıbridos, ca-pazes de controlar o fluxo de potencia em uma linha durante o regime permanente, realizar acompensacao dinamica de tensao e limitar as correntes de curto-circuito durante um disturbiono sistema. Este conceito e utilizado pelo controlador unificado de fluxo de potencia (UPFC -Unified Power Flow Controller).
Apesar dos potenciais benefıcios obtidos com o uso de controladores FACTS, o custo destesdispositivos e elevado e ainda existem poucos desses dispositivos instalados nos sistemas aoredor do mundo. Informacoes mais detalhadas sobre o funcionamento dos dispositivos FACTSpodem ser encontradas em (WATANABE et al., 1998) e (MORAN et al., 2007).
2.1.6 Controle dos nıveis de reativos
A coordenacao do despacho de reativos apresenta varias vantagens para um sistema depotencia (MILLER, 1982):
• Reducao de custos devido a reducao das perdas do sistema;
• Melhoria no perfil de tensao;
• Melhoria no controle da tensao;
• Melhoria na seguranca do sistema;
• Aumento na capacidade de transferencia do sistema;
• Melhoria na operacao do sistema.
Usualmente, ajustes em fontes de potencia reativa sao empregados com vistas a corrigiros nıveis de tensao do sistema, de maneira a mante-los em patamares aceitaveis e controlaras perdas no sistema de transmissao. A natureza local da potencia reativa e compensada pelogrande numero de dispositivos que podem ser utilizados para seu controle, distribuıdos por todo

2.2 Acoes corretivas para alıvio de sobrecargas 35
o sistema. Geradores sıncronos, transformadores com mudanca de tap sob carga, capacitores eindutores em derivacao, compensadores estaticos e compensadores sıncronos podem ser utili-zados para esse controle.
2.2 Acoes corretivas para alıvio de sobrecargas
Uma sobrecarga severa, persistindo por muito tempo, pode danificar um equipamento dosistema, mas geralmente um rele atuara e isolara o dispositivo em falha. Isso pode levar a saıdade outro dispositivo que, por sua vez, causa variacoes nos fluxos e tensoes da rede e pode tornara sobrecarga ainda mais severa. Dessa maneira, uma serie de falhas em cascata resultaria nodesligamento de uma parte significativa do sistema.
Problemas de violacoes podem ocorrer em qualquer estagio de operacao do sistema desdeo mercado de dia seguinte (day-ahead market) ate a operacao em tempo real. A presenca decongestionamento nos sistemas de energia pode impedir o uso de fontes mais baratas para suprira demanda, alem de facilitar a manipulacao do mercado (DENNY; DISMUKES, 2002). Comoconsequencia, as redes de transmissao tem sofrido sobrecargas nas linhas de maneira cada vezmais frequente.
Por muitos anos, o redespacho e o corte de cargas foram as acoes corretivas mais utilizadasno alıvio de sobrecargas em sistemas eletricos de potencia. Contudo, em ambientes desvertica-lizados, os custos referentes a essas acoes sao muito altos. Assim, novas tecnicas, mais baratase, as vezes, mais eficientes, tem sido aplicadas no cumprimento dessa tarefa. Alem disso, novaspropostas que visam amenizar os custos das acoes corretivas tradicionais vem sendo apresen-tadas. Chaveamento de linhas, uso de dispositivos FACTS e cortes de cargas distribuıdas estaoentre essas tecnicas. Na sequencia, e apresentada uma sıntese de alguns trabalhos encontradosna literatura a respeito desse tema.
Uma breve revisao bibliografica sobre o alıvio de congestionamentos em mercados com-petitivos e apresentada em (KUMAR; SRIVASTAVA; SINGH, 2005), onde a maioria das re-ferencias analisadas abordam o problema por meio de procedimentos de redespacho e corte decargas. Segundo os autores, os metodos para alıvio do congestionamento podem ser divididosem: metodos baseados em fatores de sensibilidade; metodos baseados em leiloes; metodos ba-seados em precos; metodos baseados em redespacho e metodos de pagamento combinado (wil-lingness to pay methods) e dispositivos como defasadores, transformadores com tap variavel econtroladores FACTS podem exercer papeis vitais no alıvio de congestionamentos em mercadosdesregulados.

2.2 Acoes corretivas para alıvio de sobrecargas 36
Uma analise comparativa entre os esquemas para alıvio de congestionamentos adotadosem cinco mercados eletricos (England and Wales; Pennsylvania-Jersey-Maryland; Noruega;Suecia e California) dentro de uma mesma estrutura e apresentada em (BOMPARD et al., 2003).Esse trabalho fornece uma boa visao de varios aspectos, como a eficiencia a curto prazo ea adequacao dos sinais economicos para alıvio do congestionamento nos diversos esquemasanalisados.
Dois tratamentos distintos para sobrecargas moderadas e severas sao propostos em (LA-CHS, 1987). Sao definidas como sobrecargas moderadas aquelas que podem ser toleradas porum determinado intervalo de tempo sem danificar a linha de transmissao ou outros equipa-mentos do sistema e; como sobrecargas severas, aquelas que requerem acoes imediatas. Assobrecargas moderadas sao aliviadas com o redespacho da geracao, sendo que os ajustes nosnıveis de geracao sao efetuados de maneira empırica, de acordo com seus efeitos sobre as per-das reativas do sistema. O alıvio de sobrecargas severas e realizado com o corte de cargasestrategico, de maneira a nao permitir a atuacao da protecao da linha e o consequente risco defalhas em cascata. Segundo o autor, essa abordagem permite o alıvio de sobrecargas de qualquermagnitude.
Em (BIJWE; KOTHARI; ARYA, 1993), os autores tratam do alıvio de sobrecargas e dasviolacoes de tensao como um problema de otimizacao composto, mas tratando os problemasde maneira desacoplada. A princıpio, o sistema e despachado sem restricoes e, em seguida, erealizado um redespacho corretivo. O algoritmo e baseado em programacao linear e nao existenecessidade de representacao da rede e de calculos de fluxo de potencia. Os fluxos nas linhaspara cada patamar de geracao sao obtidos utilizando-se fatores de ajuste (shift factors). A qua-lidade das acoes propostas e avaliada por um ındice de desempenho calculado pelo somatoriodos quadrados das divisoes entre os fatores de ajuste e os limites das linhas.
Em (ROLIM; MACHADO, 1999) e apresentada uma revisao bibliografica sobre o uso dechaveamento corretivo em sistemas de transmissao. O uso de linhas de transmissao, transfor-madores e elementos shunt sao analisados. Essas acoes sao aplicadas principalmente na solucaode problemas de sobrecargas, violacoes de tensao, reducao de perdas e melhoria da segurancado sistema. O estudo mostra que os dois primeiros tipos de dispositivos sao amplamente utiliza-dos. Contudo, reducao na confiabilidade do sistema e danos nos isolamentos de equipamentosda rede de transmissao devido a sobretensoes transitorias sao alguns dos problemas relacionadosa esse tipo de acao corretiva.
Os autores de (SHAO; VITTAL, 2005) apresentam um algoritmo baseado em tecnicas deinversao esparsa e no fluxo de potencia desacoplado rapido, com numero limitado de iteracoes,

2.2 Acoes corretivas para alıvio de sobrecargas 37
para determinar o chaveamento corretivo de linhas de transmissao e barramentos para o alıviode sobrecargas. O fluxo de potencia desacoplado e usado para obter informacoes sobre tensoese potencia reativa. As acoes de chaveamento encontradas sao classificadas de acordo com umındice de margem de seguranca. Presume-se que apenas uma linha ou barramento e chaveadopor vez, de maneira a evitar a reducao da seguranca do sistema a nıveis inaceitaveis. Um con-trole corretivo de tensao e integrado ao algoritmo para aliviar as violacoes de tensao persistentesapos o chaveamento. Nesse estagio sao utilizados dispositivos shunt. Os resultados apresenta-dos mostram que o numero de linhas e/ou barramentos que podem ser utilizados com sucessopara o alıvio de sobrecargas e limitado.
Um algoritmo de fluxo de potencia otimo baseado em programacao linear para controlecorretivo de dispositivos FACTS de maneira a aliviar sobrecargas e violacoes de tensao devidoa ocorrencia de contingencias e apresentado em (SHAO; VITTAL, 2006). A funcao objetivo doproblema e minimizar o carregamento medio de todas as linhas de transmissao do sistema. Amatriz de sensibilidades das variaveis do UPFC (Unified Power Flow Controller) sao atualizadasa cada iteracao do fluxo de potencia otimo para nao comprometer a precisao do algoritmo. Oslimites operacionais do dispositivo FACTS claramente restringe seu campo de acao.
Em (FARANDA; PIEVATOLO; TIRONI, 2007) e proposta uma nova abordagem para ocorte de cargas no alıvio de congestionamentos, denominada “corte de cargas interruptıveisdistribuıdas” (DILS - Distributed Interruptible Load Shedding). Nessa proposta, varios consu-midores sao encorajados a participar do programa de corte de cargas, ao inves de se eliminaralguns usuarios ou alimentadores completos da distribuicao, como usualmente se procede emplanos programados de emergencia. As cargas de cada usuario sao divididas entre interruptıveise nao-interruptıveis, sendo que apenas a primeira parte e considerada no corte de cargas e po-dem ser determinadas de maneira estatıstica. Com base em analises temporais, poder-se-ia de-terminar como a divisao das cargas entre interruptıveis e nao-interruptıveis se comporta a cadainstante e, assim, definir o comportamento de cada tipo de usuario interessado em participar docorte de cargas. A participacao dos consumidores no programa esta condicionada ao pagamentode um benefıcio economico por sua cooperacao. Contudo, os autores nao definem como seriamdados esses benefıcios e admitem serem necessarias analises adicionais do problema. O maiorobstaculo para a aplicacao pratica da proposta esta no fato de que seriam necessarios medidoresinstalados em cada usuario para informar em tempo real as cargas interruptıveis. Segundo osautores, essa metodologia se apresenta interessante para as distribuidoras de energia, uma vezque as multas cobradas pelo nao atendimento da demanda sao caras e na abordagem proposta,usuarios domesticos poderiam ser incluıdos no corte de cargas interruptıveis e trazer benefıcioseconomicos e sociais.

2.2 Acoes corretivas para alıvio de sobrecargas 38
Em (CAPITANESCU; CUTSEM, 2007), os autores apresentam uma proposta para solucaodos problemas de instabilidade de tensao e sobrecargas em linhas de transmissao de maneiraunificada em ambientes desregulados. Duas abordagens sao propostas: a primeira, denominadacontrole de injecao (IC - Injection Control), e aplicavel em qualquer modelo desregulado erefere-se as alteracoes nos nıveis de potencia injetada nas barras (geracao e cargas); a segunda,denominada controle de transferencias (TC - Transaction Control), e aplicavel em mercadoscom contratos bilaterais e consiste no corte otimizado nas transferencias de potencia nao firma-das para o alıvio de congestionamentos. As margens de seguranca do sistema para tensoes ecarregamentos das linhas sao estabelecidas por meio de sensibilidades lineares em relacao asvariacoes de potencia ativa das barras e definem o conjunto das acoes corretivas mais eficien-tes. No IC, os erros introduzidos pelas nao-linearidades do sistema sao compensados com baseem uma abordagem heurıstica. No TC, o objetivo e minimizar o somatorio dos quadrados dasalteracoes nas transferencias de potencia.
Os autores de (ELA; SPEA, 2009) apresentam tres procedimentos baseados em algoritmogenetico e algoritmo genetico multi-objetivo para aliviar sobrecargas e minimizar as perdas dosistema para diferentes condicoes de operacao, utilizando varias acoes corretivas. A primeiraabordagem e baseada no chaveamento de linhas de transmissao e redespacho. Em situacoes querequerem acoes rapidas, o algoritmo proposto segue dois estagios. No primeiro, e realizado ochaveamento das linhas de maneira a minimizar as perdas e os fluxos nas linhas sobrecarregadasdo sistema. No segundo estagio, o redespacho e usado como acao corretiva e minimizar o custoda geracao e adicionado a funcao objetivo do problema. A alocacao e o dimensionamento otimode geradores distribuıdos formam a funcao objetivo da segunda proposta apresentada nessetrabalho. Por fim, a terceira proposta apresentada baseia-se no corte de cargas. Em um primeiroestagio, o corte de cargas e realizado em conjunto com a reserva girante rapida. Minimizar asperdas e os fluxos nas linhas crıticas, satisfazer a prioridade das cargas e minimizar o corte decargas sao os objetivos do algoritmo genetico multi-objetivo. A restituicao do fornecimentoas cargas cortadas e realizado em um segundo estagio utilizando geradores distribuıdos. Porfim, o redespacho e executado para restabelecer todas as cargas do sistema. O chaveamentocorretivo apresenta bons resultados, mas pode comprometer a confiabilidade do sistema. Omesmo acontece com o uso de geradores distribuıdos, dependendo da potencia injetada por eles.Problemas crıticos neste tipo de abordagem, os custos e o tempo computacional demandado naoforam avaliados pelos autores.
As acoes corretivas em (GATTA et al., 2009) sao definidas por meio de um processo deotimizacao que combina um μ-algoritmo genetico com um programa de fluxo de potenciabaseado no metodo de correcao das correntes perifericas (Fringing Current Correction) (BE-

2.2 Acoes corretivas para alıvio de sobrecargas 39
NATO; PAOLUCCI, 2000) citado em (GATTA et al., 2009). As acoes corretivas consideradaspara melhorar a seguranca do sistema sao: ajustes nos taps de transformadores, reatores e ca-pacitores shunt, reconfiguracao de rede, redespacho e, quando necessario, corte de cargas. Acada geracao do algoritmo genetico, um fluxo de potencia e calculado para cada indivıduo, demaneira a calcular as tensoes e correntes nodais para avaliar a adaptacao dos indivıduos napopulacao e, finalmente, otimizar a funcao de adaptacao. O algoritmo mostrou-se robusto, for-necendo solucoes proximas das otimas, mas com altos tempos computacionais, o que restringesua aplicacao em tempo real.
40
3 Gerenciamento da potencia reativa:consideracoes tecnicas e economicas
A principal funcao dos sistemas de transmissao e transportar a potencia ativa disponıvel noscentros de geracao ate os centros de carga. Assim, para que um sistema aproxime-se do pontode operacao otimo, os fluxos reativos nas linhas devem ser minimizados e a potencia reativanecessaria para suprir as correntes magnetizantes de transformadores, motores de inducao, etc.deve ser gerada proxima ao ponto de consumo sempre que possıvel. Alem disso, a potenciareativa possui natureza local, ou seja, nao pode viajar por grandes distancias pelo sistema detransmissao.
Dessa maneira, torna-se necessaria a instalacao de equipamentos para fornecimento de su-porte de reativos por todo o sistema. Alem dos geradores sıncronos e linhas de transmissaolongas, dispositivos como indutores e capacitores, compensadores sıncronos e transformadorescom tap variavel podem ser utilizados para essa finalidade.
Tais caracterısticas dificultam a definicao dos precos e a formacao de um mercado depotencia reativa. Tanto que, apesar de algumas propostas de precificacao de reativos terem sidoapresentadas na literatura (ZHONG; BHATTACHARYA, 2002; ZHONG et al., 2004; MAN-DAL et al., 2005; LIN et al., 2006; MOZAFARI et al., 2006), em muitas estruturas de mercado,o suporte de reativos e considerado como um servico ancilar, fornecido em carater compulsorioe, em alguns casos, sem remuneracao para o agente prestador (RABIEE; SHAYANFAR; AM-JADY, 2009).
Neste capıtulo e apresentada uma analise tecnica e economica dos dispositivos conectadosao sistema para prestacao de servicos de suporte de reativos, sendo dada maior atencao aosgeradores sıncronos, uma vez que este tipo de dispositivo desempenha papel importante nofornecimento de reativos ao sistema. Uma descricao suscinta dos modelos de pagamentos poresses servicos em diversas estruturas de mercado e apresentada e permite verificar a afirmacaoapresentada em (RABIEE; SHAYANFAR; AMJADY, 2009) a respeito do carater compulsorioe da nao existencia de um mercado estabelecido de reativos.

3.1 Fornecimento do suporte de potencia reativa como um servico ancilar 41
As estruturas de custo para geracao de reativos e as caracterısticas fısicas, como limites deoperacao e tempo de atuacao, de cada tipo de dispositivo sao avaliadas e servem de parametrospara determinar sua capacidade e aplicabilidade para fornecimento desses servicos.
3.1 Fornecimento do suporte de potencia reativa como umservico ancilar
As analises tradicionais dos custos da geracao baseiam-se principalmente nos custos decapacidade e de producao. Uma diferenca fundamental que separa os precos da potencia ativae da potencia reativa e que o custo associado a producao de reativos e muito menor, podendo,iclusive, ser desconsiderado (LAMONT; FU, 1999; MANDAL et al., 2005).
Tendo isso em vista, o fornecimento de suporte de reativos e classificado como um servicoancilar e prestado em carater compulsorio em muitas estruturas de mercado. A remuneracaodos agentes pela prestacao do servico se da de maneira especıfica em cada um deles, sendo que,de maneira geral, apenas os custos extras decorrentes da prestacao dos servicos sao ressarcidos.A seguir, e apresentada uma breve descricao das regras para o fornecimento e a remuneracaodo servico de suporte de reativos em alguns mercados eletricos.
3.1.1 AUSTRALIA
As informacoes apresentadas nesta secao a respeito do fornecimento de suporte de reativosno mercado australiano podem ser encontradas nos procedimentos de operacao dos servicosancilares (AEMO - Australian Energy Market Operator, 2009) e nas regras do mercado deeletricidade (AEMO - Australian Energy Market Operator, 2010).
Na Australia, o servico de suporte de reativos e considerado um servico ancilar fora domercado de energia. Os elementos de rede que prestam servicos dentro da estrutura de mercadodevem ser capazes de operar dentro da faixa de fator de potencia entre 0,90 indutivo e 0,95capacitivo, sendo permitidos limites diferentes para alguns casos especiais. Caso o fator depotencia medido no ponto de conexao desses elementos esteja fora dessa faixa, um suporteadicional de reativos e necessario e a potencia reativa extra demandada deve ser suprida oupaga pelo agente responsavel pelo elemento.
O servico de suporte de reativos e dividido em duas categorias, de acordo com o modode fornecimento e com a estrutura de pagamento pelos servicos: modo de geracao e modo decompensacao sıncrona.

3.1 Fornecimento do suporte de potencia reativa como um servico ancilar 42
As unidades operando em modo de geracao sao ressarcidas pela disponibilidade do servicoancilar de potencia reativa. O ajuste do montante de potencia reativa produzida por umamaquina nao afeta os pagamentos por esses sevicos, a menos que seja necessario restringira producao de potencia ativa da unidade para produzir potencia reativa. Nesses casos, as uni-dades sao compensadas financeiramente com base nos seus custos de oportunidade, conformeestabelecido nos contratos de prestacao de servicos ancilares.
Como nao existe pagamento por utilizacao para essas unidades, o controle da potencia re-ativa a ser produzida e determinado pela AEMO conforme as necessidades locais e do sistemae os geradores sao selecionados de modo a minimizar o desvio do despacho sem restricoes.Quando e necessario um suporte adicional de potencia reativa alem do disponıvel pelas uni-dades operando em modo de geracao, as unidades em modo de compensacao sıncrona saodespachadas.
As unidades despachadas em modo de compensacao sıncrona podem ser utilizadas paramanter a seguranca do sistema ou aumentar a capacidade de transferencia da rede e sao re-muneradas de acordo com sua capacidade. Essas unidades sao geralmente despachadas aposo suporte de reativos de todas as unidades em modo de geracao ser utilizado. Os detalhes docontrato para compensacao sıncrona serao definidos e apresentado a AEMO em forma de umdespacho por ordem de merito. Na selecao das unidades para serem despachadas em modo decompensacao sıncrona, sao levados em consideracao as exigencias de suporte de reativos locaise os pagamentos por capacidade.
Em nenhum dos modos de operacao os geradores sao ressarcidos pela utilizacao dos servicosde suporte de reativos.
3.1.2 CANADA
No Canada, as unidades de geracao conectadas diretamente a rede controlada pela IESOdevem ser capazes de injetar ou absorver potencia reativa dinamicamente, no ponto de conexao,ate 33% da potencia ativa nominal em qualquer nıvel de geracao de potencia ativa, excetonos casos onde uma capacidade menor seja permitida pela IESO. Para uma unidade sıncronaconvencional, a operacao na faixa de fator de potencia entre 0,90 indutivo e 0,95 capacitivo econsiderada aceitavel.
Quando uma unidade opera dentro da faixa de fator de potencia permitida, apenas os cus-tos adicionais decorrentes do despacho de reativos para atender as solicitacoes da IESO saocompensados e o despacho e realizado pela IESO. Quando o servico de suporte de reativos e

3.1 Fornecimento do suporte de potencia reativa como um servico ancilar 43
fornecido alem dessa faixa de fator de potencia, as unidades sao compensadas por meio de con-tratos para prestacao de servicos ancilares, devendo ser cobertos os custos por disponibilidade,custos de oportunidade e demais custos considerados justos pela IESO dadas as circunstanciasdo sistema. Se uma unidade que nao possui contrato de prestacao de servicos ancilares e solici-tada a fornecer reativos para o sistema, todos os custos resultantes devem ser compensados pelaIESO, inclusive os custos de oportunidade.
Os equipamentos pertencentes aos participantes do mercado, como capacitores, SVCs ereatores e compensadores sıncronos sao disponibilizados a IESO conforme as regras de mercadoe os acordos de operacao sao firmados com os proprietarios. Conforme estabelecem as regrasde mercado, todos os custos decorrentes do despacho de servicos ancilares sao recuperados pelaIESO dos participantes do mercado.
Informacoes mais detalhadas sobre o fornecimento de servicos de potencia reativa no sis-tema operado pela IESO podem ser encontradas nas regras do mercado de Ontario (IESO -Independent Electricity Sytem Operator, 2010).
3.1.3 NOVA IORQUE
As informacoes a seguir foram extraıdas dos manuais de servicos ancilares (NYISO - NewYork Independent System Operator, 2010a) e de tarifacao (NYISO - New York IndependentSystem Operator, 2010b) do NYISO.
No sistema de Nova Iorque, todos os fornecedores de servicos de suporte de tensao (VSS -Voltage Service Support) devem demonstrar anualmente ao NYISO suas capacidades de geracaoe absorcao de reativos, alem de atender a um conjunto de exigencias tecnicas e administrativas.As unidades sao orientadas pelo NYISO a operar suas fontes dentro dos limites demonstradosde producao de reativos.
Os servicos de suporte de reativos sao ressarcidos com precos baseados em custos implıcitose os geradores sao direcionados pelo NYISO a operar dentro de seus limites de capacidadepara produzir ou absorver reativos. Os pagamentos a geradores e compensadores sıncronosparticipantes do VSS sao calculados em base anual, como o produto entre um valor fixo emdolares por Mvar e a capacidade de absorcao de reativos demonstrada nos testes de desempenhodo gerador e verificados pelo NYISO. Essa tarifa esta definida atualmente em US$ 3919/Mvar(NYISO - New York Independent System Operator, 2010c).
Se um gerador e direcionado pelo NYISO a reduzir seu despacho de ativos para produzirou absorver mais reativos, ele e ressarcido tambem por uma parcela referente aos custos de

3.1 Fornecimento do suporte de potencia reativa como um servico ancilar 44
oportunidade. No caso de uma maquina operando como compensador sıncrono que entra emoperacao a pedido do NYISO, o custo pela energizacao da unidade e dos demais equipamentosnecessarios ao seu funcionamento devem ser compensados pelo NYISO a unidade.
3.1.4 REINO UNIDO
No Reino Unido, o fornecimento de reativos pode ser classificado como um servico com-pulsorio ou como um servico ancilar comercial. De maneira geral, os geradores sıncronosdevem ser capazes de operar continuamente em qualquer ponto com fator de potencia entre0,85 indutivo e 0,95 capacitivo quando fornecendo sua potencia ativa nominal. Para nıveis degeracao de potencia ativa abaixo do nominal, as unidades de geracao sıncrona devem ser capa-zes de operar em qualquer ponto dentro de sua curva de capacidade. Para nıveis de geracao depotencia ativa acima dos valores nominais, o fator de potencia indutivo mınimo e de 0,90.
Os geradores com capacidade superior a 50 MW sao obrigados a fornecer um servico desuporte de reativos basico (compulsorio) dentro das faixas de operacao exigidas, que e remu-nerado de acordo com um Mecanismo de Pagamento Padrao (Default Payment Mechanism -DPM), que compreende apenas uma parcela pela utilizacao do servico.
Alem do servico obrigatorio, os geradores podem participar de uma licitacao para fornecerum servico de reforco de potencia reativa. A National Grid avalia as propostas de acordocom os criterios de avaliacao especificados no Codigo de Conexao e Uso do Sistema (CUSC- Connection and Use of System Code) e para as propostas vencedoras sao firmados contratospara o fornecimento do servico.
As informacoes apresentadas nesta secao podem ser encontradas com mais detalhes em(National Grid, 2010).
3.1.5 PJM
A PJM opera a rede de alta tensao e o mercado eletrico que serve 13 estados (Delaware, Illi-nois, Indiana, Kentucky, Maryland, Michigan, New Jersey, North Carolina, Ohio, Pennsylvania,Tennessee, Virginia, West Virginia) e o distrito de Columbia, nos Estados Unidos.
Os servicos de suporte de reativos na rede da PJM sao fornecidos conforme estabelecidonos manuais de operacao (PJM, 2010a) e tarifacao (PJM, 2010b). Seguindo esses manuais, osservicos de suporte de reativos sao fornecidos pelo agente transmissor em coordenacao comos agentes geradores, em carater compulsorio, para cada transacao de energia realizada nas

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 45
instalacoes do agente transmissor. O suprimento de reativos que deve ser fornecido para cadatransacao e determinado com base no suporte de potencia reativa necessario para manter osnıveis de tensao dentro dos limites aceitos pelo agente transmissor.
Cada gerador recebe mensalmente uma parcela igual a 1/12 da sua remuneracao anualdos creditos pelos servicos de suporte de reativos e esse onus e repassado aos consumidores,que devem comprar esses servicos do agente transmissor. As tarifas pelo servico sao baseadasem uma formula que aloca entre a rede e as transacoes bilaterais a remuneracao devida aosgeradores pelos sevicos prestados, com base no seu uso mensal, em MW, da rede de transmissao.
3.1.6 BRASIL
O fornecimento de servicos de suporte de reativos no Brasil sao regulamentados pela Resolucaoda Agencia Nacional de Energia Eletrica (ANEEL) No. 265, de 10 de junho de 2003 (BRA-SIL, 2003), que estabelece que todas as unidades geradoras integrantes do Sistema InterligadoNacional (SIN) que estejam fornecendo potencia ativa devem fornecer o servico de suporte dereativos, sempre que solicitado pelo Operador Nacional do Sistema (ONS), sem onus para osdemais agentes e consumidores; e pelas regras de comercializacao da CCEE (CCEE - Camarade Comercializacao de Energia Eletrica, 2009).
Nos casos em que as unidades geradoras sao solicitadas a operar como compensadoressıncronos, o servico sera provido de forma obrigatoria e remunerado pela Tarifa de ServicosAncilares (TSA), que e um valor fixo, determinado por resolucao especıfica e que visa recuperaros custos adicionais de operacao e manutencao, pagos via Encargos de Servicos do Sistema(ESS), devendo, para isso, ser celebrado Contrato de Prestacao de Servicos Ancilares (CPSA)entre o ONS e os agentes. O valor da TSA em vigencia a partir de 1o de janeiro de 2010foi definido pela resolucao homologatoria ANEEL no 924 de 15 de dezembro de 2009 em R$4,20/Mvarh (BRASIL, 2009)
O uso de elementos da rede de transmissao, como capacitores e indutores shunt e transfor-madores sao considerados no calculo da Tarifa de Uso do Sistema de Transmissao (TUST).
3.2 Dispositivos aplicaveis ao controle de reativos em siste-mas de potencia
Na tentativa de garantir uma remuneracao justa pelos servicos de suporte de reativos pres-tados, varios autores propoem o uso de uma estrutura de precos que represente os custos de-

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 46
correntes da geracao de reativos (LAMONT; FU, 1999; BHATTACHARYA; ZHONG, 2001;ZHONG; BHATTACHARYA, 2002; LIN et al., 2006; MOZAFARI et al., 2006; RABIEE;SHAYANFAR; AMJADY, 2009), sendo que uma analise mais aprofundada a respeito dos gera-dores sıncronos e realizada, uma vez que a funcao principal desse tipo de dispositivo e a geracaode potencia ativa.
Os custos para se fornecer (ou absorver) potencia reativa depende do dispositivo a ser uti-lizado, pois cada tipo de equipamento possui uma estrutura de custos diferente. Contudo, paravalorar o servico de fornecer suporte de potencia reativa, duas componentes de custo devem seranalisadas:
• custos fixos: consistem no capital associado a provisao de potencia reativa;
• custos variaveis: custos de operacao e manutencao relacionados a potencia reativa.
Informacoes mais detalhadas sobre o funcionamento dos dispositivos utilizados no des-pacho e no planejamento de reativos podem ser encontradas em (GUILE, 1978), (ELGERD,1978), (MILLER, 1982), (WADHWA, 1991) e (CUTSEM; VOURNAS, 2001).
3.2.1 Capacitores e indutores shunt
Os capacitores shunt sao utilizados junto a cargas indutivas para suprir sua demanda depotencia reativa e reduzir o fluxo reativo transmistido pelas linhas e, dessa maneira, mantema tensao na carga dentro de nıveis aceitaveis. De modo similar, indutores shunt sao utilizadospara absorver reativos do sistema quando operando em condicoes de carga leve.
Capacitores e indutores shunt sao instalados diretamente a um barramento do sistema ouao terciario dos transformadores. A desvantagem do uso desses dispositivos e que a potenciareativa produzida e proporcional aos nıveis de tensao. Assim, seus efeitos sao mınimos quandoa demanda por reativos e maxima.
O controle desses dispositivos pode ser feita manualmente ou automaticamente, por meiodo uso de transdutores. Quando chaveados manualmente, o controle e lento, o que impossibilitao uso dos equipamentos em situacoes de instabilidade do sistema. A vantagem desse tipo decontrole e o baixo custo. Equipamentos chaveados automaticamente sao mais caros, mas devemser utilizados no sistema de maneira a garantir sua estabilidade, visto que esse tipo de controlee mais rapido e preciso.
O custo por utilizar capacitores e indutores shunt e proporcional a quantidade de reativosinjetada no sistema pelo equipamento (QC,i) e pode ser expressa por (3.1).

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 47
C(QC,i) = ri.QC,i (3.1)
O custo da potencia reativa gerada pelo compensador estatico instalado na barra i e definidopela taxa de depreciacao do equipamento (ri). Por exemplo, se o custo de investimento de umcapacitor e $6200/Mvar, sua taxa media de trabalho e de 2/3 e sua vida util, 30 anos, o custoda depreciacao deste equipamento pode ser calculado por (LIN et al., 2006):
ri =custo de investimento
horas de trabalho=
620030 x 365 x 24 x 2/3
= 0,0354$/Mvarh
3.2.2 Transformadores com tap variavel sob carga (OLTC)
A principal funcao de um transformador e transformar energia eletrica de um nıvel de tensaoa outro, sendo que a maioria desses equipamentos possuem dispositivos para controle dos nıveisde tensao do secundario. Assim, os transformadores nao controlam a tensao regulando a geracaode reativos, mas por meio de mudancas em sua relacao de transformacao. A mudanca de taps,alterando a magnitude de tensao na barra controlada, afeta a distribuicao da potencia reativa dosistema e pode, portanto, ser usada para o controle do fluxo reativo.
Em transformadores com mudanca de tap sob carga, e possıvel ajustar a relacao de transformacaosem interromper o fluxo de potencia pelo dispositivo. A acao desses dispositivos, no entanto, elenta e discreta, sendo as mudancas de tap realizadas um degrau por vez. O tempo mınimo ne-cessario para um transformador completar um movimento de tap e geralmente proximo a cincosegundos. Esse tempo de atuacao enquadra o tap como um dispositivo de controle adequadopara as regulacoes normais de tensao ou as alteracoes de tensao devido a disturbios pequenos oumoderados, nao permitindo seu uso para assegurar e manter a estabilidade do sistema duranteum disturbio mais severo.
A mudanca de tap pode ser manual ou automatica, respondendo a sinais de controle detensao de uma conexao ou barra vizinha. Na maioria dos casos, o tap variavel esta no lado daalta tensao. Uma das razoes para isso deve-se ao fato de a corrente ser menor desse lado, oque facilita a comutacao. Dependendo do sistema, transformadores com tap variavel sob cargapodem ser utilizados para alimentar o sistema de distribuicao, conectar a sub-transmissao atransmissao, conectar dois nıveis de tensao na transmissao e elevar as tensoes nas subestacoes degeracao. Valores tıpicos dos limites inferior e superior da regulacao estao entre 0,85−0,90p.u.e 1,10−1,15 p.u., respectivamente, com o tamanho do passo variando entre 0,5% e 1,5%.

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 48
O numero de mudancas de tap que um transformador pode realizar durante sua vida utile limitado. Assim, o custo por utilizar esse tipo de dispositivo pode ser determinado por suataxa de depreciacao, a exemplo do que ocorre com capacitores e indutores shunt. O custo dedepreciacao de um transformador e expresso em “$/mudanca de tap” e deve ser consideradocada vez que solicitado para ajuste nos nıveis de reativos do sistema.
3.2.3 Geradores sıncronos
Uma maquina sıncrona superexcitada (funcionando como motor ou como gerador) produzpotencia reativa e age, sob o ponto de vista da rede, como um capacitor em paralelo. Umamaquina sub-excitada, ao contrario, absorve potencia reativa da rede e, consequentemente, agecomo um indutor em paralelo, sob o ponto de vista da rede (ELGERD, 1978).
Considerando a maquina sıncrona em regime permanente representada pelo modelo classico,como mostrada na Figura 3.1, a corrente do gerador e dada por (3.2). As potencias complexa,ativa e reativa fornecidas pela maquina sao dadas por (3.3), (3.4) e (3.5), respectivamente:
I =Ege jθ −VtjXd
(3.2)
�
g gE = E ��
� t tV = V 0�
� �
I�
jXd
Figura 3.1: Maquina sıncrona representada pelo modelo classico.
S= Vt I∗t = Vt[Ege jθ −VtjXd
]=VtEg( jcosθ + senθ)− jV 2
tXd
(3.3)
P= Re[S] =VtEgsenθXd
(3.4)
Q= Im[S] =Vt(Egcosθ −Vt)
Xd(3.5)
A equacao (3.5) mostra que a potencia reativa Q fornecida pela maquina aumenta com o

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 49
aumento da tensao de excitacao Eg. Ocorre tambem uma pequena reducao no angulo θ , demodo a manter a potencia ativa P, em (3.4), constante. Geralmente os angulos de potencia saoinferiores a 30o, o que torna o cosθ praticamente insensıvel a suas variacoes.
Portanto, a saıda de potencia reativa de um gerador sıncrono pode ser ajustada variando-seEg, por meio da tensao e da corrente CC na excitacao da maquina, o que pode ser realizadorapidamente pela excitatriz. Em geradores com controle automatico de excitacao o tempo deresposta a essas variacoes e da ordem de 1s.
Cada gerador possui valores nominais especıficos, que definem os limites dentro dos quaisele deve ser operado, como capacidade maxima de geracao, fator de potencia, tensao e frequenciade operacao, nıveis de curto-circuito, valores de reatancia, constantes de tempo, etc. Assim,cada gerador possui sua propria curva de capacidade, que indica os limites crıticos de operacao.Usualmente, estas curvas sao apresentadas no plano P−Q.
A Figura 3.2 (ZHONG; BHATTACHARYA, 2002) ilustra a curva de capacidade de umgerador sıncrono desconsiderando os efeitos da saturacao e das saliencias dos polos. Qbase e apotencia reativa necessaria para o funcionamento do gerador e de seus equipamentos auxiliarese Qmin e a maxima capacidade da maquina em absorver reativos. Nota-se que a capacidadedas maquinas sıncronas de fornecer reativos para o sistema e maior do que sua capacidade emabsorve-los.
Se o ponto de operacao da maquina esta dentro da zona de operacao, por exemplo, em (PA,Qbase), a unidade pode aumentar sua geracao de reativos de Qbase ate QA sem necessidade dealterar sua entrega de potencia ativa PA. Contudo, se o gerador opera sobre a curva limitante,qualquer aumento nos nıveis de reativos implica em uma reducao na geracao de potencia ativa,de maneira a manter a maquina funcionando dentro dos limites de sua curva de capacidade.
Considere, por exemplo, um gerador sıncrono operando no ponto A (PA, QA). Suponhaque haja a necessidade de aumentar a geracao de reativos nessa maquina para QB. Para isso,e necessario alterar o ponto de operacao da maquina para o ponto B (PB, QB), onde PB < PA.Isso significa que a geracao de potencia ativa pela maquina deve ser reduzida de maneira amanter seu ponto de operacao dentro dos limites permitidos para que o aumento necessario emseus nıveis de geracao de reativos seja atendido. Portanto, os limites de geracao (absorcao) depotencia reativa por um gerador sıncrono estao condicionados a seu ponto de operacao e a seuslimites operacionais.
O controle dos nıveis de reativo gerados (ou absorvidos) por uma maquina sıncrona e rapidoe contınuo, sendo realizado, geralmente, pelos dispositivos de controle automatico de tensao.

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 50
NominalAB Max
B
A
Base
Min
Figura 3.2: Curva de capacidade de uma maquina sıncrona desconsiderando os efeitos dasaliencia dos polos e da saturacao.
Estes dispositivos sao acionados sempre que ocorrem disturbios no sistema e controlam a cor-rente de excitacao da maquina de maneira a manter a tensao em seus terminais nos valoresespecificados. Por essa razao, e mais rapido alterar a potencia reativa entregue pela maquina doque sua geracao de potencia ativa.
A estrutura de custos para geracao de potencia reativa por um gerador sıncrono e ilustradana Figura 3.3. A parcela referente aos custos fixos e difıcil de ser separada do custo totalda planta, por compreender os custos para funcionamento da maquina para geracao tanto deativos quanto de reativos. A componente de custos variaveis inclui uma parcela referente aoaumento das perdas nos enrolamentos de armadura e de campo e uma componente referente aocusto de oportunidade, definido como a reducao dos benefıcios recebidos pelo gerador devido adiminuicao na producao de energia ativa. Essa parcela e a que possui valores mais significativosdentro da estrutura de custos de um gerador sıncrono para a geracao de reativos.
Segundo (ZHONG; BHATTACHARYA, 2002), e possıvel definir tres regioes de operacaopara um gerador fornecendo potencia reativa:
• Regiao I - de 0 a QBase: a potencia reativa produzida nessa regiao e usada para manterequipamentos auxiliares do gerador. Sendo assim, nao pode ser qualificada como umservico ancilar, nem e passıvel de pagamento.

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 51
1 2
3
min Base A B
0
Figura 3.3: Estrutura dos custos para producao de potencia reativa por um gerador sıncrono.
• Regiao II - de QBase a QA e de 0 a Qmin: a geracao ou absorcao de reativos por um geradorsıncrono nessa regiao incorre nos custos das perdas e, portanto, espera-se pagamento poresse servico.
• Regiao III - de QA a QB: a operacao do gerador nessa regiao implica na adicao dos custosde oportunidade pela reducao da geracao de energia ativa as demais componentes docusto.
Com base no que foi definido acima, pode-se definir a estrutura de custos para geracao depotencia reativa por um gerador sıncrono por (3.6).
C(QG,i) = a0,i+∫ 0
Qminm1,i.∂Qi+
∫ QA
Qbasem2,i.∂Qi+
∫ QB
QAm3,iQi.∂Qi (3.6)
O custo por disponibilidade (a0,i) e uma componente fixa determinada pelo custo operaci-onal da maquina referente a producao de potencia reativa. O custo das perdas (m1,i ou m2,i) euma componente linear que representa o aumento das perdas nos enrolamentos de armadura ecampo da maquina devido ao aumento de sua geracao de reativos. Por fim, o custo de oportu-nidade (m3,iQi) e uma funcao nao linear do montante de potencia reativa gerada pela maquina,definida pela reducao nas receitas de um gerador quando ele tem sua producao de energia ativalimitada para que possa entregar a potencia reativa solicitada.

3.2 Dispositivos aplicaveis ao controle de reativos em sistemas de potencia 52
3.2.4 Compensadores sıncronos
Os compensadores sıncronos sao basicamente motores ou geradores sıncronos operandoa vazio, sem absorcao ou geracao de potencia ativa, conectados aos sistemas de alta tensaopor meio de transformadores e que podem ser utilizados para fornecer ou absorver grandesquantidades de reativos, ajustando-se para isso a sua corrente de excitacao. Sua sequencia deacionamento e geralmente automatica, assim como o controle durante seu funcionamento.
A excitacao dos compensadores sıncronos pode ser determinada de maneira a operar o equi-pamento com tensao terminal constante ou geracao (ou absorcao) constante de reativos, sujeitaaos limites de sobre-excitacao e subexcitacao para evitar a operacao instavel do dispositivo.
O controle do compensador sıncrono e rapido e contınuo. Porem, ao contrario dos disposi-tivos estaticos, eles contribuem para as correntes de falta do sistema, podem tornar-se instaveise necessitam de manutecao relativamente alta. Geralmente, sao utilizados em condicoes querequerem respostas rapidas, por exemplo, junto a cargas como fundicoes e fornos de arco (CUT-SEM; VOURNAS, 2001).
A estrutura de custos apresentada pelo compensadores sıncronos e a mesma apresentadapelos geradores sıncronos, com excecao da parcela referente ao custo de oportunidade, uma vezque nao existe geracao de potencia ativa (RABIEE; SHAYANFAR; AMJADY, 2009). Assim, ocusto para gerar reativos a partir de um compensador sıncrono pode ser definido por (3.7), quee a mesma expressao utilizada para geradores sıncronos (3.6), com excecao do ultimo termoreferente ao custo de oportunidade.
C(QG,i) = a0,i+∫ 0
Qminm1,i.∂Qi+
∫ QA
Qbasem2,i.∂Qi (3.7)

53
4 Tecnicas de solucao de jogoscooperativos
Usualmente, a definicao de jogo remete a um passatempo ou a uma diversao, que apresentacomo caracterıstica a existencia de um objetivo que os jogadores tentam alcancar e de um con-junto de regras que determina o que cada jogador pode fazer. Em outras palavras, “um jogo eo estado da arte em que os participantes, chamados jogadores, tomam decisoes para gerenciarrecursos dentro das regras do jogo em busca de um objetivo” (GARDNER, 2003).
Dentro dessa definicao existem diversos tipos de jogos, como jogos de tabuleiro (xadrez,damas), jogos de cartas (poquer, blackjack, truco), vıdeo games, esportes, etc. Necessariamente,todos esses jogos devem apresentar algumas caracterısticas em comum para serem enquadradasna mesma categoria:
• Todo jogo possui regras que especificam o que os jogadores podem fazer ou nao. Ojogador que quebra as regras e penalizado - novamente, de acordo com as regras.
• Em todo jogo sao necessarias estrategias. Existem estrategias boas e ruins. Um jogadorpode escolher uma estrategia ruim e ser criticado por isso.
• Existe um resultado para o jogo, por exemplo, um ganhador e um perdedor. Esse resul-tado depende da estrategia escolhida por cada jogador, num fenomeno chamado interde-pendencia estrategica. Mesmo uma estrategia ruim pode vencer se o oponente escolheruma estrategia pior.
Combinando essas caracterısticas, e possıvel definir jogo como “qualquer situacao go-vernada por regras, com um resultado bem definido, caracterizado por interdependencia es-trategica” (GARDNER, 2003).
Diversas situacoes cotidianas satisfazem essa definicao e podem ser classificadas comojogos. Por exemplo, empresas competindo num mesmo negocio. Existem regras que regemessa competicao, como as leis de contrato e as regulacoes impostas pelo governo. Se alguma
4.1 Elementos do jogo 54
empresa quebra essas regras, ela e penalizada. Alem disso, o resultado dessa disputa podeser visto no montante de dinheiro conseguido por cada empresa ou na parcela de mercadodominada por ela, e esses resultados dependem das estrategias adotadas por cada empresa,incluindo precos, quantidades, propaganda, etc. Assim, uma competicao entre empresas numdeterminado mercado e uma situacao governada por regras, com resultados bem definidos ecaracterizada por interdependencia estrategica, ou seja, e um jogo.
Nao somente os negocios podem ser caracterizados como jogos. Existem jogos psicologicos,jogados em um nıvel pessoal, em que palavras sao as armas e os benefıcios sao sentimentos bonsou ruins. Existem jogos biologicos, por exemplo, a competicao entre especies, onde a selecaonatural pode ser modelada como um jogo entre genes. Existe, ainda, uma conexao entre teoriade jogos e as areas matematicas da logica e da ciencia da computacao, entre outras (FERGU-SON, 2005). Entretanto, em diversas situacoes a modelagem com base na teoria de jogos einapropriada, apesar da complexidade e da necessidade de tomada de decisao.
Por exemplo, considere uma empresa do setor eletrico que, devido a estimativa dada por suacurva de demanda para os proximos dez anos, cogita a compra de uma nova usina. Sem duvida,esta e uma decisao difıcil de ser tomada, pois se baseia em uma previsao e envolve um altoinvestimento. Porem, nao existe outro agente racional que ira interferir no processo. Para estetipo de situacao, a modelagem utilizando a teoria da decisao e mais apropriada do que aplicar ateoria de jogos. A teoria da decisao analisa como um agente toma uma decisao sob um cenariode incerteza, mas sem interagir estrategicamente com outros agentes.
Assim, a teoria de jogos e uma teoria normativa que tenta predizer o resultado de um jogo,com base no estudo do comportamento dos indivıduos (os chamados jogadores), supostos inte-ligentemente racionais, em situacoes nas quais, havendo dois ou mais indivıduos, suas decisoesafetam aos resultados obtidos pelos outros (SORIANO, 1999), exista ou nao o conflito de in-teresses. Para isso, sao utilizados modelos matematicos que descrevem essas situacoes. Osprincipais modelos matematicos, ou formas, utilizadas para estudo dos jogos sao a forma ex-tensiva, a forma normal (ou estrategica) e a forma de coalizao. A diferenca entre elas esta naquantidade de detalhes considerados na construcao do jogo.
4.1 Elementos do jogo
A maior parte do trabalho realizado em teoria de jogos se baseia em consideracoes basicassobre os agentes. A primeira e que os jogadores sao racionais, o que significa que tem pre-ferencias, usualmente descritas por uma funcao de utilidade numerica, e o agente tenta maximi-

4.2 Teoria dos jogos cooperativos 55
zar essa funcao de forma a maximizar seus ganhos. A segunda consideracao e que os agentesse comportam estrategicamente, ou que seu comportamento esta determinado por seu conhe-cimento sobre os outros jogadores. A terceira e que todas as decisoes tomadas por todos osjogadores devem obedecer a um conjunto de regras.
A combinacao das estrategias definidas por cada jogador e conhecida como equilıbrio.Dado um equilıbrio, a analise da conjuncao das estrategias de todos os jogadores define o resul-tado do jogo.
Assim, para caracterizar um jogo sao necessarios alguns elementos:
• Jogadores: sao os tomadores de decisao;
• Conjunto de regras: define as acoes realizaveis durante o jogo;
• Estrategia: maneira pela qual cada jogador define suas acoes;
• Resultado: benefıcios ou premios obtidos por cada jogador ao fim do jogo;
• Funcoes de utilidade: descrevem as capacidades de ganho de cada jogador.
Basicamente, cada jogador estabelece sua estrategia de acordo com as regras do jogo, demaneira a maximizar sua funcao de utilidade. Pode-se dividir os jogos em dois grupos: os jogosnao cooperativos e os jogos cooperativos. Em um jogo nao cooperativo cada jogador atua demaneira a atender seus proprios interesses. Em um jogo cooperativo os jogadores podem formarcoalizoes para tentar maximizar conjuntamente seus benefıcios.
4.2 Teoria dos jogos cooperativos
Os jogos cooperativos descrevem os ganhos que podem ser obtidos pelos jogadores coma formacao de coalizoes. Entende-se por coalizao cada combinacao possıvel de ser formadaentre os jogadores para tentar solucionar um problema proposto. Obviamente, um jogador soira aderir a uma coalizao se ele espera aumentar seus benefıcios com isso. Assim, e necessarioavaliar as coalizoes que realmente podem ser criadas, analisando a potencialidade de cada umae a forca que os jogadores teriam dentro delas.
Dentro de uma coalizao, os indivıduos atuam como uma unica entidade coordenada, ou seja,um jogador que pertence a uma coalizao nao pode estabelecer acordos com outros jogadores quenao esteja na coalizao. A grande coalizao, formada por todos os n jogadores, sera denominada

4.2 Teoria dos jogos cooperativos 56
N. Existe, ainda, uma coalizao vazia, sem nenhum membro. Para um jogo com n jogadores, epossıvel estabelecer 2n coalizoes.
Considere o conjunto S= {S1,S2, ...,Sm}, formado por m coalizoes. Tres condicoes devemser satisfeitas por esse conjunto, dadas por (4.1).
S j �= /0 , j = 1, ...,m
Si∩S j = /0 , i �= j (4.1)
∪S j = N
Essas condicoes dizem que cada jogador pode pertencer apenas a uma coalizao nao vaziadas m existentes e nao pode firmar acordos com jogadores fora da sua coalizao. Alem disso, auniao de todas as m coalizoes forma a grande coalizao.
Para cada coalizao S, o maior benefıcio possıvel de ser obtido por seus membros, sem aajuda de outros jogadores fora de S, e dada por sua funcao caracterıstica v(S). Esse conceito foiintroduzido por Von Neumann e Morgenstern (VON-NEUMANN; MORGENSTERN, 1992).Uma restricao a essa definicao e que o valor da coalizao vazia seja zero, ou seja, v( /0) = 0. Alemdisso, e necessaria a existencia da superaditividade, expressada em (4.2).
v(S∪T )≥ v(S)+ v(T ); S,T ⊆ N; S∩T = /0 (4.2)
A expressao (4.2) significa que o resultado do jogo para a grande coalizao e coletivamenteracional, ja que os benefıcios totais recebidos pelos jogadores sao sempre tanto quanto elesreceberiam se atuassem individualmente. Jogos em que pelo menos uma coalizao possıvel podemelhorar os benefıcios de seus membros sao chamadas essenciais. Caso contrario, sao ditosinessenciais.
Porem, a divisao dos benefıcios obtidos com a coalizao, representados pelo vetor de pa-gamentos x = (xA,xB, ...,nn), nao e trivial. E necessario que esse vetor atenda a algumasexigencias, dadas por (4.3) e (4.4):
v(N) =n
∑i=1xi (4.3)
xi ≥ v({i}); ∀i ∈ N (4.4)

4.2 Teoria dos jogos cooperativos 57
A expressao (4.3) diz respeito a racionalidade coletiva, ou seja, e preciso que a soma dosbenefıcios recebidos por cada membro da coalizao seja igual ao benefıcio total da coalizao. Aexpressao (4.4) refere-se a racionalidade individual, e afirma que um jogador apenas participariade uma coalizao caso seus benefıcios fossem iguais ou maiores do que os que ele poderia obteratuando individualmente. Se x atende a essas duas exigencias, diz-se que x e uma imputacao.
Alem disso, em jogos cooperativos e possıvel dividir os benefıcios obtidos com a cooperacaoatraves de pagamentos laterais, ou seja, transferencias entre os membros da coalizao que mu-dam os benefıcios prescritos. A seguir, serao apresentados alguns conceitos de solucao de jogoscooperativos, para auxiliar nesta tarefa.
4.2.1 Core
O Core e um conceito de solucao de jogos cooperativos introduzido por Gillies (GILLIES,1953), e trata-se de um conjunto de imputacoes que atendem as definicoes de racionalidadeindividual, coletiva e coalizional. Define-se como racionalidade coalizional a existencia deracionalidade para todas as coalizoes formadas no jogo, como definido em (4.5):
∑xi ≥ v(S); ∀i ∈ S, S⊂ N (4.5)
Para um exemplo simples de 3 jogadores com superaditividade, as inequacoes que descre-vem o Core sao dadas por (4.6):
x(1) ≥ v(1)
x(2) ≥ v(2)
x(3) ≥ v(3)
x(12) ≥ v(12) (4.6)
x(13) ≥ v(13)
x(23) ≥ v(23)
x(1) + x(2) + x(3) = v(123)
Para ilustrar o calculo do Core, serao atribuıdos valores numericos as inequacoes (FERGU-SON, 2005).

4.2 Teoria dos jogos cooperativos 58
v(1) = 1 v(12) = 4
v( /0) = 0 v(2) = 0 v(13) = 3 v(123) = 8
v(3) = 1 v(23) = 5
Para este exemplo, as imputacoes sao os pontos (x1,x2,x3) tal que x(1)+ x(2)+ x(3) = 8e x(1) ≥ 1, x(2) ≥ 0, x(3) ≥ 1. Essas coordenadas formam o triangulo com vertices (7,0,1),(1,6,1) e (1,0,7), mostrado na Figura 4.1.
CORE
x1+x3= 3
x2+x3= 5
x1+x2= 4
(7,0,1)
(1,6,1) (1,0,7)
(2,5,1)
(1,5,2)
(3,0,5)
(4,0,4)
(1,3,4)
(3,4,1)
Instável{2,3}
Instável{1,2}Inst.
{1,3}
Figura 4.1: Core de um jogo com tres jogadores.
Os pontos com x(23) < 5 sao instaveis em (23), ou seja, nao satisfazem aos interesses dacoalizao formada entre os dispositivos 2 e 3, uma vez que, nesses pontos, os benefıcios obtidospor essa coalizao sao menores do que o benefıcio obtido por ela fora da grande coalizao, ouseja, x(23) < v(23). Seguindo a definicao de racionalidade individual, os jogadores 2 e 3 apenasestariam dispostos a aderir a coalizao (123), se x(23) ≥ v(23). Da mesma maneira, os pontosem que x(12) < 4 e x(13) < 3 sao instaveis em (12) e (13), respectivamente.
O Core e o conjunto de imputacoes que atende ao conjunto de restricoes (4.6), ou seja,o conjunto de pontos restantes no conjunto de imputacoes, dado pela figura de cinco ladosno diagrama, incluindo as margens. Este e o conceito mais simples para a solucao de jogoscooperativos. Contudo, existem muitos jogos sem Core, ou com Core vazio, basicamente pornao atenderem as exigencias de racionalidade coalizional. Quando o jogo possui um Core vazio,ao menos uma coalizao ficara insatisfeita.
Um jogo com Core nao vazio e sociologicamente neutro, ou seja, todas as demandas de to-das as coalizoes podem ser satisfeitas, e nao existe a necessidade de resolver conflitos. Contudo,

4.2 Teoria dos jogos cooperativos 59
nao e desejavel um Core com muitos elementos, pois apresentaria uma previsao imprecisa. Poroutro lado, em um jogo sem Core, as coalizoes sao muito exigentes para que sejam atendidastodas as demandas coalizionais.
4.2.2 Valor Shapley
O conceito de Core e muito util como uma medida de estabilidade. Contudo, como conceitode solucao, o Core apresenta um conjunto de solucoes sem distincao de quais sao os melhores.Alem disso, o Core pode ser vazio.
O valor Shapley (SHAPLEY, 1953) fornece um unico vetor de pagamentos, que deve obe-decer aos seguintes axiomas:
1. Renomear os jogadores nao muda o valor do jogo. Se v(S∪{i}) = v(S∪{ j}) para todacoalizao S que nao contenha i e j, entao xi = x j;
2. Existe a racionalidade coletiva;
3. Se v(S−{i}) = v(S), entao xi = 0. Ou seja, se um jogador i nao aumenta o valor dacoalizao, ele recebe pagamento igual a zero pelo valor Shapley;
4. Se x e y sao os valores Shapley para os jogos v e v, entao o valor Shapley do jogo v+ v edado por x+ y.
Se esses quatro axiomas sao validos, entao o vetor de pagamentos do jogador i (xi), e dadopor:
xi = ∑∀S|i∈S
pn(S)[v(S∪{i})− v(S)] (4.7)
Sendo:
pn(S) =|S|!(n−|S|−1)!
n!(4.8)
|S| e o numero de jogadores em S
A coalizao comeca com um unico jogador. Os demais entram, um por vez, ate que todos osn jogadores estejam admitidos e formem a grande coalizao. A expressao (4.7) mostra que xi e a

4.2 Teoria dos jogos cooperativos 60
contribuicao media do jogador i para a grande coalizao, se os jogadores formam essa coalizaosequencialmente em ordem aleatoria. A expressao (4.8) representa o mecanismo probabilısticoque ira determinar a ordem na qual os jogadores entrarao na grande coalizao, sendo que aspermutacoes possıveis entre os jogadores sao consideradas equiprovaveis.
Como ilustracao, considere o exemplo da secao 4.2.1. O jogador 1 tem probabilidade de 1/3de ser o primeiro a entrar na coalizao, e assim receber x1 = 1. A probabilidade de ele entrar emsegundo e encontrar o jogador 2 e de 1/6, recebendo v(12)−v(2) = 4−0 = 4. A probabilidadede o jogador 1 ser o segundo a entrar e encontrar o jogador 3 e de 1/6 e o benefıcio esperadopor ele e v(13)− v(3) = 3− 1 = 2. A probabilidade de o jogador 1 ser o ultimo a entrar e de1/3, e seu benefıcio seria v(123)−v(23) = 8−5 = 3. O benefıcio medio para o jogador 1 seria:
x1 =13.1+
16.4+
16.2+
13.3 = 14/6
A Tabela 4.1 mostra os benefıcios que seriam obtidos por cada jogador para todas aspossıveis ordens de entrada. Por exemplo, na primeira linha, o jogador 1 recebe x1 = v(1) = 1.O jogador 2 recebe x2 = v(12)− v(1) = 4− 1 = 3. Por fim, o jogador 3 entra na coalizao erecebe x3 = v(123)− v(12) = 8−4 = 4. O valor Shapley e a media dos seis numeros em cadacoluna.
Tabela 4.1: Valor Shapley para um jogo com tres jogadoresOrdem de Entrada Benefıcios jogador Total
1 2 31 2 3 1 3 4 81 3 2 1 5 2 82 1 3 4 0 4 82 3 1 3 0 5 83 1 2 2 5 1 83 2 1 3 4 1 8
Media 14/6 17/6 17/6 8
O valor Shapley e um conceito que calcula uma divisao justa dos benefıcios comuns entreos membros de uma coalizao. Um dos principais atrativos do valor Shapley e o fato de fornecerum unico ponto para qualquer jogo em estrutura de coalizao. Contudo, ele nao reflete as possi-bilidades reais de cada jogador no jogo, como o Core, e nao apresenta resultados satisfatoriospara jogos descentralizados (CONTRERAS, 1997).

4.2 Teoria dos jogos cooperativos 61
4.2.3 Valor Shapley Bilateral
Para evitar problemas de complexidade exponencial no calculo do valor Shapley, em (KET-CHPEL, 1993) foi introduzido o valor Shapley bilateral, que pode ser adotado para um processode negociacao entre agentes racionais. Esse valor se define para duas coalizoes Ci e Cj, sendoCi∩Cj = /0, dentro de um determinado conjunto de agentes A= {a1, ...,am}, que se unem paraformar uma coalizao maior,C =Ci∪Cj ⊆ A.
Entao,C e uma coalizao bilateral das coalizoesCi eCj. O valor Shapley bilateral da coalizaoCi na coalizao C e definido por:
bsv{C}(Ci) =12v(Ci)+
12(v(C)− v(Cj)) (4.9)
As coalizoes Ci e Cj sao chamadas fundadoras de C, e v(C) representa o valor da coalizaoC. Na verdade, existe um jogo cooperativo superaditivo entre Ci e Cj, pois ambas formarao Capenas se as exigencias de racionalidade individual forem atendidas.
De acordo com a formulacao apresentada, os fundadores obtem a metade do que obteriamatuando individualmente e metade do que conseguem com o trabalho de cooperacao com aoutra entidade. A segunda parcela da expressao do valor Shapley bilateral mostra a forca decada jogador de acordo com sua contribuicao, evitando que novos agentes obtenham vantagensdo trabalho realizado pelos existentes sem qualquer tipo de compensacao.
Em suma, o processo de formacao de coalizoes segue o algoritmo de Klush e Shehory(KLUSCH; SHEHORY, 1996):
1. Inicialmente, cada jogador calcula os benefıcios que ele receberia atuando individual-mente e os benefıcios que poderiam ser obtidos com a formacao de coalizoes;
2. Esses valores sao comunicados a um coordenador independente, que ira checar a segurancadas coalizoes propostas e informar aos seus fundadores sobre sua viabilidade ou nao;
3. Apos receber o parecer do coordenador, cada jogador realiza o calculo dos valores Sha-pley bilaterais, para ordenar as possıveis coalizoes de acordo com suas preferencias, emuma lista racional L;
4. Procede-se a fase de negociacao, onde cada jogador envia propostas de coalizao aos outrosjogadores, de acordo com os valores obtidos no passo 3. Se ambos agentes encontramvantagem em formar a coalizao, a formam, e sao considerados a partir de entao, como umunico jogador;

4.2 Teoria dos jogos cooperativos 62
5. O coordenador comunica aos demais agentes sobre a coalizao formada e os informa pararemover de suas listas de preferencias os agentes em questao.
Assim, cada agente pode avaliar quais os benefıcios com as coalizoes que ele pode formar edecidir com quais outros jogadores ele deve cooperar. Para o exemplo da secao 4.2.1, o jogador1 pode formar coalizoes com os jogadores 2, 3, ou atuar sozinho. O valor Shapley bilateral parao jogador 1, para cada uma dessas coalizoes e:
Atuar sozinho:v(1) = 1
Coalizao (12):
bsv{12}(1) =12v(1)+
12(v(12)− v(2)) =
12
+12(4−0) = 5/2
Coalizao (13):
bsv{13}(1) =12v(1)+
12(v(13)− v(3)) =
12
+12(3−1) = 3/2
Da mesma maneira, cada jogador realiza seus calculos. Uma proposta do jogador 1 paraformar uma coalizao sera aceita pelo jogador 2, pois assim os benefıcios obtidos por ambossao aumentados. Cada jogador segue realizando suas ofertas, ate que nao seja mais possıvelestabelecer coalizoes. O processo total de formacao de coalizoes e o seguinte:
{1,2,3}→ {(12),3}→ {(123)}
Para o exemplo em questao, os benefıcios totais obtidos por esta coalizao e v(123) = 8, cujadivisao e realizada aplicando-se o algoritmo apresentado em ordem inversa, ou seja:
bsv{12,3}(12) =12v(12)+
12(v(123)− v(3)) =
12.4+
12(8−1) = 11/2
bsv{12,3}(3) =12v(3)+
12(v(123)− v(12)) =
12
+12(8−4) = 5/2
bsv{1,2}(1) =12v(1)+
12(v(12)− v(2)) =
12
+12(112−0) = 13/4
bsv{1,2}(2) =12v(2)+
12(v(12)− v(1)) = 0+
12(112−1) = 9/4
Assim, a distribuicao final dos benefıcios utilizando o valor Shapley bilateral seria: x =

4.2 Teoria dos jogos cooperativos 63
(13/4; 9/4; 10/4).
4.2.4 Nucleolus
O conceito do Nucleolus foi introduzido por Schmeidler (SCHMEIDLER, 1969) e baseia-se na minimizacao das medidas de insatisfacao dos membros de uma coalizao S em relacao auma dada imputacao x.
Assim, ao inves de se aplicar uma formulacao geral a funcao de valor, o excesso de umacoalizao S em relacao a configuracao coalizional S, definido em (4.10), e utilizado como medidada insatisfacao dessa coalizao em relacao a uma imputacao x:
e(S,x) = v(S)−∑i∈Sxi (4.10)
sendo:
v(S) valor coalizional da coalizao S
xi pagamento do jogador i
O Nucleolus e mais difıcil de ser calculado que o valor Shapley. E necessario encontrar umvetor de pagamentos que minimize o maximo excesso e(S,x) = v(S) sobre todas as coalizoes Sde maneira que atenda os criterios de racionalidade coletiva, descritos em (4.3).
Assim, para uma dada imputacao x e encontrada a coalizao com o maior valor do excesso.Entao, x e ajustada, se possıvel, de maneira a minimizar esse excesso. Em seguida, encontra-seo proximo maior excesso e se ajusta x de modo a torna-lo o quanto menor seja possıvel, e assimpor diante.
O calculo do Nucleolus para o exemplo de n = 3 jogadores apresentado no inıcio destecapıtulo e apresentado na Tabela 4.2. Como os excessos relativos a coalizao vazia e a grandecoalizao sao sempre nulos, faz sentido deixa-los de fora do problema.
Considerando x = (1,3,4) como o vetor de pagamentos inicial, observa-se que o maximoexcesso ocorre para a coalizao {1, 2}. Para melhorar esse valor, e necessario diminuir o valorde x3. Como o excesso da coalizao {1} possui o mesmo valor da coalizao {1, 2}, deve-semanter x1 fixo e aumentar x2, o que leva ao ponto (1,4,3), cujo maior excesso encontra-se nacoalizao {1}. E necessario, entao, aumentar o valor de x1 e, mantendo-se x3 fixo, obtem-se oponto (2,3,3), cujo maior excesso esta nas coalizoes {1}, {1, 2} e {2, 3}. Entao, mantendo-se

4.2 Teoria dos jogos cooperativos 64
Tabela 4.2: Nucleolus para um jogo com tres jogadoresS v(S) e(S,x) = v(S) (1,3,4) (1,4,3) (2,3,3) (2,7/2,5/2){1} 1 1− x1 0 0 −1 −1{2} 0 −x2 −3 −4 −3 −7/2{3} 1 1− x3 −3 −2 −2 −3/2{1, 2} 4 4− x1− x2 = x3−4 0 −1 −1 −3/2{1, 3} 3 3− x1− x3 = x2−5 −2 −1 −2 −3/2{2, 3} 5 5− x2− x3 = x1−3 −2 −2 −1 −1
x1 fixo e diminuindo x3, encontra-se o ponto (2,7/2,5/2). Neste ponto, o maior excesso estanas coalizoes {1} e {2,3}, porem nao e possıvel melhorar os excessos dessas coalizoes semprejudicar outras coalizoes. Assim, o ponto (2,7/2,5/2) e o nucleolus do problema.
A exemplo do valor Shapley, o Nucleolus satisfaz os criterios de racionalidade individualse a funcao caracterıstica e superaditiva ou, de modo mais geral, se v(S)+ v({i})≤ v(S∪{i})quando a funcao caracterıstica e monotona para todos os jogadores i para todas as coalizoes Snao contendo i.
4.2.5 Kernel
A teoria do Kernel como um conceito de solucao de jogos cooperativos, especificamente dateoria do excesso, foi introduzida em 1965 por Davis e Maschler (DAVIS; MASCHLER, 1965).E uma teoria baseada na comparacao entre todos os pares de jogadores de um jogo que utilizao excesso como medida da forca relativa que existe entre os agentes no processo formador decoalizoes, entendendo-se que a maior forca de um jogador e o maior excesso que ele possui.
O excesso de uma coalizao e definido como o montante pelo qual uma coalizao excedeseu pagamento preferencial, ou seja, o quanto seus membros recebem alem do que esperavamreceber inicialmente ao atuar em conjunto. Matematicamente, pode ser expressado por (4.10).
Considere dois jogadores, i e j, em uma coalizao S, e o conjunto de todas as coalizoesalternativas que incluem i e excluem j, representado por C. Cada uma dessas coalizoes possuium excesso dado pela expressao (4.10). Para analisar a interacao entre os dois agentes, seconsidera o maximo excesso entre eles, definido como o maximo excesso de todas as possıveiscoalizoes:
Si j =Max C|i∈C, j/∈C e(C) (4.11)
Sendo e(C) o conjunto de todas as coalizoes C, que incluem i e excluem j.
4.2 Teoria dos jogos cooperativos 65
O jogador i sera considerado mais forte do que o jogador j, chamado de agente fraco, sepossui maior poder negociador no processo formador de coalizoes, ou seja:
Si j > S ji e x j > v( j) (4.12)
A ideia do Kernel e equiparar as forcas relativas que existem entre os agentes que se co-alizionam, de maneira a estabelecer o vetor de pagamentos x de maneira justa e sem violarracionalidades. Esta equiparidade e definida como equilıbrio.
Para os jogadores i e j, diz-se que eles estao em equilıbrio se alguma das condicoes seguin-tes e satisfeita:
Si j = S ji (4.13)
Si j > S ji e x j = v( j) (4.14)
S ji > Si j e xi = v(i) (4.15)
As relacoes (4.14) e (4.15) representam a nao disposicao do agente fraco de entregar be-nefıcios que violem sua racionalidade individual.
Portanto, o Kernel e o conjunto de todas as imputacoes x tal que dois jogadores i, j ∈ Sestao em equilıbrio para qualquer S e estabelece a igualdade de forcas para todos os pares dejogadores dentro de uma coalizao comum. No Kernel, tanto a formacao de coalizoes como osvetores de pagamento dependem da informacao sobre os pares de qual cada jogador dispoe.

66
5 Metodologia para alıvio desobrecargas com base nogerenciamento de reativos
Usualmente, o alıvio de sobrecargas em sistemas de potencia e realizado por meio de acoescorretivas que controlam os fluxos de potencia ativa nas linhas, tendo como principais medidaso redespacho da geracao e o corte de cargas. Contudo, o novo modelo do setor eletrico brasileiroinstituiu algumas barreiras para a realizacao desses procedimentos, uma vez que o despacho dageracao e o corte de cargas ja nao fazem parte do escopo de acao dos agentes transmissores erepresentam altos custos para o operador do sistema. Face a essas condicoes, novas abordagensdevem ser avaliadas para que seja possıvel manter o sistema operando de maneira segura ateque suas condicoes normais sejam restabelecidas.
Tradicionalmente, o controle de reativos esta associado a problemas de tensao e ao controledas perdas do sistema, mas diversos trabalhos tem estudado seu papel no congestionamento dossistemas e seu potencial para aliviar os fluxos nas linhas. Devido a sua natureza local, existemdispositivos capazes de realizar o controle dos nıveis de potencia reativa instalados por todo osistema, como geradores sıncronos, compensadores shunt e transformadores.
Alem disso, o custo para se produzir reativos e muito menor do que o custo para se pro-duzir potencia ativa, uma vez que nao envolve custos de combustıveis. Em sistemas bem pla-nejados, o custo de producao de potencia reativa chega a menos de 1% do preco da energiaativa (RABIEE; SHAYANFAR; AMJADY, 2009). Tal fato pode se refletir no custo das acoescorretivas necessarias para o alıvio de sobrecargas no sistema. Por exemplo, em (KUMAR;SRIVASTAVA; SINGH, 2004), o uso de reativos para alıvio de congestionamentos reduziu anecessidade de redespacho e, consequentemente, o custo do congestionamento.
Em (MEDEIROS; SALGADO; ZURN, 2003) o papel da potencia reativa no que diz res-peito ao congestionamento dos sistemas foi avaliado e mostrou-se que, sob certas circunstancias,o fluxo reativo em uma linha nao pode ser desprezado. Dois casos foram usados para ilustrar os

5.1 Sistema teste de 6 barras 67
efeitos da potencia reativa sobre os limites operacionais do sistema. No primeiro, o suporte dereativos para manter nıveis aceitaveis de tensao nas barras da rede nao pode ser fornecido de-vido as limitacoes de geracao (ou absorcao) de reativos pelos geradores e, assim, o redespachoda geracao tornou-se necessario para garantir a operacao segura do sistema. Nessas situacoes,o custo de operacao da rede e elevado devido aos custos de oportunidade. No segundo caso, ofluxo reativo nas linhas de transmissao devido ao uso de fontes distantes dos pontos de consumocausou o congestionamento das linhas.
Neste trabalho, e apresentada uma proposta para o alıvio de pequenas sobrecargas em linhasde transmissao com base no gerenciamento de reativos. As acoes corretivas sao realizadas nosentido de reduzir os fluxos de potencia reativa nas linhas sobrecarregadas, sem necessidade deinterferencia no despacho de potencia ativa.
Basicamente, na ocorrencia de sobrecargas no sistema de transmissao, sao calculados fato-res de sensibilidade lineares para verificar a existencia de dispositivos que possam ser utilizadosno controle de reativos para alıvio do sistema e os nmais eficientes sao selecionados. Esses dis-positivos sao organizados em um total de 2n − 1 coalizoes nao vazias e as acoes corretivasnecessarias e os custos decorrentes de cada coalizao sao determinados em um problema deotimizacao linear. Por fim, uma avaliacao economica e a definicao dos pagamentos destinadosa cada dispositivo e realizada com base nos conceitos da teoria de jogos cooperativos do Core(GILLIES, 1953), valor Shapley (SHAPLEY, 1953) e Nucleolus (SCHMEIDLER, 1969), sobrea coalizao (N) com o menor custo. Os principais passos da proposta apresentada sao explica-dos na sequencia do capıtulo e o sistema teste de 6 barra apresentado a seguir e utilizado parailustrar a metodologia.
5.1 Sistema teste de 6 barras
As Tabelas 5.1, 5.2 e 5.3 fornecem, respectivamente, os dados dos geradores, das barras decarga e das linhas de transmissao do sistema de 6 barras utilizado nos testes, apos a convergenciado fluxo de potencia. Esse sistema e composto de 6 barras, 8 linhas de transmissao e doistransformadores, nas linhas 1−4 e 3−6, conforme ilustrado na Figura 5.1.

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 68
1 32
4 5 6
Figura 5.1: Sistema de 6 barras.
Tabela 5.1: Dados das barras de geracao do sistema teste de 6 barrasBarra V p.u. Θ rad PG MW QG Mvar QminG Mvar QmaxG Mvar
1 1,100 0,0 29,4 32,5 -30,0 50,02 1,100 0,081 100,0 13,2 -30,0 50,05 1,100 0,102 32,0 -3,7 -20,0 40,0
Tabela 5.2: Dados das barras de carga do sistema teste de 6 barrasBarra V p.u. Θ rad PD MW QD Mvar
3 1,057 -0,033 50,0 10,04 1,076 -0,048 55,0 11,06 1,048 -0,002 52,0 18,0
Tabela 5.3: Dados das linhas de transmissao e transformadores do sistema teste de 6 barrasBarra BarraInicial Final R % X % BSH % Tap
1 2 8,0 37,0 3,01 3 9,7 40,7 3,01 4 0,0 13,3 0,0 1,0002 3 12,3 51,8 4,22 6 4,5 21,0 1,83 6 0,0 30,0 0,0 1,0004 5 72,3 105,0 0,05 6 28,2 64,0 0,0
5.2 Fatores de sensibilidade para selecao dos dispositivos uti-lizados no controle de reativos
A ocorrencia de sobrecargas em redes de transmissao geralmente se da sob condicoes decarregamento pesado, ou seja, em pontos de operacao proximos ao ponto de colapso de tensao.

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 69
Sob essas condicoes, as acoes corretivas para controle de reativos devem ser limitadas a umadeterminada faixa de variacao, em vista da forte interacao existente entre potencia reativa etensao, de maneira a alterar minimamente o ponto de operacao dos sistemas.
O alıvio de sobrecargas demanda a realizacao de acoes corretivas imediatas para mantero sistema em funcionamento ate o restabelecimento de suas condicoes operativas normais e,portanto, a instalacao de novas fontes de potencia reativa no sistema esta fora do escopo destaproposta. Dessa maneira, apenas barras e linhas que ja possuam dispositivos instalados capazesde controlar os nıveis de reativos do sistema sao indicadas pelos fatores de sensibilidade.
Em (GAINO, 2004), foram calculados fatores de sensibilidade de primeira ordem combase no metodo de fluxo de potencia de Newton que relacionam as variacoes nos fluxos depotencia ativa e reativa nas linhas com as variacoes nos parametros de controle dos dispositivosexistentes no sistema. O autor demonstrou que as sensibilidades lineares podem ser utilizadaspara determinar com boa precisao o comportamento desses fluxos e indicar os dispositivosconcectados ao sistema com maior eficiencia para a realizacao das acoes corretivas.
Porem, o maior esforco computacional durante esse processo e demandado no calculo dainversa da matriz de sensibilidades da rede. Sendo assim, o uso da matriz Jacobiana (J) para ocalculo das sensibilidades reativas pode demandar elevados tempos de processamento, em vistadas dimensoes dessa matriz, que trata simultaneamente os problemas ativo e reativo. Nesse sen-tido, a aplicacao de algumas propostas apresentadas na literatura para desacoplar os problemasativo e reativo e permitir sua solucao separadamente foram avaliadas em (HOJI, 2006) para ocalculo dos fatores de sensibilidade.
Uma matriz reduzida equivalente (Leq) pode ser obtida a partir da matriz J, conforme apre-sentado em (MONTICELLI; GARCIA; SAAVEDRA, 1990). Essa matriz possui as mesmasdimensoes da sub-matriz L e fornece resultados iguais aos obtidos com a matriz J, uma vez queos efeitos dessa matriz sao inerentes a sua equivalente reduzida. O inconveniente da matriz Leqesta no fato de ela nao apresentar esparsidade.
As consideracoes adotadas na formacao da matriz Lc do metodo implicitamente acopladode fluxo de potencia (CRIC - Constrained Reactive Implicit Coupling) (CARPENTIER, 1986)visam recuperar a esparsidade da matriz reduzida equivalente Leq, enquanto que caracterısticastıpicas dos sistemas de transmissao sao exploradas na formacao da matriz B”, como a baixarelacao R/X , tensoes proximas a 1p.u. e pequenos deslocamentos angulares nas linhas (MON-TICELLI; GARCIA; SAAVEDRA, 1990).
As matrizes Leq, Lc e B” do sistema teste de 6 barras foram calculadas a seguir e os efeitos

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 70
das consideracoes adotadas na formacao de cada uma dessas matrizes podem ser verificados.Alem dessas matrizes, a sub-matriz L foi simplesmente retirada da matriz J e avaliada nesteexemplo.
Leq =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
14,14 −3,06 −2,65 −7,97 0 0,02−2,97 10,31 −2,04 0,42 0,04 −5,13−2,57 −2,07 7,88 −0,46 −0,04 −3,53−8,09 −0,03 0,01 9,26 −0,97 0,12
0 0,01 0 −1,02 2,64 −1,680 −5,08 −3,45 −0,42 −1,81 9,76
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
Lc =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
14,18 −3,04 −2,68 −8,28 0 0−2,93 10,42 −2,08 0 0 −5,17−2,62 −2,11 8,06 0 0 −3,52−8,10 0 0 9,00 −1,16 0
0 0 0 −0,96 2,67 −1,650 −5,09 −3,50 0 −1,72 9,89
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
B′′ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
12,37 −2,58 −2,32 −7,52 0 0−2,58 8,96 −1,83 0 0 −4,55−2,32 −1,83 7,49 0 0 −3,33−7,52 0 0 8,16 −0,65 0
0 0 0 −0,65 1,95 −1,310 −4,55 −3,33 0 −1,31 9,19
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
L=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
13,93 −2,78 −2,58 −8,26 0 0−2,88 9,93 −2,05 0 0 −5,08−2,44 −1,87 7,78 0 0 −3,52−8,08 0 0 8,68 −0,62 0
0 0 0 −0,78 2,12 −1,500 −4,68 −3,49 0 −1,30 9,46
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
A matriz Leq e precisa, pois nao ha aproximacoes adotadas em sua formacao. Porem, a faltade esparsidade pode elevar consideravelmente o tempo demandado pelo processo de inversao,o que torna essa matriz pouco interessante para a proposta deste trabalho.
Apesar de manter a esparsidade da matriz, as aproximacoes consideradas na formacao de

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 71
B” reduzem sua precisao. Da mesma maneira, retirar a sub-matriz L da matriz jacobiana nao semostra eficiente, uma vez que os efeitos das demais sub-matrizes de J sao descartados.
A matriz Lc e a que apresenta valores mais proximos aos da matriz Leq, alem de possuir amesma estrutura esparsa da sub-matriz L. Em (HOJI, 2006), ficou demonstrada a precisao dosfatores de sensibilidade calculados com base nessa matriz.
Neste trabalho, os dispositivos que serao utilizados para a realizacao das acoes corretivassao selecionados com base em fatores de sensibilidade reativa. Para uma dada linha j− k,conectada entre as barras j e k do sistema, que opera sobrecarregada, sao obtidos fatores desensibilidade de barras (FS), que relacionam as variacoes no fluxo reativo na linha j−k (∂Qjk)e as variacoes nas injecoes de potencia reativa em cada barra i do sistema (∂Qi) e fatores desensibilidade de transformadores (Ja f tap), que relacionam as variacoes no fluxo reativo dalinha j− k com as variacoes no tap de cada transformador m (∂am) instalado no sistema.
Com base nos fatores de sensibilidade, as barras contendo dispositivos com algum tipo decapacidade de geracao de reativos e os transformadores sao classificados de acordo com suainfluencia sobre o fluxo reativo nas linhas sobrecarregadas. Os dispositivos podem apresentarvalores positivos ou negativos de sensibilidade, que indicam, respectivamente, a necessidade deaumentar ou reduzir a injecao de reativos nas barras ou os taps dos transformadores.
Dessa maneira, e possıvel definir o conjunto dos n dispositivos nos quais devem ser rea-lizadas as acoes corretivas para o alıvio do sistema. Um total de 2n− 1 coalizoes nao vaziaspodem ser formadas com os dispositivos desse conjunto e todas devem ser avaliadas de modoa encontrar aquela que fornece a solucao mais economica. Sendo assim, e necessario o ade-quado dimensionamento desse conjunto. Valores muito altos de n podem levar a um numeroexagerado de coalizoes e tornar o processo de otimizacao lento. Por outro lado, um valor muitopequeno de n pode nao ser suficiente para eliminar as sobrecargas do sistema.
De acordo com a magnitude de uma sobrecarga, podem ser selecionados apenas gerado-res e compensadores sıncronos, apenas compensadores estaticos e dispositivos shunt, apenastransformadores ou combinacoes das diferentes classes de dispositivos. Por exemplo, o sistemaoperando com sobrecargas severas requer acoes corretivas imediatas e, nesses casos, apenasgeradores e compensadores sıncronos sao selecionados em um primeiro momento, podendoos demais tipos de dispositivos serem solicitados posteriormente, quando o carregamento dosistema permitir o uso de dispositivos mais lentos.
Para situacoes com multiplas sobrecargas, os conjuntos de dispositivos podem ser sobre-postos, ou seja, e suficiente calcular os fatores de sensibilidade em relacao a cada linha so-

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 72
brecarregada e a uniao dos conjuntos obtidos separadamente fornece a lista de dispositivos aser utilizada. Obviamente, dispositivos com altos fatores de sensibilidade para ambos os casosdevem ser preferencialmente utilizados.
O calculo dos fatores de sensibilidade e baseado na matriz de sensibilidades Lc do modeloimplicitamente acoplado de fluxo de potencia (CRIC) (CARPENTIER, 1986), em vista da suaprecisao e da estrutura esparsa, e foi implementado em (HOJI, 2006). Por meio de manipulacoesalgebricas utilizando essa matriz sao obtidas as sensibilidades desejadas. A seguir, sao apresen-tadas as equacoes de formacao da matriz Lc, cujo desenvolvimento pode ser encontrado emdetalhes em (MANTOVANI, 1995) e o detalhamento do calculo dos fatores de sensibilidadeutilizados neste trabalho.
5.2.1 Obtencao da matriz de sensibilidades reativas Lc
O metodo CRIC de fluxo de potencia possui duas ideias basicas, uma teorica e outra pratica.A ideia teorica consiste em manter constantes as injecoes de potencia ativa durante o semicicloreativo no calculo do fluxo de potencia. A ideia pratica baseia-se no fato de que quando as mag-nitudes de tensao variam, sao introduzidos erros muito pequenos se considerarem constantes osfluxos ativos nas linhas ao inves das injecoes de potencia ativa nas barras.
Considere o bipolo da Figura 5.2. As injecoes de potencia reativa com relacao as tensoesdas barras j e k sao dadas por (5.1) e (5.2).
Figura 5.2: Sistema de 2 barras.
Qj =V 2j .
[∑j �=ka2jk.
(Yjk.cos(α jk)−bshjk
)−bshj
]−Vj. ∑
j �=ka jk.Yjk.Vk
√1−A2
j (5.1)
Qk =V 2k .
[∑j �=k
(Yjk.cos(α jk)−bshjk
)−bshk
]−Vk. ∑
j �=ka jk.Yjk.Vj
√1−A2
k (5.2)

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 73
Sendo:
Aj =Pjk−a2
jkYjkV2j sin(α jk)
a jkYjkVjVk
Ak =Pk j−YjkV 2
k sin(α jk)a jkYjkVjVk
Diferenciando parcialmente (5.1) e (5.2) em relacao as tensoesVj eVk, obtem-se as equacoesde sensibilidade (5.3) - (5.6), responsaveis pela formacao da matriz de sensibilidades reativasLc do metodo CRIC.
∂Qj∂Vj
= 2Vj.
[∑j �=ka2jk.
(Yjk.cos(α jk)−bshjk
)−bshj
](5.3)
−Vj. ∑j �=ka jk.Yjk.
[Vk+2.a jk.Vj.sen(α jk).sen(Θ jk−α jk)
cos(Θ jk−α jk)
]
∂Qj∂Vk
=− a jk.Yjk.Vjcos(Θ jk−α jk)
(5.4)
∂Qk∂Vk
= 2Vk.
[∑j �=k
(Yjk.cos(α jk)−bshjk
)−bshk
](5.5)
−∑j �=kYjk.
[a jk.Vj+2.Vk.sen(α jk).sen(Θk j−α jk)
cos(Θk j−α jk)
]
∂Qk∂Vj
=− a jk.Yjk.Vkcos(Θk j−α jk)
(5.6)
5.2.2 Fatores de sensibilidade de barras
Esse fator de sensibilidade indica as barras nas quais uma alteracao no suporte de reativos ecapaz de alterar o fluxo reativo na linha sobrecarregada. Sob as consideracoes do metodo CRIC,as derivadas parciais do fluxo reativo em uma linha j− k em relacao as suas tensoes terminaissao dadas pelas expressoes (5.7)-(5.10).

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 74
∂Qjk∂Vj
= 2.a2jk.Vj.
(Yjk.cos(α jk)−bshjk
)(5.7)
−a jk.Yjk.[Vk+2.a jk.Vj.sen(α jk).sen(Θ jk−α jk)
cos(Θ jk−α jk)
]
∂Qjk∂Vk
=− a jk.Yjk.Vjcos(Θ jk−α jk)
(5.8)
∂Qk j∂Vk
= 2Vk.(Yjk.cos(α jk)−bshjk
)(5.9)
−Yjk.[a jk.Vj+2.Vk.sen(α jk).sen(Θk j−α jk)
cos(Θk j−α jk)
]
∂Qk j∂Vj
=− a jk.Yjk.Vkcos(Θk j−α jk)
(5.10)
Obtem-se, assim, um vetor de fluxo (Ja f ) de dimensao igual ao numero de barras do sis-tema, com dois elementos nao-nulos, nas posicoes j e k.
Ja f =[
0 . . .∂Qjk∂Vj
. . .0 . . .∂Qjk∂Vk
. . .0]
(1,nb)(5.11)
Multiplicando esse vetor pelas respectivas posicoes da transposta da inversa da matriz Lc,determina-se o vetor FS, formado pelas relacoes entre a variacao do fluxo reativo na linha j−ke as injecoes de potencia reativa em cada barra i do sistema.
FS= Ja f × (L−1c )T =
[∂Qjk∂Vm
× ∂Vm∂Qi
]=
[∂Qjk∂Qi
](1,nb)
(5.12)
5.2.3 Fatores de sensibilidade de transformadores
Agora, considere a presenca de um transformador de tap variavel na linha j−k, com relacaode transformacao a jk, sendo a magnitude da tensao da barra j controlada pelo transformador.As derivadas das injecoes de potencia reativa nas barras j e k em relacao a variacao do tapsituado no circuito sao dadas pelas equacoes (5.13)-(5.14).

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 75
∂Qj∂am
= 2.am.V 2j .Yjk.cos(α jk) (5.13)
−[Yjk.Vj.Vk+2.am.Yjk.V 2
j .sen(α jk).sen(Θ jk−α jk)cos(Θ jk−α jk)
]
∂Qk∂am
=− Yjk.Vj.Vkcos(Θk j−α jk)
(5.14)
A substituicao de valores em (5.13) e (5.14) para todos os transformadores da rede formama matriz Mtap (5.15), que relaciona as injecoes de potencia reativa nas barras com as variacoesdos taps dos transformadores.
Mtap=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂Q1∂a1
∂Q2∂a1
. . . ∂Qnb∂a1
∂Q1∂a2
∂Q2∂a2
. . . ∂Qnb∂a2
... ... ...∂Q1∂ant
∂Q2∂ant . . . ∂Qnb
∂ant
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
(nb,nt)
(5.15)
Multiplicando essa matriz pela transposta da matriz FS, obtem-se o vetor Ja f tap (5.16),que fornece as sensibilidades do fluxo reativo na linha sobrecarregada em relacao a variacaodos taps dos transformadores.
Ja f tap=Mtap× (FS)T =[
∂Qi∂am
× ∂Qjk∂Qi
]=
[∂Qjk∂am
](1,nt)
(5.16)
5.2.4 Influencia da barra de referencia no calculo das sensibilidades
Durante o calculo dos fatores de sensibilidade, a linha e a coluna associadas a barra dereferencia do sistema sao eliminadas da matriz Lc no seu processo de inversao. Assim, a selecaoda barra de referencia pode afetar o calculo das sensibilidade, devido a proximidade eletrica dealguns dispositivos a essa barra, o que torna necessaria a aplicacao de alguma tecnica paracontornar esse problema, como a apresentada em (COSTA; SILVA, 2003), que basicamentedefine como nova barra de referencia a barra que apresenta o menor fator de sensibilidade coma configuracao original, conforme descrito nos passos abaixo:

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 76
1. Calcular o fluxo de potencia para o sistema em sua configuracao original;
2. Calcular os fatores de sensibilidade;
3. Modelar a barra de referencia original como PV, mantendo os nıveis de tensao e geracaocalculados no passo 1;
4. Definir como nova barra de referencia aquela que apresentar o menor valor (em magni-tude) de fator de sensibilidade de barra, mantendo os nıveis de tensao e carga calculadosno passo 1;
5. Recalcular os fatores de sensibilidade.
Alem de melhorar o condicionamento da matriz da rede, no calculo de fluxo de potenciaexiste um processo iterativo e uma barra de geracao deve ser adotada como referencia para quese possa efetuar o balanco de potencia.
O calculo dos fatores de sensibilidade, por outro lado, e realizado apos a convergenciade um fluxo de potencia CA, conforme indicado no fluxograma da Figura 5.7, o que tornaconhecidos os valores de tensao de todas as barras do sistema. Alem disso, nao existe nenhumtipo de processo iterativo e a barra de referencia e determinada apenas para evitar a singularidadeda matriz da rede. Portanto, qualquer barra pode ser adotada como referencia do sistema nocalculo das sensibilidades, independentemente do seu tipo.
A seguir, o calculo das sensibilidades e ilustrado com o sistema teste de 6 barras, cujos da-dos foram apresentados na secao 5.1 e que, para as condicoes dadas, opera com uma sobrecargana linha 2− 6. Os fatores de sensibilidade calculados para todas as barras do sistema com aconfiguracao original desse sistema, na qual a barra 1 e tomada como referencia sao apresenta-dos na Tabela 5.4. Repare que, por estar na referencia, a propria barra 1 e excluıda da lista dedispositivos.
Tabela 5.4: Fatores de sensibilidade para todas as barras do sistema de 6 barras comsobrecarga na linha 2-6 tendo a barra 1 como referenciaBarra Sensibilidade Transformador Sensibilidade
6 0,5491 3 - 6 -1,35315 0,3708 1 - 4 -0,35192 -0,22533 0,18004 0,03951 0,0000

5.2 Fatores de sensibilidade para selecao dos dispositivos utilizados no controle de reativos 77
Por apresentar o menor valor de sensibilidade, a barra 4 e definida como referencia e osfatores de sensibilidade sao recalculados. Repare que, originalmente, essa barra nao possuinenhum tipo de geracao e e modelada como tipo PQ. Porem, isso nao altera o calculo dassensibilidades, apresentadas na Tabela 5.5.
Tabela 5.5: Fatores de sensibilidade para o sistema de 6 barras com sobrecarga na linha 2-6tendo a barra 4 como referencia
Barra Sensibilidade Transformador Sensibilidade5 0,3333 3 - 6 -1,34622 -0,2539 1 - 4 -0,22891 -0,0247
A mudanca da referencia para a barra 4 permite que seja calculado o fator de sensibilidadepara a barra 1 e, dessa maneira, sua eficiencia no alıvio da linha 2−6 seja avaliada, possibili-tando a sua inclusao no conjunto de dispositivos a serem utilizados nas acoes corretivas.
5.2.5 Fontes Virtuais
O redespacho de reativos para o alıvio de sobrecargas e realizado com o intuito de alterar asinjecoes de potencia reativa nos terminais das linhas sobrecarregadas e, dessa maneira, reduziro fluxo reativo transmitido por ela. Partindo desse ponto de vista, seria eficiente instalar fontesde reativos nesses pontos para controlar diretamente os fluxos das linhas. Porem, essa nao euma acao que possa ser adotada em situacoes reais.
Contudo, e possıvel determinar o maximo alıvio que pode ser obtido com a reducao do fluxoreativo da linha considerando a instalacao de “fontes virtuais” de reativos no sistema duranteas simulacoes de fluxo de potencia. Essas fontes podem ser modeladas como compensadoressıncronos conectados aos terminais das linhas sobrecarregadas e as variacoes nos suportes dereativos dessas fontes virtuais permitem verificar a que valores os fluxos reativos das linhassobrecarregadas poderiam ser reduzidos com a realocacao dos servicos de suporte de reativosdo sistema.
Para ilustrar a ideia descrita acima, considere o sistema teste de 6 barras apresentado comoexemplo para o calculo dos fatores de sensibilidade na secao anterior. Nesse sistema, existe umgerador conectado a barra 2, que pode ser utilizado para alterar a injecao de potencia reativanessa barra, mantendo-se, para isso, seu nıvel de geracao de potencia ativa. Assim, sera adici-onada ao sistema apenas uma fonte virtual, conectada a barra 6, conforme ilustrado na Figura5.3.
O comportamento do fluxo reativo na linha 2− 6 devido as alteracoes nas injecoes de

5.3 Problema de otimizacao linear 78
6
Figura 5.3: Instalacao de fonte virtual no sistema de 6 barras.
potencia reativa das fontes virtuais pode ser previsto pelos fatores de sensibilidade, a exem-plo do que ocorre para os demais dispositivos do sistema. Na Tabela 5.6 sao apresentados osfatores de sensibilidade calculados quando uma fonte virtual e conectada a barra 6 do sistemade 6 barras.
Tabela 5.6: Fatores de sensibilidade para o sistema de 6 barras com sobrecarga na linha 2-6considerando a instalacao de uma fonte virtual na barra 6Barra Sensibilidade Transformador Sensibilidade
6 0,5174 3 - 6 -1,34625 0,3333 1 - 4 -0,22892 -0,25391 -0,0247
Assim, seguindo as indicacoes dos fatores de sensibilidade, o aumento na injecao de potenciareativa pela fonte virtual instalada na barra 6 permite reduzir o fluxo reativo na linha 2−6, con-forme ilustra a Figura 5.4. De maneira similar, reduzindo-se a potencia reativa injetada pelogerador conectado a barra 2 do sistema, e possıvel avaliar o alıvio capaz de ser obtido na linha2−6 do sistema de 6 barras, conforme ilustrado na Figura 5.5. Em ambos os casos, o mınimovalor do fluxo reativo na linha 2−6 que pode ser obtido pelo controle das injecoes de potenciareativa diretamente nos seus terminais e de aproximadamente 1,0Mvar.
5.3 Problema de otimizacao linear
As acoes corretivas a serem realizadas dentro de cada coalizao sao definidas por um pro-blema de otimizacao linear que minimiza o produto entre o custo total da coalizao pela variacao

5.3 Problema de otimizacao linear 79
0
5
10
15
20
ativo�na
�linh
a�(M
VAr)
�20
�15
�10
�5
0
5
10
15
20
1,040 1,050 1,060 1,070 1,080 1,090
Fluxo�reativo�na
�linh
a�(M
VAr)
Tensão�na�barra�6�(p.u.)Q2 6 Q6 2
�20
�15
�10
�5
0
5
10
15
20
1,040 1,050 1,060 1,070 1,080 1,090
Fluxo�reativo�na
�linh
a�(M
VAr)
Tensão�na�barra�6�(p.u.)Q2�6 Q6�2
Figura 5.4: Fluxos resultantes do ajuste do suporte de reativos na barra 6 do sistema de 6barras.
0
5
10
15
20
ativo�na
�linh
a�(M
VAr)
�20
�15
�10
�5
0
5
10
15
20
1,050 1,060 1,070 1,080 1,090 1,100 1,110
Fluxo�reativo�na
�linh
a�(M
VAr)
Tensão�na�barra�2�(p.u.)Q2 6 Q6 2
�20
�15
�10
�5
0
5
10
15
20
1,050 1,060 1,070 1,080 1,090 1,100 1,110
Fluxo�reativo�na
�linh
a�(M
VAr)
Tensão�na�barra�2�(p.u.)Q2�6 Q6�2
Figura 5.5: Fluxos resultantes do ajuste do suporte de reativos na barra 2 do sistema de 6barras.

5.3 Problema de otimizacao linear 80
do ponto de operacao do sistema de seu estado inicial. Uma vez que as variacoes nos parametrosdos dispositivos devem ocorrer dentro de uma faixa limitada, os efeitos das acoes corretivas rea-lizadas em cada um dos n dispositivos selecionados sobre as tensoes, os fluxos ativos e reativosdas linhas e os nıveis de geracao de reativos do sistema podem ser linearizados em torno doponto de operacao inicial do sistema com base nos resultados de um fluxo de potencia CAconvencional. Para isso, os seguintes parametros devem ser observados:
• Variacao considerada nos parametros de controle dos dispositivos para determinar seusefeitos sobre o sistema (Δxi)
A linearizacao dos efeitos de uma acao corretiva em torno do ponto de operacao inicial dosistema considera uma variacao no parametro de controle do dispositivo, de maneira quese possam mensurar as variacoes sofridas pelos parametros a serem controlados. Sempreque um parametro controlado e alterado por alguma das acoes corretivas, ele e incluıdono processo de otimizacao como uma restricao do problema, de maneira a evitar queocorram novas violacoes enquanto a sobrecarga e eliminada. Por exemplo, considere ovalor do parametro de controle de um dado dispositivo i no ponto de operacao inicialdo sistema(xi = x0
i ). Se uma acao corretiva nesse dispositivo implica na variacao de suacondicao para xi = x′i, as variacoes em quaisquer parametros controlados do sistema po-dem ser linearmente relacionadas a Δxi = x′i− x0
i , por ΔyΔxi = k, onde y e um parametro
qualquer do sistema e k e uma constante. Valores muito pequenos de Δxi podem ser insu-ficientes para mensurar os efeitos das acoes corretivas enquanto que valores muito altospodem levar a imprecisao do modelo linear.
• Faixa de variacao permitida para os parametros de controle dos dispositivos (|Δxmaxi |)Tendo em vista que os sistemas operam em pontos definidos pelas transacoes de energia,e necessario limitar as acoes corretivas a uma determinada faixa, de maneira a eliminar assobrecargas existentes desviando-os minimamente de sua condicao inicial. Alem disso,a precisao na linearizacao e, consequentemente, na estimacao do custo dos servicos desuporte de reativos para o sistema pode ser afetada de acordo com a variacao permitida.Assim, essa faixa deve ser estabelecida de modo a garantir a boa precisao das solucoespropostas e permitir que a responsabilidade pelo alıvio do sistema seja distribuıda entreos dispositivos sem que isso represente um alto custo para o sistema. Por exemplo, defi-nindo |Δxmaxi |= 5% significa que as variacoes nos parametros de controle dos dispositivosestarao restritas a ±5%.

5.3 Problema de otimizacao linear 81
O parametro Δxi e especıfico de cada sistema e pode ser determinado de maneira empıricaou com base no conhecimento sobre o comportamento do sistema por parte do operador. Para oexemplo com o sistema de 6 barras, a melhor aproximacao quando sao consideradas pequenasvariacoes e obtida para Δxi = 2%.
A faixa de variacao permitida para os parametros de controle dos dispositivos (|Δxmaxi |)pode ser definida com base no custo dos servicos de suporte de reativos fornecidos pela grandecoalizao (conjunto de todos os dispositivos selecionados). Para isso, o problema linear apresen-tado em (5.17) e otimizado considerando a grande coalizao formada pelos dispositivos e paradiferentes valores de |Δxmaxi |. A Figura 5.6 ilustra os resultados obtidos para o sistema de 6barras. Para este caso, o menor custo para a grande coalizao e obtido com |Δxmaxi |= 1%.
minz=CTotal .n
∑i=1
(|ΔVi|+ |ΔQi|+ |Δai|) (5.17)
s.a.
Vmini −V 0i ≤ ΔVi ≤Vmaxi −V 0
i para todas as barras;
Qmini −Q0i ≤ ΔQi ≤ Qmaxi −Q0
i para todas as fontes de Mvar;
amini −a0i ≤ Δai ≤ amaxi −a0
i para todos os transformadores;
Qminjk −Q0jk ≤ ΔQjk ≤Qmaxjk −Q0
jk para todas as linhas.
sendo:
CTotal - custo total do sistema considerando a atuacao de todos os dispositivos selecionadospelos fatores de sensibilidade.
A solucao de (5.17) envolve a minimizacao do produto entre o custo total dos servicos desuporte de reativos considerando a atuacao de todos os dispositivos selecionados pelos fatoresde sensibilidade (CTotal) e o desvio do sistema de seu ponto de operacao inicial, e permitedeterminar |Δxmaxi | de modo a minimizarCTotal .
Os efeitos das acoes corretivas associadas a geradores e compensadores sıncronos estao re-lacionados com as variacoes de tensao nos terminais desses dispositivos e sao representadas pelaprimeira parte da somatoria. Os servicos de suporte de reativos prestados por compensadoresestaticos sao computados no segundo termo da somatoria e estao relacionados diretamente comas variacoes nos montantes de potencia reativa fornecidos por esses dispositivos ao sistema. Aterceira componente da somatoria esta relacionada com as variacoes nos taps dos transforma-

5.3 Problema de otimizacao linear 82
200,00
205,00
210,00
215,00
220,00
Custo�(R$)
180,00
185,00
190,00
195,00
200,00
205,00
210,00
215,00
220,00
0% 1% 2% 3% 4% 5% 6% 7%
Custo�(R$)
|�ximax|
180,00
185,00
190,00
195,00
200,00
205,00
210,00
215,00
220,00
0% 1% 2% 3% 4% 5% 6% 7%
Custo�(R$)
|�ximax|
Figura 5.6: Variacao do custo resultante das acoes corretivas definidas para a grande coalizaoem funcao da faixa de variacao permitida para os parametros de controle dos dispositivos
(|Δxmaxi |) para o sistema de 6 barras.
dores, que afetam as tensoes do sistema e, consequentemente, os nıveis de geracao de potenciareativa e os fluxos reativos nas linhas. Nessa proposta, o custo das mudancas de tap em trans-formadores e desprezado em vista de seu valor muito baixo frente aos custos de producao deMvar por geradores e compensadores.
Definidos os parametros Δxi e |Δxmaxi |, a funcao objetivo a ser minimizada para determinaras acoes corretivas em cada coalizao S passa a ser (5.18), cuja solucao envolve a minimizacaodo produto entre o custo total dos servicos de suporte de reativos considerando a atuacao ape-nas dos dispositivos membros da coalizao S (CTotal[S]) e o desvio do sistema de seu ponto deoperacao inicial, mantendo-se as restricoes impostas ao problema em (5.17). O problema esolucionado uma vez para cada coalizao S formada entre os n dispositivos selecionados pelosfatores de sensibilidade, totalizando 2n−1 PLs. Os dispositivos participantes em cada coalizaosao ativados por meio de uma variavel binaria, enquanto que aos limites mınimo e maximo dosparametros de controle dos dispositivos que nao fazem parte da coalizao sao atribuıdos os seusvalores no ponto de operacao corrente, de maneira a manter nulas as suas variacoes.
5.3 Problema de otimizacao linear 83
minz=CTotal [S].∑i∈S
(|ΔVi|+ |ΔQi|+ |Δai|) (5.18)
s.a.
Vmini −V 0i ≤ ΔVi ≤Vmaxi −V 0
i para todas as barras;
Qmini −Q0i ≤ ΔQi ≤ Qmaxi −Q0
i para todas as fontes de Mvar;
amini −a0i ≤ Δai ≤ amaxi −a0
i para todos os transformadores;
Qminjk −Q0jk ≤ ΔQjk ≤Qmaxjk −Q0
jk para todas as linhas.
sendo:
CTotal [S] - custo total do sistema considerando a atuacao apenas dos dispositivos participan-tes da coalizao S.
Com isso, o custo resultante das acoes corretivas realizadas em cada coalizao e minimizadosem violar as restricoes operacionais do sistema de transmissao e, dessa maneira, e possıvelidentificar qual a coalizao (N) capaz de promover o alıvio das sobrecargas do sistema ao menorcusto total.
As restricoes impostas ao problema garantem que as acoes corretivas sejam capazes dealiviar as sobrecargas sem violar qualquer outro parametro do sistema. As variacoes de tensaosao restringidas aos limites operacionais definidos pelo operador em estudos de estabilidade detensao. Os suportes de reativos fornecidos por geradores sao restritos as areas I e II da curvade capacidade apresentada na Figura 3.2, onde nao ocorre o custo de oportunidade. As injecoesde Mvar por compensadores estaticos e as variacoes nos taps dos transformadores devem serlimitadas de acordo com os valores nominais de cada equipamento, enquanto que os fluxos naslinhas devem ser mantidos abaixo de seus limites termicos.
Seguindo a consideracao pratica do metodo CRIC de fluxo de potencia, as variacoes nosfluxos ativos das linhas podem ser desprezadas quando se pretende monitorar seus fluxos reati-vos. Assim, considerando invariavel o fluxo ativo existente em uma linha j−k (P0
jk), e possıveldeterminar a magnitude do maximo fluxo reativo que pode fluir nessa linha sem que sejam cau-sadas sobrecargas no sistema por Qmaxjk = [(Smaxjk )2− (P0
jk)2]1/2, sendo que Qminjk = −Qmaxjk . Os
fluxos nas linhas sobrecarregadas tambem entram nas restricoes do problema, sendo que seusfluxos reativos devem, necessariamente, ser reduzidos para que sejam atendidas as condicoesoperativas normais do sistema.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 84
Para simplificar o modelo e criar incentivos para a colaboracao dos dispositivos na solucaodo problema, as seguintes consideracoes a respeito da remuneracao pelo fornecimento dosservicos de suporte de potencia reativa sao observadas:
• Todo e qualquer servico de potencia reativa fornecido por geradores sıncronos sera remu-nerado, independentemente do fator de potencia em que a maquina esteja operando, aocontrario do que ocorre nas estruturas de mercado existentes, onde os servicos de suportede reativos prestados por geradores sao remunerados quando eles sao levados a operaralem de uma determinada faixa de fator de potencia ou, no caso do Brasil, quando ope-ram como compensadores sıncronos;
• Uma vez que a abordagem proposta busca minimizar a necessidade de interferir nastransacoes de potencia, a atuacao dos geradores sıncronos limitar-se-a as regioes de operacaoem que nao ocorre o custo de oportunidade (regioes I e II da Figura 3.2), ou seja, aos pon-tos dentro de sua curva de capacidade onde seus nıveis de geracao de potencia ativa naosejam alterados;
• Os compensadores estaticos serao remunerados de acordo com sua utilizacao e com omontante de Mvar fornecidos por eles ao sistema;
• Uma tarifa unica sera adotada para pagamento dos servicos de suporte de reativos forne-cidos por maquinas sıncronas e compensadores estaticos, com base na Tarifa de ServicosAncilares (TSA), definida pela ANEEL1;
• Os custos relacionados as mudancas de tap dos transformadores sao muito baixos em vistados custos dos servicos de suporte de reativos prestados por geradores e compensadoresshunt e podem ser desprezados.
5.4 Alocacao de benefıcios baseada na teoria de jogos coope-rativos
Com um conjunto de n dispositivos e possıvel estabelecer 2n− 1 coalizoes nao vazias eessa mesma quantidade de solucoes pode ser encontrada para o problema. Assim, diferentesconjuntos de acoes corretivas e, consequentemente, diferentes custos para o alıvio do sistemasao apresentados ao operador. Nesse cenario, e possıvel aplicar os conceitos da teoria de jogos
1O valor vigente para a TSA a partir de 1o de janeiro de 2010, definido pela Resolucao Homologatoria n o 924de 15/12/2009, e de R$4,20/Mvar. (BRASIL, 2009)

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 85
cooperativos para identificar a melhor solucao para o sistema e como os montantes pagos pelosservicos de suporte de reativos devem ser repartidos entre os dispositivos sem que isso gereinsatisfacao.
A teoria de jogos encontra uma serie de aplicacoes em sistemas de energia eletrica. Porexemplo, a teoria de jogos nao cooperativos pode ser utilizada na solucao de problemas relativosa mercados de energia (CONTRERAS et al., 2002), (TORRE; CONTRERAS; CONEJO, 2004),enquanto que a teoria de jogos cooperativos encontra, entre suas aplicacoes, o planejamento daexpansao de sistemas de transmissao (CONTRERAS, 1997), (SANHUEZA, 2004) e a alocacaode perdas (LIMA; CONTRERAS; PADILHA-FELTRIN, 2008). Alguns trabalhos propoem,ainda, a utilizacao dos conceitos de solucao dos jogos cooperativos para alocar os custos docongestionamento entre os agentes do sistema, como em (SILVA; MORALES; MELO, 2001) e(YANG; SHI; DUAN, 2003).
A proposta apresentada neste trabalho busca estabelecer os criterios para a utilizacao dateoria de jogos cooperativos como base de uma metodologia para eliminacao de sobrecargas ealıvio de congestionamentos, ao inves de simplesmente alocar os custos por sua ocorrencia. Naosera realizada uma revisao bibliografica aprofundada a respeito das aplicacoes da teoria de jogosem problemas de sistemas de potencia em vista de sua grande quantidade, alem das apresentadasno paragrafo anterior. Alguns conceitos de solucao da teoria de jogos cooperativos, entre eles,Core (GILLIES, 1953), valor Shapley (SHAPLEY, 1953) e Nucleolus (SCHMEIDLER, 1969),que serao utilizados neste trabalho, foram apresentados no Capıtulo 4.
Conforme foi estabelecido no problema linear descrito em (5.18) todos os n dispositivosselecionados devem atuar conjuntamente para encontrar a solucao de menor custo para o pro-blema. Desta maneira, a responsabilidade pela restauracao da seguranca do sistema nao con-cerne a apenas um agente, mas ao conjunto. Alem disso, o risco de que ocorram violacoes doslimites de tensao tambem e reduzido, visto que variacoes menores no suporte de reativos decada dispositivo serao necessarias.
Para a aplicacao da teoria de jogos e necessario, primeiramente, modelar o problema comoum jogo, definindo seus elementos e regras: identificacao dos jogadores, regras do jogo, resul-tado do jogo, funcao de custos/benefıcios e conceitos de solucao aplicados. A definicao desseselementos e tratada nesta secao.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 86
5.4.1 Identificacao dos jogadores
Os jogadores representam os dispositivos selecionados pela analise de sensibilidade apre-sentada na secao 5.2, sendo que cada dispositivo e considerado, individualmente, como umjogador, mesmo que varios deles pertencam a um mesmo agente. Assim, e possıvel determinaras acoes corretivas necessarias de maneira especıfica para cada dispositivo.
A atuacao de cada jogador dentro das coalizoes esta condicionada a sua eficiencia no alıviodo sistema e a seus custos e limites operacionais, sendo definida pelo problema linear apre-sentado em (5.18). A dimensao (n) da grande coalizao pode ser definida de acordo com aquantidade e a magnitude das sobrecargas nas linhas.
5.4.2 Regras do jogo
A determinacao das acoes corretivas e dos montantes que serao pagos aos proprietarios dosdispositivos devem obedecer aos seguintes criterios:
• A acao dos dispositivos para a solucao do problema esta limitada ao gerenciamento dereativos e, portanto, alteracoes no despacho de potencia ativa e nas cargas nao serao per-mitidas, salvo aquelas necessarias para compensacao das variacoes nas perdas do sistema,resultantes das acoes corretivas realizadas.
• Os jogadores devem ser agrupados em coalizoes para que seja possıvel determinar asolucao do problema ao menor custo para o sistema.
• Os limites operacionais de cada dispositivo devem ser respeitados, assim como os limitesde estabilidade de tensao e demais parametros de seguranca do sistema e determinam afaixa de acao de cada jogador.
• O valor da funcao caracterıstica da grande coalizao sera o menor valor obtido para afuncao objetivo em (5.18) e as funcoes caracterısticas das demais coalizoes serao calcu-ladas com base nos parametros referentes a essa solucao.
• Somente serao passıveis de pagamento os servicos de suporte de reativos fornecidos pelosdispositivos quando solicitados pelo operador para o alıvio das sobrecargas do sistema,excluindo-se os servicos necessarios para seu funcionamento.
• As acoes corretivas atribuıdas a um dispositivo nao podem ser realocadas para outrosdispositivos, mesmo que pertencentes ao mesmo agente.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 87
• Nos casos em que o gerenciamento de reativos e insuficiente para o alıvio do sistema,acoes corretivas mais severas devem ser solicitadas pelo operador. Contudo, nessescenarios, o problema e abordado de forma diferente, nao configurando um jogo validopara a proposta apresentada neste trabalho.
5.4.3 Funcao de Custos/Benefıcios
Os n dispositivos selecionados podem ser organizados em um total de 2n− 1 coalizoesnao vazias S e as acoes corretivas dentro de cada coalizao e seu custo total sao definidas peloproblema linear em (5.18). A partir desses resultados, e possıvel identificar a coalizao (N) queapresenta o menor custo total.
No entanto, para se determinar o pagamento destinado a um dispositivo com base na teoriados jogos cooperativos, e preciso conhecer as suas contribuicoes individuais dentro de cadacoalizao das quais ele participa. Para isso, e necessario calcular o valor da funcao caracterıstica,v[S], de cada coalizao S (S ⊆ N). A funcao caracterıstica de uma coalizao S e definida combase na parcela de CTotal [S] correspondente aos dispositivos membros de S e reflete apenas ocusto dos servicos de suporte de reativos fornecidos pelos dispositivos membros dessa coalizao,sendo calculado pela expressao (5.19). Se uma coalizao nao apresenta solucao valida, a ela eatribuıdo v[S] = 0.
Essa analise se faz necessaria porque combinar os dispositivos em coalizoes apenas temsentido se o custo total para eliminar as sobrecargas for reduzido. Por outro lado, os dispositivosapenas participarao de uma coalizao se os benefıcios obtidos por eles forem maiores do que seatuassem individualmente.
v[S] =CTotal [S].∑i∈S |Qi|∑ni=1 |Qi|
= TSA.∑i∈S|Qi| (5.19)
sendo:
TSA - Tarifa de Servicos Ancilares, fixada em R$ 4,20/Mvar (BRASIL, 2009).
5.4.4 Resultado do jogo
Apos selecionar a coalizao que produz o menor custo para o sistema, e necessario calcularos pagamentos aos dispositivos, refletindo seus custos reais para cada combinacao possıvel.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 88
Assim, ao final do jogo, e indicada a coalizao capaz de eliminar as sobrecargas do sistema aomenor custo e como os dispositivos membros dessa coalizao serao ressarcidos pelo operadorpor suas atuacoes para a solucao do problema.
A selecao da coalizao dar-se-a com base em dois criterios. A primeira analise refere-seao custo total da coalizao, calculado em (5.18). Caso mais de uma coalizao apresentem omesmo custo total, aquela que apresentar o menor valor da funcao caracterıstica (5.19) deveraser utilizada. O benefıcio a ser recebido por cada jogador basear-se-a nas suas contribuicoesindividuais dentro de cada coalizao da qual ele faz parte e sera determinado pelos conceitos dateoria de jogos cooperativos aplicados.
5.4.5 Conceitos de solucao aplicados
Os conceitos do Core (GILLIES, 1953), valor Shapley (SHAPLEY, 1953) e Nucleolus(SCHMEIDLER, 1969) serao utilizados para definir os pagamentos para os dispositivos.
Primeiramente, e analisada a existencia ou nao do Core, na tentativa de encontrar um con-junto de solucoes estaveis, ou seja, que satisfacam a todos os dispositivos participantes da coa-lizao N. Nos cenarios em que nao existe o Core ou este e vazio, o calculo do valor Shapley e doNucleolus sao utilizados para dividir os benefıcios entre os jogadores e os vetores de pagamentofornecidos por ambos os conceitos sao comparados. Caso nao seja encontrada uma alocacaojusta dos custos, a solucao de mınimo custo para o sistema deve prevalecer sobre os interessesdos dispositivos.
No exemplo apresentado com o sistema de 6 barras, o fluxo inicial na linha 2−6 e 47,8+
j17,8MVA, que representa um carregamento de 102,0%. As tensoes e nıveis de geracao dereativos dos geradores e os taps dos transformadores no estado inicial do sistema sao dados nasecao 5.1.
Para ilustrar a aplicacao dos conceitos da teoria de jogos a solucao do problema, os disposi-tivos relacionados na Tabela 5.5 serao agrupados em coalizoes, com excecao do transformador1−4, que sera descartado devido ao baixo valor de sensibilidade, o que indica a pouca eficienciadesse dispositivo.
Assim, o problema descrito em (5.18) e solucionado 24−1 = 15 vezes, considerando cadauma das coalizoes formadas e as acoes corretivas dentro de cada uma delas sao definidas, sem-pre que for possıvel encontrar uma solucao factıvel.
Na primeira coluna da Tabela 5.7 sao apresentadas as coalizoes formadas para o alıvio

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 89
da linha 2− 6 do sistema teste de 6 barras. Os estados dos dispositivos apos a execucao dasacoes corretivas sao indicados nas colunas seguintes, sendo apresentados os valores de tensaoe de geracao de reativos para os geradores, os taps dos transformadores e o fluxo resultantena linha 2− 6. Na penultima coluna sao apresentados os valores da funcao caracterıstica decada coalizao, calculados em (5.19), e representam os custos referentes apenas aos dipositivosmembros das coalizoes, sendo atribuıdo v[S] = 0,00 para as coalizoes incapazes de aliviar osistema. Na ultima coluna, e indicado para cada coalizao o custo total dos servicos de suportede reativos fornecidos pelo conjunto de n dispositivos selecionado.
Repare que para as condicoes estabelecidas para a solucao do problema, sao indicadas acoescorretivas apenas no gerador conectado a barra 2 e no transformador na linha 3− 6. Todas ascoalizoes eficientes possuem o mesmo custo total e, portanto, a coalizao {G.2, T.3-6} deve serutilizada, pois apresenta o menor valor para a funcao caracterıstica.
Como nenhum dos dispositivos e capaz de eliminar a sobrecarga na linha 2− 6 atuandoindividualmente, os benefıcios atribuıdos pelo valor Shapley e pelo Nucleolus a ambos saoiguais. Este jogo possui um Core nao vazio, definido pelas inequacoes abaixo e as solucoesfornecidas pelo valor Shapley e pelo Nucleolus encontram-se dentro do Core.
• Core: x(G.2) ≥ 0,00; x(T.3−6) ≥ 0,00; x(G.2) + x(T.3−6) = 33,18.
• Valor Shapley: x= {16,59; 16,59}
• Nucleolus: x= {16,59; 16,59}
Para ilustrar a aplicacao dos conceitos de solucao da teoria de jogos de maneira mais amplaneste exemplo, sera considerada a utilizacao da grande coalizao para o alıvio do sistema. Combase nos valores da funcao caracterıstica para cada coalizao, os seguintes vetores de pagamentosao definidos:
• Core: x(G.5) ≥ 0,00; x(G.2)≥ 0,00; x(G.1)≥ 0,00; x(T.3−6) ≥ 0,00; x(G.5) + x(G.2)
≥ 0,00; x(G.5) + x(G.1) ≥ 0,00; x(G.5) + x(T.3−6) ≥ 0,00; x(G.2) + x(G.1) ≥ 0,00;x(G.2) + x(T.3−6) ≥ 33,18; x(G.1) + x(T.3−6) ≥ 0,00; x(G.5) + x(G.2) + x(G.1) ≥0,00; x(G.5) + x(G.2) + x(T.3−6) ≥ 46,2; x(G.5) + x(G.1) + x(T.3−6) ≥ 0,00; x(G.2)
+ x(G.1) + x(T.3−6) ≥ 191,10; x(G.5) + x(G.2) + x(G.1) + x(T.3−6) = 204,12.
• Valor Shapley: x= {4,34; 73,57; 52,64; 73,57}
• Nucleolus: x= {6,51; 79,10; 39,41; 79,10}

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 90
Tabela 5.7: Estado dos dispositivos, valores da funcao caracterıstica e custos totais apos aexecucao de acoes corretivas para o alıvio da linha 2−6 do sistema teste de 6 barras
Vi (p.u.), Qi (Mvar) TapV5, V2, V1, transf. S2−6 v[S] CTotal [S]
Coalizoes Q1 Q2 Q3 a3−6 (MVA) (R$) (R$){G.5} — — — — — 0,00 0,00
— — —{G.2} — — — — — 0,00 0,00
— — —{G.1} — — — — — 0,00 0,00
— — —{T.3-6} — — — — — 0,00 0,00
— — —{G.5, G.2} — — — — — 0,00 0,00
— — —{G.5, G.1} — — — — — 0,00 0,00
— — —{G.5, T.3-6} — — — — — 0,00 0,00
— — —{G.2, G.1} — — — — — 0,00 0,00
— — —{G.2, T.3-6} 1,100 1,091 1,100 0,990 47,67 + j15,06 33,18 204,12
-3,1 7,9 37,6{G.1, T.3-6} — — — — — 0,00 0,00
— — —{G.5, G.2, G.1} — — — — — 0,00 0,00
— — —{G.5, G.2, T.3-6} 1,100 1,091 1,100 0,990 47,67 + j15,06 46,20 204,12
-3,1 7,9 37,6{G.5, G.1, T.3-6} — — — — — 0,00 0,00
— — —{G.2, G.1, T.3-6} 1,100 1,091 1,100 0,990 47,67 + j15,06 191,10 204,12
-3,1 7,9 37,6{GC}* 1,100 1,091 1,100 0,990 47,67 + j15,06 204,12 204,12
-3,1 7,9 37,6* {GC}={G.5, G.2, G.1, T.3-6}
O jogo possui Core nao vazio, uma vez que as exigencias de superaditividade sao cumpridaspor todas as coalizoes. Segundo os conceitos do valor Shapley e do Nucleolus os benefıciospagos ao gerador 2 e ao transformador 3− 6 sao maiores, pois a coalizao entre esses doisdispositivos e a que efetivamente alivia o sistema. Os valores alocados aos demais dispositivossao reduzidos em funcao de sua ineficiencia. Note que as coalizoes que contem os geradores1 e 5 apenas apresentam solucao quando eles sao associados ao gerador 2 e ao transformador3−6.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 91
Percebe-se que, na pratica, nao e economicamente vantajoso considerar a grande coalizaopara solucionar o problema para este caso, pois as mesmas acoes sao definidas para a coalizao{G.2, T.3-6}, sendo que o valor da funcao caracterıstica dessa coalizao e v[S] = 33,18, que ebem menor do que a funcao caracterıstica da grande coalizao, v[S] = 204,12.
O fluxograma da metodologia proposta neste trabalho e apresentado na Figura 5.7.

5.4 Alocacao de benefıcios baseada na teoria de jogos cooperativos 92
Calcular o fluxo de potência AC para o case de estudo
Existem linhas sobrecarregadas no
sistema?
Calcular os fatores de sensibilidade
Existem n > 0 dispositivos efetivos?
O controle de reativos não é suficiente para
eliminar a sobrecarga. Solicitar a realização de ações corretivas mais
severas
Não
Sim
Sim
Não
j � 2n-1
j = 0
Aplicar o modelo linear definido em (5.18) para minimizar os custos do
sistema para a coalizão j
j = j + 1
Sim
Armazenar a solução encontrada
Definir | ximax| com base
nas soluções de (5.17)
Selecionar a coalizão(N) com o menor custo
para o sistema
Não
Determinar as funções características de todos os
subconjuntos S (S N)aplicando-se (5.19)
Fim
Definir o vetor de pagamentos utilizando os
conceitos da teoria de jogos cooperativos
Definir as 2n-1 coalizões possíveis entre os
dispositivos selecionados
Figura 5.7: Fluxograma da metodologia para alıvio de sobrecargas utilizando reativos.

93
6 Apresentacao dos Resultados
Durante a operacao dos sistemas de trasnmissao, podem ocorrer sobrecargas isoladamenteou simultaneamente em uma determinada area ou em diversos pontos do sistema, principal-mente sob condicoes de carregamento pesado. Sabendo-se que a solucao de problemas rela-tivos a energia reativa e encontrada localmente, as abordagens para cada situacao devem serdiferentes, de maneira que as solucoes encontradas sejam precisas e determinadas rapidamente.
Como o alıvio que pode ser obtido com o controle de reativos e limitado, e necessarioque os dispositivos com maior influencia sobre os fluxos das linhas violadas sejam utilizadospara maximizar a eficiencia da proposta. Alem disso, o numero de dispositivos incluıdos nasolucao do problema afeta fortemente o tempo de processamento necessario para a definicaodas acoes corretivas. Nesse sentido, os fatores de sensibilidade descritos no capıtulo anteriorsao empregados para realizar a selecao necessaria.
Alem da funcionalidade, alguns aspectos economicos devem ser respeitados, apesar da naoexistencia de um mercado estabelecido de reativos. Assim, os conceitos da teoria de jogoscooperativos sao aplicados para alocar entre os dispositivos os benefıcios a serem pagos peloalıvio do sistema, tomando como base a coalizao que forneca a solucao de menor custo total.
Nesta secao sao apresentados os testes realizados para avaliar a metodologia proposta. Aeficiencia e a aplicabilidade da proposta a solucao de problemas em tempo-real foram avaliadascom o sistema teste IEEE de 118 barras, cujos dados estao disponıveis em http://www.ee.
washington.edu/research/pstca/ e sao apresentados no Apendice A.
As caracterısticas desse sistema sao similares a de sistemas reais e, portanto, forneceminformacoes suficientes a respeito do desempenho e da aplicabilidade do metodo a sistemasde grande porte. Tres sobrecargas sao provocadas sequencialmente, de modo a gerar diversoscenarios e permitir a avaliacao da metodologia em condicoes distintas de operacao.
No primeiro caso, quando uma unica linha do sistema opera sobrecarrregada, e possıvelavaliar como a proximidade da barra de referencia a linha violada pode afetar o calculo dosfatores de sensibilidade e comprometer a eficiencia da metodologia, que depende da selecao
6 Apresentacao dos Resultados 94
dos dispositivos. A definicao de uma nova referencia e apresentada como uma estrategia paracontornar esse problema e sua eficacia e avaliada nesse exemplo.
A ocorrencia de duas sobrecargas em linhas eletricamente proximas e considerada no se-gundo caso apresentado. Devido a essa proximidade, alguns dispositivos podem afetar os fluxosde ambas as linhas, mas nao necessariamente no mesmo sentido. Dessa maneira, podem sur-gir informacoes antagonicas, dependendo de como a analise e realizada. Uma avaliacao daatuacao de cada dispositivo e os procedimentos necessarios para evitar respostas divergentes dametodologia sao apresentados nesse exemplo.
Por fim, uma nova sobrecarga e provocada no sistema, em um ponto distante da regiao ondese situam as outras duas linhas violadas. Em vista da natureza local das solucoes encontradas,nao existem dispositivos utilizados nos casos anteriores capazes de aliviar essa nova sobrecargae, portanto, um novo conjunto de dispositivos deve ser definido. Esse exemplo ilustra como aindependencia dos eventos pode ser tratada de maneira a maximizar a eficiencia da metodologiae evitar pagamentos indevidos.
As analises detalhadas dos casos e a comparacao entre eles ilustram a funcionalidade dometodo para diversas situacoes que podem ocorrer durante a operacao dos sistemas de trans-missao. Para isso, sao apresentadas as acoes corretivas definidas pela solucao do problemalinear proposto, os tempos gastos para a determinacao dessas acoes e as consideracoes quepodem melhorar o desempenho do metodo sob condicoes de multiplas sobrecargas.
Nos dados originais, a barra 69 e definida como a referencia angular do sistema. Porem,nos testes apresentados, e possıvel verificar que a proximidade eletrica da(s) linha(s) sobrecarre-gada(s) a barra de referencia pode influenciar no calculo dos fatores de sensibilidade, conformedescrito na secao 5.2.4 e a definicao de uma nova referencia torna-se necessaria.
De modo a uniformizar e facilitar a analise dos resultados, serao considerados para todosos casos apresentados os mesmo valores dos parametros |Δxmaxi | e Δxi, que serao definidos noprimeiro cenario a ser analisado. Alem disso, o numero de dispositivos considerados na solucaodo problema e limitado para evitar que dispositivos ineficientes sejam incluıdos na solucao doproblema.
Para isso, apenas barras que possuam fator de sensibilidade com modulo maior ou iguala 0,01 e transformadores que possuem fator de sensibilidade com modulo maior ou igual a0,75 serao considerados na solucao do problema, limitados a tres com sensibilidade positiva etres com sensibilidade negativa, de cada tipo. Esses valores mınimos de sensibilidade foramestabelecidos empiricamente.

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 95
6.1 Influencia da barra de referencia sobre a determinacaodas acoes corretivas
A partir do caso base, cujos dados sao apresentados no Apendice A, uma transacao de187,00 MW entre o gerador conectado a barra 69 e a carga instalada na barra 16 em conjuntocom a contingencia da linha 23−24 ocasionam um carregamento de 104,1% na linha 65−68do sistema, com um fluxo de (146,7 − j53,7) MVA = 156,2∠−20,1o MVA no sentido dabarra 68 para a barra 65, enquanto que o limite termico dessa linha e de 150,00MVA.
Essa sobrecarga ocorre em uma linha proxima a barra 69, definida como a referencia dosistema nos dados originais, o que pode afetar o calculo dos fatores de sensibilidade e, dessamaneira, a definicao de uma nova barra de referencia pode ser necessaria. Aplicando-se atecnica apresentada na secao 5.2.4, a barra 82 e definida como a nova referencia para o sistema.O fato de essa barra ser originalmente uma barra PQ nao prejudica o calculo das sensibilidades,uma vez que nao se realiza um processo iterativo, mas uma simples inversao da matriz.
Uma vez que essa escolha pode alterar o conjunto de dispositivos selecionados e, conse-quentemente, as acoes corretivas indicadas, o valor de |Δxmaxi | para o qual se obtem o mınimocusto dos servicos de reativos necessarios para o alıvio do sistema tambem e alterado, conformeilustrado na Figura 6.1. O custo das acoes corretivas considerando a grande coalizao e minimi-zado em |Δxmaxi | = 1% para o conjunto de dispositivos selecionados com a referencia definidana barra 69, enquanto que com os dispositivos selecionados com a referencia definida na barra82 o valor mınimo ocorre em |Δxmaxi |= 2%.
Neste exemplo, serao apresentadas as acoes corretivas determinadas tendo cada uma dasbarras, 69 e 82, na referencia do sistema. Para que seja possıvel realizar uma comparacaoentre os dispositivos selecionados e as acoes corretivas propostas para cada caso e verificarcomo a definicao da barra de referencia pode prejudicar o desempenho do metodo, para ambossera permitida a mesma faixa de variacao de ±2% nos parametros de controle dos dispositivos(|Δxmaxi | = 2%). Pelo mesmo motivo, esse valor de |Δxmaxi | sera mantido para todos os demaistestes realizados.
6.1.1 Definicao das acoes corretivas com a referencia do sistema na barra69
Na Tabela 6.1, sao indicados os dispositivos com maiores fatores de sensibilidade calcu-lados com base na configuracao original do sistema, na qual a referencia e definida na barra

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 96
1400,00
1200,00
1400,00
(R$)�
1000,00
1200,00
1400,00
ivos�(R
$)�
800,00
1000,00
1200,00
1400,00
Reativos�(R
$)�
600,00
800,00
1000,00
1200,00
1400,00
l�dos�Reativos�(R$)�
400,00
600,00
800,00
1000,00
1200,00
1400,00
Total�dos�Reativos�(R$)�
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
usto�Total�dos�Reativos�(R$)�
0 00
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
Custo�To
tal�dos�Reativos�(R$)�
0,00
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
0% 2% 4% 6% 8% 10% 12%
Custo�To
tal�dos�Reativos�(R$)�
0,00
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
0% 2% 4% 6% 8% 10% 12%
Custo�To
tal�dos�Reativos�(R$)�
|�ximax|ref 69 ref 82
0,00
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
0% 2% 4% 6% 8% 10% 12%
Custo�To
tal�dos�Reativos�(R$)�
|�ximax|ref.�69 ref.�82
Figura 6.1: Variacao do custo resultante das acoes corretivas definidas para a grande coalizaoem funcao da faixa de variacao permitida para os parametros de controle dos dispositivos
(|Δxmaxi |) para o sistema IEEE-118.
69, e suas condicoes de funcionamento quando a linha 65− 68 opera sobrecarregada. O con-junto selecionado e composto por 11 dispositivos, sendo 6 geradores, apresentados na primeiracoluna, e cujas tensoes terminais, em p.u., geracao de reativos, em Mvar, e fatores de sensibi-lidade calculados, sao dadas nas colunas seguintes; e 5 transformadores, cujos taps e fatores desensibilidade sao apresentados nas duas ultimas colunas.
Tabela 6.1: Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobrecargana linha 65-68 do sistema IEEE-118 barras com referencia na barra 69
Gerador V 0i Q0
i FS Transf. a0m Jaftap
(p.u) (Mvar)26 1,015 15,0 0,847 68-69 0,935 9,49427 0,968 1,7 0,797 81-80 0,935 0,87532 0,965 -14,0 0,783 30-17 0,960 -1,24565 1,005 129,8 -0,469 26-25 0,960 -1,19461 0,995 -40,4 -0,456 38-37 0,935 -0,78462 0,998 1,2 -0,438 — — —
Para a aplicacao dos conceitos da teoria de jogos cooperativos e necessario determinar quala contribuicao de cada “jogador” a solucao do problema e quanto ele agrega ao valor da funcaocaracterıstica da cada coalizao. Nesse sentido, deve-se encontrar a melhor solucao possıvel comcada coalizao formada entre os dispositivos.
Os dispositivos indicados na Tabela 6.1 podem ser combinados em 211− 1 = 2047 coa-

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 97
lizoes nao vazias distintas e na Tabela 6.2 sao relacionadas algumas das coalizoes que apresen-tam solucao factıvel para a minimizacao da funcao objetivo em (5.18). Na primeira coluna saoindicados os dispositivos participantes de cada coalizao, sendo que a numeracao dos dispositi-vos participantes de cada coalizao e apresentada no final dessa tabela. Nas colunas seguintessao apresentados os valores de tensao, em p.u., e geracao de reativos, em Mvar, dos geradores;os taps dos transformadores e o fluxo resultante na linha 65− 68, apos a realizacao das acoescorretivas. Nas duas ultimas colunas sao apresentados os valores da funcao caracterıstica decada coalizao e o custo total dos servicos de suporte de reativos fornecidos pelo conjunto dos11 dispositivos selecionados.
E importante lembrar que na solucao do problema em (5.18), e minimizado o produto entreo custo das acoes corretivas e o desvio a partir do ponto de operacao inicial do sistema e,portanto, o custo total dos servicos de suporte reativos fornecidos pelo conjunto de dispositivos,apresentados na ultima coluna dessa tabela nao sao, necessariamente, decrescentes.

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 98
Tabe
la6.
2:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
uma
sobr
ecar
gana
linha
65−
68do
sist
ema
IEEE
-118
com
refe
renc
iana
barr
a69
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
a 10
a 11
(MVA
)(R
$)(R
$)
{G.6
5}1,
015
0,96
80,
965
1,00
10,
995
0,99
80,
935
0,93
50,
960
0,96
00,
935
146,
3-j
32,9
359,
564
0,5
15,3
1,7
-14,
085
,6-3
4,7
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.2
6,G
.65}
1,01
50,
968
0,96
51,
001
0,99
50,
998
0,93
50,
935
0,96
00,
960
0,93
514
6,3
-j32
,942
3,8
640,
5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.2
7,G
.65}
1,01
50,
968
0,96
51,
001
0,99
50,
998
0,93
50,
935
0,96
00,
960
0,93
514
6,3
-j32
,936
6,7
640,
5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.3
2,G
.65}
1,01
50,
968
0,96
81,
001
0,99
50,
998
0,93
50,
935
0,96
00,
960
0,93
514
6,3
-j32
,936
2,5
598,
9
15,3
-5,1
-0,7
85,6
-34,
71,
2
{G.6
5,G
.61}
1,01
50,
968
0,96
51,
001
0,99
50,
998
0,93
50,
935
0,96
00,
960
0,93
514
6,3
-j32
,950
5,3
640,
5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.6
5,G
.62}
1,01
50,
968
0,96
51,
001
0,99
50,
998
0,93
50,
935
0,96
00,
960
0,93
514
6,3
-j32
,936
4,6
640,
5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.6
5,T.
68-6
9}1,
015
0,96
80,
965
1,00
30,
995
0,99
80,
954
0,93
50,
960
0,96
00,
935
146,
3-j
32,4
405,
769
8,0
15,2
1,7
-14,
096
,6-3
7,5
1,2
{G.6
5,T.
81-8
0}1,
015
0,96
80,
965
1,00
30,
995
0,99
80,
935
0,95
40,
960
0,96
00,
935
146,
8-j
31,4
377,
666
4,0
15,2
1,7
-14,
089
,9-3
6,1
1,2
Con
tinua
napr
oxim
apa
gina

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 99
Tabela6.2–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
a 10
a 11
(MVA
)(R
$)(R
$)
{G.6
5,T.
30-1
7}1,
015
0,96
80,
965
1,00
10,
995
0,99
80,
935
0,93
50,
960
0,96
00,
935
146,
3-j
32,9
359,
564
0,5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.6
5,T.
26-2
5}1,
015
0,96
80,
965
1,00
10,
995
0,99
80,
935
0,93
50,
960
0,96
00,
935
146,
3-j
32,9
359,
564
0,5
15,3
1,7
-14,
085
,6-3
4,7
1,2
{G.6
5,T.
38-3
7}1,
015
0,96
80,
965
1,00
10,
995
0,99
80,
935
0,93
50,
960
0,96
00,
935
146,
3-j
32,9
359,
564
0,5
15,3
1,7
-14,
085
,6-3
4,7
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.2
6}1,
015
0,96
80,
968
1,00
40,
995
0,99
80,
954
0,95
40,
960
0,96
00,
935
146,
4-j
30,8
616,
167
9,6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}-{
G.2
7}1,
015
0,96
80,
968
1,00
40,
995
0,99
80,
954
0,95
40,
960
0,96
00,
935
146,
4-j
30,8
658,
167
9,6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}-{
G.3
2}1,
015
0,96
80,
965
1,00
40,
995
0,99
80,
954
0,95
40,
960
0,96
00,
935
146,
5-j
30,8
662,
368
3,3
15,1
1,7
-14,
010
0,8
-38,
91,
2
{GC}-{
G.6
5}—
——
——
——
——
——
—0,
00,
0
——
——
——
——
——
——
{GC}-{
G.6
1}1,
015
0,96
80,
968
1,00
40,
995
0,99
80,
954
0,95
40,
960
0,96
00,
935
146,
4-j
30,8
516,
267
9,6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}-{
G.6
2}1,
015
0,96
80,
968
1,00
40,
995
0,99
80,
954
0,95
40,
960
0,96
00,
935
146,
4-j
30,8
674,
567
9,6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
Con
tinua
napr
oxim
apa
gina

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 100
Tabela6.2–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
a 10
a 11
(MVA
)(R
$)(R
$)
{GC}-{
T.68
-69}
1,01
50,
968
0,96
81,
002
0,99
50,
998
0,93
50,
954
0,96
00,
960
0,93
514
6,8
-j31
,462
2,0
622,
0
15,2
-5,1
-0,7
89,8
-36,
11,
2
{GC}-{
T.81
-80}
1,01
50,
968
0,96
81,
003
0,99
50,
998
0,95
40,
935
0,96
00,
960
0,93
514
6,3
-j32
,465
6,5
656,
5
15,1
-5,1
-0,7
96,6
-37,
51,
2
{GC}-{
T.30
-17}
1,01
50,
968
0,96
81,
004
0,99
50,
998
0,95
40,
954
0,96
00,
960
0,93
514
6,4
-j30
,867
9,6
679,
6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}-{
T.26
-25}
1,01
50,
968
0,96
81,
004
0,99
50,
998
0,95
40,
954
0,96
00,
960
0,93
514
6,4
-j30
,867
9,6
679,
6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}-{
T.38
-37}
1,01
50,
968
0,96
81,
004
0,99
50,
998
0,95
40,
954
0,96
00,
960
0,93
514
6,4
-j30
,867
9,6
679,
6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}
1,01
50,
968
0,96
81,
004
0,99
50,
998
0,95
40,
954
0,96
00,
960
0,93
514
6,4
-j30
,867
9,6
679,
6
15,1
-5,1
-0,7
100,
8-3
8,9
1,2
{GC}={G
.26,
G.2
7,G
.32,
G.6
5,G
.61,
G.6
2,T.
68-6
9,T.
81-8
0,T.
30-1
7,T.
26-2
5,T.
38-3
7}

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 101
Individualmente, apenas o gerador conectado a barra 65 do sistema e capaz de eliminar a so-brecarga existente. Nas coalizoes com 2 elementos, apenas aquelas que contem esse dispositivosao efetivas.
Igualmente, entre as coalizoes com maior numero de elementos apenas aquelas que contemo gerador 65 apresentam solucao factıvel para o problema. Pode-se verificar que a retirada dessedispositivo da grande coalizao leva a coalizao {GC}−{G.65}, que e incapaz de solucionar oproblema. Em sua maioria, as demais coalizoes com dez elementos apresentam as mesmasacoes corretivas apresentadas pela grande coalizao (GC). Isso porque, apesar de serem utili-zados 11 elementos na determinacao das acoes corretivas, apenas o gerador 65 possui grandeefetividade. Os transformadores 68−69 e 81−80 apenas servem de auxılio para o gerador 65no alıvio da sobrecarga, enquanto que o gerador 32 e utilizado apenas para reduzir os custos dassolucoes.
Conforme explicado na secao 5.2.4, a proximidade da linha sobrecarregada com a barra dereferencia do sistema pode afetar o calculo dos fatores de sensibilidade e, a exemplo deste caso,excluir dispositivos mais eficientes da relacao apresentada na Tabela 6.1.
6.1.2 Definicao das acoes corretivas alterando-se a referencia do sistemapara a barra 82
Para atenuar os efeitos da barra de referencia sobre a determinacao das acoes corretivaspara a sobrecarga em questao, a referencia do sistema foi redefinida para a barra 82, seguindo atecnica apresentada na secao 5.2.4. Os dispositivos selecionados pelos fatores de sensibilidadecalculados com a nova referencia sao apresentados na Tabela 6.3, bem como suas condicoesiniciais e os respectivos fatores de sensibilidade calculados.
Tabela 6.3: Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobrecargana linha 65-68 do sistema IEEE-118 barras com referencia na barra 82
Gerador V 0i Q0
i FS Transf. a0m Jaftap
(p.u) (Mvar)116 1,005 50,1 0,844 81-80 0,935 4,69369 1,035 -85,6 0,593 68-69 0,935 2,73374 0,958 -5,1 0,590 65-66 0,935 -1,70265 1,005 129,8 -0,083 — — —61 0,995 -40,4 -0,043 — — —62 0,998 1,2 -0,037 — — —
A barra 69 era excluıda no calculo dos fatores de sensibilidade pelo fato de estar na re-ferencia do sistema, enquanto que o fator de sensibilidade calculado para a barra 116 era forte-

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 102
mente afetado devido a sua proximidade a barra 69, tornando-o relativamente pequeno.
Com a nova referencia, os geradores 116, 69 e 74 sao incluıdos nos lugares dos geradores26, 27 e 32, que se mostraram pouco eficientes no exemplo apresentado na secao 6.1.1. O novoconjunto selecionado e formado por apenas 9 dispositivos, ao inves de 11, como ocorre quandoa barra 69 esta na referencia. Alem disso, os transformadores 30−17 e 26−25 foram excluıdosdo conjunto de dispositivos selecionados.
Agora, e possıvel estabelecer um total de 29− 1 = 511 coalizoes nao vazias com os dis-positivos selecionados e as acoes corretivas indicadas para algumas delas sao apresentadas naTabela 6.4. E possıvel perceber que o conjunto de dispositivos definidos com a nova referenciae mais eficiente do que o conjunto definido anteriormente. Alem do gerador 65, o gerador 116tambem possui grande efetividade, sendo capaz de eliminar a sobrecarga atuando individual-mente. Assim, a retirada do gerador 65 das coalizoes nao as torna ineficientes.

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 103
Tabe
la6.
4:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
uma
sobr
ecar
gana
linha
65−
68do
sist
ema
IEEE
-118
com
refe
renc
iana
barr
a82
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{G.1
16}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,137
3,8
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.6
5}1,
005
1,03
50,
958
1,00
10,
995
0,99
80,
935
0,93
50,
935
146,
3-j
32,9
359,
511
65,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
{T.8
1-80}
——
——
——
——
——
0,0
0,0
——
——
——
{T.6
8-69}
——
——
——
——
——
0,0
0,0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.1
16,G
.69}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,177
6,6
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.1
16,G
.74}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,139
5,2
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.1
16,G
.65}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,182
8,2
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.1
16,G
.61}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,154
3,5
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
Con
tinua
napr
oxim
apa
gina

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 104
Tabela6.4–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{G.1
16,G
.62}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,137
8,8
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.1
16,T
.81-
80}
1,00
91,
035
0,95
81,
005
0,99
50,
998
0,95
40,
935
0,93
514
7,0
-j29
,822
6,8
1275
,1
54,0
-97,
2-5
,110
5,7
-40,
41,
2
{G.1
16,T
.68-
69}
1,00
81,
035
0,95
81,
005
0,99
50,
998
0,93
50,
954
0,93
514
5,5
-j29
,712
4,2
919,
7
29,6
-37,
1-5
,110
5,7
-40,
41,
2
{G.1
16,T
.65-
66}
1,01
01,
035
0,95
81,
005
0,99
50,
998
0,93
50,
935
0,93
514
6,0
-j32
,137
3,8
1427
,2
89,0
-95,
9-5
,110
8,2
-40,
41,
2
{G.6
9,G
.65}
1,00
51,
035
0,95
81,
001
0,99
50,
998
0,93
50,
935
0,93
514
6,3
-j32
,971
0,2
1165
,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
{G.7
4,G
.65}
1,00
51,
035
0,95
81,
001
0,99
50,
998
0,93
50,
935
0,93
514
6,3
-j32
,938
0,9
1165
,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
{G.6
5,G
.61}
1,00
51,
035
0,95
81,
001
0,99
50,
998
0,93
50,
935
0,93
514
6,3
-j32
,950
5,3
1165
,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
{G.6
5,G
.62}
1,00
51,
035
0,95
81,
001
0,99
50,
998
0,93
50,
935
0,93
514
6,3
-j32
,936
4,6
1165
,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
{G.6
5,T.
81-8
0}1,
005
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,93
50,
935
146,
8-j
31,4
377,
610
74,4
36,1
-87,
4-5
,189
,9-3
6,1
1,2
{G.6
5,T.
68-6
9}1,
005
1,03
50,
958
1,00
30,
995
0,99
80,
935
0,95
40,
935
145,
6-j
32,2
405,
877
9,8
15,3
-30,
0-5
,196
,6-3
7,5
1,2
Con
tinua
napr
oxim
apa
gina

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 105
Tabela6.4–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{G.6
5,T.
65-6
6}1,
005
1,03
50,
958
1,00
10,
995
0,99
80,
935
0,93
50,
935
146,
3-j
32,9
283,
111
65,6
67,4
-83,
5-5
,185
,6-3
4,7
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.1
16}
1,00
51,
035
0,95
81,
004
0,99
50,
998
0,95
40,
954
0,93
514
6,0
-j32
,175
4,8
822,
8
-16,
2-3
3,8
-5,0
100,
8-3
8,9
1,2
{GC}-{
G.6
9}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
701,
485
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.7
4}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
833,
385
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.6
5}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
402,
885
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.6
1}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
684,
685
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.6
2}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
849,
285
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
T.81
-80}
1,00
81,
035
0,95
81,
005
0,99
50,
998
0,93
50,
954
0,93
514
5,5
-j29
,792
0,2
920,
2
29,6
-37,
1-5
,110
5,7
-40,
41,
2
{GC}-{
T.68
-69}
1,00
91,
035
0,95
81,
005
0,99
50,
998
0,95
40,
935
0,93
514
7,0
-j29
,812
75,1
1275
,1
54,0
-97,
2-5
,110
5,7
-40,
41,
2
Con
tinua
napr
oxim
apa
gina

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 106
Tabela6.4–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
Taps
dost
rans
form
ador
esS 6
5−68
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{GC}-{
T.65
-66}
1,00
61,
035
0,95
81,
005
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j31
,785
4,3
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}
1,00
61,
035
0,95
81,
005
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j31
,785
4,3
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}={G
.116
,G.6
9,G
.74,
G.6
5,G
.61,
G.6
2,T.
81-8
0,T.
68-6
9,T.
65-6
6}

6.1 Influencia da barra de referencia sobre a determinacao das acoes corretivas 107
Como as sensibilidades sao afetadas pela barra de referencia, nao tem sentido analisar eco-nomicamente as acoes corretivas determinadas com a barra 69 na referencia, que sao poucoefetivas e devem ser preteridas. Assim, a aplicacao da teoria de jogos para este caso sera reali-zada com base nas acoes corretivas determinadas com a barra 82 como referencia e que foramapresentadas na Tabela 6.4.
6.1.3 Alocacao dos benefıcios entre os dispositivos
Com base nos valores da funcao caracterıstica de cada coalizao, definidos na penultimacoluna da Tabela 6.4, e possıvel alocar os benefıcios a serem pagos pela realizacao das acoescorretivas entre os dispositivos de acordo com sua contribuicao para o custo de cada coalizao.Para isso, a coalizao entre o gerador 65 e o transformador 68−69 ({G.65, T.68-69}) e conside-rada como sendo a grande coalizao, uma vez que e aquela que apresenta menor custo total.
Sendo assim, o montante a ser pago pelos servicos de reativos e dado pelo valor da funcaocaracterıstica dessa coalizao, v[G.65,T.68− 69] = 405,8, e devera ser dividido entre os doisdispositivos que formam essa coalizao. Esse jogo possui um Core nao vazio e definido pelasequacoes apresentadas na Tabela 6.5. Os valores alocados para cada dispositivo com base nosconceitos da teoria de jogos cooperativos do valor Shapley e do Nucleolus para este caso saoapresentados nas duas linhas finais na Tabela 6.5, sendo x4 e x8 os valores alocados ao gerador65 e ao transformador 68−69, respectivamente.
Tabela 6.5: Alocacao dos benefıcios pagos pelo alıvio da sobrecarga na linha 65−68 dosistema IEEE-118 com base nos conceitos da teoria de jogos cooperativos
Conceito de Alocacao dos benefıciossolucao (R$)
Core x4 ≥ 359,5;x8 ≥ 0,0;x4 + x8 = 405,8Valor Shapley x4 = 382,75; x8 = 23,05
Nucleolus x4 = 382,75; x8 = 23,05
A divisao dos benefıcios entre os dispositivos utilizando os conceitos do valor Shapleye do Nucleolus fornecem o mesmo vetor de pagamentos, que esta contido no Core, ou seja,satisfazem a ambos os jogadores. A parcela alocada ao gerador 65 e maior do que o valorque ele receberia atuando isoladamente e e destinada ao pagamento dos reativos fornecidospelo dispositivo. Apesar do custo dos transformadores ser nulo, parte dos recursos da coalizaoe destinada ao transformador 65− 68 por sua participacao na reducao dos custos das acoescorretivas.
Se todos os dispositivos da Tabela 6.3 fizerem parte do jogo, muitas das coalizoes nao

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 108
cumprirao as condicoes de superaditividade e, portanto, nao interessaria aos dispositivos unir-se a grande coalizao. Alem disso, a solucao de menor custo e encontrada em uma coalizaomenor, o que torna a grande coalizao sem sentido para o operador.
Portanto, as acoes corretivas especificadas para a coalizao entre o gerador 65 e o transfor-mador 65−68 devem ser realizadas para o alıvio do sistema, uma vez que apresentam o menorcusto para o sistema. Alem disso, os vetores de pagamento definidos com base nos conceitos desolucao da teoria de jogos cooperativos sao suficiente para satisfazer aos dispositivos membrosda coalizao.
6.2 Sobrecargas simultaneas em linhas eletricamente proximas
Apesar da natureza local da potencia reativa, as acoes corretivas realizadas nao afetam ape-nas o fluxo da linha sobrecarregada, mas tambem os parametros de um conjunto de dispositivosproximos, incluindo outras linhas de transmissao, geradores e cargas. Assim, em condicoes decarregamento pesado, as variacoes necessarias nos parametros dos dispositivos para aliviar asobrecarga em uma linha podem ser limitadas por restricoes de fluxo em outras linhas.
Dessa maneira, na ocorrencia de sobrecargas simultaneas em mais de uma linha de trans-missao, e possıvel que algumas acoes corretivas possuam influencia sobre os fluxos de mais deuma das linhas violadas. Para ilustrar o comportamento da metodologia sob essas condicoes deoperacao, o limite termico da linha 68−81 e definido em 100,0MVA a partir do caso anterior,apresentado na secao 6.1. O fluxo nessa linha e de (73,3− j76,8)MVA= 106,2∠−46,3oMVA,que representa um carregamento de 106,2%.
Os fatores de sensibilidade e os dispositivos selecionados para atuar na eliminacao de cadauma das sobrecargas, bem como suas condicoes iniciais sao apresentados nas Tabelas 6.6 e 6.7,para as linhas 65−68 e 68−81, respectivamente. Considerando os resultados apresentados nasecao 6.1, a barra 82 e considerada na referencia para o calculo das sensibilidades para este caso.E possıvel perceber que o conjunto de dispositivos selecionados e os fatores de sensibilidadecalculados para a linha 65−68 sao os mesmos do exemplo anterior.
Os conjuntos de dispositivos selecionados para cada uma das linhas possuem cinco disposi-tivos em comum, sendo tres geradores (116, 65 e 61) e dois transformadores (81−80 e 68−69).Contudo, os fatores de sensibilidade para o gerador 116 e para o transformador 68−69 apresen-tam sinais contrarios para cada uma das linhas, ou seja, a atuacao desses dispositivos promoveao mesmo tempo o alıvio de uma das sobrecargas e o aumento do carregamento da outra linha.

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 109
Tabela 6.6: Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobrecargana linha 65−68 do sistema IEEE-118, com ocorrencia simultanea de sobrecarga na linha
68−81Gerador V 0
i Q0i FS Transf. a0
m Jaftap(p.u) (Mvar)
116 1,005 50,1 0,844 81-80 0,935 4,69369 1,035 -85,6 0,593 68-69 0,935 2,73374 0,958 -5,1 0,590 65-66 0,935 -1,70265 1,005 129,8 -0,083 — — —61 0,995 -40,4 -0,043 — — —62 0,998 1,2 -0,037 — — —
Tabela 6.7: Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobrecargana linha 68−81 do sistema IEEE-118, com ocorrencia simultanea de sobrecarga na linha
65−68Gerador V 0
i Q0i FS Transf. a0
m Jaftap(p.u) (Mvar)
80 1,040 112,1 0,345 81-80 0,935 7,38399 1,010 -17,5 0,271 68-69 0,935 -2,973
107 0,952 5,7 0,265 — — —116 1,005 50,1 -0,153 — — —65 1,005 129,8 -0,122 — — —61 0,995 -40,4 -0,120 — — —
Como as variacoes nos fluxos nas linhas sao incluıdas nas restricoes do problema, e ne-cessario que, ao cumprir todas as restricoes, as acoes corretivas sejam capazes de levar todasas linhas a operarem dentro de seus limites termicos para que seja encontrada uma solucao.Assim, os dispositivos com efeitos antagonicos sobre os fluxos das linhas problematicas saopreteridos por outros que se mostrem eficientes no alıvio das sobrecargas sem agravar nenhumadas violacoes correntes no sistema.
Na Tabela 6.8 sao apresentadas as acoes corretivas definidas para algumas das coalizoesformadas entre os dispositivos relacionados na Tabela 6.6, seus efeitos sobre alguns parametrosdo sistema, inclusive os fluxos nas linhas, e os valores da funcao caracterıstica de cada coalizaoe custo total dos servicos de reativos prestados pelos dispositivos.
Apesar de nao haver alteracao no conjunto de dispositivos selecionado pelos fatores desensibilidade para a sobrecarga 65−68, as acoes corretivas nao possuem a mesma efetividadeno alıvio do sistema. Algumas coalizoes sao capazes de aliviar a sobrecarga da linha 65−68,mas nao conseguem atender as restricoes de fluxo da linha 68−81, apesar da sua proximidade.Por exemplo, os geradores 116 e 65 ja nao sao capazes de promover o alıvio do sistema atuandoindividualmente.

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 110
Entre os dispositivos comuns aos dois conjuntos apresentados nas Tabelas 6.6 e 6.7, o trans-formador 81−80 e o que apresenta maior fator de sensibilidade e o aumento no seu tap e capazde aliviar as duas sobrecargas, ou seja, a atuacao do transformador 81−80 dentro das coalizoese fundamental para anular os efeitos contrarios que alguns dispositivos possam apresentar sobreuma das linhas problematicas. Assim, se o transformador 81− 80 for excluıdo do conjuntode dispositivos da Tabela 6.6, nenhuma solucao pode ser encontrada para o problema, mesmocombinando todos os dispositivos restantes (coalizao {GC}-{G.81-80}).
E possıvel percerber que na ocorrencia de sobrecargas simultaneas nas linhas 65− 68 e68−81, um numero menor de coalizoes formadas com o conjunto de dispositivos da Tabela 6.6possui capacidade de aliviar o sistema.
A coalizao {G.65, T.68-69}, que anteriormente apresentava o menor custo para realizar oalıvio do sistema, agora e incapaz cumprir essa tarefa. Dessa maneira, os custos para alıviodo sistema sao ligeiramente maiores que no caso anterior, assim como as acoes corretivas ne-cessarias. A coalizao {G.65, T.81-80, T.68-69} e a que agora apresenta o menor custo total, R$822,8.

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 111
Tabe
la6.
8:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
uma
sobr
ecar
gana
linha
65−
68do
sist
ema
IEEE
-118
,com
ocor
renc
iade
uma
sobr
ecar
gasi
mul
tane
ana
linha
68−
81
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 81−
68v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{G.1
16}
——
——
——
——
——
—0,
00,
0
——
——
——
{G.6
5}—
——
——
——
——
——
0,0
0,0
——
——
——
{T.8
1-80}
——
——
——
——
——
—0,
00,
0
——
——
——
{T.6
8-69}
——
——
——
——
——
—0,
00,
0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.1
16,G
.65}
——
——
——
——
——
—0,
00,
0
——
——
——
{G.1
16,T
.81-
80}
1,00
91,
035
0,95
81,
005
0,99
50,
998
0,95
40,
935
0,93
514
7,0
-j29
,873
,5-j
46,1
226,
812
75,1
54,0
-97,
2-5
,110
5,7
-40,
41,
2
{G.6
5,T.
81-8
0}1,
005
1,03
50,
958
1,00
20,
995
0,99
80,
954
0,93
50,
935
146,
8-j
31,4
73,6
-j39
,937
7,6
1074
,4
36,1
-87,
4-5
,189
,9-3
6,1
1,2
{G.6
5,T.
68-6
9}—
——
——
——
——
——
0,0
0,0
——
——
——
Con
tinua
napr
oxim
apa
gina

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 112
Tabela6.8–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 81−
68v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$). . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.1
16,T
.81-
80,T
.68-
69}
1,00
61,
035
0,95
81,
005
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j31
,774
,4-j
45,6
54,2
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{G.6
5,T.
81-8
0,T.
68-6
9}1,
005
1,03
50,
958
1,00
40,
995
0,99
80,
954
0,95
40,
935
146,
5-j
30,8
74,4
-j43
,942
3,4
822,
8
-16,
2-3
3,8
-5,0
100,
8-3
8,9
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{GC}-{
G.1
16,G
.65}
1,00
51,
045
0,95
91,
005
0,99
50,
998
0,95
40,
954
0,93
514
4,9
-j31
75,8
-j45
,929
2,7
910,
1
-40,
421
,3-6
,810
6,6
-40,
41,
2. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.1
16}
1,00
51,
035
0,95
81,
004
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j30
,874
,4-j
43,9
754,
882
2,8
-16,
2-3
3,8
-5,0
100,
8-3
8,9
1,2
{GC}-{
G.6
9}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
74,4
-j45
,670
1,4
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.7
4}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
74,4
-j45
,683
3,3
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.6
5}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
74,4
-j45
,640
2,8
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
G.6
1}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
74,4
-j45
,668
4,6
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
Con
tinua
napr
oxim
apa
gina
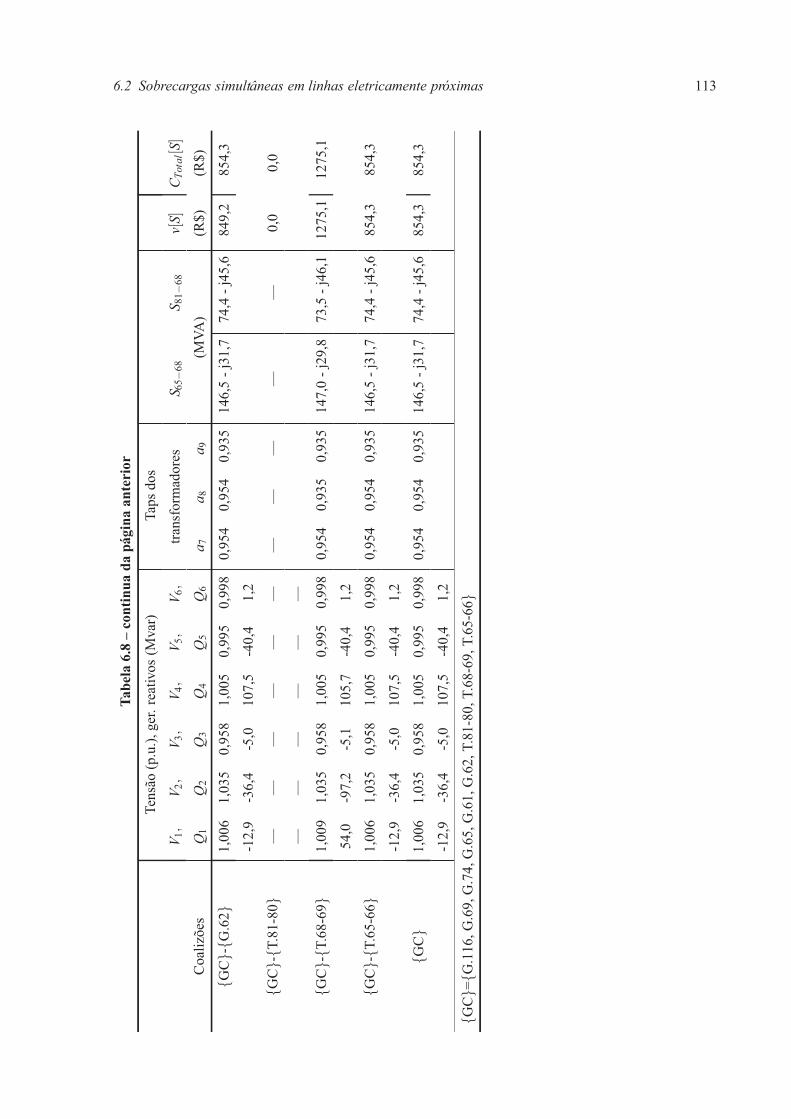
6.2 Sobrecargas simultaneas em linhas eletricamente proximas 113
Tabela6.8–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 81−
68v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8a 9
(MVA
)(R
$)(R
$)
{GC}-{
G.6
2}1,
006
1,03
50,
958
1,00
50,
995
0,99
80,
954
0,95
40,
935
146,
5-j
31,7
74,4
-j45
,684
9,2
854,
3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}-{
T.81
-80}
——
——
——
——
——
—0,
00,
0
——
——
——
{GC}-{
T.68
-69}
1,00
91,
035
0,95
81,
005
0,99
50,
998
0,95
40,
935
0,93
514
7,0
-j29
,873
,5-j
46,1
1275
,112
75,1
54,0
-97,
2-5
,110
5,7
-40,
41,
2
{GC}-{
T.65
-66}
1,00
61,
035
0,95
81,
005
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j31
,774
,4-j
45,6
854,
385
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}
1,00
61,
035
0,95
81,
005
0,99
50,
998
0,95
40,
954
0,93
514
6,5
-j31
,774
,4-j
45,6
854,
385
4,3
-12,
9-3
6,4
-5,0
107,
5-4
0,4
1,2
{GC}={G
.116
,G.6
9,G
.74,
G.6
5,G
.61,
G.6
2,T.
81-8
0,T.
68-6
9,T.
65-6
6}
6.2 Sobrecargas simultaneas em linhas eletricamente proximas 114
Na Tabela 6.9 sao apresentadas algumas coalizoes formadas com os dispositivos relacio-nados na Tabela 6.7, selecionados pelos fatores de sensibilidade para o alıvio da sobrecarga nalinha 68−81, os efeitos das acoes corretivas sobre os dispositivos e sobre os fluxos nas linhassobrecarregadas, a funcao caracterıstica de cada coalizao e o custo total dos servicos de reativosfornecidos pelo conjunto de dispositivos selecionados.
De modo similar ao que ocorre com o conjunto de dispositivos selecionados para para alinha 65−68, o gerador 116 e o transformador 68−69 sao preteridos em funcao de seus efeitoscontrarios sobre as duas linhas sobrecarregadas. Dentro desse conjunto, a atuacao do gerador 65e fundamental para a eficiencia das coalizoes e a sua exclusao torna as demais acoes incapazesde solucionar o problema, a exemplo do que ocorre com a coalizao {GC}-{G.65}.
A solucao de menor custo e obtida com a coalizao entre os geradores 116 e 65 ({G.116,G.65}), que mostrou-se ineficiente quando as acoes corretivas foram definidas em funcao doconjunto de dispositivos selecionados para o alıvio da linha 65−68. Essa divergencia deve-sea linearizacao dos parametros, porem os erros introduzidos sao pequenos. O fluxo na linha65− 68 e reduzido a 146,4− j33,6MVA = 150,2MVA, sendo que o limite dessa linha e de150,0MVA, ou seja, o erro para este caso e de aproximadamente 0,14%.
Alem dos erros introduzidos nessa solucao, economicamente, ela e menos interessante parao operador do que a obtida com a coalizao {G.65, T.81-80, T.68-69}, na Tabela 6.8, em funcaodo seu custo total.

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 115
Tabe
la6.
9:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
uma
sobr
ecar
gana
linha
68−
81do
sist
ema
IEEE
-118
,com
ocor
renc
iade
uma
sobr
ecar
gasi
mul
tane
ana
linha
65−
68
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{G.8
0}—
——
——
——
——
—0,
00,
0
——
——
——
{G.1
16}
——
——
——
——
——
0,0
0,0
——
——
——
{G.6
5}—
——
——
——
——
—0,
00,
0
——
——
——
{T.8
1-80}
——
——
——
——
——
0,0
0,0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.8
0,G
.65}
1,04
51,
010
0,95
21,
005
1,00
10,
995
0,93
50,
935
146,
6-j
31,4
72,4
-j67
,298
4,9
1495
,6
150,
4-2
0,0
5,7
61,2
84,1
-34,
7
{G.1
16,G
.65}
1,04
01,
010
0,95
21,
000
0,99
70,
995
0,93
50,
935
146,
4-j
33,6
73,5
-j67
,445
9,1
1187
,8
121,
2-1
7,5
5,7
46,0
63,3
-29,
1
{G.6
5,T.
81-8
0}1,
040
1,01
00,
952
1,00
51,
002
0,99
50,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
377,
613
99,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.6
5,T.
81-8
0,T.
68-6
9}1,
040
1,01
00,
952
1,00
51,
002
0,99
50,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
377,
613
99,0
Con
tinua
napr
oxim
apa
gina

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 116
Tabela6.9–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
147,
8-1
7,5
5,7
36,1
89,9
-36,
1. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{GC}-{
G.8
0,G
.65}
——
——
——
——
——
0,0
0,0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.8
0}1,
040
1,01
00,
952
1,00
51,
002
0,99
50,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
778,
313
99,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}-{
G.9
9}1,
040
1,01
00,
952
1,00
51,
002
0,99
50,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
1325
,513
99,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}-{
G.1
07}
1,04
01,
010
0,95
21,
005
1,00
20,
995
0,95
40,
935
146,
8-j
31,4
73,6
-j39
,913
75,1
1399
,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}-{
G.1
16}
1,04
01,
010
0,95
21,
005
1,00
20,
995
0,95
40,
935
146,
8-j
31,4
73,6
-j39
,912
47,4
1399
,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}-{
G.6
5}—
——
——
——
——
—0,
00,
0
——
——
——
{GC}-{
G.6
1}1,
040
1,01
00,
952
1,00
51,
002
0,99
50,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
1247
,413
99,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}-{
T.81
-80}
1,04
51,
010
0,95
21,
005
1,00
10,
995
0,93
50,
935
146,
6-j
31,4
72,4
-j67
,214
95,6
1495
,6
150,
4-2
0,0
5,7
61,2
84,1
-34,
7
Con
tinua
napr
oxim
apa
gina
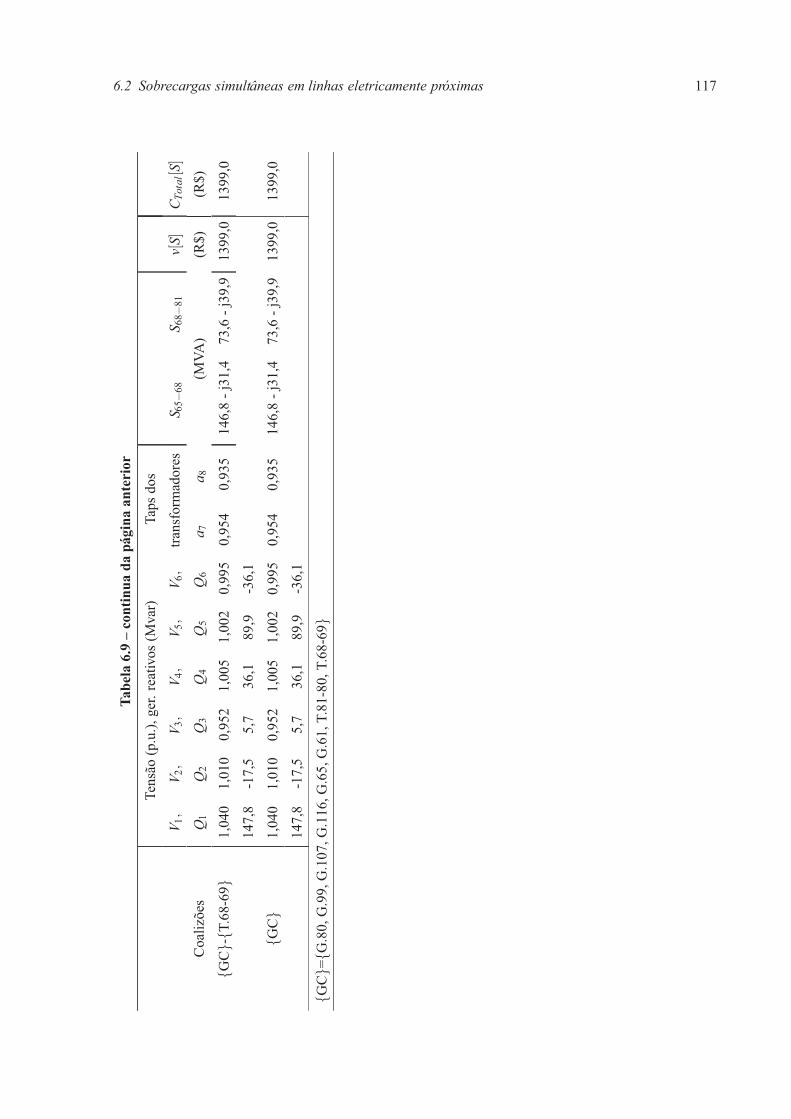
6.2 Sobrecargas simultaneas em linhas eletricamente proximas 117
Tabela6.9–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{GC}-{
T.68
-69}
1,04
01,
010
0,95
21,
005
1,00
20,
995
0,95
40,
935
146,
8-j
31,4
73,6
-j39
,913
99,0
1399
,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}
1,04
01,
010
0,95
21,
005
1,00
20,
995
0,95
40,
935
146,
8-j
31,4
73,6
-j39
,913
99,0
1399
,0
147,
8-1
7,5
5,7
36,1
89,9
-36,
1
{GC}={G
.80,
G.9
9,G
.107
,G.1
16,G
.65,
G.6
1,T.
81-8
0,T.
68-6
9}

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 118
Os efeitos dos sinais dos fatores de sensibilidade e da linearizacao dos parametros nadeterminacao das acoes corretivas podem ser percebidos em outras coalizoes, alem da formadapelos geradores 116 e 65, que apesar de serem compostas pelos mesmos dispositivos, apresen-tam solucoes diferentes nas Tabelas 6.8 e 6.9.
Por exemplo, o gerador 116 possui fator de sensibilidade positivo para uma sobrecarga nalinha 65−68 e, dessa maneira, a linearizacao de seus efeitos em torno do ponto de operacao efeita considerando-se uma variacao positiva em seu parametro de controle, ou seja, ΔV116 > 0.De maneira analoga, os efeitos desse dispositivo sao linearizados com base em uma variacaonegativa em sua tensao (ΔV116 < 0) para uma sobrecarga na linha 68−81, uma vez que seu fatorde sensibilidade em relacao a essa linha e negativo.
Assim, para algumas coalizoes formadas pelos mesmos dispositivos, como por exemplopara a coalizao {G.65, T.81-80, T.68-69}, formada pelo gerador 65 e pelos transformadores81−80 e 68−69, sao definidas acoes corretivas diferentes nas Tabelas 6.8 e 6.9, como resumidona Tabela 6.10, na qual sao indicadas algumas coalizoes e as acoes corretivas definidas para elesconsiderando os fatores de sensibilidade calculados em relacao a linha 65−68 e a linha 68−81.As variacoes nas tensoes sao indicadas em p.u..
As acoes corretivas definidas para a grande coalizao em cada caso tambem sao distintas,apesar de serem realizadas em dispositivos comuns aos dois conjuntos. Contudo, quando cadadispositivo membro de uma coalizao possui fatores de sensibilidade de mesmo sinal em relacaoas duas linhas violadas, sao definidas as mesmas acoes corretivas dentro dos dois conjuntos dedispositivos, como ocorre, por exemplo, com a coalizao entre o gerador 65 e o transformador81−80.
Tabela 6.10: Comparacao entre as acoes corretivas definidas para algumas coalizoesconsiderando os conjuntos de dispositivos selecionados para as sobrecargas nas linhas 65−68
e 68−81 do sistema IEEE-118Acoes Corretivas
Coalizao Sens. linha 65−68 Sens. linha 68−81{G.116, G.65} — ΔV116 = -0,005
— ΔV65 = -0,008{G.65, T.81-80} ΔV65 = -0,003 ΔV65 = -0,003
Δa81−80 = 0,019 Δa81−80 = 0,019ΔV65 = -0,001 ΔV65 = -0,003
{G.65, T.81-80 e T.68-69} Δa81−80 = 0,019 Δa81−80 = 0,019Δa68−69 = 0,019 Δa68−69 = 0,000ΔV116 = 0,001 ΔV65 = -0,003
{GC} Δa81−80 = 0,019 Δa81−80 = 0,019Δa68−69 = 0,019 Δa68−69 = 0,000
6.2 Sobrecargas simultaneas em linhas eletricamente proximas 119
E possıvel perceber que, apesar da proximidade das linhas 65− 68 e 68− 81 e de variosdispositivos serem indicados pelos fatores de sensibilidade para ambos os casos, determinar se-paradamente as acoes corretivas para cada linha pode gerar informacoes antagonicas e dificultara tomada de decisao por parte do operador.
Portanto, e necessario estabeler de um novo conjunto, unico e com eficacia sobre ambas aslinhas sobrecarregadas. Considerar todos os dispositivos indicados nas Tabelas 6.6 e 6.7 implicaem um total de 12 dispositivos, ou seja, torna necessaria a resolucao de 212−1 = 4095 PLs, oque demandaria um tempo razoavel de processamento, como demonstrado na secao 6.4.
Para evitar um numero excessivo de dispositivos, esse novo conjunto pode ser obtido somando-se os fatores de sensibilidade calculados em relacao a cada linha sobrecarregada para cada dis-positivo e seguindo as condicoes descritas no inıcio deste capıtulo.
Por exemplo, as sensibilidades calculadas para o gerador 116 em relacao as linhas 65−68 e68−81 sao 0,844 e−0,153, respectivamente. Somando-se esses valores, obtem-se um fator desensibilidade total de 0,691. Isso e feito para cada dispositivo e o novo conjunto de dispositivosformado a partir da soma dos fatores de sensibilidade e mostrado na Tabela 6.11.
Dispositivos com valores de sensibilidade aproximadamente iguais e sinais contrarios saoexcluıdos da relacao, a exemplo do transformador 68−69, uma vez que a soma de seus fatoresde sensibilidade possui um valor muito proximo de zero. Isso porque, se o tap desse transfor-mador fosse elevado em 0,020, seguindo o sentido indicado pela sensibilidade calculada emrelacao a linha 65−68, o fluxo dessa linha seria reduzido a 146,3− j42,3MVA= 152,3MVA,enquanto que o fluxo na linha 68− 81 seria elevado a 74,2− j80,5MVA = 109,5MVA. Poroutro lado, se a mesma variacao no tap desse transformador for realizada em atendimento aindicacao fornecida pela sensibilidade calculada em relacao a linha 68−81, ou seja, −0,020,o fluxo dessa linha seria reduzido a 72,5− j72,9MVA = 102,8MVA, enquanto que na linha65−68 o fluxo resultante seria 147,2− j66,0MVA= 161,3MVA, agravando a sobrecarga exis-tente nessa linha.
Portanto, dispositivos com sensibilidades de mesmo sinal, como o gerador 65 e dispositivoscom sensibilidade de sinais contrarios e magnitudes diferentes, como o gerador 116, sao oscandidatos a formar o novo conjunto.
As acoes corretivas definidas para algumas das coalizoes formadas dentro desse novo con-junto sao apresentadas na Tabela 6.12. A eficiencia desse novo conjunto pode ser percebidaquando um dos dispositivos e excluıdo da grande coalizao. Ao contrario do que acontece comos conjuntos definidos em funcao de uma unica linha, agora, todas as coalizoes de n−1 dispo-

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 120
Tabela 6.11: Condicoes iniciais dos dispositivos e fatores de sensibilidade para sobrecargassimultaneas nas linhas 65−68 e 68−81 do sistema IEEE-118Gerador V 0
i Q0i FS Transf. a0
m Jaftap(p.u) (Mvar)
80 1,040 112,1 0,814 81-80 0,935 12,076116 1,005 50,1 0,691 65-66 0,935 -1,79177 1,006 11,9 0,642 — — —65 1,005 129,8 -0,205 — — —61 0,995 -40,4 -0,163 — — —62 0,998 1,2 -0,153 — — —
sitivos continuam eficientes.
Isso permite fornecer ao operador informacoes mais completas e precisas para sua tomadade decisao a respeito de quais acoes corretivas devem ser realizadas para o alıvio do sistema,pois a maioria das coalizoes que se mostraram eficientes nas Tabelas 6.8 e/ou 6.9 apresentamuma unica solucao dentro do novo conjunto.
Apesar de mais eficientes, as coalizoes agora apresentam um custo mais elevado, uma vezque o montante de reativos fornecidos pelos geradores dentro do novo conjunto e maior doque nos conjuntos definidos anteriormente. Alem disso, e possıvel verificar que dentro de cadaconjunto de dispositivos selecionados, alguns padroes sao estabelecidos na determinacao dasacoes corretivas e eles se repetem nas coalizoes formadas, apresentando o mesmo custo total,mas com valores distintos para a funcao caracterıstica.
Assim, o fato de as coalizoes apresentarem custos totais maiores nao implica, necessari-amente, em um maior valor a ser pago aos dispositivos, uma vez que esses pagamentos saobaseados nos valores da funcao caracterıstica das coalizoes, que estao diretamente ligados aotamanho da coalizao.

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 121
Tabe
la6.
12:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
sobr
ecar
gas
sim
ulta
neas
nasl
inha
s65−
68e
68−
81do
sist
ema
IEEE
-118
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{G.8
0}—
——
——
——
——
—0,
00,
0
——
——
——
{G.1
16}
——
——
——
——
——
0,0
0,0
——
——
——
{G.7
7}—
——
——
——
——
—0,
00,
0
——
——
——
{G.6
5}—
——
——
——
——
—0,
00,
0
——
——
——
{T.8
1-80}
——
——
——
——
——
0,0
0,0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.8
0,G
.65}
1,04
51,
005
1,00
61,
001
0,99
50,
998
0,93
50,
935
146,
6-j
31,4
72,4
-j67
,298
4,9
1431
,4
150,
461
,2-9
,284
,1-3
4,7
1,2
{G.1
16,T
.81-
80}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
0-j
29,8
73,5
-j46
,122
6,8
1490
,6
141,
754
,011
,910
5,7
-40,
41,
2
{G.6
5,T.
81-8
0}1,
040
1,00
51,
006
1,00
20,
995
0,99
80,
954
0,93
514
6,8
-j31
,473
,6-j
39,9
377,
613
56,6
147,
836
,111
,989
,9-3
6,1
1,2
Con
tinua
napr
oxim
apa
gina

6.2 Sobrecargas simultaneas em linhas eletricamente proximas 122
Tabela6.12–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.8
0,G
.116
,G.7
7}1,
049
1,01
01,
007
1,00
50,
995
0,99
80,
935
0,93
514
6,8
-j29
,571
,5-j
68,6
1114
,317
31,2
168,
177
,8-1
9,4
105,
3-4
0,4
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.8
0}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,0
-j29
,873
,5-j
46,1
895,
414
90,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}-{
G.1
16}
1,04
01,
005
1,00
61,
002
0,99
50,
998
0,95
40,
935
146,
8-j
31,4
73,6
-j39
,912
05,0
1356
,6
147,
836
,111
,989
,9-3
6,1
1,2
{GC}-{
G.7
7}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,0
-j29
,873
,5-j
46,1
1263
,814
90,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}-{
G.6
5}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,0
-j29
,873
,5-j
46,1
1046
,614
90,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}-{
G.6
1}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,0
-j29
,873
,5-j
46,1
1320
,914
90,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}-{
G.6
2}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,0
-j29
,873
,5-j
46,1
1485
,514
90,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}-{
T.81
-80}
1,04
51,
005
1,00
61,
001
0,99
50,
998
0,93
50,
935
146,
6-j
31,4
72,4
-j67
,214
31,4
1431
,4
150,
461
,2-9
,284
,1-3
4,7
1,2
{GC}-{
T.65
-66}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
0-j
29,8
73,5
-j46
,114
90,6
1490
,6
Con
tinua
napr
oxim
apa
gina
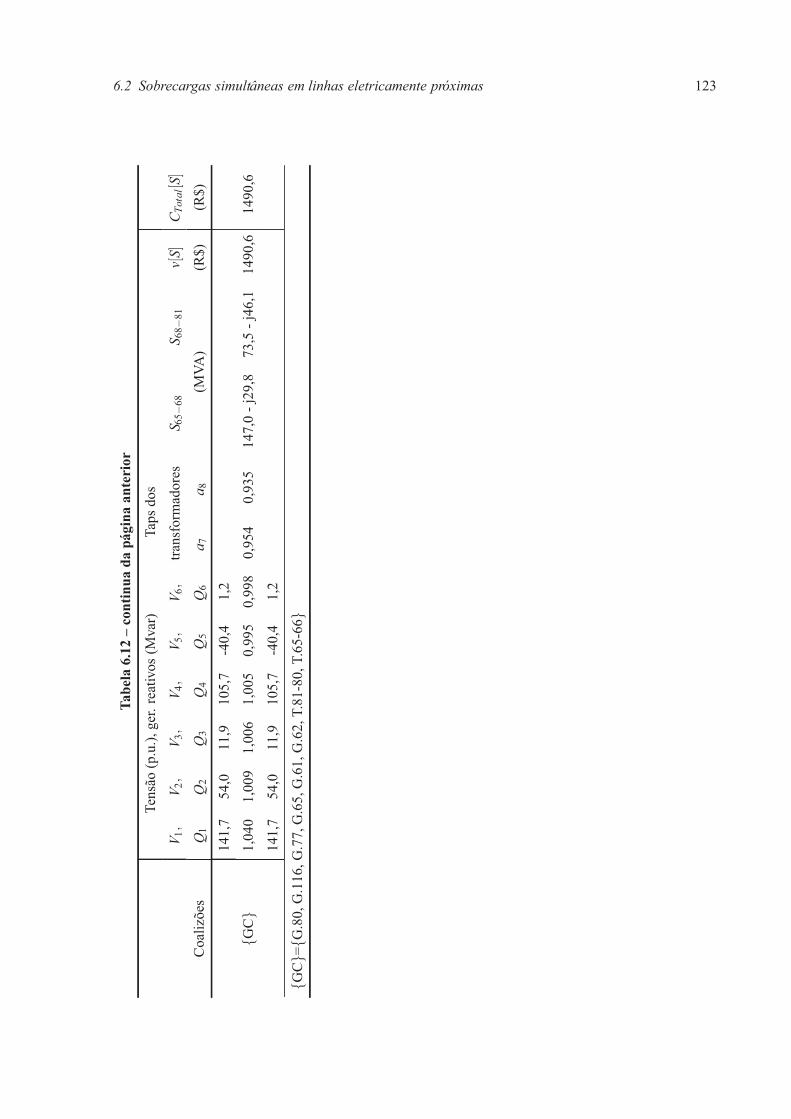
6.2 Sobrecargas simultaneas em linhas eletricamente proximas 123
Tabela6.12–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trans
form
ador
esS 6
5−68
S 68−
81v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
141,
754
,011
,910
5,7
-40,
41,
2
{GC}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
0-j
29,8
73,5
-j46
,114
90,6
1490
,6
141,
754
,011
,910
5,7
-40,
41,
2
{GC}={G
.80,
G.1
16,G
.77,
G.6
5,G
.61,
G.6
2,T.
81-8
0,T.
65-6
6}

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 124
6.2.1 Alocacao dos benefıcios entre os dispositivos
Se as acoes fossem definidas separadamente para cada linha, haveriam divergencias entreos dispositivos a respeito de qual conjunto deveria ser utilizado para a execucao das acoescorretivas e, consequentemente, a quais dispositivos seriam alocados os benefıcios pelo alıviodo sistema, pois cada um buscaria atender a seus interesses.
Por exemplo, para os transformadores 68−69 e 81−80 seria interessante que fossem consi-deradas as acoes definidas na Tabela 6.8, uma vez que esses dispositivos participam da coalizaoque apresenta o menor custo quando as acoes corretivas sao definidas com o conjunto de dispo-sitivos selecionados em relacao a linha 65−68 e, assim, receberiam pelo alıvio do sistema. Poroutro lado, o interesse do gerador 65 e que sejam executadas as acoes de menor custo entre asapresentadas na Tabela 6.9, pois sua atuacao nessa coalizao seria remunerada. Nesse sentido,a uniformizacao das acoes, definindo-as dentro de um unico conjunto de dispositivos, permiteque esses conflitos sejam evitados.
Dentro desse novo conjunto, a coalizao entre o gerador 65 e o transformador 81−80 ({G.65,T.81-80}) e a que apresenta o menor custo. O valor da funcao caracterıstica dessa coalizao ev[S] = R$ 377,6 e, como nenhum dos dispositivos e eficaz atuando individualmente, a ambos ealocado o valor de R$ 188,8 pelos metodos do valor Shapley e do Nucleolus, apesar do maiorcusto operacional do gerador 65.
Essa penalizacao ao gerador reflete sua dependencia da atuacao do transformador 81−80para que o alıvio do sistema possa ser obtido. Contudo, essa divisao e aceita pelos dispositivos,uma vez que seus benefıcios seriam nulos se atuassem isoladamente. Assim como no casoanterior, em que ocorria apenas uma sobrecarga na linha 65− 68 do sistema, nao faz sentidoselecionar a grande coalizao para a realizacao das acoes corretivas, ja que a solucao de menorcusto e encontrada em uma coalizao menor.
6.3 Sobrecargas simultaneas em linhas eletricamente distan-tes
Se por um lado e interessante definir um unico conjunto de dispositivos para a realizacao dasacoes corretivas na ocorrencia de sobrecargas simultaneas em linhas eletricamente proximas,por outro, a natureza local da potencia reativa torna essa abordagem ineficiente quando ocorremsobrecargas simultaneas em pontos distantes do sistema.
Neste exemplo, uma nova transferencia de 35MW entre o gerador 12 e a carga instalada na

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 125
barra 16, a partir do caso anterior, leva o fluxo na linha 12− 16 a (147,4 + j32,3) MVA =
150,9∠12,4o MVA no sentido da barra 12 para a barra 16, enquanto que o limite termico dessalinha e de 150,00 MVA. Essa linha encontra-se em um ponto do sistema distante das linhas65−68 e 68−81, cujos fluxos passam a ser de (147,0 − j53,7)MVA = 156,5∠−20,1oMVA,no sentido 68−65 e de (73,4 − j76,8) MVA = 106,2∠−46,3o MVA, no sentido 81−68,respectivamente.
Nas Tabelas 6.13 e 6.14 sao apresentados os dispositivos selecionados pela soma dos fato-res de sensibilidade em relacao as sobrecargas nas linhas 65− 68 e 68− 81 e os dispositivosselecionados em relacao ao fluxo da linha 12− 16, respectivamente. Os conjuntos indicadossao completamente diferentes, o que demonstra a natureza local das solucoes e que, portanto,as acoes corretivas devem ser realizadas em dispositivos proximos a cada linha.
Tabela 6.13: Condicoes iniciais dos dispositivos e fatores de sensibilidade para sobrecargassimultaneas nas linhas 65−68 e 68−81 do sistema IEEE-118, com ocorrencia de outra
sobrecarga na linha 12−16Gerador V 0
i Q0i FS Transf. a0
m Jaftap(p.u) (Mvar)
80 1,040 112,2 0,811 81-80 0,935 12,044116 1.005 50,1 0.685 65-66 0,935 -1,77077 1,006 11,9 0,639 — — —65 1.005 130.0 -0.212 — — —61 0.995 -40.4 -0.171 — — —62 0,998 1,2 -0,159 — — —
Tabela 6.14: Condicoes iniciais dos dispositivos e fatores de sensibilidade para uma sobrecargana linha 12−16 do sistema IEEE-118, com ocorrencia de sobrecargas simultaneas nas linhas
65−68 e 68−81Gerador V 0
i Q0i FS Transf. a0
m Jaftap(p.u) (Mvar)
113 0,993 18,9 0,038 8-5 0,985 1,67031 0,967 33,5 0,026 30-17 0,960 -1,63818 0,973 33,2 0,023 — — —12 0,984 120,0 -0,209 — — —1 0,955 2,8 -0,202 — — —6 0,990 28,0 -0,184 — — —
As restricoes referentes aos fluxos nas linhas sobrecarregadas impostas ao problema em(5.18) torna cada um desses conjuntos incapazes de promover o alıvio do sistema pois, separa-damente, as acoes corretivas definidas em cada um deles nao sao capazes de aliviar a(s) linha(s)distante(s). Ao contrario do que foi apresentado no cenario anterior, nao e viavel definir umunico conjunto de dispositivos para este caso, pois isso levaria a um numero excessivo de dis-

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 126
positivos e, consequentemente, de coalizoes e PLs a serem resolvidos. Neste caso, a uniao dosdois conjuntos possui n= 16 dispositivos, ou seja, requer a solucao de 216−1 = 65.535 PLs.
Ao inves disso, e mais eficiente explorar a natureza local das solucoes e definir as acoes cor-retivas separadamente para linhas eletricamente distantes. Para isso, sao retiradas do problemaas restricoes relativas aos fluxos de linhas sobrecarregadas situadas eletricamente distantes dalinha que se pretende aliviar. Neste caso, as restricoes de fluxo das linhas 65− 68 e 68− 81podem ser retiradas do problema quando se pretende determinar as acoes necessarias para oalıvio da linha 12−16 e vice-versa.
Na Tabela 6.15 sao apresentadas as acoes corretivas definidas para alıvio das sobrecargasnas linhas 65− 68 e 68− 81, retirando-se do problema as restricoes de fluxo da linha 12−16. A realizacao das acoes descritas para cada coalizao e capaz de aliviar as linhas 65− 68 e68−81, mas praticamente nao possuem efeito sobre o fluxo na linha 12−16, que permanecesobrecarregada.

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 127
Tabe
la6.
15:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
alıv
iode
sobr
ecar
gas
sim
ulta
neas
nasl
inha
s65−
68e
68−
81do
sist
ema
IEEE
-118
,ret
irand
o-se
asre
stric
oesd
eflu
xoda
linha
12−
16do
prob
lem
a
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{G.8
0}—
——
——
——
——
——
0,0
0,0
——
——
——
{G.1
16}
——
——
——
——
——
—0,
00,
0
——
——
——
{G.7
7}—
——
——
——
——
——
0,0
0,0
——
——
——
{G.6
5}—
——
——
——
——
——
0,0
0,0
——
——
——
{T.8
1-80}
——
——
——
——
——
—0,
00,
0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.8
0,G
.65}
1,04
51,
005
1,00
61,
001
0,99
50,
998
0,93
50,
935
146,
9-j
31,4
72,5
-j67
,214
7,4
-j32
,398
5,7
1432
,2
150,
461
,2-9
,284
,3-3
4,7
1,2
{G.1
16,T
.81-
80}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
3-j
29,9
73,5
-j46
,114
7,4
-j32
,322
6,8
1491
,4
141,
754
,011
,910
5,9
-40,
41,
2
{G.6
5,T.
81-8
0}1,
040
1,00
51,
006
1,00
20,
995
0,99
80,
954
0,93
514
7,1
-j31
,473
,7-j
39,9
147,
4-j
32,3
378,
413
57,4
147,
836
,111
,990
,1-3
6,1
1,2
Con
tinua
napr
oxim
apa
gina

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 128
Tabela6.15–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.8
0,G
.116
,G.7
7}1,
049
1,01
01,
007
1,00
50,
995
0,99
80,
935
0,93
514
7,1
-j29
,571
,6-j
68,6
147,
4-j
32,3
1114
,317
32,5
168,
177
,8-1
9,4
105,
6-4
0,4
1,2
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{GC}-{
G.8
0}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,3
-j29
,973
,5-j
46,1
147,
4-j
32,3
896,
314
91,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}-{
G.1
16}
1,04
01,
005
1,00
61,
002
0,99
50,
998
0,95
40,
935
147,
1-j
31,4
73,7
-j39
,914
7,4
-j32
,312
05,8
1357
,4
147,
836
,111
,990
,1-3
6,1
1,2
{GC}-{
G.7
7}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,3
-j29
,973
,5-j
46,1
147,
4-j
32,3
1441
,414
91,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}-{
G.6
5}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,3
-j29
,973
,5-j
46,1
147,
4-j
32,3
1046
,614
91,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}-{
G.6
1}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,3
-j29
,973
,5-j
46,1
147,
4-j
32,3
1321
,714
91,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}-{
G.6
2}1,
040
1,00
91,
006
1,00
50,
995
0,99
80,
954
0,93
514
7,3
-j29
,973
,5-j
46,1
147,
4-j
32,3
1486
,414
91,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}-{
T.81
-80}
1,04
51,
005
1,00
61,
001
0,99
50,
998
0,93
50,
935
146,
9-j
31,4
72,5
-j67
,214
7,4
-j32
,314
32,2
1432
,2
150,
461
,2-9
,284
,3-3
4,7
1,2
{GC}-{
T.65
-66}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
3-j
29,9
73,5
-j46
,114
7,4
-j32
,314
91,1
1491
,4
Con
tinua
napr
oxim
apa
gina

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 129
Tabela6.15–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
141,
754
,011
,910
5,9
-40,
41,
2
{GC}
1,04
01,
009
1,00
61,
005
0,99
50,
998
0,95
40,
935
147,
3-j
29,9
73,5
-j46
,114
7,4
-j32
,314
91,4
1491
,4
141,
754
,011
,910
5,9
-40,
41,
2
{GC}={G
.80,
G.1
16,G
.77,
G.6
5,G
.61,
G.6
2,T.
81-8
0,T.
65-6
6}
6.3 Sobrecargas simultaneas em linhas eletricamente distantes 130
As acoes definidas na Tabela 6.15 sao ligeiramente distintas do exemplo anterior devido asvariacoes sofridas pelos fluxos nas linhas 65−68 e 68−81 apos o fechamento do balanco depotencia resultante da transferencia realizada entre as barras 12 e 16. Novamente, a solucao demenor custo e obtida com a coalizao {G.65, T.81-80}.
Tomando agora o conjunto de dispositivos relacionados na Tabela 6.14 e possıvel deter-minar as acoes corretivas necessarias para o alıvio da linha 12− 16, que sao apresentadas naTabela 6.16. De maneira analoga ao conjunto anterior, as acoes corretivas para o alıvio da li-nha 12−16 foram definidas retirando-se do problema as restricoes relativas as linhas 65−68 e68−81, cujos fluxos nao sofrem alteracao com a atuacao desses dispositivos.
A solucao de menor custo total e obtida com a coalizao {GC}-{G.113, G.18}, formadapor todos os dispositivos selecionados, exceto os geradores conectados as barras 113 e 18. Eimportante ressaltar que esses custos referem-se apenas ao alıvio da linha 12−16, pois as linhas65−68 e 68−81 permanecem violadas apos a realizacao das acoes corretivas.
Como as acoes definidas nas Tabelas 6.15 e 6.16 possuem escopos diferentes, o alıvio dosistema pode ser obtido pela execucao das acoes definidas para as coalizoes de menor custo decada tabela. O tempo medio de processamento demandado para a definicao das acoes dentro decada conjunto e de aproximadamente 25s.
Para determinar todas as acoes necessarias para o alıvio do sistema em um unico problema,todos os dispositivos relacionados nas Tabelas 6.13 e 6.14 devem ser considerados em um unicogrupo, com n= 16 dispositivos, o que aumenta consideravelmente o tempo de processamento,conforme descrito na secao 6.4, mas nao resulta em grandes alteracoes na definicao das acoescorretivas.
Na Tabela 6.17 e apresentada uma comparacao das acoes corretivas definidas nas Tabelas6.15 e 6.16, para as coalizoes de menor custo e para a grande coalizao com as acoes definidasconsiderando todos os 16 dispositivos na solucao do problema. Nessa tabela, os conjuntosindicados por S1 e S2 sao compostos pelos dispositivos selecionados em relacao as sobrecargasnas linhas 65− 68 e 68− 81 e em relacao a linha 12− 16, respectivamente, enquanto que auniao desses conjuntos (S1 ∪ S2) engloba todos os dispositivos selecionados.

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 131
Tabe
la6.
16:C
ondi
coes
dosd
ispo
sitiv
ose
cust
osre
sulta
ntes
apos
aex
ecuc
aoda
saco
esco
rret
ivas
defin
idas
para
alıv
ioda
sobr
ecar
gana
linha
12−
16do
sist
ema
IEEE
-118
,ret
irand
o-se
asre
stric
oesd
eflu
xoda
slin
has
65−
68e
68−
81do
prob
lem
a
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{G.1
13}
——
——
——
——
——
—0,
00,
0
——
——
——
{G.1
8}—
——
——
——
——
——
0,0
0,0
——
——
——
{G.6}
——
——
——
——
——
—0,
00,
0
——
——
——
{T.8
-5}
——
——
——
——
——
—0,
00,
0
——
——
——
{T.3
0-17}
——
——
——
——
——
—0,
00,
0
——
——
——
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
{G.1
13,G
.31,
G.6}
1,01
30,
968
0,97
30,
980
0,95
50,
976
0,98
50,
960
147,
5-j
53,7
73,5
-j76
,814
6,4
+j2
8,3
483,
811
05,4
73,4
28,8
20,1
120,
27,
9-1
3,0
{G.1
13,G
.18,
G.6}
1,01
30,
967
0,97
80,
981
0,95
50,
980
0,98
50,
960
147,
4-j
53,7
73,5
-j76
,814
6,4
+j2
8,5
440,
610
81,1
70,2
26,4
33,8
120,
06,
1-0
,9
{G.1
13,G
.12,
G.6}
——
——
——
——
——
—0,
00,
0
——
——
——
Con
tinua
napr
oxim
apa
gina

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 132
Tabela6.16–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{G.1
13,G
.1,G
.6}
1,01
30,
967
0,97
30,
979
0,95
40,
975
0,98
50,
960
147,
6-j
53,7
73,5
-j76
,814
6,4
+j2
8,3
397,
711
00,8
73,8
27,1
20,3
120,
06,
7-1
3,0
{G.1
13,G
.6,T
.8-5}
1,01
30,
967
0,97
30,
979
0,95
50,
976
1,00
50,
960
147,
6-j
53,7
73,5
-j76
,814
5,8
+j2
8,3
324,
210
71,8
73,8
27,1
20,3
120,
010
,6-3
,4
{G.1
13,G
.6,
1,01
30,
967
0,97
30,
983
0,95
50,
986
0,98
50,
941
147,
5-j
53,7
73,5
-j76
,814
6,0
+j2
8,4
328,
410
10,9
T.30
-17}
62,8
25,0
13,9
120,
03,
615
,4. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{G.3
1,G
.18,
G.1
,0,
993
0,98
10,
980
0,97
40,
941
0,97
01,
005
0,96
014
7,4
-j53
,773
,5-j
76,8
146,
1+
j28,
552
7,9
1079
,4
G.6
,T.8
-5}
11,3
57,9
50,0
120,
0-4
,1-1
3,7
{G.3
1,G
.18,
G.1
,0,
993
0,96
90,
981
0,97
70,
944
0,97
40,
985
0,94
114
7,4
-j53
,773
,5-j
76,8
146,
2+
j28,
342
8,0
947,
1
G.6
,T.3
0-17}
3,6
34,2
50,0
120,
0-5
,0-1
2,7
{G.3
1,G
.18,
G.6
,0,
993
0,97
50,
982
0,97
80,
955
0,97
21,
005
0,94
114
7,2
-j53
,773
,4-j
76,8
145,
6+
j28,
445
2,8
1013
,0
T.8-
5,T.
30-1
7}1,
344
,850
,012
0,0
12,1
-13,
0
{G.3
1,G
.1,G
.6,
0,99
30,
978
0,97
30,
974
0,94
00,
970
1,00
50,
941
147,
6-j
53,7
73,5
-j76
,814
5,6
+j2
7,9
295,
393
6,2
T.8-
5,T.
30-1
7}6,
451
,426
,212
0,0
-5,4
-13,
5
{G.1
8,G
.1,G
.6,
0,99
30,
967
0,98
10,
976
0,94
90,
972
1,00
50,
941
147,
3-j
53,7
73,5
-j76
,814
5,6
+j2
8,2
285,
693
7,4
T.8-
5,T.
30-1
7}4,
530
,750
,012
0,0
5,0
-13,
0
{GC}
0,99
30,
967
0,98
10,
976
0,94
90,
972
1,00
50,
941
147,
3-j
53,7
73,5
-j76
,814
5,6
+j2
8,2
789,
693
7,4
-{G.1
13,G
.31}
4,5
30,7
50,0
120,
05,
0-1
3,0
Con
tinua
napr
oxim
apa
gina
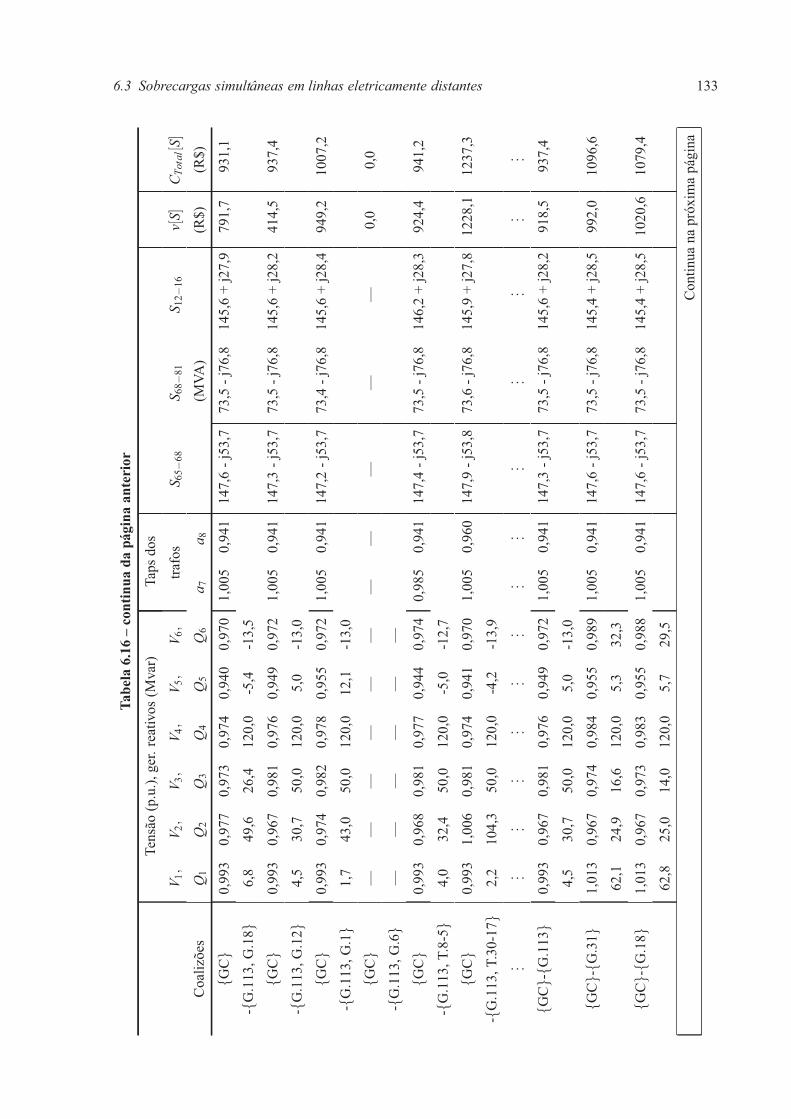
6.3 Sobrecargas simultaneas em linhas eletricamente distantes 133
Tabela6.16–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{GC}
0,99
30,
977
0,97
30,
974
0,94
00,
970
1,00
50,
941
147,
6-j
53,7
73,5
-j76
,814
5,6
+j2
7,9
791,
793
1,1
-{G.1
13,G
.18}
6,8
49,6
26,4
120,
0-5
,4-1
3,5
{GC}
0,99
30,
967
0,98
10,
976
0,94
90,
972
1,00
50,
941
147,
3-j
53,7
73,5
-j76
,814
5,6
+j2
8,2
414,
593
7,4
-{G.1
13,G
.12}
4,5
30,7
50,0
120,
05,
0-1
3,0
{GC}
0,99
30,
974
0,98
20,
978
0,95
50,
972
1,00
50,
941
147,
2-j
53,7
73,4
-j76
,814
5,6
+j2
8,4
949,
210
07,2
-{G.1
13,G
.1}
1,7
43,0
50,0
120,
012
,1-1
3,0
{GC}
——
——
——
——
——
—0,
00,
0
-{G.1
13,G
.6}
——
——
——
{GC}
0,99
30,
968
0,98
10,
977
0,94
40,
974
0,98
50,
941
147,
4-j
53,7
73,5
-j76
,814
6,2
+j2
8,3
924,
494
1,2
-{G.1
13,T
.8-5}
4,0
32,4
50,0
120,
0-5
,0-1
2,7
{GC}
0,99
31,
006
0,98
10,
974
0,94
10,
970
1,00
50,
960
147,
9-j
53,8
73,6
-j76
,814
5,9
+j2
7,8
1228
,112
37,3
-{G.1
13,T
.30-
17}
2,2
104,
350
,012
0,0
-4,2
-13,
9. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
{GC}-{
G.1
13}
0,99
30,
967
0,98
10,
976
0,94
90,
972
1,00
50,
941
147,
3-j
53,7
73,5
-j76
,814
5,6
+j2
8,2
918,
593
7,4
4,5
30,7
50,0
120,
05,
0-1
3,0
{GC}-{
G.3
1}1,
013
0,96
70,
974
0,98
40,
955
0,98
91,
005
0,94
114
7,6
-j53
,773
,5-j
76,8
145,
4+
j28,
599
2,0
1096
,6
62,1
24,9
16,6
120,
05,
332
,3
{GC}-{
G.1
8}1,
013
0,96
70,
973
0,98
30,
955
0,98
81,
005
0,94
114
7,6
-j53
,773
,5-j
76,8
145,
4+
j28,
510
20,6
1079
,4
62,8
25,0
14,0
120,
05,
729
,5
Con
tinua
napr
oxim
apa
gina
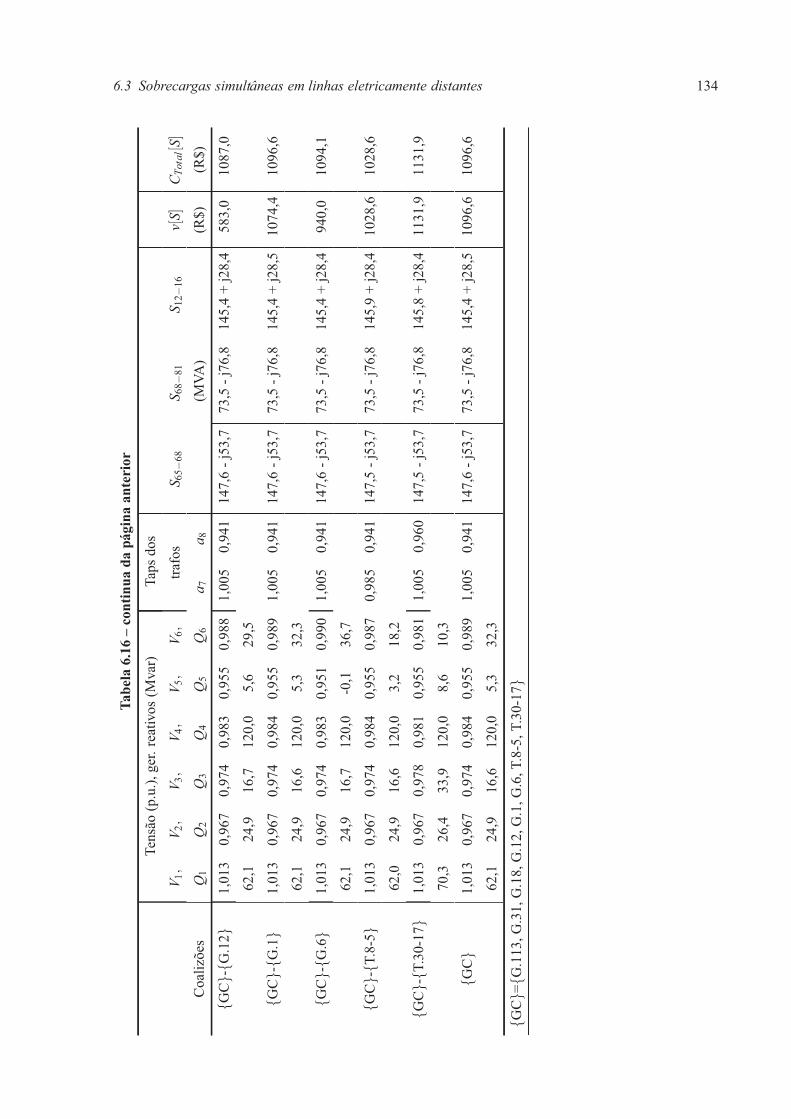
6.3 Sobrecargas simultaneas em linhas eletricamente distantes 134
Tabela6.16–continuadapaginaanterior
Tens
ao(p
.u.),
ger.
reat
ivos
(Mva
r)Ta
psdo
s
V 1,
V 2,
V 3,
V 4,
V 5,
V 6,
trafo
sS 6
5−68
S 68−
81S 1
2−16
v[S]
C Total[S
]
Coa
lizoe
sQ
1Q
2Q
3Q
4Q
5Q
6a 7
a 8(M
VA)
(R$)
(R$)
{GC}-{
G.1
2}1,
013
0,96
70,
974
0,98
30,
955
0,98
81,
005
0,94
114
7,6
-j53
,773
,5-j
76,8
145,
4+
j28,
458
3,0
1087
,0
62,1
24,9
16,7
120,
05,
629
,5
{GC}-{
G.1}
1,01
30,
967
0,97
40,
984
0,95
50,
989
1,00
50,
941
147,
6-j
53,7
73,5
-j76
,814
5,4
+j2
8,5
1074
,410
96,6
62,1
24,9
16,6
120,
05,
332
,3
{GC}-{
G.6}
1,01
30,
967
0,97
40,
983
0,95
10,
990
1,00
50,
941
147,
6-j
53,7
73,5
-j76
,814
5,4
+j2
8,4
940,
010
94,1
62,1
24,9
16,7
120,
0-0
,136
,7
{GC}-{
T.8-
5}1,
013
0,96
70,
974
0,98
40,
955
0,98
70,
985
0,94
114
7,5
-j53
,773
,5-j
76,8
145,
9+
j28,
410
28,6
1028
,6
62,0
24,9
16,6
120,
03,
218
,2
{GC}-{
T.30
-17}
1,01
30,
967
0,97
80,
981
0,95
50,
981
1,00
50,
960
147,
5-j
53,7
73,5
-j76
,814
5,8
+j2
8,4
1131
,911
31,9
70,3
26,4
33,9
120,
08,
610
,3
{GC}
1,01
30,
967
0,97
40,
984
0,95
50,
989
1,00
50,
941
147,
6-j
53,7
73,5
-j76
,814
5,4
+j2
8,5
1096
,610
96,6
62,1
24,9
16,6
120,
05,
332
,3
{GC}={G
.113
,G.3
1,G
.18,
G.1
2,G
.1,G
.6,T
.8-5
,T.3
0-17}

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 135
Tabela 6.17: Comparacao entre as acoes corretivas para alıvio das linhas 65−68, 68−81 e12−16 do sistema IEEE-118 definidas separadamente para linhas distantes (S1 e S2) e as
acoes definidas em um unico conjunto de dispositivos (S1 ∪ S2)Acoes Corretivas
Coalizao S1 S2 S1 ∪ S2{G.65, T.81-80} ΔV65 = -0,003 ΔV65 = -0,003
Δa81−80 = 0,019 — Δa81−80 = 0,019ΔV31 = 0,010 ΔV31 = 0,011
{G.31, G.12, G.1, G.6, ΔV1 = -0,015 ΔV1 = -0,015T.8-5 e T.30-17} — ΔV6 = -0,020 ΔV6 = -0,020
Δa8−5 = 0,020 Δa8−5 = 0,020Δa30−17 = -0,019 Δa30−17 = -0,019
ΔV113 = 0,020ΔV113 = 0,020 ΔV6 = -0,003ΔV18 = 0,001 Δa8−5 = 0,020
{GC} ΔV116 = 0,004 ΔV6 = -0,001 Δa30−17 = -0,019Δa81−80 = 0,019 Δa8−5 = 0,020 ΔV116 = 0,003
Δa30−17 = -0,019 ΔV65 = -0,001Δa81−80 = 0,019
Executar as acoes corretivas definidas para as coalizoes de menor custo em cada conjuntoS1 e S2, reduz os fluxos nas linhas 65−68, 68−81 e 12−16 a S65−68 = 147,7− j31,5MVA=
151,0MVA, S68−81 = 73,8− j39,9MVA= 83,9MVA e S12−16 = 145,6+ j27,9MVA= 148,2MVA,respectivamente, que sao os mesmos resultados obtidos com as acoes definidas considerandoS1 ∪ S2. O custo total das acoes definidas separadamente e de R$ 2.294,8 e em S1 ∪ S2 e deR$ 2.306,6.
Neste caso, o limite termico da linha 65− 68, que e de 150,0MVA, permanece violado,apesar do consideravel alıvio obtido com as acoes corretivas. Contudo, o erro introduzidopela linearizacao e pequeno, situando-se em torno de 0,7%, o que denota a boa precisao dametodologia. Alem disso, deve-se ressaltar que nao e possıvel obter o alıvio total da linha emquestao utilizando reativos e acoes corretivas mais severas devem ser executadas.
As acoes definidas para a grande coalizao tambem sao bastantes parecidas para os dois ca-sos. O alıvio obtido com as acoes de S1 e S2 levam os fluxos nas linhas a S65−68 = 147,8−j29,9MVA= 150,8MVA, S68−81 = 73,7− j46,1MVA= 86,9MVA e S12−16 = 145,4+ j28,5MVA=
148,2MVA, ao custo total de R$ 2.588,0. Os fluxos resultantes apos a execucao das acoes defi-nidas em S1∪ S2 sao S65−68 = 147,8− j29,0MVA= 150,6MVA, S68−81 = 73,7− j44,5MVA=
86,1MVA e S12−16 = 145,4+ j28,4MVA= 148,1MVA, com custo total de R$ 2.528,0.

6.3 Sobrecargas simultaneas em linhas eletricamente distantes 136
6.3.1 Alocacao dos benefıcios entre os dispositivos
Os dispositivos do conjunto S1, definido anteriormente, nao possuem efeito sobre o fluxoda linha 12−16 e, portanto, nao devem ser remunerados pelo alıvio daquela linha. Da mesmamaneira, as acoes corretivas definidas no conjunto S2 nao podem ser executadas para aliviaras linhas 65− 68 e 68− 81 e, sendo assim, esses dispositivos nao devem ser considerados nadivisao dos benefıcios por esses servicos. Portanto, os pagamentos pelo alıvio das linhas devemser alocados separadamente nos conjuntos S1 e S2, de modo a evitar uma destinacao indevidados recursos.
Na Tabela 6.18 sao apresentadas as alocacoes dos benefıcios entre os dispositivos mem-bros das coalizoes de menor custo em S1 e S2, com base nos conceitos do valor Shapley e doNucleolus. Para S1, o menor custo e obtido com a coalizao {G.65, T.81-80} e para S2, com acoalizao {G.31, G.12, G.1, G.6, T.8-5 e T.30-17}. Os vetores de pagamento que seriam obtidospor esses dispositivos se as acoes fossem definidas em S1 ∪ S2 sao apresentados na ultima linhada tabela.
Tabela 6.18: Alocacao dos benefıcios pelo alıvio das linhas 12−16, 65−68 e 68−81 dosistema IEEE-118, com base nos conceitos da teoria de jogos cooperativos
Dispositivos Alocacao dos benefıcios v[S]valor Shapley Nucleolus (R$)
{G.65, T.81-80} x(65) = 189,2 x(65) = 189,2 378,4x(81−80) = 189,2 x(81−80) = 189,2x(31) = 141,79 x(31) = 158,34x(12) = 82,73 x(12) = 0,00
{G.31, G.12, G.1, G.6, x(1) = 141,79 x(1) = 158,34 791,7T.8-5 e T.30-17} x(6) = 141,79 x(6) = 158,34
x(8−5) = 141,79 x(8−5) = 158,34x(30−17) = 141,79 x(30−17) = 158,34
x(65) = 160,86 x(65) = 169,86x(81−80) = 160,86 x(81−80) = 169,86
x(31) = 160,86 x(31) = 169,86{G.65, T.81-80, G.31, G.12, x(12) = 63,00 x(12) = 0,00 1.189,0G.1, G.6, T.8-5 e T.30-17} x(1) = 160,86 x(1) = 169,86
x(6) = 160,86 x(6) = 169,86x(8−5) = 160,86 x(8−5) = 169,86
x(30−17) = 160,86 x(30−17) = 169,86
Quando os benefıcios sao alocados separadamente em S1 e S2, o gerador 65 e o transfor-mador 81−80 recebem igualmente R$ 189,2 pelo alıvio das linhas 65−68 e 68−81, segundoambos os conceitos do valor Shapley e do Nucleolus.
Mesmo com a realizacao das acoes corretivas, o suporte de reativos fornecido pelo gerador

6.4 Tempos de processamento para determinacao das acoes corretivas 137
conectado a barra 12 (G.12) se mantem inalterado, ou seja, esse dispositivo nao atua de ma-neira efetiva para o alıvio da sobrecarga na linha 12−16. Dessa maneira, ele e penalizado nadistribuicao dos benefıcios. Segundo o valor Shapley, cada dispositivo da coalizao deve recebero valor de R$ 141,79, enquanto que o gerador 12 recebe R$ 82,73.
Quando essa divisao e realizada com base no conceito do Nucleolus, essa penalizacao eainda mais severa. Com esse conceito, enquanto todos os demais dispositivos recebem R$158,34 e a parcela destinada ao gerador 12 e nula. Apesar de mais severas, as solucoes forneci-das pelo Nucleolus se mostram mais justas do que as obtidas com o valor Shapley, do ponto devista dos dispositivos, no que diz respeito a penalizacao dos dispositivos sem participacao noalıvio das linhas.
Se a definicao das acoes corretivas e a alocacao dos benefıcios for realizada no conjutnoS1 ∪ S2, parte dos recursos destinados ao pagamento dos dispositivos G.65 e T.81-80 peloalıvio das linhas 65−68 e 68−81 seria repartido entre os demais dispositivos, que nem sequeratuaram para o alıvio dessas linhas. Entre as subcoalizoes que podem ser formadas com todosesses dispositivos, apenas a {G.65, T.81-80, G.31, G.1, G.6, T.8-5 e T.30-17} e capaz de aliviaro sistema e o valor de sua funcao caracterıstica e v[S] = 685,0.
Nessas condicoes, a cada dispositivo sao alocados R$ 160,86 e R$ 169,86 pelo valor Sha-pley e Nucleolus, respectivamente, com excecao do gerador 12, que continua penalizado pornao contribuir para o alıvio do sistema. Por ambos os conceitos, os benefıcios destinados aogerador 65 e o transformador 81−80 sao reduzidos em relacao a alocacao realizada apenas emS1.
Para as tres situacoes descritas na Tabela 6.18 o jogo possui Core nao vazio e, apesar detodas as alocacoes fornecidas por ambos valor Shapley e Nucleolus estarem no Core dos res-pectivos jogos, nao e interessante promover essa alocacao em S1 ∪ S2. Portanto, a exemplo dadefinicao das acoes corretivas, a alocacao dos benefıcios pelo alıvio das linhas deve ser realizadaseparadamente para sobrecargas localizadas em pontos distantes do sistema.
6.4 Tempos de processamento para determinacao das acoescorretivas
Entre os objetivos dessa proposta esta a aplicacao em situacoes emergenciais, nas quaisprocedimentos em tempo-real sao necessarios. Para isso, e importante que se cumpram algunsrequisitos em relacao ao tempo necessario para a determinacao das acoes corretivas. Nesse sen-tido, a definicao de um valor razoavel para n e fundamental, uma vez que o numero de coalizoes

6.4 Tempos de processamento para determinacao das acoes corretivas 138
formadas e, consequentemente, de PLs a serem resolvidos, aumenta exponencialmente com oaumento na quantidade de dispositivos considerados na solucao do problema.
A metodologia proposta neste trabalho foi implementada em linguagem Fortran e o pro-blema de otimizacao linear apresentado em (5.18) foi solucionado com um algoritmo simplexrevisado. Na Tabela 6.19 sao indicados os tempos medios demandados para a determinacaodas acoes corretivas utilizando diferentes quantidades de dispositivos na solucao do problema.Esses tempos englobam desde o calculo dos fatores de sensibilidade ate a solucao dos 2n− 1PLs.
Tabela 6.19: Tempos medios de processamento para determinacao das acoes corretivas deacordo com a quantidade de dispositivos considerados na solucao do problema para o sistema
IEEE-118Numero de LP a serem Tempo
dispositivos (n) solucionados demandado8 28−1 = 255 25,5s.9 29−1 = 511 28,6s.
12 212−1 = 4095 1min 10s.16 216−1 = 65535 8min 46s.17 217−1 = 131071 22min 05s.20 220−1∼= 106 5h 10min
Como o tempo de processamento aumenta exponencialmente com o aumento da quantidadede dispositivos incluıdos na solucao do problema, a selecao dos dispositivos mais eficientespara a determinacao das acoes corretivas e de fundamental importancia para a aplicabilidade dametodologia em tempo-real.
Por exemplo, no caso apresentado na secao 6.3, os conjuntos S1 e S2 sao formados por8 dispositivos cada e a determinacao das acoes corretivas separadamente demanda em tornode 25s. para cada regiao sobrecarregada, que pode ser considerado um tempo razoavel paraaplicacoes em tempo-real. Contudo, se um unico conjunto for considerado, S1 ∪ S2, esse tempoe elevado a aproximadamente 9min, comprometendo a aplicacao da metodologia em situacoesemergenciais, mas sem promover mudancas significativas nas acoes propostas.
Alem do adequado dimensionamento do conjunto de dispositivos, e interessante verificaroutras abordagens que possam ser aplicadas para a reducao dos tempos apresentados na Tabela6.19. Por exemplo, considerando que as coalizoes nao apresentam interdependencia, ou seja,a solucao para cada uma delas pode ser encontrada independentemente das demais coalizoes,a aplicacao de processamento paralelo para a solucao do problema apresenta-se como umaalternativa a ser analisada.

6.5 Conclusoes parciais 139
6.5 Conclusoes parciais
Nesta secao foram apresentados os testes realizados para avaliacao da metodologia pro-posta, tendo sido analisados tres cenarios com diferentes nıveis de violacao no sistema IEEE de118 barras.
Em um primeiro cenario foi considerada a ocorrencia de uma unica sobrecarga, em umalinha eletricamente proxima a barra de referencia do sistema. Essa proximidade pode afetar ocalculo dos fatores de sensibilidade e, consequentemente, a determinacao das acoes corretivaspara o alıvio do sistema. Uma abordagem baseada na redefinicao da barra de referencia dosistema para o calculo dos fatores de sensibilidade foi apresentada e pode ser utilizada amenizaressa influencia.
Nos dois outros cenarios foi considerada a ocorrencia de sobrecargas simultaneas em dife-rentes pontos do sistema de transmissao e foi possıvel verificar que, dependendo da distanciaeletrica entre as linhas sobrecarregadas, as acoes corretivas necessarias para o alıvio do sistemadevem ser executadas em conjunto ou separadamente.
Essa determinacao (se serao conjuntas ou separadas) pode ser realizada comparando-se osconjuntos de dispositivos selecionados para o alıvio de cada sobrecarga. Se os mesmos disposi-tivos sao indicados para o alıvio de diferentes sobrecargas, um unico conjunto deve ser formadopara o alıvio das linhas, somando-se os fatores de sensibilidade calculados para cada sobre-carga. Por outro lado, se os conjuntos de dispositivos indicados para o alıvio das sobrecargasnao possuem dispositivos em comum, as sobrecargas devem ser alividas em separado.
Apesar de pequenos, a linearizacao do problema pode introduzir erros nas solucoes en-contradas, e esse valor tende a aumentar quanto pior for o condicionamento do sistema. Nostestes realizados, o maior erro encontrado foi de 0,7%, no terceiro cenario. Esses valores saoaceitaveis, mas podem ser reduzidos ainda mais de modo a aumentar a confiabilidade da me-todologia. Para isso, um processo iterativo poderia ser utilizado na determinacao das acoescorretivas.
Em todos os cenarios analisados, a alocacao dos benefıcios com base nos conceitos dateoria dos jogos cooperativos para pagamento dos dispositivos utilizados demonstrou-se justa eeficiente, refletindo a contribuicao individual dos dispositivos no alıvio do sistema e na reducaodo custo da solucao escolhida.
Embora os vetores de pagamento definidos tanto pelo valor Shapley quanto pelo Nucleolussatisfacam as condicoes de racionalidade exigidas na formacao do Core, o Nucleolus demons-

6.5 Conclusoes parciais 140
trou maior rigor, nao atribuindo benefıcios aos dispositivos que, apesar de serem membros dascoalizoes selecionadas, nao contribuıram para a solucao do problema, como foi o caso do gera-dor 12 no terceiro cenario analisado.
Os tempos medios de processamento demandados pela proposta demonstram a aplicabili-dade da proposta em problemas em tempo-real, sendo necessario, para isso, o adequado dimen-sionamento do conjunto de dispositivos. Alem disso, outras abordagens podem ser estudadaspara reduzir esses tempos, por exemplo, a aplicacao de processamento paralelo na solucao doproblema.

141
7 Consideracoes finais e trabalhosfuturos
Uma metodologia para o alıvio de sobrecargas em redes de transmissao baseada no redespa-cho de reativos e na analise de sensibilidades lineares foi proposta neste trabalho e apresenta-secomo uma alternativa ao corte de cargas, podendo ser aplicada no alıvio de pequenas sobrecar-gas e em situacoes nas quais a solucao nao pode ser encontrada com o redespacho de ativos.
As acoes corretivas necessarias para o alıvio do sistema foram determinadas com boa pre-cisao pela solucao de um problema de otimizacao linear, sendo que a limitacao da faixa devariacao imposta aos parametros dos dispositivos faz com que os erros introduzidos pela sualinearizacao em torno do ponto de operacao do sistema sejam pequenos. Alem da boa precisao,os tempos de processamento necessarios para a determinacao das acoes corretivas indicam quea metodologia pode ser aplicada a problemas em tempo real, em sistemas operando proximos aseus limites.
O desempenho da proposta esta diretamente ligada a eficiencia dos dispositivos utilizados,uma vez que a aplicacao da teoria de jogos cooperativos requer que todas as coalizoes formadasna determinacao das acoes corretivas sejam analisadas e, dessa maneira, a inclusao indiscrimi-nada de dispositivos ao problema pode nao promover melhorias na solucao, onerar o tempo deprocessamento necessario para o alıvio do sistema e, alem disso, interferir na reparticao dosbenefıcios. Nesse sentido, a utilizacao dos fatores de sensibilidades se mostrou suficiente parapromover a selecao necessaria e limitar as dimensoes do problema.
Contudo, a natureza local das solucoes torna necessarios tratamentos diferentes a sobrecar-gas ocorrendo em linhas proximas e a sobrecargas em pontos distantes no sistema, tendo sidoapresentadas as abordagens adequadas a cada condicao de operacao, o que garante a qualidadedas solucoes.
A remuneracao pelos servicos de suporte de reativos fornecidos pelos dispositivos para oalıvio do sistema foi determinada com base nos conceitos de solucao da teoria de jogos coope-

7 Consideracoes finais e trabalhos futuros 142
rativos. Em vista da nao existencia de um mercado estabelecido de reativos, todos os servicosde energia reativa fornecidos por geradores sıncronos e compensadores estaticos foram remune-rados com base na TSA, definida pela ANEEL, sendo que a operacao dos geradores foi limitadaas regioes de operacao onde nao ocorre o custo de oportunidade.
Os conceitos do Core, do valor Shapley e do Nucleolus foram avaliados e, entre eles, oNucleolus foi o que se mostrou mais justo, alocando os benefıcios entre os dispositivos combase em sua participacao na solucao do problema e penalizando severamente aqueles poucoefetivos. O calculo do valor Shapley fornece uma divisao mais equitativa dos benefıcios, naopenalizando tao severamente aqueles com pouca participacao dentro das coalizoes. Os veto-res de pagamento fornecidos por ambos valor Shapley e Nucleolus encontram-se no Core dojogo, sempre que este nao e vazio, ou seja, satisfazem a todos os dispositivos da coalizao uti-lizada. Contudo, a existencia do Core para os casos apresentados nao garante a sua existenciapara qualquer situacao, haja vista que o aumento no numero de dispositivos nas coalizoes naoimplica, necessariamente, na reducao dos custos.
Apesar de pequenos, os erros introduzidos pela linearizacao do problema devem ser ade-quadamente tratados, buscando-se mecanismos para reduzir esses valores e aumentar a confia-bilidade da metodologia proposta neste trabalho. Uma proposta para realizar essa tarefa, seriadeterminar as acoes corretivas para o alıvio do sistema em um processo iterativo, reduzindogradualmente os fluxos reativos nas linhas.
Apesar de eficiente, a metodologia encontra limitacoes em relacao a magnitude das sobre-cargas que podem ser aliviadas com o redespacho de reativos. Sobrecargas de grandes magnitu-des nao podem ser eliminadas com a metodologia proposta e, nessas situacoes, acoes corretivasmais severas, como o corte de carga e o redespacho, devem ser executadas.
A partir das pesquisas realizadas nesta tese, algumas sugestoes para o desenvolvimento detrabalhos futuros sao apresentadas a seguir:
• Aplicar a metodologia proposta neste trabalho a redes com geradores distribuıdos e ve-rificar a capacidade desses dispositivos de fornecer servicos de suporte de reativos e seupotencial de aplicacao no alıvio de sistemas de transmissao.
• Verificar a possibilidade de se obter a solucao de menor custo sem a necessidade de cal-cular as acoes corretivas para todas as coalizoes. Uma sugestao e modelar o problemautilizando programacao linear inteira mista.
• Aplicar a metodologia dentro de um sistema iterativo, fixando valores pequenos para Δxie |Δxmaxi |. Dessa maneira, o sistema seria levado a um ponto de operacao mais proximo

7 Consideracoes finais e trabalhos futuros 143
do estado seguro a cada iteracao e os erros introduzidos pela linearizacao do problemapoderiam ser reduzidos.
• Implementar a metodologia utilizando processamento paralelo e verificar se ocorrem me-lhorias significativas nos tempos de processamento. Essa alteracao poderia ser realizadaem conjunto com as duas anteriores.
• Incluir a funcao objetivo utilizada neste trabalho dentro de um algoritmo multi-objetivo,que inclua entre suas funcoes objetivos, a minimizacao do redespacho e do corte de car-gas. Dessa maneira, seria possıvel realizar o alıvio de sobrecargas de qualquer magnitudeque venham a ocorrer no sistema.
• Realizar as modificacoes necessarias e verificar a aplicacao do redespacho de reativospara o alıvio de sobrecargas em redes de distribuicao de energia eletrica.

144
Referencias
AEMO - Australian Energy Market Operator. Operating procedure non-market ancillaryservices, 2009. Disponıvel em: <http://www.aemo.com.au>.
AEMO - Australian Energy Market Operator. National electricity rules, version 39, 2010.Disponıvel em: <http://www.aemo.com.au>.
BENATO, R.; PAOLUCCI, A. Flussi di potenza in sistemi multiconduttore a strutturadissimmetrica. un programma per pc. L’energia Elettrica, v. 77, p. 43 – 53, 2000.
BHATTACHARYA, K.; ZHONG, J. Reactive power as an ancillary service. IEEE Transactionson Power Systems, New York, v. 16, n. 2, p. 294 – 300, 2001.
BIJWE, P. R.; KOTHARI, D. P.; ARYA, L. D. Alleviation of line overloads and voltageviolations by corrective rescheduling. IET Proceedings on Generation, Transmission andDistribution, New York, v. 140, n. 4, p. 249 – 255, 1993.
BOMPARD, E. et al. Congestion-management schemes: a comparative analysis under a unifiedframework. IEEE Transactions on Power Systems, New York, v. 18, n. 1, p. 346 – 352, 2003.
BRASIL. Resolucao no. 265, de 10 de junho de 2003. Diario Oficial [da RepublicaFederativa do Brasil], Brasılia, DF, v. 140, n. 111, p. 65, 2003. Disponıvel em:<http://www.in.gov.br/in>.
BRASIL. Resolucao homologatoria no. 924, de 15 de dezembro de 2009. Diario Oficial [daRepublica Federativa do Brasil], Brasılia, DF, v. 146, n. 242, p. 106, 2009. Disponıvel em:<http://www.in.gov.br/in>.
CAPITANESCU, F.; CUTSEM, T. V. A unified management of congestions due to voltageinstability and thermal overload. Electric Power Systems Research, Lausanne, v. 77, n. 10, p.1274 – 1283, 2007.
CARPENTIER, J. L. CRIC: A new active-reactive decoupling process in load flow, optimalload flows and system control. In: IFAC Symposium on Power Systems and Plant Control.Beijing, China: [s.n.], 1986.
CCEE - Camara de Comercializacao de Energia Eletrica. Regras de comercializacao, modulo6 - encargos de servicos do sistema, 2009. Disponıvel em: <http://www.ccee.org.br>.
CONTRERAS, J. A Cooperative Game Theory Approach to Transmission Planning in PowerSystems. Tese (Doutorado) — Universidade da California, Berkeley, 1997.
CONTRERAS, J. et al. A cobweb bidding model for competitive electricity markets. IEEETransactions on Power Systems, New York, v. 17, n. 1, p. 148–153, 2002.

Referencias 145
COSTA, J. G. C.; SILVA, A. M. Leite da. Transmission loss allocation: part I - single energymarket. IEEE Transactions on Power Systems, New York, v. 18, n. 4, p. 1289 – 1394, 2003.
CUTSEM, T. van; VOURNAS, C. Voltage stability of electric power systems. Boston: Kluweracademic publishers, 2001.
DAVIS, J. H.; MASCHLER, M. The kernel of a cooperative game. Naval Research LogisticsQuaterly, n. 12, p. 223–259, 1965.
DENNY, F. I.; DISMUKES, D. E. Power system operations and electricity markets. BocaRaton, Florida: CRC Press, 2002.
EL-HAWARY, M. E. Electrical energy systems. Boca Raton, Florida: CRC Press, 2000.
ELA, A. A. A. E.; SPEA, S. R. Optimal corrective actions for power systems usingmulti-objective genetic algorithms. Electric Power Systems Research, v. 79, n. 5, p. 722 – 733,2009.
ELGERD, O. I. Introducao a teoria de sistemas de energia eletrica. Sao Paulo: Mcgraw-hill,1978.
FARANDA, R.; PIEVATOLO, A.; TIRONI, E. Load shedding: a new proposal. IEEETransactions on Power Systems, New York, v. 22, n. 4, p. 2086 – 2093, 2007.
FERGUSON, T. S. Game theory - part IV: games in coalitional form. University of CaliforniaAt Los Angeles, 2005. Disponıvel em: <http://www.math.ucla.edu/~tom/Game_Theory/
Contents.html>. Acesso em: 01 Jun. 2006.
FU, X.; WANG, X. Unified preventive control approach considering voltage instability andthermal overload. IET Proceedings on Generation, Transmission and Distribution, v. 1, p. 864– 871, 2007.
GAINO, F. C. Avaliacao da capacidade de transferencia e alıvio de sobrecargas em redesde transmissao. Dissertacao (Mestrado) — Faculdade de Engenharia, Universidade EstadualPaulista, Ilha Solteira, 2004.
GALVIS, J. C. Valorizacao de servicos sncilares de reserva em geradores hidreletricos. 171 p.Tese (Doutorado) — Faculdade de Engenharia, Universidade Estadual Paulista, Ilha Solteira,2010.
GARDNER, R. Games for business and economics. 2. ed. New York: John Wiley & Sons,2003.
GATTA, F. M. et al. Improving high-voltage transmission system adequacy under contingencyby genetic algorithms. Electric Power Systems Research, v. 79, n. 1, p. 201 – 209, 2009.
GILLIES, D. B. Some theorems on n-person games. Tese (Doutorado) — Princeton University,1953.
GOOI, H. B. et al. Optimal scheduling of spinning reserve. IEEE Transactions on PowerSystems, New York, v. 14, n. 4, p. 1485 – 1492, 1999.
GROSS, G. et al. Unbundled reactive support service: key characteristics and dominant costcomponent. IEEE Transactions on Power Systems, New York, v. 17, n. 2, p. 283–289, 2002.
Referencias 146
GUILE, A. E. Electric power systems. Guildford, Surrey: Pergamon Press, 1978.
HAZRA, J.; SINHA, A. K. Congestion management using multiobjective particle swarmoptimization. IEEE Transactions on Power Systems, New York, v. 22, n. 4, p. 1726 – 1735,2007.
HEDMAN, K. W. et al. Optimal transmission switching - sensitivity analysis and extensions.IEEE Transactions on Power Systems, New York, v. 23, n. 3, p. 1469 – 1479, 2008.
HOBSON, E. Network constrained reactive power control using linear programming. IEEETransactions on Power Apparatus & Systems, New York, PAS-99, n. 3, p. 868–877, 1980.
HOJI, E. S. Analise de sensiblidade atraves de um modelo implicitamente acoplado paraalıvio de sobrecargas em redes de transmissao. 109 p. Dissertacao (Mestrado) — Faculdade deEngenharia, Universidade Estadual Paulista, Ilha Solteira, 2006.
HOJI, E. S.; PADILHA-FELTRIN, A. Sensitivity analysis for overload-relief in transmissionlines using an implicitly coupled method (CRIC). In: Transmission & Distribution Conferenceand Exposition: Latin America, 2006. Caracas, Venezuela: [s.n.], 2006. Disponıvel em:<http://www.labplan.ufsc.br/congressos/td2006/Papers/TD06_291.pdf>.
IESO - Independent Electricity Sytem Operator. Market rules for the Ontario electricitymarket, issue 39, 2010. Disponıvel em: <http://www.ieso.ca>.
KETCHPEL s P. Coalition formation among autonomous agents. In: MAAMAW-93. Neuchatel,Switzerland: [s.n.], 1993.
KLUSCH, M.; SHEHORY, O. Coalition formation among rational information agents. In:MAAMAW-96. Eindhoven, The Netherlands: [s.n.], 1996.
KUMAR, A.; SRIVASTAVA, S. C.; SINGH, S. N. A zonal congestion management approachusing real and reactive power rescheduling. IEEE Transactions on Power Systems, New York,v. 19, n. 1, p. 554 – 562, 2004.
KUMAR, A.; SRIVASTAVA, S. C.; SINGH, S. N. Congestion management in competitivepower market: a bibliographical survey. Electric Power Systems Research, New York, v. 76,n. 1-3, p. 153 – 164, 2005.
KUNDUR, P. Power system stability and control. New York: McGraw-Hill Professional, 1994.
LACHS, W. R. Transmission-line overloads: real-time control. IET Proceedings on Generation,Transmission and Distribution, Stevenage, v. 134, n. 5, p. 342 – 347, 1987.
LAMONT, J. W.; FU, J. Cost analysis of reactive power support. IEEE Transactions on PowerSystems, New York, v. 14, n. 3, p. 890 – 898, 1999.
LIMA, D. A.; CONTRERAS, J.; PADILHA-FELTRIN, A. A cooperative game theory analysisfor transmission loss allocation. Electric Power Systems Research, Lausanne, v. 78, n. 2, p.264–275, 2008.
LIN, X. J. et al. A novel market-based reactive power management scheme. Electrical Powerand Energy Systems, Guildford, v. 28, n. 2, p. 127 – 132, 2006.

Referencias 147
MANDAL, K. K. et al. Reactive power pricing in a deregulated electricity industry. 2005.Disponıvel em: <http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=
1627316>.
MANTOVANI, J. R. S. Um modelo heurıstico para solucao do problema de planejamentode reativos em sistemas de energia eletrica. Tese (Doutorado) — Faculdade de EngenhariaEletrica e Computacao, Universidade Estadual de Campinas, Campinas, 1995.
MEDEIROS, A. D. R.; SALGADO, R.; ZURN, H. H. Congestion due to reactive power: costallocation. 2003. Disponıvel em: <http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=
\&arnumber=1304355>.
MILLER, T. J. E. Reactive power control in electric systems. New York: John Wiley & SonsInc., 1982.
MONTICELLI, A.; GARCIA, A.; SAAVEDRA, O. R. Fast decoupled load flow: hypotesis,derivations and testing. IEEE Transactions on Power Systems, New York, v. 5, n. 4, p. 1425 –1431, 1990.
MONTICELLI, A. J. Fluxo de carga em redes de energia eletrica. Sao Paulo: Edgar BlucherLtda, 1983.
MORAN, L. et al. Facts controllers. In: . Power systems. Boca Raton, Florida: CRC Press,2007.
MOYA, O. E. A spinning reserve, load shedding, and economic dispatch solution by bender’sdecomposition. IEEE Transactions on Power Systems, New York, v. 20, n. 1, p. 384 – 388,2005.
MOZAFARI, B. et al. A competitive market structure for reactive power procurement. IranianJournal of Science & Technology, Transactions B, Engineering, Shiraz, v. 30, n. B2, p. 259 –276, 2006.
National Grid. The grid code, issue 4, revision 4, 2010. Disponıvel em: <http:
//www.nyiso.com>.
NYISO - New York Independent System Operator. Ancillary services manual, 2010a.Disponıvel em: <http://www.nyiso.com>.
NYISO - New York Independent System Operator. Accounting and billing manual, 2010b.Disponıvel em: <http://www.nyiso.com>.
NYISO - New York Independent System Operator. NYISO tariffs - MST schedules, 2010c.Disponıvel em: <http://www.nyiso.com>.
PJM. PJM manual 14D: generator operational requirements, 2010a. Disponıvel em:<http://www.pjm.com>.
PJM. PJM manual 27: open access transmission tariff accounting, 2010b. Disponıvel em:<http://www.pjm.com>.
RABIEE, A.; SHAYANFAR, H. A.; AMJADY, N. Reactive power pricing. IEEE Power andEnergy Magazine, New York, v. 7, n. 1, p. 18 – 32, 2009.

Referencias 148
ROLIM, J. G.; MACHADO, L. J. B. A study of the use of corrective switching in transmissionsystems. IEEE Transactions on Power Systems, New York, v. 14, n. 1, p. 336 – 341, 1999.
SANHUEZA, R. H. S. Planificacion de la expansion de la transmision desde la perspectivaprivada utilizando teorıa de juegos cooperativos. Dissertacao (mestrado) — PontifıciaUniversidad Catolica de Chile, 2004.
SCHMEIDLER, D. The nucleolus of a characteristic function game. SIAM Journalon Applied Mathematics, SIAM, v. 17, n. 6, p. 1163–1170, 1969. Disponıvel em:<http://link.aip.org/link/?SMM/17/1163/1>.
SHAO, W.; VITTAL, V. Corrective switching algorithm for relieving overloads and voltageviolations. IEEE Transactions on Power Systems, New York, v. 20, n. 4, p. 1877 – 1885, 2005.
SHAO, W.; VITTAL, V. LP-based opf for corrective facts control to relieve overloads andvoltage violations. IEEE Transactions on Power Systems, New York, v. 21, n. 4, p. 1832 –1839, 2006.
SHAPLEY, L. S. A value for n-person games. Princeton: Princeton University Press, 1953.
SILVA, E. L. da; MORALES, J. C.; MELO, A. G. de. Allocating Congestion Cost Using GameTheory. 2001. Disponıvel em: <http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=
\&arnumber=964617>.
SORIANO, J. S. La teorıa de juegos. Boletın de la Sociedad Espanola de Estadıstica eInvestigacion Operativa (SEIO), v. 15, p. 3–8, 1999.
TORRE, S. de-la; CONTRERAS, J.; CONEJO, A. J. Finding multiperiod nash equilibria inpool-based electricity markets. IEEE Transactions on Power Systems, New York, v. 19, n. 1, p.643–651, 2004.
UWEE - Power systems test case archive. Disponıvel em: <http://www.ee.washington.
edu/research/pstca/>.
VON-NEUMANN, J.; MORGENSTERN, O. Theory of games and economics behaviour.Princeton: Princeton University Press, 1992.
WADHWA, C. L. Electrical power systems. New York: John Wiley & Sons Inc., 1991.
WATANABE, E. H. et al. Tecnologia FACTS - tutorial. SBA Controle e Automacao, Campinas,v. 9, n. 1, p. 39–55, 1998.
XU, N.; YU, C. W.; WEN, F. S. Valuation of reactive power support services based onsensitivity and risk analysis. Electric Power Systems Research, Lausanne, v. 77, n. 10, p. 646 –651, 2007.
XU, W. et al. Valuation of dynamic reactive power support services for transmission access.IEEE Transactions on Power Systems, New York, v. 16, n. 4, p. 719 – 728, 2001.
YANG, H.; SHI, D.; DUAN, X. Congestion Cost Allocation Method Based on Aumann-ShapleyValue in Bilateral Model. 2003. Disponıvel em: <http://ieeexplore.ieee.org/stamp/
stamp.jsp?tp=\&arnumber=1270448>.

Referencias 149
ZHONG, J.; BHATTACHARYA, K. Toward a competitive market for reactive power. IEEETransactions on Power Systems, New York, v. 17, n. 4, p. 1206 – 1215, 2002.
ZHONG, J. et al. Localized reactive power markets using the concept of voltage control areas.IEEE Transactions on Power Systems, New York, v. 19, n. 3, p. 1555 – 1561, 2004.

150
APENDICE A -- Dados do sistema IEEE de 118barras
Os dados de barras e de linhas do sistema IEEE de 118 barras, utilizado nos testes, saoapresentados nas Tabelas A.1 e A.2, respectivamente e estao disponıveis em http://www.ee.
washington.edu/research/pstca/. Esse sistema e composto por 118 barras e 186 linhas,com 54 geradores, 91 barras com carga e 9 transformadores e esta representado na Figura A.1.
Tabela A.1: Dados de barras do sistema IEEE de 118 barras
V θ PG QG QminG QmaxG PD QD BshBarra (p.u.) (rad) (MW ) (Mvar) (Mvar) (Mvar) (MW ) (Mvar) (Mvar)
1 0,955 0,192 -3,1 -5,0 15,0 51,0 27,0
2 0,971 0,201 20,0 9,0
3 0,968 0,207 39,0 10,0
4 0,998 0,272 -15,0 -300,0 300,0 39,0 12,0
5 1,002 0,280 -40,0
6 0,990 0,232 15,9 -13,0 50,0 52,0 22,0
7 0,989 0,224 19,0 2,0
8 1,015 0,367 62,7 -300,0 300,0 28,0
9 1,043 0,494
10 1,050 0,626 450,0 -51,0 -147,0 200,0
11 0,985 0,227 70,0 23,0
12 0,990 0,218 85,0 91,3 -35,0 120,0 47,0 10,0
13 0,968 0,203 34,0 16,0
14 0,984 0,206 14,0 1,0
15 0,970 0,201 3,0 -10,0 30,0 90,0 30,0
16 0,984 0,213 25,0 10,0
17 0,995 0,244 11,0 3,0
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 151
Tabela A.1 – continua da pagina anterior
V θ PG QG QminG QmaxG PD QD BshBarra (p.u.) (rad) (MW ) (Mvar) (Mvar) (Mvar) (MW ) (Mvar) (Mvar)
18 0,973 0,206 25,5 -16,0 50,0 60,0 34,0
19 0,963 0,197 -8,0 -8,0 24,0 45,0 25,0
20 0,958 0,213 18,0 3,0
21 0,959 0,240 14,0 8,0
22 0,970 0,285 10,0 5,0
23 1,000 0,371 7,0 3,0
24 0,992 0,369 -15,5 -300,0 300,0 13,0
25 1,050 0,492 220,0 49,7 -47,0 140,0
26 1,015 0,523 314,0 9,9 -999,0 1000,0
27 0,968 0,273 2,0 -300,0 300,0 71,0 13,0
28 0,962 0,242 17,0 7,0
29 0,963 0,225 24,0 4,0
30 0,986 0,332
31 0,967 0,227 7,0 31,6 -300,0 300,0 43,0 27,0
32 0,964 0,263 -12,4 -14,0 42,0 59,0 23,0
33 0,972 0,190 23,0 9,0
34 0,986 0,201 -7,0 -8,0 24,0 59,0 26,0 14,0
35 0,981 0,193 33,0 9,0
36 0,980 0,193 -1,9 -8,0 24,0 31,0 17,0
37 0,992 0,209 -25,0
38 0,962 0,299
39 0,971 0,150 27,0 11,0
40 0,970 0,131 26,8 -300,0 300,0 66,0 23,0
41 0,967 0,124 37,0 10,0
42 0,985 0,151 41,0 -300,0 300,0 96,0 23,0
43 0,979 0,200 18,0 7,0
44 0,985 0,243 16,0 8,0 10,0
45 0,987 0,275 53,0 22,0 10,0
46 1,005 0,324 19,0 -5,2 -100,0 100,0 28,0 10,0 10,0
47 1,017 0,363 34,0
48 1,021 0,350 20,0 11,0 15,0
49 1,025 0,367 204,0 115,6 -85,0 210,0 87,0 30,0
50 1,001 0,331 17,0 4,0
51 0,967 0,286 17,0 8,0
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 152
Tabela A.1 – continua da pagina anterior
V θ PG QG QminG QmaxG PD QD BshBarra (p.u.) (rad) (MW ) (Mvar) (Mvar) (Mvar) (MW ) (Mvar) (Mvar)
52 0,957 0,269 18,0 5,0
53 0,946 0,252 23,0 11,0
54 0,955 0,268 48,0 3,9 -300,0 300,0 113,0 32,0
55 0,952 0,263 4,7 -8,0 23,0 63,0 22,0
56 0,954 0,266 -2,3 -8,0 15,0 84,0 18,0
57 0,971 0,287 12,0 3,0
58 0,959 0,272 12,0 3,0
59 0,985 0,340 155,0 76,8 -60,0 180,0 277,0 113,0
60 0,993 0,406 78,0 3,0
61 0,995 0,421 160,0 -40,4 -100,0 300,0
62 0,998 0,410 1,3 -20,0 20,0 77,0 14,0
63 0,969 0,398
64 0,984 0,429
65 1,005 0,484 391,0 80,8 -67,0 200,0
66 1,050 0,481 392,0 -2,0 -67,0 200,0 39,0 18,0
67 1,020 0,435 28,0 7,0
68 1,003 0,482
69 1,035 0,524 513,4 -82,4 -300,0 300,0
70 0,984 0,395 9,7 -10,0 32,0 66,0 20,0
71 0,987 0,388
72 0,980 0,368 -11,1 -100,0 100,0 12,0
73 0,991 0,384 9,7 -100,0 100,0 6,0
74 0,958 0,378 -5,6 -6,0 9,0 68,0 27,0 12,0
75 0,967 0,400 47,0 11,0
76 0,943 0,381 5,3 -8,0 23,0 68,0 36,0
77 1,006 0,467 11,9 -20,0 70,0 61,0 28,0
78 1,003 0,462 71,0 26,0
79 1,009 0,467 39,0 32,0 20,0
80 1,040 0,506 477,0 104,9 -165,0 280,0 130,0 26,0
81 0,997 0,491
82 0,989 0,476 54,0 27,0 20,0
83 0,985 0,497 20,0 10,0 10,0
84 0,980 0,541 11,0 7,0
85 0,985 0,568 -5,8 -8,0 23,0 24,0 15,0
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 153
Tabela A.1 – continua da pagina anterior
V θ PG QG QminG QmaxG PD QD BshBarra (p.u.) (rad) (MW ) (Mvar) (Mvar) (Mvar) (MW ) (Mvar) (Mvar)
86 0,987 0,544 21,0 10,0
87 1,015 0,549 4,0 11,0 -100,0 1000,0
88 0,988 0,623 48,0 10,0
89 1,005 0,694 607,0 -13,7 -210,0 300,0
90 0,985 0,582 59,3 -300,0 300,0 163,0 42,0
91 0,980 0,582 -15,4 -100,0 100,0 10,0
92 0,993 0,591 0,5 -3,0 9,0 65,0 10,0
93 0,987 0,538 12,0 7,0
94 0,991 0,501 30,0 16,0
95 0,981 0,484 42,0 31,0
96 0,993 0,481 38,0 15,0
97 1,011 0,487 15,0 9,0
98 1,024 0,479 34,0 8,0
99 1,010 0,473 -17,5 -100,0 100,0 42,0
100 1,017 0,490 252,0 109,2 -50,0 155,0 37,0 18,0
101 0,993 0,518 22,0 15,0
102 0,992 0,564 5,0 3,0
103 1,001 0,427 40,0 40,0 -15,0 40,0 23,0 16,0
104 0,971 0,379 5,7 -8,0 23,0 38,0 25,0
105 0,966 0,360 -8,0 -8,0 23,0 31,0 26,0 20,0
106 0,962 0,356 43,0 16,0
107 0,952 0,307 5,7 -200,0 200,0 50,0 12,0 6,0
108 0,967 0,339 2,0 1,0
109 0,968 0,331 8,0 3,0
110 0,973 0,317 4,9 -8,0 23,0 39,0 30,0 6,0
111 0,980 0,345 36,0 -1,8 -100,0 1000,0
112 0,975 0,263 41,5 -100,0 1000,0 68,0 13,0
113 0,993 0,244 6,1 -100,0 200,0 6,0
114 0,961 0,257 8,0 3,0
115 0,961 0,257 22,0 7,0
116 1,005 0,474 51,3 -999,0 1000,0 184,0
117 0,974 0,191 20,0 8,0
118 0,949 0,383 33,0 15,0

Apendice A -- Dados do sistema IEEE de 118 barras 154
Tabela A.2: Dados de linhas do sistema IEEE de 118 barras
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
1 2 1 3,03 9,99 2,54 150
1 3 1 1,29 4,24 1,08 150
2 12 1 1,87 6,16 1,57 800
3 5 1 2,41 10,80 2,84 150
3 12 1 4,84 16,00 4,06 150
4 5 1 0,18 0,80 0,21 150
4 11 1 2,09 6,88 1,75 150
5 6 1 1,19 5,40 1,43 150
5 11 1 2,03 6,82 1,74 150
6 7 1 0,46 2,08 0,55 150
7 12 1 0,86 3,40 0,87 150
8 5 1 2,67 0,985 1000
8 9 1 0,24 3,05 116,20 800
8 30 1 0,43 5,04 51,40 800
9 10 1 0,26 3,22 123,00 800
11 12 1 0,60 1,96 0,50 150
11 13 1 2,23 7,31 1,88 150
12 14 1 2,15 7,07 1,82 150
12 16 1 2,12 8,34 2,14 150
12 117 1 3,29 14,00 3,58 150
13 15 1 7,44 24,44 6,27 150
14 15 1 5,95 19,50 5,02 150
15 17 1 1,32 4,37 4,44 800
15 19 1 1,20 3,94 1,01 150
15 33 1 3,80 12,44 3,19 150
16 17 1 4,54 18,01 4,66 800
17 18 1 1,23 5,05 1,30 150
17 31 1 4,74 15,63 3,99 150
17 113 1 0,91 3,01 0,77 150
18 19 1 1,12 4,93 1,14 150
19 20 1 2,52 11,70 2,98 150
19 34 1 7,52 24,70 6,32 150
20 21 1 1,83 8,49 2,16 150
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 155
Tabela A.2 – continua da pagina anterior
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
21 22 1 2,09 9,70 2,46 150
22 23 1 3,42 15,90 4,04 150
23 24 1 1,35 4,92 4,98 150
23 25 1 1,56 8,00 8,64 800
23 32 1 3,17 11,53 11,73 800
24 70 1 0,22 41,15 0,20 150
24 72 1 4,88 19,60 4,88 150
25 27 1 3,18 16,30 17,64 800
26 25 1 3,82 0,960 1000
26 30 1 0,80 8,60 90,80 800
27 28 1 1,91 8,55 2,16 150
27 32 1 2,29 7,55 1,93 150
27 115 1 1,64 7,41 1,97 150
28 29 1 2,37 9,43 2,38 150
29 31 1 1,08 3,31 0,83 150
30 17 1 3,88 0,960 1000
30 38 1 0,46 5,40 42,20 1000
31 32 1 2,98 9,85 2,51 150
32 113 1 6,15 20,30 5,18 150
32 114 1 1,35 6,12 1,63 150
33 37 1 4,15 14,20 3,66 150
34 36 1 0,87 2,68 0,57 150
34 37 1 0,26 0,94 0,98 800
34 43 1 4,13 16,81 4,23 150
35 36 1 0,22 1,02 0,27 150
35 37 1 1,10 4,97 1,32 150
37 39 1 3,21 10,60 2,70 150
37 40 1 5,93 16,80 4,20 150
38 37 1 3,75 0,935 1000
38 65 1 0,90 9,86 104,60 800
39 40 1 1,84 6,05 1,55 150
40 41 1 1,45 4,87 1,22 150
40 42 1 5,55 18,30 4,66 150
41 42 1 4,10 13,50 3,44 150
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 156
Tabela A.2 – continua da pagina anterior
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
42 49 1 7,15 32,30 8,60 150
42 49 2 7,15 32,30 8,60 150
43 44 1 6,08 24,54 6,07 150
44 45 1 2,24 9,01 2,24 150
45 46 1 4,00 13,56 3,32 150
45 49 1 6,84 18,60 4,44 150
46 47 1 3,80 12,70 3,16 150
46 48 1 6,01 18,90 4,72 150
47 49 1 1,91 6,25 1,60 150
47 69 1 8,44 27,78 7,09 150
48 49 1 1,79 5,05 1,26 150
49 50 1 2,67 7,52 1,87 150
49 51 1 4,86 13,70 3,42 150
49 54 1 7,30 28,90 7,38 150
49 54 2 8,69 29,10 7,30 150
49 66 1 1,80 9,19 2,48 800
49 66 2 1,80 9,19 2,48 800
49 69 1 9,85 32,40 8,28 150
50 57 1 4,74 13,40 3,32 150
51 52 1 2,03 5,88 1,40 150
51 58 1 2,55 7,19 1,79 150
52 53 1 4,05 16,35 4,06 150
53 54 1 2,63 12,20 3,10 150
54 55 1 1,69 7,07 2,02 150
54 56 1 0,28 0,96 0,73 150
54 59 1 5,03 22,93 5,98 150
55 56 1 0,49 1,51 0,37 150
55 59 1 4,74 21,58 5,65 150
56 57 1 3,43 9,66 2,42 150
56 58 1 3,43 9,66 2,42 150
56 59 1 8,25 25,10 5,69 150
56 59 2 8,03 23,90 5,36 150
59 60 1 3,17 14,50 3,76 150
59 61 1 3,28 15,00 3,88 150
Continua na proxima pagina
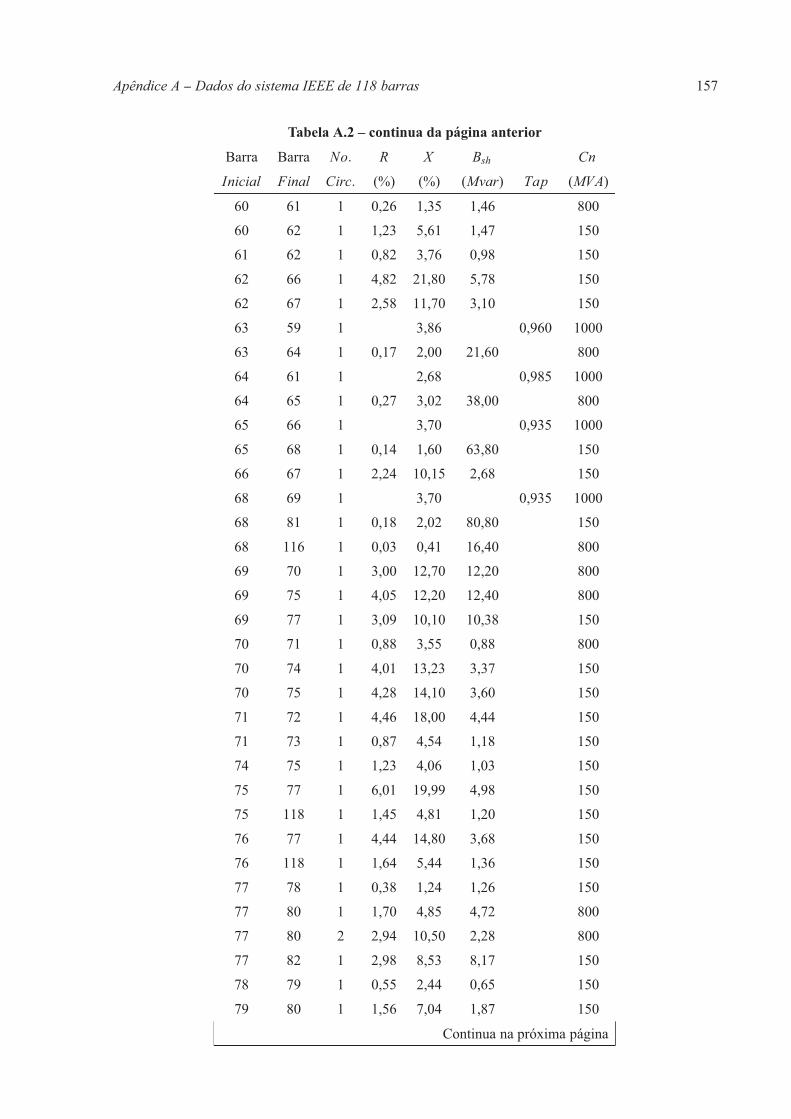
Apendice A -- Dados do sistema IEEE de 118 barras 157
Tabela A.2 – continua da pagina anterior
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
60 61 1 0,26 1,35 1,46 800
60 62 1 1,23 5,61 1,47 150
61 62 1 0,82 3,76 0,98 150
62 66 1 4,82 21,80 5,78 150
62 67 1 2,58 11,70 3,10 150
63 59 1 3,86 0,960 1000
63 64 1 0,17 2,00 21,60 800
64 61 1 2,68 0,985 1000
64 65 1 0,27 3,02 38,00 800
65 66 1 3,70 0,935 1000
65 68 1 0,14 1,60 63,80 150
66 67 1 2,24 10,15 2,68 150
68 69 1 3,70 0,935 1000
68 81 1 0,18 2,02 80,80 150
68 116 1 0,03 0,41 16,40 800
69 70 1 3,00 12,70 12,20 800
69 75 1 4,05 12,20 12,40 800
69 77 1 3,09 10,10 10,38 150
70 71 1 0,88 3,55 0,88 800
70 74 1 4,01 13,23 3,37 150
70 75 1 4,28 14,10 3,60 150
71 72 1 4,46 18,00 4,44 150
71 73 1 0,87 4,54 1,18 150
74 75 1 1,23 4,06 1,03 150
75 77 1 6,01 19,99 4,98 150
75 118 1 1,45 4,81 1,20 150
76 77 1 4,44 14,80 3,68 150
76 118 1 1,64 5,44 1,36 150
77 78 1 0,38 1,24 1,26 150
77 80 1 1,70 4,85 4,72 800
77 80 2 2,94 10,50 2,28 800
77 82 1 2,98 8,53 8,17 150
78 79 1 0,55 2,44 0,65 150
79 80 1 1,56 7,04 1,87 150
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 158
Tabela A.2 – continua da pagina anterior
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
80 96 1 3,56 18,20 4,94 150
80 97 1 1,83 9,34 2,54 150
80 98 1 2,38 10,80 2,86 150
80 99 1 4,54 20,60 5,46 150
81 80 1 3,70 0,935 1000
82 83 1 1,12 3,67 3,80 150
82 96 1 1,62 5,30 5,44 150
83 84 1 6,25 13,20 2,58 150
83 85 1 4,30 14,80 3,48 150
84 85 1 3,02 6,41 1,23 150
85 86 1 3,50 12,30 2,76 150
85 88 1 2,00 10,20 2,76 150
85 89 1 2,39 17,30 4,70 150
86 87 1 2,83 20,74 4,45 1000
88 89 1 1,39 7,12 1,93 800
89 90 1 5,18 18,80 5,28 800
89 90 2 2,38 9,97 10,60 800
89 92 1 0,99 5,05 5,48 800
89 92 2 3,93 15,81 4,14 800
90 91 1 2,54 8,36 2,14 150
91 92 1 3,87 12,72 3,27 150
92 93 1 2,58 8,48 2,18 150
92 94 1 4,81 15,80 4,06 150
92 100 1 6,48 29,50 4,72 150
92 102 1 1,23 5,59 1,46 150
93 94 1 2,23 7,32 1,88 150
94 95 1 1,32 4,34 1,11 150
94 96 1 2,69 8,69 2,30 150
94 100 1 1,78 5,80 6,04 150
95 96 1 1,71 5,47 1,47 150
96 97 1 1,73 8,85 2,40 150
98 100 1 3,97 17,90 4,76 150
99 100 1 1,80 8,13 2,16 150
100 101 1 2,77 12,62 3,28 150
Continua na proxima pagina

Apendice A -- Dados do sistema IEEE de 118 barras 159
Tabela A.2 – continua da pagina anterior
Barra Barra No. R X Bsh Cn
Inicial Final Circ. (%) (%) (Mvar) Tap (MVA)
100 103 1 1,60 5,25 5,36 800
100 104 1 4,51 20,40 5,41 150
100 106 1 6,05 22,90 6,20 150
101 102 1 2,46 11,20 2,94 150
103 104 1 4,66 15,84 4,07 150
103 105 1 5,35 16,25 4,08 150
103 110 1 3,91 18,13 4,61 150
104 105 1 0,99 3,78 0,99 150
105 106 1 1,40 5,47 1,43 150
105 107 1 5,30 18,30 4,72 150
105 108 1 2,61 7,03 1,84 150
106 107 1 5,30 18,30 4,72 150
108 109 1 1,05 2,88 0,76 150
109 110 1 2,78 7,62 2,02 150
110 111 1 2,20 7,55 2,00 150
110 112 1 2,47 6,40 6,20 150
114 115 1 0,23 1,04 0,28 150

Apendice A -- Dados do sistema IEEE de 118 barras 160
G
G
G
G
GG
G
G
GG
G
GG
G
G
G
GG
GG
G
G
GG
GG
G
GG
G
G
G
G
GG
GG
G
G
G
G
G
G
G
G
G
G
GG
G
G
G
G
G
Figu
raA
.1:S
iste
ma
IEEE
118
barr
as.


















