Rela to Rio Experiencia Motor

of 14
-
Upload
rodrigo-daniel -
Category
Documents
-
view
221 -
download
0
Transcript of Rela to Rio Experiencia Motor
-
7/24/2019 Rela to Rio Experiencia Motor
1/14
Universidade Estadual Paulista Jlio de Mesquita Filho
Campus Experimental de Sorocaba
LABORATRIO DE CONTROLE Experincia 2
Parmetros de um motor de corrente continua
Rodrigo Daniel da Silva 1110314
Jssica Toledo Salles 1110225
Pedro Luiz Martins Marques 1110128
Setembro/2015
-
7/24/2019 Rela to Rio Experiencia Motor
2/14
Sumrio
1. Resumo .............................................................................................................. 3
2.
Objetivos ............................................................................................................ 4
3. Introduo .......................................................................................................... 5
4. Resultados e Discusses .................................................................................... 7
4.1. Atividade 1 ..................................................................................................... 7
4.2. Atividade 2 ..................................................................................................... 8
4.3. Atividade 3 ................................................................................................... 10
4.4.
Atividade 4 ................................................................................................... 10
4.5. Determinao da funo de transferncia por identificao ........................ 11
4.5.1. Identificao atravs do degrau ................................................................ 11
4.5.2. Identificao atravs do diagrama de bode (resposta em frequncia) ...... 12
5. Concluso ......................................................................................................... 14
-
7/24/2019 Rela to Rio Experiencia Motor
3/14
3
1. Resumo
O experimento tem como objetivo atravs do kit fabricado pela Amira no qual se
dispe de um motor de corrente contnua, sensores acoplados ao mesmo e
controladores, levantar-se o modelo de um motor de corrente contnua.
-
7/24/2019 Rela to Rio Experiencia Motor
4/14
4
2. Objetivos
O objetivo principal do experimento de determinar o modelo matemtica de um
motor de corrente continua. Esse levantamento ser feito de duas maneiras distintas:
Modelagem fenomenolgica = Utilizando-se as leis da fsica para se obter as
equaes eltricas e mecnica do sistema e suas funes de transferncia
Identificao de sistemas = assume-se uma funo de transferncia e determina-
se atravs dos parmetros experimentais a posio dos polos e zeros
-
7/24/2019 Rela to Rio Experiencia Motor
5/14
5
3. Introduo
Como foi visto em laboratrio o motor de corrente continua bastante usado em
sistemas de controle, pois opera em faixas de operao que so interessantes para
anlise. Atravs da anlise do seu comportamento possvel notar como um sistema de
primeira ordem (primeira ordem devido s simplificaes) se comporta de acordo com
diferentes entradas, que no caso foram senoidais e uma onda quadrada.
Atravs da anlise do sistema para diferentes entradas possvel obter seus
parmetros como o ganho e a posio do seu polo. Isso possvel, pois o sistema
responde de uma maneira bem especifica e permite que no caso da onda quadrada, seja
possvel analisar a onda para obter o ganho e a localizao do polo, enquanto para a
senide, possvel coletar diferentes valores de ganho e fase para que, desse modo, seja
possvel plotar um digrama de bode que permita analisar a funo de transferncia do
sistema;
A importncia da utilizao de modelos matemticos para simulaes ou projetos
vem cada vez mais se tornando uma realidade no s na rea de engenharia, sendo
aplicados modelos no ramo de finanas ou at mesmo planejamento empresarial. Tendo
em mente isso, no de se estranhar que seja imprescindvel a um engenheiro ter o
domnio de modelos desde a sua obteno e desenvolvimento sua otimizao e
controle. Este experimento teve como meta a obteno da funo de transferncia, ou
seja, do modelo matemtico que rege um motor de corrente contnua atravs de mtodos
prticos como leitura de sensores levantamento de diagramas em frequncia e clculos
de constantes relacionadas ao sistema.
A escolha de um motor de corrente contnua para representar o sistema de estudo se
deve ao fato da vasta gama de aplicaes do mesmo visto que motores so elementos
presentes em grande parte das mquinas eltricas vigentes e pode atuar tanto comoatuador quanto conversor de energia (gerador eltrico, por exemplo). Uma caracterstica
do motor de corrente contnua que seu modelo representado por um sistema de
segunda ordem mas que pode ser aproximado para um sistema de primeira ordem caso
se utilize o mesmo em uma regio de trabalho em que seu comportamento seja linear. O
motor utilizado pode girar tanto no sentido horrio quanto no sentido anti-horrio
levando-se em considerao a polaridade da corrente que flui atravs do mesmo. No
caso do motor modelado em laboratrio, trata-se de um conjunto fornecido pela Amiraque conta com um motor, um servo atuador alm de sensores como tacmetro
-
7/24/2019 Rela to Rio Experiencia Motor
6/14
6
(responsvel pela medio da velocidade do rotor) e controladores que visam tornar o
kit didtico para estudantes de controle em geral.
-
7/24/2019 Rela to Rio Experiencia Motor
7/14
7
4. Resultados e Discusses
Na primeira etapa do relatrio foram analisados os parmetros tericos do motor
de corrente continua e aps a anlise terica foi feita a analise atravs dos dados
experimentais.
4.1.Atividade 1
Inicialmente partindo do diagrama de blocos do motor demonstrado na figura 1, foi
necessrio simplificar o diagrama sabendo que a constante de tempo mecnica bem
superior constante de tempo eltrica, fazendo com que assim a dinmica do sistema
fosse predominantemente mecnica (inercia).
Figura 1- Diagrama de blocos do motor.
Essa simplificao ocorre devido a 2 fatos principais: a realimentao Ke,
tambm chamada de realimentao de velocidade, uma realimentao que existe na
estrutura de realimentao no motor CC e intrnseca (interna ao motor) e realizada
pela forca contra eletromotriz que induzida no sistema. E com isso essa no na
verdade uma realimentao de malha fechada, e sim uma realimentao natural. Osegundo fato que valida essa simplificao que o controlador de corrente um PI que
possui como funo de transferncia:
()
=
-
7/24/2019 Rela to Rio Experiencia Motor
8/14
8
Onde isolando o K encontramos a seguinte funo de transferncia genrica para
o controlador PI:
()
( )
Assim chega-se ao seguinte diagrama de blocos simplificado para o sistema:
Figura 2- Diagrama de blocos simplificado.
4.2.Atividade 2
Na atividade 2 era necessrio demonstrar atravs do LGR que para um valor de
1/TA >> 1/T1 a funo de transferncia de malha fechada da figura 2 poderia ser
simplificada para um sistema de primeira ordem. Nessa malha fechada possvel notar
um zero de malha aberta em -1/T1e os plos na origem e em um ponto -1/TA.
Utilizando-se o software MATLAB, com a ferramenta de sisotool possvel
analisar o efeito de um zero muito distante no sistema de controle, esse feito
demonstrado pelo diagrama de bode demonstrado na Figura 3.
-
7/24/2019 Rela to Rio Experiencia Motor
9/14
9
Figura 3- LGR e diagrama de bode do sistema.
possvel observar que o zero tem um efeito praticamente mnimo nesse
sistema, pois o ganho alm de negativo elevado e desse modo no h praticamente o
efeito do zero, apesar do sistema fechar o LGR pois em geral todos os polos de malha
fechada tendem para os zeros de MA quando o ganho tende a infinito. Assim, pelos
fatores j citados possvel escrever a funo de transferncia da malha fechada na
seguinte forma:
-
7/24/2019 Rela to Rio Experiencia Motor
10/14
10
4.3.Atividade 3
Considerando que a malha do sistema aps as simplificaes realizadas na
atividade 1 e 2 era dada pela Figura 4 a seguir:
Figura 4- Diagrama de blocos simplificado.
Assim para encontrar a funo de transferncia era simples pois resta multiplicar
os componentes do sistema em questo, ou seja:
= Iref x
Kt
=
()
4.4.Atividade 4
Supondo ento um torque de atrito equivalente a Tatrito(s) = b() necessrio
considerar que ocorre uma realimentao entre a sada e a entrada do integrador, e essa
realimentao dada por uma constante b. Assim o seguinte equacionamento
possvel:
=
x
=
x
=
()()
Nesse caso os clculos necessitavam ser literais, pois o valor de b no
conhecido.
-
7/24/2019 Rela to Rio Experiencia Motor
11/14
11
4.5.Determinao da funo de transferncia por identificao
4.5.1. Identificao atravs do degrau
Obteve-se ento uma sada do sistema para uma entrada quadrada, isso foi
possvel, pois considerando um sistema de primeira ordem a funo de transferncia
dada por:
Y(s) =
y(t) = 1 -
Considerando ento a mdia dos valores obtidos pra resposta ao degrau queforam K = 1,96 e T = 320ms, com isso encontra-se um valor de =0,70 e K1= 1,96.
Assim a funo de transferncia encontrada a partir da entrada degrau equivalente a:
G(s) =
A obteno dessa funo de transferncia possvel inserindo-se ondas
quadradas na entrada com diferentes amplitudes e, a partir desta, analisa-se a amplitudetanto da entrada quanto da sada e o tempo que se demora pra se atingir 63% do valor
final.
Figura 5- Onda obtida para o clculo da FT.
-
7/24/2019 Rela to Rio Experiencia Motor
12/14
12
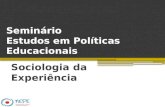
4.5.2. Identificao atravs do diagrama de bode (resposta em frequncia)
Na segunda etapa buscou-se elaborar o diagrama de bode do sistema em questo.
Para isso utilizaram-se na entrada diferentes senides onde a amplitude e fase eram
constantes, mas as frequncias eram variveis. Com isso obtiveram-se diferentes valores
para a fase e o ganho do sistema. Plotou-se ento o grfico de bode e sua resposta foi
verificada com a funo curve fitting do MATLAB que possibilita que atravs de um
conjunto de pontos, encontre-se uma funo que corresponda a essa curva. O grfico
experimental e o terico feito utilizando o curve fitting so demonstrados na figura 5 a
seguir.
Esse grfico do ganho de bode suavizado, permite tambm que o
comportamento passa baixas do sistema seja observado pois nas baixas frequncias o
ganho do sistema bem mais alto comparado aos valores nas maiores frequncias
(acima de 15 Hz por exemplo).
A funo de transferncia extrada do diagrama de bode pode ser analisada por
meio das assntotas que descrevem o grfico (como visto em teoria de controle) e assim
a funo de transferncia obtida atravs do grfico de bode equivalente a:
Figura 6- Ganho do sistema juntamente com curve fitting.
-
7/24/2019 Rela to Rio Experiencia Motor
13/14
13
G(s) =
Que foi uma funo de transferncia bem prxima a obtida atravs do mtodo da
resposta do degrau, o que s comprova o fato de que, independentemente do mtodoadotado, a resposta deve ser a mesma ou ao menos prxima, visto que fatores
experimentais costumas ter erros associados.
-
7/24/2019 Rela to Rio Experiencia Motor
14/14
14
5. Concluso
Com o fim do experimento em questo notou-se que atravs de ensaios feitos em
laboratrio bem como a aplicao de leis da fsica e alguns conceitos de controle
possvel extrair o modelo de controle (funo de transferncia) de modo emprico para
que depois este possa ser analisado e controlado. Notou-se tambm que ao se traar o
diagrama de Bode os rudos contidos no sistema acarretaram em um esboo no to
preciso quanto o desejado contudo ainda condizente com o modelo esperado. Por fim
notou-se que o diagrama em frequncia (Bode) de fase sofre muito mais a ao de
componentes de rudo que o diagrama de mdulo.