Resolução Numérica de Sistemas Lineares – Parte I · Cálculo Numérico: Aspectos teóricos e...
79
Profs.: Bruno Correia da Nóbrega Queiroz José Eustáquio Rangel de Queiroz Marcelo Alves de Barros Resolução Numérica de Sistemas Lineares – Parte I Cálculo Numérico Cálculo Numérico Módulo V Módulo V
Transcript of Resolução Numérica de Sistemas Lineares – Parte I · Cálculo Numérico: Aspectos teóricos e...
Profs.: Bruno Correia da Nóbrega QueirozJosé Eustáquio Rangel de QueirozMarcelo Alves de Barros
Resolução Numérica deSistemas Lineares – Parte I
Cálculo NuméricoCálculo NuméricoMódulo VMódulo V
2
Sistemas Lineares
Forma Geral
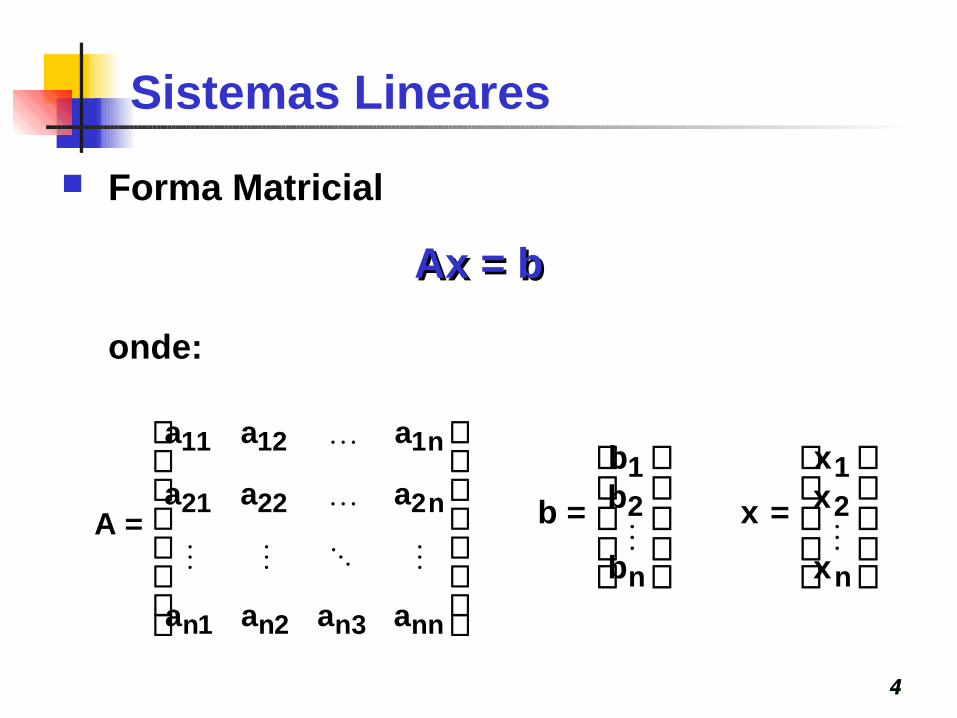
onde:aaijij coeficientes
xxii incógnitas
nnnn22n11n
2nn2222121
1nn1212111
bxa...xaxa
bxa...xaxa
bxa...xaxa
=+++
=+++
=+++
3
Exemplo 01
2, 4, 5, 4, 1, 5, 2, 4 e 5 coeficientesx1, x2 e x3 incógnitas
Sistemas Lineares
1x5x4x2
2x5x1x4
5x5x4x2
321
321
321
−=++
=−+
=−+
4
Sistemas Lineares Forma Matricial
onde:
4
Ax = bAx = b
=
nn3n2n1n
n22221
n11211
aaaa
aaa
aaa
A
=
n
21
b
bb
b
=
n
21
x
xx
x
5
Sistemas Lineares
1x5x4x2
2x5x1x4
5x5x4x2
321
321
321
−=++
=−+
=−+
5
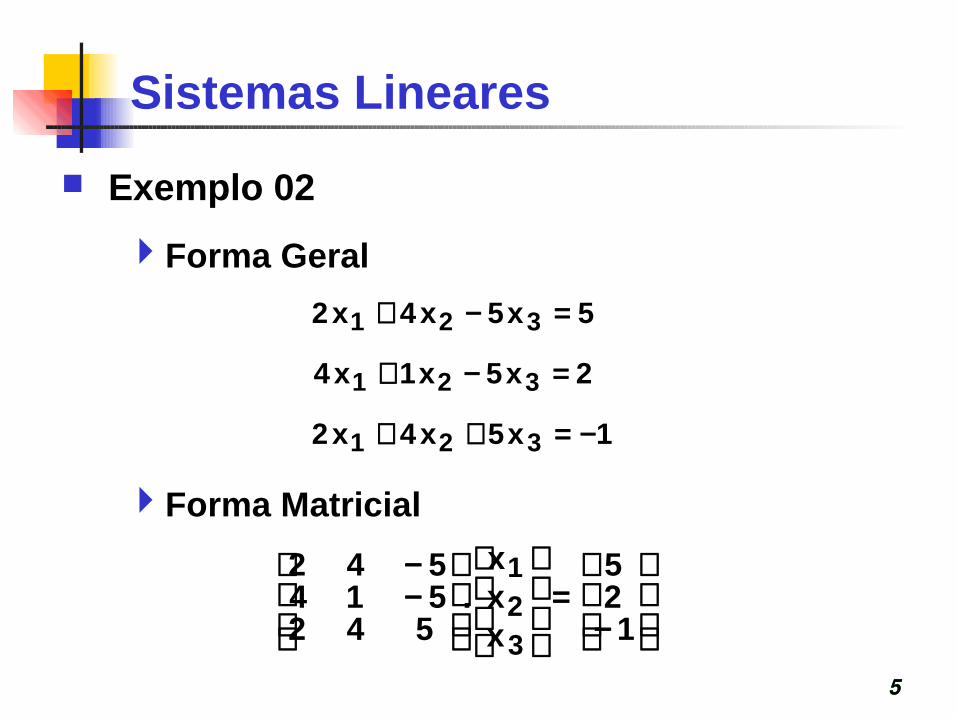
Exemplo 02Forma Geral
Forma Matricial
−=
−−
125
xxx
.542514542
321
6
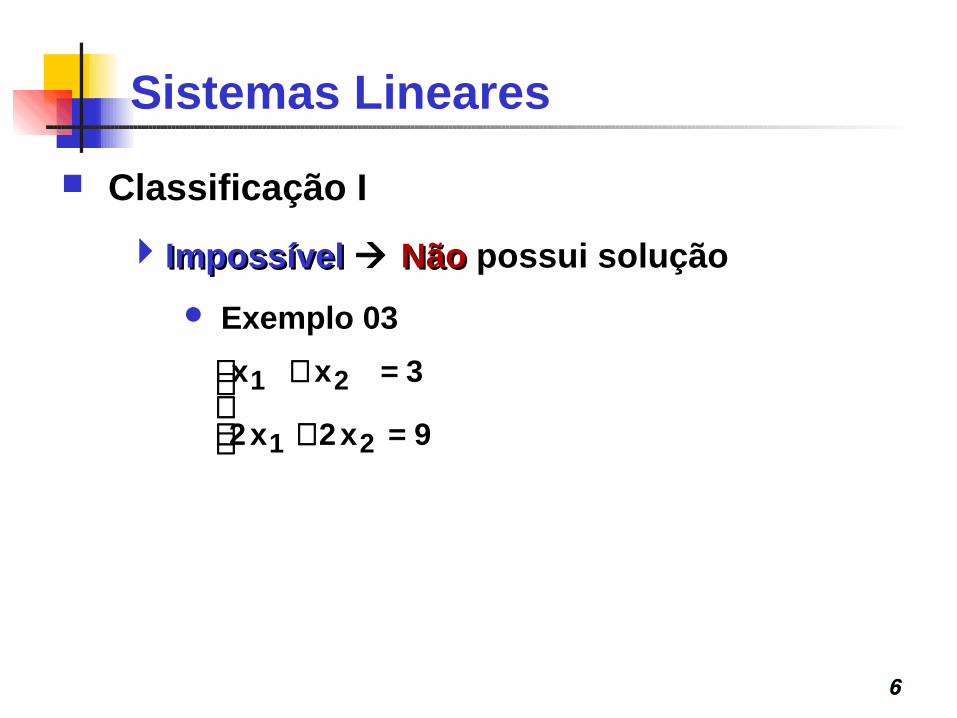
Sistemas Lineares Classificação I
ImpossívelImpossível NãoNão possui solução Exemplo 03
6
=+
=+
9x2x2
3xx
21
21
7
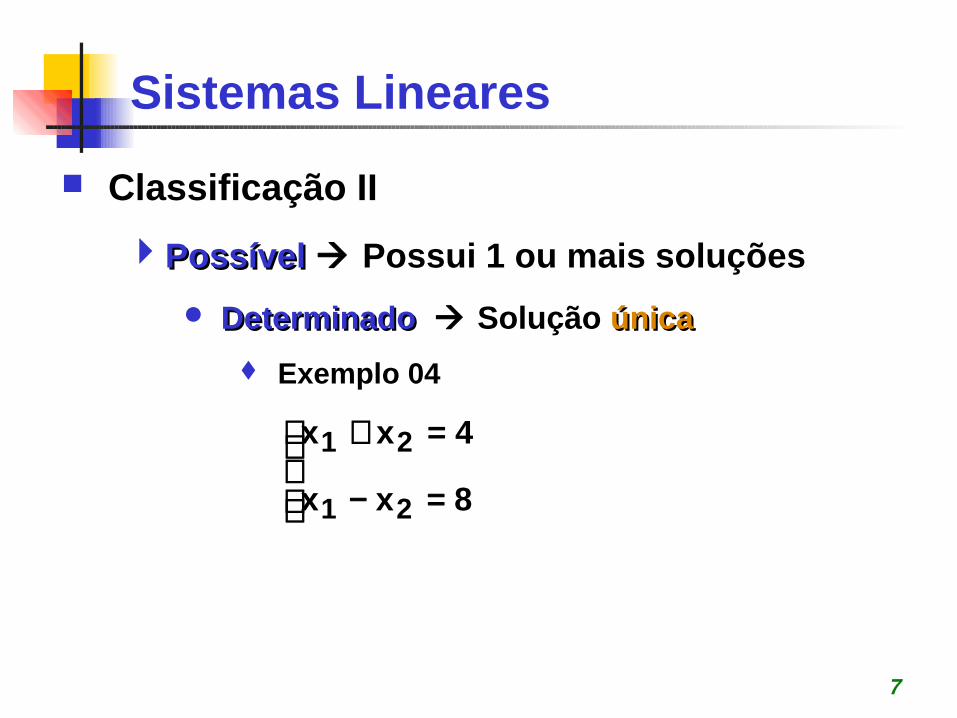
Sistemas Lineares Classificação II
PossívelPossível Possui 1 ou mais soluções DeterminadoDeterminado Solução únicaúnica
Exemplo 04
=−
=+
8xx
4xx
21
21
8
Classificação III PossívelPossível Possui 1 ou mais soluções
IndeterminadoIndeterminado Mais de umaMais de uma solução Exemplo 05
Sistemas Lineares
=+
=+
8x2x2
4xx
21
21
9
Sistemas Lineares Classificação IV
PossívelPossível Possui 1 ou mais soluções HomogêneoHomogêneo Vetor b=0b=0 (x=0 sempre
existe solução) Exemplo 06
=+
=+
0x3x2
0xx
21
21
10
Sistemas Lineares
=
nn3n2n1n
3332312221
11
aaaa
0aaa00aa000a
A
Sistemas Triangulares:Possibilidade de resolução de forma
RetroativaRetroativa InferiorInferior
11
Sistemas Lineares
=
nn
n333n22322n1131211
a000
aa00aaa0aaaa
A
Sistemas Triangulares:Possibilidade de resolução de forma
RetroativaRetroativa SuperiorSuperior
12
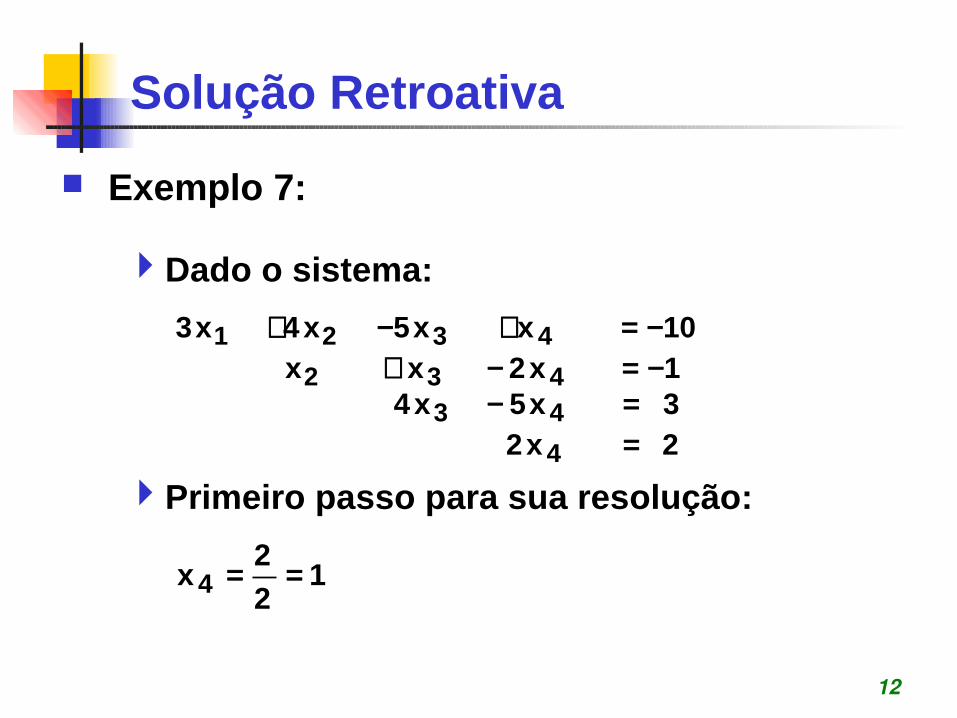
Solução Retroativa Exemplo 7:
Dado o sistema:
Primeiro passo para sua resolução:2x23x5x41x2xx10xx5x4x3
443432
4321
==−
−=−+−=+−+
122x 4 ==
13
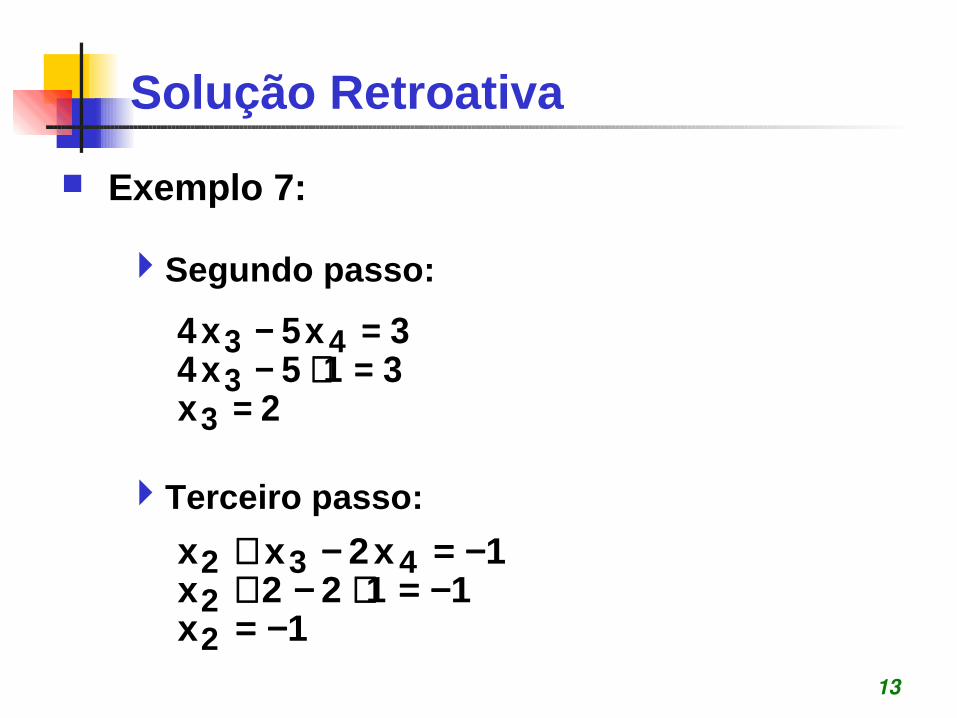
Solução Retroativa Exemplo 7:
Segundo passo:
Terceiro passo:
2x315x43x5x4
33
43
==⋅−=−
1x1122x
1x2xx
22
432
−=−=⋅−+
−=−+
14
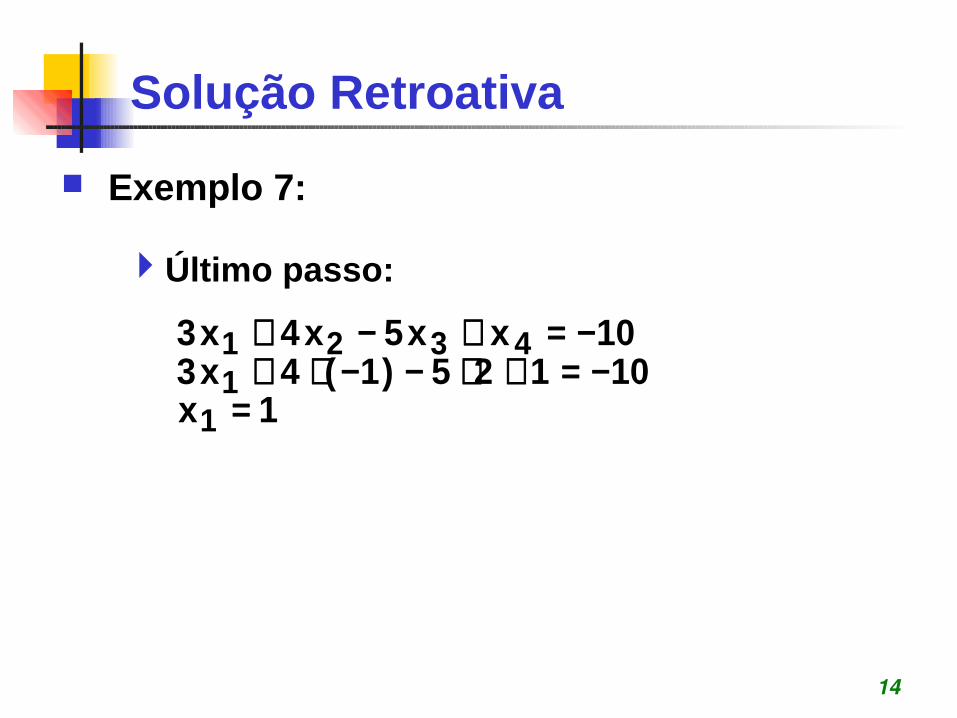
Solução Retroativa Exemplo 7:
Último passo:
1x10125)1(4x3
10xx5x4x3
11
4321
=−=+⋅−−⋅+
−=+−+
15
Métodos Numéricos DiretosDiretos
Solução pode ser encontrada através de um número finito de passos Método de GaussMétodo de Gauss Método da Eliminação de JordanMétodo da Eliminação de Jordan Fatoração LUFatoração LU
16
Métodos Numéricos IterativosIterativos
Solução a partir de uma seqüência de seqüência de aproximações aproximações para o valor do vetor solução xx , até que seja obtido um valor que satisfaça à precisão préestabelecida Método de JacobiMétodo de Jacobi Método de Gauss – SiedelMétodo de Gauss – Siedel
17
Método de Gauss Propósito
Transformação do sistema linear a ser resolvido em um sistema linear triangularsistema linear triangular;
Resolução do sistema linear triangular de forma retroativaretroativa
18
Método de Gauss Transformação do Sistema Linear
Troca da ordem das linhas;
Multiplicação de uma das equações por um número real não nulo;
Substituição de uma das equações por uma combinação linear dela mesma com outra equação.
19
Método de Gauss Passos do Método de Gauss
Construção da matriz aumentada AbAb
19
[ ]
=
nnn3n2n1n
2n222211n11211
baaaa
baaabaaa
Ab
20
Método de Gauss Passos do Método de Gauss
Passo 1: Eliminar os coeficientes de xEliminar os coeficientes de x11 presentes nas
linhas 2,3,...,n sendo a21 = a31, = ... = an1 = 0 sendo aa1111 chamado de pivô da colunapivô da coluna
Substituir a linha 2, LL22, pela combinação linear
1121
211212 aam:onde,LmL =⋅−
21
Método de Gauss
1131
3113133 aam:onde,LmLL =⋅−=
Passos do Métdo de Gauss
Substituir a linha 3, L3, pela combinação linear:
22
Método de Gauss Passos do Método de Gauss
Devese continuar a substituição até a linha n;
Caso algum elemento app=0, achar outra linha k onde akp≠ 0 e trocar tais linhas. Caso a linha k não exista, o sistema linear não possui solução.
23
Método de Gauss Passos do Método de Gauss
Eliminar os coeficientes de x2 nas linhas 3, 4, ..., n (fazer a32=a42=...=an2 = 0);
Eliminar os coeficientes de x3 nas linhas 4, 5, ..., n (fazer a43=a53=...=an3 = 0) e assim sucessivamente.
24
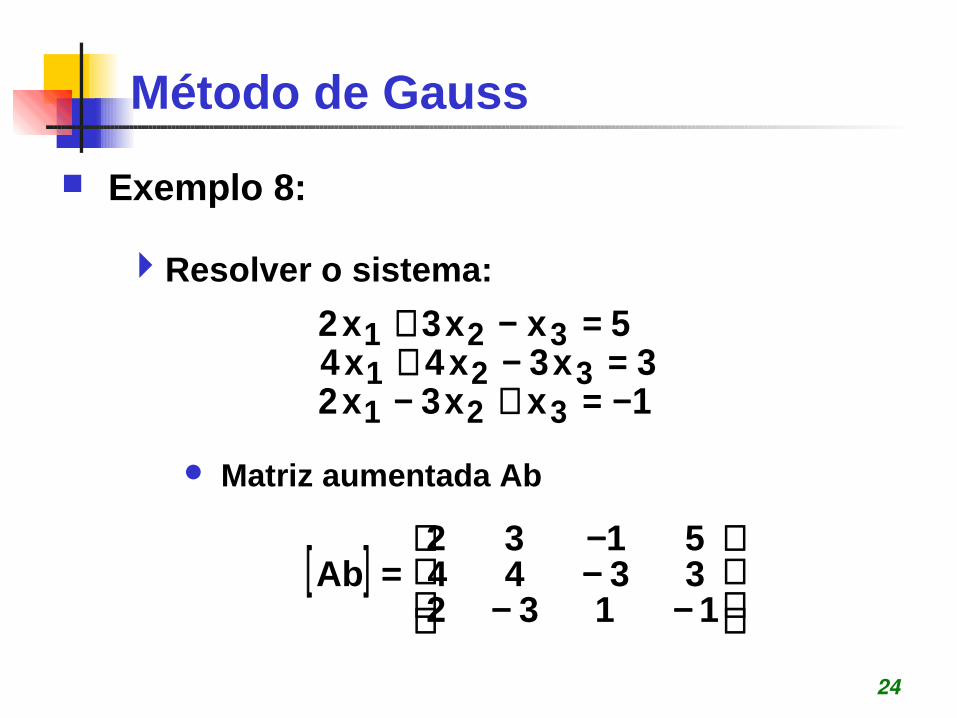
Método de Gauss Exemplo 8:
Resolver o sistema:
Matriz aumentada Ab
1xx3x23x3x4x4
5xx3x2
321321
321
−=+−=−+
=−+
[ ]
−−−−
=1132
33445132
Ab
25
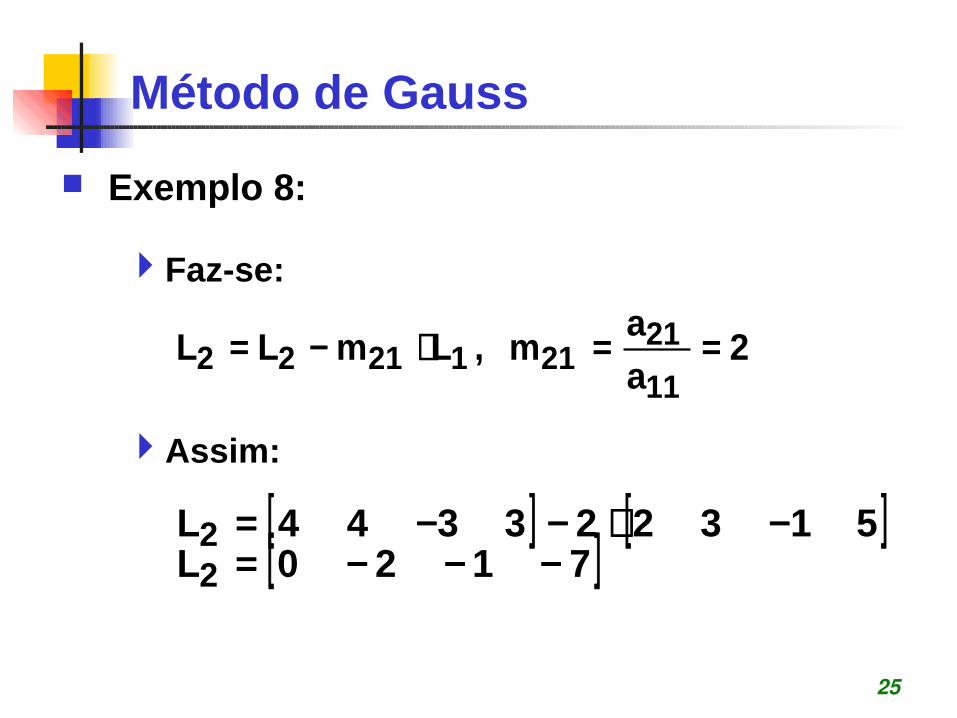
Método de Gauss Exemplo 8:
Fazse:
Assim:
2aam,LmLL
1121
2112122 ==⋅−=
[ ] [ ][ ]7120L
513223344L22
−−−=−⋅−−=
26
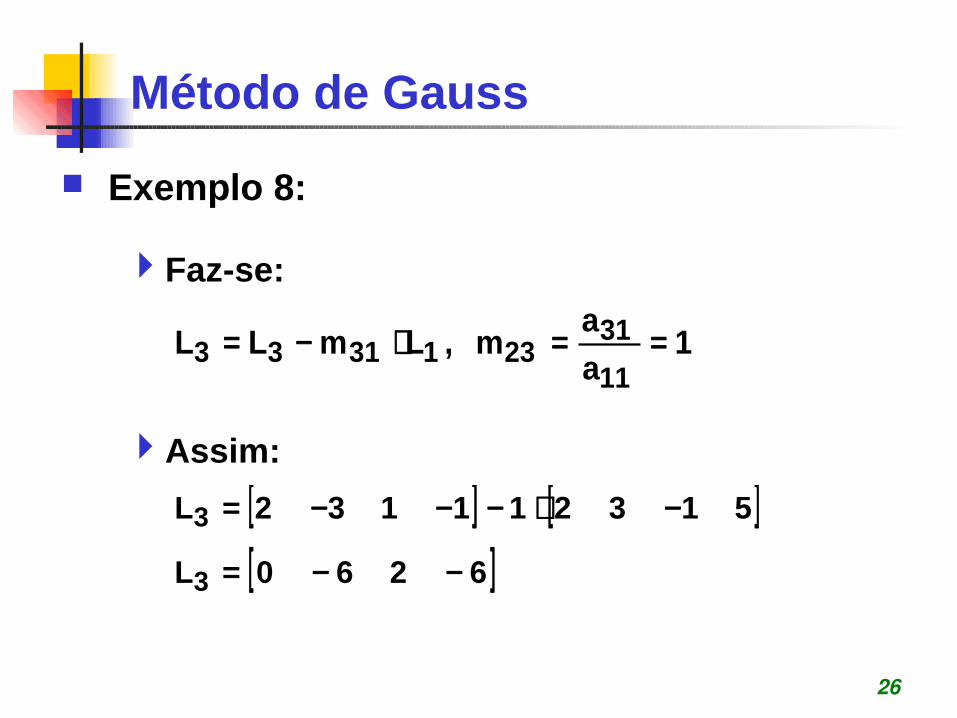
Método de Gauss Exemplo 8:
Fazse:
Assim:
1aam,LmLL
1131
2313133 ==⋅−=
[ ] [ ][ ]6260L
513211132L
3
3
−−=
−⋅−−−=
27
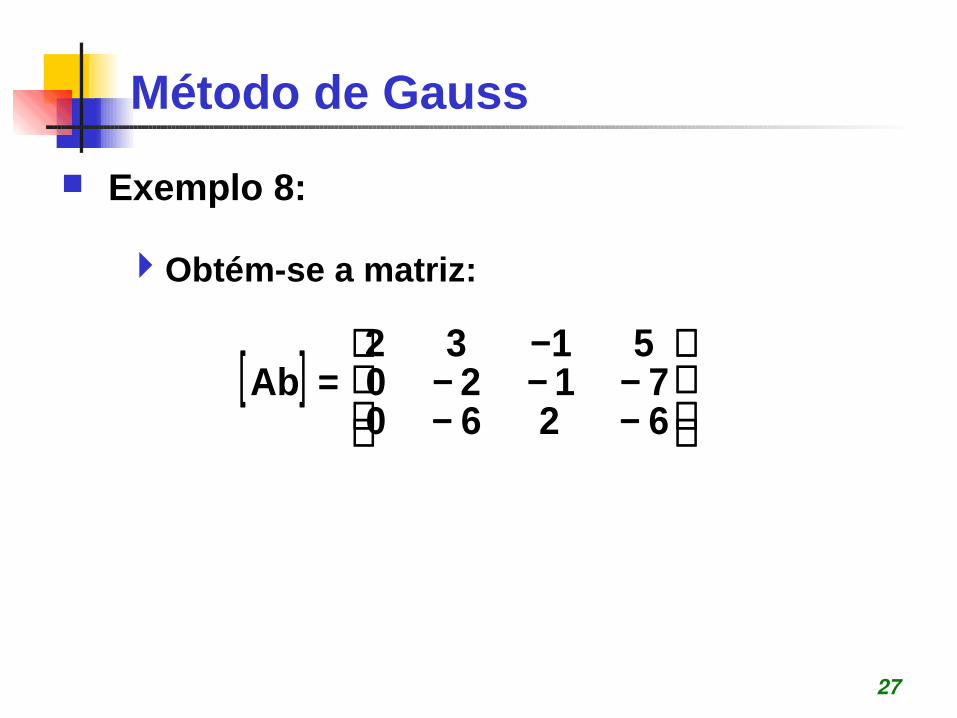
Método de Gauss Exemplo 8:
Obtémse a matriz:
[ ]
−−−−−
−=
62607120
5132Ab
28
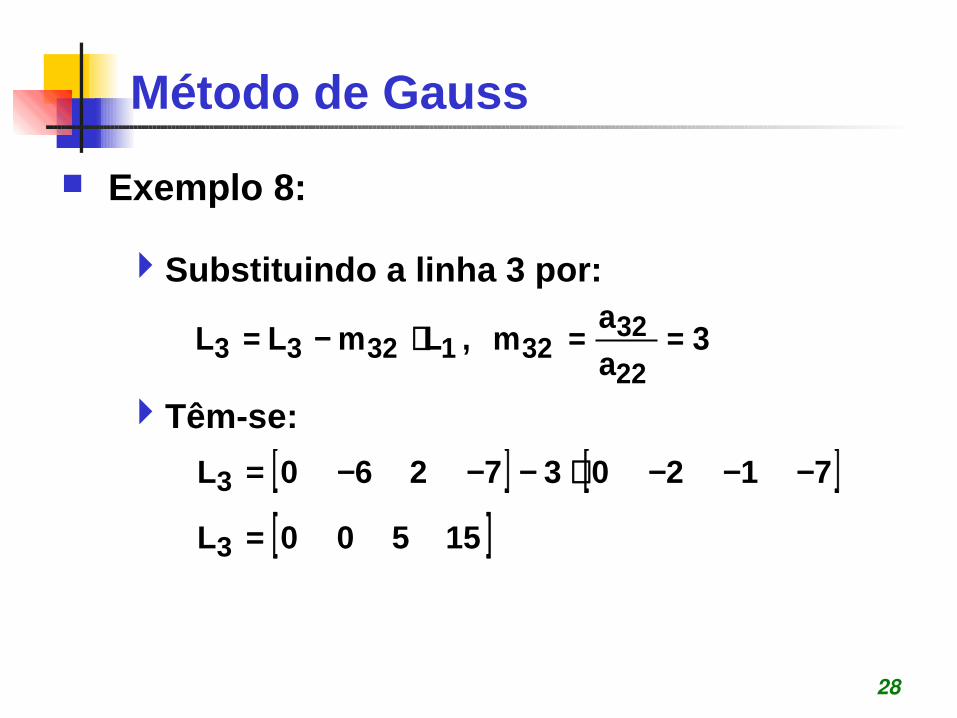
Método de Gauss Exemplo 8:
Substituindo a linha 3 por:
Têmse:
3aam,LmLL
2232
3213233 ==⋅−=
[ ] [ ][ ]15500L
712037260L
3
3
=
−−−⋅−−−=
29
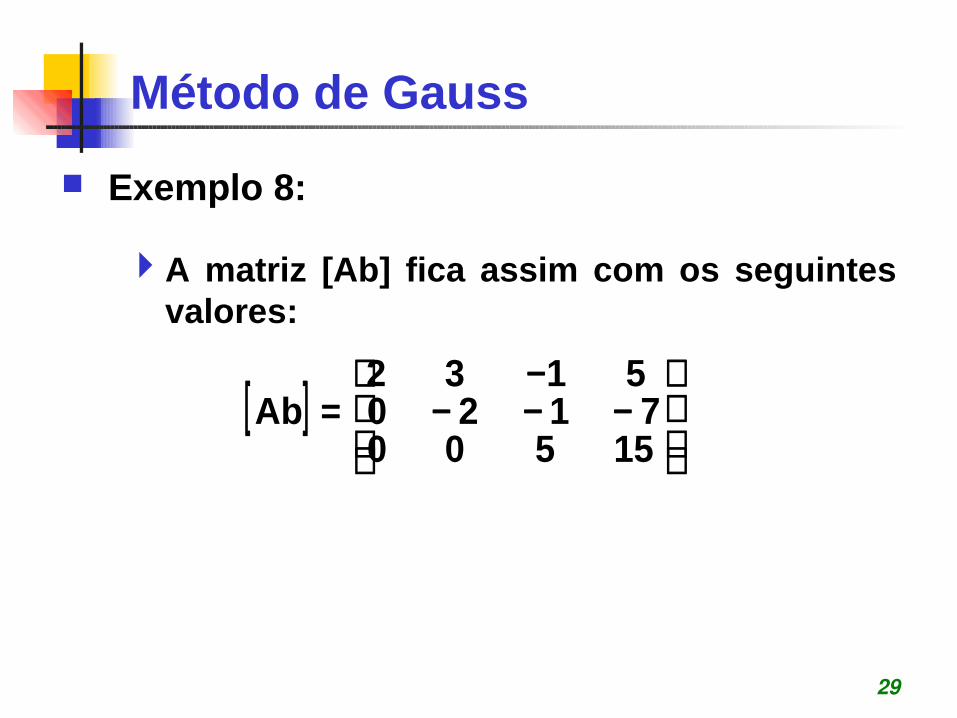
Método de Gauss Exemplo 8:
A matriz [Ab] fica assim com os seguintes valores:
[ ]
−−−
−=
155007120
5132Ab
30
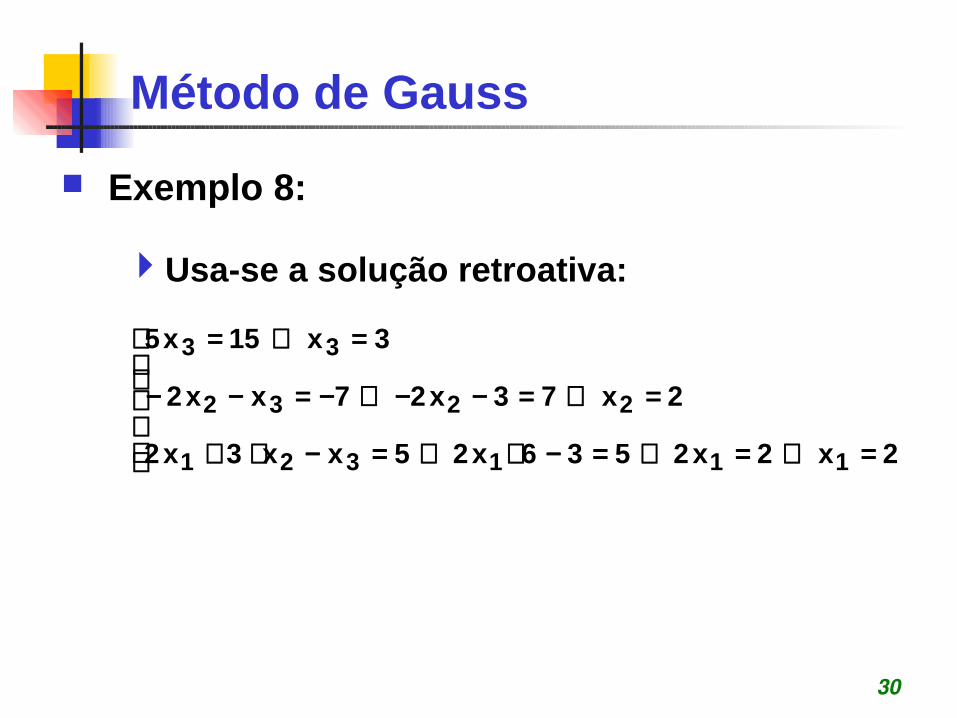
Método de Gauss Exemplo 8:
Usase a solução retroativa:
=⇒=⇒=−+⇒=−⋅+
=⇒=−−⇒−=−−
=⇒=
2x2x2536x25xx3x2
2x73x27xx2
3x15x5
111321
2232
33
31
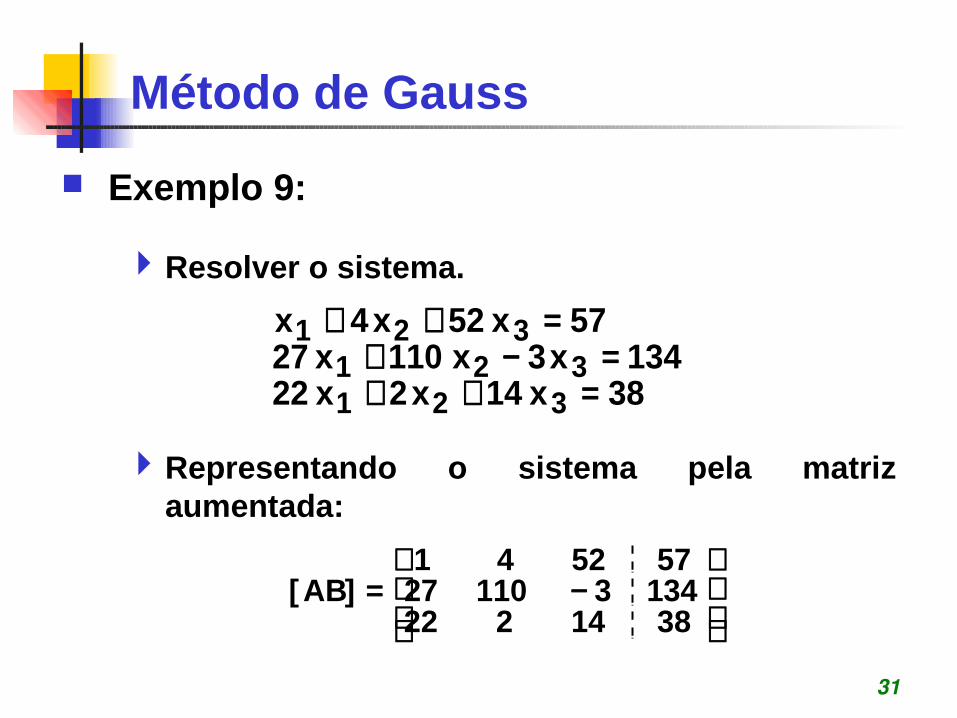
Método de Gauss Exemplo 9:
Resolver o sistema.
Representando o sistema pela matriz aumentada:
38x14x2x22134x3x110x27
57x52x4x
321321
321
=++=−+
=++
−=
3814222134311027575241
]AB[
32
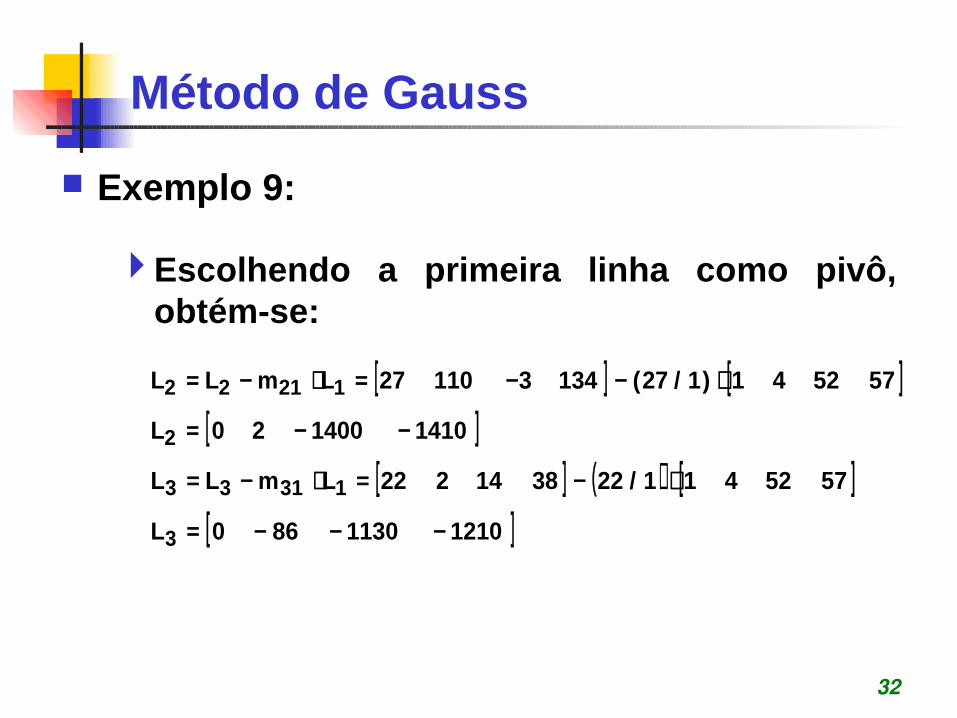
Método de Gauss Exemplo 9:
Escolhendo a primeira linha como pivô, obtémse:
[ ] [ ][ ]
[ ] ( ) [ ][ ]12101130860L
5752411/223814222LmLL
1410140020L
575241)1/27(134311027LmLL
3
13133
2
12122
−−−=
⋅−=⋅−=
−−=
⋅−−=⋅−=
33
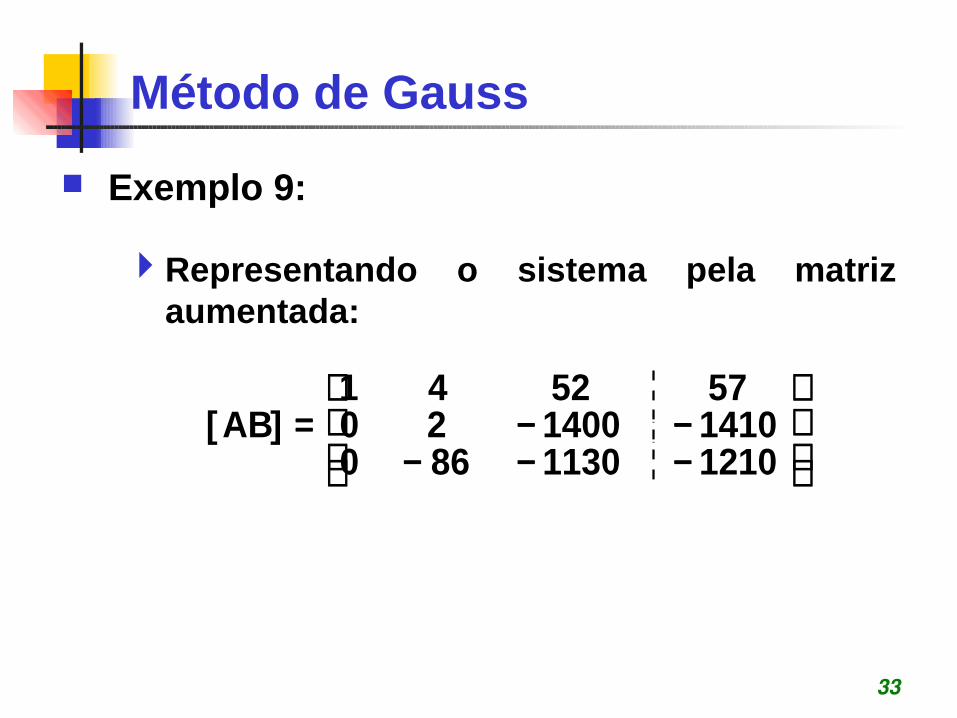
Método de Gauss Exemplo 9:
Representando o sistema pela matriz aumentada:
−−−−−=
121011308601410140020575241
]AB[
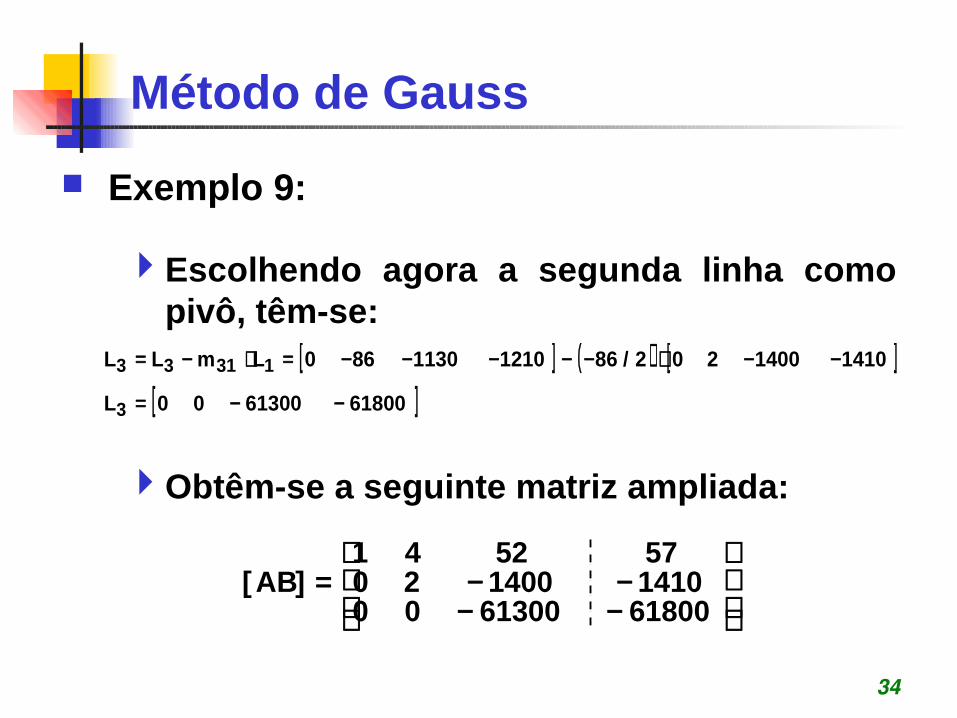
34
Exemplo 9:
Escolhendo agora a segunda linha como pivô, têmse:
Obtêmse a seguinte matriz ampliada:
Método de Gauss
[ ] ( ) [ ][ ]618006130000L
14101400202/8612101130860LmLL
3
13133
−−=
−−⋅−−−−−=⋅−=
−−−−=6180061300001410140020575241
]AB[

35
Método de Gauss Exemplo 9:
O que termina com a triangulação:
×−=⋅×−⋅+⋅×−=⋅×−⋅+⋅
=⋅+⋅+
43
421
33
321
321
106.18x106.13x0x01014.1x10 40.1x2x0
57x52x4x
36
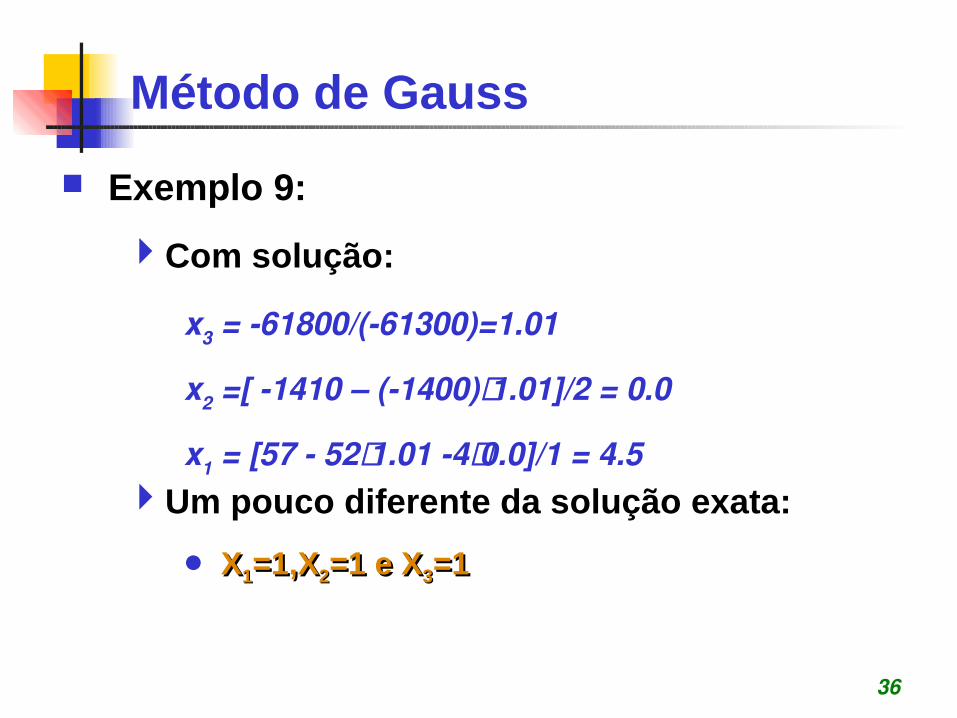
Método de Gauss Exemplo 9:
Com solução:
Um pouco diferente da solução exata: XX11=1,X=1,X22=1 e X=1 e X33=1=1
x3 = 61800/(61300)=1.01
x2 =[ 1410 – (1400)⋅1.01]/2 = 0.0
x1 = [57 52⋅1.01 4⋅0.0]/1 = 4.5
37
Método do Pivoteamento Parcial Semelhante ao método de Gauss;
Minimiza a amplificação de erros de arredondamento durante as eliminações;
Consiste em escolher o elemento de maior módulo em cada coluna para ser o pivô.
38
Método do Pivoteamento Parcial Exemplo 10:
Resolver o sistema com precisão de 3 casas decimais
=⋅+⋅+⋅=⋅−⋅+⋅
=⋅+⋅+
38x14x2x22134x3x110x27
57x52x4x
321321
321
39
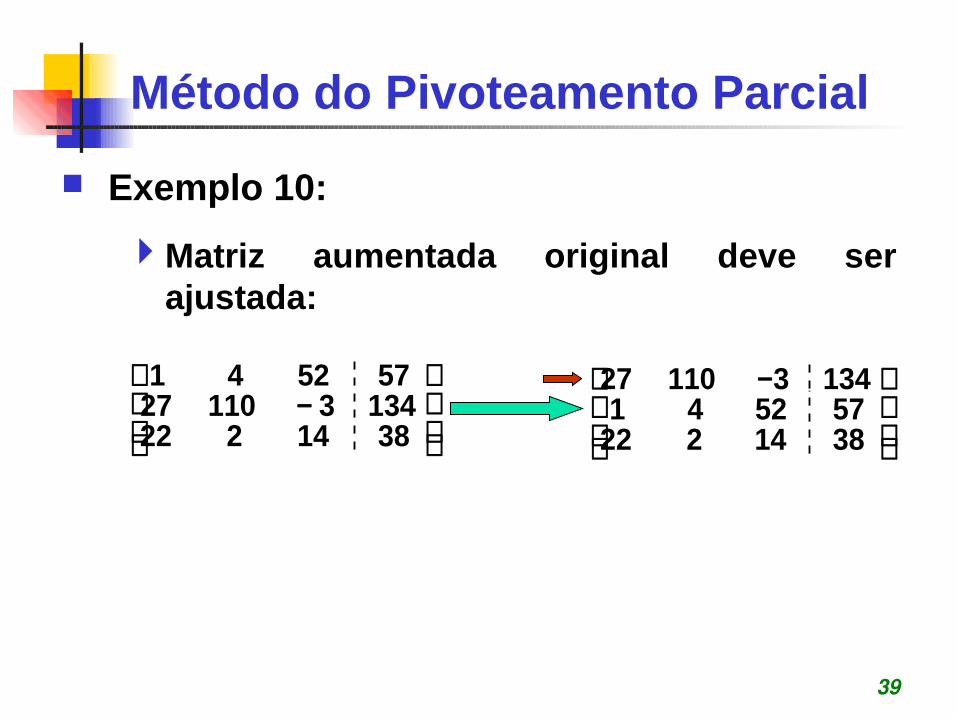
Método do Pivoteamento Parcial Exemplo 10:
Matriz aumentada original deve ser ajustada:
−
3814222134311027575241
−
3814222575241
134311027
40
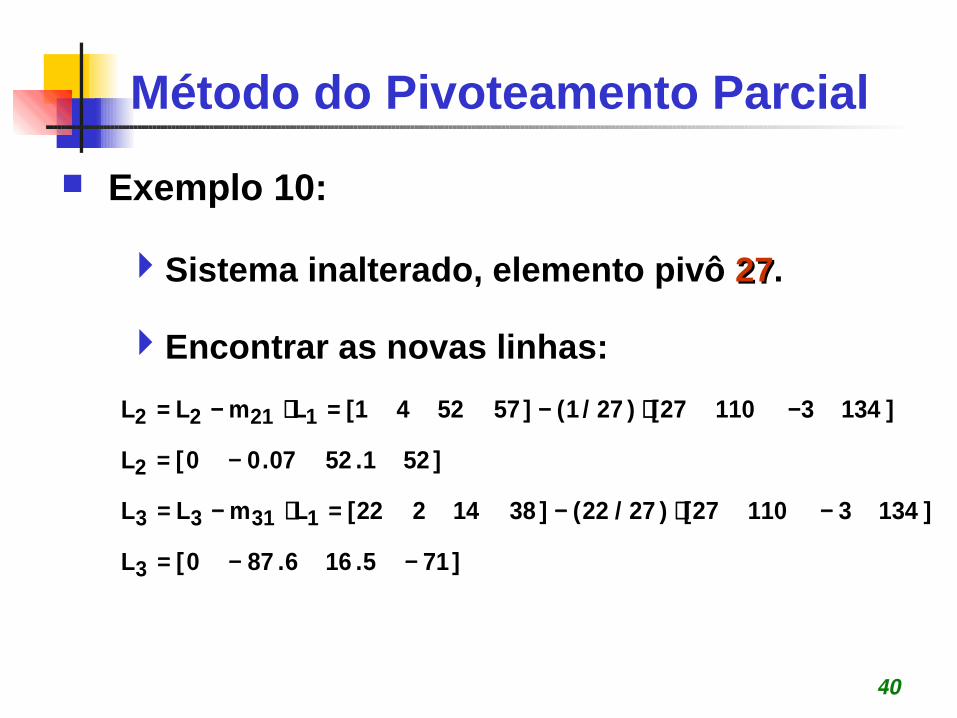
Método do Pivoteamento Parcial Exemplo 10:
Sistema inalterado, elemento pivô 2727.
Encontrar as novas linhas:
]715.166.870[L
]134311027[)27/22(]3814222[LmLL
]521.5207.00[L
]134311027[)27/1(]575241[LmLL
3
13133
2
12122
−−=
−⋅−=⋅−=
−=
−⋅−=⋅−=
41
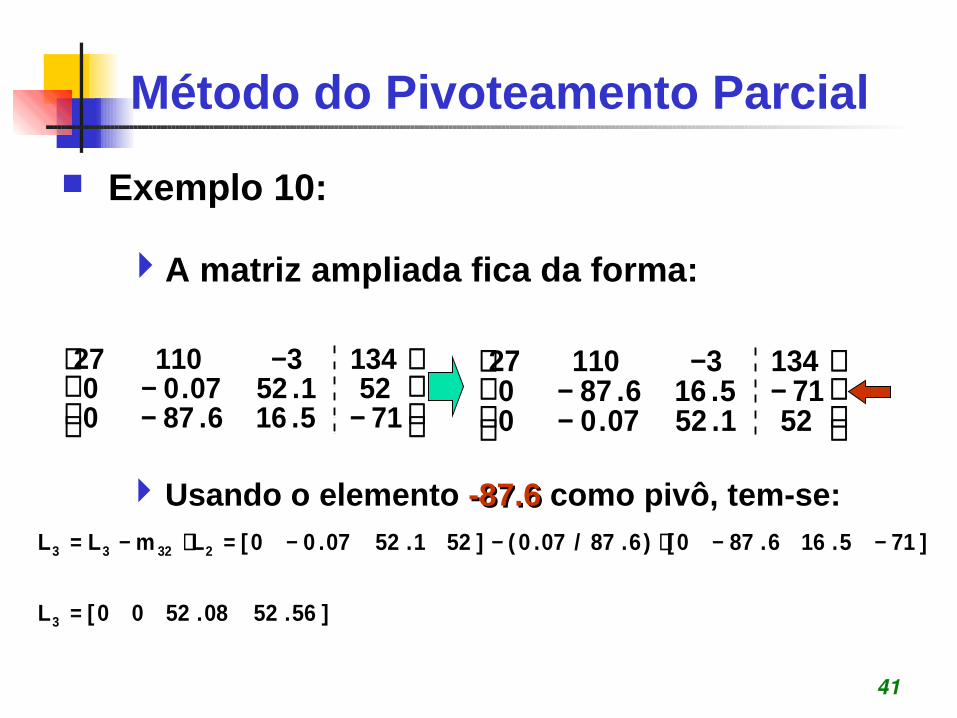
Método do Pivoteamento Parcial Exemplo 10:
A matriz ampliada fica da forma:
Usando o elemento 87.687.6 como pivô, temse:
−−−
−
715.166.870521.5207.00
134311027
−−−
−
521.5207.00715.166.870
134311027
]56.5208.5200[L
]715.166.870[)6.87/07.0(]521.5207.00[LmLL
3
23233
=
−−⋅−−=⋅−=
42
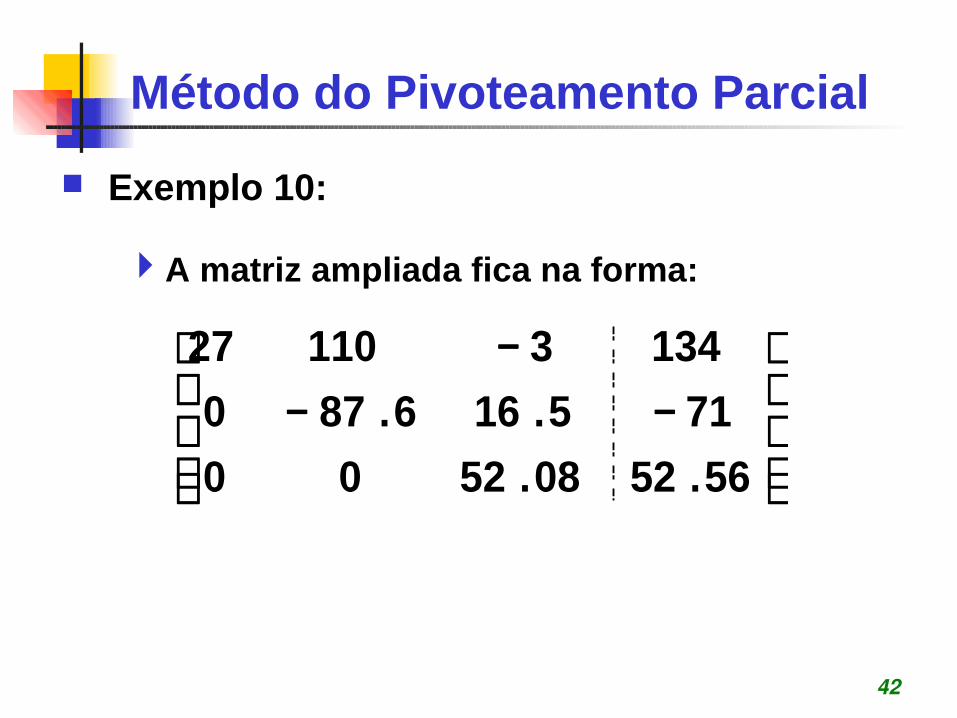
Método do Pivoteamento Parcial Exemplo 10:
A matriz ampliada fica na forma:
−−
−
56.5208.5200715.166.870
134311027
43
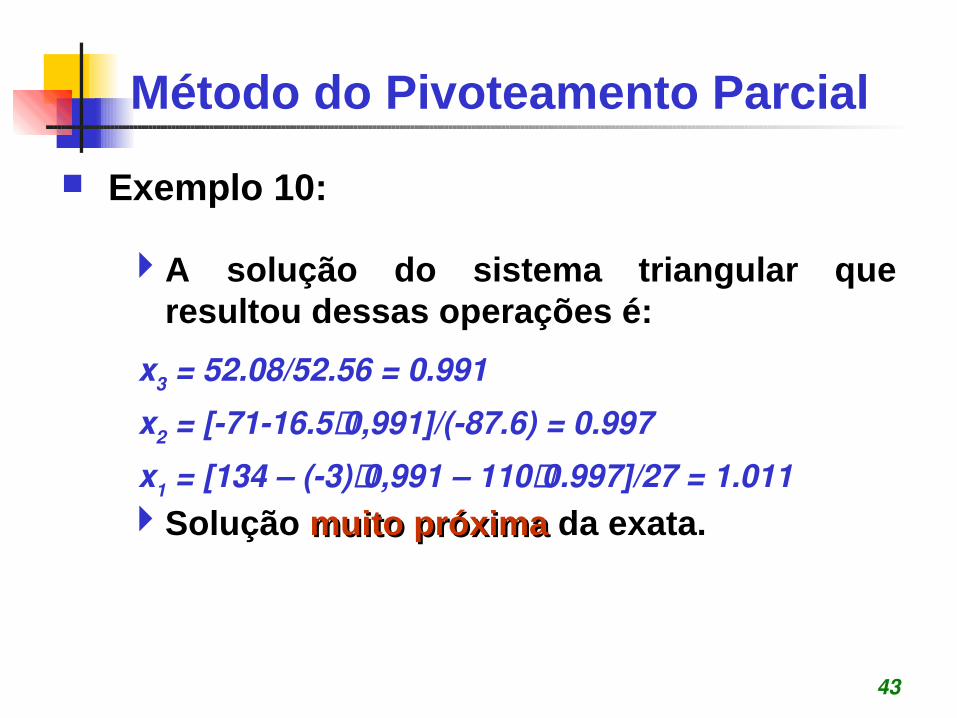
Método do Pivoteamento Parcial Exemplo 10:
A solução do sistema triangular que resultou dessas operações é:
Solução muito próximamuito próxima da exata.
x3 = 52.08/52.56 = 0.991x2 = [7116.5⋅0,991]/(87.6) = 0.997x1 = [134 – (3)⋅0,991 – 110⋅0.997]/27 = 1.011
44
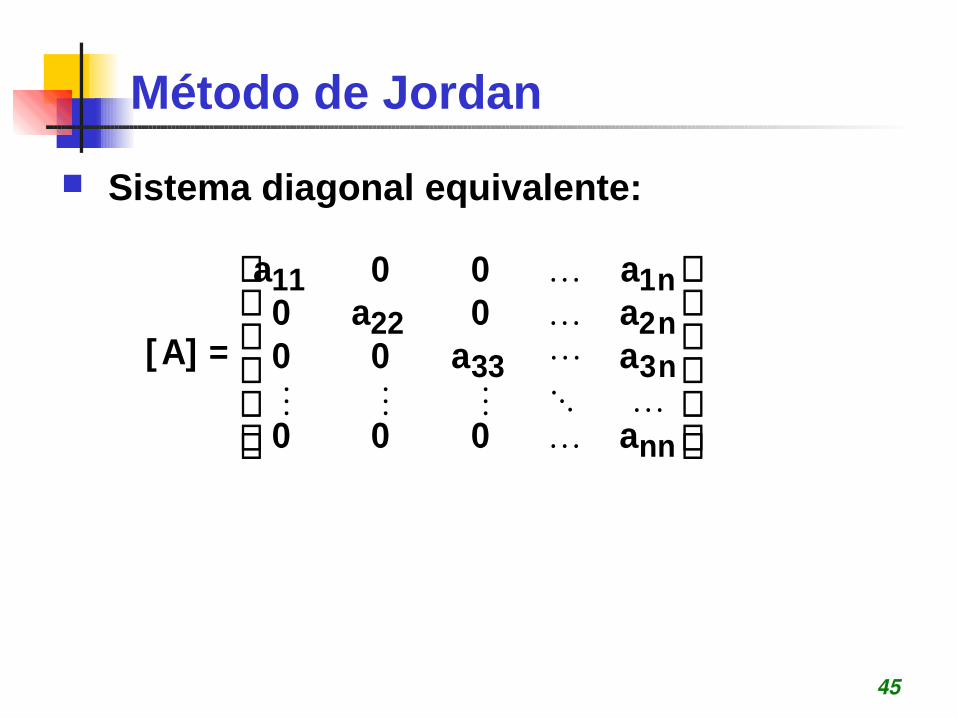
Método de Jordan Consiste em efetuar operações sobre as
equações do sistema, com a finalidade de obter um sistema diagonal equivalente;
Um sistema diagonal é aquele em que os elementos aaijij da matriz coeficiente [A] são iguais a zero, para ii≠j≠j,
i, j = 1,2,...,n.
45
Método de Jordan Sistema diagonal equivalente:
=
nn
n333n222n111
a000
aa00a0a0a00a
]A[
46
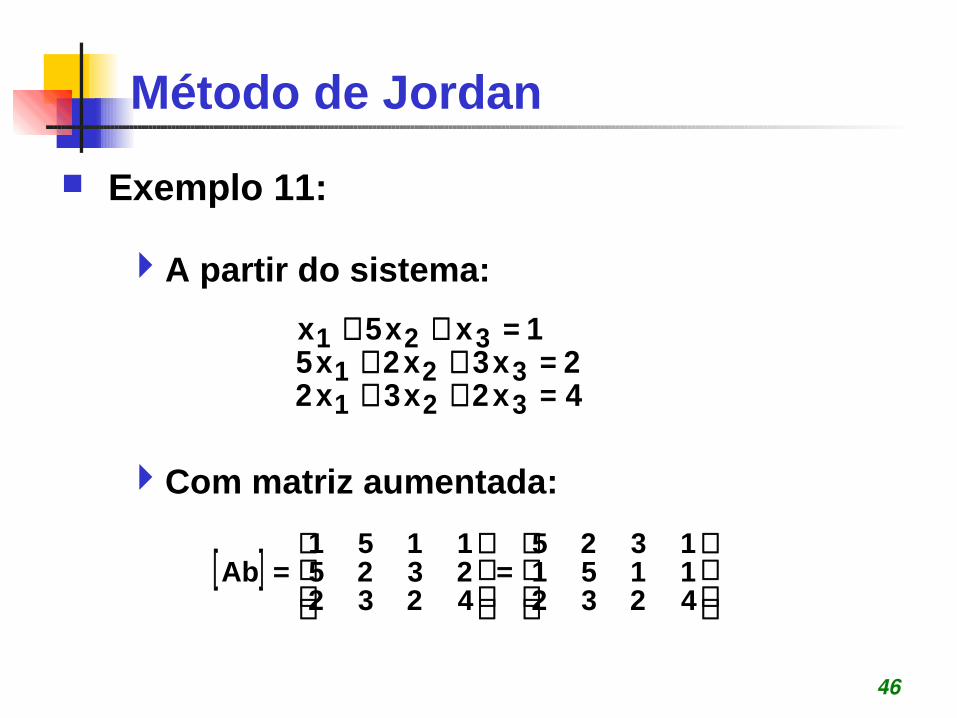
Método de Jordan Exemplo 11:
A partir do sistema:
Com matriz aumentada:
4x2x3x22x3x2x5
1xx5x
321321
321
=++=++
=++
[ ]
=
=
423211511325
423223251151
Ab
47
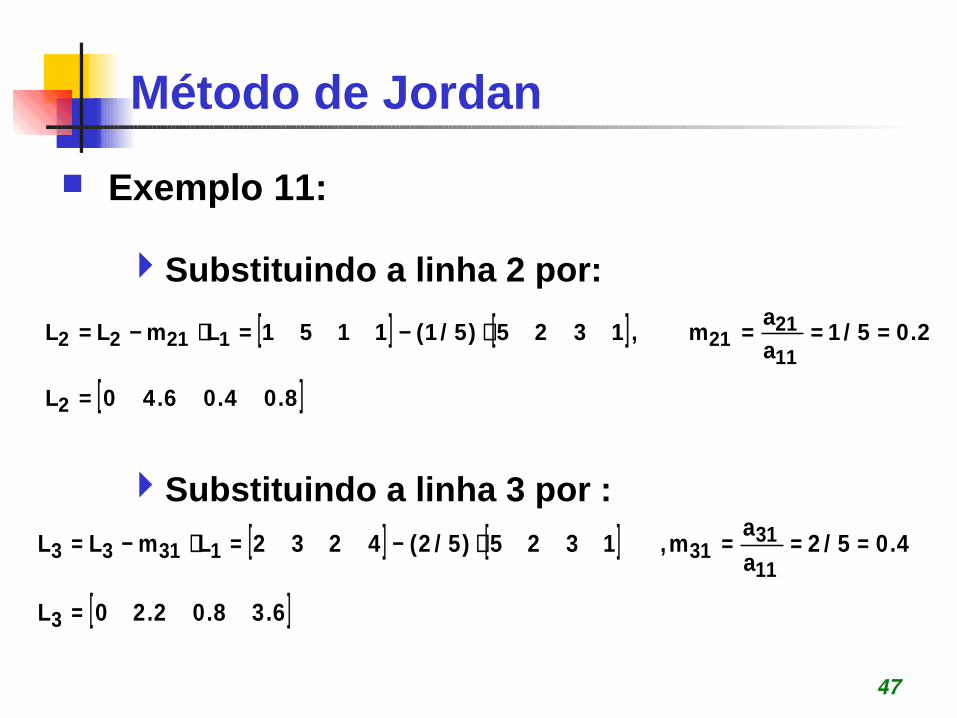
Método de Jordan Exemplo 11:
Substituindo a linha 2 por:
Substituindo a linha 3 por :
[ ] [ ]
[ ]8.04.06.40L
2.05/1aam,1325)5/1(1151LmLL
2
11212112122
=
===⋅−=⋅−=
[ ] [ ]
[ ]6.38.02.20L
4.05/2aam,1325)5/2(4232LmLL
3
1131
3113133
=
===⋅−=⋅−=
48
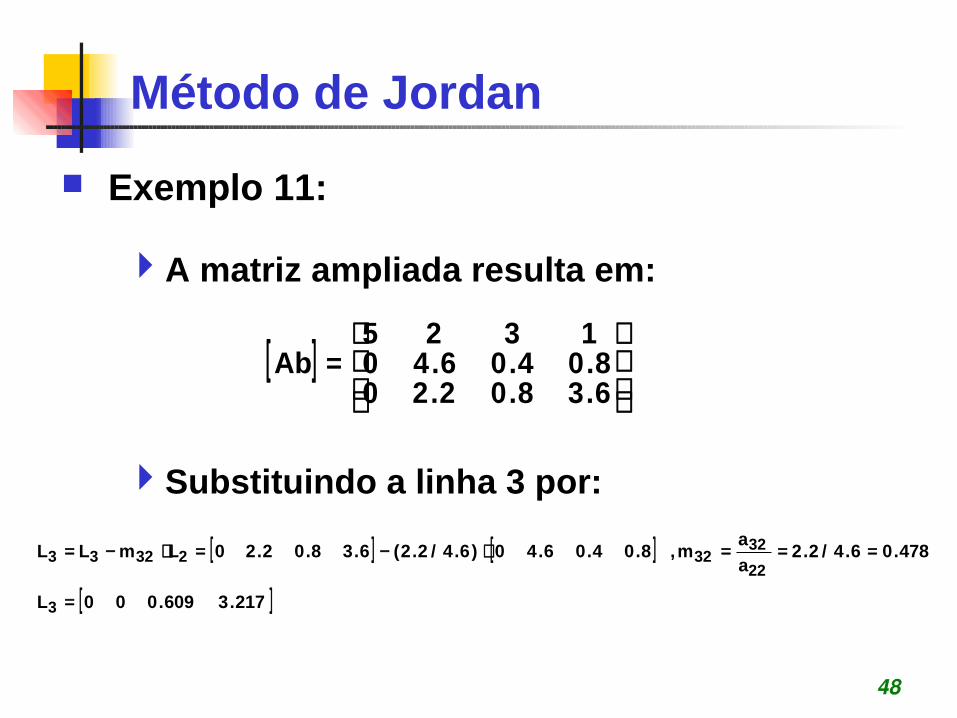
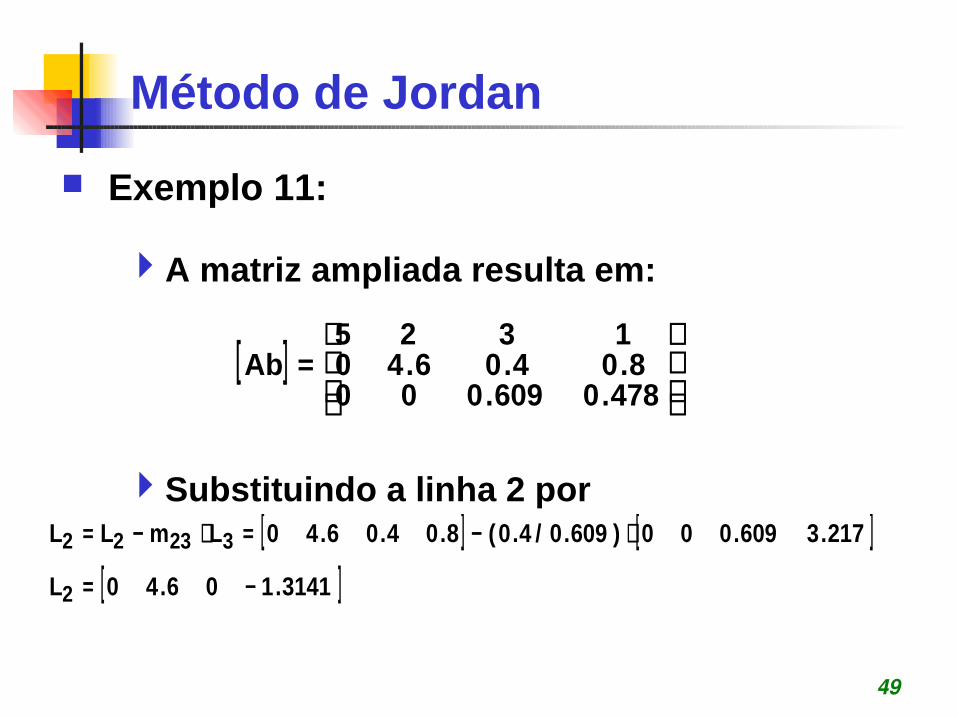
Método de Jordan Exemplo 11:
A matriz ampliada resulta em:
Substituindo a linha 3 por:
[ ]
=
6.38.02.208.04.06.40
1325Ab
[ ] [ ]
[ ]217.3609.000L
478.06.4/2.2aam,8.04.06.40)6.4/2.2(6.38.02.20LmLL
3
2232
3223233
=
===⋅−=⋅−=
49
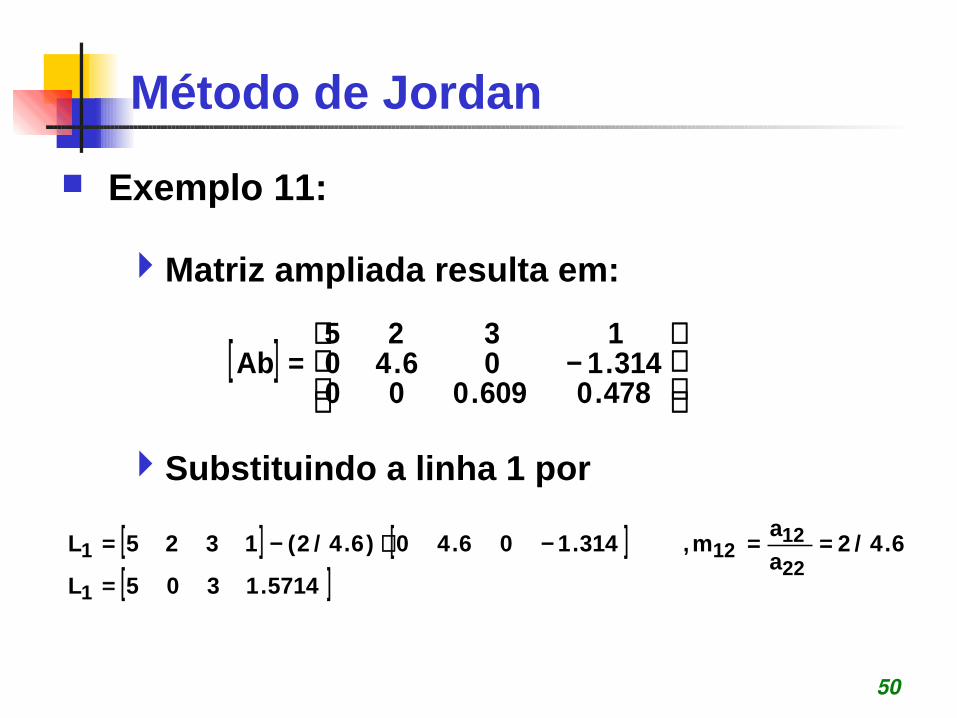
Método de Jordan Exemplo 11:
A matriz ampliada resulta em:
Substituindo a linha 2 por
[ ]
=
478.0609.0008.04.06.40
1325Ab
[ ] [ ][ ]3141.106.40L
217.3609.000)609.0/4.0(8.04.06.40LmLL
2
32322
−=
⋅−=⋅−=
50
Método de Jordan Exemplo 11:
Matriz ampliada resulta em:
Substituindo a linha 1 por
[ ]
−=
478.0609.000314.106.401325
Ab
[ ] [ ][ ]5714.1305L
6.4/2aam,314.106.40)6.4/2(1325L
12212
121=
==−⋅−=
51
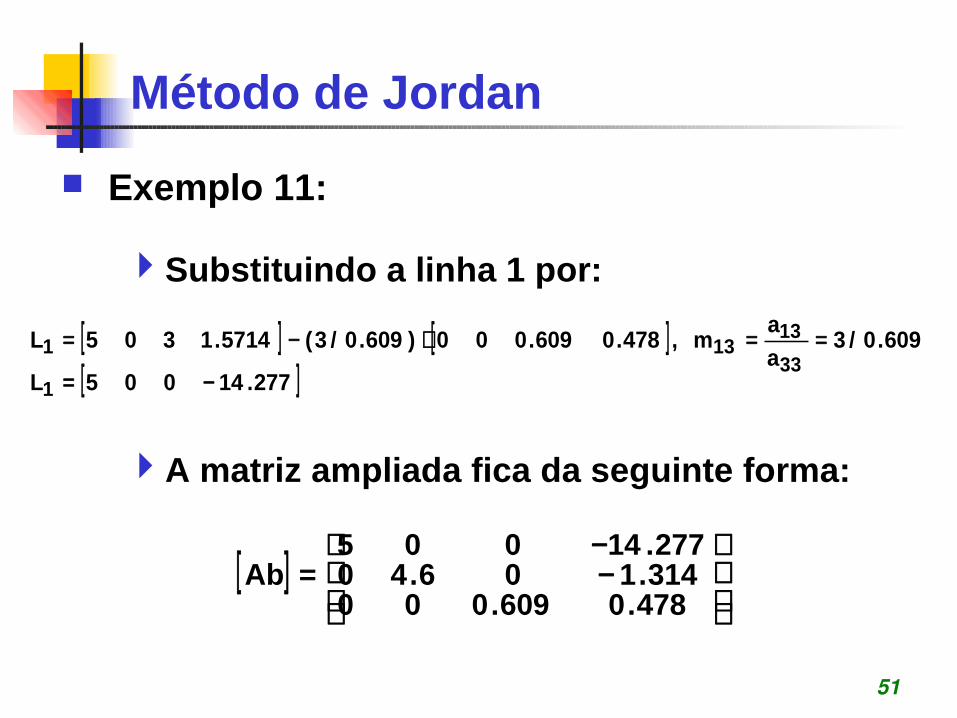
Método de Jordan Exemplo 11:
Substituindo a linha 1 por:
A matriz ampliada fica da seguinte forma:
[ ] [ ][ ]277.14005L
609.0/3aam,478.0609.000)609.0/3(5714.1305L
13313
131−=
==⋅−=
[ ]
−−
=478.0609.000314.106.40277.14005
Ab
52
Método de Jordan Exemplo 11:
E as soluções são:
x1 =0.78 , x2= 0.28, x3=2.85x1 =0.78 , x2= 0.28, x3=2.85
53
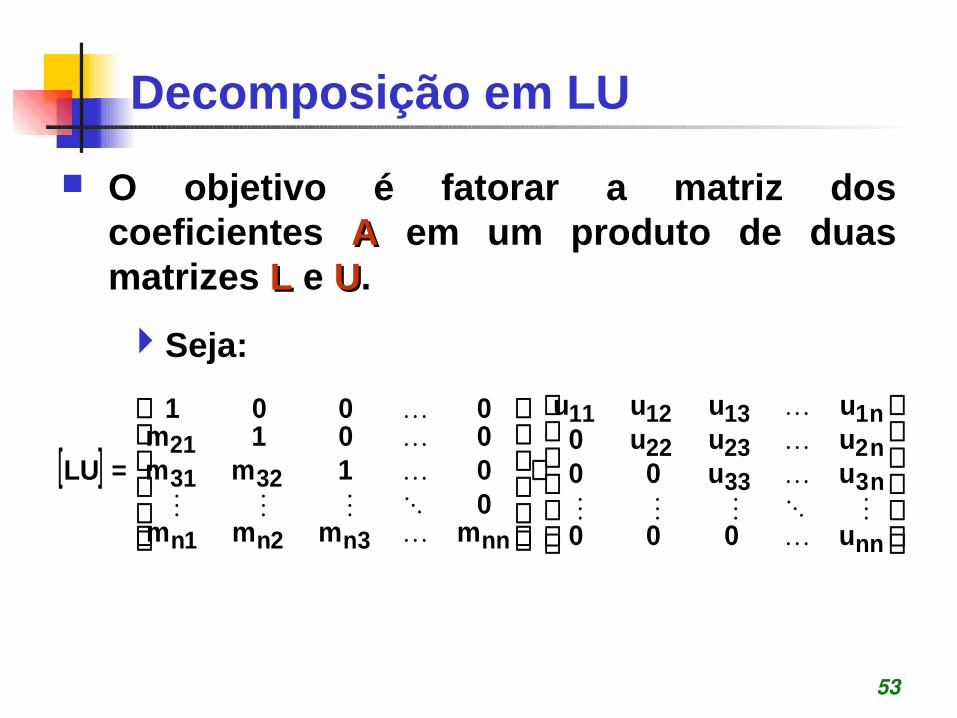
Decomposição em LU O objetivo é fatorar a matriz dos
coeficientes AA em um produto de duas matrizes LL e UU.Seja:
[ ]
⋅
=
nn
n333n22322n1131211
nn3n2n1n
323121
u000
uu00uuu0uuuu
mmmm001mm001m0001
LU
54
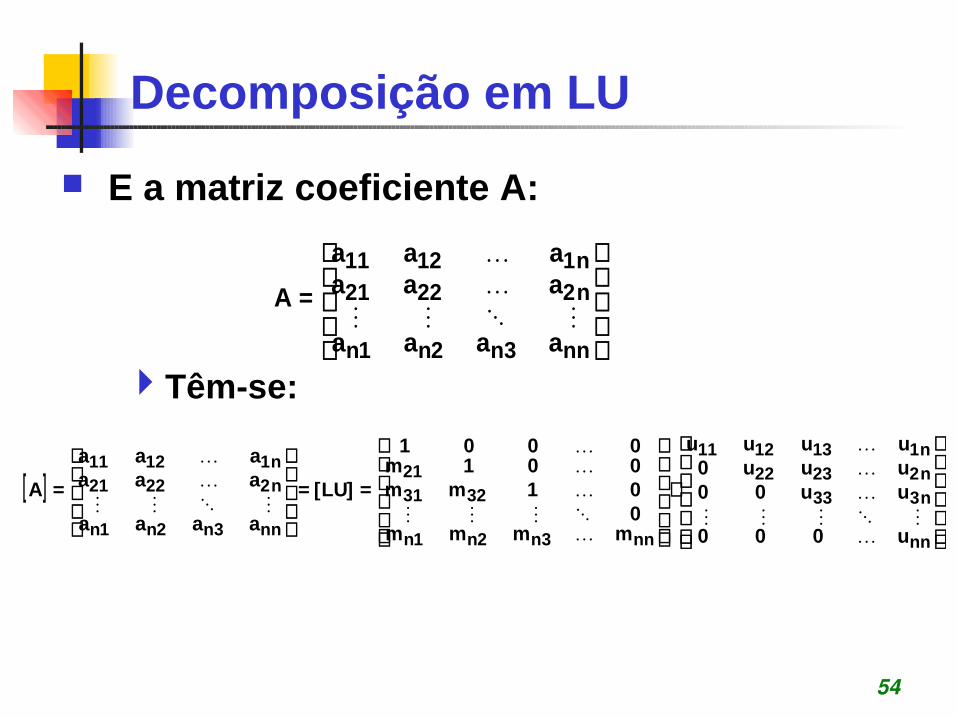
Decomposição em LU E a matriz coeficiente A:
Têmse:
=
nn3n2n1n
n22221n11211
aaaa
aaaaaa
A
[ ]
⋅
==
=
nn
n333n22322n1131211
nn3n2n1n
323121
nn3n2n1n
n22221n11211
u000
uu00uuu0uuuu
mmmm001mm001m0001
]LU[aaaa
aaaaaa
A
55
Decomposição em LU Para se obter os elementos da matriz LL e da
matriz UU, devese calcular os elementos das linhas de UU e os elementos da colunas de LLcomo segue.
56
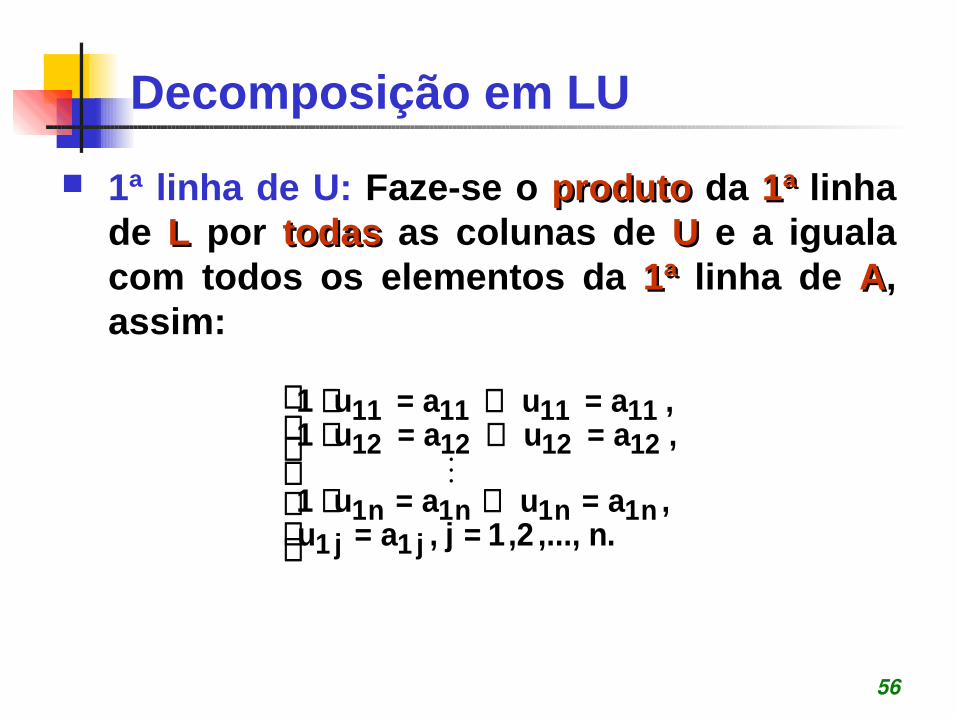
Decomposição em LU 1ª linha de U: Fazese o produtoproduto da 1ª 1ª linha
de LL por todas todas as colunas de U U e a iguala com todos os elementos da 1ª1ª linha de AA, assim:
===⇒=⋅
=⇒=⋅=⇒=⋅
.n,...,2,1j,au,auau1
,auau1,auau1
j1j1n1n1n1n1
1212121211111111
57
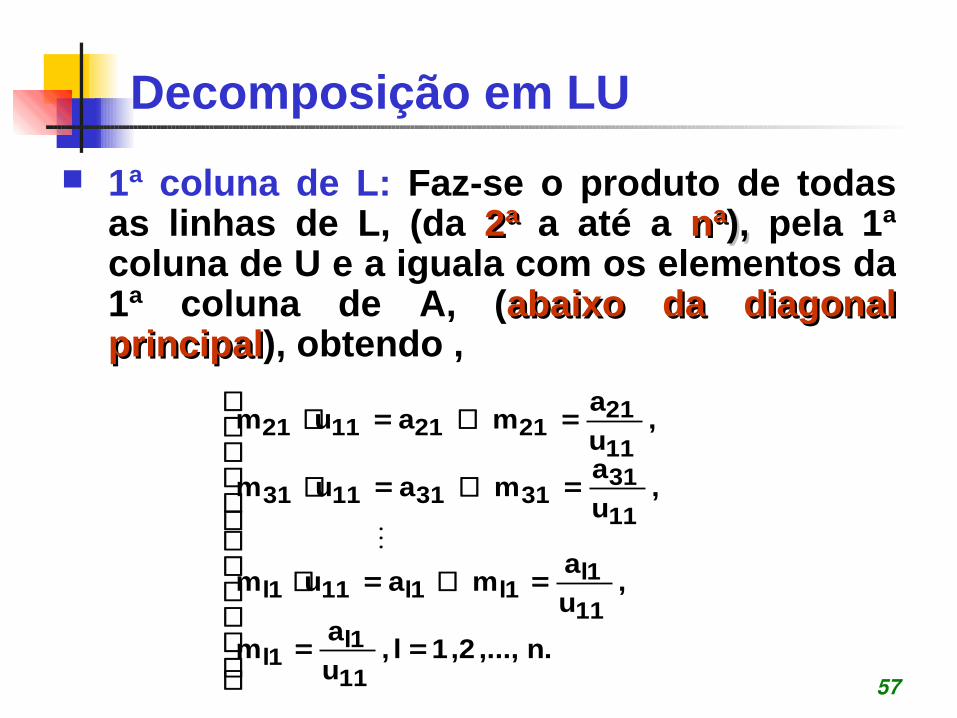
Decomposição em LU 1ª coluna de L: Fazse o produto de todas
as linhas de L, (da 2ª 2ª a até a nª nª),), pela 1ª coluna de U e a iguala com os elementos da 1ª coluna de A, (abaixo da diagonal abaixo da diagonal principalprincipal), obtendo ,
==
=⇒=⋅
=⇒=⋅
=⇒=⋅
.n,...,2,1l,uam
,uamaum
,uamaum
,uamaum
111l1l
111l
1l1l111l
1131
31311131
112121211121
58
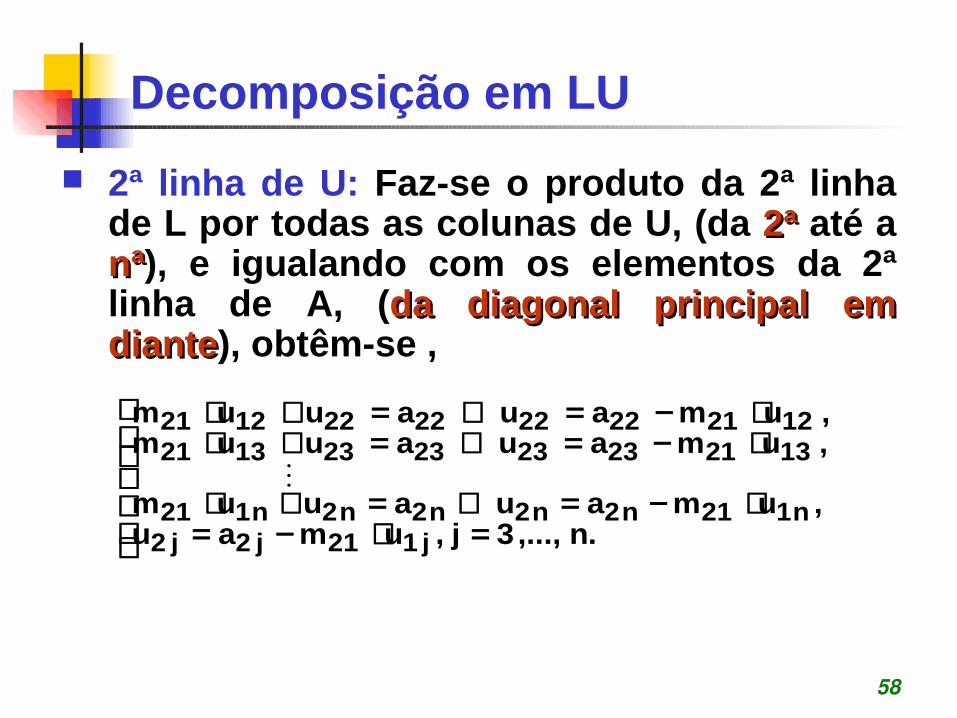
Decomposição em LU 2ª linha de U: Fazse o produto da 2ª linha
de L por todas as colunas de U, (da 2ª 2ª até anªnª), e igualando com os elementos da 2ª linha de A, (da diagonal principal em da diagonal principal em diantediante), obtêmse ,
=⋅−=⋅−=⇒=+⋅
⋅−=⇒=+⋅⋅−=⇒=+⋅
.n,...,3j,umau,umauauum
,umauauum,umauauum
j121j2j2n121n2n2n2n2n121
13212323232313211221222222221221
59
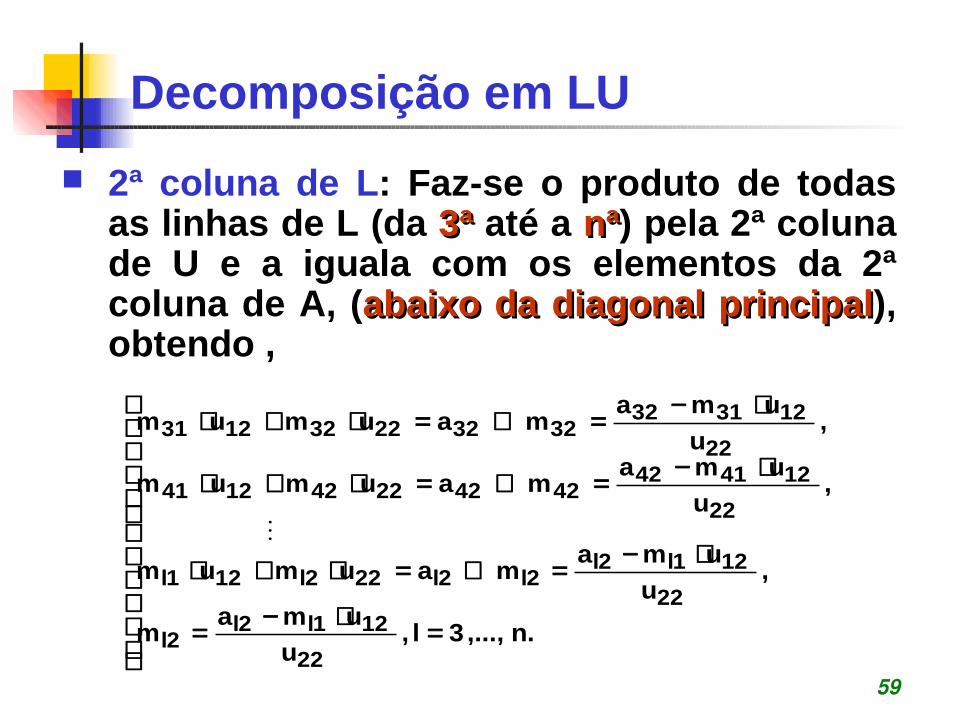
Decomposição em LU 2ª coluna de L: Fazse o produto de todas
as linhas de L (da 3ª 3ª até a nª nª) pela 2ª coluna de U e a iguala com os elementos da 2ª coluna de A, (abaixo da diagonal principalabaixo da diagonal principal), obtendo ,
=⋅−
=
⋅−=⇒=⋅+⋅
⋅−=⇒=⋅+⋅
⋅−=⇒=⋅+⋅
.n,...,3l,u
umam
,u
umamaumum
,u
umamaumum
,u
umamaumum
22121l2l
2l
22121l2l
2l2l222l121l
22124142
424222421241
22123132
323222321231
60
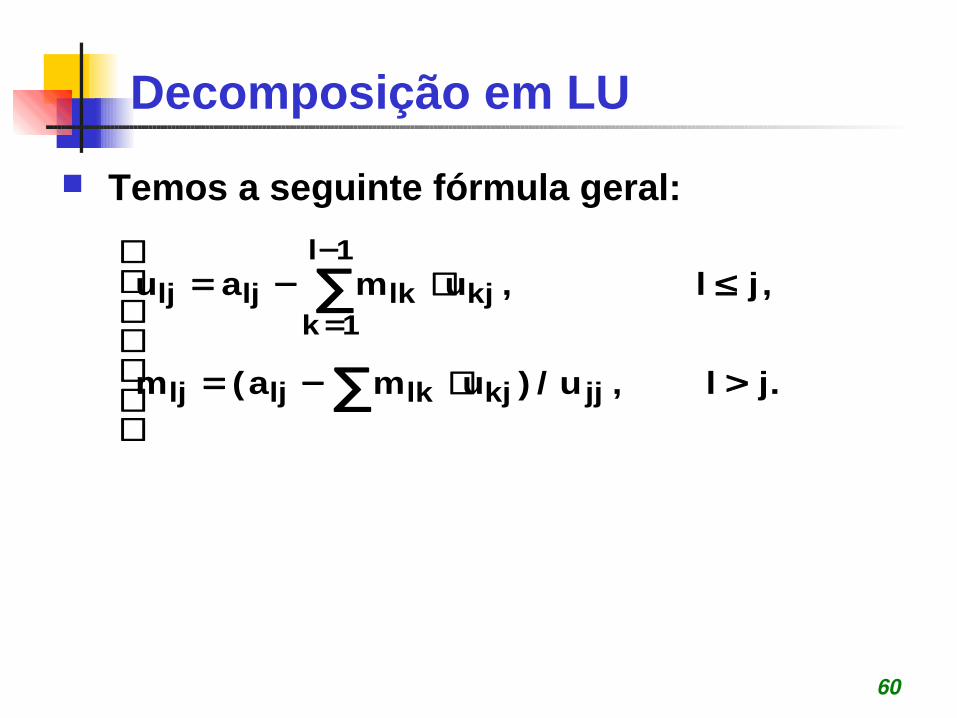
Decomposição em LU Temos a seguinte fórmula geral:
>⋅−=
≤⋅−=
∑
∑−
=
.jl,u/)uma(m
,jl,umau
jjkjlkljlj
1l
1kkjlkljlj
61
Decomposição em LU Resumo de Passos:
Seja um sistema Ax = bAx = b de ordem n, onde A satisfaz as condições da fatoração LU.
Então, o sistema Ax = bAx = b pode ser escrito como: Lux = bLux = b
62
Decomposição em LU Resumo dos Passos:
Fazendo Ux = yUx = y, a equação acima reduzse a Ly = bLy = b.
Resolvendo o sistema triangular inferior Ly Ly = b= b, obtémse o vetor yy.
63
Decomposição em LU Resumo dos Passos:
Substituição do valor de yy no sistema Ux Ux = y= y ⇒ Obtenção de um sistema triangular superior cuja solução é o vetor xxprocurado;
Aplicação da fatoração LU na resolução de sistemas lineares ⇒ Necessidade de solução de dois sistemas triangulares
64
Erros Avaliação de Erros No sistema AA⋅⋅ x = bx = b , onde:
o erro da soluçãoerro da solução é x – x’x – x’ .
=
=
=
n
21
n
21
nn2n1n
n22221n11211
b
bb
]b[a
aa
]x[aaa
aaaaaa
]A[
65
Procedimento de Determinação do Erro Determinar:
AA⋅⋅ x’ = b’x’ = b’
Erros Avaliação de Erros
66
Erros – Resíduo Procedimento de Determinação do Erro
Fazer: Resíduo Resíduo = b – b’
Resíduo =Resíduo = b – b’ = A⋅x A⋅x’ = A⋅(x – x’) = AA⋅⋅ erroerro
67
Erros – Resíduo Verificase que:
O resíduo nãonão é o erro, apenasapenas uma estimativa do mesmo;
Quanto menormenor for o resíduo, menormenor será o erro.
68
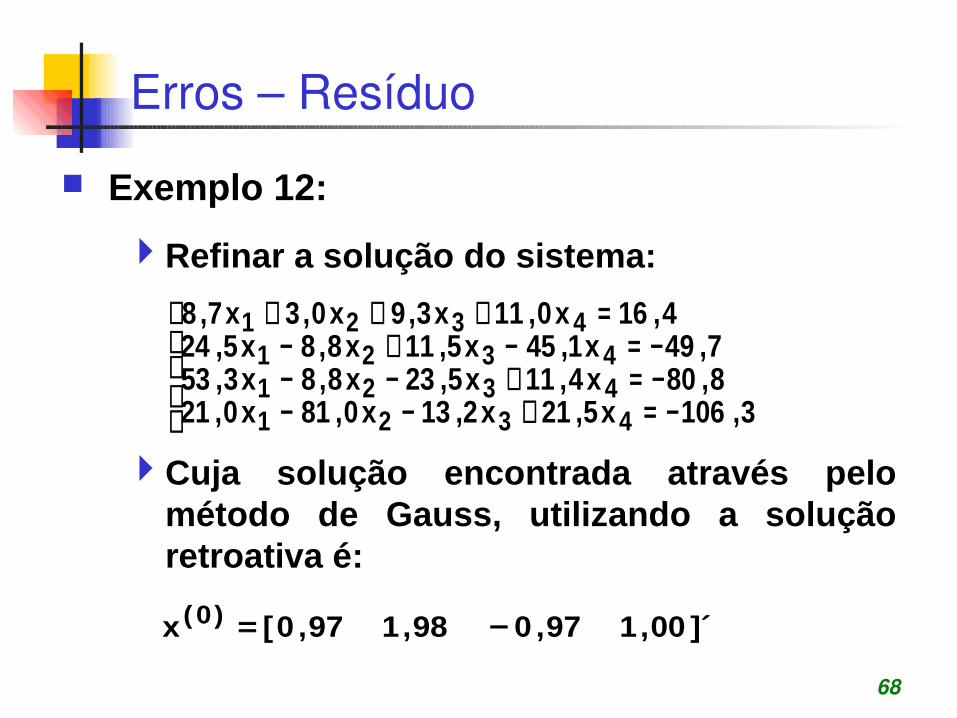
Exemplo 12:Refinar a solução do sistema:
Cuja solução encontrada através pelo método de Gauss, utilizando a solução retroativa é:
−=+−−−=+−−−=−+−
=+++
3,106x5,21x2,13x0,81x0,218,80x4,11x5,23x8,8x3,537,49x1,45x5,11x8,8x5,24
4,16x0,11x3,9x0,3x7,8
432143214321
4321
]´00,197,098,197,0[x )0( −=
Erros – Resíduo
69
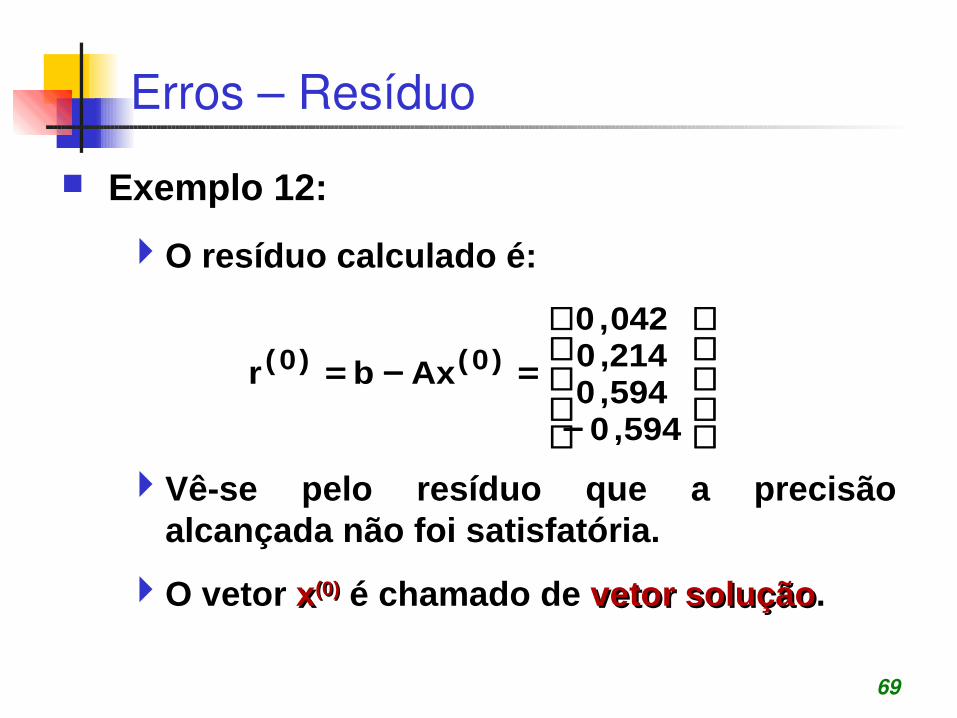
Exemplo 12:O resíduo calculado é:
Vêse pelo resíduo que a precisão alcançada não foi satisfatória.
O vetor xx(0)(0) é chamado de vetor soluçãovetor solução.
−
=−=
594,0594,0214,0042,0
Axbr )0()0(
Erros – Resíduo
70
Exemplo 12:Com o intuito de melhorar a solução,
considerase um novo vetor xx(1)(1) chamado de vetor solução melhoradovetor solução melhorado.
Erros – Resíduo
71
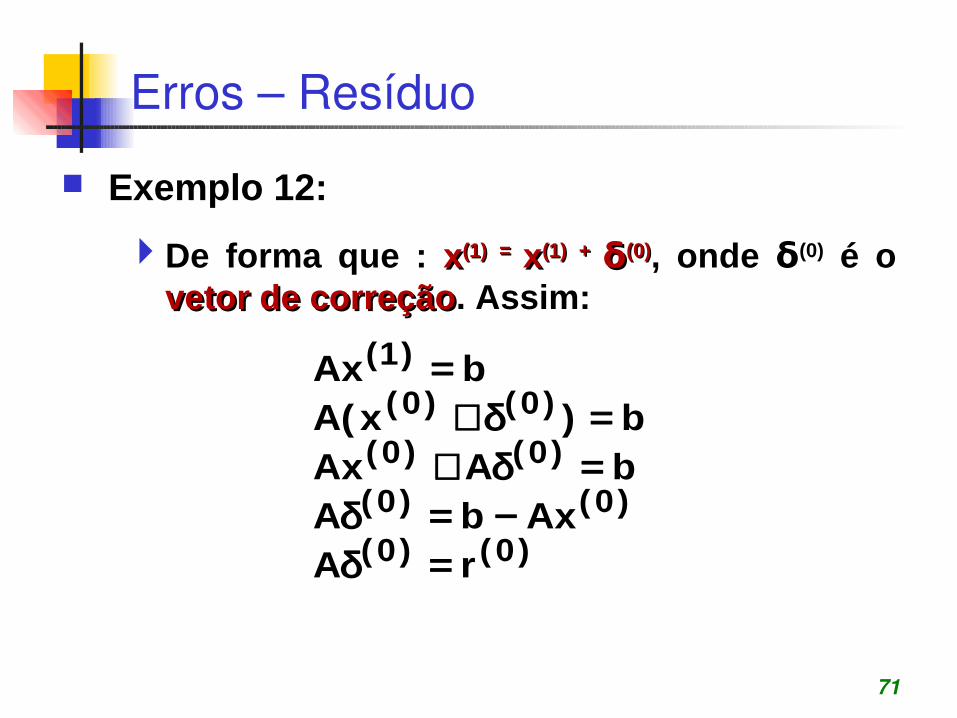
Exemplo 12:De forma que : xx(1) = (1) = xx(1) + (1) + δδ(0)(0), onde δ(0) é o
vetor de correçãovetor de correção. Assim:
)0()0()0()0(
)0()0()0()0(
)1(
rAAxbA
bAAxb)x(A
bAx
=δ−=δ
=δ+=δ+
=
Erros – Resíduo
72
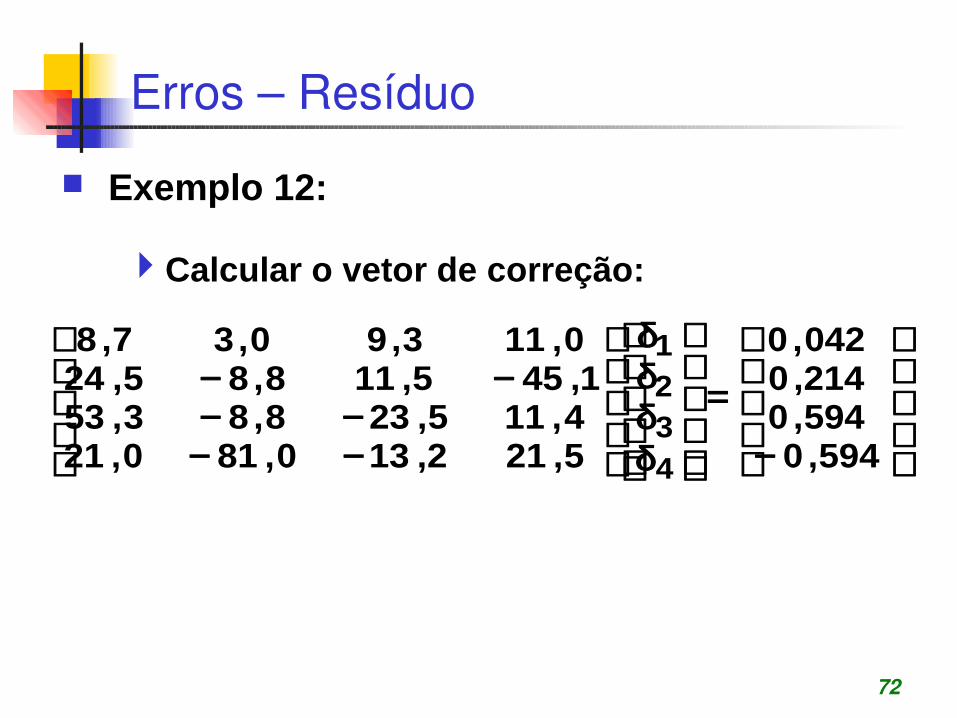
Exemplo 12:
Calcular o vetor de correção:
−
=
δδδδ
−−−−
−−
594,0594,0214,0042,0
5,212,130,810,214,115,238,83,531,455,118,85,24
0,113,90,37,8
4321
Erros – Resíduo
73
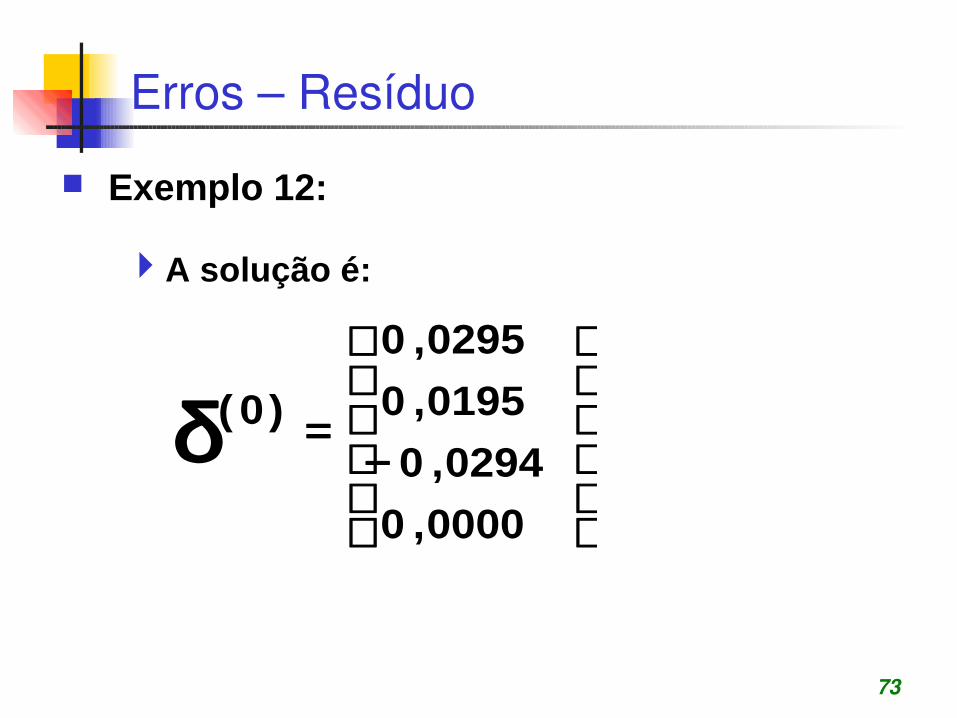
Exemplo 12:
A solução é:
−=δ
0000,00294,0
0195,00295,0
)0(
Erros – Resíduo
74
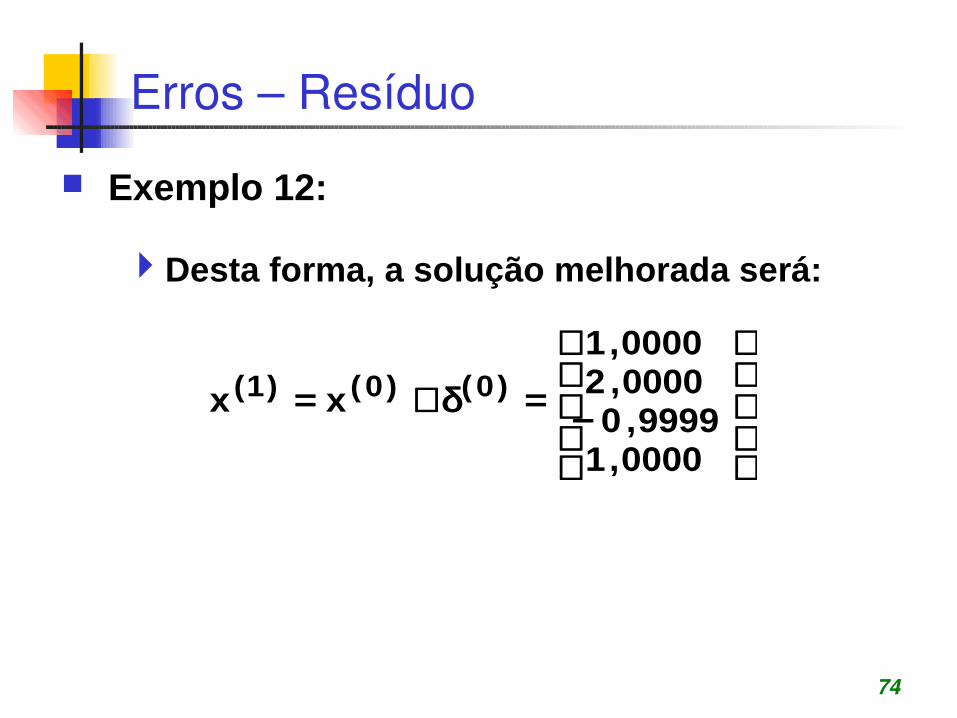
Exemplo 12:
Desta forma, a solução melhorada será:
−=δ+=
0000,19999,0
0000,20000,1
xx )0()0()1(
Erros – Resíduo
75
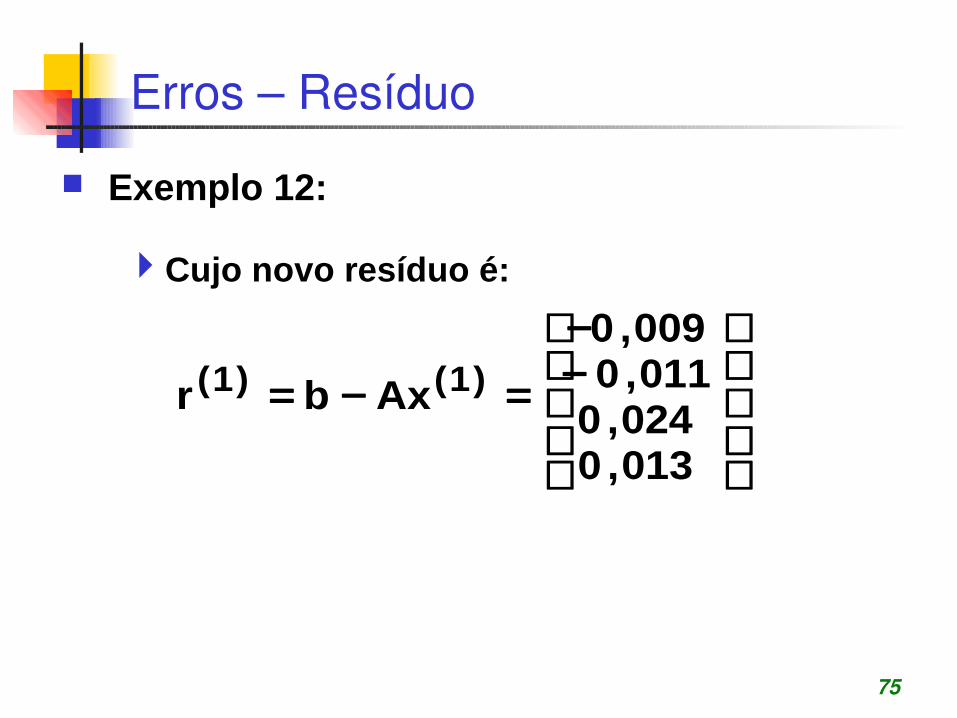
Exemplo 12:
Cujo novo resíduo é:
−−
=−=
013,0024,0011,0009,0
Axbr )1()1(
Erros – Resíduo
76
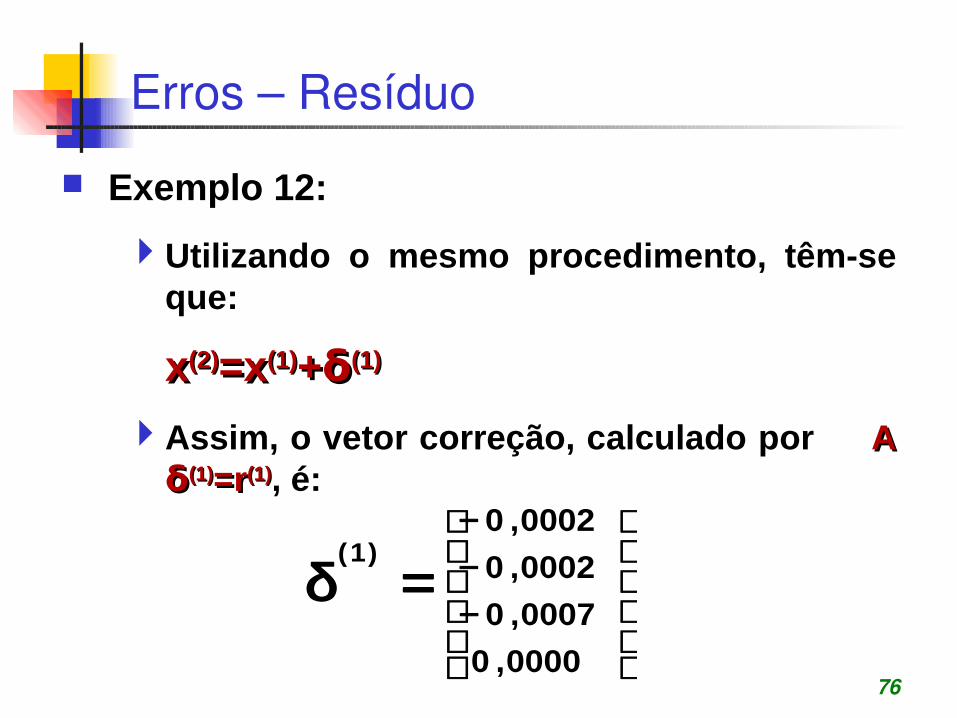
Exemplo 12:Utilizando o mesmo procedimento, têmse
que:
xx(2)(2)=x=x(1)(1)++δδ(1)(1)
Assim, o vetor correção, calculado por A A δδ(1)(1)=r=r(1)(1), é:
−−−
=δ0000,00007,00002,00002,0
)1(
Erros – Resíduo
77
Exemplo 12:
Achase assim uma solução melhorada:
−=
0000,10000,1
0000,20000,1
x )2(
Erros – Resíduo
78
Exemplo 12:
Que possui resíduo:
=
0000
r )2(
Erros – Resíduo
79
Sistemas Lineares Bibliografia Ruggiero, M. A. Gomes & Lopes, V. L. da R. Ruggiero, M. A. Gomes & Lopes, V. L. da R. Cálculo Cálculo
Numérico: Aspectos teóricos e computacionaisNumérico: Aspectos teóricos e computacionais. . MAKRON Books, 1996, 2MAKRON Books, 1996, 2ªª ed. ed.
Asano, C. H. & Colli, E. Asano, C. H. & Colli, E. Cálculo Numérico: Cálculo Numérico: Fundamentos e AplicaçõesFundamentos e Aplicações. Departamento de . Departamento de Matemática Aplicada – IME/USP, 2007.Matemática Aplicada – IME/USP, 2007.
Sanches, I. J. & Furlan, D. C. Sanches, I. J. & Furlan, D. C. Métodos NuméricosMétodos Numéricos. . DI/UFPR, 2006.DI/UFPR, 2006.
Paulino, C. D. & Soares, C. Erros e Propagação de Paulino, C. D. & Soares, C. Erros e Propagação de Erros, Erros, Notas de aulaNotas de aula, SE/ DM/ IST [Online] , SE/ DM/ IST [Online] http://www.math.ist.utl.pt/stat/pe/qeb/semestre_1_20http://www.math.ist.utl.pt/stat/pe/qeb/semestre_1_20042005/PE_erros.pdf042005/PE_erros.pdf [Último acesso 07 de Junho de [Último acesso 07 de Junho de 2007].2007].