sisel exerc cap 4 - Departamento de Engenharia...
24
Instituto Superior de Engenharia do Porto Departamento de Engenharia Electrotécnica Licenciatura em Engenharia Electrotécnica e de Computadores SISEL - Sistemas Electromecânicos Exercícios de Sistemas robóticos 2006
Transcript of sisel exerc cap 4 - Departamento de Engenharia...

Instituto Superior de Engenharia do Porto Departamento de Engenharia Electrotécnica
Licenciatura em Engenharia Electrotécnica e de Computadores
SISEL - Sistemas Electromecânicos
Exercícios de
Sistemas robóticos
2006

SISEL - Sistemas Electromecânicos Sistemas robóticos
1
1. Considere o manipulador robótico representado na figura. Representando por R uma junta Rotacional e por P uma junta Prismática, então a estrutura cinemática vem: A) PPP B) RPR C) RRP D) RRR 2. Considere o manipulador robótico representado na figura. Representando por R uma junta Rotacional e por P uma junta Prismática, então a estrutura cinemática vem: A) PPP B) RPR C) RRP D) Outro resultado
3. Considere o manipulador robótico representado na figura. Representando por R uma junta Rotacional e por P uma junta Prismática, então a estrutura cinemática vem: A) PPP B) RPR C) RRP D) Outro resultado
4. Considere o manipulador robótico representado na figura. Representando por R uma junta Rotacional e por P uma junta Prismática, então a estrutura cinemática vem: A) PPP B) RPR C) RRP D) Outro resultado 5. Considere o espaço de trabalho no espaço operacional Oxy, gerado por um manipulador com dois eixos. Então, designando por R e P, respectivamente os eixos rotacional e prismático (ou linear) verifica-se que se trata de um: A) Robô com eixo 1 = R e eixo 2 = R (robô RR) B) Robô com eixo 1 = P e eixo 2 = R (robô PR) C) Robô com eixo 1 = R e eixo 2 = P (robô (RP) D) Robô com eixo 1 = P e eixo 2 = P (robô PP)

SISEL - Sistemas Electromecânicos Sistemas robóticos
2
6. Considere o robô RR, com dois graus de liberdade rotacionais (onde l1 e l2 representam, respectivamente, os comprimentos dos elos 1 e 2) e –180º<θ1<+180º –180º<θ2<+180º. Na segunda figura está esboçado o correspondente espaço de trabalho no espaço operacional {Oxy}. Então, pode concluir-se que: A) l1 = 1,2 m e l2 = 0,8 m B) l1 = 0,6 m e l2 = 0,6 m C) l1 = 1 m e l2 = 0,2 m D) l1 = 0,8 m e l2 = 0,4 m 7. Considere o robô RR, com dois graus de liberdade rotacionais, e o seu espaço de trabalho representado na figura. Suponha que os comprimentos dos elos do robô são representados por li (i = 1,2) e que os ângulos nos eixos tomam valores tais que θiMin < θi < θiMax, onde θiMin e θiMax representam, respectivamente, os limites mínimo e máximo de variação (i = 1,2). Se os pontos A e B tiverem coordenadas A ≡ (2.7, 0) e B ≡ (0, −0.3) então pode dizer-se que: A) l1 = l2 = 1.35 B) l1 = 1.7 e l2 = 1 C) l1 = 1,5 e l2 = 1,2 D) Outro resultado 8. Considere o seguinte manipulador robótico com dois graus de liberdade rotacionais (robô RR).
x
y (x,y)
L2
θ1
o
L1
θ2
L1 - comprimento do elo 1 L2 - comprimento do elo 2 θ1 - ângulo em que se encontra o eixo 1 θ2 - ângulo em que se encontra o eixo 2 As características físicas do robô são as seguintes:
A) L1 = 1 m; L2 = 0,5 m; −135º < θ1 < +135º; 45 º < θ2 < +180º;
B) L1 = 1 m; L2 = 0,5 m; −135º < θ1 < +135º; 0 º < θ2 < +180º;
C) L1 = 1 m; L2 = 1 m; −135º < θ1 < +135º; 0 º < θ2 < +180º;
D) L1 = 1 m; L2 = 0,5 m; −135º < θ1 < +135º; 0 º < θ2 < +135º;
x
l1
y
l2
θ1
θ2
x
y
1,2 m 0,8 m

SISEL - Sistemas Electromecânicos Sistemas robóticos
3
9. Considere o robô RR, com dois graus de liberdade rotacionais, onde l1 = 1 m e l2 = 1 m, e correspondente espaço de trabalho no espaço operacional {Oxy}, representados nas figuras. Então, pode concluir-se que: A) 0º < θ1 <+90º e –180º < θ2 < +180º B) –180º < θ1 <+90º e –180º < θ2 < +90º C) –180º < θ1 <+180º e –180º < θ2 < +180º D) –90º < θ1 <+90º e –180º < θ2 < 0º 10. Considere o robô RR, com dois graus de liberdade rotacionais, onde l1 = 1 m e l2 = 1 m, e correspondente espaço de trabalho no espaço operacional {Oxy}, representados nas figuras. Além disso, sabe-se que o robô apresenta as seguintes limitações de accionamento nas juntas: –90º ≤ θ1 ≤ +90º e –180º ≤ θ2 ≤ 0º, Neste caso, para θ1 = +90º e θ2 = –90º a mão robô atinge: A) Ponto A B) Ponto B C) Ponto C D) Outro resultado 11. Considere o robô RP, com um grau de liberdade rotacional (R) e um grau de liberdade linear (P), conforme representado na figura. Considere que as juntas têm as limitações de deslocamento tais que –π/2 < q1 < 5π/6 rad e 2,0 < q2 < 3,0 m. Então, a área de trabalho A no espaço operacional xy vem aproximadamente: A) A ≈ 15,7 m2 B) A ≈ 31,4 m2 C) A ≈ 10,5 m2 D) Outro resultado 12. Considere o robô PP, com dois graus de liberdade lineares (P), conforme representado na figura. As juntas são actuadas por motores acoplados a engrenagens com um reduções ni onde θi é o deslocamento (rotacional) do motor e qi é o deslocamento (linear) do elo i do robô (i = 1,2). Considere que as juntas têm as limitações de deslocamento tais que –π/2 < θ1 < π rad, –π/3 < θ2 < 2π/3 rad, que n1 = 0,8 m rad−1, n2 = 0,5 m rad−1. Então, a área de trabalho A no espaço operacional xy vem aproximadamente: A) A ≈ 37,01 m2 B) A ≈ 14,80 m2 C) A ≈ 5,92 m2 D) Outro resultado
A
x
y
q2
q1
θ1 n1 n2
θ2
motor 2
motor 1
x
l1
y
l2
θ1
θ2
x
y
q2
q1
x
l1
y
l2
θ1
θ2 A
B
C

SISEL - Sistemas Electromecânicos Sistemas robóticos
4
13. Considere o robô PP, com dois graus de liberdade lineares (P), conforme representado na figura. As juntas são actuadas por motores acoplados a engrenagens com um reduções ni onde θi é o deslocamento (rotacional) do motor e qi é o deslocamento (linear) do elo i do robô (i = 1,2). Considere que as juntas têm as limitações de deslocamento tais que –π/2 < θ1 < π rad, –π/3 < θ2 < 2π/3 rad, que n1 = 0,8 m rad−1, n2 = 0,5 m rad−1. Então, a área de trabalho A no espaço operacional xy vem aproximadamente: A) A ≈ 17,3 m2 B) A ≈ 5,9 m2 C) A ≈ 4,1 m2 D) Outro resultado 14. Considere o manipulador robótico representado na figura, com estrutura RPP (R - junta Rotacional, P - junta Prismática) e sejam θi (i = 1,2,3) as variáveis das juntas. Se as variáveis nas juntas têm amplitude de variação tais que 0 ≤ θ1 < 2π rad (eixo R), 0 ≤ θ2 < L (eixo P) e L ≤ θ3 < 2L (eixo P), então o volume de trabalho V vem: A) V ≈ 4L3 B) V ≈ 9L3 C) V ≈ 12L3 D) Outro resultado 15. Considere o manipulador robótico com estrutura cinemática RRP representado na figura (R - junta Rotacional, P - junta Prismática) e sejam {θ1, θ2, θ3} as variáveis das juntas. Supondo que −π ≤ θ1 ≤ π , −π ≤ θ2 ≤ π, 0 ≤ θ3 ≤ L então o volume de trabalho V vem: A) V = πL3/3 B) V = 2πL3/3 C) V = 4πL3/3 D) Outro resultado 16. Considere o manipulador robótico com estrutura cinemática PRP representado na figura (R - junta Rotacional, P - junta Prismática) e sejam {θ1, θ2, θ3} as variáveis das juntas. Supondo que 0 ≤θ1 ≤ L , −π ≤ θ2 ≤ π, 0 ≤ θ3 ≤ L então o volume de trabalho V vem: A) V = πL3 B) V = 2πL3 C) V = 3πL3 D) Outro resultado 17. Considere o manipulador robótico com estrutura cinemática RRP representado na figura (R - junta Rotacional, P - junta Prismática) e sejam {θ1, θ2, θ3} as variáveis das juntas. Supondo que −π ≤ θ1 ≤ π [rad], 0 ≤ θ2 ≤ π [rad], L ≤ θ3 ≤ 2L [m] então o volume de trabalho V vem: A) V = (7/3)πL3/3 [m3] B) V = (14/3)πL3/3 [m3] C) V = (28/3)πL3 [m3] D) V = (4/3)πL3/3 [m3]
θ1
θ2
θ3
θ2
θ1
θ3
θ1
θ2 θ3
x
y
q2
q1 motor
qi
θI, ni elo i

SISEL - Sistemas Electromecânicos Sistemas robóticos
5
18. Considere o manipulador robótico com 3 juntas da figura, que apresenta as seguintes dimensões e restrições das juntas: La=0,5 m Lb=0,1 m −135º < q2 < 135º Lc=0,1 m 0 m < q3 < 0,4 m 18.a) Indique qual a estrutura do manipulador, o seu índice de mobilidade (M) e o número de graus de liberdade (n). 18.b) Calcule o espaço de trabalho do manipulador para q1 = 0º. 18.c) Calcule o espaço de trabalho do manipulador para 0º < q1 < 180º. 19. As características de precisão e de repetibilidade de dois robôs são testadas através de uma mesma experiência. Assim, solicita-se que repitam várias vezes uma trajectória até ao centro de um alvo. Os pontos atingidos estão representados nas figuras seguintes. Então, pode dizer-se que: A) O robô 1 tem maior precisão que o robô 2 B) O robô 1 tem menor precisão que o robô 2 C) O robô 1 tem menor repetibilidade que o robô 2 D) Outro caso 20. As características de precisão e de repetibilidade de dois manipuladores robóticos são testadas através de uma mesma experiência. Assim, solicita-se que repitam várias vezes uma trajectória, com início num mesmo ponto até um ponto final situado no centro de um alvo. Os grupos de pontos atingidos estão representados na figura e designam-se por A e B, respectivamente para os robôs 1 e 2. Então, pode dizer-se que: A) O robô 1 tem menor precisão e maior repetibilidade do que o robô 2 B) Os robôs 1 e 2 têm precisão e repetibilidade idênticas C) O robô 1 tem maior precisão e menor repetibilidade do que o robô 2 D) Outro resultado 21. As características de precisão e de repetibilidade de dois manipuladores robóticos são testadas através de uma mesma experiência. Assim, solicita-se que repitam várias vezes uma trajectória, com início no ponto A até um ponto final B no centro de um alvo. Os pontos atingidos estão representados na figura seguinte. Então, pode dizer-se que: 21.a) A) O robô 1 tem menor precisão que o robô 2 B) O robô 1 tem precisão igual à do robô 2 C) O robô 1 tem maior precisão que o robô 2 D) Outro caso 21.b) A) O robô 1 tem menor repetibilidade que o robô 2 B) O robô 1 tem repetibilidade igual à do robô 2 C) O robô 1 tem maior repetibilidade que o robô 2 D) Outro caso
robot 1 robot 2
alvo pontos atingidos

SISEL - Sistemas Electromecânicos Sistemas robóticos
6
22. Considere o robô RRR representado na figura seguinte.
A cinemática directa deste robô é dada por: A)
( ) ( )
( ) ( )321321211
321321211
coscoscossensensen
θθθLθθLθLyθθθLθθLθLx+++++=
+++++=
B)
332211
332211
sensensencoscoscosθLθLθLyθLθLθLx
++=++=
C)
( ) ( )
( ) ( )321321211
321321211
sensensencoscoscos
θθθLθθLθLyθθθLθθLθLx
+++++=+++++=
D) Outro resultado
23. Considere o seguinte manipulador robótico com três graus de liberdade rotacionais.
Z
X
θ1
θ2
θ3
Vista Lateral do Manipulador
L1
L2
h
X
Y
θ1
Vista de Topo do Manipulador
23.a) Determine a cinemática directa deste manipulador, sendo: L1 - comprimento do elo 1; L2 - comprimento do elo 2; h - altura desde a base do manipulador até ao eixo 1; θ1 - ângulo em que se encontra o eixo 1; θ2 - ângulo em que se encontra o eixo 2; θ3 - ângulo em que se encontra o eixo 3.
23.b) Esboce o volume de trabalho (vista lateral e vista de topo) deste manipulador, sendo:
L1 = 1 m; L2 = 0,5 m; h = 1,5 m; −145º < θ1 < +145º; −45 º < θ2 < +180º; 0º < θ3 < 135º.
x
y
(x,y)
L2
θ1
o
L1
θ2
θ3L3

SISEL - Sistemas Electromecânicos Sistemas robóticos
7
Z
X
Vista Lateral do Manipulador
X
Y
Vista de Topo do Manipulador

SISEL - Sistemas Electromecânicos Sistemas robóticos
8
24. Considere o seguinte manipulador robótico com estrutura RRP (três graus de liberdade, dois rotacionais θ1 e θ2 e um prismático l2).
Z
X
θ1
θ2
Vista Lateral do Manipulador
L1
l2
h
X
Y
θ1
Vista de Topo do Manipulador
24.a) Escreva as equações da cinemática directa (de posição) para este robô, sendo:
L1 – comprimento do elo 1; l2 – deslocamento linear da junta 3; h – altura desde a base do manipulador até à junta 1; θ1 – deslocamento angular da junta 1; θ2 – deslocamento angular da junta 2;
24.b) Represente no espaço operacional a trajectória do robô entre os pontos A e B, representados no espaço das juntas (θ1 é o eixo vertical, θ2 é o eixo das abcissas e l2 o eixo das ordenadas). Suponha uma interpolação linear entre estes dois pontos, no espaço das juntas. Considere θ1 constante com o valor θ1 =0º.
θ2 (º)
l2 (m)
Espaço das juntas
A B
-45º 135º 180º0º
0,5
1
0,75
θ1 - eixo vertical
Limite dovolume detrabalho
24.c) Esboçe o volume de trabalho (vista lateral e vista de topo) deste manipulador, sendo:
h = 1,5 m; L1 = 1 m; 0,5 m < l2 < 1 m; −180º < θ1 < +135º; −45 º < θ2 < +180º;

SISEL - Sistemas Electromecânicos Sistemas robóticos
9
Z
X
X
Y
Vista Lateral do Manipulador
Vista de Topo do Manipulador

SISEL - Sistemas Electromecânicos Sistemas robóticos
10
25. Considere o robô do tipo RPRP representado na figura, onde: −180º < q1 < 180º, 0,25 m < q2 < 1,0 m, 0º < q3 < 90º, 0,25 m < q4 < 1,5 m 25.a) Calcule as equações da cinemática directa. 25.b) Determine os valores das juntas de forma a que a posição do robô seja x = 1,0 m, m25,1=y , z = 0,5 m 25.c) Em geral, para uma dada posição (x,y,z) no interior do espaço de trabalho quantas soluções (q1,q2,q3,q4) existem para as equações da cinemática inversa? 26. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que l1 = 0,9 m, l2 = 0,4 m, −90º <θ1 <+180º e 0º <θ2 <+180º. Esboce o espaço de trabalho do robot no espaço operacional {Oxy} e indique os pontos onde ocorrem singularidades cinemáticas. 27. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que l1 e l2 representam os comprimentos dos elos 1 e 2. Então, existem singularidades cinemáticas nos lugares geométricos: A) x2 + y2 = (l1 + l2)2 e x2 + y2 = (l1 − l2)2 B) x2 + y2 = l1
2 + l22 e x2 + y2 = l1
2 − l22
C) x + y = l1 + l2 e x − y = l1 − l2 D) x + y = (l1 + l2)2 e x − y = (l1 − l2)2 28. Considere o robô RR, com dois graus de liberdade rotacionais, onde l1 = 1 m e l2 = 1 m, e correspondente espaço de trabalho no espaço operacional {Oxy}, representados nas figuras. Além disso, sabe-se que o robô apresenta as seguintes limitações de accionamento nas juntas: –90º ≤ θ1 ≤ +90º e –180º ≤ θ2 ≤ 0º. Neste caso, é ponto com singularidade cinemática: A) Ponto A B) Ponto B C) Ponto C D) Ponto D 29. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que: l1 = 0.6 m, l2 = 0.4 m, −90º ≤ θ1 ≤ +90º e −135º ≤ θ2 ≤ +120º. Esboce o volume de trabalho do robô no espaço operacional {x, y} e no espaço das juntas {θ1, θ2}. Indique os pontos onde ocorrem singularidades cinemáticas caso existam.
x
l1
y
l2
θ1
θ2
x l1
y
l2
θ1
θ2 A
B
C
D
x l1
y
l2
θ1
θ2
x l1
y
l2
θ1
θ2

SISEL - Sistemas Electromecânicos Sistemas robóticos
11
30. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que l1 = 1,0 m l2 = 0,5 m. Então, ocorre uma singularidade cinemática nos lugares geométricos: A) x2 + y2 = 2,52 e x2 + y2 = 0 B) x2 + y2 = 22 e x2 + y2 = 1,52 C) x2 + y2 = 22 e x2 + y2 = 0 D) Outro resultado
31. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que l1 = 1 m l2 = 0,5 m. Então, existe uma singularidade cinemática no lugar geométrico: A) θ1 = 0 rad, θ2 = π/2 rad B) θ1 = ±π rad, θ2 = π/2 rad C) θ1 = π/2 rad, θ2 = π/2 rad D) Outro resultado 32. Considere um robô com uma estrutura RR, tal como representado na figura seguinte, em que os elos apresentam comprimentos Li = 1m (i=1,2). A gama de variação do movimento de cada uma das juntas deste robô é: –180º < θi < +180º (i=1,2). Indique se é possível a este robô efectuar uma trajectória em linha recta no espaço operacional entre os pontos com coordenadas A ≡ (−1 ; 1.5) e B ≡ (−1 ; −1.5). Justifique a sua resposta através da representação da trajectória resultante seja no espaço operacional {oxy} seja no espaço das juntas {oθ1θ2}. 33. Um manipulador RR está inserido no processo de produção fabril representado na figura. 33.a) Configure os limites das juntas de modo a evitar que (por exemplo, devido a um erro de programação) o manipulador choque com a Máquina 1. 33.b) A função do manipulador consiste em transportar peças do tapete 1 (ponto A) para o tapete 2 (ponto B). Calcule as coordenadas (q1,q2) de quatro pontos (inicial, intermédio1, intermédio2 e final) de uma trajectória a ser seguida pelas juntas que permita que o manipulador cumpra essa função sem colidir com nenhuma das máquinas. Esboce a evolução da posição dos elos ao longo da trajectória.
l1 = 0.75m l2 = 0.5m A ≡ (1, 0) B ≡ (0, -1) C ≡ (0, 0.5) D ≡ (0.6, -0.6)
x (m)
y (m)
q1
q2l2
l1Tapete 1
X
Tapete 2
B
A
Máquina 1
Máquina 2
X
D
X
X
C
(0,0)
x l1
y
l2
θ1
θ2
x l1
y
l2
θ1
θ2
x
y (x,y)
L2
θ1
o
L1
θ2

SISEL - Sistemas Electromecânicos Sistemas robóticos
12
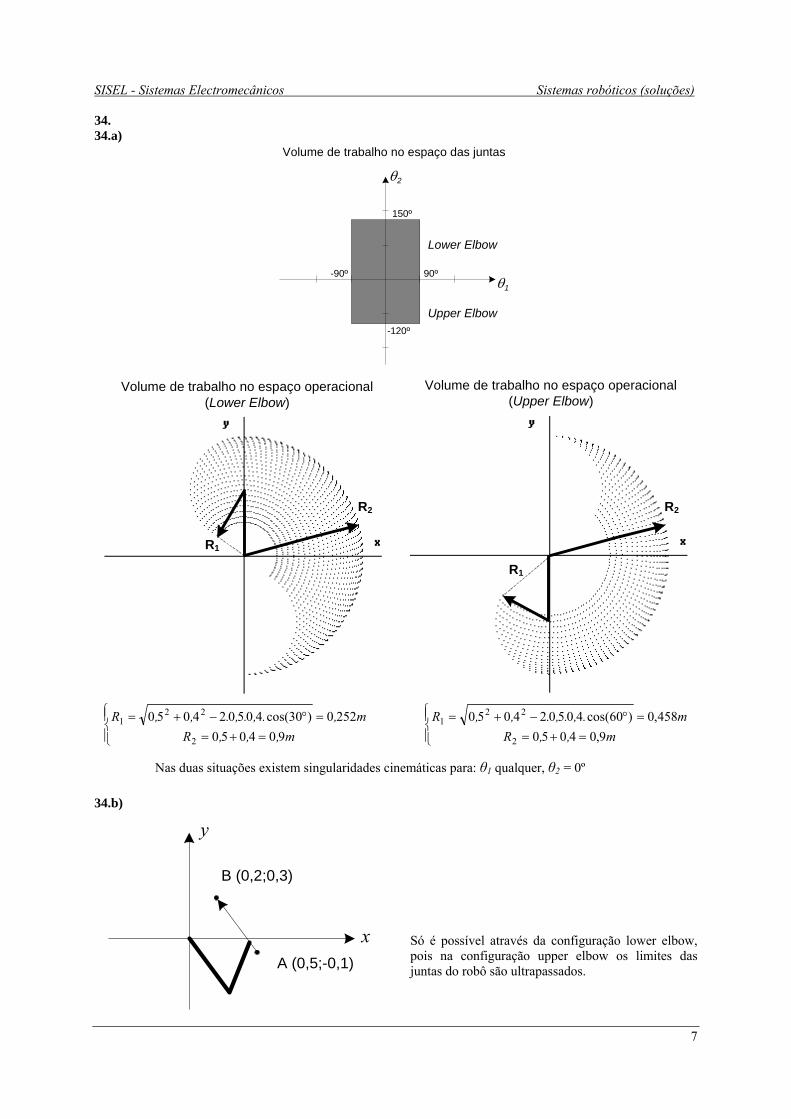
34. Considere o robô RR, com dois graus de liberdade rotacionais, representado na figura tal que l1 = 0,5 m, l2 = 0,4 m, −90º <θ1 < +90º e −120º < θ2 < +150º. 34.a) Esboce o espaço de trabalho do robô no espaço operacional {xy} e no espaço das juntas {θ1θ2}. Indique os pontos onde ocorrem singularidades cinemáticas caso existam. 34.b) A mão do robô executa uma trajectória no espaço operacional entre os pontos A = (x,y) ≡ (0,5; −0,1) e B = (x,y) ≡ (0,2; 0,3). Determine as correspondentes coordenadas no espaço das juntas {θ1θ2}. Comente as diferentes possibilidades caso elas existam.
35. Um robô RR com l1 = 1 m e l2 = 1,5 m, está inserido no processo de produção fabril representado na figura. A função do manipulador consiste em transportar peças do tapete 1 (ponto A) para o tapete 2 (ponto B). 35.a) Calcule, no espaço das juntas, as coordenadas {q1, q2} de quatro pontos (inicial, intermédio1, intermédio2 e final) de uma trajectória a ser seguida pelas juntas que permita que o manipulador cumpra essa função sem colidir com nenhuma das máquinas. Esboce a evolução da posição dos elos ao longo da trajectória. 35.b) Seria possível usar outro tipo de manipulador com um número de juntas igual ou inferior ao do robô RR para desempenhar a função descrita? Em caso afirmativo diga qual e esboce a sua trajectória, no espaço das juntas, para o percurso A-B. 36. Considere o robô RR, com dois graus de liberdade rotacionais e l1 = l2 = 1 m, e as trajectórias A→B e C→D no espaço operacional {Oxy}, ambas com duração de 2 seg, representadas nas duas figuras para várias configurações sucessivas do robô. Então, pode dizer-se que:
A) A trajectória A→B impõe maiores velocidades nos eixos do robô. B) A trajectória C→D impõe maiores velocidades nos eixos do robô. C) As trajectórias A→B e C→D impõem velocidades idênticas nos eixos do robô. D) Outro resultado.
A ≡ (2, 0) B ≡ (0, -2) C ≡ (0, 1) D ≡ (0.8, -0.8)
x l1
y
l2
θ1
θ2
Tapete 2
x (m)
y (m)
q1
q2
l2
l1 Tapete 1X
B
A
Máquina 1
Máquina 2
X
D
X
X
C

SISEL - Sistemas Electromecânicos Sistemas robóticos
13
37. Considere o planeamento de trajectórias de um robô. Então, em geral pode dizer-se que: A) A trajectória deve incluir pontos situados muito perto dos limites de deslocamento dos eixos B) A trajectória deve incluir pontos situados perto das singularidades cinemáticas C) A trajectória deve incluir pontos situados fora do espaço de trabalho D) Outro resultado 38. Considere o robô RR, com dois graus de liberdade rotacionais, com l1 = 5 m e l2 = 5 m e as seguintes limitações de accionamento nas juntas: –90º ≤ θ1 ≤ +90º e 0º ≤ θ2 ≤ +180º. Pretende-se efectuar a trajectória A→B→C→D→E no espaço operacional Oxy representada na figura da direita. Indique a corresponde evolução dos sinais {x(t), y(t)} e {θ1 (t), θ2(t)}. 39. Considere o robô RR, com dois graus de liberdade rotacionais, com l1 = 5 m e l2 = 5 m e as seguintes limitações de accionamento nas juntas: θ1min ≤ θ1 ≤ θ1max e θ2min ≤ θ2 ≤ θ2max (com valores mínimo e máximo tais que θ1min < θ1max e θ2min < θ2max). Pretende-se efectuar a trajectória A→B→C→D→E no espaço operacional Oxy representada na figura da direita. Determine os valores limite de {θ1min, θ1max, θ2min, θ2max} tais que: 39.a) A trajectória só é possível de executar com configuração do robô “cotovelo para baixo” (lower elbow). 39.b) A trajectória só é possível de executar com configuração do robô “cotovelo para cima” (upper elbow). 40. Considere um manipulador robótico do tipo RR com l1 = l2 = 1,5 m e −180º<q1<180º e −180º<q2<180º. Pretende-se que o manipulador se movimente segundo uma trajectória com pontos inicial e final respectivamente A≡(x0,y0) = (−1,1) e D≡(x3,y3) = (1,−1). O algoritmo de planeamento de trajectória efectua uma interpolação gerando dois pontos adicionais B e C de forma aos quatro pontos ficarem equidistantes. Para uma configuração “lower elbow”, determine os valores das coordenadas (q1,q2) e (x,y), respectivamente no espaço das juntas e no espaço operacional, correspondentes aos quatro pontos {A,B,C,D} quando: 40.a) A interpolação é executada no espaço das juntas Oq1q2 40.b) A interpolação é executada no espaço operacional Oxy 40.c) A trajectória especificada na alínea anterior obriga o manipulador a cruzar uma singularidade. Indique qual a singularidade, os seus efeitos no desempenho do manipulador e uma possível forma de os minimizar.
x
l1
y
l2
θ1
θ2
x
l1
y
l2
θ1
θ2

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
1
Soluções 1. D) RRR 2. D) Outro resultado (RPP) 3. C) RRP 4. B) RPR 5. C) Robô com eixo 1 = R e eixo 2 = P (robô (RP) 6. C) l1 = 1 m e l2 = 0,2 m 7. C) l1 = 1,5 e l2 = 1,2 8. B) 9. D) –90º < θ1 <+90º e –180º < θ2 < 0º 10. A) Ponto A
11. ( ) 222 5,102321
65
2mA ≅−⎟
⎠⎞
⎜⎝⎛ +=
π
C) A ≈ 10,5 m2 12. C) A ≈ 5,92 m2 13.
πθπθπ
πθπθπ
=Δ⎯→⎯<<−
=Δ⎯→⎯<<−
22
11
32
3
23
2
( ) 221 9,55,0.8,0.
23. mqqAnq ii ≅⎟
⎠⎞
⎜⎝⎛=ΔΔ=⎯→⎯Δ=Δ ππθ
B) A ≈ 5,9 m2 14. B) V ≈ 9L3 15. C) V = 4πL3/3 16. A) V = πL3 17. B) V = (14/3)πL3/3 [m3] 18. 18.a) RRP, M=3, n=3 18.b)
área de trabalho = 222 56,0)1,05,0(360270 m≈−π
0,50,1
Representação da área de trabalho no espaço operacional para q1=0º

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
2
18.c)
Volume de trabalho = [ ] 350
10
334
3
022
043
0
50
10123
232 440
3cos2 m,
q)(qπdqdqdq)qsen(q
,
,
ππ π ,
,≈
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=∫ ∫ ∫
19. B) O robô 1 tem menor precisão que o robô 2 20. C) O robô 1 tem maior precisão e menor repetibilidade do que o robô 2 21. 21.a) A) O robô 1 tem menor precisão que o robô 2 21.b) B) O robô 1 tem repetibilidade idêntica à do robô 2 22. C) 23. 23.a) Cinemática directa:
( )[ ]( )[ ]
( )⎪⎩
⎪⎨
⎧
+++=++=++=
32221
322211
322211
sensencoscossencoscoscos
θθlθlhzθθlθlθyθθlθlθx
23.b)

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
3
24.
24.a) Cinemática directa:( )[ ]( )[ ]
( )⎪⎩
⎪⎨
⎧
++=+=+=
)(sen)cos()(sen)cos()cos(
221
2211
2211
θθθθθ
lLhzlLylLx
24.b)
x
z
h
l1=1mA
l2=0,75m
Bθ 2=0º
θ 2=135º
24.c)

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
4
25. 25.a)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
)sen())sen((cos)(cos)(cos
342
134
134
qqqqqqqqq
zyx
25.b)
m,yxr 5122 =+= Só é possível com °= 03q e m,q 514 = , logo:
⎪⎩
⎪⎨⎧
°=⇔=
==⇔
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
248)(cos)sen(
50)sen(51)(cos51
11
1
2
2
1
1
,qqq
xy
m,zq
qq,q,
zyx
25.c) Infinitas. 26. 27. A) x2 + y2 = (l1 + l2)2 e x2 + y2 = (l1 - l2)2 28. C) Ponto C 29.
⎩⎨⎧
°=°=
⇒⎩⎨⎧
=−==+=
1800
5,03,1
2
1
212
211
θθ
mllRmllR
Obtêm-se duas zonas de singularidade cinemática:
Volume de trabalho no espaço das juntas
θ1
θ2
120º
-90º 90º
-135º
Lower Elbow
Upper Elbow
Volume de trabalho no espaço operacional
R2 R1

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
5
Volume de trabalho no espaço operacional(Lower Elbow)
R2
R1
Volume de trabalho no espaço operacional
(Upper Elbow)
R2
R1
30. D) Outro resultado
Pontos singulares ⎪⎩
⎪⎨⎧
=+=+
222
222
5,05,1
yxyx
31. D) Outro resultado θ2 = 0 rad , θ2 = ±π rad
⎪⎩
⎪⎨⎧
=+==°−+=
m,,Rm.,.,,,R
14060529,0)60(cos4060.24060
2
221
⎪⎩
⎪⎨⎧
=+==°−+=
m,,Rm.,.,.,,R
14060425,0)45(cos406024060
2
221
Verifica-se uma singularidade cinemática para: θ1 qualquer, θ2 = 0º
Verifica-se uma singularidade cinemática para: θ1 qualquer, θ2 = 0º

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
6
y
x
B
A
-2 2
2
-2
Trajectória pretendida no espaço operacional
xA
y
B
0,36m
32.
33. 33.a)
°=⎟⎠⎞
⎜⎝⎛= 841
75050arcsin2 ,
,,q
°−<<°−°<<°−8,41180
8,41180
2
1
33.b) Ponto inicial → Ponto A ⎪⎩
⎪⎨⎧
⎩⎨⎧
°−=°=
⇒==
5,759,28
01
2
1
yx
A
A
Ponto intermédio 1 → Ponto I1 ⎪⎩
⎪⎨⎧
⎩⎨⎧
°−=°=
⇒−=
=
5,1043,19
25,075,0
2
1
1
1
yx
I
I
Ponto intermédio 2 → Ponto I2 ⎪⎩
⎪⎨⎧
⎩⎨⎧
°−=°−=
⇒−=
=
5,1048,33
75,025,0
2
1
2
2
yx
I
I
Ponto final → Ponto B ⎪⎩
⎪⎨⎧
⎩⎨⎧
°−=°−=
⇒−=
=5,75
611
0
2
1
yx
B
B
Volume de trabalho no espaço das juntas
180º
-180º 180º
-180º
q2
q1
B A
A (98º;51,3º)
B (-149º;51,3º)
q1 excede o limite de movimento admissível
SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
7
34. 34.a)
Volume de trabalho no espaço das juntas
θ1
θ2
150º
-90º 90º
-120º
Lower Elbow
Upper Elbow
Volume de trabalho no espaço operacional
(Upper Elbow)Volume de trabalho no espaço operacional
(Lower Elbow)
R2R2
R1
R1
⎪⎩
⎪⎨⎧
=+==°−+=
m,,,Rm,.,.,.,,R
9040502520)30(cos405024050
2
221
⎪⎩
⎪⎨⎧
=+==°−+=
m,,Rm.,.,.,,R
9,04050458,0)60(cos405024050
2
221
34.b)
Só é possível através da configuração lower elbow, pois na configuração upper elbow os limites das juntas do robô são ultrapassados.
xA (0,5;-0,1)
y
B (0,2;0,3)
Nas duas situações existem singularidades cinemáticas para: θ1 qualquer, θ2 = 0º

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
8
A
B
x
y
Lower Elbow Upper Elbow
trajectória x y θ1 (graus) θ2 (graus) θ1 (graus) θ2 (graus) A 0,5 -0,1 -58,0 112,0 35,3 -112,0 0,425 0 -50,4 125,0 50,4 -125,0 0,35 0,1 -36,4 133,9 68,3 -133,9 0,275 0,2 -16,8 137,4 88,8 -137,4 B 0,2 0,3 3,9 134,4 108,7 -134,4
35.
35.a) Ponto inicial → Ponto A ⎪⎩
⎪⎨⎧
⎩⎨⎧
°=°−=
⇒==
5,756,46
02
2
1
yx
A
A
Ponto intermédio 1 → Ponto I1
⎪⎪⎩
⎪⎪⎨
⎧
⎩⎨⎧
°=°−=
⇒−=
=
6,1382,142
22
22
2
1
1
1
y
x
I
I
Ponto intermédio 2 → Ponto I2 ⎪⎩
⎪⎨⎧
⎩⎨⎧
°=°−=
⇒−=
=
5,1043,138
31
2
1
2
2
yx
I
I
Ponto final → Ponto B ⎪⎩
⎪⎨⎧
⎩⎨⎧
°=°−=
⇒−=
=5,756,136
20
2
1
yx
B
B
35.b) Sim. Uma estrutura RP.
2
1
-π2
-π4
AB
q1
q2
36. B) A trajectória C→D impõe maiores velocidades nos eixos do robô. 37. D) Outro resultado

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
9
38. Cinemática inversa de um robô RR:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−+
⎟⎟⎠
⎞⎜⎜⎝
⎛+
−⎟⎠
⎞⎜⎝
⎛
=⎥⎦
⎤⎢⎣
⎡
21
22
21
22221
2222
2
1
2arccos
cossin
llllyx
θllθl
arctgxy
arctg
θθ
Com l1 = l2 = 5m vem:
Lower Elbow Upper Elbow
trajectória tempo x y θ1 (graus) θ2 (graus) θ1 (graus) θ2 (graus) A 0 9 0 -25,8 51,7 25,8 -51,7 B 4,5 9 1,5 -14,7 48,3 33,6 -48,3 C 7 6 3 -21,3 95,7 74,4 -95,7 D 11 3 3 -19,9 129,8 109,9 -129,8 E 13 0 0 -45 180 135 -180
Evolução de x e y
0123456789
10
0 2 4 6 8 10 12 14
tempo
x
y
Evolução de q1 e q2
-100
-50
0
50
100
150
200
0 2 4 6 8 10 12 14
tempo
q1 (graus)
q2 (graus)
39. (Ver resolução do exercício anterior) 39.a) Lower Elbow: –90º ≤ θ1 ≤ 0º e 0º ≤ θ2 ≤ 180º 39.b) Upper Elbow: 0º ≤ θ1 ≤ 180º e -180º ≤ θ2 ≤ 0º
Solução 1, é possível
Solução 2: não é possível pois excede os limites das juntas.

SISEL - Sistemas Electromecânicos Sistemas robóticos (soluções)
10
40. 40.a)
40.b)
40.c) - Singularidade cinemática: l1 = l2 e x=y=0 (θ1 qualquer, θ2 = ±180º).
- Existe um número infinito de possíveis configurações do robô. - Definir uma trajectória que não atravesse o ponto singular em causa.
Lower Elbow
trajectória x y θ1 (graus) θ2 (graus) A -1 1 73,1 123,7 B 0,37 1,37 13,1 123,7 C 1,37 0,37 -46,9 123,7 D 1 -1 -106,9 123,7
Lower Elbow
trajectória x y θ1 (graus) θ2 (graus) A -1 1 73,1 123,7 B -0,33 0,33 54,0 161,9 C 0,33 -0,33 -126,0 161,9 D 1 -1 -106,9 123,7 x
y
A (-1;1)
D (1;-1)
Interpolação no espaço operacional
3
C
B