Sistema de Aquecimento e Resfriamento de peças...
18
Instituto Federal de Santa Catarina – Campus Joinville. Curso de Tecnologia em Mecatrônica Industrial. Módulo: V. Matéria: Metrologia e Instrumentação. Professor Dr.: Rodrigo Coral. Sistema de Aquecimento e Resfriamento de peças automatizado. Alunos: Douglas Ismael da Conceição. Joselino Xavier Junior. Joinville, julho de 2015.
Transcript of Sistema de Aquecimento e Resfriamento de peças...

Instituto Federal de Santa Catarina – Campus Joinville.
Curso de Tecnologia em Mecatrônica Industrial.
Módulo: V.
Matéria: Metrologia e Instrumentação.
Professor Dr.: Rodrigo Coral.
Sistema de Aquecimento e
Resfriamento de peças
automatizado.
Alunos: Douglas Ismael da Conceição.
Joselino Xavier Junior.
Joinville, julho de 2015.
Introdução/Funcionamento.
A equipe propõe o projeto de um sistema de manuseio de
peças onde o mesmo será composto de um braço robótico
(Construído com peças de lego, com dois a três eixos de
coordenadas).
Estação de aquecimento da peça, composta por: uma
lâmpada incandescente para fazer a amostragem
(o aquecimento) da temperatura da peça em questão, um
sensor onde vai ler essa determinada temperatura e um
espaço determinado para o posicionamento da peça.
Estação de Resfriamento da peça, composta por: dois à
três coolers para fazer o resfriamento da matéria, junto de um
timer para especificar o tempo que a peça ficará na estação, e
um espaço determinado para o posicionamento da peça.
O projeto terá o controle da temperatura da peça, informando
ao controlador quando estará apta para a próxima operação.
Monitoração de velocidade, a tensão e as posições do braço
robótico.
Programação em Labview

Protótipo do Projeto.
Grandeza a ser medida /
Instrumentação.
A matéria, sendo um corpo ou uma substância e a energia
podem ser avaliada. Cada característica que possa ser quantificada
constitui uma grandeza física.
Grandezas físicas são aquelas grandezas que podem ser
medidas, ou seja, que descrevem qualitativamente e
quantitativamente as relações entre as propriedades observadas no
estudo dos fenômenos físicos.
Como nosso trabalho em termos gerais constitui em uma
estação de aquecimento, um braço robótico e uma estação de
resfriamento, consequentemente vamos realizar a medida de duas
grandezas: a temperatura de aquecimento da nossa estação, e o
possível posicionamento (ângulo) dos eixos dos motores do braço
robótico.
História da Temperatura
As primeiras medições de temperatura eram feitas, de forma
imprecisa, pela comparação com certos fenômenos físicos. Para
metais aquecidos, a cor dava alguma idéia. Para temperatura
menores, a fusão de substâncias como chumbo, enxofre, cera, a
ebulição da água, etc.
O primeiro termômetro documentado de que se tem notícia foi
inventado por Galileu por volta de 1592. Era um bulbo de vidro
acoplado a um tubo também de vidro com a extremidade aberta. O
tubo era mergulhado em água. O aquecimento do bulbo expande o
ar no interior e uma parte escapa pela extremidade do tubo.
Removido o aquecimento, o ar volta à temperatura anterior, mas em
menor quantidade e alguma água sobe no tubo, indicando que
houve uma mudança de temperatura do bulbo.
O termômetro de álcool foi inventado pelo físico alemão Daniel
Gabriel Fahrenheit em 1709. Em 1714 ele inventou o termômetro de
mercúrio e, em 1724, introduziu a escala de temperatura que leva o
seu nome. Inicialmente ele imaginou usar 0 para a temperatura
mais baixa no inverno da região onde vivia e 100 para a mais alta
no verão. De forma definitiva, ajustou 32 para o ponto de fusão da
água e 212 para o ponto de ebulição.
A escala de centígrados (0 para fusão da água e 100 para ebulição)
foi inventada por Anders Celsius, astrônomo sueco, em 1742. O
nome Celsius para e escala foi oficializado em 1948 por uma
conferência internacional para pesos e medidas.
Nas primeiras décadas do século 19 houve bastante evolução nos
conceitos de temperatura. Lord Kelvin postulou a existência do zero
absoluto. Sir William Hershel descobriu que a temperatura das
cores do espectro solar projetado por um prisma variava, com
aumento na direção do vermelho e na região que hoje conhecemos
como infravermelho.
Em 1821, duas descobertas marcaram o início dos sensores
elétricos de temperatura: T J Seebeck verificou que uma tensão era
produzida por duas junções de metais diferentes em diferentes
temperaturas, ou seja, o termopar. Sir Humphrey Davy verificou que
metais tinham coeficiente positivo de temperatura e podiam ser
usados para medição.

Grandeza (Temperatura)
A temperatura é uma grandeza física escalar que está
associada ao grau de agitação molecular de um sistema. O grau de
agitação térmica molecular não pode ser medida diretamente, por
isso a medida da temperatura é feita indiretamente medindo-se
grandezas físicas que variam com ela, por exemplo, pressão,
volume, etc. Vale ressaltar que a sensação térmica é uma forma de
medição imprecisa da temperatura.

Transdutores de Temperatura
Transdutor é um dispositivo que desenvolve um sinal
elétrico de saída em resposta a um fenômeno físico específico. Os
transdutores normalmente são compostos de 2 elementos: o sensor
e o elemento de transdução.
O elemento sensor é a parte do transdutor que responde a um
efeito físico, ou a uma variação neste efeito. Deve ser imune a
outros efeitos, evitando distorções de resposta ao efeito que está
sendo medido. O elemento de transdução é a parte de um
transdutor que transforma a resposta do elemento sensor em um
sinal elétrico. Um exemplo, é o termopar, onde uma variação de
temperatura cria uma diferença de potencial na junção entre
2 metais diferentes.
Aplicações de Transdutores em
Temperaturas
A medição da temperatura é um dos problemas mais antigos da
humanidade, pois ela afeta, diretamente, o meio ambiente e todas
as reações físico-químicas da natureza. Por esta razão é que há
tanta diversidade de transdutores para medir a temperatura.
Os transdutores de temperatura são dispositivos destinados a
converter o sinal de um sensor de temperatura em um sinal linear
de corrente elétrica. Esta conversão permite que o sinal seja
transportado com maior imunidade a ruído, aumentando assim a
distância entre o sensor e o indicador ou painel de controle.
Qualquer componente eletrônico muda suas características com a
temperatura; assim, alguns componentes são projetados para medir
temperatura, outros o são para se manterem estáveis com a
temperatura.

Os estáveis serão empregados em circuitos de controle e interface,
e os variáveis, serão os transdutores.
Dentre eles:
Transdutores Resistivos;
Detectores Resistivos de Temperatura (RTD);
Termistores;

Esquema de Acionamento dos eixos
Ponte H

Simulado o funcionamento do Circuito no Proteus e feito
o esquemático da placa no Ares.

Trilhas executadas

Fonte +12V/-12V (variável), com tensão fixa de +12/-12V.
Placa de Acionamento dos Motores (Ponte H)
NI USB – 6009
Braço Robótico
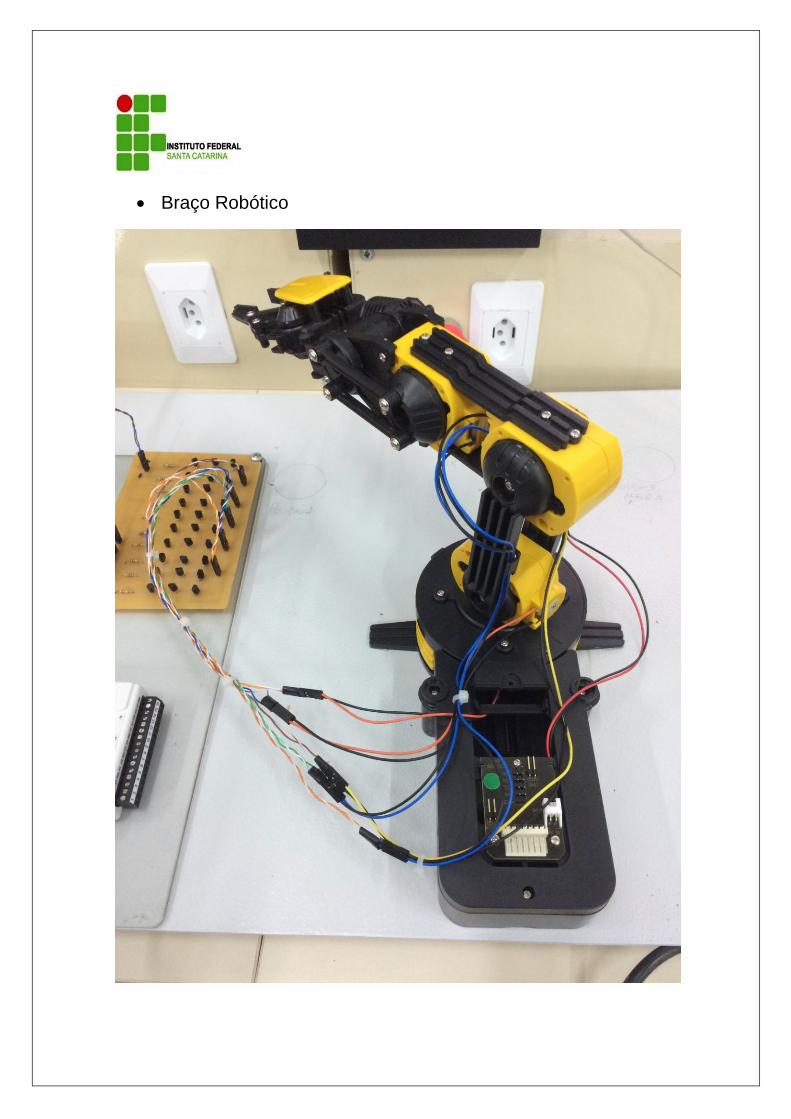
Braço Robótico

Pontos para a referência de programação em malha aberta.
Ponto inicial da base.
Ponto inicial do Cotovelo.

Ponto inicial da Garra.
Ponto inicial de inclinação.
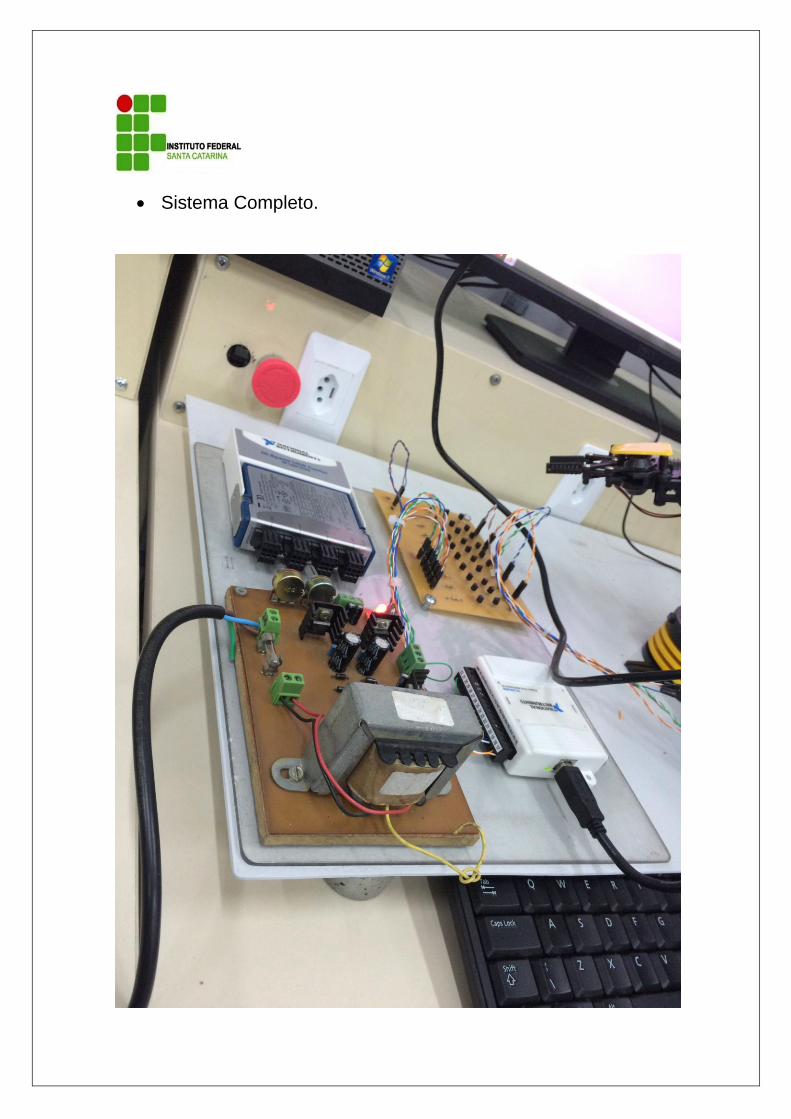
Sistema Completo.
Conclusão
Dificuldades: Pela falta de tempo, optamos junto com o professor,
pela programação em malha aberta, onde as dificuldades são muito
grandes em relação a posição dos eixos do braço robótico, onde foi
feita através de tempo. Algumas posições do braço, em
determinado eixo, devido ao peso do braço demoravam um pouco
mais para fazer o percurso, compensamos esse tempo em alguns
eixos e o braço fez exatamente uma trajetória completa em
perfeitas condições, a partir da segunda trajetória, o braço já
começava a se perder nas posições devido as relações citadas.