Texto Sobre Manobrabilidade 2010 PNV2342(2)

of 47
-
Upload
othoniel-muniz -
Category
Documents
-
view
166 -
download
7
Transcript of Texto Sobre Manobrabilidade 2010 PNV2342(2)
CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 Manobrabilidade de Navios de Superfcie SUMRIO 1 Preliminares ................................................................................................................................................. 1 2 Algumas propostas semi-empricas de modelos de manobra ...................................................................... 2 3 Modelo de manobra ....................................................................................................................................15 3.1 As equaes do movimento ................................................................................................................15 3.2 O conceito de derivadas hidrodinmicas ............................................................................................18 3.3 Resoluo das equaes do movimento ..............................................................................................25 3.4 Estima das derivadas hidrodinmicas .................................................................................................29 3.5 Modelo de giro....................................................................................................................................35 3.6 Modelo de estabilidade em linha reta .................................................................................................39 3.7 Modelo de parada ...............................................................................................................................42 4 Modelo heurstico para esforos no plano horizontal em navios tanqueiros sob correnteza ......................42 5 Referncias bibliogrficas ..........................................................................................................................46 1 Preliminares Resumem-senaseo2trabalhosclssicossobremanobrabilidadedenavios,a saber,deInoueetalii(1981)edeClarke(1983e2001).Naseo3desenvolve-seum modelo terico simples de manobra, utilizando argumentos fsicos e alguns resultados da teoria de asas de pequena razo deaspecto.Esteestudo contou comacolaborao de J. A. P. Aranha. Naseo4apresenta-seummodelohidrodinmicoheurstico,baseadonateoria de asa curta, para estimar foras de corrente no plano horizontal para um sistema FPSO. Tal modelo foi desenvolvido por uma equipe sob a orientao de J. A P. Aranha (Leite et alii,1998).Omodelodependedasdimensesprincipaisdonavioesomentedetrs coeficientes hidrodinmicos: o coeficiente de atrito para incidncia aproada, o coeficiente de arrasto para incidncia lateral e o correspondente coeficiente de momento de guinada. Tais coeficientes podem ser estimados por exemplo atravs da curva de atrito da ITTC e dosresultadosseccionaisdeHoerner,tornandoomodelocompletamenteexplcito.O modelo foi testado frente a resultados experimentais para coeficientes de fora horizontal, bemcomoparabifurcaoparaumaconfiguraocomturret,apresentandoboa aproximao.Simosetalii(2001)estenderamomodelodeLeiteetalii(1998)para incorporartermosdevelocidadedeguinada.Omodelomodificadofoitestadofrentea resultadosexperimentaisparanavioscomdiversascondiesdelastro,sobmovimentos rotatriosdeguinada,tendo-semedidoesforosnoplanohorizontal,eobtendo-seboa correspondncia.Tannurietalii(2001)testamomodelomodificadodeSimosetalii (2001)frentearesultadosexperimentaisparanaviotanqueirocompontonicode CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 2 amarra1, observando a sua capacidade de lidar com caractersticas dinmicas do problema de instabilidade tipo rabo-de-peixe2. Modelos como os de Inoue et alii (1981) e de Takashima (1986) so basicamente acomodaesdeexpressesanalticasadadosexperimentaise/oudecampo.Modelos comoosdeClarkeaquelesapresentadosnassees3e4jenvolvemestruturasmais conceituais que procuram modelar a fsica do problema. H uma certa discusso sobre as duasabordagens.Bhattacharyya,porexemplo,participandodadiscussodoartigode Clarkeetalii(1983),diz:eudiscordototalmentedoargumento...dequensobtemos nossosresultados...porensaiosexperimentais.Nsconduzimosnossosclculosde projetopreliminardonaviosemiraosresultadosexperimentais....[...Se]nsformos bonsprojetistas,nsnodevemosesperarresultadosexperimentaistodootempo. Ensaiosdemodelodevemserfeitos,masnumestgioposterior....Comoarquitetos navais,nsdevemossercapazesdesentarnaescrivaninhaedescobrircomoestimaro desempenho de escala real. Eu estou muito interessado em projeto de manobrabilidade, e no h outra maneira de projetar um navio do ponto de vista de manobrabilidade sem ser atravsdasequaeslinearesedeprevisosimplesdecoeficientes....Emrespostaa Bhattacharyya,Clarkeetalii(1983)dizem:[...Ns]simpatizamoscomosseus sentimentossobreousodeequaesno-linearescomplexas,contendodziasde coeficientes,comoumaferramentadeprojetoinicial.Tambmparticipandoda discussodoartigodeClarkeetalii(1983),Martinafirma:Osautoresso... cumprimentados pela sua coragem em apresentar sua anlide de regresso das derivadas lineares, e especialmente os dados estatsticos, os quais permitem-nos ver o quo pobres so os ajustes.... EmBrinatiedeConti(2009)realizam-sealgumasaplicaesrelativas manobrabilidade de petroleiros. 2 Algumas propostas semi-empricas de modelos de manobra Inoueetalii3(1981)realizaramexperimentosparainvestigaresforos hidrodinmicosatuantesemcascosdenaviossemapndices4.Foramfeitascorrelaes entre parmetros de modelo terico baseado em teoria de superfcie de sustentao no lineareresultadosexperimentais,desenvolvendo-seummodelosemi-empricopara vriostiposdenaviosnasseguintescondiesdecarregamento:comlastrosemtrim5e com trim, com meia-carga sem trim e com carga completa sem trim.
1 single point mooring (SPM) tanker ship. 2 fishtailing. 3Primeiroesegundoautores:KyushuUniversity,Fukuoka;terceiroautor:MitsuiEngineeringand Shipbuilding Co. Ltd., Tokyo. 4 Bare hulls. 5 Even keel. CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 3 Os autores fizeram testes com trs navios tanqueiros6, trs navios graneleiros7, um navioporta-containers,umnavioLNG8,umnavioroll-on-roll-offeumnavio transportadordeveculos9.Todososmodelostinham2,5metrosdecomprimento.As razescomprimento-bocasesituavamentre4,500e6,812.OnmerodeFroudenos ensaios foi mantido em aproximadamente 0,06; simulou-se condio de guas profundas. Ascaractersticasprincipaisdosmodelosestolistadasnotrabalho.Ostestesforam feitos na universidade de Kyushu, utilizando os equipamentos brao giratrio e tanque de reboque oblquo. Mediram-se fora lateral e momento de guinada. Inoueetalii(1981)consideramaseguinterepresentaoparaforalateral (positiva para boreste) e momento de guinada em torno da meia-nau (positivo no sentido horrio, para o navio visto por cima): ( ) ( ) r , f r Y Y r , YY r' | + ' ' + | ' = ' | '| ; ( ) ( ) r , f r N N r , NN r' | + ' ' | ' = ' | '| ,(2.1) em que 2LdU21YY= 'e 2 2dU L21NN= ' , coma densidade da gua, L o comprimento do navio, d o calado, U a velocidade;| o ngulo de guinada (positivo no sentido anti-horrio,paraonaviovistoporcima);ravelocidadeangulardeguinada(positivano sentido horrio, para o navio visto por cima); Rrr = ' , com R o raio de giro; 0 r0YY== ||| c ' c= ' ; 0 r0rrYY== |' c ' c= ' ; 0 r0NN== ||| c ' c= ' ; 0 r0rrNN== |' c ' c= ' . Asderivadaslinearesapartirdosensaiosapresentaramumaboacorrelaocom asderivadasprevistaspelateoriadeasadepequenarazodeaspecto(Weisinger,1947, apud Inoue et alii, 1981), com exceo de |' Y . Os autores sugerem as seguintes frmulas para as derivadas lineares em funo da razo de aspecto k, para cascos sem trim: f k2Y +t= '| , comBLC4 , 1 fB=, sendo BCo coeficiente de bloco e B a boca ;
6 Oil tanker. 7 Dry cargo ship. 8 Liquid natural gas tanker. 9 Car carrier ship. CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 4 k N = '| ;k4Yrt= '; 2rk k 54 , 0 N = '(2.2) Osautoresconsideramnecessriaaconsideraodetermosnolineares, especilamenteparagrandesngulosdeleme.Deacordocomateoriadoescoamento cruzado ou lei newtoniana, os autores prevem que os termos no lineares dependam de| | ,r' | er r' ' .Istoseconfirmapara Yf apartirdosresultadosexperimentais; porm, para Nfh necessidade de ajustes para melhor aproximao; ao final, tem-se: r r Y r Y Y frr r Y' ' + ' | + | | =| || ( ) r N r N r r N fr rr rr N' | | + ' + ' ' =|| |(2.3) O valor dos coeficientes em funo dos parmetros dBC 1B, BLCB ou dBCB pode ser obtido a partir das figuras 3.1 a 3.6 do artigo. Inoueetalii(1981)aindaapresentamumaaproximaotericaparasubsidiara construo de frmulas para a condio com trim. A teoria se baseia no mtodo de Fuwa (1973,apudInoueetalii,1981)enateoriadecorpoesbeltodeNewman(1977,apud Inoueetalii,1981).Osautoresfazemestimativasnumricascombasenestateoriapara pelo menos dois cascos da srie 60, um com L/B=7,5 e60 , 0 CB =e outro com L/B=6,5 e 80 , 0 CB = .Chegamaresultadosmuitoprximosdaquelesexperimentaisparaoscascos anteriormentecitados,comaexceodavariaode |' N comotrim,paraoqual consideram haver necessidade de se separar a parcela de momento de Munk no afetada pelavariaodotrimeaparcelademomentodevidosustentaoafetadapela variao do trim. Sendoo trim angular dado por mdt, ondet o deslocamento de trim (positivopelapopa)e md ocaladomdio,osautorespropemasseguintescorrees para os coeficientes lineares: ( ) ( )((
t+ ' = t '| |md 320 , 1 0 Y Y( ) ( )(((
t ' = t '|| |md27 , 00 , 1 0 N N CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 5 ( ) ( )((
t+ ' = t 'mr rd80 , 0 0 , 1 0 Y Y( ) ( )((
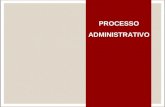
t+ ' = t 'mr rd30 , 0 0 , 1 0 N N (2.4) sendo ( )( ) 0 Y0 N|||''= . Essas frmulas incluem, ento, variaes com calado, trim e razo de aspecto do navio, podendo ser utilizadas nas etapas iniciais do projeto do navio. Clarke et alii10 (1983) preocupam-se com estabelecer critrios de manobrabilidade de navios que permitam comparaes e decises quanto aceitabilidade de caractersticas demanobrabilidade.Osautoressebaseiamemmodelolinear,propondoosseguintes critrios:(1)giroecapacidadedemudanaderumo;(2)estabilidadedinmicae capacidadedemanutenodecurso;(3)capacidadedemanobramanual.Onavio suposto navegar em guas calmas com velocidade normal a vante. Naexposiodomodelomatemtico,osautoresadmitemqueonaviosejaum corporgido,comtrsgrausdeliberdadedemovimento:avano(surge),deriva (sway) e guinada (yaw). As equaes do movimento referidas a um sistema euleriano com eixos acompanhando o movimento do navio so: ( )2Gr x rv u m X = ( ) r x ru v m YG + + =( ) ru v mx r I NG Z+ + = (2.5) sendoquenosprimeirosmembrostm-seosesforoshidrodinmicosenossegundos membrososesforosinerciais,comuevasvelocidadeslongitudinalelateralera velocidade angular de guinada; a massa do navio m e seu momento de inrcia em torno de um eixo vertical passando pela seo mestra ZI ; a posio longitudinal do centro de massa com relao seo mestra Gx(sistema de coordenadas na figura 2.1).
10 British Ship Research Association, Wallsend, Tyne & Wear, England. CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 6 Figura 2.1 Sistema de coordenadas adotado por Clarke et alii. Clarkeetalii(1983)admitemqueosesforoshidrodinmicospossamser expresssosapartirperturbaesemtornodeumatrajetriaretilneaavantecom velocidade 0u , tomando somente os termos lineares nas aceleraes e velocidades: u X u X Xu uA + = r Y r Y v Y v Y Yr r v v+ + + = r N r N v N v N Nr r v v+ + + = (2.6) em que vante aretilineatrajetoriauuXXcc= , etc.. Aequaonadireolongitudinalfoisupostadesacopladadasdemais,e ignoradadaquiparafrente,poisosautoresestointeressadosnomovimentotransversal do casco. Incluindo o efeito de leme nas equaes, considerado tambm de forma linear, as equaes(2.5)segundoosgrausdeliberdadedederivaedeguinada,levandoemconta (2.6), ficam: ( ) ( ) ( ) 0 Y r m Y r x m Y v Y v m Yr G r v v= o ' + ' ' ' + ' ' ' ' + ' ' + ' ' 'o 0x0y X Y U |oCURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 7 ( ) ( ) ( ) 0 N r x m N r I N v N v x m NG r Z r v G v= o ' + ' ' ' ' + ' ' ' + ' ' + ' ' ' 'o (2.7) em que o superescrito linha se refere a grandezas adimensionalizadas conforme tabela 2.1. Tabela 2.1 Parmetros adimensionalizados (Clarke et alii, 1983). uvv = '( )( )( )TLBLLkC 2L21kL21II2B525ZZ=V == 'u L21YY2vV= 'urLr = 'LxxGG = 'u L21YY3rr= '2uL vv = '3vVL21YY= ' u L21NN3vV= '22uL rr = '4rrL21YY= ' u L21NN4rr= 'Ltut = '4vVL21NN= ' 2 2u L21YY= 'oo ( )( )TLBLC 2L21mB3=V = '5rrL21NN= ' 2 3u L21NN= 'oo Solues das equaes (2.7) para o sistema livre so: t22 t112 1ervervrv' o ' o((
+((
=((
'' (2.8) em que 1v , 1r , 2ve 2rso constantes de integrao que dependem das condies iniciais. Omovimentoestveleconvergenteseambos 1o e 2o tiverempartesreais negativas. Presena de pelo menos uma parte real positiva indica movimento divergente. Asequaes(2.7)podemsercolocadasnaforma(apartirdeNomotoetalii, 1957, apud Clarke et alii, 1983): CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 8 ( ) o' ' ' + o ' = ' + ' ' + ' + ' ' ' 3 2 1 2 1T K K r r T T r T T( ) o' ' ' + o ' = ' + ' ' + ' + ' ' ' 4 v 2 1 2 1T K K v v T T v T T(2.9) em que os parmetros so expressos conforme a tabela 2.2. Tabela 2.2 Parmetros das expresses de Nomoto (Clarke et alii, 1983). ( )( ) ( )( )( ) ( ) m Y N x m N Yx m N x m Y I N m YT Tr v G r vG v G r Z r v2 1' ' ' ' ' ' '' ' ' ' ' ' ' ' ' '= ' ' ( )( ) ( ) ( ) ( )( )( ) ( ) m Y N x m N Ym Y x m N N x m Y Y I N x m N m YT Tr v G r vr G v v G r v Z r G r v2 1' ' ' ' ' ' '' ' ' ' ' ' ' ' ' ' ' ' + ' ' ' ' '= ' + ' ( ) ( )o oo o' ' ' '' ' ' ' ' ' '= 'N Y Y NN m Y Y x m NTv vv G v3 ( ) ( )( ) ( )o oo o' ' ' ' ' ' '' ' ' ' ' ' '= 'N m Y Y x m NN x m Y Y I NTr G rG r Z r4 ( ) ( ) m Y N x m N YN Y Y NKr v G r vv v' ' ' ' ' ' '' ' ' '= 'o o ( ) ( )( ) ( ) m Y N x m N YN m Y Y x m NKr v G r vr G rv' ' ' ' ' ' '' ' ' ' ' ' '= ' o o 3 2 1T T T T ' ' + ' = ' AmotivaoparaasequaesseremcolocadasnessaformadevidaaNomotoet alii a dificuldade de se medir em escala real a velocidade de deriva; trabalha-se, ento, com a primeira das equaes (2.9), envolvendo a velocidade angular de guinada. Essadescrioenvolveconstantesdetempo iT' eganhoK' dosistema, consistente com a prtica de engenharia de controle. A soluo das equaes (2.9) do mesmo tipo que (2.8), sendo que as constantes 1oe 2oso dadas por: 11T1' = o; 22T1' = o(2.10) Na proposta de critrios de manobra, Clarke et alii (1983) argumentam: a)Quandoonavioestemgironormalmentecomumdimetrodecercade duasatrsvezesocomprimentodonavioosefeitosno-linearesso importantes. Da, propem que se considere como medida de manobrabilidade CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 9 acapacidadedeentrarnogiro,quandooregimeaindaserialinear, especificandoocritriodengulodeaproamentoapartirdeumatrajetria emlinhareta,porunidadedengulodelemeaplicada,apsonavioter trafegado um comprimento de casco. b)Namaioriadosproblemasdemanobrabilidade,osexpoentes 1o e 2o so reais, e para se garantir que o sistema seja dinamicamente estvel, deve-se ter, considerando (2.10), 1T'e 2T'positivos, o que acaba implicando na expresso abaixo (a partir de Abkowitz, 1964, apud Clarke et alii, 1983), que diz que h estabilidadequandoocentrodepressoemguinadapuraestavantedo centro de presso em deriva pura: vvrG rYNm Yx m N''>' '' ' ' (2.11) c)Quando o critrio de estabilidade no fr satisfeito, o timoneiro (humano) ter problemas para controlar a embarcao. Os autores sugerem que se considere o limite de fase de no mximo 30 graus para o timoneiro antecipar qual ser o movimento do casco. Quantoestimativadasderivadashidrodinmicas,osautoresapresentamas expresses das derivadas lineares(ver tabela 2.3), usando a teoria de Jones paraasas de pequena razo de aspecto. Tabela 2.3 Expresses para as derivadas lineares segundo a teoria de Jones. ( ) 1LTY2V|.|
\|t = '( ) 1LTY2V|.|
\|t = '( ) 0LTY2r|.|
\|t = '|.|
\||.|
\|t = '21LTY2r ( ) 0LTN2V|.|
\|t = '|.|
\||.|
\|t = '21LTN2V |.|
\||.|
\|t = '121LTN2r|.|
\||.|
\|t = '41LTN2r Aseguir,compararamexpressesderegressoparaasderivadas vY' , rY' , vN' e rN' propostasporSmitt(1970e1971,apudClarkeetalii,1983),Norrbin(1971,apud Clarke et alii, 1983) e Inoue et alii (1981), observando discrepncias. Resolvem,ento,considerarumasriederesultadosdeexperimentosapartirde braosgiratrioseoutrasrieapartirdemecanismosdemovimentoplano,obtidospor CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 10 vriosautores.Conduzindoumaanlisederegresso,Clarkeetalii(1983)propemas expresses da tabela 2.4. Tabela 2.4 Expresses semi-empricas propostas por Clarke et alii (1983). ||.|
\||.|
\| + |.|
\|t = '2B2VLB1 , 5TBC 16 , 0 1LTY|.|
\| +|.|
\|t = 'TBC 40 , 0 1LTYB2V ||.|
\||.|
\| |.|
\|t = '2 2rTB0033 , 0LB67 , 0LTY|.|
\| + |.|
\|t = 'TB080 , 0LB2 , 221LTY2r |.|
\||.|
\|t = 'TB041 , 0LB1 . 1LTN2V|.|
\|+|.|
\|t = 'LT4 , 221LTN2V |.|
\| +|.|
\|t = 'LB33 , 0TBC 017 , 0121LTNB2r|.|
\| +|.|
\|t = 'LB56 , 0TB039 , 041LTN2r Osautoresalertamquehnecessidadededadosmaisconsistentesparaqueeste tipoderegressosejamelhorado;trata-se,porm,deumavanocomrelaoaos resultadosparasuperfcieplana,sendoqueadependnciacomasprincipais caractersticas do casco foi incorporada nas frmulas das derivadas. Osautoresapresentamfrmulasparaestimativadasderivadashidrodinmicas referentesaoleme.Seja L2AC c21Y = aforadesustentaonoleme,calculadacomo uma asa de baixa razo de aspecto, sendo c a velocidade do fluxo sobre o leme, A a rea de leme e LCo coeficiente de sustentao. Tornando esta fora no dimensional, tem-se: 2L2 2 ucCLTLTAL u21YY |.|
\|== ' .Seguemasderivadasdaforalateraledomomentode guinada com relao ao ngulo de leme, sendo que para este ltimo, sups-se que o leve estivesse a meio comprimento de navio para r, a partir de seu centro: 2Luc CLTLTAY|.|
\|o cc= 'o ; o o' = ' Y21N(2.12) Costuma-se aproximar, para cascos mono-hlice:0 , 3uc C2L=|.|
\|o cc. Alm de atuar como superfcie de controle, o leme atua tambm como superfcie estabilizadora, e as contribuies nas derivadas ficam: CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 11 o' = ' Y Yleme , v ; leme , v leme , rY21Y ' = '; leme , v leme , vY21N ' = '; leme , v leme , rY41N ' = '(2.13) Clarke et alii (1983) tambm transcrevem resultados de Sheng (1981, apud Clarke et alii, 1983) relativos a correses para guas rasas: 22 1 0vvrrvvTBK158TBK32KNNYYYY|.|
\|+ + =''=''='' 22 1 0rrTBK10524TBK52KNN|.|
\|+ + ='' 22 1 0vvTBKTBK KYY|.|
\|+ + ='' 22 1 0rrTBK31TBK21KNN|.|
\|+ + ='' (2.14) onde 3 20F0110 , 0F0775 , 01 K + =; 3 21F0113 , 0F0724 , 0F0643 , 0K + =; F0342 , 0K2 =; 1THF = , sendo H a profundidade. Clarke e Yap11 (2001) analisam critrios de estabilidade estabelecidos pela IMO resoluo IMO A.751 (18), que tambm so expostos em Valkhof et alii (2000). Oscritriosseaplicamatodaembarcaodecomprimentomaiordoque100 metros, e tambm quelas de carga perigosa (qumica, gs) de qualquer comprimento, as quais devem atender a certos padres de manobra, isto sendo demonstrado no processo de projetoeposteriormenteemprovasdemar.Ascondiesparaessasverificaesso: plena carga em guas profundas; condies calmas de ventos e ondas; regime permanente develocidade,aqualdeveser90%davelocidadedeservio,compotncia85%da mxima potncia de sada do motor. Os critrios envolvem (ver figura 2.1): 1)manobras de giro: -devem ser verificadas para boreste e para bombordo; deve-se aplicar 35 graus de ngulo de leme ou o mximo permissvel na velocidade de teste; o avano
11Primeiroautor:UniversityofNewcastleuponTyne;segundoautor:SembauangShipyardLtd., Singapore, formerly University of Newcastle upon Tyne. CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 12 distnciatrafegadanadireooriginal,domomentoemqueoleme acionadoatoaproamentodonaviotersealteradode90grausnodeve exceder4,5vezesocomprimentodonavio;odimetrotticodistncia trafegada perperdicularmente trajetria original, do momento em que o leme acionado at o aproamento do navio ter se alterado de 180 graus no deve exceder 5,0 vezes o comprimento do navio; 2)capacidade de entrar em giro; -deve-se aplicar 10 graus de ngulo de leme; a distncia trafegada at o navio terseurumoalteradode10grausnodevesersuperiora2,5vezeso comprimento do navio; 3)manobras zigue-zague com ngulo de leme de 10 graus; -devem ser verificadas para boreste e para bombordo; deve-se aplicar 10 graus dengulodeleme;apsoaproamentodonavioter-sealteradode10graus, deve-seaplicarngulodelemede10grausnobordooposto;oresultante ngulodeovershootdevesermenordoque10grausseL/U30 seg, e menor do que |.|
\| +UL215graus se 10 seg((((
' '' + ' '(3.32) CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 42 Odeterminanteem(3.32)omesmodeterminantequeaparecenasexpresses para o raio de giro (3.26) e (3.27) e para o ngulo de ataque no casco (3.28), para o casco sem o leme. 3.7 Modelo de parada Imagine-se,porexemplo,queumcascoestejanavengandoavantecom velocidadeU.Derepente,faz-secessarsuaforapropulsora.Quer-sesaberemquanto tempo e em qual distncia o barco deve parar. Este modelo porderia ser representado por umaequaosemelhantea(3.11a),pormsupondoforapropulsoranula.Avelocidade seriadadacomoderivadadaposio,comonaprimeiradasexpresses(3.12),supondo ngulo nulo de rumo. As equaes seriam: ( ) u FmBLC21t du dXuXaB' ' ' +='' ( ) u 1t dx d' + =''(3.32) No instante inicial tem-se( ) 0 0 u = 'e( ) 0 0 x = ' . Aevoluodaposioemfunodotempopodeserobtidapelaintegrao dessas equaes. 4 Modelo heurstico para esforos no plano horizontal em navios tanqueiros sob correnteza Considere-seumsistemadecoordenadascomorigemnaseomdiadocasco, eixozverticalparacim,eixoxlongitudinaldapopaparaaproa,eeixoylateralpara bombordo. SejaUavelocidadedacorrenteza,numadireoformandoumnguloocomo eixo x:( ) ( ) | | j sin i cos U U o + o = . Sendo L o comprimento e T o calado, as foras longitudinal e lateral e o momento de guinada so, respectivamente, representados por: CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 43 ( ) ( )2C 1 CU C TL21X o = o ;( ) ( )2C 2 CU C TL21Y o = o ;( ) ( )2C 62CU C TL21N o = o, (4.1) sendoqueseobjetivaexpressar( ) oC 1C ,( ) oC 2C e( ) oC 6C comofunodecertos coerficientes hidrodinmicos e de dimenses principais e coeficientes deforma, a saber, comprimento L, boca B, calado T, coeficiente de bloco BCe superfcie molhada S. Paracorrentezanalongitudinal( = o 0 e = o 180 ),ignoram-sediferenasna proaepopa,efaz-seumacomposiodocoeficientedeatrito,talcomodadopela expresso da ITTC de 1957, com o fator de forma, estimado segundo Prohaska: ( ) ( ) ( )( ) TLS2 Re log075 , 0k 1 180 C 0 C210C 1 C 1+ = = ; k=0,25 (4.2) Paracorrentezanatransversal( = o 90 e = o 270 ),considera-seocoeficiente de arrasto de separao, a partir por exemplo dos dados de Hoerner (1965), sendo funo darazo T 2Bedoraiodobojo.OsdadosdeHoernersoparaseestransversaisbi-dimensionais,eportantodevemsercorrigidosparalevaremcontaefeitostri-dimensionais. Tem-se: ( ) ( )|.|
\|= = T 2BC 270 C 90 CD C 2 C 2(4.3) Aassimetriaproa-popafazsurgirummomentodeguinada,correspondendo fora lateral ter um braocomrelao origem do sistema de coordenadas, emgeral para r: ( ) ( )|.|
\| = = T 2BCL270 C 90 CD C 6 C 6 (4.4) Resultados experimentais indicam que L fica entre 1% e 8% para diversos tipos de cascos, sendo 5% um valor tpico. CURSO DE ENGENHARIA NAVAL DISCIPLINA PNV2342 HIDRODINMICA Notas de Aula Manobrabilidade Prof. Mardel B. de Conti - Segundo Semestre de 2010 44 Emseguida,aconstruodomodeloprosseguecomumacombinaoentre expressesparaescoamentolateral,vlidasquando( ) 1 O sin ~ o ,eexpressesdateoria deasasdebaixarazodeaspecto,vlidaspara1